
移し替え制御装置
【課題】 採尿カップから試験管に所定量の内容物を正確に移し替える。
【解決手段】 所定の単位時間当たりの流量の内容物が他の容器に移し替えられるように、採尿カップHCをDR4方向に傾斜させる速度(回転速度)を制御する。さらに、センサ2bで所定量の液面を検知した時間およびセンサ2cで所定量の液面を検知した時間から、移し替えを終える反転時間を算出する。反転時間に採尿カップHCをDR5方向に反転させる。
【解決手段】 所定の単位時間当たりの流量の内容物が他の容器に移し替えられるように、採尿カップHCをDR4方向に傾斜させる速度(回転速度)を制御する。さらに、センサ2bで所定量の液面を検知した時間およびセンサ2cで所定量の液面を検知した時間から、移し替えを終える反転時間を算出する。反転時間に採尿カップHCをDR5方向に反転させる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、汎用カップに採取した内容物を、他の容器に正確に移し替えるための技術に関する。
【背景技術】
【0002】
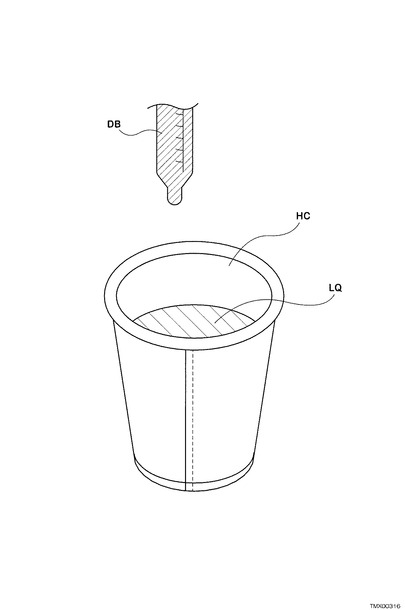
健康診断などで実施される尿検査の際には、図16に示すような採尿カップHCが用いられており、被験者自身がトイレで尿を採尿カップ2に採取するのに用いられる。採尿カップHCに採取された尿は、医師や看護師、検査技師などが手作業で検査用の試験管に移し替え、複数の検査が行われる。
【0003】
従来は、採尿カップHC内の尿LQを試験管などの他の容器に移し替える際に、分注用の器具DB(例えば、特許文献1の図6に示す分注・廃液ノズル115)を用いていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−142235号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の技術のように、採尿カップHC内に分注用の器具DB(図16)を入れると所定量の尿を移し替えることは可能であるが、尿LQが付着した器具を洗浄する必要が生じてしまう。一方で、分注用の器具DBを用いずに、正確な量を採尿カップHCから他の容器に移し替えることが困難であると考えられていた(患者により採取された尿LQの量がバラバラである等の理由から)。
【0006】
この発明は、内容物を入れた状態の採尿カップから、分注用の器具を使用することなく、他の容器に正確に内容物を移し替えることが可能な移し替え制御の実現を目的とする。
【課題を解決するための手段】
【0007】
(1)この発明の移し替え制御装置は、
内容物を入れた容器を傾斜させる傾斜手段を制御して、内容物を他の容器に移し替えるための移し替え制御装置であって、
他の容器に移し替えられた内容物の量が、少なくとも第1の所定量および第2の所定量であることを検知するセンサと、
単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記内容物を入れた容器が傾斜される速度を制御する傾斜速度制御手段と、
前記センサから第1の所定量および第2の所定量を検知したことを受けると、当該第1の所定量の検知を受けた時間および当該第2の所定量の検知を受けた時間に基づいて、設定量の内容物を移し替え終わる反転時間を算出する手段と、
前記反転時間に達すると、前記傾斜手段を反転させように制御する手段と、
を備えたこと、
を特徴とする。
【0008】
これにより、他の容器に移し替えられている内容物の量を、正確に把握してすることが可能となり、分注用の器具を使用せずに所定量の移し替え制御を行うことができる。
【0009】
(2)この発明の移し替え制御装置は、さらに、
前記容器が傾斜される角度に対応づけて、所定の単位時間当たりの流量に対応する回転速度を記憶した記憶部を備え、
前記傾斜速度制御手段は、前記記憶部を参照して、前記内容物を入れた容器が傾斜される速度を制御すること、
を特徴とする。
【0010】
これにより、各角度に対応する回転速度を記憶した記憶部を参照するだけで、単位時間当たりの流量が所定値になるように制御することができる。
【0011】
(3)この発明の移し替え制御装置は、
前記単位時間当たりの流量が、前記傾斜される角度について一定の値に設定されたこと、
を特徴とする。
【0012】
これにより、一定の単位時間当たりの流量に基づいて、移し替えを終える時間を正確に算出することができる。
【0013】
(4)この発明の移し替え制御装置は、さらに、
前記容器が傾斜される角度に対応づけて、内容物の残り容積を記憶した記憶部、
前記容器に入っている内容物の量が残り容積以下とならない最大の角度を初期傾斜角度として決定し、当該初期傾斜角度まで傾斜するように前記傾斜手段を制御する手段、
を備えたこと、
を特徴とする。
【0014】
これにより、液面が注ぎ口付近まで到達した初期傾斜角度から、内容物の移し替えを開始することができる。
【0015】
(8)この発明の移し替え制御装置は、
内容物を入れた容器を傾斜させる傾斜手段を制御して、内容物を他の容器に移し替えるための移し替え制御装置であって、
単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記容器が傾斜される速度を制御する手段と、
前記単位時間当たりの移し替え量から算出される反転時間に達すると、前記傾斜手段を反転させように制御する手段と、
を特徴とする。
【0016】
これにより、容器が傾斜される速度を、容器の形状に応じて、単位時間当たりの移し替え量が設定値になるように制御することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の内容物移し替え装置100の構成を示す図である。
【図2】内容物移し替え装置100(図1)のα矢視図である。
【図3】内容物移し替え装置100(図1)のβ矢視図である。
【図4】本発明の移し替え制御装置200のハードウェア構成を示す図である。
【図5】傾斜速度制御テーブル34のデータ例を示す図である。
【図6】内容物移し替え装置100の動作および制御処理を示すフローチャートである。
【図7】内容物移し替え装置100が動作した状態(図6のS02)を示す図である。
【図8】内容物移し替え装置100が動作した状態(図6のS04)を示す図である。
【図9】採尿カップHCの開口部を変形させた状態および注ぎ口成形用の型の詳細を示す図である。
【図10】内容物移し替え装置100が動作した状態(図6のS08)を示す図である。
【図11】移し替え装置100の動作および制御処理を示すフローチャートである。
【図12】移し替えを開始した後の経過時間tと、移し替えられた尿LQの容積(総分注量)Vとの関係を示すグラフである。
【図13】傾斜速度制御テーブル34を算出するために用いられるデータの具体例を示す図である。
【図14】単位時間当たりの流量Qを一定に保つ場合の、傾斜角度θと回転速度nとの関係を示す図である。
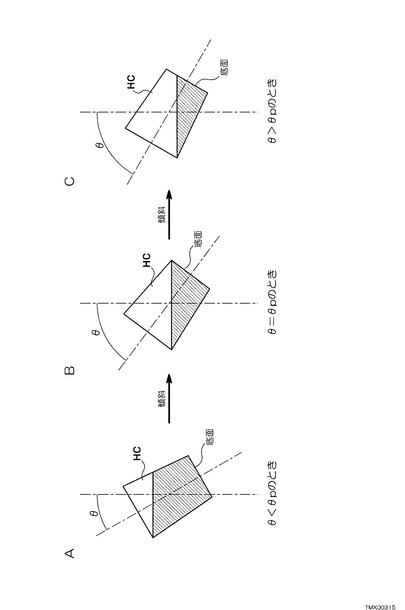
【図15】採尿カップHCを角度θだけ傾斜させたときの採尿カップHCの底面と、尿LQの液面との位置関係を示す図である。
【図16】一般的な採尿カップHCの外形図である。
【発明を実施するための形態】
【0018】
1.内容物移し替え装置100の構造
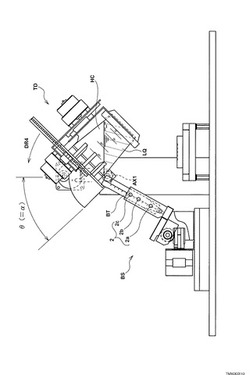
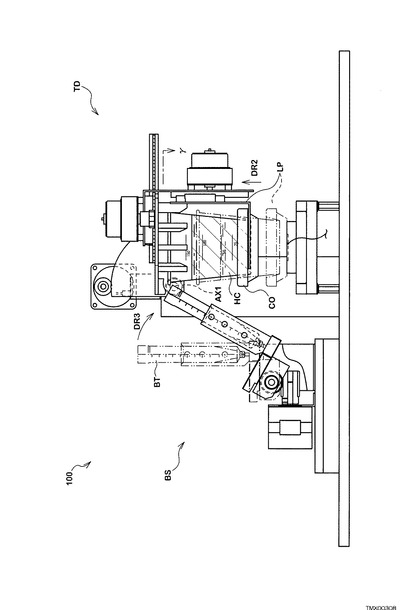
本発明の内容物移し替え装置100の構造を図1に示す。図1は、動作前の内容物移し替え装置100の状態を示す側面図である。なお、以下の実施形態では、容積200mLの採尿カップHCに尿LQが140mLが入っている状態から、他の容器である試験管BTに10mL(設定量)を移し替える場合を例として説明する。
【0019】
まず、図1に示す内容物移し替え装置100が備える採尿カップ傾斜装置TD、試験管受け台BSによって行われる一連の動作について、図1および図8、図10を用いて簡単に説明する。
【0020】
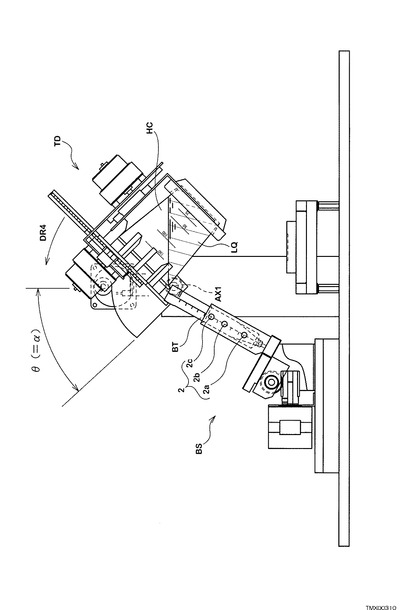
採尿カップ傾斜装置TDは、図1に示す状態から動作を開始し、リフトプレートLPを前方向DR1、上方向DR2に順に移動させて採尿カップHCを保持する(図8)。さらに、図10に示すように、尿LQの液面が採尿カップHCの縁に達する手前の所定角度(初期傾斜角度α)まで採尿カップHCを傾斜させる。一方、試験管受け台BSは、尿LQが移し替えやすいように、試験管BTを方向DR3に旋回させる(図8)。
【0021】
