
磁気共鳴装置
【課題】アーチファクトを低減する。
【解決手段】k空間を、データが収集されるデータ収集領域Racqと、データが収集されないデータ非収集領域Rnonに分け、シーケンス群G1〜Gmを実行することにより、データ収集領域Racqのデータを取得する。各シーケンス群のi回目〜n回目に実行されるイメージングシーケンスAi〜Anは、同じフリップ角αmax(例えば、αmax=30°)に設定されており、1回目〜i回目に実行されるイメージングシーケンスA1〜Aiは、フリップ角が次第に増加しながらαmaxに到達するように設定されている。
【解決手段】k空間を、データが収集されるデータ収集領域Racqと、データが収集されないデータ非収集領域Rnonに分け、シーケンス群G1〜Gmを実行することにより、データ収集領域Racqのデータを取得する。各シーケンス群のi回目〜n回目に実行されるイメージングシーケンスAi〜Anは、同じフリップ角αmax(例えば、αmax=30°)に設定されており、1回目〜i回目に実行されるイメージングシーケンスA1〜Aiは、フリップ角が次第に増加しながらαmaxに到達するように設定されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、データ収集領域に配置されるデータを取得する磁気共鳴装置に関する。
【背景技術】
【0002】
撮影の高速化を図る方法として、k空間の一部の領域のデータのみを収集する方法が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−042245号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
また、k空間のkz方向のデータを部分的に収集するパーシャルkzが知られている。しかし、パーシャルkzによりデータを収集した場合、k空間のデータが収集されない領域と、データが収集される領域との間に、大きな信号強度の段差が生じやすく、アーチファクトの原因となる。したがって、信号強度の段差ができるだけ小さくなるように、データを収集することが望まれている。
【課題を解決するための手段】
【0005】
本発明の第1の態様は、k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスのうちの1回目〜i回目のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置から、前記データ非収集領域を離れる方向に並ぶように、前記データ収集領域に配置され、
前記1回目〜i回目のイメージングシーケンスのRFパルスのフリップ角が次第に増加するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置である。
【0006】
本発明の第2の態様は、k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスは、複数のセグメントに分割されており、
各セグメントの1回目〜i回目のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置から、前記データ非収集領域を離れる方向に並ぶように、前記データ収集領域に配置され、
前記1回目〜i回目のイメージングシーケンスのRFパルスのフリップ角が次第に増加するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置である。
【0007】
本発明の第3の態様は、k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスのうちのj回目(j>1)以降のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置に向かって並ぶように、前記データ収集領域に配置され、
前記j回目以降のイメージングシーケンスのRFパルスのフリップ角が次第に減少するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置である。
【0008】
本発明の第4の態様は、k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスは、複数のセグメントに分割されており、
各セグメントのj回目(j>1)以降のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置に向かって並ぶように、前記データ収集領域に配置され、
前記j回目以降のイメージングシーケンスのRFパルスのフリップ角が次第に減少するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置である。
【発明の効果】
【0009】
フリップ角が次第に増加又は減少するように、スキャンを実行することにより、k空間のデータ収集領域とデータ非収集領域との間に生じる信号強度の段差を小さくすることができ、アーチファクトを低減することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第1の形態の磁気共鳴装置の概略図である。
【図2】被検体12を撮影するときに実行されるスキャンの説明図である。
【図3】被検体12の撮影領域を概略的に示す図である。
【図4】3Dグラディエントエコー法を用いたイメージングシーケンスを示す図である。
【図5】フリップ角の説明図である。
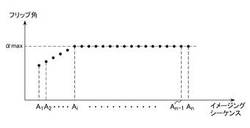
【図6】全てのイメージングシーケンスA1〜Anのフリップ角を同じ値αmaxに設定したときの図である。
【図7】イメージングシーケンスA1〜Anのフリップ角を図5に示すように設定したときのk空間のkz方向の信号強度の変化と、イメージングシーケンスA1〜Anのフリップ角を図6に示すように設定したときのk空間のkz方向の信号強度の変化との違いを概略的に示すグラフである。
【図8】第2の形態におけるスキャンを示す図である。
【図9】被検体の撮影領域を概略的に示す図である。
【図10】第3の形態におけるシーケンス群のフリップ角の説明図である。
【図11】第4の形態におけるスキャンの説明図である。
【図12】第4の形態におけるフリップ角の説明図である。
【図13】第5の形態におけるフリップ角の説明図である。
【図14】シミュレーション結果を示す図である。
【図15】第6の形態におけるフリップ角の説明図である。
【図16】シミュレーション結果を示す図である。
【図17】第7の形態におけるシーケンス群を示す図である。
【図18】第7の形態におけるフリップ角の説明図である。
【図19】第8の形態におけるスキャンの説明図である。
【図20】第8の形態におけるフリップ角の説明図である。
【図21】第9の形態におけるスキャンの説明図である。
【図22】第9の形態におけるフリップ角の説明図である。
【発明を実施するための形態】
【0011】
以下、発明を実施するための形態を説明するが、本発明は、以下の形態に限定されることはない。
【0012】
(1)第1の形態
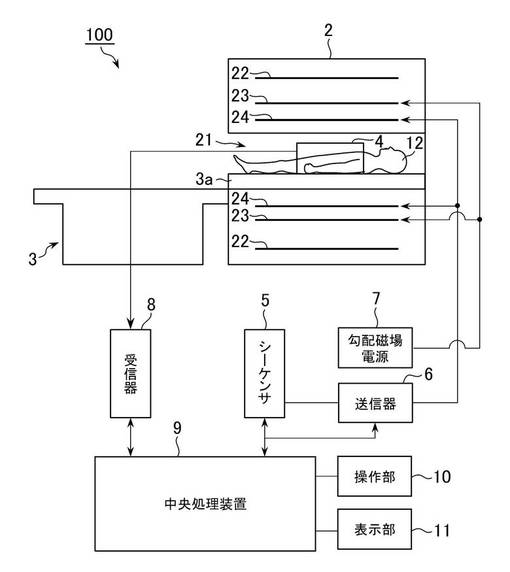
図1は、本発明の第1の形態の磁気共鳴装置の概略図である。
磁気共鳴装置(以下、「MR装置」と呼ぶ。MR:Magnetic Resonance)100は、マグネット2、テーブル3、受信コイル4などを有している。
【0013】
マグネット2は、被検体12が収容されるボア21、超伝導コイル22、勾配コイル23、送信コイル24などを有している。超伝導コイル22は静磁場を印加し、勾配コイル23は勾配磁場を印加し、送信コイル24はRFパルスを送信する。尚、超伝導コイル22の代わりに、永久磁石を用いてもよい。
【0014】
テーブル3は、被検体12を支持するためのクレードル3aを有している。クレードル3aがボア21に移動することによって、被検体12がボアに搬入される。
受信コイル4は被検体12の腹部に取り付けられている。
【0015】
MR装置100は、更に、シーケンサ5、送信器6、勾配磁場電源7、受信器8、中央処理装置9、操作部10、および表示部11を有している。
【0016】
シーケンサ5は、中央処理装置9の制御を受けて、パルスシーケンスを実行するための情報を送信器6および勾配磁場電源7に送る。
【0017】
送信器6は、RFコイル24に信号を供給する。
勾配磁場電源7は、勾配コイル23に信号を供給する。
【0018】
受信器8は、受信コイル4で受信された磁気共鳴信号を信号処理し、中央処理装置9に出力する。
【0019】
中央処理装置9は、シーケンサ5および表示部11に必要な情報を伝送したり、受信器8から受け取ったデータに基づいて画像を再構成するなど、MR装置100の各種の動作を実現するように、MR装置100の各部の動作を制御する。中央処理装置9は、例えばコンピュータ(computer)によって構成される。
【0020】
操作部10は、オペレータにより操作され、種々の情報を中央処理装置9に入力する。表示部11は種々の情報を表示する。
【0021】
MR装置100は、上記のように構成されている。尚、マグネット2、シーケンサ5、送信器6、勾配磁場電源7、受信器8を合わせたものが、スキャン手段に相当する。
【0022】
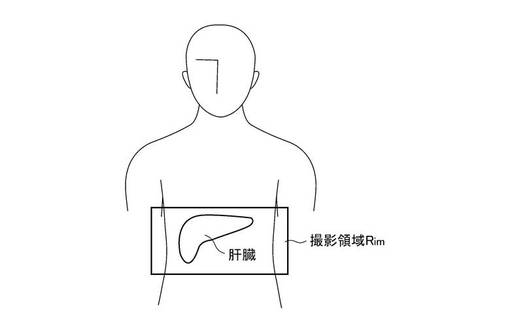
図2は、被検体12を撮影するときに実行されるスキャンの説明図、図3は、被検体12の撮影領域を概略的に示す図である。
【0023】
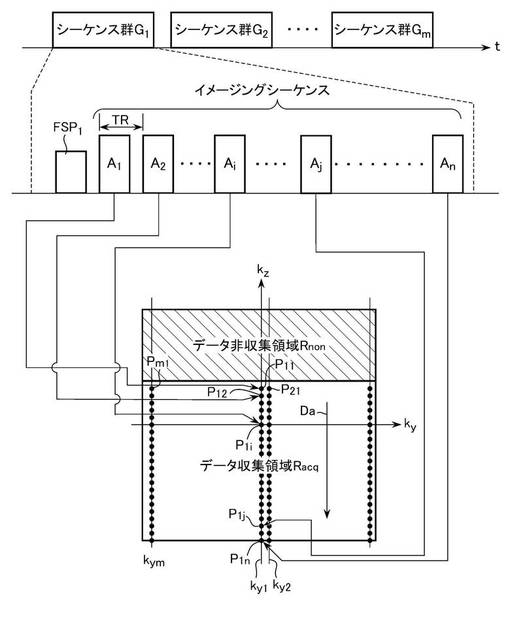
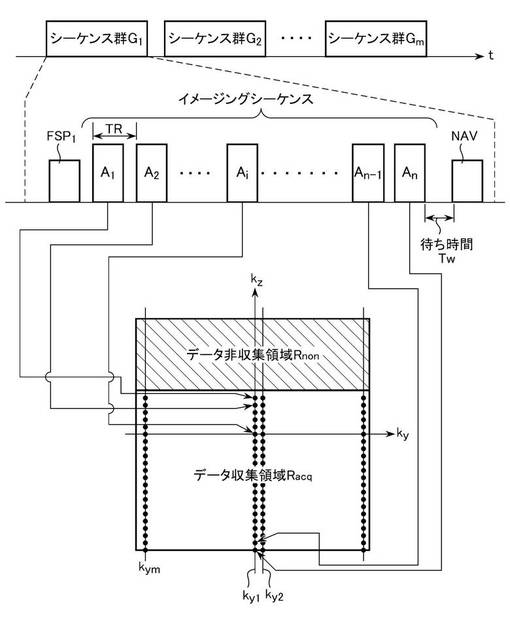
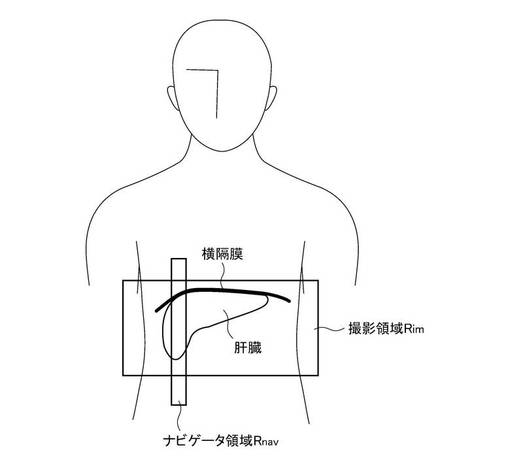
第1の形態では、被検体12の肝臓を含む領域を、撮影領域Rim(図3参照)としている。撮影領域Rimの画像データを取得するために、図2に示すように、シーケンス群G1〜Gmを含むスキャンが実行される。
【0024】
シーケンス群G1は、脂肪抑制パルスFSP1と、イメージングシーケンスA1〜Anとを有している。イメージングシーケンスA1〜Anの各々は、被検体12の肝臓を含む撮影領域Rimの画像データを取得するためのシーケンスである。イメージングシーケンスA1〜Anは繰り返し時間TRごとに実行される。
【0025】
その他のシーケンス群G2〜Gmも、シーケンス群G1と同様に、脂肪抑制パルスFSP1と、イメージングシーケンスA1〜Anとを有している。シーケンス群G1〜Gmを実行することによって、撮影領域Rimの画像データを取得するために必要なk空間のデータが収集される。
【0026】
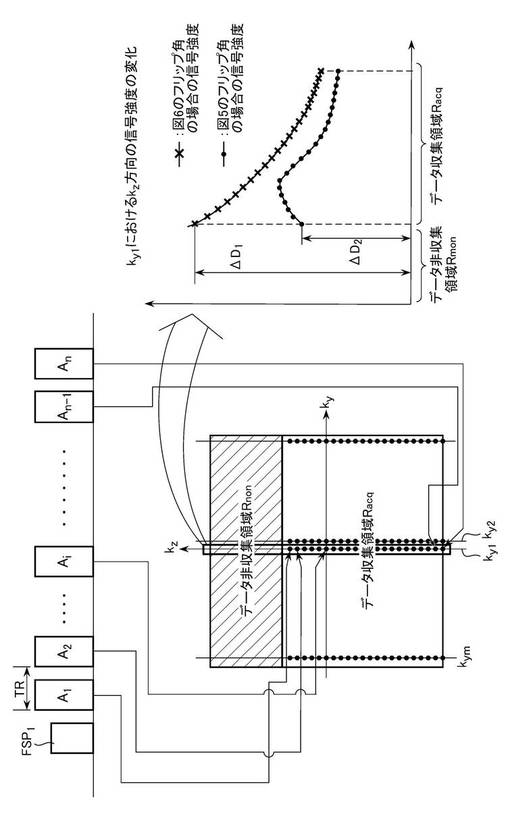
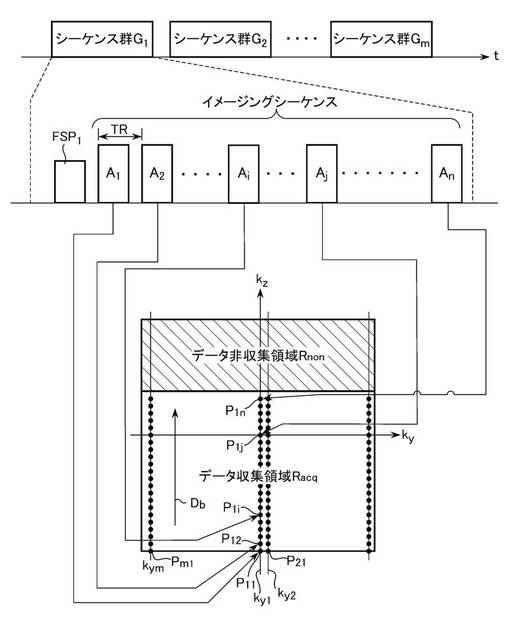
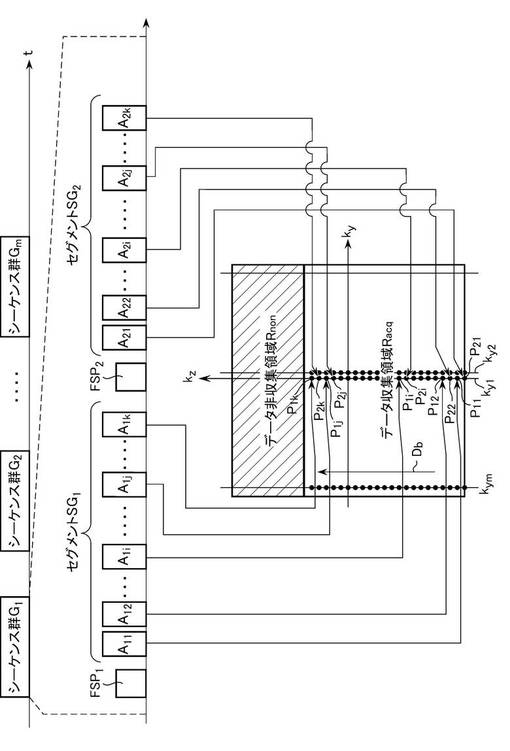
尚、第1の形態では、k空間は、データが収集されないデータ非収集領域Rnonと、データが収集されるデータ収集領域Racqとに分けられている。シーケンス群G1のイメージングシーケンスA1〜Anよって収集されるデータは、データ非収集領域Rnonに隣接する側の位置P11から、データ非収集領域Rnonを離れる方向Daに並ぶように、ky=ky1のライン上に配置される。例えば、1回目〜i回目のイメージングシーケンスA1〜Aiによって収集されるデータは、データ非収集領域Rnonに隣接する側の位置P11から、データ収集領域Racq内の位置P1iに向かって並ぶように配置される。また、j回目以降(j回目〜n回目)のイメージングシーケンスAj〜Anによって収集されるデータは、データ収集領域Racqの位置P1jから、データ非収集領域Rnonとは反対側の位置P1nに向かって並ぶように配置される。
【0027】
以下同様に、他のシーケンスG2〜Gmにおいて収集されたデータは、それぞれ、データ非収集領域Rnonに隣接する側の位置P21〜Pm1から、データ非収集領域Rnonを離れる方向Daに並ぶように、ky=ky2〜kymのライン上に配置される。
【0028】
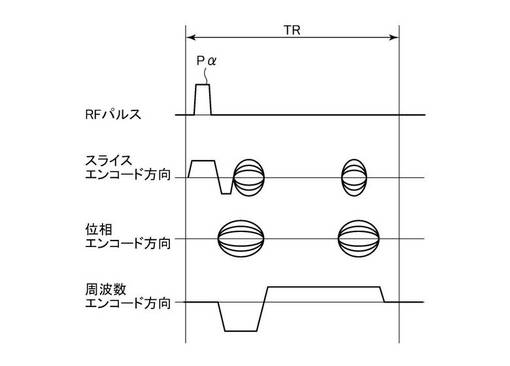
次に、イメージングシーケンスA1〜Anについて説明する。図4に、イメージングシーケンスA1〜Anの一例として、3Dグラディエントエコー法を用いたイメージングシーケンスが示されている。各シーケンス群G1〜Gmでは、図4に示すイメージングシーケンスが、繰り返し時間TRごとに、繰り返し実行されている。ただし、第1の形態では、イメージングシーケンスA1〜AnのRFパルスPαのフリップ角は同じ値ではなく、イメージングシーケンスA1〜Aiについては、RFパルスPαのフリップ角が次第に増加するように設定されている。以下に、第1の形態におけるRFパルスPαのフリップ角について説明する。
【0029】
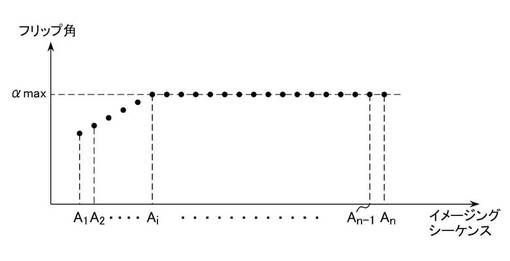
