
磁気共鳴イメージング装置
【課題】被検体を移動しながら撮像を行う場合に、静磁場の不均一性を補正しつつ撮像時間を短縮する。
【解決手段】実施形態に係る磁気共鳴イメージング装置において、測定部は、撮像前に、被検体が置かれた天板を撮像空間内における複数の位置のうち少なくとも1つの位置に移動して、シムコイル部に供給されるシムコイル電流値を調整することで、静磁場が均一化された時点でのシムコイル電流値を測定する。算出部は、測定部によって測定されたシムコイル電流値と被検体情報又は撮像条件とに基づいて、複数の位置のうち測定部によってシムコイル電流値が測定されなかった位置のシムコイル電流値である未測定シムコイル電流値を算出する。
【解決手段】実施形態に係る磁気共鳴イメージング装置において、測定部は、撮像前に、被検体が置かれた天板を撮像空間内における複数の位置のうち少なくとも1つの位置に移動して、シムコイル部に供給されるシムコイル電流値を調整することで、静磁場が均一化された時点でのシムコイル電流値を測定する。算出部は、測定部によって測定されたシムコイル電流値と被検体情報又は撮像条件とに基づいて、複数の位置のうち測定部によってシムコイル電流値が測定されなかった位置のシムコイル電流値である未測定シムコイル電流値を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、磁気共鳴イメージング装置に関する。
【背景技術】
【0002】
磁気共鳴イメージング装置によって良好な画像を得るためには、被検体(被検者)が置かれる撮像空間に均一な静磁場を生成することが望ましい。そのため、従来、静磁場の不均一性を補正するための各種の技術が知られている。例えば、静磁場磁石によって発生した静磁場中に鉄シムなどの強磁性体を配置することで、撮像空間における静磁場を均一化する方法が知られている。また、例えば、シムコイルを用いる方法が知られている。この方法では、シムコイルが、静磁場の不均一性を補正するための補正磁場を発生させ、その補正磁場を静磁場に重畳させることで、撮像空間における静磁場が均一化される。
【0003】
この一方で、近年では、被検体に開放感を与えるという目的や、傾斜磁場強度の向上に伴って生じるdB/dt(傾斜磁場強度の単位時間当たりの変化量)の増加を抑制するという目的などから、MRI装置が有する静磁場磁石の軸長を短くする傾向がある。この結果、体軸方向の撮像可能な範囲が狭くなる。このため、例えば脊椎を撮像する場合のように、被検体の体軸方向に広い範囲を撮像する場合には、被検体を体軸方向に移動しながら、撮像対象の範囲を分割して撮像することが行われている。
【0004】
このように、被検体を移動しながら撮像が行われる場合は、被検体の移動にともなって、撮像空間内に位置する部位が変わることになる。ここで、撮像空間内における静磁場の均一性は、撮像空間内に置かれている部位によって変化することが知られている。このため、前述した静磁場の不均一性の補正は、被検体を移動するたびに行われており、この結果として、撮像全体にかかる時間が長くなる場合があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−165772号公報
【特許文献2】特開2004−73660号公報
【特許文献3】特開2007−209749号公報
【特許文献4】特開2007−301348号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、被検体を移動しながら撮像を行う場合に、静磁場の不均一性を補正しつつ撮像時間を短縮することが可能な磁気共鳴イメージング装置を提供することである。
【課題を解決するための手段】
【0007】
実施形態に係る磁気共鳴イメージング装置は、静磁場発生部と、シムコイル部と、測定部と、算出部と、制御部とを備える。静磁場発生部は、撮像空間に静磁場を発生させる。シムコイル部は、前記静磁場の不均一性を補正する補正磁場を発生させる。測定部は、撮像前に、被検体が置かれた天板を前記撮像空間内における複数の位置のうち少なくとも1つの位置に移動して、前記シムコイル部に供給されるシムコイル電流値を調整することで、前記静磁場が均一化された時点でのシムコイル電流値を測定する。算出部は、前記測定部によって測定されたシムコイル電流値と被検体情報又は撮像条件とに基づいて、前記複数の位置のうち前記測定部によってシムコイル電流値が測定されなかった位置のシムコイル電流値である未測定シムコイル電流値を算出する。制御部は、前記測定部によって測定されたシムコイル電流値及び前記算出部によって算出されたシムコイル電流値のうち、前記天板の位置に応じたシムコイル電流値の電流を前記シムコイル部に供給することで、前記天板の位置ごとに前記静磁場を均一化しながら撮像を行う。
【図面の簡単な説明】
【0008】
【図1】図1は、本実施形態に係る磁気共鳴イメージング(Magnetic Resonance Imaging:MRI)装置の構成を示す図である。
【図2】図2は、図1に示したシムコイル部を軸方向から見た場合の断面図である。
【図3】図3は、図1に示した計算機システムの構成を示す機能ブロック図である。
【図4】図4は、本実施形態に係るシムコイル電流値記憶部によって記憶される情報の一例を示す図である。
【図5A】図5Aは、本実施形態に係る電流値測定部によるシムコイル電流値の測定の一例を示す図(1)である。
【図5B】図5Bは、本実施形態に係る電流値測定部によるシムコイル電流値の測定の一例を示す図(2)である。
【図5C】図5Cは、本実施形態に係る電流値測定部によるシムコイル電流値の測定の一例を示す図(3)である。
【図6】図6は、本実施形態に係るMRI装置におけるシムコイル電流値測定時の動作を示すフローチャートである。
【図7】図7は、本実施形態に係るMRI装置における被検体撮像時の動作を示すフローチャートである。
【図8】図8は、本実施形態に係る電流値算出部によるシムコイル電流値の算出方法を説明するための図である。
【発明を実施するための形態】
【0009】
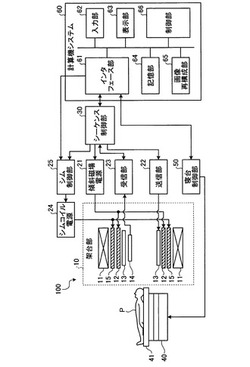
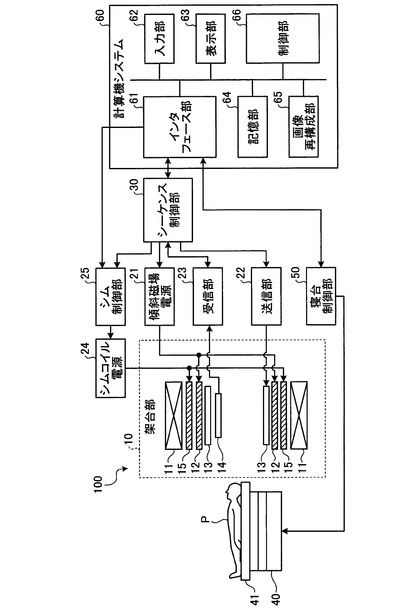
まず、本実施形態に係るMRI装置の構成について説明する。図1は、本実施形態に係るMRI装置100の構成を示す図である。図1に示すように、MRI装置100は、架台部10と、傾斜磁場電源21と、送信部22と、受信部23と、シムコイル電源24と、シム制御部25と、シーケンス制御部30と、寝台部40と、寝台制御部50と、計算機システム60とを有する。
【0010】
架台部10は、静磁場中に置かれた被検体Pに高周波磁場を照射し、それにより被検体Pから発せられるMR信号を収集する。例えば、架台部10は、静磁場磁石11と、傾斜磁場コイル12と、送信用RF(Radio Frequency)コイル13と、受信用RFコイル14と、シムコイル部15とを有する。
【0011】
静磁場磁石11は、中空の円筒形状に形成され、円筒内に形成された撮像空間に静磁場を発生させる。この静磁場磁石11としては、例えば、永久磁石や超伝導磁石などが用いられる。
【0012】
傾斜磁場コイル12は、中空の円筒形状に形成され、静磁場磁石11の内側に配置される。この傾斜磁場コイル12は、互いに直交するX,Y,Zの各軸に対応する3つのコイルを有する。各コイルは、それぞれ後述する傾斜磁場電源21から電流供給を受けて、X,Y,Zの各軸に沿って磁場強度が変化する傾斜磁場を発生させる。なお、Z軸方向は、静磁場と同方向とされる。
【0013】
また、傾斜磁場コイル12によって発生するX,Y,Z各軸の傾斜磁場は、例えば、スライス選択用傾斜磁場Gs、位相エンコード用傾斜磁場Ge及びリードアウト用傾斜磁場Grにそれぞれ対応する。スライス選択用傾斜磁場Gsは、任意に撮像断面を決めるために利用される。位相エンコード用傾斜磁場Geは、空間的位置に応じてエコー信号(MR信号)の位相を変化させるために利用される。リードアウト用傾斜磁場Grは、空間的位置に応じてエコー信号の周波数を変化させるために利用される。
【0014】
送信用RFコイル13は、傾斜磁場コイル12の内側に配置され、送信部22から高周波パルスの供給を受けて高周波磁場を発生する。
【0015】
受信用RFコイル14は、傾斜磁場コイル12の内側に配置され、送信用RFコイル13により発生した高周波磁場の影響によって被検体Pから発せられるエコー信号を受信する。そして、受信用RFコイル14は、受信したエコー信号を受信部23へ出力する。
【0016】
シムコイル部15は、静磁場磁石11により発生する静磁場の不均一性を補正する補正磁場を発生させる。このシムコイル部15は、傾斜磁場コイル12の外周面上に隙間なく接合される。一般的に、静磁場の不均一性は、0次成分X0,Y0,Z0、1次成分X1,Y1,Z1、及び2次成分X2,Y2,Z2,XY,ZY,ZXなどの各成分に分けて表される。さらに、3次成分以上の高次の成分も存在する。そして、静磁場の不均一性の補正は、このような成分ごとに行われるのが一般的である。
【0017】
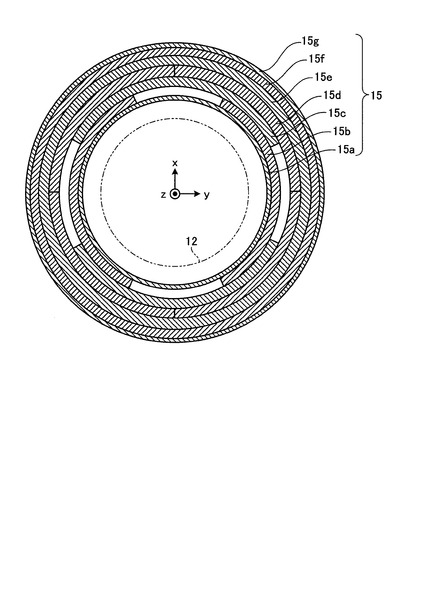
本実施形態では、シムコイル部15は、2次シムの構造を有し、2次成分ZX,ZY,XY,X2−Y2,Z2を補正するための5チャンネルの補正磁場を発生させる。図2は、図1に示したシムコイル部15を軸方向から見た場合の断面図である。
【0018】
図2に示すように、シムコイル部15は、内側樹脂層15aと、シムコイル15b〜15fと、樹脂テープ層15gとを有する。内側樹脂層15aは、傾斜磁場コイル12の外周面上に円筒状に形成される。シムコイル15b〜15fは、それぞれ、例えば絶縁性のベース上にフレキシブル基板を配置することで、所要のコイルパターンをなすように形成される。
【0019】
シムコイル15bは、内側樹脂層15aの外周面上に配置され、静磁場磁石11が発生する静磁場のZX成分とほぼ同じ磁場方向を持つ磁場を発生する。シムコイル15cは、シムコイル15bの外周面上に配置され、静磁場磁石11が発生する静磁場のZY成分とほぼ同じ磁場方向を持つ磁場を発生する。シムコイル15dは、シムコイル15cの外周面上に配置され、静磁場磁石11が発生する静磁場のXY成分とほぼ同じ磁場方向を持つ磁場を発生する。
【0020】
シムコイル15eは、シムコイル15dの外周面上に配置され、静磁場磁石11が発生する静磁場のX2−Y2成分とほぼ同じ磁場方向を持つ磁場を発生する。シムコイル15fは、シムコイル15eの外周面上に配置され、静磁場磁石11が発生する静磁場のZ2成分とほぼ同じ磁場方向を持つ磁場を発生する。樹脂テープ層15gは、シムコイル15fの外周面上に樹脂テープを巻き付けて形成され、シムコイル15b〜15fを保護及び絶縁する。
【0021】
このような構成により、シムコイル部15は、後述するシムコイル電源24から電流の供給を受けて、5チャンネルの補正磁場を発生する。なお、例えば13チャンネルや18チャンネルの補正磁場を発生することが可能な、より多くのシムコイルが搭載されたシムコイル部が用いられてもよい。
【0022】
シムコイル電源24は、シムコイル電源24による制御のもと、シムコイル部15が有するシムコイル15b〜15fそれぞれに対して独立に電流を供給する。
【0023】
シム制御部25は、計算機システム60による制御のもと、シムコイル電源24を制御する。具体的には、シム制御部25は、計算機システム60によってシムコイルごとに決定されるシムコイル電流値を受け付け、受け付けたシムコイル電流値の電流をシムコイル15b〜15fに供給するようシムコイル電源24を制御する。
【0024】
図1の説明に戻って、傾斜磁場電源21は、傾斜磁場コイル12に電流を供給する。送信部22は、ラーモア周波数に対応する高周波パルスを送信用RFコイル13に送信する。受信部23は、受信用RFコイル14から出力されるMR信号をデジタル化することによってMR信号データを生成し、生成したMR信号データをシーケンス制御部30へ送信する。
【0025】
シーケンス制御部30は、計算機システム60から送信されるシーケンス情報に基づいて、傾斜磁場電源21、送信部22及び受信部23を駆動することによって、被検体Pのスキャンを行う。また、シーケンス制御部30は、被検体Pのスキャンを行った結果、受信部23からMR信号データが送信されると、そのMR信号データを計算機システム60へ転送する。
【0026】
