
磁気テープ、磁気テープ装置、サーボパターン記録装置、磁気テープの製造方法及び記録方法
【課題】
正確にデータを記録、再生することが可能な磁気テープ、該磁気テープのサーボパターン記録装置、及び該磁気テープの変形(幅と長手方向の伸縮)情報や磁気テープの傾き情報を検出することを可能とする磁気テープ装置、該磁気テープの製造方法及び該磁気テープにデータを記録する方法を提供する。
【解決手段】
磁気テープ1の幅方向に複数設けられるデータバンドb0〜b3上に、サーボパターン2、ガードスペース4、データバースト3、ガードスペース4、サーボパターン2、ガードスペース4、データバースト3、・・・のように配置されている。サーボパターン2dを有する磁気テープ1に、LTMによるシフトd、変形によるアジマス角変化が±β、傾き角度γが複合して発生した場合に、シフトd、角度β及び傾き角度γを求め、ヘッドHの位置を調整することで、データの正確な記録、再生を行うことができる。
正確にデータを記録、再生することが可能な磁気テープ、該磁気テープのサーボパターン記録装置、及び該磁気テープの変形(幅と長手方向の伸縮)情報や磁気テープの傾き情報を検出することを可能とする磁気テープ装置、該磁気テープの製造方法及び該磁気テープにデータを記録する方法を提供する。
【解決手段】
磁気テープ1の幅方向に複数設けられるデータバンドb0〜b3上に、サーボパターン2、ガードスペース4、データバースト3、ガードスペース4、サーボパターン2、ガードスペース4、データバースト3、・・・のように配置されている。サーボパターン2dを有する磁気テープ1に、LTMによるシフトd、変形によるアジマス角変化が±β、傾き角度γが複合して発生した場合に、シフトd、角度β及び傾き角度γを求め、ヘッドHの位置を調整することで、データの正確な記録、再生を行うことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁気テープ、磁気テープのサーボパターン記録装置、リニア型などの磁気テープ装置、磁気テープの製造方法及び記録方法に関する。
に関する。
【背景技術】
【0002】
従来、トラック追従サーボ制御の例は、長手方向データトラック群の間に予め記録された平行な長手方向サーボ・トラックを設け、その結果、1つまたは複数のサーボ・ヘッドがサーボ・トラックを読取ることができ、付随するトラック追従サーボが、ヘッドまたはテープのテープ幅方向の位置を調節して、サーボ・トラックに対して所望のテープ幅方向位置にサーボ・ヘッドを維持し、それによって、データ・ヘッドがデータトラックに対して中心に位置決めされるようにしている。
【0003】
トラック追従サーボ・システムについては、例えば特許文献1に記載されている。この特許文献1には、タイミング・ベース・サーボ・システムに関して記載されている。タイミング・ベース・サーボ・システムは、例えば、LTO(リニア・テープ・オープン)フォーマットとともに用いられ、その一例には、米国IBM社のLTO Ultrim(登録商標)磁気テープ・ドライブ及びそれに関連するテープ・カートリッジが含まれる。
【0004】
リニア・サーボ・トラックは、例えば、あらかじめ記録された磁気遷移からなる感知可能な遷移パターンを含む。これらの遷移は、リニア・サーボ・トラックの上をテープ幅方向に延びる2つの異なるアジマス角配向の遷移の繰返し循環周期シーケンスからなるタイミング・ベース・サーボ・パターンを形成する。例えば、このパターンは、リニア・サーボ・トラックの方向に対して第1方向に傾斜した、すなわち第1方向のアジマス角配向を有する遷移と、反対方向に傾斜した、すなわち反対方向のアジマス角配向を有する遷移が交互に並ぶものを含み得る。このため、媒体がサーボ読取りヘッドに対して直線方向に移動すると、タイミング・ベース・サーボ・トラックに対するサーボ読取りヘッドのテープ幅方向位置は、異なるアジマス角配向を有する2つの遷移間の時間を、平行なアジマス角配向を有する2つの遷移間の時間と比較した尺度に基づいて感知される。このサーボ読取りヘッドによって読取られる遷移の相対的なタイミングは、ヘッドのテープ幅方向位置に応じて線形に変化する。そのため、複数の平行なデータトラックを、サーボ・トラックを横切る、異なるテープ幅方向位置と位置合せすることができる(例えば、特許文献1参照。)。
【特許文献1】米国特許第5,689,384号
【発明の開示】
【発明が解決しようとする課題】
【0005】
リニア型磁気テープ装置の面記録密度を高めるには、線密度を高めることは既に検討しつくしているので、トラック密度を上げることが最も効果的である。しかしながら、トラック密度を上げる際には次のような問題があることが知られている。即ち、トラッキング情報をいかにして感度を高く検出するか、一般的に用いられる2バンプ型のヘッドに対して、磁気テープの走行の傾きにどう対処するか、磁気テープの変形(幅方向、長手方向)にどう対応するか、ヘッドチャンネルスペーシングをどう小さくするかなどである。
【0006】
一般には、磁気テープを幅方向に複数(例えば4)に分割して、それぞれに磁気テープの幅方向にデータバンドとサーボバンドとを設ける。磁気テープ出荷時には、サーボバンドにトラッキングのためのサーボパターンが予め記録されている。データバンドにデータを書き込むとき、或いはデータを読取るときには、サーボパターンを再生して相対的なヘッドの位置情報(磁気テープの幅方向にその時々に特定な位置の情報)を検出し、記録ヘッドまたは再生ヘッドを常に正しい位置に維持している(トラッキングを取っている)。このため、ヘッドにはサーボパターンを再生するための追加チャンネルが、データチャンネルの外側に用意されている。
【0007】
2バンプ型のヘッドを使用したリニア型の磁気テープ装置では、データ記録時には、上流のバンプの記録ヘッドで記録し、直後に下流のバンプの再生ヘッドで再生することにより、データが正しく記録されているかを確認している(これを「リードアフターライト」または「リードホワイルライト」と言う)。なお、以下においては、再生ヘッド(再生チャンネル)は、特に指定がない限り、上流(記録側)/下流(再生側)何れかのバンプにあるものを指す。
【0008】
2バンプ型のヘッドは、記録ヘッドの上に再生ヘッドが(或いはその逆)ピギーバックされているヘッドブロック2つを逆向きに合わせて、1つのヘッドとしているもので、第一のバンプに記録/再生ヘッド、第二のバンプに再生/記録(或いはこれらと逆の順序に)ヘッドを配置し、第一のバンプの記録ヘッドは第二のバンプの再生ヘッドと、また第一のバンプの再生ヘッドは第二のバンプの記録ヘッドとトラックの位置合わせをしてある。
【0009】
こうして記録ギャップと再生ギャップとを1ミリメートル前後離すことにより、記録ヘッドから再生ヘッドへのクロストークを軽減している。
【0010】
また、記録時には、記録ヘッドと同じバンプにある再生ヘッドは、データチャンネルの外側にあるサーボ用チャンネルと言えども、記録ヘッドからのクロストークによりサーボ信号の再生には使用できない。従って、磁気テープの走行方向に離れた再生ヘッドのサーボチャンネルで、サーボ信号を検出して、記録ヘッドの位置の制御をすることになる。この状態で磁気テープの走行が傾くと、記録ヘッドの位置は、その分正しい位置から外れることになり、トラック密度を制約することになる。通常の方法では、磁気テープの走行の傾きの影響を軽減するには、第1のバンプのギャップラインと第2のバンプのギャップラインとの間の距離を近づけることになるが、クロストークの制約などがあり難しい。
【0011】
即ち、トラッキング動作は常に再生ギャップを基準のトラックセンターに位置合わせしようとする。従って、テープがヘッドの前面を走行する方向(傾き)がダイナミックに変化(テープが蛇行)したときには、記録ギャップの位置は傾き角の正接と両ギャップ間の(長手方向の)距離に応じた量だけトラックずれ(トラックミスレジストレーション)を起こしてしまう。すなわち、記録トラックの位置がオフセットしたために、記録済みの隣接トラックの一部を上書きし、そのトラック幅を狭めることによりトラッキングマージンを削ることになる。なお、再生時には、データ再生とサーボ信号再生のヘッドが同一ギャップライン上にあるので、この問題(再生ギャップのトラックミスレジストレーション)は発生しない。厳密には、テープ走行が傾くと実効的にヘッドのトラック間距離が変化(減少)することによりトラックミスレジストレーションが起こるが、その効果は(1−傾き角の余弦)×データバンド幅/2、且つ再生ヘッドトラック<記録ヘッドトラック幅であり、影響は小さい。一方、記録時に記録側のバンプにある再生ギャップを用いてサーボ信号を検出できるかと言うと、記録ヘッドからのクロストークが邪魔をして難しい。
【0012】
以上のような事情に鑑み、本発明の目的は、正確にデータを記録、再生することが可能な磁気テープ、該磁気テープのサーボパターン記録装置、該磁気テープの変形(幅と長手方向の伸縮)情報や磁気テープの傾き情報を検出することを可能とする磁気テープ装置、該磁気テープの製造方法及び該記録方法を提供することにある。
【課題を解決するための手段】
【0013】
上記目的を達成するため、本発明に係る磁気テープは、データバンドを有する磁気テープにおいて、前記データバンドの全幅にわたって、且つ前記磁気テープの長手方向には間隔をあけて配置されたサーボパターンと、前記サーボパターン間に配置されたデータと、前記サーボパターンと前記データとの間に配置されたガードスペースとを具備する。
【0014】
すなわち、本発明は、2バンプ型ヘッドを用いた際に見られた磁気テープ走行の傾きの影響を軽減する磁気テープとしてエンベッデド型のサーボパターンを有する磁気テープを提供するものである。
【0015】
本発明では、データバンドの全幅にわたって、且つ前記磁気テープの長手方向には間隔をあけて配置されたサーボパターン間にデータが配置されている。すなわち、磁気テープの幅方向に一般には複数設けられるデータバンド上に、サーボパターン、ガードスペース、データ、ガードスペース、サーボパターン、ガードスペース、データ、・・・のように配置する。
【0016】
このようにデータを記録するには、サーボパターンは予め記録されているものとして、記録開始時に先ず記録ヘッドと同じバンプにある再生チャンネルで、サーボパターンを通常複数個再生し(この間記録電流は流さない)ヘッドの位置を制御した後に、記録動作に入る。即ち、記録ヘッドに記録電流を流してデータを記録し、次にある時間経過後に(次のサーボパターンの直前で)記録電流を止める。再び同じバンプの再生ヘッドで次のサーボパターンを再生し、ヘッド位置情報を検出し、直後に再び記録に戻る。以下、この記録と再生とヘッド位置制御とを記録終了まで繰り返す。記録中には下流にあるバンプの再生ヘッドを用いてリードアフターライト(またはリードホワイルライトと言う)を行う。即ち、記録時に記録ヘッドと異なるバンプにある再生ヘッドを用いて記録ヘッドの位置決めをする場合には、磁気テープの走行が傾くことにより記録トラックの位置がずれて隣接トラックの領域に侵入すると言う問題(記録済み隣接トラックを上書きする、または後から記録の隣接トラックにより上書きされる可能性がある)が生じるのに対して、本発明では、同じバンプにある記録ヘッドと再生ヘッドとを時分割で交互にデータの記録と記録ヘッドの位置検出とに使用することにより、記録ヘッドにより近い(背中合わせになっている)再生ヘッドでサーボパターンを再生して、前記のテープが傾いて走行する際に生じる問題を回避して、データを正確な位置に記録することを可能にしている。また、記録時に、記録ヘッドから再生ヘッドへのクロストークの問題を解決することが出来る。
【0017】
再生時にはデータ再生に用いる再生ヘッド(どのバンプにある再生ヘッドを用いるかはヘッドブロックの設計にもよる)でサーボパターンも再生してヘッドの位置を制御する。
【0018】
データバンドとは、磁気テープを幅方向に分割して形成される磁気テープ全長にわたった領域である。データバンドは「データサブバンド×データの記録/再生を並列して行うヘッドのチャンネルの数」で構成される。データの記録/再生は、通常1つのデータバンドを終了してから次のデータバンドに移る。
【0019】
データサブバンドは、幅が2バンプ型ヘッドのチャンネルスペーシングで、磁気テープ全長にわたった領域である。並列記録/再生する多チャンネルヘッドの対応する1チャンネルが、1パス毎に磁気テープ幅方向に位置を変えて、規定回数の往復(1往復=2パス)で走査を完了する領域である。
【0020】
ヘッドチャンネルスペーシングは、データの記録/再生を並列に行う多チャンネルヘッドの、隣り合うチャンネルそれぞれの中心線の間の距離である。必ずしも全てのチャンネルが単一のギャップライン上になくてもよい(2次元的にギャップが配置されていてもよい、或いは、複数のヘッドブロックに亘って隣接チャンネルがあってもよい)。
【0021】
サーボパターンは、データバンドの全幅にまたがり(不連続でもよい)、幅方向に複数のセグメントから構成される。サーボパターンは、2バンプ型ヘッドを磁気テープ幅方向に位置制御する(トラッキングをとる)、或いは、磁気テープを速度制御/位相制御するのに用いる磁化遷移(反転)の組み合わせである。サーボパターンは、磁気テープの長手方向には間隔を空けて配置される。サーボパターンは、磁気テープの出荷時には予め磁気テープに記録されていて、個々の磁気テープ装置では書き換えない。セグメントの境界はアジマス角の変化点を結んだ仮想の線(磁気テープ長手方向の線)である。
【0022】
ガードスペースは、サーボパターンとデータバースト(データ)とを分離する領域(ギャップ)である。データ記録時に発生する、データバーストの磁気テープの長手方向の位置が変動するのを吸収する役目を負っている。フォーマット上必ず必要である。
【0023】
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで磁気テープ上に先ず記録し、次いで該記録したサーボパターンの一部を後続の全幅消去ヘッドでデータ記録部分を形成するように消去することで形成してもよい。磁化遷移は反転を含む。境界は磁気テープの記録面内にあり、磁化遷移(反転)は、記録電流の変化に基づいている。
【0024】
これにより、走行方向の長さの短いサーボパターンを形成することができる。
【0025】
前記データバンド上で、前記サーボパターンを前記データバンドの幅方向に、少なくとも2つのセグメントから構成されるようになし、隣り合うセグメントを異なるアジマス角で記録するようになすことが好ましい。(セグメントの数>=アジマス角の数)
これにより、磁気ヘッドの位置決め情報(トラッキングの情報)磁気テープの速度情報に加えて、磁気テープの変形(幅と長手方向の伸縮)情報やテープの傾き情報を磁気テープ装置により検出することができる。
【0026】
前記サーボパターンのそれぞれのセグメントに与えるアジマス角に、絶対値の等しい正と負、及び0度の3通りの中から少なくとも2つを用いてもよい。
【0027】
これにより、磁気ヘッドの位置決め情報(トラッキングの情報)磁気テープの速度情報に加えて、磁気テープの変形(幅と長手方向の伸縮)情報やテープの傾き情報を磁気テープ装置により検出することができる。
【0028】
前記サーボパターンを当該磁気テープの長手方向に等間隔に配置することが好ましい。
【0029】
これにより、磁気テープにより周期的にサーボ情報を提供することができる。同時に、テープ速度制御を容易にする。
【0030】
前記データバンドの幅方向に、少なくとも2つのセグメントから構成されるようになしたサーボパターンの各セグメントの幅を、それぞれ前記データが記録されるデータトラックのトラックピッチの略整数倍にしてもよい。
【0031】
これにより、データバンドの幅方向にサーボパターンが複数のデータトラックに亘る。
【0032】
前記磁気テープの幅方向に前記データバンドが複数ある場合に、隣り合うデータバンドの間でそれぞれのサーボパターンの長手方向の位置を同一になすようにし、サーボパターンを形成する磁化遷移のアジマス角を隣り合うデータバンドの仮想の境界線を挟んだセグメント間で、符号の異なるアジマス角となしてもよい。磁化遷移とは反転を含み、アジマス角をデータバンドの仮想の境界線を挟んだセグメント間で共に0度としてもよい。
【0033】
或いは、前記磁気テープの幅方向に前記データバンドが複数ある場合に、隣り合うデータバンドの間でそれぞれのサーボパターンの長手方向の位置を略同一になすようにし、サーボパターンを形成する磁化遷移のアジマス角を隣り合うデータバンドの仮想の境界線を挟んだセグメント間で、同じ符号のアジマス角となしてもよい。磁化遷移は反転を含み、アジマス角をデータバンドの仮想の境界線を挟んだセグメント間で共に0度としてもよい。
【0034】
これらにより、磁気ヘッドの位置決め情報、磁気テープの変形情報および/または磁気テープの傾き情報を磁気テープ装置により検出することが出来る。後者はヘッド位置決め情報のダイナミックレンジを広げるのにも有効である。
【0035】
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン全幅記録ヘッドで磁気テープ全幅を記録するに当たり、サーボパターン1つ当たりの記録電流の変化(反転を含む)の回数を全て奇数回或いは全て偶数回となすようにしてもよい。磁化遷移は反転を含む。境界は磁気テープの記録面内にあり、磁化遷移(反転)は、記録電流の変化に基づいている。
【0036】
これにより、サーボパターンに挟まれたデータ記録領域(データバーストを記録する領域)の初期の磁化の状態(方向)を、サーボパターンの前後で逆にまたは同じにすることを選択できる。即ち、磁気テープ上に形成される多数のデータ記録領域の初期の(磁気テープ装置により最初にデータを記録する前の)磁化の状態(方向)を交互に逆にまたは全て同じに出来る。
【0037】
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン全幅記録ヘッドで磁気テープ全幅を記録するに当たり、記録電流の変化のタイミングを変調してバイナリデータまたはユニークな同期信号を表現するようにしてもよい。磁化遷移は反転を含む。境界は磁気テープの記録面内にあり、磁化遷移(反転)は、記録電流の変化に基づいている。
【0038】
これにより、記録電流の変化(反転を含む)のタイミングを変調してバイナリデータまたはユニークな同期信号を表現することができる。
【0039】
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで磁気テープ上に先ず記録し、次いで該記録したサーボパターンの一部を後続の全幅消去ヘッドでデータ記録部分を形成するように消去するに当たり、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン中にバイナリデータを表現するようになした、或いは、ユニークな同期信号を表現するようにしてもよい。磁化遷移は反転を含む。境界は磁気テープの記録面内にある。
【0040】
これにより、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン中にバイナリデータまたはユニークな同期信号を表現することができる。
【0041】
前記サーボパターンを、1ビットのデータに対応させるようになした、或いは、ユニークな同期信号に対応させるようにしてもよい。
【0042】
これにより、サーボパターンにより1ビットのデータ、或いは、ユニークな同期信号を提供することができる。
【0043】
前記アドレス情報をサーボパターンに挿入する際に、アドレス情報が挿入されているサーボパターンに対して、ユニークな同期信号が挿入されているサーボパターンを先行させることにより、アドレス情報のフレーム同期を確実に出来る。
【0044】
前記サーボパターンにアドレス情報を挿入する際に、該サーボパターン記録装置が扱える最長の磁気テープよりも充分に長いモジュロのアドレス発生器を用いると共に、前記サーボパターン記録装置に生の磁気テープを装填する毎に、前記アドレス発生器のアドレスをリセットするようになしたサーボパターン記録装置を用いて製造されてもよい。生の磁気テープとは未記録磁気テープを含む。
【0045】
これにより、磁気テープにアドレス情報を記録することができる。
【0046】
本発明に係る磁気テープ装置は、データバンドを有する磁気テープにおいて、前記データバンドの全幅にわたって、且つ前記磁気テープの長手方向には間隔をあけて配置されたサーボパターンとを具備する磁気テープに、前記サーボパターン間で、前記サーボパターンとの間にガードスペースを介してデータを記録する記録ヘッドと、前記磁気テープに記録されたデータを再生する再生ヘッドとを具備する。
【0047】
本発明では、磁気テープの幅方向に一般には複数設けられるデータバンド上に、サーボパターン、ガードスペース、データ、ガードスペース、サーボパターン、ガードスペース、データ、・・・のように配置されている。
【0048】
このようにデータを記録するには、サーボパターンは予め記録されているものとして、記録開始時に先ず記録ヘッドと同じバンプにある再生チャンネルで、サーボパターンを通常複数個再生し(この間記録電流は流さない)ヘッドの位置を制御した後に、記録動作に入る。即ち、記録ヘッドに記録電流を流してデータを記録し、次にある時間経過後に(次のサーボパターンの直前で)記録電流を止める。再び同じバンプの再生ヘッドで次のサーボパターンを再生し、ヘッド位置情報を検出し、直後に再び記録に戻る。以下、この記録と再生とヘッド位置制御とを記録終了まで繰り返す。記録中には下流にあるバンプの再生ヘッドを用いてリードアフターライト(またはリードホワイルライトと言う)を行う。即ち、記録時に記録ヘッドと異なるバンプにある再生ヘッドを用いて記録ヘッドの位置決めをする場合には、磁気テープの走行が傾くことにより記録トラックの位置がずれて隣接トラックの領域に侵入すると言う問題(記録済み隣接トラックを上書きする、または後から記録の隣接トラックにより上書きされる可能性がある)が生じるのに対して、本発明では、同じバンプにある記録ヘッドと再生ヘッドとを時分割で交互にデータの記録と記録ヘッドの位置検出とに使用することにより、記録ヘッドにより近い(背中合わせになっている)再生ヘッドでサーボパターンを再生して、前記のテープが傾いて走行する際に生じる問題を回避して、データを正確な位置に記録することを可能にしている。また、記録時に、記録ヘッドから再生ヘッドへのクロストークの問題を解決することが出来る。
【0049】
再生時にはデータ再生に用いる再生ヘッド(どのバンプにある再生ヘッドを用いるかはヘッドブロックの設計にもよる)でサーボパターンも再生してヘッドの位置を制御する。
【0050】
これにより、磁気ヘッドの位置決め情報(トラッキングの情報)磁気テープの速度情報に加えて、磁気テープの変形(幅と長手方向の伸縮)情報やテープの傾き情報を磁気テープ装置により検出することが出来る。
【0051】
前記サーボパターンの再生に、前記再生ヘッドのデータ用チャンネルの少なくとも2チャンネルを使用し、各チャンネルからの再生サーボ信号間の相関関係と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とから、前記記録ヘッドまたは前記再生ヘッドの位置決め情報、前記磁気テープの変形情報、及び/または、磁気テープの傾き情報を検出するようにしてもよい。
【0052】
これにより、記録ヘッドまたは再生ヘッドの位置決め情報、磁気テープの変形情報、及び/または、磁気テープの傾き情報を検出することができる。
【0053】
前記サーボパターンの再生に、前記再生ヘッドのデータ用チャンネル及びサーボ用補助チャンネルの中から少なくとも2チャンネルを使用し、各チャンネルからの再生サーボ信号間の相関関係と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とから、前記記録ヘッドまたは前記再生ヘッド位置決め情報、磁気テープの変形情報、及び/または、磁気テープの傾き情報を検出するようにしてもよい。
【0054】
これにより、記録ヘッドまたは再生ヘッドのヘッド位置決め情報、磁気テープの変形情報、及び/または、磁気テープの傾き情報を検出することができる。同時に、ヘッド位置決め情報検出のダイナミックレンジを広げるのにも有効である。
【0055】
前記サーボパターンの異なるアジマス角のセグメントを、それぞれに対応する再生チャンネルで再生し、それぞれの出力信号の間の経過時間または該磁気テープ装置内の時計で計測した時刻差に、磁気テープ速度情報と、対応する再生チャンネルの組み合わせ毎に予め決められた基準値とを組み合わせて、前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を得るようにしてもよい。
【0056】
これにより、記録ヘッドまたは再生ヘッドのトラック幅方向の位置決め情報を得ることができる。
【0057】
前記サーボパターンの正のアジマス角のセグメントと負のアジマス角のセグメントを、それぞれに対応する再生チャンネルで再生してもよい。
【0058】
これにより、サーボパターンの正のアジマス角のセグメントと負のアジマス角のセグメントの情報をそれぞれ対応する再生チャンネルで再生することができる。
【0059】
前記サーボパターンの、正負の第一のアジマス角の組み合わせから得られた位置に関する第一の情報と、前記第一のアジマス角より大きな正負の第二のアジマス角の組み合わせから得られた位置に関する第二の情報とを組み合わせて、位置決め情報を得るようにしてもよい。第一の情報とは、例えば位置に関する低感度、広ダイナミックレンジの情報であり、第二の情報とは、例えば位置に関する高感度、狭ダイナミックレンジの情報である。
【0060】
これにより、低感度の情報を用いてヘッド位置の粗調整を行い、次いで高感度の情報を用いて精密なヘッド位置合わせ(トラッキング)を可能とする。即ち、高感度と広ダイナミックレンジと言う相反する条件を満たすことが出来る。
【0061】
前記サーボパターンのアジマス角が0度ではないセグメントを、対応する2つの再生チャンネルで再生し、再生信号間の経過時間または該磁気テープ装置内の時計で計測した時刻差である第一の値と、これとは逆のアジマス角のセグメントを対応する第2の2つの再生チャンネルで再生して得られる第二の値と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの変形情報、及び/または、磁気テープの傾き情報を検出するようにしてもよい。
【0062】
これにより、磁気テープの変形情報、及び/または、磁気テープの傾き情報を検出することができる。
【0063】
前記サーボパターンのアジマス角が0度のセグメントを、対応する2つの再生チャンネルで再生し、再生信号間の経過時間または装置内の時計で計測した時刻差と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの傾き情報を検出するようにしてもよい。
【0064】
これにより、磁気テープの傾き情報を検出することができる。
【0065】
前記サーボパターンの、0度ではない等しいアジマス角の第一の2つのセグメントを、第一の再生チャンネルペアでそれぞれ再生し、再生信号間の経過時間または該磁気テープ装置内の時計で計測した時刻差を得ると共に、これとは逆の等しいアジマス角の第二の2つのセグメントを、第二の再生チャンネルペアで再生して再生信号間の経過時間または時刻差を得、テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの変形情報と傾き情報との混合した情報を検出すると共に、アジマス角が0度のセグメントを第三の再生チャンネルペアで再生して検出される磁気テープの傾き情報を用いて、磁気テープ変形情報を得るようにしてもよい。
【0066】
これにより、磁気テープの傾き情報を用いて、磁気テープ変形情報を得ることができる。
【0067】
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出するようにしてもよい。
【0068】
これにより、バースト位相比較器により位相差(即ち、前記の時間情報)を検出することができる。
【0069】
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、及び/または、前記傾き情報を用いて補正するようにしてもよい。
【0070】
これにより、トラック幅方向でより正確な位置に記録ヘッド、及び/または、再生ヘッドを位置決めすることができる。
【0071】
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御するようにしてもよい。傾き角はアジマス角を含む。
【0072】
これにより、より正確な位置に記録ヘッド、及び/または、再生ヘッドを位置決めすることができる。
【0073】
前記磁気テープ速度情報を、設定されている速度情報(目標値)とした、及び/または、前記磁気テープ速度情報を、再生するサーボパターンの周期を計測して得るようにしてもよい。設定されている速度情報とは、速度の目標値の情報を含む。
【0074】
これにより、磁気テープ速度を得ることができる。
【0075】
前記サーボパターン中にアジマス角0度のセグメントがある場合に、このセグメントを再生するチャンネルの出力のサーボパターンの周期を計測して速度情報を得るようにしてもよい。
【0076】
これにより、正確な速度情報を得ることができる。
【0077】
前記サーボパターン中にアジマス角0度のセグメントがない場合に、アジマス角が正のセグメントに対応する再生チャンネルの出力のサーボパターンの周期と、負のセグメントに対応する再生チャンネルの出力のサーボパターンの周期とを計測し、それぞれのアジマス角の絶対値を考慮した演算を行って速度情報としてもよい。
【0078】
α1, α2をサーボパターンの(既知の)アジマス角として、(n−1)番目のサーボパターンからn番目のサーボパターンまでテープが走行する間に、Δdだけテープが上がった(相対的にヘッドが下がった)とすると、
Δd1(〜dn−dn−1),dn−1,dn:n−1, nにおけるヘッドの位置(計算値)
T1=T01+Δd1tan(−α1+Δγ1), T1:n−1からnまでの時間(実測値)
T01=T1+Δd1tan(α1−Δγ1),T01:T1から求めた周期
Δγ1=arctan(Δd1/T01)<<α1
従って
T01=T1+Δd1tanα1
同様にして
T02=T2−Δd2tanα2
T0=(T01+T02)/2, T0:推定周期
T0=((T1+T2)/2)+Δd1tanα1−Δd2tanα2
正負のアジマス角のサーボパターンは、テープ上の長手方向に略同じ位置にあるから
Δd1=Δd2=Δd
よって
T0=((T1+T2)/2)+Δd(tanα1−tanα2)
尚、テープの変形を考慮する場合には上記α1,α2を(α1−β),(α2−β)とすればよい(例えば図18参照)。
【0079】
これにより、サーボパターン中にアジマス角0度のセグメントがない場合にも速度情報を得ることができる。
【0080】
