
磁気共鳴イメージング装置、および、傾斜磁場発生システムの負荷算出方法
【課題】MRIの傾斜磁場発生システムにかかる電気的負荷を撮像シーケンスに応じて正確に予測する。
【解決手段】一実施形態では、MRI装置(20)は、傾斜磁場発生システムに電流を供給することで撮像領域に傾斜磁場を印加し、傾斜磁場を伴った磁気共鳴イメージングを行う。このMRI装置は、条件設定部(100)と、負荷取得部(104)とを備える。条件設定部は、磁気共鳴イメージングの撮像条件を設定する。負荷取得部は、傾斜磁場の波形に関する情報を取得し、磁気共鳴イメージングが実行される場合の傾斜磁場発生システムに対する電気的負荷を、上記波形に関する情報に基づいて複数の周波数帯に対してそれぞれ算出する。
【解決手段】一実施形態では、MRI装置(20)は、傾斜磁場発生システムに電流を供給することで撮像領域に傾斜磁場を印加し、傾斜磁場を伴った磁気共鳴イメージングを行う。このMRI装置は、条件設定部(100)と、負荷取得部(104)とを備える。条件設定部は、磁気共鳴イメージングの撮像条件を設定する。負荷取得部は、傾斜磁場の波形に関する情報を取得し、磁気共鳴イメージングが実行される場合の傾斜磁場発生システムに対する電気的負荷を、上記波形に関する情報に基づいて複数の周波数帯に対してそれぞれ算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、磁気共鳴イメージング装置、磁気共鳴イメージング方法、および、傾斜磁場発生システムの負荷算出方法に関する。
【背景技術】
【0002】
MRIは、静磁場中に置かれた被検体の原子核スピンをラーモア周波数のRFパルスで磁気的に励起し、この励起に伴って発生するMR信号から画像を再構成する撮像法である。なお、上記MRIは磁気共鳴イメージング(Magnetic Resonance Imaging)の意味であり、RFパルスは高周波パルス(radio frequency pulse)の意味であり、MR信号は核磁気共鳴信号(nuclear magnetic resonance signal)の意味である。
【0003】
MRI装置の傾斜磁場発生システムは、被検体が置かれる撮像空間内で傾斜磁場を印加することで、MR信号に空間的な位置情報を付加する傾斜磁場コイルを備える。この傾斜磁場コイルは、撮像中にパルス電流が繰り返して供給されることで大きく発熱する。傾斜磁場発生システムは、全チャンネル(X軸方向、Y軸方向、Z軸方向の各傾斜磁場コイル)に同時に最大電流を流し続けることが可能なものではなく、全体の電力上限値、各チャンネル毎の電力上限値等の様々な制約が存在する。
【0004】
しかしながら、従来技術では、傾斜磁場発生システムの電力的な使用限界を撮像シーケンスに応じて正確に予測することは困難であった。このため、従来技術では、例えば傾斜磁場コイルに許された最大温度での抵抗値を用いて傾斜磁場コイルの立ち上がり特性を算出し、この範囲内で撮像条件を決定後、傾斜磁場コイルを駆動している(例えば、特許文献1参照)。
【0005】
上記の場合の立ち上がり特性は最悪の条件の値であるが、実際の使用状況では傾斜磁場コイルの温度が最大温度に達することはあまりない。このように、傾斜磁場システムへの電流供給量がその使用限界値を確実に下回るように、即ち、実際の電流供給量と使用限界値との間に十分なマージンをとるように制御することで、傾斜磁場発生システムを安全に駆動していた。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平8−56917号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記従来技術では、実際には傾斜磁場発生システムの使用限界まで余裕があるにも拘らず、より安全な条件で撮像していた場合もあった。
傾斜磁場発生システムの使用限界までの余裕があった場合、本来、その余裕の分だけスライス枚数を増やす等の手段をとることで、より最適化した条件で撮像できたことになる。
【0008】
従って、より最適化した条件での撮像を行うため、MRIの傾斜磁場発生システムに対する電気的負荷を撮像条件に応じて正確に予測する技術が要望されていた。
【課題を解決するための手段】
【0009】
一実施形態では、MRI装置は、傾斜磁場発生システムに電流を供給することで撮像領域に傾斜磁場を印加し、傾斜磁場を伴った磁気共鳴イメージングを行うものであって、条件設定部と、負荷取得部とを備える。
条件設定部は、磁気共鳴イメージングの撮像条件を設定する。
負荷取得部は、傾斜磁場の波形に関する情報を取得し、磁気共鳴イメージングが実行される場合に傾斜磁場発生システムに課される電気的負荷を、上記波形に関する情報に基づいて複数の周波数帯に対してそれぞれ算出する。
【0010】
なお、別の一実施形態では、負荷取得部は、上記構成に代えて、撮像条件により定まる傾斜磁場の波形の周波数に関する情報に基づいて、磁気共鳴イメージングが実行される場合の傾斜磁場発生システムに対する電気的負荷を取得して出力する構成である。
【0011】
一実施形態では、傾斜磁場発生システムの負荷算出方法は、以下のステップを有する。
1つは、傾斜磁場発生システムにより印加される傾斜磁場を伴った磁気共鳴イメージングの撮像条件を設定するステップである。
1つは、上記撮像条件に基づいて、磁気共鳴イメージングが実行される場合の傾斜磁場発生システムに対する電気的負荷を算出するステップである。
【図面の簡単な説明】
【0012】
【図1】第1の実施形態におけるMRI装置の全体構成を示すブロック図。
【図2】図1に示すコンピュータ58の機能ブロック図。
【図3】傾斜磁場コイルへの供給電流の周波数の増大に伴って、傾斜磁場コイルのインピーダンスが1次関数的に上昇する場合の周波数分離の一例を示す説明図。
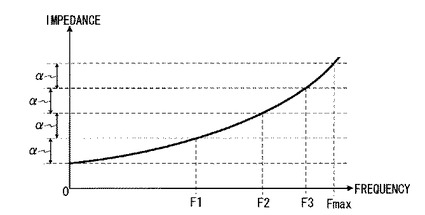
【図4】傾斜磁場コイルへの供給電流の周波数が高いほど、単位周波数の増加当たりのインピーダンスの増加量が大きい場合の周波数分離の一例を示す説明図。
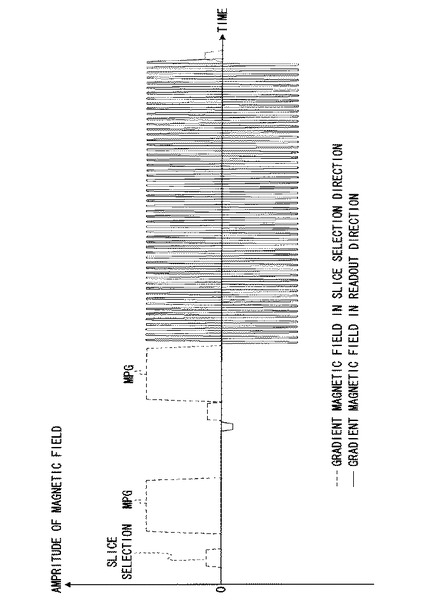
【図5】スピンエコー系のシングルショットのEPIのパルスシーケンスにおける、スライス選択方向傾斜磁場および読み出し方向傾斜磁場の波形の一例を示す模式図。
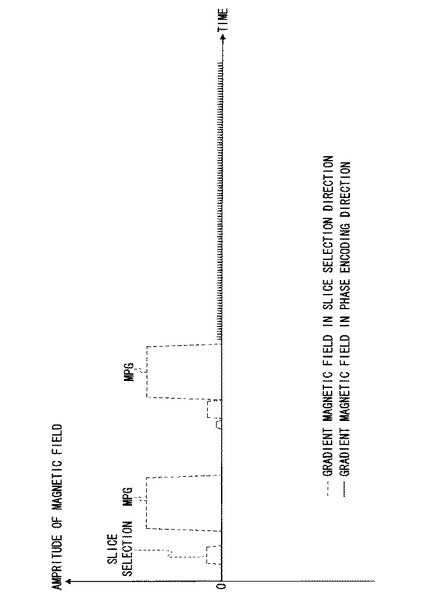
【図6】スピンエコー系のシングルショットのEPIのパルスシーケンスにおける、スライス選択方向傾斜磁場および位相エンコード方向傾斜磁場の波形の一例を示す模式図。
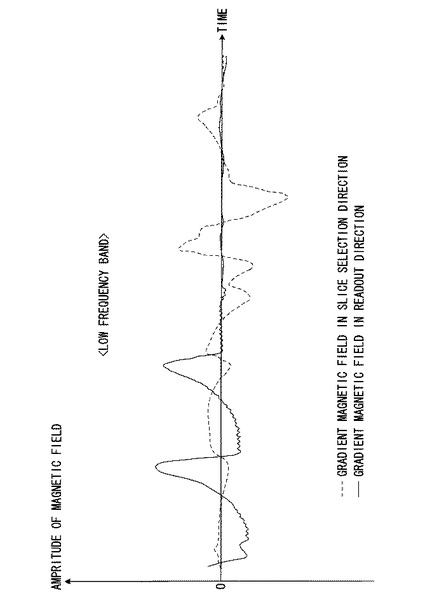
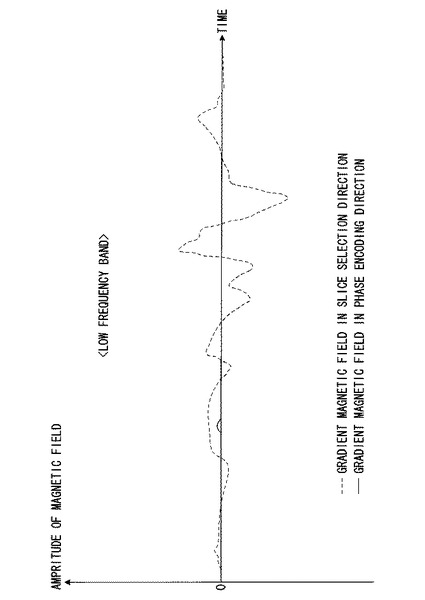
【図7】図5および図6のパルスシーケンスを図3のように周波数分離した場合における、低周波数帯のスライス選択方向傾斜磁場および読み出し方向傾斜磁場の波形を示す模式図。
【図8】図5および図6のパルスシーケンスを図3のように周波数分離した場合における、低周波数帯のスライス選択方向傾斜磁場および位相エンコード方向傾斜磁場の波形を示す模式図。
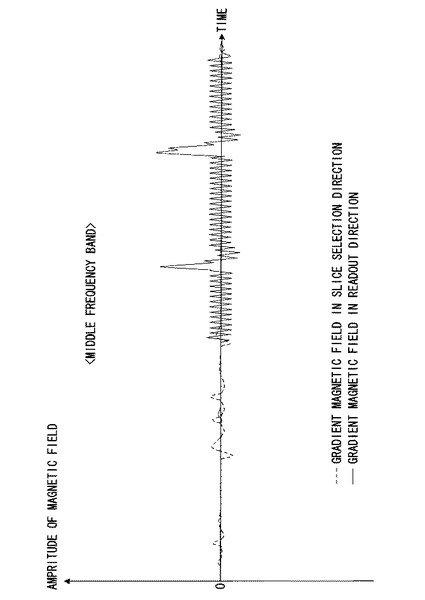
【図9】図5および図6のパルスシーケンスを図3のように周波数分離した場合における、中周波数帯のスライス選択方向傾斜磁場および読み出し方向傾斜磁場の波形を示す模式図。
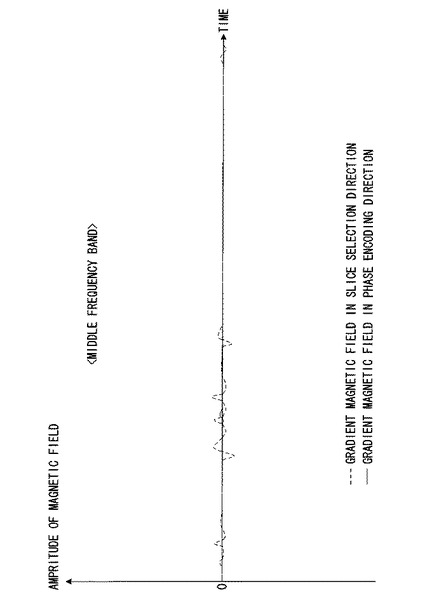
【図10】図5および図6のパルスシーケンスを図3のように周波数分離した場合における、中周波数帯のスライス選択方向傾斜磁場および位相エンコード方向傾斜磁場の波形を示す模式図。
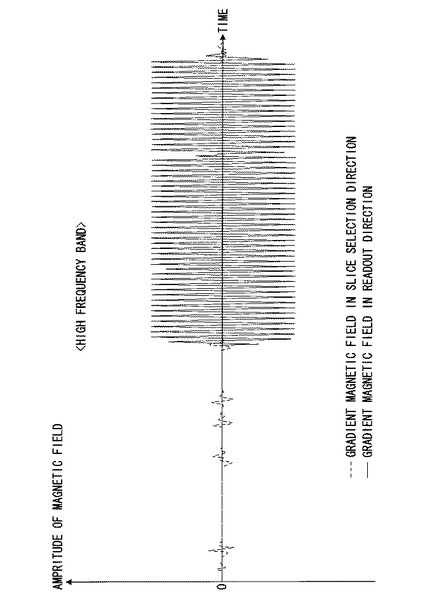
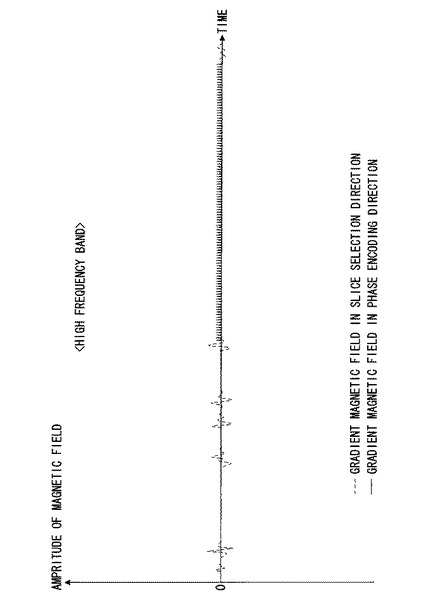
【図11】図5および図6のパルスシーケンスを図3のように周波数分離した場合における、高周波数帯のスライス選択方向傾斜磁場および読み出し方向傾斜磁場の波形を示す模式図。
【図12】図5および図6のパルスシーケンスを図3のように周波数分離した場合における、高周波数帯のスライス選択方向傾斜磁場および位相エンコード方向傾斜磁場の波形を示す模式図。
【図13】撮像条件の設定用画面において、警告通知が表示される場合の一例を示す模式図。
【図14】撮像シーケンスが実行不能と判定された場合における、撮像条件の修正候補の表示の一例を示す模式図。
【図15】撮像シーケンスが実行不能と判定された場合における、撮像条件の修正候補の表示の別の一例を示す模式図。
【図16】合計電気的負荷が最大電気的負荷に対してかなりの余裕がある場合における、撮像条件の修正候補の表示例を示す模式図
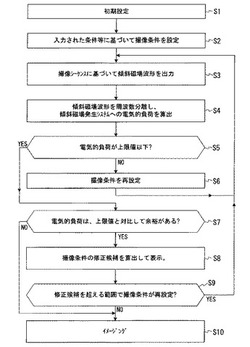
【図17】第1の実施形態に係るMRI装置の動作の流れを示すフローチャート。
【図18】第2の実施形態に係るMRI装置の動作の流れを示すフローチャート。
【図19】傾斜磁場波形を再現する座標データの一例を示す模式図。
【発明を実施するための形態】
【0013】
以下、MRI装置、MRI方法、および、傾斜磁場発生システムの負荷算出方法の実施形態について、添付図面に基づいて説明する。なお、各図において同一要素には同一符号を付し、重複する説明を省略する。
【0014】
(第1の実施形態)
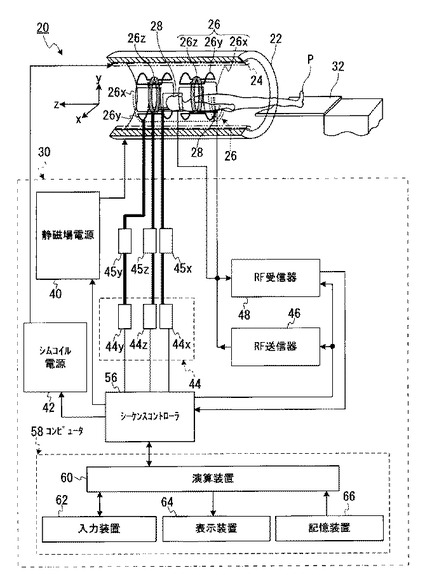
図1は、第1の本実施形態におけるMRI装置20の全体構成を示すブロック図である。図1に示すように、MRI装置20は、静磁場を形成する筒状の静磁場用磁石22と、静磁場用磁石22の内側において軸を同じにして設けられた筒状のシムコイル24と、傾斜磁場コイル26と、RFコイル28と、制御系30と、被検体Pが乗せられる寝台32とを備える。
【0015】
ここでは一例として、装置座標系の互いに直交するX軸、Y軸、Z軸を以下のように定義する。まず、静磁場用磁石22およびシムコイル24は、それらの軸方向が鉛直方向に直交するように配置されているものとし、静磁場用磁石22およびシムコイル24の軸方向をZ軸方向とする。また、鉛直方向をY軸方向とし、寝台32は、その天板の載置用の面の法線方向がY軸方向となるように配置されているものとする。
【0016】
制御系30は、静磁場電源40と、シムコイル電源42と、傾斜磁場電源44と、EMC(Electro−magnetic Compatibility)フィルタ45x、45y、45zと、RF送信器46と、RF受信器48と、シーケンスコントローラ56と、コンピュータ58とを備える。
【0017】
傾斜磁場電源44は、X軸傾斜磁場電源44xと、Y軸傾斜磁場電源44yと、Z軸傾斜磁場電源44zとで構成されている。また、コンピュータ58は、演算装置60と、入力装置62と、表示装置64と、記憶装置66とで構成されている。
【0018】
静磁場用磁石22は、静磁場電源40に接続され、静磁場電源40から供給された電流により撮像空間に静磁場を形成させる。
【0019】
上記撮像空間とは、例えば、被検体Pが置かれて、静磁場が印加されるガントリ内の空間を意味する。ガントリとは、静磁場磁石22、シムコイル24、傾斜磁場コイル26、RFコイル28を含むように、例えば円筒状に形成された構造体である。なお、図1では煩雑となるので、ガントリ内の静磁場磁石22等の構成要素を図示し、ガントリ自体は図示していない。
【0020】
撮像領域は、例えば、1画像又は1セットの画像の生成に用いるMR信号の収集範囲の少なくとも一部であって、画像となる領域を意味する。撮像領域は、例えば装置座標系により、撮像空間の一部として位置的且つ範囲的に規定される。MR信号の収集範囲の全てが画像となる場合、即ち、MR信号の収集範囲と撮像領域とが完全合致する場合もあるが、両者が完全合致しない場合もある。例えば、折り返しアーチファクトを防止するために、画像となる領域よりも広い範囲でMR信号を収集する場合、撮像領域は、MR信号の収集範囲の一部と言える。
【0021】
上記「1画像」及び「1セットの画像」は、2次元画像の場合もあれば3次元画像の場合もある。「1セットの画像」とは、例えばマルチスライス撮像などのように、1のパルスシーケンス内で複数画像のMR信号が一括的に収集される場合の「複数画像」である。
【0022】
シムコイル24は、シムコイル電源42に接続され、シムコイル電源42から供給される電流により、この静磁場を均一化する。
【0023】
静磁場用磁石22は、超伝導コイルで構成される場合が多く、励磁の際に静磁場電源40に接続されて電流が供給されるが、一旦励磁された後は非接続状態とされるのが一般的である。なお、静磁場電源40を設けずに、静磁場用磁石22を永久磁石で構成してもよい。
【0024】
傾斜磁場コイル26は、X軸傾斜磁場コイル26xと、Y軸傾斜磁場コイル26yと、Z軸傾斜磁場コイル26zとを有し、静磁場用磁石22の内側で筒状に形成されている。X軸傾斜磁場コイル26x、Y軸傾斜磁場コイル26y、Z軸傾斜磁場コイル26zはそれぞれ、X軸傾斜磁場電源44x、Y軸傾斜磁場電源44y、Z軸傾斜磁場電源44zに接続される。
【0025】
X軸傾斜磁場電源44x、Y軸傾斜磁場電源44y、Z軸傾斜磁場電源44zからX軸傾斜磁場コイル26x、Y軸傾斜磁場コイル26y、Z軸傾斜磁場コイル26zにそれぞれ供給される電流により、X軸方向の傾斜磁場Gx、Y軸方向の傾斜磁場Gy、Z軸方向の傾斜磁場Gzが撮像領域にそれぞれ形成される。
【0026】
即ち、装置座標系の3軸方向の傾斜磁場Gx、Gy、Gzを合成して、論理軸としてのスライス選択方向傾斜磁場Gss、位相エンコード方向傾斜磁場Gpe、および、読み出し方向(周波数エンコード方向)傾斜磁場Groの各方向を任意に設定できる。スライス選択方向、位相エンコード方向、および、読み出し方向の各傾斜磁場は、静磁場に重畳される。
【0027】
EMCフィルタ45xは、X軸傾斜磁場電源44xとX軸傾斜磁場コイル26xとを電気的に接続するケーブル(図1の太線部分)間に直列に挿入されており、外部からのノイズを除去する。同様に、EMCフィルタ45xは、Y軸傾斜磁場電源44yとY軸傾斜磁場コイル26yとを接続するケーブル間に直列に挿入され、EMCフィルタ45zは、Z軸傾斜磁場電源44zとY軸傾斜磁場コイル26zとを接続するケーブル間に直列に挿入され、これらも外部からのノイズを除去する。
【0028】
RF送信器46は、シーケンスコントローラ56から入力される制御情報に基づいて、核磁気共鳴を起こすためのラーモア周波数のRFパルス(RF電流パルス)を生成し、これを送信用のRFコイル28に送信する。RFコイル28には、ガントリに内蔵されたRFパルスの送受信用の全身用コイルや、寝台32または被検体Pの近傍に設けられるRFパルスの受信用の局所コイルなどがある。
【0029】
送信用のRFコイル28は、RF送信器46からRFパルスを受けて被検体Pに送信する。受信用のRFコイル28は、被検体Pの内部の原子核スピンがRFパルスによって励起されることで発生したMR信号(高周波信号)を受信し、このMR信号は、RF受信器48により検出される。
【0030】
RF受信器48は、検出したMR信号に前置増幅、中間周波変換、位相検波、低周波増幅、フィルタリングなどの各種の信号処理を施した後、A/D(analog to digital)変換を施すことで、デジタル化された複素データである生データ(raw data)を生成する。RF受信器48は、生成したMR信号の生データをシーケンスコントローラ56に入力する。
【0031】
演算装置60は、MRI装置20全体のシステム制御を行うものであり、これについては後述の図2を用いて説明する。
【0032】
シーケンスコントローラ56は、演算装置60の指令に従って、傾斜磁場電源44、RF送信器46およびRF受信器48を駆動させるために必要な制御情報を記憶する。ここでの制御情報とは、例えば、傾斜磁場電源44に印加すべきパルス電流の強度や印加時間、印加タイミング等の動作制御情報を記述したシーケンス情報である。
【0033】
シーケンスコントローラ56は、記憶した所定のシーケンスに従って傾斜磁場電源44、RF送信器46およびRF受信器48を駆動させることにより、X軸傾斜磁場Gx、Y軸傾斜磁場Gy、Z軸傾斜磁場GzおよびRFパルスを発生させる。また、シーケンスコントローラ56は、RF受信器48から入力されるMR信号の生データ(raw data)を受けて、これを演算装置60に入力する。
【0034】
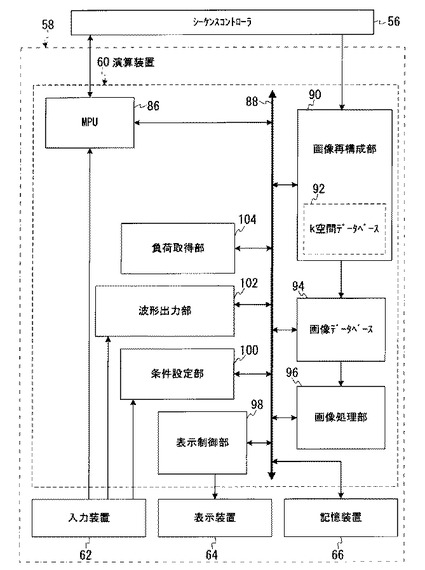
図2は、図1に示すコンピュータ58の機能ブロック図である。図2に示すように、コンピュータ58の演算装置60は、MPU(Micro Processor Unit)86と、システムバス88と、画像再構成部90と、画像データベース94と、画像処理部96と、表示制御部98と、条件設定部100と、波形出力部102と、負荷取得部104とを備える。
【0035】
MPU86は、本スキャンの撮像条件の設定、撮像動作および撮像後の画像表示において、システムバス88等の配線を介してMRI装置20全体のシステム制御を行う。そのために、MPU86は、表示制御部98を制御して、撮像条件の設定用画面を表示装置64に表示させる。
【0036】
上記「撮像条件」とは、例えば、どの種類の撮像シーケンス(パルスシーケンス)により、どのような条件でRFパルス等を送信して、どのような条件で被検体からMR信号を収集するか、の意味である。撮像条件の例としては、撮像領域、傾斜磁場の印加方法、スライス数、撮像部位、パラレルイメージングなどの撮像シーケンスの種類、などが挙げられる。
上記撮像部位とは、例えば、頭部、胸部、腹部などの被検体Pのどの部分を撮像領域として画像化するか、の意味である。
【0037】
上記「本スキャン」は、T1強調画像などの、目的とする診断画像の撮像のためのスキャンであって、位置決め画像用のMR信号収集のスキャンや、較正スキャンを含まないものとする。スキャンとは、MR信号の収集動作を指し、画像再構成を含まないものとする。
【0038】
較正スキャンとは例えば、本スキャンの撮像条件の内の未確定のものや、本スキャン後の画像再構成時に用いる条件やデータなどを決定するために、本スキャンとは別に行われるスキャンを指す。ここでは一例として、較正スキャンの内、本スキャン前に行われるものをプレスキャンと称する。較正スキャンとしては、例えば、本スキャンでのRFパルスの中心周波数を計算するシーケンスが挙げられる。
【0039】
また、MPU86は、条件設定部100が設定した撮像シーケンスをシーケンスコントローラ56に入力する。
入力装置62は、撮像条件や画像処理条件を設定する機能をユーザに提供する。
【0040】
画像再構成部90は、内部にk空間データベース92を有する。画像再構成部90は、k空間データベース92に形成されたk空間において、シーケンスコントローラ56から入力されるMR信号の生データをk空間データとして配置する。画像再構成部90は、k空間データに2次元フーリエ変換などを含む画像再構成処理を施して、被検体Pの各スライスの画像データを生成する。画像再構成部90は、生成した画像データを画像データベース94に保存する。
【0041】
画像処理部96は、画像データベース94から画像データを取り込み、これに所定の画像処理を施し、画像処理後の画像データを表示用画像データとして記憶装置66に記憶させる。
【0042】
記憶装置66は、上記の表示用画像データに対し、その表示用画像データの生成に用いた撮像条件や被検体Pの情報(患者情報)等を付帯情報として付属させて記憶する。
【0043】
表示制御部98は、MPU86の制御に従って、撮像条件の設定用画面や、撮像により生成された画像データが示す画像を表示装置64に表示させる。
【0044】
条件設定部100は、入力装置62に対して入力された撮像条件の一部の条件(入力情報)に基づいて、撮像条件を設定する。撮像条件により、撮像シーケンスが規定される。また、条件設定部100は、撮像条件の再設定指令を受けた場合、所定の条件を満たすように撮像条件を再設定する(詳細は後述のステップS6参照)。
【0045】
波形出力部102は、条件設定部100により設定された撮像条件(に従って規定される撮像シーケンス)に基づいて、傾斜磁場の波形を計算して出力する。
【0046】
