
磁気記録再生装置
【課題】効率的にトラッキング信号をサンプリングすることができる磁気記録再生装置を提供する。
【解決手段】従来の回転ドラムのヘッド数のm倍(1<m<n)のヘッド数を有する回転ドラム11と、回転ドラム11の回転周波数を従来の回転ドラムの回転周波数の(n/m)倍に制御し、従来の回転ドラムを用いた場合のn倍レートで所定フォーマットの信号の記録再生を行う記録部25、復号部51、モータ駆動部64と、回転ドラム11の略180度対向位置にある2つのヘッドで再生可能な部分に挿入されている前記所定フォーマットのトラッキング信号を、前記第2の回転ドラムの略180度対向位置にある2つのヘッドとは異なる2つのヘッドで再生し、トラッキングを行うトラッキング制御部80とを備える。
【解決手段】従来の回転ドラムのヘッド数のm倍(1<m<n)のヘッド数を有する回転ドラム11と、回転ドラム11の回転周波数を従来の回転ドラムの回転周波数の(n/m)倍に制御し、従来の回転ドラムを用いた場合のn倍レートで所定フォーマットの信号の記録再生を行う記録部25、復号部51、モータ駆動部64と、回転ドラム11の略180度対向位置にある2つのヘッドで再生可能な部分に挿入されている前記所定フォーマットのトラッキング信号を、前記第2の回転ドラムの略180度対向位置にある2つのヘッドとは異なる2つのヘッドで再生し、トラッキングを行うトラッキング制御部80とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁気記録再生装置に関する。詳しくは、回転ドラムに設けられる記録ヘッドや再生ヘッドの数を増やすだけでなく回転ドラムの回転周波数を高めることで、所望のフォーマットの信号の記録再生レートを高めるものである。
【背景技術】
【0002】
従来、磁気テープは、種々のフォーマットが規格化されているが、複数のフォーマットに対する記録や消去が可能な磁気記録再生装置も知られている。例えば、特許文献1には、DV(Digital Video)フォーマットとDVCPROフォーマット(登録商標)に対応可能な磁気記録再生装置が開示されている。
【0003】
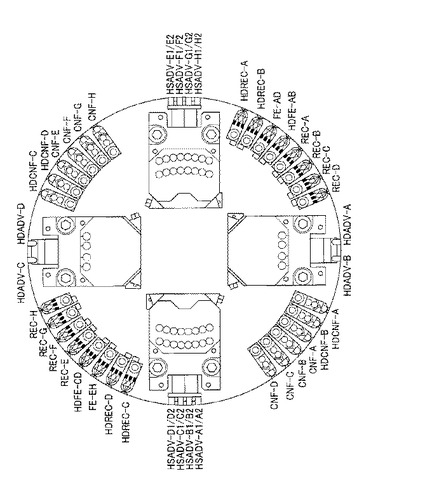
図7は、複数のフォーマット、例えばHDCAM(登録商標)フォーマットとHDCAM−SR(登録商標)フォーマットに対応可能な従来の磁気記録再生装置で用いられている回転ドラムのヘッドの配置例を示す図である。
【0004】
HDCAMフォーマットのトラックピッチは21.7μm、HDCAM−SRフォーマットのトラックピッチは13.2μmにそれぞれ規定されており、トラックピッチが大きく異なる。したがって、HDCAMフォーマットとHDCAM−SRフォーマットに対応させる場合、回転ドラムには、HDCAMフォーマットに対応するヘッドとHDCAM−SRフォーマットに対応するヘッドが個々に設けられる。
【0005】
HDCAM−SRフォーマットに対応するヘッドとしては、例えば記録ヘッドREC−A〜REC−H、再生及び可変速再生のための所謂ダイナミックトラッキングヘッドHSADV−A1/A2〜HSADV−H1/H2、信号が正しく記録されたか確認するためのコンフィデンスヘッドCNF−A〜CNF−H、及び消去ヘッドFE−AD,FE−EHが設けられている。なお、ダイナミックトラッキングヘッドとは、電圧の印加によって撓み変形されるアクチュエータ(例えばバイモルフ)に再生ヘッドをマウントして、この再生ヘッドがマウントされたアクチュエータを回転ドラム上に配置したものであり、このアクチュエータに電圧を印加することで、走査方向に対して直交する方向に再生ヘッドを移動できるものである。
【0006】
また、HDCAMフォーマットに対応するヘッドとしては、例えば記録ヘッドHDREC−A〜HDREC−D、再生や可変速再生のためのダイナミックトラッキングヘッドHDADV−A〜HDADV−D、信号が正しく記録されたか確認するためのコンフィデンスヘッドHDCNF−A〜HDCNF−D及び消去ヘッドHDFE−AB,HDFE−CDが設けられている。
【0007】
このように、HDCAMフォーマットに対応したヘッドとHDCAM−SRフォーマットに対応したヘッドとが回転ドラムに設けられることで、例えばHDCAM−SRフォーマットで記録再生を行う場合でも、過去にHDCAMフォーマットで信号が記録されている磁気テープの再生、すなわちレガシー再生を行うことができる。
【0008】
また、HDCAMフォーマットの記録レートは140Mbps、HDCAM−SRフォーマットの記録レートは440Mbpsにそれぞれ規定されており、記録レートの高いHDCAM−SRフォーマットの記録再生でもHDCAMフォーマットの記録再生と同じドラム回転数となるように、HDCAM−SRフォーマットに対応したヘッドは、HDCAMフォーマットのヘッドよりも数が多く設けられている。
【0009】
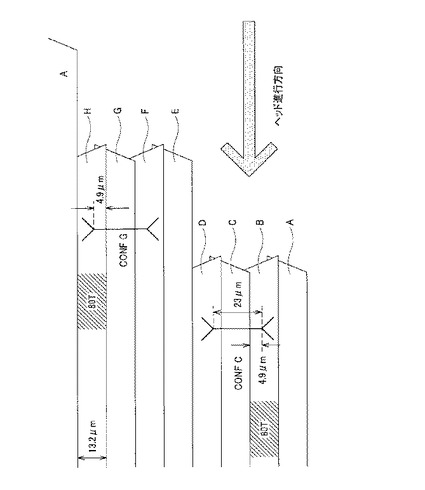
図8は、HDCAM−SRフォーマットの記録パターンを示す模式図である。HDCAM−SRフォーマットでは、トラックの所定の部分にSAT(Supplemental Automatic Tracking)信号が挿入されている。SATは、編集時に実行されるオートトラッキングである。
【0010】
SAT信号には8Tと80Tの2種類が規定され、記録ヘッドRECで8Tを、コンフィデンスヘッドCNFで80Tを再生する。トラック幅13.2μmに対しヘッド幅が23μmなので、ヘッドは上下のトラックに4.9μmずつはみ出している。このはみ出した部分で、コンフィデンスヘッドCNF−CはBトラックを、コンフィデンスヘッドCNF−GはHトラックをなぞり、80Tを再生する。すなわち、80Tは、図7に示すように略180度対向して設けられたヘッドで再生可能な部分に挿入されている。
【0011】
【特許文献1】特開2001−283408号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
ところで、高画質で映像の記録再生を行う場合や複数の撮像装置で得られた映像を同時に記録する場合等では、映像のデータ量が増加することから、記録レートのさらなる高速化が必要となる。
【0013】
例えば、HDCAM−SRフォーマットの記録レートを向上させる場合、HDCAM−SRフォーマットに対応する記録ヘッドやコンフィデンスヘッド等を増加させ、回転ドラムの回転速度を上げれば、記録レートを増加させることができる。
【0014】
しかし、SAT信号は、図7に示すように略180度対向して設けられたヘッドで再生可能な部分に挿入されているため、ヘッド数を増加させ、回転ドラムの回転速度を上げると、SAT信号が配置されているトラック単位とスキャンするヘッド数との最小公倍数のトラック毎にしかSAT信号をサンプリングできない。このため、トラッキング信号の収束に時間がかかってしまう。
【0015】
本発明は、このような従来の実情に鑑みて提案されたものであり、効率的にトラッキング信号をサンプリングすることができる磁気記録再生装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
上述の課題を解決するために、本発明に係る磁気記録再生装置は、第1のレートで記録再生可能な第1の回転ドラムを用いて記録される所定フォーマットの信号を第1のレートのn倍の第2のレートで記録再生する磁気記録再生装置であって、前記第1の回転ドラムのヘッド数のm倍(1<m<n)のヘッド数を有する第2の回転ドラムと、前記第2の回転ドラムの回転周波数を前記第1の回転ドラムの回転周波数の(n/m)倍に制御し、前記第2のレートで前記所定フォーマットの信号の記録再生を行う記録再生制御部と、前記第1の回転ドラムの略180度対向位置にある2つのヘッドで再生可能な部分に挿入されている前記所定フォーマットのトラッキング信号を、前記第2の回転ドラムの略180度対向位置にある2つのヘッドとは異なる2つのヘッドで再生し、トラッキングを行うトラッキング制御部とを備える。
【発明の効果】
【0017】
本発明は、第1の回転ドラムのヘッド数のm倍(1<m<n)のヘッド数を有する第2の回転ドラムを用いて所定フォーマットの信号を再生する際、所定フォーマットのトラッキング信号を、第2の回転ドラムの略180度対向位置にある2つのヘッドとは異なる2つのヘッドで再生することにより、効率的にトラッキング信号をサンプリングすることができる。
【発明を実施するための最良の形態】
【0018】
以下、図面を参照しながら、本発明の実施の一形態について説明する。本発明の具体例として示す磁気記録再生装置は、従来の磁気記録再生装置に比べて、回転ドラムに設けるヘッドを増やして回転ドラムの回転数を高速化し、記録レートや再生レートを高めたものである。
【0019】
以下、第1のフォーマットとしてHDCAM−SR(登録商標)フォーマットを挙げ、第2のフォーマットとしてHDCAM(登録商標)フォーマットを挙げ、HDCAM−SRフォーマットの信号の記録再生を行う際に、記録再生レートを従来の2倍である880Mbpsとするとともに、レガシー再生として、HDCAMフォーマットで記録された信号を再生可能とする磁気記録再生装置について説明する。
【0020】
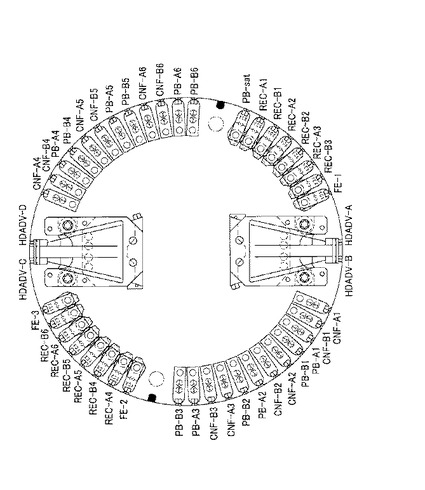
図1は、本実施の形態に係る磁気記録再生装置に用いられる回転ドラム11のヘッド配置の一例を示す図である。回転ドラム11には、HDCAM−SRフォーマットに対応するヘッドとして、例えば記録再生レートが440Mbpsである従来の磁気記録再生装置に比べて2倍よりも少ない(3/2)倍の数のヘッドが設けられている。すなわち、記録ヘッドREC−A1,REC−B1〜REC−A6,REC−B6、標準度再生及び可変速再生のための再生ヘッドPB−A1,PB−B1〜PB−A6,PB−B6、信号が正しく記録されたか確認するためのコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A6,CNF−B6が設けられている。また、ヘッドREC−A1〜REC−A6,PB−A1〜PB−A6,CNF−A1〜CNF−A6は、第1のアジマス角とされており、ヘッドREC−B1〜REC−B6,PB−B1〜PB−B6,CNF−B1〜CNF−B6は、第1のアジマス角とは異なる第2のアジマス角とされている。
【0021】
さらに、回転ドラム11には、消去ヘッドFE−1,FE−2,FE−3と、SAT再生ヘッドPB−satが設けられている。なお、SAT再生ヘッドPB−satは、編集時のトラッキング精度を高めるためにビデオトラックとオーディオトラック間に記録されたSAT(Supplement Auto Tracking)信号を再生するためのヘッドである。
【0022】
また、回転ドラム11には、HDCAMフォーマットで記録されている信号を再生するため、HDCAMフォーマットに対応するヘッドとして、標準速再生や可変速再生のためのダイナミックトラッキングヘッドHDADV−A〜HDADV−Dが設けられている。ダイナミックトラッキングヘッドHDADV−A,HDADV−Bは、組として構成されており、ダイナミックトラッキングヘッドHDADV−AのヘッドギャップとダイナミックトラッキングヘッドHDADV−Bのヘッドギャップはトラック幅方向に位置ずれを生じた状態とされている。またダイナミックトラッキングヘッドHDADV−C,HDADV−Dも、ダイナミックトラッキングヘッドHDADV−A,HDADV−Bと同様に組として構成されている。
【0023】
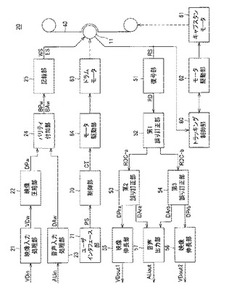
