
移動体の旋回角度・方位・位置を検出するシステムおよび方法
【課題】 移動体の旋回角度および方位を検出するシステムを提供する。
【解決手段】
移動体には、所定の走査角度範囲にわたって周囲の対象物までの距離データを生成する距離計が搭載されている。検出システムは、フーリエ変換手段25と、旋回角度演算手段28と、方位演算手段29を備えている。フーリエ変換手段25は、上記距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、空間周波数領域においてフーリエ変換する。旋回角度演算手段28は、移動体が第1の方位から第2の方位へと旋回する際に、上記第1の方位での上記フーリエ変換データの所定次数の成分例えば三次成分と、上記第2の方位での上記フーリエ変換データの三次成分の位相差に基づき、移動体の旋回角度を演算する。方位演算手段29は、検出された旋回角度と既知の第1の方位に基づき、移動体の第2の方位を演算する。
【解決手段】
移動体には、所定の走査角度範囲にわたって周囲の対象物までの距離データを生成する距離計が搭載されている。検出システムは、フーリエ変換手段25と、旋回角度演算手段28と、方位演算手段29を備えている。フーリエ変換手段25は、上記距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、空間周波数領域においてフーリエ変換する。旋回角度演算手段28は、移動体が第1の方位から第2の方位へと旋回する際に、上記第1の方位での上記フーリエ変換データの所定次数の成分例えば三次成分と、上記第2の方位での上記フーリエ変換データの三次成分の位相差に基づき、移動体の旋回角度を演算する。方位演算手段29は、検出された旋回角度と既知の第1の方位に基づき、移動体の第2の方位を演算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体に搭載した距離計の測定データを用いてフーリエ変換処理をすることにより、移動体の旋回角度・方位・位置を検出するシステムおよび方法に関する。
【背景技術】
【0002】
特許文献1には、移動体の位置および方位を自動検出する装置が開示されている。この装置はGPS受信機と速度センサとジャイロを備えている。通常はGPSデータから移動体の位置と方位を検出することができる。また、GPSデータを受信できない状況でも、移動体の走行中、速度センサからのデータを積分処理することにより移動体の移動距離を演算し、ジャイロからの角速度を積分処理することにより移動体の方位からの旋回角度を演算し、これら移動距離と旋回角度に基づき、移動体の現在の位置と方位を検出するようになっている。
【0003】
先行技術文献として参考のために特許文献2を挙げる。この特許文献2では、対象物を撮影し、そのビデオ画像データを空間周波数でフーリエ変換し、このフーリエ変換データに基づき対象物の動きを検出する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−264182号公報
【特許文献2】特開2004−310281号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の位置・方位検出システムでは、高価なジャイロを必要とする。また、積分処理の際の誤差の蓄積により旋回角度の検出精度が低下する可能性もある。
また、移動体の旋回指令量から旋回角度を推測し、移動指令量により移動距離を推測して位置・方位情報を得る技術もあるが、これは移動体の滑りにより大きな誤差が生じる可能性がある。
【0006】
なお、特許文献2では空間周波数でフーリエ変換したデータを用いる点で本願発明と共通であるが、対象物の動きを検出することを目的とする点および原データとしてビデオ画像データを用いる点が本願発明と異なり、さらにフーリエ変換データの利用の仕方も本願発明と異なるものである。
【課題を解決するための手段】
【0007】
本発明は、上記課題を解決するため、移動体の旋回角度を検出するシステムにおいて、
(ア)移動体に搭載され、所定の走査角度範囲にわたって周囲の対象物までの距離データを生成する距離計と、
(イ)上記距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、空間周波数領域においてフーリエ変換するフーリエ変換手段と、
(ウ)移動体が第1の方位から第2の方位へと旋回する際に、上記第1の方位での上記フーリエ変換データの所定次数の成分と、上記第2の方位での上記フーリエ変換データの上記所定次数の成分の位相差に基づき、移動体の旋回角度を演算する旋回角度演算手段と、
を備えたことを特徴とする。
【0008】
上記システムによれば、比較的安価な距離計からの測定データを用いて移動体の旋回角度を検出することができる。
また、この旋回角度検出に際して、積分処理をしないので誤差が蓄積されることがなく、旋回指令量を用いないので移動体のすべりに伴う誤差も生じず、比較的高い検出精度が得られる。
【0009】
好ましくは、上記フーリエ変換データの上記所定次数の成分が、三次成分である。この三次成分は旋回角度との相関性が高いので、旋回角度の検出精度をより高めることができる。
【0010】
本発明の移動体の方位検出システムは、上記旋回角度検出システムを含み、さらに、この旋回角度検出システムで検出された旋回角度と既知の第1の方位に基づき、移動体の第2の方位を演算する方位演算手段を備えている。
これにより、移動体の第2方位すなわち現在方位を検出することができる。
【0011】
本発明の移動体の位置・方位検出システムは、上記移動体の方位検出システムを含み、上記走査角度範囲が上記距離計を通る基準軸線を中心として広がっており、さらに、移動体が第1の位置から第2の位置へ上記基準軸線に沿って直線的に移動する際に、上記フーリエ変換手段で演算された第1の位置でのフーリエ変換データの一次成分と、上記第2の位置でのフーリエ変換データの一次成分の振幅差に基づき、移動体の移動距離を演算する移動距離演算手段と、上記演算された移動距離と、移動体の既知の第1の位置とこの第1位置での既知の方位に基づき、移動体の第2の位置を演算する位置演算手段とを備えている。