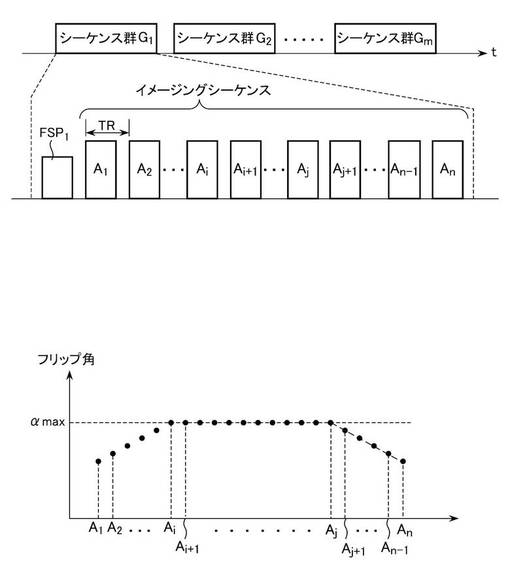
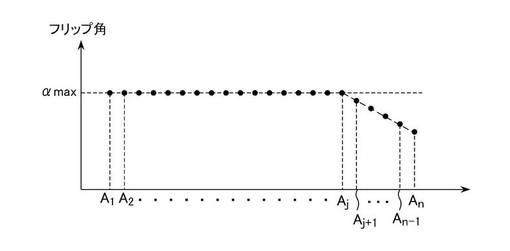
図5は、フリップ角の説明図である。
図5のグラフの横軸は、イメージングシーケンスA1〜Anを表しており、グラフの縦軸は、各イメージングシーケンスA1〜AnのRFパルスPαのフリップ角を表している。
【0030】
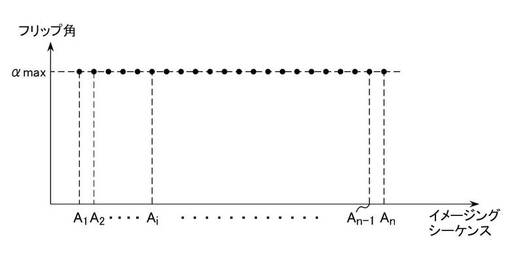
i回目〜n回目に実行されるイメージングシーケンスAi〜AnのRFパルスPαは、同じフリップ角αmax(例えば、αmax=30°)に設定されている。しかし、1回目〜i回目に実行されるイメージングシーケンスA1〜AiのRFパルスPαのフリップ角は、次第に増加しながら、αmaxに到達している。図5に示すようにフリップ角を設定することによって、全てのイメージングシーケンスA1〜Anのフリップ角を同じ値αmaxに設定する場合(図6参照)と比較して、アーチファクトを低減できるという効果がある。以下に、この効果が得られる理由について、図7を参照しながら説明する。
【0031】
図7は、イメージングシーケンスA1〜Anのフリップ角を図5に示すように設定したときのk空間のkz方向の信号強度の変化と、イメージングシーケンスA1〜Anのフリップ角を図6に示すように設定したときのk空間のkz方向の信号強度の変化との違いを概略的に示すグラフである。
【0032】
図7には、ky=ky1におけるkz方向の信号強度の変化を示しているが、ky=ky2〜kymにおけるkz方向の信号強度の変化も、図7と同様のグラフで示される。
【0033】
イメージングシーケンスA1〜Anの全てのフリップ角を同じ値αmaxに設定した場合(図6のフリップ角の場合)、イメージングシーケンスA1で取得された磁気共鳴信号の信号強度が最大となり、信号強度は次第に小さくなる。したがって、k空間のデータ非収集領域Rnonとデータ収集領域Racqとの間に、信号強度の大きな段差ΔD1が現れ、アーチファクトの原因となる。
【0034】
これに対し、イメージングシーケンスA1〜Aiのフリップ角を次第に増加させながらαmaxに到達させた場合(図5のフリップ角の場合)、イメージングシーケンスA1のフリップ角はαmaxよりも十分に小さい値になる。したがって、k空間のデータ非収集領域Rnonとデータ収集領域Racqとの間に現れる信号強度の段差ΔD2を、ΔD1よりも小さくすることができるので、アーチファクトを低減することができる。
【0035】
尚、第1の形態では、シーケンス群は、脂肪抑制パルスFSP1を有しているが、脂肪抑制をする必要がない場合は、脂肪抑制パルスFSP1は備えなくてもよい。
【0036】
また、上記の説明では、k空間のデータをシーケンシャルに収集する例について説明されているが、k空間の段差を小さくすることができるのであれば、別の収集順序であってもよい。
【0037】
(2)第2の形態
第2の形態は、第1の形態と比較すると、シーケンス群が異なるが、その他の点は第1の形態と同じである。したがって、第2の形態の説明に当たっては、シーケンス群について主に説明する。
【0038】
図8は第2の形態におけるスキャンを示す図、図9は被検体の撮影領域を概略的に示す図である。
【0039】
第2の形態では、最後のイメージングシーケンスAnの後に、ナビゲータシーケンスNAVが備えられている。尚、その他の点は、第1の形態(図2参照)と同じである。ナビゲータシーケンスNAVは、被検体の呼吸信号を検出するためのシーケンスであり、具体的には、横隔膜を含むナビゲータ領域Rnav(図3参照)から、横隔膜の位置を表すナビゲータデータを取得するためのシーケンスである。このように、ナビゲータシーケンスNAVを備えることによって、呼吸同期法で被検体を撮影することができる。
【0040】
尚、1つのシーケンス群には複数のイメージングシーケンスA1〜Anが含まれているので、イメージングシーケンスが実行されるたびに、RFパルスが送信される。したがって、撮影領域Rim内では、スピンの飽和効果によって、スピンの縦磁化が次第に小さくなる。そして、このように縦磁化が小さくなった後で、ナビゲータシーケンスNAVが実行される。しかし、ナビゲータシーケンスNAVにより励起されるナビゲータ領域Rnavは、撮影領域Rimに重なっているので、最後のイメージングシーケンスAnが終了した直後は、ナビゲータ領域Rnav内の磁化もかなり小さくなっている。したがって、イメージングシーケンスAnが終了して直ぐにナビゲータシーケンスNAVを実行すると、ナビゲータ領域Rnav内の磁化が小さいことが原因でナビゲータ信号が劣化してしまい、横隔膜の位置の検出精度が低下することがある。
【0041】
そこで、第2の形態では、最後のイメージングシーケンスAnと、ナビゲータシーケンスNAVとの間に、待ち時間TWを設けている。待ち時間TWを設けることによって、ナビゲータ領域Rnav内の磁化を回復させることができるので、ナビゲータ信号の劣化を抑制することができ、横隔膜の位置の検出精度を向上させることができる。待ち時間TWは、例えば、20msec程度とすることができる。尚、十分な検出精度が得られるのであれば、待ち時間TWを設けなくてもよい。
【0042】
(3)第3の形態
第3の形態は、第1の形態と比較すると、シーケンス群のフリップ角が異なるが、その他の点は第1の形態と同じである。したがって、第3の形態の説明に当たっては、シーケンス群のフリップ角について主に説明する。
【0043】
図10は、第3の形態におけるシーケンス群のフリップ角の説明図である。
第3の形態では、1番目〜i番目に実行されるイメージングシーケンスA1〜AiのRFパルスPαのフリップ角は、次第に増加しながら、αmaxに到達している。そして、i番目〜j番目に実行されるイメージングシーケンスAi〜AjのRFパルスPαは、同じフリップ角αmax(例えば、αmax=30°)に設定されている。ここまでは、第1の形態と同じである。しかし、第3の形態では、j番目以降(j番目〜n番目)に実行されるイメージングシーケンスAj〜AnのRFパルスPαのフリップ角は、αmaxから次第に減少するように設定されている。図10では、シーケンス群G1のフリップ角を説明したが、その他のシーケンス群G2〜Gmのフリップ角も、図10に示すフリップ角で表される。
【0044】
フリップ角を次第に増加させるだけでなく、途中からフリップ角を次第に減少させることによって、画像のアーチファクトを更に低減することができる。
【0045】
また、第3の形態でも、第1の形態と同様に、k空間のデータの収集順序はシーケンシャルに限られることはなく、別の収集方法で収集してもよい。更に、第2の形態と同様に、ナビゲータシーケンスNAVを設けてもよい(図8参照)。ナビゲータシーケンスNAVを設けた場合は、最後のイメージングシーケンスAnとナビゲータシーケンスNAVとの間に、待ち時間TWを設けることにより、ナビゲータ信号の劣化を抑制することができ、横隔膜の位置の検出精度を向上させることができる。
【0046】
(4)第4の形態
第4の形態は、第1の形態と比較すると、シーケンス群が異なるが、その他の点は第1の形態と同じである。したがって、第4形態の説明に当たっては、シーケンス群について主に説明する。
【0047】
図11は、第4の形態におけるスキャンの説明図である。
第4の形態では、シーケンス群G1〜Gmを含むスキャンが実行される。
【0048】
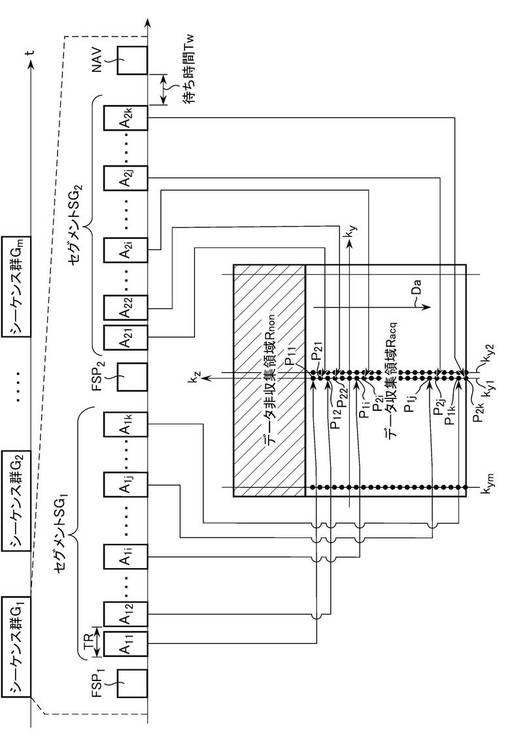
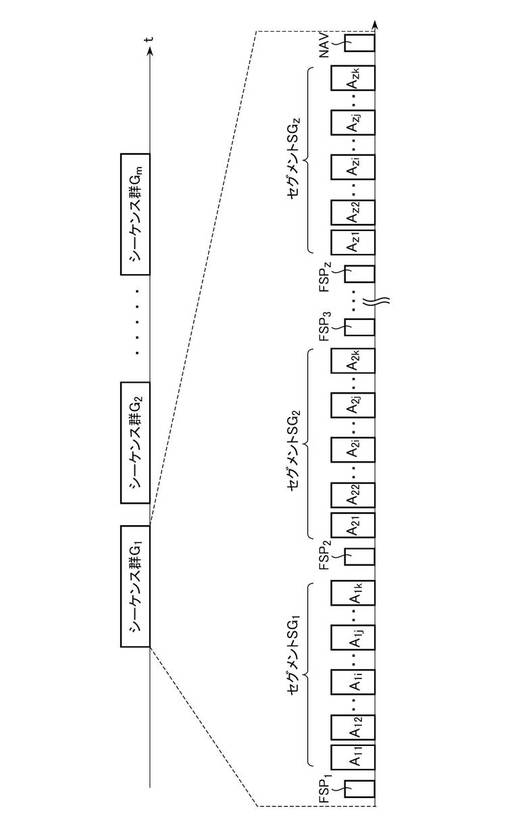
シーケンス群G1は、2つの脂肪抑制パルスFSP1およびFSP2と、2つのセグメントSG1およびSG2と、ナビゲータシーケンスNAVとを有している。セグメントSG1は、イメージングシーケンスA11〜A1kを有しており、セグメントSG2は、イメージングシーケンスA21〜A2kを有している。1つ目の脂肪抑制パルスFSP1は、イメージングシーケンスA11の前に設けられており、2つ目の脂肪抑制パルスFSP2は、イメージングシーケンスA1kとA21との間に設けられている。
【0049】
セグメントSG1のイメージングシーケンスA11〜A1kによって収集されるデータは、データ非収集領域Rnonに隣接する側の位置P11から、データ非収集領域Rnonを離れる方向Daに並ぶように、ky=ky1のライン上に配置される。ただし、セグメントSG1は、ky=ky1のライン上において、kz座標値が奇数となる位置のデータを収集する。
【0050】
例えば、1回目〜i回目のイメージングシーケンスA11〜A1iによって収集されるデータは、データ非収集領域Rnonに隣接する側の位置P11から、データ収集領域Racq内の位置P1iに向かって、kz座標値が奇数となる位置に配置される。また、j回目以降(j回目〜k回目)のイメージングシーケンスA1j〜A1kによって収集されるデータは、データ収集領域Racq内の位置P1jから、データ非収集領域Rnonとは反対側の位置P1kに向かって、kz座標値が奇数となる位置に配置される。
【0051】
一方、セグメントSG2のイメージングシーケンスA21〜A2kによって収集されるデータは、データ非収集領域Rnonに隣接する側の位置P21から、データ非収集領域Rnonを離れる方向Daに並ぶように、ky=ky1のライン上に配置される。ただし、セグメントSG2は、ky=ky1のライン上において、kz座標値が偶数となる位置のデータを収集する。
【0052】
例えば、1回目〜i回目のイメージングシーケンスA21〜A2iによって収集されるデータは、データ非収集領域Rnonに隣接する側の位置P21から、データ収集領域Racq内の位置P2iに向かって、kz座標値が偶数となる位置に配置される。また、j回目以降(j回目〜k回目)のイメージングシーケンスA2j〜A2kによって収集されるデータは、データ収集領域Racqの位置P2jから、データ非収集領域Rnonとは反対側の位置P2kに向かって、kz座標値が偶数となる位置に配置される。
【0053】
その他のシーケンス群G2〜Gmも、シーケンス群G1と同様に、2つの脂肪抑制パルスFSP1およびFSP2と、2つのセグメントSG1およびSG2と、ナビゲータシーケンスNAVとを有しており、ky=ky2〜kymのライン上のデータを収集する。
次に、第4の形態におけるイメージングシーケンスのフリップ角について説明する。
【0054】
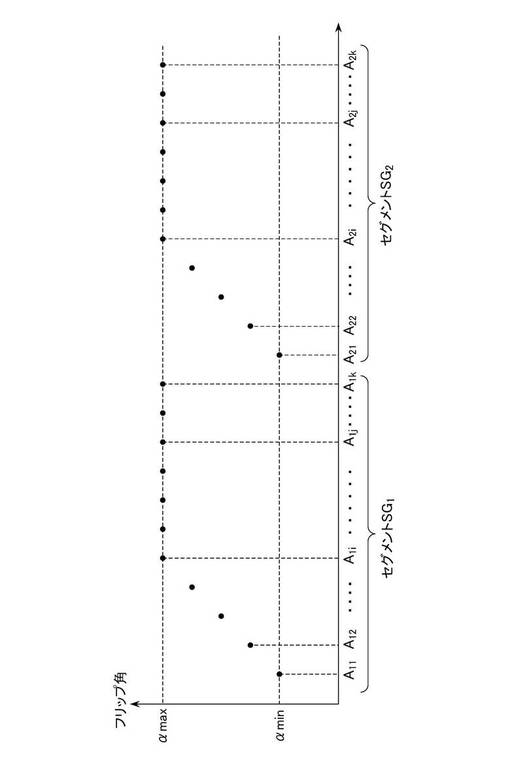
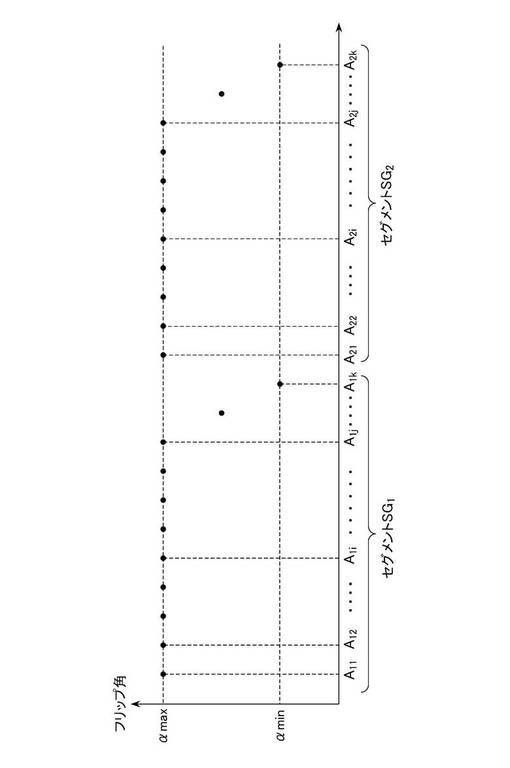
図12は、フリップ角の説明図である。
図12のグラフの横軸は、1つ目のセグメントSG1のイメージングシーケンスA11〜A1kと、2つ目のセグメントSG2のイメージングシーケンスA21〜A2kとを表している。グラフの縦軸は、各イメージングシーケンスのRFパルスPαのフリップ角を表している。
【0055】
1つ目のセグメントSG1では、1回目〜i回目に実行されるイメージングシーケンスA11〜A1iのRFパルスPαのフリップ角は、αminから次第に増加しながらαmaxに到達するように設定されており、i回目〜k回目に実行されるイメージングシーケンスA1i〜A1kのRFパルスPαは、同じフリップ角αmaxに設定されている。
【0056】
また、2つ目のセグメントSG2でも、1つ目のセグメントSG1と同様に、1回目〜i回目に実行されるイメージングシーケンスA21〜A2iのRFパルスPαのフリップ角は、αminから次第に増加しながらαmaxに到達するように設定されており、i回目〜k回目に実行されるイメージングシーケンスA2i〜A2kのRFパルスPαは、同じフリップ角αmaxに設定されている。
【0057】
1つ目のセグメントSG1と2つ目のセグメントSG2とのフリップ角を図12に示すように設定することにより、セグメントSG1で得られた信号強度と、セグメントSG2で得られた信号強度との差を小さくすることができるので、アーチファクトを更に低減することができる。
【0058】
また、第4の形態では、1つのシーケンス群に2つの脂肪抑制パルスFSP1およびFSP2が備えられている。このように脂肪抑制パルスを2つ備えることによって、1つ目の脂肪抑制パルスFSP1の脂肪抑制効果が途中で得られなくなっても、2つ目の脂肪抑制パルスFSP2の脂肪抑制効果によって、1つのシーケンス群を実行している間に渡って、脂肪抑制効果を維持することができる。
【0059】
また、第4の形態では、1つ目のセグメントSG1によってkz座標値が奇数となる位置のデータを先に収集し、次に、2つ目のセグメントSG2によってkz座標値が偶数となる位置のデータを収集している。しかし、別の収集方法(例えば、kz座標値が偶数となる位置のデータを先に収集し、次に、kz座標値が奇数となる位置のデータを収集する方法)で収集してもよい。更に、第4の形態では、ナビゲータシーケンスNAVを備えているが、呼吸同期法で撮影をする必要がない場合は、ナビゲータシーケンスNAVは備えなくてもよい。