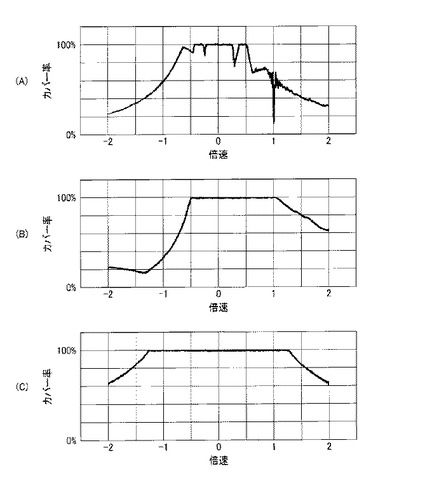
図2は、本実施の形態に係る磁気記録再生装置の構成を示す図である。磁気記録再生装置20の映像入力処理部21は、外部から種々のフォーマット等で映像入力信号VDinが供給されても、映像入力信号VDinを記録できるように処理する。例えばデフォーマット処理を行い、HD−SDI(High Definition Serial Digital Interface)フォーマット等で映像入力信号VDinが供給されたとき、このHD−SDIフォーマットの信号から輝度信号と色差信号と抽出して、記録ビデオ信号DVwとして映像圧縮部22に供給する。
【0024】
映像圧縮部22は、記録ビデオ信号DVwの符号化処理を行い、データ量を圧縮してパリティ付加部24に供給する。映像圧縮部22は、符号化処理として例えばMPEG(Moving Picture Experts Group)−4スタジオプロファイル方式で符号化処理を行い、得られた符号化データDPwをパリティ付加部24に供給する。
【0025】
音声入力処理部23は、外部から種々のフォーマット等で音声入力信号AUinが供給されても、映像信号を記録できるように処理する。例えば、音声入力処理部23はデフォーマット処理を行い、AES/EBUフォーマットのディジタル信号から音声データを抽出して、記録音声データDAwとしてパリティ付加部24に供給する。また、音声入力処理部23は、音声データのサンプリングレートを所望のサンプリングレートとするレート変換やフィルタ処理、信号レベル調整等を行う。
【0026】
パリティ付加部24は、符号化データDPwや記録音声データDAwに対して誤り訂正符号を生成して付加する。例えば、内符号パリティと外符号パリティを符号化データDPwに付加してSYNCブロックBPwを構成する。また、記録音声データDAwに基づいてSYNCブロックBAwを構成して、このSYNCブロックBPw,BAwを記録部25に供給する。
【0027】
記録部25は、パリティ付加部24から供給されたSYNCブロックBPw,BAwのデータに同期符号や識別符号を付加して、トラック毎の記録データを生成する。さらに、記録データのチャネルコーディングを行い、得られた信号を記録電流WSに変換して、回転ドラム11に搭載された記録ヘッドREC−A1,REC−B1〜REC−A6,REC−B6に供給する。また、記録部25は、制御部70からの制御信号CTによって記録されている信号を消去する指示がなされたとき、消去電流ESを生成して回転ドラム11に搭載された消去ヘッドFE−1,FE−2,FE−3に供給する。
【0028】
このように、回転ドラム11の記録ヘッドREC−A1,REC−B1〜REC−A6,REC−B6に記録電流WSを供給することで、磁気テープ40に映像や音声を記録できる。また消去ヘッドFE−1,FE−2,FE−3に消去電流ESを供給することで、記録されている映像や音声を消去できる。
【0029】
磁気テープ40に記録されている信号は、回転ドラム11の再生ヘッドPB−A1,PB−B1〜PB−A6,PB−B6やコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A6,CNF−B6、ダイナミックトラッキングヘッドHDADV−A〜HDADV−Dによって読み出されて、再生信号RSとして復号部51及びトラッキング制御部80に供給される。
【0030】
復号部51は、再生信号RSの振幅や位相を調整して波形整形を行い、さらに記録部25で行われるチャネルコーディングに対応した復号処理を行って再生データRDを生成する。この再生データRDは、第1誤り訂正部52に供給される。
【0031】
第1誤り訂正部52は、再生データRDを構成する符号化データに含まれた内符号パリティを用いた誤り訂正を行う。ここで、後述する制御部からHDCAM−SRフォーマットに対応する再生ヘッドで読み出しが行われていることが制御信号CTによって示されたとき、このときの誤り訂正後の再生データRDCaを第2誤り訂正部53に供給する。また、HDCAMフォーマットに対応する再生ヘッドで読み出しが行われていることが制御信号CTによって示されたとき、このときの誤り訂正後の再生データRDCbを第3誤り訂正部54に供給する。
【0032】
第2誤り訂正部53は、再生データRDCaに対して外符号パリティを用いた誤り訂正を行い、誤り訂正後の符号化データDPraを映像伸長部55に供給する。また、第2誤り訂正部53では、音声データの誤り訂正を行い誤り訂正後の音声データDAraを音声出力部57に供給する。
【0033】
第3誤り訂正部54は、再生データRDCbに対して外符号パリティを用いた誤り訂正を行い、誤り訂正後の符号化データDPrbを映像伸長部56に供給する。また、第2誤り訂正部53では、音声データの誤り訂正を行い誤り訂正後の音声データDAraを音声出力部57に供給する。
【0034】
映像伸長部55は、供給された符号化データDPraの復号化処理を行い、ディジタルの映像出力信号VDout1として出力する。この映像伸長部55では映像圧縮部22で用いられている符号化方式に対応した復号化処理を行う。例えば映像圧縮部22で上述のようにMPEG−4スタジオプロファイル方式で符号化処理が行われているときは、MPEG−4スタジオプロファイル方式に対応した復号化処理を行う。
【0035】
映像伸長部56は、供給された符号化データDPrbの復号化を行い、ディジタルの映像出力信号VDout2として出力する。この映像伸長部56では、レガシー再生する信号で用いられている符号化方式に対応した復号化処理を行う。例えばHDCAMフォーマットでは、フィールド内DCT符号化処理が行われていることから、この符号化処理に対応した復号化処理を行う。
【0036】
音声出力部57は、音声データDAra,DArbのフィルタ処理等を行って音声出力信号AUoutとして出力する。また、アナログ信号で音声出力を行う場合は、音声データDAra,DArbのD/A変換処理等を行う。
【0037】
なお、映像伸長部55,56や音声出力部57は映像出力信号VDout1,VDout2や音声出力信号AUoutを出力する際に、フォーマット化等を行うものとしてもよい。
【0038】
磁気テープ40の走行制御を行うキャプスタンモータ61は、モータ駆動部62によって回転制御されている。回転ドラムを駆動するドラムモータ63は、モータ駆動部64によって回転制御が行われる。
【0039】
制御部70にはユーザインタフェース部71が接続されている。ユーザインタフェース部71は、ユーザ操作に応じた操作信号PSを生成して制御部70に供給する。制御部70は、操作信号PSに基づき制御信号CTを生成して、磁気記録再生装置の動作がユーザ操作に応じた動作となるように各部の動作を制御する。
【0040】
トラッキング制御部80は、再生信号RSに基づきSAT(Supplement Auto Tracking)動作を行う。具体的には、後述するように80Tの周波数のサーボパイロット信号に基づいて初期的なヘッド引き込みを行い、それに連続して8Tの周波数のサーボパイロット信号に基づいて最終的なヘッド引き込みを実行する。
【0041】
このように構成された磁気記録再生装置20において、回転ドラム11には、HDCAM−SRフォーマットに対応するヘッドとして、従来の磁気記録再生装置に比べて(3/2)倍(m=3/2)の数のヘッドが設けられており、HDCAM−SRフォーマットで信号の記録再生を行う際に、記録再生レートを従来の2倍(n=2)である880Mbpsとすることから、回転ドラムの回転周波数は従来の回転ドラムの回転周波数に比べて(n/m)倍すなわち(4/3)倍とする。例えば従来の回転ドラムの回転周波数が「90Hz」であるときには「120Hz」とする。すなわち、ヘッド数を(3/2)倍で回転周波数を(4/3)倍とすれば、記録再生レートは従来の2倍となる。
【0042】
このように、HDCAM−SRフォーマットで信号の記録再生を行うためのヘッドの数を増やして回転ドラムの回転周波数を高めるものとすれば、ヘッドの数のみを増やして記録再生レートを所望のレートに高める場合に比べてヘッド数を少なくできるので、ヘッドの占有領域が少なくなりレガシー再生のためのヘッドを容易に回転ドラムに設けることができる。また、増やすヘッドの数を少なくできるので、コストアップを抑えることができる。さらに、また、回転ドラムの回転周波数のみを高めて記録再生レートを所望のレートに高める場合に比べて回転周波数を低く抑えることができるので、テープダメージを少なくできる。
【0043】
また、このような磁気記録再生装置20において、記録再生レートを従来の2倍とし、ヘッド数を増やして回転周波数を高くした場合、磁気記録再生装置20に設けられている固定シリンダに形成されたリードの角度(リード角)が従来と等しいリード角であるとき、トラック角がHDCAM−SRフォーマットで規定されているトラック角よりも大きくなってしまうため、トラック角がHDCAM−SRフォーマットで規定されている角度となるように、リード角を小さくする。例えばリード角を4.607度から4.595度に変更する。
【0044】
また、レガシー再生としてHDCAMフォーマットで記録された信号を再生する場合、リード角が変更されていると、回転ドラムにレガシー再生用の再生ヘッドを設けて、この回転ドラムの回転数を従来の回転周波数としても、トラックを正しくトレースすることができないため、リード角が変更されてもトラックを正しくトレースできるように、レガシー再生のための再生ヘッドとしてダイナミックトラッキングヘッドを用いる。ダイナミックトラッキングヘッドを用いる場合、再生動作中にダイナミックトラッキングヘッドを走査方向に対して直交する方向に振動させて、再生信号の信号レベルが最大となるようにダイナミックトラッキングヘッドを駆動すれば、リード角が異なっていてもトラックを正しくトレースすることが可能となり、記録されている信号を正しく再生することができる。
【0045】
さらに、HDCAM−SRフォーマットの信号再生をノントラッキング方式で行うものとして、再生ヘッドをコンフィデンスヘッドに隣接して設け、コンフィデンスヘッドを記録ヘッドから離して設けることで、信号記録時のクロストークを削減して、広い可変速再生範囲を確保する。
【0046】
ノントラッキング方式の再生では、2個以上の再生ヘッドからの再生信号を利用して1つのトラックの信号を得る処理が行われる。例えば、2個の再生ヘッドによるノントラッキング再生では、第1の再生ヘッドを1倍速再生でオントラックする位置として回転ドラムに取り付ける。また、第2の再生ヘッドは、可変速再生時に第1の再生ヘッドで取得されない信号を得ることが可能な位置として回転ドラムに取り付ける。そして、2個の再生ヘッドより再生された再生信号の誤り訂正を第1誤り訂正部52で行い、誤りの少ない誤り訂正後の信号を第2誤り訂正部53等に供給する。
【0047】
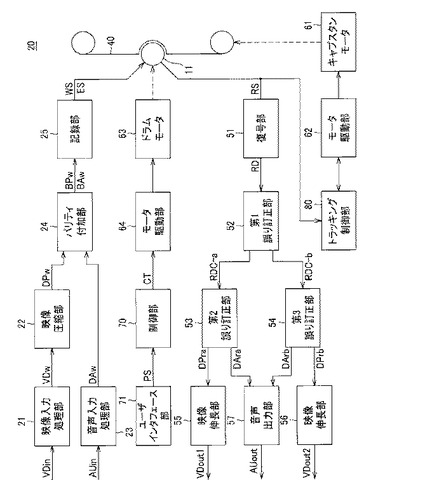
図3は、可変速再生速度と再生ヘッドによるトラックのカバー率を示している。なお、図3において、0倍速とはスチル状態、1倍速は標準速度であることを示している。
【0048】
