
磁気記録ディスクおよびディスクドライブ
【課題】位相型サーボパターンを用いるトラック識別を備える磁気記録ディスクおよびディスクドライブを提供する。
【解決手段】各トラックがトラックの中心線を有し、複数の同心の円形データトラックにデータを記録するための磁化可能な材料である記録層と、サーボセクタが、半径方向に向けられ周方向に離間した複数の山形パターンを有し、山形パターンの各々が半径方向に離間した固有の周期を有する複数の半径方向に離間した磁性化サーボアイランドを有し、複数のデータトラックにわたって半径方向に延在する複数の非データサーボセクタとを含む磁気記録ディスクであって、山形パターンの最も小さい周期が周期P1であり、かつ他の山形パターンの各々が、P1の固有の倍数である周期を有する。
【解決手段】各トラックがトラックの中心線を有し、複数の同心の円形データトラックにデータを記録するための磁化可能な材料である記録層と、サーボセクタが、半径方向に向けられ周方向に離間した複数の山形パターンを有し、山形パターンの各々が半径方向に離間した固有の周期を有する複数の半径方向に離間した磁性化サーボアイランドを有し、複数のデータトラックにわたって半径方向に延在する複数の非データサーボセクタとを含む磁気記録ディスクであって、山形パターンの最も小さい周期が周期P1であり、かつ他の山形パターンの各々が、P1の固有の倍数である周期を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般的に、各データビットがディスク上の磁気的に分離されたデータアイランドに格納されているパターン化された媒体ディスクを含む磁気記録ディスクに関し、より詳細にはヘッドの位置決め用にパターン化された位相型サーボパターンを備えるディスクおよびディスクドライブに関する。
【背景技術】
【0002】
従来の磁気記録ディスクドライブは、「連続」媒体を備えるディスクを使用する。これは、磁気記録層が磁化可能な材料の連続薄膜であることを意味する。従来の連続媒体ディスクでは、同心データトラックは互いに物理的に分離されておらず、記録層に予め形成されていなが、書き込みヘッドからの書き込み磁場が連続的な磁気層に磁化を発生させるときに、形成される。連続媒体ディスクをまた、「ディスクリートトラック」ディスクともし得る。これは、連続的な磁性材料の同心データトラックが、同心の非磁性のガードバンドによって互いに半径方向に分離されていることを意味する。
【0003】
データ密度を増大させるものとして、パターン化された磁気記録媒体を備える磁気記録ハードディスクドライブが提案されている。パターン化された媒体では、ディスク上の磁気記録層が、小さく分離されたデータアイランドにパターン化されて、各アイランドまたは「ビット」には単一の磁区があるようにする。単一の磁区は単一の粒子で構成してもよく、または単一の磁気領域として一斉に磁性状態を切り替える、強く結合した数個の粒子で構成してもよい。これは、単一の「ビット」が、磁区壁によって分離された複数の磁区を有し得る従来の連続媒体とは異なる。パターン化されたアイランドに必要な磁気分離をもたらすために、アイランド間の空間の磁気モーメントを、これらの空間を実質的に非磁性にするために、無効にするかまたは実質的に低減させる必要がある。あるいは、パターン化された媒体を、アイランド間の空間に磁性材料がないように作製し得る。
【0004】
従来のパターン化されていない、すなわち連続的な媒体ディスク、およびディスクリートトラックディスクのように、パターン化された媒体ディスクも、読み取り/書き込みヘッドの位置決めに使用される非データサーボ領域を有する。パターン化された媒体ディスクの非データサーボ領域は、非磁性空間によって分離された、パターン化されたディスクリートサーボブロックまたはアイランドを含む。サーボアイランドは、サーボ・リードバック信号を発生するサーボパターンを形成する。サーボ・リードバック信号は、読み取り/書き込みヘッドを所望のデータトラックに位置決めしかつそれをトラック上に維持するための位置誤差信号(PES:position error signal)に復調される。このタイプのディスクをフォーマットするために提案された方法は、製造中大きな磁石によってディスクをDC「消去」し、同じ方向に磁化されたサーボアイランドを全て残す。それゆえ、垂直磁気記録ディスクの場合、サーボアイランドの全てが、ディスクの表面「に向かう」またはそこ「から出る」のいずれかの磁化方向を有する。
【0005】
パターン化された媒体では、データセクタおよび非データサーボ領域をパターン化する。しかしながら、非データサーボ領域のみがパターン化された連続媒体ディスクを作製することも可能である。このタイプの連続媒体ディスクは、従来の同心データトラック、または非磁性のガードバンドによって分離されたディスクリートデータトラックのいずれかを有し得るが、非データサーボ領域はパターン化されている。パターン化されたサーボ領域を備えるディスクリートトラックディスクの例は(特許文献1)に記載されている。
【0006】
サーボパターンの1つのタイプは、「山形」パターンを形成するPESフィールドを備える位相型サーボパターンである。山形パターンは、データトラックに対して傾斜した、周方向に離間した第1の組のサーボアイランド、および第1の組の鏡像でありかつほぼ半径方向の対称中心線の周りで第1の組から周方向に離間した第2の組のサーボアイランドである。山形パターンの2つの組のサーボアイランドが読み取りヘッドを通るので、2つの正弦波リードバック信号が生成され、かつ2つの正弦波信号間の位相差が、最も近いトラックの中心線に対する、読み取りヘッドの半径方向位置に復調される。しかしながら、このタイプの従来の位相型サーボパターンはさらに別個のトラック識別(TID)フィールド、一般にグレーコードパターンを必要とし、そのグレーコードパターンは、読み取りヘッドの絶対位置を決定するために読み取られて復号される必要がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国特許第4,912,585号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
別個のTIDフィールドを必要とすることなく、読み取りヘッドの絶対位置を決定するために復調され得る、パターン化されたディスクリートサーボアイランドの山形サーボパターンを備える磁気記録ディスクおよびディスクドライブが必要とされている。
【課題を解決するための手段】
【0009】
本発明は、パターン化されたディスクリートサーボアイランドの複数の周方向に離間した山形パターンのサーボパターンを有する磁気記録ディスクに関する。本発明はまた、別個のTIDフィールドを必要とすることなく、サーボパターンを復号してヘッドの半径方向の絶対位置を決定するサーボエレクトロニクスを備えるディスクドライブにも関する。第1の山形パターン(好ましくはヘッドによって最初に読み取られるもの)は半径方向の周期P1を有し、他の山形パターンの各々は、P1の固有の倍数である周期を有する。好ましくは、第1の山形パターンは、最も小さい半径方向の周期P1を有するものであり、それぞれ次に続く山形パターンは、各山形パターンの周期が漸次的に増大するように、直前のパターンの周期よりも大きい周期を有する。周期P1は、好ましくはデータトラックの間隔またはトラックピッチTpの整数倍に等しく、好ましくは4Tpまたは2Tpである。一実施形態では、各山形パターンの周期は、固定整数に、直前の山形パターンの周期を掛けたものである。別の実施形態では、半径方向の周期P1を有する山形パターンを除いた山形パターンは全て、P1よりもわずかに大きいだけの周期を有する。この倍数は、好ましくは互いに素である2つの整数、すなわち、共通の因数を有しない2つの整数の比である倍数、例えば8/7である。さらに別の実施形態では、半径方向の周期P1を有する山形パターン以外の山形パターンはすべて、P1の固有の整数倍である周期を有する。これらの整数は、互いに素である、すなわち、共通の因数を有しない固有の整数である。
【0010】
本発明による、複数の周方向に離間した山形パターンを有するサーボパターンを備える磁気記録ディスクは、パターン化されたデータトラックおよびパターン化されたサーボ領域の双方を備えるパターン化された媒体ディスク、従来の連続媒体データトラックおよびパターン化されたサーボ領域を備える連続媒体ディスク、またはディスクリートデータトラックおよびパターン化されたサーボ領域を備える連続媒体ディスクとすることができる。
【0011】
本発明の性質および利点をより完全に理解するために、添付の図面と併せて以下の説明を参照されたい。
【図面の簡単な説明】
【0012】
【図1】非データサーボセクタおよび同期フィールドを備える磁気記録ディスクを示す従来の磁気記録ディスクドライブの概略図である。
【図2】ディスクの表面からみた読み取り/書き込みヘッドの端部およびデータトラックの一部を備えるディスクドライブスライダのディスク対向面を示す図である。
【図3】いくつかのデータトラックにまたがったパターン化されたsyncフィールドおよびパターン化されたサーボセクタを備えるパターン化された媒体ディスクの一部分、および2つの山形パターンで構成されたTIDフィールドおよびPESフィールドを示す。
【図4A】5つの山形パターンを備える本発明のサーボパターンの第1の実施形態を示し、各山形パターンの周期は、固定整数Nに、直前の山形パターンの周期を掛けたものである。
【図4B】図4Aのサーボパターンを半径方向に拡大したセクションを示す。
【図4C】図4Bに示すラインに沿ってヘッドが山形パターンを通過するときのリードバック信号の正弦波形を示す。
【図5】本発明のディスクドライブ用のサーボエレクトロニクスのブロック図である。
【図6A】図4Bに示す1つのラインに沿ってヘッドが5つの山形パターンを通過するときにヘッドによって生成されたリードバック信号を示す。
【図6B】本発明のディスクドライブ用の山形パターンの各々からリードバック信号の位相を検出するための位相検出器のブロック図である。
【図7】図4Aに示すサーボパターンの復号化方法のブロック図である。
【図8】5つの山形パターンを備える本発明のサーボパターンの第2の実施形態を示し、第1の山形パターンに続く山形パターンは全て、第1の山形パターンの周期よりもわずかに大きいだけの周期を有する。
【図9】図8に示すサーボパターンの復号化方法のブロック図である。
【図10】5つの山形パターンを備える本発明のサーボパターンの第3の実施形態を示し、第1の山形パターンに続く山形パターンは全て、第1の山形パターンの周期の整数倍である周期を有し、これらの整数は互いに素である。
【図11】図10に示すサーボパターンの復号化方法のブロック図である。
【発明を実施するための形態】
【0013】
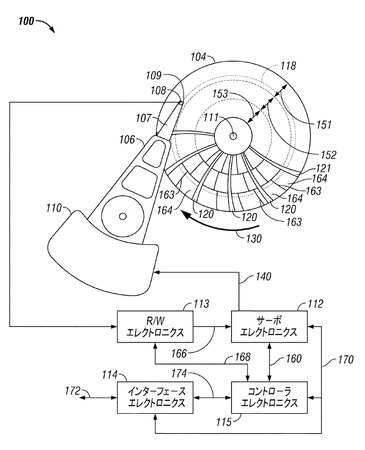
図1は、従来の磁気記録ディスクドライブの概略図であり、非データ領域を備える磁気記録ディスク、具体的には、データトラック上の記録ヘッドを位置決めするためのサーボセクタおよび記録ヘッドがデータセクタに対してデータを読み書きできるようにするための同期フィールドを示す。全体的に100で示すディスクドライブは、磁気記録ディスク104、ボイスコイルモータ(VCM)アクチュエータ110、アクチュエータアーム106、サスペンション107、ヘッドキャリアまたは空気軸受スライダ108および記録ヘッド109を含む。記録ヘッド109は一般に、誘導書き込みヘッドと磁気抵抗読み取りヘッドとの組み合わせ(読み取り/書き込みヘッドとも呼ばれる)であり、スライダ108のトレーリング端部または端面に配置されている。スライダ108は、サスペンション107によってアクチュエータアーム106に支持される。サスペンション107は、スライダが、ディスク104が矢印130の方向に回転するときにディスク104によって発生する空気軸受上で「縦揺れ」および「横揺れ」できるようにする。関連のスライダおよび記録ヘッドを備える1つのディスク表面のみを図1に示すが、一般に、スピンドルモータによって回転されるハブに複数のディスクが積み重ねられており、各ディスクの各表面は別個のスライダおよび記録ヘッドを有している。
【0014】
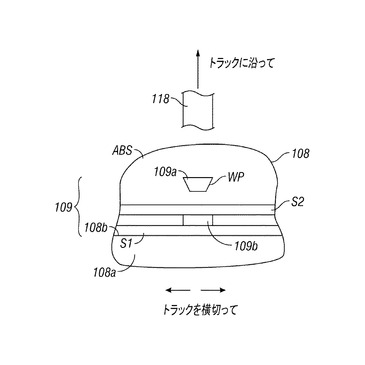
図2は、データトラック118の一部分と重ね合わせられたディスク104の表面からみたスライダ108のディスク対向面108aおよびヘッド109の端部を示す図である。ヘッド109は読み取り/書き込みヘッドであり、かつスライダ108の端面108b上に堆積されてリソグラフィーによりパターン化された一連の薄膜である。書き込みヘッド109aは、ディスク104上の記録層に対して垂直な磁化を記録する垂直磁気書き込み磁極WPを含む。書き込みヘッド109aはまた、トレーリングシールドおよび/またはサイドシールド(図示せず)を含み得る。読み取りヘッド109bを、2つの磁気シールドS1とS2との間に配置する。シールドS1、S2は透磁性材料で形成され、かつまた、読み取りヘッド109bへの導線として機能できるように導電性であってもよい。
【0015】