前記サーボパターン中のアジマス角0度のセグメントを、磁気テープ走行の上流のバンプの再生ヘッドと下流のバンプの再生ヘッドとでそれぞれ順次再生して、その経過時間或いは計測時間差と、両再生ヘッドのギャップ間距離を使って磁気テープ速度情報を得るようにしてもよい。
【0081】
これにより、磁気テープ走行の上流の再生ヘッドと下流の再生ヘッドとを用いて、磁気テープ速度情報を得ることができる。
【0082】
前記サーボパターンの正、負のアジマス角のセグメントそれぞれを、前記上流の再生ヘッドと前記下流の再生ヘッドで順次再生して、それぞれの経過時間或いは計測時間差と上流下流再生ヘッドそれぞれのギャップ間距離から第一及び第二の速度情報を得た後、使用した再生ヘッドのチャンネル情報とアジマス角の情報を考慮した演算を行って速度情報とするようにしてもよい。
【0083】
これにより、正、負のアジマス角のセグメントそれぞれを、上流の再生ヘッドと下流の再生ヘッドとで順次再生して、速度情報を得ることができる。
【0084】
前記磁気テープを位相ロックする場合に、前記サーボパターン中にアジマス角0度のセグメントがある場合には、該セグメントを再生するチャンネルの出力サーボパターンの周期を、必要なだけ分周して基準信号と位相比較するようにしてもよい。
【0085】
周知のように、位相検出器は最も簡単なかけ算型の場合は+/−90度、もっと精巧な形式の場合でも+/−180度外装検出の限界で、この範囲を超えると次のトランジションとの位相比較の結果を出力する。即ち、基準信号とVFO(可変周波数発信機)の周波数に差があると、両者のトランジションの1:1の位相比較が出来ずに、検出器の出力は両周波数の差の周波数成分が支配的になる。位相ループを形成したときの問題は、VFOの応答性が良く、前記の周波数成分に素早く応答して同期に入れるかどうかである。テープ走行系のようの機械系を伴ったVFOは応答が遅い。一方、位相比較の周波数を低くする(分周する)と、前記の+/−90度或いは+/−180度に相当する時間の窓の絶対値が大きくなる。その結果、ある点で同期に入り易くなる。しかし、位相同期系というのはサンプリング系でもあるので、サンプリングの観点からは位相比較の周波数は高い方が望ましい。従って、同期引き込みと同期後の精度との兼ね合いで分周の程度を決めることになる。
【0086】
これにより、サーボパターン中にアジマス角0度のセグメントがある場合に、磁気テープを位相ロックすることができる。
【0087】
前記磁気テープを位相ロックする場合に、前記サーボパターン中にアジマス角0度のセグメントがない場合には、アジマス角が正のセグメントに対応する再生チャンネルの出力サーボパターンの周期を、所定の分周比で必要なだけ分周して第一の基準信号と位相比較するようになし、負のセグメントに対応する再生チャンネルの出力サーボパターンの周期を、同じ分周比で分周して第二の基準信号と位相比較するようになし、それぞれの位相比較器の出力をアジマス角の絶対値を考慮した演算を行って、位相ロックするようにしてもよい。第二の基準信号は第一の基準信号と実質的に同じ(周波数)場合もあり得る。一方、正のアジマス角のチャンネルの出力と負のアジマス角のチャンネルの出力が大きく異なる場合には、第1の基準信号と第2の基準信号とを同一周波数で位相の異なる信号とする。
α1, α2をサーボパターンの(既知の)アジマス角として、テープがΔTだけ走行する間に、dだけテープが上がった(相対的にヘッドが下がった)とすると、
ΔT− アジマス角α1のセグメントとREF(基準)との間の距離(又は周期)
ΔT+ アジマス角α2のセグメントとREF(基準)との間の距離(又は周期)
ΔT=(ΔT− + ΔT+)/2 + d(tanα1−tanα2)
尚、テープの変形を考慮する場合には上記α1を(α1−γ),(α1−β−γ)とし、上記α2を(α2+γ),(α2−β+γ)とすればよい(例えば図19参照)。
【0088】
これにより、サーボパターン中にアジマス角0度のセグメントがない場合に、磁気テープを位相ロックすることができる。
【0089】
前記データ記録時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生するようにしてもよい。
【0090】
これにより、上流のバンプの記録ヘッドによりデータを記録し、上流のバンプの再生ヘッドによりサーボパターンを再生することができる。
【0091】
前記データ再生時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生するようにしてもよい。
【0092】
これにより、データ再生時に、下流の再生ヘッドを使用して、サーボパターンを再生することができる。
【0093】
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生するようにしてもよい。この際、検出されたテープの傾きおよび記録ギャップと再生ギャップの長手方向の距離に応じて、ヘッドの位置決めをオフセットする。
【0094】
これにより、データ記録時に、下流の再生ヘッドを使用して、サーボパターンを再生することができる。
【0095】
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生するようにしてもよい。この際、検出されたテープの傾きおよび記録ギャップと再生ギャップの長手方向の距離に応じて、ヘッドの位置決めをオフセットする。
【0096】
これにより、データ再生時に、上流の記録ヘッドにピギーバックされている再生ヘッドを使用して、サーボパターンを再生することができる。
【0097】
前記記録ヘッド及び前記再生ヘッドの、記録及び/または再生ギャップの個々の位置の、基準の位置からの偏差の情報を該磁気テープ装置内に格納し、その情報を用いて前記記録ヘッド及び前記再生ヘッドの位置情報、磁気テープの変形情報、磁気テープの傾き情報、磁気テープ速度情報、及び/または、磁気テープの位相情報を補正する。
【0098】
これにより、記録ヘッド及び再生ヘッドの位置情報、磁気テープの変形情報、磁気テープの傾き情報、磁気テープ速度情報、及び/または、磁気テープの位相情報を補正することができる。
【0099】
前記サーボパターンに挟まれたデータ領域の構成要素である各パス毎の領域の所定の位置に、前記データバンドおよび/またはパスの識別情報を挿入するようにしてもよい。
【0100】
これにより、磁気テープ装置により、データ領域の所定の位置で、データバンド及び/またはパスの識別情報を識別することができる。
【0101】
各パス毎に、前記サーボパターンに挟まれたデータ領域と、隣接して先行または後続するサーボパターンと、付随するガードスペースとを単位にして、その整数倍を物理ブロックとして取り扱うようにしてもよい。
【0102】
データバーストとは、データバンド上でサーボパターンとサーボパターンに挟まれた領域にある、1パスの部分データを含む。それぞれの領域には、規定のパス数(2×往復回数)のデータバーストが磁気テープ幅方向に多重化(1パス毎にトラック位置をかえて多重化)される。
【0103】
これにより、データ管理が容易となる。
【0104】
各パス毎に、前記サーボパターンに挟まれたデータ領域と、隣接して先行または後続するサーボパターンと、付随するガードスペースとを単位に、1個または複数個を用いてテープマークとなすようにしてもよい。テープマークはファイルマークを含む。テープマーク(ファイルマーク)はデータの終わりを表す。
【0105】
これにより、磁気テープを取り扱い易くなる。
【0106】
本発明に係るサーボパターン記録装置は、磁気テープに記録するサーボパターンの磁化遷移の境界の形状と同じ形状の記録ギャップを有し前記サーボパターンを前記磁気テープの全幅に亘って記録する記録ヘッドと、前記記録ヘッドで前記磁気テープ全幅を記録するに当たり、前記サーボパターン1つ当たりの記録電流の変化の回数を全て奇数回或いは全て偶数回に制御する制御手段とを具備する。磁化遷移は反転を含む。境界は磁気テープの記録面内にあり、磁化遷移(反転)は、記録電流の変化に基づいている。
【0107】
本発明では、制御手段により記録電流の変化(反転を含む)の回数を全て奇数回或いは全て偶数回にして、サーボパターン全幅記録ヘッドにより、サーボパターンを磁気テープの全幅に記録することができる。
【0108】
本発明に係るサーボパターン記録装置は、磁気テープに記録するサーボパターンの磁化遷移の境界の形状と同じ形状の記録ギャップを有し前記サーボパターンを前記磁気テープの全幅に亘って記録する磁気ヘッドと、前記記録ヘッドで前記磁気テープ上に先ず記録し、次いでデータ記録領域を形成するように後続の全幅消去ヘッドで該サーボパターンの一部を消去することで、該サーボパターンを形成する。
【0109】
これにより、磁気テープの走行方向の幅(長さ)の狭いサーボパターン、または磁気テープの走行方向の長さの短いサーボパターンを形成することができる。
【0110】
前記サーボパターンを、前記記録ヘッドで磁気テープ全幅を記録するに当たり、記録電流の変化のタイミングを変調してバイナリデータまたはユニークな同期信号を表現するようにしてもよい。磁化遷移(反転)は、記録電流の変化に基づいている。
【0111】
これにより、記録電流の変化(反転を含む)のタイミングを変調してバイナリデータまたはユニークな同期信号を表現することができる。
【0112】
前記サーボパターンを、前記記録ヘッドでテープ上に先ず記録し、次いで後続の全幅消去ヘッドでデータ記録部分を形成するように該記録されたサーボパターンの一部を消去するに当たり、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン中にバイナリデータを表現する、或いは、ユニークな同期信号を表現するようにしてもよい。
【0113】
これにより、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン中にバイナリデータまたはユニークな同期信号を表現することができる。
【0114】
前記サーボパターンを、1ビットのデータに対応させる、或いは、1ビットのデータまたはユニークな同期信号に対応させるようにしてもよい。
【0115】
これにより、サーボパターンにより1ビットのデータ、或いは、1ビットのデータまたはユニークな同期信号を提供することができる。
【0116】
前記サーボパターンにアドレス情報を挿入する際に、該サーボパターン記録装置が扱える最長の磁気テープよりも充分に長いモジュロのアドレス発生器を用いると共に、該サーボパターン記録装置に生の磁気テープを装填する毎に、アドレス発生器のアドレスをリセットする。また、前記アドレス情報をサーボパターンに挿入する際に、アドレス情報が挿入されているサーボパターンに対して、ユニークな同期信号が挿入されているサーボパターンを先行させることにより、アドレス情報のフレーム同期を確実に出来る。
【0117】
これにより、サーボパターンにアドレス情報を記録することができる。
【0118】
サーボパターン記録装置は、未記録の磁気テープを定速走行させるテープ走行装置と、テープに接触している記録ヘッドと、記録ヘッドに電流を供給する電子回路とで構成されている。サーボパターンの記録動作は、磁気テープを定速走行させながら記録電流を変化させる(一般にはトランジション以外の点でも電流は流れている)だけである。
【0119】
本発明に係る記録方法は、データバンドを有する磁気テープにデータを記録する方法において、前記データバンドの全幅にわたって、且つ前記磁気テープの長手方向には間隔をあけて配置されたサーボパターンからサーボ信号を取得し、前記取得したサーボ信号に基づいて、前記サーボパターン間にガードスペースを介してデータを記録する。
【0120】
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで、トランジションの数をサーボパターン1つ当たり、全て奇数回または偶数回となるようにテープ上に記録することによって、データ記録領域を形成してもよい。
【0121】
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで磁気テープ上に先ず記録し、次いで該記録したサーボパターンの一部を下流にある全幅消去ヘッドで消去することによって、データ記録領域を形成してもよい。
【0122】
前記データバンド上で、前記サーボパターンを前記データバンドの幅方向に、少なくとも2つのセグメントから構成されるようになすと共に隣り合うセグメントを異なるアジマス角で記録するようになして、データ記録領域を形成してもよい。
【発明の効果】
【0123】
以上のように、本発明によれば、正確にデータを記録、再生することが可能な磁気テープ、該磁気テープのサーボパターン記録装置、及び該磁気テープの変形(幅と長手方向の伸縮)情報や磁気テープの傾き情報を検出することを可能とする磁気テープ装置、該磁気テープの製造方法及び記録方法を提供することができる。
【発明を実施するための最良の形態】
【0124】
以下、本発明の実施の形態を図面に基づき説明する。
図1は本発明の一実施形態に係る磁気テープを示す平面図、図2(A)〜(D)は図1に示す磁気テープ1のサーボパターン2の例を示す平面図、図3は磁気テープ装置のヘッド位置、磁気テープ1の変形及び磁気テープ1の傾きの情報の検出の原理説明図である。
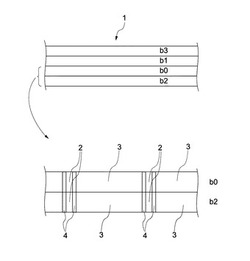
図1に示すように、磁気テープ1は、複数(例えば4個)のデータバンドb0、b1、b2及びb3と、データバンドb0、b1、b2及びb3の全幅に亘って、且つ磁気テープ1の長手方向には間隔をあけて配置されたサーボパターン2と、サーボパターン2とサーボパターン2との間に配置されデータバースト3と、サーボパターン2とデータバースト3との間に配置されたガードスペース4とを備えている。例えばサーボパターン2とデータバースト3とガードスペースとの整数倍を物理ブロックとして取り扱うようにしている。
【0125】
データバンドb0、b1、b2及びb3は、磁気テープ1を幅方向に分割して形成された磁気テープ1全長に亘った領域である。データバンドb0、b1、b2及びb3は、それぞれ「データサブバンド×データの記録/再生を並列して行う磁気テープ装置のヘッドのチャンネルの数」で構成される。データの記録/再生は、通常1つのデータバンドを終了してから次のデータバンドに移る。
【0126】
データサブバンドは、幅がヘッドHのチャンネルスペーシングで、磁気テープ1全長にわたった領域である。並列記録/再生する多チャンネルヘッドの対応する1チャンネルが、1パス毎に磁気テープ1の幅方向に位置を変えて、規定回数の往復(1往復=2パス)で走査を完了する領域である。
【0127】
ヘッドチャンネルスペーシングは、データの記録/再生を並列に行う多チャンネルのヘッドHの、隣り合うチャンネルそれぞれの中心線の間の距離である。必ずしも全てのチャンネルが単一のギャップライン上になくてもよい(2次元的にギャップが配置されていてもよい、或いは、ヘッドを構成する複数のヘッドブロックHB1、HB2、HB3・・・のそれぞれにチャンネルがあってもよい)。
【0128】
サーボパターン2は、データバンドb0、b1、b2及びb3の全幅に亘って(不連続でもよい)、且つ磁気テープ1の長手方向には間隔をあけて配置されている。なお、データバンドb0のサーボパターン2と、データバンドb1のサーボパターン2とが、磁気テープ1の長手方向でずれて(オフセットされて)配置されていてもよい。データバンドb0〜b3の番号の付け方はこれに限られない。
【0129】
サーボパターン2は、ヘッドHを磁気テープ1の幅方向に位置制御する(トラッキングをとる)、或いは、磁気テープ1を速度制御/位相制御するのに用いる磁化反転の組み合わせである。サーボパターン2は、磁気テープ1の出荷時には予め記録されていて、個々の磁気テープ装置では書き換えない。サーボパターン2は、磁気テープ1の長手方向に例えば等間隔に配置されている。
【0130】
データバースト3は、データバンドb0、b1、b2及びb3上でサーボパターン2とサーボパターン2に挟まれた領域にある規定のパス数(2×往復回数)の部分データを含んでいる。データバースト3のそれぞれの領域には、規定のパス数(2×往復回数)の部分データが磁気テープ1の幅方向に多重化(1パス毎にトラック位置をかえて多重化)される。
【0131】
ガードスペース4は、サーボパターン2とデータバースト3とを分離する領域(ギャップ)である。データ記録時に発生する、データバースト3の磁気テープの長手方向の位置が変動するのを吸収する役目を負っている。フォーマット上必ず必要である。
【0132】
図2(A)、図2(B)及び図2(C)に示すサーボパターン2a、2b及び2cは、いずれもデータバンドb0の幅方向に2個のセグメントで構成されている。例えばサーボパターン2aは、磁気テープ1の走行方向に直交する方向に対して所定の正負のアジマス角で形成された二つのセグメントs1、s2で形成されている。図2(A)に示すように、例えばサーボパターン2aを形成する各セグメントs1、s2のアジマス角は、データバンドb0とデータバンドb2との間の仮想の境界線Gを挟んで符号が異なっている。図2(B)に示すように、例えばサーボパターン2bを形成する各セグメントのアジマス角は、データバンドb0とデータバンドb2との間の仮想の境界線Gを挟んで符号が同じになっている。サーボパターン2aの各セグメントs1、s2の幅は、それぞれデータが記録されるデータトラックのトラックピッチの略整数倍になっている。
【0133】
図2(C)では、サーボパターン2cを所定の長さで一旦記録し、その後、後続の消去ヘッドで部分的にサーボパターン2cの一部2c´を消去し、データ領域を形成した例を示している。
【0134】
図2(D)では、サーボパターン2dは、6個のセグメントから構成されている。サーボパターン2dの各セグメントの(記録)アジマス角は、絶対値の等しい正と負、及び0度の3通りに設定されている。
【0135】
これらの例では、サーボパターン2a、2b、2c及び2dが、磁気テープ1の幅方向に連続的に配置されているが、例えば隣合うデータバンドb0と、データバンドb2との境界等で不連続となっていてもよい。
【0136】
図3に示すように、サーボパターン2bが等しい正と負のアジマス角αのセグメントで構成されているときに、後述する磁気テープ装置のヘッドHのトラック幅方向(Y方向)の位置情報(ずれ量 d)、磁気テープ1の変形の情報(角度β)、及び磁気テープ1の傾き情報(角度γ)を検出する原理を説明する。ヘッドHのチャンネルA、B、C及びDが同じギャップラインGL上にあるとして、サーボパターン2bの磁化反転に反応して磁気テープ装置のヘッドHが信号を出力する時点を考える。
【0137】
2バンプ型のヘッドHは、記録ヘッドH1の上に再生ヘッドH2が(或いはその逆)ピギーバックされているヘッドブロックHB1、HB2を2つを逆向きに合わせて、1つのヘッドHとしているもので、ヘッドブロックHB1(を構成する第一のバンプ(上流側のバンプ))に記録/再生ヘッドH1、H2、ヘッドブロックHB2(を構成する第二のバンプ(下流側のバンプ))に再生/記録(或いはこれらと逆の順序に)ヘッドH2,H1を配置し、第一のバンプの記録ヘッドH1は第二のバンプの再生ヘッドH2と、また第一のバンプの再生ヘッドH2は第二のバンプの記録ヘッドH1とトラックの位置を合わせてある。
【0138】
図3に示すように、LTM(走行中の磁気テープ1の幅方向の運動)により磁気テープ1が長さdだけ上がった(相対的にヘッドHが下がった)場合は、チャンネルA、Cの出力は同じ値だけ位相が進む(出力時点が早くなる)、また、チャンネルB、Dの出力は同じ値だけ位相が遅れる(出力時点が遅くなる)。
【0139】
LTMとは、ラテラルテープモーションの略であり、磁気テープ1の走行時に発生する磁気テープ1の幅方向の運動である。狭ピッチのトラック(従って、狭トラック)のトラッキングを阻害する要因になる。サーボパターン2bを再生してヘッドHと磁気テープ1の相対位置を検出し、LTMを追尾することにより、ヘッドHをできるだけ正しいトラックの位置に置くようにする制御(トラッキングサーボ)している。
【0140】
磁気テープ1が変形して(磁気テープ1の幅が広がり(正、負のセグメントのなす角が角度2β大きくなり)、長さが縮んだ例)場合は、チャンネルA、B、C及びD全ての出力の位相が遅れるが、遅れ量はチャンネルA、Bは小さく、チャンネルC、Dは大きい。
【0141】
磁気テープ1がY方向に対して角度γ傾いて走行した場合は、チャンネルA、Cの出力の位相は進み、チャンネルB、Dのそれは後れる。チャンネルA、B、C及びDの位相変化の方向はLTMの場合と同じであるが、その変化量はチャンネルA、Bは小さく、チャンネルC、Dは大きい。これらを図3に矢印の向きと長さで表す。このように、LTM、磁気テープ1の変形、及び、磁気テープ1の走行の傾きの影響は全て異なっている。しかし、これらが混合した場合も、次に示すように完全に分離可能である。
【0142】
図4は磁気テープ装置のヘッド位置、磁気テープ1の変形及び磁気テープ1の傾きの情報の検出の原理説明図である。
サーボパターン2bを有する磁気テープ1に、LTM(走行中の磁気テープ1の幅方向の運動)によるシフトd(位置決め情報)、変形によるアジマス角変化が±β(変形情報)、傾きγ(傾き情報)が複合して発生した場合を示す。シフトdはヘッドH(または磁気テープ1)の位置決め情報となる。図4に示すように、チャンネルA、B、C及びDと、正規の状態にある点線で示すサーボパターン2bとの交点を(xA,yA)、(xB,yB)、(xC,yC)、D(xD,yD)とし、シフト、変形、傾きの影響を受けた実線で示すサーボパターン2bとの交点を(x´A,yA)、(x´B,yB)、(x´C,yC)、(x´D,yD)とする。また、正規の状態にあるサーボパターン2bの頂点の座標を(0,0)、頂角を(π−2α)、すなわちアジマス角±α、シフト量をdとする。未知数(d、γ、β)のうち例えばdは以下のように求められる。
【0143】
【数1】

【0144】
ところで、
x´A−x´B = V×t´AB = V(t´B−t´A)
x´C−x´A = V×t´CA = V(t´A−t´C)
x´D−x´B = V×t´DB = V(t´B−t´D)
ここに、
V:磁気テープ速度
t´AB,t´CA,t´DB :検出出力間の経過時間
t´A,t´B,t´C,t´D :チャンネルA〜Dの出力検出時刻
yA,yB,yC,yD :チャンネル(ヘッドH)A〜Dの磁気テープ幅方向の位置(既知 再生チャンネルの組み合わせ毎に予め決められた基準値:チャンネル情報(座標情報))
ここで、各チャンネルA〜Dのy軸方向の位置yA、yB、yC、yDとアジマス角αは既知であること、また、例えば点(x´A,yA)と(x´B,yB)とのx軸方向の距離は、対応するチャンネルA、Bの出力間の経過時間或いは時刻差(何れも測定値):t´B−t´Aに磁気テープ速度Vを乗じたものである。
【0145】
すなわち、既知の値と計測値とから、K1、K2が求まり、その結果、dが求まる。
【0146】
なお、この場合は、dを求める式の分母、分子が共にVの係数倍という形になり、Vに関係なくyとtとからdを求めることができる。β、γも求めることができる。
【0147】
次に、サーボパターン2eを有する磁気テープ1に、LTMによるシフトd、変形によるアジマス角変化が±β、傾きγが複合して発生した場合を示す。図5に示すサーボパターン2eは、等しい正負のアジマス角±αのセグメントとアジマス角0度の2つのセグメントとで構成されている。このときに、ヘッドHのトラック幅方向の位置情報(シフトd)、及び、磁気テープ1の傾き情報(角度γ)を検出する原理を説明する(β=0とする)。
【0148】
図5はヘッド位置、磁気テープ変形及び磁気テープ傾きの情報の検出の原理説明図である。
図5に示すように、ヘッドHのチャンネルA、B、C及びDが同じギャップラインGL上にあるとして、サーボパターン2eの磁化反転に反応して磁気ヘッド装置のヘッドHが信号を出力する時点を考える。
【0149】
図5に示すように、LTMによりサーボパターン2eを有する磁気テープ1が上がり(相対的にヘッドHが下がり シフトd)かつ磁気テープが(角度γ)傾いて走行した場合を示す。この場合には、チャンネルA、Cの出力は位相が進む(出力時点が早くなる)、また、チャンネルB、Dの出力は位相が遅れる(出力時点が遅くなる)。
【0150】
以下に示すように、シフトd、傾き角度γを求めることができる。
【0151】
【数2】
【0152】
磁気テープ1が(角度γ)傾いて走行した場合(β=0と見なす)は、チャンネルC、Dの出力の位相差から直接傾きの角度γがtanγ=V(t´C−t´D)/(yD−yC)より求められる。
【0153】
更にチャンネルC、Dの位相差を無視すれば(要するにチャンネルA、Bの位相差のみからヘッドHの位置情報であるシフトdを求めると)、磁気テープ1の傾きも無視したこと(γ=0と見なすこと)になる。
【0154】
次に、サーボパターン2dを有する磁気テープに、LTMによるシフトd、変形によるアジマス角変化が±β、傾き角度γが複合して発生する場合を示す。サーボパターン2dが等しい正負のアジマス角のセグメント、アジマス角0度の2つのセグメント、及び、別の等しい正負のアジマス角のセグメントで構成されているときに、ヘッドHのトラック幅方向の位置情報(シフトd)、磁気テープ1の幅の情報(角度β)、及び、磁気テープ1の傾き情報(角度γ)を検出する原理を説明する。
【0155】
図6及び図7はサーボパターン2dの構造、ヘッド位置、磁気テープ変形及び磁気テープ傾きの情報の検出の原理説明図である。
【0156】
これらの図に示すように、磁気テープ装置のヘッドHのチャンネルA、B、C、D、E及びFが同じギャップライン上にあり、チャンネルA、B、C、D、E及びFのy軸方向の位置YA、YB、YC、YD、YE、YF及びアジマス角αは既知であるとして、サーボパターンの磁化反転に反応してヘッドHが信号を出力する時点を考える。
【0157】
次に磁気テープのシフトを計算するための計算式を説明する。
【0158】
図6に示す式(8−1)、式(8−2)は次に示すように変形することができる。
【0159】
【数3】
【0160】
図7に示すように、図6よりも原点を−X方向にX´シフトする(すなわち、XNEW=X+X´)。
【0161】
Y0:データバンドピッチ
α:アジマス角(Y0tanα=2X0)
X1:サーボパターンを決めるシフト量、とする。
【0162】
このとき、図7に示すサーボパターンの各部は、次に示すように式(11−1)、式(11−2)、式(11−3)及び式(11−4)で示される。
【0163】
【数4】
【0164】
角度β(磁気テープが幅方向の広がるときの変化角度)を考慮して、アジマス角αをα−βに置き換えると、次に示す式(11−1´)、式(11−2´)、式(11−3´)及び式(11−4´)が得られる。
【0165】
【数5】
【0166】
角度γ(磁気テープ走行時の傾きの角度)を考慮すると、次に示す式(12−1)、式(12−2)が得られる。
【0167】
【数6】
【0168】
また、点(X(ツーダッシュ),0)が(X(スリーダッシュ),Y(スリーダッシュ))に移動し、式(12−1)、式(12−2)は、それぞれ式(12−3)、式(12−4)となる。但し、X(ツーダッシュ)=2X0−X1、2X0=Y0tanαである。
【0169】
【数7】
【0170】
式(12−1)〜式(12−4)を基にシフトdを考慮すると、次に示す式(13−1)、式(13−2)、式(13−3)及び式(13−4)が得られる。
【0171】
【数8】
【0172】
ここで、ヘッドHのチャンネルA,B,C,DのY方向の位置をYA,YB,YC,YDとすると、次に示す式(13−1´)、式(13−2´)、式(13−3´)及び式(13−4´)が得られる。これらの式から、次に示す式(13−5´)及び式(13−6´)が得られる。
【0173】
【数9】
【0174】
これらの式から次に示すシフトdを求める式(13−7)が得られる。
【0175】
【数10】
【0176】
ここで、YA、YBは既知、XA−XBは計測値(チャンネルA,B出力の時間差)から求められる。従って、K1及びK2が式(13−5´)及び式(13−6´)から求められれば、式(13−7)を用いてシフトdを求めることができる。
【0177】
このようにチャンネルA、B、C及びDの出力の経過時間或いは時刻差からシフトdを求めると式(13−7)を得るが、傾き角γが未知である。そこでチャンネルE、Fの出力の時間差から傾き角γを求めればシフトdが得られる。なお、この過程で用いるX軸方向の長さX1(サーボパターンのフォーマットの一部)は、サーボパターン計測時の磁気テープ速度を用いて、磁気テープの長手方向の変形を含めて補正をする必要がある。磁気テープの長手方向の変形は磁気テープ速度偏差に帰着する。
【0178】
ところで、
X(スリーダッシュ)=X(ツーダッシュ)cosγ
Y(スリーダッシュ)=X(ツーダッシュ)sinγ
X(ツーダッシュ)=Y0・tanα−X1
一方、
tanγ=(XE−XF)/(YF−YE)
γ=tan−1[(XE−XF)/(YF−YE)] (13−8)
ここで、YF,YEは、既知であり、XE−XFは計測値から得られる。これらを式(13−5´)、式(13−6´)に代入すれば、次の式(14−1)、式(14−2)に示すように、K1、K2が全て既知の値、或いは計測値から求められた値によって、表現された。
【0179】
【数11】
【0180】
従って、式(14−1)、式(14−2)を式(13−7)に代入してシフトdを求めることができる。例えば式(13−5´)などを用いて角度βも求めることができる。
【0181】
磁気テープ速度の検出
磁気テープ装置により、基本的にはサーボパターンの周期を計測する。図6,9に示すサーボパターン2dように、サーボパターン中にアジマス角0度のセグメントがある場合は、単純にこのセグメントの例えば第一のトランジション(遷移)から磁気テープの長手方向次のサーボパターンの中の第一のトランジション(遷移)の周期を計測すればよい。
【0182】
一方、図4に示すサーボパターン2bように、サーボパターン中にアジマス角0度のセグメントがない場合は、アジマス角が正のセグメントと負のセグメメント(例えばチャンネルAとBと)の、例えば第一のトランジション(遷移)間の周期をそれぞれ計測してその平均から磁気テープ速度を求めればLTMの変動(シフトdの変動)の影響を軽減できる。なお、データバンドの中央を挟んで上下にあるセグメントの周期をそれぞれ計測しその平均を取る方法はアジマス角0度のセグメントの場合にも使用可能で、この場合は磁気テープの傾きの影響を軽減できる。
【0183】
このように本実施形態によれば、磁気テープ1の幅方向に複数設けられるデータバンドb0〜b3上に、サーボパターン2、ガードスペース4、データバースト3、ガードスペース4、サーボパターン2、ガードスペース4、データバースト3、・・・のように配置されている。
【0184】
