
移動体の位置検出方法
【課題】フォークリフトなどの移動体の位置及び向きを簡易に推定する方法を提供する。
【解決手段】複数の柱が平面視で格子状に配置された対象エリア内において、検出感度に指向性を有する複数のRFIDタグを、指向性の向きが該格子方向と一致するように複数の柱に配備する。また、フォークリフト5に、RFIDタグを検出するリーダ装置と、RFIDタグとリーダ装置の間で電波の送受信を行うアンテナとを配備する。さらに、検出されるRFIDタグの対象エリア内における配置とフォークリフト5の対象エリア内における推定位置との関係を示す位置推定パターンを備えておく。複数の柱に配備されたRFIDタグを、アンテナから送受信される電波を介して、リーダ装置で1つ以上検出し、検出されたRFIDタグの対象エリア内における配置に対応する位置推定パターンを判別することで、フォークリフト5の位置を推定する。
【解決手段】複数の柱が平面視で格子状に配置された対象エリア内において、検出感度に指向性を有する複数のRFIDタグを、指向性の向きが該格子方向と一致するように複数の柱に配備する。また、フォークリフト5に、RFIDタグを検出するリーダ装置と、RFIDタグとリーダ装置の間で電波の送受信を行うアンテナとを配備する。さらに、検出されるRFIDタグの対象エリア内における配置とフォークリフト5の対象エリア内における推定位置との関係を示す位置推定パターンを備えておく。複数の柱に配備されたRFIDタグを、アンテナから送受信される電波を介して、リーダ装置で1つ以上検出し、検出されたRFIDタグの対象エリア内における配置に対応する位置推定パターンを判別することで、フォークリフト5の位置を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、RFIDタグ等を用いた移動体の位置検出方法に関するものである。
【背景技術】
【0002】
現在、RFID(Radio Frequency IDentification)タグを用いた物流管理システムの導入が、様々な場所で検討されている。この物流管理システムでは、管理対象物の一つ一つにRFIDタグを取り付け、そのタグを物流現場の任意の位置で検知することによって管理対象物の位置を検出する。
RFIDタグは、ICチップ及びアンテナで構成される無線タグと、ICチップに書き込まれたIDを非接触で読み書き可能な無線タグリーダ・ライタとから構成される。近年、UHF帯無線を用いたRFIDタグの普及によって検知距離が数メートルにも及ぶようになり、作業者がリーダ装置を用いて手作業でIDタグの読み取りを行わずとも、リーダ装置の近傍をRFIDタグが取り付けられた管理対象物が通過するだけで、管理対象物を自動的に検知できるようになっている。このようなRFIDタグの用途が、ますます広がっている。
【0003】
上述の物流管理システムの一例として、管理対象物が工場ラインを流れるような物流管理システムの場合、工場ライン上の所定の位置にリーダ装置が設置される。このため、管理対象物に取り付けられたRFIDタグがリーダ装置で読み込まれると、当該リーダ装置の設置位置近傍に管理対象物が存在することがわかり、工場ライン上での進捗状況を検知することができる。
【0004】
また、フォークリフトやクレーンといった移動体で管理対象物を搬送するような物流管理システムの場合、管理対象物の位置を自動で管理するために、移動体に物流管理のリーダ装置を設置して、管理対象物に取り付けられたRFIDタグのID情報を読み取ると共に移動体の位置情報もあわせて得る。移動体の位置情報を得るためには、GPSを用いて位置情報を得る方法や、特許文献1に開示されるような床面に埋め込まれたRFIDタグを読み取る方法がある。
【0005】
特許文献1に記載の位置検出システムでは、固有のID情報が書き込まれたRFIDタグが、倉庫の通路に基準マークとして配置されている。また、このRFIDタグには、固有のID情報と共に、通路の延在方向である通路方位角が書き込まれている。本位置検出システムでは、移動体は、RFIDタグのID情報を読み取るためのリーダを有しており、読み取ったRFIDタグのID情報を基に、タグ位置の座標と通路方位角とをタグ情報記憶部から読み出して、RFIDタグが配置されたタグ位置を移動体の現在位置とし、RFIDタグが配置されたタグ位置における移動体の方位角を得ている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−9533号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
工場や倉庫などの屋内や高い建物に囲まれたようなエリア内では、GPSは有効に機能せず、上述のGPSを用いて位置情報を得る方法を採用することはできない。そこで、特許文献1に開示されるように、パッシブタグであるRFIDタグを床面に埋め込んで配置することが考えられる。
ところが、床面に埋め込まれたRFIDタグの信号は、コンクリート面の干渉を受けて大きく減衰するので、リーダ装置がRFIDタグを検知できる距離は、10cm〜20cm程度となる。RFIDタグが埋め込まれた位置に対する移動体の移動経路のずれ幅が上記タグの検知距離以下であれば、問題はないが、移動体の移動経路のずれ幅が大きい場合や、移動体が自由に移動する場合は、多数のRFIDタグを高い密度で埋め込む必要があり、特許文献1の技術を現実に実施するのは困難をともなう。
【0008】
この問題を解決するための手段として、上述のパッシブ型RFIDタグに換えて、電池式のアクティブタグと呼ばれる検知距離の長いタグを用いることが考えられる。しかし、このアクティブタグの単価は、数千円〜1万円と高価である。加えて、アクティブタグには電池交換の作業が必要となるため、多数のアクティブタグを床面に埋め込むことは、コスト面から見て、現実に実施するのは困難である。
【0009】
また、物流現場では、フォークリフト等で任意の位置に移動させた管理対象物の位置を特定することが要求される。通常、管理対象物の位置は、該管理対象物が降ろされたときのフォークリフトの位置で置き換えられることが多い。
ところが、管理対象物はフォークリフトの前方位置に降ろされるため、降ろされた管理対象物の位置を正確に特定するには、そのときのフォークリフトの位置だけではなく向きを表す情報も得て、フォークリフトの前方位置を知ることが要求される。このような要求に対して、特許文献1の方法では、任意の位置におけるフォークリフトの向きを表す情報は得られず、電子コンパスやジャイロセンサを合わせて用いるなどの、RFIDタグ以外のセンサを用いた工夫が必要となり、簡便な方法で管理対象物の位置を特定することができない。
【0010】
本願は、このような問題点に鑑みてなされたものであり、フォークリフトなどの移動体の位置及び向きを簡易に推定する方法を提供することを目的とする。
【課題を解決するための手段】
【0011】
上述の目的を達成するため、本発明においては以下の技術的手段を講じた。
本発明の移動体の位置検出方法は、複数の柱が平面視で格子状に配置された対象エリア内で移動する移動体の位置を検出するに際し、検出感度に指向性を有する複数のIDタグを、指向性の向きが該格子方向と一致するように前記複数の柱に配備しておき、前記移動体に、前記IDタグを検出するIDタグリーダと、前記IDタグと前記IDタグリーダの間で電波の送受信を行うアンテナとを配備しておき、さらに、検出されるIDタグの前記対象エリア内における配置と前記移動体の対象エリア内における推定位置との関係を示す位置推定パターンを備えておき、前記複数の柱に配備されたIDタグを、前記アンテナから送受信される電波を介して、前記IDタグリーダで1つ以上検出し、前記検出されたIDタグの前記対象エリア内における配置に対応する位置推定パターンを判別することで、前記移動体の位置を推定することを特徴とする。
【0012】
ここで、複数の前記位置推定パターンを位置テーブルとして備えてもよい。
また、前記移動体に配備されたアンテナは指向性を有するものであり、前記位置推定パターンは、前記アンテナの指向性に基づいた前記移動体の向きを示す情報を備えていてもよい。
また、前記移動体のIDタグリーダでIDタグを1つ以上検出した後に、検出された複数のIDタグの検出信号強度又は応答回数の大小に基づいて、所定個数を上限としてIDタグを選出し、該選出されたIDタグの前記対象エリア内における配置に基づいて位置推定パターンを判別することで前記移動体の位置を推定してもよい。
【0013】
さらに、前記移動体は、指向性を有するアンテナを複数備えるものであって、前記複数のアンテナ毎に、検出したIDタグに基づいて移動体の位置及び向きを表す情報を得、前記移動体の位置及び向きを表す複数の情報を用いて、前記移動体の位置を推定してもよい。
【発明の効果】
【0014】
本発明に係る移動体の位置検出方法によれば、フォークリフトなどの移動体の位置及び向きを簡易に推定することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1実施形態による移動体の位置検出方法の実施態様を示す概略図であである。
【図2】図1に一部を示した倉庫を天井側からみたときの、柱、RFIDタグ、及びフォークリフトの配置を示す概略図である。
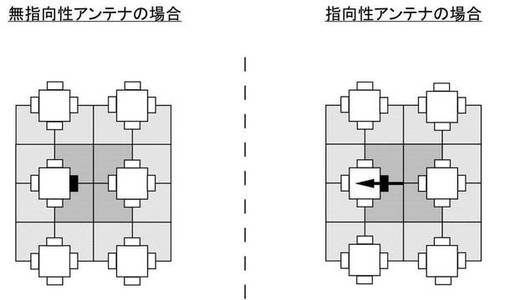
【図3】1つの柱の側面に配置された1つのRFIDタグが検出された場合の位置推定パターンを示す図である。
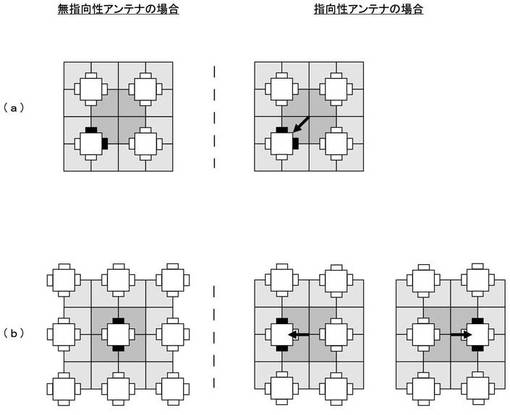
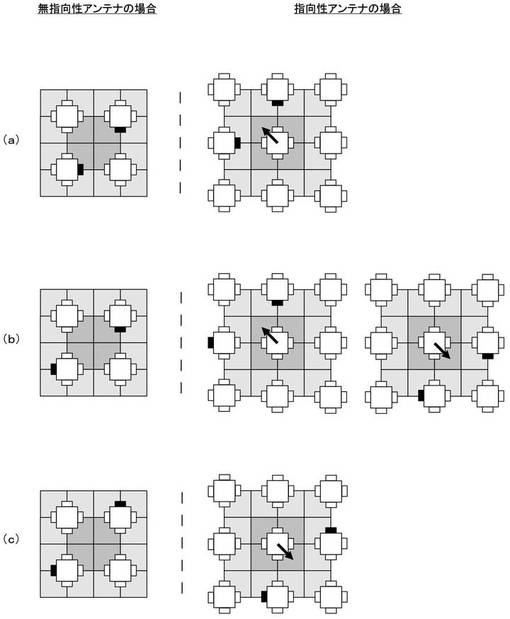
【図4】(a)は、1つの柱の隣り合う側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図であり、(b)は、1つの柱の互いに反対を向く側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
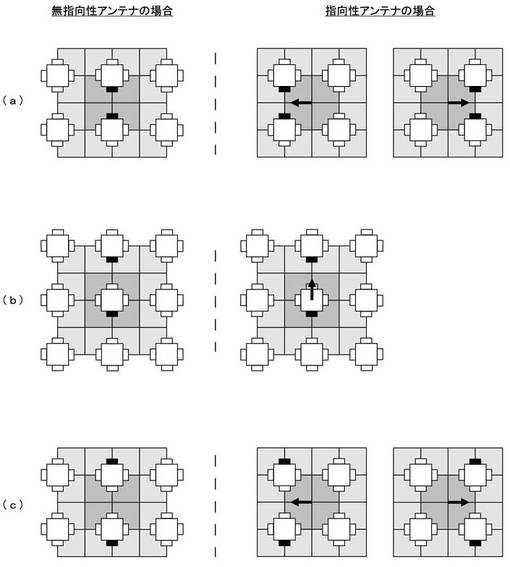
【図5】(a)〜(c)は、隣り合う2つの柱において、2つのRFIDタグが検出された場合の位置推定パターンを示す図であり、2つのRFIDタグは、(a)においては互いに向かい合う側面、(b)においては互いに同じ向きの側面、(c)においては互いに反対を向く側面にある。
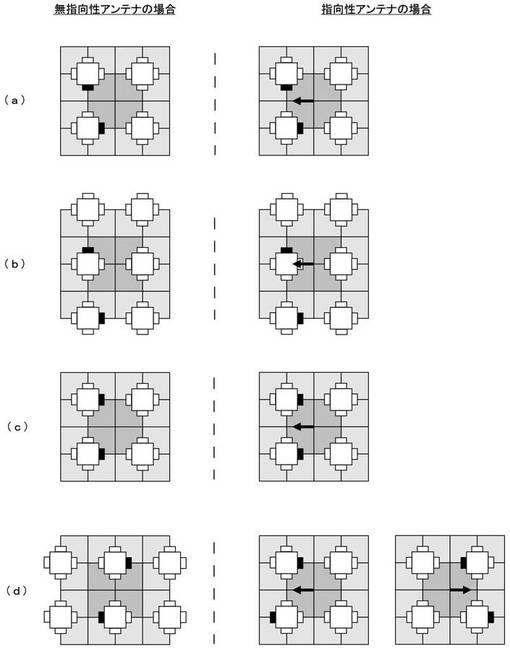
【図6】(a)〜(d)は、隣り合う2つの柱において、2つのRFIDタグが検出された場合の位置推定パターンを示す図であり、2つのRFIDタグは、(a)においては互いに異なる向きの側面、(b)においては互いに異なる向きの側面、(c)においては互いに並列に同じ向きとなる側面、(d)においては互いに並列に異なる向きとなる側面にある。
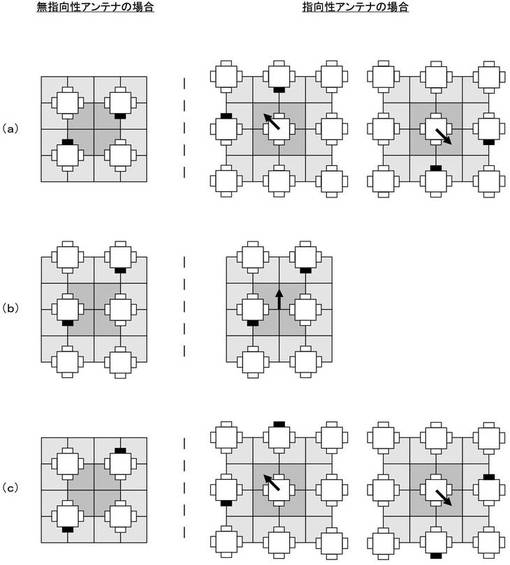
