
磁気共鳴イメージング装置
【課題】 局所コイルの故障を自動的に判定し、その旨を使用者に認識させる。
【解決手段】 SNR算出部6-1〜6-nは、MAPスキャンに用いられる局所コイルのそれぞれについて、プレスキャンの全スライスにおける出力信号の強度のいくつかの上位値の平均値といくつかの下位値の平均値との比としてSNRを算出する。故障判定部7は、SNRの最大値に対して規定度合い以下であるSNRに対応する局所コイルが故障であると判定する。
【解決手段】 SNR算出部6-1〜6-nは、MAPスキャンに用いられる局所コイルのそれぞれについて、プレスキャンの全スライスにおける出力信号の強度のいくつかの上位値の平均値といくつかの下位値の平均値との比としてSNRを算出する。故障判定部7は、SNRの最大値に対して規定度合い以下であるSNRに対応する局所コイルが故障であると判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の局所コイルをそれぞれの感度領域が他の少なくとも1つの局所コイルの感度領域と一部で重なるように配置したフェーズドアレイコイルを備えた磁気共鳴イメージング装置に関する。
【背景技術】
【0002】
この種の磁気共鳴イメージング(MRI)装置は、フェーズドアレイコイル(PAC)の各局所コイルのそれぞれの出力に基づくイメージを合成して1つのイメージを作成する。従って、一部の局所コイルが故障していても、他の正常な局所コイルの出力に基づいてイメージが作成される。
【0003】
しかしながら、故障している局所コイルの出力信号もそのまま合成されるために、SNR(Signal-to-Noise Ratio)が低下し、画質は低下する。この画質低下が局所コイルの故障に因ることを使用者が判断することは困難であり、この状態のまま使用され続けてしまう恐れがあった。
【0004】
なお、全ての局所コイルを使用した事前のスキャンによって感度領域が撮影範囲外となる局所コイルを判定し、このような局所コイルをイメージングスキャンの際に用いないようにする磁気共鳴イメージング装置は知られている(例えば特許文献1を参照)。このような磁気共鳴イメージング装置によれば、故障している局所コイルは、その感度領域が撮影範囲外であるとみなされ、イメージングスキャンに使用されなくなるかもしれない。しかしながら、本来は使用するべき局所コイルが使用されなくなるために、使用者が局所コイルの故障にさらに気付きにくくなってしまう恐れがある。
【特許文献1】特開2002−355233
【発明の開示】
【発明が解決しようとする課題】
【0005】
以上のように従来は、局所コイルの故障を使用者が画質から判断しなければならないために、その故障への対処が遅れてしまう恐れがあった。
【0006】
本発明はこのような事情を考慮してなされたものであり、その目的とするところは、局所コイルの故障を自動的に判定し、その旨を使用者に認識させることができる磁気共鳴イメージング装置を提供することにある。
【課題を解決するための手段】
【0007】
以上の目的を達成するために本発明は、複数の局所コイルを配置したフェーズドアレイコイルと、イメージングスキャンに先立って、イメージングスキャン領域の少なくとも一部を含む領域をプレスキャンするプレスキャン手段と、前記プレスキャンで前記局所コイルのそれぞれから出力された出力信号に基づいて前記局所コイルのそれぞれの故障の有無を判断する判断手段とを備えて磁気共鳴イメージング装置を構成した。
【0008】
また前記の目的を達成するために別の本発明は、複数の局所コイルを配置したフェーズドアレイコイルと、前記複数のフェーズドアレイコイルの感度領域を包含する感度領域を持った広域コイルと、イメージングスキャンに先立って、イメージングスキャン領域の少なくとも一部を含む領域をプレスキャンするプレスキャン手段と、前記プレスキャンで、ほぼ同一のスキャン位置についての前記局所コイルから出力された出力信号と前記広域コイルから出力された出力信号とに基づいて前記局所コイルのそれぞれの故障の有無を判断する判断手段とを備えて磁気共鳴イメージング装置を構成した。
【発明の効果】
【0009】
本発明によれば、局所コイルの故障を自動的に判定し、その旨を使用者に認識させることが可能となる。
【発明を実施するための最良の形態】
【0010】
以下、図面を参照して本発明の実施形態について説明する。
【0011】
(第1の実施形態)
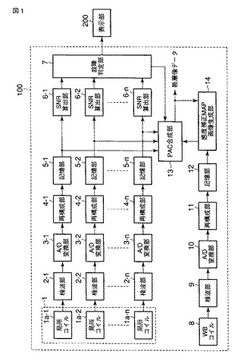
図1は第1の実施形態に係る磁気共鳴イメージング装置(以下、MRI装置と称する)100の要部構成を示すブロック図である。磁気共鳴イメージング装置100は、この図1に示す要素以外にも周知のMRI装置が備える種々の要素を有するが、これらについては図示および説明を省略する。
【0012】
図1に示すようにMRI装置100は、フェーズドアレイコイル1、検波部2-1,2-2…,2-n、A/D変換部3-1,3-2…,3-n、再構成部4-1,4-2…,4-n、記憶部5-1,5-2…,5-n、SNR算出部6-1,6-2…,6-n、故障判定部7、ホールボディコイル(WBコイル)8、検波部9、A/D変換部10、再構成部11、記憶部12、PAC合成部13および感度補正MAP画像生成部14を含む。
【0013】
フェーズドアレイコイル1は、さらに複数の局所コイル1a-1,1a-2…,1a-nを含む。そして局所コイル1a-1,1a-2…,1a-n、検波部2-1,2-2…,2-n、A/D変換部3-1,3-2…,3-n、再構成部4-1,4-2…,4-n、記憶部5-1,5-2…,5-nおよびSNR算出部6-1,6-2…,6-nの1つずつが1組となって、フェーズドアレイコイル1の1チャネル分の処理系を形成している。なお以下においては、局所コイル1a-1,1a-2…,1a-n、検波部2-1,2-2…,2-n、A/D変換部3-1,3-2…,3-n、再構成部4-1,4-2…,4-n、記憶部5-1,5-2…,5-nおよびSNR算出部6-1,6-2…,6-nは、それぞれを区別する必要がある場合を除き、局所コイル1a、検波部2、A/D変換部3、再構成部4、記憶部5およびSNR算出部6と表記する。
【0014】
局所コイル1a-1,1a-2…,1a-nは、それぞれの感度領域が他の少なくとも1つの局所コイルの感度領域と一部で重なるように配置される。そして各局所コイル1aは、感度領域内から送信されるMR信号を受信する。検波部2は、局所コイル1aの出力信号を検波する。A/D変換部3は、検波部2の出力信号をアナログ/ディジタル変換する。再構成部4は、A/D変換部3の出力信号に基づいて画像を再構成する。記憶部5は、再構成部4の出力データを記憶する。SNR算出部6は、記憶部5に記憶されたデータに基づいてSNRを算出する。
【0015】
故障判定部7は、SNR算出部6-1,6-2…,6-nのそれぞれで算出されたSNRに基づいて、局所コイル1a-1,1a-2…,1a-nの故障の有無を判定する。故障判定部7は、局所コイル1a-1,1a-2…,1a-nのいずれかが故障している場合に、その旨を示した画像の表示を表示部200に行わせる。なお表示部200としては、MRI装置100のオペレータにより目視される表示器やMRI装置100の監視者により目視される表示器などである。表示部200は、MRI装置100の外部のデバイスであっても良いし、MRI装置100に設けられた操作卓に装着されたデバイスなどのように内蔵されたものであっても良い。また、故障判定部7は、局所コイル1a-1,1a-2…,1a-nのいずれかが故障している場合に、パトランプの様な発行デバイス、スピーカやブザーなどのような鳴動デバイス、バイブレータなどのような振動デバイスなどを駆動するようにしても良い。あるいは、故障判定部7は、MRI装置100を自動監視する故障監視装置に通知情報を出力するようにしても良い。
【0016】
ホールボディコイル8は、局所コイル1a-1,1a-2…,1a-nの感度領域の全てを包含する広い感度領域を持った広域コイルである。検波部9は、ホールボディコイル8の出力信号を検波する。A/D変換部10は、検波部9の出力信号をアナログ/ディジタル変換する。再構成部11は、A/D変換部10の出力信号に基づいて画像を再構成する。記憶部12は、再構成部11の出力データを記憶する。
【0017】
