
磁気共鳴イメージング装置および高周波コイル
【課題】複数のループコイルと1つの8の字コイルとを組み合せた場合でも、コイルエレメント間のデカップリングを容易に実現する。
【解決手段】受信用RFコイル8bは、静磁場と直交する方向に並べて配置された複数のループコイルと、複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルとを有する。また、分配合成回路は、ループコイルおよび8の字コイルによって受信された受信信号を分配合成することで複数の新たな受信信号を生成する。そして、選択回路は、分配合成回路によって生成された受信信号の中から画像の生成に用いられる受信信号を選択する。
【解決手段】受信用RFコイル8bは、静磁場と直交する方向に並べて配置された複数のループコイルと、複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルとを有する。また、分配合成回路は、ループコイルおよび8の字コイルによって受信された受信信号を分配合成することで複数の新たな受信信号を生成する。そして、選択回路は、分配合成回路によって生成された受信信号の中から画像の生成に用いられる受信信号を選択する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁気共鳴イメージング装置および高周波コイルに関する。
【背景技術】
【0002】
磁気共鳴イメージング装置は、磁気共鳴現象を利用して被検体内を画像化する装置である。具体的には、磁気共鳴イメージング装置は、静磁場内に置かれた被検体に高周波磁場を印加し、その高周波磁場の印加によって被検体から発せられる核磁気共鳴信号を検出して画像を生成する。
【0003】
かかる磁気共鳴イメージング装置は、被検体から発せられる核磁気共鳴現象を検出する高周波コイルを備える。近年では、この高周波コイルとして、複数のコイルエレメントを組み合せたアレイコイルが広く利用されている(例えば、特許文献1〜4参照)。ここで、アレイコイルに用いられるコイルエレメントには、ループコイルや8の字コイル(「サドルコイル」とも呼ばれる)などの各種のコイルがある。
【0004】
そして、アレイコイルは、組み合せるコイルエレメントの種類によって特性が異なる。例えば、複数のループコイルを並べたアレイコイルは、被検体に対して深さ方向に深く、かつ、ループコイルが並ぶ方向に広い感度を有する。また、8の字コイルの中央にループコイルを重ねたアレイコイルは、SN比が良好であるが、腹部全体をカバーするだけの広い感度は有していない。
【0005】
このようなことから、近年では、広い感度を有しつつSN比が良好なアレイコイルを作製することを目的として、複数のループコイルと1つの8の字コイルとを組み合せることが検討されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−153878号公報
【特許文献2】特開2007−21188号公報
【特許文献3】特開2003−50235号公報
【特許文献4】特開2003−132308号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、複数のループコイルと1つの8の字コイルとを組み合せた場合には、各コイルの重なりが大きくなる。その結果、コイルエレメント間でカップリングが発生してSN比が低減するという課題が生じてしまう。
【0008】
本発明は、上記に鑑みてなされたものであって、複数のループコイルと1つの8の字コイルとを組み合せた場合でも、コイルエレメント間のデカップリングを容易に実現することができる磁気共鳴イメージング装置および高周波コイルを提供することを目的とする。
【課題を解決するための手段】
【0009】
上述した課題を解決し、目的を達成するために、請求項1記載の本発明は、静磁場内に置かれた被検体から発せられる磁気共鳴信号を受信する高周波コイルを備えた磁気共鳴イメージング装置であって、前記高周波コイルは、前記静磁場と直交する方向に並べて配置された複数のループコイルと、前記複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルとを有することを特徴とする。
【0010】
また、請求項6記載の本発明は、静磁場内に置かれた被検体から発せられる磁気共鳴信号を受信する高周波コイルであって、前記静磁場と直交する方向に並べて配置された複数のループコイルと、前記複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルとを有することを特徴とする。
【発明の効果】
【0011】
請求項1または6記載の本発明によれば、複数のループコイルと1つの8の字コイルとを組み合せた場合でも、コイルエレメント間のデカップリングを容易に実現することができるという効果を奏する。
【図面の簡単な説明】
【0012】
【図1】図1は、本実施例1に係るMRI装置の全体構成を示す図である。
【図2】図2は、受信用RFコイルにおけるコイルエレメントの配置の一例示す図である。
【図3】図3は、受信用RFコイル、受信部および計算機システムの関係を示すブロック図である。
【図4】図4は、選択回路によって選択されるセクションの単位を説明するための図である。
【図5】図5は、受信信号の分配合成および優先順位の設定を説明するための図である。
【図6】図6は、8の字コイルから出力される受信信号を合成する場合を説明するための図である。
【図7】図7は、静磁場と直交する方向に4つのループコイルが配置される場合の変形例を説明するための図(1)である。
【図8】図8は、静磁場と直交する方向に4つのループコイルが配置される場合の変形例を説明するための図(2)である。
【図9】図9は、静磁場と直交する方向に4つのループコイルが配置される場合の変形例を説明するための図(3)である。
【発明を実施するための形態】
【0013】
以下に、本発明に係る磁気共鳴イメージング装置および高周波コイルの実施例を図面に基づいて詳細に説明する。なお、以下に示す実施例によって本発明が限定されるものではない。また、以下に示す実施例では、磁気共鳴イメージング装置を「MRI(Magnetic Resonance Imaging)装置」と呼び、核磁気共鳴信号を「NMR(Nuclear Magnetic Resonance)信号」と呼ぶ。
【実施例1】
【0014】
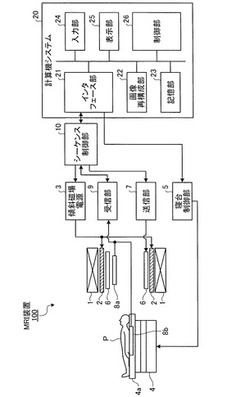
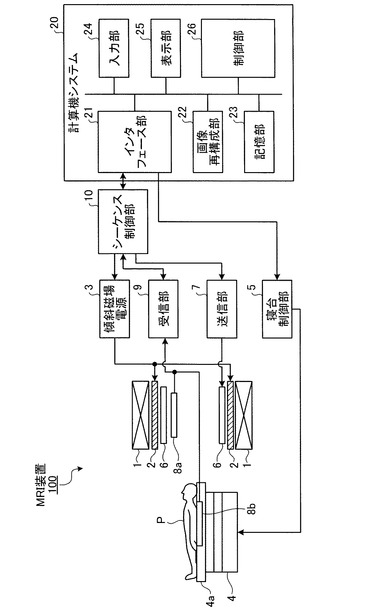
最初に、本実施例1に係るMRI装置の全体構成について説明する。図1は、本実施例1に係るMRI装置100の全体構成を示す図である。図1に示すように、MRI装置100は、静磁場磁石1、傾斜磁場コイル2、傾斜磁場電源3、寝台4、寝台制御部5、送信用RF(Radio Frequency)コイル6、送信部7、受信用RFコイル8aおよび8b、受信部9、シーケンス制御部10および計算機システム20を備える。
【0015】
静磁場磁石1は、中空の円筒形状に形成されており、内部の空間に一様な静磁場を発生させる。この静磁場磁石1としては、例えば永久磁石、超伝導磁石などが用いられる。
【0016】
傾斜磁場コイル2は、中空の円筒形状に形成されており、静磁場磁石1の内側に配置される。この傾斜磁場コイル2は、互いに直交するX,Y,Zの各軸に対応する3つのコイルが組み合わされて形成されている。これら3つのコイルは、傾斜磁場電源3から個別に電流供給を受けることによって、X,Y,Zの各軸に沿って磁場強度が変化する傾斜磁場を発生させる。
【0017】
かかる傾斜磁場コイル2によって発生するX,Y,Z各軸の傾斜磁場は、例えば、リードアウト用傾斜磁場Gr、位相エンコード用傾斜磁場Geおよびスライス選択用傾斜磁場Gsにそれぞれ対応している。リードアウト用傾斜磁場Grは、空間的位置に応じてNMR信号の周波数を変化させるために利用される。位相エンコード用傾斜磁場Geは、空間的位置に応じてNMR信号の位相を変化させるために利用される。スライス選択用傾斜磁場Gsは、任意に撮像断面を決めるために利用される。
【0018】
傾斜磁場電源3は、傾斜磁場コイル2に電流を供給する。寝台4は、被検体Pが載置される天板4aを備え、寝台制御部5による制御のもと、被検体Pが載置された状態で天板4aを傾斜磁場コイル2の空洞(撮像口)内へ挿入する。通常、この寝台4は、長手方向が静磁場磁石1の中心軸と平行になるように設置される。寝台制御部5は、制御部26による制御のもと、寝台4を駆動して天板4aを長手方向および上下方向へ移動する。