【図7】(a)〜(c)は、格子の斜め方向に隣り合う2つの柱において、2つのRFIDタグが検出された場合の位置推定パターンを示す図であり、2つのRFIDタグは、(a)においては互いに逆を向く側面、(b)においては互いに同じ向きの側面、(c)においては互いに逆を向く側面にある。
【図8】(a)〜(c)は、格子の斜め方向に隣り合う2つの柱において、2つのRFIDタグが検出された場合の位置推定パターンを示す図であり、2つのRFIDタグは、(a)〜(c)において互いに異なる向きの側面にある。
【図9】本発明の第2実施形態による推定リストを示す図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態を、図を基に説明する。
(第1実施形態)
図面を参照しながら、以下に、本発明の第1実施形態について説明する。
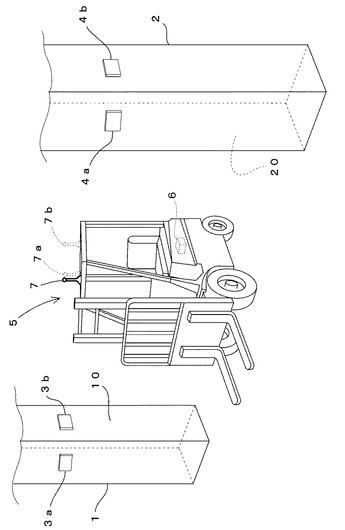
まず、図1及び図2を参照して、図1は、本発明の第1実施形態による移動体の位置検出方法の実施態様を示す概略図であり、柱1、柱2、RFIDタグ3a,3b,4a,4b、及びフォークリフト5の配置を示す。図2は、図1でその一部を示した倉庫(対象エリア)を天井側からみたときの概略図である。
【0017】
図1は、例えば製造業や物流業における倉庫の内部を表しており、床面から天井に向かってほぼ垂直に立つ複数の柱1,2と、床面を走行する移動体であるフォークリフト5を表している。フォークリフト5は、これら柱の間を自由に移動するものである。図1において柱は2本しか示されていないが、実際の倉庫内では、床面から天井に向かって多数の柱が配置されている。
【0018】
倉庫に配置される複数の柱は、略四角柱の形状を有している。さらに複数の柱は、互いの側面を平行に対向させるようにして、例えば約10〜20メートルの間の所定の等間隔で格子状に配置されている。図1では、柱1の側面10と柱2の側面20とが平行に対向している。
RFIDタグ3a,3b,4a,4bは、ICチップ及びアンテナで構成される無線タグと、ICチップに書き込まれたIDを非接触で読み書き可能な無線タグリーダ・ライタとから構成される金属対応長距離型パッシブRFIDタグである。これらRFIDタグは、無線通信に例えばUHF帯無線を用いるものであり、通信に指向性を有するものである。RFIDタグは、後述するリーダ装置6(IDタグリーダ)から発信されたUHF波を受信すると、これに応答して自身のIDをUHF波で発信する。リーダ装置6がこのIDを受信してRFIDタグ3a,3b,4a,4bを検知できる距離は、これらRFIDタグの前方約10メートルの範囲である。
【0019】
このようなRFIDタグは、図1において柱1,2の4つの側面それぞれに、床面から高さ約2メートルの位置に配置されている。よって、各RFIDタグは、隣接する柱の対向する側面に配置されたRFIDタグと対向している。
フォークリフト5は、倉庫内で管理対象物となる資材や物品を移動させる一般的な輸送機器である。フォークリフト5は、UHF波を発信すると共に柱に配置されたRFIDタグからのUHF波を受信する1本のアンテナ7と、RFIDタグからのUHF波を受信することでRFIDタグを検知するリーダ装置6とを有している。アンテナ7は、UHF電波の受発信に指向性を有しており、指向性の向きがフォークリフト5の前方に向けられている。よって、アンテナ7から発せられたUHF電波は、フォークリフト5の側方及び後方には伝播せず、フォークリフト5の前方に伝播する。
【0020】
リーダ装置6は、アンテナ7を介して1秒間に数回〜数十回UHF波を発信(ポーリング)し、発信したUHF波に応答したRFIDタグからのUHF波を受信する。
このような構成によって、フォークリフト5の位置を、リーダ装置6からのポーリングに応答したRFIDタグの付近であると推定することができる。また、管理対象物にもRFIDタグを付しておけば、このRFIDタグのIDもリーダ装置6で受信することができる。この管理対象物のIDと、ポーリングに応答したRFIDタグのIDとを関連づければ、同様に、管理対象物の位置も推定することができる。
【0021】
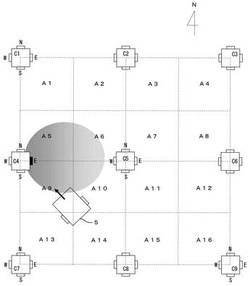
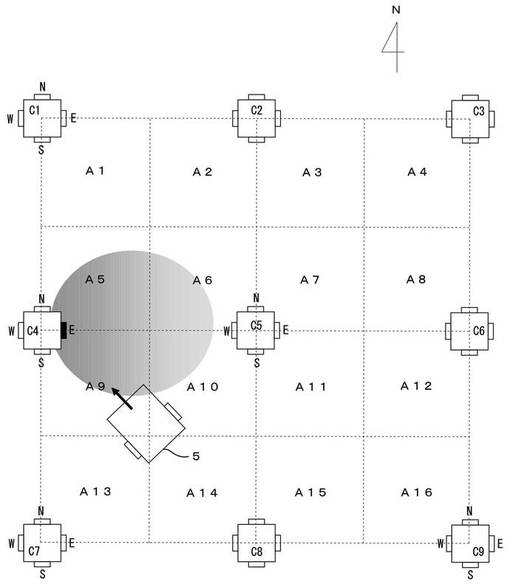
図2を参照して、第1実施形態による移動体の位置検出方法について、さらに詳しく説明する。
図2は、紙面に向かって上方を、北方向として表されているので、北方向を向くRFIDタグには、柱に付された符号の先頭に方位を表す文字Nを添えた符号を与える。南方向を向くRFIDタグには、文字Sを添え、東方向を向くRFIDタグには、文字Eを添え、西方向を向くRFIDタグには、文字Wを添えて符号を与える。
【0022】
これに従い、図2において、柱C1には、RFIDタグNC1、RFIDタグSC1、RFIDタグEC1、及びRFIDタグWC1が配置されている。他のRFIDタグについても、同様の方法で、図2に示すように符号を与えている。
それぞれの柱に配置された各RFIDタグは、柱側面の前方、つまり、隣接する柱に指向性の向きを向けている。そのため、RFIDタグから発せられたUHF電波の伝播範囲(RFIDタグの検知エリア)は、図2のRFIDタグの回りにグレースケールで示される範囲となる。
【0023】
このような、RFIDタグの指向性と、フォークリフト5のアンテナ7の指向性とを関連づけることにより、フォークリフト5の位置及び向きを検知(推定)することができる。
例えば、図2に示すように、柱C4、C5、C7、及びC8に囲まれた範囲にフォークリフト5が位置しているときに、フォークリフト5のリーダ装置6が、アンテナ7を介してUHF電波を発信したとする。
【0024】
このとき、RFIDタグEC4が、発信されたUHF電波を受信して、自身のIDを示す情報をUHF電波で発信する。RFIDタグEC4から発せられたUHF電波を、リーダ装置6が受信する(RFIDタグを検知する)と、フォークリフト5がRFIDタグEC4の検知エリア内にいると判断することができる。
アンテナ7からのUHF電波は、フォークリフト5の前方に向けられて発せられているので、RFIDタグEC4は、フォークリフト5の前方にあると判断することができる。この判断に基づいて、フォークリフト5の位置はRFIDタグEC4の検知エリア内であり、RFIDタグEC4にその前方を向けていると推定できる。
【0025】
しかし、この場合において、フォークリフト5のアンテナ7が指向性を有していなければ、フォークリフト5の前方のみならず、左右方向及び後方に存在するRFIDタグもアンテナ7からのUHF電波を受信して、各々がIDを示す情報を発信する可能性がある。指向性のないアンテナがこれら全てのRFIDタグを検知すると、フォークリフト5の位置を判断することはできても、フォークリフト5の前方がいずれのRFIDタグを向いているのかを判断することはできない。
【0026】
このような前提の下に、図2に示すように、上述の柱が配置された床面を、各柱の中心を結ぶ直線状の破線と、柱間の中間地点を結ぶ直線状の破線とで区分けして、各区分を区分A1〜A16とする。この区分けと、上述のRFIDタグEC4の検知エリアとを重ね合わせると、フォークリフト5は、区分A5、区分A6、区分A9、及び区分A10内の何れかの位置でRFIDタグEC4にその前方を向けていると判断することもできる。
【0027】
このとき、RFIDタグEC4の検出強度が高ければ、RFIDタグEC4に近い位置、つまり、検知エリアのグレースケールの濃い領域にフォークリフト5が位置している確率が高いので、区分A5及び区分A9内の何れかの位置でRFIDタグEC4にその前方を向けていると推定することができる。逆に、RFIDタグEC4の検出強度が低ければ、RFIDタグEC4から遠い位置、つまり、検知エリアのグレースケールの薄い領域にフォークリフト5が位置している確率が高いので、区分A6及び区分A10内の何れかの位置でRFIDタグEC4にその前方を向けていると推定することができる。
【0028】
以上のように、検出されたRFIDタグの位置を基にして倉庫内におけるフォークリフト5の位置及び向きを推定することができるが、検出されるRFIDタグの数は、単数であるよりも複数であることの方が多い。フォークリフト5は、検出されたRFIDタグが配置された柱を含む複数の柱に囲まれた範囲に位置すると考えられるので、フォークリフト5が位置する区分と、検出されたRFIDタグが配置された柱の位置とを対応づけてパターン化しておくことができる。このパターンを位置推定パターンとして複数用意すれば、位置推定パターンを用いてフォークリフト5が位置する区分を容易に推定することができる。
【0029】
この位置推定パターンについて、以下に詳しく説明する。
位置推定パターンとは、少なくとも1つのRFIDタグが検出されたときに、検出されたRFIDタグの位置を基にして、検出されたRFIDタグが配置された柱の位置と、フォークリフト5が位置する可能性のある区分とを対応づけたものである。
本実施形態においては、1つのRFIDタグが検出された場合と、2つのRFIDタグが検出された場合を考える。3つ以上のRFIDタグが検出された場合を考えることもできるが、その場合は、後述するようにRFIDタグの検出強度(検出信号強度)や検出確率(応答回数)などを基にして、その上位2つのRFIDタグを選出すればよい。
【0030】
次に、図3〜図8を参照して、位置推定パターンを順に説明する。図3〜図8における、柱、RFIDタグ、及び床面の区分の表記方法は、図2における表記方法に準拠している。図3〜図8では、検出されたRFIDタグを黒く塗りつぶして表し、フォークリフト5が位置していると推定される区分(推定区分)をグレースケールで表している。なお、図3〜図8のグレースケールは、濃淡を区別して示されているが、濃く示されたグレースケールは推定区分を示しており、薄く示されたグレースケールは、フォークリフト5が位置している確率が0ではないが、低いと考えられる区分を示している。
【0031】
以下、それぞれの位置推定パターンについて、まず、無指向性アンテナでRFIDタグを検出した場合を説明し、次に、指向性アンテナでRFIDタグを検出した場合を説明する。
図3は、1つの柱の側面に配置された1つのRFIDタグが検出された場合の位置推定パターンを示す図である。
【0032】
1つの柱の1つのRFIDタグだけが検知された場合、フォークリフト5が位置していると推定される推定区分は、図3に濃いグレースケールで示すように、検知されたRFIDタグが配置された柱と、検知されたRFIDタグに対向する柱との間の4つの区分となる。
図3の左側に示すように、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が濃いグレースケールで示す推定区分に位置していることしか推定できないが、図3の右側に示すように、フォークリフト5のアンテナ7が指向性であり、指向性の向きをフォークリフト5の前方に向けていれば、矢印で示すように、フォークリフト5が、検出されたRFIDタグに前方を向けて位置していると推定することができる。