PAC合成部13は、記憶部5-1,5-2…,5-nのそれぞれに記憶されたデータが示す画像を合成し、フェーズドアレイコイル1を用いて取得したものとしての1つの画像を生成する。PAC合成部13により生成される画像は、MAPスキャン時には感度MAP画像であり、イメージングスキャン時には断層像を表すデータである。なおPAC合成部13は、イメージングスキャン時には、上記の合成処理の際に感度補正MAP画像生成部14が生成する感度補正MAP画像に基づく補正を行う。この補正処理としては、周知の処理を適用できる。
【0018】
感度補正MAP画像生成部14は、PAC合成部13が出力する感度MAP画像と、記憶部12に記憶されたデータとに基づいて、局所コイル1a-1,1a-2…,1a-nの感度のばらつきに応じた感度補正MAP画像を生成する。この感度補正MAP画像を生成する処理としては、周知の処理を適用できる。
【0019】
次に以上のように構成されたMRI装置100の動作について説明する。
このMRI装置100では、実際に診断などに使用する断層像データを取得するためのイメージングスキャンを行うのに先立って、局所コイル1a-1,1a-2…,1a-nの感度のばらつきを検出するためのMAPスキャンを行う。このMAPスキャンは、イメージングスキャンでのイメージング範囲と感度領域の一部が重なる局所コイル1aのみを全て用いて行う。例えば、フェーズドアレイコイル1が局所コイル1aを6つ含み、かつそれらの局所コイル1aが、感度領域が図2に示すように分布するように配置されているとする。そして、図2に示すようなイメージング領域についてイメージングスキャンを行おうとしているとする。この場合、Ch.2,3,5,6の感度領域の一部がそれぞれイメージング領域に重なるので、これらのCh.2,3,5,6に対応する局所コイル1aをMAPスキャンに用いる。Ch.1,4に対応する局所コイル1aは、MAPスキャンに用いない。そして例えば、図2に示すようなMAP領域についてMAPスキャンを行う。なお以下においては、MAPスキャンに用いるチャネルを、第1のMAPチャネル〜第kのMAPチャネルと称する。
【0020】
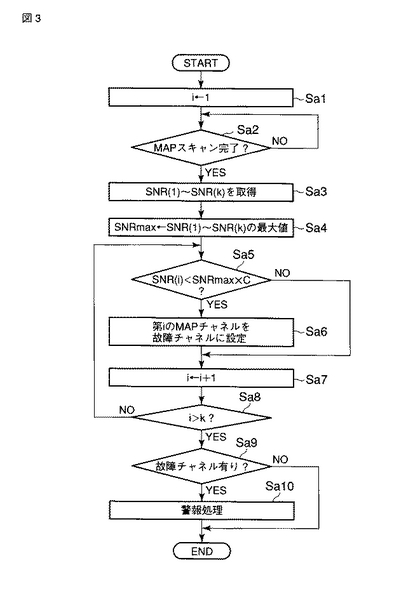
このMAPスキャンを行うに当たり故障判定部7は、図3に示すような処理を実行する。
ステップSa1において故障判定部7は、変数iを「1」に初期設定する。この上でステップSa2において故障判定部7は、MAPスキャンが完了するのを待ち受ける。
【0021】
一方、MAPチャネルに属するSNR算出部6は、MAPスキャンにより再構成されて記憶部5に記憶されたデータに基づいて、当該MAPチャネルに関するSNRを算出する。具体的にSNR算出部6は、MAPスキャンにおける全スライスの生データ信号強度(MR信号値)のうちから上位10%の値をそれぞれ選定し、これらの値の平均値AVEhighを算出する。SNR算出部6は、MAPスキャンにおける全スライスの生データ信号強度(MR信号値)のうちから下位10%の値をそれぞれ選定し、これらの値の平均値AVElowを算出する。そしてSNR算出部6は、平均値AVEhighと平均値AVElowとの比として、1つのMAPチャネルについてのSNRを算出する。すなわちSNRは、次の(1)式により算出される。
【0022】
SNR=AVEhigh/AVElow …(1)
さて、MAPスキャンが完了したならば、故障判定部7はステップSa2からステップSa3へ進む。ステップSa3において故障判定部7は、第1〜第kのMAPチャネルのそれぞれに関するSNRをSNR(1)〜SNR(k)として取得する。ステップSa4において故障判定部7は、上記のSNR(1)〜SNR(k)のうちから最大値を選定し、この最大値を変数SNRmaxに代入する。
【0023】
ステップSa5において故障判定部7は、次の(2)式が満たされるか否かを確認する。
SNR(i)<SNRmax×C …(2)
なお、Cは予めシミュレーションや評価などにより予め定めた係数であり、少なくとも1未満である。
【0024】
(2)式が満たされると判断した場合に故障判定部7は、ステップSa5からステップSa6へ進む。ステップSa6において故障判定部7は、第iのチャネルを故障チャネルに設定する。この後に故障判定部7は、ステップSa7へ進む。これに対して、(2)式が満たされないと判断した場合に故障判定部7は、ステップSa6を行うことなしにステップSa5からステップSa7へ進む。従って、このときの第iのMAPチャネルは故障チャネルに設定されない。
【0025】
ステップSa7において故障判定部7は、変数iの値を1つ増加する。ステップSa8において故障判定部7は、変数iがMAPチャネルの数k以上になっているか否かを確認する。そして故障判定部7は、ここで変数iがk以上になっていることが確認できるまで、ステップSa5乃至ステップSa8を繰り返す。これにより、MAPチャネルのそれぞれについて、順次故障の有無がチェックされる。変数iがk以上になったことを確認したならば、すなわち全てのMAPチャネルについてのチェックが完了したならば、故障判定部7はステップSa8からステップSa9へ進む。
【0026】
ステップSa9において故障判定部7は、故障チャネルとして設定されたチャネルがあるか否かを確認する。そして故障チャネルがある場合に故障判定部7は、ステップSa9からステップSa10へ進む。ステップSa10において故障判定部7は、警報処理を行う。この警報処理にて故障判定部7は例えば、故障チャネルに対応する局所コイル1aが故障していることを表す情報を表示部200に表示させる。また故障判定部7は、PAC合成部13に故障している局所コイル1aがいずれであるかを通知する。
【0027】
表示部200に表示させる情報は、例えば図4に示すような画像とする。図4に示す画像は、脊椎用の4チャネルフェーズドアレイコイルについての故障判定の結果を通知する。図4においては、4つの局所コイルが体軸方向に沿って並べられていることを示している。ハッチングは、他の箇所とは色を異ならせていることを示している。そして、この色を異ならせた箇所に対応する局所コイルが故障していることを示している。
【0028】
このような通知により、ユーザは、局所コイルが故障していること、ならびにその故障している局所コイルがいずれであるのかを容易に認識できる。
【0029】
警報処理を終えたならば、故障判定部7は図3に示す処理を終了する。なお、故障チャネルが無かった場合、故障判定部7はステップSa10を行うことなく、ステップSa9から図3に示す処理を終了する。
【0030】
PAC合成部13は、故障判定部32からの通知に基づいて、いずれの局所コイル1aが故障しているかを管理しておく。そしてPAC合成部13はイメージングスキャンの際には、故障している局所コイル1aが属するチャネルについての画像は、PAC合成に使用しない。
【0031】
以上のように第1の実施形態のMRI装置100によれば、MAPチャネルのうちで、SNRが最大値SNRmaxよりも大幅に小さいチャネルについては、対応する局所コイル1aが故障していると判定して、その旨を警報する。MAPスキャンでは、各MAPチャネルの一部が必ずイメージング範囲と重なるから、MAPスキャンにおける全スライスでMR信号が受信されないことは正常な状況においては無いはずである。このため、SNRが最大値SNRmaxよりも大幅に小さいチャネルについては、感度領域内でMR信号が生じているにも拘わらずにそれを受信できていないことになるから、上記のように局所コイル1aの故障と判定することができる。そして、局所コイル1aの故障が検出された場合にはその旨の警報が行われるから、使用者や管理者はその故障への対処を迅速に行うことができる。
【0032】
また、故障していると判定された局所コイル1aはイメージングスキャンに使用されないため、上記の警報に基づく修理が行われるまでの間にイメージングスキャンを行う場合でも、故障している局所コイル1aの受信信号によるSNRの低下を来すことなく撮影を行うことが可能である。
【0033】
(第2の実施形態)
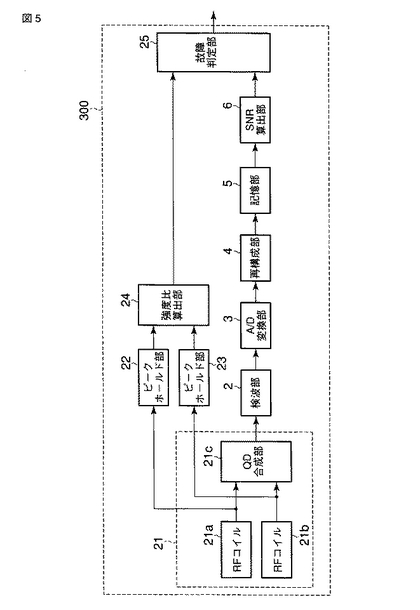
図5は第2の実施形態に係るMRI装置300の要部構成を示すブロック図である。MRI装置300の構成は、MRI装置100の構成と大部分で共通する。図5では、MRI装置100と異なる特徴的な構成のみを図示している。図5において図1と同一の要素には同一の符号を付し、その詳細な説明は省略する。
【0034】
