
秤とその補正方法
【課題】秤において、必要な記憶容量を抑制しつつ、任意の地域で十分に高い精度で、被測定物の重量の測定値を補正する。
【解決手段】被測定物が載置される台1を備える秤を提供する。台1は、荷重を信号に変換して出力するロードセル11と、ロードセル11から出力された信号に基づいて荷重を測定する荷重測定回路12と、CPU13と、記憶部14とを備える。ロードセル11と荷重測定回路12とCPU13は、台1の重量を測定する第1測定部と、被測定物の重量を測定する第2測定部として機能する。またCPU13と記憶部14は、台1の重量の測定値Wと特定の重力加速度下での台1の重量W´との比率Rを算出する比率算出部と、被測定物の重量の測定値Wtを比率Rに基づいて補正する補正部として機能する。
【解決手段】被測定物が載置される台1を備える秤を提供する。台1は、荷重を信号に変換して出力するロードセル11と、ロードセル11から出力された信号に基づいて荷重を測定する荷重測定回路12と、CPU13と、記憶部14とを備える。ロードセル11と荷重測定回路12とCPU13は、台1の重量を測定する第1測定部と、被測定物の重量を測定する第2測定部として機能する。またCPU13と記憶部14は、台1の重量の測定値Wと特定の重力加速度下での台1の重量W´との比率Rを算出する比率算出部と、被測定物の重量の測定値Wtを比率Rに基づいて補正する補正部として機能する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被測定物の重量を測定する秤とその補正方法とに関する。
【背景技術】
【0002】
被測定物の重量は、被測定物の質量と重力加速度との積である。重力加速度は、赤道付近では小さく、極付近では大きいから、同一の被測定物であっても、その重量には重力加速度の相違に起因した地域間のバラツキが生じうる。しかし、同一の被測定物の重量の測定値に上記のバラツキがあると、実社会において様々な不都合が生じうる。そこで、上記のバラツキを回避するために、特定の重力加速度下における被測定物の重量の測定値を推定して表示する秤が提案されている。
【0003】
特許文献1に記載の秤(重力補正機能付電子式秤量機)は、地域毎の補正値データを記憶したメモリを備え、スイッチで指定された地域に対応する補正値データを選択し、選択した補正値データで被測定物の重量の測定値を補正することで、特定の重力加速度下での被測定物の重量の測定値を推定し、推定値を表示する。また、特許文献2には、GPS信号に基づいて補正値データを自動的に選択する秤(ロードセル秤)が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭60−64224号公報
【特許文献2】特開2001−59769号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1及び2に記載の秤で上記の補正を十分に高い精度で行うためには、十分に細分化された地域ごとの補正値データを記憶しておく必要がある。したがって、必要な記憶容量は、使用可能な地域が広いほど増え、上記の補正の精度が高いほど増える。つまり、任意の地域で上記の補正を十分に高い精度で行うためには、膨大な記憶容量が必要となってしまう。
【0006】
そこで、本発明は、必要な記憶容量を抑制しつつ、任意の地域で十分に高い精度で、被測定物の重量の測定値を補正することができる秤とその補正方法を提供することを解決課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は、被測定物が載置される台と、前記台の重量を測定する第1測定部と、前記台の重量の測定値と特定の重力加速度下での前記台の重量との比率を算出する比率算出部と、前記被測定物の重量を測定する第2測定部と、前記被測定物の重量の測定値を前記比率に基づいて補正する補正部とを備える秤を提供する。
【0008】
この秤によれば、ある地域において、台の重量を測定し、この測定値と特定の重力加速度下での台の重量との比率を算出し、この比率に基づいて、この地域で得られた、被測定物の重量の測定値を補正することができる。上記の比率は、この地域における重力加速度と特定の重力加速度との比率でもあるから、この秤によれば、上記の補正により、特定の重力加速度下での被測定物の重量の測定値を推定することができる。
【0009】
また、この秤によれば、任意の地域において台の重量を測定することによって当該地域の重力加速度に応じた上記の比率を算出することができるから、被測定物の重量の測定値の補正に用いるデータを地域ごとに記憶しておく必要はない。よって、この秤によれば、必要な記憶容量を抑制しつつ、任意の地域で十分に高い精度で、被測定物の重量の測定値を補正することができる。
【0010】
上記の秤において、荷重を信号に変換して出力する荷重変換器と、前記荷重変換器から出力された信号に基づいて前記荷重変換器に加わっている荷重を測定する荷重測定回路とを備え、前記第1測定部は、前記荷重変換器に荷重が加わっていないときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値(Wa)と、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値(Wb)とに基づいて、前記台の重量の測定値(W=Wb−Wa)を算出し、前記第2測定部は、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値(W0)と、前記台に前記被測定物が載置されており、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値(Ws)とに基づいて、前記被測定物の重量の測定値(Wt=Ws−W0)を算出するようにしてもよい。この場合、荷重変換器に荷重が加わっていないときに荷重変換器から出力された信号に基づく荷重測定回路の測定値(Wa)がゼロでなくとも、台の重量および被測定物の重量を正確に測定することができる。これは、上記の補正の精度の向上に寄与する。
【0011】
この秤において、使用者に操作される操作部を備え、前記第1測定部は、前記操作部の操作状態が第1操作状態のときの前記荷重測定回路の測定値を、前記荷重変換器に荷重が加わっていないときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とし、前記操作部の操作状態が第2操作状態のときの前記荷重測定回路の測定値を、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とするようにしてもよいし、情報を表示する表示部を備え、前記第1測定部は、前記表示部の表示状態が第1表示状態のときの前記荷重測定回路の測定値を、前記荷重変換器に荷重が加わっていないときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とし、前記操作部の表示状態が第2表示状態のときの前記荷重測定回路の測定値を、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とするようにしてもよい。前者の場合、比率の算出に必要な測定が操作部の操作状態に基づいて進行するから、無駄な待ち時間を排除することができる。後者の場合、比率の算出に必要な測定のための操作部を備える必要がないから、秤の構成を簡素とすることができる。
【0012】
また、上記課題を解決するために、本発明は、被測定物が載置される台の重量を測定する第1重量測定ステップと、前記台の重量の測定値と特定の重力加速度下での前記台の重量との比率を算出する比率算出ステップと、前記被測定物の重量を測定する第2重量測定ステップと、前記被測定物の重量の測定値を前記比率に基づいて補正する補正ステップとを有する秤の補正方法を提供する。この方法によれば、本発明に係る秤について前述した理由と同様の理由により、必要な記憶容量を抑制しつつ、任意の地域で十分に高い精度で、被測定物の重量の測定値を補正することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係る秤10の平面図である。
【図2】秤10が備える台1の電気的構成を示すブロック図である。
【図3】図1のA−A´断面図(載置時)である。