【0060】
尚、最初のセグメントSG1では、1回目〜i回目のイメージングシーケンスA11〜A1iのフリップ角が次第に増加するように設定されており、次のセグメントSG2では、1回目〜i回目のイメージングシーケンスA21〜A2iのフリップ角が次第に増加するように設定されている。ここで、セグメントSG1およびSG2におけるiの値は、同じ値に設定することができる。例えば、最初のセグメントSG1においてi=5とし、次のセグメントSG2でもi=5とすることができる。この場合、セグメントSG1では、1回目〜5回目のイメージングシーケンスA11〜A15のフリップ角が次第に増加し、次のセグメントSG2では、1回目〜5回目のイメージングシーケンスA21〜A25のフリップ角が次第に増加する。
【0061】
一方、セグメントSG1およびSG2におけるiの値は、異なる値に設定してもよい。例えば、最初のセグメントSG1においてi=5とし、次のセグメントSG2においてi=6としてもよい。この場合、セグメントSG1では、1回目〜5回目のイメージングシーケンスA11〜A15のフリップ角が次第に増加し、次のセグメントSG2では、1回目〜6回目のイメージングシーケンスA21〜A26のフリップ角が次第に増加する。
【0062】
(5)第5の形態
第5の形態は、第4の形態と比較すると、シーケンス群のフリップ角が異なるが、その他の点は第4の形態と同じである。したがって、第5の形態の説明に当たっては、シーケンス群のフリップ角について主に説明する。
【0063】
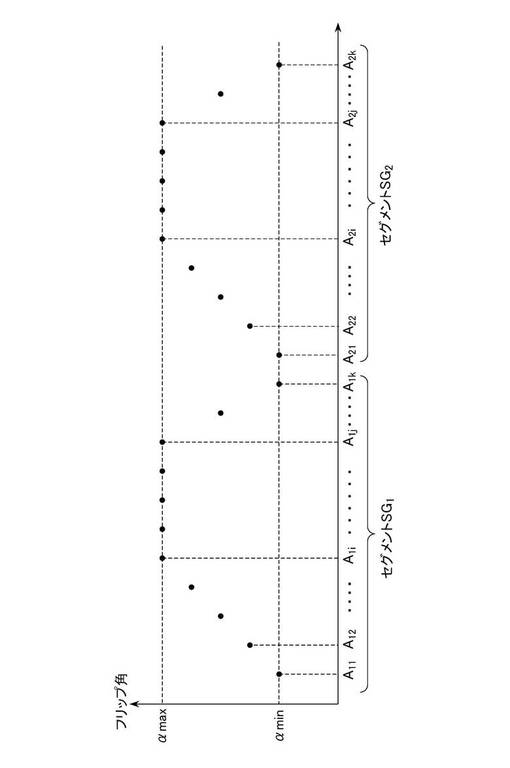
図13は、フリップ角の説明図である。
1つ目のセグメントSG1では、1回目〜i回目に実行されるイメージングシーケンスA11〜A1iのRFパルスPαのフリップ角は、αminから次第に増加しながらαmaxに到達しており、i回目〜j回目に実行されるイメージングシーケンスA1i〜A1jのRFパルスPαは、同じフリップ角αmaxに設定されている。ここまでは、第4の形態と同じである。しかし、第5の形態では、j番目以降(j番目〜k番目)に実行されるイメージングシーケンスA1j〜A1kのRFパルスPαのフリップ角は、αmaxから次第に減少するように設定されている。
2つ目のセグメントSG2も、1つ目のセグメントSG1と同様に、フリップ角が増減している。
【0064】
第5の形態では、RFパルスPαのフリップ角を次第に増加させながらαmaxに到達させた後、フリップ角をαmaxに保持し、途中からフリップ角を次第に減少させている。このように、RFパルスPαのフリップ角を次第に増加させるだけでなく、途中から次第に減少させことによって、アーチファクトを更に低減することができる。アーチファクトが更に低減できることを検証するため、図13のフリップ角を有するパルスシーケンスを用いて点関数を受信したときの点関数の広がりを表す点広がり関数(Point Spread Function)のシミュレーションを行った。シミュレーション条件は、以下の通りである。
(1)フリップ角の最大値αmax=30°
(2)フリップ角の最小値αmin=15°
(3)セグメントSG1のイメージングシーケンスA11〜A1kの数:11個
(4)セグメントSG2のイメージングシーケンスA21〜A2kの数:11個
【0065】
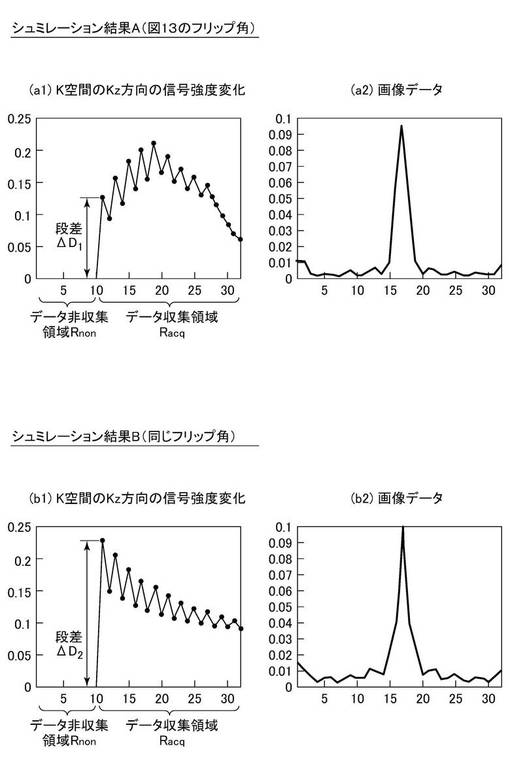
図14は、シミュレーション結果を示す図である。
図14には、2つのシミュレーション結果AおよびBが示されている。シミュレーション結果Aは、イメージングシーケンスA11〜A2kのフリップ角を図13に示すフリップ角に設定したときのシミュレーション結果である。一方、シミュレーション結果Bは、シミュレーション結果Aと比較するためのものであり、イメージングシーケンスA11〜A2kのフリップ角を同じ値αmax=30°に設定したときのシミュレーション結果である。
【0066】
シミュレーション結果AおよびBの左側のグラフ(a1)および(b1)は、k空間のkz方向の信号強度変化を示す図であり、右側のグラフ(a2)および(b2)は、画像データを示す図である。
【0067】
グラフ(a1)の信号強度変化と、グラフ(b1)の信号強度変化とを比較すると、グラフ(a1)における信号強度の段差ΔD1は、グラフ(b1)における信号強度の段差ΔD2よりも小さくなっている。また、グラフ(a2)の画像データとグラフ(b2)の画像データとを比較すると、グラフ(a2)の画像データは、グラフ(b2)の画像データよりも、ピークの両側のデータ値が抑制されている。したがって、イメージングシーケンスA11〜A2kのフリップ角を図13に示すフリップ角に設定することによって、アーチファクトを低減できることがわかる。
【0068】
第5の形態では、第4の形態と同様に、最初のセグメントSG1において、1回目〜i回目のイメージングシーケンスA11〜A1iのフリップ角が次第に増加するように設定されており、次のセグメントSG2において、1回目〜i回目のイメージングシーケンスA21〜A2iのフリップ角が次第に増加するように設定されている。第5の形態でも、セグメントSG1およびSG2におけるiの値は、同じ値でもよいし、異なる値でもよい。
【0069】
尚、第5の形態では、最初のセグメントSG1において、j回目以降(j回目〜k回目)のイメージングシーケンスA1j〜A1kのフリップ角が次第に減少するように設定されており、次のセグメントSG2において、j回目以降(j回目〜k回目)のイメージングシーケンスA2j〜A2kのフリップ角が次第に減少するように設定されている。ここで、最初のセグメントSG1におけるjの値は、次のセグメントSG2におけるjの値と同じ値に設定することができる。例えば、最初のセグメントSG1においてj=9とし、次のセグメントSG2でもj=9とすることができる。この場合、セグメントSG1では、9回目〜k回目のイメージングシーケンスA19〜A1kのフリップ角が次第に減少し、次のセグメントSG2でも、9回目〜k回目のイメージングシーケンスA29〜A2kのフリップ角が次第に減少する。
【0070】
一方、セグメントSG1およびSG2におけるjの値は、異なる値に設定してもよい。例えば、最初のセグメントSG1においてj=9とし、次のセグメントSG2においてj=8としてもよい。この場合、セグメントSG1では、9回目〜k回目のイメージングシーケンスA19〜A1kのフリップ角が次第に減少し、次のセグメントSG2では、8回目〜k回目のイメージングシーケンスA28〜A2kのフリップ角が次第に減少すする。
【0071】
(6)第6の形態
第6の形態は、第5の形態と比較すると、シーケンス群のフリップ角が異なるが、その他の点は第5の形態と同じである。したがって、第6の形態の説明に当たっては、シーケンス群のフリップ角について主に説明する。
【0072】
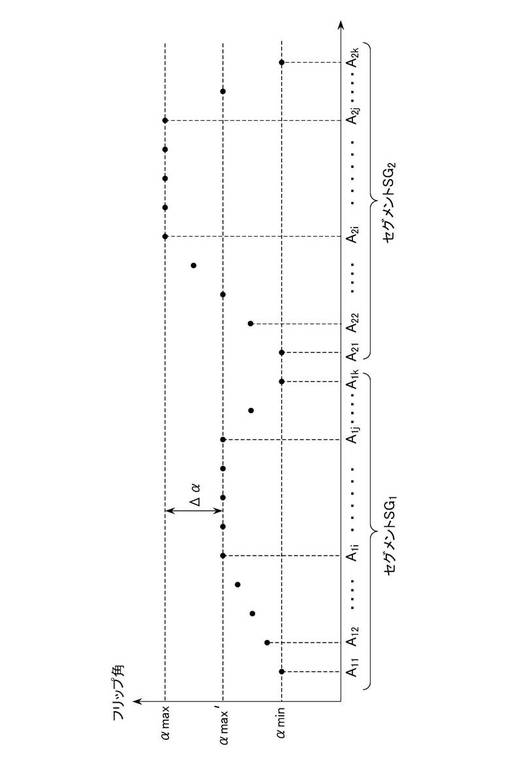
図15は、フリップ角の説明図である。
第6の形態では、セグメントSG1のイメージングシーケンスA1i〜A1jのフリップ角αmax′を、セグメントSG2のイメージングシーケンスA2i〜A2jのフリップ角αmaxよりもΔαだけ小さくしている。
【0073】
このようにフリップ角を小さくすることによって、kz方向の隣り合う信号強度の段差を小さくすることができる。このことを検証するため、図15に示すフリップ角のパルスシーケンスを用いて点関数を受信したときのシミュレーションを行った。シミュレーション条件は、αmax′=25°であり、その他の条件は、第5の形態のシミュレーション条件と同じである。
【0074】
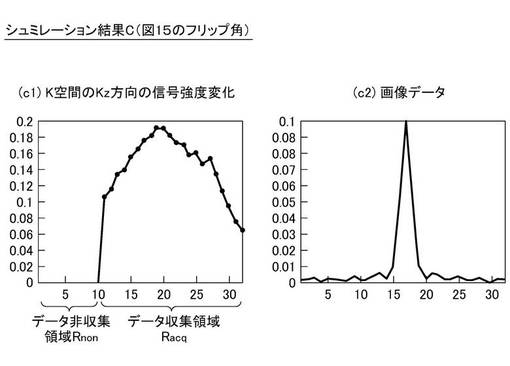
図16は、シミュレーション結果を示す図である。
図16には、イメージングシーケンスA11〜A2kのフリップ角を図15に示すフリップ角に設定したときのシミュレーション結果Cが示されている。シミュレーション結果Cの左側のグラフ(c1)は、k空間のkz方向の信号強度変化を示す図であり、右側のグラフ(c2)は画像データを示す図である。
【0075】
図16のグラフ(c1)の信号強度変化と、図14のグラフ(a1)の信号強度変化とを比較すると、図16のグラフ(c1)は、図14のグラフ(a1)よりも、kz方向に隣接する信号強度の差が小さくなっている。また、図16のグラフ(c2)の画像データと、図14のグラフ(a2)の画像データとを比較すると、図16のグラフ(c2)の画像データは、図14のグラフ(a2)の画像データよりも、FOVの端でのゴーストが抑えられている。したがって、イメージングシーケンスA11〜A2kのフリップ角を図15に示すフリップ角に設定することによって、アーチファクトを更に低減できることがわかる。
【0076】
(7)第7の形態
第4〜第6の形態では、1つのシーケンス群が2つのセグメントSG1およびSG2を有する例について説明したが、第7の形態では、セグメントの数を一般化して、1つのシーケンス群にz個のセグメントを含んでいる場合について説明する。
【0077】
図17は、第7の形態におけるシーケンス群を示す図である。
第7の形態では、1つのシーケンス群は、z個の脂肪抑制パルスFSP1〜FSPzと、z個のセグメントSG1〜SGzと、ナビゲータシーケンスNAVとを有している。
【0078】
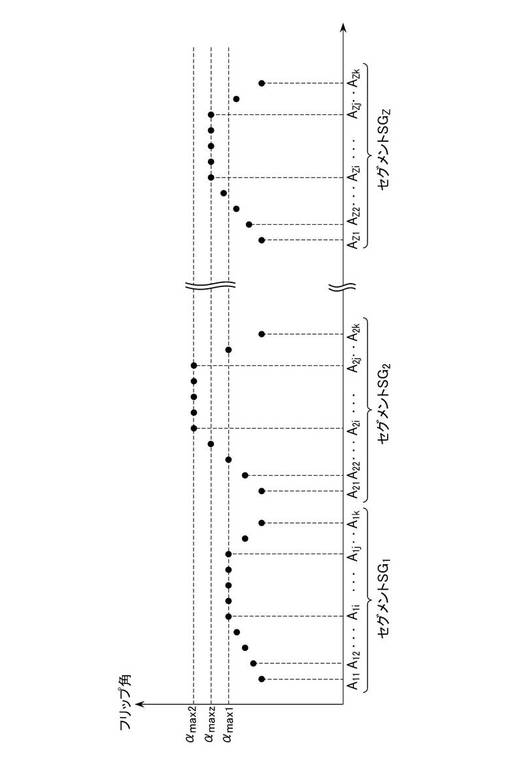
図18は、第7の形態におけるフリップ角を示す図である。
各セグメントSG1〜SGzのフリップ角は、1回目〜i回目のイメージングシーケンスのフリップ角が次第に増加するように設定されており、j回目以降(j回目〜k回目)のイメージングシーケンスのフリップ角が次第に小さくなるように設定されている。また、第7の形態では、セグメントSG1〜SGzのうちの3つ以上のセグメントのフリップ角の最大値が、互いに異なる値に設定されている。図18では、セグメントSG1、SG2、およびSGzのフリップ角の最大値αmax1、αmax2、およびαmaxzが、互いに異なる値に設定されている例が示されている。このように、フリップ角の最大値を異なる値に設定することによって、kz方向の隣り合う信号強度の段差を更に小さくすることができるので、アーチファクトを更に低減することができる。
【0079】
尚、各セグメントSG1〜SGzには、k個のイメージングシーケンスが含まれているが、各セグメントSG1〜SGzのkの値は、同じ値でもよいし、異なる値でもよい。
【0080】
(8)第8の形態
第8の形態では、第1〜第7の形態とは別の収集順序でデータを収集する場合について説明する。
【0081】
図19は、第8の形態におけるスキャンの説明図である。
第8の形態では、シーケンス群G1〜Gmを含むスキャンが実行される。
【0082】
シーケンス群G1は、脂肪抑制パルスFSP1と、イメージングシーケンスA1〜Anとを有している。その他のシーケンス群G2〜Gmも、シーケンス群G1と同様に、脂肪抑制パルスFSP1と、イメージングシーケンスA1〜Anとを有している。
【0083】
k空間は、データが収集されないデータ非収集領域Rnonと、データが収集されるデータ収集領域Racqとに分けられている。シーケンス群G1のイメージングシーケンスA1〜Anよって収集されるデータは、データ非収集領域Rnonとは反対側の位置P11から、データ非収集領域Rnonに近づく方向Dbに並ぶように、ky=ky1のライン上に配置される。例えば、1回目〜i回目のイメージングシーケンスA1〜Aiによって収集されるデータは、データ非収集領域Rnonとは反対側の位置P11から、データ収集領域Racq内の位置P1iに向かって並ぶように配置される。また、j回目以降(j回目〜n回目)のイメージングシーケンスAj〜Anによって収集されるデータは、データ収集領域Racqの位置P1jから、データ非収集領域Rnonに隣接する側の位置P1nに向かって並ぶように配置される。
【0084】
以下同様に、他のシーケンスG2〜Gmにおいて収集されたデータは、それぞれ、データ非収集領域Rnonとは反対側の位置P21〜Pm1から、データ非収集領域Rnonに近づく方向Dbに並ぶように、ky=ky2〜kymのライン上に配置される。
次に、第8の形態におけるイメージングシーケンスのフリップ角について説明する。
【0085】
図20は、フリップ角の説明図である。
第8の形態では、1番目〜j番目のイメージングシーケンスA1〜AjのRFパルスPαは、同じフリップ角αmax(例えば、αmax=30°)に設定されている。しかし、j番目以降(j番目〜n番目)のイメージングシーケンスAj〜AnにおけるRFパルスPαのフリップ角は、αmaxから次第に減少するように設定されている。
【0086】
図20に示すように、途中からフリップ角を次第に減少させることによって、データ収集領域Racqとデータ非収集領域Rnonとの信号強度の段差を減少させることができる。
【0087】
