
磁気共鳴イメージング装置
【課題】MRIにおいて、ユーザに設定操作の手間をかけずに、プレスキャンなどの較正用のスキャンの条件を適正に設定する。
【解決手段】一実施形態では、MRI装置(20)は、本スキャンを実行する本スキャン実行部と、本スキャンで収集された磁気共鳴信号に基づいて画像データの再構成処理を実行する画像再構成部(90)と、補正スキャン設定部(100)と、補正スキャン実行部と、条件決定部とを備える。補正スキャン設定部(100)は、本スキャンの撮像条件又は再構成処理の条件の決定に用いられる補正スキャンの条件を、RFコイル装置の種類及び撮像部位に応じて算出及び自動設定する。補正スキャン実行部は、自動設定された補正スキャンの条件に基づいて補正スキャンを実行する。条件決定部は、補正スキャンの実行結果に基づいて、本スキャンの撮像条件又は再構成処理の条件を決定する。
【解決手段】一実施形態では、MRI装置(20)は、本スキャンを実行する本スキャン実行部と、本スキャンで収集された磁気共鳴信号に基づいて画像データの再構成処理を実行する画像再構成部(90)と、補正スキャン設定部(100)と、補正スキャン実行部と、条件決定部とを備える。補正スキャン設定部(100)は、本スキャンの撮像条件又は再構成処理の条件の決定に用いられる補正スキャンの条件を、RFコイル装置の種類及び撮像部位に応じて算出及び自動設定する。補正スキャン実行部は、自動設定された補正スキャンの条件に基づいて補正スキャンを実行する。条件決定部は、補正スキャンの実行結果に基づいて、本スキャンの撮像条件又は再構成処理の条件を決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、磁気共鳴イメージングに関する。
【背景技術】
【0002】
MRIは、静磁場中に置かれた被検体の原子核スピンをラーモア周波数のRFパルスで磁気的に励起し、この励起に伴って発生するMR信号から画像を再構成する撮像法である。なお、上記MRIは磁気共鳴イメージング(Magnetic Resonance Imaging)の意味であり、RFパルスは高周波パルス(radio frequency pulse)の意味であり、MR信号は核磁気共鳴信号(nuclear magnetic resonance signal)の意味である。
【0003】
MRIでは、撮像部位に応じたRFコイル装置をフェーズドアレイコイルとして被検体に装着させ、当該RFコイル装置によりMR信号を受信することがある。一般に、MRI装置に内蔵された全身用コイルの感度は十分均一であるが、撮像部位別のRFコイル装置内の要素コイル間の感度は、全身用コイルと比べてあまり均一ではない。即ち、被検体から発せられるMR信号の強度が位置に拘らず均一でも、受信信号のレベルがフェーズドアレイコイルの要素コイル間で不均一となり、画質を低下させる。
【0004】
また、所定値以上の均一性を有する静磁場が形成された撮像空間の中に被検体を入れると、被検体内とその周囲との透磁率の違いにより、静磁場の均一性が損なわれる。
【0005】
そこで、本スキャン前にプレスキャンを行い、本スキャン後の画像再構成時に用いる条件や本スキャンの撮像条件などをプレスキャンの実行結果に基づいて決定することがある。なお、スキャンとは、MR信号の収集動作を指し、画像再構成を含まないものとする。
【0006】
プレスキャンとしては、例えば以下のシーケンスが挙げられる。オフセット磁場を算出する磁場計測シーケンス(例えば特許文献1参照)、RFコイル装置内の各要素コイルの感度分布マップを生成するシーケンス(例えば特許文献2参照)、本スキャンでのRFパルスの中心周波数の補正値を算出するシーケンス(例えば特許文献3参照)などである。
【0007】
上記オフセット磁場は、被検体が撮像空間に入れられた後、本スキャンにおける静磁場を均一化する補正の際の指標として用いられる。また、上記感度分布マップは、例えば本スキャン後の画像再構成時に、フェーズドアレイコイルの感度不均一性に起因する各画素の輝度レベルの誤差を補正する輝度補正処理に用いられる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2011−152348号公報
【特許文献2】特開2005−237703号公報
【特許文献3】特開2009−34152号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
プレスキャンの実行結果は本スキャンで得られる画像の画質に大きく影響するため、より適正な条件でプレスキャンを行うことが望まれる。しかし、プレスキャンの条件は、撮像条件に拘らず画一的に自動設定されるか、又は、適正な条件となるようにユーザがマニュアルで設定していた。
【0010】
このため、MRIにおいて、ユーザに設定操作の手間をかけることなく、プレスキャンなどの較正用のスキャンの条件を適正に設定する技術が要望されていた。
【課題を解決するための手段】
【0011】
以下、本発明の実施形態が取り得る態様の数例を各態様毎に説明する。
【0012】
(1)一実施形態では、MRI装置は、本スキャン実行部と、画像再構成部と、補正スキャン設定部と、補正スキャン実行部と、条件決定部とを備える。
本スキャン実行部は、決定された撮像条件に基づいてRFパルスを送信すると共に被検体の撮像部位に装着されたRFコイル装置を介して磁気共鳴信号を収集する動作を、本スキャンとして実行する。
画像再構成部は、本スキャンで収集された磁気共鳴信号に基づいて、撮像部位の画像データの再構成処理を実行する。
補正スキャン設定部は、本スキャンの撮像条件又は再構成処理の条件の決定に用いられる補正スキャンの条件を、RFコイル装置の種類及び撮像部位に応じて算出及び自動設定する。
補正スキャン実行部は、自動設定された補正スキャンの条件に基づいて補正スキャンを実行する。
条件決定部は、補正スキャンの実行結果に基づいて、本スキャンの撮像条件又は再構成処理の条件を決定する。
(2)別の一実施形態のMRI装置は、上記(1)のMRI装置と対比して、補正スキャン設定部が以下のように構成される点のみ異なる。即ち、補正スキャン設定部は、上記補正スキャンの条件を、「本スキャンの撮像条件に拘らずに固定的に設定される条件」、「本スキャンの撮像条件の内、対応する条件の設定内容を変更なしに適用する条件」、「本スキャンの撮像条件の一部に基づいて算出する条件」の3種類に分けつつ、本スキャンの撮像条件の一部に基づいて算出及び自動設定する。
【0013】
(3)さらに別の一実施形態のMRI装置は、上記(1)のMRI装置と対比して、補正スキャン設定部及び補正スキャン実行部が以下のように構成される点のみ異なる。
補正スキャン設定部は、本スキャンの撮像条件の一部に基づいて、上記補正スキャンとして実行するシーケンスを選択肢として予め記憶された複数のシーケンスから自動選択すると共に、自動選択されたシーケンスの条件を算出及び自動設定する。
補正スキャン実行部は、補正スキャン設定部により自動設定された条件に基づいて、自動選択されたシーケンスを補正スキャンとして実行する。
【図面の簡単な説明】
【0014】
【図1】第1の実施形態におけるMRI装置の全体構成を示すブロック図。
【図2】図1に示すコンピュータ58の機能ブロック図。
【図3】MR信号を受信する装着型のRFコイル装置の一例として、頭部用RFコイル装置の構成の一例を示す模式的斜視図。
【図4】MR信号を受信する装着型のRFコイル装置の一例として、上半身用RFコイル装置の構成の一例を示す平面模式図。
【図5】図1のRF受信器の詳細構成の一例を示すブロック図。
【図6】補正スキャン設定部による補正スキャンの条件の分類方法の一例を示す表。
【図7】FOVのサイズの設定方法の一例を示す模式的説明図。
【図8】FOVのサイズの設定方法の別の一例を示す模式的説明図。
【図9】3次元撮像の場合のFOVのサイズの設定方法の一例を示す模式的説明図。
【図10】第1の実施形態に係るMRI装置の動作の流れを示すフローチャート。
【図11】第2の実施形態に係るMRI装置の動作の流れを示すフローチャート。
【図12】第3の実施形態に係るMRI装置の動作の流れを示すフローチャート。
【図13】第4の実施形態に係るMRI装置の動作の流れを示すフローチャート。
【図14】第1の実施形態の変形例として、一部の補正スキャンを本スキャン前に実行し、残りの補正スキャンを本スキャン後に行う場合のMRI装置の動作の流れを示すフローチャート。
【発明を実施するための形態】
【0015】
以下、MRI装置及びMRI方法の実施形態について、添付図面に基づいて説明する。なお、各図において同一要素には同一符号を付し、重複する説明を省略する。
【0016】
(第1の実施形態)
図1は、第1の実施形態におけるMRI装置20の全体構成を示すブロック図である。図1に示すように、MRI装置20は、静磁場を形成する筒状の静磁場磁石22と、静磁場磁石22の内側において軸を同じにして設けられた筒状のシムコイル24と、傾斜磁場コイル26と、RFコイル28と、制御装置30と、被検体Pが乗せられる寝台32とを備える。
【0017】
ここでは一例として、装置座標系の互いに直交するX軸、Y軸、Z軸を以下のように定義する。まず、静磁場磁石22及びシムコイル24は、それらの軸方向が鉛直方向に直交するように配置されているものとし、静磁場磁石22及びシムコイル24の軸方向をZ軸方向とする。また、鉛直方向をY軸方向とし、寝台32は、その天板の載置用の面の法線方向がY軸方向となるように配置されているものとする。
【0018】
制御装置30は、静磁場電源40と、シムコイル電源42と、傾斜磁場電源44と、RF送信器46と、RF受信器48と、寝台駆動装置50と、シーケンスコントローラ56と、コンピュータ58とを備える。
【0019】
傾斜磁場電源44は、X軸傾斜磁場電源44xと、Y軸傾斜磁場電源44yと、Z軸傾斜磁場電源44zとで構成されている。また、コンピュータ58は、演算装置60と、入力装置62と、表示装置64と、記憶装置66とで構成されている。
【0020】
静磁場磁石22は、静磁場電源40に接続され、静磁場電源40から供給された電流により撮像空間に静磁場を形成させる。
【0021】
上記撮像空間とは、例えば、被検体Pが置かれて、静磁場が印加されるガントリ内の空間の意味である。ガントリとは、静磁場磁石22、シムコイル24、傾斜磁場コイル26、RFコイル28を含むように、例えば円筒状に形成された構造体である。被検体Pが乗せられた寝台32がガントリの内部に移動できるように、ガントリ及び寝台32は構成される。なお、図1では煩雑となるので、ガントリ内の静磁場磁石22、シムコイル24、傾斜磁場コイル26、RFコイル28を構成要素として図示し、ガントリ自体は図示していない。
【0022】
撮像領域は、例えば、「1つの画像」又は「1セットの画像」の生成に用いるMR信号の収集範囲であって、撮像空間の一部として設定される領域の意味である。ここでの「1つの画像」及び「1セットの画像」とは、2次元画像の場合もあれば3次元画像の場合もある。ここでの「1セットの画像」とは、例えば、マルチスライス撮像などのように、1つのパルスシーケンス内で「複数の画像」のMR信号が一括的に収集される場合の、「複数の画像」である。
撮像領域は、例えば、装置座標系によって3次元的に規定される。ここでは一例として、撮像領域は、厚さの薄い領域であればスライスと称し、ある程度の厚みのある領域であればスラブと称することとする。
【0023】
シムコイル24は、シムコイル電源42に接続され、シムコイル電源42から供給される電流により、この静磁場を均一化する。静磁場磁石22は、超伝導コイルで構成される場合が多く、励磁の際に静磁場電源40に接続されて電流が供給されるが、一旦励磁された後は非接続状態とされるのが一般的である。なお、静磁場電源40を設けずに、静磁場磁石22を永久磁石で構成してもよい。
【0024】
傾斜磁場コイル26は、X軸傾斜磁場コイル26xと、Y軸傾斜磁場コイル26yと、Z軸傾斜磁場コイル26zとを有し、静磁場磁石22の内側で筒状に形成されている。X軸傾斜磁場コイル26x、Y軸傾斜磁場コイル26y、Z軸傾斜磁場コイル26zはそれぞれ、X軸傾斜磁場電源44x、Y軸傾斜磁場電源44y、Z軸傾斜磁場電源44zに接続される。
【0025】
X軸傾斜磁場電源44x、Y軸傾斜磁場電源44y、Z軸傾斜磁場電源44zからX軸傾斜磁場コイル26x、Y軸傾斜磁場コイル26y、Z軸傾斜磁場コイル26zにそれぞれ供給される電流により、X軸方向の傾斜磁場Gx、Y軸方向の傾斜磁場Gy、Z軸方向の傾斜磁場Gzが撮像領域にそれぞれ形成される。
【0026】
即ち、装置座標系の3軸方向の傾斜磁場Gx、Gy、Gzを合成して、論理軸としてのスライス選択方向傾斜磁場Gss、位相エンコード方向傾斜磁場Gpe、及び、読み出し方向(周波数エンコード方向)傾斜磁場Groの各方向を任意に設定できる。スライス選択方向、位相エンコード方向、及び、読み出し方向の各傾斜磁場は、静磁場に重畳される。
【0027】
RF送信器46は、シーケンスコントローラ56から入力される制御情報に基づいて、核磁気共鳴を起こすためのラーモア周波数のRFパルス(RF電流パルス)を生成し、これを送信用のRFコイル28に送信する。RFコイル28には、ガントリに内蔵されたRFパルスの送受信用の全身用コイルや、寝台32又は被検体Pの近傍に設けられるRFパルスの受信用の局所コイルなどがある。
【0028】
送信用のRFコイル28は、RF送信器46からRFパルスを受けて被検体Pに送信する。受信用のRFコイル28は、被検体Pの内部の原子核スピンがRFパルスによって励起されることで発生したMR信号(高周波信号である核磁気共鳴信号)を受信し、このMR信号は、RF受信器48により検出される。
【0029】
RF受信器48は、検出したMR信号に前置増幅、中間周波変換、位相検波、低周波増幅、フィルタリングなどの各種の信号処理を施した後、A/D(analog to digital)変換を施すことで、デジタル化された複素データである生データ(raw data)を生成する。RF受信器48は、生成したMR信号の生データをシーケンスコントローラ56に入力する。
【0030】
演算装置60は、MRI装置20全体のシステム制御を行うものであり、これについては後述の図2を用いて説明する。
【0031】
シーケンスコントローラ56は、演算装置60の指令に従って、傾斜磁場電源44、RF送信器46及びRF受信器48を駆動させるために必要な制御情報を記憶する。ここでの制御情報とは、例えば、傾斜磁場電源44に印加すべきパルス電流の強度や印加時間、印加タイミング等の動作制御情報を記述したシーケンス情報である。
【0032】
シーケンスコントローラ56は、記憶した所定のシーケンスに従って傾斜磁場電源44、RF送信器46及びRF受信器48を駆動させることにより、X軸傾斜磁場Gx、Y軸傾斜磁場Gy、Z軸傾斜磁場Gz及びRFパルスを発生させる。また、シーケンスコントローラ56は、RF受信器48から入力されるMR信号の生データを受けて、これを演算装置60に入力する。
【0033】
寝台駆動装置50は、シーケンスコントローラ56を介して演算装置60に接続される。シーケンスコントローラ56は、演算装置60の指令に従って寝台駆動装置50を制御することで寝台32の天板(table)を装置座標系のZ軸方向に移動させ、これにより例えば、Moving Table法やStepping‐Table法による撮像を行う。
【0034】
Moving Table法は、撮像時に寝台32の天板をZ軸方向に連続移動することで移動方向に大きな撮像視野(FOV:field of view)を得る技術である。Stepping‐Table法は、ステーション毎に寝台32の天板をステップ移動させて3次元撮像を行う技術である。これらの技術は、例えば、全身撮像のように一度に撮像できない広領域の撮像を行う場合に用いられる。演算装置60は、寝台32を移動して収集された複数の画像を合成処理によって互いに繋ぎ合わせることもできる。
【0035】
図2は、図1に示すコンピュータ58の機能ブロック図である。図2に示すように、コンピュータ58の演算装置60は、MPU(Micro Processor Unit)86と、システムバス88と、画像再構成部90と、画像データベース94と、画像処理部96と、表示制御部98と、補正スキャン設定部100とを有する。
【0036】
MPU86は、撮像条件の設定、撮像動作及び撮像後の画像表示において、システムバス88等の配線を介してMRI装置20全体のシステム制御を行う。「撮像条件」とは、例えば、スピンエコーやEPIなどの内のどの種類のパルスシーケンスにより、どのような条件でRFパルス等を送信して、どのような条件で被検体からMR信号を収集するか、の意味である。
【0037】
「撮像条件」としては、例えば、撮像空間内での位置的情報としての撮像領域、フリップ角、繰り返し時間TR(Repetition Time)、スライス数、FOV(Field Of View)、撮像部位、位相エンコード方向及び周波数エンコード方向のステップ数、EPIやスピンエコー法などのパルスシーケンスの種類、などが挙げられる。ここでの撮像部位とは、例えば、頭部、胸部、腹部、腰部、脚部などの被検体Pのどの部分を撮像領域として画像化するか、の意味である。
【0038】
また、MPU86は、撮像条件設定部としても機能し、入力装置62からの指示情報に基づいてFETシーケンス等のパルスシーケンスを含む撮像条件を設定し、設定した撮像条件をシーケンスコントローラ56に入力する。
【0039】
そのために、MPU86は、表示制御部98を制御して、撮像条件の設定用画面情報を表示装置64に表示させる。
入力装置62は、撮像条件や画像処理条件を設定する機能をユーザに提供する。
【0040】
画像再構成部90は、内部にk空間データベース92を有する。画像再構成部90は、k空間データベース92に形成されたk空間において、シーケンスコントローラ56から入力されるMR信号の生データをk空間データとして配置する。画像再構成部90は、k空間データに2次元フーリエ変換などを含む画像再構成処理を施して、被検体Pの各スライスの画像データを生成する。画像再構成部90は、生成した画像データを画像データベース94に保存する。
【0041】
画像処理部96は、画像データベース94から画像データを取り込み、これに所定の画像処理を施し、画像処理後の画像データを表示用画像データとして記憶装置66に記憶させる。
【0042】
記憶装置66は、上記の表示用画像データに対し、その表示用画像データの生成に用いた撮像条件や被検体Pの情報(患者情報)等を付帯情報として付属させて記憶する。
【0043】
表示制御部98は、MPU86の制御に従って、撮像条件の設定用画面や、撮像により生成された画像データが示す画像を表示装置64に表示させる。
【0044】
補正スキャン設定部100は、補正スキャンの条件を算出及び自動設定する。補正スキャンとは例えば、本スキャンの撮像条件の内の未確定のものや、本スキャン後の画像再構成時に用いる条件やデータなどを決定するために、本スキャンとは別に行われる(チューニング用の)スキャンを指す。即ち、補正スキャンは、プレスキャンの上位概念であって、本スキャンの後に行われるものも含み、例えば、以下のシーケンスが挙げられる。
【0045】
第1に、静磁場補正用のオフセット磁場を算出するための磁場計測シーケンスであり、これは本スキャン前に行われる。第2に、本スキャンでのRFパルスの中心周波数を算出するシーケンスであり、これは本スキャン前に行われる。なお、これら磁場計測シーケンスと、RFパルスの中心周波数を算出するシーケンスとは、後述のように1の補正スキャンとして実行してもよい。第3に、RFコイル装置内の各要素コイルの感度分布マップを生成するシーケンスであり、これは、本スキャン前に行っても、本スキャンの後に行ってもよい。
【0046】
また、「本スキャン」は、T1強調画像などの、目的とする診断画像の撮像のためのスキャンであって、ロケータ画像用のMR信号収集のスキャンや、補正スキャンのような較正目的のスキャンを含まないものとする。補正スキャン設定部100による補正スキャンの条件の算出及び自動決定方法については、後述する。
【0047】
図3は、MR信号を受信する装着型のRFコイル装置の一例として、頭部用RFコイル装置120の構成の一例を示す模式的斜視図である。図3に示すように、頭部用RFコイル装置120は、筺体122と、ケーブル124と、コネクタ126とを有する。筺体122内には、ループ状の要素コイル(表面コイル)128a、128b、128cが配設されている。
【0048】
なお、頭部用RFコイル装置120は、MR信号の受信だけではなく、RFパルスの送信も可能な送受信兼用コイルとして構成され、この送受信は要素コイル128a、128b、128cにより行われる。要素コイル128a、128b、128cは、筺体122内の増幅回路等を含む公知の回路構成によって、個別にケーブル124内の別々の配線に電気的に接続されている(図示せず)。コネクタ126がMRI装置20の接続ポート(図示せず)に接続されることで、要素コイル128a、128b、128cは、ケーブル124を介してRF送信器46およびRF受信器48に接続される。
【0049】
頭部用RFコイル装置120への電力は、コネクタ126がMRI装置20の接続ポートに接続された場合に、ケーブル124を介してMRI装置20から供給される。
【0050】
なお、頭部用RFコイル装置120は、制御回路(図示せず)と、頭部用RFコイル装置120の識別情報を記憶した記憶素子(図示せず)とを筺体122内に有する。コネクタ126がMRI装置20の接続ポートに接続された場合、頭部用RFコイル装置120の識別情報は、この制御回路から、MRI装置20内の配線を介してMPU86に入力される。
【0051】
図4は、MR信号を受信する装着型のRFコイル装置の一例として、上半身用RFコイル装置140の構成の一例を示す平面模式図である。図に示すように、上半身用RFコイル装置140は、カバー部材142と、ケーブル124と、コネクタ126とを有する。
【0052】
カバー部材142は、可撓性を有する材料によって折り曲げ等の変形が可能に形成されている。このように変形可能な材料としては、例えば特開2007−229004号公報に記載の可撓性を有する回路基板(Flexible Printed Circuit:FPC)などを用いることができる。
【0053】
カバー部材142における、図4内の横方向の破線の直線で2等分した上側半分の内部には、被検体Pの背面側に対応した例えば20個の要素コイル(表面コイル)144が配設されている。ここでは一例として、背面側では、被検体Pの背骨の存在を考慮した感度向上の観点から、体軸付近に他の要素コイル144よりも小さい要素コイル144が配置される。
カバー部材142を2等分した下側半分は、被検体Pの頭部、胸部及び腹部上に被さるように構成され、その内部には、被検体Pの前面側に対応した例えば20個の要素コイル(表面コイル)146が配設されている。なお、図4において、要素コイル144は太線で示し、要素コイル146は破線で示す。
【0054】
なお、上半身用RFコイル装置140は、制御回路(図示せず)と、上半身用RFコイル装置140の識別情報を記憶した記憶素子(図示せず)とをカバー部材142内に有する。コネクタ126がMRI装置20の接続ポートに接続された場合、上半身用RFコイル装置140の識別情報は、この制御回路からMRI装置20内の配線を介してMPU86に入力される。
【0055】
図5は、図1のRF受信器48の詳細構成の一例を示すブロック図である。ここでは一例として、上半身用RFコイル装置140と、MR信号を受信する装着型の下半身用RFコイル装置160とが被検体Pに装着されるものとする。下半身用RFコイル装置160は、MR信号を受信する多数の要素コイル164(図では煩雑となるので6つのみ示す)を有する。
【0056】
この場合、RFコイル28は、太線の四角枠で示す筒状の全身用コイルWBと、上半身用RFコイル装置140の要素コイル144、146と、下半身用RFコイル装置160の要素164とを含む。要素コイル144、146、160は、MR信号の受信を担うフェーズドアレイコイルとして機能する。全身用コイルWBは、ガントリ内に配設され、RFパルスの送信用及びMR信号の受信が可能な送受信兼用コイルである。
【0057】
RF受信器48は、デュプレクサ(送受信切替器)174と、複数のアンプ176と、切替合成器178と、複数の受信系回路180とを備える。切替合成器178の入力側は、アンプ176を介して各要素コイル144、146、164に個別に接続されると共に、デュプレクサ174及びアンプ176を介して全身用コイルWBに個別に接続されている。また、各受信系回路180は、切替合成器178の出力側に個別に接続されている。
【0058】
デュプレクサ174は、RF送信器46から送信されるRFパルスを全身用コイルWBに与える。また、デュプレクサ174は、全身用コイルWBで受信されたMR信号をアンプ176に入力し、このMR信号は、アンプ176により増幅されて切替合成器178の入力側に与えられる。また、各要素コイル144、146、164で受信されたMR信号は、それぞれ対応するアンプ176で増幅されて切替合成器178の入力側に与えられる。
【0059】
切替合成器178は、受信系回路180の数に応じて、各要素コイル144、146、164及び全身用コイルWBから検出されるMR信号の合成処理及び切換を行い、対応する受信系回路180に出力する。このようにしてMRI装置20は、全身用コイルWB及び所望の数の要素コイル144、146、164を用いて撮像部位に応じた感度分布を形成し、様々な撮像部位からのMR信号を受信する。
【0060】
但し、要素コイル144、146、164を設けずに、全身用コイルWBのみでMR信号を受信する構成も可能であるが、以下の説明では一例として、装着型のRFコイル装置を用いる例について説明する。また、切替合成器178を設けずに、要素コイル144、146、164や全身用コイルWBで受信されたMR信号を受信系回路180に直接出力する構成としてもよい。さらに、より多くの要素コイルを広範囲に亘って配置してもよい。
【0061】
なお、上記説明では、上半身用RFコイル装置140の要素コイル144、146及び下半身用RFコイル装置160の要素コイル164がRFコイル28の一部であるとして、即ち、上半身用RFコイル装置140及び下半身用RFコイル装置160がMRI装置20の一部であるとした。これは説明の便宜上にすぎず、上半身用RFコイル装置140及び下半身用RFコイル装置160(の各要素コイル)は、MRI装置20とは別個として捉えてもよい。
【0062】
本実施形態では、上記の頭部用RFコイル装置120、上半身用RFコイル装置140及び下半身用RFコイル装置160に加えて、胸部用RFコイル装置、腹部用RFコイル装置、肩用RFコイル装置、心臓用RFコイル装置、腰用RFコイル装置、膝用RFコイル装置など、各種の装着型RFコイル装置をMR信号の受信用に使用可能である。これら装着型RFコイル装置も同様、MRI装置20の一部として捉えてもよいし、MRI装置20とは別個として捉えてもよい。
【0063】
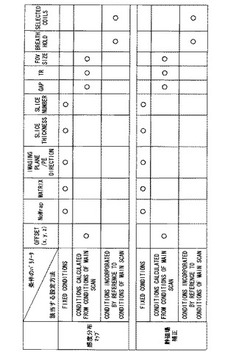