【図4】図1のA−A´断面図(持ち上げ時)である。
【図5】秤10で実行される設定処理の流れを示すフローチャートである。
【図6】秤10で実行される測定処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0014】
本発明の一実施形態に係る秤10は、人間などの被測定物の重量を測定する重量測定装置であり、被測定物が載置される台1と、台1の重量を測定する第1測定部(後述のロードセル11と荷重測定回路12とCPU(Central Processing Unit)13)と、台1の重量の測定値と特定の重力加速度下での台1の重量との比率Rを算出する比率算出部(後述のCPU13と記憶部14)と、被測定物の重量を測定する第2測定部(後述のロードセル11と荷重測定回路12とCPU13)と、被測定物の重量の測定値を比率Rに基づいて補正する補正部(後述のCPU13と記憶部14)とを備える。また、秤10は、その動作モードとして、比率Rを設定する設定モードと、被測定物の重量を測定する測定モードとを有する。
【0015】
以下、秤10について、図面を参照して説明する。
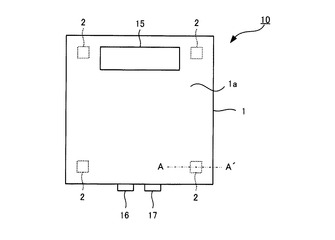
図1は、秤10の平面図である。この図に示されるように、秤10は、被測定物が載置される矩形状の台1と、台1を支持する4個の脚2とを備える。台1は、被測定物に接する上面1aと、図示しない下面とを有し、上面1aの一部を表示面とする表示部15と、設定モードと測定モードとを切り替えるための設定スイッチ16と、設定モードにおいて使用者の指示を入力するための操作スイッチ(操作部)17と、秤10の電源を投入/切断するための電源ボタン(図示略)とを備える。
【0016】
表示部15は、例えば液晶表示装置である。設定スイッチ16及び操作スイッチ17は、いずれも、使用者に操作されてオン状態またはオフ状態となる2状態スイッチであり、その状態に応じた信号を出力する。ただし、設定スイッチ16が、操作されると、その状態を切り替えて次に操作されるまで維持するのに対し、操作スイッチ17は、通常はオフ状態を維持し、操作されると、その状態を一時的にオン状態とした後にオフ状態に戻す。なお、秤10の動作モードは、電源投入時の設定スイッチ16の状態に依存する。具体的には、オン状態の場合には設定モードとなり、オフ状態の場合には測定モードとなる。
【0017】
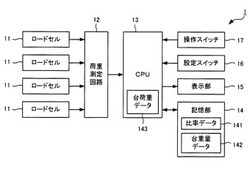
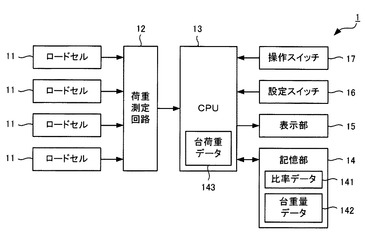
図2は、台1の電気的構成を示すブロック図である。この図に示されるように、台1は、4個の脚2にそれぞれ対応する4個のロードセル11と、荷重測定回路12と、CPU13と、記憶部14とを備える。ロードセル11は、荷重を信号に変換して出力する荷重変換器であり、荷重に応じて歪む起歪体と、この歪みに応じた信号を出力するブリッジ回路とを備え、荷重に応じた信号を出力し続ける。
【0018】
荷重測定回路12は、荷重測定処理を繰り返し実行する。荷重測定処理は、4個のロードセル11から出力された信号に基づいて、4個のロードセル11に加わる荷重を測定し、測定値を示す信号を出力する処理である。荷重測定回路12に測定される荷重は、4個のロードセル11の各々に加わる荷重の合計(以降、「合計荷重」と称する)である。ロードセル11からは荷重に応じた信号が出力され続けるから、荷重測定回路12からは、最新の合計荷重の測定値を示す信号が繰り返し出力される。
【0019】
記憶部14は、EEPROM(Electrically Erasable and Programmable Read Only Memory)などの書き換え可能な不揮発性メモリであり、比率Rを示す比率データ141を記憶する。また、記憶部14には、特定の重力加速度下での台1の重量W´を示す台重量データ142が予め記憶されている。本実施形態では、特定の重力加速度として標準重力加速度が採用されているが、これに限るものではない。
【0020】
CPU13は、後述の測定値Wb又は後述の測定値W0を示す台荷重データ143を記憶する内部記憶部(図示略)を備え、荷重測定回路12から出力された信号を受け取ったり、比率データ141などの各種のデータを記憶部14に記憶させたり、記憶部14から比率データ141や台重量データ142などの各種のデータを読み出したり、文字列などの各種の情報を表示部15に表示させたり、設定スイッチ16から出力された信号に基づいて、設定スイッチ16の状態(オン状態/オフ状態)を判別したり、操作スイッチ17から出力された信号に基づいて、操作スイッチ17の状態(オン状態/オフ状態)を判別したりすることができる。
【0021】
また、CPU13は、電源が投入されると、設定スイッチ16の状態(オン状態/オフ状態)を判別し、オン状態(設定モード)の場合には、比率Rを設定する設定処理を実行し、その後に電源を遮断し、オフ状態(測定モード)の場合には、被測定物の重量を測定する測定処理を実行する。測定処理は、使用者が電源ボタンを操作して電源を遮断するまで継続する。
【0022】
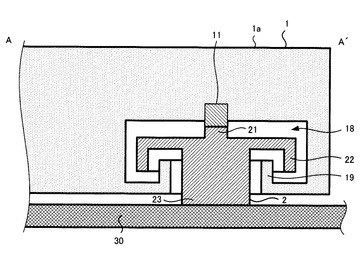
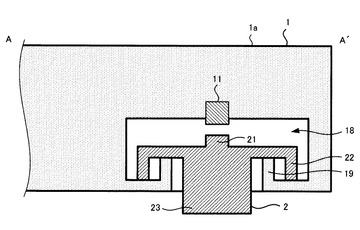
図3及び図4は、それぞれ、図1のA−A´断面図であり、図3及び図4における上下方向は鉛直方向に一致している。ただし、図3は秤10を床30に載置した場合のものであり、図4は台1を掴んで秤10を持ち上げた場合のものである。図3から明らかなように、台1の四隅には下方に開口した収容孔18が一つずつ形成されている。各収容孔18は、その上面の一部がロードセル11で構成されており、脚2を収容している。
【0023】
脚2は、台1に対して可動である。ただし、脚2の鉛直上方への移動は、図3に示すように、脚2の上部21とロードセル11との当接によって制限され、脚2の鉛直下方や水平方向への移動は、図4に示すように、脚2の側部22と台1の当接部19との当接によって制限される。したがって、台1を掴んで秤10を持ち上げても脚2は台1から脱落しない。また、台1の各部のうち、脚2の上部21と当接するのはロードセル11のみであり、脚2の各部のうち、ロードセル11と当接するのは上部21のみである。
【0024】
図3に示すように、脚2の上部21とロードセル11とが当接している場合でも、脚2の下部23は収容孔18の開口から突出する。よって、秤10を床30に載置した場合、台1は4個の脚2のみに支持され、4個のロードセル11に加わる合計荷重は、台1の重量と台1に載置された被測定物の重量との合計(以降、「合計重量」と称する)と一致する。一方、台1を掴んで秤10を持ち上げた場合、図4に示すように、各ロードセル11は脚2に当接しないから、各ロードセル11に加わる荷重はいずれもゼロとなり、合計荷重もゼロとなる。
【0025】
次に、秤10の動作について説明する。
使用者は、秤10を使用する地域において、まず、CPU13に設定処理を実行させる。具体的には、設定スイッチ16を操作してオン状態とした上で電源ボタンを押す。これにより、電源が投入され、設定処理が実行される。次に使用者は、上記の地域において、CPU13に測定処理を実行させる。具体的には、設定スイッチ16を操作してオフ状態とした上で電源ボタンを押す。これにより、電源が投入され、測定処理が実行される。なお、設定処理が必要なのは最初の1回だけであり、秤10を使用する地域を変更しない限り、設定処理を再実行させる必要はない。
【0026】
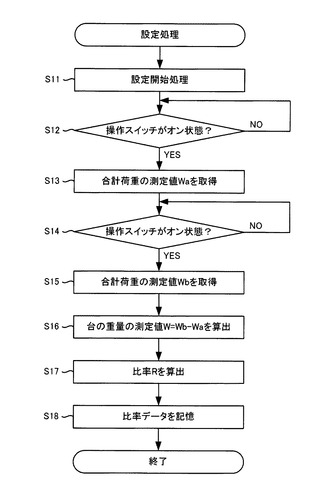
図5は、設定処理の流れを示すフローチャートである。この図に示すように、設定処理では、CPU13は、まず、設定開始処理を実行する(S11)。設定開始処理では、CPU13は、使用者に対する指示の表示を開始する。この表示では、表示部15に、例えば、「まず、台を掴んで秤を持ち上げ、操作スイッチ17を操作してください。次に、秤を床に置き、操作スイッチ17を操作してください。」という文字列が表示される。
【0027】