これによれば、移動体の第2方位すなわち現在方位のみならず、第2位置すなわち現在位置をも距離データを用いて検出することができる。
【0012】
移動体の旋回角度検出方法は、移動体が第1の方位から第2の方位へと旋回する際の旋回角度を検出するものであって、
(ア)移動体に搭載された距離計により、移動体が上記第1の方位にある時に所定の走査角度範囲にわたって周囲の対象物までの距離データを生成し、移動体が上記第2の方位にある時に上記走査角度範囲にわたって周囲対象物までの距離データを生成し、
(イ)上記第1、第2の方位での距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、それぞれ空間周波数領域においてフーリエ変換し、
(ウ)上記第1方位でのフーリエ変換データの所定次数の成分と上記第2方位でのフーリエ変換データの上記所定次数の成分の位相差に基づき、移動体の旋回角度を演算する
ことを特徴とする。
【0013】
好ましくは、上記フーリエ変換データの上記所定次数の成分が、三次成分である。
【0014】
本発明の移動体の方位検出方法は、上記移動体の旋回角度検出方法を用いて検出した移動体の旋回角度と、既知の上記第1方位とに基づき、上記第2方位を検出する。
【0015】
本発明の移動体の位置・方位検出方法は、上記移動体の方位検出方法を用いて移動体の方位を検出するとともに、移動体の位置を検出する方法であって、
上記走査角度範囲が、上記距離計を通る基準軸線を中心として広がっており、
移動体が第1の位置から第2の位置へ上記基準軸線に沿って直線的に移動する際に、上記距離計により、移動体が上記第1の位置にある時に上記走査角度範囲にわたって周囲の対象物までの距離データを生成し、移動体が上記第2の位置にある時に上記走査角度範囲にわたって周囲対象物までの距離データを生成し、
上記第1、第2の位置での距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、それぞれ空間周波数領域においてフーリエ変換し、
上記第1の位置でのフーリエ変換データの一次成分と、上記第2の位置でのフーリエ変換データの一次成分の振幅差に基づき、移動体の移動距離を演算し、
上記の演算された移動距離と、既知の第1の位置とこの第1位置での既知の方位に基づき、移動体の第2の位置を演算する。
【発明の効果】
【0016】
本発明によれば、安価な距離計を用いて、負担の軽いフーリエ変換処理により、移動体の旋回角度、方位、位置を比較的高い精度で検出することができる。
【図面の簡単な説明】
【0017】
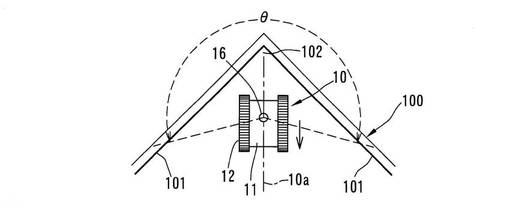
【図1】本発明の一実施形態をなす位置・方位検出システムが適用されるクローラロボットの概略平面図である。
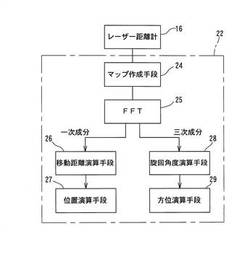
【図2】上記位置・検出システムで実行されるルーチンを作業別に示すブロック図である。
【図3】上記クローラロボットが家屋床下において布基礎の隅部から遠ざかるように直線的に後退する状態を示す概略平面図である。
【図4】(A)は上記クローラロボットが後退する前後の2時点での距離データに基づいて演算された布基礎壁面のマップを示す図であり、(B)は上記2時点でのマップデータを空間周波数領域でフーリエ変換したデータの一次成分をそれぞれ示す波形図であり、(C)は同三次成分の波形図である。
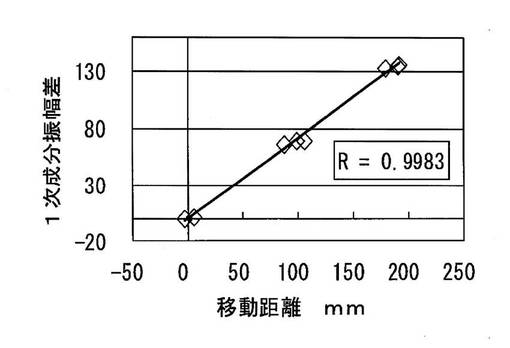
【図5】一次成分の振幅差と直線移動距離とのリニアな関係を示すグラフである。
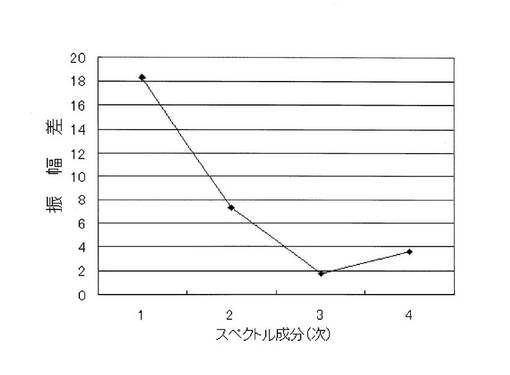
【図6】所定距離だけ直線移動した時の、一次〜四次成分の振幅差を示すグラフである。
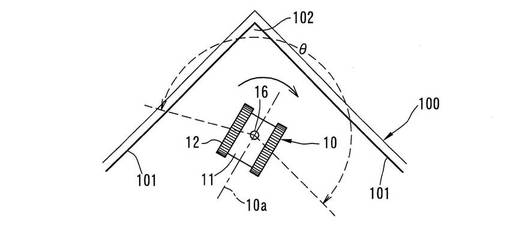
【図7】上記クローラロボットが家屋床下において超信地旋回をしている状態を示す概略平面図である。
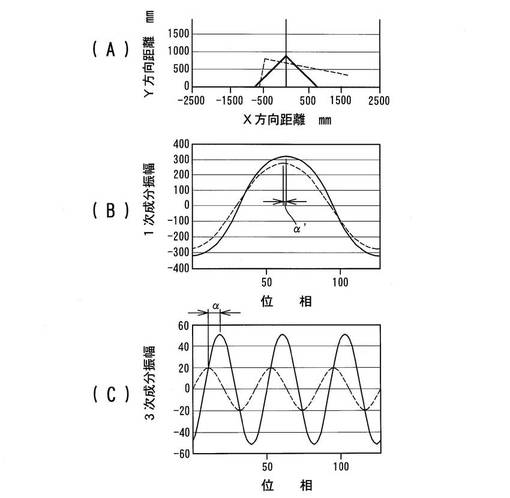
【図8】(A)は上記クローラロボットが超信地旋回する前後の2時点での距離データに基づいて演算された布基礎壁面のマップを示す図であり、(B)は上記2時点でのマップデータを空間周波数領域でフーリエ変換したデータの一次成分を示す波形図であり、(C)は同三次成分の波形図である。
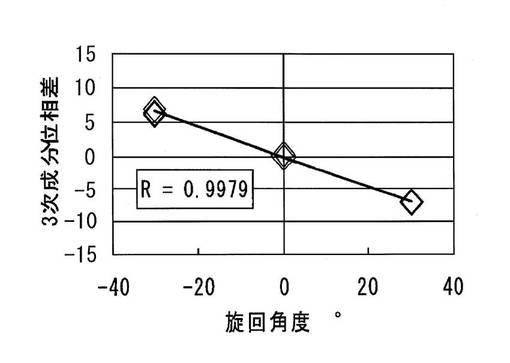
【図9】三次成分の位相差と旋回角度のリニアな関係を示すグラフである。
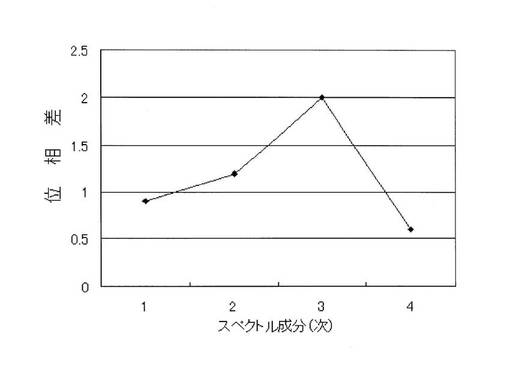
【図10】所定角度だけ超信地旋回した時の、一次〜四次成分の位相差を示すグラフである。
【発明を実施するための形態】
【0018】
以下、本発明の一実施形態に係わるクローラロボット10(移動体)の位置・方位検出システムについて、図面を参照しながら説明する。
説明の便宜上、図1に示すようにクローラロボット10を基準として、その前後に延びる座標軸をY軸とし、左右に延びる座標軸をX軸とする。クローラロボット10のY軸に沿って延びる中心軸線(基準軸線)を符号10aで示す。
【0019】
本実施形態のクローラロボット10は、軽量小型であり、前後方向に細長いボデイ11と、このボデイ11の左右に設けられた一対のクローラ12とを備えている。
上記ボデイ11には、上記中心軸線10a上に位置するビデオカメラ15とレーザー距離計16が搭載されるとともに、送受信機17が搭載されている。
【0020】
他方、基地局20はパソコンを主要構成としており、送受信機21と、制御・演算部22(図2参照)を備えるとともに、ディスプレイとリモートコントローラ(いずれも図示せず)を備えている。送受信機17,21間では、無線または有線による信号伝送が行われる。これら構成は周知であるので詳細な説明を省略する。
【0021】
ビデオカメラ15で撮影された映像は基地局20のディスプレイで表示される。操作者は、ディスプレイの映像を見ながらリモートコントローラを操作してクローラロボット12を移動させる。
【0022】
