
磁気テープ
【課題】温度や湿度などによって変形したとしても、磁気ヘッドの追従を安定して行うことができる磁気テープを提供する。
【解決手段】データ信号を記録可能な複数のデータバンド3、4、12を備えた磁気テープであって、バースト信号で構成されたサーボパターン15を備え、前記サーボパターンは前記複数のデータバンドのうちの一つのデータバンド12において、当該磁気テープの長手方向に、所定間隔毎に形成されている。
【解決手段】データ信号を記録可能な複数のデータバンド3、4、12を備えた磁気テープであって、バースト信号で構成されたサーボパターン15を備え、前記サーボパターンは前記複数のデータバンドのうちの一つのデータバンド12において、当該磁気テープの長手方向に、所定間隔毎に形成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、少なくともサーボパターンが形成された磁気テープに関する。
【背景技術】
【0002】
磁気テープは、オーディオテープ、ビデオテープ、コンピューターテープなど様々な用途があるが、特にコンピューターのデータバックアップに使用されるデータバックアップ用テープの分野では、バックアップ対象となるハードディスクの大容量化に伴い、1巻当たり数百GBの記憶容量のものが商品化されている。今後、ハードディスクのさらなる大容量化に対応するため、バックアップテープの高容量化は不可欠である。
【0003】
磁気テープの高容量化に伴い、磁気テープに対する高密度記録が必要となる。高密度記録の一例として、データの記録波長を短波長化して磁気テープに記録する技術(短波長化技術)や、磁気テープに記録されるトラック幅を狭幅化して記録する技術(狭トラック化技術)がある。
【0004】
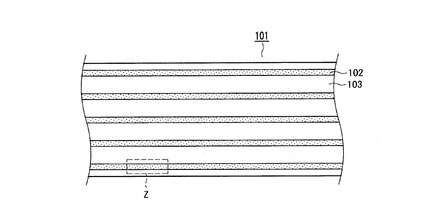
また、磁気ヘッドを目標トラックに正確に追従させるために、磁気テープには予めサーボ信号が記録されている。例えば、LTO(Liner Tape Open)規格に準拠した磁気テー
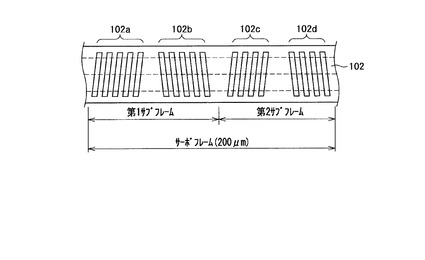
プは、図5Aに示すように、磁気テープ101の長手方向に複数のデータバンド103が形成され、各データバンド103の間にサーボバンド102が形成されている。データバンド103にはデータ信号を記録することができ、サーボバンド102には予めサーボライター等によりサーボ信号が記録されている。図5Bは、図5AにおけるZ部の拡大図である。図5Bに示すように、サーボバンド102は、略「ハ」の字状のサーボパターンが複数形成されている。LTO規格では、磁気テープ101の長手方向に対して第1の方向に傾斜した5本のサーボパターンで構成された第1のサーボパターン群102aと、第1の方向に相対する第2の方向に傾斜した5本のサーボパターンで構成された第2のサーボパターン群102bと、第1の方向に傾斜した4本のサーボパターンで構成された第3のサーボパターン群102cと、第2の方向に傾斜した4本のサーボパターンで構成された第4のサーボパターン群102dとで、1つのサーボフレームを構成している。1つのサーボフレームは、200μmの長さを有する。
【0005】
このような磁気テープ101をドライブで再生する際、データバンド103に記録されているデータ信号をデータヘッドで読み出すとともに、サーボバンド102に記録されているサーボ信号をサーボヘッドで読み出すことにより、磁気ヘッドを磁気テープ101上の目標トラック上に正確に位置決めしながら、データ信号を読み出すことができる。なお、トラッキングサーボを行う際は、1つのサーボフレームのサーボ信号を読み出してから、磁気ヘッドの位置決め制御量を更新する。すなわち、磁気テープ101を200μm走行させる毎に磁気ヘッドの位置を修正する。
【0006】
例えば特許文献1には、磁気テープ上にサーボ信号を磁気記録または再生する構成が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−056500号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら図5A及び図5Bに示す構成では、1つのサーボフレームが200μmの長さを有するため、単位時間当たりのサーボ信号のサンプル数が少なく、磁気テープに対する磁気ヘッドの追従性が低いという問題があった。特に、磁気テープが、温度や湿度な
どの影響により幅方向に変形している場合は、磁気テープに対する磁気ヘッドの追従性が大幅に低下してしまう。
【0009】
本発明の目的は、温度や湿度などによって変形したとしても、磁気ヘッドの追従を安定して行うことができる磁気テープを提供することである。
【課題を解決するための手段】
【0010】
本発明の磁気テープは、データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、トラッキングサーボを行うためのサーボパターンを備え、前記サーボパターンは、前記複数のデータバンドのうちの少なくとも一つのデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成されている。
【0011】
本発明の磁気テープの第1の構成は、データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、バースト信号で構成されたサーボパターンを備え、前記サーボパターンは。前記複数のデータバンドのうちの一つのデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成されているものである。
【0012】
本発明の磁気テープの第2の構成は、データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、バースト信号で構成されたサーボパターンを備え、前記サーボパターンは、前記複数のデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成され、当該磁気テープの長手方向における位置を、前記データバンド毎に互いに異ならせて形成されているものである。
【0013】
本発明の磁気テープの第3の構成は、データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、当該磁気テープの長手方向に傾斜して形成されたストライプ状のサーボパターンを備え、前記サーボパターンは、前記複数のデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成され、当該磁気テープの長手方向における位置を前記データバンド毎に互いに異ならせて形成されているものである。
【発明の効果】
【0014】
本発明によれば、温度や湿度などによって変形したとしても、磁気ヘッドの追従を安定して行うことができる。
【図面の簡単な説明】
【0015】
【図1A】実施の形態1における磁気テープの構成を示す平面図
【図1B】実施の形態1における磁気テープに記録されたサーボ信号の波形図
【図1C】オフトラックが生じている時のサーボ信号の波形図
【図2A】実施の形態2における磁気テープの構成を示す平面図
【図2B】実施の形態2における磁気テープに記録されたサーボ信号の波形図
【図3A】実施の形態3における磁気テープの構成を示す平面図
【図3B】実施の形態3における磁気テープに記録されたサーボ信号の波形図
【図3C】実施の形態3においてLTMが生じた磁気テープのトラッキングサーボを説明するための図
【図4A】実施の形態4における磁気テープの構成を示す平面図
【図4B】実施の形態4における磁気テープに記録されたサーボ信号の波形図
【図4C】実施の形態4における磁気テープに記録されたサーボ信号の波形図
【図5A】従来の磁気テープの構成を示す平面図
【図5B】従来の磁気テープにおけるサーボパターンの構成を示す模式図
【発明を実施するための形態】
【0016】
(実施の形態)
〔1.磁気テープの基本構成〕
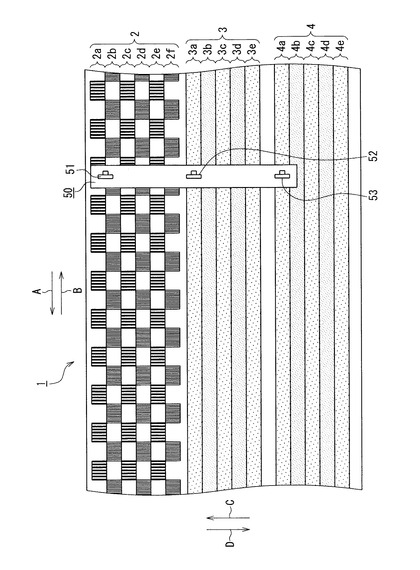
図1Aは、実施の形態1における磁気テープの記録面の構成を示す。図1Aに示すように、磁気テープ1は、その長手方向にサーボバンド2とデータバンド3及び4とを備えている。サーボバンド2とデータバンド3とデータバンド4とは、互いに平行に形成されている。また、磁気テープ1は、ドライブによって矢印AまたはBに示す方向へ搬送される。
【0017】
サーボバンド2は、磁気テープ1の幅方向上端に形成され、複数のサーボトラック2a〜2fから構成されている。サーボトラック2a〜2fは、磁気テープ1の幅方向に互いに平行に並んで形成されている。サーボトラック2a,2c,2eはそれぞれ同じ周波数のバースト信号で構成されたサーボパターンで構成され、サーボトラック2b,2d,2fはそれぞれ同じ周波数のバースト信号で構成されたサーボパターンで構成されている。サーボトラック2a,2c,2eとサーボトラック2b,2d,2fとは、互いに異なる周波数のサーボパターンで構成されている。また、サーボトラック2a〜2fを構成しているサーボパターンは、磁気テープ1の長手方向に千鳥状に配列されている。このような
サーボパターンをサーボヘッド51で読み取る際は、2つのサーボトラック間をトレースさせるため、サーボヘッド51から得られるサーボ信号は図1Bに示すように連続的となる。よって、サーボパターンは、磁気テープ1の長手方向に連続的に形成されていると解釈することができる。
【0018】
データバンド3及び4は、磁気ヘッドユニット50によってデータ信号を記録可能な領域である。データバンド3にデータ信号を記録すると、複数のデータトラック3a〜3eが形成される。データトラック3a〜3eは、磁気テープ1の幅方向に互いに平行に並んで形成される。また、データバンド4にデータ信号を記録すると、複数のデータトラック4a〜4eが形成される。データトラック4a〜4eは、磁気テープ1の幅方向に互いに平行に並んで形成される。
【0019】
なお、本実施の形態では、データバンド3及び4には、それぞれ5本のデータトラックが形成される構成としたが、データバンドの本数、データトラックの本数はこれらに限定されない。また、サーボトラックの本数は6本としたが、この数には限定されない。サーボトラックの本数は、データトラックの本数をn本とした時、(n+1)本で構成すれば本実施の形態を実現することができる。また、サーボバンド2は、磁気テープ1の幅方向上端としたが、データバンド3とデータバンド4とに挟まれた位置など、他の位置に配置してもよい。
【0020】
磁気ヘッドユニット50は、サーボヘッド51と、データヘッド52及び53とを備えている。サーボヘッド51は、磁気テープ1のサーボバンド2に形成されているサーボパターン2a〜2fを読み取ることができる。データヘッド52は、データバンド3にデータ信号を記録することができるとともに、データバンド3に記録されているデータ信号を読み取ることができる。データヘッド53は、データバンド4にデータ信号を記録することができるとともに、データバンド4に記録されているデータ信号を読み取ることができる。
【0021】
〔2.記録再生動作〕
磁気テープ1にデータ信号を記録する場合は、磁気テープ1を矢印AまたはBに示す方向に搬送させながら、サーボヘッド51,データヘッド52及び53に通電を行う。これにより、サーボヘッド51でサーボパターン2a〜2fを選択的に読み取ってトラッキングサーボを行いながら、データヘッド52でデータバンド3にデータ信号を記録し、データヘッド53でデータバンド4にデータ信号を記録する。
【0022】
磁気テープ1に記録されたデータ信号を再生する場合は、磁気テープ1を矢印AまたはBに示す方向に搬送させながら、サーボヘッド51,データヘッド52及び53に通電を行う。これにより、サーボヘッド51でサーボパターン2a〜2fを選択的に読み取ってトラッキングサーボを行いながら、データヘッド52でデータバンド3に記録されたデータ信号を読み取り、データヘッド53でデータバンド4に記録されたデータ信号を読み取る。
【0023】
〔3.トラッキングサーボの動作〕
磁気ヘッドユニット50を磁気テープ1に対してトラッキングサーボを行う際は、まずサーボヘッド51でサーボパターン2a〜2fのいずれかを読み取る。例えば、データヘッド52をデータトラック3aにオントラックさせ、データヘッド53をデータトラック4aにオントラックさせる場合は、サーボヘッド51をサーボトラック2aとサーボトラック2bとの間をトレースさせ、サーボトラック2aのサーボパターンとサーボトラック2bのサーボパターンとを読み取る。
