
磁気ディスク装置およびヘッドの位置制御方法
【課題】フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成すること。
【解決手段】 磁気ディスク装置は、サーボ情報が記録される磁気ディスクと、磁気ディスクのサーボ情報を読み出すためのヘッドと、位置制御手段とを具備する。位置制御手段は、前記ヘッドの位置決め制御を行う際に、ヘッドにより読み出したサーボ情報から生成される位置誤差情報に基づいて、可変係数を含む高次のIIR型デジタルフィルタを用いて位置決め制御における外乱となる所定周波数を推定する。
【解決手段】 磁気ディスク装置は、サーボ情報が記録される磁気ディスクと、磁気ディスクのサーボ情報を読み出すためのヘッドと、位置制御手段とを具備する。位置制御手段は、前記ヘッドの位置決め制御を行う際に、ヘッドにより読み出したサーボ情報から生成される位置誤差情報に基づいて、可変係数を含む高次のIIR型デジタルフィルタを用いて位置決め制御における外乱となる所定周波数を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、ヘッドの位置を制御する磁気ディスク装置およびヘッドの位置制御方法に関する。
【背景技術】
【0002】
近年、磁気ディスクのヘッドの位置制御では、ヘッドの位置誤差情報をフィルタ処理した情報により制御対象となるVCMを制御するフィードバック制御が適用されている。また、フィードバック制御だけでなく、フィードバック制御系に印加される外乱の周波数成分に基づくフィードフォワード制御が付加されることもある。さらに、フィードバック制御系の一部を構成する機構部に発生する共振周波数成分を抑圧するための共振(抑圧)フィルタが付加されることもある。このようなヘッドの位置制御のためのフィルタ処理には、適応フィルタが用いられる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平07−098948号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが従来は、フィードフォワード制御における外乱の周波数成分または機構部に発生する共振周波数成分の推定にFFTが用いられることが一般的であった。また、ヘッドの位置制御のフィルタ処理をソフトウェアで実現することが多かったが、FFTをソフトウェアで実現することは容易ではなかった。また、FFTをハードウェアで実現する場合であっても、コストアップやチップ上でのダイ面積が大きくなることが課題となっていた。すなわち、ヘッドの位置制御などのフィードバック制御で用いられる適応フィルタを容易に構成することは困難であった。
【0005】
そこで、本発明が解決しようとする課題は、フィードバック制御で用いられる適応フィルタを容易に構成することができる磁気ディスク装置およびヘッドの位置制御方法を提供することである。
【課題を解決するための手段】
【0006】
実施形態の磁気ディスク装置は、サーボ情報が記録される磁気ディスクと、磁気ディスクのサーボ情報を読み出すためのヘッドと、位置制御手段とを具備する。位置制御手段は、前記ヘッドの位置決め制御を行う際に、ヘッドにより読み出したサーボ情報から生成される位置誤差情報に基づいて、可変係数を含む高次のIIR型デジタルフィルタを用いて位置決め制御における外乱となる所定周波数を推定する。
【図面の簡単な説明】
【0007】
【図1】第1の実施形態にかかる磁気ディスク装置(HDD)を備える電子機器の構成を示すブロック図。
【図2】第1の実施形態においてヘッドの位置制御処理を実行する複数のブロックを説明するための構成図。
【図3】第1の実施形態にかかる適応フィルタの構成を説明するためのブロック図。
【図4】第1の実施形態にかかる適応フィルタにおける経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図。
【図5】第1の実施形態にかかる適応フィルタの伝達特性を示す図。
【図6】第1の実施形態にかかる適応フィルタを含むフィードバック制御系の閉ループ特性(感度特性)を示す図。
【図7】第2の実施形態にかかる適応フィルタの構成を説明するためのブロック図。
【図8】第2の実施形態にかかる適応フィルタにおける経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図。
【図9】第2の実施形態にかかる適応フィルタの伝達特性を示す図。
【図10】第2の実施形態にかかる適応フィルタを含むフィードバック制御系の閉ループ特性(感度特性)を示す図。
【図11】第3の実施形態にかかる適応フィルタの構成を説明するためのブロック図。
【図12】第3の実施形態において共振が発生する機構部を含む制御対象の伝達特性を示す図。
【図13】第3の実施形態にかかる適応フィルタにおける経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図。
【図14】第3の実施形態にかかる適応フィルタの伝達特性を示す図。
【図15】第4の実施形態にかかる適応フィルタの構成を説明するためのブロック図。
【図16】第4の実施形態にかかる適応フィルタにおける経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図。
【図17】第4の実施形態にかかる適応フィルタの伝達特性を示す図。
【図18】第4の実施形態にかかる適応フィルタを含むフィードバック制御系の閉ループ特性(感度特性)を示す図。
【発明を実施するための形態】
【0008】
以下、複数の実施形態について図面を用いて説明する。
【0009】
(第1の実施形態)
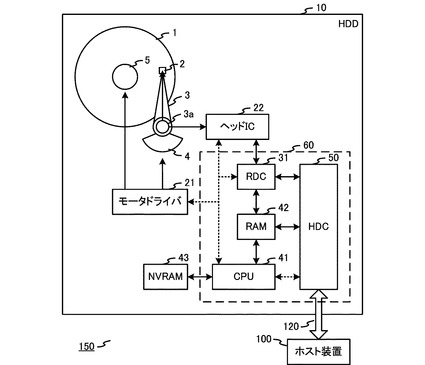
図1は、本第1の実施形態にかかる磁気ディスク装置(以下、HDDとも称する)10を備える電子機器150の構成を示すブロック図である。また電子機器150はホスト装置100を備えている。HDD10は、通信媒体(ホストI/F)120を介してホスト装置100と接続され、ホスト装置100の記憶モジュールとして機能する。ホストI/F120は、ホスト装置100とHDD10とを接続し、ホスト装置100とHDD10との間のデータ及びコマンドの送受に係る通信に利用される。例えば、電子機器150は、パーソナルコンピュータであり、ホスト装置100は、パーソナルコンピュータに備えられるチップセットICである。
【0010】
本第1の実施形態ではHDD10の例を説明するが、光ディスクドライブ、MOドライブ、MDドライブ、デジタルカメラ(の手振れ抑制制御)などの、フィードバック制御により位置制御,速度制御を行うフィードバック制御装置に本第1の実施形態の構成を適用することも可能である。
【0011】
HDD10は、磁気ディスク1、スライダ2、アーム3、VCM(ボイスコイルモータ)4、及びSPM(スピンドルモータ)5などの機構部を有する。またHDD10は、モータドライバ21、ヘッドIC22、NVRAM43、及びコントローラ60などの回路ブロックを備える。コントローラ60は、リードライトチャネル(以下、RDCとも称する)31、CPU41、RAM42、及びHDC(Hard Disc Controller)50を含む。
【0012】
本第1の実施形態に係るHDD10では、磁気ディスク1に記録されたサーボ情報に基づいて、スライダ2に備えられたヘッド(不図示)の位置制御が行われる。ヘッドの位置制御には、フィードバック制御が適用される。このフィードバック制御では、磁気ディスク1からヘッド(不図示)により読み出されたサーボ情報とフィードバック制御での制御目標位置となる目標位置情報とに基づいて位置誤差情報が算出され、算出された位置誤差情報はフィルタ処理される。本第1の実施形態では、算出された位置誤差情報は、適応フィルタを用いてフィルタ処理される。本第1の実施形態において特徴的な構成の一つである適応フィルタは、FFTを用いることなく外乱の不特定の周波数成分を適応的に推定して抑圧することができる。
【0013】
磁気ディスク1は、SPM5に固定され、SPM5が回転駆動することで回転する。磁気ディスク1の少なくとも一面は磁気的に情報が記録される記録面である。つまり、磁気ディスク1は磁気記録媒体である。記録面には例えば同心円の複数のトラックが定義され、各トラックはサーボ領域とデータ領域とを有する。サーボ領域には、磁気ディスク1の記録面上での物理的なアドレス情報、および、トラックの中心に対する半径方向のズレを算出するための位置情報を含むサーボ情報が記録されている。また、HDD10に記録すべき情報はデータ領域に記録される。
【0014】
スライダ2は、磁気ディスク1の記録面に対応するようにアーム3の一端に備えられる。スライダ2は、リードヘッド(不図示)及びライトヘッド(不図示)を備えている。リードヘッド(不図示)は、磁気ディスク1の記録面に磁気記録された信号を読み取る。読み取られた信号は、アーム3上の導体パターンを介してヘッドIC22へ出力される。ライトヘッド(不図示)は、ヘッドIC22からアーム3上の導体パターンを介して入力されるライト信号(ライト電流)に応じて、磁気ディスク1の記録面に磁気記録する。
【0015】
アーム3は、一端にスライダ2、他端に軸受部3aを備えている。アーム3は、VCM4への駆動電流の供給に応じて、軸受部3aの略中央部を中心として回転し、磁気ディスク1の記録面上でスライダ2を半径方向に移動させる。
【0016】
VCM4は、モータドライバ21から供給される駆動信号(電流)に応じて駆動し、アーム3を回転させる。
【0017】
SPM5は、モータドライバ21から供給される駆動信号(電流)に応じて駆動し、磁気ディスク1を回転させる。
【0018】
モータドライバ21は、コントローラ60(さらに詳細にはCPU41)からの制御信号に基づいて、VCM4を駆動するための駆動信号(電流)をVCM4へ、SPM5を駆動するための駆動信号(電流)をSPM5へ供給する。
【0019】
ヘッドIC22は、スライダ2に備えられたリードヘッド(不図示)からアーム3上の導体パターンを介して入力された信号を増幅し、増幅した信号をリード情報としてコントローラ60(さらに詳細にはRDC31)に出力する。またヘッドIC22は、コントローラ60(RDC31)から入力された記録情報に応じたライト信号(ライト電流)を、スライダ2に備えられたライトヘッド(不図示)へ、アーム3上の導体パターンを介して出力する。
【0020】
コントローラ60は、RDC31、CPU41、RAM42、及びHDC50等を含むSoC(System On Chip)として構成される。本第1の実施形態では、コントローラ60は、磁気ディスク1に記録されたサーボ情報に基づいて、スライダ2に備えられたリードヘッド(不図示)のトラックの中心に対する半径方向のズレ(位置)を制御する位置制御処理を行う。なお、コントローラ60がRAM42を含まず、コントローラ60の外部にRAM42が接続される構成であってもよい。
【0021】
RDC31は、ヘッドIC22から入力されたリード情報からサーボ領域に対応するサーボ情報を検出し、検出したサーボ情報からアドレス情報および位置情報を抽出する。抽出されたアドレス情報および位置情報はCPU41へ出力される。またRDC31は、リード情報からデータ領域に対応する情報を検出し、検出した情報に所定の処理を施して復号化する。復号化された情報はHDC50へ出力される。さらにRDC31は、HDC50から入力された記録すべき情報に所定の処理を施して符号化し、この符号化した情報を記録情報としてヘッドIC22へ出力する。RDC31は、これらの複数の処理のためにRAM42をワークメモリとして利用する。
【0022】
CPU41は、NVRAM43に記憶されたプログラムを実行することでHDD10に備えられた各ブロックを制御するプロセッサである。例えばCPU41は、磁気ディスク1の記録面に対するリードヘッド(不図示)の位置制御処理、VCM4及びSPM5の回転制御処理、及び磁気ディスク1からの情報再生処理の動作を制御する。CPU41は、コントローラ60がサーボコントローラ、又はリードライトコントローラとして動作するためのプログラムを実行する。CPU41は、このようなプログラムの実行においてRAM42をワークメモリとして利用する。本第1の実施形態では、コントローラ60がサーボコントローラとして動作する場合、CPU41は、RDC31から入力されたアドレス情報および位置情報に基づく位置制御処理の動作を制御する。位置制御処理は、位置誤差情報に対するフィルタ処理を含むフィードバック制御である。このフィルタ処理には、CPU41で実行されるプログラムによって実現される適応フィルタが適用される。本第1の実施形態の適応フィルタは、FFTを用いずに構成されて、位置制御処理に対する外乱の不特定の周波数成分を適応的に推定することができる。
【0023】
RAM42は、RDC31、CPU41及びHDC50のワークメモリである。RAM42には揮発性メモリであるDRAMが適用される。
【0024】
NVRAM43は、CPU41が実行するプログラムを記憶する不揮発性メモリである。NVRAM43に記憶されるプログラムは更新可能である。またNVRAM43は、CPU41で実行される処理で利用されるパラメータ値を記憶する。
【0025】
HDC50は、ホスト装置100との間で情報を送信及び受信する通信処理を実行する。HDC50は、RDC31からの復号化された情報に所定の処理を施して符号化し、符号化した情報を送信情報としてホスト装置100へ送信する。またHDC50は、ホスト装置100から受信した受信情報に所定の処理を施して復号化し、復号化した情報を記録すべき情報としてRDC31へ出力する。例えばHDC50は、ホスト装置100との間でSATA(Serial Advanced Technology Attachment)規格に準拠した通信処理を実行する。HDC50は、ホスト装置100から、データの記録を開始する論理アドレス及び記録データ長の情報を含むライトコマンドを受信した場合、受信したライトコマンドから論理アドレス及び記録データ長の情報を抽出する。抽出された論理アドレス及び記録データ長の情報はCPU41へ出力される。