上記レーザー距離計16は、クローラロボット10の前方および左右にわたって、より正確には上記中心軸線10aを中心に角度範囲Θにわたって、水平面上を走査して距離測定を行う。この角度Θは好ましくは180〜240°であり、本実施形態では200°である。なお、距離計測は、角度Θを均等に角度分割した128のサンプリングポイントで行うようになっている。
【0023】
図2に示すように、上記基地局20の制御・演算部22は後述するルーチンを実行し、実質的に、マップ作成手段24と、FFT25(高速フーリエ変換手段:フーリエ変換手段)と、移動距離演算手段26と、位置演算手段27と、旋回角度演算手段28と、方位演算手段29とを備えている。
【0024】
上記構成をなすクローラロボット10を家屋の床下点検に用いた場合の位置・方位検出システムの作用について説明する。床下には布基礎100(周囲対象物)が配置されている。操作者は、クローラロボット10を移動させ、ディスプレイに表示された映像をみながら床下の状態を点検する。
【0025】
本実施形態では、クローラロボット10の移動制御は、中心軸線10aに沿った前後の直線的移動と、超信地旋回(位置を変えずにその場での旋回)に限定する。
クローラロボット10が図3に示す第1の位置・方位にある場合を例にとって説明する。図3の状態では、クローラロボット10は、布基礎100において2つの壁面101が直角に交差した隅部102の近傍に配置されている。クローラロボット10の中心軸線10aが上記隅部102を通り、2つの壁面101と同角度をなして交差している。
【0026】
上記クローラロボット10が直線的移動または超信地旋回をした場合、クローラロボット10は上記第1の位置・方位から第2の位置・方位に至る。上記クローラロボット10が図3に示すように直線移動する際には、第1の方位と第2の方位が等しく、第1の位置から第2の位置へと変化する。図7に示すように超信地旋回する際には、第1の位置と第2の位置が等しく、第1の方位から第2の方位へと変化する。
【0027】
クローラロボット10が上記第1の位置・方位にある時、レーザー距離計16により、角度Θにわたりレーザー距離計16から壁面101までの距離データを得る。上記制御・演算部22ではこの距離データに基づき、図4(A)、図8(A)に実線で示すような壁面101のX,Y座標における二次元マップデータを作成する。
【0028】
クローラロボット10が上記第2の位置・方位にある時にも同様にして距離データを得、二次元マップデータを作成する。
図3に矢印で示すように、クローラロボット10を中心軸線10aに沿って直線的に移動させた場合、例えば布基礎100の隅部102から遠ざかるように後退させた場合には、壁面101のマップは図4(A)に破線で示すようになる。また、超信地旋回させた場合のマップは図8(A)に破線で示すようになる。
【0029】
上記制御・演算部22における二次元マップ作成処理は、図2のマップ作成手段24に相当する。上記の壁面101のマップはクローラロボット10が第1位置・方位にある時および第2位置・方位にある時、基地局20のディスプレイに表示される。
【0030】
上記制御・演算部22では、上記第1の位置・方位でのマップデータおよび第2の位置・方位でのマップデータをそれぞれ空間周波数においてフーリエ変換し、記憶する。このフーリエ変化処理は、図2のFFT25に相当する。このフーリエ変換処理は、クローラロボット10が各位置・方位にある時に実行してもよいし、クローラロボットの移動終了後に行ってもよい。
【0031】
上記制御・演算手段22は、上記リモートコントローラからの操作情報(直線的移動か超信地旋回かの情報)に応答して以下のルーチンを実行する。
クローラロボット10が直線的移動例えば上述したように後退動作をする際には、制御・演算手段22は第1の位置・方位でのフーリエ変換データから図4(B)に実線で示す一次成分(周波数が「1」の成分)を抽出するとともに、第2の位置・方位でのフーリエ変換データから図4(B)に破線で示す一次成分を抽出する。なお、図4(B)において横軸は、位相(または周期)を表し、縦軸は振幅を表す。横軸の数字は0〜127のサンプリングポイントを示す。
【0032】
さらに、上記第1の位置・方位での一次成分と第2の位置・方位での一次成分の振幅の差ΔWを演算し、この振幅差ΔWから直線移動距離を演算する。上記一次成分の振幅差ΔWと直線移動距離は、図5に示す検証試験結果に示すように相関係数0.9983のリニアな関係を有している。この演算処理は、図2の移動距離演算手段26に相当する。
【0033】
参考までに、上記直線移動の際の、第1の位置・方位および第2の位置・方位でのフーリエ変換データの三次成分を図4(C)に実線および破線で示す。この三次成分でも振幅差ΔW’が生じるが、一次成分の振幅差ΔWより遥かに小さい。
本発明者は、所定距離だけ直線的に移動した時の一次〜四次のスペクトル成分の振幅差を測定し、図6のようなデータを得た。このデータからも、一次成分の振幅差が最大であることが理解できる。
そこで、本実施形態では上述したように、一次成分の振幅差ΔWを用いて移動距離を演算したのである。
【0034】
次に、上記第1の位置・方位と上記演算された直線移動距離に基づき、第2の位置すなわち現在の位置を演算する。上記第1の位置・方位は最初にクローラロボット10を床下に置く時に操作者が入力されるか、制御・演算部22で演算された位置・方位であり、既知である。この処理は図2の位置演算手段27に相当する。
【0035】
上述したようにして制御・演算部22は第2の位置を検出する。なお、直線的移動の場合、第2の方位は既知の第1の方位と等しいので、制御・演算部22は現在の位置・方位(第2の位置・方位)を検出したことになる。この位置・方位は、次の移動(直線的移動または超信地旋回)に際して、第1の位置・方位として提供される。
クローラロボット10を前進する場合も、上記と同様の演算により現在の位置・方位(第2の位置・方位)を検出することができる。
【0036】
クローラロボット10が超信地旋回の場合には、制御・演算手段22は第1の位置・方位でのフーリエ変換データから図8(C)に実線で示す三次成分(周波数が「3」の成分、換言すれば角度Θで3周期となる空間周波数をもつ成分)を抽出するとともに、第2の位置・方位でのフーリエ変換データから図8(C)に破線で示す三次成分を抽出する。