尚、シーケンス群は、脂肪抑制パルスFSP1を有しているが、脂肪抑制をする必要がない場合は、脂肪抑制パルスFSP1は備えなくてもよい。また、呼吸同期法で撮影する場合は、ナビゲータシーケンスNAVを設ければよい。
【0088】
第8の形態では、フリップ角は図20に示すように設定されているが、図10に示すように設定してもよい。図10のフリップ角により、アーチファクトを更に低減することができる。
【0089】
(9)第9の形態
第9の形態では、シーケンス群が2つのセグメントに分けられている場合について説明する。
【0090】
図21は、第9の形態におけるスキャンの説明図である。
第9の形態では、シーケンス群G1〜Gmを含むスキャンが実行される。
【0091】
シーケンス群G1は、2つの脂肪抑制パルスFSP1およびFSP2と、2つのセグメントSG1およびSG2と、ナビゲータシーケンスNAVとを有している。セグメントSG1は、イメージングシーケンスA11〜A1kを有しており、セグメントSG2は、イメージングシーケンスA21〜A2kを有している。1つ目の脂肪抑制パルスFSP1は、イメージングシーケンスA11の前に設けられており、2つ目の脂肪抑制パルスFSP2は、イメージングシーケンスA1kとA21との間に設けられている。
【0092】
セグメントSG1のイメージングシーケンスA11〜A1kによって収集されるデータは、データ非収集領域Rnonとは反対側の位置P11から、データ非収集領域Rnonに近づく方向Dbに並ぶように、ky=ky1のライン上に配置される。ただし、セグメントSG1は、ky=ky1のライン上において、kz座標値が奇数となる位置のデータを収集する。
【0093】
例えば、1回目〜i回目のイメージングシーケンスA11〜A1iによって収集されるデータは、データ非収集領域Rnonとは反対側の位置P11から、データ収集領域Racq内の位置P1iに向かって、kz座標値が奇数となる位置に配置される。また、j回目以降(j回目〜k回目)のイメージングシーケンスA1j〜A1kによって収集されるデータは、データ収集領域Racq内の位置P1jから、データ非収集領域Rnonに隣接する側の位置P1kに向かって、kz座標値が奇数となる位置に配置される。
【0094】
一方、セグメントSG2のイメージングシーケンスA21〜A2kによって収集されるデータは、データ非収集領域Rnonとは反対側の位置P21から、データ非収集領域Rnonに近づく方向Dbに並ぶように、ky=ky1のライン上に配置される。ただし、セグメントSG2は、ky=ky1のライン上において、kz座標値が偶数となる位置のデータを収集する。
【0095】
例えば、1回目〜i回目のイメージングシーケンスA21〜A2iによって収集されるデータは、データ非収集領域Rnonとは反対側の位置P21から、データ収集領域Racq内の位置P2iに向かって、kz座標値が偶数となる位置に配置される。また、j回目以降(j回目〜k回目)のイメージングシーケンスA2j〜A2kによって収集されるデータは、データ収集領域Racq内の位置P2jから、データ非収集領域Rnonに隣接する側の位置P2kに向かって、kz座標値が偶数となる位置に配置される。
【0096】
その他のシーケンス群G2〜Gmも、シーケンス群G1と同様に、2つの脂肪抑制パルスFSP1およびFSP2と、2つのセグメントSG1およびSG2と、ナビゲータシーケンスNAVとを有しており、ky=ky2〜kymのライン上のデータを収集する。
次に、第9の形態におけるイメージングシーケンスのフリップ角について説明する。
【0097】
図22は、フリップ角の説明図である。
図22のグラフの横軸は、1つ目のセグメントSG1のイメージングシーケンスA11〜A1kと、2つ目のセグメントSG2のイメージングシーケンスA21〜A2kとを表している。グラフの縦軸は、各イメージングシーケンスのRFパルスPαのフリップ角を表している。
【0098】
1つ目のセグメントSG1では、1回目〜j回目のイメージングシーケンスA11〜A1jのRFパルスPαのフリップ角は、同じフリップ角αmaxに設定されている。しかし、j回目以降のイメージングシーケンスA1j〜A1kのRFパルスPαは、αmaxから次第に減少するように設定されている。
【0099】
また、2つ目のセグメントSG2でも、1つ目のセグメントSG1と同様に、1回目〜j回目のイメージングシーケンスA21〜A2jのRFパルスPαのフリップ角は、同じフリップ角αmaxに設定されているが、j回目以降のイメージングシーケンスA1j〜A1kのRFパルスPαは、αmaxから次第に減少するように設定されている。
【0100】
1つ目のセグメントSG1と2つ目のセグメントSG2とのフリップ角を図22に示すように設定することにより、セグメントSG1で得られた信号強度と、セグメントSG2で得られた信号強度との差を小さくすることができるので、アーチファクトを更に低減することができる。
【0101】
また、第9の形態では、ナビゲータシーケンスNAVを備えているが、呼吸同期法で撮影をする必要がない場合は、ナビゲータシーケンスNAVは備えなくてもよい。
【0102】
尚、第9の形態では、フリップ角は図22に示すように設定されているが、図13に示すように設定してもよい。図13のフリップ角により、アーチファクトを更に低減することができる。
【0103】
更に、図17に示すように、1つのシーケンス群をz個のセグメントSG1〜SGzに分け、図18に示すように、フリップ角を設定してもよい。
【符号の説明】
【0104】
2 マグネット
3 テーブル
3a クレードル
5 シーケンサ
6 送信器
7 勾配磁場電源
8 受信器
9 中央処理装置
10 操作部
11 表示部
12 被検体
100 MR装置
【技術分野】
【0001】
本発明は、k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、データ収集領域に配置されるデータを取得する磁気共鳴装置に関する。
【背景技術】
【0002】
撮影の高速化を図る方法として、k空間の一部の領域のデータのみを収集する方法が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−042245号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
また、k空間のkz方向のデータを部分的に収集するパーシャルkzが知られている。しかし、パーシャルkzによりデータを収集した場合、k空間のデータが収集されない領域と、データが収集される領域との間に、大きな信号強度の段差が生じやすく、アーチファクトの原因となる。したがって、信号強度の段差ができるだけ小さくなるように、データを収集することが望まれている。
【課題を解決するための手段】
【0005】
本発明の第1の態様は、k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスのうちの1回目〜i回目のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置から、前記データ非収集領域を離れる方向に並ぶように、前記データ収集領域に配置され、
前記1回目〜i回目のイメージングシーケンスのRFパルスのフリップ角が次第に増加するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置である。
【0006】
本発明の第2の態様は、k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスは、複数のセグメントに分割されており、
各セグメントの1回目〜i回目のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置から、前記データ非収集領域を離れる方向に並ぶように、前記データ収集領域に配置され、
前記1回目〜i回目のイメージングシーケンスのRFパルスのフリップ角が次第に増加するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置である。
【0007】
本発明の第3の態様は、k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスのうちのj回目(j>1)以降のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置に向かって並ぶように、前記データ収集領域に配置され、
前記j回目以降のイメージングシーケンスのRFパルスのフリップ角が次第に減少するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置である。
【0008】
本発明の第4の態様は、k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスは、複数のセグメントに分割されており、
各セグメントのj回目(j>1)以降のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置に向かって並ぶように、前記データ収集領域に配置され、
前記j回目以降のイメージングシーケンスのRFパルスのフリップ角が次第に減少するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置である。
【発明の効果】
【0009】
フリップ角が次第に増加又は減少するように、スキャンを実行することにより、k空間のデータ収集領域とデータ非収集領域との間に生じる信号強度の段差を小さくすることができ、アーチファクトを低減することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第1の形態の磁気共鳴装置の概略図である。
【図2】被検体12を撮影するときに実行されるスキャンの説明図である。
【図3】被検体12の撮影領域を概略的に示す図である。
【図4】3Dグラディエントエコー法を用いたイメージングシーケンスを示す図である。
【図5】フリップ角の説明図である。
【図6】全てのイメージングシーケンスA1〜Anのフリップ角を同じ値αmaxに設定したときの図である。
【図7】イメージングシーケンスA1〜Anのフリップ角を図5に示すように設定したときのk空間のkz方向の信号強度の変化と、イメージングシーケンスA1〜Anのフリップ角を図6に示すように設定したときのk空間のkz方向の信号強度の変化との違いを概略的に示すグラフである。
【図8】第2の形態におけるスキャンを示す図である。
【図9】被検体の撮影領域を概略的に示す図である。
【図10】第3の形態におけるシーケンス群のフリップ角の説明図である。
【図11】第4の形態におけるスキャンの説明図である。
【図12】第4の形態におけるフリップ角の説明図である。
【図13】第5の形態におけるフリップ角の説明図である。
【図14】シミュレーション結果を示す図である。
【図15】第6の形態におけるフリップ角の説明図である。
【図16】シミュレーション結果を示す図である。
【図17】第7の形態におけるシーケンス群を示す図である。
【図18】第7の形態におけるフリップ角の説明図である。
【図19】第8の形態におけるスキャンの説明図である。
【図20】第8の形態におけるフリップ角の説明図である。
【図21】第9の形態におけるスキャンの説明図である。
【図22】第9の形態におけるフリップ角の説明図である。
【発明を実施するための形態】
【0011】
以下、発明を実施するための形態を説明するが、本発明は、以下の形態に限定されることはない。
【0012】
(1)第1の形態
図1は、本発明の第1の形態の磁気共鳴装置の概略図である。
磁気共鳴装置(以下、「MR装置」と呼ぶ。MR:Magnetic Resonance)100は、マグネット2、テーブル3、受信コイル4などを有している。
【0013】
マグネット2は、被検体12が収容されるボア21、超伝導コイル22、勾配コイル23、送信コイル24などを有している。超伝導コイル22は静磁場を印加し、勾配コイル23は勾配磁場を印加し、送信コイル24はRFパルスを送信する。尚、超伝導コイル22の代わりに、永久磁石を用いてもよい。
【0014】
テーブル3は、被検体12を支持するためのクレードル3aを有している。クレードル3aがボア21に移動することによって、被検体12がボアに搬入される。
受信コイル4は被検体12の腹部に取り付けられている。
【0015】
MR装置100は、更に、シーケンサ5、送信器6、勾配磁場電源7、受信器8、中央処理装置9、操作部10、および表示部11を有している。
【0016】
シーケンサ5は、中央処理装置9の制御を受けて、パルスシーケンスを実行するための情報を送信器6および勾配磁場電源7に送る。
【0017】
送信器6は、RFコイル24に信号を供給する。
勾配磁場電源7は、勾配コイル23に信号を供給する。
【0018】
受信器8は、受信コイル4で受信された磁気共鳴信号を信号処理し、中央処理装置9に出力する。
【0019】
