
磁気ディスク装置及び同装置におけるマイクロアクチュエータ制御方法
【課題】ディスクの第1の面がトラッキング面として使用される場合に、ディスクの第2の面の位置誤差も低減できるようにする。
【解決手段】磁気ディスク装置は、ディスクと、第1及び第2のマイクロアクチュエータと、サーボコントローラとを具備する。ディスクは、第1及び第2の面を備える。第1及び第2のマイクロアクチュエータ15−1,15−2は、それぞれ、第1及び第2の面に対応付けられた第1及び第2のヘッドを微動させる。サーボコントローラ20は、第1の面がトラックキング面として使用される特定モードにおいて、第1のマイクロアクチュエータに与えられるべき第3の操作量が生成された場合、第3の操作量を第1の操作量として第1のマイクロアクチュエータに、第3の操作量の特定周波数の成分の極性が反転された操作量を第2の操作量として第2のマイクロアクチュエータに、それぞれ与える。
【解決手段】磁気ディスク装置は、ディスクと、第1及び第2のマイクロアクチュエータと、サーボコントローラとを具備する。ディスクは、第1及び第2の面を備える。第1及び第2のマイクロアクチュエータ15−1,15−2は、それぞれ、第1及び第2の面に対応付けられた第1及び第2のヘッドを微動させる。サーボコントローラ20は、第1の面がトラックキング面として使用される特定モードにおいて、第1のマイクロアクチュエータに与えられるべき第3の操作量が生成された場合、第3の操作量を第1の操作量として第1のマイクロアクチュエータに、第3の操作量の特定周波数の成分の極性が反転された操作量を第2の操作量として第2のマイクロアクチュエータに、それぞれ与える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、マイクロアクチュエータを備えた磁気ディスク装置及び同装置におけるマイクロアクチュエータ制御方法に関する。
【背景技術】
【0002】
磁気ディスク装置は、周知のように、磁気ディスクを記録媒体として備えている。以下の説明では、磁気ディスクを、単にディスクと表記する場合もある。ディスクの例えば両面には、サーボデータ(サーボパターン)が記録されている。サーボデータは、ヘッドを目標位置に位置付けるために用いられる。
【0003】
近年の磁気ディスク装置は、サーボデータを、当該磁気ディスク装置自身がディスクの両面にライトする機能(いわゆるセルフサーボライト機能)を有している。セルフサーボライトは、一般に次のように実行される。まず、ディスクが第1の面及び第2の面を備えており、第1の面には原サーボデータが記録されているものとする。また、第1の面及び第2の面に対応して、それぞれ、第1のヘッド及び第2のヘッドが配置されているものとする。この場合、第1の面に記録されている原サーボデータに基づいて、第1のヘッドが目標位置に位置付けられる(トラッキングされる)。つまり、第1の面がトラッキング面として用いられる。この状態で、第1のヘッド及び第2のヘッドにより、それぞれ、第1の面及び第2の面に、同時にサーボデータが書き込まれる。トラッキングに用いられない第2の面を、非トラッキング面またはサーボライト面と呼ぶ。また、ディスクのそれぞれの面に同時にサーボデータが書き込まれるセルフサーボライトは、バンクライト方式サーボライトと呼ばれる。
【0004】
また近年は、ディスクのそれぞれの面に対応付けられたマイクロアクチュエータ(微動マイクロアクチュエータ)を備えた磁気ディスク装置も出現している。各マイクロアクチュエータは、主アクチュエータ(粗動アクチュエータ)と異なり、対応するヘッドを他のヘッドから独立して微動させることが可能である。このため、マイクロアクチュエータを備えた磁気ディスク装置では、ディスクの第1の面(トラッキング面)に対応するマイクロアクチュエータ(第1のマイクロアクチュエータ)に第1の操作量を与える一方、当該ディスクの第2の面(非トラッキング面)に対応するマイクロアクチュエータ(第2のマイクロアクチュエータ)に、第1の操作量とは異なる第2の操作量を与えることができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第7,027,253号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したように、第1及び第2のマイクロアクチュエータを備えた磁気ディスク装置において、第1及び第2のマイクロアクチュエータは独立して駆動される。そのため、第1及び第2のマイクロアクチュエータには、それぞれ独立に第1及び第2の操作量が与えられる。
【0007】
ここで、バンクライト方式サーボライトのように、ディスクの両面に同時にデータを書き込むものとする。このような場合、第1の操作量の極性を反転した操作量を第2の操作量として用いるならば、ディスクの第1の面及び第2の面で逆相の位置誤差を抑圧することが可能となる。但し、ディスクの第1の面及び第2の面で同相の位置誤差は、第2の面で増大する。
【0008】
そこで、ディスクの第1の面がトラッキング面として使用される場合に、当該ディスクの第2の面の位置誤差も低減することが要求されている。
【0009】
本発明の目的は、ディスクの第1の面がトラッキング面として使用される場合に、当該ディスクの第2の面の位置誤差も低減できる、マイクロアクチュエータを備えた磁気ディスク装置及び同装置におけるマイクロアクチュエータ制御方法を提供することである。
【課題を解決するための手段】
【0010】
実施形態によれば、磁気ディスク装置は、ディスクと、第1及び第2のマイクロアクチュエータと、サーボコントローラとを具備する。前記ディスクは、第1の面及び第2の面を備える。前記第1のマイクロアクチュエータは、前記第1の面に対応付けられた第1のヘッドを、第1の操作量に応じて微動させる。前記第2のマイクロアクチュエータは、前記第2の面に対応付けられた第2のヘッドを、第2の操作量に応じて微動させる。前記サーボコントローラは、前記第1の面がトラックキング面として使用される特定モードにおいて、前記第1のマイクロアクチュエータに与えられるべき第3の操作量が生成された場合、前記第3の操作量を前記第1の操作量として前記第1のマイクロアクチュエータに、前記第3の操作量の特定周波数の成分の極性が反転された操作量を前記第2の操作量として前記第2のマイクロアクチュエータに、それぞれ与える。
【図面の簡単な説明】
【0011】
【図1】実施形態に係る磁気ディスク装置の典型的な構成を示すブロック図。
【図2】同実施形態で適用されるサーボコントローラの典型的な構成を示すブロック図。
【図3】同実施形態の変形例で適用されるサーボコントローラの典型的な構成を示すブロック図。
【発明を実施するための形態】
【0012】
以下、実施の形態につき図面を参照して説明する。
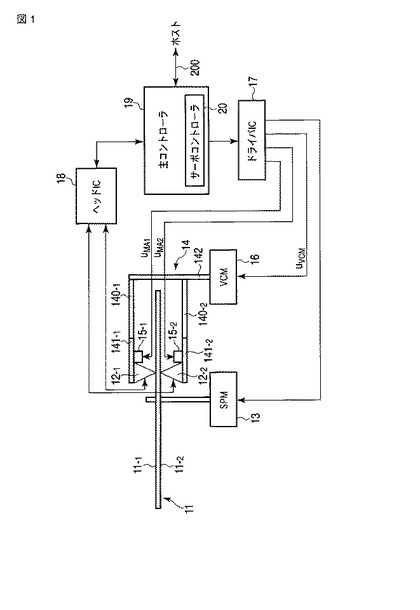
図1は実施形態に係る磁気ディスク装置の典型的な構成を示すブロック図である。
【0013】
図1に示す磁気ディスク装置(以下、HDDと称する)は、ディスク(磁気ディスク)11と、ヘッド(磁気ヘッド)12-1及び12-2と、スピンドルモータ(以下、SPMと称する)13と、主アクチュエータ14と、マイクロアクチュエータ15-1及び15-2と、ボイスコイルモータ(以下、VCMと称する)16と、ドライバIC17と、ヘッドIC18と、主コントローラ19とを備えている。
【0014】
ディスク11は、上側のディスク面(第1の面)11-1と、下側のディスク面11-2とを備えた磁気記録媒体である。ディスク面11-1及び11-2は、データが磁気記録される記録面をなしている。ディスク11はSPM13によって高速に回転させられる。SPM13は、ドライバIC17から供給される駆動電流(または駆動電圧)により駆動される。
【0015】
ヘッド(第1のヘッド)12-1はディスク11のディスク面11-1に対応して配置され、ヘッド(第2のヘッド)12-2はディスク11のディスク面11-2に対応して配置されている。つまりヘッド12-1及び12-2は、それぞれディスク面11-1及び11-2に対応付けられている。ヘッド12-1及び12-2は、いずれも図示せぬリード素子及びライト素子を備えている。ヘッド12-1及び12-2は、それぞれ、ディスク11のディスク面11-1及び11-2へ/からのデータの書き込み/読み出しに用いられる。図1の構成では、単一枚のディスク11を備えたHDDを想定している。しかし、ディスク11が複数枚積層配置されたHDDであっても構わない。
【0016】
