
磁気検出装置
【課題】 特に、センターずれが生じても従来に比べて出力誤差(角度誤差)を小さくすることが可能な磁気検出装置を提供することを目的とする。
【解決手段】 軸部30を有する回転体と、軸受部31を有して回転体を回転自在に支持する支持体と、前記回転体と前記支持体との間に非接触にて配置された磁石及び磁気センサとを有する。軸受部31の底面31bの径D1は、軸部30の先端面30bの径D2より大きく形成されている。軸受部31の第1の側面31a及び軸部30の第2の側面30aはともに底面及び前記先端面に対する垂直方向から傾いて形成されており、第1の側面31aの前記底面と平行な面方向に対する傾き角度θ1(鋭角)は、第2の側面30aの前記先端面と平行な面方向に対する傾き角度θ2(鋭角)よりも小さい。これによりセンターずれが生じると、軸部30は横ずれした後、傾く。
【解決手段】 軸部30を有する回転体と、軸受部31を有して回転体を回転自在に支持する支持体と、前記回転体と前記支持体との間に非接触にて配置された磁石及び磁気センサとを有する。軸受部31の底面31bの径D1は、軸部30の先端面30bの径D2より大きく形成されている。軸受部31の第1の側面31a及び軸部30の第2の側面30aはともに底面及び前記先端面に対する垂直方向から傾いて形成されており、第1の側面31aの前記底面と平行な面方向に対する傾き角度θ1(鋭角)は、第2の側面30aの前記先端面と平行な面方向に対する傾き角度θ2(鋭角)よりも小さい。これによりセンターずれが生じると、軸部30は横ずれした後、傾く。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁気センサと磁石とが非接触にて配置された磁気検出装置に係り、特に磁気センサと磁石間の位置決め精度に関する。
【背景技術】
【0002】
下記特許文献1には回転検出装置に関する発明が開示されている。この発明では、回転軸部を有するギア本体部にリング状磁石が固定支持されており、リング状磁石とは非接触の位置にホール素子が設けられている。ギア本体部は回転可能に支持されており、ギア本体部の回転に伴って、ホール素子に作用するリング状磁石からの磁束密度が変化し、これにより回転状態を検出することが可能になっている。
【0003】
ところで検出精度を向上させるために、磁石と磁気センサ間の位置決め精度が重要になる。
【0004】
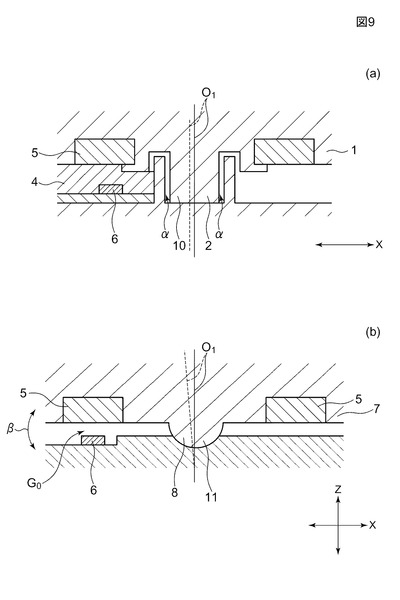
図9(a)では、特許文献1と同様に回転体1に設けられた軸部2が円筒形で突出形成されている。軸部2は凹状の軸受部10により回転自在に支持されている。軸部2と軸受部10との間に隙間αが設けられている。また、図9(a)に示すように回転体1の下面とギャップ層4との間に磁石5が設けられ、ギャップ層4下に磁気センサ6が設けられる。磁石5と磁気センサ6間はギャップ層4を介して非接触に保たれる。
【0005】
図9(a)では、軸部2の中心軸O1(実線)が、ちょうど軸受部10の中央に位置した状態であるが、図9(a)に示すように軸部2の中心軸O1(点線)がセンターずれを起こして、軸部2が横方向(X)にずれると磁石5と磁気センサ6間の位置精度が悪化し、検出精度が低下する問題があった。
【0006】
また図9(b)は特許文献2と同様に回転体7に設けられた軸部8を半球状で突出させた従来例である。軸部8は半球状に凹んだ軸受部11により回転自在に支持されている。図9(b)に示すように、磁石5は回転体7に固定支持されている。また、磁気センサ6は磁石5とギャップを介して非接触にて基板側に固定支持されている。図9(b)の従来例によれば、図9(a)の形態と異なって、軸部のセンターずれに伴う横ずれ(X方向へのずれ)は生じにくい。
【0007】
図9(b)では、軸部8の中心軸O1(実線)が、ちょうど垂直方向(Z)に一致した状態であるが、軸部8の中心軸O1(点線)がセンターずれを起こすと軸部8は軸受部11の凹曲面を摺動しながら高さ方向に傾き(傾きを矢印βで示した)、磁石5と磁気センサ6間のギャップG0が変動し、検出精度が低下する問題があった。
【0008】
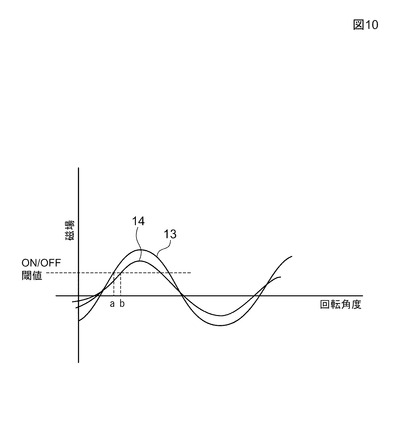
図10に示すように、磁石5と磁気センサ6間のギャップG0が変動すると、磁気センサ6に作用する磁場の波形13,14は変化する。図10は、回転角度に対する磁場の波形とON/OFF閾値を示すイメージ図である。ON/OFF閾値は、磁場曲線における最大磁場と最小磁場の間に設定される。
【0009】
図10に示すように磁場の波形13,14は、回転角度に対して略SIN波となるが、ギャップG0の変化が大きいほど、波形13,14間の変動も大きくなり、ON/OFF点a,bの変化が大きくなり、出力誤差(角度誤差)が大きくなる問題があった。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2010−71852号公報
【特許文献2】特開2009−180409号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
