
磁気ディスク制御装置

【課題】PWM・リニア併用方式を採用しつつシーク動作の短縮化を図った磁気ディスク制御装置を提供する。
【解決手段】VCMドライバは、モード制御信号に対応して上記磁気ヘッドが隣接するトラックを順次に走査するトラッキング動作のときにリニア動作を行い、上記磁気ヘッドがトラックを跨いで移動するシーク動作のときにPWM動作を行う出力段を有する。電圧生成部は、同じ駆動電圧に対応した上記PWM動作とリニア動作との間のオフセットに相当するオフセット補償電圧を形成する。上記VCMドライバは、上記リニア動作のときには駆動電圧を上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動する。上記VCMドライバは、上記PWM動作のときには駆動電圧に上記オフセット補償電圧を加えて上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動する。
【解決手段】VCMドライバは、モード制御信号に対応して上記磁気ヘッドが隣接するトラックを順次に走査するトラッキング動作のときにリニア動作を行い、上記磁気ヘッドがトラックを跨いで移動するシーク動作のときにPWM動作を行う出力段を有する。電圧生成部は、同じ駆動電圧に対応した上記PWM動作とリニア動作との間のオフセットに相当するオフセット補償電圧を形成する。上記VCMドライバは、上記リニア動作のときには駆動電圧を上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動する。上記VCMドライバは、上記PWM動作のときには駆動電圧に上記オフセット補償電圧を加えて上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁気ディスク制御装置に関し、例えば、ハードディスクメモリ装置に適用して有効な技術に関するものである。
【背景技術】
【0002】
ハードディスク駆動装置では高速アクセスの観点からトラック間を跨いで移動するシーク時間を短縮する方向にある。この結果、VCM(Voice Coil Motor)の駆動電流は増加してシーク動作時の発熱が問題になっている。この発熱問題を解決する為、位置決め制御の精度が要求されない代わりに電力消費が大きくなるシーク期間のみPWM(パルス幅変調)駆動によって消費電力を下げ、高精度制御が要求され、上記PWM駆動によるノイズの影響が無視できないリード・ライト時はリニア駆動に切り替えるようにしたPWM・リニア併用方式が、例えば特開2002−184137公報、特開2002−358742公報により提案されている。
【特許文献1】特開2002−184137公報
【特許文献2】特開2002−358742公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
図12には、この発明に先立って検討された前記PWM・リニア併用方式の磁気ディスク制御装置のブロック図が示されている。マイクロコンピュータを含むようなコントローラは、位置指令情報と磁気ヘッド及び信号処理ICにより取り出された位置情報とから駆動電流指令CODEを形成する。この駆動電流指令CODEは、デジタル/アナログ変換回路DACによりアナログ信号DACOUTに変換される。制御アンプAMP2は、上記アナログ信号DACOUTを基に抵抗Rx ,Cx 及びCx2の時定数回路で設定されたスルーレートを持つ駆動電圧Vcnt を形成する。基準電圧VREF1,VREF2は、回路の動作基準電圧である。上記駆動電圧Vcnt は、利得1のバッファB1を通して第1出力段DRV1の入力端子に伝えられる。上記バッファB1の出力信号は、位相反転させるバッファB2を通して第2出力段DRV2の入力端子に伝えられる。
【0004】
三角波発生回路TRAGと、PWM変調回路PWMG1とPWMG2とは、PWM動作のときの駆動電圧PWMP,PWMNを形成する。上記出力段DRV1,DRV2は、縦列形態の2つのアンプからなり、リニア動作のときには入力側アンプの出力信号が出力側アンプに伝えられる。PWM動作のときには、PWM動作信号PWM−ENによりスイッチが切り替えられて上記PWM駆動電圧PWMP,PWMNが出力側アンプに伝えられる。上記出力段DRV1とDRV2は、出力端子VCMPとVCMNに接続されたボイスコイルモータVCMを駆動する。このボイスコイルモータの駆動電流Ivcm は、抵抗Rs により電圧信号に変換される。この電圧信号は、センスアンプAMP1により増幅されて、上記制御アンプAM2の帰還信号とされる。これにより、駆動電圧Vcnt は上記アナログ信号DACOUTに比例した駆動電流をボイスコイルモータVCMに流すようにする。
【0005】
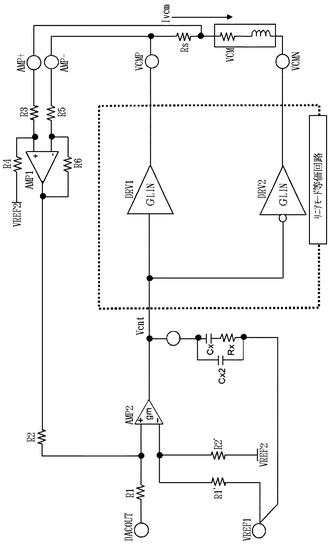
図13には、図12の磁気ディスク制御装置のリニア動作時の等価回路図が示されている。出力段DRV1とDRV2は、差動動作(相補動作)し、制御アンプAMP2の駆動電圧Vcnt からボイスコイルモータVCMの両端電圧VCMP−VCMNまでの伝達利得が2×GLIN となる。ここで、GLIN は出力段(入力側アンプ+出力側アンプ)DRV1,DRV2におけるリニア動作時の電圧利得である。
【0006】
図14には、図12の磁気ディスク制御装置のPWM動作時の等価回路図が示されている。PWM動作では、駆動電圧Vcnt に対し線形なPWM変調回路PWMG1,PWMG2でパルス信号に変換し出力側アンプに入力する。PWM変調回路PWMG1,PWMG2のゲインをGPWM (1/Va)、出力側アンプのゲインをGO とすると、ボイスコイルモータVCMの両端VCMP−VCMNには、Vcnt ×GPWM ×GO で決まる電圧が印加される。例えば、三角波発生回路TRAGの振幅をVa 、PWM変調回路PWMG1,PWMG2のゲインをGPWM (1/Va)、出力側アンプのゲイン(GO)をVpsとすると、Vcnt からVCMP−VCMNまでの伝達利得は、2×1/Va×Vpsとなる。この時、出力側アンプのゲインGO は、線形とみなしており、GPWM ×GO =GLIN となるように設定している。出力側アンプは、PWM動作・リニア動作の両モードに対応しており、内部切替スイッチでモード切り替えし、リニアモードではAB級パワーアンプ、PWMモードではD級パワーアンプとして動作する。
【0007】
リニアモード時の出力側アンプはAB級アンプの構成をとっており、不感帯は生じずに線形な電圧アンプとして動作する。一方、PWM駆動時の出力側アンプは、貫通電流を防止する為のデッド(Dead)時間がある為、必然的に不感帯が生じる。この為、上記のようにGPWM ×GO =GLIN と設定していても、電流誤差回路(AMP2)からの電流指示値Vcnt に対し、PWMモードとリニアモード間で出力オフセットが生じ、これがPWM/リニアの切り替え時に電流変動を生じさせる要因となっている事が判った。
【0008】
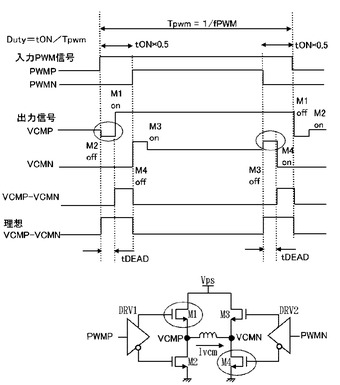
つまり、図15のタイミング図に示すように、PWM駆動時は貫通電流を防止するためのデッド時間tDEADが設けられる。図15の参考回路に示したように端子VCMPからVCMNへ電流を流している例を示している。この時、出力段DRV1の出力MOSFETM1と出力段DRV2の出力MOSFETM4がオン状態となり、出力段DRV1の出力MOSFETM2と出力段DRV2の出力MOSFETM3はオフ状態であり、整流用として動作する。端子VCMPがロウレベルからハイレベルに変化するとき、整流側のMOSFETM2がオフしてからデッド時間tDEADの後に上記MOSFETM1をオン状態にする。ここで、上記デッド時間tDEADの遅れ時間が生じる。同様に、VCMNがハイレベルからロウレベルに変化するときでは、整流側のMOSFETM3をオフ状態にしてからデッド時間tDEADの後に上記MOSFETM4をオン状態にする。ここでもデッド時間tDEADの遅れ時間が生じる。
【0009】
このように、PWMの1周期間Tpwm に、2×tDEADの遅れ時間が生じる事になるので、入力DUTYからボイスコイルモータVCMの両端VCMP−VCMNまでの伝達特性は、DUTY×Vps−2×tDEAD×fPWM ×Vpsとなる。fPWM はPWM周波数であり、Vpsは出力側アンプの電源電圧である。更に、Duty=Vcnt /Va (Va は三角波発生回路TRAGの出力振幅)なので、ボイスコイルモータVCMの両端VCMP−VCMNに印加される出力電圧をVOUT とすると、
VOUT =Vcnt×2/Va ×Vps−2×tDEAD×fPWM ×Vps
=Vcnt ×{(2/Va )−2×tDEAD×fPWM }×Vpsとなる。
【0010】
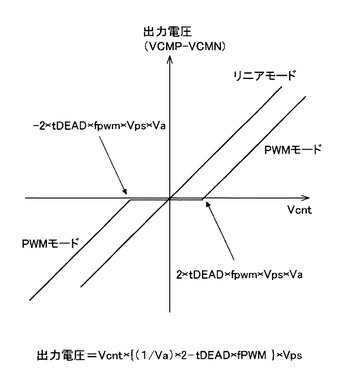
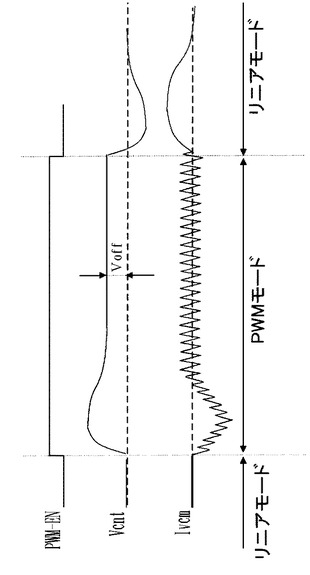
以上より、PWMモードとリニアモードとの駆動電圧Vcnt から出力電圧VOUT (VCMP−VCMN)までの伝達特性は、図16に示すようになる。同図の特性図に示すように、リニアモードとPWMモードの間には、±2×tDEAD×fPWM ×VpsのようなオフセットVoff が生じる事となる。上記のようなオフセットVoff が生じると、図17のPWM/リニア切替波形図に示したように、同じ電流Ivcm をボイスコイルモータVCMに流す場合、リニアモードとPWMモードでは、前記図16に示した出力段でのオフセットに相当する電圧だけ過渡的な電流変動が生じてしまうものとなる。この電流変動期間はヘッドの位置を正しく制御できなくなるために、シーク動作時間を長くしてしまうという問題を引き起こす。
【0011】
出力段DRV1,DRV2において、バイアス状態がPWMモードとリニアモード間で異なっているタイミングでPWMモードからリニアモードに切り替えた場合、出力段DRV1,DRV2の各バイアスがリニアモードのバイアス状態に整定するまでの間、後述するように出力電流に過渡的な変動が生じることも発見した。広帯域化を図る為にPWM周波数を高くしたい場合や、VCM電流が大きい状態で切り替える場合には、その切り替えタイミングの最適化が困難であり、前記同様な出力電流に過渡的な変動が生じてシーク時間を長くするという問題を引き起こす。