中央処理装置9は、シーケンサ5および表示部11に必要な情報を伝送したり、受信器8から受け取ったデータに基づいて画像を再構成するなど、MR装置100の各種の動作を実現するように、MR装置100の各部の動作を制御する。中央処理装置9は、例えばコンピュータ(computer)によって構成される。
【0020】
操作部10は、オペレータにより操作され、種々の情報を中央処理装置9に入力する。表示部11は種々の情報を表示する。
【0021】
MR装置100は、上記のように構成されている。尚、マグネット2、シーケンサ5、送信器6、勾配磁場電源7、受信器8を合わせたものが、スキャン手段に相当する。
【0022】
図2は、被検体12を撮影するときに実行されるスキャンの説明図、図3は、被検体12の撮影領域を概略的に示す図である。
【0023】
第1の形態では、被検体12の肝臓を含む領域を、撮影領域Rim(図3参照)としている。撮影領域Rimの画像データを取得するために、図2に示すように、シーケンス群G1〜Gmを含むスキャンが実行される。
【0024】
シーケンス群G1は、脂肪抑制パルスFSP1と、イメージングシーケンスA1〜Anとを有している。イメージングシーケンスA1〜Anの各々は、被検体12の肝臓を含む撮影領域Rimの画像データを取得するためのシーケンスである。イメージングシーケンスA1〜Anは繰り返し時間TRごとに実行される。
【0025】
その他のシーケンス群G2〜Gmも、シーケンス群G1と同様に、脂肪抑制パルスFSP1と、イメージングシーケンスA1〜Anとを有している。シーケンス群G1〜Gmを実行することによって、撮影領域Rimの画像データを取得するために必要なk空間のデータが収集される。
【0026】
尚、第1の形態では、k空間は、データが収集されないデータ非収集領域Rnonと、データが収集されるデータ収集領域Racqとに分けられている。シーケンス群G1のイメージングシーケンスA1〜Anよって収集されるデータは、データ非収集領域Rnonに隣接する側の位置P11から、データ非収集領域Rnonを離れる方向Daに並ぶように、ky=ky1のライン上に配置される。例えば、1回目〜i回目のイメージングシーケンスA1〜Aiによって収集されるデータは、データ非収集領域Rnonに隣接する側の位置P11から、データ収集領域Racq内の位置P1iに向かって並ぶように配置される。また、j回目以降(j回目〜n回目)のイメージングシーケンスAj〜Anによって収集されるデータは、データ収集領域Racqの位置P1jから、データ非収集領域Rnonとは反対側の位置P1nに向かって並ぶように配置される。
【0027】
以下同様に、他のシーケンスG2〜Gmにおいて収集されたデータは、それぞれ、データ非収集領域Rnonに隣接する側の位置P21〜Pm1から、データ非収集領域Rnonを離れる方向Daに並ぶように、ky=ky2〜kymのライン上に配置される。
【0028】
次に、イメージングシーケンスA1〜Anについて説明する。図4に、イメージングシーケンスA1〜Anの一例として、3Dグラディエントエコー法を用いたイメージングシーケンスが示されている。各シーケンス群G1〜Gmでは、図4に示すイメージングシーケンスが、繰り返し時間TRごとに、繰り返し実行されている。ただし、第1の形態では、イメージングシーケンスA1〜AnのRFパルスPαのフリップ角は同じ値ではなく、イメージングシーケンスA1〜Aiについては、RFパルスPαのフリップ角が次第に増加するように設定されている。以下に、第1の形態におけるRFパルスPαのフリップ角について説明する。
【0029】
図5は、フリップ角の説明図である。
図5のグラフの横軸は、イメージングシーケンスA1〜Anを表しており、グラフの縦軸は、各イメージングシーケンスA1〜AnのRFパルスPαのフリップ角を表している。
【0030】
i回目〜n回目に実行されるイメージングシーケンスAi〜AnのRFパルスPαは、同じフリップ角αmax(例えば、αmax=30°)に設定されている。しかし、1回目〜i回目に実行されるイメージングシーケンスA1〜AiのRFパルスPαのフリップ角は、次第に増加しながら、αmaxに到達している。図5に示すようにフリップ角を設定することによって、全てのイメージングシーケンスA1〜Anのフリップ角を同じ値αmaxに設定する場合(図6参照)と比較して、アーチファクトを低減できるという効果がある。以下に、この効果が得られる理由について、図7を参照しながら説明する。
【0031】
図7は、イメージングシーケンスA1〜Anのフリップ角を図5に示すように設定したときのk空間のkz方向の信号強度の変化と、イメージングシーケンスA1〜Anのフリップ角を図6に示すように設定したときのk空間のkz方向の信号強度の変化との違いを概略的に示すグラフである。
【0032】
図7には、ky=ky1におけるkz方向の信号強度の変化を示しているが、ky=ky2〜kymにおけるkz方向の信号強度の変化も、図7と同様のグラフで示される。
【0033】
イメージングシーケンスA1〜Anの全てのフリップ角を同じ値αmaxに設定した場合(図6のフリップ角の場合)、イメージングシーケンスA1で取得された磁気共鳴信号の信号強度が最大となり、信号強度は次第に小さくなる。したがって、k空間のデータ非収集領域Rnonとデータ収集領域Racqとの間に、信号強度の大きな段差ΔD1が現れ、アーチファクトの原因となる。
【0034】
これに対し、イメージングシーケンスA1〜Aiのフリップ角を次第に増加させながらαmaxに到達させた場合(図5のフリップ角の場合)、イメージングシーケンスA1のフリップ角はαmaxよりも十分に小さい値になる。したがって、k空間のデータ非収集領域Rnonとデータ収集領域Racqとの間に現れる信号強度の段差ΔD2を、ΔD1よりも小さくすることができるので、アーチファクトを低減することができる。
【0035】
尚、第1の形態では、シーケンス群は、脂肪抑制パルスFSP1を有しているが、脂肪抑制をする必要がない場合は、脂肪抑制パルスFSP1は備えなくてもよい。
【0036】
また、上記の説明では、k空間のデータをシーケンシャルに収集する例について説明されているが、k空間の段差を小さくすることができるのであれば、別の収集順序であってもよい。
【0037】
(2)第2の形態
第2の形態は、第1の形態と比較すると、シーケンス群が異なるが、その他の点は第1の形態と同じである。したがって、第2の形態の説明に当たっては、シーケンス群について主に説明する。
【0038】
図8は第2の形態におけるスキャンを示す図、図9は被検体の撮影領域を概略的に示す図である。
【0039】
第2の形態では、最後のイメージングシーケンスAnの後に、ナビゲータシーケンスNAVが備えられている。尚、その他の点は、第1の形態(図2参照)と同じである。ナビゲータシーケンスNAVは、被検体の呼吸信号を検出するためのシーケンスであり、具体的には、横隔膜を含むナビゲータ領域Rnav(図3参照)から、横隔膜の位置を表すナビゲータデータを取得するためのシーケンスである。このように、ナビゲータシーケンスNAVを備えることによって、呼吸同期法で被検体を撮影することができる。
【0040】
尚、1つのシーケンス群には複数のイメージングシーケンスA1〜Anが含まれているので、イメージングシーケンスが実行されるたびに、RFパルスが送信される。したがって、撮影領域Rim内では、スピンの飽和効果によって、スピンの縦磁化が次第に小さくなる。そして、このように縦磁化が小さくなった後で、ナビゲータシーケンスNAVが実行される。しかし、ナビゲータシーケンスNAVにより励起されるナビゲータ領域Rnavは、撮影領域Rimに重なっているので、最後のイメージングシーケンスAnが終了した直後は、ナビゲータ領域Rnav内の磁化もかなり小さくなっている。したがって、イメージングシーケンスAnが終了して直ぐにナビゲータシーケンスNAVを実行すると、ナビゲータ領域Rnav内の磁化が小さいことが原因でナビゲータ信号が劣化してしまい、横隔膜の位置の検出精度が低下することがある。
【0041】
そこで、第2の形態では、最後のイメージングシーケンスAnと、ナビゲータシーケンスNAVとの間に、待ち時間TWを設けている。待ち時間TWを設けることによって、ナビゲータ領域Rnav内の磁化を回復させることができるので、ナビゲータ信号の劣化を抑制することができ、横隔膜の位置の検出精度を向上させることができる。待ち時間TWは、例えば、20msec程度とすることができる。尚、十分な検出精度が得られるのであれば、待ち時間TWを設けなくてもよい。
【0042】
(3)第3の形態
第3の形態は、第1の形態と比較すると、シーケンス群のフリップ角が異なるが、その他の点は第1の形態と同じである。したがって、第3の形態の説明に当たっては、シーケンス群のフリップ角について主に説明する。
【0043】
図10は、第3の形態におけるシーケンス群のフリップ角の説明図である。
第3の形態では、1番目〜i番目に実行されるイメージングシーケンスA1〜AiのRFパルスPαのフリップ角は、次第に増加しながら、αmaxに到達している。そして、i番目〜j番目に実行されるイメージングシーケンスAi〜AjのRFパルスPαは、同じフリップ角αmax(例えば、αmax=30°)に設定されている。ここまでは、第1の形態と同じである。しかし、第3の形態では、j番目以降(j番目〜n番目)に実行されるイメージングシーケンスAj〜AnのRFパルスPαのフリップ角は、αmaxから次第に減少するように設定されている。図10では、シーケンス群G1のフリップ角を説明したが、その他のシーケンス群G2〜Gmのフリップ角も、図10に示すフリップ角で表される。
【0044】
フリップ角を次第に増加させるだけでなく、途中からフリップ角を次第に減少させることによって、画像のアーチファクトを更に低減することができる。
【0045】
また、第3の形態でも、第1の形態と同様に、k空間のデータの収集順序はシーケンシャルに限られることはなく、別の収集方法で収集してもよい。更に、第2の形態と同様に、ナビゲータシーケンスNAVを設けてもよい(図8参照)。ナビゲータシーケンスNAVを設けた場合は、最後のイメージングシーケンスAnとナビゲータシーケンスNAVとの間に、待ち時間TWを設けることにより、ナビゲータ信号の劣化を抑制することができ、横隔膜の位置の検出精度を向上させることができる。
【0046】
(4)第4の形態
第4の形態は、第1の形態と比較すると、シーケンス群が異なるが、その他の点は第1の形態と同じである。したがって、第4形態の説明に当たっては、シーケンス群について主に説明する。
【0047】
図11は、第4の形態におけるスキャンの説明図である。
第4の形態では、シーケンス群G1〜Gmを含むスキャンが実行される。
【0048】
シーケンス群G1は、2つの脂肪抑制パルスFSP1およびFSP2と、2つのセグメントSG1およびSG2と、ナビゲータシーケンスNAVとを有している。セグメントSG1は、イメージングシーケンスA11〜A1kを有しており、セグメントSG2は、イメージングシーケンスA21〜A2kを有している。1つ目の脂肪抑制パルスFSP1は、イメージングシーケンスA11の前に設けられており、2つ目の脂肪抑制パルスFSP2は、イメージングシーケンスA1kとA21との間に設けられている。
【0049】
セグメントSG1のイメージングシーケンスA11〜A1kによって収集されるデータは、データ非収集領域Rnonに隣接する側の位置P11から、データ非収集領域Rnonを離れる方向Daに並ぶように、ky=ky1のライン上に配置される。ただし、セグメントSG1は、ky=ky1のライン上において、kz座標値が奇数となる位置のデータを収集する。
【0050】
例えば、1回目〜i回目のイメージングシーケンスA11〜A1iによって収集されるデータは、データ非収集領域Rnonに隣接する側の位置P11から、データ収集領域Racq内の位置P1iに向かって、kz座標値が奇数となる位置に配置される。また、j回目以降(j回目〜k回目)のイメージングシーケンスA1j〜A1kによって収集されるデータは、データ収集領域Racq内の位置P1jから、データ非収集領域Rnonとは反対側の位置P1kに向かって、kz座標値が奇数となる位置に配置される。
【0051】
一方、セグメントSG2のイメージングシーケンスA21〜A2kによって収集されるデータは、データ非収集領域Rnonに隣接する側の位置P21から、データ非収集領域Rnonを離れる方向Daに並ぶように、ky=ky1のライン上に配置される。ただし、セグメントSG2は、ky=ky1のライン上において、kz座標値が偶数となる位置のデータを収集する。
【0052】
例えば、1回目〜i回目のイメージングシーケンスA21〜A2iによって収集されるデータは、データ非収集領域Rnonに隣接する側の位置P21から、データ収集領域Racq内の位置P2iに向かって、kz座標値が偶数となる位置に配置される。また、j回目以降(j回目〜k回目)のイメージングシーケンスA2j〜A2kによって収集されるデータは、データ収集領域Racqの位置P2jから、データ非収集領域Rnonとは反対側の位置P2kに向かって、kz座標値が偶数となる位置に配置される。