【0037】
さらに、上記第1の位置・方位での三次成分と第2の位置・方位での三次成分の位相差αを演算し、この位相差αから旋回角度を演算する。上記三次成分の位相差αと旋回角度は、図9に示す検証試験結果に示すように相関係数0.9979のリニアな関係を有している。この演算処理は、図2の旋回角度演算手段28に相当する。
【0038】
参考までに、上記超信地旋回の際の、第1の位置・方位および第2の位置・方位でのフーリエ変換データの一次成分を図8(B)に実線および破線で示す。この一次成分での位相差α’は三次成分の位相差αより小さい。
本発明者は、所定角度だけ超信地旋回時の一次〜四次のスペクトル成分の位相差を測定し、図10のようなデータを得た。このデータからも、三次成分の位相差が最大であることが理解できる。
そこで、本実施形態では上述したように、三次成分の振幅差αを用いて旋回角度を演算したのである。
【0039】
次に、既知の第1の方位と上記演算された旋回角度に基づき、第2の方位すなわち現在の方位を演算する。この処理は、図2の方位演算手段29に相当する。
上述したようにして制御・演算部22は第2の方位を検出する。なお、超信地旋回の場合、第2の位置は第1の位置と等しいので、制御・演算部22は、現在の位置・方位(第2の位置・方位)を検出したことになる。
【0040】
本発明は上記実施例に制約されず、種々の態様を採用することができる。例えば、上記実施形態では距離データからX,Y軸の2次元マップを作成し、このマップデータをフーリエ変換したが、距離データを直接フーリエ変換してもよい。
【0041】
上記実施形態では旋回角度演算のためにフーリエ変換データの三次成分を用いたが、一次、二次、四次以降の成分を用いてもよいし、2以上の成分に基づいて演算された旋回角度を評価し、平均化処理して最終的な旋回角度を得てもよい。
【0042】
上記実施形態では直線的移動または超信地旋回の前後における移動距離、旋回角度、位置、方位を演算したが、これら演算を移動の過程で所定時間間隔毎に行なってもよい。
【0043】
本実施形態では、距離計からの距離データだけに基づいて、移動体の旋回角度、移動距離、方位、位置の演算を行ったが、例えばGPSと併用し、GPSの電波が届かない場所で本実施形態の検出システムを作動させるようにしてもよい。
また、本実施形態の検出システムと、ジャイロ、速度センサを含む位置・方位検出システムとの併用も可能である。
【産業上の利用可能性】
【0044】
本発明は、床下点検ロボット等の移動体の位置・方位の検出システムとして用いることができる。
【符号の説明】
【0045】
10 クローラロボット(移動体)
16 距離計
24 マップ作成手段
25 FFT(フーリエ変換手段)
26 移動距離演算手段
27 位置演算手段
28 旋回角度演算手段
29 方位演算手段
【技術分野】
【0001】
本発明は、移動体に搭載した距離計の測定データを用いてフーリエ変換処理をすることにより、移動体の旋回角度・方位・位置を検出するシステムおよび方法に関する。
【背景技術】
【0002】
特許文献1には、移動体の位置および方位を自動検出する装置が開示されている。この装置はGPS受信機と速度センサとジャイロを備えている。通常はGPSデータから移動体の位置と方位を検出することができる。また、GPSデータを受信できない状況でも、移動体の走行中、速度センサからのデータを積分処理することにより移動体の移動距離を演算し、ジャイロからの角速度を積分処理することにより移動体の方位からの旋回角度を演算し、これら移動距離と旋回角度に基づき、移動体の現在の位置と方位を検出するようになっている。
【0003】
先行技術文献として参考のために特許文献2を挙げる。この特許文献2では、対象物を撮影し、そのビデオ画像データを空間周波数でフーリエ変換し、このフーリエ変換データに基づき対象物の動きを検出する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−264182号公報
【特許文献2】特開2004−310281号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の位置・方位検出システムでは、高価なジャイロを必要とする。また、積分処理の際の誤差の蓄積により旋回角度の検出精度が低下する可能性もある。
また、移動体の旋回指令量から旋回角度を推測し、移動指令量により移動距離を推測して位置・方位情報を得る技術もあるが、これは移動体の滑りにより大きな誤差が生じる可能性がある。
【0006】
なお、特許文献2では空間周波数でフーリエ変換したデータを用いる点で本願発明と共通であるが、対象物の動きを検出することを目的とする点および原データとしてビデオ画像データを用いる点が本願発明と異なり、さらにフーリエ変換データの利用の仕方も本願発明と異なるものである。
【課題を解決するための手段】
【0007】
本発明は、上記課題を解決するため、移動体の旋回角度を検出するシステムにおいて、
(ア)移動体に搭載され、所定の走査角度範囲にわたって周囲の対象物までの距離データを生成する距離計と、
(イ)上記距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、空間周波数領域においてフーリエ変換するフーリエ変換手段と、
(ウ)移動体が第1の方位から第2の方位へと旋回する際に、上記第1の方位での上記フーリエ変換データの所定次数の成分と、上記第2の方位での上記フーリエ変換データの上記所定次数の成分の位相差に基づき、移動体の旋回角度を演算する旋回角度演算手段と、
を備えたことを特徴とする。
【0008】
上記システムによれば、比較的安価な距離計からの測定データを用いて移動体の旋回角度を検出することができる。
また、この旋回角度検出に際して、積分処理をしないので誤差が蓄積されることがなく、旋回指令量を用いないので移動体のすべりに伴う誤差も生じず、比較的高い検出精度が得られる。
【0009】