そこで本発明は上記従来の課題を解決するためのものであり、特に、センターずれが生じても従来に比べて出力誤差(角度誤差)を小さくすることが可能な磁気検出装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、軸部を有する回転体と、前記回転体と高さ方向で対向し、前記軸部との対向位置に軸受部を有して前記回転体を回転自在に支持する支持体と、前記回転体と前記支持体との間に非接触にて配置された磁石及び磁気センサとを有し、前記磁石と前記磁気センサの一方が前記回転体に固定支持され、他方が前記支持体側に固定支持された磁気検出装置において、
前記軸受部は、第1の側面と底面とを有して前記第1の側面から前記底面にかけて凹形状とされており、前記軸部は、前記底面と対向する先端面と、前記第1の側面と対向する第2の側面とを有して前記先端面から前記第2の側面にかけて突起状とされており、
前記軸受部の底面の径D1は、前記軸部の先端面の径D2より大きく形成されており、
前記軸受部の第1の側面及び前記軸部の第2の側面はともに前記底面及び前記先端面に対する垂直方向から傾いて形成されており、前記第1の側面の前記底面と平行な面方向に対する傾き角度θ1(鋭角)は、前記第2の側面の前記先端面と平行な面方向に対する傾き角度θ2(鋭角)よりも小さいことを特徴とするものである。本発明では、前記軸部が切頭円錐状で形成されていることが好ましい。
【0013】
本発明によれば、軸部のセンターずれが生じたとき、軸部はまず横ずれを起こし、続いて、軸部が軸部と軸受部との側面間の角度差に基づいて傾く。このように、センターずれに伴って軸部を横ずれモードと傾きモードとに分散させることができ、これにより従来よりも出力誤差(角度誤差)を小さくでき、検出精度を向上させることができる。
【発明の効果】
【0014】
本発明によれば、センターずれに伴って軸部を横ずれモードと傾きモードとに分散させることができ、これにより従来よりも出力誤差(角度誤差)を小さくでき、検出精度を向上させることができる。
【図面の簡単な説明】
【0015】
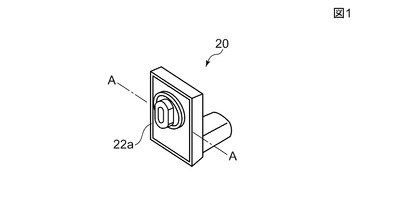
【図1】図1は、本実施形態の磁気検出装置の斜視図である。
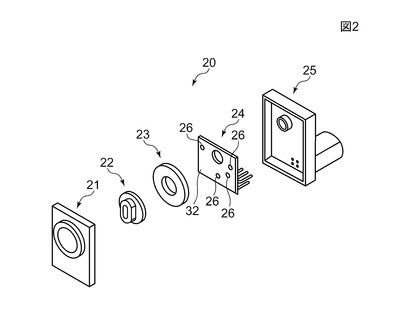
【図2】図2は、図1に示す磁気検出装置の分解斜視図である。
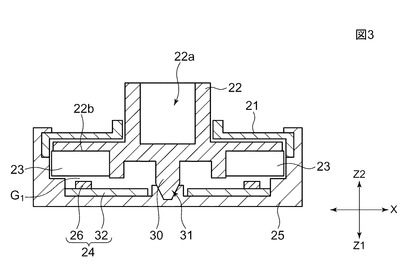
【図3】図3は、図1に示す本実施形態の磁気検出装置をA−A線に沿って切断した縦断面図である。
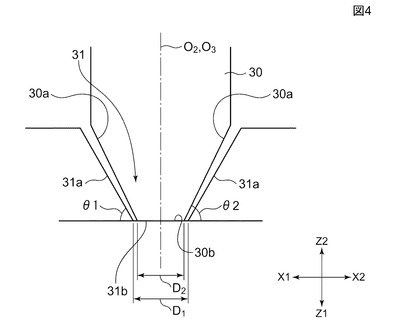
【図4】図4は、図3に示す軸部と軸受部との付近を拡大した部分拡大縦断面図である。なお断面を示す斜線は省略した。
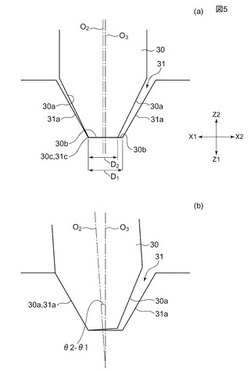
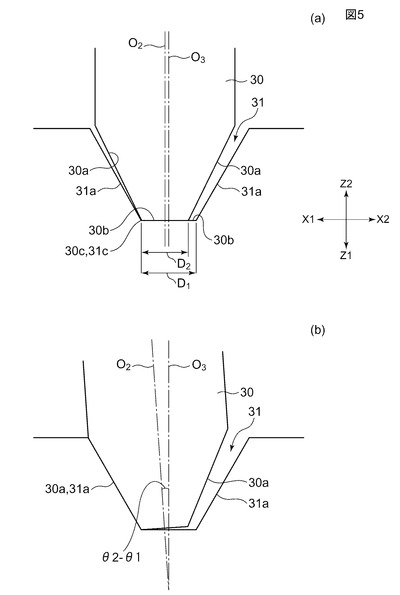
【図5】図5は、軸部のセンターずれが生じたときに起こる横ずれモード(図5(a))と、傾きモード(図5(b))を説明するための部分拡大縦断面図である。なお断面を示す斜線は省略した。
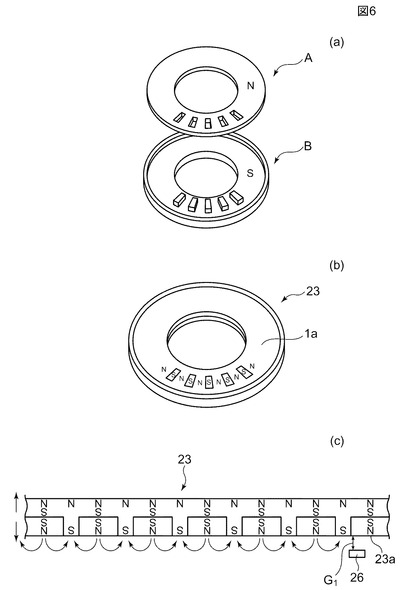
【図6】図6(a)は、本実施形態の磁気検出装置に使用される磁石の一例を示す分解斜視図であり、図6(b)は、図6(a)の磁石A及び磁石Bを組み合わせた磁石の斜視図(図6(a)よりもやや大きく図示した)、図6(c)は、図6(b)に示す着磁面を円周方向に沿って切断した磁石と磁気センサとを備える磁気検出装置の部分拡大縦断面図である。なお図6(c)において、断面を示す斜線は省略した。
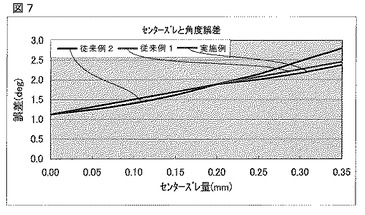
【図7】図7は、本実施例、従来例1及び従来例2の各磁気検出装置におけるセンターずれ量と出力誤差との関係を示すグラフである。
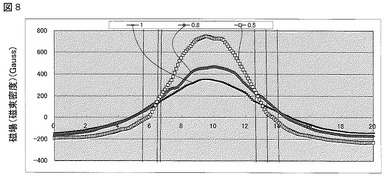
【図8】図8は、磁石の回転角度と磁気センサに作用する磁場(磁束密度)との関係を示すグラフである。
【図9】図9は、従来の磁気検出装置の構造を示す部分拡大断面図であり、図9(a)は図7に示す従来例1、図9(b)は図7に示す従来例2の磁気検出装置である。
【図10】図10は、磁石の回転角度と磁気センサに作用する磁場及びON/OFF閾値との関係を示すイメージ図である。
【発明を実施するための形態】
【0016】
図1は、本実施形態の磁気検出装置の斜視図であり、図2は、図1に示す磁気検出装置の分解斜視図であり、図3は、図1に示す本実施形態の磁気検出装置をA−A線に沿って切断した縦断面図であり、図4は、図3に示す軸部と軸受部との付近を拡大した部分拡大縦断面図である。
【0017】
図1,図2に示す磁気検出装置20は、カバー21、シャフト(回転体)22、磁石23、磁気センサ24及びケース(支持体)25等を有して構成される。図面には、Oリング等を図示していない。本実施形態の磁気検出装置20は、車載用、電子機器用等、使用用途を限定するものでない。
【0018】