【0012】
この発明の目的は、PWM・リニア併用方式を採用しつつシーク動作の短縮化を図った磁気ディスク制御装置を提供することにある。この発明の前記ならびにそのほかの目的と新規な特徴は、本明細書の記述および添付図面から明らかになるであろう。
【課題を解決するための手段】
【0013】
本願において開示される発明のうち代表的なものの概要を簡単に説明すれば、下記の通りである。磁気ヘッドから読み出された位置情報と、コントローラからの位置指令情報とに対応して駆動電流制御信号が形成されてVCMドライバに入力される。上記VCMドライバは、モード制御信号に対応して上記磁気ヘッドが隣接するトラックを順次に走査するトラッキング動作のときにリニア動作を行い、上記磁気ヘッドがトラックを跨いで移動するシーク動作のときにPWM動作を行う出力段を有する。電圧生成部は、同じ駆動電流制御信号に対応した上記PWM動作とリニア動作との間のオフセットに相当するオフセット補償電圧を形成する。上記VCMドライバは、上記PWM動作のときには上記駆動電流制御信号に対応した駆動電圧を上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動する。上記VCMドライバは、上記リニア動作のときには上記駆動電流制御信号に対応した駆動電圧に上記オフセット補償電圧を加えて上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動する。
【発明の効果】
【0014】
PWM・リニア併用方式を採用しつつシーク動作の短縮化を図ることができる。
【発明を実施するための最良の形態】
【0015】
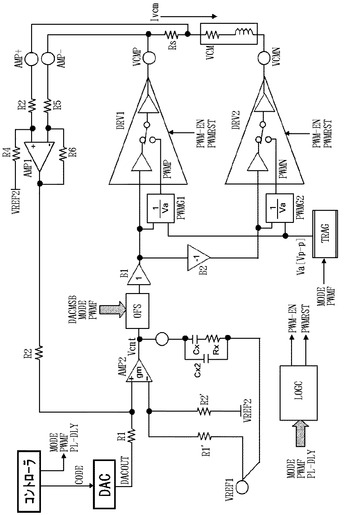
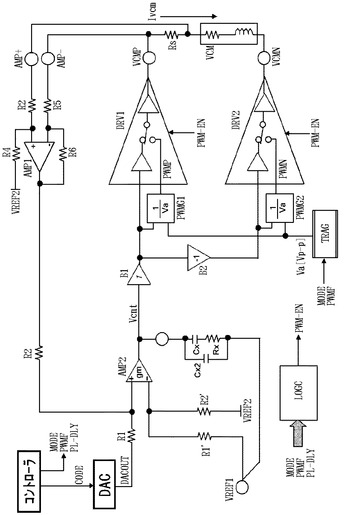
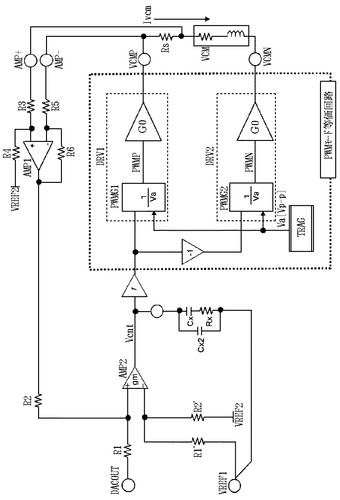
図1には、この発明に係るPWM・リニア併用方式の磁気ディスク制御装置のブロック図が示されている。前記図12と同様にマイクロコンピュータを含むようなコントローラは、位置指令情報と図示しない磁気ヘッド及び信号処理ICにより取り出された位置情報とから駆動電流指令CODEを形成する。この駆動電流指令CODEは、デジタル/アナログ変換回路DACによりアナログ信号DACOUTに変換される。制御アンプAMP2は、上記アナログ信号DACOUTを基に抵抗Rx ,Cx 及びCx2の時定数回路で設定されたスルーレートを持つ駆動電圧Vcnt を形成する。基準電圧VREF1,VREF2は、回路の動作基準電圧である。上記駆動電圧Vcnt は、利得1のバッファB1を通して第1出力段DRV1の入力端子に伝えられる。上記バッファB1の出力信号は、位相反転させるバッファB2を通して第2出力段DRV2の入力端子に伝えられる。
【0016】
三角波発生回路TRAGと、PWM変調回路PWMG1とPWMG2とは、PWM動作のときの駆動電圧PWMP,PWMNを形成する。上記出力段DRV1,DRV2は、縦列形態の2つのアンプからなり、リニア動作のときには入力側アンプの出力信号が出力側アンプに伝えられる。PWM動作のときには、PWM動作信号PWM−ENによりスイッチが切り替えられて上記PWM駆動電圧PWMP,PWMNが出力側アンプに伝えられる。上記出力段DRV1とDRV2は、出力端子VCMPとVCMNに接続されたボイスコイルモータVCMを駆動する。このボイスコイルモータの駆動電流Ivcm は、抵抗Rs により電圧信号に変換されて、センスアンプAMP1により増幅されて、上記制御アンプAM2の帰還信号とされる。これにより、駆動電圧Vcnt は上記アナログ信号DACOUTに比例した駆動電流をボイスコイルモータVCMに流すようにする。
【0017】
この実施例では、制御アンプAMP2の出力側にオフセット補償のための電圧生成部OFSが設けられる。この電圧生成部OFSは、前記図12で説明したオフセット電圧±2×tDEAD×fPWM ×Vpsに対応したオフセット補償電圧を形成する。このオフセット補償電圧は、PWM周波数PWMFに対応される。この電圧生成部OFSは、上記PWMモードのときにはPWM動作信号PWM−ENに対応して上記制御アンプAMP2で形成された駆動電圧Vcnt に上記オフセット補償電圧を加えて、上記バッファB1を介して第1出力段DRV1の入力に伝える。したがって、上記PWMモードのときには、上記駆動電圧Vcnt にオフセット補償電圧が加えられた電圧が上記バッファB1とB2を介して第2出力段DRV1の入力に伝えられる。また、リニアモードのときには、PWM動作信号PWM−ENに対応して駆動電圧Vcnt が電圧生成部OFSをスルーして上記バッファB1を介して第1出力段DRV1の入力に伝えられ、上記バッファB1とB2を介して第2出力段DRV1の入力に伝えられる。
【0018】
制御ロジックLOGCは、コントローラからのモード切り替え信号MODE、PWM周波数信号PWMF及びモード切替タイミング調整信号PL−DLYを受けて、PWM動作信号PWM−EN及びPWMリセット信号PWMRSTを生成し、上記出力段DRV1,DRV2を制御して、位置決め制御中に両モードの切り替えを高速且つ滑らかに行う。上記PWMリセット信号PWMRSTは、後述する出力段DRV1,DRV2の各バイアスがリニアモードのバイアス状態に整定するまでの間での出力電流に過渡的な変動を抑えるために用いられる。
【0019】
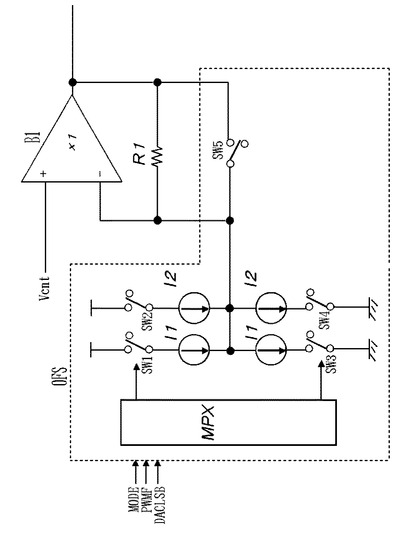
図2には、図1の電圧生成部OFSの一実施例の回路図が示されている。電圧生成部OFSは、押し出し電流源I1、I2、吸い込み電流源I1とI2、上記電流源に対応して設けられたスイッチSW1〜SW4、バッファB1の反転入力端子(−)と出力端子との間に設けられた抵抗RF及びその両端に設けられたスイッチSW5から構成される。上記バッファB1の非反転入力端子(+)には、駆動電圧Vcnt が供給される。上記電流源I1、I2は、上記抵抗RFに流れて上記オフセット補償電圧を形成する。電流源I1とI2は、PWM周波数PWMFに対応していずれかが選択されて、PWMモードでのPWM周波数fPWM に対応したオフセット補償電圧を形成する。前記DACの極性ビットDACMSBは、磁気ヘッドの移動方向を決める極性信号であり、それによりスイッチSW1(SW2)又はSW3(SW4)をオン状態にしてオフセット補償電圧の極性を決める。
【0020】
モード切り替え信号MODEによりPWMモードとされるときには、上記スイッチSW5がオフ状態にされる。そして、前記DACが正のアナログ信号DACOUTを形成して、制御アンプAMP2が正の駆動電圧Vcnt を形成するとき、PWM周波数PWMFと極性ビットDACMSBによりスイッチSW1(SW2)がオン状態にされる。上記抵抗RFに電流源I1(I2)の電流がバッファB1の出力端子に向けて流れて負のオフセット補償電圧Voff を形成する。差動アンプからなるバッファB1は、入力端子(+)と(−)が同電位となるよう動作をするから、結局バッファB1の出力端子はVcnt −Voff のような出力電圧となる。
【0021】
上記PWMモードにおいて、前記DACが負のアナログ信号DACOUTを形成して、制御アンプAMP2が負の駆動電圧Vcnt を形成するとき、PWM周波数PWMFと極性ビットDACMSBによりスイッチSW3(SW4)がオン状態にされる。上記抵抗RFにバッファB1の出力端子から電流源I1(I2)に向けて流れて正のオフセット補償電圧Voff を形成する。前記同様に、差動アンプからなるバッファB1は、入力端子(+)と(−)が同電位となるよう動作をするから、結局バッファB1の出力端子はVcnt +Voff のような出力電圧となる。
【0022】
モード切り替え信号MODEによりリニアモードとされるときには、前記スイッチSW1〜SW4は全てオフ状態となり、スイッチSW5がオン状態になる。これにより、バッファB1は、ボルテージフォロワ動作を行い、非反転入力端子(+)に供給された駆動電圧Vcnt をそのまま出力する動作を行う。
【0023】
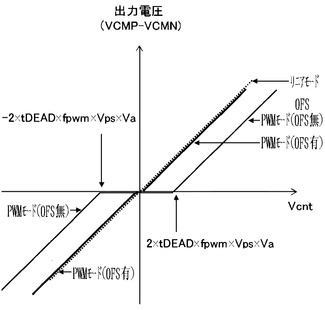
図3には、図2の電圧生成回路OFSの動作を説明するための特性図が示されている。前記PWMモードにおいて、前記のように駆動電圧Vcnt が正電圧領域では、電圧生成部OFSが無いときには、前記図16に示した2×tDEAD×fPWM ×VpsのようなオフセットVoff を有している。しかし、前記電圧生成回路OFSにより、Vcnt −Voff が出力段DRV1,DRV2に供給されるので、その入出力特性図は点線で示したリニアモードと等しくなるよう補償される。同様に駆動電圧Vcnt が負電圧領域では、電圧生成部OFSが無いときには、前記図16に示した−2×tDEAD×fPWM ×VpsのようなオフセットVoff を有している。しかし、前記電圧生成回路OFSにより、Vcnt +Voff が出力段DRV1,DRV2に供給されるので、その入出力特性図は点線で示したリニアモードと等しくなるよう補償される。この結果、駆動電圧Vcnt によりPWMモードからリニアモードに切り替えた際に、同じ電流Ivcm をボイスコイルモータVCMに流すことができる。これにより、シーク動作からリード・ライト動作までの切り替え時間を短縮化することができる。
【0024】
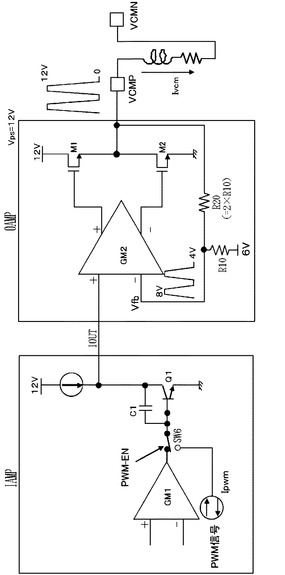
図4には、図1の出力段DRV1(DRV2)の一実施例のブロック図が示されている。上記出力段DRV1(DRV2)は、ゲインを得るための入力側アンプIAMPと、大電流を出力する出力側アンプOAMPで構成される。リニアモード時は、入力側アンプIAMPと出力側アンプOAMPとは直列に接続されて一つのAB級のアンプとして動作する。
【0025】
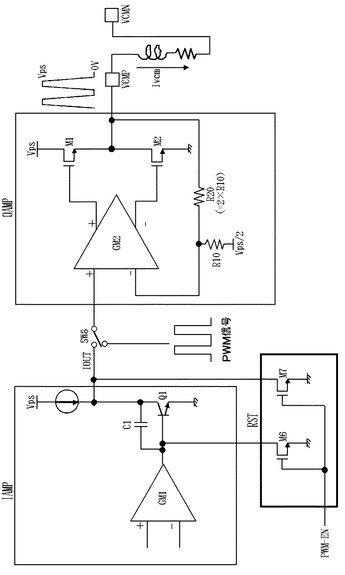
