
磁気式近接センサ
【課題】検出対象と検出部の距離が遠い場合でも、検出対象と検出部のギャップが変動する場合でも検出対象と検出部の近接を高精度に検出する。
【解決手段】磁界発生部2は、検出部1と磁界発生部2とが相対的に移動する方向に並設され、それぞれの磁化方向が略平行で互いに反対方向を向くように配置された一対の磁石202a、202bからなり、一対の磁石202a、202bのそれぞれを通り、磁気センサ101が検出する磁界の方向が反転する一対の磁界反転面203a、203bを形成する磁界を発生し、磁気センサ101は移動する際に磁界反転面203a、203bの少なくとも一方を横切るものであり、判定部3は磁気センサ101の検出信号の出力レベルが磁界反転面203a、203bを検出するための基準信号のレベルより大きいときに所定レベルの近接検出信号を出力するコンパレータ301を備えた。
【解決手段】磁界発生部2は、検出部1と磁界発生部2とが相対的に移動する方向に並設され、それぞれの磁化方向が略平行で互いに反対方向を向くように配置された一対の磁石202a、202bからなり、一対の磁石202a、202bのそれぞれを通り、磁気センサ101が検出する磁界の方向が反転する一対の磁界反転面203a、203bを形成する磁界を発生し、磁気センサ101は移動する際に磁界反転面203a、203bの少なくとも一方を横切るものであり、判定部3は磁気センサ101の検出信号の出力レベルが磁界反転面203a、203bを検出するための基準信号のレベルより大きいときに所定レベルの近接検出信号を出力するコンパレータ301を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は磁石からなる磁界発生部と磁気センサからなる検出部とが相対的に移動する際に、磁気センサが検出する磁束密度の変化に基づいて磁界発生部と検出部との接近を検知する磁気式近接センサに関するものである。
【背景技術】
【0002】
磁気式近接センサは、工場でベルトコンベア上のワークが所定の位置に到達するのを検知する場合、あるいは、エレベータの階床への到達を検知する場合などに応用されるものが知られている。その位置検出精度は検出対象とセンサの距離によっても異なるが、一般的に数mmから数cmである。
【0003】
従来の磁気式近接センサは、特許文献1の図1に示されるように、磁石を設けた移動体とホール素子を設けた固定体からなり、検出対象である移動体の磁石が検出部であるホール素子の直上を通過する際に、ホール素子が感知する磁束密度の極性が反転する。ホール素子が感知する磁束密度に応じた検出信号と基準信号を比較して、両者が等しくなる位置を検出することで検出対象と検出部との接近を検知する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−329405号公報(第3頁、図1)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のように検出対象と検出部が互いに対向して配置されるタイプの磁気式近接センサでは、検出対象と検出部とのギャップが広くなると、検出部が受ける磁界強度が低下するためノイズによる出力変動を受けやすくなり、接近検知時における位置検出誤差を生じるので、検出位置精度が低下してしまうという問題点があった。
特許文献1の磁気式近接検出装置は、磁石の磁化方向の法線方向における磁束密度を検出し、磁界の極性が反転する位置における磁束密度に対応する検出電圧を基準信号と比較し、基準位置の検出を行うものである。しかし、磁石の性質上、磁化方向への磁界は強く発生するが、磁化方向と法線方向への磁界は弱いことから、検出対象と検出部のギャップが広くなると磁界強度が低くなってしまう。その結果、ホール素子の出力電圧が低くなり、ノイズが重畳すれば検出電圧に変動が生じるため、位置検出に誤差が生じてしまう課題があった。
【0006】
本発明は、上述のような課題を解決するためになされたもので、検出対象がある検出範囲内に入ったことを検知する磁気式近接センサの検出位置精度を向上することを目的とする。また、本発明は特に検出対象と検出部の距離が遠い場合であっても、また、検出対象と検出部のギャップが変動する場合であっても高い精度を確保することを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る磁気式近接センサは、磁石からなる磁界発生部と磁気センサからなる検出部とが相対的に移動する際に、磁気センサが検出する磁束密度の変化に基づいて磁界発生部と検出部との接近を検知する判定部を備えた磁気式近接センサにおいて、磁界発生部は磁界発生部と検出部とが相対的に移動する方向に並設され、それぞれの磁化方向が略平行で互いに反対方向を向くように配置された一対の磁石からなり、一対の磁石のそれぞれを通り、磁気センサが検出する磁界の方向が反転する一対の磁界反転面を形成する磁界を発生し、磁気センサは磁界発生部と検出部とが相対的に移動する際に上記磁界反転面の少なくとも一方を横切るものであり、判定部は磁気センサの検出信号と上記磁界反転面を検出するための基準信号とを比較し、検出信号の出力レベルが基準信号のレベルより大きいときに磁気センサが磁界反転面の間にあることを示す所定レベルの近接検出信号を出力するコンパレータを備えたことを特徴とするものである。
【発明の効果】
【0008】
この発明は、磁界発生部と検出部との接近を検知する判定部を備えた磁気式近接センサにおいて、磁界発生部は磁界発生部と検出部とが相対的に移動する方向に並設され、それぞれの磁化方向が略平行で互いに反対方向を向くように配置された一対の磁石からなり、一対の磁石のそれぞれを通り、磁気センサが検出する磁界の方向が反転する一対の磁界反転面を形成する磁界を発生し、磁気センサは磁界発生部と検出部とが相対的に移動する際に上記磁界反転面の少なくとも一方を横切るものであり、判定部は磁気センサの検出信号と上記磁界反転面を検出するための基準信号とを比較し、検出信号の出力レベルが基準信号のレベルより大きいときに磁気センサが磁界反転面の間にあることを示す所定レベルの近接検出信号を出力するコンパレータを備えるようにしたことにより、磁界発生部と検出部のギャップが広い領域でも強い磁界を得ることができるため、信号強度を高くすることができ、ノイズに対する信号の安定性を高めることができる。これにより、磁界発生部と検出部のギャップが広くなった場合でも、接近検知時の位置検出誤差を低減することができる。また、磁界の方向が反転する箇所が検知位置に対応するので、磁界発生部と検出部の間のギャップが変化しても、従来よりも検出信号レベルが高く、かつ、検出信号のゼロ点を検出する方式とすることができるため、接近検知時の位置検出誤差を極めて小さくすることができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態1による磁気式近接センサの構成図である。
【図2】本発明の実施の形態1による磁気式近接センサ動作時の磁力線の模式図である。
【図3】本発明の実施の形態1による磁気式近接センサ動作時の磁力線の模式図である。
【図4】本発明の実施の形態1による磁気式近接センサ動作時の磁力線の模式図である。
【図5】本発明の実施の形態1による磁気式近接センサ動作時の磁気センサを貫く磁束密度およびコンパレータ出力を示す図である。
【図6】本発明の実施の形態1による磁気式近接センサ動作時の磁気センサを貫く磁束密度を示す図である。
【図7】本発明の実施の形態1による磁気式近接センサ動作時の磁力線の模式図である。
【図8】本発明の実施の形態1による磁気式近接センサ動作時の磁力線の模式図である。
【図9】本発明の実施の形態2による磁気式近接センサの構成図である。
【図10】本発明の実施の形態2による磁気式近接センサ動作時の磁気センサを貫く磁束密度、コンパレータ出力、増幅器出力を示す図である。
【図11】本発明の実施の形態3による磁気式近接センサの構成図である。
【図12】本発明の実施の形態3による磁気式近接センサ動作時の磁気センサを貫く磁束密度、コンパレータ出力、増幅器出力、論理積演算回路出力を示す図である。
【図13】本発明の実施の形態3による磁気式近接センサ動作時の磁気センサを貫く磁束密度、コンパレータ出力、増幅器出力、論理積演算回路出力を示す図である。
【図14】本発明の実施の形態4による磁気式近接センサの構成図である。
【図15】本発明の実施の形態4による磁気式近接センサ動作時の磁気センサを貫く磁束密度、コンパレータ出力、増幅器出力を示す図である。
【図16】本発明の実施の形態5による磁気式近接センサの構成図である。
【図17】本発明の実施の形態6による磁気式近接センサの構成図である。
【発明を実施するための形態】
【0010】
実施の形態1.