主アクチュエータ14は、ディスク11のディスク面11-1及び11-2にそれぞれ対応付けられたアーム140-1及び140-2を備えている。ヘッド12-1及び12-2は、それぞれ、主アクチュエータ14のアーム140-1及び140-2から延出したサスペンション141-1及び141-2の先端(より詳細には、サスペンション141-1及び141-2の先端に備えられたヘッドスライダ)に取り付けられている。
【0017】
サスペンション141-1(より詳細には、サスペンション141-1とヘッドスライダとの間)には更に、ヘッド12-1に近接してマイクロアクチュエータ(第1のマイクロアクチュエータ)15-1が取り付けられている。同様に、サスペンション141-2には、ヘッド12-2に近接してマイクロアクチュエータ(第2のマイクロアクチュエータ)15-2が取り付けられている。マイクロアクチュエータ15-1及び15-2は、主コントローラ19からドライバIC17を介して与えられる操作量uMA1及びuMA2(より詳細には、操作量uMA1及びuMA2によってそれぞれ指定される、例えば駆動電圧)に応じて互いに独立に駆動する。これによりマイクロアクチュエータ15-1及び15-2は、対応するヘッド12-1及び12-2を微動させる。
【0018】
主アクチュエータ14は枢軸142の回りで回動自在に支持されている。主アクチュエータ14は、VCM16を備えている。VCM16は、主アクチュエータ14の駆動源である。VCM16は、主コントローラ19からドライバIC17を介して与えられる操作量uVCM(より詳細には、操作量uVCMによって指定される、例えば駆動電流)に応じて駆動して、主アクチュエータ14を枢軸142の回りに回動させる。つまりVCM16は、主アクチュエータ14のアーム140-1及び140-2を、ディスク11のディスク面11-1及び11-2の半径方向に同時に移動させる。これによりヘッド12-1及び12-2も、ディスク11のディスク面11-1及び11-2の半径方向に移動させられる。
【0019】
ドライバIC17は、主コントローラ19の制御に従い、SPM13と、VCM16(つまり主アクチュエータ14)と、マイクロアクチュエータ15-1及び15-2とを駆動する。ヘッドIC18は、ヘッド12-1または12-2により読み出された信号(リード信号)を増幅する。ヘッドIC18はまた、主コントローラ19から転送されるライトデータをライト電流に変換してヘッド12-1または12-2に出力する。
【0020】
主コントローラ19は、例えばマイクロプロセッサユニット(MPU)、メモリ等を含む複数の要素が単一チップに集積されたシステムLSIによって実現される。主コントローラ19は、ディスク11を高速回転させるために、ドライバIC17を介してSPM13を制御する。
【0021】
主コントローラ19は、ディスクコントローラとしても機能する。主コントローラ19は、当該主コントローラ19とホストとの間で信号を授受する。具体的には、主コントローラ19は、ホストからホストインタフェース200を介して転送されるコマンド(ライトコマンド、リードコマンド等)を受信する。主コントローラ19はまた、ホストと当該主コントローラ19との間のデータ転送を制御する。主コントローラ19はまた、ディスク11と当該主コントローラ19との間のデータ転送を制御する。
【0022】
主コントローラ19はリード/ライトチャネルとしても機能する。主コントローラ19は、ヘッドIC18から出力されるリード信号をデジタルデータに変換し、このデジタルデータからリードデータを復号する。主コントローラ19は、上記デジタルデータからヘッド12-1または12-2の位置決めに必要なサーボデータを抽出する。主コントローラ19ははまた、ライトデータを符号化する。
【0023】
主コントローラ19はサーボコントローラ20を備えている。サーボコントローラ20は、ヘッド12-1及び12-2を、それぞれディスク11のディスク面11-1及び11-2上の目標位置に位置付けるために、ドライバIC17を介してVCM16を制御する。ここで、VCM16を制御することは、当該VCM16を備えた主アクチュエータ14を制御することと等価である。そこで以下の説明では、主アクチュエータ14をVCMアクチュエータ14と表記し、サーボコントローラ20が、当該VCMアクチュエータ14を制御するものとする。主コントローラ19は更に、ヘッド12-1及び12-2の位置を微調整するために、それぞれドライバIC17を介してマイクロアクチュエータ15-1及び15-2を独立に制御する。
【0024】
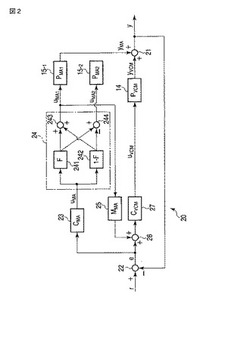
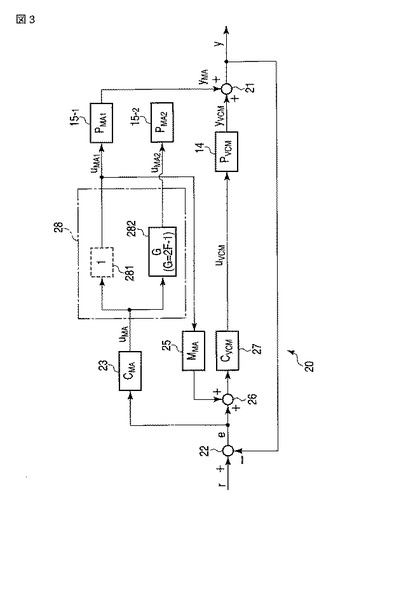
図2は本実施形態で適用されるサーボコントローラ20の典型的な構成を示すブロック図である。図2に示すサーボコントローラ20は、ディスク11のディスク面(第1の面)11-1がトラッキング面として使用される特定モードに適合する構成を有している。より具体的には、サーボコントローラ20は、上記特定モードにおいて、ディスク11のディスク面(第1の面)11-1及びディスク面(第2の面)11-2に、サーボデータを同時に書き込むバンクライト方式サーボライトに適合する構成を有している。ここでディスク面11-1には、例えば特許第4227111号公報に記載されているような原サーボデータが記録されているものとする。
【0025】
サーボコントローラ20は、ディスク面11-1に記録されている原サーボデータに基づいて、ヘッド12-1及び12-2を目標位置に位置付けるために、VCMアクチュエータ14と、マイクロアクチュエータ15-1及び15-2とを制御する、いわゆる2段アクチュエータフォロイング制御系を構成する。つまりサーボコントローラ20は、ディスク面11-1をトラッキング面として用いてVCMアクチュエータ14を制御することにより、ヘッド12-1及び12-2の位置を粗調整する。サーボコントローラ20はまた、マイクロアクチュエータ15-1及び15-2を個々に制御することにより、ヘッド12-1及び12-2の位置を微調整する。
【0026】
このように、VCMアクチュエータ14と、マイクロアクチュエータ15-1及び15-2とは、2段アクチュエータフォロイング制御系における制御対象である。そこで図2では、VCMアクチュエータ14がPVCMのように表記され、マイクロアクチュエータ15-1及び15-2が、それぞれPMA1及びPMA2のように表記されている。
【0027】
サーボコントローラ20は、減算器22、マイクロアクチュエータ制御器(CMA)23、フィルタ部24、マイクロアクチュエータモデル(MMA)25、加算器26、及びVCMアクチュエータ制御器(CVCM)27を備えている。
【0028】
図2において、加算点21における記号yは、トラッキング面に対応するヘッド12-1の位置(ヘッド位置)を示す。ここで、VCMアクチュエータ(PVCM)14の変位をyVCMとし、トラッキング面に対応するマイクロアクチュエータ(PMA1)15-1の変位をyMAとする。この場合、変位yVCMと変位yMAとの和(yVCM+yMA)が、ヘッド位置yとして観測される。。
【0029】
減算器22は、ヘッド位置yの目標位置rからの差分を偏差e(=r−y)として算出する。マイクロアクチュエータ制御器23は、偏差eに基づいて、マイクロアクチュエータ15-1に与えられるべき操作量(第3の操作量)uMAを生成する。
【0030】
フィルタ部24は、操作量(第3の操作量)uMAを操作量(第1の操作量)uMA1としてそのまま出力し、操作量(第3の操作量)uMAの特定周波数の成分の極性が反転された操作量を操作量(第2の操作量)uMA2として出力する。操作量uMA1及びuMA2は、それぞれマイクロアクチュエータ15-1及び15-2を駆動するのに用いられる。フィルタ部24は、帯域除去フィルタ(F)241と、帯域通過フィルタ(1−F)242と、加算器243と、加算器244とを備えている。
【0031】
帯域除去フィルタ(F)241は、操作量uMAから特定周波数の成分を除去する。操作量uMAから特定周波数の成分が除去された操作量(第4の操作量)を、操作量F・uMAのように表記する。帯域通過フィルタ(1−F)242は、操作量uMAの特定周波数の成分を通過させる。操作量uMAの特定周波数の成分が通過された操作量(第5の操作量)を、操作量(1−F)・uMAのように表記する。
【0032】
