
磁気記録媒体及び磁気読取装置
【課題】サーボパターン分割による再生波形振幅劣化の影響を低減できる磁気記録媒体及び磁気読取装置を提供する。
【解決手段】情報を記録するために複数の第1磁性ドットを所定の位置に配置したデータ領域と、前記第1磁性ドットの位置を特定するための複数の第2磁性ドットを所定の位置に配置したサーボ領域とを表面に備え、このサーボ領域中のサーボアドレスマークを2重に作製し、一方の前記サーボアドレスマークの細分化分割位置と他方の前記サーボアドレスマークの細分化分割位置とを、互いに径方向に異なる位置で細分化分割して成る磁気記録媒体。
【解決手段】情報を記録するために複数の第1磁性ドットを所定の位置に配置したデータ領域と、前記第1磁性ドットの位置を特定するための複数の第2磁性ドットを所定の位置に配置したサーボ領域とを表面に備え、このサーボ領域中のサーボアドレスマークを2重に作製し、一方の前記サーボアドレスマークの細分化分割位置と他方の前記サーボアドレスマークの細分化分割位置とを、互いに径方向に異なる位置で細分化分割して成る磁気記録媒体。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、磁気記録媒体及び磁気読取装置に関する。
【背景技術】
【0002】
BPM(ビットパターンドメディア)のサーボパターン細分化分割方法に係わる。BPMの磁性膜はグラニュラーでない連続膜であるため、大面積パターンでは反磁界により保磁力が低下する。このため、サーボパターン磁化方向を初期化着磁しておいても、へッドタッチ等の刺激により磁化反転が発生する。
【0003】
この対策として、サーボパターンを細分化分割することで面積を小さくして保磁力を確保することが既に公知となっている。例えば、特許文献1には、前エッジデータ系列、後エッジデータ系列の2系列のデータそれぞれから特定パターンを検出する構成が開示されている。
【0004】
しかしながら、なおサーボパターン分割による再生波形振幅劣化への対策の要望があるが、かかる要望を実現するための手段は知られていない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平6−275027号公報(段落番号0005、図4)
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、サーボパターン分割による再生波形振幅劣化の影響を低減できる磁気記録媒体及び磁気読取装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、実施形態によれば磁気記録媒体は、情報を記録するために複数の第1磁性ドットを所定の位置に配置したデータ領域と、前記第1磁性ドットの位置を特定するための複数の第2磁性ドットを所定の位置に配置したサーボ領域とを表面に備え、このサーボ領域中のサーボアドレスマークを2重に作製し、一方の前記サーボアドレスマークの細分化分割位置と他方の前記サーボアドレスマークの細分化分割位置とを、互いに径方向に異なる位置で細分化分割して成る。
【図面の簡単な説明】
【0008】
【図1】磁気記録媒体を備える磁気記録装置の一実施形態を示す概略構成図。
【図2】磁気ディスク装置に備えられた一実施形態の磁気ディスク媒体のセクタ構造を示す平面概念図。
【図3】実施形態の磁気ディスク媒体の表面を示す平面模式図(図3a)、及びデータ領域及びサーボ領域の磁化状態を示す概念的模式図(図3b)。
【図4】実施形態のSAMパターン細分化分割方法の実施例。
【図5】実施形態のSAMパターンを検出するための構成の例。
【図6】実施形態のSAMパターン細分化分割方法の他の実施例。
【図7】実施形態の磁気ディスク装置におけるサーボ信号復調回路のブロック図。
【図8】実施形態の磁気ディスク装置におけるサーボ信号復調回路の動作タイミングチャート。
【発明を実施するための形態】
【0009】
以下、実施形態を説明する。
(第1の実施形態)
第1の実施形態を図を参照して説明する。
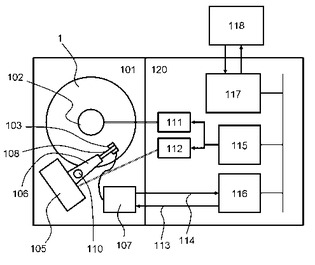
図1は、後述する磁気記録媒体を備える磁気読取装置の一実施形態である磁気記録(再生)装置を示す概略構成図である。図1に示す磁気記録装置はディスク状の磁気記録媒体(磁気ディスク媒体)1を備える。(以下、磁気ディスク媒体を備える磁気記録装置を磁気ディスク装置と呼称する。)
【0010】
磁気ディスク装置は、ディスクエンクロージャ101と回路基板120とを含んでなる。
ディスクエンクロージャ101は、磁気ディスク媒体1、スピンドルモータ102、磁気ヘッド103、ボイス・コイル・モータ(VCM)(図示せず)を含んでなるアクチュエータ105、ヘッドジンバル組立体108、キャリッジアーム106、シャフト110、ヘッドアンプ107等を密封して搭載する容器である。磁気ディスク媒体1はスピンドルモータ(SPM)102に装着されている。磁気ヘッド103は、磁気ディスク媒体1に磁気情報を記録する記録(ライト)素子(図示せず)、磁気ディスク媒体1に記録された磁気情報を電気信号として取り出す働きを有する再生(リード)素子(図示せず)の少なくとも一方を含む。記録素子は、例えばライトコイル、主磁極層、及び補助磁極層を含んでなる。ライトコイルは磁束を発生させる機能を有する。主磁極層は、ライトコイルにおいて発生した磁束を収容し、その磁束を磁気ディスクに向けて放出する機能を有する、補助磁極層は主磁極層から放出された磁束を磁気ディスクを経由して環流させる機能を有する。再生素子としては、例えばMR素子(磁気抵抗効果素子)などが挙げられる。ヘッドジンバル組立体108に搭載され、磁気ディスク媒体1と対向するように配置される。
【0011】
磁気ディスク媒体1としては、後述する種々の磁気記録媒体を使用することができる。ヘッドジンバル組立体108の磁気ヘッド103が搭載されていない端部はキャリッジアーム106の先端に固定されている。キャリッジアーム106は、VCMによりシャフト110を回転軸にして揺動駆動することができる。磁気ヘッド103はこの揺動駆動により磁気ディスク1上を概ね径方向に走査することができる。磁気ヘッド103が磁気ディスク媒体1上の所望の記録トラックに位置決めされることにより、磁気ヘッド103は磁気ディスク媒体1上の記録トラックに配列された記録ビットに情報を書き込む、あるいは磁気ディスク媒体1から情報を読み取ることができる。ヘッドアンプ107は、記録信号113を元に磁気ヘッド103に搭載される記録素子に電流を流して磁気ディスク媒体1に記録を行う、あるいは、磁気ヘッド103の再生素子が検出した磁気ディスク媒体1の磁化情報を再生信号114として変換する働きを担っている。
【0012】
回路基板120は、リードチャンネル116、マイクロ・プロセッシング・ユニット(MPU)115、スピンドルモータ(SPM)ドライバ111、ボイス・コイル・モータ(VCM)ドライバ112、ディスクコントローラ117等を含む。リードチャネル116は、ヘッドアンプ107からの再生信号114(サーボ信号あるいはデータ信号)を解読してデジタル情報に変換する、あるいは、ディスクコントローラ117から記録指示された情報を、ヘッドアンプ107を駆動するための記録信号113に変換する働きを担う。
【0013】