図3に示すようにシャフト22には上面側(Z2側)に機器本体の駆動軸(図示せず)を挿入するための挿入孔22aが設けられ、シャフト22の下面側(Z1側)には下方向に向けて突出する軸部30が設けられている。軸部30及び挿入孔22aはシャフト22の中央に位置し、軸部30の中心軸と挿入孔22aの中心軸は一致している。なお、本実施例ではシャフト22に挿入孔22aが形成された構成を示しているが、シャフト22に凸部が形成され軸部30の中心軸と凸部の中心軸が一致している構成のものでもよい。
【0019】
図3に示すように、軸部30の周囲に位置するシャフト22の下面22bにはリング状の磁石23が固定支持されている。
【0020】
図6(a)は、磁石23の分解斜視図、図6(b)は、図6(a)の磁石A及び磁石Bを組み合わせた磁石の斜視図((a)よりもやや大きく図示した)、図6(c)は、図6(b)に示す着磁面を円周方向に沿って切断した磁石と磁気センサとの部分拡大縦断面図である。
【0021】
図6(a)に示すように例えば、磁石Aの表面はN極に着磁され、磁石Bの表面はS極に着磁されている。したがって図6(b)に示すように磁石Aと磁石Bとを組み立てた磁石23の表面(磁気センサ2との対向面;着磁面)23aは、円周方向に沿ってN極とS極とが交互に並んでいる。
【0022】
図6(c)に示す磁石23は、図6(b)の磁石23を反転させたものである。
なお図6に示す磁石の構成は一例であって、図6以外の磁石を使用することも可能である。
【0023】
図3に示すように、シャフト22はカバー21とケース25との間に挟みこまれる。このとき図1に示すようにシャフト22の挿入孔22aは外部に露出した状態であり、機器本体側の駆動部が前記挿入孔22a内に挿入される。
【0024】
ケース25は、回転体であるシャフト22を回転自在に支持する支持体である。ケース25にはシャフト22の軸部30と対向する位置に凹状の軸受部31が設けられ、軸部30の先端部分が軸受部31内に入り込んでいる。
【0025】
図3に示すように軸受部31の周囲であってケース25の内表面には磁気センサ24が固定支持されている。軸受部31が設けられる支持体部分と、磁気センサ24を固定支持する支持体部分は図3のように一体的であることが好ましいが別体とされていてもよい。磁気センサ24は、プリント基板32と、プリント基板32上に固定支持された複数の磁気検出素子26とを有して構成される。図3,図6に示すように、磁気センサ24を構成する磁気検出素子26と磁石23とが高さ方向(Z)に間隔(ギャップG1)を空けて非接触にて対向している。
【0026】
シャフト22の回転により磁石23が回転すると、磁気センサ24を構成する磁気検出素子26は、磁石23のN極からS極にかけて生じる磁場変化を受けて電気特性が変化する。そして磁気検出素子26の検出信号(ON/OFF信号)に基づいて、回転状態(回転角度や回転方向)を知ることができる。
【0027】
なお磁気検出素子26はホール素子、磁気抵抗効果素子(GMR素子)等、特に限定するものでない。
【0028】
また、シャフト22側に磁気センサ24が固定支持され、ケース25側に磁石23が固定支持されてもよいが、磁気センサ24を回転しないケース25側に固定したほうが配線の引き回し等を容易化でき好適である。
【0029】
図4に示すように、軸受部31は、第1の側面31aと底面31bとを有して第1の側面31aから底面31bにかけて凹形状とされている。また軸部30は、軸受部31の底面31bと対向する先端面30bと、第1の側面31aと対向する第2の側面30aを有して、先端面30bから第2の側面30aにかけて突起状とされている。本実施形態における軸部30は下方向(Z1)に向けて切頭円錐状に突出している。また、軸受部31も、下方向(Z1)に向けて切頭円錐状に凹んでいる。よって図4に示すように、軸受部31の底面31b及び軸部30の先端面30bはともに平面であり、底面31bの径はD1、先端面30bの径はD2で形成されている。
【0030】
図4に示すように、軸受部31の第1の側面31a、及び軸部30の第2の側面30aはともに、高さ方向(Z1−Z2)から平面方向に向けて傾いて形成されている。第1の側面31aは、軸受部31の底面31bと平行な面方向に対して傾き角度θ1(鋭角)を有して傾いている。また、第2の側面30aは、軸部30の先端面30bと平行な面方向に対して傾き角度θ2(鋭角)を有して傾いている。図4では、第1の側面31a及び第2の側面30aが直線状とされているが、曲面であってもよい。
【0031】
図4に示すように、軸受部31の底面31bの径D1>軸部30の先端面30bの径D2とされており、軸受部31の第1の側面31aの傾き角度θ1<軸部30の第2の側面aの傾き角度θ2とされている。
【0032】
一例を示すと、軸受部31の底面31bの径D1は、2〜10mm程度、軸部30の先端面30bの径D2は、1.8〜9.8mm程度、軸受部31の第1の側面31aの傾き角度θ1は、60〜80°程度、軸部30の第2の側面aの傾き角度θ2は、62〜82°程度である。
【0033】