負荷取得部104は、波形出力部102により算出された傾斜磁場の波形を複数の周波数帯に分離して、複数の周波数帯に対してそれぞれ「傾斜磁場発生システム」に対する電気的負荷を算出する。上記「傾斜磁場発生システム」は、例えば、図1の傾斜磁場電源44と、傾斜磁場コイル26と、これらを互いに電気的に接続するケーブル(図1の太線部分)と、これらケーブル間に挿入されたEMCフィルタ45x、45y、45zとに対応する。
【0047】
負荷取得部104は、設定された撮像シーケンスの実行可否を電気的負荷に基づいて判定し、実行不能な場合には撮像条件の再設定指令を条件設定部100に入力する。
【0048】
ここで、傾斜磁場コイル26への供給電流の周波数に依存して、傾斜磁場コイル26のインピーダンスが変化することに本発明者は着眼した。例えば、周波数増大に伴ってインピーダンスが上昇する場合がある。
そこで本発明者は、周波数分離を行うことで各周波数帯毎に電気的負荷を算出後、これらを合算することで傾斜磁場発生システムへの電気的負荷を正確に算出するという極めて画期的な方法を捻出した。以下、順を追ってその方法を具体的に説明する。
【0049】
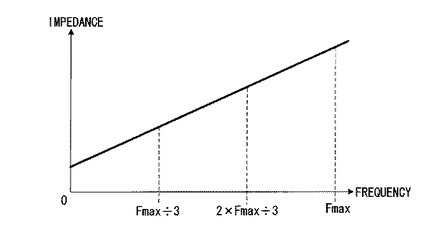
図3および図4はそれぞれ、傾斜磁場の波形を複数の周波数帯に分離する方法の一例を示す説明図であり、傾斜磁場コイル26への供給電流の周波数の増大に伴ってそのインピーダンスが上昇する場合である。
【0050】
図3は、傾斜磁場コイル26への供給電流の周波数の増大に伴って、傾斜磁場コイル26のインピーダンスが1次関数的に上昇する場合の周波数分離を示す。ここでは一例として、傾斜磁場コイル26に供給される電流の最大周波数Fmaxに基づいて、最大周波数Fmaxを3等分することで、低周波数帯、中周波数帯、高周波数帯の3つに分離する。図3において、低周波数帯は0ヘルツから(Fmax/3)ヘルツの範囲であり、中周波数帯は(Fmax/3)ヘルツから(2×Fmax/3)ヘルツの範囲であり、高周波数帯は(2×Fmax/3)ヘルツらFmaxヘルツの範囲である。
【0051】
なお、分離数が多いほど、傾斜磁場発生システムへの電気的負荷を正確に算出できる反面、その算出処理に時間および記憶容量を要する。このため、分離数は上記のように3に限定されるものではなく複数であればよいが、MRI装置20全体の動作の一環として許容される時間および記憶容量に収まる程度に分離数を決定することが望ましい。
【0052】
図4は、周波数が高いほど、単位周波数の増加当たりのインピーダンスの増加量が大きい場合の周波数分離の一例を示す。ここでは一例として、分離されたどの周波数帯においても、その周波数帯での最大インピーダンスと最小インピーダンスとの差分が所定値(図中のα)で等しくなるように分離する。
【0053】
図4の例では、第1周波数帯は0〜F1ヘルツの範囲であり、第2周波数帯はF1〜F2ヘルツの範囲であり、第3周波数帯はF2〜F3ヘルツの範囲であり、第4周波数帯はF3〜Fmaxヘルツの範囲である。
【0054】
このように負荷取得部104は、傾斜磁場コイル26のインピーダンスの周波数特性に応じて、傾斜磁場の波形を複数の周波数帯に分離する。また、X軸傾斜磁場コイル26x、Y軸傾斜磁場コイル26y、Z軸傾斜磁場コイル26zはそれぞれ、コイルの巻き方などが違うので、それらのインピーダンスの周波数特性は合致しない。そこで、負荷取得部104は、X、Y、Z軸傾斜磁場コイル26x、26y、26zでそれぞれ、分離数は同じにしつつ、各周波数帯の周波数帯域をインピーダンスの周波数特性に応じて変える。
【0055】
具体的には例えば、X軸傾斜磁場コイル26xは、低周波数帯が0〜200ヘルツ、中周波数帯が200〜600ヘルツ、高周波数帯が600〜Fmaxヘルツとし、Y軸傾斜磁場コイル26yは、低周波数帯が0〜250ヘルツ、中周波数帯が250〜700ヘルツ、高周波数帯が700〜Fmaxヘルツというように変える。
【0056】
ここでは傾斜磁場発生システムへの電気的負荷の算出方法として、スピンエコー系のシングルショットのEPIのパルスシーケンスにMPGパルスを適用した拡散強調イメージングを例に説明する。なお、上記EPIはエコープラナーイメージング(echo planar imaging)の意味であり、上記MPGパルスは拡散傾斜磁場(Motion Probing Gradient)の意味である。
【0057】
図5および図6は、上記のスピンエコー系のシングルショットのEPIのパルスシーケンスにおける傾斜磁場波形の一例を示す模式図である。3方向を同時に表示すると煩雑となるので、図5ではスライス選択方向傾斜磁場Gssおよび読み出し方向傾斜磁場Groの波形を示し、図6ではスライス選択方向傾斜磁場Gssおよび位相エンコード方向傾斜磁場Gpeの波形を示す。
【0058】
図5および図6において、横軸は経過時間を示し、縦軸は傾斜磁場の振幅を示す。また、図5および図6において、スライス選択方向傾斜磁場Gssは共通に破線で示し、読み出し方向傾斜磁場Gro(図5のみ)は実線で示し、位相エンコード方向傾斜磁場Gpe(図6のみ)は実線で示す。以上の表記は、後述の図7〜図12についても同様である。
【0059】
なお、ここでは説明の簡単化のため、装置座標系の3軸がそれぞれ、スライス選択方向、位相エンコード方向、読み出し方向のいずれかに合致するものとする。即ち、X、Y、Z軸傾斜磁場コイル26x、26y、26zはそれぞれ、スライス選択方向傾斜磁場Gss、位相エンコード方向傾斜磁場Gpe、読み出し方向傾斜磁場Groのいずれかを形成する。従って、縦軸は、X軸傾斜磁場Gx、Y軸傾斜磁場Gy、Z軸傾斜磁場Gzのいずれか1つの強度に該当する。即ち、X軸傾斜磁場コイル26x、Y軸傾斜磁場コイル26y、Z軸傾斜磁場コイル26zのいずれかへの供給電流値におよそ相当する。
【0060】
但し、本実施形態は上記態様に限定されるものではない。装置座標系のX−Y平面、Y−Z平面、X−Z平面に対して斜めのスライスを撮像する場合も適用可能である。即ち、上記のようにスライス選択方向傾斜磁場Gss、位相エンコード方向傾斜磁場Gpe、読み出し方向傾斜磁場Groが規定されるパルスシーケンスに基づいて、X、Y、Z軸傾斜磁場Gx、Gy、Gzを計算すればよい。これにより、X、Y、Z軸傾斜磁場コイル26x、26y、26zへの各供給電流値を算出できるので、同様に傾斜磁場発生システムへの電気的負荷を算出できる。
【0061】
以下、図5および図6のパルスシーケンスを簡単に説明する。まず、スライス選択方向にスライス選択傾斜磁場Gssを印加しながら、RFコイル28から撮像領域に90°RFパルスを送信することで、所望のスライス領域を励起する。次に、読み出し方向に第1のMPGパルスを印加する。
【0062】
次に、励起領域の磁化を反転してエコー信号を形成させるため、スライス選択方向に傾斜磁場を印加し、RFコイル28から撮像領域に再収束用の180°RFパルスを送信する。次に、読み出し方向に第2のMPGパルスを印加する。この後、読み出し方向において極性を反転させながら傾斜磁場を印加すると共に、位相エンコード方向にも所定の間隔で傾斜磁場パルスを印加し、画像再構成用のMR信号(エコー信号)を取得する。
【0063】
図7〜図12は、図5および図6のパルスシーケンスを図3のように周波数分離した場合における、各周波数帯の傾斜磁場波形の一例を示す模式図である。図7および図8は前記低周波数帯の傾斜磁場波形を示し、図9および図10は前記中周波数帯の傾斜磁場波形を示し、図11および図12は前記高周波数帯の傾斜磁場波形を示す。
【0064】
また、3方向の傾斜磁場波形を同時表示すると煩雑となるため、図7、図9、図11ではスライス選択方向傾斜磁場Gssおよび読み出し方向傾斜磁場Groの波形を示し、図8、10、12ではスライス選択方向傾斜磁場Gssおよび位相エンコード方向傾斜磁場Gpeの波形を示す。
【0065】
図5および図6のパルスシーケンスの傾斜磁場波形を、図7〜図12に示すように各周波数帯毎の傾斜磁場波形に分離するには、例えば、もとの傾斜磁場波形に対して、所望の周波数帯域のみを選択的に通過させるデジタルフィルタを適用すればよい。
【0066】
このように所望の周波数帯域のみを選択的に通過させるフィルタの作成手法としては、例えば、以下の方法が挙げられる。即ち、チェビシェフフィルタ、バターワースフィルタなどのIIRフィルタ(無限インパルス応答フィルタ: Infinite Impulse Response Filter)や、FIRフィルタ(有限インパルス応答フィルタ:Finite Impulse Response Filter)などのフィルタから適切なフィルタを用い、タップ数(フィルタ係数の個数)などの条件の適切に変更すればよい。負荷取得部104は、周波数分離用に上記の各種フィルタを有する。
【0067】
ここで、周波数帯毎に分離した傾斜磁場波形の縦軸は、前述のように傾斜磁場コイルへの供給電流値の振幅に相当し、符号が正の場合も負の場合もあるので、符号を揃えて強度として電気的負荷を算出すれば、計算が容易になる。
【0068】
そこで本実施形態では、周波数帯毎に分離した傾斜磁場波形(図7〜図12)について、横軸(時間)はそのままに、縦軸の値のみを二乗する変換を行う。このような変換後において、縦軸の値は、電流の二乗(電力÷抵抗値)に相当し、符号がマイナスだった部分は反転して全て正の値となるから、その縦軸の値に対して抵抗値に相当する値を乗じることで、電力に相当する電気的負荷を算出できる。
【0069】
より詳細には、電流の二乗に相当する変換後の縦軸の値に対して、撮像シーケンスの開始時刻から終了時刻までの時間積分値を計算する。この時間積分値を、フル出力(開始時刻から終了時刻まで、最大電流を流し続けた場合)の時間積分値で割ることで規格化し、割った値を以下、パワーデューティという。
【0070】
パワーデューティは0以上、1以下になる。パワーデューティに対して、インピーダンスに相当する負荷係数を乗じることで、1つの周波数帯における1つのチャネル(X軸、Y軸、Z軸のいずれか)の電気的負荷を算出できる。上記負荷係数は、X軸、Y軸、Z軸の各チャネル毎に異なり、周波数帯によっても異なるが、負荷係数の決め方については後述する。
【0071】
そして、分離した全周波数帯においてそれぞれ、Xチャネルの電気的負荷を上記のように算出して合算すれば、Xチャネルの全体の電気的負荷(以下、Xチャネル電気的負荷Lx)を算出できる。同様の計算をYチャネル、Zチャネルについても適用し、Yチャネル電気的負荷Ly、Zチャネル電気的負荷Lzを算出する。X、Y、Zチャネル電気的負荷Lx、Ly、Lzを合算すれば、傾斜磁場発生システムへの合計電気的負荷Ltを算出できる。合計電気的負荷Ltは、図3のように3つの周波数帯に分離する場合、例えば以下の(1)式で算出できる。
【0072】
Lt= Lx+Ly+Lz
= (PLx×RLx+PMx×RMx+PHx×RHx)
+(PLy×RLy+PMy×RMy+PHy×RHy)
+(PLz×RLz+PMz×RMz+PHz×RHz) ・・・(1)
【0073】
3項からなる(1)式において、1項目はXチャネル電気的負荷Lxであり、2項目はYチャネル電気的負荷Lyであり、3項目はZチャネル電気的負荷Lzである。
【0074】
(1)式の1項目において、PLxは低周波数帯、PMxは中周波数帯、PHxは高周波数帯にそれぞれ対応し、これらはXチャネルのパワーデューティである。
また、RLxは低周波数帯、RMxは中周波数帯、RHxは高周波数帯にそれぞれ対応し、これらはXチャネルの負荷係数である。
【0075】
(1)式の2項目において、PLyは低周波数帯、PMyは中周波数帯、PHyは高周波数帯にそれぞれ対応し、これらはYチャネルのパワーデューティである。
また、RLyは低周波数帯、RMyは中周波数帯、RHyは高周波数帯にそれぞれ対応し、これらはYチャネルの負荷係数である。
【0076】
(1)式の3項目において、PLzは低周波数帯、PMzは中周波数帯、PHzは高周波数帯にそれぞれ対応し、これらはZチャネルのパワーデューティである。
また、RLzは低周波数帯、RMzは中周波数帯、RHzは高周波数帯にそれぞれ対応し、これらはZチャネルの負荷係数である。
【0077】
パワーデューティは規格化しているので無名数であるため、負荷係数も無名数でよい。その場合、合計電気的負荷Ltも無名数になる。また、低周波数帯の周波数域は、前述のようにX、Y、Zのチャネル毎に異なる。中周波数帯、高周波数帯についても同様である。但し、本実施形態は無名数での計算に限定されるものではない。例えば、パワーデューティを「(アンペアの二乗)×時間」の単位の値に換算後、負荷係数もインピーダンスの単位の値に換算し、ワット×時間の単位として合計電気的負荷Ltを算出してもよい。
【0078】
ここで、負荷係数は例えば、X、Y、Z軸傾斜磁場コイル26x、26y、26zのインピーダンスの周波数特性を測定後、傾斜磁場電源44の仕様などに基づいてシミュレーションにより算出できる。シミュレーションでは、実際のパルスシーケンスの傾斜磁場波形を出力後、これをフィルタによってチャネル毎に周波数分離し、電気的負荷を算出する。この電気的負荷の算出時において、X、Y、Z軸傾斜磁場コイル26x、26y、26zの各インピーダンスの周波数特性に合致するように負荷係数を決定すればよい。
【0079】
また、実際にパルスシーケンスを実行しながら傾斜磁場電源44の+側および−側入力端子の間の電圧差や、傾斜磁場コイル26に流れる電流の時間変化を測定することで、測定値に基づいて電気的負荷を算出し、シミュレーションで算出した負荷係数と合致するか否かを照合することが望ましい。若干のずれがある場合には、実測値に基づいて負荷係数を修正すればよい。
【0080】
ここで、負荷係数を確認する実験において、MRI装置20の全てを接続する以上、電気的負荷は、傾斜磁場電源44、傾斜磁場コイル26、これらを結ぶケーブル、EMCフィルタ45x、45y、45zなどの傾斜磁場発生システム全体への負荷値として算出される。従って、負荷係数の値も、傾斜磁場発生システム全体が反映されたものとなる。
【0081】
そして、1つの周波数分離の方法に対応して各チャネル、各周波数帯毎に算出した1セットの負荷係数(以下、「負荷係数群」という)を予めテーブルデータとして負荷取得部104内に記録しておく。同様のシミュレーションを、周波数分離の仕方を変えて行い、再度、上記の負荷係数群を算出し、負荷取得部104内に記録しておく。同様にして、周波数分離の仕方を多様に変えて、それぞれについて負荷係数群を負荷取得部104内に記録しておく。
【0082】
このように多様の周波数分離の仕方にそれぞれ対応した負荷係数群と、X、Y、Z軸傾斜磁場コイル26x、26y、26zのインピーダンスの周波数特性とを負荷取得部104内に予め記録しておく。これにより、設定されたパルスシーケンスに応じて周波数分離の仕方を変更しても、電気的負荷を算出することができる。
【0083】
なお、傾斜磁場発生システムは、全チャネル(X軸方向、Y軸方向、Z軸方向の各傾斜磁場コイル)に同時に最大電流を流し続けることが可能なものではなく、全体の電力の上限値、各チャンネル毎の電力上限値等の様々な制約が存在する。このため、負荷取得部104は、傾斜磁場発生システムによって許容できる最大電気的負荷Lmaxを記憶している。最大電気的負荷Lmaxは、X、Y、Z軸傾斜磁場コイル26x、26y、26zや傾斜磁場電源44などの各部の仕様に基づいてシミュレーションにより算出できる。
【0084】
同様に、合計電気的負荷Ltは、図4のように4つの周波数帯に分離する場合、例えば以下の(2)式で算出できる。
【0085】
Lt= Lx+Ly+Lz
= (P1x×R1x+P2x×R2x+P3x×R3x+P4x×R4x)
+(P1y×R1y+P2y×R2y+P3y×R3y+P4y×R4y)
+(P1z×R1z+P2z×R2z+P3z×R3z+P4z×R4z)
・・・(2)
【0086】
(2)式において、1項目はXチャネル電気的負荷Lxであり、2項目はYチャネル電気的負荷Lyであり、3項目はZチャネル電気的負荷Lzである。
【0087】
(2)式の1項目において、P1xは第1周波数帯、P2xは第2周波数帯、P3xは第3周波数帯、P4xは第4周波数帯にそれぞれ対応し、これらはXチャネルのパワーデューティである。また、R1xは第1周波数帯、R2xは第2周波数帯、R3xは第3周波数帯、R4xは第4周波数帯にそれぞれ対応し、これらはXチャネルの負荷係数である。(2)式の2項目、3項目についても同様である。
【0088】
負荷取得部104は、傾斜磁場発生システムによって許容できる最大電気的負荷Lmaxよりも、合計電気的負荷Ltが大きいか否かを判定する。大きい場合、負荷取得部104は、現在設定されている撮像シーケンスを実行不能と判定する。以下、撮像シーケンスが実行不能と判定された場合の処理について、図13、図14、図15の3つの例を挙げて説明する。
【0089】
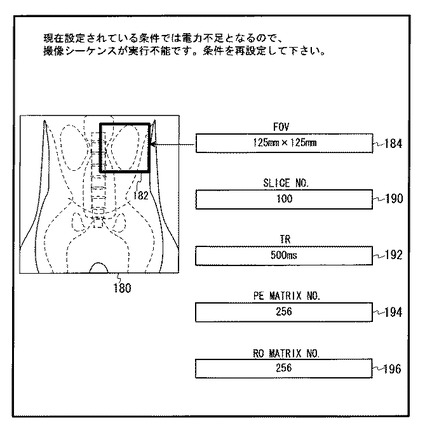
図13は、撮像シーケンスの条件の設定用画面において、警告通知が表示される場合の一例を示す模式図である。図13の例では、位置決め画像180内にFOV(撮像視野:Field Of View)の太枠182が表示され、位置決め画像180の右側には、撮像条件の設定用のボックス184、190、192、194、196が表示されている。
【0090】
ボックス184の表示は、FOVが現在125mm×125mmに設定されていることを示す。ボックス190の表示は、スライス数が現在100枚に設定されていることを示す。ボックス192の表示は、繰り返し時間TR(Time Of Retry)が現在500msに設定されていることを示す。ボックス194の表示は、位相エンコードステップ数が現在256に設定されていることを示す。ボックス196の表示は、周波数エンコードステップ数が現在256に設定されていることを示す。
【0091】
ここでは一例として、負荷取得部104は、表示制御部98を制御することで、「(現在設定されている撮像条件で規定される)撮像シーケンスが実行不能であること」の文字情報的な警告通知を表示装置64の画面の上部に表示させる。ユーザは、入力装置62を介してボックス184、190、192、194、196内の各パラメータ値を変更することで、撮像条件を変更できる。
【0092】
即ち、スライス数を減らす等の条件変更により、ユーザは、電気的負荷が減るように撮像条件を変更(再設定)できる。その場合、更新された撮像条件に基づいて合計電気的負荷Ltが算出され、合計電気的負荷Ltが最大電気的負荷Lmax以下か否かの判定が再実行される。
【0093】
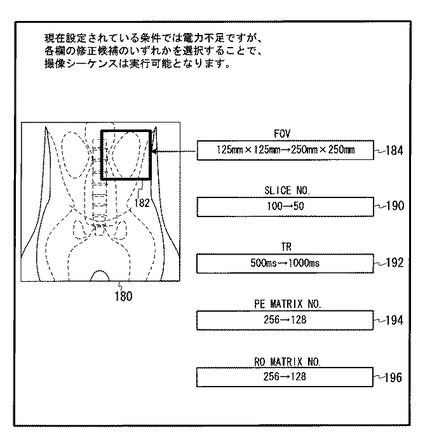
図14は、撮像シーケンスが実行不能と判定された場合における、撮像条件の修正候補の表示の一例を示す模式図である。撮像シーケンスが実行不能と判定された場合、条件設定部100は、合計電気的負荷Ltが最大電気的負荷Lmaxを超えないように、撮像条件の修正候補を複数算出する。
【0094】
具体的には例えば、条件設定部100は、最大電気的負荷Lmaxを100%として、入力された合計電気的負荷Ltが何%オーバーしているかを算出する。条件設定部100は、このオーバー量に応じて、電気的負荷が小さくなるように撮像条件の修正候補を複数算出する。具体的には、スライス数を減らす、繰り返し時間TRを伸ばす、MPGの印加量(b―factor)を減らす、FOVを広げるなどによって、電気的負荷は小さくなる。
【0095】
なお、FOVを広げれば、傾斜磁場の傾斜が緩やかになるため、電気的負荷は小さくなる。これは、位置的情報を付加するためにはFOVの一端側と反対側とで磁場強度の差として所定値以上が必要だからである。
【0096】
条件設定部100は、算出した撮像条件の複数の修正候補を表示制御部98に入力することで、撮像条件の複数の修正候補を表示装置64に表示させる。
【0097】
図14の例では、ボックス184において、FOVを125mm×125mmから250mm×250mmに拡張することが、撮像の条件の一修正候補として表示されている。
また、ボックス190において、スライス数を100枚から50枚に減らすことが、撮像条件の一修正候補として表示されている。
【0098】
また、ボックス192において、繰り返し時間TRを500msから1000msに延長することが、撮像条件の一修正候補として表示されている。
また、ボックス194及び196において、位相エンコードステップ数及び周波数エンコードステップ数をそれぞれ256から128に減らすことが、撮像条件の修正候補として表示されている。