次にCPU13は、操作スイッチ17がオン状態であるか否かを判定する(S12)。この判定結果が「NO」の場合、処理はステップS12に戻る。操作スイッチ17は、通常、オフ状態であるから、暫くはステップS12が繰り返されることになる。一方、使用者は、表示された指示にしたがって、図4に示すように台1を掴んで秤10を持ち上げ、操作スイッチ17を操作する。これにより、操作スイッチ17が一時的にオン状態となり、ステップS12の判定結果が「YES」となる。
【0028】
ステップS12の判定結果が「YES」となると、CPU13は、荷重測定回路12から出力された信号を受け取り、受け取った信号に基づいて、合計荷重の測定値を取得する(S13)。前述したように、荷重測定回路12からは最新の合計荷重の測定値を示す信号が出力されるから、ステップS13において取得されるのは、台1を掴んで秤10が持ち上げられているとき(図4参照)の合計荷重の測定値Waである。測定値Waは、4個のロードセル11のいずれにも荷重が加わっていないときに4個のロードセル11から出力された信号に基づく荷重測定回路12の測定値でもある。なお、ステップS13において、操作スイッチ17はオフ状態に戻る。
【0029】
次にCPU13は、操作スイッチ17がオン状態であるか否かを判定する(S14)。この判定結果が「NO」の場合、処理はステップS14に戻る。操作スイッチ17は、既にオフ状態に戻っているから、暫くはステップS14が繰り返されることになる。一方、使用者は、表示された指示にしたがって、図3に示すように秤10を床30に載置し、操作スイッチ17を操作する。これにより、操作スイッチ17が一時的にオン状態となり、ステップS14の判定結果が「YES」となる。
【0030】
ステップS14の判定結果が「YES」となると、CPU13は、荷重測定回路12から出力された信号を受け取り、受け取った信号に基づいて、合計荷重の測定値を取得する(S15)。前述したように、荷重測定回路12からは最新の合計荷重の測定値を示す信号が出力されるから、ステップS15においてCPU13に取得されるのは、被測定物が載置されていない台1が4個のロードセル11に支持されているとき(図3参照)の合計荷重の測定値Wbである。測定値Wbは、設定処理において、台1に被測定物が載置されておらず、かつ、4個のロードセル11の各々に荷重が加わっているときに、4個のロードセル11から出力された信号に基づく荷重測定回路12の測定値(設定時測定値)でもある。そして、CPU13の内部記憶部には、測定値Wbを示す台荷重データ143が記憶される。なお、ステップS15において、使用者に対する指示の表示は終了する。
【0031】
次にCPU13は、ステップS15で取得した測定値WbからステップS13で取得した測定値Waを減算して台1の重量の測定値Wを算出する(S16)。すなわち、4個のロードセル11と荷重測定回路12とCPU13は、台1の重量を測定する第1測定部として機能する。また、ステップS13、S15及びS16は、台1の重量を測定する第1重量測定ステップに相当する。
【0032】
次にCPU13は、ステップS16で取得した測定値Wと記憶部14に記憶されている台重量データ142で示される重量W´とに基づいて、比率Rを算出する(S17)。比率Rを算出する式は、R=W´/Wである。重量W´は特定の重力加速度下での台1の重量であるから、CPU13と記憶部14は、台1の重量の測定値と特定の重力加速度下での台1の重量との比率Rを算出する比率算出部として機能する。また、ステップS17は、比率Rを算出する比率算出ステップに相当する。
【0033】
次にCPU13は、ステップS17で算出した比率Rを示す比率データ141を記憶部14に記憶させる(S18)。こうして設定処理が終了し、電源が遮断される。
【0034】
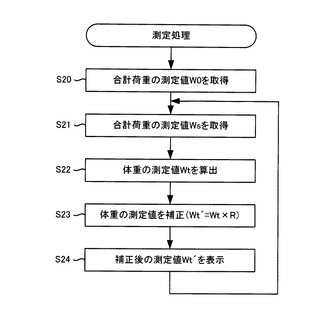
図6は、測定処理の流れを示すフローチャートである。この図に示すように、測定処理では、CPU13は、まず、合計荷重の測定値W0を取得する(S20)。具体的には、まず、表示部15に、例えば「秤を床に置き、操作スイッチ17を操作してください。」という文字列を表示させ、操作スイッチ17が操作されるまで待つ。そして、操作スイッチ17が操作されると、荷重測定回路12から出力された信号を受け取り、受け取った信号に基づいて、合計荷重の測定値を取得し、取得した測定値を示す台荷重データ143をCPU13の内部記憶部に記憶し、表示部15に、例えば「被測定物を秤に載せてください。」という文字列を表示させる。したがって、ステップS20では、測定処理において、被測定物が載置されていない台1が4個のロードセル11に支持されているとき(図3参照)の合計荷重の測定値(測定時測定値)W0が取得され、測定値W0を示す台荷重データ143がCPU13の内部記憶部に記憶される。すなわち、台荷重データ143は、ここで取得した測定値W0を示すものに更新される
【0035】
以降、CPU13は、合計荷重の測定値Wsを取得する処理(S21)と、測定値WsからステップS20で取得した測定値W0を減算して被測定物の重量の測定値Wtを算出する処理(S22)と、測定値Wtを記憶部14に記憶されている比率データ141で示される比率Rで補正する処理(S23)と、補正後の測定値(推定値)Wt´を表示する処理(S24)とを、順次、繰り返し実行する。
【0036】
比率Rは、現在地の重力加速度に対する特定の重力加速度の比率でもある。したがって、現在地の重力加速度下での被測定物の重量の測定値Wtに比率Rを乗ずれば、特定の重力加速度下での被測定物の重量の測定値Wt´を算出することができる。ただし、測定値Wt´がゼロ以外の値となるのは、被測定物が台1に載置されている場合のみである。
【0037】
被測定物が台1に載置されていない場合、ステップS21で取得される測定値Wsは、被測定物が載置されていない台1が4個のロードセル11に支持されているときの合計荷重の測定値である。これは、台荷重データ143で示される測定値W0と一致する。よって、ステップS22で算出される測定値Wt=Ws−W0はゼロとなる。ゼロに何を乗じてもゼロであるから、ステップS23で算出される測定値Wt´=Wt×Rはゼロとなり、このゼロが、ステップS24において表示部15に表示される。
【0038】
一方、被測定物が台1に載置されている場合、ステップS21で取得される測定値Wsは、被測定物が載置されている台1が4個のロードセル11に支持されているときの合計荷重の測定値である。一方、台荷重データ143で示される測定値W0は、被測定物が載置されていない台1が4個のロードセル11に支持されているときの合計荷重の測定値である。よって、ステップS22で算出される測定値Wt=Ws−W0は、現在地の重力加速度下での被測定物の重量の測定値となる。すなわち、ステップS21及びS22は、被測定物の重量を測定する第2重量測定ステップに相当し、4個のロードセル11と荷重測定回路12とCPU13は、被測定物の重量を測定する第2測定部として機能する。
【0039】
続くステップS23では、この測定値Wtと比率Rとの乗算により、特定の重力加速度下での被測定物の重量の測定値Wt´が算出される。すなわち、ステップS23は、被測定物の重量の測定値を比率に基づいて補正する補正ステップに相当し、CPU13と記憶部14は、被測定物の重量の測定値を比率Rに基づいて補正する補正部として機能する。この補正では、CPU13は、測定値Wtと比率Rとを用いて補正後の測定値Wt´を算出する。この算出に用いる式は、Wt´=Wt×Rである。そして、ステップS24では、測定値Wt´が表示部15に表示される。
【0040】
以上説明したように、秤10によれば、ある地域において、被測定物が載置される台1の重量を測定し、この測定値Wに対する特定の重力加速度下での台1の重量W´の比率Rを算出し、この比率Rに基づいて、この地域で得られた、被測定物の重量の測定値Wtを補正することにより、特定の重力加速度下での被測定物の重量の測定値Wt´を算出することができる。つまり、秤10は、特定の重力加速度とは異なる重力加速度下であっても、特定の重力加速度下での被測定物の重量の測定値Wt´を推定して表示することができる。よって、秤10には、その測定値(推定値)に重力加速度の相違に起因した地域間のバラツキが生じないという利点がある。
【0041】