加算器(第1の加算器)243は、帯域除去フィルタ241によって出力される操作量F・uMAと帯域通過フィルタ242によって出力される操作量(1−F)・uMAとを加算する。加算器243の加算結果は操作量uMA1として用いられる。加算器(第2の加算器)244は、上記操作量F・uMAと、上記操作量(1−F)・uMAの極性が反転された操作量−(1−F)・uMAとを加算する。加算器244の加算結果は操作量uMA2として用いられる。なお、加算器244に代えて、操作量F・uMAから操作量(1−F)・uMAを減算する減算器を用いることも可能である。
【0033】
マイクロアクチュエータモデル25は、フィルタ部24によってマイクロアクチュエータ15-1に与えられる操作量uMA1に基づいて、当該マイクロアクチュエータ15-1の変位を取得する。加算器26は、減算器22によって算出された偏差eにマイクロアクチュエータモデル25によって取得された変位を加算する。VCMアクチュエータ制御器27は、VCMアクチュエータ14に与える操作量uVCMを、加算器26の出力に基づいて生成する。このように、2段アクチュエータのフォロイング制御系では、マイクロアクチュエータモデル(MMA)25によって求められた変位が偏差eに加算され、その加算結果が、VCMアクチュエータ制御器(CVCM)27に入力される。つまり2段アクチュエータのフォロイング制御系では、非干渉型の制御系が構成される。
【0034】
次に、第1の実施形態の動作について、ディスク11のディスク面11-1がトラッキング面として使用される特定モードに適用されるバンクライト方式サーボライトを例に説明する。ここでは、特に、マイクロアクチュエータ15-1及び15-2にそれぞれ与えられる操作量uMA1及びuMA2の生成について説明する。操作量uMA1及びuMA2は、バンクライト方式サーボライトにおいて、ヘッド12-1及び12-2を、それぞれディスク11のディスク面11-1及び11-2上の目標位置に高精度に位置付けるのに用いられる。
【0035】
まず、マイクロアクチュエータ制御器23は、マイクロアクチュエータ15-1に与えられるべき操作量uMAを、偏差eに基づいて生成する。マイクロアクチュエータ15-1は、トラッキング面として用いられているディスク11のディスク面11-1に対応する。操作量uMAは、ディスク面11-1(トラッキング面)に対応するヘッド12-1を目標位置に位置付ける際の、ディスクフラッタ(ディスクフラッタ外乱)に起因する位置誤差(つまり、トラッキング面での位置誤差)を抑圧する特定周波数の成分を含む。このため、特定周波数は、ディスクフラッタに起因する位置誤差の周波数(以下、位置誤差のフラッタ成分と称する)にほぼ一致する。
【0036】
位置誤差のフラッタ成分は、ディスク11の共振特性及びディスク11の回転速度などで決まる。ディスク11の共振特性は、当該ディスク11の、材料、寸法及び拘束条件(押さえ方)などで決まる。位置誤差のフラッタ成分は、2.5インチHDDまたは3.5インチHDDのような一般的なHDDでは、例えば、1kHz〜数kHzにまたがって分布している。また、1kHz〜数kHzの周波数範囲において、周波数の低い例えば1kHz〜2kHzの成分は、他の周波数の成分よりも大きい。
【0037】
このため本実施形態において、マイクロアクチュエータ制御器23によって生成される操作量uMAは、ディスクフラッタに起因するトラッキング面での位置誤差を抑圧する特定周波数の成分として、ヘッド位置決めに影響の大きい、例えば1kHz〜2kHzの範囲の周波数成分を含む。ここで、ディスクフラッタに起因する位置誤差は、上記特許第4227111号公報にも記載されているように、ディスク11のディスク面11-1(トラッキング面)と、ディスク11のディスク面11-2(非トラッキング面)とで逆相となる。
【0038】
また、操作量uMAは、ディスクフラッタ以外の外乱に起因する位置誤差を抑圧する、上記特定周波数とは異なる周波数の成分も含む。ディスクフラッタ以外の外乱としては、ディスク11の偏心(ディスク偏心)及び流体起因力などが知られている。流体起因力は、ディスク11の回転に伴って発生する空気の流れが制御対象に作用する力である。これら、ディスクフラッタ以外の外乱に起因する位置誤差のうち、ヘッド位置決めに影響の大きい外乱に起因する位置誤差の周波数の成分は、上記特定周波数の成分とは異なる。例えば、ディスク偏心、或いは流体起因力に起因する位置誤差の周波数の成分は、1kHzよりも低い。ディスク偏心、或いは流体起因力のような、ディスクフラッタ以外にヘッド位置決めに影響の大きい外乱に起因する位置誤差は、ディスク11のディスク面11-1及び11-2で同相となる。
【0039】
マイクロアクチュエータ制御器23によって生成された操作量uMAは、フィルタ部24の帯域除去フィルタ(F)241及び帯域通過フィルタ(1−F)242にそれぞれ入力される。
【0040】
帯域除去フィルタ241は、操作量uMAから上記特定周波数(本実施形態では、1kHz〜2kHz)の成分を除去する。つまり帯域除去フィルタ241は、操作量uMAの特定周波数を除く周波数成分を通過させる。これにより帯域除去フィルタ241から、操作量F・uMAが出力される。
【0041】
一方、帯域通過フィルタ242は、操作量uMAの特定周波数の成分を通過させる。つまり帯域通過フィルタ242は、操作量uMAから特定周波数を除く周波数成分を除去する。これにより帯域通過フィルタ242から、操作量(1−F)・uMAが出力される。
【0042】
加算器243は、操作量F・uMAと操作量(1−F)・uMAとを加算して、加算結果を操作量uMA1として出力する。この操作量uMA1は、次式(1)
uMA1=F・uMA+(1−F)・uMA
=1・uMA
=uMA (1)
のように表される。加算器243から出力される操作量uMA1(=操作量uMA)は、マイクロアクチュエータ(PMA1)15-1に与えられる。
【0043】
一方、加算器244は、操作量F・uMAと、操作量(1−F)・uMAの極性が反転された操作量−(1−F)・uMAとを加算して、加算結果を操作量uMA2として出力する。この操作量uMA2は、次式(2)
uMA2=F・uMA−(1−F)・uMA (2)
のように表される。加算器244から出力される操作量uMA2は、マイクロアクチュエータ(PMA2)15-2に与えられる。
【0044】
上述の説明から明らかなように、加算器243からマイクロアクチュエータ(PMA1)15-1に与えられる操作量uMA1は、マイクロアクチュエータ制御器(CMA)23から出力される操作量uMAに等しい。一方、加算器244からマイクロアクチュエータ(PMA2)15-2に与えられる操作量uMA2は、帯域除去フィルタ(F)241を通過した成分F・uMAと、帯域通過フィルタ(1−F)242を通過した成分(1−F)・uMAの極性が反転された成分−(1−F)・uMAとを、加算(重畳)した成分である。
【0045】
本実施形態で想定している、帯域除去フィルタ(F)241及び帯域通過フィルタ(1−F)242の特徴は、前述の説明から明らかなように、以下の通りである。
(1)帯域除去フィルタ(F)241で通過させる周波数の成分は、ディスク11のディスク面11-1(トラッキング面)とディスク面11-2(非トラッキング面)とで同相の位置誤差を抑圧する成分である。したがって、ディスク面11-2での上記同相の位置誤差を抑圧するためには、以下に示す条件1を満たす必要がある。この条件1は、操作量uMA2が、帯域除去フィルタ(F)241で通過させられた周波数の成分を、極性が反転されない状態で含むことである。
【0046】
(2)帯域通過フィルタ(1−F)242で通過させる周波数(特定周波数)の成分は、ディスク11のディスク面11-1とディスク面11-2とで逆相となる位置誤差(より詳細には、ディスク面11-1での位置誤差)を抑圧する成分である。したがって、ディスク面11-2での上記逆相の位置誤差を抑圧するためには、以下に示す条件2を満たす必要がある。この条件2は、操作量uMA2が、帯域通過フィルタ(1−F)242で通過させられた周波数の極性が反転された成分を含むことである。
【0047】
本実施形態において、帯域除去フィルタ(F)241で除去される成分の周波数、及び帯域通過フィルタ(1−F)242で通過させる成分の周波数は、いずれも、ディスクフラッタに起因する位置誤差の周波数に設定されている。このため、上記操作量uMA2、即ち加算器244からマイクロアクチュエータ15-2に与えられる操作量uMA2は、上記式(2)からも明らかなように、条件1及び2を満足する。つまり、本実施形態においてサーボコントローラ20は、以下に述べる特徴を有する操作量uMA2を生成することができる。第1は、操作量uMA2が、ディスク11のディスク面11-1とディスク面11-2とで同相となる、ディスクフラッタ以外の外乱に起因する位置誤差(より詳細には、ディスク面11-2での位置誤差)を抑圧するための周波数成分を含むことである。第2は、操作量uMA2が、ディスク11のディスク面11-1とディスク面11-2とで逆相となる、ディスクフラッタに起因する位置誤差(より詳細には、ディスク面11-2での位置誤差)を抑圧するための周波数成分を含むことである。