【0099】
ユーザは、入力装置62を介して、表示装置64に表示されている撮像条件の修正候補のいずれか又は複数を選択することで、当該撮像条件を変更(再設定)し、当該撮像シーケンスを実行可能にすることができる。
【0100】
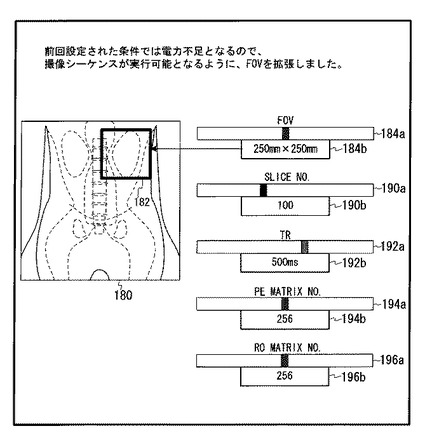
図15は、撮像シーケンスが実行不能と判定された場合における、撮像条件の修正候補の表示の別の一例を示す模式図である。図15は、スライダーバー型の撮像条件の設定画面の模式図である。
【0101】
図15において、スライダーバー184aは、スライダー(黒く塗りつぶした長方形)を、横方向のバー内で移動させることで、FOVを設定するものである。
ボックス184bは、スライダーバー184aの位置に応じて、現在設定されているFOVを数字的に示す。
【0102】
同様に、スライダーバー190aは、スライス数を設定するものであり、ボックス190bは、現在設定されているスライス数を数字的に示す。
また、スライダーバー192aは、繰り返し時間TRを設定するものであり、ボックス192bは、現在設定されている繰り返し時間TRを数字的に示す。
【0103】
また、スライダーバー194aは、位相エンコードステップ数を設定するものであり、ボックス194bは、現在設定されている位相エンコードステップ数を数字的に示す。
また、スライダーバー196aは、周波数エンコードステップ数を設定するものであり、ボックス196bは、現在設定されている周波数エンコードステップ数を数字的に示す。
【0104】
撮像シーケンスが実行不能と判定された場合、例えば、図14の場合と同様にして、撮像条件の修正候補が自動計算され、自動的に修正される。図15の例では、電力的に撮像シーケンスが実行可能となる程度にFOVが拡張された(自動再設定)されたものであり、その旨が画面上部に文字情報的に表示されている。
【0105】
図15の状態(撮像条件が自動修正された状態)において、合計電気的負荷Ltが大きくなるように、撮像条件の一部をユーザが手動変更した場合、他の条件の少なくとも一部が連動して自動変更される。具体的には、ユーザが変更した条件以外の条件の少なくとも1つが、撮像シーケンスが実行可能となる範囲、且つ、合計電気的負荷Ltがあまり変わらない程度に、自動修正される。
【0106】
例えば、図15の状態から、ユーザが繰り返し時間TRを1/4の125msに手動変更した場合を考える。この場合、条件設定部100は、撮像シーケンスが実行可能となる範囲、且つ、合計電気的負荷Ltがあまり変わらない程度となるように、位相エンコードステップ数及び周波数エンコードステップ数の各修正候補を計算する。
【0107】
例えば、各修正候補が128である場合、条件設定部100は、位相エンコードステップ数及び周波数エンコードステップ数を算出された修正候補に更新(再設定)すると共に、これら修正候補を表示制御部98に入力する。
これにより、表示装置64は、更新された位相エンコードステップ数及び周波数エンコードステップ数をボックス194b、196bに表示し、スライダーバー194a、196a内のスライダーも修正候補に対応する位置に移動する。
【0108】
上記は一例にすぎず、繰り返し時間TRが手動で再設定された場合、スライス数又はFOVの修正候補を自動算出し、手動再設定に連動して、スライス数又はFOVが修正候補に自動再設定されるようにしてもよい。或いは、繰り返し時間TRが手動で再設定された場合、スライス数、FOV、位相エンコードステップ数、周波数エンコードステップ数、或いは、それ以外の条件の1つ又は2つ以上が連動して自動再設定されるようにしてもよい。FOVなどの他の条件が手動で再設定された場合についても同様である。
【0109】
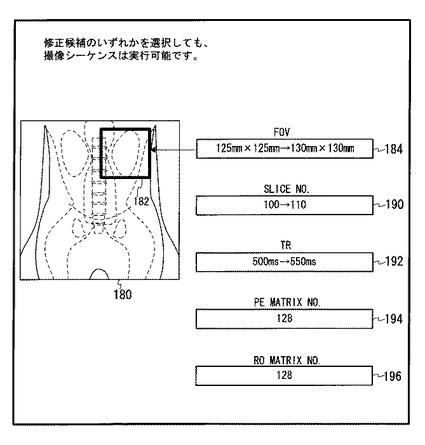
図16は、合計電気的負荷Ltが最大電気的負荷Lmaxに対してかなりの余裕がある場合における、撮像条件の修正候補の表示例を示す模式図である。ユーザは、撮像条件を始めに設定する際に、合計電気的負荷Ltが確実に最大電気的負荷Lmax以下となるように、電気的負荷の少ない条件を選択した可能性がある。
【0110】
その場合、合計電気的負荷Ltと、最大電気的負荷Lmaxとのマージン分だけ、撮像条件を最適化する余地がある。そこで、本実施形態では一例として、合計電気的負荷Ltが最大電気的負荷Lmaxに対してかなりの余裕がある場合、合計電気的負荷Ltが最大電気的負荷Lmaxに近づくような撮像条件の修正候補が算出され、表示される。ここでの修正候補の算出方法については、後述の図17のステップS8において、詳細に説明する。
【0111】
図16の例では、撮像条件の修正候補として、以下3つが表示されている。
第1に、FOVを130mm×130mmに拡張することが、ボックス184において修正候補の1つとして表示されている。
第2に、スライス数を110枚に増やすことが、ボックス190において修正候補の1つとして表示されている。
第3に、繰り返し時間TRを550msに延長することが、ボックス192において修正候補の1つとして表示されている。
【0112】
これら3つのいずれか1つを選択するだけで、ユーザは、撮像条件をより最適化された条件に近づけることができる。
【0113】
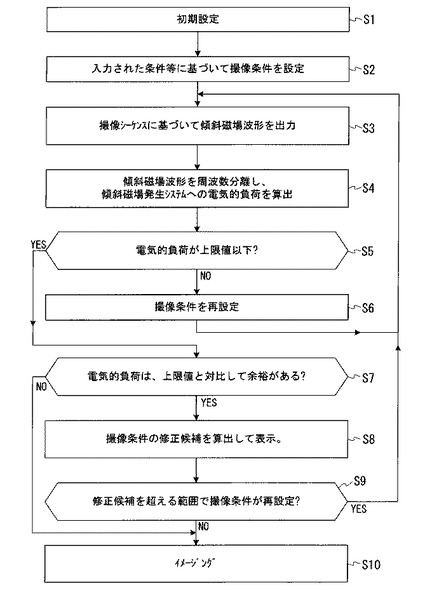
図17は、第1の実施形態におけるMRI装置20の動作の流れを示すフローチャートである。以下、前述した各図を適宜参照しながら、図17に示すステップ番号に従って、MRI装置20の動作を説明する。
【0114】
[ステップS1]MPU86(図2参照)は、入力装置62に対して入力された撮像条件の一部の条件(入力情報)等に基づいて、MRI装置20の初期設定を行う。また、プレスキャンなどによってRFパルスの中心周波数等が設定される。この後、ステップS2に進む。
【0115】
[ステップS2]条件設定部100は、入力装置62に対して入力された撮像条件の一部等に基づいて撮像条件全体を暫定的に設定する。即ち、条件設定部100は、暫定的に設定された各条件に基づいて、本スキャンの撮像シーケンス(スライス選択方向、位相エンコード方向、読み出し方向の傾斜磁場の印加シーケンスや、RFパルスの印加シーケンスを含む)を暫定的に設定する(図5、図6参照)。この後、ステップS3に進む。
【0116】
[ステップS3]波形出力部102は、撮像シーケンスに基づいて、Xチャネル、Yチャネル、Zチャネルの傾斜磁場波形(傾斜磁場強度の時間変化)を計算して出力する。負荷取得部104は、各チャネルの傾斜磁場波形のデータを波形出力部102から取得する。この後、ステップS4に進む。
【0117】
[ステップS4]負荷取得部104は、撮像シーケンスの長さなどの条件に応じて、電気的負荷の算出に要する時間が所定時間に収まるように、周波数分離を行う際の分離数を設定する。また、負荷取得部104は、撮像シーケンスに基づいて、撮像シーケンスでの最大周波数Fmaxが何ヘルツかを算出する。
【0118】
次に、負荷取得部104は、X軸傾斜磁場コイル26xのインピーダンスの周波数特性と、最大周波数Fmaxとに基づいて、Xチャネルの傾斜磁場波形を周波数分離する際の各周波数帯の範囲を決定する。例えば、分離されたどの周波数帯においても、その周波数帯での最大インピーダンスと最小インピーダンスとの差が等しくなるように分離する。
【0119】
なお、負荷取得部104内には、周波数分離の仕方の多数のパターンが予め記憶されているので、負荷取得部104はそれらのいずれか1つを選択する。これにより、周波数分離の仕方に対応してテーブルデータとして負荷取得部104に記憶されている負荷係数群を、電気的負荷の算出にそのまま利用できる。
【0120】
負荷取得部104は、Yチャネル、Zチャネルについても、周波数分離する際の各周波数帯の範囲を決定する。
【0121】
次に、負荷取得部104は、X、Y、Zの各チャネルの傾斜磁場波形をそれぞれ、上記のように決定した範囲に従って、周波数帯毎に分離する(図7〜図12参照)。
【0122】
次に、負荷取得部104は、暫定的に設定された撮像シーケンスにおける、傾斜磁場発生システムへの合計電気的負荷Ltを算出する。即ち、分離した周波数帯にそれぞれ対応する負荷係数群を用いることでXチャネル電気的負荷Lxを算出する。同様に、Yチャネル電気的負荷Ly、Zチャネル電気的負荷Lzも算出し、これらとXチャネル電気的負荷Lxを合算し、合計電気的負荷Ltとする。この計算方法の詳細については、前述した通りなので、重複する説明を省略する。この後、ステップS5に進む。
【0123】
[ステップS5]ステップS4で算出した合計電気的負荷Ltが、傾斜磁場発生システムによって許容できる最大電気的負荷Lmax以下か否かを、負荷取得部104は判定する。合計電気的負荷Ltが最大電気的負荷Lmax以下の場合、暫定的に設定されている撮像シーケンスは実行可能であるから、ステップS7に進む。合計電気的負荷Ltが最大電気的負荷Lmaxを超える場合、暫定的に設定されている撮像シーケンスは実行不能であるから、ステップS6に進む。
【0124】
[ステップS6]負荷取得部104は、撮像条件の再設定指令と、合計電気的負荷Ltの算出結果とを条件設定部100に入力する。条件設定部100は、再設定される撮像条件で規定される撮像シーケンスが磁気共鳴イメージングとして実行される場合の傾斜磁場発生システムへの電気的負荷が最大電気的負荷Lmaxを超えないように、撮像条件の修正候補を複数算出する。
【0125】
具体的には例えば、条件設定部100は、最大電気的負荷Lmaxを100%として、入力された合計電気的負荷Ltが何%オーバーしているかを算出する。条件設定部100は、このオーバー量に応じて、電気的負荷が小さくなるように撮像条件の修正候補を複数算出する。具体的には、スライス数を減らす、繰り返し時間TRを伸ばす、MPGの印加量(b―factor)を減らす、FOVを広げるなどによって、電気的負荷は小さくなる。
【0126】
条件設定部100は、算出した撮像条件の複数の修正候補を表示制御部98に入力することで、撮像条件の複数の修正候補を表示装置64に表示させる(図14参照)。
【0127】
撮像条件の修正候補の表示開始時刻から所定時間経過してもユーザによる選択や、ユーザによる撮像条件の再設定の入力がなければ、条件設定部100は、複数の修正候補のいずれかを自動選択する。ここでの自動選択の優先順位は、例えば、スライス枚数を減らす修正候補を最優先とするものであり、ステップS1において予め設定しておけばよい。
【0128】
なお、前述の図15で説明したように、撮像条件を修正候補に自動再設定して表示してもよい。この自動再設定の後に、電気的負荷が大きくなるように、撮像条件の一部をユーザが手動変更した場合、前述したように、他の条件の少なくとも一部が連動して自動再設定(自動変更)される。
【0129】
このように、複数の修正候補のいずれかが選択されるか、或いは、ユーザの手動操作によって、撮像条件が再設定される。条件設定部100は、再設定された撮像条件に基づいて撮像シーケンスを規定する。この後、ステップS3に戻り、合計電気的負荷Ltの算出が再度行われる。
【0130】
[ステップS7]MPU86は、負荷取得部104から、算出された合計電気的負荷Ltを取得する。MPU86は、合計電気的負荷Ltが最大電気的負荷Lmaxと対比して所定の割合以上の余裕があるか否かを判定する。ここでの所定の割合は、例えばステップS1において入力装置62を介してMPU86に対して予め設定しておけばよい。
【0131】
具体的には、合計電気的負荷Ltが最大電気的負荷Lmaxの例えば70%未満(或いは、60%未満、50%未満)などの場合、余裕ありと判定する。なお、ここで挙げた数値は説明を具体的にするための単なる一例にすぎない。
【0132】
余裕ありとMPU86が判定した場合、ステップS8に進み、そうでない場合、ステップS10に進む。
【0133】
[ステップS8]MPU86は、撮像条件の少なくとも一部の条件の修正候補の計算指令を条件設定部100に入力する(即ち、MPU86は、撮像条件の「最適化指令部」として機能する)。条件設定部100は、合計電気的負荷Ltが最大電気的負荷Lmaxに近づく方向に撮像条件の修正候補を複数算出する。
【0134】
具体的には、条件設定部100は、最大電気的負荷Lmaxを100%とした場合に、合計電気的負荷Ltと最大電気的負荷Lmaxとのマージン(差)が何%であるかに応じて、撮像条件の修正候補を複数算出する。
【0135】
条件設定部100は、このマージンに応じて、合計電気的負荷Ltが大きくなるように、且つ、合計電気的負荷Ltが最大電気的負荷Lmaxの所定割合(例えば85%などの100%以下の値)となるように、撮像条件の修正候補を複数算出する。具体的には、スライス数を増やす、MPGの印加量を増大する、FOVを狭めるなどによって、最大電気的負荷Lmaxの範囲内で合計電気的負荷Ltは大きくなる。
【0136】
即ち、ユーザは、最大電気的負荷Lmaxを確実に下回るようにステップS1で撮像条件を設定した可能性があるが、例えばスライス数を少なくしすぎたなどによって、最大電気的負荷Lmaxに対して余裕がある場合が生じる。そのような場合でも、ステップS7、S8、S9の処理を通すことによって、最大電気的負荷Lmaxの範囲内で撮像条件が最適化される。
【0137】
条件設定部100は、算出した撮像条件の修正候補を表示制御部98に入力することで、撮像条件の複数の修正候補を表示装置64上に表示させる(図16参照)。
撮像条件の修正候補の表示開始時刻から所定時間経過してもユーザによる選択や撮像条件の再設定の入力がない場合、条件設定部100は、撮像条件を再設定しない。
【0138】
なお、所定時間経過してもユーザによる選択や撮像条件の再設定の入力がない場合、条件設定部100が複数の修正候補のいずれかを自動選択してもよい。
ここでの自動選択の優先順位は、例えば、スライス枚数を増やす修正候補を最優先とするものであり、ステップS1において予め設定しておけばよい。
この後、ステップS9に進む。
【0139】
[ステップS9]MPU86は、ステップS8で算出した修正候補の範囲を超える条件でユーザにより撮像条件が再設定されたか否かを判定する。修正候補の範囲を超える条件で撮像条件が再設定された場合、ステップS3に戻り、それ以外の場合、ステップS10に進む。
【0140】
具体的には例えば、ステップS8で撮像条件の修正候補の1つとしてスライス数150枚が表示されていたとする。スライス数150枚以下の範囲でスライス数が再設定されただけの場合、修正候補の範囲を超えないと判定される。また、ステップS8で表示される撮像条件の修正候補のいずれかが選択された場合や、撮像条件が再設定されない場合も、修正候補の範囲を超えないと判定される。
【0141】
一方、修正候補を超える枚数であるスライス数151枚以上でスライス数が再設定された場合、或いは、修正候補として表示したFOVよりも狭い範囲のFOVが設定された場合、電気的負荷が最大電気的負荷Lmaxを超える可能性があるので、修正候補の範囲を超えると判定される。
【0142】
[ステップS10]設定された撮像シーケンスに従ってデータ収集が行われる。具体的には、寝台32に被検体Pがセットされ、静磁場電源40により励磁された静磁場用磁石22によって撮像空間に静磁場が形成される。また、シムコイル電源42からシムコイル24に電流が供給されて、撮像空間に形成された静磁場が均一化される。
【0143】
そして、入力装置62からMPU86に撮像開始指示が入力されると、MPU86は、条件設定部100によって設定された撮像シーケンスをシーケンスコントローラ56に入力する。シーケンスコントローラ56は、入力された撮像シーケンスに従って傾斜磁場電源44、RF送信器46およびRF受信器48を駆動させることで、撮像領域に傾斜磁場を形成させると共に、RFコイル28からRF信号を発生させる。
【0144】
このため、被検体Pの内部の核磁気共鳴により生じたMR信号がRFコイル28により受信されて、RF受信器48により検出される。RF受信器48は、検出したMR信号に所定の信号処理を施した後、これをA/D変換することで、デジタル化したMR信号である生データを生成する。RF受信器48は、生成した生データをシーケンスコントローラ56に入力する。シーケンスコントローラ56は、生データを画像再構成部90に入力し、画像再構成部90は、k空間データベース92に形成されたk空間において、生データをk空間データとして配置する。
【0145】
画像再構成部90は、k空間データベース92からk空間データを取り込み、これに2次元フーリエ変換を含む画像再構成処理を施すことで画像データを再構成し、得られた画像データを画像データベース94に保存する。
【0146】
画像処理部96は、画像データベース94から画像データを取り込み、これに所定の画像処理を施すことで2次元の表示用画像データを生成し、この表示用画像データを記憶装置66に保存する。
【0147】
なお、撮像シーケンスが実行不能と判定された場合のステップS6において、条件設定部100が撮像条件の修正候補を計算する例を述べたが、修正候補の計算は必須ではない。修正候補を計算せず、図13のように警告通知を表示装置64に表示させ、ユーザによる手動での撮像条件の再設定を促す構成としてもよい。以上が第1の実施形態のMRI装置20の動作説明である。
【0148】
このように第1の実施形態では、傾斜磁場コイル26のインピーダンスの周波数特性に応じて傾斜磁場波形を複数の周波数帯に分離し、周波数帯毎に電気的負荷を算出して合算することで1チャネルの電気的負荷を算出する。これをX、Y、Zの各チャネルに対して行って、3チャネルの電気的負荷を合算するので、傾斜磁場発生システムへの合計電気的負荷Ltを正確に算出できる。
【0149】
傾斜磁場発生システムへの合計電気的負荷Ltを正確に算出できるので、許容できる最大電気的負荷Lmaxに対してどれだけの余裕があるか否かを正確に判定できる。合計電気的負荷Ltが最大電気的負荷Lmaxに対して十分な余裕がある場合、合計電気的負荷Ltが最大電気的負荷Lmaxに近づくような撮像条件の修正候補を複数表示する。従って、ユーザは、修正候補のいずれかを選択するだけで、撮像条件を最適化しうる。
【0150】
反対に、合計電気的負荷Ltが最大電気的負荷Lmaxを超えた場合、合計電気的負荷Ltが最大電気的負荷Lmaxの範囲内となるように撮像条件を再設定するので、MRI装置20を安全に運用できる。この撮像条件の再設定に際して、撮像条件の修正候補を複数表示するので、ユーザは、それらのいずれかを選択するだけでよい。この結果、ユーザの利便性は向上する。
【0151】
即ち、合計電気的負荷Ltを正確に算出した上で、合計電気的負荷Ltが最大電気的負荷Lmax以下となるように撮像条件を設定するので、傾斜磁場発生システムの電力的な使用限界の範囲内で撮像条件を最適化することが可能である。
【0152】
以上の最適化の制御は、予め記憶させた負荷係数や傾斜磁場コイル26のインピーダンスの周波数特性などを用いた演算により行われ、ハードウェア的には、従来構成に追加される要素はない。即ち、製品のコストを増大させることなく、撮像条件を最適化することが可能である。
【0153】
また、仮に例えば修理等によって傾斜磁場コイル26が交換になったとしても、負荷取得部104に記憶される負荷係数や傾斜磁場コイル26のインピーダンスの周波数特性などの情報を更新すればよいだけである。即ち、傾斜磁場発生システムの改修を行うに際して、メンテナンスが容易である。
【0154】
以上説明した実施形態によれば、MRIの傾斜磁場発生システムにかかる電気的負荷を撮像シーケンスに応じて正確に予測できる。
【0155】
なお、従来は傾斜磁場コイルのインピーダンスが周波数により変化することが考慮されてなかったので、傾斜磁場発生システムへの電気的負荷を正確に算出できなかった。このため、傾斜磁場発生システムの電力的な使用限界と、実際に設定可能なパルスシーケンスの電気的負荷との間に必要以上のマージンが存在していたので、本実施形態と同程度に撮像条件を最適化することはできなかった。
【0156】
(第2の実施形態)
第2の実施形態は、第1の実施形態の変形例であり、MRI装置20の装置構成としては第1の実施形態と同様である(図1、図2参照)。第1の実施形態との違いは、電気的負荷の算出方法のみである。
【0157】