図4では、軸部30の中心軸O2と、軸受部31の中心垂線O3とが一致した状態である。ここで「軸部30の中心軸O2」とは、水平面方向を向く先端面30bの中心に垂直に交わる垂線である。また「軸受部31の中心垂線O3」とは、水平面方向を向く底面31bの中心に垂直に交わる垂線である。
【0034】
機器本体側の駆動軸が、シャフト22の挿入孔22aに挿入されるとき、前記駆動軸の中心軸(図示しない)が、軸部30の中心軸O2に対してずれて挿入されると、そのずれ量がセンターずれ量となる。
【0035】
本実施形態では、センターずれが生じている場合、図4で説明したように、軸受部31の底面31bの径D1>軸部30の先端面30bの径D2の関係により、図5(a)に示すように軸部30が例えばX1方向に横ずれを起こす。軸部30の先端面30bと第2の側面30aとの間の縁部30cが、軸受部31の底面31bと第1の側面31aとの間の縁部31cにまで到達すると、すなわち、軸部3が横方向に(D1−D2)/2だけ移動すると、これ以上、軸部30は横ずれしない。
【0036】
続いて、図4で説明したように、軸受部31の第1の側面31aの傾き角度θ1<軸部30の第2の側面aの傾き角度θ2の関係により、図5(b)に示すよに、軸部30が傾く。軸部30の第2の側面30aが、軸受部31の第1の側面31aに接触すると、すなわち、軸部3がθ2−θ1だけ傾くと、これ以上、軸部30は傾かない。
【0037】
図7は、本実施形態の磁気検出装置、図8(a)に示す従来例1の磁気検出装置、及び図8(b)に示す従来例2の磁気検出装置におけるセンターずれ量と出力誤差(角度誤差)との関係を示すグラフである。実施例での軸受部31の底面31bの径D1を、2mm、軸部30の先端面30bの径D2を1.8mm、軸受部31の第1の側面31aの傾き角度θ1を、73°、軸部30の第2の側面aの傾き角度θ2を75°とした。
【0038】
なお図7に示すようにセンターずれ量が0mmのときでも、実施例、従来例1及び従来例2では出力誤差(角度誤差)を生じているが、これは組立時点で生じる位置ずれによるもので、実施例、従来例1及び従来例2は全てセンターずれ量が0mmのときに同じ出力誤差を有している。下記の表1に、センターずれ量と、出力誤差を表示した。
【0039】
【表1】

【0040】
図7及び表1に示すようにセンターずれ量が0.2mmまでは、実施例は図5(a)の横ずれを起こしており、実施例と従来例1との出力誤差は一致している。一方、従来例2では、センターずれ量と出力誤差とは略二次関数の関係であるが、センターずれ量が0.2mmより大きくなると、従来例2では実施例及び従来例1よりも出力誤差が大きくなり、0.2mm以降、出力誤差の差は、従来例2と、実施例及び従来例1との間で急速に大きくなっていく。
【0041】
図7に示すようにセンターずれ量が0.2mmより大きくなると、実施例では図5(b)に示すように軸部が傾き始める。そして、実施例では、従来例1よりも出力誤差が小さくなる。これは図9(a)で説明した横ずれを生じる場合、そのセンターずれ量と出力誤差とは略一次関数の関係であるが、図9(b)で説明した傾きが生じて磁気センサと磁石間のギャップが変動する場合、センターずれ量と出力誤差とは略二次関数の関係となるからである。図8に示すグラフは、磁気センサと磁石間のギャップが、0.5、0.8、1と異なる場合の磁石の回転角度と磁気検出素子に作用する磁場(磁束密度)との関係を示すグラフである。図8に示すようにギャップが小さくなると磁場は強くなるが、単位距離あたりの磁場強度変化はギャップが小さくなるほど大きくなることがわかる。すなわち磁石が傾き始めて磁気センサに近づく初期よりも、さらに磁石が傾いて磁気センサにより近づく後期のほうが磁気センサに作用する磁場強度の変化量が大きくなる。このため、センターずれ量が0.2mm以上になり、図5(a)の状態から図5(b)のように軸部30が傾き始めると、出力誤差は、二次関数的な変動に切り替わるが、軸部30が傾き始めた最初の頃の磁場強度の変動はさほど大きくないため、センターずれに対する出力誤差の傾きを、一次関数による出力誤差の傾きを有する従来例1よりも小さくできる。したがって、センターずれ量が0.2mmより大きくなると、実施例のほうが従来例1よりも出力誤差を小さくできる。
【0042】
センターずれ量は、機器本体側の駆動軸との関係で決まるものであるため、ある程度センターずれ量がばらつくことを想定して、出力誤差を小さくできるように構成しなければならないが、本実施形態では、センターずれに伴い、軸部30を横ずれモードから傾きモードに途中で切り替えることができ、これにより、出力誤差を小さく抑えることが可能なセンターずれ量の範囲を広げることができる。換言すれば大きなセンターずれが生じたときでも、従来に比べて出力誤差を許容範囲内に収めることが可能になる。以上により、本実施形態では従来に比べて検出精度を向上させることが可能になる。
【符号の説明】
【0043】
20 磁気検出装置
21 カバー
22 シャフト(回転体)
22a 挿入孔
23 磁石
24 磁気センサ
25 ケース(支持体)
26 磁気検出素子
30 軸部
30a 第2の側面
30b 先端面
31 軸受部
31a 第1の側面
31b 底面
【技術分野】
【0001】