【0048】
前述したように、操作量uMA2はマイクロアクチュエータ(PMA2)15-2に与えられる。一方、操作量uMA1はマイクロアクチュエータ(PMA1)15-1に与えられる。つまりサーボコントローラ20は、操作量uMA1に基づいてマイクロアクチュエータ(PMA1)15-1を制御すると同時に、操作量uMA2に基づいてマイクロアクチュエータ(PMA2)15-2を制御する。これにより、ディスク11のディスク面11-1及び11-2上で、それぞれヘッド12-1及び12-2を、相対位置が同一の目標位置に高精度に位置付けることができる。
【0049】
本実施形態では、上述のような操作量uMA1及び操作量uMA2の生成が、上記特許第4227111号公報にも記載されているバンクライト方式のセルフサーボライトに適用される。このセルフサーボライトにおいて、ディスク11のディスク面11-1は、トラッキング面(より詳細には、トラッキング面で且つサーボライト面)として用いられるものとする。一方、ディスク11のディスク面11-2は、サーボライト面(より詳細には、非トラッキング面で且つサーボライト面)として用いられるものとする。この場合、ディスク面11-1(トラッキング面)でのヘッド12-1の位置ずれは勿論、ディスク面11-2(サーボライト面)でのヘッド12-2の位置ずれを効果的に低減でき、サーボライト品質改善に寄与できる。
【0050】
なお、もし本実施形態と異なって、単に操作量uMAの極性が反転された操作量を操作量uMA2として用いるならば、上記条件2は満たすものの、上記条件1は満たさない。この場合、ディスク11のディスク面11-1及び11-2で逆相の位置誤差は、ディスク面11-1及び11-2の双方で抑圧されるものの、ディスク面11-1及び11-2で同相の位置誤差は、ディスク面11-2で増大する。つまり、ディスク面11-2(サーボライト面)でのヘッド12-2の位置ずれが増大する。
【0051】
[変形例]
次に、上記実施形態の変形例について図面を参照して説明する。
この変形例の特徴は、サーボコントローラ20の構成を簡略化した点にある。
【0052】
まず、上記式(2)は、次式(3)
uMA2=(2F−1)・uMA (3)
のように表すことができる。
【0053】
ここで、G=2F−1とするならば、式(3)は、次式(4)
uMA2=G・uMA (4)
のように表すことができる。
【0054】
式(4)は、操作量uMAに基づく操作量uMA2の生成を、1つのフィルタだけで実現できることを示す。一方、式(1)は操作量uMAを、そのまま操作量uMA1として用いることができることを示す。上記実施形態の変形例では、これらの点を考慮して、サーボコントローラ20のフィルタ部が構成される。
【0055】
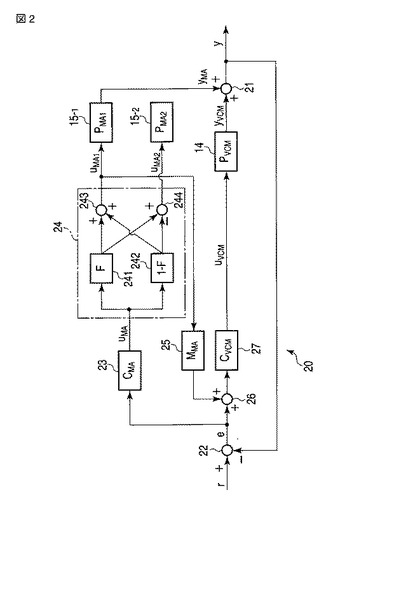
図3は上記実施形態の変形例で適用されるサーボコントローラの典型的な構成を示すブロック図である。図3において、図2と等価な要素には同一参照符号を付してある。
図3に示すサーボコントローラ20が、図2に示すサーボコントローラ20と相違する点は、フィルタ部24に代えてフィルタ部28が用いられることである。
【0056】
フィルタ部28は、フィルタ281及び282を備えている。フィルタ281は、マイクロアクチュエータ制御器23によって生成された操作量uMAを操作量uMA1としてそのまま通過させる。操作量uMAと操作量uMA1との関係は、上記式(1)から明らかなように、uMA=1・uMA1=uMA1である。フィルタ281は、この操作量uMAと操作量uMA1との関係の理解を容易にするために導入された仮想的なフィルタであり、物理的には不要である、
一方、フィルタ282は、操作量uMAの特定周波数の成分の極性が反転された操作量を操作量uMA2として出力する。つまりフィルタ282は、操作量uMAの特定周波数以外の成分は通過させる。
【0057】
図3に示す構成のサーボコントローラ20によって、上記実施形態と同様に、前述した条件1及び2を満たす操作量uMA2を生成することができる。しかも、フィルタ部の構成を簡略化できる。
【0058】
以上説明した少なくとも1つの実施形態によれば、ディスクの第1の面がトラッキング面として使用される場合に、当該ディスクの第2の面の位置誤差も低減できる、マイクロアクチュエータを備えた磁気ディスク装置及び同装置におけるマイクロアクチュエータ制御方法を提供することができる。
【0059】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0060】
11…ディスク、11-1…ディスク面(第1の面)、11-2…ディスク面(第2の面)、12-1…ヘッド(第1のヘッド)、12-2…ヘッド(第2のヘッド)、13…スピンドルモータ(SPM)、14…主アクチュエータ(VCMアクチュエータ、PVCM)、15-1…マイクロアクチュエータ(PMA1、第1のマイクロアクチュエータ)、15-2…マイクロアクチュエータ(PMA2、第2のマイクロアクチュエータ)、16…ボイスコイルモータ(VCM)、17…ドライバIC、19…主コントローラ、20…サーボコントローラ、21…加算器、22…減算器、23…マイクロアクチュエータ制御器(CMA)、24…フィルタ部、25…マイクロアクチュエータモデル(MMA)、26…加算器、27…VCMアクチュエータ制御器(CVCM)、28…フィルタ部、241…帯域除去フィルタ、242…帯域通過フィルタ、243…加算器(第1の加算器)、244…加算器(第2の加算器)、282…フィルタ。
【技術分野】
【0001】
本発明の実施形態は、マイクロアクチュエータを備えた磁気ディスク装置及び同装置におけるマイクロアクチュエータ制御方法に関する。
【背景技術】
【0002】
磁気ディスク装置は、周知のように、磁気ディスクを記録媒体として備えている。以下の説明では、磁気ディスクを、単にディスクと表記する場合もある。ディスクの例えば両面には、サーボデータ(サーボパターン)が記録されている。サーボデータは、ヘッドを目標位置に位置付けるために用いられる。
【0003】
近年の磁気ディスク装置は、サーボデータを、当該磁気ディスク装置自身がディスクの両面にライトする機能(いわゆるセルフサーボライト機能)を有している。セルフサーボライトは、一般に次のように実行される。まず、ディスクが第1の面及び第2の面を備えており、第1の面には原サーボデータが記録されているものとする。また、第1の面及び第2の面に対応して、それぞれ、第1のヘッド及び第2のヘッドが配置されているものとする。この場合、第1の面に記録されている原サーボデータに基づいて、第1のヘッドが目標位置に位置付けられる(トラッキングされる)。つまり、第1の面がトラッキング面として用いられる。この状態で、第1のヘッド及び第2のヘッドにより、それぞれ、第1の面及び第2の面に、同時にサーボデータが書き込まれる。トラッキングに用いられない第2の面を、非トラッキング面またはサーボライト面と呼ぶ。また、ディスクのそれぞれの面に同時にサーボデータが書き込まれるセルフサーボライトは、バンクライト方式サーボライトと呼ばれる。
【0004】
また近年は、ディスクのそれぞれの面に対応付けられたマイクロアクチュエータ(微動マイクロアクチュエータ)を備えた磁気ディスク装置も出現している。各マイクロアクチュエータは、主アクチュエータ(粗動アクチュエータ)と異なり、対応するヘッドを他のヘッドから独立して微動させることが可能である。このため、マイクロアクチュエータを備えた磁気ディスク装置では、ディスクの第1の面(トラッキング面)に対応するマイクロアクチュエータ(第1のマイクロアクチュエータ)に第1の操作量を与える一方、当該ディスクの第2の面(非トラッキング面)に対応するマイクロアクチュエータ(第2のマイクロアクチュエータ)に、第1の操作量とは異なる第2の操作量を与えることができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第7,027,253号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したように、第1及び第2のマイクロアクチュエータを備えた磁気ディスク装置において、第1及び第2のマイクロアクチュエータは独立して駆動される。そのため、第1及び第2のマイクロアクチュエータには、それぞれ独立に第1及び第2の操作量が与えられる。
