
移動体の計測方法および計測装置
【課題】移動体の移動方向および移動速度を計測できる範囲を大きく確保でき移動体の移動方向や移動速度を的確に計測する上で有利な移動体の計測方法および装置を提供する。
【解決手段】第1乃至第4のアンテナ12A〜12Dは、指向性を有し、供給される送信信号に基づいてゴルフボール2に向けて送信波W1を送信すると共に、ゴルフボール2反射された反射波W2を受信して受信信号を生成し、互いに離間して配置されている。第1乃至第4のドップラーセンサ14A〜14Dは、ドップラー周波数Fdを有する第1乃至第4ドップラー信号SdA〜SdDを時系列データとして生成する。計測処理部20は、予め得られている各アンテナ12A〜12Dを用いて計測された速度と移動方向および移動速度との実測値との相関関係に基づき、測定された各速度から移動方向および移動速度を算出する。
【解決手段】第1乃至第4のアンテナ12A〜12Dは、指向性を有し、供給される送信信号に基づいてゴルフボール2に向けて送信波W1を送信すると共に、ゴルフボール2反射された反射波W2を受信して受信信号を生成し、互いに離間して配置されている。第1乃至第4のドップラーセンサ14A〜14Dは、ドップラー周波数Fdを有する第1乃至第4ドップラー信号SdA〜SdDを時系列データとして生成する。計測処理部20は、予め得られている各アンテナ12A〜12Dを用いて計測された速度と移動方向および移動速度との実測値との相関関係に基づき、測定された各速度から移動方向および移動速度を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は移動体の移動方向および移動速度を計測する計測方法および計測装置に関する。
【背景技術】
【0002】
移動体の速度を計測する方法として、電波や超音波を送信波として発信し、移動体からの反射波との周波数変化から速度を算出するドップラー法が広く知られている。
このようなドップラー法を用いて移動体の移動方向および移動速度の双方を計測する技術が提案されている(特許文献1参照)。
この技術では、単一の送波器からの超音波を移動体(ゴルフクラブヘッド)に向けて送波すると共に、移動体で反射された反射波を異なる位置に設けられた3つの受波器で受波する。そして、各受波器で検出された反射波に含まれるドップラー信号成分に基づき、各受波方向における移動体の相対速度をそれぞれ算出し、これら相対速度に基づいて移動体の速度ベクトルを算出し、速度ベクトルの向きに基づいて移動体の移動方向(角度)を算出している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−71802号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術では、移動方向および移動速度の計測精度を確保するためには、送波器および3つの受波器の指向性を狭くすると共に、各送波器および3つの受波器の配置を厳密に設定する必要があり、したがって、移動体の計測範囲が狭い範囲に限定される。
そのため、例えば、計測対象となる移動体がゴルフクラブヘッドで打撃されることで飛翔するゴルフボールのように打ち出し角度が広い範囲にわたってばらつくようなものである場合には、移動体が計測範囲外に移動すると、移動方向や移動速度を的確に計測することが困難である。
本発明は、このような事情に鑑みてなされたものであり、その目的は、移動体の移動方向および移動速度を計測できる範囲を大きく確保でき、移動体の移動方向や移動速度を的確に計測する上で有利な移動体の計測方法および計測装置を提供することにある。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明の移動体の計測方法は、指向性を有し、供給される送信信号に基づいて移動体に向けて送信波を送信すると共に、前記移動体で反射された反射波を受信して受信信号を生成する第1乃至第n(nは2以上の整数)のアンテナを互いに離間して配置し、前記第1乃至第nのアンテナのそれぞれに対応して、前記アンテナに前記送信信号を供給すると共に、前記アンテナから供給される前記受信信号に基づいてドップラー周波数を有するドップラー信号を生成する第1乃至第nのドップラーセンサを設け、前記第1乃至第nのドップラーセンサのそれぞれから得られたドップラー信号を周波数解析することにより周波数ごとの信号強度の分布を示す第1乃至第nの信号強度分布データを生成する信号強度分布データ生成部を設け、前記第1乃至第nの信号強度分布データのそれぞれに基づいて、前記移動体の移動速度に対応するドップラー周波数成分を検出し、それら検出したドップラー周波数成分に基づいて第1乃至第nの速度を算出する速度演算部を設け、前記第1乃至第nの速度と前記移動体の移動方向との相関関係と、前記第1乃至第nの速度と前記移動体の移動速度との相関関係とをそれぞれ予め求めておき、前記第1乃至第nの速度と前記移動体の移動方向との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動方向を算出し、前記第1乃至第nの速度と前記移動体の移動速度との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動速度を算出することを特徴とする。
また本発明の移動体の計測装置は、指向性を有し、供給される送信信号に基づいて移動体に向けて送信波を送信すると共に、前記移動体で反射された反射波を受信して受信信号を生成する互いに離間して配置された第1乃至第n(nは2以上の整数)のアンテナと、前記第1乃至第nのアンテナのそれぞれに対応して設けられ、前記アンテナに前記送信信号を供給すると共に、前記アンテナから供給される前記受信信号に基づいてドップラー周波数を有するドップラー信号を生成する第1乃至第nのドップラーセンサと、前記第1乃至第nのドップラーセンサのそれぞれから得られたドップラー信号を周波数解析することにより周波数ごとの信号強度の分布を示す第1乃至第nの信号強度分布データを生成する信号強度分布データ生成部と、前記第1乃至第nの信号強度分布データのそれぞれに基づいて、前記移動体の移動速度に対応するドップラー周波数成分を検出し、それら検出したドップラー周波数成分に基づいて第1乃至第nの速度を算出する速度演算部と、予め実測され得られている前記第1乃至第nの速度と予め実測され得られている前記移動体の移動方向との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動方向を算出する移動方向演算部と、予め実測され得られている前記第1乃至第nの速度と予め実測され得られている前記移動体の移動速度との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動速度を算出する移動速度演算部とを備えることを特徴とする。
【発明の効果】
【0006】
本発明によれば、移動体に向けて送信波を送信すると共に、移動体から反射された反射波を受信する複数のアンテナを設け、予め得られている各アンテナを用いて計測された速度と移動方向および移動速度との実測値との相関関係に基づき、測定された各速度から移動方向および移動速度を算出するようにした。
したがって、アンテナの指向性やアンテナの配置に関する制約が少ないことから、移動体に送信波を送信しかつ移動体で反射された反射波を受信する空間を広く確保する上で有利となり、しかも、予め得られた相関関係に基づいて移動方向および移動速度を算出するため移動方向および移動速度の精度を確保する上で有利となる。
【図面の簡単な説明】
【0007】
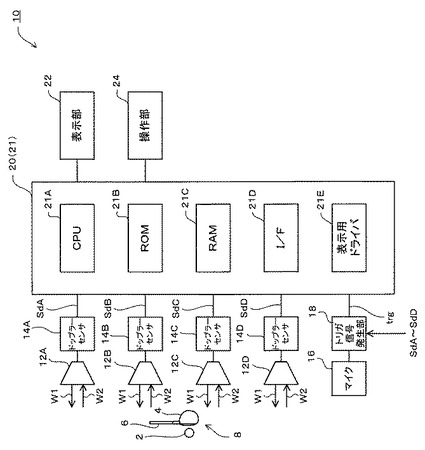
【図1】第1の実施の形態の移動体の計測装置10の構成を示すブロック図である。
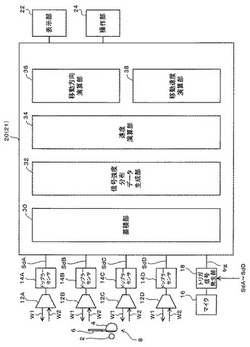
【図2】計測装置10の機能ブロック図である。
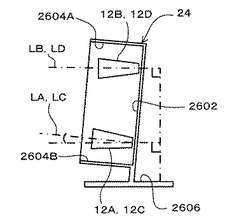
【図3】第1乃至第4のアンテナ12A〜12Dの構成を示す正面図である。
【図4】図3のA矢視図である。
【図5】図3のB矢視図である。
【図6】第1〜第4アンテナ14A〜14Dを側面視した説明図である。
【図7】第1〜第4アンテナ14A〜14Dを平面視した説明図である。
【図8】ゴルフクラブヘッド4によってゴルフボール2を打撃した際の第1乃至第4のドップラー信号SdA〜SdDの一例を示す線図である。
【図9】信号強度分布データ生成部32によって生成された第1乃至第4の信号強度分布データPA〜PDの一例を示す線図である。
【図10】ゴルフボール2と第1〜第4アンテナ14A〜14Dとを側面視した説明図である。
【図11】ゴルフボール2と第1〜第4アンテナ14A〜14Dとを平面視した説明図である。
【図12】左右角度θxと第1の値D1との相関関係を表す特性線kを示す図である。
【図13】第1乃至第4の速度VA〜VDと、ゴルフボール2の移動方向および移動速度との相関関係を示す相関式の設定処理を説明するフローチャートである。
【図14】ゴルフボール2を打撃した場合における計測装置10の移動方向および移動速度の計測動作を説明するフローチャートである。
【図15】第1乃至第3のアンテナ12A、12B、12Cが設けられた構成を示す正面図である。
【図16】第2の実施の形態における単一の相関式で示される特性線kを示す図である。
【図17】(a)、(b)は図16の第1、第2の領域Ga、Gbに区分された特性線ka、kbを示す図である。
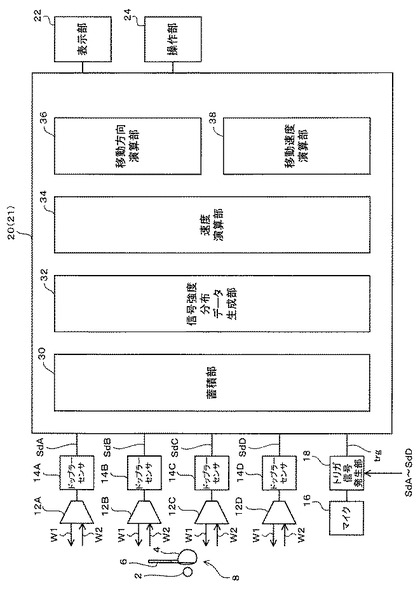
【図18】第3の実施の形態における計測装置10の機能ブロック図である。
【発明を実施するための形態】
【0008】
(第1の実施の形態)
以下、本発明の実施の形態について図面を参照して説明する。
本実施の形態では、移動体がゴルフボールであり、本実施の形態に係る移動体の計測装置は、ゴルフクラブヘッドによって打撃されたゴルフボールの移動方向と移動速度を計測するものである場合について説明する。なお、移動体は、野球用ボールやサッカーボールなどの球技用ボールであってもよく、空間を移動する移動体であればよい。
図1に示すように、本実施の形態の移動体の計測装置10は、第1乃至第4のアンテナ12A、12B、12C、12Dと、第1乃至第4のドップラーセンサ14A、14B、14C、14Dと、マイク16と、トリガ信号発生部18と、計測処理部20と、表示部22と、操作部24などを含んで構成されている。