MRI装置300がMRI装置100と異なっているのは、局所コイルとしてクアドラチャーコイル(QDコイル)を備えたフェーズドアレイコイルを、フェーズドアレイコイル1に代えて備える点である。図5では、フェーズドアレイコイルにおける1チャネル分の処理系のみを図示している。すなわち、MRI装置300は、フェーズドアレイコイルにおける1チャネル分の処理系を、検波部2、A/D変換部3、再構成部4、記憶部5、SNR算出部6、QDコイル21、ピークホールド部22,23および強度比算出部24により形成する。そして図示は省略しているが、これと同様な構成の処理系がMRI装置100のようにn系列分設けられている。なお、ホールボディコイル(WBコイル)8、検波部9、A/D変換部10、再構成部11、記憶部12、PAC合成部13および感度補正MAP画像生成部14についても図示を省略している。
【0035】
QDコイル21は、RFコイル21a,21bおよびQD合成部21cを有する。RFコイル21a,21bは、互いに位相が90度ずれたMR信号を受信する。QD合成部21cは、RFコイル21a,21bのそれぞれの出力信号をQD合成する。
【0036】
ピークホールド部22,23には、RFコイル21a,21bの出力信号がそれぞれ入力される。ピークホールド部22,23は、それぞれの入力信号のピーク値を検出し、保持する。強度比算出部24は、ピークホールド部22,23がそれぞれ保持するピーク値の絶対値の比を算出する。すなわち強度比算出部24は、QDコイル21のIチャネルの信号とQチャネルの信号との強度比(以下、IQ強度比と称する)を算出する。
【0037】
さらにMRI装置300では、MRI装置100における故障判定部7に代えて故障判定部25を備える。故障判定部25には、各処理系のSNR算出部6で算出されたSNRの他に、各処理系の強度比算出部24で算出されたIQ強度比が入力される。故障判定部25は、各処理系のSNR算出部6のそれぞれで算出されたSNRと、各処理系の強度比算出部24で算出されたIQ強度比とに基づいて、各処理系のQDコイル21の故障の有無を判定する。故障判定部25は、QDコイル21のいずれかが故障している場合に、その旨を示した画像の表示を表示部200に行わせる。
【0038】
次に以上のように構成されたMRI装置300の動作について説明する。
MAPスキャンが行われる際、MAPチャネルに属するRFコイル21a,21bは、I成分およびQ成分の信号をそれぞれ出力するが、これらの信号はQD合成部21cにより合成されるのと並行して、各信号のピーク値Imax,Qmaxの検出がピークホールド部22,23でそれぞれ行われる。
【0039】
そして強度比算出部24が、次の(3)式によりIQ強度比Riqを算出する。
Riq=abs(Imax)/abs(Qmax) …(3)
一方、MAPスキャンを行うに当たり故障判定部25は、図6に示すような処理を実行する。なお、図6において図3に示されるのと同一の処理には同一の符号を付し、その詳細な説明は省略する。
【0040】
故障判定部25は、ステップSa1乃至ステップSa4を第1の実施形態と同様に行った後、ステップSb1へ進む。ステップSb1において故障判定部25は、第1〜第kのMAPチャネルのそれぞれに関するIQ強度比RiqをRiq(1)〜Riq(k)として取得する。
【0041】
続いて故障判定部25は、ステップSa5を第1の実施形態と同様に行う。そして、(2)式が満たされないと判断した場合に故障判定部25は、ステップSa5からステップSb2へ進む。ステップSb2において故障判定部25は、次の(4)式が満たされるか否かを確認する。
THmin<Riq(i)<THmax …(4)
なおこの(4)式で、THminおよびTHmaxは、QDコイル21が正常な状態におけるIQ強度比の最小値および最大値をそれぞれ考慮して定めた許容範囲の下限および上限を示す閾値である。
【0042】
(4)式が満たされると判断した場合に故障判定部25は、ステップSb2からステップSa6へ進む。(4)式が満たされないと判断した場合に故障判定部25は、ステップSb2からステップSa7へ進む。
【0043】
以降において故障判定部25は、ステップSa6乃至ステップSa10を第1の実施形態と同様に行う。
【0044】
かくしてこの第2の実施形態によれば、MAPチャネルのうちで、SNRが最大値SNRmaxよりも大幅に小さいチャネルに加えて、IQ強度比が許容範囲から外れるチャネルについても、対応するQDコイル21が故障していると判定して、その旨を警報する。QDコイル21は、RFコイル21a,21bの一方のみが故障したとしても、QD合成後の信号強度が極端には低下しないので、SNRの低下による故障検出が困難な場合がある。しかしこのような場合でも第2の実施形態によれば、故障を検出できる。
【0045】
(第3の実施形態)
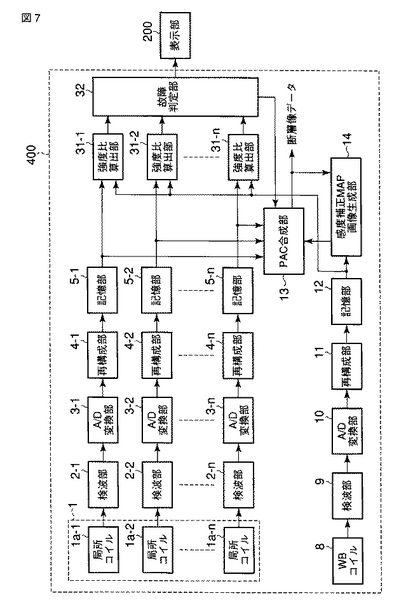
図7は第3の実施形態に係るMRI装置400の要部構成を示すブロック図である。MRI装置400の構成は、MRI装置100の構成と大部分で共通する。図7において図1と同一の要素には同一の符号を付し、その詳細な説明は省略する。
【0046】
図7に示すようにMRI装置400は、フェーズドアレイコイル1、検波部2-1,2-2…,2-n、A/D変換部3-1,3-2…,3-n、再構成部4-1,4-2…,4-n、記憶部5-1,5-2…,5-n、ホールボディコイル(WBコイル)8、検波部9、A/D変換部10、再構成部11、記憶部12、PAC合成部13、感度補正MAP画像生成部14、強度比算出部31-1,31-2…,31-nおよび故障判定部32を含む。すなわちMRI装置400は、MRI装置100におけるSNR算出部6-1,6-2…,6-nおよび故障判定部7に代えて、強度比算出部31-1,31-2…,31-nおよび故障判定部32を備えている。なお、強度比算出部31-1,31-2…,31-nについても、それぞれを区別する必要がある場合を除き、強度比算出部31と表記する。
【0047】
強度比算出部31は、記憶部5に記憶されたデータと記憶部12に記憶されたデータとに基づいて局所コイル1aでの受信強度とホールボディコイル8での受信強度との比を算出する。
【0048】
故障判定部32は、強度比算出部31-1,31-2…,31-nのそれぞれで算出された強度比に基づいて、局所コイル1a-1,1a-2…,1a-nの故障の有無を判定する。故障判定部32は、局所コイル1a-1,1a-2…,1a-nのいずれかが故障している場合に、その旨を示した画像の表示を表示部200に行わせる。
【0049】
次に以上のように構成されたMRI装置400の動作について説明する。
MAPスキャンが行われる際、MAPチャネルに属する強度比算出部31では、記憶部5に記憶されるデータが示す感度MAP画像内における上位10%の信号強度値と、それらの信号強度値が現れている位置とを判定する。そして強度比算出部31は、上記の上位10%の信号強度値の平均値を算出し、これを局所強度値とする。また強度比算出部31は、記憶部12に記憶されたデータが示すホールボディ画像内における上記の判定した各位置と同位置の信号強度値を判定する。そして強度比算出部31は、このホールボディ画像内から判定した信号強度値の平均値を算出し、これをホールボディ強度値とする。最後に強度比算出部31は、強度比Rlwを、次の(5)式により算出する。
Rlw=局所強度値/ホールボディ強度値 …(5)
一方、MAPスキャンを行うに当たり故障判定部32は、図8に示すような処理を実行する。なお、図8において図3に示されるのと同一の処理には同一の符号を付し、その詳細な説明は省略する。
【0050】
故障判定部32は、ステップSa1およびステップSa2を第1の実施形態と同様に行った後、ステップSc1へ進む。ステップSc1において故障判定部32は、第1〜第kのMAPチャネルのそれぞれに関する強度比RlwをRlw(1)〜Rlw(k)として取得する。
【0051】
続いてステップSc2において故障判定部32は、次の(6)式が満たされるか否かを確認する。
Rlw(i)<TH …(6)
なお、局所コイル1aおよびホールボディコイル8のそれぞれの感度を考慮して予め定めた閾値である。
【0052】
(6)式が満たされると判断した場合に故障判定部32は、ステップSc1からステップSa6へ進む。(6)式が満たされないと判断した場合に故障判定部32は、ステップSc1からステップSa7へ進む。
【0053】
以降において故障判定部32は、ステップSa6乃至ステップSa10を第1の実施形態と同様に行う。
