
磁気共鳴イメージング装置
【課題】
外部加振による真空容器振動が超電導コイルに伝播することを抑制する。運搬時等の衝撃荷重に耐えうる強度を保持する。
【解決手段】
本発明のMRI装置は、超伝導コイルと、超伝導コイルを収容するコイル容器と、コイル容器を覆う熱シールドと、コイル容器及び熱シールドを収容する真空容器とを備え、コイル容器は上側コイル容器,下側コイル容器及びコイル容器連結部とを有し、真空容器は上側真空容器及び下側真空容器とを有し、コイル容器は下側真空容器から支持され上側真空容器からは自由な状態にされているとともに、真空容器と熱シールドとを一時的に締結する一時締結機構を備える。傾斜磁場コイル振動等の外部加振による真空容器振動が超電導コイルに伝播することを抑制できる。また、運搬時等の衝撃荷重に耐えうる強度を保持することができる。
外部加振による真空容器振動が超電導コイルに伝播することを抑制する。運搬時等の衝撃荷重に耐えうる強度を保持する。
【解決手段】
本発明のMRI装置は、超伝導コイルと、超伝導コイルを収容するコイル容器と、コイル容器を覆う熱シールドと、コイル容器及び熱シールドを収容する真空容器とを備え、コイル容器は上側コイル容器,下側コイル容器及びコイル容器連結部とを有し、真空容器は上側真空容器及び下側真空容器とを有し、コイル容器は下側真空容器から支持され上側真空容器からは自由な状態にされているとともに、真空容器と熱シールドとを一時的に締結する一時締結機構を備える。傾斜磁場コイル振動等の外部加振による真空容器振動が超電導コイルに伝播することを抑制できる。また、運搬時等の衝撃荷重に耐えうる強度を保持することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は磁気共鳴イメージング装置(以下「MRI装置」という。)に係り、特に被検体に与える閉塞感が少ない開放型のMRI装置に関する。
【背景技術】
【0002】
従来のMRI装置の例が特許文献1に記載されている。特許文献1に記載のMRI装置では、外部加振による磁場変動を生じにくくさせるため、超電動コイルを内包するコイル容器は、真空容器に内包されるとともに、支持棒で真空容器内壁に支持される。さらに、第1の連結管により、上下のコイル容器は機械的及び熱的に連結される。
【0003】
【特許文献1】特開2002−159466号公報(第9頁,図1)
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のMRI装置においては、設置床面に対して真空容器を片持ち支持しているので、主として真空容器間を連結する第2の連結管の曲げに起因して、上側の真空容器が振動する。真空容器が振動すると、真空容器に接続されたコイル容器も振動する。下側のコイル容器は床面で規制されているので、下側のコイル容器の振幅は上側のコイル容器の振幅に比べて小さい。その結果、上下のコイル容器に収容された超電導コイル間に、相対変位が生じる。上下の超伝導コイル間に相対変位が生じると、磁気共鳴画像が劣化する。特に、高画質化のために静磁場強度及び傾斜磁場強度を増大させると、それらの磁場強度の増大に用いる傾斜磁場コイルの振動が、磁気共鳴画像に影響する。
【課題を解決するための手段】
【0005】
上記課題を解決するため本発明のMRI装置は、超伝導コイルと、超伝導コイルを収容するコイル容器と、コイル容器を覆う熱シールドと、コイル容器及び熱シールドを収容する真空容器とを備え、コイル容器は上側コイル容器,下側コイル容器及びコイル容器連結部とを有し、真空容器は上側真空容器及び下側真空容器とを有し、コイル容器は下側真空容器から支持され上側真空容器からは自由な状態にされているとともに、真空容器と熱シールドとを一時的に締結する一時締結機構を備える。
【発明の効果】
【0006】
本発明によれば、上側真空容器に比べ振動が小さい下側真空容器がコイル容器を支持するので、傾斜磁場コイル振動や設置床面振動の外部加振による真空容器振動が超電導コイルに伝播することを抑制できる。また、超電導コイルが振動してMR画像を劣化させることを防止できる。
【0007】
さらに、真空容器と熱シールド(又はコイル容器)とを一時的に締結する機構を有することにより、下側真空容器がコイル容器を支持し、コイル容器が上側真空容器から自由な状態であるMRI装置であっても、運搬時等の衝撃荷重に耐えうる強度を保持することができる。
【発明を実施するための最良の形態】
【0008】
MRI装置は、均一な静磁場内に置かれた被検体に電磁波を照射して、被検体から発生した核磁気共鳴信号を検出する。そして、検出した核磁気共鳴信号を画像処理して被検体の物理的性質を表す磁気共鳴画像を得る。核磁気共鳴信号の位置情報を付与するために、静磁場に重畳して傾斜磁場を印加する。
【0009】
垂直方向に静磁場を発生するMRI装置は、水平方向に磁場を発生するMRI装置に比べて、被検者への開放性はあるが、静磁場の発生や漏洩磁場の低減が難しいとされている。一方、垂直方向に静磁場を発生するMRI装置では、磁場強度を高めて高画質の画像を得ることが必要である。しかし、画質は外部加振等により大きく左右される。そこで本発明では、傾斜磁場コイル振動や設置床面振動の外部加振による真空容器の振動が超電導コイルに伝播するのを抑制している。また、真空容器と熱シールド(又はコイル容器)とを一時的に締結する機構を有することにより、下側真空容器がコイル容器を支持しコイル容器が上側真空容器から自由な状態であるMRIであっても、運搬時等の衝撃荷重に耐えうる強度を保持させることができる。
【実施例1】
【0010】
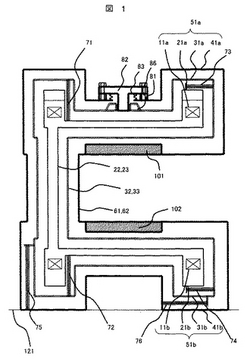
本発明に係るMRI装置の第1の実施例を、図1乃至図4を用いて説明する。図1は
MRI装置の縦断面図であり、図2はその斜視図、図3は振動モードを説明する図、図4は上側真空容器と上側熱シールドとの締結部の拡大図である。
【0011】
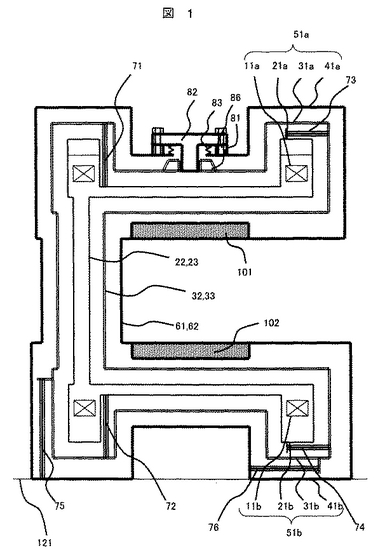
MRI装置は、超電導磁石装置と、傾斜磁場コイル(以下「GC」という。)101a,101bと、高周波コイルと、被検者を載せて撮像空間99に案内するベッド98と、被検体から得られた磁気共鳴信号に基づき核磁気共鳴画像を構成する画像再構成装置と、超電導磁石装置やGC,高周波コイル等に電源を供給する電源装置と、MRI装置を制御する制御装置とから構成される。超電導磁石装置は、撮像空間99を挟んで上下方向に対向して配置される超電導コイル11a,11bと、超電導コイル11a,11bを冷媒と共に収容するコイル容器21a,21bと、コイル容器を包囲するように設けられた熱シールド31a,31bと、コイル容器と熱シールドとを内蔵し且つ内部が真空に保持された真空容器41a,41bとで構成されたクライオスタット51a,51bと、真空容器41a,41bと接続されクライオスタットを相互に相対向するように配置する真空容器連結管61,62とから構成される。GCは静磁場に重畳して傾斜磁場を印加させるものであり、核磁気共鳴信号の位置情報を付与する。GC101a,101bは、真空容器取り付いた構造を採る。高周波コイルは、電磁波を照射する。
【0012】
超電導コイル11a,11bは環状に巻かれており、撮像空間99に均一な垂直方向の静磁場を発生する。超電導コイル11a,11bは環状のコイル容器21a,21b内に収容され、コイル容器21a,21b内に貯蔵された液体ヘリウム等の冷媒に浸漬される。超電導コイル11a,11bは超電導特性を示す温度まで冷却され、その冷却温度が保持される。コイル容器21aは真空容器41aに、コイル容器21bは真空容器41bそれぞれ内蔵される。
【0013】
コイル容器21aと真空容器41aとの間及びコイル容器21bと真空容器41bとの間には、コイル容器に輻射熱が侵入するのを抑制させるための熱シールド31a,31bが配設される。熱シールド31a,31bは、各コイル容器21a,21bを覆うように形成される。コイル容器21a,21b内の冷媒と熱シールド31a,31bとを図示しない冷凍機で冷却する。
【0014】