再び図1を参照すると、ディスク104は回転の中心111を有していて、130で示す方向に回転する。ディスク104は、半径方向に離間した同心データトラックを備える磁気記録層を有し、その同心データトラックの1つをトラック118として示す。各データトラックは、トラックの始まり部分を示す参照符号121を有する。ディスクドライブをゾーンビット記録(ZBR)ディスクドライブとして示す。なぜなら、データトラックが、多数の環状のデータバンドまたはゾーンに半径方向にグループ化されているためである(そのうちの3つを、ゾーン151、152および153として示す)。しかし、本発明を、ZBRを使用しないディスクドライブに適用することも十分でき、その場合ディスクドライブは単一のデータゾーンのみを有する。各ゾーン内で、トラックはまた、周方向において多数のデータセクタ(半径方向外側のデータゾーンにある典型的なデータセクタ164など)に分割される。各データセクタ164の前には同期(sync)フィールド(典型的なsyncフィールド163など)がある。syncフィールド163は、データセクタ164におけるデータビットの読み取りおよび書き込みの同期を可能にするために読み取りヘッドによって検出可能である。
【0016】
各データトラックはまた、複数の周方向にまたは角度的に離間したサーボセクタ120を含む。サーボセクタ120は、ヘッド109を所望のデータトラックに動かしてヘッド109をデータトラック上に維持するための、読み取りヘッドによって検出可能な位置情報を含む。各トラックのサーボセクタは、他のトラックのサーボセクタと周方向に整列されて、その結果、半径方向に向けられたサーボセクタ120で示すように、ほぼ半径方向にトラックを横断して延在する。サーボセクタ120はほぼ半径方向にほぼ弓形形状を有し、これは、一般的にヘッドが109ラジアルアクチュエータ110によってディスクを横切って移動するときの、ヘッド109の経路を再現する。サーボセクタ120はディスク上の非データ領域であり、この領域は、一般にディスクの製造またはフォーマット中に一度磁化され、ディスクドライブの通常動作中に消去されないものである。
【0017】
ディスクドライブ100に関連するエレクトロニクスは、読み取り/書き込み(R/W)エレクトロニクス113、サーボエレクトロニクス112、コントローラエレクトロニクス115およびインターフェースエレクトロニクス114を含む。ディスクドライブ100の動作では、R/Wエレクトロニクス113は、ヘッド109からの信号を受信し、かつサーボセクタ120からサーボエレクトロニクス112へサーボ情報を、およびデータセクタ164からコントローラエレクトロニクス115へデータ信号を送る。サーボエレクトロニクス112はサーボ情報を使用して140において電流を生成させ、この電流が、ヘッド109を位置決めするためにVCMアクチュエータ110を駆動する。インターフェースエレクトロニクス114はインターフェース172によってホストシステム(図示せず)と通信し、データおよびコマンド情報を送る。インターフェースエレクトロニクス114はまたインターフェース174によってコントローラエレクトロニクス115と通信する。ディスクドライブ100の動作では、インターフェースエレクトロニクス114はインターフェース172を介してデータセクタ164に対して読み取りまたは書き込みを行う要求を受信する。コントローラエレクトロニクス115は、インターフェースエレクトロニクス114から要求されたデータセクタのリストを受信し、それらを、ディスク表面、トラックおよびデータセクタを一意的に識別する一組の数字に変換する。それらの数字がサーボエレクトロニクス112に送られて、ヘッド109を適切なデータセクタに位置決めすることを可能にする。
【0018】
ディスクドライブが、「ヘッダーがない」アーキテクチャのディスクドライブである場合、すなわちデータセクタ164が、データセクタに対してデータの読み取りまたは書き込みを行う前に読み取られる必要がある固有のデータセクタアドレスを含まない場合、サーボエレクトロニクス112は、一度適切なデータトラック上にヘッド109を位置決めし、所望のデータセクタの位置を識別し配置するためにセクタ計算を実行し始める。要するに、ヘッダーがないアーキテクチャの手法では、サーボセクタ120の始まりにおけるサーボタイミングマーク(STM)を使用してサーボセクタの位置を突き止め、かつ参照符号121を含むサーボセクタからのSTMのカウント数が各サーボセクタを一義的に識別する。このようにして所望のデータセクタが識別されたら、データセクタから読み取られたデータビットまたはデータセクタに書き込まれるデータビットのタイミングを制御するために、そのデータセクタに先行するsyncフィールドが検出される。
【0019】
従来の磁気記録ディスクドライブは、「連続」媒体を備えるディスクを使用する。つまり、磁気記録層は、磁化可能な材料の連続的な薄膜である。従来の連続媒体ディスクでは、同心データトラックは互いに物理的に分離しておらず、記録層に予め形成されずに、書き込みヘッドからの書き込み磁界が連続的な磁気層に磁化を発生させるときに形成される。連続媒体ディスクをまた「ディスクリートトラック」ディスクともし得る。つまり、連続的な磁性材料の同心データトラックは互いに、同心の非磁性のガードバンドだけ半径方向に分離している。ディスクリートトラック磁気記録ディスクは、例えば特許文献1に記載されているように当該技術分野で公知である。ディスクリートトラックディスクでは、非磁性のガードバンドをトレンチまたは溝とすることができるか、または非磁性材料で形成し得るか、または磁性材料を含むが、データトラックからのリードバック信号に悪影響を与えないようにデータトラックの表面から十分下に離れた箇所に表面を有する。
【0020】
しかしながら、「パターン化された」媒体を備える磁気記録ディスクが、データ密度を高めるために提案されている。パターン化された媒体では、ディスク上の磁化可能な材料は、各アイランドに単一の磁区すなわち「ビット」があるように、分離された小さなアイランドにパターン化される。単一の磁区を単一の粒子とすることも、または単一の磁気領域として一斉に磁性状態を切り替える、強く結合した数個の粒子からなるようにすることもできる。これは、単一の「ビット」が複数の独立して切り替えられた磁性粒子、または非磁性の粒界によって分離された粒子を有し得る従来の連続媒体とは異なる。パターン化されたアイランドに必要な磁気分離を生じさせるために、アイランド間の空間の磁気モーメントを無効にするかまたは実質的に低減させて、これらの空間を実質的に非磁性にする必要がある。パターン化された媒体では、データセクタならびに非データ領域がパターン化される。しかしながら、非データ領域のみがパターン化される連続媒体ディスクを作製することも可能である。このタイプの連続媒体ディスクは、従来の同心データトラックか、または非磁性のガードバンドによって分離されるが非データ領域がパターン化されているディスクリートデータトラックを有し得る。パターン化されたサーボ領域を備えるディスクリートトラックディスクの例が特許文献1に記載されている。
【0021】
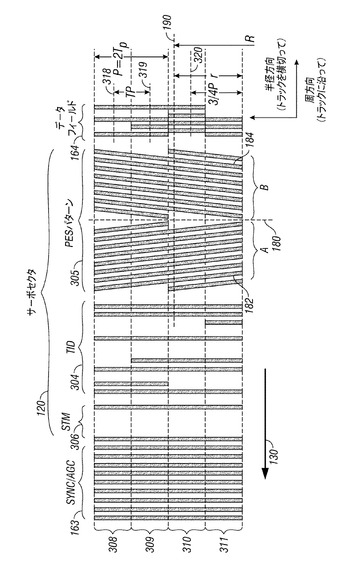
図3は、syncフィールド163、サーボセクタ120およびデータセクタ164の一部分を示すディスク104の一部分の概略図である。図3には、明確にするために、データトラックを4つのみ(トラック308、309、310および311)備える、非常に簡略化したパターンを示す。トラックは、トラック308の中心線318と、トラック309の中心線319との間の半径方向距離として示すトラックピッチTpを有する。サーボセクタ120はデータフィールド164に先行し、かつヘッドに対して矢印130で示す方向に移動する。媒体の2つの起こり得る磁性状態を黒白領域として示す。
【0022】
サーボセクタ120は、3つの異なるパターンで構成されている:サーボタイミングマーク(STM)フィールド306、トラック識別(TID)フィールド304および位置誤差信号(PES)パターン305である。STMフィールド306は、半径方向の全ての位置において同じである。STMパターンを、サーボパターンのどこにも発生せずかつデータ記録部に発生しないように選択する。STMを使用して、サーボセクタ120の始まりの位置を突き止める。TIDフィールド304はトラック数を含み、通常グレーコード化され、かつ記録された2ビットの有無として書き込まれる。TIDフィールド304は、ヘッドの半径方向位置の整数部を決定する。
【0023】
位置誤差信号(PES)パターン305は従来の位相型山形サーボパターンである。山形パターンは、サーボアイランドの2つのフィールドすなわちセットA、Bで構成されており、セットBは、半径方向の対称中心線180を中心としたセットAの鏡像である。各セットは、複数のデータトラックにわたって、すなわち、ディスク全体(またはゾーン全体)にわたってほぼ半径方向に延在する。アイランドのセットは、ディスクにわたってほぼ半径方向に延在し、好ましくは、一般的にヘッドがラジアルアクチュエータによってディスクにわたって移動するときに、ヘッドの経路を再現する弓形形状を有する(図1のサーボセクタ120で示すように)。
【0024】
各セットA、Bは、半径方向に離間した複数のディスクリートサーボアイランドである。各サーボアイランドは、セットAの典型的なアイランド182およびセットBの184のように、長さ方向がトラックに沿った方向に対して鋭角に傾斜または向けられたほぼ平行四辺形である。セットAのアイランドは、トラックの中心線に対して鋭角で同じ方向に傾斜し、かつセットBのアイランドは、同じ鋭角で反対方向に傾斜している。図3の例ではセットAのアイランドは、半径方向において負の方向(ディスクの内径に向かって)傾斜し、セットBのアイランドは、半径方向において正の方向に傾斜しているが、2つのセットのアイランドを反対方向に傾斜させることもできる。2つのアイランドの形状は合同の平行四辺形であるが、それらは周方向において反対の向きに配置される。線対称は、トラックの中心線に対して垂直な半径方向の線180であるので、セットBのパターンは、線180を中心としてセットAのパターンの鏡像である。図3の例では、パターンが繰り返される半径方向距離として定義される山形パターンの周期Pは2Tpに等しいが、周期Pを、Tpの別の倍数、例えば4Tpとして選択することもできる。
【0025】
当該技術分野で周知のように、位相型山形パターンのサーボシステムでは、PESを、基準周波数に対する山形パターンからのリードバック信号の位相を測定することによって判断する。セットAからのリードバック信号の位相は半径方向に増大する一方、セットBからのリードバック信号の位相は半径方向に低減する。それゆえ、位相差は、山形パターンの周期の半分(P/2)と等しい距離となった後に再びゼロに戻る前に徐々に半径方向で増大する。測定した位相差はPESであるため、山形パターンの一周期P内のヘッドの相対位置に直接関係する。しかしながら、ヘッドに最も近いデータトラックを識別して、ヘッドの半径方向の絶対位置を決定できるようにするために、TIDが必要とされる。例えば、ヘッドが図3のライン190に置かれる場合、TIDフィールド304からの信号を復号して、ヘッドをトラック310内に配置してトラック310の中心線320の半径方向位置に配置することを決定する。山形パターン305からの信号を復号し、測定された位相差を得て、山形パターンの一周期内の半径方向の相対距離rを判断する。中心線320は山形パターンの一周期内の(3/4)Pに配置されているので、この例では、ライン190のヘッドの半径方向の絶対位置Rは、中心線320の半径方向位置+[r−(3/4)P]である。
【0026】
本発明のディスクドライブは、複数の周方向に離間した山形パターンを含む位相型PESパターンと、パターンを復号してヘッドの半径方向の絶対位置を判断するサーボエレクトロニクスとを有する。それゆえ、TIDフィールドおよび関連の復号エレクトロニクスは必要ではない。第1の山形パターン(好ましくはヘッドによって最初に読み取られるもの)は、半径方向の周期P1を有し、かつ他方の山形パターンの各々は、P1の固有の倍数である周期を有する。好ましくは、連続的な各山形パターンは、その直前のパターンの周期よりも大きな周期を有するので、各山形パターンの周期は漸次的に増大する。
【0027】
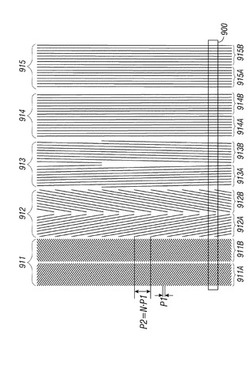
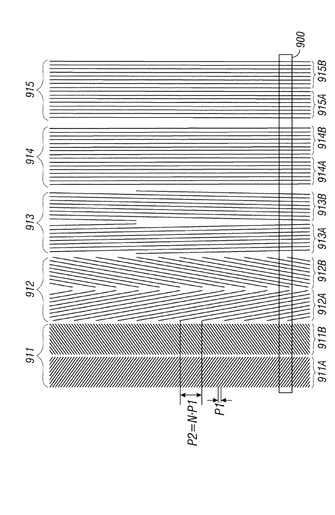
図4Aに、本発明によるPESパターンの第1の実施形態を示す。5つの山形パターン911、912、913、914および915があり、それぞれがフィールドすなわちセットAおよびB(山形パターン911のセット911Aおよび911Bのように)を備える。各山形パターンのセットAおよびBは、2つのセット間の半径方向の線(図3の半径方向の線180のような)を中心として互いに鏡像である。5つの山形パターン911〜915は、図3の先行技術のPESパターン305として機能し、かつ図3の先行技術では必要とされるTIDフィールド304を別に有する必要性をなくす。第1の山形パターン911を、96周期に及ぶ半径方向の周期P1で示す。周期P1は、好ましくはTpの整数倍に等しく、好ましくは4Tpまたは2Tpである。各山形パターンの周期は、固定整数Nに、その直前の山形パターンの周期を掛けたものであり、この例ではN=8である。それゆえ山形パターン912、913、914および915は、P1の固有の整数倍であり、具体的には山形パターン911の周期P1よりも8、64、512および4096倍大きい周期を有する。それゆえ、図4Aの実施形態の一般的な場合を、第1の山形パターン以外の山形パターンの各々の周期が周期Pj=P1*N(j−1)(式中、Nは整数であり、およびjは2以上であり、かつ山形パターンの数である)で説明できる。
