
磁気測定データ校正装置及び方位角計測装置
【課題】環境オフセットの変動に対する追従性を向上させる磁気測定データ校正装置及び方位角計測装置を提供する。
【解決手段】本発明は、互いに直交する3つの測定軸を有し、測定軸方向の地磁気を測定する軸センサからなる磁気センサから出力される測定軸毎の磁気測定データのオフセットを求め、磁気測定データを補正する装置であり、測定された磁気測定データの測定軸毎の磁気データと、前回のオフセットとの差分から誤差関数を求める誤差関数計算部と、誤差関数及び前回の共分散行列からオフセット残差を算出するオフセット残差計算部と、前回の磁気測定データの測定時のオフセットに対し、オフセット残差を加算し、新たなオフセットを算出するオフセット更新部と、測定された磁気測定データを用い、以前に測定された磁気測定データを母集団とする磁気測定データの共分散行列を更新する共分散行列更新部とを備える。
【解決手段】本発明は、互いに直交する3つの測定軸を有し、測定軸方向の地磁気を測定する軸センサからなる磁気センサから出力される測定軸毎の磁気測定データのオフセットを求め、磁気測定データを補正する装置であり、測定された磁気測定データの測定軸毎の磁気データと、前回のオフセットとの差分から誤差関数を求める誤差関数計算部と、誤差関数及び前回の共分散行列からオフセット残差を算出するオフセット残差計算部と、前回の磁気測定データの測定時のオフセットに対し、オフセット残差を加算し、新たなオフセットを算出するオフセット更新部と、測定された磁気測定データを用い、以前に測定された磁気測定データを母集団とする磁気測定データの共分散行列を更新する共分散行列更新部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、携帯機器に搭載される磁気センサの校正を行う磁気測定データ校正装置及び方位角計測装置に関する。
【背景技術】
【0002】
近年、携帯電話などの携帯機器に3軸の磁気センサ(以下、単に磁気センサ)が搭載され、携帯機器における方位測定に用いられている。
この方位測定に用いる磁気センサは、通常、携帯機器に搭載する前に、3軸ヘルムホルツコイルを用いて、各軸毎のゼロ磁界出力値の調整(以下、オフセット調整)をしておく。
この具体的な調整手順は、予め校正された磁気センサにより、地磁気の測定を行い、その予め校正された磁気センサの出力する3軸各々の磁気データを基準磁気測定データとして、方位測定に用いる。
【0003】
次に、3軸ヘルムホルツコイルにより、基準磁気測定データと逆方向の磁界を、オフセット調整の対象である対象磁気センサに対して印加する。
ここで、対象磁気センサは、オフセットが無い場合、出力する磁気測定データが3軸共に0であり、オフセットを有する場合、出力する磁気測定データが0ではない。
ここで、対象磁気センサが出力する磁気測定データを、対象磁気センサ自身の有するオフセットとして測定し、この磁気測定データにより、磁気センサの出力する磁気測定データのオフセット調整を行う。
すなわち、磁気センサの出力する磁気測定データから、3軸ヘルムホルツコイルで測定したオフセットを、各磁気測定データから減算し、磁気センサの測定結果として方位検出を行うことになる。
【0004】
しかしながら、磁気センサ単体でオフセット調整を行ったとしても、携帯機器には方位を検出する磁気センサ以外にも多くの他の部品が使われており、これら他の部品が発生する磁界が磁気センサに対して影響を与える場合がある。例えば、スピーカに搭載されている磁石、開閉スイッチに設けられている磁石、あるいは携帯機器の部品に施されたニッケルメッキなどから磁界が発生している。
【0005】
このため、携帯機器内部に設けられた磁気センサに対して周囲の環境による環境オフセットが生じ、オフセット調整を行った磁気センサ単体から環境オフセットが重畳した磁気測定データが出力されることになる。
したがって、磁気センサ単体でオフセット調整を行った後、搭載される携帯機器の他の部品が発生する磁界により、携帯機器が向いている実際の方位と、磁気センサが出力する磁気データから得られる方位とに、環境オフセットによる差異が生じることになる。
【0006】
また、磁気センサを他の部品とともに携帯機器に登載した状態で、3軸ヘルムホルツコイルにより環境オフセットを含めたオフセット調整を行うことが考えられる。
しかしながら、各部品の磁力の経時的な変化や、携帯機器の周囲の温度の変化、さらには携帯機器の周囲に強度の磁界を発生する物体の存在により、環境オフセットの値が常に変動してしまう。
【0007】
したがって、3軸ヘルムホルツコイルにより、携帯機器に搭載した後に、環境オフセットを含めた磁気センサのオフセット調整を行っても、周囲の状況により環境オフセットが刻々変動する。このため、磁気センサの磁気測定データに重畳する環境オフセットの変動により、磁気センサが出力する磁気測定データが真値に対してずれてしまうことになる。
このため、オフセットを再度行う必要があるが、常に3軸ヘルムホルツコイルにより、携帯機器に登載された磁気センサのオフセット調整を行うことができない。したがって、自身が磁気センサのオフセット調整を行う機能を、携帯機器に対して持たせる必要がある。
【0008】
このため、携帯機器に登載されたオフセット調整部が、3軸各々の磁気センサにより、各軸の磁界の強度を多数測定し、測定した磁気測定データを内部のデータバッファに一旦蓄積する。
そして、オフセット調整部がデータバッファに蓄積された磁気測定データに対して、距離(磁界の強度)が最小となるオフセットを求める手法がある(例えば、特許文献1を参照)。この手法においては、以下の式に示すように、球の方程式に磁気測定データを代入し、最小二乗法によりオフセットSxを求める。
Sx=Σ{(Xi−X0)2+(Yi−Y0)2+(Zi−Z0)2−R2}=0 …(i)
Xi、Yi及びZiが磁気測定データであり、X0、Y0及びZ0がオフセット座標であり、Rが定数である。
【0009】
また、3軸の磁気センサの各々の磁気測定データを1組として、4組の磁気測定データの組をデータバッファに蓄積し、上述した特許文献1と同様に、磁気測定データとの距離によりオフセットを求める手法がある(例えば、特許文献2を参照)。
この特許文献2においては、時系列に測定される測定データの中から4組の磁気測定データを抽出する際、抽出する抽出条件を以下のように設定している。すなわち、磁気センサの3軸で構成される3次元空間で、磁気測定データを座標点として以下の抽出条件が設定されている。
3軸の磁気測定データを3次元空間(3次元座標系)内に描画(配置)した際、
a.1組目の磁気測定データと2組目の磁気測定データとの距離が十分離れている
b.3組目の磁気測定データは、1組目及び2組目の磁気測定データとで構成される鈍角3角形の鈍角の頂点である
c.4組目の磁気測定データは、1組目から3組目の磁気測定データが形成する平面からの距離が十分離れている
【0010】
そして、特許文献2においては、以下の球の方程式を用いて、連立方程式を解くことによりオフセットを算出している。
(Xi−X0)2+(Yi−Y0)2+(Zi−Z0)2−R2=0 …(ii)
Xi、Yi及びZiが磁気測定データであり、X0、Y0及びZ0がオフセット座標であり、Rが定数である。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特許4391416号公報
【特許文献2】特許4590511号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1は、データバッファに複数の磁気測定データ蓄積し、この蓄積した磁気測定データを用いて、(i)式を用いた最小二乗法によりオフセットを算出する。ここで、特許文献1は、データバッファ分の磁気測定データを多数測定した後、オフセットの算出が行われる。このため、特許文献1は、多数の磁気測定データを蓄積するための時間を必要とし、環境オフセットの変化に対するオフセット調整の追従性が悪くなる。
【0013】
また、特許文献2は、磁気センサ自身の特性の時間的変動要因と、外部磁場の時間的変動要因とによる磁気ノイズが、磁気センサの出力する磁気測定データに重畳すると、算出されるオフセットを正確に算出できない。
すなわち、4組の磁気測定データのいずれかに磁気ノイズが重畳している場合、これらの磁気測定データを用いて算出されたオフセットは、磁気ノイズによる誤差が含まれることになり、実際のオフセットとずれることになる。
【0014】
さらに、特許文献1及び特許文献2の双方において、オフセットを求めるための磁気測定データの測定点が、一定の球の表面で測定されることが仮定されている。
このため、ユーザは、オフセット調整の際、携帯機器を円を描くように、すなわち、一定の球面に沿うように移動させる必要がある。
この移動が行われている際、磁気測定データを多数取得してバッファに蓄積し、すでに説明した算出に用いる磁気測定データの抽出処理を行う。
したがって、環境オフセットが変化に追従できない場合が発生し、再度、新たな磁気測定データを取得して、オフセット調整を繰り返して行なわなければならなくなる。
【0015】
本発明は、このような事情に鑑みてなされたもので、環境オフセットの変動に対する追従性を向上させることが可能な磁気測定データ校正装置及び方位角計測装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
この発明は上述した課題を解決するためになされたもので、本発明の磁気測定データ校正装置は、互いに直交する3つの測定軸を有し、測定軸方向の地磁気を測定する軸センサからなる磁気センサから出力される前記測定軸毎の地磁気の測定結果である磁気測定データのオフセットを求め、前記磁気測定データを補正する装置であり、測定された磁気測定データの前記測定軸毎の磁気データと、前回求められたオフセットとの差分から誤差関数を求める誤差関数計算部と、前記誤差関数及び前回求められた共分散行列からオフセット残差を算出するオフセット残差計算部と、前回の前記磁気測定データの測定時に算出したオフセットに対し、前記オフセット残差を加算し、新たなオフセットを算出するオフセット更新部と、測定された前記磁気測定データを用い、以前に測定された前記磁気測定データを母集団とする磁気測定データの共分散行列を更新し、測定された前記磁気測定データを前記母集団に加えて新たな共分散行列を生成する共分散行列更新部とを備えることを特徴とする。
【0017】
本発明の磁気測定データ校正装置は、前回算出されたオフセットを求める際に用いた磁気測定データと、前記磁気センサから新たに入力された新たな磁気測定データとの、前記磁気センサの測定軸からなる3次元磁界空間における第1距離を求め、当該第1距離と予め設定されている閾値との比較を行い、前記第1距離が前記閾値を超えている場合、前記オフセット更新部に対して新たなオフセットの更新を行わせ、一方前記第1距離が前記閾値以下の場合、新たなオフセットの更新を行わせない制御を行う磁気測定データ判定部を
さらに有することを特徴とする。
【0018】
本発明の磁気測定データ校正装置は、前記閾値が、前記3次元磁界空間における前記磁気センサの各測定軸方向における測定ノイズの座標点と、前記3次元磁界空間の原点との距離として定められていることを特徴とする。
【0019】
本発明の磁気測定データ校正装置は、現時点までに前記オフセットを算出した際に用いた磁気測定データを時系列に記憶するバッファと、前記バッファに記憶されている前記磁気測定データの各々と前回のオフセットとの第2距離を求め、当該第2距離の各々と前回のオフセットを求めた際の前記磁気測定データから求めた全磁力との第1差分を求め、全ての第2距離に対応する当該第1差分を加算して第1評価値を算出し、前記バッファに記憶されている前記磁気測定データの各々と今回算出されたオフセットとの第3距離を求め、当該第3距離の各々と今回のオフセットを求めた際の前記磁気測定データから求めた全磁力との第2差分を求め、全ての第3距離に対応する当該第2差分を加算して第2評価値を算出し、前記第1評価値と前記第2評価値とを比較し、前記第2評価値が前記第1評価値未満である場合、新たに求めたオフセットを前記磁気測定データの校正に用いるオフセットとし、一方、前記第2評価値が前記第1評価値以上である場合、前回求めたオフセットを前記磁気測定データの校正に用いるオフセットとするオフセット有効性判定部とをさらに有することを特徴とする。
【0020】
本発明の磁気測定データ校正装置は、前記誤差関数計算部が、前記3つの測定軸からなる3次元座標系において、測定された前記磁気測定データのデータ座標と、前回の前記磁気測定データの測定時に算出した前記オフセットのオフセット座標との距離の2乗から全磁力を求め、当該全磁力から前回算出した前回全磁力を減算し、減算結果を前記誤差関数とすることを特徴とする。
【0021】
本発明の方位角計測装置は、互いに直交する3つの測定軸を有し、測定軸方向の地磁気を測定する軸センサからなる磁気センサと、前記磁気センサから出力される前記測定軸毎の地磁気の測定結果である磁気測定データのオフセットを求め、前記磁気測定データを補正する磁気測定データ校正部と、前記磁気測定データ校正装置から出力される、前記磁気測定データを校正した磁気校正データから方位角を算出する方位角計測部とを備え、前記磁気測定データ校正部が、測定された磁気測定データの前記測定軸毎の磁気データと、前回求められたオフセットとの差分から誤差関数を求める誤差関数計算部と、前記誤差関数及び前回求められた共分散行列からオフセット残差を算出するオフセット残差計算部と、前回の前記磁気測定データの測定時に算出したオフセットに対し、前記オフセット残差を加算し、新たなオフセットを算出するオフセット更新部と、測定された前記磁気測定データを用い、以前に測定された前記磁気測定データを母集団とする磁気測定データの共分散行列を更新し、測定された前記磁気測定データを前記母集団に加えて新たな共分散行列を生成する共分散行列更新部とを備えることを特徴とする。
【発明の効果】
【0022】
この発明によれば、前回算出したオフセットと、新たに得られる磁気測定データとから、前回算出したオフセットに対するオフセット残差を求め、このオフセット残差を前回算出したオフセットに加算して新たなオフセットを算出するため、従来のように複数の磁気測定データを得た後にオフセットを算出するための遅延時間が無く、リアルタイムに、すなわち高速にオフセットの算出が行うことが可能となり、環境オフセットの変動に対する追従性を、従来に比較して向上させることができる。
【図面の簡単な説明】
【0023】
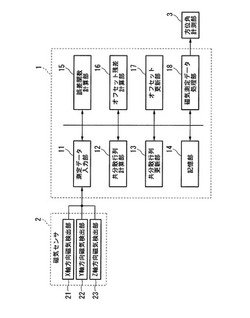
【図1】本発明の第1の実施形態による磁気測定データ校正装置を用いた方位角計測装置の構成例を示す概略ブロック図である。
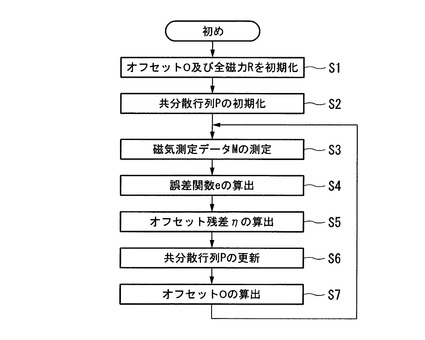
【図2】第1の実施形態の磁気測定データ校正装置1における磁気センサ2が検出した磁気測定データMを校正する処理の動作例を示すフローチャートである。
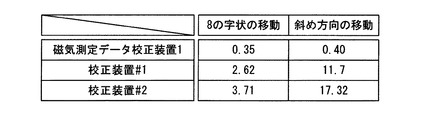
【図3】本実施形態による磁気測定データ校正装置1、校正装置#1及び#2に対し、磁気と逆の磁界と、特定移動磁界(8の字状の移動と斜め方向の移動)と、オフセット磁界との合成磁界を印加し、計測したオフセット推定誤差を示すテーブルである。
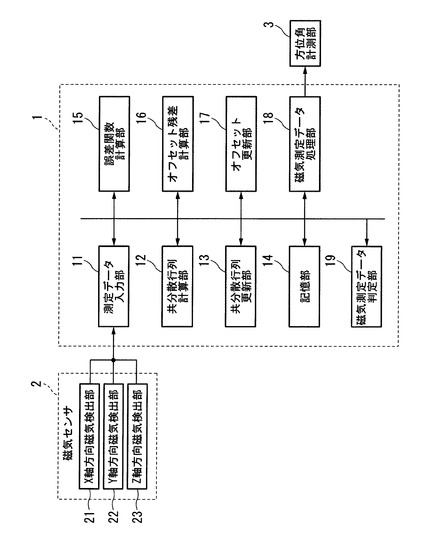
【図4】本発明の第2の実施形態による磁気測定データ校正装置を用いた方位角計測装置の構成例を示す概略ブロック図である。
【図5】第2の実施形態の磁気測定データ校正装置1における磁気センサ2が検出した磁気測定データMを校正する処理の動作例を示すフローチャートである。
【図6】本発明の第3の実施形態による磁気測定データ校正装置1を用いた方位角計測装置の構成例を示す概略ブロック図である。
【図7】第3の実施形態における磁気センサ2が検出した磁気測定データMを校正する処理の動作例を示すフローチャートである。
【図8】3軸加速度センサにより求まる絶対座標系と、3軸磁気センサである磁気計測装置の検出するセンサ座標系との各軸のずれを説明する図である。
【発明を実施するための形態】
【0024】
<第1の実施形態>
以下、図面を参照して、本発明の第1の実施形態について説明する。図1は、この発明の第1の実施形態による磁気測定データ校正装置を用いた方位角計測装置の構成例を示す概略ブロック図である。この方位各計測装置は、携帯機器などに搭載される。
本実施形態の方位計測装置は、磁気測定データ校正装置1、磁気センサ2及び方位角計測部3から構成されている。
磁気センサ2は、例えば、X軸方向の測定軸における磁界の強度を示す磁気データMxを測定するX軸方向磁気検出部21、Y軸方向の測定軸における磁界の強度を示す磁気データMyを測定するY軸方向磁気検出部22、Z軸方向の測定軸における磁界の強度を示す磁気データMzを測定するZ軸方向磁気検出部23とから構成された、X軸、Y軸及びZ軸の3軸の測定軸を有する磁気センサである。ここで、X軸方向磁気検出部21、Y軸方向磁気検出部22及びZ軸方向磁気検出部23は、例えば、ホール素子、磁気抵抗素子、フラックスゲート型磁気素子などが用いられる。