【0026】
このような構成により、本第1の実施形態に係るHDD10に備えられた複数のブロックによって、磁気ディスク1の記録面に対するリードヘッド(不図示)の位置制御処理が、フィードバック制御によって実行される。本第1の実施形態にかかる位置制御処理には、CPU41で実行されるプログラムによって実現され、位置制御処理に対する外乱の不特定の周波数成分を適応的に推定する適応フィルタが適用される。従って、本第1の実施形態にかかるHDD10は、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0027】
次に、図2を用いて、本第1の実施形態においてヘッドの位置制御処理を実行する複数のブロックを説明する。図2は、本第1の実施形態においてヘッドの位置制御処理を実行する複数のブロックを説明するための構成図である。
【0028】
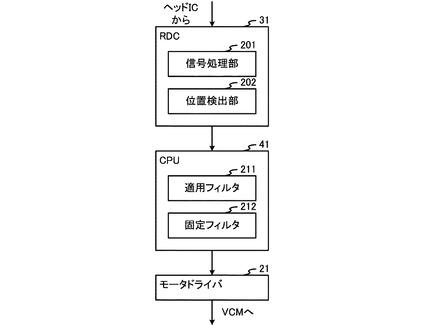
本第1の実施形態にかかるヘッドの位置制御処理は、RDC31に備えられる信号処理部201および位置検出部202、CPU41で実行されるソフトウェアモジュールである適応フィルタ211および固定フィルタ212、および、モータドライバ21を含む複数のブロックによって実行される。
【0029】
ヘッドICからのリード情報は、RDC31の信号処理部201に入力される。信号処理部201は、入力されたリード情報に対して復調やエラー訂正などの処理を施す。信号処理部201で処理された情報は、位置検出部202に出力される。位置検出部202は、信号処理部201から入力された情報からサーボ情報を検出し、検出したサーボ情報からアドレス情報および位置情報を抽出する。抽出されたアドレス情報および位置情報はCPU41へ出力される。
【0030】
RDC31(さらに詳細には位置検出部202)からのアドレス情報および位置情報は、CPU41にて位置誤差情報として算出される。算出された位置誤差情報は、CPU41の適応フィルタ211に入力される。適応フィルタ211は、ヘッドの位置制御処理に対する外乱の不特定の周波数成分を適応的に推定するフィルタであり、プログラムによる演算で実現されるソフトウェアモジュールである。適応フィルタ211は、推定された周波数成分に対して特徴的な特性でフィルタ処理(フィルタリング)する。適応フィルタでフィルタリングされた情報は、固定フィルタ212へ出力される。固定フィルタ212は、ヘッドの位置制御処理におけるフィードバック制御を安定化するための位相補償やゲイン補償を行うためのフィルタであり、プログラムによる演算で実現されるソフトウェアモジュールである。固定フィルタ212を実現するため、所定の伝達関数を実現するためのフィルタ係数が予め設定されている。固定フィルタ212でフィルタリングされた情報は、モータドライバ21へ出力される。
【0031】
モータドライバ21は、適応フィルタ211および固定フィルタ212でフィルタリングされた情報に基づいてVCM4を回転駆動して、スライダ2を磁気ディスク1上で移動させる。スライダ2に備えられたリードヘッド(不図示)が磁気ディスク1の記録面から読み出した信号は、ヘッドICを介してリード情報となり、ヘッドの位置制御処理におけるフィードバック制御が形成される。
【0032】
このようにして、本第1の実施形態にかかる複数のブロックによるヘッドの位置制御処理が実行される。このヘッドの位置制御処理の一部である適応フィルタ211および固定フィルタ212は、ソフトウェアモジュールで構成される。すなわち、本第1の実施形態にかかるHDD10は、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0033】
次に、図3を用いて、本第1の実施形態にかかる適応フィルタ211の構成を説明する。図3は、本第1の実施形態にかかる適応フィルタ211の構成を説明するためのブロック図である。
【0034】
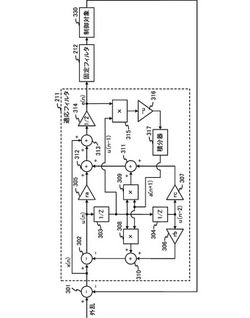
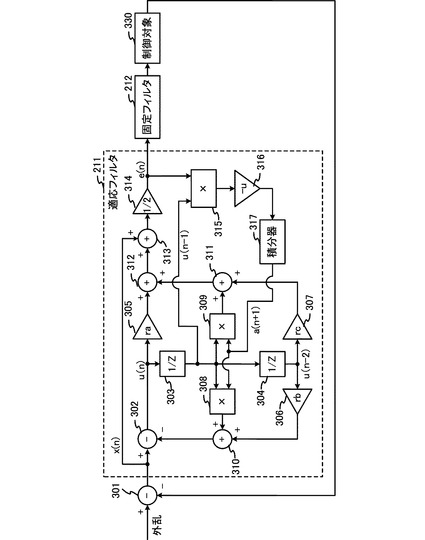
図3では、本第1の実施形態にかかるヘッドの位置制御処理におけるフィードバック制御系の全体の概略的なモデルが示される。このフィードバック制御系では、適応フィルタ211の後段に固定フィルタ212が備えられ、固定フィルタ212の後段に、制御対象330が備えられる。そして、制御対象330から出力される情報は、ループして適応フィルタ211に入力される。制御対象330は、モータドライバ21から適応フィルタ211の入力部までを含むブロックであるため、そこから出力される情報は位置誤差情報である。図3では、位置誤差情報の極性を反転した情報に外乱が加算されるモデルが示される。
【0035】
外乱が加算された位置誤差情報x(n)は、減算器302に入力される。減算器302の出力値である現在値u(n)は、係数(ra)305および遅延器303に入力される。遅延器303を経た1遅延値u(n−1)は、乗算器308,309、遅延器304、および、乗算器315に入力される。遅延器304を経た2遅延値u(n−2)は、係数(rb)306および係数(rc)307に入力される。また、乗算器308の出力値と、2遅延値u(n−2)に係数(rb)306を乗じた値とは、加算器310で加算される。加算器310の出力値は、減算器302において、外乱が加算された位置誤差情報x(n)から減算される。さらに、乗算器309の出力値と、2遅延値u(n−2)に係数(rc)307を乗じた値とは、加算器311で加算される。加算器311の出力値は、加算器312において、現在値u(n)に係数(ra)305を乗じた値と加算される。すなわち、これらのブロックにより2次のIIR型デジタルフィルタが構成される。
【0036】
2次のIIR型デジタルフィルタの後段では、加算器312の出力値と、外乱が加算された位置誤差情報x(n)とが、加算器313で加算される。加算器313の出力値は、係数314にて1/2(0.5)倍されて適応フィルタ出力値e(n)となる。適応フィルタ出力値e(n)は、固定フィルタ212および乗算器315に入力される。乗算器315では、適応フィルタ出力値e(n)と1遅延値u(n−1)とが乗算される。乗算器315の出力値に係数(−u)316を乗じた値は積分器317に入力される。積分器317の出力値であるフィードバック値a(n+1)は、乗算器308,309それぞれに入力され、それぞれで、遅延値u(n−1)と乗算される。
【0037】
このような構成により、適応フィルタ211が備える2次のIIR型デジタルフィルタの係数の一部である乗算器308,309の値は、1サンプルごとに変更(更新)される。すなわち、適応フィルタ211は、サンプリング周波数に基づく所定の時間間隔で、後段に出力する値を決定(更新)するサンプル値制御系で構成される。また、2次のIIR型デジタルフィルタの特性は、係数(ra)305、係数(rb)306、係数(rc)307、および、1サンプルごとに変更(更新)される乗算器308,309の値で定まるため、本第1の実施形態にかかる適応フィルタ211の特性は、1サンプルごとに変化する。
【0038】
なお、適応フィルタ211の後段に固定フィルタ212が備えられる構成を説明したが、適応フィルタ211が固定フィルタ212の後段に備えられる構成であってもよい。
【0039】
すなわち、ソフトウェアモジュールで構成される適応フィルタ211を備える、本第1の実施形態にかかるHDD10は、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0040】
次に、図4〜6を用いて、本第1の実施形態にかかる適応フィルタ211に関する特性を説明する。図4は、本第1の実施形態にかかる適応フィルタ211における経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図、図5は、本第1の実施形態にかかる適応フィルタ211の伝達特性を示す図、図6は、本第1の実施形態にかかる適応フィルタ211を含むフィードバック制御系の閉ループ特性(感度特性)を示す図である。
【0041】
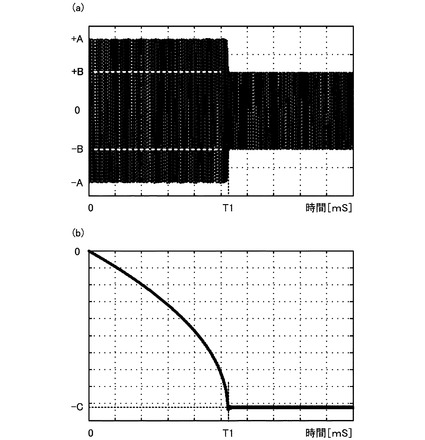
図4に示すとおり、時間0[mS]では、フィードバック制御系に所定周波数の外乱が印加され、位置誤差情報の振幅値が±Aとなっている。このとき、適応フィルタ211の変動係数である乗算器308,309の値は「0」である。この時点では、外乱に対して、適応フィルタ211の係数が最適化されていない。適応フィルタ211のサンプリング周波数に基づく所定の時間間隔で、乗算器308,309の値は、0[mS]から徐々にマイナス方向に変動する。経過時間がT1[mS]付近となると、位置誤差情報の振幅値は急激に小さくなり、略±B(|B|<|A|)となる。また、このとき、乗算器308,309の値は略「−C」となる。つまり、この時点で、外乱に対して、適応フィルタ211の係数が最適化された状態となる。経過時間がT1[mS]以降では、位置誤差情報の振幅値は略±Bに、乗算器308,309の値は略「−C」に保たれる。すなわち、外乱の所定周波数が未知であり、適応フィルタ211の変動係数の値が最適値でない場合であっても、所定時間が経過すると、適応フィルタ211の係数が最適化されることが確認できる。適応フィルタ211の係数が最適化されると、位置誤差情報の振幅値は改善されて小さくなる。
【0042】
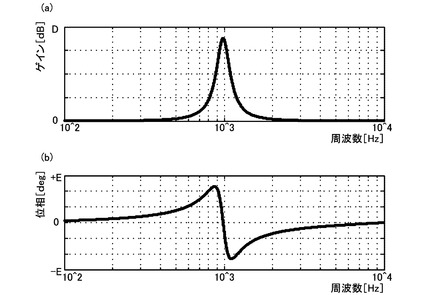
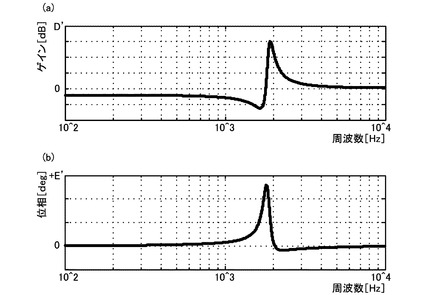
図5に示す図は、図4における経過時間T1[mS]以降で、変動係数が略収束した状態における適応フィルタ211の伝達特性を示している。本第1の実施形態にかかる適応フィルタ211の伝達特性は、特定周波数において所定のQ値にてゲインをUPする特性(いわゆる、逆ノッチ特性)となる。すなわち、本第1の実施形態では、周波数1[kHz]にて、ゲインUP量がD[dB]以下で位相変動が±E[deg]となる伝達特性が、印加された所定周波数の外乱に対して効果的な特性となる。換言すると、適応フィルタ211が最適化された状態における伝達特性から、印加された外乱の所定周波数は1[kHz]であると推定できる。また、図4における経過時間0〜T1[mS]の間での適応フィルタ211の伝達特性は、周波数が1[kHz]よりも低い帯域での逆ノッチ特性であり、時間経過とともに徐々にその周波数が1[kHz]に近づくように変化する。
【0043】
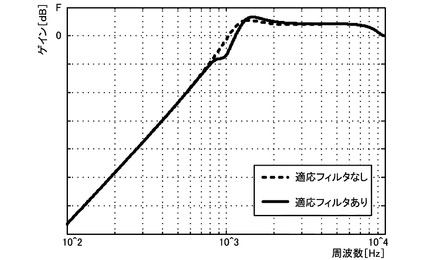
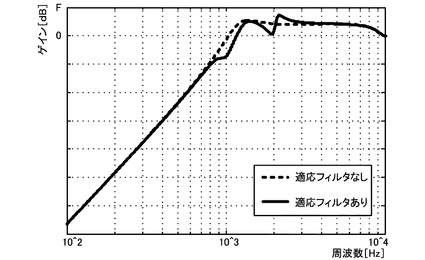
図6に示す図は、適応フィルタ211が図5の伝達特性となっている状態での、ヘッドの位置制御処理におけるフィードバック制御系の閉ループ特性(感度関数)を示している。この伝達特性は、所定周波数(約1「kHz」)にゲインのピークがあり、この所定周波数でのフィードバックゲインを上げる効果を有していることが確認できる。また、所定周波数(約1「kHz」)以上の帯域での感度は、F[dB]以下である。
【0044】
このようにして、本第1の実施形態にかかる適応フィルタ211は、FFTを用いずとも、所定周波数の外乱に対して効果的に伝達特性を最適化することが可能となる。この適応フィルタ211はソフトウェアモジュールによる演算で構成することが可能である。すなわち、本第1の実施形態にかかる適応フィルタ211を備えるHDD10によれば、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0045】
(第2の実施形態)
図7は、本第2の実施形態にかかる適応フィルタ720の構成を説明するためのブロック図である。
【0046】
本第2の実施形態は、前述した第1の実施形態にかかる適応フィルタ211とは一部の構成が異なる適応フィルタ720を用いる点で第1の実施形態と異なる。従って、これ以降では、第1の実施形態にかかる適応フィルタ211と同じ構成については、説明を簡略化または省略し、異なる構成について詳細に説明することとする。
【0047】
本第2の実施形態にかかる適応フィルタ720は、第1の実施形態で説明したCPU41で実行されるソフトウェアモジュールである。つまり、本第2の実施形態にかかるヘッドの位置制御処理は、第1の実施形態と同様にCPU41によって実行される。すなわち、本第2の実施形態にかかるヘッドの位置制御装置は、第1の実施形態と同様にHDD10によって実行されるものである。
【0048】
図7では、本第2の実施形態にかかるヘッドの位置制御処理におけるフィードバック制御系の全体の概略的なモデルが示される。このフィードバック制御系では、適応フィルタ720の後段に固定フィルタ212が備えられ、固定フィルタ212の後段に、制御対象330が備えられる。そして、制御対象330から出力される情報は、ループして適応フィルタ211に入力される。
【0049】
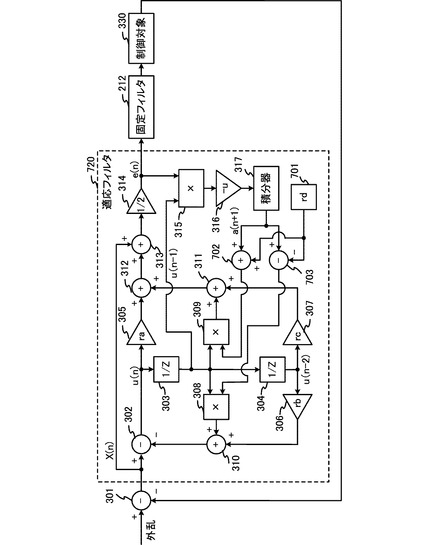
適応フィルタ720では、第1の実施形態にかかる適応フィルタ211と同様に、2次のIIR型デジタルフィルタが構成される。すなわち、適応フィルタ720は、減算器302、遅延器303,304、加算器310,311,312、係数(ra)305、係数(rb)306、係数(rc)307、乗算器308,309で構成される2次のIIR型デジタルフィルタを備えている。また、この2次のIIR型デジタルフィルタの後段には、加算器313、係数314、乗算器315、係数(−u)316、積分器317が接続される。積分器317の出力値であるフィードバック値a(n+1)は、加算器702および減算器703それぞれに入力される。また、係数(rd)701も、加算器702および減算器703それぞれに入力される。加算器702にて、フィードバック値a(n+1)と係数(rd)701の出力値とが加算された値は、乗算器309に出力される。同様に減算器703にて、フィードバック値a(n+1)から係数(rd)701の出力値が減算された値が、乗算器308に出力される。乗算器308,309それぞれに入力された値は、それぞれで、遅延値u(n−1)と乗算される。