具体的には、第1の実施形態の負荷係数は、シミュレーションや実測用によって予め求めたものであり、この負荷係数によって算出される合計電気的負荷Ltは、傾斜磁場発生システムに対する実際の電気的な負荷値を正確に与える。
【0158】
一方、第2の実施形態では、傾斜磁場発生システムに対する実際の電気的な負荷値よりも大きな値として合計電気的負荷Ltが算出されるようにする。これにより、許容できる最大電気的負荷Lmaxと、実際に傾斜磁場発生システムにかかる電気的負荷との間に常に一定割合以上のマージンを保ち、MRI装置20を安全に運用する。
【0159】
第1の具体的方法としては、負荷取得部104は、負荷係数として、第1の実施形態の負荷係数を例えば1.2倍した値を用いる。ここでの1.2倍は、説明を具体化するための一例にすぎず、1より大きければよく、本実施形態を何ら限定するものでない。以下に示す各数値についても同様である。この場合、負荷係数の違いを除いて、合計電気的負荷Ltの算出方法は第1の実施形態と同様である。
【0160】
第2の具体的方法としては、負荷取得部104は、負荷係数として、第1の実施形態の負荷係数と同じ値を用いるが、以下の(3)式で合計電気的負荷Ltを算出する。
【0161】
Lt=(Lx+Ly+Lz)×W ・・・(3)
【0162】
第1の実施形態では、Lt=Lx+Ly+Lzで合計電気的負荷Ltを算出するところ、(3)式の係数Wは、1より大きい値であり、例えば1.2である。この場合、Xチャネル電気的負荷Lx、Yチャネル電気的負荷Ly、Zチャネル電気的負荷Lzの計算方法は、第1の実施形態と同じである。なお、0より大きく、1より小さい値の係数W’を用いた以下の(4)式で合計電気的負荷Ltを算出する方法も、この方法と等価である。
【0163】
Lt=(Lx+Ly+Lz)÷W’ ・・・(4)
【0164】
第3の具体的方法としては、負荷取得部104は、負荷係数として、第1の実施形態の負荷係数と同じ値を用いるが、以下の(5)式で合計電気的負荷Ltを算出する。
【0165】
Lt=Lx+Ly+Lz+Lmargin ・・・(5)
【0166】
(5)式において、加算定数Lmarginは、例えば、最大電気的負荷Lmaxの20%の値である。この場合も、Xチャネル電気的負荷Lx、Yチャネル電気的負荷Ly、Zチャネル電気的負荷Lzの計算方法は、第1の実施形態と同じである。
【0167】
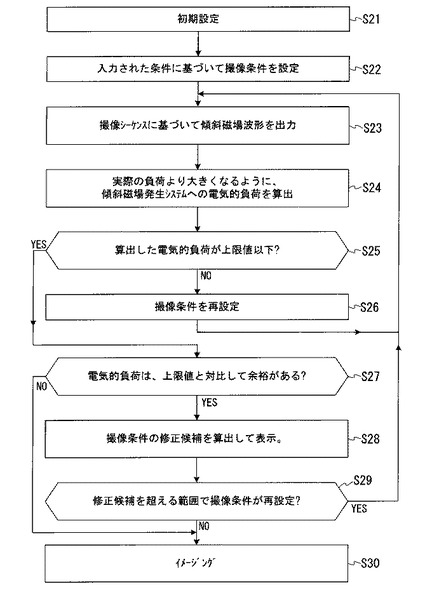
図18は、第2の実施形態におけるMRI装置20の動作の流れを示すフローチャートである。以下、図18に示すステップ番号に従って、MRI装置20の動作を説明する。
【0168】
[ステップS21〜S23]第1の実施形態のステップS1〜S3とそれぞれ同様であるので、重複する説明を省略する。
【0169】
[ステップS24]負荷取得部104は、上記のいずれか1つの方法によって、実際に傾斜磁場発生システムにかかる電気的負荷よりも大きな値となるように、合計電気的負荷Ltを算出する。この後、ステップS25に進む。
【0170】
[ステップS25〜S30]第1の実施形態のステップS5〜S10とそれぞれ同様であるので、重複する説明を省略する。以上が第2の実施形態の動作説明である。
【0171】
このように第2の実施形態においても、第1の実施形態と同様の効果が得られる。さらに、第2の実施形態では、実際の値よりも大きく算出された合計電気的負荷Ltと、傾斜磁場発生システムが許容できる最大電気的負荷Lmaxとを対比する(ステップS25)。
従って、どのような撮像条件を設定しても、実際の負荷値よりも大きく算出される合計電気的負荷Ltが最大電気的負荷Lmax以下となるように、必要に応じて撮像条件が再設定される(ステップS26)。
このため、傾斜磁場発生システムに限界近くの負荷がかかることはなく、許容できる最大電気的負荷Lmaとの間に常に一定の割合以上のマージンが保たれる。従って、MRI装置20を極めて安全に運用できる。
【0172】
(実施形態の補足事項)
[1]上記実施形態では、傾斜磁場波形のグラフの縦軸を二乗することで、合計電気的負荷Ltの算出過程におけるパワーデューティとして電流二乗に相当する値を用いる例を述べた。本発明の実施形態は、かかる態様に限定されるものではない。
【0173】
傾斜磁場電源44内のスイッチング素子のIGBT(絶縁ゲートバイポーラトランジスタ:Insulated Gate Bipolar Transistor)の加熱性に応じて、傾斜磁場波形の縦軸の値の絶対値をパワーデューティとして用いてもよい。この場合のパワーデューティは、電流の絶対値に相当する。IGBTの瞬間的な加熱性は、電流二乗ではなく、電流の大きさに依存する場合もあるからである。
【0174】
[2]Xチャネル、Yチャネル、Zチャネルで周波数分離の分離数を揃える例を述べた。本発明の実施形態は、かかる態様に限定されるものではない。X、Y、Z軸傾斜磁場コイル26x、26y、26zのインピーダンスの各周波数特性などに応じて、Xチャネル、Yチャネル、Zチャネルで周波数分離の分離数を変えて、合計電気的負荷Ltを算出してもよい。
【0175】
[3]第1の実施形態において、撮像条件を最適化するためのステップS7〜S9の処理は必須ではなく、省略してもよい。即ち、ステップS5で判定結果が肯定的な場合、ステップS10に移行してもよい。第2の実施形態についても同様である。
【0176】
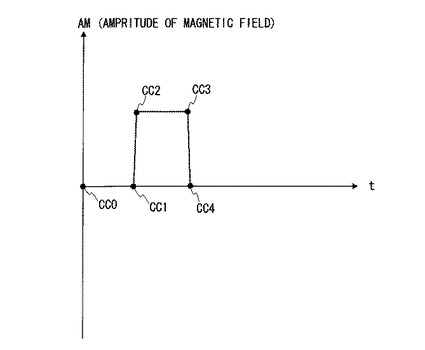
[4]第1及び第2の実施形態では、傾斜磁場の波形そのものを複数の周波数帯に分離して、周波数帯毎に傾斜磁場発生システムに対する電気的負荷を算出して合算する例を述べた。本発明の実施形態は、かかる態様に限定されるものではない。傾斜磁場の波形そのものに限らず、「傾斜磁場波形を規定する座標データ」などの「傾斜磁場の波形に関する情報」を用いてもよい。
【0177】
図19は、傾斜磁場波形を再現する座標データの一例を示す模式図である。図19において、横軸は撮像シーケンスの開始時刻(t=0秒)からの経過時間tを示し、縦軸は傾斜磁場強度AMを示す。
【0178】
この例では、撮像シーケンスの開始時刻からの5つの座標でMPGパルスの波形が規定される。即ち、座標CC0は、例えば経過時間t=0、傾斜磁場強度AM=0を示す。座標CC1は、例えばt=0.01、AM=0を示し、座標CC2は、例えばt=0.0101、AM=1を示し、座標CC3は、例えばt=0.02、AM=1を示し、座標CC4は、例えばt=0.0201、AM=0を示す。
【0179】
このように、多数の座標値に基づいて、X軸方向の傾斜磁場Gx、Y軸方向の傾斜磁場Gy、Z軸方向の傾斜磁場Gzの各傾斜磁場波形を規定できる。この場合、負荷取得部104は、傾斜磁場波形を規定する座標データを波形出力部102から取得し、この座標データに基づいて、上記実施形態と同様に分離された各周波数帯毎に傾斜磁場発生システムに対する電気的負荷を算出できる。
【0180】
[5]第1及び第2の実施形態では、撮像条件の暫定的な設定後、撮像条件により規定される撮像シーケンスの実行前に、傾斜磁場発生システムに対する合計電気的負荷Ltが算出される例を述べた。本発明の実施形態は、かかる態様に限定されるものではなく、以下の変形例も含まれる。
【0181】
パルスシーケンスの種類や、各条件のパラメータ値などの撮像条件の代表的なパターンを予め多数作成し、(例えばMRI装置20の出荷前に)予め記憶させてもよい。即ち、各々のパターンは、1つの撮像シーケンスを規定する条件のセットである。この場合、各パターンの撮像シーケンスに対してそれぞれ予め算出された合計電気的負荷Ltを負荷取得部104に記憶させる。
具体的には例えば、負荷取得部104は、各パターンの撮像条件と、その撮像条件で規定される撮像シーケンスを実行した場合の合計電気的負荷Ltとを、テーブルデータで記憶する。
【0182】
このテーブルデータは、「傾斜磁場コイル26のインピーダンスの周波数特性に応じた傾斜磁場発生システムに対する電気的負荷と、撮像条件との関係」を規定する情報とも言える。予め記憶される合計電気的負荷Ltの算出方法は、第1の実施形態における合計電気的負荷Ltの算出方法と同様である。
【0183】
この場合のMRI装置20の動作は、図17のステップS3、S4(又は図18のステップS23、24)の代わりに、以下の処理を実行することを除いて、第1及び第2の実施形態と同様である。
即ち、負荷取得部104は、現在設定されている撮像条件と、最も近いパターンの撮像条件を記憶データの中から選択する。負荷取得部104は、選択したパターンに対して記憶された合計電気的負荷Ltを取得する。
【0184】
この場合、撮像条件を設定すれば、演算処理を実行せずに、記憶データから読み出すだけで、傾斜磁場発生システムに対する合計電気的負荷Ltを取得できる。従って、コンピュータの計算時間を省略できるので、撮像条件の設定に要する時間を短縮できる。
【0185】
なお、(A)撮像条件の多様なパターンに対してそれぞれ電気的負荷を予め記憶しておく実施形態、(B)撮像条件の設定の都度、電気的負荷を算出する第1及び第2の実施形態、のいずれも、以下の概念に基づく。
【0186】
具体的には、(1)撮像条件の暫定的な設定(又は再設定)、(2)設定された撮像条件により規定される撮像シーケンスを実行した場合の電気的負荷の取得、(3)設定された撮像シーケンスの実行可否の判定、の3ステップが繰り返される。
これら3ステップは、上記(3)で実行可能と判定され、撮像条件が最終確定するまで順次繰り返される。
換言すれば、撮像条件の最終確定まで、撮像条件及び撮像シーケンスを実行した場合の電気的負荷が逐次的に取得され、更新される。
【0187】
[6]MRI装置20として、静磁場用磁石22、シムコイル24、傾斜磁場コイル26などが含まれるガントリの外にRF受信器48が存在する例を述べた(図1参照)。本発明の実施形態は、かかる態様に限定されるものではない。RF受信器48がガントリ内に含まれる態様でもよい。
【0188】
具体的には例えば、RF受信器48に相当する電子回路基盤をガントリ内に配設する。そして、受信用RFコイルによって電磁波からアナログの電気信号に変換されたMR信号を、当該電子回路基盤内のプリアンプによって増幅し、デジタル信号としてガントリ外に出力し、シーケンスコントローラ56に入力してもよい。ガントリ外への出力に際しては、例えば光通信ケーブルを用いて光デジタル信号として送信すれば、外部ノイズの影響が軽減されるので、望ましい。
【0189】
[7]本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0190】
20 MRI装置
22 静磁場用磁石
24 シムコイル
26 傾斜磁場コイル
26x X軸傾斜磁場コイル
26y Y軸傾斜磁場コイル
26z Z軸傾斜磁場コイル
28 RFコイル
30 制御系
32 寝台
40 静磁場電源
42 シムコイル電源
44 傾斜磁場電源
44x X軸傾斜磁場電源
44y Y軸傾斜磁場電源
44z Z軸傾斜磁場電源
45x、45y、45z EMCフィルタ
46 RF送信器
48 RF受信器
56 シーケンスコントローラ
58 コンピュータ
60 演算装置
62 入力装置
64 表示装置
66 記憶装置
86 MPU
88 システムバス
90 画像再構成部
92 k空間データベース
94 画像データベース
96 画像処理部
98 表示制御部
100 条件設定部
102 波形出力部
104 負荷取得部
180 位置決め画像
182 FOV
184、190、192、194、196 ボックス
184a、190a、192a、194a、196a ボックス
184b、190b、192b、194b、196b スライダーバー
P 被検体
【技術分野】
【0001】
本発明の実施形態は、磁気共鳴イメージング装置、磁気共鳴イメージング方法、および、傾斜磁場発生システムの負荷算出方法に関する。
【背景技術】
【0002】
MRIは、静磁場中に置かれた被検体の原子核スピンをラーモア周波数のRFパルスで磁気的に励起し、この励起に伴って発生するMR信号から画像を再構成する撮像法である。なお、上記MRIは磁気共鳴イメージング(Magnetic Resonance Imaging)の意味であり、RFパルスは高周波パルス(radio frequency pulse)の意味であり、MR信号は核磁気共鳴信号(nuclear magnetic resonance signal)の意味である。
【0003】
MRI装置の傾斜磁場発生システムは、被検体が置かれる撮像空間内で傾斜磁場を印加することで、MR信号に空間的な位置情報を付加する傾斜磁場コイルを備える。この傾斜磁場コイルは、撮像中にパルス電流が繰り返して供給されることで大きく発熱する。傾斜磁場発生システムは、全チャンネル(X軸方向、Y軸方向、Z軸方向の各傾斜磁場コイル)に同時に最大電流を流し続けることが可能なものではなく、全体の電力上限値、各チャンネル毎の電力上限値等の様々な制約が存在する。
【0004】
しかしながら、従来技術では、傾斜磁場発生システムの電力的な使用限界を撮像シーケンスに応じて正確に予測することは困難であった。このため、従来技術では、例えば傾斜磁場コイルに許された最大温度での抵抗値を用いて傾斜磁場コイルの立ち上がり特性を算出し、この範囲内で撮像条件を決定後、傾斜磁場コイルを駆動している(例えば、特許文献1参照)。
【0005】
上記の場合の立ち上がり特性は最悪の条件の値であるが、実際の使用状況では傾斜磁場コイルの温度が最大温度に達することはあまりない。このように、傾斜磁場システムへの電流供給量がその使用限界値を確実に下回るように、即ち、実際の電流供給量と使用限界値との間に十分なマージンをとるように制御することで、傾斜磁場発生システムを安全に駆動していた。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平8−56917号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記従来技術では、実際には傾斜磁場発生システムの使用限界まで余裕があるにも拘らず、より安全な条件で撮像していた場合もあった。
傾斜磁場発生システムの使用限界までの余裕があった場合、本来、その余裕の分だけスライス枚数を増やす等の手段をとることで、より最適化した条件で撮像できたことになる。
【0008】
従って、より最適化した条件での撮像を行うため、MRIの傾斜磁場発生システムに対する電気的負荷を撮像条件に応じて正確に予測する技術が要望されていた。
【課題を解決するための手段】
【0009】
一実施形態では、MRI装置は、傾斜磁場発生システムに電流を供給することで撮像領域に傾斜磁場を印加し、傾斜磁場を伴った磁気共鳴イメージングを行うものであって、条件設定部と、負荷取得部とを備える。
条件設定部は、磁気共鳴イメージングの撮像条件を設定する。
負荷取得部は、傾斜磁場の波形に関する情報を取得し、磁気共鳴イメージングが実行される場合に傾斜磁場発生システムに課される電気的負荷を、上記波形に関する情報に基づいて複数の周波数帯に対してそれぞれ算出する。
【0010】
なお、別の一実施形態では、負荷取得部は、上記構成に代えて、撮像条件により定まる傾斜磁場の波形の周波数に関する情報に基づいて、磁気共鳴イメージングが実行される場合の傾斜磁場発生システムに対する電気的負荷を取得して出力する構成である。
【0011】
一実施形態では、傾斜磁場発生システムの負荷算出方法は、以下のステップを有する。
1つは、傾斜磁場発生システムにより印加される傾斜磁場を伴った磁気共鳴イメージングの撮像条件を設定するステップである。
1つは、上記撮像条件に基づいて、磁気共鳴イメージングが実行される場合の傾斜磁場発生システムに対する電気的負荷を算出するステップである。
【図面の簡単な説明】
【0012】
【図1】第1の実施形態におけるMRI装置の全体構成を示すブロック図。
【図2】図1に示すコンピュータ58の機能ブロック図。
【図3】傾斜磁場コイルへの供給電流の周波数の増大に伴って、傾斜磁場コイルのインピーダンスが1次関数的に上昇する場合の周波数分離の一例を示す説明図。
【図4】傾斜磁場コイルへの供給電流の周波数が高いほど、単位周波数の増加当たりのインピーダンスの増加量が大きい場合の周波数分離の一例を示す説明図。
【図5】スピンエコー系のシングルショットのEPIのパルスシーケンスにおける、スライス選択方向傾斜磁場および読み出し方向傾斜磁場の波形の一例を示す模式図。
【図6】スピンエコー系のシングルショットのEPIのパルスシーケンスにおける、スライス選択方向傾斜磁場および位相エンコード方向傾斜磁場の波形の一例を示す模式図。
【図7】図5および図6のパルスシーケンスを図3のように周波数分離した場合における、低周波数帯のスライス選択方向傾斜磁場および読み出し方向傾斜磁場の波形を示す模式図。
【図8】図5および図6のパルスシーケンスを図3のように周波数分離した場合における、低周波数帯のスライス選択方向傾斜磁場および位相エンコード方向傾斜磁場の波形を示す模式図。
【図9】図5および図6のパルスシーケンスを図3のように周波数分離した場合における、中周波数帯のスライス選択方向傾斜磁場および読み出し方向傾斜磁場の波形を示す模式図。
【図10】図5および図6のパルスシーケンスを図3のように周波数分離した場合における、中周波数帯のスライス選択方向傾斜磁場および位相エンコード方向傾斜磁場の波形を示す模式図。
【図11】図5および図6のパルスシーケンスを図3のように周波数分離した場合における、高周波数帯のスライス選択方向傾斜磁場および読み出し方向傾斜磁場の波形を示す模式図。
【図12】図5および図6のパルスシーケンスを図3のように周波数分離した場合における、高周波数帯のスライス選択方向傾斜磁場および位相エンコード方向傾斜磁場の波形を示す模式図。
【図13】撮像条件の設定用画面において、警告通知が表示される場合の一例を示す模式図。
【図14】撮像シーケンスが実行不能と判定された場合における、撮像条件の修正候補の表示の一例を示す模式図。
【図15】撮像シーケンスが実行不能と判定された場合における、撮像条件の修正候補の表示の別の一例を示す模式図。
【図16】合計電気的負荷が最大電気的負荷に対してかなりの余裕がある場合における、撮像条件の修正候補の表示例を示す模式図
【図17】第1の実施形態に係るMRI装置の動作の流れを示すフローチャート。
【図18】第2の実施形態に係るMRI装置の動作の流れを示すフローチャート。
【図19】傾斜磁場波形を再現する座標データの一例を示す模式図。
【発明を実施するための形態】
【0013】
以下、MRI装置、MRI方法、および、傾斜磁場発生システムの負荷算出方法の実施形態について、添付図面に基づいて説明する。なお、各図において同一要素には同一符号を付し、重複する説明を省略する。
【0014】
(第1の実施形態)
図1は、第1の本実施形態におけるMRI装置20の全体構成を示すブロック図である。図1に示すように、MRI装置20は、静磁場を形成する筒状の静磁場用磁石22と、静磁場用磁石22の内側において軸を同じにして設けられた筒状のシムコイル24と、傾斜磁場コイル26と、RFコイル28と、制御系30と、被検体Pが乗せられる寝台32とを備える。
【0015】
ここでは一例として、装置座標系の互いに直交するX軸、Y軸、Z軸を以下のように定義する。まず、静磁場用磁石22およびシムコイル24は、それらの軸方向が鉛直方向に直交するように配置されているものとし、静磁場用磁石22およびシムコイル24の軸方向をZ軸方向とする。また、鉛直方向をY軸方向とし、寝台32は、その天板の載置用の面の法線方向がY軸方向となるように配置されているものとする。
【0016】
制御系30は、静磁場電源40と、シムコイル電源42と、傾斜磁場電源44と、EMC(Electro−magnetic Compatibility)フィルタ45x、45y、45zと、RF送信器46と、RF受信器48と、シーケンスコントローラ56と、コンピュータ58とを備える。
【0017】
傾斜磁場電源44は、X軸傾斜磁場電源44xと、Y軸傾斜磁場電源44yと、Z軸傾斜磁場電源44zとで構成されている。また、コンピュータ58は、演算装置60と、入力装置62と、表示装置64と、記憶装置66とで構成されている。
【0018】
静磁場用磁石22は、静磁場電源40に接続され、静磁場電源40から供給された電流により撮像空間に静磁場を形成させる。
【0019】