図6は、補正スキャン設定部100による補正スキャンの条件の分類方法の一例を示す表である。図6では一例として、RFコイル装置内の各要素コイルの感度分布マップを生成するシーケンス(補正スキャン)を上段に示し、静磁場補正用のオフセット磁場を算出する磁場計測シーケンス(補正スキャン)を下段に示す。補正スキャン設定部100は、補正スキャンの条件を図6に示す3種類に分類し、補正スキャンの条件を算出する。
【0064】
上記3種類とは、図6に示すように、第1に、本スキャンの撮像条件に拘らずに固定的に設定される条件(FIXED CONDITIONS)である。第2に、本スキャンの撮像条件の中で対応する条件を変更なしに適用する条件(CONDITIONS INCORPORATED BY REFERENCE TO CONDITIONS OF MAIN SCAN)である。第3に、本スキャンの撮像条件の一部に基づいて算出する条件(CONDITIONS CALCULATED FROM CONDITIONS OF MAIN SCAN)である。
【0065】
図6では一例として、補正スキャンの条件のパラメータを11種類示し、以下、それらパラメータを左から順に説明する。
【0066】
OFFSETは、ボリュームデータとして複数のスライスを撮像する場合に、複数のスライス全体を合わせたボリュームとしての撮像領域の中心の装置座標系の座標位置である。なお、ここでは一例として、磁場中心の位置は装置座標系の原点に合致するように制御される。従って、OFFSETは、撮像領域の中心と、磁場中心との位置的ズレを表す。
【0067】
NoWrapは、折り返しアーチファクトを除去するために、撮像視野(FOV)を大きくして撮像画像を取得後、画像として必要な領域のみを撮像画像から抽出する処理を行うか否かの条件である。
【0068】
MATRIXは、位相エンコードステップ数×周波数エンコードステップ数である画像の縦横の画素数である。
【0069】
「IMAGING PLANE/PE DIRECTION」は、撮像断面に対して、位相エンコード方向の向きをどのように設定するかの条件である。
「SLICE THICKNESS」は、撮像画像のスライス厚さである。
「SLICE NUMBER」は、撮像するスライス数である。
GAPは、隣接するスライス間の間隔である。
TR(Repetition Time)は、繰り返し時間である。
【0070】
「FOV SIZE」は、FOV(Field of View)のサイズ(例えば、縦横がそれぞれ何ミリメートルか)である。
「BREATH HOLD」は、息止め撮像を行うか否かの条件である。
【0071】
「SELECTED COILS」は、本スキャンでのMR信号の受信用に用いるものとして選択された要素コイルである。要素コイルの選択は、例えば、特開2010−259777号公報などに記載のコイル位置計測シーケンスの実行後に行われる。
具体的には例えば、全身用コイルWBからRFパルスを送信後、MRI装置20に接続中の装着型RFコイル装置からMR信号を収集し、収集されたMR信号に基づいてコイル位置決め用のプロファイルデータを生成する。次に、プロファイルデータに基づいてRFコイル装置内の要素コイル毎の位置を算出する。この後、各要素コイルの位置に基づいて、MR信号の受信に用いる要素コイルをMPU86が自動選択するか、又は、各要素コイルの位置を表示装置64上に表示後に、MR信号の受信に用いる要素コイルをユーザが選択する。
【0072】
ここで、図6において、各条件のパラメータは、前記3種類の内のいずれか1つに丸が付いている。パラメータ毎の丸の付け方は、上段の感度分布マップを生成する補正スキャンと、下段の磁場計測の補正スキャンとで同じである。
【0073】
具体的には、図6に示すように、NoWrap、MATRIX等の補正スキャンの条件は、本スキャンの撮像条件に拘らずに固定的に設定される。また、OFFSET、GAP、繰り返し時間、FOVのサイズは、本スキャンの撮像条件の一部に基づいて算出される。また、BREATH HOLD、及び、SELECTED COILSは、本スキャンの撮像条件の中で対応する条件を変更なしに適用することで設定される。
【0074】
補正スキャン設定部100は、3種類に補正スキャンの条件を分類し、RFコイル装置の種類と、撮像部位との組み合わせに応じて補正スキャンの条件を算出する。このとき、補正スキャン設定部100は、本スキャンの撮像条件の一部(既に設定済みの条件)を取得すると共に、取得した撮像条件に基づいて、算出を行う。
【0075】
具体的には、MR信号を受信する胸部用RFコイル装置と、撮像部位としての胸部との組み合わせなら、補正スキャンの各条件は、図6に示す丸の位置で3種類に分類された上で、算出及び自動設定される。同様に、MR信号を受信する頭部用RFコイル装置120と、撮像部位としての頭部との組み合わせでも、補正スキャンの各条件は、図6に示す丸の位置で3種類に分類された上で、算出及び自動設定される。
【0076】
即ち、RFコイル装置の種類と、撮像部位との組み合わせに拘らず、補正スキャンの各条件は、(図6の丸の位置で示されるものと)同じように3種類に分類される。しかし、本スキャンの撮像条件が同じであっても、補正スキャンの各条件は、本スキャンの撮像条件における同一パラメータの設定内容を変更なしに適用するものを除き、RFコイル装置の種類と撮像部位との組み合わせによって変わる。
【0077】
具体的には例えば、胸部用RFコイル装置と、胸部との組み合わせの場合、感度分布マップ生成のシーケンスにおけるOFFSETは、例えばある計算手法を本スキャンの撮像条件に適用することで(1、1、1)と算出され、MATRIXは例えば256×256の画素数として固定的に設定される。一方、頭部用RFコイル装置120と、頭部との組み合わせの場合、感度分布マップ生成のシーケンスにおけるオフセットは、前記計算手法を本スキャンの撮像条件に適用することで例えば(2、2、2)と算出され、MATRIXは上記と同じく256×256の画素数として固定的に設定される。
【0078】
ここで、まず、本スキャンの撮像条件に拘らずに固定的に設定される補正スキャンの条件について、感度分布マップ生成のシーケンスにおけるMATRIXを一例として説明する。例えば、撮像領域に配置された要素コイルの数が、撮像領域の体積に対して相対的に多い場合、補正スキャン設定部100は256×256の画素数として設定する。要素コイルの数が相対的に多いほど、受信されるMR信号の信号レベルの分布をより細かく検出することで、より正確な感度分布マップを生成する方が望ましいからである。
【0079】
反対に、撮像領域に配置された要素コイルの数が、撮像領域の体積に対して相対的に少ない場合、補正スキャン設定部100は、128×128の画素数として設定する。撮像領域に配置された要素コイルの数が、撮像領域の体積に対して相対的に多いか少ないかは、RFコイル装置の識別情報に基づくRFコイル装置内の要素コイル数と、撮像部位とに基づいて、予め判定できる。
【0080】
別の例として、オフセット磁場を算出する磁場計測シーケンスにおけるスライス枚数について説明する。この場合、例えば、撮像領域の厚み(スライスの法線方向におけるスライスの幅)に対して、スライス枚数が相対的に少なくならないよう、且つ、多すぎないように補正スキャン設定部100はスライス枚数を設定する。例えば、頭部が撮像部位である場合、スライス枚数は20枚とすれば、胸部及び腹部が撮像部位である場合、スライス枚数は50枚とする。なお、以上の設定方法はあくまで一例にすぎず、本実施形態は上記設定方法に限定されるものではない。
【0081】
本スキャンの撮像条件に拘らずに固定的に設定される他のパラメータについても、補正スキャン設定部100は、上記のように、RFコイル装置の種類と撮像部位とに応じて、補正スキャンのシーケンス毎に予め算出された各パラメータの適正値又は設定内容をテーブルデータとして記憶している。従って、補正スキャン設定部100は、テーブルデータの中から、RFコイル装置の種類と、撮像部位と、補正スキャンのシーケンスの種類とに応じて、該当するパラメータの設定内容を取得する。
【0082】
次に、本スキャンの撮像条件の一部に基づいて算出される補正スキャンの条件の計算手法について、FOVのサイズ及びスライス間隔(GAP)を例として説明する。なお、ここでは一例として、FOVのサイズ及びスライス間隔については、RFコイル装置の種類と撮像部位とに拘らず、同様にして算出される。
【0083】
図7は、FOVのサイズの設定方法の一例を示す模式的説明図である。補正スキャンにおけるFOVの初期設定値(DEFAULT)として、ここでは一例として、位相エンコード方向(PHASE ENCODE DIRECTION)に30cm、読み出し方向(READOUT DIRECTION)に45cmが初期値として設定されている。
【0084】
補正スキャン設定部100は例えば、位相エンコード方向及び読み出し方向のどちらにおいても、以下の2条件を満たす範囲で最小サイズ又は任意の割合に指定されたサイズとなる補正スキャンのFOVを設定する。
第1に、補正スキャンのFOVが、位相エンコード方向及び読み出し方向のどちらにおいても、初期設定値よりも小さくならないようにする。
第2に、本スキャンの撮像条件のプランニング中にユーザが設定したFOVを包含するようにする。なお、スライス選択方向については、後述するように、撮像範囲が包含されるようにGAP(隣接スライス間の間隔)を設定する。
【0085】
図7(A)は上記初期設定値のFOVを示す。次に、本スキャンの撮像条件のプランニング中に、ユーザが例えば位相エンコード方向に20cm、読み出し方向に60cmのFOVを設定したとする。図7(B)は、この状態を示す。この場合、上記2条件を満たし、且つ、最小となるFOVのサイズは、位相エンコード方向に30cm、読み出し方向に60cmである。従って、補正スキャン設定部100は、そのように補正スキャンのFOVを設定する。図7(C)は、この状態を示す。
【0086】
図8は、FOVのサイズの設定方法の別の例を示す模式的説明図である。図8(A)は上記同様の初期設定値のFOVを示す。次に、本スキャンの撮像条件のプランニング中に、ユーザが例えば位相エンコード方向に60cm、読み出し方向に20cmのFOVを設定したとする。図8(B)は、この状態を示す。この場合、上記2条件を満たし、且つ、最小となるFOVのサイズは、位相エンコード方向に60cm、読み出し方向に45cmである。従って、補正スキャン設定部100は、そのように補正スキャンのFOVを設定する。図8(C)は、この状態を示す。
【0087】
図9は、3次元撮像の場合のFOVのサイズの設定方法の一例を示す模式的説明図である。ここでは説明の簡単化のため、互いに直交するスライス選択方向(SLICE SELECTION DIRECTION)、位相エンコード方向、読み出し方向はそれぞれ、装置座標系のX軸、Y軸、Z軸のいずれか1つに合致するものとする。
【0088】
3次元撮像において、外縁の8辺がどれも装置座標系の3軸のいずれかに平行な直方体状の領域が装置座標系の3軸に対して傾けられ、この傾けられた領域301がユーザによって撮像ターゲットとされた場合を考える。この場合、補正スキャン設定部100は、外縁の8辺がどれも装置座標系の3軸のいずれかに平行な直方体領域であって、図7の場合と同じ2条件を満たす最小領域をFOV302として設定する。
【0089】
図9において、直方体状の領域301の各頂点をV1、V2、V3、V4、V5、V6、V7、V8とする。この例では、領域301の各頂点の内、読み出し方向において互いに最も離れた2頂点はV4及びV6であるので、読み出し方向における両者の間隔をLroとする。また、領域301の各頂点の内、位相エンコード方向に互いに最も離れた2頂点はV2及びV8であるので、位相エンコード方向における両者の間隔をLpeとする。
【0090】
間隔Lro、Lpeがそれぞれ、読み出し方向及び位相エンコード方向のFOVのサイズの初期値(図7の例では45cm×30cm)より小さくない場合、補正スキャン設定部100は、撮像領域内のスライスのサイズを、間隔Lro、Lpeをそれぞれ2辺とする長方形の領域として設定する。図9(A)は、この状態を示す。
【0091】
なお、間隔Lroが読み出し方向のFOVのサイズの初期値より小さい場合、補正スキャン設定部100は、当該初期値を撮像領域内のスライスの読み出し方向のサイズとして設定する。また、間隔Lpeが位相エンコード方向のFOVのサイズの初期値より小さい場合、補正スキャン設定部100は、当該初期値を撮像領域内のスライスの位相エンコード方向のサイズとして設定する。
【0092】
次に、補正スキャン設定部100は、間隔Lro、Lpeの決定方法と同様に、FOV301の各頂点の内、スライス選択方向において互いに最も離れた2頂点(この例ではV1、V7が該当)を算出し、スライス選択方向における両者の間隔をLssとする。
【0093】
次に、補正スキャン設定部100は、読み出し方向の幅がLro、位相エンコード方向の幅がLpe、スライス選択方向の幅がLssである直方体であって、装置座標系の座標位置として領域301を包含する領域をFOV302として設定する。図9(B)は、この状態を示す。
【0094】
次に、補正スキャン設定部100は、FOV302をスライス数で均等に分割することで、読み出し方向の幅がLro、位相エンコード方向の幅がLpeであって互いに等間隔で平行なスライスSL1〜SL6をFOV302内に設定する。図9(C)は、この状態を示す。このように、補正スキャン設定部100は、スライス選択方向、位相エンコード方向、読み出し方向を装置座標系の各軸に合致させ、スライスの面を装置座標系のX−Y平面、Y−Z平面、X−Z平面のいずれかに平行に保つ。
【0095】
ここで、上記のスライス間隔(GAP)の設定方法について説明する。スライス間隔Sgapは、図6に示すように、本スキャンの撮像条件に基づいて算出されるパラメータである。補正スキャン設定部100は、以下の(1)式に基づいてスライス間隔Sgap(図9(C)参照)を算出する。
Sgap={SSt−(Snu×Sth)}/(Snu−1) ・・・(1)
【0096】
(1)式において、SStは、スライス選択方向におけるFOVの幅であり、図9のFOV302の場合はLssに該当する。また、Snuは、スライス枚数であり、Sthはスライス厚である。例えば、スライス選択方向におけるFOVの幅が30cmであり、スライス厚が1cmであり、スライス枚数が6枚の場合、スライス間隔Sgapは(1)式により4.8cmと算出される。
【0097】
本スキャンの一部の撮像条件に基づいて算出される他のパラメータについても、補正スキャン設定部100は、上記のように各パラメータの値又は条件の算出方法(判定方法)を予め記憶しており、これに基づいて当該パラメータの条件を自動設定する。
【0098】
図10は、第1の実施形態におけるMRI装置20の動作の流れを示すフローチャートである。第1の実施形態では、本スキャンの一部の撮像条件(既に設定済みのもの)に基づいて補正スキャンの条件を自動設定し、本スキャンの前に補正スキャンを実行する。以下、前述した各図を適宜参照しながら、図10に示すステップ番号に従って、第1の実施形態のMRI装置20の動作を説明する。
【0099】
[ステップS1]MPU86(図2参照)は、入力装置62を介してMRI装置20に入力された本スキャンの一部の撮像条件に基づいて、MRI装置20の初期設定を行い、被検体Pの撮像部位を取得する。
【0100】
また、MR信号の受信用であって被検体に装着されるRFコイル装置がMRI装置20の接続ポートに接続されると、MPU86は、接続ポート及びシーケンスコントローラ56を介して、RFコイル装置の識別情報を取得する。ここでのRFコイル装置は、1つとは限らず、複数の場合もある。また、プレスキャンなどによってRFパルスの中心周波数等が暫定的に設定される。また、要素コイルの選択が必要な場合(局所用ではないRFコイル装置が装着されている場合)、例えば前述のコイル位置計測シーケンスの実行後、RFコイル装置内の多数の要素コイルの中から、MR信号受信に用いる要素コイルが自動又は手動操作で選択される。
【0101】
[ステップS2]MPU86の制御の下、被検体Pが乗せられた寝台32がガントリ内の撮像空間における所定位置に移動し、MRI装置20によってアキシャル断面のロケータ画像の撮像が行われる。なお、ロケータ画像は、位置決めをするための基準の画像(参照画像)である。
【0102】
また、上記アキシャル断面は患者座標系で定義され、本実施形態では一例として、患者座標系のX軸、Y軸、Z軸を以下のように定義する。即ち、被検体Pの左右方向をX軸方向とし、腹側を前、背中側を後ろとした被検体Pの前後方向をY軸方向とする。また、およそ背骨延在方向に頭を上、足を下とした被検体Pの体軸方向をZ軸方向とする。
このとき、患者座標系のX−Y平面をアキシャル面、患者座標系のX−Z平面をコロナル面、患者座標系のY−Z平面をサジタル面とする。なお、ここでは説明の簡単化のため、患者座標系と装置座標系とでX軸、Y軸、Z軸が互いに合致し、被検体Pは、体軸方向が装置座標系のZ軸方向に合致するように寝台32上に乗せられているものとする。
【0103】
ロケータ画像の撮像動作は、例えば以下になる。まず、静磁場電源40により励磁された静磁場磁石22が撮像空間に静磁場を形成し、シーケンスコントローラ56は、MPU86から入力されたパルスシーケンスに従って傾斜磁場電源44、RF送信器46及びRF受信器48を駆動させることで撮像領域に傾斜磁場を形成させると共に、RFコイル28からRFパルスを発生させる。このとき、RFパルスの中心周波数は、ステップS1で暫定的に設定された値が用いられる。
【0104】
このため、被検体P内の核磁気共鳴により生じたMR信号がRFコイル28により受信され、RF受信器48により検出される。RF受信器48は、検出したMR信号に所定の信号処理を施した後、これをA/D変換することで、デジタル化したMR信号である生データを生成する。RF受信器48は、生データをシーケンスコントローラ56に入力する。シーケンスコントローラ56は、生データを画像再構成部90に入力し、画像再構成部90は、k空間データベース92に形成されたk空間において、生データをk空間データとして配置する。
【0105】
画像再構成部90は、k空間データベース92からk空間データを取り込み、これにフーリエ変換を含む画像再構成処理を施すことで画像データを再構成し、得られた画像データを画像データベース94に保存する。画像処理部96は、画像データベース94から画像データを取り込み、これに所定の画像処理を施すことで2次元の表示用画像データを生成し、この表示用画像データを記憶装置66に保存する。
【0106】
[ステップS3]表示装置64上には、サジタル断面のロケータ画像の撮像条件の設定画面が表示される。ユーザは、表示装置64上の設定画面を見ながら、入力装置62を介して、サジタル断面のロケータ画像の撮像条件を設定する。ここで設定される撮像条件は、既に撮像されたアキシャル断面に対して、どの位置のサジタル断面をどれだけのサイズで撮像するか、繰り返し時間をどの程度にするか、などの条件を含む。
【0107】
[ステップS4]MPU86の制御の下、被検体Pが乗せられた寝台32がガントリ内の撮像空間における所定位置に移動し、MRI装置20によってサジタル断面のロケータ画像の撮像が上記同様に行われる。このときの撮像条件は、ステップS3でプランニングされた条件、即ち、ユーザにより設定された条件に従って行われる。
【0108】
[ステップS5]表示制御部98は、MPU86の指令に従ってアキシャル断面及びサジタル断面のロケータ画像の表示用画像データを記憶装置66から取得し、表示装置64上にこれらロケータ画像を表示させる。そして、表示制御部98は、本スキャンの撮像条件の設定画面を表示装置64に表示させる。この後、ユーザは、ロケータ画像を参照しながら、入力装置62を介して本スキャンの撮像条件を設定する。
【0109】
本スキャンの撮像条件の設定が終わった場合、MPU86は、次のステップS6に処理を移行させる。即ち、ユーザが本スキャンのプランニング(撮像条件の設定)を終えないと、次のステップ(補正スキャンの条件の自動設定)には進まない。
【0110】
[ステップS6]補正スキャン設定部100は、ステップS1でMPU86が取得した被検体Pの撮像部位と、RFコイル装置の識別情報(種類)とをMPU86から取得する。そして、補正スキャン設定部100は、補正スキャンの条件を算出及び自動設定するに際して、まず、どのシーケンスを補正スキャンとして行うかを本スキャンの一部の撮像条件に基づいて自動設定する。
【0111】
具体的には、補正スキャン設定部100は、RFコイル装置内の各要素コイルの感度分布マップを生成するシーケンス、静磁場補正用のオフセット磁場を算出する磁場計測シーケンス、RFパルスの中心周波数の補正値を算出するシーケンスなどの複数のシーケンスを補正スキャンの候補として予め記憶している。補正スキャン設定部100は、これらの候補のシーケンスの中から、どのシーケンスを補正スキャンとして行うかを例えば以下のように自動選択する。
【0112】
例えば、本スキャンのパルスシーケンスがパラレルイメージングの場合、補正スキャン設定部100は、RFコイル装置内の各要素コイルの感度分布マップを生成するシーケンスを補正スキャンとして行うように設定する。なお、パラレルイメージングは、複数の要素コイルを備えたフェーズドアレイコイルを用いてRFコイルを構成し、各要素コイルを用いてMR信号を収集する高速撮影技術である。一般にパラレルイメージングでは、位相エンコード方向のデータ取得回数を減らし、プレスキャンで得られた感度分布マップを用いて、間引いた位相エンコードステップ数で生じる折り返しアーチファクトを補償する。
【0113】
また、例えば肩用RFコイル装置などの局所RFコイル装置のように、パラレルイメージングを実行できないRFコイル装置をMR信号の受信に使用する場合、補正スキャン設定部100は、上記感度分布マップを生成するシーケンスを補正スキャンとして行わないように設定する。
【0114】
また、例えば静磁場の均一性が大きく乱れる場合や、静磁場均一性の精度が特に望まれる場合、補正スキャン設定部100は、静磁場補正用のオフセット磁場を算出する磁場計測シーケンスを、補正スキャンとして行うように設定する。
【0115】
例えば、後述の第2の実施形態のマルチステーション撮像のように、寝台が移動して撮像ステーションが移動した場合、静磁場の均一性が乱れる。
【0116】
静磁場均一性の精度が特に望まれる場合とは、例えば、脂肪抑制を行う場合や心臓撮像において局所シミング(特開2007−209749号公報参照)が望まれるような場合などである。
【0117】
また、例えば、寝台32のステップ移動がなく、被検体Pの同じ部位を何回も本スキャンする場合、最初の本スキャンの前に行われた補正スキャンで得られたオフセット磁場を使うことで、2回目以降の本スキャンでは、オフセット磁場を算出するシーケンスを行わずに静磁場を補正できる。
【0118】
このような場合、補正スキャン設定部100は、上記オフセット磁場を算出する磁場計測シーケンスを、補正スキャンとして行わないように設定する。
【0119】
また、例えばブレスト撮像では、脂肪組織が多く含まれるため、脂肪抑制プレパルスが本スキャンのパルスシーケンスに含まれることがある。脂肪抑制プレパルスが本スキャンに含まれる場合、補正スキャン設定部100は、RFパルスの中心周波数の補正値を算出するシーケンスを、補正スキャンとして行うように設定する。
【0120】
また、例えば、脂肪組織からのMR信号を抑制するプレパルスの印加が本スキャンのパルスシーケンスに含まれない場合、補正スキャン設定部100は、RFパルスの中心周波数の補正値を算出するシーケンスを、補正スキャンとして行わないように設定する。
【0121】
なお、どのシーケンスを補正スキャンとして行うかについての上記判断基準は、あくまで一例にすぎない。例えば、本スキャンの撮像条件に拘らず、上記オフセット磁場を算出する磁場計測シーケンス、RFパルスの中心周波数の補正値を算出するシーケンスを補正スキャンとして行うようにしてもよい。
【0122】
次に、補正スキャン設定部100は、補正スキャンとして行うとして決定した各シーケンスの条件(パラメータ)を算出及び自動設定する。具体的には、補正スキャン設定部100は、各シーケンスの条件(パラメータ)を、RFコイル装置の種類と撮像部位との組み合わせに拘らず、図6のように3種類に分類する。
【0123】
そして、補正スキャン設定部100は、「SELECTED COILS」のように、本スキャンの撮像条件における同じパラメータの設定内容を変更なしに適用するパラメータについては、そのように設定する。また、本スキャンの条件に拘らず固定的に算出されるパラメータについては、RFコイル装置の種類と撮像部位とに応じて、前記テーブルデータに基づいて自動設定する。
【0124】
また、スライス間隔(GAP)のように、本スキャンの撮像条件の一部に基づいて算出(判定)するパラメータについては、予め記憶した算出(判定)方法に基づいて、補正スキャン設定部100が自動設定する。補正スキャン設定部100による補正スキャンの各シーケンスの条件の算出及び自動設定の手法については、図6〜図9を用いて前述したので、さらなる説明を省略する。
【0125】
なお、RFパルスの中心周波数の補正値を算出するシーケンスが補正スキャンとして行われる場合、補正スキャン設定部100は、上記とは異なる方法でその条件を設定する。このシーケンスについては、主に磁気共鳴スペクトロスコピーを行う領域を定めればよいので、感度分布マップを生成するシーケンスや、オフセット磁場を算出する磁場計測シーケンスのように多くのパラメータを設定しなくてよいからである。
【0126】
この場合、補正スキャン設定部100は、オフセット磁場を算出するシーケンスで設定される撮像領域の中心を含むスライスを対象として、磁気共鳴スペクトロスコピーを行うように自動設定する。
【0127】
なお、補正スキャン設定部100による補正スキャンの条件の算出及び自動設定は、MRI装置20内の演算であるため、このステップS6の処理は瞬時に終了し、次のステップS7に進む。
【0128】
[ステップS7]入力装置62を介して、ユーザにより本スキャンの開始指令が入力される。本スキャンの開始指令が入力されるまで、MPU86は待機し、次のステップに進まない。
【0129】
[ステップS8]MPU86は、本スキャンの開始指令を受けて、ステップS6で条件を自動設定した補正スキャンをMRI装置20に実行させる。ここでは一例として、上記感度分布マップを生成するシーケンス、上記オフセット磁場を算出する磁場計測シーケンス、RFパルスの中心周波数の補正値を算出するシーケンスの3つが補正スキャンとして行われる場合について説明する。
【0130】
ここで、補正スキャンの各シーケンスは、時間的に別々に行われる。但し、オフセット磁場を算出する磁場計測シーケンスは、RFパルスの中心周波数の補正値を算出するシーケンスよりも先に行うことが望ましい。これは、オフセット磁場に基づいて静磁場をより均一に補正した状態で、RFパルスの中心周波数の補正値を算出するシーケンスを実行した方が、より正確な磁気共鳴スペクトラムデータを得られるからである。