PWMモード時は、入力側アンプIAMPのコンダクタンス回路GM1をスイッチSW6により切り離し、PWM変調されたパルス電流Ipwm をトランジスタQ1のベースに供給する。上記出力トランジスタQ1のコレクタには、電流源が負荷として設けられる。上記入力側アンプIAMPの出力トランジスタQ1のベートとコレクタ間には、位相補償容量C1が設けられて、スルーレート制御された比較的緩やかなパルス電圧が形成される。出力側アンプOAMPの出力端子VCMPの出力電圧VPは、上記入力側アンプIAMPの出力信号IOUTを入力とし、帰還抵抗R10とR20で決まるものとなる。
VP=IOUT×(1+R20/R10)−(R20/R10)×(Vps/2)……(1)
【0026】
図5には、図4の出力段DRV1(DRV2)のPWMモード/リニアモード切り替え時の波形図が示されている。出力段DRV1,DRV2をPWMモードからリニアモードに切り替える場合、どのタイミングで切り替えるかが重要になる。出力段DRV1,DRV2の入力側アンプIAMPの出力信号IOUTが同じ状態で、そのレベルから速やかにリニア動作できるタイミングで切り替える必要がある。具体的には、出力段DRV1,DRV2の入力側アンプIAMPの出力信号IOUTがロウレベル/ロウレベル、若しくはハイレベル/ハイレベルの状態で切り替える。
【0027】
例えば、PWM変調回路PWMG1,PWMG2のクロックを基準に、入力側アンプIAMPの遅延時間を考慮して、上記出力信号IOUTがロウレベル/ロウレベルの状態にある期間に、切り替え信号PWM−ENを生成する。切り替え信号PWM−ENがハイレベルからロウレベルになると、上記出力信号IOUT(P) 、IOUT(N) が共にロウレベル/ロウレベルから入力側アンプIAMPの最大スルーレートで上昇する。この間、出力端子VCMP=VCMN=0Vであり、VCM電流Ivcm は下がり続ける。その後、出力側アンプOAPMの入力制御範囲内に入ると、AB級パワーアンプとして動作し始め、その帯域でリニアモードの動作状態に整定する。従って、入力側アンプIAMPの最大出力スルーレートを適正にしておけば、PWMモードからリニアモードへの切り替え時の電流変動は抑制できる。
【0028】
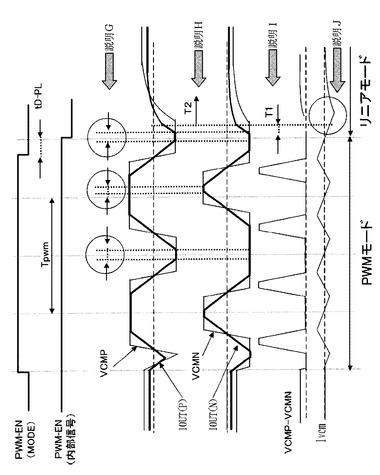
しかし、PWMモードの電流制御帯域の広帯域化を図る為にPWM周波数を高くした場合、入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) ロウレベル/ロウレベル若しくはハイレベル/ハイレベルの状態が短くなり、タイミングの最適化が困難になることが判明した。すなわち、図5の説明Gにおいて、○で示したように切り替え最適期間は、P側(VCMP)、N側(VCMN)の入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) が等しい期間である。すなわち、入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) がロウレベル/ロウレベル又はハイレベル/ハイレベルの状態であり、この期間に合うように切り替え信号(内部信号)PWM−ENを定数設定及びタイミング作成する。図5の説明Hにおいて、時刻T2から、入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) がAB級アンプ(リニアモード)の帯域で速やかに整定する。図5の説明Iにおいて、期間T1は、出力側アンプOAMPが飽和している期間であり、VCMP=VCMNの状態となる。この期間は、入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) の最大スルーレートで決まる。そして、図5の説明Jにおいて、○で示したように入力側アンプIAMPの最大スルーレートが小さい場合、VCMP=VCMNの状態の期間が延び、電流変動が大きくなるという問題が生じる。
【0029】
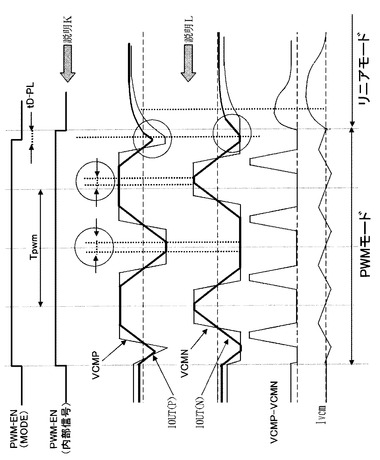
図6には、図4の出力段DRV1(DRV2)において、PWM周波数を高くした場合の波形図が示されている。出力段DRV1(P側)の入力側アンプIAMPの出力信号IOUT(P) がロウレベルに下がり切らない状態でリニアモードに切り替えてしまった場合、出力端子VCMNより先に出力端子VCMPが整定してしまい、出力段DRV2(N側)に対応した出力端子VCMNとの間に電圧差が生じ、その結果、過渡的な電流変動が生じてしまう事となる。この問題は、周波数が高い場合だけでなく、比較的電流の大きい状態で切り替えようとした場合でも同じ事がいえる。
【0030】
図6の説明Kにおいて、PWM周波数が高い場合には、入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) が等しい状態が短くなるので、この期間に合うように切り替え信号(内部信号)PWM−ENの定数設定及びタイミング作成は困難となる。このため、入力側アンプIAMPの出力信号IOUT(P) が下がり切らないところで切り替え信号(内部信号)PWM−ENがロウレベルになるということが生じ得る。図6の説明Lは、VCMP側がVPCMN側より先に整定してしまうことを示している。この結果、VCMP−VCMN間に電圧差が生じ、それに対応してVCM電流Ivcm に大きな電流変動が生じる。このようにVCM電流Ivcm の変動はヘッド位置を変動に対応し、シーク動作の短縮化を阻害する要因となる。
【0031】
図7には、図1の出力段DRV1(DRV2)の他の一実施例のブロック図が示されている。この実施例では、前記図4の実施例の出力段DRV1(DRV2)の改良に係るものであり、PWMモードとリニアモードの切り替え時に発生する前記のようなVCM電流Ivcm の変動を抑制するために、リセット回路RSTが付加される。リセット回路RSTは、出力トランジスタQ1のベートと回路の接地電位との間に設けられたNチャネルMOSFETM5と、上記トランジスタQ1のコレクタに、ダイオードD1を通して3.3Vの電圧を供給するスイッチSW7とから構成される。
【0032】
切り替え信号(内部信号)PWM−ENがハイレベルからロウレベルに変化することにより、PWMモードからリニアモードに切り替えられる。これにより、入力側アンプIAMPのスイッチSW6がPWM変調されたパルス電流Ipwm から切り離してコンダクタンス回路GM1側に接続される。これと同期して、リセット信号PWMRSTが一時的にハイレベルにされて、MOSFETM5及びスイッチSW7をオン状態にする。これにより、トランジスタQ1のコレクタ電圧に3.3V−Vfのバイアス電圧を与える。
【0033】
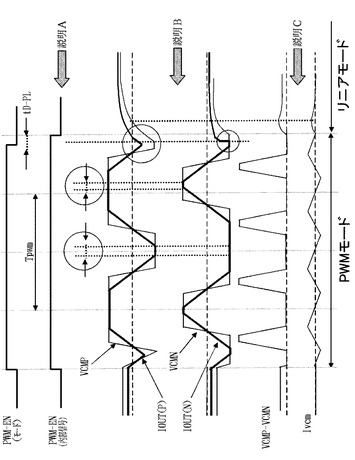
図8には、図7の出力段DRV1(DRV2)の動作波形図が示されている。前記説明したように切り替え信号(内部信号)PWM−ENに同期して、短時間リセット信号PWMRSTを作成し、リセット信号PWMRSTがハイレベルの期間、入力側アンプIAMPを出力側アンプOAMPの制御範囲付近になるようにキャパシタC1を充電させる。パルス幅は、キャパシタC1を充電できる時間、例えば数10ns程度でよい。リセット回路RSTの具体的構成は、種々の形態が考えられるが、前記図7の実施例ではスイッチSW7とダイオードD1を用いている。リセット電圧は、例えば3.3V−Vfのように出力側アンプOAMPの入力制御範囲(4V−6V)よりやや低めに設定しておけば問題ない。これにより、出力段DRV2に対応したVCMN側も直ぐにリニア動作状態に整定させる事ができ、切り替え時の電流変動が抑制できるようになる。
【0034】
図8の説明Aは、前記説明したようにPWM周波数が高い場合、出力段DRV1,DRV2の入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) が等しい期間が短くなるので、この期間に合うように切り替え信号(内部信号)PWM−ENの定数設定及びタイミング作成は困難となる。このため、入力側アンプIAMPの出力信号IOUT(P) が下がり切らないところで切り替え信号(内部信号)PWM−ENがロウレベルになるということを示している。図8の説明Bは、VCMN側の出力側アンプOAMPの制御入力範囲のロウレベル側電圧付近(3.3−Vf)にリセットされているので、VCMN側と同じように素早く整定するようになることを示している。説明Cは、VCMP−VCMN電圧差が低減しVCM電流Ivcm の電流変動が低減していることを示している。上記説明したように、PWMモードからリニアモードへの切り替え時の電流変動が低減する事で、低発熱、低消費電力化に有利なPWMモードをより広い電流範囲に適用できるようになる。
【0035】
図9には、図7の出力段DRV1(DRV2)の変形例が示されている。この実施例では、入力側アンプIAMPと出力側アンプOAMPの間にスイッチSW8が設けられる。リニアモードの時には、入力側アンプIAMPの出力信号IOUTがスイッチSW8を通して出力側アンプOAMPの入力端子に伝えられる。PWMモードの時には、スイッチSW8により入力側アンプIAMPの出力信号IOUTが切り離され、PWM信号が出力側アンプOAMPの入力端子に伝えられる。リセット回路RSTは、入力側アンプIAMPの出力トランジスタQ1のベートと回路の接地電位との間に設けられたNチャネルMOSFETM6と、上記トランジスタQ1のコレクタと回路の接地電位との間に設けらNチャネルMOSFETM7から構成される。これらのMOSFETM6,M7のゲートには、切り替え信号(内部信号)PWM−ENが供給される。
【0036】
この実施例では、出力電圧のスルーレート制御をしない場合、PWMとリニアの切り替えを入力側アンプAMPの出力側で行う。このように出力電圧のスルーレート制御をしない場合、PWMモードのときには、MOSFETM6,M7をオン状態にして入力側アンプIAMPの出力信号IOUTを回路の接地電位(ロウレベル)に抑えておく。リニアモードに切り替えるのは、出力端子VCMPとVCMNが接地電位(ロウレベル)にいる期間に行う。この期間は、前述したように入力側アンプIAMPの出力信号IOUTに比べて長いので、タイミングの最適化を行う事は容易となる。これにより、切り替え時の電流変動が抑制できるようになる。