本発明は、磁気センサと磁石とが非接触にて配置された磁気検出装置に係り、特に磁気センサと磁石間の位置決め精度に関する。
【背景技術】
【0002】
下記特許文献1には回転検出装置に関する発明が開示されている。この発明では、回転軸部を有するギア本体部にリング状磁石が固定支持されており、リング状磁石とは非接触の位置にホール素子が設けられている。ギア本体部は回転可能に支持されており、ギア本体部の回転に伴って、ホール素子に作用するリング状磁石からの磁束密度が変化し、これにより回転状態を検出することが可能になっている。
【0003】
ところで検出精度を向上させるために、磁石と磁気センサ間の位置決め精度が重要になる。
【0004】
図9(a)では、特許文献1と同様に回転体1に設けられた軸部2が円筒形で突出形成されている。軸部2は凹状の軸受部10により回転自在に支持されている。軸部2と軸受部10との間に隙間αが設けられている。また、図9(a)に示すように回転体1の下面とギャップ層4との間に磁石5が設けられ、ギャップ層4下に磁気センサ6が設けられる。磁石5と磁気センサ6間はギャップ層4を介して非接触に保たれる。
【0005】
図9(a)では、軸部2の中心軸O1(実線)が、ちょうど軸受部10の中央に位置した状態であるが、図9(a)に示すように軸部2の中心軸O1(点線)がセンターずれを起こして、軸部2が横方向(X)にずれると磁石5と磁気センサ6間の位置精度が悪化し、検出精度が低下する問題があった。
【0006】
また図9(b)は特許文献2と同様に回転体7に設けられた軸部8を半球状で突出させた従来例である。軸部8は半球状に凹んだ軸受部11により回転自在に支持されている。図9(b)に示すように、磁石5は回転体7に固定支持されている。また、磁気センサ6は磁石5とギャップを介して非接触にて基板側に固定支持されている。図9(b)の従来例によれば、図9(a)の形態と異なって、軸部のセンターずれに伴う横ずれ(X方向へのずれ)は生じにくい。
【0007】
図9(b)では、軸部8の中心軸O1(実線)が、ちょうど垂直方向(Z)に一致した状態であるが、軸部8の中心軸O1(点線)がセンターずれを起こすと軸部8は軸受部11の凹曲面を摺動しながら高さ方向に傾き(傾きを矢印βで示した)、磁石5と磁気センサ6間のギャップG0が変動し、検出精度が低下する問題があった。
【0008】
図10に示すように、磁石5と磁気センサ6間のギャップG0が変動すると、磁気センサ6に作用する磁場の波形13,14は変化する。図10は、回転角度に対する磁場の波形とON/OFF閾値を示すイメージ図である。ON/OFF閾値は、磁場曲線における最大磁場と最小磁場の間に設定される。
【0009】
図10に示すように磁場の波形13,14は、回転角度に対して略SIN波となるが、ギャップG0の変化が大きいほど、波形13,14間の変動も大きくなり、ON/OFF点a,bの変化が大きくなり、出力誤差(角度誤差)が大きくなる問題があった。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2010−71852号公報
【特許文献2】特開2009−180409号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
そこで本発明は上記従来の課題を解決するためのものであり、特に、センターずれが生じても従来に比べて出力誤差(角度誤差)を小さくすることが可能な磁気検出装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、軸部を有する回転体と、前記回転体と高さ方向で対向し、前記軸部との対向位置に軸受部を有して前記回転体を回転自在に支持する支持体と、前記回転体と前記支持体との間に非接触にて配置された磁石及び磁気センサとを有し、前記磁石と前記磁気センサの一方が前記回転体に固定支持され、他方が前記支持体側に固定支持された磁気検出装置において、
前記軸受部は、第1の側面と底面とを有して前記第1の側面から前記底面にかけて凹形状とされており、前記軸部は、前記底面と対向する先端面と、前記第1の側面と対向する第2の側面とを有して前記先端面から前記第2の側面にかけて突起状とされており、
前記軸受部の底面の径D1は、前記軸部の先端面の径D2より大きく形成されており、
前記軸受部の第1の側面及び前記軸部の第2の側面はともに前記底面及び前記先端面に対する垂直方向から傾いて形成されており、前記第1の側面の前記底面と平行な面方向に対する傾き角度θ1(鋭角)は、前記第2の側面の前記先端面と平行な面方向に対する傾き角度θ2(鋭角)よりも小さいことを特徴とするものである。本発明では、前記軸部が切頭円錐状で形成されていることが好ましい。
【0013】
本発明によれば、軸部のセンターずれが生じたとき、軸部はまず横ずれを起こし、続いて、軸部が軸部と軸受部との側面間の角度差に基づいて傾く。このように、センターずれに伴って軸部を横ずれモードと傾きモードとに分散させることができ、これにより従来よりも出力誤差(角度誤差)を小さくでき、検出精度を向上させることができる。
【発明の効果】
【0014】
本発明によれば、センターずれに伴って軸部を横ずれモードと傾きモードとに分散させることができ、これにより従来よりも出力誤差(角度誤差)を小さくでき、検出精度を向上させることができる。
