
磁気共鳴イメージング装置
【課題】マーカのような位置検出用の仕組みを備えていないコイルユニットの位置、あるいはこのようなコイルユニットに含まれた複数の要素コイルのそれぞれの位置を正確に判定可能とする。
【解決手段】RFコイルユニット6bとしては、被検体200からの磁気共鳴信号をそれぞれ受信する複数の要素コイルが配列されたアレイコイルが用いられる。再構成部13は、複数の要素コイルそれぞれで受信された複数の磁気共鳴信号に基づいて複数の要素コイルの配列方向についての各要素コイルの投影データをそれぞれ計算する。主制御部17は、複数の要素コイルそれぞれの投影データに基づいて、複数の要素コイルそれぞれの位置あるいはRFコイルユニット6bの位置を判定する。
【解決手段】RFコイルユニット6bとしては、被検体200からの磁気共鳴信号をそれぞれ受信する複数の要素コイルが配列されたアレイコイルが用いられる。再構成部13は、複数の要素コイルそれぞれで受信された複数の磁気共鳴信号に基づいて複数の要素コイルの配列方向についての各要素コイルの投影データをそれぞれ計算する。主制御部17は、複数の要素コイルそれぞれの投影データに基づいて、複数の要素コイルそれぞれの位置あるいはRFコイルユニット6bの位置を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の要素コイルを配列して形成されたアレイコイルを使用して磁気共鳴信号を受信する磁気共鳴イメージング装置に関する。
【背景技術】
【0002】
複数の要素コイルを配列して形成されたアレイコイルを用いて、パラレルイメージングを効率的に行う方法が知られている。
【0003】
このパラレルイメージングにおいては、アレイコイルの位置を考慮することによってパフォーマンスを向上させることが可能である。例えば非特許文献1には、「Mode Matrix」を用いて、多数のアレイコイルを用いたパラレルイメージングまたは一般イメージングを効率的に行う技術が開示されている。
【0004】
受信コイルの位置を求める技術としては、特許文献1に開示されたものが知られている。特許文献1には、受信コイルの中心部にマーカを取付け、このマーカからのNMR(nuclear magnetic resonance)信号を収集し、この収集したNMR信号からマーカの位置を求める技術が開示されている。また、特別なコイル位置検出用の機構を設ける方法も特許文献2により提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平7−124135号公報
【特許文献2】特公平5−41256号公報
【非特許文献】
【0006】
【非特許文献1】A. Reykowski, M. Blasche, Mode Matrix - A Generalized Signal Combiner For Parallel Imaging Arrays, ISMRM 2004, p.1587
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の技術によれば、受信コイルの位置を精度良く求めることができる。しかしながら、マーカが取り付けられていない受信コイルの位置は検出することができない。また特許文献1の方法は、機構的に複雑であり、多くのコイルの位置検出に適用するのは困難である。
【0008】
本発明はこのような事情を考慮してなされたものであり、その目的とするところは、マーカのような位置検出用の仕組みを備えていないコイルユニットの位置、あるいはこのようなコイルユニットに含まれた複数の要素コイルのそれぞれの位置を正確に判定できる磁気共鳴イメージング装置を提供することにある。
【課題を解決するための手段】
【0009】
本発明の一態様による磁気共鳴イメージング装置は、被検体からの磁気共鳴信号をそれぞれ受信する複数の要素コイルが配列されたアレイコイルと、前記被検体あるいは前記アレイコイルを移動させる移動ユニット、前記被検体あるいは前記アレイコイルを前記移動ユニットにより移動させながら前記磁気共鳴信号を前記複数の要素コイルそれぞれに受信させるシーケンスを実行するスキャンコントローラと、前記複数の要素コイルそれぞれで受信された複数の磁気共鳴信号に基づいて前記複数の要素コイルの配列方向についての各要素コイルの投影データをそれぞれ計算する計算ユニットと、前記複数の要素コイルそれぞれの前記投影データに基づいて、前記複数の要素コイルそれぞれの位置あるいは前記アレイコイルの位置を判定する判定ユニットとを具備する。
【図面の簡単な説明】
【0010】
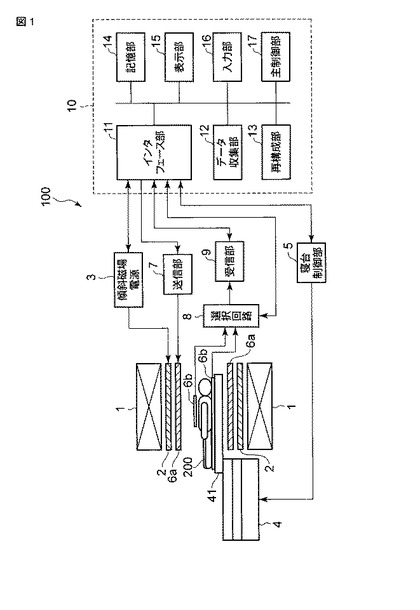
【図1】本発明の一実施形態に係る磁気共鳴イメージング装置(MRI装置)の構成を示す図。
【図2】図1中のRFコイルユニットの装着例を示す図。
【図3】図2中のRFコイルユニットにおける要素コイルの配列状況を示す斜視図。
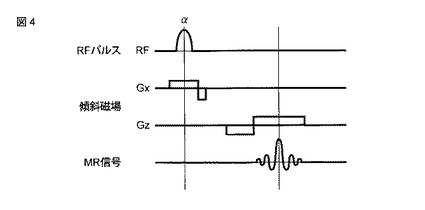
【図4】位置判定プレスキャンにおける基本的なパルスシーケンスを示す図。
【図5】投影データから要素コイルの中心座標を推定する原理を示す図。
【図6】図2中のRFコイルユニットに含まれた4つの要素コイルそれぞれに関して得られた投影データの一例を示す図。
【図7】図6から求められる各種の数値を表す図。
【図8】ツイスター付マルチエコーシーケンスのタイミング図。
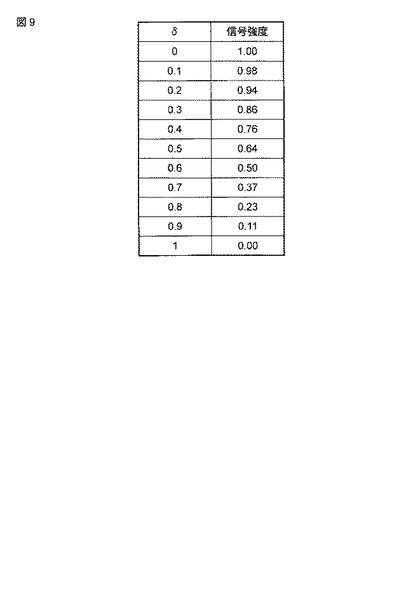
【図9】ツイスターを用いた場合における相対信号量のδに対する変化を示す図。
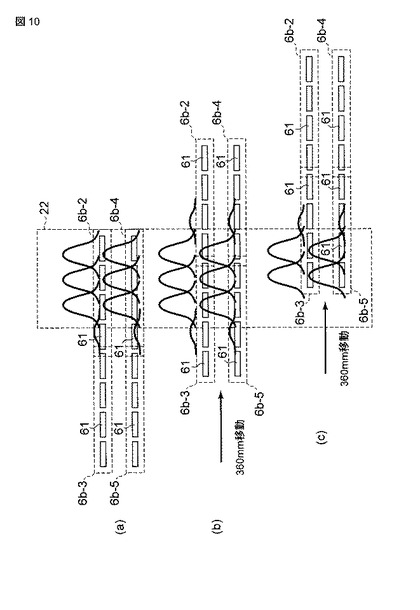
【図10】位置判定プレスキャンを天板送りをしている間に行う様子を示す図。
【発明を実施するための形態】
【0011】
以下、図面を参照して本発明の一実施形態について説明する。
【0012】
図1は本実施形態に係る磁気共鳴イメージング装置(MRI装置)100の構成を示す図である。MRI装置100は、静磁場磁石1、傾斜磁場コイル2、傾斜磁場電源3、寝台4、寝台制御部5、RFコイルユニット6a,6b、送信部7、選択回路8、受信部9および計算機システム10を具備する。
【0013】
静磁場磁石1は、中空の円筒形をなし、内部の空間に一様な静磁場を発生する。この静磁場磁石1としては、例えば永久磁石、超伝導磁石等が使用される。
【0014】
傾斜磁場コイル2は、中空の円筒形をなし、静磁場磁石1の内側に配置される。傾斜磁場コイル2は、互いに直交するX,Y,Zの各軸に対応する3種のコイルが組み合わされている。傾斜磁場コイル2は、上記の3種のコイルが傾斜磁場電源3から個別に電流供給を受けて、磁場強度がX,Y,Zの各軸に沿って傾斜する傾斜磁場を発生する。なお、Z軸方向は、例えば静磁場方向と同方向とする。X,Y,Z各軸の傾斜磁場は、例えば、スライス選択用傾斜磁場Gs、位相エンコード用傾斜磁場Geおよびリードアウト用傾斜磁場Grにそれぞれ対応される。スライス選択用傾斜磁場Gsは、任意に撮影断面を決めるために利用される。位相エンコード用傾斜磁場Geは、空間的位置に応じて磁気共鳴信号の位相を変化させるために利用される。リードアウト用傾斜磁場Grは、空間的位置に応じて磁気共鳴信号の周波数を変化させるために利用される。
【0015】
被検体200は、寝台4の天板41に載置された状態で傾斜磁場コイル2の内部の空間(撮像空間)内に挿入される。寝台4は、寝台制御部5の制御の下に、天板41をその長手方向(図1中における左右方向)および上下方向に移動させる。通常、この長手方向が静磁場磁石1の中心軸と平行になるように寝台4が設置される。
【0016】
RFコイルユニット6aは、1つまたは複数のコイルを円筒状のケースに収容して構成される。RFコイルユニット6aは、傾斜磁場コイル2の内側に配置される。RFコイルユニット6aは、送信部7から高周波パルス(RFパルス)の供給を受けて、高周波磁場を発生する。
【0017】
RFコイルユニット6bは、天板41上に載置されたり、天板41に内蔵されたり、あるいは被検体200に装着される。そして撮影時には、被検体200とともに撮像空間内に挿入される。RFコイルユニット6bとしては、様々なタイプのものが任意に装着可能である。また受信用のRFコイルユニットは、1つまたは3つ以上が装着されても良い。RFコイルユニット6bは、それぞれ少なくとも1つの要素コイルを備える。RFコイルユニット6bに備えられた要素コイルはそれぞれ、被検体200から放射される磁気共鳴信号を受信する。要素コイルのそれぞれの出力信号は、個別に選択回路8に入力される。なお、選択回路8に同時に接続可能な要素コイルの数を、以下ではmと示す。このmは、例えば「128」である。
【0018】
送信部7は、ラーモア周波数に対応するRFパルスをRFコイルユニット6aに供給する。
【0019】
選択回路8は、RFコイルユニット6bから出力される最大mチャネルの磁気共鳴信号から任意の1乃至nチャネルの磁気共鳴信号を選択する。ただし、nは、mよりも小さな正数であり、例えば「32」である。そして選択回路8は、選択した磁気共鳴信号を受信部9へ与える。どのチャネルを選択するかは、計算機システム10から指示される。
【0020】
受信部9は、増幅器、位相検波器およびアナログディジタル変換器を有する処理系をnチャネル備えている。これらnチャネルの処理系へは、選択回路8が選択する最大nチャネルの磁気共鳴信号がそれぞれ入力される。増幅器は、磁気共鳴信号を増幅する。位相検波器は、増幅器から出力される磁気共鳴信号の位相を検波する。アナログディジタル変換器は、位相検波器から出力される信号をディジタル信号に変換する。受信部9は、各処理系により得られる最大nチャネルのディジタル信号をそれぞれ出力する。