図10に示す状態から、採尿カップ傾斜装置TDは、採尿カップHCをさらに傾斜させる。これにより、尿が採尿カップHCから試験管BTに移し替えられる。このとき、予め設定された単位時間当たりの流量Qで移し替えられるように、採尿カップHCを傾斜させる速度(回転速度)が制御される(後述する)。
【0022】
つぎに、図1に示す内容物移し替え装置100の各部の構造について、具体的に説明する。
【0023】
図1に示す採尿カップHCには、予め患者などにより採取された尿LQが入れられている。採尿カップHCは、機械により自動的に、または人間がコースターCOの上に載置して配置される。また、コースターCOが載置されるコースター受け台CSには、尿LQの容積を算出するための重量センサ3が設けられている。コースター受け台CSは、載置面FDに対して固定されている。
【0024】
図1の採尿カップ傾斜装置TDは、コースターCOを介して採尿カップHCを持ち上げるためのリフトプレートLPと、リフトプレートLPを採尿カップHCに対して前後方向に移動させるモーター4aと、リフトプレートLPを上下方向に移動させるモーター4bと、モーター4aとモーター4bとを一体的に固定する固定プレートFPと、回転軸AX1を中心として回転するスイングプレートSPと、スイングプレートSPを回転させるためのモーター4dと、スイングプレートSPに一体的に固着されるレールプレートRPとを備える。
【0025】
図1に示すリフトプレートLPは、前方向DR1に移動した後、上方向DR2に移動したときに、コースターCOの縁を下から持ち上げることが可能な形状(例えば、コの字型)に成形される。
【0026】
図2は、図1に示す内容物移し替え装置100のα矢視図である。モーター4dは、図2に示すように、片側の筐体HSに取り付けられており、モーター4dの駆動軸はスイングプレートSPに噛み合っている。このため、モーター4dの駆動軸が回転すると、これと噛み合うスイングプレートSPが図1に示すDR4方向(反転のときは、DR5方向)に回転する構造となっている。
【0027】
図1の試験管受け台BSは、他の容器である試験管BTを採尿カップHCの開口部に近づけるための装置である。このため、試験管受け台BSは、図1に示すように、試験管BTを保持するためのスイング部SWと、回転軸AX2を介してスイング部SWに連結される固定部FXと、スイング部SWを所定角度まで旋回させるためのモーター4cとを備える(図1)。
【0028】
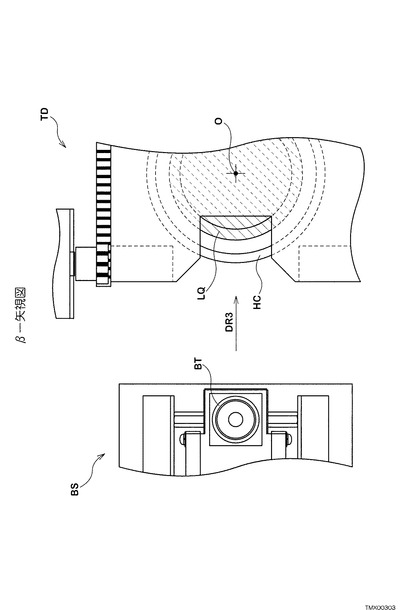
試験管受け台BSのモーター4c(図1)は、載置面FDに対して固定された固定部FXに取り付けられており、モーター4cの駆動軸が回転すると、これと噛み合うネジ機構を備えた回転軸AX2が回転し、回転軸AX2を中心として、スイング部SWが図1に示すDR3の方向に旋回される。図3は、図1に示す内容物移し替え装置100のβ矢視図である。図3に示すように、試験管BTは、採尿カップHCの中心Oに向かうDR3の方向に旋回する。
【0029】
図1に示すように、試験管受け台BSのスイング部SWには、試験管BTが差し込まれている。また、スイング部SWの側壁には、試験管BTの液面位置を検知するための3つの液面センサ(図1に示すトリガーセンサ2a、第1センサ2b、第2センサ2c)が所定位置に取り付けられている。例えば、トリガーセンサ2aは約0.2mL、第1センサ2bは3mL、第2センサ2cは8mLの液面レベルを検知する。
【0030】
なお、図1のトリガーセンサ2aは、試験管BTに尿が移し替えられ始めたことを検知するための液面センサである。このため、厳密に所定量であることを検知する必要はない。これに対し、図1の第1センサ2bおよび第2センサ2cは、移し替えを終える正確な時間を算出するために、それぞれ所定量の液面レベルを検知する必要がある。このため、第1センサ2bおよび第2センサ2cは、それぞれ所定量に対応する液面位置に向けて正確に取り付けられる。
【0031】
なお、図1に示すように、第1センサ2bおよび第2センサ2cは試験管BTの中央位置Cでの液面を測定している。このため、試験管BTが傾斜しても、液面レベルの測定に問題は生じない。これは、試験管BTの形状が第1センサ2bおよび第2センサ2cが取り付けられた付近において円柱であるため、試験管BTが鉛直方向のときの水平面と、傾斜した状態での水平面と、試験管BTの側面とで形成される空間の体積が、中央位置Cを挟んだ両側で等しくなるからである。
【0032】
図1に示す内容物移し替え装置100の動作を制御する移し替え制御コンピュータ(移し替え制御装置)200のハードウェア構成について、図4を用いて説明する。
【0033】
図4に示すように移し替え制御コンピュータ200は、CPU20、RAM22、表示部24、フラッシュメモリ26、入力手段28、I/O30などを備えている。移し替え制御コンピュータ200には、I/O30を介して、液面センサ2(図1のセンサ2a〜2c)、重量センサ3(図1)、駆動部4(図1のモーター4a〜4d)が接続されている。
【0034】
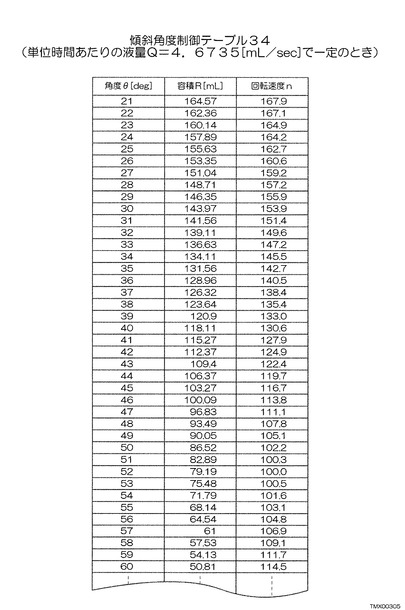
図4に示すように、移し替え制御コンピュータ200のフラッシュメモリ26には、移し替え制御プログラム32と傾斜速度制御テーブル34が記憶されている。図5に、傾斜速度制御テーブル34のデータ例を示す。なお、図5に示す傾斜速度制御テーブル34では、単位時間当たりの流量Qを4.6375[mL/sec]に設定し、各値を算出している。
【0035】
傾斜速度制御テーブル34には、少なくとも採尿カップHCを傾斜する角度θに対応づけられた回転速度nが記憶されている。また、図5に示す傾斜速度制御テーブル34には、さらに、傾斜する角度θに対応づけられた採尿カップHCの残り容積Rが記憶されており、初期傾斜角度αを決定するために用いられる。
【0036】
移し替え制御プログラム32(図4)は、図5に示す傾斜速度制御テーブル34を参照して、予め設定された単位時間当たりの流量Qの尿LQを試験管BTに移し替えるように、モーター4c(図1)の回転速度nを制御する。具体的には、モーター4c(図1)の回転速度nは、所定角度だけ軸を回転させるために必要なパルス数と、所定角度だけ軸を回転させるのに要する所要時間との関係に基づいて制御される。なお、図5に示す回転速度nの算出方法については、後で説明する。
【0037】
図5に示す残り容積Rは、採尿カップHCを所定角度θだけ傾けたときの最大容積、すなわち、採尿カップHCにどれだけの量(容積)が残っているかを示す値である。例えば、容積Rの値は、採尿カップHCの形状と、各傾斜角度θにおける液面位置とで仕切られる容積を3次元CAD等を用いて算出することで得られる。
【0038】
なお、図5に示す傾斜速度制御テーブル34を参照すると、10mLの設定量を移し替えるのに必要な傾斜角度(すなわち、移し替えを開始した角度と、移し替えを終えた角度との差)は、最初に採尿カップHCに144mL入っているときは約4°(30°〜34°)であるのに対し、最初に103mL入っているときは約3°(45°〜48°)であり、最初に採尿カップHCに入っている尿LQの量によって異なることが分かる。
【0039】
2.内容物移し替え装置100の動作
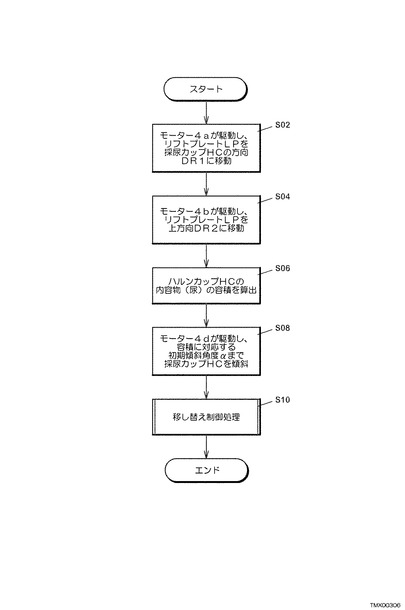
図6のフローチャートなどを用いて、内容物移し替え装置100(図1)の動作および制御処理について説明する。
【0040】
まず、移し替え制御プログラム32(図4)による制御を受けて、図1のモーター4aが駆動し、図7に示すように、リフトプレートLPを採尿カップの方向DR1に移動させる(図6のステップS02)。
【0041】
さらに、モーター4bが駆動し、リフトプレートLPを上方向DR2に移動させる(図6のステップS04)。これにより、図8に示すように、採尿カップHCが、コースターCOごと持ち上げられる。このとき、採尿カップHCの開口部が、図9Aに示す注ぎ口成形用の型MLに押し込まれて把持され、注ぎ口PSが設けられる。
【0042】
図9Aは、図8に示す内容物移し替え装置100のγ断面矢視図であり、図9Aでは、突起PJが取り付けられるレールプレートRPを点線で示している。図9Aに示すように、注ぎ口成形用の型MLは、注ぎ口PSに対応する位置を除いてC型に配置された、複数の突起PJを備えている。また、図9Bに示すように、各突起PJは、下方向に開いたテーパー状に成形されており、採尿カップHCがリフトプレートLPによって持ち上げられた際に、それぞれの突起PJが採尿カップHCの開口部を外側から押圧して注ぎ口PSが設けられる。
【0043】