【0028】
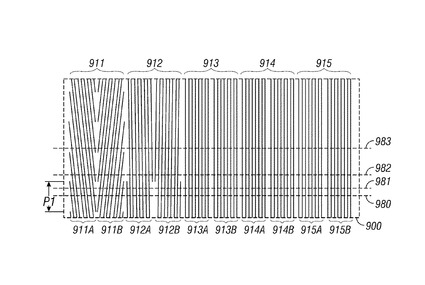
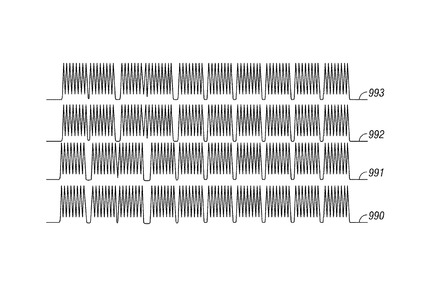
図4Bに、図4Aのセクション900を半径方向に拡張したものを示す。このセクション900は、第1の山形パターン911の4つの周期P1よりもわずかに長く延在する。図4Cに、ヘッドがそれぞれ図4Bのライン980〜983に沿って山形パターン911〜915を通り過ぎるときのリードバック信号の正弦波形990〜993を示す。
【0029】
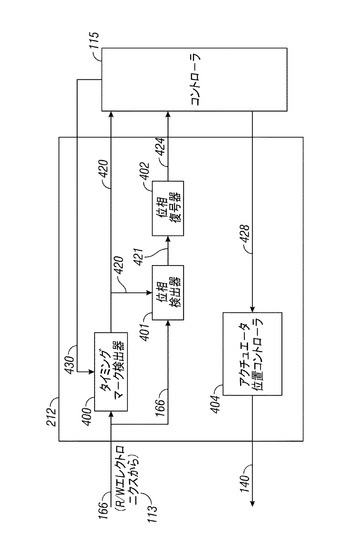
図5は、本発明のディスクドライブ用のサーボエレクトロニクス212のブロック図である。動作時、コントローラエレクトロニクス115はアクチュエータ位置コントローラ404に入力428を与え、次いでそれがアクチュエータに信号140を与えて、ヘッドを位置決めする。コントローラエレクトロニクス115は、サーボセクタによって読み取られたサーボ情報を使用して、アクチュエータ位置コントローラ404への入力428を決定する。サーボ情報は読み取り/書き込みエレクトロニクス113(図1)によって読み取られ、信号166がサーボエレクトロニクス212に入力される。サーボタイミングマーク(STM)検出器400が、読み取り/書き込みエレクトロニクス113からの入力としてリードバック信号サンプル値166のストリームとコントローラエレクトロニクス115からの制御入力430とを受信する。タイミングマークが検出されたらゲート信号420が生成される。このゲート信号420を使用して複数の山形パターン911〜915における位相測定のシーケンス(sequence)を制御する。
【0030】
タイミングマークの検出後、位相検出器401がリードバック信号値166を分析し、その後、測定された位相値421を位相復号器402に送る。位相復号器はこれらの位相測定値をヘッド位置の推定値424に変換する。ヘッド位置値424は、ヘッドの半径方向の絶対位置であり、PESの一部で構成され、データトラック内のヘッドの相対位置およびデータトラックの半径方向位置に対応する。
【0031】
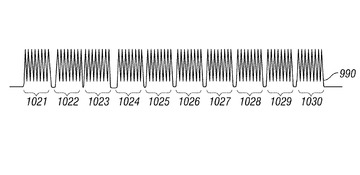
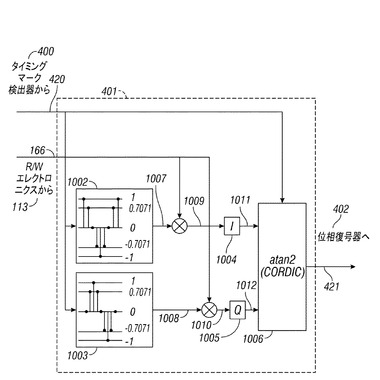
図6Aは、ヘッドが図4Bのライン980に沿って5つの山形パターン911〜915を通り過ぎるときにヘッドによって生成されるリードバック信号990であり、図6Bは、山形パターン911〜915のセットA、Bのそれぞれからのリードバック信号の位相を検出するための位相検出器401のブロック図である。このリードバック信号990を、5つの山形パターン911〜915のセットA、Bからの正弦波信号を示す10個のバンド1021〜1030にさらに分割する。隣接するバンド1021〜1030は、狭いガードバンドによって分離されている。位相検出器401は、基準周波数に対するこれら10個の正弦波信号の各々の位相を測定する。サンプルされたリードバック信号166に、それぞれ回路1002および1003で発生された、局所的に発生したコサイン(余弦)1007およびサイン(正弦)1008参照シーケンスを乗じる。局所的に発生したコサイン1007およびサイン1008シーケンスは、正弦波リードバック信号1021〜1030の周波数と非常に近い周波数を有する。
【0032】
コサイン加重信号値1009は、同相(I)レジスタ1004に蓄積される一方、サイン加重信号値1010は、直角位相(Q)レジスタ1005に蓄積される。10個のバンドそれぞれに対して、測定された位相角度θを、θ=atan2(Q,I)(式中、atan2は周知の2パラメータの逆正接関数である)として計算する。atan2計算は、CORDIC再帰アルゴリズムを用いてハードウェアにおいて効率的に計算される(CORDICは、座標回転デジタルコンピュータ(COordinate Rotation DIgital Computer)の略であり、双曲線関数および三角関数を計算するための周知の単純で効率的なアルゴリズムである)。10個のバンド1021〜1030に対応する10個の測定された位相値のシーケンスは、位相復号器402への出力である。コサイン1007およびサイン1008参照シーケンスの発生、レジスタ1004および1005のリセットおよびラッチ、ならびに位相値の計算は全て、タイミングマーク検出器400からのゲート信号420によってトリガされた固定シーケンスによって実行される。
【0033】
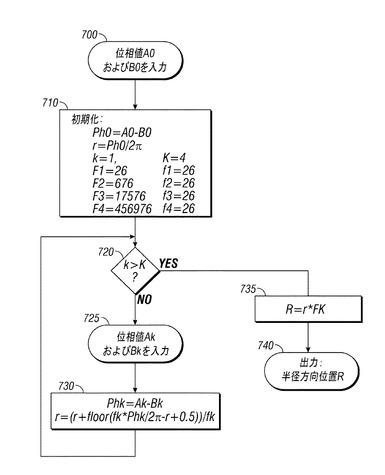
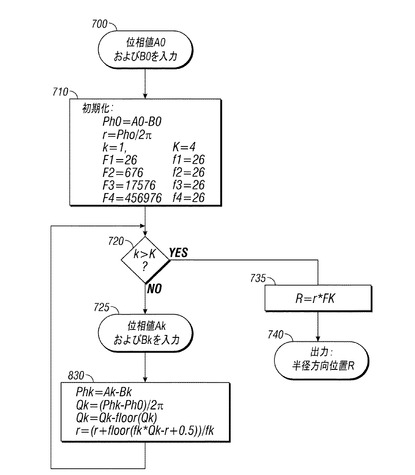
各山形パターンの周期が直前の山形パターンの周期の整数倍N(図4Aの例ではN=8)と同じである複数の山形パターン911〜915は、本願明細書ではクロノメータのアナログダイヤルに例えて「時計の針(hands−of−the−clock)」パターンと称す。図7は、時計の針パターンの復号方法を示すブロック図である。この例では、各パターンの周期が直前のパターンの26倍(N=26)である合計5つの山形パターンがある。パターン全体が約50万個のトラック後に繰り返す。この説明では、全ての角度はラジアンで定められると考えられ、公称トラックピッチTpは第1の山形パターン(P1=2Tp)の周期の半分に等しい。
【0034】
第1の山形パターン911が検出され、2つの位相値A0およびB0が位相検出器401で測定されて位相復号器402に入力される(ブロック700)。ブロック710では、第1の位相差Ph0を計算する。第1の位相差Ph0は、ヘッドがディスクの半径方向にわたって移動するときに最も迅速に進む。時計の針との類似性では第1の位相差は秒針に対応する。位相差Ph0を、2πで割ることによってゼロと1との間の値に変換する。パターンカウンタkを値1に設定し、最大パターン数Kを、第1の山形パターン後の山形パターンの数に対応する4に設定する。相対的および絶対的なパターン周期f1〜f4およびF1〜F4がそれぞれ初期化される。各相対周期f1〜f4は値Nを有し、F1〜F4は、第1の山形パターン911後の4つの山形パターン912〜915の周期P2〜P5に対応する。第1の位相差Ph0の計算後、ヘッドのトラックからわずかに(fractional)外れた位置は分かるが、ヘッドが配置されているトラックは分からない。
【0035】
復号化は、kがKを超えるまで反復して続く(ブロック720)、すなわち、復号化は5つの山形パターン全てが読み取られると終わる。各反復では、次の2つの位相値AkおよびBkが入力される(ブロック725)。各反復後、トラックの段々大きくなるバンドを法とした(modulo)ヘッドの半径方向位置を知る。例えば、第1の反復の最後では(k=1)、すなわち、第2の山形パターン912が読み取られた後、山形パターン912の26個のトラックのバンド内にヘッド位置があることは分かるが、26個のトラックのどのバンドにヘッドが配置されているかは分からない。同様に、第2の反復の最後では(k=2)、すなわち、第3の山形パターン913が読み取られた後、山形パターン913の676個のトラックのバンド内にヘッド位置があることが分かるが、676個のトラックのどのバンドにヘッドが配置されているかは分からない。
【0036】
各反復(ブロック730)では、新しい位相差Phkを計算する。位相差は、既知のわずかにずれた(fractional)位置に対して補正される。残りの位相差は、この現パターンが最後に巡ってきたものであるため、何個のパターンがこれまでに巡ってきたかに対応する。各反復の最後において、rは次の反復で予期される小数値と等しい。ブロック730および735の演算を以下説明する。
a)値H1は、位相差にfkを掛けてから2πで割ったものに等しいとして計算される:
H1=fk*Phk/2π
b)値H2は、H1からrを引いて0.5を足したものに等しいとして計算される:
H2=H1−r+0.5
c)値H3は、H2を、H2以下の最大の整数値に切り下げたものに等しいとして計算される:
H3=floor(H2)
d)値H4は、H3にrを足したものに等しいとして計算される:
H4=r+H3
e)rの新しい値は、H4をfkで割ったものに等しいとして計算される:
r=H4/fk
【0037】
最終反復後、rは、位相山形の全セットの総周期の何分の1かの値(fractional)として示されるヘッドの半径方向位置と等しい。ブロック735では、トラックの半径方向位置Rを、rとFKとの積として計算する。次いで、Rの値を、コントローラ115(図5)に出力424として出力する(ブロック740)。
【0038】
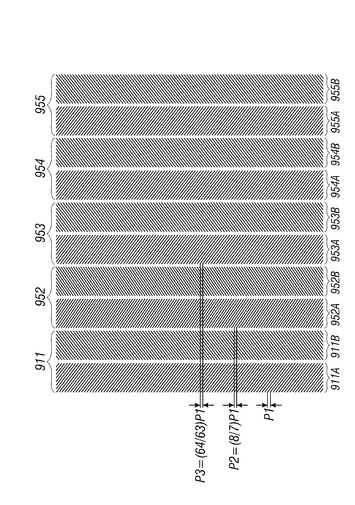
図8にサーボパターンの第2の実施形態を示す。この実施形態は、調和駆動ギヤボックス(harmonic drive gearbox)にたとえて第1の実施形態の「調和」の変形形態とみなされ得る。5つの山形パターン911、952、953、954および955があり、それぞれがフィールドすなわちセットAおよびBを備え(山形パターン911のセット911Aおよび911Bのように)、第1の山形パターン911の96の周期にまたがって示されている。第1の山形パターン911は、図4Aに示した第1の実施形態の第1の山形パターン911と同一である。しかしながら、それに続く山形パターン952〜955は全て、第1の山形パターン911の周期P1よりもわずかに大きいだけの周期を有する。パターン952の位相差は、パターン911の位相差よりもわずかにゆっくりと増大する。パターン952の位相差とパターン911の位相差との間の位相の相違は、最終的にパターン952の位相差がパターン911の位相差に完全に1サイクル遅れるまで徐々に増大し、そこで2つのパターンの位相差は再び等しくなる。この例では、パターン952の周期P2は(8/7)P1であり、これらの整数8および7は互いに素である。すなわち、各整数は共通の因数を有しない。この例では、パターン952〜955は、パターン911の周期P1よりもそれぞれ8/7、64/63、512/511および4096/4095倍大きい周期を有する。それゆえ、パターン952、953、954および955は、それぞれ8、64、512および4096トラック毎にパターン911の位相に戻る。このサーボパターンの利点は、個々の山形パターンの周期がほぼ正確に同じであることである。それゆえ、図8の実施形態に一般的な場合を、第1の山形パターン以外の山形パターンの各々の周期は、P1に、共通の因数を有しない2つの整数の比を掛けたものであると説明できる。図8の具体例では、第1の山形パターン以外の山形パターンの各々は周期Pj=P1*[(N(j−1)/(N(j−1)−1)](式中、Nは整数であり、およびjは2以上であり、かつ山形パターンの数である)を有する。
【0039】
図9は、図8に示したタイプのサーボパターンの復号化方法を示すブロック図である。この方法は、ブロック730に代わるブロック830に示す計算を除いては、図4Aのサーボパターンの復号化のための図7の方法と同一である。ブロック830では、各反復において、山形パターンPhkの位相差と第1のパターンPh0の位相差との間の相違Qkを計算する。計算は、位相差自体ではなくこの位相の相違Qkを用いて、これまでのように続く。
【0040】
各反復では、新しい対の位相値が読み取られ(ブロック725)、多数の計算が実行される。ブロック830および735におけるこれらの計算の演算を以下説明する。
a)値Phkは、測定された位相値AkとBkとの差である:
Phk=Ak−Bk
b)値J1は、位相差Phkと位相差Ph0との差として計算される:
J1=Phk−Ph0
c)値J2は、値J1を2πで割ったものとして計算される:
J2=J1/2π
d)位相の相違Qkは、値J2と、J2以下の最大整数値の値との差として計算される:
Qk=J2−floor(J2)
e)値H1は、位相差にfkを掛けたものに等しいとして計算される:
H1=fk*Qk
f)値H2は、H1からrを引いて0.5を足したものに等しいとして計算される:
H2=H1−r+0.5
g)値H3は、H2を、H2以下の最大整数値に切り下げたものに等しいとして計算される:
H3=floor(H2)
h)値H4は、H3にrを足したものに等しいとして計算される:
H4=r+H3
i)新しいrの値は、H4をfkで割ったものに等しいとして計算される:
r=H4/fk
【0041】
全てのデータが読み取られ処理されたら、ブロック735において、トラックの位置Rがrと最終的なトラック範囲FKとの積をとることによって計算される。次いでRの値が、出力424としてコントローラ115(図5)に出力される(ブロック740)。
【0042】
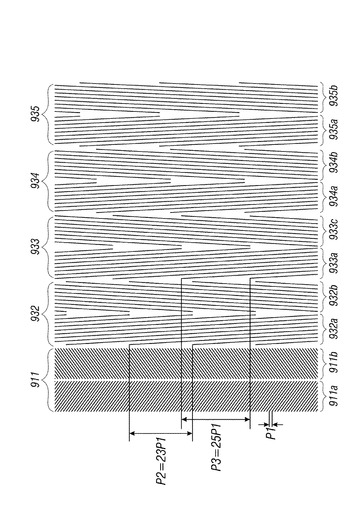
図10に、サーボパターンの第3の実施形態を示す。5つの山形パターン911、932、933、934および935があり、それぞれ、フィールドすなわちセットAおよびB(山形パターン911のセット911Aおよび911Bのように)を有し、第1の山形パターン911の96の周期にまたがって示す。第1の山形パターン911は、図4Aに示す第1の実施形態の第1の山形パターン911と同一である。しかしながら、それに続く山形パターン932〜935は全て、第1の山形パターンの周期P1の固有の整数倍である周期を有し、これら整数は互いに素である。すなわち、これらの固有の整数は共通の因数を有しない。この例では、山形パターン932〜935は、山形パターン911の周期P1のそれぞれ23、25、27および29倍の周期を有する。
