
磁気特性推定装置、磁気特性推定方法、及びコンピュータプログラム
【課題】 それぞれの結晶粒の構造が単磁区構造ではない場合であっても、軟磁性材料からなる鋼板の集合組織から、当該鋼板の磁気特性を正確に計算できるようにする。
【解決手段】 各結晶粒Aの<100>方向と磁界Hの方向とのなす最小角度αminを導出する。次に、<100>方向と磁界Hの方向とのなす最小角度αminを用いて、計算対象の鋼板に与えられる磁界Hの磁化容易軸方向の成分H<100>を導出し、それに対応する「磁化容易軸方向の磁束密度B<100>」を、「計算対象の鋼板の単結晶の<100>方向におけるB−H曲線」から導出する。次に、導出した「磁化容易軸方向の磁束密度B<100>」と、<100>方向と磁界Hの方向とのなす最小角度αminを用いて、磁界Hの方向の磁束密度B<100>Hを、各結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」として導出する。
【解決手段】 各結晶粒Aの<100>方向と磁界Hの方向とのなす最小角度αminを導出する。次に、<100>方向と磁界Hの方向とのなす最小角度αminを用いて、計算対象の鋼板に与えられる磁界Hの磁化容易軸方向の成分H<100>を導出し、それに対応する「磁化容易軸方向の磁束密度B<100>」を、「計算対象の鋼板の単結晶の<100>方向におけるB−H曲線」から導出する。次に、導出した「磁化容易軸方向の磁束密度B<100>」と、<100>方向と磁界Hの方向とのなす最小角度αminを用いて、磁界Hの方向の磁束密度B<100>Hを、各結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」として導出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁気特性推定装置、磁気特性推定方法、及びコンピュータプログラムに関し、特に、軟磁性材料からなる鋼板の磁気特性を推定(推算)するために用いて好適なものである。
【背景技術】
【0002】
従来から、無方向性電磁鋼板等、軟磁性材料からなる鋼板の集合組織から、B50(磁界Hが5000[A/m]のときの磁束密度)等の磁気特性を計算することが実施されている。非特許文献1では、ベクトル法による三次元解析データを用いて、無方向性電磁鋼板の集合組織から、その磁気特性を計算するようにしている。この非特許文献1では、(1)それぞれの結晶粒においては、外部磁界の向きとのなす角が最も近い磁化容易軸に平行に磁化されていること、(2)相互に隣接し合う結晶粒の相互作用は無視できる程度に十分小さいこと、(3)結晶粒が単磁区構造であること、(4)板厚方向の集合組織が一定であること、の仮定の下で、無方向性電磁鋼板の磁気特性を計算している。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】立野一郎,「無方向性電磁鋼板の集合組織に基づく磁化の異方性」,鉄と鋼,1990年,第76巻,第1号,p.81−88
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、前述したように、非特許文献1に記載の技術では、それぞれの結晶粒の構造が単磁区構造であるとして計算を行っている。よって、それぞれの結晶粒の磁区構造が実際に単磁区構造に近い材料では、集合組織を持つ材料の磁気特性を計算することができるが、それぞれの結晶粒の構造が実際に単磁区構造と近似できない材料や、それぞれの結晶粒の構造が単磁区構造とならない条件(磁束密度の小さい条件(B25等))では、集合組織を持つ材料の磁気特性を正確に計算することができなかった。
また、前述したように、非特許文献1に記載の技術では、板厚方向の集合組織が一定であるとして計算を行っている。よって、板厚方向で集合組織が異なる条件では、集合組織を持つ材料の磁気特性を正確に計算することができなかった。そこで、板厚方向における複数の集合組織を得て、それらについて個々に磁気特性を計算し、計算した磁気特性の平均をとることが考えられる。しかしながら、このように磁気特性の平均を単純にとる方法では、磁気特性の平均として正確な値を得るために、板厚方向における集合組織として多数の集合組織を得る必要がある。これにより、集合組織を得るための負荷や、磁気特性を得るための計算負荷が増大してしまう。
【0005】
本発明は、以上の問題点に鑑みてなされたものであり、それぞれの結晶粒の構造が単磁区構造ではない場合であっても、軟磁性材料からなる鋼板の集合組織から、当該鋼板の磁気特性を正確に計算できるようにすることを第1の目的とする。
また、本発明では、板厚方向で集合組織が異なる場合であっても、軟磁性材料からなる鋼板の集合組織から、当該鋼板の磁気特性を容易に計算できるようにすることを第2の目的とする。
【課題を解決するための手段】
【0006】
本発明の磁気特性計算装置は、軟磁性材料からなる鋼板の磁気特性を推定する磁気特性推定装置であって、前記鋼板における集合組織を構成する結晶粒の粒界の位置の情報と、前記結晶粒のそれぞれの方位の情報とを含む結晶粒情報を取得する結晶粒情報取得手段と、前記鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線を取得するB−H曲線取得手段と、前記鋼板に外部から与える磁界の大きさと方向とを設定する磁界設定手段と、前記鋼板の結晶粒に対して設定される結晶座標系において、複数の磁化容易軸のうち前記磁界設定手段により設定された磁界の方向に最も近い軸として当該磁界の方向の方向余弦が最も大きい軸を磁化容易軸として導出することを、前記結晶粒情報取得手段により取得された結晶粒情報に基づいて、当該鋼板の結晶粒のそれぞれについて行う磁化容易軸導出手段と、磁束密度計算手段と、を有し、前記磁束密度計算手段は、前記磁界設定手段により設定された磁界の、前記磁化容易軸方向の成分を導出することを、前記結晶粒情報取得手段により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁界成分導出手段と、前記磁界成分導出手段により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記B−H曲線から導出することを、前記結晶粒情報取得手段により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁化容易軸方向磁束密度導出手段と、前記磁化容易軸方向磁束密度導出手段により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度に基づいて、前記鋼板における、前記磁界設定手段により設定された磁界の方向の磁束密度を導出する磁界方向磁束密度導出手段と、を有することを特徴とする。
【0007】
本発明の磁気特性予測方法は、軟磁性材料からなる鋼板の磁気特性を推定する磁気特性推定方法であって、前記鋼板における集合組織を構成する結晶粒の粒界の位置の情報と、前記結晶粒のそれぞれの方位の情報とを含む結晶粒情報を取得する結晶粒情報取得工程と、前記鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線を取得するB−H曲線取得工程と、前記鋼板に外部から与える磁界の大きさと方向とを設定する磁界設定工程と、前記鋼板の結晶粒に対して設定される結晶座標系において、複数の磁化容易軸のうち前記磁界設定工程により設定された磁界の方向に最も近い軸として当該磁界の方向の方向余弦が最も大きい軸を磁化容易軸として導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、当該鋼板の結晶粒のそれぞれについて行う磁化容易軸導出工程と、磁束密度計算工程と、を有し、前記磁束密度計算工程は、前記磁界設定工程により設定された磁界の、前記磁化容易軸方向の成分を導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁界成分導出工程と、前記磁界成分導出工程により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記B−H曲線から導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁化容易軸方向磁束密度導出工程と、前記磁化容易軸方向磁束密度導出工程により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度に基づいて、前記鋼板における、前記磁界設定工程により設定された磁界の方向の磁束密度を導出する磁界方向磁束密度導出工程と、を有することを特徴とする。
【0008】
本発明のコンピュータプログラムは、軟磁性材料からなる鋼板の磁気特性を推定することをコンピュータに実行させるためのコンピュータプログラムであって、前記鋼板における集合組織を構成する結晶粒の粒界の位置の情報と、前記結晶粒のそれぞれの方位の情報とを含む結晶粒情報を取得する結晶粒情報取得工程と、前記鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線を取得するB−H曲線取得工程と、前記鋼板に外部から与える磁界の大きさと方向とを設定する磁界設定工程と、前記鋼板の結晶粒に対して設定される結晶座標系において、複数の磁化容易軸のうち前記磁界設定工程により設定された磁界の方向に最も近い軸として当該磁界の方向の方向余弦が最も大きい軸を磁化容易軸として導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、当該鋼板の結晶粒のそれぞれについて行う磁化容易軸導出工程と、磁束密度計算工程と、をコンピュータに実行させ、前記磁束密度計算工程は、前記磁界設定工程により設定された磁界の、前記磁化容易軸方向の成分を導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁界成分導出工程と、前記磁界成分導出工程により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記B−H曲線から導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁化容易軸方向磁束密度導出工程と、前記磁化容易軸方向磁束密度導出工程により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度に基づいて、前記鋼板における、前記磁界設定工程により設定された磁界の方向の磁束密度を導出する磁界方向磁束密度導出工程と、を有することを特徴とする。
【発明の効果】
【0009】
本発明によれば、鋼板に外部から与える磁界の磁化容易軸方向の成分に対応する、磁化容易軸方向における磁束密度を、当該鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線から導出し、導出した磁化容易軸方向における磁束密度に基づいて、当該鋼板における当該磁界の方向の磁束密度を導出するようにした。したがって、結晶粒の構造が多磁区構造であるとして取り扱うことができる。よって、計算対象の鋼板のそれぞれの結晶粒の構造が単磁区構造ではない場合であっても、当該鋼板の磁束密度を正確に計算することができる。
また、本発明の他の特徴によれば、鋼板の表層の位置と中心層の位置とにおける結晶粒情報をそれぞれ1組ずつ取得し、当該結晶粒情報のそれぞれについて、当該鋼板における磁界の方向の磁束密度を、鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、それらの算術平均を導出するようにした。したがって、多くの結晶粒情報を取得する必要がなくなる。よって、板厚方向で集合組織が異なる場合であっても、軟磁性材料からなる鋼板の集合組織から、当該鋼板の磁気特性を容易に計算することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第1の実施形態を示し、磁気特性推定装置の機能的な構成の一例を示す図である。
【図2】本発明の第1の実施形態を示し、結晶粒画像と、結晶粒の粒界上に設定される点と、ライン、粒界の一例を示す図である。
【図3】本発明の第1の実施形態を示し、材料座標系と結晶座標系の一例を示す図である。
【図4】本発明の第1の実施形態を示し、結晶粒情報の記憶構造の一例を概念的に示す図である。
【図5】本発明の第1の実施形態を示し、B−H曲線の一例を概念的に示す図である。
【図6】本発明の第1の実施形態を示し、無方向性電磁鋼板の基本単位格子と、基本単位格子の1つの頂点がとり得る結晶座標系XYZの一例を示す図である。
【図7】本発明の第1の実施形態を示し、結晶粒における結晶座標系と、材料座標系と、結晶粒に与えられる磁界との関係の一例を示す図である。
【図8】本発明の第1の実施形態を示し、磁界の結晶座標系の<100>方向の成分の一例を概念的に示す図である。
【図9】本発明の第1の実施形態を示し、磁束密度の磁界の方向の成分の一例を概念的に示す図である。
【図10】本発明の第1の実施形態を示し、各厚み位置が代表する厚み方向長さの一例を概念的に示す図である。
【図11】本発明の第1の実施形態を示し、磁気特性推定装置が行う処理動作の一例を説明するフローチャートである。
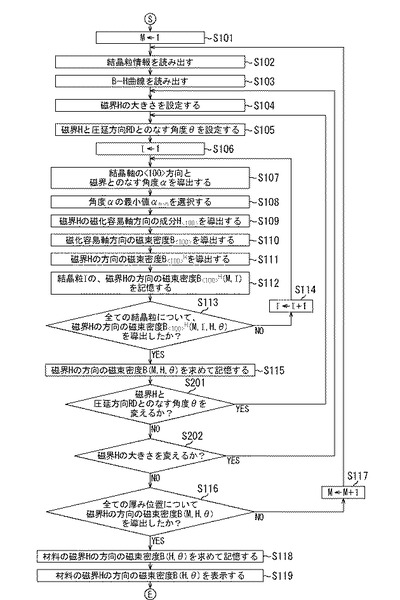
【図12】本発明の第2の実施形態を示し、磁気特性推定装置が行う処理動作の一例を説明するフローチャートである。
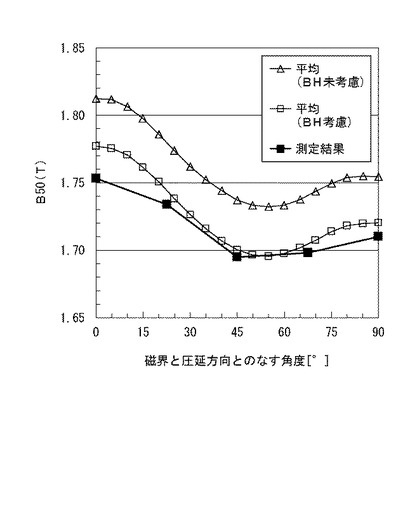
【図13】本発明の実施例を示し、磁界と圧延方向とのなす角度と、B50との関係の一例を示す図である。
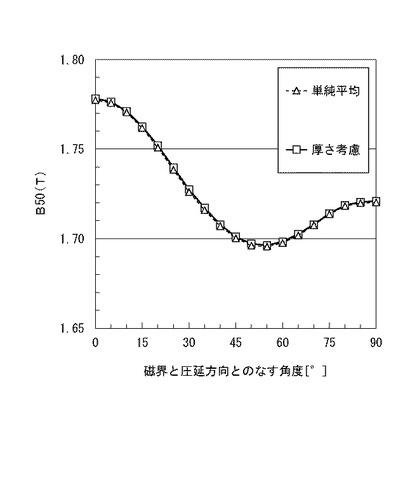
【図14】本発明の実施例を示し、磁界と圧延方向とのなす角度と、各厚み位置におけるB50の加重平均値及び算術平均値との関係の一例を示す図である。
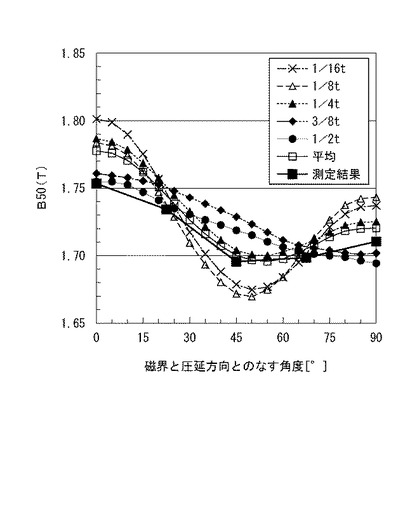
【図15】本発明の第3の実施形態を示し、各厚み位置における、磁界と圧延方向とのなす角度と、B50との関係の一例を示す図である。
【発明を実施するための形態】
【0011】
以下、図面を参照しながら、本発明の実施形態を説明する。
(第1の実施形態)
まず、本発明の第1の実施形態について説明する。
[磁気特性推定装置100の全体構成]
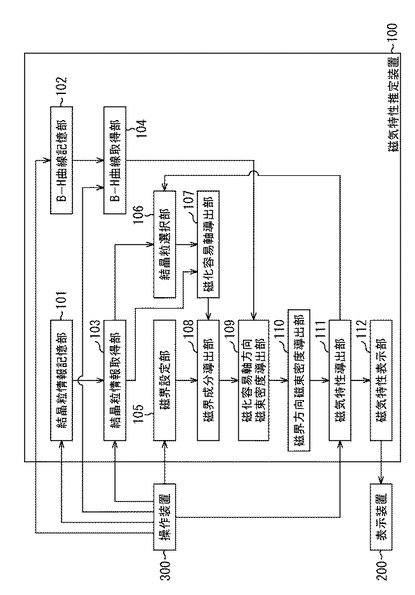
図1は、磁気特性推定装置100の機能的な構成の一例を示す図である。尚、磁気特性推定装置100のハードウェアは、パーソナルコンピュータ等、CPU、ROM、RAM、ハードディスク、画像入出力ボード、各種インターフェース、及びインターフェースコントローラ等を備えた情報処理装置を用いて実現することができる。そして、特に断りのない限り、図1に示す磁気特性推定装置100の各ブロックは、CPUが、ROMやハードディスクに記憶されている制御プログラムを、RAMを用いて実行することにより実現される。
【0012】
図1において、磁気特性推定装置100は、結晶粒情報記憶部101と、B−H曲線記憶部102と、結晶粒情報取得部103と、B−H曲線取得部104と、磁界設定部105と、結晶粒選択部106と、磁化容易軸導出部107と、磁界成分導出部108と、磁化容易軸方向磁束密度導出部109と、磁界方向磁束密度導出部110と、磁気特性導出部111と、磁気特性表示部112と、を有している。
【0013】
[結晶粒情報記憶部101]
結晶粒情報記憶部101は、磁気特性の計算対象となる「軟磁性材料からなる鋼板」の「多数の結晶粒により構成される集合組織」の情報を外部から入力して記憶するためのものである。以下の説明では、この情報を、必要に応じて、結晶粒情報と称する。また、磁気特性の計算対象となる鋼板を、必要に応じて、計算対象の鋼板と称する。ここで、本実施形態では、計算対象の鋼板の各結晶粒が単結晶の集合体であるとしている。また、本実施形態では、結晶粒情報は、EBSP法による測定で得られた結晶粒情報である。以下に、結晶粒情報記憶部101に記憶される結晶粒情報を得る方法の一例を説明する。
【0014】
EBSP(Electron Back Scattering Pattern)法は、後方散乱電子回折を利用して、結晶の方位を解析する手法である。電子プローブからの電子線を材料に照射すると、電子線が照射された部分の結晶方位に対応した電子回折パターンが得られる。この電子回折パターンから、方位解析を行いながら、電子プローブを材料上で走査すると、材料の各部における結晶の方位の情報が得られる。EBSP法の空間分解能は、数十nm程度である。これに対し、計算対象の鋼板である無方向性電磁鋼板の結晶粒の直径は、数十μm程度である。したがって、EBSP法を用いれば、結晶粒の形状の情報と、各結晶粒の方位の情報とを正確に得ることができる。ここで、結晶粒の方位の情報として、材料座標系(圧延方向(RD)、板幅方向(TD)、板厚方向(ND)を軸とする3次元座標系)に対する結晶座標系(結晶主軸を軸とする3次元座標系)のオイラー角(φ1、Φ、φ2)の情報が得られる。
【0015】
このように、EBSP法では、計算対象の鋼板の結晶の画像信号と、その画像信号に含まれる各結晶粒Aの方位ξ(オイラー角(φ1、Φ、φ2))を示す信号等が得られる。以下の説明では、計算対象の鋼板の結晶の画像信号を、必要に応じて結晶粒画像と称する。
まず、EBSP法により得られる情報である結晶粒画像の一例について説明する。
【0016】
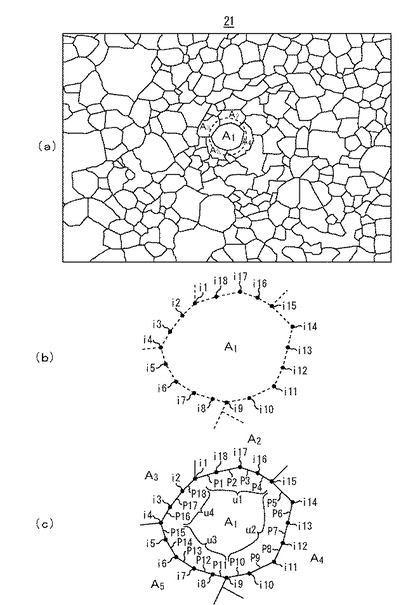
図2は、結晶粒画像と(図2(a))、結晶粒の粒界u上に設定される点iと(図2(b))、ラインp及び粒界u(図2(c))の一例を示す図である。尚、説明の都合上、図2(b)、図2(c)では、図2(a)に示す結晶粒画像21に含まれる多数の結晶粒Aのうち、破線で囲まれた結晶粒A1に対して設定された点i、粒界uのみを示している。
【0017】
磁気特性推定装置100は、図2(a)に示すような結晶粒画像21を表示する。ユーザは、マウス等の操作装置300を用いて、粒界uの両端点に対応する位置の点iと、粒界uの中間点に対応する位置の点iとを、各粒界uのそれぞれについて指定する。磁気特性推定装置100は、点iの指定に応じて、同一の粒界u上で相互に隣接する2つの点iにより特定されるラインpに関する情報を設定する。このように本実施形態では、各点iについてのラインpに関する情報を用いることにより、各点iがどの粒界uに属しているのかを磁気特性推定装置100が判断することができる。
【0018】
ここでは、図2(b)に示すように、例えば、粒界u1上の点として、点i1、i15〜i18が指定され、粒界u2上の点として、点i9〜i15が指定され、粒界u3上の点として、点i4〜点i9が指定され、粒界u4上の点として、点i1〜i4が指定される。磁気特性推定装置100は、このようにして指定された点iの座標を求める。以下の説明では、この座標を必要に応じて粒界点座標と称する。このようにして、結晶粒画像21に含まれる結晶粒のそれぞれについて粒界点座標が得られる。
【0019】
次に、EBSP法により得られる情報であるオイラー角(φ1、Φ、φ2)の一例について説明する。
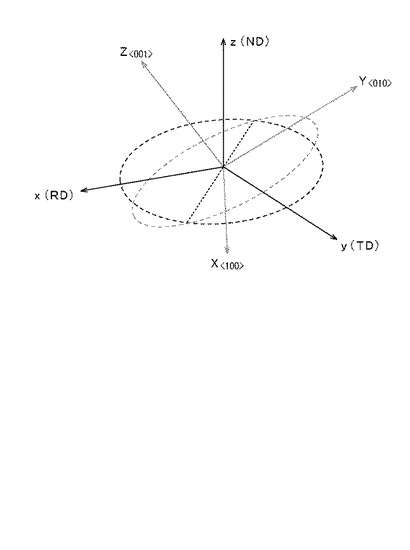
図3は、材料座標系と結晶座標系の一例を示す図である。
