
磁界擾乱体の検出方法および検出器、物体の位置の特定方法および特定システム、およびこれらの方法のための記録媒体
【課題】簡単な計算によって、磁界放射体から放射された磁界に対する磁界擾乱体の存在を容易に検出することができる方法を提供する。
【解決手段】この方法は、相異なる所定の位置に配置された少なくとも2つの3軸センサによって、磁界放射体から放射された磁界を測定するステップ(52)と、3軸センサの各々に対して、3軸センサによって測定された磁界から、磁界放射体の幾何学的中心と、3軸センサの幾何学的中心とを通る軸と同一直線上の方向ベクトルの座標を特定するステップ(54)と、各々が方向ベクトルの1つと同一直線上にある複数の軸間の最短距離が、あらかじめ定められた限界値未満であるか否かを検証するステップ(56)と、最短距離が、限界値未満でない場合には、磁界擾乱体が存在しているという通知を行うステップ(64)と、限界値未満である場合には、この通知を行わないステップ(66)とを含んでいる。
【解決手段】この方法は、相異なる所定の位置に配置された少なくとも2つの3軸センサによって、磁界放射体から放射された磁界を測定するステップ(52)と、3軸センサの各々に対して、3軸センサによって測定された磁界から、磁界放射体の幾何学的中心と、3軸センサの幾何学的中心とを通る軸と同一直線上の方向ベクトルの座標を特定するステップ(54)と、各々が方向ベクトルの1つと同一直線上にある複数の軸間の最短距離が、あらかじめ定められた限界値未満であるか否かを検証するステップ(56)と、最短距離が、限界値未満でない場合には、磁界擾乱体が存在しているという通知を行うステップ(64)と、限界値未満である場合には、この通知を行わないステップ(66)とを含んでいる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、少なくとも3軸を有する磁界放射体から放射された磁界に対する磁界擾乱体(または磁界擾乱要素)を検出する方法に関する。本発明は、さらに、物体の位置を特定する方法およびシステム、およびこれらの方法を実行するために必要な情報の記録媒体にも関する。
【0002】
磁界擾乱体は、本明細書においては、その近辺に放射された磁界の磁力線を弱めるか、または歪ませる任意の物体のことを言う。磁界擾乱体は、例えば導電体である場合がある。この場合には、導電体に渦電流が発生することによって、磁力線が弱められる。この導電体は、例えば金属体である場合がある。さらに磁界擾乱体は、常磁性体または強磁性体などの磁性体である場合もある。
【0003】
3軸磁界放射体は、互いに同一直線上にない3つの放射軸に沿って磁界を放射する。このような磁界放射体は、例えばいくつかの1軸磁界放射源の各々を、磁界を放射させようとする各軸に沿って並べることによって実現される。
【0004】
一軸磁界放射源は、選択的に単一軸に沿って磁界を放射する磁界放射源である。例えばターン全体が同一の軸に巻き付けられているコイルは1軸磁界放射源であり、その選択的な放射軸は、ターンが巻き付けられている軸と一致する。
【0005】
同様に、少なくとも3軸を有する磁界放射体は、同一直線上にない3つ以上の軸に沿って、磁界を放射する磁界放射体である。
【0006】
さらに、3軸磁界センサは、磁界の方向を測定することができるセンサである。通常、この測定を行うために、3軸磁界センサは、互いに同一直線上にない3つの測定軸上の磁界成分の振幅を測定する。したがって、磁界の方向を測定するために、および一般的には、さらに、磁界の振幅を測定するために、3軸磁界センサを用いることができる。
【背景技術】
【0007】
従来技術による、磁界擾乱体の検出方法は、磁界放射体から放射された磁界を、相異なる所定の位置に配置された少なくとも2つの3軸磁界センサによって測定するステップを含んでいる。
【0008】
磁界擾乱体の検出方法は、特に、磁気システムを用いた、物体の位置の特定方法において用いられる。実際、物体の位置の特定に用いられた測定磁界が擾乱を受けていれば、その物体の、特定された位置は誤っている。物体の位置の特定方法が、人体内のプローブまたはカテーテルを探すために、医療現場において用いられたときには、この位置の誤りによって、特に危険な状況がもたらされる場合がある。このような応用において、きわめて重要なことは、プローブの位置の特定が、信頼性高く行われなければならないということである。今日、医療現場においては、物体の位置の特定を誤らせるおそれのある、多くの磁界擾乱体が存在する。このような磁界擾乱体には、例えば手術台、外科用メス、患者の近くに配置された、その他の機器の金属フレームなどが含まれる。
【0009】
磁界擾乱体を検出するためのいくつかの方法が、既に提案されている(例えば特許文献1または特許文献2を参照)。これらの方法の実施には、複雑な計算を必要とする。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】ヨーロッパ特許公開第1502544号公報
【特許文献2】ヨーロッパ特許公開第0993804号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、放射された磁界に対する磁界擾乱体の存在を、複雑な計算を要することなく検出することによって、上述の問題を解決することを目的とする。
【課題を解決するための手段】
【0012】
この目的を達成するために、本発明は、第1に、次のステップを含んでいる、放射磁界に対する磁界擾乱体を検出する方法を提供する。
− 相異なる所定の位置に配置された少なくとも2つの3軸磁界センサによって、磁界放射体から放射された磁界を測定するステップと、
− 3軸磁界センサの各々に対して、3軸磁界センサによって測定された磁界から、磁界放射体の幾何学的中心と、3軸磁界センサの幾何学的中心とを通る軸と同一直線上の方向ベクトルの座標を特定するステップであって、磁界放射体の幾何学的中心は、磁界放射体を模擬的に表わした点磁界放射源が位置する点であり、3軸磁界センサは、磁界が測定される点に位置しており、かつ3軸磁界センサの幾何学的中心を構成している点トランスデューサによって模擬的に表わすことができるステップと、
− 各々が方向ベクトルの1つと同一直線上にある複数の軸間の最短距離が、あらかじめ定められた限界値未満であるか否かを検証する検証ステップと、
− この最短距離が、限界値未満でない場合には、磁界擾乱体が存在しているという通知を行うステップと、限界値未満である場合には、この通知を行わないステップ。
【0013】
この方法は、磁界擾乱体が存在せず、かつ理想的な場合には、方向ベクトルと同一直線上の軸は、磁界放射体の位置に一致する点Eで交差しなければならないという事実に基づいている。磁界擾乱体が存在していると、1つ以上の方向ベクトルの方向が変化する。その結果、これらの方向ベクトルと同一直線上の軸のうちの少なくとも1つは、もはや他の軸と交差しなくなる。この場合には、これらの軸のうちの少なくとも2つの間の最短距離dは、0ではなくなる。したがって、この最短距離dが、あらかじめ定められた限界値を超過した場合には、磁界擾乱体が存在している。
【0014】
方向ベクトルの計算は、いくつかの乗算および加算しか必要としないから、この方法を実行することは容易である。したがって、3軸磁界センサと磁界放射体とが、互いに対して急激に移動したとしても、この方法を迅速に実行することができ、かつ「リアルタイム」に適用することができる。さらに、この方法は、非常に高感度である。実際、方向ベクトルのうちの1つの方向がわずかでも擾乱を受けると、最短距離dが大きく変化する。
【0015】
最後に、この方法は、いかなる較正も、または実質的にいかなる較正も必要としない。3軸磁界センサ同士の位置関係だけが、前もって知られているだけでよい。
【0016】
この方法の実施形態には、次の特性のうちの1つ以上が含まれていてもよい。
・検証ステップは、少なくとも第1および第2の方向ベクトル(数1)および(数2)に対して行われ、かつ次のサブステップを含んでいる。
− 第1の方向ベクトル(数1)と、第1および第2の方向ベクトル(数1)および(数2)に対応する2つの3軸磁界センサの幾何学的中心を通る軸Dとに直交する第1のベクトル(数3)の座標を計算するサブステップと、
− 第2の方向ベクトル(数2)と軸Dとに直交する第2のベクトル(数4)の座標を計算するサブステップと、
− 第1のベクトル(数3)と第2のベクトル(数4)との間の角度を計算するサブステップと、
− この角度が、上述のあらかじめ定められた限界値に対応する閾値未満であるか否かを調べるサブステップ。
・検証ステップは、少なくとも第1および第2の方向ベクトル(数1)および(数2)に対して行われ、かつ次のサブステップを含んでいる。
− 数5および・を、それぞれベクトル積およびスカラー積をとる操作を表わす記号であるとし、ベクトル(数6)を、第1および第2の方向ベクトル(数1)および(数2)に対応する2つの3軸磁界センサの幾何学的中心を通る軸Dと同一直線上のベクトルであるとしたとき、数7によって定義される結合積の値を計算するサブステップと、
− 結合積の値が、上述のあらかじめ定められた限界値に対応する閾値未満であるか否かを調べるサブステップ。
・上述の少なくとも2つの3軸磁界センサの位置が、同一基準系内に固定されている。
【数1】

【数2】
【数3】
【数4】
【数5】
【数6】
【数7】
【0017】
磁界擾乱体を検出する方法に関するこれらの実施形態は、さらに、次の利点を有している。
− 第1のベクトル(数3)と第2のベクトル(数4)との間の角度を計算することによって、磁界擾乱体の検出精度が増す。
【0018】