【0021】
計算機システム10は、インタフェース部11、データ収集部12、再構成部13、記憶部14、表示部15、入力部16および主制御部17を有している。
【0022】
インタフェース部11には、傾斜磁場電源3、寝台制御部5、送信部7、選択回路8および受信部9等が接続される。インタフェース部11は、これらの接続された各部と計算機システム10との間で授受される信号の入出力を行う。
【0023】
データ収集部12は、受信部9から出力されるディジタル信号を収集する。データ収集部12は、収集したディジタル信号、すなわち磁気共鳴信号データを、記憶部14に格納する。
【0024】
再構成部13は、記憶部14に記憶された磁気共鳴信号データに対して、後処理、すなわちフーリエ変換等の再構成を実行し、被検体200内の所望核スピンのスペクトラムデータあるいは画像データを求める。また再構成部13は、主制御部17から指定される特定要素コイルで受信された磁気共鳴信号に関した磁気共鳴信号データに基づいて、要素コイルの配列方向の投影データをそれぞれ生成する。
【0025】
記憶部14は、磁気共鳴信号データと、スペクトラムデータあるいは画像データとを、被検者毎に記憶する。
【0026】
表示部15は、スペクトラムデータあるいは画像データ等の各種の情報を主制御部17の制御の下に表示する。表示部15としては、液晶表示器などの表示デバイスを利用可能である。
【0027】
入力部16は、オペレータからの各種指令や情報入力を受け付ける。入力部16としては、マウスやトラックボールなどのポインティングデバイス、モード切替スイッチ等の選択デバイス、あるいはキーボード等の入力デバイスを適宜に利用可能である。
【0028】
主制御部17は、図示していないCPUやメモリ等を有しており、MRI装置100を総括的に制御する。主制御部17は、RFコイルユニット6bとして、複数の要素コイルを配列して形成されたアレイコイルが利用される場合に、その位置を判定するためのスキャン(以下、位置判定プレスキャンと称する)を制御する機能や、位置判定プレスキャンの結果に基づいてアレイコイルの位置を判定する機能を備える。位置判定プレスキャンを制御する機能には、アレイコイルに含まれる要素コイルのうちから位置判定プレスキャンのために使用する特定要素コイルを選択する機能と、位置判定プレスキャンの条件を、特定要素コイルでの受信にてオーバーフローを生じさせないように設定する機能とを含む。位置を判定する機能には、特定要素コイルのそれぞれの位置を、各特定要素について得られた投影データに基づいて推定する機能と、特定要素コイルのそれぞれに関して推定された位置および複数の要素コイルの配列状態に関する既知の情報とに基づいてアレイコイルの位置を判定する機能とを含む。なお、既知の情報は、典型的には物理的な数値である。物理的な数値は、典型的には要素コイルどうしの間隔である。
【0029】
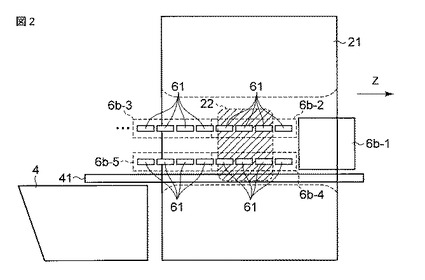
図2はRFコイルユニット6bの装着例を示す図である。なお、図1と同一部分には同一符号を付し、その詳細な説明は省略する。
【0030】
図2に示す例では、5つのRFコイルユニット6bが装着されている。なお、これらのRFコイルユニット6bのそれぞれを区別する必要が有る場合には、それぞれをRFコイルユニット6b-1,6b-2,6b-3,6b-4,6b-5と記すこととする。RFコイルユニット6b-1は頭部用コイルであり、天板41上の任意の位置に載置されて被検体200の頭部が挿入されるか、被検体200の頭部に装着されて被検体200とともに天板41上に載置される。RFコイルユニット6b-2,6b-3はそれぞれ腹部用コイルであり、被検体200の身体の表面側に装着される。RFコイルユニット6b-4,6b-5は脊椎用コイルであり、天板41上の任意の位置に載置されてその上に被検体200が仰向けに載置されるか、被検体200の背面側に装着されて被検体200とともに天板41上に載置される。かくして、これらのRFコイルユニット6bは、天板41上に載置される位置が不定である。RFコイルユニット6bとしては、このほかに膝などの各部位ごとに最適化したものが使用されることもある。
【0031】
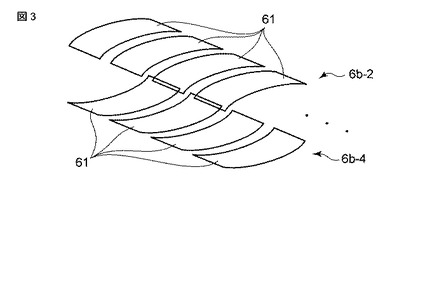
RFコイルユニット6b-2,6b-3,6b-4,6b-5は、図2および図3に示すように、それぞれ複数の要素コイル61(ここでは4つ)を一方向に一定間隔で配列して形成されている。RFコイルユニット6b-2,6b-3,6b-4,6b-5は、図2に示すように要素コイル61の配列方向とZ軸方向とが一致する姿勢で使用される。なお図3は、RFコイルユニット6b-2,6b-3における要素コイル61の配列状況を示す斜視図である。
【0032】
RFコイルユニット6b-2,6b-3は、それぞれが個別に任意の位置に装着することも可能であるし、機械的な連結機構によって互いに連結されて、一定の間隔を保って装着することも可能である。これは、RFコイルユニット6b-4,6b-5についても同様である。
【0033】
要素コイル61は、更に複数のコイルを結合して形成されることもある。3〜4個程度の複数のコイルを結合しなおして使うMode Matrixと呼ばれる方式も提案されている(非特許文献1を参照)。このMode Matrixにおける結合単位も、要素コイルと同様に扱える。
【0034】
さて、図2における符号21は、静磁場磁石1、傾斜磁場コイル2およびRFコイルユニット6aを収容した架台を示す。架台21内部の撮像空間のうち、実際に撮像に利用する撮像利用範囲は符号22を付して示すように一部のみである。RFコイルユニット6b-2,6b-3,6b-4,6b-5は、撮像利用範囲22よりも大きく、一部の要素コイル61のみが撮像利用範囲22内に位置し得る。図2の例では、RFコイルユニット6b-2,6b-3のそれぞれの第2乃至第4の要素コイル61が撮像利用範囲22内に位置している。すなわち、図2に示す状態においては、撮像利用範囲22内に位置している要素コイル61が実際の撮像に使用される。このため、アレイコイルの多チャンネル化が進むほど、RFコイルユニットの位置、あるいは各要素コイル61の位置を知って、撮像に使用する要素コイルの適切な選択を行うことが必要になる。
【0035】
(1) 要素コイル61の位置の判定
そこでMRI装置100では、天板41上での位置が不定であるRFコイルユニット6bが有る場合に、そのRFコイルユニット6bに含まれる要素コイル61のそれぞれの位置を以下に説明するようにして判定する。この位置の判定は、天板41上での位置が不定であるRFコイルユニット6bのみを対象として行えば良く、脊椎用コイルのように天板41に固定されるタイプのRFコイルユニット6bについては対象外とする。
【0036】
主制御部17はまず、位置判定プレスキャンを実行させる。位置判定プレスキャンは、USP5,936,406に開示された技術を利用できる。すなわち、位置判定プレスキャンは、RFコイルユニット6bでの要素コイル61の配列方向に、すなわち図4に示すシーケンスによりZ軸方向に傾斜磁場をかけながら、当該方向の投影データを得る。この場合、撮像利用範囲22内に位置する要素コイル61によって受信された磁気共鳴信号に基づいた投影データは、例えば図5に示すように要素コイル61の大まかな位置を表す。そこで主制御部17は、例えば予め定められた閾値を使用して両端座標C1,C2を求める。さらに主制御部17は、両端座標C1,C2の中点となる座標C3を要素コイル61の中心座標として推定する。
【0037】
なお、撮像利用範囲22外に位置している要素コイル61からは、磁気共鳴信号が出力されないか、あるいは小さな磁気共鳴信号しか出力されない。そこで主制御部17は、このような要素コイル61からの出力信号は無視し、有意な信号を出力した要素コイル61に関してのみ位置の推定を行う。要素コイル61からの出力信号を無視するに当たっては、該当信号に基づく投影データの作成を行わないようにしても良いし、該当信号から生成された投影データに基づく中心座標の推定を行わないようにしても良いし、該当信号を出力した要素コイル61に関して推定された中心座標を各要素コイル61の位置の判定のために利用しないようにしても良い。また、有意な信号を出力した全ての要素コイル61に関して位置の推定を行う必要はなく、そのような要素コイル61のうちの一部に関してのみ位置の推定を行っても良い。
【0038】
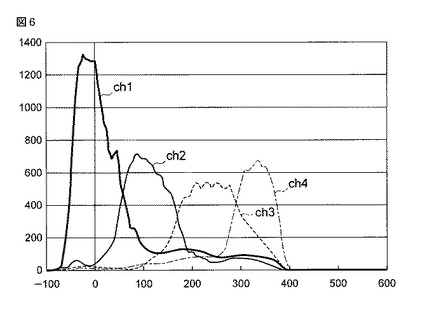
図6はRFコイルユニット6b-4の4つの要素コイル61のそれぞれに関して得られた投影データの一例を示す図である。なお4つの要素コイル61の間隔は120mmである。標準的な体格の健常者を被検体200とし、図4に示したパルスシーケンスを使用し、サジタル撮像(左右方向投影)、50cm厚(実質非選択励起)で取得したものである。なお,読み出し方向のオーバーサンプリング収集による折返し防止はもちろん併用したほうがよい。
【0039】
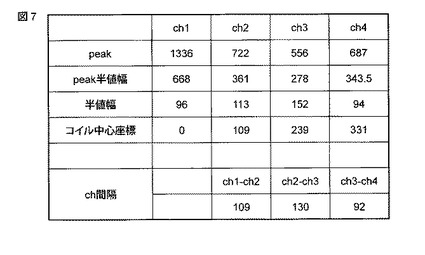
この投影データに基づいて4つの要素コイル61のそれぞれについて上記のように推定される中心座標は、第1チャネルch1の中心座標を基準として、図7に示すように0mm、109mm、239mmおよび331mmである。ただしここでは、投影データに対して、閾値処理した後のピークの面積の中心をもって要素コイル61の中心座標の推定値とした。ここでは、投影データのピークの半値幅で上記の閾値処理をしている。