【0043】
第1の山形911の位相差に対してパターン932〜935の位相差を復号化することによって、互いに素の整数のセットを法としたとするトラック数を計算する。孫子の中国の剰余定理から、この情報からトラック数を再構築することが可能である。この「中国の剰余定理」のサーボパターンの利点は、山形パターン932〜935の周期が比較的類似していることである。非常に長いパターンを有する山形パターンがない。
【0044】
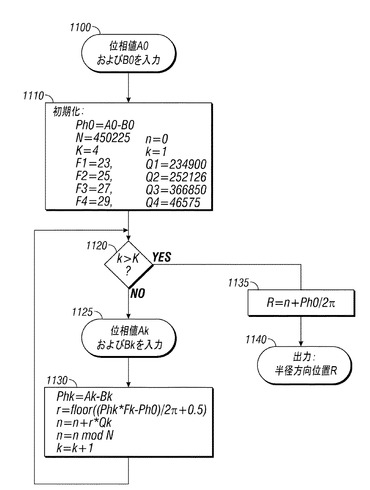
図11は、図10のサーボパターンの復号化方法を示すブロック図である。第1の山形パターン911を検出し、2つの位相値A0およびB0が位相検出器401において測定されて位相復号器402に入力される(ブロック1100)。ブロック1110では、第1の位相差Ph0が計算され、および絶対的なパターン周期F1〜F4および値Q1〜Q4が初期化される。
【0045】
値Q1〜Q4は、Fnを法としたQnの余りは1に等しいが、Fnを除いたFkの値の全てに関しFkはQnを割り切ることができるという特性を有する。例えば、図11に示す例でQ1を考える:Q1=234900=10213*23+1であるため、F1を法としたQ1の余りは1である。加えて、Q1=234900=9396*25=8700*27=8100*29であるため、F2、F3、およびF4は全てQ1を割り切ることができる。同様に、Q2=252126=10962*23=10085*25+1=9338*27=8694*29などである。
【0046】
互いに素の数のいずれかのセットFnに関し、必要な特性を有する唯一のセットの数Qnを見つけることができる。ほとんどの場合、数Fnの各々を法としたであるN未満の全ての正の整数を網羅的に検索することが現実的である。この例では1〜450225の間の全数が調べられ、かつ23、25、27および29を法とした余りを計算する。その場合、Q1を、23を法としたときの余りが1および25、27および29を法としたときの余りが0である数として選択する。Q2を、25を法としたときの余りが1および23、27および29を法としたときの余りが0である数として選択する。Q3を、27を法としたときの余りが1および23、25および29を法としたときの余りが0である数として選択する。最後に、Q4を、29を法としたときの余りが1および23、25および27を法としたときの余りが0である数として選択する。
【0047】
値Qnをより効率的に見つけるために、拡張したユークリッドの互除法も使用することができる。対の数aおよびbを仮定すると、拡張したユークリッドの互除法は、ax+byがaとbの共通の最大除数と等しくなるようにxおよびyを生じる。拡張したユークリッドの互除法の再帰式を以下に完全性のために示す:
a)aがbで割り切れる場合、アルゴリズムは終了し、自明な解x=0、y=1に戻る。
b)そうでなければ、bおよびbを法とするaでアルゴリズムを繰り返し、x'およびy'として解を記憶する。
c)次いで、現在の式の解はx=y'、およびy=x'−y'×(aをbで割った商)となる。
【0048】
例えば、Q1を、以下のように、拡張したユークリッドの互除法の再帰式を使用して計算できる。a=F2*F3*F4=19575およびb=F1=23の場合、再帰的な拡張したユークリッドの互除法は以下の通り進み、ここで、divおよびmodは、それぞれ周知の整数の除算および除算後の法である:
a)a0=19575、b0=23。
b)23では19575を割り切れないため、セットa1=b0=23、セットb1=mod(a0,b0)=2である。
c)2では23を割り切れないため、セットa2=2、セットb2=mod(a1,b1)=1である。
d)ここで、1で2を割り切れるため、セットx2=0、セットy2=1。
e)その後も同様に、セットx1=y2=1、セットy1=x2−y2*div(a1,b1)=0−1*11=−11。
f)x0=y1=−11およびy0=x1−y1*div(a0,b0)=1−(−11)*851=9362に戻る。
【0049】
ここで恒等式(−11)*19575+9362*23=1が得られた(F1〜F4が互いに素であるためaおよびbの共通の最大除数は1である)。xが正の値およびyが負の値である解が必要であり、従って、a*b=F1*F2*F3*F4を足したり引いたりすることにより等価の解(23−11)*19575+(9362−19575)*23=1が得られる。セットQ1=(23−11)*19575=234900。F2*F3*F4はQ1の因数であるため、F2、F3およびF4を法としたQ1の余りが、必要に応じていずれの場合もゼロであることが分かる。Q1−10213*F1=1であるため、F1を法としたQ1の余りが、必要に応じて1であることが分かる。
【0050】
各反復で、新しい対の位相値が読み取られ(ブロック1125)、多数の計算が実行される。ブロック1130および1135のこれらの計算の演算を以下に説明する。
a)値Phkは、測定された位相値AkとBkとの差である:
Phk=Ak−Bk
b)値J1は、位相差Phkと周期Fkとの積であると計算される:
J1=Phk*Fk
c)値J2はJ1と位相差Ph0との差であると計算される:
J2=J1−Ph0
d)値J3は、値J2を2πで割って0.5を足したものと計算される:
J3=J2/2π+0.5
e)値rは、J3を、J3以下の最大整数値まで切り下げたものに等しいと計算される:
r=floor(J3)
f)値J4は、値nに、rとQkとの積を足したものに等しいと計算される:
J4=n+r*Qk
g)nの新しい値は、Nを法としたJ4の余りに等しいと計算される:
n=J4 mod N
h)カウンタkを増分する:
k=k+1
【0051】
データが読み取られ、処理されると、トラックのわずかなずれPh0/2πをトラック数nに足すことによって、トラックの位置Rが計算される(ブロック1135)。次いでRの値が、出力424としてコントローラ115(図5)に出力される(ブロック1140)。
【0052】
本発明に従って上で説明したような、ディスクリートサーボアイランドの山形パターンを有するパターン化されたサーボセクタは、好ましくはパターン化された媒体ディスクで使用できる。しかしながら、本発明はパターン化された媒体ディスクに限定されず、従来の連続媒体データトラックおよびパターン化されたサーボセクタを備える連続媒体ディスク、ならびに非磁性のガードバンドおよびパターン化されたサーボセクタによって分離されたディスクリートデータトラックを備える連続媒体ディスクにも適用できる。
【0053】
本発明を、特に、好ましい実施形態を参照して示し、かつ説明したが、本発明の趣旨および範囲を逸脱することなく、形態および詳細に対して様々な変更をなすことができることは当業者に理解されるであろう。従って、上述の発明は、単に例示にすぎず、その範囲の限界は、添付の特許請求の範囲において規定されるとみなされるべきである。
【符号の説明】
【0054】
100 ディスクドライブ
104 磁気記録ディスク
106 アクチュエータアーム
107 サスペンション
108 空気軸受スライダ
108a ディスク対向面
108b スライダの端面
109 記録ヘッド
109a 書き込みヘッド
109b 読み取りヘッド
110 ボイスコイルモータアクチュエータ
112 サーボエレクトロニクス
113 読み取り/書き込みエレクトロニクス
114 インターフェースエレクトロニクス
115 コントローラエレクトロニクス
118 データトラック
120 サーボセクタ
121 トラックの始まり部分
151、152、153 ゾーン
163 syncフィールド
164 データセクタ
172、174 インターフェース
212 サーボエレクトロニクス
304 トラック識別フィールド
305 位置誤差信号パターン
306 サーボタイミングマークフィールド
308、309、310、311 トラック
400 サーボタイミングマーク検出器
401 位相検出器
402 位相復号器
404 アクチュエータ位置コントローラ
1004、1005 レジスタ
1021〜1030 バンド
S1、S2 磁気シールド
【技術分野】
【0001】
本発明は、一般的に、各データビットがディスク上の磁気的に分離されたデータアイランドに格納されているパターン化された媒体ディスクを含む磁気記録ディスクに関し、より詳細にはヘッドの位置決め用にパターン化された位相型サーボパターンを備えるディスクおよびディスクドライブに関する。
【背景技術】
【0002】
従来の磁気記録ディスクドライブは、「連続」媒体を備えるディスクを使用する。これは、磁気記録層が磁化可能な材料の連続薄膜であることを意味する。従来の連続媒体ディスクでは、同心データトラックは互いに物理的に分離されておらず、記録層に予め形成されていなが、書き込みヘッドからの書き込み磁場が連続的な磁気層に磁化を発生させるときに、形成される。連続媒体ディスクをまた、「ディスクリートトラック」ディスクともし得る。これは、連続的な磁性材料の同心データトラックが、同心の非磁性のガードバンドによって互いに半径方向に分離されていることを意味する。
【0003】
データ密度を増大させるものとして、パターン化された磁気記録媒体を備える磁気記録ハードディスクドライブが提案されている。パターン化された媒体では、ディスク上の磁気記録層が、小さく分離されたデータアイランドにパターン化されて、各アイランドまたは「ビット」には単一の磁区があるようにする。単一の磁区は単一の粒子で構成してもよく、または単一の磁気領域として一斉に磁性状態を切り替える、強く結合した数個の粒子で構成してもよい。これは、単一の「ビット」が、磁区壁によって分離された複数の磁区を有し得る従来の連続媒体とは異なる。パターン化されたアイランドに必要な磁気分離をもたらすために、アイランド間の空間の磁気モーメントを、これらの空間を実質的に非磁性にするために、無効にするかまたは実質的に低減させる必要がある。あるいは、パターン化された媒体を、アイランド間の空間に磁性材料がないように作製し得る。
【0004】
従来のパターン化されていない、すなわち連続的な媒体ディスク、およびディスクリートトラックディスクのように、パターン化された媒体ディスクも、読み取り/書き込みヘッドの位置決めに使用される非データサーボ領域を有する。パターン化された媒体ディスクの非データサーボ領域は、非磁性空間によって分離された、パターン化されたディスクリートサーボブロックまたはアイランドを含む。サーボアイランドは、サーボ・リードバック信号を発生するサーボパターンを形成する。サーボ・リードバック信号は、読み取り/書き込みヘッドを所望のデータトラックに位置決めしかつそれをトラック上に維持するための位置誤差信号(PES:position error signal)に復調される。このタイプのディスクをフォーマットするために提案された方法は、製造中大きな磁石によってディスクをDC「消去」し、同じ方向に磁化されたサーボアイランドを全て残す。それゆえ、垂直磁気記録ディスクの場合、サーボアイランドの全てが、ディスクの表面「に向かう」またはそこ「から出る」のいずれかの磁化方向を有する。
【0005】
パターン化された媒体では、データセクタおよび非データサーボ領域をパターン化する。しかしながら、非データサーボ領域のみがパターン化された連続媒体ディスクを作製することも可能である。このタイプの連続媒体ディスクは、従来の同心データトラック、または非磁性のガードバンドによって分離されたディスクリートデータトラックのいずれかを有し得るが、非データサーボ領域はパターン化されている。パターン化されたサーボ領域を備えるディスクリートトラックディスクの例は(特許文献1)に記載されている。
【0006】
サーボパターンの1つのタイプは、「山形」パターンを形成するPESフィールドを備える位相型サーボパターンである。山形パターンは、データトラックに対して傾斜した、周方向に離間した第1の組のサーボアイランド、および第1の組の鏡像でありかつほぼ半径方向の対称中心線の周りで第1の組から周方向に離間した第2の組のサーボアイランドである。山形パターンの2つの組のサーボアイランドが読み取りヘッドを通るので、2つの正弦波リードバック信号が生成され、かつ2つの正弦波信号間の位相差が、最も近いトラックの中心線に対する、読み取りヘッドの半径方向位置に復調される。しかしながら、このタイプの従来の位相型サーボパターンはさらに別個のトラック識別(TID)フィールド、一般にグレーコードパターンを必要とし、そのグレーコードパターンは、読み取りヘッドの絶対位置を決定するために読み取られて復号される必要がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国特許第4,912,585号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
別個のTIDフィールドを必要とすることなく、読み取りヘッドの絶対位置を決定するために復調され得る、パターン化されたディスクリートサーボアイランドの山形サーボパターンを備える磁気記録ディスクおよびディスクドライブが必要とされている。
【課題を解決するための手段】
【0009】