【0025】
磁気測定データ校正装置1は、磁気センサ2から供給される、磁気データMx、磁気データMy及び磁気データMzからなる磁気測定データM(Mx,My,Mz)のオフセットを校正した磁気校正データMf(Mfx,Mfy,Mfz)を出力する。
方位角計測部3は、磁気測定データ校正装置1が校正した磁気校正データMf(Mfx,Mfy,Mfz)を用い、方位角計測装置の向いている方位を出力する。
【0026】
本実施形態において、補正すべきオフセットを、オフセットO(Ox,Oy,Oz)とする。ここで、OxはX軸方向のオフセットであり、OyはY軸方向のオフセットであり、OzはZ軸方向のオフセットである。
また、磁気測定データMn(Mxn,Myn,Mzn)は、n番目の磁気データである。また、地磁気ベクトルの大きさ(以下、全磁力)をRとする。
ここで、全磁力は、磁気測定データMn(Mxn,Myn,Mzn)とオフセットO(Ox,Oy,Oz)とを用い、以下の(1)式により、求められる。
【0027】
【数1】

【0028】
この(1)式の関係は常に成り立つ。すなわち、携帯機器を携帯するユーザの移動の際、携帯機器が回転することにより、磁気測定データにおける各測定軸方向の磁気データが変化する。しかしながら、この磁気測定データから検出される全磁力が変化しない限り、磁気測定データをX軸、Y軸及びZ軸からなる3次元空間の座標点として配置すると、磁気測定データは測定軸からなる3次元空間において、同一の球面上のいずれかの位置に存在する(この点については従来例と同様に同一球面上で移動することを仮定している)。
したがって、全磁力が同一であるならば、上述した(1)式の関係は、磁気測定データにおける各測定軸方向の磁気データが変化したとしても、常に成り立つことになる。
【0029】
上記(1)式において、4個の磁気測定データMを用いることにより、オフセットOの各測定軸におけるオフセット成分Ox、Oy、Oz、全磁力Rを、算出することができる。
ここで、(1)式を変形するため、以下の(2)式に示す定数Qを定義する。
【0030】
【数2】
【0031】
上記(2)式を用いて(1)式を行列の構成とすることにより、以下の(3)式のように変形する。
【0032】
【数3】
【0033】
上記(3)式を解くことにより、オフセット成分Ox、Oy、Oz、全磁力Rを求めることができる。このとき、(3)式の左辺の逆行列が存在することが必要である。
しかしながら、実際の磁気測定データMには、携帯機器の各部品からのまたは外部からの磁気ノイズが重畳している。
このため、(3)式から算出されるオフセット成分Ox、Oy、Oz、全磁力Rは正確な値を得ることができない場合がある。
したがって、統計的な手法、すなわちRLS(Recursive Least Square:再帰的最小二乗)法を用いて、磁気ノイズを低減することにより、オフセット成分Ox、Oy、Oz、全磁力Rの推定値(以下、最尤推定値)を算出する。最尤推定値が算出できる説明は後述する。以下、本実施形態における、RLS法を用いた磁気測定データの校正について説明する。
【0034】
次に、磁気測定データ校正装置1は、測定データ入力部11、共分散行列計算部12、共分散行列更新部13、記憶部14、誤差関数計算部15、オフセット残差計算部16、オフセット更新部17、磁気測定データ処理部18を備えている。
測定データ入力部11は、X軸方向磁気検出部21、Y軸方向磁気検出部22及びZ軸方向磁気検出部23の各々から入力されるアナログ値の軸センサ測定値を、デジタル値に変換して出力する。ここで、X軸方向磁気検出部21、Y軸方向磁気検出部22及びZ軸方向磁気検出部23の各々は、自身の感知方向で検出した磁場に対応した、アナログ値である電圧値を磁気データとして出力する。
また、測定データ入力部11は、アナログ値の磁気データM(Mx,My,Mz)を、デジタル値の磁気測定データM(Mx、My、Mz)に変換する際、アナログ値の磁気データに含まれているオフセット値を除去するため、磁気センサ単体でのオフセット調整を行うようにしてもよい。
【0035】
共分散行列計算部12は、後述するオフセット残差計算部16において用いる共分散行列Pの初期値を、以下の(4)式のように設定する。
【0036】
【数4】
【0037】
この(4)式において、共分散行列計算部12は、定数αを、例えば1.000から100.000までの範囲で設定する。
また、(4)式における左辺の4行×4列の行列における磁気測定データを示す列行列を、以下の(5)式のベクトルznとして定義する。
【0038】
【数5】
【0039】
また、(4)式における左辺の4行×1列の行列を、以下の(6)式のオフセットのベクトルxnとして定義する。
【0040】
【数6】
【0041】
上記(6)式は、n番目の磁気測定データを用いて更新された際のオフセットOn(Oxn,Oyn,Ozn)と全磁力から計算された定数Qnからなるベクトルを示す行列である。
【0042】
誤差関数計算部15は、以下の(7)式を用いて、誤差関数enを算出する。
【0043】
【数7】
【0044】
すなわち、誤差関数計算部15は、n番目に測定された磁気測定データMnと、前回算出したオフセットOn−1(n−1番目の磁気測定データMn−1を用いて求めたオフセット)と、前回算出した全磁力Rn−1(n−1番目の磁気測定データMn−1を用いて求めた全磁力)とから、誤差関数enを算出する。
ここで、誤差関数計算部15は、磁気測定データMnとオフセットOnとの距離の二乗と、全磁力Rn−1の二乗を算出し、磁気測定データMnとオフセットOnとの距離の二乗から、全磁力Rn−1の二乗を減算し、減算結果を誤差関数enとする。ここで、磁気測定データMnとオフセットOnとの距離とは、測定軸であるX軸、Y軸及びZ軸からなる3次元空間において、磁気測定データMnとオフセットOn−1とを配置した際の、磁気測定データMnとオフセットOn−1との座標点の距離である。
【0045】
オフセット残差計算部16は、誤差関数計算部15の求めた誤差関数enと、前回測定時に求めた共分散行列Pn−1とを用い、以下の(8)式により、オフセット残差ηを算出する。
【0046】
【数8】
【0047】
この(8)式において、忘却係数ρは、RLS法で用いられる定数である。一般的に、0.95<ρ<1の範囲に設定される。
【0048】
共分散行列更新部13は、磁気測定データMnを共分散行列の母集団に含めた際の共分散行列Pnを、(1)式の行列znと、(1)式の転置行列znTと、磁気測定データM0からMn−1を母集団とする共分散行列Pn−1と、忘却係数ρとを用い、以下に示す(9)式により算出する。
【0049】
【数9】
【0050】
オフセット更新部17は、直前の磁気測定データMn−1から求めたオフセットベクトルxn−1と、オフセット残差ηとから、磁気測定データMnに対応するオフセットベクトルxnを、以下の(10)式により算出する。
【0051】
【数10】
【0052】
磁気測定データ処理部18は、磁気測定データMnの磁気データMxn、Myn、Mznの各々から、オフセットベクトルXnにおけるOxn、Oyn、Oznをそれぞれ減算し、磁気校正データMf(Mfx,Mfy,Mfz)を算出する。
記憶部14には、共分散行列Pと、オフセットベクトルxと、全磁力Rとが記憶される。共分散行列P、オフセットベクトルx及び全磁力Rの各々は、それぞれ書き込まれる際に、次の算出において用いられる直前のデータである、共分散行列Pn−1、オフセットベクトルn−1及び全磁力Rn−1として書き込まれる。
また、記憶部14には、共分散行列Pの初期値、忘却係数ρ、(5)式、(6)式、(7)式、(8)式、(9)式、(10)式が予め書き込まれて記憶されている。
【0053】
次に、図1及図2を用いて、本実施形態の磁気測定データ校正装置1における磁気測定データの校正を行う処理について説明する。図2は、磁気センサ2が検出した磁気測定データMを校正する処理の動作例を示すフローチャートである。
ステップS1:
共分散行列計算部12は、オフセットO及び全磁力Rの初期化を行う。
このとき、例えば、オフセットOの初期化の値としては磁気センサ2の単体で3軸ヘルムホルツコイルにて測定されたオフセット値が記憶部14に予め書き込まれて記憶されている。また、全磁力Rの初期化の値としては、複数の地域における地磁気基準値が記憶部14に予め書き込まれて記憶されている。
そして、携帯機器に電源を投入した後、ユーザは携帯機器の表示部に表示される複数の地域から、自身の居住地が含まれる地域を選択する。
これにより、共分散行列計算部12は、記憶部14から、オフセットOの初期値を読み出すとともに、ユーザの選択した地域に対応して記憶されている地磁気基準値を全磁力Rの初期値として読み出す。
また、GPS(Global Positioning System)機能が携帯機器に搭載されている場合、共分散行列計算部12は、GPSから得られる緯度経度情報が含まれる地域(緯度経度情報の範囲で規定された領域)に対応して記憶されている地磁気基準値を全磁力Rの初期値として読み出すように構成しても良い。
そして、共分散行列計算部12は、処理をステップS2へ進める。
【0054】
ステップS2:
次に、共分散行列計算部12は、共分散行列Pの初期化を行う。すなわち、共分散行列計算部12は、記憶部14に予め書き込まれて記憶されている(4)式を読み出し、読み出した(4)式を共分散行列の初期値とする。
そして、共分散行列計算部12は、処理をステップS3へ進める。
【0055】
ステップS3:
測定データ入力部11は、磁気センサ2のX軸方向磁気検出部21、Y軸方向磁気検出部22及びZ軸方向磁気検出部23の各々から、磁気測定データMnとして磁気データMxn、Myn及びMznを読み込む。
そして、測定データ入力部11は、読み込んだ磁気測定データMnを記憶部14に書き込んで記憶させる。
磁気測定データMnを読み込んだ後、測定データ入力部11は、処理をステップS4へ進める。
【0056】
ステップS4:
次に、誤差関数計算部15は、記憶部14から読み込んだ(7)式に対し、磁気センサ2から読み込んだ磁気データMxn、Myn及びMznと、記憶部14から読み込んだオフセットOn−1(Oxn−1,Oyn−1,Ozn−1)とを代入し、誤差関数enを算出する。
すなわち、誤差関数計算部15は、磁気データMxnからオフセットOxn−1を減算した結果を二乗し、磁気データMynからオフセットOyn−1を減算した結果を二乗し、磁気データMznからオフセットOzn−1を減算した結果を二乗する。
そして、誤差関数計算部15は、それぞれの減算した結果を加算し、この加算した結果から、全磁力Rn−1の二乗を減算し、誤差関数enを求める。
誤差関数enを算出した後、誤差関数計算部15は、処理をステップS5へ進める。
また、図2のフローチャートにおけるステップS3からステップS7までのループ(繰り返し処理)において、携帯機器の電源が投入されてから1回目のループの際、オフセットOn−1としては初期化におけるオフセットの数値が用いられ、同様に、全磁力Rn−1としては初期化における全磁力の数値が用いられる。
【0057】
ステップS5:
オフセット残差計算部16は、記憶部14から、(5)式と、(8)式と、忘却係数ρと、前回求めた共分散行列Pn−1とを読み出す。
次に、オフセット残差計算部16は、磁気データMnを(5)式に代入してベクトルznの行列を生成し、この生成したベクトルznの行列の転置行列znTを生成する。
そして、オフセット残差計算部16は、忘却係数ρ、共分散行列Pn−1、ベクトルzn及び転置行列znTの各々を(8)式に代入し、オフセット残差ηを算出し、このオフセット残差ηをオフセット更新部17へ出力する。
オフセット残差ηを算出した後、オフセット残差計算部16は、処理をステップS6へ進める。
【0058】
ステップS6:
共分散行列更新部13は、記憶部14から、(5)式と、(9)式と、忘却係数ρと、共分散行列Pn−1とを読み込む。
次に、共分散行列更新部13は、磁気データMnを(5)式に代入してベクトルznの行列を生成し、この生成したベクトルznの行列の転置行列znTを生成する。
そして、共分散行列更新部13は、忘却係数ρと、共分散行列Pn−1と、ベクトルznと、転置行列znTとを、(9)式に代入し、新たな共分散行列Pnを生成し、記憶部14に書き込んで記憶させる。この共分散行列更新部13が記憶部14に書き込んだ共分散行列Pnが、磁界のループにおいては共分散行列Pn−1として用いられる。
今回の磁気データMnを含む、今までに共分散行列Pを生成するために用いた磁気データMの全てを母集団とする共分散行列Pnを生成した後、共分散行列更新部13は、処理をステップS7へ進める。
【0059】
ステップS7:
オフセット更新部17は、記憶部14から(6)式及び(10)式を読み出す。
次に、オフセット更新部17は、(6)式に対し、前回算出されたオフセットOn−1と全磁力Rn−1とを代入し、オフセットのベクトルxn−1を求める。
そして、オフセット更新部17は、オフセット残差計算部16から供給されるオフセット残差ηと、求めたベクトルとを(10)式に代入し、磁気測定データMnを測定した時点(すなわち現在)におけるオフセットを示すオフセットのベクトルxnを算出する。すなわち、オフセット更新部17は、ベクトルxn−1に対し、オフセット残差ηを加算することにより、新たなオフセットを示すベクトルxnを算出する。
ベクトルxnを算出した後、オフセット更新部17は、処理をステップS3へ進める。
上述したように、本実施形態による磁気測定データ校正装置1は、図2のフローチャートに従い、オフセットOnの更新処理を行う。
【0060】
また、磁気測定データ処理部18は、方位角計測部3が方位角の算出を行う際、測定データ入力部11が入力する磁気測定データMnに対応したオフセットOnを、磁気測定データMnから減算する。
そして、磁気測定データ処理部18は、磁気測定データMnからオフセットOnを減算した結果を、校正した磁気校正データMf(Mfx,Mfy,Mfz)として、方位角計測部3に対して出力する。
【0061】
上述した本実施形態によれば、前回求めたオフセットOn−1と、現時点で測定した磁気測定データMnとを用い、誤差関数enが最小となるように、オフセット残差ηを算出し、このオフセット残差ηと前回求めたオフセットOn−1とを用いてオフセットOnを算出するため、磁気測定データMnに重畳する磁気ノイズも最小化することが可能となり、従来に比較してより高い精度により、測定される磁気測定データMnのオフセットOnを求めることができる。
【0062】
また、本実施形態によれば、今回の磁気測定データMnからオフセットOnを求めるため、前回求めたオフセットOn−1に加算するオフセット残差ηを求める際、誤差関数をどの程度反映させるかの割合を、前回までの測定値を母集団とする共分散行列Pn−1と、現時点の磁気測定データMnと、忘却係数ρとにより設定しており、従来のように同一球面上を移動させて複数の磁気測定データMを測定する必要が無いため、新たな磁気測定データMnを測定する毎に、前回までのオフセットOn−1から容易に現時点のオフセットOnを求めることが可能となり、環境オフセットの変動に対する従性を向上させることができる。
【0063】
次に、本実施形態の磁気測定データ校正装置1と、特許文献1の第1の手法と、特許文献2の第2の手法との各々により推定したオフセットOnの真値との誤差を比較した結果を説明する。
本実施形態による磁気測定データ校正装置1と、第1の手法のアルゴリズムを用いた校正装置#1と、第2の手法のアルゴリズムを用いた校正装置#2との各々を搭載した磁気計測装置を用意した。
そして、磁気計測装置の各々のオフセットを3軸ヘルムホルツコイルにて測定し、それぞれの校正装置が設けられた磁気センサのオフセット調整を行った状態とする。
【0064】
次に、磁気測定データ校正装置1と、第1の手法のアルゴリズムを用いた校正装置#1と、第2の手法のアルゴリズムを用いた校正装置#2との各々を搭載した磁気計測装置の各々におけるオフセットの算出処理を行った。
まず、測定する磁気計測装置をオフセットが校正された状態で、3軸ヘルムホルツコイルのステージに静止させてセットする。
そして、地磁気と逆の磁界を発生させて磁界が0となる状態とし、この状態で磁気計測装置を特定の方向に移動させた際に磁気センサに印加される磁界である特定移動磁界を3軸ヘルムホルツコイルに発生させる。
すなわち、3軸ヘルムホルツコイルのステージに静止されてセットされた磁気計測装置に対し、磁気計測装置を移動させたときに磁気センサが検出すると推定される磁界を3軸ヘルムホルツコイルにより印加する。これにより、磁気計測装置を搭載した携帯機器を移動させた状態をシミュレーションすることになる。
【0065】
本実施形態において、上述した3軸ヘルムホルツコイルを用いた携帯機器の移動のシミュレーションとしては、例えば8の字を描く移動を行わせた第1のシミュレーションと、斜め方向に移動させた第2のシミュレーションとを行った。この斜め方向とは、地表面に垂直な軸に対して角度を有する方向を指している。