本実施の形態では、第1乃至第4のアンテナ12A、12B、12C、12Dと第1乃至第4のドップラーセンサ14A、14B、14C、14Dとは後述するケース26(図3)に収容保持されている。
また、トリガ信号発生部18と、計測処理部20と、表示部22と、操作部24とは、不図示の筐体に組み込まれている。
第1乃至第4のドップラーセンサ14A、14B、14C、14Dと計測処理部20とは不図示の接続ケーブルを介して接続され、マイク16と計測処理部20とは不図示の接続ケーブルを介して接続されている。
なお、図1において符号2は移動体としてのゴルフボール、4はゴルフクラブヘッド、6はシャフト、8はゴルフクラブを示す。
【0009】
第1乃至第4のアンテナ12A〜12Dは、第1乃至第4のドップラーセンサ14A〜14Dから供給される送信信号に基づいて送信波W1としてのマイクロ波を移動体に向けて送信すると共に、移動体で反射された反射波W2を受信して受信信号を第1乃至第4のドップラーセンサ14A〜14Dに供給するものである。
より詳細には、第1乃至第4のアンテナ12A〜12Dは、指向性を有し、送信波W1を送信すると共に、ゴルフボール2反射された反射波W2を受信して受信信号を生成するものであり、互いに離間して配置されている。
本実施の形態では、第1乃至第4アンテナ12A〜12Dは同形同大の指向性アンテナで構成され、このような指向性アンテナとしてホーンアンテナを使用している。
指向性アンテナとしてホーンアンテナ以外のパラボラアンテナなどの従来公知のさまざまな指向性アンテナを使用可能であるが、ホーンアンテナは構成が簡素であり比較的安価であることからコストを抑制する上で有利である。
【0010】
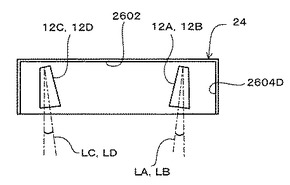
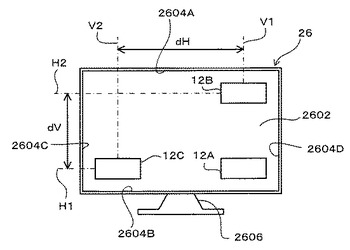
図3は第1乃至第4のアンテナ12A〜12Dの構成を示す正面図、図4は図3のA矢視図、図5は図3のB矢視図である。
図3乃至図5に示すように、第1乃至第4アンテナの12A〜12Dは、ケース26に収容保持されている。
ケース26は、後板2602と、上下左右の側板2604A、2604B、2604C、2604Dと、脚部2606とを含んで構成されている。
後板2602は矩形板状を呈し、上下の辺を水平方向と平行させ、上方に至るほど後方に傾斜するように設けられている。
上下左右の側板2604A〜2604Dは、後板2602の上下左右の辺から起立され、各側板2604A〜2604Dの前縁により矩形状の開口が形成されている。
脚部2606は、下部の側板2604Bの下面中央に設けられ地面や床面に設置される。
第1乃至第4のアンテナ12A〜12Dは、前記の開口を介して前方を向いた状態で後板2602の前面に取着され、後板2602と側板2604A〜2604Dとで囲まれた空間に収容されている。第1乃至第4のアンテナ12A〜12Dの前部は、各側板2604A〜2604Dの前縁よりも後方に位置している。
前記開口は、送信波W1および反射波W2の透過が可能な材料で形成された図示しないカバーによって覆われており、第1乃至第4のアンテナ12A〜12Dの防塵および保護が図られている。
本実施の形態では、図3に示すように正面から見て第1乃至第4のアンテナ12A〜12Dは後板2602の4つの角部近傍に配置されている。すなわち、後板2602の右下寄りの箇所に第1のアンテナ12Aが配置されている。右上寄りの箇所に第2のアンテナ12Bが配置されている。左下寄りの箇所に第3のアンテナ12Cが配置されている。左上寄りの箇所に第4のアンテナ12Dが配置されている。
【0011】
ここで、第1乃至第4のアンテナ12A〜12Dのそれぞれの利得が最大となる方向に沿って延在する直線を各アンテナの指向方向を示す第1乃至第4の仮想軸LA、LB、LC、LDとする。
図3、図4に示すように、側面視した状態で第1、第2のアンテナ12A、12Bは鉛直方向に間隔dV(第1の間隔)をおいて配置され、第1、第2の仮想軸LA、LBが単一の鉛直平面上を延在している。
本実施の形態では、第2の仮想軸LBが水平方向に延在し、かつ、第1の仮想軸LAが水平方向に対して上方に6度傾斜した方向に延在している。したがって、第1、第2の仮想軸LA、LBが交差するように配置されている。
第3、第4のアンテナ12C、12Dも、第1、第2のアンテナ12A、12Bと同様に鉛直方向に間隔dV(第1の間隔)をおいて配置され、第3、第4の仮想軸LC、LDが単一の鉛直平面上を延在している。
本実施の形態では、第4の仮想軸LDが水平方向に延在し、かつ、第3の仮想軸LCが水平方向に対して上方に6度傾斜した方向に延在している。したがって、第3、第4の仮想軸LC、LDが交差するように配置されている。
【0012】
図4、図5に示すように、平面視した状態で、第2、第4のアンテナ12B、12Dは、水平方向に間隔dH(第2の間隔)をおいて配置され、第2、第4の仮想軸LB、LDが単一の水平面上を延在している。
本実施の形態では、第2、第4のアンテナ12B、12Dの仮想軸LB、LDが前後方向に対してそれぞれ内方に4度傾斜した方向に延在している。したがって、第2、第4の仮想軸LB、LDが交差するように配置されている。
第1、第3のアンテナ12A、12Cは、水平方向に間隔dH(第2の間隔)をおいて配置されている。
第1、第3の仮想軸LA、LCも第2、第4の仮想軸LB、LDと同様に前後方向に対してそれぞれ内方に4度傾斜した方向に延在している。したがって、第1、第3の仮想軸LA、LCが交差するように配置されている。
【0013】
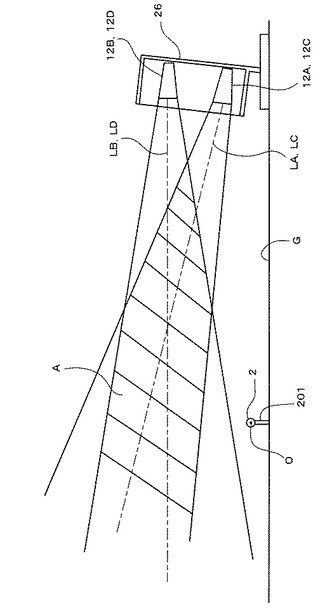
図6、図7に示すように、第1乃至第4のアンテナ12A〜12Dは、ゴルフボール2の移動方向においてゴルフボール2よりも後方の箇所に設けられている。なお、図6において符号201はゴルフボール2が載置されるティー、Gは地面(水平面)を示す。
図6に示すように、側面視した状態で第1、第2の仮想軸LA、LBが交差すると共に、第3、第4の仮想軸LC、LDが交差している。
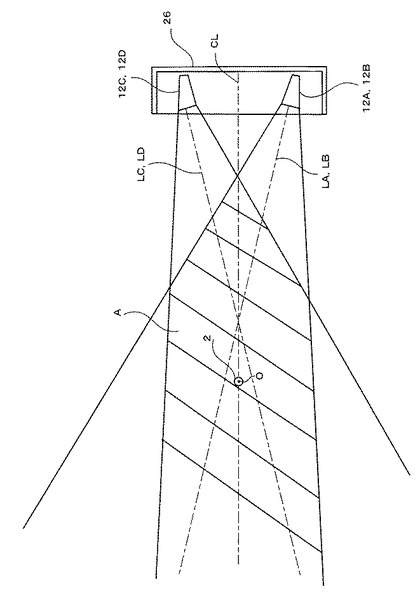
図7に示すように、平面視した状態で第1、第3の仮想軸LA、LCが交差すると共に、第2、第4の仮想軸LB、LDが交差している。
また、平面視した状態で、左右方向において第1、第3のアンテナ12A、12C(第2、第4のアンテナ12B、12D)の間隔dHの中心を通り水平方向に延在する仮想線CL上にティー201に載置されたゴルフボール2の中心点が配置されている。この中心点を基準位置O(あるいは原点O)とする。
本実施の形態では、図6、図7に示すように、実際に基準位置Oから打撃されたゴルフボール2の軌跡のばらつきを考慮して、上述した各仮想軸が交差する点を基準位置Oよりも前方の位置に設定した。
このようにすることで、側面視した状態で、第1、第2のアンテナ12A、12Bのそれぞれから送信される送信波W1が重なる領域と、第3、第4のアンテナ12C、12Dのそれぞれから送信される送信波W1が重なる領域とが、実際に打撃されたゴルフボール2の移動軌跡と重なる範囲を上下方向にわたって広く確保する上で有利となる。図6において送信波W1が重なる領域をハッチングで示す。
また、このようにすることで、平面視した状態で、第1、第3のアンテナ12A、12Cのそれぞれから送信される送信波W1が重なる領域と、第2、第4のアンテナ12B、12Dのそれぞれから送信される送信波W1とが、実際に打撃されたゴルフボール2の移動軌跡と重なる範囲を左右方向にわたって広く確保する上で有利となる。図7において送信波W1が重なる領域をハッチングで示す。
したがって、基準位置Oでゴルフクラブヘッド4で打撃されたゴルフボール2の移動方向が上下方向あるいは左右方向にわたって多少ばらついたとしても、移動するゴルフボール2を前記の送信波W1が重なる領域内で確実に捉える上で有利となる。言い換えると、ゴルフボール2に対して第1乃至第4のアンテナ12A〜12Dから送信波W1を確実に当てると共に、ゴルフボール2で反射された反射波W2を第1乃至第4のアンテナ12A〜12Dによって確実に受信する上で有利となり、打撃直後のゴルフボール2の移動方向、移動速度(初速)の計測を確実に行う上で有利となる。
【0014】
なお、移動体としてゴルフボール2を想定し、平面視した状態で基準位置Oから後方に1.7m離間した箇所に第1乃至第4のアンテナ12A〜12Dを配置し、かつ、打撃されたゴルフボール2の上下方向における角度の上限が45度であり、左右方向における角度が左右に15度である場合、第1乃至第4のアンテナ12A〜12Dの指向特性は以下のように設定することが好ましい。
仮想軸LA〜LD上における利得を最大値とし、仮想軸を含む水平面内で利得が3dB低下する角度を水平角とし、仮想軸を含む鉛直面内で利得が3dB低下する角度を垂直角とする。
水平角は10度以上20度以下が好ましい。この範囲内であると、ゴルフボールが打ち出されると想定される範囲内を十分な感度で計測できる点で有利となる。また、この範囲を下回ると十分な計測範囲が確保できない点で不利となり、この範囲を上回ると計測可能距離が短くなる点で不利となる。本実施の形態では、水平角が15度である。
垂直角は15度以上30度以下が好ましい。この範囲内であると、ゴルフボールが打ち出されると想定される範囲内を十分な感度で計測できる点で有利となる。また、この範囲を下回ると十分な計測範囲が確保できない点で不利となり、この範囲を上回ると計測可能距離が短くなる点で不利となる。本実施の形態では、垂直角が25度である。
【0015】
第1乃至第4ドップラーセンサ14A、14B、14C、14Dは、ケース26に収容保持されている。
図1に示すように、第1乃至第4ドップラーセンサ14A〜14Dは、第1乃至第4アンテナ12A〜12Dのそれぞれに送信信号を供給するものである。また、第1乃至第4アンテナ12A〜12Dのそれぞれから供給される受信信号に基づいてドップラー周波数Fdを有する第1乃至第4ドップラー信号SdA、SdB、SdC、SdDを時系列データとして生成するものである。
ドップラー信号Sdとは、前記送信信号の周波数F1と前記受信信号の周波数F2との差分の周波数F1−F2で定義されるドップラー周波数Fdを有する信号である。
ドップラーセンサ14A〜14Dは、市販されている種々のものが使用可能である。
なお、前記の送信信号としては、例えば、24GHzのマイクロ波が使用可能であり、ドップラー信号Sdを得られるものであれば送信信号の周波数は限定されない。
【0016】
