
磁気共鳴イメージング装置
【課題】簡易にB1均一性を一層向上させることが可能な磁気共鳴イメージング装置を提供する。
【解決手段】実施形態に係る磁気共鳴イメージング装置は、高周波送信パルスの位相および振幅の少なくとも一方を互に独立に調整することが可能な送信用のQDコイルを用いて被検体の磁気共鳴イメージングを行うイメージング手段と、前記高周波パルスの位相および振幅の少なくとも一方を撮像条件に応じて調整する調整手段と、を備える。
【解決手段】実施形態に係る磁気共鳴イメージング装置は、高周波送信パルスの位相および振幅の少なくとも一方を互に独立に調整することが可能な送信用のQDコイルを用いて被検体の磁気共鳴イメージングを行うイメージング手段と、前記高周波パルスの位相および振幅の少なくとも一方を撮像条件に応じて調整する調整手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、磁気共鳴イメージング装置に関する。
【背景技術】
【0002】
磁気共鳴イメージングは、静磁場中に置かれた被検体の原子核スピンをラーモア周波数のRF信号で磁気的に励起し、この励起に伴って発生するNMR信号から画像を再構成する撮像法である。
【0003】
この磁気共鳴イメージングにおいて、送信されるRFパルスの周波数が増大すると、被検体内におけるRF磁場が不均一となる。このRF磁場の不均一性は、B1不均一性とも呼ばれる。そこで、B1不均一性を改善することが重要となる。
【0004】
例えば、アスペクト比に応じてRF送信パルスの振幅および位相を決定するB1補正方法が考案されている(例えば特許文献1参照)。また、RF送信パルスの振幅および位相を変えながらB1マップを収集し、RF送信パルスの振幅および位相を決定する方法も知られている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特表2008−514259号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、近年、磁場強度が高いMRI装置が開発されてきている。このため、RFパルスの周波数が一層大きくなり、従来のようにアスペクト比に応じて求めた振幅および位相でRFパルスを送信しても、B1不均一性が解消できない場合がある。一方、従来のようにRFパルスの振幅および位相を変化させながらB1マップを収集する場合には、撮像時間が長くなるという問題やB1不均一性の判定が難しいという問題点がある。
【0007】
そこで、簡易にB1均一性を一層向上させることが可能な磁気共鳴イメージング装置が望まれている。
【課題を解決するための手段】
【0008】
実施形態の磁気共鳴イメージング装置は、高周波送信パルスの位相および振幅の少なくとも一方を互に独立に調整することが可能な送信用のQDコイルを用いて被検体の磁気共鳴イメージングを行うイメージング手段と、前記高周波パルスの位相および振幅の少なくとも一方を撮像条件に応じて調整する調整手段と、を備えることを特徴とする。
【図面の簡単な説明】
【0009】
【図1】本発明に係る磁気共鳴イメージング装置の実施の形態を示す構成図。
【図2】送信用のQDコイルおよび送信器の詳細構成例を示す図。
【図3】コンピュータの機能ブロック図。
【図4】位相振幅ルックアップテーブルの一例を示す図。
【図5】イメージングに先だってB1均一性を向上させるためにRF送信パルスの位相および振幅を調整する際の手順の一例を示すフローチャート。
【図6】RF送信パルスの最適な位相を決定するためのデータ収集用のDSEシーケンスを示す図。
【図7】RF送信パルスの位相Φ2の変化に対する画像値の不均一性の変化を示すカーブから最適位相Φ2optを求める方法を説明する図。
【図8】画像値の均一性とリフォーカスパルスのフォーワードパワーから最適位相Φ2optを求める方法を説明する図。
【図9】頭部におけるB1マップデータの対称性を利用してRF送信パルスの最適位相Φ2optを求める方法を説明する図。
【図10】2つのチャンネルch1, ch2において夫々独立に送信して収集した2つのB1マップデータに基づいて位相Φ2および利得G2を調整する際の手順の一例を示すフローチャート。
【図11】2つのチャンネルch1, ch2をそれぞれ単独で使用して収集した2つのB1マップデータの一例を示す図。
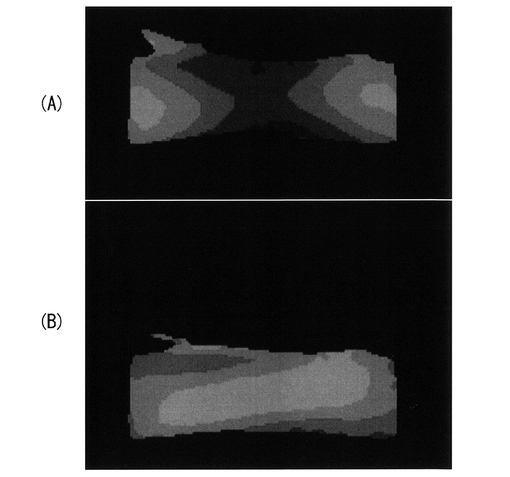
【図12】位相Φ2の補正前のB1マップデータと位相Φ2を初期値から60°だけ補正して収集した補正後のB1マップデータとを比較した例を示す図。
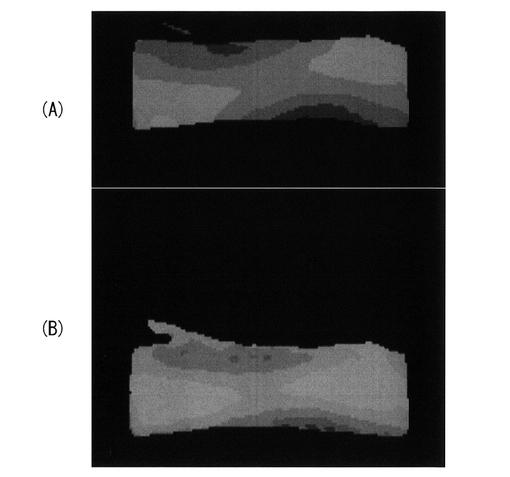
【図13】利得G2の初期値に対する補正量Δgain2を-5dBとして収集したB1マップデータと補正量Δgain2を+5dBとして収集したB1マップデータとを比較した例を示す図。
【発明を実施するための形態】
【0010】
磁気共鳴イメージング装置の実施の形態について添付図面を参照して説明する。実施形態の磁気共鳴イメージング装置は、高周波送信パルスの位相および振幅の少なくとも一方を互に独立に調整することが可能な送信用のQDコイルを用いて被検体の磁気共鳴イメージングを行うイメージング手段と、前記高周波パルスの位相および振幅の少なくとも一方を撮像条件に応じて調整する調整手段と、を備える。
【0011】
(構成および機能)
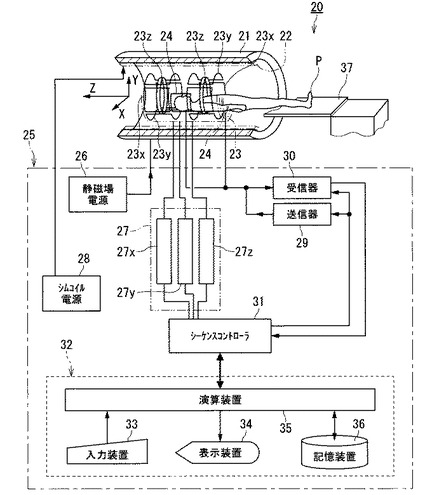
図1は本発明に係る磁気共鳴イメージング装置の実施の形態を示す構成図である。
【0012】
磁気共鳴イメージング装置20は、静磁場を形成する筒状の静磁場用磁石21、この静磁場用磁石21の内部に設けられたシムコイル22、傾斜磁場コイル23およびRFコイル24を備えている。
【0013】
また、磁気共鳴イメージング装置20には、制御系25が備えられる。制御系25は、静磁場電源26、傾斜磁場電源27、シムコイル電源28、送信器29、受信器30、シーケンスコントローラ31およびコンピュータ32を具備している。制御系25の傾斜磁場電源27は、X軸傾斜磁場電源27x、Y軸傾斜磁場電源27yおよびZ軸傾斜磁場電源27zで構成される。また、コンピュータ32には、入力装置33、表示装置34、演算装置35および記憶装置36が備えられる。
【0014】
静磁場用磁石21は静磁場電源26と接続され、静磁場電源26から供給された電流により撮像領域に静磁場を形成させる機能を有する。尚、静磁場用磁石21は超伝導コイルで構成される場合が多く、励磁の際に静磁場電源26と接続されて電流が供給されるが、一旦励磁された後は非接続状態とされるのが一般的である。また、静磁場用磁石21を永久磁石で構成し、静磁場電源26が設けられない場合もある。
【0015】
また、静磁場用磁石21の内側には、同軸上に筒状のシムコイル22が設けられる。シムコイル22はシムコイル電源28と接続され、シムコイル電源28からシムコイル22に電流が供給されて静磁場が均一化されるように構成される。
【0016】
傾斜磁場コイル23は、X軸傾斜磁場コイル23x、Y軸傾斜磁場コイル23yおよびZ軸傾斜磁場コイル23zで構成され、静磁場用磁石21の内部において筒状に形成される。傾斜磁場コイル23の内側には寝台37が設けられて撮像領域とされ、寝台37には被検体Pがセットされる。RFコイル24にはガントリに内蔵されたRF信号の送受信用の全身用コイル(WBC: whole body coil)や寝台37や被検体P近傍に設けられるRF信号の受信用の局所コイルなどがある。
【0017】
また、傾斜磁場コイル23は、傾斜磁場電源27と接続される。傾斜磁場コイル23のX軸傾斜磁場コイル23x、Y軸傾斜磁場コイル23yおよびZ軸傾斜磁場コイル23zはそれぞれ、傾斜磁場電源27のX軸傾斜磁場電源27x、Y軸傾斜磁場電源27yおよびZ軸傾斜磁場電源27zと接続される。
【0018】
そして、X軸傾斜磁場電源27x、Y軸傾斜磁場電源27yおよびZ軸傾斜磁場電源27zからそれぞれX軸傾斜磁場コイル23x、Y軸傾斜磁場コイル23yおよびZ軸傾斜磁場コイル23zに供給された電流により、撮像領域にそれぞれX軸方向の傾斜磁場Gx、Y軸方向の傾斜磁場Gy、Z軸方向の傾斜磁場Gzを形成することができるように構成される。
【0019】
RFコイル24は、送信器29および/または受信器30と接続される。送信用のRFコイル24は、送信器29からRF信号を受けて被検体Pに送信する機能を有し、受信用のRFコイル24は、被検体P内部の原子核スピンのRF信号による励起に伴って発生したNMR信号を受信して受信器30に与える機能を有する。
【0020】
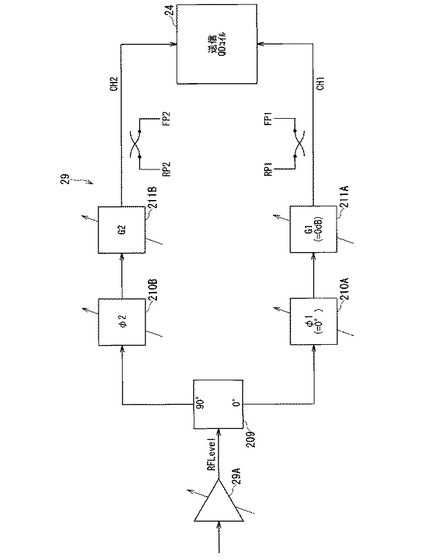
図2は、図1に示す送信用のRFコイル24および送信器29の詳細構成例を示す図である。
【0021】
送信用のRFコイル24である全身用コイル24Aは、QDコイルとして構成される。QDコイルには、通常2つの送信チャンネルch1, ch2から送信信号が給電され、第1の送信チャンネルch1と第2の送信チャンネルch2によって、空間的に互いに直交する磁界を発生する。QDコイルには、円筒状のバードケージタイプ型のものや、独立した2つのコイルで構成されるタイプのものがある。バードケージタイプのQDコイルでは、円筒上で互いに90度離れた位置にある2つの給電点に、チャンネルch1とチャンネルch2の送信信号が夫々給電される。一方、独立2コイルタイプのQDでは、それぞれのコイルにチャンネルch1とチャンネルch2の送信信号が別々に給電される。
【0022】
RFアンプ29Aから出力されたRF送信パルスは、90度分配器209によって電気的に90度位相の異なる第1及び第2の送信チャンネルch1, ch2の信号に分配される。
【0023】
送信用QDコイルは、電気的位相が90度離れた2つのRF信号を空間的に直交する方向にそれぞれ印加することにより、理想的な条件下においては、撮像領域のXY面に完全に均一な磁場を形成することができる。
【0024】
しかしながら、現実にはこのような理想的な条件は成立しない。例えば、送信用QDコイルの位置と撮像部位(患者の頭部、腹部、手首等)と位置関係によって磁場の均一性は大きく影響を受ける。つまり、同じ送信用QDコイル(例えば全身用コイル)を使用したとしても、撮像部位によって磁場の均一性は必ずしも確保されず、また不均一な状態も撮像部位によって異なってくる。
【0025】
また、使用するコイルの種類によっても磁場の均一性は大きく影響をうける。例えば、同じ送信用QDコイルに対しても、受信コイルとして胴部コイルを使用する場合と手首コイルを使用する場合では、磁場の均一性は異なる。
【0026】
そこで、磁場の均一性を調整する手段として、第1及び第2の送信チャンネルch1, ch2には、位相調整手段210A、210B、及び利得調整手段211A、211Bが夫々設けられている。
【0027】
位相調整手段210A、210Bと利得調整手段211A、211Bによって、チャンネル間の相対的な位相(位相バランス)と相対的な利得(利得バランス)を調整することができる。位相調整手段210A、210Bと利得調整手段211A、211Bは、図2に示すように夫々のチャンネルに別々に設けても良いし、いずれか一方のチャンネルにのみ設けても良い。
【0028】
以下の説明では、第1の送信チャンネルch1の位相Φ1と利得G1を夫々0°と0dBに固定し、第2の送信チャンネルch2の位相Φ2と利得G2を可変にしてチャンネル間の位相バランスと利得バランスを調整するものとする。位相Φ2や利得G2の可変範囲は特に限定するものではないが、例えば、位相Φ2は、-90°から90°まで設定可能であり、利得G2は、-10dBから10dBまで設定可能である。
【0029】
なお、位相Φ2と利得G2のうち、いずれか一方のみを調整可能な構成としても良い。また、以下の説明では、チャンネルの「利得」という用語を主に使用するが、チャンネル内の信号の「振幅」という用語に置き換えても、その意味は同じである。
【0030】
また、第1及び第2の送信チャンネルch1, ch2には、QDコイルに出力するRF送信パルスのフォーワードパルスのパワーFP1、FP2を測定する機能、およびQDコイルからの反射パルスのパワーRP1、RP2を測定する機能がそれぞれ設けられている。
【0031】
図1に戻って説明する。制御系25のシーケンスコントローラ31は、傾斜磁場電源27、送信器29および受信器30と接続される。シーケンスコントローラ31は傾斜磁場電源27、送信器29および受信器30を駆動させるために必要な制御情報、例えば傾斜磁場電源27に印加すべきパルス電流の強度や印加時間、印加タイミング等の動作制御情報を記述したシーケンス情報を記憶する機能と、記憶した所定のシーケンスに従って傾斜磁場電源27、送信器29および受信器30を駆動させることによりX軸傾斜磁場Gx、Y軸傾斜磁場Gy,Z軸傾斜磁場GzおよびRF信号を発生させる機能を有する。
【0032】
また、シーケンスコントローラ31は、受信器30におけるNMR信号の検波およびA/D (analog to digital)変換により得られた複素データである生データ(raw data)を受けてコンピュータ32に与えるように構成される。
【0033】
このため、送信器29には、シーケンスコントローラ31から受けた制御情報に基づいてRF信号をRFコイル24に与える機能が備えられる一方、受信器30には、RFコイル24から受けたNMR信号を検波して所要の信号処理を実行するとともにA/D変換することにより、デジタル化された複素データである生データを生成する機能と生成した生データをシーケンスコントローラ31に与える機能とが備えられる。
【0034】
また、コンピュータ32の記憶装置36に保存されたプログラムを演算装置35で実行することにより、コンピュータ32には各種機能が備えられる。ただし、プログラムによらず、各種機能を有する特定の回路を磁気共鳴イメージング装置20に設けてもよい。
【0035】
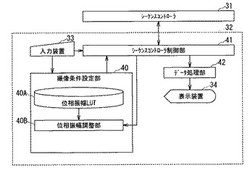
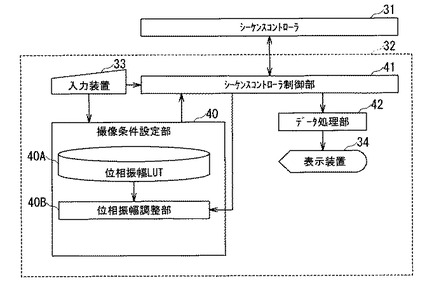
図3は、図1に示すコンピュータ32の機能ブロック図である。
【0036】