本実施形態では、図3に示すように、材料座標系xyzのx軸を圧延方向(RD)に対応させ、y軸を板幅方向(TD)に対応させ、z軸を板厚方向(ND)に対応させる。また、結晶座標系XYZのX軸を<100>方向に対応させ、Y軸を<010>方向に対応させ、Z軸を<001>方向に対応させる。そして、結晶座標系XYZのオイラー角を(φ1、Φ、φ2)とする。このように本実施形態では、オイラー角を、Bungeによる手法で表記する。
【0020】
本実施形態では、以上のようにして、各結晶粒Aの位置の情報である粒界点座標と、各結晶粒Aの方位ξの情報であるオイラー角(φ1、Φ、φ2)とを、各結晶粒Aのそれぞれについて得て、結晶粒情報を生成している。
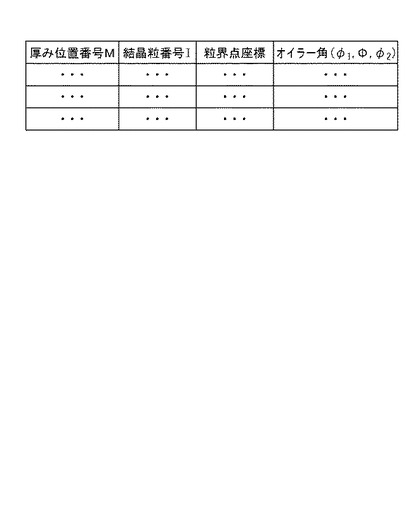
図4は、結晶粒情報記憶部101における結晶粒情報の記憶構造の一例を概念的に示す図である。
図4に示すように、結晶粒情報は、厚み位置番号Mと、結晶粒番号Iと、結晶粒番号Iの結晶粒の3次元方位を示すオイラー角と、結晶粒番号Iの結晶粒上の点の座標(粒界点座標)とが相互に関連付けられたものである。尚、結晶粒番号Iと厚み位置番号Mは、整数であり、1から昇順に付けられるものとする。
ここで、結晶粒Aの粒界点座標は、任意の点から一定の方向(ここでは反時計回りの方向)に順番に結晶粒情報記憶部101に記憶されるようにする。図2に示す例では、結晶粒A1における粒界点座標として、点i1、i2、i3、・・・の位置の座標を、この順番で結晶粒情報記憶部101に記憶されるようにしている。
結晶粒番号Iは、結晶粒を特定する番号である。
【0021】
また、本実施形態では、結晶粒情報記憶部101は、計算対象の鋼板の厚み方向における複数の位置における結晶粒情報を記憶している。具体的に結晶粒情報記憶部101は、計算対象の鋼板の各厚み位置における「当該鋼板の面方向の断面」の結晶粒情報を記憶している。本実施形態では、各厚み位置は、一方の表面から当該鋼板の厚みの1/16、1/8、1/4、3/8、1/2、5/8、3/4、7/8、15/16の長さだけ、当該鋼板の厚み方向に沿った当該鋼板の内側の位置である(後述する図10を参照)。厚み位置番号Mはこの位置を特定する番号である。
結晶粒情報記憶部101は、例えば、RAM又はハードディスクを用いて構成される。
【0022】
[B−H曲線記憶部102]
B−H曲線記憶部102は、計算対象の鋼板の単結晶の<100>方向におけるB−H曲線を外部から入力して、当該鋼板の種類と、当該B−H曲線とを相互に関連付けて記憶するためのものである。
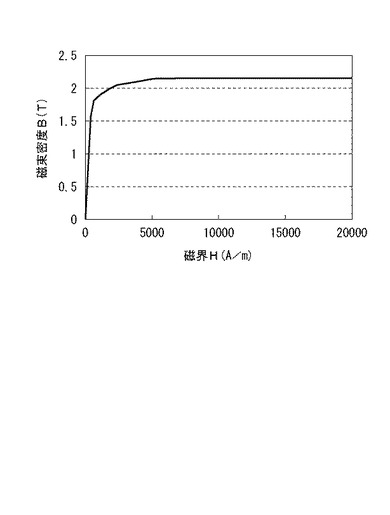
図5は、B−H曲線記憶部102に記憶されているB−H曲線の一例を概念的に示す図である。本実施形態では、無方向性電磁鋼板を計算対象の鋼板としている。そこで、本実施形態では、<100>方向における鉄の単結晶のB−H曲線をB−H曲線記憶部102に記憶している。B−H曲線記憶部102は、B−H曲線を、式として記憶していてもよいし、テーブルとして記憶していてもよい。
尚、B−H曲線記憶部102は、例えば、RAM又はハードディスクを用いて構成される。
【0023】
[結晶粒情報取得部103]
結晶粒情報取得部103は、ユーザの操作装置300の操作に応じて、結晶粒情報記憶部101に記憶されている結晶粒情報(図4を参照)を読み出す。
[B−H曲線取得部104]
B−H曲線取得部104は、ユーザの操作装置300の操作に応じて、B−H曲線記憶部102に記憶されているB−H曲線(<100>方向における鉄の単結晶のB−H曲線)を読み出す。
【0024】
[磁界設定部105]
磁界設定部105は、ユーザが、操作装置300を操作して磁界H(外部磁界)の大きさと方向とを1つずつ入力すると、このユーザの操作に基づいて、「計算対象の鋼板に与える磁界Hの大きさ」と、「当該磁界Hの方向と計算対象の鋼板の圧延方向(RD)とのなす角度θ」とを、RAM又はハードディスクに設定(記憶)する(後述する図8を参照)。尚、以下の説明では、「磁界Hの方向と計算対象の鋼板の圧延方向(RD)となす角度θ」を、必要に応じて、「磁界と圧延方向とのなす角度θ」と称する。尚、磁気特性として、B50を導出する場合には、磁界Hの大きさとして、5000[A/m]が設定される。また、磁界と圧延方向とのなす角度θの範囲は、0°≦θ≦180°である。
【0025】
[結晶粒選択部106]
結晶粒選択部106は、結晶粒情報取得部103により取得された結晶粒情報に含まれる結晶粒番号Iを昇順に順次選択する。
[磁化容易軸導出部107]
磁化容易軸導出部107は、結晶粒選択部106で選択された結晶粒番号Iの結晶粒Aの結晶座標系において、計算対象の鋼板に与えられた磁界Hの方向に最も近い所定の軸の情報を磁化容易軸の情報として導出する。
具体的に本実施形態では、まず、結晶粒選択部106で選択された結晶粒番号Iの結晶粒Aについて、結晶座標系XYZにおけるX軸方向(<100>方向)と、磁界Hの方向とのなす角度αを導出する。尚、以下の説明では、「結晶座標系XYZにおけるX軸方向(<100>方向)と、磁界Hの方向とのなす角度α」を、必要に応じて、「<100>方向と磁界Hの方向とのなす角度α」と称する。
【0026】
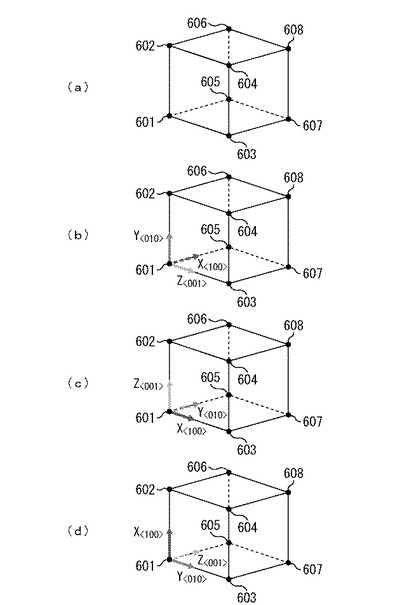
図6は、無方向性電磁鋼板の基本単位格子(図6(a))と、基本単位格子の1つの頂点がとり得る結晶座標系XYZ(図6(b)〜図6(d))の一例を示す図である。
本実施形態では、計算対象の鋼板を無方向性電磁鋼板としている。無方向性電磁鋼板は、bcc(体心立方格子)を有するので、図6(a)に示す基本単位格子の8つの頂点601〜608に結晶座標系XYZを設けることができる。そして、図6(b)〜図6(d)に示すように、1つの頂点601に対して、結晶座標系XYZとして3通りの座標系を取ることができる。このことは、他の頂点602〜608についても同じである。したがって、無方向性電磁鋼板の結晶粒Aの結晶座標系XYZとして、24(=3×8)通りの座標系で表現することができる。
【0027】
本実施形態では、磁化容易軸導出部107は、これら24個の結晶座標系XYZにおける「<100>方向と磁界Hの方向とのなす角度α」を導出する。そして、磁化容易軸導出部107は、導出した24個の「<100>方向と磁界Hの方向とのなす角度α」のうち、最も小さい角度αminを選択する。尚、以下の説明では、この角度αminを、必要に応じて「<100>方向と磁界Hの方向とのなす最小角度αmin」と称する。
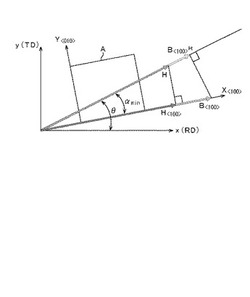
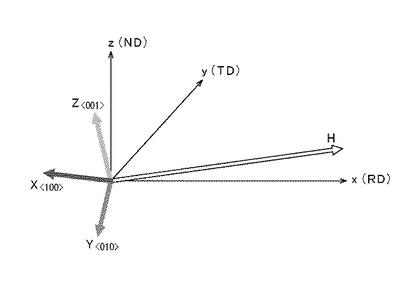
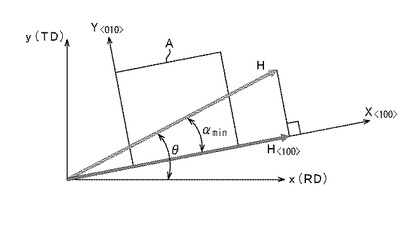
図7を参照しながら、このようにして、「<100>方向と磁界Hの方向とのなす最小角度αmin」を求める理由を説明する。図7は、結晶粒Aにおける結晶座標系XYZと、材料座標系xyzと、結晶粒Aに与えられる磁界Hとの関係の一例を示す図である。
図7において、X軸、Y軸、Z軸の何れもが磁化容易軸の候補となり得る。したがって、結晶粒Aにおける結晶座標系XYZと、材料座標系xyzと、結晶粒Aに与えられる磁界Hとの関係が、図7に示す関係である場合、計算対象の鋼板に与えられた磁界Hの方向に最も近い磁化容易軸を導出しようとする場合、磁界Hの方向とのなす角度が最も小さい軸を磁化容易軸として選択することになる。したがって、本実施形態では、磁化容易軸の誤検出を防止するために、結晶粒Aがとり得る全ての結晶座標系XYZにおける「<100>方向と磁界Hの方向とのなす角度α」のうち、最も小さい角度αminを選択するようにしている。
【0028】
具体的に、磁化容易軸導出部107は、以下の(1)式によって、<100>方向と磁界Hの方向とのなす角度α((1)式では、2つのベクトルa、bのなす角度)を導出し、この角度αのうち最も小さい角度αminを導出するようにしている。すなわち、結晶粒Aがとり得る全ての結晶座標系XYZにおける磁化容易軸のうち、磁界Hの方向の方向余弦が最も大きくなる軸を、計算対象の鋼板に与えられた磁界Hの方向に最も近い磁化容易軸として導出するようにしている。
【0029】
【数1】

【0030】
尚、(1)式の最初の右辺の分子の「・」は内積を示す。
ここで、xH、yH、zHは、材料座標系xyzにおいて磁界Hの方向を示す単位ベクトルで、それぞれ以下の(2)式〜(4)式で表される。
xH=cos(θ) ・・・(2)
yH=sin(θ) ・・・(3)
zH=0 ・・・(4)
また、x100、y100、z100は、材料座標系xyzにおいて結晶座標系XYZの各軸の方向を表す単位ベクトルであり、それぞれ以下の(5)式〜(7)式で表される。
x100=cos(φ1)×cos(φ2)−sin(φ1)×sin(φ2)×cos(Φ) ・・・(5)
y100=sin(φ1)×cos(φ2)+cos(φ1)×sin(φ2)×cos(Φ) ・・・(6)
z100=sin(φ2)×sin(Φ) ・・・(7)
【0031】
[磁界成分導出部108]
磁界成分導出部108は、磁界設定部105で設定された「磁界Hの大きさ」と、磁化容易軸導出部107で導出された「<100>方向と磁界Hの方向とのなす最小角度αmin」とを、以下の(8)式に代入して、磁界Hの磁化容易軸方向(<100>方向)の成分H<100>を導出する。
H<100>=Hcos(αmin) ・・・(8)
磁界Hの磁化容易軸方向の成分H<100>は、概念的には図8に示すようになる。尚、磁気特性として、B50を導出する場合には、(8)式において、Hは、5000[A/m]となる。
【0032】
[磁化容易軸方向磁束密度導出部109]
磁化容易軸方向磁束密度導出部109は、B−H曲線取得部104で取得されたB−H曲線(図5を参照)から、磁界成分導出部108で導出された「磁界Hの磁化容易軸方向の成分H<100>」に対応する「磁化容易軸方向(<100>方向)の磁束密度B<100>」を導出する。B−H曲線において、あるHにおけるBをB(H)と表記すれば、B<100>は、以下の(9)式により導出される。
B<100>=B<100>(H<100>)=B<100>(Hcos(αmin)) ・・・(9)
【0033】
[磁界方向磁束密度導出部110]
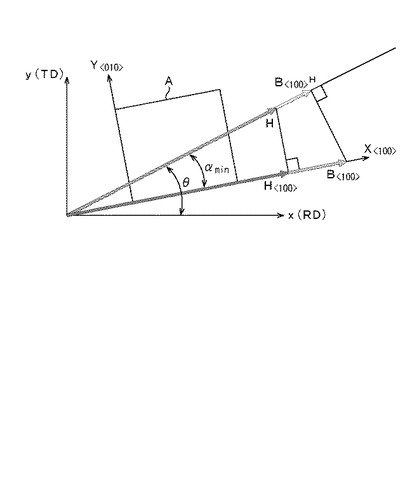
磁界方向磁束密度導出部110は、磁化容易軸方向磁束密度導出部109で導出された「磁化容易軸方向の磁束密度B<100>」と、磁化容易軸導出部107で導出された「<100>方向と磁界Hの方向とのなす最小角度αmin」とを、以下の(10)式に代入して、厚み位置番号M、結晶粒番号Iの結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」を導出する。尚、ここでは、磁界Hの方向の磁束密度B<100>H(M,I)としてB50を導出するものとする。そして、磁界方向磁束密度導出部110は、導出した「磁界Hの方向の磁束密度B<100>H(M,I)」を、RAM又はハードディスクに記憶する。
B<100>H(M,I)=B<100>H=B<100>cos(αmin) ・・・(10)
磁界Hの方向の磁束密度B<100>Hは、概念的には、図9に示すようになる。
【0034】
尚、本実施形態では、B−H曲線として、計算対象の鋼板を構成する材料として、無方向性電磁鋼板そのものではなく、鉄の単結晶のB−H曲線を用いている。そこで、磁界方向磁束密度導出部110は、磁界Hの方向の磁束密度B<100>Hを、無方向性電磁鋼板の種類に応じた補正情報を使って補正するようにしてもよい。この補正用の磁束密度は、例えば、無方向性電磁鋼板の飽和磁束密度と、鉄の飽和磁束密度との比に基づいて予め得ることができる。また、このようにする代わりに、鉄の単結晶のB−H曲線ではなく、計算対象の鋼板である無方向性電磁鋼板の単結晶のB−H曲線をB−H曲線記憶部102に記憶させるようにしてもよい。
【0035】
[磁気特性導出部111]
磁気特性導出部111は、結晶粒情報取得部103で取得された結晶粒情報に含まれる全ての厚み位置番号M、結晶粒番号Iの結晶粒Aについて、磁界Hの方向の磁束密度B<100>H(M,I)が導出されると、厚み位置番号Mにおける各結晶粒番号Iの結晶粒Aの面積SM,Iを、厚み位置番号Mにおける当該結晶粒番号Iの結晶粒における点iの座標(粒界点座標)に基づいて導出する。
そして、磁気特性導出部111は、以下の(11)式に示すように、厚み位置番号Mにおける各結晶粒番号Iの結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」について、各結晶粒Aの面積SM,Iによる加重平均を行って、計算対象の鋼板の「ある厚み位置における『磁界Hの方向の磁束密度B(M)』」を導出する(ここでは、B50を導出するものとする)。
【0036】
【数2】
【0037】
(11)式において、mは、結晶粒情報取得部103で取得された結晶粒情報に含まれる厚み位置番号Mにおける結晶粒番号Iの最大値である。
そして、磁気特性導出部111は、計算対象の鋼板の「(ある厚み位置における)磁界Hの方向の磁束密度B(M)」を、ハードディスクに記憶する。以上のようにして、計算対象の鋼板の「磁界Hの方向の磁束密度B(M)」が磁気特性として求められる。
【0038】
磁気特性導出部111は、結晶粒情報取得部103で取得された結晶粒情報に含まれる全ての厚み位置番号Mの厚み位置において、計算対象の鋼板の「磁界Hの方向の磁束密度B(M)」を求める。
そして、磁気特性導出部111は、以下の(12)式に示すように、各厚み位置番号Mの各厚み位置で求めた、計算対象の鋼板の「磁界Hの方向の磁束密度B(M)」を、当該厚み位置が代表する「計算対象の鋼板の厚み方向の範囲(長さ)LM」で加重平均することにより、計算対象の鋼板全体の「磁界Hの方向の磁束密度B」を導出する。尚、以下の説明では、「計算対象の鋼板の厚み方向の範囲(長さ)」を、必要に応じて「厚み方向長さ」と称する。
【0039】
【数3】
【0040】
(12)式において、nは、厚み位置の数(厚み位置番号Mの最大値)である。
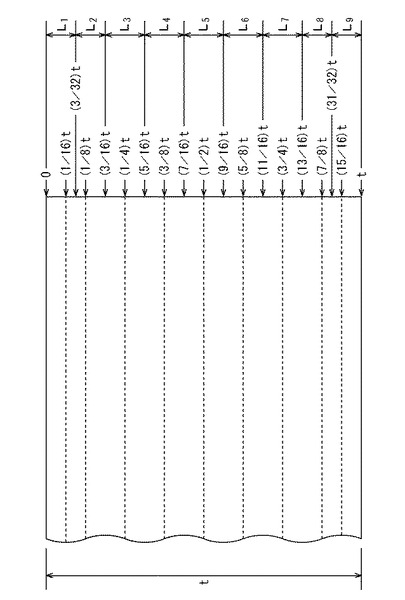
図10は、各厚み位置が代表する厚み方向長さLMの一例を概念的に示す図である。図10は、計算対象の鋼板の厚み部分の一部を示す図である。
前述したように、本実施形態では、計算対象の鋼板の一方の表面から当該鋼板の厚みの1/16、1/8、1/4、3/8、1/2、5/8、3/4、7/8、15/16の長さの位置における当該鋼板の面方向の断面の結晶粒情報を記憶している。
したがって、計算対象の鋼板の厚みをtとすると、当該鋼板の一方の表面から、(1/16)t、(1/8)t、(1/4)t、(3/8)t、(1/2)t、(5/8)t、(3/4)t、(7/8)t、(15/16)tの長さだけ、当該鋼板の厚み方向に沿って当該鋼板の内側に位置した各厚み位置における「当該鋼板の面方向の断面」の結晶粒情報が得られる。尚、以下の説明では、これらの各厚み位置を必要に応じて、(X/Y)tの厚み位置と称する。
【0041】
本実施形態では、ある厚み位置と、当該厚み位置と相互に隣り合う厚み位置との間の距離の1/2倍の長さの和を、当該厚み位置が代表する厚み方向長さLMとしている。
例えば、図10において、(1/8)tの厚み位置と相互に隣り合う厚み位置は、(1/16)tの厚み位置と、(1/4)tの厚み位置である。(1/8)tの厚み位置と、(1/16)tの厚み位置との間の距離の1/2倍の厚み位置は、(3/32)tの厚み位置である。また、(1/8)tの厚み位置と、(1/4)tの厚み位置との間の距離の1/2倍の厚み位置は、(3/16)tの厚み位置である。
よって、(1/8)tの厚み位置が代表する厚み方向長さL2は、(3/32)tの厚み位置から(3/16)tの厚み位置までの厚み方向の長さである。尚、L2の「2」は、厚み位置番号Mが2であることを表す。
【0042】
その他の厚み位置についても、(1/8)tの厚み位置と同様にして、厚み位置が代表する厚み方向長さL1、L3〜L9が得られる。ただし、(1/16)tの厚み位置と、(15/16)tの厚み位置については、当該厚み位置と相互に隣接する一方の厚み位置がないため、当該一方の厚み位置が、計算対象の鋼板の表面であるとして、厚み位置が代表する厚み方向長さL1、L9を求める。
尚、本実施形態では、磁気特性導出部111は、磁界Hの方向の磁束密度B(M)として、B50を導出している。しかしながら、磁気特性導出部111は、この他にも、B25、透磁率、及びこれらから得られる物性値を磁気特性として導出することができる。
【0043】
[磁気特性表示部112]
磁気特性表示部112は、磁気特性導出部111で導出された「計算対象の鋼板全体の『磁界Hの方向の磁束密度B』」の情報を表示装置200に表示させる。このとき、磁気特性表示部112は、計算対象の鋼板に与えた磁界Hの大きさや方向の情報等を、計算対象の鋼板全体の「磁界Hの方向の磁束密度B」の情報と共に表示装置200に表示することができる。
【0044】
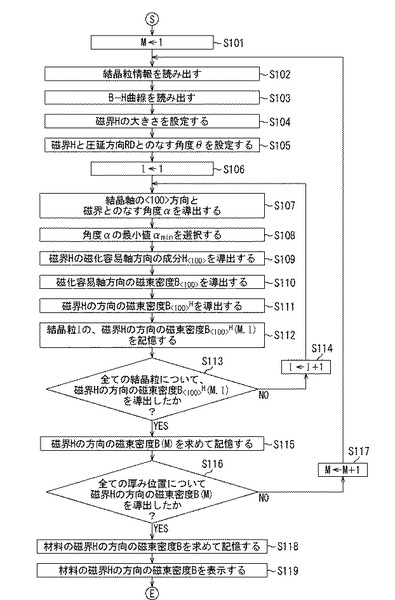
[動作フローチャート]
次に、図11のフローチャートを参照しながら、磁気特性推定装置100が行う処理動作の一例を説明する。尚、ここでは、結晶粒情報記憶部101に、全ての厚み位置での(全ての厚み位置番号Mの)結晶粒情報が既に記憶されており、且つ、B−H曲線記憶部102に、B−H曲線が既に記憶されているものとする。また、「磁界Hの大きさ」と「磁界と圧延方向とのなす角度θ」とが既に磁界設定部105で設定されているものとする。
【0045】
まず、ステップS101において、結晶粒情報取得部103は、ユーザによる操作装置300の操作に基づいて、厚み位置番号Mとして「1」を設定する。
次に、ステップS102において、結晶粒情報取得部103は、結晶粒情報記憶部101から、厚み位置番号Mの結晶粒情報を読み出す。
次に、ステップS103において、B−H曲線取得部104は、B−H曲線記憶部102から、予測対象の鋼板に対応するB−H曲線を読み出す。
次に、ステップS104において、磁界設定部105は、ユーザによる操作装置300の操作に基づいて、「磁界Hの大きさ」をRAM又はハードディスクに設定する。
次に、ステップS105において、磁界設定部105は、ユーザによる操作装置300の操作に基づいて、「磁界と圧延方向とのなす角度θ」をRAM又はハードディスクに設定する。
【0046】
次に、ステップS106において、結晶粒選択部106は、結晶粒番号Iとして「1」を設定する。
次に、ステップS107において、磁化容易軸導出部107は、ステップS106で選択された厚み位置番号M、結晶粒番号Iの結晶粒Aについて、<100>方向と磁界Hの方向とのなす角度αを導出する。前述したように、本実施形態では、<100>方向と磁界Hの方向とのなす角度αは、24個導出される。
次に、ステップS108において、磁化容易軸導出部107は、ステップS107で導出された24個の「<100>方向と磁界Hの方向とのなす角度α」のうち、最も小さい角度αminを選択する。本実施形態では、このステップS108により、磁界Hの方向に最も近い所定の軸(ここでは<100>方向の軸)の情報が磁化容易軸の情報として導出される。
【0047】
次に、ステップS109において、磁界成分導出部108は、ステップS104で設定された「磁界Hの大きさ」と、ステップS108で選択された「<100>方向と磁界Hの方向とのなす最小角度αmin」とを、(8)式に代入して、磁界Hの磁化容易軸方向の成分H<100>を導出する。
次に、ステップS110において、磁化容易軸方向磁束密度導出部109は、ステップS103で読み出されたB−H曲線から、ステップS109で導出された「磁界Hの磁化容易軸方向の成分H<100>」に対応する「磁化容易軸方向の磁束密度B<100>」を導出する。