【0019】
送信用RFコイル6は、傾斜磁場コイル2の内側に配置され、送信部7から高周波パルスの供給を受けて高周波磁場を発生する。送信部7は、ラーモア周波数に対応する高周波パルスを送信用RFコイル6に送信する。
【0020】
受信用RFコイル8aおよび8bは、傾斜磁場コイル2の内側に配置され、送信用RFコイル6によって発生した高周波磁場の影響で被検体Pから放射されるNMR信号を受信する高周波コイルである。また、受信用RFコイル8aおよび8bは、受信したNMR信号を受信信号として受信部9に出力する。
【0021】
なお、受信用RFコイル8aおよび8bは、それぞれ、複数のコイルエレメントを組み合わせて形成されたアレイコイルである。受信用RFコイル8aは、被検体の腹側に装着される腹部用コイルであり、受信用RFコイル8bは、被検体の背中側に装着される脊椎用コイルである。そして、腹部撮影時には、受信用RFコイル8aおよび8bがともに用いられ、脊椎撮像時には、受信用RFコイル8bのみが用いられる。
【0022】
受信部9は、受信用RFコイル8aおよび8bから出力される受信信号に基づいてデジタル信号の生データを生成し、生成した生データをシーケンス制御部10に送信する。なお、受信部9は、生データを伝送するための複数の受信チャネルを有している。この受信チャネルを受信用RFコイル8aおよび8bが有するコイルエレメントに適宜に接続することによって、画像の生成に用いられる受信信号を選択することができる。
【0023】
シーケンス制御部10は、計算機システム20から送信されるシーケンス実行データに基づいて傾斜磁場電源3、送信部7および受信部9を駆動することによって被検体Pのスキャンを行う。そして、スキャンを行った結果として受信部9から生データが送信されると、シーケンス制御部10は、そのk空間データを計算機システム20へ転送する。
【0024】
ここで、「シーケンス実行データ」とは、所定のシーケンスに基づいて撮像を実行するためのデータである。すなわち、シーケンス実行データとは、傾斜磁場電源3が傾斜磁場コイル2に供給する電源の強さや電源を供給するタイミング、送信部7が送信用RFコイル6に送信するRF信号の強さやRF信号を送信するタイミング、受信部9がNMR信号を検出するタイミングなどを定義したデータである。
【0025】
計算機システム20は、MRI装置100の全体制御や、データ収集、画像再構成などを行う。この計算機システム20は、特に、インタフェース部21、画像再構成部22、記憶部23、入力部24、表示部25および制御部26を有する。
【0026】
インタフェース部21は、シーケンス制御部10との間で授受される各種信号の入出力を制御する。例えば、このインタフェース部21は、シーケンス制御部10に対してシーケンス実行データを送信したり、シーケンス制御部10から生データを受信したりする。
【0027】
ここで、インタフェース部21によって受信された生データは、傾斜磁場コイル2により発生したスライス選択用傾斜磁場Gs、位相エンコード用傾斜磁場Geおよびリードアウト用傾斜磁場GrによってSE(Slice Encode)方向、PE(Phase Encode)方向およびRO(Read Out)方向における空間周波数の情報が対応付けられたk空間データとして、記憶部23に格納される。
【0028】
画像再構成部22は、記憶部23に記憶されたk空間データに対してフーリエ変換等の再構成処理を施すことによって、被検体P内における所望核スピンのスペクトラムデータあるいは画像データを生成する。
【0029】
記憶部23は、インタフェース部21によって受信された生データ(k空間データ)や、画像再構成部22によって生成された画像データなどを被検体Pごとに記憶する。
【0030】
入力部24は、操作者からの各種指示や情報入力を受け付ける。この入力部24としては、マウスやトラックボールなどのポインティングデバイス、モード切替スイッチ等の選択デバイス、あるいはキーボード等の入力デバイスが適宜に用いられる。
【0031】
表示部25は、制御部26による制御のもと、スペクトラムデータあるいは画像データ等の各種の情報を表示する。この表示部25としては、液晶表示器などの表示デバイスが適宜に用いられる。
【0032】
制御部26は、MRI装置100全体を制御する。具体的には、制御部26は、図示していないCPU(Central Processing Unit)やメモリ等を有し、操作者からの指示に基づいて各種プログラムを実行することによって、上述した各部の動作を制御する。
【0033】
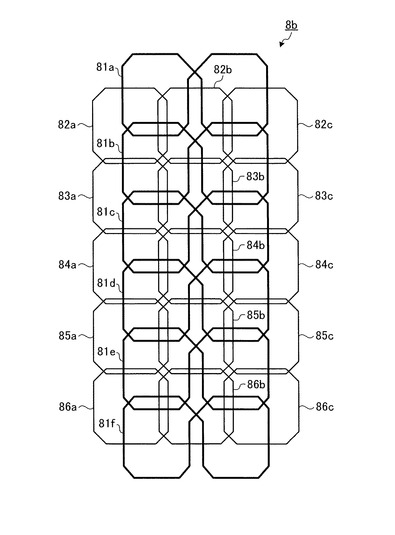
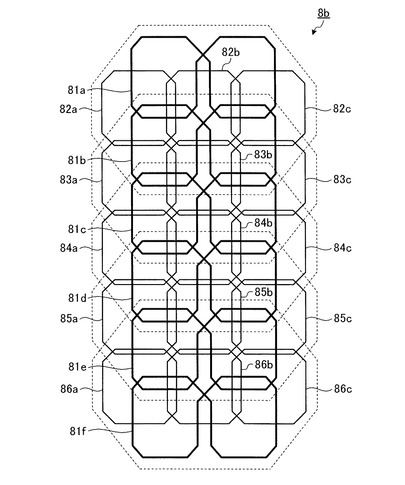
以上、本実施例1に係るMRI装置100の全体構成について説明した。このような構成のもと、本実施例1では、受信用RFコイル8bは、コイルエレメントとして、静磁場と直交する方向に並べて配置された複数のループコイルと、複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルとを有する。図2は、受信用RFコイル8bにおけるコイルエレメントの配置の一例示す図である。
【0034】
図2に示すように、受信用RFコイル8bは、15個のループコイル82a〜82c、83a〜83c、84a〜84c、85a〜85cおよび86a〜86cと、6個の8の字コイル81a〜81fとを有する。なお、図2において、上下方向が静磁場の方向であることとする。
【0035】
ループコイル82a〜82c、ループコイル83a〜83c、ループコイル84a〜84c、ループコイル85a〜85cおよびループコイル86a〜86cは、それぞれ、3個のループコイルが静磁場と直交する方向に並べて配置される。そして、ループコイル82a〜82c、ループコイル83a〜83c、ループコイル84a〜84c、ループコイル85a〜85cおよびループコイル86a〜86cの各組は、静磁場の方向に並べて配置される。
【0036】
6個の8の字コイル81a〜81fは、それぞれ、静磁場の方向に並べられ、ループコイル82a〜82c、83a〜83c、84a〜84c、85a〜85cおよび86a〜86cの概略中央に重ねて配置される。
【0037】
ここで、各8の字コイルは、3個のループコイルそれぞれの中心を通る直線に関して対称な位置に配置される。例えば、8の字コイル81aおよび81bは、3個のループコイル82a〜82cそれぞれの中心を通る直線に関して対称な位置に配置される。また、例えば、8の字コイル81bおよび81cは、3個のループコイル83a〜83cそれぞれの中心を通る直線に関して、対称な位置に配置される。この他の8の字コイルおよびループコイルも同様に配置される。
【0038】
このように、各8の字コイルが、3個のループコイルそれぞれの中心を通る直線に関して対称な位置に配置されることによって、各8の字コイルが有するコイルループの位置と、3個のループコイルそれぞれが有するコイルループの位置とが、コイルループの大きさの半分だけ静磁場の方向にずれることになる。これにより、各8の字コイルが有するコイルループと各ループコイルが有するコイルループとの重なりが少なくなるので、コイルエレメント間のデカップリングが実現される。
【0039】
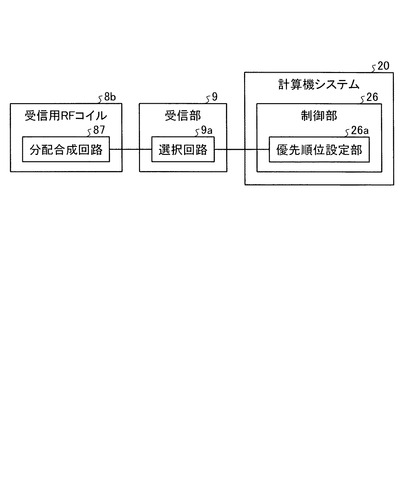
次に、受信用RFコイル8b、受信部9および計算機システム20の関係について説明する。図3は、受信用RFコイル8b、受信部9および計算機システム20の関係を示すブロック図である。なお、前述したように、受信部9と計算機システム20とはシーケンス制御部10を介して情報をやり取りするが、ここでは、シーケンス制御部10については図示を省略している。
【0040】
図3に示すように、受信用RFコイル8bは、分配合成回路87を有する。また、計算機システム20の制御部26は、優先順位設定部26aを有する。また、受信部9は、選択回路9aを有する。
【0041】
受信用RFコイル8bの分配合成回路87は、ループコイルおよび8の字コイルによって受信された受信信号を分配合成することで複数の新たな受信信号を生成する。なお、かかる分配合成回路87によって行われる受信信号の分配合成ついては、後に詳細に説明する。
【0042】
計算機システム20の優先順位設定部26aは、撮像対象の部位である撮像部位に応じて、分配合成回路87によって生成された受信信号の優先順位を設定する。具体的には、優先順位設定部26aは、撮像に際して設定された撮像条件に基づいて撮像部位を特定し、特定した撮像部位に応じて優先順位を設定する。なお、かかる優先順位設定部26aによって行われる優先順位の設定については、後に詳細に説明する。
