
磁気ディスク装置及び制御方法
【課題】スパイラルデータトラック方式で一部のトラックへ追従させる際の待機時間を短くすることを可能とする。
【解決手段】磁気ディスク装置は、外周から内周、もしくは内周から外周に向かってスパイラル状にデータトラックが記録された磁気ディスクと、回転する磁気ディスクからデータトラックに記録されたデータの読み出しと書き込みを行うためのヘッドと、ヘッドを回転周期の整数倍からデータトラックへシークするのに要するシーク時間を差し引いた単位で、所定のデータトラックへヘッドを追従させる制御手段とを備える。
【解決手段】磁気ディスク装置は、外周から内周、もしくは内周から外周に向かってスパイラル状にデータトラックが記録された磁気ディスクと、回転する磁気ディスクからデータトラックに記録されたデータの読み出しと書き込みを行うためのヘッドと、ヘッドを回転周期の整数倍からデータトラックへシークするのに要するシーク時間を差し引いた単位で、所定のデータトラックへヘッドを追従させる制御手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁気ディスク装置及び制御方法に関する。
【背景技術】
【0002】
従来、ハードディスクドライブ(HDD)などの磁気ディスク装置における磁気ディスク媒体上のデータトラックでは、ヘッドのシーケンシャルアクセス性能を向上させるため、外周から内周、もしくは内周から外周に向かってスパイラル状に配置されるスパイラルデータトラック方式がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許3627263号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、スパイラルデータトラック方式では、例えば外周から内周に向かうスパイラル状のデータトラックにヘッドを追従させた場合に、外周から内周に向かってヘッドが移動することになる。したがって、一部のトラックへ繰り返し追従させる場合は、中心に向かったヘッドを外周に戻す際にシーク動作を行う必要があることから、シーク動作で整定した後のヘッドが読み出し又は書き込みを始める始点に到達するまでの待機時間が生じることがあった。
【0005】
本発明の実施形態は、スパイラルデータトラック方式で一部のトラックへ繰り返し追従させる際の待機時間を短くすることを可能とする磁気ディスク装置及び制御方法を得ることを目的の一つとする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、実施形態の磁気ディスク装置は、外周から内周、もしくは内周から外周に向かってスパイラル状にデータトラックが記録された磁気ディスクと、回転する前記磁気ディスクから前記データトラックに記録されたデータの読み出しと書き込みを行うためのヘッドと、前記ヘッドを回転周期から前記データトラックへシークするのに要するシーク時間を差し引いた単位で、所定のデータトラックへ前記ヘッドを追従させる制御手段とを備える。
【0007】
また、実施形態の制御方法は、外周から内周、もしくは内周から外周に向かってスパイラル状にデータトラックが記録された磁気ディスクと、回転する前記磁気ディスクから前記データトラックに記録されたデータの読み出しと書き込みを行うためのヘッドとを有する磁気ディスク装置の制御方法であって、前記ヘッドを回転周期の整数倍から前記データトラックへシークするのに要するシーク時間を差し引いた単位で、所定のデータトラックへ前記ヘッドを追従させる。
【図面の簡単な説明】
【0008】
【図1】図1は、実施形態にかかる磁気ディスクのデータトラックを例示する概念図である。
【図2】図2は、回転周期からヘッドをデータトラックへシークするのに要するシーク時間を差し引いた単位で、ヘッドをデータトラックへ追従させる際の始点と終点を例示する概念図である。
【図3】図3は、回転周期からヘッドをデータトラックへシークするのに要するシーク時間を差し引いた単位で、ヘッドをデータトラックへ追従させる際の、ヘッドの軌跡を例示する概念図である。
【図4】図4は、回転周期からヘッドをデータトラックへシークするのに要するシーク時間を差し引いた単位で、ヘッドをデータトラックへ追従させる際の、ヘッドの軌跡を例示する概念図である。
【図5】図5は、回転周期の整数倍からヘッドをデータトラックへシークするのに要するシーク時間を差し引いた単位で、ヘッドをデータトラックへ追従させる際の始点と終点を例示する概念図である。
【図6】図6は、回転周期の整数倍からヘッドをデータトラックへシークするのに要するシーク時間を差し引いた単位で、ヘッドをデータトラックへ追従させる際の、ヘッドの軌跡を例示する概念図である。
【図7】図7は、回転周期の整数倍からヘッドをデータトラックへシークするのに要するシーク時間を差し引いた単位で、ヘッドをデータトラックへ追従させる際の、ヘッドの軌跡を例示する概念図である。
【図8】図8は、実施形態にかかる磁気ディスク装置の構成を示すブロック図である。
【図9】図9は、RRO情報を書き込む動作の一例を示すフローチャートである。
【図10】図10は、一巡伝達特性の測定にかかるブロック線図である。
【図11】図11は、サーボフォーマットの一例を示す概念図である。
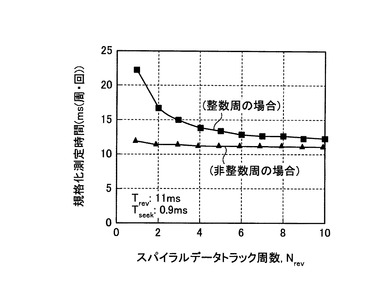
【図12】図12は、スパイラルデータトラック長と、1周当たりで規格化した位置誤差測定時間との関係を示すグラフである。
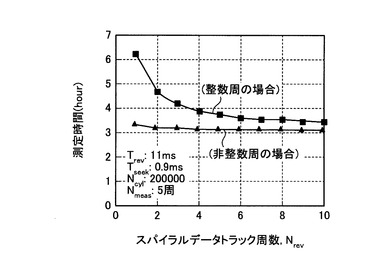
【図13】図13は、磁気ディスクの1面の総シリンダ数が20万である磁気ディスク装置において、スパイラルデータトラック長と、位置誤差測定に要した時間との関係を示すグラフである。
【発明を実施するための形態】
【0009】
以下に添付図面を参照して、実施形態にかかる磁気ディスク装置及び制御方法を詳細に説明する。なお、本実施形態では、磁気ディスク装置の一例として、PC(Personal Computer)等の情報機器に搭載されるハードディスクドライブを例示する。
【0010】
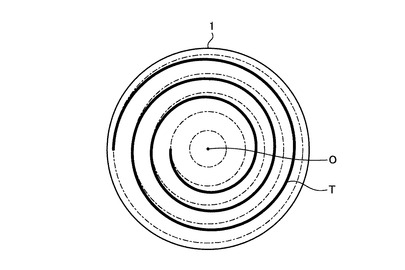