【0024】
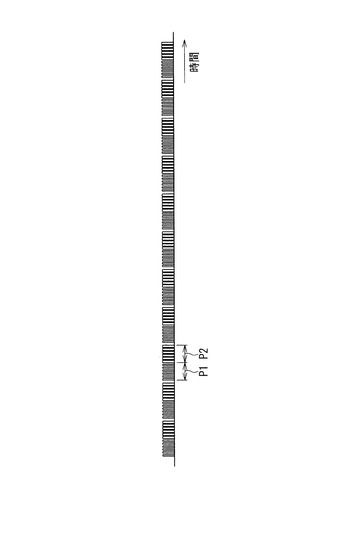
図1Bは、サーボヘッド51によって再生されたサーボ信号の波形を示す。サーボヘッド51が、サーボトラック2aとサーボトラック2bとの中間部分をトレースしていれば、図1Bに示すようにサーボトラック2aから再生されたサーボ信号P2の出力レベルと、サーボトラック2bから再生されたサーボ信号P1の出力レベルとはほぼ同じになるが、磁気テープ1がLTM(Liner Tape Motion)などによって幅方向(矢印CまたはDに
示す方向)に変位し、磁気ヘッドユニット50と磁気テープ1との相対位置がずれている場合は、サーボ信号P1の出力レベルとサーボ信号P2の出力レベルとは異なる出力レベルになる。例えば、磁気ヘッドユニット50が正規の位置から矢印Cに示す方向に変位している場合は、図1Cに示すようにサーボトラック2aから再生されるサーボ信号P2の出力レベルが高くなり、サーボトラック2bから再生されるサーボ信号P1の出力レベルが低くなる。
【0025】
ドライブ側では、図1Cに示すサーボ信号のレベルに基づいてオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット50を磁気テープ1の幅方向に移動させるよう制御している。
【0026】
このように、サーボパターン2a及び2bを読み取りながらトラッキングサーボを行うことで、データヘッド52をデータトラック3aにオントラックさせることができ、データヘッド53をデータトラック4aにオントラックさせることができる。
【0027】
同様に、データヘッド52をデータトラック3bにオントラックさせ、データヘッド53をデータトラック4bにオントラックさせる場合は、磁気テープ1を矢印Bに示す方向へ搬送させ、サーボヘッド51でサーボトラック2b及び2cのサーボパターンを読み取って、トラッキングサーボを行う。データトラック3c,3d,3e,4c,4d,4eについても上記と同様にトラッキングサーボを行うことで、それぞれデータヘッド52及び53をオントラックさせることができる。
【0028】
〔4.実施の形態の効果、他〕
本実施の形態によれば、バースト信号で構成されたサーボパターンを配置したサーボバンド2を備えたことにより、磁気テープ1にLTM(蛇行状の変形)が発生していたとしても、サーボパターンの読み取り間隔が従来に比べて短いため、単位時間当たりのサーボ信号のサンプル数が多くなり、磁気ヘッドユニット50の追従性を向上させることができる。
【0029】
また、本実施の形態において磁気テープ1の記録領域全体に対するサーボバンド2が占める面積は、図5Aに示す従来の磁気テープと比べて大差が無いため、データ信号を記録可能な領域の面積が従来に比べて少なくなることはなく、データ信号の記録可能容量も従来と同等に確保することができる。
【0030】
(実施の形態2)
〔1.磁気テープの基本構成〕
図2Aは、実施の形態2における磁気テープの記録面の構成を示す。なお、図2Aに示す構成において、図1Aに示す構成と同様の構成については、同一番号を付与して詳しい説明は省略する。
【0031】
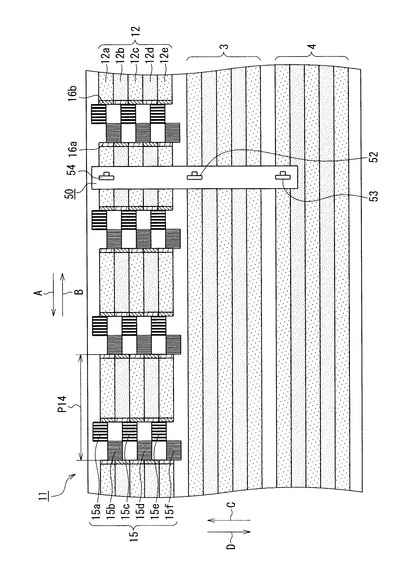
図2Aに示すように、磁気テープ11は、その長手方向に複数のデータバンド3,4,12を備えている。また、磁気テープ11は、ドライブによって矢印AまたはBに示す方向へ搬送される。
【0032】
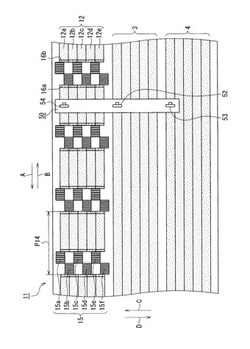
データバンド12は、データトラック12a〜12eと、サーボパターン部15と、サ
ーボマーク16aと、シンクマーク16bとを備えている。データトラック12a〜12eは、データ信号を記録可能な領域であり、本実施の形態では5本形成されている。サーボパターン部15は、磁気テープ11の長手方向の所定間隔毎に形成され、千鳥状に配置した6個のサーボパターン15a〜15fから構成されている。また、サーボパターン15a〜15fは、バースト信号で構成されたパターンである。サーボマーク16a及びシンクマーク16aは、サーボパターン部15において磁気テープ11の長手方向の前後に形成されている。サーボマーク16aは、サーボパターン部15の開始位置であることを示す情報が含まれている。シンクマーク16bは、データトラック12a〜12eの開始位置であることを示す情報が含まれている。本実施の形態では、磁気テープ11にデータ信号を記録または磁気テープ11からデータ信号を再生する際、磁気テープ11を矢印AまたはBに示す方向に往復搬送させるため、データトラック12a,12c,12eとデータトラック12b,12dとではサーボマーク16a及びシンクマーク16bの形成位置が異なる。なお、本明細書において「データバンド」とは、1つの磁気ヘッドでデータ信号を記録再生できる領域のことである。
【0033】
なお、本実施の形態では、サーボパターン部15の間隔P14は、例えば50μmとした。また、データバンド3,4,12には、それぞれ5本のデータトラックを形成する構成としたが、データバンドの本数、データトラックの本数はこれらに限定されない。また、1つのサーボパターン部15におけるサーボパターンの個数は6個としたが、この数には限定されない。1つのサーボパターン部15におけるサーボパターンの個数は、データトラックの本数をn本とした時、(n+1)個で構成すれば本実施の形態を実現することができる。
【0034】
磁気ヘッドユニット50は、図1Aに示すサーボヘッド51に代えて磁気ヘッド54を備えている。磁気ヘッド54は、磁気テープ11に形成されているサーボパターンを読み取ることができ、磁気テープ11のデータトラック12a〜12eにデータ信号を記録することができ、磁気テープ11のデータトラック12a〜12eに記録されているデータ信号を読み取ることができる。
【0035】
〔2.トラッキングサーボの動作〕
本実施の形態におけるデータ信号の記録および再生の基本的な動作は、前述の実施の形態1に記載と同様であるため説明は省略し、トラッキングサーボの動作を中心に説明する。
【0036】
磁気テープ11が矢印Aに示す方向へ搬送され、磁気テープ11に対してデータ信号を記録または再生している時、磁気ヘッド54はデータバンド12の所定のデータトラックをトレースしている。この時、磁気ヘッド54は、トレース中にサーボマーク16aを検出すると、サーボパターンを読み取る動作に切り換えられる。これにより、磁気ヘッド54は、サーボマーク16aに続くサーボパターンを読み取る。例えば、磁気テープ11が矢印A方向に搬送され、磁気ヘッド54がデータトラック12aをトレースしている場合は、サーボパターン15b及び15aを読み取る。
【0037】
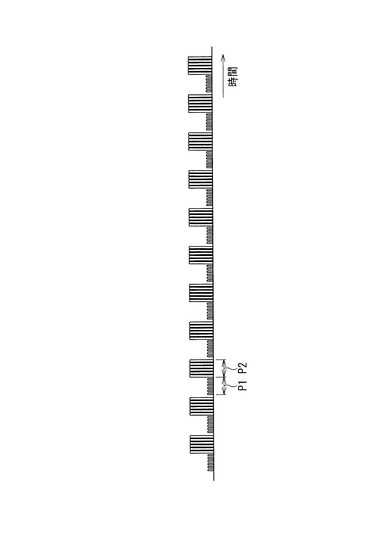
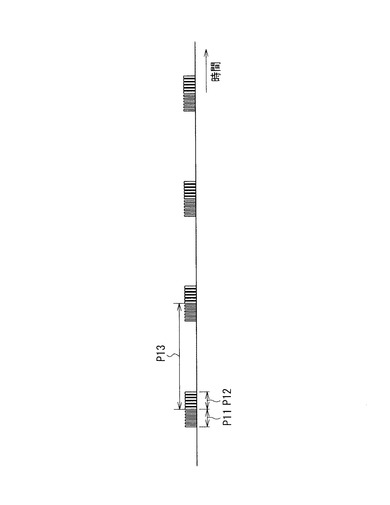
図2Bは、磁気ヘッド54によって読み取ったサーボパターンに基づき再生されたサーボ信号の波形を示す。磁気ヘッド54が、サーボパターン15aとサーボパターン15bとの中間部分をトレースしていれば、図2Bに示すようにサーボパターン15bから再生されたサーボ信号P11の出力レベルと、サーボパターン15aから再生されたサーボパターンP12の出力レベルとはほぼ同じになるが、磁気テープ11がLTM(Liner Tape
Motion)などが原因で磁気ヘッドユニット50に対してその幅方向(矢印CまたはDに
示す方向)に変位している場合は、サーボ信号P11の出力レベルとサーボ信号P12の出力レベルとは異なるレベルになる。ドライブ側では、図2Bに示すサーボ信号の出力レ
ベルに基づいてオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット50を磁気テープ11の幅方向に移動させる。なお、磁気ヘッドユニット50を磁気テープ11の幅方向に移動させる動作は、オフトラック量を算出してから行うので、磁気ヘッドユニット50を移動させるタイミングは、読み取ったサーボパターン部15に続くデータトラックをトレースしている時である。
【0038】
磁気ヘッド54は、サーボパターン15a及び15bの読み取り後、シンクマーク16bを検出すると、再びデータ信号の記録動作または再生動作に切り換えられる。これにより、磁気ヘッド54は、データトラック12aにデータ信号を記録またはデータトラック12aに記録されたデータ信号を再生することができる。なお、データヘッド52及び53は、磁気ヘッド54の動作状態の切り換えに関係なく、データ信号の記録動作または再生動作を継続して行っている。
【0039】
このように、サーボパターン15a及び15bを読み取ってトラッキングサーボを行うことで、磁気ヘッドユニット50を磁気テープ11上の正規の位置をトレースさせることができる。
【0040】
同様に、磁気ヘッド54をデータトラック12bにトレースさせる場合は、磁気ヘッドユニット50を矢印Dに示す方向へ僅かに移動させ、磁気テープ11を矢印Bに示す方向へ搬送させる。磁気ヘッド54は、データトラック12b上に形成されたサーボマーク16aを検出すると、サーボ信号の再生動作に切り換えられる。これにより、磁気ヘッド54は、サーボマーク16aに続くサーボパターン15c及び15bを読み取り、トラッキングサーボを行う。次に、磁気ヘッド54は、シンクマーク16bを検出すると再びデータ信号の記録動作または再生動作に切り換えられ、シンクマーク16bに続くデータトラック12bにデータ信号を記録、またはデータトラック12bに記録されたデータ信号を再生する。
【0041】
〔3.実施の形態の効果、他〕
本実施の形態によれば、データバンド12に、バースト信号を千鳥配置して構成されたサーボパターン部15を所定間隔P14毎に形成したことにより、LTM(蛇行状の変形)が発生して磁気テープ11の位置が幅方向に変動したとしても、サーボ信号の読み取り間隔が従来に比べて短いため、単位時間当たりのサーボ信号のサンプル数が多くなり、磁気テープ11に対する磁気ヘッドユニット50の追従性を向上させることができる。
【0042】
また、サーボパターン部15を所定間隔P14毎に形成し、サーボパターン部15間にデータ信号を記録可能な構成としたことにより、1本の磁気テープ11におけるデータ信号の記録可能容量を大きくすることができる。
【0043】
なお、本実施の形態では、サーボパターン部15の間隔P14を50μmとしたが、この数値は一例である。間隔P14を狭くすることで磁気ヘッド54でサーボ信号のサンプル数を多くすることができるので、より追従性を向上させたトラッキングサーボを行うことができる。一方、サーボパターン部15の間隔P14を広くすることで、データバンド12におけるデータ信号の記録可能容量を多くすることができる。
【0044】
また、サーボマーク16a及びシンクマーク16bは、必ずしも形成する必要はない。サーボマーク16a及びシンクマーク16bは、データトラックとサーボパターンとの境界を検出するために形成されているものであるが、データトラックに記録されるデータ信号の周波数とサーボパターンの周波数とが異なる場合は、サーボマーク16a及びシンクマーク16bを形成しなくても境界を検出することができる。
【0045】
(実施の形態3)
〔1.磁気テープの基本構成〕
図3Aは、実施の形態3における磁気テープの記録面の構成を示す。なお、図3Aに示す構成において、図2Aに示す構成と同様の構成については、同一番号を付与して詳しい説明は省略する。
【0046】
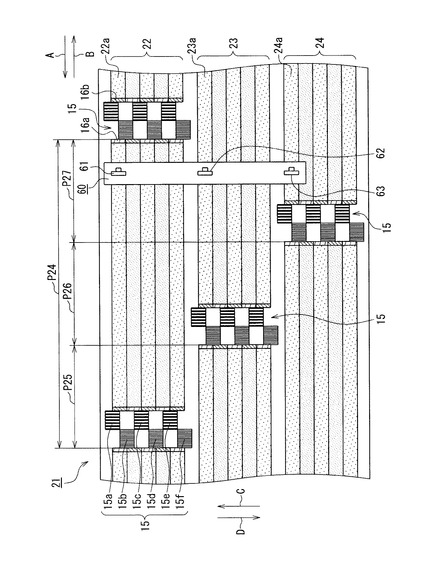
図3Aに示すように、磁気テープ21は、その長手方向に複数のデータバンド22,23,24を備えている。また、磁気テープ21は、ドライブによって矢印AまたはBに示す方向へ搬送される。
【0047】
データバンド22は、複数のデータトラック(便宜上、1つのデータトラックに符号22aのみ付与した)と、サーボパターン部15と、サーボマーク16aと、シンクマーク16bとから構成されている。データトラックは、データ信号を記録可能な領域であり、本実施の形態では5本形成されている。サーボパターン部15に含まれるサーボパターン15a〜15fは、バースト信号で構成されたパターンである。図中の符号付与は省略するが、データバンド23及び24にもデータバンド22と同様に、データトラック、サーボパターン部15、サーボマーク16a、シンクマーク16bを備えている。