【0033】
図3では、紙面に向かって右側を向くRFIDタグが検知された場合の位置推定パターンを示しているが、この位置推定パターンは、トポロジカルなパターンとして示されている。よって、当該位置推定パターンを回転させて得られる全てのパターンは、図3に示す位置推定パターンで代表される。以下、図4〜図8に示す位置推定パターンも、トポロジカルなパターンとして示される。
【0034】
図4(a)は、1つの柱の隣り合う側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
1つの柱の隣り合う側面に配置された2つのRFIDタグが検知された場合、フォークリフト5が位置していると推定される推定区分は、図4(a)に濃いグレースケールで示すように、検知されたRFIDタグが配置された柱と、該柱の右上に位置する柱と、当該RFIDタグに対向する柱とに囲まれた4つの区分となる。
【0035】
図4(a)の左側に示すように、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が濃いグレースケールで示す推定区分に位置しているとしか推定できないが、図4(a)の右側に示すように、フォークリフト5のアンテナ7が指向性であり、指向性の向きをフォークリフト5の前方に向けていれば、矢印で示すように、フォークリフト5が、検出されたRFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0036】
図4(b)は、1つの柱の互いに反対を向く側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
1つの柱の互いに反対を向く側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図4(b)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された柱周辺の4つの区分となる。
【0037】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図4(b)の右側に示すように、検知されたRFIDタグが配置された柱と、該柱の右側又は左側に隣接する柱との間の4つの区分が推定区分となり、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0038】
図5(a)は、隣り合う2つの柱の互いに向かい合う側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
隣り合う2つの柱の互いに向かい合う側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図5(a)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱の間の4つの区分となる。
【0039】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図5(a)の右側に示すように、検知されたRFIDタグが配置された柱と、該柱の右側又は左側に隣接する柱とで囲まれた4つの区分が推定区分となり、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0040】
図5(b)は、隣り合う2つの柱の互いに同じ向きの側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
隣り合う2つの柱の互いに同じ向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図5(b)左側に濃いグレースケールで示すように、検出された2つのRFIDタグのうち指向性の向きにおいて前方にあるのRFIDタグが配置された柱周辺の4つの区分となる。
【0041】
これに対して、フォークリフト5のアンテナ7が指向性である場合も、図5(b)の右側に示すように、検出された2つのRFIDタグのうち指向性の向きにおいて前方にあるRFIDタグが配置された柱周辺の4つの区分が推定区分となる。このときフォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0042】
図5(c)は、隣り合う2つの柱の互いに反対を向く側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
隣り合う2つの柱の互いに反対を向く側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図5(c)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱の間の4つの区分となる。
【0043】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図5(c)の右側に示すように、検知されたRFIDタグが配置された柱と、該柱の右側又は左側に隣接する柱とで囲まれた4つの区分が推定区分となり、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0044】
図6(a)は、隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
図6(a)に示すように、隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図6(a)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された柱と、該柱に隣接する柱とで囲まれた4つの区分となる。
【0045】
これに対して、フォークリフト5のアンテナ7が指向性であれば、フォークリフト5は、図6(a)の右側に示すように、検知されたRFIDタグが配置された柱と、該柱に隣接する柱とで囲まれた推定区分において、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
図6(b)は、隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検出された他の場合の位置推定パターンを示す図である。
【0046】
図6(b)に示すように、隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図6(b)左側に濃いグレースケールで示すように、検知された2つのRFIDタグのうち、紙面上方を向くRFIDタグが配置された柱に対して、もう一方のRFIDタグが向く右側方向にある4つの区分となる。
【0047】
これに対して、フォークリフト5のアンテナ7が指向性であれば、フォークリフト5は、図6(b)の右側に示すように、検知された2つのRFIDタグのうち、紙面上方を向くRFIDタグが配置された柱に対して、もう一方のRFIDタグが向く右側方向にある推定区分において、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0048】
図6(c)は、隣り合う2つの柱の互いに並列に同じ向きとなる側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
図6(c)に示すように、隣り合う2つの柱の互いに並列に同じ向きとなる側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図6(c)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された柱と、該RFIDタグの指向性の方向側で隣接する柱とで囲まれた4つの区分となる。
【0049】
これに対して、フォークリフト5のアンテナ7が指向性であれば、フォークリフト5は、図6(c)の右側に示すように、検知されたRFIDタグが配置された柱と、該柱に隣接する柱とで囲まれた推定区分において、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
図6(d)は、隣り合う2つの柱の互いに並列に異なる向きとなる側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
【0050】
隣り合う2つの柱の互いに並列に異なる向きとなる側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図6(d)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱の間の4つの区分となる。
これに対して、フォークリフト5のアンテナ7が指向性であれば、図6(d)の右側に示すように、検知されたRFIDタグが配置された柱と、該柱の右側又は左側に隣接する柱とで囲まれた4つの区分が推定区分となり、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0051】
図7(a)は、格子の斜め方向に隣り合う2つの柱の互いに逆を向く側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
格子の斜め方向に隣り合う2つの柱の互いに逆を向く側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図7(a)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱と、該柱にそれぞれ隣接する柱に囲まれた4つの区分となる。
【0052】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図7(a)の右側に示すように、検知された2つのRFIDタグのうち、いずれか一方のRFIDタグの指向性の方向側で隣接する柱周辺の4つの区分となる。よって、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0053】
図7(b)は、格子の斜め方向に隣り合う2つの柱の互いに同じ向きの側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
格子の斜め方向に隣り合う2つの柱の互いに同じ向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図7(b)左側に濃いグレースケールで示すように、検出された2つのRFIDタグのうち指向性の向きにおいて前方にあるRFIDタグが配置された柱に対して、もう一方のRFIDタグが配置された柱側にある4つの区分となる。
【0054】
フォークリフト5のアンテナ7が指向性である場合も、図7(b)の右側に示すように、検出された2つのRFIDタグのうち指向性の向きにおいて前方にあるRFIDタグが配置された柱に隣接する4つの区分が推定区分となる。このときフォークリフト5は、矢印で示すように、指向性の向きにおいて後方にあるRFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0055】
