
磁気テープ
【課題】高速かつ高精度にトラッキングサーボを行うことができるサーボ信号が書き込まれた、磁気テープを提供する。
【解決手段】少なくとも2本のサーボトラックを有し、一方のサーボトラックに、テープ変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ供給側に記録され、他方のサーボトラックに、テープ変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ巻き取り側に記録される。
【解決手段】少なくとも2本のサーボトラックを有し、一方のサーボトラックに、テープ変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ供給側に記録され、他方のサーボトラックに、テープ変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ巻き取り側に記録される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、コンピュータ用のデータストレージ磁気テープシステムにおける、ヘッドトラッキングサーボ用のサーボ信号が記録された磁気テープに関する。
【背景技術】
【0002】
磁気テープは、オーディオテープ、ビデオテープ、コンピュータテープなど種々の用途があるが、特にデータバックアップ用テープの分野では、バックアップの対象となるハードディスクの大容量化に伴い、1巻当たり800GB以上の記録容量を持つ磁気テープが商品化されている。また、今後4TBを超えるデータをバックアップする技術が開発されるのに伴い、大容量バックアップテープが提案されている。
【0003】
磁気テープを大容量化するには、例えば、磁気テープの厚さを薄くすることで、リールに対する磁気テープの巻径を増加させずに、リール1巻あたりのテープ長さを長くする方法がある。また、磁気テープに記録するデータの記録波長を短くすることで、磁気テープの長手方向の記録密度を高くする方法がある。また、磁気テープの記録トラック幅を狭くすることで、磁気テープの幅方向の記録密度を高くする方法(高記録密度化技術)などが考えられる。
【0004】
磁気テープの高記録密度化技術を採用することにより記録トラック幅が狭くなると、データの再生時などにおける磁気テープの幅方向の位置変動によって、磁気ヘッドが記録トラックを正確に追従できなくなり、エラーを起こしやすくなる。そこで、現在では、磁気テープの製造時に、磁性層あるいはバックコート層にサーボ信号を記録し、そのサーボ信号によるヘッドトラッキングサーボを用いたシステム(サーボ方式を有するシステム)が主流になっている。
【0005】
サーボ方式には、磁気サーボ方式と光学サーボ方式がある。磁気サーボ方式は、サーボ信号を磁気テープの磁性層に磁気記録し、このサーボ信号を磁気的に読み取ってサーボトラッキングを行う方式である。また、光学サーボ方式は、凹部アレイから構成されるサーボ信号を、レーザー照射などで磁気テープのバックコート層に形成し、この凹部アレイを光学的に読み取ってサーボトラッキングを行う方式である。
【0006】
これらのサーボ方式により、磁気テープにデータを記録する際または磁気テープからデータを再生する際、磁気テープの位置が磁気ヘッドに対して相対的に幅方向に変動しても、磁気ヘッドを記録トラックに追随させることができる。具体的には、まずサーボヘッドで、磁気テープに記録されているサーボ信号を読み取る。次に、読み取ったサーボ信号に応じて、ヘッドユニット(少なくともデータ記録用ヘッドとデータ再生用ヘッドとを含む)の磁気テープの幅方向における位置をコントロールして、データ記録用ヘッドまたはデータ再生用ヘッドを記録トラックに追従させる。これにより、磁気テープに対して正確に情報を記録することができるとともに、磁気テープに記録されている情報を正確に再生することができる。
【0007】
上記のサーボ方式の一例として、特許文献1にタイミングベースサーボ方式が開示されている。タイミングベースサーボ方式では、サーボ信号が磁気テープの幅方向に対して傾斜させたパターンで、磁気テープに記録されている。そのサーボ信号を再生した時における、再生波形のピークの時間間隔からヘッド位置を認識する。
【0008】
また、特許文献2には、さらに記録トラック幅が狭くなり、テープ速度が速くなった場合においても、再生ヘッドを記録トラックに高速で正確に追従させて、エラーを起こすことなくデータを記録再生することが可能であり、磁気テープの高記録密度化に対応することができる、ヘッドトラッキングサーボ方法が開示されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平8−30942号公報
【特許文献2】米国特許第6,226,688号明細書
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら特許文献1及び2に記載のサーボ書き込みヘッドで磁気テープに書き込まれたサーボ信号では、テープドライブにおいて高速かつ高精度にトラッキングサーボを行うことができないという問題があった。
【0011】
本発明の目的は、高速かつ高精度にトラッキングサーボを行うことができるサーボ信号が書き込まれた磁気テープを提供することである。
【課題を解決するための手段】
【0012】
本発明の磁気テープは、少なくとも2本のサーボトラックを有し、一方のサーボトラックに、変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ供給側に記録され、他方のサーボトラックに、変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ巻き取り側に記録されることを特徴とする。
【発明の効果】
【0013】
本発明によれば、高速かつ高精度にトラッキングサーボを行うことができるサーボ信号が書き込まれた、磁気テープを得ることができる。
【図面の簡単な説明】
【0014】
【図1】実施の形態1におけるサーボ信号記録装置の構成を示す模式図
【図2】サーボトラックの構成を示す模式図
【図3】サーボトラックの構成を示す模式図
【図4】信号処理部の構成を示すブロック図
【図5】テープ変動情報の一例であるLTM測定データの特性図
【図6】サーボトラック近傍の模式図
【図7】実施の形態2におけるサーボ信号記録装置の構成を示す模式図
【発明を実施するための形態】
【0015】
(実施の形態1)
〔1.サーボ信号記録装置の構成及び動作〕
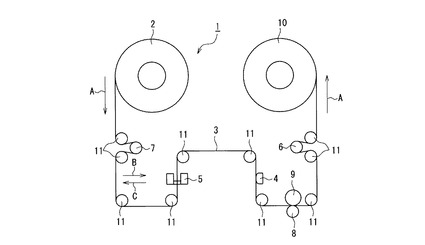
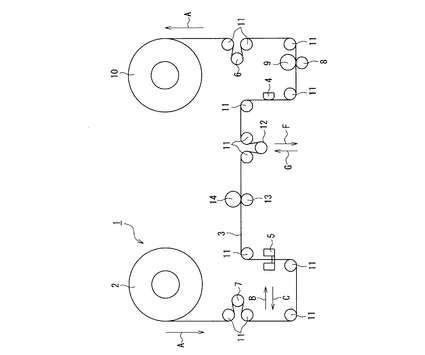
図1は、実施の形態1にかかるサーボ信号記録装置の構成である。図1に示すサーボライター1(サーボ信号記録装置)は、磁気テープカートリッジの製造工程で用いられる装置であり、パンケーキ2(テープ供給部)にトラッキングサーボのための磁気ヘッド位置検出用のサーボ信号を書き込む装置である。サーボ信号記録ヘッド4は、磁気テープ3のサーボトラックにサーボ信号を記録することができる。なお、磁気テープ3におけるサーボトラック及びサーボ信号の構成については、図2を参照して後述する。テープ変動測定部5は、磁気テープ3の幅方向の位置変動を測定し、その測定結果であるテープ変動情報を出力する。また、テープ変動測定部5は、磁気テープ3の表面側から磁気テープ3のエッジにレーザー光を照射し、磁気テープ3の裏面側に配された受光部で、磁気テープ3によって遮断されなかったレーザー光を受光する。受光部で受光する光量の変動に基づき、テープ変動情報を生成する。磁気テープ3は、パンケーキ2から引き出された後、各所に配されたガイドローラ11で案内されながら、キャプスタン8及びピンチローラ9で挟持されて矢印Aに示す方向へ走行駆動され、巻き取りリール10(テープ巻き取り部)に巻き取られる。また、磁気テープ3は、テンション制御部6及び7によって、走行中のテンションが制御されている。