このシミュレーションの際、地磁気と逆の磁界と特定移動磁界とのみでなく、ある一方向の決められた大きさの特定方向の磁界を仮想オフセットとする磁界(あたかも環境オフセットが存在するようにする仮想的なオフセット磁界)を、地磁気と逆の磁界と特定移動磁界とに対して合成した合成磁界を印加した。
そして、上述した合成磁界を印加し、各磁気計測装置の出力を計測した。このとき、合成磁界の磁界変化を検知し、正常に校正が行われた場合、磁気計測装置における校正装置がオフセット磁界を、携帯機器内部のオフセットとして判定する。このため、磁気計測装置は、オフセット磁界と携帯機器内部のオフセットを磁気測定データから減算して出力することになる。
【0066】
したがって、上述した校正処理を磁気計測装置に対して行わせた後、地磁気と逆の磁界とオフセット磁界との合成磁界を印加した状態における磁気計測装置の出力する磁気測定データM(Mx,My,Mz)は0となる。
上述した実験において、X、Y及びZ軸方向の各々の測定軸に対し、それぞれオフセット磁界として10μT(マイクロテスラ)を用いた。
また、地磁気と逆の磁界とオフセット磁界との合成磁界を印加した状態における磁気計測装置の出力する各測定軸の磁気データの2乗を加算し、加算結果の平方根をオフセット推定誤差として計算した。このオフセット推定誤差は0に近くなるほど、校正装置の算出したオフセットが真値に近いことを示すことになる。
図3に本実施形態における実験の結果を示す。この図3は、本実施形態による磁気測定データ校正装置1、校正装置#1及び校正装置#2に対し、磁気と逆の磁界と、特定移動磁界(8の字状の移動と斜め方向の移動)と、オフセット磁界との合成磁界を印加し、計測したオフセット推定誤差を示すテーブルである。
【0067】
図3に示されているように、携帯機器を8の字状に移動させた第1の状態、斜め方向に移動させた第2の状態のいずれの場合でも、本実施形態における磁気測定データ校正装置1によるオフセットが真値に近いことが、すなわち算出されるオフセットOが実際のオフセットに近い結果が得られた。
斜め方向に移動させる第2の状態の場合、本実施形態においては第1の状態の場合と差がないが、校正装置#1及び#2においては第1の状態に対し、算出されるオフセットの算出精度が低下している。特に、校正装置#2は、17.32=(102+102+102)1/2であるため、そもそもオフセットの推定自体が行われていないことが判る。
上述した図3の結果から、本実施形態によれば、磁気測定データの校正に必要な携帯機器の移動を最小限にすることができ、かつ従来の手法に比較してオフセットの推定精度を向上させることができる。
【0068】
<第2の実施形態>
以下、図面を参照して、本発明の第2の実施形態について説明する。図4は、この発明の第2の実施形態による磁気測定データ校正装置1を用いた方位角計測装置の構成例を示す概略ブロック図である。この方位各計測装置は、第1の実施形態と同様に、携帯機器などに搭載される。
本実施形態の方位計測装置は、磁気測定データ校正装置1、磁気センサ2及び方位角計測部3から構成されている。図4において、第1の実施形態と同様の構成には同一の符号を付してある。第1の実施形態と異なる点は、磁気測定データ校正装置1に対して、新たに磁気測定データ判定部19が設けられていることである。以下、第1の実施形態と異なる構成と動作のみを説明する。
【0069】
磁気測定データ判定部19は、前回オフセットOn−1を算出した磁気測定データMn−1、現時点で測定された磁気測定データMnとの距離dを算出する。この距離dは、すでに説明したように、磁気センサ2のX軸、Y軸及びZ軸方向の各々の測定軸で構成される3次元空間(磁界3次元空間)に磁気測定データMn及びMn−1を配置した際の、それぞれの座標値の距離である。
また、磁気測定データ判定部19は、算出した距離dが予め設定した閾値dsを超えない場合、磁気測定データ校正装置1において、新たな磁気測定データMnによるオフセットOnの算出を行わない制御を行う。この場合、記憶部14に記憶されるデータは、磁気測定データMn−1において算出された数値が、書き換えられずにそのまま記憶されることになる。
【0070】
ここで、閾値dsは、以下のように設定されている。すなわち、閾値dsは磁気センサ2の測定における測定ノイズに対応した数値で決定される。磁気データを測定するX軸、Y軸及びZ軸方向の各測定軸の測定ノイズを、それぞれ測定ノイズvx、vy、zvとすると、静止状態においても、時系列に磁気センサ2において測定される磁気測定データ間の距離は、0とはならない。
方位計測装置を静止状態とし、X軸、Y軸及びZ軸方向の各測定軸の磁気測定データの変動幅を予め測定し、この変動幅を含む範囲を測定ノイズvx、vy、zvとする。
【0071】
したがって、以下に示す(11)式により、閾値dsが求められている。この閾値dsは予め記憶部14に書き込まれ記憶されている。ここで、閾値dsは、測定ノイズのベクトル(vx、vy、zv)の長さ、すなわち磁気センサ2の測定軸で構成される3次元空間の原点と、測定ノイズvx、vy、zvの座標値との距離で設定されている。
例えば、X軸、Y軸及びZ軸方向の各測定軸の測定ノイズの標準偏差が1μTである磁気センサを用いた場合、(11)式により求められる変動幅は最大で4.5μTである。この場合、閾値dsを5μTとして設定する。
また、測定データ入力部11は、オフセットOnが求められた後、磁気測定データMnを記憶部14に書き込んで記憶させる。
【0072】
【数11】
【0073】
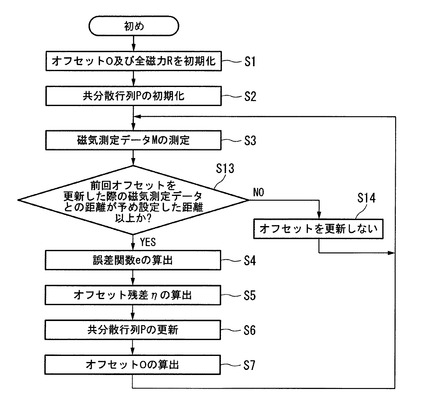
次に、図4及図5を用いて、本実施形態の磁気測定データ校正装置1における磁気測定データの校正を行う処理について説明する。図5は、本実施形態における磁気センサ2が検出した磁気測定データMを校正する処理の動作例を示すフローチャートである。
図5におけるステップS1からS7は、図2におけるステップS1からS7と同様である。以下、第1の実施形態の図2におけるフローチャートと異なる点のみを説明する。
ステップS3において、磁気測定データMnを読み込んだ後、測定データ入力部11は、処理をステップS13へ進める。
【0074】
ステップS13:
磁気測定データ判定部19は、測定データ入力部11から磁気測定データMnが供給されると、閾値dsと、前回オフセットOn−1の算出に用いた磁気測定データMn−1とを記憶部14から読み出す。
次に、磁気測定データ判定部19は、供給された磁気測定データMnと、記憶部14から読み出した磁気測定データMn−1との距離dを算出する。
そして、磁気測定データ判定部19は、算出した距離dと、記憶部14から読み出した閾値dsとを比較する。
このとき、磁気測定データ判定部19は、距離dが閾値ds以上の場合、処理をステップS4へ進め、一方、距離dが閾値ds未満の場合、処理をステップS14へ進める。
【0075】
ステップS14:
磁気測定データ判定部19は、オフセットOnの算出の処理を磁気測定データ校正装置1に行わせず、記憶部14に記憶された数値をそのままとし、処理をステップS3へ進める。
【0076】
上述した構成により、本実施形態においては、同一あるいは同様の磁気測定データ、すなわち距離が小さな磁気測定データにおいて、オフセットを算出する計算を繰り返すことにより、オフセットを大きく推定する、すなわち磁気測定データが全てオフセットであると判定してしまう第1の実施形態の欠点を解消することが可能である。
【0077】
<第3の実施形態>
以下、図面を参照して、本発明の第3の実施形態について説明する。図6は、この発明の第3の実施形態による磁気測定データ校正装置1を用いた方位角計測装置の構成例を示す概略ブロック図である。この方位各計測装置は、第2の実施形態と同様に、携帯機器などに搭載される。
本実施形態の方位計測装置は、磁気測定データ校正装置1、磁気センサ2及び方位角計測部3から構成されている。図6において、第2の実施形態と同様の構成には同一の符号を付してある。第2の実施形態と異なる点は、磁気測定データ校正装置1に対して、新たにオフセット有効性判定部10が設けられていることである。以下、第2の実施形態と異なる構成と動作のみを説明する。
【0078】
オフセット有効性判定部10は、磁気センサ2から読み込んだ磁気測定データMnから求めたオフセットOnが有効か否かの判定を行い、オフセットOnが有効でないと判定した場合、前回求めたオフセットOn−1を新たなオフセットOnとして用いる。
また、記憶部14には、データバッファが設けられており、16組から32組の磁気測定データMがこのデータバッファに書き込まれて記憶されている。例えば、16組の磁気測定データの組が記憶されている場合、磁気測定データM1からM16までの磁気測定データがデータバッファに記憶されることになる。
【0079】
ここで、オフセット有効性判定部10は、磁気測定データ判定部19において、距離dが予め設定した閾値dsを超えた磁気測定データMnを、上述したデータバッファに書き込んで記憶させる。このとき、オフセット有効性判定部10は、データバッファにおける最も古い磁気測定データに、新たな磁気測定データMnを上書きする。すなわち、オフセット有効性判定部10は、磁気測定データ判定部19がオフセット計算をして更新すると判定された磁気測定データのみをデータに書き込んで記憶させる。本実施形態における距離も、第2実施形態で示した磁気センサ2のX軸、Y軸及びZ軸方向の各々の測定軸で構成される3次元空間における距離である。
【0080】
また、オフセット有効性判定部10は、記憶部14からオフセットOn−1と、全磁力Rn−1とを読み出し、このオフセットのベクトルをO1(O1x,O1y,O1z)とし、全磁力をR1とする。
オフセット有効性判定部10は、以下の(12)式により、データバッファに記憶されている磁気測定データM1からMnの各々に対応する距離d1nを算出する。
【0081】
【数12】
【0082】
すなわち、オフセット有効性判定部10は、磁気測定データM毎に、磁気データMxからオフセットO1xを減算した結果を二乗し、磁気データMyからオフセットO1yを減算した結果を二乗し、磁気データMzからオフセットO1zを減算した結果を二乗する。
そして、オフセット有効性判定部10は、それぞれ二乗した結果を加算し、加算結果の平方根を算出することで、距離d1nを求める。ここで、オフセット有効性判定部10は、磁気測定データM1からMnの各々に対応し、距離d11からd1nの各々を求める。
また、オフセット有効性判定部10は、以下の(13)式により、評価値G1を算出する。
【0083】
【数13】
【0084】
すなわち、オフセット有効性判定部10は、距離d11からd1nの各々から、それぞれ全磁力R1を減算し、減算結果毎に二乗して、減算結果の二乗の総和を求めるため、全ての二乗結果を加算し、加算結果である二乗の総和を評価値G1とする。
また、オフセット有効性判定部10は、磁気センサ2から読み込んだ磁気測定データMnから求めたオフセットOnのオフセットのベクトルをO2(O2x,O2y,O2z)とし、このベクトルO2(O2x,O2y,O2z)と、磁気測定データMnとから新たに全磁力R2を求める。
そして、オフセット有効性判定部10は、以下の(14)式により、データバッファに記憶されている磁気測定データM1からMnの各々に対応する距離d2nを算出する。
【0085】
【数14】
【0086】
すなわち、オフセット有効性判定部10は、磁気測定データM毎に、磁気データMxからオフセットO2xを減算した結果を二乗し、磁気データMyからオフセットO2yを減算した結果を二乗し、磁気データMzからオフセットO2zを減算した結果を二乗する。
そして、オフセット有効性判定部10は、それぞれ二乗した結果を加算し、加算結果の平方根を算出することで、距離d2nを求める。ここで、オフセット有効性判定部10は、磁気測定データM1からMnの各々に対応し、距離d21からd2nの各々を求める。
また、オフセット有効性判定部10は、以下の(15)式により、評価値G2を算出する。
【0087】
【数15】
【0088】
すなわち、オフセット有効性判定部10は、距離d21からd2nの各々から、それぞれ全磁力R2を減算し、減算結果毎に二乗して、減算結果の二乗の総和を求めるため、全ての二乗結果を加算し、加算結果である二乗の総和を評価値G2とする。
評価値G1及びG2を算出すると、オフセット有効性判定部10は、この評価値G1と評価値G2の比較を行う。
このとき、オフセットO1と全磁力R1とが真値になっている場合、評価値G1が真値であり、オフセットO2と全磁力R2とが真値になっている場合、評価値G2が真値である。すなわち、オフセットO1と全磁力R1とが真値に近くなるほど評価値G1が小さくなり、また、オフセットO2と全磁力R2とが真値に近くなるほど評価値G2が小さくなると考えられる。
【0089】
したがって、オフセット有効性判定部10は、評価値G1及びG2を比較し、評価値G2が評価値G1未満である(G2<G1)場合、新たに算出されたオフセットOn及び全磁力Rnが前回算出したオフセットOn−1及び全磁力Rn−1より真値に近いと判定する。
一方、オフセット有効性判定部10は、評価値G2が評価値G1以上である(G2≧G1)場合、前回算出したオフセットOn−1及び全磁力Rn−1が新たに算出されたオフセットOn及び全磁力Rnより真値に近いか、あるいは同様と判定する。
【0090】
ここで、オフセット有効性判定部10は、G2<G1の場合、新たに算出されたオフセットOn及び全磁力Rnを、磁気測定データ処理部18へ出力するとともに、オフセットを更新することを示す制御信号を、オフセット更新部17に対して出力する。
オフセット更新部17は、前回算出したオフセットOn−1を更新することを示す制御情報が供給されると、記憶部14に記憶されているオフセットOn−1対して、新たに算出されたオフセットOnを上書きする。これにより、記憶部14には最新のオフセットOnが保持される。
また、オフセット有効性判定部10は、G2≧G1の場合、記憶部14に記憶されているオフセットの値と全磁力Rとを、磁気測定データ処理部18へ出力するとともに、オフセットを更新しないことを示す制御信号を、オフセット更新部17に対して出力する。
オフセット更新部17は、オフセットを更新しないことを示す制御情報が供給されると、記憶部14に記憶されている前回算出したオフセットOn−1を上書きせず、前回算出したオフセットOn−1の値の更新処理を行わない。これにより、記憶部14には、最新のオフセットとして、前回算出したオフセットOn−1と同じ値のオフセットOnが保持される。
【0091】
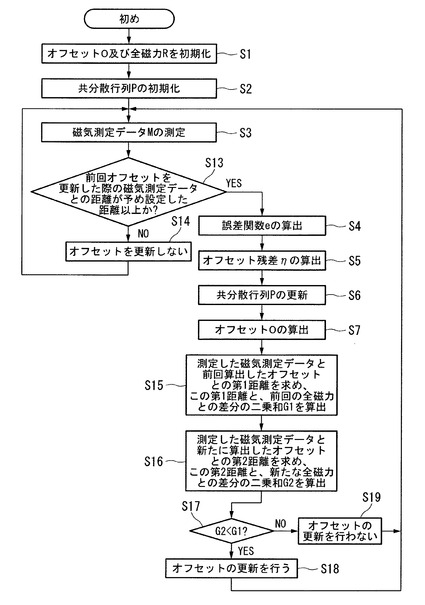
次に、図6及図7を用いて、本実施形態の磁気測定データ校正装置1における磁気測定データの校正を行う処理について説明する。図7は、本実施形態における磁気センサ2が検出した磁気測定データMを校正する処理の動作例を示すフローチャートである。
図7におけるステップS1からS7とステップS13及びS13とは、図5におけるステップS1からS7とステップS13及びS14と同様である。以下、第2の実施形態の図5におけるフローチャートと異なる点のみを説明する。
ステップS7において、オフセット更新部17は、ベクトルxnを算出した後、処理をステップS15へ進める。
【0092】
ステップS15:
次に、オフセット有効性判定部10は、記憶部14に記憶されている磁気測定データM1からMnと、前回算出されて記憶されたオフセットOn−1(O1)を読み出し、磁気データM毎に、上述した(12)式により距離d1nを算出する。
そして、オフセット有効性判定部10は、記憶部14に記憶されている磁気測定データMn−1とオフセットOn−1とを読み出し、(1)式により全磁力R1を算出する。
これにより、オフセット有効性判定部10は、算出した磁気データ毎の距離d1nと、全磁力R1とから、(13)式により評価値G1の算出を行い、処理をステップS16へ進める。
【0093】
ステップS16:
次に、オフセット有効性判定部10は、記憶部14に記憶されている磁気測定データM1からMnと、今回算出されて記憶されたオフセットOn(O2)を読み出し、磁気データM毎に、上述した(14)式により距離d2nを算出する。
そして、オフセット有効性判定部10は、記憶部14に記憶されている磁気測定データMnとオフセットOnとを読み出し、(1)式により全磁力R2を算出する。
これにより、オフセット有効性判定部10は、算出した磁気データ毎の距離d2nと、全磁力R2とから、(15)式により評価値G2の算出を行い、処理をステップS17へ進める。
【0094】
ステップS17:
次に、オフセット有効性判定部10は、算出した評価値G1とG2とを比較し、評価値G2が評価値G1未満であるか否かの判定を行う。
このとき、オフセット有効性判定部10は、評価値G2が評価値G1未満である場合、処理をステップS18へ進め、一方、評価値G2が評価値G1以上である場合、処理をステップS19へ進める。
【0095】
ステップS18:
評価値G2が評価値G1未満である場合、今回求めたオフセットOnが前回記憶部14にオフセットとして書き込まれて記憶されたオフセットOn−1より真値に近いため、オフセット有効性判定部10は、今回求めたオフセットOnを更新しないことを判定する。