データバースト3にデータを記録するには、サーボパターン2は予め記録されているものとして、記録開始時に先ず上流側の記録ヘッドH1と同じバンプにある再生ヘッドH2で、サーボパターン2を通常複数個再生し(この間記録電流は流さない)ヘッドHの位置を制御した後に、上流側の記録ヘッドH1に記録電流を流してデータを記録し、次にある時間経過後(次のサーボパターンの直前で)に記録電流を止める。再び同じバンプの再生ヘッドH2で次のサーボパターン2を再生し、ヘッド位置情報を検出し、直後に再びデータバースト記録に入る。以下、この記録と再生とヘッド位置制御とを記録終了まで繰り返す。記録中には下流にあるバンプの再生ヘッドH2を用いてリードアフターライト(またはリードホワイルライトと言う)を行う。
【0185】
すなわち、上流と下流との(異なるバンプの)記録ヘッドH1と再生ヘッドH2とを用いる場合に磁気テープ1の走行方向が傾くことにより記録データトラックの位置がずれる問題が生じるのに対して、本発明では、同じ上流側のバンプの記録ヘッドH1と再生ヘッドH2とを時分割で交互に使用することにより、記録ヘッドH1により近い再生ヘッドH2によりサーボパターン2を再生し正確なサーボ情報に基づきヘッドHの位置をより正確に制御し、ヘッドHを最適な位置へ誘導し、正確な位置にデータを記録することができる。また、記録時に、記録ヘッドH1から再生ヘッドH2へのクロストークの問題を解決することができる。
【0186】
図8は、従来の磁気テープ装置のヘッド及び従来の磁気テープの部分平面図である。
つまり、従来では、図8に示したように、2バンプ型のヘッドH´は、記録ヘッドH1の上に再生ヘッドH2が(或いはその逆)ピギーバックされているヘッドブロックHB1´、HB2´を2つを逆向きに合わせて、1つのヘッドH´としているもので、ヘッドブロックHB1´(を構成する第一のバンプ(上流側のバンプ))に記録/再生ヘッドH1、H2、ヘッドブロックHB2´(を構成する第二のバンプ(下流側のバンプ))に再生/記録(或いはこれらと逆の順序に)ヘッドH2,H1を配置し、第一のバンプの記録ヘッドH1は第二のバンプの再生ヘッドH2と、また第一のバンプの再生ヘッドH2は第二のバンプの記録ヘッドH1とトラックの位置を合わせてある。再生ギャップ上には、サーボ用のギャップが形成されている。
【0187】
こうして例えば記録ギャップ(上流側)と再生ギャップ(下流側)とを1ミリメートル前後離すことにより、記録ヘッドH1から再生ヘッドH2へのクロストークを軽減している。
【0188】
図8に示すように、従来では、磁気テープ1Aを幅方向に複数(例えば4)に分割して、それぞれに磁気テープ1Aの幅方向にデータバンド3Aとサーボバンド2Aとを設ける。記録時には、記録ヘッドH1と同じバンプにある再生ヘッドH2は、データチャンネルの外側にあるサーボ用チャンネルSと言えども、記録ヘッドH1からのクロストークによりサーボ信号の再生には使用できない。従って、磁気テープ1Aの走行方向下流にある隣のバンプの再生ヘッドH2のサーボチャンネルで、サーボ信号を検出して、記録ヘッドの位置の制御をすることになる。この状態で磁気テープ1Aの走行が傾くと、記録ヘッドH1の位置は、その分正しい位置から外れることになり、トラック密度を制約することになる。通常の方法では、磁気テープ1Aの走行の傾きの影響を軽減するには、ヘッドブロックHB1´のギャップラインとヘッドブロックHB2´のギャップラインとの間の距離を近づけることになるが、クロストークの制約などがあり難しい。
【0189】
即ち、トラッキング動作は常に再生ギャップを基準のトラックセンターに位置合わせしようとする。従って、図9に示すように磁気テープがヘッドの前面を走行する方向(傾き)がダイナミックに変化(テープが蛇行)したときには、記録ギャップの位置は傾き角の正接と両ギャップ間の(長手方向の)距離に応じた量だけトラックずれ(トラックミスレジストレーション)を起こしてしまう。すなわち、記録トラックの位置がオフセットしたために、記録済みの隣接トラックの一部を上書きし、そのトラック幅を狭めることによりトラッキングマージンを削ることになる。
【0190】
これに対して、本実施形態では、図3に示すように、同じ上流側のバンプの記録ヘッドH1と再生ヘッドH2とを時分割で交互に使用することにより、記録ヘッドH1により近い再生ヘッドH2によりサーボパターン2を再生し正確なサーボ情報に基づきヘッドHの位置をより正確に制御し、ヘッドHを最適な位置へ誘導し、正確な位置にデータを記録することができる。また、記録時に、記録ヘッドH1から再生ヘッドH2へのクロストークの問題を解決することができる。
【0191】
再生時にはデータ再生に用いる再生ヘッドH2(通常は下流側バンプ)でサーボパターン2も再生してヘッドHの位置を制御する。
【0192】
サーボパターン2bを有する磁気テープ1に、LTM(走行中の磁気テープ1の幅方向の運動)によるシフトd、変形によるアジマス角変化が±β、傾き角度γが複合して発生した場合に、図5に示すように、既知の値と計測値とから、K1、K2が求まり、その結果、シフトd、角度β及び傾き角度γを求めることができる。(記録ヘッドH1または再生ヘッドH2のトラック幅方向の位置決め情報(シフトd)を、磁気テープ1の変形情報(角度β)、及び/または、傾き情報(角度γ)を用いて補正する(求める)ことができる。)その結果、ヘッドHの位置を調整することで、データの正確な記録、再生を行うことができる。
【0193】
サーボパターン2eを有する磁気テープ1に、LTMによるシフトd、傾き角度γが複合して発生した場合には、チャンネルC、Dの出力の位相差から直接傾きの角度γが求まり、[数2]に示す式からシフトdを求めることができる。その結果、ヘッドHの位置を調整することで、データの正確な記録、再生を行うことができる。
【0194】
サーボパターン2dを有する磁気テープに、LTMによるシフトd、変形によるアジマス角変化が±β、傾き角度γが複合して発生する場合に、式(13−7)からシフトdが求まり、式(13−8)からγを求めることができる。その結果、ヘッドHの位置を調整することで、データの正確な記録、再生を行うことができる。
【0195】
マルチチャンネルヘッドHを備えたリニア型磁気テープ装置により、サーボパターン2を有する磁気テープ1を記録、再生することで、通常の磁気テープ1の幅方向の位置情報に加え、磁気テープ1の変形やヘッドHの傾きに起因する偏差にも対応した位置決め情報の検出することができ、トラック密度(TPI)を飛躍的に高めることができる。
【0196】
これまではトラックピッチが限りなく狭いとしていたが、以下では磁気テープの一実施例を示す。
図10は一実施例のサーボパターンとデータバンドとの位置関係及びヘッドチャンネル位置とパスとの関係を示す図である。
【0197】
図10に示すように、データバンドの幅方向のピッチであるデータバンドピッチが640マイクロメートル、16トラック並列記録/再生、1つのデータバンドを16パス(8往復)で完結するもの(トラックピッチは2.5マイクロメートル)、また、LTMは±15マイクロメートル以下、更に、ヘッドはサーボを考慮して17チャンネル(チャンネル17(CH17):サーボ用補助チャンネル)としておくが、これに限ったものではない。
【0198】
サーボパターンを挿入する頻度は、サンプリングの立場からは高いほうがよいのは当然であるが、冗長度の観点と、ヘッドの位置情報、磁気テープ幅情報、及び、磁気テープの傾き情報の検出感度と、更には想定されるLTMとを考慮して、頻度とサーボパターンの最適な組み合わせを探す必要がある。
【0199】
以下、サーボパターンはこれまでに挙げた中で最も複雑且つ長手方向の専有長が短い(冗長度が低くなる)図7に示す例を用いて説明するが、他のパターンの場合も同様である。
【0200】
サーボパターンは、正負のアジマス角のセグメントの幅をそれぞれ80マイクロメートル、アジマス角0度のセグメントの幅をそれぞれ200マイクロメートルとする。なお、通常サーボパターンは複数の磁化反転で構成されるが、ここではその中の1つの磁化反転を記してある。サーボパターンとデータバンドのテープ幅方向の位置はパス1の時18.75(トラック上端で20)マイクロメートル、オフセットさせる。通常、奇数のパスはBOTからEOTに、偶数のパスはEOTからBOTにテープは走行する。各チャンネルは、全16パス(8往復)でデータサブバンドを構成する。奇数の8パスと偶数の8パスは別々のトラックグループを形成し、行き帰りのパスによるトラックが隣り合うことをできるだけ避ける。この例では、隣のチャンネルのパス16とパス1のトラック、パス15とパス2のトラック、及びパス16と隣のチャンネルのパス1のトラックが該当する。データバースト3の所定の位置に、データに加えて、データバンド及びパスの識別情報を挿入してもよい。なお、ガードバンドを設ける場合にはこれらの(テープ走行方向が逆向きになる)トラック間に入れる。(なお、一般にガードバンドは、データバンドとデータバンドを、或いは、トラックとトラックを分離する領域である。データバンドは、フォーマット上は必ずしも必要ではない。)各パスにおけるヘッドチャンネルと図7のチャンネルの対応は、A:CH10、B:CH8、C:CH17、D:CH1、E:CH14、F: CH4となる。CH1からCH1はデータチャンネルでCH17はサーボ用の補助チャンネルである。オフセットをとったことにより式(13−7)におけるdの値は、Nをパスナンバーとして:
d=dN+LTM
dN=−18.75+{2.5×(N−1)/2}
N=1,3,5,...,15(BOT→EOT)
dN={2.5×(N−1)/2}
N=2,4,6,...,16(EOT → BOT)
となる。
【0201】
また、YA,YBはトラックセンターで:
YA=−40
YB=+40
(単位:マイクロメートル)である(CH9のトラックセンターを基準にして)。
【0202】
同様に、
YC=−320
YD=+320
YE=−200
YF=+200
(単位:マイクロメートル)である。
【0203】
オフセットをとることより、何れのパスにおいても、想定されている±15マイクロメートルのLTMに対して、ヘッドがそれぞれのセグメントを外れることはない。また、Nの奇数、偶数とデータバンドナンバーの組み合わせとでサーボパターンの向き(磁気テープ走行方向に対して)が逆になる。
【0204】
さて、データサブバンドの幅(ヘッドのチャンネルスペーシング)が決まっている場合に、アジマス角及び磁化反転の間隔と数を決めるには、次のことを考慮する。LTMの検出感度、例えば1マイクロメートルのLTMを何マイクロメートルの長手方向の位置の変化(時間として検出)に変換したいか。想定される最大のLTMのときにも、アジマス角故に隣の同極性の磁化反転により誤検出されることはないか。必要最小限の数の磁化反転とデータバーストの長さで決まる冗長度及びサンプリング周期は必要十分か(周波数に換算して、必要とされるサーボ帯域の10倍程度)。LTMの検出感度を上げるためにアジマス角を大きくすることと、他の条件は相反しているので妥協点を探ることになる。
【0205】
この一例として正負のアジマス角を約±14度(tanα=0.25)とする。この結果、図7のX1は70マイクロメートルとなる。また隣り合うサーボパターンの間隔を1ミリメートルとする。従って、磁気テープ速度を10メートル/秒とすればLTMをサンプリングする周波数は10KHzとなる。また、1マイクロメートルLTMは正負のアジマス角のおかげで長手方向に0.5マイクロメートルの長さに変換される。これは磁気テープ速度10メートル/秒においては50ナノ秒(5E−8秒)の時間に相当する。クロック1GHzのカウンターで計時すれば0.1マイクロメートル程度のLTMが検出可能となる(約5カウントの差となる)。トラックピッチ2.5マイクロメートルに対して十分な分解能である。因みに、この時磁気テープの傾き及び磁気テープの変形の検出感度は5カウントの差(長手方向に約5ナノメートルの変化/変形に相当)を目安にすると、傾き(角度γ)約7E−3度及び変形(角度β)約8.5E−3度となる。なお、アナログ回路の助けを借りれば、より低い周波数のクロックを用いつつ、サブナノ秒の分解能で時間を計測できることも知られている。
【0206】
この時のデータバースト3の長さは、サーボパターン(トランジション)の間隔を10マイクロメートルで4トランジションとし、サーボパターンの前後のガードスペース4をそれぞれ80マイクロメートル程度とすると、全部で約800マイクロメートルの長さとなる。すなわち、磁気テープ1の長手方向の利用効率は約80パーセントとなる。
【0207】
なお、4トランジションのサーボパターンは、第2のトランジションを第1のトランジションに近づけたり、第3のトランジションを第1のトランジションから遠ざけたり位置(位相)変調することにより(同極性のトランジション、第1と第3または第2と第4、の距離を20マイクロメートルより近づけないように変調している)、フレーム同期のためのユニークなパターンと1ビットのデータを表現することができる(多値で変調すれば複数ビットのデータも表現することが可能となる)。すなわち、サーボパターン2を、その磁化遷移の境界の形状と同じ形状の後述する記録ギャップ309(図17参照)を持つ記録ヘッド308(サーボパターン全幅記録ヘッド)で磁気テープ1全幅を記録するに当たり、記録電流の変化のタイミングを変調して異なるサーボパターンを形成し、バイナリデータ、ユニークな同期信号を表現しうる。更に、複数のサーボパターンを用いて、ユニークな同期信号と複数のデータビットからなるデータフレームを構成することができる。図2(C)に示すサーボパターン2cを形成するときに、記録電流の変化のタイミングを変調して複数のサーボパターンを形成し、バイナリデータ、ユニークな同期信号を得るようにしてもよい。
【0208】
以上を基に磁気テープ装置のトラッキングサーボ構成の一例を示す。
図11は磁気テープ装置のトラッキングサーボ機構のブロック図である。
磁気テープ装置の信号処理系、リールモーター制御系及びサーボパターンのデータ復調系は公知の手法を用いることができる。
【0209】
トラッキングサーボ機構100は、ヘッドスタック101、AMP/SEL(プリアンプ/セレクター)102、ピーク検出/時間計測(距離換算)器103、データバーストゲート104、フライホィール105、トラッキング(LTM)検出器106、D/A(ディジタル/アナログ変換)器107、微動アクチュエーター108、粗動アクチュエーター109を備えている。
【0210】
AMP/SEL(プリアンプ/セレクター)102のSELはR/W(リード/ライト)に応じて対応するバンプからの出力を選択する。
【0211】
ピーク検出/時間計測(距離換算)器103は、データバンドセレクトのLSB(テープ走行方向)とパスナンバーNのLSBの情報に従って、チャンネルA,B,C,D,E及びFに対応するチャンネルのピーク検出と時間計測を行い、速度情報を用いて長手方向の距離に換算する。
【0212】
データバーストゲート104はフライホィール105の出力を受けて、各データチャンネル(CH1,CH2,...,CH16)に対して時間軸上でサーボパターンをマスクする。なお、図示しないが、記録側にもサーボパターンを保護するために、同じくフライホィール105の出力を受けて、記録電流をゲートする機能ブロックが挿入されている。
【0213】
フライホィール105はキャプチャーモードとロックモードで時定数の異なる公知のPLL(位相同期系)である。
【0214】
トラッキング(LTM)検出器106はピーク検出/時間計測(距離換算)器103の出力を受けてシフトdを計算し、パスナンバーの情報を用いてトラッキングエラー(LTM)を求める。サーボループは、この値をゼロに近づけるように働く。ピーク検出/時間計測(距離換算)器103の他の出力は、磁気テープ速度を検出(パルス列の周期を速度情報に変換)してリールモーターの制御に用いられるが、公知の技術であるのでここでは立ち入らない。
【0215】
微動アクチュエーター108及び粗動アクチュエーター109は、例えばスプリングで保持さているヘッドHをムービングコイルで駆動するステージ及びパスナンバーの情報とデータバンド指定の情報とに基づいてステージを駆動するパルスモーターとスクリュー等である。なお、これらはストロークの長いリニアモーターで構成することもできる。微動アクチュエーター108及び粗動アクチュエーター109は、公知の技術である。
【0216】
次に本発明のピーク検出/時間計測(距離換算)器103とトラッキング(LTM)検出器106の構成の一例を示す(他のブロックは公知の技術で実現できる)。
【0217】
図12はトラッキングサーボ機構のピーク検出/時間計測(距離換算)器103の詳細を示すブロック図である。ここでは時間の計測に内蔵時計を用いた例を示す。
ピーク検出/時間計測(距離換算)器103は、ピーク検出器131、時刻サンプラー132、距離検出器133、内蔵時計134、パルス成形器135を備えている。
【0218】
ピーク検出器131は、ローパスフィルター、狭義のピーク検出器(正負のピークを別々に検出)、及びセレクターで構成され、正負の検出ピークの何れかを選択して出力する。ローパスフィルターの役割はデータバースト及びノイズを減衰させて、サーボパターンの誤検出を防ぐことにある。
【0219】
時刻サンプラー132は、内蔵時計134の出力をピーク検出器131の出力でサンプリングして時刻を得る。
【0220】
距離検出器133は、時刻サンプラー132の出力間の差を取り、磁気テープ速度を乗じて距離に変換し、さらにパスナンバー情報(すなわちテープ走行方向情報)とデータバンド情報に従って、その符号を反転させる。
【0221】
内蔵時計134はカウンターで、サーボパターンの同極性トランジション間の時間の2倍より長い周期があればよい(2つの時刻入力の大小関係からトランジション間の正負の時間が必要)。この例では、クロック1GHzの13ビットのカウンターが適当である。何故ならば、このカウンターの出力の周期は8マイクロ秒強であるのに対して、同極性のトランジションの間隔20マイクロメートルは、磁気テープ速度10メートル/秒の時2マイクロ秒に相当している。
【0222】
パルス成形器135の一例にはパルス幅Tがトランジションの間隔よりも長いリトリガーモノマルチバイブレーター(この例では間隔2マイクロ秒、すなわち2<T<<100)が挙げられる。
【0223】
図13はトラッキングサーボ機構のトラッキング(LTM)検出器106の詳細を示すブロック図である。
【0224】
トラッキング(LTM)検出器106は、cosγ,sinγ演算器61、K1演算器62、K2演算器62´、d演算器63、LTM演算器64及びdN演算器65を備えている。
【0225】
cosγ,sinγ演算器61は、先ず距離検出器133からの±(XE-XF)と既知のYF,YEからγを求め(γの値は小さいからリニアの近似でよい)、次いでcosγ,sinγを求める(こちらは他の定数との関係から級数展開して第2項までの近似が適当)。
【0226】
K1演算器62、K2演算器62´は、それぞれ距離検出器133からの±(XA-XD),±(XB-XC)とcosγ,sinγ演算器61からのcosγ,sinγとを受け、既知のY0(データバンドピッチ),tanα(=0.25),X1(=70),YA, YD, YB, YCを用いてK1,K2を計算(四則演算)する。
【0227】
d演算器63は、距離検出器133からの±(XA-XB)とK1演算器62、K2演算器62´からのK1,K2とを受け、既知のYA,YBと合わせて式(13−7)に従ってシフトdを計算(四則演算)する。
【0228】
LTM演算器64は、d演算器63の出力dとdN演算器65の出力dNの差をとってLTMを求める。
【0229】
dN演算器65は、パスナンバーNをdNに変換する(テーブルルックアップが簡単)。なお、この例ではパスナンバーN(N=1,2,...,16)のLSB(最下位ビット)がテープ走行方向を表している。
【0230】
図14は、別のトラッキング(LTM)検出器106´の詳細を示すブロック図である。
トラッキング(LTM)検出器106´は、LTM演算器64、dN演算器65に加えて、γ演算器61´及びd演算器63´を備えている。
【0231】
γ演算器61´は、γの近似(リニア近似)を演算する。
【0232】
γ演算器61´及びd演算器63´を用いた近似解を求める計算の一例を説明する。d演算器は式(22-1)の演算を行いdを得る。
【0233】
【数12】
【0234】
【数13】
【0235】
【数14】
【0236】
磁気テープ速度を変えた場合、例えば5メートル/秒にした場合、周波数は1/2倍に、時間は2倍になる。この際、ローパスフィルターのカットオフ周波数も1/2にすることが望ましい。一方、時間の計測は、クロック周波数を1/2にしてカウント数を維持する。或いは、クロック周波数を維持してカウント数を2倍にする等も考えられる。他の速度にした場合も、速度に比例してローパスフィルターのカットオフ周波数と時間計測方法とを変更すればよいのは言うまでもない。
【0237】
図10に示されている例に従って、サーボパターンの記録方法を説明する。
磁気テープ上の長さを、信号発生器の時間軸に変換するに当たって、テープ速度は10メートル/秒とする。他の速度の場合には時間の値を速度に逆比例させれば良い(5メートル/秒ならば全て2倍)。
【0238】
図15Aは磁気テープ上の磁化パターンを示し、図15Bは同磁化パターンを記録する電流波形を示す。図15Cは4トランジションで構成されるサーボパターンを変調して、1ビットのアドレスまたはデータ、或いはユニークなシンク(同期)パターン1または2を表す一例を示す。
【0239】
図16Aおよび図16Bは磁気テープ上のイメージで、一例として20ビットのアドレスと128ビットの管理データ(128ビットはデータ+エラー制御ビットとしても良い)を挿入する場合のフレーム構成の両極端な例を示す。
【0240】
図16Aは1アドレスに対して128ビットのデータで1フレームを構成するのに対して、図16Bは1アドレスに対してデータ1ビットでサブフレームを構成し、128サブフレームで1フレームを構成する。
【0241】
前者は1フレームの長さが0.15メートルと短くなるもののアドレスも0.15メートルが単位になってしまう。
【0242】
一方、後者は1フレームの長さは2.8メートル強となるもののアドレスの単位は22ミリメートルと最短になる。
アドレスおよび管理データの性質から後者の方が望ましい。
何れの場合もシンクパターン0はフレーム同期として、シンクパターン1はサブフレームのセパレータとして活用されている。
【0243】
以下、記録装置の実現方法では図16Bの場合を例にする。
尚、20ビットのアドレスは上述した段落0116で示した条件、サーボパターン記録装置が扱える最長のテープより充分長いモジュロのアドレス発生、を満足している。
【0244】
即ち、サーボパターン記録装置が扱える最長のテープ長を例えば5000メートルとすると、アドレスの単位長が22ミリメートルの時、
(5000/0.022)=約227273<262144=2の18乗
よって、18ビットあれば良い。
また、アドレスの単位長が0.15メートルの場合は16ビットで充分である。
【0245】
図17は、図16Bに示すフレーム構成の、サーボパターン記録装置300の一構成例である。
2MHzのクロックCk(周期0.5マイクロ秒)は、1/200分周器301により1/200に分周されてサーボパターンの周期(100マイクロ秒)を形成し、次に1/22分周器302により1/22に分周されてサブフレーム周期(2.2ミリ秒)を形成すると共に20ビットのアドレス発生器303を歩進する。
【0246】
更に1/128分周器304により1/128に分周されてフレーム周期(281.6ミリ秒)を形成する。
【0247】
アドレス発生器303はコントローラ305を介して、サーボパターン記録装置300に長尺の磁気テープ1が装填される毎に、リセットされる。
【0248】
これにより長尺テープ1の中のアドレスが単調増加になる(従って一部を切り出されてカートリッジに巻き込まれたテープのアドレスも単調増加になる)ことが保証される。
【0249】
パターン発生器306は前記のクロック、サーボパターン周期、サブフレーム周期、フレーム周期、20ビットアドレスデータと、これらに加えてコントローラ305を介しての128ビットの管理データを入力として、図15Bのサーボパターンが図15Cの様に変調された信号を発生する。
【0250】
パターン発生器306の出力は増幅器307を介して記録ヘッド308に供給される。尚、実施例としては4トランジションのサーボパターン1つが、1ビットのデータまたはユニークなシンクパターンを表し、アドレスと1ビットのデータでサブフレームを構成し、複数のサブフレームでフレームを構成する方法を説明したが、他の場合も、例えば、トランジションの数が多い場合、多値変調の場合、アドレスと複数データビットでサブフレームを構成する場合等、同様の考察で実現可能である。
【0251】
記録ヘッド308は、フェライトリングを備えており、サーボパターン2を磁気テープ1の全幅に亘って記録することが可能なサーボパターン全幅記録ヘッドである。記録ヘッド308は、サーボパターン2の磁化遷移の境界の形状と同じ形状の記録ギャップ309を備えている。
【0252】
コントローラ305は、記録ヘッド308で磁気テープ1全幅を記録するに当たり、記録電流の変化の回数を全て(のサーボパターン2毎に)奇数回或いは全て偶数回に制御する。
【0253】
サーボパターン記録装置200が図示しない全幅消去ヘッドを備えるようにしてもよい。全幅消去ヘッドは、図2(C)に示すサーボパターン2cの一部2c´を消去し、データ領域を形成するために用いられる。
【0254】
サーボパターン2を、記録ヘッド308で磁気テープ1全幅を記録するに当たり、記録電流の変化のタイミングを変調してバイナリデータまたはユニークな同期信号を表現することができる。
【0255】
サーボパターン2を、記録ヘッド308で磁気テープ1上に先ず記録し、次いで後続の全幅消去ヘッドでデータ記録部分を形成するように、記録されたサーボパターンの一部を消去するに当たり、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン2中にバイナリデータを表現する、或いは、ユニークな同期信号を表現することができる。
【0256】
サーボパターン2を、1ビットのデータに対応させる、或いは、1ビットのデータまたはユニークな同期信号に対応させることができる。
【0257】
以上の説明では、データバンドの境界及びデータサブバンドの中央と境界にガードバンドを設けていないが、これらの線を挟んだ両側のトラックを逆向きの磁気テープ走行で記録/再生するようになして、ガードバンドを設置する場合、或いはここで示した例以外のパラメーター(データバンドピッチ、トラックピッチ、サーボパターン等など)の組み合わせの場合にも本発明が有効なのは言うまでもない。
【0258】
なお、磁気テープ1の幅方向にデータバンドb0が1つでもよい。また、データバンドb0とデータバンドb1との間のガードバンドは、その幅が0(ゼロ)でもよい。
【0259】
例えば図2に示すサーボパターン2aを、その磁化遷移の境界の形状と同じ形状の図17に示す記録ギャップ307を持つ記録ヘッド308(サーボパターン全幅記録ヘッド)で磁気テープ1全幅を記録するに当たり、記録電流の変化の回数を全て奇数回或いは全て偶数回としている。
【0260】
上記実施形態では、記録ヘッドH1及び再生ヘッドH2の、記録及び/または再生ギャップの個々の位置の、基準の位置からの偏差の情報を磁気テープ装置内に格納し、その情報を用いて記録ヘッドH1及び再生ヘッドH2の位置情報、磁気テープ1の変形情報、磁気テープ1の傾き情報、磁気テープ速度情報、及び/または、磁気テープ1の位相情報を補正している。
【0261】
距離検出器133は、時刻サンプラー132の出力間の差を取っているが、この出力間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出するようにしてもよい。
【0262】
サーボパターン2中に図2(A)、図2(B)に示すように、(記録)アジマス角0度のセグメントがない場合に、アジマス角が正のセグメントに対応する再生チャンネルの出力のサーボパターンの周期と、負のセグメントに対応する再生チャンネルの出力のサーボパターンの周期とを計測し、それぞれのアジマス角の絶対値を考慮した演算を施して速度情報とするようにしてもよい。
【0263】
また、サーボパターン2の正、負のアジマス角のセグメントそれぞれを、上流の再生ヘッドH2と下流の再生ヘッドH2で順次再生して、それぞれの経過時間或いは計測時間差と上流下流再生ヘッドH2それぞれのギャップ間距離から第一及び第二の速度情報を得た後、テープ傾き角とアジマス角の情報を考慮して、これらを演算して速度情報とするようにしてもよい。
【0264】
磁気テープ装置が、例えば磁気テープ1の傾き情報(角度γ)に従ってヘッドHの傾き角を制御する制御機構を備えるようにしてもよい。このようにすれば、リードアフターライト(リードホワイルライト)時に再生ヘッドをトラック上に正しく位置決めできる。逆に、記録時に下流側バンプの再生ヘッドを用いて記録ヘッドの位置決めも可能となる。
【0265】
磁気テープ1を図示しない周波数逓倍器などにより位相ロックする場合に、サーボパターン2中にアジマス角0度のセグメントがある場合には、セグメントを再生するチャンネルの出力サーボパターンの周期(周波数)を、必要なだけ図示しない分周器により分周して基準信号と位相比較する。
【0266】
磁気テープ1を位相ロックする場合に、サーボパターン2中にアジマス角0度のセグメントがない場合には、アジマス角が正のセグメントに対応する再生チャンネルの出力サーボパターンの周期(周波数)を、所定の分周比で必要なだけ分周して第一の基準信号と位相比較するようになし、負のセグメントに対応する再生チャンネルの出力サーボパターンの周期(周波数)を、同じ分周比で分周して第二の基準信号と位相比較するようになし、それぞれの位相比較器の出力をアジマス角の絶対値を考慮した演算をして、位相ロックするようにしてもよい。
【0267】
1個または複数個のデータバースト3を用いてテープマークとなすようにしてもよい。テープマーク(ファイルマーク)によりデータの終わりを表すことができる。
【図面の簡単な説明】
【0268】
【図1】本発明の一実施形態に係る磁気テープを示す平面図である。
【図2】図1に示す磁気テープのサーボパターンの例を示す平面図である。
【図3】磁気テープ装置のヘッド位置、磁気テープ変形及び磁気テープ傾きの情報の検出の原理説明図である。
【図4】磁気テープ装置のヘッド位置、磁気テープ変形及び磁気テープ傾きの情報の検出の原理説明図である。
【図5】磁気テープ装置のヘッド位置、磁気テープ変形及び磁気テープ傾きの情報の検出の原理説明図である。
【図6】サーボパターンの一例(2d)の構造説明図である。
【図7】磁気テープ装置のヘッド位置、磁気テープ変形及び磁気テープ傾きの情報の検出の原理説明図である。
【図8】従来の磁気テープ装置のヘッド及び従来の磁気テープの部分平面図である。
【図9】従来の磁気テープ走行が傾いたときの記録トラックのずれの説明図である。
【図10】一実施例のサーボパターンとデータバンドとの位置関係及びヘッドチャンネル位置とパスとの関係を示す図である。