【0016】
パンケーキ2から矢印Aに示す方向に引き出された磁気テープ3は、テンション制御部7を介して、テープ変動測定部5に到達する。磁気テープ3がテープ変動測定部5を通過する時、テープ変動測定部5は、磁気テープ3の幅方向の位置変動(すなわち、磁気テープ3のエッジ部分の位置変動)を測定し、テープ変動情報を生成する。生成されたテープ変動情報は、信号処理部20(図4参照)に入力される。信号処理部20は、入力されるテープ変動情報を含むサーボ信号を生成する。生成されたサーボ信号は、サーボ信号記録ヘッド4に送られる。
【0017】
テープ変動測定部5を出た磁気テープ3は、サーボ信号記録ヘッド4に到達する。サーボ信号記録ヘッド4は、磁気テープ3におけるサーボバンドに、サーボ信号を記録する。なお、詳しいサーボ信号の記録方法は後述する。
【0018】
サーボ信号記録ヘッド4を出た磁気テープ3は、キャプスタン8及びピンチローラ9に到達する。キャプスタン8及びピンチローラ9を出た磁気テープ3は、テンション制御部6を介して、巻き取りリール10に巻き取られる。
【0019】
ここで、図1に示すように、テープ変動測定部5をサーボ信号記録ヘッド4よりもテープ供給側(パンケーキ2側)に設置して、磁気テープ3のテープ変動情報をサーボ信号がそのテープ位置に書き込まれる前に測定することにより、サーボトラックの正規の位置にテープ変動情報を含んだサーボ信号を記録することができる。
【0020】
通常のコンピュータ用磁気テープは、テープドライブにおいて、カートリッジから磁気テープを引き出しながらデータの記録再生を行うフォワード走行と、カートリッジ内へ磁気テープを巻き戻しながらデータを記録再生するバックワード走行とを繰り返して、テープ全域にデータを記録することができる。
【0021】
本実施の形態のサーボ信号記録装置は、磁気テープ3における少なくとも2本のサーボバンドにサーボ信号を書き込む手段を有しており、2つのサーボバンドのうちの一方のサーボバンドに、フォワード走行時のためのテープ変動情報を記録し、他方のサーボバンドにバックワード走行時のためのテープ変動情報を記録することができる。この時、両サーボバンドに記録された変動情報は、バックワード用及びフォワード用に記録される。
【0022】
これにより、フォワード走行、バックワード走行の双方において、データを再生する前に予めテープ変動情報を読み込むことができ、磁気テープ3の変動に応じてヘッド位置の調節を即座に行うことができる。よって、高速かつ高精度にトラッキングサーボを行うことができる。
【0023】
〔2.サーボ信号の構成〕
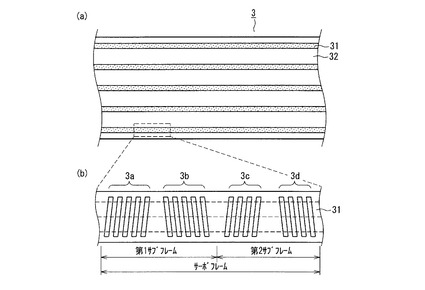
図2(a)は、磁気テープ3に記録されているデータ構造を示す。図2(a)に示すように、磁気テープ3には、サーボ信号に基づくサーボパターンが記録されているサーボバンド31と、データが記録されているデータバンド32とが形成されている。図2(b)は、サーボバンド31の一部を拡大した図である。なお、サーボパターンは、図1に示すサーボライター1により記録される。
【0024】
図2(b)に示すように、サーボバンド31に記録されているサーボパターンは、1つのサーボフレームが第1のサブフレームと第2のサブフレームとで構成されている。また、第1のサブフレームは、第1のストライプ群3a及び第2のストライプ群3bで構成されている。また、第2のサブフレームは、第3のストライプ群3c及び第4のストライプ群3dで構成されている。第1のストライプ群3aは、互いに平行な5本のストライプで構成され、サーボバンド31の幅方向に対して僅かに傾斜(本実施の形態では、アジマス角が6°±5°)して形成されている。第2のストライプ群3bは、互いに平行な5本のストライプで構成され、サーボバンド31の幅方向に対して僅かに傾斜(本実施の形態では、アジマス角が6°±5°)して形成されている。なお、第1のストライプ群3aと第2のストライプ群3bの傾斜方向は、相対する方向である。第3のストライプ群3cは、互いに平行な4本のストライプで構成され、第1のストライプ群3aのサーボトラックと同方向に同角度傾斜している。第4のストライプ群3dは、互いに平行な4本のストライプで構成され、第2のストライプ群3bのストライプと同方向に同角度傾斜している。すなわち、サーボフレームは、18本のストライプで構成されている。
【0025】
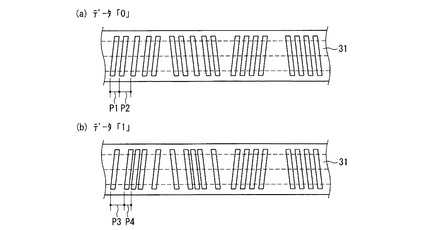
なお、図2(b)に示すサーボバンド31に記録されている各ストライプの間隔は等間隔に形成されているが、サーボバンド31に各種情報を含ませるために、図3に示すようにストライプの間隔を規則的に異ならせて形成することができる。すなわち、図3に示すようにストライプを形成することで、ヘッドトラッキングサーボ動作を実行させることができるとともに、磁気テープやカートリッジに関する各種情報を含ませることもできる。その情報は、デジタルデータで構成されているため、サーボバンド31に情報を含ませるためには、サーボバンド31に記録されるストライプは値「0」と値「1」に対応する2つのパターンが必要になる。
【0026】
図3(a)は、値「0」に対応するストライプの構成を示す。図3(b)は、値「1」に対応するストライプの構成を示す。サーボバンド31に値「0」を記録する際は、図3(a)に示すように、第1のストライプ群3a及び第2のストライプ群3bにおいて、テープ走行方向Aの先頭から数えて2番目のストライプと3番目のストライプとの間隔(ピッチP2)、および3番目のストライプと4番目のストライプとの間隔(ピッチP2と同じ間隔)を、他の部分(ピッチP1)よりも広くして記録する。また、値「1」をサーボバンド31に記録する際は、図3(b)に示すように、第1のストライプ群3a及び第2のストライプ群3bにおいて、テープ走行方向Aの先頭から数えて1番目のストライプと2番目のストライプとの間隔(ピッチP3)、および4番目のストライプと5番目のストライプとの間隔(ピッチP3と同じ間隔)を、他の部分(ピッチP4)よりも広くして記録する。図3(a)及び図3(b)に示すように、ストライプの間隔に規則性を持たせることで、ヘッドトラッキングサーボ動作を実行させることができるとともに、デジタルデータで構成された各種情報をサーボトラックに含ませることができる。本実施の形態では、サーボパターンにテープ変動情報を含ませることができる。
【0027】
〔3.テープ変動情報の記録方法〕
図1に示すサーボライター1において、テープ変動測定部5から出力されるテープ変動情報を含むサーボ信号を、磁気テープ3に記録する動作について説明する。
【0028】
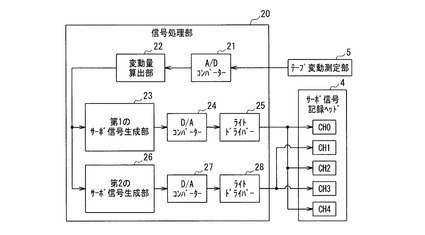
図4は、信号処理部の構成を示す。図4に示すように、信号処理部20は、A/Dコンバーター21、変動量算出部22、第1のサーボ信号生成部23、第2のサーボ信号生成部26、D/Aコンバーター24及び27、ライトドライバー25及び28を備えている。
【0029】
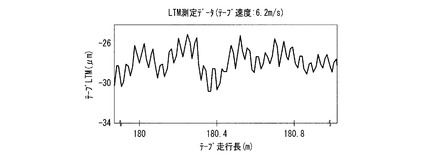
A/Dコンバーター21は、テープ変動測定部5から出力されるテープ変動情報(アナログ信号)を、デジタル信号に変換する。なお、図5は、テープ変動測定部5から出力されるテープ変動情報の一例としてLTM測定データ(LTM:Lateral Tape Motion)を示している。図5において、横軸は磁気テープ5の走行長を示し、縦軸は磁気テープ3の幅方向の変動量を示している。