MPU115は、リードチャネル116が解読したサーボ信号のデジタル情報(サーボ情報)を元に、VCMドライバ112を駆動して磁気ヘッド103の位置決め制御をおこなう、あるいは、SPMドライバ111を駆動して磁気ディスク媒体1の回転制御を行う。
【0014】
ディスクコントローラ117は、ホストコンピュータ118から記録再生命令によって、MPU115に磁気ヘッド103の位置決め指示をし、磁気ヘッド103の磁気ディスク媒体1へのアドレッシングを行う働きを担う。また、ディスクコントローラ117は、リードチャネル116に記録再生するデジタル情報の送受信を行なって、結果をホストコンピュータ118へ返す動作を行う働きを担う。
【0015】
以下、本発明の磁気記録媒体の実施形態について、図2以下を参照しながら説明する。
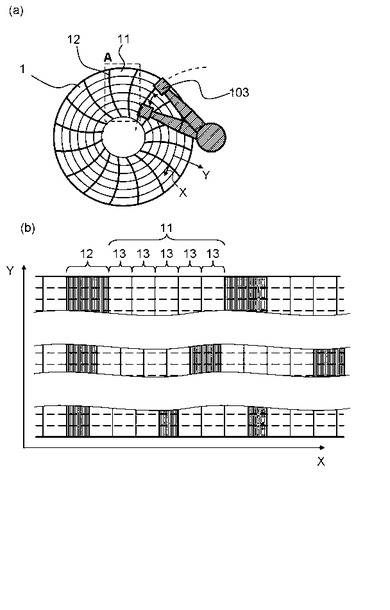
図2(a)は、磁気ディスク装置に備えられた一実施形態の磁気ディスク媒体のセクタ構造を示す平面概念図である。図2(b)は、図2(a)における部分Aを拡大した図である。なお、図中、ディスクの表面において、ディスクの周方向をX軸、径方向をY軸とする(以下の図において同様とする。)。
【0016】
一般に、磁気ディスク1上に、データ領域11とサーボ領域12とが周方向に交互に配置されている。すなわち、サーボ領域12は磁気ディスク媒体1の略中心を中心とする帯状の略円周上に、断続的に配置されている。また、データ領域11は帯状の略円周上の前記サーボ領域12が配置されていない部分に配置されている。
【0017】
データ領域11は、データを記憶する領域である。データ領域11には、記録再生を行うための記憶領域であるデータセクタ13が、周方向に一定長(トラックピッチ)周期で配置されている。それぞれのデータセクタ11には磁性ドット(図示せず)が含まれている。データ領域11に設けられた磁性部の形状及び配置をデータパターンと呼称する。
【0018】
サーボ領域(サーボセクタ)12は、データ領域11に含まれる磁性ドットの位置(特にディスクの径方向の位置)を特定するために設けられる。サーボ領域12は、後述する様々な形状及び配置がなされた磁性ドットを含んでなる。サーボ領域12の形状は、磁気ディスク装置のヘッドアクセス軌跡となる円弧状で、かつサーボ領域の周方向長が、半径位置に比例して長くなるように形成される。サーボ領域12に設けられた磁性ドットの形状及び配置をサーボパターンと呼称する。
【0019】
磁気ヘッド103は、磁気ディスク媒体を回転させた状態において、サーボ領域12に含まれる磁性ドットにより形成される再生信号を読み取ることにより、磁気ヘッド103の位置情報を得る。得られた磁気ヘッド103の位置情報をもとに、磁気ヘッド103はトラックに対して位置決めされ、データ領域12の所望の位置の磁性部に記録及び再生を行うことができる。
【0020】
図3は、本実施形態の磁気ディスク媒体の表面を示す平面模式図(図3a)、及びデータ領域及びサーボ領域の磁化状態を示す概念的模式図(図3b)である。本実施形態の磁気記録媒体は、データ領域の磁性ドット及びサーボ領域の磁性ドットが所定の位置に形成された、いわゆるパターンドメディアである。
【0021】
データ領域11には複数の磁性ドット(第1磁性ドット)41が所定の位置に配置されている。磁気ディスク装置内部において、磁気ヘッドが第1磁性ドット41上を走査することにより情報ビットaを形成する。ここで「所定の位置に」配置されるとは、隣接する磁性ドットが一定の決まり、すなわち、周方向(トラック方向)に断続的に配置されることを意味する。通常、周方向に隣接する第1磁性ドットは、一定の間隔で配置される。後述するナノインプリント法やフォトリソグラフィ法を用いて形成された磁性ドットの構造は所定の位置に配置されている例である。一方、非磁性体に磁性粒子を分散させて形成した磁性ドットの配置が不規則な構造(いわゆるグラニュラ構造)は所定の位置に配置されていない例である。
【0022】
第1磁性ドット41は、例えばCoCrPt等の強磁性体の多結晶からなる。第1の磁性ドット41の周囲には、シリカ、アルミナ、空気等の非磁性体44が配置される。この非磁性体44により、隣り合う2つの第1の磁性ドット41間は分断されている。磁気ディスク装置内において、磁性ドット41は、それぞれ記録素子により所望の磁場が印加される。この磁場により磁性ドット41の磁化は所望の方向を向いた状態で保持される。このように、磁性ドット41は磁気情報を蓄積することができる。また、再生素子は第1磁性ドットに記録された磁気情報を再生する。尚、図3において、第1の磁性ドット41は磁化の方向によって異なるハッチングを用いて表示している。また、垂直磁気記録方式の磁気ディスク媒体においては、磁性ドットの磁化は媒体表面の法線方向を向く。
【0023】
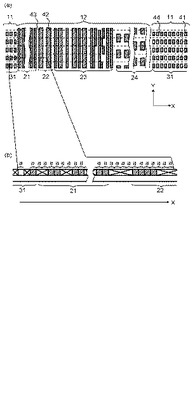
サーボ領域12は、磁性部42及び非磁性部43を含んでなる。磁性部42は、複数の磁性ドット(第2磁性ドット)(図示せず)及びその磁性ドットを取り巻くように配置された非磁性体(図示せず)を含んでなる。この第2磁性ドット及び非磁性体については後述する。なお、パターンドメディアにおいて、通常、第2磁性ドットの磁化はすべて同じ向きを向いている。非磁性部43は非磁性体からなる。磁気ディスク装置内部において、磁気ヘッドが磁性部42及び非磁性部43上を走査することにより、磁性と非磁性によって情報ビットaをそれぞれ形成している。
【0024】
サーボ領域12は、磁気ディスク媒体において用いられる際の機能により、同期信号生成部21、同期信号検出部22、アドレス部23、微小位置検出部24に分類できる。
【0025】
同期信号生成部21は、サーボ情報を呼び出す前に信号アンプの増幅率を調整して振幅を一定にする働き、及びA/D変換(Analog to Digital Converter)クロック信号のサンプリングタイミングを生成する働きを有する。同期信号生成部21は、媒体の内周から外周まで全てあるいは一部の範囲で径方向に連続し、かつ、周方向に一定の間隔で形成された磁性部を含んでなる。
【0026】
同期信号検出部22はサーボ情報の開始を示す特徴的なパターンである。同期信号検出部22は、媒体の内周から外周まで全てあるいは一部の範囲で径方向に連続し、かつ、周方向に同期信号生成部に比べて長いビット長の単一の磁性部又は数ビット長の既定符号を生成する複数の磁性部を含んでなる。
【0027】
アドレス部23は、サーボフレーム毎のトラック番号およびセクタ番号を示すIDパターンである。磁気記録装置において、磁気ヘッドの位置するトラック位置を示す。アドレス部23は、セクタ番号を示す周方向位置では媒体の内周から外周まで全てあるいは一部の範囲で径方向に連続し、トラック番号の上位桁を示す周方向位置では媒体の内周から外周まで全てあるいは一部の範囲で径方向に連続し、トラック番号の下位桁を示す周方向位置では媒体の径方向に断続的となる磁性体を含んでなる。
【0028】