コンピュータ32は、プログラムにより撮像条件設定部40、シーケンスコントローラ制御部41およびデータ処理部42として機能する。撮像条件設定部40は、位相振幅LUT (look up table)40Aおよび位相振幅調整部40Bを有する。
【0037】
撮像条件設定部40は、入力装置33からの指示情報に基づいて撮像部位(imaging region)やコイルの種別、或いはパルスシーケンスを含む各種の撮像条件を設定し、設定した撮像条件に基づく各種パラメータをシーケンスコントローラ制御部41に与える機能を有する。
【0038】
位相振幅LUT40Aには、撮像部位(imaging region)や使用する送信コイルあるいは受信コイルの種別等の撮像条件に応じた適切な送信RFパルスの位相および振幅が撮像条件ごとに参照可能に予め保存されている。
【0039】
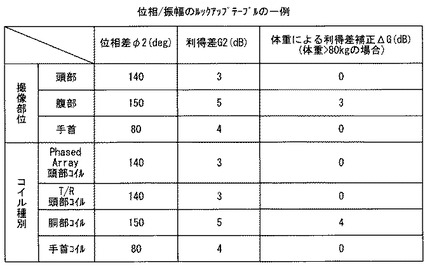
図4は、位相振幅LUT40Aの一例を示す図である。位相振幅LUT40Aでは、患者の頭部、腹部、手首といった各撮像部位、或いはPhased Array 頭部コイル,T/R(送信/受信)頭部コイル、胴部コイル、手首コイルといった各コイル種別に対して、第1の送信チャンネルch1を基準とする第2の送信チャンネルch2の位相Φ2および利得G2が保存されている。
【0040】
また、位相振幅LUT40Aには、体重に応じた利得補正値(ΔG)も保存されている。
【0041】
位相振幅LUT40Aに保存される送信RFパルスの位相Φ2利得G2は、過去のスキャンや試験スキャンにより収集されたデータの分析またはシミュレーション等の方法で求めることができる。また、後述する再調整のシーケンスでの処理と同じ方法を用いて,位相振幅LUT40A内の位相Φ2及び利得G2を求めても良い。
【0042】
位相振幅調整部40Bは、イメージングスキャンの実行に先だって、位相振幅LUT40Aを参照することによって送信RFパルスの位相Φ2および利得G2を撮像条件に応じた適切な値に調整する。また、位相振幅調整部40Bは、調整した送信RFパルスの位相Φ2および利得G2をシーケンスコントローラ制御部41から取得した画像データ等に基づいて更に再調整し、最終的に決定された送信RFパルスの位相Φ2および利得G2をイメージングスキャン用のパラメータとしてシーケンスコントローラ制御部41に設定する機能を有する。
【0043】
シーケンスコントローラ制御部41は、入力装置33及び撮像条件設定部40からの情報に基づいて、シーケンスコントローラ31にパルスシーケンスを含む各種パラメータを出力する。また、シーケンスコントローラ制御部41は、シーケンスコントローラ31から生データを受けてk空間データとしてデータ処理部42に与える機能を有する。
【0044】
データ処理部42は、k空間データにフーリエ変換(FT: Fourier transform)を含む画像再構成処理を施すことにより画像データを生成する機能と、画像データに必要な画像処理を行って表示装置34に表示させる機能を有する。
【0045】
(動作および作用)
次に磁気共鳴イメージング装置20の動作および作用について説明する。尚、第1の送信チャンネルch1の位相Φ1および利得G1が固定であり、第2の送信チャンネルch2の位相Φ2および利得G2が可変である場合を例に説明する。
【0046】
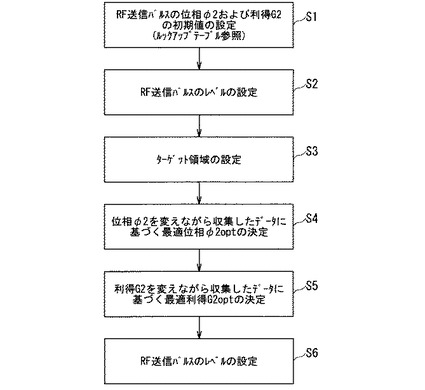
図5は、図1に示す磁気共鳴イメージング装置20において、イメージングに先だってB1均一性を向上させるためにRF送信パルスの位相および振幅を調整する際の手順の一例を示すフローチャートである。
【0047】
まず、予め寝台37に被検体Pがセットされ、静磁場電源26により励磁された静磁場用磁石21(超伝導磁石)の撮像領域に静磁場が形成される。また、シムコイル電源28からシムコイル22に電流が供給されて撮像領域に形成された静磁場が均一化される。
【0048】
そして、ステップS1において、第2の送信チャンネルch2から送信されるRF送信パルスの位相Φ2および利得G2が、被検体の撮像部位、撮像に使用するコイルの種別等の撮像条件に応じた適切な値に設定される。
【0049】
具体的には、撮像条件設定部40の位相振幅調整部40Bは、位相振幅LUT40Aを参照することによって撮像条件に対応するRF送信パルスの位相Φ2および利得G2を取得し、取得した位相Φ2および利得G2を送信部29の位相調整手段および利得調整手段にそれぞれ設定すべくシーケンスコントローラ制御部41に出力する。
【0050】
なお、撮像条件として、撮像に用いるコイルの種別や患者の撮像部位のほか、患者の体重や横臥の向きを付加してもい。例えば、図3に示すように、患者の体重が80kgを超える場合は、利得G2に利得補正値ΔGを加算する。
【0051】
また、患者の横臥の向きが横向き(患者が仰向けからほぼ90度傾いた状態)である場合には、位相振幅LUT40Aから取得したRF送信パルスの位相Φ2および利得G2に-1を乗じる。例えば、位相振幅LUT40Aから取得した位相Φ2が140度であり、利得G2が3dBの場合には、それぞれに−1を乗じて補正し、位相Φ2を−140度、利得G2を−3dBを、位相振幅LUT40A内の数値と置き換える。
【0052】
位相振幅LUT40Aを参照することにより、RF送信パルスの位相Φ2および利得G2を撮像条件に応じた適切な値に設定することができるものの、ステップS2以降の再調整手順を実行することによって位相Φ2と利得G2をより適切な値に設定することができる。ステップS2以降の処理では、位相振幅LUT40A内の位相Φ2および利得G2を初期値として送信部29の位相調整手段210B及び利得調整手段211Bに設定し、この初期値から位相Φ2及び利得G2を変化させながら取得した調整用の画像データに基づいて位相Φ2および利得G2を再調整する。
【0053】
再調整は、以下の手順で行う。まず、ステップS2において、RF送信パルスの最適な出力レベルRFlevelが求められる。すなわち、SE (spin echo)法等の公知のデータ収集法によりRF送信パルスの出力パワーのレベルを変更しながら信号を収集し、収集される信号の強度が最大となるときの出力レベルRFlevelが求められる。
【0054】
次に、ステップS3において、RF送信パルスの位相Φ2および利得G2の再調整用のデータを収集するためのターゲット領域が設定される。ターゲット領域は、イメージングスキャン用の撮像領域に対応して設定される。ターゲット領域としては、アキシャル断面が選択される場合が多いがサジタル断面やコロナル断面の局所領域を選択してもよい。
【0055】
次に、ステップS4において、RF送信パルスの位相Φ2を変えて収集したデータに基づいてRF送信パルスの最適な位相Φ2optが決定される。
【0056】
具体的には、まず、RF送信パルスの位相Φ2を変えながら位相エンコードを行わずに信号が収集される。例えば、位相振幅LUT40Aに記憶されているRF送信パルスの位相Φ2の初期値が30°である場合には、RF送信パルスの位相Φ2を-90°, -70°, -50° , …, 90°のように20°刻みで変化させて信号収集が行われる。そして、B1均一性が最も高く、この結果、ターゲット領域から収集される信号の強度が最大となるときの最適な位相Φ2optが算出される。これは、第1のチャンネルch1から送信されるB1と、第2のチャンネルch2から送信されるB1とが直交するような第2のチャンネルch2の位相phase2を求めることに相当する。
【0057】
このときのデータ収集法には、1軸または2軸スライス選択SE法や1軸、2軸または3軸スライス選択DSE (Double Spine Echo)法を用いることができる。
【0058】
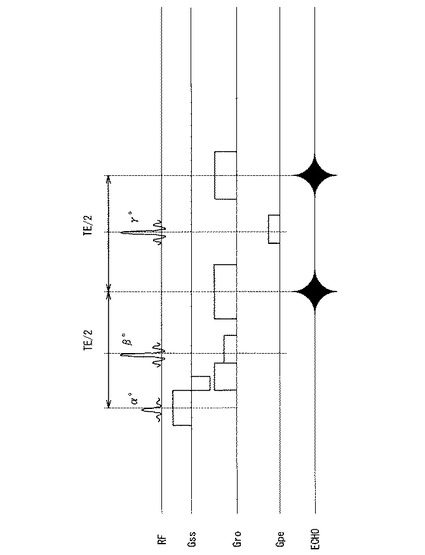
図6は、RF送信パルスの最適な位相phase2optを決定するためのデータ収集用のDSEシーケンスを示す図である。
【0059】
図6において、RFはRF送信パルスを、Gssはスライス選択方向の傾斜磁場を、Groはリードアウト方向の傾斜磁場を、Gpeは位相エンコード方向の傾斜磁場を、ECHOは収集されるエコー信号を、それぞれ示す。
【0060】
図6に示すように、DSEシーケンスでは、スライス選択方向、リードアウト方向および位相エンコード方向のスライス選択をそれぞれ伴って、フリップ角αの励起パルス、フリップ角βの1番目のリフォーカスパルスおよび、フリップ角γの2番目のリフォーカスパルスが印加される。そして、1番目のリフォーカスパルスの後に位相エンコード用傾斜磁場パルスを印加せずにリードアウト用傾斜磁場を印加することによって、励起パルスからTE/2 (TEはエコー時間: echo time)後に1番目のエコー信号が収集される。また、2番目のリフォーカスパルスの後に位相エンコード用傾斜磁場パルスを印加せずにリードアウト用傾斜磁場を印加することによって、1番目のエコー信号からTE/2後に2番目のエコー信号が収集される。
【0061】
SE法により収集されるエコー信号の強度Sseは、緩和を無視すると、励起パルスのフリップ角をα、1番目のリフォーカスパルスのフリップ角をβとすると、式(1)で表される。また、DSE法により2番目に収集されるエコー信号の強度Sdseは、緩和を無視すると、上述のように励起パルスのフリップ角をα、1番目のリフォーカスパルスのフリップ角をβ、2番目のリフォーカスパルスのフリップ角をγとすると、式(2)で表される。
Sse=sin(α)・sin2(β/2) (1)
Sdse=sin(α)・sin2(β/2)・sin2(γ/2) (2)
式(1)、(2)からわかるように、励起パルスのフリップ角αが90°に近い場合やリフォーカスパルスのフリップ角β、γが180°に近い場合には、強度Sse、Sdseの値は緩やかに変化するため、B1磁場の変動に対して信号強度の変化は小さくなる。一方、SE法またはDSE法における励起パルスのフリップ角αおよびリフォーカスパルスのフリップ角β, γを、本来のフリップ角よりも小さいフリップ角に設定すると、強度Sse、Sdseの値の変化の傾きは大きくなる。このため、B1不均一性の影響をより鋭敏に信号に反映させることが可能となる。換言すれば、フリップ角を低フリップ角に設定することによりB1磁場の変化に敏感な信号を収集することが可能となり、B1均一性が高くなるときの位相Φ2をより正確に求めることができる。
【0062】
例えば、SE法であれば、励起パルスと1番目のリフォーカスパルスのフリップ角αおよびβを一般的な90°および-180°ではなく30°および-60°に設定することが好適である。また、DSE法であれば、励起パルスのフリップ角αおよびリフォーカスパルスのフリップ角β, γを一般的な90°, -180°および-180°ではなく30°, -60°および-60°に設定することが好適である。
【0063】
そして、SE法やDSE法により収集されたエコー信号に基づいて、画像値の不均一性を表す指標を位相Φ2ごとに算出する。画像値の不均一性を表す指標としては、平均値からの乖離量が閾値(例えば-20%以下および/または20%以上)を超える範囲の面積値や分散等が挙げられる。具体的には、SE法により励起パルスのフリップ角αおよびリフォーカスパルスのフリップ角βを低フリップ角として収集されたエコー信号や、DSE法により励起パルスフリップ角αおよびリフォーカスパルスのフリップ角β, γを低フリップ角として収集された2番目のエコー信号を1次元高速フーリエ変換(1D FFT: one-dimensional fast Fourier transformation)することによって、位相Φ2ごとのリードアウト方向における画像値の不均一性を表す指標Sを算出することができる。
【0064】
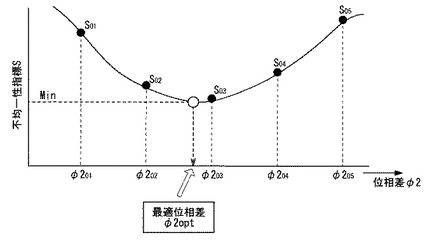
図7は、RF送信パルスの位相Φ2に対する画像値の不均一性指標Sの変化を示すカーブを模式的に示す図である。
【0065】
まず、位相Φ2ごとに、リードアウト方向における画像値の平均値を求め、平均値からの乖離量が所定の閾値を超える範囲の面積値や分散等を指標S01、S02、S03等として求める。そして、指標S01、S02、S03等を多項式フィッティング等の公知の近似法により近似すると図7の実線示すような不均一性カーブが得られる。そうすると、不均一性カーブが最小となるときの最適な位相Φ2optを求めることができる。
【0066】
最適な位相Φ2optは、上述した例の他、様々な方法により求めることができる。例えば、DSE法において励起パルスのフリップ角αおよび1番目のリフォーカスパルスのフリップ角βをそれぞれ通常の90°および180°とし、2番目のリフォーカスパルスのフリップ角γのみを通常よりも小さな低フリップ角としてエコー信号を収集してもよい。この場合、2番目のエコー信号に対応する画像値の不均一性指標を1番目のエコー信号に対応する画像値の不均一性指標で除算した値が最小となるときの位相Φ2を最適な位相Φ2optとすることができる。この場合、体動の影響を受け難いという利点が得られる。
【0067】
また、3つ以上のエコー信号を収集するシーケンスを用いてエコー信号を収集し、3つ以上のエコー信号に対応する位相Φ2の不均一性指標に基づいて最適な位相Φ2optを求めることもできる。例えば、FSE (fast spin echo)法により位相エンコードを行いながらシングルショットまたは2ショット程度のマルチショットで8つ程度のエコー信号を収集し、収集したエコー信号に2次元(2D: two-dimensional)FFTを施すと2D画像データが得られる。そして、2D画像データのピクセル値を用いて位相Φ2の不均一性指標カーブを作成することができる。
【0068】
更に別の例としては、グラディエントエコー法を用いる公知の手法で1Dまたは2DのB1マップデータを異なる複数の位相Φ2について収集し、位相Φ2ごとのB1マップデータの代表値などに基づいて位相Φ2の不均一性指標カーブを作成することもできる。この場合、不均一性指標カーブの作成に先立ってB1マップデータを2乗または3乗する等の、マップデータの強度の変化を強調する処理を行えば、不均一性に対する感度を向上させることができる。例えば、位相エンコードをかけないシーケンスによってリードアウト方向のみのB1マップデータを得る場合、リードアウト方向のみのB1マップデータの2乗値や3乗値を位相phase2ごとに算出し、位相Φ2に対する不均一性指標カーブを作成することができる。