【0030】
変動量算出部22は、A/Dコンバーター21から出力されるテープ変動情報に基づき、磁気テープ3上の所定の位置における変動量を算出する。本実施の形態では、変動量算出部22は、内部クロックより算出された位置(アドレス)情報と、その位置情報に対応する変動量の情報とをテーブル化して保持する。
【0031】
第1のサーボ信号生成部23及び第2のサーボ信号生成部26は、磁気テープ3にテープ変動情報を記録するべきタイミングになれば、変動量算出部22に蓄積されている変動量の情報を読み出し、変動量の情報を含むサーボ信号を生成する。本実施の形態では、第1のサーボ信号生成部23は、フォワード用のサーボ信号を生成するものであり、前記測定位置がサーボ信号記録ヘッド4に到達する前に、テープ変動情報を磁気テープに記録するためのサーボ信号を生成する。また、第2のサーボ信号生成部26は、バックワード用のサーボ信号を生成するものであり、前記測定位置がサーボ信号記録ヘッド4を通過した後にサーボ信号と時間軸を反転させたテープ変動情報を磁気テープに記録するためのサーボ信号を生成する。なお、具体的な記録タイミングは後述する。
【0032】
D/Aコンバーター24は、第1のサーボ信号生成部23から出力されるサーボ信号(デジタル信号)をアナログのサーボ信号に変換する。また、D/Aコンバーター27は、第2のサーボ信号生成部26から出力されるサーボ信号(デジタル信号)をアナログのサーボ信号に変換する。
【0033】
ライトドライバー25は、D/Aコンバーター24から出力されるサーボ信号に基づいて、サーボ信号とテープ変動情報を合成した信号を、サーボ信号記録ヘッド4におけるヘッドチップ(本例では、CH0、CH2、およびCH4のヘッドチップ)の記録電流を制御して、磁気テープ3のサーボバンド31にサーボ信号を記録する。また、ライトドライバー28は、D/Aコンバーター27から出力されるサーボ信号に基づいて、サーボ信号と時間軸を反転させたテープ変動情報とを合成した信号を、サーボ信号記録ヘッド4におけるヘッドチップ(本例ではCH1とCH3のヘッドチップ)の記録電流を制御して、磁気テープ3のサーボバンド31にサーボ信号を記録する。
【0034】
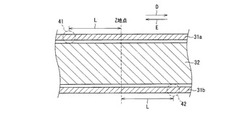
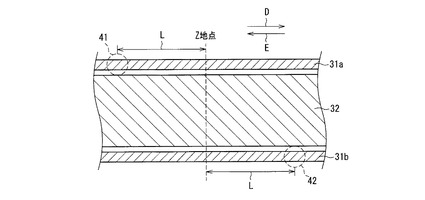
図6は、磁気テープ3におけるサーボバンド31及びデータバンド32の一部を拡大した図である。図6において、データバンド32のテープ幅方向に隣接する位置に第1のサーボバンド31aと第2のサーボバンド31bとが形成されている。本実施の形態のサーボ信号記録装置によって、第1のサーボバンド31aにはフォワード走行用のテープ変動情報を含むサーボ信号が記録され、第2のサーボバンド31bにはバックワード走行用のテープ変動情報を含むサーボ信号が記録される。
【0035】
以下、図4及び図6を参照して、磁気テープ3にサーボ信号を記録する動作について説明する。
【0036】
まず、テープ変動測定部5において、磁気テープ3のZ地点のテープ変動を測定したとする。測定されたテープ変動情報は、A/Dコンバーター21でデジタル信号に変換されて変動量算出部22に入力される。なお、テープ変動測定部5における測定動作は、例えば100Hz〜4kHzのサンプリング周波数に基づいて測定が行われるため、磁気テープ3を走行している間は変動量算出部22に断続的にテープ変動情報が入力される。変動量算出部22は、入力されるテープ変動情報に基づき変動量を算出し、算出した変動量を蓄積する。
【0037】
磁気テープ3に、テープ変動情報を含むサーボ信号を記録するべきタイミングになれば、第1のサーボ信号生成部23は、変動量算出部22から変動量の情報を取得し、取得した変動量の情報を含むサーボ信号を生成する。
【0038】
第1のサーボ信号生成部23で生成されたサーボ信号は、D/Aコンバーター24を介してライトドライバー25に入力される。ライトドライバー25は、サーボ信号記録ヘッド4の所定のヘッドチップを制御して、サーボバンド31aにサーボ信号とテープ変動情報を合成した信号を記録する。それと同時に、第2のサーボ信号生成部26で生成されたサーボ信号が、D/Aコンバーター27を介してライトドライバー28に入力される。ライトドライバー28は、サーボ信号記録ヘッド4の所定のヘッドチップを制御して、サーボバンド31bにサーボ信号と時間軸を反転させたテープ変動情報とを合成した信号とを記録する。
【0039】
本実施の形態ではサーボ信号にテープ変動情報を含ませて記録する。例えば、図6に示すZ地点のテープ変動情報を記録する際、フォワード走行用のテープ変動情報を位置41に記録し、バックワード走行用のテープ変動情報を位置42に記録する。すなわち、位置41に記録されるテープ変動情報は、磁気テープ3をテープドライブにセットして、磁気テープ3を矢印E方向(フォワード走行方向)に走行させてデータの記録再生を行う際、テープドライブに搭載されているデータヘッドがZ地点に到達するよりも前に、サーボヘッドが位置41に到達してテープ変動情報を読み取ることができるような位置に、テープ変動情報を記録している。また、位置42に記録されるテープ変動情報は、磁気テープ3をテープドライブにセットして、磁気テープを矢印D方向(バックワード方向)に走行させてデータの記録再生を行う際、テープドライブに搭載されているデータヘッドがZ地点に到達するよりも前に、サーボヘッドが位置42に到達してテープ変動情報を読み取ることができるような位置に、テープ変動情報を記録している。
【0040】
なお、Z地点から位置41及び42までの距離Lと、磁気テープ3の走行速度Vと、テープドライブにおいて磁気テープ3の走行開始からヘッドユニットのサーボトラッキングが完了するまでの時間tとは、以下のような関係にある。
【0041】
L>t×V
図6のフォワード走行用のテープ変動位置41、バックワード走行用のテープ変動位置42、Z地点と、図1のテープ変動測定部5、サーボ信号記録ヘッド4の関係は次のようになる。図1における変動測定部5とサーボ信号記録ヘッド4との距離は上記式で表されるL以上(L+信号処理の時間t×走行速度V)となる。第1のサーボバンド31aに記録されるフォワード走行用のテープ変動情報は、テープ変動測定部5で測定され、距離L離れたサーボ信号記録ヘッド4で磁気テープ3に記録される。また、第2のサーボバンド31bに記録されるバックワード走行用のテープ変動情報は、テープ変動測定部5で測定されたテープ変動情報の時間軸を反転させ、距離L離れたサーボ信号記録ヘッド4で、磁気テープ3が距離2L走行した時点で記録される。
【0042】
すなわち、テープ変動情報を記録する位置41及び42は、テープドライブにおいてサーボトラッキングに要する時間に相当する磁気テープ3の移動距離よりも、Z地点から離れた位置であればよい。位置41及び42がZ地点に近すぎると、テープドライブで磁気テープ3のトラッキングサーボを行う際に、Z地点がヘッドユニットに到達しても、ヘッドユニットが移動する時間が短く、所定のトラックに追随できないため、テープ変動情報に基づくトラッキングサーボを行うことができない。本実施の形態のように、位置41及び42をZ地点から距離L以上離すことにより、Z地点がヘッドユニットに到達する前にテープ変動情報を読み取ることができるので、テープ変動情報に基づくトラッキングサーボを行うことができる。
【0043】
なお、位置41及び42は、Z地点から離れすぎていても(つまり、Z地点がヘッドユニットに到達する随分前に、ヘッドユニットでテープ変動情報を読み取っていた場合)、読み取ったテープ変動情報を蓄積しておくことができるので問題はない。