【0037】
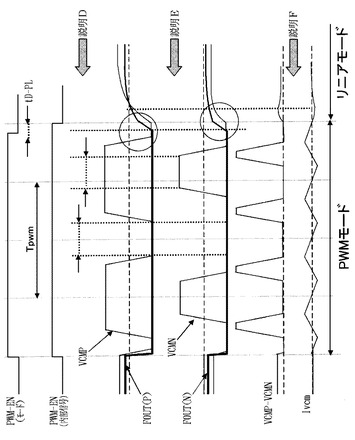
図10には、図9の出力段DRV1(DRV2)の動作波形図が示されている。図10の説明Dは、PWMモード時に入力側アンプIAMPの出力端子が、出力側アンプOAMPと切り離されているので回路の接地電位にセットしておく。リニアモードに切り替えるタイミングは、VCMP,VCMNがロウレベル/ロウレベルのときに行う。この期間は、PWM周波数が高い場合でもある程度長いことを示している。図10の説明Eは、出力段DRV1,DRV2共に入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) が回路の接地電位からコンダクタン回路GM1の最大スルーレートで立ち上り始める。この期間は、VCMP,VCMNは回路の接地電位である。入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) が出力側アンプOAMPの制御内に入ると、リニア信号に応じた出力側アンプOAMPの帯域で速やかに整定することを示している。図10の説明Fは、VCMP−VCMN電位差は小さく、過渡的な電流変動も小さく抑えられることを示している。このようにPWMモードからリニアモードへの切り替え時の電流変動が低減する事で、低発熱、低消費電力化に有利なPWMモードを、より広い電流範囲に適用できるようになる。また、周波数が高い場合でも容易に速やかなモード切り替えを行える。
【0038】
図11には、この発明が適用される磁気ディスク装置の一実施例の概略構成図が示されている。ハードディスク記憶装置(HDD)は、スピンドルモータによって高速回転しているディスク上にヘッドよりデータを書き込み、読み出す。記憶位置(ヘッドの位置)を可変するヘッドアクチュエータであるVCM(Voice Coil Motor)を用い、ディスク上に予め記憶されたサーボ情報を信号処理ICで読み出し、マイコンを含むコントローラによって上記VCMを駆動する電流指令を発行し、それをDAC(デジタル/アナログ変換回路)を含むモータ駆動回路DRV1,DRV2によって上記VCMを駆動する帰還制御が行われる。この発明の適用によってトラックを跨がったメモリアクセスの高速化を図ることができる。同図のモータ駆動回路は、特に制限されないが、前記図1の回路及びDACを含んで1つの半導体基板上に形成される。
【0039】
以上本発明者によってなされた発明を、前記実施形態に基づき具体的に説明したが、本発明は、前記実施形態に限定されるものではなく、その要旨を逸脱しない範囲において種々変更可能である。例えば、オフセット回路OFS、出力段DRV1,DRV2を構成する入力側アンプIAMP、出力側アンプOAMP及びそれに付加されるリセット回路RSTの具体的構成は種々の実施形態を採ることができる。この発明は、HDD等のような磁気ディスク制御装置に広く利用することができる。
【図面の簡単な説明】
【0040】
【図1】この発明に係るPWM・リニア併用方式の磁気ディスク制御装置の一実施例を示すブロック図である。
【図2】図1の電圧生成部OFSの一実施例を示す回路図である。
【図3】図2の電圧生成回路PFSの動作を説明するための特性図である。
【図4】図1の出力段DRV1(DRV2)の一実施例を示すブロック図である。
【図5】図4の出力段DRV1(DRV2)におけるPWMモード/リニアモード切り替え時の波形図である。
【図6】図4の出力段DRV1(DRV2)におけるPWM周波数を高くした場合の波形図である。
【図7】図1の出力段DRV1(DRV2)の他の一実施例を示すブロック図である。
【図8】図7の出力段DRV1(DRV2)の動作波形図である。
【図9】図7の出力段DRV1(DRV2)の変形例である。
【図10】図9の出力段DRV1(DRV2)の動作波形図である。
【図11】この発明が適用される磁気ディスク装置の一実施例を示す概略構成図である。
【図12】この発明に先立って検討されたPWM・リニア併用方式の磁気ディスク制御装置のブロック図である。
【図13】図12の磁気ディスク制御装置のリニア動作時の等価回路図である。
【図14】図12の磁気ディスク制御装置のPWM動作時の等価回路図である。
【図15】図14でのPWM駆動を説明するためのタイミング図である。
【図16】図13と図14に対応した等価回路の特性図である。
【図17】図13と図14に対応したPWM/リニア切替波形図である。
【符号の説明】
【0041】
DRV1,DRV2…出力段、OFS…電圧生成部、PWMG1,PWMG2…PWM変調回路、AMP1…センスアンプ、AMP2…制御アンプ、DAC…デジタル/アナログ変換回路、LOGC…制御ロジック、TRAG…三角波発生回路、B1,B2…バッファ、R1〜R20…抵抗、SW1〜SW8…スイッチ、IAMP…入力側アンプ、OAMP…出力側アンプ、M1〜M7…MOSFET、Q1…トランジスタ、C1…キャパシタ、VCM…ボイスコイルモータ。
【技術分野】
【0001】
本発明は、磁気ディスク制御装置に関し、例えば、ハードディスクメモリ装置に適用して有効な技術に関するものである。
【背景技術】
【0002】
ハードディスク駆動装置では高速アクセスの観点からトラック間を跨いで移動するシーク時間を短縮する方向にある。この結果、VCM(Voice Coil Motor)の駆動電流は増加してシーク動作時の発熱が問題になっている。この発熱問題を解決する為、位置決め制御の精度が要求されない代わりに電力消費が大きくなるシーク期間のみPWM(パルス幅変調)駆動によって消費電力を下げ、高精度制御が要求され、上記PWM駆動によるノイズの影響が無視できないリード・ライト時はリニア駆動に切り替えるようにしたPWM・リニア併用方式が、例えば特開2002−184137公報、特開2002−358742公報により提案されている。
【特許文献1】特開2002−184137公報
【特許文献2】特開2002−358742公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
図12には、この発明に先立って検討された前記PWM・リニア併用方式の磁気ディスク制御装置のブロック図が示されている。マイクロコンピュータを含むようなコントローラは、位置指令情報と磁気ヘッド及び信号処理ICにより取り出された位置情報とから駆動電流指令CODEを形成する。この駆動電流指令CODEは、デジタル/アナログ変換回路DACによりアナログ信号DACOUTに変換される。制御アンプAMP2は、上記アナログ信号DACOUTを基に抵抗Rx ,Cx 及びCx2の時定数回路で設定されたスルーレートを持つ駆動電圧Vcnt を形成する。基準電圧VREF1,VREF2は、回路の動作基準電圧である。上記駆動電圧Vcnt は、利得1のバッファB1を通して第1出力段DRV1の入力端子に伝えられる。上記バッファB1の出力信号は、位相反転させるバッファB2を通して第2出力段DRV2の入力端子に伝えられる。
【0004】
三角波発生回路TRAGと、PWM変調回路PWMG1とPWMG2とは、PWM動作のときの駆動電圧PWMP,PWMNを形成する。上記出力段DRV1,DRV2は、縦列形態の2つのアンプからなり、リニア動作のときには入力側アンプの出力信号が出力側アンプに伝えられる。PWM動作のときには、PWM動作信号PWM−ENによりスイッチが切り替えられて上記PWM駆動電圧PWMP,PWMNが出力側アンプに伝えられる。上記出力段DRV1とDRV2は、出力端子VCMPとVCMNに接続されたボイスコイルモータVCMを駆動する。このボイスコイルモータの駆動電流Ivcm は、抵抗Rs により電圧信号に変換される。この電圧信号は、センスアンプAMP1により増幅されて、上記制御アンプAM2の帰還信号とされる。これにより、駆動電圧Vcnt は上記アナログ信号DACOUTに比例した駆動電流をボイスコイルモータVCMに流すようにする。
【0005】
図13には、図12の磁気ディスク制御装置のリニア動作時の等価回路図が示されている。出力段DRV1とDRV2は、差動動作(相補動作)し、制御アンプAMP2の駆動電圧Vcnt からボイスコイルモータVCMの両端電圧VCMP−VCMNまでの伝達利得が2×GLIN となる。ここで、GLIN は出力段(入力側アンプ+出力側アンプ)DRV1,DRV2におけるリニア動作時の電圧利得である。
【0006】
図14には、図12の磁気ディスク制御装置のPWM動作時の等価回路図が示されている。PWM動作では、駆動電圧Vcnt に対し線形なPWM変調回路PWMG1,PWMG2でパルス信号に変換し出力側アンプに入力する。PWM変調回路PWMG1,PWMG2のゲインをGPWM (1/Va)、出力側アンプのゲインをGO とすると、ボイスコイルモータVCMの両端VCMP−VCMNには、Vcnt ×GPWM ×GO で決まる電圧が印加される。例えば、三角波発生回路TRAGの振幅をVa 、PWM変調回路PWMG1,PWMG2のゲインをGPWM (1/Va)、出力側アンプのゲイン(GO)をVpsとすると、Vcnt からVCMP−VCMNまでの伝達利得は、2×1/Va×Vpsとなる。この時、出力側アンプのゲインGO は、線形とみなしており、GPWM ×GO =GLIN となるように設定している。出力側アンプは、PWM動作・リニア動作の両モードに対応しており、内部切替スイッチでモード切り替えし、リニアモードではAB級パワーアンプ、PWMモードではD級パワーアンプとして動作する。
【0007】
リニアモード時の出力側アンプはAB級アンプの構成をとっており、不感帯は生じずに線形な電圧アンプとして動作する。一方、PWM駆動時の出力側アンプは、貫通電流を防止する為のデッド(Dead)時間がある為、必然的に不感帯が生じる。この為、上記のようにGPWM ×GO =GLIN と設定していても、電流誤差回路(AMP2)からの電流指示値Vcnt に対し、PWMモードとリニアモード間で出力オフセットが生じ、これがPWM/リニアの切り替え時に電流変動を生じさせる要因となっている事が判った。
【0008】