また、秤10によれば、任意の地域において台1の重量を測定することによって当該地域の重力加速度に応じた比率Rを算出することができるから、被測定物の重量の測定値Wtの補正に用いるデータを地域(重力加速度)ごとに記憶しておく必要がない。よって、秤10によれば、記憶部14に要求される記憶容量を抑制しつつ、任意の地域で十分に高い精度で、被測定物の重量の測定値Wtを補正することができる。
【0042】
また、秤10によれば、台1の重量を測定する第1測定部が、台1を掴んで秤10が持ち上げられているときの合計荷重の測定値Waと、被測定物が載置されていない台1が4個のロードセル11に支持されているときの合計荷重の測定値Wbとに基づいて、台1の重量の測定値W=Wb−Waを算出し、被測定物の重量を測定する第2測定部が、被測定物が載置されていない台1が4個のロードセル11に支持されているときの合計荷重の測定値W0と、被測定物が載置されている台1が4個のロードセル11に支持されているときの合計荷重の測定値Wsとに基づいて、被測定物の重量の測定値Wt=Ws−W0を算出するから、Wa=0でなくとも、台1の重量および被測定物の重量を正確に測定することができる。これは、被測定物の重量の測定値Wtの補正の精度の向上に寄与する。
【0043】
なお、本発明は、上述した実施形態のみならず、上述した実施形態に以下の変形を施して得られる各種の形態や、これらの形態の任意の組み合わせをも範囲に含みうる。
上述した実施形態では、測定値Wbから測定値Waを減算して台1の重量の測定値Wを算出しているが、測定値Waがゼロの場合には、測定値Wbを測定値Wとしてもよい。すなわち、W=Wb−Waではなく、W=Wbとしてもよい。この場合、測定値Waを取得する必要はなくなる。
【0044】
上述した実施形態では、第1測定部としてのCPU13が、操作スイッチ17の操作状態が第1操作状態(設定処理における操作回数が1回の状態)のときの荷重測定回路12の測定値を、台1を掴んで秤10が持ち上げられているときに4個のロードセル11から出力された信号に基づく測定値Waとし、操作スイッチ17の操作状態が第2操作状態(設定処理における操作回数が2回の状態)のときの荷重測定回路12の測定値を、被測定物が載置されていない台1が4個のロードセル11に支持されているときに各ロードセル11から出力された信号に基づく測定値Wbとしている。
これを変形し、設定処理における操作回数が1回のときの荷重測定回路12の測定値を、被測定物が載置されていない台1が4個のロードセル11に支持されているときに各ロードセル11から出力された信号に基づく測定値Wbとし、設定処理における操作回数が2回のときの荷重測定回路12の測定値を、台1を掴んで秤10が持ち上げられているときに4個のロードセル11から出力された信号に基づく測定値Waとするようにしてもよい。すなわち、図5のステップS13とステップS15とを入れ替えた形態としてもよい。この形態では、設定処理における操作回数が2回の状態が「第1操作状態」に相当し、設定処理における操作回数が1回の状態が「第2操作状態」に相当する。
また、例えば、図5のフローチャートにおいて、ステップS12及びS14を削除し、ステップS11を、「台を掴んで秤を持ち上げてください。」という文字列を表示部15に所定の時間だけ表示させるステップとし、ステップS13とS15との間に、「秤を床に置いてください。」という文字列を表示部15に所定の時間だけ表示させるステップを挿入してもよい。
すなわち、第1測定部としてのCPU13が、表示部15の表示状態が第1表示状態(「台を掴んで秤を持ち上げてください。」という文字列の表示の終了時)のときの荷重測定回路12の測定値を、台1を掴んで秤10が持ち上げられているときに4個のロードセル11から出力された信号に基づく測定値Waとし、表示部15の表示状態が第2表示状態(「秤を床に置いてください。」という文字列の表示の終了時)のときの荷重測定回路12の測定値を、被測定物が載置されていない台1が4個のロードセル11に支持されているときに各ロードセル11から出力された信号に基づく測定値Wbとするようにしてもよい。
この場合、設定処理において操作スイッチ17を操作する必要がなくなるから、秤10から操作スイッチ17を削除することができる。すなわち、秤10の構成を簡素することができる。これに対して、上述した実施形態では、設定処理における測定が操作スイッチ17の操作状態に基づいて進行するから、無駄な待ち時間を排除することができる。
なお、この形態についても、ステップS13とステップS15とを入れ替える変形が可能である。ただし、この形態では、ステップS11を、例えば、「秤を床に置いてください。」という文字列を表示部15に所定の時間だけ表示させるステップとし、ステップS13とS15との間に挿入するステップを、例えば、「台を掴んで秤を持ち上げてください。」という文字列を表示部15に所定の時間だけ表示させるステップとする。なお、この形態でも、「台を掴んで秤を持ち上げてください。」という文字列の表示の終了時が「第1表示状態」に相当し、「秤を床に置いてください。」という文字列の表示の終了時が「第2表示状態」に相当する。
【0045】
上述した実施形態では、台1の重量の測定値Wと特定の重力加速度下での台1の重量W´との比率Rとして、台1の重量の測定値Wに対する特定の重力加速度下での台1の重量W´の比率を採用したが、特定の重力加速度下での台1の重量W´に対する台1の重量の測定値Wの比率を採用してもよい。この場合、R=W/W´であるから、補正後の測定値Wt´を算出する式は、Wt´=Wt/Rとなる。
【0046】
上述した実施形態では、4個のロードセル11で台1を支持する構成としたが、3個以下のロードセル11で台1を支持する構成としてもよいし、5個以上のロードセル11で台1を支持する構成としてもよい。なお、1個のロードセル11で台1を支持する構成では、このロードセル11に加わる荷重が上記の合計荷重となる。また、ロードセル以外の荷重変換器を採用してもよい。
【符号の説明】
【0047】
1 台
2 脚
10 秤
11 ロードセル
12 荷重測定回路
13 CPU
14 記憶部
15 表示部
16 設定スイッチ
17 操作スイッチ
【技術分野】
【0001】
本発明は、被測定物の重量を測定する秤とその補正方法とに関する。
【背景技術】
【0002】
被測定物の重量は、被測定物の質量と重力加速度との積である。重力加速度は、赤道付近では小さく、極付近では大きいから、同一の被測定物であっても、その重量には重力加速度の相違に起因した地域間のバラツキが生じうる。しかし、同一の被測定物の重量の測定値に上記のバラツキがあると、実社会において様々な不都合が生じうる。そこで、上記のバラツキを回避するために、特定の重力加速度下における被測定物の重量の測定値を推定して表示する秤が提案されている。
【0003】
特許文献1に記載の秤(重力補正機能付電子式秤量機)は、地域毎の補正値データを記憶したメモリを備え、スイッチで指定された地域に対応する補正値データを選択し、選択した補正値データで被測定物の重量の測定値を補正することで、特定の重力加速度下での被測定物の重量の測定値を推定し、推定値を表示する。また、特許文献2には、GPS信号に基づいて補正値データを自動的に選択する秤(ロードセル秤)が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭60−64224号公報
【特許文献2】特開2001−59769号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1及び2に記載の秤で上記の補正を十分に高い精度で行うためには、十分に細分化された地域ごとの補正値データを記憶しておく必要がある。したがって、必要な記憶容量は、使用可能な地域が広いほど増え、上記の補正の精度が高いほど増える。つまり、任意の地域で上記の補正を十分に高い精度で行うためには、膨大な記憶容量が必要となってしまう。
【0006】
そこで、本発明は、必要な記憶容量を抑制しつつ、任意の地域で十分に高い精度で、被測定物の重量の測定値を補正することができる秤とその補正方法を提供することを解決課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は、被測定物が載置される台と、前記台の重量を測定する第1測定部と、前記台の重量の測定値と特定の重力加速度下での前記台の重量との比率を算出する比率算出部と、前記被測定物の重量を測定する第2測定部と、前記被測定物の重量の測定値を前記比率に基づいて補正する補正部とを備える秤を提供する。