【0040】
上記の推定値に基づく隣接する要素コイル61どうしの間隔は、109mm、130mm、92mmとなり、120mmという既知情報と一致しない。つまり、上記のように推定される中心位置は、要素コイル61のそれぞれの位置を正確に推定できていない。そこで主制御部17は、4つの中心座標の平均値として求まる座標(170mm)を基準座標として、さらに要素コイル61の間隔が120mmであるという既知情報とに基づいて4つの要素コイル61のそれぞれの中心座標を次のような計算により判定する。
【0041】
第1のチャネルch1:170−120*1.5=−10mm
第2のチャネルch2:170−120*0.5=110mm
第3のチャネルch3:170+120*0.5=230mm
第4のチャネルch4:170+120*1.5=350mm
このようにして、要素コイル61のそれぞれについて推定された中心座標の相対的な関係と、既知である要素コイル61の間隔とに基づいて要素コイル61のそれぞれの位置を判定するので、より高精度に要素コイル61の位置を判定することができる。すなわち、一つ一つの要素コイル61の位置を個別に求めるよりも、ロバストな推定が可能になる。
【0042】
なお、ここではRFコイルユニット6b-4に含まれた要素コイル61の位置判定のみについて説明したが、他のRFコイルユニット6bについても同様にして位置判定を行う。ただし、機械的な連結機構によって互いに連結された複数のRFコイルユニット6bに関しては、それらに含まれる要素コイル61の位置を上記の処理によってまとめて判定することも可能である。
【0043】
例えば、RFコイルユニット6b-2,6b-3が、それぞれの端部に位置する要素コイル61どうしの間隔が120mmとなるように互いに連結されているとする。このときに例えば図2のようにRFコイルユニット6b-2のみが撮像利用範囲22に入っているならば、RFコイルユニット6b-3に含まれた要素コイル61の位置を判定するための情報を得ることができない。しかしながら、上述のようにしてRFコイルユニット6b-2の第2乃至第4チャネルch2〜ch4の要素コイル61それぞれの中心座標が118mm,−2mm,−122mmとしてそれぞれ推定されたとするならば、RFコイルユニット6b-2の第1チャネルch1の要素コイル61の中心座標が238mmと判定でき、またRFコイルユニット6b-3の各チャネルの要素コイル61それぞれの中心座標が−242mm,−362mm,−482mm,−602mmとそれぞれ判定できる。
【0044】
また例えば、RFコイルユニット6b-2,6b-3それぞれの端部のみが撮像利用範囲22に入っているならば、RFコイルユニット6b-2に含まれた少なくとも1つの要素コイル61について推定される位置と、RFコイルユニット6b-3に含まれた少なくとも1つの要素コイル61について推定される位置とに基づいてRFコイルユニット6b-2,6b-3の各要素コイル61それぞれの位置を判定することができる。
【0045】
位置が不定であるRFコイルユニット6bに含まれる要素コイル61の数が受信部9が持つ受信チャネル数を上回る場合には、位置判定プレスキャンにおいて該当する全ての要素コイル61の受信信号を収集することができない。このような場合には、位置が不定であるRFコイルユニット6bのそれぞれに、受信チャネルを割り当てるようにする。例えばシステムの受信可能チャンネル数が「16」で、位置が不定であるRFコイルユニット6bの数が「5」であれば、この5つのRFコイルユニット6bに3チャネルずつを割り当てれば良い。
【0046】
主制御部17は、このようにして判定した要素コイル61の位置を、スキャンプランなど撮像の条件設定を行うユーザーインターフェース上にて表示させる。この表示は、例えば図2に示されるような模式的な図を用いることができる。この表示は、要素コイル61の位置を操作者に確認させるためだけに行うものであっても良いし、撮像に使用する要素コイル61の選択を操作者におこなせるために行うものであっても良い。
【0047】
このような表示を行うことによって、要素コイル61の位置を操作者が容易かつ的確に知ることができるようになる。
【0048】
なおここでは、各要素コイル61の位置は、要素コイルの受信信号から推定された位置情報および既知情報(物理的位置情報、要素コイルの間隔、コイルユニット中心からコイルエレメント中心までの距離など)に基づいて判定されるために、静磁場の中心からの相対的位置として判定される。そこで表示に当たっては、天板41に対する相対位置に換算しても良い。
【0049】
(2) RFパワーの設定
上記のような位置判定は、検査のできるだけ早いタイミングで行うことが望ましい。MRI装置では一般に、被検体200のセッティングを終えた後に、関心領域を磁場中心に移動し、RFパワーの調整や受信ゲインの調整などのための通常の一連のプレスキャンが行われる、MRI装置100では、これらの通常のプレスキャンに先立って、位置判定プレスキャンを行うようにする。この場合に主制御部17は、位置判定プレスキャンにおけるRFパワーは、入力部16から入力された被検体200の体重と、予め準備した体重別RFテーブルとに従って、被検体200の体重に応じた適切な値に設定する。
【0050】
(3) オーバーフローの防止によるロバスト性の向上
被検体200となる被検者の体格は千差万別であり、要素コイル61で受信される磁気共鳴信号の大きさもバリエーションが大きい。また例えば、肺野部を含んだ胸部や、正中では無信号に近い下肢では、磁気共鳴信号が少ない傾向があるなどのように、撮像対象に応じても要素コイル61で受信される磁気共鳴信号の大きさが変化する。このような事情を考慮して、位置判定に有用な磁気共鳴信号を確実に受信できるように、前述した位置判定プレスキャンにおけるスライス厚みを50cm厚(実質非選択励起)としている。しかしながら、放射される磁気共鳴信号が大きすぎても、オーバーフローが発生するために好ましくない。そこで以下に示すような方法のいずれかによって、位置判定に使用する磁気共鳴信号のレベルを適正に調整しても良い。
【0051】
(3-1) 入力部16から入力された被検体200の体重と、予め準備した体重別受信ゲインテーブルとに従って、被検体200の体重に応じた適切な受信ゲインを設定する。
【0052】
(3-2) 受信ゲインを変えながら磁気共鳴信号を複数回受信し、これにより得られた複数の信号のうちでオーバーフローしない信号を使用する。
【0053】
(3-3) スライス厚を変えながら磁気共鳴信号を複数回受信し、これにより得られた複数の信号のうちでオーバーフローしない信号を使用する。
【0054】
(3-4) TR(パルスシーケンスの繰り返し時間)を変えながら磁気共鳴信号を複数回受信し、これにより得られた複数の信号のうちでオーバーフローしない信号を使用する。
【0055】
(3-5) 撮像領域全体にわたって、プレサチュレーションパルスやインバージョンパルスを印加した後に、位置判定に使用するためのデータ収集を行う。
【0056】
(3-6) ツイスター付マルチエコーシーケンスを位置判定プリスキャンのシーケンスとして採用する。
【0057】
なお、(3-3)や(3-4)の方法では、スライス厚やTR以外の撮像条件を変更することも可能である。
【0058】
これらの方法のいずれかを採用することにより、位置判定に使用する磁気共鳴信号のレベルを適正に調整することができる。しかしながら、(3-1)の方法では、被検体200の体重についての入力情報が正確でないと受信エラーを起こす可能性があり、また(3-2)乃至(3-4)の方法では、収集時間が長くなってしまう。(3-4)の方法では更に、被検体200に関する緩和時間T1に依存するために、受信信号強度のコントロールがしにくい。
【0059】
このようなことから、(3-6)の方法が他の方法よりも優れる。そこで以下、(3-6)の方法について詳細に説明する。
【0060】
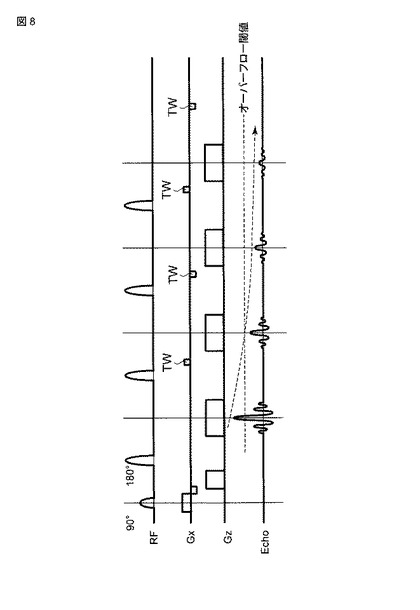
図8はツイスター付マルチエコーシーケンスのタイミング図である。
【0061】
このシーケンスでは、微小なスライス方向ツイスターTWを累積的に印加する。SE(spin echo)系では、ツイスターTWの符号は正負交互にする必要がある。ツイスターTWの大きさは、マルチエコー分累積されてもスライス厚みの1エンコード分以下から1エンコード分程度にする(δエンコードとする)。もちろん、累積的な印加でなく、エコーごとに反転パルスで効果をリセットして、次のエコーにて所望の量のスポイラーを印加しても良い。
【0062】
例えば、スライス厚みをW、ツイスターTWの傾斜磁場強度をG、印加時間をTとするとき、γGTW=δが成り立つので、δ=0.2、W=0.5m、T=1msとすると、
γG=0.2/((1/1000)×(0.5))=400[Hz/m]
G=400/(43.6×106)≒10-5[T/m]=0.01[mT/m]
となり、ツイスターTWは微弱なパルスでよい。TE(エコー時間)による信号減衰もあるが、ツイスターTWによって確実にエコーの強度を減弱することができる。そして主制御部17は、予め定めたオーバーフロー閾値よりも小さくなった最初のエコーを位置判定のために用いるようにする。例えば図8に示す例では、2番目のエコーが採用されることになる。
【0063】
ちなみに、ツイスターTWを用いた場合、被検体200が同一構造とした場合の粗い近似では、信号はSinc関数に従って減衰するので、相対信号量はδに対して図9に示すように変化する(減衰する)。
