
磁気センサ
【課題】SAW共振子を用いて確実に磁界検知ができる磁気センサを実現する。
【解決手段】SAW共振子10の水晶基板11の表面111には、第1のくし形電極12A、第2のくし形電極12Bが形成されている。第1のくし形電極12Aの電極指121Aと第2のくし形電極12Bの電極指121Bとは、配列方向に沿って交互に配置されており、全ての電極指121A,121Bの長さおよび幅は同じである。電極指121Aと電極指121Bの交叉幅も一定である。SAW共振子10を、磁界検出の一態様において、電極指121A,121Bの配列方向すなわち共振信号の伝搬方向と磁石20A,20Bで生じる磁界強度の中心軸とが平行になるように、設置する。より具体的には、交叉幅の中心を結んで得られるSAW共振子10のX軸中心軸と、磁界強度の中心軸に対応する磁石20A,20Bの中心軸とが略一致するように、SAW共振子10を設置する。
【解決手段】SAW共振子10の水晶基板11の表面111には、第1のくし形電極12A、第2のくし形電極12Bが形成されている。第1のくし形電極12Aの電極指121Aと第2のくし形電極12Bの電極指121Bとは、配列方向に沿って交互に配置されており、全ての電極指121A,121Bの長さおよび幅は同じである。電極指121Aと電極指121Bの交叉幅も一定である。SAW共振子10を、磁界検出の一態様において、電極指121A,121Bの配列方向すなわち共振信号の伝搬方向と磁石20A,20Bで生じる磁界強度の中心軸とが平行になるように、設置する。より具体的には、交叉幅の中心を結んで得られるSAW共振子10のX軸中心軸と、磁界強度の中心軸に対応する磁石20A,20Bの中心軸とが略一致するように、SAW共振子10を設置する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、弾性表面波素子を用いて磁気検出を行う磁気センサに関する。
【背景技術】
【0002】
従来、弾性表面波素子を用いたセンサが各種考案されている。その一つとして、特許文献1に記載のセンサでは、圧電基板の表面にIDT電極を形成して、弾性表面波を励振させる。そして、このセンサでは、弾性表面波の伝搬経路上に磁性体を形成しており、弾性表面波の伝搬特性の変化から、磁界を検出する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−47229号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のような従来のセンサでは、磁界を如何に効果的に検出するか、という概念はなく、単に磁界を検出できればよいものであった。
【0005】
本発明の目的は、単に磁界検知できるだけでなく、より確実に磁界検知ができる磁気センサを実現することにある。
【課題を解決するための手段】
【0006】
この発明は、磁気センサに関する。この磁気センサは、SAW共振子と共振信号検知手段とを備える。SAW共振子は、水晶基板、該水晶基板表面に形成されたNiを主成分とする金属からなるIDT電極、を備える。共振信号検知手段は、SAW共振子で励振された弾性表面波に基づく共振信号を検知する。このような構成において、さらに、SAW共振子は、弾性表面波の伝搬方向と検知対象の磁界の方向とが平行になるように配設されている。
【0007】
この構成に示すように、検知対象の磁界に対してSAW共振子を配設することで、後述の図4に示すように、磁束密度の変化に応じたSAW共振子の共振周波数の変化を大きくすることができる。これにより、磁界の有無を含む磁束密度および磁界強度の変化を、検出しやすくなる。
【0008】
また、この発明の磁気センサでは、IDT電極は少なくとも第1のくし形電極と第2のくし形電極とからなり、第1のくし形電極の電極指と第2のくし形電極の電極指との交叉幅の中心を結び、水晶基板の表面で延びるSAW共振子側中心軸と、検知対象の磁界を発生する磁石の中心軸とが、一致するように、SAW共振子が配設されている。
【0009】
この構成では、検知対象の磁界に対するSAW共振子の具体的な配設構成を示している。このような構成とすることで、磁界の有無を含む磁束密度および磁界強度の変化を、さらに検出しやすくなる。
【0010】
また、この発明の磁気センサでは、子機は、SAW共振子、および該SAW共振子に接続する第1のアンテナを備える。親機は、第1のアンテナに対して無線通信が可能な第2のアンテナ、該第2のアンテナ接続しSAW共振子を励振させる励振信号を生成する励振信号生成手段、および共振信号検知手段を備える。
【0011】
この構成では、磁気センサを、子機と親機とを備える無線システムで実現することができる。
【0012】
また、この発明の磁気センサでは、共振信号検知手段は、共振信号の検知の有無により、検知対象の磁界の有無を検知する。
【0013】
この構成では、無線式の磁気センサを実現する場合の具体的な磁界検知方法を示している。
【発明の効果】
【0014】
この発明によれば、従来よりも確実に磁界検知を行うことができる。
【図面の簡単な説明】
【0015】
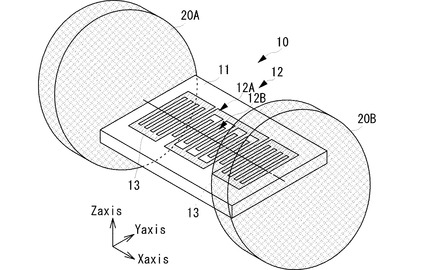
【図1】本発明の実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bとの位置関係を示す外観斜視図である。
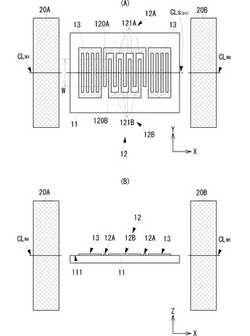
【図2】本発明の実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bとの位置関係を示す平面図および側面図である。
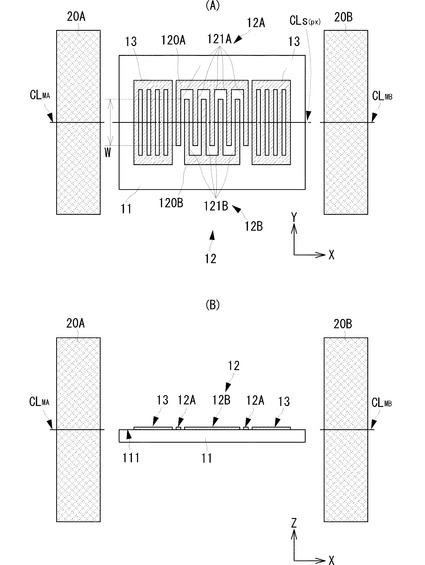
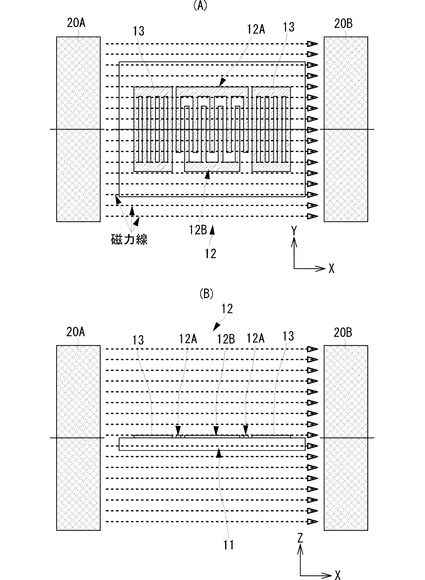
【図3】本発明の実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bの発生する磁界(磁力線)との関係を示す平面図および側面図である。
【図4】SAW共振子10の配置領域における磁束密度に対するSAW共振子10の共振周波数fpの変化特性を示した図、および、SAW共振子10に対して、磁石を近づけたり遠ざけたりした場合の共振周波数fpの変化を示す図である。