図7(c)は、格子の斜め方向に隣り合う2つの柱の互いに逆を向く側面に配置された2つのRFIDタグが検出された他の場合の位置推定パターンを示す図である。
図7(c)に示すように、格子の斜め方向に隣り合う2つの柱の互いに逆を向く側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図7(c)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱と、該柱にそれぞれ隣接する柱に囲まれた4つの区分となる。
【0056】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図7(c)の右側に示すように、検知された2つのRFIDタグのうち、いずれか一方のRFIDタグの指向性の方向において反対側に隣接する柱周辺の4つの区分となる。よって、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0057】
図8(a)は、格子の斜め方向に隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
格子の斜め方向に隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図8(a)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱と、該柱にそれぞれ隣接する柱に囲まれた4つの区分となる。
【0058】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図8(a)の右側に示すように、検知された2つのRFIDタグの指向性の方向側で隣接する柱周辺の4つの区分が推定区分となる。このときフォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
図8(b)は、格子の斜め方向に隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検出された他の場合の位置推定パターンを示す図である。
【0059】
格子の斜め方向に隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図8(b)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱と、該柱にそれぞれ隣接する柱に囲まれた4つの区分となる。
【0060】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図8(b)の右側に示すように、検知された2つのRFIDタグが配置された2つの柱に共通に隣接する柱周辺の4つの区分が推定区分となる。よって、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0061】
図8(c)は、格子の斜め方向に隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検出されたさらに他の場合の位置推定パターンを示す図である。
図8(c)に示すように、格子の斜め方向に隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図8(c)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱と、該柱にそれぞれ隣接する柱に囲まれた4つの区分となる。
【0062】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図8(c)の右側に示すように、検知された2つのRFIDタグが配置された2つの柱に共通に隣接する柱のうち、該2つのRFIDタグの指向性の向きに対して左又は右側に隣接する柱周辺の4つの区分が推定区分となる。このときフォークリフト5は、矢印ですように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0063】
以上、図3〜図8を参照してトポロジカルな位置推定パターンについて説明した。本実施形態においては、これら複数の位置推定パターンを位置テーブルとしてまとめて予め用意しておく。その上で、検出されたRFIDタグが1つであれば、図3に示す位置推定パターンを1つ選定し、検出されたRFIDタグが2つであれば、検出されたRFIDタグの相対的な位置関係を基に図4〜図8に示す位置推定パターンから1つ選定し、選定した位置推定パターンを実際の倉庫内の検出されたRFIDタグの位置に対応させる。そうすることで、倉庫内におけるフォークリフト5の位置を推定することができる。
【0064】
なお、参照した図において、フォークリフト5の向きを矢印で示したが、この矢印は、フォークリフト5の向きを示す方向ベクトルであり、フォークリフト5は、推定区分内でこの矢印に平行な向きに前方を向けていると推定できる。本実施形態において、方向ベクトルの大きさは無視する。
(第2実施形態)
次に、図9を参照しながら、本発明の第2実施形態について説明する。
【0065】
第1実施形態で説明した位置テーブルから、検出されたRFIDタグの相対的な位置関係に対応する位置推定パターンを選定して、選定した位置推定パターンを実際の倉庫内の検出されたRFIDタグの位置に対応させると、倉庫内におけるフォークリフト5の位置を推定することができる。
つまり、倉庫内で検出されたRFIDタグの組み合わせのそれぞれに対して位置推定パターンが決まるので、具体的なRFIDタグの組み合わせを決めれば、上述した位置推定パターンに基づいて、そのRFIDタグの組み合わせに対応した倉庫内における実際の推定区分と、フォークリフト5の向きが決まる。
【0066】
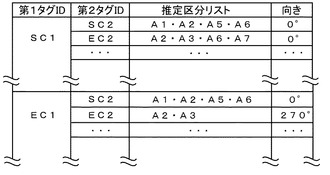
これら、RFIDタグの具体的な組み合わせと、それに対応する実際の推定区分と、フォークリフト5の向きとを予め図9に示すような推定リストとして保持しておけば、より簡便に、推定区分とフォークリフト5の向きを得ることができる。
図9は、その推定リストを示す図である。例えば、RFIDタグSC1が最も検出強度が高く、RFIDタグSC2が2番目に検出強度が高かった場合、第1タグIDはSC1であり、第2タグIDはSC2である。このときの推定区分は、図9より区分A1,A2,A5,及びA6であり、フォークリフト5の向きは0°であると推定することができる。
【0067】
このようなリストを用いることで、位置推定パターンを倉庫内の実際の位置に対応させる手間を省くことができる。
(第3実施形態)
次に、本発明の第3実施形態について説明する。
第1実施形態及び第2実施形態におけるフォークリフト5は、指向性を有するアンテナ7を、ルーフに1つだけ備えていた。本実施形態によるフォークリフト5は、図1に示すように、指向性を有するアンテナ7a,7bを、前進方向に対して左右両側に、ルーフの高さ付近に備える。これら2つのアンテナ7a,7bの指向性は、ともにフォークリフト5の前方に向けられている。
【0068】
これら2つのアンテナ7a,7bがそれぞれ独立してRFIDタグを検出すると、それぞれのアンテナごとに対応する位置推定パターンを2つ得ることができる。これら2つの位置推定パターンを用いれば、より正確にフォークリフト5の位置を推定することができる。
例えば、得られた2つの位置推定パターンが同じものであれば、フォークリフト5は、ほぼ間違いなく位置推定パターンが示す推定区分に位置すると推定できる。
【0069】
仮に、得られた2つの位置推定パターンが異なるものであれば、フォークリフト5は、互いの位置推定パターンにおいて共通する推定区分に位置すると推定できる。
ところで、一般的に、複数の事象の分布確率が得られた場合、それらの複合確率(条件付き確率)を求めることによって、両者が同時に得られる確率を求めることができる。上述した位置推定パターンの推定区分は、フォークリフト5がそこに存在する存在確率に基づいて作成されているものであるので、簡便には、各推定区分等に予め指標値を与えておき、得られた2つ位置推定パターンに示される推定区分の指標値を加算や乗算することによって、最もフォークリフト5の存在確率の高いを考えられる推定区分を求めることができる。
【0070】
具体的には、図9の推定区分リストの区分ごとに確率指標値を割り振って、重み付けとして用いる。例えば、フォークリフト5が主として動くライン(動線)を含んでいてフォークリフト5の存在確率が高いと思われる推定区分には、大きな確率指標値として3、倉庫の端又は隅でフォークリフト5の動線から外れた推定区分には、小さな確率指標値として1、を割り振る。
【0071】
このように確率指標値を割り振った上で、複数の推定区分が得られた場合には、区分毎の確率指標値を加算あるいは乗算し、その計算結果が最も大きな区分を推定区分とする、あるいは、得られた全ての位置推定パターンについて、各区分の座標を、確率指標値を重み付けとして加重平均をとる、といった方法が考えられる。
図中矢印で示した方向ベクトルについても、アンテナの指向性の向きから得られたフォークリフト5の向きについて、得られた推定位置パターンで示された方向ベクトルの平均を取るなどの方法でフォークリフト5の向きを計算する方法が考えられる。
【0072】
ところで、今回開示された実施形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0073】
1,2 柱
3a,3b,4a,4b RFIDタグ
5 フォークリフト
6 リーダ装置
7,7a,7b アンテナ
10,20 側面
【技術分野】
【0001】
本発明は、RFIDタグ等を用いた移動体の位置検出方法に関するものである。
【背景技術】
【0002】
現在、RFID(Radio Frequency IDentification)タグを用いた物流管理システムの導入が、様々な場所で検討されている。この物流管理システムでは、管理対象物の一つ一つにRFIDタグを取り付け、そのタグを物流現場の任意の位置で検知することによって管理対象物の位置を検出する。
RFIDタグは、ICチップ及びアンテナで構成される無線タグと、ICチップに書き込まれたIDを非接触で読み書き可能な無線タグリーダ・ライタとから構成される。近年、UHF帯無線を用いたRFIDタグの普及によって検知距離が数メートルにも及ぶようになり、作業者がリーダ装置を用いて手作業でIDタグの読み取りを行わずとも、リーダ装置の近傍をRFIDタグが取り付けられた管理対象物が通過するだけで、管理対象物を自動的に検知できるようになっている。このようなRFIDタグの用途が、ますます広がっている。
【0003】