図1に示すヘッド配置で、ノントラッキング再生を行わない場合、再生速度の可変範囲は、図3(A)に示すように−0.2倍速〜+0.2倍速程度の範囲である。しかし、ノントラッキング再生を行うものとすれば、再生速度の可変範囲を、図3(B)に示すように−0.5倍速〜+1倍速程度の範囲に広げることができる。また、図1に示すヘッド配置では、コンフィデンスヘッドと記録ヘッドの間に再生ヘッドやダイナミックトラッキングヘッドが設けられていることから、コンフィデンスヘッドから読み出された信号は、信号記録時に発生するクロストークの影響が少ないものとされた信号となる。すなわち、良好な画質の再生画像等を得ることが可能となる。なお、再生ヘッドとコンフィデンスヘッドを回転ドラム上に均等に配置すれば、図3(C)に示すように再生速度の可変範囲を広くすることが可能となる。しかし、記録ヘッドのコンフィデンスヘッドが図1に示す配置の場合よりも近接した状態となって、コンフィデンスヘッドから読み出された信号におけるクロストークの影響が大きくなってしまうので、それを回避するためには図1に示すヘッド配置が好ましい。
【0049】
次に、編集時に実行されるSAT(Supplement Auto Tracking)動作について説明する。SATは、編集時に実行されるオートトラッキングであり、トラックの所定の部分に挿入されているSAT信号を記録ヘッド及びコンフィデンスヘッドで再生し、そのエンベロープをAD変換してトラッキング情報とする。なお、SATは、編集中に適切なトラッキングを確保するための機能であるが、SAT動作そのものは編集中であるなしにかかわらず、一定条件がそろえば起動する。
【0050】
SAT信号には、8Tと80Tの2種類サーボパイロット信号(CTL信号)が用意されており、記録ヘッド再生では8Tを、コンフィデンスヘッド再生では80Tを使うように規定されている。ここで、8Tとは基準周波数の1周期Tの8倍の周期をいい、同様に、80Tとは基準周波数の1周期Tの80倍の周期をいう。したがって、8Tのサーボパイロット信号の周波数は、80Tのサーボパイロット信号の周波数よりも10倍高くなっている。8Tのサーボパイロット信号は、トラッキング時に、基準となる記録トラックに最終引き込みを行う際に使用され、80Tのサーボパイロット信号は、同トラッキング時に、同記録トラックに初期ヘッド引き込みを行う際に使用される。
【0051】
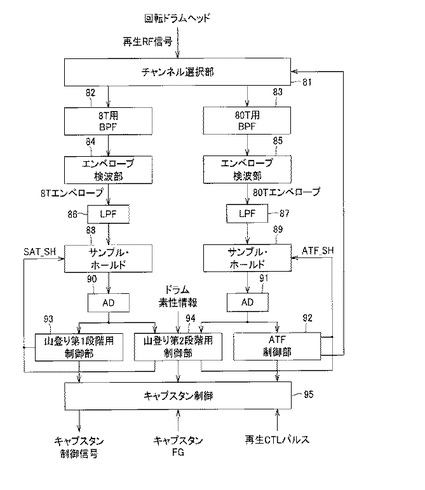
SAT動作は、ATF(automatic track following)と、山登り第1段階と、山登り第2段階との三種類の制御で構成されている。以下、これらのトラッキング動作について説明する。
【0052】
図4は、トラッキング制御部80の構成例を示すブロック図である。チャンネル選択部81は、回転ドラムのヘッドで読み取られた再生RF信号のうち、所望のヘッドの再生RF信号を選択する。例えばA2−A5、A3−A6等の180度対向しているヘッドからの再生RF信号がそれぞれ1つのチャンネルになるので、例えばA2−A6の再生RF信号を選択する場合、A2−A6の再生RF信号が選択されるようなタイミングで2つのチャンネルを切替える。なお、従来の回転ドラムでは、C,Gトラックを交互に再生し、B,Hトラックの80T信号を得ており、また、C,Gトラックを再生するヘッドは対向した位置にあるので、1チャンネルで信号を伝送することができた。
【0053】
8T用BPF(Band Pass Filter)82は、チャンネル選択部81で選択された再生RF信号から8Tのサーボパイロット信号を取り出す。また、80T用BPF(Band Pass Filter)83は、チャンネル選択部81で選択された再生RF信号から80Tのサーボパイロット信号を取り出す。
【0054】
8Tのサーボパイロット信号は、エンベロープ検波部84にて8Tのエンベロープ(包絡線)が検出され、LPF(Low Pass Filter)86にて、8Tのエンベロープの低周波部が取り出され、サンプル・ホールド部88に保持される。サンプル・ホールド部88は、8T用サンプルホールドパルス(SAT_SH)のタイミングによってエンベロープを保持し、SAT_SHの割り込みによりAD変換部90を介してAD値が得られる。
【0055】
80Tのサーボパイロット信号は、エンベロープ検波部85にて80Tのエンベロープ(包絡線)が検出され、LPF(Low Pass Filter)87にて、80Tのエンベロープの低周波部が取り出され、サンプル・ホールド部89に保持される。サンプル・ホールド部89は、80T用サンプルホールドパルス(ATF_SH)のタイミングによってエンベロープを保持し、ATF_SHの割り込みによりAD変換部91を介してAD値が得られる。
【0056】
ATF制御部92は、80T信号(ATF信号)のAD値よりATFの収斂位置を決定し、キャプスタン制御信号に補正を付加する。ATFは、大まかなトラッキングであり、大きくオフトラックしているような場合でも短時間で大まかに引き込むように、CTLロック位相を決定する。後述するようにATFでは、コンフィデンスヘッド再生による80T記録のSAT信号がトラッキングに用いられる。また、所望のヘッドからのSAT信号を取得するためにチャンネル選択信号をチャンネル選択部81に出力する。具体的には、後述するようにコンフィデンスヘッドCNF−A2、A6、又はコンフィデンスヘッドCNF−A2、A6の組み合わせからの再生RF信号が得られるようにチャンネルを選択する。また、チャンネル選択信号の状態に応じて、どちらのエンベロープなのかを判断して記憶するとともにオフトラック量等を計算する。
【0057】
山登り第1段階用制御部93は、8TのAD値より収斂位置を決定し、キャプスタン制御信号に補正を付加する。山登り第1段階は、高精度のトラッキングであり、記録ヘッド再生による8T記録のSAT信号が用いられる。具体的には、ATF収斂位置であるCTL位相を基点とし、CTLロック位相を一定ステップ(例えば、トラック幅15%分)ずつ変化させ、そのつどSAT信号をAD変換する。そして、AD結果からCTL位相に対するSATエンベロープの山の形を把握し、再生ヘッドの下エッジとトラックの下エッジが一致するCTLロック位相を選び、そこを収斂点とする。
【0058】
山登り第2段階用制御部94は、システムから受け取るドラム素性情報に基づいて8Tを使うか80Tを使うかを判断し、そのAD値より収斂位置を決定してキャプスタン制御信号に補正を付加する。この山登り第2段階は、インサート編集を実行中の場合のみ実行される。山登り第2段階は、システムから受け取るドラムの素性情報により二種類の方法から一つの方法を選択する。ドラムの素性情報は、インサート実行中の記録ヘッド再生信号にかぶりが大きいドラムか、かぶり対策済みドラムかのいずれかの情報である。前者の場合、下地の80T記録信号をコンフィデンスヘッドで再生し、トラッキングをとる。また、後者の場合は、山登り第1段階と同様に、記録ヘッド再生による下地の8T記録信号を用いる。山登り第2段階は、IN点を通過し編集区間をトレースするようになったら下地のSAT信号のエンベロープレベルを常に監視して、下地のトラッキングが徐々にずれていくような場合に追従する。例えば、CTLロック位相をより細かいステップで変化させる。例えば、ステップ幅として、トラック幅4%分を用いる。また、AD値を得るための平均回数を多くとる。したがって、山登り第2段階は、ゆっくりとした追従となる。
【0059】
キャプスタン制御部95は、ATF制御部92、山登り第1段階制御部93及び山登り第2段階制御部94による補正をキャプスタン制御信号に付加し、キャプスタンを制御する。
【0060】
このようにトラッキング制御部80は、80Tの周波数のサーボパイロット信号に基づいて初期的なヘッド引き込みを行い、それに連続して8Tの周波数のサーボパイロット信号に基づいて最終的なヘッド引き込みを実行することにより、高精度なトラッキングを行うことができる。
【0061】
続いて、磁気テープに記録されたサーボパイロット信号のヘッド再生について説明する。以下では、まず記録フォーマットを説明し、次に回転ドラム11のヘッドとトラックとの対応について説明する。
【0062】
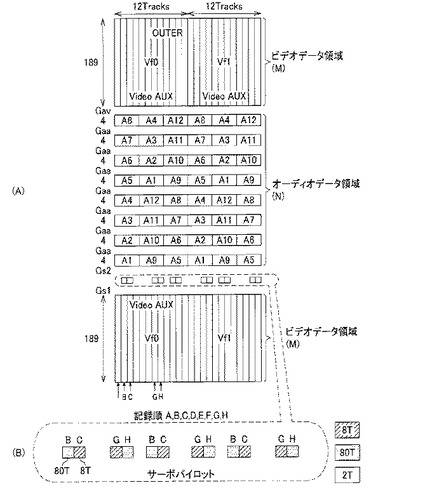
図5は、磁気テープにおける記録フォーマットとしてHDCAM−SRフォーマットのフットプリント例を示す図である。図5(A)に示すフットプリント(ECC構成およびデータ記録形式)において、ビデオデータ領域(M)はトラックの前後に分かれており、この間にオーディオデータ領域(N)が割り当てられる。最初のビデオデータ領域(M)とオーディオデータ領域(N)の間には、サーボパイロット信号が配置されている。ビデオデータ領域(M)からオーディオデータ領域(N)へ移行する部分にサーボパイロット信号が位置しているため、C1訂正処理を行う際に必要なビデオデータ領域(M)−オーディオデータ領域(N)間の信号処理スペースを十分に確保できるようになる。
【0063】
図5(A)に示すフットプリントの12トラック×2フィールドにおいて、各々の12トラックには、上方のビデオデータ領域(sync:(M))と、下方のビデオデータ領域と、この上下のビデオデータ領域(M)の間にオーディオデータ領域(N)が配置されている。1フィールドのビデオデータ領域(M)には、例えば、36個のECCブロック(符号化単位データ)が記録される。後述するようにECCブロックは、126個のsyncブロックから構成される。
【0064】
右側の12トラックにはフィールドf0のビデオデータが記録され、左側の12トラックにはフィールドf1のビデオデータが記録される。上下の各々のビデオデータ領域(M)の大きさは12トラック×189syncブロックである。オーディオデータ領域(N)には、オーディオデータDaが記録される。オーディオデータ領域(N)は、8つに区分され、1区分の大きさは4syncブロック×12トラックである。
【0065】
ここで下方のビデオデータ領域(M)側から、上方のビデオデータ領域(M)側へ図3に示したようなヘリカル記録ヘッド50を走査するものとすると、右側の12トラックにおいて、第1区分にはオーディオデータA1,A9,A5が配置され、第2区分にはオーディオデータA2,A10,A6が配置され、第3区分にはオーディオデータA3,A11,A7が配置され、第4区分にはオーディオデータA4,A12,A8が配置され、第5区分にはオーディオデータA5,A1,A9が配置され、第6区分にはオーディオデータA6,A2,A10が配置され、第7区分にはオーディオデータA7,A3,A11が配置され、第8区分にはオーディオデータA8,A4,A12が各々配置される。左側の12トラックにおいても同様にして、オーディオデータA1〜A12が配置される。
【0066】
上方のビデオデータ領域(M)とオーディオデータ領域(N)との間には、ギャップGavが配置されている。また、各区分のオーディオデータ間にはギャップGaaが配置されている。一方、オーディオデータ領域(N)と下方のビデオデータ領域(M)との間にはサーボパイロット信号(CTL信号)が配置されている。また、下方のビデオデータ領域(M)とサーボパイロット信号と間にはギャップGs1が配置され、このサーボパイロット信号と下方のビデオデータ領域(M)との間にはギャップGs2が配置される。これは再生時に信号処理スペースを確保するためである。
【0067】
ここで、符号化単位データであるECCブロックについて説明する。1個のECCブロックは、226バイト×114バイトのデータ配列からなるビデオデータに対して、外符号演算データ系列につき、各列のデータ(データ列)が例えば(126,114)リードソロモン符号によって符号化され、12バイトのC2パリティ(外符号パリティ:OUTER)が生成される。さらに、これらビデオデータおよびC2パリティに対して、内符号演算データ系列につき、各行のデータ(データ列)が例えば(242,226)リードソロモン符号によって符号化され、16バイトのC1パリティ(内符号パリティ:INNER)が生成される。また、各々のデータ行の先頭には、それぞれ2バイトの大きさを有するsyncデータおよびIDが配される。
