
磁気駆動マイクロツールの駆動機構およびマイクロデバイス
【課題】磁気駆動マイクロツールの動きを正確に制御することができる磁気駆動マイクロツールの駆動機構およびマイクロデバイスを提供する。
【解決手段】電磁石から成る磁力発生体21を有している。磁力発生体21は、電磁石に交流電流を流して周期的に極性を反転し、磁性を有する磁気駆動マイクロツール12に磁力を作用させるよう構成されている。電磁石は、芯の少なくとも一方の端部に、コイルの端部から突出して、芯の長さ方向に沿って筒状または柱状に形成された突出部21aを有していてもよい。また、磁力発生体21と磁気駆動マイクロツール12との間に配置された、透磁率の大きい材質から成る薄膜22を有していてもよい。
【解決手段】電磁石から成る磁力発生体21を有している。磁力発生体21は、電磁石に交流電流を流して周期的に極性を反転し、磁性を有する磁気駆動マイクロツール12に磁力を作用させるよう構成されている。電磁石は、芯の少なくとも一方の端部に、コイルの端部から突出して、芯の長さ方向に沿って筒状または柱状に形成された突出部21aを有していてもよい。また、磁力発生体21と磁気駆動マイクロツール12との間に配置された、透磁率の大きい材質から成る薄膜22を有していてもよい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁気駆動マイクロツールの駆動機構およびマイクロデバイスに関する。
【背景技術】
【0002】
主に医療分野、医薬分野、品種改良といったバイオ系産業分野において、卵子、細胞、菌などの微粒子に対して、分離、分類、加工、選択、処理等の一連の操作が行われている。従来、このような微粒子に対する操作を行う装置として、永久磁石や電磁石により駆動される磁気駆動マイクロツール(MMT)を使用して、微小流路を流れる微粒子に対して各操作を行うものがある(例えば、特許文献1または2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−325429号公報
【特許文献2】特開2008−148677号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
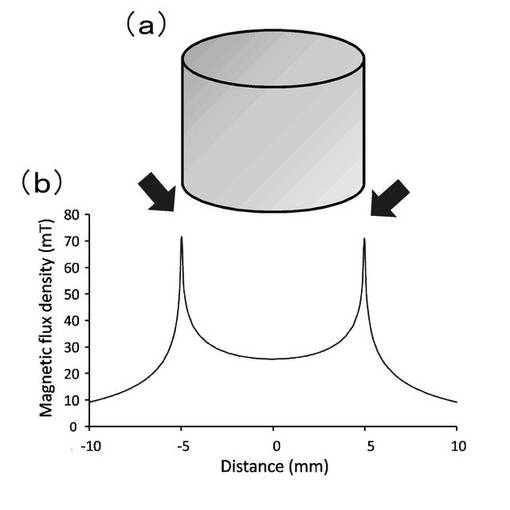
特許文献1または2に記載のような装置では、円柱状の永久磁石や電磁石を、一方の端面を磁気駆動マイクロツールに向けて配置し、永久磁石を動かしたり、電磁石に流す電流をON/OFFしたりして、磁気駆動マイクロツールを駆動している。このとき、図9に示すように、円柱状の磁石では、磁石の周縁部で磁束密度が大きいが、磁石の中心部では磁束密度が小さくなっている。このため、磁石の中心部では、磁気駆動マイクロツールに摩擦等の抵抗が働くと、磁気駆動マイクロツールを磁力に追従させることができず、磁気駆動マイクロツールの動きを正確に制御するのが困難であるという課題があった。
【0005】
これに対し、磁石の中心部での磁束密度を大きくするために、磁石を小さくすることが考えられるが、小型化にも限界があり、また、小さくするに従って磁力も弱くなるため、やはり磁気駆動マイクロツールの動きを正確に制御することは困難になる。
【0006】
また、磁石で磁気駆動マイクロツールを引きつけ、その引力方向に対して垂直方向に磁気駆動マイクロツールを移動させるとき、磁気駆動マイクロツールに作用する磁石の引力により、磁気駆動マイクロツールとそれを支える支持面等との間に働く摩擦力が大きくなる。このため、この場合にも、磁気駆動マイクロツールの動きを正確に制御するのが困難であるという課題があった。
【0007】
本発明は、このような課題に着目してなされたもので、磁気駆動マイクロツールの動きを正確に制御することができる磁気駆動マイクロツールの駆動機構およびマイクロデバイスを提供することを目的としている。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明に係る磁気駆動マイクロツールの駆動機構は、磁性を有する磁気駆動マイクロツールを駆動するための磁気駆動マイクロツールの駆動機構であって、周期的に磁場を変化させて、前記磁気駆動マイクロツールに磁力を作用させるよう構成された磁力発生体を有することを、特徴とする。
【0009】
本発明に係る磁気駆動マイクロツールの駆動機構では、磁力発生体が周期的に磁場を変化させるため、磁気駆動マイクロツールに作用する磁力の大きさや向きが、磁場の変化により変動する。このため、磁場の周期的に変化に連動して、磁気駆動マイクロツールを振動させることができる。これにより、磁気駆動マイクロツールとそれを支える支持面等との間に働く摩擦力を低減することができるため、磁力発生体の動きや磁力に磁気駆動マイクロツールを追従させることができる。このため、磁力発生体により磁気駆動マイクロツールの動きを正確に制御することができる。
【0010】
また、磁気駆動マイクロツールが振動して磁気駆動マイクロツールに働く摩擦力を低減することができるため、永久磁石を使用したときの磁力と比べて弱い磁力でも、磁気駆動マイクロツールを駆動することができる。これにより、より小さいエネルギーで磁気駆動マイクロツールを駆動することができるとともに、磁力発生体の磁力が周囲に及ぼす影響をより小さくすることができる。また、磁気駆動マイクロツールを微小流路のように天井のある閉空間内で使用する場合には、磁気駆動マイクロツールの天井に対して垂直な方向の動きが制限されるため、磁気駆動マイクロツールを振動させても、磁気駆動マイクロツールを安定して駆動することができる。なお、磁気駆動マイクロツール(MMT)は、磁力により駆動可能であれば、いかなるものであってもよい。
【0011】
磁力発生体は、周期的に磁場を変化可能であれば、どのように構成されていてもよい。磁力発生体は、例えば、電磁石から成り、電磁石に流す電流の大きさや向きを周期的に変化させたり、電磁石に流す電流を周期的にON/OFFしたりするよう構成されていてもよい。磁場の変化の周期は、磁気駆動マイクロツールとそれを支える支持面等との間に働く摩擦力を低減可能であれば、いかなる周期であってもよい。
【0012】
本発明に係る磁気駆動マイクロツールの駆動機構で、前記磁力発生体は電磁石に交流電流を流して構成されることが好ましい。この場合、電磁石に交流電流を流すことにより、電磁石の極性が周期的に反転するため、磁力線の向きも周期的に反転し、磁場が周期的に変化する。このため、その周期的な変化に連動して磁気駆動マイクロツールを振動させることができ、磁力発生体により磁気駆動マイクロツールの動きを正確に制御することができる。また、磁気駆動マイクロツールがリング状部を有しする場合には、磁力発生体の磁場の変化によりリング状部に誘導電流が流れるため、磁気駆動マイクロツールと磁力発生体とが反発する。このため、磁気駆動マイクロツールがそれを支える支持面から浮き上がり、磁気駆動マイクロツールと支持面との間に働く摩擦力を低減することができる。これにより、磁力発生体の動きや磁力に磁気駆動マイクロツールを容易に追従させることができ、磁力発生体により磁気駆動マイクロツールの動きを正確に制御することができる。
【0013】