【0048】
本実施の形態では、サーボパターン部15の形成位置に特徴がある。具体的には、まずデータバンド22〜24のそれぞれには、間隔P24毎にサーボパターン部15が形成されている。また、データバンド23において、データバンド22に形成されたサーボパターン部15から磁気テープ21の長手方向に所定距離P25離れた位置に、サーボパターン部15が形成されている。また、データバンド24において、データバンド23に形成されたサーボパターン部15から磁気テープ21の長手方向に所定距離P26離れた位置に、サーボパターン部15が形成されている。また、データバンド22において、データバンド24に形成されたサーボパターン部15から磁気テープ21の長手方向に所定距離P27離れた位置に、サーボパターン15が形成されている。すなわち、データバンド22〜24には、それぞれ距離P24の間隔でサーボパターン部15が形成され、その形成位置を互いに磁気テープ21の長手方向にずらして形成されている。なお、距離P25,P26,P27はそれぞれ同じ値であり、和が距離P24と一致するようにサーボパターン部15を形成している。本実施の形態では、距離P25,P26,P27はそれぞれ50μmとした。
【0049】
なお、本実施の形態では、データバンド22,23,24には、それぞれ5本のデータトラックを形成する構成としたが、データバンドの本数、データトラックの本数はこれらに限定されない。また、1つのサーボパターン部15におけるサーボパターンの個数は6個としたが、この数には限定されない。1つのサーボパターン部15におけるサーボパターンの個数は、データトラックの本数をn本とした時、(n+1)個で構成すれば本実施の形態を実現することができる。
【0050】
磁気ヘッドユニット60は、3個の磁気ヘッド61,62,63を備えている。磁気ヘッド61,62,63は、それぞれサーボパターンを読み取ることができ、データトラックにデータ信号を記録することができ、データトラックに記録されているデータ信号を読み取ることができる。
【0051】
〔2.トラッキングサーボの動作〕
本実施の形態におけるデータ信号の記録および再生の基本的な動作は、前述の実施の形態1または2に記載と同様であるため説明は省略し、トラッキングサーボの動作を中心に説明する。
【0052】
磁気ヘッド61は、磁気テープ21に対してデータ信号を記録または再生している時、データバンド22の所定のトラックをトレースし、磁気ヘッド62はデータバンド23の所定のトラックをトレースし、磁気ヘッド63はデータバンド24の所定のトラックをトレースしている。以下の説明では、磁気ヘッド61〜63が、各データバンド22〜24における最上段のデータトラック22a〜24aをトレースしていることとして説明する。
【0053】
磁気テープ21が矢印Aに示す方向へ搬送される時、磁気ヘッド61は、データトラック22aをトレース中にサーボマーク16aを検出すると、サーボパターンを読み取る動作に切り換えられる。これにより、磁気ヘッド61は、サーボマーク16aに続くサーボパターン15a及び15bを読み取る。
【0054】
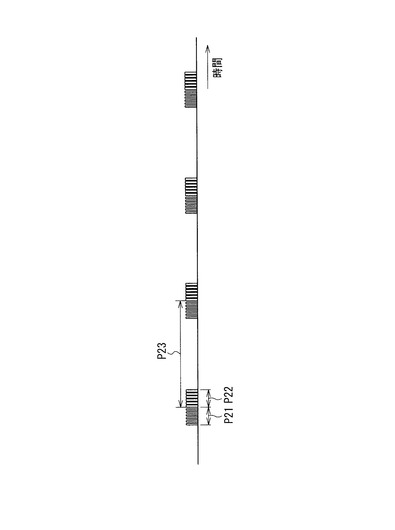
図3Bは、磁気ヘッド61によって読み取ったサーボパターンに基づき再生されたサーボ信号の波形を示す。磁気ヘッド61が、サーボパターン15bとサーボパターン15aとの中間部分をトレースしていれば、図3Bに示すようにサーボパターン15bから再生されたサーボ信号P21の出力レベルと、サーボパターン15aから再生されたサーボパターンP22の出力レベルとはほぼ同じになるが、磁気テープ21がLTM(Liner Tape
Motion)などが原因で磁気ヘッドユニット60に対してその幅方向(矢印CまたはDに
示す方向)に変位したり、温湿度膨張などによって幅方向に変形している場合は、サーボ信号P21の出力レベルとサーボ信号P22の出力レベルとは異なるレベルになる。ドライブ側では、図3Bに示すサーボ信号のレベルに基づいてオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット60を磁気テープ21の幅方向に移動させる。なお、磁気ヘッドユニット60を磁気テープ21の幅方向に移動させる動作は、オフトラック量を算出してから行うので、磁気ヘッドユニット60を移動させるタイミングは、読み取ったサーボパターン部15に続くデータトラックをトレースしている時である。
【0055】
磁気ヘッド61は、サーボパターン15a及び15bの読み取り後、シンクマーク16bを検出すると、再びデータ信号の記録動作または再生動作に切り換えられる。
【0056】
次に、磁気テープ21を所定距離搬送後に、磁気ヘッド62がデータトラック23aに形成されたサーボマーク16aを検出すると、サーボパターンを読み取る動作に切り換えられる。これにより、磁気ヘッド62は、データバンド23に形成されたサーボマーク16aに続くサーボパターン15b及び15aを読み取る。ドライブ側では、データバンド23に形成されたサーボパターン15a及び15bに基づくサーボ信号によってオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット60を磁気テープ21の幅方向に移動させる。
【0057】
さらに、磁気テープ21を所定距離搬送後に、磁気ヘッド63がデータトラック24aに形成されたサーボマーク16aを検出すると、サーボパターンを読み取る動作に切り換えられる。これにより、磁気ヘッド63は、データバンド24に形成されたサーボマーク16aに続くサーボパターン15b及び15aを読み取る。ドライブ側では、データバンド24に形成されたサーボパターン15a及び15bに基づくサーボ信号によってオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット60を磁気テープ21の幅方向に移動させる。
【0058】
以上の動作を繰り返すことで、所定時間毎(本実施の形態では50μm)に読み出されるサーボ信号により、トラッキングサーボを行うことができる。
【0059】
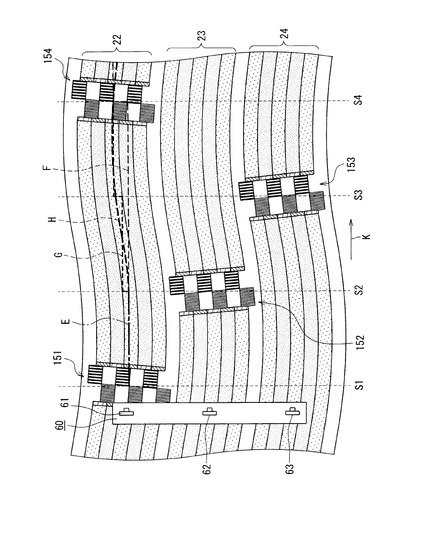
図3Cは、蛇行状に変形している磁気テープ21に対するトラッキングサーボの動作を
説明するための図である。なお、説明の便宜上、図3Cを参照した動作説明では、磁気テープ21が矢印K方向へ移動することとして説明する。また、図3Cにおいて、一点鎖線E,破線F,G,Hは、それぞれ磁気ヘッドユニット60の移動軌跡を表すためのものであり、磁気ヘッド61の移動軌跡を示す。
【0060】
まず、磁気ヘッドユニット60が図3Cに示す位置から矢印Kに示す方向へ移動し、位置S1まで移動すると、磁気ヘッド61はデータバンド22に形成されたサーボパターン部151のサーボパターンを読み取り、トラッキングサーボを行う。この時点では、磁気ヘッドユニット60は正規の位置をトレースしているので、トラッキングサーボによる磁気ヘッドユニット60の矢印CまたはDに示す方向への移動動作は生じない。よって、磁気ヘッドユニット60は、一点鎖線E上を移動する。
【0061】
次に、磁気ヘッドユニット60が位置S2まで移動すると、磁気ヘッド62はデータバンド23に形成されたサーボパターン部152のサーボパターンを読み取り、トラッキングサーボを行う。位置S2では、磁気テープ21にLTMが生じているため、正規の位置よりも矢印Cに示す方向へ変位している。したがって、磁気ヘッドユニット60と磁気テープ21との間にはオフトラックが生じている。磁気ヘッドユニット60は、ドライブ側で算出されたオフトラック量に基づき矢印Cに示す方向へ移動される。磁気ヘッドユニット60は、位置S2以降、理論上は破線Gに示す移動軌跡となるが、実際は磁気ヘッドユニット60を低速で矢印Cに示す方向へ移動させるため、破線Hに示す移動軌跡を辿ることになる。
【0062】
次に、磁気ヘッドユニット60が位置S3まで移動すると、磁気ヘッド63はデータバンド24に形成されたサーボパターン部153のサーボパターンを読み取り、トラッキングサーボを行う。位置S3は、磁気テープ21にLTMが生じているため、位置S2よりもさらに矢印Cに示す方向へ変位している。磁気ヘッドユニット60は、ドライブ側で算出されたオフトラック量に基づき矢印Cに示す方向へ移動される。
【0063】
次に、磁気ヘッドユニット60が位置S4まで移動すると、磁気ヘッド61はデータバンド22に形成されたサーボパターン部154のサーボパターンを読み取り、トラッキングサーボを行う。
【0064】
ここで、従来の磁気テープのようにサーボパターン部の間隔が広い場合(例えば、データバンド22に形成されているサーボパターンのみでトラッキングサーボを行う場合)は、磁気ヘッドユニット60は、破線F上を移動するため、磁気テープに対する追従性は低い。特に、位置S3とS4との間ではオフトラック量が最大となり、データ信号の書き込みエラーや読み取りエラーなどが生じてしまう可能性が高い。これに対して、本実施の形態の磁気テープでは、位置S1〜S4のそれぞれの間隔が狭いため、磁気ヘッドユニット60を破線H上を移動させることができ、磁気テープ21に対する追従性を向上させることができる。よって、データ信号の書き込みエラーや読み取りエラーなどが生じない。
【0065】
〔3.実施の形態の効果、他〕
本実施の形態によれば、バースト信号で構成されたサーボパターン部15を、磁気テープ21の長手方向に断続的に形成したデータバンド12に備えたことにより、LTM(蛇行状の変形)が発生して磁気テープ21の位置が幅方向に変動したとしても、サーボ信号の読み取り間隔が従来に比べて短いため、単位時間当たりのサーボ信号のサンプル数が多くなり、磁気テープ21に対する磁気ヘッドユニット60の追従性を向上させることができる。
【0066】
また、サーボパターン部15を磁気テープ21上の全てのデータバンド上に振り分けて
形成したことにより、例えば磁気テープ21の幅方向の寸法が温度や湿度の影響で変化した場合、再生されるサーボ出力が磁気ヘッドにより変化する。例えば磁気ヘッド61を基準として考えると、図3Bのサーボ出力は、
磁気ヘッド61のサーボ出力:P21=P22
磁気ヘッド62のサーボ出力:P21>P22
磁気ヘッド63のサーボ出力:P21>>P22
となる。このようなサーボ出力の変化を検出した場合、データ信号の記録再生を停止したり、或いは複数の磁気ヘッドで同時に記録再生する従来の方式から、1つの磁気ヘッドのみを使ってデータを記録再生する方法に切り替え、記録再生時のエラーを予防することが可能になる。
【0067】
また、各データバンド22〜24において、サーボパターン部15を所定の間隔P24毎に形成し、サーボパターン部15間にデータ信号を記録可能な構成としたことにより、1本の磁気テープ21におけるデータ信号の記録可能容量を大きくすることができる。例えば、図3Aに示すP25〜P27が図2Aに示すP14と同じ寸法であるため、記録可能容量は同等である。
【0068】
なお、本実施の形態では、サーボパターン部15の間隔P25〜P27のそれぞれを50μmとしたが、この数値は一例である。間隔P25〜P27のそれぞれを狭くすることで読み取られるサーボ信号のサンプル数を多くすることができるので、より追従性を向上させたトラッキングサーボを行うことができる。一方、サーボパターン部15の間隔P25〜P27のそれぞれを広くすることで、データバンド22〜24におけるデータ信号の記録可能容量を多く確保することができる。
【0069】
また、サーボマーク16a及びシンクマーク16bは、必ずしも形成する必要はない。サーボマーク16a及びシンクマーク16bは、データトラックとサーボパターンとの境界を検出するために形成されているものであるが、データトラックに記録されるデータ信号の周波数とサーボパターンの周波数とが異なる場合は、サーボマーク16a及びシンクマーク16bを形成しなくても境界を検出することができる。
【0070】
また、本実施の形態では、全てのデータバンドにサーボパターンを形成する構成としたが、必ずしも全てのデータバンドにサーボパターンを形成しなくてもよい。例えば、16本のデータバンドを備えた磁気テープの場合、奇数列及び偶数列のデータバンドのうちいずれか一方のデータバンドのみにサーボパターンを形成する構成であっても、本実施の形態と同様の効果を得ることができる。
【0071】
また、本実施の形態では、サーボパターン部15の間隔P25〜P27を均等間隔としたが、不等間隔であっても同様にトラッキングサーボを行うことができる。