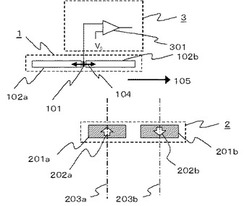
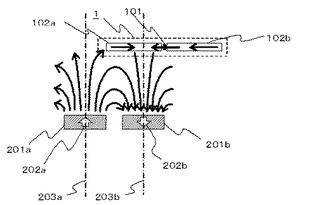
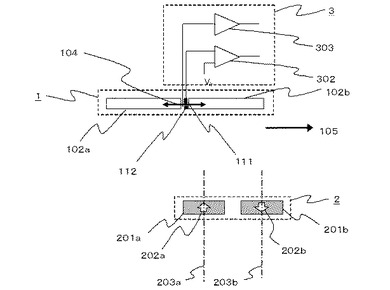
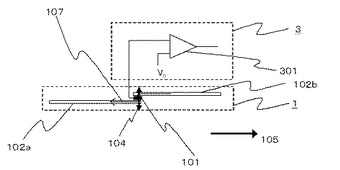
図1は本発明の実施の形態1による磁気式近接センサを示す構成図である。本発明による磁気式近接センサは検出部1、磁界発生部2および判定部3からなる。検出部1はホール素子などの磁気センサ101、磁気センサ101を挟みその両側に配置される2つの棒状または板状の形状をした、鉄などの軟磁性体102aおよび102bからなる。図1においては軟磁性体102aおよび102bとして棒状のものの例を示す。磁気センサ101の感磁方向は図1中の矢印104に示す方向である。軟磁性体102aおよび102bはその長手方向が磁気センサ101の感磁方向104に沿うように配置される。これは板状の軟磁性体である場合も同様であり、板状の軟磁性体の厚み方向が図1の感磁方向104と直交するように配置される。磁界発生部2は2つの磁石201aおよび201bからなる。検出部1と磁界発生部2は相対的に移動し、この相対的な移動の方向を図1において矢印105の方向で示す。
【0011】
なお、本実施の形態を含め、以下の各実施の形態においては説明の便宜のために、主として検出部1が移動する場合について述べるが、本発明においては検出部1と磁界発生部2とが相対的に移動をすればよく、検出部1または磁界発生部2が移動するものであっても、両者がともに移動するものであってもよい。
【0012】
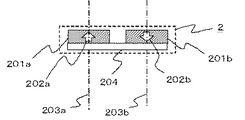
磁界発生部2における磁石201aおよび201bの磁化方向は、図1の白抜き矢印202aおよび202bに示す方向であり、磁気センサ101の感磁方向(矢印104が示す両方向)と、検出部1と磁界発生部2とが相対的に移動する方向(矢印105の方向)の両方に垂直であり、しかも2つの磁石201aと201bの磁化方向は互いに反対方向である。また、この2つの磁石201aと201bそれぞれの中心を通り磁化方向と平行で紙面に垂直な平面をそれぞれ203a、203bとする。図1は磁気センサ101の感磁方向104が平面203a、203bに垂直な場合について示す。
判定部3は磁気センサ101の出力と基準電圧とを入力信号とするコンパレータ301から構成される。
【0013】
次に動作について説明する。
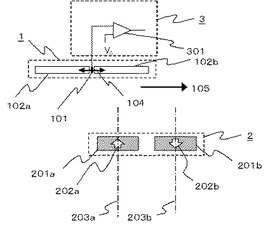
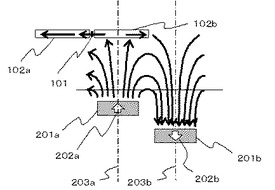
まず、図1において検出部1が矢印105で示す方向へスライドする場合の動作について説明する。図2は図1に示した構成要素のうち、磁気センサ101、軟磁性体102a、102b、磁石201a、201bの構成要素のみを図示し、これら以外は省略している。図2は磁気センサ101の位置が平面203aよりも左側にある場合を示す。図2はこの時に生じる磁力線の状態を併せて示しており、磁気センサ101には紙面上で左向きの磁界が加わる。
【0014】
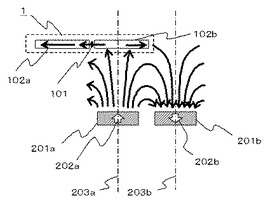
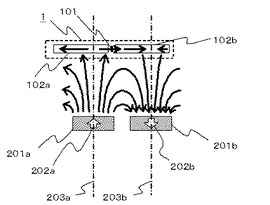
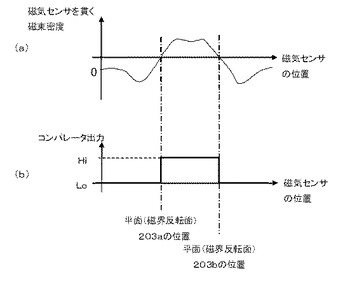
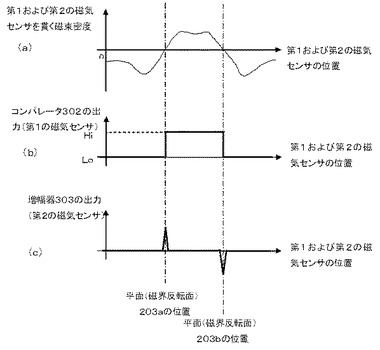
次に検出部1が図2の状態から右へ移動し、磁気センサ101が平面203aおよび203bの間に位置する場合の磁力線の状態を図3に示す。図3に示すように、磁気センサ101には右向きの磁界が加えられる。図3の状態からさらに検出部1が右へ移動し、磁気センサ101が平面203bより右側へ移動した場合を図4に示す。この時の磁力線の状態より、磁気センサ101には図面上で左向きの磁界が加わる。これら一連の動作、すなわち、検出部1が図1の矢印105の方向に移動するとき、磁気センサ101を貫く磁束密度、すなわち矢印105の方向の磁束密度成分は図5(a)のようになる。ここで、図5(a)の横軸は磁気センサ101の位置、縦軸は磁気センサ101を貫く磁束密度(磁束密度のうち平面203aまたは203bの法線方向の成分)であり、その符号は図1〜図4の右向きを正としている。
【0015】
図5(a)からわかるように、磁気センサ101が平面203aおよび203bを通過する前後で磁気センサ101を貫く磁束の向きが反転する。すなわち、磁気センサ101が平面203aと平面203bの間にある時とそれ以外の位置にある時とで、磁気センサを貫く磁束の向きが互いに反対になる。このように、磁界発生部2が発生する磁界は平面203aおよび203bの位置で磁界の向きが反転するため、これら平面203aおよび203bを以下、磁界反転面とよぶことにする。
【0016】
磁気センサ101としてはホール素子など、磁界の大きさと方向を電気信号に変換するものが用いられる。例えばホール素子では、ホール素子を貫く磁束密度に比例した電圧出力が得られる。
判定部3におけるコンパレータ301は磁気センサ101の出力と接続され、この磁気センサ101の出力と、磁界反転面203aまたは203bの位置、すなわち、磁束密度がゼロとなる位置の基準信号となる基準電圧V0との比較を行う。つまり、基準電圧V0の値は磁界ゼロの時の磁気センサ出力と同値となる。図5(b)に示すように、コンパレータ301の出力は磁界ゼロのときを境にしてHi(ハイ)とLo(ロー)が切り替わる。コンパレータ出力がHiであることから、検出部1と磁界発生部2との接近を検出することができる。本発明では、磁気センサ101が2つの磁界反転面203aと203bの間または磁界反転面203aまたは203bの位置にあるときをもって、検出部1と磁界発生部2の接近として検知する。こうして、検出対象と検出部との接近を検知することができる。
【0017】
また、磁界反転面203aまたは203b上では、上述のごとく磁束密度がゼロになるため、磁気センサ101の出力と基準電圧V0とを比較し、両者が等しくなった時に、磁気センサ101が基準となる磁界反転面203aあるいは203bの位置にあることを検出し、検出対象の接近として検知することもできる。
また、磁気センサ101が検出する磁束密度の向きを上記のように図1〜図4における右向きを正とし、図5(b)で示す、コンパレータ301の出力の立上がり、立下がりを判定することにより、検出部1と磁界発生部2とが相対的に移動する方向を判別することができる。
【0018】
このように構成することで、磁界発生部2の磁石201aの磁化方向202a、磁石201bの磁化方向202bがいずれも検出部1と磁界発生部2が相対的に移動する方向に垂直であるため、検出部1と磁界発生部2のギャップが広くなっても検出部1が受ける磁界強度は強く保たれ、磁気センサ101の出力電圧が高くなる。そのため、磁界方向が反転する付近では磁気センサの出力変化が大きく、磁気センサの出力である電圧波形は急峻な立上がりあるいは立下がりを示す。これにより、従来よりも検出信号レベルが高く、かつ、検出信号のゼロ点を検出する方式とすることでできるので、接近検知時における位置検出の精度を高めることができ、誤差を極めて少なくすることができる。
【0019】
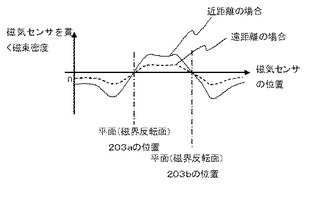
図6に検出部1と磁界発生部2との検出部のギャップが小さい場合(近距離の場合)と大きい場合(遠距離の場合)の磁気センサ101を貫く磁束密度を示す。図6より、磁界発生部と検出部の間のギャップが変化しても磁界ゼロの位置は変わらない。このように、コンパレータ301の出力のHiとLoの切替る位置が、磁界方向が反転する位置に対応しているので、検出部1と磁界発生部2の間のギャップが変化すると、磁界方向が反転する位置(図6における磁界反転面203aまたは203bの位置)の近くで検出される磁束密度の絶対値に変化はあるものの、磁界ゼロの位置は変わらない。その結果、従来よりも検出信号レベルが高く、かつ、検出信号のゼロ点を検出する方式とすることができるので、検出部1と磁界発生部2の間のギャップが変化しても検出位置誤差を極めて小さくできる。
【0020】
上記のように構成することにより、磁気センサや磁石の磁気特性にばらつきが生じる場合、あるいは周囲温度が変化する場合でも、磁束密度の絶対値は変動するが、磁界ゼロの位置はほとんど変わらない。従って、磁気センサ101の磁界ゼロの出力変動(オフセット変動)のみを補正すればよく、検出位置変動を極めて小さく抑えることができる。例えば、ホール素子感度の温度に対する変化率は、ホール素子の種類により0.01%/℃程度から10%/℃程度のものあるが、本実施の形態では磁束密度がゼロの点を測定するのでホール素子の感度に対する温度変動は考慮する必要がなくなるため、温度ドリフトをほぼゼロにすることができる。
さらに、本実施の形態の構成では磁気センサ101は軟磁性体102aと102bに挟まれているため、磁気センサに磁束が集中するので磁気センサ101の磁気感度が増大し、信号対雑音比を高くすることができ、その結果、従来よりも検出信号レベルが高く、かつ、検出信号のゼロ点を検出する方式とすることができるので、検出誤差を小さくすることができる。
【0021】
なお、図1〜4においては、軟磁性体102aおよび102bと磁気センサ101の感磁方向が平行である場合を示したがこれに限るものではない。例えば、感磁方向104に対し、軟磁性体102aまたは102bの長手方向とが傾斜している場合であっても、平行である場合より磁束を磁気センサ101に集中する効果は低くなるが、磁気感度を増大する効果がある。ただし、感磁方向104と軟磁性体102aまたは102bの長手方向とのなす交角のうち小さい方は5度以内が望ましく、より望ましくは3度以内、さらに望ましくは1度以内であればより磁気感度を増大することができ、高精度な近接位置の検出が可能である。これは本実施の形態のみならず、本発明の他の実施の形態についても同様である。
【0022】
また、磁界反転面203aおよび203bの位置は、磁石201aおよび201bの磁化の強さがそれぞれ、図1における検出部1と磁界発生部2の相対的な移動方向105に沿って均質であれば、それぞれの磁石の略中心となる。磁化の強さが上記の移動方向105に沿って均質でない場合、例えば、図1における磁石の中心位置より右側で強く、左側で弱い場合には磁石201aの中心位置より右側にずれる場合がある。この場合においても、磁界反転面203aの位置は磁石201a上のいずれかにあり、磁界反転面203aは平面となる。従って、磁束密度がゼロの位置を検出することにより、磁界反転面203aを基準の位置(の一方)として、検出部1と磁界発生部2との接近を検知することができる。
【0023】
本実施の形態においては、検出部1と磁界発生部2が相対的にスライドする場合、すなわち、両者が所定の間隔をおいて対向し、平行移動する場合を例に説明したが、本発明においては相対的な移動の形態はこの例に限るものではない。例えば、検出部1が回転運動をすることにより、磁界反転面203aと203bの一方を横切る場合でも上述した手順により、検出部1と磁界発生部2の接近を検知することができる。
【0024】
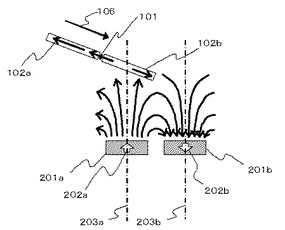
また、図1〜図4においては、相対的な移動方向(矢印105の方向)が磁界反転面203aおよび203bと垂直である場合について示したが、これに限るものではなく、検出部1が例えば図7に示すように、磁界反転面203aまたは203bを斜めに(矢印106の方向に)横切る場合であってもよく、この場合にも磁気センサ101の検出する磁束密度は、磁界反転面203aまたは203b上でゼロとなるため、この場合でも上述の方法により、コンパレータ301の出力から検出部1と磁界発生部2の接近を検出することができる。
【0025】
さらに、検出部1または磁界発生部2が回転運動する場合においても、磁気センサ101が磁界反転面203aまたは203bのいずれかを横切る時にその回転運動の接線方向が磁界反転面203aまたは203bと垂直である場合でなくてもよい。この場合でも図7のように検出部1が斜めに横切る場合と同様に、磁気センサ101が検出する磁束密度のうち、磁界反転面203aまたは203bの法線方向成分をコンパレータ301の入力として用いることにより、検出部1と磁界発生部2との接近の検知が可能である。
要は、検出部1と磁界発生部2が相対的に移動する際に、磁気センサ101が磁界反転面203aまたは203bのいずれか、または両方を横切り、その際に磁気センサ101が検出する磁束密度の磁界反転面203aまたは203bの法線方向成分を取得して、コンパレータ301の入力とすれば、検出部1と磁界発生部2の接近の検知が可能である。
【0026】
また、図1〜4において、磁界発生部2における磁石201aと201bの磁化方向202a、202bが平行である場合を用いて説明したが、これに限るものではない。例えば、磁化方向202aに対し、磁化方向202bの方向が傾斜している場合でも本実施の形態を用いることは可能である。ただし、傾斜角(202aと202bの延長線がなす交角のうち小さい方)は3度以内が望ましく、より望ましくは1度以内、さらに望ましくは0.5度以内であればより高精度な近接位置の検出が可能である。これは本実施の形態のみならず、本発明の以下の実施の形態においても同様である。
【0027】
また、図1〜4においては、磁界発生部2における磁石201aと201bが紙面上で同じ高さ(すなわち、例えば図1において磁石201aと201bと磁気センサ101との間隔が同じ)である場合について説明したが、磁界発生部2の構成はこれに限るものではない。例えば、図8に示すように、磁石201aと磁気センサ101との間隔と、磁石201bと磁気センサ101との間隔とが異なる場合(図8では磁石201aの方が磁気センサ101に近い場合を示す)であっても、磁界発生部2は一対の磁界反転面203aおよび203bを有する磁界を発生するので、この一対の磁界反転面を基準位置とした近接検知が可能である。要は、2つの磁石の磁化方向が平行または略平行であって、それらの磁化方向が反対向きであり、磁界を発生すればよい。
【0028】
実施の形態2.