【0053】
その他のシーケンス群G2〜Gmも、シーケンス群G1と同様に、2つの脂肪抑制パルスFSP1およびFSP2と、2つのセグメントSG1およびSG2と、ナビゲータシーケンスNAVとを有しており、ky=ky2〜kymのライン上のデータを収集する。
次に、第4の形態におけるイメージングシーケンスのフリップ角について説明する。
【0054】
図12は、フリップ角の説明図である。
図12のグラフの横軸は、1つ目のセグメントSG1のイメージングシーケンスA11〜A1kと、2つ目のセグメントSG2のイメージングシーケンスA21〜A2kとを表している。グラフの縦軸は、各イメージングシーケンスのRFパルスPαのフリップ角を表している。
【0055】
1つ目のセグメントSG1では、1回目〜i回目に実行されるイメージングシーケンスA11〜A1iのRFパルスPαのフリップ角は、αminから次第に増加しながらαmaxに到達するように設定されており、i回目〜k回目に実行されるイメージングシーケンスA1i〜A1kのRFパルスPαは、同じフリップ角αmaxに設定されている。
【0056】
また、2つ目のセグメントSG2でも、1つ目のセグメントSG1と同様に、1回目〜i回目に実行されるイメージングシーケンスA21〜A2iのRFパルスPαのフリップ角は、αminから次第に増加しながらαmaxに到達するように設定されており、i回目〜k回目に実行されるイメージングシーケンスA2i〜A2kのRFパルスPαは、同じフリップ角αmaxに設定されている。
【0057】
1つ目のセグメントSG1と2つ目のセグメントSG2とのフリップ角を図12に示すように設定することにより、セグメントSG1で得られた信号強度と、セグメントSG2で得られた信号強度との差を小さくすることができるので、アーチファクトを更に低減することができる。
【0058】
また、第4の形態では、1つのシーケンス群に2つの脂肪抑制パルスFSP1およびFSP2が備えられている。このように脂肪抑制パルスを2つ備えることによって、1つ目の脂肪抑制パルスFSP1の脂肪抑制効果が途中で得られなくなっても、2つ目の脂肪抑制パルスFSP2の脂肪抑制効果によって、1つのシーケンス群を実行している間に渡って、脂肪抑制効果を維持することができる。
【0059】
また、第4の形態では、1つ目のセグメントSG1によってkz座標値が奇数となる位置のデータを先に収集し、次に、2つ目のセグメントSG2によってkz座標値が偶数となる位置のデータを収集している。しかし、別の収集方法(例えば、kz座標値が偶数となる位置のデータを先に収集し、次に、kz座標値が奇数となる位置のデータを収集する方法)で収集してもよい。更に、第4の形態では、ナビゲータシーケンスNAVを備えているが、呼吸同期法で撮影をする必要がない場合は、ナビゲータシーケンスNAVは備えなくてもよい。
【0060】
尚、最初のセグメントSG1では、1回目〜i回目のイメージングシーケンスA11〜A1iのフリップ角が次第に増加するように設定されており、次のセグメントSG2では、1回目〜i回目のイメージングシーケンスA21〜A2iのフリップ角が次第に増加するように設定されている。ここで、セグメントSG1およびSG2におけるiの値は、同じ値に設定することができる。例えば、最初のセグメントSG1においてi=5とし、次のセグメントSG2でもi=5とすることができる。この場合、セグメントSG1では、1回目〜5回目のイメージングシーケンスA11〜A15のフリップ角が次第に増加し、次のセグメントSG2では、1回目〜5回目のイメージングシーケンスA21〜A25のフリップ角が次第に増加する。
【0061】
一方、セグメントSG1およびSG2におけるiの値は、異なる値に設定してもよい。例えば、最初のセグメントSG1においてi=5とし、次のセグメントSG2においてi=6としてもよい。この場合、セグメントSG1では、1回目〜5回目のイメージングシーケンスA11〜A15のフリップ角が次第に増加し、次のセグメントSG2では、1回目〜6回目のイメージングシーケンスA21〜A26のフリップ角が次第に増加する。
【0062】
(5)第5の形態
第5の形態は、第4の形態と比較すると、シーケンス群のフリップ角が異なるが、その他の点は第4の形態と同じである。したがって、第5の形態の説明に当たっては、シーケンス群のフリップ角について主に説明する。
【0063】
図13は、フリップ角の説明図である。
1つ目のセグメントSG1では、1回目〜i回目に実行されるイメージングシーケンスA11〜A1iのRFパルスPαのフリップ角は、αminから次第に増加しながらαmaxに到達しており、i回目〜j回目に実行されるイメージングシーケンスA1i〜A1jのRFパルスPαは、同じフリップ角αmaxに設定されている。ここまでは、第4の形態と同じである。しかし、第5の形態では、j番目以降(j番目〜k番目)に実行されるイメージングシーケンスA1j〜A1kのRFパルスPαのフリップ角は、αmaxから次第に減少するように設定されている。
2つ目のセグメントSG2も、1つ目のセグメントSG1と同様に、フリップ角が増減している。
【0064】
第5の形態では、RFパルスPαのフリップ角を次第に増加させながらαmaxに到達させた後、フリップ角をαmaxに保持し、途中からフリップ角を次第に減少させている。このように、RFパルスPαのフリップ角を次第に増加させるだけでなく、途中から次第に減少させことによって、アーチファクトを更に低減することができる。アーチファクトが更に低減できることを検証するため、図13のフリップ角を有するパルスシーケンスを用いて点関数を受信したときの点関数の広がりを表す点広がり関数(Point Spread Function)のシミュレーションを行った。シミュレーション条件は、以下の通りである。
(1)フリップ角の最大値αmax=30°
(2)フリップ角の最小値αmin=15°
(3)セグメントSG1のイメージングシーケンスA11〜A1kの数:11個
(4)セグメントSG2のイメージングシーケンスA21〜A2kの数:11個
【0065】
図14は、シミュレーション結果を示す図である。
図14には、2つのシミュレーション結果AおよびBが示されている。シミュレーション結果Aは、イメージングシーケンスA11〜A2kのフリップ角を図13に示すフリップ角に設定したときのシミュレーション結果である。一方、シミュレーション結果Bは、シミュレーション結果Aと比較するためのものであり、イメージングシーケンスA11〜A2kのフリップ角を同じ値αmax=30°に設定したときのシミュレーション結果である。
【0066】
シミュレーション結果AおよびBの左側のグラフ(a1)および(b1)は、k空間のkz方向の信号強度変化を示す図であり、右側のグラフ(a2)および(b2)は、画像データを示す図である。
【0067】
グラフ(a1)の信号強度変化と、グラフ(b1)の信号強度変化とを比較すると、グラフ(a1)における信号強度の段差ΔD1は、グラフ(b1)における信号強度の段差ΔD2よりも小さくなっている。また、グラフ(a2)の画像データとグラフ(b2)の画像データとを比較すると、グラフ(a2)の画像データは、グラフ(b2)の画像データよりも、ピークの両側のデータ値が抑制されている。したがって、イメージングシーケンスA11〜A2kのフリップ角を図13に示すフリップ角に設定することによって、アーチファクトを低減できることがわかる。
【0068】
第5の形態では、第4の形態と同様に、最初のセグメントSG1において、1回目〜i回目のイメージングシーケンスA11〜A1iのフリップ角が次第に増加するように設定されており、次のセグメントSG2において、1回目〜i回目のイメージングシーケンスA21〜A2iのフリップ角が次第に増加するように設定されている。第5の形態でも、セグメントSG1およびSG2におけるiの値は、同じ値でもよいし、異なる値でもよい。
【0069】
尚、第5の形態では、最初のセグメントSG1において、j回目以降(j回目〜k回目)のイメージングシーケンスA1j〜A1kのフリップ角が次第に減少するように設定されており、次のセグメントSG2において、j回目以降(j回目〜k回目)のイメージングシーケンスA2j〜A2kのフリップ角が次第に減少するように設定されている。ここで、最初のセグメントSG1におけるjの値は、次のセグメントSG2におけるjの値と同じ値に設定することができる。例えば、最初のセグメントSG1においてj=9とし、次のセグメントSG2でもj=9とすることができる。この場合、セグメントSG1では、9回目〜k回目のイメージングシーケンスA19〜A1kのフリップ角が次第に減少し、次のセグメントSG2でも、9回目〜k回目のイメージングシーケンスA29〜A2kのフリップ角が次第に減少する。
【0070】
一方、セグメントSG1およびSG2におけるjの値は、異なる値に設定してもよい。例えば、最初のセグメントSG1においてj=9とし、次のセグメントSG2においてj=8としてもよい。この場合、セグメントSG1では、9回目〜k回目のイメージングシーケンスA19〜A1kのフリップ角が次第に減少し、次のセグメントSG2では、8回目〜k回目のイメージングシーケンスA28〜A2kのフリップ角が次第に減少すする。
【0071】
(6)第6の形態
第6の形態は、第5の形態と比較すると、シーケンス群のフリップ角が異なるが、その他の点は第5の形態と同じである。したがって、第6の形態の説明に当たっては、シーケンス群のフリップ角について主に説明する。
【0072】
図15は、フリップ角の説明図である。
第6の形態では、セグメントSG1のイメージングシーケンスA1i〜A1jのフリップ角αmax′を、セグメントSG2のイメージングシーケンスA2i〜A2jのフリップ角αmaxよりもΔαだけ小さくしている。
【0073】
このようにフリップ角を小さくすることによって、kz方向の隣り合う信号強度の段差を小さくすることができる。このことを検証するため、図15に示すフリップ角のパルスシーケンスを用いて点関数を受信したときのシミュレーションを行った。シミュレーション条件は、αmax′=25°であり、その他の条件は、第5の形態のシミュレーション条件と同じである。
【0074】
図16は、シミュレーション結果を示す図である。
図16には、イメージングシーケンスA11〜A2kのフリップ角を図15に示すフリップ角に設定したときのシミュレーション結果Cが示されている。シミュレーション結果Cの左側のグラフ(c1)は、k空間のkz方向の信号強度変化を示す図であり、右側のグラフ(c2)は画像データを示す図である。
【0075】
図16のグラフ(c1)の信号強度変化と、図14のグラフ(a1)の信号強度変化とを比較すると、図16のグラフ(c1)は、図14のグラフ(a1)よりも、kz方向に隣接する信号強度の差が小さくなっている。また、図16のグラフ(c2)の画像データと、図14のグラフ(a2)の画像データとを比較すると、図16のグラフ(c2)の画像データは、図14のグラフ(a2)の画像データよりも、FOVの端でのゴーストが抑えられている。したがって、イメージングシーケンスA11〜A2kのフリップ角を図15に示すフリップ角に設定することによって、アーチファクトを更に低減できることがわかる。
【0076】
(7)第7の形態
第4〜第6の形態では、1つのシーケンス群が2つのセグメントSG1およびSG2を有する例について説明したが、第7の形態では、セグメントの数を一般化して、1つのシーケンス群にz個のセグメントを含んでいる場合について説明する。
【0077】
図17は、第7の形態におけるシーケンス群を示す図である。
第7の形態では、1つのシーケンス群は、z個の脂肪抑制パルスFSP1〜FSPzと、z個のセグメントSG1〜SGzと、ナビゲータシーケンスNAVとを有している。
【0078】
図18は、第7の形態におけるフリップ角を示す図である。
各セグメントSG1〜SGzのフリップ角は、1回目〜i回目のイメージングシーケンスのフリップ角が次第に増加するように設定されており、j回目以降(j回目〜k回目)のイメージングシーケンスのフリップ角が次第に小さくなるように設定されている。また、第7の形態では、セグメントSG1〜SGzのうちの3つ以上のセグメントのフリップ角の最大値が、互いに異なる値に設定されている。図18では、セグメントSG1、SG2、およびSGzのフリップ角の最大値αmax1、αmax2、およびαmaxzが、互いに異なる値に設定されている例が示されている。このように、フリップ角の最大値を異なる値に設定することによって、kz方向の隣り合う信号強度の段差を更に小さくすることができるので、アーチファクトを更に低減することができる。
【0079】
尚、各セグメントSG1〜SGzには、k個のイメージングシーケンスが含まれているが、各セグメントSG1〜SGzのkの値は、同じ値でもよいし、異なる値でもよい。
【0080】
(8)第8の形態
第8の形態では、第1〜第7の形態とは別の収集順序でデータを収集する場合について説明する。