本発明に係る磁気駆動マイクロツールの駆動機構で、前記電磁石は、芯の少なくとも一方の端部に、コイルの端部から突出して、前記芯の長さ方向に沿って筒状または柱状に形成された突出部を有することが好ましい。この場合、突出部に磁場が集中するため、突出部を磁気駆動マイクロツール側に向けて配置することにより、電磁石に流れる電流が同じでも、より強い磁力を磁気駆動マイクロツールに作用させることができる。また、突出部が芯の長さ方向に沿って筒状または柱状に形成されているため、突出部の先端面の縁部に沿って線状に磁力の強い場所が分布する。このため、磁気駆動マイクロツールを線で捕らえることができ、より安定した状態で磁気駆動マイクロツールを駆動することができる。
【0014】
本発明に係る磁気駆動マイクロツールの駆動機構は、前記磁力発生体と前記磁気駆動マイクロツールとの間に配置された、透磁率の大きい材質から成る薄膜を有してもよい。この場合、薄膜により、磁力発生体で発する磁力が同じであっても、磁気駆動マイクロツールに作用する磁力を高めることができる。
【0015】
本発明に係るマイクロデバイスは、微粒子を流す微小流路と、少なくとも一部が前記微小流路内に配置された磁気駆動マイクロツールと、前記磁気駆動マイクロツールを駆動可能に設けられた本発明に係る磁気駆動マイクロツールの駆動機構とを有することを、特徴とする。
【0016】
本発明に係るマイクロデバイスは、本発明に係る磁気駆動マイクロツールの駆動機構により磁気駆動マイクロツールを駆動するため、磁気駆動マイクロツールの動きを正確に制御することができる。また、より小さいエネルギーで磁気駆動マイクロツールを駆動することもできる。このため、微小流路内で、卵子、細胞、菌などの微粒子の分離、分類、加工、選択、処理等の操作を、正確かつ高精度で行うことができる。なお、マイクロデバイスは、各操作の工程を行う個々のマイクロモジュールであってもよく、これらのマイクロモジュールを連結したマイクロチップであってもよい。
【0017】
本発明に係るマイクロデバイスで、前記磁気駆動マイクロツールは、移動方向に対して垂直な方向への動きが制限されるよう、前記垂直な方向での幅が狭い空間内に設けられていることが好ましい。この場合、磁気駆動マイクロツールが移動方向に対して垂直な方向への動きが制限されるため、駆動機構により磁気駆動マイクロツールを振動させても、磁気駆動マイクロツールを移動方向に沿って安定して駆動することができる。
【0018】
本発明に係るマイクロデバイスで、前記微粒子は内部に核を有する細胞から成り、前記微小流路は前記微粒子の大きさよりも高さまたは幅が狭い狭路部を有し、前記微粒子が前記狭路部を通過するとき、光学的手段により変形した前記微粒子の核を検出するよう設けられた検出装置を有していてもよい。この場合、狭路部を流れる微粒子が幅方向または高さ方向に潰れた状態で変形して移動するため、微粒子の厚みを薄くして微粒子の内部を観察しやすくすることができる。このため、検出装置の光学的手段により容易に核を検出することができる。検出装置による核の検出の自動化が容易である。
【0019】
本発明に係るマイクロデバイスで、前記磁気駆動マイクロツールは、所定の平面に沿って移動可能に設けられた磁性を有する移動部と、前記移動部を弾性的に固定する複数の固定部とを有し、前記駆動機構により前記移動部に前記平面に沿った力を作用させたとき、前記力の大きさに対する前記平面に沿った前記移動部の移動量が等方的であることが好ましい。この場合、駆動機構による移動部の移動量の制御を正確かつ容易に行うことができ、磁気駆動マイクロツールを操作しやすい。なお、ここで移動部の移動量が等方的であるとは、平面に沿った全ての向きで、駆動機構による同じ大きさの力に対する移動部の移動量が概ね同じ大きさであればよく、移動量が誤差15%以内、好ましくは2%以内に収まることをいう。
【0020】
本発明に係るマイクロデバイスで、前記微小流路は前記微粒子の大きさよりも高さまたは幅が狭い狭路部を有し、前記磁気駆動マイクロツールは1対から成り、互いに前記狭路部を挟んだ位置に配置され、前記移動部に前記狭路部に向かって互いに対向してまたはすれ違って突出するよう設けられた針状部材を有し、前記駆動機構は1対から成り、各磁気駆動マイクロツールに対応して設けられ、前記狭路部に前記微粒子が流れてきたとき、各駆動機構により対応する磁気駆動マイクロツールの前記移動部を移動させて前記針状部材を突出させることにより、変形した前記微粒子を2つに分割するよう構成されていてもよい。
【0021】
この微粒子を2つに分割する場合、狭路部を流れる微粒子が幅方向または高さ方向に潰れた状態で変形して移動するため、微粒子の厚みを薄くして微粒子の内部を観察しやすくすることができる。また、これにより、微粒子の内部を観察しながら、微粒子を2つに分割することができる。微粒子が卵子から成る場合、卵子を、核が存在する部分と核が存在しない部分とに正確に分割することができ、卵子の除核処理を行うことができる。
【0022】
本発明に係るマイクロデバイスで、前記磁気駆動マイクロツールはリング状部を有し、前記磁力発生体の磁場の変化により前記リング状部に誘導電流が流れ、前記磁力発生体と反発するよう構成されていてもよい。この場合、磁力発生体による誘導電流がリング状部に流れ、磁気駆動マイクロツールと磁力発生体とが反発するため、磁気駆動マイクロツールがそれを支える支持面から浮き上がる。このため、磁気駆動マイクロツールと支持面との間に働く摩擦力を低減することができる。これにより、磁力発生体の動きや磁力に磁気駆動マイクロツールを容易に追従させることができ、磁力発生体により磁気駆動マイクロツールの動きを正確に制御することができる。
【発明の効果】
【0023】
本発明によれば、磁気駆動マイクロツールの動きを正確に制御することができる磁気駆動マイクロツールの駆動機構およびマイクロデバイスを提供することができる。
【図面の簡単な説明】
【0024】
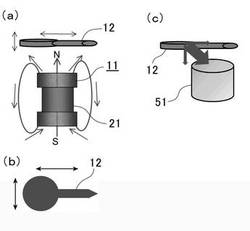
【図1】(a)本発明の実施の形態の磁気駆動マイクロツールの駆動機構の原理を示す側面図、(b)その磁気駆動マイクロツールの平面図、(c)従来の永久磁石による駆動原理を示す斜視図である。
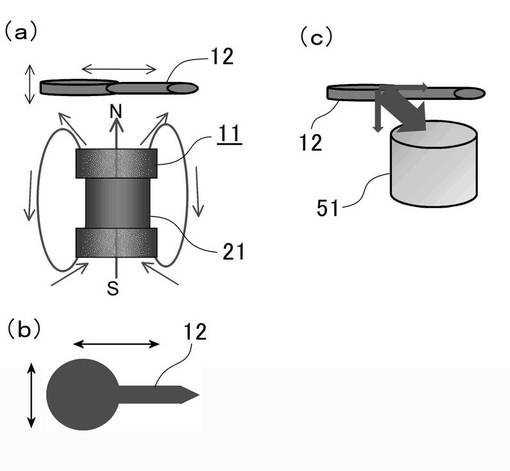
【図2】本発明の実施の形態の磁気駆動マイクロツールの駆動機構の突出部を有する変形例を示す側面図である。
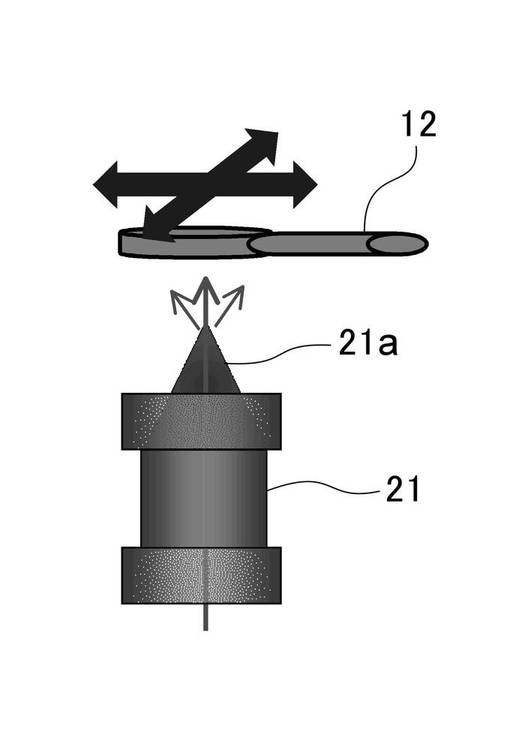
【図3】図2に示す磁気駆動マイクロツールの駆動機構の変形例の突出部の形状を、(a)芯の長さ方向に沿った円筒状の中空形状、(b)先端が尖った円錐形状、(c)先端が平面状の円錐台形状、(d)中空を有する円筒状の円錐台形状に形成したときの磁束密度の分布を示すグラフである。
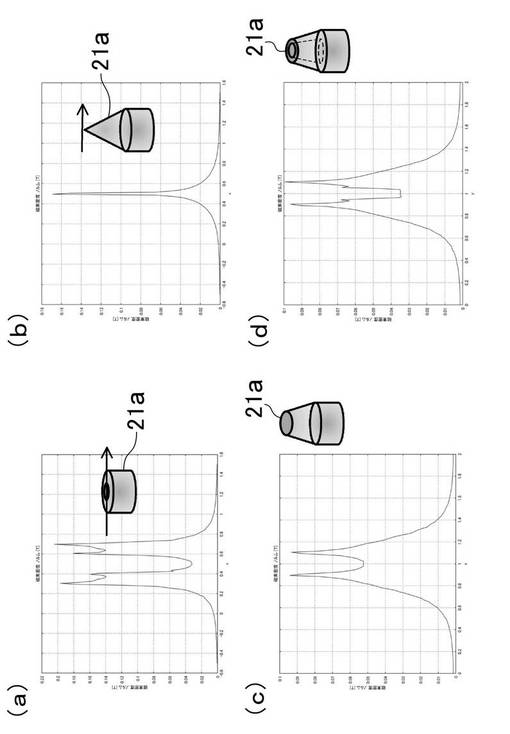
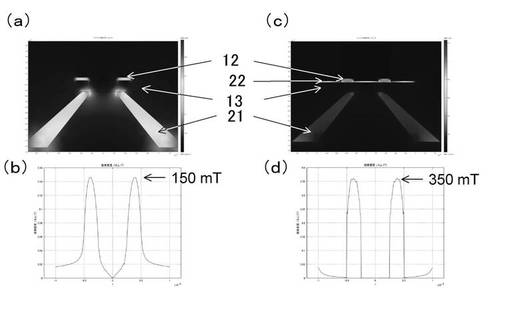
【図4】本発明の実施の形態の磁気駆動マイクロツールの駆動機構の(a)表面での磁束密度を示す側面図、(b)そのときの磁束密度の分布を示すグラフ、(c)薄膜を有する変形例の表面での磁束密度を示す側面図、(d)そのときの磁束密度の分布を示すグラフである。
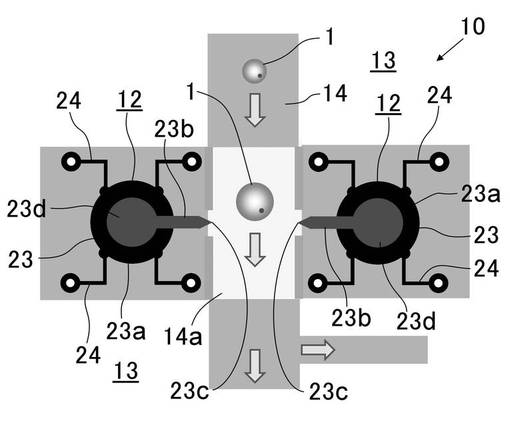
【図5】本発明の実施の形態のマイクロデバイスを示す平面図である。
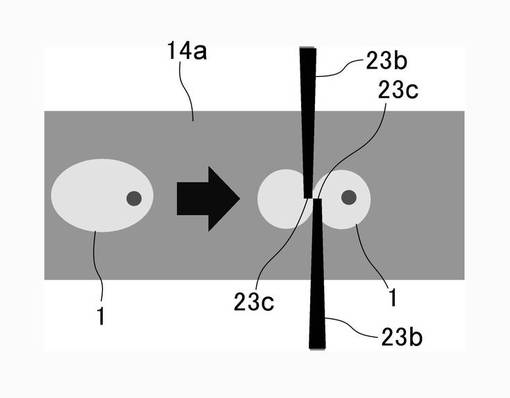
【図6】図5に示すマイクロデバイスの除核処理での使用状態を示す狭路部の拡大平面図である。
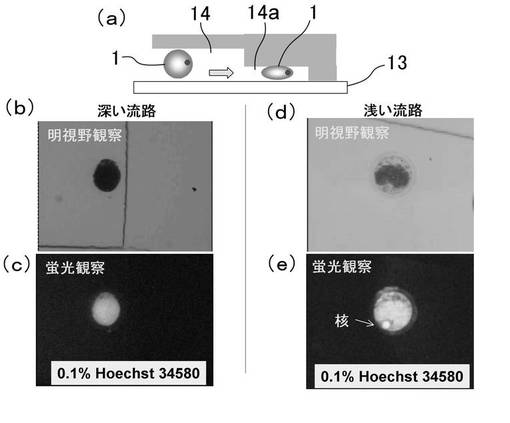