上述の物流管理システムの一例として、管理対象物が工場ラインを流れるような物流管理システムの場合、工場ライン上の所定の位置にリーダ装置が設置される。このため、管理対象物に取り付けられたRFIDタグがリーダ装置で読み込まれると、当該リーダ装置の設置位置近傍に管理対象物が存在することがわかり、工場ライン上での進捗状況を検知することができる。
【0004】
また、フォークリフトやクレーンといった移動体で管理対象物を搬送するような物流管理システムの場合、管理対象物の位置を自動で管理するために、移動体に物流管理のリーダ装置を設置して、管理対象物に取り付けられたRFIDタグのID情報を読み取ると共に移動体の位置情報もあわせて得る。移動体の位置情報を得るためには、GPSを用いて位置情報を得る方法や、特許文献1に開示されるような床面に埋め込まれたRFIDタグを読み取る方法がある。
【0005】
特許文献1に記載の位置検出システムでは、固有のID情報が書き込まれたRFIDタグが、倉庫の通路に基準マークとして配置されている。また、このRFIDタグには、固有のID情報と共に、通路の延在方向である通路方位角が書き込まれている。本位置検出システムでは、移動体は、RFIDタグのID情報を読み取るためのリーダを有しており、読み取ったRFIDタグのID情報を基に、タグ位置の座標と通路方位角とをタグ情報記憶部から読み出して、RFIDタグが配置されたタグ位置を移動体の現在位置とし、RFIDタグが配置されたタグ位置における移動体の方位角を得ている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−9533号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
工場や倉庫などの屋内や高い建物に囲まれたようなエリア内では、GPSは有効に機能せず、上述のGPSを用いて位置情報を得る方法を採用することはできない。そこで、特許文献1に開示されるように、パッシブタグであるRFIDタグを床面に埋め込んで配置することが考えられる。
ところが、床面に埋め込まれたRFIDタグの信号は、コンクリート面の干渉を受けて大きく減衰するので、リーダ装置がRFIDタグを検知できる距離は、10cm〜20cm程度となる。RFIDタグが埋め込まれた位置に対する移動体の移動経路のずれ幅が上記タグの検知距離以下であれば、問題はないが、移動体の移動経路のずれ幅が大きい場合や、移動体が自由に移動する場合は、多数のRFIDタグを高い密度で埋め込む必要があり、特許文献1の技術を現実に実施するのは困難をともなう。
【0008】
この問題を解決するための手段として、上述のパッシブ型RFIDタグに換えて、電池式のアクティブタグと呼ばれる検知距離の長いタグを用いることが考えられる。しかし、このアクティブタグの単価は、数千円〜1万円と高価である。加えて、アクティブタグには電池交換の作業が必要となるため、多数のアクティブタグを床面に埋め込むことは、コスト面から見て、現実に実施するのは困難である。
【0009】
また、物流現場では、フォークリフト等で任意の位置に移動させた管理対象物の位置を特定することが要求される。通常、管理対象物の位置は、該管理対象物が降ろされたときのフォークリフトの位置で置き換えられることが多い。
ところが、管理対象物はフォークリフトの前方位置に降ろされるため、降ろされた管理対象物の位置を正確に特定するには、そのときのフォークリフトの位置だけではなく向きを表す情報も得て、フォークリフトの前方位置を知ることが要求される。このような要求に対して、特許文献1の方法では、任意の位置におけるフォークリフトの向きを表す情報は得られず、電子コンパスやジャイロセンサを合わせて用いるなどの、RFIDタグ以外のセンサを用いた工夫が必要となり、簡便な方法で管理対象物の位置を特定することができない。
【0010】
本願は、このような問題点に鑑みてなされたものであり、フォークリフトなどの移動体の位置及び向きを簡易に推定する方法を提供することを目的とする。
【課題を解決するための手段】
【0011】
上述の目的を達成するため、本発明においては以下の技術的手段を講じた。
本発明の移動体の位置検出方法は、複数の柱が平面視で格子状に配置された対象エリア内で移動する移動体の位置を検出するに際し、検出感度に指向性を有する複数のIDタグを、指向性の向きが該格子方向と一致するように前記複数の柱に配備しておき、前記移動体に、前記IDタグを検出するIDタグリーダと、前記IDタグと前記IDタグリーダの間で電波の送受信を行うアンテナとを配備しておき、さらに、検出されるIDタグの前記対象エリア内における配置と前記移動体の対象エリア内における推定位置との関係を示す位置推定パターンを備えておき、前記複数の柱に配備されたIDタグを、前記アンテナから送受信される電波を介して、前記IDタグリーダで1つ以上検出し、前記検出されたIDタグの前記対象エリア内における配置に対応する位置推定パターンを判別することで、前記移動体の位置を推定することを特徴とする。
【0012】
ここで、複数の前記位置推定パターンを位置テーブルとして備えてもよい。
また、前記移動体に配備されたアンテナは指向性を有するものであり、前記位置推定パターンは、前記アンテナの指向性に基づいた前記移動体の向きを示す情報を備えていてもよい。
また、前記移動体のIDタグリーダでIDタグを1つ以上検出した後に、検出された複数のIDタグの検出信号強度又は応答回数の大小に基づいて、所定個数を上限としてIDタグを選出し、該選出されたIDタグの前記対象エリア内における配置に基づいて位置推定パターンを判別することで前記移動体の位置を推定してもよい。
【0013】
さらに、前記移動体は、指向性を有するアンテナを複数備えるものであって、前記複数のアンテナ毎に、検出したIDタグに基づいて移動体の位置及び向きを表す情報を得、前記移動体の位置及び向きを表す複数の情報を用いて、前記移動体の位置を推定してもよい。
【発明の効果】
【0014】
本発明に係る移動体の位置検出方法によれば、フォークリフトなどの移動体の位置及び向きを簡易に推定することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1実施形態による移動体の位置検出方法の実施態様を示す概略図であである。
【図2】図1に一部を示した倉庫を天井側からみたときの、柱、RFIDタグ、及びフォークリフトの配置を示す概略図である。
【図3】1つの柱の側面に配置された1つのRFIDタグが検出された場合の位置推定パターンを示す図である。
【図4】(a)は、1つの柱の隣り合う側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図であり、(b)は、1つの柱の互いに反対を向く側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
【図5】(a)〜(c)は、隣り合う2つの柱において、2つのRFIDタグが検出された場合の位置推定パターンを示す図であり、2つのRFIDタグは、(a)においては互いに向かい合う側面、(b)においては互いに同じ向きの側面、(c)においては互いに反対を向く側面にある。
【図6】(a)〜(d)は、隣り合う2つの柱において、2つのRFIDタグが検出された場合の位置推定パターンを示す図であり、2つのRFIDタグは、(a)においては互いに異なる向きの側面、(b)においては互いに異なる向きの側面、(c)においては互いに並列に同じ向きとなる側面、(d)においては互いに並列に異なる向きとなる側面にある。
【図7】(a)〜(c)は、格子の斜め方向に隣り合う2つの柱において、2つのRFIDタグが検出された場合の位置推定パターンを示す図であり、2つのRFIDタグは、(a)においては互いに逆を向く側面、(b)においては互いに同じ向きの側面、(c)においては互いに逆を向く側面にある。
【図8】(a)〜(c)は、格子の斜め方向に隣り合う2つの柱において、2つのRFIDタグが検出された場合の位置推定パターンを示す図であり、2つのRFIDタグは、(a)〜(c)において互いに異なる向きの側面にある。
【図9】本発明の第2実施形態による推定リストを示す図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態を、図を基に説明する。
(第1実施形態)
図面を参照しながら、以下に、本発明の第1実施形態について説明する。
まず、図1及び図2を参照して、図1は、本発明の第1実施形態による移動体の位置検出方法の実施態様を示す概略図であり、柱1、柱2、RFIDタグ3a,3b,4a,4b、及びフォークリフト5の配置を示す。図2は、図1でその一部を示した倉庫(対象エリア)を天井側からみたときの概略図である。
【0017】
図1は、例えば製造業や物流業における倉庫の内部を表しており、床面から天井に向かってほぼ垂直に立つ複数の柱1,2と、床面を走行する移動体であるフォークリフト5を表している。フォークリフト5は、これら柱の間を自由に移動するものである。図1において柱は2本しか示されていないが、実際の倉庫内では、床面から天井に向かって多数の柱が配置されている。
【0018】
倉庫に配置される複数の柱は、略四角柱の形状を有している。さらに複数の柱は、互いの側面を平行に対向させるようにして、例えば約10〜20メートルの間の所定の等間隔で格子状に配置されている。図1では、柱1の側面10と柱2の側面20とが平行に対向している。
RFIDタグ3a,3b,4a,4bは、ICチップ及びアンテナで構成される無線タグと、ICチップに書き込まれたIDを非接触で読み書き可能な無線タグリーダ・ライタとから構成される金属対応長距離型パッシブRFIDタグである。これらRFIDタグは、無線通信に例えばUHF帯無線を用いるものであり、通信に指向性を有するものである。RFIDタグは、後述するリーダ装置6(IDタグリーダ)から発信されたUHF波を受信すると、これに応答して自身のIDをUHF波で発信する。リーダ装置6がこのIDを受信してRFIDタグ3a,3b,4a,4bを検知できる距離は、これらRFIDタグの前方約10メートルの範囲である。
【0019】
このようなRFIDタグは、図1において柱1,2の4つの側面それぞれに、床面から高さ約2メートルの位置に配置されている。よって、各RFIDタグは、隣接する柱の対向する側面に配置されたRFIDタグと対向している。
フォークリフト5は、倉庫内で管理対象物となる資材や物品を移動させる一般的な輸送機器である。フォークリフト5は、UHF波を発信すると共に柱に配置されたRFIDタグからのUHF波を受信する1本のアンテナ7と、RFIDタグからのUHF波を受信することでRFIDタグを検知するリーダ装置6とを有している。アンテナ7は、UHF電波の受発信に指向性を有しており、指向性の向きがフォークリフト5の前方に向けられている。よって、アンテナ7から発せられたUHF電波は、フォークリフト5の側方及び後方には伝播せず、フォークリフト5の前方に伝播する。
【0020】
リーダ装置6は、アンテナ7を介して1秒間に数回〜数十回UHF波を発信(ポーリング)し、発信したUHF波に応答したRFIDタグからのUHF波を受信する。