マイク16は、ゴルフボール2がゴルフクラブヘッド4によって打撃された際に発生する打撃音を収音し音声信号を検出するものである。
トリガ信号発生部18は、マイク16によって検出された音声信号の振幅が予め定められたしきい値を上回ったときに、トリガ信号trgを生成して計測処理部20に供給するものである。
トリガ信号trgは、計測処理部20に対して後述するデータ処理の開始を指示するものである。
なお、上述したようにトリガ信号発生部18が単に打撃音に応じてトリガ信号trgを生成するものである場合、計測装置10の設置環境によっては以下の不都合が生じることが懸念される。
すなわち、計測装置10の設置環境が例えば複数の打席を備えるゴルフ練習場である場合、計測装置10の測定対象となる打席以外の周囲の打席の打撃音によってもトリガ信号trgが生成され、計測装置10の誤動作が発生することが懸念される。
したがって、本実施の形態では、以下のように構成することで上記誤動作の防止を図っている。
トリガ信号発生部18を、マイク16からの音声信号に加えて、各ドップラーセンサ14A〜14Dからのドップラー信号SdA〜SdDを入力する。
そして、トリガ信号発生部18は、ドップラー信号SdA〜SdDの少なくとも1つ以上の信号を受信し、かつ、打撃音の音声信号が予め定められたしきい値を上回ったときに、トリガ信号trgを生成して計測処理部20に供給する。この場合、当初発生するドップラー信号SdA〜SdDはゴルフクラブヘッド4の動きを検出したものとなる。
したがって、トリガ信号発生部18は、ゴルフクラブ4の動きと打撃音の両方でトリガ信号trgを生成するため、計測装置10の誤動作を的確に防止する上で有利となる。
トリガ信号発生部18はトリガ信号trgを生成できれば、マイク16以外のセンサを用いても良い。例えば、予め定められた特定の位置(例えば基準位置O)を通過するゴルフクラブヘッド4を検出する光センサを設け、該光センサの検出信号に基づいてトリガ信号発生部18がトリガ信号trgを生成するなど任意である。しかしながら、光センサは設置する位置や方向を厳密に調整する必要があることから、本実施の形態のようにマイク16を用いる方が設置作業の簡素化を図る上で有利となる。
【0017】
計測処理部20は、第1乃至第4のドップラーセンサ14A〜14Dから供給される第1乃至第4のドップラー信号SdA〜SdDを入力して演算処理を行うことにより、ゴルフボール2の移動方向および移動速度を算出するものである。
本実施の形態では、計測処理部20は、マイクロコンピュータ21によって構成されている。
マイクロコンピュータ21は、CPU21Aと、不図示のインターフェース回路およびバスラインを介して接続されたROM21B、RAM21C、インターフェース21D、表示用ドライバ21Eなどを含んで構成されている。
ROM21BはCPU21Aが実行する移動体の移動方向および移動速度を算出するための制御プログラムなどを格納し、RAM21Cはワーキングエリアを提供するものである。
インターフェース21Dは、第1乃至第4のドップラー信号SdA〜SdDを入力してCPU21Aに供給し、また、操作部24からの操作信号を受け付けてCPU21Aに供給するものである。
表示用ドライバ21EはCPU21Aの制御に基づいて表示部22を駆動するものである。
【0018】
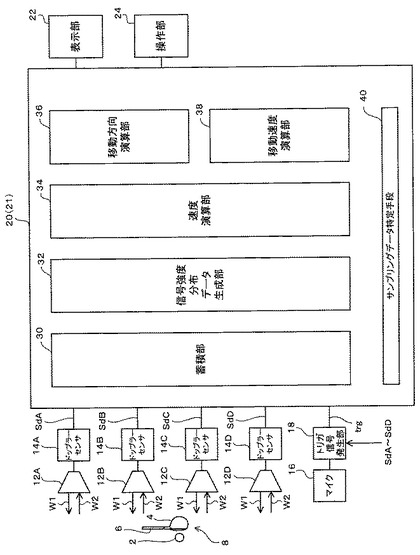
図2はマイクロコンピュータ21の構成を機能ブロックで示した計測装置10のブロック図である。
マイクロコンピュータ21は、機能的には、蓄積部30と、信号強度分布データ生成部32と、速度演算部34と、移動方向演算部36と、移動速度演算部38とを含んで構成されている。
また、蓄積部30と、信号強度分布データ生成部32と、速度演算部34と、移動方向演算部36と、移動速度演算部38は、CPU22Aが前記制御プログラムを実行することで実現されるものであるが、これらの部分は、回路等のハードウェアで構成されたものであってもよい。
【0019】
蓄積部30は、第1乃至第4のドップラー信号SdA〜SdDと、トリガ信号trgを予め定められたサンプリング周期で時間経過に従って順番に蓄積するものである。本実施の形態では、CPU21Aが第1乃至第4のドップラー信号SdA〜SdDとトリガ信号trgを前記サンプリング周期でサンプリングしてRAM21Cに第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータおよびトリガ信号trgのサンプリングデータとして格納する。
蓄積部30は、例えば、計測装置10の電源が投入されると同時にサンプリング動作を開始する。
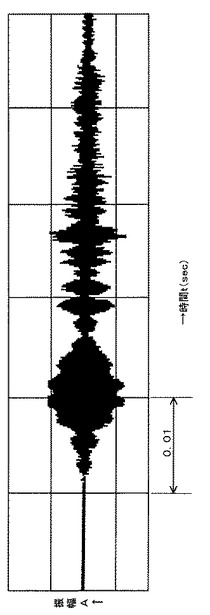
図8はゴルフクラブヘッド4によってゴルフボール2を打撃した際の第1乃至第4のドップラー信号SdA〜SdDの一例を示す線図であり、横軸に時間t(sec)、縦軸に振幅(任意単位)をとっている。
図8において、初めの大きな振幅を呈する波形部分がゴルフクラブヘッド4によって生じるドップラー信号の部分を示し、その後に続く波形部分が打撃されたゴルフボール2によって生じるドップラー信号の部分を示している。
【0020】
信号強度分布データ生成部32は、蓄積部30に蓄積された第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータを周波数解析(連続FFT解析、あるいは、ウェーブレット解析)することによって信号強度分布データを生成するものである。
言い換えると、信号強度分布データ生成部32は、第1乃至第4のドップラーセンサ14A〜14Dのそれぞれから得られた第1乃至第4のドップラー信号SdA〜SdDを周波数解析することにより周波数ごとの信号強度の分布を示す第1乃至第4の信号強度分布データを生成する。
本実施の形態では、信号強度分布データ生成部32は、蓄積部30に蓄積されたトリガ信号trgに基づいて、蓄積部30に蓄積された時系列データである第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータを予め定められた区間に特定して第1乃至第4の信号強度分布データの生成を実施する。ここで、第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータの区間は単一のトリガ信号trgに基づいて同期して特定される。
言い換えると、信号強度分布データ生成部32は、垂れ流し方式で蓄積されている各ドップラー信号SdA〜SdDのサンプリングデータのうち、ゴルフボール2が打撃された後の区間におけるサンプリングデータを特定して第1乃至第4の信号強度分布データの生成を実施する。
【0021】
サンプリングデータを予め定められた区間に特定する方法としては以下の方法が例示される。
すなわち、信号強度分布データ生成部32は、トリガ信号trgの検出時点を基準時点として、基準時点から数えてa個目までのサンプリングデータを除外し、a+1個目からb個目(a<b)までのサンプリングデータを特定して第1乃至第4の信号強度分布データの生成を実施する。
この場合、a+1個目からb個目(a<b)までのサンプリングデータに、ゴルフクラブヘッド4による影響を受けたデータが含まれないように、上記の数値a、bを設定する。
数値a,bは、実際にゴルフクラブ6がスウィングされた場合のゴルフクラブヘッド4のスピードのばらつきを考慮して設定すればよい。
あるいは、トリガ信号trgの検出時点を基準時点として、経過時間に基づいてゴルフクラブヘッドによる影響を受けたデータが含まれないように、サンプリングデータを予め定められた区間に特定してもよい。
また、上記の数値a、bの設定は、基準位置Oに対してゴルフボール2が約1m移動した時点前後におけるサンプリングデータが得られるにように設定される。この理由は、ゴルフクラブヘッド4で打撃されたゴルフボール2が1m前後移動した時点における移動速度の変化がほぼ無視できるからである。
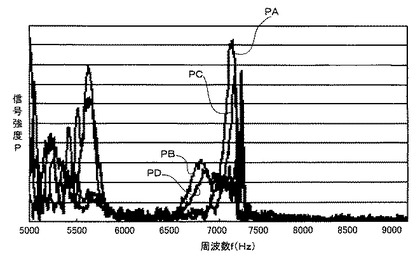
図9は信号強度分布データ生成部32によって生成された第1乃至第4の信号強度分布データPA〜PDの一例を示す線図であり、横軸に周波数f(Hz)、縦軸に信号強度P(任意単位)を取っている。
図9において、周波数fが低い領域で信号強度Pが高くなっている部分は、ゴルフクラブヘッド4による反射波W2に対応しており、その後に続く信号強度の山の部分が打撃されたゴルフゴール2による反射波W2に対応している。
【0022】
速度演算部34は、第1乃至第4の信号強度分布データPA〜PDのそれぞれに基づいて、ゴルフボール2の移動速度に対応するドップラー周波数成分を検出し、それら検出したドップラー周波数成分に基づいて第1乃至第4の速度V1〜V4を算出するものである。
各信号強度分布データPA〜PDからドップラー周波数成分を検出する方法としては以下の手順が例示される。
(1)第1乃至第4の信号強度分布データPA〜PDのそれぞれについて移動平均を取ることによってノイズの影響を抑制した信号強度分布データを得る。
(2)移動平均を取った信号強度分布データにおいて信号強度のピーク値、あるいは、信号強度の山の中央値に対応する周波数をドップラー周波数成分(ドップラー周波数)として検出する。
なお、ドップラー周波数成分の検出方法は、各信号強度分布データPA〜PDに含まれるノイズの影響を抑制し、ドップラー周波数成分を正確かつ安定して検出できればよいのであり、上記の手順に限定されるものではない。
【0023】
ここで、ゴルフボール2の速度の計測原理について説明する。
従来から知られているように、ドップラー周波数Fdは式(1)で表される。
Fd=F1−F2=2・V・F1/c (1)
ただし、V:ゴルフボール2の速度、c:光速(3・108m/s)
したがって、式(1)をVについて解くと、(2)式となる。
V=c・Fd/(2・F1) (2)
すなわち、ゴルフボール22の速度Vは、ドップラー周波数Fdに比例することになる。
したがって、ドップラー信号Sdからドップラー周波数Fdの周波数成分を検出し、検出したドップラー周波数成分から式(2)に基づいてゴルフボール2の速度Vを求めることができる。
ところで、式(2)によって得られるゴルフボール2の移動速度は、アンテナの指向性を示す仮想軸と一致する方向の速度成分である。
したがって、ゴルフボール2の移動軌跡がアンテナの指向性を示す仮想軸に対して外れるほど式(2)によって得られるゴルフボール2の移動速度の誤差が増大する傾向となる。