【0072】
(実施の形態4)
〔1.磁気テープの基本構成〕
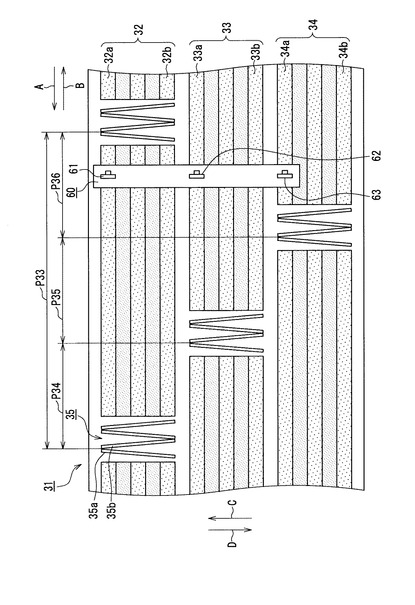
図4Aは、本実施の形態における磁気テープの構成を示す。図4Aにおいて、図3Aに示す構成と同様の構成については、同一番号を付与して詳細説明は省略する。図4Aに示すように、磁気テープ31は、その長手方向に複数のデータバンド32,33,34を備えている。また、磁気テープ31は、ドライブによって矢印AまたはBに示す方向へ搬送される。
【0073】
データバンド32は、複数のデータトラックと、サーボパターン部35とが形成されている。データトラックは、データ信号を記録可能な領域であり、本実施の形態では1つのデータバンドに5本のデータトラックを備えている。説明の便宜上、データバンド32,
33,34における上端及び下端のデータトラックのみに符号を付与した(符号32a、32b,33a,33b,34a,34b)。
【0074】
サーボパターン部35は、データバンド32〜34における所定位置に形成され、サーボパターン35a及び35bを備えている。サーボパターン35a及び35bは、磁気テープ31の長手方向に傾斜したストライプ状のパターンで形成され、略「ハ」の字状に形成されている。本実施の形態では、図示のように1つのサーボパターン部35に4本のサーボパターンを備えているが、これは一例である。また、サーボパターン部35は、データバンド32〜34のそれぞれにおいて、間隔P33毎に形成されている。また、データバンド33において、データバンド32に形成されたサーボパターン部35から磁気テープ31の長手方向に所定距離P34離れた位置に、サーボパターン部35が形成されている。また、データバンド34において、データバンド33に形成されたサーボパターン部35から磁気テープ31の長手方向に所定距離P35離れた位置に、サーボパターン部35が形成されている。また、データバンド32において、データバンド34に形成されたサーボパターン部35から磁気テープ31の長手方向に所定距離P36離れた位置に、サーボパターン35が形成されている。すなわち、データバンド32〜34には、それぞれP33の間隔でサーボパターン部35が形成され、その形成位置を互いに磁気テープ31の長手方向にずらして形成されている。なお、距離P34,P35,P36はそれぞれ同じ値であり、和が距離P33と一致するようにサーボパターン部35を形成している。本実施の形態では、距離P34,P35,P36はそれぞれ50μmとした。また、各サーボパターン部35の前後に、図3Aに示すようなサーボマーク及びシンクマークが形成されているが、説明の便宜上、図4Aにおける図示は省略した。
【0075】
なお、本実施の形態では、データバンド32,33,34には、それぞれ5本のデータトラックを形成する構成としたが、データバンドの本数、データトラックの本数はこれらに限定されない。
【0076】
〔2.トラッキングサーボの動作〕
本実施の形態におけるデータ信号の記録および再生の基本的な動作は、前述の実施の形態1から3のいずれかに記載の動作と同様であるため説明は省略し、トラッキングサーボの動作を中心に説明する。
【0077】
磁気ヘッド61は、磁気テープ31に対してデータ信号を記録または再生している時、データバンド32の所定のトラックをトレースし、磁気ヘッド62はデータバンド33の所定のトラックをトレースし、磁気ヘッド63はデータバンド34の所定のトラックをトレースしている。以下の説明では、磁気ヘッド61〜63が、各データバンド32〜34における最上段のデータトラックをトレースしていることとして説明する。
【0078】
磁気テープ31が矢印Aに示す方向へ搬送される時、磁気ヘッド61は、データトラック32aをトレース中にサーボマーク(図3A等参照)を検出すると、サーボパターンを読み取る動作に切り換えられる。これにより、磁気ヘッド61は、サーボマークに続くサーボパターン35a及び35bを読み取る。
【0079】
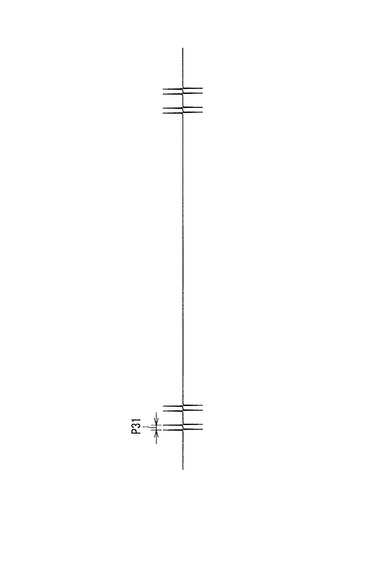
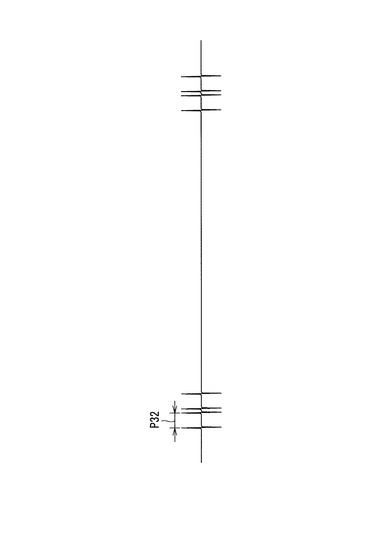
図4Bは、磁気ヘッド61がデータトラック32aをトレースしている時に再生されたサーボ信号の波形を示す。図4Cは、磁気ヘッド61がデータトラック32bをトレースしている時に再生されるサーボ信号の波形を示す。
【0080】
磁気ヘッド61が、データトラック32aの幅方向の中心をトレースしていれば、再生されるサーボ信号は図4Bに示すピーク間隔P31となる。このピーク間隔P31のサーボ信号を検出することで、磁気ヘッド61がデータトラック32aをトレースしているこ
とを検出することができる。一方、磁気ヘッド61が、データトラック32bの幅方向の中心をトレースしていれば、再生されるサーボ信号は図4Cに示すピーク間隔P32となる。このピーク間隔P32のサーボ信号を検出することで、磁気ヘッド61がデータトラック32bをトレースしていることを検出することができる。すなわち、サーボパターン35a及び35bは、略「ハ」の字状に形成されているため、データバンド32における各データトラックをトレースしている時に得られるサーボ信号のピーク間隔は、データトラック毎に異なる、ドライブ側では、サーボ信号のピーク間隔に基づいて、現在磁気ヘッド61がトレースしているデータトラックを特定することができる。
【0081】
また、磁気テープ31が、LTMなどが原因で磁気ヘッドユニット60に対してその幅方向(矢印CまたはDに示す方向)に変位したり、温湿度膨張などによって幅方向に変形している場合は、磁気ヘッド61とサーボパターン35a及び35bとのテープ幅方向の相対位置がずれるため、再生されるサーボ信号のピーク間隔が変動する。例えば、磁気ヘッド61がデータトラック32aをトレース中に、磁気テープ31が矢印Dに示す方向に変位した場合、磁気ヘッド61から得られるサーボ信号のピーク間隔は、ピーク間隔P31よりも小さくなる。一方、磁気テープ31が矢印Cに示す方向に変位した場合は、磁気ヘッド61から得られるサーボ信号のピーク間隔は、ピーク間隔P31よりも大きくなる。ドライブ側では、このようなサーボ信号のピーク間隔の変動に基づきオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット60を矢印CまたはDに示す方向へ移動させる。これにより、磁気ヘッド61,62,63を所定のデータトラックに追従させることができる。
【0082】
磁気ヘッド61は、サーボパターン部35の読み取り後、シンクマーク(図3A等参照)を検出すると、再びデータ信号の記録動作または再生動作に切り換えられる。
【0083】
次に、磁気テープ31を所定距離(距離P34に相当)搬送後に、磁気ヘッド62がデータバンド33に形成されたサーボパターン35a及び35bを読み取る。ドライブ側では、データバンド33に形成されたサーボパターン35a及び35bに基づくサーボ信号によってオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット60を磁気テープ31の幅方向に移動させる。
【0084】
さらに、磁気テープ31を所定距離(距離P35に相当)搬送後に、磁気ヘッド63がデータバンド34に形成されたサーボパターン35a及び35bを読み取る。ドライブ側では、データバンド34に形成されたサーボパターン35a及び35bに基づくサーボ信号によってオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット60を磁気テープ31の幅方向に移動させる。
【0085】
以上の動作を繰り返すことで、所定時間毎(本実施の形態では50μm)に読み出されるサーボ信号により、トラッキングサーボを行うことができる。
【0086】
〔3.実施の形態の効果、他〕
本実施の形態によれば、タイムベースサーボ方式のサーボ信号で構成されたサーボパターン部35を、磁気テープ31の長手方向に断続的に形成したデータバンド32に備えたことにより、LTM(蛇行状の変形)が発生して磁気テープ31の位置が幅方向に変動したとしても、サーボ信号の読み取り間隔が従来に比べて短いため、単位時間当たりのサーボ信号のサンプル数が多くなり、磁気テープ31に対する磁気ヘッドユニット60の追従性を向上させることができる。
【0087】
また、本実施の形態によれば、磁気テープ31のサーボ信号の出力レベルが低下しても、サーボエラーが生じにくく、安定したトラッキングサーボを実行することができる。す
なわち、磁気テープは、主に磁性層の厚みの変動が原因で、サーボ信号の出力レベルに変動が生じやすいが、本実施の形態のようにサーボ信号の出力波形の有無のみを検出する構成とすることにより、たとえサーボ信号の出力レベルが低下したとしてもサーボエラーが生じにくい。
【0088】
また、サーボパターン部35を磁気テープ31上の全てのデータバンド上に振り分けて形成したことにより、例えば磁気テープ31の幅方向の寸法が温度や湿度の影響で変化した場合、再生されるサーボ出力が磁気ヘッドにより変化する。例えば、磁気ヘッド61から得られるサーボ信号のピーク間隔(図4BのP31に相当するもの)をP31A、磁気ヘッド62から得られるサーボ信号のピーク間隔をP31B、磁気ヘッド63から得られるサーボ信号のピーク間隔をP31Cとし、磁気ヘッド61を基準として考えると、各磁気ヘッドから得られるサーボ信号のピーク間隔は、
P31A<P31B<P31C
となる。このようなサーボ信号のピーク間隔の変化を検出した場合、データ信号の記録再生を停止したり、或いは複数の磁気ヘッドで同時に記録再生する従来の方式から、1つの磁気ヘッドのみを使ってデータを記録再生する方法に切り替え、記録再生時のエラーを予防することが可能になる。
【0089】
なお、本実施の形態では、サーボパターン部35の間隔P34〜P36のそれぞれを50μmとしたが、この数値は一例である。間隔P34〜P36のそれぞれを狭くすることで読み取られるサーボ信号のサンプル数を多くすることができるので、より追従性を向上させたトラッキングサーボを行うことができる。一方、サーボパターン部35の間隔P34〜P36のそれぞれを広くすることで、データバンド32〜34におけるデータ信号の記録可能容量を多く確保することができる。
【0090】
また、本実施の形態では、全てのデータバンドにサーボパターンを形成する構成としたが、必ずしも全てのデータバンドにサーボパターンを形成しなくてもよい。例えば、16本のデータバンドを備えた磁気テープの場合、奇数列及び偶数列のデータバンドのうちいずれか一方のデータバンドのみにサーボパターンを形成する構成であっても、本実施の形態と同様の効果を得ることができる。
【産業上の利用可能性】
【0091】
本発明の磁気テープは、サーボパターンが形成されている磁気テープに有用である。
【符号の説明】
【0092】
1,11,21 磁気テープ
2 サーボバンド
3,4,12,22,23,24 データバンド
15 サーボパターン部
15a,15b,15c,15d,15e,15f サーボパターン
【技術分野】
【0001】
本発明は、少なくともサーボパターンが形成された磁気テープに関する。
【背景技術】
【0002】
磁気テープは、オーディオテープ、ビデオテープ、コンピューターテープなど様々な用途があるが、特にコンピューターのデータバックアップに使用されるデータバックアップ用テープの分野では、バックアップ対象となるハードディスクの大容量化に伴い、1巻当たり数百GBの記憶容量のものが商品化されている。今後、ハードディスクのさらなる大容量化に対応するため、バックアップテープの高容量化は不可欠である。
【0003】
磁気テープの高容量化に伴い、磁気テープに対する高密度記録が必要となる。高密度記録の一例として、データの記録波長を短波長化して磁気テープに記録する技術(短波長化技術)や、磁気テープに記録されるトラック幅を狭幅化して記録する技術(狭トラック化技術)がある。
【0004】
また、磁気ヘッドを目標トラックに正確に追従させるために、磁気テープには予めサーボ信号が記録されている。例えば、LTO(Liner Tape Open)規格に準拠した磁気テー