本発明は、第2に、少なくとも1つの、少なくとも3軸を有する磁界放射体と、この磁界放射体から放射された磁界を検出するための少なくとも2つの3軸磁界センサとを用いて、1つの基準系内の物体の位置を特定する方法であって、3軸磁界センサの各々は、この基準系内に固定されており、かつ磁界放射体の各々は、物体に固着されているか、または、磁界放射体の各々は、この基準系内に固定されており、かつ3軸磁界センサの各々は、物体に固着されている方法を提供する。この方法は、次のステップを含んでいる。
− 磁界放射体から磁界を放射するステップと、3軸磁界センサによってこの磁界を測定するステップと、
− 3軸磁界センサによってなされた測定から、この基準系における物体の位置を特定する位置特定ステップと、
位置特定ステップにおいて用いられた3軸磁界センサと同じ3軸磁界センサを用い、かつ磁界擾乱体を検出する上述の方法を実施することによって、磁界放射体から放射された磁界に対する磁界擾乱体を検出するステップ。
【0019】
本発明は、第3に、電子計算機によって実行されたときに、上述のいずれか1つの方法を実施するための命令を記憶している情報記録媒体を提供するものである。
【0020】
本発明は、第4に、少なくとも3軸を有する磁界放射体から放射された磁界に対する磁界擾乱体を検出するための、次のものを備える検出器を提供するものである。
− 磁界放射体から放射された磁界を測定することができる少なくとも2つの3軸磁界センサであって、相異なる所定の位置に配置される3軸磁界センサと、
− 磁界放射体から放射された磁界の測定結果を処理するために、3軸磁界センサに接続されている処理ユニット。
この処理ユニットは、
− 3軸磁界センサの各々に対して、磁界放射体を模擬的に表わした点磁界放射源が位置する点として定義される、磁界放射体の幾何学的中心と、3軸磁界センサを模擬的に表わした点トランスデューサが位置する、磁界が測定される点として定義される、3軸磁界センサの幾何学的中心とを通る軸と同一直線上の方向ベクトルの座標を、3軸磁界センサによって測定された磁界から特定し、
− 各々が方向ベクトルの1つと同一直線上にある複数の軸間の最短距離が、あらかじめ定められた限界値未満であるか否かを検証し、かつ
− この最短距離が、限界値未満でない場合には、磁界擾乱体が存在しているという通知を行い、限界値未満である場合には、磁界擾乱体が存在しているという通知を行わない。
【0021】
本発明は、第5に、1つの基準系において物体の位置を特定するための、次のものを備えているシステムを提供するものである。
− 少なくとも1つの、少なくとも3軸を有する磁界放射体と、
− 磁界放射体から放射された磁界を測定するための、少なくとも2つの3軸磁界センサであって、これらの3軸磁界センサはこの基準系内に固定され、かつ磁界放射体は、物体に固着されるか、または、磁界放射体はこの基準系内に固定され、かつ3軸磁界センサは、物体に固着される3軸磁界センサと、
− 3軸磁界センサによって行われた測定から、この基準系における物体の位置を特定することができる位置特定モジュールと、
磁界放射体から放射された磁界に対する磁界擾乱体を検出する、上述の検出器であって、位置特定モジュールによって用いられる3軸磁界センサを構成要素として有している検出器。
【図面の簡単な説明】
【0022】
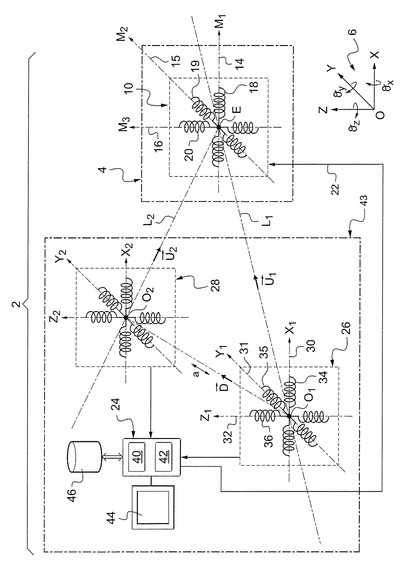
【図1】磁界擾乱体の検出器を装備した、物体の位置を特定するためのシステムの略図である。
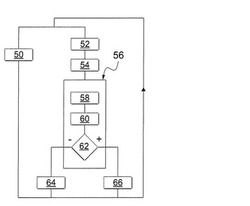
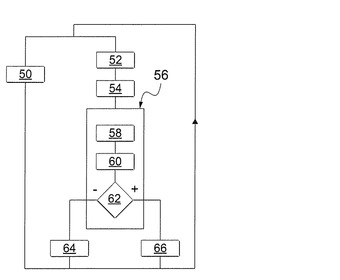
【図2】図1のシステムによって磁界擾乱体を検出し、物体の位置を特定する方法の一実施形態のフローチャートである。
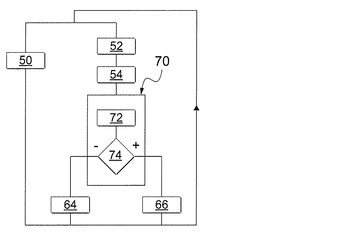
【図3】図1のシステムによって磁界擾乱体を検出し、物体の位置を特定する方法の別の一実施形態のフローチャートである。
【発明を実施するための形態】
【0023】
添付図面を参照して、単に非限定的な例として与えられる以下の説明を読むことによって、本発明がより明瞭に理解される。
【0024】
添付図面において、同一の要素には、同一の符号が付されている。
【0025】
以下の説明において、当業者に公知の特性および機能は、詳細には記述しない。
【0026】
図1は、基準系6において物体4の位置を特定するための位置特定システム2を示している。物体4は、例えば人体内に導入されたプローブまたはカテーテルである。物体4は、基準系6において、例えば移動可能である。
【0027】
基準系6は、原点Oにおいて互いに直交する3つの座標軸X、Y、Zを有する固定基準系である。
【0028】
基準系6において物体4の位置を特定するステップには、例えばその位置(x、y、z)、およびその角度(θx、θy、θz)を見出すステップが含まれる。角度(θx、θy、θz)は、それぞれ座標軸X、Y、Zを基準とした、物体4の方向を表わしている。
【0029】
基準系6における物体4の位置の特定を可能にするために、物体4は、例えばいくつかの磁界放射体を実装している。単純化のために、図1においては、1つの磁界放射体10しか示されていない。
【0030】
磁界放射体10は、同一直線上にない3つの軸14、15、16に沿って磁界を放射する3軸磁界放射体である。この例において、これらの軸14〜16は、互いに直交している。これらの軸は、物体4に付属する軸である。そのために、磁界放射体10には、磁気モーメントM1、M2、M3をそれぞれ有する3つの1軸磁界放射源18、19、20が組み込まれている。これらの1軸磁界放射源の各々において、磁界のほとんどが、単一の放射方向に放射される。1軸磁界放射源18〜20の放射方向は、磁気モーメントM1〜M3を配されている軸14〜16とそれぞれ一致する。
【0031】
1軸磁界放射源18〜20の各々を、模擬的に点磁界放射源で表わすことが可能である。全ての点磁界放射源が、基準系6内の同一の位置を正確に占めるように、一軸磁界放射源18〜20を配置することが好ましい。この位置が、点Eとして識別される。点Eは、軸14〜16の交点である。1軸磁界放射源18〜20に対応する点磁界放射源が重なる点が、磁界放射体10の幾何学的中心を構成する。この例においては、この幾何学的中心は、1軸磁界放射源18〜20の重心すなわち質量中心と一致する。
【0032】
各一軸磁界放射源18〜20は、例えばそれぞれ軸14〜16のまわりに巻き付けられた単一のコイルによって構成されている。この例においては、これらのコイルの各々は、各々が巻き付けられている軸に沿って、点Eの両側に等分に分配された2つの同一のターン群に区分されている。各ターン群は、その軸のまわりに同じ向きに巻かれている。
【0033】
磁界放射体10は、処理ユニット24に接続されたたわみ線リンク22によって電力を供給され、かつ制御される。
【0034】
処理ユニット24は、さらに、いくつかの3軸磁界センサに接続されている。単純化のために、図1においては、2つの3軸磁界センサ26および28しか示されていない。これらの3軸磁界センサの各々は、磁界放射体10から放射された磁界の方向および振幅を測定することができる。
【0035】
3軸磁界センサ26と28とは、相互に距離aだけ離れている。
【0036】
3軸磁界センサ26は、基準系6内で固定されている。3軸磁界センサ26は、互いに直交する3つの軸30、31、32に沿った磁界成分を測定する。この例においては、軸30〜32の各々は、それぞれ、3軸磁界センサ26の中心に一致する原点O1を有する直交基準系R1の座標軸X1、Y1、Z1と同一直線上にある。
【0037】
3軸磁界センサ26は、この例においては、3つの1軸トランスデューサ34、35、36によって形成されている。各1軸トランスデューサ34〜36は、放射された磁界の、軸30〜32上の各成分を測定する。
【0038】
1軸トランスデューサ34〜36の各々は、例えばそれぞれ軸30〜32のまわりに巻き付けられた単一のコイルから成っている。磁界放射体10の場合におけるように、これらのコイルの各々は、巻き付けられている軸に沿って、原点O1の両側に対称的に分配された、2つの同一のターン群に分離されている。各ターン群は、その軸に沿って、同じ向きに巻き付けられている。したがって、1軸トランスデューサ34〜36の各々を、それぞれの測定軸上で磁界成分が測定される点トランスデューサで、模擬的に表わすことが可能である。この例においては、3つの点トランスデューサは、原点O1に位置する。全ての点トランスデューサが重なる点(原点O1)は、3軸磁界センサ26の幾何学的中心である。この例においては、この幾何学的中心は、1軸トランスデューサ34〜36の重心すなわち質量中心と一致する。
【0039】
3軸磁界センサ26は、放射された磁界の、原点O1における方向を測定する。
【0040】
3軸磁界センサ28は、3軸磁界センサ28の幾何学的中心と一致する原点O2を有する直交基準系R2の3つの座標軸X2、Y2、Z2のまわりに、それぞれのコイルが巻き付けられているということを除いて、例えば3軸磁界センサ26と同じである。
【0041】
計算を簡単にするために、座標軸X2、Y2、Z2は、それぞれ座標軸X1、Y1、Z1に平行であるとする。
【0042】
距離aは、3軸磁界センサの1つの最大寸法より、少なくとも2〜3倍大きいことが好ましい。3軸磁界センサ26の最大寸法は、この例においては、例えば1軸トランスデューサ34〜36の1つの最大長さである。
【0043】
さらに、3軸磁界センサ26および28は、3軸磁界センサ26および28の最大寸法の少なくとも2〜3倍に等しい距離だけ磁界放射体10から離れている。したがって、磁界放射体10は、擬似的に、点Eに集中した点磁界放射源で表わすことができる。
【0044】