なお、ここでいうシーケンス情報とは、シーケンス制御部30が傾斜磁場コイル12に供給する電源の強さや電源を供給するタイミング、送信部22が送信用RFコイル13に送信するRF信号の強さやRF信号を送信するタイミング、受信部23がエコー信号を検出するタイミングなど、スキャンを行うための手順を定義した情報である。
【0027】
寝台部40は、被検体Pが載置される天板41を有し、その天板41を被検体Pとともに架台部10の開口部に挿入する。この寝台部40は、長手方向が静磁場磁石11の中心軸と平行になるように設置される。
【0028】
寝台制御部50は、計算機システム60による制御のもと、寝台部40を駆動して天板41を長手方向及び上下方向へ移動する。なお、寝台制御部50は、天板41の位置を移動する度に、天板41の位置を示す位置情報を計算機システム60に送信する。
【0029】
計算機システム60は、MRI装置100の全体制御や、データ収集、画像再構成などを行う装置である。例えば、計算機システム60は、インタフェース部61と、入力部62と、表示部63と、記憶部64と、画像再構成部65と、制御部66とを有している。
【0030】
インタフェース部61は、シーケンス制御部30との間でやり取りされる各種信号の入出力を制御する。例えば、インタフェース部61は、シーケンス制御部30に対してシーケンス情報を送信し、シーケンス制御部30からMR信号データを受信する。また、インタフェース部61は、MR信号データを受信すると、受信したMR信号データを被検体Pごとに記憶部64に記憶させる。
【0031】
入力部62は、操作者からの各種指示や情報入力を受け付ける。例えば、入力部62は、撮像条件の設定を操作者から受け付ける。この入力部62としては、例えば、マウスやトラックボールなどのポインティングデバイス、モード切替スイッチ等の選択デバイス、あるいはキーボード等の入力デバイスが用いられる。
【0032】
表示部63は、操作者により参照される各種画像や、操作者から各種操作を受け付けるためのGUI(Graphical User Interface)を表示する。この表示部63としては、例えば、液晶モニタやCRTモニタなどの表示デバイスが用いられる。
【0033】
記憶部64は、シーケンス制御部30から送信されたMR信号データや、後述する画像再構成部65により生成された画像データを被検体Pごとに記憶する。なお、かかる記憶部64により記憶される情報については後に詳細に説明する。
【0034】
画像再構成部65は、記憶部64により記憶されたMR信号データに対して後処理すなわちフーリエ変換処理等の再構成処理を施すことによって、被検体P内を表す画像データを生成する。
【0035】
制御部66は、上述した機能部間での制御の移動や、機能部と記憶部との間のデータの受け渡しなどを行うことで、MRI装置100の全体制御を行う。この制御部66は、CPU(Central Processing Unit)及びメモリを有し、これらを用いて各種プログラムを実行させることで、MRI装置100が有する各部を制御する。例えば、制御部66は、操作者によって設定された撮像条件に基づいてシーケンス情報を生成し、生成したシーケンス情報をシーケンス制御部30に送信することで各種の撮像を実行する。
【0036】
以上、本実施形態に係るMRI装置100の構成について説明した。このような構成のもと、MRI装置100は、撮像前に、複数の位置のうち少なくとも1つの位置に天板41を移動して、シムコイル部15に供給されるシムコイル電流値を調整することで、静磁場が均一化された時点でのシムコイル電流値を測定する。また、MRI装置100は、測定されたシムコイル電流値に基づいて、複数の位置のうちシムコイル電流値が測定されなかった位置に応じたシムコイル電流値を算出する。そして、MRI装置100は、複数の位置に天板41を移動しながら、測定されたシムコイル電流値及び算出されたシムコイル電流値のうち、天板41の位置に応じたシムコイル電流値の電流をシムコイル部15に供給することで、天板41の位置ごとに静磁場を均一化しながら撮像を行う。
【0037】
すなわち、本実施形態によれば、撮像空間内における少なくとも1つの位置でシムコイル電流値が測定されれば、測定されたシムコイル電流値から他の位置に関するシムコイル電流値が補間されるので、撮像時に天板が移動される全ての位置についてシムコイル電流値を測定する必要がない。したがって、本実施形態によれば、被検体を移動しながら撮像を行う場合に、静磁場の不均一性を補正しつつ撮像時間を短縮することが可能になる。
【0038】
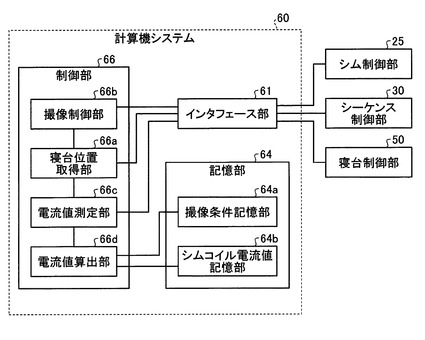
次に、本実施形態に係るMRI装置100の詳細な構成について説明する。なお、ここでは、図1に示した計算機システム60の構成を中心に説明する。図3は、図1に示した計算機システム60の構成を示す機能ブロック図である。なお、図3では、計算機システム60が有する機能部のうち、インタフェース部61と、記憶部64と、制御部66とを示し、他の機能部については図示を省略している。
【0039】
図3に示すように、記憶部64は、例えば、撮像条件記憶部64aと、シムコイル電流値記憶部64bとを有する。
【0040】
撮像条件記憶部64aは、入力部62を介して操作者から受け付けた撮像条件を記憶する。例えば、撮像条件記憶部64aは、撮像対象の部位ごとに撮像条件を分類して記憶する。ここでいう部位とは、例えば、「頭部」や「胸部」、「下肢」などである。また、撮像条件記憶部64aによって記憶される撮像条件には、例えば、被検体Pの体重及び身長、撮像時における被検体Pの体位及び撮像空間への挿入方向などを示す情報が含まれる。ここでいう体位を示す情報とは、例えば、「背臥位(仰向け)」や「腹臥位(うつ伏せ)」、「右側臥位」、「左側臥位」などである。また、挿入方向を示す情報とは、「頭から挿入」、「足から挿入」などである。
【0041】
なお、撮像部位が脊椎である場合のように、被検体Pの体軸方向に広い範囲が撮像される場合には、被検体Pを体軸方向に移動しながら、撮像対象の範囲を分割して撮像が行われる。この場合には、撮像条件には、天板41の移動回数及び移動間隔も含まれる。この移動回数及び移動間隔は、制御部66によって撮像範囲の大きさや撮像部位に応じて自動的に算出される。または、移動回数及び移動間隔は、操作者によって指定されてもよい。
【0042】
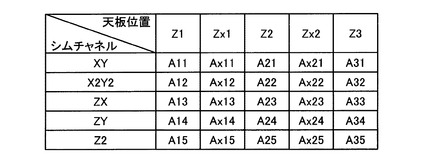
シムコイル電流値記憶部64bは、天板の位置に応じたシムコイル電流値を記憶する。図4は、本実施形態に係るシムコイル電流値記憶部64bによって記憶される情報の一例を示す図である。図4において、Z1,Zx1,Z2,Zx2,Z3は、それぞれZ軸方向における天板41の位置(天板位置)を示す位置情報である。また、XY,X2−Y2,ZX,ZY,Z2は、それぞれシムコイルのチャンネル(シムチャンネル)を示す情報である。
【0043】
図4に示すように、シムコイル電流値記憶部64bは、天板41が移動される位置ごとに、各シムチャンネルに供給されるシムコイル電流値を記憶する。例えば、図4に示す例では、天板41の位置がZ1である場合には、XYチャンネルのシムコイル15dに電流値がA11の電流が、X2−Y2チャンネルのシムコイル15eに電流値がA12の電流が、ZXチャンネルのシムコイル15bに電流値がA13の電流が、ZYチャンネルのシムコイル15cに電流値がA14の電流が、Z2チャンネルのシムコイル15fに電流値がA15の電流が、それぞれ供給されることを示している。
【0044】
図3の説明に戻って、制御部66は、例えば、寝台位置取得部66aと、撮像制御部66bと、電流値測定部66cと、電流値算出部66dとを有する。
【0045】
寝台位置取得部66aは、寝台制御部50から送信される天板41の位置情報を取得し、取得した位置情報を内部メモリなどに保持する。
【0046】
電流値測定部66cは、撮像前に、被検体Pが置かれた天板41を撮像空間内における複数の位置のうち少なくとも1つの位置に移動して、シムコイル部15に供給されるシムコイル電流値を調整することで、静磁場が均一化された時点でのシムコイル電流値を測定する。
【0047】
具体的には、電流値測定部66cは、被検体Pの体軸方向に広い範囲が撮像される場合には、まず、撮像条件に含まれる天板41の移動回数及び移動間隔に基づいて、撮像時に天板41が移動されるZ軸方向の位置を示す複数の撮像位置を算出する。その後、電流値測定部66cは、算出した複数の撮像位置から少なくとも1つの位置を選択し、選択した位置をシムコイル電流値の測定位置として決定する。そして、電流値測定部66cは、寝台制御部50を制御して、決定した測定位置に天板41を移動しながら、シムコイル電流値を測定する。
【0048】
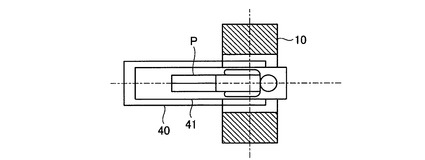
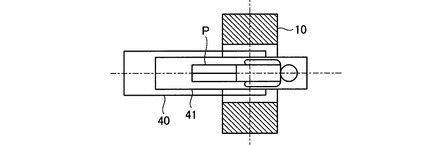
図5A、5B及び5Cは、本実施形態に係る電流値測定部66cによるシムコイル電流値の測定の一例を示す図である。図5A、5B及び5Cに示すように、例えば、電流値測定部66cは、被検体Pの胸部から大腿部までが撮像される場合に、被検体Pの胸部が磁場中心に置かれる位置、被検体Pの腹部が磁場中心に置かれる位置、被検体Pの大腿部が磁場中心に置かれる位置に、天板41を段階的に移動させる。
【0049】
そして、電流値測定部66cは、天板41が移動された位置ごとに、シム制御部25を制御して、シムコイル電源24からシムコイル部15に供給されるシムコイル電流値を調整することで、静磁場の均一化を行う。また、電流値測定部66cは、静磁場の均一化を行った際に、その時点でのシムコイル電流値を測定する。
【0050】
ここで、静磁場の均一化を行う方法は、公知である各種の方法を用いることができる。例えば、電流値測定部66cは、磁場分布を位相マップとして空間的に求めたのちに、この磁場分布を磁場成分ごとに分解し、磁場成分ごとに磁場分布が安定的となるような磁場強度を得るのに要するシムコイル電流値をシムコイルごとに求める。
【0051】
なお、電流値測定部66cは、静磁場が均一化された時点でのシムコイル電流値を測定するたびに、寝台位置取得部66aから天板41の位置情報を取得し、取得した位置情報と測定したシムコイル電流値とを対応付けた情報をシムコイル電流値記憶部64bに記憶させる。
【0052】
例えば、図5Aにおける天板41の位置情報がZ1であり、図5Bにおける天板41の位置情報がZ2であり、図5Cにおける天板41の位置情報がZ3であったとする。この場合には、電流値測定部66cは、図4に示したように、天板41の位置情報Z1と、XY,X2−Y2,ZX,ZY,Z2チャンネルのシムコイル電流値A11〜A15とを対応付けた情報をシムコイル電流値記憶部64bに記憶させる。また、電流値測定部66cは、図4に示したように、天板41の位置情報Z2と、XY,X2−Y2,ZX,ZY,Z2チャンネルのシムコイル電流値A21〜A25とを対応付けた情報をシムコイル電流値記憶部64bに記憶させる。また、電流値測定部66cは、図4に示したように、天板41の位置情報Z3と、XY,X2−Y2,ZX,ZY,Z2チャンネルのシムコイル電流値A31〜A35とを対応付けた情報をシムコイル電流値記憶部64bに記憶させる。
【0053】
図3の説明に戻って、電流値算出部66dは、電流値測定部66cによって測定されたシムコイル電流値に基づいて、複数の位置のうち電流値測定部66cによってシムコイル電流値が測定されなかった位置に応じたシムコイル電流値を算出する。
【0054】
具体的には、電流値算出部66dは、シムコイル電流値記憶部64bに記憶されているシムコイル電流値を参照して、未測定の撮像位置におけるシムコイル電流値を算出する。このとき、例えば、電流値算出部66dは、電流値測定部66cによって2つ以上の測定位置におけるシムコイル電流値が算出されている場合には、隣り合う2つの測定位置におけるシムコイル電流値を用いて、それらの測定位置の間にある撮像位置のシムコイル電流値を算出する。
【0055】
例えば、図4に示したシムコイル電流値のうち、天板41の位置情報Z1、Z2及びZ3に対応するシムコイル電流値が、すでにシムコイル電流値記憶部64bに記憶されていたとする。その場合には、電流値算出部66dは、Z1により示される測定位置とZ2により示される測定位置との間にある撮像位置Zx1について、各シムチャンネルのシムコイル電流値Ax11〜Ax15を算出し、シムコイル電流値記憶部64bに記憶させる。さらに、電流値算出部66dは、Z2により示される測定位置とZ3により示される測定位置との間にある撮像位置Zx2についても、各シムチャンネルのシムコイル電流値Ax21〜Ax25を算出し、シムコイル電流値記憶部64bに記憶させる。これにより、電流値測定部66cによって測定されたシムコイル電流値から、未測定の位置に関するシムコイル電流値が補間される。