【0054】
かくしてこの第3の実施形態によれば、MAPチャネルのうちで、感度MAP画像内における信号強度と、ホールボディ画像内における同一位置の信号強度との強度比が閾値TH以下に低下しているチャネルについては、対応する局所コイル1aが故障していると判定して、その旨を警報する。ホールボディコイル8は、局所コイル1aの感度領域の全てを包含する感度領域を持つから、MAPスキャンにて局所コイル1aとホールボディコイル8とでは、同一位置からのMR信号が受信される。局所コイル1aはホールボディコイル8よりも感度が高いから、上記の同一位置からのMR信号についての受信強度は、局所コイル1aとホールボディコイル8とで異なるが、その比は局所コイル1aの感度とホールボディコイル8の感度との差によりほぼ一定となる。このため、上記の強度比Rlwが低下するならば、局所コイル1aの感度が低下していることになるから、上記のように局所コイル1aの故障と判定することができる。そして、局所コイル1aの故障が検出された場合にはその旨の警報が行われるから、使用者や管理者はその故障への対処を迅速に行うことができる。
【0055】
以上の各実施形態は、次のような種々の変形実施が可能である。
第1および第2の実施形態では、SNRの代わりに、生データ信号強度値の総和を用いても良い。
第1および第2の実施形態では、平均値AVEhighおよびAVElowを算出するためのサンプル値の数は、任意に変更可能である。
第2の実施形態では、RFコイル21a,21bの一方が故障していると判定されたQDコイル21については、正常である方、すなわち出力される信号強度が大きい方のRFコイルの出力信号を定数倍してQDコイル21の出力を得るようにしても良い。なお上記の定数は、RFコイル21a,21bの感度差を考慮して予め設定する。RFコイル21a,21bの感度が同じであるならば、上記の定数は例えば√2とすると良い。
第2の実施形態では、各QDコイル21の幾何学的配置や、各QDコイルの使用部位などによって、各QDコイル21で受信される信号強度が変化するので、これらを考慮して閾値THmin,THmaxをチャネル毎に異ならせても良い。
第2の実施形態では、IQ強度比Riqの代わりに、QD合成の前後の信号強度比を用いても良い。
第3の実施形態では、局所強度値を算出するためのサンプル値の数は、任意に変更可能である。
各実施形態では、シミングのためのスキャンなどのようなMAPスキャン以外のプレスキャンの結果に基づいて局所コイルの故障の判定を行うようにしても良い。
【0056】
なお、本発明は上記各実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記各実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【図面の簡単な説明】
【0057】
【図1】本発明の第1の実施形態に係るMRI装置100の要部構成を示すブロック図。
【図2】MAPチャネルを説明する図。
【図3】図1中の故障判定部7の処理手順を示すフローチャート。
【図4】故障判定の結果を通知する画像の一例を示す図。
【図5】本発明の第2の実施形態に係るMRI装置300の要部構成を示すブロック図。
【図6】図5中の故障判定部25の処理手順を示すフローチャート。
【図7】本発明の第3の実施形態に係るMRI装置400の要部構成を示すブロック図。
【図8】図6中の故障判定部32の処理手順を示すフローチャート。
【符号の説明】
【0058】
100,300,400…MRI装置、1…フェーズドアレイコイル、1a(1a-1,1a-2…,1a-n)…局所コイル、2(2-1,2-2…,2-n),9…検波部、3(3-1,3-2…,3-n),10…A/D変換部、4(4-1,4-2…,4-n),11…再構成部、5(5-1,5-2…,5-n),12…記憶部、6(6-1,6-2…,6-n)…SNR算出部、7,25,32…故障判定部、8…ホールボディコイル、13…PAC合成部、14…感度補正MAP画像生成部、21…QDコイル、21a,21b…RFコイル、21c…QD合成部、22,23…ピークホールド部、24…強度比算出部、31(31-1,31-2…,31-n)…強度比算出部。
【技術分野】
【0001】
本発明は、複数の局所コイルをそれぞれの感度領域が他の少なくとも1つの局所コイルの感度領域と一部で重なるように配置したフェーズドアレイコイルを備えた磁気共鳴イメージング装置に関する。
【背景技術】
【0002】
この種の磁気共鳴イメージング(MRI)装置は、フェーズドアレイコイル(PAC)の各局所コイルのそれぞれの出力に基づくイメージを合成して1つのイメージを作成する。従って、一部の局所コイルが故障していても、他の正常な局所コイルの出力に基づいてイメージが作成される。
【0003】
しかしながら、故障している局所コイルの出力信号もそのまま合成されるために、SNR(Signal-to-Noise Ratio)が低下し、画質は低下する。この画質低下が局所コイルの故障に因ることを使用者が判断することは困難であり、この状態のまま使用され続けてしまう恐れがあった。
【0004】
なお、全ての局所コイルを使用した事前のスキャンによって感度領域が撮影範囲外となる局所コイルを判定し、このような局所コイルをイメージングスキャンの際に用いないようにする磁気共鳴イメージング装置は知られている(例えば特許文献1を参照)。このような磁気共鳴イメージング装置によれば、故障している局所コイルは、その感度領域が撮影範囲外であるとみなされ、イメージングスキャンに使用されなくなるかもしれない。しかしながら、本来は使用するべき局所コイルが使用されなくなるために、使用者が局所コイルの故障にさらに気付きにくくなってしまう恐れがある。
【特許文献1】特開2002−355233
【発明の開示】
【発明が解決しようとする課題】
【0005】
以上のように従来は、局所コイルの故障を使用者が画質から判断しなければならないために、その故障への対処が遅れてしまう恐れがあった。
【0006】
本発明はこのような事情を考慮してなされたものであり、その目的とするところは、局所コイルの故障を自動的に判定し、その旨を使用者に認識させることができる磁気共鳴イメージング装置を提供することにある。
【課題を解決するための手段】
【0007】
以上の目的を達成するために本発明は、複数の局所コイルを配置したフェーズドアレイコイルと、イメージングスキャンに先立って、イメージングスキャン領域の少なくとも一部を含む領域をプレスキャンするプレスキャン手段と、前記プレスキャンで前記局所コイルのそれぞれから出力された出力信号に基づいて前記局所コイルのそれぞれの故障の有無を判断する判断手段とを備えて磁気共鳴イメージング装置を構成した。
【0008】
また前記の目的を達成するために別の本発明は、複数の局所コイルを配置したフェーズドアレイコイルと、前記複数のフェーズドアレイコイルの感度領域を包含する感度領域を持った広域コイルと、イメージングスキャンに先立って、イメージングスキャン領域の少なくとも一部を含む領域をプレスキャンするプレスキャン手段と、前記プレスキャンで、ほぼ同一のスキャン位置についての前記局所コイルから出力された出力信号と前記広域コイルから出力された出力信号とに基づいて前記局所コイルのそれぞれの故障の有無を判断する判断手段とを備えて磁気共鳴イメージング装置を構成した。
【発明の効果】
【0009】
本発明によれば、局所コイルの故障を自動的に判定し、その旨を使用者に認識させることが可能となる。
【発明を実施するための最良の形態】
【0010】
以下、図面を参照して本発明の実施形態について説明する。
【0011】
(第1の実施形態)
図1は第1の実施形態に係る磁気共鳴イメージング装置(以下、MRI装置と称する)100の要部構成を示すブロック図である。磁気共鳴イメージング装置100は、この図1に示す要素以外にも周知のMRI装置が備える種々の要素を有するが、これらについては図示および説明を省略する。
【0012】
図1に示すようにMRI装置100は、フェーズドアレイコイル1、検波部2-1,2-2…,2-n、A/D変換部3-1,3-2…,3-n、再構成部4-1,4-2…,4-n、記憶部5-1,5-2…,5-n、SNR算出部6-1,6-2…,6-n、故障判定部7、ホールボディコイル(WBコイル)8、検波部9、A/D変換部10、再構成部11、記憶部12、PAC合成部13および感度補正MAP画像生成部14を含む。
【0013】