【0008】
この秤によれば、ある地域において、台の重量を測定し、この測定値と特定の重力加速度下での台の重量との比率を算出し、この比率に基づいて、この地域で得られた、被測定物の重量の測定値を補正することができる。上記の比率は、この地域における重力加速度と特定の重力加速度との比率でもあるから、この秤によれば、上記の補正により、特定の重力加速度下での被測定物の重量の測定値を推定することができる。
【0009】
また、この秤によれば、任意の地域において台の重量を測定することによって当該地域の重力加速度に応じた上記の比率を算出することができるから、被測定物の重量の測定値の補正に用いるデータを地域ごとに記憶しておく必要はない。よって、この秤によれば、必要な記憶容量を抑制しつつ、任意の地域で十分に高い精度で、被測定物の重量の測定値を補正することができる。
【0010】
上記の秤において、荷重を信号に変換して出力する荷重変換器と、前記荷重変換器から出力された信号に基づいて前記荷重変換器に加わっている荷重を測定する荷重測定回路とを備え、前記第1測定部は、前記荷重変換器に荷重が加わっていないときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値(Wa)と、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値(Wb)とに基づいて、前記台の重量の測定値(W=Wb−Wa)を算出し、前記第2測定部は、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値(W0)と、前記台に前記被測定物が載置されており、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値(Ws)とに基づいて、前記被測定物の重量の測定値(Wt=Ws−W0)を算出するようにしてもよい。この場合、荷重変換器に荷重が加わっていないときに荷重変換器から出力された信号に基づく荷重測定回路の測定値(Wa)がゼロでなくとも、台の重量および被測定物の重量を正確に測定することができる。これは、上記の補正の精度の向上に寄与する。
【0011】
この秤において、使用者に操作される操作部を備え、前記第1測定部は、前記操作部の操作状態が第1操作状態のときの前記荷重測定回路の測定値を、前記荷重変換器に荷重が加わっていないときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とし、前記操作部の操作状態が第2操作状態のときの前記荷重測定回路の測定値を、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とするようにしてもよいし、情報を表示する表示部を備え、前記第1測定部は、前記表示部の表示状態が第1表示状態のときの前記荷重測定回路の測定値を、前記荷重変換器に荷重が加わっていないときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とし、前記操作部の表示状態が第2表示状態のときの前記荷重測定回路の測定値を、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とするようにしてもよい。前者の場合、比率の算出に必要な測定が操作部の操作状態に基づいて進行するから、無駄な待ち時間を排除することができる。後者の場合、比率の算出に必要な測定のための操作部を備える必要がないから、秤の構成を簡素とすることができる。
【0012】
また、上記課題を解決するために、本発明は、被測定物が載置される台の重量を測定する第1重量測定ステップと、前記台の重量の測定値と特定の重力加速度下での前記台の重量との比率を算出する比率算出ステップと、前記被測定物の重量を測定する第2重量測定ステップと、前記被測定物の重量の測定値を前記比率に基づいて補正する補正ステップとを有する秤の補正方法を提供する。この方法によれば、本発明に係る秤について前述した理由と同様の理由により、必要な記憶容量を抑制しつつ、任意の地域で十分に高い精度で、被測定物の重量の測定値を補正することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係る秤10の平面図である。
【図2】秤10が備える台1の電気的構成を示すブロック図である。
【図3】図1のA−A´断面図(載置時)である。
【図4】図1のA−A´断面図(持ち上げ時)である。
【図5】秤10で実行される設定処理の流れを示すフローチャートである。
【図6】秤10で実行される測定処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0014】
本発明の一実施形態に係る秤10は、人間などの被測定物の重量を測定する重量測定装置であり、被測定物が載置される台1と、台1の重量を測定する第1測定部(後述のロードセル11と荷重測定回路12とCPU(Central Processing Unit)13)と、台1の重量の測定値と特定の重力加速度下での台1の重量との比率Rを算出する比率算出部(後述のCPU13と記憶部14)と、被測定物の重量を測定する第2測定部(後述のロードセル11と荷重測定回路12とCPU13)と、被測定物の重量の測定値を比率Rに基づいて補正する補正部(後述のCPU13と記憶部14)とを備える。また、秤10は、その動作モードとして、比率Rを設定する設定モードと、被測定物の重量を測定する測定モードとを有する。
【0015】
以下、秤10について、図面を参照して説明する。
図1は、秤10の平面図である。この図に示されるように、秤10は、被測定物が載置される矩形状の台1と、台1を支持する4個の脚2とを備える。台1は、被測定物に接する上面1aと、図示しない下面とを有し、上面1aの一部を表示面とする表示部15と、設定モードと測定モードとを切り替えるための設定スイッチ16と、設定モードにおいて使用者の指示を入力するための操作スイッチ(操作部)17と、秤10の電源を投入/切断するための電源ボタン(図示略)とを備える。
【0016】
表示部15は、例えば液晶表示装置である。設定スイッチ16及び操作スイッチ17は、いずれも、使用者に操作されてオン状態またはオフ状態となる2状態スイッチであり、その状態に応じた信号を出力する。ただし、設定スイッチ16が、操作されると、その状態を切り替えて次に操作されるまで維持するのに対し、操作スイッチ17は、通常はオフ状態を維持し、操作されると、その状態を一時的にオン状態とした後にオフ状態に戻す。なお、秤10の動作モードは、電源投入時の設定スイッチ16の状態に依存する。具体的には、オン状態の場合には設定モードとなり、オフ状態の場合には測定モードとなる。
【0017】
図2は、台1の電気的構成を示すブロック図である。この図に示されるように、台1は、4個の脚2にそれぞれ対応する4個のロードセル11と、荷重測定回路12と、CPU13と、記憶部14とを備える。ロードセル11は、荷重を信号に変換して出力する荷重変換器であり、荷重に応じて歪む起歪体と、この歪みに応じた信号を出力するブリッジ回路とを備え、荷重に応じた信号を出力し続ける。
【0018】
荷重測定回路12は、荷重測定処理を繰り返し実行する。荷重測定処理は、4個のロードセル11から出力された信号に基づいて、4個のロードセル11に加わる荷重を測定し、測定値を示す信号を出力する処理である。荷重測定回路12に測定される荷重は、4個のロードセル11の各々に加わる荷重の合計(以降、「合計荷重」と称する)である。ロードセル11からは荷重に応じた信号が出力され続けるから、荷重測定回路12からは、最新の合計荷重の測定値を示す信号が繰り返し出力される。
【0019】
記憶部14は、EEPROM(Electrically Erasable and Programmable Read Only Memory)などの書き換え可能な不揮発性メモリであり、比率Rを示す比率データ141を記憶する。また、記憶部14には、特定の重力加速度下での台1の重量W´を示す台重量データ142が予め記憶されている。本実施形態では、特定の重力加速度として標準重力加速度が採用されているが、これに限るものではない。