また、図6のステップS04と同時に(またはステップS04の前後に)、モーター4cが駆動し、スイング部SWを所定角度まで旋回させる。これにより、図8に示すように、回転軸AX1の付近(つまり、採尿カップHCの注ぎ口PS付近)に、試験管BTの口が近づけられる。
【0044】
さらに、CPU20(図4)は、採尿カップHCの重量を重量センサ3から取得し、これに基づいて尿LQの容積を算出する(図6のステップS06)。例えば、重量センサ3から取得した重量の値から、採尿カップHCおよびコースターCOの重さを差し引いて、比重から演算すればよい。
【0045】
さらに、移し替え制御プログラム32による制御を受けて、モーター4dが駆動して、スイングプレートSPを回転させ、所定の初期傾斜角度αまで、採尿カップHCを傾斜させる(図6のステップS08)。初期傾斜角度αに致るまでの回転速度は、特に限定されないが、液垂れが生じない程度で、できるだけ速やかに行うのがよい。
【0046】
所定の初期傾斜角度αは、ステップS08で算出した尿LQの容積に基づいて、図5に示す傾斜速度制御テーブル34を参照することで得られる。具体的には、ステップS08で算出した容積が、残り容積R以下とならない最大の角度θを初期傾斜角度αとして決定する。例えば、図6のステップS06で得られた尿LQの容積が140mLであった場合には、図5の傾斜速度制御テーブル34から、容積Rが140mL以下とならない最大の角度である31°を初期傾斜角度αとする。
【0047】
以上の処理により、図10に示す状態、すなわち、尿LQの液面が採尿カップHCの注ぎ口PS付近に達し、内容物の移し替えが可能な状態になる。その後、移し替え制御処理(図6のステップS10)が以下のように行われる。
【0048】
3.移し替え制御処理(ステップS10)の詳細
移し替え制御プログラム32による移し替え制御処理(図6のステップS10)の詳細について、図11のフローチャート、図12のグラフなどを用いて以下に説明する。図12は、移し替え開始からの経過時間tと、既に移し替えられた内容物の容積(総分注量)Vとの関係を示すグラフである。
【0049】
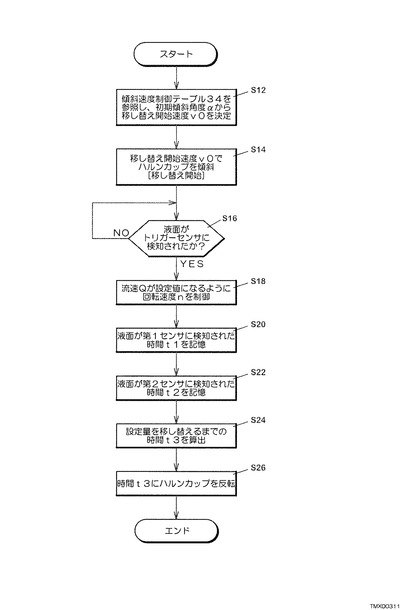
図6のステップS08において、所定の初期傾斜角度αまで、採尿カップHCを傾斜させた後、CPU20(図4)は、傾斜速度制御テーブル34を参照して、初期傾斜角度αから移し替え開始速度n0を決定する(図11のステップS12)。具体的には、移し替え開始速度n0は、移し替えの開始時に液垂れの発生を防止するため、初期傾斜角度αに対応する回転速度nを所定倍(例えば、2.5倍程度)した値とする。例えば、図5の傾斜速度制御テーブル34を参照すると、α=31°のとき、回転速度は151.4[pps]なので、その2.5倍の速さ378.5[pps]が、移し替え開始速度n0として決定される。
【0050】
CPU20(図4)は、ステップS12で決定した移し替え開始速度n0で、回転軸AX1を中心として採尿カップHCを傾斜させ(図11のステップS14)、さらに、液面がトリガーセンサ2aに検知されたか否かを検知する(図11のステップS16)。図12のグラフに示すように、容積V0の液面がトリガーセンサ2aに検知される時間t0まで、総分注量Vは、移し替え開始速度n0に対応する傾きで直線的に増加する。なお、単位時間当たりの流量Qの変化は、図12のグラフにおいて傾きで表される。
【0051】
液面がトリガーセンサ2aに検知されると(図11のステップS16のYes)、CPU20(図4)は、傾斜速度制御テーブル34を参照して、移し替えられる尿LQの単位時間当たりの流量Qが設定値になるように、モーター4dの回転速度nを制御する(図11のステップS18)。すなわち、液面がトリガーセンサ2aに検知された後は、図5に示す傾斜角度制御テーブル34の回転速度nと同じになるようにモーター4dの回転速度が制御される。
【0052】
すなわち、時間t0からt1までは、図12のグラフに示すように、設定された単位時間当たりの流量に対応する傾きに近づくように制御される。このとき、時間t0からt1までのグラフの傾きは、時間t0までの傾きより小さくなる(単位時間当たりの流量Qが1/2.5倍に減少したため)。なお、図12のグラフから、時間t0を過ぎてから、単位時間当たりの流量Qが一定になるには少し時間がかかっているが、これは慣性力による影響がしばらく残っているためである。
【0053】
その後、CPU20(図4)は、液面が第1センサ2bに検知された時間t1を記憶し(図11のステップS20)、さらに、液面が第2センサ2cに検知された時間t2をRAM22に記憶する(図11のステップS22)。すなわち、図12のグラフに示す、容積V1のときの時間t1、および容積V2のときの時間t2が記憶される。
【0054】
さらに、CPU20(図4)は、ステップS20およびステップS22でRAM22に記憶したデータに基づいて、設定量V3を移し替え終わるまでの時間t3を、以下のように算出する(図11のステップS24)。
【0055】
図12のグラフでは、時間t1からt2までの間に、容積がV1からV2に増加している。このため、単位時間当たりの容積増加率ΔVは、(V2−V1)/(t2−t1)となる(y=ax+bの傾きaに相当)。また、y=ax+bに、x=t1のとき、y=V1を条件として代入すると、b=V1−t1(V2−V1)/(t2−t1)である。そうすると、例えば、(t1,V1)=(0.5,2.8)、(t2,V2)=(1.8,8)であったとき、a=4となり、b=0.8となる。
【0056】
これより、時間t3を算出するための式y=4x+0.8が得られる。よって、採尿カップHCから、試験管BTに設定量V3(10mL)だけ分注するときの時間t3は、t3=2.3[s]となる。つまり、移し替えを開始してから2.3秒後に採尿カップHCを反転させればよいことになる。なお、時間t1からは1.8秒後、時間t2からは0.5秒後に相当する。
【0057】
最後に、CPU20(図4)は、算出した上記時間t3に達したときに、採尿カップを素早く図1のDR5方向に反転させるように、モーター4dを制御する(図11のステップS26)。なお、採尿カップHCの回転はできるだけ速やかに行うべきであり、例えば、図11のステップS12で決定した移し替え開始速度n0で、逆方向に反転させればよい。
【0058】
以上の処理により、予め設定した単位時間当たりの流量Qに基づいて、所定量の尿LQを正確に移し替えることができる。
【0059】
4.傾斜速度制御テーブル34のデータについて
図5に示す傾斜速度制御テーブル34の各データを算出する方法について、図13を用いて以下に説明する。図13は、図5に示す傾斜速度制御テーブル34において、パルス数N、単位時間当たりの流量Q、容積差ΔR、所要時間Δtのデータ項目を追加したものである。
【0060】
各角度θについて、単位時間当たりの流量Q(例えば、4.6375[mL/sec])を設定すると、以下のように、各角度θに対応する回転速度nを算出することができる。
【0061】
まず、図13に示す採尿カップHC内の残り容積Rの差、容積差ΔRをおよび単位時間当たりの流量Qを、(式)Δt=ΔR/Q(設定値)に代入して、各角度θについての所要時間Δtが得られる。さらに、回転速度nは、n=80/Δtで得られる。ここで、80は、採尿カップHCを1度だけ傾斜させるのに必要なパルス数である。
【0062】
なお、図5の傾斜角度制御テーブル34のように、少なくとも傾斜角度θと回転速度nを対応づけたテーブルさえ記憶しておけば、上記のような計算をその都度行う必要は無い。
【0063】
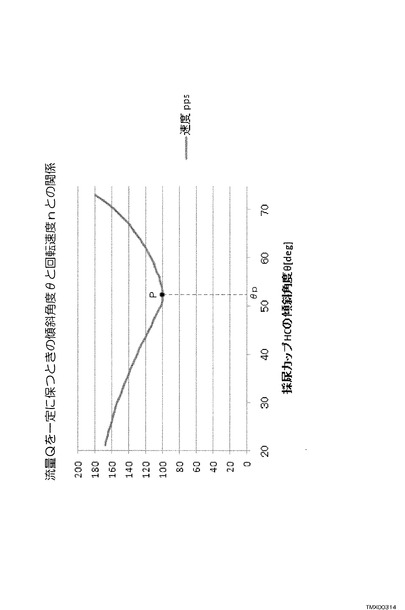
図14は、単位時間当たりの流量Qを一定に保つときの、採尿カップHCの傾斜角度θとその角度θにおける回転速度nとの関係を示すグラフである。図14に示すグラフには、回転速度nが最小になるピーク角度θp(図14に点Pで示す)が存在する。これは、図13のデータにおいて、θ=52°のときに回転速度nが最小となるピーク角度θpが存在することに対応する。
【0064】
すなわち、採尿カップHCの傾斜を開始してから、採尿カップHCの底に達するまでの間(図15Aの状態)は、容積差ΔR(図13)は徐々に大きくなるので、図14に示すように回転速度nは減少する(単位時間当たりの流量Qを一定に保つため)。さらに、採尿カップHCの底に初めて達すると(図15Bの状態)、ピーク角度θp(図13に示すθ=52°)で、容積差ΔRが最大となり、回転速度nが最小になる。その後、さらに、採尿カップHCを傾斜させると、容積差ΔR(図13)は徐々に小さくなるので、図14に示すように回転速度nは増加する(単位時間当たりの流量Qを一定に保つため)。