上記撮像空間とは、例えば、被検体Pが置かれて、静磁場が印加されるガントリ内の空間を意味する。ガントリとは、静磁場磁石22、シムコイル24、傾斜磁場コイル26、RFコイル28を含むように、例えば円筒状に形成された構造体である。なお、図1では煩雑となるので、ガントリ内の静磁場磁石22等の構成要素を図示し、ガントリ自体は図示していない。
【0020】
撮像領域は、例えば、1画像又は1セットの画像の生成に用いるMR信号の収集範囲の少なくとも一部であって、画像となる領域を意味する。撮像領域は、例えば装置座標系により、撮像空間の一部として位置的且つ範囲的に規定される。MR信号の収集範囲の全てが画像となる場合、即ち、MR信号の収集範囲と撮像領域とが完全合致する場合もあるが、両者が完全合致しない場合もある。例えば、折り返しアーチファクトを防止するために、画像となる領域よりも広い範囲でMR信号を収集する場合、撮像領域は、MR信号の収集範囲の一部と言える。
【0021】
上記「1画像」及び「1セットの画像」は、2次元画像の場合もあれば3次元画像の場合もある。「1セットの画像」とは、例えばマルチスライス撮像などのように、1のパルスシーケンス内で複数画像のMR信号が一括的に収集される場合の「複数画像」である。
【0022】
シムコイル24は、シムコイル電源42に接続され、シムコイル電源42から供給される電流により、この静磁場を均一化する。
【0023】
静磁場用磁石22は、超伝導コイルで構成される場合が多く、励磁の際に静磁場電源40に接続されて電流が供給されるが、一旦励磁された後は非接続状態とされるのが一般的である。なお、静磁場電源40を設けずに、静磁場用磁石22を永久磁石で構成してもよい。
【0024】
傾斜磁場コイル26は、X軸傾斜磁場コイル26xと、Y軸傾斜磁場コイル26yと、Z軸傾斜磁場コイル26zとを有し、静磁場用磁石22の内側で筒状に形成されている。X軸傾斜磁場コイル26x、Y軸傾斜磁場コイル26y、Z軸傾斜磁場コイル26zはそれぞれ、X軸傾斜磁場電源44x、Y軸傾斜磁場電源44y、Z軸傾斜磁場電源44zに接続される。
【0025】
X軸傾斜磁場電源44x、Y軸傾斜磁場電源44y、Z軸傾斜磁場電源44zからX軸傾斜磁場コイル26x、Y軸傾斜磁場コイル26y、Z軸傾斜磁場コイル26zにそれぞれ供給される電流により、X軸方向の傾斜磁場Gx、Y軸方向の傾斜磁場Gy、Z軸方向の傾斜磁場Gzが撮像領域にそれぞれ形成される。
【0026】
即ち、装置座標系の3軸方向の傾斜磁場Gx、Gy、Gzを合成して、論理軸としてのスライス選択方向傾斜磁場Gss、位相エンコード方向傾斜磁場Gpe、および、読み出し方向(周波数エンコード方向)傾斜磁場Groの各方向を任意に設定できる。スライス選択方向、位相エンコード方向、および、読み出し方向の各傾斜磁場は、静磁場に重畳される。
【0027】
EMCフィルタ45xは、X軸傾斜磁場電源44xとX軸傾斜磁場コイル26xとを電気的に接続するケーブル(図1の太線部分)間に直列に挿入されており、外部からのノイズを除去する。同様に、EMCフィルタ45xは、Y軸傾斜磁場電源44yとY軸傾斜磁場コイル26yとを接続するケーブル間に直列に挿入され、EMCフィルタ45zは、Z軸傾斜磁場電源44zとY軸傾斜磁場コイル26zとを接続するケーブル間に直列に挿入され、これらも外部からのノイズを除去する。
【0028】
RF送信器46は、シーケンスコントローラ56から入力される制御情報に基づいて、核磁気共鳴を起こすためのラーモア周波数のRFパルス(RF電流パルス)を生成し、これを送信用のRFコイル28に送信する。RFコイル28には、ガントリに内蔵されたRFパルスの送受信用の全身用コイルや、寝台32または被検体Pの近傍に設けられるRFパルスの受信用の局所コイルなどがある。
【0029】
送信用のRFコイル28は、RF送信器46からRFパルスを受けて被検体Pに送信する。受信用のRFコイル28は、被検体Pの内部の原子核スピンがRFパルスによって励起されることで発生したMR信号(高周波信号)を受信し、このMR信号は、RF受信器48により検出される。
【0030】
RF受信器48は、検出したMR信号に前置増幅、中間周波変換、位相検波、低周波増幅、フィルタリングなどの各種の信号処理を施した後、A/D(analog to digital)変換を施すことで、デジタル化された複素データである生データ(raw data)を生成する。RF受信器48は、生成したMR信号の生データをシーケンスコントローラ56に入力する。
【0031】
演算装置60は、MRI装置20全体のシステム制御を行うものであり、これについては後述の図2を用いて説明する。
【0032】
シーケンスコントローラ56は、演算装置60の指令に従って、傾斜磁場電源44、RF送信器46およびRF受信器48を駆動させるために必要な制御情報を記憶する。ここでの制御情報とは、例えば、傾斜磁場電源44に印加すべきパルス電流の強度や印加時間、印加タイミング等の動作制御情報を記述したシーケンス情報である。
【0033】
シーケンスコントローラ56は、記憶した所定のシーケンスに従って傾斜磁場電源44、RF送信器46およびRF受信器48を駆動させることにより、X軸傾斜磁場Gx、Y軸傾斜磁場Gy、Z軸傾斜磁場GzおよびRFパルスを発生させる。また、シーケンスコントローラ56は、RF受信器48から入力されるMR信号の生データ(raw data)を受けて、これを演算装置60に入力する。
【0034】
図2は、図1に示すコンピュータ58の機能ブロック図である。図2に示すように、コンピュータ58の演算装置60は、MPU(Micro Processor Unit)86と、システムバス88と、画像再構成部90と、画像データベース94と、画像処理部96と、表示制御部98と、条件設定部100と、波形出力部102と、負荷取得部104とを備える。
【0035】
MPU86は、本スキャンの撮像条件の設定、撮像動作および撮像後の画像表示において、システムバス88等の配線を介してMRI装置20全体のシステム制御を行う。そのために、MPU86は、表示制御部98を制御して、撮像条件の設定用画面を表示装置64に表示させる。
【0036】
上記「撮像条件」とは、例えば、どの種類の撮像シーケンス(パルスシーケンス)により、どのような条件でRFパルス等を送信して、どのような条件で被検体からMR信号を収集するか、の意味である。撮像条件の例としては、撮像領域、傾斜磁場の印加方法、スライス数、撮像部位、パラレルイメージングなどの撮像シーケンスの種類、などが挙げられる。
上記撮像部位とは、例えば、頭部、胸部、腹部などの被検体Pのどの部分を撮像領域として画像化するか、の意味である。
【0037】
上記「本スキャン」は、T1強調画像などの、目的とする診断画像の撮像のためのスキャンであって、位置決め画像用のMR信号収集のスキャンや、較正スキャンを含まないものとする。スキャンとは、MR信号の収集動作を指し、画像再構成を含まないものとする。
【0038】
較正スキャンとは例えば、本スキャンの撮像条件の内の未確定のものや、本スキャン後の画像再構成時に用いる条件やデータなどを決定するために、本スキャンとは別に行われるスキャンを指す。ここでは一例として、較正スキャンの内、本スキャン前に行われるものをプレスキャンと称する。較正スキャンとしては、例えば、本スキャンでのRFパルスの中心周波数を計算するシーケンスが挙げられる。
【0039】
また、MPU86は、条件設定部100が設定した撮像シーケンスをシーケンスコントローラ56に入力する。
入力装置62は、撮像条件や画像処理条件を設定する機能をユーザに提供する。
【0040】
画像再構成部90は、内部にk空間データベース92を有する。画像再構成部90は、k空間データベース92に形成されたk空間において、シーケンスコントローラ56から入力されるMR信号の生データをk空間データとして配置する。画像再構成部90は、k空間データに2次元フーリエ変換などを含む画像再構成処理を施して、被検体Pの各スライスの画像データを生成する。画像再構成部90は、生成した画像データを画像データベース94に保存する。
【0041】
画像処理部96は、画像データベース94から画像データを取り込み、これに所定の画像処理を施し、画像処理後の画像データを表示用画像データとして記憶装置66に記憶させる。
【0042】
記憶装置66は、上記の表示用画像データに対し、その表示用画像データの生成に用いた撮像条件や被検体Pの情報(患者情報)等を付帯情報として付属させて記憶する。
【0043】
表示制御部98は、MPU86の制御に従って、撮像条件の設定用画面や、撮像により生成された画像データが示す画像を表示装置64に表示させる。
【0044】
条件設定部100は、入力装置62に対して入力された撮像条件の一部の条件(入力情報)に基づいて、撮像条件を設定する。撮像条件により、撮像シーケンスが規定される。また、条件設定部100は、撮像条件の再設定指令を受けた場合、所定の条件を満たすように撮像条件を再設定する(詳細は後述のステップS6参照)。
【0045】
波形出力部102は、条件設定部100により設定された撮像条件(に従って規定される撮像シーケンス)に基づいて、傾斜磁場の波形を計算して出力する。
【0046】
負荷取得部104は、波形出力部102により算出された傾斜磁場の波形を複数の周波数帯に分離して、複数の周波数帯に対してそれぞれ「傾斜磁場発生システム」に対する電気的負荷を算出する。上記「傾斜磁場発生システム」は、例えば、図1の傾斜磁場電源44と、傾斜磁場コイル26と、これらを互いに電気的に接続するケーブル(図1の太線部分)と、これらケーブル間に挿入されたEMCフィルタ45x、45y、45zとに対応する。
【0047】
負荷取得部104は、設定された撮像シーケンスの実行可否を電気的負荷に基づいて判定し、実行不能な場合には撮像条件の再設定指令を条件設定部100に入力する。
【0048】
ここで、傾斜磁場コイル26への供給電流の周波数に依存して、傾斜磁場コイル26のインピーダンスが変化することに本発明者は着眼した。例えば、周波数増大に伴ってインピーダンスが上昇する場合がある。
そこで本発明者は、周波数分離を行うことで各周波数帯毎に電気的負荷を算出後、これらを合算することで傾斜磁場発生システムへの電気的負荷を正確に算出するという極めて画期的な方法を捻出した。以下、順を追ってその方法を具体的に説明する。
【0049】
図3および図4はそれぞれ、傾斜磁場の波形を複数の周波数帯に分離する方法の一例を示す説明図であり、傾斜磁場コイル26への供給電流の周波数の増大に伴ってそのインピーダンスが上昇する場合である。
【0050】
図3は、傾斜磁場コイル26への供給電流の周波数の増大に伴って、傾斜磁場コイル26のインピーダンスが1次関数的に上昇する場合の周波数分離を示す。ここでは一例として、傾斜磁場コイル26に供給される電流の最大周波数Fmaxに基づいて、最大周波数Fmaxを3等分することで、低周波数帯、中周波数帯、高周波数帯の3つに分離する。図3において、低周波数帯は0ヘルツから(Fmax/3)ヘルツの範囲であり、中周波数帯は(Fmax/3)ヘルツから(2×Fmax/3)ヘルツの範囲であり、高周波数帯は(2×Fmax/3)ヘルツらFmaxヘルツの範囲である。
【0051】
なお、分離数が多いほど、傾斜磁場発生システムへの電気的負荷を正確に算出できる反面、その算出処理に時間および記憶容量を要する。このため、分離数は上記のように3に限定されるものではなく複数であればよいが、MRI装置20全体の動作の一環として許容される時間および記憶容量に収まる程度に分離数を決定することが望ましい。
【0052】
図4は、周波数が高いほど、単位周波数の増加当たりのインピーダンスの増加量が大きい場合の周波数分離の一例を示す。ここでは一例として、分離されたどの周波数帯においても、その周波数帯での最大インピーダンスと最小インピーダンスとの差分が所定値(図中のα)で等しくなるように分離する。
【0053】
図4の例では、第1周波数帯は0〜F1ヘルツの範囲であり、第2周波数帯はF1〜F2ヘルツの範囲であり、第3周波数帯はF2〜F3ヘルツの範囲であり、第4周波数帯はF3〜Fmaxヘルツの範囲である。
【0054】
このように負荷取得部104は、傾斜磁場コイル26のインピーダンスの周波数特性に応じて、傾斜磁場の波形を複数の周波数帯に分離する。また、X軸傾斜磁場コイル26x、Y軸傾斜磁場コイル26y、Z軸傾斜磁場コイル26zはそれぞれ、コイルの巻き方などが違うので、それらのインピーダンスの周波数特性は合致しない。そこで、負荷取得部104は、X、Y、Z軸傾斜磁場コイル26x、26y、26zでそれぞれ、分離数は同じにしつつ、各周波数帯の周波数帯域をインピーダンスの周波数特性に応じて変える。
【0055】
具体的には例えば、X軸傾斜磁場コイル26xは、低周波数帯が0〜200ヘルツ、中周波数帯が200〜600ヘルツ、高周波数帯が600〜Fmaxヘルツとし、Y軸傾斜磁場コイル26yは、低周波数帯が0〜250ヘルツ、中周波数帯が250〜700ヘルツ、高周波数帯が700〜Fmaxヘルツというように変える。
【0056】
ここでは傾斜磁場発生システムへの電気的負荷の算出方法として、スピンエコー系のシングルショットのEPIのパルスシーケンスにMPGパルスを適用した拡散強調イメージングを例に説明する。なお、上記EPIはエコープラナーイメージング(echo planar imaging)の意味であり、上記MPGパルスは拡散傾斜磁場(Motion Probing Gradient)の意味である。
【0057】
図5および図6は、上記のスピンエコー系のシングルショットのEPIのパルスシーケンスにおける傾斜磁場波形の一例を示す模式図である。3方向を同時に表示すると煩雑となるので、図5ではスライス選択方向傾斜磁場Gssおよび読み出し方向傾斜磁場Groの波形を示し、図6ではスライス選択方向傾斜磁場Gssおよび位相エンコード方向傾斜磁場Gpeの波形を示す。
【0058】
図5および図6において、横軸は経過時間を示し、縦軸は傾斜磁場の振幅を示す。また、図5および図6において、スライス選択方向傾斜磁場Gssは共通に破線で示し、読み出し方向傾斜磁場Gro(図5のみ)は実線で示し、位相エンコード方向傾斜磁場Gpe(図6のみ)は実線で示す。以上の表記は、後述の図7〜図12についても同様である。
【0059】
なお、ここでは説明の簡単化のため、装置座標系の3軸がそれぞれ、スライス選択方向、位相エンコード方向、読み出し方向のいずれかに合致するものとする。即ち、X、Y、Z軸傾斜磁場コイル26x、26y、26zはそれぞれ、スライス選択方向傾斜磁場Gss、位相エンコード方向傾斜磁場Gpe、読み出し方向傾斜磁場Groのいずれかを形成する。従って、縦軸は、X軸傾斜磁場Gx、Y軸傾斜磁場Gy、Z軸傾斜磁場Gzのいずれか1つの強度に該当する。即ち、X軸傾斜磁場コイル26x、Y軸傾斜磁場コイル26y、Z軸傾斜磁場コイル26zのいずれかへの供給電流値におよそ相当する。
【0060】
但し、本実施形態は上記態様に限定されるものではない。装置座標系のX−Y平面、Y−Z平面、X−Z平面に対して斜めのスライスを撮像する場合も適用可能である。即ち、上記のようにスライス選択方向傾斜磁場Gss、位相エンコード方向傾斜磁場Gpe、読み出し方向傾斜磁場Groが規定されるパルスシーケンスに基づいて、X、Y、Z軸傾斜磁場Gx、Gy、Gzを計算すればよい。これにより、X、Y、Z軸傾斜磁場コイル26x、26y、26zへの各供給電流値を算出できるので、同様に傾斜磁場発生システムへの電気的負荷を算出できる。
【0061】
以下、図5および図6のパルスシーケンスを簡単に説明する。まず、スライス選択方向にスライス選択傾斜磁場Gssを印加しながら、RFコイル28から撮像領域に90°RFパルスを送信することで、所望のスライス領域を励起する。次に、読み出し方向に第1のMPGパルスを印加する。
【0062】
次に、励起領域の磁化を反転してエコー信号を形成させるため、スライス選択方向に傾斜磁場を印加し、RFコイル28から撮像領域に再収束用の180°RFパルスを送信する。次に、読み出し方向に第2のMPGパルスを印加する。この後、読み出し方向において極性を反転させながら傾斜磁場を印加すると共に、位相エンコード方向にも所定の間隔で傾斜磁場パルスを印加し、画像再構成用のMR信号(エコー信号)を取得する。
【0063】
図7〜図12は、図5および図6のパルスシーケンスを図3のように周波数分離した場合における、各周波数帯の傾斜磁場波形の一例を示す模式図である。図7および図8は前記低周波数帯の傾斜磁場波形を示し、図9および図10は前記中周波数帯の傾斜磁場波形を示し、図11および図12は前記高周波数帯の傾斜磁場波形を示す。
【0064】
また、3方向の傾斜磁場波形を同時表示すると煩雑となるため、図7、図9、図11ではスライス選択方向傾斜磁場Gssおよび読み出し方向傾斜磁場Groの波形を示し、図8、10、12ではスライス選択方向傾斜磁場Gssおよび位相エンコード方向傾斜磁場Gpeの波形を示す。
【0065】
図5および図6のパルスシーケンスの傾斜磁場波形を、図7〜図12に示すように各周波数帯毎の傾斜磁場波形に分離するには、例えば、もとの傾斜磁場波形に対して、所望の周波数帯域のみを選択的に通過させるデジタルフィルタを適用すればよい。
【0066】
このように所望の周波数帯域のみを選択的に通過させるフィルタの作成手法としては、例えば、以下の方法が挙げられる。即ち、チェビシェフフィルタ、バターワースフィルタなどのIIRフィルタ(無限インパルス応答フィルタ: Infinite Impulse Response Filter)や、FIRフィルタ(有限インパルス応答フィルタ:Finite Impulse Response Filter)などのフィルタから適切なフィルタを用い、タップ数(フィルタ係数の個数)などの条件の適切に変更すればよい。負荷取得部104は、周波数分離用に上記の各種フィルタを有する。
【0067】
ここで、周波数帯毎に分離した傾斜磁場波形の縦軸は、前述のように傾斜磁場コイルへの供給電流値の振幅に相当し、符号が正の場合も負の場合もあるので、符号を揃えて強度として電気的負荷を算出すれば、計算が容易になる。
【0068】
そこで本実施形態では、周波数帯毎に分離した傾斜磁場波形(図7〜図12)について、横軸(時間)はそのままに、縦軸の値のみを二乗する変換を行う。このような変換後において、縦軸の値は、電流の二乗(電力÷抵抗値)に相当し、符号がマイナスだった部分は反転して全て正の値となるから、その縦軸の値に対して抵抗値に相当する値を乗じることで、電力に相当する電気的負荷を算出できる。
【0069】
より詳細には、電流の二乗に相当する変換後の縦軸の値に対して、撮像シーケンスの開始時刻から終了時刻までの時間積分値を計算する。この時間積分値を、フル出力(開始時刻から終了時刻まで、最大電流を流し続けた場合)の時間積分値で割ることで規格化し、割った値を以下、パワーデューティという。
【0070】
パワーデューティは0以上、1以下になる。パワーデューティに対して、インピーダンスに相当する負荷係数を乗じることで、1つの周波数帯における1つのチャネル(X軸、Y軸、Z軸のいずれか)の電気的負荷を算出できる。上記負荷係数は、X軸、Y軸、Z軸の各チャネル毎に異なり、周波数帯によっても異なるが、負荷係数の決め方については後述する。
【0071】
そして、分離した全周波数帯においてそれぞれ、Xチャネルの電気的負荷を上記のように算出して合算すれば、Xチャネルの全体の電気的負荷(以下、Xチャネル電気的負荷Lx)を算出できる。同様の計算をYチャネル、Zチャネルについても適用し、Yチャネル電気的負荷Ly、Zチャネル電気的負荷Lzを算出する。X、Y、Zチャネル電気的負荷Lx、Ly、Lzを合算すれば、傾斜磁場発生システムへの合計電気的負荷Ltを算出できる。合計電気的負荷Ltは、図3のように3つの周波数帯に分離する場合、例えば以下の(1)式で算出できる。
【0072】
Lt= Lx+Ly+Lz
= (PLx×RLx+PMx×RMx+PHx×RHx)
+(PLy×RLy+PMy×RMy+PHy×RHy)
+(PLz×RLz+PMz×RMz+PHz×RHz) ・・・(1)
【0073】
3項からなる(1)式において、1項目はXチャネル電気的負荷Lxであり、2項目はYチャネル電気的負荷Lyであり、3項目はZチャネル電気的負荷Lzである。
【0074】
(1)式の1項目において、PLxは低周波数帯、PMxは中周波数帯、PHxは高周波数帯にそれぞれ対応し、これらはXチャネルのパワーデューティである。