微小位置検出部24は、磁気記録装置において、磁気ヘッドの位置のトラック中心からのずれ情報を検出するために設けられる。微小位置検出部24の一例として、周方向に特定の形状及び配列からなる1又は2種類以上の磁性パターンを有し、それぞれの磁性パターンは媒体の径方向にトラック毎に等間隔に配置されている態様が挙げられる。また、微小位置検出部24の別の例として、複数のトラックにわたり、長手方向がディスクの径方向に平行ではない、帯状の磁性パターン(以下、斜線帯状の磁性パターンと呼称する。)からなる態様が挙げられる。
【0029】
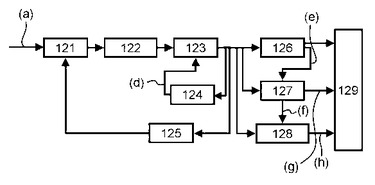
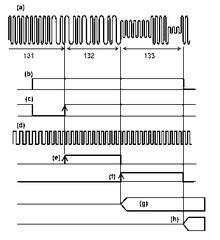
図7は、本実施形態の磁気ディスク媒体を備える磁気記録装置において、MPUが磁気ヘッドの位置決め制御を行なう際に、磁気ディスク媒体上のサーボ情報を読み取る時のリードチャネル116の動作を表わすブロック図である。図8はそのリードチャネルの動作のタイムチャートである。
【0030】
磁気ディスク媒体1が一定角速度で回転することにより、ヘッドアンプからは一定の時間間隔でサーボパターン再生信号(a)が得られる。サーボパターン再生信号(a)はリードチャネル116内で低域通過フィルタ122によって高域ノイズ成分を遮断後、A/D変換器123によってA/D変換され、デジタル化された振幅情報を元に、ゲイン制御器125によって、最適な振幅が得られるように可変ゲイン121の調整がなされる。
【0031】
サーボパターンの導入部は同期信号生成部21として一定周期のパターンが書かれており、位相ロックループ(PLL)回路124が収束するのに十分な波数が得られるように予めサーボゲート信号(b)がアサートされるようになっている。
【0032】
サーボゲート信号(b)がアサートされると、サーボパターン再生信号の同期信号にPLLが掛けられ、ここから、つづいてサーボパターン再生信号に現れるアドレス部および微小位置検出部をサンプリングするのに必要なADCクロック信号(d)がPLL回路124から生成される。
【0033】
サーボパターンの同期信号生成部の終端には、サーボ情報の始まりを示すサーボシンクマークパターンが、一定長のビットあるいは特定のコードパターンビットで書かれており、これを検出すると、同期パターン検出信号(c)がアサートされる。
【0034】
同期信号検出器126が同期パターン検出信号(c)のアサートを確認して、アドレス検出ゲート信号(e)をアドレス復調器127に送ることにより、続いて再生されるアドレス部の復調が行なわれる。
【0035】
既定長のアドレス部の復調が終了すると、アドレス復調値(g)が確定され、デジタル情報としてレジスタ129に記録される。また、つづいてバーストゲート信号(f)がアサートされ、微小位置復調器128により微小位置検出部の復調が開始される。
【0036】
既定長の微小位置検出部の復調が終了すると、微小位置復調値(h)が確定され、デジタル情報としてレジスタ129に記録される。
以上の動作により、レジスタに格納されたアドレス復調値(g)および微小位置復調値(h)をMPU115が読み取り、磁気ヘッドの位置決め制御に必要な演算を行って、VCMドライバ112を駆動する。
【0037】
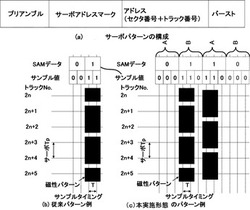
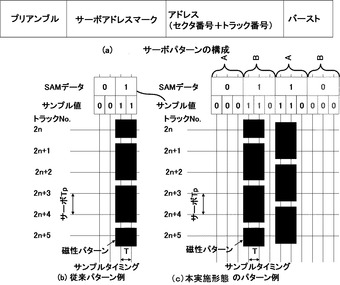
図4(a)にサーボパターンの構成例をまとめて示す。クロック同期のためのプリアンブル領域の後にサーボ信号再生の基準タイミングとなるサーボアドレスマーク(Servo Address Mark:SAM)があり、続いてセクタ番号とトラック番号を示すアドレスパターンがあり、さらにヘッドの位置を検出するためのバーストパターンがあるという構成である。
【0038】
図4(b)にBPR(ビットパターンドレコーディング)の場合のSAMパターンの従来例を示す。BPRではデータドット内に複数の磁性粒子があっても、ドットが単磁区に振舞うように粒子間交換結合が強い磁性膜が用いられている。このため、サーボパターンのような大面積パターンでは反磁界により保磁力が小さくなり、磁化の向きを初期化しておいても勝手に磁化反転が生じることがある。この対策として、サーボパターンを面積の小さいパターンに細分化分割することで保磁力を確保することができる。図4(b)ではパターンを2×サーボTp毎に分割している。
【0039】
従来例の課題としてサーボ信号の劣化がある。細分化分割位置をリードヘッドが通る場合には、再生波形振幅の劣化が生じる。サーボパターンの中でも特にSAM信号は、アドレス信号、バースト信号の復調の基準タイミングを得るためのものであり、十分小さなエラー率で確実に検出する必要がある。従って、細分化分割による劣化の影響なくSAMが正しく検出できる方法が必要である。
【0040】
図4(c)に本実施形態の実施例を示す。図中でA、Bで示した2つのSAM信号を交互に1ビットずつ配置したパターンを作製し、細分化分割位置が互いに異なるようにした。このため例えば、AのSAMパターンの細分化分割位置をリードヘッドが通るときAのSAM信号は劣化するが、Bの細分化分割位置を通らないので、BのSAM信号は劣化なく正しく検出できることになる。逆に、BのSAMの細分化分割位置をリードヘッドが通るときには、AのSAMの細分化分割位置を通らないので、AのSAM信号が正しく検出されることになる。よって、リードヘッドがどこを通ってもA、Bの少なくとも一方のSAMは正しく検出できる。
【0041】
なお、SAMデータの 1, 0 に対応するサンプル値を、従来例の 11, 00 から 110, 000 となるようにしたのは、AとBのパターンがつながってしまわないようにするためである。付加された 0 はSAM検出には使用しないことも可能であり、その場合は必ずしも 0 と再生できなくても支障ない。
【0042】
ただし、後述する検出系で正しく検出されるために、AとBとでSAMデータパターンを異なるパターンとする必要がある。例えばAが「001100001010」の場合にBを「11001100110101」と、AとBで 1, 0 が互いに反転関係になるようにした例では、SAMデータは「01011010010101010010110011001」となる。
【0043】
次に、従来のSAM検出系の構成例を述べる。即ち、プリアンブルで同期した(図示しない)同期クロック毎に、再生波形からADCでサンプリングされFIRフィルタにより波形処理されたサンプル値信号がレジスタへと送られシフトしていくのを、一致比較回路で検出パターンと比較し、検出パターンと合致したタイミングを得る。そして、そのタイミングの信号を遅延させて、アドレス復調開始、バースト復調開始のタイミングを得る構成である。検出パターンとの一致を検出するときに、1ビットないし2ビット程度のエラーを許容することも行われている。
【0044】
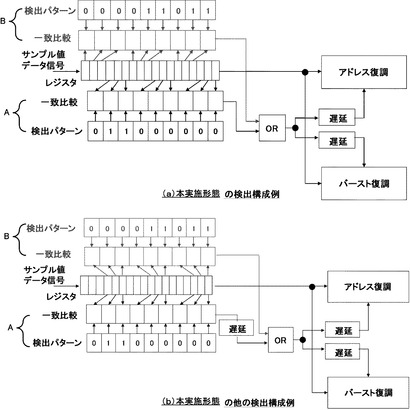
これに対して、本実施形態のSAM方式に対する検出構成例を図5(a)に示す。従来例と同様に再生波形からADCでサンプリングされFIRフィルタにより波形処理されて、レジスタをシフトしていくサンプル値信号を、図4(c)のA、Bで示した2重のSAMに対応した2つの一致比較回路で監視し、それぞれの検出パターンに合致するタイミングを見出す構成である。ヘッドが再生するのはAが最初でA→B→A→Bの順とし、SAMの1ビットをサンプル値データの3ビットに展開している場合に対応している。図の見易さのために、SAMの頭3ビットずつに対応する検出パターンに関連する部分に限定して、例示している。