【0068】
すなわち、1フィールドは、36個のECCブロックから構成され、1個のECCブロックは、126個のsyncブロックから構成される。また、1個のsyncブロックは、2バイトのsyncデータと、2バイトのIDと、226バイトのビデオデータと、16バイトのC1パリティから構成される。IDには、当該1syncブロックが12トラックのいずれに記録されたものかを識別するトラックID、当該1syncブロックが一本の傾斜トラックに記録された複数のsyncブロックのいずれであるかを識別するsyncブロックIDが含まれる。また、12トラック毎に1セグメントが構成され、「0〜3」のセグメント番号が順次繰り返し付与されるが、上述の2バイトのIDには、当該1syncブロックが記録されるセグメントのセグメント番号を示すセグメントIDも含まれる。
【0069】
図5(B)は、図5(A)に示したフットプリントの12トラック×2フィールドのサーボパイロット信号の記録例を示す拡大図である。信号記録順は、紙面の右から左側へA,B,C,D,E,F,G,Hである。図5(B)において、左側の12トラックの記録トラックBには、なし地に示す80Tの周波数のサーボパイロット信号が記録され(打ち込まれ)、記録トラックCには斜線に示す8Tの周波数のサーボパイロット信号が記録され、更に、記録トラックGには斜線に示す8Tの周波数のサーボパイロット信号が記録され、記録トラックHには、なし地に示す80Tの周波数のサーボパイロット信号が各々記録される。更に続けて、記録トラックBには、なし地に示す80Tの周波数のサーボパイロット信号が記録され、記録トラックCには斜線に示す8Tの周波数のサーボパイロット信号が各々記録される。
【0070】
また、右側の12トラックの記録トラックGには、斜線に示す8Tの周波数のサーボパイロット信号が記録され、記録トラックHには、なし地に示す80Tの周波数のサーボパイロット信号が記録され、更に、記録トラックBには、なし地に示す80Tの周波数のサーボパイロット信号が記録され、記録トラックCには、斜線に示す8Tの周波数のサーボパイロット信号が各々記録される。更に続けて、記録トラックGには、斜線に示す8Tの周波数のサーボパイロット信号が記録され、記録トラックHには、なし地に示す80Tの周波数のサーボパイロット信号が各々記録される。
【0071】
このように80T信号が記録されている部分は、従来の回転ドラムでスキャンするヘッド数の単位毎に1箇所になるように挿入されている。具体的には、対向の配置の2つのヘッドで再生可能な位置に挿入されている。
【0072】
回転ドラム11は、図1に示すように、6個のコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A3,CNF−B3が配置されていると共に、これら6個のコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A3,CNF−B3に対して180度の角間隔をもって6個のコンフィデンスヘッドCNF−A4,CNF−B4〜CNF−A6,CNF−B6が配置されている。また、記録ヘッドREC−A1,REC−B1〜REC−A6,REC−B6も、再生ヘッドPB−A1,PB−B1〜PB−A6,PB−B6も同様に配置されている。したがって、記録時および再生時には、1回のスキャンでは6個のヘッドによって6トラックが同時に走査され、12トラックは2回のスキャンで走査される。
【0073】
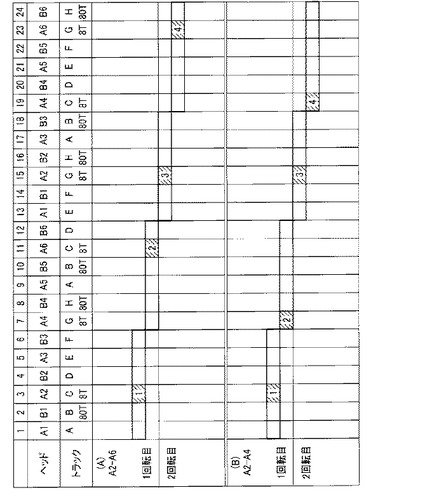
図6は、HDCAM−SRフォーマットの信号とコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A6,CNF−B6との対応関係を示す模式図である。
80Tの周波数のサーボパイロット信号は、コンフィデンスヘッドCNFで再生される。コンフィデンスヘッドCNFの幅は、トラック幅13.2μmに対し、23μmなので、上下のトラックに4.9μmずつはみ出している。そして、このはみ出した部分で、Bトラック及びHトラックに記録された80Tの周波数のサーボパイロット信号をなぞる。
【0074】
すなわち、図6(A)に示すように、コンフィデンスヘッドCNF−A2及びコンフィデンスヘッドCNF−A6を用いて、C,Gチャンネルを再生し、B,Hトラックの80Tの周波数のサーボパイロット信号を取得する。又は、図6(B)に示すように、コンフィデンスヘッドCNF−A2及びコンフィデンスヘッドCNF−A4を用いて、C,Gチャンネルを再生し、B,Hトラックの80Tの周波数のサーボパイロット信号を取得する。なお、これらの組み合わせは、一般的に換言すると、回転ヘッド11が従来の回転ドラムのヘッドのm倍のヘッドを有する場合、仮に回転ドラム11の複数のヘッドを円に均等に配置した場合に、180/m度に位置する2つのヘッドである。
【0075】
図6において、両側のコンフィデンスヘッドで80T信号が再生されることがあるコンフィデンスヘッドCNF−A1、A3、A5を用いることはできない。また、隣接トラックから80T信号を再生するので、コンフィデンスヘッドCNF−B1〜B6も用いることはできない。したがって、ATF制御部92は、3つのコンフィデンスヘッドCNF−A2、A4、A6から2つの組み合わせを用いる。なお。コンフィデンスヘッドCNF−A2、A6の組み合わせは、サンプリングが同時期になるので用いることができない。
【0076】
コンフィデンスヘッドCNF−A2、A6の組み合わせでは、回転ドラムの回転毎に80T信号を再生するトラックが同じとなる。つまり、1回転目ではトラックCを再生し、2回転目ではトラックGを再生する。また、トラックC、Gのサンプリングを同数とするため、24トラック単位でトラッキング制御が行われる。
【0077】
コンフィデンスヘッドCNF−A2、A4の組み合わせでは、80T信号を再生するトラックが交互になるので、12トラック単位でトラッキング制御が行われる。
【0078】
トラックCの再生信号は、6サンプル分のAD値が得られた後、平均値が算出される(以下、C平均と呼ぶ)、トラックGの再生信号は、6サンプル分のAD値が得られた後、平均値が算出される(以下、G平均と呼ぶ)。そして、C平均とG平均との比を計算し、オフトラックの方向と量を得る。ここで、比を算出する際に常にC平均/G平均を計算するのではなく、次式のように比の値及びC平均とG平均との大小関係をもとに、修正すべきオフトラック量を決定することが好ましい。
【0079】
if(G平均≧C平均) 比=G平均/C平均
つまり、C平均>G平均ならば、オフトラック量はマイナスとなる。これによりプラス側もマイナス側も均等に分解能を得ることができる。
【0080】
そして、CTLのロック位相を補正するために、キャプスタン制御部95にトラッキング補正量(CTLロック位相補正量)を出力する。
【0081】
このように80T信号が記録されている部分が、従来の回転ドラムにおいて対向の配置の2つのヘッドで再生可能な位置に挿入されていたため、スキャンするヘッド数の単位が変わると、80T信号が配置されているトラックの単位とスキャンするヘッド数の最小公倍数のトラック毎にしかサンプリングできなかったが、ヘッドが対向するチャンネルをずらして用い、スキャンするヘッドの単位毎にデータを得ることにより、ATFを実行するのに効率的に80T信号をサンプリングすることができる。
【0082】
すなわち、従来、コンフィデンスヘッドCNF−A2、A5の組み合わせを用いてATFを行っていたが、コンフィデンスヘッドCNF−A2、A4、又はコンフィデンスヘッドCNF−A2、A6の組み合わせを用いることにより、ATF実行時間を短縮させることができる。
【0083】
また、コンフィデンスヘッドCNF−A2、A5の組み合わせだと、従来に比べてサンプリングの回数が3分の1になるところを、前記トラッキング制御によれば3分の2にすることができ、収束時間を短縮することができる。
【0084】
なお、上述した組み合わせのヘッド位置は180度対向ではなく、切り替えのスイッチングパルスが180度の切り替えにはならないが、図5に示すように80T信号はトラックの真ん中付近に挿入されているので、従来のコンフィデンスヘッドCNF−A2,A5のスイッチングパルスで代用することができる。
【図面の簡単な説明】
【0085】
【図1】本実施の形態に係る磁気記録再生装置に用いられる回転ドラムのヘッド配置の一例を示す図である
【図2】本実施の形態に係る磁気記録再生装置の構成を示す図である。
【図3】可変速再生速度と再生ヘッドによるトラックのカバー率を示すグラフである。
【図4】トラッキング制御部の構成例を示すブロック図である。
【図5】磁気テープにおける記録フォーマットとしてHDCAM−SRフォーマットのフットプリント例を示す図である。
【図6】、HDCAM−SRフォーマットの信号とコンフィデンスヘッドCNFとの対応関係を示す模式図である。
【図7】従来の回転ドラムのヘッドの配置例を示す図である。
【図8】HDCAM−SRフォーマットの記録パターンを示す模式図である。
【符号の説明】
【0086】
11 回転ドラム、 20 磁気記録再生装置、 21 映像入力処理部、 22映像圧縮部、 23 音声入力処理部、 24 パリティ付加部、 25 記録部、 40 磁気テープ、 51 復号部、 52 第1誤り訂正部、 53 第2誤り訂正部、 54 第3誤り訂正部、 55、56 映像伸長部、 57 音声出力部、 61 キャプスタンモータ、 62,64 モータ駆動部、 63 ドラムモータ、 70 制御部、 71 ユーザインタフェース部、 80 トラッキング制御部、 81 チャンネル選択部、 84,85 エンベロープ検波部、 88,89 サンプル・ホールド部、 90,91 AD変換部、 92 ATF制御部、 93 山登り第1段階用段階制御部、 94 山登り第2段階用段階制御部、 95 キャプスタン制御部
【技術分野】
【0001】
本発明は、磁気記録再生装置に関する。詳しくは、回転ドラムに設けられる記録ヘッドや再生ヘッドの数を増やすだけでなく回転ドラムの回転周波数を高めることで、所望のフォーマットの信号の記録再生レートを高めるものである。
【背景技術】
【0002】
従来、磁気テープは、種々のフォーマットが規格化されているが、複数のフォーマットに対する記録や消去が可能な磁気記録再生装置も知られている。例えば、特許文献1には、DV(Digital Video)フォーマットとDVCPROフォーマット(登録商標)に対応可能な磁気記録再生装置が開示されている。
【0003】
図7は、複数のフォーマット、例えばHDCAM(登録商標)フォーマットとHDCAM−SR(登録商標)フォーマットに対応可能な従来の磁気記録再生装置で用いられている回転ドラムのヘッドの配置例を示す図である。
【0004】
HDCAMフォーマットのトラックピッチは21.7μm、HDCAM−SRフォーマットのトラックピッチは13.2μmにそれぞれ規定されており、トラックピッチが大きく異なる。したがって、HDCAMフォーマットとHDCAM−SRフォーマットに対応させる場合、回転ドラムには、HDCAMフォーマットに対応するヘッドとHDCAM−SRフォーマットに対応するヘッドが個々に設けられる。
【0005】