撮像空間99を挟んで上下に配置したコイル容器21a,21bは、コイル容器連結管22,23を用いて、上下方向に所定の距離だけ離して支持される。コイル容器21a,21bは、コイル容器連結管22,23により、機械的及び熱的に連結される。
【0015】
コイル容器連結管22,23の外周部には、熱シールド31a,31bを接続する管状の熱シールド連結管32,33が配設されている。熱シールド連結管32,33は、熱シールド31a,31bを、上下方向に所定の距離だけ離して支持する。熱シールド31a,31bと熱シールド連結管32,33とにより、コイル容器21a,21bとコイル容器連結管22,23は覆われ、コイル容器21a,21bに外部から熱が侵入するのを防止する。
【0016】
真空容器41a,41bと、熱シールド31a,31b,コイル容器21a,21b,真空容器連結管61,62、熱シールド連結管32,33等の超電導磁石装置を構成する部材には、主としてステンレス鋼やアルミニウム合金等の非磁性の金属系材料を用いる。
【0017】
コイル容器21a,21b及び熱シールド31a,31bは、支持部材71〜76を介して、真空容器41a,41bに支持される。本実施例においては、支持部材75及び
76を介して、下側真空容器41bにより直接的に下側熱シールド31bが支持される。ここで、熱シールドは上側真空容器41aに対して直接支持されず、上側真空容器41aに対して自由な状態となる。そして、超電導コイルを収納するコイル容器は、熱シールドにより支持される。従って、コイル容器も上側真空容器41aに対して自由な状態となる。このように、上側真空容器に比べ振動が小さい下側真空容器がコイル容器を支持するので、傾斜磁場コイル振動や設置床面振動の外部加振による真空容器振動が超電導コイルに伝播することを抑制できる。
【0018】
本実施例のように、上側コイル容器21aと上側熱シールド31aとの間に支持部材
71及び73を設けることもできる。この場合、上側コイル容器21aと上側熱シールド31aが支持部材71及び73により一体化され、コイル容器21aと熱シールド31aの剛性が増大する。その結果、支持部材を介して伝播する振動によるコイル容器の励振が抑制される。
【0019】
また、本実施例のように、真空容器とコイル容器とを直接接続せず、熱シールドを介して真空容器とコイル容器と接続することにより、支持部材による断熱距離を大きくすることができる。
【0020】
尚、本実施例では、熱シールドを介して真空容器とコイル容器とが接続されるが、下側真空容器41bにより直接コイル容器を支持してもよい。つまりコイル容器を上側真空容器41aに対して自由な状態とすることができれば、傾斜磁場コイル振動等による真空容器振動が超電導コイルに伝播することを抑制できる。
【0021】
さらには、真空容器とコイル容器との接続は、上述した熱シールドを介しての真空容器とコイル容器との間接的な接続と、熱シールドを介さない真空容器とコイル容器との直接的な接続とを組み合わせてもよい。
【0022】
支持部材71〜76の形状として棒状を用いる。支持部材の形状は、棒状の他にも、単円筒状,多重円筒状等を用いることができる。真空容器からコイル容器及び熱シールドを断熱するため、支持部材は熱伝導率の小さい非磁性の材料を用いる。例えば、ガラス繊維補強エポキシ樹脂などの繊維補強合成樹脂材料を用いることができる。同じ断熱性能であれば、棒状及び単円筒状の方が多重円筒状に比べて安価である。ただし、棒状および端円筒状の場合は、より接続間距離を広げる必要がある。
【0023】
本実施例では、コイル容器を垂直方向に支持する支持部材71,72,75と、水平方向に支持する支持部材73,74,76により、コイル容器を真空容器に支持した。斜め方向に支持する支持部材を用いて支持してもよい。また、支持部材71〜76は、周方向に間隔をおいて配置される。
【0024】
熱シールドは、真空容器の外周部の温度である室温と、コイル容器が冷媒で冷却される超電導温度との間の温度に保持される。したがって、支持部材71〜76には大きな温度勾配が生じる。熱シールドは60K〜70Kに保持されるのが好ましい。そこで、熱シールドがこの温度に保持されるように、支持部材からの熱侵入,熱シールドの熱容量、及び冷凍機の冷凍能力を考慮して、支持部材の取付位置やその形状,本数,断面積等を決定する。支持部材の本数と支持部材の断面積は、強度面からは多いほど好ましいが、コイル容器への熱侵入を抑制する観点からはできるだけ少ない方が望ましい。支持部材の長さは強度面から短い方が好ましいが、コイル容器への熱侵入を抑制する観点からはできるだけ長い方が望ましい。
【0025】
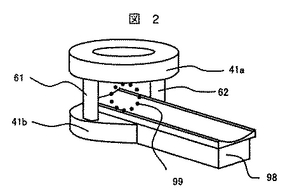
次に、MRI装置の動作を以下に説明する。GCの振動や設置床面の振動などの外部加振により、真空容器41a,41bが振動する。この振動の様子を誇張して図3に示す。MRI装置では、下側真空容器41bの振動は設置床面により規制されるので、上側真空容器41aの振動に比べて小さい。下側真空容器41bの底面では振動は殆ど無く、MRI装置の自重により拘束されたものとみなすことができる。つまり、真空容器41bの底面は、理想的には振動に節になる。
【0026】
本実施例では、振動が小さい下側真空容器41bが(熱シールドを介して)コイル容器を支持しているため、真空容器からコイル容器に伝播する振動を抑制することができる。従って、真空容器の振動をコイル容器内に収納された超電導コイルに伝播することを抑制できる。その結果、良好な核磁気共鳴画像を得ることが可能となる。振動の節となる下側の真空容器41bの底面から熱シールド31bを支持(コイル容器21bを間接的に支持)することにより、その効果は顕著となる。従って、振動の節となる下側真空容器41bの底面から、熱シールド又はコイル容器を支持することが好ましい。
【0027】
本実施例では、支持部材75により下側熱シールド31bの外周面を下側真空容器41bに支持した。これにより、内周面で支持する場合に比べてコイル容器の転倒モーメントを大きくすることができる。その結果、MRI装置の安定性が増す。設置位置のスペース等を考慮し、下側熱シールド31bの内周面と下側真空容器41bとを接続してもよい。
【0028】
また、下側真空容器41bの支持部材の接続位置は底面に限られず、側面であってもよい。しかし、下側真空容器41bの側面から支持する場合は、支持位置を下側真空容器
41bの底面に近づけることが好ましい。その理由は、下側真空容器41bの底面が、理想的には振動の節となり、底面から離れるに従って側面の振動が大きくなるからである。つまり、接続位置が底面から離れるに従って、コイル容器に伝播する振動が大きくなる。側面の振動を抑制するには、側面の剛性を増大させればよい。
【0029】
尚、本実施例では、上下に配置した真空容器41a,41bを2本の真空容器連結管
61,62で接続したが、開放性を損なわず且つ十分な支持力を発生するなら1本または3本以上の真空容器連結管4で接続してもよい。
【0030】
本実施例では、コイル容器及び熱シールドは上側真空容器41aと接続されていないが、実際のMRI装置では、冷凍機や液体ヘリウム注液配管などが上側真空容器41aに取り付けられており、それらの付属品はコイル容器や熱シールドに接続されている。その場合でも、冷凍機等の付属品は真空容器にベローズを介して振動絶縁されているので、その効果は損なわれない。
【0031】
ここで、本実施例のようなコイル容器及び熱シールドが上側真空容器41aと接続されていないMRI装置においては、支持部材71〜76により、超電導コイル,コイル容器,熱シールド及びその付加物の自重を支持しなければならない。さらには、支持部材や熱シールド等は運搬時の衝撃荷重に耐えうる強度が必要となる。以下に、運搬時等の衝撃に起因する支持部材及び熱シールド等の損傷を回避しうるMRI装置について検討する。
【0032】