【図11】磁気テープ装置のトラッキングサーボ機構のブロック図である。
【図12】トラッキングサーボ機構のピーク検出/時間計測器の詳細を示すブロック図である。
【図13】トラッキングサーボ機構のトラッキング(LTM)検出器の詳細を示すブロック図である。
【図14】別のトラッキング(LTM)検出器の詳細を示すブロック図である。
【図15】図15Aは磁気テープ上の磁化パターンを示し、図15Bは同磁化パターンを記録する電流波形をし、図15Cは4トランジションで構成されるサーボパターンを変調して、1ビットのアドレスまたはデータ、或いはユニークなシンク(同期)パターン1または2を表す一例を示す。
【図16】図16Aおよび図16Bは磁気テープ上のイメージで、一例として20ビットのアドレスと128ビットの管理データ(128ビットはデータ+エラー制御ビットとしても良い)を挿入する場合のフレーム構成の両極端な例を示す。
【図17】図16Bに示すフレーム構成の、サーボパターン記録装置の一構成例である。
【図18】正負のアジマス角のサーボパターンを有する磁気テープの周期(速度情報)を検出する原理説明図である。
【図19】正負のアジマス角のサーボパターンを有する磁気テープの位相をロックするときの原理説明図である。
【符号の説明】
【0269】
b0〜b3 データバンド
s1、s2 セグメント
G 境界線
H ヘッド
H1 記録ヘッド
H2 再生ヘッド
CH17 サーボ用補助チャンネル
α アジマス角
β 角度
γ (傾き)角度
1 磁気テープ
2 サーボパターン
3 データバースト(データ)
4 ガードスペース
300 サーボパターン記録装置
305 コントローラ
308 記録ヘッド
309 記録ギャップ
【技術分野】
【0001】
本発明は、磁気テープ、磁気テープのサーボパターン記録装置、リニア型などの磁気テープ装置、磁気テープの製造方法及び記録方法に関する。
に関する。
【背景技術】
【0002】
従来、トラック追従サーボ制御の例は、長手方向データトラック群の間に予め記録された平行な長手方向サーボ・トラックを設け、その結果、1つまたは複数のサーボ・ヘッドがサーボ・トラックを読取ることができ、付随するトラック追従サーボが、ヘッドまたはテープのテープ幅方向の位置を調節して、サーボ・トラックに対して所望のテープ幅方向位置にサーボ・ヘッドを維持し、それによって、データ・ヘッドがデータトラックに対して中心に位置決めされるようにしている。
【0003】
トラック追従サーボ・システムについては、例えば特許文献1に記載されている。この特許文献1には、タイミング・ベース・サーボ・システムに関して記載されている。タイミング・ベース・サーボ・システムは、例えば、LTO(リニア・テープ・オープン)フォーマットとともに用いられ、その一例には、米国IBM社のLTO Ultrim(登録商標)磁気テープ・ドライブ及びそれに関連するテープ・カートリッジが含まれる。
【0004】
リニア・サーボ・トラックは、例えば、あらかじめ記録された磁気遷移からなる感知可能な遷移パターンを含む。これらの遷移は、リニア・サーボ・トラックの上をテープ幅方向に延びる2つの異なるアジマス角配向の遷移の繰返し循環周期シーケンスからなるタイミング・ベース・サーボ・パターンを形成する。例えば、このパターンは、リニア・サーボ・トラックの方向に対して第1方向に傾斜した、すなわち第1方向のアジマス角配向を有する遷移と、反対方向に傾斜した、すなわち反対方向のアジマス角配向を有する遷移が交互に並ぶものを含み得る。このため、媒体がサーボ読取りヘッドに対して直線方向に移動すると、タイミング・ベース・サーボ・トラックに対するサーボ読取りヘッドのテープ幅方向位置は、異なるアジマス角配向を有する2つの遷移間の時間を、平行なアジマス角配向を有する2つの遷移間の時間と比較した尺度に基づいて感知される。このサーボ読取りヘッドによって読取られる遷移の相対的なタイミングは、ヘッドのテープ幅方向位置に応じて線形に変化する。そのため、複数の平行なデータトラックを、サーボ・トラックを横切る、異なるテープ幅方向位置と位置合せすることができる(例えば、特許文献1参照。)。
【特許文献1】米国特許第5,689,384号
【発明の開示】
【発明が解決しようとする課題】
【0005】
リニア型磁気テープ装置の面記録密度を高めるには、線密度を高めることは既に検討しつくしているので、トラック密度を上げることが最も効果的である。しかしながら、トラック密度を上げる際には次のような問題があることが知られている。即ち、トラッキング情報をいかにして感度を高く検出するか、一般的に用いられる2バンプ型のヘッドに対して、磁気テープの走行の傾きにどう対処するか、磁気テープの変形(幅方向、長手方向)にどう対応するか、ヘッドチャンネルスペーシングをどう小さくするかなどである。
【0006】
一般には、磁気テープを幅方向に複数(例えば4)に分割して、それぞれに磁気テープの幅方向にデータバンドとサーボバンドとを設ける。磁気テープ出荷時には、サーボバンドにトラッキングのためのサーボパターンが予め記録されている。データバンドにデータを書き込むとき、或いはデータを読取るときには、サーボパターンを再生して相対的なヘッドの位置情報(磁気テープの幅方向にその時々に特定な位置の情報)を検出し、記録ヘッドまたは再生ヘッドを常に正しい位置に維持している(トラッキングを取っている)。このため、ヘッドにはサーボパターンを再生するための追加チャンネルが、データチャンネルの外側に用意されている。
【0007】
2バンプ型のヘッドを使用したリニア型の磁気テープ装置では、データ記録時には、上流のバンプの記録ヘッドで記録し、直後に下流のバンプの再生ヘッドで再生することにより、データが正しく記録されているかを確認している(これを「リードアフターライト」または「リードホワイルライト」と言う)。なお、以下においては、再生ヘッド(再生チャンネル)は、特に指定がない限り、上流(記録側)/下流(再生側)何れかのバンプにあるものを指す。
【0008】
2バンプ型のヘッドは、記録ヘッドの上に再生ヘッドが(或いはその逆)ピギーバックされているヘッドブロック2つを逆向きに合わせて、1つのヘッドとしているもので、第一のバンプに記録/再生ヘッド、第二のバンプに再生/記録(或いはこれらと逆の順序に)ヘッドを配置し、第一のバンプの記録ヘッドは第二のバンプの再生ヘッドと、また第一のバンプの再生ヘッドは第二のバンプの記録ヘッドとトラックの位置合わせをしてある。
【0009】
こうして記録ギャップと再生ギャップとを1ミリメートル前後離すことにより、記録ヘッドから再生ヘッドへのクロストークを軽減している。
【0010】
また、記録時には、記録ヘッドと同じバンプにある再生ヘッドは、データチャンネルの外側にあるサーボ用チャンネルと言えども、記録ヘッドからのクロストークによりサーボ信号の再生には使用できない。従って、磁気テープの走行方向に離れた再生ヘッドのサーボチャンネルで、サーボ信号を検出して、記録ヘッドの位置の制御をすることになる。この状態で磁気テープの走行が傾くと、記録ヘッドの位置は、その分正しい位置から外れることになり、トラック密度を制約することになる。通常の方法では、磁気テープの走行の傾きの影響を軽減するには、第1のバンプのギャップラインと第2のバンプのギャップラインとの間の距離を近づけることになるが、クロストークの制約などがあり難しい。
【0011】
即ち、トラッキング動作は常に再生ギャップを基準のトラックセンターに位置合わせしようとする。従って、テープがヘッドの前面を走行する方向(傾き)がダイナミックに変化(テープが蛇行)したときには、記録ギャップの位置は傾き角の正接と両ギャップ間の(長手方向の)距離に応じた量だけトラックずれ(トラックミスレジストレーション)を起こしてしまう。すなわち、記録トラックの位置がオフセットしたために、記録済みの隣接トラックの一部を上書きし、そのトラック幅を狭めることによりトラッキングマージンを削ることになる。なお、再生時には、データ再生とサーボ信号再生のヘッドが同一ギャップライン上にあるので、この問題(再生ギャップのトラックミスレジストレーション)は発生しない。厳密には、テープ走行が傾くと実効的にヘッドのトラック間距離が変化(減少)することによりトラックミスレジストレーションが起こるが、その効果は(1−傾き角の余弦)×データバンド幅/2、且つ再生ヘッドトラック<記録ヘッドトラック幅であり、影響は小さい。一方、記録時に記録側のバンプにある再生ギャップを用いてサーボ信号を検出できるかと言うと、記録ヘッドからのクロストークが邪魔をして難しい。
【0012】
以上のような事情に鑑み、本発明の目的は、正確にデータを記録、再生することが可能な磁気テープ、該磁気テープのサーボパターン記録装置、該磁気テープの変形(幅と長手方向の伸縮)情報や磁気テープの傾き情報を検出することを可能とする磁気テープ装置、該磁気テープの製造方法及び該記録方法を提供することにある。
【課題を解決するための手段】
【0013】
上記目的を達成するため、本発明に係る磁気テープは、データバンドを有する磁気テープにおいて、前記データバンドの全幅にわたって、且つ前記磁気テープの長手方向には間隔をあけて配置されたサーボパターンと、前記サーボパターン間に配置されたデータと、前記サーボパターンと前記データとの間に配置されたガードスペースとを具備する。
【0014】
すなわち、本発明は、2バンプ型ヘッドを用いた際に見られた磁気テープ走行の傾きの影響を軽減する磁気テープとしてエンベッデド型のサーボパターンを有する磁気テープを提供するものである。
【0015】
本発明では、データバンドの全幅にわたって、且つ前記磁気テープの長手方向には間隔をあけて配置されたサーボパターン間にデータが配置されている。すなわち、磁気テープの幅方向に一般には複数設けられるデータバンド上に、サーボパターン、ガードスペース、データ、ガードスペース、サーボパターン、ガードスペース、データ、・・・のように配置する。
【0016】
このようにデータを記録するには、サーボパターンは予め記録されているものとして、記録開始時に先ず記録ヘッドと同じバンプにある再生チャンネルで、サーボパターンを通常複数個再生し(この間記録電流は流さない)ヘッドの位置を制御した後に、記録動作に入る。即ち、記録ヘッドに記録電流を流してデータを記録し、次にある時間経過後に(次のサーボパターンの直前で)記録電流を止める。再び同じバンプの再生ヘッドで次のサーボパターンを再生し、ヘッド位置情報を検出し、直後に再び記録に戻る。以下、この記録と再生とヘッド位置制御とを記録終了まで繰り返す。記録中には下流にあるバンプの再生ヘッドを用いてリードアフターライト(またはリードホワイルライトと言う)を行う。即ち、記録時に記録ヘッドと異なるバンプにある再生ヘッドを用いて記録ヘッドの位置決めをする場合には、磁気テープの走行が傾くことにより記録トラックの位置がずれて隣接トラックの領域に侵入すると言う問題(記録済み隣接トラックを上書きする、または後から記録の隣接トラックにより上書きされる可能性がある)が生じるのに対して、本発明では、同じバンプにある記録ヘッドと再生ヘッドとを時分割で交互にデータの記録と記録ヘッドの位置検出とに使用することにより、記録ヘッドにより近い(背中合わせになっている)再生ヘッドでサーボパターンを再生して、前記のテープが傾いて走行する際に生じる問題を回避して、データを正確な位置に記録することを可能にしている。また、記録時に、記録ヘッドから再生ヘッドへのクロストークの問題を解決することが出来る。
【0017】
再生時にはデータ再生に用いる再生ヘッド(どのバンプにある再生ヘッドを用いるかはヘッドブロックの設計にもよる)でサーボパターンも再生してヘッドの位置を制御する。
【0018】
データバンドとは、磁気テープを幅方向に分割して形成される磁気テープ全長にわたった領域である。データバンドは「データサブバンド×データの記録/再生を並列して行うヘッドのチャンネルの数」で構成される。データの記録/再生は、通常1つのデータバンドを終了してから次のデータバンドに移る。
【0019】
データサブバンドは、幅が2バンプ型ヘッドのチャンネルスペーシングで、磁気テープ全長にわたった領域である。並列記録/再生する多チャンネルヘッドの対応する1チャンネルが、1パス毎に磁気テープ幅方向に位置を変えて、規定回数の往復(1往復=2パス)で走査を完了する領域である。
【0020】
ヘッドチャンネルスペーシングは、データの記録/再生を並列に行う多チャンネルヘッドの、隣り合うチャンネルそれぞれの中心線の間の距離である。必ずしも全てのチャンネルが単一のギャップライン上になくてもよい(2次元的にギャップが配置されていてもよい、或いは、複数のヘッドブロックに亘って隣接チャンネルがあってもよい)。
【0021】
サーボパターンは、データバンドの全幅にまたがり(不連続でもよい)、幅方向に複数のセグメントから構成される。サーボパターンは、2バンプ型ヘッドを磁気テープ幅方向に位置制御する(トラッキングをとる)、或いは、磁気テープを速度制御/位相制御するのに用いる磁化遷移(反転)の組み合わせである。サーボパターンは、磁気テープの長手方向には間隔を空けて配置される。サーボパターンは、磁気テープの出荷時には予め磁気テープに記録されていて、個々の磁気テープ装置では書き換えない。セグメントの境界はアジマス角の変化点を結んだ仮想の線(磁気テープ長手方向の線)である。
【0022】
ガードスペースは、サーボパターンとデータバースト(データ)とを分離する領域(ギャップ)である。データ記録時に発生する、データバーストの磁気テープの長手方向の位置が変動するのを吸収する役目を負っている。フォーマット上必ず必要である。
【0023】
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで磁気テープ上に先ず記録し、次いで該記録したサーボパターンの一部を後続の全幅消去ヘッドでデータ記録部分を形成するように消去することで形成してもよい。磁化遷移は反転を含む。境界は磁気テープの記録面内にあり、磁化遷移(反転)は、記録電流の変化に基づいている。
【0024】
これにより、走行方向の長さの短いサーボパターンを形成することができる。
【0025】
前記データバンド上で、前記サーボパターンを前記データバンドの幅方向に、少なくとも2つのセグメントから構成されるようになし、隣り合うセグメントを異なるアジマス角で記録するようになすことが好ましい。(セグメントの数>=アジマス角の数)
これにより、磁気ヘッドの位置決め情報(トラッキングの情報)磁気テープの速度情報に加えて、磁気テープの変形(幅と長手方向の伸縮)情報やテープの傾き情報を磁気テープ装置により検出することができる。
【0026】
前記サーボパターンのそれぞれのセグメントに与えるアジマス角に、絶対値の等しい正と負、及び0度の3通りの中から少なくとも2つを用いてもよい。
【0027】
これにより、磁気ヘッドの位置決め情報(トラッキングの情報)磁気テープの速度情報に加えて、磁気テープの変形(幅と長手方向の伸縮)情報やテープの傾き情報を磁気テープ装置により検出することができる。
【0028】
前記サーボパターンを当該磁気テープの長手方向に等間隔に配置することが好ましい。
【0029】
これにより、磁気テープにより周期的にサーボ情報を提供することができる。同時に、テープ速度制御を容易にする。
【0030】
前記データバンドの幅方向に、少なくとも2つのセグメントから構成されるようになしたサーボパターンの各セグメントの幅を、それぞれ前記データが記録されるデータトラックのトラックピッチの略整数倍にしてもよい。
【0031】
これにより、データバンドの幅方向にサーボパターンが複数のデータトラックに亘る。
【0032】
前記磁気テープの幅方向に前記データバンドが複数ある場合に、隣り合うデータバンドの間でそれぞれのサーボパターンの長手方向の位置を同一になすようにし、サーボパターンを形成する磁化遷移のアジマス角を隣り合うデータバンドの仮想の境界線を挟んだセグメント間で、符号の異なるアジマス角となしてもよい。磁化遷移とは反転を含み、アジマス角をデータバンドの仮想の境界線を挟んだセグメント間で共に0度としてもよい。
【0033】
或いは、前記磁気テープの幅方向に前記データバンドが複数ある場合に、隣り合うデータバンドの間でそれぞれのサーボパターンの長手方向の位置を略同一になすようにし、サーボパターンを形成する磁化遷移のアジマス角を隣り合うデータバンドの仮想の境界線を挟んだセグメント間で、同じ符号のアジマス角となしてもよい。磁化遷移は反転を含み、アジマス角をデータバンドの仮想の境界線を挟んだセグメント間で共に0度としてもよい。
【0034】
これらにより、磁気ヘッドの位置決め情報、磁気テープの変形情報および/または磁気テープの傾き情報を磁気テープ装置により検出することが出来る。後者はヘッド位置決め情報のダイナミックレンジを広げるのにも有効である。
【0035】
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン全幅記録ヘッドで磁気テープ全幅を記録するに当たり、サーボパターン1つ当たりの記録電流の変化(反転を含む)の回数を全て奇数回或いは全て偶数回となすようにしてもよい。磁化遷移は反転を含む。境界は磁気テープの記録面内にあり、磁化遷移(反転)は、記録電流の変化に基づいている。
【0036】
これにより、サーボパターンに挟まれたデータ記録領域(データバーストを記録する領域)の初期の磁化の状態(方向)を、サーボパターンの前後で逆にまたは同じにすることを選択できる。即ち、磁気テープ上に形成される多数のデータ記録領域の初期の(磁気テープ装置により最初にデータを記録する前の)磁化の状態(方向)を交互に逆にまたは全て同じに出来る。
【0037】
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン全幅記録ヘッドで磁気テープ全幅を記録するに当たり、記録電流の変化のタイミングを変調してバイナリデータまたはユニークな同期信号を表現するようにしてもよい。磁化遷移は反転を含む。境界は磁気テープの記録面内にあり、磁化遷移(反転)は、記録電流の変化に基づいている。
【0038】
これにより、記録電流の変化(反転を含む)のタイミングを変調してバイナリデータまたはユニークな同期信号を表現することができる。
【0039】
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで磁気テープ上に先ず記録し、次いで該記録したサーボパターンの一部を後続の全幅消去ヘッドでデータ記録部分を形成するように消去するに当たり、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン中にバイナリデータを表現するようになした、或いは、ユニークな同期信号を表現するようにしてもよい。磁化遷移は反転を含む。境界は磁気テープの記録面内にある。
【0040】
これにより、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン中にバイナリデータまたはユニークな同期信号を表現することができる。
【0041】
前記サーボパターンを、1ビットのデータに対応させるようになした、或いは、ユニークな同期信号に対応させるようにしてもよい。
【0042】
これにより、サーボパターンにより1ビットのデータ、或いは、ユニークな同期信号を提供することができる。
【0043】
前記アドレス情報をサーボパターンに挿入する際に、アドレス情報が挿入されているサーボパターンに対して、ユニークな同期信号が挿入されているサーボパターンを先行させることにより、アドレス情報のフレーム同期を確実に出来る。
【0044】
前記サーボパターンにアドレス情報を挿入する際に、該サーボパターン記録装置が扱える最長の磁気テープよりも充分に長いモジュロのアドレス発生器を用いると共に、前記サーボパターン記録装置に生の磁気テープを装填する毎に、前記アドレス発生器のアドレスをリセットするようになしたサーボパターン記録装置を用いて製造されてもよい。生の磁気テープとは未記録磁気テープを含む。
【0045】
これにより、磁気テープにアドレス情報を記録することができる。
【0046】
本発明に係る磁気テープ装置は、データバンドを有する磁気テープにおいて、前記データバンドの全幅にわたって、且つ前記磁気テープの長手方向には間隔をあけて配置されたサーボパターンとを具備する磁気テープに、前記サーボパターン間で、前記サーボパターンとの間にガードスペースを介してデータを記録する記録ヘッドと、前記磁気テープに記録されたデータを再生する再生ヘッドとを具備する。
【0047】
本発明では、磁気テープの幅方向に一般には複数設けられるデータバンド上に、サーボパターン、ガードスペース、データ、ガードスペース、サーボパターン、ガードスペース、データ、・・・のように配置されている。
【0048】
このようにデータを記録するには、サーボパターンは予め記録されているものとして、記録開始時に先ず記録ヘッドと同じバンプにある再生チャンネルで、サーボパターンを通常複数個再生し(この間記録電流は流さない)ヘッドの位置を制御した後に、記録動作に入る。即ち、記録ヘッドに記録電流を流してデータを記録し、次にある時間経過後に(次のサーボパターンの直前で)記録電流を止める。再び同じバンプの再生ヘッドで次のサーボパターンを再生し、ヘッド位置情報を検出し、直後に再び記録に戻る。以下、この記録と再生とヘッド位置制御とを記録終了まで繰り返す。記録中には下流にあるバンプの再生ヘッドを用いてリードアフターライト(またはリードホワイルライトと言う)を行う。即ち、記録時に記録ヘッドと異なるバンプにある再生ヘッドを用いて記録ヘッドの位置決めをする場合には、磁気テープの走行が傾くことにより記録トラックの位置がずれて隣接トラックの領域に侵入すると言う問題(記録済み隣接トラックを上書きする、または後から記録の隣接トラックにより上書きされる可能性がある)が生じるのに対して、本発明では、同じバンプにある記録ヘッドと再生ヘッドとを時分割で交互にデータの記録と記録ヘッドの位置検出とに使用することにより、記録ヘッドにより近い(背中合わせになっている)再生ヘッドでサーボパターンを再生して、前記のテープが傾いて走行する際に生じる問題を回避して、データを正確な位置に記録することを可能にしている。また、記録時に、記録ヘッドから再生ヘッドへのクロストークの問題を解決することが出来る。
【0049】
再生時にはデータ再生に用いる再生ヘッド(どのバンプにある再生ヘッドを用いるかはヘッドブロックの設計にもよる)でサーボパターンも再生してヘッドの位置を制御する。
【0050】
これにより、磁気ヘッドの位置決め情報(トラッキングの情報)磁気テープの速度情報に加えて、磁気テープの変形(幅と長手方向の伸縮)情報やテープの傾き情報を磁気テープ装置により検出することが出来る。
【0051】
前記サーボパターンの再生に、前記再生ヘッドのデータ用チャンネルの少なくとも2チャンネルを使用し、各チャンネルからの再生サーボ信号間の相関関係と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とから、前記記録ヘッドまたは前記再生ヘッドの位置決め情報、前記磁気テープの変形情報、及び/または、磁気テープの傾き情報を検出するようにしてもよい。
【0052】
これにより、記録ヘッドまたは再生ヘッドの位置決め情報、磁気テープの変形情報、及び/または、磁気テープの傾き情報を検出することができる。
【0053】
前記サーボパターンの再生に、前記再生ヘッドのデータ用チャンネル及びサーボ用補助チャンネルの中から少なくとも2チャンネルを使用し、各チャンネルからの再生サーボ信号間の相関関係と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とから、前記記録ヘッドまたは前記再生ヘッド位置決め情報、磁気テープの変形情報、及び/または、磁気テープの傾き情報を検出するようにしてもよい。
【0054】
これにより、記録ヘッドまたは再生ヘッドのヘッド位置決め情報、磁気テープの変形情報、及び/または、磁気テープの傾き情報を検出することができる。同時に、ヘッド位置決め情報検出のダイナミックレンジを広げるのにも有効である。
【0055】
前記サーボパターンの異なるアジマス角のセグメントを、それぞれに対応する再生チャンネルで再生し、それぞれの出力信号の間の経過時間または該磁気テープ装置内の時計で計測した時刻差に、磁気テープ速度情報と、対応する再生チャンネルの組み合わせ毎に予め決められた基準値とを組み合わせて、前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を得るようにしてもよい。
【0056】
これにより、記録ヘッドまたは再生ヘッドのトラック幅方向の位置決め情報を得ることができる。
【0057】
前記サーボパターンの正のアジマス角のセグメントと負のアジマス角のセグメントを、それぞれに対応する再生チャンネルで再生してもよい。
【0058】
これにより、サーボパターンの正のアジマス角のセグメントと負のアジマス角のセグメントの情報をそれぞれ対応する再生チャンネルで再生することができる。
【0059】
前記サーボパターンの、正負の第一のアジマス角の組み合わせから得られた位置に関する第一の情報と、前記第一のアジマス角より大きな正負の第二のアジマス角の組み合わせから得られた位置に関する第二の情報とを組み合わせて、位置決め情報を得るようにしてもよい。第一の情報とは、例えば位置に関する低感度、広ダイナミックレンジの情報であり、第二の情報とは、例えば位置に関する高感度、狭ダイナミックレンジの情報である。
【0060】
これにより、低感度の情報を用いてヘッド位置の粗調整を行い、次いで高感度の情報を用いて精密なヘッド位置合わせ(トラッキング)を可能とする。即ち、高感度と広ダイナミックレンジと言う相反する条件を満たすことが出来る。
【0061】
前記サーボパターンのアジマス角が0度ではないセグメントを、対応する2つの再生チャンネルで再生し、再生信号間の経過時間または該磁気テープ装置内の時計で計測した時刻差である第一の値と、これとは逆のアジマス角のセグメントを対応する第2の2つの再生チャンネルで再生して得られる第二の値と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの変形情報、及び/または、磁気テープの傾き情報を検出するようにしてもよい。
【0062】
これにより、磁気テープの変形情報、及び/または、磁気テープの傾き情報を検出することができる。
【0063】
前記サーボパターンのアジマス角が0度のセグメントを、対応する2つの再生チャンネルで再生し、再生信号間の経過時間または装置内の時計で計測した時刻差と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの傾き情報を検出するようにしてもよい。
【0064】
これにより、磁気テープの傾き情報を検出することができる。
【0065】
前記サーボパターンの、0度ではない等しいアジマス角の第一の2つのセグメントを、第一の再生チャンネルペアでそれぞれ再生し、再生信号間の経過時間または該磁気テープ装置内の時計で計測した時刻差を得ると共に、これとは逆の等しいアジマス角の第二の2つのセグメントを、第二の再生チャンネルペアで再生して再生信号間の経過時間または時刻差を得、テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの変形情報と傾き情報との混合した情報を検出すると共に、アジマス角が0度のセグメントを第三の再生チャンネルペアで再生して検出される磁気テープの傾き情報を用いて、磁気テープ変形情報を得るようにしてもよい。
【0066】
これにより、磁気テープの傾き情報を用いて、磁気テープ変形情報を得ることができる。
【0067】
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出するようにしてもよい。
【0068】
これにより、バースト位相比較器により位相差(即ち、前記の時間情報)を検出することができる。
【0069】
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、及び/または、前記傾き情報を用いて補正するようにしてもよい。
【0070】
これにより、トラック幅方向でより正確な位置に記録ヘッド、及び/または、再生ヘッドを位置決めすることができる。
【0071】
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御するようにしてもよい。傾き角はアジマス角を含む。
【0072】
これにより、より正確な位置に記録ヘッド、及び/または、再生ヘッドを位置決めすることができる。
【0073】
前記磁気テープ速度情報を、設定されている速度情報(目標値)とした、及び/または、前記磁気テープ速度情報を、再生するサーボパターンの周期を計測して得るようにしてもよい。設定されている速度情報とは、速度の目標値の情報を含む。
【0074】
これにより、磁気テープ速度を得ることができる。
【0075】
前記サーボパターン中にアジマス角0度のセグメントがある場合に、このセグメントを再生するチャンネルの出力のサーボパターンの周期を計測して速度情報を得るようにしてもよい。
【0076】
これにより、正確な速度情報を得ることができる。
【0077】
前記サーボパターン中にアジマス角0度のセグメントがない場合に、アジマス角が正のセグメントに対応する再生チャンネルの出力のサーボパターンの周期と、負のセグメントに対応する再生チャンネルの出力のサーボパターンの周期とを計測し、それぞれのアジマス角の絶対値を考慮した演算を行って速度情報としてもよい。
【0078】
α1, α2をサーボパターンの(既知の)アジマス角として、(n−1)番目のサーボパターンからn番目のサーボパターンまでテープが走行する間に、Δdだけテープが上がった(相対的にヘッドが下がった)とすると、
Δd1(〜dn−dn−1),dn−1,dn:n−1, nにおけるヘッドの位置(計算値)
T1=T01+Δd1tan(−α1+Δγ1), T1:n−1からnまでの時間(実測値)
T01=T1+Δd1tan(α1−Δγ1),T01:T1から求めた周期
Δγ1=arctan(Δd1/T01)<<α1
従って
T01=T1+Δd1tanα1
同様にして
T02=T2−Δd2tanα2
T0=(T01+T02)/2, T0:推定周期
T0=((T1+T2)/2)+Δd1tanα1−Δd2tanα2
正負のアジマス角のサーボパターンは、テープ上の長手方向に略同じ位置にあるから
Δd1=Δd2=Δd
よって
T0=((T1+T2)/2)+Δd(tanα1−tanα2)
尚、テープの変形を考慮する場合には上記α1,α2を(α1−β),(α2−β)とすればよい(例えば図18参照)。
【0079】
これにより、サーボパターン中にアジマス角0度のセグメントがない場合にも速度情報を得ることができる。
【0080】
前記サーボパターン中のアジマス角0度のセグメントを、磁気テープ走行の上流のバンプの再生ヘッドと下流のバンプの再生ヘッドとでそれぞれ順次再生して、その経過時間或いは計測時間差と、両再生ヘッドのギャップ間距離を使って磁気テープ速度情報を得るようにしてもよい。