フェーズドアレイコイル1は、さらに複数の局所コイル1a-1,1a-2…,1a-nを含む。そして局所コイル1a-1,1a-2…,1a-n、検波部2-1,2-2…,2-n、A/D変換部3-1,3-2…,3-n、再構成部4-1,4-2…,4-n、記憶部5-1,5-2…,5-nおよびSNR算出部6-1,6-2…,6-nの1つずつが1組となって、フェーズドアレイコイル1の1チャネル分の処理系を形成している。なお以下においては、局所コイル1a-1,1a-2…,1a-n、検波部2-1,2-2…,2-n、A/D変換部3-1,3-2…,3-n、再構成部4-1,4-2…,4-n、記憶部5-1,5-2…,5-nおよびSNR算出部6-1,6-2…,6-nは、それぞれを区別する必要がある場合を除き、局所コイル1a、検波部2、A/D変換部3、再構成部4、記憶部5およびSNR算出部6と表記する。
【0014】
局所コイル1a-1,1a-2…,1a-nは、それぞれの感度領域が他の少なくとも1つの局所コイルの感度領域と一部で重なるように配置される。そして各局所コイル1aは、感度領域内から送信されるMR信号を受信する。検波部2は、局所コイル1aの出力信号を検波する。A/D変換部3は、検波部2の出力信号をアナログ/ディジタル変換する。再構成部4は、A/D変換部3の出力信号に基づいて画像を再構成する。記憶部5は、再構成部4の出力データを記憶する。SNR算出部6は、記憶部5に記憶されたデータに基づいてSNRを算出する。
【0015】
故障判定部7は、SNR算出部6-1,6-2…,6-nのそれぞれで算出されたSNRに基づいて、局所コイル1a-1,1a-2…,1a-nの故障の有無を判定する。故障判定部7は、局所コイル1a-1,1a-2…,1a-nのいずれかが故障している場合に、その旨を示した画像の表示を表示部200に行わせる。なお表示部200としては、MRI装置100のオペレータにより目視される表示器やMRI装置100の監視者により目視される表示器などである。表示部200は、MRI装置100の外部のデバイスであっても良いし、MRI装置100に設けられた操作卓に装着されたデバイスなどのように内蔵されたものであっても良い。また、故障判定部7は、局所コイル1a-1,1a-2…,1a-nのいずれかが故障している場合に、パトランプの様な発行デバイス、スピーカやブザーなどのような鳴動デバイス、バイブレータなどのような振動デバイスなどを駆動するようにしても良い。あるいは、故障判定部7は、MRI装置100を自動監視する故障監視装置に通知情報を出力するようにしても良い。
【0016】
ホールボディコイル8は、局所コイル1a-1,1a-2…,1a-nの感度領域の全てを包含する広い感度領域を持った広域コイルである。検波部9は、ホールボディコイル8の出力信号を検波する。A/D変換部10は、検波部9の出力信号をアナログ/ディジタル変換する。再構成部11は、A/D変換部10の出力信号に基づいて画像を再構成する。記憶部12は、再構成部11の出力データを記憶する。
【0017】
PAC合成部13は、記憶部5-1,5-2…,5-nのそれぞれに記憶されたデータが示す画像を合成し、フェーズドアレイコイル1を用いて取得したものとしての1つの画像を生成する。PAC合成部13により生成される画像は、MAPスキャン時には感度MAP画像であり、イメージングスキャン時には断層像を表すデータである。なおPAC合成部13は、イメージングスキャン時には、上記の合成処理の際に感度補正MAP画像生成部14が生成する感度補正MAP画像に基づく補正を行う。この補正処理としては、周知の処理を適用できる。
【0018】
感度補正MAP画像生成部14は、PAC合成部13が出力する感度MAP画像と、記憶部12に記憶されたデータとに基づいて、局所コイル1a-1,1a-2…,1a-nの感度のばらつきに応じた感度補正MAP画像を生成する。この感度補正MAP画像を生成する処理としては、周知の処理を適用できる。
【0019】
次に以上のように構成されたMRI装置100の動作について説明する。
このMRI装置100では、実際に診断などに使用する断層像データを取得するためのイメージングスキャンを行うのに先立って、局所コイル1a-1,1a-2…,1a-nの感度のばらつきを検出するためのMAPスキャンを行う。このMAPスキャンは、イメージングスキャンでのイメージング範囲と感度領域の一部が重なる局所コイル1aのみを全て用いて行う。例えば、フェーズドアレイコイル1が局所コイル1aを6つ含み、かつそれらの局所コイル1aが、感度領域が図2に示すように分布するように配置されているとする。そして、図2に示すようなイメージング領域についてイメージングスキャンを行おうとしているとする。この場合、Ch.2,3,5,6の感度領域の一部がそれぞれイメージング領域に重なるので、これらのCh.2,3,5,6に対応する局所コイル1aをMAPスキャンに用いる。Ch.1,4に対応する局所コイル1aは、MAPスキャンに用いない。そして例えば、図2に示すようなMAP領域についてMAPスキャンを行う。なお以下においては、MAPスキャンに用いるチャネルを、第1のMAPチャネル〜第kのMAPチャネルと称する。
【0020】
このMAPスキャンを行うに当たり故障判定部7は、図3に示すような処理を実行する。
ステップSa1において故障判定部7は、変数iを「1」に初期設定する。この上でステップSa2において故障判定部7は、MAPスキャンが完了するのを待ち受ける。
【0021】
一方、MAPチャネルに属するSNR算出部6は、MAPスキャンにより再構成されて記憶部5に記憶されたデータに基づいて、当該MAPチャネルに関するSNRを算出する。具体的にSNR算出部6は、MAPスキャンにおける全スライスの生データ信号強度(MR信号値)のうちから上位10%の値をそれぞれ選定し、これらの値の平均値AVEhighを算出する。SNR算出部6は、MAPスキャンにおける全スライスの生データ信号強度(MR信号値)のうちから下位10%の値をそれぞれ選定し、これらの値の平均値AVElowを算出する。そしてSNR算出部6は、平均値AVEhighと平均値AVElowとの比として、1つのMAPチャネルについてのSNRを算出する。すなわちSNRは、次の(1)式により算出される。
【0022】
SNR=AVEhigh/AVElow …(1)
さて、MAPスキャンが完了したならば、故障判定部7はステップSa2からステップSa3へ進む。ステップSa3において故障判定部7は、第1〜第kのMAPチャネルのそれぞれに関するSNRをSNR(1)〜SNR(k)として取得する。ステップSa4において故障判定部7は、上記のSNR(1)〜SNR(k)のうちから最大値を選定し、この最大値を変数SNRmaxに代入する。
【0023】
ステップSa5において故障判定部7は、次の(2)式が満たされるか否かを確認する。
SNR(i)<SNRmax×C …(2)
なお、Cは予めシミュレーションや評価などにより予め定めた係数であり、少なくとも1未満である。
【0024】
(2)式が満たされると判断した場合に故障判定部7は、ステップSa5からステップSa6へ進む。ステップSa6において故障判定部7は、第iのチャネルを故障チャネルに設定する。この後に故障判定部7は、ステップSa7へ進む。これに対して、(2)式が満たされないと判断した場合に故障判定部7は、ステップSa6を行うことなしにステップSa5からステップSa7へ進む。従って、このときの第iのMAPチャネルは故障チャネルに設定されない。
【0025】
ステップSa7において故障判定部7は、変数iの値を1つ増加する。ステップSa8において故障判定部7は、変数iがMAPチャネルの数k以上になっているか否かを確認する。そして故障判定部7は、ここで変数iがk以上になっていることが確認できるまで、ステップSa5乃至ステップSa8を繰り返す。これにより、MAPチャネルのそれぞれについて、順次故障の有無がチェックされる。変数iがk以上になったことを確認したならば、すなわち全てのMAPチャネルについてのチェックが完了したならば、故障判定部7はステップSa8からステップSa9へ進む。
【0026】
ステップSa9において故障判定部7は、故障チャネルとして設定されたチャネルがあるか否かを確認する。そして故障チャネルがある場合に故障判定部7は、ステップSa9からステップSa10へ進む。ステップSa10において故障判定部7は、警報処理を行う。この警報処理にて故障判定部7は例えば、故障チャネルに対応する局所コイル1aが故障していることを表す情報を表示部200に表示させる。また故障判定部7は、PAC合成部13に故障している局所コイル1aがいずれであるかを通知する。