【0064】
累積的なツイスター量が例えば、0,0.5,0.8,0.9となるように、実際のパルスとしてのツイスター量は、その差分に符号をつけた、0,−0.5,0.3,−0.1とすればよい。
【0065】
このようにマルチエコーシーケンスを使用できるために繰返し励起が不要となるため、データ収集時間の延長はほとんど無視できる。例えば、TE=10msのシーケンスで4エコーであれば、約50msでデータ収集を終了することができ非常に効率がよい。
【0066】
なお、信号強度はMRI装置ごとに差がありえるので、この差を考慮してツイスター量や受信ゲインは適宜設定を変更することが望ましい。しかしながら、信号強度に違いがあったとしても、エコーが進むに従ってツイスターTWの効果とT2緩和の効果により受信信号の強度が低下し、オーバーフローしなくなるから、信号強度の差は無視しても構わない。
【0067】
この実施形態は、次のような種々の変形実施が可能である。
【0068】
(1) 位置判定プレスキャンは、検査開始にあたって被検体200のセッティングを終えた後に、天板送りをしている間に行うことも可能である。
【0069】
典型的な実現例としては、天板送りを開始する前に、あらかじめ準備した体重別RFテーブルに従ってRFパワー設定を行う。ゲインは最小とする。そして図10に示すように、天板41を18cm/s程度で移動させながら、2sおきに、すなわち天板41が360mm移動するたびに、上述のツイスター付マルチエコーシーケンスを用いてデータ収集を行う。天板41の移動をデータ収集の度に停止しても良いが、停止することなくデータ収集を行うことも可能である。ただし、天板41を移動させたままでデータ収集を行う場合には、データ収集中にも天板41が9mmほどの移動するので、エコーごとに位置の補正をすることが望ましい。
【0070】
天板41が架台21内に挿入された時点で、最初の関心部位までの位置判定用のデータが揃う。真の全身撮影で頭頂から足先までのコイル装着位置を直接確認したい場合には、天板41を全領域にわたって移動しながらデータ収集を行っても良い。RFコイルユニット6b-2,6b-3,6b-4,6b-5は、図10における(a)(b)および(c)の各状態でのスキャンによってRFコイルユニット6b-2,6b-3,6b-4,6b-5に含まれた全ての要素コイル61の位置を判定するための投影データが収集できる。なお図10には、各要素コイル61に並べて、その要素コイル61により受信される磁気共鳴信号に基づいて得られる投影データを模式的に示している。
【0071】
主制御部17は天板41の位置を常に把握しておき、前述の位置判定により判定される要素コイル61の位置と各スキャンを行った際の天板41の位置とに基づいて各要素コイル61の位置を判定する。
【0072】
(2) 投影データは、コイル感度の影響を受けるため、概略Gaussianのような形状となる。この投影データが最大値をとる位置を要素コイル61の位置の推定座標とすることもできる。あるいは、よりロバストにするために、例えば最大値の20%程度で閾値処理を施して閾値以上の領域の中点、あるいは重心を推定座標としてもよい。あるいはGaussianでフィッティングをして、その中心座標を推定座標とすることもできる。その他、この種の一峰性の形状をもつ関数のフィッティングをしても良い。
【0073】
(3) 傾斜磁場は、一般的に非線形性をもつ。特に近年は、傾斜磁場スリューレートアップ、最大傾斜磁場強度のアップ、あるいは大口径化などのトレードオフとして、傾斜磁場の非線形性をある程度は許容する傾向にある。そこでz方向の非線形性を考慮して、磁場中心から例えば±15cm以下の領域にピークを持つデータだけを採用して位置の判定を行っても良い。この場合、上記のように天板送りをしている間に位置判定プレスキャンを行うようにするならば、1.5秒おきに27cmずつ天板41を移動しながらデータ収集をしても良い。もちろん、非線形性の補正を行って推定データとして採用しても良い。
【0074】
(4) 静磁場の不均一性によっても投影位置情報にエラーが生じるので、同様に補正しても良い。ここで、静磁場不均一性による位置の歪みは読み出し用傾斜磁場の強度と極性に依存するので、これらを考慮するものとする。
【0075】
(5) ここまでの説明では、全てZ軸方向についての位置判定を説明したが、しかしながら、Z軸方向と直交するX−Y面方向などの他の方向に要素コイル61が配列されているならば、それらの要素コイル61の位置を判定することも可能である。この場合には、位置判定プレスキャンにおける読み出し方向を、要素コイル61の配列方向の傾斜磁場とすれば良い。位置判定プレスキャンを繰り返して、X,Y,Zのうちの複数の方向に関する位置を判定しても良い。
【0076】
(6) 既知の情報を参照せずに、投影データのみに基づいて要素コイル61それぞれの位置を判定しても良い。
【0077】
(7) 要素コイル61の配列に関する物理的な数値は、RFコイルユニット6bの大きさを表す数値や、要素コイル61の大きさを表す数値などの他の様々な数値であっても良いし、それら様々な数値の組み合わせであっても良い。
【0078】
(8) 要素コイル61の配列に関する既知の情報は、物理的な数値のみならず、要素コイル61の配列状態を表す情報などの他の情報を含んでも良い。
【0079】
(9) RFコイルユニット6bの位置を判定しても良い。
【0080】
(10) RFコイルユニット6bに含まれた複数の要素コイル61のうちの一部についてそれぞれ得られた投影データと、要素コイル61の配列に関する既知の情報とに基づいて、上記一部の要素コイル61以外の要素コイル61の位置を判定することもできる。例えば、RFコイルユニット6b-2の第1乃至第3チャネルch1〜ch3のそれぞれに関する投影データに基づいて第2および第3チャネルch2,ch3の要素コイル61のそれぞれの中心座標が118mm,−2mmとそれぞれ判定されたとするならば、第4チャネルch4の要素コイル61の中心座標を−122mmと判定することができる。
【0081】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0082】
1…静磁場磁石、2…傾斜磁場コイル、3…傾斜磁場電源、4…寝台、5…寝台制御部、6a,6b…RFコイルユニット、7…送信部、8…選択回路、9…受信部、10…計算機システム、11…インタフェース部、12…データ収集部、13…再構成部、14…記憶部、15…表示部、16…入力部、17…主制御部、61…要素コイル、100…磁気共鳴イメージング装置(MRI装置)、200…被検体。
【技術分野】
【0001】
本発明は、複数の要素コイルを配列して形成されたアレイコイルを使用して磁気共鳴信号を受信する磁気共鳴イメージング装置に関する。
【背景技術】
【0002】
複数の要素コイルを配列して形成されたアレイコイルを用いて、パラレルイメージングを効率的に行う方法が知られている。
【0003】
このパラレルイメージングにおいては、アレイコイルの位置を考慮することによってパフォーマンスを向上させることが可能である。例えば非特許文献1には、「Mode Matrix」を用いて、多数のアレイコイルを用いたパラレルイメージングまたは一般イメージングを効率的に行う技術が開示されている。
【0004】
受信コイルの位置を求める技術としては、特許文献1に開示されたものが知られている。特許文献1には、受信コイルの中心部にマーカを取付け、このマーカからのNMR(nuclear magnetic resonance)信号を収集し、この収集したNMR信号からマーカの位置を求める技術が開示されている。また、特別なコイル位置検出用の機構を設ける方法も特許文献2により提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平7−124135号公報
【特許文献2】特公平5−41256号公報
【非特許文献】
【0006】
【非特許文献1】A. Reykowski, M. Blasche, Mode Matrix - A Generalized Signal Combiner For Parallel Imaging Arrays, ISMRM 2004, p.1587
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の技術によれば、受信コイルの位置を精度良く求めることができる。しかしながら、マーカが取り付けられていない受信コイルの位置は検出することができない。また特許文献1の方法は、機構的に複雑であり、多くのコイルの位置検出に適用するのは困難である。
【0008】
本発明はこのような事情を考慮してなされたものであり、その目的とするところは、マーカのような位置検出用の仕組みを備えていないコイルユニットの位置、あるいはこのようなコイルユニットに含まれた複数の要素コイルのそれぞれの位置を正確に判定できる磁気共鳴イメージング装置を提供することにある。
【課題を解決するための手段】
【0009】
本発明の一態様による磁気共鳴イメージング装置は、被検体からの磁気共鳴信号をそれぞれ受信する複数の要素コイルが配列されたアレイコイルと、前記被検体あるいは前記アレイコイルを移動させる移動ユニット、前記被検体あるいは前記アレイコイルを前記移動ユニットにより移動させながら前記磁気共鳴信号を前記複数の要素コイルそれぞれに受信させるシーケンスを実行するスキャンコントローラと、前記複数の要素コイルそれぞれで受信された複数の磁気共鳴信号に基づいて前記複数の要素コイルの配列方向についての各要素コイルの投影データをそれぞれ計算する計算ユニットと、前記複数の要素コイルそれぞれの前記投影データに基づいて、前記複数の要素コイルそれぞれの位置あるいは前記アレイコイルの位置を判定する判定ユニットとを具備する。