【0081】
図19は、第8の形態におけるスキャンの説明図である。
第8の形態では、シーケンス群G1〜Gmを含むスキャンが実行される。
【0082】
シーケンス群G1は、脂肪抑制パルスFSP1と、イメージングシーケンスA1〜Anとを有している。その他のシーケンス群G2〜Gmも、シーケンス群G1と同様に、脂肪抑制パルスFSP1と、イメージングシーケンスA1〜Anとを有している。
【0083】
k空間は、データが収集されないデータ非収集領域Rnonと、データが収集されるデータ収集領域Racqとに分けられている。シーケンス群G1のイメージングシーケンスA1〜Anよって収集されるデータは、データ非収集領域Rnonとは反対側の位置P11から、データ非収集領域Rnonに近づく方向Dbに並ぶように、ky=ky1のライン上に配置される。例えば、1回目〜i回目のイメージングシーケンスA1〜Aiによって収集されるデータは、データ非収集領域Rnonとは反対側の位置P11から、データ収集領域Racq内の位置P1iに向かって並ぶように配置される。また、j回目以降(j回目〜n回目)のイメージングシーケンスAj〜Anによって収集されるデータは、データ収集領域Racqの位置P1jから、データ非収集領域Rnonに隣接する側の位置P1nに向かって並ぶように配置される。
【0084】
以下同様に、他のシーケンスG2〜Gmにおいて収集されたデータは、それぞれ、データ非収集領域Rnonとは反対側の位置P21〜Pm1から、データ非収集領域Rnonに近づく方向Dbに並ぶように、ky=ky2〜kymのライン上に配置される。
次に、第8の形態におけるイメージングシーケンスのフリップ角について説明する。
【0085】
図20は、フリップ角の説明図である。
第8の形態では、1番目〜j番目のイメージングシーケンスA1〜AjのRFパルスPαは、同じフリップ角αmax(例えば、αmax=30°)に設定されている。しかし、j番目以降(j番目〜n番目)のイメージングシーケンスAj〜AnにおけるRFパルスPαのフリップ角は、αmaxから次第に減少するように設定されている。
【0086】
図20に示すように、途中からフリップ角を次第に減少させることによって、データ収集領域Racqとデータ非収集領域Rnonとの信号強度の段差を減少させることができる。
【0087】
尚、シーケンス群は、脂肪抑制パルスFSP1を有しているが、脂肪抑制をする必要がない場合は、脂肪抑制パルスFSP1は備えなくてもよい。また、呼吸同期法で撮影する場合は、ナビゲータシーケンスNAVを設ければよい。
【0088】
第8の形態では、フリップ角は図20に示すように設定されているが、図10に示すように設定してもよい。図10のフリップ角により、アーチファクトを更に低減することができる。
【0089】
(9)第9の形態
第9の形態では、シーケンス群が2つのセグメントに分けられている場合について説明する。
【0090】
図21は、第9の形態におけるスキャンの説明図である。
第9の形態では、シーケンス群G1〜Gmを含むスキャンが実行される。
【0091】
シーケンス群G1は、2つの脂肪抑制パルスFSP1およびFSP2と、2つのセグメントSG1およびSG2と、ナビゲータシーケンスNAVとを有している。セグメントSG1は、イメージングシーケンスA11〜A1kを有しており、セグメントSG2は、イメージングシーケンスA21〜A2kを有している。1つ目の脂肪抑制パルスFSP1は、イメージングシーケンスA11の前に設けられており、2つ目の脂肪抑制パルスFSP2は、イメージングシーケンスA1kとA21との間に設けられている。
【0092】
セグメントSG1のイメージングシーケンスA11〜A1kによって収集されるデータは、データ非収集領域Rnonとは反対側の位置P11から、データ非収集領域Rnonに近づく方向Dbに並ぶように、ky=ky1のライン上に配置される。ただし、セグメントSG1は、ky=ky1のライン上において、kz座標値が奇数となる位置のデータを収集する。
【0093】
例えば、1回目〜i回目のイメージングシーケンスA11〜A1iによって収集されるデータは、データ非収集領域Rnonとは反対側の位置P11から、データ収集領域Racq内の位置P1iに向かって、kz座標値が奇数となる位置に配置される。また、j回目以降(j回目〜k回目)のイメージングシーケンスA1j〜A1kによって収集されるデータは、データ収集領域Racq内の位置P1jから、データ非収集領域Rnonに隣接する側の位置P1kに向かって、kz座標値が奇数となる位置に配置される。
【0094】
一方、セグメントSG2のイメージングシーケンスA21〜A2kによって収集されるデータは、データ非収集領域Rnonとは反対側の位置P21から、データ非収集領域Rnonに近づく方向Dbに並ぶように、ky=ky1のライン上に配置される。ただし、セグメントSG2は、ky=ky1のライン上において、kz座標値が偶数となる位置のデータを収集する。
【0095】
例えば、1回目〜i回目のイメージングシーケンスA21〜A2iによって収集されるデータは、データ非収集領域Rnonとは反対側の位置P21から、データ収集領域Racq内の位置P2iに向かって、kz座標値が偶数となる位置に配置される。また、j回目以降(j回目〜k回目)のイメージングシーケンスA2j〜A2kによって収集されるデータは、データ収集領域Racq内の位置P2jから、データ非収集領域Rnonに隣接する側の位置P2kに向かって、kz座標値が偶数となる位置に配置される。
【0096】
その他のシーケンス群G2〜Gmも、シーケンス群G1と同様に、2つの脂肪抑制パルスFSP1およびFSP2と、2つのセグメントSG1およびSG2と、ナビゲータシーケンスNAVとを有しており、ky=ky2〜kymのライン上のデータを収集する。
次に、第9の形態におけるイメージングシーケンスのフリップ角について説明する。
【0097】
図22は、フリップ角の説明図である。
図22のグラフの横軸は、1つ目のセグメントSG1のイメージングシーケンスA11〜A1kと、2つ目のセグメントSG2のイメージングシーケンスA21〜A2kとを表している。グラフの縦軸は、各イメージングシーケンスのRFパルスPαのフリップ角を表している。
【0098】
1つ目のセグメントSG1では、1回目〜j回目のイメージングシーケンスA11〜A1jのRFパルスPαのフリップ角は、同じフリップ角αmaxに設定されている。しかし、j回目以降のイメージングシーケンスA1j〜A1kのRFパルスPαは、αmaxから次第に減少するように設定されている。
【0099】
また、2つ目のセグメントSG2でも、1つ目のセグメントSG1と同様に、1回目〜j回目のイメージングシーケンスA21〜A2jのRFパルスPαのフリップ角は、同じフリップ角αmaxに設定されているが、j回目以降のイメージングシーケンスA1j〜A1kのRFパルスPαは、αmaxから次第に減少するように設定されている。
【0100】
1つ目のセグメントSG1と2つ目のセグメントSG2とのフリップ角を図22に示すように設定することにより、セグメントSG1で得られた信号強度と、セグメントSG2で得られた信号強度との差を小さくすることができるので、アーチファクトを更に低減することができる。
【0101】
また、第9の形態では、ナビゲータシーケンスNAVを備えているが、呼吸同期法で撮影をする必要がない場合は、ナビゲータシーケンスNAVは備えなくてもよい。
【0102】
尚、第9の形態では、フリップ角は図22に示すように設定されているが、図13に示すように設定してもよい。図13のフリップ角により、アーチファクトを更に低減することができる。
【0103】
更に、図17に示すように、1つのシーケンス群をz個のセグメントSG1〜SGzに分け、図18に示すように、フリップ角を設定してもよい。
【符号の説明】
【0104】
2 マグネット
3 テーブル
3a クレードル
5 シーケンサ
6 送信器
7 勾配磁場電源
8 受信器
9 中央処理装置
10 操作部
11 表示部
12 被検体
100 MR装置
【特許請求の範囲】
【請求項1】
k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスのうちの1回目〜i回目のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置から、前記データ非収集領域を離れる方向に並ぶように、前記データ収集領域に配置され、
前記1回目〜i回目のイメージングシーケンスのRFパルスのフリップ角が次第に増加するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置。
【請求項2】
前記k空間は、前記データ収集領域と前記データ非収集領域とを横切るラインを有し、
前記1回目〜i回目のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置から、前記データ非収集領域を離れる方向に並ぶように、前記ライン上に配置される、請求項1に記載の磁気共鳴装置。
【請求項3】
前記複数回のイメージングシーケンスのうちのj回目以降(j>i)のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域とは反対側の位置に向かって並ぶように、前記ライン上に配置され、
前記スキャン手段は、
前記j回目以降のイメージングシーケンスのRFパルスのフリップ角が次第に減少するように、前記スキャンを実行する、請求項2に記載の磁気共鳴装置。
【請求項4】
前記シーケンス群は、前記被検体の呼吸信号を検出するためのナビゲータシーケンスを有する、請求項1〜3のうちのいずれか一項に記載の磁気共鳴装置。
【請求項5】
前記ナビゲータシーケンスは、前記複数回のイメージングシーケンスが実行された後に、待ち時間を設けて実行される、請求項4に記載の磁気共鳴装置。
【請求項6】
k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスは、複数のセグメントに分割されており、
各セグメントの1回目〜i回目のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置から、前記データ非収集領域を離れる方向に並ぶように、前記データ収集領域に配置され、
前記1回目〜i回目のイメージングシーケンスのRFパルスのフリップ角が次第に増加するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置。
【請求項7】
前記複数のセグメントのうちの少なくとも2つ以上のセグメントの前記iの値は、互いに異なる値である、請求項6に記載の磁気共鳴装置。
【請求項8】
前記k空間は、前記データ収集領域と前記データ非収集領域とを横切るラインを有し、
前記各セグメントの1回目〜i回目のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置から、前記データ非収集領域を離れる方向に並ぶように、前記ライン上に配置される、請求項6又は7に記載の磁気共鳴装置。
【請求項9】
前記各セグメントのj回目以降(j>i)のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域とは反対側の位置に向かって並ぶように、前記ライン上に配置され、
前記スキャン手段は、
前記j回目以降のイメージングシーケンスのRFパルスのフリップ角が次第に減少するように、前記スキャンを実行する、請求項8に記載の磁気共鳴装置。
【請求項10】
前記複数のセグメントのうちの少なくとも2つ以上のセグメントの前記jの値は、互いに異なる値である、請求項9に記載の磁気共鳴装置。
【請求項11】
前記シーケンス群は、前記被検体の呼吸信号を検出するためのナビゲータシーケンスを有する、請求項6〜10のうちのいずれか一項に記載の磁気共鳴装置。
【請求項12】
前記ナビゲータシーケンスは、前記複数回のイメージングシーケンスが実行された後に、待ち時間を設けて実行される、請求項11に記載の磁気共鳴装置。
【請求項13】
前記複数のセグメントのうちの少なくとも2つ以上のセグメントのフリップ角の最大値は、互いに異なる値である、請求項6〜12のうちのいずれか一項に記載の磁気共鳴装置。
【請求項14】
k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスのうちのj回目(j>1)以降のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置に向かって並ぶように、前記データ収集領域に配置され、
前記j回目以降のイメージングシーケンスのRFパルスのフリップ角が次第に減少するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置。
【請求項15】
前記k空間は、前記データ収集領域と前記データ非収集領域とを横切るラインを有し、