また、RLxは低周波数帯、RMxは中周波数帯、RHxは高周波数帯にそれぞれ対応し、これらはXチャネルの負荷係数である。
【0075】
(1)式の2項目において、PLyは低周波数帯、PMyは中周波数帯、PHyは高周波数帯にそれぞれ対応し、これらはYチャネルのパワーデューティである。
また、RLyは低周波数帯、RMyは中周波数帯、RHyは高周波数帯にそれぞれ対応し、これらはYチャネルの負荷係数である。
【0076】
(1)式の3項目において、PLzは低周波数帯、PMzは中周波数帯、PHzは高周波数帯にそれぞれ対応し、これらはZチャネルのパワーデューティである。
また、RLzは低周波数帯、RMzは中周波数帯、RHzは高周波数帯にそれぞれ対応し、これらはZチャネルの負荷係数である。
【0077】
パワーデューティは規格化しているので無名数であるため、負荷係数も無名数でよい。その場合、合計電気的負荷Ltも無名数になる。また、低周波数帯の周波数域は、前述のようにX、Y、Zのチャネル毎に異なる。中周波数帯、高周波数帯についても同様である。但し、本実施形態は無名数での計算に限定されるものではない。例えば、パワーデューティを「(アンペアの二乗)×時間」の単位の値に換算後、負荷係数もインピーダンスの単位の値に換算し、ワット×時間の単位として合計電気的負荷Ltを算出してもよい。
【0078】
ここで、負荷係数は例えば、X、Y、Z軸傾斜磁場コイル26x、26y、26zのインピーダンスの周波数特性を測定後、傾斜磁場電源44の仕様などに基づいてシミュレーションにより算出できる。シミュレーションでは、実際のパルスシーケンスの傾斜磁場波形を出力後、これをフィルタによってチャネル毎に周波数分離し、電気的負荷を算出する。この電気的負荷の算出時において、X、Y、Z軸傾斜磁場コイル26x、26y、26zの各インピーダンスの周波数特性に合致するように負荷係数を決定すればよい。
【0079】
また、実際にパルスシーケンスを実行しながら傾斜磁場電源44の+側および−側入力端子の間の電圧差や、傾斜磁場コイル26に流れる電流の時間変化を測定することで、測定値に基づいて電気的負荷を算出し、シミュレーションで算出した負荷係数と合致するか否かを照合することが望ましい。若干のずれがある場合には、実測値に基づいて負荷係数を修正すればよい。
【0080】
ここで、負荷係数を確認する実験において、MRI装置20の全てを接続する以上、電気的負荷は、傾斜磁場電源44、傾斜磁場コイル26、これらを結ぶケーブル、EMCフィルタ45x、45y、45zなどの傾斜磁場発生システム全体への負荷値として算出される。従って、負荷係数の値も、傾斜磁場発生システム全体が反映されたものとなる。
【0081】
そして、1つの周波数分離の方法に対応して各チャネル、各周波数帯毎に算出した1セットの負荷係数(以下、「負荷係数群」という)を予めテーブルデータとして負荷取得部104内に記録しておく。同様のシミュレーションを、周波数分離の仕方を変えて行い、再度、上記の負荷係数群を算出し、負荷取得部104内に記録しておく。同様にして、周波数分離の仕方を多様に変えて、それぞれについて負荷係数群を負荷取得部104内に記録しておく。
【0082】
このように多様の周波数分離の仕方にそれぞれ対応した負荷係数群と、X、Y、Z軸傾斜磁場コイル26x、26y、26zのインピーダンスの周波数特性とを負荷取得部104内に予め記録しておく。これにより、設定されたパルスシーケンスに応じて周波数分離の仕方を変更しても、電気的負荷を算出することができる。
【0083】
なお、傾斜磁場発生システムは、全チャネル(X軸方向、Y軸方向、Z軸方向の各傾斜磁場コイル)に同時に最大電流を流し続けることが可能なものではなく、全体の電力の上限値、各チャンネル毎の電力上限値等の様々な制約が存在する。このため、負荷取得部104は、傾斜磁場発生システムによって許容できる最大電気的負荷Lmaxを記憶している。最大電気的負荷Lmaxは、X、Y、Z軸傾斜磁場コイル26x、26y、26zや傾斜磁場電源44などの各部の仕様に基づいてシミュレーションにより算出できる。
【0084】
同様に、合計電気的負荷Ltは、図4のように4つの周波数帯に分離する場合、例えば以下の(2)式で算出できる。
【0085】
Lt= Lx+Ly+Lz
= (P1x×R1x+P2x×R2x+P3x×R3x+P4x×R4x)
+(P1y×R1y+P2y×R2y+P3y×R3y+P4y×R4y)
+(P1z×R1z+P2z×R2z+P3z×R3z+P4z×R4z)
・・・(2)
【0086】
(2)式において、1項目はXチャネル電気的負荷Lxであり、2項目はYチャネル電気的負荷Lyであり、3項目はZチャネル電気的負荷Lzである。
【0087】
(2)式の1項目において、P1xは第1周波数帯、P2xは第2周波数帯、P3xは第3周波数帯、P4xは第4周波数帯にそれぞれ対応し、これらはXチャネルのパワーデューティである。また、R1xは第1周波数帯、R2xは第2周波数帯、R3xは第3周波数帯、R4xは第4周波数帯にそれぞれ対応し、これらはXチャネルの負荷係数である。(2)式の2項目、3項目についても同様である。
【0088】
負荷取得部104は、傾斜磁場発生システムによって許容できる最大電気的負荷Lmaxよりも、合計電気的負荷Ltが大きいか否かを判定する。大きい場合、負荷取得部104は、現在設定されている撮像シーケンスを実行不能と判定する。以下、撮像シーケンスが実行不能と判定された場合の処理について、図13、図14、図15の3つの例を挙げて説明する。
【0089】
図13は、撮像シーケンスの条件の設定用画面において、警告通知が表示される場合の一例を示す模式図である。図13の例では、位置決め画像180内にFOV(撮像視野:Field Of View)の太枠182が表示され、位置決め画像180の右側には、撮像条件の設定用のボックス184、190、192、194、196が表示されている。
【0090】
ボックス184の表示は、FOVが現在125mm×125mmに設定されていることを示す。ボックス190の表示は、スライス数が現在100枚に設定されていることを示す。ボックス192の表示は、繰り返し時間TR(Time Of Retry)が現在500msに設定されていることを示す。ボックス194の表示は、位相エンコードステップ数が現在256に設定されていることを示す。ボックス196の表示は、周波数エンコードステップ数が現在256に設定されていることを示す。
【0091】
ここでは一例として、負荷取得部104は、表示制御部98を制御することで、「(現在設定されている撮像条件で規定される)撮像シーケンスが実行不能であること」の文字情報的な警告通知を表示装置64の画面の上部に表示させる。ユーザは、入力装置62を介してボックス184、190、192、194、196内の各パラメータ値を変更することで、撮像条件を変更できる。
【0092】
即ち、スライス数を減らす等の条件変更により、ユーザは、電気的負荷が減るように撮像条件を変更(再設定)できる。その場合、更新された撮像条件に基づいて合計電気的負荷Ltが算出され、合計電気的負荷Ltが最大電気的負荷Lmax以下か否かの判定が再実行される。
【0093】
図14は、撮像シーケンスが実行不能と判定された場合における、撮像条件の修正候補の表示の一例を示す模式図である。撮像シーケンスが実行不能と判定された場合、条件設定部100は、合計電気的負荷Ltが最大電気的負荷Lmaxを超えないように、撮像条件の修正候補を複数算出する。
【0094】
具体的には例えば、条件設定部100は、最大電気的負荷Lmaxを100%として、入力された合計電気的負荷Ltが何%オーバーしているかを算出する。条件設定部100は、このオーバー量に応じて、電気的負荷が小さくなるように撮像条件の修正候補を複数算出する。具体的には、スライス数を減らす、繰り返し時間TRを伸ばす、MPGの印加量(b―factor)を減らす、FOVを広げるなどによって、電気的負荷は小さくなる。
【0095】
なお、FOVを広げれば、傾斜磁場の傾斜が緩やかになるため、電気的負荷は小さくなる。これは、位置的情報を付加するためにはFOVの一端側と反対側とで磁場強度の差として所定値以上が必要だからである。
【0096】
条件設定部100は、算出した撮像条件の複数の修正候補を表示制御部98に入力することで、撮像条件の複数の修正候補を表示装置64に表示させる。
【0097】
図14の例では、ボックス184において、FOVを125mm×125mmから250mm×250mmに拡張することが、撮像の条件の一修正候補として表示されている。
また、ボックス190において、スライス数を100枚から50枚に減らすことが、撮像条件の一修正候補として表示されている。
【0098】
また、ボックス192において、繰り返し時間TRを500msから1000msに延長することが、撮像条件の一修正候補として表示されている。
また、ボックス194及び196において、位相エンコードステップ数及び周波数エンコードステップ数をそれぞれ256から128に減らすことが、撮像条件の修正候補として表示されている。
【0099】
ユーザは、入力装置62を介して、表示装置64に表示されている撮像条件の修正候補のいずれか又は複数を選択することで、当該撮像条件を変更(再設定)し、当該撮像シーケンスを実行可能にすることができる。
【0100】
図15は、撮像シーケンスが実行不能と判定された場合における、撮像条件の修正候補の表示の別の一例を示す模式図である。図15は、スライダーバー型の撮像条件の設定画面の模式図である。
【0101】
図15において、スライダーバー184aは、スライダー(黒く塗りつぶした長方形)を、横方向のバー内で移動させることで、FOVを設定するものである。
ボックス184bは、スライダーバー184aの位置に応じて、現在設定されているFOVを数字的に示す。
【0102】
同様に、スライダーバー190aは、スライス数を設定するものであり、ボックス190bは、現在設定されているスライス数を数字的に示す。
また、スライダーバー192aは、繰り返し時間TRを設定するものであり、ボックス192bは、現在設定されている繰り返し時間TRを数字的に示す。
【0103】
また、スライダーバー194aは、位相エンコードステップ数を設定するものであり、ボックス194bは、現在設定されている位相エンコードステップ数を数字的に示す。
また、スライダーバー196aは、周波数エンコードステップ数を設定するものであり、ボックス196bは、現在設定されている周波数エンコードステップ数を数字的に示す。
【0104】
撮像シーケンスが実行不能と判定された場合、例えば、図14の場合と同様にして、撮像条件の修正候補が自動計算され、自動的に修正される。図15の例では、電力的に撮像シーケンスが実行可能となる程度にFOVが拡張された(自動再設定)されたものであり、その旨が画面上部に文字情報的に表示されている。
【0105】
図15の状態(撮像条件が自動修正された状態)において、合計電気的負荷Ltが大きくなるように、撮像条件の一部をユーザが手動変更した場合、他の条件の少なくとも一部が連動して自動変更される。具体的には、ユーザが変更した条件以外の条件の少なくとも1つが、撮像シーケンスが実行可能となる範囲、且つ、合計電気的負荷Ltがあまり変わらない程度に、自動修正される。
【0106】
例えば、図15の状態から、ユーザが繰り返し時間TRを1/4の125msに手動変更した場合を考える。この場合、条件設定部100は、撮像シーケンスが実行可能となる範囲、且つ、合計電気的負荷Ltがあまり変わらない程度となるように、位相エンコードステップ数及び周波数エンコードステップ数の各修正候補を計算する。
【0107】
例えば、各修正候補が128である場合、条件設定部100は、位相エンコードステップ数及び周波数エンコードステップ数を算出された修正候補に更新(再設定)すると共に、これら修正候補を表示制御部98に入力する。
これにより、表示装置64は、更新された位相エンコードステップ数及び周波数エンコードステップ数をボックス194b、196bに表示し、スライダーバー194a、196a内のスライダーも修正候補に対応する位置に移動する。
【0108】
上記は一例にすぎず、繰り返し時間TRが手動で再設定された場合、スライス数又はFOVの修正候補を自動算出し、手動再設定に連動して、スライス数又はFOVが修正候補に自動再設定されるようにしてもよい。或いは、繰り返し時間TRが手動で再設定された場合、スライス数、FOV、位相エンコードステップ数、周波数エンコードステップ数、或いは、それ以外の条件の1つ又は2つ以上が連動して自動再設定されるようにしてもよい。FOVなどの他の条件が手動で再設定された場合についても同様である。
【0109】
図16は、合計電気的負荷Ltが最大電気的負荷Lmaxに対してかなりの余裕がある場合における、撮像条件の修正候補の表示例を示す模式図である。ユーザは、撮像条件を始めに設定する際に、合計電気的負荷Ltが確実に最大電気的負荷Lmax以下となるように、電気的負荷の少ない条件を選択した可能性がある。
【0110】
その場合、合計電気的負荷Ltと、最大電気的負荷Lmaxとのマージン分だけ、撮像条件を最適化する余地がある。そこで、本実施形態では一例として、合計電気的負荷Ltが最大電気的負荷Lmaxに対してかなりの余裕がある場合、合計電気的負荷Ltが最大電気的負荷Lmaxに近づくような撮像条件の修正候補が算出され、表示される。ここでの修正候補の算出方法については、後述の図17のステップS8において、詳細に説明する。
【0111】
図16の例では、撮像条件の修正候補として、以下3つが表示されている。
第1に、FOVを130mm×130mmに拡張することが、ボックス184において修正候補の1つとして表示されている。
第2に、スライス数を110枚に増やすことが、ボックス190において修正候補の1つとして表示されている。
第3に、繰り返し時間TRを550msに延長することが、ボックス192において修正候補の1つとして表示されている。
【0112】
これら3つのいずれか1つを選択するだけで、ユーザは、撮像条件をより最適化された条件に近づけることができる。
【0113】
図17は、第1の実施形態におけるMRI装置20の動作の流れを示すフローチャートである。以下、前述した各図を適宜参照しながら、図17に示すステップ番号に従って、MRI装置20の動作を説明する。
【0114】
[ステップS1]MPU86(図2参照)は、入力装置62に対して入力された撮像条件の一部の条件(入力情報)等に基づいて、MRI装置20の初期設定を行う。また、プレスキャンなどによってRFパルスの中心周波数等が設定される。この後、ステップS2に進む。
【0115】
[ステップS2]条件設定部100は、入力装置62に対して入力された撮像条件の一部等に基づいて撮像条件全体を暫定的に設定する。即ち、条件設定部100は、暫定的に設定された各条件に基づいて、本スキャンの撮像シーケンス(スライス選択方向、位相エンコード方向、読み出し方向の傾斜磁場の印加シーケンスや、RFパルスの印加シーケンスを含む)を暫定的に設定する(図5、図6参照)。この後、ステップS3に進む。
【0116】
[ステップS3]波形出力部102は、撮像シーケンスに基づいて、Xチャネル、Yチャネル、Zチャネルの傾斜磁場波形(傾斜磁場強度の時間変化)を計算して出力する。負荷取得部104は、各チャネルの傾斜磁場波形のデータを波形出力部102から取得する。この後、ステップS4に進む。
【0117】
[ステップS4]負荷取得部104は、撮像シーケンスの長さなどの条件に応じて、電気的負荷の算出に要する時間が所定時間に収まるように、周波数分離を行う際の分離数を設定する。また、負荷取得部104は、撮像シーケンスに基づいて、撮像シーケンスでの最大周波数Fmaxが何ヘルツかを算出する。
【0118】
次に、負荷取得部104は、X軸傾斜磁場コイル26xのインピーダンスの周波数特性と、最大周波数Fmaxとに基づいて、Xチャネルの傾斜磁場波形を周波数分離する際の各周波数帯の範囲を決定する。例えば、分離されたどの周波数帯においても、その周波数帯での最大インピーダンスと最小インピーダンスとの差が等しくなるように分離する。
【0119】
なお、負荷取得部104内には、周波数分離の仕方の多数のパターンが予め記憶されているので、負荷取得部104はそれらのいずれか1つを選択する。これにより、周波数分離の仕方に対応してテーブルデータとして負荷取得部104に記憶されている負荷係数群を、電気的負荷の算出にそのまま利用できる。
【0120】
負荷取得部104は、Yチャネル、Zチャネルについても、周波数分離する際の各周波数帯の範囲を決定する。
【0121】
次に、負荷取得部104は、X、Y、Zの各チャネルの傾斜磁場波形をそれぞれ、上記のように決定した範囲に従って、周波数帯毎に分離する(図7〜図12参照)。
【0122】
次に、負荷取得部104は、暫定的に設定された撮像シーケンスにおける、傾斜磁場発生システムへの合計電気的負荷Ltを算出する。即ち、分離した周波数帯にそれぞれ対応する負荷係数群を用いることでXチャネル電気的負荷Lxを算出する。同様に、Yチャネル電気的負荷Ly、Zチャネル電気的負荷Lzも算出し、これらとXチャネル電気的負荷Lxを合算し、合計電気的負荷Ltとする。この計算方法の詳細については、前述した通りなので、重複する説明を省略する。この後、ステップS5に進む。
【0123】
[ステップS5]ステップS4で算出した合計電気的負荷Ltが、傾斜磁場発生システムによって許容できる最大電気的負荷Lmax以下か否かを、負荷取得部104は判定する。合計電気的負荷Ltが最大電気的負荷Lmax以下の場合、暫定的に設定されている撮像シーケンスは実行可能であるから、ステップS7に進む。合計電気的負荷Ltが最大電気的負荷Lmaxを超える場合、暫定的に設定されている撮像シーケンスは実行不能であるから、ステップS6に進む。
【0124】
[ステップS6]負荷取得部104は、撮像条件の再設定指令と、合計電気的負荷Ltの算出結果とを条件設定部100に入力する。条件設定部100は、再設定される撮像条件で規定される撮像シーケンスが磁気共鳴イメージングとして実行される場合の傾斜磁場発生システムへの電気的負荷が最大電気的負荷Lmaxを超えないように、撮像条件の修正候補を複数算出する。
【0125】
具体的には例えば、条件設定部100は、最大電気的負荷Lmaxを100%として、入力された合計電気的負荷Ltが何%オーバーしているかを算出する。条件設定部100は、このオーバー量に応じて、電気的負荷が小さくなるように撮像条件の修正候補を複数算出する。具体的には、スライス数を減らす、繰り返し時間TRを伸ばす、MPGの印加量(b―factor)を減らす、FOVを広げるなどによって、電気的負荷は小さくなる。
【0126】
条件設定部100は、算出した撮像条件の複数の修正候補を表示制御部98に入力することで、撮像条件の複数の修正候補を表示装置64に表示させる(図14参照)。
【0127】
撮像条件の修正候補の表示開始時刻から所定時間経過してもユーザによる選択や、ユーザによる撮像条件の再設定の入力がなければ、条件設定部100は、複数の修正候補のいずれかを自動選択する。ここでの自動選択の優先順位は、例えば、スライス枚数を減らす修正候補を最優先とするものであり、ステップS1において予め設定しておけばよい。
【0128】
なお、前述の図15で説明したように、撮像条件を修正候補に自動再設定して表示してもよい。この自動再設定の後に、電気的負荷が大きくなるように、撮像条件の一部をユーザが手動変更した場合、前述したように、他の条件の少なくとも一部が連動して自動再設定(自動変更)される。
【0129】
このように、複数の修正候補のいずれかが選択されるか、或いは、ユーザの手動操作によって、撮像条件が再設定される。条件設定部100は、再設定された撮像条件に基づいて撮像シーケンスを規定する。この後、ステップS3に戻り、合計電気的負荷Ltの算出が再度行われる。
【0130】
[ステップS7]MPU86は、負荷取得部104から、算出された合計電気的負荷Ltを取得する。MPU86は、合計電気的負荷Ltが最大電気的負荷Lmaxと対比して所定の割合以上の余裕があるか否かを判定する。ここでの所定の割合は、例えばステップS1において入力装置62を介してMPU86に対して予め設定しておけばよい。
【0131】
具体的には、合計電気的負荷Ltが最大電気的負荷Lmaxの例えば70%未満(或いは、60%未満、50%未満)などの場合、余裕ありと判定する。なお、ここで挙げた数値は説明を具体的にするための単なる一例にすぎない。