つまり、図15のタイミング図に示すように、PWM駆動時は貫通電流を防止するためのデッド時間tDEADが設けられる。図15の参考回路に示したように端子VCMPからVCMNへ電流を流している例を示している。この時、出力段DRV1の出力MOSFETM1と出力段DRV2の出力MOSFETM4がオン状態となり、出力段DRV1の出力MOSFETM2と出力段DRV2の出力MOSFETM3はオフ状態であり、整流用として動作する。端子VCMPがロウレベルからハイレベルに変化するとき、整流側のMOSFETM2がオフしてからデッド時間tDEADの後に上記MOSFETM1をオン状態にする。ここで、上記デッド時間tDEADの遅れ時間が生じる。同様に、VCMNがハイレベルからロウレベルに変化するときでは、整流側のMOSFETM3をオフ状態にしてからデッド時間tDEADの後に上記MOSFETM4をオン状態にする。ここでもデッド時間tDEADの遅れ時間が生じる。
【0009】
このように、PWMの1周期間Tpwm に、2×tDEADの遅れ時間が生じる事になるので、入力DUTYからボイスコイルモータVCMの両端VCMP−VCMNまでの伝達特性は、DUTY×Vps−2×tDEAD×fPWM ×Vpsとなる。fPWM はPWM周波数であり、Vpsは出力側アンプの電源電圧である。更に、Duty=Vcnt /Va (Va は三角波発生回路TRAGの出力振幅)なので、ボイスコイルモータVCMの両端VCMP−VCMNに印加される出力電圧をVOUT とすると、
VOUT =Vcnt×2/Va ×Vps−2×tDEAD×fPWM ×Vps
=Vcnt ×{(2/Va )−2×tDEAD×fPWM }×Vpsとなる。
【0010】
以上より、PWMモードとリニアモードとの駆動電圧Vcnt から出力電圧VOUT (VCMP−VCMN)までの伝達特性は、図16に示すようになる。同図の特性図に示すように、リニアモードとPWMモードの間には、±2×tDEAD×fPWM ×VpsのようなオフセットVoff が生じる事となる。上記のようなオフセットVoff が生じると、図17のPWM/リニア切替波形図に示したように、同じ電流Ivcm をボイスコイルモータVCMに流す場合、リニアモードとPWMモードでは、前記図16に示した出力段でのオフセットに相当する電圧だけ過渡的な電流変動が生じてしまうものとなる。この電流変動期間はヘッドの位置を正しく制御できなくなるために、シーク動作時間を長くしてしまうという問題を引き起こす。
【0011】
出力段DRV1,DRV2において、バイアス状態がPWMモードとリニアモード間で異なっているタイミングでPWMモードからリニアモードに切り替えた場合、出力段DRV1,DRV2の各バイアスがリニアモードのバイアス状態に整定するまでの間、後述するように出力電流に過渡的な変動が生じることも発見した。広帯域化を図る為にPWM周波数を高くしたい場合や、VCM電流が大きい状態で切り替える場合には、その切り替えタイミングの最適化が困難であり、前記同様な出力電流に過渡的な変動が生じてシーク時間を長くするという問題を引き起こす。
【0012】
この発明の目的は、PWM・リニア併用方式を採用しつつシーク動作の短縮化を図った磁気ディスク制御装置を提供することにある。この発明の前記ならびにそのほかの目的と新規な特徴は、本明細書の記述および添付図面から明らかになるであろう。
【課題を解決するための手段】
【0013】
本願において開示される発明のうち代表的なものの概要を簡単に説明すれば、下記の通りである。磁気ヘッドから読み出された位置情報と、コントローラからの位置指令情報とに対応して駆動電流制御信号が形成されてVCMドライバに入力される。上記VCMドライバは、モード制御信号に対応して上記磁気ヘッドが隣接するトラックを順次に走査するトラッキング動作のときにリニア動作を行い、上記磁気ヘッドがトラックを跨いで移動するシーク動作のときにPWM動作を行う出力段を有する。電圧生成部は、同じ駆動電流制御信号に対応した上記PWM動作とリニア動作との間のオフセットに相当するオフセット補償電圧を形成する。上記VCMドライバは、上記PWM動作のときには上記駆動電流制御信号に対応した駆動電圧を上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動する。上記VCMドライバは、上記リニア動作のときには上記駆動電流制御信号に対応した駆動電圧に上記オフセット補償電圧を加えて上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動する。
【発明の効果】
【0014】
PWM・リニア併用方式を採用しつつシーク動作の短縮化を図ることができる。
【発明を実施するための最良の形態】
【0015】
図1には、この発明に係るPWM・リニア併用方式の磁気ディスク制御装置のブロック図が示されている。前記図12と同様にマイクロコンピュータを含むようなコントローラは、位置指令情報と図示しない磁気ヘッド及び信号処理ICにより取り出された位置情報とから駆動電流指令CODEを形成する。この駆動電流指令CODEは、デジタル/アナログ変換回路DACによりアナログ信号DACOUTに変換される。制御アンプAMP2は、上記アナログ信号DACOUTを基に抵抗Rx ,Cx 及びCx2の時定数回路で設定されたスルーレートを持つ駆動電圧Vcnt を形成する。基準電圧VREF1,VREF2は、回路の動作基準電圧である。上記駆動電圧Vcnt は、利得1のバッファB1を通して第1出力段DRV1の入力端子に伝えられる。上記バッファB1の出力信号は、位相反転させるバッファB2を通して第2出力段DRV2の入力端子に伝えられる。
【0016】
三角波発生回路TRAGと、PWM変調回路PWMG1とPWMG2とは、PWM動作のときの駆動電圧PWMP,PWMNを形成する。上記出力段DRV1,DRV2は、縦列形態の2つのアンプからなり、リニア動作のときには入力側アンプの出力信号が出力側アンプに伝えられる。PWM動作のときには、PWM動作信号PWM−ENによりスイッチが切り替えられて上記PWM駆動電圧PWMP,PWMNが出力側アンプに伝えられる。上記出力段DRV1とDRV2は、出力端子VCMPとVCMNに接続されたボイスコイルモータVCMを駆動する。このボイスコイルモータの駆動電流Ivcm は、抵抗Rs により電圧信号に変換されて、センスアンプAMP1により増幅されて、上記制御アンプAM2の帰還信号とされる。これにより、駆動電圧Vcnt は上記アナログ信号DACOUTに比例した駆動電流をボイスコイルモータVCMに流すようにする。
【0017】
この実施例では、制御アンプAMP2の出力側にオフセット補償のための電圧生成部OFSが設けられる。この電圧生成部OFSは、前記図12で説明したオフセット電圧±2×tDEAD×fPWM ×Vpsに対応したオフセット補償電圧を形成する。このオフセット補償電圧は、PWM周波数PWMFに対応される。この電圧生成部OFSは、上記PWMモードのときにはPWM動作信号PWM−ENに対応して上記制御アンプAMP2で形成された駆動電圧Vcnt に上記オフセット補償電圧を加えて、上記バッファB1を介して第1出力段DRV1の入力に伝える。したがって、上記PWMモードのときには、上記駆動電圧Vcnt にオフセット補償電圧が加えられた電圧が上記バッファB1とB2を介して第2出力段DRV1の入力に伝えられる。また、リニアモードのときには、PWM動作信号PWM−ENに対応して駆動電圧Vcnt が電圧生成部OFSをスルーして上記バッファB1を介して第1出力段DRV1の入力に伝えられ、上記バッファB1とB2を介して第2出力段DRV1の入力に伝えられる。
【0018】
制御ロジックLOGCは、コントローラからのモード切り替え信号MODE、PWM周波数信号PWMF及びモード切替タイミング調整信号PL−DLYを受けて、PWM動作信号PWM−EN及びPWMリセット信号PWMRSTを生成し、上記出力段DRV1,DRV2を制御して、位置決め制御中に両モードの切り替えを高速且つ滑らかに行う。上記PWMリセット信号PWMRSTは、後述する出力段DRV1,DRV2の各バイアスがリニアモードのバイアス状態に整定するまでの間での出力電流に過渡的な変動を抑えるために用いられる。
【0019】
図2には、図1の電圧生成部OFSの一実施例の回路図が示されている。電圧生成部OFSは、押し出し電流源I1、I2、吸い込み電流源I1とI2、上記電流源に対応して設けられたスイッチSW1〜SW4、バッファB1の反転入力端子(−)と出力端子との間に設けられた抵抗RF及びその両端に設けられたスイッチSW5から構成される。上記バッファB1の非反転入力端子(+)には、駆動電圧Vcnt が供給される。上記電流源I1、I2は、上記抵抗RFに流れて上記オフセット補償電圧を形成する。電流源I1とI2は、PWM周波数PWMFに対応していずれかが選択されて、PWMモードでのPWM周波数fPWM に対応したオフセット補償電圧を形成する。前記DACの極性ビットDACMSBは、磁気ヘッドの移動方向を決める極性信号であり、それによりスイッチSW1(SW2)又はSW3(SW4)をオン状態にしてオフセット補償電圧の極性を決める。
【0020】
モード切り替え信号MODEによりPWMモードとされるときには、上記スイッチSW5がオフ状態にされる。そして、前記DACが正のアナログ信号DACOUTを形成して、制御アンプAMP2が正の駆動電圧Vcnt を形成するとき、PWM周波数PWMFと極性ビットDACMSBによりスイッチSW1(SW2)がオン状態にされる。上記抵抗RFに電流源I1(I2)の電流がバッファB1の出力端子に向けて流れて負のオフセット補償電圧Voff を形成する。差動アンプからなるバッファB1は、入力端子(+)と(−)が同電位となるよう動作をするから、結局バッファB1の出力端子はVcnt −Voff のような出力電圧となる。
【0021】
上記PWMモードにおいて、前記DACが負のアナログ信号DACOUTを形成して、制御アンプAMP2が負の駆動電圧Vcnt を形成するとき、PWM周波数PWMFと極性ビットDACMSBによりスイッチSW3(SW4)がオン状態にされる。上記抵抗RFにバッファB1の出力端子から電流源I1(I2)に向けて流れて正のオフセット補償電圧Voff を形成する。前記同様に、差動アンプからなるバッファB1は、入力端子(+)と(−)が同電位となるよう動作をするから、結局バッファB1の出力端子はVcnt +Voff のような出力電圧となる。