【図7】図5に示すマイクロデバイスの(a)微小流路での微粒子の状態を示す側面図、(b)通常の深い流路のときの明視野観察による顕微鏡写真、(c)そのときの蛍光観察による顕微鏡写真、(d)狭路部の浅い流路のときの明視野観察による顕微鏡写真、(e)そのときの蛍光観察による顕微鏡写真である。
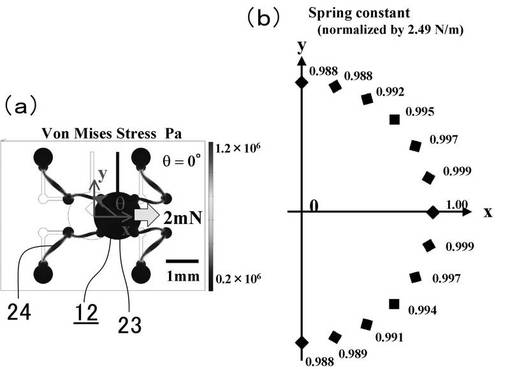
【図8】図5に示すマイクロデバイスの(a)移動部に所定の方向に一定の力を作用させたときの移動部の移動状態およびフォンミーゼス応力(Von Mises Stress)を示す平面図、(b)そのときの移動部の移動量を規格化された(normalized)バネ定数(Spring constant)で示すグラフである。
【図9】(a)従来の円柱状の磁石の斜視図、(b)その磁束密度(Magnetic flux density)の分布を示すグラフである。
【発明を実施するための形態】
【0025】
以下、図面に基づき本発明の実施の形態について説明する。
図1乃至図4は、本発明の実施の形態の磁気駆動マイクロツールの駆動機構を示している。
【0026】
図1(a)に示すように、磁気駆動マイクロツールの駆動機構11は、電磁石から成る磁力発生体21を有している。図1(a)および(b)に示すように、磁力発生体21は、電磁石に交流電流を流して周期的に極性を反転し、磁性を有する磁気駆動マイクロツール12に磁力を作用させるよう構成されている。
【0027】
駆動機構11では、電磁石に交流電流を流すことにより、電磁石の極性が周期的に反転するため、磁力線の向きも周期的に反転し、磁場が周期的に変化する。このため、その周期的な変化に連動して磁気駆動マイクロツール12を振動させることができる。これにより、磁気駆動マイクロツール12とそれを支える支持面等との間に働く摩擦力を低減することができるため、磁力発生体21の動きや磁力に磁気駆動マイクロツール12を追従させることができる。このため、磁力発生体21により磁気駆動マイクロツール12の動きを正確に制御することができる。
【0028】
また、図1(c)に示すように、永久磁石51を使用する場合、磁気駆動マイクロツール12を引きつけ、その引力方向に対して垂直方向に磁気駆動マイクロツール12を移動させるとき、磁気駆動マイクロツール12に作用する永久磁石51の引力により、磁気駆動マイクロツール12とそれを支える支持面等との間に働く摩擦力が大きくなる。このため、磁気駆動マイクロツール12を動かすために、強い磁力が必要となる。これに対し、駆動機構11では、磁気駆動マイクロツール12を振動させて、磁気駆動マイクロツール12に働く摩擦力を低減することができるため、永久磁石51の場合と比べて弱い磁力でも磁気駆動マイクロツール12を駆動することができる。一例では、同じ大きさの磁石を使用した場合、永久磁石51と比べて約1/20の磁力で磁気駆動マイクロツール12を駆動できることが確認されている。
【0029】
このように、駆動機構11は、より小さいエネルギーで磁気駆動マイクロツール12を駆動することができるとともに、磁力発生体21の磁力が周囲に及ぼす影響をより小さくすることができる。このため、より狭い領域に、互いに影響を及ぼすことなく複数の駆動機構11を近接して配置することができ、駆動機構11を利用したマイクロデバイスをより小型化することができる。
【0030】
なお、図2に示すように、磁力発生体21は、電磁石の芯の一方の端部に、コイルの端部から突出した突出部21aを有していてもよい。この場合、突出部21aに磁場が集中するため、突出部21aを磁気駆動マイクロツール12の側に向けて配置することにより、電磁石に流れる電流が同じでも、より強い磁力を磁気駆動マイクロツール12に作用させることができる。
【0031】
図3に示すように、突出部21aの形状を、芯の長さ方向に沿った円筒状の中空形状(図3(a))、先端が尖った円錐形状(図3(b))、先端が平面状の円錐台形状(図3(c))、中空を有する円筒状の円錐台形状(図3(d))に形成したとき、突出部21aの先端面の縁部や尖端の位置で、磁束密度が高くなっているのが確認できる。図3(b)に示すように、突出部21aの先端が尖っている場合、磁束が一点に集中して磁力が強くなっているため、磁気駆動マイクロツール12を点で捕らえることになる。これに対し、図3(a)、(c)、(d)に示すように、突出部21aが芯の長さ方向に沿って筒状または柱状に形成されている場合には、突出部21aの先端面の縁部に沿って線状に磁束が集中して磁力の強い場所が分布するため、磁気駆動マイクロツール12を線で捕らえることができる。このため、点で捕らえる場合よりも、安定した状態で磁気駆動マイクロツール12を駆動することができる。
【0032】
また、図4に示すように、駆動機構11は、磁力発生体21と磁気駆動マイクロツール12との間に配置された、透磁率の大きい材質から成る薄膜22を有してもよい。薄膜22は、ニッケル(Ni)製で、磁気駆動マイクロツール12を支持するガラス基板13と、磁気駆動マイクロツール12との間に敷かれている。この場合、薄膜22により、磁力発生体21で発する磁力が同じであっても、磁気駆動マイクロツール12に作用する磁力を高めることができる。図4に示す一例では、薄膜22がない場合に比べて、2倍以上の磁束密度が得られている。
【0033】
図5乃至図8は、本発明の実施の形態のマイクロデバイスを示している。
図5に示すように、マイクロデバイス10は、駆動機構11と磁気駆動マイクロツール12と、微粒子1を流す微小流路14とを有している。
【0034】
微小流路14は、透明なガラス基板13の内部に形成されており、卵子(卵細胞)、体細胞等の任意の動物細胞、植物細胞、ES細胞、微生物、菌、DNA分子、ナノチューブ、ナノ材料等の微小物体などから成る微粒子1を流すようになっている。微小流路14は、一部に、微粒子1の大きさよりも高さ方向が狭く形成された狭路部14aを有している。
【0035】
磁気駆動マイクロツール12は、ほぼ円形の移動部23と4つの固定部24とを有している。移動部23は、柔軟性のポリマー素材から成る円形の基台23aと、基台23aに固定された剛性のニッケル素材から成る針状部材23bとを有している。各固定部24は、柔軟性のポリマー素材から成り、細長い紐状に形成されている。各固定部24は、移動部23の基台23aの周縁部に、基台23aの中心に対して90度間隔で、それぞれ一端が接続されている。各固定部24は、基台23aの表面に対して平行で基台23aの中心を通る直線(以下、「参考直線」という)に対して、基台23aの周縁部からそれぞれ平行に伸び、中間部で参考直線から離れる方向に、参考直線に対してほぼ垂直に伸びるよう折れ曲がっている。各固定部24は、関節に対応する移動部23との接続位置、折れ曲がり位置および他端に、円形の補強部を有している。針状部材23bは、針状に形成された尖端23cと、尖端23cとは反対側に円形状に形成された反対端23dとを有している。針状部材23bは、基台23aの表面に対して平行かつ参考直線に対して垂直を成し、尖端23cが基台23aの周縁より外側に向かって突出するよう、反対端23dで基台23aの上部中央に固定されている。
【0036】
磁気駆動マイクロツール12は、針状部材23bがニッケル素材から成り、磁性を有している。磁気駆動マイクロツール12は、1対から成り、それぞれ微小流路14の狭路部14aを挟むよう、狭路部14aの両脇に固定されている。各磁気駆動マイクロツール12は、基台23aの表面が狭路部14aの幅方向に対して平行になるよう、各固定部24の他端で、微小流路14を形成する透明なガラス基板13に固定されている。また、各磁気駆動マイクロツール12は、それぞれ針状部材23bの尖端23cが、狭路部14aを挟んで対向するように配置されている。