【0048】
次に、ステップS111において、磁界方向磁束密度導出部110は、ステップS110で導出された「磁化容易軸方向の磁束密度B<100>」と、ステップS108で導出された「<100>方向と磁界Hの方向とのなす最小角度αmin」とを、(10)式に代入して、磁界Hの方向の磁束密度B<100>H(M,I)を導出する。
次に、ステップS112において、磁界方向磁束密度導出部110は、ステップS111で導出された「磁界Hの方向の磁束密度B<100>H(M,I)」を、厚み方向位置M、結晶粒番号Iの結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」としてRAM又はハードディスクに記憶する。
【0049】
次に、ステップS113において、結晶粒選択部106は、ステップS102で読み出された結晶粒情報に含まれる厚み位置番号Mにおける全ての結晶粒番号Iの結晶粒Aについて、磁界Hの方向の磁束密度B<100>H(M,I)が導出されたか否かを判定する。この判定の結果、全ての結晶粒番号Iの結晶粒Aについて、磁界Hの方向の磁束密度B<100>H(M,I)が導出されていない場合には、ステップS114に進む。ステップS114に進むと、結晶粒選択部106は、結晶粒番号Iとして「I+1」を設定する(結晶粒番号Iをインクリメントする)。そして、ステップS107に戻り、厚み位置番号Mにおける全ての結晶粒番号Iの結晶粒Aについて、磁界Hの方向の磁束密度B<100>H(M,I)が導出されるまで、ステップS107〜S114の処理を繰り返し行う。
【0050】
ステップS113において、厚み位置番号Mにおける全ての結晶粒番号Iの結晶粒Aについて、磁界Hの方向の磁束密度B<100>H(M,I)が導出されたと判定されると、ステップS115に進む。ステップS115に進むと、磁気特性導出部111は、厚み位置番号Mにおける各結晶粒番号Iの結晶粒Aの面積SM,Iを、厚み位置番号Mにおける当該結晶粒番号Iの結晶粒における点iの座標(粒界点座標)に基づいて導出する。そして、磁気特性導出部111は、厚み位置番号M、結晶粒番号Iの結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」について、各結晶粒Aの面積SM,Iによる加重平均を行って、計算対象の鋼板の、「厚み位置番号Mの厚み位置における『磁界Hの方向の磁束密度B(M)』」を導出する((11)式を参照)。
【0051】
次に、ステップS116において、結晶粒情報取得部103は、全ての厚み位置番号Mの厚み位置において、磁界Hの方向の磁束密度B(M)を導出したか否かを判定する。この判定の結果、全ての厚み位置において、磁界Hの方向の磁束密度B(M)を導出していない場合には、ステップS117に進む。ステップS117に進むと、結晶粒情報取得部103は、厚み位置番号Mとして「M+1」を設定する(厚み位置番号Mをインクリメントする)。そして、ステップS102に戻り、全ての厚み位置において、磁界Hの方向の磁束密度B(M)が導出されるまで、ステップS102〜S117の処理を繰り返し行う。
【0052】
そして、ステップS116において、全ての厚み位置において、磁界Hの方向の磁束密度B(M)が導出されたと判定されると、ステップS118に進む。ステップS118に進むと、磁気特性導出部111は、各厚み位置の「磁界Hの方向の磁束密度B(M)」と、各厚み位置が代表する厚み方向長さLMとを、(12)式に代入して、計算対象の鋼板全体の「磁界Hの方向の磁束密度B」を導出する。
次、ステップS119において、磁気特性表示部112は、ステップS111で導出された「計算対象の鋼板全体の『磁界Hの方向の磁束密度B』」の情報を表示装置200に表示させる。
【0053】
[まとめ]
以上のように本実施形態では、まず、各結晶粒Aの結晶座標系XYZにおける<100>方向の情報として、<100>方向と磁界Hの方向とのなす最小角度αminを導出する。次に、<100>方向と磁界Hの方向とのなす最小角度αminを用いて、計算対象の鋼板に与えられる磁界Hの磁化容易軸方向の成分H<100>を導出し、それに対応する「磁化容易軸方向の磁束密度B<100>」を、予め記憶しておいた「計算対象の鋼板を構成する材料の単結晶の<100>方向におけるB−H曲線」から導出する。次に、導出した「磁化容易軸方向の磁束密度B<100>」と、<100>方向と磁界Hの方向とのなす最小角度αminとを用いて、磁界Hの方向の磁束密度B<100>Hを、各結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」として導出する。次に、各結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」について、結晶粒Aの面積SM,Iによる加重平均を行い、厚み位置番号Mの厚み位置における「計算対象の鋼板の磁界Hの方向における磁束密度B(M)」を導出する。このような計算対象の鋼板の磁界Hの方向における磁束密度B(M)の導出を、全ての厚み位置番号Mの厚み位置について行う。そして、厚み位置番号Mの厚み位置の「計算対象の鋼板の磁界Hの方向における磁束密度B(M)」について、各厚み位置が代表する厚み方向長さLMによる加重平均を行い、計算対象の鋼板全体の「磁界Hの方向の磁束密度B」を導出する。このように、計算対象の鋼板に与えられる磁界Hの磁化容易軸方向の成分H<100>を導出し、計算対象の鋼板を構成する材料の単結晶の<100>方向におけるB−H曲線を用いて、磁化容易軸方向の磁束密度B<100>を導出することにより、結晶粒の構造が多磁区構造であるとして取り扱うことができる。したがって、計算対象の鋼板のそれぞれの結晶粒の構造が単磁区構造ではない場合であっても、当該鋼板の磁束密度を正確に計算することができる。一方、非特許文献1の記載の技術では、計算対象の鋼板のそれぞれの結晶粒の構造が単磁区構造であるとしているので、磁化容易軸方向の磁束密度B<100>は飽和領域の値となる。よって、非特許文献1に記載の技術では、このような飽和領域以外の磁束密度を正確に計算することが困難である。
また、各厚み位置において、計算対象の鋼板の磁界Hの方向における磁束密度B(M)を導出し、各厚み位置が代表する厚み方向長さLMでそれらの加重平均をとるようにしたので、計算対象の鋼板の集合組織が板厚方向で異なる場合であっても、当該鋼板の磁束密度を正確に計算することができる。
【0054】
[変形例]
本実施形態では、計算対象の鋼板の集合組織が板厚方向で異なるものとして、各厚み位置において、計算対象の鋼板の磁界Hの方向における磁束密度B(M,I)を導出し、各厚み位置が代表する厚み方向長さLMでそれらの加重平均をとるようにした。しかしながら、計算対象の鋼板の集合組織が板厚方向で同じであると見なせる場合(当該鋼板の結晶粒の板厚方向の大きさが当該鋼板の板厚方向の長さよりも大きいと見なせる場合)には、計算対象の鋼板の磁界Hの方向における磁束密度B(M,I)を、1つの厚み位置で計算することにより得ることができる。すなわち、厚み位置番号Mの最大値を「1」とし、(12)式の計算を行わずに、(11)式により「計算対象の鋼板の『磁界Hの方向の磁束密度B』」を導出するようにしてもよい。
また、(1/16)t、(1/8)t、(1/4)t、(3/8)t、(1/2)t、(5/8)t、(3/4)t、(7/8)t、(15/16)tの厚み位置について、計算対象の鋼板の「磁界Hの方向の磁束密度B(M)」を導出しているが、(1/2)tの厚み位置で、集合組織が対称となることが多いので、(15/16)tを(1/16)tで、(7/8)tを(1/8)tで、(3/4)tを(1/4)tで、(5/8)tを(3/8)tで代替してもよい。
【0055】
また、本実施形態では、結晶粒Aがとり得る全ての結晶座標系XYZにおける「<100>方向と磁界Hの方向とのなす角度α」のうち、最も小さい角度αminを選択するようにした。しかしながら、磁界Hの方向に最も近い所定の軸を磁化容易軸として導出するようにしていれば、必ずしもこのようにする必要はない。例えば、以下の、(13)式〜(21)式で得られる、3つのベクトル(u v w)、(p q r)、(h k l)と、(−u −v −w)、(−p −q −r)、(−h −k −l)と磁界Hとのなす角度を求め、求めた6個の角度のうち、最も小さい角度を求めるようにしてもよい。
u=cosφ1×cosφ2−sinφ1×sinφ2×cosΦ ・・・(13)
v=cosφ1×sinφ2−sinφ1×cosφ2×cosΦ ・・・(14)
w=sinφ1×sinΦ ・・・(15)
p=sinφ1×cosφ2+cosφ1×sinφ2×cosΦ ・・・(16)
q=sinφ1×sinφ2+cosφ1×cosφ2×cosΦ ・・・(17)
r=cosφ1×sinΦ ・・・(18)
h=sinφ2×sinΦ ・・・(19)
k=cosφ2×sinΦ ・・・(20)
l=cosΦ ・・・(21)
尚、(13)式〜(21)式は、Bungeの式であり、(u p h)、(v q k)、(w r l)は、それぞれ、結晶座標系XYZのX軸、Y軸、Z軸を材料座標系xyzで方向余弦として表現したものである。
【0056】
また、本実施形態では、ユーザが、結晶粒画像21を見ながら、操作装置300を使用して、点iを指定する場合を例に挙げて説明したが、必ずしもこのようにする必要はない。例えば、EBSP法で解析することにより得られた結晶粒画像信号に基づいて、磁気特性推定装置100(コンピュータ)が自動的に、点iを指定するようにしてもよい。この場合、粒界uの長さに応じて点iの数を異ならせたり、粒界uの曲率に応じて点iの数を異ならせたり(例えば、直線的な部分よりも凸凹している部分に多くの点iを指定したり)することができる。
更にまた、点iは、電子プローブを材料上に走査したときにできる格子状又は蜂の巣状の交差点の内の粒界上のすべての点であってもよい。
【0057】
尚、計算対象の鋼板が異なる場合には、B−H曲線記憶部102に記憶されるB−H曲線等、磁気特性推定装置100で使用される情報が、鋼板の種類に応じて異なることになる。
【0058】
(第2の実施形態)
次に、本発明の第2の実施形態について説明する。前述した第1の実施形態では、計算対象の鋼板に与える磁界Hの大きさと、磁界と圧延方向とのなす角度θとが一定である場合について説明した。これに対し、本実施形態では、これらを変えて、計算対象の鋼板の「磁界Hの方向の磁束密度B」を演算する。このように本実施形態は、前述した第1の実施形態に対し、計算対象の鋼板に与える磁界Hの大きさと、磁界と圧延方向とのなす角度θとを、変更する構成が追加されたものである。したがって、本実施形態の説明において、第1の実施形態と同一の部分については、図1〜図11に付した符号と同一の符号を付す等して詳細な説明を省略する。
【0059】
本実施形態では、例えば、ユーザは、操作装置300を操作して、磁界H(外部磁界)の大きさと方向との少なくとも何れか一方を複数入力する。磁気特性推定装置100の磁界設定部105は、このユーザによる操作装置300の操作に基づいて、「磁界Hの大きさ」と、「磁界と圧延方向とのなす角度θ」との少なくとも何れか一方を、複数設定することができる。また、このようにする代わりに、次のようにしてもよい。すなわち、まず、ユーザは、第1の実施形態と同様に、操作装置300を操作して、磁界H(外部磁界)の大きさと方向とを1つずつ入力する。そして、磁界設定部105は、「磁界Hの大きさ」と、「磁界と圧延方向とのなす角度θ」との少なくとも何れか一方について、ユーザが入力した値を、所定値ずつ増加(又は減少)させることにより、「磁界Hの大きさ」と、「磁界と圧延方向とのなす角度θ」との少なくとも何れか一方を、複数設定することができる。
【0060】
そして、このようにして設定された「磁界Hの大きさ」と、「磁界と圧延方向とのなす角度θ」とに基づいて、第1の実施形態と同様に、磁気特性導出部111は、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,I,H,θ)を導出する。この磁束密度B(M,I,H,θ)は、磁界Hの大きさと、磁界と圧延方向とのなす角度θとの少なくとも何れか一方に応じたものとなる。磁気特性導出部111で、或る「磁界Hの大きさ」と、或る「磁界と圧延方向とのなす角度θ」とに基づいた「計算対象の鋼板の『磁界Hの方向の磁束密度B(M,H,θ)』」が導出されると、磁界設定部105は、設定した「『磁界Hの大きさ』と、『磁界と圧延方向とのなす角度θ』」の中に、磁束密度B(M,H,θ)を導出するために使用していないものがあるか否かを判定する。そして、使用していないものがある場合、磁界設定部105は、使用していないものの情報を、磁界成分導出部108に出力する。そして、前述した処理を行うことにより((11)式の計算を行うことにより)、磁界設定部105に設定された「『磁界Hの大きさ』と、『磁界と圧延方向とのなす角度θ』」の全てに基づいて、磁束密度B(M,H,θ)が導出される。そして、磁気特性導出部111は、磁界Hの大きさ毎、磁界と圧延方向とのなす角度θ毎に前述した処理を行うことにより((12)式の計算を行うことにより)、計算対象の鋼板の「磁界Hの方向の磁束密度B(H,θ)」を導出する。したがって、本実施形態の磁気特性推定装置100では、図1に示した機能構成に対し、結晶粒選択部106から磁界設定部105に向かう矢印線が追加されたものになる。
【0061】
次に、図12のフローチャートを参照しながら、磁気特性推定装置100が行う処理動作の一例を説明する。図12において、ステップS101〜S115、S116〜S119は、図11に示したフローチャートによる処理が実行される。
図12のステップS115において、計算対象の鋼板の「磁束密度B(M,H,θ)が記憶されると、ステップS201に進む。ステップS201に進むと、磁界設定部105は、磁界と圧延方向とのなす角度θを変えて、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」を導出するか否かを判定する。すなわち、ユーザによって指定された「磁界と圧延方向とのなす角度θ」のうち、ステップS105で設定していない「磁界と圧延方向とのなす角度θ」があるか否かを判定する。この判定の結果、磁界と圧延方向とのなす角度θを変える場合には、ステップS105に戻り、磁界設定部105は、未設定の「磁界と圧延方向とのなす角度θ」を設定する。そして、磁界と圧延方向とのなす角度θの全てについて、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」が導出されるまで、ステップS105〜S115、S201の処理を繰り返し行う。
【0062】
そして、磁界と圧延方向とのなす角度θの全てについて、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」が導出されると、ステップS202に進む。ステップS202に進むと、磁界設定部105は、磁界Hの大きさを変えて、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」を導出するか否かを判定する。すなわち、ユーザによって指定された「磁界Hの大きさ」のうち、ステップS104で設定していない「磁界Hの大きさ」があるか否かを判定する。この判定の結果、磁界Hの大きさを変える場合には、ステップS104に戻り、磁界設定部105は、未設定の「磁界Hの大きさ」を設定する。そして、磁界Hの大きさの全てについて、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」が導出されるまで、ステップS104〜S115、S201、S202の処理を繰り返し行う。
【0063】
そして、磁界Hの大きさの全てについて、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」が導出されると、ステップS116に進む。そして、前述したようにして処理が行われ、ステップS118において、計算対象の鋼板の「磁界Hの方向の磁束密度B(H,θ)」が導出される。このステップS118の処理で、第1の実施形態で示した「計算対象の鋼板の『磁界Hの方向の磁束密度B』」が、磁界Hの大きさ毎、磁界と圧延方向とのなす角度θ毎に複数得られることになる。
以上のようにすることによって、鋼板の磁束密度についてのより詳細な情報を、自動的に、且つ、正確に計算することができる。
尚、本実施形態でも、第1の実施形態で説明した種々の変形例を採用することができる。
【0064】
(実施例)
図13は、磁界と圧延方向とのなす角度θと、B50との関係の一例を示す図である。ここでは、JIS C 2552で規定される50A1300材について調査した。
図13において、平均(BH未考慮)は、非特許文献1に記載の技術で計算された結果を示す。平均(BH考慮)は、第2の実施形態で説明したようにして計算された結果を示す。また、測定結果は、計算結果で示すものと同種の無方向性電磁鋼板に対して測定された結果を示す。ここで、平均とは、図10に示した「(1/16)tの厚み位置、(1/8)tの厚み位置、(1/4)tの厚み位置、(3/8)tの厚み位置、(1/2)tの厚み位置」の各厚み位置において「50A1300材のB50」を計算すると共に、図10に示すようにして各厚み位置が代表する厚み方向長さLMを設定し、これらを(12)式に代入して、50A1300材全体のB50(磁界Hの方向の磁束密度B(H,θ))を導出したことを表す。また、(1/16)tの厚み位置、(1/8)tの厚み位置、(1/4)tの厚み位置、(3/8)tの厚み位置、(1/2)tの厚み位置の「(12)式における重み」は、それぞれ、3/16、3/16、4/16、4/16、2/16である。
【0065】
図13に示すように、測定結果と平均(BH未考慮)とに比べ、測定結果と平均(BH考慮)との方が、(磁界と圧延方向とのなす角度θによらず)値が近くなっている。よって、前述した第1、第2の実施形態のようにすれば、従来の技術よりも、鋼板の磁束密度を正確に計算することができることが分かる。
尚、ここでは、B50について示したが、予測する磁束密度はB50に限定するものではなく、例えば、B25についても、B50と同様に正確に予測できるものである。
【0066】
[変形例]
次に、第1、第2の実施形態の変形例について説明する。
図14は、磁界と圧延方向とのなす角度と、各厚み位置におけるB50の加重平均値及び算術平均値との関係の一例を示す図である。
図14において、厚さ考慮は、図13に示した平均(BH考慮)と同じものを示す。単純平均とは、図10に示した「(1/16)tの厚み位置、(1/8)tの厚み位置、(1/4)tの厚み位置、(3/8)tの厚み位置、(1/2)tの厚み位置」の各厚み位置において「50A1300材のB50」を計算し、計算したB50を算術平均して、50A1300材全体のB50(磁界Hの方向の磁束密度B(H,θ))を導出したことを表す。すなわち、厚さ考慮と単純平均は、各厚み位置におけるB50の平均の取り方だけを異ならせたものである。
図14に示すように、各厚み位置におけるB50を、厚み方向の範囲(長さ)LMで加重平均した値と、各厚み位置におけるB50を算術平均した値とは、殆ど差がない。したがって、各厚み位置における「計算対象の鋼板全体の『磁界Hの方向の磁束密度B(H,θ)』」を、厚み方向の範囲(長さ)LMで加重平均する代わりに、算術平均するようにすれば、計算対象の鋼板全体の「磁界Hの方向の磁束密度B(H,θ)」を、計算精度を大きく落とすことなく高速に求めることができる。