【0050】
このような構成により、適応フィルタ720が備える2次のIIR型デジタルフィルタの係数の一部である乗算器308,309の値は、1サンプルごとに変更(更新)される。すなわち、適応フィルタ720は、サンプリング周波数に基づく所定の時間間隔で、後段に出力する値を決定(更新)するサンプル値制御系で構成される。本第2の実施形態にかかる適応フィルタ720の特性は、1サンプルごとに変化する。
【0051】
なお、適応フィルタ720の後段に固定フィルタ212が備えられる構成を説明したが、適応フィルタ720が固定フィルタ212の後段に備えられる構成であってもよい。また、加算器702は、フィードバック値a(n+1)から係数(rd)701の出力値を減算した値を乗算器308に出力する減算器として構成されてもよい。また、減算器703は、フィードバック値a(n+1)と係数(rd)701の出力値とを加算した値を乗算器309に出力する加算器として構成されてもよい。
【0052】
すなわち、ソフトウェアモジュールで構成される適応フィルタ720を備える、本第2の実施形態にかかるHDD10は、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0053】
次に、図8〜10を用いて、本第2の実施形態にかかる適応フィルタ720に関する特性を説明する。図8は、本第2の実施形態にかかる適応フィルタ720における経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図、図9は、本第2の実施形態にかかる適応フィルタ720の伝達特性を示す図、図10は、本第2の実施形態にかかる適応フィルタ720を含むフィードバック制御系の閉ループ特性(感度特性)を示す図である。
【0054】
図8に示すとおり、時間0[mS]では、フィードバック制御系に所定周波数の外乱が印加され、位置誤差情報の振幅値が±Aとなっている。このとき、適応フィルタ720の変動係数である乗算器308,309の値は「0」である。この時点では、外乱に対して、適応フィルタ720の係数が最適化されていない。適応フィルタ720のサンプリング周波数に基づく所定の時間間隔で、乗算器308,309の値は「0」から徐々にマイナス方向に変動する。経過時間がT2[mS]付近となると、位置誤差情報の振幅値は急激に小さくなり、略±B’(|B’|<|A|)となる。また、このとき、乗算器308,309の値は略「−C’」となる。つまり、この時点で、外乱に対して、適応フィルタ720の係数が最適化された状態となる。経過時間がT2[mS]以降では、位置誤差情報の振幅値は略±B’に、乗算器308,309の値は略「−C’」に保たれる。すなわち、外乱の所定周波数が未知であり、適応フィルタ720の変動係数の値が最適値でない場合であっても、所定時間が経過すると、適応フィルタ720の係数が最適化されることが確認できる。適応フィルタ720の係数が最適化されると、位置誤差情報の振幅値は改善されて小さくなる。本第2の実施形態において適応フィルタ720の係数が最適化される所定時間「T2」は、第1の実施形態において適応フィルタ211の係数が最適化される所定時間「T1」よりも早いタイミングである。
【0055】
図9に示す図は、図8における経過時間T2[mS]以降で、変動係数が略収束した状態における適応フィルタ720の伝達特性を示している。本第2の実施形態にかかる適応フィルタ720の伝達特性は、特定周波数において位相にピークを持たせる特性となる。すなわち、本第2の実施形態では、周波数2[kHz]付近にて、位相UP量がE’[deg]以下でゲインUP量がD’[dB]以下となる伝達特性が、印加された所定周波数の外乱に対して効果的な特性となる。換言すると、適応フィルタ720が最適化された状態における伝達特性から、印加された外乱の所定周波数は2[kHz]付近であると推定できる。また、図8における経過時間0〜T2[mS]の間での適応フィルタ720の伝達特性は、周波数が2[kHz]よりも低い帯域で位相にピークを持たせる特性であり、時間経過とともに徐々にその周波数が2[kHz]に近づくように変化する。
【0056】
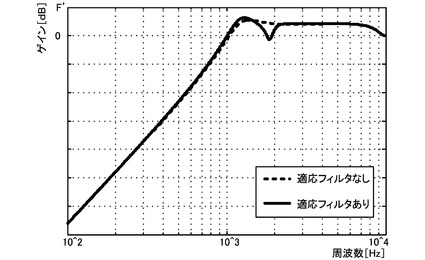
図10に示す図は、適応フィルタ720が図9の伝達特性となっている状態での、ヘッドの位置制御処理におけるフィードバック制御系の閉ループ特性(感度関数)を示している。この伝達特性では、第1の実施形態にかかる閉ループ特性(感度関数)と比較して、所定周波数(約2「kHz」)での感度関数ゲインを下げることができるため、抑圧率がより改善する。また、本第2の実施形態にかかる閉ループ特性(感度関数)では、第1の実施形態と比較して、所定周波数(約2「kHz」)以上の帯域での位置決め精度を改善することができる。また、所定周波数(約1「kHz」)以上の帯域での感度は、F’[dB]以下である。
【0057】
このようにして、本第2の実施形態にかかる適応フィルタ720でも、FFTを用いずとも、所定周波数の外乱に対して効果的に伝達特性を最適化することが可能となる。この適応フィルタ720はソフトウェアモジュールによる演算で構成することが可能である。すなわち、本第2の実施形態にかかる適応フィルタ720を備えるHDD10によっても、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0058】
(第3の実施形態)
図11は、本第3の実施形態にかかる適応フィルタ1120の構成を説明するためのブロック図である。
【0059】
本第3の実施形態は、前述した第1の実施形態にかかる適応フィルタ211とは一部の構成が異なる適応フィルタ1120を用いる点、および、適応フィルタ1120と固定フィルタ212との配置順序が異なる点で第1の実施形態と異なる。従って、これ以降では、第1の実施形態と同じ構成については、説明を簡略化または省略し、異なる構成について詳細に説明することとする。
【0060】
本第3の実施形態にかかる適応フィルタ1120は、第1の実施形態で説明したCPU41で実行されるソフトウェアモジュールとして構成される。つまり、本第3の実施形態にかかるヘッドの位置制御処理の一部は、第1の実施形態と同様にCPU41によって実行される。すなわち、本第3の実施形態にかかるヘッドの位置制御装置も、第1,第2の実施形態と同様にHDD10において実行されるものである。
【0061】
図11には、本第3の実施形態にかかるヘッドの位置制御処理におけるフィードバック制御系全体の概略的なモデルが示される。このフィードバック制御系では、固定フィルタ212の後段に適応フィルタ1120が備えられ、適応フィルタ1120の後段に制御対象330が備えられる。制御対象330から出力される情報は、ループして固定フィルタ212に入力される。制御対象330は機構部を含み、この機構部で共振が発生することがある。この共振により特定周波数の共振周波数成分がフィードバック制御系に付加される。
【0062】
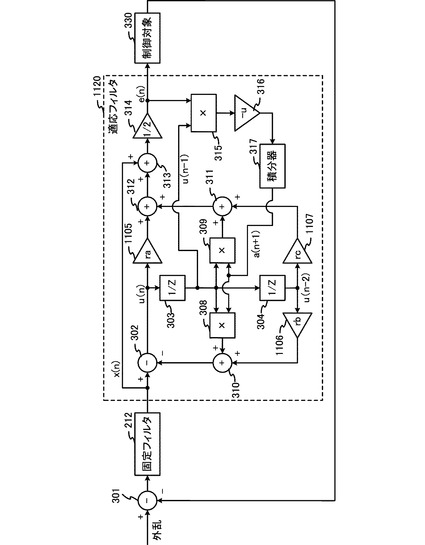
適応フィルタ1120は、第1,第2の実施形態にかかる適応フィルタと同様に、2次のIIR型デジタルフィルタを含んで構成される。すなわち、適応フィルタ1120は、減算器302、遅延器303,304、加算器310,311,312、係数(ra)1105、係数(rb)1106、係数(rc)1107、乗算器308,309で構成される2次のIIR型デジタルフィルタを備えている。また、この2次のIIR型デジタルフィルタの後段には、加算器313、係数314、乗算器315、係数(−u)316、積分器317が接続される。これらのブロックは、第1,第2の実施形態にかかる適応フィルタと同様に接続される。
【0063】
本第3の実施形態にかかる適応フィルタ1120は、特定周波数のゲインを減衰するノッチフィルタを含んで構成される。すなわち、適応フィルタ1120の一部がノッチフィルタを構成するように、係数(ra)1105、係数(rb)1106、係数(rc)1107の値が設定される。
【0064】
このような構成により、適応フィルタ1120が備える2次のIIR型デジタルフィルタの係数の一部である乗算器308,309の値が、1サンプルごとに変更(更新)される。すなわち、適応フィルタ1120は、サンプリング周波数に基づく所定の時間間隔で、後段に出力する値を決定(更新)するサンプル値制御系で構成される。本第3の実施形態では、乗算器308,309の値が1サンプルごとに変更(更新)されるため、適応フィルタ1120の特性は1サンプルごとに変化する。
【0065】
なお、固定フィルタ212の後段に適応フィルタ1120が備えられる構成を説明したが、適応フィルタ1120が固定フィルタ212の後段に備えられる構成であってもよい。しかし、適応フィルタ1120は、共振が発生する機構部を含む制御対象330の前段に配置されることが好ましい。
【0066】
すなわち、適応フィルタ1120を備える本第3の実施形態にかかるHDD10は、フィードバック制御において、共振に起因する所定周波数成分を抑圧する適応フィルタを容易に構成することができる。
【0067】
次に、図12〜14を用いて、本第3の実施形態にかかる適応フィルタ1120に関する特性を説明する。図12は、共振が発生する機構部を含む制御対象330の伝達特性を示す図、図13は、本第3の実施形態にかかる適応フィルタ1120における経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図、図14は、本第3の実施形態にかかる適応フィルタ1120の伝達特性を示す図である。
【0068】
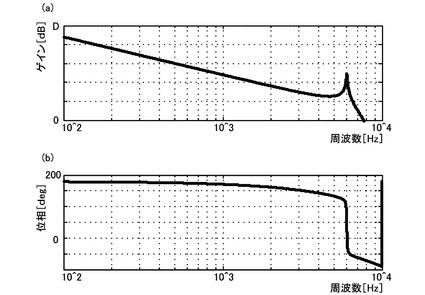
図12に示すとおり、共振が発生する機構部を含む制御対象330の伝達特性は遅れ系の特性を示し、周波数6[kHz]付近にて共振を有している。また、この共振周波数に向けて位相は徐々に遅れ始め、共振周波数よりも高い周波数では位相が180[deg]遅れる。このように機構部を含む制御対象330の伝達特性は、共振を有する遅れ系であることが一般的である。
【0069】
図13に示すとおり、時間0[mS]から時間T3[mS]の期間では、フィードバック制御系に共振が発生して、位置誤差情報の振幅値が±AA近傍まで増加する。このとき、適応フィルタ1120の変動係数である乗算器308,309の値は「0」近傍から徐々に増加している。時間0[mS]の時点では、共振に対して適応フィルタ1120の変動係数は最適化されていないが、時間T3[mS]に近づくに従って、適応フィルタ1120の変動係数は共振に対して最適化される。時間T3[mS]で、変動係数の値が「CC1」近傍になると、位置誤差情報の振幅値は±AA近傍から減少する。時間T3[mS]以降に、変動係数の値は「CC2」近傍まで増加するが、その後、変動係数は「CC1」近傍の値に収束する。
【0070】
本第3の実施形態によれば、共振の所定周波数が未知であり、適応フィルタ1120の変動係数の初期値が最適値でない場合であっても、所定時間が経過すると、変動係数が最適化される(所定値に収束する)ことが確認できる。適応フィルタ1120の変動係数が最適化されると、位置誤差情報の振幅値は改善されて小さくなる。適応フィルタ1120の変動係数の初期値が最適化された値であれば、位置誤差情報の振幅値は安定したままであることが期待できる。
【0071】
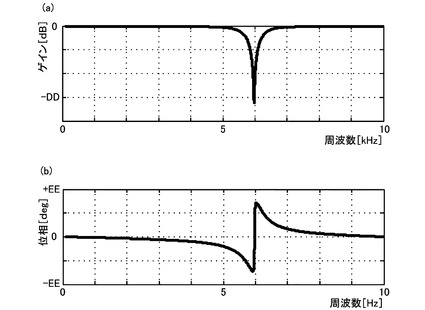
図14に示す図は、図13における経過時間T3[mS]以降で、変動係数が略収束した状態における適応フィルタ1120の伝達特性を示している。この状態での適応フィルタ1120の伝達特性は、特定周波数においてゲインを減衰する特性(いわゆるノッチ特性)となる。すなわち、本第3の実施形態では、周波数6[kHz]付近にて、ゲイン減衰量がーDD[dB]以下で位相変動量が±EE[deg]以下となる伝達特性が、所定周波数の共振の抑圧に対して効果的となる。換言すると、適応フィルタ1120が最適化された状態における伝達特性から、共振の所定周波数は6[kHz]付近であると推定できる。また、図13における経過時間0〜T3[mS]の間での適応フィルタ1120の伝達特性は、周波数が6[kHz]よりも低い帯域でのノッチ特性であり、時間経過とともに徐々にその周波数が6[kHz]に近づくように変化する。
【0072】
このようにして、本第3の実施形態にかかる適応フィルタ1120でも、FFTを用いずとも、所定周波数の外乱(共振)に対して効果的に伝達特性を最適化することが可能となる。この適応フィルタ1120はソフトウェアモジュールによる演算で構成することが可能である。すなわち、本第3の実施形態にかかる適応フィルタ1120を備えるHDD10によっても、フィードバック制御で用いられる適応フィルタを容易に構成することができる。
【0073】
(第4の実施形態)
図15は、本第4の実施形態にかかる適応フィルタ1520の構成を説明するためのブロック図である。
【0074】
本第4の実施形態は、前述した第1の実施形態にかかる適応フィルタ211と同じ構成の二つの適応フィルタ1520a,1520bを用いる点で第1の実施形態と異なる。従って、これ以降では、第1の実施形態と同じ構成については、説明を簡略化または省略し、異なる構成について詳細に説明することとする。
【0075】
本第4の実施形態にかかる適応フィルタ1520a,1520bは、第1の実施形態で説明したCPU41で実行されるソフトウェアモジュールとして構成される。つまり、本第4の実施形態にかかるヘッドの位置制御処理の一部は、第1の実施形態と同様にCPU41によって実行される。すなわち、本第4の実施形態にかかるヘッドの位置制御装置も、第1から第3の実施形態と同様にHDD10において実行されるものである。
【0076】