【0132】
余裕ありとMPU86が判定した場合、ステップS8に進み、そうでない場合、ステップS10に進む。
【0133】
[ステップS8]MPU86は、撮像条件の少なくとも一部の条件の修正候補の計算指令を条件設定部100に入力する(即ち、MPU86は、撮像条件の「最適化指令部」として機能する)。条件設定部100は、合計電気的負荷Ltが最大電気的負荷Lmaxに近づく方向に撮像条件の修正候補を複数算出する。
【0134】
具体的には、条件設定部100は、最大電気的負荷Lmaxを100%とした場合に、合計電気的負荷Ltと最大電気的負荷Lmaxとのマージン(差)が何%であるかに応じて、撮像条件の修正候補を複数算出する。
【0135】
条件設定部100は、このマージンに応じて、合計電気的負荷Ltが大きくなるように、且つ、合計電気的負荷Ltが最大電気的負荷Lmaxの所定割合(例えば85%などの100%以下の値)となるように、撮像条件の修正候補を複数算出する。具体的には、スライス数を増やす、MPGの印加量を増大する、FOVを狭めるなどによって、最大電気的負荷Lmaxの範囲内で合計電気的負荷Ltは大きくなる。
【0136】
即ち、ユーザは、最大電気的負荷Lmaxを確実に下回るようにステップS1で撮像条件を設定した可能性があるが、例えばスライス数を少なくしすぎたなどによって、最大電気的負荷Lmaxに対して余裕がある場合が生じる。そのような場合でも、ステップS7、S8、S9の処理を通すことによって、最大電気的負荷Lmaxの範囲内で撮像条件が最適化される。
【0137】
条件設定部100は、算出した撮像条件の修正候補を表示制御部98に入力することで、撮像条件の複数の修正候補を表示装置64上に表示させる(図16参照)。
撮像条件の修正候補の表示開始時刻から所定時間経過してもユーザによる選択や撮像条件の再設定の入力がない場合、条件設定部100は、撮像条件を再設定しない。
【0138】
なお、所定時間経過してもユーザによる選択や撮像条件の再設定の入力がない場合、条件設定部100が複数の修正候補のいずれかを自動選択してもよい。
ここでの自動選択の優先順位は、例えば、スライス枚数を増やす修正候補を最優先とするものであり、ステップS1において予め設定しておけばよい。
この後、ステップS9に進む。
【0139】
[ステップS9]MPU86は、ステップS8で算出した修正候補の範囲を超える条件でユーザにより撮像条件が再設定されたか否かを判定する。修正候補の範囲を超える条件で撮像条件が再設定された場合、ステップS3に戻り、それ以外の場合、ステップS10に進む。
【0140】
具体的には例えば、ステップS8で撮像条件の修正候補の1つとしてスライス数150枚が表示されていたとする。スライス数150枚以下の範囲でスライス数が再設定されただけの場合、修正候補の範囲を超えないと判定される。また、ステップS8で表示される撮像条件の修正候補のいずれかが選択された場合や、撮像条件が再設定されない場合も、修正候補の範囲を超えないと判定される。
【0141】
一方、修正候補を超える枚数であるスライス数151枚以上でスライス数が再設定された場合、或いは、修正候補として表示したFOVよりも狭い範囲のFOVが設定された場合、電気的負荷が最大電気的負荷Lmaxを超える可能性があるので、修正候補の範囲を超えると判定される。
【0142】
[ステップS10]設定された撮像シーケンスに従ってデータ収集が行われる。具体的には、寝台32に被検体Pがセットされ、静磁場電源40により励磁された静磁場用磁石22によって撮像空間に静磁場が形成される。また、シムコイル電源42からシムコイル24に電流が供給されて、撮像空間に形成された静磁場が均一化される。
【0143】
そして、入力装置62からMPU86に撮像開始指示が入力されると、MPU86は、条件設定部100によって設定された撮像シーケンスをシーケンスコントローラ56に入力する。シーケンスコントローラ56は、入力された撮像シーケンスに従って傾斜磁場電源44、RF送信器46およびRF受信器48を駆動させることで、撮像領域に傾斜磁場を形成させると共に、RFコイル28からRF信号を発生させる。
【0144】
このため、被検体Pの内部の核磁気共鳴により生じたMR信号がRFコイル28により受信されて、RF受信器48により検出される。RF受信器48は、検出したMR信号に所定の信号処理を施した後、これをA/D変換することで、デジタル化したMR信号である生データを生成する。RF受信器48は、生成した生データをシーケンスコントローラ56に入力する。シーケンスコントローラ56は、生データを画像再構成部90に入力し、画像再構成部90は、k空間データベース92に形成されたk空間において、生データをk空間データとして配置する。
【0145】
画像再構成部90は、k空間データベース92からk空間データを取り込み、これに2次元フーリエ変換を含む画像再構成処理を施すことで画像データを再構成し、得られた画像データを画像データベース94に保存する。
【0146】
画像処理部96は、画像データベース94から画像データを取り込み、これに所定の画像処理を施すことで2次元の表示用画像データを生成し、この表示用画像データを記憶装置66に保存する。
【0147】
なお、撮像シーケンスが実行不能と判定された場合のステップS6において、条件設定部100が撮像条件の修正候補を計算する例を述べたが、修正候補の計算は必須ではない。修正候補を計算せず、図13のように警告通知を表示装置64に表示させ、ユーザによる手動での撮像条件の再設定を促す構成としてもよい。以上が第1の実施形態のMRI装置20の動作説明である。
【0148】
このように第1の実施形態では、傾斜磁場コイル26のインピーダンスの周波数特性に応じて傾斜磁場波形を複数の周波数帯に分離し、周波数帯毎に電気的負荷を算出して合算することで1チャネルの電気的負荷を算出する。これをX、Y、Zの各チャネルに対して行って、3チャネルの電気的負荷を合算するので、傾斜磁場発生システムへの合計電気的負荷Ltを正確に算出できる。
【0149】
傾斜磁場発生システムへの合計電気的負荷Ltを正確に算出できるので、許容できる最大電気的負荷Lmaxに対してどれだけの余裕があるか否かを正確に判定できる。合計電気的負荷Ltが最大電気的負荷Lmaxに対して十分な余裕がある場合、合計電気的負荷Ltが最大電気的負荷Lmaxに近づくような撮像条件の修正候補を複数表示する。従って、ユーザは、修正候補のいずれかを選択するだけで、撮像条件を最適化しうる。
【0150】
反対に、合計電気的負荷Ltが最大電気的負荷Lmaxを超えた場合、合計電気的負荷Ltが最大電気的負荷Lmaxの範囲内となるように撮像条件を再設定するので、MRI装置20を安全に運用できる。この撮像条件の再設定に際して、撮像条件の修正候補を複数表示するので、ユーザは、それらのいずれかを選択するだけでよい。この結果、ユーザの利便性は向上する。
【0151】
即ち、合計電気的負荷Ltを正確に算出した上で、合計電気的負荷Ltが最大電気的負荷Lmax以下となるように撮像条件を設定するので、傾斜磁場発生システムの電力的な使用限界の範囲内で撮像条件を最適化することが可能である。
【0152】
以上の最適化の制御は、予め記憶させた負荷係数や傾斜磁場コイル26のインピーダンスの周波数特性などを用いた演算により行われ、ハードウェア的には、従来構成に追加される要素はない。即ち、製品のコストを増大させることなく、撮像条件を最適化することが可能である。
【0153】
また、仮に例えば修理等によって傾斜磁場コイル26が交換になったとしても、負荷取得部104に記憶される負荷係数や傾斜磁場コイル26のインピーダンスの周波数特性などの情報を更新すればよいだけである。即ち、傾斜磁場発生システムの改修を行うに際して、メンテナンスが容易である。
【0154】
以上説明した実施形態によれば、MRIの傾斜磁場発生システムにかかる電気的負荷を撮像シーケンスに応じて正確に予測できる。
【0155】
なお、従来は傾斜磁場コイルのインピーダンスが周波数により変化することが考慮されてなかったので、傾斜磁場発生システムへの電気的負荷を正確に算出できなかった。このため、傾斜磁場発生システムの電力的な使用限界と、実際に設定可能なパルスシーケンスの電気的負荷との間に必要以上のマージンが存在していたので、本実施形態と同程度に撮像条件を最適化することはできなかった。
【0156】
(第2の実施形態)
第2の実施形態は、第1の実施形態の変形例であり、MRI装置20の装置構成としては第1の実施形態と同様である(図1、図2参照)。第1の実施形態との違いは、電気的負荷の算出方法のみである。
【0157】
具体的には、第1の実施形態の負荷係数は、シミュレーションや実測用によって予め求めたものであり、この負荷係数によって算出される合計電気的負荷Ltは、傾斜磁場発生システムに対する実際の電気的な負荷値を正確に与える。
【0158】
一方、第2の実施形態では、傾斜磁場発生システムに対する実際の電気的な負荷値よりも大きな値として合計電気的負荷Ltが算出されるようにする。これにより、許容できる最大電気的負荷Lmaxと、実際に傾斜磁場発生システムにかかる電気的負荷との間に常に一定割合以上のマージンを保ち、MRI装置20を安全に運用する。
【0159】
第1の具体的方法としては、負荷取得部104は、負荷係数として、第1の実施形態の負荷係数を例えば1.2倍した値を用いる。ここでの1.2倍は、説明を具体化するための一例にすぎず、1より大きければよく、本実施形態を何ら限定するものでない。以下に示す各数値についても同様である。この場合、負荷係数の違いを除いて、合計電気的負荷Ltの算出方法は第1の実施形態と同様である。
【0160】
第2の具体的方法としては、負荷取得部104は、負荷係数として、第1の実施形態の負荷係数と同じ値を用いるが、以下の(3)式で合計電気的負荷Ltを算出する。
【0161】
Lt=(Lx+Ly+Lz)×W ・・・(3)
【0162】
第1の実施形態では、Lt=Lx+Ly+Lzで合計電気的負荷Ltを算出するところ、(3)式の係数Wは、1より大きい値であり、例えば1.2である。この場合、Xチャネル電気的負荷Lx、Yチャネル電気的負荷Ly、Zチャネル電気的負荷Lzの計算方法は、第1の実施形態と同じである。なお、0より大きく、1より小さい値の係数W’を用いた以下の(4)式で合計電気的負荷Ltを算出する方法も、この方法と等価である。
【0163】
Lt=(Lx+Ly+Lz)÷W’ ・・・(4)
【0164】
第3の具体的方法としては、負荷取得部104は、負荷係数として、第1の実施形態の負荷係数と同じ値を用いるが、以下の(5)式で合計電気的負荷Ltを算出する。
【0165】
Lt=Lx+Ly+Lz+Lmargin ・・・(5)
【0166】
(5)式において、加算定数Lmarginは、例えば、最大電気的負荷Lmaxの20%の値である。この場合も、Xチャネル電気的負荷Lx、Yチャネル電気的負荷Ly、Zチャネル電気的負荷Lzの計算方法は、第1の実施形態と同じである。
【0167】
図18は、第2の実施形態におけるMRI装置20の動作の流れを示すフローチャートである。以下、図18に示すステップ番号に従って、MRI装置20の動作を説明する。
【0168】
[ステップS21〜S23]第1の実施形態のステップS1〜S3とそれぞれ同様であるので、重複する説明を省略する。
【0169】
[ステップS24]負荷取得部104は、上記のいずれか1つの方法によって、実際に傾斜磁場発生システムにかかる電気的負荷よりも大きな値となるように、合計電気的負荷Ltを算出する。この後、ステップS25に進む。
【0170】
[ステップS25〜S30]第1の実施形態のステップS5〜S10とそれぞれ同様であるので、重複する説明を省略する。以上が第2の実施形態の動作説明である。
【0171】
このように第2の実施形態においても、第1の実施形態と同様の効果が得られる。さらに、第2の実施形態では、実際の値よりも大きく算出された合計電気的負荷Ltと、傾斜磁場発生システムが許容できる最大電気的負荷Lmaxとを対比する(ステップS25)。
従って、どのような撮像条件を設定しても、実際の負荷値よりも大きく算出される合計電気的負荷Ltが最大電気的負荷Lmax以下となるように、必要に応じて撮像条件が再設定される(ステップS26)。
このため、傾斜磁場発生システムに限界近くの負荷がかかることはなく、許容できる最大電気的負荷Lmaとの間に常に一定の割合以上のマージンが保たれる。従って、MRI装置20を極めて安全に運用できる。
【0172】
(実施形態の補足事項)
[1]上記実施形態では、傾斜磁場波形のグラフの縦軸を二乗することで、合計電気的負荷Ltの算出過程におけるパワーデューティとして電流二乗に相当する値を用いる例を述べた。本発明の実施形態は、かかる態様に限定されるものではない。
【0173】
傾斜磁場電源44内のスイッチング素子のIGBT(絶縁ゲートバイポーラトランジスタ:Insulated Gate Bipolar Transistor)の加熱性に応じて、傾斜磁場波形の縦軸の値の絶対値をパワーデューティとして用いてもよい。この場合のパワーデューティは、電流の絶対値に相当する。IGBTの瞬間的な加熱性は、電流二乗ではなく、電流の大きさに依存する場合もあるからである。
【0174】
[2]Xチャネル、Yチャネル、Zチャネルで周波数分離の分離数を揃える例を述べた。本発明の実施形態は、かかる態様に限定されるものではない。X、Y、Z軸傾斜磁場コイル26x、26y、26zのインピーダンスの各周波数特性などに応じて、Xチャネル、Yチャネル、Zチャネルで周波数分離の分離数を変えて、合計電気的負荷Ltを算出してもよい。
【0175】
[3]第1の実施形態において、撮像条件を最適化するためのステップS7〜S9の処理は必須ではなく、省略してもよい。即ち、ステップS5で判定結果が肯定的な場合、ステップS10に移行してもよい。第2の実施形態についても同様である。
【0176】
[4]第1及び第2の実施形態では、傾斜磁場の波形そのものを複数の周波数帯に分離して、周波数帯毎に傾斜磁場発生システムに対する電気的負荷を算出して合算する例を述べた。本発明の実施形態は、かかる態様に限定されるものではない。傾斜磁場の波形そのものに限らず、「傾斜磁場波形を規定する座標データ」などの「傾斜磁場の波形に関する情報」を用いてもよい。
【0177】
図19は、傾斜磁場波形を再現する座標データの一例を示す模式図である。図19において、横軸は撮像シーケンスの開始時刻(t=0秒)からの経過時間tを示し、縦軸は傾斜磁場強度AMを示す。
【0178】
この例では、撮像シーケンスの開始時刻からの5つの座標でMPGパルスの波形が規定される。即ち、座標CC0は、例えば経過時間t=0、傾斜磁場強度AM=0を示す。座標CC1は、例えばt=0.01、AM=0を示し、座標CC2は、例えばt=0.0101、AM=1を示し、座標CC3は、例えばt=0.02、AM=1を示し、座標CC4は、例えばt=0.0201、AM=0を示す。
【0179】
このように、多数の座標値に基づいて、X軸方向の傾斜磁場Gx、Y軸方向の傾斜磁場Gy、Z軸方向の傾斜磁場Gzの各傾斜磁場波形を規定できる。この場合、負荷取得部104は、傾斜磁場波形を規定する座標データを波形出力部102から取得し、この座標データに基づいて、上記実施形態と同様に分離された各周波数帯毎に傾斜磁場発生システムに対する電気的負荷を算出できる。
【0180】
[5]第1及び第2の実施形態では、撮像条件の暫定的な設定後、撮像条件により規定される撮像シーケンスの実行前に、傾斜磁場発生システムに対する合計電気的負荷Ltが算出される例を述べた。本発明の実施形態は、かかる態様に限定されるものではなく、以下の変形例も含まれる。
【0181】
パルスシーケンスの種類や、各条件のパラメータ値などの撮像条件の代表的なパターンを予め多数作成し、(例えばMRI装置20の出荷前に)予め記憶させてもよい。即ち、各々のパターンは、1つの撮像シーケンスを規定する条件のセットである。この場合、各パターンの撮像シーケンスに対してそれぞれ予め算出された合計電気的負荷Ltを負荷取得部104に記憶させる。
具体的には例えば、負荷取得部104は、各パターンの撮像条件と、その撮像条件で規定される撮像シーケンスを実行した場合の合計電気的負荷Ltとを、テーブルデータで記憶する。
【0182】
このテーブルデータは、「傾斜磁場コイル26のインピーダンスの周波数特性に応じた傾斜磁場発生システムに対する電気的負荷と、撮像条件との関係」を規定する情報とも言える。予め記憶される合計電気的負荷Ltの算出方法は、第1の実施形態における合計電気的負荷Ltの算出方法と同様である。
【0183】
この場合のMRI装置20の動作は、図17のステップS3、S4(又は図18のステップS23、24)の代わりに、以下の処理を実行することを除いて、第1及び第2の実施形態と同様である。
即ち、負荷取得部104は、現在設定されている撮像条件と、最も近いパターンの撮像条件を記憶データの中から選択する。負荷取得部104は、選択したパターンに対して記憶された合計電気的負荷Ltを取得する。
【0184】
この場合、撮像条件を設定すれば、演算処理を実行せずに、記憶データから読み出すだけで、傾斜磁場発生システムに対する合計電気的負荷Ltを取得できる。従って、コンピュータの計算時間を省略できるので、撮像条件の設定に要する時間を短縮できる。
【0185】
なお、(A)撮像条件の多様なパターンに対してそれぞれ電気的負荷を予め記憶しておく実施形態、(B)撮像条件の設定の都度、電気的負荷を算出する第1及び第2の実施形態、のいずれも、以下の概念に基づく。
【0186】
具体的には、(1)撮像条件の暫定的な設定(又は再設定)、(2)設定された撮像条件により規定される撮像シーケンスを実行した場合の電気的負荷の取得、(3)設定された撮像シーケンスの実行可否の判定、の3ステップが繰り返される。
これら3ステップは、上記(3)で実行可能と判定され、撮像条件が最終確定するまで順次繰り返される。
換言すれば、撮像条件の最終確定まで、撮像条件及び撮像シーケンスを実行した場合の電気的負荷が逐次的に取得され、更新される。
【0187】
[6]MRI装置20として、静磁場用磁石22、シムコイル24、傾斜磁場コイル26などが含まれるガントリの外にRF受信器48が存在する例を述べた(図1参照)。本発明の実施形態は、かかる態様に限定されるものではない。RF受信器48がガントリ内に含まれる態様でもよい。
【0188】
具体的には例えば、RF受信器48に相当する電子回路基盤をガントリ内に配設する。そして、受信用RFコイルによって電磁波からアナログの電気信号に変換されたMR信号を、当該電子回路基盤内のプリアンプによって増幅し、デジタル信号としてガントリ外に出力し、シーケンスコントローラ56に入力してもよい。ガントリ外への出力に際しては、例えば光通信ケーブルを用いて光デジタル信号として送信すれば、外部ノイズの影響が軽減されるので、望ましい。
【0189】
[7]本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0190】
20 MRI装置
22 静磁場用磁石
24 シムコイル
26 傾斜磁場コイル
26x X軸傾斜磁場コイル
26y Y軸傾斜磁場コイル
26z Z軸傾斜磁場コイル
28 RFコイル
30 制御系
32 寝台
40 静磁場電源
42 シムコイル電源
44 傾斜磁場電源
44x X軸傾斜磁場電源
44y Y軸傾斜磁場電源
44z Z軸傾斜磁場電源
45x、45y、45z EMCフィルタ
46 RF送信器
48 RF受信器
56 シーケンスコントローラ
58 コンピュータ
60 演算装置
62 入力装置
64 表示装置
66 記憶装置
86 MPU
88 システムバス
90 画像再構成部
92 k空間データベース
94 画像データベース
96 画像処理部
98 表示制御部
100 条件設定部
102 波形出力部
104 負荷取得部
180 位置決め画像
182 FOV
184、190、192、194、196 ボックス
184a、190a、192a、194a、196a ボックス
184b、190b、192b、194b、196b スライダーバー
P 被検体
【特許請求の範囲】
【請求項1】
傾斜磁場発生システムに電流を供給することで撮像領域に傾斜磁場を印加し、前記傾斜磁場を伴った磁気共鳴イメージングを行う磁気共鳴イメージング装置であって、
前記磁気共鳴イメージングの撮像条件を設定する条件設定部と、