本発明は、パターン化されたディスクリートサーボアイランドの複数の周方向に離間した山形パターンのサーボパターンを有する磁気記録ディスクに関する。本発明はまた、別個のTIDフィールドを必要とすることなく、サーボパターンを復号してヘッドの半径方向の絶対位置を決定するサーボエレクトロニクスを備えるディスクドライブにも関する。第1の山形パターン(好ましくはヘッドによって最初に読み取られるもの)は半径方向の周期P1を有し、他の山形パターンの各々は、P1の固有の倍数である周期を有する。好ましくは、第1の山形パターンは、最も小さい半径方向の周期P1を有するものであり、それぞれ次に続く山形パターンは、各山形パターンの周期が漸次的に増大するように、直前のパターンの周期よりも大きい周期を有する。周期P1は、好ましくはデータトラックの間隔またはトラックピッチTpの整数倍に等しく、好ましくは4Tpまたは2Tpである。一実施形態では、各山形パターンの周期は、固定整数に、直前の山形パターンの周期を掛けたものである。別の実施形態では、半径方向の周期P1を有する山形パターンを除いた山形パターンは全て、P1よりもわずかに大きいだけの周期を有する。この倍数は、好ましくは互いに素である2つの整数、すなわち、共通の因数を有しない2つの整数の比である倍数、例えば8/7である。さらに別の実施形態では、半径方向の周期P1を有する山形パターン以外の山形パターンはすべて、P1の固有の整数倍である周期を有する。これらの整数は、互いに素である、すなわち、共通の因数を有しない固有の整数である。
【0010】
本発明による、複数の周方向に離間した山形パターンを有するサーボパターンを備える磁気記録ディスクは、パターン化されたデータトラックおよびパターン化されたサーボ領域の双方を備えるパターン化された媒体ディスク、従来の連続媒体データトラックおよびパターン化されたサーボ領域を備える連続媒体ディスク、またはディスクリートデータトラックおよびパターン化されたサーボ領域を備える連続媒体ディスクとすることができる。
【0011】
本発明の性質および利点をより完全に理解するために、添付の図面と併せて以下の説明を参照されたい。
【図面の簡単な説明】
【0012】
【図1】非データサーボセクタおよび同期フィールドを備える磁気記録ディスクを示す従来の磁気記録ディスクドライブの概略図である。
【図2】ディスクの表面からみた読み取り/書き込みヘッドの端部およびデータトラックの一部を備えるディスクドライブスライダのディスク対向面を示す図である。
【図3】いくつかのデータトラックにまたがったパターン化されたsyncフィールドおよびパターン化されたサーボセクタを備えるパターン化された媒体ディスクの一部分、および2つの山形パターンで構成されたTIDフィールドおよびPESフィールドを示す。
【図4A】5つの山形パターンを備える本発明のサーボパターンの第1の実施形態を示し、各山形パターンの周期は、固定整数Nに、直前の山形パターンの周期を掛けたものである。
【図4B】図4Aのサーボパターンを半径方向に拡大したセクションを示す。
【図4C】図4Bに示すラインに沿ってヘッドが山形パターンを通過するときのリードバック信号の正弦波形を示す。
【図5】本発明のディスクドライブ用のサーボエレクトロニクスのブロック図である。
【図6A】図4Bに示す1つのラインに沿ってヘッドが5つの山形パターンを通過するときにヘッドによって生成されたリードバック信号を示す。
【図6B】本発明のディスクドライブ用の山形パターンの各々からリードバック信号の位相を検出するための位相検出器のブロック図である。
【図7】図4Aに示すサーボパターンの復号化方法のブロック図である。
【図8】5つの山形パターンを備える本発明のサーボパターンの第2の実施形態を示し、第1の山形パターンに続く山形パターンは全て、第1の山形パターンの周期よりもわずかに大きいだけの周期を有する。
【図9】図8に示すサーボパターンの復号化方法のブロック図である。
【図10】5つの山形パターンを備える本発明のサーボパターンの第3の実施形態を示し、第1の山形パターンに続く山形パターンは全て、第1の山形パターンの周期の整数倍である周期を有し、これらの整数は互いに素である。
【図11】図10に示すサーボパターンの復号化方法のブロック図である。
【発明を実施するための形態】
【0013】
図1は、従来の磁気記録ディスクドライブの概略図であり、非データ領域を備える磁気記録ディスク、具体的には、データトラック上の記録ヘッドを位置決めするためのサーボセクタおよび記録ヘッドがデータセクタに対してデータを読み書きできるようにするための同期フィールドを示す。全体的に100で示すディスクドライブは、磁気記録ディスク104、ボイスコイルモータ(VCM)アクチュエータ110、アクチュエータアーム106、サスペンション107、ヘッドキャリアまたは空気軸受スライダ108および記録ヘッド109を含む。記録ヘッド109は一般に、誘導書き込みヘッドと磁気抵抗読み取りヘッドとの組み合わせ(読み取り/書き込みヘッドとも呼ばれる)であり、スライダ108のトレーリング端部または端面に配置されている。スライダ108は、サスペンション107によってアクチュエータアーム106に支持される。サスペンション107は、スライダが、ディスク104が矢印130の方向に回転するときにディスク104によって発生する空気軸受上で「縦揺れ」および「横揺れ」できるようにする。関連のスライダおよび記録ヘッドを備える1つのディスク表面のみを図1に示すが、一般に、スピンドルモータによって回転されるハブに複数のディスクが積み重ねられており、各ディスクの各表面は別個のスライダおよび記録ヘッドを有している。
【0014】
図2は、データトラック118の一部分と重ね合わせられたディスク104の表面からみたスライダ108のディスク対向面108aおよびヘッド109の端部を示す図である。ヘッド109は読み取り/書き込みヘッドであり、かつスライダ108の端面108b上に堆積されてリソグラフィーによりパターン化された一連の薄膜である。書き込みヘッド109aは、ディスク104上の記録層に対して垂直な磁化を記録する垂直磁気書き込み磁極WPを含む。書き込みヘッド109aはまた、トレーリングシールドおよび/またはサイドシールド(図示せず)を含み得る。読み取りヘッド109bを、2つの磁気シールドS1とS2との間に配置する。シールドS1、S2は透磁性材料で形成され、かつまた、読み取りヘッド109bへの導線として機能できるように導電性であってもよい。
【0015】
再び図1を参照すると、ディスク104は回転の中心111を有していて、130で示す方向に回転する。ディスク104は、半径方向に離間した同心データトラックを備える磁気記録層を有し、その同心データトラックの1つをトラック118として示す。各データトラックは、トラックの始まり部分を示す参照符号121を有する。ディスクドライブをゾーンビット記録(ZBR)ディスクドライブとして示す。なぜなら、データトラックが、多数の環状のデータバンドまたはゾーンに半径方向にグループ化されているためである(そのうちの3つを、ゾーン151、152および153として示す)。しかし、本発明を、ZBRを使用しないディスクドライブに適用することも十分でき、その場合ディスクドライブは単一のデータゾーンのみを有する。各ゾーン内で、トラックはまた、周方向において多数のデータセクタ(半径方向外側のデータゾーンにある典型的なデータセクタ164など)に分割される。各データセクタ164の前には同期(sync)フィールド(典型的なsyncフィールド163など)がある。syncフィールド163は、データセクタ164におけるデータビットの読み取りおよび書き込みの同期を可能にするために読み取りヘッドによって検出可能である。
【0016】
各データトラックはまた、複数の周方向にまたは角度的に離間したサーボセクタ120を含む。サーボセクタ120は、ヘッド109を所望のデータトラックに動かしてヘッド109をデータトラック上に維持するための、読み取りヘッドによって検出可能な位置情報を含む。各トラックのサーボセクタは、他のトラックのサーボセクタと周方向に整列されて、その結果、半径方向に向けられたサーボセクタ120で示すように、ほぼ半径方向にトラックを横断して延在する。サーボセクタ120はほぼ半径方向にほぼ弓形形状を有し、これは、一般的にヘッドが109ラジアルアクチュエータ110によってディスクを横切って移動するときの、ヘッド109の経路を再現する。サーボセクタ120はディスク上の非データ領域であり、この領域は、一般にディスクの製造またはフォーマット中に一度磁化され、ディスクドライブの通常動作中に消去されないものである。
【0017】
ディスクドライブ100に関連するエレクトロニクスは、読み取り/書き込み(R/W)エレクトロニクス113、サーボエレクトロニクス112、コントローラエレクトロニクス115およびインターフェースエレクトロニクス114を含む。ディスクドライブ100の動作では、R/Wエレクトロニクス113は、ヘッド109からの信号を受信し、かつサーボセクタ120からサーボエレクトロニクス112へサーボ情報を、およびデータセクタ164からコントローラエレクトロニクス115へデータ信号を送る。サーボエレクトロニクス112はサーボ情報を使用して140において電流を生成させ、この電流が、ヘッド109を位置決めするためにVCMアクチュエータ110を駆動する。インターフェースエレクトロニクス114はインターフェース172によってホストシステム(図示せず)と通信し、データおよびコマンド情報を送る。インターフェースエレクトロニクス114はまたインターフェース174によってコントローラエレクトロニクス115と通信する。ディスクドライブ100の動作では、インターフェースエレクトロニクス114はインターフェース172を介してデータセクタ164に対して読み取りまたは書き込みを行う要求を受信する。コントローラエレクトロニクス115は、インターフェースエレクトロニクス114から要求されたデータセクタのリストを受信し、それらを、ディスク表面、トラックおよびデータセクタを一意的に識別する一組の数字に変換する。それらの数字がサーボエレクトロニクス112に送られて、ヘッド109を適切なデータセクタに位置決めすることを可能にする。
【0018】
ディスクドライブが、「ヘッダーがない」アーキテクチャのディスクドライブである場合、すなわちデータセクタ164が、データセクタに対してデータの読み取りまたは書き込みを行う前に読み取られる必要がある固有のデータセクタアドレスを含まない場合、サーボエレクトロニクス112は、一度適切なデータトラック上にヘッド109を位置決めし、所望のデータセクタの位置を識別し配置するためにセクタ計算を実行し始める。要するに、ヘッダーがないアーキテクチャの手法では、サーボセクタ120の始まりにおけるサーボタイミングマーク(STM)を使用してサーボセクタの位置を突き止め、かつ参照符号121を含むサーボセクタからのSTMのカウント数が各サーボセクタを一義的に識別する。このようにして所望のデータセクタが識別されたら、データセクタから読み取られたデータビットまたはデータセクタに書き込まれるデータビットのタイミングを制御するために、そのデータセクタに先行するsyncフィールドが検出される。
【0019】
従来の磁気記録ディスクドライブは、「連続」媒体を備えるディスクを使用する。つまり、磁気記録層は、磁化可能な材料の連続的な薄膜である。従来の連続媒体ディスクでは、同心データトラックは互いに物理的に分離しておらず、記録層に予め形成されずに、書き込みヘッドからの書き込み磁界が連続的な磁気層に磁化を発生させるときに形成される。連続媒体ディスクをまた「ディスクリートトラック」ディスクともし得る。つまり、連続的な磁性材料の同心データトラックは互いに、同心の非磁性のガードバンドだけ半径方向に分離している。ディスクリートトラック磁気記録ディスクは、例えば特許文献1に記載されているように当該技術分野で公知である。ディスクリートトラックディスクでは、非磁性のガードバンドをトレンチまたは溝とすることができるか、または非磁性材料で形成し得るか、または磁性材料を含むが、データトラックからのリードバック信号に悪影響を与えないようにデータトラックの表面から十分下に離れた箇所に表面を有する。
【0020】
しかしながら、「パターン化された」媒体を備える磁気記録ディスクが、データ密度を高めるために提案されている。パターン化された媒体では、ディスク上の磁化可能な材料は、各アイランドに単一の磁区すなわち「ビット」があるように、分離された小さなアイランドにパターン化される。単一の磁区を単一の粒子とすることも、または単一の磁気領域として一斉に磁性状態を切り替える、強く結合した数個の粒子からなるようにすることもできる。これは、単一の「ビット」が複数の独立して切り替えられた磁性粒子、または非磁性の粒界によって分離された粒子を有し得る従来の連続媒体とは異なる。パターン化されたアイランドに必要な磁気分離を生じさせるために、アイランド間の空間の磁気モーメントを無効にするかまたは実質的に低減させて、これらの空間を実質的に非磁性にする必要がある。パターン化された媒体では、データセクタならびに非データ領域がパターン化される。しかしながら、非データ領域のみがパターン化される連続媒体ディスクを作製することも可能である。このタイプの連続媒体ディスクは、従来の同心データトラックか、または非磁性のガードバンドによって分離されるが非データ領域がパターン化されているディスクリートデータトラックを有し得る。パターン化されたサーボ領域を備えるディスクリートトラックディスクの例が特許文献1に記載されている。