超電導コイル,コイル容器,熱シールド及び真空容器等の位置を保持するために、支持部材により各位置関係を健全に保つ必要がある。また、これらの支持には、高い断熱性能が要求される。ここで、既に述べたように、MRI装置では傾斜磁場を発生するために、GCにパルス状の電流が流される。GCは静磁場中にあるため、電流を流すGCの導体にはローレンツ力が作用し、GCに振動を誘発する。このGC振動は、支持構造部材等を介して静磁場発生源にまで伝達し、静磁場発生源を振動させる。静磁場発生源の振動により、静磁場が時間的に変動し、その結果としてMRI画像に悪影響を与える。そのため、本実施例においては、GCが取り付く真空容器と熱シールドとを拘束端に近い下側真空容器41bでのみ接続し、GC振動が静磁場発生源に伝わり難い構造を採用する。しかしながら、下側真空容器41bだけでの熱シールド/コイル容器支持では、片持ちに近い支持体系となる。従って、輸送等の衝撃を受けた際に、熱シールドが倒れ込みにより変形し、支持部材に曲げや軸力で過大な荷重負荷が生じる可能性がある。そこで、輸送等の衝撃に起因する熱シールドや支持部材の変形を十分に抑制できるMRI装置について検討した。
【0033】
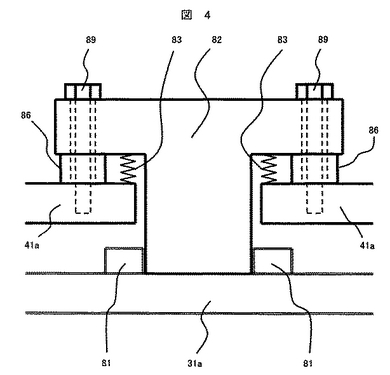
本実施例のMRI装置では、輸送等の衝撃に起因する熱シールドや支持部材の変形を抑制するため、上側真空容器41aと上側熱シールド31aとを一時的に締結する。具体的には、上側真空容器41aに接続された一時締結装置82を上側熱シールド31aに接続することにより、上側真空容器41aと上側熱シールド31aとを一時的に締結する。一時締結装置82はT字形の断面形状有する。上側真空容器41aには開口部が設けられ、この開口部から一時締結装置82の凸部が真空容器内に挿入される。上側熱シールド31a上には、熱シールド座81により、凹部が形成される。上側熱シールド31a上に形成された凹部に、一時締結装置82の凸部(T字形の│の部分)を嵌め込むことにより、一時締結装置82を介して、上側真空容器41aと上側熱シールド31aとが一時的に締結される。一時締結装置82及び上側熱シールド31a上に形成された凹部をあわせて、「一時締結機構」とする。
【0034】
このように、常設されている下側真空容器41bと熱シールドとの接続に加えて、この接続位置(床側)から遠い上側真空容器41aと上側熱シールド31aとを一時的に接続することにより、輸送の際に熱シールド等へ衝撃が加えられても、一時締結装置82を経由して上側真空容器41aへ衝撃荷重が流れ、熱シールド等の変形を抑制することができる。
【0035】
一時締結装置82は、締結時固定ブロック86及びベローズ83を介して、上側真空容器41aに取り付けられている。締結時固定ブロック86は、一時締結装置82と上側真空容器41aとの間に固定され、一時締結装置82の高さ方向のレベルを調整する。上側真空容器41aと上側熱シールド31aとの距離及び一時締結装置82の凸部の長さ等を考慮し、所定の長さの締結時固定ブロック86を選択する。所定の長さより長い固定ブロックを用いることにより、上側真空容器41aと上側熱シールド31aとの締結を解除することができる。
【0036】
図4は、上側真空容器41aと上側熱シールド31aとの締結部の拡大図である。一時締結装置82は、締結時固定ネジ89により、締結時固定ブロック86を介して上側真空容器41aに固定される。一時締結装置82の固定は、締結時固定ネジ89による締付けのほか、溶接や接着等でも可能である。
【0037】
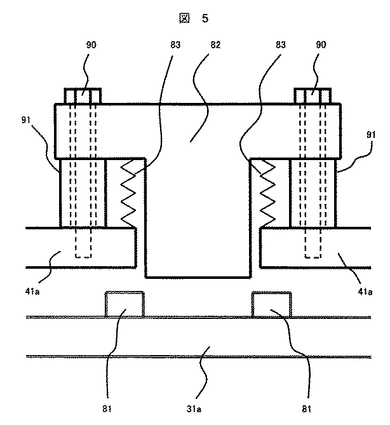
図5は、一時締結装置82の締結を解除した際の締結部を示す図である。本発明によるMRI装置は、所定の場所へ運搬される際には上側真空容器41aと上側熱シールド31aとを一時的に締結するが、所定の場所へ運搬された後はその締結を解除する。MRI装置使用時に、コイル容器を上側真空容器41aに対して自由な状態とするためである。一時締結装置82の締結解除の手順を以下に示す。まず、締結時固定ネジ89を一時締結装置82,締結時固定ブロック86及び上側真空容器41aから取り外す。一時締結装置82と上側真空容器41aとの間にジャッキを挿入し、真空力で真空容器側に引き付けられている一時締結装置82を上側真空容器41aから引き離す。次に、緩んだ締結時固定ブロック86を取り外す。次に、ジャッキにより、所定の位置までさらに一時締結装置82を持ち上げる。一時締結装置82が所定の位置に達したら、締結解除時固定ブロック91を一時締結装置82と上側真空容器41aの間に設置する。その後、ジャッキを緩めて締結解除時固定ブロック91と一時締結装置82とのギャップをなくし、締結解除時固定ネジ90を締め付ける。輸送時等以外には、上側真空容器41aと上側熱シールド31aとの締結を解除することにより、接触熱伝達による熱シールド等への熱侵入を抑制することができる。
【0038】
ベローズ83を一時締結装置82と上側真空容器41aに接続することで、真空を保持したまま、締結時固定ブロック86や締結解除時固定ブロック91の固定や開放が可能となる。真空を保持したままでの作業が可能となるため、真空を保持しない場合に比べて輸送先での復旧作業時間を低減できる。
【0039】
本発明によれば、上側真空容器に比べ振動が小さい下側真空容器がコイル容器を支持しているので、GC振動や設置床面振動の外部加振による真空容器振動が超電導コイルに伝播するのを抑制できる。また、超電導コイルが振動してMR画像を劣化させるのを防止できる。さらに、上側真空容器と上側熱シールドとを一時的に締結する機構を有することにより、下側真空容器がコイル容器を支持し、コイル容器が上側真空容器から自由な状態であるMRIであっても、運搬時等の衝撃荷重に耐えうる強度を保持することができる。
【0040】
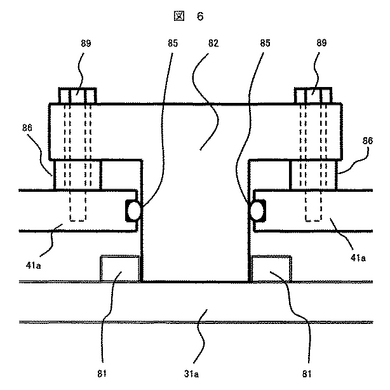
図6は、本発明の第2の実施例を示す図であり、締結部近傍の拡大図を示している。本実施例は、第1実施例の真空シール機構であるベローズ83に代えて、軸シール85を採用する。
【0041】
ここで、軸シール85はOリング形状を有する。材質はゴム等の弾性部材で構成される。軸シール85は上側真空容器41a開口部内面に接続されている。軸シール内面は一時締結装置82の凸部外周に密着する。一時締結装置82の凸部が上下する際にも、軸シール内面は一時締結装置82の凸部外周に密着し続ける。このような軸シールを具備することにより、ベローズ83同様に、真空を保持したまま、締結時固定ブロック86等の固定や開放が可能となる。
【0042】
本実施例においても、第1実施例と同様の効果を有する。さらに、真空シール機構として軸シール85を採用することで、万一真空シール機構が損傷を受けた場合でも、溶接等で取り付けたベローズに比べて迅速な交換が可能であり、MRI装置の復旧までの時間を短縮することができる。
【0043】
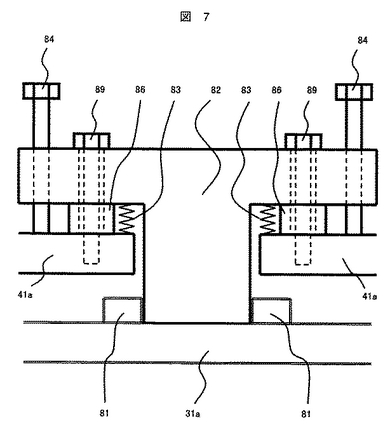
図7は、本発明の第3の実施例を示す図であり、締結部近傍の拡大図を示している。本実施例は、第1の実施例において、一時締結装置82の高さ方向のレベル調整のために用いたジャッキに代えて、調整ネジ84を採用する。調整ネジ84を採用することにより、一時締結装置82の高さ方向のレベル調整を容易にしたものである。
【0044】
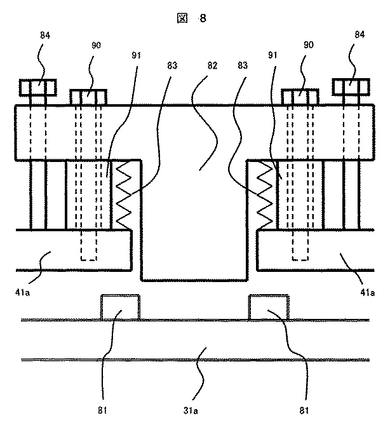
図8は、一時締結装置82の締結を解除した際の締結部を示す図である。一時締結装置82の締結解除の手順を以下に示す。まず、締結時固定ネジ89を一時締結装置82,締結時固定ブロック86及び上側真空容器41aから取り外す。次に、調整ネジを用いて
(一時締結装置82と上側真空容器41aとの距離が長くなる方へ調整ネジを回して)、一時締結装置82を上側真空容器41aから引き離す。緩んだ締結時固定ブロック86を取り外す。調整ネジを用いて、所定の位置までさらに一時締結装置82を持ち上げる。一時締結装置82が所定の位置に達したら、締結解除時固定ブロック91を一時締結装置
82と上側真空容器41aの間に設置する。一時締結装置82と上側真空容器41aとの距離が短くなる方へ調整ネジを回して、一時締結装置82と締結時固定ブロック91とのギャップをなくす。その後、締結時固定ネジ90を、一時締結装置82,締結時固定ブロック91及び上側真空容器41aに締め付ける。