処理ユニット24は、3軸磁界センサ26および28によってなされた測定から、基準系6における磁界放射体10の位置を特定するための位置特定モジュール40を備えている。位置特定モジュール40は、例えば連立方程式を解くことによって、物体4の位置および方向を特定する。この連立方程式は、磁界擾乱体の存在を考慮に入れずに、1軸磁界放射源とトランスデューサとの間の磁気相互作用を模擬的に表現することによって得られる。この連立方程式において、物体4の位置(x、y、z)および角度(θx、θy、θz)が末知数であり、他のパラメータの値は、3軸磁界センサ26および28によってなされた測定から得られる。そのような連立方程式についてのより多くの情報が、例えば特許文献1に開示されている。
【0045】
処理ユニット24は、さらに、磁界放射体10から放射された磁界に対する磁界擾乱体の存在を検出するための検出モジュール42を備えている。この検出モジュール42の動作を、図2および図3を参照して詳細に説明する。
【0046】
3軸磁界センサ26、28および検出モジュール42を含む組み合わせによって、磁界放射体10から放射された磁界に対する磁界擾乱体の検出器43が形成されている。
【0047】
処理ユニット24は、さらに、例えば磁界擾乱体が検出されたことをオペレータに通知するために、または物体4の位置を指示するために用いられるマンマシンインターフェース44に接続されている。
【0048】
処理ユニット24は、情報記録媒体に記録されている命令を実行することができる、プログラム可能な電子計算機を、その主要素として備えている。電子計算機による、命令の実行を可能にするために、処理ユニット24は、図2または図3の方法を実行するために必要な命令を記憶しているメモリ、すなわち情報記録媒体46に接続されている。
【0049】
ここで、図2の方法に関して、位置特定システム2の動作を、より詳細に説明する。
【0050】
ステップ50において、磁界放射体10が、各軸14〜16に沿って、例えば順次に磁界を放射する。
【0051】
同時に、ステップ52において、3軸磁界センサ26および28の各々が、磁界放射体10から放射された磁界を測定する。
【0052】
次に、ステップ54において、検出モジュール42が、原点O1から点Eに、またはその逆に向かう方向ベクトル(数1)、および原点O2から点Eに、またはその逆に向かう方向ベクトル(数2)を特定する。図1においては、これらの方向ベクトルは、どちらも、点Eに向かうように表わされている。
【0053】
上記の動作状態においては、磁界放射体10は、双極子磁界で近似される磁界を放射する。したがって、1軸磁界放射源i(i=18、19、20)から放射されて、3軸磁界センサ26によって測定される磁界は、次の関係式(数8)によって与えられる。
【数8】
この関係式において、
― 添え字iは、1軸磁界放射源18〜20の各々を識別する識別子であり、
― Miは、磁界放射体10の1軸磁界放射源iの磁気モーメントに関する列行列であり、
― Iは、恒等行列、すなわち単位行列であり、
― u1は、基準系R1において表わされる方向ベクトル(数1)の座標を含む列行列であり、
― Rは、磁界放射体10と3軸磁界センサ26との間の距離であり、
― Hiは、3軸磁界センサ26の3つの軸30〜32に沿って測定される磁界の座標を含む列行列であり、
― 記号「T」は、転置を行う操作を表わす記号である。
【0054】
以下の説明において、H1、H2、H3は、1軸磁界放射源18〜20から放射されたそれぞれの磁界の、軸30〜32に沿う測定値を含む列行列である。このような表記法を用いると、基準系R1における方向ベクトル(数1)の座標は、次の関係式(数9)から得られる。
【数9】
【0055】
ステップ54において、同様に、検出モジュール42は、原点O2から点Eに向かう方向ベクトル(数2)の座標も特定する。
【0056】
ここで、軸L1およびL2を、それぞれ方向ベクトル(数1)および(数2)と同一直線上の軸と定義する。
【0057】
3軸磁界センサ26と28とは、同一の磁界放射体から放射された磁界を測定するから、磁界擾乱体が存在しない場合には、軸L1とL2とは、点Eで交差しなければならない。しかしながら、実際には、測定に混入するノイズおよび計算誤差の影響によって、軸L1とL2とは交差しない。しかし、軸L1とL2とはともに、点Eの近傍を通る。したがって、軸L1とL2との間の最短距離dは短い。対照的に、磁界擾乱体が存在する場合には、その磁界擾乱体は、方向ベクトル(数1)または(数2)の方向を相当に変える。したがって、最短距離dは長くなる。
【0058】
したがって、ステップ56において、軸L1とL2との間の最短距離dが、あらかじめ定められた限界値未満であるか否かが調べられる。
【0059】
このために、例えばサブステップ58において、検出モジュール42は、方向ベクトル(数1)およびベクトル(数6)に直交するベクトル(数3)の、基準系R1における座標を計算する。ベクトル(数6)は、原点O1およびO2を通る軸Dと同一直線上のベクトルである。この例においては、3軸磁界センサ26および28の位置が固定されているから、基準系R1におけるこのベクトル(数6)の座標は、基準系6における原点O1およびO2の座標から、容易に特定することができる。
【0060】
ベクトル(数3)の座標は、例えば次の関係式(数10)によって計算される。
【数10】
この関係式において、
− 記号(数5)は、ベクトル積をとる操作を表わす記号である。
【0061】
サブステップ58において、同様に、方向ベクトル(数2)およびベクトル(数6)に直交するベクトル(数4)の座標が計算される。ベクトル(数4)の座標は、例えば基準系R2において表わされる。
【0062】
次に、サブステップ60において、ベクトル(数3)とベクトル(数4)との間の角度θが計算される。基準系R1とR2との座標軸同士が互いに平行であれば、この角度θは、次の関係式(数11)から直接計算することができる。
【数11】
この関係式において、
− 記号「acos」は、角度の逆余弦をとる操作を表わし、
− 記号「・」は、スカラー積をとる操作を表わし、
− 記号「*」は、2つのスカラー量の乗算を行う操作を表わし、
− 「||...||」は、ベクトルのユークリッドノームであることを表わしている。
【0063】
磁界擾乱体が存在していない場合には、方向ベクトル(数1)と方向ベクトル(数2)との向きに応じて、この角度θは、ほぼ0°またはほぼ180°でなければならない。本明細書においては、磁界擾乱体が存在していない場合には、方向ベクトル(数1)と方向ベクトル(数2)との向きは、角度θがほぼ0°になるように定められている。
【0064】
次に、サブステップ62において、距離dが、あらかじめ定められた限界値未満であるか否かを調べるために、角度θが、閾値S1と比較される。
【0065】
角度θが、この閾値S1を超過していると、それは、磁界擾乱体が存在していることを意味する。そうすると、ステップ64が実行されて、この磁界擾乱体の存在が通知される。この磁界擾乱体の存在の通知は、例えばマンマシンインターフェース44を介して行われる。その通知は、例えば必ずしもユーザに伝えられるのではなく、単に、処理ユニット24によって行なわれた処理操作に、磁界擾乱体が存在しているという情報を考慮に入れるためになされる操作であってもよい。
【0066】
角度θが閾値S1未満であると、それは、磁界擾乱体が存在していないことを意味している。その場合には、この方法は、ステップ66に進んで、位置特定モジュール40が、例えば3軸磁界センサ26および28によってなされた測定から、基準系6における磁界放射体10の位置を特定する。
【0067】
ステップ50、64および66が終了すると、この方法は、ステップ50および52に戻る。
【0068】
図3の方法は、ステップ56がステップ70に置き換えられているということを除いて、図2の方法と同じである。このステップ70の開始時に、サブステップ72において、方向ベクトル(数1)と(数2)との間の結合積Pが、次の関係式(数12)から計算される。
【数12】
この関係式において、
− Pは、方向ベクトル(数1)と(数2)との間の結合積である。
【0069】
次に、この方法は、サブステップ74に進んで、最短距離dが、あらかじめ定められた限界値未満であるか否かを調べるために、結合積Pの値と閾値S2とが比較される。磁界擾乱体が存在していない場合には、結合積Pの値は、ほぼ0でなければならない。それと対照的に、磁界擾乱体が存在していると、この結合積Pの値は大きくなる。
【0070】
したがって、結合積Pの値が、あらかじめ定められた閾値S2未満であった場合には、この方法はステップ66に進む。そうでなかった場合には、この方法は、ステップ64に進む。
【0071】
他の多くの実施形態が可能である。例えば磁界放射体は、磁界放射のための、4つ以上の軸を有していてもよい。この場合には、4番目以降の軸(補助軸)からの磁界放射は、磁界センサによって測定される情報に冗長性を与える。磁界センサに相対的に物体4の位置を特定するような応用において、磁界擾乱体によってもたらされた擾乱を克服するために、この冗長性を、その後において用いることができる。
【0072】
磁界放射体10は、時系列に、または同時に、その軸の各々において磁界を放射することができる。後者の場合には、それぞれの軸において放射された磁界を、磁界センサ側で互いに区別することができるように、軸の各々で相異なる周波数の磁界を放射することが好ましい。
【0073】
方向ベクトルの座標の計算のために、上述の方法以外の方法を用いることもできる。特に、方向ベクトルを、磁界放射体の幾何学的中心から発して、それぞれの磁界センサを向くように定めることができる。
【0074】
基準系R1とR2との座標軸は、必ずしも互いに平行でなくてもよい。この場合には、ベクトル(数3)および(数4)、または結合積Pの計算の前に、方向ベクトル(数1)と(数2)との座標が同じ基準系で表わされるように、それらの2つの方向ベクトルのうちの一方の座標上で、基準系の変更が行なわれる。