【0007】
ここで、バンクライト方式サーボライトのように、ディスクの両面に同時にデータを書き込むものとする。このような場合、第1の操作量の極性を反転した操作量を第2の操作量として用いるならば、ディスクの第1の面及び第2の面で逆相の位置誤差を抑圧することが可能となる。但し、ディスクの第1の面及び第2の面で同相の位置誤差は、第2の面で増大する。
【0008】
そこで、ディスクの第1の面がトラッキング面として使用される場合に、当該ディスクの第2の面の位置誤差も低減することが要求されている。
【0009】
本発明の目的は、ディスクの第1の面がトラッキング面として使用される場合に、当該ディスクの第2の面の位置誤差も低減できる、マイクロアクチュエータを備えた磁気ディスク装置及び同装置におけるマイクロアクチュエータ制御方法を提供することである。
【課題を解決するための手段】
【0010】
実施形態によれば、磁気ディスク装置は、ディスクと、第1及び第2のマイクロアクチュエータと、サーボコントローラとを具備する。前記ディスクは、第1の面及び第2の面を備える。前記第1のマイクロアクチュエータは、前記第1の面に対応付けられた第1のヘッドを、第1の操作量に応じて微動させる。前記第2のマイクロアクチュエータは、前記第2の面に対応付けられた第2のヘッドを、第2の操作量に応じて微動させる。前記サーボコントローラは、前記第1の面がトラックキング面として使用される特定モードにおいて、前記第1のマイクロアクチュエータに与えられるべき第3の操作量が生成された場合、前記第3の操作量を前記第1の操作量として前記第1のマイクロアクチュエータに、前記第3の操作量の特定周波数の成分の極性が反転された操作量を前記第2の操作量として前記第2のマイクロアクチュエータに、それぞれ与える。
【図面の簡単な説明】
【0011】
【図1】実施形態に係る磁気ディスク装置の典型的な構成を示すブロック図。
【図2】同実施形態で適用されるサーボコントローラの典型的な構成を示すブロック図。
【図3】同実施形態の変形例で適用されるサーボコントローラの典型的な構成を示すブロック図。
【発明を実施するための形態】
【0012】
以下、実施の形態につき図面を参照して説明する。
図1は実施形態に係る磁気ディスク装置の典型的な構成を示すブロック図である。
【0013】
図1に示す磁気ディスク装置(以下、HDDと称する)は、ディスク(磁気ディスク)11と、ヘッド(磁気ヘッド)12-1及び12-2と、スピンドルモータ(以下、SPMと称する)13と、主アクチュエータ14と、マイクロアクチュエータ15-1及び15-2と、ボイスコイルモータ(以下、VCMと称する)16と、ドライバIC17と、ヘッドIC18と、主コントローラ19とを備えている。
【0014】
ディスク11は、上側のディスク面(第1の面)11-1と、下側のディスク面11-2とを備えた磁気記録媒体である。ディスク面11-1及び11-2は、データが磁気記録される記録面をなしている。ディスク11はSPM13によって高速に回転させられる。SPM13は、ドライバIC17から供給される駆動電流(または駆動電圧)により駆動される。
【0015】
ヘッド(第1のヘッド)12-1はディスク11のディスク面11-1に対応して配置され、ヘッド(第2のヘッド)12-2はディスク11のディスク面11-2に対応して配置されている。つまりヘッド12-1及び12-2は、それぞれディスク面11-1及び11-2に対応付けられている。ヘッド12-1及び12-2は、いずれも図示せぬリード素子及びライト素子を備えている。ヘッド12-1及び12-2は、それぞれ、ディスク11のディスク面11-1及び11-2へ/からのデータの書き込み/読み出しに用いられる。図1の構成では、単一枚のディスク11を備えたHDDを想定している。しかし、ディスク11が複数枚積層配置されたHDDであっても構わない。
【0016】
主アクチュエータ14は、ディスク11のディスク面11-1及び11-2にそれぞれ対応付けられたアーム140-1及び140-2を備えている。ヘッド12-1及び12-2は、それぞれ、主アクチュエータ14のアーム140-1及び140-2から延出したサスペンション141-1及び141-2の先端(より詳細には、サスペンション141-1及び141-2の先端に備えられたヘッドスライダ)に取り付けられている。
【0017】
サスペンション141-1(より詳細には、サスペンション141-1とヘッドスライダとの間)には更に、ヘッド12-1に近接してマイクロアクチュエータ(第1のマイクロアクチュエータ)15-1が取り付けられている。同様に、サスペンション141-2には、ヘッド12-2に近接してマイクロアクチュエータ(第2のマイクロアクチュエータ)15-2が取り付けられている。マイクロアクチュエータ15-1及び15-2は、主コントローラ19からドライバIC17を介して与えられる操作量uMA1及びuMA2(より詳細には、操作量uMA1及びuMA2によってそれぞれ指定される、例えば駆動電圧)に応じて互いに独立に駆動する。これによりマイクロアクチュエータ15-1及び15-2は、対応するヘッド12-1及び12-2を微動させる。
【0018】
主アクチュエータ14は枢軸142の回りで回動自在に支持されている。主アクチュエータ14は、VCM16を備えている。VCM16は、主アクチュエータ14の駆動源である。VCM16は、主コントローラ19からドライバIC17を介して与えられる操作量uVCM(より詳細には、操作量uVCMによって指定される、例えば駆動電流)に応じて駆動して、主アクチュエータ14を枢軸142の回りに回動させる。つまりVCM16は、主アクチュエータ14のアーム140-1及び140-2を、ディスク11のディスク面11-1及び11-2の半径方向に同時に移動させる。これによりヘッド12-1及び12-2も、ディスク11のディスク面11-1及び11-2の半径方向に移動させられる。
【0019】
ドライバIC17は、主コントローラ19の制御に従い、SPM13と、VCM16(つまり主アクチュエータ14)と、マイクロアクチュエータ15-1及び15-2とを駆動する。ヘッドIC18は、ヘッド12-1または12-2により読み出された信号(リード信号)を増幅する。ヘッドIC18はまた、主コントローラ19から転送されるライトデータをライト電流に変換してヘッド12-1または12-2に出力する。
【0020】
主コントローラ19は、例えばマイクロプロセッサユニット(MPU)、メモリ等を含む複数の要素が単一チップに集積されたシステムLSIによって実現される。主コントローラ19は、ディスク11を高速回転させるために、ドライバIC17を介してSPM13を制御する。
【0021】
主コントローラ19は、ディスクコントローラとしても機能する。主コントローラ19は、当該主コントローラ19とホストとの間で信号を授受する。具体的には、主コントローラ19は、ホストからホストインタフェース200を介して転送されるコマンド(ライトコマンド、リードコマンド等)を受信する。主コントローラ19はまた、ホストと当該主コントローラ19との間のデータ転送を制御する。主コントローラ19はまた、ディスク11と当該主コントローラ19との間のデータ転送を制御する。
【0022】
主コントローラ19はリード/ライトチャネルとしても機能する。主コントローラ19は、ヘッドIC18から出力されるリード信号をデジタルデータに変換し、このデジタルデータからリードデータを復号する。主コントローラ19は、上記デジタルデータからヘッド12-1または12-2の位置決めに必要なサーボデータを抽出する。主コントローラ19ははまた、ライトデータを符号化する。
【0023】
主コントローラ19はサーボコントローラ20を備えている。サーボコントローラ20は、ヘッド12-1及び12-2を、それぞれディスク11のディスク面11-1及び11-2上の目標位置に位置付けるために、ドライバIC17を介してVCM16を制御する。ここで、VCM16を制御することは、当該VCM16を備えた主アクチュエータ14を制御することと等価である。そこで以下の説明では、主アクチュエータ14をVCMアクチュエータ14と表記し、サーボコントローラ20が、当該VCMアクチュエータ14を制御するものとする。主コントローラ19は更に、ヘッド12-1及び12-2の位置を微調整するために、それぞれドライバIC17を介してマイクロアクチュエータ15-1及び15-2を独立に制御する。