図1は、実施形態にかかる磁気ディスク1のデータトラックTを例示する概念図である。図1に示すように、磁気ディスク1には、外周から内周に向かってスパイラル状のデータトラックTが記録されている。なお、図示例では、右回りで外周から内周に向かうスパイラル状のデータトラックTが記録される構成を例示したが、左回りで外周から内周に向かうスパイラル状のデータトラックTが記録される構成であってもよいことは言うまでもないことである。
【0011】
同心円状にデータトラックTが記録される場合(図示例では一点鎖線)と比較しても明らかなように、回転する磁気ディスク1のデータトラックTにヘッドを追従させた場合には、磁気ディスク1の回転に伴ってヘッド位置が半径方向にずれる。このため、1周分のデータトラックTに繰り返してヘッドを追従させる場合には、読み出し又は書き込みを終了する終点から読み出し又は書き込みを始める始点に戻るためにシーク動作を行う必要があり、シーク動作で整定した後のヘッドが始点に到達するまでの待機時間が生じることとなる。
【0012】
したがって、本実施形態では、回転周期の整数倍からデータトラックTへヘッドをシークするのに要するシーク時間を差し引いた単位で、データトラックTへヘッドを追従させるように制御する。このように制御することで、例えばデータトラックTの一部へヘッドを繰り返して追従させてデータの読み出しを行う場合は、シーク動作で整定した後のヘッドは読み出しを始める始点に位置することとなるため、上述した待機時間を抑制できる。
【0013】
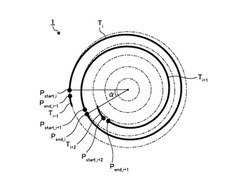
図2は、回転周期からシーク時間を差し引いた単位でヘッドをデータトラックT(Ti−1、Ti、Ti+1、Ti+2…)へ追従させる際の始点(Pstart_i、Pstart_i+1、Pstart_i+2)と終点(Pend_i−1、Pend_i、Pend_i+1)を例示する概念図である。
【0014】
図2に示すように、各データトラックTi−1、Ti、Ti+1、Ti+2…は、1周長からヘッドをシークするのに要する回転角α分に相当した距離を差し引いた長さの構成である。具体的には、データトラックTiは、始点Pstart_i(≒Pend_i−1)から終点Pend_i(≒Pstart_i+1)であり、その始点Pstart_iと終点Pend_iとが磁気ディスク1の中心となす角はシーク時間分の磁気ディスク1の回転角αである。
【0015】
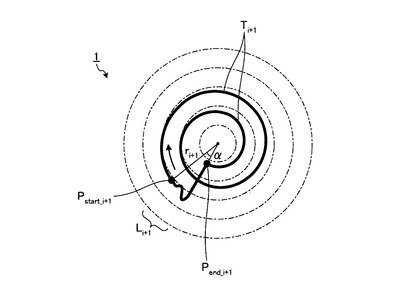
図3は、回転周期からシーク時間を差し引いた単位でヘッドをデータトラックTiへ追従させる際の、ヘッドの軌跡を例示する概念図である。図4は、回転周期からシーク時間を差し引いた単位でヘッドをデータトラックTi+1へ追従させる際の、ヘッドの軌跡を例示する概念図である。
【0016】
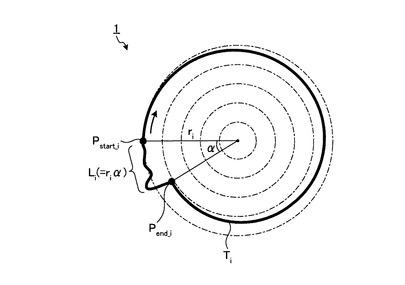
図3に示すように、データトラックTiへヘッドを追従させる場合には、終点Pend_iから半径riへのシーク動作を開始し、磁気ディスク1の回転角αに相当するシーク長Li進んだ始点Pstart_iのところでシーク動作が整定する。言い換えると、回転角αに相当するシーク時間の間に磁気ディスク1の円周方向に移動するヘッドの距離がシーク長である。同様に、図4に示すように、データトラックTi+1へヘッドを追従させる場合には、終点Pend_i+1から半径ri+1へのシーク動作を開始し、磁気ディスク1の回転角αに相当するシーク長Li+1進んだ始点Pstart_i+1のところでシーク動作が整定する。したがって、シーク動作で整定した後のヘッドは始点Pstart_i、Pstart_i+1に位置することとなるため、待機時間を抑制できる。
【0017】
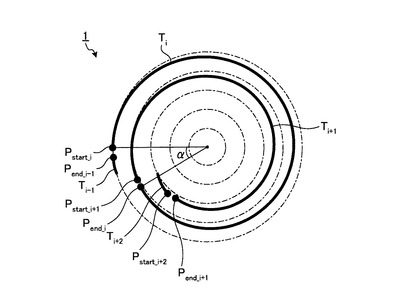
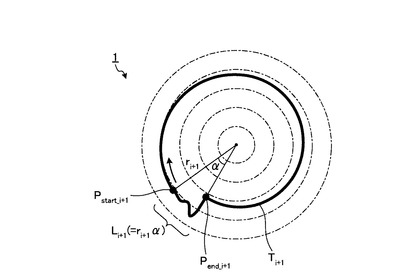
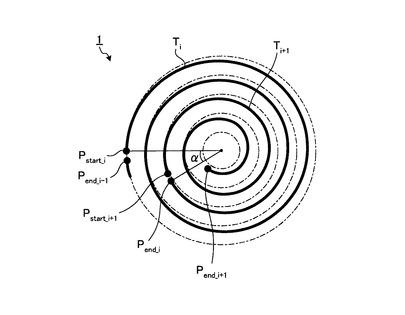
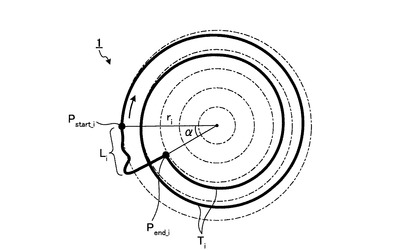
回転周期からシーク時間を差し引いた単位を1周未満とする場合を例示したが、複数周に亘ってヘッドをデータトラックTに追従させる場合も同様、回転周期からシーク時間を差し引いた単位で行う。図5は、回転周期の整数倍からシーク時間を差し引いた単位でヘッドをデータトラックTへ追従させる際の始点と終点を例示する概念図である。図6、7は、回転周期の整数倍からシーク時間を差し引いた単位でヘッドをデータトラックTへ追従させる際の、ヘッドの軌跡を例示する概念図である。より具体的には、図5、6、7では、複数周(図示例では2周相当)に亘ってヘッドをデータトラックに追従させる場合を例示している。
【0018】
図5に示すように、2周相当のデータトラックTiは、始点Pstart_iから終点Pend_iであり、その始点Pstart_iと終点Pend_iとが磁気ディスク1の中心となす角はシーク時間分の磁気ディスク1の回転角αである。図6に示すように、データトラックTiへヘッドを追従させる場合には、終点Pend_iから半径riへのシーク動作を開始し、磁気ディスク1の回転角αに相当するシーク長Li進んだ始点Pstart_iのところでシーク動作が整定する。同様に、図7に示すように、データトラックTi+1へヘッドを追従させる場合には、終点Pend_i+1から半径ri+1へのシーク動作を開始し、磁気ディスク1の回転角αに相当するシーク長Li+1進んだ始点Pstart_i+1のところでシーク動作が整定する。したがって、シーク動作で整定した後のヘッドは始点Pstart_i、Pstart_i+1に位置することとなるため、待機時間を抑制できる。
【0019】
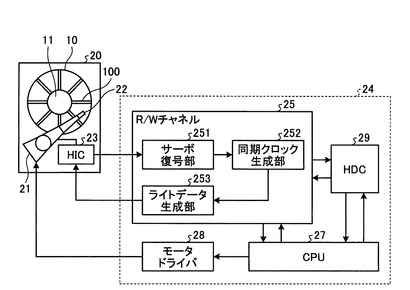
ここで、回転同期振れを示すRRO(Repeatble RunOut)情報を磁気ディスク1上のサーボ領域に書き込む際に、上述した制御を用いる磁気ディスク装置の動作について説明する。図8は、実施形態にかかる磁気ディスク装置20の構成を示すブロック図である。
【0020】