【0131】
同様に、オフセット磁場を算出する磁場計測シーケンスは、感度分布マップを生成するシーケンスよりも先に行うことが望ましい。被検体の大きさや撮像部位などによって静磁場の均一性が大きく乱れる場合、静磁場をより均一に補正した状態で感度分布マップを生成するシーケンスを行った方が、より正確な感度分布マップが得られるからである。
そこで、ここでは一例として、オフセット磁場を算出する磁場計測シーケンス、RFパルスの中心周波数の補正値を算出するシーケンス、感度分布マップを生成するシーケンス、の順に行うものとして、以下、順に説明する。
【0132】
第1に、オフセット磁場を算出するシーケンスの一例について説明する。この技術は、例えば特許文献1(特開2011−152348号公報)に説明されているので、ここでは簡単に説明する。
【0133】
寝台駆動装置50は、MPU86及びシーケンスコントローラ56の制御に従って、被検体Pが乗せられた寝台32をガントリ内に移動する。また、シーケンスコントローラ56の制御に従って、静磁場電源40から静磁場磁石22に電流が供給され、撮像空間内に静磁場が印加される。ここでの静磁場磁石22への供給電流値は、仮に撮像空間内に何も存在しなければ均一な静磁場が発生するように制御されたものであり、これにより発生する静磁場を「基準静磁場」とする。撮像空間内に被検体Pが存在することで透磁率が周囲とは異なる領域が存在するので、撮像空間内の実際の静磁場の強度分布は不均一となる。
【0134】
次に、シーケンスコントローラ56は、MPU86からの制御信号に基づいて、撮像空間の磁場強度分布が得られるように傾斜磁場(Gx、Gy、Gz)等を印加してスライスを選択し、RFパルス等を送信する。この後、RF受信器48によりMR信号が検出され、検出されたMR信号はシーケンスコントローラ56を介してMPU86に入力される。
【0135】
これらMR信号はk空間の生データであるため、MPU86は、入力されたMR信号をx−y−z座標系の実空間のデータに変換し、変換後のデータに基づいて撮像空間の磁場強度分布を計算し、これを計測値の磁場強度分布Bm(x、y、z)とする。(x、y、z)は、装置座標系での座標位置(x、y、z)の関数という意味である。
【0136】
この後、MPU86は、例えば次式により、静磁場を均一化するオフセット磁場の強度分布Bo(x、y、z)を算出する。
Bo(x、y、z)=Bi(x、y、z)−Bm(x、y、z) ・・・(2)
【0137】
(2)式において、Bi(x、y、z)は、静磁場の磁場強度の目標分布であって、撮像空間に亘って均一的な分布である。即ち、オフセット磁場を印加しなければ計測値の磁場強度分布をBm(x、y、z)が静磁場として発生するところ、本スキャンでは、基準静磁場にオフセット磁場が重畳されるように制御することで、ほぼ目標分布の静磁場が得られる。
【0138】
第2に、RFパルスの中心周波数の補正値を算出するシーケンスの一例について説明する。この補正スキャンの条件は、FOVの中心を含むスライスに対して磁気共鳴スペクトロスコピーを施すことが加わる以外、例えば、磁場計測シーケンスと同じ条件を使う。MPU86は、MRI装置20の各部を制御して、FOVの中心を含むスライスに対して磁気共鳴スペクトロスコピーを施すことで周波数スペクトラムデータを収集及び解析し、ピーク周波数等に基づいて水素原子核スピンの磁気共鳴周波数を検出する。
【0139】
MPU86は、上記シーケンスの実行結果に基づいて、本スキャンで用いるRFパルスの中心周波数を算出及び再設定(補正)する。具体的には例えば、検出した水素原子核スピンの磁気共鳴周波数を、RFパルスの中心周波数とする。なお、中心周波数を検出するシーケンス等については、例えば特許文献3(特開2009−34152号公報)に記載の技術などの従来手法を用いればよい。
【0140】
第3に、装着型RFコイル装置の感度分布マップを生成するシーケンスの一例について説明する。この技術は、例えば特許文献2(特開2005−237703号公報)に説明されているので、ここでは簡単に説明する。
【0141】
まず、感度分布マップ生成シーケンスがMPU86からシーケンスコントローラ56に入力され、被検体Pに装着されたRFコイル装置、及び、全身用コイルWBを受信用コイルとして、MR信号が収集される。そして、全身用コイルから得られた画像データ(以下、WB画像データという)、及び、RFコイル装置から得られた画像データ(以下、主コイル画像データという)が、RFコイル装置内の全要素コイルの感度分布推定用の画像データとして取得され、画像データベース94に保存される。同様な画像データの取得が3次元領域全体の各断面に亘って実施され、ボリュームデータとして画像データベース94に保存される。
【0142】
MPU86は、以上の感度分布マップ生成シーケンスの実行結果に基づいて、RFコイル装置内に含まれる全要素コイルの感度分布を3次元感度分布マップデータとして生成し、記憶装置66に保存する。具体的には例えば、主コイル画像データの信号強度分布をWB画像データの信号強度分布で除算し、両者の信号強度比をRFコイル装置内の全要素コイルの感度分布の推定値として算出する。同様な処理を3次元領域全体の各断面の画像データに対して実行すれば、3次元感度分布マップデータを生成できる。3次元感度分布マップデータは例えば、画像再構成部90による画像再構成時に、輝度補正処理に用いられる。
【0143】
なお、全身用コイルから得られたWB画像データは、基準として用いるものであるため、全身用コイルWBを受信用コイルとせずに、被検体Pに装着されたRFコイル装置のみを受信用コイルとしても感度分布マップを生成可能である。
【0144】
MPU86は、本スキャンの撮像条件の内、未確定の条件を補正スキャンの実行結果に基づいて確定する。未確定の条件とは、上記磁場計測シーケンスを補正スキャンとして行った場合には、本スキャン実行時の静磁場を均一化するために、どのような強度分布の磁場を基準静磁場に重畳印加するか、などの条件である。また、未確定の条件とは、例えば、RFパルスの中心周波数を算出するシーケンスを補正スキャンとして行った場合には、本スキャン実行時のRFパルスの中心周波数の値である。
【0145】
[ステップS9]MPU86の制御の下、MRI装置20による本スキャンが実行される。MRI装置20は、オフセット磁場を前記「基準静磁場」に重畳的に印加することで、均一化された静磁場を印加する。オフセット磁場の2次成分については、例えばMPU86がシムコイル電源42を制御することで、シムコイル24への供給電流を調整し、これにより補正する。また、オフセット磁場の1次成分については、例えばMPU86が傾斜磁場電源44を制御することで、X、Y、Z軸傾斜磁場コイル26x、26y、26zへの各供給電流を調整して補正する。
【0146】
上記のように均一化された静磁場が印加された下で、本スキャンのMR信号の収集が行われる。即ち、MPU86は、ロケータ画像の撮像時と同様にMRI装置20の各部を動作させ、被検体Pの撮像部位が含まれる撮像領域に傾斜磁場を形成させ、補正された中心周波数のRFパルスをRFコイル28から発生させる。これにより生じたMR信号は、RFコイル装置により受信されて、RF受信器48により検出され、生データに変換されて画像再構成部90に入力される。画像再構成部90は、k空間データベース92に形成されたk空間において、生データをk空間データとして配置する。
【0147】
[ステップS10]画像再構成部90は、k空間データベース92からk空間データを取り込み、これにフーリエ変換を含む画像再構成処理を施すことで画像データを再構成し、得られた画像データを画像データベース94に一旦保存する。
【0148】
画像処理部96は、本スキャンにおける撮像断面方向等の撮像条件、画像再構成条件等の諸条件に応じて、3次元感度分布マップデータにおける対応する部分を抽出し、感度分布マップとして用いる。画像処理部96は、画像データベース94から画像データを取り込み、感度分布マップを用いて画像データに輝度補正を施し、補正後の画像データを画像データベース94に保存する。ここまでが画像再構成処理であり、これにより、RFコイル装置内の要素コイル同士の感度差に起因する各画素の輝度レベルの誤差が改善される。
【0149】
画像処理部96は、補正された画像データに所定の画像処理を施すことで2次元の表示用画像データを生成し、この表示用画像データを記憶装置66に保存する。なお、感度分布マップを生成するシーケンスが補正スキャンに含まれない場合には、上記の輝度補正処理が行われずに、画像再構成が行われる。
【0150】
そして、MPU86の指令に従って、表示用画像データが表示制御部98に転送され、表示装置64上に表示される。以上が本実施形態のMRI装置20の動作説明である。
【0151】
このように本実施形態では、補正スキャン設定部100は、どのシーケンスを補正スキャンとして行うかを、本スキャンの一部の撮像条件(設定済みのもの)に基づいて自動設定する(ステップS6)。次に、補正スキャン設定部100は、補正スキャンのシーケンスの各条件を図6のように3種類に分類し、MR信号を受信する装着型のRFコイル装置の種類と、撮像部位との組み合わせに応じて補正スキャンの条件を算出及び自動設定する。
【0152】
例えば本スキャンに脂肪抑制プレパルスが含まれるか場合にはRFパルスの中心周波数の補正値を算出するシーケンスを補正スキャンとして行うなど、本スキャンの撮像条件から望まれるシーケンスを補正スキャンとして自動的に実行する。この場合には、脂肪組織からのMR信号の抑制の効果が確実となる。従って、ユーザに操作の負担をかけないのでMRI装置20の操作性が向上し、さらには本スキャンの画質向上を期待できる。また、例えば以下のような、ユーザの操作ミスによる画質低下を回避できる。即ち、脂肪抑制プレパルスが含まれるにも拘らず、RFパルスの中心周波数の補正値を算出するシーケンスをユーザが挿入し忘れたために、脂肪抑制の程度にムラが生じて画質低下を招くことを回避できる。
また、本スキャンがパラレルイメージングや輝度補正を伴う場合、RFコイル装置内の各要素コイルの感度分布マップを生成するシーケンスを実行していないと、画質低下(折り返しアーチファクトや輝度ムラ)が生じる。しかし、このようにパラレルイメージングなどを伴う本スキャンの場合、補正スキャン設定部100は、感度分布マップを生成するシーケンスを補正スキャンとして行うように自動設定するので、上述の画質低下を回避できる。
【0153】
より具体的には、感度分布マップを生成するシーケンスを行う場合、RFコイル装置の種類と撮像部位とに応じて、当該シーケンスの条件を3種類に分けて自動設定する。この自動設定に際して、図6〜図9を用いて前述したように、各条件がRFコイル装置の種類及び撮像部位に応じた適正な設定内容となるように、予めテーブルデータや算出(判定)方法を補正スキャン設定部100に記憶させておく。従って、RFコイル装置内の複数の要素コイルの感度分布マップを正確に生成できるので、これに基づいて本スキャンの画像再構成時に感度補正を施すため、画質を向上できる。
【0154】
同様に、オフセット磁場を算出するシーケンスも、RFコイル装置の種類と撮像部位とに応じて当該シーケンスの条件を3種類に分け、各条件が適正な設定内容となるように予め記憶されたテーブルデータや算出方法に基づいて、各条件が適正に自動設定される。従って、このようにして得られた正確なオフセット磁場に基づいて静磁場をより均一にした状態で本スキャンにおけるMR信号の収集を行うので、さらに画質を向上できる。
【0155】
これに対して従来技術では、補正スキャンの条件は、RFコイル装置の種類と撮像部位とに拘らず画一的に自動設定されるか、又は、ユーザがマニュアル設定していた。画一的に自動設定される場合には、撮像条件に拘らず、同じ条件で感度分布マップが生成され、同じ条件でオフセット磁場が算出されていたため、補正スキャンの条件は必ずしも適正には設定されていなかった。ユーザがマニュアル設定していた場合には、補正スキャンの条件が適正に設定されても、ユーザに操作の負担をかけていた。
しかし、以上説明した実施形態によれば、MRIにおいて、ユーザに設定操作の手間をかけることなく、プレスキャンなどの較正用(チューニング用)のスキャンの条件を適正に設定できるので、上記従来課題を解消している。
【0156】
なお、上記実施形態では、オフセット磁場を算出する磁場計測シーケンスと、RFパルスの中心周波数の補正値を算出するシーケンスとの2つを別々の補正スキャンとして実行数する例を述べたが、これは一例に過ぎない。磁場計測シーケンスと、RFパルスの中心周波数の補正値を算出するシーケンスとを1つの(1セットの)補正スキャンとして実行してもよい(この点は、第2の実施形態以降の他の実施形態や変形例についても同様である)。即ち、磁場計測を行い、計測結果から算出されるオフセット磁場に基づいて補正された静磁場を印加した状態で磁気共鳴スペクトロスコピーを行い、その周波数スペクトラムデータに基づいてRFパルスの中心周波数を再設定(補正)する、という一連の処理を1の補正スキャンとして実行してもよい。
【0157】
(第2の実施形態)
第2の実施形態以降の各実施形態のMRI装置のハードウェア的な構成は、第1の実施形態のMRI装置20と同様である。第2の実施形態では、寝台32のステップ移動と、一時停止とを順次繰り返すことで、各寝台32の位置で撮像を行う場合、即ち、マルチステーション撮像の場合における補正スキャンの条件の自動設定方法について説明する。ここでは一例として、第1ステーション〜第3ステーションの各寝台位置でそれぞれ本スキャンを行う3ステーション撮像の場合について説明する。
【0158】
図11は、第2の実施形態におけるMRI装置20の動作の流れを示すフローチャートである。以下、図11に示すステップ番号に従って、第2の実施形態のMRI装置20の動作を説明する。
【0159】
[ステップS21]第1の実施形態のステップS1と同様に、MPU86は、MRI装置20の初期設定を行い、被検体Pの撮像部位を取得し、RFコイル装置の識別情報を取得する。
【0160】
ここでは3ステーション撮像なので、上半身用RFコイル装置140のように、ある程度の範囲をカバーできる1つ又は複数のMR信号受信用のRFコイル装置が用いられる。そして、例えば前述のコイル位置計測シーケンスの実行後、それらRFコイル装置内の多数の要素コイルの中から、MR信号の受信に用いる要素コイルが自動又は手動操作で各ステーション毎に選択される。
【0161】
[ステップS22]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32をガントリ内の撮像空間における第1の所定位置(第1ステーションの位置)に移動させる。この後、次のステップS23に移行するまでの間、寝台32は動かない。
【0162】
次に、MPU86の制御の下、MRI装置20によって、第1の実施形態のステップS2〜S4と同様にして、第1ステーションの位置におけるロケータ画像が撮像される。
【0163】
[ステップS23]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32を撮像空間における第2の所定位置(第2ステーションの位置)に移動させる。この後、次のステップS25に移行するまでの間、寝台32は動かない。
【0164】
[ステップS24]MPU86の制御の下、MRI装置20によって上記同様に第2ステーションの位置でロケータ画像が撮像される。
【0165】
[ステップS25]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32を撮像空間における第3の所定位置(第3ステーションの位置)に移動させる。この後、次のステップS27に移行するまでの間、寝台32は動かない。
【0166】
[ステップS26]MPU86の制御の下、MRI装置20によって上記同様に第3ステーションの位置でロケータ画像が撮像される。
【0167】
[ステップS27]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32を撮像空間における第1ステーションの位置に移動させる。
【0168】
[ステップS28]表示制御部98は、MPU86の制御に従って第1〜第3ステーションの各ロケータ画像を表示装置64に表示させる。この後、ユーザは、ロケータ画像を参照しながら、入力装置62を介して3ステーション分の本スキャンの撮像条件をそれぞれ設定する。本スキャンの撮像条件の設定が終わった場合、MPU86は、次のステップS29に処理を移行させる。即ち、ユーザが本スキャンのプランニングを終えないと、次のステップには進まない。
【0169】
[ステップS29]補正スキャン設定部100は、被検体Pの撮像部位と、RFコイル装置の識別情報(種類)とをMPU86から取得する。そして、補正スキャン設定部100は、どのシーケンスを補正スキャンとして行うかを、第1の実施形態のステップS6と同様に、本スキャンの一部の撮像条件に基づいて自動選択する。この後、補正スキャン設定部100は、補正スキャンとして行う各シーケンスの条件(パラメータ)を、前記ステップS6と同様に算出及び自動設定する。この例では、補正スキャン設定部100は、3ステーション分の補正スキャンの条件を算出及び自動設定する。
【0170】
[ステップS30]入力装置62を介して、ユーザにより本スキャンの開始指令が入力される。本スキャンの開始指令が入力されるまで、MPU86は待機し、次のステップに進まない。
【0171】
[ステップS31]寝台32は、ステップS27において第1ステーションの位置に戻っている。MPU86は、本スキャンの開始指令を受けて、第1ステーションの位置で、ステップS29で条件を自動設定した補正スキャンをMRI装置20に実行させる。
【0172】
この後、MPU86は、補正スキャンの実行結果に基づいて、第1ステーションの位置での本スキャンの撮像条件の内、未確定の条件を確定する。未確定の条件とは、例えば前述のオフセット磁場に基づいて補正された静磁場が印加された下で、RFパルスの中心周波数を算出するシーケンスを行った場合には、このシーケンスにより取得(補正)された本スキャン実行時のRFパルスの中心周波数の値である。
【0173】
上記のようにして本スキャンの全撮像条件が確定後、MPU86は、MRI装置20の各部を制御して、第1ステーションの位置での本スキャンを実行させる。これにより、第1ステーションの位置で収集されたMR信号は、生データに変換された後、k空間データベース92に形成されたk空間においてk空間データとして配置される。
【0174】
[ステップS32]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32を撮像空間における第2ステーションの位置に移動させる。この後、次のステップS34までの間、寝台32は動かない。
【0175】
[ステップS33]MPU86は、第2ステーションの位置で補正スキャンをMRI装置20に実行させ、第2ステーションの位置での本スキャンの撮像条件の内、未確定の条件を補正スキャンの実行結果に基づいて確定する。この後、MPU86は、MRI装置20の各部を制御して、第2ステーションの位置での本スキャンを実行させる。これにより、第2ステーションの位置で収集されたMR信号は、生データに変換された後、k空間データベース92に形成されたk空間においてk空間データとして配置される。
【0176】
[ステップS34]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32を撮像空間における第3ステーションの位置に移動させる。
【0177】
[ステップS35]MPU86は、第3ステーションの位置で補正スキャンをMRI装置20に実行させ、第3ステーションの位置での本スキャンの撮像条件の内、未確定の条件を補正スキャンの実行結果に基づいて確定する。この後、MPU86は、MRI装置20の各部を制御して、第3ステーションの位置での本スキャンを実行させる。これにより、第3ステーションの位置で収集されたMR信号は、生データに変換された後、k空間データベース92に形成されたk空間においてk空間データとして配置される。
【0178】
[ステップS36]画像再構成部90は、第1の実施形態のステップS10と同様にして、3ステーション分の本スキャンの画像データを再構成し、得られた画像データを画像データベース94に一旦保存する。
【0179】
画像処理部96は、前記ステップS10と同様にして、感度分布マップを用いて画像データを補正し、補正された画像データに所定の画像処理を施すことで2次元の表示用画像データを生成し、この表示用画像データを記憶装置66に保存する。なお、感度分布マップを生成するシーケンスが補正スキャンに含まれない場合には、上記の補正処理が行われずに、画像再構成が行われる。
【0180】
そして、MPU86の指令に従って表示用画像データが表示制御部98に転送され、表示装置64上に表示される。以上が第2の実施形態のMRI装置20の動作説明である。
【0181】
このように第2の実施形態においても、第1の実施形態と同様の効果を得ることができる。さらに、第2の実施形態では、マルチステーション撮像の場合にも、ユーザに設定操作の手間をかけることなく、補正スキャンの条件を適正に自動設定できる。
【0182】
なお、第2の実施形態では、寝台32の移動及び撮像のセットであるステップ移動数が3である3ステーション撮像の例を述べた。本発明の実施形態は、かかる態様に限定されるものではない。ステップ移動数(ステーション数)は、4以上でも2でもよい。
【0183】
また、以下のように各ステーションでロケータ画像の撮像から本スキャンまでの処理を行ってから、寝台32を移動させて次のステーションに移行してもよい。
【0184】
例えば2ステーションの場合で説明すると、まず、第1ステーションの位置で、ロケータ画像を撮像後、第1ステーションの本スキャンのプランニングをしてから、補正スキャンの条件を自動設定し、補正スキャンを実行する。この後、補正スキャンの実行結果に基づいて第1ステーション位置での本スキャンの全撮像条件を確定し、第1ステーション位置での本スキャンを実行する。次に、第2ステーションの位置に寝台を移動する。
【0185】
次に、第2ステーションの位置でロケータ画像を撮像後、第2ステーションの本スキャンのプランニングをしてから補正スキャンの条件を自動設定し、補正スキャンを実行する。この後、補正スキャンの実行結果に基づいて第2ステーション位置での本スキャンの全撮像条件を確定し、第2ステーション位置で本スキャンを実行する。最後に、全ステーション分の本スキャンの画像を再構成して表示すればよい。
【0186】
(第3の実施形態)
第3の実施形態では、複数の本スキャンが行われる場合に、撮像時間の短縮を図る。第3の実施形態では一例として、第1、第2の本スキャンが順次行われ、ユーザによる第2の本スキャンの撮像条件のプランニングの間に、第1の本スキャンに対する補正スキャンを自動実行し、撮像時間の短縮を図る。ここでは一例として、第1の本スキャンは、補正スキャンとして、本スキャン後に実行可能なシーケンスのみの実行が望まれるもの(例えば腎動脈撮像)であるものとする。但し、これは単なる一例にすぎず、他の種類のシーケンスであってもよい。
【0187】
図12は、第3の実施形態におけるMRI装置20の動作の流れを示すフローチャートである。以下、図12に示すステップ番号に従って、第3の実施形態のMRI装置20の動作を説明する。
【0188】
[ステップS41]第1の実施形態のステップS1と同様に、MPU86は、MRI装置20の初期設定を行い、被検体Pの撮像部位を取得し、RFコイル装置の識別情報を取得する。また、プレスキャンなどによってRFパルスの中心周波数等が暫定的に設定される。また、要素コイルの選択が必要な場合、例えば前述のコイル位置計測シーケンスの実行後、RFコイル装置内の多数の要素コイルの中から、MR信号受信に用いる要素コイルが自動又は手動操作で選択される。
【0189】
[ステップS42]第1の実施形態のステップS2、S3と同様にして、ロケータ画像が撮像される。
【0190】
[ステップS43]第1の実施形態のステップS5と同様にして、ロケータ画像が表示装置64上に表示され、これを参照しながら、第1の本スキャンの撮像条件の設定(プランニング)がユーザにより行われる。
【0191】
[ステップS44]補正スキャン設定部100は、ステップS41でMPU86が取得した被検体Pの撮像部位と、RFコイル装置の識別情報(種類)とをMPU86から取得する。そして、補正スキャン設定部100は、第1の実施形態のステップS6と同様にして、どのシーケンスを「第1の本スキャンに対する補正スキャン」として行うかを第1の本スキャンの撮像条件に基づいて自動設定する。ここでは一例として、感度分布マップを生成するシーケンスのように、本スキャンの後に行っても支障のないシーケンスのみが選択されるものとする。即ち、第1の本スキャンの撮像条件は、本スキャン実行前における静磁場の補正が不要であるものとする。
【0192】
次に、補正スキャン設定部100は、補正スキャンとして行うとして決定したシーケンスの条件を、第1の実施形態のステップS6と同様に算出及び自動設定する。
【0193】
[ステップS45]入力装置62を介して、ユーザにより第1の本スキャンの開始指令が入力される。第1の本スキャンの開始指令が入力されるまで、MPU86は待機し、次のステップに進まない。
【0194】
[ステップS46]第1の実施形態のステップS9と同様にして、第1の本スキャンが実行される。
【0195】
[ステップS47]例えばステップS42での撮像画像がロケータ画像として表示装置64上に表示され、これを参照しながら、第2の本スキャンの撮像条件の設定がユーザにより行われる(プランニング)。
ユーザによる第2の本スキャンの撮像条件のプランニングが行われている期間に、MPU86は、MRI装置20の各部を制御して、ステップS44で条件が決定された「第1の本スキャンに対する補正スキャン」を実行させる。ユーザによるプランニングが行われている期間とは、換言すれば、入力装置62を介してMPU86に対して第2の本スキャンの撮像条件の設定が行われている期間である。
第2の本スキャンの撮像条件のプランニングと、「第1の本スキャンに対する補正スキャン」とが終了した場合、MPU86は、次のステップに処理を移行させる。
【0196】
[ステップS48]補正スキャン設定部100は、前述と同様にして、どのシーケンスを第2の本スキャンに対する補正スキャンとして行うかを第2の本スキャンの撮像条件に基づいて自動選択する。次に、補正スキャン設定部100は、補正スキャンとして選択したシーケンスの条件を、前述同様に算出及び自動設定する。
【0197】
[ステップS49]入力装置62を介して、ユーザにより第2の本スキャンの開始指令が入力される。第2の本スキャンの開始指令が入力されるまで、MPU86は待機し、次のステップに進まない。
【0198】