【図5】Y軸方向に沿ったX軸方向中心軸のズレ量とズレ量に応じた共振周波数fpの変化量、Z軸方向に沿ったX軸方向中心軸のズレ量とズレ量に応じた共振周波数fpの変化量を示す図である。
【図6】SAW共振子10と磁石20A,20Bとの位置関係の許容角度範囲を示す図である。
【図7】SAW共振子10を用いた磁気センサ1の構成を示す回路ブロック図である。
【図8】SAW共振子10を用いた無線式の磁気センサ1Aの構成を示す回路ブロック図である。
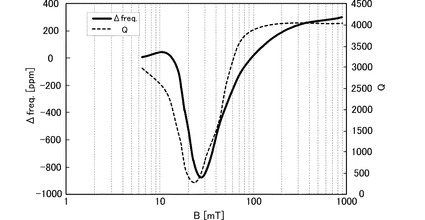
【図9】SAW共振子10の配置領域における磁束密度に対するSAW共振子10の共振周波数fpおよびSAW共振子10の共振に対するQ値の変化特性を示した図である。
【発明を実施するための形態】
【0016】
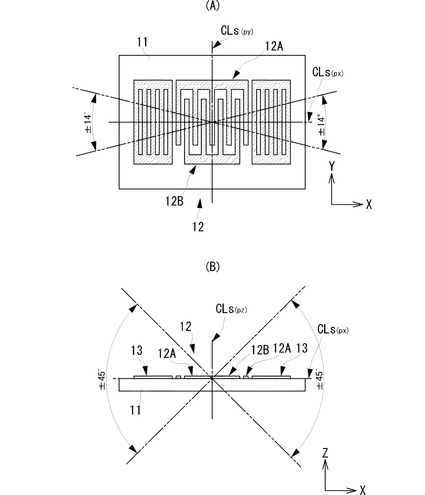
本発明の実施形態に係る磁気センサについて、図を参照して説明する。図1は本実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bとの位置関係を示す外観斜視図である。図2(A)は本実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bとの位置関係を示す平面図である。図2(B)は本実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bとの位置関係を示す側面図である。図3(A)は本実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bの発生する磁界(磁力線)との関係を示す平面図である。図3(B)は本実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bの発生する磁界(磁力線)との関係を示す側面図である。
【0017】
まず、本実施形態の磁気センサの検出原理について説明する。本実施形態の磁気センサではSAW共振子10を用い、磁界強度に応じたSAW共振子10の特性変化を利用している。
【0018】
SAW共振子10は、水晶基板11、第1のくし形電極12A、第2のくし形電極12B、反射器電極13を備える。第1のくし形電極12Aと第2のくし形電極12Bとが互いに間挿し合うことにより、IDT電極12が形成される。水晶基板11は、水晶の結晶体を所謂37°回転Yカットすることにより、基板形状に形成されている。
【0019】
水晶基板11の表面111には、第1のくし形電極12A、第2のくし形電極12B、反射器電極13が形成されている。第1のくし形電極12A、第2のくし形電極12B、反射器電極13は、感磁性を有する金属からなり、具体的には、ニッケルNiからなる。なお、ニッケルNiのみでなく、ニッケルNiを主成分とする金属であってもよい。これら第1のくし形電極12A、第2のくし形電極12B、反射器電極13は、水晶基板11の表面に、密着層であるチタンTiを介して形成されている。
【0020】
第1のくし形電極12Aは、複数の電極指121Aとバスバー120Aとから形成されている。複数の電極指121Aは、全て同じ長さおよび同じ幅で形成されている。複数の電極指121Aは、水晶基板11の結晶方位に対して所定角(90°X方向)に平行になるように、所定間隔で配列形成されている。この際、複数の電極指121Aは、長さ方向が配列方向に直交し、幅方向が配列方向に平行になるように、形成されている。複数の電極指121Aの長さ方向の一方端は、バスバー120Aに接続している。バスバー120Aは、長さ方向が上記配列方向に平行であり、幅方向が配列方向に対して直交するように、形成されている。このバスバー120Aには、外部入出力用電極(図示せず)が接続されている。
【0021】
第2のくし形電極12Bは、複数の電極指121Bとバスバー120Bとから形成されている。複数の電極指121Bは、全て同じ長さおよび同じ幅で形成されている。複数の電極指121Bは、水晶基板11の結晶方位に対して所定角(90°X方向)に平行になるように、所定間隔で配列形成されている。この際、複数の電極指121Bは、長さ方向が配列方向に直交し、幅方向が配列方向に平行になるように、形成されている。複数の電極指121Bの長さ方向の一方端は、バスバー120Bに接続している。バスバー120Bは、長さ方向が上記配列方向に平行であり、幅方向が配列方向に対して直交するように、形成されている。このバスバー120Bには、外部入出力用電極(図示せず)が接続されている。
【0022】
そして、第1のくし形電極12Aと第2のくし形電極12Bとは、それぞれの電極指121A,121Bが配列方向にそって、交互に繰り返されるように、配設されている。この際、電極指121Aと電極指121Bとの間隔は、一定に設定されている。また、電極指121Aと電極指121Bとの交叉幅も一定に設定されている。この構成により、SAW共振子10は、所謂正規型1ポート共振子となる。
【0023】
反射器電極13は、第1のくし形電極12Aおよび第2のくし形電極12Bに対して電極指121A、121Bの配列方向の両端から外方側へ所定の距離の位置に、それぞれ形成されている。
【0024】
ここで、具体的な形成寸法例を示すと、第1のくし形電極12A、第2のくし形電極12Bは200μm、密着層は5μmとする。第1のくし形電極12A、第2のくし形電極12Bの幅および配列方向への形成間隔であるラインアンドスペース(Line&Space)は5.84μm&1.46μmであり、Line/(Line+Space)は0.8としている。これにより、磁界無印加時の共振周波数が315MHzとなるSAW共振子10を形成することができる。
【0025】
このようなSAW共振子10を、磁界強度が変化する環境に設置する。例えば、SAW共振子10を、シャーシの扉が当接する箇所に設置する。そして、磁石20A,20Bを扉のシャーシへ当接する箇所に設置する。これにより、扉が開いている時には、磁石20A,20Bで生じる磁界はSAW共振子10へ殆ど到達せず。扉が閉まっている時には、磁石20A,20Bで生じる強い磁界内にSAW共振子10が配置されることになる。
【0026】