【0045】
前述の通り、AとBとでSAMのパターンを異なるものとしているので、SAMのサンプル値信号がレジスタをシフトしていく過程で、AとBのどちらの一致比較回路も2回以上SAM検出することはなく、検出されるタイミングはどちらも同じになる。そこで、両者の検出タイミングの論理和(OR)をとることで、少なくとも一方のSAMが検出されれば、アドレス復調、バースト復調が行える構成である。
【0046】
なお、エラーを許容するSAMデータビット数をNビットとすると、2つのSAMデータパターンを互いに誤検出しないようにするためには、SAMデータパターン同士が互いに N+1 ビット以上、異なっている必要がある。さらに、互いに誤検出する可能性を減らすには、SAMデータパターン同士のハミング距離が大きくなるようにするのが良く、上記のように互いに反転したパターンになっているときが最も誤検出する確率が小さくなる。なおハミング距離を一般化したものにレーベンシュタイン距離がある。この距離は、同じ文字数の単語に対する置換編集に使われるハミング距離の一般化とされているが、文字数が異なるSAMを用いるような場合にはこのレーベンシュタイン距離を用いて構成してもよい。
【0047】
図5(b)は、図5(a)に対する他の方法の構成例である。この例では、Aの一致比較回路の方がBよりも先にSAM検出するため、AとBとで検出タイミングが異なることになる。そこでSAMの1ビット(サンプル値データの3ビット)分の遅延回路を用いてAとBの検出タイミングが揃うようにしてから、両者の論理和(OR)をとる構成としている。
【0048】
(第2の実施形態)
本発明による第2の実施形態を図を参照して説明する。実施形態1と共通する部分は説明を省略する。
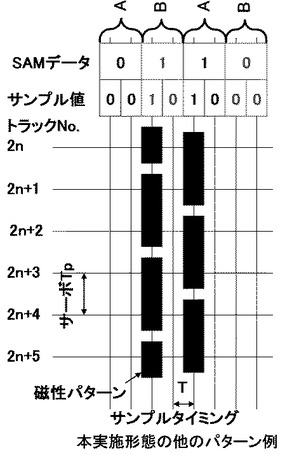
図6は、実施形態のSAMパターン細分化分割方法の他の実施例である。この例は、SAMデータの 1, 0 に対応するサンプル値が 10, 00 となるようなパターンとしたものである。SAMデータの1ビットに対してサンプル値が2ビットで良いので、実施形態1よりSAMパターン全体の長さを短くすることができる。
【0049】
なお、サンプル値2ビット目の 0 は、SAM検出に使用しなくても良く、その場合は必ずしも 0 と再生できなくても支障ない。
効果として実施例で説明したとおり、リードヘッドがどの半径位置を通っても正しく確実に2重になっているSAMの少なくとも一方を検出することができる。以下の実施形態のヴァリエーションがある。
【0050】
(1)ビットパターンドメディアのサーボパターン中のサーボアドレスマーク(Servo Address Mark:SAM)の細分化分割において、SAMを2重に作製し、その一方の半径方向細分化分割位置を、他方の半径方向細分化分割位置と異なる位置にすることを特徴とする。
【0051】
A.2重に作製するSAMデータの各ビットを、順に交互に配置することを特徴とする。
B.Aで、交互に配置されたSAMデータの各ビットのサンプル値ビット数を1つ追加して、非磁性パターンを対応させることを特徴とする。
C. 2重に作製されたSAMの一方を、他方と異なるデータパターンとすることを特徴とする。
(2)(1)のSAMを検出するために、同期クロック毎にレジスタをシフトして流れていく再生サンプル値信号から、2つの一致比較回路で、2重に作製されたそれぞれのSAMに対応する検出パターンに合致したタイミングを検出することを特徴とする。
【0052】
A. それぞれのSAMの検出信号の論理和(OR)をとることで、少なくとも一方のSAMが検出されれば、アドレス復調、バースト復調を行うことを特徴とする。
B. AでそれぞれのSAMの検出タイミングの差を遅延回路で補正することを特徴とする。
なお、この発明は上記実施形態に限定されるものではなく、この外その要旨を逸脱しない範囲で種々変形して実施することができる。
また、上記した実施の形態に開示されている複数の構成要素を適宜に組み合わせることにより、種々の発明を形成することができる。例えば、実施の形態に示される全構成要素から幾つかの構成要素を削除しても良いものである。さらに、異なる実施の形態に係わる構成要素を適宜組み合わせても良いものである。
【符号の説明】
【0053】
1 磁気ディスク媒体
11 データ領域
12 サーボ領域(サーボセクタ)
13 データセクタ
21 同期信号生成部
22 同期信号検出部
23 アドレス部
24 微小位置検出部
41 第1磁性ドット
42 磁性部(磁性による情報ビット)
43 非磁性部(非磁性による情報ビット)
44 非磁性体
101 ディスクエンクロージャ
102 スピンドルモータ
103 磁気ヘッド
105 ボイス・コイル・モータ
106 キャリッジアーム
107 ヘッドアンプ
108 ヘッドジンバル組立体
110 シャフト
111 スピンドルモータドライバ
112 ボイス・コイル・モータドライバ
113 記録信号
114 再生信号
115 マイクロ・プロセッシング・ユニット
116 リードチャネル
117 ディスクコントローラ
118 ホストコンピュータ
【技術分野】
【0001】
本発明の実施形態は、磁気記録媒体及び磁気読取装置に関する。
【背景技術】
【0002】
BPM(ビットパターンドメディア)のサーボパターン細分化分割方法に係わる。BPMの磁性膜はグラニュラーでない連続膜であるため、大面積パターンでは反磁界により保磁力が低下する。このため、サーボパターン磁化方向を初期化着磁しておいても、へッドタッチ等の刺激により磁化反転が発生する。
【0003】
この対策として、サーボパターンを細分化分割することで面積を小さくして保磁力を確保することが既に公知となっている。例えば、特許文献1には、前エッジデータ系列、後エッジデータ系列の2系列のデータそれぞれから特定パターンを検出する構成が開示されている。
【0004】
しかしながら、なおサーボパターン分割による再生波形振幅劣化への対策の要望があるが、かかる要望を実現するための手段は知られていない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平6−275027号公報(段落番号0005、図4)
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、サーボパターン分割による再生波形振幅劣化の影響を低減できる磁気記録媒体及び磁気読取装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、実施形態によれば磁気記録媒体は、情報を記録するために複数の第1磁性ドットを所定の位置に配置したデータ領域と、前記第1磁性ドットの位置を特定するための複数の第2磁性ドットを所定の位置に配置したサーボ領域とを表面に備え、このサーボ領域中のサーボアドレスマークを2重に作製し、一方の前記サーボアドレスマークの細分化分割位置と他方の前記サーボアドレスマークの細分化分割位置とを、互いに径方向に異なる位置で細分化分割して成る。
【図面の簡単な説明】
【0008】