【0045】
本実施例においても、第1実施例と同様の効果を有する。さらに、調整ネジ84を採用することにより、一時締結装置82の高さ方向レベルの微調整がより容易となり、一時締結機構の締結及び解除作業の時間を短縮することができる。
【0046】
図9は、本発明の第4の実施例を示す図であり、締結部近傍の拡大図を示している。本実施例は、一時締結装置82の凸部は先端に向かうに従って円錐状に直径が減少するテーパ構造を備える。一方、上側熱シールド31a上に形成された凹部は一時締結装置82の凸部対応したテーパ構造を備える。
【0047】
本実施例は、第1実施例と同様の効果を有する。さらに、上側熱シールド31a上に形成された凹部と一時締結装置82の凸部が組み合わさるテーパ構造を採用するため、上側熱シールド31a上に形成された凹部に、一時締結装置82の凸部を嵌め込む際に、若干の位置ずれが生じても、容易に挿入することができる。
【0048】
図10は、本発明の第5の実施例を示す図である。本実施例は、MRI装置上面に、第1の実施例における一時締結機構を複数配置したものである。本実施例においては、複数の一時締結機構を用いるため、各一時締結機構の荷重負荷が軽減され、各一時締結機構の形状を小型化できる。
【0049】
図11は、本発明の第6の実施例を示す図である。本実施例は、MRI装置側面に、第1の実施例における一時締結機構を配置したものである。本実施例においては、一時締結機構をMRI装置側面に配置しているため、一時締結機構の設置によるMRI装置形状の高さ方向の増大を回避することができる。
【0050】
図12は、本発明の第7の実施例を示す図である。本実施例は、MRI装置上面及び側面に、第1の実施例における一時締結機構を配置したものである。本実施例においては、複数の一時締結機構を上面及び側面に配置しているため、一時締結機構を設置する場合であってもMRI装置全体としての小型化を図ることができる。
【0051】
上記各実施例においては、一時締結機構を用いて上側真空容器41aと上側熱シールド31aとを締結した。上側真空容器41aと上側コイル容器21aとを締結する場合、上側熱シールド31aに開口部を形成する必要があるが、上側真空容器41aと上側熱シールド31aとを締結することにより、上側熱シールド31aへの開口部の形成と、一時締結解除後の開口部の穴塞ぎが不要となる。
【0052】
一方、上側真空容器41aと上側コイル容器21aとを締結してもよい。また、上側真空容器41aと上側熱シールド31a及び上側コイル容器21aとを締結してもよい。この場合は、上側真空容器41aと上側コイル容器21aを直接的に締結できるため、運搬時の衝撃荷重をより広範囲に分散することができる。
【図面の簡単な説明】
【0053】
【図1】本発明のMRI装置の第1の実施例を示す断面図。
【図2】本発明のMRI装置の斜視図。
【図3】本発明のMRI装置の振動モードを説明する図。
【図4】本発明のMRI装置の第1の実施例を示す断面図。
【図5】本発明のMRI装置の第1の実施例を示す断面図。
【図6】本発明のMRI装置の第2の実施例を示す断面図。
【図7】本発明のMRI装置の第3の実施例を示す断面図。
【図8】本発明のMRI装置の第3の実施例を示す断面図。
【図9】本発明のMRI装置の第4の実施例を示す断面図。
【図10】本発明のMRI装置の第5の実施例を示す断面図。
【図11】本発明のMRI装置の第6の実施例を示す断面図。
【図12】本発明のMRI装置の第7の実施例を示す断面図。
【符号の説明】
【0054】
11a,11b…超電導コイル、21a,21b…コイル容器、31a,31b…熱シールド、41a,41b…真空容器、71,72,73,74,75,76…支持部材、81…熱シールド座、82…一時締結装置。
【技術分野】
【0001】
本発明は磁気共鳴イメージング装置(以下「MRI装置」という。)に係り、特に被検体に与える閉塞感が少ない開放型のMRI装置に関する。
【背景技術】
【0002】
従来のMRI装置の例が特許文献1に記載されている。特許文献1に記載のMRI装置では、外部加振による磁場変動を生じにくくさせるため、超電動コイルを内包するコイル容器は、真空容器に内包されるとともに、支持棒で真空容器内壁に支持される。さらに、第1の連結管により、上下のコイル容器は機械的及び熱的に連結される。
【0003】
【特許文献1】特開2002−159466号公報(第9頁,図1)
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のMRI装置においては、設置床面に対して真空容器を片持ち支持しているので、主として真空容器間を連結する第2の連結管の曲げに起因して、上側の真空容器が振動する。真空容器が振動すると、真空容器に接続されたコイル容器も振動する。下側のコイル容器は床面で規制されているので、下側のコイル容器の振幅は上側のコイル容器の振幅に比べて小さい。その結果、上下のコイル容器に収容された超電導コイル間に、相対変位が生じる。上下の超伝導コイル間に相対変位が生じると、磁気共鳴画像が劣化する。特に、高画質化のために静磁場強度及び傾斜磁場強度を増大させると、それらの磁場強度の増大に用いる傾斜磁場コイルの振動が、磁気共鳴画像に影響する。
【課題を解決するための手段】
【0005】
上記課題を解決するため本発明のMRI装置は、超伝導コイルと、超伝導コイルを収容するコイル容器と、コイル容器を覆う熱シールドと、コイル容器及び熱シールドを収容する真空容器とを備え、コイル容器は上側コイル容器,下側コイル容器及びコイル容器連結部とを有し、真空容器は上側真空容器及び下側真空容器とを有し、コイル容器は下側真空容器から支持され上側真空容器からは自由な状態にされているとともに、真空容器と熱シールドとを一時的に締結する一時締結機構を備える。
【発明の効果】
【0006】
本発明によれば、上側真空容器に比べ振動が小さい下側真空容器がコイル容器を支持するので、傾斜磁場コイル振動や設置床面振動の外部加振による真空容器振動が超電導コイルに伝播することを抑制できる。また、超電導コイルが振動してMR画像を劣化させることを防止できる。
【0007】
さらに、真空容器と熱シールド(又はコイル容器)とを一時的に締結する機構を有することにより、下側真空容器がコイル容器を支持し、コイル容器が上側真空容器から自由な状態であるMRI装置であっても、運搬時等の衝撃荷重に耐えうる強度を保持することができる。
【発明を実施するための最良の形態】
【0008】
MRI装置は、均一な静磁場内に置かれた被検体に電磁波を照射して、被検体から発生した核磁気共鳴信号を検出する。そして、検出した核磁気共鳴信号を画像処理して被検体の物理的性質を表す磁気共鳴画像を得る。核磁気共鳴信号の位置情報を付与するために、静磁場に重畳して傾斜磁場を印加する。
【0009】
垂直方向に静磁場を発生するMRI装置は、水平方向に磁場を発生するMRI装置に比べて、被検者への開放性はあるが、静磁場の発生や漏洩磁場の低減が難しいとされている。一方、垂直方向に静磁場を発生するMRI装置では、磁場強度を高めて高画質の画像を得ることが必要である。しかし、画質は外部加振等により大きく左右される。そこで本発明では、傾斜磁場コイル振動や設置床面振動の外部加振による真空容器の振動が超電導コイルに伝播するのを抑制している。また、真空容器と熱シールド(又はコイル容器)とを一時的に締結する機構を有することにより、下側真空容器がコイル容器を支持しコイル容器が上側真空容器から自由な状態であるMRIであっても、運搬時等の衝撃荷重に耐えうる強度を保持させることができる。
【実施例1】
【0010】
本発明に係るMRI装置の第1の実施例を、図1乃至図4を用いて説明する。図1は
MRI装置の縦断面図であり、図2はその斜視図、図3は振動モードを説明する図、図4は上側真空容器と上側熱シールドとの締結部の拡大図である。
【0011】