図8に示すように、磁気ディスク装置20は、ヘッド22を搭載しているアクチュエータアーム21と、アンプなどの機能を有するヘッドIC回路23と、プリント回路基板24とを有する。ヘッド22は、アクチュエータアーム21の選択に設けられている。ヘッド22は、いわゆる統合ヘッドであり、磁気ディスク1からデータ(サーボパターンを含む)を読み出すためのリードヘッド、及び磁気ディスク1にデータを書き込むためのライトヘッドを含む。
【0021】
アクチュエータアーム21は、図示しないボイス・コイル・モータ(VCM)に駆動され、ヘッド22を磁気ディスク1の半径方向に移動させる。プリント回路基板24には、R/Wチャンネル25(リード/ライト)、CPU27(Central Processing Unit)、モータドライバ28、HDC29(ハードディスクコントローラ)が実装されている。
【0022】
R/Wチャンネル25は、サーボパターン及びユーザデータのリード/ライト信号を処理する信号処理回路である。R/Wチャンネル25は、リードヘッドより読み出されたユーザデータを再生して、HDC29に創出する。また、R/Wチャンネル25は、HDC29から出力されるユーザデータをライト信号に変換してヘッドIC回路23に出力する。
【0023】
R/Wチャンネル25は、リードヘッドにより読み出されたサーボパターンを復号するサーボ復号部251、基準クロックであるサーボライトクロックを生成する同期クロック生成部252、及びサーボライトクロックに同期してサーボデータのようなデータの書き込みを制御するライトデータ生成部253を備えている。したがって、R/Wチャンネル25は、CPU27と共同して、セルフサーボ書き込み処理を実行するサーボ書き込み部としての機能を実現してもよい。
【0024】
CPU27は、アクチュエータアーム21を制御して、スピンドルモータ11により回転される磁気ディスク1上の指定位置までヘッド22を移動して位置決めする。この時、RRO(Repeatble RunOut)情報を算出するため同一部分のデータトラックTに繰り返して追従させる場合は、データトラックTへヘッド22を回転周期の整数倍からシーク時間を差し引いた単位で、ヘッド22を追従させるように制御する。具体的には、予めメモリなどに設定されたシーク時間と、スピンドルモータ11により回転する磁気ディスク1の回転速度とを元に、シーク時間で磁気ディスク1が回転する回転角を算出する。次いで、算出された回転角(α)とデータトラックTの半径方向における位置(r)とをもとに、シーク長(L)を求める。これにより、CPU27は、読み出しの始点よりシーク長を差し引いた終点で読み出しを終えて始点に戻すように制御する。このように制御することで、磁気ディスク装置20では、スパイラルデータトラック方式のデータトラックTへ追従させる際の待機時間を短くすることが可能となる。
【0025】
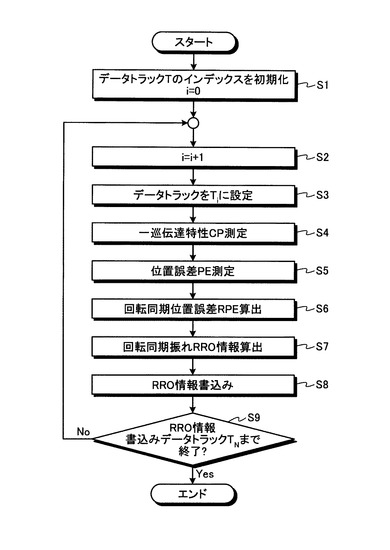
ここで、RRO情報を書き込む動作を詳細に説明する。図9は、RRO情報を書き込む動作の一例を示すフローチャートである。
【0026】
図9に示すように、処理が開始されると、CPU27は、RRO情報の算出を行う半径方向におけるデータトラックTのインデックス(i)を初期化(i=0)する(S1)。ここでデータトラックTのインデックスは、外周から内周に向かって増加するように割り当てられるものとする。
【0027】
次いで、CPU27は、データトラックTのインデックスをインクリメント(i=i+1)し(S2)、RRO情報の算出を行う半径方向におけるデータトラックTの位置をTiに設定する(S3)。ここで、CPU27は、データトラックTiについて、回転周期の整数倍からシーク時間を差し引いた単位での追従を開始する。
【0028】
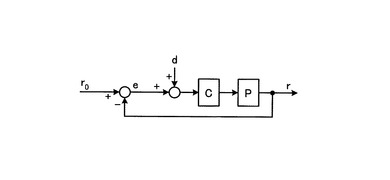
次いで、CPU27は、データトラックTiについてサーボ一巡伝達特性CPを測定する(S4)。図10は、一巡伝達特性の測定にかかるブロック線図である。S4では、図10に例示したブロック線図でサーボ一巡伝達特性CPの測定が行われる。ここで、Cはフィードバック制御の特性、Pはアクチュエータアーム21のVCM(ボイス・コイル・モータ)プラントの特性を表す。次に、数1のようにサーボ感度関数Sを算出する。
【0029】
【数1】

【0030】
なお、RRO情報による補正適用後のRPE(Repeatble Position Error)残留が要求仕様を満たす場合においては、全てのデータトラックTiで一巡伝達特性CPの測定及び感度関数Sの算出をする必要は必ずしも無く、前のデータトラックTiで算出した感度関数Sを用いてもよいものとする。
【0031】
次いで、CPU27は、データを記録及び再生する際に再生ヘッドが走行するデータトラックのシーク中において1回もしくは複数回の位置誤差PE(Position Error)を測定する(S5)。次いで、CPU27は、S5にて1回もしくは複数回測定した位置誤差PEを用いて、数2のように平均化をすることにより非回転同期位置誤差NRPE(Non-Rpeatable Position Error)を除去した回転同期位置誤差RPEを算出する(S6)。なお、数2におけるSvSCTはサーボセクタ番号を示し、Nmeasは位置誤差PEの測定回数を示す。
【0032】
【数2】
【0033】
次いで、CPU27は、回転同期振れを示すRRO情報を、数3のように、S4にて算出した感度関数Sと、S6にて算出した回転同期位置誤差RPEとをもとに算出する(S7)。例えば、データを記録及び再生する際に再生ヘッドが走行するデータトラックとシーク中において測定した回転同期位置誤差RPEをフーリエ変換演算し、周波数領域にて数3の演算を行う。そして、逆フーリエ変換を行うことでRRO情報を算出し、シーク中を除いたデータを記録及び再生する際に再生ヘッドが走行するデータトラックのRRO情報をサーボ領域に書き込む。
【0034】
【数3】
【0035】
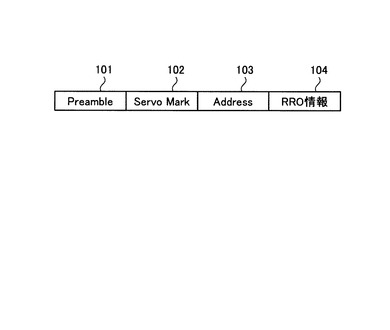
次いで、CPU27は、算出したRRO情報を磁気ディスク1上のサーボ領域内に書き込む(S8)。図11は、サーボフォーマットの一例を示す概念図である。図11に示すように、サーボ領域には、プリアンブル101と、サーボマーク102と、アドレス情報103と、RRO情報104とを含むサーボフォーマットで書き込みが行われる。