【0081】
これにより、磁気テープ走行の上流の再生ヘッドと下流の再生ヘッドとを用いて、磁気テープ速度情報を得ることができる。
【0082】
前記サーボパターンの正、負のアジマス角のセグメントそれぞれを、前記上流の再生ヘッドと前記下流の再生ヘッドで順次再生して、それぞれの経過時間或いは計測時間差と上流下流再生ヘッドそれぞれのギャップ間距離から第一及び第二の速度情報を得た後、使用した再生ヘッドのチャンネル情報とアジマス角の情報を考慮した演算を行って速度情報とするようにしてもよい。
【0083】
これにより、正、負のアジマス角のセグメントそれぞれを、上流の再生ヘッドと下流の再生ヘッドとで順次再生して、速度情報を得ることができる。
【0084】
前記磁気テープを位相ロックする場合に、前記サーボパターン中にアジマス角0度のセグメントがある場合には、該セグメントを再生するチャンネルの出力サーボパターンの周期を、必要なだけ分周して基準信号と位相比較するようにしてもよい。
【0085】
周知のように、位相検出器は最も簡単なかけ算型の場合は+/−90度、もっと精巧な形式の場合でも+/−180度外装検出の限界で、この範囲を超えると次のトランジションとの位相比較の結果を出力する。即ち、基準信号とVFO(可変周波数発信機)の周波数に差があると、両者のトランジションの1:1の位相比較が出来ずに、検出器の出力は両周波数の差の周波数成分が支配的になる。位相ループを形成したときの問題は、VFOの応答性が良く、前記の周波数成分に素早く応答して同期に入れるかどうかである。テープ走行系のようの機械系を伴ったVFOは応答が遅い。一方、位相比較の周波数を低くする(分周する)と、前記の+/−90度或いは+/−180度に相当する時間の窓の絶対値が大きくなる。その結果、ある点で同期に入り易くなる。しかし、位相同期系というのはサンプリング系でもあるので、サンプリングの観点からは位相比較の周波数は高い方が望ましい。従って、同期引き込みと同期後の精度との兼ね合いで分周の程度を決めることになる。
【0086】
これにより、サーボパターン中にアジマス角0度のセグメントがある場合に、磁気テープを位相ロックすることができる。
【0087】
前記磁気テープを位相ロックする場合に、前記サーボパターン中にアジマス角0度のセグメントがない場合には、アジマス角が正のセグメントに対応する再生チャンネルの出力サーボパターンの周期を、所定の分周比で必要なだけ分周して第一の基準信号と位相比較するようになし、負のセグメントに対応する再生チャンネルの出力サーボパターンの周期を、同じ分周比で分周して第二の基準信号と位相比較するようになし、それぞれの位相比較器の出力をアジマス角の絶対値を考慮した演算を行って、位相ロックするようにしてもよい。第二の基準信号は第一の基準信号と実質的に同じ(周波数)場合もあり得る。一方、正のアジマス角のチャンネルの出力と負のアジマス角のチャンネルの出力が大きく異なる場合には、第1の基準信号と第2の基準信号とを同一周波数で位相の異なる信号とする。
α1, α2をサーボパターンの(既知の)アジマス角として、テープがΔTだけ走行する間に、dだけテープが上がった(相対的にヘッドが下がった)とすると、
ΔT− アジマス角α1のセグメントとREF(基準)との間の距離(又は周期)
ΔT+ アジマス角α2のセグメントとREF(基準)との間の距離(又は周期)
ΔT=(ΔT− + ΔT+)/2 + d(tanα1−tanα2)
尚、テープの変形を考慮する場合には上記α1を(α1−γ),(α1−β−γ)とし、上記α2を(α2+γ),(α2−β+γ)とすればよい(例えば図19参照)。
【0088】
これにより、サーボパターン中にアジマス角0度のセグメントがない場合に、磁気テープを位相ロックすることができる。
【0089】
前記データ記録時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生するようにしてもよい。
【0090】
これにより、上流のバンプの記録ヘッドによりデータを記録し、上流のバンプの再生ヘッドによりサーボパターンを再生することができる。
【0091】
前記データ再生時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生するようにしてもよい。
【0092】
これにより、データ再生時に、下流の再生ヘッドを使用して、サーボパターンを再生することができる。
【0093】
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生するようにしてもよい。この際、検出されたテープの傾きおよび記録ギャップと再生ギャップの長手方向の距離に応じて、ヘッドの位置決めをオフセットする。
【0094】
これにより、データ記録時に、下流の再生ヘッドを使用して、サーボパターンを再生することができる。
【0095】
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生するようにしてもよい。この際、検出されたテープの傾きおよび記録ギャップと再生ギャップの長手方向の距離に応じて、ヘッドの位置決めをオフセットする。
【0096】
これにより、データ再生時に、上流の記録ヘッドにピギーバックされている再生ヘッドを使用して、サーボパターンを再生することができる。
【0097】
前記記録ヘッド及び前記再生ヘッドの、記録及び/または再生ギャップの個々の位置の、基準の位置からの偏差の情報を該磁気テープ装置内に格納し、その情報を用いて前記記録ヘッド及び前記再生ヘッドの位置情報、磁気テープの変形情報、磁気テープの傾き情報、磁気テープ速度情報、及び/または、磁気テープの位相情報を補正する。
【0098】
これにより、記録ヘッド及び再生ヘッドの位置情報、磁気テープの変形情報、磁気テープの傾き情報、磁気テープ速度情報、及び/または、磁気テープの位相情報を補正することができる。
【0099】
前記サーボパターンに挟まれたデータ領域の構成要素である各パス毎の領域の所定の位置に、前記データバンドおよび/またはパスの識別情報を挿入するようにしてもよい。
【0100】
これにより、磁気テープ装置により、データ領域の所定の位置で、データバンド及び/またはパスの識別情報を識別することができる。
【0101】
各パス毎に、前記サーボパターンに挟まれたデータ領域と、隣接して先行または後続するサーボパターンと、付随するガードスペースとを単位にして、その整数倍を物理ブロックとして取り扱うようにしてもよい。
【0102】
データバーストとは、データバンド上でサーボパターンとサーボパターンに挟まれた領域にある、1パスの部分データを含む。それぞれの領域には、規定のパス数(2×往復回数)のデータバーストが磁気テープ幅方向に多重化(1パス毎にトラック位置をかえて多重化)される。
【0103】
これにより、データ管理が容易となる。
【0104】
各パス毎に、前記サーボパターンに挟まれたデータ領域と、隣接して先行または後続するサーボパターンと、付随するガードスペースとを単位に、1個または複数個を用いてテープマークとなすようにしてもよい。テープマークはファイルマークを含む。テープマーク(ファイルマーク)はデータの終わりを表す。
【0105】
これにより、磁気テープを取り扱い易くなる。
【0106】
本発明に係るサーボパターン記録装置は、磁気テープに記録するサーボパターンの磁化遷移の境界の形状と同じ形状の記録ギャップを有し前記サーボパターンを前記磁気テープの全幅に亘って記録する記録ヘッドと、前記記録ヘッドで前記磁気テープ全幅を記録するに当たり、前記サーボパターン1つ当たりの記録電流の変化の回数を全て奇数回或いは全て偶数回に制御する制御手段とを具備する。磁化遷移は反転を含む。境界は磁気テープの記録面内にあり、磁化遷移(反転)は、記録電流の変化に基づいている。
【0107】
本発明では、制御手段により記録電流の変化(反転を含む)の回数を全て奇数回或いは全て偶数回にして、サーボパターン全幅記録ヘッドにより、サーボパターンを磁気テープの全幅に記録することができる。
【0108】
本発明に係るサーボパターン記録装置は、磁気テープに記録するサーボパターンの磁化遷移の境界の形状と同じ形状の記録ギャップを有し前記サーボパターンを前記磁気テープの全幅に亘って記録する磁気ヘッドと、前記記録ヘッドで前記磁気テープ上に先ず記録し、次いでデータ記録領域を形成するように後続の全幅消去ヘッドで該サーボパターンの一部を消去することで、該サーボパターンを形成する。
【0109】
これにより、磁気テープの走行方向の幅(長さ)の狭いサーボパターン、または磁気テープの走行方向の長さの短いサーボパターンを形成することができる。
【0110】
前記サーボパターンを、前記記録ヘッドで磁気テープ全幅を記録するに当たり、記録電流の変化のタイミングを変調してバイナリデータまたはユニークな同期信号を表現するようにしてもよい。磁化遷移(反転)は、記録電流の変化に基づいている。
【0111】
これにより、記録電流の変化(反転を含む)のタイミングを変調してバイナリデータまたはユニークな同期信号を表現することができる。
【0112】
前記サーボパターンを、前記記録ヘッドでテープ上に先ず記録し、次いで後続の全幅消去ヘッドでデータ記録部分を形成するように該記録されたサーボパターンの一部を消去するに当たり、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン中にバイナリデータを表現する、或いは、ユニークな同期信号を表現するようにしてもよい。
【0113】
これにより、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン中にバイナリデータまたはユニークな同期信号を表現することができる。
【0114】
前記サーボパターンを、1ビットのデータに対応させる、或いは、1ビットのデータまたはユニークな同期信号に対応させるようにしてもよい。
【0115】
これにより、サーボパターンにより1ビットのデータ、或いは、1ビットのデータまたはユニークな同期信号を提供することができる。
【0116】
前記サーボパターンにアドレス情報を挿入する際に、該サーボパターン記録装置が扱える最長の磁気テープよりも充分に長いモジュロのアドレス発生器を用いると共に、該サーボパターン記録装置に生の磁気テープを装填する毎に、アドレス発生器のアドレスをリセットする。また、前記アドレス情報をサーボパターンに挿入する際に、アドレス情報が挿入されているサーボパターンに対して、ユニークな同期信号が挿入されているサーボパターンを先行させることにより、アドレス情報のフレーム同期を確実に出来る。
【0117】
これにより、サーボパターンにアドレス情報を記録することができる。
【0118】
サーボパターン記録装置は、未記録の磁気テープを定速走行させるテープ走行装置と、テープに接触している記録ヘッドと、記録ヘッドに電流を供給する電子回路とで構成されている。サーボパターンの記録動作は、磁気テープを定速走行させながら記録電流を変化させる(一般にはトランジション以外の点でも電流は流れている)だけである。
【0119】
本発明に係る記録方法は、データバンドを有する磁気テープにデータを記録する方法において、前記データバンドの全幅にわたって、且つ前記磁気テープの長手方向には間隔をあけて配置されたサーボパターンからサーボ信号を取得し、前記取得したサーボ信号に基づいて、前記サーボパターン間にガードスペースを介してデータを記録する。
【0120】
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで、トランジションの数をサーボパターン1つ当たり、全て奇数回または偶数回となるようにテープ上に記録することによって、データ記録領域を形成してもよい。
【0121】
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで磁気テープ上に先ず記録し、次いで該記録したサーボパターンの一部を下流にある全幅消去ヘッドで消去することによって、データ記録領域を形成してもよい。
【0122】
前記データバンド上で、前記サーボパターンを前記データバンドの幅方向に、少なくとも2つのセグメントから構成されるようになすと共に隣り合うセグメントを異なるアジマス角で記録するようになして、データ記録領域を形成してもよい。
【発明の効果】
【0123】
以上のように、本発明によれば、正確にデータを記録、再生することが可能な磁気テープ、該磁気テープのサーボパターン記録装置、及び該磁気テープの変形(幅と長手方向の伸縮)情報や磁気テープの傾き情報を検出することを可能とする磁気テープ装置、該磁気テープの製造方法及び記録方法を提供することができる。
【発明を実施するための最良の形態】
【0124】
以下、本発明の実施の形態を図面に基づき説明する。
図1は本発明の一実施形態に係る磁気テープを示す平面図、図2(A)〜(D)は図1に示す磁気テープ1のサーボパターン2の例を示す平面図、図3は磁気テープ装置のヘッド位置、磁気テープ1の変形及び磁気テープ1の傾きの情報の検出の原理説明図である。
図1に示すように、磁気テープ1は、複数(例えば4個)のデータバンドb0、b1、b2及びb3と、データバンドb0、b1、b2及びb3の全幅に亘って、且つ磁気テープ1の長手方向には間隔をあけて配置されたサーボパターン2と、サーボパターン2とサーボパターン2との間に配置されデータバースト3と、サーボパターン2とデータバースト3との間に配置されたガードスペース4とを備えている。例えばサーボパターン2とデータバースト3とガードスペースとの整数倍を物理ブロックとして取り扱うようにしている。
【0125】
データバンドb0、b1、b2及びb3は、磁気テープ1を幅方向に分割して形成された磁気テープ1全長に亘った領域である。データバンドb0、b1、b2及びb3は、それぞれ「データサブバンド×データの記録/再生を並列して行う磁気テープ装置のヘッドのチャンネルの数」で構成される。データの記録/再生は、通常1つのデータバンドを終了してから次のデータバンドに移る。
【0126】
データサブバンドは、幅がヘッドHのチャンネルスペーシングで、磁気テープ1全長にわたった領域である。並列記録/再生する多チャンネルヘッドの対応する1チャンネルが、1パス毎に磁気テープ1の幅方向に位置を変えて、規定回数の往復(1往復=2パス)で走査を完了する領域である。
【0127】
ヘッドチャンネルスペーシングは、データの記録/再生を並列に行う多チャンネルのヘッドHの、隣り合うチャンネルそれぞれの中心線の間の距離である。必ずしも全てのチャンネルが単一のギャップライン上になくてもよい(2次元的にギャップが配置されていてもよい、或いは、ヘッドを構成する複数のヘッドブロックHB1、HB2、HB3・・・のそれぞれにチャンネルがあってもよい)。
【0128】
サーボパターン2は、データバンドb0、b1、b2及びb3の全幅に亘って(不連続でもよい)、且つ磁気テープ1の長手方向には間隔をあけて配置されている。なお、データバンドb0のサーボパターン2と、データバンドb1のサーボパターン2とが、磁気テープ1の長手方向でずれて(オフセットされて)配置されていてもよい。データバンドb0〜b3の番号の付け方はこれに限られない。
【0129】
サーボパターン2は、ヘッドHを磁気テープ1の幅方向に位置制御する(トラッキングをとる)、或いは、磁気テープ1を速度制御/位相制御するのに用いる磁化反転の組み合わせである。サーボパターン2は、磁気テープ1の出荷時には予め記録されていて、個々の磁気テープ装置では書き換えない。サーボパターン2は、磁気テープ1の長手方向に例えば等間隔に配置されている。
【0130】
データバースト3は、データバンドb0、b1、b2及びb3上でサーボパターン2とサーボパターン2に挟まれた領域にある規定のパス数(2×往復回数)の部分データを含んでいる。データバースト3のそれぞれの領域には、規定のパス数(2×往復回数)の部分データが磁気テープ1の幅方向に多重化(1パス毎にトラック位置をかえて多重化)される。
【0131】
ガードスペース4は、サーボパターン2とデータバースト3とを分離する領域(ギャップ)である。データ記録時に発生する、データバースト3の磁気テープの長手方向の位置が変動するのを吸収する役目を負っている。フォーマット上必ず必要である。
【0132】
図2(A)、図2(B)及び図2(C)に示すサーボパターン2a、2b及び2cは、いずれもデータバンドb0の幅方向に2個のセグメントで構成されている。例えばサーボパターン2aは、磁気テープ1の走行方向に直交する方向に対して所定の正負のアジマス角で形成された二つのセグメントs1、s2で形成されている。図2(A)に示すように、例えばサーボパターン2aを形成する各セグメントs1、s2のアジマス角は、データバンドb0とデータバンドb2との間の仮想の境界線Gを挟んで符号が異なっている。図2(B)に示すように、例えばサーボパターン2bを形成する各セグメントのアジマス角は、データバンドb0とデータバンドb2との間の仮想の境界線Gを挟んで符号が同じになっている。サーボパターン2aの各セグメントs1、s2の幅は、それぞれデータが記録されるデータトラックのトラックピッチの略整数倍になっている。
【0133】
図2(C)では、サーボパターン2cを所定の長さで一旦記録し、その後、後続の消去ヘッドで部分的にサーボパターン2cの一部2c´を消去し、データ領域を形成した例を示している。
【0134】
図2(D)では、サーボパターン2dは、6個のセグメントから構成されている。サーボパターン2dの各セグメントの(記録)アジマス角は、絶対値の等しい正と負、及び0度の3通りに設定されている。
【0135】
これらの例では、サーボパターン2a、2b、2c及び2dが、磁気テープ1の幅方向に連続的に配置されているが、例えば隣合うデータバンドb0と、データバンドb2との境界等で不連続となっていてもよい。
【0136】
図3に示すように、サーボパターン2bが等しい正と負のアジマス角αのセグメントで構成されているときに、後述する磁気テープ装置のヘッドHのトラック幅方向(Y方向)の位置情報(ずれ量 d)、磁気テープ1の変形の情報(角度β)、及び磁気テープ1の傾き情報(角度γ)を検出する原理を説明する。ヘッドHのチャンネルA、B、C及びDが同じギャップラインGL上にあるとして、サーボパターン2bの磁化反転に反応して磁気テープ装置のヘッドHが信号を出力する時点を考える。
【0137】
2バンプ型のヘッドHは、記録ヘッドH1の上に再生ヘッドH2が(或いはその逆)ピギーバックされているヘッドブロックHB1、HB2を2つを逆向きに合わせて、1つのヘッドHとしているもので、ヘッドブロックHB1(を構成する第一のバンプ(上流側のバンプ))に記録/再生ヘッドH1、H2、ヘッドブロックHB2(を構成する第二のバンプ(下流側のバンプ))に再生/記録(或いはこれらと逆の順序に)ヘッドH2,H1を配置し、第一のバンプの記録ヘッドH1は第二のバンプの再生ヘッドH2と、また第一のバンプの再生ヘッドH2は第二のバンプの記録ヘッドH1とトラックの位置を合わせてある。
【0138】
図3に示すように、LTM(走行中の磁気テープ1の幅方向の運動)により磁気テープ1が長さdだけ上がった(相対的にヘッドHが下がった)場合は、チャンネルA、Cの出力は同じ値だけ位相が進む(出力時点が早くなる)、また、チャンネルB、Dの出力は同じ値だけ位相が遅れる(出力時点が遅くなる)。
【0139】
LTMとは、ラテラルテープモーションの略であり、磁気テープ1の走行時に発生する磁気テープ1の幅方向の運動である。狭ピッチのトラック(従って、狭トラック)のトラッキングを阻害する要因になる。サーボパターン2bを再生してヘッドHと磁気テープ1の相対位置を検出し、LTMを追尾することにより、ヘッドHをできるだけ正しいトラックの位置に置くようにする制御(トラッキングサーボ)している。
【0140】
磁気テープ1が変形して(磁気テープ1の幅が広がり(正、負のセグメントのなす角が角度2β大きくなり)、長さが縮んだ例)場合は、チャンネルA、B、C及びD全ての出力の位相が遅れるが、遅れ量はチャンネルA、Bは小さく、チャンネルC、Dは大きい。
【0141】
磁気テープ1がY方向に対して角度γ傾いて走行した場合は、チャンネルA、Cの出力の位相は進み、チャンネルB、Dのそれは後れる。チャンネルA、B、C及びDの位相変化の方向はLTMの場合と同じであるが、その変化量はチャンネルA、Bは小さく、チャンネルC、Dは大きい。これらを図3に矢印の向きと長さで表す。このように、LTM、磁気テープ1の変形、及び、磁気テープ1の走行の傾きの影響は全て異なっている。しかし、これらが混合した場合も、次に示すように完全に分離可能である。
【0142】
図4は磁気テープ装置のヘッド位置、磁気テープ1の変形及び磁気テープ1の傾きの情報の検出の原理説明図である。
サーボパターン2bを有する磁気テープ1に、LTM(走行中の磁気テープ1の幅方向の運動)によるシフトd(位置決め情報)、変形によるアジマス角変化が±β(変形情報)、傾きγ(傾き情報)が複合して発生した場合を示す。シフトdはヘッドH(または磁気テープ1)の位置決め情報となる。図4に示すように、チャンネルA、B、C及びDと、正規の状態にある点線で示すサーボパターン2bとの交点を(xA,yA)、(xB,yB)、(xC,yC)、D(xD,yD)とし、シフト、変形、傾きの影響を受けた実線で示すサーボパターン2bとの交点を(x´A,yA)、(x´B,yB)、(x´C,yC)、(x´D,yD)とする。また、正規の状態にあるサーボパターン2bの頂点の座標を(0,0)、頂角を(π−2α)、すなわちアジマス角±α、シフト量をdとする。未知数(d、γ、β)のうち例えばdは以下のように求められる。
【0143】
【数1】
【0144】
ところで、
x´A−x´B = V×t´AB = V(t´B−t´A)
x´C−x´A = V×t´CA = V(t´A−t´C)
x´D−x´B = V×t´DB = V(t´B−t´D)
ここに、
V:磁気テープ速度
t´AB,t´CA,t´DB :検出出力間の経過時間
t´A,t´B,t´C,t´D :チャンネルA〜Dの出力検出時刻
yA,yB,yC,yD :チャンネル(ヘッドH)A〜Dの磁気テープ幅方向の位置(既知 再生チャンネルの組み合わせ毎に予め決められた基準値:チャンネル情報(座標情報))
ここで、各チャンネルA〜Dのy軸方向の位置yA、yB、yC、yDとアジマス角αは既知であること、また、例えば点(x´A,yA)と(x´B,yB)とのx軸方向の距離は、対応するチャンネルA、Bの出力間の経過時間或いは時刻差(何れも測定値):t´B−t´Aに磁気テープ速度Vを乗じたものである。
【0145】
すなわち、既知の値と計測値とから、K1、K2が求まり、その結果、dが求まる。
【0146】
なお、この場合は、dを求める式の分母、分子が共にVの係数倍という形になり、Vに関係なくyとtとからdを求めることができる。β、γも求めることができる。
【0147】
次に、サーボパターン2eを有する磁気テープ1に、LTMによるシフトd、変形によるアジマス角変化が±β、傾きγが複合して発生した場合を示す。図5に示すサーボパターン2eは、等しい正負のアジマス角±αのセグメントとアジマス角0度の2つのセグメントとで構成されている。このときに、ヘッドHのトラック幅方向の位置情報(シフトd)、及び、磁気テープ1の傾き情報(角度γ)を検出する原理を説明する(β=0とする)。
【0148】
図5はヘッド位置、磁気テープ変形及び磁気テープ傾きの情報の検出の原理説明図である。
図5に示すように、ヘッドHのチャンネルA、B、C及びDが同じギャップラインGL上にあるとして、サーボパターン2eの磁化反転に反応して磁気ヘッド装置のヘッドHが信号を出力する時点を考える。
【0149】
図5に示すように、LTMによりサーボパターン2eを有する磁気テープ1が上がり(相対的にヘッドHが下がり シフトd)かつ磁気テープが(角度γ)傾いて走行した場合を示す。この場合には、チャンネルA、Cの出力は位相が進む(出力時点が早くなる)、また、チャンネルB、Dの出力は位相が遅れる(出力時点が遅くなる)。
【0150】
以下に示すように、シフトd、傾き角度γを求めることができる。
【0151】
【数2】
【0152】
磁気テープ1が(角度γ)傾いて走行した場合(β=0と見なす)は、チャンネルC、Dの出力の位相差から直接傾きの角度γがtanγ=V(t´C−t´D)/(yD−yC)より求められる。
【0153】
更にチャンネルC、Dの位相差を無視すれば(要するにチャンネルA、Bの位相差のみからヘッドHの位置情報であるシフトdを求めると)、磁気テープ1の傾きも無視したこと(γ=0と見なすこと)になる。
【0154】
次に、サーボパターン2dを有する磁気テープに、LTMによるシフトd、変形によるアジマス角変化が±β、傾き角度γが複合して発生する場合を示す。サーボパターン2dが等しい正負のアジマス角のセグメント、アジマス角0度の2つのセグメント、及び、別の等しい正負のアジマス角のセグメントで構成されているときに、ヘッドHのトラック幅方向の位置情報(シフトd)、磁気テープ1の幅の情報(角度β)、及び、磁気テープ1の傾き情報(角度γ)を検出する原理を説明する。
【0155】
図6及び図7はサーボパターン2dの構造、ヘッド位置、磁気テープ変形及び磁気テープ傾きの情報の検出の原理説明図である。
【0156】
これらの図に示すように、磁気テープ装置のヘッドHのチャンネルA、B、C、D、E及びFが同じギャップライン上にあり、チャンネルA、B、C、D、E及びFのy軸方向の位置YA、YB、YC、YD、YE、YF及びアジマス角αは既知であるとして、サーボパターンの磁化反転に反応してヘッドHが信号を出力する時点を考える。
【0157】
次に磁気テープのシフトを計算するための計算式を説明する。
【0158】
図6に示す式(8−1)、式(8−2)は次に示すように変形することができる。
【0159】
【数3】
【0160】
図7に示すように、図6よりも原点を−X方向にX´シフトする(すなわち、XNEW=X+X´)。
【0161】
Y0:データバンドピッチ
α:アジマス角(Y0tanα=2X0)
X1:サーボパターンを決めるシフト量、とする。
【0162】
このとき、図7に示すサーボパターンの各部は、次に示すように式(11−1)、式(11−2)、式(11−3)及び式(11−4)で示される。
【0163】
【数4】
【0164】
角度β(磁気テープが幅方向の広がるときの変化角度)を考慮して、アジマス角αをα−βに置き換えると、次に示す式(11−1´)、式(11−2´)、式(11−3´)及び式(11−4´)が得られる。
【0165】
【数5】
【0166】
角度γ(磁気テープ走行時の傾きの角度)を考慮すると、次に示す式(12−1)、式(12−2)が得られる。
【0167】
【数6】
【0168】
また、点(X(ツーダッシュ),0)が(X(スリーダッシュ),Y(スリーダッシュ))に移動し、式(12−1)、式(12−2)は、それぞれ式(12−3)、式(12−4)となる。但し、X(ツーダッシュ)=2X0−X1、2X0=Y0tanαである。
【0169】
【数7】
【0170】
式(12−1)〜式(12−4)を基にシフトdを考慮すると、次に示す式(13−1)、式(13−2)、式(13−3)及び式(13−4)が得られる。
【0171】
【数8】
【0172】
ここで、ヘッドHのチャンネルA,B,C,DのY方向の位置をYA,YB,YC,YDとすると、次に示す式(13−1´)、式(13−2´)、式(13−3´)及び式(13−4´)が得られる。これらの式から、次に示す式(13−5´)及び式(13−6´)が得られる。
【0173】
【数9】
【0174】
これらの式から次に示すシフトdを求める式(13−7)が得られる。
【0175】
【数10】
【0176】
ここで、YA、YBは既知、XA−XBは計測値(チャンネルA,B出力の時間差)から求められる。従って、K1及びK2が式(13−5´)及び式(13−6´)から求められれば、式(13−7)を用いてシフトdを求めることができる。
【0177】
このようにチャンネルA、B、C及びDの出力の経過時間或いは時刻差からシフトdを求めると式(13−7)を得るが、傾き角γが未知である。そこでチャンネルE、Fの出力の時間差から傾き角γを求めればシフトdが得られる。なお、この過程で用いるX軸方向の長さX1(サーボパターンのフォーマットの一部)は、サーボパターン計測時の磁気テープ速度を用いて、磁気テープの長手方向の変形を含めて補正をする必要がある。磁気テープの長手方向の変形は磁気テープ速度偏差に帰着する。
【0178】
ところで、
X(スリーダッシュ)=X(ツーダッシュ)cosγ
Y(スリーダッシュ)=X(ツーダッシュ)sinγ
X(ツーダッシュ)=Y0・tanα−X1
一方、
tanγ=(XE−XF)/(YF−YE)
γ=tan−1[(XE−XF)/(YF−YE)] (13−8)
ここで、YF,YEは、既知であり、XE−XFは計測値から得られる。これらを式(13−5´)、式(13−6´)に代入すれば、次の式(14−1)、式(14−2)に示すように、K1、K2が全て既知の値、或いは計測値から求められた値によって、表現された。
【0179】
【数11】
【0180】
従って、式(14−1)、式(14−2)を式(13−7)に代入してシフトdを求めることができる。例えば式(13−5´)などを用いて角度βも求めることができる。
【0181】
磁気テープ速度の検出
磁気テープ装置により、基本的にはサーボパターンの周期を計測する。図6,9に示すサーボパターン2dように、サーボパターン中にアジマス角0度のセグメントがある場合は、単純にこのセグメントの例えば第一のトランジション(遷移)から磁気テープの長手方向次のサーボパターンの中の第一のトランジション(遷移)の周期を計測すればよい。
【0182】
一方、図4に示すサーボパターン2bように、サーボパターン中にアジマス角0度のセグメントがない場合は、アジマス角が正のセグメントと負のセグメメント(例えばチャンネルAとBと)の、例えば第一のトランジション(遷移)間の周期をそれぞれ計測してその平均から磁気テープ速度を求めればLTMの変動(シフトdの変動)の影響を軽減できる。なお、データバンドの中央を挟んで上下にあるセグメントの周期をそれぞれ計測しその平均を取る方法はアジマス角0度のセグメントの場合にも使用可能で、この場合は磁気テープの傾きの影響を軽減できる。
【0183】
このように本実施形態によれば、磁気テープ1の幅方向に複数設けられるデータバンドb0〜b3上に、サーボパターン2、ガードスペース4、データバースト3、ガードスペース4、サーボパターン2、ガードスペース4、データバースト3、・・・のように配置されている。
【0184】
データバースト3にデータを記録するには、サーボパターン2は予め記録されているものとして、記録開始時に先ず上流側の記録ヘッドH1と同じバンプにある再生ヘッドH2で、サーボパターン2を通常複数個再生し(この間記録電流は流さない)ヘッドHの位置を制御した後に、上流側の記録ヘッドH1に記録電流を流してデータを記録し、次にある時間経過後(次のサーボパターンの直前で)に記録電流を止める。再び同じバンプの再生ヘッドH2で次のサーボパターン2を再生し、ヘッド位置情報を検出し、直後に再びデータバースト記録に入る。以下、この記録と再生とヘッド位置制御とを記録終了まで繰り返す。記録中には下流にあるバンプの再生ヘッドH2を用いてリードアフターライト(またはリードホワイルライトと言う)を行う。