【0067】
(第3の実施形態)
次に、本発明の第3の実施形態について説明する。前述した第1、第2の実施形態では、(12)式に従って加重平均をとるので、多数の(具体的には5個又は9個)の厚み位置における結晶粒情報を得る必要があった。これに対し、本実施形態では、鋼板の集合組織の状態が、表層と中心層とで大別されることに着目し、鋼板の表層を代表する1か所の厚み位置の結晶粒情報から、磁界Hの方向の磁束密度B(M)(又はB(M,H,θ))を導出すると共に、鋼板の中心層を代表する1か所の厚み位置の結晶粒情報から、磁界Hの方向の磁束密度B(M)(又はB(M,H,θ))を導出し、これらの算術平均をとって、鋼板の磁界Hの方向の磁束密度B(又はB(H,θ))を導出する。このように本実施形態と、前述した第1及び第2の実施形態とは、磁界Hの方向の磁束密度B(M)(又はB(M,H,θ))の導出対象となる厚み位置が異なることによる処理が主として異なる。したがって、本実施形態の説明において、第1及び第2の実施形態と同一の部分については、図1〜図14に付した符号と同一の符号を付す等して詳細な説明を省略する。尚、本実施形態でも、計算対象の鋼板が無方向性電磁鋼板であるとする。
【0068】
本実施形態では、表層を代表する厚み位置として、計算対象の鋼板の表面の位置と、計算対象の鋼板の表面から、当該鋼板の厚みの1/8倍の長さだけ、当該鋼板の厚み方向に沿って当該鋼板の内側に位置した厚み位置と、を上下限値とする当該鋼板の厚み方向の長さ範囲内から1つの厚み位置を選択するようにしている。すなわち、図10において、計算対象の鋼板の上側の表面と(1/8)tの厚み位置とを上下限値とする鋼板の厚み方向の長さ範囲内、又は計算対象の鋼板の下側の表面と(7/8)tの厚み位置とを上下限値とする鋼板の厚み方向の長さ範囲内から1つの厚み位置を選択するようにしている。
【0069】
一方、本実施形態では、中心部を代表する厚み位置として、計算対象の鋼板の表面から、当該鋼板の厚みの3/8倍の長さだけ、当該鋼板の厚み方向に沿って当該鋼板の内側に位置した厚み位置と、同じく計算対象の鋼板の表面から、当該鋼板の厚みの1/2倍の長さだけ、当該鋼板の厚み方向に沿って当該鋼板の内側に位置した厚み位置と、を上下限値とする当該鋼板の厚み方向の長さ範囲内から1つの厚み位置を選択するようにしている。すなわち、図10において、(3/8)tの厚み位置と(1/2)tの厚み位置とを上下限値とする鋼板の厚み方向の長さ範囲内、又は(5/8)tの厚み位置と(1/2)tの厚み位置とを上下限値とする鋼板の厚み方向の長さ範囲内から1つの厚み位置を選択するようにしている。
【0070】
図15は、各厚み位置における、磁界と圧延方向とのなす角度θと、B50との関係の一例を示す図である。ここでは、前述した実施例と同一の種類の鋼板及び条件で計算と測定を行った結果を示す。
図15において、例えば、1/16tは、(1/16)tの厚み位置の結晶粒画像を用いて第2の実施形態で説明したようにして、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」を計算した結果を示す。また、測定結果と平均は、前述した実施例と同じものである。
【0071】
図15に示すように、磁界と圧延方向とのなす角度θと、B50との関係を示す曲線の形は、1/16t及び1/8tの曲線と、1/2t及び3/8tの曲線とで大きく異なる。また、1/4tの曲線の形は、1/16t及び1/8tの曲線と、1/2t及び3/8tの曲線との中間の形になっている。
これらのことから、表層を代表する厚み位置と、中心層を代表する厚み位置として、それぞれ前述した範囲を採用することが好ましいことが分かる。これらのうち、(1/8)tの厚み位置(若しくは(7/8)tの厚み位置)を、表層を代表する厚み位置とし、(3/8)tの厚み位置(若しくは(5/8)tの厚み位置)又は(1/2)tの厚み位置を、中心層を代表する厚み位置とすることがより好ましい。一般に、鋼板の表層は、鋼板の表面から(1/4)tの厚み位置(若しくは3/4tの厚み位置)までの領域とされ、鋼板の中心層は、(1/4)tの厚み位置(若しくは3/4tの厚み位置)から(1/2)tの厚み位置とされている。よって、これらの中心の位置である(1/8)tの厚み位置(若しくは(7/8)tの厚み位置)を、表層を代表する厚み位置とし、(3/8)tの厚み位置(若しくは(5/8)tの厚み位置)を、中心層を代表する厚み位置とすることが好ましい。ただし、鋼板の中心層の集合組織を採取する場合には、(1/2)tの厚み位置の集合組織を採取することが多いので、中心層を代表する厚み位置として、(1/2)tの厚み位置を採用することも好ましい。
【0072】
このように、本実施形態では、磁気特性導出部111は、計算対象の鋼板の「磁界Hの方向の磁束密度B(M)」を2つだけ導出する。例えば、(1/8)tの厚み位置を、表層を代表する厚み位置とし、(3/8)tの厚み位置を、中心層を代表する厚み位置とし、それらの厚み位置番号Mがそれぞれ「2」、「4」であるとする。この場合、磁気特性導出部111は、(12)式の代わりに、以下の(22)式により、計算対象の鋼板の「磁界Hの方向の磁束密度B」を導出する。
B=(B(2)+B(4))/2 ・・・(22)
【0073】
以上のように本実施形態では、計算対象の鋼板の表層を代表する1か所の厚み位置の結晶粒情報から、磁界Hの方向の磁束密度B(M)(又はB(M,H,θ))を導出すると共に、鋼板の中心層を代表する1か所の厚み位置の結晶粒情報から、磁界Hの方向の磁束密度B(M)(又はB(M,H,θ))を導出し、これらの算術平均をとって、計算対象の鋼板の磁界Hの方向の磁束密度B(又はB(H,θ))を導出する。したがって、第1及び第2の実施形態で示した効果に加えて、計算対象の鋼板の磁界Hの方向の磁束密度B(又はB(H,θ))を導出する際の負荷を、第1及び第2の実施形態で示したものよりも軽減することができる。
尚、本実施形態でも、第1の実施形態で説明した種々の変形例を採用することができる。
【0074】
以上説明した本発明の実施形態のうち、CPUが実行する部分は、コンピュータがプログラムを実行することによって実現することができる。また、プログラムをコンピュータに供給するための手段、例えばかかるプログラムを記録したCD−ROM等のコンピュータ読み取り可能な記録媒体、又はかかるプログラムを伝送する伝送媒体も本発明の実施形態として適用することができる。また、上記プログラムを記録したコンピュータ読み取り可能な記録媒体などのプログラムプロダクトも本発明の実施の形態として適用することができる。上記のプログラム、コンピュータ読み取り可能な記録媒体、伝送媒体及びプログラムプロダクトは、本発明の範疇に含まれる。
また、前述した実施形態は、何れも本発明を実施するにあたっての具体化の例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその技術思想、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【0075】
(請求項との関係)
前述した本発明の各実施形態では、例えば、結晶粒情報記憶部101を用いるにより結晶粒情報取得手段の一例が実現され、B−H曲線記憶部102を用いることにより、B−H曲線取得手段の一例が実現され、磁界設定部105を用いることにより磁界設定手段の一例が実現され、磁化容易軸導出部107を用いることにより磁化容易軸導出手段の一例が実現される。また、例えば、磁界成分導出部108、磁化容易軸方向磁束密度導出部109、磁界方向磁束密度導出部110、及び磁気特性導出部111を用いることにより磁束密度計算手段の一例が実現される。磁束密度計算手段について、例えば、磁界成分導出部108を用いることにより磁界成分導出手段の一例が実現され、磁化容易軸方向磁束密度導出部109を用いることにより磁化容易軸方向磁束密度導出手段の一例が実現され、磁界方向磁束密度導出部110を用いることにより磁界方向磁束密度導出手段の一例が実現される。また、磁気特性導出部111を用いることにより磁気特性導出手段の一例が実現される。
【符号の説明】
【0076】
100 磁気特性推定装置
200 表示装置
300 操作装置
101 結晶粒情報記憶部
102 B−H曲線記憶部
103 結晶粒情報取得部
104 B−H曲線取得部
105 磁界設定部
106 結晶粒選択部
107 磁化容易軸導出部
108 磁界成分導出部
109 磁化容易軸方向磁束密度導出部
110 磁界方向磁束密度導出部
111 磁気特性導出部
112 磁気特性表示部
【技術分野】
【0001】
本発明は、磁気特性推定装置、磁気特性推定方法、及びコンピュータプログラムに関し、特に、軟磁性材料からなる鋼板の磁気特性を推定(推算)するために用いて好適なものである。
【背景技術】
【0002】
従来から、無方向性電磁鋼板等、軟磁性材料からなる鋼板の集合組織から、B50(磁界Hが5000[A/m]のときの磁束密度)等の磁気特性を計算することが実施されている。非特許文献1では、ベクトル法による三次元解析データを用いて、無方向性電磁鋼板の集合組織から、その磁気特性を計算するようにしている。この非特許文献1では、(1)それぞれの結晶粒においては、外部磁界の向きとのなす角が最も近い磁化容易軸に平行に磁化されていること、(2)相互に隣接し合う結晶粒の相互作用は無視できる程度に十分小さいこと、(3)結晶粒が単磁区構造であること、(4)板厚方向の集合組織が一定であること、の仮定の下で、無方向性電磁鋼板の磁気特性を計算している。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】立野一郎,「無方向性電磁鋼板の集合組織に基づく磁化の異方性」,鉄と鋼,1990年,第76巻,第1号,p.81−88
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、前述したように、非特許文献1に記載の技術では、それぞれの結晶粒の構造が単磁区構造であるとして計算を行っている。よって、それぞれの結晶粒の磁区構造が実際に単磁区構造に近い材料では、集合組織を持つ材料の磁気特性を計算することができるが、それぞれの結晶粒の構造が実際に単磁区構造と近似できない材料や、それぞれの結晶粒の構造が単磁区構造とならない条件(磁束密度の小さい条件(B25等))では、集合組織を持つ材料の磁気特性を正確に計算することができなかった。
また、前述したように、非特許文献1に記載の技術では、板厚方向の集合組織が一定であるとして計算を行っている。よって、板厚方向で集合組織が異なる条件では、集合組織を持つ材料の磁気特性を正確に計算することができなかった。そこで、板厚方向における複数の集合組織を得て、それらについて個々に磁気特性を計算し、計算した磁気特性の平均をとることが考えられる。しかしながら、このように磁気特性の平均を単純にとる方法では、磁気特性の平均として正確な値を得るために、板厚方向における集合組織として多数の集合組織を得る必要がある。これにより、集合組織を得るための負荷や、磁気特性を得るための計算負荷が増大してしまう。
【0005】
本発明は、以上の問題点に鑑みてなされたものであり、それぞれの結晶粒の構造が単磁区構造ではない場合であっても、軟磁性材料からなる鋼板の集合組織から、当該鋼板の磁気特性を正確に計算できるようにすることを第1の目的とする。
また、本発明では、板厚方向で集合組織が異なる場合であっても、軟磁性材料からなる鋼板の集合組織から、当該鋼板の磁気特性を容易に計算できるようにすることを第2の目的とする。
【課題を解決するための手段】
【0006】
本発明の磁気特性計算装置は、軟磁性材料からなる鋼板の磁気特性を推定する磁気特性推定装置であって、前記鋼板における集合組織を構成する結晶粒の粒界の位置の情報と、前記結晶粒のそれぞれの方位の情報とを含む結晶粒情報を取得する結晶粒情報取得手段と、前記鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線を取得するB−H曲線取得手段と、前記鋼板に外部から与える磁界の大きさと方向とを設定する磁界設定手段と、前記鋼板の結晶粒に対して設定される結晶座標系において、複数の磁化容易軸のうち前記磁界設定手段により設定された磁界の方向に最も近い軸として当該磁界の方向の方向余弦が最も大きい軸を磁化容易軸として導出することを、前記結晶粒情報取得手段により取得された結晶粒情報に基づいて、当該鋼板の結晶粒のそれぞれについて行う磁化容易軸導出手段と、磁束密度計算手段と、を有し、前記磁束密度計算手段は、前記磁界設定手段により設定された磁界の、前記磁化容易軸方向の成分を導出することを、前記結晶粒情報取得手段により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁界成分導出手段と、前記磁界成分導出手段により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記B−H曲線から導出することを、前記結晶粒情報取得手段により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁化容易軸方向磁束密度導出手段と、前記磁化容易軸方向磁束密度導出手段により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度に基づいて、前記鋼板における、前記磁界設定手段により設定された磁界の方向の磁束密度を導出する磁界方向磁束密度導出手段と、を有することを特徴とする。
【0007】
本発明の磁気特性予測方法は、軟磁性材料からなる鋼板の磁気特性を推定する磁気特性推定方法であって、前記鋼板における集合組織を構成する結晶粒の粒界の位置の情報と、前記結晶粒のそれぞれの方位の情報とを含む結晶粒情報を取得する結晶粒情報取得工程と、前記鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線を取得するB−H曲線取得工程と、前記鋼板に外部から与える磁界の大きさと方向とを設定する磁界設定工程と、前記鋼板の結晶粒に対して設定される結晶座標系において、複数の磁化容易軸のうち前記磁界設定工程により設定された磁界の方向に最も近い軸として当該磁界の方向の方向余弦が最も大きい軸を磁化容易軸として導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、当該鋼板の結晶粒のそれぞれについて行う磁化容易軸導出工程と、磁束密度計算工程と、を有し、前記磁束密度計算工程は、前記磁界設定工程により設定された磁界の、前記磁化容易軸方向の成分を導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁界成分導出工程と、前記磁界成分導出工程により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記B−H曲線から導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁化容易軸方向磁束密度導出工程と、前記磁化容易軸方向磁束密度導出工程により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度に基づいて、前記鋼板における、前記磁界設定工程により設定された磁界の方向の磁束密度を導出する磁界方向磁束密度導出工程と、を有することを特徴とする。
【0008】
本発明のコンピュータプログラムは、軟磁性材料からなる鋼板の磁気特性を推定することをコンピュータに実行させるためのコンピュータプログラムであって、前記鋼板における集合組織を構成する結晶粒の粒界の位置の情報と、前記結晶粒のそれぞれの方位の情報とを含む結晶粒情報を取得する結晶粒情報取得工程と、前記鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線を取得するB−H曲線取得工程と、前記鋼板に外部から与える磁界の大きさと方向とを設定する磁界設定工程と、前記鋼板の結晶粒に対して設定される結晶座標系において、複数の磁化容易軸のうち前記磁界設定工程により設定された磁界の方向に最も近い軸として当該磁界の方向の方向余弦が最も大きい軸を磁化容易軸として導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、当該鋼板の結晶粒のそれぞれについて行う磁化容易軸導出工程と、磁束密度計算工程と、をコンピュータに実行させ、前記磁束密度計算工程は、前記磁界設定工程により設定された磁界の、前記磁化容易軸方向の成分を導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁界成分導出工程と、前記磁界成分導出工程により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記B−H曲線から導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁化容易軸方向磁束密度導出工程と、前記磁化容易軸方向磁束密度導出工程により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度に基づいて、前記鋼板における、前記磁界設定工程により設定された磁界の方向の磁束密度を導出する磁界方向磁束密度導出工程と、を有することを特徴とする。
【発明の効果】
【0009】
本発明によれば、鋼板に外部から与える磁界の磁化容易軸方向の成分に対応する、磁化容易軸方向における磁束密度を、当該鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線から導出し、導出した磁化容易軸方向における磁束密度に基づいて、当該鋼板における当該磁界の方向の磁束密度を導出するようにした。したがって、結晶粒の構造が多磁区構造であるとして取り扱うことができる。よって、計算対象の鋼板のそれぞれの結晶粒の構造が単磁区構造ではない場合であっても、当該鋼板の磁束密度を正確に計算することができる。
また、本発明の他の特徴によれば、鋼板の表層の位置と中心層の位置とにおける結晶粒情報をそれぞれ1組ずつ取得し、当該結晶粒情報のそれぞれについて、当該鋼板における磁界の方向の磁束密度を、鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、それらの算術平均を導出するようにした。したがって、多くの結晶粒情報を取得する必要がなくなる。よって、板厚方向で集合組織が異なる場合であっても、軟磁性材料からなる鋼板の集合組織から、当該鋼板の磁気特性を容易に計算することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第1の実施形態を示し、磁気特性推定装置の機能的な構成の一例を示す図である。
【図2】本発明の第1の実施形態を示し、結晶粒画像と、結晶粒の粒界上に設定される点と、ライン、粒界の一例を示す図である。
【図3】本発明の第1の実施形態を示し、材料座標系と結晶座標系の一例を示す図である。
【図4】本発明の第1の実施形態を示し、結晶粒情報の記憶構造の一例を概念的に示す図である。
【図5】本発明の第1の実施形態を示し、B−H曲線の一例を概念的に示す図である。
【図6】本発明の第1の実施形態を示し、無方向性電磁鋼板の基本単位格子と、基本単位格子の1つの頂点がとり得る結晶座標系XYZの一例を示す図である。
【図7】本発明の第1の実施形態を示し、結晶粒における結晶座標系と、材料座標系と、結晶粒に与えられる磁界との関係の一例を示す図である。
【図8】本発明の第1の実施形態を示し、磁界の結晶座標系の<100>方向の成分の一例を概念的に示す図である。