【0044】
〔4.実施の形態の効果、他〕
本実施の形態によれば、磁気テープ3における所定位置でのテープ変動情報を、テープ走行方向にずらして書き込むことにより、磁気テープ3に記録されているデータを再生する際に予めテープ変動情報を読み込むことができ、磁気テープ3の変動に応じてヘッド位置の調節を即座に行うことができる。
【0045】
また、本実施の形態のサーボ信号記録装置で磁気テープにサーボ信号を記録することにより、高記録密度化に伴い記録トラック幅が狭くなり、テープ速度が速くなった場合においても、テープドライブにおいて磁気ヘッドを所定のトラックに高速かつ正確に追従させることができる。
【0046】
なお、本実施の形態では、テープ変動測定部5でテープ変動測定を行いながら、サーボ信号記録ヘッド4でサーボ信号を記録する構成としたが、サーボ信号を記録する前に磁気テープ3全域に渡ってテープ変動測定を行う構成としてもよい。具体的には、まず、磁気テープ3を始端から終端に至るまで走行させて、テープ変動測定部5で磁気テープ3の長手方向全域に渡ってテープ変動の測定を行う。次に、測定して得られたテープ変動情報を蓄積する。次に、サーボ信号記録ヘッド4で磁気テープ3にサーボ信号を記録する際に、蓄積しておいたテープ変動情報をサーボ信号に含ませて、サーボ信号を磁気テープ3に記録する。このような構成により、テープ変動測定の回数を増やすことができるので、テープ変動情報のサンプル数を増やすことができ、より高精度にトラッキングサーボを行うことができる。
【0047】
(実施の形態2)
本発明では、サーボライター書き込み時にテープ変動情報を測定してサーボ信号に書き込むために、サーボ信号の直線性のひずみの要因であるサーボ書き込み時におけるテープLTM(幅方向のテープ変動)に近い情報を得ることができ、ヘッドを高速、高精度にサーボトラックに追従させることができる。このテープLTMに影響を与える要因の一つとして、磁気テープの走行張力がある。
【0048】
図7は、実施の形態2におけるサーボ信号記録装置の構成を示す。図7において、図1に示す構成と同様の構成要素については、同一番号を付与して詳細説明を省略する。テンション制御部12は、キャプスタン13及びピンチローラ14とサーボ信号記録ヘッド4との間に配され、サーボ信号記録ヘッド4の近傍における磁気テープ3の走行張力を制御するものである。キャプスタン13及びピンチローラ14は、テンション制御部12とテープ変動測定部5との間に配され、磁気テープ3のテンションをカットするものである。
【0049】
以下、動作について説明する。
【0050】
パンケーキ2から矢印Aに示す方向に引き出された磁気テープ3は、テンション制御部7を介して、テープ変動測定部5に到達する。磁気テープ3がテープ変動測定部5を通過する時、テープ変動測定部5は、磁気テープ3の幅方向の位置変動(すなわち、磁気テープ3のエッジ部分の位置変動)を測定し、テープ変動情報を生成する。生成されたテープ変動情報は、サーボ信号記録ヘッド4に送られる。テープ変動測定部5を出た磁気テープ3は、キャプスタン13及びピンチローラ14に到達する。
【0051】
キャプスタン13及びピンチローラ14を出た磁気テープ3は、テンション制御部12を介してサーボ信号記録ヘッド4に到達する。サーボ信号記録ヘッド4は、磁気テープ3におけるサーボバンドに、サーボ信号を記録する。この時、サーボ信号記録ヘッド4は、テープ変動測定部5から送られるテープ変動情報をサーボ信号に含ませて、磁気テープ3に記録する。なお、詳しいサーボ信号の記録方法は後述する。
【0052】
サーボ信号記録ヘッド4を出た磁気テープ3は、キャプスタン8及びピンチローラ9に到達する。キャプスタン8及びピンチローラ9を出た磁気テープ3は、テンション制御部6を介して、巻き取りリール10に巻き取られる。
【0053】
次に、磁気テープ3のテンション制御について説明する。
【0054】
磁気テープ3において、テープ変動測定部5の近傍の走行張力は、テンション制御部7を矢印BまたはCに示す方向へ移動することにより、調整することができる。すなわち、テープ変動測定部5の近傍における磁気テープ3の走行張力が所定値よりも高ければ、テンション制御部7を矢印Cに示す方向へ移動して、磁気テープ3の走行張力を下げる。また、テープ変動測定部5の近傍における磁気テープ3の走行張力が所定値よりも低ければ、テンション制御部7を矢印Bに示す方向へ移動して、磁気テープ3の走行張力を上げる。このように、磁気テープ3の一部をキャプスタン13及びピンチローラ14でテンションカットした状態で、テンション制御部7により走行張力の調整を行うことで、テープ変動測定部5の近傍の走行張力が所定値になるように調整することができる。
【0055】
また、サーボ信号記録ヘッド4の近傍の走行張力は、テンション制御部12を矢印FまたはGに示す方向へ移動することにより、調整することができる。すなわち、サーボ信号記録ヘッド4の近傍における磁気テープ3の走行張力が所定値よりも高ければ、テンション制御部12を矢印Gに示す方向へ移動して、磁気テープ3の走行張力を下げる。また、サーボ信号記録ヘッド4の近傍における磁気テープ3の走行張力が所定値よりも低ければ、テンション制御部12を矢印Fに示す方向へ移動して、磁気テープ3の走行張力を上げる。このように、磁気テープ3の一部をキャプスタン8及びピンチローラ9でテンションカットした状態で、テンション制御部12により走行張力を調整することで、サーボ信号記録ヘッド4の近傍の走行張力が所定値になるように調整することができる。
【0056】
本実施の形態では、サーボ信号記録ヘッド4の近傍における磁気テープ3の走行張力と、テープ変動測定部5の近傍における磁気テープ3の走行張力とが同じになるように調整している。
【0057】
上記のように磁気テープ3の走行張力が調整されている状態で、テープ変動測定部5で磁気テープ3のテープ変動を測定し、その測定結果であるテープ変動情報に基づいてサーボ信号記録ヘッド4で磁気テープ3にサーボ信号を記録する。なお、テープ変動の測定方法や、磁気テープ3へのサーボ信号の記録方法については、実施の形態1において説明した方法と同様に行うので、本実施の形態における説明は省略する。
【0058】
本実施の形態によれば、サーボ信号記録ヘッド4の近傍の磁気テープ3の走行張力と、テープ変動測定部5の近傍の磁気テープ3の走行張力とを、独立して制御することができる。これにより、サーボ信号記録ヘッド4の近傍の磁気テープ3の走行張力と、テープ変動測定部5の近傍の磁気テープ3の走行張力とが同じになるように制御することによって、精度の高いテープ変動情報が得られる。したがって、テープドライブにおいて、さらに高速かつ高精度にトラッキングサーボを行うことができる。
【産業上の利用可能性】
【0059】
本発明のヘッドトラッキングサーボ方法は、磁気テープを情報媒体として使用する、コンピュータ用のデータストレージシステムに有用である。
【符号の説明】
【0060】
1 サーボライター
3 磁気テープ
4 サーボ信号記録ヘッド
5 テープ変動測定部
7、12 テンション制御部
20 信号処理部
21 A/Dコンバーター
22 変動量算出部
23 第1のサーボ信号生成部
24、27 D/Aコンバーター
25、28 ライトドライバー
26 第2のサーボ信号生成部
【技術分野】
【0001】
本発明は、コンピュータ用のデータストレージ磁気テープシステムにおける、ヘッドトラッキングサーボ用のサーボ信号が記録された磁気テープに関する。
【背景技術】
【0002】
磁気テープは、オーディオテープ、ビデオテープ、コンピュータテープなど種々の用途があるが、特にデータバックアップ用テープの分野では、バックアップの対象となるハードディスクの大容量化に伴い、1巻当たり800GB以上の記録容量を持つ磁気テープが商品化されている。また、今後4TBを超えるデータをバックアップする技術が開発されるのに伴い、大容量バックアップテープが提案されている。