【0043】
受信部9の選択回路9aは、分配合成回路87によって生成された受信信号の中から画像の生成に用いられる受信信号を選択する。具体的には、選択回路9aは、優先順位設定部26aによって設定された優先順位にしたがって受信信号を選択する。
【0044】
ここで、選択回路9aによる受信信号の選択について詳細に説明する。まず、選択回路9aは、セクションと呼ばれる単位でコイルエレメントを選択し、選択したコイルエレメントによって受信された受信信号を処理する。図4は、選択回路9aによって選択されるセクションの単位を説明するための図である。図4において、点線で囲まれた各範囲は、それぞれ、選択回路9aによって選択されるセクションを示している。
【0045】
図4に示すように、選択回路9aは、2つの8の字コイルと3個のループコイルとを組み合せた単位を1つのセクションとして、コイルエレメントを選択する。例えば、選択回路9aは、2つの8の字コイル81aおよび81bと3個のループコイル82a〜82cとを組み合せた単位で、コイルエレメントを選択する。
【0046】
このように、選択回路9aが、2つの8の字コイルと3個のループコイルとを組み合せた単位で、コイルエレメントを選択することによって、静磁場の方向では、静磁場と直交する方向に並べて配置された3つのループコイルごとの感度領域を基準に、撮像される範囲を設定することができる。
【0047】
その後、選択回路9aは、優先順位設定部26aによって設定された優先順位にしたがって、分配合成回路87によって生成された受信信号の中から画像の生成に用いられる受信信号を選択する。
【0048】
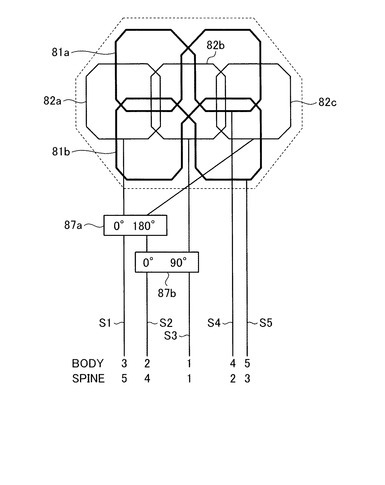
次に、受信用RFコイル8bの分配合成回路87によって行われる受信信号の分配合成、および、優先順位設定部26aによって行われる優先順位の設定について説明する。図5は、受信信号の分配合成および優先順位の設定を説明するための図である。図5に示すように、例えば、分配合成回路87として、0°−180°ハイブリッド回路87aと、0°−90°ハイブリッド回路87bとが設けられる。
【0049】
0°−180°ハイブリッド回路87aは、ループコイル82aおよび82cから出力される受信信号を入力する。そして、0°−180°ハイブリッド回路87aは、入力した2つの信号をそのまま合成し、合成した信号を0°出力側から受信信号S1として出力する。また、0°−180°ハイブリッド回路87aは、入力した2つの信号の位相を互いに180°シフトさせた信号を合成し、合成した信号を180°出力側から出力する。
【0050】
0°−90°ハイブリッド回路87bは、0°−180°ハイブリッド回路87aの180°側から出力される合成信号と、ループコイル82bから出力される受信信号を入力する。そして、0°−90°ハイブリッド回路87bは、入力した2つの信号をそのまま合成し、合成した信号を0°出力側から受信信号S2として出力する。また、0°−90°ハイブリッド回路87bは、入力した2つの信号の位相を互いに90°シフトさせた信号を合成し、合成した信号を90°出力側から受信信号S3として出力する。
【0051】
なお、ここでは、8の字コイル81aから出力される信号を受信信号S4とし、8の字コイル81bから出力される信号を受信信号S5とする。
【0052】
この場合、優先順位設定部26aは、受信信号S1〜受信信号S5について、優先順位を設定する。まず、優先順位設定部26aは、撮像に際して設定された撮像条件に基づいて撮像部位を特定し、特定した撮像部位に応じて優先順位を設定する。
【0053】
ここで、分配合成回路87によって生成される各受信信号の特性について説明すると、まず、受信信号S1およびS2は、被検体に対して深さ方向に浅く、かつ、ループコイル82a〜82cが並ぶ方向に広い感度を有する。また、受信信号S3は、被検体に対して深さ方向に深く、かつ、ループコイル82a〜82cが並ぶ方向に広い感度を有する。また、受信信号S4およびS5は、8の字コイル81aおよび81bの中央付近でSN比が高い感度を有する。
【0054】
そこで、例えば、優先順位設定部26aは、撮像部位が腹部であった場合には、図5の「BODY」に示すように、受信信号S3(優先順位「1」)、受信信号S2(優先順位「2」)、受信信号S1(優先順位「3」)、受信信号S4(優先順位「4」)、受信信号S5(優先順位「5」)の順で優先順位を設定する。すなわち、撮像部位が腹部であった場合には、被検体に対して広い範囲で感度がよい受信信号の優先順位が高くなる。
【0055】
また、例えば、優先順位設定部26aは、撮像部位が脊椎であった場合には、図5の「SPINE」に示すように、受信信号S3(優先順位「1」)、受信信号S4(優先順位「2」)、受信信号S5(優先順位「3」)、受信信号S2(優先順位「4」)、受信信号S1(優先順位「5」)の順で優先順位を設定する。すなわち、撮像部位が脊椎であった場合には、被検体に対して中央付近でSN比がよい受信信号の優先順位が高くなる。
【0056】
このように、優先順位設定部26aは、撮像対象の部位である撮像部位に応じて、最も適した感度が得られるように、受信信号の優先順位を設定する。
【0057】
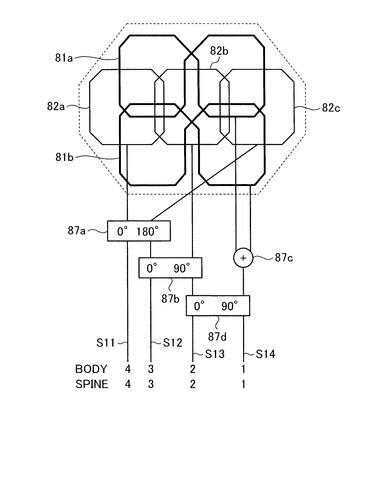
なお、例えば、受信部9が有する受信チャネルの数が限られている場合には、8の字コイル81aおよび81bから出力される受信信号を合成してもよい。図6は、8の字コイルから出力される受信信号を合成する場合を説明するための図である。図6に示すように、この場合、分配合成回路87は、0°−180°ハイブリッド回路87aと、0°−90°ハイブリッド回路87bに加えて、加算回路87cおよび0°−90°ハイブリッド回路87dをさらに有する。
【0058】
なお、ここでは、0°−180°ハイブリッド回路87aの0°出力側から出力される信号を受信信号S11とし、0°−90°ハイブリッド回路87bの0°出力側から出力される信号を受信信号S12とする。
【0059】
加算回路87cは、8の字コイル81aおよび81bから出力される受信信号を合成する。0°−90°ハイブリッド回路87dは、0°−90°ハイブリッド回路87bの90°側から出力される信号と、加算回路87dから出力される受信信号を入力する。そして、0°−90°ハイブリッド回路87dは、入力した2つの信号をそのまま合成し、合成した信号を0°出力側から受信信号S13として出力する。また、0°−90°ハイブリッド回路87dは、入力した2つの信号の位相を互いに90°シフトさせた信号を合成し、合成した信号を90°出力側から受信信号S14として出力する。
【0060】
この場合、優先順位設定部26aは、受信信号S11〜受信信号S14について、優先順位を設定する。まず、優先順位設定部26aは、撮像に際して設定された撮像条件に基づいて撮像部位を特定し、特定した撮像部位に応じて優先順位を設定する。
【0061】
ここで、分配合成回路87によって生成される各受信信号の特性について説明すると、まず、受信信号S11およびS12は、被検体に対して深さ方向に浅く、かつ、ループコイル82a〜82cが並ぶ方向に広い感度を有する。また、受信信号S13は、ループコイル82a〜82cが並ぶ方向に広く、8の字コイル81aおよび81bの中央付近で深い感度を有する。また、受信信号S14は、ループコイル82a〜82cが並ぶ方向に広く、8の字コイル81aおよび81bの中央付近でSN比が高い感度を有する。
【0062】
そこで、例えば、優先順位設定部26aは、撮像部位が腹部または脊椎であった場合には、図6の「BODY」および「SPINE」に示すように、受信信号S14(優先順位「1」)、受信信号S13(優先順位「2」)、受信信号S12(優先順位「3」)、受信信号S11(優先順位「4」)の順で優先順位を設定する。すなわち、この場合には、被検体に対して広い範囲で感度がよく、かつ、中央付近でSN比がよい受信信号の優先順位が高くなる。
【0063】
なお、ここでは、優先順位設定部26aは、撮像条件に基づいて撮像部位を特定する場合について説明したが、例えば、撮像時に使用される受信用RFコイルの種類を検出し、検出した受信用RFコイルの種類に基づいて撮像部位を特定してもよい。その場合、優先順位設定部26aは、例えば、受信用RFコイル8aおよび8bをともに検出した場合には、撮像部位を腹部と特定する。また、優先順位設定部26aは、受信用RFコイル8bのみを検出した場合には、撮像部位を脊椎と特定する。