そこで、本発明では、第1乃至第4のアンテナ12A〜12Dを用いて得られた第1乃至第4の速度VA〜VDと、実測されたゴルフボール2の移動方向との間に相関関係があり、また、それら第1乃至第4の速度VA〜VDと、実測されたゴルフボール2の移動速度との間に相関関係があることに着目した。
すなわち、予め上述した2つの相関関係を取得しておけば、それら2つの相関関係に基づいて第1乃至第4の速度VA〜VDからゴルフボール2の移動方向および移動速度を求めることが可能となる。
【0024】
移動方向演算部36は、予め得られている第1乃至第4の速度VA〜VDと実測されたゴルフボール2の移動方向との相関関係に基づいて、第1乃至第4の速度VA〜VDから移動方向を算出するものである。
本実施の形態では、ゴルフボール2の移動方向を次のように定義する。
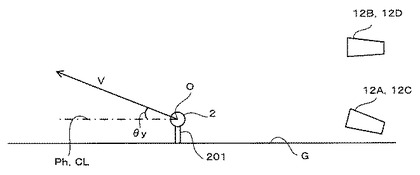
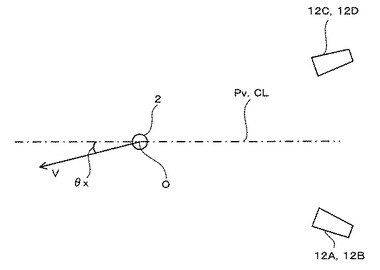
図10、図11に示すように、基準位置Oを通る仮想線CLを含む基準鉛直面Pvと、基準位置Oを通り基準鉛直面Pvと直交する基準水平面Phとを設定する。
言い換えると、予め定められた基準位置Oを通り水平方向に延在する仮想線CLを含み鉛直方向に延在する平面を基準鉛直面Pvとする。基準位置Oを通り基準鉛直面Pvと直交する平面を基準水平面Phとする。
ゴルフボール2の移動軌跡を基準鉛直面Pvに投影した場合に投影した移動軌跡と基準水平面Ph(仮想線CL)とがなす角度を上下角度θyとする。
ゴルフボール2の移動軌跡を基準水平面Phに投影した場合に投影した移動軌跡と基準鉛直面Pvとがなす角度を左右角度θxとする。
ゴルフボール2の移動方向を上下角度θyと左右角度θxとで定義する。
【0025】
本実施の形態では、鉛直方向において間隔dVをおいて配置された2つのアンテナを用いて実測して得た2つの速度の差分と、実測して得たゴルフボール2の上下角度θyとの相関関係に基づいて上下角度θyを算出する。
より詳細には、第1、第2のアンテナ12A、12Bを用いて実測して得た第1、第2の速度VA、VBの差分ΔVAB=VA−VBと第3、第4のアンテナ12C、12Dとを用いて得た第3、第4の速度VC、VDの差分ΔVCD=VC−VDとの平均値(ΔVAB+ΔVCD)/2を、第1乃至第4の速度VA〜VDの平均値ΔVAVEで除算した第1の値D1=((ΔVAB+ΔVCD)/2)/ΔVAVEを算出する。
また、予め実測して得た第1の値D1と、実測して得たゴルフボール2の上下角度θyとの相関関係に基づいて、第1の値D1から上下角度θyを算出する。
このように2組のアンテナを用いて得た2つの速度の差分の平均値から上下角度θyを算出することにより上下角度θyの値をより精度よく安定して求める上で有利となる。
【0026】
また、本実施の形態では、水平方向において間隔dHをおいて配置された2つのアンテナを用いて実測して得た2つの速度の差分と、実測して得たゴルフボール2の左右角度θxとの相関関係に基づいて左右角度θxを算出する。
より詳細には、第1、第3のアンテナ12A、12Cを用いて得た第1、第3の速度VA、VCの差分ΔVAC=VA−VCと第2、第4のアンテナ12B、12Dとを用いて得た第2、第4の速度VB、VDの差分ΔVBD=VB−VDとの平均値(ΔVAC+ΔVBD)/2を、第1乃至第4の速度VA〜VDの平均値ΔVAVEで除算した第2の値D2=((ΔVAC+ΔVBD)/2)/ΔVAVEを算出する。
また、実測して得た第2の値D2と、実測して得たゴルフボール2の左右角度θxとの相関関係に基づいて、第2の値D2から左右角度θxを算出する。
このように2組のアンテナを用いて得た2つの速度の差分の平均値から左右角度θxを算出することにより左右角度θxの値をより精度よく安定して求める上で有利となる。
【0027】
移動速度演算部38は、予め得られている第1乃至第4の速度VA〜VDと実測されたゴルフボール2の移動速度Vαとの相関関係に基づいて、第1乃至第4の速度VA〜VDから移動速度Vαを算出するものである。
本実施の形態では、後述するように、予め得られている第1乃至第4の速度VA〜VDの平均値と、実測されたゴルフボール2の移動速度Vαとの相関関係に基づいて移動速度Vαを算出する。
このように4つのアンテナを用いて得た第1乃至第4の速度VA〜VDの平均値からゴルフボールの移動速度Vαを算出することにより移動速度Vαの値をより精度よく安定して求める上で有利となる。
なお、本明細書において、ゴルフボール2の移動速度Vαは、ゴルフボール2の移動方向に沿ったゴルフボール2の速度、すなわちゴルフボール2の3次元速度をいう。
【0028】
次に、(1)実測して得た第1乃至第4の速度VA〜VDと実測して得たゴルフボール2の移動方向との相関関係と、(2)実測して得た第1乃至第4の速度VA〜VDと実測して得たゴルフボール2の移動速度との相関関係の取得について説明する。
【0029】
まず、専用のゴルフボール打ち出し装置(スイングロボット)によって基準位置Oに位置するゴルフボール2を、さまざまな速度、方向にて打ち出す。言い換えると、左右角度θx、上下角度θy、移動速度Vαを異ならせて打撃する。
そして、移動体の移動方向および移動速度を高精度に計測可能な基準計測器によってゴルフボール2の左右角度θx、上下角度θy、移動速度Vαを計測し、左右角度θx、上下角度θy、移動速度Vαの実測データを取得する。
このような基準計測器として、例えば、特許第4104384号に開示されているような従来公知のさまざまな測定装置が使用可能である。
また、左右角度θx、上下角度θy、移動速度Vαの計測と同時に、本実施の形態の計測装置10Aを用いることにより、速度演算部34によって第1乃至第4の速度VA、VB、VC、VDを取得する。すなわち、左右角度θx、上下角度θy、移動速度Vαの実測データに対応する第1乃至第4の速度VA、VB、VC、VDを取得する。
【0030】
(1)実測して得た第1乃至第4の速度VA〜VDと実測して得たゴルフボール2の移動方向との相関関係については以下のように求める。
そして、上下角度θyの実測データと、第1乃至第4の速度VA、VB、VC、VDから算出された第1の値D1との相関関係に基づいて上下角度θy算出用の相関式(回帰式)を求める。なお、計測装置10は、相関式の算出を行う機能を備える必要はなく、相関式の算出は、計測装置10とは別に設けられたコンピュータを用いて行うなど任意である。
【0031】
言い換えると、上下角度θyと、第1の値D1との関係を離散的に測定したデータを取得する。そして、取得したデータを従来公知の最小二乗法などを用いて回帰分析することによって上下角度θyを第1の値D1の関数(多項式)によって表わした相関式を求める。すなわち、このようにして求められた相関式によって上下角度θyと第1の値D1との関係を示す特性線を得ることができる。
同様に、左右角度θxの実測データと、第1乃至第4の速度VA、VB、VC、VDから算出された第2の値D2との相関関係に基づいて左右角度θx算出用の相関式(回帰式)を求める。
言い換えると、左右角度θxと、第2の値D2との関係を離散的に測定したデータを取得する。そして、取得したデータを従来公知の最小二乗法などを用いて回帰分析することによって左右角度θxを第2の値D2の関数(多項式)によって表わした相関式を求める。すなわち、このようにして求められた相関式によって左右角度θxと第2の値D2との関係を示す特性線を得ることができる。
したがって、これら2つの相関式を用いることにより、第1乃至第4の速度VA、VB、VC、VDから左右角度θxおよび上下角度θyを求めることが可能となる。
本実施の形態では、移動方向演算部36は上下角度θy算出用の相関式および左右角度θx算出用の相関式を用いることで第1乃至第4の速度VA、VB、VC、VDから左右角度θxおよび上下角度θyをゴルフボール2の移動方向として算出する。
したがって、本実施の形態では、移動方向演算部36による移動方向の算出は、予め実測され得られている第1乃至第4の速度VA〜VDと予め実測され得られているゴルフボール2の移動方向との相関関係を示す移動方向算出用の相関式に基づいてなされる。
なお、上記のような相関式に代えて、相関式によって示される特性線のデータを左右角度θx算出用のマップとしてあるいは上下角度θy算出用のマップとして記憶しておき、各マップを用いて左右角度θxおよび上下角度θyを算出してもよい。その場合にはそれらマップをマイクロコンピュータのメモリ、例えば、ROMに設けるなど任意である。
【0032】
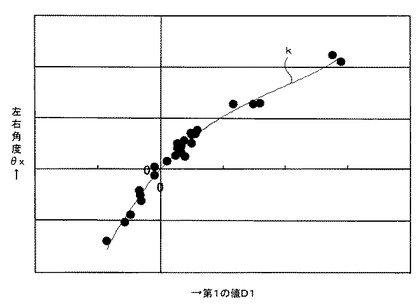
図12は、左右角度θxと第1の値D1との相関関係を表す特性線kを示す図である。
横軸は第1の値D1を示し、縦軸は左右角度θxを示している。記号●は離散的に計測された左右角度θxと第1の値D1とのデータを示している。
特性線kが左右角度と第1のデータD1との相関関係を示しており、特性線kを示す相関式(回帰式)は、例えば、3次の多項式で示されている。
なお、上下角度θyについても図12と同様の特性線が算出される。
【0033】
また、本実施の形態では、第1の値D1、第2の値D2を算出するために、2つの速度の差分である以下の4つのデータを用いた。
(1)第1、第2の速度VA、VBの差分ΔVAB=VA−VB
(2)第3、第4の速度VC、VDの差分ΔVCD=VC−VD
(3)第1、第3の速度VA、VCの差分ΔVAC=VA−VC
(4)第2、第4の速度VB、VDの差分ΔVBD=VB−VD
しかしながら、上記4つのデータに代えて以下に示す2つの速度の比である以下の4つのデータを用いても、第1の値D1と上下角度θy、上下速度Vyとの相関関係、第2の値D2と左右角度θx、左右速度Vxとの相関関係を得ることができ、したがって、上記(1)〜(4)の値に代えて以下の(5)〜(8)の値を用いてもよい。
(5)第1、第2の速度VA、VBの比RVAB=VA/VB
(6)第3、第4の速度VC、VDの比RVCD=VC/VD
(7)第1、第3の速度VA、VCの比RVAC=VA/VC
(8)第2、第4の速度VB、VDの比RVBD=VB/VD
【0034】
(2)実測して得た第1乃至第4の速度VA〜VDと実測して得たゴルフボール2の移動速度との相関関係については以下のように求める。
第1乃至第4の速度VA、VB、VC、VDの平均値Vave=(VA+VB+VC+VD)/4を算出する。
基準測定器で計測した移動速度Vαの実測データと、平均値Vaveとの相関関係に基づいて移動速度Vα算出用の相関式(回帰式)を求める。