MRI装置は、超電導磁石装置と、傾斜磁場コイル(以下「GC」という。)101a,101bと、高周波コイルと、被検者を載せて撮像空間99に案内するベッド98と、被検体から得られた磁気共鳴信号に基づき核磁気共鳴画像を構成する画像再構成装置と、超電導磁石装置やGC,高周波コイル等に電源を供給する電源装置と、MRI装置を制御する制御装置とから構成される。超電導磁石装置は、撮像空間99を挟んで上下方向に対向して配置される超電導コイル11a,11bと、超電導コイル11a,11bを冷媒と共に収容するコイル容器21a,21bと、コイル容器を包囲するように設けられた熱シールド31a,31bと、コイル容器と熱シールドとを内蔵し且つ内部が真空に保持された真空容器41a,41bとで構成されたクライオスタット51a,51bと、真空容器41a,41bと接続されクライオスタットを相互に相対向するように配置する真空容器連結管61,62とから構成される。GCは静磁場に重畳して傾斜磁場を印加させるものであり、核磁気共鳴信号の位置情報を付与する。GC101a,101bは、真空容器取り付いた構造を採る。高周波コイルは、電磁波を照射する。
【0012】
超電導コイル11a,11bは環状に巻かれており、撮像空間99に均一な垂直方向の静磁場を発生する。超電導コイル11a,11bは環状のコイル容器21a,21b内に収容され、コイル容器21a,21b内に貯蔵された液体ヘリウム等の冷媒に浸漬される。超電導コイル11a,11bは超電導特性を示す温度まで冷却され、その冷却温度が保持される。コイル容器21aは真空容器41aに、コイル容器21bは真空容器41bそれぞれ内蔵される。
【0013】
コイル容器21aと真空容器41aとの間及びコイル容器21bと真空容器41bとの間には、コイル容器に輻射熱が侵入するのを抑制させるための熱シールド31a,31bが配設される。熱シールド31a,31bは、各コイル容器21a,21bを覆うように形成される。コイル容器21a,21b内の冷媒と熱シールド31a,31bとを図示しない冷凍機で冷却する。
【0014】
撮像空間99を挟んで上下に配置したコイル容器21a,21bは、コイル容器連結管22,23を用いて、上下方向に所定の距離だけ離して支持される。コイル容器21a,21bは、コイル容器連結管22,23により、機械的及び熱的に連結される。
【0015】
コイル容器連結管22,23の外周部には、熱シールド31a,31bを接続する管状の熱シールド連結管32,33が配設されている。熱シールド連結管32,33は、熱シールド31a,31bを、上下方向に所定の距離だけ離して支持する。熱シールド31a,31bと熱シールド連結管32,33とにより、コイル容器21a,21bとコイル容器連結管22,23は覆われ、コイル容器21a,21bに外部から熱が侵入するのを防止する。
【0016】
真空容器41a,41bと、熱シールド31a,31b,コイル容器21a,21b,真空容器連結管61,62、熱シールド連結管32,33等の超電導磁石装置を構成する部材には、主としてステンレス鋼やアルミニウム合金等の非磁性の金属系材料を用いる。
【0017】
コイル容器21a,21b及び熱シールド31a,31bは、支持部材71〜76を介して、真空容器41a,41bに支持される。本実施例においては、支持部材75及び
76を介して、下側真空容器41bにより直接的に下側熱シールド31bが支持される。ここで、熱シールドは上側真空容器41aに対して直接支持されず、上側真空容器41aに対して自由な状態となる。そして、超電導コイルを収納するコイル容器は、熱シールドにより支持される。従って、コイル容器も上側真空容器41aに対して自由な状態となる。このように、上側真空容器に比べ振動が小さい下側真空容器がコイル容器を支持するので、傾斜磁場コイル振動や設置床面振動の外部加振による真空容器振動が超電導コイルに伝播することを抑制できる。
【0018】
本実施例のように、上側コイル容器21aと上側熱シールド31aとの間に支持部材
71及び73を設けることもできる。この場合、上側コイル容器21aと上側熱シールド31aが支持部材71及び73により一体化され、コイル容器21aと熱シールド31aの剛性が増大する。その結果、支持部材を介して伝播する振動によるコイル容器の励振が抑制される。
【0019】
また、本実施例のように、真空容器とコイル容器とを直接接続せず、熱シールドを介して真空容器とコイル容器と接続することにより、支持部材による断熱距離を大きくすることができる。
【0020】
尚、本実施例では、熱シールドを介して真空容器とコイル容器とが接続されるが、下側真空容器41bにより直接コイル容器を支持してもよい。つまりコイル容器を上側真空容器41aに対して自由な状態とすることができれば、傾斜磁場コイル振動等による真空容器振動が超電導コイルに伝播することを抑制できる。
【0021】
さらには、真空容器とコイル容器との接続は、上述した熱シールドを介しての真空容器とコイル容器との間接的な接続と、熱シールドを介さない真空容器とコイル容器との直接的な接続とを組み合わせてもよい。
【0022】
支持部材71〜76の形状として棒状を用いる。支持部材の形状は、棒状の他にも、単円筒状,多重円筒状等を用いることができる。真空容器からコイル容器及び熱シールドを断熱するため、支持部材は熱伝導率の小さい非磁性の材料を用いる。例えば、ガラス繊維補強エポキシ樹脂などの繊維補強合成樹脂材料を用いることができる。同じ断熱性能であれば、棒状及び単円筒状の方が多重円筒状に比べて安価である。ただし、棒状および端円筒状の場合は、より接続間距離を広げる必要がある。
【0023】
本実施例では、コイル容器を垂直方向に支持する支持部材71,72,75と、水平方向に支持する支持部材73,74,76により、コイル容器を真空容器に支持した。斜め方向に支持する支持部材を用いて支持してもよい。また、支持部材71〜76は、周方向に間隔をおいて配置される。
【0024】
熱シールドは、真空容器の外周部の温度である室温と、コイル容器が冷媒で冷却される超電導温度との間の温度に保持される。したがって、支持部材71〜76には大きな温度勾配が生じる。熱シールドは60K〜70Kに保持されるのが好ましい。そこで、熱シールドがこの温度に保持されるように、支持部材からの熱侵入,熱シールドの熱容量、及び冷凍機の冷凍能力を考慮して、支持部材の取付位置やその形状,本数,断面積等を決定する。支持部材の本数と支持部材の断面積は、強度面からは多いほど好ましいが、コイル容器への熱侵入を抑制する観点からはできるだけ少ない方が望ましい。支持部材の長さは強度面から短い方が好ましいが、コイル容器への熱侵入を抑制する観点からはできるだけ長い方が望ましい。
【0025】
次に、MRI装置の動作を以下に説明する。GCの振動や設置床面の振動などの外部加振により、真空容器41a,41bが振動する。この振動の様子を誇張して図3に示す。MRI装置では、下側真空容器41bの振動は設置床面により規制されるので、上側真空容器41aの振動に比べて小さい。下側真空容器41bの底面では振動は殆ど無く、MRI装置の自重により拘束されたものとみなすことができる。つまり、真空容器41bの底面は、理想的には振動に節になる。
【0026】
本実施例では、振動が小さい下側真空容器41bが(熱シールドを介して)コイル容器を支持しているため、真空容器からコイル容器に伝播する振動を抑制することができる。従って、真空容器の振動をコイル容器内に収納された超電導コイルに伝播することを抑制できる。その結果、良好な核磁気共鳴画像を得ることが可能となる。振動の節となる下側の真空容器41bの底面から熱シールド31bを支持(コイル容器21bを間接的に支持)することにより、その効果は顕著となる。従って、振動の節となる下側真空容器41bの底面から、熱シールド又はコイル容器を支持することが好ましい。
【0027】
本実施例では、支持部材75により下側熱シールド31bの外周面を下側真空容器41bに支持した。これにより、内周面で支持する場合に比べてコイル容器の転倒モーメントを大きくすることができる。その結果、MRI装置の安定性が増す。設置位置のスペース等を考慮し、下側熱シールド31bの内周面と下側真空容器41bとを接続してもよい。
【0028】
また、下側真空容器41bの支持部材の接続位置は底面に限られず、側面であってもよい。しかし、下側真空容器41bの側面から支持する場合は、支持位置を下側真空容器