【図面の簡単な説明】
【0010】
【図1】本発明の一実施形態に係る磁気共鳴イメージング装置(MRI装置)の構成を示す図。
【図2】図1中のRFコイルユニットの装着例を示す図。
【図3】図2中のRFコイルユニットにおける要素コイルの配列状況を示す斜視図。
【図4】位置判定プレスキャンにおける基本的なパルスシーケンスを示す図。
【図5】投影データから要素コイルの中心座標を推定する原理を示す図。
【図6】図2中のRFコイルユニットに含まれた4つの要素コイルそれぞれに関して得られた投影データの一例を示す図。
【図7】図6から求められる各種の数値を表す図。
【図8】ツイスター付マルチエコーシーケンスのタイミング図。
【図9】ツイスターを用いた場合における相対信号量のδに対する変化を示す図。
【図10】位置判定プレスキャンを天板送りをしている間に行う様子を示す図。
【発明を実施するための形態】
【0011】
以下、図面を参照して本発明の一実施形態について説明する。
【0012】
図1は本実施形態に係る磁気共鳴イメージング装置(MRI装置)100の構成を示す図である。MRI装置100は、静磁場磁石1、傾斜磁場コイル2、傾斜磁場電源3、寝台4、寝台制御部5、RFコイルユニット6a,6b、送信部7、選択回路8、受信部9および計算機システム10を具備する。
【0013】
静磁場磁石1は、中空の円筒形をなし、内部の空間に一様な静磁場を発生する。この静磁場磁石1としては、例えば永久磁石、超伝導磁石等が使用される。
【0014】
傾斜磁場コイル2は、中空の円筒形をなし、静磁場磁石1の内側に配置される。傾斜磁場コイル2は、互いに直交するX,Y,Zの各軸に対応する3種のコイルが組み合わされている。傾斜磁場コイル2は、上記の3種のコイルが傾斜磁場電源3から個別に電流供給を受けて、磁場強度がX,Y,Zの各軸に沿って傾斜する傾斜磁場を発生する。なお、Z軸方向は、例えば静磁場方向と同方向とする。X,Y,Z各軸の傾斜磁場は、例えば、スライス選択用傾斜磁場Gs、位相エンコード用傾斜磁場Geおよびリードアウト用傾斜磁場Grにそれぞれ対応される。スライス選択用傾斜磁場Gsは、任意に撮影断面を決めるために利用される。位相エンコード用傾斜磁場Geは、空間的位置に応じて磁気共鳴信号の位相を変化させるために利用される。リードアウト用傾斜磁場Grは、空間的位置に応じて磁気共鳴信号の周波数を変化させるために利用される。
【0015】
被検体200は、寝台4の天板41に載置された状態で傾斜磁場コイル2の内部の空間(撮像空間)内に挿入される。寝台4は、寝台制御部5の制御の下に、天板41をその長手方向(図1中における左右方向)および上下方向に移動させる。通常、この長手方向が静磁場磁石1の中心軸と平行になるように寝台4が設置される。
【0016】
RFコイルユニット6aは、1つまたは複数のコイルを円筒状のケースに収容して構成される。RFコイルユニット6aは、傾斜磁場コイル2の内側に配置される。RFコイルユニット6aは、送信部7から高周波パルス(RFパルス)の供給を受けて、高周波磁場を発生する。
【0017】
RFコイルユニット6bは、天板41上に載置されたり、天板41に内蔵されたり、あるいは被検体200に装着される。そして撮影時には、被検体200とともに撮像空間内に挿入される。RFコイルユニット6bとしては、様々なタイプのものが任意に装着可能である。また受信用のRFコイルユニットは、1つまたは3つ以上が装着されても良い。RFコイルユニット6bは、それぞれ少なくとも1つの要素コイルを備える。RFコイルユニット6bに備えられた要素コイルはそれぞれ、被検体200から放射される磁気共鳴信号を受信する。要素コイルのそれぞれの出力信号は、個別に選択回路8に入力される。なお、選択回路8に同時に接続可能な要素コイルの数を、以下ではmと示す。このmは、例えば「128」である。
【0018】
送信部7は、ラーモア周波数に対応するRFパルスをRFコイルユニット6aに供給する。
【0019】
選択回路8は、RFコイルユニット6bから出力される最大mチャネルの磁気共鳴信号から任意の1乃至nチャネルの磁気共鳴信号を選択する。ただし、nは、mよりも小さな正数であり、例えば「32」である。そして選択回路8は、選択した磁気共鳴信号を受信部9へ与える。どのチャネルを選択するかは、計算機システム10から指示される。
【0020】
受信部9は、増幅器、位相検波器およびアナログディジタル変換器を有する処理系をnチャネル備えている。これらnチャネルの処理系へは、選択回路8が選択する最大nチャネルの磁気共鳴信号がそれぞれ入力される。増幅器は、磁気共鳴信号を増幅する。位相検波器は、増幅器から出力される磁気共鳴信号の位相を検波する。アナログディジタル変換器は、位相検波器から出力される信号をディジタル信号に変換する。受信部9は、各処理系により得られる最大nチャネルのディジタル信号をそれぞれ出力する。
【0021】
計算機システム10は、インタフェース部11、データ収集部12、再構成部13、記憶部14、表示部15、入力部16および主制御部17を有している。
【0022】
インタフェース部11には、傾斜磁場電源3、寝台制御部5、送信部7、選択回路8および受信部9等が接続される。インタフェース部11は、これらの接続された各部と計算機システム10との間で授受される信号の入出力を行う。
【0023】
データ収集部12は、受信部9から出力されるディジタル信号を収集する。データ収集部12は、収集したディジタル信号、すなわち磁気共鳴信号データを、記憶部14に格納する。
【0024】
再構成部13は、記憶部14に記憶された磁気共鳴信号データに対して、後処理、すなわちフーリエ変換等の再構成を実行し、被検体200内の所望核スピンのスペクトラムデータあるいは画像データを求める。また再構成部13は、主制御部17から指定される特定要素コイルで受信された磁気共鳴信号に関した磁気共鳴信号データに基づいて、要素コイルの配列方向の投影データをそれぞれ生成する。
【0025】
記憶部14は、磁気共鳴信号データと、スペクトラムデータあるいは画像データとを、被検者毎に記憶する。
【0026】
表示部15は、スペクトラムデータあるいは画像データ等の各種の情報を主制御部17の制御の下に表示する。表示部15としては、液晶表示器などの表示デバイスを利用可能である。
【0027】
入力部16は、オペレータからの各種指令や情報入力を受け付ける。入力部16としては、マウスやトラックボールなどのポインティングデバイス、モード切替スイッチ等の選択デバイス、あるいはキーボード等の入力デバイスを適宜に利用可能である。
【0028】
主制御部17は、図示していないCPUやメモリ等を有しており、MRI装置100を総括的に制御する。主制御部17は、RFコイルユニット6bとして、複数の要素コイルを配列して形成されたアレイコイルが利用される場合に、その位置を判定するためのスキャン(以下、位置判定プレスキャンと称する)を制御する機能や、位置判定プレスキャンの結果に基づいてアレイコイルの位置を判定する機能を備える。位置判定プレスキャンを制御する機能には、アレイコイルに含まれる要素コイルのうちから位置判定プレスキャンのために使用する特定要素コイルを選択する機能と、位置判定プレスキャンの条件を、特定要素コイルでの受信にてオーバーフローを生じさせないように設定する機能とを含む。位置を判定する機能には、特定要素コイルのそれぞれの位置を、各特定要素について得られた投影データに基づいて推定する機能と、特定要素コイルのそれぞれに関して推定された位置および複数の要素コイルの配列状態に関する既知の情報とに基づいてアレイコイルの位置を判定する機能とを含む。なお、既知の情報は、典型的には物理的な数値である。物理的な数値は、典型的には要素コイルどうしの間隔である。
【0029】
図2はRFコイルユニット6bの装着例を示す図である。なお、図1と同一部分には同一符号を付し、その詳細な説明は省略する。
【0030】
図2に示す例では、5つのRFコイルユニット6bが装着されている。なお、これらのRFコイルユニット6bのそれぞれを区別する必要が有る場合には、それぞれをRFコイルユニット6b-1,6b-2,6b-3,6b-4,6b-5と記すこととする。RFコイルユニット6b-1は頭部用コイルであり、天板41上の任意の位置に載置されて被検体200の頭部が挿入されるか、被検体200の頭部に装着されて被検体200とともに天板41上に載置される。RFコイルユニット6b-2,6b-3はそれぞれ腹部用コイルであり、被検体200の身体の表面側に装着される。RFコイルユニット6b-4,6b-5は脊椎用コイルであり、天板41上の任意の位置に載置されてその上に被検体200が仰向けに載置されるか、被検体200の背面側に装着されて被検体200とともに天板41上に載置される。かくして、これらのRFコイルユニット6bは、天板41上に載置される位置が不定である。RFコイルユニット6bとしては、このほかに膝などの各部位ごとに最適化したものが使用されることもある。
【0031】
RFコイルユニット6b-2,6b-3,6b-4,6b-5は、図2および図3に示すように、それぞれ複数の要素コイル61(ここでは4つ)を一方向に一定間隔で配列して形成されている。RFコイルユニット6b-2,6b-3,6b-4,6b-5は、図2に示すように要素コイル61の配列方向とZ軸方向とが一致する姿勢で使用される。なお図3は、RFコイルユニット6b-2,6b-3における要素コイル61の配列状況を示す斜視図である。