【0036】
次いで、CPU27は、RRO情報を書き込む必要がある領域全てにおいてRRO情報を書き込んだか否かを確認する(S9)。具体的には、データトラックTの半径方向において中心Oに最も近いデータトラックTNまでRRO情報を書き込んだか否かを確認する。データトラックTNまでRRO情報の書き込みが終了していない場合には、S2に処理を戻す。データトラックTNまでRRO情報の書き込みが終了している場合には、RRO情報を書き込む動作を終了する。
【0037】
ここで、回転周期の整数倍単位でデータトラックTへ追従させる場合と、回転周期の整数倍長からシーク時間を差し引いた単位でデータトラックTへ追従させる場合とについての比較を行う。
【0038】
回転周期の整数倍単位でデータトラックTへ追従させる場合は、回転同期位置誤差RPEを算出するためにNmeas回の測定を行う場合、Nmeas回だけデータトラックTの始点へシークする必要が生じる。シーク残留が制定するまでに要するシーク時間をTseekとし、シーク後の回転待ち時間をTwaitとすると、NrevのRPE測定のために要する時間t0は数4となる。なお、Tseek+Twaitは、整定後の始点まで待機時間であることからT1rev(1周分の時間)と同等である。
【0039】
【数4】
【0040】
また、1周当たりPRE測定のために要する時間Tnor0は、数5のとおりである。
【0041】
【数5】
【0042】
回転周期からシーク時間を差し引いた単位でデータトラックTへ追従させる場合では、回転同期位置誤差RPEを算出するための測定を、回転周期の非整数倍単位で行う。したがって、測定周N’revは、Tseekを差し引いたものとなるため数6となる。
【0043】
【数6】
【0044】
したがって、回転周期からシーク時間を差し引いた単位でデータトラックTへ追従させる場合における、RPE測定のために要する時間t2は数7となる。数4と数7とを比較しても明らかなように、回転周期からシーク時間を差し引いた単位でデータトラックTへ追従させることで、RPE測定のために要する時間を減少させることが可能である。
【0045】
【数7】
【0046】
なお、データトラックTがスパイラル状に記録されている場合は、同心円状に記録されている場合と異なり、データトラック長を変えることにより、複数周連続して位置誤差PEの測定を行うことができる。例えば、図5〜7で例示した場合では、2周相当の計測を連続して行っている。したがって、測定周係数をkとすると、位置誤差PEを測定する測定周数N’revを数8のように表すことができる。
【0047】
【数8】
【0048】
k=1のときは数6と対応する。また、測定周数N’revだけ位置誤差PEを測定するのに要する時間t3は数9のようになる。
【0049】
【数9】
【0050】
また、1周当たりRPE測定のために要する時間Tnor3は、数10のとおりである。
【0051】
【数10】
【0052】
なお、回転周期の整数倍単位の場合と比べた場合の差分時間Δ3は数11のとおりである。
【0053】
【数11】
【0054】
図12は、スパイラルデータトラック長と、1周当たりで規格化した位置誤差測定時間との関係を示すグラフである。図13は、磁気ディスクの1面の総シリンダ数が20万である磁気ディスク装置において、スパイラルデータトラック長と、位置誤差測定に要した時間との関係を示すグラフである。ここでシリンダは1周長のトラックと定義し、RPE算出のための位置誤差の測定を5回とした。図12、図13からも明らかなように、回転周期の整数倍からシーク時間を差し引いた単位でデータトラックTへ追従させることで、測定に要する時間を短縮させることが可能となる。
【0055】
なお、磁気ディスク装置20では、磁気ディスク1のデータトラックTに記録するデータのデータセクタ長を、ヘッド22を回転周期の整数倍からシーク時間を差し引いた単位としてもよい。具体的には、図2、図5に例示したデータトラックTi、データトラックTi+1…をデータセクタ長としてもよい。このようにデータセクタ長を設定することで、リトライ時などにおける回転待ち時間を改善することができる。
【0056】
なお、本発明は、上記実施の形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化することができる。また、上記実施の形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成することができる。例えば、実施の形態に示される全構成要素からいくつかの構成要素を削除してもよい。さらに、異なる実施の形態にわたる構成要素を適宜組み合わせても良い。
【符号の説明】
【0057】
1…磁気ディスク、20…磁気ディスク装置、21…アクチュエータアーム、22…ヘッド、23…ヘッドIC回路、24…プリント回路基板、25…R/Wチャンネル、27…CPU、28…モータドライバ、29…HDC、100…サーボパターン、101…プリアンブル、102…サーボマーク、103…アドレス情報、104…RRO情報、251…サーボ復号部、252…同期クロック生成部、253…ライトデータ生成部、O…中心、T…データトラック、α…回転角
【技術分野】
【0001】
本発明は、磁気ディスク装置及び制御方法に関する。
【背景技術】
【0002】
従来、ハードディスクドライブ(HDD)などの磁気ディスク装置における磁気ディスク媒体上のデータトラックでは、ヘッドのシーケンシャルアクセス性能を向上させるため、外周から内周、もしくは内周から外周に向かってスパイラル状に配置されるスパイラルデータトラック方式がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許3627263号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、スパイラルデータトラック方式では、例えば外周から内周に向かうスパイラル状のデータトラックにヘッドを追従させた場合に、外周から内周に向かってヘッドが移動することになる。したがって、一部のトラックへ繰り返し追従させる場合は、中心に向かったヘッドを外周に戻す際にシーク動作を行う必要があることから、シーク動作で整定した後のヘッドが読み出し又は書き込みを始める始点に到達するまでの待機時間が生じることがあった。