【0069】
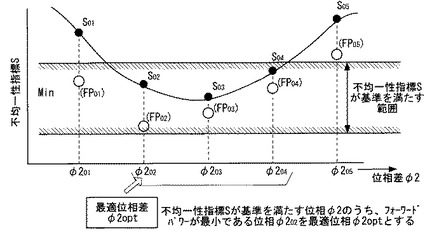
上述した方法では、B1不均一性指標Sが最小となる位相Φ2を最適位相Φ2optとしているが、B1不均一性指標Sだけでなく、リフォーカスパルスのフォワードパワーFPも考慮してRF送信パルスの最適な位相Φ2optを決定することもできる。
【0070】
具体的には、図8に示すように、不均一性指標Sが所定の基準範囲内(例えば、不均一性指標Sの最小値の±10%の範囲)となるとなる位相Φ2のうち、2つの送信チャンネルch1, ch2からそれぞれ送信されるリフォーカスパルスのフォワードパワーFP1、FP2の合計値FPが最小となる位相Φ2を最適位相Φ2optとする。リフォーカスパルスのフォワードパワーFP1、FP2は、位相Φ2を変えながら不均一性指標Sの測定を行うのと同時に図2に示す系統により測定することができる。この方法によれば、B1均一性が良好で、かつリフォーカスパルスのフォワードパワーが小さくなるときの位相Φ2を最適な位相Φ2optとして求めることが可能となる。
【0071】
尚、条件の増加に伴ってデータ収集時間が増加する恐れがある場合には、位相Φ2の変更範囲を例えば0°から90°に限定することによりデータ収集時間の増加を低減させることができる。
【0072】
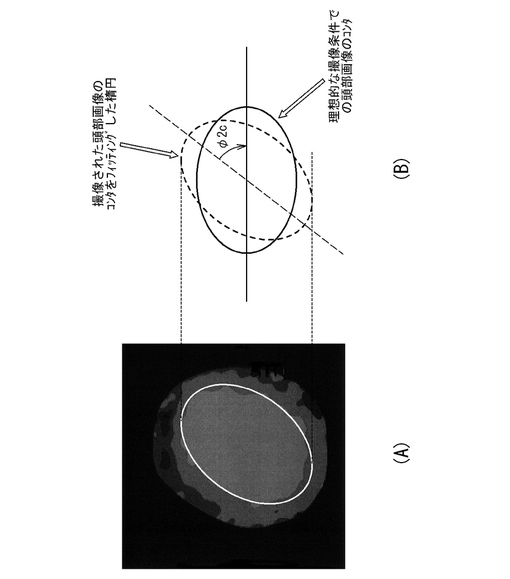
ここまでは、位相Φ2を変化させながら取得したB1不均一性指標SやB1マップデータから最適位相Φ2optを求める手法について説明してきたが、位相Φ2を変化させることなく、初期値として設定した位相Φ2intに対する1つのB1マップデータから直ちに最適位相Φ2optを求めることもできる。図9(A)、(B)は、この手法の概念を説明する図である。
【0073】
図9(A)は、頭部のB1マップデータと、B1マップデータにおける同一の値同士をつないだコンタを楕円モデルでフィッティングした白い線とを重ねて表示した図である。
【0074】
一般に、頭部におけるB1マップデータのコンタは、その形状が比較的安定している。そして、第1及び第2の送信チャンネルch1, ch2の位相Φ2が理想的な状態では、寝台に仰向けに横臥した患者の頭部のアキシャル断面形状は水平方向が垂直方向よりも長くなる。したがって、位相Φ2が理想的な状態では、頭部形状のコンタをフィッティングした楕円(図9(B)に実線で示す楕円)の長軸は水平方向となる。
【0075】
一方、位相Φ2が理想的な状態からずれると、図9(B)に示すように、頭部コンタをフィッティングした楕円(図9(A)の白線、図9(B)の破線で示す楕円)の長軸は水平とはならず、水平方向に対して傾きΦ2cをもつ。この傾きΦ2cは、位相Φ2の理想値からのずれに相当する。したがって、位相Φ2を理想的な値、即ち最適位相Φ2opt(deg)にするには、傾いたB1マップデータが得られたときの位相Φ2の初期値Φ2int(deg)に対して、傾きΦ2c(deg)の角度だけ補正してやればよい。
【0076】
このように、この手法では、初期値として設定した位相Φ2int(deg)に対して得られたB1マップデータのコンタを楕円でフィッティングし、得られた楕円の長軸の水平方向からのずれを位相Φ2の補正値Φ2cとする。そして、初期値位相Φ2int(deg)を補正値Φ2c(deg)で補正(加減算)することによって最適な位相Φ2opt(deg)を得ることができる。この手法は、適用できる部位が頭部等、形状が判りやすい部位にある程度限定されるものの、1つのB1マップデータから直ちに最適位相Φ2optが求まるため、補正に要する時間が短くてすむ。
【0077】
次に、図5のステップS5において、RF送信パルスの利得G2を変えて収集したデータに基づいてRF送信パルスの最適な利得G2optが決定される。このとき、RF送信パルスの位相Φ2は最適な位相Φ2optに固定される。
【0078】
具体的には、RF送信パルスの利得G2を変えながら信号が収集される。例えば、位相振幅LUT40Aに記憶されてるRF送信パルスの利得G2の初期値が2dBである場合には、RF送信パルスの利得G2を-8dB, -6dB, -4dB, …, 8dBのように2dB刻みで変化させて信号収集が行われる。そして、B1均一性が高くターゲット領域から収集される信号の強度が最大となるときの最適な利得G2が算出される。
【0079】
尚、異なる利得G2に対応する複数の信号を比較するために、2つのチャンネルch1. ch2から出力されるRF送信パルスの合計パワーが一定となるように、RF送信パルスの出力レベルRFlevelが調整される。例えば、初期状態における出力レベルRFlevelが50dBである場合には、第1のチャンネルch1から50dBでRF送信パルスが出力されている。一方、第2のチャンネルch2からは、出力レベルRFlevel 50dBに利得G2の初期値である2dBを加えた52dBでRF送信パルスが出力されている。つまり、RF送信パルスの合計パワーはデシベル値でみると102dBである。一方、第2のチャンネルch2の利得G2を、例えば+6dBに設定したときは、出力レベルRFlevelは48dBに設定される。この場合、第2のチャンネルch2からは54dBで、第1のチャンネルch1からは48dBで、それぞれRF送信パルスが出力されるので合計パワーはやはり102dBとなり、一定にできる。
【0080】
最適な利得G2optも最適な位相Φ2optを求める方法と同様に、異なる複数の利得G2ごとのB1不均一性指標カーブやB1マップデータから求めることができる。また、最適な利得G2optを求める場合にも、不均一性が所定の基準範囲内にある複数の利得G2の中から、リフォーカスパルスのフォワードパワーが最も小さくなる利得G2を選択して、最適利得G2optとすることができる。
【0081】
尚、条件の増加に伴ってデータ収集時間が増加する恐れがある場合には、利得G2の変更範囲を例えば0dBから6dBに限定することによりデータ収集時間の増加を低減させることができる。
【0082】
次に、ステップS6において、必要に応じてRF送信パルスの出力レベルRFlevelが再設定される。すなわち、RF送信パルスの位相Φ2および利得G2がそれぞれ最適な位相Φ2optおよび利得G2optに再調整されたため、RF送信パルスの最適な出力レベルRFlevelを決定するための条件が変わっていることになる。そこで、RF送信パルスの出力レベルRFlevelを、RF送信パルスの最適な位相Φ2optおよび利得G2optに応じて再調整することが望ましい。
【0083】
出力レベルRFlevelの再設定は、ステップS2と同様に行うことができるが、他の方法により行うこともできる。
【0084】
例えば、SE法やDSE法により出力レベルRFlevelを変えながら、ターゲット領域からエコー信号を収集し、収集されるエコー信号の強度が最大となるときの出力レベルRFlevelを最設定値とすることができる。ターゲット領域は、イメージングスキャン用の撮像領域に対応して設定される。
【0085】
或いは、SE法やDSE法により、出力レベルRFlevelを変えながらターゲット領域のB1マップデータを収集し、出力レベルRFlevelごとのB1マップデータに基づいて出力レベルRFlevelの最適値を求めることができる。すなわち、B1マップデータの分散や平均値から出力レベルRFlevelごとのB1不均一指標を表すカーブを作成し、B1不均一性が最小となるときの出力レベルRFlevelを最設定値とすることができる。或いは、最適なB1マップデータに対応する出力レベルRFlevelを最設定値としてもよい。
【0086】
更に別の例として、出力レベルRFlevelのデフォルト値からの補正量を、位相振幅LUT40Aに撮像部位や送信コイル種類等の撮像条件並びにRF送信パルスの位相Φ2および利得G2ごとに保存しておくことができる。そして、撮像条件、位相Φ2および利得G2に対応する補正量を位相振幅調整部40Bが位相振幅LUT40Aから取得し、取得した補正量に従って出力レベルRFlevelを最設定することもできる。
【0087】
このようにして、位相振幅調整部40Bにおいて撮像条件に応じた最適なRF送信パルスの位相Φ2opt、利得G2optおよび出力レベルRFlevelを求めることができる。尚、データ収集時間の短縮化のためにステップS1以外の任意のステップを省略してもよい。また、最適な利得G2optを求めた後に、利得G2を固定した状態で最適な位相Φ2optを求めてもよい。ただし、B1均一性への影響は利得G2よりも位相Φ2の方が支配的である。このため、最適な位相Φ2optを求めた後に最適な利得G2optを求める方が望ましい。
【0088】
さらに、データ収集時間の短縮化のために位相Φ2および利得G2の双方を変化させてエコー信号を収集し、最適な位相Φ2optおよび最適な利得G2optの双方を求めることもできる。すなわち、B1不均一性指標やB1マップデータを位相Φ2と利得G2の両方を変化させながら取得してもよい。また、リフォーカスパルスのフォワードパワーも位相Φ2と利得G2の両方を変化さながら取得することができる。そして、B1不均一性およびリフォーカスパルスのフォワードパワーがより小さくなるように最適な位相Φ2optおよび最適な利得G2optの双方を同時に決定することができる。
【0089】
上述した手法では、ステップS2からステップS6(特にステップS3からステップS5)における位相Φ2と利得G2の再調整手順を行うことを前提としている。このため、位相振幅LUT40Aに記憶される位相Φ2と利得G2の夫々の初期値の精度はそれ程高くなくてもよい。
【0090】
これとは逆に、ステップS3からステップS5における位相Φ2と利得G2の再調整手順を撮像部位やコイルの種類ごとに予め行い、得られた最適位相Φ2optと最適利得G2optを、撮像部位やコイルの種類ごとに位相振幅LUT40Aに記憶させておいてもよい。この場合、ステップS1における位相振幅LUT40Aの参照によって、精度の高い最適位相Φ2optと最適利得G2optが得られるため、ステップS2からステップS6(特にステップS3からステップS5)の再調整手順を省略してもよい。
【0091】
上述した例では、位相Φ2、或いは利得G2を変化させながら、第1及び第2の送信チャンネルch1, ch2の2つの送信チャンネルから同時に送信し、位相Φ2、或いは利得G2ごとに得られる複数のデータに基づいて第2のチャンネルch2の位相Φ2および利得G2を再調整する場合について説明した。また、頭部等のB1マップデータから楕円のフィッティングカーブを求め、その長軸の傾きと理想的な楕円の長軸の傾きから最適位相Φ2optを求める場合でも、第1及び第2の送信チャンネルch1, ch2から同時に送信を行っている。
【0092】
これに対して、以下に説明する方法では、第1の送信チャンネルch1のみから送信したときに得られるB1マップデータと、第2の送信チャンネルch2のみから送信したときに得られるB1マップデータの2つのB1マップデータから、最適位相Φ2optと最適利得G2optを求めている。この方法を、以下、チャンネル独立送信法と呼ぶ。チャンネル独立送信法では、位相Φ2および利得G2を複数ステップで変化させることなく、2つのB1マップデータから、最適位相Φ2optと最適利得G2optを直ちに求めることができる。
【0093】
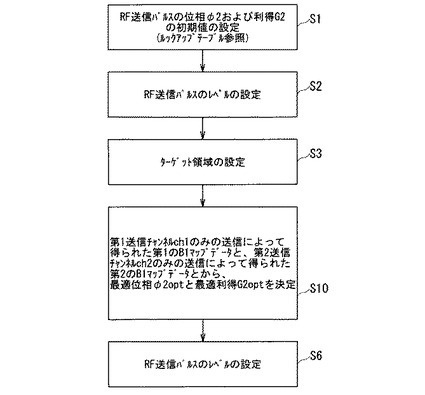
図10は、チャンネル独立送信法を用いて、最適位相Φ2optと最適利得G2optを求める手順の一例を示すフローチャートである。尚、図10において、図5と同等なステップには同符号を付して説明を省略する。
【0094】
チャンネル独立送信法では、ステップS10において、第1の送信チャンネルch1のみの送信によって収集した第1のB1マップデータと、第2の送信チャンネルch2のみの送信によって収集した第2のB1マップデータに基づいて、第2のチャンネルch2の最適な位相Φ2optおよび利得G2optが求められる。
【0095】
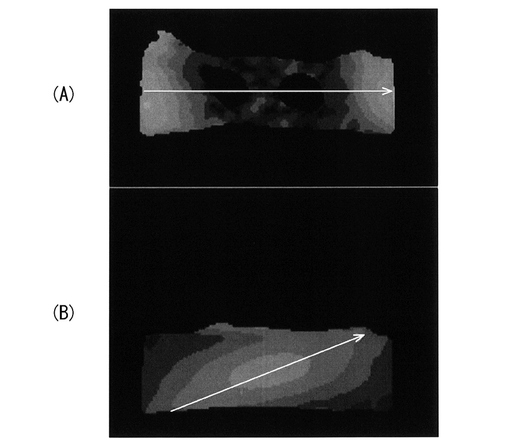
図11(A)は、第2の送信チャンネルch2をオフ状態にして、第1の送信チャンネルch1のみからの送信を用いて収集した薄いファントムに対する第1のB1マップデータをコンタ表示した画像である。また、図11(B)は、第1の送信チャンネルch1をオフ状態にして、第2の送信チャンネルch2のみからの送信を用いて収集した薄いファントムに対する第2のB1マップデータをコンタ表示した画像である。
【0096】
ここで、画像の中心を通る任意の直線のうち、その直線に沿った振幅分布の均一性が最も大きくなる直線を均一性最大直線と呼ぶものとする。図11(A)、(B)中に示した白い矢印は、第1、第2のB1マップデータにおける均一性最大直線を夫々図示したものである。
【0097】
ファントムが球状である場合には、理想的には、第1の送信チャンネルch1のみから送信したときに収集される第1のB1マップデータの均一性最大直線の向きは、第1の送信チャンネルch1によって形成される水平方向の磁場の向きに対応して、水平方向、つまり角度が0°となる。一方、第2の送信チャンネルch2のみから送信したときに収集される第2のB1マップデータの均一性最大直線の向きは、第2の送信チャンネルch1によって形成される垂直方向の磁場の向きに対応して、垂直方向、つまり角度が90°となる。
【0098】
ファントムの形状に依存してB1マップデータの形状は異なってくるが、均一性最大直線の向きに関する上記の特徴は概ね維持される。
【0099】
図11(A)では、均一性最大直線の角度はほぼ0°であり、理想的な状態に近い。一方、図11(B)では、均一性最大直線の角度は約30°であり、理想的な角度90°からは約60°ずれている。
【0100】