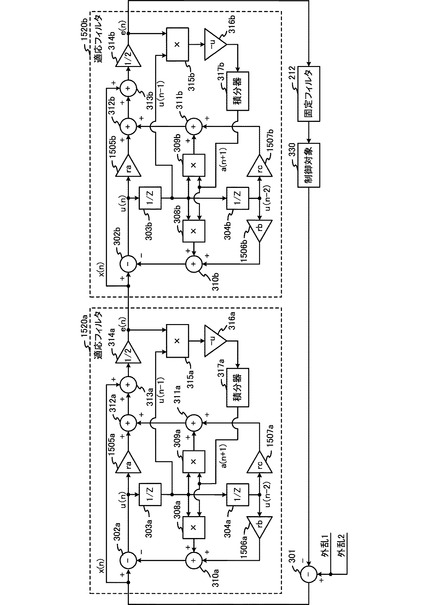
図15には、本第4実施形態にかかるヘッドの位置制御処理におけるフィードバック制御系全体の概略的なモデルが示される。このフィードバック制御系では、二つの適応フィルタ1520a,1520bが直列に接続される。適応フィルタ1520bの後段には固定フィルタ212が備えられ、固定フィルタ212の後段に制御対象330が備えられる。制御対象330から出力される情報は、ループして適応フィルタ1520aに入力される。図15では、制御対象330から出力される位置誤差情報の極性を反転した情報に2種の外乱が加算されるモデルが示される。
【0077】
適応フィルタ1520aは、第1から第3の実施形態にかかる適応フィルタと同様に、2次のIIR型デジタルフィルタを含んで構成される。すなわち、適応フィルタ1520aは、減算器302a、遅延器303a,304a、加算器310a,311a,312a、係数(ra)1505a、係数(rb)1506a、係数(rc)1507a、乗算器308a,309aで構成される2次のIIR型デジタルフィルタを備えている。また、この2次のIIR型デジタルフィルタの後段には、加算器313a、係数314a、乗算器315a、係数(−u)316a、積分器317aが接続される。これらのブロックは、第1から第3の実施形態にかかる適応フィルタと同様に接続される。
【0078】
また、適応フィルタ1520bも、第1から第3の実施形態にかかる適応フィルタと同様に、2次のIIR型デジタルフィルタを含んで構成される。すなわち、適応フィルタ1520bは、減算器302b、遅延器303b,304b、加算器310b,311b,312b、係数(ra)1505b、係数(rb)1506b、係数(rc)1507b、乗算器308b,309bで構成される2次のIIR型デジタルフィルタを備えている。また、この2次のIIR型デジタルフィルタの後段には、加算器313b、係数314b、乗算器315b、係数(−u)316b、積分器317bが接続される。これらのブロックも、第1から第3の実施形態にかかる適応フィルタと同様に接続される。
【0079】
本第4の実施形態にかかる適応フィルタ1520a,1520bそれぞれは、特定周波数のゲインをUPする逆ノッチフィルタを含んで構成される。適応フィルタ1520aと適応フィルタ1520bとでは逆ノッチフィルタの対象となる周波数が異なる。すなわち、適応フィルタ1520a,1520bそれぞれの一部が、異なる特定周波数の逆ノッチフィルタを構成するように、係数(ra)1505a,1505b、係数(rb)1506a,1506b、係数(rc)1507a,1507bの値が設定される。適応フィルタ1520a,1520bそれぞれは、サンプリング周波数に基づく所定の時間間隔で、後段に出力する値を決定(更新)するサンプル値制御系で構成される。本第4の実施形態では、乗算器308a,308b,309a,309bの値が1サンプルごとに変更(更新)されるため、適応フィルタ1520a,1520bそれぞれの特性は、1サンプルごとに変化する。
【0080】
なお、適応フィルタ1520a,1520bが直列に接続され、適応フィルタ1520bの後段に固定フィルタ212が備えられる構成を説明したが、この構成に限定されるものではない。例えば、適応フィルタ1520a,1520bの間に固定フィルタ212が備えられる構成や、適応フィルタ1520a,1520bが直列に接続され、適応フィルタ1520aの前段に固定フィルタ212が備えられる構成であってもよい。また、二つの適応フィルタ1520a,1520bだけでなく3以上の適応フィルタを備える構成であってもよい。
【0081】
すなわち、適応フィルタ1520a,1520bを備える本第4の実施形態にかかるHDD10は、フィードバック制御において、異なる所定周波数の複数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0082】
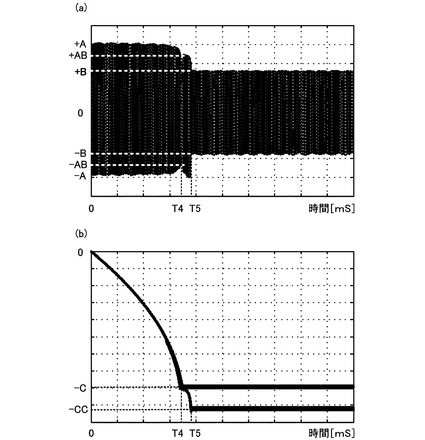
次に、図16〜18を用いて、本第4の実施形態にかかる適応フィルタ1520a,1520bに関する特性を説明する。図16は、本第4の実施形態にかかる適応フィルタ1520a,1520bにおける経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図、図17は、本第4の実施形態にかかる適応フィルタ1520a,1520bの伝達特性を示す図、図18は、本第4の実施形態にかかる適応フィルタ1520a,1520bを含むフィードバック制御系の閉ループ特性(感度特性)を示す図である。
【0083】
図16に示すとおり、時間0[mS]では、フィードバック制御系に異なる所定周波数の二つの外乱が印加され、位置誤差情報の振幅値が±Aとなっている。このとき、適応フィルタ1520a,1520bそれぞれの変動係数である乗算器308a,308b,309a,309bの値は「0」である。この時点では、外乱に対して、適応フィルタ1520a,1520bの係数が最適化されていない。適応フィルタ1520a,1520bのサンプリング周波数に基づく所定の時間間隔ごとに、乗算器308a,308b,309a,309bの値は、0[mS]から徐々にマイナス方向に変動する。経過時間がT4[mS]付近となると、位置誤差情報の振幅値は小さくなり、略±AB(|AB|<|A|)となる。また、このとき、適応フィルタ1520aにかかる乗算器308a,309aの値は略「−C」となる。つまり、この時点で、第1の特定周波数の外乱に対して、適応フィルタ1520aの係数が最適化された状態となる。
【0084】
位置誤差情報の振幅値は、経過時間がT4[mS]以降は更に小さくなり、T5[mS]付近で略±B(|B|<|AB|)となる。また、このとき、適応フィルタ1520aにかかる乗算器308a,309aの値は略「−C」を維持するが、適応フィルタ1520bにかかる乗算器308b,309bの値は略「−CC」となる。つまり、この時点で、第1の特定周波数の外乱に対して、適応フィルタ1520aの係数が最適化されるとともに、第2の特定周波数の外乱に対して、適応フィルタ1520bの係数が最適化された状態となる。経過時間がT5[mS]以降では、位置誤差情報の振幅値は略±Bに、適応フィルタ1520aにかかる乗算器308a,309aの値は略「−C」に、適応フィルタ1520bにかかる乗算器308b,309bの値は略「−CC」に保たれる。
【0085】
すなわち、本第4の実施形態によれば、外乱の所定周波数が未知であり、適応フィルタ1520a,1520bそれぞれの変動係数の初期値が最適値でない場合であっても、所定時間が経過すると、適応フィルタ1520a,1520bそれぞれの係数が最適化される(所定値に収束する)ことが確認できる。適応フィルタ1520a,1520bそれぞれの係数が最適化されると、位置誤差情報の振幅値は改善されて小さくなる。
【0086】
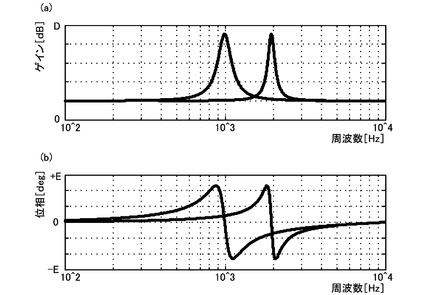
図17に示す図は、図16における経過時間T5[mS]以降で、変動係数が所定値に収束した状態における適応フィルタ1520a,1520bそれぞれの伝達特性を示している。この状態での適応フィルタ1520a,1520bそれぞれの伝達特性は、特定周波数において所定のQ値にてゲインをUPする特性(いわゆる、逆ノッチ特性)となる。すなわち、本第4の実施形態では、周波数1[kHz]においてゲインUP量がD[dB]以下で位相変動が±E[deg]となる伝達特性が、印加された第1の所定周波数の外乱に対して効果的な特性となる。また、周波数2[kHz]においてゲインUP量がD[dB]以下で位相変動が±E[deg]となる伝達特性が、印加された第2の所定周波数の外乱に対して効果的な特性となる。換言すると、適応フィルタ1520a,1520bそれぞれが最適化された状態における伝達特性から、印加された複数の外乱のうち、第1の所定周波数は1[kHz]であり、第2の所定周波数は2[kHz]であると推定できる。
【0087】
なお、図16において、経過時間0〜T4[mS]の間での適応フィルタ1520aの伝達特性は、周波数が1[kHz]よりも低い帯域での逆ノッチ特性であり、時間経過とともに徐々にその周波数が1[kHz]に近づくように変化する。また、経過時間0〜T5[mS]の間での適応フィルタ1520bの伝達特性は、周波数が2[kHz]よりも低い帯域での逆ノッチ特性であり、時間経過とともに徐々にその周波数が2[kHz]に近づくように変化する。
【0088】
図18に示す図は、適応フィルタ1520a,1520bそれぞれが図17の伝達特性となっている状態での、ヘッドの位置制御処理におけるフィードバック制御系の閉ループ特性(感度関数)を示している。図17の伝達特性では、第1の所定周波数(約1「kHz」)および第2の所定周波数(約2「kHz」)にゲインのピークがある。すなわち、本第4の実施形態にかかる伝達特性は、この2つの所定周波数でのフィードバックゲインを上げる効果を有している。このため、図18に示す感度関数では、第1の所定周波数(約1「kHz」)および第2の所定周波数(約2「kHz」)の感度が下がっていることが確認できる。また、第2の所定周波数(約2「kHz」)以上の帯域での感度は、F[dB]以下である。
【0089】
このようにして、本第4の実施形態にかかる適応フィルタ1520a,1520bは、FFTを用いずとも、複数の所定周波数の外乱に対して効果的に伝達特性を最適化することが可能となる。この適応フィルタ1520a,1520bはソフトウェアモジュールによる演算で構成することが可能である。すなわち、本第4の実施形態にかかる適応フィルタ1520a,1520bを備えるHDD10によれば、フィードバック制御において、異なる所定周波数の複数の外乱成分を抑圧する適応フィルタを容易に構成することができる。
【0090】
以上説明したように第1から第4の実施形態によれば、ソフトウェアモジュールを用いたデジタルフィルタを用いて、フィードバック制御系に印加された外乱の不特定の周波数成分を適応的に推定する適応フィルタを実現することが可能となる。この適応フィルタは、FFTを用いることなくCPUにて実行されるプログラムで実現される。すなわち、第1から第4の実施形態によれば、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる磁気ディスク装置およびヘッドの位置制御方法を提供することが可能となる。
【0091】
なお、図1に示した電子機器150において、HDD10に対して印加される所定周波数の外乱としては、電子機器150内に設けられたスピーカ(不図示)から音声信号が出力されることで発生する振動に起因するものが挙げられる。また、電子機器150内でHDD10を支持する筐体に対して印加された振動に基づいてHDD10に伝播する振動に起因するものも想定される。
【0092】
なお、複数の実施形態を説明したが、説明した実施形態は一例として提示したものであり、発明の範囲はこの実施形態に限定されない。また、説明した実施形態は、本発明の要旨を変えない範囲において、種々の変更、改変等が可能である。さらに、前述した実施形態に開示されている複数の構成要素を適宜に組み合わせることにより、種々の発明を形成することができる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよく、さらに、異なる実施形態に係る構成要素を適宜組み合わせても良い。これらの実施形態やその変形は、発明の範囲や要旨に含まれ、特許請求の範囲に記載された発明と、その均等の範囲に含まれるものである。
【符号の説明】
【0093】
1…磁気ディスク、2…スライダ、3…アーム、4…VCM(ボイスコイルモータ)、5…SPM(スピンドルモータ)、10…磁気ディスク装置(HDD)、21…モータドライバ、22…ヘッドIC、31…リードライトチャネルIC(RDC)、41…CPU、42…RAM、43…NVRAM、50…HDC(Hard Disc Controller)、100…ホスト装置、120…通信媒体(ホストI/F)、150…電子機器、201…信号処理部、202…位置検出部、211,720,1120,1520…適応フィルタ、212…固定フィルタ。
【技術分野】
【0001】
本発明の実施形態は、ヘッドの位置を制御する磁気ディスク装置およびヘッドの位置制御方法に関する。
【背景技術】
【0002】
近年、磁気ディスクのヘッドの位置制御では、ヘッドの位置誤差情報をフィルタ処理した情報により制御対象となるVCMを制御するフィードバック制御が適用されている。また、フィードバック制御だけでなく、フィードバック制御系に印加される外乱の周波数成分に基づくフィードフォワード制御が付加されることもある。さらに、フィードバック制御系の一部を構成する機構部に発生する共振周波数成分を抑圧するための共振(抑圧)フィルタが付加されることもある。このようなヘッドの位置制御のためのフィルタ処理には、適応フィルタが用いられる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平07−098948号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが従来は、フィードフォワード制御における外乱の周波数成分または機構部に発生する共振周波数成分の推定にFFTが用いられることが一般的であった。また、ヘッドの位置制御のフィルタ処理をソフトウェアで実現することが多かったが、FFTをソフトウェアで実現することは容易ではなかった。また、FFTをハードウェアで実現する場合であっても、コストアップやチップ上でのダイ面積が大きくなることが課題となっていた。すなわち、ヘッドの位置制御などのフィードバック制御で用いられる適応フィルタを容易に構成することは困難であった。
【0005】
そこで、本発明が解決しようとする課題は、フィードバック制御で用いられる適応フィルタを容易に構成することができる磁気ディスク装置およびヘッドの位置制御方法を提供することである。