【0022】
モード切り替え信号MODEによりリニアモードとされるときには、前記スイッチSW1〜SW4は全てオフ状態となり、スイッチSW5がオン状態になる。これにより、バッファB1は、ボルテージフォロワ動作を行い、非反転入力端子(+)に供給された駆動電圧Vcnt をそのまま出力する動作を行う。
【0023】
図3には、図2の電圧生成回路OFSの動作を説明するための特性図が示されている。前記PWMモードにおいて、前記のように駆動電圧Vcnt が正電圧領域では、電圧生成部OFSが無いときには、前記図16に示した2×tDEAD×fPWM ×VpsのようなオフセットVoff を有している。しかし、前記電圧生成回路OFSにより、Vcnt −Voff が出力段DRV1,DRV2に供給されるので、その入出力特性図は点線で示したリニアモードと等しくなるよう補償される。同様に駆動電圧Vcnt が負電圧領域では、電圧生成部OFSが無いときには、前記図16に示した−2×tDEAD×fPWM ×VpsのようなオフセットVoff を有している。しかし、前記電圧生成回路OFSにより、Vcnt +Voff が出力段DRV1,DRV2に供給されるので、その入出力特性図は点線で示したリニアモードと等しくなるよう補償される。この結果、駆動電圧Vcnt によりPWMモードからリニアモードに切り替えた際に、同じ電流Ivcm をボイスコイルモータVCMに流すことができる。これにより、シーク動作からリード・ライト動作までの切り替え時間を短縮化することができる。
【0024】
図4には、図1の出力段DRV1(DRV2)の一実施例のブロック図が示されている。上記出力段DRV1(DRV2)は、ゲインを得るための入力側アンプIAMPと、大電流を出力する出力側アンプOAMPで構成される。リニアモード時は、入力側アンプIAMPと出力側アンプOAMPとは直列に接続されて一つのAB級のアンプとして動作する。
【0025】
PWMモード時は、入力側アンプIAMPのコンダクタンス回路GM1をスイッチSW6により切り離し、PWM変調されたパルス電流Ipwm をトランジスタQ1のベースに供給する。上記出力トランジスタQ1のコレクタには、電流源が負荷として設けられる。上記入力側アンプIAMPの出力トランジスタQ1のベートとコレクタ間には、位相補償容量C1が設けられて、スルーレート制御された比較的緩やかなパルス電圧が形成される。出力側アンプOAMPの出力端子VCMPの出力電圧VPは、上記入力側アンプIAMPの出力信号IOUTを入力とし、帰還抵抗R10とR20で決まるものとなる。
VP=IOUT×(1+R20/R10)−(R20/R10)×(Vps/2)……(1)
【0026】
図5には、図4の出力段DRV1(DRV2)のPWMモード/リニアモード切り替え時の波形図が示されている。出力段DRV1,DRV2をPWMモードからリニアモードに切り替える場合、どのタイミングで切り替えるかが重要になる。出力段DRV1,DRV2の入力側アンプIAMPの出力信号IOUTが同じ状態で、そのレベルから速やかにリニア動作できるタイミングで切り替える必要がある。具体的には、出力段DRV1,DRV2の入力側アンプIAMPの出力信号IOUTがロウレベル/ロウレベル、若しくはハイレベル/ハイレベルの状態で切り替える。
【0027】
例えば、PWM変調回路PWMG1,PWMG2のクロックを基準に、入力側アンプIAMPの遅延時間を考慮して、上記出力信号IOUTがロウレベル/ロウレベルの状態にある期間に、切り替え信号PWM−ENを生成する。切り替え信号PWM−ENがハイレベルからロウレベルになると、上記出力信号IOUT(P) 、IOUT(N) が共にロウレベル/ロウレベルから入力側アンプIAMPの最大スルーレートで上昇する。この間、出力端子VCMP=VCMN=0Vであり、VCM電流Ivcm は下がり続ける。その後、出力側アンプOAPMの入力制御範囲内に入ると、AB級パワーアンプとして動作し始め、その帯域でリニアモードの動作状態に整定する。従って、入力側アンプIAMPの最大出力スルーレートを適正にしておけば、PWMモードからリニアモードへの切り替え時の電流変動は抑制できる。
【0028】
しかし、PWMモードの電流制御帯域の広帯域化を図る為にPWM周波数を高くした場合、入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) ロウレベル/ロウレベル若しくはハイレベル/ハイレベルの状態が短くなり、タイミングの最適化が困難になることが判明した。すなわち、図5の説明Gにおいて、○で示したように切り替え最適期間は、P側(VCMP)、N側(VCMN)の入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) が等しい期間である。すなわち、入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) がロウレベル/ロウレベル又はハイレベル/ハイレベルの状態であり、この期間に合うように切り替え信号(内部信号)PWM−ENを定数設定及びタイミング作成する。図5の説明Hにおいて、時刻T2から、入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) がAB級アンプ(リニアモード)の帯域で速やかに整定する。図5の説明Iにおいて、期間T1は、出力側アンプOAMPが飽和している期間であり、VCMP=VCMNの状態となる。この期間は、入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) の最大スルーレートで決まる。そして、図5の説明Jにおいて、○で示したように入力側アンプIAMPの最大スルーレートが小さい場合、VCMP=VCMNの状態の期間が延び、電流変動が大きくなるという問題が生じる。
【0029】
図6には、図4の出力段DRV1(DRV2)において、PWM周波数を高くした場合の波形図が示されている。出力段DRV1(P側)の入力側アンプIAMPの出力信号IOUT(P) がロウレベルに下がり切らない状態でリニアモードに切り替えてしまった場合、出力端子VCMNより先に出力端子VCMPが整定してしまい、出力段DRV2(N側)に対応した出力端子VCMNとの間に電圧差が生じ、その結果、過渡的な電流変動が生じてしまう事となる。この問題は、周波数が高い場合だけでなく、比較的電流の大きい状態で切り替えようとした場合でも同じ事がいえる。
【0030】
図6の説明Kにおいて、PWM周波数が高い場合には、入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) が等しい状態が短くなるので、この期間に合うように切り替え信号(内部信号)PWM−ENの定数設定及びタイミング作成は困難となる。このため、入力側アンプIAMPの出力信号IOUT(P) が下がり切らないところで切り替え信号(内部信号)PWM−ENがロウレベルになるということが生じ得る。図6の説明Lは、VCMP側がVPCMN側より先に整定してしまうことを示している。この結果、VCMP−VCMN間に電圧差が生じ、それに対応してVCM電流Ivcm に大きな電流変動が生じる。このようにVCM電流Ivcm の変動はヘッド位置を変動に対応し、シーク動作の短縮化を阻害する要因となる。
【0031】
図7には、図1の出力段DRV1(DRV2)の他の一実施例のブロック図が示されている。この実施例では、前記図4の実施例の出力段DRV1(DRV2)の改良に係るものであり、PWMモードとリニアモードの切り替え時に発生する前記のようなVCM電流Ivcm の変動を抑制するために、リセット回路RSTが付加される。リセット回路RSTは、出力トランジスタQ1のベートと回路の接地電位との間に設けられたNチャネルMOSFETM5と、上記トランジスタQ1のコレクタに、ダイオードD1を通して3.3Vの電圧を供給するスイッチSW7とから構成される。
【0032】
切り替え信号(内部信号)PWM−ENがハイレベルからロウレベルに変化することにより、PWMモードからリニアモードに切り替えられる。これにより、入力側アンプIAMPのスイッチSW6がPWM変調されたパルス電流Ipwm から切り離してコンダクタンス回路GM1側に接続される。これと同期して、リセット信号PWMRSTが一時的にハイレベルにされて、MOSFETM5及びスイッチSW7をオン状態にする。これにより、トランジスタQ1のコレクタ電圧に3.3V−Vfのバイアス電圧を与える。
【0033】
図8には、図7の出力段DRV1(DRV2)の動作波形図が示されている。前記説明したように切り替え信号(内部信号)PWM−ENに同期して、短時間リセット信号PWMRSTを作成し、リセット信号PWMRSTがハイレベルの期間、入力側アンプIAMPを出力側アンプOAMPの制御範囲付近になるようにキャパシタC1を充電させる。パルス幅は、キャパシタC1を充電できる時間、例えば数10ns程度でよい。リセット回路RSTの具体的構成は、種々の形態が考えられるが、前記図7の実施例ではスイッチSW7とダイオードD1を用いている。リセット電圧は、例えば3.3V−Vfのように出力側アンプOAMPの入力制御範囲(4V−6V)よりやや低めに設定しておけば問題ない。これにより、出力段DRV2に対応したVCMN側も直ぐにリニア動作状態に整定させる事ができ、切り替え時の電流変動が抑制できるようになる。
【0034】
図8の説明Aは、前記説明したようにPWM周波数が高い場合、出力段DRV1,DRV2の入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) が等しい期間が短くなるので、この期間に合うように切り替え信号(内部信号)PWM−ENの定数設定及びタイミング作成は困難となる。このため、入力側アンプIAMPの出力信号IOUT(P) が下がり切らないところで切り替え信号(内部信号)PWM−ENがロウレベルになるということを示している。図8の説明Bは、VCMN側の出力側アンプOAMPの制御入力範囲のロウレベル側電圧付近(3.3−Vf)にリセットされているので、VCMN側と同じように素早く整定するようになることを示している。説明Cは、VCMP−VCMN電圧差が低減しVCM電流Ivcm の電流変動が低減していることを示している。上記説明したように、PWMモードからリニアモードへの切り替え時の電流変動が低減する事で、低発熱、低消費電力化に有利なPWMモードをより広い電流範囲に適用できるようになる。