【0005】
本発明の実施形態は、スパイラルデータトラック方式で一部のトラックへ繰り返し追従させる際の待機時間を短くすることを可能とする磁気ディスク装置及び制御方法を得ることを目的の一つとする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、実施形態の磁気ディスク装置は、外周から内周、もしくは内周から外周に向かってスパイラル状にデータトラックが記録された磁気ディスクと、回転する前記磁気ディスクから前記データトラックに記録されたデータの読み出しと書き込みを行うためのヘッドと、前記ヘッドを回転周期から前記データトラックへシークするのに要するシーク時間を差し引いた単位で、所定のデータトラックへ前記ヘッドを追従させる制御手段とを備える。
【0007】
また、実施形態の制御方法は、外周から内周、もしくは内周から外周に向かってスパイラル状にデータトラックが記録された磁気ディスクと、回転する前記磁気ディスクから前記データトラックに記録されたデータの読み出しと書き込みを行うためのヘッドとを有する磁気ディスク装置の制御方法であって、前記ヘッドを回転周期の整数倍から前記データトラックへシークするのに要するシーク時間を差し引いた単位で、所定のデータトラックへ前記ヘッドを追従させる。
【図面の簡単な説明】
【0008】
【図1】図1は、実施形態にかかる磁気ディスクのデータトラックを例示する概念図である。
【図2】図2は、回転周期からヘッドをデータトラックへシークするのに要するシーク時間を差し引いた単位で、ヘッドをデータトラックへ追従させる際の始点と終点を例示する概念図である。
【図3】図3は、回転周期からヘッドをデータトラックへシークするのに要するシーク時間を差し引いた単位で、ヘッドをデータトラックへ追従させる際の、ヘッドの軌跡を例示する概念図である。
【図4】図4は、回転周期からヘッドをデータトラックへシークするのに要するシーク時間を差し引いた単位で、ヘッドをデータトラックへ追従させる際の、ヘッドの軌跡を例示する概念図である。
【図5】図5は、回転周期の整数倍からヘッドをデータトラックへシークするのに要するシーク時間を差し引いた単位で、ヘッドをデータトラックへ追従させる際の始点と終点を例示する概念図である。
【図6】図6は、回転周期の整数倍からヘッドをデータトラックへシークするのに要するシーク時間を差し引いた単位で、ヘッドをデータトラックへ追従させる際の、ヘッドの軌跡を例示する概念図である。
【図7】図7は、回転周期の整数倍からヘッドをデータトラックへシークするのに要するシーク時間を差し引いた単位で、ヘッドをデータトラックへ追従させる際の、ヘッドの軌跡を例示する概念図である。
【図8】図8は、実施形態にかかる磁気ディスク装置の構成を示すブロック図である。
【図9】図9は、RRO情報を書き込む動作の一例を示すフローチャートである。
【図10】図10は、一巡伝達特性の測定にかかるブロック線図である。
【図11】図11は、サーボフォーマットの一例を示す概念図である。
【図12】図12は、スパイラルデータトラック長と、1周当たりで規格化した位置誤差測定時間との関係を示すグラフである。
【図13】図13は、磁気ディスクの1面の総シリンダ数が20万である磁気ディスク装置において、スパイラルデータトラック長と、位置誤差測定に要した時間との関係を示すグラフである。
【発明を実施するための形態】
【0009】
以下に添付図面を参照して、実施形態にかかる磁気ディスク装置及び制御方法を詳細に説明する。なお、本実施形態では、磁気ディスク装置の一例として、PC(Personal Computer)等の情報機器に搭載されるハードディスクドライブを例示する。
【0010】
図1は、実施形態にかかる磁気ディスク1のデータトラックTを例示する概念図である。図1に示すように、磁気ディスク1には、外周から内周に向かってスパイラル状のデータトラックTが記録されている。なお、図示例では、右回りで外周から内周に向かうスパイラル状のデータトラックTが記録される構成を例示したが、左回りで外周から内周に向かうスパイラル状のデータトラックTが記録される構成であってもよいことは言うまでもないことである。
【0011】
同心円状にデータトラックTが記録される場合(図示例では一点鎖線)と比較しても明らかなように、回転する磁気ディスク1のデータトラックTにヘッドを追従させた場合には、磁気ディスク1の回転に伴ってヘッド位置が半径方向にずれる。このため、1周分のデータトラックTに繰り返してヘッドを追従させる場合には、読み出し又は書き込みを終了する終点から読み出し又は書き込みを始める始点に戻るためにシーク動作を行う必要があり、シーク動作で整定した後のヘッドが始点に到達するまでの待機時間が生じることとなる。
【0012】
したがって、本実施形態では、回転周期の整数倍からデータトラックTへヘッドをシークするのに要するシーク時間を差し引いた単位で、データトラックTへヘッドを追従させるように制御する。このように制御することで、例えばデータトラックTの一部へヘッドを繰り返して追従させてデータの読み出しを行う場合は、シーク動作で整定した後のヘッドは読み出しを始める始点に位置することとなるため、上述した待機時間を抑制できる。
【0013】
図2は、回転周期からシーク時間を差し引いた単位でヘッドをデータトラックT(Ti−1、Ti、Ti+1、Ti+2…)へ追従させる際の始点(Pstart_i、Pstart_i+1、Pstart_i+2)と終点(Pend_i−1、Pend_i、Pend_i+1)を例示する概念図である。
【0014】
図2に示すように、各データトラックTi−1、Ti、Ti+1、Ti+2…は、1周長からヘッドをシークするのに要する回転角α分に相当した距離を差し引いた長さの構成である。具体的には、データトラックTiは、始点Pstart_i(≒Pend_i−1)から終点Pend_i(≒Pstart_i+1)であり、その始点Pstart_iと終点Pend_iとが磁気ディスク1の中心となす角はシーク時間分の磁気ディスク1の回転角αである。
【0015】
図3は、回転周期からシーク時間を差し引いた単位でヘッドをデータトラックTiへ追従させる際の、ヘッドの軌跡を例示する概念図である。図4は、回転周期からシーク時間を差し引いた単位でヘッドをデータトラックTi+1へ追従させる際の、ヘッドの軌跡を例示する概念図である。