【0021】
図3は、syncフィールド163、サーボセクタ120およびデータセクタ164の一部分を示すディスク104の一部分の概略図である。図3には、明確にするために、データトラックを4つのみ(トラック308、309、310および311)備える、非常に簡略化したパターンを示す。トラックは、トラック308の中心線318と、トラック309の中心線319との間の半径方向距離として示すトラックピッチTpを有する。サーボセクタ120はデータフィールド164に先行し、かつヘッドに対して矢印130で示す方向に移動する。媒体の2つの起こり得る磁性状態を黒白領域として示す。
【0022】
サーボセクタ120は、3つの異なるパターンで構成されている:サーボタイミングマーク(STM)フィールド306、トラック識別(TID)フィールド304および位置誤差信号(PES)パターン305である。STMフィールド306は、半径方向の全ての位置において同じである。STMパターンを、サーボパターンのどこにも発生せずかつデータ記録部に発生しないように選択する。STMを使用して、サーボセクタ120の始まりの位置を突き止める。TIDフィールド304はトラック数を含み、通常グレーコード化され、かつ記録された2ビットの有無として書き込まれる。TIDフィールド304は、ヘッドの半径方向位置の整数部を決定する。
【0023】
位置誤差信号(PES)パターン305は従来の位相型山形サーボパターンである。山形パターンは、サーボアイランドの2つのフィールドすなわちセットA、Bで構成されており、セットBは、半径方向の対称中心線180を中心としたセットAの鏡像である。各セットは、複数のデータトラックにわたって、すなわち、ディスク全体(またはゾーン全体)にわたってほぼ半径方向に延在する。アイランドのセットは、ディスクにわたってほぼ半径方向に延在し、好ましくは、一般的にヘッドがラジアルアクチュエータによってディスクにわたって移動するときに、ヘッドの経路を再現する弓形形状を有する(図1のサーボセクタ120で示すように)。
【0024】
各セットA、Bは、半径方向に離間した複数のディスクリートサーボアイランドである。各サーボアイランドは、セットAの典型的なアイランド182およびセットBの184のように、長さ方向がトラックに沿った方向に対して鋭角に傾斜または向けられたほぼ平行四辺形である。セットAのアイランドは、トラックの中心線に対して鋭角で同じ方向に傾斜し、かつセットBのアイランドは、同じ鋭角で反対方向に傾斜している。図3の例ではセットAのアイランドは、半径方向において負の方向(ディスクの内径に向かって)傾斜し、セットBのアイランドは、半径方向において正の方向に傾斜しているが、2つのセットのアイランドを反対方向に傾斜させることもできる。2つのアイランドの形状は合同の平行四辺形であるが、それらは周方向において反対の向きに配置される。線対称は、トラックの中心線に対して垂直な半径方向の線180であるので、セットBのパターンは、線180を中心としてセットAのパターンの鏡像である。図3の例では、パターンが繰り返される半径方向距離として定義される山形パターンの周期Pは2Tpに等しいが、周期Pを、Tpの別の倍数、例えば4Tpとして選択することもできる。
【0025】
当該技術分野で周知のように、位相型山形パターンのサーボシステムでは、PESを、基準周波数に対する山形パターンからのリードバック信号の位相を測定することによって判断する。セットAからのリードバック信号の位相は半径方向に増大する一方、セットBからのリードバック信号の位相は半径方向に低減する。それゆえ、位相差は、山形パターンの周期の半分(P/2)と等しい距離となった後に再びゼロに戻る前に徐々に半径方向で増大する。測定した位相差はPESであるため、山形パターンの一周期P内のヘッドの相対位置に直接関係する。しかしながら、ヘッドに最も近いデータトラックを識別して、ヘッドの半径方向の絶対位置を決定できるようにするために、TIDが必要とされる。例えば、ヘッドが図3のライン190に置かれる場合、TIDフィールド304からの信号を復号して、ヘッドをトラック310内に配置してトラック310の中心線320の半径方向位置に配置することを決定する。山形パターン305からの信号を復号し、測定された位相差を得て、山形パターンの一周期内の半径方向の相対距離rを判断する。中心線320は山形パターンの一周期内の(3/4)Pに配置されているので、この例では、ライン190のヘッドの半径方向の絶対位置Rは、中心線320の半径方向位置+[r−(3/4)P]である。
【0026】
本発明のディスクドライブは、複数の周方向に離間した山形パターンを含む位相型PESパターンと、パターンを復号してヘッドの半径方向の絶対位置を判断するサーボエレクトロニクスとを有する。それゆえ、TIDフィールドおよび関連の復号エレクトロニクスは必要ではない。第1の山形パターン(好ましくはヘッドによって最初に読み取られるもの)は、半径方向の周期P1を有し、かつ他方の山形パターンの各々は、P1の固有の倍数である周期を有する。好ましくは、連続的な各山形パターンは、その直前のパターンの周期よりも大きな周期を有するので、各山形パターンの周期は漸次的に増大する。
【0027】
図4Aに、本発明によるPESパターンの第1の実施形態を示す。5つの山形パターン911、912、913、914および915があり、それぞれがフィールドすなわちセットAおよびB(山形パターン911のセット911Aおよび911Bのように)を備える。各山形パターンのセットAおよびBは、2つのセット間の半径方向の線(図3の半径方向の線180のような)を中心として互いに鏡像である。5つの山形パターン911〜915は、図3の先行技術のPESパターン305として機能し、かつ図3の先行技術では必要とされるTIDフィールド304を別に有する必要性をなくす。第1の山形パターン911を、96周期に及ぶ半径方向の周期P1で示す。周期P1は、好ましくはTpの整数倍に等しく、好ましくは4Tpまたは2Tpである。各山形パターンの周期は、固定整数Nに、その直前の山形パターンの周期を掛けたものであり、この例ではN=8である。それゆえ山形パターン912、913、914および915は、P1の固有の整数倍であり、具体的には山形パターン911の周期P1よりも8、64、512および4096倍大きい周期を有する。それゆえ、図4Aの実施形態の一般的な場合を、第1の山形パターン以外の山形パターンの各々の周期が周期Pj=P1*N(j−1)(式中、Nは整数であり、およびjは2以上であり、かつ山形パターンの数である)で説明できる。
【0028】
図4Bに、図4Aのセクション900を半径方向に拡張したものを示す。このセクション900は、第1の山形パターン911の4つの周期P1よりもわずかに長く延在する。図4Cに、ヘッドがそれぞれ図4Bのライン980〜983に沿って山形パターン911〜915を通り過ぎるときのリードバック信号の正弦波形990〜993を示す。
【0029】
図5は、本発明のディスクドライブ用のサーボエレクトロニクス212のブロック図である。動作時、コントローラエレクトロニクス115はアクチュエータ位置コントローラ404に入力428を与え、次いでそれがアクチュエータに信号140を与えて、ヘッドを位置決めする。コントローラエレクトロニクス115は、サーボセクタによって読み取られたサーボ情報を使用して、アクチュエータ位置コントローラ404への入力428を決定する。サーボ情報は読み取り/書き込みエレクトロニクス113(図1)によって読み取られ、信号166がサーボエレクトロニクス212に入力される。サーボタイミングマーク(STM)検出器400が、読み取り/書き込みエレクトロニクス113からの入力としてリードバック信号サンプル値166のストリームとコントローラエレクトロニクス115からの制御入力430とを受信する。タイミングマークが検出されたらゲート信号420が生成される。このゲート信号420を使用して複数の山形パターン911〜915における位相測定のシーケンス(sequence)を制御する。
【0030】
タイミングマークの検出後、位相検出器401がリードバック信号値166を分析し、その後、測定された位相値421を位相復号器402に送る。位相復号器はこれらの位相測定値をヘッド位置の推定値424に変換する。ヘッド位置値424は、ヘッドの半径方向の絶対位置であり、PESの一部で構成され、データトラック内のヘッドの相対位置およびデータトラックの半径方向位置に対応する。
【0031】
図6Aは、ヘッドが図4Bのライン980に沿って5つの山形パターン911〜915を通り過ぎるときにヘッドによって生成されるリードバック信号990であり、図6Bは、山形パターン911〜915のセットA、Bのそれぞれからのリードバック信号の位相を検出するための位相検出器401のブロック図である。このリードバック信号990を、5つの山形パターン911〜915のセットA、Bからの正弦波信号を示す10個のバンド1021〜1030にさらに分割する。隣接するバンド1021〜1030は、狭いガードバンドによって分離されている。位相検出器401は、基準周波数に対するこれら10個の正弦波信号の各々の位相を測定する。サンプルされたリードバック信号166に、それぞれ回路1002および1003で発生された、局所的に発生したコサイン(余弦)1007およびサイン(正弦)1008参照シーケンスを乗じる。局所的に発生したコサイン1007およびサイン1008シーケンスは、正弦波リードバック信号1021〜1030の周波数と非常に近い周波数を有する。
【0032】
コサイン加重信号値1009は、同相(I)レジスタ1004に蓄積される一方、サイン加重信号値1010は、直角位相(Q)レジスタ1005に蓄積される。10個のバンドそれぞれに対して、測定された位相角度θを、θ=atan2(Q,I)(式中、atan2は周知の2パラメータの逆正接関数である)として計算する。atan2計算は、CORDIC再帰アルゴリズムを用いてハードウェアにおいて効率的に計算される(CORDICは、座標回転デジタルコンピュータ(COordinate Rotation DIgital Computer)の略であり、双曲線関数および三角関数を計算するための周知の単純で効率的なアルゴリズムである)。10個のバンド1021〜1030に対応する10個の測定された位相値のシーケンスは、位相復号器402への出力である。コサイン1007およびサイン1008参照シーケンスの発生、レジスタ1004および1005のリセットおよびラッチ、ならびに位相値の計算は全て、タイミングマーク検出器400からのゲート信号420によってトリガされた固定シーケンスによって実行される。
【0033】
各山形パターンの周期が直前の山形パターンの周期の整数倍N(図4Aの例ではN=8)と同じである複数の山形パターン911〜915は、本願明細書ではクロノメータのアナログダイヤルに例えて「時計の針(hands−of−the−clock)」パターンと称す。図7は、時計の針パターンの復号方法を示すブロック図である。この例では、各パターンの周期が直前のパターンの26倍(N=26)である合計5つの山形パターンがある。パターン全体が約50万個のトラック後に繰り返す。この説明では、全ての角度はラジアンで定められると考えられ、公称トラックピッチTpは第1の山形パターン(P1=2Tp)の周期の半分に等しい。
【0034】
第1の山形パターン911が検出され、2つの位相値A0およびB0が位相検出器401で測定されて位相復号器402に入力される(ブロック700)。ブロック710では、第1の位相差Ph0を計算する。第1の位相差Ph0は、ヘッドがディスクの半径方向にわたって移動するときに最も迅速に進む。時計の針との類似性では第1の位相差は秒針に対応する。位相差Ph0を、2πで割ることによってゼロと1との間の値に変換する。パターンカウンタkを値1に設定し、最大パターン数Kを、第1の山形パターン後の山形パターンの数に対応する4に設定する。相対的および絶対的なパターン周期f1〜f4およびF1〜F4がそれぞれ初期化される。各相対周期f1〜f4は値Nを有し、F1〜F4は、第1の山形パターン911後の4つの山形パターン912〜915の周期P2〜P5に対応する。第1の位相差Ph0の計算後、ヘッドのトラックからわずかに(fractional)外れた位置は分かるが、ヘッドが配置されているトラックは分からない。
【0035】
復号化は、kがKを超えるまで反復して続く(ブロック720)、すなわち、復号化は5つの山形パターン全てが読み取られると終わる。各反復では、次の2つの位相値AkおよびBkが入力される(ブロック725)。各反復後、トラックの段々大きくなるバンドを法とした(modulo)ヘッドの半径方向位置を知る。例えば、第1の反復の最後では(k=1)、すなわち、第2の山形パターン912が読み取られた後、山形パターン912の26個のトラックのバンド内にヘッド位置があることは分かるが、26個のトラックのどのバンドにヘッドが配置されているかは分からない。同様に、第2の反復の最後では(k=2)、すなわち、第3の山形パターン913が読み取られた後、山形パターン913の676個のトラックのバンド内にヘッド位置があることが分かるが、676個のトラックのどのバンドにヘッドが配置されているかは分からない。
【0036】