【0032】
RFコイルユニット6b-2,6b-3は、それぞれが個別に任意の位置に装着することも可能であるし、機械的な連結機構によって互いに連結されて、一定の間隔を保って装着することも可能である。これは、RFコイルユニット6b-4,6b-5についても同様である。
【0033】
要素コイル61は、更に複数のコイルを結合して形成されることもある。3〜4個程度の複数のコイルを結合しなおして使うMode Matrixと呼ばれる方式も提案されている(非特許文献1を参照)。このMode Matrixにおける結合単位も、要素コイルと同様に扱える。
【0034】
さて、図2における符号21は、静磁場磁石1、傾斜磁場コイル2およびRFコイルユニット6aを収容した架台を示す。架台21内部の撮像空間のうち、実際に撮像に利用する撮像利用範囲は符号22を付して示すように一部のみである。RFコイルユニット6b-2,6b-3,6b-4,6b-5は、撮像利用範囲22よりも大きく、一部の要素コイル61のみが撮像利用範囲22内に位置し得る。図2の例では、RFコイルユニット6b-2,6b-3のそれぞれの第2乃至第4の要素コイル61が撮像利用範囲22内に位置している。すなわち、図2に示す状態においては、撮像利用範囲22内に位置している要素コイル61が実際の撮像に使用される。このため、アレイコイルの多チャンネル化が進むほど、RFコイルユニットの位置、あるいは各要素コイル61の位置を知って、撮像に使用する要素コイルの適切な選択を行うことが必要になる。
【0035】
(1) 要素コイル61の位置の判定
そこでMRI装置100では、天板41上での位置が不定であるRFコイルユニット6bが有る場合に、そのRFコイルユニット6bに含まれる要素コイル61のそれぞれの位置を以下に説明するようにして判定する。この位置の判定は、天板41上での位置が不定であるRFコイルユニット6bのみを対象として行えば良く、脊椎用コイルのように天板41に固定されるタイプのRFコイルユニット6bについては対象外とする。
【0036】
主制御部17はまず、位置判定プレスキャンを実行させる。位置判定プレスキャンは、USP5,936,406に開示された技術を利用できる。すなわち、位置判定プレスキャンは、RFコイルユニット6bでの要素コイル61の配列方向に、すなわち図4に示すシーケンスによりZ軸方向に傾斜磁場をかけながら、当該方向の投影データを得る。この場合、撮像利用範囲22内に位置する要素コイル61によって受信された磁気共鳴信号に基づいた投影データは、例えば図5に示すように要素コイル61の大まかな位置を表す。そこで主制御部17は、例えば予め定められた閾値を使用して両端座標C1,C2を求める。さらに主制御部17は、両端座標C1,C2の中点となる座標C3を要素コイル61の中心座標として推定する。
【0037】
なお、撮像利用範囲22外に位置している要素コイル61からは、磁気共鳴信号が出力されないか、あるいは小さな磁気共鳴信号しか出力されない。そこで主制御部17は、このような要素コイル61からの出力信号は無視し、有意な信号を出力した要素コイル61に関してのみ位置の推定を行う。要素コイル61からの出力信号を無視するに当たっては、該当信号に基づく投影データの作成を行わないようにしても良いし、該当信号から生成された投影データに基づく中心座標の推定を行わないようにしても良いし、該当信号を出力した要素コイル61に関して推定された中心座標を各要素コイル61の位置の判定のために利用しないようにしても良い。また、有意な信号を出力した全ての要素コイル61に関して位置の推定を行う必要はなく、そのような要素コイル61のうちの一部に関してのみ位置の推定を行っても良い。
【0038】
図6はRFコイルユニット6b-4の4つの要素コイル61のそれぞれに関して得られた投影データの一例を示す図である。なお4つの要素コイル61の間隔は120mmである。標準的な体格の健常者を被検体200とし、図4に示したパルスシーケンスを使用し、サジタル撮像(左右方向投影)、50cm厚(実質非選択励起)で取得したものである。なお,読み出し方向のオーバーサンプリング収集による折返し防止はもちろん併用したほうがよい。
【0039】
この投影データに基づいて4つの要素コイル61のそれぞれについて上記のように推定される中心座標は、第1チャネルch1の中心座標を基準として、図7に示すように0mm、109mm、239mmおよび331mmである。ただしここでは、投影データに対して、閾値処理した後のピークの面積の中心をもって要素コイル61の中心座標の推定値とした。ここでは、投影データのピークの半値幅で上記の閾値処理をしている。
【0040】
上記の推定値に基づく隣接する要素コイル61どうしの間隔は、109mm、130mm、92mmとなり、120mmという既知情報と一致しない。つまり、上記のように推定される中心位置は、要素コイル61のそれぞれの位置を正確に推定できていない。そこで主制御部17は、4つの中心座標の平均値として求まる座標(170mm)を基準座標として、さらに要素コイル61の間隔が120mmであるという既知情報とに基づいて4つの要素コイル61のそれぞれの中心座標を次のような計算により判定する。
【0041】
第1のチャネルch1:170−120*1.5=−10mm
第2のチャネルch2:170−120*0.5=110mm
第3のチャネルch3:170+120*0.5=230mm
第4のチャネルch4:170+120*1.5=350mm
このようにして、要素コイル61のそれぞれについて推定された中心座標の相対的な関係と、既知である要素コイル61の間隔とに基づいて要素コイル61のそれぞれの位置を判定するので、より高精度に要素コイル61の位置を判定することができる。すなわち、一つ一つの要素コイル61の位置を個別に求めるよりも、ロバストな推定が可能になる。
【0042】
なお、ここではRFコイルユニット6b-4に含まれた要素コイル61の位置判定のみについて説明したが、他のRFコイルユニット6bについても同様にして位置判定を行う。ただし、機械的な連結機構によって互いに連結された複数のRFコイルユニット6bに関しては、それらに含まれる要素コイル61の位置を上記の処理によってまとめて判定することも可能である。
【0043】
例えば、RFコイルユニット6b-2,6b-3が、それぞれの端部に位置する要素コイル61どうしの間隔が120mmとなるように互いに連結されているとする。このときに例えば図2のようにRFコイルユニット6b-2のみが撮像利用範囲22に入っているならば、RFコイルユニット6b-3に含まれた要素コイル61の位置を判定するための情報を得ることができない。しかしながら、上述のようにしてRFコイルユニット6b-2の第2乃至第4チャネルch2〜ch4の要素コイル61それぞれの中心座標が118mm,−2mm,−122mmとしてそれぞれ推定されたとするならば、RFコイルユニット6b-2の第1チャネルch1の要素コイル61の中心座標が238mmと判定でき、またRFコイルユニット6b-3の各チャネルの要素コイル61それぞれの中心座標が−242mm,−362mm,−482mm,−602mmとそれぞれ判定できる。
【0044】
また例えば、RFコイルユニット6b-2,6b-3それぞれの端部のみが撮像利用範囲22に入っているならば、RFコイルユニット6b-2に含まれた少なくとも1つの要素コイル61について推定される位置と、RFコイルユニット6b-3に含まれた少なくとも1つの要素コイル61について推定される位置とに基づいてRFコイルユニット6b-2,6b-3の各要素コイル61それぞれの位置を判定することができる。
【0045】
位置が不定であるRFコイルユニット6bに含まれる要素コイル61の数が受信部9が持つ受信チャネル数を上回る場合には、位置判定プレスキャンにおいて該当する全ての要素コイル61の受信信号を収集することができない。このような場合には、位置が不定であるRFコイルユニット6bのそれぞれに、受信チャネルを割り当てるようにする。例えばシステムの受信可能チャンネル数が「16」で、位置が不定であるRFコイルユニット6bの数が「5」であれば、この5つのRFコイルユニット6bに3チャネルずつを割り当てれば良い。
【0046】
主制御部17は、このようにして判定した要素コイル61の位置を、スキャンプランなど撮像の条件設定を行うユーザーインターフェース上にて表示させる。この表示は、例えば図2に示されるような模式的な図を用いることができる。この表示は、要素コイル61の位置を操作者に確認させるためだけに行うものであっても良いし、撮像に使用する要素コイル61の選択を操作者におこなせるために行うものであっても良い。
【0047】
このような表示を行うことによって、要素コイル61の位置を操作者が容易かつ的確に知ることができるようになる。
【0048】
なおここでは、各要素コイル61の位置は、要素コイルの受信信号から推定された位置情報および既知情報(物理的位置情報、要素コイルの間隔、コイルユニット中心からコイルエレメント中心までの距離など)に基づいて判定されるために、静磁場の中心からの相対的位置として判定される。そこで表示に当たっては、天板41に対する相対位置に換算しても良い。
【0049】
(2) RFパワーの設定
上記のような位置判定は、検査のできるだけ早いタイミングで行うことが望ましい。MRI装置では一般に、被検体200のセッティングを終えた後に、関心領域を磁場中心に移動し、RFパワーの調整や受信ゲインの調整などのための通常の一連のプレスキャンが行われる、MRI装置100では、これらの通常のプレスキャンに先立って、位置判定プレスキャンを行うようにする。この場合に主制御部17は、位置判定プレスキャンにおけるRFパワーは、入力部16から入力された被検体200の体重と、予め準備した体重別RFテーブルとに従って、被検体200の体重に応じた適切な値に設定する。