【図9】本発明の第1の実施形態を示し、磁束密度の磁界の方向の成分の一例を概念的に示す図である。
【図10】本発明の第1の実施形態を示し、各厚み位置が代表する厚み方向長さの一例を概念的に示す図である。
【図11】本発明の第1の実施形態を示し、磁気特性推定装置が行う処理動作の一例を説明するフローチャートである。
【図12】本発明の第2の実施形態を示し、磁気特性推定装置が行う処理動作の一例を説明するフローチャートである。
【図13】本発明の実施例を示し、磁界と圧延方向とのなす角度と、B50との関係の一例を示す図である。
【図14】本発明の実施例を示し、磁界と圧延方向とのなす角度と、各厚み位置におけるB50の加重平均値及び算術平均値との関係の一例を示す図である。
【図15】本発明の第3の実施形態を示し、各厚み位置における、磁界と圧延方向とのなす角度と、B50との関係の一例を示す図である。
【発明を実施するための形態】
【0011】
以下、図面を参照しながら、本発明の実施形態を説明する。
(第1の実施形態)
まず、本発明の第1の実施形態について説明する。
[磁気特性推定装置100の全体構成]
図1は、磁気特性推定装置100の機能的な構成の一例を示す図である。尚、磁気特性推定装置100のハードウェアは、パーソナルコンピュータ等、CPU、ROM、RAM、ハードディスク、画像入出力ボード、各種インターフェース、及びインターフェースコントローラ等を備えた情報処理装置を用いて実現することができる。そして、特に断りのない限り、図1に示す磁気特性推定装置100の各ブロックは、CPUが、ROMやハードディスクに記憶されている制御プログラムを、RAMを用いて実行することにより実現される。
【0012】
図1において、磁気特性推定装置100は、結晶粒情報記憶部101と、B−H曲線記憶部102と、結晶粒情報取得部103と、B−H曲線取得部104と、磁界設定部105と、結晶粒選択部106と、磁化容易軸導出部107と、磁界成分導出部108と、磁化容易軸方向磁束密度導出部109と、磁界方向磁束密度導出部110と、磁気特性導出部111と、磁気特性表示部112と、を有している。
【0013】
[結晶粒情報記憶部101]
結晶粒情報記憶部101は、磁気特性の計算対象となる「軟磁性材料からなる鋼板」の「多数の結晶粒により構成される集合組織」の情報を外部から入力して記憶するためのものである。以下の説明では、この情報を、必要に応じて、結晶粒情報と称する。また、磁気特性の計算対象となる鋼板を、必要に応じて、計算対象の鋼板と称する。ここで、本実施形態では、計算対象の鋼板の各結晶粒が単結晶の集合体であるとしている。また、本実施形態では、結晶粒情報は、EBSP法による測定で得られた結晶粒情報である。以下に、結晶粒情報記憶部101に記憶される結晶粒情報を得る方法の一例を説明する。
【0014】
EBSP(Electron Back Scattering Pattern)法は、後方散乱電子回折を利用して、結晶の方位を解析する手法である。電子プローブからの電子線を材料に照射すると、電子線が照射された部分の結晶方位に対応した電子回折パターンが得られる。この電子回折パターンから、方位解析を行いながら、電子プローブを材料上で走査すると、材料の各部における結晶の方位の情報が得られる。EBSP法の空間分解能は、数十nm程度である。これに対し、計算対象の鋼板である無方向性電磁鋼板の結晶粒の直径は、数十μm程度である。したがって、EBSP法を用いれば、結晶粒の形状の情報と、各結晶粒の方位の情報とを正確に得ることができる。ここで、結晶粒の方位の情報として、材料座標系(圧延方向(RD)、板幅方向(TD)、板厚方向(ND)を軸とする3次元座標系)に対する結晶座標系(結晶主軸を軸とする3次元座標系)のオイラー角(φ1、Φ、φ2)の情報が得られる。
【0015】
このように、EBSP法では、計算対象の鋼板の結晶の画像信号と、その画像信号に含まれる各結晶粒Aの方位ξ(オイラー角(φ1、Φ、φ2))を示す信号等が得られる。以下の説明では、計算対象の鋼板の結晶の画像信号を、必要に応じて結晶粒画像と称する。
まず、EBSP法により得られる情報である結晶粒画像の一例について説明する。
【0016】
図2は、結晶粒画像と(図2(a))、結晶粒の粒界u上に設定される点iと(図2(b))、ラインp及び粒界u(図2(c))の一例を示す図である。尚、説明の都合上、図2(b)、図2(c)では、図2(a)に示す結晶粒画像21に含まれる多数の結晶粒Aのうち、破線で囲まれた結晶粒A1に対して設定された点i、粒界uのみを示している。
【0017】
磁気特性推定装置100は、図2(a)に示すような結晶粒画像21を表示する。ユーザは、マウス等の操作装置300を用いて、粒界uの両端点に対応する位置の点iと、粒界uの中間点に対応する位置の点iとを、各粒界uのそれぞれについて指定する。磁気特性推定装置100は、点iの指定に応じて、同一の粒界u上で相互に隣接する2つの点iにより特定されるラインpに関する情報を設定する。このように本実施形態では、各点iについてのラインpに関する情報を用いることにより、各点iがどの粒界uに属しているのかを磁気特性推定装置100が判断することができる。
【0018】
ここでは、図2(b)に示すように、例えば、粒界u1上の点として、点i1、i15〜i18が指定され、粒界u2上の点として、点i9〜i15が指定され、粒界u3上の点として、点i4〜点i9が指定され、粒界u4上の点として、点i1〜i4が指定される。磁気特性推定装置100は、このようにして指定された点iの座標を求める。以下の説明では、この座標を必要に応じて粒界点座標と称する。このようにして、結晶粒画像21に含まれる結晶粒のそれぞれについて粒界点座標が得られる。
【0019】
次に、EBSP法により得られる情報であるオイラー角(φ1、Φ、φ2)の一例について説明する。
図3は、材料座標系と結晶座標系の一例を示す図である。
本実施形態では、図3に示すように、材料座標系xyzのx軸を圧延方向(RD)に対応させ、y軸を板幅方向(TD)に対応させ、z軸を板厚方向(ND)に対応させる。また、結晶座標系XYZのX軸を<100>方向に対応させ、Y軸を<010>方向に対応させ、Z軸を<001>方向に対応させる。そして、結晶座標系XYZのオイラー角を(φ1、Φ、φ2)とする。このように本実施形態では、オイラー角を、Bungeによる手法で表記する。
【0020】
本実施形態では、以上のようにして、各結晶粒Aの位置の情報である粒界点座標と、各結晶粒Aの方位ξの情報であるオイラー角(φ1、Φ、φ2)とを、各結晶粒Aのそれぞれについて得て、結晶粒情報を生成している。
図4は、結晶粒情報記憶部101における結晶粒情報の記憶構造の一例を概念的に示す図である。
図4に示すように、結晶粒情報は、厚み位置番号Mと、結晶粒番号Iと、結晶粒番号Iの結晶粒の3次元方位を示すオイラー角と、結晶粒番号Iの結晶粒上の点の座標(粒界点座標)とが相互に関連付けられたものである。尚、結晶粒番号Iと厚み位置番号Mは、整数であり、1から昇順に付けられるものとする。
ここで、結晶粒Aの粒界点座標は、任意の点から一定の方向(ここでは反時計回りの方向)に順番に結晶粒情報記憶部101に記憶されるようにする。図2に示す例では、結晶粒A1における粒界点座標として、点i1、i2、i3、・・・の位置の座標を、この順番で結晶粒情報記憶部101に記憶されるようにしている。
結晶粒番号Iは、結晶粒を特定する番号である。
【0021】
また、本実施形態では、結晶粒情報記憶部101は、計算対象の鋼板の厚み方向における複数の位置における結晶粒情報を記憶している。具体的に結晶粒情報記憶部101は、計算対象の鋼板の各厚み位置における「当該鋼板の面方向の断面」の結晶粒情報を記憶している。本実施形態では、各厚み位置は、一方の表面から当該鋼板の厚みの1/16、1/8、1/4、3/8、1/2、5/8、3/4、7/8、15/16の長さだけ、当該鋼板の厚み方向に沿った当該鋼板の内側の位置である(後述する図10を参照)。厚み位置番号Mはこの位置を特定する番号である。
結晶粒情報記憶部101は、例えば、RAM又はハードディスクを用いて構成される。
【0022】
[B−H曲線記憶部102]
B−H曲線記憶部102は、計算対象の鋼板の単結晶の<100>方向におけるB−H曲線を外部から入力して、当該鋼板の種類と、当該B−H曲線とを相互に関連付けて記憶するためのものである。
図5は、B−H曲線記憶部102に記憶されているB−H曲線の一例を概念的に示す図である。本実施形態では、無方向性電磁鋼板を計算対象の鋼板としている。そこで、本実施形態では、<100>方向における鉄の単結晶のB−H曲線をB−H曲線記憶部102に記憶している。B−H曲線記憶部102は、B−H曲線を、式として記憶していてもよいし、テーブルとして記憶していてもよい。
尚、B−H曲線記憶部102は、例えば、RAM又はハードディスクを用いて構成される。
【0023】
[結晶粒情報取得部103]
結晶粒情報取得部103は、ユーザの操作装置300の操作に応じて、結晶粒情報記憶部101に記憶されている結晶粒情報(図4を参照)を読み出す。
[B−H曲線取得部104]
B−H曲線取得部104は、ユーザの操作装置300の操作に応じて、B−H曲線記憶部102に記憶されているB−H曲線(<100>方向における鉄の単結晶のB−H曲線)を読み出す。
【0024】
[磁界設定部105]
磁界設定部105は、ユーザが、操作装置300を操作して磁界H(外部磁界)の大きさと方向とを1つずつ入力すると、このユーザの操作に基づいて、「計算対象の鋼板に与える磁界Hの大きさ」と、「当該磁界Hの方向と計算対象の鋼板の圧延方向(RD)とのなす角度θ」とを、RAM又はハードディスクに設定(記憶)する(後述する図8を参照)。尚、以下の説明では、「磁界Hの方向と計算対象の鋼板の圧延方向(RD)となす角度θ」を、必要に応じて、「磁界と圧延方向とのなす角度θ」と称する。尚、磁気特性として、B50を導出する場合には、磁界Hの大きさとして、5000[A/m]が設定される。また、磁界と圧延方向とのなす角度θの範囲は、0°≦θ≦180°である。
【0025】
[結晶粒選択部106]
結晶粒選択部106は、結晶粒情報取得部103により取得された結晶粒情報に含まれる結晶粒番号Iを昇順に順次選択する。
[磁化容易軸導出部107]
磁化容易軸導出部107は、結晶粒選択部106で選択された結晶粒番号Iの結晶粒Aの結晶座標系において、計算対象の鋼板に与えられた磁界Hの方向に最も近い所定の軸の情報を磁化容易軸の情報として導出する。
具体的に本実施形態では、まず、結晶粒選択部106で選択された結晶粒番号Iの結晶粒Aについて、結晶座標系XYZにおけるX軸方向(<100>方向)と、磁界Hの方向とのなす角度αを導出する。尚、以下の説明では、「結晶座標系XYZにおけるX軸方向(<100>方向)と、磁界Hの方向とのなす角度α」を、必要に応じて、「<100>方向と磁界Hの方向とのなす角度α」と称する。
【0026】
図6は、無方向性電磁鋼板の基本単位格子(図6(a))と、基本単位格子の1つの頂点がとり得る結晶座標系XYZ(図6(b)〜図6(d))の一例を示す図である。
本実施形態では、計算対象の鋼板を無方向性電磁鋼板としている。無方向性電磁鋼板は、bcc(体心立方格子)を有するので、図6(a)に示す基本単位格子の8つの頂点601〜608に結晶座標系XYZを設けることができる。そして、図6(b)〜図6(d)に示すように、1つの頂点601に対して、結晶座標系XYZとして3通りの座標系を取ることができる。このことは、他の頂点602〜608についても同じである。したがって、無方向性電磁鋼板の結晶粒Aの結晶座標系XYZとして、24(=3×8)通りの座標系で表現することができる。
【0027】
本実施形態では、磁化容易軸導出部107は、これら24個の結晶座標系XYZにおける「<100>方向と磁界Hの方向とのなす角度α」を導出する。そして、磁化容易軸導出部107は、導出した24個の「<100>方向と磁界Hの方向とのなす角度α」のうち、最も小さい角度αminを選択する。尚、以下の説明では、この角度αminを、必要に応じて「<100>方向と磁界Hの方向とのなす最小角度αmin」と称する。
図7を参照しながら、このようにして、「<100>方向と磁界Hの方向とのなす最小角度αmin」を求める理由を説明する。図7は、結晶粒Aにおける結晶座標系XYZと、材料座標系xyzと、結晶粒Aに与えられる磁界Hとの関係の一例を示す図である。
図7において、X軸、Y軸、Z軸の何れもが磁化容易軸の候補となり得る。したがって、結晶粒Aにおける結晶座標系XYZと、材料座標系xyzと、結晶粒Aに与えられる磁界Hとの関係が、図7に示す関係である場合、計算対象の鋼板に与えられた磁界Hの方向に最も近い磁化容易軸を導出しようとする場合、磁界Hの方向とのなす角度が最も小さい軸を磁化容易軸として選択することになる。したがって、本実施形態では、磁化容易軸の誤検出を防止するために、結晶粒Aがとり得る全ての結晶座標系XYZにおける「<100>方向と磁界Hの方向とのなす角度α」のうち、最も小さい角度αminを選択するようにしている。
【0028】
具体的に、磁化容易軸導出部107は、以下の(1)式によって、<100>方向と磁界Hの方向とのなす角度α((1)式では、2つのベクトルa、bのなす角度)を導出し、この角度αのうち最も小さい角度αminを導出するようにしている。すなわち、結晶粒Aがとり得る全ての結晶座標系XYZにおける磁化容易軸のうち、磁界Hの方向の方向余弦が最も大きくなる軸を、計算対象の鋼板に与えられた磁界Hの方向に最も近い磁化容易軸として導出するようにしている。
【0029】
【数1】
【0030】
尚、(1)式の最初の右辺の分子の「・」は内積を示す。
ここで、xH、yH、zHは、材料座標系xyzにおいて磁界Hの方向を示す単位ベクトルで、それぞれ以下の(2)式〜(4)式で表される。
xH=cos(θ) ・・・(2)
yH=sin(θ) ・・・(3)
zH=0 ・・・(4)
また、x100、y100、z100は、材料座標系xyzにおいて結晶座標系XYZの各軸の方向を表す単位ベクトルであり、それぞれ以下の(5)式〜(7)式で表される。
x100=cos(φ1)×cos(φ2)−sin(φ1)×sin(φ2)×cos(Φ) ・・・(5)
y100=sin(φ1)×cos(φ2)+cos(φ1)×sin(φ2)×cos(Φ) ・・・(6)
z100=sin(φ2)×sin(Φ) ・・・(7)
【0031】
[磁界成分導出部108]
磁界成分導出部108は、磁界設定部105で設定された「磁界Hの大きさ」と、磁化容易軸導出部107で導出された「<100>方向と磁界Hの方向とのなす最小角度αmin」とを、以下の(8)式に代入して、磁界Hの磁化容易軸方向(<100>方向)の成分H<100>を導出する。
H<100>=Hcos(αmin) ・・・(8)
磁界Hの磁化容易軸方向の成分H<100>は、概念的には図8に示すようになる。尚、磁気特性として、B50を導出する場合には、(8)式において、Hは、5000[A/m]となる。
【0032】
[磁化容易軸方向磁束密度導出部109]
磁化容易軸方向磁束密度導出部109は、B−H曲線取得部104で取得されたB−H曲線(図5を参照)から、磁界成分導出部108で導出された「磁界Hの磁化容易軸方向の成分H<100>」に対応する「磁化容易軸方向(<100>方向)の磁束密度B<100>」を導出する。B−H曲線において、あるHにおけるBをB(H)と表記すれば、B<100>は、以下の(9)式により導出される。
B<100>=B<100>(H<100>)=B<100>(Hcos(αmin)) ・・・(9)
【0033】
[磁界方向磁束密度導出部110]
磁界方向磁束密度導出部110は、磁化容易軸方向磁束密度導出部109で導出された「磁化容易軸方向の磁束密度B<100>」と、磁化容易軸導出部107で導出された「<100>方向と磁界Hの方向とのなす最小角度αmin」とを、以下の(10)式に代入して、厚み位置番号M、結晶粒番号Iの結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」を導出する。尚、ここでは、磁界Hの方向の磁束密度B<100>H(M,I)としてB50を導出するものとする。そして、磁界方向磁束密度導出部110は、導出した「磁界Hの方向の磁束密度B<100>H(M,I)」を、RAM又はハードディスクに記憶する。
B<100>H(M,I)=B<100>H=B<100>cos(αmin) ・・・(10)
磁界Hの方向の磁束密度B<100>Hは、概念的には、図9に示すようになる。
【0034】
尚、本実施形態では、B−H曲線として、計算対象の鋼板を構成する材料として、無方向性電磁鋼板そのものではなく、鉄の単結晶のB−H曲線を用いている。そこで、磁界方向磁束密度導出部110は、磁界Hの方向の磁束密度B<100>Hを、無方向性電磁鋼板の種類に応じた補正情報を使って補正するようにしてもよい。この補正用の磁束密度は、例えば、無方向性電磁鋼板の飽和磁束密度と、鉄の飽和磁束密度との比に基づいて予め得ることができる。また、このようにする代わりに、鉄の単結晶のB−H曲線ではなく、計算対象の鋼板である無方向性電磁鋼板の単結晶のB−H曲線をB−H曲線記憶部102に記憶させるようにしてもよい。
【0035】
[磁気特性導出部111]
磁気特性導出部111は、結晶粒情報取得部103で取得された結晶粒情報に含まれる全ての厚み位置番号M、結晶粒番号Iの結晶粒Aについて、磁界Hの方向の磁束密度B<100>H(M,I)が導出されると、厚み位置番号Mにおける各結晶粒番号Iの結晶粒Aの面積SM,Iを、厚み位置番号Mにおける当該結晶粒番号Iの結晶粒における点iの座標(粒界点座標)に基づいて導出する。
そして、磁気特性導出部111は、以下の(11)式に示すように、厚み位置番号Mにおける各結晶粒番号Iの結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」について、各結晶粒Aの面積SM,Iによる加重平均を行って、計算対象の鋼板の「ある厚み位置における『磁界Hの方向の磁束密度B(M)』」を導出する(ここでは、B50を導出するものとする)。
【0036】
【数2】
【0037】
(11)式において、mは、結晶粒情報取得部103で取得された結晶粒情報に含まれる厚み位置番号Mにおける結晶粒番号Iの最大値である。
そして、磁気特性導出部111は、計算対象の鋼板の「(ある厚み位置における)磁界Hの方向の磁束密度B(M)」を、ハードディスクに記憶する。以上のようにして、計算対象の鋼板の「磁界Hの方向の磁束密度B(M)」が磁気特性として求められる。
【0038】
磁気特性導出部111は、結晶粒情報取得部103で取得された結晶粒情報に含まれる全ての厚み位置番号Mの厚み位置において、計算対象の鋼板の「磁界Hの方向の磁束密度B(M)」を求める。
そして、磁気特性導出部111は、以下の(12)式に示すように、各厚み位置番号Mの各厚み位置で求めた、計算対象の鋼板の「磁界Hの方向の磁束密度B(M)」を、当該厚み位置が代表する「計算対象の鋼板の厚み方向の範囲(長さ)LM」で加重平均することにより、計算対象の鋼板全体の「磁界Hの方向の磁束密度B」を導出する。尚、以下の説明では、「計算対象の鋼板の厚み方向の範囲(長さ)」を、必要に応じて「厚み方向長さ」と称する。
【0039】
【数3】
【0040】
(12)式において、nは、厚み位置の数(厚み位置番号Mの最大値)である。
図10は、各厚み位置が代表する厚み方向長さLMの一例を概念的に示す図である。図10は、計算対象の鋼板の厚み部分の一部を示す図である。