【課題を解決するための手段】
【0006】
実施形態の磁気ディスク装置は、サーボ情報が記録される磁気ディスクと、磁気ディスクのサーボ情報を読み出すためのヘッドと、位置制御手段とを具備する。位置制御手段は、前記ヘッドの位置決め制御を行う際に、ヘッドにより読み出したサーボ情報から生成される位置誤差情報に基づいて、可変係数を含む高次のIIR型デジタルフィルタを用いて位置決め制御における外乱となる所定周波数を推定する。
【図面の簡単な説明】
【0007】
【図1】第1の実施形態にかかる磁気ディスク装置(HDD)を備える電子機器の構成を示すブロック図。
【図2】第1の実施形態においてヘッドの位置制御処理を実行する複数のブロックを説明するための構成図。
【図3】第1の実施形態にかかる適応フィルタの構成を説明するためのブロック図。
【図4】第1の実施形態にかかる適応フィルタにおける経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図。
【図5】第1の実施形態にかかる適応フィルタの伝達特性を示す図。
【図6】第1の実施形態にかかる適応フィルタを含むフィードバック制御系の閉ループ特性(感度特性)を示す図。
【図7】第2の実施形態にかかる適応フィルタの構成を説明するためのブロック図。
【図8】第2の実施形態にかかる適応フィルタにおける経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図。
【図9】第2の実施形態にかかる適応フィルタの伝達特性を示す図。
【図10】第2の実施形態にかかる適応フィルタを含むフィードバック制御系の閉ループ特性(感度特性)を示す図。
【図11】第3の実施形態にかかる適応フィルタの構成を説明するためのブロック図。
【図12】第3の実施形態において共振が発生する機構部を含む制御対象の伝達特性を示す図。
【図13】第3の実施形態にかかる適応フィルタにおける経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図。
【図14】第3の実施形態にかかる適応フィルタの伝達特性を示す図。
【図15】第4の実施形態にかかる適応フィルタの構成を説明するためのブロック図。
【図16】第4の実施形態にかかる適応フィルタにおける経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図。
【図17】第4の実施形態にかかる適応フィルタの伝達特性を示す図。
【図18】第4の実施形態にかかる適応フィルタを含むフィードバック制御系の閉ループ特性(感度特性)を示す図。
【発明を実施するための形態】
【0008】
以下、複数の実施形態について図面を用いて説明する。
【0009】
(第1の実施形態)
図1は、本第1の実施形態にかかる磁気ディスク装置(以下、HDDとも称する)10を備える電子機器150の構成を示すブロック図である。また電子機器150はホスト装置100を備えている。HDD10は、通信媒体(ホストI/F)120を介してホスト装置100と接続され、ホスト装置100の記憶モジュールとして機能する。ホストI/F120は、ホスト装置100とHDD10とを接続し、ホスト装置100とHDD10との間のデータ及びコマンドの送受に係る通信に利用される。例えば、電子機器150は、パーソナルコンピュータであり、ホスト装置100は、パーソナルコンピュータに備えられるチップセットICである。
【0010】
本第1の実施形態ではHDD10の例を説明するが、光ディスクドライブ、MOドライブ、MDドライブ、デジタルカメラ(の手振れ抑制制御)などの、フィードバック制御により位置制御,速度制御を行うフィードバック制御装置に本第1の実施形態の構成を適用することも可能である。
【0011】
HDD10は、磁気ディスク1、スライダ2、アーム3、VCM(ボイスコイルモータ)4、及びSPM(スピンドルモータ)5などの機構部を有する。またHDD10は、モータドライバ21、ヘッドIC22、NVRAM43、及びコントローラ60などの回路ブロックを備える。コントローラ60は、リードライトチャネル(以下、RDCとも称する)31、CPU41、RAM42、及びHDC(Hard Disc Controller)50を含む。
【0012】
本第1の実施形態に係るHDD10では、磁気ディスク1に記録されたサーボ情報に基づいて、スライダ2に備えられたヘッド(不図示)の位置制御が行われる。ヘッドの位置制御には、フィードバック制御が適用される。このフィードバック制御では、磁気ディスク1からヘッド(不図示)により読み出されたサーボ情報とフィードバック制御での制御目標位置となる目標位置情報とに基づいて位置誤差情報が算出され、算出された位置誤差情報はフィルタ処理される。本第1の実施形態では、算出された位置誤差情報は、適応フィルタを用いてフィルタ処理される。本第1の実施形態において特徴的な構成の一つである適応フィルタは、FFTを用いることなく外乱の不特定の周波数成分を適応的に推定して抑圧することができる。
【0013】
磁気ディスク1は、SPM5に固定され、SPM5が回転駆動することで回転する。磁気ディスク1の少なくとも一面は磁気的に情報が記録される記録面である。つまり、磁気ディスク1は磁気記録媒体である。記録面には例えば同心円の複数のトラックが定義され、各トラックはサーボ領域とデータ領域とを有する。サーボ領域には、磁気ディスク1の記録面上での物理的なアドレス情報、および、トラックの中心に対する半径方向のズレを算出するための位置情報を含むサーボ情報が記録されている。また、HDD10に記録すべき情報はデータ領域に記録される。
【0014】
スライダ2は、磁気ディスク1の記録面に対応するようにアーム3の一端に備えられる。スライダ2は、リードヘッド(不図示)及びライトヘッド(不図示)を備えている。リードヘッド(不図示)は、磁気ディスク1の記録面に磁気記録された信号を読み取る。読み取られた信号は、アーム3上の導体パターンを介してヘッドIC22へ出力される。ライトヘッド(不図示)は、ヘッドIC22からアーム3上の導体パターンを介して入力されるライト信号(ライト電流)に応じて、磁気ディスク1の記録面に磁気記録する。
【0015】
アーム3は、一端にスライダ2、他端に軸受部3aを備えている。アーム3は、VCM4への駆動電流の供給に応じて、軸受部3aの略中央部を中心として回転し、磁気ディスク1の記録面上でスライダ2を半径方向に移動させる。
【0016】
VCM4は、モータドライバ21から供給される駆動信号(電流)に応じて駆動し、アーム3を回転させる。
【0017】
SPM5は、モータドライバ21から供給される駆動信号(電流)に応じて駆動し、磁気ディスク1を回転させる。
【0018】
モータドライバ21は、コントローラ60(さらに詳細にはCPU41)からの制御信号に基づいて、VCM4を駆動するための駆動信号(電流)をVCM4へ、SPM5を駆動するための駆動信号(電流)をSPM5へ供給する。
【0019】
ヘッドIC22は、スライダ2に備えられたリードヘッド(不図示)からアーム3上の導体パターンを介して入力された信号を増幅し、増幅した信号をリード情報としてコントローラ60(さらに詳細にはRDC31)に出力する。またヘッドIC22は、コントローラ60(RDC31)から入力された記録情報に応じたライト信号(ライト電流)を、スライダ2に備えられたライトヘッド(不図示)へ、アーム3上の導体パターンを介して出力する。
【0020】
コントローラ60は、RDC31、CPU41、RAM42、及びHDC50等を含むSoC(System On Chip)として構成される。本第1の実施形態では、コントローラ60は、磁気ディスク1に記録されたサーボ情報に基づいて、スライダ2に備えられたリードヘッド(不図示)のトラックの中心に対する半径方向のズレ(位置)を制御する位置制御処理を行う。なお、コントローラ60がRAM42を含まず、コントローラ60の外部にRAM42が接続される構成であってもよい。
【0021】
RDC31は、ヘッドIC22から入力されたリード情報からサーボ領域に対応するサーボ情報を検出し、検出したサーボ情報からアドレス情報および位置情報を抽出する。抽出されたアドレス情報および位置情報はCPU41へ出力される。またRDC31は、リード情報からデータ領域に対応する情報を検出し、検出した情報に所定の処理を施して復号化する。復号化された情報はHDC50へ出力される。さらにRDC31は、HDC50から入力された記録すべき情報に所定の処理を施して符号化し、この符号化した情報を記録情報としてヘッドIC22へ出力する。RDC31は、これらの複数の処理のためにRAM42をワークメモリとして利用する。
【0022】
CPU41は、NVRAM43に記憶されたプログラムを実行することでHDD10に備えられた各ブロックを制御するプロセッサである。例えばCPU41は、磁気ディスク1の記録面に対するリードヘッド(不図示)の位置制御処理、VCM4及びSPM5の回転制御処理、及び磁気ディスク1からの情報再生処理の動作を制御する。CPU41は、コントローラ60がサーボコントローラ、又はリードライトコントローラとして動作するためのプログラムを実行する。CPU41は、このようなプログラムの実行においてRAM42をワークメモリとして利用する。本第1の実施形態では、コントローラ60がサーボコントローラとして動作する場合、CPU41は、RDC31から入力されたアドレス情報および位置情報に基づく位置制御処理の動作を制御する。位置制御処理は、位置誤差情報に対するフィルタ処理を含むフィードバック制御である。このフィルタ処理には、CPU41で実行されるプログラムによって実現される適応フィルタが適用される。本第1の実施形態の適応フィルタは、FFTを用いずに構成されて、位置制御処理に対する外乱の不特定の周波数成分を適応的に推定することができる。
【0023】
RAM42は、RDC31、CPU41及びHDC50のワークメモリである。RAM42には揮発性メモリであるDRAMが適用される。
【0024】
NVRAM43は、CPU41が実行するプログラムを記憶する不揮発性メモリである。NVRAM43に記憶されるプログラムは更新可能である。またNVRAM43は、CPU41で実行される処理で利用されるパラメータ値を記憶する。
【0025】
HDC50は、ホスト装置100との間で情報を送信及び受信する通信処理を実行する。HDC50は、RDC31からの復号化された情報に所定の処理を施して符号化し、符号化した情報を送信情報としてホスト装置100へ送信する。またHDC50は、ホスト装置100から受信した受信情報に所定の処理を施して復号化し、復号化した情報を記録すべき情報としてRDC31へ出力する。例えばHDC50は、ホスト装置100との間でSATA(Serial Advanced Technology Attachment)規格に準拠した通信処理を実行する。HDC50は、ホスト装置100から、データの記録を開始する論理アドレス及び記録データ長の情報を含むライトコマンドを受信した場合、受信したライトコマンドから論理アドレス及び記録データ長の情報を抽出する。抽出された論理アドレス及び記録データ長の情報はCPU41へ出力される。
【0026】
このような構成により、本第1の実施形態に係るHDD10に備えられた複数のブロックによって、磁気ディスク1の記録面に対するリードヘッド(不図示)の位置制御処理が、フィードバック制御によって実行される。本第1の実施形態にかかる位置制御処理には、CPU41で実行されるプログラムによって実現され、位置制御処理に対する外乱の不特定の周波数成分を適応的に推定する適応フィルタが適用される。従って、本第1の実施形態にかかるHDD10は、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0027】
次に、図2を用いて、本第1の実施形態においてヘッドの位置制御処理を実行する複数のブロックを説明する。図2は、本第1の実施形態においてヘッドの位置制御処理を実行する複数のブロックを説明するための構成図である。
【0028】
本第1の実施形態にかかるヘッドの位置制御処理は、RDC31に備えられる信号処理部201および位置検出部202、CPU41で実行されるソフトウェアモジュールである適応フィルタ211および固定フィルタ212、および、モータドライバ21を含む複数のブロックによって実行される。
【0029】
ヘッドICからのリード情報は、RDC31の信号処理部201に入力される。信号処理部201は、入力されたリード情報に対して復調やエラー訂正などの処理を施す。信号処理部201で処理された情報は、位置検出部202に出力される。位置検出部202は、信号処理部201から入力された情報からサーボ情報を検出し、検出したサーボ情報からアドレス情報および位置情報を抽出する。抽出されたアドレス情報および位置情報はCPU41へ出力される。
【0030】
RDC31(さらに詳細には位置検出部202)からのアドレス情報および位置情報は、CPU41にて位置誤差情報として算出される。算出された位置誤差情報は、CPU41の適応フィルタ211に入力される。適応フィルタ211は、ヘッドの位置制御処理に対する外乱の不特定の周波数成分を適応的に推定するフィルタであり、プログラムによる演算で実現されるソフトウェアモジュールである。適応フィルタ211は、推定された周波数成分に対して特徴的な特性でフィルタ処理(フィルタリング)する。適応フィルタでフィルタリングされた情報は、固定フィルタ212へ出力される。固定フィルタ212は、ヘッドの位置制御処理におけるフィードバック制御を安定化するための位相補償やゲイン補償を行うためのフィルタであり、プログラムによる演算で実現されるソフトウェアモジュールである。固定フィルタ212を実現するため、所定の伝達関数を実現するためのフィルタ係数が予め設定されている。固定フィルタ212でフィルタリングされた情報は、モータドライバ21へ出力される。
【0031】