【図1】磁気記録媒体を備える磁気記録装置の一実施形態を示す概略構成図。
【図2】磁気ディスク装置に備えられた一実施形態の磁気ディスク媒体のセクタ構造を示す平面概念図。
【図3】実施形態の磁気ディスク媒体の表面を示す平面模式図(図3a)、及びデータ領域及びサーボ領域の磁化状態を示す概念的模式図(図3b)。
【図4】実施形態のSAMパターン細分化分割方法の実施例。
【図5】実施形態のSAMパターンを検出するための構成の例。
【図6】実施形態のSAMパターン細分化分割方法の他の実施例。
【図7】実施形態の磁気ディスク装置におけるサーボ信号復調回路のブロック図。
【図8】実施形態の磁気ディスク装置におけるサーボ信号復調回路の動作タイミングチャート。
【発明を実施するための形態】
【0009】
以下、実施形態を説明する。
(第1の実施形態)
第1の実施形態を図を参照して説明する。
図1は、後述する磁気記録媒体を備える磁気読取装置の一実施形態である磁気記録(再生)装置を示す概略構成図である。図1に示す磁気記録装置はディスク状の磁気記録媒体(磁気ディスク媒体)1を備える。(以下、磁気ディスク媒体を備える磁気記録装置を磁気ディスク装置と呼称する。)
【0010】
磁気ディスク装置は、ディスクエンクロージャ101と回路基板120とを含んでなる。
ディスクエンクロージャ101は、磁気ディスク媒体1、スピンドルモータ102、磁気ヘッド103、ボイス・コイル・モータ(VCM)(図示せず)を含んでなるアクチュエータ105、ヘッドジンバル組立体108、キャリッジアーム106、シャフト110、ヘッドアンプ107等を密封して搭載する容器である。磁気ディスク媒体1はスピンドルモータ(SPM)102に装着されている。磁気ヘッド103は、磁気ディスク媒体1に磁気情報を記録する記録(ライト)素子(図示せず)、磁気ディスク媒体1に記録された磁気情報を電気信号として取り出す働きを有する再生(リード)素子(図示せず)の少なくとも一方を含む。記録素子は、例えばライトコイル、主磁極層、及び補助磁極層を含んでなる。ライトコイルは磁束を発生させる機能を有する。主磁極層は、ライトコイルにおいて発生した磁束を収容し、その磁束を磁気ディスクに向けて放出する機能を有する、補助磁極層は主磁極層から放出された磁束を磁気ディスクを経由して環流させる機能を有する。再生素子としては、例えばMR素子(磁気抵抗効果素子)などが挙げられる。ヘッドジンバル組立体108に搭載され、磁気ディスク媒体1と対向するように配置される。
【0011】
磁気ディスク媒体1としては、後述する種々の磁気記録媒体を使用することができる。ヘッドジンバル組立体108の磁気ヘッド103が搭載されていない端部はキャリッジアーム106の先端に固定されている。キャリッジアーム106は、VCMによりシャフト110を回転軸にして揺動駆動することができる。磁気ヘッド103はこの揺動駆動により磁気ディスク1上を概ね径方向に走査することができる。磁気ヘッド103が磁気ディスク媒体1上の所望の記録トラックに位置決めされることにより、磁気ヘッド103は磁気ディスク媒体1上の記録トラックに配列された記録ビットに情報を書き込む、あるいは磁気ディスク媒体1から情報を読み取ることができる。ヘッドアンプ107は、記録信号113を元に磁気ヘッド103に搭載される記録素子に電流を流して磁気ディスク媒体1に記録を行う、あるいは、磁気ヘッド103の再生素子が検出した磁気ディスク媒体1の磁化情報を再生信号114として変換する働きを担っている。
【0012】
回路基板120は、リードチャンネル116、マイクロ・プロセッシング・ユニット(MPU)115、スピンドルモータ(SPM)ドライバ111、ボイス・コイル・モータ(VCM)ドライバ112、ディスクコントローラ117等を含む。リードチャネル116は、ヘッドアンプ107からの再生信号114(サーボ信号あるいはデータ信号)を解読してデジタル情報に変換する、あるいは、ディスクコントローラ117から記録指示された情報を、ヘッドアンプ107を駆動するための記録信号113に変換する働きを担う。
【0013】
MPU115は、リードチャネル116が解読したサーボ信号のデジタル情報(サーボ情報)を元に、VCMドライバ112を駆動して磁気ヘッド103の位置決め制御をおこなう、あるいは、SPMドライバ111を駆動して磁気ディスク媒体1の回転制御を行う。
【0014】
ディスクコントローラ117は、ホストコンピュータ118から記録再生命令によって、MPU115に磁気ヘッド103の位置決め指示をし、磁気ヘッド103の磁気ディスク媒体1へのアドレッシングを行う働きを担う。また、ディスクコントローラ117は、リードチャネル116に記録再生するデジタル情報の送受信を行なって、結果をホストコンピュータ118へ返す動作を行う働きを担う。
【0015】
以下、本発明の磁気記録媒体の実施形態について、図2以下を参照しながら説明する。
図2(a)は、磁気ディスク装置に備えられた一実施形態の磁気ディスク媒体のセクタ構造を示す平面概念図である。図2(b)は、図2(a)における部分Aを拡大した図である。なお、図中、ディスクの表面において、ディスクの周方向をX軸、径方向をY軸とする(以下の図において同様とする。)。
【0016】
一般に、磁気ディスク1上に、データ領域11とサーボ領域12とが周方向に交互に配置されている。すなわち、サーボ領域12は磁気ディスク媒体1の略中心を中心とする帯状の略円周上に、断続的に配置されている。また、データ領域11は帯状の略円周上の前記サーボ領域12が配置されていない部分に配置されている。
【0017】
データ領域11は、データを記憶する領域である。データ領域11には、記録再生を行うための記憶領域であるデータセクタ13が、周方向に一定長(トラックピッチ)周期で配置されている。それぞれのデータセクタ11には磁性ドット(図示せず)が含まれている。データ領域11に設けられた磁性部の形状及び配置をデータパターンと呼称する。
【0018】
サーボ領域(サーボセクタ)12は、データ領域11に含まれる磁性ドットの位置(特にディスクの径方向の位置)を特定するために設けられる。サーボ領域12は、後述する様々な形状及び配置がなされた磁性ドットを含んでなる。サーボ領域12の形状は、磁気ディスク装置のヘッドアクセス軌跡となる円弧状で、かつサーボ領域の周方向長が、半径位置に比例して長くなるように形成される。サーボ領域12に設けられた磁性ドットの形状及び配置をサーボパターンと呼称する。
【0019】
磁気ヘッド103は、磁気ディスク媒体を回転させた状態において、サーボ領域12に含まれる磁性ドットにより形成される再生信号を読み取ることにより、磁気ヘッド103の位置情報を得る。得られた磁気ヘッド103の位置情報をもとに、磁気ヘッド103はトラックに対して位置決めされ、データ領域12の所望の位置の磁性部に記録及び再生を行うことができる。
【0020】
図3は、本実施形態の磁気ディスク媒体の表面を示す平面模式図(図3a)、及びデータ領域及びサーボ領域の磁化状態を示す概念的模式図(図3b)である。本実施形態の磁気記録媒体は、データ領域の磁性ドット及びサーボ領域の磁性ドットが所定の位置に形成された、いわゆるパターンドメディアである。
【0021】