プは、図5Aに示すように、磁気テープ101の長手方向に複数のデータバンド103が形成され、各データバンド103の間にサーボバンド102が形成されている。データバンド103にはデータ信号を記録することができ、サーボバンド102には予めサーボライター等によりサーボ信号が記録されている。図5Bは、図5AにおけるZ部の拡大図である。図5Bに示すように、サーボバンド102は、略「ハ」の字状のサーボパターンが複数形成されている。LTO規格では、磁気テープ101の長手方向に対して第1の方向に傾斜した5本のサーボパターンで構成された第1のサーボパターン群102aと、第1の方向に相対する第2の方向に傾斜した5本のサーボパターンで構成された第2のサーボパターン群102bと、第1の方向に傾斜した4本のサーボパターンで構成された第3のサーボパターン群102cと、第2の方向に傾斜した4本のサーボパターンで構成された第4のサーボパターン群102dとで、1つのサーボフレームを構成している。1つのサーボフレームは、200μmの長さを有する。
【0005】
このような磁気テープ101をドライブで再生する際、データバンド103に記録されているデータ信号をデータヘッドで読み出すとともに、サーボバンド102に記録されているサーボ信号をサーボヘッドで読み出すことにより、磁気ヘッドを磁気テープ101上の目標トラック上に正確に位置決めしながら、データ信号を読み出すことができる。なお、トラッキングサーボを行う際は、1つのサーボフレームのサーボ信号を読み出してから、磁気ヘッドの位置決め制御量を更新する。すなわち、磁気テープ101を200μm走行させる毎に磁気ヘッドの位置を修正する。
【0006】
例えば特許文献1には、磁気テープ上にサーボ信号を磁気記録または再生する構成が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−056500号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら図5A及び図5Bに示す構成では、1つのサーボフレームが200μmの長さを有するため、単位時間当たりのサーボ信号のサンプル数が少なく、磁気テープに対する磁気ヘッドの追従性が低いという問題があった。特に、磁気テープが、温度や湿度な
どの影響により幅方向に変形している場合は、磁気テープに対する磁気ヘッドの追従性が大幅に低下してしまう。
【0009】
本発明の目的は、温度や湿度などによって変形したとしても、磁気ヘッドの追従を安定して行うことができる磁気テープを提供することである。
【課題を解決するための手段】
【0010】
本発明の磁気テープは、データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、トラッキングサーボを行うためのサーボパターンを備え、前記サーボパターンは、前記複数のデータバンドのうちの少なくとも一つのデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成されている。
【0011】
本発明の磁気テープの第1の構成は、データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、バースト信号で構成されたサーボパターンを備え、前記サーボパターンは。前記複数のデータバンドのうちの一つのデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成されているものである。
【0012】
本発明の磁気テープの第2の構成は、データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、バースト信号で構成されたサーボパターンを備え、前記サーボパターンは、前記複数のデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成され、当該磁気テープの長手方向における位置を、前記データバンド毎に互いに異ならせて形成されているものである。
【0013】
本発明の磁気テープの第3の構成は、データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、当該磁気テープの長手方向に傾斜して形成されたストライプ状のサーボパターンを備え、前記サーボパターンは、前記複数のデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成され、当該磁気テープの長手方向における位置を前記データバンド毎に互いに異ならせて形成されているものである。
【発明の効果】
【0014】
本発明によれば、温度や湿度などによって変形したとしても、磁気ヘッドの追従を安定して行うことができる。
【図面の簡単な説明】
【0015】
【図1A】実施の形態1における磁気テープの構成を示す平面図
【図1B】実施の形態1における磁気テープに記録されたサーボ信号の波形図
【図1C】オフトラックが生じている時のサーボ信号の波形図
【図2A】実施の形態2における磁気テープの構成を示す平面図
【図2B】実施の形態2における磁気テープに記録されたサーボ信号の波形図
【図3A】実施の形態3における磁気テープの構成を示す平面図
【図3B】実施の形態3における磁気テープに記録されたサーボ信号の波形図
【図3C】実施の形態3においてLTMが生じた磁気テープのトラッキングサーボを説明するための図
【図4A】実施の形態4における磁気テープの構成を示す平面図
【図4B】実施の形態4における磁気テープに記録されたサーボ信号の波形図
【図4C】実施の形態4における磁気テープに記録されたサーボ信号の波形図
【図5A】従来の磁気テープの構成を示す平面図
【図5B】従来の磁気テープにおけるサーボパターンの構成を示す模式図
【発明を実施するための形態】
【0016】
(実施の形態)
〔1.磁気テープの基本構成〕
図1Aは、実施の形態1における磁気テープの記録面の構成を示す。図1Aに示すように、磁気テープ1は、その長手方向にサーボバンド2とデータバンド3及び4とを備えている。サーボバンド2とデータバンド3とデータバンド4とは、互いに平行に形成されている。また、磁気テープ1は、ドライブによって矢印AまたはBに示す方向へ搬送される。
【0017】
サーボバンド2は、磁気テープ1の幅方向上端に形成され、複数のサーボトラック2a〜2fから構成されている。サーボトラック2a〜2fは、磁気テープ1の幅方向に互いに平行に並んで形成されている。サーボトラック2a,2c,2eはそれぞれ同じ周波数のバースト信号で構成されたサーボパターンで構成され、サーボトラック2b,2d,2fはそれぞれ同じ周波数のバースト信号で構成されたサーボパターンで構成されている。サーボトラック2a,2c,2eとサーボトラック2b,2d,2fとは、互いに異なる周波数のサーボパターンで構成されている。また、サーボトラック2a〜2fを構成しているサーボパターンは、磁気テープ1の長手方向に千鳥状に配列されている。このような
サーボパターンをサーボヘッド51で読み取る際は、2つのサーボトラック間をトレースさせるため、サーボヘッド51から得られるサーボ信号は図1Bに示すように連続的となる。よって、サーボパターンは、磁気テープ1の長手方向に連続的に形成されていると解釈することができる。
【0018】
データバンド3及び4は、磁気ヘッドユニット50によってデータ信号を記録可能な領域である。データバンド3にデータ信号を記録すると、複数のデータトラック3a〜3eが形成される。データトラック3a〜3eは、磁気テープ1の幅方向に互いに平行に並んで形成される。また、データバンド4にデータ信号を記録すると、複数のデータトラック4a〜4eが形成される。データトラック4a〜4eは、磁気テープ1の幅方向に互いに平行に並んで形成される。
【0019】
なお、本実施の形態では、データバンド3及び4には、それぞれ5本のデータトラックが形成される構成としたが、データバンドの本数、データトラックの本数はこれらに限定されない。また、サーボトラックの本数は6本としたが、この数には限定されない。サーボトラックの本数は、データトラックの本数をn本とした時、(n+1)本で構成すれば本実施の形態を実現することができる。また、サーボバンド2は、磁気テープ1の幅方向上端としたが、データバンド3とデータバンド4とに挟まれた位置など、他の位置に配置してもよい。
【0020】
磁気ヘッドユニット50は、サーボヘッド51と、データヘッド52及び53とを備えている。サーボヘッド51は、磁気テープ1のサーボバンド2に形成されているサーボパターン2a〜2fを読み取ることができる。データヘッド52は、データバンド3にデータ信号を記録することができるとともに、データバンド3に記録されているデータ信号を読み取ることができる。データヘッド53は、データバンド4にデータ信号を記録することができるとともに、データバンド4に記録されているデータ信号を読み取ることができる。
【0021】
〔2.記録再生動作〕
磁気テープ1にデータ信号を記録する場合は、磁気テープ1を矢印AまたはBに示す方向に搬送させながら、サーボヘッド51,データヘッド52及び53に通電を行う。これにより、サーボヘッド51でサーボパターン2a〜2fを選択的に読み取ってトラッキングサーボを行いながら、データヘッド52でデータバンド3にデータ信号を記録し、データヘッド53でデータバンド4にデータ信号を記録する。
【0022】
磁気テープ1に記録されたデータ信号を再生する場合は、磁気テープ1を矢印AまたはBに示す方向に搬送させながら、サーボヘッド51,データヘッド52及び53に通電を行う。これにより、サーボヘッド51でサーボパターン2a〜2fを選択的に読み取ってトラッキングサーボを行いながら、データヘッド52でデータバンド3に記録されたデータ信号を読み取り、データヘッド53でデータバンド4に記録されたデータ信号を読み取る。
【0023】
〔3.トラッキングサーボの動作〕
磁気ヘッドユニット50を磁気テープ1に対してトラッキングサーボを行う際は、まずサーボヘッド51でサーボパターン2a〜2fのいずれかを読み取る。例えば、データヘッド52をデータトラック3aにオントラックさせ、データヘッド53をデータトラック4aにオントラックさせる場合は、サーボヘッド51をサーボトラック2aとサーボトラック2bとの間をトレースさせ、サーボトラック2aのサーボパターンとサーボトラック2bのサーボパターンとを読み取る。
【0024】
図1Bは、サーボヘッド51によって再生されたサーボ信号の波形を示す。サーボヘッド51が、サーボトラック2aとサーボトラック2bとの中間部分をトレースしていれば、図1Bに示すようにサーボトラック2aから再生されたサーボ信号P2の出力レベルと、サーボトラック2bから再生されたサーボ信号P1の出力レベルとはほぼ同じになるが、磁気テープ1がLTM(Liner Tape Motion)などによって幅方向(矢印CまたはDに
示す方向)に変位し、磁気ヘッドユニット50と磁気テープ1との相対位置がずれている場合は、サーボ信号P1の出力レベルとサーボ信号P2の出力レベルとは異なる出力レベルになる。例えば、磁気ヘッドユニット50が正規の位置から矢印Cに示す方向に変位している場合は、図1Cに示すようにサーボトラック2aから再生されるサーボ信号P2の出力レベルが高くなり、サーボトラック2bから再生されるサーボ信号P1の出力レベルが低くなる。
【0025】
ドライブ側では、図1Cに示すサーボ信号のレベルに基づいてオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット50を磁気テープ1の幅方向に移動させるよう制御している。
【0026】
このように、サーボパターン2a及び2bを読み取りながらトラッキングサーボを行うことで、データヘッド52をデータトラック3aにオントラックさせることができ、データヘッド53をデータトラック4aにオントラックさせることができる。
【0027】
同様に、データヘッド52をデータトラック3bにオントラックさせ、データヘッド53をデータトラック4bにオントラックさせる場合は、磁気テープ1を矢印Bに示す方向へ搬送させ、サーボヘッド51でサーボトラック2b及び2cのサーボパターンを読み取って、トラッキングサーボを行う。データトラック3c,3d,3e,4c,4d,4eについても上記と同様にトラッキングサーボを行うことで、それぞれデータヘッド52及び53をオントラックさせることができる。
【0028】
〔4.実施の形態の効果、他〕
本実施の形態によれば、バースト信号で構成されたサーボパターンを配置したサーボバンド2を備えたことにより、磁気テープ1にLTM(蛇行状の変形)が発生していたとしても、サーボパターンの読み取り間隔が従来に比べて短いため、単位時間当たりのサーボ信号のサンプル数が多くなり、磁気ヘッドユニット50の追従性を向上させることができる。
【0029】