[ステップS50]MPU86は、MRI装置20の各部を制御して、ステップS48で条件が決定された「第2の本スキャンに対する補正スキャン」を実行させる。「第2の本スキャンに対する補正スキャン」に、磁場計測シーケンスのように本スキャン前に行うべきシーケンスが含まれる場合には、MPU86は、この補正スキャンの実行結果を第2の本スキャンの撮像条件に反映させる。
【0199】
[ステップS51]第1の実施形態のステップS9と同様にして、第2の本スキャンが実行される。
【0200】
[ステップS52]第1の実施形態のステップS10と同様にして、第1及び第2の本スキャンで収集したMR信号に基づく画像が再構成され、表示装置64に表示される。なお、第1の本スキャンで収集したMR信号に基づく画像再構成に際しては、第1の本スキャンに対する補正スキャンで得られた感度分布マップによる輝度補正が併せて行われる。以上が第3の実施形態のMRI装置20の動作説明である。
【0201】
このように第3の実施形態においても、第1の実施形態と同様の効果を得ることができる。第3の実施形態は、先に行われる本スキャンに対する補正スキャンに、本スキャン後にも実行可能なシーケンスしか含まれない場合に有効である。これは、後から行われる本スキャンの撮像条件をユーザがプランニングしている間に、先に行われた本スキャンに対する補正スキャンを自動実行するため、撮像時間を短縮できるからである。
【0202】
本スキャンの前にも後にも実行可能な補正スキャンのシーケンスとしては、第3の実施形態で一例として挙げた感度分布マップを生成するシーケンス以外にも、以下のものが挙げられる。例えば本スキャンのシーケンスがEPI(Echo Planar Imaging:エコープラナーイメージング)の場合、EPIの位相補正データを得るシーケンスである。EPIの位相補正は、本スキャン後である画像再構成時に行ってもよいからである。
【0203】
また、第3の実施形態では、第1の本スキャンに対する補正スキャンとして、本スキャン後にも実行可能なシーケンスのみが選択される例を挙げたが、第1の本スキャンの撮像条件によっては、本スキャン前に実行すべきシーケンスが選択されることも考えられる。前記磁場計測シーケンスのように本スキャン前に実行すべきシーケンスが選択された場合には、MPU86は、第1の本スキャンに対する補正スキャンを、第1の本スキャンの実行の直前に実行するようにシーケンス順序を適宜変更すればよい。この点は、次の第4の実施形態についても同様である。
【0204】
(第4の実施形態)
第4の実施形態では、第3の実施形態の手法をマルチステーション撮像の場合に適用した一例について説明する。
【0205】
図13は、第4の実施形態におけるMRI装置20の動作の流れを示すフローチャートである。以下、図13に示すステップ番号に従って、第4の実施形態のMRI装置20の動作を説明する。
【0206】
[ステップS61]第2の実施形態のステップS21と同様であるので、重複する説明を省略する。
【0207】
[ステップS62]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32をガントリ内の撮像空間における第1ステーションの位置に移動させる。
次に、MPU86の制御の下、第1ステーションの位置で前述と同様にしてロケータ画像が撮像されて表示され、第1ステーションでの第1の本スキャンの撮像条件の設定(プランニング)がユーザにより行われる。
【0208】
[ステップS63]補正スキャン設定部100は、第1ステーションでの第1の本スキャンの撮像条件(RFコイル装置の種類や撮像部位を含む)に基づいて、「第1ステーションでの第1の本スキャンに対する補正スキャン」のシーケンスを自動選択後、選択したシーケンスの条件を算出及び自動設定する。この自動設定方法は、第3の実施形態のステップS44と同様である。ここでも一例として、本スキャンの後にも実行可能なシーケンスのみが選択されるものとする。
【0209】
[ステップS64]入力装置62を介して、第1ステーションでの第1の本スキャンの開始指令が入力されると、MPU86は、前述と同様にして、第1ステーションでの第1の本スキャンをMRI装置20に実行させる。
【0210】
[ステップS65]前述同様に、第1ステーションにおけるロケータ画像が表示され、入力装置62を介して、「第1ステーションでの第2の本スキャン」の撮像条件の設定(プランニング)がユーザにより行われる。
【0211】
ユーザによるプランニングが行われている期間に、MPU86は、ステップS63で条件を自動設定した「第1ステーションでの第1の本スキャンに対する補正スキャン」をMRI装置20に実行させる。ユーザによるプランニングが行われている期間とは、換言すれば、入力装置62を介してMPU86に対して撮像条件の設定が行われている期間である。第2の本スキャンの撮像条件のプランニングと、「第1ステーションでの第1の本スキャンに対する補正スキャン」とが終了した場合、MPU86は、次のステップに処理を移行させる。
【0212】
[ステップS66]補正スキャン設定部100は、前述と同様に、第1ステーションでの第2の本スキャンの撮像条件(RFコイル装置の種類や撮像部位を含む)に基づいて、「第1ステーションでの第2の本スキャンに対する補正スキャン」のシーケンスを自動選択後、選択したシーケンスの条件を算出及び自動設定する。
【0213】
[ステップS67]入力装置62を介して、第1ステーションでの第2の本スキャンの開始指令が入力されると、MPU86は、前述と同様にして、「第1ステーションでの第2の本スキャンに対する補正スキャン」をMRI装置20に実行させる。ここで実行する補正スキャンに、磁場計測シーケンスのように本スキャン前に行うべきシーケンスが含まれる場合には、MPU86は、補正スキャンの実行結果を第1ステーションでの第2の本スキャンの撮像条件に反映させる。
【0214】
[ステップS68]MPU86は、MRI装置20の各部を制御して、第1ステーションでの第2の本スキャンを実行させる。
【0215】
[ステップS69]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32を第2ステーションの位置に移動させる。次に、第2ステーションの位置において、前述同様にロケータ画像が撮像されて表示され、第2ステーションでの第1の本スキャンの撮像条件の設定(プランニング)がユーザにより行われる。
【0216】
[ステップS70]補正スキャン設定部100は、ステップS63と同様に、第2ステーションでの第1の本スキャンの撮像条件に基づいて、「第2ステーションでの第1の本スキャンに対する補正スキャン」のシーケンスを自動選択後、選択したシーケンスの条件を算出及び自動設定する。ここでも一例として、本スキャンの後にも実行可能なシーケンスのみが選択されるものとする。
【0217】
[ステップS71]入力装置62を介して、第2ステーションでの第1の本スキャンの開始指令が入力されると、MPU86は、前述同様にして、第2ステーションでの第1の本スキャンをMRI装置20に実行させる。
【0218】
[ステップS72]前述同様に、第2ステーションにおけるロケータ画像が表示され、入力装置62を介して、第2ステーションでの第2の本スキャンの撮像条件の設定(プランニング)がユーザにより行われる。ユーザによるプランニングが行われている期間に、MPU86は、ステップS70で条件を自動設定した「第2ステーションでの第1の本スキャンに対する補正スキャン」をMRI装置20に実行させる。第2の本スキャンの撮像条件のプランニングと、「第2ステーションでの第1の本スキャンに対する補正スキャン」とが終了した場合、MPU86は、次のステップに処理を移行させる。
【0219】
[ステップS73]補正スキャン設定部100は、前述同様に、第2ステーションでの第2の本スキャンの撮像条件に基づいて、「第2ステーションでの第2の本スキャンに対する補正スキャン」のシーケンスを自動選択後、選択したシーケンスの条件を算出及び自動設定する。
【0220】
[ステップS74]入力装置62を介して、第2ステーションでの第2の本スキャンの開始指令が入力されると、MPU86は、前述同様に「第2ステーションでの第2の本スキャンに対する補正スキャン」をMRI装置20に実行させる。ここで実行する補正スキャンに、本スキャン前に行うべきシーケンスが含まれる場合、MPU86は、その実行結果を第2ステーションでの第2の本スキャンの撮像条件に反映させる。
【0221】
[ステップS75]MPU86は、MRI装置20の各部を制御して、第2ステーションでの第2の本スキャンを実行させる。
【0222】
[ステップS76]第2の実施形態のステップS36と同様に、(感度分布マップを生成した場合には輝度補正を施しつつ)2ステーション分の本スキャンの画像データが再構成及び保存される。この画像データに基づいて表示用画像データが生成され、表示装置64上に表示される。以上が第4の実施形態のMRI装置20の動作説明である。
【0223】
このように第4の実施形態では、マルチステーション撮像の場合においても、第3の実施形態と同様の効果を得ることができる。なお、第4の実施形態では、寝台32の移動及び撮像のセットであるステップ移動数が2である2ステーション撮像の例を述べたが、ステップ移動数(ステーション数)は、3以上でもよい。
【0224】
(実施形態の補足事項)
[1]上記各実施形態では、補正スキャンの例として、オフセット磁場を算出する磁場計測シーケンス、感度分布マップを生成するシーケンス、RFパルスの中心周波数を算出するシーケンスを挙げた。本発明の実施形態は、かかる態様に限定されるものではない。これらは補正スキャンの一例にすぎず、例えば本スキャンのシーケンスがEPIの場合、EPIの位相補正データを得るシーケンスを補正スキャンとして行ってもよい。
【0225】
[2]補正スキャンの実行は、その対象となる本スキャンの実行前のみに行う場合、又は、その対象となる本スキャンの実行後のみに行う場合には限定されない。例えば、一部の補正スキャンを本スキャン前に実行し、残りの補正スキャンを本スキャン後に実行してもよい。
【0226】
図14は、第1の実施形態の変形例として、一部の補正スキャンを本スキャン前に実行し、残りの補正スキャンを本スキャン後に行う場合のMRI装置20の動作の流れを示すフローチャートである。ステップS1’〜S7’、S9’の動作はそれぞれ、第1の実施形態のステップS1〜S7、S9と同様である。
【0227】
ステップS8’では、MPU86は、例えば静磁場補正用のオフセット磁場を算出するための磁場計測シーケンスや、本スキャンでのRFパルスの中心周波数を算出するシーケンスなどの本スキャンの前に行うべき補正スキャンをMRI装置20に実行させる。なお、前述のように、磁場計測シーケンスと、本スキャンでのRFパルスの中心周波数を算出するシーケンスとは、1のシーケンスとして(1の補正スキャンとして)実行してもよい。また、仮に本スキャンの前に行うべき補正スキャンがない場合、このステップS8’は省略すればよい。
【0228】
ステップS10’では、MPU86は、例えばRFコイル装置内の各要素コイルの感度分布マップを生成するシーケンスなど、本スキャンの後に行ってもよい補正スキャンをMRI装置20に実行させる。その後のステップS11’では、本スキャン後に行われた補正スキャンの実行結果を反映しつつ、第1の実施形態のステップS10と同様にして画像再構成、画像表示が行われる。
【0229】
[3]RFコイル装置の種類及び撮像部位に応じて補正スキャンの条件を算出及び自動設定する例を述べた。上記各実施形態で述べた補正スキャンの条件を決める際の判定要素としての撮像部位は、例えば、撮像部位を包含するSAR検出部位も含む。
【0230】
上記SAR(Specific Absorption Ratio:比吸収率)とは、例えば、生体組織1kgに吸収されるRFパルスのエネルギーを意味する。安全上の基準として、例えば任意の10秒間、6分間のSARがそれぞれ第1または第2の上限値を超えないように定められている。上記各実施形態の動作説明では省略したが、MPU86及び補正スキャン設定部100は、補正スキャンや本スキャンの実行時にSARが上限値を超えないように、補正スキャンの条件及び本スキャンの撮像条件を制限している。
【0231】
片手を撮像する場合、SAR検出部位は、例えば、被検体Pが腕を伸ばして寝台32上に寝た状態で片手を包含する領域であり、腰部と、両手と、両手首とを合わせた領域になる。また、心臓を撮像する場合、SAR検出部位は、例えば、被検体Pが寝台32上に寝た状態で心臓を包含する領域であり、胸部と両腕上腕部とを合わせた領域となる。
従って、換言すれば、上記各実施形態は、RFコイル装置の種類及びSAR検出部位に応じて補正スキャンの条件を算出及び自動設定する構成としてもよい。
【0232】
[4]本スキャン前に行うべきシーケンスが補正スキャンに含まれない場合であって、撮像時間短縮を優先する場合には、本スキャン直前に補正スキャンを行う第1の実施形態のフローよりも、第3の実施形態のフローの方が望ましい。第3の実施形態のフローとは、補正スキャンの対象の本スキャンの実行後、さらに後に行われる他の本スキャンの撮像条件のプランニング中に、当該補正スキャンを行うフローである。
【0233】
一方、本スキャンの撮像条件(静磁場の印加方法や、RFパルスの中心周波数等などのMR信号収集条件)を本スキャン前に較正することが望まれる場合、本スキャン直前に補正スキャンを行う第1の実施形態のフローが望ましい。以下に具体例を2つ挙げる。
【0234】
第1に、例えばDWI(Diffusion Weighted Imaging:拡散強調イメージング)では、b値や、拡散傾斜磁場(MPG: Motion Probing Gradient)の印加方向等が異なる撮像を連続して行う。従って、DWIでは、傾斜磁場コイル26が発熱し、鉄シムの温度が上昇して透磁率が変化し、磁場均一性が乱れ、水素原子の磁気共鳴の中心周波数がシフトする。このため、前述の磁場計測シーケンスを行うことで得られるオフセット磁場に基づいて補正された静磁場が印加された下で、RFパルスの中心周波数の補正値を算出するシーケンスを本スキャン直前に行い、RFパルスの中心周波数を新たな補正値にした後、引き続きDWIの本スキャンを行うことが望ましい。
【0235】
第2に、例えばブレスト撮像では、脂肪組織や(肺の中の)空気が多く含まれるため、RFパルスの中心周波数のズレの影響を受け易い。このため、ブレスト撮像では、RFパルスの中心周波数の補正値を算出する補正スキャンを、プレパルスとしての脂肪抑制パルスが含まれる本スキャン直前に行うことが望ましい。より詳細には、撮像時間経過に伴う傾斜磁場コイル26の温度上昇に伴い、水素原子の磁気共鳴の中心周波数も時間変化してズレていく。この点を考慮すると、補正スキャンの実行タイミングは、本スキャンの直前である程、本スキャン実行時と条件が近く、中心周波数をより適正に較正できるからである。
【0236】
[5]MRI装置20として、静磁場磁石22、シムコイル24、傾斜磁場コイルユニット26、RFコイル28が含まれるガントリの外にRF受信器48が存在する例を述べた(図1参照)。本発明の実施形態は、かかる態様に限定されるものではない。RF受信器48がガントリ内に含まれる態様でもよい。
【0237】
具体的には例えば、RF受信器48に相当する電子回路基盤をガントリ内に配設する。そして、受信用RFコイルによって電磁波からアナログの電気信号に変換されたMR信号を、当該電子回路基盤内のプリアンプによって増幅し、デジタル信号としてガントリ外に出力し、シーケンスコントローラ56に入力してもよい。ガントリ外への出力に際しては、例えば光通信ケーブルを用いて光デジタル信号として送信すれば、外部ノイズの影響が軽減されるので、望ましい。
【0238】
[6]第1の実施形態では、アキシャル断面及びサジタル断面のロケータ画像を撮像する例を述べた。本発明の実施形態は、かかる態様に限定されるものではない。コロナル断面など、他の断面のロケータ画像を撮像してもよい。この点は、第2〜第4の実施形態についても同様である。
【0239】
[7]請求項の用語と実施形態との対応関係を説明する。なお、以下に示す対応関係は、参考のために示した一解釈であり、本発明を限定するものではない。
【0240】
静磁場磁石22、シムコイル24、傾斜磁場コイル26、RFコイル28、制御装置30の全体(図1参照)が、傾斜磁場及びRFパルスの印加を伴ってMR信号を収集し、補正スキャンを実行する構成は、請求項記載の補正スキャン実行部の一例である。
【0241】
静磁場磁石22、シムコイル24、傾斜磁場コイル26、RFコイル28、制御装置30の全体が、確定後の本スキャンの撮像条件に従って、静磁場、傾斜磁場及びRFパルスの印加を伴って被検体Pの撮像部位を含む撮像領域からMR信号を収集する構成は、請求項記載の本スキャン実行部の一例である。
【0242】
収集されたMR信号に基づいて被検体Pの撮像部位の画像データを再構成する画像再構成部90の機能は、請求項記載の画像再構成部の一例である。
画像再構成時に併せて行われる輝度補正において用いられる感度分布マップは、請求項記載の再構成処理の条件の一例である。
補正スキャンの実行結果によって算出されるRFパルスの中心周波数の補正値は、本スキャンの撮像条件の一例である。
【0243】
補正スキャンの実行結果に基づいて、本スキャンの一部の撮像条件(未確定のもの)、及び、画素再構成処理の条件を決定するMPU86の機能は、請求項記載の条件決定部の一例である。
MPU86の指令に従って寝台駆動装置50を駆動するシーケンスコントローラ56の機能、及び、被検体Pが乗せられた寝台32を撮像空間における所定位置に移動させる寝台駆動装置50は、請求項記載の寝台駆動部の一例である。
【0244】
[8]本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0245】
20 MRI装置
22 静磁場磁石
24 シムコイル
26 傾斜磁場コイル
26x X軸傾斜磁場コイル
26y Y軸傾斜磁場コイル
26z Z軸傾斜磁場コイル
28 RFコイル
30 制御装置
32 寝台
40 静磁場電源
42 シムコイル電源
44 傾斜磁場電源
44x X軸傾斜磁場電源
44y Y軸傾斜磁場電源
44z Z軸傾斜磁場電源
46 RF送信器
48 RF受信器
50 寝台駆動装置
56 シーケンスコントローラ
58 コンピュータ
60 演算装置
62 入力装置
64 表示装置
66 記憶装置
86 MPU
88 システムバス
90 画像再構成部
92 k空間データベース
94 画像データベース
96 画像処理部
98 表示制御部
100 補正スキャン設定部
120 頭部用RFコイル装置
122 筺体
124 ケーブル
126 コネクタ
128a、128b、128c 要素コイル
140 上半身用RFコイル装置
142 カバー部材
144、146 要素コイル
174 デュプレクサ
176 アンプ
178 切替合成器
180 受信系回路
P 被検体
WB 全身用コイル
【技術分野】
【0001】
本発明の実施形態は、磁気共鳴イメージングに関する。
【背景技術】
【0002】
MRIは、静磁場中に置かれた被検体の原子核スピンをラーモア周波数のRFパルスで磁気的に励起し、この励起に伴って発生するMR信号から画像を再構成する撮像法である。なお、上記MRIは磁気共鳴イメージング(Magnetic Resonance Imaging)の意味であり、RFパルスは高周波パルス(radio frequency pulse)の意味であり、MR信号は核磁気共鳴信号(nuclear magnetic resonance signal)の意味である。
【0003】
MRIでは、撮像部位に応じたRFコイル装置をフェーズドアレイコイルとして被検体に装着させ、当該RFコイル装置によりMR信号を受信することがある。一般に、MRI装置に内蔵された全身用コイルの感度は十分均一であるが、撮像部位別のRFコイル装置内の要素コイル間の感度は、全身用コイルと比べてあまり均一ではない。即ち、被検体から発せられるMR信号の強度が位置に拘らず均一でも、受信信号のレベルがフェーズドアレイコイルの要素コイル間で不均一となり、画質を低下させる。
【0004】
また、所定値以上の均一性を有する静磁場が形成された撮像空間の中に被検体を入れると、被検体内とその周囲との透磁率の違いにより、静磁場の均一性が損なわれる。
【0005】
そこで、本スキャン前にプレスキャンを行い、本スキャン後の画像再構成時に用いる条件や本スキャンの撮像条件などをプレスキャンの実行結果に基づいて決定することがある。なお、スキャンとは、MR信号の収集動作を指し、画像再構成を含まないものとする。
【0006】
プレスキャンとしては、例えば以下のシーケンスが挙げられる。オフセット磁場を算出する磁場計測シーケンス(例えば特許文献1参照)、RFコイル装置内の各要素コイルの感度分布マップを生成するシーケンス(例えば特許文献2参照)、本スキャンでのRFパルスの中心周波数の補正値を算出するシーケンス(例えば特許文献3参照)などである。
【0007】
上記オフセット磁場は、被検体が撮像空間に入れられた後、本スキャンにおける静磁場を均一化する補正の際の指標として用いられる。また、上記感度分布マップは、例えば本スキャン後の画像再構成時に、フェーズドアレイコイルの感度不均一性に起因する各画素の輝度レベルの誤差を補正する輝度補正処理に用いられる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2011−152348号公報
【特許文献2】特開2005−237703号公報
【特許文献3】特開2009−34152号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
プレスキャンの実行結果は本スキャンで得られる画像の画質に大きく影響するため、より適正な条件でプレスキャンを行うことが望まれる。しかし、プレスキャンの条件は、撮像条件に拘らず画一的に自動設定されるか、又は、適正な条件となるようにユーザがマニュアルで設定していた。
【0010】
このため、MRIにおいて、ユーザに設定操作の手間をかけることなく、プレスキャンなどの較正用のスキャンの条件を適正に設定する技術が要望されていた。
【課題を解決するための手段】
【0011】
以下、本発明の実施形態が取り得る態様の数例を各態様毎に説明する。
【0012】
(1)一実施形態では、MRI装置は、本スキャン実行部と、画像再構成部と、補正スキャン設定部と、補正スキャン実行部と、条件決定部とを備える。
本スキャン実行部は、決定された撮像条件に基づいてRFパルスを送信すると共に被検体の撮像部位に装着されたRFコイル装置を介して磁気共鳴信号を収集する動作を、本スキャンとして実行する。
画像再構成部は、本スキャンで収集された磁気共鳴信号に基づいて、撮像部位の画像データの再構成処理を実行する。
補正スキャン設定部は、本スキャンの撮像条件又は再構成処理の条件の決定に用いられる補正スキャンの条件を、RFコイル装置の種類及び撮像部位に応じて算出及び自動設定する。
補正スキャン実行部は、自動設定された補正スキャンの条件に基づいて補正スキャンを実行する。
条件決定部は、補正スキャンの実行結果に基づいて、本スキャンの撮像条件又は再構成処理の条件を決定する。
(2)別の一実施形態のMRI装置は、上記(1)のMRI装置と対比して、補正スキャン設定部が以下のように構成される点のみ異なる。即ち、補正スキャン設定部は、上記補正スキャンの条件を、「本スキャンの撮像条件に拘らずに固定的に設定される条件」、「本スキャンの撮像条件の内、対応する条件の設定内容を変更なしに適用する条件」、「本スキャンの撮像条件の一部に基づいて算出する条件」の3種類に分けつつ、本スキャンの撮像条件の一部に基づいて算出及び自動設定する。
【0013】
(3)さらに別の一実施形態のMRI装置は、上記(1)のMRI装置と対比して、補正スキャン設定部及び補正スキャン実行部が以下のように構成される点のみ異なる。
補正スキャン設定部は、本スキャンの撮像条件の一部に基づいて、上記補正スキャンとして実行するシーケンスを選択肢として予め記憶された複数のシーケンスから自動選択すると共に、自動選択されたシーケンスの条件を算出及び自動設定する。
補正スキャン実行部は、補正スキャン設定部により自動設定された条件に基づいて、自動選択されたシーケンスを補正スキャンとして実行する。
【図面の簡単な説明】
【0014】
【図1】第1の実施形態におけるMRI装置の全体構成を示すブロック図。
【図2】図1に示すコンピュータ58の機能ブロック図。
【図3】MR信号を受信する装着型のRFコイル装置の一例として、頭部用RFコイル装置の構成の一例を示す模式的斜視図。
【図4】MR信号を受信する装着型のRFコイル装置の一例として、上半身用RFコイル装置の構成の一例を示す平面模式図。
【図5】図1のRF受信器の詳細構成の一例を示すブロック図。
【図6】補正スキャン設定部による補正スキャンの条件の分類方法の一例を示す表。
【図7】FOVのサイズの設定方法の一例を示す模式的説明図。
【図8】FOVのサイズの設定方法の別の一例を示す模式的説明図。
【図9】3次元撮像の場合のFOVのサイズの設定方法の一例を示す模式的説明図。
【図10】第1の実施形態に係るMRI装置の動作の流れを示すフローチャート。
【図11】第2の実施形態に係るMRI装置の動作の流れを示すフローチャート。
【図12】第3の実施形態に係るMRI装置の動作の流れを示すフローチャート。
【図13】第4の実施形態に係るMRI装置の動作の流れを示すフローチャート。
【図14】第1の実施形態の変形例として、一部の補正スキャンを本スキャン前に実行し、残りの補正スキャンを本スキャン後に行う場合のMRI装置の動作の流れを示すフローチャート。
【発明を実施するための形態】
【0015】
以下、MRI装置及びMRI方法の実施形態について、添付図面に基づいて説明する。なお、各図において同一要素には同一符号を付し、重複する説明を省略する。
【0016】
(第1の実施形態)
図1は、第1の実施形態におけるMRI装置20の全体構成を示すブロック図である。図1に示すように、MRI装置20は、静磁場を形成する筒状の静磁場磁石22と、静磁場磁石22の内側において軸を同じにして設けられた筒状のシムコイル24と、傾斜磁場コイル26と、RFコイル28と、制御装置30と、被検体Pが乗せられる寝台32とを備える。
【0017】
ここでは一例として、装置座標系の互いに直交するX軸、Y軸、Z軸を以下のように定義する。まず、静磁場磁石22及びシムコイル24は、それらの軸方向が鉛直方向に直交するように配置されているものとし、静磁場磁石22及びシムコイル24の軸方向をZ軸方向とする。また、鉛直方向をY軸方向とし、寝台32は、その天板の載置用の面の法線方向がY軸方向となるように配置されているものとする。
【0018】
制御装置30は、静磁場電源40と、シムコイル電源42と、傾斜磁場電源44と、RF送信器46と、RF受信器48と、寝台駆動装置50と、シーケンスコントローラ56と、コンピュータ58とを備える。
【0019】
傾斜磁場電源44は、X軸傾斜磁場電源44xと、Y軸傾斜磁場電源44yと、Z軸傾斜磁場電源44zとで構成されている。また、コンピュータ58は、演算装置60と、入力装置62と、表示装置64と、記憶装置66とで構成されている。
【0020】