【図面の簡単な説明】
【0015】
【図1】図1は、本実施形態の磁気検出装置の斜視図である。
【図2】図2は、図1に示す磁気検出装置の分解斜視図である。
【図3】図3は、図1に示す本実施形態の磁気検出装置をA−A線に沿って切断した縦断面図である。
【図4】図4は、図3に示す軸部と軸受部との付近を拡大した部分拡大縦断面図である。なお断面を示す斜線は省略した。
【図5】図5は、軸部のセンターずれが生じたときに起こる横ずれモード(図5(a))と、傾きモード(図5(b))を説明するための部分拡大縦断面図である。なお断面を示す斜線は省略した。
【図6】図6(a)は、本実施形態の磁気検出装置に使用される磁石の一例を示す分解斜視図であり、図6(b)は、図6(a)の磁石A及び磁石Bを組み合わせた磁石の斜視図(図6(a)よりもやや大きく図示した)、図6(c)は、図6(b)に示す着磁面を円周方向に沿って切断した磁石と磁気センサとを備える磁気検出装置の部分拡大縦断面図である。なお図6(c)において、断面を示す斜線は省略した。
【図7】図7は、本実施例、従来例1及び従来例2の各磁気検出装置におけるセンターずれ量と出力誤差との関係を示すグラフである。
【図8】図8は、磁石の回転角度と磁気センサに作用する磁場(磁束密度)との関係を示すグラフである。
【図9】図9は、従来の磁気検出装置の構造を示す部分拡大断面図であり、図9(a)は図7に示す従来例1、図9(b)は図7に示す従来例2の磁気検出装置である。
【図10】図10は、磁石の回転角度と磁気センサに作用する磁場及びON/OFF閾値との関係を示すイメージ図である。
【発明を実施するための形態】
【0016】
図1は、本実施形態の磁気検出装置の斜視図であり、図2は、図1に示す磁気検出装置の分解斜視図であり、図3は、図1に示す本実施形態の磁気検出装置をA−A線に沿って切断した縦断面図であり、図4は、図3に示す軸部と軸受部との付近を拡大した部分拡大縦断面図である。
【0017】
図1,図2に示す磁気検出装置20は、カバー21、シャフト(回転体)22、磁石23、磁気センサ24及びケース(支持体)25等を有して構成される。図面には、Oリング等を図示していない。本実施形態の磁気検出装置20は、車載用、電子機器用等、使用用途を限定するものでない。
【0018】
図3に示すようにシャフト22には上面側(Z2側)に機器本体の駆動軸(図示せず)を挿入するための挿入孔22aが設けられ、シャフト22の下面側(Z1側)には下方向に向けて突出する軸部30が設けられている。軸部30及び挿入孔22aはシャフト22の中央に位置し、軸部30の中心軸と挿入孔22aの中心軸は一致している。なお、本実施例ではシャフト22に挿入孔22aが形成された構成を示しているが、シャフト22に凸部が形成され軸部30の中心軸と凸部の中心軸が一致している構成のものでもよい。
【0019】
図3に示すように、軸部30の周囲に位置するシャフト22の下面22bにはリング状の磁石23が固定支持されている。
【0020】
図6(a)は、磁石23の分解斜視図、図6(b)は、図6(a)の磁石A及び磁石Bを組み合わせた磁石の斜視図((a)よりもやや大きく図示した)、図6(c)は、図6(b)に示す着磁面を円周方向に沿って切断した磁石と磁気センサとの部分拡大縦断面図である。
【0021】
図6(a)に示すように例えば、磁石Aの表面はN極に着磁され、磁石Bの表面はS極に着磁されている。したがって図6(b)に示すように磁石Aと磁石Bとを組み立てた磁石23の表面(磁気センサ2との対向面;着磁面)23aは、円周方向に沿ってN極とS極とが交互に並んでいる。
【0022】
図6(c)に示す磁石23は、図6(b)の磁石23を反転させたものである。
なお図6に示す磁石の構成は一例であって、図6以外の磁石を使用することも可能である。
【0023】
図3に示すように、シャフト22はカバー21とケース25との間に挟みこまれる。このとき図1に示すようにシャフト22の挿入孔22aは外部に露出した状態であり、機器本体側の駆動部が前記挿入孔22a内に挿入される。
【0024】
ケース25は、回転体であるシャフト22を回転自在に支持する支持体である。ケース25にはシャフト22の軸部30と対向する位置に凹状の軸受部31が設けられ、軸部30の先端部分が軸受部31内に入り込んでいる。
【0025】
図3に示すように軸受部31の周囲であってケース25の内表面には磁気センサ24が固定支持されている。軸受部31が設けられる支持体部分と、磁気センサ24を固定支持する支持体部分は図3のように一体的であることが好ましいが別体とされていてもよい。磁気センサ24は、プリント基板32と、プリント基板32上に固定支持された複数の磁気検出素子26とを有して構成される。図3,図6に示すように、磁気センサ24を構成する磁気検出素子26と磁石23とが高さ方向(Z)に間隔(ギャップG1)を空けて非接触にて対向している。
【0026】
シャフト22の回転により磁石23が回転すると、磁気センサ24を構成する磁気検出素子26は、磁石23のN極からS極にかけて生じる磁場変化を受けて電気特性が変化する。そして磁気検出素子26の検出信号(ON/OFF信号)に基づいて、回転状態(回転角度や回転方向)を知ることができる。