【0185】
すなわち、上流と下流との(異なるバンプの)記録ヘッドH1と再生ヘッドH2とを用いる場合に磁気テープ1の走行方向が傾くことにより記録データトラックの位置がずれる問題が生じるのに対して、本発明では、同じ上流側のバンプの記録ヘッドH1と再生ヘッドH2とを時分割で交互に使用することにより、記録ヘッドH1により近い再生ヘッドH2によりサーボパターン2を再生し正確なサーボ情報に基づきヘッドHの位置をより正確に制御し、ヘッドHを最適な位置へ誘導し、正確な位置にデータを記録することができる。また、記録時に、記録ヘッドH1から再生ヘッドH2へのクロストークの問題を解決することができる。
【0186】
図8は、従来の磁気テープ装置のヘッド及び従来の磁気テープの部分平面図である。
つまり、従来では、図8に示したように、2バンプ型のヘッドH´は、記録ヘッドH1の上に再生ヘッドH2が(或いはその逆)ピギーバックされているヘッドブロックHB1´、HB2´を2つを逆向きに合わせて、1つのヘッドH´としているもので、ヘッドブロックHB1´(を構成する第一のバンプ(上流側のバンプ))に記録/再生ヘッドH1、H2、ヘッドブロックHB2´(を構成する第二のバンプ(下流側のバンプ))に再生/記録(或いはこれらと逆の順序に)ヘッドH2,H1を配置し、第一のバンプの記録ヘッドH1は第二のバンプの再生ヘッドH2と、また第一のバンプの再生ヘッドH2は第二のバンプの記録ヘッドH1とトラックの位置を合わせてある。再生ギャップ上には、サーボ用のギャップが形成されている。
【0187】
こうして例えば記録ギャップ(上流側)と再生ギャップ(下流側)とを1ミリメートル前後離すことにより、記録ヘッドH1から再生ヘッドH2へのクロストークを軽減している。
【0188】
図8に示すように、従来では、磁気テープ1Aを幅方向に複数(例えば4)に分割して、それぞれに磁気テープ1Aの幅方向にデータバンド3Aとサーボバンド2Aとを設ける。記録時には、記録ヘッドH1と同じバンプにある再生ヘッドH2は、データチャンネルの外側にあるサーボ用チャンネルSと言えども、記録ヘッドH1からのクロストークによりサーボ信号の再生には使用できない。従って、磁気テープ1Aの走行方向下流にある隣のバンプの再生ヘッドH2のサーボチャンネルで、サーボ信号を検出して、記録ヘッドの位置の制御をすることになる。この状態で磁気テープ1Aの走行が傾くと、記録ヘッドH1の位置は、その分正しい位置から外れることになり、トラック密度を制約することになる。通常の方法では、磁気テープ1Aの走行の傾きの影響を軽減するには、ヘッドブロックHB1´のギャップラインとヘッドブロックHB2´のギャップラインとの間の距離を近づけることになるが、クロストークの制約などがあり難しい。
【0189】
即ち、トラッキング動作は常に再生ギャップを基準のトラックセンターに位置合わせしようとする。従って、図9に示すように磁気テープがヘッドの前面を走行する方向(傾き)がダイナミックに変化(テープが蛇行)したときには、記録ギャップの位置は傾き角の正接と両ギャップ間の(長手方向の)距離に応じた量だけトラックずれ(トラックミスレジストレーション)を起こしてしまう。すなわち、記録トラックの位置がオフセットしたために、記録済みの隣接トラックの一部を上書きし、そのトラック幅を狭めることによりトラッキングマージンを削ることになる。
【0190】
これに対して、本実施形態では、図3に示すように、同じ上流側のバンプの記録ヘッドH1と再生ヘッドH2とを時分割で交互に使用することにより、記録ヘッドH1により近い再生ヘッドH2によりサーボパターン2を再生し正確なサーボ情報に基づきヘッドHの位置をより正確に制御し、ヘッドHを最適な位置へ誘導し、正確な位置にデータを記録することができる。また、記録時に、記録ヘッドH1から再生ヘッドH2へのクロストークの問題を解決することができる。
【0191】
再生時にはデータ再生に用いる再生ヘッドH2(通常は下流側バンプ)でサーボパターン2も再生してヘッドHの位置を制御する。
【0192】
サーボパターン2bを有する磁気テープ1に、LTM(走行中の磁気テープ1の幅方向の運動)によるシフトd、変形によるアジマス角変化が±β、傾き角度γが複合して発生した場合に、図5に示すように、既知の値と計測値とから、K1、K2が求まり、その結果、シフトd、角度β及び傾き角度γを求めることができる。(記録ヘッドH1または再生ヘッドH2のトラック幅方向の位置決め情報(シフトd)を、磁気テープ1の変形情報(角度β)、及び/または、傾き情報(角度γ)を用いて補正する(求める)ことができる。)その結果、ヘッドHの位置を調整することで、データの正確な記録、再生を行うことができる。
【0193】
サーボパターン2eを有する磁気テープ1に、LTMによるシフトd、傾き角度γが複合して発生した場合には、チャンネルC、Dの出力の位相差から直接傾きの角度γが求まり、[数2]に示す式からシフトdを求めることができる。その結果、ヘッドHの位置を調整することで、データの正確な記録、再生を行うことができる。
【0194】
サーボパターン2dを有する磁気テープに、LTMによるシフトd、変形によるアジマス角変化が±β、傾き角度γが複合して発生する場合に、式(13−7)からシフトdが求まり、式(13−8)からγを求めることができる。その結果、ヘッドHの位置を調整することで、データの正確な記録、再生を行うことができる。
【0195】
マルチチャンネルヘッドHを備えたリニア型磁気テープ装置により、サーボパターン2を有する磁気テープ1を記録、再生することで、通常の磁気テープ1の幅方向の位置情報に加え、磁気テープ1の変形やヘッドHの傾きに起因する偏差にも対応した位置決め情報の検出することができ、トラック密度(TPI)を飛躍的に高めることができる。
【0196】
これまではトラックピッチが限りなく狭いとしていたが、以下では磁気テープの一実施例を示す。
図10は一実施例のサーボパターンとデータバンドとの位置関係及びヘッドチャンネル位置とパスとの関係を示す図である。
【0197】
図10に示すように、データバンドの幅方向のピッチであるデータバンドピッチが640マイクロメートル、16トラック並列記録/再生、1つのデータバンドを16パス(8往復)で完結するもの(トラックピッチは2.5マイクロメートル)、また、LTMは±15マイクロメートル以下、更に、ヘッドはサーボを考慮して17チャンネル(チャンネル17(CH17):サーボ用補助チャンネル)としておくが、これに限ったものではない。
【0198】
サーボパターンを挿入する頻度は、サンプリングの立場からは高いほうがよいのは当然であるが、冗長度の観点と、ヘッドの位置情報、磁気テープ幅情報、及び、磁気テープの傾き情報の検出感度と、更には想定されるLTMとを考慮して、頻度とサーボパターンの最適な組み合わせを探す必要がある。
【0199】
以下、サーボパターンはこれまでに挙げた中で最も複雑且つ長手方向の専有長が短い(冗長度が低くなる)図7に示す例を用いて説明するが、他のパターンの場合も同様である。
【0200】
サーボパターンは、正負のアジマス角のセグメントの幅をそれぞれ80マイクロメートル、アジマス角0度のセグメントの幅をそれぞれ200マイクロメートルとする。なお、通常サーボパターンは複数の磁化反転で構成されるが、ここではその中の1つの磁化反転を記してある。サーボパターンとデータバンドのテープ幅方向の位置はパス1の時18.75(トラック上端で20)マイクロメートル、オフセットさせる。通常、奇数のパスはBOTからEOTに、偶数のパスはEOTからBOTにテープは走行する。各チャンネルは、全16パス(8往復)でデータサブバンドを構成する。奇数の8パスと偶数の8パスは別々のトラックグループを形成し、行き帰りのパスによるトラックが隣り合うことをできるだけ避ける。この例では、隣のチャンネルのパス16とパス1のトラック、パス15とパス2のトラック、及びパス16と隣のチャンネルのパス1のトラックが該当する。データバースト3の所定の位置に、データに加えて、データバンド及びパスの識別情報を挿入してもよい。なお、ガードバンドを設ける場合にはこれらの(テープ走行方向が逆向きになる)トラック間に入れる。(なお、一般にガードバンドは、データバンドとデータバンドを、或いは、トラックとトラックを分離する領域である。データバンドは、フォーマット上は必ずしも必要ではない。)各パスにおけるヘッドチャンネルと図7のチャンネルの対応は、A:CH10、B:CH8、C:CH17、D:CH1、E:CH14、F: CH4となる。CH1からCH1はデータチャンネルでCH17はサーボ用の補助チャンネルである。オフセットをとったことにより式(13−7)におけるdの値は、Nをパスナンバーとして:
d=dN+LTM
dN=−18.75+{2.5×(N−1)/2}
N=1,3,5,...,15(BOT→EOT)
dN={2.5×(N−1)/2}
N=2,4,6,...,16(EOT → BOT)
となる。
【0201】
また、YA,YBはトラックセンターで:
YA=−40
YB=+40
(単位:マイクロメートル)である(CH9のトラックセンターを基準にして)。
【0202】
同様に、
YC=−320
YD=+320
YE=−200
YF=+200
(単位:マイクロメートル)である。
【0203】
オフセットをとることより、何れのパスにおいても、想定されている±15マイクロメートルのLTMに対して、ヘッドがそれぞれのセグメントを外れることはない。また、Nの奇数、偶数とデータバンドナンバーの組み合わせとでサーボパターンの向き(磁気テープ走行方向に対して)が逆になる。
【0204】
さて、データサブバンドの幅(ヘッドのチャンネルスペーシング)が決まっている場合に、アジマス角及び磁化反転の間隔と数を決めるには、次のことを考慮する。LTMの検出感度、例えば1マイクロメートルのLTMを何マイクロメートルの長手方向の位置の変化(時間として検出)に変換したいか。想定される最大のLTMのときにも、アジマス角故に隣の同極性の磁化反転により誤検出されることはないか。必要最小限の数の磁化反転とデータバーストの長さで決まる冗長度及びサンプリング周期は必要十分か(周波数に換算して、必要とされるサーボ帯域の10倍程度)。LTMの検出感度を上げるためにアジマス角を大きくすることと、他の条件は相反しているので妥協点を探ることになる。
【0205】
この一例として正負のアジマス角を約±14度(tanα=0.25)とする。この結果、図7のX1は70マイクロメートルとなる。また隣り合うサーボパターンの間隔を1ミリメートルとする。従って、磁気テープ速度を10メートル/秒とすればLTMをサンプリングする周波数は10KHzとなる。また、1マイクロメートルLTMは正負のアジマス角のおかげで長手方向に0.5マイクロメートルの長さに変換される。これは磁気テープ速度10メートル/秒においては50ナノ秒(5E−8秒)の時間に相当する。クロック1GHzのカウンターで計時すれば0.1マイクロメートル程度のLTMが検出可能となる(約5カウントの差となる)。トラックピッチ2.5マイクロメートルに対して十分な分解能である。因みに、この時磁気テープの傾き及び磁気テープの変形の検出感度は5カウントの差(長手方向に約5ナノメートルの変化/変形に相当)を目安にすると、傾き(角度γ)約7E−3度及び変形(角度β)約8.5E−3度となる。なお、アナログ回路の助けを借りれば、より低い周波数のクロックを用いつつ、サブナノ秒の分解能で時間を計測できることも知られている。
【0206】
この時のデータバースト3の長さは、サーボパターン(トランジション)の間隔を10マイクロメートルで4トランジションとし、サーボパターンの前後のガードスペース4をそれぞれ80マイクロメートル程度とすると、全部で約800マイクロメートルの長さとなる。すなわち、磁気テープ1の長手方向の利用効率は約80パーセントとなる。
【0207】
なお、4トランジションのサーボパターンは、第2のトランジションを第1のトランジションに近づけたり、第3のトランジションを第1のトランジションから遠ざけたり位置(位相)変調することにより(同極性のトランジション、第1と第3または第2と第4、の距離を20マイクロメートルより近づけないように変調している)、フレーム同期のためのユニークなパターンと1ビットのデータを表現することができる(多値で変調すれば複数ビットのデータも表現することが可能となる)。すなわち、サーボパターン2を、その磁化遷移の境界の形状と同じ形状の後述する記録ギャップ309(図17参照)を持つ記録ヘッド308(サーボパターン全幅記録ヘッド)で磁気テープ1全幅を記録するに当たり、記録電流の変化のタイミングを変調して異なるサーボパターンを形成し、バイナリデータ、ユニークな同期信号を表現しうる。更に、複数のサーボパターンを用いて、ユニークな同期信号と複数のデータビットからなるデータフレームを構成することができる。図2(C)に示すサーボパターン2cを形成するときに、記録電流の変化のタイミングを変調して複数のサーボパターンを形成し、バイナリデータ、ユニークな同期信号を得るようにしてもよい。
【0208】
以上を基に磁気テープ装置のトラッキングサーボ構成の一例を示す。
図11は磁気テープ装置のトラッキングサーボ機構のブロック図である。
磁気テープ装置の信号処理系、リールモーター制御系及びサーボパターンのデータ復調系は公知の手法を用いることができる。
【0209】
トラッキングサーボ機構100は、ヘッドスタック101、AMP/SEL(プリアンプ/セレクター)102、ピーク検出/時間計測(距離換算)器103、データバーストゲート104、フライホィール105、トラッキング(LTM)検出器106、D/A(ディジタル/アナログ変換)器107、微動アクチュエーター108、粗動アクチュエーター109を備えている。
【0210】
AMP/SEL(プリアンプ/セレクター)102のSELはR/W(リード/ライト)に応じて対応するバンプからの出力を選択する。
【0211】
ピーク検出/時間計測(距離換算)器103は、データバンドセレクトのLSB(テープ走行方向)とパスナンバーNのLSBの情報に従って、チャンネルA,B,C,D,E及びFに対応するチャンネルのピーク検出と時間計測を行い、速度情報を用いて長手方向の距離に換算する。
【0212】
データバーストゲート104はフライホィール105の出力を受けて、各データチャンネル(CH1,CH2,...,CH16)に対して時間軸上でサーボパターンをマスクする。なお、図示しないが、記録側にもサーボパターンを保護するために、同じくフライホィール105の出力を受けて、記録電流をゲートする機能ブロックが挿入されている。
【0213】
フライホィール105はキャプチャーモードとロックモードで時定数の異なる公知のPLL(位相同期系)である。
【0214】
トラッキング(LTM)検出器106はピーク検出/時間計測(距離換算)器103の出力を受けてシフトdを計算し、パスナンバーの情報を用いてトラッキングエラー(LTM)を求める。サーボループは、この値をゼロに近づけるように働く。ピーク検出/時間計測(距離換算)器103の他の出力は、磁気テープ速度を検出(パルス列の周期を速度情報に変換)してリールモーターの制御に用いられるが、公知の技術であるのでここでは立ち入らない。
【0215】
微動アクチュエーター108及び粗動アクチュエーター109は、例えばスプリングで保持さているヘッドHをムービングコイルで駆動するステージ及びパスナンバーの情報とデータバンド指定の情報とに基づいてステージを駆動するパルスモーターとスクリュー等である。なお、これらはストロークの長いリニアモーターで構成することもできる。微動アクチュエーター108及び粗動アクチュエーター109は、公知の技術である。
【0216】
次に本発明のピーク検出/時間計測(距離換算)器103とトラッキング(LTM)検出器106の構成の一例を示す(他のブロックは公知の技術で実現できる)。
【0217】
図12はトラッキングサーボ機構のピーク検出/時間計測(距離換算)器103の詳細を示すブロック図である。ここでは時間の計測に内蔵時計を用いた例を示す。
ピーク検出/時間計測(距離換算)器103は、ピーク検出器131、時刻サンプラー132、距離検出器133、内蔵時計134、パルス成形器135を備えている。
【0218】
ピーク検出器131は、ローパスフィルター、狭義のピーク検出器(正負のピークを別々に検出)、及びセレクターで構成され、正負の検出ピークの何れかを選択して出力する。ローパスフィルターの役割はデータバースト及びノイズを減衰させて、サーボパターンの誤検出を防ぐことにある。
【0219】
時刻サンプラー132は、内蔵時計134の出力をピーク検出器131の出力でサンプリングして時刻を得る。
【0220】
距離検出器133は、時刻サンプラー132の出力間の差を取り、磁気テープ速度を乗じて距離に変換し、さらにパスナンバー情報(すなわちテープ走行方向情報)とデータバンド情報に従って、その符号を反転させる。
【0221】
内蔵時計134はカウンターで、サーボパターンの同極性トランジション間の時間の2倍より長い周期があればよい(2つの時刻入力の大小関係からトランジション間の正負の時間が必要)。この例では、クロック1GHzの13ビットのカウンターが適当である。何故ならば、このカウンターの出力の周期は8マイクロ秒強であるのに対して、同極性のトランジションの間隔20マイクロメートルは、磁気テープ速度10メートル/秒の時2マイクロ秒に相当している。
【0222】
パルス成形器135の一例にはパルス幅Tがトランジションの間隔よりも長いリトリガーモノマルチバイブレーター(この例では間隔2マイクロ秒、すなわち2<T<<100)が挙げられる。
【0223】
図13はトラッキングサーボ機構のトラッキング(LTM)検出器106の詳細を示すブロック図である。
【0224】
トラッキング(LTM)検出器106は、cosγ,sinγ演算器61、K1演算器62、K2演算器62´、d演算器63、LTM演算器64及びdN演算器65を備えている。
【0225】
cosγ,sinγ演算器61は、先ず距離検出器133からの±(XE-XF)と既知のYF,YEからγを求め(γの値は小さいからリニアの近似でよい)、次いでcosγ,sinγを求める(こちらは他の定数との関係から級数展開して第2項までの近似が適当)。
【0226】
K1演算器62、K2演算器62´は、それぞれ距離検出器133からの±(XA-XD),±(XB-XC)とcosγ,sinγ演算器61からのcosγ,sinγとを受け、既知のY0(データバンドピッチ),tanα(=0.25),X1(=70),YA, YD, YB, YCを用いてK1,K2を計算(四則演算)する。
【0227】
d演算器63は、距離検出器133からの±(XA-XB)とK1演算器62、K2演算器62´からのK1,K2とを受け、既知のYA,YBと合わせて式(13−7)に従ってシフトdを計算(四則演算)する。
【0228】
LTM演算器64は、d演算器63の出力dとdN演算器65の出力dNの差をとってLTMを求める。
【0229】
dN演算器65は、パスナンバーNをdNに変換する(テーブルルックアップが簡単)。なお、この例ではパスナンバーN(N=1,2,...,16)のLSB(最下位ビット)がテープ走行方向を表している。
【0230】
図14は、別のトラッキング(LTM)検出器106´の詳細を示すブロック図である。
トラッキング(LTM)検出器106´は、LTM演算器64、dN演算器65に加えて、γ演算器61´及びd演算器63´を備えている。
【0231】
γ演算器61´は、γの近似(リニア近似)を演算する。
【0232】
γ演算器61´及びd演算器63´を用いた近似解を求める計算の一例を説明する。d演算器は式(22-1)の演算を行いdを得る。
【0233】
【数12】
【0234】
【数13】
【0235】
【数14】
【0236】
磁気テープ速度を変えた場合、例えば5メートル/秒にした場合、周波数は1/2倍に、時間は2倍になる。この際、ローパスフィルターのカットオフ周波数も1/2にすることが望ましい。一方、時間の計測は、クロック周波数を1/2にしてカウント数を維持する。或いは、クロック周波数を維持してカウント数を2倍にする等も考えられる。他の速度にした場合も、速度に比例してローパスフィルターのカットオフ周波数と時間計測方法とを変更すればよいのは言うまでもない。
【0237】
図10に示されている例に従って、サーボパターンの記録方法を説明する。
磁気テープ上の長さを、信号発生器の時間軸に変換するに当たって、テープ速度は10メートル/秒とする。他の速度の場合には時間の値を速度に逆比例させれば良い(5メートル/秒ならば全て2倍)。
【0238】
図15Aは磁気テープ上の磁化パターンを示し、図15Bは同磁化パターンを記録する電流波形を示す。図15Cは4トランジションで構成されるサーボパターンを変調して、1ビットのアドレスまたはデータ、或いはユニークなシンク(同期)パターン1または2を表す一例を示す。
【0239】
図16Aおよび図16Bは磁気テープ上のイメージで、一例として20ビットのアドレスと128ビットの管理データ(128ビットはデータ+エラー制御ビットとしても良い)を挿入する場合のフレーム構成の両極端な例を示す。
【0240】
図16Aは1アドレスに対して128ビットのデータで1フレームを構成するのに対して、図16Bは1アドレスに対してデータ1ビットでサブフレームを構成し、128サブフレームで1フレームを構成する。
【0241】
前者は1フレームの長さが0.15メートルと短くなるもののアドレスも0.15メートルが単位になってしまう。
【0242】
一方、後者は1フレームの長さは2.8メートル強となるもののアドレスの単位は22ミリメートルと最短になる。
アドレスおよび管理データの性質から後者の方が望ましい。
何れの場合もシンクパターン0はフレーム同期として、シンクパターン1はサブフレームのセパレータとして活用されている。
【0243】
以下、記録装置の実現方法では図16Bの場合を例にする。
尚、20ビットのアドレスは上述した段落0116で示した条件、サーボパターン記録装置が扱える最長のテープより充分長いモジュロのアドレス発生、を満足している。
【0244】
即ち、サーボパターン記録装置が扱える最長のテープ長を例えば5000メートルとすると、アドレスの単位長が22ミリメートルの時、
(5000/0.022)=約227273<262144=2の18乗
よって、18ビットあれば良い。
また、アドレスの単位長が0.15メートルの場合は16ビットで充分である。
【0245】
図17は、図16Bに示すフレーム構成の、サーボパターン記録装置300の一構成例である。
2MHzのクロックCk(周期0.5マイクロ秒)は、1/200分周器301により1/200に分周されてサーボパターンの周期(100マイクロ秒)を形成し、次に1/22分周器302により1/22に分周されてサブフレーム周期(2.2ミリ秒)を形成すると共に20ビットのアドレス発生器303を歩進する。
【0246】
更に1/128分周器304により1/128に分周されてフレーム周期(281.6ミリ秒)を形成する。
【0247】
アドレス発生器303はコントローラ305を介して、サーボパターン記録装置300に長尺の磁気テープ1が装填される毎に、リセットされる。
【0248】
これにより長尺テープ1の中のアドレスが単調増加になる(従って一部を切り出されてカートリッジに巻き込まれたテープのアドレスも単調増加になる)ことが保証される。
【0249】
パターン発生器306は前記のクロック、サーボパターン周期、サブフレーム周期、フレーム周期、20ビットアドレスデータと、これらに加えてコントローラ305を介しての128ビットの管理データを入力として、図15Bのサーボパターンが図15Cの様に変調された信号を発生する。
【0250】
パターン発生器306の出力は増幅器307を介して記録ヘッド308に供給される。尚、実施例としては4トランジションのサーボパターン1つが、1ビットのデータまたはユニークなシンクパターンを表し、アドレスと1ビットのデータでサブフレームを構成し、複数のサブフレームでフレームを構成する方法を説明したが、他の場合も、例えば、トランジションの数が多い場合、多値変調の場合、アドレスと複数データビットでサブフレームを構成する場合等、同様の考察で実現可能である。
【0251】
記録ヘッド308は、フェライトリングを備えており、サーボパターン2を磁気テープ1の全幅に亘って記録することが可能なサーボパターン全幅記録ヘッドである。記録ヘッド308は、サーボパターン2の磁化遷移の境界の形状と同じ形状の記録ギャップ309を備えている。
【0252】
コントローラ305は、記録ヘッド308で磁気テープ1全幅を記録するに当たり、記録電流の変化の回数を全て(のサーボパターン2毎に)奇数回或いは全て偶数回に制御する。
【0253】
サーボパターン記録装置200が図示しない全幅消去ヘッドを備えるようにしてもよい。全幅消去ヘッドは、図2(C)に示すサーボパターン2cの一部2c´を消去し、データ領域を形成するために用いられる。
【0254】
サーボパターン2を、記録ヘッド308で磁気テープ1全幅を記録するに当たり、記録電流の変化のタイミングを変調してバイナリデータまたはユニークな同期信号を表現することができる。
【0255】
サーボパターン2を、記録ヘッド308で磁気テープ1上に先ず記録し、次いで後続の全幅消去ヘッドでデータ記録部分を形成するように、記録されたサーボパターンの一部を消去するに当たり、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン2中にバイナリデータを表現する、或いは、ユニークな同期信号を表現することができる。
【0256】
サーボパターン2を、1ビットのデータに対応させる、或いは、1ビットのデータまたはユニークな同期信号に対応させることができる。
【0257】
以上の説明では、データバンドの境界及びデータサブバンドの中央と境界にガードバンドを設けていないが、これらの線を挟んだ両側のトラックを逆向きの磁気テープ走行で記録/再生するようになして、ガードバンドを設置する場合、或いはここで示した例以外のパラメーター(データバンドピッチ、トラックピッチ、サーボパターン等など)の組み合わせの場合にも本発明が有効なのは言うまでもない。
【0258】
なお、磁気テープ1の幅方向にデータバンドb0が1つでもよい。また、データバンドb0とデータバンドb1との間のガードバンドは、その幅が0(ゼロ)でもよい。
【0259】
例えば図2に示すサーボパターン2aを、その磁化遷移の境界の形状と同じ形状の図17に示す記録ギャップ307を持つ記録ヘッド308(サーボパターン全幅記録ヘッド)で磁気テープ1全幅を記録するに当たり、記録電流の変化の回数を全て奇数回或いは全て偶数回としている。
【0260】
上記実施形態では、記録ヘッドH1及び再生ヘッドH2の、記録及び/または再生ギャップの個々の位置の、基準の位置からの偏差の情報を磁気テープ装置内に格納し、その情報を用いて記録ヘッドH1及び再生ヘッドH2の位置情報、磁気テープ1の変形情報、磁気テープ1の傾き情報、磁気テープ速度情報、及び/または、磁気テープ1の位相情報を補正している。
【0261】
距離検出器133は、時刻サンプラー132の出力間の差を取っているが、この出力間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出するようにしてもよい。
【0262】
サーボパターン2中に図2(A)、図2(B)に示すように、(記録)アジマス角0度のセグメントがない場合に、アジマス角が正のセグメントに対応する再生チャンネルの出力のサーボパターンの周期と、負のセグメントに対応する再生チャンネルの出力のサーボパターンの周期とを計測し、それぞれのアジマス角の絶対値を考慮した演算を施して速度情報とするようにしてもよい。
【0263】
また、サーボパターン2の正、負のアジマス角のセグメントそれぞれを、上流の再生ヘッドH2と下流の再生ヘッドH2で順次再生して、それぞれの経過時間或いは計測時間差と上流下流再生ヘッドH2それぞれのギャップ間距離から第一及び第二の速度情報を得た後、テープ傾き角とアジマス角の情報を考慮して、これらを演算して速度情報とするようにしてもよい。
【0264】
磁気テープ装置が、例えば磁気テープ1の傾き情報(角度γ)に従ってヘッドHの傾き角を制御する制御機構を備えるようにしてもよい。このようにすれば、リードアフターライト(リードホワイルライト)時に再生ヘッドをトラック上に正しく位置決めできる。逆に、記録時に下流側バンプの再生ヘッドを用いて記録ヘッドの位置決めも可能となる。
【0265】
磁気テープ1を図示しない周波数逓倍器などにより位相ロックする場合に、サーボパターン2中にアジマス角0度のセグメントがある場合には、セグメントを再生するチャンネルの出力サーボパターンの周期(周波数)を、必要なだけ図示しない分周器により分周して基準信号と位相比較する。
【0266】
磁気テープ1を位相ロックする場合に、サーボパターン2中にアジマス角0度のセグメントがない場合には、アジマス角が正のセグメントに対応する再生チャンネルの出力サーボパターンの周期(周波数)を、所定の分周比で必要なだけ分周して第一の基準信号と位相比較するようになし、負のセグメントに対応する再生チャンネルの出力サーボパターンの周期(周波数)を、同じ分周比で分周して第二の基準信号と位相比較するようになし、それぞれの位相比較器の出力をアジマス角の絶対値を考慮した演算をして、位相ロックするようにしてもよい。
【0267】
1個または複数個のデータバースト3を用いてテープマークとなすようにしてもよい。テープマーク(ファイルマーク)によりデータの終わりを表すことができる。
【図面の簡単な説明】
【0268】
【図1】本発明の一実施形態に係る磁気テープを示す平面図である。
【図2】図1に示す磁気テープのサーボパターンの例を示す平面図である。
【図3】磁気テープ装置のヘッド位置、磁気テープ変形及び磁気テープ傾きの情報の検出の原理説明図である。
【図4】磁気テープ装置のヘッド位置、磁気テープ変形及び磁気テープ傾きの情報の検出の原理説明図である。
【図5】磁気テープ装置のヘッド位置、磁気テープ変形及び磁気テープ傾きの情報の検出の原理説明図である。
【図6】サーボパターンの一例(2d)の構造説明図である。
【図7】磁気テープ装置のヘッド位置、磁気テープ変形及び磁気テープ傾きの情報の検出の原理説明図である。
【図8】従来の磁気テープ装置のヘッド及び従来の磁気テープの部分平面図である。
【図9】従来の磁気テープ走行が傾いたときの記録トラックのずれの説明図である。
【図10】一実施例のサーボパターンとデータバンドとの位置関係及びヘッドチャンネル位置とパスとの関係を示す図である。
【図11】磁気テープ装置のトラッキングサーボ機構のブロック図である。
【図12】トラッキングサーボ機構のピーク検出/時間計測器の詳細を示すブロック図である。
【図13】トラッキングサーボ機構のトラッキング(LTM)検出器の詳細を示すブロック図である。