好ましくは、上記フーリエ変換データの上記所定次数の成分が、三次成分である。この三次成分は旋回角度との相関性が高いので、旋回角度の検出精度をより高めることができる。
【0010】
本発明の移動体の方位検出システムは、上記旋回角度検出システムを含み、さらに、この旋回角度検出システムで検出された旋回角度と既知の第1の方位に基づき、移動体の第2の方位を演算する方位演算手段を備えている。
これにより、移動体の第2方位すなわち現在方位を検出することができる。
【0011】
本発明の移動体の位置・方位検出システムは、上記移動体の方位検出システムを含み、上記走査角度範囲が上記距離計を通る基準軸線を中心として広がっており、さらに、移動体が第1の位置から第2の位置へ上記基準軸線に沿って直線的に移動する際に、上記フーリエ変換手段で演算された第1の位置でのフーリエ変換データの一次成分と、上記第2の位置でのフーリエ変換データの一次成分の振幅差に基づき、移動体の移動距離を演算する移動距離演算手段と、上記演算された移動距離と、移動体の既知の第1の位置とこの第1位置での既知の方位に基づき、移動体の第2の位置を演算する位置演算手段とを備えている。
これによれば、移動体の第2方位すなわち現在方位のみならず、第2位置すなわち現在位置をも距離データを用いて検出することができる。
【0012】
移動体の旋回角度検出方法は、移動体が第1の方位から第2の方位へと旋回する際の旋回角度を検出するものであって、
(ア)移動体に搭載された距離計により、移動体が上記第1の方位にある時に所定の走査角度範囲にわたって周囲の対象物までの距離データを生成し、移動体が上記第2の方位にある時に上記走査角度範囲にわたって周囲対象物までの距離データを生成し、
(イ)上記第1、第2の方位での距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、それぞれ空間周波数領域においてフーリエ変換し、
(ウ)上記第1方位でのフーリエ変換データの所定次数の成分と上記第2方位でのフーリエ変換データの上記所定次数の成分の位相差に基づき、移動体の旋回角度を演算する
ことを特徴とする。
【0013】
好ましくは、上記フーリエ変換データの上記所定次数の成分が、三次成分である。
【0014】
本発明の移動体の方位検出方法は、上記移動体の旋回角度検出方法を用いて検出した移動体の旋回角度と、既知の上記第1方位とに基づき、上記第2方位を検出する。
【0015】
本発明の移動体の位置・方位検出方法は、上記移動体の方位検出方法を用いて移動体の方位を検出するとともに、移動体の位置を検出する方法であって、
上記走査角度範囲が、上記距離計を通る基準軸線を中心として広がっており、
移動体が第1の位置から第2の位置へ上記基準軸線に沿って直線的に移動する際に、上記距離計により、移動体が上記第1の位置にある時に上記走査角度範囲にわたって周囲の対象物までの距離データを生成し、移動体が上記第2の位置にある時に上記走査角度範囲にわたって周囲対象物までの距離データを生成し、
上記第1、第2の位置での距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、それぞれ空間周波数領域においてフーリエ変換し、
上記第1の位置でのフーリエ変換データの一次成分と、上記第2の位置でのフーリエ変換データの一次成分の振幅差に基づき、移動体の移動距離を演算し、
上記の演算された移動距離と、既知の第1の位置とこの第1位置での既知の方位に基づき、移動体の第2の位置を演算する。
【発明の効果】
【0016】
本発明によれば、安価な距離計を用いて、負担の軽いフーリエ変換処理により、移動体の旋回角度、方位、位置を比較的高い精度で検出することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施形態をなす位置・方位検出システムが適用されるクローラロボットの概略平面図である。
【図2】上記位置・検出システムで実行されるルーチンを作業別に示すブロック図である。
【図3】上記クローラロボットが家屋床下において布基礎の隅部から遠ざかるように直線的に後退する状態を示す概略平面図である。
【図4】(A)は上記クローラロボットが後退する前後の2時点での距離データに基づいて演算された布基礎壁面のマップを示す図であり、(B)は上記2時点でのマップデータを空間周波数領域でフーリエ変換したデータの一次成分をそれぞれ示す波形図であり、(C)は同三次成分の波形図である。
【図5】一次成分の振幅差と直線移動距離とのリニアな関係を示すグラフである。
【図6】所定距離だけ直線移動した時の、一次〜四次成分の振幅差を示すグラフである。
【図7】上記クローラロボットが家屋床下において超信地旋回をしている状態を示す概略平面図である。
【図8】(A)は上記クローラロボットが超信地旋回する前後の2時点での距離データに基づいて演算された布基礎壁面のマップを示す図であり、(B)は上記2時点でのマップデータを空間周波数領域でフーリエ変換したデータの一次成分を示す波形図であり、(C)は同三次成分の波形図である。
【図9】三次成分の位相差と旋回角度のリニアな関係を示すグラフである。
【図10】所定角度だけ超信地旋回した時の、一次〜四次成分の位相差を示すグラフである。
【発明を実施するための形態】
【0018】
以下、本発明の一実施形態に係わるクローラロボット10(移動体)の位置・方位検出システムについて、図面を参照しながら説明する。
説明の便宜上、図1に示すようにクローラロボット10を基準として、その前後に延びる座標軸をY軸とし、左右に延びる座標軸をX軸とする。クローラロボット10のY軸に沿って延びる中心軸線(基準軸線)を符号10aで示す。
【0019】
本実施形態のクローラロボット10は、軽量小型であり、前後方向に細長いボデイ11と、このボデイ11の左右に設けられた一対のクローラ12とを備えている。
上記ボデイ11には、上記中心軸線10a上に位置するビデオカメラ15とレーザー距離計16が搭載されるとともに、送受信機17が搭載されている。
【0020】
他方、基地局20はパソコンを主要構成としており、送受信機21と、制御・演算部22(図2参照)を備えるとともに、ディスプレイとリモートコントローラ(いずれも図示せず)を備えている。送受信機17,21間では、無線または有線による信号伝送が行われる。これら構成は周知であるので詳細な説明を省略する。