HDCAM−SRフォーマットに対応するヘッドとしては、例えば記録ヘッドREC−A〜REC−H、再生及び可変速再生のための所謂ダイナミックトラッキングヘッドHSADV−A1/A2〜HSADV−H1/H2、信号が正しく記録されたか確認するためのコンフィデンスヘッドCNF−A〜CNF−H、及び消去ヘッドFE−AD,FE−EHが設けられている。なお、ダイナミックトラッキングヘッドとは、電圧の印加によって撓み変形されるアクチュエータ(例えばバイモルフ)に再生ヘッドをマウントして、この再生ヘッドがマウントされたアクチュエータを回転ドラム上に配置したものであり、このアクチュエータに電圧を印加することで、走査方向に対して直交する方向に再生ヘッドを移動できるものである。
【0006】
また、HDCAMフォーマットに対応するヘッドとしては、例えば記録ヘッドHDREC−A〜HDREC−D、再生や可変速再生のためのダイナミックトラッキングヘッドHDADV−A〜HDADV−D、信号が正しく記録されたか確認するためのコンフィデンスヘッドHDCNF−A〜HDCNF−D及び消去ヘッドHDFE−AB,HDFE−CDが設けられている。
【0007】
このように、HDCAMフォーマットに対応したヘッドとHDCAM−SRフォーマットに対応したヘッドとが回転ドラムに設けられることで、例えばHDCAM−SRフォーマットで記録再生を行う場合でも、過去にHDCAMフォーマットで信号が記録されている磁気テープの再生、すなわちレガシー再生を行うことができる。
【0008】
また、HDCAMフォーマットの記録レートは140Mbps、HDCAM−SRフォーマットの記録レートは440Mbpsにそれぞれ規定されており、記録レートの高いHDCAM−SRフォーマットの記録再生でもHDCAMフォーマットの記録再生と同じドラム回転数となるように、HDCAM−SRフォーマットに対応したヘッドは、HDCAMフォーマットのヘッドよりも数が多く設けられている。
【0009】
図8は、HDCAM−SRフォーマットの記録パターンを示す模式図である。HDCAM−SRフォーマットでは、トラックの所定の部分にSAT(Supplemental Automatic Tracking)信号が挿入されている。SATは、編集時に実行されるオートトラッキングである。
【0010】
SAT信号には8Tと80Tの2種類が規定され、記録ヘッドRECで8Tを、コンフィデンスヘッドCNFで80Tを再生する。トラック幅13.2μmに対しヘッド幅が23μmなので、ヘッドは上下のトラックに4.9μmずつはみ出している。このはみ出した部分で、コンフィデンスヘッドCNF−CはBトラックを、コンフィデンスヘッドCNF−GはHトラックをなぞり、80Tを再生する。すなわち、80Tは、図7に示すように略180度対向して設けられたヘッドで再生可能な部分に挿入されている。
【0011】
【特許文献1】特開2001−283408号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
ところで、高画質で映像の記録再生を行う場合や複数の撮像装置で得られた映像を同時に記録する場合等では、映像のデータ量が増加することから、記録レートのさらなる高速化が必要となる。
【0013】
例えば、HDCAM−SRフォーマットの記録レートを向上させる場合、HDCAM−SRフォーマットに対応する記録ヘッドやコンフィデンスヘッド等を増加させ、回転ドラムの回転速度を上げれば、記録レートを増加させることができる。
【0014】
しかし、SAT信号は、図7に示すように略180度対向して設けられたヘッドで再生可能な部分に挿入されているため、ヘッド数を増加させ、回転ドラムの回転速度を上げると、SAT信号が配置されているトラック単位とスキャンするヘッド数との最小公倍数のトラック毎にしかSAT信号をサンプリングできない。このため、トラッキング信号の収束に時間がかかってしまう。
【0015】
本発明は、このような従来の実情に鑑みて提案されたものであり、効率的にトラッキング信号をサンプリングすることができる磁気記録再生装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
上述の課題を解決するために、本発明に係る磁気記録再生装置は、第1のレートで記録再生可能な第1の回転ドラムを用いて記録される所定フォーマットの信号を第1のレートのn倍の第2のレートで記録再生する磁気記録再生装置であって、前記第1の回転ドラムのヘッド数のm倍(1<m<n)のヘッド数を有する第2の回転ドラムと、前記第2の回転ドラムの回転周波数を前記第1の回転ドラムの回転周波数の(n/m)倍に制御し、前記第2のレートで前記所定フォーマットの信号の記録再生を行う記録再生制御部と、前記第1の回転ドラムの略180度対向位置にある2つのヘッドで再生可能な部分に挿入されている前記所定フォーマットのトラッキング信号を、前記第2の回転ドラムの略180度対向位置にある2つのヘッドとは異なる2つのヘッドで再生し、トラッキングを行うトラッキング制御部とを備える。
【発明の効果】
【0017】
本発明は、第1の回転ドラムのヘッド数のm倍(1<m<n)のヘッド数を有する第2の回転ドラムを用いて所定フォーマットの信号を再生する際、所定フォーマットのトラッキング信号を、第2の回転ドラムの略180度対向位置にある2つのヘッドとは異なる2つのヘッドで再生することにより、効率的にトラッキング信号をサンプリングすることができる。
【発明を実施するための最良の形態】
【0018】
以下、図面を参照しながら、本発明の実施の一形態について説明する。本発明の具体例として示す磁気記録再生装置は、従来の磁気記録再生装置に比べて、回転ドラムに設けるヘッドを増やして回転ドラムの回転数を高速化し、記録レートや再生レートを高めたものである。
【0019】
以下、第1のフォーマットとしてHDCAM−SR(登録商標)フォーマットを挙げ、第2のフォーマットとしてHDCAM(登録商標)フォーマットを挙げ、HDCAM−SRフォーマットの信号の記録再生を行う際に、記録再生レートを従来の2倍である880Mbpsとするとともに、レガシー再生として、HDCAMフォーマットで記録された信号を再生可能とする磁気記録再生装置について説明する。
【0020】
図1は、本実施の形態に係る磁気記録再生装置に用いられる回転ドラム11のヘッド配置の一例を示す図である。回転ドラム11には、HDCAM−SRフォーマットに対応するヘッドとして、例えば記録再生レートが440Mbpsである従来の磁気記録再生装置に比べて2倍よりも少ない(3/2)倍の数のヘッドが設けられている。すなわち、記録ヘッドREC−A1,REC−B1〜REC−A6,REC−B6、標準度再生及び可変速再生のための再生ヘッドPB−A1,PB−B1〜PB−A6,PB−B6、信号が正しく記録されたか確認するためのコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A6,CNF−B6が設けられている。また、ヘッドREC−A1〜REC−A6,PB−A1〜PB−A6,CNF−A1〜CNF−A6は、第1のアジマス角とされており、ヘッドREC−B1〜REC−B6,PB−B1〜PB−B6,CNF−B1〜CNF−B6は、第1のアジマス角とは異なる第2のアジマス角とされている。
【0021】
さらに、回転ドラム11には、消去ヘッドFE−1,FE−2,FE−3と、SAT再生ヘッドPB−satが設けられている。なお、SAT再生ヘッドPB−satは、編集時のトラッキング精度を高めるためにビデオトラックとオーディオトラック間に記録されたSAT(Supplement Auto Tracking)信号を再生するためのヘッドである。
【0022】
また、回転ドラム11には、HDCAMフォーマットで記録されている信号を再生するため、HDCAMフォーマットに対応するヘッドとして、標準速再生や可変速再生のためのダイナミックトラッキングヘッドHDADV−A〜HDADV−Dが設けられている。ダイナミックトラッキングヘッドHDADV−A,HDADV−Bは、組として構成されており、ダイナミックトラッキングヘッドHDADV−AのヘッドギャップとダイナミックトラッキングヘッドHDADV−Bのヘッドギャップはトラック幅方向に位置ずれを生じた状態とされている。またダイナミックトラッキングヘッドHDADV−C,HDADV−Dも、ダイナミックトラッキングヘッドHDADV−A,HDADV−Bと同様に組として構成されている。
【0023】
図2は、本実施の形態に係る磁気記録再生装置の構成を示す図である。磁気記録再生装置20の映像入力処理部21は、外部から種々のフォーマット等で映像入力信号VDinが供給されても、映像入力信号VDinを記録できるように処理する。例えばデフォーマット処理を行い、HD−SDI(High Definition Serial Digital Interface)フォーマット等で映像入力信号VDinが供給されたとき、このHD−SDIフォーマットの信号から輝度信号と色差信号と抽出して、記録ビデオ信号DVwとして映像圧縮部22に供給する。
【0024】
映像圧縮部22は、記録ビデオ信号DVwの符号化処理を行い、データ量を圧縮してパリティ付加部24に供給する。映像圧縮部22は、符号化処理として例えばMPEG(Moving Picture Experts Group)−4スタジオプロファイル方式で符号化処理を行い、得られた符号化データDPwをパリティ付加部24に供給する。
【0025】
音声入力処理部23は、外部から種々のフォーマット等で音声入力信号AUinが供給されても、映像信号を記録できるように処理する。例えば、音声入力処理部23はデフォーマット処理を行い、AES/EBUフォーマットのディジタル信号から音声データを抽出して、記録音声データDAwとしてパリティ付加部24に供給する。また、音声入力処理部23は、音声データのサンプリングレートを所望のサンプリングレートとするレート変換やフィルタ処理、信号レベル調整等を行う。
【0026】
パリティ付加部24は、符号化データDPwや記録音声データDAwに対して誤り訂正符号を生成して付加する。例えば、内符号パリティと外符号パリティを符号化データDPwに付加してSYNCブロックBPwを構成する。また、記録音声データDAwに基づいてSYNCブロックBAwを構成して、このSYNCブロックBPw,BAwを記録部25に供給する。
【0027】
記録部25は、パリティ付加部24から供給されたSYNCブロックBPw,BAwのデータに同期符号や識別符号を付加して、トラック毎の記録データを生成する。さらに、記録データのチャネルコーディングを行い、得られた信号を記録電流WSに変換して、回転ドラム11に搭載された記録ヘッドREC−A1,REC−B1〜REC−A6,REC−B6に供給する。また、記録部25は、制御部70からの制御信号CTによって記録されている信号を消去する指示がなされたとき、消去電流ESを生成して回転ドラム11に搭載された消去ヘッドFE−1,FE−2,FE−3に供給する。
【0028】
このように、回転ドラム11の記録ヘッドREC−A1,REC−B1〜REC−A6,REC−B6に記録電流WSを供給することで、磁気テープ40に映像や音声を記録できる。また消去ヘッドFE−1,FE−2,FE−3に消去電流ESを供給することで、記録されている映像や音声を消去できる。
【0029】
磁気テープ40に記録されている信号は、回転ドラム11の再生ヘッドPB−A1,PB−B1〜PB−A6,PB−B6やコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A6,CNF−B6、ダイナミックトラッキングヘッドHDADV−A〜HDADV−Dによって読み出されて、再生信号RSとして復号部51及びトラッキング制御部80に供給される。
【0030】
復号部51は、再生信号RSの振幅や位相を調整して波形整形を行い、さらに記録部25で行われるチャネルコーディングに対応した復号処理を行って再生データRDを生成する。この再生データRDは、第1誤り訂正部52に供給される。