【0064】
また、例えば、優先順位設定部26aは、入力部24を介して、操作者から受信信号ごとに優先順位を受け付け、受け付けた優先順位を設定してもよい。
【0065】
上述してきたように、本実施例1では、受信用RFコイル8bは、静磁場と直交する方向に並べて配置された複数のループコイルと、複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルとを有する。したがって、本実施例1によれば、複数のループコイルと1つの8の字コイルとを組み合せた場合でも、コイルエレメント間のデカップリングを容易に実現することができる。
【0066】
また、本実施例1では、分配合成回路87は、ループコイルおよび8の字コイルによって受信された受信信号を分配合成することで複数の新たな受信信号を生成する。そして、選択回路9aは、分配合成回路87によって生成された受信信号の中から画像の生成に用いられる受信信号を選択する。したがって、本実施例1によれば、各コイルエレメントによって受信された受信信号を各種の特性を有する受信信号に変換したうえで、撮像部位や撮像の目的などに応じて最適な受信信号を選択することができる。
【0067】
また、本実施例1では、優先順位設定部26aは、撮像対象の部位である撮像部位に応じて、分配合成回路87によって生成された受信信号の優先順位を設定する。そして、選択回路9aは、優先順位設定部26aによって設定された優先順位にしたがって受信信号を選択する。したがって、本実施例1によれば、撮像部位ごとに最適な受信信号を選択することができるので、撮像部位が変わっても安定した画質の画像を得ることが可能である。
【0068】
また、本実施例1では、優先順位設定部26aは、撮像に際して設定された撮像条件に基づいて撮像部位を特定し、特定した撮像部位に応じて、優先順位を設定する。したがって、本実施例1によれば、複数の部位が1回の検査で撮像される場合に、撮像部位ごとに最適な受信信号を自動的に選択することができる。
【0069】
また、本実施例1では、優先順位設定部26aは、撮像時に使用される高周波コイルの種類を検出し、検出した高周波コイルの種類に基づいて撮像部位を特定し、特定した撮像部位に応じて、優先順位を設定する。したがって、本実施例1によれば、複数種類の異なる高周波コイルが撮像に用いられる場合に、撮像部位ごとに最適な受信信号を自動的に選択することができる。
【0070】
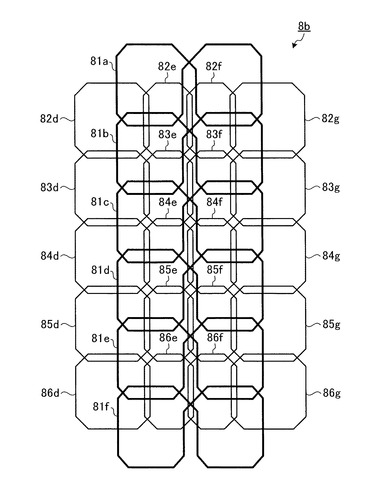
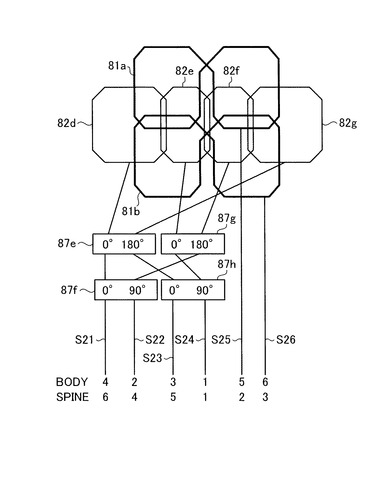
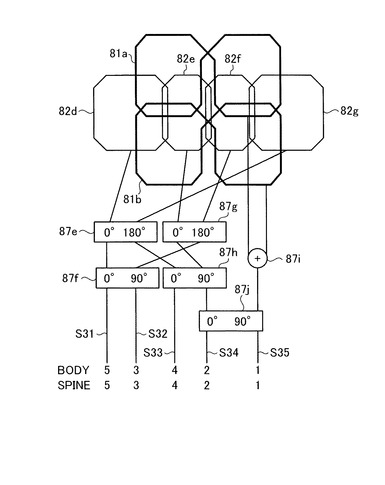
なお、上記実施例1では、3個のループコイルが静磁場と直交する方向に配置される場合について説明したが、本発明はこれに限られるものではない。例えば、4個のループコイルが静磁場と直交する方向に配置される場合にも本発明を同様に適用することができる。図7、8および9は、静磁場と直交する方向に4つのループコイルが配置される場合の変形例を説明するための図である。
【0071】
図7に示すように、例えば、受信用RFコイル8bは、20個のループコイル82d〜82g、83d〜83g、84d〜84g、85d〜85gおよび86d〜86gと、6個の8の字コイル81a〜81fとを有する。なお、図7において、上下方向が静磁場の方向であることとする。
【0072】
ループコイル82d〜82g、ループコイル83d〜83g、ループコイル84d〜84g、ループコイル85d〜85gおよびループコイル86d〜86gは、それぞれ、4個のループコイルが静磁場と直交する方向に並べて配置される。そのうえで、ループコイル82d〜82g、ループコイル83d〜83g、ループコイル84d〜84g、ループコイル85d〜85gおよびループコイル86d〜86gの各組は、静磁場の方向に並べて配置される。
【0073】
この場合も、6個の8の字コイル81a〜81fは、それぞれ、静磁場の方向に並べられ、ループコイル82d〜82g、83d〜83g、84d〜84g、85d〜85gおよび86d〜86gの概略中央に重ねて配置される。
【0074】
ここで、各8の字コイルは、4個のループコイルそれぞれの中心を通る直線に関して対称な位置に配置される。例えば、8の字コイル81aおよび81bは、4個のループコイル82d〜82gそれぞれの中心を通る直線に関して対称な位置に配置される。また、例えば、8の字コイル81bおよび81cは、4個のループコイル83d〜83gそれぞれの中心を通る直線に関して、対称な位置に配置される。この他の8の字コイルおよびループコイルも同様に配置される。
【0075】
このように、各8の字コイルが、4個のループコイルそれぞれの中心を通る直線に関して対称な位置に配置されることによって、各8の字コイルが有するコイルループの位置と4個のループコイルそれぞれが有するコイルループの位置とが、コイルループの大きさの半分だけ静磁場の方向にずれることになる。これにより、3個のループコイルが静磁場と直交する方向に配置される場合と同様に、各8の字コイルが有するコイルループと各ループコイルが有するコイルループとの重なりが減るので、コイルエレメント間のデカップリングが実現される。
【0076】
したがって、4個のループコイルが静磁場と直交する方向に配置される場合でも、コイルエレメント間のデカップリングを容易に実現することができる。
【0077】
また、4個のループコイルが静磁場と直交する方向に配置される場合、図8に示すように、例えば、分配合成回路87として、0°−180°ハイブリッド回路87eと、0°−90°ハイブリッド回路87fと、0°−180°ハイブリッド回路87gと、0°−90°ハイブリッド回路87hとが設けられる。
【0078】
この場合も、図5に示した例と同様に、優先順位設定部26aは、例えば、撮像に際して設定された撮像条件に基づいて撮像部位を特定し、特定した撮像部位に応じて、各ハイブリッド回路および各8の字ループから出力される受信信号S21〜S26の優先順位を設定する。
【0079】
また、受信部9が有する受信チャネルの数が限られている場合には、図9に示すように、例えば、分配合成回路87は、加算回路87iおよび0°−90°ハイブリッド回路87jをさらに有する。加算回路87iは、8の字コイル81aおよび81bから出力される受信信号を合成する。
【0080】
この場合も、図6に示した例と同様に、優先順位設定部26aは、例えば、撮像に際して設定された撮像条件に基づいて撮像部位を特定し、特定した撮像部位に応じて、各ハイブリッド回路から出力される受信信号S31〜S35の優先順位を設定する。
【0081】
このように、4個のループコイルが静磁場と直交する方向に配置される場合でも、撮像対象の部位である撮像部位に応じて、最も適した感度が得られるように、受信信号の優先順位を設定する。
【符号の説明】
【0082】
100 MRI装置(磁気共鳴イメージング装置)
8b 受信用RFコイル
82a〜82g、83a〜83g、84a〜84g、85a〜85g、86a〜86g、 ループコイル
81a〜81f 8の字コイル
【技術分野】
【0001】
本発明は、磁気共鳴イメージング装置および高周波コイルに関する。
【背景技術】
【0002】
磁気共鳴イメージング装置は、磁気共鳴現象を利用して被検体内を画像化する装置である。具体的には、磁気共鳴イメージング装置は、静磁場内に置かれた被検体に高周波磁場を印加し、その高周波磁場の印加によって被検体から発せられる核磁気共鳴信号を検出して画像を生成する。
【0003】
かかる磁気共鳴イメージング装置は、被検体から発せられる核磁気共鳴現象を検出する高周波コイルを備える。近年では、この高周波コイルとして、複数のコイルエレメントを組み合せたアレイコイルが広く利用されている(例えば、特許文献1〜4参照)。ここで、アレイコイルに用いられるコイルエレメントには、ループコイルや8の字コイル(「サドルコイル」とも呼ばれる)などの各種のコイルがある。
【0004】
そして、アレイコイルは、組み合せるコイルエレメントの種類によって特性が異なる。例えば、複数のループコイルを並べたアレイコイルは、被検体に対して深さ方向に深く、かつ、ループコイルが並ぶ方向に広い感度を有する。また、8の字コイルの中央にループコイルを重ねたアレイコイルは、SN比が良好であるが、腹部全体をカバーするだけの広い感度は有していない。
【0005】