そこで、第2のB1マップデータの均一性最大直線の角度が90°となるように、第2の送信チャンネルch2の位相Φ2を補正するための補正量を求めることができる。具体的には、第1、第2のB1マップデータのそれぞれの均一性最大直線のなす角度(この場合30°)と、理想的な状態における2つの均一性最大直線のなす角度90°との差分を第2のチャンネルch2の最適な位相Φ2optを求めるための補正量とすることができる。例えば、図11(A)、(B)の例では、第2の送信チャンネルch2の位相Φ2の補正量は、60°となる。
【0101】
図12(A)は、第2の送信チャンネルch2の位相Φ2を初期値のままとし、上述した補正を行わずに、第1及び第2の送信チャンネルch1, ch2で同時に送信して収集したB1マップデータ画像である。画像中央部の画像値のレベルが低く、均一性が確保されていない。
【0102】
一方、図12(B)は、第2の送信チャンネルch2の位相Φ2を初期値から60°だけ補正した後(再調整した後)、第1及び第2の送信チャンネルch1, ch2で同時送信して収集したB1マップデータ画像である。図12(B)に示すように、第2の送信チャンネルch2の位相Φ2を補正する(再調整する)ことによって、B1マップデータの均一性が改善されたことが確認できる。
【0103】
なお、均一性最大直線の抽出は例えば次のように行う。まず、予め収集した受信コイルの感度マップデータや位置決め(ロケータ)画像データ等の任意の画像データを用いて撮像領域の中心を求める。次に、B1マップデータにおいて撮像領域の中心から5°等の所望の角度の刻み幅で放射状に直線を引き、各直線上におけるB1値の代表値(例えば平均値)を算出する。B1値の平均値はその直線におけるB1値の均一性を表す指標となり得る。したがって、B1値の代表値(例えば平均値)が最大となる直線を抽出することにより、抽出したその直線を均一性最大直線とみなすことができる。
【0104】
一方、第2の送信チャンネルch2の利得G2を再調整するための補正量も、位相Φ2の補正量と同様に、第1及び第2の送信チャンネルch1, ch2をそれぞれ単独で送信することによって収集した第1、第2のB1マップデータに基づいて決定することができる。
【0105】
具体的には、第1の送信チャンネルch1から送信されるRF送信パルスのB1均一性に対する寄与度と、第2の送信チャンネルch2から送信されるRF送信パルスのB1均一性に対する寄与度とを求め、寄与度が大きい側のチャンネルから送信されるRF送信パルスの振幅が相対的に大きくなるように利得G2の補正量を決定する。
【0106】
例えば、図11(A)によれば、第1の送信チャンネルch1から送信されるRF送信パルスによって撮像中心近傍に形成されるB1強度は小さいことが分かる。一方、図11(B)によれば、第2の送信チャンネルch2から送信されるRF送信パルスによって撮像中心近傍に高い強度でB1が形成されることが分かる。従って、第2の送信チャンネルch2の利得G2を相対的に大きくした方が、第1の送信チャンネルch1の利得G1を大きくするよりも均一性を高める上で望ましいことが分かる。
【0107】
B1均一性に対する寄与度は、種々の指標として求めることができる。例えば、B1マップデータにおいて撮像領域の中心から5°等の所望の角度の刻み幅で放射状に直線を引き、各直線上におけるB1値の平均値や合計値等の代表値を求めることができる。そして、各直線に対応するB1の代表値を加算した値をB1均一性に対する寄与度の指標とすることができる。
【0108】
この場合、利得G2の初期値からの補正量Δgain2は、例えば、式(3)に示すように2つの送信チャンネルch1, ch2のB1均一性に対する寄与度の比に基づいて算出することができる。
Δgain2(dB)=20log10(SumB1ch2/SumB1ch1) (3)
ただし、式(3)において、SumB1ch1は、第1の送信チャンネルch1に対応するB1マップデータ上における各直線上のB1代表値の総和(真数)であり、SumB1ch2は、第2の送信チャンネルch2に対応するB1マップデータ上における各直線上のB1代表値の総和(真数)である。
【0109】
図13(A)は、第2の送信チャンネルch2の利得G2の初期値に対する補正量Δgain2を-5dBとして第1及び第2の送信チャンネルch1, ch2を同時送信して収集したB1マップデータ画像である。一方、図13(B)は、第2の送信チャンネルch2の利得G2の初期値に対する補正量Δgain2を+5dBとして第1及び第2の送信チャンネルch1, ch2を同時送信して収集したB1マップデータ画像である。尚、図13(A),(B)において、第2の送信チャンネルch2の位相Φ2に対する補正量は、いずれも60°に固定した。
【0110】
図13(A)によれば、B1均一性に対する寄与度が小さい第1の送信チャンネルch1の利得G1が相対的に大きく設定されているため、この結果、撮像中心におけるB1強度が小さくなり、B1の均一性が小さくなっていることが確認できる。一方、図13(B)によれば、B1均一性に対する寄与度が大きい第2の送信チャンネルch2の利得G2が相対的に大きく設定されているため、撮像中心におけるB1強度が大きく、かつB1均一性も改善されていることが確認できる。
【0111】
上記の説明では、第2のチャンネルch2の位相Φ2および利得G2の双方を第1、第2の2つのB1マップデータに基づいて再調整(補正)する例を示したが、位相Φ2の再調整または利得G2の再調整の何れか一方を省略してもよい。
【0112】
また、位相Φ2および利得G2の一方または双方の再調整をユーザが表示装置34に表示される2つのB1マップデータ画像を参照しながら入力装置33の操作によってマニュアルで行えるようにしてもよい。
【0113】
上記のように最適位相Φ2optと最適利得G2optが決定されると、撮像条件設定部40は、最適位相Φ2optと最適利得G2optやパルスシーケンスに関わる各種のパラメータ等をシーケンスコントローラ制御部41に与える。これにより、イメージングスキャンを実行することが可能となる。イメージングスキャンは以下のような流れで行われる。
【0114】
入力装置33からシーケンスコントローラ制御部41にスキャン開始指示が与えられると、シーケンスコントローラ制御部41は撮像条件設定部40から取得した各種撮像用パラメータをシーケンスコントローラ31に与える。シーケンスコントローラ31は、シーケンスコントローラ制御部41から受けた各種撮像用パラメータに従って傾斜磁場電源27、送信器29および受信器30を駆動させることにより被検体Pがセットされた撮像領域に傾斜磁場を形成させるとともに、RFコイル24からRF信号を発生させる。
【0115】
このため、被検体Pの内部における核磁気共鳴により生じたNMR信号が、RFコイル24により受信されて受信器30に与えられる。受信器30は、RFコイル24からNMR信号を受けて、所要の信号処理を実行した後、A/D変換することにより、デジタルデータのNMR信号である生データを生成する。受信器30は、生成した生データをシーケンスコントローラ31に与える。シーケンスコントローラ31は、生データをシーケンスコントローラ制御部41に与え、シーケンスコントローラ制御部41は生データをk空間データとしてデータ処理部42与える。
【0116】
次に、データ処理部42は、k空間データに画像再構成処理を施すことにより画像データを生成し、画像データに必要な画像処理を行って表示装置34に表示させる。これによりユーザは診断画像を確認することができる。
【0117】
つまり以上のような磁気共鳴イメージング装置20は、撮像部位やRFコイルの種類等の撮像条件に応じて適切にRF送信パルスの位相および振幅を調整し、さらに必要に応じて収集データに基づいて送信B1がより均一になるようにRF送信パルスの位相および振幅を再調整できるようにしたものである。
【0118】
このため、磁気共鳴イメージング装置20によれば、撮像部位やRFコイルの種類等の撮像条件に応じて、より均一な送信B1を得ることができる。
【0119】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0120】
20 磁気共鳴イメージング装置
21 静磁場用磁石
22 シムコイル
23 傾斜磁場コイル
24 RFコイル
24A 全身用コイル
25 制御系
26 静磁場電源
27 傾斜磁場電源
28 シムコイル電源
29 送信器
29A RFアンプ
30 受信器
31 シーケンスコントローラ
32 コンピュータ
37 寝台
P 被検体
【技術分野】
【0001】
本発明の実施形態は、磁気共鳴イメージング装置に関する。
【背景技術】
【0002】
磁気共鳴イメージングは、静磁場中に置かれた被検体の原子核スピンをラーモア周波数のRF信号で磁気的に励起し、この励起に伴って発生するNMR信号から画像を再構成する撮像法である。
【0003】
この磁気共鳴イメージングにおいて、送信されるRFパルスの周波数が増大すると、被検体内におけるRF磁場が不均一となる。このRF磁場の不均一性は、B1不均一性とも呼ばれる。そこで、B1不均一性を改善することが重要となる。
【0004】
例えば、アスペクト比に応じてRF送信パルスの振幅および位相を決定するB1補正方法が考案されている(例えば特許文献1参照)。また、RF送信パルスの振幅および位相を変えながらB1マップを収集し、RF送信パルスの振幅および位相を決定する方法も知られている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特表2008−514259号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、近年、磁場強度が高いMRI装置が開発されてきている。このため、RFパルスの周波数が一層大きくなり、従来のようにアスペクト比に応じて求めた振幅および位相でRFパルスを送信しても、B1不均一性が解消できない場合がある。一方、従来のようにRFパルスの振幅および位相を変化させながらB1マップを収集する場合には、撮像時間が長くなるという問題やB1不均一性の判定が難しいという問題点がある。
【0007】
そこで、簡易にB1均一性を一層向上させることが可能な磁気共鳴イメージング装置が望まれている。
【課題を解決するための手段】
【0008】
実施形態の磁気共鳴イメージング装置は、高周波送信パルスの位相および振幅の少なくとも一方を互に独立に調整することが可能な送信用のQDコイルを用いて被検体の磁気共鳴イメージングを行うイメージング手段と、前記高周波パルスの位相および振幅の少なくとも一方を撮像条件に応じて調整する調整手段と、を備えることを特徴とする。
【図面の簡単な説明】
【0009】
【図1】本発明に係る磁気共鳴イメージング装置の実施の形態を示す構成図。
【図2】送信用のQDコイルおよび送信器の詳細構成例を示す図。
【図3】コンピュータの機能ブロック図。
【図4】位相振幅ルックアップテーブルの一例を示す図。
【図5】イメージングに先だってB1均一性を向上させるためにRF送信パルスの位相および振幅を調整する際の手順の一例を示すフローチャート。
【図6】RF送信パルスの最適な位相を決定するためのデータ収集用のDSEシーケンスを示す図。
【図7】RF送信パルスの位相Φ2の変化に対する画像値の不均一性の変化を示すカーブから最適位相Φ2optを求める方法を説明する図。
【図8】画像値の均一性とリフォーカスパルスのフォーワードパワーから最適位相Φ2optを求める方法を説明する図。
【図9】頭部におけるB1マップデータの対称性を利用してRF送信パルスの最適位相Φ2optを求める方法を説明する図。
【図10】2つのチャンネルch1, ch2において夫々独立に送信して収集した2つのB1マップデータに基づいて位相Φ2および利得G2を調整する際の手順の一例を示すフローチャート。
【図11】2つのチャンネルch1, ch2をそれぞれ単独で使用して収集した2つのB1マップデータの一例を示す図。
【図12】位相Φ2の補正前のB1マップデータと位相Φ2を初期値から60°だけ補正して収集した補正後のB1マップデータとを比較した例を示す図。
【図13】利得G2の初期値に対する補正量Δgain2を-5dBとして収集したB1マップデータと補正量Δgain2を+5dBとして収集したB1マップデータとを比較した例を示す図。
【発明を実施するための形態】
【0010】
磁気共鳴イメージング装置の実施の形態について添付図面を参照して説明する。実施形態の磁気共鳴イメージング装置は、高周波送信パルスの位相および振幅の少なくとも一方を互に独立に調整することが可能な送信用のQDコイルを用いて被検体の磁気共鳴イメージングを行うイメージング手段と、前記高周波パルスの位相および振幅の少なくとも一方を撮像条件に応じて調整する調整手段と、を備える。
【0011】
(構成および機能)
図1は本発明に係る磁気共鳴イメージング装置の実施の形態を示す構成図である。
【0012】
磁気共鳴イメージング装置20は、静磁場を形成する筒状の静磁場用磁石21、この静磁場用磁石21の内部に設けられたシムコイル22、傾斜磁場コイル23およびRFコイル24を備えている。
【0013】
また、磁気共鳴イメージング装置20には、制御系25が備えられる。制御系25は、静磁場電源26、傾斜磁場電源27、シムコイル電源28、送信器29、受信器30、シーケンスコントローラ31およびコンピュータ32を具備している。制御系25の傾斜磁場電源27は、X軸傾斜磁場電源27x、Y軸傾斜磁場電源27yおよびZ軸傾斜磁場電源27zで構成される。また、コンピュータ32には、入力装置33、表示装置34、演算装置35および記憶装置36が備えられる。
【0014】
静磁場用磁石21は静磁場電源26と接続され、静磁場電源26から供給された電流により撮像領域に静磁場を形成させる機能を有する。尚、静磁場用磁石21は超伝導コイルで構成される場合が多く、励磁の際に静磁場電源26と接続されて電流が供給されるが、一旦励磁された後は非接続状態とされるのが一般的である。また、静磁場用磁石21を永久磁石で構成し、静磁場電源26が設けられない場合もある。
【0015】
また、静磁場用磁石21の内側には、同軸上に筒状のシムコイル22が設けられる。シムコイル22はシムコイル電源28と接続され、シムコイル電源28からシムコイル22に電流が供給されて静磁場が均一化されるように構成される。
【0016】