【0037】
各磁気駆動マイクロツール12は、移動部23が、柔軟性のポリマー素材から成る各固定部24により弾性的に固定されており、基台23aの表面に平行な平面に沿って移動可能になっている。また、各磁気駆動マイクロツール12は、移動方向に対して垂直な方向でガラス基板13により挟まれた幅の狭い空間内に設けられており、垂直な方向への動きが制限されている。各磁気駆動マイクロツール12の移動部23は、力が作用しないとき、各固定部24の中央に位置し、力が作用して任意の方向に移動した後、力が除かれたとき、各固定部24の弾性により各固定部24の中央に戻るようになっている。
【0038】
駆動機構11は、1対から成り、各磁気駆動マイクロツール12に対応してガラス基板13の下部に設けられ、対応する磁気駆動マイクロツール12を駆動可能になっている。駆動機構11は、針状部材23bの尖端23cが狭路部14aに向かって互いにすれ違って突出するよう、各磁気駆動マイクロツール12の移動部23を移動可能になっている。これにより、図6に示すように、マイクロデバイス10は、狭路部14aに微粒子1が流れてきたとき、針状部材23bの針状の尖端23cで微粒子1を2つに分割するよう構成されている。
【0039】
次に、作用について説明する。
マイクロデバイス10は、駆動機構11により磁気駆動マイクロツール12を駆動するため、磁気駆動マイクロツール12の動きを正確に制御することができる。また、より小さいエネルギーで磁気駆動マイクロツール12を駆動することもできる。磁気駆動マイクロツール12が移動方向に対して垂直な方向への動きが制限されているため、駆動機構11により磁気駆動マイクロツール12を振動させても、磁気駆動マイクロツール12を移動方向に沿って安定して駆動することができる。
【0040】
図7に示すように、マイクロデバイス10では、狭路部14aを流れる微粒子1が高さ方向に潰れた状態で変形して移動するため、微粒子1の厚みを薄くして微粒子1の内部を観察しやすくすることができる。また、これにより、微粒子1の内部を観察しながら、微粒子1を2つに分割することができる。図7に示す一例では、微粒子1の卵子が狭路部14aを流れるとき、変形して潰れた卵子内に核が明瞭に観察できるため、核が存在する部分と核が存在しない部分とに正確に分割することができ、卵子の除核処理を行うことができる。また、光学的手段を有する検出装置などにより、狭路部14aの微粒子1を画像処理することにより、微粒子1の位置や微粒子1内の核の位置を自動で検出し、それに基づいて駆動機構11で磁気駆動マイクロツール12を駆動して微粒子1を分割することができ、除核処理の自動化を図ることができる。処理の自動化により、処理速度、処理効率および処理精度の向上、作業者の技能に左右されない処理の均一化を図ることができる。
【0041】
図8に、駆動機構11により、磁気駆動マイクロツール12の移動部23に、基台23aの表面に平行な平面に沿って所定の方向に一定の力を作用させたときの、その平面に沿った移動部23の移動量を調べた結果を示す。図8に示すように、同じ大きさの力に対する移動部23の移動量は、全ての方向で誤差2%以内に収まっており、ほぼ等方的であることが確認された。このため、マイクロデバイス10は、駆動機構11による移動部23の移動量の制御を正確かつ容易に行うことができ、磁気駆動マイクロツール12を操作しやすいといえる。また、移動部23を一方向だけでなく、平面内の任意の方向に移動させることができ、磁気駆動マイクロツール12の操作の自由度を高めることができる。
【0042】
なお、磁気駆動マイクロツール12はリング状部を有し、磁力発生体21の磁場の変化によりリング状部に誘導電流が流れ、磁力発生体21と反発するよう構成されていてもよい。この場合、磁力発生体21による誘導電流がリング状部に流れ、磁気駆動マイクロツール12と磁力発生体21とが反発するため、磁気駆動マイクロツール12がそれを支えるガラス基板13から浮き上がる。このため、磁気駆動マイクロツール12とガラス基板13との間に働く摩擦力を低減することができる。これにより、磁力発生体21の動きや磁力に磁気駆動マイクロツール12を容易に追従させることができ、磁力発生体21により磁気駆動マイクロツール12の動きを正確に制御することができる。
【0043】
駆動機構11は、卵子の除核処理に限らず、微粒子1の分離、分類、加工、選択、処理等の磁気駆動マイクロツール12を使用する様々な操作で使用可能である。また、マイクロデバイス10は、卵子の除核処理を行うものに限らず、微粒子1の分離、分類、加工、選択、処理等の様々な操作を行うものから成っていてもよい。
【符号の説明】
【0044】
1 微粒子
10 マイクロデバイス
11 駆動機構
12 磁気駆動マイクロツール
13 ガラス基板
14 微小流路
14a 狭路部
21 磁力発生体
21a 突出部
22 薄膜
23 移動部
23a 基台
23b 針状部材
23c 尖端
23d 反対端
24 固定部
【技術分野】
【0001】
本発明は、磁気駆動マイクロツールの駆動機構およびマイクロデバイスに関する。
【背景技術】
【0002】
主に医療分野、医薬分野、品種改良といったバイオ系産業分野において、卵子、細胞、菌などの微粒子に対して、分離、分類、加工、選択、処理等の一連の操作が行われている。従来、このような微粒子に対する操作を行う装置として、永久磁石や電磁石により駆動される磁気駆動マイクロツール(MMT)を使用して、微小流路を流れる微粒子に対して各操作を行うものがある(例えば、特許文献1または2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−325429号公報
【特許文献2】特開2008−148677号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1または2に記載のような装置では、円柱状の永久磁石や電磁石を、一方の端面を磁気駆動マイクロツールに向けて配置し、永久磁石を動かしたり、電磁石に流す電流をON/OFFしたりして、磁気駆動マイクロツールを駆動している。このとき、図9に示すように、円柱状の磁石では、磁石の周縁部で磁束密度が大きいが、磁石の中心部では磁束密度が小さくなっている。このため、磁石の中心部では、磁気駆動マイクロツールに摩擦等の抵抗が働くと、磁気駆動マイクロツールを磁力に追従させることができず、磁気駆動マイクロツールの動きを正確に制御するのが困難であるという課題があった。
【0005】
これに対し、磁石の中心部での磁束密度を大きくするために、磁石を小さくすることが考えられるが、小型化にも限界があり、また、小さくするに従って磁力も弱くなるため、やはり磁気駆動マイクロツールの動きを正確に制御することは困難になる。
【0006】
また、磁石で磁気駆動マイクロツールを引きつけ、その引力方向に対して垂直方向に磁気駆動マイクロツールを移動させるとき、磁気駆動マイクロツールに作用する磁石の引力により、磁気駆動マイクロツールとそれを支える支持面等との間に働く摩擦力が大きくなる。このため、この場合にも、磁気駆動マイクロツールの動きを正確に制御するのが困難であるという課題があった。
【0007】