【0020】
CPU13は、後述の測定値Wb又は後述の測定値W0を示す台荷重データ143を記憶する内部記憶部(図示略)を備え、荷重測定回路12から出力された信号を受け取ったり、比率データ141などの各種のデータを記憶部14に記憶させたり、記憶部14から比率データ141や台重量データ142などの各種のデータを読み出したり、文字列などの各種の情報を表示部15に表示させたり、設定スイッチ16から出力された信号に基づいて、設定スイッチ16の状態(オン状態/オフ状態)を判別したり、操作スイッチ17から出力された信号に基づいて、操作スイッチ17の状態(オン状態/オフ状態)を判別したりすることができる。
【0021】
また、CPU13は、電源が投入されると、設定スイッチ16の状態(オン状態/オフ状態)を判別し、オン状態(設定モード)の場合には、比率Rを設定する設定処理を実行し、その後に電源を遮断し、オフ状態(測定モード)の場合には、被測定物の重量を測定する測定処理を実行する。測定処理は、使用者が電源ボタンを操作して電源を遮断するまで継続する。
【0022】
図3及び図4は、それぞれ、図1のA−A´断面図であり、図3及び図4における上下方向は鉛直方向に一致している。ただし、図3は秤10を床30に載置した場合のものであり、図4は台1を掴んで秤10を持ち上げた場合のものである。図3から明らかなように、台1の四隅には下方に開口した収容孔18が一つずつ形成されている。各収容孔18は、その上面の一部がロードセル11で構成されており、脚2を収容している。
【0023】
脚2は、台1に対して可動である。ただし、脚2の鉛直上方への移動は、図3に示すように、脚2の上部21とロードセル11との当接によって制限され、脚2の鉛直下方や水平方向への移動は、図4に示すように、脚2の側部22と台1の当接部19との当接によって制限される。したがって、台1を掴んで秤10を持ち上げても脚2は台1から脱落しない。また、台1の各部のうち、脚2の上部21と当接するのはロードセル11のみであり、脚2の各部のうち、ロードセル11と当接するのは上部21のみである。
【0024】
図3に示すように、脚2の上部21とロードセル11とが当接している場合でも、脚2の下部23は収容孔18の開口から突出する。よって、秤10を床30に載置した場合、台1は4個の脚2のみに支持され、4個のロードセル11に加わる合計荷重は、台1の重量と台1に載置された被測定物の重量との合計(以降、「合計重量」と称する)と一致する。一方、台1を掴んで秤10を持ち上げた場合、図4に示すように、各ロードセル11は脚2に当接しないから、各ロードセル11に加わる荷重はいずれもゼロとなり、合計荷重もゼロとなる。
【0025】
次に、秤10の動作について説明する。
使用者は、秤10を使用する地域において、まず、CPU13に設定処理を実行させる。具体的には、設定スイッチ16を操作してオン状態とした上で電源ボタンを押す。これにより、電源が投入され、設定処理が実行される。次に使用者は、上記の地域において、CPU13に測定処理を実行させる。具体的には、設定スイッチ16を操作してオフ状態とした上で電源ボタンを押す。これにより、電源が投入され、測定処理が実行される。なお、設定処理が必要なのは最初の1回だけであり、秤10を使用する地域を変更しない限り、設定処理を再実行させる必要はない。
【0026】
図5は、設定処理の流れを示すフローチャートである。この図に示すように、設定処理では、CPU13は、まず、設定開始処理を実行する(S11)。設定開始処理では、CPU13は、使用者に対する指示の表示を開始する。この表示では、表示部15に、例えば、「まず、台を掴んで秤を持ち上げ、操作スイッチ17を操作してください。次に、秤を床に置き、操作スイッチ17を操作してください。」という文字列が表示される。
【0027】
次にCPU13は、操作スイッチ17がオン状態であるか否かを判定する(S12)。この判定結果が「NO」の場合、処理はステップS12に戻る。操作スイッチ17は、通常、オフ状態であるから、暫くはステップS12が繰り返されることになる。一方、使用者は、表示された指示にしたがって、図4に示すように台1を掴んで秤10を持ち上げ、操作スイッチ17を操作する。これにより、操作スイッチ17が一時的にオン状態となり、ステップS12の判定結果が「YES」となる。
【0028】
ステップS12の判定結果が「YES」となると、CPU13は、荷重測定回路12から出力された信号を受け取り、受け取った信号に基づいて、合計荷重の測定値を取得する(S13)。前述したように、荷重測定回路12からは最新の合計荷重の測定値を示す信号が出力されるから、ステップS13において取得されるのは、台1を掴んで秤10が持ち上げられているとき(図4参照)の合計荷重の測定値Waである。測定値Waは、4個のロードセル11のいずれにも荷重が加わっていないときに4個のロードセル11から出力された信号に基づく荷重測定回路12の測定値でもある。なお、ステップS13において、操作スイッチ17はオフ状態に戻る。
【0029】
次にCPU13は、操作スイッチ17がオン状態であるか否かを判定する(S14)。この判定結果が「NO」の場合、処理はステップS14に戻る。操作スイッチ17は、既にオフ状態に戻っているから、暫くはステップS14が繰り返されることになる。一方、使用者は、表示された指示にしたがって、図3に示すように秤10を床30に載置し、操作スイッチ17を操作する。これにより、操作スイッチ17が一時的にオン状態となり、ステップS14の判定結果が「YES」となる。
【0030】
ステップS14の判定結果が「YES」となると、CPU13は、荷重測定回路12から出力された信号を受け取り、受け取った信号に基づいて、合計荷重の測定値を取得する(S15)。前述したように、荷重測定回路12からは最新の合計荷重の測定値を示す信号が出力されるから、ステップS15においてCPU13に取得されるのは、被測定物が載置されていない台1が4個のロードセル11に支持されているとき(図3参照)の合計荷重の測定値Wbである。測定値Wbは、設定処理において、台1に被測定物が載置されておらず、かつ、4個のロードセル11の各々に荷重が加わっているときに、4個のロードセル11から出力された信号に基づく荷重測定回路12の測定値(設定時測定値)でもある。そして、CPU13の内部記憶部には、測定値Wbを示す台荷重データ143が記憶される。なお、ステップS15において、使用者に対する指示の表示は終了する。
【0031】
次にCPU13は、ステップS15で取得した測定値WbからステップS13で取得した測定値Waを減算して台1の重量の測定値Wを算出する(S16)。すなわち、4個のロードセル11と荷重測定回路12とCPU13は、台1の重量を測定する第1測定部として機能する。また、ステップS13、S15及びS16は、台1の重量を測定する第1重量測定ステップに相当する。
【0032】
次にCPU13は、ステップS16で取得した測定値Wと記憶部14に記憶されている台重量データ142で示される重量W´とに基づいて、比率Rを算出する(S17)。比率Rを算出する式は、R=W´/Wである。重量W´は特定の重力加速度下での台1の重量であるから、CPU13と記憶部14は、台1の重量の測定値と特定の重力加速度下での台1の重量との比率Rを算出する比率算出部として機能する。また、ステップS17は、比率Rを算出する比率算出ステップに相当する。
【0033】
次にCPU13は、ステップS17で算出した比率Rを示す比率データ141を記憶部14に記憶させる(S18)。こうして設定処理が終了し、電源が遮断される。
【0034】
図6は、測定処理の流れを示すフローチャートである。この図に示すように、測定処理では、CPU13は、まず、合計荷重の測定値W0を取得する(S20)。具体的には、まず、表示部15に、例えば「秤を床に置き、操作スイッチ17を操作してください。」という文字列を表示させ、操作スイッチ17が操作されるまで待つ。そして、操作スイッチ17が操作されると、荷重測定回路12から出力された信号を受け取り、受け取った信号に基づいて、合計荷重の測定値を取得し、取得した測定値を示す台荷重データ143をCPU13の内部記憶部に記憶し、表示部15に、例えば「被測定物を秤に載せてください。」という文字列を表示させる。したがって、ステップS20では、測定処理において、被測定物が載置されていない台1が4個のロードセル11に支持されているとき(図3参照)の合計荷重の測定値(測定時測定値)W0が取得され、測定値W0を示す台荷重データ143がCPU13の内部記憶部に記憶される。すなわち、台荷重データ143は、ここで取得した測定値W0を示すものに更新される