前記傾斜磁場の波形に関する情報を取得し、前記磁気共鳴イメージングが実行される場合に前記傾斜磁場発生システムに課される電気的負荷を、前記波形に関する情報に基づいて複数の周波数帯に対してそれぞれ算出する負荷取得部と
を備えることを特徴とする磁気共鳴イメージング装置。
【請求項2】
請求項1記載の磁気共鳴イメージング装置において、
前記負荷取得部は、前記条件設定部により設定された撮像条件で規定される撮像シーケンスの実行可否を前記電気的負荷に基づいて判定後、実行不能と判定した場合には前記撮像条件の再設定指令を前記条件設定部に入力するように構成され、
前記条件設定部は、前記再設定指令を受けた場合、前記負荷取得部により算出された前記電気的負荷に基づいて、再設定後の前記撮像条件に対して算出される前記電気的負荷が前記傾斜磁場発生システムによって許容できる最大負荷を超えないように、前記撮像条件を再設定するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項3】
請求項2記載の磁気共鳴イメージング装置において、
前記負荷取得部は、各々の前記周波数帯毎の負荷係数を前記磁気共鳴イメージングの実行前に予め記憶しており、前記周波数帯に応じた前記負荷係数を前記傾斜磁場発生システムへの供給電気量に乗じることで、複数の前記周波数帯に対してそれぞれ前記電気的負荷を算出するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項4】
請求項3記載の磁気共鳴イメージング装置において、
前記傾斜磁場発生システムは、磁気共鳴イメージング装置の一部であって、互いに直交する所定軸方向に傾斜磁場をそれぞれ発生させる3つの傾斜磁場コイルを有し、
前記負荷取得部は、前記周波数帯に応じた前記負荷係数を各々の前記傾斜磁場コイルへの供給電気量に乗じることで、各々の前記傾斜磁場コイルへの前記電気的負荷を前記周波数帯毎に算出し、前記周波数帯毎に算出した各々の前記傾斜磁場コイルへの前記電気的負荷の合計として総負荷を算出し、前記撮像シーケンスの実行可否を前記総負荷に基づいて判定するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項5】
請求項4記載の磁気共鳴イメージング装置において、
前記傾斜磁場発生システムは、傾斜磁場電源と、前記3つの傾斜磁場コイルから前記傾斜磁場電源までをそれぞれ電気的に接続するケーブルと、EMCフィルタとをさらに有し、
前記負荷取得部は、前記傾斜磁場発生システム全体に対する電気的な負荷の値を前記総負荷として算出するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項6】
請求項5記載の磁気共鳴イメージング装置において、
表示装置をさらに備え、
前記条件設定部は、前記撮像条件の再設定指定を受けた場合に、前記総負荷が前記最大負荷を超えないように前記撮像条件の少なくとも一部の修正候補を算出するように構成され、
前記表示装置は、前記修正候補を表示するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項7】
請求項6記載の磁気共鳴イメージング装置において、
前記総負荷が前記最大負荷に対して所定の割合の余裕があるか否かを判定後、余裕があると判定した場合には前記撮像条件の少なくとも一部の修正候補の計算指令を前記条件設定部に入力する最適化指令部をさらに備え、
前記条件設定部は、前記最適化指令部から前記修正候補の計算指令を受けた場合に、前記総負荷が前記最大負荷に近づく方向に前記修正候補を算出し、前記修正候補を前記表示装置に表示させるように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項8】
請求項3記載の磁気共鳴イメージング装置において、
前記負荷取得部は、前記傾斜磁場発生システムに対する実際の電気的な負荷値を与える前記負荷係数よりも大きな値を前記負荷係数として用いる、前記電気的負荷の算出過程で1よりも大きい係数を乗じる、前記電気的負荷の算出過程で所定のマージンを加算する、のいずれか1つの手段をとることで、前記実際の電気的な負荷値よりも大きな負荷として前記電気的負荷を算出するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項9】
請求項3記載の磁気共鳴イメージング装置において、
前記傾斜磁場発生システムは、磁気共鳴イメージング装置の一部であって、前記傾斜磁場を発生させる傾斜磁場コイルを有し、
前記負荷取得部は、前記傾斜磁場コイルのインピーダンスの周波数特性に応じて、前記傾斜磁場の波形を複数の前記周波数帯に分離する際の各々の前記周波数帯の周波数域を変化させるように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項10】
請求項3記載の磁気共鳴イメージング装置において、
前記傾斜磁場発生システムは、傾斜磁場コイルと、傾斜磁場電源と、傾斜磁場コイルから前記傾斜磁場電源までを電気的に接続するケーブルと、EMCフィルタとを有し、
前記負荷取得部は、前記電気的負荷として、前記傾斜磁場発生システム全体に対する電気的な負荷の値を算出するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項11】
請求項1記載の磁気共鳴イメージング装置において、
表示装置をさらに備え、
前記負荷取得部は、算出された前記電気的負荷が前記傾斜磁場発生システムの許容できる最大負荷を超えるか否かを判定するように構成され、
前記表示装置は、前記負荷取得部の判定結果が肯定的な場合に、前記撮像シーケンスが実行不能である旨の通知を表示するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項12】
請求項1記載の磁気共鳴イメージング装置において、
表示装置をさらに備え、
前記負荷取得部は、算出された前記電気的負荷が前記傾斜磁場発生システムの許容できる最大負荷を超えるか否かを判定するように構成され、
前記条件設定部は、前記負荷取得部の判定結果が肯定的な場合に、前記電気的負荷が前記最大負荷を超えないように前記撮像条件の少なくとも一部の修正候補を算出するように構成され、
前記表示装置は、前記修正候補を表示するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項13】
請求項12記載の磁気共鳴イメージング装置において、
前記表示装置による前記修正候補の表示後に、前記撮像条件の一部が再設定された場合、前記条件設定部は、前記電気的負荷が前記最大負荷を超えないように、前記撮像シーケンスの条件の内、再設定された条件以外の条件の修正候補を算出して前記表示装置に表示させるように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項14】
傾斜磁場発生システムに電流を供給することで撮像領域に傾斜磁場を印加し、前記傾斜磁場を伴った磁気共鳴イメージングを行う磁気共鳴イメージング装置であって、
前記磁気共鳴イメージングの撮像条件を設定する条件設定部と、
前記撮像条件により定まる前記傾斜磁場の波形の周波数に関する情報に基づいて、前記磁気共鳴イメージングが実行される場合の前記傾斜磁場発生システムに対する電気的負荷を取得して出力する負荷取得部と
を備えることを特徴とする磁気共鳴イメージング装置。
【請求項15】
請求項14記載の磁気共鳴イメージング装置において、
前記傾斜磁場発生システムに対する電気的負荷は、複数の周波数帯に対してそれぞれ算出された電気的負荷を合算することで算出された値である
ことを特徴とする磁気共鳴イメージング装置。
【請求項16】
請求項15記載の磁気共鳴イメージング装置において、
前記負荷取得部は、前記撮像条件により規定される撮像シーケンスの実行可否を前記電気的負荷に基づいて判定後、実行不能と判定した場合には前記撮像条件の再設定指令を前記条件設定部に入力するように構成され、
前記条件設定部は、前記再設定指令を受けた場合、前記電気的負荷が前記傾斜磁場発生システムによって許容できる最大負荷を超えないように、前記撮像条件を再設定するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項17】
請求項15記載の磁気共鳴イメージング装置において、
表示装置をさらに備え、
前記負荷取得部は、算出された前記電気的負荷が前記傾斜磁場発生システムの許容できる最大負荷を超えるか否かを判定するように構成され、
前記表示装置は、前記負荷取得部の判定結果が肯定的な場合に、前記撮像条件により規定される撮像シーケンスが実行不能である旨の通知を表示するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項18】
請求項15記載の磁気共鳴イメージング装置において、
表示装置をさらに備え、
前記負荷取得部は、算出された前記電気的負荷が前記傾斜磁場発生システムの許容できる最大負荷を超えるか否かを判定するように構成され、
前記条件設定部は、前記負荷取得部の判定結果が肯定的な場合に、前記電気的負荷が前記最大負荷を超えないように前記撮像条件の少なくとも一部の修正候補を算出するように構成され、
前記表示装置は、前記修正候補を表示するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項19】
傾斜磁場発生システムにより印加される傾斜磁場を伴った磁気共鳴イメージングの撮像条件を設定するステップと、
前記撮像条件に基づいて、前記磁気共鳴イメージングが実行される場合の傾斜磁場発生システムに対する電気的負荷を算出するステップと
を有することを特徴とする傾斜磁場発生システムの負荷算出方法。
【請求項1】
傾斜磁場発生システムに電流を供給することで撮像領域に傾斜磁場を印加し、前記傾斜磁場を伴った磁気共鳴イメージングを行う磁気共鳴イメージング装置であって、
前記磁気共鳴イメージングの撮像条件を設定する条件設定部と、
前記傾斜磁場の波形に関する情報を取得し、前記磁気共鳴イメージングが実行される場合に前記傾斜磁場発生システムに課される電気的負荷を、前記波形に関する情報に基づいて複数の周波数帯に対してそれぞれ算出する負荷取得部と
を備えることを特徴とする磁気共鳴イメージング装置。
【請求項2】
請求項1記載の磁気共鳴イメージング装置において、
前記負荷取得部は、前記条件設定部により設定された撮像条件で規定される撮像シーケンスの実行可否を前記電気的負荷に基づいて判定後、実行不能と判定した場合には前記撮像条件の再設定指令を前記条件設定部に入力するように構成され、
前記条件設定部は、前記再設定指令を受けた場合、前記負荷取得部により算出された前記電気的負荷に基づいて、再設定後の前記撮像条件に対して算出される前記電気的負荷が前記傾斜磁場発生システムによって許容できる最大負荷を超えないように、前記撮像条件を再設定するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項3】
請求項2記載の磁気共鳴イメージング装置において、
前記負荷取得部は、各々の前記周波数帯毎の負荷係数を前記磁気共鳴イメージングの実行前に予め記憶しており、前記周波数帯に応じた前記負荷係数を前記傾斜磁場発生システムへの供給電気量に乗じることで、複数の前記周波数帯に対してそれぞれ前記電気的負荷を算出するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項4】
請求項3記載の磁気共鳴イメージング装置において、
前記傾斜磁場発生システムは、磁気共鳴イメージング装置の一部であって、互いに直交する所定軸方向に傾斜磁場をそれぞれ発生させる3つの傾斜磁場コイルを有し、
前記負荷取得部は、前記周波数帯に応じた前記負荷係数を各々の前記傾斜磁場コイルへの供給電気量に乗じることで、各々の前記傾斜磁場コイルへの前記電気的負荷を前記周波数帯毎に算出し、前記周波数帯毎に算出した各々の前記傾斜磁場コイルへの前記電気的負荷の合計として総負荷を算出し、前記撮像シーケンスの実行可否を前記総負荷に基づいて判定するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項5】
請求項4記載の磁気共鳴イメージング装置において、
前記傾斜磁場発生システムは、傾斜磁場電源と、前記3つの傾斜磁場コイルから前記傾斜磁場電源までをそれぞれ電気的に接続するケーブルと、EMCフィルタとをさらに有し、
前記負荷取得部は、前記傾斜磁場発生システム全体に対する電気的な負荷の値を前記総負荷として算出するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項6】
請求項5記載の磁気共鳴イメージング装置において、
表示装置をさらに備え、
前記条件設定部は、前記撮像条件の再設定指定を受けた場合に、前記総負荷が前記最大負荷を超えないように前記撮像条件の少なくとも一部の修正候補を算出するように構成され、
前記表示装置は、前記修正候補を表示するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項7】
請求項6記載の磁気共鳴イメージング装置において、
前記総負荷が前記最大負荷に対して所定の割合の余裕があるか否かを判定後、余裕があると判定した場合には前記撮像条件の少なくとも一部の修正候補の計算指令を前記条件設定部に入力する最適化指令部をさらに備え、
前記条件設定部は、前記最適化指令部から前記修正候補の計算指令を受けた場合に、前記総負荷が前記最大負荷に近づく方向に前記修正候補を算出し、前記修正候補を前記表示装置に表示させるように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項8】
請求項3記載の磁気共鳴イメージング装置において、
前記負荷取得部は、前記傾斜磁場発生システムに対する実際の電気的な負荷値を与える前記負荷係数よりも大きな値を前記負荷係数として用いる、前記電気的負荷の算出過程で1よりも大きい係数を乗じる、前記電気的負荷の算出過程で所定のマージンを加算する、のいずれか1つの手段をとることで、前記実際の電気的な負荷値よりも大きな負荷として前記電気的負荷を算出するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項9】
請求項3記載の磁気共鳴イメージング装置において、
前記傾斜磁場発生システムは、磁気共鳴イメージング装置の一部であって、前記傾斜磁場を発生させる傾斜磁場コイルを有し、
前記負荷取得部は、前記傾斜磁場コイルのインピーダンスの周波数特性に応じて、前記傾斜磁場の波形を複数の前記周波数帯に分離する際の各々の前記周波数帯の周波数域を変化させるように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項10】
請求項3記載の磁気共鳴イメージング装置において、
前記傾斜磁場発生システムは、傾斜磁場コイルと、傾斜磁場電源と、傾斜磁場コイルから前記傾斜磁場電源までを電気的に接続するケーブルと、EMCフィルタとを有し、
前記負荷取得部は、前記電気的負荷として、前記傾斜磁場発生システム全体に対する電気的な負荷の値を算出するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項11】
請求項1記載の磁気共鳴イメージング装置において、
表示装置をさらに備え、
前記負荷取得部は、算出された前記電気的負荷が前記傾斜磁場発生システムの許容できる最大負荷を超えるか否かを判定するように構成され、
前記表示装置は、前記負荷取得部の判定結果が肯定的な場合に、前記撮像シーケンスが実行不能である旨の通知を表示するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項12】
請求項1記載の磁気共鳴イメージング装置において、
表示装置をさらに備え、
前記負荷取得部は、算出された前記電気的負荷が前記傾斜磁場発生システムの許容できる最大負荷を超えるか否かを判定するように構成され、
前記条件設定部は、前記負荷取得部の判定結果が肯定的な場合に、前記電気的負荷が前記最大負荷を超えないように前記撮像条件の少なくとも一部の修正候補を算出するように構成され、
前記表示装置は、前記修正候補を表示するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項13】
請求項12記載の磁気共鳴イメージング装置において、
前記表示装置による前記修正候補の表示後に、前記撮像条件の一部が再設定された場合、前記条件設定部は、前記電気的負荷が前記最大負荷を超えないように、前記撮像シーケンスの条件の内、再設定された条件以外の条件の修正候補を算出して前記表示装置に表示させるように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項14】
傾斜磁場発生システムに電流を供給することで撮像領域に傾斜磁場を印加し、前記傾斜磁場を伴った磁気共鳴イメージングを行う磁気共鳴イメージング装置であって、
前記磁気共鳴イメージングの撮像条件を設定する条件設定部と、
前記撮像条件により定まる前記傾斜磁場の波形の周波数に関する情報に基づいて、前記磁気共鳴イメージングが実行される場合の前記傾斜磁場発生システムに対する電気的負荷を取得して出力する負荷取得部と
を備えることを特徴とする磁気共鳴イメージング装置。
【請求項15】
請求項14記載の磁気共鳴イメージング装置において、
前記傾斜磁場発生システムに対する電気的負荷は、複数の周波数帯に対してそれぞれ算出された電気的負荷を合算することで算出された値である
ことを特徴とする磁気共鳴イメージング装置。
【請求項16】
請求項15記載の磁気共鳴イメージング装置において、
前記負荷取得部は、前記撮像条件により規定される撮像シーケンスの実行可否を前記電気的負荷に基づいて判定後、実行不能と判定した場合には前記撮像条件の再設定指令を前記条件設定部に入力するように構成され、
前記条件設定部は、前記再設定指令を受けた場合、前記電気的負荷が前記傾斜磁場発生システムによって許容できる最大負荷を超えないように、前記撮像条件を再設定するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項17】
請求項15記載の磁気共鳴イメージング装置において、
表示装置をさらに備え、
前記負荷取得部は、算出された前記電気的負荷が前記傾斜磁場発生システムの許容できる最大負荷を超えるか否かを判定するように構成され、
前記表示装置は、前記負荷取得部の判定結果が肯定的な場合に、前記撮像条件により規定される撮像シーケンスが実行不能である旨の通知を表示するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項18】
請求項15記載の磁気共鳴イメージング装置において、
表示装置をさらに備え、
前記負荷取得部は、算出された前記電気的負荷が前記傾斜磁場発生システムの許容できる最大負荷を超えるか否かを判定するように構成され、
前記条件設定部は、前記負荷取得部の判定結果が肯定的な場合に、前記電気的負荷が前記最大負荷を超えないように前記撮像条件の少なくとも一部の修正候補を算出するように構成され、
前記表示装置は、前記修正候補を表示するように構成される
ことを特徴とする磁気共鳴イメージング装置。
【請求項19】
傾斜磁場発生システムにより印加される傾斜磁場を伴った磁気共鳴イメージングの撮像条件を設定するステップと、
前記撮像条件に基づいて、前記磁気共鳴イメージングが実行される場合の傾斜磁場発生システムに対する電気的負荷を算出するステップと
を有することを特徴とする傾斜磁場発生システムの負荷算出方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−17810(P2013−17810A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2012−133157(P2012−133157)
【出願日】平成24年6月12日(2012.6.12)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成24年6月12日(2012.6.12)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
[ Back to top ]