図9は本発明の実施の形態2による磁気式近接センサを示す構成図であり、上記実施の形態1との相違点は次のとおりである。まず、検出部1は2種類の磁気センサで構成され、一方は実施の形態1における磁気センサ101と同様に、磁界の大きさと方向を電気信号に変換する第1の磁気センサ111であり、例えばホール素子などが用いられる。磁気センサの他方は、検出する磁界の方向が反転する時にパルス上の信号を出力する第2の磁気センサ112であり、例えば大バルクハウゼン効果応用素子が用いられる。また、実施の形態1との相違点として、判定部3は第1の磁気センサ111の出力と、磁界反転面203aまたは203bの位置を検出するための基準信号V0とを入力とするコンパレータ302および第2の磁気センサ112の出力を増幅する増幅器303からなる。
【0029】
次に動作について説明する。
第1の磁気センサ111および第2の磁気センサ112は、感磁方向が図9中の矢印104の方向になるように配置される。これにより、第1の磁気センサ111および第2の磁気センサ112にかかる磁束密度のうち、磁界反転面203aおよび203bの法線方向の磁束密度成分は、磁石201a、201b、軟磁性体102a、102bといった磁性材料の位置関係が実施の形態1と同じであるので、図5で示したものと同じになる。第1の磁気センサ111および第2の磁気センサ112の位置に対して、これらの素子を貫く磁束密度の横方向成分(すなわち磁界反転面203aおよび203bの法線方向の磁束密度成分)、コンパレータ302の出力および増幅器303の出力をそれぞれ図10(a)、(b)および(c)に示す。
【0030】
第2の磁気センサ112として例えば大バルクハウゼン効果応用素子を用いる場合、これは大バルクハウゼン効果を有するワイヤとその周囲に巻回されるコイル巻線からなり、磁界の方向が反転するときのみ、パルス状の出力を発生するものであり、パルスの極性は磁界が変化する方向により正負反対になる。従って、第2の磁気センサ112の出力は磁界の方向が反転するとき、すなわち、第2の磁気センサ112が図9の磁界反転面203aおよび203bを通過するときにパルスを発生し、そのパルスの極性は磁界反転面203aと203bを通過するときでは互いに逆になる。このような第2の磁気センサ112を用いることにより、検出部1と磁界発生部2のギャップが変動しても、磁界反転面の位置は変わらないので、従来よりも検出信号レベルが高く、かつ、検出信号のゼロ点を検出する方式とすることができるので、接近検知時における位置検出の精度を高めることができ、誤差を極めて少なくすることができる。
【0031】
ここで、第1の磁気センサ111からの出力と基準電圧V0とを比較するコンパレータ302の出力は、検出対象がある範囲内に入ったことを示す「ゾーン検知」の役割を果たすことになる。また、第2の磁気センサ112の出力、すなわち増幅器303の出力は、検出対象が、ある決められた位置を通過したことを高精度に計測する「位置検知」の役割を果たすことになる。したがって本実施の形態における構成により、「ゾーン検出」と「位置検出」の両方の出力を有することから、接近検知時における位置検出精度は問わないがゾーンを検出する場合はコンパレータ302の出力を採用し、位置を高精度に検知する場合は増幅器303の出力を採用するといった使い方が可能となる。
【0032】
なお、増幅器303の出力、すなわち、第2の磁気センサ112の出力は、磁界変化の方向により極性が変わる。これから、増幅器303の出力の極性を判別することにより、検出部1と磁界発生部2が相対的に移動する方向を判別することもできる。
【0033】
実施の形態3.
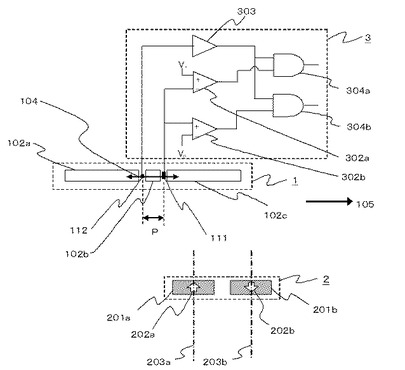
図11は本発明の実施の形態3による磁気式近接センサを示す構成図であり、上記実施の形態1との相違点は次のとおりである。検出部1における磁気センサは2種類から構成され、一方は実施の形態1における磁気センサ101と同様に、磁界の大きさと方向を電気信号に変換する第1の磁気センサ111であり、例えばホール素子などを用いる。磁気センサの他方は、検出する磁界の方向が反転する時にパルス上の信号を出力する第2の磁気センサ112であり、例えば大バルクハウゼン効果応用素子を用いる。また、図11において第1の磁気センサ111の右側に軟磁性体102cが配置され、第1の磁気センサ111と第2の磁気センサ112の間に軟磁性体102bが配置され、さらに第2の磁気センサ112の左側に軟磁性体102aが配置される構成となっている。
【0034】
また、第1の磁気センサ111の出力と基準電圧V1を入力とするコンパレータ302aと、第1の磁気センサ111の出力と基準電圧V0とを入力とするコンパレータ302b、および、第2の磁気センサ112の信号を入力とする増幅器303を有し、さらに増幅器303とコンパレータ302aを入力とする論理積演算回路304a、および、増幅器303とコンパレータ302bを入力とする論理積演算回路304bを有する。
【0035】
次に動作について説明する。第1の磁気センサ111および第2の磁気センサ112はいずれも、感磁方向が図中の矢印104の方向になるように配置されている。検出部1が矢印105の方向に移動したとき、第1の磁気センサ111または第2の磁気センサ112が検出する磁束密度のうち、磁界反転面203aの法線方向の成分は、実施の形態1で示した図5とほとんど同じになる。その理由は、本実施の形態では軟磁性体の部品数が3であり、第1の磁気センサと第2の磁気センサの間にも軟磁性体102bが配置されていることが実施の形態1と異なる点であるが、軟磁性体と軟磁性体の間隔は第1の磁気センサ(例えばホール素子など)の厚み程度しかなく非常に小さいため、実質的には実施の形態1と本実施の形態の磁気回路に大きな差異はなく、ほとんど同等とみなせるからである。
【0036】
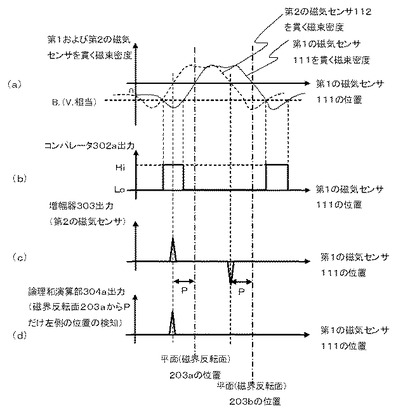
図12(a)に、横軸を第1の磁気センサ111の位置とした場合の、第1の磁気センサ111および第2の磁気センサ112を貫く磁束密度の横方向成分(すなわち、磁界反転面203aの法線方向成分)を示し、同図(b)にコンパレータ302aの出力を、同図(c)に第2の磁気センサの出力を増幅器303で増幅した出力を、さらに同図(d)に論理積演算回路304aの出力を示す。ここで、第1の磁気センサ111と第2の磁気センサ112との間隔Pは、磁石201aの磁化方向に垂直な磁束密度成分が極大になる位置と、磁石201aの中心位置との間の距離に概ね等しくなるようにする(すなわち、同図(c)に示すPと同程度にする)。このように構成することにより、第1の磁気センサ111と第2の磁気センサ112の間隔がPだけ離れているので、同図(a)に示すように、第1の磁気センサにかかる磁束密度と第2の磁気センサにかかる磁束密度は間隔Pだけずれることになる。
【0037】
ここで、コンパレータの基準電圧V1を図12(a)に示すように負の適当な値に定めると、コンパレータ302aの出力は同図(b)に示すように、磁界反転面203aより距離Pだけ左側の位置付近でHiを示すようになる。一方、第2の磁気センサ112の出力は第1の磁気センサ111が磁界反転面203aを通過するときは距離Pだけ左側にあるので、同図(c)に示すように、増幅器303の出力(すなわち、第2の磁気センサ112の出力)は、磁界反転面203aより距離Pだけ左側のところでパルスを出力する。
【0038】
論理積演算回路304aにてコンパレータ302aの出力と増幅器303の出力との論理積を演算することにより、第1の磁気センサ111が磁界反転面203aから左側に距離Pだけ離れた位置を通過したときの出力信号のみを抽出することができる。こうして、第1の磁気センサ111の出力から論理積演算回路304aの出力としてゲート信号を得ることができる。ゲート信号を基に磁気センサ111が磁界反転面203aから左側に所定の距離(オフセット)Pだけ離れた位置にあることを検出できるため、近接検出の信頼性を向上することができる。また、オフセットPは基準電圧V1の値を調整することにより、様々な値に設定が可能である。
【0039】
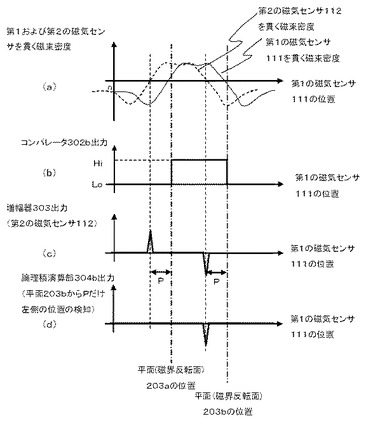
一方、もうひとつの磁界反転面である203bの位置の検出は以下に示す方法で行うことができる。コンパレータ302bの基準電圧V0は実施の形態1で述べたように、磁束密度ゼロに相当する値であるため、コンパレータ302bの出力は図13(b)に示すように、磁界反転面203aと203bの間で出力がHiになる。この区間は、磁界反転面203bからの距離Pだけ左側に離れた位置を含む。第2の磁気センサ112の出力は第1の磁気センサ111が磁界反転面203bを通過するときは距離Pだけ左側にあるので、同図(c)に示すように、増幅器303の出力(すなわち、第2の磁気センサ112の出力)は、磁界反転面203bより距離Pだけ左側のところでパルスを出力する。
【0040】
そして論理積演算回路304bにてコンパレータ302bの出力と増幅器303の出力の論理積をとることにより、第1の磁気センサ111が磁界反転面203bから左側に距離Pだけ離れた位置を通過したときのみの出力信号を抽出することができる。このようにして、磁界反転面面203bについても第1の磁気センサ111の出力をゲート信号として利用することができる。ゲート信号を基に磁気センサ111が磁界反転面203bから右側に所定の距離(オフセット)Pだけ離れた位置にあることを検出できるため、近接検出の信頼性を向上することができる。
【0041】
本実施の形態では、図13に示すように磁界反転面203aと203bの距離よりもオフセットPの設定値が小さい場合を示したが、さらにオフセットの値を大きく設定する必要がある場合には、例えば、磁界発生部2における磁石201aと201bの間隔を大きく取ることでオフセットPの値を大きくすることができる。また、コンパレータ302bが比較する基準電圧を磁界ゼロと同値となるV0の値より低い値に設定することにより、コンパレータ302bがHiを出力する区間を広げることができ、オフセットPの設定値を大きく取ることができる。
なお、増幅器303の出力(すなわち第2の磁気センサ112の出力)は、磁界変化の方向により極性が変わる。すなわち、増幅器303の出力の極性を判別することにより移動方向を判別することもできる。
なお、本発明の実施の形態1において、磁気センサ101が2つの磁界反転面203aと203bの間または磁界反転面203aまたは203bの位置にあるときをもって、検出部1と磁界発生部2の接近として検知するとしたが、本実施の形態においては検出部1と磁界発生部2の接近を上記2つの磁界反転面203aと203bを基準とする以外に、磁界反転面203aまたは203bから所定の距離Pだけ離れた位置を基準とすることも可能である。いずれの位置を基準として検出部1と磁界発生部2の接近として検知するかは用途に応じて適宜選択すればよい。
【0042】
実施の形態4.