【0056】
なお、未測定の位置に関するシムコイル電流値を算出する方法としては、各種の方法を用いることができる。例えば、電流値算出部66dは、隣り合う2つの測定位置に関するシムコイル電流値の中間値を算出し、算出した中間値を、2つの測定位置の間にある未測定の撮像位置におけるシムコイル電流値とする。
【0057】
または、例えば、電流値算出部66dは、撮像対象の部位に応じて定義された補正関数を用いて、シムコイル電流値を算出してもよい。この場合には、電流値算出部66dは、撮像条件記憶部64aを参照して、撮像対象の部位を特定する。例えば、被検体Pの下肢を撮像する場合と、被検体Pの胸部から腹部までを撮像する場合とでは、撮像対象に含まれる部位の性質や体積が異なるので、天板41を被検体Pの体軸方向に移動したときの静磁場の不均一性の変化は異なる。このことから、撮像対象の部位に応じて異なる補正関数を用いることで、被検体を移動しながら静磁場を適切に均一化することができるようになる。なお、ここで用いられる補正関数は、例えば、あらかじめ撮像対象の部位ごとに対応付けられて記憶部64に記憶される。
【0058】
または、電流値算出部66dは、被検体Pの体重又は身長に応じて定義された補正関数を用いて、シムコイル電流値を算出してもよい。この場合には、電流値算出部66dは、撮像条件記憶部64aを参照して、被検体Pの体重又は身長を特定する。被検体Pの体重や身長が異なれば、被検体の体格も異なるので、天板41を被検体Pの体軸方向に移動したときの静磁場の不均一性の変化は異なる。このことから、被検体Pの体重又は身長に応じて異なる補正関数を用いることで、被検体を移動しながら静磁場を適切に均一化することができるようになる。なお、ここで用いられる補正関数は、例えば、あらかじめ体重又は身長に対応付けられて記憶部64に記憶される。
【0059】
または、電流値算出部66dは、撮像時における被検体Pの体位又は撮像空間への挿入方向に応じて定義された補正関数を用いて、シムコイル電流値を算出してもよい。この場合には、電流値算出部66dは、撮像条件記憶部64aを参照して、被検体Pの体位又は撮像空間への挿入方向を特定する。撮像時における被検体Pの体位や撮像空間への挿入方向が異なれば、天板41を被検体Pの体軸方向に移動したときの静磁場の不均一性の変化は異なる。このことから、被検体Pの体位又は挿入方向に応じて異なる補正関数を用いることで、被検体を移動しながら静磁場を適切に均一化することができるようになる。なお、ここで用いられる補正関数は、例えば、あらかじめ体位又は挿入方向に対応付けられて記憶部64に記憶される。
【0060】
以上のように、電流値算出部66dが、あらかじめ定義された補正関数を用いてシムコイル電流値を算出する場合には、電流値測定部66cによって少なくとも1つの位置についてシムコイル電流値が測定されていればよい。したがって、撮像全体にかかる時間をより短縮することができる。
【0061】
図3の説明に戻って、撮像制御部66bは、操作者によって設定された撮像条件に基づいてシーケンス情報を生成し、生成したシーケンス情報をシーケンス制御部30に送信することで各種の撮像を実行する。
【0062】
本実施形態では、撮像制御部66bは、複数の位置に前記天板を移動しながら、電流値測定部66cによって測定されたシムコイル電流値及び電流値算出部66dによって算出されたシムコイル電流値のうち天板41の位置に応じたシムコイル電流値の電流をシムコイル部15に供給することで、天板41の位置ごとに静磁場を均一化しながら撮像を行う。
【0063】
具体的には、撮像制御部66bは、被検体Pの体軸方向に広い範囲が撮像される場合には、まず、撮像条件に含まれる天板41の移動回数及び移動間隔に基づいて、撮像時に天板41が移動されるZ軸方向の位置を示す複数の撮像位置を算出する。ここで算出される撮像位置は、前述した電流値測定部66cによって算出される撮像位置と同じになる。
【0064】
その後、撮像制御部66bは、寝台制御部50を制御して、算出した撮像位置に天板41を移動しながら、被検体Pの撮像を行う。このとき、撮像制御部66bは、撮像位置に天板41を移動するごとに、撮像を行う前に寝台位置取得部66aから天板41の位置情報を取得する。そして、撮像制御部66bは、シムコイル電流値記憶部64bに記憶されているシムコイル電流値を参照して、取得した天板41の位置情報に対応する各シムチャンネルのシムコイル電流値を決定する。そして、撮像制御部66bは、シム制御部25に対して、決定したシムコイル電流値をシムコイル部15に供給するよう指示する。これにより、天板41の位置ごとに静磁場を均一化しながら撮像が行われる。
【0065】
次に、本実施形態に係るMRI装置100の動作について説明する。なお、ここでは、複数の位置に前記天板を移動しながら撮像が行われる場合について、シムコイル電流値の測定を行う際の動作と、被検体Pの撮像を行う際の動作とを説明する。なお、シムコイル電流値の測定は、被検体Pの撮像が行われる前に実施される。
【0066】
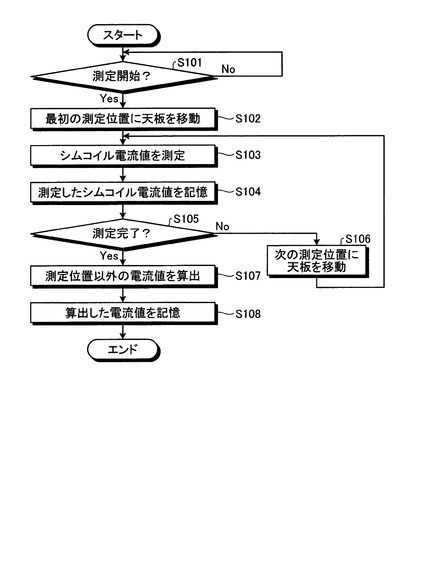
まず、シムコイル電流値の測定を行う際の動作について説明する。図6は、本実施形態に係るMRI装置100におけるシムコイル電流値測定時の動作を示すフローチャートである。図6に示すように、シムコイル電流値測定時には、電流値測定部66cが、入力部62を介して、測定を開始する指示を操作者から受け付ける(ステップS101)。
【0067】
そして、測定を開始する指示を受け付けると(ステップS101,Yes)、電流値測定部66cは、撮像条件に基づいてシムコイル電流値の測定位置を決定したのちに、最初の測定位置に天板41を移動させる(ステップS102)。続いて、電流値測定部66cは、静磁場の均一化を行うとともに、静磁場が均一化された時点でのシムコイル電流値をシムチャンネルごとに測定する(ステップS103)。そして、電流値測定部66cは、測定した各シムチャンネルのシムコイル電流値と天板41の位置情報とを対応付けてシムコイル電流値記憶部64bに記憶させる(ステップS104)。
【0068】
その後、シムコイル電流値を測定していない測定位置が他にある場合には(ステップS105,No)、電流値測定部66cは、次の測定位置に天板41を移動させたのちに(ステップS106)、再度、シムコイル電流値を測定する(ステップS103、ステップS104)。こうして、電流値測定部66cは、全ての測定位置についてシムコイル電流値の測定が完了するまで、天板41の移動とシムコイル電流値の測定とを繰り返す。
【0069】
そして、全ての測定位置についてシムコイル電流値の測定が完了した場合には(ステップS105,Yes)、電流値測定部66cは、測定位置以外の撮像位置におけるシムコイル電流値を算出する(ステップS107)。その後、電流値測定部66cは、算出したシムコイル電流値をシムコイル電流値記憶部64bに記憶させ(ステップS108)、シムコイル電流値の測定に関する処理を終了する。
【0070】
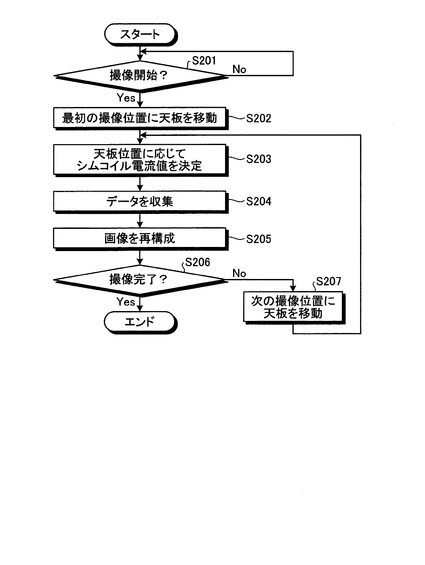
次に、被検体Pの撮像を行う際の動作について説明する。図7は、本実施形態に係るMRI装置100における被検体撮像時の動作を示すフローチャートである。図7に示すように、被検体撮像時には、撮像制御部66bが、入力部62を介して、撮像を開始する指示を操作者から受け付ける(ステップS201)。
【0071】
そして、撮像を開始する指示を受け付けると(ステップS201,Yes)、撮像制御部66bは、撮像条件に基づいて複数の撮像位置を算出したのちに、最初の撮像位置に天板41を移動させる(ステップS202)。続いて、電流値測定部66cは、シムコイル電流値記憶部64bに記憶されているシムコイル電流値を参照して、天板41の位置に応じたシムコイル電流値を決定する(ステップS203)。
【0072】
そして、撮像制御部66bは、決定したシムコイル電流値をシムコイル部15に供給することで、天板41の位置ごとに静磁場を均一化しながらMR信号データを収集するように、シーケンス制御部30及びシム制御部25を制御する(ステップS204)。また、画像再構成部65が、収集されたMR信号データから画像データを再構成する(ステップS205)。
【0073】
その後、撮像が行われていない撮像位置が他にある場合には(ステップS206,No)、撮像制御部66bは、次の撮像位置に天板41を移動させたのちに(ステップS207)、再度、MR信号データの収集及び画像の再構成を行うよう制御する(ステップS203〜ステップS205)。こうして、撮像制御部66bは、全ての撮像位置について撮像が完了するまで、MR信号データの収集及び画像の再構成を繰り返す。そして、全ての撮像位置について撮像が完了した場合には(ステップS206,Yes)、撮像制御部66bは、被検体Pの撮像に関する処理を終了する。
【0074】
上述したように、本実施形態に係るMRI装置100は、静磁場磁石11と、シムコイル部15と、電流値測定部66cと、電流値算出部66dと、撮像制御部66bとを備える。電流値測定部66cは、撮像前に、被検体Pが置かれた天板41を撮像空間内における複数の位置のうち少なくとも1つの位置に移動して、シムコイル部15に供給されるシムコイル電流値を調整することで、静磁場が均一化された時点でのシムコイル電流値を測定する。電流値算出部66dは、電流値測定部66cによって測定されたシムコイル電流値に基づいて、複数の位置のうち電流値測定部66cによってシムコイル電流値が測定されなかった位置に応じたシムコイル電流値を算出する。撮像制御部66bは、複数の位置に天板41を移動しながら、電流値測定部66cによって測定されたシムコイル電流値及び電流値算出部66dによって算出されたシムコイル電流値のうち、天板41の位置に応じたシムコイル電流値の電流をシムコイル部15に供給することで、天板41の位置ごとに静磁場を均一化しながら撮像を行う。
【0075】
すなわち、本実施形態によれば、撮像空間内における少なくとも1つの位置でシムコイル電流値が測定されれば、測定されたシムコイル電流値から他の位置に関するシムコイル電流値が補間されるので、撮像時に天板が移動される全ての位置についてシムコイル電流値を測定する必要がない。したがって、本実施形態によれば、被検体を移動しながら撮像を行う場合に、静磁場の不均一性を補正しつつ撮像時間を短縮することが可能になる。また、撮像時間が短縮されることから、被検体の負担を軽減したり、検査のスループットを向上させたりすることができる。
【0076】
なお、本実施形態では、天板41が移動される位置ごとにシムコイル電流値を算出する場合について説明したが、実施形態はこれに限られない。例えば、天板41が位置決めされた1つの位置における撮像可能な範囲内に含まれる複数の位置について、シムコイル電流値を算出するようにしてもよい。
【0077】
また、本実施形態では、天板41を段階的に移動させる場合について説明したが、実施形態はこれに限られない。例えば、天板41を連続的に移動させながら撮像が行われる場合でも同様に実施が可能である。この場合には、シムコイル電流値記憶部64bによって記憶された位置ごとに、天板41が移動される範囲を分割し、分割された範囲ごとにシムコイル部15に供給されるシムコイル電流値を変化させる。これにより、静磁場の不均一性によって生じる画像の乱れを少なくすることができる。
【0078】
なお、上記実施形態では、電流値算出部66dが、隣り合う2つの測定位置に関するシムコイル電流値の中間値を算出したり、各種の補正関数を用いたりすることで、未測定の位置におけるシムコイル電流値を算出する場合の例を説明した。ここでは、他の実施形態として、電流値算出部66dが、磁化率関数及び補正関数を用いて、未測定の位置におけるシムコイル電流値を算出する場合の例を説明する。
【0079】
本実施形態では、電流値算出部66dは、被検体の部位に応じた磁化率の変化を表す磁化率関数を用いて、電流値測定部66cによって測定されたシムコイル電流値から未測定シムコイル電流値を算出する。なお、ここでいう未測定シムコイル電流値は、電流値測定部66cによってシムコイル電流値が測定されなかった位置のシムコイル電流値である。
【0080】