【0024】
図2は本実施形態で適用されるサーボコントローラ20の典型的な構成を示すブロック図である。図2に示すサーボコントローラ20は、ディスク11のディスク面(第1の面)11-1がトラッキング面として使用される特定モードに適合する構成を有している。より具体的には、サーボコントローラ20は、上記特定モードにおいて、ディスク11のディスク面(第1の面)11-1及びディスク面(第2の面)11-2に、サーボデータを同時に書き込むバンクライト方式サーボライトに適合する構成を有している。ここでディスク面11-1には、例えば特許第4227111号公報に記載されているような原サーボデータが記録されているものとする。
【0025】
サーボコントローラ20は、ディスク面11-1に記録されている原サーボデータに基づいて、ヘッド12-1及び12-2を目標位置に位置付けるために、VCMアクチュエータ14と、マイクロアクチュエータ15-1及び15-2とを制御する、いわゆる2段アクチュエータフォロイング制御系を構成する。つまりサーボコントローラ20は、ディスク面11-1をトラッキング面として用いてVCMアクチュエータ14を制御することにより、ヘッド12-1及び12-2の位置を粗調整する。サーボコントローラ20はまた、マイクロアクチュエータ15-1及び15-2を個々に制御することにより、ヘッド12-1及び12-2の位置を微調整する。
【0026】
このように、VCMアクチュエータ14と、マイクロアクチュエータ15-1及び15-2とは、2段アクチュエータフォロイング制御系における制御対象である。そこで図2では、VCMアクチュエータ14がPVCMのように表記され、マイクロアクチュエータ15-1及び15-2が、それぞれPMA1及びPMA2のように表記されている。
【0027】
サーボコントローラ20は、減算器22、マイクロアクチュエータ制御器(CMA)23、フィルタ部24、マイクロアクチュエータモデル(MMA)25、加算器26、及びVCMアクチュエータ制御器(CVCM)27を備えている。
【0028】
図2において、加算点21における記号yは、トラッキング面に対応するヘッド12-1の位置(ヘッド位置)を示す。ここで、VCMアクチュエータ(PVCM)14の変位をyVCMとし、トラッキング面に対応するマイクロアクチュエータ(PMA1)15-1の変位をyMAとする。この場合、変位yVCMと変位yMAとの和(yVCM+yMA)が、ヘッド位置yとして観測される。。
【0029】
減算器22は、ヘッド位置yの目標位置rからの差分を偏差e(=r−y)として算出する。マイクロアクチュエータ制御器23は、偏差eに基づいて、マイクロアクチュエータ15-1に与えられるべき操作量(第3の操作量)uMAを生成する。
【0030】
フィルタ部24は、操作量(第3の操作量)uMAを操作量(第1の操作量)uMA1としてそのまま出力し、操作量(第3の操作量)uMAの特定周波数の成分の極性が反転された操作量を操作量(第2の操作量)uMA2として出力する。操作量uMA1及びuMA2は、それぞれマイクロアクチュエータ15-1及び15-2を駆動するのに用いられる。フィルタ部24は、帯域除去フィルタ(F)241と、帯域通過フィルタ(1−F)242と、加算器243と、加算器244とを備えている。
【0031】
帯域除去フィルタ(F)241は、操作量uMAから特定周波数の成分を除去する。操作量uMAから特定周波数の成分が除去された操作量(第4の操作量)を、操作量F・uMAのように表記する。帯域通過フィルタ(1−F)242は、操作量uMAの特定周波数の成分を通過させる。操作量uMAの特定周波数の成分が通過された操作量(第5の操作量)を、操作量(1−F)・uMAのように表記する。
【0032】
加算器(第1の加算器)243は、帯域除去フィルタ241によって出力される操作量F・uMAと帯域通過フィルタ242によって出力される操作量(1−F)・uMAとを加算する。加算器243の加算結果は操作量uMA1として用いられる。加算器(第2の加算器)244は、上記操作量F・uMAと、上記操作量(1−F)・uMAの極性が反転された操作量−(1−F)・uMAとを加算する。加算器244の加算結果は操作量uMA2として用いられる。なお、加算器244に代えて、操作量F・uMAから操作量(1−F)・uMAを減算する減算器を用いることも可能である。
【0033】
マイクロアクチュエータモデル25は、フィルタ部24によってマイクロアクチュエータ15-1に与えられる操作量uMA1に基づいて、当該マイクロアクチュエータ15-1の変位を取得する。加算器26は、減算器22によって算出された偏差eにマイクロアクチュエータモデル25によって取得された変位を加算する。VCMアクチュエータ制御器27は、VCMアクチュエータ14に与える操作量uVCMを、加算器26の出力に基づいて生成する。このように、2段アクチュエータのフォロイング制御系では、マイクロアクチュエータモデル(MMA)25によって求められた変位が偏差eに加算され、その加算結果が、VCMアクチュエータ制御器(CVCM)27に入力される。つまり2段アクチュエータのフォロイング制御系では、非干渉型の制御系が構成される。
【0034】
次に、第1の実施形態の動作について、ディスク11のディスク面11-1がトラッキング面として使用される特定モードに適用されるバンクライト方式サーボライトを例に説明する。ここでは、特に、マイクロアクチュエータ15-1及び15-2にそれぞれ与えられる操作量uMA1及びuMA2の生成について説明する。操作量uMA1及びuMA2は、バンクライト方式サーボライトにおいて、ヘッド12-1及び12-2を、それぞれディスク11のディスク面11-1及び11-2上の目標位置に高精度に位置付けるのに用いられる。
【0035】
まず、マイクロアクチュエータ制御器23は、マイクロアクチュエータ15-1に与えられるべき操作量uMAを、偏差eに基づいて生成する。マイクロアクチュエータ15-1は、トラッキング面として用いられているディスク11のディスク面11-1に対応する。操作量uMAは、ディスク面11-1(トラッキング面)に対応するヘッド12-1を目標位置に位置付ける際の、ディスクフラッタ(ディスクフラッタ外乱)に起因する位置誤差(つまり、トラッキング面での位置誤差)を抑圧する特定周波数の成分を含む。このため、特定周波数は、ディスクフラッタに起因する位置誤差の周波数(以下、位置誤差のフラッタ成分と称する)にほぼ一致する。
【0036】
位置誤差のフラッタ成分は、ディスク11の共振特性及びディスク11の回転速度などで決まる。ディスク11の共振特性は、当該ディスク11の、材料、寸法及び拘束条件(押さえ方)などで決まる。位置誤差のフラッタ成分は、2.5インチHDDまたは3.5インチHDDのような一般的なHDDでは、例えば、1kHz〜数kHzにまたがって分布している。また、1kHz〜数kHzの周波数範囲において、周波数の低い例えば1kHz〜2kHzの成分は、他の周波数の成分よりも大きい。
【0037】
このため本実施形態において、マイクロアクチュエータ制御器23によって生成される操作量uMAは、ディスクフラッタに起因するトラッキング面での位置誤差を抑圧する特定周波数の成分として、ヘッド位置決めに影響の大きい、例えば1kHz〜2kHzの範囲の周波数成分を含む。ここで、ディスクフラッタに起因する位置誤差は、上記特許第4227111号公報にも記載されているように、ディスク11のディスク面11-1(トラッキング面)と、ディスク11のディスク面11-2(非トラッキング面)とで逆相となる。
【0038】
また、操作量uMAは、ディスクフラッタ以外の外乱に起因する位置誤差を抑圧する、上記特定周波数とは異なる周波数の成分も含む。ディスクフラッタ以外の外乱としては、ディスク11の偏心(ディスク偏心)及び流体起因力などが知られている。流体起因力は、ディスク11の回転に伴って発生する空気の流れが制御対象に作用する力である。これら、ディスクフラッタ以外の外乱に起因する位置誤差のうち、ヘッド位置決めに影響の大きい外乱に起因する位置誤差の周波数の成分は、上記特定周波数の成分とは異なる。例えば、ディスク偏心、或いは流体起因力に起因する位置誤差の周波数の成分は、1kHzよりも低い。ディスク偏心、或いは流体起因力のような、ディスクフラッタ以外にヘッド位置決めに影響の大きい外乱に起因する位置誤差は、ディスク11のディスク面11-1及び11-2で同相となる。
【0039】