また、本実施の形態において磁気テープ1の記録領域全体に対するサーボバンド2が占める面積は、図5Aに示す従来の磁気テープと比べて大差が無いため、データ信号を記録可能な領域の面積が従来に比べて少なくなることはなく、データ信号の記録可能容量も従来と同等に確保することができる。
【0030】
(実施の形態2)
〔1.磁気テープの基本構成〕
図2Aは、実施の形態2における磁気テープの記録面の構成を示す。なお、図2Aに示す構成において、図1Aに示す構成と同様の構成については、同一番号を付与して詳しい説明は省略する。
【0031】
図2Aに示すように、磁気テープ11は、その長手方向に複数のデータバンド3,4,12を備えている。また、磁気テープ11は、ドライブによって矢印AまたはBに示す方向へ搬送される。
【0032】
データバンド12は、データトラック12a〜12eと、サーボパターン部15と、サ
ーボマーク16aと、シンクマーク16bとを備えている。データトラック12a〜12eは、データ信号を記録可能な領域であり、本実施の形態では5本形成されている。サーボパターン部15は、磁気テープ11の長手方向の所定間隔毎に形成され、千鳥状に配置した6個のサーボパターン15a〜15fから構成されている。また、サーボパターン15a〜15fは、バースト信号で構成されたパターンである。サーボマーク16a及びシンクマーク16aは、サーボパターン部15において磁気テープ11の長手方向の前後に形成されている。サーボマーク16aは、サーボパターン部15の開始位置であることを示す情報が含まれている。シンクマーク16bは、データトラック12a〜12eの開始位置であることを示す情報が含まれている。本実施の形態では、磁気テープ11にデータ信号を記録または磁気テープ11からデータ信号を再生する際、磁気テープ11を矢印AまたはBに示す方向に往復搬送させるため、データトラック12a,12c,12eとデータトラック12b,12dとではサーボマーク16a及びシンクマーク16bの形成位置が異なる。なお、本明細書において「データバンド」とは、1つの磁気ヘッドでデータ信号を記録再生できる領域のことである。
【0033】
なお、本実施の形態では、サーボパターン部15の間隔P14は、例えば50μmとした。また、データバンド3,4,12には、それぞれ5本のデータトラックを形成する構成としたが、データバンドの本数、データトラックの本数はこれらに限定されない。また、1つのサーボパターン部15におけるサーボパターンの個数は6個としたが、この数には限定されない。1つのサーボパターン部15におけるサーボパターンの個数は、データトラックの本数をn本とした時、(n+1)個で構成すれば本実施の形態を実現することができる。
【0034】
磁気ヘッドユニット50は、図1Aに示すサーボヘッド51に代えて磁気ヘッド54を備えている。磁気ヘッド54は、磁気テープ11に形成されているサーボパターンを読み取ることができ、磁気テープ11のデータトラック12a〜12eにデータ信号を記録することができ、磁気テープ11のデータトラック12a〜12eに記録されているデータ信号を読み取ることができる。
【0035】
〔2.トラッキングサーボの動作〕
本実施の形態におけるデータ信号の記録および再生の基本的な動作は、前述の実施の形態1に記載と同様であるため説明は省略し、トラッキングサーボの動作を中心に説明する。
【0036】
磁気テープ11が矢印Aに示す方向へ搬送され、磁気テープ11に対してデータ信号を記録または再生している時、磁気ヘッド54はデータバンド12の所定のデータトラックをトレースしている。この時、磁気ヘッド54は、トレース中にサーボマーク16aを検出すると、サーボパターンを読み取る動作に切り換えられる。これにより、磁気ヘッド54は、サーボマーク16aに続くサーボパターンを読み取る。例えば、磁気テープ11が矢印A方向に搬送され、磁気ヘッド54がデータトラック12aをトレースしている場合は、サーボパターン15b及び15aを読み取る。
【0037】
図2Bは、磁気ヘッド54によって読み取ったサーボパターンに基づき再生されたサーボ信号の波形を示す。磁気ヘッド54が、サーボパターン15aとサーボパターン15bとの中間部分をトレースしていれば、図2Bに示すようにサーボパターン15bから再生されたサーボ信号P11の出力レベルと、サーボパターン15aから再生されたサーボパターンP12の出力レベルとはほぼ同じになるが、磁気テープ11がLTM(Liner Tape
Motion)などが原因で磁気ヘッドユニット50に対してその幅方向(矢印CまたはDに
示す方向)に変位している場合は、サーボ信号P11の出力レベルとサーボ信号P12の出力レベルとは異なるレベルになる。ドライブ側では、図2Bに示すサーボ信号の出力レ
ベルに基づいてオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット50を磁気テープ11の幅方向に移動させる。なお、磁気ヘッドユニット50を磁気テープ11の幅方向に移動させる動作は、オフトラック量を算出してから行うので、磁気ヘッドユニット50を移動させるタイミングは、読み取ったサーボパターン部15に続くデータトラックをトレースしている時である。
【0038】
磁気ヘッド54は、サーボパターン15a及び15bの読み取り後、シンクマーク16bを検出すると、再びデータ信号の記録動作または再生動作に切り換えられる。これにより、磁気ヘッド54は、データトラック12aにデータ信号を記録またはデータトラック12aに記録されたデータ信号を再生することができる。なお、データヘッド52及び53は、磁気ヘッド54の動作状態の切り換えに関係なく、データ信号の記録動作または再生動作を継続して行っている。
【0039】
このように、サーボパターン15a及び15bを読み取ってトラッキングサーボを行うことで、磁気ヘッドユニット50を磁気テープ11上の正規の位置をトレースさせることができる。
【0040】
同様に、磁気ヘッド54をデータトラック12bにトレースさせる場合は、磁気ヘッドユニット50を矢印Dに示す方向へ僅かに移動させ、磁気テープ11を矢印Bに示す方向へ搬送させる。磁気ヘッド54は、データトラック12b上に形成されたサーボマーク16aを検出すると、サーボ信号の再生動作に切り換えられる。これにより、磁気ヘッド54は、サーボマーク16aに続くサーボパターン15c及び15bを読み取り、トラッキングサーボを行う。次に、磁気ヘッド54は、シンクマーク16bを検出すると再びデータ信号の記録動作または再生動作に切り換えられ、シンクマーク16bに続くデータトラック12bにデータ信号を記録、またはデータトラック12bに記録されたデータ信号を再生する。
【0041】
〔3.実施の形態の効果、他〕
本実施の形態によれば、データバンド12に、バースト信号を千鳥配置して構成されたサーボパターン部15を所定間隔P14毎に形成したことにより、LTM(蛇行状の変形)が発生して磁気テープ11の位置が幅方向に変動したとしても、サーボ信号の読み取り間隔が従来に比べて短いため、単位時間当たりのサーボ信号のサンプル数が多くなり、磁気テープ11に対する磁気ヘッドユニット50の追従性を向上させることができる。
【0042】
また、サーボパターン部15を所定間隔P14毎に形成し、サーボパターン部15間にデータ信号を記録可能な構成としたことにより、1本の磁気テープ11におけるデータ信号の記録可能容量を大きくすることができる。
【0043】
なお、本実施の形態では、サーボパターン部15の間隔P14を50μmとしたが、この数値は一例である。間隔P14を狭くすることで磁気ヘッド54でサーボ信号のサンプル数を多くすることができるので、より追従性を向上させたトラッキングサーボを行うことができる。一方、サーボパターン部15の間隔P14を広くすることで、データバンド12におけるデータ信号の記録可能容量を多くすることができる。
【0044】
また、サーボマーク16a及びシンクマーク16bは、必ずしも形成する必要はない。サーボマーク16a及びシンクマーク16bは、データトラックとサーボパターンとの境界を検出するために形成されているものであるが、データトラックに記録されるデータ信号の周波数とサーボパターンの周波数とが異なる場合は、サーボマーク16a及びシンクマーク16bを形成しなくても境界を検出することができる。
【0045】
(実施の形態3)
〔1.磁気テープの基本構成〕
図3Aは、実施の形態3における磁気テープの記録面の構成を示す。なお、図3Aに示す構成において、図2Aに示す構成と同様の構成については、同一番号を付与して詳しい説明は省略する。
【0046】
図3Aに示すように、磁気テープ21は、その長手方向に複数のデータバンド22,23,24を備えている。また、磁気テープ21は、ドライブによって矢印AまたはBに示す方向へ搬送される。
【0047】
データバンド22は、複数のデータトラック(便宜上、1つのデータトラックに符号22aのみ付与した)と、サーボパターン部15と、サーボマーク16aと、シンクマーク16bとから構成されている。データトラックは、データ信号を記録可能な領域であり、本実施の形態では5本形成されている。サーボパターン部15に含まれるサーボパターン15a〜15fは、バースト信号で構成されたパターンである。図中の符号付与は省略するが、データバンド23及び24にもデータバンド22と同様に、データトラック、サーボパターン部15、サーボマーク16a、シンクマーク16bを備えている。
【0048】
本実施の形態では、サーボパターン部15の形成位置に特徴がある。具体的には、まずデータバンド22〜24のそれぞれには、間隔P24毎にサーボパターン部15が形成されている。また、データバンド23において、データバンド22に形成されたサーボパターン部15から磁気テープ21の長手方向に所定距離P25離れた位置に、サーボパターン部15が形成されている。また、データバンド24において、データバンド23に形成されたサーボパターン部15から磁気テープ21の長手方向に所定距離P26離れた位置に、サーボパターン部15が形成されている。また、データバンド22において、データバンド24に形成されたサーボパターン部15から磁気テープ21の長手方向に所定距離P27離れた位置に、サーボパターン15が形成されている。すなわち、データバンド22〜24には、それぞれ距離P24の間隔でサーボパターン部15が形成され、その形成位置を互いに磁気テープ21の長手方向にずらして形成されている。なお、距離P25,P26,P27はそれぞれ同じ値であり、和が距離P24と一致するようにサーボパターン部15を形成している。本実施の形態では、距離P25,P26,P27はそれぞれ50μmとした。
【0049】
なお、本実施の形態では、データバンド22,23,24には、それぞれ5本のデータトラックを形成する構成としたが、データバンドの本数、データトラックの本数はこれらに限定されない。また、1つのサーボパターン部15におけるサーボパターンの個数は6個としたが、この数には限定されない。1つのサーボパターン部15におけるサーボパターンの個数は、データトラックの本数をn本とした時、(n+1)個で構成すれば本実施の形態を実現することができる。
【0050】
磁気ヘッドユニット60は、3個の磁気ヘッド61,62,63を備えている。磁気ヘッド61,62,63は、それぞれサーボパターンを読み取ることができ、データトラックにデータ信号を記録することができ、データトラックに記録されているデータ信号を読み取ることができる。
【0051】
〔2.トラッキングサーボの動作〕
本実施の形態におけるデータ信号の記録および再生の基本的な動作は、前述の実施の形態1または2に記載と同様であるため説明は省略し、トラッキングサーボの動作を中心に説明する。
【0052】
磁気ヘッド61は、磁気テープ21に対してデータ信号を記録または再生している時、データバンド22の所定のトラックをトレースし、磁気ヘッド62はデータバンド23の所定のトラックをトレースし、磁気ヘッド63はデータバンド24の所定のトラックをトレースしている。以下の説明では、磁気ヘッド61〜63が、各データバンド22〜24における最上段のデータトラック22a〜24aをトレースしていることとして説明する。
【0053】
磁気テープ21が矢印Aに示す方向へ搬送される時、磁気ヘッド61は、データトラック22aをトレース中にサーボマーク16aを検出すると、サーボパターンを読み取る動作に切り換えられる。これにより、磁気ヘッド61は、サーボマーク16aに続くサーボパターン15a及び15bを読み取る。
【0054】