撮像空間に被検体が入ることによって生じる磁場の不均一性は、被検体の磁化によるものであることが知られている。すなわち、磁場の不均一性は、磁場中に置かれた被検体の磁化率が高いと大きくなり、被検体の磁化率が低いと小さくなる。さらに、被検体(人体)の磁化率(susceptibility)は、主に血液(鉄分)の分布と関係があり、例えば肝臓など、血液が多く集まる部位は磁化率が高くなる。つまり、被検体の磁化率は被検体の部位ごとに異なる。したがって、磁場の不均一性は、磁場中に置かれる部位の磁化率に応じて変化することになり、磁場均一性の補正に必要なシムコイル電流値も、磁場中に置かれる部位の磁化率に応じて変化することになる。ここで、シムコイル電流値と磁化率との間には、一定の相関関係があると考えられる。すなわち、磁場均一性の補正に必要なシムコイル電流値は、磁場中に置かれる部位の磁化率から一定の算出式で求められる。このようなことから、本実施形態では、電流値算出部66dは、被検体の部位に応じた磁化率の変化を表す磁化率関数を用いて、未測定シムコイル電流値を算出する。
【0081】
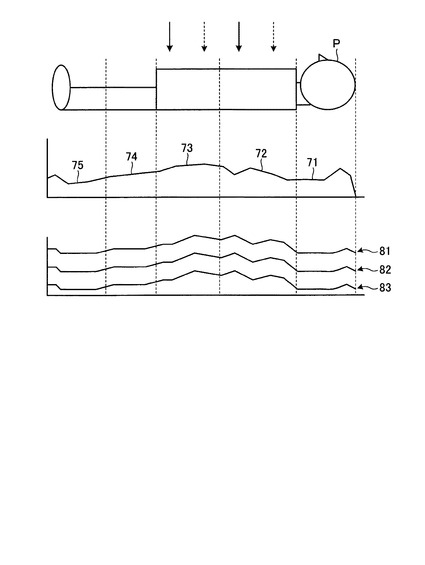
図8は、本実施形態に係る電流値算出部66dによるシムコイル電流値の算出方法を説明するための図である。図8に示す曲線71〜75は、被検体Pの部位に応じた磁化率の変化を表している。図8において、横軸は天板41の移動方向(Z軸方向)の位置を示しており、縦軸は磁化率の大きさを示している。ここで、例えば、曲線71は、頭部における磁化率の変化を示している。また、曲線72は、胸部における磁化率の変化を表しており、曲線73は、腹部における磁化率の変化を表している。また、曲線74は、上肢における磁化率の変化を表しており、曲線75は、下肢における磁化率の変化を表している。これらの曲線は、それぞれ部位ごとに特定の磁化率関数で定義される。
【0082】
まず、電流値算出部66dは、シムコイル電流値記憶部64bに記憶されているシムコイル電流値を参照して、測定済みのシムコイル電流値と、そのシムコイル電流値が測定された測定位置(例えば、図8に示す実線矢印の位置)とを特定する。続いて、電流値算出部66dは、特定した測定位置に対応する部位の磁化率関数を用いて、測定済みのシムコイル電流値から同じ部位における未測定の位置(例えば、図8に示す点線矢印の位置)のシムコイル電流値を算出する。電流値算出部66dは、シムコイル電流値記憶部64bに記憶されている測定済みのシムコイル電流値それぞれについて同様の処理を行うことで、部位ごとに、全ての未測定の位置のシムコイル電流値を算出する。これにより、電流値測定部66cによって測定されたシムコイル電流値から、未測定の位置におけるシムコイル電流値が補間される。
【0083】
なお、被検体内の血液の分布は、被検体情報や撮像条件によって変化することが想定される。例えば、被検体の体重や身長が変われば、被検体内の血液量や血液の分布範囲が変化する。また、例えば、被検体の性別が変われば、被検体の体型が変化することになり、それに応じて血液量や血液の分布範囲が変化する。また、例えば、撮像時における被検体の体位や、撮像空間への被検体の挿入方向によっても血液の分布範囲が変化する。例えば、被検体の挿入方向が逆になれば、血液の分布状態は天板41の移動方向に沿って反転することになる。
【0084】
したがって、電流値算出部66dは、被検体情報及び撮像条件の少なくとも一方に応じて定義された補正関数により磁化率関数を補正し、補正後の磁化率関数を用いて、電流値測定部66cによって測定されたシムコイル電流値から未測定シムコイル電流値を算出してもよい。ここでいう被検体情報は、例えば、被検体の体重や、身長、性別などである。また、撮像条件は、例えば、撮像時における被検体の体位や、撮像空間への被検体の挿入方向などである。
【0085】
この場合には、被検体情報や撮像条件に応じて、あらかじめ各種の補正関数を定義しておく。例えば、図8において、曲線81、82及び83は、被検体Pの体重に応じた補正関数を示している。具体的には、曲線81は、体重が所定範囲を超える場合の補正関数であり、曲線82は、体重が所定範囲内の場合の補正関数であり、曲線83は、所定範囲を下回る場合の補正関数である。この他にも、例えば、被検体の身長や性別、撮像時における被検体の体位や撮像空間への被検体の挿入方向などに応じた補正関数を、あらかじめ定義しておく。なお、補正関数で表される値は、磁化率関数に乗じるための補正係数であってもよいし、磁化率関数に加算するためのオフセット値であってもよい。
【0086】
そして、例えば、電流値算出部66dは、操作者によって入力された被検体情報を取得し、取得した被検体情報に対応する補正関数を被検体情報に応じて定義された補正関数の中から選択し、選択した補正関数により磁化率関数を補正して、未測定シムコイル電流値を算出する。なお、例えば、被検体情報は、撮像が実行される前に設定される撮像条件の一部として入力される。
【0087】
または、電流値算出部66dは、被検体に関する被検体情報を他の医用システムから取得し、取得した被検体情報に対応する補正関数を被検体情報に応じて定義された補正関数の中から選択し、選択した補正関数により磁化率関数を補正して、未測定シムコイル電流値を算出してもよい。例えば、MRI装置100がネットワークを介して他の医用システムと通信可能に接続されている場合には、電流値算出部66dは、ネットワーク経由で他の医用システムから被検体情報を取得する。なお、ここでいう医用システムとは、例えば、放射線科情報システム(Radiology Information System:RIS)や、病院情報システム(Hospital Information System:HIS)、画像保存通信システム(Picture Archiving and Communication Systems:PACS)などである。
【0088】
なお、上記実施形態では、磁化率関数が用いられる場合の例を説明したが、補正関数の代わりに、補正値を記憶したテーブルなどが用いられてもよい。この場合には、例えば、記憶部64が、被検体の部位に応じた磁化率の値を記憶する磁化率記憶部をさらに備える。例えば、磁化率記憶部は、被検体の部位ごとに、天板41の移動方向における位置と磁化率の値とを対応付けたテーブルを記憶する。
【0089】
そして、電流値算出部66dは、磁化率記憶部によって記憶された磁化率を用いて、電流値測定部66cによって測定されたシムコイル電流値から未測定シムコイル電流値を算出する。まず、電流値算出部66dは、シムコイル電流値記憶部64bに記憶されているシムコイル電流値を参照して、測定済みのシムコイル電流値と、そのシムコイル電流値が測定された測定位置とを特定する。続いて、電流値算出部66dは、特定した測定位置がどの部位に対応するかを特定し、特定した部位に対応するテーブルを参照する。そして、電流値算出部66dは、特定した測定位置における磁化率と未測定の位置における磁化率との関係により、測定済みのシムコイル電流値から未測定の位置のシムコイル電流値を算出する。電流値算出部66dは、シムコイル電流値記憶部64bに記憶されている測定済みのシムコイル電流値それぞれについて同様の処理を行うことで、部位ごとに、全ての未測定の位置のシムコイル電流値を算出する。これにより、電流値測定部66cによって測定されたシムコイル電流値から、未測定の位置におけるシムコイル電流値が補間される。
【0090】
また、例えば、補正関数の代わりに、補正値を記憶したテーブルなどが用いられてもよい。その場合には、例えば、記憶部64が、被検体情報及び撮像条件の少なくとも一方に応じて定義された補正値を記憶する補正値記憶部をさらに備える。例えば、補正値記憶部は、被検体の部位と補正値とを対応付けたテーブルやファイルなどを記憶する。例えば、補正値記憶部は、被検体の部位ごとに、天板41の移動方向における位置と補正値とを対応付けたテーブルやファイルなどを記憶する。なお、ここでいう補正値は、磁化率に乗じるための補正係数であってもよいし、磁化率に加算するためのオフセット値であってもよい。
【0091】
そして、電流値算出部66dは、部位ごとに、補正値記憶部によって記憶された補正値により磁化率を補正し、補正後の磁化率を用いて、電流値測定部66cによって測定されたシムコイル電流値から未測定シムコイル電流値を算出する。
【0092】
なお、この実施形態でも、例えば、電流値算出部66dは、操作者によって入力された被検体情報を取得し、取得した被検体情報に対応する補正値を補正値記憶部によって記憶された補正値の中から選択し、選択した補正値により磁化率を補正して、未測定シムコイル電流値を算出する。または、電流値算出部66dは、被検体に関する被検体情報を他の医用システムから取得し、取得した被検体情報に対応する補正値を補正値記憶部によって記憶された補正値の中から選択し、選択した補正値により磁化率関数を補正して、未測定シムコイル電流値を算出してもよい。
【0093】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0094】
11 静磁場磁石
15 シムコイル部
60 計算機システム
66 制御部
66c 電流値測定部
66d 電流値算出部
66b 撮像制御部
【技術分野】
【0001】
本発明の実施形態は、磁気共鳴イメージング装置に関する。
【背景技術】
【0002】
磁気共鳴イメージング装置によって良好な画像を得るためには、被検体(被検者)が置かれる撮像空間に均一な静磁場を生成することが望ましい。そのため、従来、静磁場の不均一性を補正するための各種の技術が知られている。例えば、静磁場磁石によって発生した静磁場中に鉄シムなどの強磁性体を配置することで、撮像空間における静磁場を均一化する方法が知られている。また、例えば、シムコイルを用いる方法が知られている。この方法では、シムコイルが、静磁場の不均一性を補正するための補正磁場を発生させ、その補正磁場を静磁場に重畳させることで、撮像空間における静磁場が均一化される。
【0003】
この一方で、近年では、被検体に開放感を与えるという目的や、傾斜磁場強度の向上に伴って生じるdB/dt(傾斜磁場強度の単位時間当たりの変化量)の増加を抑制するという目的などから、MRI装置が有する静磁場磁石の軸長を短くする傾向がある。この結果、体軸方向の撮像可能な範囲が狭くなる。このため、例えば脊椎を撮像する場合のように、被検体の体軸方向に広い範囲を撮像する場合には、被検体を体軸方向に移動しながら、撮像対象の範囲を分割して撮像することが行われている。
【0004】
このように、被検体を移動しながら撮像が行われる場合は、被検体の移動にともなって、撮像空間内に位置する部位が変わることになる。ここで、撮像空間内における静磁場の均一性は、撮像空間内に置かれている部位によって変化することが知られている。このため、前述した静磁場の不均一性の補正は、被検体を移動するたびに行われており、この結果として、撮像全体にかかる時間が長くなる場合があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−165772号公報
【特許文献2】特開2004−73660号公報
【特許文献3】特開2007−209749号公報
【特許文献4】特開2007−301348号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、被検体を移動しながら撮像を行う場合に、静磁場の不均一性を補正しつつ撮像時間を短縮することが可能な磁気共鳴イメージング装置を提供することである。
【課題を解決するための手段】
【0007】
実施形態に係る磁気共鳴イメージング装置は、静磁場発生部と、シムコイル部と、測定部と、算出部と、制御部とを備える。静磁場発生部は、撮像空間に静磁場を発生させる。シムコイル部は、前記静磁場の不均一性を補正する補正磁場を発生させる。測定部は、撮像前に、被検体が置かれた天板を前記撮像空間内における複数の位置のうち少なくとも1つの位置に移動して、前記シムコイル部に供給されるシムコイル電流値を調整することで、前記静磁場が均一化された時点でのシムコイル電流値を測定する。算出部は、前記測定部によって測定されたシムコイル電流値と被検体情報又は撮像条件とに基づいて、前記複数の位置のうち前記測定部によってシムコイル電流値が測定されなかった位置のシムコイル電流値である未測定シムコイル電流値を算出する。制御部は、前記測定部によって測定されたシムコイル電流値及び前記算出部によって算出されたシムコイル電流値のうち、前記天板の位置に応じたシムコイル電流値の電流を前記シムコイル部に供給することで、前記天板の位置ごとに前記静磁場を均一化しながら撮像を行う。