【0075】
磁界擾乱体の検出器は、3つ以上の3軸磁界センサを有していてもよい。
【0076】
上述の方法以外の方法によって、軸L1とL2との間の最短距離dが、あらかじめ定められた限界値未満であるか否かを検証することもできる。例えば同じ基準系において、軸L1およびL2の方程式を定めて、次に、最短距離dとあらかじめ定められた限界値とを比較する前に、これらの方程式に基づいて、軸L1とL2との間の最短距離dを計算することができる。
【0077】
本明細書においては、位置特定システム2は、磁界放射体が移動可能であり、磁界センサが固定される特定の場合について説明している。しかしながら、本明細書において説明されている方法は、磁界放射体が固定され、磁界センサが基準系6において移動可能である、反対の場合にも適用される。
【0078】
磁界センサを基準系6に固定する必要はない。そうではなくて、必要なことは、一方の磁界センサが測定を行なっている時点と、他方の磁界センサが測定を行なっている時点との間で、それらの磁界センサに対する磁界放射体の相対位置が変化してはならないということである。例えば2つの磁界センサによる測定が同時になされる場合には、それらの磁界センサが基準系6内で移動しても、この条件は満たされる。
【0079】
磁界センサの位置が固定されない場合には、上述の方法のうちのいずれかが実行される前に、2つの磁界センサ間の相対位置が、あらかじめ知られていなければならない。相対位置が「あらかじめ知られている」ということは、少なくとも、ベクトル(数6)の方向またはそのユークリッドノームがあらかじめ知られていること、より好ましくは、その方向があらかじめ知られていること、または、方向とユークリッドノームとの両方があらかじめ知られていることを意味する。磁界センサ間の相対位置を知ることができる多数の方法がある。相対位置を知るために、例えばカルマンフィルタを用いることができる。より具体的には、このカルマンフィルタは、放射された磁界と測定された磁界とを関連付ける電磁方程式に基づいて組み立てられる。この電磁方程式において、未知数は磁界センサの位置であり、場合によっては磁界放射体の位置である。
【0080】
一変形例においては、ベクトル(数6)の方向だけがあらかじめ知られており、そのユークリッドノームは知られていない。この変形例においては、ベクトル(数6)のユークリッドノームは任意の値、例えば1に等しくなるように選ばれる。次に、上述のように磁界擾乱体の存在の有無が調べられる閾値S1またはS2の評価調整のための学習相が実施される。この変形例は、ベクトル(数6)の方向しか、あらかじめ知られていないということを除いて、例えば図2の方法と同じである。例えば用いられているベクトルの全てが正規化されている場合には、閾値S1またはS2の値を、ベクトル(数6)のユークリッドノームに依存しなくすることができる。
【0081】
3軸磁界センサ26および28を単純化するために、それらの各々を、単一のターンで形成することができる。
【産業上の利用可能性】
【0082】
上述の方法および位置特定システムを、医療分野以外の種々の応用分野にも用いることができる。例えば室内において、磁界放射体を保持している真空掃除機の位置を特定するために、または子供などの人間の位置を特定するために、本発明の位置特定システムを用いることができる。
【符号の説明】
【0083】
2 位置特定システム
4 物体
6 基準系
10 磁界放射体
14〜16、30〜32、L1、L2 軸
18〜20 1軸磁界放射源
22 たわみ線リンク
24 処理ユニット
26、28 3軸磁界センサ
34〜36 1軸トランスデューサ
40 位置特定モジュール
42 検出モジュール
43 検出器
44 マンマシンインターフェース
46 情報記録媒体
a 距離
E 点
M1〜M3 磁気モーメント
O、O1、O2 原点
X、Y、Z、X1、Y1、Z1、X2、Y2、Z2 座標軸
θx、θy、θz 角度
【技術分野】
【0001】
本発明は、少なくとも3軸を有する磁界放射体から放射された磁界に対する磁界擾乱体(または磁界擾乱要素)を検出する方法に関する。本発明は、さらに、物体の位置を特定する方法およびシステム、およびこれらの方法を実行するために必要な情報の記録媒体にも関する。
【0002】
磁界擾乱体は、本明細書においては、その近辺に放射された磁界の磁力線を弱めるか、または歪ませる任意の物体のことを言う。磁界擾乱体は、例えば導電体である場合がある。この場合には、導電体に渦電流が発生することによって、磁力線が弱められる。この導電体は、例えば金属体である場合がある。さらに磁界擾乱体は、常磁性体または強磁性体などの磁性体である場合もある。
【0003】
3軸磁界放射体は、互いに同一直線上にない3つの放射軸に沿って磁界を放射する。このような磁界放射体は、例えばいくつかの1軸磁界放射源の各々を、磁界を放射させようとする各軸に沿って並べることによって実現される。
【0004】
一軸磁界放射源は、選択的に単一軸に沿って磁界を放射する磁界放射源である。例えばターン全体が同一の軸に巻き付けられているコイルは1軸磁界放射源であり、その選択的な放射軸は、ターンが巻き付けられている軸と一致する。
【0005】
同様に、少なくとも3軸を有する磁界放射体は、同一直線上にない3つ以上の軸に沿って、磁界を放射する磁界放射体である。
【0006】
さらに、3軸磁界センサは、磁界の方向を測定することができるセンサである。通常、この測定を行うために、3軸磁界センサは、互いに同一直線上にない3つの測定軸上の磁界成分の振幅を測定する。したがって、磁界の方向を測定するために、および一般的には、さらに、磁界の振幅を測定するために、3軸磁界センサを用いることができる。
【背景技術】
【0007】
従来技術による、磁界擾乱体の検出方法は、磁界放射体から放射された磁界を、相異なる所定の位置に配置された少なくとも2つの3軸磁界センサによって測定するステップを含んでいる。
【0008】
磁界擾乱体の検出方法は、特に、磁気システムを用いた、物体の位置の特定方法において用いられる。実際、物体の位置の特定に用いられた測定磁界が擾乱を受けていれば、その物体の、特定された位置は誤っている。物体の位置の特定方法が、人体内のプローブまたはカテーテルを探すために、医療現場において用いられたときには、この位置の誤りによって、特に危険な状況がもたらされる場合がある。このような応用において、きわめて重要なことは、プローブの位置の特定が、信頼性高く行われなければならないということである。今日、医療現場においては、物体の位置の特定を誤らせるおそれのある、多くの磁界擾乱体が存在する。このような磁界擾乱体には、例えば手術台、外科用メス、患者の近くに配置された、その他の機器の金属フレームなどが含まれる。
【0009】
磁界擾乱体を検出するためのいくつかの方法が、既に提案されている(例えば特許文献1または特許文献2を参照)。これらの方法の実施には、複雑な計算を必要とする。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】ヨーロッパ特許公開第1502544号公報
【特許文献2】ヨーロッパ特許公開第0993804号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、放射された磁界に対する磁界擾乱体の存在を、複雑な計算を要することなく検出することによって、上述の問題を解決することを目的とする。
【課題を解決するための手段】
【0012】
この目的を達成するために、本発明は、第1に、次のステップを含んでいる、放射磁界に対する磁界擾乱体を検出する方法を提供する。
− 相異なる所定の位置に配置された少なくとも2つの3軸磁界センサによって、磁界放射体から放射された磁界を測定するステップと、
− 3軸磁界センサの各々に対して、3軸磁界センサによって測定された磁界から、磁界放射体の幾何学的中心と、3軸磁界センサの幾何学的中心とを通る軸と同一直線上の方向ベクトルの座標を特定するステップであって、磁界放射体の幾何学的中心は、磁界放射体を模擬的に表わした点磁界放射源が位置する点であり、3軸磁界センサは、磁界が測定される点に位置しており、かつ3軸磁界センサの幾何学的中心を構成している点トランスデューサによって模擬的に表わすことができるステップと、
− 各々が方向ベクトルの1つと同一直線上にある複数の軸間の最短距離が、あらかじめ定められた限界値未満であるか否かを検証する検証ステップと、
− この最短距離が、限界値未満でない場合には、磁界擾乱体が存在しているという通知を行うステップと、限界値未満である場合には、この通知を行わないステップ。
【0013】
この方法は、磁界擾乱体が存在せず、かつ理想的な場合には、方向ベクトルと同一直線上の軸は、磁界放射体の位置に一致する点Eで交差しなければならないという事実に基づいている。磁界擾乱体が存在していると、1つ以上の方向ベクトルの方向が変化する。その結果、これらの方向ベクトルと同一直線上の軸のうちの少なくとも1つは、もはや他の軸と交差しなくなる。この場合には、これらの軸のうちの少なくとも2つの間の最短距離dは、0ではなくなる。したがって、この最短距離dが、あらかじめ定められた限界値を超過した場合には、磁界擾乱体が存在している。
【0014】
方向ベクトルの計算は、いくつかの乗算および加算しか必要としないから、この方法を実行することは容易である。したがって、3軸磁界センサと磁界放射体とが、互いに対して急激に移動したとしても、この方法を迅速に実行することができ、かつ「リアルタイム」に適用することができる。さらに、この方法は、非常に高感度である。実際、方向ベクトルのうちの1つの方向がわずかでも擾乱を受けると、最短距離dが大きく変化する。
【0015】