このようなことから、近年では、広い感度を有しつつSN比が良好なアレイコイルを作製することを目的として、複数のループコイルと1つの8の字コイルとを組み合せることが検討されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−153878号公報
【特許文献2】特開2007−21188号公報
【特許文献3】特開2003−50235号公報
【特許文献4】特開2003−132308号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、複数のループコイルと1つの8の字コイルとを組み合せた場合には、各コイルの重なりが大きくなる。その結果、コイルエレメント間でカップリングが発生してSN比が低減するという課題が生じてしまう。
【0008】
本発明は、上記に鑑みてなされたものであって、複数のループコイルと1つの8の字コイルとを組み合せた場合でも、コイルエレメント間のデカップリングを容易に実現することができる磁気共鳴イメージング装置および高周波コイルを提供することを目的とする。
【課題を解決するための手段】
【0009】
上述した課題を解決し、目的を達成するために、請求項1記載の本発明は、静磁場内に置かれた被検体から発せられる磁気共鳴信号を受信する高周波コイルを備えた磁気共鳴イメージング装置であって、前記高周波コイルは、前記静磁場と直交する方向に並べて配置された複数のループコイルと、前記複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルとを有することを特徴とする。
【0010】
また、請求項6記載の本発明は、静磁場内に置かれた被検体から発せられる磁気共鳴信号を受信する高周波コイルであって、前記静磁場と直交する方向に並べて配置された複数のループコイルと、前記複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルとを有することを特徴とする。
【発明の効果】
【0011】
請求項1または6記載の本発明によれば、複数のループコイルと1つの8の字コイルとを組み合せた場合でも、コイルエレメント間のデカップリングを容易に実現することができるという効果を奏する。
【図面の簡単な説明】
【0012】
【図1】図1は、本実施例1に係るMRI装置の全体構成を示す図である。
【図2】図2は、受信用RFコイルにおけるコイルエレメントの配置の一例示す図である。
【図3】図3は、受信用RFコイル、受信部および計算機システムの関係を示すブロック図である。
【図4】図4は、選択回路によって選択されるセクションの単位を説明するための図である。
【図5】図5は、受信信号の分配合成および優先順位の設定を説明するための図である。
【図6】図6は、8の字コイルから出力される受信信号を合成する場合を説明するための図である。
【図7】図7は、静磁場と直交する方向に4つのループコイルが配置される場合の変形例を説明するための図(1)である。
【図8】図8は、静磁場と直交する方向に4つのループコイルが配置される場合の変形例を説明するための図(2)である。
【図9】図9は、静磁場と直交する方向に4つのループコイルが配置される場合の変形例を説明するための図(3)である。
【発明を実施するための形態】
【0013】
以下に、本発明に係る磁気共鳴イメージング装置および高周波コイルの実施例を図面に基づいて詳細に説明する。なお、以下に示す実施例によって本発明が限定されるものではない。また、以下に示す実施例では、磁気共鳴イメージング装置を「MRI(Magnetic Resonance Imaging)装置」と呼び、核磁気共鳴信号を「NMR(Nuclear Magnetic Resonance)信号」と呼ぶ。
【実施例1】
【0014】
最初に、本実施例1に係るMRI装置の全体構成について説明する。図1は、本実施例1に係るMRI装置100の全体構成を示す図である。図1に示すように、MRI装置100は、静磁場磁石1、傾斜磁場コイル2、傾斜磁場電源3、寝台4、寝台制御部5、送信用RF(Radio Frequency)コイル6、送信部7、受信用RFコイル8aおよび8b、受信部9、シーケンス制御部10および計算機システム20を備える。
【0015】
静磁場磁石1は、中空の円筒形状に形成されており、内部の空間に一様な静磁場を発生させる。この静磁場磁石1としては、例えば永久磁石、超伝導磁石などが用いられる。
【0016】
傾斜磁場コイル2は、中空の円筒形状に形成されており、静磁場磁石1の内側に配置される。この傾斜磁場コイル2は、互いに直交するX,Y,Zの各軸に対応する3つのコイルが組み合わされて形成されている。これら3つのコイルは、傾斜磁場電源3から個別に電流供給を受けることによって、X,Y,Zの各軸に沿って磁場強度が変化する傾斜磁場を発生させる。
【0017】
かかる傾斜磁場コイル2によって発生するX,Y,Z各軸の傾斜磁場は、例えば、リードアウト用傾斜磁場Gr、位相エンコード用傾斜磁場Geおよびスライス選択用傾斜磁場Gsにそれぞれ対応している。リードアウト用傾斜磁場Grは、空間的位置に応じてNMR信号の周波数を変化させるために利用される。位相エンコード用傾斜磁場Geは、空間的位置に応じてNMR信号の位相を変化させるために利用される。スライス選択用傾斜磁場Gsは、任意に撮像断面を決めるために利用される。
【0018】
傾斜磁場電源3は、傾斜磁場コイル2に電流を供給する。寝台4は、被検体Pが載置される天板4aを備え、寝台制御部5による制御のもと、被検体Pが載置された状態で天板4aを傾斜磁場コイル2の空洞(撮像口)内へ挿入する。通常、この寝台4は、長手方向が静磁場磁石1の中心軸と平行になるように設置される。寝台制御部5は、制御部26による制御のもと、寝台4を駆動して天板4aを長手方向および上下方向へ移動する。
【0019】
送信用RFコイル6は、傾斜磁場コイル2の内側に配置され、送信部7から高周波パルスの供給を受けて高周波磁場を発生する。送信部7は、ラーモア周波数に対応する高周波パルスを送信用RFコイル6に送信する。
【0020】
受信用RFコイル8aおよび8bは、傾斜磁場コイル2の内側に配置され、送信用RFコイル6によって発生した高周波磁場の影響で被検体Pから放射されるNMR信号を受信する高周波コイルである。また、受信用RFコイル8aおよび8bは、受信したNMR信号を受信信号として受信部9に出力する。
【0021】
なお、受信用RFコイル8aおよび8bは、それぞれ、複数のコイルエレメントを組み合わせて形成されたアレイコイルである。受信用RFコイル8aは、被検体の腹側に装着される腹部用コイルであり、受信用RFコイル8bは、被検体の背中側に装着される脊椎用コイルである。そして、腹部撮影時には、受信用RFコイル8aおよび8bがともに用いられ、脊椎撮像時には、受信用RFコイル8bのみが用いられる。
【0022】
受信部9は、受信用RFコイル8aおよび8bから出力される受信信号に基づいてデジタル信号の生データを生成し、生成した生データをシーケンス制御部10に送信する。なお、受信部9は、生データを伝送するための複数の受信チャネルを有している。この受信チャネルを受信用RFコイル8aおよび8bが有するコイルエレメントに適宜に接続することによって、画像の生成に用いられる受信信号を選択することができる。
【0023】
シーケンス制御部10は、計算機システム20から送信されるシーケンス実行データに基づいて傾斜磁場電源3、送信部7および受信部9を駆動することによって被検体Pのスキャンを行う。そして、スキャンを行った結果として受信部9から生データが送信されると、シーケンス制御部10は、そのk空間データを計算機システム20へ転送する。
【0024】
ここで、「シーケンス実行データ」とは、所定のシーケンスに基づいて撮像を実行するためのデータである。すなわち、シーケンス実行データとは、傾斜磁場電源3が傾斜磁場コイル2に供給する電源の強さや電源を供給するタイミング、送信部7が送信用RFコイル6に送信するRF信号の強さやRF信号を送信するタイミング、受信部9がNMR信号を検出するタイミングなどを定義したデータである。
【0025】
計算機システム20は、MRI装置100の全体制御や、データ収集、画像再構成などを行う。この計算機システム20は、特に、インタフェース部21、画像再構成部22、記憶部23、入力部24、表示部25および制御部26を有する。
【0026】
インタフェース部21は、シーケンス制御部10との間で授受される各種信号の入出力を制御する。例えば、このインタフェース部21は、シーケンス制御部10に対してシーケンス実行データを送信したり、シーケンス制御部10から生データを受信したりする。