【図14】別のトラッキング(LTM)検出器の詳細を示すブロック図である。
【図15】図15Aは磁気テープ上の磁化パターンを示し、図15Bは同磁化パターンを記録する電流波形をし、図15Cは4トランジションで構成されるサーボパターンを変調して、1ビットのアドレスまたはデータ、或いはユニークなシンク(同期)パターン1または2を表す一例を示す。
【図16】図16Aおよび図16Bは磁気テープ上のイメージで、一例として20ビットのアドレスと128ビットの管理データ(128ビットはデータ+エラー制御ビットとしても良い)を挿入する場合のフレーム構成の両極端な例を示す。
【図17】図16Bに示すフレーム構成の、サーボパターン記録装置の一構成例である。
【図18】正負のアジマス角のサーボパターンを有する磁気テープの周期(速度情報)を検出する原理説明図である。
【図19】正負のアジマス角のサーボパターンを有する磁気テープの位相をロックするときの原理説明図である。
【符号の説明】
【0269】
b0〜b3 データバンド
s1、s2 セグメント
G 境界線
H ヘッド
H1 記録ヘッド
H2 再生ヘッド
CH17 サーボ用補助チャンネル
α アジマス角
β 角度
γ (傾き)角度
1 磁気テープ
2 サーボパターン
3 データバースト(データ)
4 ガードスペース
300 サーボパターン記録装置
305 コントローラ
308 記録ヘッド
309 記録ギャップ
【特許請求の範囲】
【請求項1】
データバンドを有する磁気テープであって、
前記データバンドの全幅にわたって、且つ前記磁気テープの長手方向には間隔をあけて配置されたサーボパターンと、
前記サーボパターン間に配置されたデータと、
前記サーボパターンと前記データとの間に配置されたガードスペースと
を具備する磁気テープ。
【請求項2】
請求項1に記載の磁気テープであって、
前記サーボパターンを当該磁気テープの長手方向に等間隔に配置した磁気テープ。
【請求項3】
請求項1に記載の磁気テープであって、
前記データバンド上で、前記サーボパターンを前記データバンドの幅方向に、少なくとも2つのセグメントから構成されるようになし、隣り合うセグメントを異なるアジマス角で記録するようになした磁気テープ。
【請求項4】
請求項3に記載の磁気テープであって、
前記サーボパターンのそれぞれのセグメントに与えるアジマス角に、絶対値の等しい正と負、および0度の3通りの中から少なくとも2つを用いた磁気テープ。
【請求項5】
請求項3に記載の磁気テープであって、
前記データバンドの幅方向に、少なくとも2つのセグメントから構成されるようになしたサーボパターンの各セグメントの幅を、それぞれ前記データが記録されるデータトラックのトラックピッチの略整数倍になした磁気テープ。
【請求項6】
請求項3に記載の磁気テープであって、
前記磁気テープの幅方向に前記データバンドが複数ある場合に、隣り合うデータバンドの間でそれぞれのサーボパターンの長手方向の位置を同一になすようにし、サーボパターンを形成する磁化遷移のアジマス角を隣り合うデータバンドの仮想の境界線を挟んだセグメント間で、符号の異なるアジマス角となした磁気テープ。
【請求項7】
請求項3に記載の磁気テープであって、
前記磁気テープの幅方向に前記データバンドが複数ある場合に、隣り合うデータバンドの間でそれぞれのサーボパターンの長手方向の位置を略同一になすようにし、サーボパターンを形成する磁化遷移のアジマス角を隣り合うデータバンドの仮想の境界線を挟んだセグメント間で、同じ符号のアジマス角となした磁気テープ。
【請求項8】
請求項3に記載の磁気テープであって、
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン全幅記録ヘッドで磁気テープ全幅を記録するに当たり、記録電流の変化の回数を全て奇数回或いは全て偶数回となした磁気テープ。
【請求項9】
請求項3に記載の磁気テープであって、
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで磁気テープ上に先ず記録し、次いで該記録したサーボパターンの一部を後続の全幅消去ヘッドでデータ記録部分を形成するように消去することで形成した磁気テープ。
【請求項10】
請求項8に記載の磁気テープであって、
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン全幅記録ヘッドで磁気テープ全幅を記録するに当たり、記録電流の変化のタイミングを変調してバイナリデータまたはユニークな同期信号を表現するようになした磁気テープ。
【請求項11】
請求項9に記載の磁気テープであって、
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで磁気テープ上に先ず記録し、次いで該記録したサーボパターンの一部を後続の全幅消去ヘッドでデータ記録部分を形成するように消去するに当たり、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン中にバイナリデータを表現するようになした、或いは、ユニークな同期信号を表現するようになした磁気テープ。
【請求項12】
請求項10に記載の磁気テープであって、
前記サーボパターンを、1ビットのデータに対応させるようになした、或いは、ユニークな同期信号に対応させるようになした磁気テープ。
【請求項13】
請求項11に記載の磁気テープであって、
前記サーボパターンを、1ビットのデータに対応させるようになした、或いは、ユニークな同期信号に対応させるようになした磁気テープ。
【請求項14】
請求項10に記載の磁気テープであって、
前記サーボパターンにアドレス情報を挿入する際に、該サーボパターン記録装置が扱える最長の磁気テープよりも充分に長いモジュロのアドレス発生器を用いると共に、前記サーボパターン記録装置に生の磁気テープを装填する毎に、前記アドレス発生器のアドレスをリセットするようになしたサーボパターン記録装置を用いて製造された磁気テープ。
【請求項15】
請求項11に記載の磁気テープであって、
前記サーボパターンにアドレス情報を挿入する際に、該サーボパターン記録装置が扱える最長の磁気テープよりも充分に長いモジュロのアドレス発生器を用いると共に、前記サーボパターン記録装置に生の磁気テープを装填する毎に、前記アドレス発生器のアドレスをリセットするようになしたサーボパターン記録装置を用いて製造された磁気テープ。
【請求項16】
磁気テープのデータバンドの全幅にわたって、且つ磁気テープの長手方向には間隔をあけて配置されたサーボパターンを有する磁気テープに、前記サーボパターン間にガードスペースを介してデータを記録する記録ヘッドと、
前記磁気テープに記録されたデータを再生する再生ヘッドと
を具備する磁気テープ装置。
【請求項17】
請求項16に記載の磁気テープ装置であって、
前記サーボパターンの再生に、前記再生ヘッドのデータ用チャンネルの少なくとも2チャンネルを使用し、各チャンネルからの再生サーボ信号間の相関関係と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とから、前記記録ヘッドまたは前記再生ヘッドの位置決め情報、前記磁気テープの変形情報、および/または、磁気テープの傾き情報を検出する磁気テープ装置。
【請求項18】
請求項16に記載の磁気テープ装置であって、
前記サーボパターンの再生に、前記再生ヘッドのデータ用チャンネルおよびサーボ用補助チャンネルの中から少なくとも2チャンネルを使用し、各チャンネルからの再生サーボ信号間の相関関係と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とから、前記記録ヘッドまたは前記再生ヘッド位置決め情報、磁気テープの変形情報、および/または
、磁気テープの傾き情報を検出する磁気テープ装置。
【請求項19】
請求項17に記載の磁気テープ装置であって、
前記サーボパターンの異なるアジマス角のセグメントを、それぞれに対応する再生チャンネルで再生し、それぞれの出力信号の間の経過時間または該磁気テープ装置内の時計で計測した時刻差に、磁気テープ速度情報と、対応する再生チャンネルの組み合わせ毎に予め決められた基準値とを組み合わせて、前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を得る磁気テープ装置。
【請求項20】
請求項18に記載の磁気テープ装置であって、
前記サーボパターンの異なるアジマス角のセグメントを、それぞれに対応する再生チャンネルで再生し、それぞれの出力信号の間の経過時間または該磁気テープ装置内の時計で計測した時刻差に、磁気テープ速度情報と、対応する再生チャンネルの組み合わせ毎に予め決められた基準値とを組み合わせて、前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を得る磁気テープ装置。
【請求項21】
請求項19に記載の磁気テープ装置であって、
前記サーボパターンの正のアジマス角のセグメントと負のアジマス角のセグメントとを、それぞれに対応する再生チャンネルで再生する磁気テープ装置。
【請求項22】
請求項20に記載の磁気テープ装置であって、
前記サーボパターンの正のアジマス角のセグメントと負のアジマス角のセグメントとを、それぞれに対応する再生チャンネルで再生する磁気テープ装置。
【請求項23】
請求項21に記載の磁気テープ装置であって、
前記サーボパターンの、正負の第一のアジマス角の組み合わせから得られた位置に関する第一の情報と、前記第一のアジマス角より大きな正負の第二のアジマス角の組み合わせから得られた位置に関する第二の情報とを組み合わせて、位置決め情報を得る磁気テープ装置。
【請求項24】
請求項22に記載の磁気テープ装置であって、
前記サーボパターンの、正負の第一のアジマス角の組み合わせから得られた位置に関する第一の情報と、前記第一のアジマス角より大きな正負の第二のアジマス角の組み合わせから得られた位置に関する第二の情報とを組み合わせて、位置決め情報を得る磁気テープ装置。
【請求項25】
請求項17に記載の磁気テープ装置であって、
前記サーボパターンのアジマス角が0度ではないセグメントを、対応する2つの再生チャンネルで再生し、再生信号間の経過時間または該磁気テープ装置内の時計で計測した時刻差である第一の値と、これとは逆のアジマス角のセグメントを対応する第二の2つの再生チャンネルで再生して得られる第二の値と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの変形情報、および/または、磁気テープの傾き情報を検出する磁気テープ装置。
【請求項26】
請求項18に記載の磁気テープ装置であって、
前記サーボパターンのアジマス角が0度ではないセグメントを、対応する2つの再生チャンネルで再生し、再生信号間の経過時間または該磁気テープ装置内の時計で計測した時刻差である第一の値と、これとは逆のアジマス角のセグメントを対応する第二の2つの再生チャンネルで再生して得られる第二の値と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの変形情報、および/または、磁気テープの傾き情報を検出する磁気テープ装置。
【請求項27】
請求項17に記載の磁気テープ装置であって、
前記サーボパターンのアジマス角が0度のセグメントを、対応する2つの再生チャンネルで再生し、再生信号間の経過時間または装置内の時計で計測した時刻差と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの傾き情報を検出する磁気テープ装置。
【請求項28】
請求項18に記載の磁気テープ装置であって、
前記サーボパターンのアジマス角が0度のセグメントを、対応する2つの再生チャンネルで再生し、再生信号間の経過時間または装置内の時計で計測した時刻差と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの傾き情報を検出する磁気テープ装置。
【請求項29】
請求項17に記載の磁気テープ装置であって、
前記サーボパターンの、0度ではない等しいアジマス角の第一の2つのセグメントを、第一の再生チャンネルペアでそれぞれ再生し、再生信号間の経過時間または該磁気テープ装置内の時計で計測した時刻差を得ると共に、これとは逆の等しいアジマス角の第二の2つのセグメントを、第二の再生チャンネルペアで再生して再生信号間の経過時間または時刻差を得、テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの変形情報と傾き情報との混合した情報を検出すると共に、アジマス角が0度のセグメントを第三の再生チャンネルペアで再生して検出される磁気テープの傾き情報を用いて、磁気テープ変形情報を得る磁気テープ装置。
【請求項30】
請求項18に記載の磁気テープ装置であって、
前記サーボパターンの、0度ではない等しいアジマス角の第一の2つのセグメントを、第一の再生チャンネルペアでそれぞれ再生し、再生信号間の経過時間または該磁気テープ装置内の時計で計測した時刻差を得ると共に、これとは逆の等しいアジマス角の第二の2つのセグメントを、第二の再生チャンネルペアで再生して再生信号間の経過時間または時刻差を得、テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの変形情報と傾き情報との混合した情報を検出すると共に、アジマス角が0度のセグメントを第三の再生チャンネルペアで再生して検出される磁気テープの傾き情報を用いて、磁気テープ変形情報を得る磁気テープ装置。
【請求項31】
請求項19に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項32】
請求項20に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項33】
請求項25に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項34】
請求項26に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項35】
請求項27に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項36】
請求項28に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項37】
請求項29に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項38】
請求項30に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項39】
請求項25に記載の磁気テープ装置であって、
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、および/または、前記傾き情報を用いて補正する磁気テープ装置。
【請求項40】
請求項26に記載の磁気テープ装置であって、
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、および/または、前記傾き情報を用いて補正する磁気テープ装置。
【請求項41】
請求項27に記載の磁気テープ装置であって、
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、および/または、前記傾き情報を用いて補正する磁気テープ装置。
【請求項42】
請求項28に記載の磁気テープ装置であって、
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、および/または、前記傾き情報を用いて補正する磁気テープ装置。
【請求項43】
請求項29に記載の磁気テープ装置であって、
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、および/または、前記傾き情報を用いて補正する磁気テープ装置。
【請求項44】
請求項30に記載の磁気テープ装置であって、
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、および/または、前記傾き情報を用いて補正する磁気テープ装置。
【請求項45】
請求項25に記載の磁気テープ装置であって、
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御する磁気テープ装置。
【請求項46】
請求項26に記載の磁気テープ装置であって、
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御する磁気テープ装置。
【請求項47】
請求項27に記載の磁気テープ装置であって、
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御する磁気テープ装置。
【請求項48】
請求項28に記載の磁気テープ装置であって、
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御する磁気テープ装置。
【請求項49】
請求項29に記載の磁気テープ装置であって、
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御する磁気テープ装置。
【請求項50】
請求項30に記載の磁気テープ装置であって、
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御する磁気テープ装置。
【請求項51】
請求項17に記載の磁気テープ装置であって、
前記磁気テープ速度情報を、設定されている速度情報とした、および/または、前記磁気テープ速度情報を、再生するサーボパターンの周期を計測して得るようにした磁気テープ装置。
【請求項52】
請求項18に記載の磁気テープ装置であって、
前記磁気テープ速度情報を、設定されている速度情報とした、および/または、前記磁気テープ速度情報を、再生するサーボパターンの周期を計測して得るようにした磁気テープ装置。
【請求項53】
請求項51に記載の磁気テープ装置であって、
前記サーボパターン中にアジマス角0度のセグメントがある場合に、このセグメントを再生するチャンネルの出力のサーボパターンの周期を計測して速度情報を得る磁気テープ装置。
【請求項54】
請求項52に記載の磁気テープ装置であって、
前記サーボパターン中にアジマス角0度のセグメントがある場合に、このセグメントを再生するチャンネルの出力のサーボパターンの周期を計測して速度情報を得る磁気テープ装置。
【請求項55】
請求項51に記載の磁気テープ装置であって、
前記サーボパターン中にアジマス角0度のセグメントがない場合に、アジマス角が正のセグメントに対応する再生チャンネルの出力のサーボパターンの周期と、負のセグメントに対応する再生チャンネルの出力のサーボパターンの周期とを計測し、それぞれのアジマス角の絶対値を考慮した演算を行って速度情報とする磁気テープ装置。
【請求項56】
請求項52に記載の磁気テープ装置であって、
前記サーボパターン中にアジマス角0度のセグメントがない場合に、アジマス角が正のセグメントに対応する再生チャンネルの出力のサーボパターンの周期と、負のセグメントに対応する再生チャンネルの出力のサーボパターンの周期とを計測し、それぞれのアジマス角の絶対値を考慮した演算を行って速度情報とする磁気テープ装置。
【請求項57】
請求項51に記載の磁気テープ装置であって、
前記サーボパターン中のアジマス角0度のセグメントを、磁気テープ走行の上流のバンプの再生ヘッドと下流のバンプの再生ヘッドとでそれぞれ順次再生して、その経過時間或いは計測時間差と、両再生ヘッドのギャップ間距離を使って磁気テープ速度情報を得る磁気テープ装置。
【請求項58】
請求項52に記載の磁気テープ装置であって、
前記サーボパターン中のアジマス角0度のセグメントを、磁気テープ走行の上流のバンプの再生ヘッドと下流のバンプの再生ヘッドとでそれぞれ順次再生して、その経過時間或いは計測時間差と、両再生ヘッドのギャップ間距離を使って磁気テープ速度情報を得る磁気テープ装置。
【請求項59】
請求項51に記載の磁気テープ装置であって、
前記サーボパターンの正、負のアジマス角のセグメントそれぞれを、前記上流の再生ヘッドと前記下流の再生ヘッドで順次再生して、それぞれの経過時間或いは計測時間差と上流下流再生ヘッドそれぞれのギャップ間距離から第一および第二の速度情報を得た後、使用した再生ヘッドのチャンネル情報とアジマス角の情報を考慮した演算を行って速度情報とする磁気テープ装置。
【請求項60】
請求項52に記載の磁気テープ装置であって、
前記サーボパターンの正、負のアジマス角のセグメントそれぞれを、前記上流の再生ヘッドと前記下流の再生ヘッドで順次再生して、それぞれの経過時間或いは計測時間差と上流下流再生ヘッドそれぞれのギャップ間距離から第一および第二の速度情報を得た後、使用した再生ヘッドのチャンネル情報とアジマス角の情報を考慮した演算を行って速度情報とする磁気テープ装置。
【請求項61】
請求項16に記載の磁気テープ装置であって、
前記磁気テープを位相ロックする場合に、前記サーボパターン中にアジマス角0度のセグメントがある場合には、該セグメントを再生するチャンネルの出力サーボパターンの周期を、必要なだけ分周して基準信号と位相比較する磁気テープ装置。
【請求項62】
請求項16に記載の磁気テープ装置であって、
前記磁気テープを位相ロックする場合に、前記サーボパターン中にアジマス角0度のセグメントがない場合には、アジマス角が正のセグメントに対応する再生チャンネルの出力サーボパターンの周期を、所定の分周比で必要なだけ分周して第一の基準信号と位相比較するようになし、負のセグメントに対応する再生チャンネルの出力サーボパターンの周期を、同じ分周比で分周して第二の基準信号と位相比較するようになし、それぞれの位相比較器の出力をアジマス角の絶対値を考慮した演算を行って、位相ロックする磁気テープ装置。
【請求項63】
請求項16に記載の磁気テープ装置であって、
前記磁気データ記録時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項64】
請求項16に記載の磁気テープ装置であって、
前記データ再生時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項65】
請求項45に記載の磁気テープ装置であって、
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項66】
請求項46に記載の磁気テープ装置であって、
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項67】
請求項47に記載の磁気テープ装置であって、
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項68】
請求項48に記載の磁気テープ装置であって、
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項69】
請求項49に記載の磁気テープ装置であって、
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項70】
請求項50に記載の磁気テープ装置であって、
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項71】
請求項45に記載の磁気テープ装置であって、
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項72】
請求項46に記載の磁気テープ装置であって、
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項73】
請求項47に記載の磁気テープ装置であって、
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項74】
請求項48に記載の磁気テープ装置であって、
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項75】
請求項49に記載の磁気テープ装置であって、
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項76】
請求項50に記載の磁気テープ装置であって、
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項77】
請求項17に記載の磁気テープ装置であって、
前記記録ヘッド及び前記再生ヘッドの、記録および/または再生ギャップの個々の位置の、基準の位置からの偏差の情報を該磁気テープ装置内に格納し、その情報を用いて前記記録ヘッド及び前記再生ヘッドの位置情報、磁気テープの変形情報、磁気テープの傾き情報、磁気テープ速度情報、および/または、磁気テープの位相情報を補正する磁気テープ装置。
【請求項78】
請求項18に記載の磁気テープ装置であって、
前記記録ヘッド及び前記再生ヘッドの、記録および/または再生ギャップの個々の位置の、基準の位置からの偏差の情報を該磁気テープ装置内に格納し、その情報を用いて前記記録ヘッド及び前記再生ヘッドの位置情報、磁気テープの変形情報、磁気テープの傾き情報、磁気テープ速度情報、および/または、磁気テープの位相情報を補正する磁気テープ装置。
【請求項79】
請求項16に記載の磁気テープ装置であって、
前記サーボパターンに挟まれたデータ領域の構成要素である各パス毎の領域の所定の位置に、前記データバンドおよび/またはパスの識別情報を挿入する磁気テープ装置。
【請求項80】
請求項16に記載の磁気テープ装置であって、
各パス毎に、前記サーボパターンに挟まれたデータ領域と、隣接して先行または後続するサーボパターンと、付随するガードスペースとを単位にして、その整数倍を物理ブロックとして取り扱う磁気テープ装置。
【請求項81】
請求項16に記載の磁気テープ装置であって、
各パス毎に、前記サーボパターンに挟まれたデータ領域と、隣接して先行または後続するサーボパターンと、付随するガードスペースとを単位に、1個または複数個を用いてテープマークとなす磁気テープ装置。
【請求項82】
磁気テープに記録するサーボパターンの磁化遷移の境界の形状と同じ形状の記録ギャップを有し前記サーボパターンを前記磁気テープの全幅に亘って記録する記録ヘッドと、
前記記録ヘッドで前記磁気テープ全幅を記録するに当たり、前記サーボパターン1つ当たりの記録電流の変化の回数を全て奇数回或いは全て偶数回に制御する制御手段と
を具備するサーボパターン記録装置。
【請求項83】
磁気テープに記録するサーボパターンの磁化遷移の境界の形状と同じ形状の記録ギャップを有し前記サーボパターンを前記磁気テープの全幅に亘って記録する磁気ヘッドと、
前記記録ヘッドで前記磁気テープ上に先ず記録し、次いでデータ記録領域を形成するように後続の全幅消去ヘッドで該サーボパターンの一部を消去することで、該サーボパターンを形成するサーボパターン記録装置。
【請求項84】
請求項82に記載のサーボパターン記録装置であって、
前記サーボパターンを、前記記録ヘッドで磁気テープ全幅を記録するに当たり、記録電流の変化のタイミングを変調してバイナリデータまたはユニークな同期信号を表現するサーボパターン記録装置。
【請求項85】
請求項83に記載のサーボパターン記録装置であって、
前記サーボパターンを、前記記録ヘッドでテープ上に先ず記録し、次いで後続の全幅消去ヘッドでデータ記録部分を形成するように該記録されたサーボパターンの一部を消去するに当たり、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン中にバイナリデータを表現する、或いは、ユニークな同期信号を表現するサーボパターン記録装置。
【請求項86】
請求項84に記載のサーボパターン記録装置であって、
前記サーボパターンを、1ビットのデータに対応させる、或いは、1ビットのデータま たはユニークな同期信号に対応させるサーボパターン記録装置。
【請求項87】
請求項85に記載のサーボパターン記録装置であって、
前記サーボパターンを、1ビットのデータに対応させる、或いは、1ビットのデータま たはユニークな同期信号に対応させるサーボパターン記録装置。
【請求項88】
請求項84に記載のサーボパターン記録装置であって、
前記サーボパターンにアドレス情報を記録する際に、該サーボパターン記録装置が扱える最長の磁気テープよりも充分に長いモジュロのアドレス発生器を用いると共に、該サーボパターン記録装置に生の磁気テープを装填する毎に、アドレス発生器のアドレスをリセットするサーボパターン記録装置。
【請求項89】
請求項85に記載のサーボパターン記録装置であって、
前記サーボパターンにアドレス情報を記録する際に、該サーボパターン記録装置が扱える最長の磁気テープよりも充分に長いモジュロのアドレス発生器を用いると共に、該サーボパターン記録装置に生の磁気テープを装填する毎に、アドレス発生器のアドレスをリセットするサーボパターン記録装置。
【請求項90】
データバンドを有する磁気テープにデータを記録する方法において、
前記データバンドの全幅にわたって、且つ前記磁気テープの長手方向には間隔をあけて配置されたサーボパターンからサーボ信号を取得し、
前記取得したサーボ信号に基づいて、前記サーボパターン間にガードスペースを介してデータを記録する記録方法。
【請求項91】
請求項90に記載の、磁気テープにデータを記録する方法であって、
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで、トランジションの数をサーボパターン1つ当たり、全て奇数回または偶数回となるようにテープ上に記録することによって、データ記録領域を形成した記録方法。
【請求項92】
請求項90に記載の、磁気テープにデータを記録する方法であって、
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで磁気テープ上に先ず記録し、次いで該記録したサーボパターンの一部を下流にある全幅消去ヘッドで消去することによって、データ記録領域を形成した記録方法。
【請求項93】
請求項90に記載の、磁気テープにデータを記録する方法であって、
前記データバンド上で、前記サーボパターンを前記データバンドの幅方向に、少なくとも2つのセグメントから構成されるようになすと共に隣り合うセグメントを異なるアジマス角で記録するようになして、データ記録領域を形成した記録方法。
【請求項1】
データバンドを有する磁気テープであって、
前記データバンドの全幅にわたって、且つ前記磁気テープの長手方向には間隔をあけて配置されたサーボパターンと、
前記サーボパターン間に配置されたデータと、
前記サーボパターンと前記データとの間に配置されたガードスペースと
を具備する磁気テープ。
【請求項2】
請求項1に記載の磁気テープであって、
前記サーボパターンを当該磁気テープの長手方向に等間隔に配置した磁気テープ。
【請求項3】
請求項1に記載の磁気テープであって、