【0016】
図3に示すように、データトラックTiへヘッドを追従させる場合には、終点Pend_iから半径riへのシーク動作を開始し、磁気ディスク1の回転角αに相当するシーク長Li進んだ始点Pstart_iのところでシーク動作が整定する。言い換えると、回転角αに相当するシーク時間の間に磁気ディスク1の円周方向に移動するヘッドの距離がシーク長である。同様に、図4に示すように、データトラックTi+1へヘッドを追従させる場合には、終点Pend_i+1から半径ri+1へのシーク動作を開始し、磁気ディスク1の回転角αに相当するシーク長Li+1進んだ始点Pstart_i+1のところでシーク動作が整定する。したがって、シーク動作で整定した後のヘッドは始点Pstart_i、Pstart_i+1に位置することとなるため、待機時間を抑制できる。
【0017】
回転周期からシーク時間を差し引いた単位を1周未満とする場合を例示したが、複数周に亘ってヘッドをデータトラックTに追従させる場合も同様、回転周期からシーク時間を差し引いた単位で行う。図5は、回転周期の整数倍からシーク時間を差し引いた単位でヘッドをデータトラックTへ追従させる際の始点と終点を例示する概念図である。図6、7は、回転周期の整数倍からシーク時間を差し引いた単位でヘッドをデータトラックTへ追従させる際の、ヘッドの軌跡を例示する概念図である。より具体的には、図5、6、7では、複数周(図示例では2周相当)に亘ってヘッドをデータトラックに追従させる場合を例示している。
【0018】
図5に示すように、2周相当のデータトラックTiは、始点Pstart_iから終点Pend_iであり、その始点Pstart_iと終点Pend_iとが磁気ディスク1の中心となす角はシーク時間分の磁気ディスク1の回転角αである。図6に示すように、データトラックTiへヘッドを追従させる場合には、終点Pend_iから半径riへのシーク動作を開始し、磁気ディスク1の回転角αに相当するシーク長Li進んだ始点Pstart_iのところでシーク動作が整定する。同様に、図7に示すように、データトラックTi+1へヘッドを追従させる場合には、終点Pend_i+1から半径ri+1へのシーク動作を開始し、磁気ディスク1の回転角αに相当するシーク長Li+1進んだ始点Pstart_i+1のところでシーク動作が整定する。したがって、シーク動作で整定した後のヘッドは始点Pstart_i、Pstart_i+1に位置することとなるため、待機時間を抑制できる。
【0019】
ここで、回転同期振れを示すRRO(Repeatble RunOut)情報を磁気ディスク1上のサーボ領域に書き込む際に、上述した制御を用いる磁気ディスク装置の動作について説明する。図8は、実施形態にかかる磁気ディスク装置20の構成を示すブロック図である。
【0020】
図8に示すように、磁気ディスク装置20は、ヘッド22を搭載しているアクチュエータアーム21と、アンプなどの機能を有するヘッドIC回路23と、プリント回路基板24とを有する。ヘッド22は、アクチュエータアーム21の選択に設けられている。ヘッド22は、いわゆる統合ヘッドであり、磁気ディスク1からデータ(サーボパターンを含む)を読み出すためのリードヘッド、及び磁気ディスク1にデータを書き込むためのライトヘッドを含む。
【0021】
アクチュエータアーム21は、図示しないボイス・コイル・モータ(VCM)に駆動され、ヘッド22を磁気ディスク1の半径方向に移動させる。プリント回路基板24には、R/Wチャンネル25(リード/ライト)、CPU27(Central Processing Unit)、モータドライバ28、HDC29(ハードディスクコントローラ)が実装されている。
【0022】
R/Wチャンネル25は、サーボパターン及びユーザデータのリード/ライト信号を処理する信号処理回路である。R/Wチャンネル25は、リードヘッドより読み出されたユーザデータを再生して、HDC29に創出する。また、R/Wチャンネル25は、HDC29から出力されるユーザデータをライト信号に変換してヘッドIC回路23に出力する。
【0023】
R/Wチャンネル25は、リードヘッドにより読み出されたサーボパターンを復号するサーボ復号部251、基準クロックであるサーボライトクロックを生成する同期クロック生成部252、及びサーボライトクロックに同期してサーボデータのようなデータの書き込みを制御するライトデータ生成部253を備えている。したがって、R/Wチャンネル25は、CPU27と共同して、セルフサーボ書き込み処理を実行するサーボ書き込み部としての機能を実現してもよい。
【0024】
CPU27は、アクチュエータアーム21を制御して、スピンドルモータ11により回転される磁気ディスク1上の指定位置までヘッド22を移動して位置決めする。この時、RRO(Repeatble RunOut)情報を算出するため同一部分のデータトラックTに繰り返して追従させる場合は、データトラックTへヘッド22を回転周期の整数倍からシーク時間を差し引いた単位で、ヘッド22を追従させるように制御する。具体的には、予めメモリなどに設定されたシーク時間と、スピンドルモータ11により回転する磁気ディスク1の回転速度とを元に、シーク時間で磁気ディスク1が回転する回転角を算出する。次いで、算出された回転角(α)とデータトラックTの半径方向における位置(r)とをもとに、シーク長(L)を求める。これにより、CPU27は、読み出しの始点よりシーク長を差し引いた終点で読み出しを終えて始点に戻すように制御する。このように制御することで、磁気ディスク装置20では、スパイラルデータトラック方式のデータトラックTへ追従させる際の待機時間を短くすることが可能となる。
【0025】
ここで、RRO情報を書き込む動作を詳細に説明する。図9は、RRO情報を書き込む動作の一例を示すフローチャートである。
【0026】
図9に示すように、処理が開始されると、CPU27は、RRO情報の算出を行う半径方向におけるデータトラックTのインデックス(i)を初期化(i=0)する(S1)。ここでデータトラックTのインデックスは、外周から内周に向かって増加するように割り当てられるものとする。
【0027】