【0027】
表示部200に表示させる情報は、例えば図4に示すような画像とする。図4に示す画像は、脊椎用の4チャネルフェーズドアレイコイルについての故障判定の結果を通知する。図4においては、4つの局所コイルが体軸方向に沿って並べられていることを示している。ハッチングは、他の箇所とは色を異ならせていることを示している。そして、この色を異ならせた箇所に対応する局所コイルが故障していることを示している。
【0028】
このような通知により、ユーザは、局所コイルが故障していること、ならびにその故障している局所コイルがいずれであるのかを容易に認識できる。
【0029】
警報処理を終えたならば、故障判定部7は図3に示す処理を終了する。なお、故障チャネルが無かった場合、故障判定部7はステップSa10を行うことなく、ステップSa9から図3に示す処理を終了する。
【0030】
PAC合成部13は、故障判定部32からの通知に基づいて、いずれの局所コイル1aが故障しているかを管理しておく。そしてPAC合成部13はイメージングスキャンの際には、故障している局所コイル1aが属するチャネルについての画像は、PAC合成に使用しない。
【0031】
以上のように第1の実施形態のMRI装置100によれば、MAPチャネルのうちで、SNRが最大値SNRmaxよりも大幅に小さいチャネルについては、対応する局所コイル1aが故障していると判定して、その旨を警報する。MAPスキャンでは、各MAPチャネルの一部が必ずイメージング範囲と重なるから、MAPスキャンにおける全スライスでMR信号が受信されないことは正常な状況においては無いはずである。このため、SNRが最大値SNRmaxよりも大幅に小さいチャネルについては、感度領域内でMR信号が生じているにも拘わらずにそれを受信できていないことになるから、上記のように局所コイル1aの故障と判定することができる。そして、局所コイル1aの故障が検出された場合にはその旨の警報が行われるから、使用者や管理者はその故障への対処を迅速に行うことができる。
【0032】
また、故障していると判定された局所コイル1aはイメージングスキャンに使用されないため、上記の警報に基づく修理が行われるまでの間にイメージングスキャンを行う場合でも、故障している局所コイル1aの受信信号によるSNRの低下を来すことなく撮影を行うことが可能である。
【0033】
(第2の実施形態)
図5は第2の実施形態に係るMRI装置300の要部構成を示すブロック図である。MRI装置300の構成は、MRI装置100の構成と大部分で共通する。図5では、MRI装置100と異なる特徴的な構成のみを図示している。図5において図1と同一の要素には同一の符号を付し、その詳細な説明は省略する。
【0034】
MRI装置300がMRI装置100と異なっているのは、局所コイルとしてクアドラチャーコイル(QDコイル)を備えたフェーズドアレイコイルを、フェーズドアレイコイル1に代えて備える点である。図5では、フェーズドアレイコイルにおける1チャネル分の処理系のみを図示している。すなわち、MRI装置300は、フェーズドアレイコイルにおける1チャネル分の処理系を、検波部2、A/D変換部3、再構成部4、記憶部5、SNR算出部6、QDコイル21、ピークホールド部22,23および強度比算出部24により形成する。そして図示は省略しているが、これと同様な構成の処理系がMRI装置100のようにn系列分設けられている。なお、ホールボディコイル(WBコイル)8、検波部9、A/D変換部10、再構成部11、記憶部12、PAC合成部13および感度補正MAP画像生成部14についても図示を省略している。
【0035】
QDコイル21は、RFコイル21a,21bおよびQD合成部21cを有する。RFコイル21a,21bは、互いに位相が90度ずれたMR信号を受信する。QD合成部21cは、RFコイル21a,21bのそれぞれの出力信号をQD合成する。
【0036】
ピークホールド部22,23には、RFコイル21a,21bの出力信号がそれぞれ入力される。ピークホールド部22,23は、それぞれの入力信号のピーク値を検出し、保持する。強度比算出部24は、ピークホールド部22,23がそれぞれ保持するピーク値の絶対値の比を算出する。すなわち強度比算出部24は、QDコイル21のIチャネルの信号とQチャネルの信号との強度比(以下、IQ強度比と称する)を算出する。
【0037】
さらにMRI装置300では、MRI装置100における故障判定部7に代えて故障判定部25を備える。故障判定部25には、各処理系のSNR算出部6で算出されたSNRの他に、各処理系の強度比算出部24で算出されたIQ強度比が入力される。故障判定部25は、各処理系のSNR算出部6のそれぞれで算出されたSNRと、各処理系の強度比算出部24で算出されたIQ強度比とに基づいて、各処理系のQDコイル21の故障の有無を判定する。故障判定部25は、QDコイル21のいずれかが故障している場合に、その旨を示した画像の表示を表示部200に行わせる。
【0038】
次に以上のように構成されたMRI装置300の動作について説明する。
MAPスキャンが行われる際、MAPチャネルに属するRFコイル21a,21bは、I成分およびQ成分の信号をそれぞれ出力するが、これらの信号はQD合成部21cにより合成されるのと並行して、各信号のピーク値Imax,Qmaxの検出がピークホールド部22,23でそれぞれ行われる。
【0039】
そして強度比算出部24が、次の(3)式によりIQ強度比Riqを算出する。
Riq=abs(Imax)/abs(Qmax) …(3)
一方、MAPスキャンを行うに当たり故障判定部25は、図6に示すような処理を実行する。なお、図6において図3に示されるのと同一の処理には同一の符号を付し、その詳細な説明は省略する。
【0040】
故障判定部25は、ステップSa1乃至ステップSa4を第1の実施形態と同様に行った後、ステップSb1へ進む。ステップSb1において故障判定部25は、第1〜第kのMAPチャネルのそれぞれに関するIQ強度比RiqをRiq(1)〜Riq(k)として取得する。
【0041】
続いて故障判定部25は、ステップSa5を第1の実施形態と同様に行う。そして、(2)式が満たされないと判断した場合に故障判定部25は、ステップSa5からステップSb2へ進む。ステップSb2において故障判定部25は、次の(4)式が満たされるか否かを確認する。
THmin<Riq(i)<THmax …(4)
なおこの(4)式で、THminおよびTHmaxは、QDコイル21が正常な状態におけるIQ強度比の最小値および最大値をそれぞれ考慮して定めた許容範囲の下限および上限を示す閾値である。
【0042】
(4)式が満たされると判断した場合に故障判定部25は、ステップSb2からステップSa6へ進む。(4)式が満たされないと判断した場合に故障判定部25は、ステップSb2からステップSa7へ進む。
【0043】
以降において故障判定部25は、ステップSa6乃至ステップSa10を第1の実施形態と同様に行う。
【0044】
かくしてこの第2の実施形態によれば、MAPチャネルのうちで、SNRが最大値SNRmaxよりも大幅に小さいチャネルに加えて、IQ強度比が許容範囲から外れるチャネルについても、対応するQDコイル21が故障していると判定して、その旨を警報する。QDコイル21は、RFコイル21a,21bの一方のみが故障したとしても、QD合成後の信号強度が極端には低下しないので、SNRの低下による故障検出が困難な場合がある。しかしこのような場合でも第2の実施形態によれば、故障を検出できる。
【0045】
(第3の実施形態)
図7は第3の実施形態に係るMRI装置400の要部構成を示すブロック図である。MRI装置400の構成は、MRI装置100の構成と大部分で共通する。図7において図1と同一の要素には同一の符号を付し、その詳細な説明は省略する。
【0046】
図7に示すようにMRI装置400は、フェーズドアレイコイル1、検波部2-1,2-2…,2-n、A/D変換部3-1,3-2…,3-n、再構成部4-1,4-2…,4-n、記憶部5-1,5-2…,5-n、ホールボディコイル(WBコイル)8、検波部9、A/D変換部10、再構成部11、記憶部12、PAC合成部13、感度補正MAP画像生成部14、強度比算出部31-1,31-2…,31-nおよび故障判定部32を含む。すなわちMRI装置400は、MRI装置100におけるSNR算出部6-1,6-2…,6-nおよび故障判定部7に代えて、強度比算出部31-1,31-2…,31-nおよび故障判定部32を備えている。なお、強度比算出部31-1,31-2…,31-nについても、それぞれを区別する必要がある場合を除き、強度比算出部31と表記する。