【0035】
以降、CPU13は、合計荷重の測定値Wsを取得する処理(S21)と、測定値WsからステップS20で取得した測定値W0を減算して被測定物の重量の測定値Wtを算出する処理(S22)と、測定値Wtを記憶部14に記憶されている比率データ141で示される比率Rで補正する処理(S23)と、補正後の測定値(推定値)Wt´を表示する処理(S24)とを、順次、繰り返し実行する。
【0036】
比率Rは、現在地の重力加速度に対する特定の重力加速度の比率でもある。したがって、現在地の重力加速度下での被測定物の重量の測定値Wtに比率Rを乗ずれば、特定の重力加速度下での被測定物の重量の測定値Wt´を算出することができる。ただし、測定値Wt´がゼロ以外の値となるのは、被測定物が台1に載置されている場合のみである。
【0037】
被測定物が台1に載置されていない場合、ステップS21で取得される測定値Wsは、被測定物が載置されていない台1が4個のロードセル11に支持されているときの合計荷重の測定値である。これは、台荷重データ143で示される測定値W0と一致する。よって、ステップS22で算出される測定値Wt=Ws−W0はゼロとなる。ゼロに何を乗じてもゼロであるから、ステップS23で算出される測定値Wt´=Wt×Rはゼロとなり、このゼロが、ステップS24において表示部15に表示される。
【0038】
一方、被測定物が台1に載置されている場合、ステップS21で取得される測定値Wsは、被測定物が載置されている台1が4個のロードセル11に支持されているときの合計荷重の測定値である。一方、台荷重データ143で示される測定値W0は、被測定物が載置されていない台1が4個のロードセル11に支持されているときの合計荷重の測定値である。よって、ステップS22で算出される測定値Wt=Ws−W0は、現在地の重力加速度下での被測定物の重量の測定値となる。すなわち、ステップS21及びS22は、被測定物の重量を測定する第2重量測定ステップに相当し、4個のロードセル11と荷重測定回路12とCPU13は、被測定物の重量を測定する第2測定部として機能する。
【0039】
続くステップS23では、この測定値Wtと比率Rとの乗算により、特定の重力加速度下での被測定物の重量の測定値Wt´が算出される。すなわち、ステップS23は、被測定物の重量の測定値を比率に基づいて補正する補正ステップに相当し、CPU13と記憶部14は、被測定物の重量の測定値を比率Rに基づいて補正する補正部として機能する。この補正では、CPU13は、測定値Wtと比率Rとを用いて補正後の測定値Wt´を算出する。この算出に用いる式は、Wt´=Wt×Rである。そして、ステップS24では、測定値Wt´が表示部15に表示される。
【0040】
以上説明したように、秤10によれば、ある地域において、被測定物が載置される台1の重量を測定し、この測定値Wに対する特定の重力加速度下での台1の重量W´の比率Rを算出し、この比率Rに基づいて、この地域で得られた、被測定物の重量の測定値Wtを補正することにより、特定の重力加速度下での被測定物の重量の測定値Wt´を算出することができる。つまり、秤10は、特定の重力加速度とは異なる重力加速度下であっても、特定の重力加速度下での被測定物の重量の測定値Wt´を推定して表示することができる。よって、秤10には、その測定値(推定値)に重力加速度の相違に起因した地域間のバラツキが生じないという利点がある。
【0041】
また、秤10によれば、任意の地域において台1の重量を測定することによって当該地域の重力加速度に応じた比率Rを算出することができるから、被測定物の重量の測定値Wtの補正に用いるデータを地域(重力加速度)ごとに記憶しておく必要がない。よって、秤10によれば、記憶部14に要求される記憶容量を抑制しつつ、任意の地域で十分に高い精度で、被測定物の重量の測定値Wtを補正することができる。
【0042】
また、秤10によれば、台1の重量を測定する第1測定部が、台1を掴んで秤10が持ち上げられているときの合計荷重の測定値Waと、被測定物が載置されていない台1が4個のロードセル11に支持されているときの合計荷重の測定値Wbとに基づいて、台1の重量の測定値W=Wb−Waを算出し、被測定物の重量を測定する第2測定部が、被測定物が載置されていない台1が4個のロードセル11に支持されているときの合計荷重の測定値W0と、被測定物が載置されている台1が4個のロードセル11に支持されているときの合計荷重の測定値Wsとに基づいて、被測定物の重量の測定値Wt=Ws−W0を算出するから、Wa=0でなくとも、台1の重量および被測定物の重量を正確に測定することができる。これは、被測定物の重量の測定値Wtの補正の精度の向上に寄与する。
【0043】
なお、本発明は、上述した実施形態のみならず、上述した実施形態に以下の変形を施して得られる各種の形態や、これらの形態の任意の組み合わせをも範囲に含みうる。
上述した実施形態では、測定値Wbから測定値Waを減算して台1の重量の測定値Wを算出しているが、測定値Waがゼロの場合には、測定値Wbを測定値Wとしてもよい。すなわち、W=Wb−Waではなく、W=Wbとしてもよい。この場合、測定値Waを取得する必要はなくなる。
【0044】
上述した実施形態では、第1測定部としてのCPU13が、操作スイッチ17の操作状態が第1操作状態(設定処理における操作回数が1回の状態)のときの荷重測定回路12の測定値を、台1を掴んで秤10が持ち上げられているときに4個のロードセル11から出力された信号に基づく測定値Waとし、操作スイッチ17の操作状態が第2操作状態(設定処理における操作回数が2回の状態)のときの荷重測定回路12の測定値を、被測定物が載置されていない台1が4個のロードセル11に支持されているときに各ロードセル11から出力された信号に基づく測定値Wbとしている。
これを変形し、設定処理における操作回数が1回のときの荷重測定回路12の測定値を、被測定物が載置されていない台1が4個のロードセル11に支持されているときに各ロードセル11から出力された信号に基づく測定値Wbとし、設定処理における操作回数が2回のときの荷重測定回路12の測定値を、台1を掴んで秤10が持ち上げられているときに4個のロードセル11から出力された信号に基づく測定値Waとするようにしてもよい。すなわち、図5のステップS13とステップS15とを入れ替えた形態としてもよい。この形態では、設定処理における操作回数が2回の状態が「第1操作状態」に相当し、設定処理における操作回数が1回の状態が「第2操作状態」に相当する。
また、例えば、図5のフローチャートにおいて、ステップS12及びS14を削除し、ステップS11を、「台を掴んで秤を持ち上げてください。」という文字列を表示部15に所定の時間だけ表示させるステップとし、ステップS13とS15との間に、「秤を床に置いてください。」という文字列を表示部15に所定の時間だけ表示させるステップを挿入してもよい。
すなわち、第1測定部としてのCPU13が、表示部15の表示状態が第1表示状態(「台を掴んで秤を持ち上げてください。」という文字列の表示の終了時)のときの荷重測定回路12の測定値を、台1を掴んで秤10が持ち上げられているときに4個のロードセル11から出力された信号に基づく測定値Waとし、表示部15の表示状態が第2表示状態(「秤を床に置いてください。」という文字列の表示の終了時)のときの荷重測定回路12の測定値を、被測定物が載置されていない台1が4個のロードセル11に支持されているときに各ロードセル11から出力された信号に基づく測定値Wbとするようにしてもよい。
この場合、設定処理において操作スイッチ17を操作する必要がなくなるから、秤10から操作スイッチ17を削除することができる。すなわち、秤10の構成を簡素することができる。これに対して、上述した実施形態では、設定処理における測定が操作スイッチ17の操作状態に基づいて進行するから、無駄な待ち時間を排除することができる。