マイクロアクチュエータ制御器23によって生成された操作量uMAは、フィルタ部24の帯域除去フィルタ(F)241及び帯域通過フィルタ(1−F)242にそれぞれ入力される。
【0040】
帯域除去フィルタ241は、操作量uMAから上記特定周波数(本実施形態では、1kHz〜2kHz)の成分を除去する。つまり帯域除去フィルタ241は、操作量uMAの特定周波数を除く周波数成分を通過させる。これにより帯域除去フィルタ241から、操作量F・uMAが出力される。
【0041】
一方、帯域通過フィルタ242は、操作量uMAの特定周波数の成分を通過させる。つまり帯域通過フィルタ242は、操作量uMAから特定周波数を除く周波数成分を除去する。これにより帯域通過フィルタ242から、操作量(1−F)・uMAが出力される。
【0042】
加算器243は、操作量F・uMAと操作量(1−F)・uMAとを加算して、加算結果を操作量uMA1として出力する。この操作量uMA1は、次式(1)
uMA1=F・uMA+(1−F)・uMA
=1・uMA
=uMA (1)
のように表される。加算器243から出力される操作量uMA1(=操作量uMA)は、マイクロアクチュエータ(PMA1)15-1に与えられる。
【0043】
一方、加算器244は、操作量F・uMAと、操作量(1−F)・uMAの極性が反転された操作量−(1−F)・uMAとを加算して、加算結果を操作量uMA2として出力する。この操作量uMA2は、次式(2)
uMA2=F・uMA−(1−F)・uMA (2)
のように表される。加算器244から出力される操作量uMA2は、マイクロアクチュエータ(PMA2)15-2に与えられる。
【0044】
上述の説明から明らかなように、加算器243からマイクロアクチュエータ(PMA1)15-1に与えられる操作量uMA1は、マイクロアクチュエータ制御器(CMA)23から出力される操作量uMAに等しい。一方、加算器244からマイクロアクチュエータ(PMA2)15-2に与えられる操作量uMA2は、帯域除去フィルタ(F)241を通過した成分F・uMAと、帯域通過フィルタ(1−F)242を通過した成分(1−F)・uMAの極性が反転された成分−(1−F)・uMAとを、加算(重畳)した成分である。
【0045】
本実施形態で想定している、帯域除去フィルタ(F)241及び帯域通過フィルタ(1−F)242の特徴は、前述の説明から明らかなように、以下の通りである。
(1)帯域除去フィルタ(F)241で通過させる周波数の成分は、ディスク11のディスク面11-1(トラッキング面)とディスク面11-2(非トラッキング面)とで同相の位置誤差を抑圧する成分である。したがって、ディスク面11-2での上記同相の位置誤差を抑圧するためには、以下に示す条件1を満たす必要がある。この条件1は、操作量uMA2が、帯域除去フィルタ(F)241で通過させられた周波数の成分を、極性が反転されない状態で含むことである。
【0046】
(2)帯域通過フィルタ(1−F)242で通過させる周波数(特定周波数)の成分は、ディスク11のディスク面11-1とディスク面11-2とで逆相となる位置誤差(より詳細には、ディスク面11-1での位置誤差)を抑圧する成分である。したがって、ディスク面11-2での上記逆相の位置誤差を抑圧するためには、以下に示す条件2を満たす必要がある。この条件2は、操作量uMA2が、帯域通過フィルタ(1−F)242で通過させられた周波数の極性が反転された成分を含むことである。
【0047】
本実施形態において、帯域除去フィルタ(F)241で除去される成分の周波数、及び帯域通過フィルタ(1−F)242で通過させる成分の周波数は、いずれも、ディスクフラッタに起因する位置誤差の周波数に設定されている。このため、上記操作量uMA2、即ち加算器244からマイクロアクチュエータ15-2に与えられる操作量uMA2は、上記式(2)からも明らかなように、条件1及び2を満足する。つまり、本実施形態においてサーボコントローラ20は、以下に述べる特徴を有する操作量uMA2を生成することができる。第1は、操作量uMA2が、ディスク11のディスク面11-1とディスク面11-2とで同相となる、ディスクフラッタ以外の外乱に起因する位置誤差(より詳細には、ディスク面11-2での位置誤差)を抑圧するための周波数成分を含むことである。第2は、操作量uMA2が、ディスク11のディスク面11-1とディスク面11-2とで逆相となる、ディスクフラッタに起因する位置誤差(より詳細には、ディスク面11-2での位置誤差)を抑圧するための周波数成分を含むことである。
【0048】
前述したように、操作量uMA2はマイクロアクチュエータ(PMA2)15-2に与えられる。一方、操作量uMA1はマイクロアクチュエータ(PMA1)15-1に与えられる。つまりサーボコントローラ20は、操作量uMA1に基づいてマイクロアクチュエータ(PMA1)15-1を制御すると同時に、操作量uMA2に基づいてマイクロアクチュエータ(PMA2)15-2を制御する。これにより、ディスク11のディスク面11-1及び11-2上で、それぞれヘッド12-1及び12-2を、相対位置が同一の目標位置に高精度に位置付けることができる。
【0049】
本実施形態では、上述のような操作量uMA1及び操作量uMA2の生成が、上記特許第4227111号公報にも記載されているバンクライト方式のセルフサーボライトに適用される。このセルフサーボライトにおいて、ディスク11のディスク面11-1は、トラッキング面(より詳細には、トラッキング面で且つサーボライト面)として用いられるものとする。一方、ディスク11のディスク面11-2は、サーボライト面(より詳細には、非トラッキング面で且つサーボライト面)として用いられるものとする。この場合、ディスク面11-1(トラッキング面)でのヘッド12-1の位置ずれは勿論、ディスク面11-2(サーボライト面)でのヘッド12-2の位置ずれを効果的に低減でき、サーボライト品質改善に寄与できる。
【0050】
なお、もし本実施形態と異なって、単に操作量uMAの極性が反転された操作量を操作量uMA2として用いるならば、上記条件2は満たすものの、上記条件1は満たさない。この場合、ディスク11のディスク面11-1及び11-2で逆相の位置誤差は、ディスク面11-1及び11-2の双方で抑圧されるものの、ディスク面11-1及び11-2で同相の位置誤差は、ディスク面11-2で増大する。つまり、ディスク面11-2(サーボライト面)でのヘッド12-2の位置ずれが増大する。
【0051】
[変形例]
次に、上記実施形態の変形例について図面を参照して説明する。
この変形例の特徴は、サーボコントローラ20の構成を簡略化した点にある。
【0052】
まず、上記式(2)は、次式(3)
uMA2=(2F−1)・uMA (3)
のように表すことができる。
【0053】
ここで、G=2F−1とするならば、式(3)は、次式(4)
uMA2=G・uMA (4)
のように表すことができる。
【0054】
式(4)は、操作量uMAに基づく操作量uMA2の生成を、1つのフィルタだけで実現できることを示す。一方、式(1)は操作量uMAを、そのまま操作量uMA1として用いることができることを示す。上記実施形態の変形例では、これらの点を考慮して、サーボコントローラ20のフィルタ部が構成される。
【0055】
図3は上記実施形態の変形例で適用されるサーボコントローラの典型的な構成を示すブロック図である。図3において、図2と等価な要素には同一参照符号を付してある。
図3に示すサーボコントローラ20が、図2に示すサーボコントローラ20と相違する点は、フィルタ部24に代えてフィルタ部28が用いられることである。
【0056】
フィルタ部28は、フィルタ281及び282を備えている。フィルタ281は、マイクロアクチュエータ制御器23によって生成された操作量uMAを操作量uMA1としてそのまま通過させる。操作量uMAと操作量uMA1との関係は、上記式(1)から明らかなように、uMA=1・uMA1=uMA1である。フィルタ281は、この操作量uMAと操作量uMA1との関係の理解を容易にするために導入された仮想的なフィルタであり、物理的には不要である、
一方、フィルタ282は、操作量uMAの特定周波数の成分の極性が反転された操作量を操作量uMA2として出力する。つまりフィルタ282は、操作量uMAの特定周波数以外の成分は通過させる。
【0057】
図3に示す構成のサーボコントローラ20によって、上記実施形態と同様に、前述した条件1及び2を満たす操作量uMA2を生成することができる。しかも、フィルタ部の構成を簡略化できる。
【0058】