【0050】
(3) オーバーフローの防止によるロバスト性の向上
被検体200となる被検者の体格は千差万別であり、要素コイル61で受信される磁気共鳴信号の大きさもバリエーションが大きい。また例えば、肺野部を含んだ胸部や、正中では無信号に近い下肢では、磁気共鳴信号が少ない傾向があるなどのように、撮像対象に応じても要素コイル61で受信される磁気共鳴信号の大きさが変化する。このような事情を考慮して、位置判定に有用な磁気共鳴信号を確実に受信できるように、前述した位置判定プレスキャンにおけるスライス厚みを50cm厚(実質非選択励起)としている。しかしながら、放射される磁気共鳴信号が大きすぎても、オーバーフローが発生するために好ましくない。そこで以下に示すような方法のいずれかによって、位置判定に使用する磁気共鳴信号のレベルを適正に調整しても良い。
【0051】
(3-1) 入力部16から入力された被検体200の体重と、予め準備した体重別受信ゲインテーブルとに従って、被検体200の体重に応じた適切な受信ゲインを設定する。
【0052】
(3-2) 受信ゲインを変えながら磁気共鳴信号を複数回受信し、これにより得られた複数の信号のうちでオーバーフローしない信号を使用する。
【0053】
(3-3) スライス厚を変えながら磁気共鳴信号を複数回受信し、これにより得られた複数の信号のうちでオーバーフローしない信号を使用する。
【0054】
(3-4) TR(パルスシーケンスの繰り返し時間)を変えながら磁気共鳴信号を複数回受信し、これにより得られた複数の信号のうちでオーバーフローしない信号を使用する。
【0055】
(3-5) 撮像領域全体にわたって、プレサチュレーションパルスやインバージョンパルスを印加した後に、位置判定に使用するためのデータ収集を行う。
【0056】
(3-6) ツイスター付マルチエコーシーケンスを位置判定プリスキャンのシーケンスとして採用する。
【0057】
なお、(3-3)や(3-4)の方法では、スライス厚やTR以外の撮像条件を変更することも可能である。
【0058】
これらの方法のいずれかを採用することにより、位置判定に使用する磁気共鳴信号のレベルを適正に調整することができる。しかしながら、(3-1)の方法では、被検体200の体重についての入力情報が正確でないと受信エラーを起こす可能性があり、また(3-2)乃至(3-4)の方法では、収集時間が長くなってしまう。(3-4)の方法では更に、被検体200に関する緩和時間T1に依存するために、受信信号強度のコントロールがしにくい。
【0059】
このようなことから、(3-6)の方法が他の方法よりも優れる。そこで以下、(3-6)の方法について詳細に説明する。
【0060】
図8はツイスター付マルチエコーシーケンスのタイミング図である。
【0061】
このシーケンスでは、微小なスライス方向ツイスターTWを累積的に印加する。SE(spin echo)系では、ツイスターTWの符号は正負交互にする必要がある。ツイスターTWの大きさは、マルチエコー分累積されてもスライス厚みの1エンコード分以下から1エンコード分程度にする(δエンコードとする)。もちろん、累積的な印加でなく、エコーごとに反転パルスで効果をリセットして、次のエコーにて所望の量のスポイラーを印加しても良い。
【0062】
例えば、スライス厚みをW、ツイスターTWの傾斜磁場強度をG、印加時間をTとするとき、γGTW=δが成り立つので、δ=0.2、W=0.5m、T=1msとすると、
γG=0.2/((1/1000)×(0.5))=400[Hz/m]
G=400/(43.6×106)≒10-5[T/m]=0.01[mT/m]
となり、ツイスターTWは微弱なパルスでよい。TE(エコー時間)による信号減衰もあるが、ツイスターTWによって確実にエコーの強度を減弱することができる。そして主制御部17は、予め定めたオーバーフロー閾値よりも小さくなった最初のエコーを位置判定のために用いるようにする。例えば図8に示す例では、2番目のエコーが採用されることになる。
【0063】
ちなみに、ツイスターTWを用いた場合、被検体200が同一構造とした場合の粗い近似では、信号はSinc関数に従って減衰するので、相対信号量はδに対して図9に示すように変化する(減衰する)。
【0064】
累積的なツイスター量が例えば、0,0.5,0.8,0.9となるように、実際のパルスとしてのツイスター量は、その差分に符号をつけた、0,−0.5,0.3,−0.1とすればよい。
【0065】
このようにマルチエコーシーケンスを使用できるために繰返し励起が不要となるため、データ収集時間の延長はほとんど無視できる。例えば、TE=10msのシーケンスで4エコーであれば、約50msでデータ収集を終了することができ非常に効率がよい。
【0066】
なお、信号強度はMRI装置ごとに差がありえるので、この差を考慮してツイスター量や受信ゲインは適宜設定を変更することが望ましい。しかしながら、信号強度に違いがあったとしても、エコーが進むに従ってツイスターTWの効果とT2緩和の効果により受信信号の強度が低下し、オーバーフローしなくなるから、信号強度の差は無視しても構わない。
【0067】
この実施形態は、次のような種々の変形実施が可能である。
【0068】
(1) 位置判定プレスキャンは、検査開始にあたって被検体200のセッティングを終えた後に、天板送りをしている間に行うことも可能である。
【0069】
典型的な実現例としては、天板送りを開始する前に、あらかじめ準備した体重別RFテーブルに従ってRFパワー設定を行う。ゲインは最小とする。そして図10に示すように、天板41を18cm/s程度で移動させながら、2sおきに、すなわち天板41が360mm移動するたびに、上述のツイスター付マルチエコーシーケンスを用いてデータ収集を行う。天板41の移動をデータ収集の度に停止しても良いが、停止することなくデータ収集を行うことも可能である。ただし、天板41を移動させたままでデータ収集を行う場合には、データ収集中にも天板41が9mmほどの移動するので、エコーごとに位置の補正をすることが望ましい。
【0070】
天板41が架台21内に挿入された時点で、最初の関心部位までの位置判定用のデータが揃う。真の全身撮影で頭頂から足先までのコイル装着位置を直接確認したい場合には、天板41を全領域にわたって移動しながらデータ収集を行っても良い。RFコイルユニット6b-2,6b-3,6b-4,6b-5は、図10における(a)(b)および(c)の各状態でのスキャンによってRFコイルユニット6b-2,6b-3,6b-4,6b-5に含まれた全ての要素コイル61の位置を判定するための投影データが収集できる。なお図10には、各要素コイル61に並べて、その要素コイル61により受信される磁気共鳴信号に基づいて得られる投影データを模式的に示している。
【0071】
主制御部17は天板41の位置を常に把握しておき、前述の位置判定により判定される要素コイル61の位置と各スキャンを行った際の天板41の位置とに基づいて各要素コイル61の位置を判定する。
【0072】
(2) 投影データは、コイル感度の影響を受けるため、概略Gaussianのような形状となる。この投影データが最大値をとる位置を要素コイル61の位置の推定座標とすることもできる。あるいは、よりロバストにするために、例えば最大値の20%程度で閾値処理を施して閾値以上の領域の中点、あるいは重心を推定座標としてもよい。あるいはGaussianでフィッティングをして、その中心座標を推定座標とすることもできる。その他、この種の一峰性の形状をもつ関数のフィッティングをしても良い。
【0073】
(3) 傾斜磁場は、一般的に非線形性をもつ。特に近年は、傾斜磁場スリューレートアップ、最大傾斜磁場強度のアップ、あるいは大口径化などのトレードオフとして、傾斜磁場の非線形性をある程度は許容する傾向にある。そこでz方向の非線形性を考慮して、磁場中心から例えば±15cm以下の領域にピークを持つデータだけを採用して位置の判定を行っても良い。この場合、上記のように天板送りをしている間に位置判定プレスキャンを行うようにするならば、1.5秒おきに27cmずつ天板41を移動しながらデータ収集をしても良い。もちろん、非線形性の補正を行って推定データとして採用しても良い。
【0074】
(4) 静磁場の不均一性によっても投影位置情報にエラーが生じるので、同様に補正しても良い。ここで、静磁場不均一性による位置の歪みは読み出し用傾斜磁場の強度と極性に依存するので、これらを考慮するものとする。
【0075】
(5) ここまでの説明では、全てZ軸方向についての位置判定を説明したが、しかしながら、Z軸方向と直交するX−Y面方向などの他の方向に要素コイル61が配列されているならば、それらの要素コイル61の位置を判定することも可能である。この場合には、位置判定プレスキャンにおける読み出し方向を、要素コイル61の配列方向の傾斜磁場とすれば良い。位置判定プレスキャンを繰り返して、X,Y,Zのうちの複数の方向に関する位置を判定しても良い。
【0076】
(6) 既知の情報を参照せずに、投影データのみに基づいて要素コイル61それぞれの位置を判定しても良い。
【0077】
(7) 要素コイル61の配列に関する物理的な数値は、RFコイルユニット6bの大きさを表す数値や、要素コイル61の大きさを表す数値などの他の様々な数値であっても良いし、それら様々な数値の組み合わせであっても良い。
【0078】