各反復(ブロック730)では、新しい位相差Phkを計算する。位相差は、既知のわずかにずれた(fractional)位置に対して補正される。残りの位相差は、この現パターンが最後に巡ってきたものであるため、何個のパターンがこれまでに巡ってきたかに対応する。各反復の最後において、rは次の反復で予期される小数値と等しい。ブロック730および735の演算を以下説明する。
a)値H1は、位相差にfkを掛けてから2πで割ったものに等しいとして計算される:
H1=fk*Phk/2π
b)値H2は、H1からrを引いて0.5を足したものに等しいとして計算される:
H2=H1−r+0.5
c)値H3は、H2を、H2以下の最大の整数値に切り下げたものに等しいとして計算される:
H3=floor(H2)
d)値H4は、H3にrを足したものに等しいとして計算される:
H4=r+H3
e)rの新しい値は、H4をfkで割ったものに等しいとして計算される:
r=H4/fk
【0037】
最終反復後、rは、位相山形の全セットの総周期の何分の1かの値(fractional)として示されるヘッドの半径方向位置と等しい。ブロック735では、トラックの半径方向位置Rを、rとFKとの積として計算する。次いで、Rの値を、コントローラ115(図5)に出力424として出力する(ブロック740)。
【0038】
図8にサーボパターンの第2の実施形態を示す。この実施形態は、調和駆動ギヤボックス(harmonic drive gearbox)にたとえて第1の実施形態の「調和」の変形形態とみなされ得る。5つの山形パターン911、952、953、954および955があり、それぞれがフィールドすなわちセットAおよびBを備え(山形パターン911のセット911Aおよび911Bのように)、第1の山形パターン911の96の周期にまたがって示されている。第1の山形パターン911は、図4Aに示した第1の実施形態の第1の山形パターン911と同一である。しかしながら、それに続く山形パターン952〜955は全て、第1の山形パターン911の周期P1よりもわずかに大きいだけの周期を有する。パターン952の位相差は、パターン911の位相差よりもわずかにゆっくりと増大する。パターン952の位相差とパターン911の位相差との間の位相の相違は、最終的にパターン952の位相差がパターン911の位相差に完全に1サイクル遅れるまで徐々に増大し、そこで2つのパターンの位相差は再び等しくなる。この例では、パターン952の周期P2は(8/7)P1であり、これらの整数8および7は互いに素である。すなわち、各整数は共通の因数を有しない。この例では、パターン952〜955は、パターン911の周期P1よりもそれぞれ8/7、64/63、512/511および4096/4095倍大きい周期を有する。それゆえ、パターン952、953、954および955は、それぞれ8、64、512および4096トラック毎にパターン911の位相に戻る。このサーボパターンの利点は、個々の山形パターンの周期がほぼ正確に同じであることである。それゆえ、図8の実施形態に一般的な場合を、第1の山形パターン以外の山形パターンの各々の周期は、P1に、共通の因数を有しない2つの整数の比を掛けたものであると説明できる。図8の具体例では、第1の山形パターン以外の山形パターンの各々は周期Pj=P1*[(N(j−1)/(N(j−1)−1)](式中、Nは整数であり、およびjは2以上であり、かつ山形パターンの数である)を有する。
【0039】
図9は、図8に示したタイプのサーボパターンの復号化方法を示すブロック図である。この方法は、ブロック730に代わるブロック830に示す計算を除いては、図4Aのサーボパターンの復号化のための図7の方法と同一である。ブロック830では、各反復において、山形パターンPhkの位相差と第1のパターンPh0の位相差との間の相違Qkを計算する。計算は、位相差自体ではなくこの位相の相違Qkを用いて、これまでのように続く。
【0040】
各反復では、新しい対の位相値が読み取られ(ブロック725)、多数の計算が実行される。ブロック830および735におけるこれらの計算の演算を以下説明する。
a)値Phkは、測定された位相値AkとBkとの差である:
Phk=Ak−Bk
b)値J1は、位相差Phkと位相差Ph0との差として計算される:
J1=Phk−Ph0
c)値J2は、値J1を2πで割ったものとして計算される:
J2=J1/2π
d)位相の相違Qkは、値J2と、J2以下の最大整数値の値との差として計算される:
Qk=J2−floor(J2)
e)値H1は、位相差にfkを掛けたものに等しいとして計算される:
H1=fk*Qk
f)値H2は、H1からrを引いて0.5を足したものに等しいとして計算される:
H2=H1−r+0.5
g)値H3は、H2を、H2以下の最大整数値に切り下げたものに等しいとして計算される:
H3=floor(H2)
h)値H4は、H3にrを足したものに等しいとして計算される:
H4=r+H3
i)新しいrの値は、H4をfkで割ったものに等しいとして計算される:
r=H4/fk
【0041】
全てのデータが読み取られ処理されたら、ブロック735において、トラックの位置Rがrと最終的なトラック範囲FKとの積をとることによって計算される。次いでRの値が、出力424としてコントローラ115(図5)に出力される(ブロック740)。
【0042】
図10に、サーボパターンの第3の実施形態を示す。5つの山形パターン911、932、933、934および935があり、それぞれ、フィールドすなわちセットAおよびB(山形パターン911のセット911Aおよび911Bのように)を有し、第1の山形パターン911の96の周期にまたがって示す。第1の山形パターン911は、図4Aに示す第1の実施形態の第1の山形パターン911と同一である。しかしながら、それに続く山形パターン932〜935は全て、第1の山形パターンの周期P1の固有の整数倍である周期を有し、これら整数は互いに素である。すなわち、これらの固有の整数は共通の因数を有しない。この例では、山形パターン932〜935は、山形パターン911の周期P1のそれぞれ23、25、27および29倍の周期を有する。
【0043】
第1の山形911の位相差に対してパターン932〜935の位相差を復号化することによって、互いに素の整数のセットを法としたとするトラック数を計算する。孫子の中国の剰余定理から、この情報からトラック数を再構築することが可能である。この「中国の剰余定理」のサーボパターンの利点は、山形パターン932〜935の周期が比較的類似していることである。非常に長いパターンを有する山形パターンがない。
【0044】
図11は、図10のサーボパターンの復号化方法を示すブロック図である。第1の山形パターン911を検出し、2つの位相値A0およびB0が位相検出器401において測定されて位相復号器402に入力される(ブロック1100)。ブロック1110では、第1の位相差Ph0が計算され、および絶対的なパターン周期F1〜F4および値Q1〜Q4が初期化される。
【0045】
値Q1〜Q4は、Fnを法としたQnの余りは1に等しいが、Fnを除いたFkの値の全てに関しFkはQnを割り切ることができるという特性を有する。例えば、図11に示す例でQ1を考える:Q1=234900=10213*23+1であるため、F1を法としたQ1の余りは1である。加えて、Q1=234900=9396*25=8700*27=8100*29であるため、F2、F3、およびF4は全てQ1を割り切ることができる。同様に、Q2=252126=10962*23=10085*25+1=9338*27=8694*29などである。
【0046】
互いに素の数のいずれかのセットFnに関し、必要な特性を有する唯一のセットの数Qnを見つけることができる。ほとんどの場合、数Fnの各々を法としたであるN未満の全ての正の整数を網羅的に検索することが現実的である。この例では1〜450225の間の全数が調べられ、かつ23、25、27および29を法とした余りを計算する。その場合、Q1を、23を法としたときの余りが1および25、27および29を法としたときの余りが0である数として選択する。Q2を、25を法としたときの余りが1および23、27および29を法としたときの余りが0である数として選択する。Q3を、27を法としたときの余りが1および23、25および29を法としたときの余りが0である数として選択する。最後に、Q4を、29を法としたときの余りが1および23、25および27を法としたときの余りが0である数として選択する。
【0047】
値Qnをより効率的に見つけるために、拡張したユークリッドの互除法も使用することができる。対の数aおよびbを仮定すると、拡張したユークリッドの互除法は、ax+byがaとbの共通の最大除数と等しくなるようにxおよびyを生じる。拡張したユークリッドの互除法の再帰式を以下に完全性のために示す:
a)aがbで割り切れる場合、アルゴリズムは終了し、自明な解x=0、y=1に戻る。
b)そうでなければ、bおよびbを法とするaでアルゴリズムを繰り返し、x'およびy'として解を記憶する。
c)次いで、現在の式の解はx=y'、およびy=x'−y'×(aをbで割った商)となる。
【0048】
例えば、Q1を、以下のように、拡張したユークリッドの互除法の再帰式を使用して計算できる。a=F2*F3*F4=19575およびb=F1=23の場合、再帰的な拡張したユークリッドの互除法は以下の通り進み、ここで、divおよびmodは、それぞれ周知の整数の除算および除算後の法である:
a)a0=19575、b0=23。
b)23では19575を割り切れないため、セットa1=b0=23、セットb1=mod(a0,b0)=2である。
c)2では23を割り切れないため、セットa2=2、セットb2=mod(a1,b1)=1である。
d)ここで、1で2を割り切れるため、セットx2=0、セットy2=1。
e)その後も同様に、セットx1=y2=1、セットy1=x2−y2*div(a1,b1)=0−1*11=−11。
f)x0=y1=−11およびy0=x1−y1*div(a0,b0)=1−(−11)*851=9362に戻る。
【0049】
ここで恒等式(−11)*19575+9362*23=1が得られた(F1〜F4が互いに素であるためaおよびbの共通の最大除数は1である)。xが正の値およびyが負の値である解が必要であり、従って、a*b=F1*F2*F3*F4を足したり引いたりすることにより等価の解(23−11)*19575+(9362−19575)*23=1が得られる。セットQ1=(23−11)*19575=234900。F2*F3*F4はQ1の因数であるため、F2、F3およびF4を法としたQ1の余りが、必要に応じていずれの場合もゼロであることが分かる。Q1−10213*F1=1であるため、F1を法としたQ1の余りが、必要に応じて1であることが分かる。
【0050】
各反復で、新しい対の位相値が読み取られ(ブロック1125)、多数の計算が実行される。ブロック1130および1135のこれらの計算の演算を以下に説明する。
a)値Phkは、測定された位相値AkとBkとの差である:
Phk=Ak−Bk
b)値J1は、位相差Phkと周期Fkとの積であると計算される:
J1=Phk*Fk
c)値J2はJ1と位相差Ph0との差であると計算される:
J2=J1−Ph0
d)値J3は、値J2を2πで割って0.5を足したものと計算される:
J3=J2/2π+0.5
e)値rは、J3を、J3以下の最大整数値まで切り下げたものに等しいと計算される:
r=floor(J3)
f)値J4は、値nに、rとQkとの積を足したものに等しいと計算される:
J4=n+r*Qk
g)nの新しい値は、Nを法としたJ4の余りに等しいと計算される:
n=J4 mod N
h)カウンタkを増分する:
k=k+1
【0051】
データが読み取られ、処理されると、トラックのわずかなずれPh0/2πをトラック数nに足すことによって、トラックの位置Rが計算される(ブロック1135)。次いでRの値が、出力424としてコントローラ115(図5)に出力される(ブロック1140)。
【0052】
本発明に従って上で説明したような、ディスクリートサーボアイランドの山形パターンを有するパターン化されたサーボセクタは、好ましくはパターン化された媒体ディスクで使用できる。しかしながら、本発明はパターン化された媒体ディスクに限定されず、従来の連続媒体データトラックおよびパターン化されたサーボセクタを備える連続媒体ディスク、ならびに非磁性のガードバンドおよびパターン化されたサーボセクタによって分離されたディスクリートデータトラックを備える連続媒体ディスクにも適用できる。
【0053】
本発明を、特に、好ましい実施形態を参照して示し、かつ説明したが、本発明の趣旨および範囲を逸脱することなく、形態および詳細に対して様々な変更をなすことができることは当業者に理解されるであろう。従って、上述の発明は、単に例示にすぎず、その範囲の限界は、添付の特許請求の範囲において規定されるとみなされるべきである。
【符号の説明】
【0054】
100 ディスクドライブ
104 磁気記録ディスク
106 アクチュエータアーム
107 サスペンション
108 空気軸受スライダ
108a ディスク対向面
108b スライダの端面
109 記録ヘッド
109a 書き込みヘッド
109b 読み取りヘッド
110 ボイスコイルモータアクチュエータ
112 サーボエレクトロニクス
113 読み取り/書き込みエレクトロニクス
114 インターフェースエレクトロニクス
115 コントローラエレクトロニクス
118 データトラック
120 サーボセクタ
121 トラックの始まり部分
151、152、153 ゾーン
163 syncフィールド
164 データセクタ