【図面の簡単な説明】
【0008】
【図1】図1は、本実施形態に係る磁気共鳴イメージング(Magnetic Resonance Imaging:MRI)装置の構成を示す図である。
【図2】図2は、図1に示したシムコイル部を軸方向から見た場合の断面図である。
【図3】図3は、図1に示した計算機システムの構成を示す機能ブロック図である。
【図4】図4は、本実施形態に係るシムコイル電流値記憶部によって記憶される情報の一例を示す図である。
【図5A】図5Aは、本実施形態に係る電流値測定部によるシムコイル電流値の測定の一例を示す図(1)である。
【図5B】図5Bは、本実施形態に係る電流値測定部によるシムコイル電流値の測定の一例を示す図(2)である。
【図5C】図5Cは、本実施形態に係る電流値測定部によるシムコイル電流値の測定の一例を示す図(3)である。
【図6】図6は、本実施形態に係るMRI装置におけるシムコイル電流値測定時の動作を示すフローチャートである。
【図7】図7は、本実施形態に係るMRI装置における被検体撮像時の動作を示すフローチャートである。
【図8】図8は、本実施形態に係る電流値算出部によるシムコイル電流値の算出方法を説明するための図である。
【発明を実施するための形態】
【0009】
まず、本実施形態に係るMRI装置の構成について説明する。図1は、本実施形態に係るMRI装置100の構成を示す図である。図1に示すように、MRI装置100は、架台部10と、傾斜磁場電源21と、送信部22と、受信部23と、シムコイル電源24と、シム制御部25と、シーケンス制御部30と、寝台部40と、寝台制御部50と、計算機システム60とを有する。
【0010】
架台部10は、静磁場中に置かれた被検体Pに高周波磁場を照射し、それにより被検体Pから発せられるMR信号を収集する。例えば、架台部10は、静磁場磁石11と、傾斜磁場コイル12と、送信用RF(Radio Frequency)コイル13と、受信用RFコイル14と、シムコイル部15とを有する。
【0011】
静磁場磁石11は、中空の円筒形状に形成され、円筒内に形成された撮像空間に静磁場を発生させる。この静磁場磁石11としては、例えば、永久磁石や超伝導磁石などが用いられる。
【0012】
傾斜磁場コイル12は、中空の円筒形状に形成され、静磁場磁石11の内側に配置される。この傾斜磁場コイル12は、互いに直交するX,Y,Zの各軸に対応する3つのコイルを有する。各コイルは、それぞれ後述する傾斜磁場電源21から電流供給を受けて、X,Y,Zの各軸に沿って磁場強度が変化する傾斜磁場を発生させる。なお、Z軸方向は、静磁場と同方向とされる。
【0013】
また、傾斜磁場コイル12によって発生するX,Y,Z各軸の傾斜磁場は、例えば、スライス選択用傾斜磁場Gs、位相エンコード用傾斜磁場Ge及びリードアウト用傾斜磁場Grにそれぞれ対応する。スライス選択用傾斜磁場Gsは、任意に撮像断面を決めるために利用される。位相エンコード用傾斜磁場Geは、空間的位置に応じてエコー信号(MR信号)の位相を変化させるために利用される。リードアウト用傾斜磁場Grは、空間的位置に応じてエコー信号の周波数を変化させるために利用される。
【0014】
送信用RFコイル13は、傾斜磁場コイル12の内側に配置され、送信部22から高周波パルスの供給を受けて高周波磁場を発生する。
【0015】
受信用RFコイル14は、傾斜磁場コイル12の内側に配置され、送信用RFコイル13により発生した高周波磁場の影響によって被検体Pから発せられるエコー信号を受信する。そして、受信用RFコイル14は、受信したエコー信号を受信部23へ出力する。
【0016】
シムコイル部15は、静磁場磁石11により発生する静磁場の不均一性を補正する補正磁場を発生させる。このシムコイル部15は、傾斜磁場コイル12の外周面上に隙間なく接合される。一般的に、静磁場の不均一性は、0次成分X0,Y0,Z0、1次成分X1,Y1,Z1、及び2次成分X2,Y2,Z2,XY,ZY,ZXなどの各成分に分けて表される。さらに、3次成分以上の高次の成分も存在する。そして、静磁場の不均一性の補正は、このような成分ごとに行われるのが一般的である。
【0017】
本実施形態では、シムコイル部15は、2次シムの構造を有し、2次成分ZX,ZY,XY,X2−Y2,Z2を補正するための5チャンネルの補正磁場を発生させる。図2は、図1に示したシムコイル部15を軸方向から見た場合の断面図である。
【0018】
図2に示すように、シムコイル部15は、内側樹脂層15aと、シムコイル15b〜15fと、樹脂テープ層15gとを有する。内側樹脂層15aは、傾斜磁場コイル12の外周面上に円筒状に形成される。シムコイル15b〜15fは、それぞれ、例えば絶縁性のベース上にフレキシブル基板を配置することで、所要のコイルパターンをなすように形成される。
【0019】
シムコイル15bは、内側樹脂層15aの外周面上に配置され、静磁場磁石11が発生する静磁場のZX成分とほぼ同じ磁場方向を持つ磁場を発生する。シムコイル15cは、シムコイル15bの外周面上に配置され、静磁場磁石11が発生する静磁場のZY成分とほぼ同じ磁場方向を持つ磁場を発生する。シムコイル15dは、シムコイル15cの外周面上に配置され、静磁場磁石11が発生する静磁場のXY成分とほぼ同じ磁場方向を持つ磁場を発生する。
【0020】
シムコイル15eは、シムコイル15dの外周面上に配置され、静磁場磁石11が発生する静磁場のX2−Y2成分とほぼ同じ磁場方向を持つ磁場を発生する。シムコイル15fは、シムコイル15eの外周面上に配置され、静磁場磁石11が発生する静磁場のZ2成分とほぼ同じ磁場方向を持つ磁場を発生する。樹脂テープ層15gは、シムコイル15fの外周面上に樹脂テープを巻き付けて形成され、シムコイル15b〜15fを保護及び絶縁する。
【0021】
このような構成により、シムコイル部15は、後述するシムコイル電源24から電流の供給を受けて、5チャンネルの補正磁場を発生する。なお、例えば13チャンネルや18チャンネルの補正磁場を発生することが可能な、より多くのシムコイルが搭載されたシムコイル部が用いられてもよい。
【0022】
シムコイル電源24は、シムコイル電源24による制御のもと、シムコイル部15が有するシムコイル15b〜15fそれぞれに対して独立に電流を供給する。
【0023】
シム制御部25は、計算機システム60による制御のもと、シムコイル電源24を制御する。具体的には、シム制御部25は、計算機システム60によってシムコイルごとに決定されるシムコイル電流値を受け付け、受け付けたシムコイル電流値の電流をシムコイル15b〜15fに供給するようシムコイル電源24を制御する。
【0024】
図1の説明に戻って、傾斜磁場電源21は、傾斜磁場コイル12に電流を供給する。送信部22は、ラーモア周波数に対応する高周波パルスを送信用RFコイル13に送信する。受信部23は、受信用RFコイル14から出力されるMR信号をデジタル化することによってMR信号データを生成し、生成したMR信号データをシーケンス制御部30へ送信する。
【0025】
シーケンス制御部30は、計算機システム60から送信されるシーケンス情報に基づいて、傾斜磁場電源21、送信部22及び受信部23を駆動することによって、被検体Pのスキャンを行う。また、シーケンス制御部30は、被検体Pのスキャンを行った結果、受信部23からMR信号データが送信されると、そのMR信号データを計算機システム60へ転送する。
【0026】
なお、ここでいうシーケンス情報とは、シーケンス制御部30が傾斜磁場コイル12に供給する電源の強さや電源を供給するタイミング、送信部22が送信用RFコイル13に送信するRF信号の強さやRF信号を送信するタイミング、受信部23がエコー信号を検出するタイミングなど、スキャンを行うための手順を定義した情報である。
【0027】
寝台部40は、被検体Pが載置される天板41を有し、その天板41を被検体Pとともに架台部10の開口部に挿入する。この寝台部40は、長手方向が静磁場磁石11の中心軸と平行になるように設置される。
【0028】
寝台制御部50は、計算機システム60による制御のもと、寝台部40を駆動して天板41を長手方向及び上下方向へ移動する。なお、寝台制御部50は、天板41の位置を移動する度に、天板41の位置を示す位置情報を計算機システム60に送信する。
【0029】
計算機システム60は、MRI装置100の全体制御や、データ収集、画像再構成などを行う装置である。例えば、計算機システム60は、インタフェース部61と、入力部62と、表示部63と、記憶部64と、画像再構成部65と、制御部66とを有している。
【0030】
インタフェース部61は、シーケンス制御部30との間でやり取りされる各種信号の入出力を制御する。例えば、インタフェース部61は、シーケンス制御部30に対してシーケンス情報を送信し、シーケンス制御部30からMR信号データを受信する。また、インタフェース部61は、MR信号データを受信すると、受信したMR信号データを被検体Pごとに記憶部64に記憶させる。
【0031】
入力部62は、操作者からの各種指示や情報入力を受け付ける。例えば、入力部62は、撮像条件の設定を操作者から受け付ける。この入力部62としては、例えば、マウスやトラックボールなどのポインティングデバイス、モード切替スイッチ等の選択デバイス、あるいはキーボード等の入力デバイスが用いられる。
【0032】
表示部63は、操作者により参照される各種画像や、操作者から各種操作を受け付けるためのGUI(Graphical User Interface)を表示する。この表示部63としては、例えば、液晶モニタやCRTモニタなどの表示デバイスが用いられる。
【0033】
記憶部64は、シーケンス制御部30から送信されたMR信号データや、後述する画像再構成部65により生成された画像データを被検体Pごとに記憶する。なお、かかる記憶部64により記憶される情報については後に詳細に説明する。
【0034】
画像再構成部65は、記憶部64により記憶されたMR信号データに対して後処理すなわちフーリエ変換処理等の再構成処理を施すことによって、被検体P内を表す画像データを生成する。
【0035】
制御部66は、上述した機能部間での制御の移動や、機能部と記憶部との間のデータの受け渡しなどを行うことで、MRI装置100の全体制御を行う。この制御部66は、CPU(Central Processing Unit)及びメモリを有し、これらを用いて各種プログラムを実行させることで、MRI装置100が有する各部を制御する。例えば、制御部66は、操作者によって設定された撮像条件に基づいてシーケンス情報を生成し、生成したシーケンス情報をシーケンス制御部30に送信することで各種の撮像を実行する。
【0036】
以上、本実施形態に係るMRI装置100の構成について説明した。このような構成のもと、MRI装置100は、撮像前に、複数の位置のうち少なくとも1つの位置に天板41を移動して、シムコイル部15に供給されるシムコイル電流値を調整することで、静磁場が均一化された時点でのシムコイル電流値を測定する。また、MRI装置100は、測定されたシムコイル電流値に基づいて、複数の位置のうちシムコイル電流値が測定されなかった位置に応じたシムコイル電流値を算出する。そして、MRI装置100は、複数の位置に天板41を移動しながら、測定されたシムコイル電流値及び算出されたシムコイル電流値のうち、天板41の位置に応じたシムコイル電流値の電流をシムコイル部15に供給することで、天板41の位置ごとに静磁場を均一化しながら撮像を行う。
【0037】
すなわち、本実施形態によれば、撮像空間内における少なくとも1つの位置でシムコイル電流値が測定されれば、測定されたシムコイル電流値から他の位置に関するシムコイル電流値が補間されるので、撮像時に天板が移動される全ての位置についてシムコイル電流値を測定する必要がない。したがって、本実施形態によれば、被検体を移動しながら撮像を行う場合に、静磁場の不均一性を補正しつつ撮像時間を短縮することが可能になる。
【0038】
次に、本実施形態に係るMRI装置100の詳細な構成について説明する。なお、ここでは、図1に示した計算機システム60の構成を中心に説明する。図3は、図1に示した計算機システム60の構成を示す機能ブロック図である。なお、図3では、計算機システム60が有する機能部のうち、インタフェース部61と、記憶部64と、制御部66とを示し、他の機能部については図示を省略している。
【0039】
図3に示すように、記憶部64は、例えば、撮像条件記憶部64aと、シムコイル電流値記憶部64bとを有する。