前述したように、本実施形態では、計算対象の鋼板の一方の表面から当該鋼板の厚みの1/16、1/8、1/4、3/8、1/2、5/8、3/4、7/8、15/16の長さの位置における当該鋼板の面方向の断面の結晶粒情報を記憶している。
したがって、計算対象の鋼板の厚みをtとすると、当該鋼板の一方の表面から、(1/16)t、(1/8)t、(1/4)t、(3/8)t、(1/2)t、(5/8)t、(3/4)t、(7/8)t、(15/16)tの長さだけ、当該鋼板の厚み方向に沿って当該鋼板の内側に位置した各厚み位置における「当該鋼板の面方向の断面」の結晶粒情報が得られる。尚、以下の説明では、これらの各厚み位置を必要に応じて、(X/Y)tの厚み位置と称する。
【0041】
本実施形態では、ある厚み位置と、当該厚み位置と相互に隣り合う厚み位置との間の距離の1/2倍の長さの和を、当該厚み位置が代表する厚み方向長さLMとしている。
例えば、図10において、(1/8)tの厚み位置と相互に隣り合う厚み位置は、(1/16)tの厚み位置と、(1/4)tの厚み位置である。(1/8)tの厚み位置と、(1/16)tの厚み位置との間の距離の1/2倍の厚み位置は、(3/32)tの厚み位置である。また、(1/8)tの厚み位置と、(1/4)tの厚み位置との間の距離の1/2倍の厚み位置は、(3/16)tの厚み位置である。
よって、(1/8)tの厚み位置が代表する厚み方向長さL2は、(3/32)tの厚み位置から(3/16)tの厚み位置までの厚み方向の長さである。尚、L2の「2」は、厚み位置番号Mが2であることを表す。
【0042】
その他の厚み位置についても、(1/8)tの厚み位置と同様にして、厚み位置が代表する厚み方向長さL1、L3〜L9が得られる。ただし、(1/16)tの厚み位置と、(15/16)tの厚み位置については、当該厚み位置と相互に隣接する一方の厚み位置がないため、当該一方の厚み位置が、計算対象の鋼板の表面であるとして、厚み位置が代表する厚み方向長さL1、L9を求める。
尚、本実施形態では、磁気特性導出部111は、磁界Hの方向の磁束密度B(M)として、B50を導出している。しかしながら、磁気特性導出部111は、この他にも、B25、透磁率、及びこれらから得られる物性値を磁気特性として導出することができる。
【0043】
[磁気特性表示部112]
磁気特性表示部112は、磁気特性導出部111で導出された「計算対象の鋼板全体の『磁界Hの方向の磁束密度B』」の情報を表示装置200に表示させる。このとき、磁気特性表示部112は、計算対象の鋼板に与えた磁界Hの大きさや方向の情報等を、計算対象の鋼板全体の「磁界Hの方向の磁束密度B」の情報と共に表示装置200に表示することができる。
【0044】
[動作フローチャート]
次に、図11のフローチャートを参照しながら、磁気特性推定装置100が行う処理動作の一例を説明する。尚、ここでは、結晶粒情報記憶部101に、全ての厚み位置での(全ての厚み位置番号Mの)結晶粒情報が既に記憶されており、且つ、B−H曲線記憶部102に、B−H曲線が既に記憶されているものとする。また、「磁界Hの大きさ」と「磁界と圧延方向とのなす角度θ」とが既に磁界設定部105で設定されているものとする。
【0045】
まず、ステップS101において、結晶粒情報取得部103は、ユーザによる操作装置300の操作に基づいて、厚み位置番号Mとして「1」を設定する。
次に、ステップS102において、結晶粒情報取得部103は、結晶粒情報記憶部101から、厚み位置番号Mの結晶粒情報を読み出す。
次に、ステップS103において、B−H曲線取得部104は、B−H曲線記憶部102から、予測対象の鋼板に対応するB−H曲線を読み出す。
次に、ステップS104において、磁界設定部105は、ユーザによる操作装置300の操作に基づいて、「磁界Hの大きさ」をRAM又はハードディスクに設定する。
次に、ステップS105において、磁界設定部105は、ユーザによる操作装置300の操作に基づいて、「磁界と圧延方向とのなす角度θ」をRAM又はハードディスクに設定する。
【0046】
次に、ステップS106において、結晶粒選択部106は、結晶粒番号Iとして「1」を設定する。
次に、ステップS107において、磁化容易軸導出部107は、ステップS106で選択された厚み位置番号M、結晶粒番号Iの結晶粒Aについて、<100>方向と磁界Hの方向とのなす角度αを導出する。前述したように、本実施形態では、<100>方向と磁界Hの方向とのなす角度αは、24個導出される。
次に、ステップS108において、磁化容易軸導出部107は、ステップS107で導出された24個の「<100>方向と磁界Hの方向とのなす角度α」のうち、最も小さい角度αminを選択する。本実施形態では、このステップS108により、磁界Hの方向に最も近い所定の軸(ここでは<100>方向の軸)の情報が磁化容易軸の情報として導出される。
【0047】
次に、ステップS109において、磁界成分導出部108は、ステップS104で設定された「磁界Hの大きさ」と、ステップS108で選択された「<100>方向と磁界Hの方向とのなす最小角度αmin」とを、(8)式に代入して、磁界Hの磁化容易軸方向の成分H<100>を導出する。
次に、ステップS110において、磁化容易軸方向磁束密度導出部109は、ステップS103で読み出されたB−H曲線から、ステップS109で導出された「磁界Hの磁化容易軸方向の成分H<100>」に対応する「磁化容易軸方向の磁束密度B<100>」を導出する。
【0048】
次に、ステップS111において、磁界方向磁束密度導出部110は、ステップS110で導出された「磁化容易軸方向の磁束密度B<100>」と、ステップS108で導出された「<100>方向と磁界Hの方向とのなす最小角度αmin」とを、(10)式に代入して、磁界Hの方向の磁束密度B<100>H(M,I)を導出する。
次に、ステップS112において、磁界方向磁束密度導出部110は、ステップS111で導出された「磁界Hの方向の磁束密度B<100>H(M,I)」を、厚み方向位置M、結晶粒番号Iの結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」としてRAM又はハードディスクに記憶する。
【0049】
次に、ステップS113において、結晶粒選択部106は、ステップS102で読み出された結晶粒情報に含まれる厚み位置番号Mにおける全ての結晶粒番号Iの結晶粒Aについて、磁界Hの方向の磁束密度B<100>H(M,I)が導出されたか否かを判定する。この判定の結果、全ての結晶粒番号Iの結晶粒Aについて、磁界Hの方向の磁束密度B<100>H(M,I)が導出されていない場合には、ステップS114に進む。ステップS114に進むと、結晶粒選択部106は、結晶粒番号Iとして「I+1」を設定する(結晶粒番号Iをインクリメントする)。そして、ステップS107に戻り、厚み位置番号Mにおける全ての結晶粒番号Iの結晶粒Aについて、磁界Hの方向の磁束密度B<100>H(M,I)が導出されるまで、ステップS107〜S114の処理を繰り返し行う。
【0050】
ステップS113において、厚み位置番号Mにおける全ての結晶粒番号Iの結晶粒Aについて、磁界Hの方向の磁束密度B<100>H(M,I)が導出されたと判定されると、ステップS115に進む。ステップS115に進むと、磁気特性導出部111は、厚み位置番号Mにおける各結晶粒番号Iの結晶粒Aの面積SM,Iを、厚み位置番号Mにおける当該結晶粒番号Iの結晶粒における点iの座標(粒界点座標)に基づいて導出する。そして、磁気特性導出部111は、厚み位置番号M、結晶粒番号Iの結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」について、各結晶粒Aの面積SM,Iによる加重平均を行って、計算対象の鋼板の、「厚み位置番号Mの厚み位置における『磁界Hの方向の磁束密度B(M)』」を導出する((11)式を参照)。
【0051】
次に、ステップS116において、結晶粒情報取得部103は、全ての厚み位置番号Mの厚み位置において、磁界Hの方向の磁束密度B(M)を導出したか否かを判定する。この判定の結果、全ての厚み位置において、磁界Hの方向の磁束密度B(M)を導出していない場合には、ステップS117に進む。ステップS117に進むと、結晶粒情報取得部103は、厚み位置番号Mとして「M+1」を設定する(厚み位置番号Mをインクリメントする)。そして、ステップS102に戻り、全ての厚み位置において、磁界Hの方向の磁束密度B(M)が導出されるまで、ステップS102〜S117の処理を繰り返し行う。
【0052】
そして、ステップS116において、全ての厚み位置において、磁界Hの方向の磁束密度B(M)が導出されたと判定されると、ステップS118に進む。ステップS118に進むと、磁気特性導出部111は、各厚み位置の「磁界Hの方向の磁束密度B(M)」と、各厚み位置が代表する厚み方向長さLMとを、(12)式に代入して、計算対象の鋼板全体の「磁界Hの方向の磁束密度B」を導出する。
次、ステップS119において、磁気特性表示部112は、ステップS111で導出された「計算対象の鋼板全体の『磁界Hの方向の磁束密度B』」の情報を表示装置200に表示させる。
【0053】
[まとめ]
以上のように本実施形態では、まず、各結晶粒Aの結晶座標系XYZにおける<100>方向の情報として、<100>方向と磁界Hの方向とのなす最小角度αminを導出する。次に、<100>方向と磁界Hの方向とのなす最小角度αminを用いて、計算対象の鋼板に与えられる磁界Hの磁化容易軸方向の成分H<100>を導出し、それに対応する「磁化容易軸方向の磁束密度B<100>」を、予め記憶しておいた「計算対象の鋼板を構成する材料の単結晶の<100>方向におけるB−H曲線」から導出する。次に、導出した「磁化容易軸方向の磁束密度B<100>」と、<100>方向と磁界Hの方向とのなす最小角度αminとを用いて、磁界Hの方向の磁束密度B<100>Hを、各結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」として導出する。次に、各結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」について、結晶粒Aの面積SM,Iによる加重平均を行い、厚み位置番号Mの厚み位置における「計算対象の鋼板の磁界Hの方向における磁束密度B(M)」を導出する。このような計算対象の鋼板の磁界Hの方向における磁束密度B(M)の導出を、全ての厚み位置番号Mの厚み位置について行う。そして、厚み位置番号Mの厚み位置の「計算対象の鋼板の磁界Hの方向における磁束密度B(M)」について、各厚み位置が代表する厚み方向長さLMによる加重平均を行い、計算対象の鋼板全体の「磁界Hの方向の磁束密度B」を導出する。このように、計算対象の鋼板に与えられる磁界Hの磁化容易軸方向の成分H<100>を導出し、計算対象の鋼板を構成する材料の単結晶の<100>方向におけるB−H曲線を用いて、磁化容易軸方向の磁束密度B<100>を導出することにより、結晶粒の構造が多磁区構造であるとして取り扱うことができる。したがって、計算対象の鋼板のそれぞれの結晶粒の構造が単磁区構造ではない場合であっても、当該鋼板の磁束密度を正確に計算することができる。一方、非特許文献1の記載の技術では、計算対象の鋼板のそれぞれの結晶粒の構造が単磁区構造であるとしているので、磁化容易軸方向の磁束密度B<100>は飽和領域の値となる。よって、非特許文献1に記載の技術では、このような飽和領域以外の磁束密度を正確に計算することが困難である。
また、各厚み位置において、計算対象の鋼板の磁界Hの方向における磁束密度B(M)を導出し、各厚み位置が代表する厚み方向長さLMでそれらの加重平均をとるようにしたので、計算対象の鋼板の集合組織が板厚方向で異なる場合であっても、当該鋼板の磁束密度を正確に計算することができる。
【0054】
[変形例]
本実施形態では、計算対象の鋼板の集合組織が板厚方向で異なるものとして、各厚み位置において、計算対象の鋼板の磁界Hの方向における磁束密度B(M,I)を導出し、各厚み位置が代表する厚み方向長さLMでそれらの加重平均をとるようにした。しかしながら、計算対象の鋼板の集合組織が板厚方向で同じであると見なせる場合(当該鋼板の結晶粒の板厚方向の大きさが当該鋼板の板厚方向の長さよりも大きいと見なせる場合)には、計算対象の鋼板の磁界Hの方向における磁束密度B(M,I)を、1つの厚み位置で計算することにより得ることができる。すなわち、厚み位置番号Mの最大値を「1」とし、(12)式の計算を行わずに、(11)式により「計算対象の鋼板の『磁界Hの方向の磁束密度B』」を導出するようにしてもよい。
また、(1/16)t、(1/8)t、(1/4)t、(3/8)t、(1/2)t、(5/8)t、(3/4)t、(7/8)t、(15/16)tの厚み位置について、計算対象の鋼板の「磁界Hの方向の磁束密度B(M)」を導出しているが、(1/2)tの厚み位置で、集合組織が対称となることが多いので、(15/16)tを(1/16)tで、(7/8)tを(1/8)tで、(3/4)tを(1/4)tで、(5/8)tを(3/8)tで代替してもよい。
【0055】
また、本実施形態では、結晶粒Aがとり得る全ての結晶座標系XYZにおける「<100>方向と磁界Hの方向とのなす角度α」のうち、最も小さい角度αminを選択するようにした。しかしながら、磁界Hの方向に最も近い所定の軸を磁化容易軸として導出するようにしていれば、必ずしもこのようにする必要はない。例えば、以下の、(13)式〜(21)式で得られる、3つのベクトル(u v w)、(p q r)、(h k l)と、(−u −v −w)、(−p −q −r)、(−h −k −l)と磁界Hとのなす角度を求め、求めた6個の角度のうち、最も小さい角度を求めるようにしてもよい。
u=cosφ1×cosφ2−sinφ1×sinφ2×cosΦ ・・・(13)
v=cosφ1×sinφ2−sinφ1×cosφ2×cosΦ ・・・(14)
w=sinφ1×sinΦ ・・・(15)
p=sinφ1×cosφ2+cosφ1×sinφ2×cosΦ ・・・(16)
q=sinφ1×sinφ2+cosφ1×cosφ2×cosΦ ・・・(17)
r=cosφ1×sinΦ ・・・(18)
h=sinφ2×sinΦ ・・・(19)
k=cosφ2×sinΦ ・・・(20)
l=cosΦ ・・・(21)
尚、(13)式〜(21)式は、Bungeの式であり、(u p h)、(v q k)、(w r l)は、それぞれ、結晶座標系XYZのX軸、Y軸、Z軸を材料座標系xyzで方向余弦として表現したものである。
【0056】
また、本実施形態では、ユーザが、結晶粒画像21を見ながら、操作装置300を使用して、点iを指定する場合を例に挙げて説明したが、必ずしもこのようにする必要はない。例えば、EBSP法で解析することにより得られた結晶粒画像信号に基づいて、磁気特性推定装置100(コンピュータ)が自動的に、点iを指定するようにしてもよい。この場合、粒界uの長さに応じて点iの数を異ならせたり、粒界uの曲率に応じて点iの数を異ならせたり(例えば、直線的な部分よりも凸凹している部分に多くの点iを指定したり)することができる。
更にまた、点iは、電子プローブを材料上に走査したときにできる格子状又は蜂の巣状の交差点の内の粒界上のすべての点であってもよい。
【0057】
尚、計算対象の鋼板が異なる場合には、B−H曲線記憶部102に記憶されるB−H曲線等、磁気特性推定装置100で使用される情報が、鋼板の種類に応じて異なることになる。
【0058】
(第2の実施形態)
次に、本発明の第2の実施形態について説明する。前述した第1の実施形態では、計算対象の鋼板に与える磁界Hの大きさと、磁界と圧延方向とのなす角度θとが一定である場合について説明した。これに対し、本実施形態では、これらを変えて、計算対象の鋼板の「磁界Hの方向の磁束密度B」を演算する。このように本実施形態は、前述した第1の実施形態に対し、計算対象の鋼板に与える磁界Hの大きさと、磁界と圧延方向とのなす角度θとを、変更する構成が追加されたものである。したがって、本実施形態の説明において、第1の実施形態と同一の部分については、図1〜図11に付した符号と同一の符号を付す等して詳細な説明を省略する。
【0059】
本実施形態では、例えば、ユーザは、操作装置300を操作して、磁界H(外部磁界)の大きさと方向との少なくとも何れか一方を複数入力する。磁気特性推定装置100の磁界設定部105は、このユーザによる操作装置300の操作に基づいて、「磁界Hの大きさ」と、「磁界と圧延方向とのなす角度θ」との少なくとも何れか一方を、複数設定することができる。また、このようにする代わりに、次のようにしてもよい。すなわち、まず、ユーザは、第1の実施形態と同様に、操作装置300を操作して、磁界H(外部磁界)の大きさと方向とを1つずつ入力する。そして、磁界設定部105は、「磁界Hの大きさ」と、「磁界と圧延方向とのなす角度θ」との少なくとも何れか一方について、ユーザが入力した値を、所定値ずつ増加(又は減少)させることにより、「磁界Hの大きさ」と、「磁界と圧延方向とのなす角度θ」との少なくとも何れか一方を、複数設定することができる。
【0060】
そして、このようにして設定された「磁界Hの大きさ」と、「磁界と圧延方向とのなす角度θ」とに基づいて、第1の実施形態と同様に、磁気特性導出部111は、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,I,H,θ)を導出する。この磁束密度B(M,I,H,θ)は、磁界Hの大きさと、磁界と圧延方向とのなす角度θとの少なくとも何れか一方に応じたものとなる。磁気特性導出部111で、或る「磁界Hの大きさ」と、或る「磁界と圧延方向とのなす角度θ」とに基づいた「計算対象の鋼板の『磁界Hの方向の磁束密度B(M,H,θ)』」が導出されると、磁界設定部105は、設定した「『磁界Hの大きさ』と、『磁界と圧延方向とのなす角度θ』」の中に、磁束密度B(M,H,θ)を導出するために使用していないものがあるか否かを判定する。そして、使用していないものがある場合、磁界設定部105は、使用していないものの情報を、磁界成分導出部108に出力する。そして、前述した処理を行うことにより((11)式の計算を行うことにより)、磁界設定部105に設定された「『磁界Hの大きさ』と、『磁界と圧延方向とのなす角度θ』」の全てに基づいて、磁束密度B(M,H,θ)が導出される。そして、磁気特性導出部111は、磁界Hの大きさ毎、磁界と圧延方向とのなす角度θ毎に前述した処理を行うことにより((12)式の計算を行うことにより)、計算対象の鋼板の「磁界Hの方向の磁束密度B(H,θ)」を導出する。したがって、本実施形態の磁気特性推定装置100では、図1に示した機能構成に対し、結晶粒選択部106から磁界設定部105に向かう矢印線が追加されたものになる。
【0061】
次に、図12のフローチャートを参照しながら、磁気特性推定装置100が行う処理動作の一例を説明する。図12において、ステップS101〜S115、S116〜S119は、図11に示したフローチャートによる処理が実行される。
図12のステップS115において、計算対象の鋼板の「磁束密度B(M,H,θ)が記憶されると、ステップS201に進む。ステップS201に進むと、磁界設定部105は、磁界と圧延方向とのなす角度θを変えて、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」を導出するか否かを判定する。すなわち、ユーザによって指定された「磁界と圧延方向とのなす角度θ」のうち、ステップS105で設定していない「磁界と圧延方向とのなす角度θ」があるか否かを判定する。この判定の結果、磁界と圧延方向とのなす角度θを変える場合には、ステップS105に戻り、磁界設定部105は、未設定の「磁界と圧延方向とのなす角度θ」を設定する。そして、磁界と圧延方向とのなす角度θの全てについて、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」が導出されるまで、ステップS105〜S115、S201の処理を繰り返し行う。