【0065】
また、図14のグラフおける回転速度nの減少率は、液面が採尿カップHCの底(図15Bの状態)に近づくほど大きくなる。これは、採尿カップHCの液面が底面に近づくほど、容積差ΔR(図13)の増加率が大きくなるからためである。さらに、ピーク角度θp(図13に示すθ=52°)を超えると、図14のグラフに示す回転速度nの増加率は、徐々に大きくなる。これは、採尿カップHCの液面が底面を超えると(図15Cの状態)、容積差ΔR(図13)の減少率が徐々に小さくなるからである。
【0066】
5.その他の実施形態
なお、上記実施形態では、傾斜角度θに対応づけて回転速度nが記憶された傾斜角度制御テーブル34(図5)を用いて制御することとしたが、これに限られず、容器の形状に対応した計算式から同様のデータを得て制御するようにしてもよい。
【0067】
なお、上記実施形態では、所定の単位時間当たりの流量Qを、傾斜角度制御テーブル34と同じ設定にして、傾斜角度(回転速度)を制御することとしたが、これに限られず、傾斜角度制御テーブル34の設定とは異なる流量になるように制御するようにしてもよい。例えば、図5に示す単位時間当たりの流量Qを、設定値4.6375 [mL/sec]として生成された傾斜角度制御テーブル34を用いて、設定値の2倍、すなわち9.275[mL/sec]の単位時間当たりの流量を得たいような場合は、傾斜角度制御テーブル34の各角度θに対応する回転速度nを2倍すればよい。
【0068】
なお、上記実施形態では、予め設定する単位時間当たりの流量Qを一定の値、すなわち、図12のグラフ(流量Qに対応する傾きaの部分)で示されるような線形の方程式から得られる値としたが、これに限られず、例えば、一定の割合で増加または減少する値(非線形の方程式から得られる値)に、各角度θにおける単位時間当たりの流量Qを設定してもよい。
【0069】
また、上記実施形態では、単位時間当たりの流量Qを一定の値に設定して回転速度nを変化させたが、回転速度nを一定の値に設定して単位時間当たりの流量Qを変化させてもよい。このとき、移し替えを開始してからの総流量(時間的に変化する流量を加算したもの)が設定量となったときに、採尿カップHCを反転させればよい。
【0070】
なお、上記実施形態では、移し替え開始速度n0を、移し替えの開始時に液垂れの発生を防止するため、初期傾斜角度αに対応する回転速度nを所定倍(例えば、2.5倍程度)した値としたが(図11のステップS12)、これに限られず、例えば、移し替え開始速度n0を、初期傾斜角度αに対応する回転速度nと同じにしてもよい。このとき、単位時間当たりの流量Qは、移し替え開始から一定となるため、センサ2を設けなくても(図1)、t3=V3/Qの関係より、単位時間当たりの流量Qと、移し替える設定量V3から、移し替えを終わる時間t3を簡単に算出することができる。
【0071】
なお、上記実施形態では、採尿カップHCを傾斜させるための回転軸AX1(図1)を採尿カップHCの注ぎ口付近に設けたが、これに限られず、例えば、採尿カップHCの重心位置に回転軸AX1(図1)を設けて、液面の揺れを低減させてもよい。
【0072】
なお、上記実施形態では、試験管BTを傾斜させることとしたが(図8)、これに限られず、試験管BTを傾斜させないようにしてもよい。
【0073】
なお、上記実施形態では、尿LQの粘性や表面張力を考慮しないデータ(図5の傾斜角度制御テーブル34)を用いて制御したが、これに限られず、尿LQの粘性や表面張力を考慮して補正したデータを用いて制御してもよい。
【0074】
なお、上記実施形態では、注ぎ口PSを設ける際に、容器を安定に保持するとともに、液の幅を狭めて液垂れを防止するという目的から、採尿カップHCの開口部を少し変形させているが(図9A)、これに限られず、採尿カップHCの開口部を全く変形させないようにしてもよい。
【0075】
なお、上記実施形態では、底が平面の採尿カップHCを用いることとしたが、これに限られず、底が平面でない容器(例えば、底が曲面の容器)を用いることもできる。
【0076】
なお、上記実施形態では、内容物として尿(液体)を移し替えることとしたが、これに限られず、他の液体または粉状(粒状)の固体を移し替えるようにしてもよい。
【技術分野】
【0001】
この発明は、汎用カップに採取した内容物を、他の容器に正確に移し替えるための技術に関する。
【背景技術】
【0002】
健康診断などで実施される尿検査の際には、図16に示すような採尿カップHCが用いられており、被験者自身がトイレで尿を採尿カップ2に採取するのに用いられる。採尿カップHCに採取された尿は、医師や看護師、検査技師などが手作業で検査用の試験管に移し替え、複数の検査が行われる。
【0003】
従来は、採尿カップHC内の尿LQを試験管などの他の容器に移し替える際に、分注用の器具DB(例えば、特許文献1の図6に示す分注・廃液ノズル115)を用いていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−142235号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の技術のように、採尿カップHC内に分注用の器具DB(図16)を入れると所定量の尿を移し替えることは可能であるが、尿LQが付着した器具を洗浄する必要が生じてしまう。一方で、分注用の器具DBを用いずに、正確な量を採尿カップHCから他の容器に移し替えることが困難であると考えられていた(患者により採取された尿LQの量がバラバラである等の理由から)。
【0006】
この発明は、内容物を入れた状態の採尿カップから、分注用の器具を使用することなく、他の容器に正確に内容物を移し替えることが可能な移し替え制御の実現を目的とする。
【課題を解決するための手段】
【0007】
(1)この発明の移し替え制御装置は、
内容物を入れた容器を傾斜させる傾斜手段を制御して、内容物を他の容器に移し替えるための移し替え制御装置であって、
他の容器に移し替えられた内容物の量が、少なくとも第1の所定量および第2の所定量であることを検知するセンサと、
単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記内容物を入れた容器が傾斜される速度を制御する傾斜速度制御手段と、
前記センサから第1の所定量および第2の所定量を検知したことを受けると、当該第1の所定量の検知を受けた時間および当該第2の所定量の検知を受けた時間に基づいて、設定量の内容物を移し替え終わる反転時間を算出する手段と、
前記反転時間に達すると、前記傾斜手段を反転させように制御する手段と、
を備えたこと、
を特徴とする。
【0008】
これにより、他の容器に移し替えられている内容物の量を、正確に把握してすることが可能となり、分注用の器具を使用せずに所定量の移し替え制御を行うことができる。
【0009】
(2)この発明の移し替え制御装置は、さらに、
前記容器が傾斜される角度に対応づけて、所定の単位時間当たりの流量に対応する回転速度を記憶した記憶部を備え、
前記傾斜速度制御手段は、前記記憶部を参照して、前記内容物を入れた容器が傾斜される速度を制御すること、
を特徴とする。
【0010】
これにより、各角度に対応する回転速度を記憶した記憶部を参照するだけで、単位時間当たりの流量が所定値になるように制御することができる。
【0011】
(3)この発明の移し替え制御装置は、
前記単位時間当たりの流量が、前記傾斜される角度について一定の値に設定されたこと、
を特徴とする。
【0012】
これにより、一定の単位時間当たりの流量に基づいて、移し替えを終える時間を正確に算出することができる。
【0013】
(4)この発明の移し替え制御装置は、さらに、
前記容器が傾斜される角度に対応づけて、内容物の残り容積を記憶した記憶部、
前記容器に入っている内容物の量が残り容積以下とならない最大の角度を初期傾斜角度として決定し、当該初期傾斜角度まで傾斜するように前記傾斜手段を制御する手段、
を備えたこと、
を特徴とする。
【0014】
これにより、液面が注ぎ口付近まで到達した初期傾斜角度から、内容物の移し替えを開始することができる。
【0015】
(8)この発明の移し替え制御装置は、
内容物を入れた容器を傾斜させる傾斜手段を制御して、内容物を他の容器に移し替えるための移し替え制御装置であって、
単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記容器が傾斜される速度を制御する手段と、