【0027】
ここで、インタフェース部21によって受信された生データは、傾斜磁場コイル2により発生したスライス選択用傾斜磁場Gs、位相エンコード用傾斜磁場Geおよびリードアウト用傾斜磁場GrによってSE(Slice Encode)方向、PE(Phase Encode)方向およびRO(Read Out)方向における空間周波数の情報が対応付けられたk空間データとして、記憶部23に格納される。
【0028】
画像再構成部22は、記憶部23に記憶されたk空間データに対してフーリエ変換等の再構成処理を施すことによって、被検体P内における所望核スピンのスペクトラムデータあるいは画像データを生成する。
【0029】
記憶部23は、インタフェース部21によって受信された生データ(k空間データ)や、画像再構成部22によって生成された画像データなどを被検体Pごとに記憶する。
【0030】
入力部24は、操作者からの各種指示や情報入力を受け付ける。この入力部24としては、マウスやトラックボールなどのポインティングデバイス、モード切替スイッチ等の選択デバイス、あるいはキーボード等の入力デバイスが適宜に用いられる。
【0031】
表示部25は、制御部26による制御のもと、スペクトラムデータあるいは画像データ等の各種の情報を表示する。この表示部25としては、液晶表示器などの表示デバイスが適宜に用いられる。
【0032】
制御部26は、MRI装置100全体を制御する。具体的には、制御部26は、図示していないCPU(Central Processing Unit)やメモリ等を有し、操作者からの指示に基づいて各種プログラムを実行することによって、上述した各部の動作を制御する。
【0033】
以上、本実施例1に係るMRI装置100の全体構成について説明した。このような構成のもと、本実施例1では、受信用RFコイル8bは、コイルエレメントとして、静磁場と直交する方向に並べて配置された複数のループコイルと、複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルとを有する。図2は、受信用RFコイル8bにおけるコイルエレメントの配置の一例示す図である。
【0034】
図2に示すように、受信用RFコイル8bは、15個のループコイル82a〜82c、83a〜83c、84a〜84c、85a〜85cおよび86a〜86cと、6個の8の字コイル81a〜81fとを有する。なお、図2において、上下方向が静磁場の方向であることとする。
【0035】
ループコイル82a〜82c、ループコイル83a〜83c、ループコイル84a〜84c、ループコイル85a〜85cおよびループコイル86a〜86cは、それぞれ、3個のループコイルが静磁場と直交する方向に並べて配置される。そして、ループコイル82a〜82c、ループコイル83a〜83c、ループコイル84a〜84c、ループコイル85a〜85cおよびループコイル86a〜86cの各組は、静磁場の方向に並べて配置される。
【0036】
6個の8の字コイル81a〜81fは、それぞれ、静磁場の方向に並べられ、ループコイル82a〜82c、83a〜83c、84a〜84c、85a〜85cおよび86a〜86cの概略中央に重ねて配置される。
【0037】
ここで、各8の字コイルは、3個のループコイルそれぞれの中心を通る直線に関して対称な位置に配置される。例えば、8の字コイル81aおよび81bは、3個のループコイル82a〜82cそれぞれの中心を通る直線に関して対称な位置に配置される。また、例えば、8の字コイル81bおよび81cは、3個のループコイル83a〜83cそれぞれの中心を通る直線に関して、対称な位置に配置される。この他の8の字コイルおよびループコイルも同様に配置される。
【0038】
このように、各8の字コイルが、3個のループコイルそれぞれの中心を通る直線に関して対称な位置に配置されることによって、各8の字コイルが有するコイルループの位置と、3個のループコイルそれぞれが有するコイルループの位置とが、コイルループの大きさの半分だけ静磁場の方向にずれることになる。これにより、各8の字コイルが有するコイルループと各ループコイルが有するコイルループとの重なりが少なくなるので、コイルエレメント間のデカップリングが実現される。
【0039】
次に、受信用RFコイル8b、受信部9および計算機システム20の関係について説明する。図3は、受信用RFコイル8b、受信部9および計算機システム20の関係を示すブロック図である。なお、前述したように、受信部9と計算機システム20とはシーケンス制御部10を介して情報をやり取りするが、ここでは、シーケンス制御部10については図示を省略している。
【0040】
図3に示すように、受信用RFコイル8bは、分配合成回路87を有する。また、計算機システム20の制御部26は、優先順位設定部26aを有する。また、受信部9は、選択回路9aを有する。
【0041】
受信用RFコイル8bの分配合成回路87は、ループコイルおよび8の字コイルによって受信された受信信号を分配合成することで複数の新たな受信信号を生成する。なお、かかる分配合成回路87によって行われる受信信号の分配合成ついては、後に詳細に説明する。
【0042】
計算機システム20の優先順位設定部26aは、撮像対象の部位である撮像部位に応じて、分配合成回路87によって生成された受信信号の優先順位を設定する。具体的には、優先順位設定部26aは、撮像に際して設定された撮像条件に基づいて撮像部位を特定し、特定した撮像部位に応じて優先順位を設定する。なお、かかる優先順位設定部26aによって行われる優先順位の設定については、後に詳細に説明する。
【0043】
受信部9の選択回路9aは、分配合成回路87によって生成された受信信号の中から画像の生成に用いられる受信信号を選択する。具体的には、選択回路9aは、優先順位設定部26aによって設定された優先順位にしたがって受信信号を選択する。
【0044】
ここで、選択回路9aによる受信信号の選択について詳細に説明する。まず、選択回路9aは、セクションと呼ばれる単位でコイルエレメントを選択し、選択したコイルエレメントによって受信された受信信号を処理する。図4は、選択回路9aによって選択されるセクションの単位を説明するための図である。図4において、点線で囲まれた各範囲は、それぞれ、選択回路9aによって選択されるセクションを示している。
【0045】
図4に示すように、選択回路9aは、2つの8の字コイルと3個のループコイルとを組み合せた単位を1つのセクションとして、コイルエレメントを選択する。例えば、選択回路9aは、2つの8の字コイル81aおよび81bと3個のループコイル82a〜82cとを組み合せた単位で、コイルエレメントを選択する。
【0046】
このように、選択回路9aが、2つの8の字コイルと3個のループコイルとを組み合せた単位で、コイルエレメントを選択することによって、静磁場の方向では、静磁場と直交する方向に並べて配置された3つのループコイルごとの感度領域を基準に、撮像される範囲を設定することができる。
【0047】
その後、選択回路9aは、優先順位設定部26aによって設定された優先順位にしたがって、分配合成回路87によって生成された受信信号の中から画像の生成に用いられる受信信号を選択する。
【0048】
次に、受信用RFコイル8bの分配合成回路87によって行われる受信信号の分配合成、および、優先順位設定部26aによって行われる優先順位の設定について説明する。図5は、受信信号の分配合成および優先順位の設定を説明するための図である。図5に示すように、例えば、分配合成回路87として、0°−180°ハイブリッド回路87aと、0°−90°ハイブリッド回路87bとが設けられる。
【0049】
0°−180°ハイブリッド回路87aは、ループコイル82aおよび82cから出力される受信信号を入力する。そして、0°−180°ハイブリッド回路87aは、入力した2つの信号をそのまま合成し、合成した信号を0°出力側から受信信号S1として出力する。また、0°−180°ハイブリッド回路87aは、入力した2つの信号の位相を互いに180°シフトさせた信号を合成し、合成した信号を180°出力側から出力する。
【0050】
0°−90°ハイブリッド回路87bは、0°−180°ハイブリッド回路87aの180°側から出力される合成信号と、ループコイル82bから出力される受信信号を入力する。そして、0°−90°ハイブリッド回路87bは、入力した2つの信号をそのまま合成し、合成した信号を0°出力側から受信信号S2として出力する。また、0°−90°ハイブリッド回路87bは、入力した2つの信号の位相を互いに90°シフトさせた信号を合成し、合成した信号を90°出力側から受信信号S3として出力する。