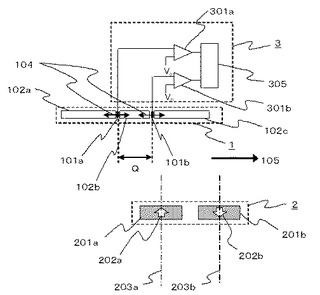
図14は本発明の実施の形態4による磁気式近接センサを示す構成図であり、実施の形態1との相違点は次のとおりである。検出部1は、磁界の大きさと方向を電気信号に変換する2つの磁気センサ101aと101bで構成される。磁気センサ101a、101bとしては例えばホール素子などが使用される。
また、図14において磁気センサ101aの左側に軟磁性体102aが配置され、磁気センサ101aと101bの間に軟磁性体102bが配置され、磁気センサ101の右側に軟磁性体102cが配置される。判定部3は磁気センサ101aの出力と基準電圧V0を入力とするコンパレータ301aと、磁気センサ101bの出力と基準電圧V0を入力とするコンパレータ301b、およびコンパレータ301aと301bの出力を比較演算する比較演算回路305で構成される。
【0043】
次に動作について説明する。磁気センサ101aおよび101bは感磁方向が図中の104の方向になるように配置されている。検出部1が矢印105の方向に移動したとき、磁気センサ101aまたは101bに加わる磁束密度のうち、磁界反転面203aの法線方向の磁束密度成分は、実施の形態1で示した図5とほとんど同じになる。その理由は、本実施の形態では軟磁性体の部品数が3であることが実施の形態1と異なる点であるが、軟磁性体と軟磁性体の間隔は磁気センサ101a(例えばホール素子など)の厚み程度しかなく非常に小さいため、実質的には実施の形態1と本実施の形態の磁気回路に大きな差異はなく、ほとんど同等とみなせるからである。
【0044】
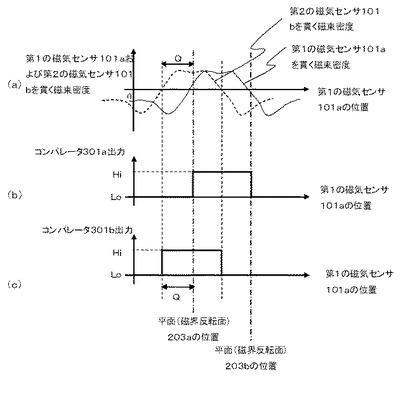
図15(a)に、横軸を磁気センサ101aの位置とした場合の、磁気センサ101aおよび101bを貫く磁束密度の横方向成分(すなわち、磁界反転面203aの法線方向の成分)を示す。ここで、磁気センサ101aと101bは所定の距離Qだけ離れている。そのため、図15(a)に示すように磁気センサ101aと101bが検出する磁束密度は間隔Qだけ位相がずれることになる。
【0045】
ここで、コンパレータの基準電圧V0を磁気センサが示す磁界ゼロのときの値に設定すると、コンパレータ301aおよび301bの出力は図15(b)および(c)に示すように、互いに間隔Qだけずれることになる。検出部1が矢印105またはその正反対の方向に移動するとき、コンパレータ301aの出力と301bの出力は、必ずいずれかがHi(またはLo)になった後にもう一方がHi(またはLo)になる。すなわち、コンパレータ301aと301bの出力を比較し、Hi(またはLo)になった順序を判別することにより移動方向を判別することができる。
【0046】
また、上記所定の間隔Qを2つの磁界反転面203aと203bの間隔より小さく設定した場合、検出部1が磁界発生部2の近くを通過する時、故障箇所がなければ、コンパレータ301aと301bのいずれか一方の出力がHiになってからLoになるまでの間に、他方のコンパレータの出力は必ずHiになる。仮に、一方のコンパレータ出力がHiになってからLoになるまでの間に、もう一方のコンパレータ出力が全くHiにならないときは、何らかの故障があると判断できる。このようにして、2つのコンパレータ出力の変化を検知することにより、検出部に故障があるか否かの自己診断を行うことができる。
【0047】
実施の形態5.
図16は本発明の実施の形態5による磁気式近接センサを示す構成図であり、同図では検出部1と判定部3を示す。実施の形態1との本実施の形態の相違点は以下の通りである。軟磁性体102aと102bの形状は板状であり、一方の軟磁性体の板の端部と他方の軟磁性体の板の端部の間に磁気センサ101が配置されている。なお、磁気センサ101の感磁方向は図の矢印104に示す方向である。
【0048】
図16に示すように、磁束の大部分は折れ線矢印107で示すように、2つの軟磁性体の間の最も狭いギャップを通過するので、磁気センサ101を貫く磁束の方向は矢印104の方向となる。このように構成することにより、磁気センサ101に磁束が集中するので、磁気センサ101の磁気感度が増大し、信号対雑音比を高くすることができ、その結果、検出誤差を小さくすることができる。また、磁気感度を確保するには概ね軟磁性体の磁束方向に垂直な方向の断面積を大きくすればよいが、棒状の軟磁性体と同じ断面積(すばわち磁気感度)を得るための板状の軟磁性体は、棒状軟磁性体に比べて薄く形成することができるので、検出部を薄く小型にすることができる。
【0049】
実施の形態6.
図17は本発明の実施の形態6による磁気式近接センサを示す構成図であり、同図では磁界発生部2のみを示す。実施の形態1との本実施の形態の相違点は以下の通りである。磁界発生部2は2つの磁石201aおよび202bと、この2つの磁石に接続される鉄などの軟磁性体204からなる。
【0050】
このような配置にすることにより、磁石201aおよび201bから発生する磁界のうち、図の下方へ発生するものはその大部分が軟磁性体204の中を通り、軟磁性体204の外側(図の下方)には磁界がほとんど漏れなくなる。また、軟磁性体204の外側(図15の下方)に鉄、磁石、電流線などの磁場を乱すものがあったとしても、軟磁性体204に遮蔽される。このように、外乱磁界がある場合でもその影響を低減することができ、検出性能を確保することができる。
なお、磁石201aおよび201bから発生する磁界のうち、検出部1が通過する側(図の上方)には、実施の形態1と同様に磁界がかかるため、上記実施の形態1〜5と同様に高精度に検出対象の近接検出を行うことができる。
【符号の説明】
【0051】
1 検出部、101、101a、101b 磁気センサ、102a、102b、102c 軟磁性体、104 磁気センサの感磁方向、105、106 検出部の移動方向、107 磁束の方向、111 第1の磁気センサ、112 第2の磁気センサ、2 磁界発生部、201a、201b 磁石、202a、202b 磁石の磁化方向、203a、203b 磁界反転面、204 軟磁性体、3 判定部、301、301a、301b、302 コンパレータ、303 増幅器、304a、304b 論理積演算回路、305 比較演算回路
【技術分野】
【0001】
本発明は磁石からなる磁界発生部と磁気センサからなる検出部とが相対的に移動する際に、磁気センサが検出する磁束密度の変化に基づいて磁界発生部と検出部との接近を検知する磁気式近接センサに関するものである。
【背景技術】
【0002】
磁気式近接センサは、工場でベルトコンベア上のワークが所定の位置に到達するのを検知する場合、あるいは、エレベータの階床への到達を検知する場合などに応用されるものが知られている。その位置検出精度は検出対象とセンサの距離によっても異なるが、一般的に数mmから数cmである。
【0003】
従来の磁気式近接センサは、特許文献1の図1に示されるように、磁石を設けた移動体とホール素子を設けた固定体からなり、検出対象である移動体の磁石が検出部であるホール素子の直上を通過する際に、ホール素子が感知する磁束密度の極性が反転する。ホール素子が感知する磁束密度に応じた検出信号と基準信号を比較して、両者が等しくなる位置を検出することで検出対象と検出部との接近を検知する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−329405号公報(第3頁、図1)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のように検出対象と検出部が互いに対向して配置されるタイプの磁気式近接センサでは、検出対象と検出部とのギャップが広くなると、検出部が受ける磁界強度が低下するためノイズによる出力変動を受けやすくなり、接近検知時における位置検出誤差を生じるので、検出位置精度が低下してしまうという問題点があった。
特許文献1の磁気式近接検出装置は、磁石の磁化方向の法線方向における磁束密度を検出し、磁界の極性が反転する位置における磁束密度に対応する検出電圧を基準信号と比較し、基準位置の検出を行うものである。しかし、磁石の性質上、磁化方向への磁界は強く発生するが、磁化方向と法線方向への磁界は弱いことから、検出対象と検出部のギャップが広くなると磁界強度が低くなってしまう。その結果、ホール素子の出力電圧が低くなり、ノイズが重畳すれば検出電圧に変動が生じるため、位置検出に誤差が生じてしまう課題があった。
【0006】
本発明は、上述のような課題を解決するためになされたもので、検出対象がある検出範囲内に入ったことを検知する磁気式近接センサの検出位置精度を向上することを目的とする。また、本発明は特に検出対象と検出部の距離が遠い場合であっても、また、検出対象と検出部のギャップが変動する場合であっても高い精度を確保することを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る磁気式近接センサは、磁石からなる磁界発生部と磁気センサからなる検出部とが相対的に移動する際に、磁気センサが検出する磁束密度の変化に基づいて磁界発生部と検出部との接近を検知する判定部を備えた磁気式近接センサにおいて、磁界発生部は磁界発生部と検出部とが相対的に移動する方向に並設され、それぞれの磁化方向が略平行で互いに反対方向を向くように配置された一対の磁石からなり、一対の磁石のそれぞれを通り、磁気センサが検出する磁界の方向が反転する一対の磁界反転面を形成する磁界を発生し、磁気センサは磁界発生部と検出部とが相対的に移動する際に上記磁界反転面の少なくとも一方を横切るものであり、判定部は磁気センサの検出信号と上記磁界反転面を検出するための基準信号とを比較し、検出信号の出力レベルが基準信号のレベルより大きいときに磁気センサが磁界反転面の間にあることを示す所定レベルの近接検出信号を出力するコンパレータを備えたことを特徴とするものである。
【発明の効果】
【0008】