本実施形態の磁気センサでは、この際に、磁石20A,20Bが生じる磁界強度の中心軸と、SAW共振子10の複数の電極指121A,121Bの配列方向とが一致するように、SAW共振子10を配置している。言い換えれば、磁石20A,20Bが生じる磁界強度の中心軸と、SAW共振子10の信号伝搬方向とが平行になるように、SAW共振子10を配置している。
【0027】
より具体的には、SAW共振子10を挟んで磁石20A,20Bが配置されるようにする。この際、磁石20A,20Bは、異なる極となる主面同士が対向するように配置される。そして、これら主面に直交し、磁石20A,20Bの中心を通る直線を、それぞれ中心軸CLMA,CLMBとし、これら中心軸CLMA,CLMBが略一致するように、磁石20A,20Bが配設される。
【0028】
このように配設された磁石20A,20Bに対して、扉が閉まった時に、電極指121A,121Bの交叉幅の中心を結ぶ配列方向に沿った中心軸(以下、当該中心軸をX軸方向中心軸CLs(px)と称する。)と中心軸CLMA,CLMBとが一致するように、SAW共振子10は配設されている。
【0029】
検知対象である磁石20A,20Bの発生する磁界に対して、上述のように、SAW共振子10を配設することで、以下のような特性が得られる。
【0030】
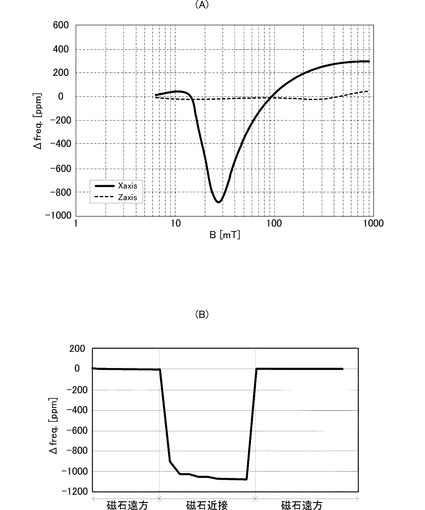
図4(A)はSAW共振子10の配置領域における磁束密度に対するSAW共振子10の共振周波数fpの変化特性を示した図である。なお、図4(A)において、実線は本実施形態の配置構成の場合を示し、破線は水晶基板11の表面111に対して、磁石20A,20Bが生じる磁界強度の中心軸が直交する場合を示す。図4(B)は、SAW共振子10に対して、磁石を近づけたり遠ざけたりした場合の共振周波数fpの変化を示す図である。なお、図4では、磁界無印加の共振周波数に対する変化量を示している。
【0031】
図4(A)に示すように、本実施形態のSAW共振子10の配置を用いることで、磁束密度(磁界強度)の変化に応じて、SAW共振子10の共振周波数fpが大きく変化する。一方、水晶基板11の表面111に対して磁石20A,20Bが生じる磁界強度の中心軸が直交する場合には、磁束密度(磁界強度)が変化しても、SAW共振子10の共振周波数fpは殆ど変化しない。
【0032】
したがって、この共振周波数の変化を検知することで、磁界強度の変化を高精度且つ確実に検知することが可能になる。
【0033】
ここで、扉を閉めた時にSAW共振子10の感じる磁束密度が、最も共振周波数fpの変化した磁束密度(本実施形態の場合であれば略25mT)となるように、SAW共振子10と磁石20A,20Bの位置関係、および、磁石20A,20Bの材質形状を設定する。これにより、扉が開いている時すなわち磁石20A,20Bが遠方にあり磁界強度が略0の時に対して、扉が閉まっている時すなわち磁石20A,20Bが近傍にあり磁界強度が所定値の時に、共振周波数fpが大きく変化する。したがって、この共振周波数fpの変化を検知することで、扉の開閉を高精度且つ確実に検知することができる。
【0034】
なお、上述の図4(A)に示す特性結果は、X軸方向中心軸CLs(px)と磁石20A,20Bの中心軸CLMA,CLMBとが一致する場合を示している。X軸方向中心軸CLs(px)と磁石20A,20Bの中心軸CLMA,CLMBとが平行であれば、X軸に直交する各方向へ所定の角度範囲でずれていても、本実施形態の作用効果を得ることができる。
【0035】
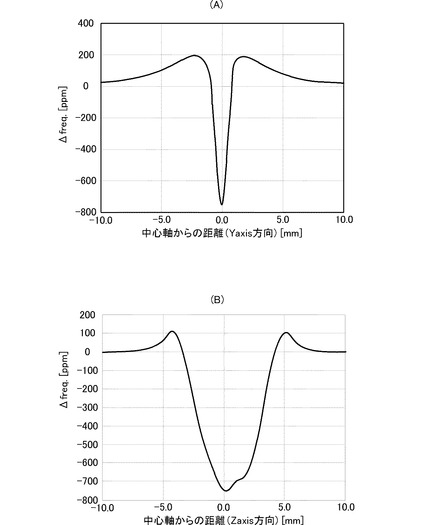
なお、以下では、各図に示したように、配列方向に平行な方向をY軸方向とし、水晶基板11の表面111に対して直交する方向をZ軸方向とする。また、Y軸中心軸CLs(py)は、第1のくし形電極12Aの配列方向(X軸方向)の両端位置に対して中点となる位置を通り、X軸中心軸CLs(px)に直交し、水晶基板11の表面111に平行な軸である。また、Z軸中心軸CLs(pz)は、第1のくし形電極12Aの配列方向(X軸方向)の両端位置に対して中点となる位置を通り、X軸中心軸CLs(px)およびY軸中心軸CLs(py)に直交し、水晶基板11の表面111に直交する軸である。
【0036】
図5(A)は、Y軸方向に沿ったX軸方向中心軸CLs(px)のズレ量と、ズレ量に応じた共振周波数fpの変化量を示している。図5(B)は、Z軸方向に沿ったX軸方向中心軸CLs(px)のズレ量と、ズレ量に応じた共振周波数fpの変化量を示している。なお、図5(A),(B)の特性は、上述の図4(A)の特性が得られた磁石をSAW共振子10の中心位置(X軸中心軸、Y軸中心軸、Z軸中心軸の交点)から4mm離間した状態で、Y軸方向もしくはZ軸方向へシフトさせることで得たものである。
【0037】
ここで、例えば、磁界検知のための共振周波数fpの変化量の加減を50ppmとすると、Y軸方向に対しては図5(A)から分かるように、±1mm程度のシフト量までが磁界検知可能範囲となる。これは、角度に換算すると、図6(A)に示すように、SAW共振子10の中心位置からY軸方向に開く角度で、±14°程度となる。
【0038】
同様に、磁界検知のための共振周波数fpの変化量の加減を50ppmとすると、Z軸方向に対しては図5(B)から分かるように、±4mm程度のシフト量までが磁界検知可能範囲となる。これは、角度に換算すると、図6(B)に示すように、SAW共振子10の中心位置からZ軸方向に開く角度で、±45°程度となる。
【0039】
このような角度範囲内であれば、SAW共振子10と磁石20A,20Bとの位置が、Y−Z平面上でずれても、確実に磁界強度を検出することができる。
【0040】
このようなSAW共振子10を用いて、次に示すような構成から磁気センサを形成する。
【0041】
<第1実施例>
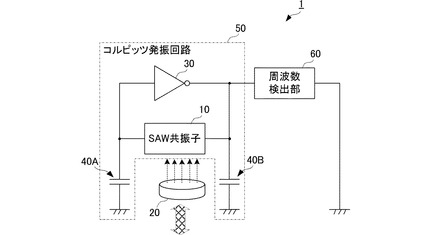
図7は、本実施形態のSAW共振子10を用いた磁気センサ1の構成を示す回路ブロック図である。図7に示すように、磁気センサ1は、コルピッツ発振回路50と周波数検出部60とを備える。
【0042】
コルピッツ発振回路50は、上述のSAW共振子10、反転増幅器30、コンデンサ40A,40Bを備える。SAW共振子10の一方の外部入出力電極端子は、反転増幅器30の入力端に接続されている。SAW共振子10の他方の外部入出力電極端子は、反転増幅器30の出力端に接続されている。
【0043】