【0040】
撮像条件記憶部64aは、入力部62を介して操作者から受け付けた撮像条件を記憶する。例えば、撮像条件記憶部64aは、撮像対象の部位ごとに撮像条件を分類して記憶する。ここでいう部位とは、例えば、「頭部」や「胸部」、「下肢」などである。また、撮像条件記憶部64aによって記憶される撮像条件には、例えば、被検体Pの体重及び身長、撮像時における被検体Pの体位及び撮像空間への挿入方向などを示す情報が含まれる。ここでいう体位を示す情報とは、例えば、「背臥位(仰向け)」や「腹臥位(うつ伏せ)」、「右側臥位」、「左側臥位」などである。また、挿入方向を示す情報とは、「頭から挿入」、「足から挿入」などである。
【0041】
なお、撮像部位が脊椎である場合のように、被検体Pの体軸方向に広い範囲が撮像される場合には、被検体Pを体軸方向に移動しながら、撮像対象の範囲を分割して撮像が行われる。この場合には、撮像条件には、天板41の移動回数及び移動間隔も含まれる。この移動回数及び移動間隔は、制御部66によって撮像範囲の大きさや撮像部位に応じて自動的に算出される。または、移動回数及び移動間隔は、操作者によって指定されてもよい。
【0042】
シムコイル電流値記憶部64bは、天板の位置に応じたシムコイル電流値を記憶する。図4は、本実施形態に係るシムコイル電流値記憶部64bによって記憶される情報の一例を示す図である。図4において、Z1,Zx1,Z2,Zx2,Z3は、それぞれZ軸方向における天板41の位置(天板位置)を示す位置情報である。また、XY,X2−Y2,ZX,ZY,Z2は、それぞれシムコイルのチャンネル(シムチャンネル)を示す情報である。
【0043】
図4に示すように、シムコイル電流値記憶部64bは、天板41が移動される位置ごとに、各シムチャンネルに供給されるシムコイル電流値を記憶する。例えば、図4に示す例では、天板41の位置がZ1である場合には、XYチャンネルのシムコイル15dに電流値がA11の電流が、X2−Y2チャンネルのシムコイル15eに電流値がA12の電流が、ZXチャンネルのシムコイル15bに電流値がA13の電流が、ZYチャンネルのシムコイル15cに電流値がA14の電流が、Z2チャンネルのシムコイル15fに電流値がA15の電流が、それぞれ供給されることを示している。
【0044】
図3の説明に戻って、制御部66は、例えば、寝台位置取得部66aと、撮像制御部66bと、電流値測定部66cと、電流値算出部66dとを有する。
【0045】
寝台位置取得部66aは、寝台制御部50から送信される天板41の位置情報を取得し、取得した位置情報を内部メモリなどに保持する。
【0046】
電流値測定部66cは、撮像前に、被検体Pが置かれた天板41を撮像空間内における複数の位置のうち少なくとも1つの位置に移動して、シムコイル部15に供給されるシムコイル電流値を調整することで、静磁場が均一化された時点でのシムコイル電流値を測定する。
【0047】
具体的には、電流値測定部66cは、被検体Pの体軸方向に広い範囲が撮像される場合には、まず、撮像条件に含まれる天板41の移動回数及び移動間隔に基づいて、撮像時に天板41が移動されるZ軸方向の位置を示す複数の撮像位置を算出する。その後、電流値測定部66cは、算出した複数の撮像位置から少なくとも1つの位置を選択し、選択した位置をシムコイル電流値の測定位置として決定する。そして、電流値測定部66cは、寝台制御部50を制御して、決定した測定位置に天板41を移動しながら、シムコイル電流値を測定する。
【0048】
図5A、5B及び5Cは、本実施形態に係る電流値測定部66cによるシムコイル電流値の測定の一例を示す図である。図5A、5B及び5Cに示すように、例えば、電流値測定部66cは、被検体Pの胸部から大腿部までが撮像される場合に、被検体Pの胸部が磁場中心に置かれる位置、被検体Pの腹部が磁場中心に置かれる位置、被検体Pの大腿部が磁場中心に置かれる位置に、天板41を段階的に移動させる。
【0049】
そして、電流値測定部66cは、天板41が移動された位置ごとに、シム制御部25を制御して、シムコイル電源24からシムコイル部15に供給されるシムコイル電流値を調整することで、静磁場の均一化を行う。また、電流値測定部66cは、静磁場の均一化を行った際に、その時点でのシムコイル電流値を測定する。
【0050】
ここで、静磁場の均一化を行う方法は、公知である各種の方法を用いることができる。例えば、電流値測定部66cは、磁場分布を位相マップとして空間的に求めたのちに、この磁場分布を磁場成分ごとに分解し、磁場成分ごとに磁場分布が安定的となるような磁場強度を得るのに要するシムコイル電流値をシムコイルごとに求める。
【0051】
なお、電流値測定部66cは、静磁場が均一化された時点でのシムコイル電流値を測定するたびに、寝台位置取得部66aから天板41の位置情報を取得し、取得した位置情報と測定したシムコイル電流値とを対応付けた情報をシムコイル電流値記憶部64bに記憶させる。
【0052】
例えば、図5Aにおける天板41の位置情報がZ1であり、図5Bにおける天板41の位置情報がZ2であり、図5Cにおける天板41の位置情報がZ3であったとする。この場合には、電流値測定部66cは、図4に示したように、天板41の位置情報Z1と、XY,X2−Y2,ZX,ZY,Z2チャンネルのシムコイル電流値A11〜A15とを対応付けた情報をシムコイル電流値記憶部64bに記憶させる。また、電流値測定部66cは、図4に示したように、天板41の位置情報Z2と、XY,X2−Y2,ZX,ZY,Z2チャンネルのシムコイル電流値A21〜A25とを対応付けた情報をシムコイル電流値記憶部64bに記憶させる。また、電流値測定部66cは、図4に示したように、天板41の位置情報Z3と、XY,X2−Y2,ZX,ZY,Z2チャンネルのシムコイル電流値A31〜A35とを対応付けた情報をシムコイル電流値記憶部64bに記憶させる。
【0053】
図3の説明に戻って、電流値算出部66dは、電流値測定部66cによって測定されたシムコイル電流値に基づいて、複数の位置のうち電流値測定部66cによってシムコイル電流値が測定されなかった位置に応じたシムコイル電流値を算出する。
【0054】
具体的には、電流値算出部66dは、シムコイル電流値記憶部64bに記憶されているシムコイル電流値を参照して、未測定の撮像位置におけるシムコイル電流値を算出する。このとき、例えば、電流値算出部66dは、電流値測定部66cによって2つ以上の測定位置におけるシムコイル電流値が算出されている場合には、隣り合う2つの測定位置におけるシムコイル電流値を用いて、それらの測定位置の間にある撮像位置のシムコイル電流値を算出する。
【0055】
例えば、図4に示したシムコイル電流値のうち、天板41の位置情報Z1、Z2及びZ3に対応するシムコイル電流値が、すでにシムコイル電流値記憶部64bに記憶されていたとする。その場合には、電流値算出部66dは、Z1により示される測定位置とZ2により示される測定位置との間にある撮像位置Zx1について、各シムチャンネルのシムコイル電流値Ax11〜Ax15を算出し、シムコイル電流値記憶部64bに記憶させる。さらに、電流値算出部66dは、Z2により示される測定位置とZ3により示される測定位置との間にある撮像位置Zx2についても、各シムチャンネルのシムコイル電流値Ax21〜Ax25を算出し、シムコイル電流値記憶部64bに記憶させる。これにより、電流値測定部66cによって測定されたシムコイル電流値から、未測定の位置に関するシムコイル電流値が補間される。
【0056】
なお、未測定の位置に関するシムコイル電流値を算出する方法としては、各種の方法を用いることができる。例えば、電流値算出部66dは、隣り合う2つの測定位置に関するシムコイル電流値の中間値を算出し、算出した中間値を、2つの測定位置の間にある未測定の撮像位置におけるシムコイル電流値とする。
【0057】
または、例えば、電流値算出部66dは、撮像対象の部位に応じて定義された補正関数を用いて、シムコイル電流値を算出してもよい。この場合には、電流値算出部66dは、撮像条件記憶部64aを参照して、撮像対象の部位を特定する。例えば、被検体Pの下肢を撮像する場合と、被検体Pの胸部から腹部までを撮像する場合とでは、撮像対象に含まれる部位の性質や体積が異なるので、天板41を被検体Pの体軸方向に移動したときの静磁場の不均一性の変化は異なる。このことから、撮像対象の部位に応じて異なる補正関数を用いることで、被検体を移動しながら静磁場を適切に均一化することができるようになる。なお、ここで用いられる補正関数は、例えば、あらかじめ撮像対象の部位ごとに対応付けられて記憶部64に記憶される。
【0058】
または、電流値算出部66dは、被検体Pの体重又は身長に応じて定義された補正関数を用いて、シムコイル電流値を算出してもよい。この場合には、電流値算出部66dは、撮像条件記憶部64aを参照して、被検体Pの体重又は身長を特定する。被検体Pの体重や身長が異なれば、被検体の体格も異なるので、天板41を被検体Pの体軸方向に移動したときの静磁場の不均一性の変化は異なる。このことから、被検体Pの体重又は身長に応じて異なる補正関数を用いることで、被検体を移動しながら静磁場を適切に均一化することができるようになる。なお、ここで用いられる補正関数は、例えば、あらかじめ体重又は身長に対応付けられて記憶部64に記憶される。
【0059】
または、電流値算出部66dは、撮像時における被検体Pの体位又は撮像空間への挿入方向に応じて定義された補正関数を用いて、シムコイル電流値を算出してもよい。この場合には、電流値算出部66dは、撮像条件記憶部64aを参照して、被検体Pの体位又は撮像空間への挿入方向を特定する。撮像時における被検体Pの体位や撮像空間への挿入方向が異なれば、天板41を被検体Pの体軸方向に移動したときの静磁場の不均一性の変化は異なる。このことから、被検体Pの体位又は挿入方向に応じて異なる補正関数を用いることで、被検体を移動しながら静磁場を適切に均一化することができるようになる。なお、ここで用いられる補正関数は、例えば、あらかじめ体位又は挿入方向に対応付けられて記憶部64に記憶される。
【0060】
以上のように、電流値算出部66dが、あらかじめ定義された補正関数を用いてシムコイル電流値を算出する場合には、電流値測定部66cによって少なくとも1つの位置についてシムコイル電流値が測定されていればよい。したがって、撮像全体にかかる時間をより短縮することができる。
【0061】
図3の説明に戻って、撮像制御部66bは、操作者によって設定された撮像条件に基づいてシーケンス情報を生成し、生成したシーケンス情報をシーケンス制御部30に送信することで各種の撮像を実行する。
【0062】
本実施形態では、撮像制御部66bは、複数の位置に前記天板を移動しながら、電流値測定部66cによって測定されたシムコイル電流値及び電流値算出部66dによって算出されたシムコイル電流値のうち天板41の位置に応じたシムコイル電流値の電流をシムコイル部15に供給することで、天板41の位置ごとに静磁場を均一化しながら撮像を行う。
【0063】
具体的には、撮像制御部66bは、被検体Pの体軸方向に広い範囲が撮像される場合には、まず、撮像条件に含まれる天板41の移動回数及び移動間隔に基づいて、撮像時に天板41が移動されるZ軸方向の位置を示す複数の撮像位置を算出する。ここで算出される撮像位置は、前述した電流値測定部66cによって算出される撮像位置と同じになる。
【0064】
その後、撮像制御部66bは、寝台制御部50を制御して、算出した撮像位置に天板41を移動しながら、被検体Pの撮像を行う。このとき、撮像制御部66bは、撮像位置に天板41を移動するごとに、撮像を行う前に寝台位置取得部66aから天板41の位置情報を取得する。そして、撮像制御部66bは、シムコイル電流値記憶部64bに記憶されているシムコイル電流値を参照して、取得した天板41の位置情報に対応する各シムチャンネルのシムコイル電流値を決定する。そして、撮像制御部66bは、シム制御部25に対して、決定したシムコイル電流値をシムコイル部15に供給するよう指示する。これにより、天板41の位置ごとに静磁場を均一化しながら撮像が行われる。
【0065】
次に、本実施形態に係るMRI装置100の動作について説明する。なお、ここでは、複数の位置に前記天板を移動しながら撮像が行われる場合について、シムコイル電流値の測定を行う際の動作と、被検体Pの撮像を行う際の動作とを説明する。なお、シムコイル電流値の測定は、被検体Pの撮像が行われる前に実施される。
【0066】