【0031】
第1誤り訂正部52は、再生データRDを構成する符号化データに含まれた内符号パリティを用いた誤り訂正を行う。ここで、後述する制御部からHDCAM−SRフォーマットに対応する再生ヘッドで読み出しが行われていることが制御信号CTによって示されたとき、このときの誤り訂正後の再生データRDCaを第2誤り訂正部53に供給する。また、HDCAMフォーマットに対応する再生ヘッドで読み出しが行われていることが制御信号CTによって示されたとき、このときの誤り訂正後の再生データRDCbを第3誤り訂正部54に供給する。
【0032】
第2誤り訂正部53は、再生データRDCaに対して外符号パリティを用いた誤り訂正を行い、誤り訂正後の符号化データDPraを映像伸長部55に供給する。また、第2誤り訂正部53では、音声データの誤り訂正を行い誤り訂正後の音声データDAraを音声出力部57に供給する。
【0033】
第3誤り訂正部54は、再生データRDCbに対して外符号パリティを用いた誤り訂正を行い、誤り訂正後の符号化データDPrbを映像伸長部56に供給する。また、第2誤り訂正部53では、音声データの誤り訂正を行い誤り訂正後の音声データDAraを音声出力部57に供給する。
【0034】
映像伸長部55は、供給された符号化データDPraの復号化処理を行い、ディジタルの映像出力信号VDout1として出力する。この映像伸長部55では映像圧縮部22で用いられている符号化方式に対応した復号化処理を行う。例えば映像圧縮部22で上述のようにMPEG−4スタジオプロファイル方式で符号化処理が行われているときは、MPEG−4スタジオプロファイル方式に対応した復号化処理を行う。
【0035】
映像伸長部56は、供給された符号化データDPrbの復号化を行い、ディジタルの映像出力信号VDout2として出力する。この映像伸長部56では、レガシー再生する信号で用いられている符号化方式に対応した復号化処理を行う。例えばHDCAMフォーマットでは、フィールド内DCT符号化処理が行われていることから、この符号化処理に対応した復号化処理を行う。
【0036】
音声出力部57は、音声データDAra,DArbのフィルタ処理等を行って音声出力信号AUoutとして出力する。また、アナログ信号で音声出力を行う場合は、音声データDAra,DArbのD/A変換処理等を行う。
【0037】
なお、映像伸長部55,56や音声出力部57は映像出力信号VDout1,VDout2や音声出力信号AUoutを出力する際に、フォーマット化等を行うものとしてもよい。
【0038】
磁気テープ40の走行制御を行うキャプスタンモータ61は、モータ駆動部62によって回転制御されている。回転ドラムを駆動するドラムモータ63は、モータ駆動部64によって回転制御が行われる。
【0039】
制御部70にはユーザインタフェース部71が接続されている。ユーザインタフェース部71は、ユーザ操作に応じた操作信号PSを生成して制御部70に供給する。制御部70は、操作信号PSに基づき制御信号CTを生成して、磁気記録再生装置の動作がユーザ操作に応じた動作となるように各部の動作を制御する。
【0040】
トラッキング制御部80は、再生信号RSに基づきSAT(Supplement Auto Tracking)動作を行う。具体的には、後述するように80Tの周波数のサーボパイロット信号に基づいて初期的なヘッド引き込みを行い、それに連続して8Tの周波数のサーボパイロット信号に基づいて最終的なヘッド引き込みを実行する。
【0041】
このように構成された磁気記録再生装置20において、回転ドラム11には、HDCAM−SRフォーマットに対応するヘッドとして、従来の磁気記録再生装置に比べて(3/2)倍(m=3/2)の数のヘッドが設けられており、HDCAM−SRフォーマットで信号の記録再生を行う際に、記録再生レートを従来の2倍(n=2)である880Mbpsとすることから、回転ドラムの回転周波数は従来の回転ドラムの回転周波数に比べて(n/m)倍すなわち(4/3)倍とする。例えば従来の回転ドラムの回転周波数が「90Hz」であるときには「120Hz」とする。すなわち、ヘッド数を(3/2)倍で回転周波数を(4/3)倍とすれば、記録再生レートは従来の2倍となる。
【0042】
このように、HDCAM−SRフォーマットで信号の記録再生を行うためのヘッドの数を増やして回転ドラムの回転周波数を高めるものとすれば、ヘッドの数のみを増やして記録再生レートを所望のレートに高める場合に比べてヘッド数を少なくできるので、ヘッドの占有領域が少なくなりレガシー再生のためのヘッドを容易に回転ドラムに設けることができる。また、増やすヘッドの数を少なくできるので、コストアップを抑えることができる。さらに、また、回転ドラムの回転周波数のみを高めて記録再生レートを所望のレートに高める場合に比べて回転周波数を低く抑えることができるので、テープダメージを少なくできる。
【0043】
また、このような磁気記録再生装置20において、記録再生レートを従来の2倍とし、ヘッド数を増やして回転周波数を高くした場合、磁気記録再生装置20に設けられている固定シリンダに形成されたリードの角度(リード角)が従来と等しいリード角であるとき、トラック角がHDCAM−SRフォーマットで規定されているトラック角よりも大きくなってしまうため、トラック角がHDCAM−SRフォーマットで規定されている角度となるように、リード角を小さくする。例えばリード角を4.607度から4.595度に変更する。
【0044】
また、レガシー再生としてHDCAMフォーマットで記録された信号を再生する場合、リード角が変更されていると、回転ドラムにレガシー再生用の再生ヘッドを設けて、この回転ドラムの回転数を従来の回転周波数としても、トラックを正しくトレースすることができないため、リード角が変更されてもトラックを正しくトレースできるように、レガシー再生のための再生ヘッドとしてダイナミックトラッキングヘッドを用いる。ダイナミックトラッキングヘッドを用いる場合、再生動作中にダイナミックトラッキングヘッドを走査方向に対して直交する方向に振動させて、再生信号の信号レベルが最大となるようにダイナミックトラッキングヘッドを駆動すれば、リード角が異なっていてもトラックを正しくトレースすることが可能となり、記録されている信号を正しく再生することができる。
【0045】
さらに、HDCAM−SRフォーマットの信号再生をノントラッキング方式で行うものとして、再生ヘッドをコンフィデンスヘッドに隣接して設け、コンフィデンスヘッドを記録ヘッドから離して設けることで、信号記録時のクロストークを削減して、広い可変速再生範囲を確保する。
【0046】
ノントラッキング方式の再生では、2個以上の再生ヘッドからの再生信号を利用して1つのトラックの信号を得る処理が行われる。例えば、2個の再生ヘッドによるノントラッキング再生では、第1の再生ヘッドを1倍速再生でオントラックする位置として回転ドラムに取り付ける。また、第2の再生ヘッドは、可変速再生時に第1の再生ヘッドで取得されない信号を得ることが可能な位置として回転ドラムに取り付ける。そして、2個の再生ヘッドより再生された再生信号の誤り訂正を第1誤り訂正部52で行い、誤りの少ない誤り訂正後の信号を第2誤り訂正部53等に供給する。
【0047】
図3は、可変速再生速度と再生ヘッドによるトラックのカバー率を示している。なお、図3において、0倍速とはスチル状態、1倍速は標準速度であることを示している。
【0048】
図1に示すヘッド配置で、ノントラッキング再生を行わない場合、再生速度の可変範囲は、図3(A)に示すように−0.2倍速〜+0.2倍速程度の範囲である。しかし、ノントラッキング再生を行うものとすれば、再生速度の可変範囲を、図3(B)に示すように−0.5倍速〜+1倍速程度の範囲に広げることができる。また、図1に示すヘッド配置では、コンフィデンスヘッドと記録ヘッドの間に再生ヘッドやダイナミックトラッキングヘッドが設けられていることから、コンフィデンスヘッドから読み出された信号は、信号記録時に発生するクロストークの影響が少ないものとされた信号となる。すなわち、良好な画質の再生画像等を得ることが可能となる。なお、再生ヘッドとコンフィデンスヘッドを回転ドラム上に均等に配置すれば、図3(C)に示すように再生速度の可変範囲を広くすることが可能となる。しかし、記録ヘッドのコンフィデンスヘッドが図1に示す配置の場合よりも近接した状態となって、コンフィデンスヘッドから読み出された信号におけるクロストークの影響が大きくなってしまうので、それを回避するためには図1に示すヘッド配置が好ましい。
【0049】
次に、編集時に実行されるSAT(Supplement Auto Tracking)動作について説明する。SATは、編集時に実行されるオートトラッキングであり、トラックの所定の部分に挿入されているSAT信号を記録ヘッド及びコンフィデンスヘッドで再生し、そのエンベロープをAD変換してトラッキング情報とする。なお、SATは、編集中に適切なトラッキングを確保するための機能であるが、SAT動作そのものは編集中であるなしにかかわらず、一定条件がそろえば起動する。
【0050】
SAT信号には、8Tと80Tの2種類サーボパイロット信号(CTL信号)が用意されており、記録ヘッド再生では8Tを、コンフィデンスヘッド再生では80Tを使うように規定されている。ここで、8Tとは基準周波数の1周期Tの8倍の周期をいい、同様に、80Tとは基準周波数の1周期Tの80倍の周期をいう。したがって、8Tのサーボパイロット信号の周波数は、80Tのサーボパイロット信号の周波数よりも10倍高くなっている。8Tのサーボパイロット信号は、トラッキング時に、基準となる記録トラックに最終引き込みを行う際に使用され、80Tのサーボパイロット信号は、同トラッキング時に、同記録トラックに初期ヘッド引き込みを行う際に使用される。
【0051】
SAT動作は、ATF(automatic track following)と、山登り第1段階と、山登り第2段階との三種類の制御で構成されている。以下、これらのトラッキング動作について説明する。
【0052】
図4は、トラッキング制御部80の構成例を示すブロック図である。チャンネル選択部81は、回転ドラムのヘッドで読み取られた再生RF信号のうち、所望のヘッドの再生RF信号を選択する。例えばA2−A5、A3−A6等の180度対向しているヘッドからの再生RF信号がそれぞれ1つのチャンネルになるので、例えばA2−A6の再生RF信号を選択する場合、A2−A6の再生RF信号が選択されるようなタイミングで2つのチャンネルを切替える。なお、従来の回転ドラムでは、C,Gトラックを交互に再生し、B,Hトラックの80T信号を得ており、また、C,Gトラックを再生するヘッドは対向した位置にあるので、1チャンネルで信号を伝送することができた。
【0053】
8T用BPF(Band Pass Filter)82は、チャンネル選択部81で選択された再生RF信号から8Tのサーボパイロット信号を取り出す。また、80T用BPF(Band Pass Filter)83は、チャンネル選択部81で選択された再生RF信号から80Tのサーボパイロット信号を取り出す。
【0054】
8Tのサーボパイロット信号は、エンベロープ検波部84にて8Tのエンベロープ(包絡線)が検出され、LPF(Low Pass Filter)86にて、8Tのエンベロープの低周波部が取り出され、サンプル・ホールド部88に保持される。サンプル・ホールド部88は、8T用サンプルホールドパルス(SAT_SH)のタイミングによってエンベロープを保持し、SAT_SHの割り込みによりAD変換部90を介してAD値が得られる。
【0055】