【0062】
そして、磁界と圧延方向とのなす角度θの全てについて、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」が導出されると、ステップS202に進む。ステップS202に進むと、磁界設定部105は、磁界Hの大きさを変えて、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」を導出するか否かを判定する。すなわち、ユーザによって指定された「磁界Hの大きさ」のうち、ステップS104で設定していない「磁界Hの大きさ」があるか否かを判定する。この判定の結果、磁界Hの大きさを変える場合には、ステップS104に戻り、磁界設定部105は、未設定の「磁界Hの大きさ」を設定する。そして、磁界Hの大きさの全てについて、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」が導出されるまで、ステップS104〜S115、S201、S202の処理を繰り返し行う。
【0063】
そして、磁界Hの大きさの全てについて、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」が導出されると、ステップS116に進む。そして、前述したようにして処理が行われ、ステップS118において、計算対象の鋼板の「磁界Hの方向の磁束密度B(H,θ)」が導出される。このステップS118の処理で、第1の実施形態で示した「計算対象の鋼板の『磁界Hの方向の磁束密度B』」が、磁界Hの大きさ毎、磁界と圧延方向とのなす角度θ毎に複数得られることになる。
以上のようにすることによって、鋼板の磁束密度についてのより詳細な情報を、自動的に、且つ、正確に計算することができる。
尚、本実施形態でも、第1の実施形態で説明した種々の変形例を採用することができる。
【0064】
(実施例)
図13は、磁界と圧延方向とのなす角度θと、B50との関係の一例を示す図である。ここでは、JIS C 2552で規定される50A1300材について調査した。
図13において、平均(BH未考慮)は、非特許文献1に記載の技術で計算された結果を示す。平均(BH考慮)は、第2の実施形態で説明したようにして計算された結果を示す。また、測定結果は、計算結果で示すものと同種の無方向性電磁鋼板に対して測定された結果を示す。ここで、平均とは、図10に示した「(1/16)tの厚み位置、(1/8)tの厚み位置、(1/4)tの厚み位置、(3/8)tの厚み位置、(1/2)tの厚み位置」の各厚み位置において「50A1300材のB50」を計算すると共に、図10に示すようにして各厚み位置が代表する厚み方向長さLMを設定し、これらを(12)式に代入して、50A1300材全体のB50(磁界Hの方向の磁束密度B(H,θ))を導出したことを表す。また、(1/16)tの厚み位置、(1/8)tの厚み位置、(1/4)tの厚み位置、(3/8)tの厚み位置、(1/2)tの厚み位置の「(12)式における重み」は、それぞれ、3/16、3/16、4/16、4/16、2/16である。
【0065】
図13に示すように、測定結果と平均(BH未考慮)とに比べ、測定結果と平均(BH考慮)との方が、(磁界と圧延方向とのなす角度θによらず)値が近くなっている。よって、前述した第1、第2の実施形態のようにすれば、従来の技術よりも、鋼板の磁束密度を正確に計算することができることが分かる。
尚、ここでは、B50について示したが、予測する磁束密度はB50に限定するものではなく、例えば、B25についても、B50と同様に正確に予測できるものである。
【0066】
[変形例]
次に、第1、第2の実施形態の変形例について説明する。
図14は、磁界と圧延方向とのなす角度と、各厚み位置におけるB50の加重平均値及び算術平均値との関係の一例を示す図である。
図14において、厚さ考慮は、図13に示した平均(BH考慮)と同じものを示す。単純平均とは、図10に示した「(1/16)tの厚み位置、(1/8)tの厚み位置、(1/4)tの厚み位置、(3/8)tの厚み位置、(1/2)tの厚み位置」の各厚み位置において「50A1300材のB50」を計算し、計算したB50を算術平均して、50A1300材全体のB50(磁界Hの方向の磁束密度B(H,θ))を導出したことを表す。すなわち、厚さ考慮と単純平均は、各厚み位置におけるB50の平均の取り方だけを異ならせたものである。
図14に示すように、各厚み位置におけるB50を、厚み方向の範囲(長さ)LMで加重平均した値と、各厚み位置におけるB50を算術平均した値とは、殆ど差がない。したがって、各厚み位置における「計算対象の鋼板全体の『磁界Hの方向の磁束密度B(H,θ)』」を、厚み方向の範囲(長さ)LMで加重平均する代わりに、算術平均するようにすれば、計算対象の鋼板全体の「磁界Hの方向の磁束密度B(H,θ)」を、計算精度を大きく落とすことなく高速に求めることができる。
【0067】
(第3の実施形態)
次に、本発明の第3の実施形態について説明する。前述した第1、第2の実施形態では、(12)式に従って加重平均をとるので、多数の(具体的には5個又は9個)の厚み位置における結晶粒情報を得る必要があった。これに対し、本実施形態では、鋼板の集合組織の状態が、表層と中心層とで大別されることに着目し、鋼板の表層を代表する1か所の厚み位置の結晶粒情報から、磁界Hの方向の磁束密度B(M)(又はB(M,H,θ))を導出すると共に、鋼板の中心層を代表する1か所の厚み位置の結晶粒情報から、磁界Hの方向の磁束密度B(M)(又はB(M,H,θ))を導出し、これらの算術平均をとって、鋼板の磁界Hの方向の磁束密度B(又はB(H,θ))を導出する。このように本実施形態と、前述した第1及び第2の実施形態とは、磁界Hの方向の磁束密度B(M)(又はB(M,H,θ))の導出対象となる厚み位置が異なることによる処理が主として異なる。したがって、本実施形態の説明において、第1及び第2の実施形態と同一の部分については、図1〜図14に付した符号と同一の符号を付す等して詳細な説明を省略する。尚、本実施形態でも、計算対象の鋼板が無方向性電磁鋼板であるとする。
【0068】
本実施形態では、表層を代表する厚み位置として、計算対象の鋼板の表面の位置と、計算対象の鋼板の表面から、当該鋼板の厚みの1/8倍の長さだけ、当該鋼板の厚み方向に沿って当該鋼板の内側に位置した厚み位置と、を上下限値とする当該鋼板の厚み方向の長さ範囲内から1つの厚み位置を選択するようにしている。すなわち、図10において、計算対象の鋼板の上側の表面と(1/8)tの厚み位置とを上下限値とする鋼板の厚み方向の長さ範囲内、又は計算対象の鋼板の下側の表面と(7/8)tの厚み位置とを上下限値とする鋼板の厚み方向の長さ範囲内から1つの厚み位置を選択するようにしている。
【0069】
一方、本実施形態では、中心部を代表する厚み位置として、計算対象の鋼板の表面から、当該鋼板の厚みの3/8倍の長さだけ、当該鋼板の厚み方向に沿って当該鋼板の内側に位置した厚み位置と、同じく計算対象の鋼板の表面から、当該鋼板の厚みの1/2倍の長さだけ、当該鋼板の厚み方向に沿って当該鋼板の内側に位置した厚み位置と、を上下限値とする当該鋼板の厚み方向の長さ範囲内から1つの厚み位置を選択するようにしている。すなわち、図10において、(3/8)tの厚み位置と(1/2)tの厚み位置とを上下限値とする鋼板の厚み方向の長さ範囲内、又は(5/8)tの厚み位置と(1/2)tの厚み位置とを上下限値とする鋼板の厚み方向の長さ範囲内から1つの厚み位置を選択するようにしている。
【0070】
図15は、各厚み位置における、磁界と圧延方向とのなす角度θと、B50との関係の一例を示す図である。ここでは、前述した実施例と同一の種類の鋼板及び条件で計算と測定を行った結果を示す。
図15において、例えば、1/16tは、(1/16)tの厚み位置の結晶粒画像を用いて第2の実施形態で説明したようにして、計算対象の鋼板の「磁界Hの方向の磁束密度B(M,H,θ)」を計算した結果を示す。また、測定結果と平均は、前述した実施例と同じものである。
【0071】
図15に示すように、磁界と圧延方向とのなす角度θと、B50との関係を示す曲線の形は、1/16t及び1/8tの曲線と、1/2t及び3/8tの曲線とで大きく異なる。また、1/4tの曲線の形は、1/16t及び1/8tの曲線と、1/2t及び3/8tの曲線との中間の形になっている。
これらのことから、表層を代表する厚み位置と、中心層を代表する厚み位置として、それぞれ前述した範囲を採用することが好ましいことが分かる。これらのうち、(1/8)tの厚み位置(若しくは(7/8)tの厚み位置)を、表層を代表する厚み位置とし、(3/8)tの厚み位置(若しくは(5/8)tの厚み位置)又は(1/2)tの厚み位置を、中心層を代表する厚み位置とすることがより好ましい。一般に、鋼板の表層は、鋼板の表面から(1/4)tの厚み位置(若しくは3/4tの厚み位置)までの領域とされ、鋼板の中心層は、(1/4)tの厚み位置(若しくは3/4tの厚み位置)から(1/2)tの厚み位置とされている。よって、これらの中心の位置である(1/8)tの厚み位置(若しくは(7/8)tの厚み位置)を、表層を代表する厚み位置とし、(3/8)tの厚み位置(若しくは(5/8)tの厚み位置)を、中心層を代表する厚み位置とすることが好ましい。ただし、鋼板の中心層の集合組織を採取する場合には、(1/2)tの厚み位置の集合組織を採取することが多いので、中心層を代表する厚み位置として、(1/2)tの厚み位置を採用することも好ましい。
【0072】
このように、本実施形態では、磁気特性導出部111は、計算対象の鋼板の「磁界Hの方向の磁束密度B(M)」を2つだけ導出する。例えば、(1/8)tの厚み位置を、表層を代表する厚み位置とし、(3/8)tの厚み位置を、中心層を代表する厚み位置とし、それらの厚み位置番号Mがそれぞれ「2」、「4」であるとする。この場合、磁気特性導出部111は、(12)式の代わりに、以下の(22)式により、計算対象の鋼板の「磁界Hの方向の磁束密度B」を導出する。
B=(B(2)+B(4))/2 ・・・(22)
【0073】
以上のように本実施形態では、計算対象の鋼板の表層を代表する1か所の厚み位置の結晶粒情報から、磁界Hの方向の磁束密度B(M)(又はB(M,H,θ))を導出すると共に、鋼板の中心層を代表する1か所の厚み位置の結晶粒情報から、磁界Hの方向の磁束密度B(M)(又はB(M,H,θ))を導出し、これらの算術平均をとって、計算対象の鋼板の磁界Hの方向の磁束密度B(又はB(H,θ))を導出する。したがって、第1及び第2の実施形態で示した効果に加えて、計算対象の鋼板の磁界Hの方向の磁束密度B(又はB(H,θ))を導出する際の負荷を、第1及び第2の実施形態で示したものよりも軽減することができる。
尚、本実施形態でも、第1の実施形態で説明した種々の変形例を採用することができる。
【0074】
以上説明した本発明の実施形態のうち、CPUが実行する部分は、コンピュータがプログラムを実行することによって実現することができる。また、プログラムをコンピュータに供給するための手段、例えばかかるプログラムを記録したCD−ROM等のコンピュータ読み取り可能な記録媒体、又はかかるプログラムを伝送する伝送媒体も本発明の実施形態として適用することができる。また、上記プログラムを記録したコンピュータ読み取り可能な記録媒体などのプログラムプロダクトも本発明の実施の形態として適用することができる。上記のプログラム、コンピュータ読み取り可能な記録媒体、伝送媒体及びプログラムプロダクトは、本発明の範疇に含まれる。
また、前述した実施形態は、何れも本発明を実施するにあたっての具体化の例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその技術思想、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【0075】
(請求項との関係)
前述した本発明の各実施形態では、例えば、結晶粒情報記憶部101を用いるにより結晶粒情報取得手段の一例が実現され、B−H曲線記憶部102を用いることにより、B−H曲線取得手段の一例が実現され、磁界設定部105を用いることにより磁界設定手段の一例が実現され、磁化容易軸導出部107を用いることにより磁化容易軸導出手段の一例が実現される。また、例えば、磁界成分導出部108、磁化容易軸方向磁束密度導出部109、磁界方向磁束密度導出部110、及び磁気特性導出部111を用いることにより磁束密度計算手段の一例が実現される。磁束密度計算手段について、例えば、磁界成分導出部108を用いることにより磁界成分導出手段の一例が実現され、磁化容易軸方向磁束密度導出部109を用いることにより磁化容易軸方向磁束密度導出手段の一例が実現され、磁界方向磁束密度導出部110を用いることにより磁界方向磁束密度導出手段の一例が実現される。また、磁気特性導出部111を用いることにより磁気特性導出手段の一例が実現される。
【符号の説明】
【0076】
100 磁気特性推定装置
200 表示装置
300 操作装置
101 結晶粒情報記憶部
102 B−H曲線記憶部
103 結晶粒情報取得部
104 B−H曲線取得部
105 磁界設定部
106 結晶粒選択部
107 磁化容易軸導出部
108 磁界成分導出部
109 磁化容易軸方向磁束密度導出部
110 磁界方向磁束密度導出部
111 磁気特性導出部
112 磁気特性表示部
【特許請求の範囲】
【請求項1】
軟磁性材料からなる鋼板の磁気特性を推定する磁気特性推定装置であって、
前記鋼板における集合組織を構成する結晶粒の粒界の位置の情報と、前記結晶粒のそれぞれの方位の情報とを含む結晶粒情報を取得する結晶粒情報取得手段と、
前記鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線を取得するB−H曲線取得手段と、
前記鋼板に外部から与える磁界の大きさと方向とを設定する磁界設定手段と、
前記鋼板の結晶粒に対して設定される結晶座標系において、複数の磁化容易軸のうち前記磁界設定手段により設定された磁界の方向に最も近い軸として当該磁界の方向の方向余弦が最も大きい軸を磁化容易軸として導出することを、前記結晶粒情報取得手段により取得された結晶粒情報に基づいて、当該鋼板の結晶粒のそれぞれについて行う磁化容易軸導出手段と、
磁束密度計算手段と、を有し、
前記磁束密度計算手段は、
前記磁界設定手段により設定された磁界の、前記磁化容易軸方向の成分を導出することを、前記結晶粒情報取得手段により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁界成分導出手段と、
前記磁界成分導出手段により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記B−H曲線から導出することを、前記結晶粒情報取得手段により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁化容易軸方向磁束密度導出手段と、
前記磁化容易軸方向磁束密度導出手段により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度に基づいて、前記鋼板における、前記磁界設定手段により設定された磁界の方向の磁束密度を導出する磁界方向磁束密度導出手段と、を有することを特徴とする磁気特性推定装置。
【請求項2】
前記結晶粒情報取得手段は、前記鋼板の表層の位置と中心層の位置とにおける結晶粒情報をそれぞれ1組ずつ取得し、
前記磁化容易軸導出手段は、前記磁化容易軸を、前記鋼板の表層の位置と中心層の位置とにおける前記結晶粒情報のそれぞれに基づいて、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁界成分導出手段は、前記磁界設定手段により設定された磁界の、前記磁化容易軸方向の成分を、前記鋼板の表層の位置と中心層の位置とにおける前記結晶粒情報のそれぞれに基づいて、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁化容易軸方向磁束密度導出手段は、前記磁界成分導出手段により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記鋼板の表層の位置と中心層の位置とにおける前記結晶粒情報のそれぞれに基づいて、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁界方向磁束密度導出手段は、前記磁化容易軸方向磁束密度導出手段により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度のそれぞれに基づいて、前記鋼板における、前記磁界設定手段により設定された磁界の方向の磁束密度を、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁束密度計算手段は、前記磁界方向磁束密度導出手段により導出された、前記鋼板における、前記磁界設定手段により設定された磁界の方向の磁束密度の、前記鋼板の表層の位置と中心層の位置とについての算術平均を導出する磁気特性導出手段を更に有することを特徴とする請求項1に記載の磁気特性推定装置。
【請求項3】
前記鋼板の表層の位置は、前記鋼板の表面の位置と、当該鋼板の表面から当該鋼板の厚みの1/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置と、を上下限値とする当該鋼板の厚み方向の長さ範囲内の位置であり、
前記鋼板の中心層の位置は、前記鋼板の表面から当該鋼板の厚みの3/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置と、当該鋼板の表面から当該鋼板の厚みの1/2倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置と、を上下限値とする当該鋼板の厚み方向の長さ範囲内の位置であることを特徴とする請求項2に記載の磁気特性推定装置。
【請求項4】
前記鋼板の表層の位置は、前記鋼板の表面から当該鋼板の厚みの1/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置であり、
前記鋼板の中心層の位置は、前記鋼板の表面から当該鋼板の厚みの3/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置、又は、前記鋼板の表面から当該鋼板の厚みの1/2倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置であることを特徴とする請求項3に記載の磁気特性推定装置。
【請求項5】
軟磁性材料からなる鋼板の磁気特性を推定する磁気特性推定方法であって、
前記鋼板における集合組織を構成する結晶粒の粒界の位置の情報と、前記結晶粒のそれぞれの方位の情報とを含む結晶粒情報を取得する結晶粒情報取得工程と、
前記鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線を取得するB−H曲線取得工程と、
前記鋼板に外部から与える磁界の大きさと方向とを設定する磁界設定工程と、