傾斜磁場コイル23は、X軸傾斜磁場コイル23x、Y軸傾斜磁場コイル23yおよびZ軸傾斜磁場コイル23zで構成され、静磁場用磁石21の内部において筒状に形成される。傾斜磁場コイル23の内側には寝台37が設けられて撮像領域とされ、寝台37には被検体Pがセットされる。RFコイル24にはガントリに内蔵されたRF信号の送受信用の全身用コイル(WBC: whole body coil)や寝台37や被検体P近傍に設けられるRF信号の受信用の局所コイルなどがある。
【0017】
また、傾斜磁場コイル23は、傾斜磁場電源27と接続される。傾斜磁場コイル23のX軸傾斜磁場コイル23x、Y軸傾斜磁場コイル23yおよびZ軸傾斜磁場コイル23zはそれぞれ、傾斜磁場電源27のX軸傾斜磁場電源27x、Y軸傾斜磁場電源27yおよびZ軸傾斜磁場電源27zと接続される。
【0018】
そして、X軸傾斜磁場電源27x、Y軸傾斜磁場電源27yおよびZ軸傾斜磁場電源27zからそれぞれX軸傾斜磁場コイル23x、Y軸傾斜磁場コイル23yおよびZ軸傾斜磁場コイル23zに供給された電流により、撮像領域にそれぞれX軸方向の傾斜磁場Gx、Y軸方向の傾斜磁場Gy、Z軸方向の傾斜磁場Gzを形成することができるように構成される。
【0019】
RFコイル24は、送信器29および/または受信器30と接続される。送信用のRFコイル24は、送信器29からRF信号を受けて被検体Pに送信する機能を有し、受信用のRFコイル24は、被検体P内部の原子核スピンのRF信号による励起に伴って発生したNMR信号を受信して受信器30に与える機能を有する。
【0020】
図2は、図1に示す送信用のRFコイル24および送信器29の詳細構成例を示す図である。
【0021】
送信用のRFコイル24である全身用コイル24Aは、QDコイルとして構成される。QDコイルには、通常2つの送信チャンネルch1, ch2から送信信号が給電され、第1の送信チャンネルch1と第2の送信チャンネルch2によって、空間的に互いに直交する磁界を発生する。QDコイルには、円筒状のバードケージタイプ型のものや、独立した2つのコイルで構成されるタイプのものがある。バードケージタイプのQDコイルでは、円筒上で互いに90度離れた位置にある2つの給電点に、チャンネルch1とチャンネルch2の送信信号が夫々給電される。一方、独立2コイルタイプのQDでは、それぞれのコイルにチャンネルch1とチャンネルch2の送信信号が別々に給電される。
【0022】
RFアンプ29Aから出力されたRF送信パルスは、90度分配器209によって電気的に90度位相の異なる第1及び第2の送信チャンネルch1, ch2の信号に分配される。
【0023】
送信用QDコイルは、電気的位相が90度離れた2つのRF信号を空間的に直交する方向にそれぞれ印加することにより、理想的な条件下においては、撮像領域のXY面に完全に均一な磁場を形成することができる。
【0024】
しかしながら、現実にはこのような理想的な条件は成立しない。例えば、送信用QDコイルの位置と撮像部位(患者の頭部、腹部、手首等)と位置関係によって磁場の均一性は大きく影響を受ける。つまり、同じ送信用QDコイル(例えば全身用コイル)を使用したとしても、撮像部位によって磁場の均一性は必ずしも確保されず、また不均一な状態も撮像部位によって異なってくる。
【0025】
また、使用するコイルの種類によっても磁場の均一性は大きく影響をうける。例えば、同じ送信用QDコイルに対しても、受信コイルとして胴部コイルを使用する場合と手首コイルを使用する場合では、磁場の均一性は異なる。
【0026】
そこで、磁場の均一性を調整する手段として、第1及び第2の送信チャンネルch1, ch2には、位相調整手段210A、210B、及び利得調整手段211A、211Bが夫々設けられている。
【0027】
位相調整手段210A、210Bと利得調整手段211A、211Bによって、チャンネル間の相対的な位相(位相バランス)と相対的な利得(利得バランス)を調整することができる。位相調整手段210A、210Bと利得調整手段211A、211Bは、図2に示すように夫々のチャンネルに別々に設けても良いし、いずれか一方のチャンネルにのみ設けても良い。
【0028】
以下の説明では、第1の送信チャンネルch1の位相Φ1と利得G1を夫々0°と0dBに固定し、第2の送信チャンネルch2の位相Φ2と利得G2を可変にしてチャンネル間の位相バランスと利得バランスを調整するものとする。位相Φ2や利得G2の可変範囲は特に限定するものではないが、例えば、位相Φ2は、-90°から90°まで設定可能であり、利得G2は、-10dBから10dBまで設定可能である。
【0029】
なお、位相Φ2と利得G2のうち、いずれか一方のみを調整可能な構成としても良い。また、以下の説明では、チャンネルの「利得」という用語を主に使用するが、チャンネル内の信号の「振幅」という用語に置き換えても、その意味は同じである。
【0030】
また、第1及び第2の送信チャンネルch1, ch2には、QDコイルに出力するRF送信パルスのフォーワードパルスのパワーFP1、FP2を測定する機能、およびQDコイルからの反射パルスのパワーRP1、RP2を測定する機能がそれぞれ設けられている。
【0031】
図1に戻って説明する。制御系25のシーケンスコントローラ31は、傾斜磁場電源27、送信器29および受信器30と接続される。シーケンスコントローラ31は傾斜磁場電源27、送信器29および受信器30を駆動させるために必要な制御情報、例えば傾斜磁場電源27に印加すべきパルス電流の強度や印加時間、印加タイミング等の動作制御情報を記述したシーケンス情報を記憶する機能と、記憶した所定のシーケンスに従って傾斜磁場電源27、送信器29および受信器30を駆動させることによりX軸傾斜磁場Gx、Y軸傾斜磁場Gy,Z軸傾斜磁場GzおよびRF信号を発生させる機能を有する。
【0032】
また、シーケンスコントローラ31は、受信器30におけるNMR信号の検波およびA/D (analog to digital)変換により得られた複素データである生データ(raw data)を受けてコンピュータ32に与えるように構成される。
【0033】
このため、送信器29には、シーケンスコントローラ31から受けた制御情報に基づいてRF信号をRFコイル24に与える機能が備えられる一方、受信器30には、RFコイル24から受けたNMR信号を検波して所要の信号処理を実行するとともにA/D変換することにより、デジタル化された複素データである生データを生成する機能と生成した生データをシーケンスコントローラ31に与える機能とが備えられる。
【0034】
また、コンピュータ32の記憶装置36に保存されたプログラムを演算装置35で実行することにより、コンピュータ32には各種機能が備えられる。ただし、プログラムによらず、各種機能を有する特定の回路を磁気共鳴イメージング装置20に設けてもよい。
【0035】
図3は、図1に示すコンピュータ32の機能ブロック図である。
【0036】
コンピュータ32は、プログラムにより撮像条件設定部40、シーケンスコントローラ制御部41およびデータ処理部42として機能する。撮像条件設定部40は、位相振幅LUT (look up table)40Aおよび位相振幅調整部40Bを有する。
【0037】
撮像条件設定部40は、入力装置33からの指示情報に基づいて撮像部位(imaging region)やコイルの種別、或いはパルスシーケンスを含む各種の撮像条件を設定し、設定した撮像条件に基づく各種パラメータをシーケンスコントローラ制御部41に与える機能を有する。
【0038】
位相振幅LUT40Aには、撮像部位(imaging region)や使用する送信コイルあるいは受信コイルの種別等の撮像条件に応じた適切な送信RFパルスの位相および振幅が撮像条件ごとに参照可能に予め保存されている。
【0039】
図4は、位相振幅LUT40Aの一例を示す図である。位相振幅LUT40Aでは、患者の頭部、腹部、手首といった各撮像部位、或いはPhased Array 頭部コイル,T/R(送信/受信)頭部コイル、胴部コイル、手首コイルといった各コイル種別に対して、第1の送信チャンネルch1を基準とする第2の送信チャンネルch2の位相Φ2および利得G2が保存されている。
【0040】
また、位相振幅LUT40Aには、体重に応じた利得補正値(ΔG)も保存されている。
【0041】
位相振幅LUT40Aに保存される送信RFパルスの位相Φ2利得G2は、過去のスキャンや試験スキャンにより収集されたデータの分析またはシミュレーション等の方法で求めることができる。また、後述する再調整のシーケンスでの処理と同じ方法を用いて,位相振幅LUT40A内の位相Φ2及び利得G2を求めても良い。
【0042】
位相振幅調整部40Bは、イメージングスキャンの実行に先だって、位相振幅LUT40Aを参照することによって送信RFパルスの位相Φ2および利得G2を撮像条件に応じた適切な値に調整する。また、位相振幅調整部40Bは、調整した送信RFパルスの位相Φ2および利得G2をシーケンスコントローラ制御部41から取得した画像データ等に基づいて更に再調整し、最終的に決定された送信RFパルスの位相Φ2および利得G2をイメージングスキャン用のパラメータとしてシーケンスコントローラ制御部41に設定する機能を有する。
【0043】
シーケンスコントローラ制御部41は、入力装置33及び撮像条件設定部40からの情報に基づいて、シーケンスコントローラ31にパルスシーケンスを含む各種パラメータを出力する。また、シーケンスコントローラ制御部41は、シーケンスコントローラ31から生データを受けてk空間データとしてデータ処理部42に与える機能を有する。
【0044】
データ処理部42は、k空間データにフーリエ変換(FT: Fourier transform)を含む画像再構成処理を施すことにより画像データを生成する機能と、画像データに必要な画像処理を行って表示装置34に表示させる機能を有する。
【0045】
(動作および作用)
次に磁気共鳴イメージング装置20の動作および作用について説明する。尚、第1の送信チャンネルch1の位相Φ1および利得G1が固定であり、第2の送信チャンネルch2の位相Φ2および利得G2が可変である場合を例に説明する。
【0046】
図5は、図1に示す磁気共鳴イメージング装置20において、イメージングに先だってB1均一性を向上させるためにRF送信パルスの位相および振幅を調整する際の手順の一例を示すフローチャートである。
【0047】
まず、予め寝台37に被検体Pがセットされ、静磁場電源26により励磁された静磁場用磁石21(超伝導磁石)の撮像領域に静磁場が形成される。また、シムコイル電源28からシムコイル22に電流が供給されて撮像領域に形成された静磁場が均一化される。
【0048】
そして、ステップS1において、第2の送信チャンネルch2から送信されるRF送信パルスの位相Φ2および利得G2が、被検体の撮像部位、撮像に使用するコイルの種別等の撮像条件に応じた適切な値に設定される。
【0049】
具体的には、撮像条件設定部40の位相振幅調整部40Bは、位相振幅LUT40Aを参照することによって撮像条件に対応するRF送信パルスの位相Φ2および利得G2を取得し、取得した位相Φ2および利得G2を送信部29の位相調整手段および利得調整手段にそれぞれ設定すべくシーケンスコントローラ制御部41に出力する。
【0050】
なお、撮像条件として、撮像に用いるコイルの種別や患者の撮像部位のほか、患者の体重や横臥の向きを付加してもい。例えば、図3に示すように、患者の体重が80kgを超える場合は、利得G2に利得補正値ΔGを加算する。
【0051】
また、患者の横臥の向きが横向き(患者が仰向けからほぼ90度傾いた状態)である場合には、位相振幅LUT40Aから取得したRF送信パルスの位相Φ2および利得G2に-1を乗じる。例えば、位相振幅LUT40Aから取得した位相Φ2が140度であり、利得G2が3dBの場合には、それぞれに−1を乗じて補正し、位相Φ2を−140度、利得G2を−3dBを、位相振幅LUT40A内の数値と置き換える。
【0052】
位相振幅LUT40Aを参照することにより、RF送信パルスの位相Φ2および利得G2を撮像条件に応じた適切な値に設定することができるものの、ステップS2以降の再調整手順を実行することによって位相Φ2と利得G2をより適切な値に設定することができる。ステップS2以降の処理では、位相振幅LUT40A内の位相Φ2および利得G2を初期値として送信部29の位相調整手段210B及び利得調整手段211Bに設定し、この初期値から位相Φ2及び利得G2を変化させながら取得した調整用の画像データに基づいて位相Φ2および利得G2を再調整する。
【0053】
再調整は、以下の手順で行う。まず、ステップS2において、RF送信パルスの最適な出力レベルRFlevelが求められる。すなわち、SE (spin echo)法等の公知のデータ収集法によりRF送信パルスの出力パワーのレベルを変更しながら信号を収集し、収集される信号の強度が最大となるときの出力レベルRFlevelが求められる。
【0054】
次に、ステップS3において、RF送信パルスの位相Φ2および利得G2の再調整用のデータを収集するためのターゲット領域が設定される。ターゲット領域は、イメージングスキャン用の撮像領域に対応して設定される。ターゲット領域としては、アキシャル断面が選択される場合が多いがサジタル断面やコロナル断面の局所領域を選択してもよい。
【0055】
次に、ステップS4において、RF送信パルスの位相Φ2を変えて収集したデータに基づいてRF送信パルスの最適な位相Φ2optが決定される。
【0056】
具体的には、まず、RF送信パルスの位相Φ2を変えながら位相エンコードを行わずに信号が収集される。例えば、位相振幅LUT40Aに記憶されているRF送信パルスの位相Φ2の初期値が30°である場合には、RF送信パルスの位相Φ2を-90°, -70°, -50° , …, 90°のように20°刻みで変化させて信号収集が行われる。そして、B1均一性が最も高く、この結果、ターゲット領域から収集される信号の強度が最大となるときの最適な位相Φ2optが算出される。これは、第1のチャンネルch1から送信されるB1と、第2のチャンネルch2から送信されるB1とが直交するような第2のチャンネルch2の位相phase2を求めることに相当する。
【0057】