データ領域11には複数の磁性ドット(第1磁性ドット)41が所定の位置に配置されている。磁気ディスク装置内部において、磁気ヘッドが第1磁性ドット41上を走査することにより情報ビットaを形成する。ここで「所定の位置に」配置されるとは、隣接する磁性ドットが一定の決まり、すなわち、周方向(トラック方向)に断続的に配置されることを意味する。通常、周方向に隣接する第1磁性ドットは、一定の間隔で配置される。後述するナノインプリント法やフォトリソグラフィ法を用いて形成された磁性ドットの構造は所定の位置に配置されている例である。一方、非磁性体に磁性粒子を分散させて形成した磁性ドットの配置が不規則な構造(いわゆるグラニュラ構造)は所定の位置に配置されていない例である。
【0022】
第1磁性ドット41は、例えばCoCrPt等の強磁性体の多結晶からなる。第1の磁性ドット41の周囲には、シリカ、アルミナ、空気等の非磁性体44が配置される。この非磁性体44により、隣り合う2つの第1の磁性ドット41間は分断されている。磁気ディスク装置内において、磁性ドット41は、それぞれ記録素子により所望の磁場が印加される。この磁場により磁性ドット41の磁化は所望の方向を向いた状態で保持される。このように、磁性ドット41は磁気情報を蓄積することができる。また、再生素子は第1磁性ドットに記録された磁気情報を再生する。尚、図3において、第1の磁性ドット41は磁化の方向によって異なるハッチングを用いて表示している。また、垂直磁気記録方式の磁気ディスク媒体においては、磁性ドットの磁化は媒体表面の法線方向を向く。
【0023】
サーボ領域12は、磁性部42及び非磁性部43を含んでなる。磁性部42は、複数の磁性ドット(第2磁性ドット)(図示せず)及びその磁性ドットを取り巻くように配置された非磁性体(図示せず)を含んでなる。この第2磁性ドット及び非磁性体については後述する。なお、パターンドメディアにおいて、通常、第2磁性ドットの磁化はすべて同じ向きを向いている。非磁性部43は非磁性体からなる。磁気ディスク装置内部において、磁気ヘッドが磁性部42及び非磁性部43上を走査することにより、磁性と非磁性によって情報ビットaをそれぞれ形成している。
【0024】
サーボ領域12は、磁気ディスク媒体において用いられる際の機能により、同期信号生成部21、同期信号検出部22、アドレス部23、微小位置検出部24に分類できる。
【0025】
同期信号生成部21は、サーボ情報を呼び出す前に信号アンプの増幅率を調整して振幅を一定にする働き、及びA/D変換(Analog to Digital Converter)クロック信号のサンプリングタイミングを生成する働きを有する。同期信号生成部21は、媒体の内周から外周まで全てあるいは一部の範囲で径方向に連続し、かつ、周方向に一定の間隔で形成された磁性部を含んでなる。
【0026】
同期信号検出部22はサーボ情報の開始を示す特徴的なパターンである。同期信号検出部22は、媒体の内周から外周まで全てあるいは一部の範囲で径方向に連続し、かつ、周方向に同期信号生成部に比べて長いビット長の単一の磁性部又は数ビット長の既定符号を生成する複数の磁性部を含んでなる。
【0027】
アドレス部23は、サーボフレーム毎のトラック番号およびセクタ番号を示すIDパターンである。磁気記録装置において、磁気ヘッドの位置するトラック位置を示す。アドレス部23は、セクタ番号を示す周方向位置では媒体の内周から外周まで全てあるいは一部の範囲で径方向に連続し、トラック番号の上位桁を示す周方向位置では媒体の内周から外周まで全てあるいは一部の範囲で径方向に連続し、トラック番号の下位桁を示す周方向位置では媒体の径方向に断続的となる磁性体を含んでなる。
【0028】
微小位置検出部24は、磁気記録装置において、磁気ヘッドの位置のトラック中心からのずれ情報を検出するために設けられる。微小位置検出部24の一例として、周方向に特定の形状及び配列からなる1又は2種類以上の磁性パターンを有し、それぞれの磁性パターンは媒体の径方向にトラック毎に等間隔に配置されている態様が挙げられる。また、微小位置検出部24の別の例として、複数のトラックにわたり、長手方向がディスクの径方向に平行ではない、帯状の磁性パターン(以下、斜線帯状の磁性パターンと呼称する。)からなる態様が挙げられる。
【0029】
図7は、本実施形態の磁気ディスク媒体を備える磁気記録装置において、MPUが磁気ヘッドの位置決め制御を行なう際に、磁気ディスク媒体上のサーボ情報を読み取る時のリードチャネル116の動作を表わすブロック図である。図8はそのリードチャネルの動作のタイムチャートである。
【0030】
磁気ディスク媒体1が一定角速度で回転することにより、ヘッドアンプからは一定の時間間隔でサーボパターン再生信号(a)が得られる。サーボパターン再生信号(a)はリードチャネル116内で低域通過フィルタ122によって高域ノイズ成分を遮断後、A/D変換器123によってA/D変換され、デジタル化された振幅情報を元に、ゲイン制御器125によって、最適な振幅が得られるように可変ゲイン121の調整がなされる。
【0031】
サーボパターンの導入部は同期信号生成部21として一定周期のパターンが書かれており、位相ロックループ(PLL)回路124が収束するのに十分な波数が得られるように予めサーボゲート信号(b)がアサートされるようになっている。
【0032】
サーボゲート信号(b)がアサートされると、サーボパターン再生信号の同期信号にPLLが掛けられ、ここから、つづいてサーボパターン再生信号に現れるアドレス部および微小位置検出部をサンプリングするのに必要なADCクロック信号(d)がPLL回路124から生成される。
【0033】
サーボパターンの同期信号生成部の終端には、サーボ情報の始まりを示すサーボシンクマークパターンが、一定長のビットあるいは特定のコードパターンビットで書かれており、これを検出すると、同期パターン検出信号(c)がアサートされる。
【0034】
同期信号検出器126が同期パターン検出信号(c)のアサートを確認して、アドレス検出ゲート信号(e)をアドレス復調器127に送ることにより、続いて再生されるアドレス部の復調が行なわれる。
【0035】
既定長のアドレス部の復調が終了すると、アドレス復調値(g)が確定され、デジタル情報としてレジスタ129に記録される。また、つづいてバーストゲート信号(f)がアサートされ、微小位置復調器128により微小位置検出部の復調が開始される。
【0036】
既定長の微小位置検出部の復調が終了すると、微小位置復調値(h)が確定され、デジタル情報としてレジスタ129に記録される。
以上の動作により、レジスタに格納されたアドレス復調値(g)および微小位置復調値(h)をMPU115が読み取り、磁気ヘッドの位置決め制御に必要な演算を行って、VCMドライバ112を駆動する。
【0037】
図4(a)にサーボパターンの構成例をまとめて示す。クロック同期のためのプリアンブル領域の後にサーボ信号再生の基準タイミングとなるサーボアドレスマーク(Servo Address Mark:SAM)があり、続いてセクタ番号とトラック番号を示すアドレスパターンがあり、さらにヘッドの位置を検出するためのバーストパターンがあるという構成である。
【0038】