このような構成によって、フォークリフト5の位置を、リーダ装置6からのポーリングに応答したRFIDタグの付近であると推定することができる。また、管理対象物にもRFIDタグを付しておけば、このRFIDタグのIDもリーダ装置6で受信することができる。この管理対象物のIDと、ポーリングに応答したRFIDタグのIDとを関連づければ、同様に、管理対象物の位置も推定することができる。
【0021】
図2を参照して、第1実施形態による移動体の位置検出方法について、さらに詳しく説明する。
図2は、紙面に向かって上方を、北方向として表されているので、北方向を向くRFIDタグには、柱に付された符号の先頭に方位を表す文字Nを添えた符号を与える。南方向を向くRFIDタグには、文字Sを添え、東方向を向くRFIDタグには、文字Eを添え、西方向を向くRFIDタグには、文字Wを添えて符号を与える。
【0022】
これに従い、図2において、柱C1には、RFIDタグNC1、RFIDタグSC1、RFIDタグEC1、及びRFIDタグWC1が配置されている。他のRFIDタグについても、同様の方法で、図2に示すように符号を与えている。
それぞれの柱に配置された各RFIDタグは、柱側面の前方、つまり、隣接する柱に指向性の向きを向けている。そのため、RFIDタグから発せられたUHF電波の伝播範囲(RFIDタグの検知エリア)は、図2のRFIDタグの回りにグレースケールで示される範囲となる。
【0023】
このような、RFIDタグの指向性と、フォークリフト5のアンテナ7の指向性とを関連づけることにより、フォークリフト5の位置及び向きを検知(推定)することができる。
例えば、図2に示すように、柱C4、C5、C7、及びC8に囲まれた範囲にフォークリフト5が位置しているときに、フォークリフト5のリーダ装置6が、アンテナ7を介してUHF電波を発信したとする。
【0024】
このとき、RFIDタグEC4が、発信されたUHF電波を受信して、自身のIDを示す情報をUHF電波で発信する。RFIDタグEC4から発せられたUHF電波を、リーダ装置6が受信する(RFIDタグを検知する)と、フォークリフト5がRFIDタグEC4の検知エリア内にいると判断することができる。
アンテナ7からのUHF電波は、フォークリフト5の前方に向けられて発せられているので、RFIDタグEC4は、フォークリフト5の前方にあると判断することができる。この判断に基づいて、フォークリフト5の位置はRFIDタグEC4の検知エリア内であり、RFIDタグEC4にその前方を向けていると推定できる。
【0025】
しかし、この場合において、フォークリフト5のアンテナ7が指向性を有していなければ、フォークリフト5の前方のみならず、左右方向及び後方に存在するRFIDタグもアンテナ7からのUHF電波を受信して、各々がIDを示す情報を発信する可能性がある。指向性のないアンテナがこれら全てのRFIDタグを検知すると、フォークリフト5の位置を判断することはできても、フォークリフト5の前方がいずれのRFIDタグを向いているのかを判断することはできない。
【0026】
このような前提の下に、図2に示すように、上述の柱が配置された床面を、各柱の中心を結ぶ直線状の破線と、柱間の中間地点を結ぶ直線状の破線とで区分けして、各区分を区分A1〜A16とする。この区分けと、上述のRFIDタグEC4の検知エリアとを重ね合わせると、フォークリフト5は、区分A5、区分A6、区分A9、及び区分A10内の何れかの位置でRFIDタグEC4にその前方を向けていると判断することもできる。
【0027】
このとき、RFIDタグEC4の検出強度が高ければ、RFIDタグEC4に近い位置、つまり、検知エリアのグレースケールの濃い領域にフォークリフト5が位置している確率が高いので、区分A5及び区分A9内の何れかの位置でRFIDタグEC4にその前方を向けていると推定することができる。逆に、RFIDタグEC4の検出強度が低ければ、RFIDタグEC4から遠い位置、つまり、検知エリアのグレースケールの薄い領域にフォークリフト5が位置している確率が高いので、区分A6及び区分A10内の何れかの位置でRFIDタグEC4にその前方を向けていると推定することができる。
【0028】
以上のように、検出されたRFIDタグの位置を基にして倉庫内におけるフォークリフト5の位置及び向きを推定することができるが、検出されるRFIDタグの数は、単数であるよりも複数であることの方が多い。フォークリフト5は、検出されたRFIDタグが配置された柱を含む複数の柱に囲まれた範囲に位置すると考えられるので、フォークリフト5が位置する区分と、検出されたRFIDタグが配置された柱の位置とを対応づけてパターン化しておくことができる。このパターンを位置推定パターンとして複数用意すれば、位置推定パターンを用いてフォークリフト5が位置する区分を容易に推定することができる。
【0029】
この位置推定パターンについて、以下に詳しく説明する。
位置推定パターンとは、少なくとも1つのRFIDタグが検出されたときに、検出されたRFIDタグの位置を基にして、検出されたRFIDタグが配置された柱の位置と、フォークリフト5が位置する可能性のある区分とを対応づけたものである。
本実施形態においては、1つのRFIDタグが検出された場合と、2つのRFIDタグが検出された場合を考える。3つ以上のRFIDタグが検出された場合を考えることもできるが、その場合は、後述するようにRFIDタグの検出強度(検出信号強度)や検出確率(応答回数)などを基にして、その上位2つのRFIDタグを選出すればよい。
【0030】
次に、図3〜図8を参照して、位置推定パターンを順に説明する。図3〜図8における、柱、RFIDタグ、及び床面の区分の表記方法は、図2における表記方法に準拠している。図3〜図8では、検出されたRFIDタグを黒く塗りつぶして表し、フォークリフト5が位置していると推定される区分(推定区分)をグレースケールで表している。なお、図3〜図8のグレースケールは、濃淡を区別して示されているが、濃く示されたグレースケールは推定区分を示しており、薄く示されたグレースケールは、フォークリフト5が位置している確率が0ではないが、低いと考えられる区分を示している。
【0031】
以下、それぞれの位置推定パターンについて、まず、無指向性アンテナでRFIDタグを検出した場合を説明し、次に、指向性アンテナでRFIDタグを検出した場合を説明する。
図3は、1つの柱の側面に配置された1つのRFIDタグが検出された場合の位置推定パターンを示す図である。
【0032】
1つの柱の1つのRFIDタグだけが検知された場合、フォークリフト5が位置していると推定される推定区分は、図3に濃いグレースケールで示すように、検知されたRFIDタグが配置された柱と、検知されたRFIDタグに対向する柱との間の4つの区分となる。
図3の左側に示すように、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が濃いグレースケールで示す推定区分に位置していることしか推定できないが、図3の右側に示すように、フォークリフト5のアンテナ7が指向性であり、指向性の向きをフォークリフト5の前方に向けていれば、矢印で示すように、フォークリフト5が、検出されたRFIDタグに前方を向けて位置していると推定することができる。
【0033】
図3では、紙面に向かって右側を向くRFIDタグが検知された場合の位置推定パターンを示しているが、この位置推定パターンは、トポロジカルなパターンとして示されている。よって、当該位置推定パターンを回転させて得られる全てのパターンは、図3に示す位置推定パターンで代表される。以下、図4〜図8に示す位置推定パターンも、トポロジカルなパターンとして示される。
【0034】
図4(a)は、1つの柱の隣り合う側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
1つの柱の隣り合う側面に配置された2つのRFIDタグが検知された場合、フォークリフト5が位置していると推定される推定区分は、図4(a)に濃いグレースケールで示すように、検知されたRFIDタグが配置された柱と、該柱の右上に位置する柱と、当該RFIDタグに対向する柱とに囲まれた4つの区分となる。
【0035】
図4(a)の左側に示すように、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が濃いグレースケールで示す推定区分に位置しているとしか推定できないが、図4(a)の右側に示すように、フォークリフト5のアンテナ7が指向性であり、指向性の向きをフォークリフト5の前方に向けていれば、矢印で示すように、フォークリフト5が、検出されたRFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0036】
図4(b)は、1つの柱の互いに反対を向く側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
1つの柱の互いに反対を向く側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図4(b)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された柱周辺の4つの区分となる。
【0037】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図4(b)の右側に示すように、検知されたRFIDタグが配置された柱と、該柱の右側又は左側に隣接する柱との間の4つの区分が推定区分となり、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0038】
図5(a)は、隣り合う2つの柱の互いに向かい合う側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
隣り合う2つの柱の互いに向かい合う側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図5(a)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱の間の4つの区分となる。
【0039】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図5(a)の右側に示すように、検知されたRFIDタグが配置された柱と、該柱の右側又は左側に隣接する柱とで囲まれた4つの区分が推定区分となり、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0040】
図5(b)は、隣り合う2つの柱の互いに同じ向きの側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