このときのデータ収集法には、1軸または2軸スライス選択SE法や1軸、2軸または3軸スライス選択DSE (Double Spine Echo)法を用いることができる。
【0058】
図6は、RF送信パルスの最適な位相phase2optを決定するためのデータ収集用のDSEシーケンスを示す図である。
【0059】
図6において、RFはRF送信パルスを、Gssはスライス選択方向の傾斜磁場を、Groはリードアウト方向の傾斜磁場を、Gpeは位相エンコード方向の傾斜磁場を、ECHOは収集されるエコー信号を、それぞれ示す。
【0060】
図6に示すように、DSEシーケンスでは、スライス選択方向、リードアウト方向および位相エンコード方向のスライス選択をそれぞれ伴って、フリップ角αの励起パルス、フリップ角βの1番目のリフォーカスパルスおよび、フリップ角γの2番目のリフォーカスパルスが印加される。そして、1番目のリフォーカスパルスの後に位相エンコード用傾斜磁場パルスを印加せずにリードアウト用傾斜磁場を印加することによって、励起パルスからTE/2 (TEはエコー時間: echo time)後に1番目のエコー信号が収集される。また、2番目のリフォーカスパルスの後に位相エンコード用傾斜磁場パルスを印加せずにリードアウト用傾斜磁場を印加することによって、1番目のエコー信号からTE/2後に2番目のエコー信号が収集される。
【0061】
SE法により収集されるエコー信号の強度Sseは、緩和を無視すると、励起パルスのフリップ角をα、1番目のリフォーカスパルスのフリップ角をβとすると、式(1)で表される。また、DSE法により2番目に収集されるエコー信号の強度Sdseは、緩和を無視すると、上述のように励起パルスのフリップ角をα、1番目のリフォーカスパルスのフリップ角をβ、2番目のリフォーカスパルスのフリップ角をγとすると、式(2)で表される。
Sse=sin(α)・sin2(β/2) (1)
Sdse=sin(α)・sin2(β/2)・sin2(γ/2) (2)
式(1)、(2)からわかるように、励起パルスのフリップ角αが90°に近い場合やリフォーカスパルスのフリップ角β、γが180°に近い場合には、強度Sse、Sdseの値は緩やかに変化するため、B1磁場の変動に対して信号強度の変化は小さくなる。一方、SE法またはDSE法における励起パルスのフリップ角αおよびリフォーカスパルスのフリップ角β, γを、本来のフリップ角よりも小さいフリップ角に設定すると、強度Sse、Sdseの値の変化の傾きは大きくなる。このため、B1不均一性の影響をより鋭敏に信号に反映させることが可能となる。換言すれば、フリップ角を低フリップ角に設定することによりB1磁場の変化に敏感な信号を収集することが可能となり、B1均一性が高くなるときの位相Φ2をより正確に求めることができる。
【0062】
例えば、SE法であれば、励起パルスと1番目のリフォーカスパルスのフリップ角αおよびβを一般的な90°および-180°ではなく30°および-60°に設定することが好適である。また、DSE法であれば、励起パルスのフリップ角αおよびリフォーカスパルスのフリップ角β, γを一般的な90°, -180°および-180°ではなく30°, -60°および-60°に設定することが好適である。
【0063】
そして、SE法やDSE法により収集されたエコー信号に基づいて、画像値の不均一性を表す指標を位相Φ2ごとに算出する。画像値の不均一性を表す指標としては、平均値からの乖離量が閾値(例えば-20%以下および/または20%以上)を超える範囲の面積値や分散等が挙げられる。具体的には、SE法により励起パルスのフリップ角αおよびリフォーカスパルスのフリップ角βを低フリップ角として収集されたエコー信号や、DSE法により励起パルスフリップ角αおよびリフォーカスパルスのフリップ角β, γを低フリップ角として収集された2番目のエコー信号を1次元高速フーリエ変換(1D FFT: one-dimensional fast Fourier transformation)することによって、位相Φ2ごとのリードアウト方向における画像値の不均一性を表す指標Sを算出することができる。
【0064】
図7は、RF送信パルスの位相Φ2に対する画像値の不均一性指標Sの変化を示すカーブを模式的に示す図である。
【0065】
まず、位相Φ2ごとに、リードアウト方向における画像値の平均値を求め、平均値からの乖離量が所定の閾値を超える範囲の面積値や分散等を指標S01、S02、S03等として求める。そして、指標S01、S02、S03等を多項式フィッティング等の公知の近似法により近似すると図7の実線示すような不均一性カーブが得られる。そうすると、不均一性カーブが最小となるときの最適な位相Φ2optを求めることができる。
【0066】
最適な位相Φ2optは、上述した例の他、様々な方法により求めることができる。例えば、DSE法において励起パルスのフリップ角αおよび1番目のリフォーカスパルスのフリップ角βをそれぞれ通常の90°および180°とし、2番目のリフォーカスパルスのフリップ角γのみを通常よりも小さな低フリップ角としてエコー信号を収集してもよい。この場合、2番目のエコー信号に対応する画像値の不均一性指標を1番目のエコー信号に対応する画像値の不均一性指標で除算した値が最小となるときの位相Φ2を最適な位相Φ2optとすることができる。この場合、体動の影響を受け難いという利点が得られる。
【0067】
また、3つ以上のエコー信号を収集するシーケンスを用いてエコー信号を収集し、3つ以上のエコー信号に対応する位相Φ2の不均一性指標に基づいて最適な位相Φ2optを求めることもできる。例えば、FSE (fast spin echo)法により位相エンコードを行いながらシングルショットまたは2ショット程度のマルチショットで8つ程度のエコー信号を収集し、収集したエコー信号に2次元(2D: two-dimensional)FFTを施すと2D画像データが得られる。そして、2D画像データのピクセル値を用いて位相Φ2の不均一性指標カーブを作成することができる。
【0068】
更に別の例としては、グラディエントエコー法を用いる公知の手法で1Dまたは2DのB1マップデータを異なる複数の位相Φ2について収集し、位相Φ2ごとのB1マップデータの代表値などに基づいて位相Φ2の不均一性指標カーブを作成することもできる。この場合、不均一性指標カーブの作成に先立ってB1マップデータを2乗または3乗する等の、マップデータの強度の変化を強調する処理を行えば、不均一性に対する感度を向上させることができる。例えば、位相エンコードをかけないシーケンスによってリードアウト方向のみのB1マップデータを得る場合、リードアウト方向のみのB1マップデータの2乗値や3乗値を位相phase2ごとに算出し、位相Φ2に対する不均一性指標カーブを作成することができる。
【0069】
上述した方法では、B1不均一性指標Sが最小となる位相Φ2を最適位相Φ2optとしているが、B1不均一性指標Sだけでなく、リフォーカスパルスのフォワードパワーFPも考慮してRF送信パルスの最適な位相Φ2optを決定することもできる。
【0070】
具体的には、図8に示すように、不均一性指標Sが所定の基準範囲内(例えば、不均一性指標Sの最小値の±10%の範囲)となるとなる位相Φ2のうち、2つの送信チャンネルch1, ch2からそれぞれ送信されるリフォーカスパルスのフォワードパワーFP1、FP2の合計値FPが最小となる位相Φ2を最適位相Φ2optとする。リフォーカスパルスのフォワードパワーFP1、FP2は、位相Φ2を変えながら不均一性指標Sの測定を行うのと同時に図2に示す系統により測定することができる。この方法によれば、B1均一性が良好で、かつリフォーカスパルスのフォワードパワーが小さくなるときの位相Φ2を最適な位相Φ2optとして求めることが可能となる。
【0071】
尚、条件の増加に伴ってデータ収集時間が増加する恐れがある場合には、位相Φ2の変更範囲を例えば0°から90°に限定することによりデータ収集時間の増加を低減させることができる。
【0072】
ここまでは、位相Φ2を変化させながら取得したB1不均一性指標SやB1マップデータから最適位相Φ2optを求める手法について説明してきたが、位相Φ2を変化させることなく、初期値として設定した位相Φ2intに対する1つのB1マップデータから直ちに最適位相Φ2optを求めることもできる。図9(A)、(B)は、この手法の概念を説明する図である。
【0073】
図9(A)は、頭部のB1マップデータと、B1マップデータにおける同一の値同士をつないだコンタを楕円モデルでフィッティングした白い線とを重ねて表示した図である。
【0074】
一般に、頭部におけるB1マップデータのコンタは、その形状が比較的安定している。そして、第1及び第2の送信チャンネルch1, ch2の位相Φ2が理想的な状態では、寝台に仰向けに横臥した患者の頭部のアキシャル断面形状は水平方向が垂直方向よりも長くなる。したがって、位相Φ2が理想的な状態では、頭部形状のコンタをフィッティングした楕円(図9(B)に実線で示す楕円)の長軸は水平方向となる。
【0075】
一方、位相Φ2が理想的な状態からずれると、図9(B)に示すように、頭部コンタをフィッティングした楕円(図9(A)の白線、図9(B)の破線で示す楕円)の長軸は水平とはならず、水平方向に対して傾きΦ2cをもつ。この傾きΦ2cは、位相Φ2の理想値からのずれに相当する。したがって、位相Φ2を理想的な値、即ち最適位相Φ2opt(deg)にするには、傾いたB1マップデータが得られたときの位相Φ2の初期値Φ2int(deg)に対して、傾きΦ2c(deg)の角度だけ補正してやればよい。
【0076】
このように、この手法では、初期値として設定した位相Φ2int(deg)に対して得られたB1マップデータのコンタを楕円でフィッティングし、得られた楕円の長軸の水平方向からのずれを位相Φ2の補正値Φ2cとする。そして、初期値位相Φ2int(deg)を補正値Φ2c(deg)で補正(加減算)することによって最適な位相Φ2opt(deg)を得ることができる。この手法は、適用できる部位が頭部等、形状が判りやすい部位にある程度限定されるものの、1つのB1マップデータから直ちに最適位相Φ2optが求まるため、補正に要する時間が短くてすむ。
【0077】
次に、図5のステップS5において、RF送信パルスの利得G2を変えて収集したデータに基づいてRF送信パルスの最適な利得G2optが決定される。このとき、RF送信パルスの位相Φ2は最適な位相Φ2optに固定される。
【0078】
具体的には、RF送信パルスの利得G2を変えながら信号が収集される。例えば、位相振幅LUT40Aに記憶されてるRF送信パルスの利得G2の初期値が2dBである場合には、RF送信パルスの利得G2を-8dB, -6dB, -4dB, …, 8dBのように2dB刻みで変化させて信号収集が行われる。そして、B1均一性が高くターゲット領域から収集される信号の強度が最大となるときの最適な利得G2が算出される。
【0079】
尚、異なる利得G2に対応する複数の信号を比較するために、2つのチャンネルch1. ch2から出力されるRF送信パルスの合計パワーが一定となるように、RF送信パルスの出力レベルRFlevelが調整される。例えば、初期状態における出力レベルRFlevelが50dBである場合には、第1のチャンネルch1から50dBでRF送信パルスが出力されている。一方、第2のチャンネルch2からは、出力レベルRFlevel 50dBに利得G2の初期値である2dBを加えた52dBでRF送信パルスが出力されている。つまり、RF送信パルスの合計パワーはデシベル値でみると102dBである。一方、第2のチャンネルch2の利得G2を、例えば+6dBに設定したときは、出力レベルRFlevelは48dBに設定される。この場合、第2のチャンネルch2からは54dBで、第1のチャンネルch1からは48dBで、それぞれRF送信パルスが出力されるので合計パワーはやはり102dBとなり、一定にできる。
【0080】
最適な利得G2optも最適な位相Φ2optを求める方法と同様に、異なる複数の利得G2ごとのB1不均一性指標カーブやB1マップデータから求めることができる。また、最適な利得G2optを求める場合にも、不均一性が所定の基準範囲内にある複数の利得G2の中から、リフォーカスパルスのフォワードパワーが最も小さくなる利得G2を選択して、最適利得G2optとすることができる。
【0081】
尚、条件の増加に伴ってデータ収集時間が増加する恐れがある場合には、利得G2の変更範囲を例えば0dBから6dBに限定することによりデータ収集時間の増加を低減させることができる。
【0082】
次に、ステップS6において、必要に応じてRF送信パルスの出力レベルRFlevelが再設定される。すなわち、RF送信パルスの位相Φ2および利得G2がそれぞれ最適な位相Φ2optおよび利得G2optに再調整されたため、RF送信パルスの最適な出力レベルRFlevelを決定するための条件が変わっていることになる。そこで、RF送信パルスの出力レベルRFlevelを、RF送信パルスの最適な位相Φ2optおよび利得G2optに応じて再調整することが望ましい。
【0083】
出力レベルRFlevelの再設定は、ステップS2と同様に行うことができるが、他の方法により行うこともできる。
【0084】
例えば、SE法やDSE法により出力レベルRFlevelを変えながら、ターゲット領域からエコー信号を収集し、収集されるエコー信号の強度が最大となるときの出力レベルRFlevelを最設定値とすることができる。ターゲット領域は、イメージングスキャン用の撮像領域に対応して設定される。
【0085】
或いは、SE法やDSE法により、出力レベルRFlevelを変えながらターゲット領域のB1マップデータを収集し、出力レベルRFlevelごとのB1マップデータに基づいて出力レベルRFlevelの最適値を求めることができる。すなわち、B1マップデータの分散や平均値から出力レベルRFlevelごとのB1不均一指標を表すカーブを作成し、B1不均一性が最小となるときの出力レベルRFlevelを最設定値とすることができる。或いは、最適なB1マップデータに対応する出力レベルRFlevelを最設定値としてもよい。
【0086】