この発明は、磁界発生部と検出部との接近を検知する判定部を備えた磁気式近接センサにおいて、磁界発生部は磁界発生部と検出部とが相対的に移動する方向に並設され、それぞれの磁化方向が略平行で互いに反対方向を向くように配置された一対の磁石からなり、一対の磁石のそれぞれを通り、磁気センサが検出する磁界の方向が反転する一対の磁界反転面を形成する磁界を発生し、磁気センサは磁界発生部と検出部とが相対的に移動する際に上記磁界反転面の少なくとも一方を横切るものであり、判定部は磁気センサの検出信号と上記磁界反転面を検出するための基準信号とを比較し、検出信号の出力レベルが基準信号のレベルより大きいときに磁気センサが磁界反転面の間にあることを示す所定レベルの近接検出信号を出力するコンパレータを備えるようにしたことにより、磁界発生部と検出部のギャップが広い領域でも強い磁界を得ることができるため、信号強度を高くすることができ、ノイズに対する信号の安定性を高めることができる。これにより、磁界発生部と検出部のギャップが広くなった場合でも、接近検知時の位置検出誤差を低減することができる。また、磁界の方向が反転する箇所が検知位置に対応するので、磁界発生部と検出部の間のギャップが変化しても、従来よりも検出信号レベルが高く、かつ、検出信号のゼロ点を検出する方式とすることができるため、接近検知時の位置検出誤差を極めて小さくすることができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態1による磁気式近接センサの構成図である。
【図2】本発明の実施の形態1による磁気式近接センサ動作時の磁力線の模式図である。
【図3】本発明の実施の形態1による磁気式近接センサ動作時の磁力線の模式図である。
【図4】本発明の実施の形態1による磁気式近接センサ動作時の磁力線の模式図である。
【図5】本発明の実施の形態1による磁気式近接センサ動作時の磁気センサを貫く磁束密度およびコンパレータ出力を示す図である。
【図6】本発明の実施の形態1による磁気式近接センサ動作時の磁気センサを貫く磁束密度を示す図である。
【図7】本発明の実施の形態1による磁気式近接センサ動作時の磁力線の模式図である。
【図8】本発明の実施の形態1による磁気式近接センサ動作時の磁力線の模式図である。
【図9】本発明の実施の形態2による磁気式近接センサの構成図である。
【図10】本発明の実施の形態2による磁気式近接センサ動作時の磁気センサを貫く磁束密度、コンパレータ出力、増幅器出力を示す図である。
【図11】本発明の実施の形態3による磁気式近接センサの構成図である。
【図12】本発明の実施の形態3による磁気式近接センサ動作時の磁気センサを貫く磁束密度、コンパレータ出力、増幅器出力、論理積演算回路出力を示す図である。
【図13】本発明の実施の形態3による磁気式近接センサ動作時の磁気センサを貫く磁束密度、コンパレータ出力、増幅器出力、論理積演算回路出力を示す図である。
【図14】本発明の実施の形態4による磁気式近接センサの構成図である。
【図15】本発明の実施の形態4による磁気式近接センサ動作時の磁気センサを貫く磁束密度、コンパレータ出力、増幅器出力を示す図である。
【図16】本発明の実施の形態5による磁気式近接センサの構成図である。
【図17】本発明の実施の形態6による磁気式近接センサの構成図である。
【発明を実施するための形態】
【0010】
実施の形態1.
図1は本発明の実施の形態1による磁気式近接センサを示す構成図である。本発明による磁気式近接センサは検出部1、磁界発生部2および判定部3からなる。検出部1はホール素子などの磁気センサ101、磁気センサ101を挟みその両側に配置される2つの棒状または板状の形状をした、鉄などの軟磁性体102aおよび102bからなる。図1においては軟磁性体102aおよび102bとして棒状のものの例を示す。磁気センサ101の感磁方向は図1中の矢印104に示す方向である。軟磁性体102aおよび102bはその長手方向が磁気センサ101の感磁方向104に沿うように配置される。これは板状の軟磁性体である場合も同様であり、板状の軟磁性体の厚み方向が図1の感磁方向104と直交するように配置される。磁界発生部2は2つの磁石201aおよび201bからなる。検出部1と磁界発生部2は相対的に移動し、この相対的な移動の方向を図1において矢印105の方向で示す。
【0011】
なお、本実施の形態を含め、以下の各実施の形態においては説明の便宜のために、主として検出部1が移動する場合について述べるが、本発明においては検出部1と磁界発生部2とが相対的に移動をすればよく、検出部1または磁界発生部2が移動するものであっても、両者がともに移動するものであってもよい。
【0012】
磁界発生部2における磁石201aおよび201bの磁化方向は、図1の白抜き矢印202aおよび202bに示す方向であり、磁気センサ101の感磁方向(矢印104が示す両方向)と、検出部1と磁界発生部2とが相対的に移動する方向(矢印105の方向)の両方に垂直であり、しかも2つの磁石201aと201bの磁化方向は互いに反対方向である。また、この2つの磁石201aと201bそれぞれの中心を通り磁化方向と平行で紙面に垂直な平面をそれぞれ203a、203bとする。図1は磁気センサ101の感磁方向104が平面203a、203bに垂直な場合について示す。
判定部3は磁気センサ101の出力と基準電圧とを入力信号とするコンパレータ301から構成される。
【0013】
次に動作について説明する。
まず、図1において検出部1が矢印105で示す方向へスライドする場合の動作について説明する。図2は図1に示した構成要素のうち、磁気センサ101、軟磁性体102a、102b、磁石201a、201bの構成要素のみを図示し、これら以外は省略している。図2は磁気センサ101の位置が平面203aよりも左側にある場合を示す。図2はこの時に生じる磁力線の状態を併せて示しており、磁気センサ101には紙面上で左向きの磁界が加わる。
【0014】
次に検出部1が図2の状態から右へ移動し、磁気センサ101が平面203aおよび203bの間に位置する場合の磁力線の状態を図3に示す。図3に示すように、磁気センサ101には右向きの磁界が加えられる。図3の状態からさらに検出部1が右へ移動し、磁気センサ101が平面203bより右側へ移動した場合を図4に示す。この時の磁力線の状態より、磁気センサ101には図面上で左向きの磁界が加わる。これら一連の動作、すなわち、検出部1が図1の矢印105の方向に移動するとき、磁気センサ101を貫く磁束密度、すなわち矢印105の方向の磁束密度成分は図5(a)のようになる。ここで、図5(a)の横軸は磁気センサ101の位置、縦軸は磁気センサ101を貫く磁束密度(磁束密度のうち平面203aまたは203bの法線方向の成分)であり、その符号は図1〜図4の右向きを正としている。
【0015】
図5(a)からわかるように、磁気センサ101が平面203aおよび203bを通過する前後で磁気センサ101を貫く磁束の向きが反転する。すなわち、磁気センサ101が平面203aと平面203bの間にある時とそれ以外の位置にある時とで、磁気センサを貫く磁束の向きが互いに反対になる。このように、磁界発生部2が発生する磁界は平面203aおよび203bの位置で磁界の向きが反転するため、これら平面203aおよび203bを以下、磁界反転面とよぶことにする。
【0016】
磁気センサ101としてはホール素子など、磁界の大きさと方向を電気信号に変換するものが用いられる。例えばホール素子では、ホール素子を貫く磁束密度に比例した電圧出力が得られる。
判定部3におけるコンパレータ301は磁気センサ101の出力と接続され、この磁気センサ101の出力と、磁界反転面203aまたは203bの位置、すなわち、磁束密度がゼロとなる位置の基準信号となる基準電圧V0との比較を行う。つまり、基準電圧V0の値は磁界ゼロの時の磁気センサ出力と同値となる。図5(b)に示すように、コンパレータ301の出力は磁界ゼロのときを境にしてHi(ハイ)とLo(ロー)が切り替わる。コンパレータ出力がHiであることから、検出部1と磁界発生部2との接近を検出することができる。本発明では、磁気センサ101が2つの磁界反転面203aと203bの間または磁界反転面203aまたは203bの位置にあるときをもって、検出部1と磁界発生部2の接近として検知する。こうして、検出対象と検出部との接近を検知することができる。
【0017】
また、磁界反転面203aまたは203b上では、上述のごとく磁束密度がゼロになるため、磁気センサ101の出力と基準電圧V0とを比較し、両者が等しくなった時に、磁気センサ101が基準となる磁界反転面203aあるいは203bの位置にあることを検出し、検出対象の接近として検知することもできる。
また、磁気センサ101が検出する磁束密度の向きを上記のように図1〜図4における右向きを正とし、図5(b)で示す、コンパレータ301の出力の立上がり、立下がりを判定することにより、検出部1と磁界発生部2とが相対的に移動する方向を判別することができる。
【0018】
このように構成することで、磁界発生部2の磁石201aの磁化方向202a、磁石201bの磁化方向202bがいずれも検出部1と磁界発生部2が相対的に移動する方向に垂直であるため、検出部1と磁界発生部2のギャップが広くなっても検出部1が受ける磁界強度は強く保たれ、磁気センサ101の出力電圧が高くなる。そのため、磁界方向が反転する付近では磁気センサの出力変化が大きく、磁気センサの出力である電圧波形は急峻な立上がりあるいは立下がりを示す。これにより、従来よりも検出信号レベルが高く、かつ、検出信号のゼロ点を検出する方式とすることでできるので、接近検知時における位置検出の精度を高めることができ、誤差を極めて少なくすることができる。
【0019】