【0003】
磁気テープを大容量化するには、例えば、磁気テープの厚さを薄くすることで、リールに対する磁気テープの巻径を増加させずに、リール1巻あたりのテープ長さを長くする方法がある。また、磁気テープに記録するデータの記録波長を短くすることで、磁気テープの長手方向の記録密度を高くする方法がある。また、磁気テープの記録トラック幅を狭くすることで、磁気テープの幅方向の記録密度を高くする方法(高記録密度化技術)などが考えられる。
【0004】
磁気テープの高記録密度化技術を採用することにより記録トラック幅が狭くなると、データの再生時などにおける磁気テープの幅方向の位置変動によって、磁気ヘッドが記録トラックを正確に追従できなくなり、エラーを起こしやすくなる。そこで、現在では、磁気テープの製造時に、磁性層あるいはバックコート層にサーボ信号を記録し、そのサーボ信号によるヘッドトラッキングサーボを用いたシステム(サーボ方式を有するシステム)が主流になっている。
【0005】
サーボ方式には、磁気サーボ方式と光学サーボ方式がある。磁気サーボ方式は、サーボ信号を磁気テープの磁性層に磁気記録し、このサーボ信号を磁気的に読み取ってサーボトラッキングを行う方式である。また、光学サーボ方式は、凹部アレイから構成されるサーボ信号を、レーザー照射などで磁気テープのバックコート層に形成し、この凹部アレイを光学的に読み取ってサーボトラッキングを行う方式である。
【0006】
これらのサーボ方式により、磁気テープにデータを記録する際または磁気テープからデータを再生する際、磁気テープの位置が磁気ヘッドに対して相対的に幅方向に変動しても、磁気ヘッドを記録トラックに追随させることができる。具体的には、まずサーボヘッドで、磁気テープに記録されているサーボ信号を読み取る。次に、読み取ったサーボ信号に応じて、ヘッドユニット(少なくともデータ記録用ヘッドとデータ再生用ヘッドとを含む)の磁気テープの幅方向における位置をコントロールして、データ記録用ヘッドまたはデータ再生用ヘッドを記録トラックに追従させる。これにより、磁気テープに対して正確に情報を記録することができるとともに、磁気テープに記録されている情報を正確に再生することができる。
【0007】
上記のサーボ方式の一例として、特許文献1にタイミングベースサーボ方式が開示されている。タイミングベースサーボ方式では、サーボ信号が磁気テープの幅方向に対して傾斜させたパターンで、磁気テープに記録されている。そのサーボ信号を再生した時における、再生波形のピークの時間間隔からヘッド位置を認識する。
【0008】
また、特許文献2には、さらに記録トラック幅が狭くなり、テープ速度が速くなった場合においても、再生ヘッドを記録トラックに高速で正確に追従させて、エラーを起こすことなくデータを記録再生することが可能であり、磁気テープの高記録密度化に対応することができる、ヘッドトラッキングサーボ方法が開示されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平8−30942号公報
【特許文献2】米国特許第6,226,688号明細書
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら特許文献1及び2に記載のサーボ書き込みヘッドで磁気テープに書き込まれたサーボ信号では、テープドライブにおいて高速かつ高精度にトラッキングサーボを行うことができないという問題があった。
【0011】
本発明の目的は、高速かつ高精度にトラッキングサーボを行うことができるサーボ信号が書き込まれた磁気テープを提供することである。
【課題を解決するための手段】
【0012】
本発明の磁気テープは、少なくとも2本のサーボトラックを有し、一方のサーボトラックに、変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ供給側に記録され、他方のサーボトラックに、変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ巻き取り側に記録されることを特徴とする。
【発明の効果】
【0013】
本発明によれば、高速かつ高精度にトラッキングサーボを行うことができるサーボ信号が書き込まれた、磁気テープを得ることができる。
【図面の簡単な説明】
【0014】
【図1】実施の形態1におけるサーボ信号記録装置の構成を示す模式図
【図2】サーボトラックの構成を示す模式図
【図3】サーボトラックの構成を示す模式図
【図4】信号処理部の構成を示すブロック図
【図5】テープ変動情報の一例であるLTM測定データの特性図
【図6】サーボトラック近傍の模式図
【図7】実施の形態2におけるサーボ信号記録装置の構成を示す模式図
【発明を実施するための形態】
【0015】
(実施の形態1)
〔1.サーボ信号記録装置の構成及び動作〕
図1は、実施の形態1にかかるサーボ信号記録装置の構成である。図1に示すサーボライター1(サーボ信号記録装置)は、磁気テープカートリッジの製造工程で用いられる装置であり、パンケーキ2(テープ供給部)にトラッキングサーボのための磁気ヘッド位置検出用のサーボ信号を書き込む装置である。サーボ信号記録ヘッド4は、磁気テープ3のサーボトラックにサーボ信号を記録することができる。なお、磁気テープ3におけるサーボトラック及びサーボ信号の構成については、図2を参照して後述する。テープ変動測定部5は、磁気テープ3の幅方向の位置変動を測定し、その測定結果であるテープ変動情報を出力する。また、テープ変動測定部5は、磁気テープ3の表面側から磁気テープ3のエッジにレーザー光を照射し、磁気テープ3の裏面側に配された受光部で、磁気テープ3によって遮断されなかったレーザー光を受光する。受光部で受光する光量の変動に基づき、テープ変動情報を生成する。磁気テープ3は、パンケーキ2から引き出された後、各所に配されたガイドローラ11で案内されながら、キャプスタン8及びピンチローラ9で挟持されて矢印Aに示す方向へ走行駆動され、巻き取りリール10(テープ巻き取り部)に巻き取られる。また、磁気テープ3は、テンション制御部6及び7によって、走行中のテンションが制御されている。
【0016】
パンケーキ2から矢印Aに示す方向に引き出された磁気テープ3は、テンション制御部7を介して、テープ変動測定部5に到達する。磁気テープ3がテープ変動測定部5を通過する時、テープ変動測定部5は、磁気テープ3の幅方向の位置変動(すなわち、磁気テープ3のエッジ部分の位置変動)を測定し、テープ変動情報を生成する。生成されたテープ変動情報は、信号処理部20(図4参照)に入力される。信号処理部20は、入力されるテープ変動情報を含むサーボ信号を生成する。生成されたサーボ信号は、サーボ信号記録ヘッド4に送られる。
【0017】
テープ変動測定部5を出た磁気テープ3は、サーボ信号記録ヘッド4に到達する。サーボ信号記録ヘッド4は、磁気テープ3におけるサーボバンドに、サーボ信号を記録する。なお、詳しいサーボ信号の記録方法は後述する。
【0018】
サーボ信号記録ヘッド4を出た磁気テープ3は、キャプスタン8及びピンチローラ9に到達する。キャプスタン8及びピンチローラ9を出た磁気テープ3は、テンション制御部6を介して、巻き取りリール10に巻き取られる。
【0019】
ここで、図1に示すように、テープ変動測定部5をサーボ信号記録ヘッド4よりもテープ供給側(パンケーキ2側)に設置して、磁気テープ3のテープ変動情報をサーボ信号がそのテープ位置に書き込まれる前に測定することにより、サーボトラックの正規の位置にテープ変動情報を含んだサーボ信号を記録することができる。