【0035】
図9には、図7の出力段DRV1(DRV2)の変形例が示されている。この実施例では、入力側アンプIAMPと出力側アンプOAMPの間にスイッチSW8が設けられる。リニアモードの時には、入力側アンプIAMPの出力信号IOUTがスイッチSW8を通して出力側アンプOAMPの入力端子に伝えられる。PWMモードの時には、スイッチSW8により入力側アンプIAMPの出力信号IOUTが切り離され、PWM信号が出力側アンプOAMPの入力端子に伝えられる。リセット回路RSTは、入力側アンプIAMPの出力トランジスタQ1のベートと回路の接地電位との間に設けられたNチャネルMOSFETM6と、上記トランジスタQ1のコレクタと回路の接地電位との間に設けらNチャネルMOSFETM7から構成される。これらのMOSFETM6,M7のゲートには、切り替え信号(内部信号)PWM−ENが供給される。
【0036】
この実施例では、出力電圧のスルーレート制御をしない場合、PWMとリニアの切り替えを入力側アンプAMPの出力側で行う。このように出力電圧のスルーレート制御をしない場合、PWMモードのときには、MOSFETM6,M7をオン状態にして入力側アンプIAMPの出力信号IOUTを回路の接地電位(ロウレベル)に抑えておく。リニアモードに切り替えるのは、出力端子VCMPとVCMNが接地電位(ロウレベル)にいる期間に行う。この期間は、前述したように入力側アンプIAMPの出力信号IOUTに比べて長いので、タイミングの最適化を行う事は容易となる。これにより、切り替え時の電流変動が抑制できるようになる。
【0037】
図10には、図9の出力段DRV1(DRV2)の動作波形図が示されている。図10の説明Dは、PWMモード時に入力側アンプIAMPの出力端子が、出力側アンプOAMPと切り離されているので回路の接地電位にセットしておく。リニアモードに切り替えるタイミングは、VCMP,VCMNがロウレベル/ロウレベルのときに行う。この期間は、PWM周波数が高い場合でもある程度長いことを示している。図10の説明Eは、出力段DRV1,DRV2共に入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) が回路の接地電位からコンダクタン回路GM1の最大スルーレートで立ち上り始める。この期間は、VCMP,VCMNは回路の接地電位である。入力側アンプIAMPの出力信号IOUT(P) 、IOUT(N) が出力側アンプOAMPの制御内に入ると、リニア信号に応じた出力側アンプOAMPの帯域で速やかに整定することを示している。図10の説明Fは、VCMP−VCMN電位差は小さく、過渡的な電流変動も小さく抑えられることを示している。このようにPWMモードからリニアモードへの切り替え時の電流変動が低減する事で、低発熱、低消費電力化に有利なPWMモードを、より広い電流範囲に適用できるようになる。また、周波数が高い場合でも容易に速やかなモード切り替えを行える。
【0038】
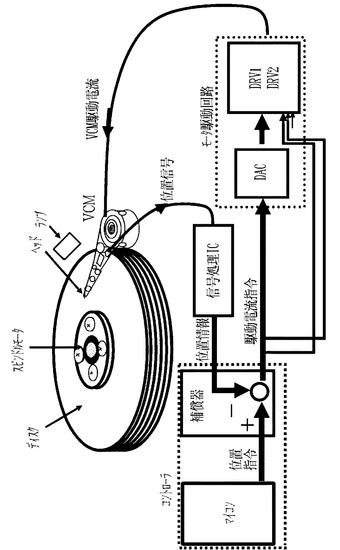
図11には、この発明が適用される磁気ディスク装置の一実施例の概略構成図が示されている。ハードディスク記憶装置(HDD)は、スピンドルモータによって高速回転しているディスク上にヘッドよりデータを書き込み、読み出す。記憶位置(ヘッドの位置)を可変するヘッドアクチュエータであるVCM(Voice Coil Motor)を用い、ディスク上に予め記憶されたサーボ情報を信号処理ICで読み出し、マイコンを含むコントローラによって上記VCMを駆動する電流指令を発行し、それをDAC(デジタル/アナログ変換回路)を含むモータ駆動回路DRV1,DRV2によって上記VCMを駆動する帰還制御が行われる。この発明の適用によってトラックを跨がったメモリアクセスの高速化を図ることができる。同図のモータ駆動回路は、特に制限されないが、前記図1の回路及びDACを含んで1つの半導体基板上に形成される。
【0039】
以上本発明者によってなされた発明を、前記実施形態に基づき具体的に説明したが、本発明は、前記実施形態に限定されるものではなく、その要旨を逸脱しない範囲において種々変更可能である。例えば、オフセット回路OFS、出力段DRV1,DRV2を構成する入力側アンプIAMP、出力側アンプOAMP及びそれに付加されるリセット回路RSTの具体的構成は種々の実施形態を採ることができる。この発明は、HDD等のような磁気ディスク制御装置に広く利用することができる。
【図面の簡単な説明】
【0040】
【図1】この発明に係るPWM・リニア併用方式の磁気ディスク制御装置の一実施例を示すブロック図である。
【図2】図1の電圧生成部OFSの一実施例を示す回路図である。
【図3】図2の電圧生成回路PFSの動作を説明するための特性図である。
【図4】図1の出力段DRV1(DRV2)の一実施例を示すブロック図である。
【図5】図4の出力段DRV1(DRV2)におけるPWMモード/リニアモード切り替え時の波形図である。
【図6】図4の出力段DRV1(DRV2)におけるPWM周波数を高くした場合の波形図である。
【図7】図1の出力段DRV1(DRV2)の他の一実施例を示すブロック図である。
【図8】図7の出力段DRV1(DRV2)の動作波形図である。
【図9】図7の出力段DRV1(DRV2)の変形例である。
【図10】図9の出力段DRV1(DRV2)の動作波形図である。
【図11】この発明が適用される磁気ディスク装置の一実施例を示す概略構成図である。
【図12】この発明に先立って検討されたPWM・リニア併用方式の磁気ディスク制御装置のブロック図である。
【図13】図12の磁気ディスク制御装置のリニア動作時の等価回路図である。
【図14】図12の磁気ディスク制御装置のPWM動作時の等価回路図である。
【図15】図14でのPWM駆動を説明するためのタイミング図である。
【図16】図13と図14に対応した等価回路の特性図である。
【図17】図13と図14に対応したPWM/リニア切替波形図である。
【符号の説明】
【0041】
DRV1,DRV2…出力段、OFS…電圧生成部、PWMG1,PWMG2…PWM変調回路、AMP1…センスアンプ、AMP2…制御アンプ、DAC…デジタル/アナログ変換回路、LOGC…制御ロジック、TRAG…三角波発生回路、B1,B2…バッファ、R1〜R20…抵抗、SW1〜SW8…スイッチ、IAMP…入力側アンプ、OAMP…出力側アンプ、M1〜M7…MOSFET、Q1…トランジスタ、C1…キャパシタ、VCM…ボイスコイルモータ。
【特許請求の範囲】
【請求項1】
磁気ヘッドから読み出された位置情報と、コントローラからの位置指令情報とに対応して形成された駆動電流制御信号によりボイスコイルモータの駆動電流を形成するVCMドライバを備え、
上記VCMドライバは、
モード制御信号に対応して上記磁気ヘッドが隣接するトラックを順次に走査するトラッキング動作のときにリニア動作を行い、上記磁気ヘッドがトラックを跨いで移動するシーク動作のときにPWM動作を行う出力段と、
同じ駆動電流制御信号に対応した上記PWM動作とリニア動作との間のオフセットに相当するオフセット補償電圧を形成する電圧生成部とを有し、
上記ニア動作のときには上記駆動電流制御信号に対応した駆動電圧を上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動し、上記PWM動作のときには上記駆動電流制御信号に対応した駆動電圧に上記オフセット補償電圧を加えて上記出力アンプの入力端子に伝えて上記ボイスコイルモータを駆動する磁気ディスク制御装置
【請求項2】
請求項1において、
上記VCMドライバは、
上記ボイスコイルモータの両端に流れる電流に対応した電圧信号をセンスするセンスアンプと、
上記センスアンプの出力信号を帰還信号として上記駆動電流制御信号と誤差比較を行う制御アンプと、
上記制御アンプ出力を積分して上記駆動電圧の指示値を形成すると共に帰還ループ 全体を安定に保つ位相補償手段と、
上記駆動電圧指示値に比例した駆動電圧を発生し、選択可能な同一の伝達利得を有する2つの駆動手段、即ちリニア駆動手段又はPWM駆動手段によって、ボイスコイルモータを駆動する出力アンプと、
上記出力アンプの駆動方式をスイッチする選択回路と、
上記選択回路がリニア駆動手段を選択した場合は、上記駆動電圧指示値と同一値を直接出力アンプに伝達し、上記選択回路がPWM駆動手段を選択した場合は、上記駆動電圧指示値に、PWM駆動手段のデッドタイムによって発生する非線形歪みをキャンセルさせる為のオフセット電圧を加算するオフセット電圧加算手段とを有する磁気ディスク制御装置。
【請求項3】
請求項2において、
上記オフセット電圧加算手段は、
非反転入力端子に上記駆動電圧指示値が供給された差動アンプと、
上記差動アンプの反転入力端子と出力端子との間に設けられた負荷抵抗と、
上記負荷抵抗に電流を流す電流源と、
上記電流源の電流を上記負荷抵抗に供給する第1スイッチと、
上記抵抗の両端を短絡する第2スイッチとを有し、
上記PWM駆動手段選択時には上記第1スイッチをオン状態に、上記第2スイッチをオフ状態にし、
上記リニア駆動手段選択時に上記第1スイッチをオフ状態に、上記第2スイッチをオン状態にする磁気ディスク制御装置。
【請求項4】
請求項3において、
上記駆動電流制御信号は、DACにより形成されるものであり、
上記電流源は、上記抵抗に対して第1方向に電流を流す第1電流源と、上記抵抗に対して第1方向とは逆方向に電流を流す第2電流源を有し、
上記第1スイッチは、上記第1電流源に対応した第11スイッチと、上記第2電流源に対応した第12スイッチを有し、
上記第11スイッチと第12スイッチは、DACに入力される極性ビットである上記駆動電流制御信号の極性信号により制御されて上記駆動電流指示値と同極性のオフセット補償電圧を形成する磁気ディスク制御装置。
【請求項5】
請求項2において、
上記オフセット電圧加算手段では、