そして、オフセット有効性判定部10は、記憶部14に記憶されているオフセットの値を更新することを示す制御信号を、オフセット更新部17に対して出力する。
この更新を行うことを示す制御情報が供給されると、オフセット更新部17は、記憶部14に記憶されているオフセットに対し、今回求めたオフセットOnを上書きし、オフセットの値の更新を行う。
そして、オフセット更新部17は、処理をステップS3へ進める。
【0096】
ステップS19:
評価値G2が評価値G1以上である場合、今回求めたオフセットOnに対して、前回記憶部14にオフセットとして書き込まれて記憶されたオフセットOn−1の方が真値に近いため、オフセット有効性判定部10は、前回書き込まれたオフセットの値を維持したまま更新することを示す制御信号を、オフセット更新部17へ出力する。
この更新を行わないことを示す制御情報が供給されると、オフセット更新部17は、記憶部14に記憶されているオフセットO、前回のオフセットOn−1の値を維持したまま上書し、オフセットの値の更新を行う。
そして、オフセット更新部17は、処理をステップS3へ進める。
【0097】
上述したように、本実施形態によれば、オフセットOの算出に使用可能と判定された磁気測定データMが供給される毎に、オフセットOnを算出して、前回有効と判定されて記憶部14に記憶されているオフセットOn−1といずれが真値に近いかを評価値G1とG2とにより比較し、より真値に近いオフセットを選択し、選択したオフセットを記憶部14に保持するため、常に最も真値に近いと推定されるオフセットOを磁気データMの校正に用いることができ、精度の高い磁気データの校正が行えることになる。
【0098】
<RLS法によりオフセットが最尤推定値として得られることの説明>
以下に、RLS法を用いた場合、共分散行列を用いて最新の磁気測定データMを用いてオフセットOを更新する、すなわちオフセットのベクトルxを更新ことで、常にオフセットOの最尤値(最尤推定値)を得ることができることの説明を行う。
まず、磁気測定データMn(Mxn,Myn,Mzn)から、以下の(16)式を定義する。
【0099】
【数16】
【0100】
一般的な最小二乗法によれば、現時点までに測定した磁気測定データM1からMnを用い、以下に示す(17)式の評価関数J1を最小とするオフセットのベクトルxを算出することになる。
【0101】
【数17】
【0102】
次に、(18)式に示すように、ベクトルznの転置行列znTを要素とする列行列Znと、(16)式のベクトルynを要素とする列行列Ynとを定義する。
【0103】
【数18】
【0104】
上記(18)式の列行列ZnとYnとを用いることにより、(17)式が以下に示す(19)式のように変形することができる。
【0105】
【数19】
【0106】
上記(19)式は、(18)式から判るように、磁気測定データM1からMnまで、すなわち現在までに測定した全ての磁気測定データの要素が含まれている。
【0107】
次に、重み付け係数Wnを要素とする行列、すなわち重み付け行列Wnを以下の(20)式のように定義する。
【0108】
【数20】
【0109】
そして、この重み付け行列Wnと、列行列Yn及びZnとを用いて、評価関数J2を以下の(21)式として示す。
【0110】
【数21】
【0111】
(20)式に示すように、重み付け行列Wnは、磁気測定データM毎を計算に用いる際の重み付け、すなわち特定の磁気測定データMの影響度を高くするために導入している。この重み付け行列Wnが単位行列であるならば、評価関数J2はすでに示した(17)式による評価関数J1と同一の評価値(J2=J1)を求める最小二乗法になる。
【0112】
ここで、(21)式の評価関数J2が最小となるオフセットのベクトルxは、以下の(22)式に示すものとなる。
【0113】
【数22】
【0114】
上記(22)式を(21)式に代入すると、(21)式の評価関数J2が最小、すなわちJ2=0となるため、(22)式が最尤推定値のベクトルxを示していることが判る。
【0115】
また、計算で用いる共分散行列Pnを表すため、行列Unを以下の(23)式により定義する。
【0116】
【数23】
【0117】
(23)式の行列Unの逆行列に対し、(18)式及び(20)式を代入することにより、以下に示す(24)式が得られる。
【0118】
【数24】
【0119】
ここで、(24)式を解析的に解くため、逆行列の補助定理を用いる。すなわち、逆行列の補助定理において、行列Aがn×n行列、行列bがn×1ベクトル、行列cがn×1ベクトルである場合、以下の(25)式に示す関係が成り立つことになる。
【0120】
【数25】
【0121】
したがって、(24)式を(25)式に代入すると、以下の(26)式となる。
【0122】
【数26】
【0123】
これにより、(24)式は、(26)式の逆行列を求めることにより、以下の(27)式の漸化式として表すことができる。
【0124】
【数27】
【0125】
ここで、(20)式における重み付け行列を、以下に示す(28)式のように設定する。
【0126】
【数28】
【0127】
上記(28)において、忘却係数ρを0から1の範囲(0<ρ<1)で設定すると、過去に取得した磁気測定データの影響(反映)の度合いが徐々に低くなる。
また、共分散行列Pnを、重み付け係数wnと行列Unで表すと、以下の(29)式となり、(27)式が(9)式と一致することになる。
【0128】
【数29】
【0129】
また、以降の計算の都合上、knを以下の(30)式のように定義する。
【0130】
【数30】
【0131】
次に、(22)式に対し、(27)式と(30)式とを代入すると、以下に示す(31)式が得られる。
【0132】
【数31】
【0133】
また、磁気測定データM1からMn−1までのデータで求められたオフセットのベクトルxn−1の推定値、すなわちn−1番目のベクトルxn−1の推定値は以下の(32)式で求められる。
【0134】
【数32】
【0135】
したがって、n番目のベクトルxnの推定値は、上記(32)式を(31)式に代入し、(31)式を変形することで、以下に示す(33)式として表される。
【0136】
【数33】
【0137】
そして、この(33)式を変形することにより、以下の(34)式を得る。
【0138】
【数34】
【0139】
上記(34)式を用いることにより、(33)式の右辺の第3項はkn×ynと簡略化できることから、(33)式から以下に示す(35)式のベクトルxの漸化式を導くことができる。
【0140】
【数35】
【0141】
上記(35)式は、(8)式及び(10)式を統合した式となっている。したがって、上述してきたRLS法により、最新の磁気測定データMを用いてオフセットのベクトルxの更新を行うことにより、常に、ベクトルxの最尤推定値を得ることができる。
【0142】
<方位検出装置>
次に、第1の実施形態から第3の実施形態による磁気測定データ校正装置1を用いた方位角計測装置の動作を以下に示す。
携帯機器に搭載される方位角計測装置には、図1に示す3軸の磁気検出部からなる磁気センサ2と、図示されていない3軸加速度センサとを組み合わせた構成が搭載されている。
すなわち、この方位角計測装置は、3軸加速度センサにより重力を検出し、検出した重力の傾きの程度から自身の傾斜角を計算する。
そして、磁気計測装置において、磁気センサ2により測定された磁気測定データが、磁気測定データ校正装置1により、オフセットが校正された磁気校正データMfを生成する。
方位角計測装置は、磁気測定データ校正装置1から出力される磁気校正データMfにより、方位角を算出する。
【0143】
以下に、方位角計測部3が行う磁気校正データMfによる方位角の算出について説明する。
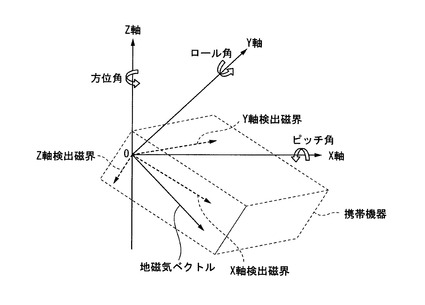
図8は、3軸加速度センサにより求まる絶対座標系と、3軸磁気センサである磁気計測装置の検出するセンサ座標系との各軸のずれを説明する図である。
図8において、3次元の絶対座標系を校正するX軸、Y軸及びZ軸を定義する。そして、X軸を回転軸とした回転角度をピッチ角(p)とし、Y軸を回転軸とした回転角度をロール角(r)とし、Z軸を回転軸とした回転角度を方位角(θ)とする。
上記絶対座標系とは、本実施形態においては、重力ベクトルに対してX軸とY軸とにより形成される平面が垂直であり、磁気センサ2の測定する磁気測定データM(Mx,My,Mz)の全てがゼロとなる地点を原点Oとした座標系としている。また、センサ座標系は、磁気センサ2が測定する磁気データM(Mx,My,Mz)が形成する座標系である。このため、磁気センサ2が磁気データM(Mx,My,Mz)を測定する測定点毎にセンサ座標系は異なる。
【0144】
しかしながら、ユーザが携帯した携帯機器を、絶対座標系におけるX軸及びY軸のなす平面と、磁気センサの測定軸、すなわちセンサ座標系におけるX軸(Mxの測定軸)及びY軸(Myの測定軸)のなす平面とを平行とすることは困難である。
そのため、磁気センサ2により方位角を推定する場合、常に絶対座標系におけるX軸及びY軸のなす平面に対して、磁気センサ2のセンサ座標系におけるX方向の測定軸(X軸検出磁界)とY方向の測定軸(T軸検出磁界)とのなす平面が平行であれば、周囲の環境による磁界の変化などの影響があっても、常に、傾斜センサとして用いた3軸加速度センサの測定する重力ベクトルにより、磁気センサ2、すなわち方位角計測装置の傾斜角を正確に測定することができる。
【0145】
このときに、方位角計測装置が地表に対して水平状態である場合、3軸加速度センサの出力する加速度計測データを、加速度計測データS(Sx,Sy,Sz)とする。一方、方位角計測装置が地表に対して傾斜状態である場合、3軸加速度センサの出力する加速度計測データを、加速度計測データS’(Sx’,Sy’,Sz’)とする。
このとき、加速度計測データS(Sx,Sy,Sz)と加速度計測データS’(Sx’,Sy’,Sz’)との関係は、以下の(36)式により示される。
【0146】
【数36】
【0147】
そして、ユーザの携帯する携帯機器が傾斜状態にあるとき、この傾斜状態での重力加速度で規格化された3軸加速度センサの出力を加速度計測データA(Ax,Ay,Az)とすると、地表面に対して方位計測装置が水平状態にある場合、A(Ax,Ay,Az)=A(0,0,1)であるため、上記(36)式は以下に示す(37)式となる。
【0148】
【数37】
【0149】
したがって、方位角計測部3は、3軸加速度センサの出力する加速度計測データA(Ax,Ay,Az)を用い、ピッチ角(p)が以下に示す(38)式から、また、ロール角(r)が以下に示す(39)式により算出する。
【0150】
【数38】
【0151】
【数39】
【0152】
また、ユーザの携帯する携帯機器が傾斜状態にあるとき、磁気測定データ校正装置1から出力される磁気校正データMfを、磁気測定データM(Mtx,Mty,Mtz)とすると、上記(38)式及び(39)式の各々から算出されたピッチ角(p)とロール角(r)とにより、以下の(40)式により、水平状態における磁気測定データM(Hx,Hy,V)が求まる。
【0153】
【数40】
【0154】
したがって、方位角計測部3は、上記(40)式により算出した磁気測定データM(Hx,Hy,V)を用い、以下に示す(41)式から方位角(θ)を算出する。
【0155】
【数41】
【0156】
上述したように、本実施形態によれば、環境オフセットを調整し、磁気センサ2の出力する磁気測定データMを校正した(すなわちゼロ磁界における磁気測定データの調整が行われた)磁気校正データMfを用い、かつ3軸磁気センサにより傾斜状態を補正して方位角を求めることが可能となり、常に、方位角測定装置の検出座標系のX軸方向及びY軸方向のなす平面と、絶対座標系における地表面とが水平状態であり、かつオフセットが校正がされた磁気測定データを用いることができるため、高い精度で方位角を求めることが実現できる。
【0157】
また、図1、図4及び図6における磁気測定データ校正装置1の機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより磁気測定データMの校正処理を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。
【0158】
また、「コンピュータシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含むものとする。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであっても良い。
【0159】
以上、この発明の実施形態を図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0160】
1…磁気測定データ校正装置 2…磁気センサ 3…方位角計測部 10…オフセット有効性判定部 11…測定データ入力部 12…共分散行列計算部 13…共分散行列更新部 14…記憶部 15…誤差関数計算部 16…オフセット残差計算部 17…オフセット更新部 18…磁気測定データ処理部 19…磁気測定データ判定部 21…X軸方向磁気検出部 22…Y軸方向磁気検出部 23…Z軸方向磁気検出部
【技術分野】
【0001】
本発明は、携帯機器に搭載される磁気センサの校正を行う磁気測定データ校正装置及び方位角計測装置に関する。
【背景技術】
【0002】
近年、携帯電話などの携帯機器に3軸の磁気センサ(以下、単に磁気センサ)が搭載され、携帯機器における方位測定に用いられている。
この方位測定に用いる磁気センサは、通常、携帯機器に搭載する前に、3軸ヘルムホルツコイルを用いて、各軸毎のゼロ磁界出力値の調整(以下、オフセット調整)をしておく。
この具体的な調整手順は、予め校正された磁気センサにより、地磁気の測定を行い、その予め校正された磁気センサの出力する3軸各々の磁気データを基準磁気測定データとして、方位測定に用いる。
【0003】
次に、3軸ヘルムホルツコイルにより、基準磁気測定データと逆方向の磁界を、オフセット調整の対象である対象磁気センサに対して印加する。
ここで、対象磁気センサは、オフセットが無い場合、出力する磁気測定データが3軸共に0であり、オフセットを有する場合、出力する磁気測定データが0ではない。
ここで、対象磁気センサが出力する磁気測定データを、対象磁気センサ自身の有するオフセットとして測定し、この磁気測定データにより、磁気センサの出力する磁気測定データのオフセット調整を行う。
すなわち、磁気センサの出力する磁気測定データから、3軸ヘルムホルツコイルで測定したオフセットを、各磁気測定データから減算し、磁気センサの測定結果として方位検出を行うことになる。
【0004】
しかしながら、磁気センサ単体でオフセット調整を行ったとしても、携帯機器には方位を検出する磁気センサ以外にも多くの他の部品が使われており、これら他の部品が発生する磁界が磁気センサに対して影響を与える場合がある。例えば、スピーカに搭載されている磁石、開閉スイッチに設けられている磁石、あるいは携帯機器の部品に施されたニッケルメッキなどから磁界が発生している。
【0005】
このため、携帯機器内部に設けられた磁気センサに対して周囲の環境による環境オフセットが生じ、オフセット調整を行った磁気センサ単体から環境オフセットが重畳した磁気測定データが出力されることになる。
したがって、磁気センサ単体でオフセット調整を行った後、搭載される携帯機器の他の部品が発生する磁界により、携帯機器が向いている実際の方位と、磁気センサが出力する磁気データから得られる方位とに、環境オフセットによる差異が生じることになる。
【0006】
また、磁気センサを他の部品とともに携帯機器に登載した状態で、3軸ヘルムホルツコイルにより環境オフセットを含めたオフセット調整を行うことが考えられる。
しかしながら、各部品の磁力の経時的な変化や、携帯機器の周囲の温度の変化、さらには携帯機器の周囲に強度の磁界を発生する物体の存在により、環境オフセットの値が常に変動してしまう。
【0007】
したがって、3軸ヘルムホルツコイルにより、携帯機器に搭載した後に、環境オフセットを含めた磁気センサのオフセット調整を行っても、周囲の状況により環境オフセットが刻々変動する。このため、磁気センサの磁気測定データに重畳する環境オフセットの変動により、磁気センサが出力する磁気測定データが真値に対してずれてしまうことになる。
このため、オフセットを再度行う必要があるが、常に3軸ヘルムホルツコイルにより、携帯機器に登載された磁気センサのオフセット調整を行うことができない。したがって、自身が磁気センサのオフセット調整を行う機能を、携帯機器に対して持たせる必要がある。
【0008】
このため、携帯機器に登載されたオフセット調整部が、3軸各々の磁気センサにより、各軸の磁界の強度を多数測定し、測定した磁気測定データを内部のデータバッファに一旦蓄積する。
そして、オフセット調整部がデータバッファに蓄積された磁気測定データに対して、距離(磁界の強度)が最小となるオフセットを求める手法がある(例えば、特許文献1を参照)。この手法においては、以下の式に示すように、球の方程式に磁気測定データを代入し、最小二乗法によりオフセットSxを求める。