【0020】
通常のコンピュータ用磁気テープは、テープドライブにおいて、カートリッジから磁気テープを引き出しながらデータの記録再生を行うフォワード走行と、カートリッジ内へ磁気テープを巻き戻しながらデータを記録再生するバックワード走行とを繰り返して、テープ全域にデータを記録することができる。
【0021】
本実施の形態のサーボ信号記録装置は、磁気テープ3における少なくとも2本のサーボバンドにサーボ信号を書き込む手段を有しており、2つのサーボバンドのうちの一方のサーボバンドに、フォワード走行時のためのテープ変動情報を記録し、他方のサーボバンドにバックワード走行時のためのテープ変動情報を記録することができる。この時、両サーボバンドに記録された変動情報は、バックワード用及びフォワード用に記録される。
【0022】
これにより、フォワード走行、バックワード走行の双方において、データを再生する前に予めテープ変動情報を読み込むことができ、磁気テープ3の変動に応じてヘッド位置の調節を即座に行うことができる。よって、高速かつ高精度にトラッキングサーボを行うことができる。
【0023】
〔2.サーボ信号の構成〕
図2(a)は、磁気テープ3に記録されているデータ構造を示す。図2(a)に示すように、磁気テープ3には、サーボ信号に基づくサーボパターンが記録されているサーボバンド31と、データが記録されているデータバンド32とが形成されている。図2(b)は、サーボバンド31の一部を拡大した図である。なお、サーボパターンは、図1に示すサーボライター1により記録される。
【0024】
図2(b)に示すように、サーボバンド31に記録されているサーボパターンは、1つのサーボフレームが第1のサブフレームと第2のサブフレームとで構成されている。また、第1のサブフレームは、第1のストライプ群3a及び第2のストライプ群3bで構成されている。また、第2のサブフレームは、第3のストライプ群3c及び第4のストライプ群3dで構成されている。第1のストライプ群3aは、互いに平行な5本のストライプで構成され、サーボバンド31の幅方向に対して僅かに傾斜(本実施の形態では、アジマス角が6°±5°)して形成されている。第2のストライプ群3bは、互いに平行な5本のストライプで構成され、サーボバンド31の幅方向に対して僅かに傾斜(本実施の形態では、アジマス角が6°±5°)して形成されている。なお、第1のストライプ群3aと第2のストライプ群3bの傾斜方向は、相対する方向である。第3のストライプ群3cは、互いに平行な4本のストライプで構成され、第1のストライプ群3aのサーボトラックと同方向に同角度傾斜している。第4のストライプ群3dは、互いに平行な4本のストライプで構成され、第2のストライプ群3bのストライプと同方向に同角度傾斜している。すなわち、サーボフレームは、18本のストライプで構成されている。
【0025】
なお、図2(b)に示すサーボバンド31に記録されている各ストライプの間隔は等間隔に形成されているが、サーボバンド31に各種情報を含ませるために、図3に示すようにストライプの間隔を規則的に異ならせて形成することができる。すなわち、図3に示すようにストライプを形成することで、ヘッドトラッキングサーボ動作を実行させることができるとともに、磁気テープやカートリッジに関する各種情報を含ませることもできる。その情報は、デジタルデータで構成されているため、サーボバンド31に情報を含ませるためには、サーボバンド31に記録されるストライプは値「0」と値「1」に対応する2つのパターンが必要になる。
【0026】
図3(a)は、値「0」に対応するストライプの構成を示す。図3(b)は、値「1」に対応するストライプの構成を示す。サーボバンド31に値「0」を記録する際は、図3(a)に示すように、第1のストライプ群3a及び第2のストライプ群3bにおいて、テープ走行方向Aの先頭から数えて2番目のストライプと3番目のストライプとの間隔(ピッチP2)、および3番目のストライプと4番目のストライプとの間隔(ピッチP2と同じ間隔)を、他の部分(ピッチP1)よりも広くして記録する。また、値「1」をサーボバンド31に記録する際は、図3(b)に示すように、第1のストライプ群3a及び第2のストライプ群3bにおいて、テープ走行方向Aの先頭から数えて1番目のストライプと2番目のストライプとの間隔(ピッチP3)、および4番目のストライプと5番目のストライプとの間隔(ピッチP3と同じ間隔)を、他の部分(ピッチP4)よりも広くして記録する。図3(a)及び図3(b)に示すように、ストライプの間隔に規則性を持たせることで、ヘッドトラッキングサーボ動作を実行させることができるとともに、デジタルデータで構成された各種情報をサーボトラックに含ませることができる。本実施の形態では、サーボパターンにテープ変動情報を含ませることができる。
【0027】
〔3.テープ変動情報の記録方法〕
図1に示すサーボライター1において、テープ変動測定部5から出力されるテープ変動情報を含むサーボ信号を、磁気テープ3に記録する動作について説明する。
【0028】
図4は、信号処理部の構成を示す。図4に示すように、信号処理部20は、A/Dコンバーター21、変動量算出部22、第1のサーボ信号生成部23、第2のサーボ信号生成部26、D/Aコンバーター24及び27、ライトドライバー25及び28を備えている。
【0029】
A/Dコンバーター21は、テープ変動測定部5から出力されるテープ変動情報(アナログ信号)を、デジタル信号に変換する。なお、図5は、テープ変動測定部5から出力されるテープ変動情報の一例としてLTM測定データ(LTM:Lateral Tape Motion)を示している。図5において、横軸は磁気テープ5の走行長を示し、縦軸は磁気テープ3の幅方向の変動量を示している。
【0030】
変動量算出部22は、A/Dコンバーター21から出力されるテープ変動情報に基づき、磁気テープ3上の所定の位置における変動量を算出する。本実施の形態では、変動量算出部22は、内部クロックより算出された位置(アドレス)情報と、その位置情報に対応する変動量の情報とをテーブル化して保持する。
【0031】
第1のサーボ信号生成部23及び第2のサーボ信号生成部26は、磁気テープ3にテープ変動情報を記録するべきタイミングになれば、変動量算出部22に蓄積されている変動量の情報を読み出し、変動量の情報を含むサーボ信号を生成する。本実施の形態では、第1のサーボ信号生成部23は、フォワード用のサーボ信号を生成するものであり、前記測定位置がサーボ信号記録ヘッド4に到達する前に、テープ変動情報を磁気テープに記録するためのサーボ信号を生成する。また、第2のサーボ信号生成部26は、バックワード用のサーボ信号を生成するものであり、前記測定位置がサーボ信号記録ヘッド4を通過した後にサーボ信号と時間軸を反転させたテープ変動情報を磁気テープに記録するためのサーボ信号を生成する。なお、具体的な記録タイミングは後述する。
【0032】
D/Aコンバーター24は、第1のサーボ信号生成部23から出力されるサーボ信号(デジタル信号)をアナログのサーボ信号に変換する。また、D/Aコンバーター27は、第2のサーボ信号生成部26から出力されるサーボ信号(デジタル信号)をアナログのサーボ信号に変換する。
【0033】
ライトドライバー25は、D/Aコンバーター24から出力されるサーボ信号に基づいて、サーボ信号とテープ変動情報を合成した信号を、サーボ信号記録ヘッド4におけるヘッドチップ(本例では、CH0、CH2、およびCH4のヘッドチップ)の記録電流を制御して、磁気テープ3のサーボバンド31にサーボ信号を記録する。また、ライトドライバー28は、D/Aコンバーター27から出力されるサーボ信号に基づいて、サーボ信号と時間軸を反転させたテープ変動情報とを合成した信号を、サーボ信号記録ヘッド4におけるヘッドチップ(本例ではCH1とCH3のヘッドチップ)の記録電流を制御して、磁気テープ3のサーボバンド31にサーボ信号を記録する。