80Tのサーボパイロット信号は、エンベロープ検波部85にて80Tのエンベロープ(包絡線)が検出され、LPF(Low Pass Filter)87にて、80Tのエンベロープの低周波部が取り出され、サンプル・ホールド部89に保持される。サンプル・ホールド部89は、80T用サンプルホールドパルス(ATF_SH)のタイミングによってエンベロープを保持し、ATF_SHの割り込みによりAD変換部91を介してAD値が得られる。
【0056】
ATF制御部92は、80T信号(ATF信号)のAD値よりATFの収斂位置を決定し、キャプスタン制御信号に補正を付加する。ATFは、大まかなトラッキングであり、大きくオフトラックしているような場合でも短時間で大まかに引き込むように、CTLロック位相を決定する。後述するようにATFでは、コンフィデンスヘッド再生による80T記録のSAT信号がトラッキングに用いられる。また、所望のヘッドからのSAT信号を取得するためにチャンネル選択信号をチャンネル選択部81に出力する。具体的には、後述するようにコンフィデンスヘッドCNF−A2、A6、又はコンフィデンスヘッドCNF−A2、A6の組み合わせからの再生RF信号が得られるようにチャンネルを選択する。また、チャンネル選択信号の状態に応じて、どちらのエンベロープなのかを判断して記憶するとともにオフトラック量等を計算する。
【0057】
山登り第1段階用制御部93は、8TのAD値より収斂位置を決定し、キャプスタン制御信号に補正を付加する。山登り第1段階は、高精度のトラッキングであり、記録ヘッド再生による8T記録のSAT信号が用いられる。具体的には、ATF収斂位置であるCTL位相を基点とし、CTLロック位相を一定ステップ(例えば、トラック幅15%分)ずつ変化させ、そのつどSAT信号をAD変換する。そして、AD結果からCTL位相に対するSATエンベロープの山の形を把握し、再生ヘッドの下エッジとトラックの下エッジが一致するCTLロック位相を選び、そこを収斂点とする。
【0058】
山登り第2段階用制御部94は、システムから受け取るドラム素性情報に基づいて8Tを使うか80Tを使うかを判断し、そのAD値より収斂位置を決定してキャプスタン制御信号に補正を付加する。この山登り第2段階は、インサート編集を実行中の場合のみ実行される。山登り第2段階は、システムから受け取るドラムの素性情報により二種類の方法から一つの方法を選択する。ドラムの素性情報は、インサート実行中の記録ヘッド再生信号にかぶりが大きいドラムか、かぶり対策済みドラムかのいずれかの情報である。前者の場合、下地の80T記録信号をコンフィデンスヘッドで再生し、トラッキングをとる。また、後者の場合は、山登り第1段階と同様に、記録ヘッド再生による下地の8T記録信号を用いる。山登り第2段階は、IN点を通過し編集区間をトレースするようになったら下地のSAT信号のエンベロープレベルを常に監視して、下地のトラッキングが徐々にずれていくような場合に追従する。例えば、CTLロック位相をより細かいステップで変化させる。例えば、ステップ幅として、トラック幅4%分を用いる。また、AD値を得るための平均回数を多くとる。したがって、山登り第2段階は、ゆっくりとした追従となる。
【0059】
キャプスタン制御部95は、ATF制御部92、山登り第1段階制御部93及び山登り第2段階制御部94による補正をキャプスタン制御信号に付加し、キャプスタンを制御する。
【0060】
このようにトラッキング制御部80は、80Tの周波数のサーボパイロット信号に基づいて初期的なヘッド引き込みを行い、それに連続して8Tの周波数のサーボパイロット信号に基づいて最終的なヘッド引き込みを実行することにより、高精度なトラッキングを行うことができる。
【0061】
続いて、磁気テープに記録されたサーボパイロット信号のヘッド再生について説明する。以下では、まず記録フォーマットを説明し、次に回転ドラム11のヘッドとトラックとの対応について説明する。
【0062】
図5は、磁気テープにおける記録フォーマットとしてHDCAM−SRフォーマットのフットプリント例を示す図である。図5(A)に示すフットプリント(ECC構成およびデータ記録形式)において、ビデオデータ領域(M)はトラックの前後に分かれており、この間にオーディオデータ領域(N)が割り当てられる。最初のビデオデータ領域(M)とオーディオデータ領域(N)の間には、サーボパイロット信号が配置されている。ビデオデータ領域(M)からオーディオデータ領域(N)へ移行する部分にサーボパイロット信号が位置しているため、C1訂正処理を行う際に必要なビデオデータ領域(M)−オーディオデータ領域(N)間の信号処理スペースを十分に確保できるようになる。
【0063】
図5(A)に示すフットプリントの12トラック×2フィールドにおいて、各々の12トラックには、上方のビデオデータ領域(sync:(M))と、下方のビデオデータ領域と、この上下のビデオデータ領域(M)の間にオーディオデータ領域(N)が配置されている。1フィールドのビデオデータ領域(M)には、例えば、36個のECCブロック(符号化単位データ)が記録される。後述するようにECCブロックは、126個のsyncブロックから構成される。
【0064】
右側の12トラックにはフィールドf0のビデオデータが記録され、左側の12トラックにはフィールドf1のビデオデータが記録される。上下の各々のビデオデータ領域(M)の大きさは12トラック×189syncブロックである。オーディオデータ領域(N)には、オーディオデータDaが記録される。オーディオデータ領域(N)は、8つに区分され、1区分の大きさは4syncブロック×12トラックである。
【0065】
ここで下方のビデオデータ領域(M)側から、上方のビデオデータ領域(M)側へ図3に示したようなヘリカル記録ヘッド50を走査するものとすると、右側の12トラックにおいて、第1区分にはオーディオデータA1,A9,A5が配置され、第2区分にはオーディオデータA2,A10,A6が配置され、第3区分にはオーディオデータA3,A11,A7が配置され、第4区分にはオーディオデータA4,A12,A8が配置され、第5区分にはオーディオデータA5,A1,A9が配置され、第6区分にはオーディオデータA6,A2,A10が配置され、第7区分にはオーディオデータA7,A3,A11が配置され、第8区分にはオーディオデータA8,A4,A12が各々配置される。左側の12トラックにおいても同様にして、オーディオデータA1〜A12が配置される。
【0066】
上方のビデオデータ領域(M)とオーディオデータ領域(N)との間には、ギャップGavが配置されている。また、各区分のオーディオデータ間にはギャップGaaが配置されている。一方、オーディオデータ領域(N)と下方のビデオデータ領域(M)との間にはサーボパイロット信号(CTL信号)が配置されている。また、下方のビデオデータ領域(M)とサーボパイロット信号と間にはギャップGs1が配置され、このサーボパイロット信号と下方のビデオデータ領域(M)との間にはギャップGs2が配置される。これは再生時に信号処理スペースを確保するためである。
【0067】
ここで、符号化単位データであるECCブロックについて説明する。1個のECCブロックは、226バイト×114バイトのデータ配列からなるビデオデータに対して、外符号演算データ系列につき、各列のデータ(データ列)が例えば(126,114)リードソロモン符号によって符号化され、12バイトのC2パリティ(外符号パリティ:OUTER)が生成される。さらに、これらビデオデータおよびC2パリティに対して、内符号演算データ系列につき、各行のデータ(データ列)が例えば(242,226)リードソロモン符号によって符号化され、16バイトのC1パリティ(内符号パリティ:INNER)が生成される。また、各々のデータ行の先頭には、それぞれ2バイトの大きさを有するsyncデータおよびIDが配される。
【0068】
すなわち、1フィールドは、36個のECCブロックから構成され、1個のECCブロックは、126個のsyncブロックから構成される。また、1個のsyncブロックは、2バイトのsyncデータと、2バイトのIDと、226バイトのビデオデータと、16バイトのC1パリティから構成される。IDには、当該1syncブロックが12トラックのいずれに記録されたものかを識別するトラックID、当該1syncブロックが一本の傾斜トラックに記録された複数のsyncブロックのいずれであるかを識別するsyncブロックIDが含まれる。また、12トラック毎に1セグメントが構成され、「0〜3」のセグメント番号が順次繰り返し付与されるが、上述の2バイトのIDには、当該1syncブロックが記録されるセグメントのセグメント番号を示すセグメントIDも含まれる。
【0069】
図5(B)は、図5(A)に示したフットプリントの12トラック×2フィールドのサーボパイロット信号の記録例を示す拡大図である。信号記録順は、紙面の右から左側へA,B,C,D,E,F,G,Hである。図5(B)において、左側の12トラックの記録トラックBには、なし地に示す80Tの周波数のサーボパイロット信号が記録され(打ち込まれ)、記録トラックCには斜線に示す8Tの周波数のサーボパイロット信号が記録され、更に、記録トラックGには斜線に示す8Tの周波数のサーボパイロット信号が記録され、記録トラックHには、なし地に示す80Tの周波数のサーボパイロット信号が各々記録される。更に続けて、記録トラックBには、なし地に示す80Tの周波数のサーボパイロット信号が記録され、記録トラックCには斜線に示す8Tの周波数のサーボパイロット信号が各々記録される。
【0070】
また、右側の12トラックの記録トラックGには、斜線に示す8Tの周波数のサーボパイロット信号が記録され、記録トラックHには、なし地に示す80Tの周波数のサーボパイロット信号が記録され、更に、記録トラックBには、なし地に示す80Tの周波数のサーボパイロット信号が記録され、記録トラックCには、斜線に示す8Tの周波数のサーボパイロット信号が各々記録される。更に続けて、記録トラックGには、斜線に示す8Tの周波数のサーボパイロット信号が記録され、記録トラックHには、なし地に示す80Tの周波数のサーボパイロット信号が各々記録される。
【0071】
このように80T信号が記録されている部分は、従来の回転ドラムでスキャンするヘッド数の単位毎に1箇所になるように挿入されている。具体的には、対向の配置の2つのヘッドで再生可能な位置に挿入されている。
【0072】
回転ドラム11は、図1に示すように、6個のコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A3,CNF−B3が配置されていると共に、これら6個のコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A3,CNF−B3に対して180度の角間隔をもって6個のコンフィデンスヘッドCNF−A4,CNF−B4〜CNF−A6,CNF−B6が配置されている。また、記録ヘッドREC−A1,REC−B1〜REC−A6,REC−B6も、再生ヘッドPB−A1,PB−B1〜PB−A6,PB−B6も同様に配置されている。したがって、記録時および再生時には、1回のスキャンでは6個のヘッドによって6トラックが同時に走査され、12トラックは2回のスキャンで走査される。
【0073】
図6は、HDCAM−SRフォーマットの信号とコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A6,CNF−B6との対応関係を示す模式図である。