最後に、この方法は、いかなる較正も、または実質的にいかなる較正も必要としない。3軸磁界センサ同士の位置関係だけが、前もって知られているだけでよい。
【0016】
この方法の実施形態には、次の特性のうちの1つ以上が含まれていてもよい。
・検証ステップは、少なくとも第1および第2の方向ベクトル(数1)および(数2)に対して行われ、かつ次のサブステップを含んでいる。
− 第1の方向ベクトル(数1)と、第1および第2の方向ベクトル(数1)および(数2)に対応する2つの3軸磁界センサの幾何学的中心を通る軸Dとに直交する第1のベクトル(数3)の座標を計算するサブステップと、
− 第2の方向ベクトル(数2)と軸Dとに直交する第2のベクトル(数4)の座標を計算するサブステップと、
− 第1のベクトル(数3)と第2のベクトル(数4)との間の角度を計算するサブステップと、
− この角度が、上述のあらかじめ定められた限界値に対応する閾値未満であるか否かを調べるサブステップ。
・検証ステップは、少なくとも第1および第2の方向ベクトル(数1)および(数2)に対して行われ、かつ次のサブステップを含んでいる。
− 数5および・を、それぞれベクトル積およびスカラー積をとる操作を表わす記号であるとし、ベクトル(数6)を、第1および第2の方向ベクトル(数1)および(数2)に対応する2つの3軸磁界センサの幾何学的中心を通る軸Dと同一直線上のベクトルであるとしたとき、数7によって定義される結合積の値を計算するサブステップと、
− 結合積の値が、上述のあらかじめ定められた限界値に対応する閾値未満であるか否かを調べるサブステップ。
・上述の少なくとも2つの3軸磁界センサの位置が、同一基準系内に固定されている。
【数1】
【数2】
【数3】
【数4】
【数5】
【数6】
【数7】
【0017】
磁界擾乱体を検出する方法に関するこれらの実施形態は、さらに、次の利点を有している。
− 第1のベクトル(数3)と第2のベクトル(数4)との間の角度を計算することによって、磁界擾乱体の検出精度が増す。
【0018】
本発明は、第2に、少なくとも1つの、少なくとも3軸を有する磁界放射体と、この磁界放射体から放射された磁界を検出するための少なくとも2つの3軸磁界センサとを用いて、1つの基準系内の物体の位置を特定する方法であって、3軸磁界センサの各々は、この基準系内に固定されており、かつ磁界放射体の各々は、物体に固着されているか、または、磁界放射体の各々は、この基準系内に固定されており、かつ3軸磁界センサの各々は、物体に固着されている方法を提供する。この方法は、次のステップを含んでいる。
− 磁界放射体から磁界を放射するステップと、3軸磁界センサによってこの磁界を測定するステップと、
− 3軸磁界センサによってなされた測定から、この基準系における物体の位置を特定する位置特定ステップと、
位置特定ステップにおいて用いられた3軸磁界センサと同じ3軸磁界センサを用い、かつ磁界擾乱体を検出する上述の方法を実施することによって、磁界放射体から放射された磁界に対する磁界擾乱体を検出するステップ。
【0019】
本発明は、第3に、電子計算機によって実行されたときに、上述のいずれか1つの方法を実施するための命令を記憶している情報記録媒体を提供するものである。
【0020】
本発明は、第4に、少なくとも3軸を有する磁界放射体から放射された磁界に対する磁界擾乱体を検出するための、次のものを備える検出器を提供するものである。
− 磁界放射体から放射された磁界を測定することができる少なくとも2つの3軸磁界センサであって、相異なる所定の位置に配置される3軸磁界センサと、
− 磁界放射体から放射された磁界の測定結果を処理するために、3軸磁界センサに接続されている処理ユニット。
この処理ユニットは、
− 3軸磁界センサの各々に対して、磁界放射体を模擬的に表わした点磁界放射源が位置する点として定義される、磁界放射体の幾何学的中心と、3軸磁界センサを模擬的に表わした点トランスデューサが位置する、磁界が測定される点として定義される、3軸磁界センサの幾何学的中心とを通る軸と同一直線上の方向ベクトルの座標を、3軸磁界センサによって測定された磁界から特定し、
− 各々が方向ベクトルの1つと同一直線上にある複数の軸間の最短距離が、あらかじめ定められた限界値未満であるか否かを検証し、かつ
− この最短距離が、限界値未満でない場合には、磁界擾乱体が存在しているという通知を行い、限界値未満である場合には、磁界擾乱体が存在しているという通知を行わない。
【0021】
本発明は、第5に、1つの基準系において物体の位置を特定するための、次のものを備えているシステムを提供するものである。
− 少なくとも1つの、少なくとも3軸を有する磁界放射体と、
− 磁界放射体から放射された磁界を測定するための、少なくとも2つの3軸磁界センサであって、これらの3軸磁界センサはこの基準系内に固定され、かつ磁界放射体は、物体に固着されるか、または、磁界放射体はこの基準系内に固定され、かつ3軸磁界センサは、物体に固着される3軸磁界センサと、
− 3軸磁界センサによって行われた測定から、この基準系における物体の位置を特定することができる位置特定モジュールと、
磁界放射体から放射された磁界に対する磁界擾乱体を検出する、上述の検出器であって、位置特定モジュールによって用いられる3軸磁界センサを構成要素として有している検出器。
【図面の簡単な説明】
【0022】
【図1】磁界擾乱体の検出器を装備した、物体の位置を特定するためのシステムの略図である。
【図2】図1のシステムによって磁界擾乱体を検出し、物体の位置を特定する方法の一実施形態のフローチャートである。
【図3】図1のシステムによって磁界擾乱体を検出し、物体の位置を特定する方法の別の一実施形態のフローチャートである。
【発明を実施するための形態】
【0023】
添付図面を参照して、単に非限定的な例として与えられる以下の説明を読むことによって、本発明がより明瞭に理解される。
【0024】
添付図面において、同一の要素には、同一の符号が付されている。
【0025】
以下の説明において、当業者に公知の特性および機能は、詳細には記述しない。
【0026】
図1は、基準系6において物体4の位置を特定するための位置特定システム2を示している。物体4は、例えば人体内に導入されたプローブまたはカテーテルである。物体4は、基準系6において、例えば移動可能である。
【0027】
基準系6は、原点Oにおいて互いに直交する3つの座標軸X、Y、Zを有する固定基準系である。
【0028】
基準系6において物体4の位置を特定するステップには、例えばその位置(x、y、z)、およびその角度(θx、θy、θz)を見出すステップが含まれる。角度(θx、θy、θz)は、それぞれ座標軸X、Y、Zを基準とした、物体4の方向を表わしている。
【0029】
基準系6における物体4の位置の特定を可能にするために、物体4は、例えばいくつかの磁界放射体を実装している。単純化のために、図1においては、1つの磁界放射体10しか示されていない。
【0030】
磁界放射体10は、同一直線上にない3つの軸14、15、16に沿って磁界を放射する3軸磁界放射体である。この例において、これらの軸14〜16は、互いに直交している。これらの軸は、物体4に付属する軸である。そのために、磁界放射体10には、磁気モーメントM1、M2、M3をそれぞれ有する3つの1軸磁界放射源18、19、20が組み込まれている。これらの1軸磁界放射源の各々において、磁界のほとんどが、単一の放射方向に放射される。1軸磁界放射源18〜20の放射方向は、磁気モーメントM1〜M3を配されている軸14〜16とそれぞれ一致する。
【0031】
1軸磁界放射源18〜20の各々を、模擬的に点磁界放射源で表わすことが可能である。全ての点磁界放射源が、基準系6内の同一の位置を正確に占めるように、一軸磁界放射源18〜20を配置することが好ましい。この位置が、点Eとして識別される。点Eは、軸14〜16の交点である。1軸磁界放射源18〜20に対応する点磁界放射源が重なる点が、磁界放射体10の幾何学的中心を構成する。この例においては、この幾何学的中心は、1軸磁界放射源18〜20の重心すなわち質量中心と一致する。
【0032】
各一軸磁界放射源18〜20は、例えばそれぞれ軸14〜16のまわりに巻き付けられた単一のコイルによって構成されている。この例においては、これらのコイルの各々は、各々が巻き付けられている軸に沿って、点Eの両側に等分に分配された2つの同一のターン群に区分されている。各ターン群は、その軸のまわりに同じ向きに巻かれている。
【0033】
磁界放射体10は、処理ユニット24に接続されたたわみ線リンク22によって電力を供給され、かつ制御される。
【0034】
処理ユニット24は、さらに、いくつかの3軸磁界センサに接続されている。単純化のために、図1においては、2つの3軸磁界センサ26および28しか示されていない。これらの3軸磁界センサの各々は、磁界放射体10から放射された磁界の方向および振幅を測定することができる。
【0035】
3軸磁界センサ26と28とは、相互に距離aだけ離れている。
【0036】
3軸磁界センサ26は、基準系6内で固定されている。3軸磁界センサ26は、互いに直交する3つの軸30、31、32に沿った磁界成分を測定する。この例においては、軸30〜32の各々は、それぞれ、3軸磁界センサ26の中心に一致する原点O1を有する直交基準系R1の座標軸X1、Y1、Z1と同一直線上にある。
【0037】
3軸磁界センサ26は、この例においては、3つの1軸トランスデューサ34、35、36によって形成されている。各1軸トランスデューサ34〜36は、放射された磁界の、軸30〜32上の各成分を測定する。
【0038】