【0034】
図6は、磁気テープ3におけるサーボバンド31及びデータバンド32の一部を拡大した図である。図6において、データバンド32のテープ幅方向に隣接する位置に第1のサーボバンド31aと第2のサーボバンド31bとが形成されている。本実施の形態のサーボ信号記録装置によって、第1のサーボバンド31aにはフォワード走行用のテープ変動情報を含むサーボ信号が記録され、第2のサーボバンド31bにはバックワード走行用のテープ変動情報を含むサーボ信号が記録される。
【0035】
以下、図4及び図6を参照して、磁気テープ3にサーボ信号を記録する動作について説明する。
【0036】
まず、テープ変動測定部5において、磁気テープ3のZ地点のテープ変動を測定したとする。測定されたテープ変動情報は、A/Dコンバーター21でデジタル信号に変換されて変動量算出部22に入力される。なお、テープ変動測定部5における測定動作は、例えば100Hz〜4kHzのサンプリング周波数に基づいて測定が行われるため、磁気テープ3を走行している間は変動量算出部22に断続的にテープ変動情報が入力される。変動量算出部22は、入力されるテープ変動情報に基づき変動量を算出し、算出した変動量を蓄積する。
【0037】
磁気テープ3に、テープ変動情報を含むサーボ信号を記録するべきタイミングになれば、第1のサーボ信号生成部23は、変動量算出部22から変動量の情報を取得し、取得した変動量の情報を含むサーボ信号を生成する。
【0038】
第1のサーボ信号生成部23で生成されたサーボ信号は、D/Aコンバーター24を介してライトドライバー25に入力される。ライトドライバー25は、サーボ信号記録ヘッド4の所定のヘッドチップを制御して、サーボバンド31aにサーボ信号とテープ変動情報を合成した信号を記録する。それと同時に、第2のサーボ信号生成部26で生成されたサーボ信号が、D/Aコンバーター27を介してライトドライバー28に入力される。ライトドライバー28は、サーボ信号記録ヘッド4の所定のヘッドチップを制御して、サーボバンド31bにサーボ信号と時間軸を反転させたテープ変動情報とを合成した信号とを記録する。
【0039】
本実施の形態ではサーボ信号にテープ変動情報を含ませて記録する。例えば、図6に示すZ地点のテープ変動情報を記録する際、フォワード走行用のテープ変動情報を位置41に記録し、バックワード走行用のテープ変動情報を位置42に記録する。すなわち、位置41に記録されるテープ変動情報は、磁気テープ3をテープドライブにセットして、磁気テープ3を矢印E方向(フォワード走行方向)に走行させてデータの記録再生を行う際、テープドライブに搭載されているデータヘッドがZ地点に到達するよりも前に、サーボヘッドが位置41に到達してテープ変動情報を読み取ることができるような位置に、テープ変動情報を記録している。また、位置42に記録されるテープ変動情報は、磁気テープ3をテープドライブにセットして、磁気テープを矢印D方向(バックワード方向)に走行させてデータの記録再生を行う際、テープドライブに搭載されているデータヘッドがZ地点に到達するよりも前に、サーボヘッドが位置42に到達してテープ変動情報を読み取ることができるような位置に、テープ変動情報を記録している。
【0040】
なお、Z地点から位置41及び42までの距離Lと、磁気テープ3の走行速度Vと、テープドライブにおいて磁気テープ3の走行開始からヘッドユニットのサーボトラッキングが完了するまでの時間tとは、以下のような関係にある。
【0041】
L>t×V
図6のフォワード走行用のテープ変動位置41、バックワード走行用のテープ変動位置42、Z地点と、図1のテープ変動測定部5、サーボ信号記録ヘッド4の関係は次のようになる。図1における変動測定部5とサーボ信号記録ヘッド4との距離は上記式で表されるL以上(L+信号処理の時間t×走行速度V)となる。第1のサーボバンド31aに記録されるフォワード走行用のテープ変動情報は、テープ変動測定部5で測定され、距離L離れたサーボ信号記録ヘッド4で磁気テープ3に記録される。また、第2のサーボバンド31bに記録されるバックワード走行用のテープ変動情報は、テープ変動測定部5で測定されたテープ変動情報の時間軸を反転させ、距離L離れたサーボ信号記録ヘッド4で、磁気テープ3が距離2L走行した時点で記録される。
【0042】
すなわち、テープ変動情報を記録する位置41及び42は、テープドライブにおいてサーボトラッキングに要する時間に相当する磁気テープ3の移動距離よりも、Z地点から離れた位置であればよい。位置41及び42がZ地点に近すぎると、テープドライブで磁気テープ3のトラッキングサーボを行う際に、Z地点がヘッドユニットに到達しても、ヘッドユニットが移動する時間が短く、所定のトラックに追随できないため、テープ変動情報に基づくトラッキングサーボを行うことができない。本実施の形態のように、位置41及び42をZ地点から距離L以上離すことにより、Z地点がヘッドユニットに到達する前にテープ変動情報を読み取ることができるので、テープ変動情報に基づくトラッキングサーボを行うことができる。
【0043】
なお、位置41及び42は、Z地点から離れすぎていても(つまり、Z地点がヘッドユニットに到達する随分前に、ヘッドユニットでテープ変動情報を読み取っていた場合)、読み取ったテープ変動情報を蓄積しておくことができるので問題はない。
【0044】
〔4.実施の形態の効果、他〕
本実施の形態によれば、磁気テープ3における所定位置でのテープ変動情報を、テープ走行方向にずらして書き込むことにより、磁気テープ3に記録されているデータを再生する際に予めテープ変動情報を読み込むことができ、磁気テープ3の変動に応じてヘッド位置の調節を即座に行うことができる。
【0045】
また、本実施の形態のサーボ信号記録装置で磁気テープにサーボ信号を記録することにより、高記録密度化に伴い記録トラック幅が狭くなり、テープ速度が速くなった場合においても、テープドライブにおいて磁気ヘッドを所定のトラックに高速かつ正確に追従させることができる。
【0046】
なお、本実施の形態では、テープ変動測定部5でテープ変動測定を行いながら、サーボ信号記録ヘッド4でサーボ信号を記録する構成としたが、サーボ信号を記録する前に磁気テープ3全域に渡ってテープ変動測定を行う構成としてもよい。具体的には、まず、磁気テープ3を始端から終端に至るまで走行させて、テープ変動測定部5で磁気テープ3の長手方向全域に渡ってテープ変動の測定を行う。次に、測定して得られたテープ変動情報を蓄積する。次に、サーボ信号記録ヘッド4で磁気テープ3にサーボ信号を記録する際に、蓄積しておいたテープ変動情報をサーボ信号に含ませて、サーボ信号を磁気テープ3に記録する。このような構成により、テープ変動測定の回数を増やすことができるので、テープ変動情報のサンプル数を増やすことができ、より高精度にトラッキングサーボを行うことができる。
【0047】
(実施の形態2)
本発明では、サーボライター書き込み時にテープ変動情報を測定してサーボ信号に書き込むために、サーボ信号の直線性のひずみの要因であるサーボ書き込み時におけるテープLTM(幅方向のテープ変動)に近い情報を得ることができ、ヘッドを高速、高精度にサーボトラックに追従させることができる。このテープLTMに影響を与える要因の一つとして、磁気テープの走行張力がある。
【0048】
図7は、実施の形態2におけるサーボ信号記録装置の構成を示す。図7において、図1に示す構成と同様の構成要素については、同一番号を付与して詳細説明を省略する。テンション制御部12は、キャプスタン13及びピンチローラ14とサーボ信号記録ヘッド4との間に配され、サーボ信号記録ヘッド4の近傍における磁気テープ3の走行張力を制御するものである。キャプスタン13及びピンチローラ14は、テンション制御部12とテープ変動測定部5との間に配され、磁気テープ3のテンションをカットするものである。