図4(b)にBPR(ビットパターンドレコーディング)の場合のSAMパターンの従来例を示す。BPRではデータドット内に複数の磁性粒子があっても、ドットが単磁区に振舞うように粒子間交換結合が強い磁性膜が用いられている。このため、サーボパターンのような大面積パターンでは反磁界により保磁力が小さくなり、磁化の向きを初期化しておいても勝手に磁化反転が生じることがある。この対策として、サーボパターンを面積の小さいパターンに細分化分割することで保磁力を確保することができる。図4(b)ではパターンを2×サーボTp毎に分割している。
【0039】
従来例の課題としてサーボ信号の劣化がある。細分化分割位置をリードヘッドが通る場合には、再生波形振幅の劣化が生じる。サーボパターンの中でも特にSAM信号は、アドレス信号、バースト信号の復調の基準タイミングを得るためのものであり、十分小さなエラー率で確実に検出する必要がある。従って、細分化分割による劣化の影響なくSAMが正しく検出できる方法が必要である。
【0040】
図4(c)に本実施形態の実施例を示す。図中でA、Bで示した2つのSAM信号を交互に1ビットずつ配置したパターンを作製し、細分化分割位置が互いに異なるようにした。このため例えば、AのSAMパターンの細分化分割位置をリードヘッドが通るときAのSAM信号は劣化するが、Bの細分化分割位置を通らないので、BのSAM信号は劣化なく正しく検出できることになる。逆に、BのSAMの細分化分割位置をリードヘッドが通るときには、AのSAMの細分化分割位置を通らないので、AのSAM信号が正しく検出されることになる。よって、リードヘッドがどこを通ってもA、Bの少なくとも一方のSAMは正しく検出できる。
【0041】
なお、SAMデータの 1, 0 に対応するサンプル値を、従来例の 11, 00 から 110, 000 となるようにしたのは、AとBのパターンがつながってしまわないようにするためである。付加された 0 はSAM検出には使用しないことも可能であり、その場合は必ずしも 0 と再生できなくても支障ない。
【0042】
ただし、後述する検出系で正しく検出されるために、AとBとでSAMデータパターンを異なるパターンとする必要がある。例えばAが「001100001010」の場合にBを「11001100110101」と、AとBで 1, 0 が互いに反転関係になるようにした例では、SAMデータは「01011010010101010010110011001」となる。
【0043】
次に、従来のSAM検出系の構成例を述べる。即ち、プリアンブルで同期した(図示しない)同期クロック毎に、再生波形からADCでサンプリングされFIRフィルタにより波形処理されたサンプル値信号がレジスタへと送られシフトしていくのを、一致比較回路で検出パターンと比較し、検出パターンと合致したタイミングを得る。そして、そのタイミングの信号を遅延させて、アドレス復調開始、バースト復調開始のタイミングを得る構成である。検出パターンとの一致を検出するときに、1ビットないし2ビット程度のエラーを許容することも行われている。
【0044】
これに対して、本実施形態のSAM方式に対する検出構成例を図5(a)に示す。従来例と同様に再生波形からADCでサンプリングされFIRフィルタにより波形処理されて、レジスタをシフトしていくサンプル値信号を、図4(c)のA、Bで示した2重のSAMに対応した2つの一致比較回路で監視し、それぞれの検出パターンに合致するタイミングを見出す構成である。ヘッドが再生するのはAが最初でA→B→A→Bの順とし、SAMの1ビットをサンプル値データの3ビットに展開している場合に対応している。図の見易さのために、SAMの頭3ビットずつに対応する検出パターンに関連する部分に限定して、例示している。
【0045】
前述の通り、AとBとでSAMのパターンを異なるものとしているので、SAMのサンプル値信号がレジスタをシフトしていく過程で、AとBのどちらの一致比較回路も2回以上SAM検出することはなく、検出されるタイミングはどちらも同じになる。そこで、両者の検出タイミングの論理和(OR)をとることで、少なくとも一方のSAMが検出されれば、アドレス復調、バースト復調が行える構成である。
【0046】
なお、エラーを許容するSAMデータビット数をNビットとすると、2つのSAMデータパターンを互いに誤検出しないようにするためには、SAMデータパターン同士が互いに N+1 ビット以上、異なっている必要がある。さらに、互いに誤検出する可能性を減らすには、SAMデータパターン同士のハミング距離が大きくなるようにするのが良く、上記のように互いに反転したパターンになっているときが最も誤検出する確率が小さくなる。なおハミング距離を一般化したものにレーベンシュタイン距離がある。この距離は、同じ文字数の単語に対する置換編集に使われるハミング距離の一般化とされているが、文字数が異なるSAMを用いるような場合にはこのレーベンシュタイン距離を用いて構成してもよい。
【0047】
図5(b)は、図5(a)に対する他の方法の構成例である。この例では、Aの一致比較回路の方がBよりも先にSAM検出するため、AとBとで検出タイミングが異なることになる。そこでSAMの1ビット(サンプル値データの3ビット)分の遅延回路を用いてAとBの検出タイミングが揃うようにしてから、両者の論理和(OR)をとる構成としている。
【0048】
(第2の実施形態)
本発明による第2の実施形態を図を参照して説明する。実施形態1と共通する部分は説明を省略する。
図6は、実施形態のSAMパターン細分化分割方法の他の実施例である。この例は、SAMデータの 1, 0 に対応するサンプル値が 10, 00 となるようなパターンとしたものである。SAMデータの1ビットに対してサンプル値が2ビットで良いので、実施形態1よりSAMパターン全体の長さを短くすることができる。
【0049】
なお、サンプル値2ビット目の 0 は、SAM検出に使用しなくても良く、その場合は必ずしも 0 と再生できなくても支障ない。
効果として実施例で説明したとおり、リードヘッドがどの半径位置を通っても正しく確実に2重になっているSAMの少なくとも一方を検出することができる。以下の実施形態のヴァリエーションがある。
【0050】
(1)ビットパターンドメディアのサーボパターン中のサーボアドレスマーク(Servo Address Mark:SAM)の細分化分割において、SAMを2重に作製し、その一方の半径方向細分化分割位置を、他方の半径方向細分化分割位置と異なる位置にすることを特徴とする。
【0051】
A.2重に作製するSAMデータの各ビットを、順に交互に配置することを特徴とする。
B.Aで、交互に配置されたSAMデータの各ビットのサンプル値ビット数を1つ追加して、非磁性パターンを対応させることを特徴とする。
C. 2重に作製されたSAMの一方を、他方と異なるデータパターンとすることを特徴とする。
(2)(1)のSAMを検出するために、同期クロック毎にレジスタをシフトして流れていく再生サンプル値信号から、2つの一致比較回路で、2重に作製されたそれぞれのSAMに対応する検出パターンに合致したタイミングを検出することを特徴とする。
【0052】
A. それぞれのSAMの検出信号の論理和(OR)をとることで、少なくとも一方のSAMが検出されれば、アドレス復調、バースト復調を行うことを特徴とする。
B. AでそれぞれのSAMの検出タイミングの差を遅延回路で補正することを特徴とする。