前記j回目以降のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置に向かって並ぶように、前記ライン上に配置される、請求項14に記載の磁気共鳴装置。
【請求項16】
前記複数回のイメージングシーケンスのうちの1回目〜i回目(i<j)のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域とは反対側の位置から、前記データ非収集領域に近づく方向に並ぶように、前記ライン上に配置され、
前記スキャン手段は、
前記1回目〜i回目に実行されるイメージングシーケンスのRFパルスのフリップ角が次第に増加するように、前記スキャンを実行する、請求項15に記載の磁気共鳴装置。
【請求項17】
前記シーケンス群は、前記被検体の呼吸信号を検出するためのナビゲータシーケンスを有する、請求項14〜16のうちのいずれか一項に記載の磁気共鳴装置。
【請求項18】
前記ナビゲータシーケンスは、前記複数回のイメージングシーケンスが実行された後に、待ち時間を設けて実行される、請求項17に記載の磁気共鳴装置。
【請求項19】
k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスは、複数のセグメントに分割されており、
各セグメントのj回目(j>1)以降のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置に向かって並ぶように、前記データ収集領域に配置され、
前記j回目以降のイメージングシーケンスのRFパルスのフリップ角が次第に減少するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置。
【請求項20】
前記複数のセグメントのうちの少なくとも2つ以上のセグメントの前記jの値は、互いに異なる値である、請求項19に記載の磁気共鳴装置。
【請求項21】
前記k空間は、前記データ収集領域と前記データ非収集領域とを横切るラインを有し、
前記各セグメントのj回目以降のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置に向かって並ぶように、前記ライン上に配置される、請求項19又は20に記載の磁気共鳴装置。
【請求項22】
前記各セグメントの1回目〜i回目(i<j)のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域とは反対側の位置から、前記データ非収集領域に近づく方向に並ぶように、前記ライン上に配置され、
前記スキャン手段は、
前記1回目〜i回目のイメージングシーケンスのRFパルスのフリップ角が次第に増加するように、前記各セグメントを実行する、請求項21に記載の磁気共鳴装置。
【請求項23】
前記複数のセグメントのうちの少なくとも2つ以上のセグメントの前記iの値は、互いに異なる値である、請求項22に記載の磁気共鳴装置。
【請求項24】
前記シーケンス群は、前記被検体の呼吸信号を検出するためのナビゲータシーケンスを有する、請求項19〜23のうちのいずれか一項に記載の磁気共鳴装置。
【請求項25】
前記ナビゲータシーケンスは、前記複数回のイメージングシーケンスが実行された後に、待ち時間を設けて実行される、請求項24に記載の磁気共鳴装置。
【請求項26】
前記複数のセグメントのうちの少なくとも2つ以上のセグメントのフリップ角の最大値は、互いに異なる値である、請求項19〜25のうちのいずれか一項に記載の磁気共鳴装置。
【請求項1】
k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスのうちの1回目〜i回目のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置から、前記データ非収集領域を離れる方向に並ぶように、前記データ収集領域に配置され、
前記1回目〜i回目のイメージングシーケンスのRFパルスのフリップ角が次第に増加するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置。
【請求項2】
前記k空間は、前記データ収集領域と前記データ非収集領域とを横切るラインを有し、
前記1回目〜i回目のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置から、前記データ非収集領域を離れる方向に並ぶように、前記ライン上に配置される、請求項1に記載の磁気共鳴装置。
【請求項3】
前記複数回のイメージングシーケンスのうちのj回目以降(j>i)のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域とは反対側の位置に向かって並ぶように、前記ライン上に配置され、
前記スキャン手段は、
前記j回目以降のイメージングシーケンスのRFパルスのフリップ角が次第に減少するように、前記スキャンを実行する、請求項2に記載の磁気共鳴装置。
【請求項4】
前記シーケンス群は、前記被検体の呼吸信号を検出するためのナビゲータシーケンスを有する、請求項1〜3のうちのいずれか一項に記載の磁気共鳴装置。
【請求項5】
前記ナビゲータシーケンスは、前記複数回のイメージングシーケンスが実行された後に、待ち時間を設けて実行される、請求項4に記載の磁気共鳴装置。
【請求項6】
k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスは、複数のセグメントに分割されており、
各セグメントの1回目〜i回目のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置から、前記データ非収集領域を離れる方向に並ぶように、前記データ収集領域に配置され、
前記1回目〜i回目のイメージングシーケンスのRFパルスのフリップ角が次第に増加するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置。
【請求項7】
前記複数のセグメントのうちの少なくとも2つ以上のセグメントの前記iの値は、互いに異なる値である、請求項6に記載の磁気共鳴装置。
【請求項8】
前記k空間は、前記データ収集領域と前記データ非収集領域とを横切るラインを有し、
前記各セグメントの1回目〜i回目のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置から、前記データ非収集領域を離れる方向に並ぶように、前記ライン上に配置される、請求項6又は7に記載の磁気共鳴装置。
【請求項9】
前記各セグメントのj回目以降(j>i)のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域とは反対側の位置に向かって並ぶように、前記ライン上に配置され、
前記スキャン手段は、
前記j回目以降のイメージングシーケンスのRFパルスのフリップ角が次第に減少するように、前記スキャンを実行する、請求項8に記載の磁気共鳴装置。
【請求項10】
前記複数のセグメントのうちの少なくとも2つ以上のセグメントの前記jの値は、互いに異なる値である、請求項9に記載の磁気共鳴装置。
【請求項11】
前記シーケンス群は、前記被検体の呼吸信号を検出するためのナビゲータシーケンスを有する、請求項6〜10のうちのいずれか一項に記載の磁気共鳴装置。
【請求項12】
前記ナビゲータシーケンスは、前記複数回のイメージングシーケンスが実行された後に、待ち時間を設けて実行される、請求項11に記載の磁気共鳴装置。
【請求項13】
前記複数のセグメントのうちの少なくとも2つ以上のセグメントのフリップ角の最大値は、互いに異なる値である、請求項6〜12のうちのいずれか一項に記載の磁気共鳴装置。
【請求項14】
k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスのうちのj回目(j>1)以降のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置に向かって並ぶように、前記データ収集領域に配置され、
前記j回目以降のイメージングシーケンスのRFパルスのフリップ角が次第に減少するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置。
【請求項15】
前記k空間は、前記データ収集領域と前記データ非収集領域とを横切るラインを有し、
前記j回目以降のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置に向かって並ぶように、前記ライン上に配置される、請求項14に記載の磁気共鳴装置。
【請求項16】
前記複数回のイメージングシーケンスのうちの1回目〜i回目(i<j)のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域とは反対側の位置から、前記データ非収集領域に近づく方向に並ぶように、前記ライン上に配置され、
前記スキャン手段は、
前記1回目〜i回目に実行されるイメージングシーケンスのRFパルスのフリップ角が次第に増加するように、前記スキャンを実行する、請求項15に記載の磁気共鳴装置。
【請求項17】
前記シーケンス群は、前記被検体の呼吸信号を検出するためのナビゲータシーケンスを有する、請求項14〜16のうちのいずれか一項に記載の磁気共鳴装置。
【請求項18】
前記ナビゲータシーケンスは、前記複数回のイメージングシーケンスが実行された後に、待ち時間を設けて実行される、請求項17に記載の磁気共鳴装置。
【請求項19】
k空間を、データが収集されるデータ収集領域と、データが収集されないデータ非収集領域とに分け、複数回のイメージングシーケンスが実行されるシーケンス群を含むスキャンを実行することにより、前記データ収集領域に配置されるデータを取得する磁気共鳴装置であって、
前記複数回のイメージングシーケンスは、複数のセグメントに分割されており、
各セグメントのj回目(j>1)以降のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置に向かって並ぶように、前記データ収集領域に配置され、
前記j回目以降のイメージングシーケンスのRFパルスのフリップ角が次第に減少するように、前記スキャンを実行するスキャン手段を有する、磁気共鳴装置。
【請求項20】
前記複数のセグメントのうちの少なくとも2つ以上のセグメントの前記jの値は、互いに異なる値である、請求項19に記載の磁気共鳴装置。
【請求項21】
前記k空間は、前記データ収集領域と前記データ非収集領域とを横切るラインを有し、
前記各セグメントのj回目以降のイメージングシーケンスによって収集されるデータは、前記データ収集領域内の位置から、前記データ収集領域のうちの前記データ非収集領域に隣接する側の位置に向かって並ぶように、前記ライン上に配置される、請求項19又は20に記載の磁気共鳴装置。
【請求項22】
前記各セグメントの1回目〜i回目(i<j)のイメージングシーケンスによって収集されるデータは、前記データ収集領域のうちの前記データ非収集領域とは反対側の位置から、前記データ非収集領域に近づく方向に並ぶように、前記ライン上に配置され、
前記スキャン手段は、
前記1回目〜i回目のイメージングシーケンスのRFパルスのフリップ角が次第に増加するように、前記各セグメントを実行する、請求項21に記載の磁気共鳴装置。
【請求項23】
前記複数のセグメントのうちの少なくとも2つ以上のセグメントの前記iの値は、互いに異なる値である、請求項22に記載の磁気共鳴装置。
【請求項24】
前記シーケンス群は、前記被検体の呼吸信号を検出するためのナビゲータシーケンスを有する、請求項19〜23のうちのいずれか一項に記載の磁気共鳴装置。
【請求項25】
前記ナビゲータシーケンスは、前記複数回のイメージングシーケンスが実行された後に、待ち時間を設けて実行される、請求項24に記載の磁気共鳴装置。
【請求項26】
前記複数のセグメントのうちの少なくとも2つ以上のセグメントのフリップ角の最大値は、互いに異なる値である、請求項19〜25のうちのいずれか一項に記載の磁気共鳴装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2013−111424(P2013−111424A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−263133(P2011−263133)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(300019238)ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー (1,125)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(300019238)ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー (1,125)
【Fターム(参考)】
[ Back to top ]