静磁場磁石22は、静磁場電源40に接続され、静磁場電源40から供給された電流により撮像空間に静磁場を形成させる。
【0021】
上記撮像空間とは、例えば、被検体Pが置かれて、静磁場が印加されるガントリ内の空間の意味である。ガントリとは、静磁場磁石22、シムコイル24、傾斜磁場コイル26、RFコイル28を含むように、例えば円筒状に形成された構造体である。被検体Pが乗せられた寝台32がガントリの内部に移動できるように、ガントリ及び寝台32は構成される。なお、図1では煩雑となるので、ガントリ内の静磁場磁石22、シムコイル24、傾斜磁場コイル26、RFコイル28を構成要素として図示し、ガントリ自体は図示していない。
【0022】
撮像領域は、例えば、「1つの画像」又は「1セットの画像」の生成に用いるMR信号の収集範囲であって、撮像空間の一部として設定される領域の意味である。ここでの「1つの画像」及び「1セットの画像」とは、2次元画像の場合もあれば3次元画像の場合もある。ここでの「1セットの画像」とは、例えば、マルチスライス撮像などのように、1つのパルスシーケンス内で「複数の画像」のMR信号が一括的に収集される場合の、「複数の画像」である。
撮像領域は、例えば、装置座標系によって3次元的に規定される。ここでは一例として、撮像領域は、厚さの薄い領域であればスライスと称し、ある程度の厚みのある領域であればスラブと称することとする。
【0023】
シムコイル24は、シムコイル電源42に接続され、シムコイル電源42から供給される電流により、この静磁場を均一化する。静磁場磁石22は、超伝導コイルで構成される場合が多く、励磁の際に静磁場電源40に接続されて電流が供給されるが、一旦励磁された後は非接続状態とされるのが一般的である。なお、静磁場電源40を設けずに、静磁場磁石22を永久磁石で構成してもよい。
【0024】
傾斜磁場コイル26は、X軸傾斜磁場コイル26xと、Y軸傾斜磁場コイル26yと、Z軸傾斜磁場コイル26zとを有し、静磁場磁石22の内側で筒状に形成されている。X軸傾斜磁場コイル26x、Y軸傾斜磁場コイル26y、Z軸傾斜磁場コイル26zはそれぞれ、X軸傾斜磁場電源44x、Y軸傾斜磁場電源44y、Z軸傾斜磁場電源44zに接続される。
【0025】
X軸傾斜磁場電源44x、Y軸傾斜磁場電源44y、Z軸傾斜磁場電源44zからX軸傾斜磁場コイル26x、Y軸傾斜磁場コイル26y、Z軸傾斜磁場コイル26zにそれぞれ供給される電流により、X軸方向の傾斜磁場Gx、Y軸方向の傾斜磁場Gy、Z軸方向の傾斜磁場Gzが撮像領域にそれぞれ形成される。
【0026】
即ち、装置座標系の3軸方向の傾斜磁場Gx、Gy、Gzを合成して、論理軸としてのスライス選択方向傾斜磁場Gss、位相エンコード方向傾斜磁場Gpe、及び、読み出し方向(周波数エンコード方向)傾斜磁場Groの各方向を任意に設定できる。スライス選択方向、位相エンコード方向、及び、読み出し方向の各傾斜磁場は、静磁場に重畳される。
【0027】
RF送信器46は、シーケンスコントローラ56から入力される制御情報に基づいて、核磁気共鳴を起こすためのラーモア周波数のRFパルス(RF電流パルス)を生成し、これを送信用のRFコイル28に送信する。RFコイル28には、ガントリに内蔵されたRFパルスの送受信用の全身用コイルや、寝台32又は被検体Pの近傍に設けられるRFパルスの受信用の局所コイルなどがある。
【0028】
送信用のRFコイル28は、RF送信器46からRFパルスを受けて被検体Pに送信する。受信用のRFコイル28は、被検体Pの内部の原子核スピンがRFパルスによって励起されることで発生したMR信号(高周波信号である核磁気共鳴信号)を受信し、このMR信号は、RF受信器48により検出される。
【0029】
RF受信器48は、検出したMR信号に前置増幅、中間周波変換、位相検波、低周波増幅、フィルタリングなどの各種の信号処理を施した後、A/D(analog to digital)変換を施すことで、デジタル化された複素データである生データ(raw data)を生成する。RF受信器48は、生成したMR信号の生データをシーケンスコントローラ56に入力する。
【0030】
演算装置60は、MRI装置20全体のシステム制御を行うものであり、これについては後述の図2を用いて説明する。
【0031】
シーケンスコントローラ56は、演算装置60の指令に従って、傾斜磁場電源44、RF送信器46及びRF受信器48を駆動させるために必要な制御情報を記憶する。ここでの制御情報とは、例えば、傾斜磁場電源44に印加すべきパルス電流の強度や印加時間、印加タイミング等の動作制御情報を記述したシーケンス情報である。
【0032】
シーケンスコントローラ56は、記憶した所定のシーケンスに従って傾斜磁場電源44、RF送信器46及びRF受信器48を駆動させることにより、X軸傾斜磁場Gx、Y軸傾斜磁場Gy、Z軸傾斜磁場Gz及びRFパルスを発生させる。また、シーケンスコントローラ56は、RF受信器48から入力されるMR信号の生データを受けて、これを演算装置60に入力する。
【0033】
寝台駆動装置50は、シーケンスコントローラ56を介して演算装置60に接続される。シーケンスコントローラ56は、演算装置60の指令に従って寝台駆動装置50を制御することで寝台32の天板(table)を装置座標系のZ軸方向に移動させ、これにより例えば、Moving Table法やStepping‐Table法による撮像を行う。
【0034】
Moving Table法は、撮像時に寝台32の天板をZ軸方向に連続移動することで移動方向に大きな撮像視野(FOV:field of view)を得る技術である。Stepping‐Table法は、ステーション毎に寝台32の天板をステップ移動させて3次元撮像を行う技術である。これらの技術は、例えば、全身撮像のように一度に撮像できない広領域の撮像を行う場合に用いられる。演算装置60は、寝台32を移動して収集された複数の画像を合成処理によって互いに繋ぎ合わせることもできる。
【0035】
図2は、図1に示すコンピュータ58の機能ブロック図である。図2に示すように、コンピュータ58の演算装置60は、MPU(Micro Processor Unit)86と、システムバス88と、画像再構成部90と、画像データベース94と、画像処理部96と、表示制御部98と、補正スキャン設定部100とを有する。
【0036】
MPU86は、撮像条件の設定、撮像動作及び撮像後の画像表示において、システムバス88等の配線を介してMRI装置20全体のシステム制御を行う。「撮像条件」とは、例えば、スピンエコーやEPIなどの内のどの種類のパルスシーケンスにより、どのような条件でRFパルス等を送信して、どのような条件で被検体からMR信号を収集するか、の意味である。
【0037】
「撮像条件」としては、例えば、撮像空間内での位置的情報としての撮像領域、フリップ角、繰り返し時間TR(Repetition Time)、スライス数、FOV(Field Of View)、撮像部位、位相エンコード方向及び周波数エンコード方向のステップ数、EPIやスピンエコー法などのパルスシーケンスの種類、などが挙げられる。ここでの撮像部位とは、例えば、頭部、胸部、腹部、腰部、脚部などの被検体Pのどの部分を撮像領域として画像化するか、の意味である。
【0038】
また、MPU86は、撮像条件設定部としても機能し、入力装置62からの指示情報に基づいてFETシーケンス等のパルスシーケンスを含む撮像条件を設定し、設定した撮像条件をシーケンスコントローラ56に入力する。
【0039】
そのために、MPU86は、表示制御部98を制御して、撮像条件の設定用画面情報を表示装置64に表示させる。
入力装置62は、撮像条件や画像処理条件を設定する機能をユーザに提供する。
【0040】
画像再構成部90は、内部にk空間データベース92を有する。画像再構成部90は、k空間データベース92に形成されたk空間において、シーケンスコントローラ56から入力されるMR信号の生データをk空間データとして配置する。画像再構成部90は、k空間データに2次元フーリエ変換などを含む画像再構成処理を施して、被検体Pの各スライスの画像データを生成する。画像再構成部90は、生成した画像データを画像データベース94に保存する。
【0041】
画像処理部96は、画像データベース94から画像データを取り込み、これに所定の画像処理を施し、画像処理後の画像データを表示用画像データとして記憶装置66に記憶させる。
【0042】
記憶装置66は、上記の表示用画像データに対し、その表示用画像データの生成に用いた撮像条件や被検体Pの情報(患者情報)等を付帯情報として付属させて記憶する。
【0043】
表示制御部98は、MPU86の制御に従って、撮像条件の設定用画面や、撮像により生成された画像データが示す画像を表示装置64に表示させる。
【0044】
補正スキャン設定部100は、補正スキャンの条件を算出及び自動設定する。補正スキャンとは例えば、本スキャンの撮像条件の内の未確定のものや、本スキャン後の画像再構成時に用いる条件やデータなどを決定するために、本スキャンとは別に行われる(チューニング用の)スキャンを指す。即ち、補正スキャンは、プレスキャンの上位概念であって、本スキャンの後に行われるものも含み、例えば、以下のシーケンスが挙げられる。
【0045】
第1に、静磁場補正用のオフセット磁場を算出するための磁場計測シーケンスであり、これは本スキャン前に行われる。第2に、本スキャンでのRFパルスの中心周波数を算出するシーケンスであり、これは本スキャン前に行われる。なお、これら磁場計測シーケンスと、RFパルスの中心周波数を算出するシーケンスとは、後述のように1の補正スキャンとして実行してもよい。第3に、RFコイル装置内の各要素コイルの感度分布マップを生成するシーケンスであり、これは、本スキャン前に行っても、本スキャンの後に行ってもよい。
【0046】
また、「本スキャン」は、T1強調画像などの、目的とする診断画像の撮像のためのスキャンであって、ロケータ画像用のMR信号収集のスキャンや、補正スキャンのような較正目的のスキャンを含まないものとする。補正スキャン設定部100による補正スキャンの条件の算出及び自動決定方法については、後述する。
【0047】
図3は、MR信号を受信する装着型のRFコイル装置の一例として、頭部用RFコイル装置120の構成の一例を示す模式的斜視図である。図3に示すように、頭部用RFコイル装置120は、筺体122と、ケーブル124と、コネクタ126とを有する。筺体122内には、ループ状の要素コイル(表面コイル)128a、128b、128cが配設されている。
【0048】
なお、頭部用RFコイル装置120は、MR信号の受信だけではなく、RFパルスの送信も可能な送受信兼用コイルとして構成され、この送受信は要素コイル128a、128b、128cにより行われる。要素コイル128a、128b、128cは、筺体122内の増幅回路等を含む公知の回路構成によって、個別にケーブル124内の別々の配線に電気的に接続されている(図示せず)。コネクタ126がMRI装置20の接続ポート(図示せず)に接続されることで、要素コイル128a、128b、128cは、ケーブル124を介してRF送信器46およびRF受信器48に接続される。
【0049】
頭部用RFコイル装置120への電力は、コネクタ126がMRI装置20の接続ポートに接続された場合に、ケーブル124を介してMRI装置20から供給される。
【0050】
なお、頭部用RFコイル装置120は、制御回路(図示せず)と、頭部用RFコイル装置120の識別情報を記憶した記憶素子(図示せず)とを筺体122内に有する。コネクタ126がMRI装置20の接続ポートに接続された場合、頭部用RFコイル装置120の識別情報は、この制御回路から、MRI装置20内の配線を介してMPU86に入力される。
【0051】
図4は、MR信号を受信する装着型のRFコイル装置の一例として、上半身用RFコイル装置140の構成の一例を示す平面模式図である。図に示すように、上半身用RFコイル装置140は、カバー部材142と、ケーブル124と、コネクタ126とを有する。
【0052】
カバー部材142は、可撓性を有する材料によって折り曲げ等の変形が可能に形成されている。このように変形可能な材料としては、例えば特開2007−229004号公報に記載の可撓性を有する回路基板(Flexible Printed Circuit:FPC)などを用いることができる。
【0053】
カバー部材142における、図4内の横方向の破線の直線で2等分した上側半分の内部には、被検体Pの背面側に対応した例えば20個の要素コイル(表面コイル)144が配設されている。ここでは一例として、背面側では、被検体Pの背骨の存在を考慮した感度向上の観点から、体軸付近に他の要素コイル144よりも小さい要素コイル144が配置される。
カバー部材142を2等分した下側半分は、被検体Pの頭部、胸部及び腹部上に被さるように構成され、その内部には、被検体Pの前面側に対応した例えば20個の要素コイル(表面コイル)146が配設されている。なお、図4において、要素コイル144は太線で示し、要素コイル146は破線で示す。
【0054】
なお、上半身用RFコイル装置140は、制御回路(図示せず)と、上半身用RFコイル装置140の識別情報を記憶した記憶素子(図示せず)とをカバー部材142内に有する。コネクタ126がMRI装置20の接続ポートに接続された場合、上半身用RFコイル装置140の識別情報は、この制御回路からMRI装置20内の配線を介してMPU86に入力される。
【0055】
図5は、図1のRF受信器48の詳細構成の一例を示すブロック図である。ここでは一例として、上半身用RFコイル装置140と、MR信号を受信する装着型の下半身用RFコイル装置160とが被検体Pに装着されるものとする。下半身用RFコイル装置160は、MR信号を受信する多数の要素コイル164(図では煩雑となるので6つのみ示す)を有する。
【0056】
この場合、RFコイル28は、太線の四角枠で示す筒状の全身用コイルWBと、上半身用RFコイル装置140の要素コイル144、146と、下半身用RFコイル装置160の要素164とを含む。要素コイル144、146、160は、MR信号の受信を担うフェーズドアレイコイルとして機能する。全身用コイルWBは、ガントリ内に配設され、RFパルスの送信用及びMR信号の受信が可能な送受信兼用コイルである。
【0057】
RF受信器48は、デュプレクサ(送受信切替器)174と、複数のアンプ176と、切替合成器178と、複数の受信系回路180とを備える。切替合成器178の入力側は、アンプ176を介して各要素コイル144、146、164に個別に接続されると共に、デュプレクサ174及びアンプ176を介して全身用コイルWBに個別に接続されている。また、各受信系回路180は、切替合成器178の出力側に個別に接続されている。
【0058】
デュプレクサ174は、RF送信器46から送信されるRFパルスを全身用コイルWBに与える。また、デュプレクサ174は、全身用コイルWBで受信されたMR信号をアンプ176に入力し、このMR信号は、アンプ176により増幅されて切替合成器178の入力側に与えられる。また、各要素コイル144、146、164で受信されたMR信号は、それぞれ対応するアンプ176で増幅されて切替合成器178の入力側に与えられる。
【0059】
切替合成器178は、受信系回路180の数に応じて、各要素コイル144、146、164及び全身用コイルWBから検出されるMR信号の合成処理及び切換を行い、対応する受信系回路180に出力する。このようにしてMRI装置20は、全身用コイルWB及び所望の数の要素コイル144、146、164を用いて撮像部位に応じた感度分布を形成し、様々な撮像部位からのMR信号を受信する。
【0060】
但し、要素コイル144、146、164を設けずに、全身用コイルWBのみでMR信号を受信する構成も可能であるが、以下の説明では一例として、装着型のRFコイル装置を用いる例について説明する。また、切替合成器178を設けずに、要素コイル144、146、164や全身用コイルWBで受信されたMR信号を受信系回路180に直接出力する構成としてもよい。さらに、より多くの要素コイルを広範囲に亘って配置してもよい。
【0061】
なお、上記説明では、上半身用RFコイル装置140の要素コイル144、146及び下半身用RFコイル装置160の要素コイル164がRFコイル28の一部であるとして、即ち、上半身用RFコイル装置140及び下半身用RFコイル装置160がMRI装置20の一部であるとした。これは説明の便宜上にすぎず、上半身用RFコイル装置140及び下半身用RFコイル装置160(の各要素コイル)は、MRI装置20とは別個として捉えてもよい。
【0062】
本実施形態では、上記の頭部用RFコイル装置120、上半身用RFコイル装置140及び下半身用RFコイル装置160に加えて、胸部用RFコイル装置、腹部用RFコイル装置、肩用RFコイル装置、心臓用RFコイル装置、腰用RFコイル装置、膝用RFコイル装置など、各種の装着型RFコイル装置をMR信号の受信用に使用可能である。これら装着型RFコイル装置も同様、MRI装置20の一部として捉えてもよいし、MRI装置20とは別個として捉えてもよい。
【0063】
図6は、補正スキャン設定部100による補正スキャンの条件の分類方法の一例を示す表である。図6では一例として、RFコイル装置内の各要素コイルの感度分布マップを生成するシーケンス(補正スキャン)を上段に示し、静磁場補正用のオフセット磁場を算出する磁場計測シーケンス(補正スキャン)を下段に示す。補正スキャン設定部100は、補正スキャンの条件を図6に示す3種類に分類し、補正スキャンの条件を算出する。
【0064】
上記3種類とは、図6に示すように、第1に、本スキャンの撮像条件に拘らずに固定的に設定される条件(FIXED CONDITIONS)である。第2に、本スキャンの撮像条件の中で対応する条件を変更なしに適用する条件(CONDITIONS INCORPORATED BY REFERENCE TO CONDITIONS OF MAIN SCAN)である。第3に、本スキャンの撮像条件の一部に基づいて算出する条件(CONDITIONS CALCULATED FROM CONDITIONS OF MAIN SCAN)である。
【0065】
図6では一例として、補正スキャンの条件のパラメータを11種類示し、以下、それらパラメータを左から順に説明する。
【0066】
OFFSETは、ボリュームデータとして複数のスライスを撮像する場合に、複数のスライス全体を合わせたボリュームとしての撮像領域の中心の装置座標系の座標位置である。なお、ここでは一例として、磁場中心の位置は装置座標系の原点に合致するように制御される。従って、OFFSETは、撮像領域の中心と、磁場中心との位置的ズレを表す。
【0067】
NoWrapは、折り返しアーチファクトを除去するために、撮像視野(FOV)を大きくして撮像画像を取得後、画像として必要な領域のみを撮像画像から抽出する処理を行うか否かの条件である。
【0068】
MATRIXは、位相エンコードステップ数×周波数エンコードステップ数である画像の縦横の画素数である。
【0069】
「IMAGING PLANE/PE DIRECTION」は、撮像断面に対して、位相エンコード方向の向きをどのように設定するかの条件である。
「SLICE THICKNESS」は、撮像画像のスライス厚さである。
「SLICE NUMBER」は、撮像するスライス数である。
GAPは、隣接するスライス間の間隔である。
TR(Repetition Time)は、繰り返し時間である。
【0070】
「FOV SIZE」は、FOV(Field of View)のサイズ(例えば、縦横がそれぞれ何ミリメートルか)である。
「BREATH HOLD」は、息止め撮像を行うか否かの条件である。
【0071】
「SELECTED COILS」は、本スキャンでのMR信号の受信用に用いるものとして選択された要素コイルである。要素コイルの選択は、例えば、特開2010−259777号公報などに記載のコイル位置計測シーケンスの実行後に行われる。
具体的には例えば、全身用コイルWBからRFパルスを送信後、MRI装置20に接続中の装着型RFコイル装置からMR信号を収集し、収集されたMR信号に基づいてコイル位置決め用のプロファイルデータを生成する。次に、プロファイルデータに基づいてRFコイル装置内の要素コイル毎の位置を算出する。この後、各要素コイルの位置に基づいて、MR信号の受信に用いる要素コイルをMPU86が自動選択するか、又は、各要素コイルの位置を表示装置64上に表示後に、MR信号の受信に用いる要素コイルをユーザが選択する。
【0072】
ここで、図6において、各条件のパラメータは、前記3種類の内のいずれか1つに丸が付いている。パラメータ毎の丸の付け方は、上段の感度分布マップを生成する補正スキャンと、下段の磁場計測の補正スキャンとで同じである。
【0073】
具体的には、図6に示すように、NoWrap、MATRIX等の補正スキャンの条件は、本スキャンの撮像条件に拘らずに固定的に設定される。また、OFFSET、GAP、繰り返し時間、FOVのサイズは、本スキャンの撮像条件の一部に基づいて算出される。また、BREATH HOLD、及び、SELECTED COILSは、本スキャンの撮像条件の中で対応する条件を変更なしに適用することで設定される。
【0074】
補正スキャン設定部100は、3種類に補正スキャンの条件を分類し、RFコイル装置の種類と、撮像部位との組み合わせに応じて補正スキャンの条件を算出する。このとき、補正スキャン設定部100は、本スキャンの撮像条件の一部(既に設定済みの条件)を取得すると共に、取得した撮像条件に基づいて、算出を行う。
【0075】
具体的には、MR信号を受信する胸部用RFコイル装置と、撮像部位としての胸部との組み合わせなら、補正スキャンの各条件は、図6に示す丸の位置で3種類に分類された上で、算出及び自動設定される。同様に、MR信号を受信する頭部用RFコイル装置120と、撮像部位としての頭部との組み合わせでも、補正スキャンの各条件は、図6に示す丸の位置で3種類に分類された上で、算出及び自動設定される。
【0076】
即ち、RFコイル装置の種類と、撮像部位との組み合わせに拘らず、補正スキャンの各条件は、(図6の丸の位置で示されるものと)同じように3種類に分類される。しかし、本スキャンの撮像条件が同じであっても、補正スキャンの各条件は、本スキャンの撮像条件における同一パラメータの設定内容を変更なしに適用するものを除き、RFコイル装置の種類と撮像部位との組み合わせによって変わる。
【0077】
具体的には例えば、胸部用RFコイル装置と、胸部との組み合わせの場合、感度分布マップ生成のシーケンスにおけるOFFSETは、例えばある計算手法を本スキャンの撮像条件に適用することで(1、1、1)と算出され、MATRIXは例えば256×256の画素数として固定的に設定される。一方、頭部用RFコイル装置120と、頭部との組み合わせの場合、感度分布マップ生成のシーケンスにおけるオフセットは、前記計算手法を本スキャンの撮像条件に適用することで例えば(2、2、2)と算出され、MATRIXは上記と同じく256×256の画素数として固定的に設定される。
【0078】
ここで、まず、本スキャンの撮像条件に拘らずに固定的に設定される補正スキャンの条件について、感度分布マップ生成のシーケンスにおけるMATRIXを一例として説明する。例えば、撮像領域に配置された要素コイルの数が、撮像領域の体積に対して相対的に多い場合、補正スキャン設定部100は256×256の画素数として設定する。要素コイルの数が相対的に多いほど、受信されるMR信号の信号レベルの分布をより細かく検出することで、より正確な感度分布マップを生成する方が望ましいからである。
【0079】
反対に、撮像領域に配置された要素コイルの数が、撮像領域の体積に対して相対的に少ない場合、補正スキャン設定部100は、128×128の画素数として設定する。撮像領域に配置された要素コイルの数が、撮像領域の体積に対して相対的に多いか少ないかは、RFコイル装置の識別情報に基づくRFコイル装置内の要素コイル数と、撮像部位とに基づいて、予め判定できる。
【0080】
別の例として、オフセット磁場を算出する磁場計測シーケンスにおけるスライス枚数について説明する。この場合、例えば、撮像領域の厚み(スライスの法線方向におけるスライスの幅)に対して、スライス枚数が相対的に少なくならないよう、且つ、多すぎないように補正スキャン設定部100はスライス枚数を設定する。例えば、頭部が撮像部位である場合、スライス枚数は20枚とすれば、胸部及び腹部が撮像部位である場合、スライス枚数は50枚とする。なお、以上の設定方法はあくまで一例にすぎず、本実施形態は上記設定方法に限定されるものではない。
【0081】
本スキャンの撮像条件に拘らずに固定的に設定される他のパラメータについても、補正スキャン設定部100は、上記のように、RFコイル装置の種類と撮像部位とに応じて、補正スキャンのシーケンス毎に予め算出された各パラメータの適正値又は設定内容をテーブルデータとして記憶している。従って、補正スキャン設定部100は、テーブルデータの中から、RFコイル装置の種類と、撮像部位と、補正スキャンのシーケンスの種類とに応じて、該当するパラメータの設定内容を取得する。
【0082】
次に、本スキャンの撮像条件の一部に基づいて算出される補正スキャンの条件の計算手法について、FOVのサイズ及びスライス間隔(GAP)を例として説明する。なお、ここでは一例として、FOVのサイズ及びスライス間隔については、RFコイル装置の種類と撮像部位とに拘らず、同様にして算出される。
【0083】
図7は、FOVのサイズの設定方法の一例を示す模式的説明図である。補正スキャンにおけるFOVの初期設定値(DEFAULT)として、ここでは一例として、位相エンコード方向(PHASE ENCODE DIRECTION)に30cm、読み出し方向(READOUT DIRECTION)に45cmが初期値として設定されている。
【0084】
補正スキャン設定部100は例えば、位相エンコード方向及び読み出し方向のどちらにおいても、以下の2条件を満たす範囲で最小サイズ又は任意の割合に指定されたサイズとなる補正スキャンのFOVを設定する。
第1に、補正スキャンのFOVが、位相エンコード方向及び読み出し方向のどちらにおいても、初期設定値よりも小さくならないようにする。
第2に、本スキャンの撮像条件のプランニング中にユーザが設定したFOVを包含するようにする。なお、スライス選択方向については、後述するように、撮像範囲が包含されるようにGAP(隣接スライス間の間隔)を設定する。
【0085】
図7(A)は上記初期設定値のFOVを示す。次に、本スキャンの撮像条件のプランニング中に、ユーザが例えば位相エンコード方向に20cm、読み出し方向に60cmのFOVを設定したとする。図7(B)は、この状態を示す。この場合、上記2条件を満たし、且つ、最小となるFOVのサイズは、位相エンコード方向に30cm、読み出し方向に60cmである。従って、補正スキャン設定部100は、そのように補正スキャンのFOVを設定する。図7(C)は、この状態を示す。
【0086】