図3Bは、磁気ヘッド61によって読み取ったサーボパターンに基づき再生されたサーボ信号の波形を示す。磁気ヘッド61が、サーボパターン15bとサーボパターン15aとの中間部分をトレースしていれば、図3Bに示すようにサーボパターン15bから再生されたサーボ信号P21の出力レベルと、サーボパターン15aから再生されたサーボパターンP22の出力レベルとはほぼ同じになるが、磁気テープ21がLTM(Liner Tape
Motion)などが原因で磁気ヘッドユニット60に対してその幅方向(矢印CまたはDに
示す方向)に変位したり、温湿度膨張などによって幅方向に変形している場合は、サーボ信号P21の出力レベルとサーボ信号P22の出力レベルとは異なるレベルになる。ドライブ側では、図3Bに示すサーボ信号のレベルに基づいてオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット60を磁気テープ21の幅方向に移動させる。なお、磁気ヘッドユニット60を磁気テープ21の幅方向に移動させる動作は、オフトラック量を算出してから行うので、磁気ヘッドユニット60を移動させるタイミングは、読み取ったサーボパターン部15に続くデータトラックをトレースしている時である。
【0055】
磁気ヘッド61は、サーボパターン15a及び15bの読み取り後、シンクマーク16bを検出すると、再びデータ信号の記録動作または再生動作に切り換えられる。
【0056】
次に、磁気テープ21を所定距離搬送後に、磁気ヘッド62がデータトラック23aに形成されたサーボマーク16aを検出すると、サーボパターンを読み取る動作に切り換えられる。これにより、磁気ヘッド62は、データバンド23に形成されたサーボマーク16aに続くサーボパターン15b及び15aを読み取る。ドライブ側では、データバンド23に形成されたサーボパターン15a及び15bに基づくサーボ信号によってオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット60を磁気テープ21の幅方向に移動させる。
【0057】
さらに、磁気テープ21を所定距離搬送後に、磁気ヘッド63がデータトラック24aに形成されたサーボマーク16aを検出すると、サーボパターンを読み取る動作に切り換えられる。これにより、磁気ヘッド63は、データバンド24に形成されたサーボマーク16aに続くサーボパターン15b及び15aを読み取る。ドライブ側では、データバンド24に形成されたサーボパターン15a及び15bに基づくサーボ信号によってオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット60を磁気テープ21の幅方向に移動させる。
【0058】
以上の動作を繰り返すことで、所定時間毎(本実施の形態では50μm)に読み出されるサーボ信号により、トラッキングサーボを行うことができる。
【0059】
図3Cは、蛇行状に変形している磁気テープ21に対するトラッキングサーボの動作を
説明するための図である。なお、説明の便宜上、図3Cを参照した動作説明では、磁気テープ21が矢印K方向へ移動することとして説明する。また、図3Cにおいて、一点鎖線E,破線F,G,Hは、それぞれ磁気ヘッドユニット60の移動軌跡を表すためのものであり、磁気ヘッド61の移動軌跡を示す。
【0060】
まず、磁気ヘッドユニット60が図3Cに示す位置から矢印Kに示す方向へ移動し、位置S1まで移動すると、磁気ヘッド61はデータバンド22に形成されたサーボパターン部151のサーボパターンを読み取り、トラッキングサーボを行う。この時点では、磁気ヘッドユニット60は正規の位置をトレースしているので、トラッキングサーボによる磁気ヘッドユニット60の矢印CまたはDに示す方向への移動動作は生じない。よって、磁気ヘッドユニット60は、一点鎖線E上を移動する。
【0061】
次に、磁気ヘッドユニット60が位置S2まで移動すると、磁気ヘッド62はデータバンド23に形成されたサーボパターン部152のサーボパターンを読み取り、トラッキングサーボを行う。位置S2では、磁気テープ21にLTMが生じているため、正規の位置よりも矢印Cに示す方向へ変位している。したがって、磁気ヘッドユニット60と磁気テープ21との間にはオフトラックが生じている。磁気ヘッドユニット60は、ドライブ側で算出されたオフトラック量に基づき矢印Cに示す方向へ移動される。磁気ヘッドユニット60は、位置S2以降、理論上は破線Gに示す移動軌跡となるが、実際は磁気ヘッドユニット60を低速で矢印Cに示す方向へ移動させるため、破線Hに示す移動軌跡を辿ることになる。
【0062】
次に、磁気ヘッドユニット60が位置S3まで移動すると、磁気ヘッド63はデータバンド24に形成されたサーボパターン部153のサーボパターンを読み取り、トラッキングサーボを行う。位置S3は、磁気テープ21にLTMが生じているため、位置S2よりもさらに矢印Cに示す方向へ変位している。磁気ヘッドユニット60は、ドライブ側で算出されたオフトラック量に基づき矢印Cに示す方向へ移動される。
【0063】
次に、磁気ヘッドユニット60が位置S4まで移動すると、磁気ヘッド61はデータバンド22に形成されたサーボパターン部154のサーボパターンを読み取り、トラッキングサーボを行う。
【0064】
ここで、従来の磁気テープのようにサーボパターン部の間隔が広い場合(例えば、データバンド22に形成されているサーボパターンのみでトラッキングサーボを行う場合)は、磁気ヘッドユニット60は、破線F上を移動するため、磁気テープに対する追従性は低い。特に、位置S3とS4との間ではオフトラック量が最大となり、データ信号の書き込みエラーや読み取りエラーなどが生じてしまう可能性が高い。これに対して、本実施の形態の磁気テープでは、位置S1〜S4のそれぞれの間隔が狭いため、磁気ヘッドユニット60を破線H上を移動させることができ、磁気テープ21に対する追従性を向上させることができる。よって、データ信号の書き込みエラーや読み取りエラーなどが生じない。
【0065】
〔3.実施の形態の効果、他〕
本実施の形態によれば、バースト信号で構成されたサーボパターン部15を、磁気テープ21の長手方向に断続的に形成したデータバンド12に備えたことにより、LTM(蛇行状の変形)が発生して磁気テープ21の位置が幅方向に変動したとしても、サーボ信号の読み取り間隔が従来に比べて短いため、単位時間当たりのサーボ信号のサンプル数が多くなり、磁気テープ21に対する磁気ヘッドユニット60の追従性を向上させることができる。
【0066】
また、サーボパターン部15を磁気テープ21上の全てのデータバンド上に振り分けて
形成したことにより、例えば磁気テープ21の幅方向の寸法が温度や湿度の影響で変化した場合、再生されるサーボ出力が磁気ヘッドにより変化する。例えば磁気ヘッド61を基準として考えると、図3Bのサーボ出力は、
磁気ヘッド61のサーボ出力:P21=P22
磁気ヘッド62のサーボ出力:P21>P22
磁気ヘッド63のサーボ出力:P21>>P22
となる。このようなサーボ出力の変化を検出した場合、データ信号の記録再生を停止したり、或いは複数の磁気ヘッドで同時に記録再生する従来の方式から、1つの磁気ヘッドのみを使ってデータを記録再生する方法に切り替え、記録再生時のエラーを予防することが可能になる。
【0067】
また、各データバンド22〜24において、サーボパターン部15を所定の間隔P24毎に形成し、サーボパターン部15間にデータ信号を記録可能な構成としたことにより、1本の磁気テープ21におけるデータ信号の記録可能容量を大きくすることができる。例えば、図3Aに示すP25〜P27が図2Aに示すP14と同じ寸法であるため、記録可能容量は同等である。
【0068】
なお、本実施の形態では、サーボパターン部15の間隔P25〜P27のそれぞれを50μmとしたが、この数値は一例である。間隔P25〜P27のそれぞれを狭くすることで読み取られるサーボ信号のサンプル数を多くすることができるので、より追従性を向上させたトラッキングサーボを行うことができる。一方、サーボパターン部15の間隔P25〜P27のそれぞれを広くすることで、データバンド22〜24におけるデータ信号の記録可能容量を多く確保することができる。
【0069】
また、サーボマーク16a及びシンクマーク16bは、必ずしも形成する必要はない。サーボマーク16a及びシンクマーク16bは、データトラックとサーボパターンとの境界を検出するために形成されているものであるが、データトラックに記録されるデータ信号の周波数とサーボパターンの周波数とが異なる場合は、サーボマーク16a及びシンクマーク16bを形成しなくても境界を検出することができる。
【0070】
また、本実施の形態では、全てのデータバンドにサーボパターンを形成する構成としたが、必ずしも全てのデータバンドにサーボパターンを形成しなくてもよい。例えば、16本のデータバンドを備えた磁気テープの場合、奇数列及び偶数列のデータバンドのうちいずれか一方のデータバンドのみにサーボパターンを形成する構成であっても、本実施の形態と同様の効果を得ることができる。
【0071】
また、本実施の形態では、サーボパターン部15の間隔P25〜P27を均等間隔としたが、不等間隔であっても同様にトラッキングサーボを行うことができる。
【0072】
(実施の形態4)
〔1.磁気テープの基本構成〕
図4Aは、本実施の形態における磁気テープの構成を示す。図4Aにおいて、図3Aに示す構成と同様の構成については、同一番号を付与して詳細説明は省略する。図4Aに示すように、磁気テープ31は、その長手方向に複数のデータバンド32,33,34を備えている。また、磁気テープ31は、ドライブによって矢印AまたはBに示す方向へ搬送される。
【0073】
データバンド32は、複数のデータトラックと、サーボパターン部35とが形成されている。データトラックは、データ信号を記録可能な領域であり、本実施の形態では1つのデータバンドに5本のデータトラックを備えている。説明の便宜上、データバンド32,
33,34における上端及び下端のデータトラックのみに符号を付与した(符号32a、32b,33a,33b,34a,34b)。
【0074】
サーボパターン部35は、データバンド32〜34における所定位置に形成され、サーボパターン35a及び35bを備えている。サーボパターン35a及び35bは、磁気テープ31の長手方向に傾斜したストライプ状のパターンで形成され、略「ハ」の字状に形成されている。本実施の形態では、図示のように1つのサーボパターン部35に4本のサーボパターンを備えているが、これは一例である。また、サーボパターン部35は、データバンド32〜34のそれぞれにおいて、間隔P33毎に形成されている。また、データバンド33において、データバンド32に形成されたサーボパターン部35から磁気テープ31の長手方向に所定距離P34離れた位置に、サーボパターン部35が形成されている。また、データバンド34において、データバンド33に形成されたサーボパターン部35から磁気テープ31の長手方向に所定距離P35離れた位置に、サーボパターン部35が形成されている。また、データバンド32において、データバンド34に形成されたサーボパターン部35から磁気テープ31の長手方向に所定距離P36離れた位置に、サーボパターン35が形成されている。すなわち、データバンド32〜34には、それぞれP33の間隔でサーボパターン部35が形成され、その形成位置を互いに磁気テープ31の長手方向にずらして形成されている。なお、距離P34,P35,P36はそれぞれ同じ値であり、和が距離P33と一致するようにサーボパターン部35を形成している。本実施の形態では、距離P34,P35,P36はそれぞれ50μmとした。また、各サーボパターン部35の前後に、図3Aに示すようなサーボマーク及びシンクマークが形成されているが、説明の便宜上、図4Aにおける図示は省略した。
【0075】
なお、本実施の形態では、データバンド32,33,34には、それぞれ5本のデータトラックを形成する構成としたが、データバンドの本数、データトラックの本数はこれらに限定されない。
【0076】
〔2.トラッキングサーボの動作〕
本実施の形態におけるデータ信号の記録および再生の基本的な動作は、前述の実施の形態1から3のいずれかに記載の動作と同様であるため説明は省略し、トラッキングサーボの動作を中心に説明する。
【0077】
磁気ヘッド61は、磁気テープ31に対してデータ信号を記録または再生している時、データバンド32の所定のトラックをトレースし、磁気ヘッド62はデータバンド33の所定のトラックをトレースし、磁気ヘッド63はデータバンド34の所定のトラックをトレースしている。以下の説明では、磁気ヘッド61〜63が、各データバンド32〜34における最上段のデータトラックをトレースしていることとして説明する。