41bの底面に近づけることが好ましい。その理由は、下側真空容器41bの底面が、理想的には振動の節となり、底面から離れるに従って側面の振動が大きくなるからである。つまり、接続位置が底面から離れるに従って、コイル容器に伝播する振動が大きくなる。側面の振動を抑制するには、側面の剛性を増大させればよい。
【0029】
尚、本実施例では、上下に配置した真空容器41a,41bを2本の真空容器連結管
61,62で接続したが、開放性を損なわず且つ十分な支持力を発生するなら1本または3本以上の真空容器連結管4で接続してもよい。
【0030】
本実施例では、コイル容器及び熱シールドは上側真空容器41aと接続されていないが、実際のMRI装置では、冷凍機や液体ヘリウム注液配管などが上側真空容器41aに取り付けられており、それらの付属品はコイル容器や熱シールドに接続されている。その場合でも、冷凍機等の付属品は真空容器にベローズを介して振動絶縁されているので、その効果は損なわれない。
【0031】
ここで、本実施例のようなコイル容器及び熱シールドが上側真空容器41aと接続されていないMRI装置においては、支持部材71〜76により、超電導コイル,コイル容器,熱シールド及びその付加物の自重を支持しなければならない。さらには、支持部材や熱シールド等は運搬時の衝撃荷重に耐えうる強度が必要となる。以下に、運搬時等の衝撃に起因する支持部材及び熱シールド等の損傷を回避しうるMRI装置について検討する。
【0032】
超電導コイル,コイル容器,熱シールド及び真空容器等の位置を保持するために、支持部材により各位置関係を健全に保つ必要がある。また、これらの支持には、高い断熱性能が要求される。ここで、既に述べたように、MRI装置では傾斜磁場を発生するために、GCにパルス状の電流が流される。GCは静磁場中にあるため、電流を流すGCの導体にはローレンツ力が作用し、GCに振動を誘発する。このGC振動は、支持構造部材等を介して静磁場発生源にまで伝達し、静磁場発生源を振動させる。静磁場発生源の振動により、静磁場が時間的に変動し、その結果としてMRI画像に悪影響を与える。そのため、本実施例においては、GCが取り付く真空容器と熱シールドとを拘束端に近い下側真空容器41bでのみ接続し、GC振動が静磁場発生源に伝わり難い構造を採用する。しかしながら、下側真空容器41bだけでの熱シールド/コイル容器支持では、片持ちに近い支持体系となる。従って、輸送等の衝撃を受けた際に、熱シールドが倒れ込みにより変形し、支持部材に曲げや軸力で過大な荷重負荷が生じる可能性がある。そこで、輸送等の衝撃に起因する熱シールドや支持部材の変形を十分に抑制できるMRI装置について検討した。
【0033】
本実施例のMRI装置では、輸送等の衝撃に起因する熱シールドや支持部材の変形を抑制するため、上側真空容器41aと上側熱シールド31aとを一時的に締結する。具体的には、上側真空容器41aに接続された一時締結装置82を上側熱シールド31aに接続することにより、上側真空容器41aと上側熱シールド31aとを一時的に締結する。一時締結装置82はT字形の断面形状有する。上側真空容器41aには開口部が設けられ、この開口部から一時締結装置82の凸部が真空容器内に挿入される。上側熱シールド31a上には、熱シールド座81により、凹部が形成される。上側熱シールド31a上に形成された凹部に、一時締結装置82の凸部(T字形の│の部分)を嵌め込むことにより、一時締結装置82を介して、上側真空容器41aと上側熱シールド31aとが一時的に締結される。一時締結装置82及び上側熱シールド31a上に形成された凹部をあわせて、「一時締結機構」とする。
【0034】
このように、常設されている下側真空容器41bと熱シールドとの接続に加えて、この接続位置(床側)から遠い上側真空容器41aと上側熱シールド31aとを一時的に接続することにより、輸送の際に熱シールド等へ衝撃が加えられても、一時締結装置82を経由して上側真空容器41aへ衝撃荷重が流れ、熱シールド等の変形を抑制することができる。
【0035】
一時締結装置82は、締結時固定ブロック86及びベローズ83を介して、上側真空容器41aに取り付けられている。締結時固定ブロック86は、一時締結装置82と上側真空容器41aとの間に固定され、一時締結装置82の高さ方向のレベルを調整する。上側真空容器41aと上側熱シールド31aとの距離及び一時締結装置82の凸部の長さ等を考慮し、所定の長さの締結時固定ブロック86を選択する。所定の長さより長い固定ブロックを用いることにより、上側真空容器41aと上側熱シールド31aとの締結を解除することができる。
【0036】
図4は、上側真空容器41aと上側熱シールド31aとの締結部の拡大図である。一時締結装置82は、締結時固定ネジ89により、締結時固定ブロック86を介して上側真空容器41aに固定される。一時締結装置82の固定は、締結時固定ネジ89による締付けのほか、溶接や接着等でも可能である。
【0037】
図5は、一時締結装置82の締結を解除した際の締結部を示す図である。本発明によるMRI装置は、所定の場所へ運搬される際には上側真空容器41aと上側熱シールド31aとを一時的に締結するが、所定の場所へ運搬された後はその締結を解除する。MRI装置使用時に、コイル容器を上側真空容器41aに対して自由な状態とするためである。一時締結装置82の締結解除の手順を以下に示す。まず、締結時固定ネジ89を一時締結装置82,締結時固定ブロック86及び上側真空容器41aから取り外す。一時締結装置82と上側真空容器41aとの間にジャッキを挿入し、真空力で真空容器側に引き付けられている一時締結装置82を上側真空容器41aから引き離す。次に、緩んだ締結時固定ブロック86を取り外す。次に、ジャッキにより、所定の位置までさらに一時締結装置82を持ち上げる。一時締結装置82が所定の位置に達したら、締結解除時固定ブロック91を一時締結装置82と上側真空容器41aの間に設置する。その後、ジャッキを緩めて締結解除時固定ブロック91と一時締結装置82とのギャップをなくし、締結解除時固定ネジ90を締め付ける。輸送時等以外には、上側真空容器41aと上側熱シールド31aとの締結を解除することにより、接触熱伝達による熱シールド等への熱侵入を抑制することができる。
【0038】
ベローズ83を一時締結装置82と上側真空容器41aに接続することで、真空を保持したまま、締結時固定ブロック86や締結解除時固定ブロック91の固定や開放が可能となる。真空を保持したままでの作業が可能となるため、真空を保持しない場合に比べて輸送先での復旧作業時間を低減できる。
【0039】
本発明によれば、上側真空容器に比べ振動が小さい下側真空容器がコイル容器を支持しているので、GC振動や設置床面振動の外部加振による真空容器振動が超電導コイルに伝播するのを抑制できる。また、超電導コイルが振動してMR画像を劣化させるのを防止できる。さらに、上側真空容器と上側熱シールドとを一時的に締結する機構を有することにより、下側真空容器がコイル容器を支持し、コイル容器が上側真空容器から自由な状態であるMRIであっても、運搬時等の衝撃荷重に耐えうる強度を保持することができる。
【0040】
図6は、本発明の第2の実施例を示す図であり、締結部近傍の拡大図を示している。本実施例は、第1実施例の真空シール機構であるベローズ83に代えて、軸シール85を採用する。
【0041】
ここで、軸シール85はOリング形状を有する。材質はゴム等の弾性部材で構成される。軸シール85は上側真空容器41a開口部内面に接続されている。軸シール内面は一時締結装置82の凸部外周に密着する。一時締結装置82の凸部が上下する際にも、軸シール内面は一時締結装置82の凸部外周に密着し続ける。このような軸シールを具備することにより、ベローズ83同様に、真空を保持したまま、締結時固定ブロック86等の固定や開放が可能となる。
【0042】
本実施例においても、第1実施例と同様の効果を有する。さらに、真空シール機構として軸シール85を採用することで、万一真空シール機構が損傷を受けた場合でも、溶接等で取り付けたベローズに比べて迅速な交換が可能であり、MRI装置の復旧までの時間を短縮することができる。