1軸トランスデューサ34〜36の各々は、例えばそれぞれ軸30〜32のまわりに巻き付けられた単一のコイルから成っている。磁界放射体10の場合におけるように、これらのコイルの各々は、巻き付けられている軸に沿って、原点O1の両側に対称的に分配された、2つの同一のターン群に分離されている。各ターン群は、その軸に沿って、同じ向きに巻き付けられている。したがって、1軸トランスデューサ34〜36の各々を、それぞれの測定軸上で磁界成分が測定される点トランスデューサで、模擬的に表わすことが可能である。この例においては、3つの点トランスデューサは、原点O1に位置する。全ての点トランスデューサが重なる点(原点O1)は、3軸磁界センサ26の幾何学的中心である。この例においては、この幾何学的中心は、1軸トランスデューサ34〜36の重心すなわち質量中心と一致する。
【0039】
3軸磁界センサ26は、放射された磁界の、原点O1における方向を測定する。
【0040】
3軸磁界センサ28は、3軸磁界センサ28の幾何学的中心と一致する原点O2を有する直交基準系R2の3つの座標軸X2、Y2、Z2のまわりに、それぞれのコイルが巻き付けられているということを除いて、例えば3軸磁界センサ26と同じである。
【0041】
計算を簡単にするために、座標軸X2、Y2、Z2は、それぞれ座標軸X1、Y1、Z1に平行であるとする。
【0042】
距離aは、3軸磁界センサの1つの最大寸法より、少なくとも2〜3倍大きいことが好ましい。3軸磁界センサ26の最大寸法は、この例においては、例えば1軸トランスデューサ34〜36の1つの最大長さである。
【0043】
さらに、3軸磁界センサ26および28は、3軸磁界センサ26および28の最大寸法の少なくとも2〜3倍に等しい距離だけ磁界放射体10から離れている。したがって、磁界放射体10は、擬似的に、点Eに集中した点磁界放射源で表わすことができる。
【0044】
処理ユニット24は、3軸磁界センサ26および28によってなされた測定から、基準系6における磁界放射体10の位置を特定するための位置特定モジュール40を備えている。位置特定モジュール40は、例えば連立方程式を解くことによって、物体4の位置および方向を特定する。この連立方程式は、磁界擾乱体の存在を考慮に入れずに、1軸磁界放射源とトランスデューサとの間の磁気相互作用を模擬的に表現することによって得られる。この連立方程式において、物体4の位置(x、y、z)および角度(θx、θy、θz)が末知数であり、他のパラメータの値は、3軸磁界センサ26および28によってなされた測定から得られる。そのような連立方程式についてのより多くの情報が、例えば特許文献1に開示されている。
【0045】
処理ユニット24は、さらに、磁界放射体10から放射された磁界に対する磁界擾乱体の存在を検出するための検出モジュール42を備えている。この検出モジュール42の動作を、図2および図3を参照して詳細に説明する。
【0046】
3軸磁界センサ26、28および検出モジュール42を含む組み合わせによって、磁界放射体10から放射された磁界に対する磁界擾乱体の検出器43が形成されている。
【0047】
処理ユニット24は、さらに、例えば磁界擾乱体が検出されたことをオペレータに通知するために、または物体4の位置を指示するために用いられるマンマシンインターフェース44に接続されている。
【0048】
処理ユニット24は、情報記録媒体に記録されている命令を実行することができる、プログラム可能な電子計算機を、その主要素として備えている。電子計算機による、命令の実行を可能にするために、処理ユニット24は、図2または図3の方法を実行するために必要な命令を記憶しているメモリ、すなわち情報記録媒体46に接続されている。
【0049】
ここで、図2の方法に関して、位置特定システム2の動作を、より詳細に説明する。
【0050】
ステップ50において、磁界放射体10が、各軸14〜16に沿って、例えば順次に磁界を放射する。
【0051】
同時に、ステップ52において、3軸磁界センサ26および28の各々が、磁界放射体10から放射された磁界を測定する。
【0052】
次に、ステップ54において、検出モジュール42が、原点O1から点Eに、またはその逆に向かう方向ベクトル(数1)、および原点O2から点Eに、またはその逆に向かう方向ベクトル(数2)を特定する。図1においては、これらの方向ベクトルは、どちらも、点Eに向かうように表わされている。
【0053】
上記の動作状態においては、磁界放射体10は、双極子磁界で近似される磁界を放射する。したがって、1軸磁界放射源i(i=18、19、20)から放射されて、3軸磁界センサ26によって測定される磁界は、次の関係式(数8)によって与えられる。
【数8】
この関係式において、
― 添え字iは、1軸磁界放射源18〜20の各々を識別する識別子であり、
― Miは、磁界放射体10の1軸磁界放射源iの磁気モーメントに関する列行列であり、
― Iは、恒等行列、すなわち単位行列であり、
― u1は、基準系R1において表わされる方向ベクトル(数1)の座標を含む列行列であり、
― Rは、磁界放射体10と3軸磁界センサ26との間の距離であり、
― Hiは、3軸磁界センサ26の3つの軸30〜32に沿って測定される磁界の座標を含む列行列であり、
― 記号「T」は、転置を行う操作を表わす記号である。
【0054】
以下の説明において、H1、H2、H3は、1軸磁界放射源18〜20から放射されたそれぞれの磁界の、軸30〜32に沿う測定値を含む列行列である。このような表記法を用いると、基準系R1における方向ベクトル(数1)の座標は、次の関係式(数9)から得られる。
【数9】
【0055】
ステップ54において、同様に、検出モジュール42は、原点O2から点Eに向かう方向ベクトル(数2)の座標も特定する。
【0056】
ここで、軸L1およびL2を、それぞれ方向ベクトル(数1)および(数2)と同一直線上の軸と定義する。
【0057】
3軸磁界センサ26と28とは、同一の磁界放射体から放射された磁界を測定するから、磁界擾乱体が存在しない場合には、軸L1とL2とは、点Eで交差しなければならない。しかしながら、実際には、測定に混入するノイズおよび計算誤差の影響によって、軸L1とL2とは交差しない。しかし、軸L1とL2とはともに、点Eの近傍を通る。したがって、軸L1とL2との間の最短距離dは短い。対照的に、磁界擾乱体が存在する場合には、その磁界擾乱体は、方向ベクトル(数1)または(数2)の方向を相当に変える。したがって、最短距離dは長くなる。
【0058】
したがって、ステップ56において、軸L1とL2との間の最短距離dが、あらかじめ定められた限界値未満であるか否かが調べられる。
【0059】
このために、例えばサブステップ58において、検出モジュール42は、方向ベクトル(数1)およびベクトル(数6)に直交するベクトル(数3)の、基準系R1における座標を計算する。ベクトル(数6)は、原点O1およびO2を通る軸Dと同一直線上のベクトルである。この例においては、3軸磁界センサ26および28の位置が固定されているから、基準系R1におけるこのベクトル(数6)の座標は、基準系6における原点O1およびO2の座標から、容易に特定することができる。
【0060】
ベクトル(数3)の座標は、例えば次の関係式(数10)によって計算される。
【数10】
この関係式において、
− 記号(数5)は、ベクトル積をとる操作を表わす記号である。
【0061】
サブステップ58において、同様に、方向ベクトル(数2)およびベクトル(数6)に直交するベクトル(数4)の座標が計算される。ベクトル(数4)の座標は、例えば基準系R2において表わされる。
【0062】
次に、サブステップ60において、ベクトル(数3)とベクトル(数4)との間の角度θが計算される。基準系R1とR2との座標軸同士が互いに平行であれば、この角度θは、次の関係式(数11)から直接計算することができる。
【数11】
この関係式において、
− 記号「acos」は、角度の逆余弦をとる操作を表わし、
− 記号「・」は、スカラー積をとる操作を表わし、
− 記号「*」は、2つのスカラー量の乗算を行う操作を表わし、
− 「||...||」は、ベクトルのユークリッドノームであることを表わしている。
【0063】
磁界擾乱体が存在していない場合には、方向ベクトル(数1)と方向ベクトル(数2)との向きに応じて、この角度θは、ほぼ0°またはほぼ180°でなければならない。本明細書においては、磁界擾乱体が存在していない場合には、方向ベクトル(数1)と方向ベクトル(数2)との向きは、角度θがほぼ0°になるように定められている。
【0064】
次に、サブステップ62において、距離dが、あらかじめ定められた限界値未満であるか否かを調べるために、角度θが、閾値S1と比較される。
【0065】
角度θが、この閾値S1を超過していると、それは、磁界擾乱体が存在していることを意味する。そうすると、ステップ64が実行されて、この磁界擾乱体の存在が通知される。この磁界擾乱体の存在の通知は、例えばマンマシンインターフェース44を介して行われる。その通知は、例えば必ずしもユーザに伝えられるのではなく、単に、処理ユニット24によって行なわれた処理操作に、磁界擾乱体が存在しているという情報を考慮に入れるためになされる操作であってもよい。
【0066】
角度θが閾値S1未満であると、それは、磁界擾乱体が存在していないことを意味している。その場合には、この方法は、ステップ66に進んで、位置特定モジュール40が、例えば3軸磁界センサ26および28によってなされた測定から、基準系6における磁界放射体10の位置を特定する。
【0067】
ステップ50、64および66が終了すると、この方法は、ステップ50および52に戻る。
【0068】
図3の方法は、ステップ56がステップ70に置き換えられているということを除いて、図2の方法と同じである。このステップ70の開始時に、サブステップ72において、方向ベクトル(数1)と(数2)との間の結合積Pが、次の関係式(数12)から計算される。
【数12】