本発明は、このような課題に着目してなされたもので、磁気駆動マイクロツールの動きを正確に制御することができる磁気駆動マイクロツールの駆動機構およびマイクロデバイスを提供することを目的としている。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明に係る磁気駆動マイクロツールの駆動機構は、磁性を有する磁気駆動マイクロツールを駆動するための磁気駆動マイクロツールの駆動機構であって、周期的に磁場を変化させて、前記磁気駆動マイクロツールに磁力を作用させるよう構成された磁力発生体を有することを、特徴とする。
【0009】
本発明に係る磁気駆動マイクロツールの駆動機構では、磁力発生体が周期的に磁場を変化させるため、磁気駆動マイクロツールに作用する磁力の大きさや向きが、磁場の変化により変動する。このため、磁場の周期的に変化に連動して、磁気駆動マイクロツールを振動させることができる。これにより、磁気駆動マイクロツールとそれを支える支持面等との間に働く摩擦力を低減することができるため、磁力発生体の動きや磁力に磁気駆動マイクロツールを追従させることができる。このため、磁力発生体により磁気駆動マイクロツールの動きを正確に制御することができる。
【0010】
また、磁気駆動マイクロツールが振動して磁気駆動マイクロツールに働く摩擦力を低減することができるため、永久磁石を使用したときの磁力と比べて弱い磁力でも、磁気駆動マイクロツールを駆動することができる。これにより、より小さいエネルギーで磁気駆動マイクロツールを駆動することができるとともに、磁力発生体の磁力が周囲に及ぼす影響をより小さくすることができる。また、磁気駆動マイクロツールを微小流路のように天井のある閉空間内で使用する場合には、磁気駆動マイクロツールの天井に対して垂直な方向の動きが制限されるため、磁気駆動マイクロツールを振動させても、磁気駆動マイクロツールを安定して駆動することができる。なお、磁気駆動マイクロツール(MMT)は、磁力により駆動可能であれば、いかなるものであってもよい。
【0011】
磁力発生体は、周期的に磁場を変化可能であれば、どのように構成されていてもよい。磁力発生体は、例えば、電磁石から成り、電磁石に流す電流の大きさや向きを周期的に変化させたり、電磁石に流す電流を周期的にON/OFFしたりするよう構成されていてもよい。磁場の変化の周期は、磁気駆動マイクロツールとそれを支える支持面等との間に働く摩擦力を低減可能であれば、いかなる周期であってもよい。
【0012】
本発明に係る磁気駆動マイクロツールの駆動機構で、前記磁力発生体は電磁石に交流電流を流して構成されることが好ましい。この場合、電磁石に交流電流を流すことにより、電磁石の極性が周期的に反転するため、磁力線の向きも周期的に反転し、磁場が周期的に変化する。このため、その周期的な変化に連動して磁気駆動マイクロツールを振動させることができ、磁力発生体により磁気駆動マイクロツールの動きを正確に制御することができる。また、磁気駆動マイクロツールがリング状部を有しする場合には、磁力発生体の磁場の変化によりリング状部に誘導電流が流れるため、磁気駆動マイクロツールと磁力発生体とが反発する。このため、磁気駆動マイクロツールがそれを支える支持面から浮き上がり、磁気駆動マイクロツールと支持面との間に働く摩擦力を低減することができる。これにより、磁力発生体の動きや磁力に磁気駆動マイクロツールを容易に追従させることができ、磁力発生体により磁気駆動マイクロツールの動きを正確に制御することができる。
【0013】
本発明に係る磁気駆動マイクロツールの駆動機構で、前記電磁石は、芯の少なくとも一方の端部に、コイルの端部から突出して、前記芯の長さ方向に沿って筒状または柱状に形成された突出部を有することが好ましい。この場合、突出部に磁場が集中するため、突出部を磁気駆動マイクロツール側に向けて配置することにより、電磁石に流れる電流が同じでも、より強い磁力を磁気駆動マイクロツールに作用させることができる。また、突出部が芯の長さ方向に沿って筒状または柱状に形成されているため、突出部の先端面の縁部に沿って線状に磁力の強い場所が分布する。このため、磁気駆動マイクロツールを線で捕らえることができ、より安定した状態で磁気駆動マイクロツールを駆動することができる。
【0014】
本発明に係る磁気駆動マイクロツールの駆動機構は、前記磁力発生体と前記磁気駆動マイクロツールとの間に配置された、透磁率の大きい材質から成る薄膜を有してもよい。この場合、薄膜により、磁力発生体で発する磁力が同じであっても、磁気駆動マイクロツールに作用する磁力を高めることができる。
【0015】
本発明に係るマイクロデバイスは、微粒子を流す微小流路と、少なくとも一部が前記微小流路内に配置された磁気駆動マイクロツールと、前記磁気駆動マイクロツールを駆動可能に設けられた本発明に係る磁気駆動マイクロツールの駆動機構とを有することを、特徴とする。
【0016】
本発明に係るマイクロデバイスは、本発明に係る磁気駆動マイクロツールの駆動機構により磁気駆動マイクロツールを駆動するため、磁気駆動マイクロツールの動きを正確に制御することができる。また、より小さいエネルギーで磁気駆動マイクロツールを駆動することもできる。このため、微小流路内で、卵子、細胞、菌などの微粒子の分離、分類、加工、選択、処理等の操作を、正確かつ高精度で行うことができる。なお、マイクロデバイスは、各操作の工程を行う個々のマイクロモジュールであってもよく、これらのマイクロモジュールを連結したマイクロチップであってもよい。
【0017】
本発明に係るマイクロデバイスで、前記磁気駆動マイクロツールは、移動方向に対して垂直な方向への動きが制限されるよう、前記垂直な方向での幅が狭い空間内に設けられていることが好ましい。この場合、磁気駆動マイクロツールが移動方向に対して垂直な方向への動きが制限されるため、駆動機構により磁気駆動マイクロツールを振動させても、磁気駆動マイクロツールを移動方向に沿って安定して駆動することができる。
【0018】
本発明に係るマイクロデバイスで、前記微粒子は内部に核を有する細胞から成り、前記微小流路は前記微粒子の大きさよりも高さまたは幅が狭い狭路部を有し、前記微粒子が前記狭路部を通過するとき、光学的手段により変形した前記微粒子の核を検出するよう設けられた検出装置を有していてもよい。この場合、狭路部を流れる微粒子が幅方向または高さ方向に潰れた状態で変形して移動するため、微粒子の厚みを薄くして微粒子の内部を観察しやすくすることができる。このため、検出装置の光学的手段により容易に核を検出することができる。検出装置による核の検出の自動化が容易である。
【0019】
本発明に係るマイクロデバイスで、前記磁気駆動マイクロツールは、所定の平面に沿って移動可能に設けられた磁性を有する移動部と、前記移動部を弾性的に固定する複数の固定部とを有し、前記駆動機構により前記移動部に前記平面に沿った力を作用させたとき、前記力の大きさに対する前記平面に沿った前記移動部の移動量が等方的であることが好ましい。この場合、駆動機構による移動部の移動量の制御を正確かつ容易に行うことができ、磁気駆動マイクロツールを操作しやすい。なお、ここで移動部の移動量が等方的であるとは、平面に沿った全ての向きで、駆動機構による同じ大きさの力に対する移動部の移動量が概ね同じ大きさであればよく、移動量が誤差15%以内、好ましくは2%以内に収まることをいう。
【0020】
本発明に係るマイクロデバイスで、前記微小流路は前記微粒子の大きさよりも高さまたは幅が狭い狭路部を有し、前記磁気駆動マイクロツールは1対から成り、互いに前記狭路部を挟んだ位置に配置され、前記移動部に前記狭路部に向かって互いに対向してまたはすれ違って突出するよう設けられた針状部材を有し、前記駆動機構は1対から成り、各磁気駆動マイクロツールに対応して設けられ、前記狭路部に前記微粒子が流れてきたとき、各駆動機構により対応する磁気駆動マイクロツールの前記移動部を移動させて前記針状部材を突出させることにより、変形した前記微粒子を2つに分割するよう構成されていてもよい。