【0078】
磁気テープ31が矢印Aに示す方向へ搬送される時、磁気ヘッド61は、データトラック32aをトレース中にサーボマーク(図3A等参照)を検出すると、サーボパターンを読み取る動作に切り換えられる。これにより、磁気ヘッド61は、サーボマークに続くサーボパターン35a及び35bを読み取る。
【0079】
図4Bは、磁気ヘッド61がデータトラック32aをトレースしている時に再生されたサーボ信号の波形を示す。図4Cは、磁気ヘッド61がデータトラック32bをトレースしている時に再生されるサーボ信号の波形を示す。
【0080】
磁気ヘッド61が、データトラック32aの幅方向の中心をトレースしていれば、再生されるサーボ信号は図4Bに示すピーク間隔P31となる。このピーク間隔P31のサーボ信号を検出することで、磁気ヘッド61がデータトラック32aをトレースしているこ
とを検出することができる。一方、磁気ヘッド61が、データトラック32bの幅方向の中心をトレースしていれば、再生されるサーボ信号は図4Cに示すピーク間隔P32となる。このピーク間隔P32のサーボ信号を検出することで、磁気ヘッド61がデータトラック32bをトレースしていることを検出することができる。すなわち、サーボパターン35a及び35bは、略「ハ」の字状に形成されているため、データバンド32における各データトラックをトレースしている時に得られるサーボ信号のピーク間隔は、データトラック毎に異なる、ドライブ側では、サーボ信号のピーク間隔に基づいて、現在磁気ヘッド61がトレースしているデータトラックを特定することができる。
【0081】
また、磁気テープ31が、LTMなどが原因で磁気ヘッドユニット60に対してその幅方向(矢印CまたはDに示す方向)に変位したり、温湿度膨張などによって幅方向に変形している場合は、磁気ヘッド61とサーボパターン35a及び35bとのテープ幅方向の相対位置がずれるため、再生されるサーボ信号のピーク間隔が変動する。例えば、磁気ヘッド61がデータトラック32aをトレース中に、磁気テープ31が矢印Dに示す方向に変位した場合、磁気ヘッド61から得られるサーボ信号のピーク間隔は、ピーク間隔P31よりも小さくなる。一方、磁気テープ31が矢印Cに示す方向に変位した場合は、磁気ヘッド61から得られるサーボ信号のピーク間隔は、ピーク間隔P31よりも大きくなる。ドライブ側では、このようなサーボ信号のピーク間隔の変動に基づきオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット60を矢印CまたはDに示す方向へ移動させる。これにより、磁気ヘッド61,62,63を所定のデータトラックに追従させることができる。
【0082】
磁気ヘッド61は、サーボパターン部35の読み取り後、シンクマーク(図3A等参照)を検出すると、再びデータ信号の記録動作または再生動作に切り換えられる。
【0083】
次に、磁気テープ31を所定距離(距離P34に相当)搬送後に、磁気ヘッド62がデータバンド33に形成されたサーボパターン35a及び35bを読み取る。ドライブ側では、データバンド33に形成されたサーボパターン35a及び35bに基づくサーボ信号によってオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット60を磁気テープ31の幅方向に移動させる。
【0084】
さらに、磁気テープ31を所定距離(距離P35に相当)搬送後に、磁気ヘッド63がデータバンド34に形成されたサーボパターン35a及び35bを読み取る。ドライブ側では、データバンド34に形成されたサーボパターン35a及び35bに基づくサーボ信号によってオフトラック量を算出し、そのオフトラック量がゼロになるように磁気ヘッドユニット60を磁気テープ31の幅方向に移動させる。
【0085】
以上の動作を繰り返すことで、所定時間毎(本実施の形態では50μm)に読み出されるサーボ信号により、トラッキングサーボを行うことができる。
【0086】
〔3.実施の形態の効果、他〕
本実施の形態によれば、タイムベースサーボ方式のサーボ信号で構成されたサーボパターン部35を、磁気テープ31の長手方向に断続的に形成したデータバンド32に備えたことにより、LTM(蛇行状の変形)が発生して磁気テープ31の位置が幅方向に変動したとしても、サーボ信号の読み取り間隔が従来に比べて短いため、単位時間当たりのサーボ信号のサンプル数が多くなり、磁気テープ31に対する磁気ヘッドユニット60の追従性を向上させることができる。
【0087】
また、本実施の形態によれば、磁気テープ31のサーボ信号の出力レベルが低下しても、サーボエラーが生じにくく、安定したトラッキングサーボを実行することができる。す
なわち、磁気テープは、主に磁性層の厚みの変動が原因で、サーボ信号の出力レベルに変動が生じやすいが、本実施の形態のようにサーボ信号の出力波形の有無のみを検出する構成とすることにより、たとえサーボ信号の出力レベルが低下したとしてもサーボエラーが生じにくい。
【0088】
また、サーボパターン部35を磁気テープ31上の全てのデータバンド上に振り分けて形成したことにより、例えば磁気テープ31の幅方向の寸法が温度や湿度の影響で変化した場合、再生されるサーボ出力が磁気ヘッドにより変化する。例えば、磁気ヘッド61から得られるサーボ信号のピーク間隔(図4BのP31に相当するもの)をP31A、磁気ヘッド62から得られるサーボ信号のピーク間隔をP31B、磁気ヘッド63から得られるサーボ信号のピーク間隔をP31Cとし、磁気ヘッド61を基準として考えると、各磁気ヘッドから得られるサーボ信号のピーク間隔は、
P31A<P31B<P31C
となる。このようなサーボ信号のピーク間隔の変化を検出した場合、データ信号の記録再生を停止したり、或いは複数の磁気ヘッドで同時に記録再生する従来の方式から、1つの磁気ヘッドのみを使ってデータを記録再生する方法に切り替え、記録再生時のエラーを予防することが可能になる。
【0089】
なお、本実施の形態では、サーボパターン部35の間隔P34〜P36のそれぞれを50μmとしたが、この数値は一例である。間隔P34〜P36のそれぞれを狭くすることで読み取られるサーボ信号のサンプル数を多くすることができるので、より追従性を向上させたトラッキングサーボを行うことができる。一方、サーボパターン部35の間隔P34〜P36のそれぞれを広くすることで、データバンド32〜34におけるデータ信号の記録可能容量を多く確保することができる。
【0090】
また、本実施の形態では、全てのデータバンドにサーボパターンを形成する構成としたが、必ずしも全てのデータバンドにサーボパターンを形成しなくてもよい。例えば、16本のデータバンドを備えた磁気テープの場合、奇数列及び偶数列のデータバンドのうちいずれか一方のデータバンドのみにサーボパターンを形成する構成であっても、本実施の形態と同様の効果を得ることができる。
【産業上の利用可能性】
【0091】
本発明の磁気テープは、サーボパターンが形成されている磁気テープに有用である。
【符号の説明】
【0092】
1,11,21 磁気テープ
2 サーボバンド
3,4,12,22,23,24 データバンド
15 サーボパターン部
15a,15b,15c,15d,15e,15f サーボパターン
【特許請求の範囲】
【請求項1】
データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、
トラッキングサーボを行うためのサーボパターンを備え、
前記サーボパターンは、
前記複数のデータバンドのうちの少なくとも一つのデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成されている、磁気テープ。
【請求項2】
データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、
バースト信号で構成されたサーボパターンを備え、
前記サーボパターンは、
前記複数のデータバンドのうちの一つのデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成されている、磁気テープ。
【請求項3】
データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、
バースト信号で構成されたサーボパターンを備え、
前記サーボパターンは、
前記複数のデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成され、
当該磁気テープの長手方向における位置を前記データバンド毎に互いに異ならせて形成されている、磁気テープ。
【請求項4】
データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、
当該磁気テープの長手方向に傾斜して形成されたストライプ状のサーボパターンを備え、
前記サーボパターンは、
前記複数のデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成され、
当該磁気テープの長手方向における位置を前記データバンド毎に互いに異ならせて形成されている、磁気テープ。
【請求項1】
データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、
トラッキングサーボを行うためのサーボパターンを備え、
前記サーボパターンは、
前記複数のデータバンドのうちの少なくとも一つのデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成されている、磁気テープ。
【請求項2】
データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、
バースト信号で構成されたサーボパターンを備え、
前記サーボパターンは、
前記複数のデータバンドのうちの一つのデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成されている、磁気テープ。
【請求項3】
データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、
バースト信号で構成されたサーボパターンを備え、
前記サーボパターンは、
前記複数のデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成され、
当該磁気テープの長手方向における位置を前記データバンド毎に互いに異ならせて形成されている、磁気テープ。
【請求項4】
データ信号を記録可能な複数のデータバンドを備えた磁気テープであって、
当該磁気テープの長手方向に傾斜して形成されたストライプ状のサーボパターンを備え、
前記サーボパターンは、
前記複数のデータバンドにおいて、当該磁気テープの長手方向に、所定間隔毎に形成され、
当該磁気テープの長手方向における位置を前記データバンド毎に互いに異ならせて形成されている、磁気テープ。
【図1A】


【図1B】
【図1C】
【図2A】
【図2B】
【図3A】
【図3B】
【図3C】
【図4A】
【図4B】
【図4C】
【図5A】
【図5B】
【図1B】
【図1C】
【図2A】
【図2B】
【図3A】
【図3B】
【図3C】
【図4A】
【図4B】
【図4C】
【図5A】
【図5B】
【公開番号】特開2012−33264(P2012−33264A)
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願番号】特願2011−248519(P2011−248519)
【出願日】平成23年11月14日(2011.11.14)
【分割の表示】特願2007−283931(P2007−283931)の分割
【原出願日】平成19年10月31日(2007.10.31)
【出願人】(000005810)日立マクセル株式会社 (2,366)
【Fターム(参考)】
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願日】平成23年11月14日(2011.11.14)
【分割の表示】特願2007−283931(P2007−283931)の分割
【原出願日】平成19年10月31日(2007.10.31)
【出願人】(000005810)日立マクセル株式会社 (2,366)
【Fターム(参考)】
[ Back to top ]