【0043】
図7は、本発明の第3の実施例を示す図であり、締結部近傍の拡大図を示している。本実施例は、第1の実施例において、一時締結装置82の高さ方向のレベル調整のために用いたジャッキに代えて、調整ネジ84を採用する。調整ネジ84を採用することにより、一時締結装置82の高さ方向のレベル調整を容易にしたものである。
【0044】
図8は、一時締結装置82の締結を解除した際の締結部を示す図である。一時締結装置82の締結解除の手順を以下に示す。まず、締結時固定ネジ89を一時締結装置82,締結時固定ブロック86及び上側真空容器41aから取り外す。次に、調整ネジを用いて
(一時締結装置82と上側真空容器41aとの距離が長くなる方へ調整ネジを回して)、一時締結装置82を上側真空容器41aから引き離す。緩んだ締結時固定ブロック86を取り外す。調整ネジを用いて、所定の位置までさらに一時締結装置82を持ち上げる。一時締結装置82が所定の位置に達したら、締結解除時固定ブロック91を一時締結装置
82と上側真空容器41aの間に設置する。一時締結装置82と上側真空容器41aとの距離が短くなる方へ調整ネジを回して、一時締結装置82と締結時固定ブロック91とのギャップをなくす。その後、締結時固定ネジ90を、一時締結装置82,締結時固定ブロック91及び上側真空容器41aに締め付ける。
【0045】
本実施例においても、第1実施例と同様の効果を有する。さらに、調整ネジ84を採用することにより、一時締結装置82の高さ方向レベルの微調整がより容易となり、一時締結機構の締結及び解除作業の時間を短縮することができる。
【0046】
図9は、本発明の第4の実施例を示す図であり、締結部近傍の拡大図を示している。本実施例は、一時締結装置82の凸部は先端に向かうに従って円錐状に直径が減少するテーパ構造を備える。一方、上側熱シールド31a上に形成された凹部は一時締結装置82の凸部対応したテーパ構造を備える。
【0047】
本実施例は、第1実施例と同様の効果を有する。さらに、上側熱シールド31a上に形成された凹部と一時締結装置82の凸部が組み合わさるテーパ構造を採用するため、上側熱シールド31a上に形成された凹部に、一時締結装置82の凸部を嵌め込む際に、若干の位置ずれが生じても、容易に挿入することができる。
【0048】
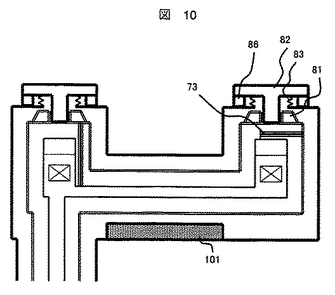
図10は、本発明の第5の実施例を示す図である。本実施例は、MRI装置上面に、第1の実施例における一時締結機構を複数配置したものである。本実施例においては、複数の一時締結機構を用いるため、各一時締結機構の荷重負荷が軽減され、各一時締結機構の形状を小型化できる。
【0049】
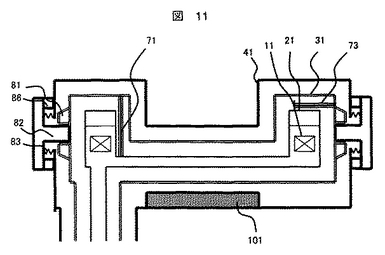
図11は、本発明の第6の実施例を示す図である。本実施例は、MRI装置側面に、第1の実施例における一時締結機構を配置したものである。本実施例においては、一時締結機構をMRI装置側面に配置しているため、一時締結機構の設置によるMRI装置形状の高さ方向の増大を回避することができる。
【0050】
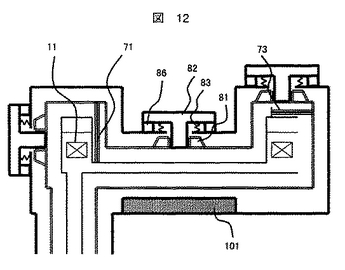
図12は、本発明の第7の実施例を示す図である。本実施例は、MRI装置上面及び側面に、第1の実施例における一時締結機構を配置したものである。本実施例においては、複数の一時締結機構を上面及び側面に配置しているため、一時締結機構を設置する場合であってもMRI装置全体としての小型化を図ることができる。
【0051】
上記各実施例においては、一時締結機構を用いて上側真空容器41aと上側熱シールド31aとを締結した。上側真空容器41aと上側コイル容器21aとを締結する場合、上側熱シールド31aに開口部を形成する必要があるが、上側真空容器41aと上側熱シールド31aとを締結することにより、上側熱シールド31aへの開口部の形成と、一時締結解除後の開口部の穴塞ぎが不要となる。
【0052】
一方、上側真空容器41aと上側コイル容器21aとを締結してもよい。また、上側真空容器41aと上側熱シールド31a及び上側コイル容器21aとを締結してもよい。この場合は、上側真空容器41aと上側コイル容器21aを直接的に締結できるため、運搬時の衝撃荷重をより広範囲に分散することができる。
【図面の簡単な説明】
【0053】
【図1】本発明のMRI装置の第1の実施例を示す断面図。
【図2】本発明のMRI装置の斜視図。
【図3】本発明のMRI装置の振動モードを説明する図。
【図4】本発明のMRI装置の第1の実施例を示す断面図。
【図5】本発明のMRI装置の第1の実施例を示す断面図。
【図6】本発明のMRI装置の第2の実施例を示す断面図。
【図7】本発明のMRI装置の第3の実施例を示す断面図。
【図8】本発明のMRI装置の第3の実施例を示す断面図。
【図9】本発明のMRI装置の第4の実施例を示す断面図。
【図10】本発明のMRI装置の第5の実施例を示す断面図。
【図11】本発明のMRI装置の第6の実施例を示す断面図。
【図12】本発明のMRI装置の第7の実施例を示す断面図。
【符号の説明】
【0054】
11a,11b…超電導コイル、21a,21b…コイル容器、31a,31b…熱シールド、41a,41b…真空容器、71,72,73,74,75,76…支持部材、81…熱シールド座、82…一時締結装置。
【特許請求の範囲】
【請求項1】
上下に対向して配置された環状の超伝導コイルと、前記超伝導コイルを収容するコイル容器と、前記コイル容器を覆うように形成された熱シールドと、前記コイル容器及び前記熱シールドを収容する真空容器とを備えたMRI装置であって、
前記コイル容器は、撮像空間に対してそれぞれ上下に位置する上側コイル容器及び下側コイル容器と、前記上側コイル容器と前記下側コイル容器とを連結するコイル容器連結部とを有し、
前記真空容器は、前記上側コイル容器を覆うように形成された上側真空容器と、前記下側コイル容器を覆うように形成された下側真空容器とを有し、
前記コイル容器は、前記下側真空容器から直接的又は間接的に支持され、前記上側真空容器からは自由な状態にされているとともに、
前記真空容器と前記熱シールドとを一時的に締結する一時締結機構を備えた磁気共鳴イメージング装置。
【請求項2】
上下に対向して配置された環状の超伝導コイルと、前記超伝導コイルを収容するコイル容器と、前記コイル容器を覆うように形成された熱シールドと、前記コイル容器及び前記熱シールドを収容する真空容器とを備えたMRI装置であって、
前記コイル容器は、撮像空間に対してそれぞれ上下に位置する上側コイル容器及び下側コイル容器と、前記上側コイル容器と前記下側コイル容器とを連結するコイル容器連結部とを有し、
前記真空容器は、前記上側コイル容器を覆うように形成された上側真空容器と、前記下側コイル容器を覆うように形成された下側真空容器とを有し、
前記コイル容器は、前記下側真空容器から直接的又は間接的に支持され、前記上側真空容器からは自由な状態にされているとともに、
前記熱シールドは、前記上側コイル容器を覆うように形成された上側熱シールドを有し、
前記上側真空容器と前記上側熱シールドとを一時的に締結する一時締結機構を備えた磁気共鳴イメージング装置。
【請求項3】
上下に対向して配置された環状の超伝導コイルと、前記超伝導コイルを収容するコイル容器と、前記コイル容器を収容する真空容器とを備えたMRI装置であって、
前記コイル容器は、撮像空間に対してそれぞれ上下に位置する上側コイル容器及び下側コイル容器と、前記上側コイル容器と前記下側コイル容器とを連結するコイル容器連結部とを有し、
前記真空容器は、前記上側コイル容器を覆うように形成された上側真空容器と、前記下側コイル容器を覆うように形成された下側真空容器とを有し、
前記コイル容器は、前記下側真空容器から直接的又は間接的に支持され、前記上側真空容器からは自由な状態にされているとともに、
前記上側真空容器と前記上側コイル容器とを一時的に締結する一時締結機構を備えた磁気共鳴イメージング装置。
【請求項4】
請求項1乃至3の何れかにおいて、前記コイル容器は前記熱シールドにより支持されている磁気共鳴イメージング装置。