【0047】
強度比算出部31は、記憶部5に記憶されたデータと記憶部12に記憶されたデータとに基づいて局所コイル1aでの受信強度とホールボディコイル8での受信強度との比を算出する。
【0048】
故障判定部32は、強度比算出部31-1,31-2…,31-nのそれぞれで算出された強度比に基づいて、局所コイル1a-1,1a-2…,1a-nの故障の有無を判定する。故障判定部32は、局所コイル1a-1,1a-2…,1a-nのいずれかが故障している場合に、その旨を示した画像の表示を表示部200に行わせる。
【0049】
次に以上のように構成されたMRI装置400の動作について説明する。
MAPスキャンが行われる際、MAPチャネルに属する強度比算出部31では、記憶部5に記憶されるデータが示す感度MAP画像内における上位10%の信号強度値と、それらの信号強度値が現れている位置とを判定する。そして強度比算出部31は、上記の上位10%の信号強度値の平均値を算出し、これを局所強度値とする。また強度比算出部31は、記憶部12に記憶されたデータが示すホールボディ画像内における上記の判定した各位置と同位置の信号強度値を判定する。そして強度比算出部31は、このホールボディ画像内から判定した信号強度値の平均値を算出し、これをホールボディ強度値とする。最後に強度比算出部31は、強度比Rlwを、次の(5)式により算出する。
Rlw=局所強度値/ホールボディ強度値 …(5)
一方、MAPスキャンを行うに当たり故障判定部32は、図8に示すような処理を実行する。なお、図8において図3に示されるのと同一の処理には同一の符号を付し、その詳細な説明は省略する。
【0050】
故障判定部32は、ステップSa1およびステップSa2を第1の実施形態と同様に行った後、ステップSc1へ進む。ステップSc1において故障判定部32は、第1〜第kのMAPチャネルのそれぞれに関する強度比RlwをRlw(1)〜Rlw(k)として取得する。
【0051】
続いてステップSc2において故障判定部32は、次の(6)式が満たされるか否かを確認する。
Rlw(i)<TH …(6)
なお、局所コイル1aおよびホールボディコイル8のそれぞれの感度を考慮して予め定めた閾値である。
【0052】
(6)式が満たされると判断した場合に故障判定部32は、ステップSc1からステップSa6へ進む。(6)式が満たされないと判断した場合に故障判定部32は、ステップSc1からステップSa7へ進む。
【0053】
以降において故障判定部32は、ステップSa6乃至ステップSa10を第1の実施形態と同様に行う。
【0054】
かくしてこの第3の実施形態によれば、MAPチャネルのうちで、感度MAP画像内における信号強度と、ホールボディ画像内における同一位置の信号強度との強度比が閾値TH以下に低下しているチャネルについては、対応する局所コイル1aが故障していると判定して、その旨を警報する。ホールボディコイル8は、局所コイル1aの感度領域の全てを包含する感度領域を持つから、MAPスキャンにて局所コイル1aとホールボディコイル8とでは、同一位置からのMR信号が受信される。局所コイル1aはホールボディコイル8よりも感度が高いから、上記の同一位置からのMR信号についての受信強度は、局所コイル1aとホールボディコイル8とで異なるが、その比は局所コイル1aの感度とホールボディコイル8の感度との差によりほぼ一定となる。このため、上記の強度比Rlwが低下するならば、局所コイル1aの感度が低下していることになるから、上記のように局所コイル1aの故障と判定することができる。そして、局所コイル1aの故障が検出された場合にはその旨の警報が行われるから、使用者や管理者はその故障への対処を迅速に行うことができる。
【0055】
以上の各実施形態は、次のような種々の変形実施が可能である。
第1および第2の実施形態では、SNRの代わりに、生データ信号強度値の総和を用いても良い。
第1および第2の実施形態では、平均値AVEhighおよびAVElowを算出するためのサンプル値の数は、任意に変更可能である。
第2の実施形態では、RFコイル21a,21bの一方が故障していると判定されたQDコイル21については、正常である方、すなわち出力される信号強度が大きい方のRFコイルの出力信号を定数倍してQDコイル21の出力を得るようにしても良い。なお上記の定数は、RFコイル21a,21bの感度差を考慮して予め設定する。RFコイル21a,21bの感度が同じであるならば、上記の定数は例えば√2とすると良い。
第2の実施形態では、各QDコイル21の幾何学的配置や、各QDコイルの使用部位などによって、各QDコイル21で受信される信号強度が変化するので、これらを考慮して閾値THmin,THmaxをチャネル毎に異ならせても良い。
第2の実施形態では、IQ強度比Riqの代わりに、QD合成の前後の信号強度比を用いても良い。
第3の実施形態では、局所強度値を算出するためのサンプル値の数は、任意に変更可能である。
各実施形態では、シミングのためのスキャンなどのようなMAPスキャン以外のプレスキャンの結果に基づいて局所コイルの故障の判定を行うようにしても良い。
【0056】
なお、本発明は上記各実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記各実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【図面の簡単な説明】
【0057】
【図1】本発明の第1の実施形態に係るMRI装置100の要部構成を示すブロック図。
【図2】MAPチャネルを説明する図。
【図3】図1中の故障判定部7の処理手順を示すフローチャート。
【図4】故障判定の結果を通知する画像の一例を示す図。
【図5】本発明の第2の実施形態に係るMRI装置300の要部構成を示すブロック図。
【図6】図5中の故障判定部25の処理手順を示すフローチャート。
【図7】本発明の第3の実施形態に係るMRI装置400の要部構成を示すブロック図。
【図8】図6中の故障判定部32の処理手順を示すフローチャート。
【符号の説明】
【0058】
100,300,400…MRI装置、1…フェーズドアレイコイル、1a(1a-1,1a-2…,1a-n)…局所コイル、2(2-1,2-2…,2-n),9…検波部、3(3-1,3-2…,3-n),10…A/D変換部、4(4-1,4-2…,4-n),11…再構成部、5(5-1,5-2…,5-n),12…記憶部、6(6-1,6-2…,6-n)…SNR算出部、7,25,32…故障判定部、8…ホールボディコイル、13…PAC合成部、14…感度補正MAP画像生成部、21…QDコイル、21a,21b…RFコイル、21c…QD合成部、22,23…ピークホールド部、24…強度比算出部、31(31-1,31-2…,31-n)…強度比算出部。
【特許請求の範囲】
【請求項1】
複数の局所コイルを配置したフェーズドアレイコイルと、
イメージングスキャンに先立って、イメージングスキャン領域の少なくとも一部を含む領域をプレスキャンするプレスキャン手段と、
前記プレスキャンで前記局所コイルのそれぞれから出力された出力信号に基づいて前記局所コイルのそれぞれの故障の有無を判断する判断手段とを具備したことを特徴とする磁気共鳴イメージング装置。
【請求項2】
前記複数の局所コイルのそれぞれの感度領域は、他の少なくとも1つの感度領域と一部が重なり、
前記プレスキャン手段は、前記複数の局所コイルのうちでその感度領域が前記イメージングスキャン領域の一部を含む局所コイルのみを全て用いて、前記イメージングスキャン領域の全てを包含する領域をプレスキャンし、
前記判断手段は、前記プレスキャンに用いられる前記局所コイルのそれぞれについて、それらの局所コイルから前記プレスキャンで出力された出力信号の比較によって故障の有無を判断することを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項3】
前記判断手段は、
前記プレスキャンに用いられる前記局所コイルのそれぞれについて、前記プレスキャンの全スライスにおける前記出力信号の強度のいくつかの上位値の平均値といくつかの下位値の平均値との比、または前記各スライスにおける前記出力信号の強度値の総和を比較値として算出する手段と、