更に別の例として、出力レベルRFlevelのデフォルト値からの補正量を、位相振幅LUT40Aに撮像部位や送信コイル種類等の撮像条件並びにRF送信パルスの位相Φ2および利得G2ごとに保存しておくことができる。そして、撮像条件、位相Φ2および利得G2に対応する補正量を位相振幅調整部40Bが位相振幅LUT40Aから取得し、取得した補正量に従って出力レベルRFlevelを最設定することもできる。
【0087】
このようにして、位相振幅調整部40Bにおいて撮像条件に応じた最適なRF送信パルスの位相Φ2opt、利得G2optおよび出力レベルRFlevelを求めることができる。尚、データ収集時間の短縮化のためにステップS1以外の任意のステップを省略してもよい。また、最適な利得G2optを求めた後に、利得G2を固定した状態で最適な位相Φ2optを求めてもよい。ただし、B1均一性への影響は利得G2よりも位相Φ2の方が支配的である。このため、最適な位相Φ2optを求めた後に最適な利得G2optを求める方が望ましい。
【0088】
さらに、データ収集時間の短縮化のために位相Φ2および利得G2の双方を変化させてエコー信号を収集し、最適な位相Φ2optおよび最適な利得G2optの双方を求めることもできる。すなわち、B1不均一性指標やB1マップデータを位相Φ2と利得G2の両方を変化させながら取得してもよい。また、リフォーカスパルスのフォワードパワーも位相Φ2と利得G2の両方を変化さながら取得することができる。そして、B1不均一性およびリフォーカスパルスのフォワードパワーがより小さくなるように最適な位相Φ2optおよび最適な利得G2optの双方を同時に決定することができる。
【0089】
上述した手法では、ステップS2からステップS6(特にステップS3からステップS5)における位相Φ2と利得G2の再調整手順を行うことを前提としている。このため、位相振幅LUT40Aに記憶される位相Φ2と利得G2の夫々の初期値の精度はそれ程高くなくてもよい。
【0090】
これとは逆に、ステップS3からステップS5における位相Φ2と利得G2の再調整手順を撮像部位やコイルの種類ごとに予め行い、得られた最適位相Φ2optと最適利得G2optを、撮像部位やコイルの種類ごとに位相振幅LUT40Aに記憶させておいてもよい。この場合、ステップS1における位相振幅LUT40Aの参照によって、精度の高い最適位相Φ2optと最適利得G2optが得られるため、ステップS2からステップS6(特にステップS3からステップS5)の再調整手順を省略してもよい。
【0091】
上述した例では、位相Φ2、或いは利得G2を変化させながら、第1及び第2の送信チャンネルch1, ch2の2つの送信チャンネルから同時に送信し、位相Φ2、或いは利得G2ごとに得られる複数のデータに基づいて第2のチャンネルch2の位相Φ2および利得G2を再調整する場合について説明した。また、頭部等のB1マップデータから楕円のフィッティングカーブを求め、その長軸の傾きと理想的な楕円の長軸の傾きから最適位相Φ2optを求める場合でも、第1及び第2の送信チャンネルch1, ch2から同時に送信を行っている。
【0092】
これに対して、以下に説明する方法では、第1の送信チャンネルch1のみから送信したときに得られるB1マップデータと、第2の送信チャンネルch2のみから送信したときに得られるB1マップデータの2つのB1マップデータから、最適位相Φ2optと最適利得G2optを求めている。この方法を、以下、チャンネル独立送信法と呼ぶ。チャンネル独立送信法では、位相Φ2および利得G2を複数ステップで変化させることなく、2つのB1マップデータから、最適位相Φ2optと最適利得G2optを直ちに求めることができる。
【0093】
図10は、チャンネル独立送信法を用いて、最適位相Φ2optと最適利得G2optを求める手順の一例を示すフローチャートである。尚、図10において、図5と同等なステップには同符号を付して説明を省略する。
【0094】
チャンネル独立送信法では、ステップS10において、第1の送信チャンネルch1のみの送信によって収集した第1のB1マップデータと、第2の送信チャンネルch2のみの送信によって収集した第2のB1マップデータに基づいて、第2のチャンネルch2の最適な位相Φ2optおよび利得G2optが求められる。
【0095】
図11(A)は、第2の送信チャンネルch2をオフ状態にして、第1の送信チャンネルch1のみからの送信を用いて収集した薄いファントムに対する第1のB1マップデータをコンタ表示した画像である。また、図11(B)は、第1の送信チャンネルch1をオフ状態にして、第2の送信チャンネルch2のみからの送信を用いて収集した薄いファントムに対する第2のB1マップデータをコンタ表示した画像である。
【0096】
ここで、画像の中心を通る任意の直線のうち、その直線に沿った振幅分布の均一性が最も大きくなる直線を均一性最大直線と呼ぶものとする。図11(A)、(B)中に示した白い矢印は、第1、第2のB1マップデータにおける均一性最大直線を夫々図示したものである。
【0097】
ファントムが球状である場合には、理想的には、第1の送信チャンネルch1のみから送信したときに収集される第1のB1マップデータの均一性最大直線の向きは、第1の送信チャンネルch1によって形成される水平方向の磁場の向きに対応して、水平方向、つまり角度が0°となる。一方、第2の送信チャンネルch2のみから送信したときに収集される第2のB1マップデータの均一性最大直線の向きは、第2の送信チャンネルch1によって形成される垂直方向の磁場の向きに対応して、垂直方向、つまり角度が90°となる。
【0098】
ファントムの形状に依存してB1マップデータの形状は異なってくるが、均一性最大直線の向きに関する上記の特徴は概ね維持される。
【0099】
図11(A)では、均一性最大直線の角度はほぼ0°であり、理想的な状態に近い。一方、図11(B)では、均一性最大直線の角度は約30°であり、理想的な角度90°からは約60°ずれている。
【0100】
そこで、第2のB1マップデータの均一性最大直線の角度が90°となるように、第2の送信チャンネルch2の位相Φ2を補正するための補正量を求めることができる。具体的には、第1、第2のB1マップデータのそれぞれの均一性最大直線のなす角度(この場合30°)と、理想的な状態における2つの均一性最大直線のなす角度90°との差分を第2のチャンネルch2の最適な位相Φ2optを求めるための補正量とすることができる。例えば、図11(A)、(B)の例では、第2の送信チャンネルch2の位相Φ2の補正量は、60°となる。
【0101】
図12(A)は、第2の送信チャンネルch2の位相Φ2を初期値のままとし、上述した補正を行わずに、第1及び第2の送信チャンネルch1, ch2で同時に送信して収集したB1マップデータ画像である。画像中央部の画像値のレベルが低く、均一性が確保されていない。
【0102】
一方、図12(B)は、第2の送信チャンネルch2の位相Φ2を初期値から60°だけ補正した後(再調整した後)、第1及び第2の送信チャンネルch1, ch2で同時送信して収集したB1マップデータ画像である。図12(B)に示すように、第2の送信チャンネルch2の位相Φ2を補正する(再調整する)ことによって、B1マップデータの均一性が改善されたことが確認できる。
【0103】
なお、均一性最大直線の抽出は例えば次のように行う。まず、予め収集した受信コイルの感度マップデータや位置決め(ロケータ)画像データ等の任意の画像データを用いて撮像領域の中心を求める。次に、B1マップデータにおいて撮像領域の中心から5°等の所望の角度の刻み幅で放射状に直線を引き、各直線上におけるB1値の代表値(例えば平均値)を算出する。B1値の平均値はその直線におけるB1値の均一性を表す指標となり得る。したがって、B1値の代表値(例えば平均値)が最大となる直線を抽出することにより、抽出したその直線を均一性最大直線とみなすことができる。
【0104】
一方、第2の送信チャンネルch2の利得G2を再調整するための補正量も、位相Φ2の補正量と同様に、第1及び第2の送信チャンネルch1, ch2をそれぞれ単独で送信することによって収集した第1、第2のB1マップデータに基づいて決定することができる。
【0105】
具体的には、第1の送信チャンネルch1から送信されるRF送信パルスのB1均一性に対する寄与度と、第2の送信チャンネルch2から送信されるRF送信パルスのB1均一性に対する寄与度とを求め、寄与度が大きい側のチャンネルから送信されるRF送信パルスの振幅が相対的に大きくなるように利得G2の補正量を決定する。
【0106】
例えば、図11(A)によれば、第1の送信チャンネルch1から送信されるRF送信パルスによって撮像中心近傍に形成されるB1強度は小さいことが分かる。一方、図11(B)によれば、第2の送信チャンネルch2から送信されるRF送信パルスによって撮像中心近傍に高い強度でB1が形成されることが分かる。従って、第2の送信チャンネルch2の利得G2を相対的に大きくした方が、第1の送信チャンネルch1の利得G1を大きくするよりも均一性を高める上で望ましいことが分かる。
【0107】
B1均一性に対する寄与度は、種々の指標として求めることができる。例えば、B1マップデータにおいて撮像領域の中心から5°等の所望の角度の刻み幅で放射状に直線を引き、各直線上におけるB1値の平均値や合計値等の代表値を求めることができる。そして、各直線に対応するB1の代表値を加算した値をB1均一性に対する寄与度の指標とすることができる。
【0108】
この場合、利得G2の初期値からの補正量Δgain2は、例えば、式(3)に示すように2つの送信チャンネルch1, ch2のB1均一性に対する寄与度の比に基づいて算出することができる。
Δgain2(dB)=20log10(SumB1ch2/SumB1ch1) (3)
ただし、式(3)において、SumB1ch1は、第1の送信チャンネルch1に対応するB1マップデータ上における各直線上のB1代表値の総和(真数)であり、SumB1ch2は、第2の送信チャンネルch2に対応するB1マップデータ上における各直線上のB1代表値の総和(真数)である。
【0109】
図13(A)は、第2の送信チャンネルch2の利得G2の初期値に対する補正量Δgain2を-5dBとして第1及び第2の送信チャンネルch1, ch2を同時送信して収集したB1マップデータ画像である。一方、図13(B)は、第2の送信チャンネルch2の利得G2の初期値に対する補正量Δgain2を+5dBとして第1及び第2の送信チャンネルch1, ch2を同時送信して収集したB1マップデータ画像である。尚、図13(A),(B)において、第2の送信チャンネルch2の位相Φ2に対する補正量は、いずれも60°に固定した。
【0110】
図13(A)によれば、B1均一性に対する寄与度が小さい第1の送信チャンネルch1の利得G1が相対的に大きく設定されているため、この結果、撮像中心におけるB1強度が小さくなり、B1の均一性が小さくなっていることが確認できる。一方、図13(B)によれば、B1均一性に対する寄与度が大きい第2の送信チャンネルch2の利得G2が相対的に大きく設定されているため、撮像中心におけるB1強度が大きく、かつB1均一性も改善されていることが確認できる。
【0111】
上記の説明では、第2のチャンネルch2の位相Φ2および利得G2の双方を第1、第2の2つのB1マップデータに基づいて再調整(補正)する例を示したが、位相Φ2の再調整または利得G2の再調整の何れか一方を省略してもよい。
【0112】
また、位相Φ2および利得G2の一方または双方の再調整をユーザが表示装置34に表示される2つのB1マップデータ画像を参照しながら入力装置33の操作によってマニュアルで行えるようにしてもよい。
【0113】
上記のように最適位相Φ2optと最適利得G2optが決定されると、撮像条件設定部40は、最適位相Φ2optと最適利得G2optやパルスシーケンスに関わる各種のパラメータ等をシーケンスコントローラ制御部41に与える。これにより、イメージングスキャンを実行することが可能となる。イメージングスキャンは以下のような流れで行われる。
【0114】
入力装置33からシーケンスコントローラ制御部41にスキャン開始指示が与えられると、シーケンスコントローラ制御部41は撮像条件設定部40から取得した各種撮像用パラメータをシーケンスコントローラ31に与える。シーケンスコントローラ31は、シーケンスコントローラ制御部41から受けた各種撮像用パラメータに従って傾斜磁場電源27、送信器29および受信器30を駆動させることにより被検体Pがセットされた撮像領域に傾斜磁場を形成させるとともに、RFコイル24からRF信号を発生させる。
【0115】
このため、被検体Pの内部における核磁気共鳴により生じたNMR信号が、RFコイル24により受信されて受信器30に与えられる。受信器30は、RFコイル24からNMR信号を受けて、所要の信号処理を実行した後、A/D変換することにより、デジタルデータのNMR信号である生データを生成する。受信器30は、生成した生データをシーケンスコントローラ31に与える。シーケンスコントローラ31は、生データをシーケンスコントローラ制御部41に与え、シーケンスコントローラ制御部41は生データをk空間データとしてデータ処理部42与える。
【0116】
次に、データ処理部42は、k空間データに画像再構成処理を施すことにより画像データを生成し、画像データに必要な画像処理を行って表示装置34に表示させる。これによりユーザは診断画像を確認することができる。
【0117】
つまり以上のような磁気共鳴イメージング装置20は、撮像部位やRFコイルの種類等の撮像条件に応じて適切にRF送信パルスの位相および振幅を調整し、さらに必要に応じて収集データに基づいて送信B1がより均一になるようにRF送信パルスの位相および振幅を再調整できるようにしたものである。
【0118】
このため、磁気共鳴イメージング装置20によれば、撮像部位やRFコイルの種類等の撮像条件に応じて、より均一な送信B1を得ることができる。
【0119】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0120】
20 磁気共鳴イメージング装置
21 静磁場用磁石
22 シムコイル
23 傾斜磁場コイル
24 RFコイル
24A 全身用コイル
25 制御系
26 静磁場電源
27 傾斜磁場電源