以上説明した少なくとも1つの実施形態によれば、ディスクの第1の面がトラッキング面として使用される場合に、当該ディスクの第2の面の位置誤差も低減できる、マイクロアクチュエータを備えた磁気ディスク装置及び同装置におけるマイクロアクチュエータ制御方法を提供することができる。
【0059】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0060】
11…ディスク、11-1…ディスク面(第1の面)、11-2…ディスク面(第2の面)、12-1…ヘッド(第1のヘッド)、12-2…ヘッド(第2のヘッド)、13…スピンドルモータ(SPM)、14…主アクチュエータ(VCMアクチュエータ、PVCM)、15-1…マイクロアクチュエータ(PMA1、第1のマイクロアクチュエータ)、15-2…マイクロアクチュエータ(PMA2、第2のマイクロアクチュエータ)、16…ボイスコイルモータ(VCM)、17…ドライバIC、19…主コントローラ、20…サーボコントローラ、21…加算器、22…減算器、23…マイクロアクチュエータ制御器(CMA)、24…フィルタ部、25…マイクロアクチュエータモデル(MMA)、26…加算器、27…VCMアクチュエータ制御器(CVCM)、28…フィルタ部、241…帯域除去フィルタ、242…帯域通過フィルタ、243…加算器(第1の加算器)、244…加算器(第2の加算器)、282…フィルタ。
【特許請求の範囲】
【請求項1】
第1の面及び第2の面を備えたディスクと、
前記第1の面に対応付けられた第1のヘッドを、第1の操作量に応じて微動させる第1のマイクロアクチュエータと、
前記第2の面に対応付けられた第2のヘッドを、第2の操作量に応じて微動させる第2のマイクロアクチュエータと、
前記第1の面がトラックキング面として使用される特定モードにおいて、前記第1のマイクロアクチュエータに与えられるべき第3の操作量が生成された場合、前記第3の操作量を前記第1の操作量として前記第1のマイクロアクチュエータに、前記第3の操作量の特定周波数の成分の極性が反転された操作量を前記第2の操作量として前記第2のマイクロアクチュエータに、それぞれ与えるサーボコントローラと
を具備する磁気ディスク装置。
【請求項2】
前記サーボコントローラは、前記第3の操作量の前記特定周波数の成分の極性を反転した操作量を前記第2の操作量として出力するフィルタを備えている請求項1記載の磁気ディスク装置。
【請求項3】
前記第3の操作量の前記特定周波数の成分は、前記第1の面で前記第2の面とは逆相の位置誤差を抑圧する成分を含み、前記第3の操作量の前記特定周波数を除く周波数の成分は、前記第1の面で前記第2の面と同相の位置誤差を抑圧する成分を含む請求項2記載の磁気ディスク装置。
【請求項4】
前記特定周波数の成分は、ディスクフラッタに起因する抑圧されるべき周波数成分である請求項3記載の磁気ディスク装置。
【請求項5】
前記特定モードが、バンクライト方式のサーボライトのために設定される請求項1記載の磁気ディスク装置。
【請求項6】
前記第1のヘッドの位置の目標位置からの偏差に基づいて前記第3の操作量を生成するマイクロアクチュエータ制御器を更に具備する請求項1記載の磁気ディスク装置。
【請求項7】
前記サーボコントローラは、
前記第3の操作量から前記特定周波数の成分を除去することにより第4の操作量を出力する帯域除去フィルタと、
前記第3の操作量の前記特定周波数の成分を通過させることにより第5の操作量を出力する帯域通過フィルタと、
前記第4の操作量と前記第5の操作量とを加算することにより、前記第1の操作量を出力する第1の加算器と、
前記第4の操作量と、前記第5の操作量の極性が反転された第6の操作量とを加算することにより、前記第2の操作量を出力する第2の加算器と
を具備する請求項1記載の磁気ディスク装置。
【請求項8】
ディスクの第1の面に対応付けられた第1のヘッドを、第1の操作量に応じて微動させる第1のマイクロアクチュエータと、前記ディスクの第2の面に対応付けられた第2のヘッドを、第2の操作量に応じて微動させる第2のマイクロアクチュエータとを備えた磁気ディスク装置において、前記第1のマイクロアクチュエータ及び前記第2のマイクロアクチュエータを制御するためのマイクロアクチュエータ制御方法であって、
前記第1の面がトラックキング面として使用される特定モードにおいて、前記第1のマイクロアクチュエータに与えられるべき第3の操作量を生成し、
前記第3の操作量を前記第1の操作量として前記第1のマイクロアクチュエータに、前記第3の操作量の特定周波数の成分の極性が反転された操作量を前記第2の操作量として前記第2のマイクロアクチュエータに、それぞれ与える
マイクロアクチュエータ制御方法。
【請求項1】
第1の面及び第2の面を備えたディスクと、
前記第1の面に対応付けられた第1のヘッドを、第1の操作量に応じて微動させる第1のマイクロアクチュエータと、
前記第2の面に対応付けられた第2のヘッドを、第2の操作量に応じて微動させる第2のマイクロアクチュエータと、
前記第1の面がトラックキング面として使用される特定モードにおいて、前記第1のマイクロアクチュエータに与えられるべき第3の操作量が生成された場合、前記第3の操作量を前記第1の操作量として前記第1のマイクロアクチュエータに、前記第3の操作量の特定周波数の成分の極性が反転された操作量を前記第2の操作量として前記第2のマイクロアクチュエータに、それぞれ与えるサーボコントローラと
を具備する磁気ディスク装置。
【請求項2】
前記サーボコントローラは、前記第3の操作量の前記特定周波数の成分の極性を反転した操作量を前記第2の操作量として出力するフィルタを備えている請求項1記載の磁気ディスク装置。
【請求項3】
前記第3の操作量の前記特定周波数の成分は、前記第1の面で前記第2の面とは逆相の位置誤差を抑圧する成分を含み、前記第3の操作量の前記特定周波数を除く周波数の成分は、前記第1の面で前記第2の面と同相の位置誤差を抑圧する成分を含む請求項2記載の磁気ディスク装置。
【請求項4】
前記特定周波数の成分は、ディスクフラッタに起因する抑圧されるべき周波数成分である請求項3記載の磁気ディスク装置。
【請求項5】
前記特定モードが、バンクライト方式のサーボライトのために設定される請求項1記載の磁気ディスク装置。
【請求項6】
前記第1のヘッドの位置の目標位置からの偏差に基づいて前記第3の操作量を生成するマイクロアクチュエータ制御器を更に具備する請求項1記載の磁気ディスク装置。
【請求項7】
前記サーボコントローラは、
前記第3の操作量から前記特定周波数の成分を除去することにより第4の操作量を出力する帯域除去フィルタと、
前記第3の操作量の前記特定周波数の成分を通過させることにより第5の操作量を出力する帯域通過フィルタと、
前記第4の操作量と前記第5の操作量とを加算することにより、前記第1の操作量を出力する第1の加算器と、
前記第4の操作量と、前記第5の操作量の極性が反転された第6の操作量とを加算することにより、前記第2の操作量を出力する第2の加算器と
を具備する請求項1記載の磁気ディスク装置。
【請求項8】
ディスクの第1の面に対応付けられた第1のヘッドを、第1の操作量に応じて微動させる第1のマイクロアクチュエータと、前記ディスクの第2の面に対応付けられた第2のヘッドを、第2の操作量に応じて微動させる第2のマイクロアクチュエータとを備えた磁気ディスク装置において、前記第1のマイクロアクチュエータ及び前記第2のマイクロアクチュエータを制御するためのマイクロアクチュエータ制御方法であって、
前記第1の面がトラックキング面として使用される特定モードにおいて、前記第1のマイクロアクチュエータに与えられるべき第3の操作量を生成し、
前記第3の操作量を前記第1の操作量として前記第1のマイクロアクチュエータに、前記第3の操作量の特定周波数の成分の極性が反転された操作量を前記第2の操作量として前記第2のマイクロアクチュエータに、それぞれ与える
マイクロアクチュエータ制御方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−138140(P2012−138140A)
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願番号】特願2010−288831(P2010−288831)
【出願日】平成22年12月24日(2010.12.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願日】平成22年12月24日(2010.12.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]