モータドライバ21は、適応フィルタ211および固定フィルタ212でフィルタリングされた情報に基づいてVCM4を回転駆動して、スライダ2を磁気ディスク1上で移動させる。スライダ2に備えられたリードヘッド(不図示)が磁気ディスク1の記録面から読み出した信号は、ヘッドICを介してリード情報となり、ヘッドの位置制御処理におけるフィードバック制御が形成される。
【0032】
このようにして、本第1の実施形態にかかる複数のブロックによるヘッドの位置制御処理が実行される。このヘッドの位置制御処理の一部である適応フィルタ211および固定フィルタ212は、ソフトウェアモジュールで構成される。すなわち、本第1の実施形態にかかるHDD10は、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0033】
次に、図3を用いて、本第1の実施形態にかかる適応フィルタ211の構成を説明する。図3は、本第1の実施形態にかかる適応フィルタ211の構成を説明するためのブロック図である。
【0034】
図3では、本第1の実施形態にかかるヘッドの位置制御処理におけるフィードバック制御系の全体の概略的なモデルが示される。このフィードバック制御系では、適応フィルタ211の後段に固定フィルタ212が備えられ、固定フィルタ212の後段に、制御対象330が備えられる。そして、制御対象330から出力される情報は、ループして適応フィルタ211に入力される。制御対象330は、モータドライバ21から適応フィルタ211の入力部までを含むブロックであるため、そこから出力される情報は位置誤差情報である。図3では、位置誤差情報の極性を反転した情報に外乱が加算されるモデルが示される。
【0035】
外乱が加算された位置誤差情報x(n)は、減算器302に入力される。減算器302の出力値である現在値u(n)は、係数(ra)305および遅延器303に入力される。遅延器303を経た1遅延値u(n−1)は、乗算器308,309、遅延器304、および、乗算器315に入力される。遅延器304を経た2遅延値u(n−2)は、係数(rb)306および係数(rc)307に入力される。また、乗算器308の出力値と、2遅延値u(n−2)に係数(rb)306を乗じた値とは、加算器310で加算される。加算器310の出力値は、減算器302において、外乱が加算された位置誤差情報x(n)から減算される。さらに、乗算器309の出力値と、2遅延値u(n−2)に係数(rc)307を乗じた値とは、加算器311で加算される。加算器311の出力値は、加算器312において、現在値u(n)に係数(ra)305を乗じた値と加算される。すなわち、これらのブロックにより2次のIIR型デジタルフィルタが構成される。
【0036】
2次のIIR型デジタルフィルタの後段では、加算器312の出力値と、外乱が加算された位置誤差情報x(n)とが、加算器313で加算される。加算器313の出力値は、係数314にて1/2(0.5)倍されて適応フィルタ出力値e(n)となる。適応フィルタ出力値e(n)は、固定フィルタ212および乗算器315に入力される。乗算器315では、適応フィルタ出力値e(n)と1遅延値u(n−1)とが乗算される。乗算器315の出力値に係数(−u)316を乗じた値は積分器317に入力される。積分器317の出力値であるフィードバック値a(n+1)は、乗算器308,309それぞれに入力され、それぞれで、遅延値u(n−1)と乗算される。
【0037】
このような構成により、適応フィルタ211が備える2次のIIR型デジタルフィルタの係数の一部である乗算器308,309の値は、1サンプルごとに変更(更新)される。すなわち、適応フィルタ211は、サンプリング周波数に基づく所定の時間間隔で、後段に出力する値を決定(更新)するサンプル値制御系で構成される。また、2次のIIR型デジタルフィルタの特性は、係数(ra)305、係数(rb)306、係数(rc)307、および、1サンプルごとに変更(更新)される乗算器308,309の値で定まるため、本第1の実施形態にかかる適応フィルタ211の特性は、1サンプルごとに変化する。
【0038】
なお、適応フィルタ211の後段に固定フィルタ212が備えられる構成を説明したが、適応フィルタ211が固定フィルタ212の後段に備えられる構成であってもよい。
【0039】
すなわち、ソフトウェアモジュールで構成される適応フィルタ211を備える、本第1の実施形態にかかるHDD10は、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0040】
次に、図4〜6を用いて、本第1の実施形態にかかる適応フィルタ211に関する特性を説明する。図4は、本第1の実施形態にかかる適応フィルタ211における経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図、図5は、本第1の実施形態にかかる適応フィルタ211の伝達特性を示す図、図6は、本第1の実施形態にかかる適応フィルタ211を含むフィードバック制御系の閉ループ特性(感度特性)を示す図である。
【0041】
図4に示すとおり、時間0[mS]では、フィードバック制御系に所定周波数の外乱が印加され、位置誤差情報の振幅値が±Aとなっている。このとき、適応フィルタ211の変動係数である乗算器308,309の値は「0」である。この時点では、外乱に対して、適応フィルタ211の係数が最適化されていない。適応フィルタ211のサンプリング周波数に基づく所定の時間間隔で、乗算器308,309の値は、0[mS]から徐々にマイナス方向に変動する。経過時間がT1[mS]付近となると、位置誤差情報の振幅値は急激に小さくなり、略±B(|B|<|A|)となる。また、このとき、乗算器308,309の値は略「−C」となる。つまり、この時点で、外乱に対して、適応フィルタ211の係数が最適化された状態となる。経過時間がT1[mS]以降では、位置誤差情報の振幅値は略±Bに、乗算器308,309の値は略「−C」に保たれる。すなわち、外乱の所定周波数が未知であり、適応フィルタ211の変動係数の値が最適値でない場合であっても、所定時間が経過すると、適応フィルタ211の係数が最適化されることが確認できる。適応フィルタ211の係数が最適化されると、位置誤差情報の振幅値は改善されて小さくなる。
【0042】
図5に示す図は、図4における経過時間T1[mS]以降で、変動係数が略収束した状態における適応フィルタ211の伝達特性を示している。本第1の実施形態にかかる適応フィルタ211の伝達特性は、特定周波数において所定のQ値にてゲインをUPする特性(いわゆる、逆ノッチ特性)となる。すなわち、本第1の実施形態では、周波数1[kHz]にて、ゲインUP量がD[dB]以下で位相変動が±E[deg]となる伝達特性が、印加された所定周波数の外乱に対して効果的な特性となる。換言すると、適応フィルタ211が最適化された状態における伝達特性から、印加された外乱の所定周波数は1[kHz]であると推定できる。また、図4における経過時間0〜T1[mS]の間での適応フィルタ211の伝達特性は、周波数が1[kHz]よりも低い帯域での逆ノッチ特性であり、時間経過とともに徐々にその周波数が1[kHz]に近づくように変化する。
【0043】
図6に示す図は、適応フィルタ211が図5の伝達特性となっている状態での、ヘッドの位置制御処理におけるフィードバック制御系の閉ループ特性(感度関数)を示している。この伝達特性は、所定周波数(約1「kHz」)にゲインのピークがあり、この所定周波数でのフィードバックゲインを上げる効果を有していることが確認できる。また、所定周波数(約1「kHz」)以上の帯域での感度は、F[dB]以下である。
【0044】
このようにして、本第1の実施形態にかかる適応フィルタ211は、FFTを用いずとも、所定周波数の外乱に対して効果的に伝達特性を最適化することが可能となる。この適応フィルタ211はソフトウェアモジュールによる演算で構成することが可能である。すなわち、本第1の実施形態にかかる適応フィルタ211を備えるHDD10によれば、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0045】
(第2の実施形態)
図7は、本第2の実施形態にかかる適応フィルタ720の構成を説明するためのブロック図である。
【0046】
本第2の実施形態は、前述した第1の実施形態にかかる適応フィルタ211とは一部の構成が異なる適応フィルタ720を用いる点で第1の実施形態と異なる。従って、これ以降では、第1の実施形態にかかる適応フィルタ211と同じ構成については、説明を簡略化または省略し、異なる構成について詳細に説明することとする。
【0047】
本第2の実施形態にかかる適応フィルタ720は、第1の実施形態で説明したCPU41で実行されるソフトウェアモジュールである。つまり、本第2の実施形態にかかるヘッドの位置制御処理は、第1の実施形態と同様にCPU41によって実行される。すなわち、本第2の実施形態にかかるヘッドの位置制御装置は、第1の実施形態と同様にHDD10によって実行されるものである。
【0048】
図7では、本第2の実施形態にかかるヘッドの位置制御処理におけるフィードバック制御系の全体の概略的なモデルが示される。このフィードバック制御系では、適応フィルタ720の後段に固定フィルタ212が備えられ、固定フィルタ212の後段に、制御対象330が備えられる。そして、制御対象330から出力される情報は、ループして適応フィルタ211に入力される。
【0049】
適応フィルタ720では、第1の実施形態にかかる適応フィルタ211と同様に、2次のIIR型デジタルフィルタが構成される。すなわち、適応フィルタ720は、減算器302、遅延器303,304、加算器310,311,312、係数(ra)305、係数(rb)306、係数(rc)307、乗算器308,309で構成される2次のIIR型デジタルフィルタを備えている。また、この2次のIIR型デジタルフィルタの後段には、加算器313、係数314、乗算器315、係数(−u)316、積分器317が接続される。積分器317の出力値であるフィードバック値a(n+1)は、加算器702および減算器703それぞれに入力される。また、係数(rd)701も、加算器702および減算器703それぞれに入力される。加算器702にて、フィードバック値a(n+1)と係数(rd)701の出力値とが加算された値は、乗算器309に出力される。同様に減算器703にて、フィードバック値a(n+1)から係数(rd)701の出力値が減算された値が、乗算器308に出力される。乗算器308,309それぞれに入力された値は、それぞれで、遅延値u(n−1)と乗算される。
【0050】
このような構成により、適応フィルタ720が備える2次のIIR型デジタルフィルタの係数の一部である乗算器308,309の値は、1サンプルごとに変更(更新)される。すなわち、適応フィルタ720は、サンプリング周波数に基づく所定の時間間隔で、後段に出力する値を決定(更新)するサンプル値制御系で構成される。本第2の実施形態にかかる適応フィルタ720の特性は、1サンプルごとに変化する。
【0051】
なお、適応フィルタ720の後段に固定フィルタ212が備えられる構成を説明したが、適応フィルタ720が固定フィルタ212の後段に備えられる構成であってもよい。また、加算器702は、フィードバック値a(n+1)から係数(rd)701の出力値を減算した値を乗算器308に出力する減算器として構成されてもよい。また、減算器703は、フィードバック値a(n+1)と係数(rd)701の出力値とを加算した値を乗算器309に出力する加算器として構成されてもよい。
【0052】
すなわち、ソフトウェアモジュールで構成される適応フィルタ720を備える、本第2の実施形態にかかるHDD10は、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0053】
次に、図8〜10を用いて、本第2の実施形態にかかる適応フィルタ720に関する特性を説明する。図8は、本第2の実施形態にかかる適応フィルタ720における経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図、図9は、本第2の実施形態にかかる適応フィルタ720の伝達特性を示す図、図10は、本第2の実施形態にかかる適応フィルタ720を含むフィードバック制御系の閉ループ特性(感度特性)を示す図である。
【0054】
図8に示すとおり、時間0[mS]では、フィードバック制御系に所定周波数の外乱が印加され、位置誤差情報の振幅値が±Aとなっている。このとき、適応フィルタ720の変動係数である乗算器308,309の値は「0」である。この時点では、外乱に対して、適応フィルタ720の係数が最適化されていない。適応フィルタ720のサンプリング周波数に基づく所定の時間間隔で、乗算器308,309の値は「0」から徐々にマイナス方向に変動する。経過時間がT2[mS]付近となると、位置誤差情報の振幅値は急激に小さくなり、略±B’(|B’|<|A|)となる。また、このとき、乗算器308,309の値は略「−C’」となる。つまり、この時点で、外乱に対して、適応フィルタ720の係数が最適化された状態となる。経過時間がT2[mS]以降では、位置誤差情報の振幅値は略±B’に、乗算器308,309の値は略「−C’」に保たれる。すなわち、外乱の所定周波数が未知であり、適応フィルタ720の変動係数の値が最適値でない場合であっても、所定時間が経過すると、適応フィルタ720の係数が最適化されることが確認できる。適応フィルタ720の係数が最適化されると、位置誤差情報の振幅値は改善されて小さくなる。本第2の実施形態において適応フィルタ720の係数が最適化される所定時間「T2」は、第1の実施形態において適応フィルタ211の係数が最適化される所定時間「T1」よりも早いタイミングである。
【0055】