(8) 要素コイル61の配列に関する既知の情報は、物理的な数値のみならず、要素コイル61の配列状態を表す情報などの他の情報を含んでも良い。
【0079】
(9) RFコイルユニット6bの位置を判定しても良い。
【0080】
(10) RFコイルユニット6bに含まれた複数の要素コイル61のうちの一部についてそれぞれ得られた投影データと、要素コイル61の配列に関する既知の情報とに基づいて、上記一部の要素コイル61以外の要素コイル61の位置を判定することもできる。例えば、RFコイルユニット6b-2の第1乃至第3チャネルch1〜ch3のそれぞれに関する投影データに基づいて第2および第3チャネルch2,ch3の要素コイル61のそれぞれの中心座標が118mm,−2mmとそれぞれ判定されたとするならば、第4チャネルch4の要素コイル61の中心座標を−122mmと判定することができる。
【0081】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0082】
1…静磁場磁石、2…傾斜磁場コイル、3…傾斜磁場電源、4…寝台、5…寝台制御部、6a,6b…RFコイルユニット、7…送信部、8…選択回路、9…受信部、10…計算機システム、11…インタフェース部、12…データ収集部、13…再構成部、14…記憶部、15…表示部、16…入力部、17…主制御部、61…要素コイル、100…磁気共鳴イメージング装置(MRI装置)、200…被検体。
【特許請求の範囲】
【請求項1】
被検体からの磁気共鳴信号をそれぞれ受信する複数の要素コイルが配列されたアレイコイルと、
前記被検体あるいは前記アレイコイルを移動させる移動ユニットと、
前記被検体あるいは前記アレイコイルを前記移動ユニットにより移動させながら前記磁気共鳴信号を前記複数の要素コイルそれぞれに受信させるシーケンスを実行するスキャンコントローラと、
前記複数の要素コイルそれぞれで受信された複数の磁気共鳴信号に基づいて前記複数の要素コイルの配列方向についての各要素コイルの投影データをそれぞれ計算する計算ユニットと、
前記複数の要素コイルそれぞれの前記投影データに基づいて、前記複数の要素コイルそれぞれの位置あるいは前記アレイコイルの位置を判定する判定ユニットとを具備することを特徴とする磁気共鳴イメージング装置。
【請求項2】
前記磁気共鳴イメージング装置は、複数の前記アレイコイルを互いに連結した状態で使用可能であり、
前記計算ユニットは、前記複数のアレイコイルに含まれる複数の要素コイルそれぞれに関して前記投影データを計算し、
前記判定ユニットは、前記複数の要素コイルそれぞれの前記投影データと前記複数のアレイコイルの連結状態とに基づいて前記複数のアレイコイルにそれぞれ含まれる前記複数の要素コイルそれぞれの位置あるいは前記複数のアレイコイルそれぞれの位置を判定することを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項3】
前記計算ユニットは、規定強度以上の磁気共鳴信号を受信できた要素コイルに関してのみ前記投影データを計算することを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項4】
前記判定ユニットは、前記複数の要素コイルそれぞれの前記投影データのうちの規定強度以上の磁気共鳴信号を受信できた要素コイルに関する前記投影データのみを前記判定に用いることを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項5】
前記移動ユニットは、前記磁気共鳴信号の受信を行うときには前記被検体あるいは前記アレイコイルの移動を停止し、複数回の前記磁気共鳴信号の受信の合間に前記被検体あるいは前記アレイコイルを移動させることを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項6】
前記移動ユニットは、複数回の前記磁気共鳴信号の受信が行われているときに前記被検体あるいは前記アレイコイルを移動させることを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項7】
前記計算ユニットおよび前記判定ユニットのうちの少なくとも1つは、傾斜磁場の非線形性あるいは静磁場の不均一性によるエラーの大きなデータは処理に使用しないことを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項8】
前記判定ユニットは、傾斜磁場の非線形性あるいは静磁場の不均一性によるエラーの大きなデータに基づいて判定した位置を、傾斜磁場の非線形性あるいは静磁場の不均一性を考慮して補正することを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項9】
前記判定ユニットによる判定結果に基づいて、ユーザーインターフェース上にてコイル位置の確認表示または選択表示を行うユニットをさらに備えることを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項1】
被検体からの磁気共鳴信号をそれぞれ受信する複数の要素コイルが配列されたアレイコイルと、
前記被検体あるいは前記アレイコイルを移動させる移動ユニットと、
前記被検体あるいは前記アレイコイルを前記移動ユニットにより移動させながら前記磁気共鳴信号を前記複数の要素コイルそれぞれに受信させるシーケンスを実行するスキャンコントローラと、
前記複数の要素コイルそれぞれで受信された複数の磁気共鳴信号に基づいて前記複数の要素コイルの配列方向についての各要素コイルの投影データをそれぞれ計算する計算ユニットと、
前記複数の要素コイルそれぞれの前記投影データに基づいて、前記複数の要素コイルそれぞれの位置あるいは前記アレイコイルの位置を判定する判定ユニットとを具備することを特徴とする磁気共鳴イメージング装置。
【請求項2】
前記磁気共鳴イメージング装置は、複数の前記アレイコイルを互いに連結した状態で使用可能であり、
前記計算ユニットは、前記複数のアレイコイルに含まれる複数の要素コイルそれぞれに関して前記投影データを計算し、
前記判定ユニットは、前記複数の要素コイルそれぞれの前記投影データと前記複数のアレイコイルの連結状態とに基づいて前記複数のアレイコイルにそれぞれ含まれる前記複数の要素コイルそれぞれの位置あるいは前記複数のアレイコイルそれぞれの位置を判定することを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項3】
前記計算ユニットは、規定強度以上の磁気共鳴信号を受信できた要素コイルに関してのみ前記投影データを計算することを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項4】
前記判定ユニットは、前記複数の要素コイルそれぞれの前記投影データのうちの規定強度以上の磁気共鳴信号を受信できた要素コイルに関する前記投影データのみを前記判定に用いることを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項5】
前記移動ユニットは、前記磁気共鳴信号の受信を行うときには前記被検体あるいは前記アレイコイルの移動を停止し、複数回の前記磁気共鳴信号の受信の合間に前記被検体あるいは前記アレイコイルを移動させることを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項6】
前記移動ユニットは、複数回の前記磁気共鳴信号の受信が行われているときに前記被検体あるいは前記アレイコイルを移動させることを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項7】
前記計算ユニットおよび前記判定ユニットのうちの少なくとも1つは、傾斜磁場の非線形性あるいは静磁場の不均一性によるエラーの大きなデータは処理に使用しないことを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項8】
前記判定ユニットは、傾斜磁場の非線形性あるいは静磁場の不均一性によるエラーの大きなデータに基づいて判定した位置を、傾斜磁場の非線形性あるいは静磁場の不均一性を考慮して補正することを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【請求項9】
前記判定ユニットによる判定結果に基づいて、ユーザーインターフェース上にてコイル位置の確認表示または選択表示を行うユニットをさらに備えることを特徴とする請求項1に記載の磁気共鳴イメージング装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−254363(P2012−254363A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2012−219801(P2012−219801)
【出願日】平成24年10月1日(2012.10.1)
【分割の表示】特願2007−173206(P2007−173206)の分割
【原出願日】平成19年6月29日(2007.6.29)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成24年10月1日(2012.10.1)
【分割の表示】特願2007−173206(P2007−173206)の分割
【原出願日】平成19年6月29日(2007.6.29)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
[ Back to top ]