【請求項5】
請求項1又は2において、前記一時締結機構は、
前記真空容器に接続されており、前記真空容器から前記熱シールドの方向に凸部を有する一時締結装置と、
前記熱シールドに接続されており、前記熱シールド上であって前記凸部と対向する位置に形成された凹部とを有し、
前記凸部を前記凹部に挿入することにより前記真空容器と前記熱シールドとの一時締結を行う磁気共鳴イメージング装置。
【請求項6】
請求項3において、前記一時締結機構は、
前記真空容器に接続されており、前記真空容器から前記コイル容器の方向に凸部を有する一時締結装置と、
前記コイル容器に接続されており、前記コイル容器上であって前記凸部と対向する位置に形成された凹部とを有し、
前記凸部を前記凹部に挿入することにより前記真空容器と前記コイル容器との一時締結を行う磁気共鳴イメージング装置。
【請求項7】
請求項5又は6において、前記凸部は先端に向かうに従って円錐状に直径が減少するテーパ構造を有し、前記凹部は前記凸部対応したテーパ構造を有する磁気共鳴イメージング装置。
【請求項8】
請求項5乃至7の何れかにおいて、前記一時締結装置は、前記真空容器と前記一時締結装置との距離を調整するブロックを介して、前記真空容器と接続されている磁気共鳴イメージング装置。
【請求項9】
請求項5乃至8の何れかいにおいて、前記一時締結機構は、前記一時締結装置を貫通し、その先端が前記真空容器外側表面方向に向かう調整ネジを有し、前記調整ネジを回転させることにより前記真空容器と前記一時締結装置との距離を調整する磁気共鳴イメージング装置。
【請求項10】
請求項1乃至9の何れかにおいて、前記一時締結機構は、前記上側真空容器の上面に位置する磁気共鳴イメージング装置。
【請求項11】
請求項1乃至9の何れかにおいて、前記一時締結機構は、前記上側真空容器の側面に位置する磁気共鳴イメージング装置。
【請求項12】
請求項1乃至11の何れかにおいて、前記下側真空容器底面の内面から支持部材を介して直接的又は間接的に前記コイル容器を支持することにより、前記下側真空容器から前記コイル容器を支持する磁気共鳴イメージング装置。
【請求項1】
上下に対向して配置された環状の超伝導コイルと、前記超伝導コイルを収容するコイル容器と、前記コイル容器を覆うように形成された熱シールドと、前記コイル容器及び前記熱シールドを収容する真空容器とを備えたMRI装置であって、
前記コイル容器は、撮像空間に対してそれぞれ上下に位置する上側コイル容器及び下側コイル容器と、前記上側コイル容器と前記下側コイル容器とを連結するコイル容器連結部とを有し、
前記真空容器は、前記上側コイル容器を覆うように形成された上側真空容器と、前記下側コイル容器を覆うように形成された下側真空容器とを有し、
前記コイル容器は、前記下側真空容器から直接的又は間接的に支持され、前記上側真空容器からは自由な状態にされているとともに、
前記真空容器と前記熱シールドとを一時的に締結する一時締結機構を備えた磁気共鳴イメージング装置。
【請求項2】
上下に対向して配置された環状の超伝導コイルと、前記超伝導コイルを収容するコイル容器と、前記コイル容器を覆うように形成された熱シールドと、前記コイル容器及び前記熱シールドを収容する真空容器とを備えたMRI装置であって、
前記コイル容器は、撮像空間に対してそれぞれ上下に位置する上側コイル容器及び下側コイル容器と、前記上側コイル容器と前記下側コイル容器とを連結するコイル容器連結部とを有し、
前記真空容器は、前記上側コイル容器を覆うように形成された上側真空容器と、前記下側コイル容器を覆うように形成された下側真空容器とを有し、
前記コイル容器は、前記下側真空容器から直接的又は間接的に支持され、前記上側真空容器からは自由な状態にされているとともに、
前記熱シールドは、前記上側コイル容器を覆うように形成された上側熱シールドを有し、
前記上側真空容器と前記上側熱シールドとを一時的に締結する一時締結機構を備えた磁気共鳴イメージング装置。
【請求項3】
上下に対向して配置された環状の超伝導コイルと、前記超伝導コイルを収容するコイル容器と、前記コイル容器を収容する真空容器とを備えたMRI装置であって、
前記コイル容器は、撮像空間に対してそれぞれ上下に位置する上側コイル容器及び下側コイル容器と、前記上側コイル容器と前記下側コイル容器とを連結するコイル容器連結部とを有し、
前記真空容器は、前記上側コイル容器を覆うように形成された上側真空容器と、前記下側コイル容器を覆うように形成された下側真空容器とを有し、
前記コイル容器は、前記下側真空容器から直接的又は間接的に支持され、前記上側真空容器からは自由な状態にされているとともに、
前記上側真空容器と前記上側コイル容器とを一時的に締結する一時締結機構を備えた磁気共鳴イメージング装置。
【請求項4】
請求項1乃至3の何れかにおいて、前記コイル容器は前記熱シールドにより支持されている磁気共鳴イメージング装置。
【請求項5】
請求項1又は2において、前記一時締結機構は、
前記真空容器に接続されており、前記真空容器から前記熱シールドの方向に凸部を有する一時締結装置と、
前記熱シールドに接続されており、前記熱シールド上であって前記凸部と対向する位置に形成された凹部とを有し、
前記凸部を前記凹部に挿入することにより前記真空容器と前記熱シールドとの一時締結を行う磁気共鳴イメージング装置。
【請求項6】
請求項3において、前記一時締結機構は、
前記真空容器に接続されており、前記真空容器から前記コイル容器の方向に凸部を有する一時締結装置と、
前記コイル容器に接続されており、前記コイル容器上であって前記凸部と対向する位置に形成された凹部とを有し、
前記凸部を前記凹部に挿入することにより前記真空容器と前記コイル容器との一時締結を行う磁気共鳴イメージング装置。
【請求項7】
請求項5又は6において、前記凸部は先端に向かうに従って円錐状に直径が減少するテーパ構造を有し、前記凹部は前記凸部対応したテーパ構造を有する磁気共鳴イメージング装置。
【請求項8】
請求項5乃至7の何れかにおいて、前記一時締結装置は、前記真空容器と前記一時締結装置との距離を調整するブロックを介して、前記真空容器と接続されている磁気共鳴イメージング装置。
【請求項9】
請求項5乃至8の何れかいにおいて、前記一時締結機構は、前記一時締結装置を貫通し、その先端が前記真空容器外側表面方向に向かう調整ネジを有し、前記調整ネジを回転させることにより前記真空容器と前記一時締結装置との距離を調整する磁気共鳴イメージング装置。
【請求項10】
請求項1乃至9の何れかにおいて、前記一時締結機構は、前記上側真空容器の上面に位置する磁気共鳴イメージング装置。
【請求項11】
請求項1乃至9の何れかにおいて、前記一時締結機構は、前記上側真空容器の側面に位置する磁気共鳴イメージング装置。
【請求項12】
請求項1乃至11の何れかにおいて、前記下側真空容器底面の内面から支持部材を介して直接的又は間接的に前記コイル容器を支持することにより、前記下側真空容器から前記コイル容器を支持する磁気共鳴イメージング装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2006−305033(P2006−305033A)
【公開日】平成18年11月9日(2006.11.9)
【国際特許分類】
【出願番号】特願2005−130711(P2005−130711)
【出願日】平成17年4月28日(2005.4.28)
【出願人】(000005108)株式会社日立製作所 (27,607)
【出願人】(390023928)日立エンジニアリング株式会社 (134)
【出願人】(000233228)日立協和エンジニアリング株式会社 (35)
【Fターム(参考)】
【公開日】平成18年11月9日(2006.11.9)
【国際特許分類】
【出願日】平成17年4月28日(2005.4.28)
【出願人】(000005108)株式会社日立製作所 (27,607)
【出願人】(390023928)日立エンジニアリング株式会社 (134)
【出願人】(000233228)日立協和エンジニアリング株式会社 (35)
【Fターム(参考)】
[ Back to top ]