言い換えると、移動速度Vαと、平均値Vaveとの関係を離散的に測定したデータを取得する。そして、取得したデータを従来公知の最小二乗法などを用いて回帰分析することによって移動速度Vαを平均値Vaveの関数(多項式)によって表わした相関式を求める。すなわち、このようにして求められた相関式によって移動速度Vαと平均値Vaveとの関係を示す特性線を得ることができる。
したがって、このようにして求めた相関式を用いることにより、第1乃至第4の速度VA、VB、VC、VDから移動速度Vαを求めることが可能となる。
本実施の形態では、移動速度演算部38は上記の相関式を用いることで第1乃至第4の速度VA、VB、VC、VDからゴルフボール2の移動速度Vαを算出する。
したがって、本実施の形態では、移動速度演算部38による移動速度の算出は、予め実測され得られている第1乃至第4の速度VA〜VDと予め実測され得られているゴルフボール2の移動速度との相関関係を示す移動速度算出用の相関式に基づいてなされる。
なお、移動速度Vαの場合も、上記のような相関式に代えて、相関式によって示される特性線のデータを移動速度Vα算出用のマップとして記憶しておき、マップを用いて移動速度Vαを算出してもよく、それらマップをマイクロコンピュータのメモリ、例えば、ROMに設けるなど任意である。
なお、移動速度Vαについても図12と同様の特性線が算出される。
【0035】
図1に戻って説明する。
表示部22は文字や画像を表示する表示画面を有している。このような表示部22として液晶表示装置など従来公知のさまざまな表示装置が使用可能である。
表示部22は、計測処理部20によって算出されたゴルフボール2の移動方向および移動速度を表示画面に表示する。
【0036】
操作部24は、表示部22に表示されるゴルフボール2の移動方向および移動速度の表示形態などを切り替えるための種々の操作入力を受け付けてCPU22Aに供給するものである。
【0037】
次に、計測装置10の動作について図13、図14のフローチャートを参照して説明する。
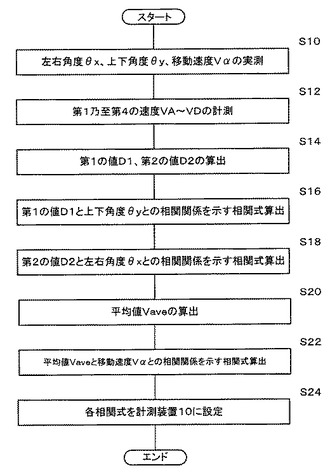
まず、図13を参照して、第1乃至第4の速度VA〜VDと、ゴルフボール2の移動方向および移動速度との相関関係を示す相関式の設定について説明する。
まず、専用のゴルフボール打ち出し装置(スイングロボット)を用いてゴルフボール2を、左右角度θx、上下角度θy、移動速度Vαを異ならせて打撃し、左右角度θx、上下角度θy、移動速度Vαを実測する(ステップS10)。
同時に、計測装置10を用いて第1乃至第4の速度VA〜VDを計測する(ステップS12)。
次いで、計測装置10とは別のコンピュータにより、第1乃至第4の速度VA〜VDに基づいて第1の値D1、第2の値D2を算出する(ステップS14)。
次いで、第1の値D1と上下角度θyとの相関関係を示す相関式を算出し(ステップS16)、第2の値D2と左右角度θxとの相関関係を示す相関式を算出する(ステップS18)。
次いで、第1乃至第4の速度VA〜VDに基づいて平均値Vaveを算出する(ステップS20)。
次いで、平均値Vaveと移動速度Vαとの相関関係を示す相関式を算出する(ステップS22)。
そして、ステップS16、S18、S22によって得られた3つの相関式を計測装置10に設定する(ステップS24)。
【0038】
次に、図14を参照してゴルフボール2を打撃した場合における計測装置10の移動方向および移動速度の計測動作について説明する。
予め図13の処理が実施され、計測装置10に前記の相関式が設定されているものとする。
まず、使用者は、ゴルフボール2の打ち出し方向においてゴルフボール2から例えば1.7m程度後方の箇所に、第1乃至第4のアンテナ12A〜12Dをゴルフボール2に向けてケース26を設置する。
ケース26は、例えば地面Gの上に載置すればよい。
これにより、第1乃至第4のアンテナ12A〜12Dから送出された送信波W1がゴルフボール2に当たり、反射波W2が第1乃至第4のアンテナ12A〜12Dに受信可能な状態となる。
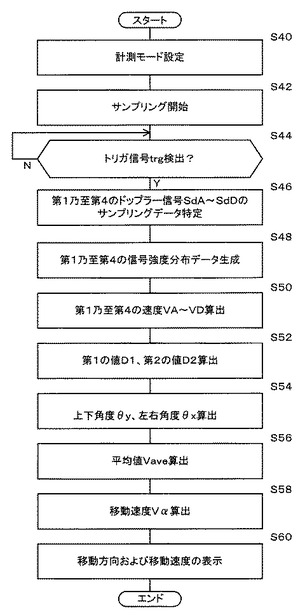
使用者が操作部24を操作することにより、計測装置10はゴルフボール2の移動方向および移動速度を計測するための計測モードに設定される(ステップS40)。
【0039】
計測モードに設定されると、第1乃至第4のドップラー信号SdA〜SdDとトリガ信号trgの蓄積部30へのサンプリングが開始される(ステップS42)。
ここで、使用者がゴルフクラブ6を把持してスウィングしてゴルフクラブヘッド4でゴルフボール2を打ち出すと、打撃音がマイク16によって収音される。トリガ信号発生部18は、ドップラー信号SdA〜SdDの少なくとも1つ以上の信号を受信し、かつ、打撃音の音声信号が予め定められたしきい値を上回ったときに、トリガ信号trgを生成して計測処理部20に供給し、これによりトリガ信号trgが蓄積部30に供給される。
【0040】
信号強度分布データ生成部32は、蓄積部30にサンプリングされたトリガ信号trgの検出の有無を判定しており(ステップS44)、トリガ信号trgを検出しなければ、ステップS44を繰り返す。
信号強度分布データ生成部32は、トリガ信号trgを検出すると、トリガ信号trgの検出時点から予め定められた区間にわたる第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータを特定する(ステップS46)。
そして、信号強度分布データ生成部32は、第1乃至第4の信号強度分布データPA〜PDを生成する(ステップS48)。
次いで、速度演算部34は、第1乃至第4の信号強度分布データPA〜PDから第1乃至第4の速度VA〜VDを算出する(ステップS50)。
次いで、移動方向検出部36は、第1の値D1、第2の値D2を算出し(ステップS52)、予め設定されている相関式から第1の値D1、第2の値D2に基づいて上下角度θy、左右角度θxを算出する(ステップS54)。
また、移動速度検出部38は、第1乃至第4の速度VA〜VDから平均値Vaveを算出し(ステップS56)、予め設定されている相関式から平均値Vaveに基づいて移動速度Vαを算出する(ステップS58)。
このようにして得られた上下角度θyおよび左右角度θxが移動方向として表示部22に供給されて表示され、移動速度Vαが移動速度として表示部22に供給されて表示される(ステップS60)。以上で一連の計測動作が終了する。
【0041】
次に、本実施の形態の計測装置10の作用効果について説明する。
本実施の形態によれば、移動体(ゴルフボール2)に向けて送信波W1を送信すると共に、移動体から反射された反射波W2を受信するアンテナを複数個設け、予め得られている各アンテナを用いて計測された速度と移動方向および移動速度との実測値との相関関係に基づき、測定された各速度から移動方向および移動速度を算出するようにした。
したがって、移動体の速度ベクトルを算出する従来技術と比較してアンテナの指向性を狭いものとし、かつ、各アンテナの配置を厳密に設定するといった制約が少ないことから、移動体に送信波を送信しかつ移動体で反射された反射波を受信する空間を広く確保する上で有利となり、しかも、予め得られた相関関係に基づいて移動方向および移動速度を算出するため移動方向および移動速度の精度を確保する上で有利となる。
そのため、移動体がゴルフボール2のように移動方向のばらつきの大きなものであっても移動方向および移動速度を的確に計測する上で有利となる。
また、測定装置10を製造する際、個々の測定装置10毎に、図13で説明した工程を実施して、移動方向および移動速度に関する相関関係(相関式)を得て設定することで、測定装置10によって計測される移動方向および移動速度の製造上のばらつきを抑制する上で有利となる。
また、相関関係に基づいて移動方向および移動速度を計測することから、移動方向および移動速度の精度を確保しつつ、測定装置10の製造上の位置精度の許容差、具体的には、第1乃至第4のアンテナ12A、12B、12C、12Dの位置精度の許容差を緩和できるため、製造コストの低減を図る上で有利となる。
【0042】
また、本実施の形態の計測装置10をゴルフシミュレータ装置に適用すれば、計測装置10で算出されたゴルフボール2の移動方向、移動速度に基づいてゴルフボール2の弾道を的確にシミュレーションすることができる。
特に、従来のゴルフシミュレータ装置では、高速度カメラで撮影したゴルフボール2の画像データに基づいてゴルフボール2の挙動の計測を行い、その計測結果に基づいてゴルフボール2の弾道のシミュレーションを行うものが多い。このような画像データを用いるゴルフシミュレータ装置では、照明光や外光の変化が高速度カメラで撮影した画像データに影響を及ぼすことから、高速度カメラの動作設定を簡単に行うことが難しく不利である。
これに対して本実施の形態では、照明光や光の影響を受けることがないため、計測装置10、ゴルフシミュレータ装置の設定作業の簡素化を図る上で有利となる。
また、高速度カメラを用いる場合は、ゴルフボール2をその移動方向と直交する方向から撮影しなくてはならないため、高速度カメラをゴルファーの正面に配置する必要があり、ゴルファーの視界に高速度カメラが入ることから、ゴルファーに圧迫感を与える不都合がある。
これに対して本実施の形態では、アンテナをゴルフボール2の後方に離れた箇所に配置すればよいため、ゴルファーの視界にアンテナが入りにくく、ゴルファーに与える圧迫感を抑制する上で有利となる。
【0043】
また、本実施の形態では、第1乃至第4のアンテナ12A〜12Dのうち、第1、第2のアンテナ12A、12Bは互いに鉛直方向に間隔dVをおいて配置され、かつ、第3、第4のアンテナ12C、12Dは互いに鉛直方向に間隔dVをおいて配置され、第1、第3のアンテナ12A、12Cは互いに水平方向に間隔dHをおいて配置され、かつ、第2、第4のアンテナ12B、12Dは互いに水平方向に間隔dHをおいて配置されている。
そして、鉛直方向に間隔dVをおいて配置された2組のアンテナ12A、12Bと12C、12Dとを用いて得た2つの速度の差分の平均値から上下角度θy、上下速度Vyをそれぞれ算出し、水平方向に間隔dHをおいて配置された2組のアンテナ12A、12Cと、12B、12Dとを用いて得た2つの速度の差分の平均値から左右角度θx、左右速度Vxをそれぞれ算出するようにした。
言い換えると、上下角度θy、上下速度Vyを算出するための速度の差分をそれぞれ2つ得られ、また、左右角度θx、左右速度Vxを算出するための速度の差分をそれぞれ2つ得られる。そのため、それら2つの速度の差分の平均値を用いて移動体の角度および速度を算出できることから、移動体の角度および速度を正確かつ安定して算出する上で有利となる。