まず、シムコイル電流値の測定を行う際の動作について説明する。図6は、本実施形態に係るMRI装置100におけるシムコイル電流値測定時の動作を示すフローチャートである。図6に示すように、シムコイル電流値測定時には、電流値測定部66cが、入力部62を介して、測定を開始する指示を操作者から受け付ける(ステップS101)。
【0067】
そして、測定を開始する指示を受け付けると(ステップS101,Yes)、電流値測定部66cは、撮像条件に基づいてシムコイル電流値の測定位置を決定したのちに、最初の測定位置に天板41を移動させる(ステップS102)。続いて、電流値測定部66cは、静磁場の均一化を行うとともに、静磁場が均一化された時点でのシムコイル電流値をシムチャンネルごとに測定する(ステップS103)。そして、電流値測定部66cは、測定した各シムチャンネルのシムコイル電流値と天板41の位置情報とを対応付けてシムコイル電流値記憶部64bに記憶させる(ステップS104)。
【0068】
その後、シムコイル電流値を測定していない測定位置が他にある場合には(ステップS105,No)、電流値測定部66cは、次の測定位置に天板41を移動させたのちに(ステップS106)、再度、シムコイル電流値を測定する(ステップS103、ステップS104)。こうして、電流値測定部66cは、全ての測定位置についてシムコイル電流値の測定が完了するまで、天板41の移動とシムコイル電流値の測定とを繰り返す。
【0069】
そして、全ての測定位置についてシムコイル電流値の測定が完了した場合には(ステップS105,Yes)、電流値測定部66cは、測定位置以外の撮像位置におけるシムコイル電流値を算出する(ステップS107)。その後、電流値測定部66cは、算出したシムコイル電流値をシムコイル電流値記憶部64bに記憶させ(ステップS108)、シムコイル電流値の測定に関する処理を終了する。
【0070】
次に、被検体Pの撮像を行う際の動作について説明する。図7は、本実施形態に係るMRI装置100における被検体撮像時の動作を示すフローチャートである。図7に示すように、被検体撮像時には、撮像制御部66bが、入力部62を介して、撮像を開始する指示を操作者から受け付ける(ステップS201)。
【0071】
そして、撮像を開始する指示を受け付けると(ステップS201,Yes)、撮像制御部66bは、撮像条件に基づいて複数の撮像位置を算出したのちに、最初の撮像位置に天板41を移動させる(ステップS202)。続いて、電流値測定部66cは、シムコイル電流値記憶部64bに記憶されているシムコイル電流値を参照して、天板41の位置に応じたシムコイル電流値を決定する(ステップS203)。
【0072】
そして、撮像制御部66bは、決定したシムコイル電流値をシムコイル部15に供給することで、天板41の位置ごとに静磁場を均一化しながらMR信号データを収集するように、シーケンス制御部30及びシム制御部25を制御する(ステップS204)。また、画像再構成部65が、収集されたMR信号データから画像データを再構成する(ステップS205)。
【0073】
その後、撮像が行われていない撮像位置が他にある場合には(ステップS206,No)、撮像制御部66bは、次の撮像位置に天板41を移動させたのちに(ステップS207)、再度、MR信号データの収集及び画像の再構成を行うよう制御する(ステップS203〜ステップS205)。こうして、撮像制御部66bは、全ての撮像位置について撮像が完了するまで、MR信号データの収集及び画像の再構成を繰り返す。そして、全ての撮像位置について撮像が完了した場合には(ステップS206,Yes)、撮像制御部66bは、被検体Pの撮像に関する処理を終了する。
【0074】
上述したように、本実施形態に係るMRI装置100は、静磁場磁石11と、シムコイル部15と、電流値測定部66cと、電流値算出部66dと、撮像制御部66bとを備える。電流値測定部66cは、撮像前に、被検体Pが置かれた天板41を撮像空間内における複数の位置のうち少なくとも1つの位置に移動して、シムコイル部15に供給されるシムコイル電流値を調整することで、静磁場が均一化された時点でのシムコイル電流値を測定する。電流値算出部66dは、電流値測定部66cによって測定されたシムコイル電流値に基づいて、複数の位置のうち電流値測定部66cによってシムコイル電流値が測定されなかった位置に応じたシムコイル電流値を算出する。撮像制御部66bは、複数の位置に天板41を移動しながら、電流値測定部66cによって測定されたシムコイル電流値及び電流値算出部66dによって算出されたシムコイル電流値のうち、天板41の位置に応じたシムコイル電流値の電流をシムコイル部15に供給することで、天板41の位置ごとに静磁場を均一化しながら撮像を行う。
【0075】
すなわち、本実施形態によれば、撮像空間内における少なくとも1つの位置でシムコイル電流値が測定されれば、測定されたシムコイル電流値から他の位置に関するシムコイル電流値が補間されるので、撮像時に天板が移動される全ての位置についてシムコイル電流値を測定する必要がない。したがって、本実施形態によれば、被検体を移動しながら撮像を行う場合に、静磁場の不均一性を補正しつつ撮像時間を短縮することが可能になる。また、撮像時間が短縮されることから、被検体の負担を軽減したり、検査のスループットを向上させたりすることができる。
【0076】
なお、本実施形態では、天板41が移動される位置ごとにシムコイル電流値を算出する場合について説明したが、実施形態はこれに限られない。例えば、天板41が位置決めされた1つの位置における撮像可能な範囲内に含まれる複数の位置について、シムコイル電流値を算出するようにしてもよい。
【0077】
また、本実施形態では、天板41を段階的に移動させる場合について説明したが、実施形態はこれに限られない。例えば、天板41を連続的に移動させながら撮像が行われる場合でも同様に実施が可能である。この場合には、シムコイル電流値記憶部64bによって記憶された位置ごとに、天板41が移動される範囲を分割し、分割された範囲ごとにシムコイル部15に供給されるシムコイル電流値を変化させる。これにより、静磁場の不均一性によって生じる画像の乱れを少なくすることができる。
【0078】
なお、上記実施形態では、電流値算出部66dが、隣り合う2つの測定位置に関するシムコイル電流値の中間値を算出したり、各種の補正関数を用いたりすることで、未測定の位置におけるシムコイル電流値を算出する場合の例を説明した。ここでは、他の実施形態として、電流値算出部66dが、磁化率関数及び補正関数を用いて、未測定の位置におけるシムコイル電流値を算出する場合の例を説明する。
【0079】
本実施形態では、電流値算出部66dは、被検体の部位に応じた磁化率の変化を表す磁化率関数を用いて、電流値測定部66cによって測定されたシムコイル電流値から未測定シムコイル電流値を算出する。なお、ここでいう未測定シムコイル電流値は、電流値測定部66cによってシムコイル電流値が測定されなかった位置のシムコイル電流値である。
【0080】
撮像空間に被検体が入ることによって生じる磁場の不均一性は、被検体の磁化によるものであることが知られている。すなわち、磁場の不均一性は、磁場中に置かれた被検体の磁化率が高いと大きくなり、被検体の磁化率が低いと小さくなる。さらに、被検体(人体)の磁化率(susceptibility)は、主に血液(鉄分)の分布と関係があり、例えば肝臓など、血液が多く集まる部位は磁化率が高くなる。つまり、被検体の磁化率は被検体の部位ごとに異なる。したがって、磁場の不均一性は、磁場中に置かれる部位の磁化率に応じて変化することになり、磁場均一性の補正に必要なシムコイル電流値も、磁場中に置かれる部位の磁化率に応じて変化することになる。ここで、シムコイル電流値と磁化率との間には、一定の相関関係があると考えられる。すなわち、磁場均一性の補正に必要なシムコイル電流値は、磁場中に置かれる部位の磁化率から一定の算出式で求められる。このようなことから、本実施形態では、電流値算出部66dは、被検体の部位に応じた磁化率の変化を表す磁化率関数を用いて、未測定シムコイル電流値を算出する。
【0081】
図8は、本実施形態に係る電流値算出部66dによるシムコイル電流値の算出方法を説明するための図である。図8に示す曲線71〜75は、被検体Pの部位に応じた磁化率の変化を表している。図8において、横軸は天板41の移動方向(Z軸方向)の位置を示しており、縦軸は磁化率の大きさを示している。ここで、例えば、曲線71は、頭部における磁化率の変化を示している。また、曲線72は、胸部における磁化率の変化を表しており、曲線73は、腹部における磁化率の変化を表している。また、曲線74は、上肢における磁化率の変化を表しており、曲線75は、下肢における磁化率の変化を表している。これらの曲線は、それぞれ部位ごとに特定の磁化率関数で定義される。
【0082】
まず、電流値算出部66dは、シムコイル電流値記憶部64bに記憶されているシムコイル電流値を参照して、測定済みのシムコイル電流値と、そのシムコイル電流値が測定された測定位置(例えば、図8に示す実線矢印の位置)とを特定する。続いて、電流値算出部66dは、特定した測定位置に対応する部位の磁化率関数を用いて、測定済みのシムコイル電流値から同じ部位における未測定の位置(例えば、図8に示す点線矢印の位置)のシムコイル電流値を算出する。電流値算出部66dは、シムコイル電流値記憶部64bに記憶されている測定済みのシムコイル電流値それぞれについて同様の処理を行うことで、部位ごとに、全ての未測定の位置のシムコイル電流値を算出する。これにより、電流値測定部66cによって測定されたシムコイル電流値から、未測定の位置におけるシムコイル電流値が補間される。
【0083】
なお、被検体内の血液の分布は、被検体情報や撮像条件によって変化することが想定される。例えば、被検体の体重や身長が変われば、被検体内の血液量や血液の分布範囲が変化する。また、例えば、被検体の性別が変われば、被検体の体型が変化することになり、それに応じて血液量や血液の分布範囲が変化する。また、例えば、撮像時における被検体の体位や、撮像空間への被検体の挿入方向によっても血液の分布範囲が変化する。例えば、被検体の挿入方向が逆になれば、血液の分布状態は天板41の移動方向に沿って反転することになる。
【0084】
したがって、電流値算出部66dは、被検体情報及び撮像条件の少なくとも一方に応じて定義された補正関数により磁化率関数を補正し、補正後の磁化率関数を用いて、電流値測定部66cによって測定されたシムコイル電流値から未測定シムコイル電流値を算出してもよい。ここでいう被検体情報は、例えば、被検体の体重や、身長、性別などである。また、撮像条件は、例えば、撮像時における被検体の体位や、撮像空間への被検体の挿入方向などである。
【0085】
この場合には、被検体情報や撮像条件に応じて、あらかじめ各種の補正関数を定義しておく。例えば、図8において、曲線81、82及び83は、被検体Pの体重に応じた補正関数を示している。具体的には、曲線81は、体重が所定範囲を超える場合の補正関数であり、曲線82は、体重が所定範囲内の場合の補正関数であり、曲線83は、所定範囲を下回る場合の補正関数である。この他にも、例えば、被検体の身長や性別、撮像時における被検体の体位や撮像空間への被検体の挿入方向などに応じた補正関数を、あらかじめ定義しておく。なお、補正関数で表される値は、磁化率関数に乗じるための補正係数であってもよいし、磁化率関数に加算するためのオフセット値であってもよい。
【0086】
そして、例えば、電流値算出部66dは、操作者によって入力された被検体情報を取得し、取得した被検体情報に対応する補正関数を被検体情報に応じて定義された補正関数の中から選択し、選択した補正関数により磁化率関数を補正して、未測定シムコイル電流値を算出する。なお、例えば、被検体情報は、撮像が実行される前に設定される撮像条件の一部として入力される。
【0087】
または、電流値算出部66dは、被検体に関する被検体情報を他の医用システムから取得し、取得した被検体情報に対応する補正関数を被検体情報に応じて定義された補正関数の中から選択し、選択した補正関数により磁化率関数を補正して、未測定シムコイル電流値を算出してもよい。例えば、MRI装置100がネットワークを介して他の医用システムと通信可能に接続されている場合には、電流値算出部66dは、ネットワーク経由で他の医用システムから被検体情報を取得する。なお、ここでいう医用システムとは、例えば、放射線科情報システム(Radiology Information System:RIS)や、病院情報システム(Hospital Information System:HIS)、画像保存通信システム(Picture Archiving and Communication Systems:PACS)などである。