図8は、FOVのサイズの設定方法の別の例を示す模式的説明図である。図8(A)は上記同様の初期設定値のFOVを示す。次に、本スキャンの撮像条件のプランニング中に、ユーザが例えば位相エンコード方向に60cm、読み出し方向に20cmのFOVを設定したとする。図8(B)は、この状態を示す。この場合、上記2条件を満たし、且つ、最小となるFOVのサイズは、位相エンコード方向に60cm、読み出し方向に45cmである。従って、補正スキャン設定部100は、そのように補正スキャンのFOVを設定する。図8(C)は、この状態を示す。
【0087】
図9は、3次元撮像の場合のFOVのサイズの設定方法の一例を示す模式的説明図である。ここでは説明の簡単化のため、互いに直交するスライス選択方向(SLICE SELECTION DIRECTION)、位相エンコード方向、読み出し方向はそれぞれ、装置座標系のX軸、Y軸、Z軸のいずれか1つに合致するものとする。
【0088】
3次元撮像において、外縁の8辺がどれも装置座標系の3軸のいずれかに平行な直方体状の領域が装置座標系の3軸に対して傾けられ、この傾けられた領域301がユーザによって撮像ターゲットとされた場合を考える。この場合、補正スキャン設定部100は、外縁の8辺がどれも装置座標系の3軸のいずれかに平行な直方体領域であって、図7の場合と同じ2条件を満たす最小領域をFOV302として設定する。
【0089】
図9において、直方体状の領域301の各頂点をV1、V2、V3、V4、V5、V6、V7、V8とする。この例では、領域301の各頂点の内、読み出し方向において互いに最も離れた2頂点はV4及びV6であるので、読み出し方向における両者の間隔をLroとする。また、領域301の各頂点の内、位相エンコード方向に互いに最も離れた2頂点はV2及びV8であるので、位相エンコード方向における両者の間隔をLpeとする。
【0090】
間隔Lro、Lpeがそれぞれ、読み出し方向及び位相エンコード方向のFOVのサイズの初期値(図7の例では45cm×30cm)より小さくない場合、補正スキャン設定部100は、撮像領域内のスライスのサイズを、間隔Lro、Lpeをそれぞれ2辺とする長方形の領域として設定する。図9(A)は、この状態を示す。
【0091】
なお、間隔Lroが読み出し方向のFOVのサイズの初期値より小さい場合、補正スキャン設定部100は、当該初期値を撮像領域内のスライスの読み出し方向のサイズとして設定する。また、間隔Lpeが位相エンコード方向のFOVのサイズの初期値より小さい場合、補正スキャン設定部100は、当該初期値を撮像領域内のスライスの位相エンコード方向のサイズとして設定する。
【0092】
次に、補正スキャン設定部100は、間隔Lro、Lpeの決定方法と同様に、FOV301の各頂点の内、スライス選択方向において互いに最も離れた2頂点(この例ではV1、V7が該当)を算出し、スライス選択方向における両者の間隔をLssとする。
【0093】
次に、補正スキャン設定部100は、読み出し方向の幅がLro、位相エンコード方向の幅がLpe、スライス選択方向の幅がLssである直方体であって、装置座標系の座標位置として領域301を包含する領域をFOV302として設定する。図9(B)は、この状態を示す。
【0094】
次に、補正スキャン設定部100は、FOV302をスライス数で均等に分割することで、読み出し方向の幅がLro、位相エンコード方向の幅がLpeであって互いに等間隔で平行なスライスSL1〜SL6をFOV302内に設定する。図9(C)は、この状態を示す。このように、補正スキャン設定部100は、スライス選択方向、位相エンコード方向、読み出し方向を装置座標系の各軸に合致させ、スライスの面を装置座標系のX−Y平面、Y−Z平面、X−Z平面のいずれかに平行に保つ。
【0095】
ここで、上記のスライス間隔(GAP)の設定方法について説明する。スライス間隔Sgapは、図6に示すように、本スキャンの撮像条件に基づいて算出されるパラメータである。補正スキャン設定部100は、以下の(1)式に基づいてスライス間隔Sgap(図9(C)参照)を算出する。
Sgap={SSt−(Snu×Sth)}/(Snu−1) ・・・(1)
【0096】
(1)式において、SStは、スライス選択方向におけるFOVの幅であり、図9のFOV302の場合はLssに該当する。また、Snuは、スライス枚数であり、Sthはスライス厚である。例えば、スライス選択方向におけるFOVの幅が30cmであり、スライス厚が1cmであり、スライス枚数が6枚の場合、スライス間隔Sgapは(1)式により4.8cmと算出される。
【0097】
本スキャンの一部の撮像条件に基づいて算出される他のパラメータについても、補正スキャン設定部100は、上記のように各パラメータの値又は条件の算出方法(判定方法)を予め記憶しており、これに基づいて当該パラメータの条件を自動設定する。
【0098】
図10は、第1の実施形態におけるMRI装置20の動作の流れを示すフローチャートである。第1の実施形態では、本スキャンの一部の撮像条件(既に設定済みのもの)に基づいて補正スキャンの条件を自動設定し、本スキャンの前に補正スキャンを実行する。以下、前述した各図を適宜参照しながら、図10に示すステップ番号に従って、第1の実施形態のMRI装置20の動作を説明する。
【0099】
[ステップS1]MPU86(図2参照)は、入力装置62を介してMRI装置20に入力された本スキャンの一部の撮像条件に基づいて、MRI装置20の初期設定を行い、被検体Pの撮像部位を取得する。
【0100】
また、MR信号の受信用であって被検体に装着されるRFコイル装置がMRI装置20の接続ポートに接続されると、MPU86は、接続ポート及びシーケンスコントローラ56を介して、RFコイル装置の識別情報を取得する。ここでのRFコイル装置は、1つとは限らず、複数の場合もある。また、プレスキャンなどによってRFパルスの中心周波数等が暫定的に設定される。また、要素コイルの選択が必要な場合(局所用ではないRFコイル装置が装着されている場合)、例えば前述のコイル位置計測シーケンスの実行後、RFコイル装置内の多数の要素コイルの中から、MR信号受信に用いる要素コイルが自動又は手動操作で選択される。
【0101】
[ステップS2]MPU86の制御の下、被検体Pが乗せられた寝台32がガントリ内の撮像空間における所定位置に移動し、MRI装置20によってアキシャル断面のロケータ画像の撮像が行われる。なお、ロケータ画像は、位置決めをするための基準の画像(参照画像)である。
【0102】
また、上記アキシャル断面は患者座標系で定義され、本実施形態では一例として、患者座標系のX軸、Y軸、Z軸を以下のように定義する。即ち、被検体Pの左右方向をX軸方向とし、腹側を前、背中側を後ろとした被検体Pの前後方向をY軸方向とする。また、およそ背骨延在方向に頭を上、足を下とした被検体Pの体軸方向をZ軸方向とする。
このとき、患者座標系のX−Y平面をアキシャル面、患者座標系のX−Z平面をコロナル面、患者座標系のY−Z平面をサジタル面とする。なお、ここでは説明の簡単化のため、患者座標系と装置座標系とでX軸、Y軸、Z軸が互いに合致し、被検体Pは、体軸方向が装置座標系のZ軸方向に合致するように寝台32上に乗せられているものとする。
【0103】
ロケータ画像の撮像動作は、例えば以下になる。まず、静磁場電源40により励磁された静磁場磁石22が撮像空間に静磁場を形成し、シーケンスコントローラ56は、MPU86から入力されたパルスシーケンスに従って傾斜磁場電源44、RF送信器46及びRF受信器48を駆動させることで撮像領域に傾斜磁場を形成させると共に、RFコイル28からRFパルスを発生させる。このとき、RFパルスの中心周波数は、ステップS1で暫定的に設定された値が用いられる。
【0104】
このため、被検体P内の核磁気共鳴により生じたMR信号がRFコイル28により受信され、RF受信器48により検出される。RF受信器48は、検出したMR信号に所定の信号処理を施した後、これをA/D変換することで、デジタル化したMR信号である生データを生成する。RF受信器48は、生データをシーケンスコントローラ56に入力する。シーケンスコントローラ56は、生データを画像再構成部90に入力し、画像再構成部90は、k空間データベース92に形成されたk空間において、生データをk空間データとして配置する。
【0105】
画像再構成部90は、k空間データベース92からk空間データを取り込み、これにフーリエ変換を含む画像再構成処理を施すことで画像データを再構成し、得られた画像データを画像データベース94に保存する。画像処理部96は、画像データベース94から画像データを取り込み、これに所定の画像処理を施すことで2次元の表示用画像データを生成し、この表示用画像データを記憶装置66に保存する。
【0106】
[ステップS3]表示装置64上には、サジタル断面のロケータ画像の撮像条件の設定画面が表示される。ユーザは、表示装置64上の設定画面を見ながら、入力装置62を介して、サジタル断面のロケータ画像の撮像条件を設定する。ここで設定される撮像条件は、既に撮像されたアキシャル断面に対して、どの位置のサジタル断面をどれだけのサイズで撮像するか、繰り返し時間をどの程度にするか、などの条件を含む。
【0107】
[ステップS4]MPU86の制御の下、被検体Pが乗せられた寝台32がガントリ内の撮像空間における所定位置に移動し、MRI装置20によってサジタル断面のロケータ画像の撮像が上記同様に行われる。このときの撮像条件は、ステップS3でプランニングされた条件、即ち、ユーザにより設定された条件に従って行われる。
【0108】
[ステップS5]表示制御部98は、MPU86の指令に従ってアキシャル断面及びサジタル断面のロケータ画像の表示用画像データを記憶装置66から取得し、表示装置64上にこれらロケータ画像を表示させる。そして、表示制御部98は、本スキャンの撮像条件の設定画面を表示装置64に表示させる。この後、ユーザは、ロケータ画像を参照しながら、入力装置62を介して本スキャンの撮像条件を設定する。
【0109】
本スキャンの撮像条件の設定が終わった場合、MPU86は、次のステップS6に処理を移行させる。即ち、ユーザが本スキャンのプランニング(撮像条件の設定)を終えないと、次のステップ(補正スキャンの条件の自動設定)には進まない。
【0110】
[ステップS6]補正スキャン設定部100は、ステップS1でMPU86が取得した被検体Pの撮像部位と、RFコイル装置の識別情報(種類)とをMPU86から取得する。そして、補正スキャン設定部100は、補正スキャンの条件を算出及び自動設定するに際して、まず、どのシーケンスを補正スキャンとして行うかを本スキャンの一部の撮像条件に基づいて自動設定する。
【0111】
具体的には、補正スキャン設定部100は、RFコイル装置内の各要素コイルの感度分布マップを生成するシーケンス、静磁場補正用のオフセット磁場を算出する磁場計測シーケンス、RFパルスの中心周波数の補正値を算出するシーケンスなどの複数のシーケンスを補正スキャンの候補として予め記憶している。補正スキャン設定部100は、これらの候補のシーケンスの中から、どのシーケンスを補正スキャンとして行うかを例えば以下のように自動選択する。
【0112】
例えば、本スキャンのパルスシーケンスがパラレルイメージングの場合、補正スキャン設定部100は、RFコイル装置内の各要素コイルの感度分布マップを生成するシーケンスを補正スキャンとして行うように設定する。なお、パラレルイメージングは、複数の要素コイルを備えたフェーズドアレイコイルを用いてRFコイルを構成し、各要素コイルを用いてMR信号を収集する高速撮影技術である。一般にパラレルイメージングでは、位相エンコード方向のデータ取得回数を減らし、プレスキャンで得られた感度分布マップを用いて、間引いた位相エンコードステップ数で生じる折り返しアーチファクトを補償する。
【0113】
また、例えば肩用RFコイル装置などの局所RFコイル装置のように、パラレルイメージングを実行できないRFコイル装置をMR信号の受信に使用する場合、補正スキャン設定部100は、上記感度分布マップを生成するシーケンスを補正スキャンとして行わないように設定する。
【0114】
また、例えば静磁場の均一性が大きく乱れる場合や、静磁場均一性の精度が特に望まれる場合、補正スキャン設定部100は、静磁場補正用のオフセット磁場を算出する磁場計測シーケンスを、補正スキャンとして行うように設定する。
【0115】
例えば、後述の第2の実施形態のマルチステーション撮像のように、寝台が移動して撮像ステーションが移動した場合、静磁場の均一性が乱れる。
【0116】
静磁場均一性の精度が特に望まれる場合とは、例えば、脂肪抑制を行う場合や心臓撮像において局所シミング(特開2007−209749号公報参照)が望まれるような場合などである。
【0117】
また、例えば、寝台32のステップ移動がなく、被検体Pの同じ部位を何回も本スキャンする場合、最初の本スキャンの前に行われた補正スキャンで得られたオフセット磁場を使うことで、2回目以降の本スキャンでは、オフセット磁場を算出するシーケンスを行わずに静磁場を補正できる。
【0118】
このような場合、補正スキャン設定部100は、上記オフセット磁場を算出する磁場計測シーケンスを、補正スキャンとして行わないように設定する。
【0119】
また、例えばブレスト撮像では、脂肪組織が多く含まれるため、脂肪抑制プレパルスが本スキャンのパルスシーケンスに含まれることがある。脂肪抑制プレパルスが本スキャンに含まれる場合、補正スキャン設定部100は、RFパルスの中心周波数の補正値を算出するシーケンスを、補正スキャンとして行うように設定する。
【0120】
また、例えば、脂肪組織からのMR信号を抑制するプレパルスの印加が本スキャンのパルスシーケンスに含まれない場合、補正スキャン設定部100は、RFパルスの中心周波数の補正値を算出するシーケンスを、補正スキャンとして行わないように設定する。
【0121】
なお、どのシーケンスを補正スキャンとして行うかについての上記判断基準は、あくまで一例にすぎない。例えば、本スキャンの撮像条件に拘らず、上記オフセット磁場を算出する磁場計測シーケンス、RFパルスの中心周波数の補正値を算出するシーケンスを補正スキャンとして行うようにしてもよい。
【0122】
次に、補正スキャン設定部100は、補正スキャンとして行うとして決定した各シーケンスの条件(パラメータ)を算出及び自動設定する。具体的には、補正スキャン設定部100は、各シーケンスの条件(パラメータ)を、RFコイル装置の種類と撮像部位との組み合わせに拘らず、図6のように3種類に分類する。
【0123】
そして、補正スキャン設定部100は、「SELECTED COILS」のように、本スキャンの撮像条件における同じパラメータの設定内容を変更なしに適用するパラメータについては、そのように設定する。また、本スキャンの条件に拘らず固定的に算出されるパラメータについては、RFコイル装置の種類と撮像部位とに応じて、前記テーブルデータに基づいて自動設定する。
【0124】
また、スライス間隔(GAP)のように、本スキャンの撮像条件の一部に基づいて算出(判定)するパラメータについては、予め記憶した算出(判定)方法に基づいて、補正スキャン設定部100が自動設定する。補正スキャン設定部100による補正スキャンの各シーケンスの条件の算出及び自動設定の手法については、図6〜図9を用いて前述したので、さらなる説明を省略する。
【0125】
なお、RFパルスの中心周波数の補正値を算出するシーケンスが補正スキャンとして行われる場合、補正スキャン設定部100は、上記とは異なる方法でその条件を設定する。このシーケンスについては、主に磁気共鳴スペクトロスコピーを行う領域を定めればよいので、感度分布マップを生成するシーケンスや、オフセット磁場を算出する磁場計測シーケンスのように多くのパラメータを設定しなくてよいからである。
【0126】
この場合、補正スキャン設定部100は、オフセット磁場を算出するシーケンスで設定される撮像領域の中心を含むスライスを対象として、磁気共鳴スペクトロスコピーを行うように自動設定する。
【0127】
なお、補正スキャン設定部100による補正スキャンの条件の算出及び自動設定は、MRI装置20内の演算であるため、このステップS6の処理は瞬時に終了し、次のステップS7に進む。
【0128】
[ステップS7]入力装置62を介して、ユーザにより本スキャンの開始指令が入力される。本スキャンの開始指令が入力されるまで、MPU86は待機し、次のステップに進まない。
【0129】
[ステップS8]MPU86は、本スキャンの開始指令を受けて、ステップS6で条件を自動設定した補正スキャンをMRI装置20に実行させる。ここでは一例として、上記感度分布マップを生成するシーケンス、上記オフセット磁場を算出する磁場計測シーケンス、RFパルスの中心周波数の補正値を算出するシーケンスの3つが補正スキャンとして行われる場合について説明する。
【0130】
ここで、補正スキャンの各シーケンスは、時間的に別々に行われる。但し、オフセット磁場を算出する磁場計測シーケンスは、RFパルスの中心周波数の補正値を算出するシーケンスよりも先に行うことが望ましい。これは、オフセット磁場に基づいて静磁場をより均一に補正した状態で、RFパルスの中心周波数の補正値を算出するシーケンスを実行した方が、より正確な磁気共鳴スペクトラムデータを得られるからである。
【0131】
同様に、オフセット磁場を算出する磁場計測シーケンスは、感度分布マップを生成するシーケンスよりも先に行うことが望ましい。被検体の大きさや撮像部位などによって静磁場の均一性が大きく乱れる場合、静磁場をより均一に補正した状態で感度分布マップを生成するシーケンスを行った方が、より正確な感度分布マップが得られるからである。
そこで、ここでは一例として、オフセット磁場を算出する磁場計測シーケンス、RFパルスの中心周波数の補正値を算出するシーケンス、感度分布マップを生成するシーケンス、の順に行うものとして、以下、順に説明する。
【0132】
第1に、オフセット磁場を算出するシーケンスの一例について説明する。この技術は、例えば特許文献1(特開2011−152348号公報)に説明されているので、ここでは簡単に説明する。
【0133】
寝台駆動装置50は、MPU86及びシーケンスコントローラ56の制御に従って、被検体Pが乗せられた寝台32をガントリ内に移動する。また、シーケンスコントローラ56の制御に従って、静磁場電源40から静磁場磁石22に電流が供給され、撮像空間内に静磁場が印加される。ここでの静磁場磁石22への供給電流値は、仮に撮像空間内に何も存在しなければ均一な静磁場が発生するように制御されたものであり、これにより発生する静磁場を「基準静磁場」とする。撮像空間内に被検体Pが存在することで透磁率が周囲とは異なる領域が存在するので、撮像空間内の実際の静磁場の強度分布は不均一となる。
【0134】
次に、シーケンスコントローラ56は、MPU86からの制御信号に基づいて、撮像空間の磁場強度分布が得られるように傾斜磁場(Gx、Gy、Gz)等を印加してスライスを選択し、RFパルス等を送信する。この後、RF受信器48によりMR信号が検出され、検出されたMR信号はシーケンスコントローラ56を介してMPU86に入力される。
【0135】
これらMR信号はk空間の生データであるため、MPU86は、入力されたMR信号をx−y−z座標系の実空間のデータに変換し、変換後のデータに基づいて撮像空間の磁場強度分布を計算し、これを計測値の磁場強度分布Bm(x、y、z)とする。(x、y、z)は、装置座標系での座標位置(x、y、z)の関数という意味である。
【0136】
この後、MPU86は、例えば次式により、静磁場を均一化するオフセット磁場の強度分布Bo(x、y、z)を算出する。
Bo(x、y、z)=Bi(x、y、z)−Bm(x、y、z) ・・・(2)
【0137】
(2)式において、Bi(x、y、z)は、静磁場の磁場強度の目標分布であって、撮像空間に亘って均一的な分布である。即ち、オフセット磁場を印加しなければ計測値の磁場強度分布をBm(x、y、z)が静磁場として発生するところ、本スキャンでは、基準静磁場にオフセット磁場が重畳されるように制御することで、ほぼ目標分布の静磁場が得られる。
【0138】
第2に、RFパルスの中心周波数の補正値を算出するシーケンスの一例について説明する。この補正スキャンの条件は、FOVの中心を含むスライスに対して磁気共鳴スペクトロスコピーを施すことが加わる以外、例えば、磁場計測シーケンスと同じ条件を使う。MPU86は、MRI装置20の各部を制御して、FOVの中心を含むスライスに対して磁気共鳴スペクトロスコピーを施すことで周波数スペクトラムデータを収集及び解析し、ピーク周波数等に基づいて水素原子核スピンの磁気共鳴周波数を検出する。
【0139】
MPU86は、上記シーケンスの実行結果に基づいて、本スキャンで用いるRFパルスの中心周波数を算出及び再設定(補正)する。具体的には例えば、検出した水素原子核スピンの磁気共鳴周波数を、RFパルスの中心周波数とする。なお、中心周波数を検出するシーケンス等については、例えば特許文献3(特開2009−34152号公報)に記載の技術などの従来手法を用いればよい。
【0140】
第3に、装着型RFコイル装置の感度分布マップを生成するシーケンスの一例について説明する。この技術は、例えば特許文献2(特開2005−237703号公報)に説明されているので、ここでは簡単に説明する。
【0141】
まず、感度分布マップ生成シーケンスがMPU86からシーケンスコントローラ56に入力され、被検体Pに装着されたRFコイル装置、及び、全身用コイルWBを受信用コイルとして、MR信号が収集される。そして、全身用コイルから得られた画像データ(以下、WB画像データという)、及び、RFコイル装置から得られた画像データ(以下、主コイル画像データという)が、RFコイル装置内の全要素コイルの感度分布推定用の画像データとして取得され、画像データベース94に保存される。同様な画像データの取得が3次元領域全体の各断面に亘って実施され、ボリュームデータとして画像データベース94に保存される。
【0142】
MPU86は、以上の感度分布マップ生成シーケンスの実行結果に基づいて、RFコイル装置内に含まれる全要素コイルの感度分布を3次元感度分布マップデータとして生成し、記憶装置66に保存する。具体的には例えば、主コイル画像データの信号強度分布をWB画像データの信号強度分布で除算し、両者の信号強度比をRFコイル装置内の全要素コイルの感度分布の推定値として算出する。同様な処理を3次元領域全体の各断面の画像データに対して実行すれば、3次元感度分布マップデータを生成できる。3次元感度分布マップデータは例えば、画像再構成部90による画像再構成時に、輝度補正処理に用いられる。
【0143】
なお、全身用コイルから得られたWB画像データは、基準として用いるものであるため、全身用コイルWBを受信用コイルとせずに、被検体Pに装着されたRFコイル装置のみを受信用コイルとしても感度分布マップを生成可能である。
【0144】
MPU86は、本スキャンの撮像条件の内、未確定の条件を補正スキャンの実行結果に基づいて確定する。未確定の条件とは、上記磁場計測シーケンスを補正スキャンとして行った場合には、本スキャン実行時の静磁場を均一化するために、どのような強度分布の磁場を基準静磁場に重畳印加するか、などの条件である。また、未確定の条件とは、例えば、RFパルスの中心周波数を算出するシーケンスを補正スキャンとして行った場合には、本スキャン実行時のRFパルスの中心周波数の値である。
【0145】
[ステップS9]MPU86の制御の下、MRI装置20による本スキャンが実行される。MRI装置20は、オフセット磁場を前記「基準静磁場」に重畳的に印加することで、均一化された静磁場を印加する。オフセット磁場の2次成分については、例えばMPU86がシムコイル電源42を制御することで、シムコイル24への供給電流を調整し、これにより補正する。また、オフセット磁場の1次成分については、例えばMPU86が傾斜磁場電源44を制御することで、X、Y、Z軸傾斜磁場コイル26x、26y、26zへの各供給電流を調整して補正する。
【0146】
上記のように均一化された静磁場が印加された下で、本スキャンのMR信号の収集が行われる。即ち、MPU86は、ロケータ画像の撮像時と同様にMRI装置20の各部を動作させ、被検体Pの撮像部位が含まれる撮像領域に傾斜磁場を形成させ、補正された中心周波数のRFパルスをRFコイル28から発生させる。これにより生じたMR信号は、RFコイル装置により受信されて、RF受信器48により検出され、生データに変換されて画像再構成部90に入力される。画像再構成部90は、k空間データベース92に形成されたk空間において、生データをk空間データとして配置する。
【0147】
[ステップS10]画像再構成部90は、k空間データベース92からk空間データを取り込み、これにフーリエ変換を含む画像再構成処理を施すことで画像データを再構成し、得られた画像データを画像データベース94に一旦保存する。
【0148】
画像処理部96は、本スキャンにおける撮像断面方向等の撮像条件、画像再構成条件等の諸条件に応じて、3次元感度分布マップデータにおける対応する部分を抽出し、感度分布マップとして用いる。画像処理部96は、画像データベース94から画像データを取り込み、感度分布マップを用いて画像データに輝度補正を施し、補正後の画像データを画像データベース94に保存する。ここまでが画像再構成処理であり、これにより、RFコイル装置内の要素コイル同士の感度差に起因する各画素の輝度レベルの誤差が改善される。
【0149】
画像処理部96は、補正された画像データに所定の画像処理を施すことで2次元の表示用画像データを生成し、この表示用画像データを記憶装置66に保存する。なお、感度分布マップを生成するシーケンスが補正スキャンに含まれない場合には、上記の輝度補正処理が行われずに、画像再構成が行われる。
【0150】
そして、MPU86の指令に従って、表示用画像データが表示制御部98に転送され、表示装置64上に表示される。以上が本実施形態のMRI装置20の動作説明である。
【0151】
このように本実施形態では、補正スキャン設定部100は、どのシーケンスを補正スキャンとして行うかを、本スキャンの一部の撮像条件(設定済みのもの)に基づいて自動設定する(ステップS6)。次に、補正スキャン設定部100は、補正スキャンのシーケンスの各条件を図6のように3種類に分類し、MR信号を受信する装着型のRFコイル装置の種類と、撮像部位との組み合わせに応じて補正スキャンの条件を算出及び自動設定する。
【0152】
例えば本スキャンに脂肪抑制プレパルスが含まれるか場合にはRFパルスの中心周波数の補正値を算出するシーケンスを補正スキャンとして行うなど、本スキャンの撮像条件から望まれるシーケンスを補正スキャンとして自動的に実行する。この場合には、脂肪組織からのMR信号の抑制の効果が確実となる。従って、ユーザに操作の負担をかけないのでMRI装置20の操作性が向上し、さらには本スキャンの画質向上を期待できる。また、例えば以下のような、ユーザの操作ミスによる画質低下を回避できる。即ち、脂肪抑制プレパルスが含まれるにも拘らず、RFパルスの中心周波数の補正値を算出するシーケンスをユーザが挿入し忘れたために、脂肪抑制の程度にムラが生じて画質低下を招くことを回避できる。