【0021】
ビデオカメラ15で撮影された映像は基地局20のディスプレイで表示される。操作者は、ディスプレイの映像を見ながらリモートコントローラを操作してクローラロボット12を移動させる。
【0022】
上記レーザー距離計16は、クローラロボット10の前方および左右にわたって、より正確には上記中心軸線10aを中心に角度範囲Θにわたって、水平面上を走査して距離測定を行う。この角度Θは好ましくは180〜240°であり、本実施形態では200°である。なお、距離計測は、角度Θを均等に角度分割した128のサンプリングポイントで行うようになっている。
【0023】
図2に示すように、上記基地局20の制御・演算部22は後述するルーチンを実行し、実質的に、マップ作成手段24と、FFT25(高速フーリエ変換手段:フーリエ変換手段)と、移動距離演算手段26と、位置演算手段27と、旋回角度演算手段28と、方位演算手段29とを備えている。
【0024】
上記構成をなすクローラロボット10を家屋の床下点検に用いた場合の位置・方位検出システムの作用について説明する。床下には布基礎100(周囲対象物)が配置されている。操作者は、クローラロボット10を移動させ、ディスプレイに表示された映像をみながら床下の状態を点検する。
【0025】
本実施形態では、クローラロボット10の移動制御は、中心軸線10aに沿った前後の直線的移動と、超信地旋回(位置を変えずにその場での旋回)に限定する。
クローラロボット10が図3に示す第1の位置・方位にある場合を例にとって説明する。図3の状態では、クローラロボット10は、布基礎100において2つの壁面101が直角に交差した隅部102の近傍に配置されている。クローラロボット10の中心軸線10aが上記隅部102を通り、2つの壁面101と同角度をなして交差している。
【0026】
上記クローラロボット10が直線的移動または超信地旋回をした場合、クローラロボット10は上記第1の位置・方位から第2の位置・方位に至る。上記クローラロボット10が図3に示すように直線移動する際には、第1の方位と第2の方位が等しく、第1の位置から第2の位置へと変化する。図7に示すように超信地旋回する際には、第1の位置と第2の位置が等しく、第1の方位から第2の方位へと変化する。
【0027】
クローラロボット10が上記第1の位置・方位にある時、レーザー距離計16により、角度Θにわたりレーザー距離計16から壁面101までの距離データを得る。上記制御・演算部22ではこの距離データに基づき、図4(A)、図8(A)に実線で示すような壁面101のX,Y座標における二次元マップデータを作成する。
【0028】
クローラロボット10が上記第2の位置・方位にある時にも同様にして距離データを得、二次元マップデータを作成する。
図3に矢印で示すように、クローラロボット10を中心軸線10aに沿って直線的に移動させた場合、例えば布基礎100の隅部102から遠ざかるように後退させた場合には、壁面101のマップは図4(A)に破線で示すようになる。また、超信地旋回させた場合のマップは図8(A)に破線で示すようになる。
【0029】
上記制御・演算部22における二次元マップ作成処理は、図2のマップ作成手段24に相当する。上記の壁面101のマップはクローラロボット10が第1位置・方位にある時および第2位置・方位にある時、基地局20のディスプレイに表示される。
【0030】
上記制御・演算部22では、上記第1の位置・方位でのマップデータおよび第2の位置・方位でのマップデータをそれぞれ空間周波数においてフーリエ変換し、記憶する。このフーリエ変化処理は、図2のFFT25に相当する。このフーリエ変換処理は、クローラロボット10が各位置・方位にある時に実行してもよいし、クローラロボットの移動終了後に行ってもよい。
【0031】
上記制御・演算手段22は、上記リモートコントローラからの操作情報(直線的移動か超信地旋回かの情報)に応答して以下のルーチンを実行する。
クローラロボット10が直線的移動例えば上述したように後退動作をする際には、制御・演算手段22は第1の位置・方位でのフーリエ変換データから図4(B)に実線で示す一次成分(周波数が「1」の成分)を抽出するとともに、第2の位置・方位でのフーリエ変換データから図4(B)に破線で示す一次成分を抽出する。なお、図4(B)において横軸は、位相(または周期)を表し、縦軸は振幅を表す。横軸の数字は0〜127のサンプリングポイントを示す。
【0032】
さらに、上記第1の位置・方位での一次成分と第2の位置・方位での一次成分の振幅の差ΔWを演算し、この振幅差ΔWから直線移動距離を演算する。上記一次成分の振幅差ΔWと直線移動距離は、図5に示す検証試験結果に示すように相関係数0.9983のリニアな関係を有している。この演算処理は、図2の移動距離演算手段26に相当する。
【0033】
参考までに、上記直線移動の際の、第1の位置・方位および第2の位置・方位でのフーリエ変換データの三次成分を図4(C)に実線および破線で示す。この三次成分でも振幅差ΔW’が生じるが、一次成分の振幅差ΔWより遥かに小さい。
本発明者は、所定距離だけ直線的に移動した時の一次〜四次のスペクトル成分の振幅差を測定し、図6のようなデータを得た。このデータからも、一次成分の振幅差が最大であることが理解できる。
そこで、本実施形態では上述したように、一次成分の振幅差ΔWを用いて移動距離を演算したのである。
【0034】
次に、上記第1の位置・方位と上記演算された直線移動距離に基づき、第2の位置すなわち現在の位置を演算する。上記第1の位置・方位は最初にクローラロボット10を床下に置く時に操作者が入力されるか、制御・演算部22で演算された位置・方位であり、既知である。この処理は図2の位置演算手段27に相当する。
【0035】
上述したようにして制御・演算部22は第2の位置を検出する。なお、直線的移動の場合、第2の方位は既知の第1の方位と等しいので、制御・演算部22は現在の位置・方位(第2の位置・方位)を検出したことになる。この位置・方位は、次の移動(直線的移動または超信地旋回)に際して、第1の位置・方位として提供される。