Sx=Σ{(Xi−X0)2+(Yi−Y0)2+(Zi−Z0)2−R2}=0 …(i)
Xi、Yi及びZiが磁気測定データであり、X0、Y0及びZ0がオフセット座標であり、Rが定数である。
【0009】
また、3軸の磁気センサの各々の磁気測定データを1組として、4組の磁気測定データの組をデータバッファに蓄積し、上述した特許文献1と同様に、磁気測定データとの距離によりオフセットを求める手法がある(例えば、特許文献2を参照)。
この特許文献2においては、時系列に測定される測定データの中から4組の磁気測定データを抽出する際、抽出する抽出条件を以下のように設定している。すなわち、磁気センサの3軸で構成される3次元空間で、磁気測定データを座標点として以下の抽出条件が設定されている。
3軸の磁気測定データを3次元空間(3次元座標系)内に描画(配置)した際、
a.1組目の磁気測定データと2組目の磁気測定データとの距離が十分離れている
b.3組目の磁気測定データは、1組目及び2組目の磁気測定データとで構成される鈍角3角形の鈍角の頂点である
c.4組目の磁気測定データは、1組目から3組目の磁気測定データが形成する平面からの距離が十分離れている
【0010】
そして、特許文献2においては、以下の球の方程式を用いて、連立方程式を解くことによりオフセットを算出している。
(Xi−X0)2+(Yi−Y0)2+(Zi−Z0)2−R2=0 …(ii)
Xi、Yi及びZiが磁気測定データであり、X0、Y0及びZ0がオフセット座標であり、Rが定数である。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特許4391416号公報
【特許文献2】特許4590511号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1は、データバッファに複数の磁気測定データ蓄積し、この蓄積した磁気測定データを用いて、(i)式を用いた最小二乗法によりオフセットを算出する。ここで、特許文献1は、データバッファ分の磁気測定データを多数測定した後、オフセットの算出が行われる。このため、特許文献1は、多数の磁気測定データを蓄積するための時間を必要とし、環境オフセットの変化に対するオフセット調整の追従性が悪くなる。
【0013】
また、特許文献2は、磁気センサ自身の特性の時間的変動要因と、外部磁場の時間的変動要因とによる磁気ノイズが、磁気センサの出力する磁気測定データに重畳すると、算出されるオフセットを正確に算出できない。
すなわち、4組の磁気測定データのいずれかに磁気ノイズが重畳している場合、これらの磁気測定データを用いて算出されたオフセットは、磁気ノイズによる誤差が含まれることになり、実際のオフセットとずれることになる。
【0014】
さらに、特許文献1及び特許文献2の双方において、オフセットを求めるための磁気測定データの測定点が、一定の球の表面で測定されることが仮定されている。
このため、ユーザは、オフセット調整の際、携帯機器を円を描くように、すなわち、一定の球面に沿うように移動させる必要がある。
この移動が行われている際、磁気測定データを多数取得してバッファに蓄積し、すでに説明した算出に用いる磁気測定データの抽出処理を行う。
したがって、環境オフセットが変化に追従できない場合が発生し、再度、新たな磁気測定データを取得して、オフセット調整を繰り返して行なわなければならなくなる。
【0015】
本発明は、このような事情に鑑みてなされたもので、環境オフセットの変動に対する追従性を向上させることが可能な磁気測定データ校正装置及び方位角計測装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
この発明は上述した課題を解決するためになされたもので、本発明の磁気測定データ校正装置は、互いに直交する3つの測定軸を有し、測定軸方向の地磁気を測定する軸センサからなる磁気センサから出力される前記測定軸毎の地磁気の測定結果である磁気測定データのオフセットを求め、前記磁気測定データを補正する装置であり、測定された磁気測定データの前記測定軸毎の磁気データと、前回求められたオフセットとの差分から誤差関数を求める誤差関数計算部と、前記誤差関数及び前回求められた共分散行列からオフセット残差を算出するオフセット残差計算部と、前回の前記磁気測定データの測定時に算出したオフセットに対し、前記オフセット残差を加算し、新たなオフセットを算出するオフセット更新部と、測定された前記磁気測定データを用い、以前に測定された前記磁気測定データを母集団とする磁気測定データの共分散行列を更新し、測定された前記磁気測定データを前記母集団に加えて新たな共分散行列を生成する共分散行列更新部とを備えることを特徴とする。
【0017】
本発明の磁気測定データ校正装置は、前回算出されたオフセットを求める際に用いた磁気測定データと、前記磁気センサから新たに入力された新たな磁気測定データとの、前記磁気センサの測定軸からなる3次元磁界空間における第1距離を求め、当該第1距離と予め設定されている閾値との比較を行い、前記第1距離が前記閾値を超えている場合、前記オフセット更新部に対して新たなオフセットの更新を行わせ、一方前記第1距離が前記閾値以下の場合、新たなオフセットの更新を行わせない制御を行う磁気測定データ判定部を
さらに有することを特徴とする。
【0018】
本発明の磁気測定データ校正装置は、前記閾値が、前記3次元磁界空間における前記磁気センサの各測定軸方向における測定ノイズの座標点と、前記3次元磁界空間の原点との距離として定められていることを特徴とする。
【0019】
本発明の磁気測定データ校正装置は、現時点までに前記オフセットを算出した際に用いた磁気測定データを時系列に記憶するバッファと、前記バッファに記憶されている前記磁気測定データの各々と前回のオフセットとの第2距離を求め、当該第2距離の各々と前回のオフセットを求めた際の前記磁気測定データから求めた全磁力との第1差分を求め、全ての第2距離に対応する当該第1差分を加算して第1評価値を算出し、前記バッファに記憶されている前記磁気測定データの各々と今回算出されたオフセットとの第3距離を求め、当該第3距離の各々と今回のオフセットを求めた際の前記磁気測定データから求めた全磁力との第2差分を求め、全ての第3距離に対応する当該第2差分を加算して第2評価値を算出し、前記第1評価値と前記第2評価値とを比較し、前記第2評価値が前記第1評価値未満である場合、新たに求めたオフセットを前記磁気測定データの校正に用いるオフセットとし、一方、前記第2評価値が前記第1評価値以上である場合、前回求めたオフセットを前記磁気測定データの校正に用いるオフセットとするオフセット有効性判定部とをさらに有することを特徴とする。
【0020】
本発明の磁気測定データ校正装置は、前記誤差関数計算部が、前記3つの測定軸からなる3次元座標系において、測定された前記磁気測定データのデータ座標と、前回の前記磁気測定データの測定時に算出した前記オフセットのオフセット座標との距離の2乗から全磁力を求め、当該全磁力から前回算出した前回全磁力を減算し、減算結果を前記誤差関数とすることを特徴とする。
【0021】
本発明の方位角計測装置は、互いに直交する3つの測定軸を有し、測定軸方向の地磁気を測定する軸センサからなる磁気センサと、前記磁気センサから出力される前記測定軸毎の地磁気の測定結果である磁気測定データのオフセットを求め、前記磁気測定データを補正する磁気測定データ校正部と、前記磁気測定データ校正装置から出力される、前記磁気測定データを校正した磁気校正データから方位角を算出する方位角計測部とを備え、前記磁気測定データ校正部が、測定された磁気測定データの前記測定軸毎の磁気データと、前回求められたオフセットとの差分から誤差関数を求める誤差関数計算部と、前記誤差関数及び前回求められた共分散行列からオフセット残差を算出するオフセット残差計算部と、前回の前記磁気測定データの測定時に算出したオフセットに対し、前記オフセット残差を加算し、新たなオフセットを算出するオフセット更新部と、測定された前記磁気測定データを用い、以前に測定された前記磁気測定データを母集団とする磁気測定データの共分散行列を更新し、測定された前記磁気測定データを前記母集団に加えて新たな共分散行列を生成する共分散行列更新部とを備えることを特徴とする。
【発明の効果】
【0022】
この発明によれば、前回算出したオフセットと、新たに得られる磁気測定データとから、前回算出したオフセットに対するオフセット残差を求め、このオフセット残差を前回算出したオフセットに加算して新たなオフセットを算出するため、従来のように複数の磁気測定データを得た後にオフセットを算出するための遅延時間が無く、リアルタイムに、すなわち高速にオフセットの算出が行うことが可能となり、環境オフセットの変動に対する追従性を、従来に比較して向上させることができる。
【図面の簡単な説明】
【0023】
【図1】本発明の第1の実施形態による磁気測定データ校正装置を用いた方位角計測装置の構成例を示す概略ブロック図である。
【図2】第1の実施形態の磁気測定データ校正装置1における磁気センサ2が検出した磁気測定データMを校正する処理の動作例を示すフローチャートである。
【図3】本実施形態による磁気測定データ校正装置1、校正装置#1及び#2に対し、磁気と逆の磁界と、特定移動磁界(8の字状の移動と斜め方向の移動)と、オフセット磁界との合成磁界を印加し、計測したオフセット推定誤差を示すテーブルである。
【図4】本発明の第2の実施形態による磁気測定データ校正装置を用いた方位角計測装置の構成例を示す概略ブロック図である。
【図5】第2の実施形態の磁気測定データ校正装置1における磁気センサ2が検出した磁気測定データMを校正する処理の動作例を示すフローチャートである。
【図6】本発明の第3の実施形態による磁気測定データ校正装置1を用いた方位角計測装置の構成例を示す概略ブロック図である。
【図7】第3の実施形態における磁気センサ2が検出した磁気測定データMを校正する処理の動作例を示すフローチャートである。
【図8】3軸加速度センサにより求まる絶対座標系と、3軸磁気センサである磁気計測装置の検出するセンサ座標系との各軸のずれを説明する図である。
【発明を実施するための形態】
【0024】
<第1の実施形態>
以下、図面を参照して、本発明の第1の実施形態について説明する。図1は、この発明の第1の実施形態による磁気測定データ校正装置を用いた方位角計測装置の構成例を示す概略ブロック図である。この方位各計測装置は、携帯機器などに搭載される。
本実施形態の方位計測装置は、磁気測定データ校正装置1、磁気センサ2及び方位角計測部3から構成されている。
磁気センサ2は、例えば、X軸方向の測定軸における磁界の強度を示す磁気データMxを測定するX軸方向磁気検出部21、Y軸方向の測定軸における磁界の強度を示す磁気データMyを測定するY軸方向磁気検出部22、Z軸方向の測定軸における磁界の強度を示す磁気データMzを測定するZ軸方向磁気検出部23とから構成された、X軸、Y軸及びZ軸の3軸の測定軸を有する磁気センサである。ここで、X軸方向磁気検出部21、Y軸方向磁気検出部22及びZ軸方向磁気検出部23は、例えば、ホール素子、磁気抵抗素子、フラックスゲート型磁気素子などが用いられる。
【0025】
磁気測定データ校正装置1は、磁気センサ2から供給される、磁気データMx、磁気データMy及び磁気データMzからなる磁気測定データM(Mx,My,Mz)のオフセットを校正した磁気校正データMf(Mfx,Mfy,Mfz)を出力する。
方位角計測部3は、磁気測定データ校正装置1が校正した磁気校正データMf(Mfx,Mfy,Mfz)を用い、方位角計測装置の向いている方位を出力する。
【0026】
本実施形態において、補正すべきオフセットを、オフセットO(Ox,Oy,Oz)とする。ここで、OxはX軸方向のオフセットであり、OyはY軸方向のオフセットであり、OzはZ軸方向のオフセットである。
また、磁気測定データMn(Mxn,Myn,Mzn)は、n番目の磁気データである。また、地磁気ベクトルの大きさ(以下、全磁力)をRとする。
ここで、全磁力は、磁気測定データMn(Mxn,Myn,Mzn)とオフセットO(Ox,Oy,Oz)とを用い、以下の(1)式により、求められる。
【0027】
【数1】
【0028】
この(1)式の関係は常に成り立つ。すなわち、携帯機器を携帯するユーザの移動の際、携帯機器が回転することにより、磁気測定データにおける各測定軸方向の磁気データが変化する。しかしながら、この磁気測定データから検出される全磁力が変化しない限り、磁気測定データをX軸、Y軸及びZ軸からなる3次元空間の座標点として配置すると、磁気測定データは測定軸からなる3次元空間において、同一の球面上のいずれかの位置に存在する(この点については従来例と同様に同一球面上で移動することを仮定している)。
したがって、全磁力が同一であるならば、上述した(1)式の関係は、磁気測定データにおける各測定軸方向の磁気データが変化したとしても、常に成り立つことになる。
【0029】
上記(1)式において、4個の磁気測定データMを用いることにより、オフセットOの各測定軸におけるオフセット成分Ox、Oy、Oz、全磁力Rを、算出することができる。
ここで、(1)式を変形するため、以下の(2)式に示す定数Qを定義する。
【0030】
【数2】
【0031】
上記(2)式を用いて(1)式を行列の構成とすることにより、以下の(3)式のように変形する。
【0032】
【数3】
【0033】
上記(3)式を解くことにより、オフセット成分Ox、Oy、Oz、全磁力Rを求めることができる。このとき、(3)式の左辺の逆行列が存在することが必要である。
しかしながら、実際の磁気測定データMには、携帯機器の各部品からのまたは外部からの磁気ノイズが重畳している。
このため、(3)式から算出されるオフセット成分Ox、Oy、Oz、全磁力Rは正確な値を得ることができない場合がある。
したがって、統計的な手法、すなわちRLS(Recursive Least Square:再帰的最小二乗)法を用いて、磁気ノイズを低減することにより、オフセット成分Ox、Oy、Oz、全磁力Rの推定値(以下、最尤推定値)を算出する。最尤推定値が算出できる説明は後述する。以下、本実施形態における、RLS法を用いた磁気測定データの校正について説明する。
【0034】
次に、磁気測定データ校正装置1は、測定データ入力部11、共分散行列計算部12、共分散行列更新部13、記憶部14、誤差関数計算部15、オフセット残差計算部16、オフセット更新部17、磁気測定データ処理部18を備えている。
測定データ入力部11は、X軸方向磁気検出部21、Y軸方向磁気検出部22及びZ軸方向磁気検出部23の各々から入力されるアナログ値の軸センサ測定値を、デジタル値に変換して出力する。ここで、X軸方向磁気検出部21、Y軸方向磁気検出部22及びZ軸方向磁気検出部23の各々は、自身の感知方向で検出した磁場に対応した、アナログ値である電圧値を磁気データとして出力する。
また、測定データ入力部11は、アナログ値の磁気データM(Mx,My,Mz)を、デジタル値の磁気測定データM(Mx、My、Mz)に変換する際、アナログ値の磁気データに含まれているオフセット値を除去するため、磁気センサ単体でのオフセット調整を行うようにしてもよい。
【0035】
共分散行列計算部12は、後述するオフセット残差計算部16において用いる共分散行列Pの初期値を、以下の(4)式のように設定する。
【0036】
【数4】
【0037】
この(4)式において、共分散行列計算部12は、定数αを、例えば1.000から100.000までの範囲で設定する。
また、(4)式における左辺の4行×4列の行列における磁気測定データを示す列行列を、以下の(5)式のベクトルznとして定義する。
【0038】
【数5】
【0039】
また、(4)式における左辺の4行×1列の行列を、以下の(6)式のオフセットのベクトルxnとして定義する。
【0040】
【数6】
【0041】
上記(6)式は、n番目の磁気測定データを用いて更新された際のオフセットOn(Oxn,Oyn,Ozn)と全磁力から計算された定数Qnからなるベクトルを示す行列である。
【0042】
誤差関数計算部15は、以下の(7)式を用いて、誤差関数enを算出する。
【0043】
【数7】
【0044】
すなわち、誤差関数計算部15は、n番目に測定された磁気測定データMnと、前回算出したオフセットOn−1(n−1番目の磁気測定データMn−1を用いて求めたオフセット)と、前回算出した全磁力Rn−1(n−1番目の磁気測定データMn−1を用いて求めた全磁力)とから、誤差関数enを算出する。
ここで、誤差関数計算部15は、磁気測定データMnとオフセットOnとの距離の二乗と、全磁力Rn−1の二乗を算出し、磁気測定データMnとオフセットOnとの距離の二乗から、全磁力Rn−1の二乗を減算し、減算結果を誤差関数enとする。ここで、磁気測定データMnとオフセットOnとの距離とは、測定軸であるX軸、Y軸及びZ軸からなる3次元空間において、磁気測定データMnとオフセットOn−1とを配置した際の、磁気測定データMnとオフセットOn−1との座標点の距離である。