また、本スキャンがパラレルイメージングや輝度補正を伴う場合、RFコイル装置内の各要素コイルの感度分布マップを生成するシーケンスを実行していないと、画質低下(折り返しアーチファクトや輝度ムラ)が生じる。しかし、このようにパラレルイメージングなどを伴う本スキャンの場合、補正スキャン設定部100は、感度分布マップを生成するシーケンスを補正スキャンとして行うように自動設定するので、上述の画質低下を回避できる。
【0153】
より具体的には、感度分布マップを生成するシーケンスを行う場合、RFコイル装置の種類と撮像部位とに応じて、当該シーケンスの条件を3種類に分けて自動設定する。この自動設定に際して、図6〜図9を用いて前述したように、各条件がRFコイル装置の種類及び撮像部位に応じた適正な設定内容となるように、予めテーブルデータや算出(判定)方法を補正スキャン設定部100に記憶させておく。従って、RFコイル装置内の複数の要素コイルの感度分布マップを正確に生成できるので、これに基づいて本スキャンの画像再構成時に感度補正を施すため、画質を向上できる。
【0154】
同様に、オフセット磁場を算出するシーケンスも、RFコイル装置の種類と撮像部位とに応じて当該シーケンスの条件を3種類に分け、各条件が適正な設定内容となるように予め記憶されたテーブルデータや算出方法に基づいて、各条件が適正に自動設定される。従って、このようにして得られた正確なオフセット磁場に基づいて静磁場をより均一にした状態で本スキャンにおけるMR信号の収集を行うので、さらに画質を向上できる。
【0155】
これに対して従来技術では、補正スキャンの条件は、RFコイル装置の種類と撮像部位とに拘らず画一的に自動設定されるか、又は、ユーザがマニュアル設定していた。画一的に自動設定される場合には、撮像条件に拘らず、同じ条件で感度分布マップが生成され、同じ条件でオフセット磁場が算出されていたため、補正スキャンの条件は必ずしも適正には設定されていなかった。ユーザがマニュアル設定していた場合には、補正スキャンの条件が適正に設定されても、ユーザに操作の負担をかけていた。
しかし、以上説明した実施形態によれば、MRIにおいて、ユーザに設定操作の手間をかけることなく、プレスキャンなどの較正用(チューニング用)のスキャンの条件を適正に設定できるので、上記従来課題を解消している。
【0156】
なお、上記実施形態では、オフセット磁場を算出する磁場計測シーケンスと、RFパルスの中心周波数の補正値を算出するシーケンスとの2つを別々の補正スキャンとして実行数する例を述べたが、これは一例に過ぎない。磁場計測シーケンスと、RFパルスの中心周波数の補正値を算出するシーケンスとを1つの(1セットの)補正スキャンとして実行してもよい(この点は、第2の実施形態以降の他の実施形態や変形例についても同様である)。即ち、磁場計測を行い、計測結果から算出されるオフセット磁場に基づいて補正された静磁場を印加した状態で磁気共鳴スペクトロスコピーを行い、その周波数スペクトラムデータに基づいてRFパルスの中心周波数を再設定(補正)する、という一連の処理を1の補正スキャンとして実行してもよい。
【0157】
(第2の実施形態)
第2の実施形態以降の各実施形態のMRI装置のハードウェア的な構成は、第1の実施形態のMRI装置20と同様である。第2の実施形態では、寝台32のステップ移動と、一時停止とを順次繰り返すことで、各寝台32の位置で撮像を行う場合、即ち、マルチステーション撮像の場合における補正スキャンの条件の自動設定方法について説明する。ここでは一例として、第1ステーション〜第3ステーションの各寝台位置でそれぞれ本スキャンを行う3ステーション撮像の場合について説明する。
【0158】
図11は、第2の実施形態におけるMRI装置20の動作の流れを示すフローチャートである。以下、図11に示すステップ番号に従って、第2の実施形態のMRI装置20の動作を説明する。
【0159】
[ステップS21]第1の実施形態のステップS1と同様に、MPU86は、MRI装置20の初期設定を行い、被検体Pの撮像部位を取得し、RFコイル装置の識別情報を取得する。
【0160】
ここでは3ステーション撮像なので、上半身用RFコイル装置140のように、ある程度の範囲をカバーできる1つ又は複数のMR信号受信用のRFコイル装置が用いられる。そして、例えば前述のコイル位置計測シーケンスの実行後、それらRFコイル装置内の多数の要素コイルの中から、MR信号の受信に用いる要素コイルが自動又は手動操作で各ステーション毎に選択される。
【0161】
[ステップS22]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32をガントリ内の撮像空間における第1の所定位置(第1ステーションの位置)に移動させる。この後、次のステップS23に移行するまでの間、寝台32は動かない。
【0162】
次に、MPU86の制御の下、MRI装置20によって、第1の実施形態のステップS2〜S4と同様にして、第1ステーションの位置におけるロケータ画像が撮像される。
【0163】
[ステップS23]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32を撮像空間における第2の所定位置(第2ステーションの位置)に移動させる。この後、次のステップS25に移行するまでの間、寝台32は動かない。
【0164】
[ステップS24]MPU86の制御の下、MRI装置20によって上記同様に第2ステーションの位置でロケータ画像が撮像される。
【0165】
[ステップS25]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32を撮像空間における第3の所定位置(第3ステーションの位置)に移動させる。この後、次のステップS27に移行するまでの間、寝台32は動かない。
【0166】
[ステップS26]MPU86の制御の下、MRI装置20によって上記同様に第3ステーションの位置でロケータ画像が撮像される。
【0167】
[ステップS27]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32を撮像空間における第1ステーションの位置に移動させる。
【0168】
[ステップS28]表示制御部98は、MPU86の制御に従って第1〜第3ステーションの各ロケータ画像を表示装置64に表示させる。この後、ユーザは、ロケータ画像を参照しながら、入力装置62を介して3ステーション分の本スキャンの撮像条件をそれぞれ設定する。本スキャンの撮像条件の設定が終わった場合、MPU86は、次のステップS29に処理を移行させる。即ち、ユーザが本スキャンのプランニングを終えないと、次のステップには進まない。
【0169】
[ステップS29]補正スキャン設定部100は、被検体Pの撮像部位と、RFコイル装置の識別情報(種類)とをMPU86から取得する。そして、補正スキャン設定部100は、どのシーケンスを補正スキャンとして行うかを、第1の実施形態のステップS6と同様に、本スキャンの一部の撮像条件に基づいて自動選択する。この後、補正スキャン設定部100は、補正スキャンとして行う各シーケンスの条件(パラメータ)を、前記ステップS6と同様に算出及び自動設定する。この例では、補正スキャン設定部100は、3ステーション分の補正スキャンの条件を算出及び自動設定する。
【0170】
[ステップS30]入力装置62を介して、ユーザにより本スキャンの開始指令が入力される。本スキャンの開始指令が入力されるまで、MPU86は待機し、次のステップに進まない。
【0171】
[ステップS31]寝台32は、ステップS27において第1ステーションの位置に戻っている。MPU86は、本スキャンの開始指令を受けて、第1ステーションの位置で、ステップS29で条件を自動設定した補正スキャンをMRI装置20に実行させる。
【0172】
この後、MPU86は、補正スキャンの実行結果に基づいて、第1ステーションの位置での本スキャンの撮像条件の内、未確定の条件を確定する。未確定の条件とは、例えば前述のオフセット磁場に基づいて補正された静磁場が印加された下で、RFパルスの中心周波数を算出するシーケンスを行った場合には、このシーケンスにより取得(補正)された本スキャン実行時のRFパルスの中心周波数の値である。
【0173】
上記のようにして本スキャンの全撮像条件が確定後、MPU86は、MRI装置20の各部を制御して、第1ステーションの位置での本スキャンを実行させる。これにより、第1ステーションの位置で収集されたMR信号は、生データに変換された後、k空間データベース92に形成されたk空間においてk空間データとして配置される。
【0174】
[ステップS32]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32を撮像空間における第2ステーションの位置に移動させる。この後、次のステップS34までの間、寝台32は動かない。
【0175】
[ステップS33]MPU86は、第2ステーションの位置で補正スキャンをMRI装置20に実行させ、第2ステーションの位置での本スキャンの撮像条件の内、未確定の条件を補正スキャンの実行結果に基づいて確定する。この後、MPU86は、MRI装置20の各部を制御して、第2ステーションの位置での本スキャンを実行させる。これにより、第2ステーションの位置で収集されたMR信号は、生データに変換された後、k空間データベース92に形成されたk空間においてk空間データとして配置される。
【0176】
[ステップS34]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32を撮像空間における第3ステーションの位置に移動させる。
【0177】
[ステップS35]MPU86は、第3ステーションの位置で補正スキャンをMRI装置20に実行させ、第3ステーションの位置での本スキャンの撮像条件の内、未確定の条件を補正スキャンの実行結果に基づいて確定する。この後、MPU86は、MRI装置20の各部を制御して、第3ステーションの位置での本スキャンを実行させる。これにより、第3ステーションの位置で収集されたMR信号は、生データに変換された後、k空間データベース92に形成されたk空間においてk空間データとして配置される。
【0178】
[ステップS36]画像再構成部90は、第1の実施形態のステップS10と同様にして、3ステーション分の本スキャンの画像データを再構成し、得られた画像データを画像データベース94に一旦保存する。
【0179】
画像処理部96は、前記ステップS10と同様にして、感度分布マップを用いて画像データを補正し、補正された画像データに所定の画像処理を施すことで2次元の表示用画像データを生成し、この表示用画像データを記憶装置66に保存する。なお、感度分布マップを生成するシーケンスが補正スキャンに含まれない場合には、上記の補正処理が行われずに、画像再構成が行われる。
【0180】
そして、MPU86の指令に従って表示用画像データが表示制御部98に転送され、表示装置64上に表示される。以上が第2の実施形態のMRI装置20の動作説明である。
【0181】
このように第2の実施形態においても、第1の実施形態と同様の効果を得ることができる。さらに、第2の実施形態では、マルチステーション撮像の場合にも、ユーザに設定操作の手間をかけることなく、補正スキャンの条件を適正に自動設定できる。
【0182】
なお、第2の実施形態では、寝台32の移動及び撮像のセットであるステップ移動数が3である3ステーション撮像の例を述べた。本発明の実施形態は、かかる態様に限定されるものではない。ステップ移動数(ステーション数)は、4以上でも2でもよい。
【0183】
また、以下のように各ステーションでロケータ画像の撮像から本スキャンまでの処理を行ってから、寝台32を移動させて次のステーションに移行してもよい。
【0184】
例えば2ステーションの場合で説明すると、まず、第1ステーションの位置で、ロケータ画像を撮像後、第1ステーションの本スキャンのプランニングをしてから、補正スキャンの条件を自動設定し、補正スキャンを実行する。この後、補正スキャンの実行結果に基づいて第1ステーション位置での本スキャンの全撮像条件を確定し、第1ステーション位置での本スキャンを実行する。次に、第2ステーションの位置に寝台を移動する。
【0185】
次に、第2ステーションの位置でロケータ画像を撮像後、第2ステーションの本スキャンのプランニングをしてから補正スキャンの条件を自動設定し、補正スキャンを実行する。この後、補正スキャンの実行結果に基づいて第2ステーション位置での本スキャンの全撮像条件を確定し、第2ステーション位置で本スキャンを実行する。最後に、全ステーション分の本スキャンの画像を再構成して表示すればよい。
【0186】
(第3の実施形態)
第3の実施形態では、複数の本スキャンが行われる場合に、撮像時間の短縮を図る。第3の実施形態では一例として、第1、第2の本スキャンが順次行われ、ユーザによる第2の本スキャンの撮像条件のプランニングの間に、第1の本スキャンに対する補正スキャンを自動実行し、撮像時間の短縮を図る。ここでは一例として、第1の本スキャンは、補正スキャンとして、本スキャン後に実行可能なシーケンスのみの実行が望まれるもの(例えば腎動脈撮像)であるものとする。但し、これは単なる一例にすぎず、他の種類のシーケンスであってもよい。
【0187】
図12は、第3の実施形態におけるMRI装置20の動作の流れを示すフローチャートである。以下、図12に示すステップ番号に従って、第3の実施形態のMRI装置20の動作を説明する。
【0188】
[ステップS41]第1の実施形態のステップS1と同様に、MPU86は、MRI装置20の初期設定を行い、被検体Pの撮像部位を取得し、RFコイル装置の識別情報を取得する。また、プレスキャンなどによってRFパルスの中心周波数等が暫定的に設定される。また、要素コイルの選択が必要な場合、例えば前述のコイル位置計測シーケンスの実行後、RFコイル装置内の多数の要素コイルの中から、MR信号受信に用いる要素コイルが自動又は手動操作で選択される。
【0189】
[ステップS42]第1の実施形態のステップS2、S3と同様にして、ロケータ画像が撮像される。
【0190】
[ステップS43]第1の実施形態のステップS5と同様にして、ロケータ画像が表示装置64上に表示され、これを参照しながら、第1の本スキャンの撮像条件の設定(プランニング)がユーザにより行われる。
【0191】
[ステップS44]補正スキャン設定部100は、ステップS41でMPU86が取得した被検体Pの撮像部位と、RFコイル装置の識別情報(種類)とをMPU86から取得する。そして、補正スキャン設定部100は、第1の実施形態のステップS6と同様にして、どのシーケンスを「第1の本スキャンに対する補正スキャン」として行うかを第1の本スキャンの撮像条件に基づいて自動設定する。ここでは一例として、感度分布マップを生成するシーケンスのように、本スキャンの後に行っても支障のないシーケンスのみが選択されるものとする。即ち、第1の本スキャンの撮像条件は、本スキャン実行前における静磁場の補正が不要であるものとする。
【0192】
次に、補正スキャン設定部100は、補正スキャンとして行うとして決定したシーケンスの条件を、第1の実施形態のステップS6と同様に算出及び自動設定する。
【0193】
[ステップS45]入力装置62を介して、ユーザにより第1の本スキャンの開始指令が入力される。第1の本スキャンの開始指令が入力されるまで、MPU86は待機し、次のステップに進まない。
【0194】
[ステップS46]第1の実施形態のステップS9と同様にして、第1の本スキャンが実行される。
【0195】
[ステップS47]例えばステップS42での撮像画像がロケータ画像として表示装置64上に表示され、これを参照しながら、第2の本スキャンの撮像条件の設定がユーザにより行われる(プランニング)。
ユーザによる第2の本スキャンの撮像条件のプランニングが行われている期間に、MPU86は、MRI装置20の各部を制御して、ステップS44で条件が決定された「第1の本スキャンに対する補正スキャン」を実行させる。ユーザによるプランニングが行われている期間とは、換言すれば、入力装置62を介してMPU86に対して第2の本スキャンの撮像条件の設定が行われている期間である。
第2の本スキャンの撮像条件のプランニングと、「第1の本スキャンに対する補正スキャン」とが終了した場合、MPU86は、次のステップに処理を移行させる。
【0196】
[ステップS48]補正スキャン設定部100は、前述と同様にして、どのシーケンスを第2の本スキャンに対する補正スキャンとして行うかを第2の本スキャンの撮像条件に基づいて自動選択する。次に、補正スキャン設定部100は、補正スキャンとして選択したシーケンスの条件を、前述同様に算出及び自動設定する。
【0197】
[ステップS49]入力装置62を介して、ユーザにより第2の本スキャンの開始指令が入力される。第2の本スキャンの開始指令が入力されるまで、MPU86は待機し、次のステップに進まない。
【0198】
[ステップS50]MPU86は、MRI装置20の各部を制御して、ステップS48で条件が決定された「第2の本スキャンに対する補正スキャン」を実行させる。「第2の本スキャンに対する補正スキャン」に、磁場計測シーケンスのように本スキャン前に行うべきシーケンスが含まれる場合には、MPU86は、この補正スキャンの実行結果を第2の本スキャンの撮像条件に反映させる。
【0199】
[ステップS51]第1の実施形態のステップS9と同様にして、第2の本スキャンが実行される。
【0200】
[ステップS52]第1の実施形態のステップS10と同様にして、第1及び第2の本スキャンで収集したMR信号に基づく画像が再構成され、表示装置64に表示される。なお、第1の本スキャンで収集したMR信号に基づく画像再構成に際しては、第1の本スキャンに対する補正スキャンで得られた感度分布マップによる輝度補正が併せて行われる。以上が第3の実施形態のMRI装置20の動作説明である。
【0201】
このように第3の実施形態においても、第1の実施形態と同様の効果を得ることができる。第3の実施形態は、先に行われる本スキャンに対する補正スキャンに、本スキャン後にも実行可能なシーケンスしか含まれない場合に有効である。これは、後から行われる本スキャンの撮像条件をユーザがプランニングしている間に、先に行われた本スキャンに対する補正スキャンを自動実行するため、撮像時間を短縮できるからである。
【0202】
本スキャンの前にも後にも実行可能な補正スキャンのシーケンスとしては、第3の実施形態で一例として挙げた感度分布マップを生成するシーケンス以外にも、以下のものが挙げられる。例えば本スキャンのシーケンスがEPI(Echo Planar Imaging:エコープラナーイメージング)の場合、EPIの位相補正データを得るシーケンスである。EPIの位相補正は、本スキャン後である画像再構成時に行ってもよいからである。
【0203】
また、第3の実施形態では、第1の本スキャンに対する補正スキャンとして、本スキャン後にも実行可能なシーケンスのみが選択される例を挙げたが、第1の本スキャンの撮像条件によっては、本スキャン前に実行すべきシーケンスが選択されることも考えられる。前記磁場計測シーケンスのように本スキャン前に実行すべきシーケンスが選択された場合には、MPU86は、第1の本スキャンに対する補正スキャンを、第1の本スキャンの実行の直前に実行するようにシーケンス順序を適宜変更すればよい。この点は、次の第4の実施形態についても同様である。
【0204】
(第4の実施形態)
第4の実施形態では、第3の実施形態の手法をマルチステーション撮像の場合に適用した一例について説明する。
【0205】
図13は、第4の実施形態におけるMRI装置20の動作の流れを示すフローチャートである。以下、図13に示すステップ番号に従って、第4の実施形態のMRI装置20の動作を説明する。
【0206】
[ステップS61]第2の実施形態のステップS21と同様であるので、重複する説明を省略する。
【0207】
[ステップS62]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32をガントリ内の撮像空間における第1ステーションの位置に移動させる。
次に、MPU86の制御の下、第1ステーションの位置で前述と同様にしてロケータ画像が撮像されて表示され、第1ステーションでの第1の本スキャンの撮像条件の設定(プランニング)がユーザにより行われる。
【0208】
[ステップS63]補正スキャン設定部100は、第1ステーションでの第1の本スキャンの撮像条件(RFコイル装置の種類や撮像部位を含む)に基づいて、「第1ステーションでの第1の本スキャンに対する補正スキャン」のシーケンスを自動選択後、選択したシーケンスの条件を算出及び自動設定する。この自動設定方法は、第3の実施形態のステップS44と同様である。ここでも一例として、本スキャンの後にも実行可能なシーケンスのみが選択されるものとする。
【0209】
[ステップS64]入力装置62を介して、第1ステーションでの第1の本スキャンの開始指令が入力されると、MPU86は、前述と同様にして、第1ステーションでの第1の本スキャンをMRI装置20に実行させる。
【0210】
[ステップS65]前述同様に、第1ステーションにおけるロケータ画像が表示され、入力装置62を介して、「第1ステーションでの第2の本スキャン」の撮像条件の設定(プランニング)がユーザにより行われる。
【0211】
ユーザによるプランニングが行われている期間に、MPU86は、ステップS63で条件を自動設定した「第1ステーションでの第1の本スキャンに対する補正スキャン」をMRI装置20に実行させる。ユーザによるプランニングが行われている期間とは、換言すれば、入力装置62を介してMPU86に対して撮像条件の設定が行われている期間である。第2の本スキャンの撮像条件のプランニングと、「第1ステーションでの第1の本スキャンに対する補正スキャン」とが終了した場合、MPU86は、次のステップに処理を移行させる。
【0212】
[ステップS66]補正スキャン設定部100は、前述と同様に、第1ステーションでの第2の本スキャンの撮像条件(RFコイル装置の種類や撮像部位を含む)に基づいて、「第1ステーションでの第2の本スキャンに対する補正スキャン」のシーケンスを自動選択後、選択したシーケンスの条件を算出及び自動設定する。
【0213】
[ステップS67]入力装置62を介して、第1ステーションでの第2の本スキャンの開始指令が入力されると、MPU86は、前述と同様にして、「第1ステーションでの第2の本スキャンに対する補正スキャン」をMRI装置20に実行させる。ここで実行する補正スキャンに、磁場計測シーケンスのように本スキャン前に行うべきシーケンスが含まれる場合には、MPU86は、補正スキャンの実行結果を第1ステーションでの第2の本スキャンの撮像条件に反映させる。
【0214】
[ステップS68]MPU86は、MRI装置20の各部を制御して、第1ステーションでの第2の本スキャンを実行させる。
【0215】
[ステップS69]シーケンスコントローラ56は、MPU86の指令に従って寝台駆動装置50を駆動することで、被検体Pが乗せられた寝台32を第2ステーションの位置に移動させる。次に、第2ステーションの位置において、前述同様にロケータ画像が撮像されて表示され、第2ステーションでの第1の本スキャンの撮像条件の設定(プランニング)がユーザにより行われる。
【0216】
[ステップS70]補正スキャン設定部100は、ステップS63と同様に、第2ステーションでの第1の本スキャンの撮像条件に基づいて、「第2ステーションでの第1の本スキャンに対する補正スキャン」のシーケンスを自動選択後、選択したシーケンスの条件を算出及び自動設定する。ここでも一例として、本スキャンの後にも実行可能なシーケンスのみが選択されるものとする。
【0217】
[ステップS71]入力装置62を介して、第2ステーションでの第1の本スキャンの開始指令が入力されると、MPU86は、前述同様にして、第2ステーションでの第1の本スキャンをMRI装置20に実行させる。
【0218】
[ステップS72]前述同様に、第2ステーションにおけるロケータ画像が表示され、入力装置62を介して、第2ステーションでの第2の本スキャンの撮像条件の設定(プランニング)がユーザにより行われる。ユーザによるプランニングが行われている期間に、MPU86は、ステップS70で条件を自動設定した「第2ステーションでの第1の本スキャンに対する補正スキャン」をMRI装置20に実行させる。第2の本スキャンの撮像条件のプランニングと、「第2ステーションでの第1の本スキャンに対する補正スキャン」とが終了した場合、MPU86は、次のステップに処理を移行させる。
【0219】
[ステップS73]補正スキャン設定部100は、前述同様に、第2ステーションでの第2の本スキャンの撮像条件に基づいて、「第2ステーションでの第2の本スキャンに対する補正スキャン」のシーケンスを自動選択後、選択したシーケンスの条件を算出及び自動設定する。
【0220】
[ステップS74]入力装置62を介して、第2ステーションでの第2の本スキャンの開始指令が入力されると、MPU86は、前述同様に「第2ステーションでの第2の本スキャンに対する補正スキャン」をMRI装置20に実行させる。ここで実行する補正スキャンに、本スキャン前に行うべきシーケンスが含まれる場合、MPU86は、その実行結果を第2ステーションでの第2の本スキャンの撮像条件に反映させる。
【0221】
[ステップS75]MPU86は、MRI装置20の各部を制御して、第2ステーションでの第2の本スキャンを実行させる。
【0222】
[ステップS76]第2の実施形態のステップS36と同様に、(感度分布マップを生成した場合には輝度補正を施しつつ)2ステーション分の本スキャンの画像データが再構成及び保存される。この画像データに基づいて表示用画像データが生成され、表示装置64上に表示される。以上が第4の実施形態のMRI装置20の動作説明である。
【0223】
このように第4の実施形態では、マルチステーション撮像の場合においても、第3の実施形態と同様の効果を得ることができる。なお、第4の実施形態では、寝台32の移動及び撮像のセットであるステップ移動数が2である2ステーション撮像の例を述べたが、ステップ移動数(ステーション数)は、3以上でもよい。
【0224】
(実施形態の補足事項)
[1]上記各実施形態では、補正スキャンの例として、オフセット磁場を算出する磁場計測シーケンス、感度分布マップを生成するシーケンス、RFパルスの中心周波数を算出するシーケンスを挙げた。本発明の実施形態は、かかる態様に限定されるものではない。これらは補正スキャンの一例にすぎず、例えば本スキャンのシーケンスがEPIの場合、EPIの位相補正データを得るシーケンスを補正スキャンとして行ってもよい。
【0225】
[2]補正スキャンの実行は、その対象となる本スキャンの実行前のみに行う場合、又は、その対象となる本スキャンの実行後のみに行う場合には限定されない。例えば、一部の補正スキャンを本スキャン前に実行し、残りの補正スキャンを本スキャン後に実行してもよい。
【0226】