図6に検出部1と磁界発生部2との検出部のギャップが小さい場合(近距離の場合)と大きい場合(遠距離の場合)の磁気センサ101を貫く磁束密度を示す。図6より、磁界発生部と検出部の間のギャップが変化しても磁界ゼロの位置は変わらない。このように、コンパレータ301の出力のHiとLoの切替る位置が、磁界方向が反転する位置に対応しているので、検出部1と磁界発生部2の間のギャップが変化すると、磁界方向が反転する位置(図6における磁界反転面203aまたは203bの位置)の近くで検出される磁束密度の絶対値に変化はあるものの、磁界ゼロの位置は変わらない。その結果、従来よりも検出信号レベルが高く、かつ、検出信号のゼロ点を検出する方式とすることができるので、検出部1と磁界発生部2の間のギャップが変化しても検出位置誤差を極めて小さくできる。
【0020】
上記のように構成することにより、磁気センサや磁石の磁気特性にばらつきが生じる場合、あるいは周囲温度が変化する場合でも、磁束密度の絶対値は変動するが、磁界ゼロの位置はほとんど変わらない。従って、磁気センサ101の磁界ゼロの出力変動(オフセット変動)のみを補正すればよく、検出位置変動を極めて小さく抑えることができる。例えば、ホール素子感度の温度に対する変化率は、ホール素子の種類により0.01%/℃程度から10%/℃程度のものあるが、本実施の形態では磁束密度がゼロの点を測定するのでホール素子の感度に対する温度変動は考慮する必要がなくなるため、温度ドリフトをほぼゼロにすることができる。
さらに、本実施の形態の構成では磁気センサ101は軟磁性体102aと102bに挟まれているため、磁気センサに磁束が集中するので磁気センサ101の磁気感度が増大し、信号対雑音比を高くすることができ、その結果、従来よりも検出信号レベルが高く、かつ、検出信号のゼロ点を検出する方式とすることができるので、検出誤差を小さくすることができる。
【0021】
なお、図1〜4においては、軟磁性体102aおよび102bと磁気センサ101の感磁方向が平行である場合を示したがこれに限るものではない。例えば、感磁方向104に対し、軟磁性体102aまたは102bの長手方向とが傾斜している場合であっても、平行である場合より磁束を磁気センサ101に集中する効果は低くなるが、磁気感度を増大する効果がある。ただし、感磁方向104と軟磁性体102aまたは102bの長手方向とのなす交角のうち小さい方は5度以内が望ましく、より望ましくは3度以内、さらに望ましくは1度以内であればより磁気感度を増大することができ、高精度な近接位置の検出が可能である。これは本実施の形態のみならず、本発明の他の実施の形態についても同様である。
【0022】
また、磁界反転面203aおよび203bの位置は、磁石201aおよび201bの磁化の強さがそれぞれ、図1における検出部1と磁界発生部2の相対的な移動方向105に沿って均質であれば、それぞれの磁石の略中心となる。磁化の強さが上記の移動方向105に沿って均質でない場合、例えば、図1における磁石の中心位置より右側で強く、左側で弱い場合には磁石201aの中心位置より右側にずれる場合がある。この場合においても、磁界反転面203aの位置は磁石201a上のいずれかにあり、磁界反転面203aは平面となる。従って、磁束密度がゼロの位置を検出することにより、磁界反転面203aを基準の位置(の一方)として、検出部1と磁界発生部2との接近を検知することができる。
【0023】
本実施の形態においては、検出部1と磁界発生部2が相対的にスライドする場合、すなわち、両者が所定の間隔をおいて対向し、平行移動する場合を例に説明したが、本発明においては相対的な移動の形態はこの例に限るものではない。例えば、検出部1が回転運動をすることにより、磁界反転面203aと203bの一方を横切る場合でも上述した手順により、検出部1と磁界発生部2の接近を検知することができる。
【0024】
また、図1〜図4においては、相対的な移動方向(矢印105の方向)が磁界反転面203aおよび203bと垂直である場合について示したが、これに限るものではなく、検出部1が例えば図7に示すように、磁界反転面203aまたは203bを斜めに(矢印106の方向に)横切る場合であってもよく、この場合にも磁気センサ101の検出する磁束密度は、磁界反転面203aまたは203b上でゼロとなるため、この場合でも上述の方法により、コンパレータ301の出力から検出部1と磁界発生部2の接近を検出することができる。
【0025】
さらに、検出部1または磁界発生部2が回転運動する場合においても、磁気センサ101が磁界反転面203aまたは203bのいずれかを横切る時にその回転運動の接線方向が磁界反転面203aまたは203bと垂直である場合でなくてもよい。この場合でも図7のように検出部1が斜めに横切る場合と同様に、磁気センサ101が検出する磁束密度のうち、磁界反転面203aまたは203bの法線方向成分をコンパレータ301の入力として用いることにより、検出部1と磁界発生部2との接近の検知が可能である。
要は、検出部1と磁界発生部2が相対的に移動する際に、磁気センサ101が磁界反転面203aまたは203bのいずれか、または両方を横切り、その際に磁気センサ101が検出する磁束密度の磁界反転面203aまたは203bの法線方向成分を取得して、コンパレータ301の入力とすれば、検出部1と磁界発生部2の接近の検知が可能である。
【0026】
また、図1〜4において、磁界発生部2における磁石201aと201bの磁化方向202a、202bが平行である場合を用いて説明したが、これに限るものではない。例えば、磁化方向202aに対し、磁化方向202bの方向が傾斜している場合でも本実施の形態を用いることは可能である。ただし、傾斜角(202aと202bの延長線がなす交角のうち小さい方)は3度以内が望ましく、より望ましくは1度以内、さらに望ましくは0.5度以内であればより高精度な近接位置の検出が可能である。これは本実施の形態のみならず、本発明の以下の実施の形態においても同様である。
【0027】
また、図1〜4においては、磁界発生部2における磁石201aと201bが紙面上で同じ高さ(すなわち、例えば図1において磁石201aと201bと磁気センサ101との間隔が同じ)である場合について説明したが、磁界発生部2の構成はこれに限るものではない。例えば、図8に示すように、磁石201aと磁気センサ101との間隔と、磁石201bと磁気センサ101との間隔とが異なる場合(図8では磁石201aの方が磁気センサ101に近い場合を示す)であっても、磁界発生部2は一対の磁界反転面203aおよび203bを有する磁界を発生するので、この一対の磁界反転面を基準位置とした近接検知が可能である。要は、2つの磁石の磁化方向が平行または略平行であって、それらの磁化方向が反対向きであり、磁界を発生すればよい。
【0028】
実施の形態2.
図9は本発明の実施の形態2による磁気式近接センサを示す構成図であり、上記実施の形態1との相違点は次のとおりである。まず、検出部1は2種類の磁気センサで構成され、一方は実施の形態1における磁気センサ101と同様に、磁界の大きさと方向を電気信号に変換する第1の磁気センサ111であり、例えばホール素子などが用いられる。磁気センサの他方は、検出する磁界の方向が反転する時にパルス上の信号を出力する第2の磁気センサ112であり、例えば大バルクハウゼン効果応用素子が用いられる。また、実施の形態1との相違点として、判定部3は第1の磁気センサ111の出力と、磁界反転面203aまたは203bの位置を検出するための基準信号V0とを入力とするコンパレータ302および第2の磁気センサ112の出力を増幅する増幅器303からなる。
【0029】
次に動作について説明する。
第1の磁気センサ111および第2の磁気センサ112は、感磁方向が図9中の矢印104の方向になるように配置される。これにより、第1の磁気センサ111および第2の磁気センサ112にかかる磁束密度のうち、磁界反転面203aおよび203bの法線方向の磁束密度成分は、磁石201a、201b、軟磁性体102a、102bといった磁性材料の位置関係が実施の形態1と同じであるので、図5で示したものと同じになる。第1の磁気センサ111および第2の磁気センサ112の位置に対して、これらの素子を貫く磁束密度の横方向成分(すなわち磁界反転面203aおよび203bの法線方向の磁束密度成分)、コンパレータ302の出力および増幅器303の出力をそれぞれ図10(a)、(b)および(c)に示す。
【0030】
第2の磁気センサ112として例えば大バルクハウゼン効果応用素子を用いる場合、これは大バルクハウゼン効果を有するワイヤとその周囲に巻回されるコイル巻線からなり、磁界の方向が反転するときのみ、パルス状の出力を発生するものであり、パルスの極性は磁界が変化する方向により正負反対になる。従って、第2の磁気センサ112の出力は磁界の方向が反転するとき、すなわち、第2の磁気センサ112が図9の磁界反転面203aおよび203bを通過するときにパルスを発生し、そのパルスの極性は磁界反転面203aと203bを通過するときでは互いに逆になる。このような第2の磁気センサ112を用いることにより、検出部1と磁界発生部2のギャップが変動しても、磁界反転面の位置は変わらないので、従来よりも検出信号レベルが高く、かつ、検出信号のゼロ点を検出する方式とすることができるので、接近検知時における位置検出の精度を高めることができ、誤差を極めて少なくすることができる。
【0031】
ここで、第1の磁気センサ111からの出力と基準電圧V0とを比較するコンパレータ302の出力は、検出対象がある範囲内に入ったことを示す「ゾーン検知」の役割を果たすことになる。また、第2の磁気センサ112の出力、すなわち増幅器303の出力は、検出対象が、ある決められた位置を通過したことを高精度に計測する「位置検知」の役割を果たすことになる。したがって本実施の形態における構成により、「ゾーン検出」と「位置検出」の両方の出力を有することから、接近検知時における位置検出精度は問わないがゾーンを検出する場合はコンパレータ302の出力を採用し、位置を高精度に検知する場合は増幅器303の出力を採用するといった使い方が可能となる。
【0032】
なお、増幅器303の出力、すなわち、第2の磁気センサ112の出力は、磁界変化の方向により極性が変わる。これから、増幅器303の出力の極性を判別することにより、検出部1と磁界発生部2が相対的に移動する方向を判別することもできる。
【0033】
実施の形態3.