【0051】
なお、ここでは、8の字コイル81aから出力される信号を受信信号S4とし、8の字コイル81bから出力される信号を受信信号S5とする。
【0052】
この場合、優先順位設定部26aは、受信信号S1〜受信信号S5について、優先順位を設定する。まず、優先順位設定部26aは、撮像に際して設定された撮像条件に基づいて撮像部位を特定し、特定した撮像部位に応じて優先順位を設定する。
【0053】
ここで、分配合成回路87によって生成される各受信信号の特性について説明すると、まず、受信信号S1およびS2は、被検体に対して深さ方向に浅く、かつ、ループコイル82a〜82cが並ぶ方向に広い感度を有する。また、受信信号S3は、被検体に対して深さ方向に深く、かつ、ループコイル82a〜82cが並ぶ方向に広い感度を有する。また、受信信号S4およびS5は、8の字コイル81aおよび81bの中央付近でSN比が高い感度を有する。
【0054】
そこで、例えば、優先順位設定部26aは、撮像部位が腹部であった場合には、図5の「BODY」に示すように、受信信号S3(優先順位「1」)、受信信号S2(優先順位「2」)、受信信号S1(優先順位「3」)、受信信号S4(優先順位「4」)、受信信号S5(優先順位「5」)の順で優先順位を設定する。すなわち、撮像部位が腹部であった場合には、被検体に対して広い範囲で感度がよい受信信号の優先順位が高くなる。
【0055】
また、例えば、優先順位設定部26aは、撮像部位が脊椎であった場合には、図5の「SPINE」に示すように、受信信号S3(優先順位「1」)、受信信号S4(優先順位「2」)、受信信号S5(優先順位「3」)、受信信号S2(優先順位「4」)、受信信号S1(優先順位「5」)の順で優先順位を設定する。すなわち、撮像部位が脊椎であった場合には、被検体に対して中央付近でSN比がよい受信信号の優先順位が高くなる。
【0056】
このように、優先順位設定部26aは、撮像対象の部位である撮像部位に応じて、最も適した感度が得られるように、受信信号の優先順位を設定する。
【0057】
なお、例えば、受信部9が有する受信チャネルの数が限られている場合には、8の字コイル81aおよび81bから出力される受信信号を合成してもよい。図6は、8の字コイルから出力される受信信号を合成する場合を説明するための図である。図6に示すように、この場合、分配合成回路87は、0°−180°ハイブリッド回路87aと、0°−90°ハイブリッド回路87bに加えて、加算回路87cおよび0°−90°ハイブリッド回路87dをさらに有する。
【0058】
なお、ここでは、0°−180°ハイブリッド回路87aの0°出力側から出力される信号を受信信号S11とし、0°−90°ハイブリッド回路87bの0°出力側から出力される信号を受信信号S12とする。
【0059】
加算回路87cは、8の字コイル81aおよび81bから出力される受信信号を合成する。0°−90°ハイブリッド回路87dは、0°−90°ハイブリッド回路87bの90°側から出力される信号と、加算回路87dから出力される受信信号を入力する。そして、0°−90°ハイブリッド回路87dは、入力した2つの信号をそのまま合成し、合成した信号を0°出力側から受信信号S13として出力する。また、0°−90°ハイブリッド回路87dは、入力した2つの信号の位相を互いに90°シフトさせた信号を合成し、合成した信号を90°出力側から受信信号S14として出力する。
【0060】
この場合、優先順位設定部26aは、受信信号S11〜受信信号S14について、優先順位を設定する。まず、優先順位設定部26aは、撮像に際して設定された撮像条件に基づいて撮像部位を特定し、特定した撮像部位に応じて優先順位を設定する。
【0061】
ここで、分配合成回路87によって生成される各受信信号の特性について説明すると、まず、受信信号S11およびS12は、被検体に対して深さ方向に浅く、かつ、ループコイル82a〜82cが並ぶ方向に広い感度を有する。また、受信信号S13は、ループコイル82a〜82cが並ぶ方向に広く、8の字コイル81aおよび81bの中央付近で深い感度を有する。また、受信信号S14は、ループコイル82a〜82cが並ぶ方向に広く、8の字コイル81aおよび81bの中央付近でSN比が高い感度を有する。
【0062】
そこで、例えば、優先順位設定部26aは、撮像部位が腹部または脊椎であった場合には、図6の「BODY」および「SPINE」に示すように、受信信号S14(優先順位「1」)、受信信号S13(優先順位「2」)、受信信号S12(優先順位「3」)、受信信号S11(優先順位「4」)の順で優先順位を設定する。すなわち、この場合には、被検体に対して広い範囲で感度がよく、かつ、中央付近でSN比がよい受信信号の優先順位が高くなる。
【0063】
なお、ここでは、優先順位設定部26aは、撮像条件に基づいて撮像部位を特定する場合について説明したが、例えば、撮像時に使用される受信用RFコイルの種類を検出し、検出した受信用RFコイルの種類に基づいて撮像部位を特定してもよい。その場合、優先順位設定部26aは、例えば、受信用RFコイル8aおよび8bをともに検出した場合には、撮像部位を腹部と特定する。また、優先順位設定部26aは、受信用RFコイル8bのみを検出した場合には、撮像部位を脊椎と特定する。
【0064】
また、例えば、優先順位設定部26aは、入力部24を介して、操作者から受信信号ごとに優先順位を受け付け、受け付けた優先順位を設定してもよい。
【0065】
上述してきたように、本実施例1では、受信用RFコイル8bは、静磁場と直交する方向に並べて配置された複数のループコイルと、複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルとを有する。したがって、本実施例1によれば、複数のループコイルと1つの8の字コイルとを組み合せた場合でも、コイルエレメント間のデカップリングを容易に実現することができる。
【0066】
また、本実施例1では、分配合成回路87は、ループコイルおよび8の字コイルによって受信された受信信号を分配合成することで複数の新たな受信信号を生成する。そして、選択回路9aは、分配合成回路87によって生成された受信信号の中から画像の生成に用いられる受信信号を選択する。したがって、本実施例1によれば、各コイルエレメントによって受信された受信信号を各種の特性を有する受信信号に変換したうえで、撮像部位や撮像の目的などに応じて最適な受信信号を選択することができる。
【0067】
また、本実施例1では、優先順位設定部26aは、撮像対象の部位である撮像部位に応じて、分配合成回路87によって生成された受信信号の優先順位を設定する。そして、選択回路9aは、優先順位設定部26aによって設定された優先順位にしたがって受信信号を選択する。したがって、本実施例1によれば、撮像部位ごとに最適な受信信号を選択することができるので、撮像部位が変わっても安定した画質の画像を得ることが可能である。
【0068】
また、本実施例1では、優先順位設定部26aは、撮像に際して設定された撮像条件に基づいて撮像部位を特定し、特定した撮像部位に応じて、優先順位を設定する。したがって、本実施例1によれば、複数の部位が1回の検査で撮像される場合に、撮像部位ごとに最適な受信信号を自動的に選択することができる。
【0069】
また、本実施例1では、優先順位設定部26aは、撮像時に使用される高周波コイルの種類を検出し、検出した高周波コイルの種類に基づいて撮像部位を特定し、特定した撮像部位に応じて、優先順位を設定する。したがって、本実施例1によれば、複数種類の異なる高周波コイルが撮像に用いられる場合に、撮像部位ごとに最適な受信信号を自動的に選択することができる。
【0070】
なお、上記実施例1では、3個のループコイルが静磁場と直交する方向に配置される場合について説明したが、本発明はこれに限られるものではない。例えば、4個のループコイルが静磁場と直交する方向に配置される場合にも本発明を同様に適用することができる。図7、8および9は、静磁場と直交する方向に4つのループコイルが配置される場合の変形例を説明するための図である。
【0071】
図7に示すように、例えば、受信用RFコイル8bは、20個のループコイル82d〜82g、83d〜83g、84d〜84g、85d〜85gおよび86d〜86gと、6個の8の字コイル81a〜81fとを有する。なお、図7において、上下方向が静磁場の方向であることとする。
【0072】