図14は、第1の実施形態の変形例として、一部の補正スキャンを本スキャン前に実行し、残りの補正スキャンを本スキャン後に行う場合のMRI装置20の動作の流れを示すフローチャートである。ステップS1’〜S7’、S9’の動作はそれぞれ、第1の実施形態のステップS1〜S7、S9と同様である。
【0227】
ステップS8’では、MPU86は、例えば静磁場補正用のオフセット磁場を算出するための磁場計測シーケンスや、本スキャンでのRFパルスの中心周波数を算出するシーケンスなどの本スキャンの前に行うべき補正スキャンをMRI装置20に実行させる。なお、前述のように、磁場計測シーケンスと、本スキャンでのRFパルスの中心周波数を算出するシーケンスとは、1のシーケンスとして(1の補正スキャンとして)実行してもよい。また、仮に本スキャンの前に行うべき補正スキャンがない場合、このステップS8’は省略すればよい。
【0228】
ステップS10’では、MPU86は、例えばRFコイル装置内の各要素コイルの感度分布マップを生成するシーケンスなど、本スキャンの後に行ってもよい補正スキャンをMRI装置20に実行させる。その後のステップS11’では、本スキャン後に行われた補正スキャンの実行結果を反映しつつ、第1の実施形態のステップS10と同様にして画像再構成、画像表示が行われる。
【0229】
[3]RFコイル装置の種類及び撮像部位に応じて補正スキャンの条件を算出及び自動設定する例を述べた。上記各実施形態で述べた補正スキャンの条件を決める際の判定要素としての撮像部位は、例えば、撮像部位を包含するSAR検出部位も含む。
【0230】
上記SAR(Specific Absorption Ratio:比吸収率)とは、例えば、生体組織1kgに吸収されるRFパルスのエネルギーを意味する。安全上の基準として、例えば任意の10秒間、6分間のSARがそれぞれ第1または第2の上限値を超えないように定められている。上記各実施形態の動作説明では省略したが、MPU86及び補正スキャン設定部100は、補正スキャンや本スキャンの実行時にSARが上限値を超えないように、補正スキャンの条件及び本スキャンの撮像条件を制限している。
【0231】
片手を撮像する場合、SAR検出部位は、例えば、被検体Pが腕を伸ばして寝台32上に寝た状態で片手を包含する領域であり、腰部と、両手と、両手首とを合わせた領域になる。また、心臓を撮像する場合、SAR検出部位は、例えば、被検体Pが寝台32上に寝た状態で心臓を包含する領域であり、胸部と両腕上腕部とを合わせた領域となる。
従って、換言すれば、上記各実施形態は、RFコイル装置の種類及びSAR検出部位に応じて補正スキャンの条件を算出及び自動設定する構成としてもよい。
【0232】
[4]本スキャン前に行うべきシーケンスが補正スキャンに含まれない場合であって、撮像時間短縮を優先する場合には、本スキャン直前に補正スキャンを行う第1の実施形態のフローよりも、第3の実施形態のフローの方が望ましい。第3の実施形態のフローとは、補正スキャンの対象の本スキャンの実行後、さらに後に行われる他の本スキャンの撮像条件のプランニング中に、当該補正スキャンを行うフローである。
【0233】
一方、本スキャンの撮像条件(静磁場の印加方法や、RFパルスの中心周波数等などのMR信号収集条件)を本スキャン前に較正することが望まれる場合、本スキャン直前に補正スキャンを行う第1の実施形態のフローが望ましい。以下に具体例を2つ挙げる。
【0234】
第1に、例えばDWI(Diffusion Weighted Imaging:拡散強調イメージング)では、b値や、拡散傾斜磁場(MPG: Motion Probing Gradient)の印加方向等が異なる撮像を連続して行う。従って、DWIでは、傾斜磁場コイル26が発熱し、鉄シムの温度が上昇して透磁率が変化し、磁場均一性が乱れ、水素原子の磁気共鳴の中心周波数がシフトする。このため、前述の磁場計測シーケンスを行うことで得られるオフセット磁場に基づいて補正された静磁場が印加された下で、RFパルスの中心周波数の補正値を算出するシーケンスを本スキャン直前に行い、RFパルスの中心周波数を新たな補正値にした後、引き続きDWIの本スキャンを行うことが望ましい。
【0235】
第2に、例えばブレスト撮像では、脂肪組織や(肺の中の)空気が多く含まれるため、RFパルスの中心周波数のズレの影響を受け易い。このため、ブレスト撮像では、RFパルスの中心周波数の補正値を算出する補正スキャンを、プレパルスとしての脂肪抑制パルスが含まれる本スキャン直前に行うことが望ましい。より詳細には、撮像時間経過に伴う傾斜磁場コイル26の温度上昇に伴い、水素原子の磁気共鳴の中心周波数も時間変化してズレていく。この点を考慮すると、補正スキャンの実行タイミングは、本スキャンの直前である程、本スキャン実行時と条件が近く、中心周波数をより適正に較正できるからである。
【0236】
[5]MRI装置20として、静磁場磁石22、シムコイル24、傾斜磁場コイルユニット26、RFコイル28が含まれるガントリの外にRF受信器48が存在する例を述べた(図1参照)。本発明の実施形態は、かかる態様に限定されるものではない。RF受信器48がガントリ内に含まれる態様でもよい。
【0237】
具体的には例えば、RF受信器48に相当する電子回路基盤をガントリ内に配設する。そして、受信用RFコイルによって電磁波からアナログの電気信号に変換されたMR信号を、当該電子回路基盤内のプリアンプによって増幅し、デジタル信号としてガントリ外に出力し、シーケンスコントローラ56に入力してもよい。ガントリ外への出力に際しては、例えば光通信ケーブルを用いて光デジタル信号として送信すれば、外部ノイズの影響が軽減されるので、望ましい。
【0238】
[6]第1の実施形態では、アキシャル断面及びサジタル断面のロケータ画像を撮像する例を述べた。本発明の実施形態は、かかる態様に限定されるものではない。コロナル断面など、他の断面のロケータ画像を撮像してもよい。この点は、第2〜第4の実施形態についても同様である。
【0239】
[7]請求項の用語と実施形態との対応関係を説明する。なお、以下に示す対応関係は、参考のために示した一解釈であり、本発明を限定するものではない。
【0240】
静磁場磁石22、シムコイル24、傾斜磁場コイル26、RFコイル28、制御装置30の全体(図1参照)が、傾斜磁場及びRFパルスの印加を伴ってMR信号を収集し、補正スキャンを実行する構成は、請求項記載の補正スキャン実行部の一例である。
【0241】
静磁場磁石22、シムコイル24、傾斜磁場コイル26、RFコイル28、制御装置30の全体が、確定後の本スキャンの撮像条件に従って、静磁場、傾斜磁場及びRFパルスの印加を伴って被検体Pの撮像部位を含む撮像領域からMR信号を収集する構成は、請求項記載の本スキャン実行部の一例である。
【0242】
収集されたMR信号に基づいて被検体Pの撮像部位の画像データを再構成する画像再構成部90の機能は、請求項記載の画像再構成部の一例である。
画像再構成時に併せて行われる輝度補正において用いられる感度分布マップは、請求項記載の再構成処理の条件の一例である。
補正スキャンの実行結果によって算出されるRFパルスの中心周波数の補正値は、本スキャンの撮像条件の一例である。
【0243】
補正スキャンの実行結果に基づいて、本スキャンの一部の撮像条件(未確定のもの)、及び、画素再構成処理の条件を決定するMPU86の機能は、請求項記載の条件決定部の一例である。
MPU86の指令に従って寝台駆動装置50を駆動するシーケンスコントローラ56の機能、及び、被検体Pが乗せられた寝台32を撮像空間における所定位置に移動させる寝台駆動装置50は、請求項記載の寝台駆動部の一例である。
【0244】
[8]本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0245】
20 MRI装置
22 静磁場磁石
24 シムコイル
26 傾斜磁場コイル
26x X軸傾斜磁場コイル
26y Y軸傾斜磁場コイル
26z Z軸傾斜磁場コイル
28 RFコイル
30 制御装置
32 寝台
40 静磁場電源
42 シムコイル電源
44 傾斜磁場電源
44x X軸傾斜磁場電源
44y Y軸傾斜磁場電源
44z Z軸傾斜磁場電源
46 RF送信器
48 RF受信器
50 寝台駆動装置
56 シーケンスコントローラ
58 コンピュータ
60 演算装置
62 入力装置
64 表示装置
66 記憶装置
86 MPU
88 システムバス
90 画像再構成部
92 k空間データベース
94 画像データベース
96 画像処理部
98 表示制御部
100 補正スキャン設定部
120 頭部用RFコイル装置
122 筺体
124 ケーブル
126 コネクタ
128a、128b、128c 要素コイル
140 上半身用RFコイル装置
142 カバー部材
144、146 要素コイル
174 デュプレクサ
176 アンプ
178 切替合成器
180 受信系回路
P 被検体
WB 全身用コイル
【特許請求の範囲】
【請求項1】
決定された撮像条件に基づいてRFパルスを送信すると共に被検体の撮像部位に装着されたRFコイル装置を介して磁気共鳴信号を収集する動作を本スキャンとして実行する本スキャン実行部と、前記磁気共鳴信号に基づいて前記撮像部位の画像データの再構成処理を実行する画像再構成部とを備えた磁気共鳴イメージング装置であって、
前記本スキャンの撮像条件又は前記再構成処理の条件の決定に用いられる補正スキャンの条件を、前記RFコイル装置の種類及び前記撮像部位に応じて算出及び自動設定する補正スキャン設定部と、
自動設定された前記補正スキャンの条件に基づいて前記補正スキャンを実行する補正スキャン実行部と、
前記補正スキャンの実行結果に基づいて、前記本スキャンの撮像条件又は前記再構成処理の条件を決定する条件決定部と
を備えることを特徴とする磁気共鳴イメージング装置。
【請求項2】
決定された撮像条件に基づいてRFパルスを送信すると共に被検体の撮像部位に装着されたRFコイル装置を介して磁気共鳴信号を収集する動作を本スキャンとして実行する本スキャン実行部と、前記磁気共鳴信号に基づいて前記撮像部位の画像データの再構成処理を実行する画像再構成部とを備えた磁気共鳴イメージング装置であって、
前記本スキャンの撮像条件又は前記再構成処理の条件の決定に用いられる補正スキャンの条件を、「前記本スキャンの撮像条件に拘らずに固定的に設定される条件」、「前記本スキャンの撮像条件の内、対応する条件の設定内容を変更なしに適用する条件」、「前記本スキャンの撮像条件の一部に基づいて算出する条件」の3種類に分けつつ、前記本スキャンの撮像条件の一部に基づいて算出及び自動設定する補正スキャン設定部と、
自動設定された前記補正スキャンの条件に基づいて前記補正スキャンを実行する補正スキャン実行部と、
前記補正スキャンの実行結果に基づいて、前記本スキャンの撮像条件又は前記再構成処理の条件を決定する条件決定部と
を備えることを特徴とする磁気共鳴イメージング装置。
【請求項3】
前記補正スキャン設定部は、前記RFコイル装置内の複数の要素コイルの感度分布マップの算出に用いられる前記磁気共鳴信号を前記複数の要素コイル経由で収集する感度分布マップシーケンスの条件を算出及び自動設定し、
前記補正スキャン実行部は、前記補正スキャンとして、前記感度分布マップシーケンスを実行し、
前記画像再構成部は、前記感度分布マップシーケンスで収集された前記磁気共鳴信号に基づいて算出される前記感度分布マップに応じた輝度補正を施しつつ、前記再構成処理を実行する
ことを特徴とする請求項1又は請求項2記載の磁気共鳴イメージング装置。
【請求項4】
前記補正スキャン設定部は、前記被検体が置かれる撮像空間の磁場強度分布を計測する磁場計測シーケンスの条件を算出及び自動設定し、
前記補正スキャン実行部は、前記補正スキャンとして、前記磁場計測シーケンスを実行し、
前記本スキャン実行部は、計測された前記磁場強度分布に基づいて補正された静磁場を前記撮像空間に印加しつつ、前記本スキャンを実行する
ことを特徴とする請求項1乃至請求項3のいずれか1項に記載の磁気共鳴イメージング装置。
【請求項5】
決定された撮像条件に基づいてRFパルスを送信すると共に被検体の撮像部位に装着されたRFコイル装置を介して磁気共鳴信号を収集する動作を本スキャンとして実行する本スキャン実行部と、前記磁気共鳴信号に基づいて前記撮像部位の画像データの再構成処理を実行する画像再構成部とを備えた磁気共鳴イメージング装置であって、
前記本スキャンの撮像条件又は前記再構成処理の条件の決定に用いられる補正スキャンとして実行するシーケンスを、選択肢として予め記憶された複数のシーケンスから前記本スキャンの撮像条件の一部に基づいて自動選択し、自動選択されたシーケンスの条件を前記本スキャンの撮像条件の一部に基づいて算出及び自動設定する補正スキャン設定部と、
前記補正スキャン設定部により自動設定された条件に基づいて、前記自動選択されたシーケンスを前記補正スキャンとして実行する補正スキャン実行部と、
前記補正スキャンの実行結果に基づいて、前記本スキャンの撮像条件又は前記再構成処理の条件を決定する条件決定部と
を備えることを特徴とする磁気共鳴イメージング装置。
【請求項6】
前記補正スキャン実行部は、前記本スキャンの実行指令が磁気共鳴イメージング装置に対して入力された後、前記本スキャンが実行される前の期間に、前記補正スキャンを自動実行する
ことを特徴とする請求項5記載の磁気共鳴イメージング装置。
【請求項7】
前記補正スキャン設定部は、
前記RFコイル装置内の複数の要素コイルの感度分布マップの算出に用いられる前記磁気共鳴信号を前記複数の要素コイル経由で収集する感度分布マップシーケンスと、
前記本スキャンで前記被検体が置かれる撮像空間に印加される静磁場を均一化する補正に用いられる前記撮像空間の磁場強度分布を計測する磁場計測シーケンスと、
前記本スキャンの前記RFパルスの中心周波数の算出に用いられる前記磁気共鳴信号を収集する中心周波数シーケンスと、を前記選択肢として予め記憶している
ことを特徴とする請求項6記載の磁気共鳴イメージング装置。
【請求項8】
前記被検体が置かれる撮像空間の磁場強度分布を計測する磁場計測シーケンスを、前記補正スキャン実行部が前記補正スキャンとして実行する場合、前記本スキャン実行部は、計測された前記磁場強度分布に基づいて補正された静磁場を前記撮像空間に印加しつつ、前記本スキャンを実行する
ことを特徴とする請求項6記載の磁気共鳴イメージング装置。
【請求項9】
前記RFコイル装置内の複数の要素コイルの感度分布マップの算出に用いられる前記磁気共鳴信号を前記複数の要素コイル経由で収集する感度分布マップシーケンスを、前記補正スキャン実行部が前記補正スキャンとして実行する場合、前記画像再構成部は、前記感度分布マップシーケンスで収集された前記磁気共鳴信号に基づいて算出される感度分布マップに応じた輝度補正を施しつつ、前記画像データを再構成する
ことを特徴とする請求項6記載の磁気共鳴イメージング装置。
【請求項10】
前記本スキャンの前記RFパルスの中心周波数の算出に用いられる前記磁気共鳴信号を収集する中心周波数シーケンスを、前記補正スキャン実行部が前記補正スキャンとして実行する場合、前記本スキャン実行部は、前記中心周波数シーケンスで収集された前記磁気共鳴信号に基づいて算出された中心周波数の前記RFパルスを印加しつつ、前記本スキャンを実行する
ことを特徴とする請求項6記載の磁気共鳴イメージング装置。
【請求項11】
前記本スキャン実行部が第1の本スキャンの実行後に第2の本スキャンを実行する場合、前記補正スキャン設定部は、前記第1の本スキャンの撮像条件の一部に基づいて、前記第1の本スキャンに対する前記補正スキャンのシーケンスを自動選択すると共に自動選択したシーケンスの条件を算出及び自動設定し、前記補正スキャン実行部は、前記第1の本スキャンの実行後であって、前記第2の本スキャンの撮像条件が設定されている期間中に、前記補正スキャン設定部により自動設定された条件で前記第1の本スキャンに対する前記補正スキャンを自動実行する
ことを特徴とする請求項5記載の磁気共鳴イメージング装置。
【請求項12】
前記RFコイル装置内の複数の要素コイルの感度分布マップの算出に用いられる前記磁気共鳴信号を前記複数の要素コイル経由で収集する感度分布マップシーケンスを、前記補正スキャン実行部が前記補正スキャンとして実行する場合、前記画像再構成部は、前記感度分布マップシーケンスで収集された前記磁気共鳴信号に基づいて算出される感度分布マップに応じた輝度補正を施しつつ、前記画像データを再構成する
ことを特徴とする請求項11記載の磁気共鳴イメージング装置。
【請求項13】
前記撮像部位を変えるために、前記RFコイル装置が装着された前記被検体が乗せられた寝台をステップ移動させる動作と、前記寝台を一時停止させる動作とを順次繰り返す寝台駆動部をさらに備え、
前記寝台のステップ移動の都度、前記補正スキャン実行部は前記補正スキャンを実行し、前記本スキャン実行部は最新の前記補正スキャンの実行結果に基づいて決定される撮像条件に従って前記本スキャンを実行する
ことを特徴とする請求項1乃至請求項10のいずれか1項記載の磁気共鳴イメージング装置。
【請求項1】
決定された撮像条件に基づいてRFパルスを送信すると共に被検体の撮像部位に装着されたRFコイル装置を介して磁気共鳴信号を収集する動作を本スキャンとして実行する本スキャン実行部と、前記磁気共鳴信号に基づいて前記撮像部位の画像データの再構成処理を実行する画像再構成部とを備えた磁気共鳴イメージング装置であって、
前記本スキャンの撮像条件又は前記再構成処理の条件の決定に用いられる補正スキャンの条件を、前記RFコイル装置の種類及び前記撮像部位に応じて算出及び自動設定する補正スキャン設定部と、
自動設定された前記補正スキャンの条件に基づいて前記補正スキャンを実行する補正スキャン実行部と、
前記補正スキャンの実行結果に基づいて、前記本スキャンの撮像条件又は前記再構成処理の条件を決定する条件決定部と
を備えることを特徴とする磁気共鳴イメージング装置。
【請求項2】
決定された撮像条件に基づいてRFパルスを送信すると共に被検体の撮像部位に装着されたRFコイル装置を介して磁気共鳴信号を収集する動作を本スキャンとして実行する本スキャン実行部と、前記磁気共鳴信号に基づいて前記撮像部位の画像データの再構成処理を実行する画像再構成部とを備えた磁気共鳴イメージング装置であって、
前記本スキャンの撮像条件又は前記再構成処理の条件の決定に用いられる補正スキャンの条件を、「前記本スキャンの撮像条件に拘らずに固定的に設定される条件」、「前記本スキャンの撮像条件の内、対応する条件の設定内容を変更なしに適用する条件」、「前記本スキャンの撮像条件の一部に基づいて算出する条件」の3種類に分けつつ、前記本スキャンの撮像条件の一部に基づいて算出及び自動設定する補正スキャン設定部と、
自動設定された前記補正スキャンの条件に基づいて前記補正スキャンを実行する補正スキャン実行部と、
前記補正スキャンの実行結果に基づいて、前記本スキャンの撮像条件又は前記再構成処理の条件を決定する条件決定部と
を備えることを特徴とする磁気共鳴イメージング装置。
【請求項3】
前記補正スキャン設定部は、前記RFコイル装置内の複数の要素コイルの感度分布マップの算出に用いられる前記磁気共鳴信号を前記複数の要素コイル経由で収集する感度分布マップシーケンスの条件を算出及び自動設定し、
前記補正スキャン実行部は、前記補正スキャンとして、前記感度分布マップシーケンスを実行し、
前記画像再構成部は、前記感度分布マップシーケンスで収集された前記磁気共鳴信号に基づいて算出される前記感度分布マップに応じた輝度補正を施しつつ、前記再構成処理を実行する
ことを特徴とする請求項1又は請求項2記載の磁気共鳴イメージング装置。
【請求項4】
前記補正スキャン設定部は、前記被検体が置かれる撮像空間の磁場強度分布を計測する磁場計測シーケンスの条件を算出及び自動設定し、
前記補正スキャン実行部は、前記補正スキャンとして、前記磁場計測シーケンスを実行し、
前記本スキャン実行部は、計測された前記磁場強度分布に基づいて補正された静磁場を前記撮像空間に印加しつつ、前記本スキャンを実行する
ことを特徴とする請求項1乃至請求項3のいずれか1項に記載の磁気共鳴イメージング装置。
【請求項5】
決定された撮像条件に基づいてRFパルスを送信すると共に被検体の撮像部位に装着されたRFコイル装置を介して磁気共鳴信号を収集する動作を本スキャンとして実行する本スキャン実行部と、前記磁気共鳴信号に基づいて前記撮像部位の画像データの再構成処理を実行する画像再構成部とを備えた磁気共鳴イメージング装置であって、
前記本スキャンの撮像条件又は前記再構成処理の条件の決定に用いられる補正スキャンとして実行するシーケンスを、選択肢として予め記憶された複数のシーケンスから前記本スキャンの撮像条件の一部に基づいて自動選択し、自動選択されたシーケンスの条件を前記本スキャンの撮像条件の一部に基づいて算出及び自動設定する補正スキャン設定部と、
前記補正スキャン設定部により自動設定された条件に基づいて、前記自動選択されたシーケンスを前記補正スキャンとして実行する補正スキャン実行部と、
前記補正スキャンの実行結果に基づいて、前記本スキャンの撮像条件又は前記再構成処理の条件を決定する条件決定部と
を備えることを特徴とする磁気共鳴イメージング装置。
【請求項6】
前記補正スキャン実行部は、前記本スキャンの実行指令が磁気共鳴イメージング装置に対して入力された後、前記本スキャンが実行される前の期間に、前記補正スキャンを自動実行する
ことを特徴とする請求項5記載の磁気共鳴イメージング装置。
【請求項7】
前記補正スキャン設定部は、
前記RFコイル装置内の複数の要素コイルの感度分布マップの算出に用いられる前記磁気共鳴信号を前記複数の要素コイル経由で収集する感度分布マップシーケンスと、
前記本スキャンで前記被検体が置かれる撮像空間に印加される静磁場を均一化する補正に用いられる前記撮像空間の磁場強度分布を計測する磁場計測シーケンスと、
前記本スキャンの前記RFパルスの中心周波数の算出に用いられる前記磁気共鳴信号を収集する中心周波数シーケンスと、を前記選択肢として予め記憶している
ことを特徴とする請求項6記載の磁気共鳴イメージング装置。
【請求項8】
前記被検体が置かれる撮像空間の磁場強度分布を計測する磁場計測シーケンスを、前記補正スキャン実行部が前記補正スキャンとして実行する場合、前記本スキャン実行部は、計測された前記磁場強度分布に基づいて補正された静磁場を前記撮像空間に印加しつつ、前記本スキャンを実行する
ことを特徴とする請求項6記載の磁気共鳴イメージング装置。
【請求項9】
前記RFコイル装置内の複数の要素コイルの感度分布マップの算出に用いられる前記磁気共鳴信号を前記複数の要素コイル経由で収集する感度分布マップシーケンスを、前記補正スキャン実行部が前記補正スキャンとして実行する場合、前記画像再構成部は、前記感度分布マップシーケンスで収集された前記磁気共鳴信号に基づいて算出される感度分布マップに応じた輝度補正を施しつつ、前記画像データを再構成する
ことを特徴とする請求項6記載の磁気共鳴イメージング装置。
【請求項10】
前記本スキャンの前記RFパルスの中心周波数の算出に用いられる前記磁気共鳴信号を収集する中心周波数シーケンスを、前記補正スキャン実行部が前記補正スキャンとして実行する場合、前記本スキャン実行部は、前記中心周波数シーケンスで収集された前記磁気共鳴信号に基づいて算出された中心周波数の前記RFパルスを印加しつつ、前記本スキャンを実行する
ことを特徴とする請求項6記載の磁気共鳴イメージング装置。
【請求項11】
前記本スキャン実行部が第1の本スキャンの実行後に第2の本スキャンを実行する場合、前記補正スキャン設定部は、前記第1の本スキャンの撮像条件の一部に基づいて、前記第1の本スキャンに対する前記補正スキャンのシーケンスを自動選択すると共に自動選択したシーケンスの条件を算出及び自動設定し、前記補正スキャン実行部は、前記第1の本スキャンの実行後であって、前記第2の本スキャンの撮像条件が設定されている期間中に、前記補正スキャン設定部により自動設定された条件で前記第1の本スキャンに対する前記補正スキャンを自動実行する
ことを特徴とする請求項5記載の磁気共鳴イメージング装置。
【請求項12】
前記RFコイル装置内の複数の要素コイルの感度分布マップの算出に用いられる前記磁気共鳴信号を前記複数の要素コイル経由で収集する感度分布マップシーケンスを、前記補正スキャン実行部が前記補正スキャンとして実行する場合、前記画像再構成部は、前記感度分布マップシーケンスで収集された前記磁気共鳴信号に基づいて算出される感度分布マップに応じた輝度補正を施しつつ、前記画像データを再構成する
ことを特徴とする請求項11記載の磁気共鳴イメージング装置。
【請求項13】
前記撮像部位を変えるために、前記RFコイル装置が装着された前記被検体が乗せられた寝台をステップ移動させる動作と、前記寝台を一時停止させる動作とを順次繰り返す寝台駆動部をさらに備え、
前記寝台のステップ移動の都度、前記補正スキャン実行部は前記補正スキャンを実行し、前記本スキャン実行部は最新の前記補正スキャンの実行結果に基づいて決定される撮像条件に従って前記本スキャンを実行する
ことを特徴とする請求項1乃至請求項10のいずれか1項記載の磁気共鳴イメージング装置。
【図1】


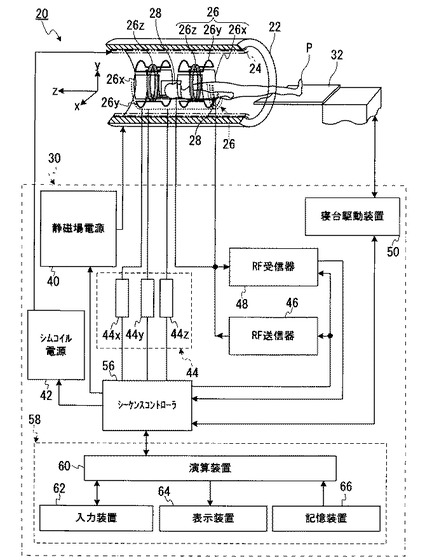
【図2】
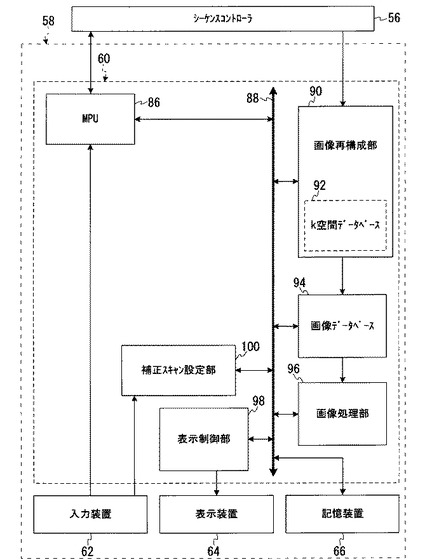
【図3】
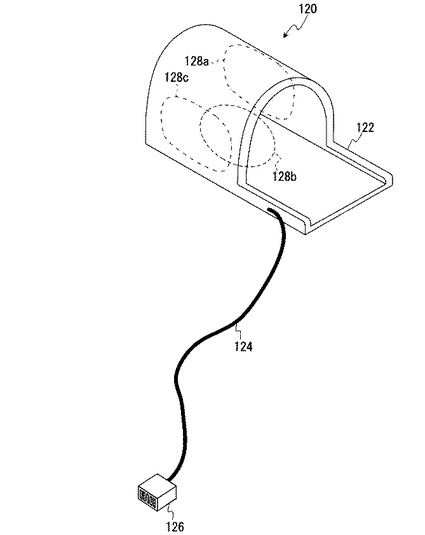
【図4】
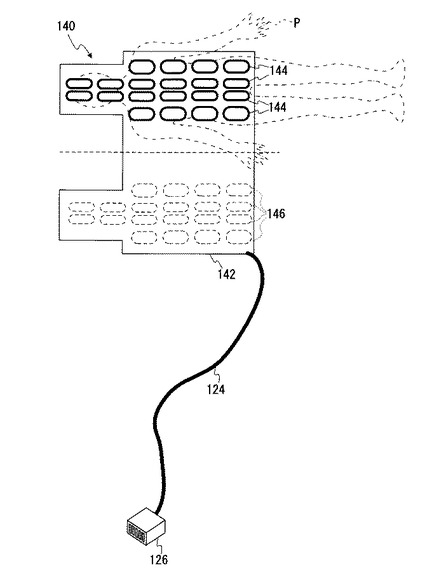
【図5】
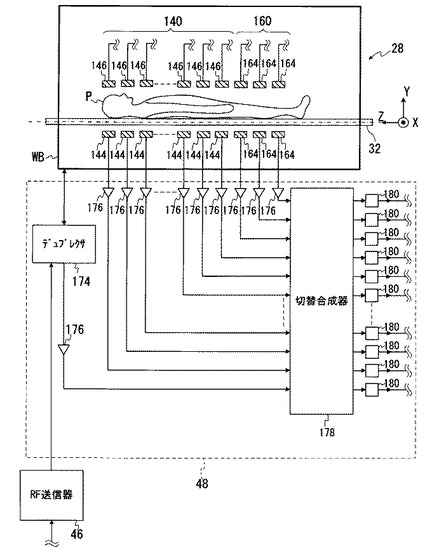
【図6】
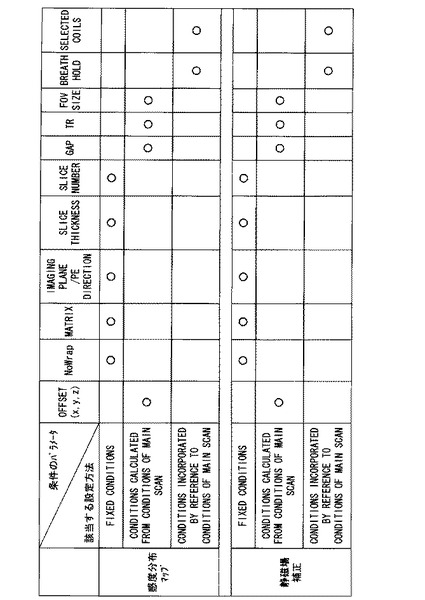
【図7】
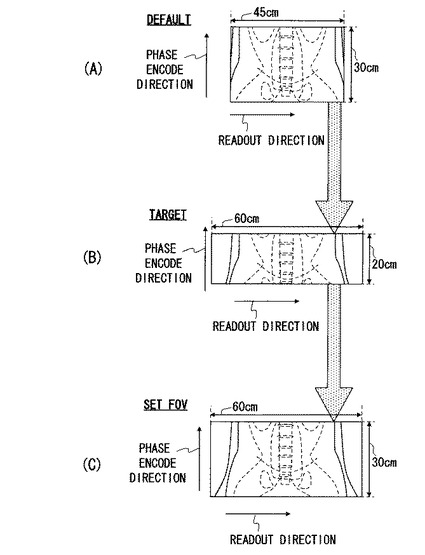
【図8】
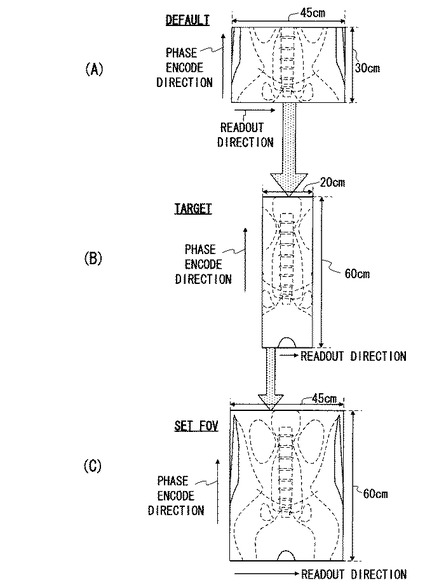
【図9】
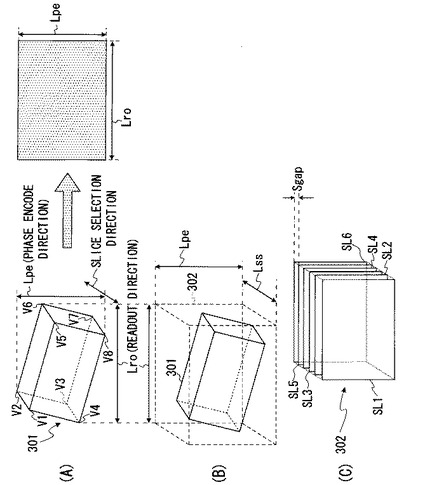
【図10】
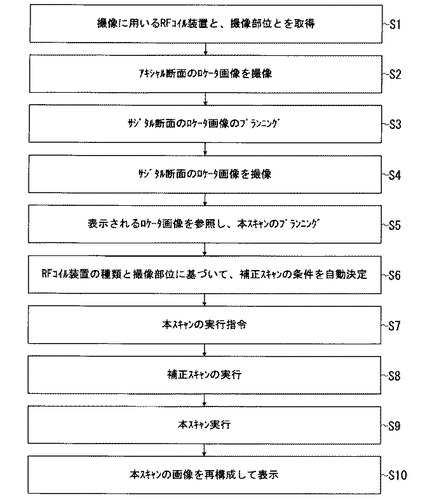
【図11】
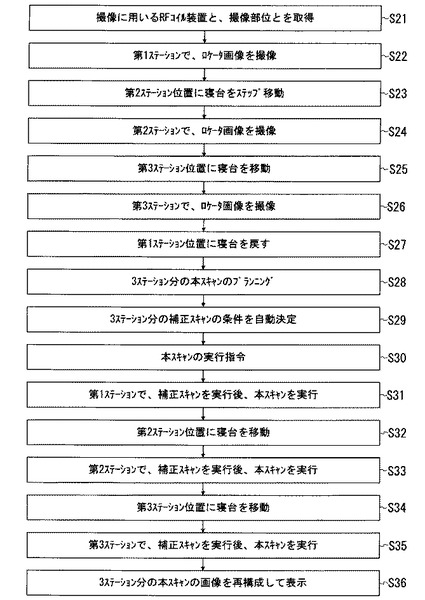
【図12】
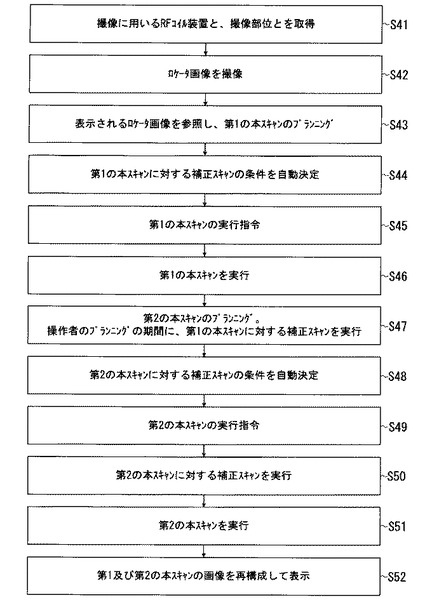
【図13】
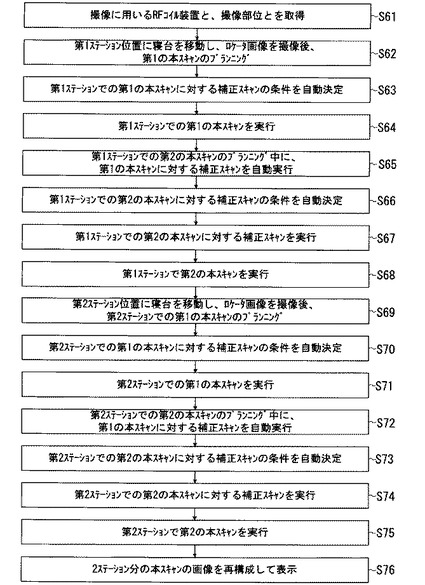
【図14】
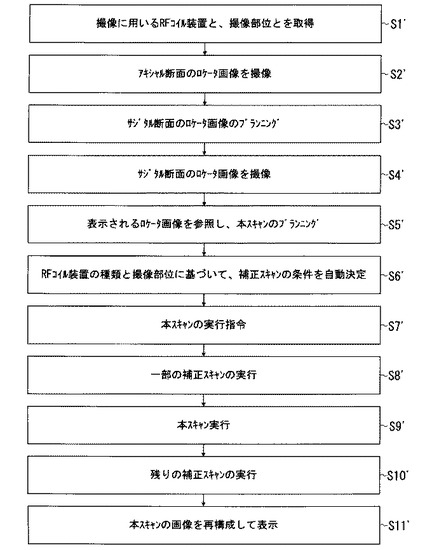
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−99449(P2013−99449A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−245176(P2011−245176)
【出願日】平成23年11月9日(2011.11.9)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月9日(2011.11.9)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]