隣り合う2つの柱の互いに同じ向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図5(b)左側に濃いグレースケールで示すように、検出された2つのRFIDタグのうち指向性の向きにおいて前方にあるのRFIDタグが配置された柱周辺の4つの区分となる。
【0041】
これに対して、フォークリフト5のアンテナ7が指向性である場合も、図5(b)の右側に示すように、検出された2つのRFIDタグのうち指向性の向きにおいて前方にあるRFIDタグが配置された柱周辺の4つの区分が推定区分となる。このときフォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0042】
図5(c)は、隣り合う2つの柱の互いに反対を向く側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
隣り合う2つの柱の互いに反対を向く側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図5(c)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱の間の4つの区分となる。
【0043】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図5(c)の右側に示すように、検知されたRFIDタグが配置された柱と、該柱の右側又は左側に隣接する柱とで囲まれた4つの区分が推定区分となり、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0044】
図6(a)は、隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
図6(a)に示すように、隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図6(a)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された柱と、該柱に隣接する柱とで囲まれた4つの区分となる。
【0045】
これに対して、フォークリフト5のアンテナ7が指向性であれば、フォークリフト5は、図6(a)の右側に示すように、検知されたRFIDタグが配置された柱と、該柱に隣接する柱とで囲まれた推定区分において、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
図6(b)は、隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検出された他の場合の位置推定パターンを示す図である。
【0046】
図6(b)に示すように、隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図6(b)左側に濃いグレースケールで示すように、検知された2つのRFIDタグのうち、紙面上方を向くRFIDタグが配置された柱に対して、もう一方のRFIDタグが向く右側方向にある4つの区分となる。
【0047】
これに対して、フォークリフト5のアンテナ7が指向性であれば、フォークリフト5は、図6(b)の右側に示すように、検知された2つのRFIDタグのうち、紙面上方を向くRFIDタグが配置された柱に対して、もう一方のRFIDタグが向く右側方向にある推定区分において、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0048】
図6(c)は、隣り合う2つの柱の互いに並列に同じ向きとなる側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
図6(c)に示すように、隣り合う2つの柱の互いに並列に同じ向きとなる側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図6(c)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された柱と、該RFIDタグの指向性の方向側で隣接する柱とで囲まれた4つの区分となる。
【0049】
これに対して、フォークリフト5のアンテナ7が指向性であれば、フォークリフト5は、図6(c)の右側に示すように、検知されたRFIDタグが配置された柱と、該柱に隣接する柱とで囲まれた推定区分において、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
図6(d)は、隣り合う2つの柱の互いに並列に異なる向きとなる側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
【0050】
隣り合う2つの柱の互いに並列に異なる向きとなる側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図6(d)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱の間の4つの区分となる。
これに対して、フォークリフト5のアンテナ7が指向性であれば、図6(d)の右側に示すように、検知されたRFIDタグが配置された柱と、該柱の右側又は左側に隣接する柱とで囲まれた4つの区分が推定区分となり、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0051】
図7(a)は、格子の斜め方向に隣り合う2つの柱の互いに逆を向く側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
格子の斜め方向に隣り合う2つの柱の互いに逆を向く側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図7(a)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱と、該柱にそれぞれ隣接する柱に囲まれた4つの区分となる。
【0052】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図7(a)の右側に示すように、検知された2つのRFIDタグのうち、いずれか一方のRFIDタグの指向性の方向側で隣接する柱周辺の4つの区分となる。よって、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0053】
図7(b)は、格子の斜め方向に隣り合う2つの柱の互いに同じ向きの側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
格子の斜め方向に隣り合う2つの柱の互いに同じ向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図7(b)左側に濃いグレースケールで示すように、検出された2つのRFIDタグのうち指向性の向きにおいて前方にあるRFIDタグが配置された柱に対して、もう一方のRFIDタグが配置された柱側にある4つの区分となる。
【0054】
フォークリフト5のアンテナ7が指向性である場合も、図7(b)の右側に示すように、検出された2つのRFIDタグのうち指向性の向きにおいて前方にあるRFIDタグが配置された柱に隣接する4つの区分が推定区分となる。このときフォークリフト5は、矢印で示すように、指向性の向きにおいて後方にあるRFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0055】
図7(c)は、格子の斜め方向に隣り合う2つの柱の互いに逆を向く側面に配置された2つのRFIDタグが検出された他の場合の位置推定パターンを示す図である。
図7(c)に示すように、格子の斜め方向に隣り合う2つの柱の互いに逆を向く側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図7(c)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱と、該柱にそれぞれ隣接する柱に囲まれた4つの区分となる。
【0056】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図7(c)の右側に示すように、検知された2つのRFIDタグのうち、いずれか一方のRFIDタグの指向性の方向において反対側に隣接する柱周辺の4つの区分となる。よって、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0057】
図8(a)は、格子の斜め方向に隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検出された場合の位置推定パターンを示す図である。
格子の斜め方向に隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図8(a)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱と、該柱にそれぞれ隣接する柱に囲まれた4つの区分となる。
【0058】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図8(a)の右側に示すように、検知された2つのRFIDタグの指向性の方向側で隣接する柱周辺の4つの区分が推定区分となる。このときフォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
図8(b)は、格子の斜め方向に隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検出された他の場合の位置推定パターンを示す図である。
【0059】
格子の斜め方向に隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図8(b)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱と、該柱にそれぞれ隣接する柱に囲まれた4つの区分となる。
【0060】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図8(b)の右側に示すように、検知された2つのRFIDタグが配置された2つの柱に共通に隣接する柱周辺の4つの区分が推定区分となる。よって、2通りの位置推定パターンを考えることができる。それぞれの位置推定パターンにおいて、フォークリフト5は、矢印で示すように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0061】
図8(c)は、格子の斜め方向に隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検出されたさらに他の場合の位置推定パターンを示す図である。
図8(c)に示すように、格子の斜め方向に隣り合う2つの柱の互いに異なる向きの側面に配置された2つのRFIDタグが検知された場合、フォークリフト5のアンテナが無指向性であれば、フォークリフト5が位置していると推定される推定区分は、図8(c)左側に濃いグレースケールで示すように、検知されたRFIDタグが配置された2つの柱と、該柱にそれぞれ隣接する柱に囲まれた4つの区分となる。