【0045】
オフセット残差計算部16は、誤差関数計算部15の求めた誤差関数enと、前回測定時に求めた共分散行列Pn−1とを用い、以下の(8)式により、オフセット残差ηを算出する。
【0046】
【数8】
【0047】
この(8)式において、忘却係数ρは、RLS法で用いられる定数である。一般的に、0.95<ρ<1の範囲に設定される。
【0048】
共分散行列更新部13は、磁気測定データMnを共分散行列の母集団に含めた際の共分散行列Pnを、(1)式の行列znと、(1)式の転置行列znTと、磁気測定データM0からMn−1を母集団とする共分散行列Pn−1と、忘却係数ρとを用い、以下に示す(9)式により算出する。
【0049】
【数9】
【0050】
オフセット更新部17は、直前の磁気測定データMn−1から求めたオフセットベクトルxn−1と、オフセット残差ηとから、磁気測定データMnに対応するオフセットベクトルxnを、以下の(10)式により算出する。
【0051】
【数10】
【0052】
磁気測定データ処理部18は、磁気測定データMnの磁気データMxn、Myn、Mznの各々から、オフセットベクトルXnにおけるOxn、Oyn、Oznをそれぞれ減算し、磁気校正データMf(Mfx,Mfy,Mfz)を算出する。
記憶部14には、共分散行列Pと、オフセットベクトルxと、全磁力Rとが記憶される。共分散行列P、オフセットベクトルx及び全磁力Rの各々は、それぞれ書き込まれる際に、次の算出において用いられる直前のデータである、共分散行列Pn−1、オフセットベクトルn−1及び全磁力Rn−1として書き込まれる。
また、記憶部14には、共分散行列Pの初期値、忘却係数ρ、(5)式、(6)式、(7)式、(8)式、(9)式、(10)式が予め書き込まれて記憶されている。
【0053】
次に、図1及図2を用いて、本実施形態の磁気測定データ校正装置1における磁気測定データの校正を行う処理について説明する。図2は、磁気センサ2が検出した磁気測定データMを校正する処理の動作例を示すフローチャートである。
ステップS1:
共分散行列計算部12は、オフセットO及び全磁力Rの初期化を行う。
このとき、例えば、オフセットOの初期化の値としては磁気センサ2の単体で3軸ヘルムホルツコイルにて測定されたオフセット値が記憶部14に予め書き込まれて記憶されている。また、全磁力Rの初期化の値としては、複数の地域における地磁気基準値が記憶部14に予め書き込まれて記憶されている。
そして、携帯機器に電源を投入した後、ユーザは携帯機器の表示部に表示される複数の地域から、自身の居住地が含まれる地域を選択する。
これにより、共分散行列計算部12は、記憶部14から、オフセットOの初期値を読み出すとともに、ユーザの選択した地域に対応して記憶されている地磁気基準値を全磁力Rの初期値として読み出す。
また、GPS(Global Positioning System)機能が携帯機器に搭載されている場合、共分散行列計算部12は、GPSから得られる緯度経度情報が含まれる地域(緯度経度情報の範囲で規定された領域)に対応して記憶されている地磁気基準値を全磁力Rの初期値として読み出すように構成しても良い。
そして、共分散行列計算部12は、処理をステップS2へ進める。
【0054】
ステップS2:
次に、共分散行列計算部12は、共分散行列Pの初期化を行う。すなわち、共分散行列計算部12は、記憶部14に予め書き込まれて記憶されている(4)式を読み出し、読み出した(4)式を共分散行列の初期値とする。
そして、共分散行列計算部12は、処理をステップS3へ進める。
【0055】
ステップS3:
測定データ入力部11は、磁気センサ2のX軸方向磁気検出部21、Y軸方向磁気検出部22及びZ軸方向磁気検出部23の各々から、磁気測定データMnとして磁気データMxn、Myn及びMznを読み込む。
そして、測定データ入力部11は、読み込んだ磁気測定データMnを記憶部14に書き込んで記憶させる。
磁気測定データMnを読み込んだ後、測定データ入力部11は、処理をステップS4へ進める。
【0056】
ステップS4:
次に、誤差関数計算部15は、記憶部14から読み込んだ(7)式に対し、磁気センサ2から読み込んだ磁気データMxn、Myn及びMznと、記憶部14から読み込んだオフセットOn−1(Oxn−1,Oyn−1,Ozn−1)とを代入し、誤差関数enを算出する。
すなわち、誤差関数計算部15は、磁気データMxnからオフセットOxn−1を減算した結果を二乗し、磁気データMynからオフセットOyn−1を減算した結果を二乗し、磁気データMznからオフセットOzn−1を減算した結果を二乗する。
そして、誤差関数計算部15は、それぞれの減算した結果を加算し、この加算した結果から、全磁力Rn−1の二乗を減算し、誤差関数enを求める。
誤差関数enを算出した後、誤差関数計算部15は、処理をステップS5へ進める。
また、図2のフローチャートにおけるステップS3からステップS7までのループ(繰り返し処理)において、携帯機器の電源が投入されてから1回目のループの際、オフセットOn−1としては初期化におけるオフセットの数値が用いられ、同様に、全磁力Rn−1としては初期化における全磁力の数値が用いられる。
【0057】
ステップS5:
オフセット残差計算部16は、記憶部14から、(5)式と、(8)式と、忘却係数ρと、前回求めた共分散行列Pn−1とを読み出す。
次に、オフセット残差計算部16は、磁気データMnを(5)式に代入してベクトルznの行列を生成し、この生成したベクトルznの行列の転置行列znTを生成する。
そして、オフセット残差計算部16は、忘却係数ρ、共分散行列Pn−1、ベクトルzn及び転置行列znTの各々を(8)式に代入し、オフセット残差ηを算出し、このオフセット残差ηをオフセット更新部17へ出力する。
オフセット残差ηを算出した後、オフセット残差計算部16は、処理をステップS6へ進める。
【0058】
ステップS6:
共分散行列更新部13は、記憶部14から、(5)式と、(9)式と、忘却係数ρと、共分散行列Pn−1とを読み込む。
次に、共分散行列更新部13は、磁気データMnを(5)式に代入してベクトルznの行列を生成し、この生成したベクトルznの行列の転置行列znTを生成する。
そして、共分散行列更新部13は、忘却係数ρと、共分散行列Pn−1と、ベクトルznと、転置行列znTとを、(9)式に代入し、新たな共分散行列Pnを生成し、記憶部14に書き込んで記憶させる。この共分散行列更新部13が記憶部14に書き込んだ共分散行列Pnが、磁界のループにおいては共分散行列Pn−1として用いられる。
今回の磁気データMnを含む、今までに共分散行列Pを生成するために用いた磁気データMの全てを母集団とする共分散行列Pnを生成した後、共分散行列更新部13は、処理をステップS7へ進める。
【0059】
ステップS7:
オフセット更新部17は、記憶部14から(6)式及び(10)式を読み出す。
次に、オフセット更新部17は、(6)式に対し、前回算出されたオフセットOn−1と全磁力Rn−1とを代入し、オフセットのベクトルxn−1を求める。
そして、オフセット更新部17は、オフセット残差計算部16から供給されるオフセット残差ηと、求めたベクトルとを(10)式に代入し、磁気測定データMnを測定した時点(すなわち現在)におけるオフセットを示すオフセットのベクトルxnを算出する。すなわち、オフセット更新部17は、ベクトルxn−1に対し、オフセット残差ηを加算することにより、新たなオフセットを示すベクトルxnを算出する。
ベクトルxnを算出した後、オフセット更新部17は、処理をステップS3へ進める。
上述したように、本実施形態による磁気測定データ校正装置1は、図2のフローチャートに従い、オフセットOnの更新処理を行う。
【0060】
また、磁気測定データ処理部18は、方位角計測部3が方位角の算出を行う際、測定データ入力部11が入力する磁気測定データMnに対応したオフセットOnを、磁気測定データMnから減算する。
そして、磁気測定データ処理部18は、磁気測定データMnからオフセットOnを減算した結果を、校正した磁気校正データMf(Mfx,Mfy,Mfz)として、方位角計測部3に対して出力する。
【0061】
上述した本実施形態によれば、前回求めたオフセットOn−1と、現時点で測定した磁気測定データMnとを用い、誤差関数enが最小となるように、オフセット残差ηを算出し、このオフセット残差ηと前回求めたオフセットOn−1とを用いてオフセットOnを算出するため、磁気測定データMnに重畳する磁気ノイズも最小化することが可能となり、従来に比較してより高い精度により、測定される磁気測定データMnのオフセットOnを求めることができる。
【0062】
また、本実施形態によれば、今回の磁気測定データMnからオフセットOnを求めるため、前回求めたオフセットOn−1に加算するオフセット残差ηを求める際、誤差関数をどの程度反映させるかの割合を、前回までの測定値を母集団とする共分散行列Pn−1と、現時点の磁気測定データMnと、忘却係数ρとにより設定しており、従来のように同一球面上を移動させて複数の磁気測定データMを測定する必要が無いため、新たな磁気測定データMnを測定する毎に、前回までのオフセットOn−1から容易に現時点のオフセットOnを求めることが可能となり、環境オフセットの変動に対する従性を向上させることができる。
【0063】
次に、本実施形態の磁気測定データ校正装置1と、特許文献1の第1の手法と、特許文献2の第2の手法との各々により推定したオフセットOnの真値との誤差を比較した結果を説明する。
本実施形態による磁気測定データ校正装置1と、第1の手法のアルゴリズムを用いた校正装置#1と、第2の手法のアルゴリズムを用いた校正装置#2との各々を搭載した磁気計測装置を用意した。
そして、磁気計測装置の各々のオフセットを3軸ヘルムホルツコイルにて測定し、それぞれの校正装置が設けられた磁気センサのオフセット調整を行った状態とする。
【0064】
次に、磁気測定データ校正装置1と、第1の手法のアルゴリズムを用いた校正装置#1と、第2の手法のアルゴリズムを用いた校正装置#2との各々を搭載した磁気計測装置の各々におけるオフセットの算出処理を行った。
まず、測定する磁気計測装置をオフセットが校正された状態で、3軸ヘルムホルツコイルのステージに静止させてセットする。
そして、地磁気と逆の磁界を発生させて磁界が0となる状態とし、この状態で磁気計測装置を特定の方向に移動させた際に磁気センサに印加される磁界である特定移動磁界を3軸ヘルムホルツコイルに発生させる。
すなわち、3軸ヘルムホルツコイルのステージに静止されてセットされた磁気計測装置に対し、磁気計測装置を移動させたときに磁気センサが検出すると推定される磁界を3軸ヘルムホルツコイルにより印加する。これにより、磁気計測装置を搭載した携帯機器を移動させた状態をシミュレーションすることになる。
【0065】
本実施形態において、上述した3軸ヘルムホルツコイルを用いた携帯機器の移動のシミュレーションとしては、例えば8の字を描く移動を行わせた第1のシミュレーションと、斜め方向に移動させた第2のシミュレーションとを行った。この斜め方向とは、地表面に垂直な軸に対して角度を有する方向を指している。
このシミュレーションの際、地磁気と逆の磁界と特定移動磁界とのみでなく、ある一方向の決められた大きさの特定方向の磁界を仮想オフセットとする磁界(あたかも環境オフセットが存在するようにする仮想的なオフセット磁界)を、地磁気と逆の磁界と特定移動磁界とに対して合成した合成磁界を印加した。
そして、上述した合成磁界を印加し、各磁気計測装置の出力を計測した。このとき、合成磁界の磁界変化を検知し、正常に校正が行われた場合、磁気計測装置における校正装置がオフセット磁界を、携帯機器内部のオフセットとして判定する。このため、磁気計測装置は、オフセット磁界と携帯機器内部のオフセットを磁気測定データから減算して出力することになる。
【0066】
したがって、上述した校正処理を磁気計測装置に対して行わせた後、地磁気と逆の磁界とオフセット磁界との合成磁界を印加した状態における磁気計測装置の出力する磁気測定データM(Mx,My,Mz)は0となる。
上述した実験において、X、Y及びZ軸方向の各々の測定軸に対し、それぞれオフセット磁界として10μT(マイクロテスラ)を用いた。
また、地磁気と逆の磁界とオフセット磁界との合成磁界を印加した状態における磁気計測装置の出力する各測定軸の磁気データの2乗を加算し、加算結果の平方根をオフセット推定誤差として計算した。このオフセット推定誤差は0に近くなるほど、校正装置の算出したオフセットが真値に近いことを示すことになる。
図3に本実施形態における実験の結果を示す。この図3は、本実施形態による磁気測定データ校正装置1、校正装置#1及び校正装置#2に対し、磁気と逆の磁界と、特定移動磁界(8の字状の移動と斜め方向の移動)と、オフセット磁界との合成磁界を印加し、計測したオフセット推定誤差を示すテーブルである。
【0067】
図3に示されているように、携帯機器を8の字状に移動させた第1の状態、斜め方向に移動させた第2の状態のいずれの場合でも、本実施形態における磁気測定データ校正装置1によるオフセットが真値に近いことが、すなわち算出されるオフセットOが実際のオフセットに近い結果が得られた。
斜め方向に移動させる第2の状態の場合、本実施形態においては第1の状態の場合と差がないが、校正装置#1及び#2においては第1の状態に対し、算出されるオフセットの算出精度が低下している。特に、校正装置#2は、17.32=(102+102+102)1/2であるため、そもそもオフセットの推定自体が行われていないことが判る。
上述した図3の結果から、本実施形態によれば、磁気測定データの校正に必要な携帯機器の移動を最小限にすることができ、かつ従来の手法に比較してオフセットの推定精度を向上させることができる。
【0068】
<第2の実施形態>
以下、図面を参照して、本発明の第2の実施形態について説明する。図4は、この発明の第2の実施形態による磁気測定データ校正装置1を用いた方位角計測装置の構成例を示す概略ブロック図である。この方位各計測装置は、第1の実施形態と同様に、携帯機器などに搭載される。
本実施形態の方位計測装置は、磁気測定データ校正装置1、磁気センサ2及び方位角計測部3から構成されている。図4において、第1の実施形態と同様の構成には同一の符号を付してある。第1の実施形態と異なる点は、磁気測定データ校正装置1に対して、新たに磁気測定データ判定部19が設けられていることである。以下、第1の実施形態と異なる構成と動作のみを説明する。
【0069】
磁気測定データ判定部19は、前回オフセットOn−1を算出した磁気測定データMn−1、現時点で測定された磁気測定データMnとの距離dを算出する。この距離dは、すでに説明したように、磁気センサ2のX軸、Y軸及びZ軸方向の各々の測定軸で構成される3次元空間(磁界3次元空間)に磁気測定データMn及びMn−1を配置した際の、それぞれの座標値の距離である。
また、磁気測定データ判定部19は、算出した距離dが予め設定した閾値dsを超えない場合、磁気測定データ校正装置1において、新たな磁気測定データMnによるオフセットOnの算出を行わない制御を行う。この場合、記憶部14に記憶されるデータは、磁気測定データMn−1において算出された数値が、書き換えられずにそのまま記憶されることになる。
【0070】
ここで、閾値dsは、以下のように設定されている。すなわち、閾値dsは磁気センサ2の測定における測定ノイズに対応した数値で決定される。磁気データを測定するX軸、Y軸及びZ軸方向の各測定軸の測定ノイズを、それぞれ測定ノイズvx、vy、zvとすると、静止状態においても、時系列に磁気センサ2において測定される磁気測定データ間の距離は、0とはならない。
方位計測装置を静止状態とし、X軸、Y軸及びZ軸方向の各測定軸の磁気測定データの変動幅を予め測定し、この変動幅を含む範囲を測定ノイズvx、vy、zvとする。
【0071】
したがって、以下に示す(11)式により、閾値dsが求められている。この閾値dsは予め記憶部14に書き込まれ記憶されている。ここで、閾値dsは、測定ノイズのベクトル(vx、vy、zv)の長さ、すなわち磁気センサ2の測定軸で構成される3次元空間の原点と、測定ノイズvx、vy、zvの座標値との距離で設定されている。
例えば、X軸、Y軸及びZ軸方向の各測定軸の測定ノイズの標準偏差が1μTである磁気センサを用いた場合、(11)式により求められる変動幅は最大で4.5μTである。この場合、閾値dsを5μTとして設定する。
また、測定データ入力部11は、オフセットOnが求められた後、磁気測定データMnを記憶部14に書き込んで記憶させる。
【0072】
【数11】
【0073】
次に、図4及図5を用いて、本実施形態の磁気測定データ校正装置1における磁気測定データの校正を行う処理について説明する。図5は、本実施形態における磁気センサ2が検出した磁気測定データMを校正する処理の動作例を示すフローチャートである。
図5におけるステップS1からS7は、図2におけるステップS1からS7と同様である。以下、第1の実施形態の図2におけるフローチャートと異なる点のみを説明する。