【0027】
なお磁気検出素子26はホール素子、磁気抵抗効果素子(GMR素子)等、特に限定するものでない。
【0028】
また、シャフト22側に磁気センサ24が固定支持され、ケース25側に磁石23が固定支持されてもよいが、磁気センサ24を回転しないケース25側に固定したほうが配線の引き回し等を容易化でき好適である。
【0029】
図4に示すように、軸受部31は、第1の側面31aと底面31bとを有して第1の側面31aから底面31bにかけて凹形状とされている。また軸部30は、軸受部31の底面31bと対向する先端面30bと、第1の側面31aと対向する第2の側面30aを有して、先端面30bから第2の側面30aにかけて突起状とされている。本実施形態における軸部30は下方向(Z1)に向けて切頭円錐状に突出している。また、軸受部31も、下方向(Z1)に向けて切頭円錐状に凹んでいる。よって図4に示すように、軸受部31の底面31b及び軸部30の先端面30bはともに平面であり、底面31bの径はD1、先端面30bの径はD2で形成されている。
【0030】
図4に示すように、軸受部31の第1の側面31a、及び軸部30の第2の側面30aはともに、高さ方向(Z1−Z2)から平面方向に向けて傾いて形成されている。第1の側面31aは、軸受部31の底面31bと平行な面方向に対して傾き角度θ1(鋭角)を有して傾いている。また、第2の側面30aは、軸部30の先端面30bと平行な面方向に対して傾き角度θ2(鋭角)を有して傾いている。図4では、第1の側面31a及び第2の側面30aが直線状とされているが、曲面であってもよい。
【0031】
図4に示すように、軸受部31の底面31bの径D1>軸部30の先端面30bの径D2とされており、軸受部31の第1の側面31aの傾き角度θ1<軸部30の第2の側面aの傾き角度θ2とされている。
【0032】
一例を示すと、軸受部31の底面31bの径D1は、2〜10mm程度、軸部30の先端面30bの径D2は、1.8〜9.8mm程度、軸受部31の第1の側面31aの傾き角度θ1は、60〜80°程度、軸部30の第2の側面aの傾き角度θ2は、62〜82°程度である。
【0033】
図4では、軸部30の中心軸O2と、軸受部31の中心垂線O3とが一致した状態である。ここで「軸部30の中心軸O2」とは、水平面方向を向く先端面30bの中心に垂直に交わる垂線である。また「軸受部31の中心垂線O3」とは、水平面方向を向く底面31bの中心に垂直に交わる垂線である。
【0034】
機器本体側の駆動軸が、シャフト22の挿入孔22aに挿入されるとき、前記駆動軸の中心軸(図示しない)が、軸部30の中心軸O2に対してずれて挿入されると、そのずれ量がセンターずれ量となる。
【0035】
本実施形態では、センターずれが生じている場合、図4で説明したように、軸受部31の底面31bの径D1>軸部30の先端面30bの径D2の関係により、図5(a)に示すように軸部30が例えばX1方向に横ずれを起こす。軸部30の先端面30bと第2の側面30aとの間の縁部30cが、軸受部31の底面31bと第1の側面31aとの間の縁部31cにまで到達すると、すなわち、軸部3が横方向に(D1−D2)/2だけ移動すると、これ以上、軸部30は横ずれしない。
【0036】
続いて、図4で説明したように、軸受部31の第1の側面31aの傾き角度θ1<軸部30の第2の側面aの傾き角度θ2の関係により、図5(b)に示すよに、軸部30が傾く。軸部30の第2の側面30aが、軸受部31の第1の側面31aに接触すると、すなわち、軸部3がθ2−θ1だけ傾くと、これ以上、軸部30は傾かない。
【0037】
図7は、本実施形態の磁気検出装置、図8(a)に示す従来例1の磁気検出装置、及び図8(b)に示す従来例2の磁気検出装置におけるセンターずれ量と出力誤差(角度誤差)との関係を示すグラフである。実施例での軸受部31の底面31bの径D1を、2mm、軸部30の先端面30bの径D2を1.8mm、軸受部31の第1の側面31aの傾き角度θ1を、73°、軸部30の第2の側面aの傾き角度θ2を75°とした。
【0038】
なお図7に示すようにセンターずれ量が0mmのときでも、実施例、従来例1及び従来例2では出力誤差(角度誤差)を生じているが、これは組立時点で生じる位置ずれによるもので、実施例、従来例1及び従来例2は全てセンターずれ量が0mmのときに同じ出力誤差を有している。下記の表1に、センターずれ量と、出力誤差を表示した。
【0039】
【表1】
【0040】
図7及び表1に示すようにセンターずれ量が0.2mmまでは、実施例は図5(a)の横ずれを起こしており、実施例と従来例1との出力誤差は一致している。一方、従来例2では、センターずれ量と出力誤差とは略二次関数の関係であるが、センターずれ量が0.2mmより大きくなると、従来例2では実施例及び従来例1よりも出力誤差が大きくなり、0.2mm以降、出力誤差の差は、従来例2と、実施例及び従来例1との間で急速に大きくなっていく。
【0041】