SAW共振子10の一方の外部入出力電極端子と反転増幅器30の入力端との接続点は、コンデンサ40Aを介して設置されている。SAW共振子10の他方の外部入出力電極端子と反転増幅器30の出力端との接続点は、コンデンサ40Bを介して設置されている。
【0044】
このように、SAW共振子10を含むコルピッツ発振回路50を形成することで、磁界強度に応じた周波数で発振信号を出力することができる。なお、発振回路はコルピッツ発振回路に限定されるものではなく、ハートレー発振回路等、その他の発振回路を用いてもよい。
【0045】
周波数検出部60は、反転増幅器30の出力端に接続されている。周波数検出部60は、コルピッツ発振回路50から出力されたSAW共振子10の共振周波数fpからなる発振信号を周波数解析する。
【0046】
周波数検出部60は、周波数と磁界強度(磁束密度)との関係を予め記憶しており、解析結果で得られた周波数から磁界強度(磁束密度)を検出する。
【0047】
このように、上述のSAW共振子10を用いて磁気センサ1を形成することで、確実且つ高精度に磁界検出を行うことができる。なお、上述の説明では、磁気センサ1は磁界強度(磁束密度)を検出しているが、検出した磁界強度(磁束密度)に閾値を設定しておき、磁界の有無のみを検出するようにすることもできる。
【0048】
<第2実施例>
図8は、本実施形態のSAW共振子10を用いた無線式の磁気センサ1Aの構成を示す回路ブロック図である。図8に示すように、磁気センサ1Aは、子機70と親機80とを備える。
【0049】
子機70は、上述のSAW共振子10とアンテナ71とを備える。アンテナ71で受信した励振信号はSAW共振子10へ出力される。SAW共振子10は、励振信号により励起して、感じた磁界強度に応じた共振周波数fpで共振し、共振信号Sfpを出力する。ここで、上述のSAW共振子10を用いていることで、磁石20が近接しているときには共振周波数fpnの共振信号Sfpnが出力され、磁石20が遠方にあるときには共振周波数fpfの共振信号Sfpfが出力され、アンテナ71は、共振信号Sfp(Sfpn,Sfpf)を送信する。
【0050】
親機80は、制御部81、励振信号生成部82、送受信部83、アンテナ84、周波数検出部85を備える。
【0051】
制御部81は、親機80の全体制御を行う。また、制御部81は、励振信号生成部82へ励振信号SpLの生成制御を行う。
【0052】
励振信号生成部82は、励振信号SpLの生成制御を受けると、励振信号SpLを生成し、送受信部83へ与える。具体的には、励振信号SpLの周波数成分がSAW共振子10が取り得る周波数帯域と略同じになるように、搬送波周波数はSAW共振子10の共振周波数に近い周波数に設定され、かつ帯域幅を決定するパルス幅(バースト時間)は適当な値に設定されている。
【0053】
送受信部83は、励振信号SpLをアンテナ84に出力する。アンテナ84は、子機70のアンテナ部71と同様の構造からなり、励振信号SpLを送信(放射)する。
【0054】
アンテナ84は、子機70のアンテナ71からの共振信号Sfp(Sfpn,Sfpf)を受信し、送受信部83へ出力する。送受信部83は、共振信号Sfp(Sfpn,Sfpf)を周波数検出部85へ出力する。
【0055】
周波数検出部85は、共振信号Sfp(Sfpn,Sfpf)を周波数解析する。周波数検出部85は、周波数と磁界強度(磁束密度)との関係を予め記憶しており、解析結果で得られた周波数から磁界強度(磁束密度)を検出する。
【0056】
このように実施例2の構成を用いれば、遠隔式で且つ確実に磁界検出を行うことができる。
【0057】
なお、実施例2の構成では、次の特性を利用して、磁界の有無のみを検出することもできる。図9はSAW共振子10の配置領域における磁束密度に対するSAW共振子10の共振周波数fpおよびSAW共振子10の共振に対するQ値の変化特性を示した図である。なお、Q値は、次式から得られる。
【0058】
Q=fp/(fpH−fpL)
ここで、周波数fpHは、共振周波数fpのインピーダンスZを√2で割ったインピーダンス(Z/(√2))となる、共振周波数fpよりも高周波数側の周波数を示す。周波数fpLは、共振周波数fpのインピーダンスZを√2で割ったインピーダンス(Z/(√2))となる、共振周波数fpよりも低周波数側の周波数を示す。
【0059】
図9に示すように、本実施形態のSAW共振子10と磁界方向との関係を用いた場合、周波数変化量が大きくなるほど、共振のQ値が低下する。このため、磁石20が所定距離まで近づき、SAW共振子10の共振周波数がfp近傍になると、Q値が低下し、共振期間が短くなる。一方、磁石20が遠方にあれば、Q値は高く、共振期間が長くなる。
【0060】
したがって、親機80の周波数検出部85は、子機70のSAW共振子10と磁石20との距離が離れている期間では共振信号Sfp(Sfpf)を取得でき、子機70のSAW共振子10と磁石20とが所定距離で近接する期間では共振信号Sfp(Sfpn)を取得できなくなる。これを利用し、共振信号Sfpの取得の有無により、磁界の有無を検出することができる。
【0061】
なお、上述の原理説明では、二個の磁石20A,20BでSAW共振子10を挟み込む構成を例に説明したが、一個の磁石であってもよい。また、上述の実施例1、実施例2の説明では、一個の磁石を用いる例を示したが、原理説明のように二個の磁石を用いてもよい。
【符号の説明】
【0062】
1,1A−磁気センサ、10−SAW共振子、11−水晶基板、111−水晶基板11の表面、12−IDT電極、12A−第1のくし形電極、12B−第2のくし形電極、13−反射器電極、20,20A,20B−磁石、30−反転増幅器、40A,40B−コンデンサ、50−コルピッツ発振回路、60−周波数検出部、70−子機、71−アンテナ、80−親機、81−制御部、82−励振信号生成部、83−送受信部、84−アンテナ、85−周波数検出部
【技術分野】
【0001】
本発明は、弾性表面波素子を用いて磁気検出を行う磁気センサに関する。
【背景技術】
【0002】