クローラロボット10を前進する場合も、上記と同様の演算により現在の位置・方位(第2の位置・方位)を検出することができる。
【0036】
クローラロボット10が超信地旋回の場合には、制御・演算手段22は第1の位置・方位でのフーリエ変換データから図8(C)に実線で示す三次成分(周波数が「3」の成分、換言すれば角度Θで3周期となる空間周波数をもつ成分)を抽出するとともに、第2の位置・方位でのフーリエ変換データから図8(C)に破線で示す三次成分を抽出する。
【0037】
さらに、上記第1の位置・方位での三次成分と第2の位置・方位での三次成分の位相差αを演算し、この位相差αから旋回角度を演算する。上記三次成分の位相差αと旋回角度は、図9に示す検証試験結果に示すように相関係数0.9979のリニアな関係を有している。この演算処理は、図2の旋回角度演算手段28に相当する。
【0038】
参考までに、上記超信地旋回の際の、第1の位置・方位および第2の位置・方位でのフーリエ変換データの一次成分を図8(B)に実線および破線で示す。この一次成分での位相差α’は三次成分の位相差αより小さい。
本発明者は、所定角度だけ超信地旋回時の一次〜四次のスペクトル成分の位相差を測定し、図10のようなデータを得た。このデータからも、三次成分の位相差が最大であることが理解できる。
そこで、本実施形態では上述したように、三次成分の振幅差αを用いて旋回角度を演算したのである。
【0039】
次に、既知の第1の方位と上記演算された旋回角度に基づき、第2の方位すなわち現在の方位を演算する。この処理は、図2の方位演算手段29に相当する。
上述したようにして制御・演算部22は第2の方位を検出する。なお、超信地旋回の場合、第2の位置は第1の位置と等しいので、制御・演算部22は、現在の位置・方位(第2の位置・方位)を検出したことになる。
【0040】
本発明は上記実施例に制約されず、種々の態様を採用することができる。例えば、上記実施形態では距離データからX,Y軸の2次元マップを作成し、このマップデータをフーリエ変換したが、距離データを直接フーリエ変換してもよい。
【0041】
上記実施形態では旋回角度演算のためにフーリエ変換データの三次成分を用いたが、一次、二次、四次以降の成分を用いてもよいし、2以上の成分に基づいて演算された旋回角度を評価し、平均化処理して最終的な旋回角度を得てもよい。
【0042】
上記実施形態では直線的移動または超信地旋回の前後における移動距離、旋回角度、位置、方位を演算したが、これら演算を移動の過程で所定時間間隔毎に行なってもよい。
【0043】
本実施形態では、距離計からの距離データだけに基づいて、移動体の旋回角度、移動距離、方位、位置の演算を行ったが、例えばGPSと併用し、GPSの電波が届かない場所で本実施形態の検出システムを作動させるようにしてもよい。
また、本実施形態の検出システムと、ジャイロ、速度センサを含む位置・方位検出システムとの併用も可能である。
【産業上の利用可能性】
【0044】
本発明は、床下点検ロボット等の移動体の位置・方位の検出システムとして用いることができる。
【符号の説明】
【0045】
10 クローラロボット(移動体)
16 距離計
24 マップ作成手段
25 FFT(フーリエ変換手段)
26 移動距離演算手段
27 位置演算手段
28 旋回角度演算手段
29 方位演算手段
【特許請求の範囲】
【請求項1】
移動体の旋回角度を検出するシステムにおいて、
(ア)移動体に搭載され、所定の走査角度範囲にわたって周囲の対象物までの距離データを生成する距離計と、
(イ)上記距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、空間周波数領域においてフーリエ変換するフーリエ変換手段と、
(ウ)移動体が第1の方位から第2の方位へと旋回する際に、上記第1の方位での上記フーリエ変換データの所定次数の成分と、上記第2の方位での上記フーリエ変換データの上記所定次数の成分の位相差に基づき、移動体の旋回角度を演算する旋回角度演算手段と、
を備えたことを特徴とする移動体の旋回角度検出システム。
【請求項2】
上記フーリエ変換データの上記所定次数の成分が、三次成分であることを特徴とする請求項1に記載の移動体の旋回角度検出システム。
【請求項3】
請求項1または2に記載の移動体の旋回角度検出システムを含み、さらに、
この旋回角度検出システムで検出された旋回角度と既知の第1の方位に基づき、移動体の第2の方位を演算する方位演算手段を備えたことを特徴とする移動体の方位検出システム。
【請求項4】
請求項3の移動体の方位検出システムを含み、上記走査角度範囲が上記距離計を通る基準軸線を中心として広がっており、さらに、
移動体が第1の位置から第2の位置へ上記基準軸線に沿って直線的に移動する際に、上記フーリエ変換手段で演算された第1の位置でのフーリエ変換データの一次成分と、上記第2の位置でのフーリエ変換データの一次成分の振幅差に基づき、移動体の移動距離を演算する移動距離演算手段と、
上記演算された移動距離と、移動体の既知の第1の位置とこの第1位置での既知の方位に基づき、移動体の第2の位置を演算する位置演算手段と、
を備えたことを特徴とする移動体の位置・方位検出システム。
【請求項5】
移動体が第1の方位から第2の方位へと旋回する際の旋回角度を検出する方法において、
(ア)移動体に搭載された距離計により、移動体が上記第1の方位にある時に所定の走査角度範囲にわたって周囲の対象物までの距離データを生成し、移動体が上記第2の方位にある時に上記走査角度範囲にわたって周囲対象物までの距離データを生成し、
(イ)上記第1、第2の方位での距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、それぞれ空間周波数領域においてフーリエ変換し、
(ウ)上記第1方位でのフーリエ変換データの所定次数の成分と上記第2方位でのフーリエ変換データの上記所定次数の成分の位相差に基づき、移動体の旋回角度を演算する
ことを特徴とする移動体の旋回角度検出方法。
【請求項6】
上記フーリエ変換データの上記所定次数の成分が、三次成分であることを特徴とする請求項5に記載の移動体の旋回角度検出方法。