図11は本発明の実施の形態3による磁気式近接センサを示す構成図であり、上記実施の形態1との相違点は次のとおりである。検出部1における磁気センサは2種類から構成され、一方は実施の形態1における磁気センサ101と同様に、磁界の大きさと方向を電気信号に変換する第1の磁気センサ111であり、例えばホール素子などを用いる。磁気センサの他方は、検出する磁界の方向が反転する時にパルス上の信号を出力する第2の磁気センサ112であり、例えば大バルクハウゼン効果応用素子を用いる。また、図11において第1の磁気センサ111の右側に軟磁性体102cが配置され、第1の磁気センサ111と第2の磁気センサ112の間に軟磁性体102bが配置され、さらに第2の磁気センサ112の左側に軟磁性体102aが配置される構成となっている。
【0034】
また、第1の磁気センサ111の出力と基準電圧V1を入力とするコンパレータ302aと、第1の磁気センサ111の出力と基準電圧V0とを入力とするコンパレータ302b、および、第2の磁気センサ112の信号を入力とする増幅器303を有し、さらに増幅器303とコンパレータ302aを入力とする論理積演算回路304a、および、増幅器303とコンパレータ302bを入力とする論理積演算回路304bを有する。
【0035】
次に動作について説明する。第1の磁気センサ111および第2の磁気センサ112はいずれも、感磁方向が図中の矢印104の方向になるように配置されている。検出部1が矢印105の方向に移動したとき、第1の磁気センサ111または第2の磁気センサ112が検出する磁束密度のうち、磁界反転面203aの法線方向の成分は、実施の形態1で示した図5とほとんど同じになる。その理由は、本実施の形態では軟磁性体の部品数が3であり、第1の磁気センサと第2の磁気センサの間にも軟磁性体102bが配置されていることが実施の形態1と異なる点であるが、軟磁性体と軟磁性体の間隔は第1の磁気センサ(例えばホール素子など)の厚み程度しかなく非常に小さいため、実質的には実施の形態1と本実施の形態の磁気回路に大きな差異はなく、ほとんど同等とみなせるからである。
【0036】
図12(a)に、横軸を第1の磁気センサ111の位置とした場合の、第1の磁気センサ111および第2の磁気センサ112を貫く磁束密度の横方向成分(すなわち、磁界反転面203aの法線方向成分)を示し、同図(b)にコンパレータ302aの出力を、同図(c)に第2の磁気センサの出力を増幅器303で増幅した出力を、さらに同図(d)に論理積演算回路304aの出力を示す。ここで、第1の磁気センサ111と第2の磁気センサ112との間隔Pは、磁石201aの磁化方向に垂直な磁束密度成分が極大になる位置と、磁石201aの中心位置との間の距離に概ね等しくなるようにする(すなわち、同図(c)に示すPと同程度にする)。このように構成することにより、第1の磁気センサ111と第2の磁気センサ112の間隔がPだけ離れているので、同図(a)に示すように、第1の磁気センサにかかる磁束密度と第2の磁気センサにかかる磁束密度は間隔Pだけずれることになる。
【0037】
ここで、コンパレータの基準電圧V1を図12(a)に示すように負の適当な値に定めると、コンパレータ302aの出力は同図(b)に示すように、磁界反転面203aより距離Pだけ左側の位置付近でHiを示すようになる。一方、第2の磁気センサ112の出力は第1の磁気センサ111が磁界反転面203aを通過するときは距離Pだけ左側にあるので、同図(c)に示すように、増幅器303の出力(すなわち、第2の磁気センサ112の出力)は、磁界反転面203aより距離Pだけ左側のところでパルスを出力する。
【0038】
論理積演算回路304aにてコンパレータ302aの出力と増幅器303の出力との論理積を演算することにより、第1の磁気センサ111が磁界反転面203aから左側に距離Pだけ離れた位置を通過したときの出力信号のみを抽出することができる。こうして、第1の磁気センサ111の出力から論理積演算回路304aの出力としてゲート信号を得ることができる。ゲート信号を基に磁気センサ111が磁界反転面203aから左側に所定の距離(オフセット)Pだけ離れた位置にあることを検出できるため、近接検出の信頼性を向上することができる。また、オフセットPは基準電圧V1の値を調整することにより、様々な値に設定が可能である。
【0039】
一方、もうひとつの磁界反転面である203bの位置の検出は以下に示す方法で行うことができる。コンパレータ302bの基準電圧V0は実施の形態1で述べたように、磁束密度ゼロに相当する値であるため、コンパレータ302bの出力は図13(b)に示すように、磁界反転面203aと203bの間で出力がHiになる。この区間は、磁界反転面203bからの距離Pだけ左側に離れた位置を含む。第2の磁気センサ112の出力は第1の磁気センサ111が磁界反転面203bを通過するときは距離Pだけ左側にあるので、同図(c)に示すように、増幅器303の出力(すなわち、第2の磁気センサ112の出力)は、磁界反転面203bより距離Pだけ左側のところでパルスを出力する。
【0040】
そして論理積演算回路304bにてコンパレータ302bの出力と増幅器303の出力の論理積をとることにより、第1の磁気センサ111が磁界反転面203bから左側に距離Pだけ離れた位置を通過したときのみの出力信号を抽出することができる。このようにして、磁界反転面面203bについても第1の磁気センサ111の出力をゲート信号として利用することができる。ゲート信号を基に磁気センサ111が磁界反転面203bから右側に所定の距離(オフセット)Pだけ離れた位置にあることを検出できるため、近接検出の信頼性を向上することができる。
【0041】
本実施の形態では、図13に示すように磁界反転面203aと203bの距離よりもオフセットPの設定値が小さい場合を示したが、さらにオフセットの値を大きく設定する必要がある場合には、例えば、磁界発生部2における磁石201aと201bの間隔を大きく取ることでオフセットPの値を大きくすることができる。また、コンパレータ302bが比較する基準電圧を磁界ゼロと同値となるV0の値より低い値に設定することにより、コンパレータ302bがHiを出力する区間を広げることができ、オフセットPの設定値を大きく取ることができる。
なお、増幅器303の出力(すなわち第2の磁気センサ112の出力)は、磁界変化の方向により極性が変わる。すなわち、増幅器303の出力の極性を判別することにより移動方向を判別することもできる。
なお、本発明の実施の形態1において、磁気センサ101が2つの磁界反転面203aと203bの間または磁界反転面203aまたは203bの位置にあるときをもって、検出部1と磁界発生部2の接近として検知するとしたが、本実施の形態においては検出部1と磁界発生部2の接近を上記2つの磁界反転面203aと203bを基準とする以外に、磁界反転面203aまたは203bから所定の距離Pだけ離れた位置を基準とすることも可能である。いずれの位置を基準として検出部1と磁界発生部2の接近として検知するかは用途に応じて適宜選択すればよい。
【0042】
実施の形態4.
図14は本発明の実施の形態4による磁気式近接センサを示す構成図であり、実施の形態1との相違点は次のとおりである。検出部1は、磁界の大きさと方向を電気信号に変換する2つの磁気センサ101aと101bで構成される。磁気センサ101a、101bとしては例えばホール素子などが使用される。
また、図14において磁気センサ101aの左側に軟磁性体102aが配置され、磁気センサ101aと101bの間に軟磁性体102bが配置され、磁気センサ101の右側に軟磁性体102cが配置される。判定部3は磁気センサ101aの出力と基準電圧V0を入力とするコンパレータ301aと、磁気センサ101bの出力と基準電圧V0を入力とするコンパレータ301b、およびコンパレータ301aと301bの出力を比較演算する比較演算回路305で構成される。
【0043】
次に動作について説明する。磁気センサ101aおよび101bは感磁方向が図中の104の方向になるように配置されている。検出部1が矢印105の方向に移動したとき、磁気センサ101aまたは101bに加わる磁束密度のうち、磁界反転面203aの法線方向の磁束密度成分は、実施の形態1で示した図5とほとんど同じになる。その理由は、本実施の形態では軟磁性体の部品数が3であることが実施の形態1と異なる点であるが、軟磁性体と軟磁性体の間隔は磁気センサ101a(例えばホール素子など)の厚み程度しかなく非常に小さいため、実質的には実施の形態1と本実施の形態の磁気回路に大きな差異はなく、ほとんど同等とみなせるからである。
【0044】
図15(a)に、横軸を磁気センサ101aの位置とした場合の、磁気センサ101aおよび101bを貫く磁束密度の横方向成分(すなわち、磁界反転面203aの法線方向の成分)を示す。ここで、磁気センサ101aと101bは所定の距離Qだけ離れている。そのため、図15(a)に示すように磁気センサ101aと101bが検出する磁束密度は間隔Qだけ位相がずれることになる。
【0045】
ここで、コンパレータの基準電圧V0を磁気センサが示す磁界ゼロのときの値に設定すると、コンパレータ301aおよび301bの出力は図15(b)および(c)に示すように、互いに間隔Qだけずれることになる。検出部1が矢印105またはその正反対の方向に移動するとき、コンパレータ301aの出力と301bの出力は、必ずいずれかがHi(またはLo)になった後にもう一方がHi(またはLo)になる。すなわち、コンパレータ301aと301bの出力を比較し、Hi(またはLo)になった順序を判別することにより移動方向を判別することができる。
【0046】
また、上記所定の間隔Qを2つの磁界反転面203aと203bの間隔より小さく設定した場合、検出部1が磁界発生部2の近くを通過する時、故障箇所がなければ、コンパレータ301aと301bのいずれか一方の出力がHiになってからLoになるまでの間に、他方のコンパレータの出力は必ずHiになる。仮に、一方のコンパレータ出力がHiになってからLoになるまでの間に、もう一方のコンパレータ出力が全くHiにならないときは、何らかの故障があると判断できる。このようにして、2つのコンパレータ出力の変化を検知することにより、検出部に故障があるか否かの自己診断を行うことができる。
【0047】
実施の形態5.
図16は本発明の実施の形態5による磁気式近接センサを示す構成図であり、同図では検出部1と判定部3を示す。実施の形態1との本実施の形態の相違点は以下の通りである。軟磁性体102aと102bの形状は板状であり、一方の軟磁性体の板の端部と他方の軟磁性体の板の端部の間に磁気センサ101が配置されている。なお、磁気センサ101の感磁方向は図の矢印104に示す方向である。
【0048】
図16に示すように、磁束の大部分は折れ線矢印107で示すように、2つの軟磁性体の間の最も狭いギャップを通過するので、磁気センサ101を貫く磁束の方向は矢印104の方向となる。このように構成することにより、磁気センサ101に磁束が集中するので、磁気センサ101の磁気感度が増大し、信号対雑音比を高くすることができ、その結果、検出誤差を小さくすることができる。また、磁気感度を確保するには概ね軟磁性体の磁束方向に垂直な方向の断面積を大きくすればよいが、棒状の軟磁性体と同じ断面積(すばわち磁気感度)を得るための板状の軟磁性体は、棒状軟磁性体に比べて薄く形成することができるので、検出部を薄く小型にすることができる。
【0049】
実施の形態6.