従来、弾性表面波素子を用いたセンサが各種考案されている。その一つとして、特許文献1に記載のセンサでは、圧電基板の表面にIDT電極を形成して、弾性表面波を励振させる。そして、このセンサでは、弾性表面波の伝搬経路上に磁性体を形成しており、弾性表面波の伝搬特性の変化から、磁界を検出する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−47229号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のような従来のセンサでは、磁界を如何に効果的に検出するか、という概念はなく、単に磁界を検出できればよいものであった。
【0005】
本発明の目的は、単に磁界検知できるだけでなく、より確実に磁界検知ができる磁気センサを実現することにある。
【課題を解決するための手段】
【0006】
この発明は、磁気センサに関する。この磁気センサは、SAW共振子と共振信号検知手段とを備える。SAW共振子は、水晶基板、該水晶基板表面に形成されたNiを主成分とする金属からなるIDT電極、を備える。共振信号検知手段は、SAW共振子で励振された弾性表面波に基づく共振信号を検知する。このような構成において、さらに、SAW共振子は、弾性表面波の伝搬方向と検知対象の磁界の方向とが平行になるように配設されている。
【0007】
この構成に示すように、検知対象の磁界に対してSAW共振子を配設することで、後述の図4に示すように、磁束密度の変化に応じたSAW共振子の共振周波数の変化を大きくすることができる。これにより、磁界の有無を含む磁束密度および磁界強度の変化を、検出しやすくなる。
【0008】
また、この発明の磁気センサでは、IDT電極は少なくとも第1のくし形電極と第2のくし形電極とからなり、第1のくし形電極の電極指と第2のくし形電極の電極指との交叉幅の中心を結び、水晶基板の表面で延びるSAW共振子側中心軸と、検知対象の磁界を発生する磁石の中心軸とが、一致するように、SAW共振子が配設されている。
【0009】
この構成では、検知対象の磁界に対するSAW共振子の具体的な配設構成を示している。このような構成とすることで、磁界の有無を含む磁束密度および磁界強度の変化を、さらに検出しやすくなる。
【0010】
また、この発明の磁気センサでは、子機は、SAW共振子、および該SAW共振子に接続する第1のアンテナを備える。親機は、第1のアンテナに対して無線通信が可能な第2のアンテナ、該第2のアンテナ接続しSAW共振子を励振させる励振信号を生成する励振信号生成手段、および共振信号検知手段を備える。
【0011】
この構成では、磁気センサを、子機と親機とを備える無線システムで実現することができる。
【0012】
また、この発明の磁気センサでは、共振信号検知手段は、共振信号の検知の有無により、検知対象の磁界の有無を検知する。
【0013】
この構成では、無線式の磁気センサを実現する場合の具体的な磁界検知方法を示している。
【発明の効果】
【0014】
この発明によれば、従来よりも確実に磁界検知を行うことができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bとの位置関係を示す外観斜視図である。
【図2】本発明の実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bとの位置関係を示す平面図および側面図である。
【図3】本発明の実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bの発生する磁界(磁力線)との関係を示す平面図および側面図である。
【図4】SAW共振子10の配置領域における磁束密度に対するSAW共振子10の共振周波数fpの変化特性を示した図、および、SAW共振子10に対して、磁石を近づけたり遠ざけたりした場合の共振周波数fpの変化を示す図である。
【図5】Y軸方向に沿ったX軸方向中心軸のズレ量とズレ量に応じた共振周波数fpの変化量、Z軸方向に沿ったX軸方向中心軸のズレ量とズレ量に応じた共振周波数fpの変化量を示す図である。
【図6】SAW共振子10と磁石20A,20Bとの位置関係の許容角度範囲を示す図である。
【図7】SAW共振子10を用いた磁気センサ1の構成を示す回路ブロック図である。
【図8】SAW共振子10を用いた無線式の磁気センサ1Aの構成を示す回路ブロック図である。
【図9】SAW共振子10の配置領域における磁束密度に対するSAW共振子10の共振周波数fpおよびSAW共振子10の共振に対するQ値の変化特性を示した図である。
【発明を実施するための形態】
【0016】
本発明の実施形態に係る磁気センサについて、図を参照して説明する。図1は本実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bとの位置関係を示す外観斜視図である。図2(A)は本実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bとの位置関係を示す平面図である。図2(B)は本実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bとの位置関係を示す側面図である。図3(A)は本実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bの発生する磁界(磁力線)との関係を示す平面図である。図3(B)は本実施形態の磁気センサを構成するSAW共振子10と磁石20A,20Bの発生する磁界(磁力線)との関係を示す側面図である。
【0017】
まず、本実施形態の磁気センサの検出原理について説明する。本実施形態の磁気センサではSAW共振子10を用い、磁界強度に応じたSAW共振子10の特性変化を利用している。
【0018】
SAW共振子10は、水晶基板11、第1のくし形電極12A、第2のくし形電極12B、反射器電極13を備える。第1のくし形電極12Aと第2のくし形電極12Bとが互いに間挿し合うことにより、IDT電極12が形成される。水晶基板11は、水晶の結晶体を所謂37°回転Yカットすることにより、基板形状に形成されている。
【0019】
水晶基板11の表面111には、第1のくし形電極12A、第2のくし形電極12B、反射器電極13が形成されている。第1のくし形電極12A、第2のくし形電極12B、反射器電極13は、感磁性を有する金属からなり、具体的には、ニッケルNiからなる。なお、ニッケルNiのみでなく、ニッケルNiを主成分とする金属であってもよい。これら第1のくし形電極12A、第2のくし形電極12B、反射器電極13は、水晶基板11の表面に、密着層であるチタンTiを介して形成されている。