予め用意された複数個のオフセット電圧を選択可能とし、上記出力アンプのPWM周波数に比例した適正値を選択する磁気ディスク制御装置。
【請求項6】
磁気ヘッドから読み出された位置情報と、コントローラからの位置指令情報とに対応して形成された駆動電流制御信号によりボイスコイルモータの駆動電流を形成するVCMドライバを備え、
上記VCMドライバは、
モード制御信号に対応して上記磁気ヘッドが隣接するトラックを順次に走査するトラッキング動作のときにリニア動作を行い、上記磁気ヘッドがトラックを跨いで移動するシーク動作のときにPWM動作を行う出力アンプを有し、
上記PWM動作からリニア動作に移行する際にリニア動作の初期値を設定することを可能にした上記ボイスコイルモータを駆動する磁気ディスク制御装置
【請求項7】
請求項6において、
上記出力アンプは、上記ボイスコイルモータの第1端子と第2端子に第1出力端子及び第2出力端子がそれぞれ接続され、第1入力端子と第2入力端子に互いに逆相の駆動信号が入力された第1回路及び第2回路を有し、
上記第1回路は、
上記第1入力端子の入力電圧を受ける第1アンプと、
上記ボイスコイルモータの第1端子に駆動信号を出力する第2アンプと、
上記第1入力端子の入力電圧に対応して第1PWM信号を形成する第1PWM変調回路と、
第1信号切り替え部とを有し、
上記第2回路は、
上記第2入力端子の入力電圧を受ける第3アンプと、
上記ボイスコイルモータの第2端子に駆動信号を出力する第4アンプと、
上記第2入力端子の入力電圧に対応して第2PWM信号を形成する第2PWM変調回路と、
第2信号切り替え部とを有し、
上記第1信号切り替え部は、上記PWM動作のときには上記第1PWM変調回路で形成された第1PWM信号を上記第2アンプの入力端子に伝え、上記リニアモードのときには上記第1アンプの出力信号を上記第2アンプの入力端子に伝え
上記第2信号切り替え部は、上記PWM動作のときには上記第2PWM変調回路で形成された第2PWM信号を上記第3アンプの入力端子に伝え、上記リニアモードのときには上記第3アンプの出力信号を上記第4アンプの入力端子に伝え、
上記出力アンプがPWM動作からリニア動作に移行する際に、上記第1アンプの出力端子に、上記第2アンプの制御入力範囲の下限電圧より僅かに低い電圧を供給する第1初期値設定回路と、上記第3アンプの出力端子に、上記第4アンプの制御入力範囲の下限電圧より僅かに低い電圧を供給する第2初期値設定回路とを更にを有する磁気ディスク制御装置。
【請求項8】
請求項7において、
上記信号切り替え部は、
上記出力アンプが、PWM動作からリニア動作に移行する際に、第1アンプの出力端子に回路の接地電位を供給する第3初期値設定回路と第3アンプの出力端子に回路の接地電位を供給する第4初期値設定回路を更に有する磁気ディスク制御装置。
【請求項9】
請求項7において、
上記出力アンプが、PWM動作からリニア動作に移行するタイミングが、上記第1端子と上記第2端子が接地レベルにあるときに同期して行なわれるように制御される磁気ディスク制御装置。
【請求項1】
磁気ヘッドから読み出された位置情報と、コントローラからの位置指令情報とに対応して形成された駆動電流制御信号によりボイスコイルモータの駆動電流を形成するVCMドライバを備え、
上記VCMドライバは、
モード制御信号に対応して上記磁気ヘッドが隣接するトラックを順次に走査するトラッキング動作のときにリニア動作を行い、上記磁気ヘッドがトラックを跨いで移動するシーク動作のときにPWM動作を行う出力段と、
同じ駆動電流制御信号に対応した上記PWM動作とリニア動作との間のオフセットに相当するオフセット補償電圧を形成する電圧生成部とを有し、
上記ニア動作のときには上記駆動電流制御信号に対応した駆動電圧を上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動し、上記PWM動作のときには上記駆動電流制御信号に対応した駆動電圧に上記オフセット補償電圧を加えて上記出力アンプの入力端子に伝えて上記ボイスコイルモータを駆動する磁気ディスク制御装置
【請求項2】
請求項1において、
上記VCMドライバは、
上記ボイスコイルモータの両端に流れる電流に対応した電圧信号をセンスするセンスアンプと、
上記センスアンプの出力信号を帰還信号として上記駆動電流制御信号と誤差比較を行う制御アンプと、
上記制御アンプ出力を積分して上記駆動電圧の指示値を形成すると共に帰還ループ 全体を安定に保つ位相補償手段と、
上記駆動電圧指示値に比例した駆動電圧を発生し、選択可能な同一の伝達利得を有する2つの駆動手段、即ちリニア駆動手段又はPWM駆動手段によって、ボイスコイルモータを駆動する出力アンプと、
上記出力アンプの駆動方式をスイッチする選択回路と、
上記選択回路がリニア駆動手段を選択した場合は、上記駆動電圧指示値と同一値を直接出力アンプに伝達し、上記選択回路がPWM駆動手段を選択した場合は、上記駆動電圧指示値に、PWM駆動手段のデッドタイムによって発生する非線形歪みをキャンセルさせる為のオフセット電圧を加算するオフセット電圧加算手段とを有する磁気ディスク制御装置。
【請求項3】
請求項2において、
上記オフセット電圧加算手段は、
非反転入力端子に上記駆動電圧指示値が供給された差動アンプと、
上記差動アンプの反転入力端子と出力端子との間に設けられた負荷抵抗と、
上記負荷抵抗に電流を流す電流源と、
上記電流源の電流を上記負荷抵抗に供給する第1スイッチと、
上記抵抗の両端を短絡する第2スイッチとを有し、
上記PWM駆動手段選択時には上記第1スイッチをオン状態に、上記第2スイッチをオフ状態にし、
上記リニア駆動手段選択時に上記第1スイッチをオフ状態に、上記第2スイッチをオン状態にする磁気ディスク制御装置。
【請求項4】
請求項3において、
上記駆動電流制御信号は、DACにより形成されるものであり、
上記電流源は、上記抵抗に対して第1方向に電流を流す第1電流源と、上記抵抗に対して第1方向とは逆方向に電流を流す第2電流源を有し、
上記第1スイッチは、上記第1電流源に対応した第11スイッチと、上記第2電流源に対応した第12スイッチを有し、
上記第11スイッチと第12スイッチは、DACに入力される極性ビットである上記駆動電流制御信号の極性信号により制御されて上記駆動電流指示値と同極性のオフセット補償電圧を形成する磁気ディスク制御装置。
【請求項5】
請求項2において、
上記オフセット電圧加算手段では、
予め用意された複数個のオフセット電圧を選択可能とし、上記出力アンプのPWM周波数に比例した適正値を選択する磁気ディスク制御装置。
【請求項6】
磁気ヘッドから読み出された位置情報と、コントローラからの位置指令情報とに対応して形成された駆動電流制御信号によりボイスコイルモータの駆動電流を形成するVCMドライバを備え、
上記VCMドライバは、
モード制御信号に対応して上記磁気ヘッドが隣接するトラックを順次に走査するトラッキング動作のときにリニア動作を行い、上記磁気ヘッドがトラックを跨いで移動するシーク動作のときにPWM動作を行う出力アンプを有し、
上記PWM動作からリニア動作に移行する際にリニア動作の初期値を設定することを可能にした上記ボイスコイルモータを駆動する磁気ディスク制御装置
【請求項7】
請求項6において、
上記出力アンプは、上記ボイスコイルモータの第1端子と第2端子に第1出力端子及び第2出力端子がそれぞれ接続され、第1入力端子と第2入力端子に互いに逆相の駆動信号が入力された第1回路及び第2回路を有し、
上記第1回路は、
上記第1入力端子の入力電圧を受ける第1アンプと、
上記ボイスコイルモータの第1端子に駆動信号を出力する第2アンプと、
上記第1入力端子の入力電圧に対応して第1PWM信号を形成する第1PWM変調回路と、
第1信号切り替え部とを有し、
上記第2回路は、
上記第2入力端子の入力電圧を受ける第3アンプと、
上記ボイスコイルモータの第2端子に駆動信号を出力する第4アンプと、
上記第2入力端子の入力電圧に対応して第2PWM信号を形成する第2PWM変調回路と、
第2信号切り替え部とを有し、
上記第1信号切り替え部は、上記PWM動作のときには上記第1PWM変調回路で形成された第1PWM信号を上記第2アンプの入力端子に伝え、上記リニアモードのときには上記第1アンプの出力信号を上記第2アンプの入力端子に伝え
上記第2信号切り替え部は、上記PWM動作のときには上記第2PWM変調回路で形成された第2PWM信号を上記第3アンプの入力端子に伝え、上記リニアモードのときには上記第3アンプの出力信号を上記第4アンプの入力端子に伝え、
上記出力アンプがPWM動作からリニア動作に移行する際に、上記第1アンプの出力端子に、上記第2アンプの制御入力範囲の下限電圧より僅かに低い電圧を供給する第1初期値設定回路と、上記第3アンプの出力端子に、上記第4アンプの制御入力範囲の下限電圧より僅かに低い電圧を供給する第2初期値設定回路とを更にを有する磁気ディスク制御装置。
【請求項8】
請求項7において、
上記信号切り替え部は、
上記出力アンプが、PWM動作からリニア動作に移行する際に、第1アンプの出力端子に回路の接地電位を供給する第3初期値設定回路と第3アンプの出力端子に回路の接地電位を供給する第4初期値設定回路を更に有する磁気ディスク制御装置。
【請求項9】
請求項7において、
上記出力アンプが、PWM動作からリニア動作に移行するタイミングが、上記第1端子と上記第2端子が接地レベルにあるときに同期して行なわれるように制御される磁気ディスク制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2007−295643(P2007−295643A)
【公開日】平成19年11月8日(2007.11.8)
【国際特許分類】
【出願番号】特願2006−117102(P2006−117102)
【出願日】平成18年4月20日(2006.4.20)
【出願人】(503121103)株式会社ルネサステクノロジ (4,790)
【Fターム(参考)】
【公開日】平成19年11月8日(2007.11.8)
【国際特許分類】
【出願日】平成18年4月20日(2006.4.20)
【出願人】(503121103)株式会社ルネサステクノロジ (4,790)
【Fターム(参考)】
[ Back to top ]