ループコイル82d〜82g、ループコイル83d〜83g、ループコイル84d〜84g、ループコイル85d〜85gおよびループコイル86d〜86gは、それぞれ、4個のループコイルが静磁場と直交する方向に並べて配置される。そのうえで、ループコイル82d〜82g、ループコイル83d〜83g、ループコイル84d〜84g、ループコイル85d〜85gおよびループコイル86d〜86gの各組は、静磁場の方向に並べて配置される。
【0073】
この場合も、6個の8の字コイル81a〜81fは、それぞれ、静磁場の方向に並べられ、ループコイル82d〜82g、83d〜83g、84d〜84g、85d〜85gおよび86d〜86gの概略中央に重ねて配置される。
【0074】
ここで、各8の字コイルは、4個のループコイルそれぞれの中心を通る直線に関して対称な位置に配置される。例えば、8の字コイル81aおよび81bは、4個のループコイル82d〜82gそれぞれの中心を通る直線に関して対称な位置に配置される。また、例えば、8の字コイル81bおよび81cは、4個のループコイル83d〜83gそれぞれの中心を通る直線に関して、対称な位置に配置される。この他の8の字コイルおよびループコイルも同様に配置される。
【0075】
このように、各8の字コイルが、4個のループコイルそれぞれの中心を通る直線に関して対称な位置に配置されることによって、各8の字コイルが有するコイルループの位置と4個のループコイルそれぞれが有するコイルループの位置とが、コイルループの大きさの半分だけ静磁場の方向にずれることになる。これにより、3個のループコイルが静磁場と直交する方向に配置される場合と同様に、各8の字コイルが有するコイルループと各ループコイルが有するコイルループとの重なりが減るので、コイルエレメント間のデカップリングが実現される。
【0076】
したがって、4個のループコイルが静磁場と直交する方向に配置される場合でも、コイルエレメント間のデカップリングを容易に実現することができる。
【0077】
また、4個のループコイルが静磁場と直交する方向に配置される場合、図8に示すように、例えば、分配合成回路87として、0°−180°ハイブリッド回路87eと、0°−90°ハイブリッド回路87fと、0°−180°ハイブリッド回路87gと、0°−90°ハイブリッド回路87hとが設けられる。
【0078】
この場合も、図5に示した例と同様に、優先順位設定部26aは、例えば、撮像に際して設定された撮像条件に基づいて撮像部位を特定し、特定した撮像部位に応じて、各ハイブリッド回路および各8の字ループから出力される受信信号S21〜S26の優先順位を設定する。
【0079】
また、受信部9が有する受信チャネルの数が限られている場合には、図9に示すように、例えば、分配合成回路87は、加算回路87iおよび0°−90°ハイブリッド回路87jをさらに有する。加算回路87iは、8の字コイル81aおよび81bから出力される受信信号を合成する。
【0080】
この場合も、図6に示した例と同様に、優先順位設定部26aは、例えば、撮像に際して設定された撮像条件に基づいて撮像部位を特定し、特定した撮像部位に応じて、各ハイブリッド回路から出力される受信信号S31〜S35の優先順位を設定する。
【0081】
このように、4個のループコイルが静磁場と直交する方向に配置される場合でも、撮像対象の部位である撮像部位に応じて、最も適した感度が得られるように、受信信号の優先順位を設定する。
【符号の説明】
【0082】
100 MRI装置(磁気共鳴イメージング装置)
8b 受信用RFコイル
82a〜82g、83a〜83g、84a〜84g、85a〜85g、86a〜86g、 ループコイル
81a〜81f 8の字コイル
【特許請求の範囲】
【請求項1】
静磁場内に置かれた被検体から発せられる磁気共鳴信号を受信する高周波コイルを備えた磁気共鳴イメージング装置であって、
前記高周波コイルは、
前記静磁場と直交する方向に並べて配置された複数のループコイルと、
前記複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルと
を有することを特徴とする磁気共鳴イメージング装置。
【請求項2】
前記ループコイルおよび前記8の字コイルによって受信された受信信号を分配合成することで複数の新たな受信信号を生成する分配合成手段と、
前記分配合成手段によって生成された受信信号の中から画像の生成に用いられる受信信号を選択する選択手段と
をさらに備えたことを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項3】
撮像対象の部位である撮像部位に応じて、前記分配合成手段によって生成された受信信号の優先順位を設定する優先順位設定手段をさらに備え、
前記選択手段は、前記優先順位設定手段によって設定された優先順位にしたがって前記受信信号を選択することを特徴とする請求項2に記載の磁気共鳴イメージング装置。
【請求項4】
前記優先順位設定手段は、撮像に際して設定された撮像条件に基づいて前記撮像部位を特定し、特定した撮像部位に応じて、前記優先順位を設定することを特徴とする請求項3に記載の磁気共鳴イメージング装置。
【請求項5】
前記優先順位設定手段は、撮像時に使用される高周波コイルの種類を検出し、検出した高周波コイルの種類に基づいて前記撮像部位を特定し、特定した撮像部位に応じて、前記優先順位を設定することを特徴とする請求項3に記載の磁気共鳴イメージング装置。
【請求項6】
静磁場内に置かれた被検体から発せられる磁気共鳴信号を受信する高周波コイルであって、
前記静磁場と直交する方向に並べて配置された複数のループコイルと、
前記複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルと
を有することを特徴とする高周波コイル。
【請求項1】
静磁場内に置かれた被検体から発せられる磁気共鳴信号を受信する高周波コイルを備えた磁気共鳴イメージング装置であって、
前記高周波コイルは、
前記静磁場と直交する方向に並べて配置された複数のループコイルと、
前記複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルと
を有することを特徴とする磁気共鳴イメージング装置。
【請求項2】
前記ループコイルおよび前記8の字コイルによって受信された受信信号を分配合成することで複数の新たな受信信号を生成する分配合成手段と、
前記分配合成手段によって生成された受信信号の中から画像の生成に用いられる受信信号を選択する選択手段と
をさらに備えたことを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項3】
撮像対象の部位である撮像部位に応じて、前記分配合成手段によって生成された受信信号の優先順位を設定する優先順位設定手段をさらに備え、
前記選択手段は、前記優先順位設定手段によって設定された優先順位にしたがって前記受信信号を選択することを特徴とする請求項2に記載の磁気共鳴イメージング装置。
【請求項4】
前記優先順位設定手段は、撮像に際して設定された撮像条件に基づいて前記撮像部位を特定し、特定した撮像部位に応じて、前記優先順位を設定することを特徴とする請求項3に記載の磁気共鳴イメージング装置。
【請求項5】
前記優先順位設定手段は、撮像時に使用される高周波コイルの種類を検出し、検出した高周波コイルの種類に基づいて前記撮像部位を特定し、特定した撮像部位に応じて、前記優先順位を設定することを特徴とする請求項3に記載の磁気共鳴イメージング装置。
【請求項6】
静磁場内に置かれた被検体から発せられる磁気共鳴信号を受信する高周波コイルであって、
前記静磁場と直交する方向に並べて配置された複数のループコイルと、
前記複数のループコイルそれぞれの中心を通る直線に関して対称な位置に配置された少なくとも2つの8の字コイルと
を有することを特徴とする高周波コイル。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−30890(P2011−30890A)
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願番号】特願2009−181690(P2009−181690)
【出願日】平成21年8月4日(2009.8.4)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願日】平成21年8月4日(2009.8.4)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]