【0021】
この微粒子を2つに分割する場合、狭路部を流れる微粒子が幅方向または高さ方向に潰れた状態で変形して移動するため、微粒子の厚みを薄くして微粒子の内部を観察しやすくすることができる。また、これにより、微粒子の内部を観察しながら、微粒子を2つに分割することができる。微粒子が卵子から成る場合、卵子を、核が存在する部分と核が存在しない部分とに正確に分割することができ、卵子の除核処理を行うことができる。
【0022】
本発明に係るマイクロデバイスで、前記磁気駆動マイクロツールはリング状部を有し、前記磁力発生体の磁場の変化により前記リング状部に誘導電流が流れ、前記磁力発生体と反発するよう構成されていてもよい。この場合、磁力発生体による誘導電流がリング状部に流れ、磁気駆動マイクロツールと磁力発生体とが反発するため、磁気駆動マイクロツールがそれを支える支持面から浮き上がる。このため、磁気駆動マイクロツールと支持面との間に働く摩擦力を低減することができる。これにより、磁力発生体の動きや磁力に磁気駆動マイクロツールを容易に追従させることができ、磁力発生体により磁気駆動マイクロツールの動きを正確に制御することができる。
【発明の効果】
【0023】
本発明によれば、磁気駆動マイクロツールの動きを正確に制御することができる磁気駆動マイクロツールの駆動機構およびマイクロデバイスを提供することができる。
【図面の簡単な説明】
【0024】
【図1】(a)本発明の実施の形態の磁気駆動マイクロツールの駆動機構の原理を示す側面図、(b)その磁気駆動マイクロツールの平面図、(c)従来の永久磁石による駆動原理を示す斜視図である。
【図2】本発明の実施の形態の磁気駆動マイクロツールの駆動機構の突出部を有する変形例を示す側面図である。
【図3】図2に示す磁気駆動マイクロツールの駆動機構の変形例の突出部の形状を、(a)芯の長さ方向に沿った円筒状の中空形状、(b)先端が尖った円錐形状、(c)先端が平面状の円錐台形状、(d)中空を有する円筒状の円錐台形状に形成したときの磁束密度の分布を示すグラフである。
【図4】本発明の実施の形態の磁気駆動マイクロツールの駆動機構の(a)表面での磁束密度を示す側面図、(b)そのときの磁束密度の分布を示すグラフ、(c)薄膜を有する変形例の表面での磁束密度を示す側面図、(d)そのときの磁束密度の分布を示すグラフである。
【図5】本発明の実施の形態のマイクロデバイスを示す平面図である。
【図6】図5に示すマイクロデバイスの除核処理での使用状態を示す狭路部の拡大平面図である。
【図7】図5に示すマイクロデバイスの(a)微小流路での微粒子の状態を示す側面図、(b)通常の深い流路のときの明視野観察による顕微鏡写真、(c)そのときの蛍光観察による顕微鏡写真、(d)狭路部の浅い流路のときの明視野観察による顕微鏡写真、(e)そのときの蛍光観察による顕微鏡写真である。
【図8】図5に示すマイクロデバイスの(a)移動部に所定の方向に一定の力を作用させたときの移動部の移動状態およびフォンミーゼス応力(Von Mises Stress)を示す平面図、(b)そのときの移動部の移動量を規格化された(normalized)バネ定数(Spring constant)で示すグラフである。
【図9】(a)従来の円柱状の磁石の斜視図、(b)その磁束密度(Magnetic flux density)の分布を示すグラフである。
【発明を実施するための形態】
【0025】
以下、図面に基づき本発明の実施の形態について説明する。
図1乃至図4は、本発明の実施の形態の磁気駆動マイクロツールの駆動機構を示している。
【0026】
図1(a)に示すように、磁気駆動マイクロツールの駆動機構11は、電磁石から成る磁力発生体21を有している。図1(a)および(b)に示すように、磁力発生体21は、電磁石に交流電流を流して周期的に極性を反転し、磁性を有する磁気駆動マイクロツール12に磁力を作用させるよう構成されている。
【0027】
駆動機構11では、電磁石に交流電流を流すことにより、電磁石の極性が周期的に反転するため、磁力線の向きも周期的に反転し、磁場が周期的に変化する。このため、その周期的な変化に連動して磁気駆動マイクロツール12を振動させることができる。これにより、磁気駆動マイクロツール12とそれを支える支持面等との間に働く摩擦力を低減することができるため、磁力発生体21の動きや磁力に磁気駆動マイクロツール12を追従させることができる。このため、磁力発生体21により磁気駆動マイクロツール12の動きを正確に制御することができる。
【0028】
また、図1(c)に示すように、永久磁石51を使用する場合、磁気駆動マイクロツール12を引きつけ、その引力方向に対して垂直方向に磁気駆動マイクロツール12を移動させるとき、磁気駆動マイクロツール12に作用する永久磁石51の引力により、磁気駆動マイクロツール12とそれを支える支持面等との間に働く摩擦力が大きくなる。このため、磁気駆動マイクロツール12を動かすために、強い磁力が必要となる。これに対し、駆動機構11では、磁気駆動マイクロツール12を振動させて、磁気駆動マイクロツール12に働く摩擦力を低減することができるため、永久磁石51の場合と比べて弱い磁力でも磁気駆動マイクロツール12を駆動することができる。一例では、同じ大きさの磁石を使用した場合、永久磁石51と比べて約1/20の磁力で磁気駆動マイクロツール12を駆動できることが確認されている。
【0029】
このように、駆動機構11は、より小さいエネルギーで磁気駆動マイクロツール12を駆動することができるとともに、磁力発生体21の磁力が周囲に及ぼす影響をより小さくすることができる。このため、より狭い領域に、互いに影響を及ぼすことなく複数の駆動機構11を近接して配置することができ、駆動機構11を利用したマイクロデバイスをより小型化することができる。
【0030】
なお、図2に示すように、磁力発生体21は、電磁石の芯の一方の端部に、コイルの端部から突出した突出部21aを有していてもよい。この場合、突出部21aに磁場が集中するため、突出部21aを磁気駆動マイクロツール12の側に向けて配置することにより、電磁石に流れる電流が同じでも、より強い磁力を磁気駆動マイクロツール12に作用させることができる。
【0031】
図3に示すように、突出部21aの形状を、芯の長さ方向に沿った円筒状の中空形状(図3(a))、先端が尖った円錐形状(図3(b))、先端が平面状の円錐台形状(図3(c))、中空を有する円筒状の円錐台形状(図3(d))に形成したとき、突出部21aの先端面の縁部や尖端の位置で、磁束密度が高くなっているのが確認できる。図3(b)に示すように、突出部21aの先端が尖っている場合、磁束が一点に集中して磁力が強くなっているため、磁気駆動マイクロツール12を点で捕らえることになる。これに対し、図3(a)、(c)、(d)に示すように、突出部21aが芯の長さ方向に沿って筒状または柱状に形成されている場合には、突出部21aの先端面の縁部に沿って線状に磁束が集中して磁力の強い場所が分布するため、磁気駆動マイクロツール12を線で捕らえることができる。このため、点で捕らえる場合よりも、安定した状態で磁気駆動マイクロツール12を駆動することができる。
【0032】