前記単位時間当たりの移し替え量から算出される反転時間に達すると、前記傾斜手段を反転させように制御する手段と、
を特徴とする。
【0016】
これにより、容器が傾斜される速度を、容器の形状に応じて、単位時間当たりの移し替え量が設定値になるように制御することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の内容物移し替え装置100の構成を示す図である。
【図2】内容物移し替え装置100(図1)のα矢視図である。
【図3】内容物移し替え装置100(図1)のβ矢視図である。
【図4】本発明の移し替え制御装置200のハードウェア構成を示す図である。
【図5】傾斜速度制御テーブル34のデータ例を示す図である。
【図6】内容物移し替え装置100の動作および制御処理を示すフローチャートである。
【図7】内容物移し替え装置100が動作した状態(図6のS02)を示す図である。
【図8】内容物移し替え装置100が動作した状態(図6のS04)を示す図である。
【図9】採尿カップHCの開口部を変形させた状態および注ぎ口成形用の型の詳細を示す図である。
【図10】内容物移し替え装置100が動作した状態(図6のS08)を示す図である。
【図11】移し替え装置100の動作および制御処理を示すフローチャートである。
【図12】移し替えを開始した後の経過時間tと、移し替えられた尿LQの容積(総分注量)Vとの関係を示すグラフである。
【図13】傾斜速度制御テーブル34を算出するために用いられるデータの具体例を示す図である。
【図14】単位時間当たりの流量Qを一定に保つ場合の、傾斜角度θと回転速度nとの関係を示す図である。
【図15】採尿カップHCを角度θだけ傾斜させたときの採尿カップHCの底面と、尿LQの液面との位置関係を示す図である。
【図16】一般的な採尿カップHCの外形図である。
【発明を実施するための形態】
【0018】
1.内容物移し替え装置100の構造
本発明の内容物移し替え装置100の構造を図1に示す。図1は、動作前の内容物移し替え装置100の状態を示す側面図である。なお、以下の実施形態では、容積200mLの採尿カップHCに尿LQが140mLが入っている状態から、他の容器である試験管BTに10mL(設定量)を移し替える場合を例として説明する。
【0019】
まず、図1に示す内容物移し替え装置100が備える採尿カップ傾斜装置TD、試験管受け台BSによって行われる一連の動作について、図1および図8、図10を用いて簡単に説明する。
【0020】
採尿カップ傾斜装置TDは、図1に示す状態から動作を開始し、リフトプレートLPを前方向DR1、上方向DR2に順に移動させて採尿カップHCを保持する(図8)。さらに、図10に示すように、尿LQの液面が採尿カップHCの縁に達する手前の所定角度(初期傾斜角度α)まで採尿カップHCを傾斜させる。一方、試験管受け台BSは、尿LQが移し替えやすいように、試験管BTを方向DR3に旋回させる(図8)。
【0021】
図10に示す状態から、採尿カップ傾斜装置TDは、採尿カップHCをさらに傾斜させる。これにより、尿が採尿カップHCから試験管BTに移し替えられる。このとき、予め設定された単位時間当たりの流量Qで移し替えられるように、採尿カップHCを傾斜させる速度(回転速度)が制御される(後述する)。
【0022】
つぎに、図1に示す内容物移し替え装置100の各部の構造について、具体的に説明する。
【0023】
図1に示す採尿カップHCには、予め患者などにより採取された尿LQが入れられている。採尿カップHCは、機械により自動的に、または人間がコースターCOの上に載置して配置される。また、コースターCOが載置されるコースター受け台CSには、尿LQの容積を算出するための重量センサ3が設けられている。コースター受け台CSは、載置面FDに対して固定されている。
【0024】
図1の採尿カップ傾斜装置TDは、コースターCOを介して採尿カップHCを持ち上げるためのリフトプレートLPと、リフトプレートLPを採尿カップHCに対して前後方向に移動させるモーター4aと、リフトプレートLPを上下方向に移動させるモーター4bと、モーター4aとモーター4bとを一体的に固定する固定プレートFPと、回転軸AX1を中心として回転するスイングプレートSPと、スイングプレートSPを回転させるためのモーター4dと、スイングプレートSPに一体的に固着されるレールプレートRPとを備える。
【0025】
図1に示すリフトプレートLPは、前方向DR1に移動した後、上方向DR2に移動したときに、コースターCOの縁を下から持ち上げることが可能な形状(例えば、コの字型)に成形される。
【0026】
図2は、図1に示す内容物移し替え装置100のα矢視図である。モーター4dは、図2に示すように、片側の筐体HSに取り付けられており、モーター4dの駆動軸はスイングプレートSPに噛み合っている。このため、モーター4dの駆動軸が回転すると、これと噛み合うスイングプレートSPが図1に示すDR4方向(反転のときは、DR5方向)に回転する構造となっている。
【0027】
図1の試験管受け台BSは、他の容器である試験管BTを採尿カップHCの開口部に近づけるための装置である。このため、試験管受け台BSは、図1に示すように、試験管BTを保持するためのスイング部SWと、回転軸AX2を介してスイング部SWに連結される固定部FXと、スイング部SWを所定角度まで旋回させるためのモーター4cとを備える(図1)。
【0028】
試験管受け台BSのモーター4c(図1)は、載置面FDに対して固定された固定部FXに取り付けられており、モーター4cの駆動軸が回転すると、これと噛み合うネジ機構を備えた回転軸AX2が回転し、回転軸AX2を中心として、スイング部SWが図1に示すDR3の方向に旋回される。図3は、図1に示す内容物移し替え装置100のβ矢視図である。図3に示すように、試験管BTは、採尿カップHCの中心Oに向かうDR3の方向に旋回する。
【0029】
図1に示すように、試験管受け台BSのスイング部SWには、試験管BTが差し込まれている。また、スイング部SWの側壁には、試験管BTの液面位置を検知するための3つの液面センサ(図1に示すトリガーセンサ2a、第1センサ2b、第2センサ2c)が所定位置に取り付けられている。例えば、トリガーセンサ2aは約0.2mL、第1センサ2bは3mL、第2センサ2cは8mLの液面レベルを検知する。
【0030】
なお、図1のトリガーセンサ2aは、試験管BTに尿が移し替えられ始めたことを検知するための液面センサである。このため、厳密に所定量であることを検知する必要はない。これに対し、図1の第1センサ2bおよび第2センサ2cは、移し替えを終える正確な時間を算出するために、それぞれ所定量の液面レベルを検知する必要がある。このため、第1センサ2bおよび第2センサ2cは、それぞれ所定量に対応する液面位置に向けて正確に取り付けられる。
【0031】
なお、図1に示すように、第1センサ2bおよび第2センサ2cは試験管BTの中央位置Cでの液面を測定している。このため、試験管BTが傾斜しても、液面レベルの測定に問題は生じない。これは、試験管BTの形状が第1センサ2bおよび第2センサ2cが取り付けられた付近において円柱であるため、試験管BTが鉛直方向のときの水平面と、傾斜した状態での水平面と、試験管BTの側面とで形成される空間の体積が、中央位置Cを挟んだ両側で等しくなるからである。
【0032】
図1に示す内容物移し替え装置100の動作を制御する移し替え制御コンピュータ(移し替え制御装置)200のハードウェア構成について、図4を用いて説明する。
【0033】
図4に示すように移し替え制御コンピュータ200は、CPU20、RAM22、表示部24、フラッシュメモリ26、入力手段28、I/O30などを備えている。移し替え制御コンピュータ200には、I/O30を介して、液面センサ2(図1のセンサ2a〜2c)、重量センサ3(図1)、駆動部4(図1のモーター4a〜4d)が接続されている。
【0034】
図4に示すように、移し替え制御コンピュータ200のフラッシュメモリ26には、移し替え制御プログラム32と傾斜速度制御テーブル34が記憶されている。図5に、傾斜速度制御テーブル34のデータ例を示す。なお、図5に示す傾斜速度制御テーブル34では、単位時間当たりの流量Qを4.6375[mL/sec]に設定し、各値を算出している。
【0035】
傾斜速度制御テーブル34には、少なくとも採尿カップHCを傾斜する角度θに対応づけられた回転速度nが記憶されている。また、図5に示す傾斜速度制御テーブル34には、さらに、傾斜する角度θに対応づけられた採尿カップHCの残り容積Rが記憶されており、初期傾斜角度αを決定するために用いられる。
【0036】