28 シムコイル電源
29 送信器
29A RFアンプ
30 受信器
31 シーケンスコントローラ
32 コンピュータ
37 寝台
P 被検体
【特許請求の範囲】
【請求項1】
高周波送信パルスの位相および振幅の少なくとも一方を互に独立に調整することが可能な送信用のQDコイルを用いて被検体の磁気共鳴イメージングを行うイメージング手段と、
前記高周波パルスの位相および振幅の少なくとも一方を撮像条件に応じて調整する調整手段と、
を備えることを特徴とする磁気共鳴イメージング装置。
【請求項2】
前記撮像条件は、前記被検体の撮像部位及び前記QDコイルの種類の少なくとも一方を含み、
前記撮像条件と、前記高周波パルスの位相および振幅の少なくとも一方とが互いに関連付けられて記憶される記憶手段を更に備え、
前記調整手段は、設定された前記撮像条件に対応する前記高周波パルスの位相および振幅の少なくとも一方を前記記憶手段から初期値として取得し、取得した前記位相および振幅の少なくとも一方の前記初期値を用いて前記位相および振幅の少なくとも一方を調整する請求項1記載の磁気共鳴イメージング装置。
【請求項3】
前記調整手段は、前記位相および振幅の少なくとも一方を前記初期値から変化させてデータを収集し、収集された前記データに基づいて前記位相および振幅の少なくとも一方を調整する請求項2記載の磁気共鳴イメージング装置。
【請求項4】
前記調整手段は、前記QDコイルによって形成される高周波磁場の不均一性を表す指標を前記収集されたデータから求め、前記指標が最小となるように前記位相および振幅の少なくとも一方を調整する請求項3記載の磁気共鳴イメージング装置。
【請求項5】
前記データは、本来のフリップ角よりも小さいフリップ角に設定したスピンエコー法のパルスシーケンスで収集された調整用データである、請求項4記載の磁気共鳴イメージング装置。
【請求項6】
前記データは、高周波磁場マップである、請求項4記載の磁気共鳴イメージング装置。
【請求項7】
前記調整手段は、前記調整用データに対して、強度変化を強調する処理を施す、請求項5記載の磁気共鳴イメージング装置。
【請求項8】
前記調整手段は、前記高周波磁場マップに対して、強度変化を強調する処理を施す、請求項6記載の磁気共鳴イメージング装置。
【請求項9】
前記調整手段は、前記被検体のアキシャル断面像を取得し、前記アキシャル断面像内の特定の軸と、前記特定の軸に対応する前記被検体の実際の軸との角度差を補正値として求め、前記記憶手段に記憶される前記位相の初期値を前記補正値によって補正する、請求項2記載の磁気共鳴イメージング装置。
【請求項10】
前記調整手段は、前記位相および振幅の少なくとも一方を変化させて測定されたリフォーカスパルスのフォワードパワーが最小となるように前記位相および振幅の少なくとも一方を調整するように構成される請求項3記載の磁気共鳴イメージング装置。
【請求項11】
前記QDコイルは、第1及び第2のチャンネルから給電され、
前記調整手段は、前記第1のチャンネルのみから送信して収集された第1の高周波磁場マップと、前記第2のチャンネルのみから送信して収集された第2の高周波磁場マップとに基づいて、前記位相および振幅の少なくとも一方を調整する請求項2記載の磁気共鳴イメージング装置。
【請求項12】
前記調整手段は、前記第1および第2の高周波磁場マップにおいて抽出された均一性最大直線のなす角度に基づいて前記位相を調整する請求項11記載の磁気共鳴イメージング装置。
【請求項13】
前記調整手段は、前記第1および第2の高周波磁場マップから算出された前記QDコイルの高周波磁場の均一性に対する寄与度に基づいて、前記振幅を調整する請求項11記載の磁気共鳴イメージング装置。
【請求項14】
前記調整手段は、調整後における前記位相および振幅の少なくとも一方を条件として前記高周波パルスの出力レベルを調整するように構成される請求項3記載の磁気共鳴イメージング装置。
【請求項15】
前記調整手段は、前記出力レベルを変化させて収集された高周波磁場の不均一性を表す指標が最小となるように前記出力レベルを調整するように構成される請求項14記載の磁気共鳴イメージング装置。
【請求項16】
前記調整手段は、前記出力レベルを変化させて収集された信号の強度が最大となるように前記出力レベルを調整するように構成される請求項14記載の磁気共鳴イメージング装置。
【請求項17】
前記調整手段は、調整後における前記位相および振幅の少なくとも一方を条件として前記高周波パルスの出力レベルを調整するように構成される請求項11記載の磁気共鳴イメージング装置。
【請求項18】
前記調整手段は、前記出力レベルを変化させて収集された高周波磁場の不均一性を表す指標が最小となるように前記出力レベルを調整するように構成される請求項17記載の磁気共鳴イメージング装置。
【請求項19】
前記調整手段は、前記出力レベルを変化させて収集された信号の強度が最大となるように前記出力レベルを調整するように構成される請求項17記載の磁気共鳴イメージング装置。
【請求項20】
前記調整手段は、前記撮像条件に対応する前記高周波パルスの位相および振幅の少なくとも一方を前記記憶手段から取得し、前記被検体の体位情報が横向きである場合に取得した前記位相および振幅の少なくとも一方に-1を乗じるように構成される請求項2記載の磁気共鳴イメージング装置。
【請求項21】
前記調整手段は、前記位相を調整した後に前記振幅を調整するように構成される請求項1記載の磁気共鳴イメージング装置。
【請求項22】
前記撮像条件は、前記被検体の撮像部位及び前記QDコイルの種類の少なくとも一方を含み、
前記撮像条件と、前記高周波パルスの位相および振幅の少なくとも一方とが互いに関連付けられて記憶される記憶手段を更に備え、
前記調整手段は、設定された前記撮像条件に対応する前記高周波パルスの位相および振幅の少なくとも一方を前記記憶手段から読み出し、読み出した前記位相および振幅の少なくとも一方を前記QDコイルの送信チャンネルに設定することによって前記位相および振幅の少なくとも一方を調整する請求項1記載の磁気共鳴イメージング装置。
【請求項23】
前記記憶手段に記憶される前記位相および振幅の少なくとも一方は、前記QDコイルによって形成される高周波磁場の不均一性を表す指標を、位相および振幅の少なくとも一方を変化させて収集されたデータから求め、前記指標が最小となるように決定された、請求項22記載の磁気共鳴イメージング装置。
【請求項24】
前記QDコイルは、第1及び第2のチャンネルから給電され、
前記記憶手段に記憶される前記位相および振幅の少なくとも一方は、前記第1のチャンネルのみから送信して収集された第1の高周波磁場マップと、前記第2のチャンネルのみから送信して収集された第2の高周波磁場マップとに基づいて決定された、請求項22記載の磁気共鳴イメージング装置。
【請求項1】
高周波送信パルスの位相および振幅の少なくとも一方を互に独立に調整することが可能な送信用のQDコイルを用いて被検体の磁気共鳴イメージングを行うイメージング手段と、
前記高周波パルスの位相および振幅の少なくとも一方を撮像条件に応じて調整する調整手段と、
を備えることを特徴とする磁気共鳴イメージング装置。
【請求項2】
前記撮像条件は、前記被検体の撮像部位及び前記QDコイルの種類の少なくとも一方を含み、
前記撮像条件と、前記高周波パルスの位相および振幅の少なくとも一方とが互いに関連付けられて記憶される記憶手段を更に備え、
前記調整手段は、設定された前記撮像条件に対応する前記高周波パルスの位相および振幅の少なくとも一方を前記記憶手段から初期値として取得し、取得した前記位相および振幅の少なくとも一方の前記初期値を用いて前記位相および振幅の少なくとも一方を調整する請求項1記載の磁気共鳴イメージング装置。
【請求項3】
前記調整手段は、前記位相および振幅の少なくとも一方を前記初期値から変化させてデータを収集し、収集された前記データに基づいて前記位相および振幅の少なくとも一方を調整する請求項2記載の磁気共鳴イメージング装置。
【請求項4】
前記調整手段は、前記QDコイルによって形成される高周波磁場の不均一性を表す指標を前記収集されたデータから求め、前記指標が最小となるように前記位相および振幅の少なくとも一方を調整する請求項3記載の磁気共鳴イメージング装置。
【請求項5】
前記データは、本来のフリップ角よりも小さいフリップ角に設定したスピンエコー法のパルスシーケンスで収集された調整用データである、請求項4記載の磁気共鳴イメージング装置。
【請求項6】
前記データは、高周波磁場マップである、請求項4記載の磁気共鳴イメージング装置。
【請求項7】
前記調整手段は、前記調整用データに対して、強度変化を強調する処理を施す、請求項5記載の磁気共鳴イメージング装置。
【請求項8】
前記調整手段は、前記高周波磁場マップに対して、強度変化を強調する処理を施す、請求項6記載の磁気共鳴イメージング装置。
【請求項9】
前記調整手段は、前記被検体のアキシャル断面像を取得し、前記アキシャル断面像内の特定の軸と、前記特定の軸に対応する前記被検体の実際の軸との角度差を補正値として求め、前記記憶手段に記憶される前記位相の初期値を前記補正値によって補正する、請求項2記載の磁気共鳴イメージング装置。
【請求項10】
前記調整手段は、前記位相および振幅の少なくとも一方を変化させて測定されたリフォーカスパルスのフォワードパワーが最小となるように前記位相および振幅の少なくとも一方を調整するように構成される請求項3記載の磁気共鳴イメージング装置。
【請求項11】
前記QDコイルは、第1及び第2のチャンネルから給電され、
前記調整手段は、前記第1のチャンネルのみから送信して収集された第1の高周波磁場マップと、前記第2のチャンネルのみから送信して収集された第2の高周波磁場マップとに基づいて、前記位相および振幅の少なくとも一方を調整する請求項2記載の磁気共鳴イメージング装置。
【請求項12】
前記調整手段は、前記第1および第2の高周波磁場マップにおいて抽出された均一性最大直線のなす角度に基づいて前記位相を調整する請求項11記載の磁気共鳴イメージング装置。
【請求項13】
前記調整手段は、前記第1および第2の高周波磁場マップから算出された前記QDコイルの高周波磁場の均一性に対する寄与度に基づいて、前記振幅を調整する請求項11記載の磁気共鳴イメージング装置。
【請求項14】
前記調整手段は、調整後における前記位相および振幅の少なくとも一方を条件として前記高周波パルスの出力レベルを調整するように構成される請求項3記載の磁気共鳴イメージング装置。
【請求項15】
前記調整手段は、前記出力レベルを変化させて収集された高周波磁場の不均一性を表す指標が最小となるように前記出力レベルを調整するように構成される請求項14記載の磁気共鳴イメージング装置。
【請求項16】
前記調整手段は、前記出力レベルを変化させて収集された信号の強度が最大となるように前記出力レベルを調整するように構成される請求項14記載の磁気共鳴イメージング装置。
【請求項17】
前記調整手段は、調整後における前記位相および振幅の少なくとも一方を条件として前記高周波パルスの出力レベルを調整するように構成される請求項11記載の磁気共鳴イメージング装置。
【請求項18】
前記調整手段は、前記出力レベルを変化させて収集された高周波磁場の不均一性を表す指標が最小となるように前記出力レベルを調整するように構成される請求項17記載の磁気共鳴イメージング装置。
【請求項19】
前記調整手段は、前記出力レベルを変化させて収集された信号の強度が最大となるように前記出力レベルを調整するように構成される請求項17記載の磁気共鳴イメージング装置。
【請求項20】
前記調整手段は、前記撮像条件に対応する前記高周波パルスの位相および振幅の少なくとも一方を前記記憶手段から取得し、前記被検体の体位情報が横向きである場合に取得した前記位相および振幅の少なくとも一方に-1を乗じるように構成される請求項2記載の磁気共鳴イメージング装置。
【請求項21】
前記調整手段は、前記位相を調整した後に前記振幅を調整するように構成される請求項1記載の磁気共鳴イメージング装置。
【請求項22】
前記撮像条件は、前記被検体の撮像部位及び前記QDコイルの種類の少なくとも一方を含み、
前記撮像条件と、前記高周波パルスの位相および振幅の少なくとも一方とが互いに関連付けられて記憶される記憶手段を更に備え、
前記調整手段は、設定された前記撮像条件に対応する前記高周波パルスの位相および振幅の少なくとも一方を前記記憶手段から読み出し、読み出した前記位相および振幅の少なくとも一方を前記QDコイルの送信チャンネルに設定することによって前記位相および振幅の少なくとも一方を調整する請求項1記載の磁気共鳴イメージング装置。
【請求項23】
前記記憶手段に記憶される前記位相および振幅の少なくとも一方は、前記QDコイルによって形成される高周波磁場の不均一性を表す指標を、位相および振幅の少なくとも一方を変化させて収集されたデータから求め、前記指標が最小となるように決定された、請求項22記載の磁気共鳴イメージング装置。
【請求項24】
前記QDコイルは、第1及び第2のチャンネルから給電され、
前記記憶手段に記憶される前記位相および振幅の少なくとも一方は、前記第1のチャンネルのみから送信して収集された第1の高周波磁場マップと、前記第2のチャンネルのみから送信して収集された第2の高周波磁場マップとに基づいて決定された、請求項22記載の磁気共鳴イメージング装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図9】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図9】
【図11】
【図12】
【図13】
【公開番号】特開2011−131045(P2011−131045A)
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願番号】特願2010−256379(P2010−256379)
【出願日】平成22年11月17日(2010.11.17)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願日】平成22年11月17日(2010.11.17)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]