【0020】
第1のくし形電極12Aは、複数の電極指121Aとバスバー120Aとから形成されている。複数の電極指121Aは、全て同じ長さおよび同じ幅で形成されている。複数の電極指121Aは、水晶基板11の結晶方位に対して所定角(90°X方向)に平行になるように、所定間隔で配列形成されている。この際、複数の電極指121Aは、長さ方向が配列方向に直交し、幅方向が配列方向に平行になるように、形成されている。複数の電極指121Aの長さ方向の一方端は、バスバー120Aに接続している。バスバー120Aは、長さ方向が上記配列方向に平行であり、幅方向が配列方向に対して直交するように、形成されている。このバスバー120Aには、外部入出力用電極(図示せず)が接続されている。
【0021】
第2のくし形電極12Bは、複数の電極指121Bとバスバー120Bとから形成されている。複数の電極指121Bは、全て同じ長さおよび同じ幅で形成されている。複数の電極指121Bは、水晶基板11の結晶方位に対して所定角(90°X方向)に平行になるように、所定間隔で配列形成されている。この際、複数の電極指121Bは、長さ方向が配列方向に直交し、幅方向が配列方向に平行になるように、形成されている。複数の電極指121Bの長さ方向の一方端は、バスバー120Bに接続している。バスバー120Bは、長さ方向が上記配列方向に平行であり、幅方向が配列方向に対して直交するように、形成されている。このバスバー120Bには、外部入出力用電極(図示せず)が接続されている。
【0022】
そして、第1のくし形電極12Aと第2のくし形電極12Bとは、それぞれの電極指121A,121Bが配列方向にそって、交互に繰り返されるように、配設されている。この際、電極指121Aと電極指121Bとの間隔は、一定に設定されている。また、電極指121Aと電極指121Bとの交叉幅も一定に設定されている。この構成により、SAW共振子10は、所謂正規型1ポート共振子となる。
【0023】
反射器電極13は、第1のくし形電極12Aおよび第2のくし形電極12Bに対して電極指121A、121Bの配列方向の両端から外方側へ所定の距離の位置に、それぞれ形成されている。
【0024】
ここで、具体的な形成寸法例を示すと、第1のくし形電極12A、第2のくし形電極12Bは200μm、密着層は5μmとする。第1のくし形電極12A、第2のくし形電極12Bの幅および配列方向への形成間隔であるラインアンドスペース(Line&Space)は5.84μm&1.46μmであり、Line/(Line+Space)は0.8としている。これにより、磁界無印加時の共振周波数が315MHzとなるSAW共振子10を形成することができる。
【0025】
このようなSAW共振子10を、磁界強度が変化する環境に設置する。例えば、SAW共振子10を、シャーシの扉が当接する箇所に設置する。そして、磁石20A,20Bを扉のシャーシへ当接する箇所に設置する。これにより、扉が開いている時には、磁石20A,20Bで生じる磁界はSAW共振子10へ殆ど到達せず。扉が閉まっている時には、磁石20A,20Bで生じる強い磁界内にSAW共振子10が配置されることになる。
【0026】
本実施形態の磁気センサでは、この際に、磁石20A,20Bが生じる磁界強度の中心軸と、SAW共振子10の複数の電極指121A,121Bの配列方向とが一致するように、SAW共振子10を配置している。言い換えれば、磁石20A,20Bが生じる磁界強度の中心軸と、SAW共振子10の信号伝搬方向とが平行になるように、SAW共振子10を配置している。
【0027】
より具体的には、SAW共振子10を挟んで磁石20A,20Bが配置されるようにする。この際、磁石20A,20Bは、異なる極となる主面同士が対向するように配置される。そして、これら主面に直交し、磁石20A,20Bの中心を通る直線を、それぞれ中心軸CLMA,CLMBとし、これら中心軸CLMA,CLMBが略一致するように、磁石20A,20Bが配設される。
【0028】
このように配設された磁石20A,20Bに対して、扉が閉まった時に、電極指121A,121Bの交叉幅の中心を結ぶ配列方向に沿った中心軸(以下、当該中心軸をX軸方向中心軸CLs(px)と称する。)と中心軸CLMA,CLMBとが一致するように、SAW共振子10は配設されている。
【0029】
検知対象である磁石20A,20Bの発生する磁界に対して、上述のように、SAW共振子10を配設することで、以下のような特性が得られる。
【0030】
図4(A)はSAW共振子10の配置領域における磁束密度に対するSAW共振子10の共振周波数fpの変化特性を示した図である。なお、図4(A)において、実線は本実施形態の配置構成の場合を示し、破線は水晶基板11の表面111に対して、磁石20A,20Bが生じる磁界強度の中心軸が直交する場合を示す。図4(B)は、SAW共振子10に対して、磁石を近づけたり遠ざけたりした場合の共振周波数fpの変化を示す図である。なお、図4では、磁界無印加の共振周波数に対する変化量を示している。
【0031】
図4(A)に示すように、本実施形態のSAW共振子10の配置を用いることで、磁束密度(磁界強度)の変化に応じて、SAW共振子10の共振周波数fpが大きく変化する。一方、水晶基板11の表面111に対して磁石20A,20Bが生じる磁界強度の中心軸が直交する場合には、磁束密度(磁界強度)が変化しても、SAW共振子10の共振周波数fpは殆ど変化しない。
【0032】
したがって、この共振周波数の変化を検知することで、磁界強度の変化を高精度且つ確実に検知することが可能になる。
【0033】
ここで、扉を閉めた時にSAW共振子10の感じる磁束密度が、最も共振周波数fpの変化した磁束密度(本実施形態の場合であれば略25mT)となるように、SAW共振子10と磁石20A,20Bの位置関係、および、磁石20A,20Bの材質形状を設定する。これにより、扉が開いている時すなわち磁石20A,20Bが遠方にあり磁界強度が略0の時に対して、扉が閉まっている時すなわち磁石20A,20Bが近傍にあり磁界強度が所定値の時に、共振周波数fpが大きく変化する。したがって、この共振周波数fpの変化を検知することで、扉の開閉を高精度且つ確実に検知することができる。
【0034】