また、図4に示すように、駆動機構11は、磁力発生体21と磁気駆動マイクロツール12との間に配置された、透磁率の大きい材質から成る薄膜22を有してもよい。薄膜22は、ニッケル(Ni)製で、磁気駆動マイクロツール12を支持するガラス基板13と、磁気駆動マイクロツール12との間に敷かれている。この場合、薄膜22により、磁力発生体21で発する磁力が同じであっても、磁気駆動マイクロツール12に作用する磁力を高めることができる。図4に示す一例では、薄膜22がない場合に比べて、2倍以上の磁束密度が得られている。
【0033】
図5乃至図8は、本発明の実施の形態のマイクロデバイスを示している。
図5に示すように、マイクロデバイス10は、駆動機構11と磁気駆動マイクロツール12と、微粒子1を流す微小流路14とを有している。
【0034】
微小流路14は、透明なガラス基板13の内部に形成されており、卵子(卵細胞)、体細胞等の任意の動物細胞、植物細胞、ES細胞、微生物、菌、DNA分子、ナノチューブ、ナノ材料等の微小物体などから成る微粒子1を流すようになっている。微小流路14は、一部に、微粒子1の大きさよりも高さ方向が狭く形成された狭路部14aを有している。
【0035】
磁気駆動マイクロツール12は、ほぼ円形の移動部23と4つの固定部24とを有している。移動部23は、柔軟性のポリマー素材から成る円形の基台23aと、基台23aに固定された剛性のニッケル素材から成る針状部材23bとを有している。各固定部24は、柔軟性のポリマー素材から成り、細長い紐状に形成されている。各固定部24は、移動部23の基台23aの周縁部に、基台23aの中心に対して90度間隔で、それぞれ一端が接続されている。各固定部24は、基台23aの表面に対して平行で基台23aの中心を通る直線(以下、「参考直線」という)に対して、基台23aの周縁部からそれぞれ平行に伸び、中間部で参考直線から離れる方向に、参考直線に対してほぼ垂直に伸びるよう折れ曲がっている。各固定部24は、関節に対応する移動部23との接続位置、折れ曲がり位置および他端に、円形の補強部を有している。針状部材23bは、針状に形成された尖端23cと、尖端23cとは反対側に円形状に形成された反対端23dとを有している。針状部材23bは、基台23aの表面に対して平行かつ参考直線に対して垂直を成し、尖端23cが基台23aの周縁より外側に向かって突出するよう、反対端23dで基台23aの上部中央に固定されている。
【0036】
磁気駆動マイクロツール12は、針状部材23bがニッケル素材から成り、磁性を有している。磁気駆動マイクロツール12は、1対から成り、それぞれ微小流路14の狭路部14aを挟むよう、狭路部14aの両脇に固定されている。各磁気駆動マイクロツール12は、基台23aの表面が狭路部14aの幅方向に対して平行になるよう、各固定部24の他端で、微小流路14を形成する透明なガラス基板13に固定されている。また、各磁気駆動マイクロツール12は、それぞれ針状部材23bの尖端23cが、狭路部14aを挟んで対向するように配置されている。
【0037】
各磁気駆動マイクロツール12は、移動部23が、柔軟性のポリマー素材から成る各固定部24により弾性的に固定されており、基台23aの表面に平行な平面に沿って移動可能になっている。また、各磁気駆動マイクロツール12は、移動方向に対して垂直な方向でガラス基板13により挟まれた幅の狭い空間内に設けられており、垂直な方向への動きが制限されている。各磁気駆動マイクロツール12の移動部23は、力が作用しないとき、各固定部24の中央に位置し、力が作用して任意の方向に移動した後、力が除かれたとき、各固定部24の弾性により各固定部24の中央に戻るようになっている。
【0038】
駆動機構11は、1対から成り、各磁気駆動マイクロツール12に対応してガラス基板13の下部に設けられ、対応する磁気駆動マイクロツール12を駆動可能になっている。駆動機構11は、針状部材23bの尖端23cが狭路部14aに向かって互いにすれ違って突出するよう、各磁気駆動マイクロツール12の移動部23を移動可能になっている。これにより、図6に示すように、マイクロデバイス10は、狭路部14aに微粒子1が流れてきたとき、針状部材23bの針状の尖端23cで微粒子1を2つに分割するよう構成されている。
【0039】
次に、作用について説明する。
マイクロデバイス10は、駆動機構11により磁気駆動マイクロツール12を駆動するため、磁気駆動マイクロツール12の動きを正確に制御することができる。また、より小さいエネルギーで磁気駆動マイクロツール12を駆動することもできる。磁気駆動マイクロツール12が移動方向に対して垂直な方向への動きが制限されているため、駆動機構11により磁気駆動マイクロツール12を振動させても、磁気駆動マイクロツール12を移動方向に沿って安定して駆動することができる。
【0040】
図7に示すように、マイクロデバイス10では、狭路部14aを流れる微粒子1が高さ方向に潰れた状態で変形して移動するため、微粒子1の厚みを薄くして微粒子1の内部を観察しやすくすることができる。また、これにより、微粒子1の内部を観察しながら、微粒子1を2つに分割することができる。図7に示す一例では、微粒子1の卵子が狭路部14aを流れるとき、変形して潰れた卵子内に核が明瞭に観察できるため、核が存在する部分と核が存在しない部分とに正確に分割することができ、卵子の除核処理を行うことができる。また、光学的手段を有する検出装置などにより、狭路部14aの微粒子1を画像処理することにより、微粒子1の位置や微粒子1内の核の位置を自動で検出し、それに基づいて駆動機構11で磁気駆動マイクロツール12を駆動して微粒子1を分割することができ、除核処理の自動化を図ることができる。処理の自動化により、処理速度、処理効率および処理精度の向上、作業者の技能に左右されない処理の均一化を図ることができる。
【0041】
図8に、駆動機構11により、磁気駆動マイクロツール12の移動部23に、基台23aの表面に平行な平面に沿って所定の方向に一定の力を作用させたときの、その平面に沿った移動部23の移動量を調べた結果を示す。図8に示すように、同じ大きさの力に対する移動部23の移動量は、全ての方向で誤差2%以内に収まっており、ほぼ等方的であることが確認された。このため、マイクロデバイス10は、駆動機構11による移動部23の移動量の制御を正確かつ容易に行うことができ、磁気駆動マイクロツール12を操作しやすいといえる。また、移動部23を一方向だけでなく、平面内の任意の方向に移動させることができ、磁気駆動マイクロツール12の操作の自由度を高めることができる。
【0042】
なお、磁気駆動マイクロツール12はリング状部を有し、磁力発生体21の磁場の変化によりリング状部に誘導電流が流れ、磁力発生体21と反発するよう構成されていてもよい。この場合、磁力発生体21による誘導電流がリング状部に流れ、磁気駆動マイクロツール12と磁力発生体21とが反発するため、磁気駆動マイクロツール12がそれを支えるガラス基板13から浮き上がる。このため、磁気駆動マイクロツール12とガラス基板13との間に働く摩擦力を低減することができる。これにより、磁力発生体21の動きや磁力に磁気駆動マイクロツール12を容易に追従させることができ、磁力発生体21により磁気駆動マイクロツール12の動きを正確に制御することができる。
【0043】
駆動機構11は、卵子の除核処理に限らず、微粒子1の分離、分類、加工、選択、処理等の磁気駆動マイクロツール12を使用する様々な操作で使用可能である。また、マイクロデバイス10は、卵子の除核処理を行うものに限らず、微粒子1の分離、分類、加工、選択、処理等の様々な操作を行うものから成っていてもよい。