図9に示す図は、図8における経過時間T2[mS]以降で、変動係数が略収束した状態における適応フィルタ720の伝達特性を示している。本第2の実施形態にかかる適応フィルタ720の伝達特性は、特定周波数において位相にピークを持たせる特性となる。すなわち、本第2の実施形態では、周波数2[kHz]付近にて、位相UP量がE’[deg]以下でゲインUP量がD’[dB]以下となる伝達特性が、印加された所定周波数の外乱に対して効果的な特性となる。換言すると、適応フィルタ720が最適化された状態における伝達特性から、印加された外乱の所定周波数は2[kHz]付近であると推定できる。また、図8における経過時間0〜T2[mS]の間での適応フィルタ720の伝達特性は、周波数が2[kHz]よりも低い帯域で位相にピークを持たせる特性であり、時間経過とともに徐々にその周波数が2[kHz]に近づくように変化する。
【0056】
図10に示す図は、適応フィルタ720が図9の伝達特性となっている状態での、ヘッドの位置制御処理におけるフィードバック制御系の閉ループ特性(感度関数)を示している。この伝達特性では、第1の実施形態にかかる閉ループ特性(感度関数)と比較して、所定周波数(約2「kHz」)での感度関数ゲインを下げることができるため、抑圧率がより改善する。また、本第2の実施形態にかかる閉ループ特性(感度関数)では、第1の実施形態と比較して、所定周波数(約2「kHz」)以上の帯域での位置決め精度を改善することができる。また、所定周波数(約1「kHz」)以上の帯域での感度は、F’[dB]以下である。
【0057】
このようにして、本第2の実施形態にかかる適応フィルタ720でも、FFTを用いずとも、所定周波数の外乱に対して効果的に伝達特性を最適化することが可能となる。この適応フィルタ720はソフトウェアモジュールによる演算で構成することが可能である。すなわち、本第2の実施形態にかかる適応フィルタ720を備えるHDD10によっても、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0058】
(第3の実施形態)
図11は、本第3の実施形態にかかる適応フィルタ1120の構成を説明するためのブロック図である。
【0059】
本第3の実施形態は、前述した第1の実施形態にかかる適応フィルタ211とは一部の構成が異なる適応フィルタ1120を用いる点、および、適応フィルタ1120と固定フィルタ212との配置順序が異なる点で第1の実施形態と異なる。従って、これ以降では、第1の実施形態と同じ構成については、説明を簡略化または省略し、異なる構成について詳細に説明することとする。
【0060】
本第3の実施形態にかかる適応フィルタ1120は、第1の実施形態で説明したCPU41で実行されるソフトウェアモジュールとして構成される。つまり、本第3の実施形態にかかるヘッドの位置制御処理の一部は、第1の実施形態と同様にCPU41によって実行される。すなわち、本第3の実施形態にかかるヘッドの位置制御装置も、第1,第2の実施形態と同様にHDD10において実行されるものである。
【0061】
図11には、本第3の実施形態にかかるヘッドの位置制御処理におけるフィードバック制御系全体の概略的なモデルが示される。このフィードバック制御系では、固定フィルタ212の後段に適応フィルタ1120が備えられ、適応フィルタ1120の後段に制御対象330が備えられる。制御対象330から出力される情報は、ループして固定フィルタ212に入力される。制御対象330は機構部を含み、この機構部で共振が発生することがある。この共振により特定周波数の共振周波数成分がフィードバック制御系に付加される。
【0062】
適応フィルタ1120は、第1,第2の実施形態にかかる適応フィルタと同様に、2次のIIR型デジタルフィルタを含んで構成される。すなわち、適応フィルタ1120は、減算器302、遅延器303,304、加算器310,311,312、係数(ra)1105、係数(rb)1106、係数(rc)1107、乗算器308,309で構成される2次のIIR型デジタルフィルタを備えている。また、この2次のIIR型デジタルフィルタの後段には、加算器313、係数314、乗算器315、係数(−u)316、積分器317が接続される。これらのブロックは、第1,第2の実施形態にかかる適応フィルタと同様に接続される。
【0063】
本第3の実施形態にかかる適応フィルタ1120は、特定周波数のゲインを減衰するノッチフィルタを含んで構成される。すなわち、適応フィルタ1120の一部がノッチフィルタを構成するように、係数(ra)1105、係数(rb)1106、係数(rc)1107の値が設定される。
【0064】
このような構成により、適応フィルタ1120が備える2次のIIR型デジタルフィルタの係数の一部である乗算器308,309の値が、1サンプルごとに変更(更新)される。すなわち、適応フィルタ1120は、サンプリング周波数に基づく所定の時間間隔で、後段に出力する値を決定(更新)するサンプル値制御系で構成される。本第3の実施形態では、乗算器308,309の値が1サンプルごとに変更(更新)されるため、適応フィルタ1120の特性は1サンプルごとに変化する。
【0065】
なお、固定フィルタ212の後段に適応フィルタ1120が備えられる構成を説明したが、適応フィルタ1120が固定フィルタ212の後段に備えられる構成であってもよい。しかし、適応フィルタ1120は、共振が発生する機構部を含む制御対象330の前段に配置されることが好ましい。
【0066】
すなわち、適応フィルタ1120を備える本第3の実施形態にかかるHDD10は、フィードバック制御において、共振に起因する所定周波数成分を抑圧する適応フィルタを容易に構成することができる。
【0067】
次に、図12〜14を用いて、本第3の実施形態にかかる適応フィルタ1120に関する特性を説明する。図12は、共振が発生する機構部を含む制御対象330の伝達特性を示す図、図13は、本第3の実施形態にかかる適応フィルタ1120における経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図、図14は、本第3の実施形態にかかる適応フィルタ1120の伝達特性を示す図である。
【0068】
図12に示すとおり、共振が発生する機構部を含む制御対象330の伝達特性は遅れ系の特性を示し、周波数6[kHz]付近にて共振を有している。また、この共振周波数に向けて位相は徐々に遅れ始め、共振周波数よりも高い周波数では位相が180[deg]遅れる。このように機構部を含む制御対象330の伝達特性は、共振を有する遅れ系であることが一般的である。
【0069】
図13に示すとおり、時間0[mS]から時間T3[mS]の期間では、フィードバック制御系に共振が発生して、位置誤差情報の振幅値が±AA近傍まで増加する。このとき、適応フィルタ1120の変動係数である乗算器308,309の値は「0」近傍から徐々に増加している。時間0[mS]の時点では、共振に対して適応フィルタ1120の変動係数は最適化されていないが、時間T3[mS]に近づくに従って、適応フィルタ1120の変動係数は共振に対して最適化される。時間T3[mS]で、変動係数の値が「CC1」近傍になると、位置誤差情報の振幅値は±AA近傍から減少する。時間T3[mS]以降に、変動係数の値は「CC2」近傍まで増加するが、その後、変動係数は「CC1」近傍の値に収束する。
【0070】
本第3の実施形態によれば、共振の所定周波数が未知であり、適応フィルタ1120の変動係数の初期値が最適値でない場合であっても、所定時間が経過すると、変動係数が最適化される(所定値に収束する)ことが確認できる。適応フィルタ1120の変動係数が最適化されると、位置誤差情報の振幅値は改善されて小さくなる。適応フィルタ1120の変動係数の初期値が最適化された値であれば、位置誤差情報の振幅値は安定したままであることが期待できる。
【0071】
図14に示す図は、図13における経過時間T3[mS]以降で、変動係数が略収束した状態における適応フィルタ1120の伝達特性を示している。この状態での適応フィルタ1120の伝達特性は、特定周波数においてゲインを減衰する特性(いわゆるノッチ特性)となる。すなわち、本第3の実施形態では、周波数6[kHz]付近にて、ゲイン減衰量がーDD[dB]以下で位相変動量が±EE[deg]以下となる伝達特性が、所定周波数の共振の抑圧に対して効果的となる。換言すると、適応フィルタ1120が最適化された状態における伝達特性から、共振の所定周波数は6[kHz]付近であると推定できる。また、図13における経過時間0〜T3[mS]の間での適応フィルタ1120の伝達特性は、周波数が6[kHz]よりも低い帯域でのノッチ特性であり、時間経過とともに徐々にその周波数が6[kHz]に近づくように変化する。
【0072】
このようにして、本第3の実施形態にかかる適応フィルタ1120でも、FFTを用いずとも、所定周波数の外乱(共振)に対して効果的に伝達特性を最適化することが可能となる。この適応フィルタ1120はソフトウェアモジュールによる演算で構成することが可能である。すなわち、本第3の実施形態にかかる適応フィルタ1120を備えるHDD10によっても、フィードバック制御で用いられる適応フィルタを容易に構成することができる。
【0073】
(第4の実施形態)
図15は、本第4の実施形態にかかる適応フィルタ1520の構成を説明するためのブロック図である。
【0074】
本第4の実施形態は、前述した第1の実施形態にかかる適応フィルタ211と同じ構成の二つの適応フィルタ1520a,1520bを用いる点で第1の実施形態と異なる。従って、これ以降では、第1の実施形態と同じ構成については、説明を簡略化または省略し、異なる構成について詳細に説明することとする。
【0075】
本第4の実施形態にかかる適応フィルタ1520a,1520bは、第1の実施形態で説明したCPU41で実行されるソフトウェアモジュールとして構成される。つまり、本第4の実施形態にかかるヘッドの位置制御処理の一部は、第1の実施形態と同様にCPU41によって実行される。すなわち、本第4の実施形態にかかるヘッドの位置制御装置も、第1から第3の実施形態と同様にHDD10において実行されるものである。
【0076】
図15には、本第4実施形態にかかるヘッドの位置制御処理におけるフィードバック制御系全体の概略的なモデルが示される。このフィードバック制御系では、二つの適応フィルタ1520a,1520bが直列に接続される。適応フィルタ1520bの後段には固定フィルタ212が備えられ、固定フィルタ212の後段に制御対象330が備えられる。制御対象330から出力される情報は、ループして適応フィルタ1520aに入力される。図15では、制御対象330から出力される位置誤差情報の極性を反転した情報に2種の外乱が加算されるモデルが示される。
【0077】
適応フィルタ1520aは、第1から第3の実施形態にかかる適応フィルタと同様に、2次のIIR型デジタルフィルタを含んで構成される。すなわち、適応フィルタ1520aは、減算器302a、遅延器303a,304a、加算器310a,311a,312a、係数(ra)1505a、係数(rb)1506a、係数(rc)1507a、乗算器308a,309aで構成される2次のIIR型デジタルフィルタを備えている。また、この2次のIIR型デジタルフィルタの後段には、加算器313a、係数314a、乗算器315a、係数(−u)316a、積分器317aが接続される。これらのブロックは、第1から第3の実施形態にかかる適応フィルタと同様に接続される。
【0078】
また、適応フィルタ1520bも、第1から第3の実施形態にかかる適応フィルタと同様に、2次のIIR型デジタルフィルタを含んで構成される。すなわち、適応フィルタ1520bは、減算器302b、遅延器303b,304b、加算器310b,311b,312b、係数(ra)1505b、係数(rb)1506b、係数(rc)1507b、乗算器308b,309bで構成される2次のIIR型デジタルフィルタを備えている。また、この2次のIIR型デジタルフィルタの後段には、加算器313b、係数314b、乗算器315b、係数(−u)316b、積分器317bが接続される。これらのブロックも、第1から第3の実施形態にかかる適応フィルタと同様に接続される。
【0079】
本第4の実施形態にかかる適応フィルタ1520a,1520bそれぞれは、特定周波数のゲインをUPする逆ノッチフィルタを含んで構成される。適応フィルタ1520aと適応フィルタ1520bとでは逆ノッチフィルタの対象となる周波数が異なる。すなわち、適応フィルタ1520a,1520bそれぞれの一部が、異なる特定周波数の逆ノッチフィルタを構成するように、係数(ra)1505a,1505b、係数(rb)1506a,1506b、係数(rc)1507a,1507bの値が設定される。適応フィルタ1520a,1520bそれぞれは、サンプリング周波数に基づく所定の時間間隔で、後段に出力する値を決定(更新)するサンプル値制御系で構成される。本第4の実施形態では、乗算器308a,308b,309a,309bの値が1サンプルごとに変更(更新)されるため、適応フィルタ1520a,1520bそれぞれの特性は、1サンプルごとに変化する。
【0080】
なお、適応フィルタ1520a,1520bが直列に接続され、適応フィルタ1520bの後段に固定フィルタ212が備えられる構成を説明したが、この構成に限定されるものではない。例えば、適応フィルタ1520a,1520bの間に固定フィルタ212が備えられる構成や、適応フィルタ1520a,1520bが直列に接続され、適応フィルタ1520aの前段に固定フィルタ212が備えられる構成であってもよい。また、二つの適応フィルタ1520a,1520bだけでなく3以上の適応フィルタを備える構成であってもよい。
【0081】
すなわち、適応フィルタ1520a,1520bを備える本第4の実施形態にかかるHDD10は、フィードバック制御において、異なる所定周波数の複数の外乱を抑圧する適応フィルタを容易に構成することができる。
【0082】
次に、図16〜18を用いて、本第4の実施形態にかかる適応フィルタ1520a,1520bに関する特性を説明する。図16は、本第4の実施形態にかかる適応フィルタ1520a,1520bにおける経過時間に対する位置誤差情報およびフィルタ係数の変化を示す図、図17は、本第4の実施形態にかかる適応フィルタ1520a,1520bの伝達特性を示す図、図18は、本第4の実施形態にかかる適応フィルタ1520a,1520bを含むフィードバック制御系の閉ループ特性(感度特性)を示す図である。