前記鋼板の結晶粒に対して設定される結晶座標系において、複数の磁化容易軸のうち前記磁界設定工程により設定された磁界の方向に最も近い軸として当該磁界の方向の方向余弦が最も大きい軸を磁化容易軸として導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、当該鋼板の結晶粒のそれぞれについて行う磁化容易軸導出工程と、
磁束密度計算工程と、を有し、
前記磁束密度計算工程は、
前記磁界設定工程により設定された磁界の、前記磁化容易軸方向の成分を導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁界成分導出工程と、
前記磁界成分導出工程により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記B−H曲線から導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁化容易軸方向磁束密度導出工程と、
前記磁化容易軸方向磁束密度導出工程により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度に基づいて、前記鋼板における、前記磁界設定工程により設定された磁界の方向の磁束密度を導出する磁界方向磁束密度導出工程と、を有することを特徴とする磁気特性推定方法。
【請求項6】
前記結晶粒情報取得工程は、前記鋼板の表層の位置と中心層の位置とにおける結晶粒情報をそれぞれ1組ずつ取得し、
前記磁化容易軸導出工程は、前記磁化容易軸を、前記鋼板の表層の位置と中心層の位置とにおける前記結晶粒情報のそれぞれに基づいて、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁界成分導出工程は、前記磁界設定工程により設定された磁界の、前記磁化容易軸方向の成分を、前記鋼板の表層の位置と中心層の位置とにおける前記結晶粒情報のそれぞれに基づいて、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁化容易軸方向磁束密度導出工程は、前記磁界成分導出工程により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記鋼板の表層の位置と中心層の位置とにおける前記結晶粒情報のそれぞれに基づいて、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁界方向磁束密度導出工程は、前記磁化容易軸方向磁束密度導出工程により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度のそれぞれに基づいて、前記鋼板における、前記磁界設定工程により設定された磁界の方向の磁束密度を、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁束密度計算工程は、前記磁界方向磁束密度導出工程により導出された、前記鋼板における、前記磁界設定工程により設定された磁界の方向の磁束密度の、前記鋼板の表層の位置と中心層の位置とについての算術平均を導出する磁気特性導出工程を更に有することを特徴とする請求項5に記載の磁気特性推定方法。
【請求項7】
前記鋼板の表層の位置は、前記鋼板の表面の位置と、当該鋼板の表面から当該鋼板の厚みの1/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置と、を上下限値とする当該鋼板の厚み方向の長さ範囲内の位置であり、
前記鋼板の中心層の位置は、前記鋼板の表面から当該鋼板の厚みの3/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置と、当該鋼板の表面から当該鋼板の厚みの1/2倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置と、を上下限値とする当該鋼板の厚み方向の長さ範囲内の位置であることを特徴とする請求項6に記載の磁気特性推定方法。
【請求項8】
前記鋼板の表層の位置は、前記鋼板の表面から当該鋼板の厚みの1/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置であり、
前記鋼板の中心層の位置は、前記鋼板の表面から当該鋼板の厚みの3/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置、又は、前記鋼板の表面から当該鋼板の厚みの1/2倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置であることを特徴とする請求項7に記載の磁気特性推定方法。
【請求項9】
軟磁性材料からなる鋼板の磁気特性を推定することをコンピュータに実行させるためのコンピュータプログラムであって、
前記鋼板における集合組織を構成する結晶粒の粒界の位置の情報と、前記結晶粒のそれぞれの方位の情報とを含む結晶粒情報を取得する結晶粒情報取得工程と、
前記鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線を取得するB−H曲線取得工程と、
前記鋼板に外部から与える磁界の大きさと方向とを設定する磁界設定工程と、
前記鋼板の結晶粒に対して設定される結晶座標系において、複数の磁化容易軸のうち前記磁界設定工程により設定された磁界の方向に最も近い軸として当該磁界の方向の方向余弦が最も大きい軸を磁化容易軸として導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、当該鋼板の結晶粒のそれぞれについて行う磁化容易軸導出工程と、
磁束密度計算工程と、をコンピュータに実行させ、
前記磁束密度計算工程は、
前記磁界設定工程により設定された磁界の、前記磁化容易軸方向の成分を導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁界成分導出工程と、
前記磁界成分導出工程により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記B−H曲線から導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁化容易軸方向磁束密度導出工程と、
前記磁化容易軸方向磁束密度導出工程により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度に基づいて、前記鋼板における、前記磁界設定工程により設定された磁界の方向の磁束密度を導出する磁界方向磁束密度導出工程と、を有することを特徴とするコンピュータプログラム。
【請求項1】
軟磁性材料からなる鋼板の磁気特性を推定する磁気特性推定装置であって、
前記鋼板における集合組織を構成する結晶粒の粒界の位置の情報と、前記結晶粒のそれぞれの方位の情報とを含む結晶粒情報を取得する結晶粒情報取得手段と、
前記鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線を取得するB−H曲線取得手段と、
前記鋼板に外部から与える磁界の大きさと方向とを設定する磁界設定手段と、
前記鋼板の結晶粒に対して設定される結晶座標系において、複数の磁化容易軸のうち前記磁界設定手段により設定された磁界の方向に最も近い軸として当該磁界の方向の方向余弦が最も大きい軸を磁化容易軸として導出することを、前記結晶粒情報取得手段により取得された結晶粒情報に基づいて、当該鋼板の結晶粒のそれぞれについて行う磁化容易軸導出手段と、
磁束密度計算手段と、を有し、
前記磁束密度計算手段は、
前記磁界設定手段により設定された磁界の、前記磁化容易軸方向の成分を導出することを、前記結晶粒情報取得手段により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁界成分導出手段と、
前記磁界成分導出手段により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記B−H曲線から導出することを、前記結晶粒情報取得手段により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁化容易軸方向磁束密度導出手段と、
前記磁化容易軸方向磁束密度導出手段により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度に基づいて、前記鋼板における、前記磁界設定手段により設定された磁界の方向の磁束密度を導出する磁界方向磁束密度導出手段と、を有することを特徴とする磁気特性推定装置。
【請求項2】
前記結晶粒情報取得手段は、前記鋼板の表層の位置と中心層の位置とにおける結晶粒情報をそれぞれ1組ずつ取得し、
前記磁化容易軸導出手段は、前記磁化容易軸を、前記鋼板の表層の位置と中心層の位置とにおける前記結晶粒情報のそれぞれに基づいて、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁界成分導出手段は、前記磁界設定手段により設定された磁界の、前記磁化容易軸方向の成分を、前記鋼板の表層の位置と中心層の位置とにおける前記結晶粒情報のそれぞれに基づいて、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁化容易軸方向磁束密度導出手段は、前記磁界成分導出手段により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記鋼板の表層の位置と中心層の位置とにおける前記結晶粒情報のそれぞれに基づいて、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁界方向磁束密度導出手段は、前記磁化容易軸方向磁束密度導出手段により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度のそれぞれに基づいて、前記鋼板における、前記磁界設定手段により設定された磁界の方向の磁束密度を、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁束密度計算手段は、前記磁界方向磁束密度導出手段により導出された、前記鋼板における、前記磁界設定手段により設定された磁界の方向の磁束密度の、前記鋼板の表層の位置と中心層の位置とについての算術平均を導出する磁気特性導出手段を更に有することを特徴とする請求項1に記載の磁気特性推定装置。
【請求項3】
前記鋼板の表層の位置は、前記鋼板の表面の位置と、当該鋼板の表面から当該鋼板の厚みの1/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置と、を上下限値とする当該鋼板の厚み方向の長さ範囲内の位置であり、
前記鋼板の中心層の位置は、前記鋼板の表面から当該鋼板の厚みの3/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置と、当該鋼板の表面から当該鋼板の厚みの1/2倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置と、を上下限値とする当該鋼板の厚み方向の長さ範囲内の位置であることを特徴とする請求項2に記載の磁気特性推定装置。
【請求項4】
前記鋼板の表層の位置は、前記鋼板の表面から当該鋼板の厚みの1/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置であり、
前記鋼板の中心層の位置は、前記鋼板の表面から当該鋼板の厚みの3/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置、又は、前記鋼板の表面から当該鋼板の厚みの1/2倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置であることを特徴とする請求項3に記載の磁気特性推定装置。
【請求項5】
軟磁性材料からなる鋼板の磁気特性を推定する磁気特性推定方法であって、
前記鋼板における集合組織を構成する結晶粒の粒界の位置の情報と、前記結晶粒のそれぞれの方位の情報とを含む結晶粒情報を取得する結晶粒情報取得工程と、
前記鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線を取得するB−H曲線取得工程と、
前記鋼板に外部から与える磁界の大きさと方向とを設定する磁界設定工程と、
前記鋼板の結晶粒に対して設定される結晶座標系において、複数の磁化容易軸のうち前記磁界設定工程により設定された磁界の方向に最も近い軸として当該磁界の方向の方向余弦が最も大きい軸を磁化容易軸として導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、当該鋼板の結晶粒のそれぞれについて行う磁化容易軸導出工程と、
磁束密度計算工程と、を有し、
前記磁束密度計算工程は、
前記磁界設定工程により設定された磁界の、前記磁化容易軸方向の成分を導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁界成分導出工程と、
前記磁界成分導出工程により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記B−H曲線から導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁化容易軸方向磁束密度導出工程と、
前記磁化容易軸方向磁束密度導出工程により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度に基づいて、前記鋼板における、前記磁界設定工程により設定された磁界の方向の磁束密度を導出する磁界方向磁束密度導出工程と、を有することを特徴とする磁気特性推定方法。
【請求項6】
前記結晶粒情報取得工程は、前記鋼板の表層の位置と中心層の位置とにおける結晶粒情報をそれぞれ1組ずつ取得し、
前記磁化容易軸導出工程は、前記磁化容易軸を、前記鋼板の表層の位置と中心層の位置とにおける前記結晶粒情報のそれぞれに基づいて、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁界成分導出工程は、前記磁界設定工程により設定された磁界の、前記磁化容易軸方向の成分を、前記鋼板の表層の位置と中心層の位置とにおける前記結晶粒情報のそれぞれに基づいて、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁化容易軸方向磁束密度導出工程は、前記磁界成分導出工程により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記鋼板の表層の位置と中心層の位置とにおける前記結晶粒情報のそれぞれに基づいて、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁界方向磁束密度導出工程は、前記磁化容易軸方向磁束密度導出工程により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度のそれぞれに基づいて、前記鋼板における、前記磁界設定工程により設定された磁界の方向の磁束密度を、前記鋼板の表層の位置と中心層の位置とについてそれぞれ導出し、
前記磁束密度計算工程は、前記磁界方向磁束密度導出工程により導出された、前記鋼板における、前記磁界設定工程により設定された磁界の方向の磁束密度の、前記鋼板の表層の位置と中心層の位置とについての算術平均を導出する磁気特性導出工程を更に有することを特徴とする請求項5に記載の磁気特性推定方法。
【請求項7】
前記鋼板の表層の位置は、前記鋼板の表面の位置と、当該鋼板の表面から当該鋼板の厚みの1/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置と、を上下限値とする当該鋼板の厚み方向の長さ範囲内の位置であり、
前記鋼板の中心層の位置は、前記鋼板の表面から当該鋼板の厚みの3/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置と、当該鋼板の表面から当該鋼板の厚みの1/2倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置と、を上下限値とする当該鋼板の厚み方向の長さ範囲内の位置であることを特徴とする請求項6に記載の磁気特性推定方法。
【請求項8】
前記鋼板の表層の位置は、前記鋼板の表面から当該鋼板の厚みの1/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置であり、
前記鋼板の中心層の位置は、前記鋼板の表面から当該鋼板の厚みの3/8倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置、又は、前記鋼板の表面から当該鋼板の厚みの1/2倍の長さだけ当該鋼板の厚み方向に沿って当該鋼板の内側にある位置であることを特徴とする請求項7に記載の磁気特性推定方法。
【請求項9】
軟磁性材料からなる鋼板の磁気特性を推定することをコンピュータに実行させるためのコンピュータプログラムであって、
前記鋼板における集合組織を構成する結晶粒の粒界の位置の情報と、前記結晶粒のそれぞれの方位の情報とを含む結晶粒情報を取得する結晶粒情報取得工程と、
前記鋼板を構成する材料の単結晶の、結晶座標系における磁化容易軸方向の、磁束密度と磁界との関係を示すB−H曲線を取得するB−H曲線取得工程と、
前記鋼板に外部から与える磁界の大きさと方向とを設定する磁界設定工程と、
前記鋼板の結晶粒に対して設定される結晶座標系において、複数の磁化容易軸のうち前記磁界設定工程により設定された磁界の方向に最も近い軸として当該磁界の方向の方向余弦が最も大きい軸を磁化容易軸として導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、当該鋼板の結晶粒のそれぞれについて行う磁化容易軸導出工程と、
磁束密度計算工程と、をコンピュータに実行させ、
前記磁束密度計算工程は、
前記磁界設定工程により設定された磁界の、前記磁化容易軸方向の成分を導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁界成分導出工程と、
前記磁界成分導出工程により導出された、磁界の前記磁化容易軸方向の成分に対応する、前記磁化容易軸方向における磁束密度を、前記B−H曲線から導出することを、前記結晶粒情報取得工程により取得された結晶粒情報に基づいて、前記鋼板における結晶粒のそれぞれについて行う磁化容易軸方向磁束密度導出工程と、
前記磁化容易軸方向磁束密度導出工程により導出された、前記結晶粒のそれぞれにおける、前記磁化容易軸方向における磁束密度に基づいて、前記鋼板における、前記磁界設定工程により設定された磁界の方向の磁束密度を導出する磁界方向磁束密度導出工程と、を有することを特徴とするコンピュータプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−173115(P2012−173115A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−34980(P2011−34980)
【出願日】平成23年2月21日(2011.2.21)
【出願人】(000006655)新日本製鐵株式会社 (6,474)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月21日(2011.2.21)
【出願人】(000006655)新日本製鐵株式会社 (6,474)
【Fターム(参考)】
[ Back to top ]