ステップS3において、磁気測定データMnを読み込んだ後、測定データ入力部11は、処理をステップS13へ進める。
【0074】
ステップS13:
磁気測定データ判定部19は、測定データ入力部11から磁気測定データMnが供給されると、閾値dsと、前回オフセットOn−1の算出に用いた磁気測定データMn−1とを記憶部14から読み出す。
次に、磁気測定データ判定部19は、供給された磁気測定データMnと、記憶部14から読み出した磁気測定データMn−1との距離dを算出する。
そして、磁気測定データ判定部19は、算出した距離dと、記憶部14から読み出した閾値dsとを比較する。
このとき、磁気測定データ判定部19は、距離dが閾値ds以上の場合、処理をステップS4へ進め、一方、距離dが閾値ds未満の場合、処理をステップS14へ進める。
【0075】
ステップS14:
磁気測定データ判定部19は、オフセットOnの算出の処理を磁気測定データ校正装置1に行わせず、記憶部14に記憶された数値をそのままとし、処理をステップS3へ進める。
【0076】
上述した構成により、本実施形態においては、同一あるいは同様の磁気測定データ、すなわち距離が小さな磁気測定データにおいて、オフセットを算出する計算を繰り返すことにより、オフセットを大きく推定する、すなわち磁気測定データが全てオフセットであると判定してしまう第1の実施形態の欠点を解消することが可能である。
【0077】
<第3の実施形態>
以下、図面を参照して、本発明の第3の実施形態について説明する。図6は、この発明の第3の実施形態による磁気測定データ校正装置1を用いた方位角計測装置の構成例を示す概略ブロック図である。この方位各計測装置は、第2の実施形態と同様に、携帯機器などに搭載される。
本実施形態の方位計測装置は、磁気測定データ校正装置1、磁気センサ2及び方位角計測部3から構成されている。図6において、第2の実施形態と同様の構成には同一の符号を付してある。第2の実施形態と異なる点は、磁気測定データ校正装置1に対して、新たにオフセット有効性判定部10が設けられていることである。以下、第2の実施形態と異なる構成と動作のみを説明する。
【0078】
オフセット有効性判定部10は、磁気センサ2から読み込んだ磁気測定データMnから求めたオフセットOnが有効か否かの判定を行い、オフセットOnが有効でないと判定した場合、前回求めたオフセットOn−1を新たなオフセットOnとして用いる。
また、記憶部14には、データバッファが設けられており、16組から32組の磁気測定データMがこのデータバッファに書き込まれて記憶されている。例えば、16組の磁気測定データの組が記憶されている場合、磁気測定データM1からM16までの磁気測定データがデータバッファに記憶されることになる。
【0079】
ここで、オフセット有効性判定部10は、磁気測定データ判定部19において、距離dが予め設定した閾値dsを超えた磁気測定データMnを、上述したデータバッファに書き込んで記憶させる。このとき、オフセット有効性判定部10は、データバッファにおける最も古い磁気測定データに、新たな磁気測定データMnを上書きする。すなわち、オフセット有効性判定部10は、磁気測定データ判定部19がオフセット計算をして更新すると判定された磁気測定データのみをデータに書き込んで記憶させる。本実施形態における距離も、第2実施形態で示した磁気センサ2のX軸、Y軸及びZ軸方向の各々の測定軸で構成される3次元空間における距離である。
【0080】
また、オフセット有効性判定部10は、記憶部14からオフセットOn−1と、全磁力Rn−1とを読み出し、このオフセットのベクトルをO1(O1x,O1y,O1z)とし、全磁力をR1とする。
オフセット有効性判定部10は、以下の(12)式により、データバッファに記憶されている磁気測定データM1からMnの各々に対応する距離d1nを算出する。
【0081】
【数12】
【0082】
すなわち、オフセット有効性判定部10は、磁気測定データM毎に、磁気データMxからオフセットO1xを減算した結果を二乗し、磁気データMyからオフセットO1yを減算した結果を二乗し、磁気データMzからオフセットO1zを減算した結果を二乗する。
そして、オフセット有効性判定部10は、それぞれ二乗した結果を加算し、加算結果の平方根を算出することで、距離d1nを求める。ここで、オフセット有効性判定部10は、磁気測定データM1からMnの各々に対応し、距離d11からd1nの各々を求める。
また、オフセット有効性判定部10は、以下の(13)式により、評価値G1を算出する。
【0083】
【数13】
【0084】
すなわち、オフセット有効性判定部10は、距離d11からd1nの各々から、それぞれ全磁力R1を減算し、減算結果毎に二乗して、減算結果の二乗の総和を求めるため、全ての二乗結果を加算し、加算結果である二乗の総和を評価値G1とする。
また、オフセット有効性判定部10は、磁気センサ2から読み込んだ磁気測定データMnから求めたオフセットOnのオフセットのベクトルをO2(O2x,O2y,O2z)とし、このベクトルO2(O2x,O2y,O2z)と、磁気測定データMnとから新たに全磁力R2を求める。
そして、オフセット有効性判定部10は、以下の(14)式により、データバッファに記憶されている磁気測定データM1からMnの各々に対応する距離d2nを算出する。
【0085】
【数14】
【0086】
すなわち、オフセット有効性判定部10は、磁気測定データM毎に、磁気データMxからオフセットO2xを減算した結果を二乗し、磁気データMyからオフセットO2yを減算した結果を二乗し、磁気データMzからオフセットO2zを減算した結果を二乗する。
そして、オフセット有効性判定部10は、それぞれ二乗した結果を加算し、加算結果の平方根を算出することで、距離d2nを求める。ここで、オフセット有効性判定部10は、磁気測定データM1からMnの各々に対応し、距離d21からd2nの各々を求める。
また、オフセット有効性判定部10は、以下の(15)式により、評価値G2を算出する。
【0087】
【数15】
【0088】
すなわち、オフセット有効性判定部10は、距離d21からd2nの各々から、それぞれ全磁力R2を減算し、減算結果毎に二乗して、減算結果の二乗の総和を求めるため、全ての二乗結果を加算し、加算結果である二乗の総和を評価値G2とする。
評価値G1及びG2を算出すると、オフセット有効性判定部10は、この評価値G1と評価値G2の比較を行う。
このとき、オフセットO1と全磁力R1とが真値になっている場合、評価値G1が真値であり、オフセットO2と全磁力R2とが真値になっている場合、評価値G2が真値である。すなわち、オフセットO1と全磁力R1とが真値に近くなるほど評価値G1が小さくなり、また、オフセットO2と全磁力R2とが真値に近くなるほど評価値G2が小さくなると考えられる。
【0089】
したがって、オフセット有効性判定部10は、評価値G1及びG2を比較し、評価値G2が評価値G1未満である(G2<G1)場合、新たに算出されたオフセットOn及び全磁力Rnが前回算出したオフセットOn−1及び全磁力Rn−1より真値に近いと判定する。
一方、オフセット有効性判定部10は、評価値G2が評価値G1以上である(G2≧G1)場合、前回算出したオフセットOn−1及び全磁力Rn−1が新たに算出されたオフセットOn及び全磁力Rnより真値に近いか、あるいは同様と判定する。
【0090】
ここで、オフセット有効性判定部10は、G2<G1の場合、新たに算出されたオフセットOn及び全磁力Rnを、磁気測定データ処理部18へ出力するとともに、オフセットを更新することを示す制御信号を、オフセット更新部17に対して出力する。
オフセット更新部17は、前回算出したオフセットOn−1を更新することを示す制御情報が供給されると、記憶部14に記憶されているオフセットOn−1対して、新たに算出されたオフセットOnを上書きする。これにより、記憶部14には最新のオフセットOnが保持される。
また、オフセット有効性判定部10は、G2≧G1の場合、記憶部14に記憶されているオフセットの値と全磁力Rとを、磁気測定データ処理部18へ出力するとともに、オフセットを更新しないことを示す制御信号を、オフセット更新部17に対して出力する。
オフセット更新部17は、オフセットを更新しないことを示す制御情報が供給されると、記憶部14に記憶されている前回算出したオフセットOn−1を上書きせず、前回算出したオフセットOn−1の値の更新処理を行わない。これにより、記憶部14には、最新のオフセットとして、前回算出したオフセットOn−1と同じ値のオフセットOnが保持される。
【0091】
次に、図6及図7を用いて、本実施形態の磁気測定データ校正装置1における磁気測定データの校正を行う処理について説明する。図7は、本実施形態における磁気センサ2が検出した磁気測定データMを校正する処理の動作例を示すフローチャートである。
図7におけるステップS1からS7とステップS13及びS13とは、図5におけるステップS1からS7とステップS13及びS14と同様である。以下、第2の実施形態の図5におけるフローチャートと異なる点のみを説明する。
ステップS7において、オフセット更新部17は、ベクトルxnを算出した後、処理をステップS15へ進める。
【0092】
ステップS15:
次に、オフセット有効性判定部10は、記憶部14に記憶されている磁気測定データM1からMnと、前回算出されて記憶されたオフセットOn−1(O1)を読み出し、磁気データM毎に、上述した(12)式により距離d1nを算出する。
そして、オフセット有効性判定部10は、記憶部14に記憶されている磁気測定データMn−1とオフセットOn−1とを読み出し、(1)式により全磁力R1を算出する。
これにより、オフセット有効性判定部10は、算出した磁気データ毎の距離d1nと、全磁力R1とから、(13)式により評価値G1の算出を行い、処理をステップS16へ進める。
【0093】
ステップS16:
次に、オフセット有効性判定部10は、記憶部14に記憶されている磁気測定データM1からMnと、今回算出されて記憶されたオフセットOn(O2)を読み出し、磁気データM毎に、上述した(14)式により距離d2nを算出する。
そして、オフセット有効性判定部10は、記憶部14に記憶されている磁気測定データMnとオフセットOnとを読み出し、(1)式により全磁力R2を算出する。
これにより、オフセット有効性判定部10は、算出した磁気データ毎の距離d2nと、全磁力R2とから、(15)式により評価値G2の算出を行い、処理をステップS17へ進める。
【0094】
ステップS17:
次に、オフセット有効性判定部10は、算出した評価値G1とG2とを比較し、評価値G2が評価値G1未満であるか否かの判定を行う。
このとき、オフセット有効性判定部10は、評価値G2が評価値G1未満である場合、処理をステップS18へ進め、一方、評価値G2が評価値G1以上である場合、処理をステップS19へ進める。
【0095】
ステップS18:
評価値G2が評価値G1未満である場合、今回求めたオフセットOnが前回記憶部14にオフセットとして書き込まれて記憶されたオフセットOn−1より真値に近いため、オフセット有効性判定部10は、今回求めたオフセットOnを更新しないことを判定する。
そして、オフセット有効性判定部10は、記憶部14に記憶されているオフセットの値を更新することを示す制御信号を、オフセット更新部17に対して出力する。
この更新を行うことを示す制御情報が供給されると、オフセット更新部17は、記憶部14に記憶されているオフセットに対し、今回求めたオフセットOnを上書きし、オフセットの値の更新を行う。
そして、オフセット更新部17は、処理をステップS3へ進める。
【0096】
ステップS19:
評価値G2が評価値G1以上である場合、今回求めたオフセットOnに対して、前回記憶部14にオフセットとして書き込まれて記憶されたオフセットOn−1の方が真値に近いため、オフセット有効性判定部10は、前回書き込まれたオフセットの値を維持したまま更新することを示す制御信号を、オフセット更新部17へ出力する。
この更新を行わないことを示す制御情報が供給されると、オフセット更新部17は、記憶部14に記憶されているオフセットO、前回のオフセットOn−1の値を維持したまま上書し、オフセットの値の更新を行う。
そして、オフセット更新部17は、処理をステップS3へ進める。
【0097】
上述したように、本実施形態によれば、オフセットOの算出に使用可能と判定された磁気測定データMが供給される毎に、オフセットOnを算出して、前回有効と判定されて記憶部14に記憶されているオフセットOn−1といずれが真値に近いかを評価値G1とG2とにより比較し、より真値に近いオフセットを選択し、選択したオフセットを記憶部14に保持するため、常に最も真値に近いと推定されるオフセットOを磁気データMの校正に用いることができ、精度の高い磁気データの校正が行えることになる。
【0098】
<RLS法によりオフセットが最尤推定値として得られることの説明>
以下に、RLS法を用いた場合、共分散行列を用いて最新の磁気測定データMを用いてオフセットOを更新する、すなわちオフセットのベクトルxを更新ことで、常にオフセットOの最尤値(最尤推定値)を得ることができることの説明を行う。
まず、磁気測定データMn(Mxn,Myn,Mzn)から、以下の(16)式を定義する。
【0099】
【数16】
【0100】
一般的な最小二乗法によれば、現時点までに測定した磁気測定データM1からMnを用い、以下に示す(17)式の評価関数J1を最小とするオフセットのベクトルxを算出することになる。
【0101】
【数17】
【0102】
次に、(18)式に示すように、ベクトルznの転置行列znTを要素とする列行列Znと、(16)式のベクトルynを要素とする列行列Ynとを定義する。
【0103】
【数18】
【0104】
上記(18)式の列行列ZnとYnとを用いることにより、(17)式が以下に示す(19)式のように変形することができる。
【0105】
【数19】
【0106】
上記(19)式は、(18)式から判るように、磁気測定データM1からMnまで、すなわち現在までに測定した全ての磁気測定データの要素が含まれている。
【0107】
次に、重み付け係数Wnを要素とする行列、すなわち重み付け行列Wnを以下の(20)式のように定義する。
【0108】
【数20】
【0109】
そして、この重み付け行列Wnと、列行列Yn及びZnとを用いて、評価関数J2を以下の(21)式として示す。
【0110】
【数21】
【0111】
(20)式に示すように、重み付け行列Wnは、磁気測定データM毎を計算に用いる際の重み付け、すなわち特定の磁気測定データMの影響度を高くするために導入している。この重み付け行列Wnが単位行列であるならば、評価関数J2はすでに示した(17)式による評価関数J1と同一の評価値(J2=J1)を求める最小二乗法になる。
【0112】
ここで、(21)式の評価関数J2が最小となるオフセットのベクトルxは、以下の(22)式に示すものとなる。
【0113】
【数22】
【0114】
上記(22)式を(21)式に代入すると、(21)式の評価関数J2が最小、すなわちJ2=0となるため、(22)式が最尤推定値のベクトルxを示していることが判る。
【0115】
また、計算で用いる共分散行列Pnを表すため、行列Unを以下の(23)式により定義する。
【0116】
【数23】
【0117】
(23)式の行列Unの逆行列に対し、(18)式及び(20)式を代入することにより、以下に示す(24)式が得られる。
【0118】
【数24】
【0119】
ここで、(24)式を解析的に解くため、逆行列の補助定理を用いる。すなわち、逆行列の補助定理において、行列Aがn×n行列、行列bがn×1ベクトル、行列cがn×1ベクトルである場合、以下の(25)式に示す関係が成り立つことになる。
【0120】
【数25】
【0121】
したがって、(24)式を(25)式に代入すると、以下の(26)式となる。
【0122】
【数26】
【0123】
これにより、(24)式は、(26)式の逆行列を求めることにより、以下の(27)式の漸化式として表すことができる。
【0124】
【数27】
【0125】
ここで、(20)式における重み付け行列を、以下に示す(28)式のように設定する。
【0126】
【数28】
【0127】
上記(28)において、忘却係数ρを0から1の範囲(0<ρ<1)で設定すると、過去に取得した磁気測定データの影響(反映)の度合いが徐々に低くなる。
また、共分散行列Pnを、重み付け係数wnと行列Unで表すと、以下の(29)式となり、(27)式が(9)式と一致することになる。
【0128】
【数29】
【0129】
また、以降の計算の都合上、knを以下の(30)式のように定義する。
【0130】
【数30】
【0131】
次に、(22)式に対し、(27)式と(30)式とを代入すると、以下に示す(31)式が得られる。
【0132】
【数31】
【0133】
また、磁気測定データM1からMn−1までのデータで求められたオフセットのベクトルxn−1の推定値、すなわちn−1番目のベクトルxn−1の推定値は以下の(32)式で求められる。
【0134】
【数32】
【0135】