図17は本発明の実施の形態6による磁気式近接センサを示す構成図であり、同図では磁界発生部2のみを示す。実施の形態1との本実施の形態の相違点は以下の通りである。磁界発生部2は2つの磁石201aおよび202bと、この2つの磁石に接続される鉄などの軟磁性体204からなる。
【0050】
このような配置にすることにより、磁石201aおよび201bから発生する磁界のうち、図の下方へ発生するものはその大部分が軟磁性体204の中を通り、軟磁性体204の外側(図の下方)には磁界がほとんど漏れなくなる。また、軟磁性体204の外側(図15の下方)に鉄、磁石、電流線などの磁場を乱すものがあったとしても、軟磁性体204に遮蔽される。このように、外乱磁界がある場合でもその影響を低減することができ、検出性能を確保することができる。
なお、磁石201aおよび201bから発生する磁界のうち、検出部1が通過する側(図の上方)には、実施の形態1と同様に磁界がかかるため、上記実施の形態1〜5と同様に高精度に検出対象の近接検出を行うことができる。
【符号の説明】
【0051】
1 検出部、101、101a、101b 磁気センサ、102a、102b、102c 軟磁性体、104 磁気センサの感磁方向、105、106 検出部の移動方向、107 磁束の方向、111 第1の磁気センサ、112 第2の磁気センサ、2 磁界発生部、201a、201b 磁石、202a、202b 磁石の磁化方向、203a、203b 磁界反転面、204 軟磁性体、3 判定部、301、301a、301b、302 コンパレータ、303 増幅器、304a、304b 論理積演算回路、305 比較演算回路
【特許請求の範囲】
【請求項1】
磁石からなる磁界発生部と磁気センサからなる検出部とが相対的に移動する際に、上記磁気センサが検出する磁束密度の変化に基づいて上記磁界発生部と上記検出部との接近を検知する判定部を備えた磁気式近接センサにおいて、上記磁界発生部は上記磁界発生部と上記検出部とが相対的に移動する方向に並設され、それぞれの磁化方向が略平行で互いに反対方向を向くように配置された一対の磁石からなり、上記一対の磁石のそれぞれを通り、上記磁気センサが検出する磁界の方向が反転する一対の磁界反転面を形成する磁界を発生し、上記磁気センサは上記磁界発生部と上記検出部とが相対的に移動する際に上記磁界反転面の少なくとも一方を横切るものであり、上記判定部は上記磁気センサの検出信号と上記磁界反転面を検出するための基準信号とを比較し、上記検出信号の出力レベルが上記基準信号のレベルより大きいときに上記磁気センサが上記磁界反転面の間にあることを示す所定レベルの近接検出信号を出力するコンパレータを備えたことを特徴とする磁気式近接センサ。
【請求項2】
上記判定部は、上記磁気センサの検出信号と上記基準信号とを比較し、両者の出力レベルが等しくなったときに上記近接検出信号の出力レベルを変更することにより、上記磁気センサが上記磁界反転面上にあることを示すコンパレータを備えたことを特徴とする請求項1に記載の磁気式近接センサ。
【請求項3】
上記検出部は、第一および第二の磁気センサからなり、上記第一および第二の磁気センサの、上記磁界反転面の法線方向に沿って測った距離が正の値となるように配置され、上記判定部は、上記第一の磁気センサの検出信号と上記基準信号とを比較し、両者の出力レベルが等しくなったときに第一の近接検出信号の出力レベルを変更する第一のコンパレータと、上記第二の磁気センサの検出信号と上記基準信号とを比較し、両者の出力レベルが等しくなったときに第二の近接検出信号の出力レベルを変更する第二のコンパレータとを備え、上記第一および第二の近接検出信号の出力レベルが変更される順序に基づいて、上記磁界発生部と上記検出部とが相対的に移動する方向を判定することを特徴とする請求項2に記載の磁気式近接センサ。
【請求項4】
上記検出部は、第一および第二の磁気センサからなり、上記第一および第二の磁気センサの間の、上記磁界反転面の法線方向に沿って測った距離が、上記磁界反転面間の距離よりも小さくなるように配置され、上記判定部は、上記第一の磁気センサの検出信号と上記基準信号とを比較し、両者の出力レベルが等しくなったときに第一の近接検出信号の出力レベルを変更する第一のコンパレータと、上記第二の磁気センサの検出信号と上記基準信号とを比較し、両者の出力レベルが等しくなったときに第二の近接検出信号の出力レベルを変更する第二のコンパレータとを備え、上記第一の近接検出信号の出力レベルが変更されてから再度出力レベルが変更されるまでの間に、上記第二の近接信号の出力レベルが変更されないときに、上記検出部または上記判定部に故障があると判定することを特徴とする請求項2に記載の磁気式近接センサ。
【請求項5】
上記検出部は、磁束密度の値に応じた検出信号を出力する第一の磁気センサと、磁束密度の値に基づいて磁界の方向が反転するときにパルス状の磁界方向反転信号を出力する第二の磁気センサからなり、上記判定部は、上記第一の磁気センサの検出信号と上記基準信号とを比較し、上記検出信号のレベルが上記基準信号のレベルより大きいときに、上記第一の磁気センサが上記磁界反転面の間にあることを示す所定レベルの近接検出信号を出力するコンパレータを備え、上記磁界方向反転信号に基づいて、上記第2の磁気センサが上記一対の磁界反転面のいずれか一方の面上にあることを示す基準面位置検出信号を出力することを特徴とする請求項1に記載の磁気式近接センサ。
【請求項6】
上記第一および第二の磁気センサの間の、上記一対の磁界反転面の法線方向に沿って測った距離が、上記一対の磁界反転面の一方の面の位置と、上記第一および第二の磁気センサの感磁方向に沿った磁束成分が極大になる位置との距離に略等しくなるように配置され、上記判定部は、上記近接検出信号と上記磁界方向反転信号との論理積演算の結果に基づいて、上記第一の磁気センサが、上記一対の磁界反転面の一方の面より所定距離だけ離れた位置にあることを示す所定レベルの近接検出信号を出力することを特徴とする請求項5に記載の磁気式近接センサ。
【請求項7】
上記第二の磁気センサが検出する磁束密度が負の値から正の値に変化するときに正の出力レベルの磁界方向反転信号を出力し、磁束密度が正の値から負の値に変化するときに負の出力レベルの磁界反転信号を出力するものであって、上記判定部は、上記磁界反転信号の出力極性に基づいて、上記磁界発生部と上記検出部とが相対的に移動する方向を判定することを特徴とする請求項5または6に記載の磁気式近接センサ。
【請求項8】
上記検出部が、磁気センサの両外側であって上記磁気センサの感磁方向に略平行に配置された棒状ないし板状の軟磁性体を備えたことを特徴とする請求項1ないし7のいずれか一項に記載の磁気式近接センサ。
【請求項9】
上記検出部が、上記磁界発生部と上記検出部とが相対的に移動する方向に略平行に並設された第一および第二の磁気センサからなり、上記第一および第二の磁気センサの間および両外側であって上記磁気センサの感磁方向と略平行に配置された棒状ないし板状の軟磁性体を備えたことを特徴とする請求項3ないし7のいずれか一項に記載の磁気式近接センサ。
【請求項10】
上記検出部が、磁気センサを挟んで配置され上記磁気センサの感磁方向と略垂直で互いに反対方向に配置された2枚の板状の軟磁性体を備えたことを特徴とする請求項1、2、4または5に記載の磁気式近接センサ。
【請求項11】
上記磁界発生部の一対の磁石に軟磁性体が接続されていることを特徴とする請求項1ないし10のいずれか一項に記載の磁気式近接センサ。
【請求項1】
磁石からなる磁界発生部と磁気センサからなる検出部とが相対的に移動する際に、上記磁気センサが検出する磁束密度の変化に基づいて上記磁界発生部と上記検出部との接近を検知する判定部を備えた磁気式近接センサにおいて、上記磁界発生部は上記磁界発生部と上記検出部とが相対的に移動する方向に並設され、それぞれの磁化方向が略平行で互いに反対方向を向くように配置された一対の磁石からなり、上記一対の磁石のそれぞれを通り、上記磁気センサが検出する磁界の方向が反転する一対の磁界反転面を形成する磁界を発生し、上記磁気センサは上記磁界発生部と上記検出部とが相対的に移動する際に上記磁界反転面の少なくとも一方を横切るものであり、上記判定部は上記磁気センサの検出信号と上記磁界反転面を検出するための基準信号とを比較し、上記検出信号の出力レベルが上記基準信号のレベルより大きいときに上記磁気センサが上記磁界反転面の間にあることを示す所定レベルの近接検出信号を出力するコンパレータを備えたことを特徴とする磁気式近接センサ。
【請求項2】
上記判定部は、上記磁気センサの検出信号と上記基準信号とを比較し、両者の出力レベルが等しくなったときに上記近接検出信号の出力レベルを変更することにより、上記磁気センサが上記磁界反転面上にあることを示すコンパレータを備えたことを特徴とする請求項1に記載の磁気式近接センサ。
【請求項3】
上記検出部は、第一および第二の磁気センサからなり、上記第一および第二の磁気センサの、上記磁界反転面の法線方向に沿って測った距離が正の値となるように配置され、上記判定部は、上記第一の磁気センサの検出信号と上記基準信号とを比較し、両者の出力レベルが等しくなったときに第一の近接検出信号の出力レベルを変更する第一のコンパレータと、上記第二の磁気センサの検出信号と上記基準信号とを比較し、両者の出力レベルが等しくなったときに第二の近接検出信号の出力レベルを変更する第二のコンパレータとを備え、上記第一および第二の近接検出信号の出力レベルが変更される順序に基づいて、上記磁界発生部と上記検出部とが相対的に移動する方向を判定することを特徴とする請求項2に記載の磁気式近接センサ。
【請求項4】
上記検出部は、第一および第二の磁気センサからなり、上記第一および第二の磁気センサの間の、上記磁界反転面の法線方向に沿って測った距離が、上記磁界反転面間の距離よりも小さくなるように配置され、上記判定部は、上記第一の磁気センサの検出信号と上記基準信号とを比較し、両者の出力レベルが等しくなったときに第一の近接検出信号の出力レベルを変更する第一のコンパレータと、上記第二の磁気センサの検出信号と上記基準信号とを比較し、両者の出力レベルが等しくなったときに第二の近接検出信号の出力レベルを変更する第二のコンパレータとを備え、上記第一の近接検出信号の出力レベルが変更されてから再度出力レベルが変更されるまでの間に、上記第二の近接信号の出力レベルが変更されないときに、上記検出部または上記判定部に故障があると判定することを特徴とする請求項2に記載の磁気式近接センサ。
【請求項5】
上記検出部は、磁束密度の値に応じた検出信号を出力する第一の磁気センサと、磁束密度の値に基づいて磁界の方向が反転するときにパルス状の磁界方向反転信号を出力する第二の磁気センサからなり、上記判定部は、上記第一の磁気センサの検出信号と上記基準信号とを比較し、上記検出信号のレベルが上記基準信号のレベルより大きいときに、上記第一の磁気センサが上記磁界反転面の間にあることを示す所定レベルの近接検出信号を出力するコンパレータを備え、上記磁界方向反転信号に基づいて、上記第2の磁気センサが上記一対の磁界反転面のいずれか一方の面上にあることを示す基準面位置検出信号を出力することを特徴とする請求項1に記載の磁気式近接センサ。
【請求項6】
上記第一および第二の磁気センサの間の、上記一対の磁界反転面の法線方向に沿って測った距離が、上記一対の磁界反転面の一方の面の位置と、上記第一および第二の磁気センサの感磁方向に沿った磁束成分が極大になる位置との距離に略等しくなるように配置され、上記判定部は、上記近接検出信号と上記磁界方向反転信号との論理積演算の結果に基づいて、上記第一の磁気センサが、上記一対の磁界反転面の一方の面より所定距離だけ離れた位置にあることを示す所定レベルの近接検出信号を出力することを特徴とする請求項5に記載の磁気式近接センサ。
【請求項7】
上記第二の磁気センサが検出する磁束密度が負の値から正の値に変化するときに正の出力レベルの磁界方向反転信号を出力し、磁束密度が正の値から負の値に変化するときに負の出力レベルの磁界反転信号を出力するものであって、上記判定部は、上記磁界反転信号の出力極性に基づいて、上記磁界発生部と上記検出部とが相対的に移動する方向を判定することを特徴とする請求項5または6に記載の磁気式近接センサ。
【請求項8】
上記検出部が、磁気センサの両外側であって上記磁気センサの感磁方向に略平行に配置された棒状ないし板状の軟磁性体を備えたことを特徴とする請求項1ないし7のいずれか一項に記載の磁気式近接センサ。
【請求項9】
上記検出部が、上記磁界発生部と上記検出部とが相対的に移動する方向に略平行に並設された第一および第二の磁気センサからなり、上記第一および第二の磁気センサの間および両外側であって上記磁気センサの感磁方向と略平行に配置された棒状ないし板状の軟磁性体を備えたことを特徴とする請求項3ないし7のいずれか一項に記載の磁気式近接センサ。
【請求項10】
上記検出部が、磁気センサを挟んで配置され上記磁気センサの感磁方向と略垂直で互いに反対方向に配置された2枚の板状の軟磁性体を備えたことを特徴とする請求項1、2、4または5に記載の磁気式近接センサ。
【請求項11】
上記磁界発生部の一対の磁石に軟磁性体が接続されていることを特徴とする請求項1ないし10のいずれか一項に記載の磁気式近接センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2010−267580(P2010−267580A)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2009−119908(P2009−119908)
【出願日】平成21年5月18日(2009.5.18)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願日】平成21年5月18日(2009.5.18)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]