次いで、CPU27は、データトラックTのインデックスをインクリメント(i=i+1)し(S2)、RRO情報の算出を行う半径方向におけるデータトラックTの位置をTiに設定する(S3)。ここで、CPU27は、データトラックTiについて、回転周期の整数倍からシーク時間を差し引いた単位での追従を開始する。
【0028】
次いで、CPU27は、データトラックTiについてサーボ一巡伝達特性CPを測定する(S4)。図10は、一巡伝達特性の測定にかかるブロック線図である。S4では、図10に例示したブロック線図でサーボ一巡伝達特性CPの測定が行われる。ここで、Cはフィードバック制御の特性、Pはアクチュエータアーム21のVCM(ボイス・コイル・モータ)プラントの特性を表す。次に、数1のようにサーボ感度関数Sを算出する。
【0029】
【数1】
【0030】
なお、RRO情報による補正適用後のRPE(Repeatble Position Error)残留が要求仕様を満たす場合においては、全てのデータトラックTiで一巡伝達特性CPの測定及び感度関数Sの算出をする必要は必ずしも無く、前のデータトラックTiで算出した感度関数Sを用いてもよいものとする。
【0031】
次いで、CPU27は、データを記録及び再生する際に再生ヘッドが走行するデータトラックのシーク中において1回もしくは複数回の位置誤差PE(Position Error)を測定する(S5)。次いで、CPU27は、S5にて1回もしくは複数回測定した位置誤差PEを用いて、数2のように平均化をすることにより非回転同期位置誤差NRPE(Non-Rpeatable Position Error)を除去した回転同期位置誤差RPEを算出する(S6)。なお、数2におけるSvSCTはサーボセクタ番号を示し、Nmeasは位置誤差PEの測定回数を示す。
【0032】
【数2】
【0033】
次いで、CPU27は、回転同期振れを示すRRO情報を、数3のように、S4にて算出した感度関数Sと、S6にて算出した回転同期位置誤差RPEとをもとに算出する(S7)。例えば、データを記録及び再生する際に再生ヘッドが走行するデータトラックとシーク中において測定した回転同期位置誤差RPEをフーリエ変換演算し、周波数領域にて数3の演算を行う。そして、逆フーリエ変換を行うことでRRO情報を算出し、シーク中を除いたデータを記録及び再生する際に再生ヘッドが走行するデータトラックのRRO情報をサーボ領域に書き込む。
【0034】
【数3】
【0035】
次いで、CPU27は、算出したRRO情報を磁気ディスク1上のサーボ領域内に書き込む(S8)。図11は、サーボフォーマットの一例を示す概念図である。図11に示すように、サーボ領域には、プリアンブル101と、サーボマーク102と、アドレス情報103と、RRO情報104とを含むサーボフォーマットで書き込みが行われる。
【0036】
次いで、CPU27は、RRO情報を書き込む必要がある領域全てにおいてRRO情報を書き込んだか否かを確認する(S9)。具体的には、データトラックTの半径方向において中心Oに最も近いデータトラックTNまでRRO情報を書き込んだか否かを確認する。データトラックTNまでRRO情報の書き込みが終了していない場合には、S2に処理を戻す。データトラックTNまでRRO情報の書き込みが終了している場合には、RRO情報を書き込む動作を終了する。
【0037】
ここで、回転周期の整数倍単位でデータトラックTへ追従させる場合と、回転周期の整数倍長からシーク時間を差し引いた単位でデータトラックTへ追従させる場合とについての比較を行う。
【0038】
回転周期の整数倍単位でデータトラックTへ追従させる場合は、回転同期位置誤差RPEを算出するためにNmeas回の測定を行う場合、Nmeas回だけデータトラックTの始点へシークする必要が生じる。シーク残留が制定するまでに要するシーク時間をTseekとし、シーク後の回転待ち時間をTwaitとすると、NrevのRPE測定のために要する時間t0は数4となる。なお、Tseek+Twaitは、整定後の始点まで待機時間であることからT1rev(1周分の時間)と同等である。
【0039】
【数4】
【0040】
また、1周当たりPRE測定のために要する時間Tnor0は、数5のとおりである。
【0041】
【数5】
【0042】
回転周期からシーク時間を差し引いた単位でデータトラックTへ追従させる場合では、回転同期位置誤差RPEを算出するための測定を、回転周期の非整数倍単位で行う。したがって、測定周N’revは、Tseekを差し引いたものとなるため数6となる。
【0043】
【数6】
【0044】
したがって、回転周期からシーク時間を差し引いた単位でデータトラックTへ追従させる場合における、RPE測定のために要する時間t2は数7となる。数4と数7とを比較しても明らかなように、回転周期からシーク時間を差し引いた単位でデータトラックTへ追従させることで、RPE測定のために要する時間を減少させることが可能である。
【0045】
【数7】
【0046】
なお、データトラックTがスパイラル状に記録されている場合は、同心円状に記録されている場合と異なり、データトラック長を変えることにより、複数周連続して位置誤差PEの測定を行うことができる。例えば、図5〜7で例示した場合では、2周相当の計測を連続して行っている。したがって、測定周係数をkとすると、位置誤差PEを測定する測定周数N’revを数8のように表すことができる。
【0047】
【数8】
【0048】
k=1のときは数6と対応する。また、測定周数N’revだけ位置誤差PEを測定するのに要する時間t3は数9のようになる。
【0049】
【数9】
【0050】
また、1周当たりRPE測定のために要する時間Tnor3は、数10のとおりである。
【0051】
【数10】
【0052】
なお、回転周期の整数倍単位の場合と比べた場合の差分時間Δ3は数11のとおりである。
【0053】
【数11】
【0054】
図12は、スパイラルデータトラック長と、1周当たりで規格化した位置誤差測定時間との関係を示すグラフである。図13は、磁気ディスクの1面の総シリンダ数が20万である磁気ディスク装置において、スパイラルデータトラック長と、位置誤差測定に要した時間との関係を示すグラフである。ここでシリンダは1周長のトラックと定義し、RPE算出のための位置誤差の測定を5回とした。図12、図13からも明らかなように、回転周期の整数倍からシーク時間を差し引いた単位でデータトラックTへ追従させることで、測定に要する時間を短縮させることが可能となる。