この関係式において、
− Pは、方向ベクトル(数1)と(数2)との間の結合積である。
【0069】
次に、この方法は、サブステップ74に進んで、最短距離dが、あらかじめ定められた限界値未満であるか否かを調べるために、結合積Pの値と閾値S2とが比較される。磁界擾乱体が存在していない場合には、結合積Pの値は、ほぼ0でなければならない。それと対照的に、磁界擾乱体が存在していると、この結合積Pの値は大きくなる。
【0070】
したがって、結合積Pの値が、あらかじめ定められた閾値S2未満であった場合には、この方法はステップ66に進む。そうでなかった場合には、この方法は、ステップ64に進む。
【0071】
他の多くの実施形態が可能である。例えば磁界放射体は、磁界放射のための、4つ以上の軸を有していてもよい。この場合には、4番目以降の軸(補助軸)からの磁界放射は、磁界センサによって測定される情報に冗長性を与える。磁界センサに相対的に物体4の位置を特定するような応用において、磁界擾乱体によってもたらされた擾乱を克服するために、この冗長性を、その後において用いることができる。
【0072】
磁界放射体10は、時系列に、または同時に、その軸の各々において磁界を放射することができる。後者の場合には、それぞれの軸において放射された磁界を、磁界センサ側で互いに区別することができるように、軸の各々で相異なる周波数の磁界を放射することが好ましい。
【0073】
方向ベクトルの座標の計算のために、上述の方法以外の方法を用いることもできる。特に、方向ベクトルを、磁界放射体の幾何学的中心から発して、それぞれの磁界センサを向くように定めることができる。
【0074】
基準系R1とR2との座標軸は、必ずしも互いに平行でなくてもよい。この場合には、ベクトル(数3)および(数4)、または結合積Pの計算の前に、方向ベクトル(数1)と(数2)との座標が同じ基準系で表わされるように、それらの2つの方向ベクトルのうちの一方の座標上で、基準系の変更が行なわれる。
【0075】
磁界擾乱体の検出器は、3つ以上の3軸磁界センサを有していてもよい。
【0076】
上述の方法以外の方法によって、軸L1とL2との間の最短距離dが、あらかじめ定められた限界値未満であるか否かを検証することもできる。例えば同じ基準系において、軸L1およびL2の方程式を定めて、次に、最短距離dとあらかじめ定められた限界値とを比較する前に、これらの方程式に基づいて、軸L1とL2との間の最短距離dを計算することができる。
【0077】
本明細書においては、位置特定システム2は、磁界放射体が移動可能であり、磁界センサが固定される特定の場合について説明している。しかしながら、本明細書において説明されている方法は、磁界放射体が固定され、磁界センサが基準系6において移動可能である、反対の場合にも適用される。
【0078】
磁界センサを基準系6に固定する必要はない。そうではなくて、必要なことは、一方の磁界センサが測定を行なっている時点と、他方の磁界センサが測定を行なっている時点との間で、それらの磁界センサに対する磁界放射体の相対位置が変化してはならないということである。例えば2つの磁界センサによる測定が同時になされる場合には、それらの磁界センサが基準系6内で移動しても、この条件は満たされる。
【0079】
磁界センサの位置が固定されない場合には、上述の方法のうちのいずれかが実行される前に、2つの磁界センサ間の相対位置が、あらかじめ知られていなければならない。相対位置が「あらかじめ知られている」ということは、少なくとも、ベクトル(数6)の方向またはそのユークリッドノームがあらかじめ知られていること、より好ましくは、その方向があらかじめ知られていること、または、方向とユークリッドノームとの両方があらかじめ知られていることを意味する。磁界センサ間の相対位置を知ることができる多数の方法がある。相対位置を知るために、例えばカルマンフィルタを用いることができる。より具体的には、このカルマンフィルタは、放射された磁界と測定された磁界とを関連付ける電磁方程式に基づいて組み立てられる。この電磁方程式において、未知数は磁界センサの位置であり、場合によっては磁界放射体の位置である。
【0080】
一変形例においては、ベクトル(数6)の方向だけがあらかじめ知られており、そのユークリッドノームは知られていない。この変形例においては、ベクトル(数6)のユークリッドノームは任意の値、例えば1に等しくなるように選ばれる。次に、上述のように磁界擾乱体の存在の有無が調べられる閾値S1またはS2の評価調整のための学習相が実施される。この変形例は、ベクトル(数6)の方向しか、あらかじめ知られていないということを除いて、例えば図2の方法と同じである。例えば用いられているベクトルの全てが正規化されている場合には、閾値S1またはS2の値を、ベクトル(数6)のユークリッドノームに依存しなくすることができる。
【0081】
3軸磁界センサ26および28を単純化するために、それらの各々を、単一のターンで形成することができる。
【産業上の利用可能性】
【0082】
上述の方法および位置特定システムを、医療分野以外の種々の応用分野にも用いることができる。例えば室内において、磁界放射体を保持している真空掃除機の位置を特定するために、または子供などの人間の位置を特定するために、本発明の位置特定システムを用いることができる。
【符号の説明】
【0083】
2 位置特定システム
4 物体
6 基準系
10 磁界放射体
14〜16、30〜32、L1、L2 軸
18〜20 1軸磁界放射源
22 たわみ線リンク
24 処理ユニット
26、28 3軸磁界センサ
34〜36 1軸トランスデューサ
40 位置特定モジュール
42 検出モジュール
43 検出器
44 マンマシンインターフェース
46 情報記録媒体
a 距離
E 点
M1〜M3 磁気モーメント
O、O1、O2 原点
X、Y、Z、X1、Y1、Z1、X2、Y2、Z2 座標軸
θx、θy、θz 角度
【特許請求の範囲】
【請求項1】
少なくとも3軸を有する磁界放射体から放射された磁界に対する磁界擾乱体を検出する方法であって、
− 相異なる所定の位置に配置された少なくとも2つの3軸センサによる、前記磁界放射体から放射された磁界を測定(52)し、
− 前記3軸センサの各々に対して、この3軸センサによって測定された磁界から、前記磁界放射体の幾何学的中心と、この3軸センサの幾何学的中心とを通る軸と同一直線上の方向ベクトルの座標を特定(54)し、前記磁界放射体の幾何学的中心は、この磁界放射体を模擬的に表わした点磁界放射源が位置する点であり、前記3軸センサは、磁界が測定される点に位置しており、かつこの3軸センサの幾何学的中心を構成している点トランスデューサによって模擬的に表わすことができ、
− 各々が前記方向ベクトルの1つと同一直線上にある複数の軸間の最短距離が、あらかじめ定められた限界値未満であるか否かを検証する検証(56、70)し、
− 前記最短距離が、前記限界値未満でない場合には、磁界擾乱体が存在しているという通知(64)を行い、前記限界値未満である場合には、この通知を行わないことを含む方法。
【請求項2】
前記検証ステップは、少なくとも第1および第2の方向ベクトル(数1)および(数2)に対して行われ、かつ
− 前記第1の方向ベクトル(数1)と、前記第1および第2の方向ベクトル(数1)および(数2)を決定するのに使用される2つの3軸センサの幾何学的中心を通る軸Dとに直交する第1のベクトル(数3)の座標を計算(58)し、
− 前記第2の方向ベクトル(数2)と前記軸Dとに直交する第2のベクトル(数4)の座標を計算(58)し、
− 前記第1のベクトル(数3)と前記第2のベクトル(数4)との間の角度を計算(60)し、
− 前記角度が、磁界擾乱体の通知が行われる前記あらかじめ定められた限界値に対応する閾値未満であるかを調べる(62)ことを含む、請求項1に記載の方法。
【数1】
【数2】
【数3】
【数4】
【請求項3】
前記検証ステップは、少なくとも第1および第2の方向ベクトル(数1)および(数2)に対して行われ、かつ
− 数5および・を、それぞれベクトル積およびスカラー積をとる操作を表わす記号であるとし、ベクトル(数6)を、前記第1および第2の方向ベクトル(数1)および(数2)を決定するのに使用される2つの3軸センサの幾何学的中心を通る軸Dと同一直線上のベクトルであるとしたとき、数7によって定義される結合積の値を計算(72)し、
− 前記結合積の値が、磁界擾乱体の通知が行われる前記あらかじめ定められた限界値に対応する閾値未満であるか否かを調べる(74)ことを含んでなる、請求項1に記載の方法。
【数5】
【数6】
【数7】
【請求項4】
同一基準系内の前記少なくとも2つの3軸センサの位置が固定されている、請求項1〜3のいずれか1つに記載の方法。
【請求項5】
少なくとも1つの、少なくとも3軸を有する磁界放射体と、この磁界放射体から放射された磁界を検出するための少なくとも2つの3軸センサとを用いて、1つの基準系内の物体の位置を特定する方法であって、前記3軸センサの各々は、前記基準系内に固定されており、かつ前記磁界放射体の各々は、前記物体に固着されているか、または、前記磁界放射体の各々は、前記基準系内に固定されており、かつ前記3軸センサの各々は、前記物体に固着され、前記方法は、
− 前記磁界放射体から磁界を放射(50)し、前記3軸センサによってこの磁界を測定(52)し、
− 前記3軸センサによってなされた測定から、前記基準系における前記物体の位置を特定(66)することを含み、
さらに、前記物体の位置を特定するステップにおいて用いられた3軸センサと同じ3軸センサを用い、かつ請求項1〜4のいずれか1つに記載の方法を実施することによって、前記磁界放射体から放射された磁界に対する磁界擾乱体を検出(54、56、70)することを含むことを特徴とする方法。
【請求項6】