また、2組のアンテナ12A、12Cと、12B、12Dとを設けたため、各アンテナとゴルフボール2との間に試打者やクラブなどの障害物が入るなどにより、一方の組のアンテナを用いた計測動作が正常になされなくなったとしても、他方の組みのアンテナを用いた計測動作が正常であれば、正常な組みのアンテナを用いた計測結果に基づいて、移動方向および移動速度を算出することができる。
したがって、2組のアンテナの一方が実質的に使用できない状態となっても残りの組みのアンテナを使用して計測を行うことができるため、障害物の影響を排除して移動方向および移動速度を計測でき有利となる。
【0044】
なお、図15に示すように、第1乃至第3のアンテナ12A、12B、12Cの3つのアンテナを設け、第1、第2のアンテナ12A、12Bを互いに水平方向に間隔dHをおいて配置し、第1、第3のアンテナ12A、12Cを鉛直方向に間隔dVをおいて配置する構成としてもよい。
この場合は、上下角度θy、上下速度Vyを算出するための速度の差分が1つ得られ、また、左右角度θx、左右速度Vxを算出するための速度の差分が1つ得られるので、実施の形態と同様に、移動体の角度および速度を算出することができる。
しかしながら、本実施の形態のようにすると、2つの速度の差分の平均値を用いて移動体の角度および速度を算出できるので、移動体の角度および速度を正確かつ安定して算出する上でより有利となる。
【0045】
(第2の実施の形態)
次に第2の実施の形態について説明する。
第1の実施の形態では、図12に示すような特性線kを示す相関式(回帰式)を予め求めておき、相関式を用いて第1の値D1、第2の値D2、平均値Vaveから移動方向あるいは移動速度を算出した。
言い換えると、特性線kを示す相関式は、上下角度θy、左右角度θx、移動速度Vαのそれぞれについて1つずつ設定されている。
しかしながら、実際の相関関係においては、特性線kを示す相関式は複雑なものとなり、単一の相関式で特性線kを表すには限度がある。
そこで、特性線kを複数の領域に区分すると共に、各領域毎に異なる相関式を求めることが考えられる。このようにすると、特性線kを単一の相関式で示す場合と比較して、相関関係をより正確に示すことができ、したがって、上下角度θy、左右角度θx、移動速度Vαをより正確に算出する上で有利となる。
そこで、第2の実施の形態では、特性線kを複数の領域に区分すると共に、各領域毎に異なる相関式を求め、各相関式を用いて第1の値D1、第2の値D2、平均値Vaveから移動方向あるいは移動速度を算出するようにしたものである。
【0046】
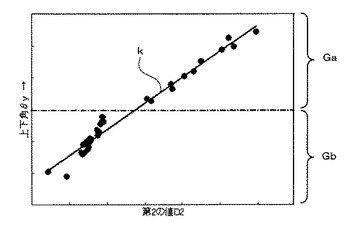
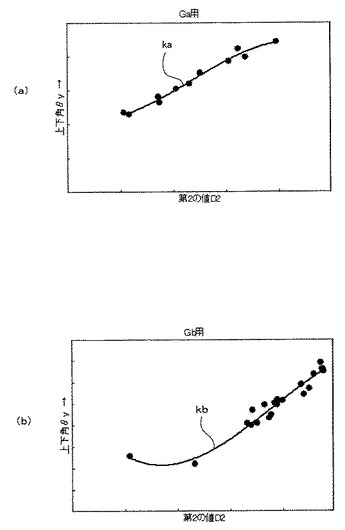
以下では、図16、図17を参照して、第2の値D2と上下角度θyとの相関関係、相関式を例にとって説明する。
まず、図16に示すように、特性線kを示す単一の相関式(以下第1の相関式)を作成する。ここで、第1の相関式は、例えば、直線式のような単純な式でよい。第1の相関式を作成する場合も、第1の実施の形態と同様に、上下角度θyと、第2の値D2との関係を離散的に測定したデータを取得し、取得したデータを従来公知の最小二乗法などを用いて回帰分析することによって上下角度θyを第2の値D2の関数(多項式)によって表わした相関式を求めることでなされる。
そして、特性線kを上下角度θyの値に応じて複数の領域、例えば第1、第2の領域Ga、Gbに区分する。
次いで、第1、第2の領域Ga、Gbのそれぞれについて該当するデータを回帰分析することによって上下角度θyを第2の値D2の関数(多項式)によって表わした相関式(以下第2、第3の相関式という)を求める。
ここで、第2、第3の相関式は、例えば、3次式以上の高次の多項式である。
図17(a)、(b)は各領域Ga、Gbに区分された特性線ka、kbを示し、それぞれ第2、第3の相関式によって示される。
このようにして得られた第1乃至第3の相関式を移動方向演算部36に設定しておく。
【0047】
移動方向演算部36による移動方向の演算動作は次のようになされる。
まず、移動方向演算部36は、第1の値D1が算出されたならば、図16に示す第1の相関式を用いて上下角度θyを算出し、その上下角度θyが該当する領域が第1、第2の領域Ga、Gbのうちの何れであるかを特定する。
次いで、移動方向演算部36は、特定された領域に対応する相関式を図17(a)、(b)に示される第2、第3の相関式のうちから特定し、特定した相関式を用いて第2の値D2から上下角度θyを算出する。
【0048】
なお、移動方向演算部36による左右角度θx、移動速度演算部38による移動速度Vαの演算についても上述と同様に第1、第2、第3の相関式が設定されており、同様に算出される。
上述の例では、特性線kを第1、第2の領域Ga、Gbに区分した場合について説明したが、3つ以上の領域に区分してもよく、その場合にも、各領域に応じて相関式を設定することは同様である。
言い換えると、移動方向算出用の相関式は、移動方向の全域について作成された1つの1次処理用の相関式と、移動方向の全域が2つ以上の範囲に区分けされ、該区分けされた各範囲毎に作成された2つ以上の2次処理用の相関式とを含んで構成されている。
そして、移動方向演算部36による移動方向の算出は、1次処理用の相関式を用いて1回目の移動方向を算出し、2つ以上の範囲のうち、算出された1回目の移動方向が該当する範囲に対応する2次処理用の相関式を用いて2回目の移動方向を算出することによってなされる。
言い換えると、移動速度算出用の相関式は、移動速度の全域について作成された1つの1次処理用の相関式と、移動速度の全域が2つ以上の範囲に区分けされ、該区分けされた各範囲毎に作成された2つ以上の2次処理用の相関式とを含んで構成されている。
そして、移動速度演算部38による移動速度の算出は、1次処理用の相関式を用いて1回目の移動速度を算出し、2つ以上の範囲のうち、算出された1回目の移動速度が該当する範囲に対応する2次処理用の相関式を用いて2回目の移動速度を算出することによってなされる。
また、第2の実施の形態において、移動方向演算部36および移動速度演算部38以外の構成は第1の実施の形態と同様であるため、説明を省略する。
【0049】
第2の実施の形態によれば、移動体の移動方向および移動速度を算出するために用いる相関式として、特性線の範囲を区分するための第1の相関式と、第1の相関式を用いて特定された特性線の範囲ごとに設定された第2、第3の相関式とを予め用意しておき、これら第1の相関式と、第2、第3の相関式とを用いて段階的に移動体の移動方向および移動速度を算出するようにした。
したがって、実測して得た第1乃至第4の速度V1〜V4と実測して得た移動体の移動方向との相関関係、あるいは、実測して得た第1乃至第4の速度V1〜V4と実測して得た移動体の移動速度との相関関係をより正確に反映させて移動体の移動方向および移動速度を算出できるため、移動体の移動方向および移動速度をより正確に算出する上で有利となる。
また、アンテナ特性などの原因によって、第1乃至第4のアンテナ12A〜12Dから見て仮想軸LA〜LDに近い範囲で移動体を計測した場合(計測範囲の中心部で計測した場合)と、その範囲の周囲で移動体を計測した場合(計測範囲の端部で計測した場合)とで、算出される第1乃至第4の速度V1〜V4の値に傾向の違いが生じることが考えられる。
この場合、同一の移動方向および同一の移動速度を有する移動体を計測したとしても、計測範囲の中心部で計測した場合と、計測範囲の端部で計測した場合とで得られる移動方向および移動速度に違いが生じ、精度が低下することが懸念される。
しかしながら、上述のように複数の相関式を用いると、算出される第1乃至第4の速度V1〜V4の値に傾向の違いを解消でき、したがって、計測範囲の中心部で計測した場合と、計測範囲の端部で計測した場合とで得られる移動方向および移動速度の精度を高める上で有利となる。
【0050】
(第3の実施の形態)
次に第3の実施の形態について説明する。
第1の実施の形態では、蓄積部30に蓄積された時系列データである第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータを予め定められた区間に特定して第1乃至第4の信号強度分布データの生成を実施した。
そして、サンプリングデータを予め定められた区間に特定する方法として、トリガ信号trgの検出時点を基準時点として、基準時点から数えてa個目までのサンプリングデータを除外し、a+1個目からb個目(a<b)までのサンプリングデータを特定して第1乃至第4の信号強度分布データの生成を実施するものとして説明した。
ところで、ゴルフクラブヘッド4のヘッドスピードは、ゴルファによって異なり、また、スウィングごとにばらつく。ヘッドスピードが異なれば、打撃されたゴルフボール2の移動速度も異なり、その結果、上記特定する区間が同一であっても、サンプリングデータを取得するゴルフボール2の基準位置Oに対する位置がばらつくことになる。
サンプリングデータを取得するゴルフボール2の位置(範囲)が異なると、第1乃至第4の速度V1〜V4とゴルフボールの移動方向との相関関係、および、第1乃至第4の速度V1〜V4とゴルフボールの移動速度との相関関係も影響を受け、最終的に算出される移動方向、移動速度の値が影響を受けることなる。
したがって、ゴルフボール2の移動速度に拘わらずゴルフボール2が同一の位置(範囲)にあるときのサンプリングデータを特定できるように、ゴルフボール2の移動速度に応じてサンプリングデータを特定する区間を補正することが、最終的に算出される移動方向、移動速度の精度を確保する上で好ましい。
【0051】
そこで第3の実施の形態では、図18に示すように、計測処理部20は、図2に示す構成に加えて、サンプリングデータを特定する区間を補正するサンプリングデータ特定手段40を設けたものである。
サンプリングデータ特定手段40による補正は、基準位置Oに対して前方に離間した位置を予め設定しておき、ゴルフクラブヘッド4がゴルフボール2を打撃してから前記位置に到達するまでの間のサンプリングデータを除外するものである。
すなわち、基準位置Oから前方に予め定められた距離X離間した位置をサンプリング区間開始位置Osとして設定しておく。