【0055】
なお、磁気ディスク装置20では、磁気ディスク1のデータトラックTに記録するデータのデータセクタ長を、ヘッド22を回転周期の整数倍からシーク時間を差し引いた単位としてもよい。具体的には、図2、図5に例示したデータトラックTi、データトラックTi+1…をデータセクタ長としてもよい。このようにデータセクタ長を設定することで、リトライ時などにおける回転待ち時間を改善することができる。
【0056】
なお、本発明は、上記実施の形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化することができる。また、上記実施の形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成することができる。例えば、実施の形態に示される全構成要素からいくつかの構成要素を削除してもよい。さらに、異なる実施の形態にわたる構成要素を適宜組み合わせても良い。
【符号の説明】
【0057】
1…磁気ディスク、20…磁気ディスク装置、21…アクチュエータアーム、22…ヘッド、23…ヘッドIC回路、24…プリント回路基板、25…R/Wチャンネル、27…CPU、28…モータドライバ、29…HDC、100…サーボパターン、101…プリアンブル、102…サーボマーク、103…アドレス情報、104…RRO情報、251…サーボ復号部、252…同期クロック生成部、253…ライトデータ生成部、O…中心、T…データトラック、α…回転角
【特許請求の範囲】
【請求項1】
外周から内周、もしくは内周から外周に向かってスパイラル状にデータトラックが記録された磁気ディスクと、
回転する前記磁気ディスクから前記データトラックに記録されたデータの読み出しと書き込みを行うためのヘッドと、
前記ヘッドを回転周期から前記データトラックへシークするのに要するシーク時間を差し引いた単位で、所定のデータトラックへ前記ヘッドを追従させる制御手段と、
を備える磁気ディスク装置。
【請求項2】
前記制御手段は、回転周期もしくは回転周期の整数倍から前記シーク時間を差し引いた単位で、所定のデータトラックへ前記ヘッドを追従させる
請求項1に記載の磁気ディスク装置。
【請求項3】
前記制御手段は、データの読み出し又は書き込みを行う始点に対して、前記シーク時間の間に前記磁気ディスクの円周方向に前記ヘッドが移動するシーク長分を差し戻した終点まで追従させる、
請求項1又は2に記載の磁気ディスク装置。
【請求項4】
前記所定のデータトラックへ前記ヘッドを追従させ、当該ヘッドで読み出されたデータをもとに、前記データトラックにかかる回転同期振れを示す情報を算出する算出手段と、
算出された回転同期振れを示す情報を前記磁気ディスクのサーボ領域に書き込む書込手段とを更に備え、
前記制御手段は、前記回転同期振れを示す情報を算出する際に、回転周期の整数倍から前記シーク時間を差し引いた単位で前記ヘッドを追従させる、
請求項1乃至3のいずれか一項に記載の磁気ディスク装置。
【請求項5】
外周から内周、もしくは内周から外周に向かってスパイラル状にデータトラックが記録された磁気ディスクと、回転する前記磁気ディスクから前記データトラックに記録されたデータの読み出しと書き込みを行うためのヘッドとを有する磁気ディスク装置の制御方法であって、
前記ヘッドを回転周期の整数倍から前記データトラックへシークするのに要するシーク時間を差し引いた単位で、所定のデータトラックへ前記ヘッドを追従させる制御方法。
【請求項1】
外周から内周、もしくは内周から外周に向かってスパイラル状にデータトラックが記録された磁気ディスクと、
回転する前記磁気ディスクから前記データトラックに記録されたデータの読み出しと書き込みを行うためのヘッドと、
前記ヘッドを回転周期から前記データトラックへシークするのに要するシーク時間を差し引いた単位で、所定のデータトラックへ前記ヘッドを追従させる制御手段と、
を備える磁気ディスク装置。
【請求項2】
前記制御手段は、回転周期もしくは回転周期の整数倍から前記シーク時間を差し引いた単位で、所定のデータトラックへ前記ヘッドを追従させる
請求項1に記載の磁気ディスク装置。
【請求項3】
前記制御手段は、データの読み出し又は書き込みを行う始点に対して、前記シーク時間の間に前記磁気ディスクの円周方向に前記ヘッドが移動するシーク長分を差し戻した終点まで追従させる、
請求項1又は2に記載の磁気ディスク装置。
【請求項4】
前記所定のデータトラックへ前記ヘッドを追従させ、当該ヘッドで読み出されたデータをもとに、前記データトラックにかかる回転同期振れを示す情報を算出する算出手段と、
算出された回転同期振れを示す情報を前記磁気ディスクのサーボ領域に書き込む書込手段とを更に備え、
前記制御手段は、前記回転同期振れを示す情報を算出する際に、回転周期の整数倍から前記シーク時間を差し引いた単位で前記ヘッドを追従させる、
請求項1乃至3のいずれか一項に記載の磁気ディスク装置。
【請求項5】
外周から内周、もしくは内周から外周に向かってスパイラル状にデータトラックが記録された磁気ディスクと、回転する前記磁気ディスクから前記データトラックに記録されたデータの読み出しと書き込みを行うためのヘッドとを有する磁気ディスク装置の制御方法であって、
前記ヘッドを回転周期の整数倍から前記データトラックへシークするのに要するシーク時間を差し引いた単位で、所定のデータトラックへ前記ヘッドを追従させる制御方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−209007(P2012−209007A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−91263(P2011−91263)
【出願日】平成23年4月15日(2011.4.15)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年4月15日(2011.4.15)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]