なお、この形態についても、ステップS13とステップS15とを入れ替える変形が可能である。ただし、この形態では、ステップS11を、例えば、「秤を床に置いてください。」という文字列を表示部15に所定の時間だけ表示させるステップとし、ステップS13とS15との間に挿入するステップを、例えば、「台を掴んで秤を持ち上げてください。」という文字列を表示部15に所定の時間だけ表示させるステップとする。なお、この形態でも、「台を掴んで秤を持ち上げてください。」という文字列の表示の終了時が「第1表示状態」に相当し、「秤を床に置いてください。」という文字列の表示の終了時が「第2表示状態」に相当する。
【0045】
上述した実施形態では、台1の重量の測定値Wと特定の重力加速度下での台1の重量W´との比率Rとして、台1の重量の測定値Wに対する特定の重力加速度下での台1の重量W´の比率を採用したが、特定の重力加速度下での台1の重量W´に対する台1の重量の測定値Wの比率を採用してもよい。この場合、R=W/W´であるから、補正後の測定値Wt´を算出する式は、Wt´=Wt/Rとなる。
【0046】
上述した実施形態では、4個のロードセル11で台1を支持する構成としたが、3個以下のロードセル11で台1を支持する構成としてもよいし、5個以上のロードセル11で台1を支持する構成としてもよい。なお、1個のロードセル11で台1を支持する構成では、このロードセル11に加わる荷重が上記の合計荷重となる。また、ロードセル以外の荷重変換器を採用してもよい。
【符号の説明】
【0047】
1 台
2 脚
10 秤
11 ロードセル
12 荷重測定回路
13 CPU
14 記憶部
15 表示部
16 設定スイッチ
17 操作スイッチ
【特許請求の範囲】
【請求項1】
被測定物が載置される台と、
前記台の重量を測定する第1測定部と、
前記台の重量の測定値と特定の重力加速度下での前記台の重量との比率を算出する比率算出部と、
前記被測定物の重量を測定する第2測定部と、
前記被測定物の重量の測定値を前記比率に基づいて補正する補正部と
を備える秤。
【請求項2】
荷重を信号に変換して出力する荷重変換器と、
前記荷重変換器から出力された信号に基づいて前記荷重変換器に加わっている荷重を測定する荷重測定回路とを備え、
前記第1測定部は、前記荷重変換器に荷重が加わっていないときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値と、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とに基づいて、前記台の重量の測定値を算出し、
前記第2測定部は、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値と、前記台に前記被測定物が載置されており、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とに基づいて、前記被測定物の重量の測定値を算出する、
ことを特徴とする請求項1に記載の秤。
【請求項3】
使用者に操作される操作部を備え、
前記第1測定部は、前記操作部の操作状態が第1操作状態のときの前記荷重測定回路の測定値を、前記荷重変換器に荷重が加わっていないときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とし、前記操作部の操作状態が第2操作状態のときの前記荷重測定回路の測定値を、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とする、
ことを特徴とする請求項2に記載の秤。
【請求項4】
情報を表示する表示部を備え、
前記第1測定部は、前記表示部の表示状態が第1表示状態のときの前記荷重測定回路の測定値を、前記荷重変換器に荷重が加わっていないときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とし、前記操作部の表示状態が第2表示状態のときの前記荷重測定回路の測定値を、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とする、
ことを特徴とする請求項2に記載の秤。
【請求項5】
被測定物が載置される台の重量を測定する第1重量測定ステップと、
前記台の重量の測定値と特定の重力加速度下での前記台の重量との比率を算出する比率算出ステップと、
前記被測定物の重量を測定する第2重量測定ステップと、
前記被測定物の重量の測定値を前記比率に基づいて補正する補正ステップと
を有する秤の補正方法。
【請求項1】
被測定物が載置される台と、
前記台の重量を測定する第1測定部と、
前記台の重量の測定値と特定の重力加速度下での前記台の重量との比率を算出する比率算出部と、
前記被測定物の重量を測定する第2測定部と、
前記被測定物の重量の測定値を前記比率に基づいて補正する補正部と
を備える秤。
【請求項2】
荷重を信号に変換して出力する荷重変換器と、
前記荷重変換器から出力された信号に基づいて前記荷重変換器に加わっている荷重を測定する荷重測定回路とを備え、
前記第1測定部は、前記荷重変換器に荷重が加わっていないときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値と、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とに基づいて、前記台の重量の測定値を算出し、
前記第2測定部は、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値と、前記台に前記被測定物が載置されており、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とに基づいて、前記被測定物の重量の測定値を算出する、
ことを特徴とする請求項1に記載の秤。
【請求項3】
使用者に操作される操作部を備え、
前記第1測定部は、前記操作部の操作状態が第1操作状態のときの前記荷重測定回路の測定値を、前記荷重変換器に荷重が加わっていないときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とし、前記操作部の操作状態が第2操作状態のときの前記荷重測定回路の測定値を、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とする、
ことを特徴とする請求項2に記載の秤。
【請求項4】
情報を表示する表示部を備え、
前記第1測定部は、前記表示部の表示状態が第1表示状態のときの前記荷重測定回路の測定値を、前記荷重変換器に荷重が加わっていないときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とし、前記操作部の表示状態が第2表示状態のときの前記荷重測定回路の測定値を、前記台に前記被測定物が載置されておらず、前記荷重変換器に荷重が加わっているときに前記荷重変換器から出力された信号に基づく前記荷重測定回路の測定値とする、
ことを特徴とする請求項2に記載の秤。
【請求項5】
被測定物が載置される台の重量を測定する第1重量測定ステップと、
前記台の重量の測定値と特定の重力加速度下での前記台の重量との比率を算出する比率算出ステップと、
前記被測定物の重量を測定する第2重量測定ステップと、
前記被測定物の重量の測定値を前記比率に基づいて補正する補正ステップと
を有する秤の補正方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−252740(P2011−252740A)
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願番号】特願2010−125495(P2010−125495)
【出願日】平成22年6月1日(2010.6.1)
【出願人】(000133179)株式会社タニタ (303)
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願日】平成22年6月1日(2010.6.1)
【出願人】(000133179)株式会社タニタ (303)
[ Back to top ]