図7に示すようにセンターずれ量が0.2mmより大きくなると、実施例では図5(b)に示すように軸部が傾き始める。そして、実施例では、従来例1よりも出力誤差が小さくなる。これは図9(a)で説明した横ずれを生じる場合、そのセンターずれ量と出力誤差とは略一次関数の関係であるが、図9(b)で説明した傾きが生じて磁気センサと磁石間のギャップが変動する場合、センターずれ量と出力誤差とは略二次関数の関係となるからである。図8に示すグラフは、磁気センサと磁石間のギャップが、0.5、0.8、1と異なる場合の磁石の回転角度と磁気検出素子に作用する磁場(磁束密度)との関係を示すグラフである。図8に示すようにギャップが小さくなると磁場は強くなるが、単位距離あたりの磁場強度変化はギャップが小さくなるほど大きくなることがわかる。すなわち磁石が傾き始めて磁気センサに近づく初期よりも、さらに磁石が傾いて磁気センサにより近づく後期のほうが磁気センサに作用する磁場強度の変化量が大きくなる。このため、センターずれ量が0.2mm以上になり、図5(a)の状態から図5(b)のように軸部30が傾き始めると、出力誤差は、二次関数的な変動に切り替わるが、軸部30が傾き始めた最初の頃の磁場強度の変動はさほど大きくないため、センターずれに対する出力誤差の傾きを、一次関数による出力誤差の傾きを有する従来例1よりも小さくできる。したがって、センターずれ量が0.2mmより大きくなると、実施例のほうが従来例1よりも出力誤差を小さくできる。
【0042】
センターずれ量は、機器本体側の駆動軸との関係で決まるものであるため、ある程度センターずれ量がばらつくことを想定して、出力誤差を小さくできるように構成しなければならないが、本実施形態では、センターずれに伴い、軸部30を横ずれモードから傾きモードに途中で切り替えることができ、これにより、出力誤差を小さく抑えることが可能なセンターずれ量の範囲を広げることができる。換言すれば大きなセンターずれが生じたときでも、従来に比べて出力誤差を許容範囲内に収めることが可能になる。以上により、本実施形態では従来に比べて検出精度を向上させることが可能になる。
【符号の説明】
【0043】
20 磁気検出装置
21 カバー
22 シャフト(回転体)
22a 挿入孔
23 磁石
24 磁気センサ
25 ケース(支持体)
26 磁気検出素子
30 軸部
30a 第2の側面
30b 先端面
31 軸受部
31a 第1の側面
31b 底面
【特許請求の範囲】
【請求項1】
軸部を有する回転体と、前記回転体と高さ方向で対向し、前記軸部との対向位置に軸受部を有して前記回転体を回転自在に支持する支持体と、前記回転体と前記支持体との間に非接触にて配置された磁石及び磁気センサとを有し、前記磁石と前記磁気センサの一方が前記回転体に固定支持され、他方が前記支持体側に固定支持された磁気検出装置において、
前記軸受部は、第1の側面と底面とを有して前記第1の側面から前記底面にかけて凹形状とされており、前記軸部は、前記底面と対向する先端面と、前記第1の側面と対向する第2の側面とを有して前記先端面から前記第2の側面にかけて突起状とされており、
前記軸受部の底面の径D1は、前記軸部の先端面の径D2より大きく形成されており、
前記軸受部の第1の側面及び前記軸部の第2の側面はともに前記底面及び前記先端面に対する垂直方向から傾いて形成されており、前記第1の側面の前記底面と平行な面方向に対する傾き角度θ1(鋭角)は、前記第2の側面の前記先端面と平行な面方向に対する傾き角度θ2(鋭角)よりも小さいことを特徴とする磁気検出装置。
【請求項2】
前記軸部が切頭円錐状で形成されている請求項1記載の磁気検出装置。
【請求項1】
軸部を有する回転体と、前記回転体と高さ方向で対向し、前記軸部との対向位置に軸受部を有して前記回転体を回転自在に支持する支持体と、前記回転体と前記支持体との間に非接触にて配置された磁石及び磁気センサとを有し、前記磁石と前記磁気センサの一方が前記回転体に固定支持され、他方が前記支持体側に固定支持された磁気検出装置において、
前記軸受部は、第1の側面と底面とを有して前記第1の側面から前記底面にかけて凹形状とされており、前記軸部は、前記底面と対向する先端面と、前記第1の側面と対向する第2の側面とを有して前記先端面から前記第2の側面にかけて突起状とされており、
前記軸受部の底面の径D1は、前記軸部の先端面の径D2より大きく形成されており、
前記軸受部の第1の側面及び前記軸部の第2の側面はともに前記底面及び前記先端面に対する垂直方向から傾いて形成されており、前記第1の側面の前記底面と平行な面方向に対する傾き角度θ1(鋭角)は、前記第2の側面の前記先端面と平行な面方向に対する傾き角度θ2(鋭角)よりも小さいことを特徴とする磁気検出装置。
【請求項2】
前記軸部が切頭円錐状で形成されている請求項1記載の磁気検出装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−44599(P2013−44599A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−181610(P2011−181610)
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]