【符号の説明】
【0044】
1 微粒子
10 マイクロデバイス
11 駆動機構
12 磁気駆動マイクロツール
13 ガラス基板
14 微小流路
14a 狭路部
21 磁力発生体
21a 突出部
22 薄膜
23 移動部
23a 基台
23b 針状部材
23c 尖端
23d 反対端
24 固定部
【特許請求の範囲】
【請求項1】
磁性を有する磁気駆動マイクロツールを駆動するための磁気駆動マイクロツールの駆動機構であって、
周期的に磁場を変化させて、前記磁気駆動マイクロツールに磁力を作用させるよう構成された磁力発生体を有することを、
特徴とする磁気駆動マイクロツールの駆動機構。
【請求項2】
前記磁力発生体は電磁石に交流電流を流して構成されることを、特徴とする請求項1記載の磁気駆動マイクロツールの駆動機構。
【請求項3】
前記電磁石は、芯の少なくとも一方の端部に、コイルの端部から突出して、前記芯の長さ方向に沿って筒状または柱状に形成された突出部を有することを、特徴とする請求項2記載の磁気駆動マイクロツールの駆動機構。
【請求項4】
前記磁力発生体と前記磁気駆動マイクロツールとの間に配置された、透磁率の大きい材質から成る薄膜を有することを、特徴とする請求項1、2または3記載の磁気駆動マイクロツールの駆動機構。
【請求項5】
微粒子を流す微小流路と、
少なくとも一部が前記微小流路内に配置された磁気駆動マイクロツールと、
前記磁気駆動マイクロツールを駆動可能に設けられた請求項1、2、3または4記載の磁気駆動マイクロツールの駆動機構とを有することを、
特徴とするマイクロデバイス。
【請求項6】
前記磁気駆動マイクロツールは、移動方向に対して垂直な方向への動きが制限されるよう、前記垂直な方向での幅が狭い空間内に設けられていることを、特徴とする請求項5記載のマイクロデバイス。
【請求項7】
前記微粒子は内部に核を有する細胞から成り、
前記微小流路は前記微粒子の大きさよりも高さまたは幅が狭い狭路部を有し、
前記微粒子が前記狭路部を通過するとき、光学的手段により変形した前記微粒子の核を検出するよう設けられた検出装置を有することを、
特徴とする請求項5または6記載のマイクロデバイス。
【請求項8】
前記磁気駆動マイクロツールは、所定の平面に沿って移動可能に設けられた磁性を有する移動部と、前記移動部を弾性的に固定する複数の固定部とを有し、前記駆動機構により前記移動部に前記平面に沿った力を作用させたとき、前記力の大きさに対する前記平面に沿った前記移動部の移動量が等方的であることを、特徴とする請求項5、6または7記載のマイクロデバイス。
【請求項9】
前記微小流路は前記微粒子の大きさよりも高さまたは幅が狭い狭路部を有し、
前記磁気駆動マイクロツールは1対から成り、互いに前記狭路部を挟んだ位置に配置され、前記移動部に前記狭路部に向かって互いに対向してまたはすれ違って突出するよう設けられた針状部材を有し、
前記駆動機構は1対から成り、各磁気駆動マイクロツールに対応して設けられ、
前記狭路部に前記微粒子が流れてきたとき、各駆動機構により対応する磁気駆動マイクロツールの前記移動部を移動させて前記針状部材を突出させることにより、変形した前記微粒子を2つに分割するよう構成されていることを、
特徴とする請求項8記載のマイクロデバイス。
【請求項10】
前記磁気駆動マイクロツールはリング状部を有し、前記磁力発生体の磁場の変化により前記リング状部に誘導電流が流れ、前記磁力発生体と反発するよう構成されていることを、特徴とする請求項5、6、7、8または9記載のマイクロデバイス。
【請求項1】
磁性を有する磁気駆動マイクロツールを駆動するための磁気駆動マイクロツールの駆動機構であって、
周期的に磁場を変化させて、前記磁気駆動マイクロツールに磁力を作用させるよう構成された磁力発生体を有することを、
特徴とする磁気駆動マイクロツールの駆動機構。
【請求項2】
前記磁力発生体は電磁石に交流電流を流して構成されることを、特徴とする請求項1記載の磁気駆動マイクロツールの駆動機構。
【請求項3】
前記電磁石は、芯の少なくとも一方の端部に、コイルの端部から突出して、前記芯の長さ方向に沿って筒状または柱状に形成された突出部を有することを、特徴とする請求項2記載の磁気駆動マイクロツールの駆動機構。
【請求項4】
前記磁力発生体と前記磁気駆動マイクロツールとの間に配置された、透磁率の大きい材質から成る薄膜を有することを、特徴とする請求項1、2または3記載の磁気駆動マイクロツールの駆動機構。
【請求項5】
微粒子を流す微小流路と、
少なくとも一部が前記微小流路内に配置された磁気駆動マイクロツールと、
前記磁気駆動マイクロツールを駆動可能に設けられた請求項1、2、3または4記載の磁気駆動マイクロツールの駆動機構とを有することを、
特徴とするマイクロデバイス。
【請求項6】
前記磁気駆動マイクロツールは、移動方向に対して垂直な方向への動きが制限されるよう、前記垂直な方向での幅が狭い空間内に設けられていることを、特徴とする請求項5記載のマイクロデバイス。
【請求項7】
前記微粒子は内部に核を有する細胞から成り、
前記微小流路は前記微粒子の大きさよりも高さまたは幅が狭い狭路部を有し、
前記微粒子が前記狭路部を通過するとき、光学的手段により変形した前記微粒子の核を検出するよう設けられた検出装置を有することを、
特徴とする請求項5または6記載のマイクロデバイス。
【請求項8】
前記磁気駆動マイクロツールは、所定の平面に沿って移動可能に設けられた磁性を有する移動部と、前記移動部を弾性的に固定する複数の固定部とを有し、前記駆動機構により前記移動部に前記平面に沿った力を作用させたとき、前記力の大きさに対する前記平面に沿った前記移動部の移動量が等方的であることを、特徴とする請求項5、6または7記載のマイクロデバイス。
【請求項9】
前記微小流路は前記微粒子の大きさよりも高さまたは幅が狭い狭路部を有し、
前記磁気駆動マイクロツールは1対から成り、互いに前記狭路部を挟んだ位置に配置され、前記移動部に前記狭路部に向かって互いに対向してまたはすれ違って突出するよう設けられた針状部材を有し、
前記駆動機構は1対から成り、各磁気駆動マイクロツールに対応して設けられ、
前記狭路部に前記微粒子が流れてきたとき、各駆動機構により対応する磁気駆動マイクロツールの前記移動部を移動させて前記針状部材を突出させることにより、変形した前記微粒子を2つに分割するよう構成されていることを、
特徴とする請求項8記載のマイクロデバイス。
【請求項10】
前記磁気駆動マイクロツールはリング状部を有し、前記磁力発生体の磁場の変化により前記リング状部に誘導電流が流れ、前記磁力発生体と反発するよう構成されていることを、特徴とする請求項5、6、7、8または9記載のマイクロデバイス。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−55791(P2011−55791A)
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願番号】特願2009−210903(P2009−210903)
【出願日】平成21年9月11日(2009.9.11)
【出願人】(504157024)国立大学法人東北大学 (2,297)
【Fターム(参考)】
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願日】平成21年9月11日(2009.9.11)
【出願人】(504157024)国立大学法人東北大学 (2,297)
【Fターム(参考)】
[ Back to top ]