80Tの周波数のサーボパイロット信号は、コンフィデンスヘッドCNFで再生される。コンフィデンスヘッドCNFの幅は、トラック幅13.2μmに対し、23μmなので、上下のトラックに4.9μmずつはみ出している。そして、このはみ出した部分で、Bトラック及びHトラックに記録された80Tの周波数のサーボパイロット信号をなぞる。
【0074】
すなわち、図6(A)に示すように、コンフィデンスヘッドCNF−A2及びコンフィデンスヘッドCNF−A6を用いて、C,Gチャンネルを再生し、B,Hトラックの80Tの周波数のサーボパイロット信号を取得する。又は、図6(B)に示すように、コンフィデンスヘッドCNF−A2及びコンフィデンスヘッドCNF−A4を用いて、C,Gチャンネルを再生し、B,Hトラックの80Tの周波数のサーボパイロット信号を取得する。なお、これらの組み合わせは、一般的に換言すると、回転ヘッド11が従来の回転ドラムのヘッドのm倍のヘッドを有する場合、仮に回転ドラム11の複数のヘッドを円に均等に配置した場合に、180/m度に位置する2つのヘッドである。
【0075】
図6において、両側のコンフィデンスヘッドで80T信号が再生されることがあるコンフィデンスヘッドCNF−A1、A3、A5を用いることはできない。また、隣接トラックから80T信号を再生するので、コンフィデンスヘッドCNF−B1〜B6も用いることはできない。したがって、ATF制御部92は、3つのコンフィデンスヘッドCNF−A2、A4、A6から2つの組み合わせを用いる。なお。コンフィデンスヘッドCNF−A2、A6の組み合わせは、サンプリングが同時期になるので用いることができない。
【0076】
コンフィデンスヘッドCNF−A2、A6の組み合わせでは、回転ドラムの回転毎に80T信号を再生するトラックが同じとなる。つまり、1回転目ではトラックCを再生し、2回転目ではトラックGを再生する。また、トラックC、Gのサンプリングを同数とするため、24トラック単位でトラッキング制御が行われる。
【0077】
コンフィデンスヘッドCNF−A2、A4の組み合わせでは、80T信号を再生するトラックが交互になるので、12トラック単位でトラッキング制御が行われる。
【0078】
トラックCの再生信号は、6サンプル分のAD値が得られた後、平均値が算出される(以下、C平均と呼ぶ)、トラックGの再生信号は、6サンプル分のAD値が得られた後、平均値が算出される(以下、G平均と呼ぶ)。そして、C平均とG平均との比を計算し、オフトラックの方向と量を得る。ここで、比を算出する際に常にC平均/G平均を計算するのではなく、次式のように比の値及びC平均とG平均との大小関係をもとに、修正すべきオフトラック量を決定することが好ましい。
【0079】
if(G平均≧C平均) 比=G平均/C平均
つまり、C平均>G平均ならば、オフトラック量はマイナスとなる。これによりプラス側もマイナス側も均等に分解能を得ることができる。
【0080】
そして、CTLのロック位相を補正するために、キャプスタン制御部95にトラッキング補正量(CTLロック位相補正量)を出力する。
【0081】
このように80T信号が記録されている部分が、従来の回転ドラムにおいて対向の配置の2つのヘッドで再生可能な位置に挿入されていたため、スキャンするヘッド数の単位が変わると、80T信号が配置されているトラックの単位とスキャンするヘッド数の最小公倍数のトラック毎にしかサンプリングできなかったが、ヘッドが対向するチャンネルをずらして用い、スキャンするヘッドの単位毎にデータを得ることにより、ATFを実行するのに効率的に80T信号をサンプリングすることができる。
【0082】
すなわち、従来、コンフィデンスヘッドCNF−A2、A5の組み合わせを用いてATFを行っていたが、コンフィデンスヘッドCNF−A2、A4、又はコンフィデンスヘッドCNF−A2、A6の組み合わせを用いることにより、ATF実行時間を短縮させることができる。
【0083】
また、コンフィデンスヘッドCNF−A2、A5の組み合わせだと、従来に比べてサンプリングの回数が3分の1になるところを、前記トラッキング制御によれば3分の2にすることができ、収束時間を短縮することができる。
【0084】
なお、上述した組み合わせのヘッド位置は180度対向ではなく、切り替えのスイッチングパルスが180度の切り替えにはならないが、図5に示すように80T信号はトラックの真ん中付近に挿入されているので、従来のコンフィデンスヘッドCNF−A2,A5のスイッチングパルスで代用することができる。
【図面の簡単な説明】
【0085】
【図1】本実施の形態に係る磁気記録再生装置に用いられる回転ドラムのヘッド配置の一例を示す図である
【図2】本実施の形態に係る磁気記録再生装置の構成を示す図である。
【図3】可変速再生速度と再生ヘッドによるトラックのカバー率を示すグラフである。
【図4】トラッキング制御部の構成例を示すブロック図である。
【図5】磁気テープにおける記録フォーマットとしてHDCAM−SRフォーマットのフットプリント例を示す図である。
【図6】、HDCAM−SRフォーマットの信号とコンフィデンスヘッドCNFとの対応関係を示す模式図である。
【図7】従来の回転ドラムのヘッドの配置例を示す図である。
【図8】HDCAM−SRフォーマットの記録パターンを示す模式図である。
【符号の説明】
【0086】
11 回転ドラム、 20 磁気記録再生装置、 21 映像入力処理部、 22映像圧縮部、 23 音声入力処理部、 24 パリティ付加部、 25 記録部、 40 磁気テープ、 51 復号部、 52 第1誤り訂正部、 53 第2誤り訂正部、 54 第3誤り訂正部、 55、56 映像伸長部、 57 音声出力部、 61 キャプスタンモータ、 62,64 モータ駆動部、 63 ドラムモータ、 70 制御部、 71 ユーザインタフェース部、 80 トラッキング制御部、 81 チャンネル選択部、 84,85 エンベロープ検波部、 88,89 サンプル・ホールド部、 90,91 AD変換部、 92 ATF制御部、 93 山登り第1段階用段階制御部、 94 山登り第2段階用段階制御部、 95 キャプスタン制御部
【特許請求の範囲】
【請求項1】
第1のレートで記録再生可能な第1の回転ドラムを用いて記録される所定フォーマットの信号を第1のレートのn倍の第2のレートで記録再生する磁気記録再生装置であって、
前記第1の回転ドラムのヘッド数のm倍(1<m<n)のヘッド数を有する第2の回転ドラムと、
前記第2の回転ドラムの回転周波数を前記第1の回転ドラムの回転周波数の(n/m)倍に制御し、前記第2のレートで前記所定フォーマットの信号の記録再生を行う記録再生制御部と、
前記第1の回転ドラムの略180度対向位置にある2つのヘッドで再生可能な部分に挿入されている前記所定フォーマットのトラッキング信号を、前記第2の回転ドラムの略180度対向位置にある2つのヘッドとは異なる2つのヘッドで再生し、トラッキングを行うトラッキング制御部とを備える磁気記録再生装置。
【請求項2】
前記トラッキング制御部は、前記第1の回転ドラムがトラッキング信号を再生するトラックから180度回転して再生する第1のトラック又は360度回転して再生するトラックを前記第2の回転ドラムで再生することを特徴とする請求項1記載の磁気記録再生装置。
【請求項3】
前記トラッキング制御部は、前記第2の回転ドラムの略180度対向位置の2つのヘッドからの再生信号を1つのチャンネルとして読み出すことを特徴とする請求項1記載の磁気記録再生装置。
【請求項4】
n=2、m=3/2であって、
前記所定のフォーマットは、8トラック毎に前記トラッキング信号が挿入されていることを特徴とする請求項1記載の磁気記録再生装置。
【請求項5】
前記回転ドラムは、6個のコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A3,CNF−B3が配置されていると共に、これら6個のコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A3,CNF−B3に対してそれぞれ180度対向して6個のコンフィデンスヘッドCNF−A4,CNF−B4〜CNF−A6,CNF−B6が配置され、
前記トラッキング制御部は、コンフィデンスヘッドCNF−A2、CNF−A4、又はコンフィデンスヘッドCNF−A2、CNF−A6の2つのヘッドでトラッキング信号を再生することを特徴とする請求項1記載の磁気記録再生装置。
【請求項6】
前記トラッキング制御部は、上記2つのヘッドの再生信号比の値、及び2つの再生信号の平均の大小関係に基づいてオフトラック量を算出することを特徴とする請求項1記載の磁気記録再生装置。
【請求項1】
第1のレートで記録再生可能な第1の回転ドラムを用いて記録される所定フォーマットの信号を第1のレートのn倍の第2のレートで記録再生する磁気記録再生装置であって、
前記第1の回転ドラムのヘッド数のm倍(1<m<n)のヘッド数を有する第2の回転ドラムと、
前記第2の回転ドラムの回転周波数を前記第1の回転ドラムの回転周波数の(n/m)倍に制御し、前記第2のレートで前記所定フォーマットの信号の記録再生を行う記録再生制御部と、
前記第1の回転ドラムの略180度対向位置にある2つのヘッドで再生可能な部分に挿入されている前記所定フォーマットのトラッキング信号を、前記第2の回転ドラムの略180度対向位置にある2つのヘッドとは異なる2つのヘッドで再生し、トラッキングを行うトラッキング制御部とを備える磁気記録再生装置。
【請求項2】
前記トラッキング制御部は、前記第1の回転ドラムがトラッキング信号を再生するトラックから180度回転して再生する第1のトラック又は360度回転して再生するトラックを前記第2の回転ドラムで再生することを特徴とする請求項1記載の磁気記録再生装置。
【請求項3】
前記トラッキング制御部は、前記第2の回転ドラムの略180度対向位置の2つのヘッドからの再生信号を1つのチャンネルとして読み出すことを特徴とする請求項1記載の磁気記録再生装置。
【請求項4】
n=2、m=3/2であって、
前記所定のフォーマットは、8トラック毎に前記トラッキング信号が挿入されていることを特徴とする請求項1記載の磁気記録再生装置。
【請求項5】
前記回転ドラムは、6個のコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A3,CNF−B3が配置されていると共に、これら6個のコンフィデンスヘッドCNF−A1,CNF−B1〜CNF−A3,CNF−B3に対してそれぞれ180度対向して6個のコンフィデンスヘッドCNF−A4,CNF−B4〜CNF−A6,CNF−B6が配置され、
前記トラッキング制御部は、コンフィデンスヘッドCNF−A2、CNF−A4、又はコンフィデンスヘッドCNF−A2、CNF−A6の2つのヘッドでトラッキング信号を再生することを特徴とする請求項1記載の磁気記録再生装置。
【請求項6】
前記トラッキング制御部は、上記2つのヘッドの再生信号比の値、及び2つの再生信号の平均の大小関係に基づいてオフトラック量を算出することを特徴とする請求項1記載の磁気記録再生装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−32372(P2009−32372A)
【公開日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願番号】特願2007−197958(P2007−197958)
【出願日】平成19年7月30日(2007.7.30)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願日】平成19年7月30日(2007.7.30)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]