電子計算機によって実行されたときに、請求項1〜5のいずれか1つに記載の方法を実施するための命令を記憶していることを特徴とする情報記録媒体(46)。
【請求項7】
少なくとも3軸を有する磁界放射体から放射された磁界に対する磁界擾乱体を検出する検出器であって、
− 前記磁界放射体から放射された磁界を測定することができる少なくとも2つの3軸センサ(26、28)であって、相異なる所定の位置に配置される3軸センサ(26、28)と、
− 前記磁界放射体から放射された磁界の測定結果を処理するために、前記3軸センサに接続されている処理ユニット(24)とを備えている検出器において、
前記処理ユニットは、
− 前記3軸センサの各々に対して、前記磁界放射体を模擬的に表わした点磁界放射源が位置する点として定義される、この磁界放射体の幾何学的中心と、この3軸センサを模擬的に表わした点トランスデューサが位置する、前記磁界が測定される点として定義される、この3軸センサの幾何学的中心とを通る軸と同一直線上の方向ベクトルの座標を、この3軸センサによって測定された磁界から特定し、
− 各々が前記方向ベクトルの1つと同一直線上にある複数の軸間の最短距離が、あらかじめ定められた限界値未満であるか否かを検証し、かつ
− 前記最短距離が、前記限界値未満でない場合には、磁界擾乱体が存在しているという通知を行い、前記限界値未満である場合には、磁界擾乱体が存在しているという通知を行わないことを特徴とする検出器。
【請求項8】
同一基準系内の前記少なくとも2つの3軸センサの位置が固定されている、請求項7に記載の検出器。
【請求項9】
1つの基準系において物体の位置を特定するためのシステムであって、
− 少なくとも1つの、少なくとも3軸を有する磁界放射体(10)と、
− 前記磁界放射体から放射された磁界を測定するための、少なくとも2つの3軸センサ(26、28)であって、この3軸センサは前記基準系内に固定され、かつ前記磁界放射体は前記物体に固着されるか、または前記磁界放射体は前記基準系内に固定され、かつ前記物体に固着されている3軸センサと、
− 前記3軸センサによってなされた測定から、前記基準系における前記物体の位置を特定することができる位置特定モジュール(40)とを備えているシステムにおいて、
前記磁界放射体から放射された磁界に対する磁界擾乱体を検出する、請求項7に記載の検出器(43)であって、前記位置特定モジュールによって用いられる3軸センサ(26、28)を構成要素として有している検出器を備えていることを特徴とするシステム。
【請求項1】
少なくとも3軸を有する磁界放射体から放射された磁界に対する磁界擾乱体を検出する方法であって、
− 相異なる所定の位置に配置された少なくとも2つの3軸センサによる、前記磁界放射体から放射された磁界を測定(52)し、
− 前記3軸センサの各々に対して、この3軸センサによって測定された磁界から、前記磁界放射体の幾何学的中心と、この3軸センサの幾何学的中心とを通る軸と同一直線上の方向ベクトルの座標を特定(54)し、前記磁界放射体の幾何学的中心は、この磁界放射体を模擬的に表わした点磁界放射源が位置する点であり、前記3軸センサは、磁界が測定される点に位置しており、かつこの3軸センサの幾何学的中心を構成している点トランスデューサによって模擬的に表わすことができ、
− 各々が前記方向ベクトルの1つと同一直線上にある複数の軸間の最短距離が、あらかじめ定められた限界値未満であるか否かを検証する検証(56、70)し、
− 前記最短距離が、前記限界値未満でない場合には、磁界擾乱体が存在しているという通知(64)を行い、前記限界値未満である場合には、この通知を行わないことを含む方法。
【請求項2】
前記検証ステップは、少なくとも第1および第2の方向ベクトル(数1)および(数2)に対して行われ、かつ
− 前記第1の方向ベクトル(数1)と、前記第1および第2の方向ベクトル(数1)および(数2)を決定するのに使用される2つの3軸センサの幾何学的中心を通る軸Dとに直交する第1のベクトル(数3)の座標を計算(58)し、
− 前記第2の方向ベクトル(数2)と前記軸Dとに直交する第2のベクトル(数4)の座標を計算(58)し、
− 前記第1のベクトル(数3)と前記第2のベクトル(数4)との間の角度を計算(60)し、
− 前記角度が、磁界擾乱体の通知が行われる前記あらかじめ定められた限界値に対応する閾値未満であるかを調べる(62)ことを含む、請求項1に記載の方法。
【数1】
【数2】
【数3】
【数4】
【請求項3】
前記検証ステップは、少なくとも第1および第2の方向ベクトル(数1)および(数2)に対して行われ、かつ
− 数5および・を、それぞれベクトル積およびスカラー積をとる操作を表わす記号であるとし、ベクトル(数6)を、前記第1および第2の方向ベクトル(数1)および(数2)を決定するのに使用される2つの3軸センサの幾何学的中心を通る軸Dと同一直線上のベクトルであるとしたとき、数7によって定義される結合積の値を計算(72)し、
− 前記結合積の値が、磁界擾乱体の通知が行われる前記あらかじめ定められた限界値に対応する閾値未満であるか否かを調べる(74)ことを含んでなる、請求項1に記載の方法。
【数5】
【数6】
【数7】
【請求項4】
同一基準系内の前記少なくとも2つの3軸センサの位置が固定されている、請求項1〜3のいずれか1つに記載の方法。
【請求項5】
少なくとも1つの、少なくとも3軸を有する磁界放射体と、この磁界放射体から放射された磁界を検出するための少なくとも2つの3軸センサとを用いて、1つの基準系内の物体の位置を特定する方法であって、前記3軸センサの各々は、前記基準系内に固定されており、かつ前記磁界放射体の各々は、前記物体に固着されているか、または、前記磁界放射体の各々は、前記基準系内に固定されており、かつ前記3軸センサの各々は、前記物体に固着され、前記方法は、
− 前記磁界放射体から磁界を放射(50)し、前記3軸センサによってこの磁界を測定(52)し、
− 前記3軸センサによってなされた測定から、前記基準系における前記物体の位置を特定(66)することを含み、
さらに、前記物体の位置を特定するステップにおいて用いられた3軸センサと同じ3軸センサを用い、かつ請求項1〜4のいずれか1つに記載の方法を実施することによって、前記磁界放射体から放射された磁界に対する磁界擾乱体を検出(54、56、70)することを含むことを特徴とする方法。
【請求項6】
電子計算機によって実行されたときに、請求項1〜5のいずれか1つに記載の方法を実施するための命令を記憶していることを特徴とする情報記録媒体(46)。
【請求項7】
少なくとも3軸を有する磁界放射体から放射された磁界に対する磁界擾乱体を検出する検出器であって、
− 前記磁界放射体から放射された磁界を測定することができる少なくとも2つの3軸センサ(26、28)であって、相異なる所定の位置に配置される3軸センサ(26、28)と、
− 前記磁界放射体から放射された磁界の測定結果を処理するために、前記3軸センサに接続されている処理ユニット(24)とを備えている検出器において、
前記処理ユニットは、
− 前記3軸センサの各々に対して、前記磁界放射体を模擬的に表わした点磁界放射源が位置する点として定義される、この磁界放射体の幾何学的中心と、この3軸センサを模擬的に表わした点トランスデューサが位置する、前記磁界が測定される点として定義される、この3軸センサの幾何学的中心とを通る軸と同一直線上の方向ベクトルの座標を、この3軸センサによって測定された磁界から特定し、
− 各々が前記方向ベクトルの1つと同一直線上にある複数の軸間の最短距離が、あらかじめ定められた限界値未満であるか否かを検証し、かつ
− 前記最短距離が、前記限界値未満でない場合には、磁界擾乱体が存在しているという通知を行い、前記限界値未満である場合には、磁界擾乱体が存在しているという通知を行わないことを特徴とする検出器。
【請求項8】
同一基準系内の前記少なくとも2つの3軸センサの位置が固定されている、請求項7に記載の検出器。
【請求項9】
1つの基準系において物体の位置を特定するためのシステムであって、
− 少なくとも1つの、少なくとも3軸を有する磁界放射体(10)と、
− 前記磁界放射体から放射された磁界を測定するための、少なくとも2つの3軸センサ(26、28)であって、この3軸センサは前記基準系内に固定され、かつ前記磁界放射体は前記物体に固着されるか、または前記磁界放射体は前記基準系内に固定され、かつ前記物体に固着されている3軸センサと、
− 前記3軸センサによってなされた測定から、前記基準系における前記物体の位置を特定することができる位置特定モジュール(40)とを備えているシステムにおいて、
前記磁界放射体から放射された磁界に対する磁界擾乱体を検出する、請求項7に記載の検出器(43)であって、前記位置特定モジュールによって用いられる3軸センサ(26、28)を構成要素として有している検出器を備えていることを特徴とするシステム。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2011−101793(P2011−101793A)
【公開日】平成23年5月26日(2011.5.26)
【国際特許分類】
【外国語出願】
【出願番号】特願2010−230560(P2010−230560)
【出願日】平成22年10月13日(2010.10.13)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
【Fターム(参考)】
【公開日】平成23年5月26日(2011.5.26)
【国際特許分類】
【出願番号】特願2010−230560(P2010−230560)
【出願日】平成22年10月13日(2010.10.13)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
【Fターム(参考)】
[ Back to top ]