サンプリングデータ特定手段40は、蓄積部30から得た第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータ、トリガ信号trgに基づいて第1乃至第4の信号強度分布データPA〜PDを生成する機能を有している。ただし、サンプリングデータの区間を特定することなく、トリガ信号trg以後のサンプリングデータに基づいて第1乃至第4の信号強度分布データPA〜PDを生成する点が信号強度分布データ生成部32と異なる。
【0052】
また、サンプリングデータ特定手段40は、生成した第1乃至第4の信号強度分布データPA〜PDに基づいて仮の移動速度Vβを求める機能を有している。
より詳細には、図9に示すように周波数fが低い領域で信号強度Pが高くなっている部分に相当する第1乃至第4の信号強度分布データPA〜PDからドップラー周波数成分を検出し、それらドップラー周波数成分に基づいて仮の移動速度Vβを求める。
仮の移動速度Vβは、厳密に言うとゴルフクラブヘッド4の移動速度であるが、仮の移動速度Vβをゴルフボール2の仮の移動速度とみなしても誤差は無視できる。
仮の移動速度Vβは、第1乃至第4の信号強度分布データPA〜PDのそれぞれから得られた速度の平均を求めることで算出してもよいし、第1乃至第4の信号強度分布データPA〜PDのそれぞれから得られた速度の1つを選択してもよい。
サンプリングデータ特定手段40は、以下に示す式(3)に基づいてトリガ信号trgの検出時点(基準時点)から予め定められた距離Xまでのサンプリングデータ数aを求める。
a=(X/Vβ)/(1/Ts) (3)
ただし、Ts:蓄積部30のサンプリング周期
したがって、サンプリングデータのうちa個のサンプリングデータは、ゴルフクラブヘッド4がゴルフボール2を打撃してから距離Xの位置に到達するまでのサンプリングデータである。
サンプリングデータ特定手段40は、サンプリングデータ数aを信号強度分布データ生成部32に供給する。
これにより、信号強度分布データ生成部32は、第1の実施の形態と同様に、基準時点から数えてa個目までのサンプリングデータを除外し、a+1個目からb個目(a<b)までのサンプリングデータを特定して第1乃至第4の信号強度分布データの生成を実施する。
これ以降の処理は第1の実施の形態と同様であるため説明を省略する。
【0053】
以上説明したように、第3の実施の形態によれば、ゴルフボール2の移動速度に拘わらずゴルフボール2が同一の位置(範囲)にあるときのサンプリングデータを特定できるようにしたので、計測されるゴルフボール2の移動方向、移動速度の精度を確保する上でより有利となる。
なお、第3の実施の形態では、サンプリングデータ特定手段40を、信号強度分布データ生成部32および速度演算部34と独立して設けた場合について説明したが、サンプリングデータ特定手段40と同様の機能を、信号強度分布データ生成部32および速度演算部34によって実現するようにしてもよいことは無論である。
【符号の説明】
【0054】
2……ゴルフボール(移動体)、12A〜12D……第1乃至第4のアンテナ、14A〜14D……第1乃至第4のドップラーセンサ、32……信号強度分布データ生成部、
34……速度演算部、36……移動方向演算部、38……移動速度演算部、PA〜PD……第1乃至第4の信号強度分布データ、VA〜VD……第1乃至第4の速度。
【技術分野】
【0001】
本発明は移動体の移動方向および移動速度を計測する計測方法および計測装置に関する。
【背景技術】
【0002】
移動体の速度を計測する方法として、電波や超音波を送信波として発信し、移動体からの反射波との周波数変化から速度を算出するドップラー法が広く知られている。
このようなドップラー法を用いて移動体の移動方向および移動速度の双方を計測する技術が提案されている(特許文献1参照)。
この技術では、単一の送波器からの超音波を移動体(ゴルフクラブヘッド)に向けて送波すると共に、移動体で反射された反射波を異なる位置に設けられた3つの受波器で受波する。そして、各受波器で検出された反射波に含まれるドップラー信号成分に基づき、各受波方向における移動体の相対速度をそれぞれ算出し、これら相対速度に基づいて移動体の速度ベクトルを算出し、速度ベクトルの向きに基づいて移動体の移動方向(角度)を算出している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−71802号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術では、移動方向および移動速度の計測精度を確保するためには、送波器および3つの受波器の指向性を狭くすると共に、各送波器および3つの受波器の配置を厳密に設定する必要があり、したがって、移動体の計測範囲が狭い範囲に限定される。
そのため、例えば、計測対象となる移動体がゴルフクラブヘッドで打撃されることで飛翔するゴルフボールのように打ち出し角度が広い範囲にわたってばらつくようなものである場合には、移動体が計測範囲外に移動すると、移動方向や移動速度を的確に計測することが困難である。
本発明は、このような事情に鑑みてなされたものであり、その目的は、移動体の移動方向および移動速度を計測できる範囲を大きく確保でき、移動体の移動方向や移動速度を的確に計測する上で有利な移動体の計測方法および計測装置を提供することにある。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明の移動体の計測方法は、指向性を有し、供給される送信信号に基づいて移動体に向けて送信波を送信すると共に、前記移動体で反射された反射波を受信して受信信号を生成する第1乃至第n(nは2以上の整数)のアンテナを互いに離間して配置し、前記第1乃至第nのアンテナのそれぞれに対応して、前記アンテナに前記送信信号を供給すると共に、前記アンテナから供給される前記受信信号に基づいてドップラー周波数を有するドップラー信号を生成する第1乃至第nのドップラーセンサを設け、前記第1乃至第nのドップラーセンサのそれぞれから得られたドップラー信号を周波数解析することにより周波数ごとの信号強度の分布を示す第1乃至第nの信号強度分布データを生成する信号強度分布データ生成部を設け、前記第1乃至第nの信号強度分布データのそれぞれに基づいて、前記移動体の移動速度に対応するドップラー周波数成分を検出し、それら検出したドップラー周波数成分に基づいて第1乃至第nの速度を算出する速度演算部を設け、前記第1乃至第nの速度と前記移動体の移動方向との相関関係と、前記第1乃至第nの速度と前記移動体の移動速度との相関関係とをそれぞれ予め求めておき、前記第1乃至第nの速度と前記移動体の移動方向との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動方向を算出し、前記第1乃至第nの速度と前記移動体の移動速度との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動速度を算出することを特徴とする。
また本発明の移動体の計測装置は、指向性を有し、供給される送信信号に基づいて移動体に向けて送信波を送信すると共に、前記移動体で反射された反射波を受信して受信信号を生成する互いに離間して配置された第1乃至第n(nは2以上の整数)のアンテナと、前記第1乃至第nのアンテナのそれぞれに対応して設けられ、前記アンテナに前記送信信号を供給すると共に、前記アンテナから供給される前記受信信号に基づいてドップラー周波数を有するドップラー信号を生成する第1乃至第nのドップラーセンサと、前記第1乃至第nのドップラーセンサのそれぞれから得られたドップラー信号を周波数解析することにより周波数ごとの信号強度の分布を示す第1乃至第nの信号強度分布データを生成する信号強度分布データ生成部と、前記第1乃至第nの信号強度分布データのそれぞれに基づいて、前記移動体の移動速度に対応するドップラー周波数成分を検出し、それら検出したドップラー周波数成分に基づいて第1乃至第nの速度を算出する速度演算部と、予め実測され得られている前記第1乃至第nの速度と予め実測され得られている前記移動体の移動方向との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動方向を算出する移動方向演算部と、予め実測され得られている前記第1乃至第nの速度と予め実測され得られている前記移動体の移動速度との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動速度を算出する移動速度演算部とを備えることを特徴とする。
【発明の効果】
【0006】
本発明によれば、移動体に向けて送信波を送信すると共に、移動体から反射された反射波を受信する複数のアンテナを設け、予め得られている各アンテナを用いて計測された速度と移動方向および移動速度との実測値との相関関係に基づき、測定された各速度から移動方向および移動速度を算出するようにした。
したがって、アンテナの指向性やアンテナの配置に関する制約が少ないことから、移動体に送信波を送信しかつ移動体で反射された反射波を受信する空間を広く確保する上で有利となり、しかも、予め得られた相関関係に基づいて移動方向および移動速度を算出するため移動方向および移動速度の精度を確保する上で有利となる。
【図面の簡単な説明】
【0007】
【図1】第1の実施の形態の移動体の計測装置10の構成を示すブロック図である。
【図2】計測装置10の機能ブロック図である。
【図3】第1乃至第4のアンテナ12A〜12Dの構成を示す正面図である。
【図4】図3のA矢視図である。
【図5】図3のB矢視図である。
【図6】第1〜第4アンテナ14A〜14Dを側面視した説明図である。
【図7】第1〜第4アンテナ14A〜14Dを平面視した説明図である。
【図8】ゴルフクラブヘッド4によってゴルフボール2を打撃した際の第1乃至第4のドップラー信号SdA〜SdDの一例を示す線図である。
【図9】信号強度分布データ生成部32によって生成された第1乃至第4の信号強度分布データPA〜PDの一例を示す線図である。
【図10】ゴルフボール2と第1〜第4アンテナ14A〜14Dとを側面視した説明図である。
【図11】ゴルフボール2と第1〜第4アンテナ14A〜14Dとを平面視した説明図である。
【図12】左右角度θxと第1の値D1との相関関係を表す特性線kを示す図である。
【図13】第1乃至第4の速度VA〜VDと、ゴルフボール2の移動方向および移動速度との相関関係を示す相関式の設定処理を説明するフローチャートである。
【図14】ゴルフボール2を打撃した場合における計測装置10の移動方向および移動速度の計測動作を説明するフローチャートである。
【図15】第1乃至第3のアンテナ12A、12B、12Cが設けられた構成を示す正面図である。