【0088】
なお、上記実施形態では、磁化率関数が用いられる場合の例を説明したが、補正関数の代わりに、補正値を記憶したテーブルなどが用いられてもよい。この場合には、例えば、記憶部64が、被検体の部位に応じた磁化率の値を記憶する磁化率記憶部をさらに備える。例えば、磁化率記憶部は、被検体の部位ごとに、天板41の移動方向における位置と磁化率の値とを対応付けたテーブルを記憶する。
【0089】
そして、電流値算出部66dは、磁化率記憶部によって記憶された磁化率を用いて、電流値測定部66cによって測定されたシムコイル電流値から未測定シムコイル電流値を算出する。まず、電流値算出部66dは、シムコイル電流値記憶部64bに記憶されているシムコイル電流値を参照して、測定済みのシムコイル電流値と、そのシムコイル電流値が測定された測定位置とを特定する。続いて、電流値算出部66dは、特定した測定位置がどの部位に対応するかを特定し、特定した部位に対応するテーブルを参照する。そして、電流値算出部66dは、特定した測定位置における磁化率と未測定の位置における磁化率との関係により、測定済みのシムコイル電流値から未測定の位置のシムコイル電流値を算出する。電流値算出部66dは、シムコイル電流値記憶部64bに記憶されている測定済みのシムコイル電流値それぞれについて同様の処理を行うことで、部位ごとに、全ての未測定の位置のシムコイル電流値を算出する。これにより、電流値測定部66cによって測定されたシムコイル電流値から、未測定の位置におけるシムコイル電流値が補間される。
【0090】
また、例えば、補正関数の代わりに、補正値を記憶したテーブルなどが用いられてもよい。その場合には、例えば、記憶部64が、被検体情報及び撮像条件の少なくとも一方に応じて定義された補正値を記憶する補正値記憶部をさらに備える。例えば、補正値記憶部は、被検体の部位と補正値とを対応付けたテーブルやファイルなどを記憶する。例えば、補正値記憶部は、被検体の部位ごとに、天板41の移動方向における位置と補正値とを対応付けたテーブルやファイルなどを記憶する。なお、ここでいう補正値は、磁化率に乗じるための補正係数であってもよいし、磁化率に加算するためのオフセット値であってもよい。
【0091】
そして、電流値算出部66dは、部位ごとに、補正値記憶部によって記憶された補正値により磁化率を補正し、補正後の磁化率を用いて、電流値測定部66cによって測定されたシムコイル電流値から未測定シムコイル電流値を算出する。
【0092】
なお、この実施形態でも、例えば、電流値算出部66dは、操作者によって入力された被検体情報を取得し、取得した被検体情報に対応する補正値を補正値記憶部によって記憶された補正値の中から選択し、選択した補正値により磁化率を補正して、未測定シムコイル電流値を算出する。または、電流値算出部66dは、被検体に関する被検体情報を他の医用システムから取得し、取得した被検体情報に対応する補正値を補正値記憶部によって記憶された補正値の中から選択し、選択した補正値により磁化率関数を補正して、未測定シムコイル電流値を算出してもよい。
【0093】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0094】
11 静磁場磁石
15 シムコイル部
60 計算機システム
66 制御部
66c 電流値測定部
66d 電流値算出部
66b 撮像制御部
【特許請求の範囲】
【請求項1】
撮像空間に静磁場を発生させる静磁場発生部と、
前記静磁場の不均一性を補正する補正磁場を発生させるシムコイル部と、
撮像前に、被検体が置かれた天板を前記撮像空間内における複数の位置のうち少なくとも1つの位置に移動して、前記シムコイル部に供給されるシムコイル電流値を調整することで、前記静磁場が均一化された時点でのシムコイル電流値を測定する測定部と、
前記測定部によって測定されたシムコイル電流値と被検体情報又は撮像条件とに基づいて、前記複数の位置のうち前記測定部によってシムコイル電流値が測定されなかった位置のシムコイル電流値である未測定シムコイル電流値を算出する算出部と、
前記測定部によって測定されたシムコイル電流値及び前記算出部によって算出されたシムコイル電流値のうち、前記天板の位置に応じたシムコイル電流値の電流を前記シムコイル部に供給することで、前記天板の位置ごとに前記静磁場を均一化しながら撮像を行う制御部と
を備える、磁気共鳴イメージング装置。
【請求項2】
前記算出部は、前記被検体の部位に応じた磁化率の変化を表す磁化率関数を用いて、前記測定部によって測定されたシムコイル電流値から前記未測定シムコイル電流値を算出する、
請求項1に記載の磁気共鳴イメージング装置。
【請求項3】
前記算出部は、前記被検体情報及び前記撮像条件の少なくとも一方に応じて定義された補正関数により前記磁化率関数を補正し、補正後の磁化率関数を用いて、前記測定部によって測定されたシムコイル電流値から前記未測定シムコイル電流値を算出する、
請求項2に記載の磁気共鳴イメージング装置。
【請求項4】
前記算出部は、操作者によって入力された被検体情報を取得し、取得した被検体情報に対応する補正関数を前記被検体情報に応じて定義された補正関数の中から選択し、選択した補正関数により前記磁化率関数を補正して、前記未測定シムコイル電流値を算出する、
請求項3に記載の磁気共鳴イメージング装置。
【請求項5】
前記算出部は、前記被検体に関する被検体情報を他の医用システムから取得し、取得した被検体情報に対応する補正関数を前記被検体情報に応じて定義された補正関数の中から選択し、選択した補正関数により前記磁化率関数を補正して、前記未測定シムコイル電流値を算出する、
請求項3に記載の磁気共鳴イメージング装置。
【請求項6】
前記被検体の部位に応じた磁化率の値を記憶する磁化率記憶部をさらに備え、
前記算出部は、前記磁化率記憶部によって記憶された前記磁化率を用いて、前記測定部によって測定されたシムコイル電流値から前記未測定シムコイル電流値を算出する、
請求項1に記載の磁気共鳴イメージング装置。
【請求項7】
前記被検体情報及び前記撮像条件の少なくとも一方に応じて定義された補正値を記憶する補正値記憶部をさらに備え、
前記算出部は、前記補正値記憶部によって記憶された前記補正値により前記磁化率を補正し、補正後の磁化率を用いて、前記測定部によって測定されたシムコイル電流値から前記未測定シムコイル電流値を算出する、
請求項6に記載の磁気共鳴イメージング装置。
【請求項8】
前記算出部は、操作者によって入力された被検体情報を取得し、取得した被検体情報に対応する補正値を前記補正値記憶部によって記憶された補正値の中から選択し、選択した補正値により前記磁化率を補正して、前記未測定シムコイル電流値を算出する、
請求項7に記載の磁気共鳴イメージング装置。
【請求項9】
前記算出部は、前記被検体に関する被検体情報を他の医用システムから取得し、取得した被検体情報に対応する補正値を前記補正値記憶部によって記憶された補正値の中から選択し、選択した補正値により前記磁化率関数を補正して、前記未測定シムコイル電流値を算出する、
請求項7に記載の磁気共鳴イメージング装置。
【請求項10】
前記被検体情報は、前記被検体の体重、身長及び性別のうち少なくとも1つである、
請求項1〜9のいずれか1つに記載の磁気共鳴イメージング装置。
【請求項11】
前記撮像条件は、撮像時における被検体の体位及び前記撮像空間への前記被検体の挿入方向のうち少なくとも1つである、
請求項1〜10のいずれか1つに記載の磁気共鳴イメージング装置。
【請求項1】
撮像空間に静磁場を発生させる静磁場発生部と、
前記静磁場の不均一性を補正する補正磁場を発生させるシムコイル部と、
撮像前に、被検体が置かれた天板を前記撮像空間内における複数の位置のうち少なくとも1つの位置に移動して、前記シムコイル部に供給されるシムコイル電流値を調整することで、前記静磁場が均一化された時点でのシムコイル電流値を測定する測定部と、
前記測定部によって測定されたシムコイル電流値と被検体情報又は撮像条件とに基づいて、前記複数の位置のうち前記測定部によってシムコイル電流値が測定されなかった位置のシムコイル電流値である未測定シムコイル電流値を算出する算出部と、
前記測定部によって測定されたシムコイル電流値及び前記算出部によって算出されたシムコイル電流値のうち、前記天板の位置に応じたシムコイル電流値の電流を前記シムコイル部に供給することで、前記天板の位置ごとに前記静磁場を均一化しながら撮像を行う制御部と
を備える、磁気共鳴イメージング装置。
【請求項2】
前記算出部は、前記被検体の部位に応じた磁化率の変化を表す磁化率関数を用いて、前記測定部によって測定されたシムコイル電流値から前記未測定シムコイル電流値を算出する、
請求項1に記載の磁気共鳴イメージング装置。
【請求項3】
前記算出部は、前記被検体情報及び前記撮像条件の少なくとも一方に応じて定義された補正関数により前記磁化率関数を補正し、補正後の磁化率関数を用いて、前記測定部によって測定されたシムコイル電流値から前記未測定シムコイル電流値を算出する、
請求項2に記載の磁気共鳴イメージング装置。
【請求項4】
前記算出部は、操作者によって入力された被検体情報を取得し、取得した被検体情報に対応する補正関数を前記被検体情報に応じて定義された補正関数の中から選択し、選択した補正関数により前記磁化率関数を補正して、前記未測定シムコイル電流値を算出する、
請求項3に記載の磁気共鳴イメージング装置。
【請求項5】
前記算出部は、前記被検体に関する被検体情報を他の医用システムから取得し、取得した被検体情報に対応する補正関数を前記被検体情報に応じて定義された補正関数の中から選択し、選択した補正関数により前記磁化率関数を補正して、前記未測定シムコイル電流値を算出する、
請求項3に記載の磁気共鳴イメージング装置。
【請求項6】
前記被検体の部位に応じた磁化率の値を記憶する磁化率記憶部をさらに備え、
前記算出部は、前記磁化率記憶部によって記憶された前記磁化率を用いて、前記測定部によって測定されたシムコイル電流値から前記未測定シムコイル電流値を算出する、
請求項1に記載の磁気共鳴イメージング装置。
【請求項7】
前記被検体情報及び前記撮像条件の少なくとも一方に応じて定義された補正値を記憶する補正値記憶部をさらに備え、
前記算出部は、前記補正値記憶部によって記憶された前記補正値により前記磁化率を補正し、補正後の磁化率を用いて、前記測定部によって測定されたシムコイル電流値から前記未測定シムコイル電流値を算出する、
請求項6に記載の磁気共鳴イメージング装置。
【請求項8】
前記算出部は、操作者によって入力された被検体情報を取得し、取得した被検体情報に対応する補正値を前記補正値記憶部によって記憶された補正値の中から選択し、選択した補正値により前記磁化率を補正して、前記未測定シムコイル電流値を算出する、
請求項7に記載の磁気共鳴イメージング装置。
【請求項9】
前記算出部は、前記被検体に関する被検体情報を他の医用システムから取得し、取得した被検体情報に対応する補正値を前記補正値記憶部によって記憶された補正値の中から選択し、選択した補正値により前記磁化率関数を補正して、前記未測定シムコイル電流値を算出する、
請求項7に記載の磁気共鳴イメージング装置。
【請求項10】
前記被検体情報は、前記被検体の体重、身長及び性別のうち少なくとも1つである、
請求項1〜9のいずれか1つに記載の磁気共鳴イメージング装置。
【請求項11】
前記撮像条件は、撮像時における被検体の体位及び前記撮像空間への前記被検体の挿入方向のうち少なくとも1つである、
請求項1〜10のいずれか1つに記載の磁気共鳴イメージング装置。
【図1】


【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図6】
【図7】
【図8】
【公開番号】特開2012−187396(P2012−187396A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2012−33111(P2012−33111)
【出願日】平成24年2月17日(2012.2.17)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成24年2月17日(2012.2.17)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
[ Back to top ]