移し替え制御プログラム32(図4)は、図5に示す傾斜速度制御テーブル34を参照して、予め設定された単位時間当たりの流量Qの尿LQを試験管BTに移し替えるように、モーター4c(図1)の回転速度nを制御する。具体的には、モーター4c(図1)の回転速度nは、所定角度だけ軸を回転させるために必要なパルス数と、所定角度だけ軸を回転させるのに要する所要時間との関係に基づいて制御される。なお、図5に示す回転速度nの算出方法については、後で説明する。
【0037】
図5に示す残り容積Rは、採尿カップHCを所定角度θだけ傾けたときの最大容積、すなわち、採尿カップHCにどれだけの量(容積)が残っているかを示す値である。例えば、容積Rの値は、採尿カップHCの形状と、各傾斜角度θにおける液面位置とで仕切られる容積を3次元CAD等を用いて算出することで得られる。
【0038】
なお、図5に示す傾斜速度制御テーブル34を参照すると、10mLの設定量を移し替えるのに必要な傾斜角度(すなわち、移し替えを開始した角度と、移し替えを終えた角度との差)は、最初に採尿カップHCに144mL入っているときは約4°(30°〜34°)であるのに対し、最初に103mL入っているときは約3°(45°〜48°)であり、最初に採尿カップHCに入っている尿LQの量によって異なることが分かる。
【0039】
2.内容物移し替え装置100の動作
図6のフローチャートなどを用いて、内容物移し替え装置100(図1)の動作および制御処理について説明する。
【0040】
まず、移し替え制御プログラム32(図4)による制御を受けて、図1のモーター4aが駆動し、図7に示すように、リフトプレートLPを採尿カップの方向DR1に移動させる(図6のステップS02)。
【0041】
さらに、モーター4bが駆動し、リフトプレートLPを上方向DR2に移動させる(図6のステップS04)。これにより、図8に示すように、採尿カップHCが、コースターCOごと持ち上げられる。このとき、採尿カップHCの開口部が、図9Aに示す注ぎ口成形用の型MLに押し込まれて把持され、注ぎ口PSが設けられる。
【0042】
図9Aは、図8に示す内容物移し替え装置100のγ断面矢視図であり、図9Aでは、突起PJが取り付けられるレールプレートRPを点線で示している。図9Aに示すように、注ぎ口成形用の型MLは、注ぎ口PSに対応する位置を除いてC型に配置された、複数の突起PJを備えている。また、図9Bに示すように、各突起PJは、下方向に開いたテーパー状に成形されており、採尿カップHCがリフトプレートLPによって持ち上げられた際に、それぞれの突起PJが採尿カップHCの開口部を外側から押圧して注ぎ口PSが設けられる。
【0043】
また、図6のステップS04と同時に(またはステップS04の前後に)、モーター4cが駆動し、スイング部SWを所定角度まで旋回させる。これにより、図8に示すように、回転軸AX1の付近(つまり、採尿カップHCの注ぎ口PS付近)に、試験管BTの口が近づけられる。
【0044】
さらに、CPU20(図4)は、採尿カップHCの重量を重量センサ3から取得し、これに基づいて尿LQの容積を算出する(図6のステップS06)。例えば、重量センサ3から取得した重量の値から、採尿カップHCおよびコースターCOの重さを差し引いて、比重から演算すればよい。
【0045】
さらに、移し替え制御プログラム32による制御を受けて、モーター4dが駆動して、スイングプレートSPを回転させ、所定の初期傾斜角度αまで、採尿カップHCを傾斜させる(図6のステップS08)。初期傾斜角度αに致るまでの回転速度は、特に限定されないが、液垂れが生じない程度で、できるだけ速やかに行うのがよい。
【0046】
所定の初期傾斜角度αは、ステップS08で算出した尿LQの容積に基づいて、図5に示す傾斜速度制御テーブル34を参照することで得られる。具体的には、ステップS08で算出した容積が、残り容積R以下とならない最大の角度θを初期傾斜角度αとして決定する。例えば、図6のステップS06で得られた尿LQの容積が140mLであった場合には、図5の傾斜速度制御テーブル34から、容積Rが140mL以下とならない最大の角度である31°を初期傾斜角度αとする。
【0047】
以上の処理により、図10に示す状態、すなわち、尿LQの液面が採尿カップHCの注ぎ口PS付近に達し、内容物の移し替えが可能な状態になる。その後、移し替え制御処理(図6のステップS10)が以下のように行われる。
【0048】
3.移し替え制御処理(ステップS10)の詳細
移し替え制御プログラム32による移し替え制御処理(図6のステップS10)の詳細について、図11のフローチャート、図12のグラフなどを用いて以下に説明する。図12は、移し替え開始からの経過時間tと、既に移し替えられた内容物の容積(総分注量)Vとの関係を示すグラフである。
【0049】
図6のステップS08において、所定の初期傾斜角度αまで、採尿カップHCを傾斜させた後、CPU20(図4)は、傾斜速度制御テーブル34を参照して、初期傾斜角度αから移し替え開始速度n0を決定する(図11のステップS12)。具体的には、移し替え開始速度n0は、移し替えの開始時に液垂れの発生を防止するため、初期傾斜角度αに対応する回転速度nを所定倍(例えば、2.5倍程度)した値とする。例えば、図5の傾斜速度制御テーブル34を参照すると、α=31°のとき、回転速度は151.4[pps]なので、その2.5倍の速さ378.5[pps]が、移し替え開始速度n0として決定される。
【0050】
CPU20(図4)は、ステップS12で決定した移し替え開始速度n0で、回転軸AX1を中心として採尿カップHCを傾斜させ(図11のステップS14)、さらに、液面がトリガーセンサ2aに検知されたか否かを検知する(図11のステップS16)。図12のグラフに示すように、容積V0の液面がトリガーセンサ2aに検知される時間t0まで、総分注量Vは、移し替え開始速度n0に対応する傾きで直線的に増加する。なお、単位時間当たりの流量Qの変化は、図12のグラフにおいて傾きで表される。
【0051】
液面がトリガーセンサ2aに検知されると(図11のステップS16のYes)、CPU20(図4)は、傾斜速度制御テーブル34を参照して、移し替えられる尿LQの単位時間当たりの流量Qが設定値になるように、モーター4dの回転速度nを制御する(図11のステップS18)。すなわち、液面がトリガーセンサ2aに検知された後は、図5に示す傾斜角度制御テーブル34の回転速度nと同じになるようにモーター4dの回転速度が制御される。
【0052】
すなわち、時間t0からt1までは、図12のグラフに示すように、設定された単位時間当たりの流量に対応する傾きに近づくように制御される。このとき、時間t0からt1までのグラフの傾きは、時間t0までの傾きより小さくなる(単位時間当たりの流量Qが1/2.5倍に減少したため)。なお、図12のグラフから、時間t0を過ぎてから、単位時間当たりの流量Qが一定になるには少し時間がかかっているが、これは慣性力による影響がしばらく残っているためである。
【0053】
その後、CPU20(図4)は、液面が第1センサ2bに検知された時間t1を記憶し(図11のステップS20)、さらに、液面が第2センサ2cに検知された時間t2をRAM22に記憶する(図11のステップS22)。すなわち、図12のグラフに示す、容積V1のときの時間t1、および容積V2のときの時間t2が記憶される。
【0054】
さらに、CPU20(図4)は、ステップS20およびステップS22でRAM22に記憶したデータに基づいて、設定量V3を移し替え終わるまでの時間t3を、以下のように算出する(図11のステップS24)。
【0055】
図12のグラフでは、時間t1からt2までの間に、容積がV1からV2に増加している。このため、単位時間当たりの容積増加率ΔVは、(V2−V1)/(t2−t1)となる(y=ax+bの傾きaに相当)。また、y=ax+bに、x=t1のとき、y=V1を条件として代入すると、b=V1−t1(V2−V1)/(t2−t1)である。そうすると、例えば、(t1,V1)=(0.5,2.8)、(t2,V2)=(1.8,8)であったとき、a=4となり、b=0.8となる。
【0056】
これより、時間t3を算出するための式y=4x+0.8が得られる。よって、採尿カップHCから、試験管BTに設定量V3(10mL)だけ分注するときの時間t3は、t3=2.3[s]となる。つまり、移し替えを開始してから2.3秒後に採尿カップHCを反転させればよいことになる。なお、時間t1からは1.8秒後、時間t2からは0.5秒後に相当する。
【0057】