前記データバンド上で、前記サーボパターンを前記データバンドの幅方向に、少なくとも2つのセグメントから構成されるようになし、隣り合うセグメントを異なるアジマス角で記録するようになした磁気テープ。
【請求項4】
請求項3に記載の磁気テープであって、
前記サーボパターンのそれぞれのセグメントに与えるアジマス角に、絶対値の等しい正と負、および0度の3通りの中から少なくとも2つを用いた磁気テープ。
【請求項5】
請求項3に記載の磁気テープであって、
前記データバンドの幅方向に、少なくとも2つのセグメントから構成されるようになしたサーボパターンの各セグメントの幅を、それぞれ前記データが記録されるデータトラックのトラックピッチの略整数倍になした磁気テープ。
【請求項6】
請求項3に記載の磁気テープであって、
前記磁気テープの幅方向に前記データバンドが複数ある場合に、隣り合うデータバンドの間でそれぞれのサーボパターンの長手方向の位置を同一になすようにし、サーボパターンを形成する磁化遷移のアジマス角を隣り合うデータバンドの仮想の境界線を挟んだセグメント間で、符号の異なるアジマス角となした磁気テープ。
【請求項7】
請求項3に記載の磁気テープであって、
前記磁気テープの幅方向に前記データバンドが複数ある場合に、隣り合うデータバンドの間でそれぞれのサーボパターンの長手方向の位置を略同一になすようにし、サーボパターンを形成する磁化遷移のアジマス角を隣り合うデータバンドの仮想の境界線を挟んだセグメント間で、同じ符号のアジマス角となした磁気テープ。
【請求項8】
請求項3に記載の磁気テープであって、
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン全幅記録ヘッドで磁気テープ全幅を記録するに当たり、記録電流の変化の回数を全て奇数回或いは全て偶数回となした磁気テープ。
【請求項9】
請求項3に記載の磁気テープであって、
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで磁気テープ上に先ず記録し、次いで該記録したサーボパターンの一部を後続の全幅消去ヘッドでデータ記録部分を形成するように消去することで形成した磁気テープ。
【請求項10】
請求項8に記載の磁気テープであって、
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン全幅記録ヘッドで磁気テープ全幅を記録するに当たり、記録電流の変化のタイミングを変調してバイナリデータまたはユニークな同期信号を表現するようになした磁気テープ。
【請求項11】
請求項9に記載の磁気テープであって、
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで磁気テープ上に先ず記録し、次いで該記録したサーボパターンの一部を後続の全幅消去ヘッドでデータ記録部分を形成するように消去するに当たり、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン中にバイナリデータを表現するようになした、或いは、ユニークな同期信号を表現するようになした磁気テープ。
【請求項12】
請求項10に記載の磁気テープであって、
前記サーボパターンを、1ビットのデータに対応させるようになした、或いは、ユニークな同期信号に対応させるようになした磁気テープ。
【請求項13】
請求項11に記載の磁気テープであって、
前記サーボパターンを、1ビットのデータに対応させるようになした、或いは、ユニークな同期信号に対応させるようになした磁気テープ。
【請求項14】
請求項10に記載の磁気テープであって、
前記サーボパターンにアドレス情報を挿入する際に、該サーボパターン記録装置が扱える最長の磁気テープよりも充分に長いモジュロのアドレス発生器を用いると共に、前記サーボパターン記録装置に生の磁気テープを装填する毎に、前記アドレス発生器のアドレスをリセットするようになしたサーボパターン記録装置を用いて製造された磁気テープ。
【請求項15】
請求項11に記載の磁気テープであって、
前記サーボパターンにアドレス情報を挿入する際に、該サーボパターン記録装置が扱える最長の磁気テープよりも充分に長いモジュロのアドレス発生器を用いると共に、前記サーボパターン記録装置に生の磁気テープを装填する毎に、前記アドレス発生器のアドレスをリセットするようになしたサーボパターン記録装置を用いて製造された磁気テープ。
【請求項16】
磁気テープのデータバンドの全幅にわたって、且つ磁気テープの長手方向には間隔をあけて配置されたサーボパターンを有する磁気テープに、前記サーボパターン間にガードスペースを介してデータを記録する記録ヘッドと、
前記磁気テープに記録されたデータを再生する再生ヘッドと
を具備する磁気テープ装置。
【請求項17】
請求項16に記載の磁気テープ装置であって、
前記サーボパターンの再生に、前記再生ヘッドのデータ用チャンネルの少なくとも2チャンネルを使用し、各チャンネルからの再生サーボ信号間の相関関係と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とから、前記記録ヘッドまたは前記再生ヘッドの位置決め情報、前記磁気テープの変形情報、および/または、磁気テープの傾き情報を検出する磁気テープ装置。
【請求項18】
請求項16に記載の磁気テープ装置であって、
前記サーボパターンの再生に、前記再生ヘッドのデータ用チャンネルおよびサーボ用補助チャンネルの中から少なくとも2チャンネルを使用し、各チャンネルからの再生サーボ信号間の相関関係と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とから、前記記録ヘッドまたは前記再生ヘッド位置決め情報、磁気テープの変形情報、および/または
、磁気テープの傾き情報を検出する磁気テープ装置。
【請求項19】
請求項17に記載の磁気テープ装置であって、
前記サーボパターンの異なるアジマス角のセグメントを、それぞれに対応する再生チャンネルで再生し、それぞれの出力信号の間の経過時間または該磁気テープ装置内の時計で計測した時刻差に、磁気テープ速度情報と、対応する再生チャンネルの組み合わせ毎に予め決められた基準値とを組み合わせて、前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を得る磁気テープ装置。
【請求項20】
請求項18に記載の磁気テープ装置であって、
前記サーボパターンの異なるアジマス角のセグメントを、それぞれに対応する再生チャンネルで再生し、それぞれの出力信号の間の経過時間または該磁気テープ装置内の時計で計測した時刻差に、磁気テープ速度情報と、対応する再生チャンネルの組み合わせ毎に予め決められた基準値とを組み合わせて、前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を得る磁気テープ装置。
【請求項21】
請求項19に記載の磁気テープ装置であって、
前記サーボパターンの正のアジマス角のセグメントと負のアジマス角のセグメントとを、それぞれに対応する再生チャンネルで再生する磁気テープ装置。
【請求項22】
請求項20に記載の磁気テープ装置であって、
前記サーボパターンの正のアジマス角のセグメントと負のアジマス角のセグメントとを、それぞれに対応する再生チャンネルで再生する磁気テープ装置。
【請求項23】
請求項21に記載の磁気テープ装置であって、
前記サーボパターンの、正負の第一のアジマス角の組み合わせから得られた位置に関する第一の情報と、前記第一のアジマス角より大きな正負の第二のアジマス角の組み合わせから得られた位置に関する第二の情報とを組み合わせて、位置決め情報を得る磁気テープ装置。
【請求項24】
請求項22に記載の磁気テープ装置であって、
前記サーボパターンの、正負の第一のアジマス角の組み合わせから得られた位置に関する第一の情報と、前記第一のアジマス角より大きな正負の第二のアジマス角の組み合わせから得られた位置に関する第二の情報とを組み合わせて、位置決め情報を得る磁気テープ装置。
【請求項25】
請求項17に記載の磁気テープ装置であって、
前記サーボパターンのアジマス角が0度ではないセグメントを、対応する2つの再生チャンネルで再生し、再生信号間の経過時間または該磁気テープ装置内の時計で計測した時刻差である第一の値と、これとは逆のアジマス角のセグメントを対応する第二の2つの再生チャンネルで再生して得られる第二の値と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの変形情報、および/または、磁気テープの傾き情報を検出する磁気テープ装置。
【請求項26】
請求項18に記載の磁気テープ装置であって、
前記サーボパターンのアジマス角が0度ではないセグメントを、対応する2つの再生チャンネルで再生し、再生信号間の経過時間または該磁気テープ装置内の時計で計測した時刻差である第一の値と、これとは逆のアジマス角のセグメントを対応する第二の2つの再生チャンネルで再生して得られる第二の値と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの変形情報、および/または、磁気テープの傾き情報を検出する磁気テープ装置。
【請求項27】
請求項17に記載の磁気テープ装置であって、
前記サーボパターンのアジマス角が0度のセグメントを、対応する2つの再生チャンネルで再生し、再生信号間の経過時間または装置内の時計で計測した時刻差と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの傾き情報を検出する磁気テープ装置。
【請求項28】
請求項18に記載の磁気テープ装置であって、
前記サーボパターンのアジマス角が0度のセグメントを、対応する2つの再生チャンネルで再生し、再生信号間の経過時間または装置内の時計で計測した時刻差と、磁気テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの傾き情報を検出する磁気テープ装置。
【請求項29】
請求項17に記載の磁気テープ装置であって、
前記サーボパターンの、0度ではない等しいアジマス角の第一の2つのセグメントを、第一の再生チャンネルペアでそれぞれ再生し、再生信号間の経過時間または該磁気テープ装置内の時計で計測した時刻差を得ると共に、これとは逆の等しいアジマス角の第二の2つのセグメントを、第二の再生チャンネルペアで再生して再生信号間の経過時間または時刻差を得、テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの変形情報と傾き情報との混合した情報を検出すると共に、アジマス角が0度のセグメントを第三の再生チャンネルペアで再生して検出される磁気テープの傾き情報を用いて、磁気テープ変形情報を得る磁気テープ装置。
【請求項30】
請求項18に記載の磁気テープ装置であって、
前記サーボパターンの、0度ではない等しいアジマス角の第一の2つのセグメントを、第一の再生チャンネルペアでそれぞれ再生し、再生信号間の経過時間または該磁気テープ装置内の時計で計測した時刻差を得ると共に、これとは逆の等しいアジマス角の第二の2つのセグメントを、第二の再生チャンネルペアで再生して再生信号間の経過時間または時刻差を得、テープ速度情報と、再生ヘッドのチャンネル情報とを組み合わせて、磁気テープの変形情報と傾き情報との混合した情報を検出すると共に、アジマス角が0度のセグメントを第三の再生チャンネルペアで再生して検出される磁気テープの傾き情報を用いて、磁気テープ変形情報を得る磁気テープ装置。
【請求項31】
請求項19に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項32】
請求項20に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項33】
請求項25に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項34】
請求項26に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項35】
請求項27に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項36】
請求項28に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項37】
請求項29に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項38】
請求項30に記載の磁気テープ装置であって、
前記出力信号間の経過時間または計測時刻差を、バースト位相比較器により位相差として検出する磁気テープ装置。
【請求項39】
請求項25に記載の磁気テープ装置であって、
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、および/または、前記傾き情報を用いて補正する磁気テープ装置。
【請求項40】
請求項26に記載の磁気テープ装置であって、
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、および/または、前記傾き情報を用いて補正する磁気テープ装置。
【請求項41】
請求項27に記載の磁気テープ装置であって、
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、および/または、前記傾き情報を用いて補正する磁気テープ装置。
【請求項42】
請求項28に記載の磁気テープ装置であって、
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、および/または、前記傾き情報を用いて補正する磁気テープ装置。
【請求項43】
請求項29に記載の磁気テープ装置であって、
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、および/または、前記傾き情報を用いて補正する磁気テープ装置。
【請求項44】
請求項30に記載の磁気テープ装置であって、
前記記録ヘッドまたは前記再生ヘッドのトラック幅方向の位置決め情報を、前記磁気テープの変形情報、および/または、前記傾き情報を用いて補正する磁気テープ装置。
【請求項45】
請求項25に記載の磁気テープ装置であって、
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御する磁気テープ装置。
【請求項46】
請求項26に記載の磁気テープ装置であって、
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御する磁気テープ装置。
【請求項47】
請求項27に記載の磁気テープ装置であって、
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御する磁気テープ装置。
【請求項48】
請求項28に記載の磁気テープ装置であって、
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御する磁気テープ装置。
【請求項49】
請求項29に記載の磁気テープ装置であって、
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御する磁気テープ装置。
【請求項50】
請求項30に記載の磁気テープ装置であって、
前記磁気テープの傾き情報に従って前記記録ヘッドまたは前記再生ヘッドの傾き角を制御する磁気テープ装置。
【請求項51】
請求項17に記載の磁気テープ装置であって、
前記磁気テープ速度情報を、設定されている速度情報とした、および/または、前記磁気テープ速度情報を、再生するサーボパターンの周期を計測して得るようにした磁気テープ装置。
【請求項52】
請求項18に記載の磁気テープ装置であって、
前記磁気テープ速度情報を、設定されている速度情報とした、および/または、前記磁気テープ速度情報を、再生するサーボパターンの周期を計測して得るようにした磁気テープ装置。
【請求項53】
請求項51に記載の磁気テープ装置であって、
前記サーボパターン中にアジマス角0度のセグメントがある場合に、このセグメントを再生するチャンネルの出力のサーボパターンの周期を計測して速度情報を得る磁気テープ装置。
【請求項54】
請求項52に記載の磁気テープ装置であって、
前記サーボパターン中にアジマス角0度のセグメントがある場合に、このセグメントを再生するチャンネルの出力のサーボパターンの周期を計測して速度情報を得る磁気テープ装置。
【請求項55】
請求項51に記載の磁気テープ装置であって、
前記サーボパターン中にアジマス角0度のセグメントがない場合に、アジマス角が正のセグメントに対応する再生チャンネルの出力のサーボパターンの周期と、負のセグメントに対応する再生チャンネルの出力のサーボパターンの周期とを計測し、それぞれのアジマス角の絶対値を考慮した演算を行って速度情報とする磁気テープ装置。
【請求項56】
請求項52に記載の磁気テープ装置であって、
前記サーボパターン中にアジマス角0度のセグメントがない場合に、アジマス角が正のセグメントに対応する再生チャンネルの出力のサーボパターンの周期と、負のセグメントに対応する再生チャンネルの出力のサーボパターンの周期とを計測し、それぞれのアジマス角の絶対値を考慮した演算を行って速度情報とする磁気テープ装置。
【請求項57】
請求項51に記載の磁気テープ装置であって、
前記サーボパターン中のアジマス角0度のセグメントを、磁気テープ走行の上流のバンプの再生ヘッドと下流のバンプの再生ヘッドとでそれぞれ順次再生して、その経過時間或いは計測時間差と、両再生ヘッドのギャップ間距離を使って磁気テープ速度情報を得る磁気テープ装置。
【請求項58】
請求項52に記載の磁気テープ装置であって、
前記サーボパターン中のアジマス角0度のセグメントを、磁気テープ走行の上流のバンプの再生ヘッドと下流のバンプの再生ヘッドとでそれぞれ順次再生して、その経過時間或いは計測時間差と、両再生ヘッドのギャップ間距離を使って磁気テープ速度情報を得る磁気テープ装置。
【請求項59】
請求項51に記載の磁気テープ装置であって、
前記サーボパターンの正、負のアジマス角のセグメントそれぞれを、前記上流の再生ヘッドと前記下流の再生ヘッドで順次再生して、それぞれの経過時間或いは計測時間差と上流下流再生ヘッドそれぞれのギャップ間距離から第一および第二の速度情報を得た後、使用した再生ヘッドのチャンネル情報とアジマス角の情報を考慮した演算を行って速度情報とする磁気テープ装置。
【請求項60】
請求項52に記載の磁気テープ装置であって、
前記サーボパターンの正、負のアジマス角のセグメントそれぞれを、前記上流の再生ヘッドと前記下流の再生ヘッドで順次再生して、それぞれの経過時間或いは計測時間差と上流下流再生ヘッドそれぞれのギャップ間距離から第一および第二の速度情報を得た後、使用した再生ヘッドのチャンネル情報とアジマス角の情報を考慮した演算を行って速度情報とする磁気テープ装置。
【請求項61】
請求項16に記載の磁気テープ装置であって、
前記磁気テープを位相ロックする場合に、前記サーボパターン中にアジマス角0度のセグメントがある場合には、該セグメントを再生するチャンネルの出力サーボパターンの周期を、必要なだけ分周して基準信号と位相比較する磁気テープ装置。
【請求項62】
請求項16に記載の磁気テープ装置であって、
前記磁気テープを位相ロックする場合に、前記サーボパターン中にアジマス角0度のセグメントがない場合には、アジマス角が正のセグメントに対応する再生チャンネルの出力サーボパターンの周期を、所定の分周比で必要なだけ分周して第一の基準信号と位相比較するようになし、負のセグメントに対応する再生チャンネルの出力サーボパターンの周期を、同じ分周比で分周して第二の基準信号と位相比較するようになし、それぞれの位相比較器の出力をアジマス角の絶対値を考慮した演算を行って、位相ロックする磁気テープ装置。
【請求項63】
請求項16に記載の磁気テープ装置であって、
前記磁気データ記録時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項64】
請求項16に記載の磁気テープ装置であって、
前記データ再生時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項65】
請求項45に記載の磁気テープ装置であって、
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項66】
請求項46に記載の磁気テープ装置であって、
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項67】
請求項47に記載の磁気テープ装置であって、
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項68】
請求項48に記載の磁気テープ装置であって、
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項69】
請求項49に記載の磁気テープ装置であって、
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項70】
請求項50に記載の磁気テープ装置であって、
前記データ記録時に、下流の前記再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項71】
請求項45に記載の磁気テープ装置であって、
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項72】
請求項46に記載の磁気テープ装置であって、
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項73】
請求項47に記載の磁気テープ装置であって、
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項74】
請求項48に記載の磁気テープ装置であって、
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項75】
請求項49に記載の磁気テープ装置であって、
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項76】
請求項50に記載の磁気テープ装置であって、
前記データ再生時に、上流の前記記録ヘッドにピギーバックされている再生ヘッドを使用して、前記サーボパターンを再生する磁気テープ装置。
【請求項77】
請求項17に記載の磁気テープ装置であって、
前記記録ヘッド及び前記再生ヘッドの、記録および/または再生ギャップの個々の位置の、基準の位置からの偏差の情報を該磁気テープ装置内に格納し、その情報を用いて前記記録ヘッド及び前記再生ヘッドの位置情報、磁気テープの変形情報、磁気テープの傾き情報、磁気テープ速度情報、および/または、磁気テープの位相情報を補正する磁気テープ装置。
【請求項78】
請求項18に記載の磁気テープ装置であって、
前記記録ヘッド及び前記再生ヘッドの、記録および/または再生ギャップの個々の位置の、基準の位置からの偏差の情報を該磁気テープ装置内に格納し、その情報を用いて前記記録ヘッド及び前記再生ヘッドの位置情報、磁気テープの変形情報、磁気テープの傾き情報、磁気テープ速度情報、および/または、磁気テープの位相情報を補正する磁気テープ装置。
【請求項79】
請求項16に記載の磁気テープ装置であって、
前記サーボパターンに挟まれたデータ領域の構成要素である各パス毎の領域の所定の位置に、前記データバンドおよび/またはパスの識別情報を挿入する磁気テープ装置。
【請求項80】
請求項16に記載の磁気テープ装置であって、
各パス毎に、前記サーボパターンに挟まれたデータ領域と、隣接して先行または後続するサーボパターンと、付随するガードスペースとを単位にして、その整数倍を物理ブロックとして取り扱う磁気テープ装置。
【請求項81】
請求項16に記載の磁気テープ装置であって、
各パス毎に、前記サーボパターンに挟まれたデータ領域と、隣接して先行または後続するサーボパターンと、付随するガードスペースとを単位に、1個または複数個を用いてテープマークとなす磁気テープ装置。
【請求項82】
磁気テープに記録するサーボパターンの磁化遷移の境界の形状と同じ形状の記録ギャップを有し前記サーボパターンを前記磁気テープの全幅に亘って記録する記録ヘッドと、
前記記録ヘッドで前記磁気テープ全幅を記録するに当たり、前記サーボパターン1つ当たりの記録電流の変化の回数を全て奇数回或いは全て偶数回に制御する制御手段と
を具備するサーボパターン記録装置。
【請求項83】
磁気テープに記録するサーボパターンの磁化遷移の境界の形状と同じ形状の記録ギャップを有し前記サーボパターンを前記磁気テープの全幅に亘って記録する磁気ヘッドと、
前記記録ヘッドで前記磁気テープ上に先ず記録し、次いでデータ記録領域を形成するように後続の全幅消去ヘッドで該サーボパターンの一部を消去することで、該サーボパターンを形成するサーボパターン記録装置。
【請求項84】
請求項82に記載のサーボパターン記録装置であって、
前記サーボパターンを、前記記録ヘッドで磁気テープ全幅を記録するに当たり、記録電流の変化のタイミングを変調してバイナリデータまたはユニークな同期信号を表現するサーボパターン記録装置。
【請求項85】
請求項83に記載のサーボパターン記録装置であって、
前記サーボパターンを、前記記録ヘッドでテープ上に先ず記録し、次いで後続の全幅消去ヘッドでデータ記録部分を形成するように該記録されたサーボパターンの一部を消去するに当たり、記録電流の変調と後続の全幅消去ヘッドの動作タイミングを制御して、サーボパターン中にバイナリデータを表現する、或いは、ユニークな同期信号を表現するサーボパターン記録装置。
【請求項86】
請求項84に記載のサーボパターン記録装置であって、
前記サーボパターンを、1ビットのデータに対応させる、或いは、1ビットのデータま たはユニークな同期信号に対応させるサーボパターン記録装置。
【請求項87】
請求項85に記載のサーボパターン記録装置であって、
前記サーボパターンを、1ビットのデータに対応させる、或いは、1ビットのデータま たはユニークな同期信号に対応させるサーボパターン記録装置。
【請求項88】
請求項84に記載のサーボパターン記録装置であって、
前記サーボパターンにアドレス情報を記録する際に、該サーボパターン記録装置が扱える最長の磁気テープよりも充分に長いモジュロのアドレス発生器を用いると共に、該サーボパターン記録装置に生の磁気テープを装填する毎に、アドレス発生器のアドレスをリセットするサーボパターン記録装置。
【請求項89】
請求項85に記載のサーボパターン記録装置であって、
前記サーボパターンにアドレス情報を記録する際に、該サーボパターン記録装置が扱える最長の磁気テープよりも充分に長いモジュロのアドレス発生器を用いると共に、該サーボパターン記録装置に生の磁気テープを装填する毎に、アドレス発生器のアドレスをリセットするサーボパターン記録装置。
【請求項90】
データバンドを有する磁気テープにデータを記録する方法において、
前記データバンドの全幅にわたって、且つ前記磁気テープの長手方向には間隔をあけて配置されたサーボパターンからサーボ信号を取得し、
前記取得したサーボ信号に基づいて、前記サーボパターン間にガードスペースを介してデータを記録する記録方法。
【請求項91】
請求項90に記載の、磁気テープにデータを記録する方法であって、
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで、トランジションの数をサーボパターン1つ当たり、全て奇数回または偶数回となるようにテープ上に記録することによって、データ記録領域を形成した記録方法。
【請求項92】
請求項90に記載の、磁気テープにデータを記録する方法であって、
前記サーボパターンを、その磁化遷移の境界の形状と同じ形状の記録ギャップを持つサーボパターン記録ヘッドで磁気テープ上に先ず記録し、次いで該記録したサーボパターンの一部を下流にある全幅消去ヘッドで消去することによって、データ記録領域を形成した記録方法。
【請求項93】
請求項90に記載の、磁気テープにデータを記録する方法であって、
前記データバンド上で、前記サーボパターンを前記データバンドの幅方向に、少なくとも2つのセグメントから構成されるようになすと共に隣り合うセグメントを異なるアジマス角で記録するようになして、データ記録領域を形成した記録方法。
【図1】

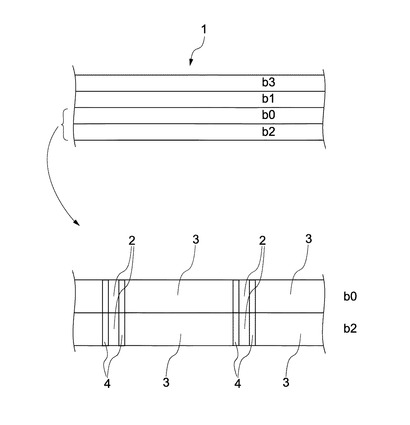
【図2】
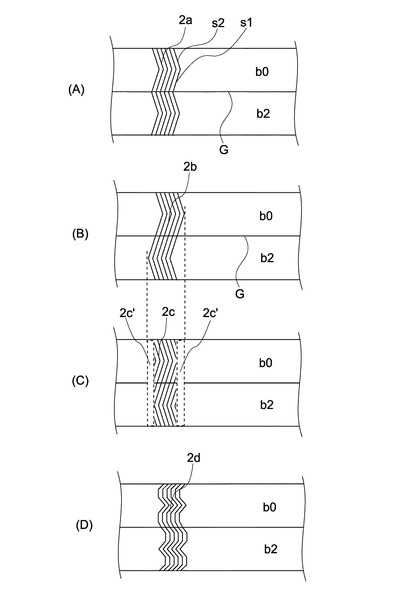
【図3】
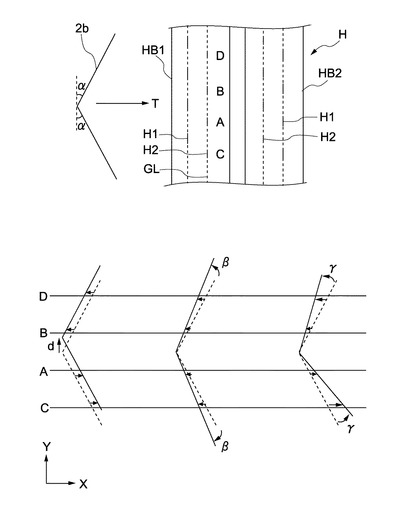
【図4】
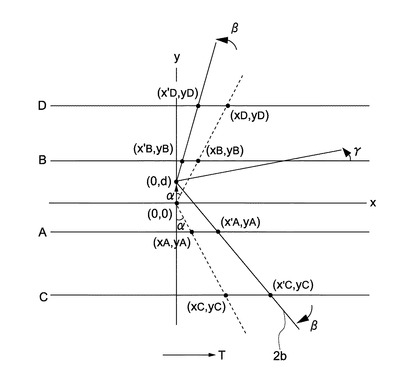
【図5】
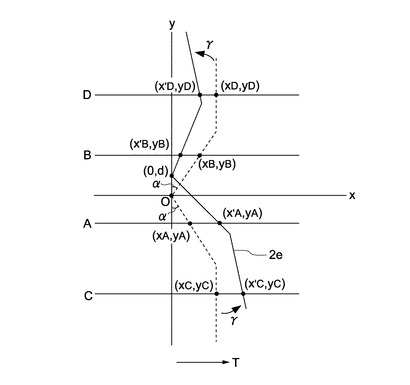
【図6】
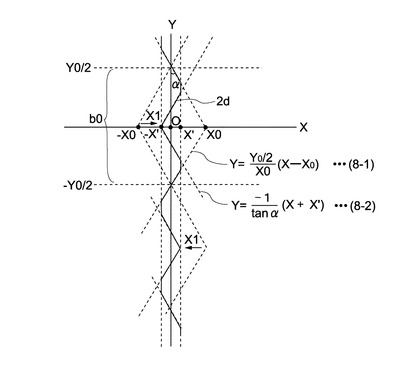
【図7】
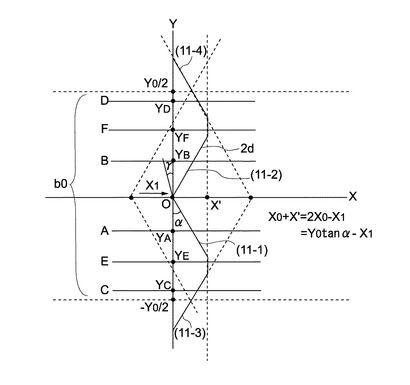
【図8】
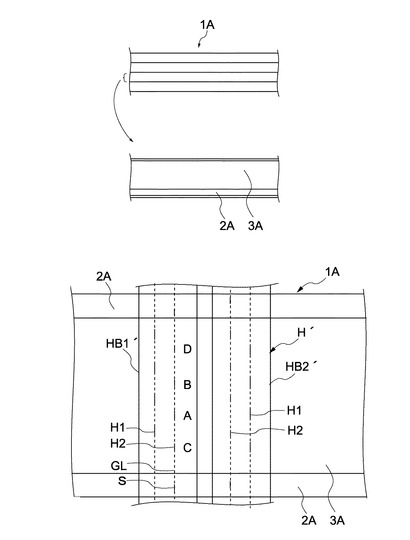
【図9】
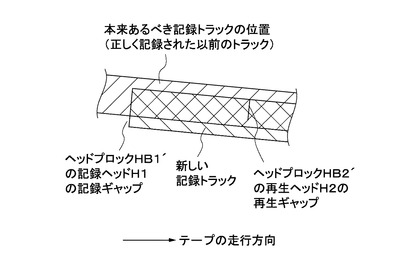
【図10】

【図11】
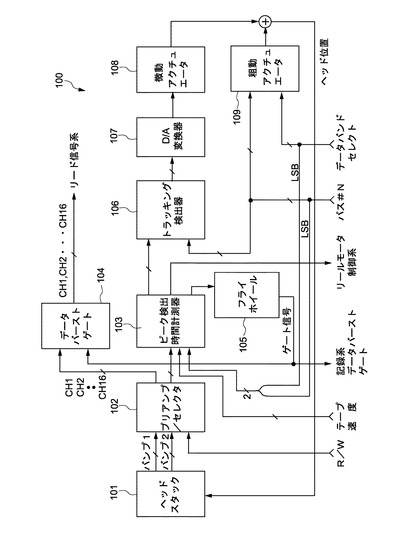
【図12】
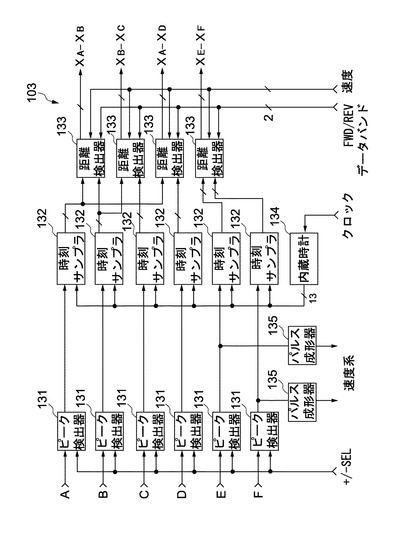
【図13】
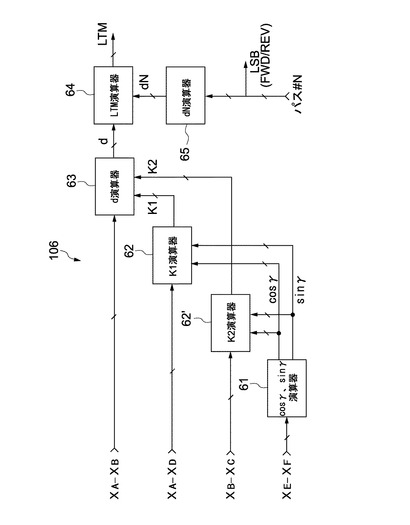
【図14】
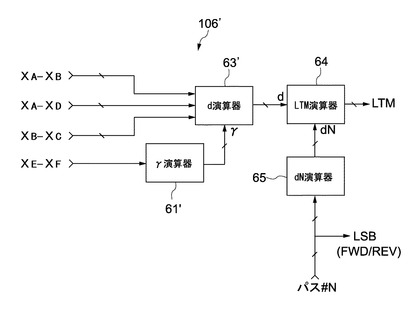
【図15】
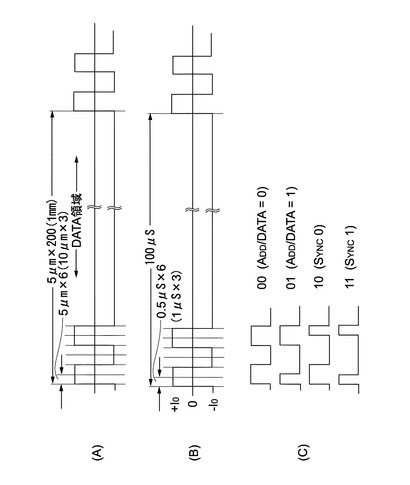
【図16】
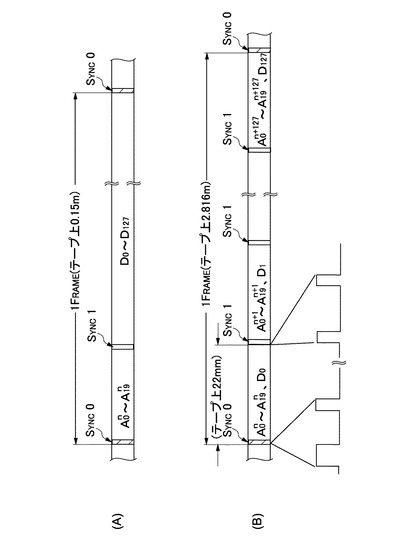
【図17】
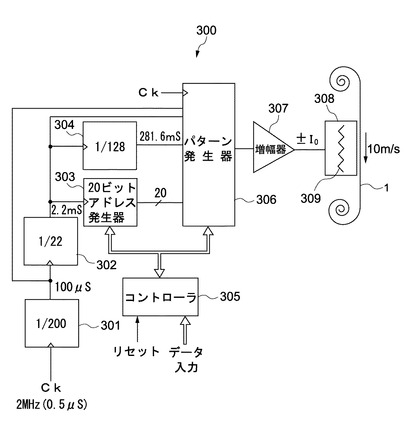
【図18】
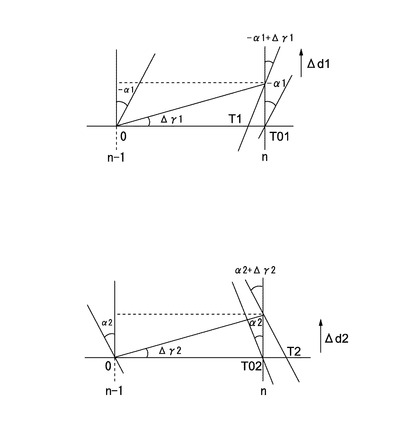
【図19】
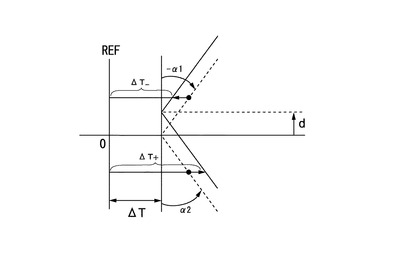
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2009−151851(P2009−151851A)
【公開日】平成21年7月9日(2009.7.9)
【国際特許分類】
【出願番号】特願2007−327102(P2007−327102)
【出願日】平成19年12月19日(2007.12.19)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成21年7月9日(2009.7.9)
【国際特許分類】
【出願日】平成19年12月19日(2007.12.19)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]