【0062】
これに対して、フォークリフト5のアンテナ7が指向性であれば、図8(c)の右側に示すように、検知された2つのRFIDタグが配置された2つの柱に共通に隣接する柱のうち、該2つのRFIDタグの指向性の向きに対して左又は右側に隣接する柱周辺の4つの区分が推定区分となる。このときフォークリフト5は、矢印ですように、RFIDタグが配置された柱方向に前方を向けて位置していると推定することができる。
【0063】
以上、図3〜図8を参照してトポロジカルな位置推定パターンについて説明した。本実施形態においては、これら複数の位置推定パターンを位置テーブルとしてまとめて予め用意しておく。その上で、検出されたRFIDタグが1つであれば、図3に示す位置推定パターンを1つ選定し、検出されたRFIDタグが2つであれば、検出されたRFIDタグの相対的な位置関係を基に図4〜図8に示す位置推定パターンから1つ選定し、選定した位置推定パターンを実際の倉庫内の検出されたRFIDタグの位置に対応させる。そうすることで、倉庫内におけるフォークリフト5の位置を推定することができる。
【0064】
なお、参照した図において、フォークリフト5の向きを矢印で示したが、この矢印は、フォークリフト5の向きを示す方向ベクトルであり、フォークリフト5は、推定区分内でこの矢印に平行な向きに前方を向けていると推定できる。本実施形態において、方向ベクトルの大きさは無視する。
(第2実施形態)
次に、図9を参照しながら、本発明の第2実施形態について説明する。
【0065】
第1実施形態で説明した位置テーブルから、検出されたRFIDタグの相対的な位置関係に対応する位置推定パターンを選定して、選定した位置推定パターンを実際の倉庫内の検出されたRFIDタグの位置に対応させると、倉庫内におけるフォークリフト5の位置を推定することができる。
つまり、倉庫内で検出されたRFIDタグの組み合わせのそれぞれに対して位置推定パターンが決まるので、具体的なRFIDタグの組み合わせを決めれば、上述した位置推定パターンに基づいて、そのRFIDタグの組み合わせに対応した倉庫内における実際の推定区分と、フォークリフト5の向きが決まる。
【0066】
これら、RFIDタグの具体的な組み合わせと、それに対応する実際の推定区分と、フォークリフト5の向きとを予め図9に示すような推定リストとして保持しておけば、より簡便に、推定区分とフォークリフト5の向きを得ることができる。
図9は、その推定リストを示す図である。例えば、RFIDタグSC1が最も検出強度が高く、RFIDタグSC2が2番目に検出強度が高かった場合、第1タグIDはSC1であり、第2タグIDはSC2である。このときの推定区分は、図9より区分A1,A2,A5,及びA6であり、フォークリフト5の向きは0°であると推定することができる。
【0067】
このようなリストを用いることで、位置推定パターンを倉庫内の実際の位置に対応させる手間を省くことができる。
(第3実施形態)
次に、本発明の第3実施形態について説明する。
第1実施形態及び第2実施形態におけるフォークリフト5は、指向性を有するアンテナ7を、ルーフに1つだけ備えていた。本実施形態によるフォークリフト5は、図1に示すように、指向性を有するアンテナ7a,7bを、前進方向に対して左右両側に、ルーフの高さ付近に備える。これら2つのアンテナ7a,7bの指向性は、ともにフォークリフト5の前方に向けられている。
【0068】
これら2つのアンテナ7a,7bがそれぞれ独立してRFIDタグを検出すると、それぞれのアンテナごとに対応する位置推定パターンを2つ得ることができる。これら2つの位置推定パターンを用いれば、より正確にフォークリフト5の位置を推定することができる。
例えば、得られた2つの位置推定パターンが同じものであれば、フォークリフト5は、ほぼ間違いなく位置推定パターンが示す推定区分に位置すると推定できる。
【0069】
仮に、得られた2つの位置推定パターンが異なるものであれば、フォークリフト5は、互いの位置推定パターンにおいて共通する推定区分に位置すると推定できる。
ところで、一般的に、複数の事象の分布確率が得られた場合、それらの複合確率(条件付き確率)を求めることによって、両者が同時に得られる確率を求めることができる。上述した位置推定パターンの推定区分は、フォークリフト5がそこに存在する存在確率に基づいて作成されているものであるので、簡便には、各推定区分等に予め指標値を与えておき、得られた2つ位置推定パターンに示される推定区分の指標値を加算や乗算することによって、最もフォークリフト5の存在確率の高いを考えられる推定区分を求めることができる。
【0070】
具体的には、図9の推定区分リストの区分ごとに確率指標値を割り振って、重み付けとして用いる。例えば、フォークリフト5が主として動くライン(動線)を含んでいてフォークリフト5の存在確率が高いと思われる推定区分には、大きな確率指標値として3、倉庫の端又は隅でフォークリフト5の動線から外れた推定区分には、小さな確率指標値として1、を割り振る。
【0071】
このように確率指標値を割り振った上で、複数の推定区分が得られた場合には、区分毎の確率指標値を加算あるいは乗算し、その計算結果が最も大きな区分を推定区分とする、あるいは、得られた全ての位置推定パターンについて、各区分の座標を、確率指標値を重み付けとして加重平均をとる、といった方法が考えられる。
図中矢印で示した方向ベクトルについても、アンテナの指向性の向きから得られたフォークリフト5の向きについて、得られた推定位置パターンで示された方向ベクトルの平均を取るなどの方法でフォークリフト5の向きを計算する方法が考えられる。
【0072】
ところで、今回開示された実施形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0073】
1,2 柱
3a,3b,4a,4b RFIDタグ
5 フォークリフト
6 リーダ装置
7,7a,7b アンテナ
10,20 側面
【特許請求の範囲】
【請求項1】
複数の柱が平面視で格子状に配置された対象エリア内で移動する移動体の位置を検出するに際し、
検出感度に指向性を有する複数のIDタグを、指向性の向きが該格子方向と一致するように前記複数の柱に配備しておき、
前記移動体に、前記IDタグを検出するIDタグリーダと、前記IDタグと前記IDタグリーダの間で電波の送受信を行うアンテナとを配備しておき、
さらに、検出されるIDタグの前記対象エリア内における配置と前記移動体の対象エリア内における推定位置との関係を示す位置推定パターンを備えておき、
前記複数の柱に配備されたIDタグを、前記アンテナから送受信される電波を介して、前記IDタグリーダで1つ以上検出し、
前記検出されたIDタグの前記対象エリア内における配置に対応する位置推定パターンを判別することで、前記移動体の位置を推定することを特徴とする移動体の位置検出方法。
【請求項2】
複数の前記位置推定パターンを位置テーブルとして備えることを特徴とする請求項1に記載の移動体の位置検出方法。
【請求項3】
前記移動体に配備されたアンテナは指向性を有するものであり、
前記位置推定パターンは、前記アンテナの指向性に基づいた前記移動体の向きを示す情報を備えることを特徴とする請求項1又は2に記載の移動体の位置検出方法。
【請求項4】
前記移動体のIDタグリーダでIDタグを1つ以上検出した後に、
検出された複数のIDタグの検出信号強度又は応答回数の大小に基づいて、所定個数を上限としてIDタグを選出し、
該選出されたIDタグの前記対象エリア内における配置に基づいて位置推定パターンを判別することで前記移動体の位置を推定することを特徴とする請求項1〜3のいずれかに記載の移動体の位置検出方法。
【請求項5】
前記移動体は、指向性を有するアンテナを複数備えるものであって、
前記複数のアンテナ毎に、検出したIDタグに基づいて移動体の位置及び向きを表す情報を得、
前記移動体の位置及び向きを表す複数の情報を用いて、前記移動体の位置を推定することを特徴とする請求項3又は4に記載の移動体の位置検出方法。
【請求項1】
複数の柱が平面視で格子状に配置された対象エリア内で移動する移動体の位置を検出するに際し、
検出感度に指向性を有する複数のIDタグを、指向性の向きが該格子方向と一致するように前記複数の柱に配備しておき、
前記移動体に、前記IDタグを検出するIDタグリーダと、前記IDタグと前記IDタグリーダの間で電波の送受信を行うアンテナとを配備しておき、
さらに、検出されるIDタグの前記対象エリア内における配置と前記移動体の対象エリア内における推定位置との関係を示す位置推定パターンを備えておき、
前記複数の柱に配備されたIDタグを、前記アンテナから送受信される電波を介して、前記IDタグリーダで1つ以上検出し、
前記検出されたIDタグの前記対象エリア内における配置に対応する位置推定パターンを判別することで、前記移動体の位置を推定することを特徴とする移動体の位置検出方法。
【請求項2】
複数の前記位置推定パターンを位置テーブルとして備えることを特徴とする請求項1に記載の移動体の位置検出方法。
【請求項3】
前記移動体に配備されたアンテナは指向性を有するものであり、
前記位置推定パターンは、前記アンテナの指向性に基づいた前記移動体の向きを示す情報を備えることを特徴とする請求項1又は2に記載の移動体の位置検出方法。
【請求項4】
前記移動体のIDタグリーダでIDタグを1つ以上検出した後に、
検出された複数のIDタグの検出信号強度又は応答回数の大小に基づいて、所定個数を上限としてIDタグを選出し、
該選出されたIDタグの前記対象エリア内における配置に基づいて位置推定パターンを判別することで前記移動体の位置を推定することを特徴とする請求項1〜3のいずれかに記載の移動体の位置検出方法。
【請求項5】
前記移動体は、指向性を有するアンテナを複数備えるものであって、
前記複数のアンテナ毎に、検出したIDタグに基づいて移動体の位置及び向きを表す情報を得、
前記移動体の位置及び向きを表す複数の情報を用いて、前記移動体の位置を推定することを特徴とする請求項3又は4に記載の移動体の位置検出方法。
【図1】


【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−226959(P2011−226959A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−97919(P2010−97919)
【出願日】平成22年4月21日(2010.4.21)
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年4月21日(2010.4.21)
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
【Fターム(参考)】
[ Back to top ]