最後に、CPU20(図4)は、算出した上記時間t3に達したときに、採尿カップを素早く図1のDR5方向に反転させるように、モーター4dを制御する(図11のステップS26)。なお、採尿カップHCの回転はできるだけ速やかに行うべきであり、例えば、図11のステップS12で決定した移し替え開始速度n0で、逆方向に反転させればよい。
【0058】
以上の処理により、予め設定した単位時間当たりの流量Qに基づいて、所定量の尿LQを正確に移し替えることができる。
【0059】
4.傾斜速度制御テーブル34のデータについて
図5に示す傾斜速度制御テーブル34の各データを算出する方法について、図13を用いて以下に説明する。図13は、図5に示す傾斜速度制御テーブル34において、パルス数N、単位時間当たりの流量Q、容積差ΔR、所要時間Δtのデータ項目を追加したものである。
【0060】
各角度θについて、単位時間当たりの流量Q(例えば、4.6375[mL/sec])を設定すると、以下のように、各角度θに対応する回転速度nを算出することができる。
【0061】
まず、図13に示す採尿カップHC内の残り容積Rの差、容積差ΔRをおよび単位時間当たりの流量Qを、(式)Δt=ΔR/Q(設定値)に代入して、各角度θについての所要時間Δtが得られる。さらに、回転速度nは、n=80/Δtで得られる。ここで、80は、採尿カップHCを1度だけ傾斜させるのに必要なパルス数である。
【0062】
なお、図5の傾斜角度制御テーブル34のように、少なくとも傾斜角度θと回転速度nを対応づけたテーブルさえ記憶しておけば、上記のような計算をその都度行う必要は無い。
【0063】
図14は、単位時間当たりの流量Qを一定に保つときの、採尿カップHCの傾斜角度θとその角度θにおける回転速度nとの関係を示すグラフである。図14に示すグラフには、回転速度nが最小になるピーク角度θp(図14に点Pで示す)が存在する。これは、図13のデータにおいて、θ=52°のときに回転速度nが最小となるピーク角度θpが存在することに対応する。
【0064】
すなわち、採尿カップHCの傾斜を開始してから、採尿カップHCの底に達するまでの間(図15Aの状態)は、容積差ΔR(図13)は徐々に大きくなるので、図14に示すように回転速度nは減少する(単位時間当たりの流量Qを一定に保つため)。さらに、採尿カップHCの底に初めて達すると(図15Bの状態)、ピーク角度θp(図13に示すθ=52°)で、容積差ΔRが最大となり、回転速度nが最小になる。その後、さらに、採尿カップHCを傾斜させると、容積差ΔR(図13)は徐々に小さくなるので、図14に示すように回転速度nは増加する(単位時間当たりの流量Qを一定に保つため)。
【0065】
また、図14のグラフおける回転速度nの減少率は、液面が採尿カップHCの底(図15Bの状態)に近づくほど大きくなる。これは、採尿カップHCの液面が底面に近づくほど、容積差ΔR(図13)の増加率が大きくなるからためである。さらに、ピーク角度θp(図13に示すθ=52°)を超えると、図14のグラフに示す回転速度nの増加率は、徐々に大きくなる。これは、採尿カップHCの液面が底面を超えると(図15Cの状態)、容積差ΔR(図13)の減少率が徐々に小さくなるからである。
【0066】
5.その他の実施形態
なお、上記実施形態では、傾斜角度θに対応づけて回転速度nが記憶された傾斜角度制御テーブル34(図5)を用いて制御することとしたが、これに限られず、容器の形状に対応した計算式から同様のデータを得て制御するようにしてもよい。
【0067】
なお、上記実施形態では、所定の単位時間当たりの流量Qを、傾斜角度制御テーブル34と同じ設定にして、傾斜角度(回転速度)を制御することとしたが、これに限られず、傾斜角度制御テーブル34の設定とは異なる流量になるように制御するようにしてもよい。例えば、図5に示す単位時間当たりの流量Qを、設定値4.6375 [mL/sec]として生成された傾斜角度制御テーブル34を用いて、設定値の2倍、すなわち9.275[mL/sec]の単位時間当たりの流量を得たいような場合は、傾斜角度制御テーブル34の各角度θに対応する回転速度nを2倍すればよい。
【0068】
なお、上記実施形態では、予め設定する単位時間当たりの流量Qを一定の値、すなわち、図12のグラフ(流量Qに対応する傾きaの部分)で示されるような線形の方程式から得られる値としたが、これに限られず、例えば、一定の割合で増加または減少する値(非線形の方程式から得られる値)に、各角度θにおける単位時間当たりの流量Qを設定してもよい。
【0069】
また、上記実施形態では、単位時間当たりの流量Qを一定の値に設定して回転速度nを変化させたが、回転速度nを一定の値に設定して単位時間当たりの流量Qを変化させてもよい。このとき、移し替えを開始してからの総流量(時間的に変化する流量を加算したもの)が設定量となったときに、採尿カップHCを反転させればよい。
【0070】
なお、上記実施形態では、移し替え開始速度n0を、移し替えの開始時に液垂れの発生を防止するため、初期傾斜角度αに対応する回転速度nを所定倍(例えば、2.5倍程度)した値としたが(図11のステップS12)、これに限られず、例えば、移し替え開始速度n0を、初期傾斜角度αに対応する回転速度nと同じにしてもよい。このとき、単位時間当たりの流量Qは、移し替え開始から一定となるため、センサ2を設けなくても(図1)、t3=V3/Qの関係より、単位時間当たりの流量Qと、移し替える設定量V3から、移し替えを終わる時間t3を簡単に算出することができる。
【0071】
なお、上記実施形態では、採尿カップHCを傾斜させるための回転軸AX1(図1)を採尿カップHCの注ぎ口付近に設けたが、これに限られず、例えば、採尿カップHCの重心位置に回転軸AX1(図1)を設けて、液面の揺れを低減させてもよい。
【0072】
なお、上記実施形態では、試験管BTを傾斜させることとしたが(図8)、これに限られず、試験管BTを傾斜させないようにしてもよい。
【0073】
なお、上記実施形態では、尿LQの粘性や表面張力を考慮しないデータ(図5の傾斜角度制御テーブル34)を用いて制御したが、これに限られず、尿LQの粘性や表面張力を考慮して補正したデータを用いて制御してもよい。
【0074】
なお、上記実施形態では、注ぎ口PSを設ける際に、容器を安定に保持するとともに、液の幅を狭めて液垂れを防止するという目的から、採尿カップHCの開口部を少し変形させているが(図9A)、これに限られず、採尿カップHCの開口部を全く変形させないようにしてもよい。
【0075】
なお、上記実施形態では、底が平面の採尿カップHCを用いることとしたが、これに限られず、底が平面でない容器(例えば、底が曲面の容器)を用いることもできる。
【0076】
なお、上記実施形態では、内容物として尿(液体)を移し替えることとしたが、これに限られず、他の液体または粉状(粒状)の固体を移し替えるようにしてもよい。
【特許請求の範囲】
【請求項1】
内容物を入れた容器を傾斜させる傾斜手段を制御して、内容物を他の容器に移し替えるための移し替え制御装置であって、
他の容器に移し替えられた内容物の量が、少なくとも第1の所定量および第2の所定量であることを検知するセンサと、
単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記内容物を入れた容器が傾斜される速度を制御する傾斜速度制御手段と、
前記センサから第1の所定量および第2の所定量を検知したことを受けると、当該第1の所定量の検知を受けた時間および当該第2の所定量の検知を受けた時間に基づいて、設定量の内容物を移し替え終わる反転時間を算出する手段と、
前記反転時間に達すると、前記傾斜手段を反転させように制御する手段と、
を備えたこと、
を特徴とする移し替え制御装置。
【請求項2】
請求項1の移し替え制御装置において、さらに、
前記容器が傾斜される角度に対応づけて、所定の単位時間当たりの流量に対応する回転速度を記憶した記憶部を備え、
前記傾斜速度制御手段は、前記記憶部を参照して、前記内容物を入れた容器が傾斜される速度を制御すること、
を特徴とする移し替え制御装置。
【請求項3】
請求項1または請求項2の移し替え制御装置において、
前記単位時間当たりの流量が、前記傾斜される角度について一定の値に設定されたこと、
を特徴とする移し替え制御装置。
【請求項4】
請求項1〜3のいずれかの移し替え制御装置において、さらに、
前記容器が傾斜される角度に対応づけて、内容物の残り容積を記憶した記憶部、
前記容器に入っている内容物の量が残り容積以下とならない最大の角度を初期傾斜角度として決定し、当該初期傾斜角度まで傾斜するように前記傾斜手段を制御する手段、
を備えたこと、を特徴とする移し替え制御装置。
【請求項5】