【請求項7】
請求項5または6の移動体の旋回角度検出方法を用いて検出した移動体の旋回角度と、既知の上記第1方位とに基づき、上記第2方位を検出する移動体の方位検出方法。
【請求項8】
請求項7の移動体の方位検出方法を用いて移動体の方位を検出するとともに、移動体の位置を検出する方法であって、
上記走査角度範囲が、上記距離計を通る基準軸線を中心として広がっており、
移動体が第1の位置から第2の位置へ上記基準軸線に沿って直線的に移動する際に、上記距離計により、移動体が上記第1の位置にある時に上記走査角度範囲にわたって周囲の対象物までの距離データを生成し、移動体が上記第2の位置にある時に上記走査角度範囲にわたって周囲対象物までの距離データを生成し、
上記第1、第2の位置での距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、それぞれ空間周波数領域においてフーリエ変換し、
上記第1の位置でのフーリエ変換データの一次成分と、上記第2の位置でのフーリエ変換データの一次成分の振幅差に基づき、移動体の移動距離を演算し、
上記の演算された移動距離と、既知の第1の位置とこの第1位置での既知の方位に基づき、移動体の第2の位置を演算することを特徴とする移動体の位置・方位検出方法。
【請求項1】
移動体の旋回角度を検出するシステムにおいて、
(ア)移動体に搭載され、所定の走査角度範囲にわたって周囲の対象物までの距離データを生成する距離計と、
(イ)上記距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、空間周波数領域においてフーリエ変換するフーリエ変換手段と、
(ウ)移動体が第1の方位から第2の方位へと旋回する際に、上記第1の方位での上記フーリエ変換データの所定次数の成分と、上記第2の方位での上記フーリエ変換データの上記所定次数の成分の位相差に基づき、移動体の旋回角度を演算する旋回角度演算手段と、
を備えたことを特徴とする移動体の旋回角度検出システム。
【請求項2】
上記フーリエ変換データの上記所定次数の成分が、三次成分であることを特徴とする請求項1に記載の移動体の旋回角度検出システム。
【請求項3】
請求項1または2に記載の移動体の旋回角度検出システムを含み、さらに、
この旋回角度検出システムで検出された旋回角度と既知の第1の方位に基づき、移動体の第2の方位を演算する方位演算手段を備えたことを特徴とする移動体の方位検出システム。
【請求項4】
請求項3の移動体の方位検出システムを含み、上記走査角度範囲が上記距離計を通る基準軸線を中心として広がっており、さらに、
移動体が第1の位置から第2の位置へ上記基準軸線に沿って直線的に移動する際に、上記フーリエ変換手段で演算された第1の位置でのフーリエ変換データの一次成分と、上記第2の位置でのフーリエ変換データの一次成分の振幅差に基づき、移動体の移動距離を演算する移動距離演算手段と、
上記演算された移動距離と、移動体の既知の第1の位置とこの第1位置での既知の方位に基づき、移動体の第2の位置を演算する位置演算手段と、
を備えたことを特徴とする移動体の位置・方位検出システム。
【請求項5】
移動体が第1の方位から第2の方位へと旋回する際の旋回角度を検出する方法において、
(ア)移動体に搭載された距離計により、移動体が上記第1の方位にある時に所定の走査角度範囲にわたって周囲の対象物までの距離データを生成し、移動体が上記第2の方位にある時に上記走査角度範囲にわたって周囲対象物までの距離データを生成し、
(イ)上記第1、第2の方位での距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、それぞれ空間周波数領域においてフーリエ変換し、
(ウ)上記第1方位でのフーリエ変換データの所定次数の成分と上記第2方位でのフーリエ変換データの上記所定次数の成分の位相差に基づき、移動体の旋回角度を演算する
ことを特徴とする移動体の旋回角度検出方法。
【請求項6】
上記フーリエ変換データの上記所定次数の成分が、三次成分であることを特徴とする請求項5に記載の移動体の旋回角度検出方法。
【請求項7】
請求項5または6の移動体の旋回角度検出方法を用いて検出した移動体の旋回角度と、既知の上記第1方位とに基づき、上記第2方位を検出する移動体の方位検出方法。
【請求項8】
請求項7の移動体の方位検出方法を用いて移動体の方位を検出するとともに、移動体の位置を検出する方法であって、
上記走査角度範囲が、上記距離計を通る基準軸線を中心として広がっており、
移動体が第1の位置から第2の位置へ上記基準軸線に沿って直線的に移動する際に、上記距離計により、移動体が上記第1の位置にある時に上記走査角度範囲にわたって周囲の対象物までの距離データを生成し、移動体が上記第2の位置にある時に上記走査角度範囲にわたって周囲対象物までの距離データを生成し、
上記第1、第2の位置での距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、それぞれ空間周波数領域においてフーリエ変換し、
上記第1の位置でのフーリエ変換データの一次成分と、上記第2の位置でのフーリエ変換データの一次成分の振幅差に基づき、移動体の移動距離を演算し、
上記の演算された移動距離と、既知の第1の位置とこの第1位置での既知の方位に基づき、移動体の第2の位置を演算することを特徴とする移動体の位置・方位検出方法。
【図1】



【図2】

【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−196761(P2011−196761A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−62212(P2010−62212)
【出願日】平成22年3月18日(2010.3.18)
【出願人】(000110251)トピー工業株式会社 (255)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月18日(2010.3.18)
【出願人】(000110251)トピー工業株式会社 (255)
【Fターム(参考)】
[ Back to top ]