なお、この発明は上記実施形態に限定されるものではなく、この外その要旨を逸脱しない範囲で種々変形して実施することができる。
また、上記した実施の形態に開示されている複数の構成要素を適宜に組み合わせることにより、種々の発明を形成することができる。例えば、実施の形態に示される全構成要素から幾つかの構成要素を削除しても良いものである。さらに、異なる実施の形態に係わる構成要素を適宜組み合わせても良いものである。
【符号の説明】
【0053】
1 磁気ディスク媒体
11 データ領域
12 サーボ領域(サーボセクタ)
13 データセクタ
21 同期信号生成部
22 同期信号検出部
23 アドレス部
24 微小位置検出部
41 第1磁性ドット
42 磁性部(磁性による情報ビット)
43 非磁性部(非磁性による情報ビット)
44 非磁性体
101 ディスクエンクロージャ
102 スピンドルモータ
103 磁気ヘッド
105 ボイス・コイル・モータ
106 キャリッジアーム
107 ヘッドアンプ
108 ヘッドジンバル組立体
110 シャフト
111 スピンドルモータドライバ
112 ボイス・コイル・モータドライバ
113 記録信号
114 再生信号
115 マイクロ・プロセッシング・ユニット
116 リードチャネル
117 ディスクコントローラ
118 ホストコンピュータ
【特許請求の範囲】
【請求項1】
情報を記録するために複数の第1磁性ドットを所定の位置に配置したデータ領域と、
前記第1磁性ドットの位置を特定するための複数の第2磁性ドットを所定の位置に配置したサーボ領域とを表面に備え、
このサーボ領域中のサーボアドレスマークを2重に作製し、一方の前記サーボアドレスマークの細分化分割位置と他方の前記サーボアドレスマークの細分化分割位置とを、互いに径方向に異なる位置で細分化分割して成る磁気記録媒体。
【請求項2】
2重に作製された前記サーボアドレスマークのデータの各ビットを、順に交互に配置して成る請求項1に記載の磁気記録媒体。
【請求項3】
前記各ビットのサンプル値ビット数を1つ追加して、この追加されたサンプル値ビットに非磁性パターンを対応させて成る請求項2に記載の磁気記録媒体。
【請求項4】
2重に作製された前記サーボアドレスマークの一方を、他方と異なるデータパターンとする請求項1に記載の磁気記録媒体。
【請求項5】
前記データパターンの2重に作製された前記サーボアドレスマーク間の相違は、符号化距離を最大にするように形成された請求項4に記載の磁気記録媒体。
【請求項6】
情報を記録するために複数の第1磁性ドットを所定の位置に配置したデータ領域と、
前記第1磁性ドットの位置を特定するための複数の第2磁性ドットを所定の位置に配置したサーボ領域とを表面に備え、
このサーボ領域中のサーボアドレスマークを2重に作製し、一方の前記サーボアドレスマークの細分化分割位置と他方の前記サーボアドレスマークの細分化分割位置とを、互いに径方向に異なる位置で細分化分割して成る磁気記録媒体と、
前記サーボアドレスマークの各ビットのサンプル値ビットを記憶するレジスタと、
このレジスタと2種の検出パターンとの値をそれぞれ比較する2つの一致比較回路とを備え、
同期クロック毎に前記レジスタをシフトして流れていく前記磁気記録媒体の再生サンプル値信号から、前記2つの一致比較回路で、2重に作製されたそれぞれの前記サーボアドレスマークに対応する検出パターンに合致したタイミングを検出して前記サーボアドレスマークを検出するように働く磁気読取装置。
【請求項7】
2重に作製された前記サーボアドレスマークの検出信号の論理和をとることにより、少なくとも一方の前記サーボアドレスマークが検出されれば、アドレス復調、バースト復調を行う請求項6に記載の磁気読取装置。
【請求項8】
2重に作製された前記サーボアドレスマークの検出信号の検出タイミングの差を遅延回路で補正してこの検出信号の論理和をとることにより、少なくとも一方の前記サーボアドレスマークが検出されれば、アドレス復調、バースト復調を行う請求項6に記載の磁気読取装置。
【請求項1】
情報を記録するために複数の第1磁性ドットを所定の位置に配置したデータ領域と、
前記第1磁性ドットの位置を特定するための複数の第2磁性ドットを所定の位置に配置したサーボ領域とを表面に備え、
このサーボ領域中のサーボアドレスマークを2重に作製し、一方の前記サーボアドレスマークの細分化分割位置と他方の前記サーボアドレスマークの細分化分割位置とを、互いに径方向に異なる位置で細分化分割して成る磁気記録媒体。
【請求項2】
2重に作製された前記サーボアドレスマークのデータの各ビットを、順に交互に配置して成る請求項1に記載の磁気記録媒体。
【請求項3】
前記各ビットのサンプル値ビット数を1つ追加して、この追加されたサンプル値ビットに非磁性パターンを対応させて成る請求項2に記載の磁気記録媒体。
【請求項4】
2重に作製された前記サーボアドレスマークの一方を、他方と異なるデータパターンとする請求項1に記載の磁気記録媒体。
【請求項5】
前記データパターンの2重に作製された前記サーボアドレスマーク間の相違は、符号化距離を最大にするように形成された請求項4に記載の磁気記録媒体。
【請求項6】
情報を記録するために複数の第1磁性ドットを所定の位置に配置したデータ領域と、
前記第1磁性ドットの位置を特定するための複数の第2磁性ドットを所定の位置に配置したサーボ領域とを表面に備え、
このサーボ領域中のサーボアドレスマークを2重に作製し、一方の前記サーボアドレスマークの細分化分割位置と他方の前記サーボアドレスマークの細分化分割位置とを、互いに径方向に異なる位置で細分化分割して成る磁気記録媒体と、
前記サーボアドレスマークの各ビットのサンプル値ビットを記憶するレジスタと、
このレジスタと2種の検出パターンとの値をそれぞれ比較する2つの一致比較回路とを備え、
同期クロック毎に前記レジスタをシフトして流れていく前記磁気記録媒体の再生サンプル値信号から、前記2つの一致比較回路で、2重に作製されたそれぞれの前記サーボアドレスマークに対応する検出パターンに合致したタイミングを検出して前記サーボアドレスマークを検出するように働く磁気読取装置。
【請求項7】
2重に作製された前記サーボアドレスマークの検出信号の論理和をとることにより、少なくとも一方の前記サーボアドレスマークが検出されれば、アドレス復調、バースト復調を行う請求項6に記載の磁気読取装置。
【請求項8】
2重に作製された前記サーボアドレスマークの検出信号の検出タイミングの差を遅延回路で補正してこの検出信号の論理和をとることにより、少なくとも一方の前記サーボアドレスマークが検出されれば、アドレス復調、バースト復調を行う請求項6に記載の磁気読取装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−190520(P2012−190520A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−54765(P2011−54765)
【出願日】平成23年3月11日(2011.3.11)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月11日(2011.3.11)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]