【0083】
図16に示すとおり、時間0[mS]では、フィードバック制御系に異なる所定周波数の二つの外乱が印加され、位置誤差情報の振幅値が±Aとなっている。このとき、適応フィルタ1520a,1520bそれぞれの変動係数である乗算器308a,308b,309a,309bの値は「0」である。この時点では、外乱に対して、適応フィルタ1520a,1520bの係数が最適化されていない。適応フィルタ1520a,1520bのサンプリング周波数に基づく所定の時間間隔ごとに、乗算器308a,308b,309a,309bの値は、0[mS]から徐々にマイナス方向に変動する。経過時間がT4[mS]付近となると、位置誤差情報の振幅値は小さくなり、略±AB(|AB|<|A|)となる。また、このとき、適応フィルタ1520aにかかる乗算器308a,309aの値は略「−C」となる。つまり、この時点で、第1の特定周波数の外乱に対して、適応フィルタ1520aの係数が最適化された状態となる。
【0084】
位置誤差情報の振幅値は、経過時間がT4[mS]以降は更に小さくなり、T5[mS]付近で略±B(|B|<|AB|)となる。また、このとき、適応フィルタ1520aにかかる乗算器308a,309aの値は略「−C」を維持するが、適応フィルタ1520bにかかる乗算器308b,309bの値は略「−CC」となる。つまり、この時点で、第1の特定周波数の外乱に対して、適応フィルタ1520aの係数が最適化されるとともに、第2の特定周波数の外乱に対して、適応フィルタ1520bの係数が最適化された状態となる。経過時間がT5[mS]以降では、位置誤差情報の振幅値は略±Bに、適応フィルタ1520aにかかる乗算器308a,309aの値は略「−C」に、適応フィルタ1520bにかかる乗算器308b,309bの値は略「−CC」に保たれる。
【0085】
すなわち、本第4の実施形態によれば、外乱の所定周波数が未知であり、適応フィルタ1520a,1520bそれぞれの変動係数の初期値が最適値でない場合であっても、所定時間が経過すると、適応フィルタ1520a,1520bそれぞれの係数が最適化される(所定値に収束する)ことが確認できる。適応フィルタ1520a,1520bそれぞれの係数が最適化されると、位置誤差情報の振幅値は改善されて小さくなる。
【0086】
図17に示す図は、図16における経過時間T5[mS]以降で、変動係数が所定値に収束した状態における適応フィルタ1520a,1520bそれぞれの伝達特性を示している。この状態での適応フィルタ1520a,1520bそれぞれの伝達特性は、特定周波数において所定のQ値にてゲインをUPする特性(いわゆる、逆ノッチ特性)となる。すなわち、本第4の実施形態では、周波数1[kHz]においてゲインUP量がD[dB]以下で位相変動が±E[deg]となる伝達特性が、印加された第1の所定周波数の外乱に対して効果的な特性となる。また、周波数2[kHz]においてゲインUP量がD[dB]以下で位相変動が±E[deg]となる伝達特性が、印加された第2の所定周波数の外乱に対して効果的な特性となる。換言すると、適応フィルタ1520a,1520bそれぞれが最適化された状態における伝達特性から、印加された複数の外乱のうち、第1の所定周波数は1[kHz]であり、第2の所定周波数は2[kHz]であると推定できる。
【0087】
なお、図16において、経過時間0〜T4[mS]の間での適応フィルタ1520aの伝達特性は、周波数が1[kHz]よりも低い帯域での逆ノッチ特性であり、時間経過とともに徐々にその周波数が1[kHz]に近づくように変化する。また、経過時間0〜T5[mS]の間での適応フィルタ1520bの伝達特性は、周波数が2[kHz]よりも低い帯域での逆ノッチ特性であり、時間経過とともに徐々にその周波数が2[kHz]に近づくように変化する。
【0088】
図18に示す図は、適応フィルタ1520a,1520bそれぞれが図17の伝達特性となっている状態での、ヘッドの位置制御処理におけるフィードバック制御系の閉ループ特性(感度関数)を示している。図17の伝達特性では、第1の所定周波数(約1「kHz」)および第2の所定周波数(約2「kHz」)にゲインのピークがある。すなわち、本第4の実施形態にかかる伝達特性は、この2つの所定周波数でのフィードバックゲインを上げる効果を有している。このため、図18に示す感度関数では、第1の所定周波数(約1「kHz」)および第2の所定周波数(約2「kHz」)の感度が下がっていることが確認できる。また、第2の所定周波数(約2「kHz」)以上の帯域での感度は、F[dB]以下である。
【0089】
このようにして、本第4の実施形態にかかる適応フィルタ1520a,1520bは、FFTを用いずとも、複数の所定周波数の外乱に対して効果的に伝達特性を最適化することが可能となる。この適応フィルタ1520a,1520bはソフトウェアモジュールによる演算で構成することが可能である。すなわち、本第4の実施形態にかかる適応フィルタ1520a,1520bを備えるHDD10によれば、フィードバック制御において、異なる所定周波数の複数の外乱成分を抑圧する適応フィルタを容易に構成することができる。
【0090】
以上説明したように第1から第4の実施形態によれば、ソフトウェアモジュールを用いたデジタルフィルタを用いて、フィードバック制御系に印加された外乱の不特定の周波数成分を適応的に推定する適応フィルタを実現することが可能となる。この適応フィルタは、FFTを用いることなくCPUにて実行されるプログラムで実現される。すなわち、第1から第4の実施形態によれば、フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成することができる磁気ディスク装置およびヘッドの位置制御方法を提供することが可能となる。
【0091】
なお、図1に示した電子機器150において、HDD10に対して印加される所定周波数の外乱としては、電子機器150内に設けられたスピーカ(不図示)から音声信号が出力されることで発生する振動に起因するものが挙げられる。また、電子機器150内でHDD10を支持する筐体に対して印加された振動に基づいてHDD10に伝播する振動に起因するものも想定される。
【0092】
なお、複数の実施形態を説明したが、説明した実施形態は一例として提示したものであり、発明の範囲はこの実施形態に限定されない。また、説明した実施形態は、本発明の要旨を変えない範囲において、種々の変更、改変等が可能である。さらに、前述した実施形態に開示されている複数の構成要素を適宜に組み合わせることにより、種々の発明を形成することができる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよく、さらに、異なる実施形態に係る構成要素を適宜組み合わせても良い。これらの実施形態やその変形は、発明の範囲や要旨に含まれ、特許請求の範囲に記載された発明と、その均等の範囲に含まれるものである。
【符号の説明】
【0093】
1…磁気ディスク、2…スライダ、3…アーム、4…VCM(ボイスコイルモータ)、5…SPM(スピンドルモータ)、10…磁気ディスク装置(HDD)、21…モータドライバ、22…ヘッドIC、31…リードライトチャネルIC(RDC)、41…CPU、42…RAM、43…NVRAM、50…HDC(Hard Disc Controller)、100…ホスト装置、120…通信媒体(ホストI/F)、150…電子機器、201…信号処理部、202…位置検出部、211,720,1120,1520…適応フィルタ、212…固定フィルタ。
【特許請求の範囲】
【請求項1】
サーボ情報が記録された磁気ディスクと、
前記磁気ディスクのサーボ情報を読み出すためのヘッドと、
前記ヘッドの位置決め制御を行う際に、前記ヘッドにより読み出した前記サーボ情報から生成される位置誤差情報に基づいて、可変係数を含む高次のIIR型デジタルフィルタを用いて前記位置決め制御における外乱となる所定周波数を推定する前位置制御手段と、
を具備し、
前記位置制御手段は、前記IIR型デジタルフィルタの出力値と1サンプル前の値とを乗算した値を所定倍した値を積分し、当該積分した値に基づく値であって、前記所定周波数におけるゲインまたは位相をピークとする伝達関数となる値を前記可変変数とする磁気ディスク装置。
【請求項2】
サーボ情報が記録された磁気ディスクと、
前記磁気ディスクのサーボ情報を読み出すためのヘッドと、
前記ヘッドの位置決め制御を行う際に、前記ヘッドにより読み出した前記サーボ情報から生成される位置誤差情報に基づいて、可変係数を含む高次のIIR型デジタルフィルタを用いて前記位置決め制御における外乱となる所定周波数を推定する位置制御手段と、
を具備する磁気ディスク装置。
【請求項3】
前記位置制御手段は、前記IIR型デジタルフィルタの出力値と1サンプル前の値とを乗算した値を所定倍した値を積分し、当該積分した値に基づく値を前記可変変数とする請求項2に記載の磁気ディスク装置。
【請求項4】
前記位置制御手段は、前記所定周波数におけるゲインまたは位相をピークとする伝達関数となる値に前記可変係数を設定する請求項2または3に記載の磁気ディスク装置。
【請求項5】
前記位置制御手段は、前記積分した値と前記1サンプル前の値とを乗算した値を前記可変変数とする請求項2から4の何れか1項に記載の磁気ディスク装置。
【請求項6】
前記位置制御手段は、前記積分した値に所定値の係数を加算した値と前記1サンプル前の値とを乗算した値を前記可変変数とする請求項2から5の何れか1項に記載の磁気ディスク装置。
【請求項7】
前記IIR型デジタルフィルタは、前記所定周波数に関する逆ノッチフィルタ又はノッチフィルタを含む請求項2から6の何れか1項に記載の磁気ディスク装置。
【請求項8】
前記位置制御手段は、直列接続された複数の前記IIR型デジタルフィルタを備える請求項2から7の何れか1項に記載の磁気ディスク装置。
【請求項9】
磁気ディスク装置でのヘッドの位置制御方法であって、
前記磁気ディスク装置は、
サーボ情報が記録された磁気ディスクと、
前記磁気ディスクのサーボ情報を読み出すための前記ヘッドと、
を具備し、
前記ヘッドの位置決め制御を行う際に、前記ヘッドにより読み出した前記サーボ情報から生成される位置誤差情報に基づいて、可変係数を含む高次のIIR型デジタルフィルタを用いて前記位置決め制御における外乱となる所定周波数を推定する位置制御方法。
【請求項1】
サーボ情報が記録された磁気ディスクと、
前記磁気ディスクのサーボ情報を読み出すためのヘッドと、
前記ヘッドの位置決め制御を行う際に、前記ヘッドにより読み出した前記サーボ情報から生成される位置誤差情報に基づいて、可変係数を含む高次のIIR型デジタルフィルタを用いて前記位置決め制御における外乱となる所定周波数を推定する前位置制御手段と、
を具備し、
前記位置制御手段は、前記IIR型デジタルフィルタの出力値と1サンプル前の値とを乗算した値を所定倍した値を積分し、当該積分した値に基づく値であって、前記所定周波数におけるゲインまたは位相をピークとする伝達関数となる値を前記可変変数とする磁気ディスク装置。
【請求項2】
サーボ情報が記録された磁気ディスクと、
前記磁気ディスクのサーボ情報を読み出すためのヘッドと、
前記ヘッドの位置決め制御を行う際に、前記ヘッドにより読み出した前記サーボ情報から生成される位置誤差情報に基づいて、可変係数を含む高次のIIR型デジタルフィルタを用いて前記位置決め制御における外乱となる所定周波数を推定する位置制御手段と、
を具備する磁気ディスク装置。
【請求項3】
前記位置制御手段は、前記IIR型デジタルフィルタの出力値と1サンプル前の値とを乗算した値を所定倍した値を積分し、当該積分した値に基づく値を前記可変変数とする請求項2に記載の磁気ディスク装置。
【請求項4】
前記位置制御手段は、前記所定周波数におけるゲインまたは位相をピークとする伝達関数となる値に前記可変係数を設定する請求項2または3に記載の磁気ディスク装置。
【請求項5】
前記位置制御手段は、前記積分した値と前記1サンプル前の値とを乗算した値を前記可変変数とする請求項2から4の何れか1項に記載の磁気ディスク装置。
【請求項6】
前記位置制御手段は、前記積分した値に所定値の係数を加算した値と前記1サンプル前の値とを乗算した値を前記可変変数とする請求項2から5の何れか1項に記載の磁気ディスク装置。
【請求項7】
前記IIR型デジタルフィルタは、前記所定周波数に関する逆ノッチフィルタ又はノッチフィルタを含む請求項2から6の何れか1項に記載の磁気ディスク装置。
【請求項8】
前記位置制御手段は、直列接続された複数の前記IIR型デジタルフィルタを備える請求項2から7の何れか1項に記載の磁気ディスク装置。
【請求項9】
磁気ディスク装置でのヘッドの位置制御方法であって、
前記磁気ディスク装置は、
サーボ情報が記録された磁気ディスクと、
前記磁気ディスクのサーボ情報を読み出すための前記ヘッドと、
を具備し、
前記ヘッドの位置決め制御を行う際に、前記ヘッドにより読み出した前記サーボ情報から生成される位置誤差情報に基づいて、可変係数を含む高次のIIR型デジタルフィルタを用いて前記位置決め制御における外乱となる所定周波数を推定する位置制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】

【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−84331(P2013−84331A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−104129(P2012−104129)
【出願日】平成24年4月27日(2012.4.27)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成24年4月27日(2012.4.27)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]