内容物を入れた容器を傾斜させる傾斜手段を制御して、内容物を他の容器に移し替えるための移し替え制御プログラムであって、
コンピュータを、
他の容器に移し替えられた内容物の量が、少なくとも第1の所定量および第2の所定量であることを検知するセンサ、
単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記内容物を入れた容器が傾斜される速度を制御する傾斜速度制御手段、
前記センサから第1の所定量および第2の所定量を検知したことを受けると、当該第1の所定量の検知を受けた時間および当該第2の所定量の検知を受けた時間に基づいて、設定量の内容物を移し替え終わる反転時間を算出する手段、
前記反転時間に達すると、前記傾斜手段を反転させように制御する手段、
として機能させることを特徴とする移し替え制御プログラム。
【請求項6】
内容物を入れた容器を傾斜させる傾斜手段を制御して、内容物を他の容器に移し替えるための移し替え制御方法であって、
他の容器に移し替えられた内容物の量が、少なくとも第1の所定量および第2の所定量であることをセンサにより検知し、
単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記内容物を入れた容器が傾斜される速度を制御し、
前記センサから第1の所定量および第2の所定量を検知したことを受けると、当該第1の所定量の検知を受けた時間および当該第2の所定量の検知を受けた時間に基づいて、設定量の内容物を移し替え終わる反転時間を算出し、
前記反転時間に達すると、前記傾斜手段を反転させように制御する、
ことを特徴とする移し替え制御方法。
【請求項7】
内容物を入れた容器を傾斜させる傾斜手段と、
他の容器に移し替えられた内容物の量を測定するセンサと、
前記内容物を入れた容器が傾斜される速度を制御する制御部と、
を備えた、内容物を他の容器に移し替えるための内容物移し替え装置であって、
前記制御部は、単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記容器が傾斜される速度を制御し、前記センサから第1の所定量および第2の所定量を検知したことを受けると、当該第1の所定量の検知を受けた時間および当該第2の所定量の検知を受けた時間に基づいて、設定量の内容物を移し替え終わる反転時間を算出し、当該反転時間に達すると、前記傾斜手段を反転させること、
を特徴とする内容物移し替え装置。
【請求項8】
内容物を入れた容器を傾斜させる傾斜手段を制御して、内容物を他の容器に移し替えるための移し替え制御装置であって、
単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記容器が傾斜される速度を制御する手段と、
前記単位時間当たりの移し替え量から算出される反転時間に達すると、前記傾斜手段を反転させように制御する手段と、
を備えたこと、
を特徴とする移し替え制御装置。
【請求項1】
内容物を入れた容器を傾斜させる傾斜手段を制御して、内容物を他の容器に移し替えるための移し替え制御装置であって、
他の容器に移し替えられた内容物の量が、少なくとも第1の所定量および第2の所定量であることを検知するセンサと、
単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記内容物を入れた容器が傾斜される速度を制御する傾斜速度制御手段と、
前記センサから第1の所定量および第2の所定量を検知したことを受けると、当該第1の所定量の検知を受けた時間および当該第2の所定量の検知を受けた時間に基づいて、設定量の内容物を移し替え終わる反転時間を算出する手段と、
前記反転時間に達すると、前記傾斜手段を反転させように制御する手段と、
を備えたこと、
を特徴とする移し替え制御装置。
【請求項2】
請求項1の移し替え制御装置において、さらに、
前記容器が傾斜される角度に対応づけて、所定の単位時間当たりの流量に対応する回転速度を記憶した記憶部を備え、
前記傾斜速度制御手段は、前記記憶部を参照して、前記内容物を入れた容器が傾斜される速度を制御すること、
を特徴とする移し替え制御装置。
【請求項3】
請求項1または請求項2の移し替え制御装置において、
前記単位時間当たりの流量が、前記傾斜される角度について一定の値に設定されたこと、
を特徴とする移し替え制御装置。
【請求項4】
請求項1〜3のいずれかの移し替え制御装置において、さらに、
前記容器が傾斜される角度に対応づけて、内容物の残り容積を記憶した記憶部、
前記容器に入っている内容物の量が残り容積以下とならない最大の角度を初期傾斜角度として決定し、当該初期傾斜角度まで傾斜するように前記傾斜手段を制御する手段、
を備えたこと、を特徴とする移し替え制御装置。
【請求項5】
内容物を入れた容器を傾斜させる傾斜手段を制御して、内容物を他の容器に移し替えるための移し替え制御プログラムであって、
コンピュータを、
他の容器に移し替えられた内容物の量が、少なくとも第1の所定量および第2の所定量であることを検知するセンサ、
単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記内容物を入れた容器が傾斜される速度を制御する傾斜速度制御手段、
前記センサから第1の所定量および第2の所定量を検知したことを受けると、当該第1の所定量の検知を受けた時間および当該第2の所定量の検知を受けた時間に基づいて、設定量の内容物を移し替え終わる反転時間を算出する手段、
前記反転時間に達すると、前記傾斜手段を反転させように制御する手段、
として機能させることを特徴とする移し替え制御プログラム。
【請求項6】
内容物を入れた容器を傾斜させる傾斜手段を制御して、内容物を他の容器に移し替えるための移し替え制御方法であって、
他の容器に移し替えられた内容物の量が、少なくとも第1の所定量および第2の所定量であることをセンサにより検知し、
単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記内容物を入れた容器が傾斜される速度を制御し、
前記センサから第1の所定量および第2の所定量を検知したことを受けると、当該第1の所定量の検知を受けた時間および当該第2の所定量の検知を受けた時間に基づいて、設定量の内容物を移し替え終わる反転時間を算出し、
前記反転時間に達すると、前記傾斜手段を反転させように制御する、
ことを特徴とする移し替え制御方法。
【請求項7】
内容物を入れた容器を傾斜させる傾斜手段と、
他の容器に移し替えられた内容物の量を測定するセンサと、
前記内容物を入れた容器が傾斜される速度を制御する制御部と、
を備えた、内容物を他の容器に移し替えるための内容物移し替え装置であって、
前記制御部は、単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記容器が傾斜される速度を制御し、前記センサから第1の所定量および第2の所定量を検知したことを受けると、当該第1の所定量の検知を受けた時間および当該第2の所定量の検知を受けた時間に基づいて、設定量の内容物を移し替え終わる反転時間を算出し、当該反転時間に達すると、前記傾斜手段を反転させること、
を特徴とする内容物移し替え装置。
【請求項8】
内容物を入れた容器を傾斜させる傾斜手段を制御して、内容物を他の容器に移し替えるための移し替え制御装置であって、
単位時間当たりの移し替え量が設定値になるように、前記傾斜手段により前記容器が傾斜される速度を制御する手段と、
前記単位時間当たりの移し替え量から算出される反転時間に達すると、前記傾斜手段を反転させように制御する手段と、
を備えたこと、
を特徴とする移し替え制御装置。
【図1】



【図2】

【図3】
【図4】

【図5】
【図6】
【図7】

【図8】
【図9】

【図10】
【図11】
【図12】

【図13】

【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−107972(P2012−107972A)
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願番号】特願2010−256586(P2010−256586)
【出願日】平成22年11月17日(2010.11.17)
【出願人】(591029518)テラメックス株式会社 (11)
【Fターム(参考)】
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願日】平成22年11月17日(2010.11.17)
【出願人】(591029518)テラメックス株式会社 (11)
【Fターム(参考)】
[ Back to top ]