なお、上述の図4(A)に示す特性結果は、X軸方向中心軸CLs(px)と磁石20A,20Bの中心軸CLMA,CLMBとが一致する場合を示している。X軸方向中心軸CLs(px)と磁石20A,20Bの中心軸CLMA,CLMBとが平行であれば、X軸に直交する各方向へ所定の角度範囲でずれていても、本実施形態の作用効果を得ることができる。
【0035】
なお、以下では、各図に示したように、配列方向に平行な方向をY軸方向とし、水晶基板11の表面111に対して直交する方向をZ軸方向とする。また、Y軸中心軸CLs(py)は、第1のくし形電極12Aの配列方向(X軸方向)の両端位置に対して中点となる位置を通り、X軸中心軸CLs(px)に直交し、水晶基板11の表面111に平行な軸である。また、Z軸中心軸CLs(pz)は、第1のくし形電極12Aの配列方向(X軸方向)の両端位置に対して中点となる位置を通り、X軸中心軸CLs(px)およびY軸中心軸CLs(py)に直交し、水晶基板11の表面111に直交する軸である。
【0036】
図5(A)は、Y軸方向に沿ったX軸方向中心軸CLs(px)のズレ量と、ズレ量に応じた共振周波数fpの変化量を示している。図5(B)は、Z軸方向に沿ったX軸方向中心軸CLs(px)のズレ量と、ズレ量に応じた共振周波数fpの変化量を示している。なお、図5(A),(B)の特性は、上述の図4(A)の特性が得られた磁石をSAW共振子10の中心位置(X軸中心軸、Y軸中心軸、Z軸中心軸の交点)から4mm離間した状態で、Y軸方向もしくはZ軸方向へシフトさせることで得たものである。
【0037】
ここで、例えば、磁界検知のための共振周波数fpの変化量の加減を50ppmとすると、Y軸方向に対しては図5(A)から分かるように、±1mm程度のシフト量までが磁界検知可能範囲となる。これは、角度に換算すると、図6(A)に示すように、SAW共振子10の中心位置からY軸方向に開く角度で、±14°程度となる。
【0038】
同様に、磁界検知のための共振周波数fpの変化量の加減を50ppmとすると、Z軸方向に対しては図5(B)から分かるように、±4mm程度のシフト量までが磁界検知可能範囲となる。これは、角度に換算すると、図6(B)に示すように、SAW共振子10の中心位置からZ軸方向に開く角度で、±45°程度となる。
【0039】
このような角度範囲内であれば、SAW共振子10と磁石20A,20Bとの位置が、Y−Z平面上でずれても、確実に磁界強度を検出することができる。
【0040】
このようなSAW共振子10を用いて、次に示すような構成から磁気センサを形成する。
【0041】
<第1実施例>
図7は、本実施形態のSAW共振子10を用いた磁気センサ1の構成を示す回路ブロック図である。図7に示すように、磁気センサ1は、コルピッツ発振回路50と周波数検出部60とを備える。
【0042】
コルピッツ発振回路50は、上述のSAW共振子10、反転増幅器30、コンデンサ40A,40Bを備える。SAW共振子10の一方の外部入出力電極端子は、反転増幅器30の入力端に接続されている。SAW共振子10の他方の外部入出力電極端子は、反転増幅器30の出力端に接続されている。
【0043】
SAW共振子10の一方の外部入出力電極端子と反転増幅器30の入力端との接続点は、コンデンサ40Aを介して設置されている。SAW共振子10の他方の外部入出力電極端子と反転増幅器30の出力端との接続点は、コンデンサ40Bを介して設置されている。
【0044】
このように、SAW共振子10を含むコルピッツ発振回路50を形成することで、磁界強度に応じた周波数で発振信号を出力することができる。なお、発振回路はコルピッツ発振回路に限定されるものではなく、ハートレー発振回路等、その他の発振回路を用いてもよい。
【0045】
周波数検出部60は、反転増幅器30の出力端に接続されている。周波数検出部60は、コルピッツ発振回路50から出力されたSAW共振子10の共振周波数fpからなる発振信号を周波数解析する。
【0046】
周波数検出部60は、周波数と磁界強度(磁束密度)との関係を予め記憶しており、解析結果で得られた周波数から磁界強度(磁束密度)を検出する。
【0047】
このように、上述のSAW共振子10を用いて磁気センサ1を形成することで、確実且つ高精度に磁界検出を行うことができる。なお、上述の説明では、磁気センサ1は磁界強度(磁束密度)を検出しているが、検出した磁界強度(磁束密度)に閾値を設定しておき、磁界の有無のみを検出するようにすることもできる。
【0048】
<第2実施例>
図8は、本実施形態のSAW共振子10を用いた無線式の磁気センサ1Aの構成を示す回路ブロック図である。図8に示すように、磁気センサ1Aは、子機70と親機80とを備える。
【0049】
子機70は、上述のSAW共振子10とアンテナ71とを備える。アンテナ71で受信した励振信号はSAW共振子10へ出力される。SAW共振子10は、励振信号により励起して、感じた磁界強度に応じた共振周波数fpで共振し、共振信号Sfpを出力する。ここで、上述のSAW共振子10を用いていることで、磁石20が近接しているときには共振周波数fpnの共振信号Sfpnが出力され、磁石20が遠方にあるときには共振周波数fpfの共振信号Sfpfが出力され、アンテナ71は、共振信号Sfp(Sfpn,Sfpf)を送信する。
【0050】
親機80は、制御部81、励振信号生成部82、送受信部83、アンテナ84、周波数検出部85を備える。
【0051】
制御部81は、親機80の全体制御を行う。また、制御部81は、励振信号生成部82へ励振信号SpLの生成制御を行う。
【0052】
励振信号生成部82は、励振信号SpLの生成制御を受けると、励振信号SpLを生成し、送受信部83へ与える。具体的には、励振信号SpLの周波数成分がSAW共振子10が取り得る周波数帯域と略同じになるように、搬送波周波数はSAW共振子10の共振周波数に近い周波数に設定され、かつ帯域幅を決定するパルス幅(バースト時間)は適当な値に設定されている。
【0053】
送受信部83は、励振信号SpLをアンテナ84に出力する。アンテナ84は、子機70のアンテナ部71と同様の構造からなり、励振信号SpLを送信(放射)する。
【0054】
アンテナ84は、子機70のアンテナ71からの共振信号Sfp(Sfpn,Sfpf)を受信し、送受信部83へ出力する。送受信部83は、共振信号Sfp(Sfpn,Sfpf)を周波数検出部85へ出力する。