172、174 インターフェース
212 サーボエレクトロニクス
304 トラック識別フィールド
305 位置誤差信号パターン
306 サーボタイミングマークフィールド
308、309、310、311 トラック
400 サーボタイミングマーク検出器
401 位相検出器
402 位相復号器
404 アクチュエータ位置コントローラ
1004、1005 レジスタ
1021〜1030 バンド
S1、S2 磁気シールド
【特許請求の範囲】
【請求項1】
各トラックがトラックの中心線を有し、複数の同心の円形データトラックにデータを記録するための磁化可能な材料である記録層と、
サーボセクタが、半径方向に向けられ周方向に離間した複数の山形パターンを有し、前記山形パターンの各々が半径方向に離間した固有の周期を有する複数の半径方向に離間した磁性化サーボアイランドを有し、複数の前記データトラックにわたって半径方向に延在する複数の非データサーボセクタと、
を含む磁気記録ディスクであって、
前記山形パターンの最も小さい周期が周期P1であり、かつ他の山形パターンの各々が、P1の固有の倍数である周期を有する磁気記録ディスク。
【請求項2】
前記磁性化サーボアイランドが、周方向に離間した2つのセットのサーボアイランドに配置され、
第1の組の前記磁性化サーボアイランドが、前記トラックの中心線に対して正の鋭角に向けられ、
第2の組の前記磁性化サーボアイランドが、前記トラックの中心線に対して負の鋭角に向けられ、正および負の鋭角の絶対値が等しい請求項1に記載の磁気記録ディスク。
【請求項3】
前記他の山形パターンの各々の周期が、P1の固有の整数倍である請求項1に記載の磁気記録ディスク。
【請求項4】
前記他の山形パターンの各々の周期が、周期Pj=P1*N(j−1)(Nは整数であり、およびjは2以上であり、かつ前記山形パターンの数である)を有する請求項3に記載の磁気記録ディスク。
【請求項5】
前記他の山形パターンの各々の周期が、P1に、共通の因数を有しない2つの整数の比を掛けたものである請求項1に記載の磁気記録ディスク。
【請求項6】
前記他の山形パターンの各々の周期が、周期Pj=P1*[(N(j−1)/(N(j−1)−1)](式中、Nは整数であり、およびjは2以上であり、かつ前記山形パターンの数である)を有する請求項1に記載の磁気記録ディスク。
【請求項7】
前記他の山形パターンの各々の周期が、P1の固有の整数倍であり、前記固有の整数は共通の因数を有しない請求項1に記載の磁気記録ディスク。
【請求項8】
隣接したトラック間の前記半径方向の間隔がトラックピッチ(Tp)であり、ここでP1=2Tpである請求項1に記載の磁気記録ディスク。
【請求項9】
隣接したトラック間の前記半径方向の間隔がトラックピッチ(Tp)であり、ここでP1=4Tpである請求項1に記載の磁気記録ディスク。
【請求項10】
前記複数のデータトラックにおいて、個々のデータトラックを識別するためのトラック識別(TID)フィールドを含まない請求項1に記載の磁気記録ディスク。
【請求項11】
前記サーボアイランドが、前記記録層の平面に対して垂直な方向に磁性化される請求項1に記載の磁気記録ディスク。
【請求項12】
前記データトラックが、非磁性空間によって分離された、磁化可能な材料のパターン化されたディスクリートデータアイランドである請求項1に記載の磁気記録ディスク。
【請求項13】
前記データトラックが、前記記録層の連続的な磁化可能な材料である請求項1に記載の磁気記録ディスク。
【請求項14】
前記データトラックが、同心の非磁性のガードバンドによって分離された、前記記録層の連続的な磁化可能な材料のディスクリートデータトラックである請求項1に記載の磁気記録ディスク。
【請求項15】
請求項1に記載の回転可能な磁気記録ディスクと、
前記データトラックにデータを書き込む書き込みヘッドと、
前記データトラックにデータを書き込み、かつ前記山形パターンの前記磁性化サーボアイランドを検出する読み取りヘッドであって、前記ディスクの回転時に前記サーボアイランドからリードバック信号を発生させる読み取りヘッドと、
異なるデータトラックに前記ヘッドを位置決めするために前記ヘッドに接続され、かつ前記ヘッドを前記トラック上に維持するアクチュエータと、
前記アクチュエータに制御信号を発生するための、サーボ信号に応答し、前記山形パターンの各々から前記リードバック信号の位相を計算し、かつ前記計算された位相から前記制御信号を計算するためのプロセッサを含むサーボエレクトロニクスを含む磁気記録ディスクドライブ。
【請求項16】
非磁性空間によって分離された、磁化可能な材料のディスクリートデータアイランドにパターン化された同心の複数の円形データトラックであって、前記複数の円形データトラックの各々の中心線を有する複数の円形データトラックと、
複数の前記円形データトラックにわたって半径方向に延在する複数の非データサーボセクタであって、前記サーボセクタの各々が、固有のほぼ半径方向に向けられ周方向に離間した山形パターンを備え、各山形パターンが、半径方向に離間した固有の周期を有する複数の半径方向に離間した磁性化サーボアイランドを備え、かつほぼ半径方向の対称中心線の周りで周方向に離間した2組のサーボアイランドにパターン化され、第1の組が、前記トラックの中心線に対して鋭角で傾斜した前記サーボアイランドでパターン化され、かつ第2の組が、前記半径方向の対称中心線を中心として前記第1の組の鏡像としてパターン化される非データサーボセクタと、
を含むパターン化された媒体の磁気記録ディスクであって、
前記山形パターンの最も小さい周期が周期P1であり、
前記他の山形パターンの各々が、P1の固有の倍数である周期を有するパターン化された媒体の磁気記録ディスク。
【請求項17】
前記他の山形パターンの各々の周期がP1の固有の整数倍である請求項16に記載の磁気記録ディスク。
【請求項18】
前記他の山形パターンの各々の周期がP1の固有の整数倍であり、
前記固有の整数倍が共通の因数を有しない請求項16に記載の磁気記録ディスク。
【請求項19】
隣接するデータトラック間の前記半径方向の間隔が前記トラックピッチ(Tp)であり、P1がTpの整数倍である請求項16に記載の磁気記録ディスク。
【請求項20】
前記複数のデータトラックにおいて個々のデータトラックを識別するためのトラック識別(TID)フィールドを含まない請求項16に記載の磁気記録ディスク。
【請求項1】
各トラックがトラックの中心線を有し、複数の同心の円形データトラックにデータを記録するための磁化可能な材料である記録層と、
サーボセクタが、半径方向に向けられ周方向に離間した複数の山形パターンを有し、前記山形パターンの各々が半径方向に離間した固有の周期を有する複数の半径方向に離間した磁性化サーボアイランドを有し、複数の前記データトラックにわたって半径方向に延在する複数の非データサーボセクタと、
を含む磁気記録ディスクであって、
前記山形パターンの最も小さい周期が周期P1であり、かつ他の山形パターンの各々が、P1の固有の倍数である周期を有する磁気記録ディスク。
【請求項2】
前記磁性化サーボアイランドが、周方向に離間した2つのセットのサーボアイランドに配置され、
第1の組の前記磁性化サーボアイランドが、前記トラックの中心線に対して正の鋭角に向けられ、
第2の組の前記磁性化サーボアイランドが、前記トラックの中心線に対して負の鋭角に向けられ、正および負の鋭角の絶対値が等しい請求項1に記載の磁気記録ディスク。
【請求項3】
前記他の山形パターンの各々の周期が、P1の固有の整数倍である請求項1に記載の磁気記録ディスク。
【請求項4】
前記他の山形パターンの各々の周期が、周期Pj=P1*N(j−1)(Nは整数であり、およびjは2以上であり、かつ前記山形パターンの数である)を有する請求項3に記載の磁気記録ディスク。
【請求項5】
前記他の山形パターンの各々の周期が、P1に、共通の因数を有しない2つの整数の比を掛けたものである請求項1に記載の磁気記録ディスク。
【請求項6】
前記他の山形パターンの各々の周期が、周期Pj=P1*[(N(j−1)/(N(j−1)−1)](式中、Nは整数であり、およびjは2以上であり、かつ前記山形パターンの数である)を有する請求項1に記載の磁気記録ディスク。
【請求項7】
前記他の山形パターンの各々の周期が、P1の固有の整数倍であり、前記固有の整数は共通の因数を有しない請求項1に記載の磁気記録ディスク。
【請求項8】
隣接したトラック間の前記半径方向の間隔がトラックピッチ(Tp)であり、ここでP1=2Tpである請求項1に記載の磁気記録ディスク。
【請求項9】
隣接したトラック間の前記半径方向の間隔がトラックピッチ(Tp)であり、ここでP1=4Tpである請求項1に記載の磁気記録ディスク。
【請求項10】
前記複数のデータトラックにおいて、個々のデータトラックを識別するためのトラック識別(TID)フィールドを含まない請求項1に記載の磁気記録ディスク。
【請求項11】
前記サーボアイランドが、前記記録層の平面に対して垂直な方向に磁性化される請求項1に記載の磁気記録ディスク。
【請求項12】
前記データトラックが、非磁性空間によって分離された、磁化可能な材料のパターン化されたディスクリートデータアイランドである請求項1に記載の磁気記録ディスク。
【請求項13】
前記データトラックが、前記記録層の連続的な磁化可能な材料である請求項1に記載の磁気記録ディスク。
【請求項14】
前記データトラックが、同心の非磁性のガードバンドによって分離された、前記記録層の連続的な磁化可能な材料のディスクリートデータトラックである請求項1に記載の磁気記録ディスク。
【請求項15】
請求項1に記載の回転可能な磁気記録ディスクと、
前記データトラックにデータを書き込む書き込みヘッドと、
前記データトラックにデータを書き込み、かつ前記山形パターンの前記磁性化サーボアイランドを検出する読み取りヘッドであって、前記ディスクの回転時に前記サーボアイランドからリードバック信号を発生させる読み取りヘッドと、
異なるデータトラックに前記ヘッドを位置決めするために前記ヘッドに接続され、かつ前記ヘッドを前記トラック上に維持するアクチュエータと、
前記アクチュエータに制御信号を発生するための、サーボ信号に応答し、前記山形パターンの各々から前記リードバック信号の位相を計算し、かつ前記計算された位相から前記制御信号を計算するためのプロセッサを含むサーボエレクトロニクスを含む磁気記録ディスクドライブ。
【請求項16】
非磁性空間によって分離された、磁化可能な材料のディスクリートデータアイランドにパターン化された同心の複数の円形データトラックであって、前記複数の円形データトラックの各々の中心線を有する複数の円形データトラックと、
複数の前記円形データトラックにわたって半径方向に延在する複数の非データサーボセクタであって、前記サーボセクタの各々が、固有のほぼ半径方向に向けられ周方向に離間した山形パターンを備え、各山形パターンが、半径方向に離間した固有の周期を有する複数の半径方向に離間した磁性化サーボアイランドを備え、かつほぼ半径方向の対称中心線の周りで周方向に離間した2組のサーボアイランドにパターン化され、第1の組が、前記トラックの中心線に対して鋭角で傾斜した前記サーボアイランドでパターン化され、かつ第2の組が、前記半径方向の対称中心線を中心として前記第1の組の鏡像としてパターン化される非データサーボセクタと、
を含むパターン化された媒体の磁気記録ディスクであって、
前記山形パターンの最も小さい周期が周期P1であり、
前記他の山形パターンの各々が、P1の固有の倍数である周期を有するパターン化された媒体の磁気記録ディスク。
【請求項17】
前記他の山形パターンの各々の周期がP1の固有の整数倍である請求項16に記載の磁気記録ディスク。
【請求項18】
前記他の山形パターンの各々の周期がP1の固有の整数倍であり、
前記固有の整数倍が共通の因数を有しない請求項16に記載の磁気記録ディスク。
【請求項19】
隣接するデータトラック間の前記半径方向の間隔が前記トラックピッチ(Tp)であり、P1がTpの整数倍である請求項16に記載の磁気記録ディスク。
【請求項20】
前記複数のデータトラックにおいて個々のデータトラックを識別するためのトラック識別(TID)フィールドを含まない請求項16に記載の磁気記録ディスク。
【図1】


【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図5】
【図6A】
【図6B】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図5】
【図6A】
【図6B】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−123989(P2011−123989A)
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願番号】特願2010−269349(P2010−269349)
【出願日】平成22年12月2日(2010.12.2)
【出願人】(503116280)ヒタチグローバルストレージテクノロジーズネザーランドビーブイ (1,121)
【Fターム(参考)】
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願日】平成22年12月2日(2010.12.2)
【出願人】(503116280)ヒタチグローバルストレージテクノロジーズネザーランドビーブイ (1,121)
【Fターム(参考)】
[ Back to top ]