したがって、n番目のベクトルxnの推定値は、上記(32)式を(31)式に代入し、(31)式を変形することで、以下に示す(33)式として表される。
【0136】
【数33】
【0137】
そして、この(33)式を変形することにより、以下の(34)式を得る。
【0138】
【数34】
【0139】
上記(34)式を用いることにより、(33)式の右辺の第3項はkn×ynと簡略化できることから、(33)式から以下に示す(35)式のベクトルxの漸化式を導くことができる。
【0140】
【数35】
【0141】
上記(35)式は、(8)式及び(10)式を統合した式となっている。したがって、上述してきたRLS法により、最新の磁気測定データMを用いてオフセットのベクトルxの更新を行うことにより、常に、ベクトルxの最尤推定値を得ることができる。
【0142】
<方位検出装置>
次に、第1の実施形態から第3の実施形態による磁気測定データ校正装置1を用いた方位角計測装置の動作を以下に示す。
携帯機器に搭載される方位角計測装置には、図1に示す3軸の磁気検出部からなる磁気センサ2と、図示されていない3軸加速度センサとを組み合わせた構成が搭載されている。
すなわち、この方位角計測装置は、3軸加速度センサにより重力を検出し、検出した重力の傾きの程度から自身の傾斜角を計算する。
そして、磁気計測装置において、磁気センサ2により測定された磁気測定データが、磁気測定データ校正装置1により、オフセットが校正された磁気校正データMfを生成する。
方位角計測装置は、磁気測定データ校正装置1から出力される磁気校正データMfにより、方位角を算出する。
【0143】
以下に、方位角計測部3が行う磁気校正データMfによる方位角の算出について説明する。
図8は、3軸加速度センサにより求まる絶対座標系と、3軸磁気センサである磁気計測装置の検出するセンサ座標系との各軸のずれを説明する図である。
図8において、3次元の絶対座標系を校正するX軸、Y軸及びZ軸を定義する。そして、X軸を回転軸とした回転角度をピッチ角(p)とし、Y軸を回転軸とした回転角度をロール角(r)とし、Z軸を回転軸とした回転角度を方位角(θ)とする。
上記絶対座標系とは、本実施形態においては、重力ベクトルに対してX軸とY軸とにより形成される平面が垂直であり、磁気センサ2の測定する磁気測定データM(Mx,My,Mz)の全てがゼロとなる地点を原点Oとした座標系としている。また、センサ座標系は、磁気センサ2が測定する磁気データM(Mx,My,Mz)が形成する座標系である。このため、磁気センサ2が磁気データM(Mx,My,Mz)を測定する測定点毎にセンサ座標系は異なる。
【0144】
しかしながら、ユーザが携帯した携帯機器を、絶対座標系におけるX軸及びY軸のなす平面と、磁気センサの測定軸、すなわちセンサ座標系におけるX軸(Mxの測定軸)及びY軸(Myの測定軸)のなす平面とを平行とすることは困難である。
そのため、磁気センサ2により方位角を推定する場合、常に絶対座標系におけるX軸及びY軸のなす平面に対して、磁気センサ2のセンサ座標系におけるX方向の測定軸(X軸検出磁界)とY方向の測定軸(T軸検出磁界)とのなす平面が平行であれば、周囲の環境による磁界の変化などの影響があっても、常に、傾斜センサとして用いた3軸加速度センサの測定する重力ベクトルにより、磁気センサ2、すなわち方位角計測装置の傾斜角を正確に測定することができる。
【0145】
このときに、方位角計測装置が地表に対して水平状態である場合、3軸加速度センサの出力する加速度計測データを、加速度計測データS(Sx,Sy,Sz)とする。一方、方位角計測装置が地表に対して傾斜状態である場合、3軸加速度センサの出力する加速度計測データを、加速度計測データS’(Sx’,Sy’,Sz’)とする。
このとき、加速度計測データS(Sx,Sy,Sz)と加速度計測データS’(Sx’,Sy’,Sz’)との関係は、以下の(36)式により示される。
【0146】
【数36】
【0147】
そして、ユーザの携帯する携帯機器が傾斜状態にあるとき、この傾斜状態での重力加速度で規格化された3軸加速度センサの出力を加速度計測データA(Ax,Ay,Az)とすると、地表面に対して方位計測装置が水平状態にある場合、A(Ax,Ay,Az)=A(0,0,1)であるため、上記(36)式は以下に示す(37)式となる。
【0148】
【数37】
【0149】
したがって、方位角計測部3は、3軸加速度センサの出力する加速度計測データA(Ax,Ay,Az)を用い、ピッチ角(p)が以下に示す(38)式から、また、ロール角(r)が以下に示す(39)式により算出する。
【0150】
【数38】
【0151】
【数39】
【0152】
また、ユーザの携帯する携帯機器が傾斜状態にあるとき、磁気測定データ校正装置1から出力される磁気校正データMfを、磁気測定データM(Mtx,Mty,Mtz)とすると、上記(38)式及び(39)式の各々から算出されたピッチ角(p)とロール角(r)とにより、以下の(40)式により、水平状態における磁気測定データM(Hx,Hy,V)が求まる。
【0153】
【数40】
【0154】
したがって、方位角計測部3は、上記(40)式により算出した磁気測定データM(Hx,Hy,V)を用い、以下に示す(41)式から方位角(θ)を算出する。
【0155】
【数41】
【0156】
上述したように、本実施形態によれば、環境オフセットを調整し、磁気センサ2の出力する磁気測定データMを校正した(すなわちゼロ磁界における磁気測定データの調整が行われた)磁気校正データMfを用い、かつ3軸磁気センサにより傾斜状態を補正して方位角を求めることが可能となり、常に、方位角測定装置の検出座標系のX軸方向及びY軸方向のなす平面と、絶対座標系における地表面とが水平状態であり、かつオフセットが校正がされた磁気測定データを用いることができるため、高い精度で方位角を求めることが実現できる。
【0157】
また、図1、図4及び図6における磁気測定データ校正装置1の機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより磁気測定データMの校正処理を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。
【0158】
また、「コンピュータシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含むものとする。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであっても良い。
【0159】
以上、この発明の実施形態を図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0160】
1…磁気測定データ校正装置 2…磁気センサ 3…方位角計測部 10…オフセット有効性判定部 11…測定データ入力部 12…共分散行列計算部 13…共分散行列更新部 14…記憶部 15…誤差関数計算部 16…オフセット残差計算部 17…オフセット更新部 18…磁気測定データ処理部 19…磁気測定データ判定部 21…X軸方向磁気検出部 22…Y軸方向磁気検出部 23…Z軸方向磁気検出部
【特許請求の範囲】
【請求項1】
互いに直交する3つの測定軸を有し、測定軸方向の地磁気を測定する軸センサからなる磁気センサから出力される前記測定軸毎の地磁気の測定結果である磁気測定データのオフセットを求め、前記磁気測定データを補正する磁気測定データ校正装置であり、
測定された磁気測定データの前記測定軸毎の磁気データと、前回求められたオフセットとの差分から誤差関数を求める誤差関数計算部と、
前記誤差関数及び前回求められた共分散行列からオフセット残差を算出するオフセット残差計算部と、
前回の前記磁気測定データの測定時に算出したオフセットに対し、前記オフセット残差を加算し、新たなオフセットを算出するオフセット更新部と、
測定された前記磁気測定データを用い、以前に測定された前記磁気測定データを母集団とする磁気測定データの共分散行列を更新し、測定された前記磁気測定データを前記母集団に加えて新たな共分散行列を生成する共分散行列更新部と
を備えることを特徴とする磁気測定データ校正装置。
【請求項2】
前回算出されたオフセットを求める際に用いた磁気測定データと、前記磁気センサから新たに入力された新たな磁気測定データとの、前記磁気センサの測定軸からなる3次元磁界空間における第1距離を求め、当該第1距離と予め設定されている閾値との比較を行い、前記第1距離が前記閾値を超えている場合、前記オフセット更新部に対して新たなオフセットの更新を行わせ、一方前記第1距離が前記閾値以下の場合、新たなオフセットの更新を行わせない制御を行う磁気測定データ判定部を
さらに有することを特徴とする請求項1に記載の磁気測定データ校正装置。
【請求項3】
前記閾値が、前記3次元磁界空間における前記磁気センサの各測定軸方向における測定ノイズの座標点と、前記3次元磁界空間の原点との距離として定められている
ことを特徴とする請求項2に記載の磁気測定データ校正装置。
【請求項4】
現時点までに前記オフセットを算出した際に用いた磁気測定データを時系列に記憶するバッファと、
前記バッファに記憶されている前記磁気測定データの各々と前回のオフセットとの第2距離を求め、当該第2距離の各々と前回のオフセットを求めた際の前記磁気測定データから求めた全磁力との第1差分を求め、全ての第2距離に対応する当該第1差分を加算して第1評価値を算出し、前記バッファに記憶されている前記磁気測定データの各々と今回算出されたオフセットとの第3距離を求め、当該第3距離の各々と今回のオフセットを求めた際の前記磁気測定データから求めた全磁力との第2差分を求め、全ての第3距離に対応する当該第2差分を加算して第2評価値を算出し、前記第1評価値と前記第2評価値とを比較し、前記第2評価値が前記第1評価値未満である場合、新たに求めたオフセットを前記磁気測定データの校正に用いるオフセットとし、一方、前記第2評価値が前記第1評価値以上である場合、前回求めたオフセットを前記磁気測定データの校正に用いるオフセットとするオフセット有効性判定部と
をさらに有することを特徴とする請求項2または請求項3に記載の磁気測定データ校正装置。
【請求項5】
前記誤差関数計算部が、
前記3つの測定軸からなる3次元座標系において、測定された前記磁気測定データのデータ座標と、前回の前記磁気測定データの測定時に算出した前記オフセットのオフセット座標との距離の2乗から全磁力を求め、当該全磁力から前回算出した前回全磁力を減算し、減算結果を前記誤差関数とする
ことを特徴とする請求項1から請求項4のいずれか一項に記載の磁気測定データ校正装置。
【請求項6】
互いに直交する3つの測定軸を有し、測定軸方向の地磁気を測定する軸センサからなる磁気センサと、
前記磁気センサから出力される前記測定軸毎の地磁気の測定結果である磁気測定データのオフセットを求め、前記磁気測定データを補正する磁気測定データ校正部と、
前記磁気測定データ校正装置から出力される、前記磁気測定データを校正した磁気校正データから方位角を算出する方位角計測部と
を備え、
前記磁気測定データ校正部が、
測定された磁気測定データの前記測定軸毎の磁気データと、前回求められたオフセットとの差分から誤差関数を求める誤差関数計算部と、
前記誤差関数及び前回求められた共分散行列からオフセット残差を算出するオフセット残差計算部と、
前回の前記磁気測定データの測定時に算出したオフセットに対し、前記オフセット残差を加算し、新たなオフセットを算出するオフセット更新部と、
測定された前記磁気測定データを用い、以前に測定された前記磁気測定データを母集団とする磁気測定データの共分散行列を更新し、測定された前記磁気測定データを前記母集団に加えて新たな共分散行列を生成する共分散行列更新部と
を備えることを特徴とする方位角計測装置。
【請求項1】
互いに直交する3つの測定軸を有し、測定軸方向の地磁気を測定する軸センサからなる磁気センサから出力される前記測定軸毎の地磁気の測定結果である磁気測定データのオフセットを求め、前記磁気測定データを補正する磁気測定データ校正装置であり、
測定された磁気測定データの前記測定軸毎の磁気データと、前回求められたオフセットとの差分から誤差関数を求める誤差関数計算部と、
前記誤差関数及び前回求められた共分散行列からオフセット残差を算出するオフセット残差計算部と、
前回の前記磁気測定データの測定時に算出したオフセットに対し、前記オフセット残差を加算し、新たなオフセットを算出するオフセット更新部と、
測定された前記磁気測定データを用い、以前に測定された前記磁気測定データを母集団とする磁気測定データの共分散行列を更新し、測定された前記磁気測定データを前記母集団に加えて新たな共分散行列を生成する共分散行列更新部と
を備えることを特徴とする磁気測定データ校正装置。
【請求項2】
前回算出されたオフセットを求める際に用いた磁気測定データと、前記磁気センサから新たに入力された新たな磁気測定データとの、前記磁気センサの測定軸からなる3次元磁界空間における第1距離を求め、当該第1距離と予め設定されている閾値との比較を行い、前記第1距離が前記閾値を超えている場合、前記オフセット更新部に対して新たなオフセットの更新を行わせ、一方前記第1距離が前記閾値以下の場合、新たなオフセットの更新を行わせない制御を行う磁気測定データ判定部を
さらに有することを特徴とする請求項1に記載の磁気測定データ校正装置。
【請求項3】
前記閾値が、前記3次元磁界空間における前記磁気センサの各測定軸方向における測定ノイズの座標点と、前記3次元磁界空間の原点との距離として定められている
ことを特徴とする請求項2に記載の磁気測定データ校正装置。
【請求項4】
現時点までに前記オフセットを算出した際に用いた磁気測定データを時系列に記憶するバッファと、
前記バッファに記憶されている前記磁気測定データの各々と前回のオフセットとの第2距離を求め、当該第2距離の各々と前回のオフセットを求めた際の前記磁気測定データから求めた全磁力との第1差分を求め、全ての第2距離に対応する当該第1差分を加算して第1評価値を算出し、前記バッファに記憶されている前記磁気測定データの各々と今回算出されたオフセットとの第3距離を求め、当該第3距離の各々と今回のオフセットを求めた際の前記磁気測定データから求めた全磁力との第2差分を求め、全ての第3距離に対応する当該第2差分を加算して第2評価値を算出し、前記第1評価値と前記第2評価値とを比較し、前記第2評価値が前記第1評価値未満である場合、新たに求めたオフセットを前記磁気測定データの校正に用いるオフセットとし、一方、前記第2評価値が前記第1評価値以上である場合、前回求めたオフセットを前記磁気測定データの校正に用いるオフセットとするオフセット有効性判定部と
をさらに有することを特徴とする請求項2または請求項3に記載の磁気測定データ校正装置。
【請求項5】
前記誤差関数計算部が、
前記3つの測定軸からなる3次元座標系において、測定された前記磁気測定データのデータ座標と、前回の前記磁気測定データの測定時に算出した前記オフセットのオフセット座標との距離の2乗から全磁力を求め、当該全磁力から前回算出した前回全磁力を減算し、減算結果を前記誤差関数とする
ことを特徴とする請求項1から請求項4のいずれか一項に記載の磁気測定データ校正装置。
【請求項6】
互いに直交する3つの測定軸を有し、測定軸方向の地磁気を測定する軸センサからなる磁気センサと、
前記磁気センサから出力される前記測定軸毎の地磁気の測定結果である磁気測定データのオフセットを求め、前記磁気測定データを補正する磁気測定データ校正部と、
前記磁気測定データ校正装置から出力される、前記磁気測定データを校正した磁気校正データから方位角を算出する方位角計測部と
を備え、
前記磁気測定データ校正部が、
測定された磁気測定データの前記測定軸毎の磁気データと、前回求められたオフセットとの差分から誤差関数を求める誤差関数計算部と、
前記誤差関数及び前回求められた共分散行列からオフセット残差を算出するオフセット残差計算部と、
前回の前記磁気測定データの測定時に算出したオフセットに対し、前記オフセット残差を加算し、新たなオフセットを算出するオフセット更新部と、
測定された前記磁気測定データを用い、以前に測定された前記磁気測定データを母集団とする磁気測定データの共分散行列を更新し、測定された前記磁気測定データを前記母集団に加えて新たな共分散行列を生成する共分散行列更新部と
を備えることを特徴とする方位角計測装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−72643(P2013−72643A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−209405(P2011−209405)
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000005186)株式会社フジクラ (4,463)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000005186)株式会社フジクラ (4,463)
【Fターム(参考)】
[ Back to top ]