【0049】
以下、動作について説明する。
【0050】
パンケーキ2から矢印Aに示す方向に引き出された磁気テープ3は、テンション制御部7を介して、テープ変動測定部5に到達する。磁気テープ3がテープ変動測定部5を通過する時、テープ変動測定部5は、磁気テープ3の幅方向の位置変動(すなわち、磁気テープ3のエッジ部分の位置変動)を測定し、テープ変動情報を生成する。生成されたテープ変動情報は、サーボ信号記録ヘッド4に送られる。テープ変動測定部5を出た磁気テープ3は、キャプスタン13及びピンチローラ14に到達する。
【0051】
キャプスタン13及びピンチローラ14を出た磁気テープ3は、テンション制御部12を介してサーボ信号記録ヘッド4に到達する。サーボ信号記録ヘッド4は、磁気テープ3におけるサーボバンドに、サーボ信号を記録する。この時、サーボ信号記録ヘッド4は、テープ変動測定部5から送られるテープ変動情報をサーボ信号に含ませて、磁気テープ3に記録する。なお、詳しいサーボ信号の記録方法は後述する。
【0052】
サーボ信号記録ヘッド4を出た磁気テープ3は、キャプスタン8及びピンチローラ9に到達する。キャプスタン8及びピンチローラ9を出た磁気テープ3は、テンション制御部6を介して、巻き取りリール10に巻き取られる。
【0053】
次に、磁気テープ3のテンション制御について説明する。
【0054】
磁気テープ3において、テープ変動測定部5の近傍の走行張力は、テンション制御部7を矢印BまたはCに示す方向へ移動することにより、調整することができる。すなわち、テープ変動測定部5の近傍における磁気テープ3の走行張力が所定値よりも高ければ、テンション制御部7を矢印Cに示す方向へ移動して、磁気テープ3の走行張力を下げる。また、テープ変動測定部5の近傍における磁気テープ3の走行張力が所定値よりも低ければ、テンション制御部7を矢印Bに示す方向へ移動して、磁気テープ3の走行張力を上げる。このように、磁気テープ3の一部をキャプスタン13及びピンチローラ14でテンションカットした状態で、テンション制御部7により走行張力の調整を行うことで、テープ変動測定部5の近傍の走行張力が所定値になるように調整することができる。
【0055】
また、サーボ信号記録ヘッド4の近傍の走行張力は、テンション制御部12を矢印FまたはGに示す方向へ移動することにより、調整することができる。すなわち、サーボ信号記録ヘッド4の近傍における磁気テープ3の走行張力が所定値よりも高ければ、テンション制御部12を矢印Gに示す方向へ移動して、磁気テープ3の走行張力を下げる。また、サーボ信号記録ヘッド4の近傍における磁気テープ3の走行張力が所定値よりも低ければ、テンション制御部12を矢印Fに示す方向へ移動して、磁気テープ3の走行張力を上げる。このように、磁気テープ3の一部をキャプスタン8及びピンチローラ9でテンションカットした状態で、テンション制御部12により走行張力を調整することで、サーボ信号記録ヘッド4の近傍の走行張力が所定値になるように調整することができる。
【0056】
本実施の形態では、サーボ信号記録ヘッド4の近傍における磁気テープ3の走行張力と、テープ変動測定部5の近傍における磁気テープ3の走行張力とが同じになるように調整している。
【0057】
上記のように磁気テープ3の走行張力が調整されている状態で、テープ変動測定部5で磁気テープ3のテープ変動を測定し、その測定結果であるテープ変動情報に基づいてサーボ信号記録ヘッド4で磁気テープ3にサーボ信号を記録する。なお、テープ変動の測定方法や、磁気テープ3へのサーボ信号の記録方法については、実施の形態1において説明した方法と同様に行うので、本実施の形態における説明は省略する。
【0058】
本実施の形態によれば、サーボ信号記録ヘッド4の近傍の磁気テープ3の走行張力と、テープ変動測定部5の近傍の磁気テープ3の走行張力とを、独立して制御することができる。これにより、サーボ信号記録ヘッド4の近傍の磁気テープ3の走行張力と、テープ変動測定部5の近傍の磁気テープ3の走行張力とが同じになるように制御することによって、精度の高いテープ変動情報が得られる。したがって、テープドライブにおいて、さらに高速かつ高精度にトラッキングサーボを行うことができる。
【産業上の利用可能性】
【0059】
本発明のヘッドトラッキングサーボ方法は、磁気テープを情報媒体として使用する、コンピュータ用のデータストレージシステムに有用である。
【符号の説明】
【0060】
1 サーボライター
3 磁気テープ
4 サーボ信号記録ヘッド
5 テープ変動測定部
7、12 テンション制御部
20 信号処理部
21 A/Dコンバーター
22 変動量算出部
23 第1のサーボ信号生成部
24、27 D/Aコンバーター
25、28 ライトドライバー
26 第2のサーボ信号生成部
【特許請求の範囲】
【請求項1】
少なくとも2本のサーボトラックを有し、
一方のサーボトラックに、テープ変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ供給側に記録され、
他方のサーボトラックに、テープ変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ巻き取り側に記録されていることを特徴とする磁気テープ。
【請求項2】
前記少なくとも2本のサブトラックは、複数のストライプ群から構成される請求項1に記載の磁気テープ。
【請求項3】
前記他方のサーボトラックに記録された前記テープ変動情報は、前記他方のサーボトラックに記録された前記サーボ信号と時間軸が反転している請求項1または2に記載の磁気テープ。
【請求項1】
少なくとも2本のサーボトラックを有し、
一方のサーボトラックに、テープ変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ供給側に記録され、
他方のサーボトラックに、テープ変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ巻き取り側に記録されていることを特徴とする磁気テープ。
【請求項2】
前記少なくとも2本のサブトラックは、複数のストライプ群から構成される請求項1に記載の磁気テープ。
【請求項3】
前記他方のサーボトラックに記録された前記テープ変動情報は、前記他方のサーボトラックに記録された前記サーボ信号と時間軸が反転している請求項1または2に記載の磁気テープ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−38419(P2012−38419A)
【公開日】平成24年2月23日(2012.2.23)
【国際特許分類】
【出願番号】特願2011−257074(P2011−257074)
【出願日】平成23年11月25日(2011.11.25)
【分割の表示】特願2007−134038(P2007−134038)の分割
【原出願日】平成19年5月21日(2007.5.21)
【出願人】(000005810)日立マクセル株式会社 (2,366)
【Fターム(参考)】
【公開日】平成24年2月23日(2012.2.23)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【分割の表示】特願2007−134038(P2007−134038)の分割
【原出願日】平成19年5月21日(2007.5.21)
【出願人】(000005810)日立マクセル株式会社 (2,366)
【Fターム(参考)】
[ Back to top ]