前記比較値の最大値に対して規定度合い以下である前記比較値に対応する前記局所コイルが故障であると判定する判定手段とを含むことを特徴とする請求項2に記載の磁気共鳴イメージング装置。
【請求項4】
複数の局所コイルを配置したフェーズドアレイコイルと、
前記複数のフェーズドアレイコイルの感度領域を包含する感度領域を持った広域コイルと、
イメージングスキャンに先立って、イメージングスキャン領域の少なくとも一部を含む領域をプレスキャンするプレスキャン手段と、
前記プレスキャンで、ほぼ同一のスキャン位置についての前記局所コイルから出力された出力信号と前記広域コイルから出力された出力信号とに基づいて前記局所コイルのそれぞれの故障の有無を判断する判断手段とを具備したことを特徴とする磁気共鳴イメージング装置。
【請求項5】
前記判断手段は、前記局所コイルから出力された出力信号と前記広域コイルから出力された出力信号との強度比に基づいて前記局所コイルのそれぞれの故障の有無を判断することを特徴とする請求項4に記載の磁気共鳴イメージング装置。
【請求項6】
前記プレスキャン手段は、前記複数の局所コイルのうちでその感度領域が前記イメージングスキャン領域の一部を含む局所コイルのみを全て用いて、前記イメージングスキャン領域の全てを包含する領域をプレスキャンし、
前記判断手段は、前記プレスキャンに用いられる前記局所コイルのそれぞれについて故障の有無を判断することを特徴とする請求項4に記載の磁気共鳴イメージング装置。
【請求項7】
前記局所コイルのいずれかが故障であると判定されたことに応じて、その旨を通知する通知手段をさらに具備したことを特徴とする請求項1または請求項4に記載の磁気共鳴イメージング装置。
【請求項8】
前記通知手段は、前記情報を前記判定手段により故障であると判定された前記局所コイルがいずれであるかを通知することを特徴とする請求項7に記載の磁気共鳴イメージング装置。
【請求項9】
前記通知手段は、前記局所コイルの配置を示した画像上で前記故障であると判定された前記局所コイルがいずれであるかを目視可能とすることを特徴とする請求項8に記載の磁気共鳴イメージング装置。
【請求項10】
前記イメージングスキャンを、前記判定手段により故障であると判定された前記局所コイル以外の局所コイルを用いて行う手段をさらに備えたことを特徴とする請求項1または請求項4に記載の磁気共鳴イメージング装置。
【請求項11】
前記局所コイルは、互いに直交する2チャネルの信号を合成するクアドラチャーコイルであって、
前記判定手段は、前記2チャネルの信号の強度比が規定範囲外であるときにも前記局所コイルが故障であると判定することを特徴とする請求項1または請求項4に記載の磁気共鳴イメージング装置。
【請求項12】
前記局所コイルは、クアドラチャーコイルが出力する互いに直交する2チャネルの信号を合成することにより出力信号を得るものであり、
前記判定手段は、前記合成の前後での信号強度比が規定値以上であるときにも前記局所コイルが故障であると判定することを特徴とする請求項1または請求項4に記載の磁気共鳴イメージング装置。
【請求項1】
複数の局所コイルを配置したフェーズドアレイコイルと、
イメージングスキャンに先立って、イメージングスキャン領域の少なくとも一部を含む領域をプレスキャンするプレスキャン手段と、
前記プレスキャンで前記局所コイルのそれぞれから出力された出力信号に基づいて前記局所コイルのそれぞれの故障の有無を判断する判断手段とを具備したことを特徴とする磁気共鳴イメージング装置。
【請求項2】
前記複数の局所コイルのそれぞれの感度領域は、他の少なくとも1つの感度領域と一部が重なり、
前記プレスキャン手段は、前記複数の局所コイルのうちでその感度領域が前記イメージングスキャン領域の一部を含む局所コイルのみを全て用いて、前記イメージングスキャン領域の全てを包含する領域をプレスキャンし、
前記判断手段は、前記プレスキャンに用いられる前記局所コイルのそれぞれについて、それらの局所コイルから前記プレスキャンで出力された出力信号の比較によって故障の有無を判断することを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項3】
前記判断手段は、
前記プレスキャンに用いられる前記局所コイルのそれぞれについて、前記プレスキャンの全スライスにおける前記出力信号の強度のいくつかの上位値の平均値といくつかの下位値の平均値との比、または前記各スライスにおける前記出力信号の強度値の総和を比較値として算出する手段と、
前記比較値の最大値に対して規定度合い以下である前記比較値に対応する前記局所コイルが故障であると判定する判定手段とを含むことを特徴とする請求項2に記載の磁気共鳴イメージング装置。
【請求項4】
複数の局所コイルを配置したフェーズドアレイコイルと、
前記複数のフェーズドアレイコイルの感度領域を包含する感度領域を持った広域コイルと、
イメージングスキャンに先立って、イメージングスキャン領域の少なくとも一部を含む領域をプレスキャンするプレスキャン手段と、
前記プレスキャンで、ほぼ同一のスキャン位置についての前記局所コイルから出力された出力信号と前記広域コイルから出力された出力信号とに基づいて前記局所コイルのそれぞれの故障の有無を判断する判断手段とを具備したことを特徴とする磁気共鳴イメージング装置。
【請求項5】
前記判断手段は、前記局所コイルから出力された出力信号と前記広域コイルから出力された出力信号との強度比に基づいて前記局所コイルのそれぞれの故障の有無を判断することを特徴とする請求項4に記載の磁気共鳴イメージング装置。
【請求項6】
前記プレスキャン手段は、前記複数の局所コイルのうちでその感度領域が前記イメージングスキャン領域の一部を含む局所コイルのみを全て用いて、前記イメージングスキャン領域の全てを包含する領域をプレスキャンし、
前記判断手段は、前記プレスキャンに用いられる前記局所コイルのそれぞれについて故障の有無を判断することを特徴とする請求項4に記載の磁気共鳴イメージング装置。
【請求項7】
前記局所コイルのいずれかが故障であると判定されたことに応じて、その旨を通知する通知手段をさらに具備したことを特徴とする請求項1または請求項4に記載の磁気共鳴イメージング装置。
【請求項8】
前記通知手段は、前記情報を前記判定手段により故障であると判定された前記局所コイルがいずれであるかを通知することを特徴とする請求項7に記載の磁気共鳴イメージング装置。
【請求項9】
前記通知手段は、前記局所コイルの配置を示した画像上で前記故障であると判定された前記局所コイルがいずれであるかを目視可能とすることを特徴とする請求項8に記載の磁気共鳴イメージング装置。
【請求項10】
前記イメージングスキャンを、前記判定手段により故障であると判定された前記局所コイル以外の局所コイルを用いて行う手段をさらに備えたことを特徴とする請求項1または請求項4に記載の磁気共鳴イメージング装置。
【請求項11】
前記局所コイルは、互いに直交する2チャネルの信号を合成するクアドラチャーコイルであって、
前記判定手段は、前記2チャネルの信号の強度比が規定範囲外であるときにも前記局所コイルが故障であると判定することを特徴とする請求項1または請求項4に記載の磁気共鳴イメージング装置。
【請求項12】
前記局所コイルは、クアドラチャーコイルが出力する互いに直交する2チャネルの信号を合成することにより出力信号を得るものであり、
前記判定手段は、前記合成の前後での信号強度比が規定値以上であるときにも前記局所コイルが故障であると判定することを特徴とする請求項1または請求項4に記載の磁気共鳴イメージング装置。
【図1】



【図2】

【図3】
【図4】

【図5】
【図6】

【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2006−223383(P2006−223383A)
【公開日】平成18年8月31日(2006.8.31)
【国際特許分類】
【出願番号】特願2005−38167(P2005−38167)
【出願日】平成17年2月15日(2005.2.15)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成18年8月31日(2006.8.31)
【国際特許分類】
【出願日】平成17年2月15日(2005.2.15)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]