【0055】
周波数検出部85は、共振信号Sfp(Sfpn,Sfpf)を周波数解析する。周波数検出部85は、周波数と磁界強度(磁束密度)との関係を予め記憶しており、解析結果で得られた周波数から磁界強度(磁束密度)を検出する。
【0056】
このように実施例2の構成を用いれば、遠隔式で且つ確実に磁界検出を行うことができる。
【0057】
なお、実施例2の構成では、次の特性を利用して、磁界の有無のみを検出することもできる。図9はSAW共振子10の配置領域における磁束密度に対するSAW共振子10の共振周波数fpおよびSAW共振子10の共振に対するQ値の変化特性を示した図である。なお、Q値は、次式から得られる。
【0058】
Q=fp/(fpH−fpL)
ここで、周波数fpHは、共振周波数fpのインピーダンスZを√2で割ったインピーダンス(Z/(√2))となる、共振周波数fpよりも高周波数側の周波数を示す。周波数fpLは、共振周波数fpのインピーダンスZを√2で割ったインピーダンス(Z/(√2))となる、共振周波数fpよりも低周波数側の周波数を示す。
【0059】
図9に示すように、本実施形態のSAW共振子10と磁界方向との関係を用いた場合、周波数変化量が大きくなるほど、共振のQ値が低下する。このため、磁石20が所定距離まで近づき、SAW共振子10の共振周波数がfp近傍になると、Q値が低下し、共振期間が短くなる。一方、磁石20が遠方にあれば、Q値は高く、共振期間が長くなる。
【0060】
したがって、親機80の周波数検出部85は、子機70のSAW共振子10と磁石20との距離が離れている期間では共振信号Sfp(Sfpf)を取得でき、子機70のSAW共振子10と磁石20とが所定距離で近接する期間では共振信号Sfp(Sfpn)を取得できなくなる。これを利用し、共振信号Sfpの取得の有無により、磁界の有無を検出することができる。
【0061】
なお、上述の原理説明では、二個の磁石20A,20BでSAW共振子10を挟み込む構成を例に説明したが、一個の磁石であってもよい。また、上述の実施例1、実施例2の説明では、一個の磁石を用いる例を示したが、原理説明のように二個の磁石を用いてもよい。
【符号の説明】
【0062】
1,1A−磁気センサ、10−SAW共振子、11−水晶基板、111−水晶基板11の表面、12−IDT電極、12A−第1のくし形電極、12B−第2のくし形電極、13−反射器電極、20,20A,20B−磁石、30−反転増幅器、40A,40B−コンデンサ、50−コルピッツ発振回路、60−周波数検出部、70−子機、71−アンテナ、80−親機、81−制御部、82−励振信号生成部、83−送受信部、84−アンテナ、85−周波数検出部
【特許請求の範囲】
【請求項1】
水晶基板と、該水晶基板表面に形成されたNiを主成分とする金属からなるIDT電極と、を備えたSAW共振子と、
前記SAW共振子で励振された弾性表面波に基づく共振信号を検知する共振信号検知手段と、を備え、
前記弾性表面波の伝搬方向と検知対象の磁界の方向とが平行になるように、前記SAW共振子が配設されている、磁気センサ。
【請求項2】
請求項1に記載の磁気センサであって、
前記IDT電極は少なくとも第1のくし形電極と第2のくし形電極とからなり、前記第1のくし形電極の電極指と前記第2のくし形電極の電極指との交叉幅の中心を結び、前記水晶基板の表面で延びるSAW共振子側中心軸と、前記検知対象の磁界を発生する磁石の中心軸とが、一致するように、前記SAW共振子が配設されている、磁気センサ。
【請求項3】
請求項1または請求項2に記載の磁気センサであって、
前記SAW共振子、および該SAW共振子に接続する第1のアンテナを備える子機と、
該第1のアンテナに対して無線通信が可能な第2のアンテナ、該第2のアンテナ接続し前記SAW共振子を励振させる励振信号を生成する励振信号生成手段、および前記共振信号検知手段を備える親機と、を有する磁気センサ。
【請求項4】
請求項3に記載の磁気センサであって、
前記共振信号検知手段は、前記共振信号の検知の有無により、前記検知対象の磁界の有無を検知する、磁気センサ。
【請求項1】
水晶基板と、該水晶基板表面に形成されたNiを主成分とする金属からなるIDT電極と、を備えたSAW共振子と、
前記SAW共振子で励振された弾性表面波に基づく共振信号を検知する共振信号検知手段と、を備え、
前記弾性表面波の伝搬方向と検知対象の磁界の方向とが平行になるように、前記SAW共振子が配設されている、磁気センサ。
【請求項2】
請求項1に記載の磁気センサであって、
前記IDT電極は少なくとも第1のくし形電極と第2のくし形電極とからなり、前記第1のくし形電極の電極指と前記第2のくし形電極の電極指との交叉幅の中心を結び、前記水晶基板の表面で延びるSAW共振子側中心軸と、前記検知対象の磁界を発生する磁石の中心軸とが、一致するように、前記SAW共振子が配設されている、磁気センサ。
【請求項3】
請求項1または請求項2に記載の磁気センサであって、
前記SAW共振子、および該SAW共振子に接続する第1のアンテナを備える子機と、
該第1のアンテナに対して無線通信が可能な第2のアンテナ、該第2のアンテナ接続し前記SAW共振子を励振させる励振信号を生成する励振信号生成手段、および前記共振信号検知手段を備える親機と、を有する磁気センサ。
【請求項4】
請求項3に記載の磁気センサであって、
前記共振信号検知手段は、前記共振信号の検知の有無により、前記検知対象の磁界の有無を検知する、磁気センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−73115(P2012−73115A)
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願番号】特願2010−218160(P2010−218160)
【出願日】平成22年9月29日(2010.9.29)
【出願人】(000006231)株式会社村田製作所 (3,635)
【Fターム(参考)】
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願日】平成22年9月29日(2010.9.29)
【出願人】(000006231)株式会社村田製作所 (3,635)
【Fターム(参考)】
[ Back to top ]