【図16】第2の実施の形態における単一の相関式で示される特性線kを示す図である。
【図17】(a)、(b)は図16の第1、第2の領域Ga、Gbに区分された特性線ka、kbを示す図である。
【図18】第3の実施の形態における計測装置10の機能ブロック図である。
【発明を実施するための形態】
【0008】
(第1の実施の形態)
以下、本発明の実施の形態について図面を参照して説明する。
本実施の形態では、移動体がゴルフボールであり、本実施の形態に係る移動体の計測装置は、ゴルフクラブヘッドによって打撃されたゴルフボールの移動方向と移動速度を計測するものである場合について説明する。なお、移動体は、野球用ボールやサッカーボールなどの球技用ボールであってもよく、空間を移動する移動体であればよい。
図1に示すように、本実施の形態の移動体の計測装置10は、第1乃至第4のアンテナ12A、12B、12C、12Dと、第1乃至第4のドップラーセンサ14A、14B、14C、14Dと、マイク16と、トリガ信号発生部18と、計測処理部20と、表示部22と、操作部24などを含んで構成されている。
本実施の形態では、第1乃至第4のアンテナ12A、12B、12C、12Dと第1乃至第4のドップラーセンサ14A、14B、14C、14Dとは後述するケース26(図3)に収容保持されている。
また、トリガ信号発生部18と、計測処理部20と、表示部22と、操作部24とは、不図示の筐体に組み込まれている。
第1乃至第4のドップラーセンサ14A、14B、14C、14Dと計測処理部20とは不図示の接続ケーブルを介して接続され、マイク16と計測処理部20とは不図示の接続ケーブルを介して接続されている。
なお、図1において符号2は移動体としてのゴルフボール、4はゴルフクラブヘッド、6はシャフト、8はゴルフクラブを示す。
【0009】
第1乃至第4のアンテナ12A〜12Dは、第1乃至第4のドップラーセンサ14A〜14Dから供給される送信信号に基づいて送信波W1としてのマイクロ波を移動体に向けて送信すると共に、移動体で反射された反射波W2を受信して受信信号を第1乃至第4のドップラーセンサ14A〜14Dに供給するものである。
より詳細には、第1乃至第4のアンテナ12A〜12Dは、指向性を有し、送信波W1を送信すると共に、ゴルフボール2反射された反射波W2を受信して受信信号を生成するものであり、互いに離間して配置されている。
本実施の形態では、第1乃至第4アンテナ12A〜12Dは同形同大の指向性アンテナで構成され、このような指向性アンテナとしてホーンアンテナを使用している。
指向性アンテナとしてホーンアンテナ以外のパラボラアンテナなどの従来公知のさまざまな指向性アンテナを使用可能であるが、ホーンアンテナは構成が簡素であり比較的安価であることからコストを抑制する上で有利である。
【0010】
図3は第1乃至第4のアンテナ12A〜12Dの構成を示す正面図、図4は図3のA矢視図、図5は図3のB矢視図である。
図3乃至図5に示すように、第1乃至第4アンテナの12A〜12Dは、ケース26に収容保持されている。
ケース26は、後板2602と、上下左右の側板2604A、2604B、2604C、2604Dと、脚部2606とを含んで構成されている。
後板2602は矩形板状を呈し、上下の辺を水平方向と平行させ、上方に至るほど後方に傾斜するように設けられている。
上下左右の側板2604A〜2604Dは、後板2602の上下左右の辺から起立され、各側板2604A〜2604Dの前縁により矩形状の開口が形成されている。
脚部2606は、下部の側板2604Bの下面中央に設けられ地面や床面に設置される。
第1乃至第4のアンテナ12A〜12Dは、前記の開口を介して前方を向いた状態で後板2602の前面に取着され、後板2602と側板2604A〜2604Dとで囲まれた空間に収容されている。第1乃至第4のアンテナ12A〜12Dの前部は、各側板2604A〜2604Dの前縁よりも後方に位置している。
前記開口は、送信波W1および反射波W2の透過が可能な材料で形成された図示しないカバーによって覆われており、第1乃至第4のアンテナ12A〜12Dの防塵および保護が図られている。
本実施の形態では、図3に示すように正面から見て第1乃至第4のアンテナ12A〜12Dは後板2602の4つの角部近傍に配置されている。すなわち、後板2602の右下寄りの箇所に第1のアンテナ12Aが配置されている。右上寄りの箇所に第2のアンテナ12Bが配置されている。左下寄りの箇所に第3のアンテナ12Cが配置されている。左上寄りの箇所に第4のアンテナ12Dが配置されている。
【0011】
ここで、第1乃至第4のアンテナ12A〜12Dのそれぞれの利得が最大となる方向に沿って延在する直線を各アンテナの指向方向を示す第1乃至第4の仮想軸LA、LB、LC、LDとする。
図3、図4に示すように、側面視した状態で第1、第2のアンテナ12A、12Bは鉛直方向に間隔dV(第1の間隔)をおいて配置され、第1、第2の仮想軸LA、LBが単一の鉛直平面上を延在している。
本実施の形態では、第2の仮想軸LBが水平方向に延在し、かつ、第1の仮想軸LAが水平方向に対して上方に6度傾斜した方向に延在している。したがって、第1、第2の仮想軸LA、LBが交差するように配置されている。
第3、第4のアンテナ12C、12Dも、第1、第2のアンテナ12A、12Bと同様に鉛直方向に間隔dV(第1の間隔)をおいて配置され、第3、第4の仮想軸LC、LDが単一の鉛直平面上を延在している。
本実施の形態では、第4の仮想軸LDが水平方向に延在し、かつ、第3の仮想軸LCが水平方向に対して上方に6度傾斜した方向に延在している。したがって、第3、第4の仮想軸LC、LDが交差するように配置されている。
【0012】
図4、図5に示すように、平面視した状態で、第2、第4のアンテナ12B、12Dは、水平方向に間隔dH(第2の間隔)をおいて配置され、第2、第4の仮想軸LB、LDが単一の水平面上を延在している。
本実施の形態では、第2、第4のアンテナ12B、12Dの仮想軸LB、LDが前後方向に対してそれぞれ内方に4度傾斜した方向に延在している。したがって、第2、第4の仮想軸LB、LDが交差するように配置されている。
第1、第3のアンテナ12A、12Cは、水平方向に間隔dH(第2の間隔)をおいて配置されている。
第1、第3の仮想軸LA、LCも第2、第4の仮想軸LB、LDと同様に前後方向に対してそれぞれ内方に4度傾斜した方向に延在している。したがって、第1、第3の仮想軸LA、LCが交差するように配置されている。
【0013】
図6、図7に示すように、第1乃至第4のアンテナ12A〜12Dは、ゴルフボール2の移動方向においてゴルフボール2よりも後方の箇所に設けられている。なお、図6において符号201はゴルフボール2が載置されるティー、Gは地面(水平面)を示す。
図6に示すように、側面視した状態で第1、第2の仮想軸LA、LBが交差すると共に、第3、第4の仮想軸LC、LDが交差している。
図7に示すように、平面視した状態で第1、第3の仮想軸LA、LCが交差すると共に、第2、第4の仮想軸LB、LDが交差している。
また、平面視した状態で、左右方向において第1、第3のアンテナ12A、12C(第2、第4のアンテナ12B、12D)の間隔dHの中心を通り水平方向に延在する仮想線CL上にティー201に載置されたゴルフボール2の中心点が配置されている。この中心点を基準位置O(あるいは原点O)とする。
本実施の形態では、図6、図7に示すように、実際に基準位置Oから打撃されたゴルフボール2の軌跡のばらつきを考慮して、上述した各仮想軸が交差する点を基準位置Oよりも前方の位置に設定した。
このようにすることで、側面視した状態で、第1、第2のアンテナ12A、12Bのそれぞれから送信される送信波W1が重なる領域と、第3、第4のアンテナ12C、12Dのそれぞれから送信される送信波W1が重なる領域とが、実際に打撃されたゴルフボール2の移動軌跡と重なる範囲を上下方向にわたって広く確保する上で有利となる。図6において送信波W1が重なる領域をハッチングで示す。
また、このようにすることで、平面視した状態で、第1、第3のアンテナ12A、12Cのそれぞれから送信される送信波W1が重なる領域と、第2、第4のアンテナ12B、12Dのそれぞれから送信される送信波W1とが、実際に打撃されたゴルフボール2の移動軌跡と重なる範囲を左右方向にわたって広く確保する上で有利となる。図7において送信波W1が重なる領域をハッチングで示す。
したがって、基準位置Oでゴルフクラブヘッド4で打撃されたゴルフボール2の移動方向が上下方向あるいは左右方向にわたって多少ばらついたとしても、移動するゴルフボール2を前記の送信波W1が重なる領域内で確実に捉える上で有利となる。言い換えると、ゴルフボール2に対して第1乃至第4のアンテナ12A〜12Dから送信波W1を確実に当てると共に、ゴルフボール2で反射された反射波W2を第1乃至第4のアンテナ12A〜12Dによって確実に受信する上で有利となり、打撃直後のゴルフボール2の移動方向、移動速度(初速)の計測を確実に行う上で有利となる。
【0014】
なお、移動体としてゴルフボール2を想定し、平面視した状態で基準位置Oから後方に1.7m離間した箇所に第1乃至第4のアンテナ12A〜12Dを配置し、かつ、打撃されたゴルフボール2の上下方向における角度の上限が45度であり、左右方向における角度が左右に15度である場合、第1乃至第4のアンテナ12A〜12Dの指向特性は以下のように設定することが好ましい。
仮想軸LA〜LD上における利得を最大値とし、仮想軸を含む水平面内で利得が3dB低下する角度を水平角とし、仮想軸を含む鉛直面内で利得が3dB低下する角度を垂直角とする。
水平角は10度以上20度以下が好ましい。この範囲内であると、ゴルフボールが打ち出されると想定される範囲内を十分な感度で計測できる点で有利となる。また、この範囲を下回ると十分な計測範囲が確保できない点で不利となり、この範囲を上回ると計測可能距離が短くなる点で不利となる。本実施の形態では、水平角が15度である。
垂直角は15度以上30度以下が好ましい。この範囲内であると、ゴルフボールが打ち出されると想定される範囲内を十分な感度で計測できる点で有利となる。また、この範囲を下回ると十分な計測範囲が確保できない点で不利となり、この範囲を上回ると計測可能距離が短くなる点で不利となる。本実施の形態では、垂直角が25度である。
【0015】
第1乃至第4ドップラーセンサ14A、14B、14C、14Dは、ケース26に収容保持されている。
図1に示すように、第1乃至第4ドップラーセンサ14A〜14Dは、第1乃至第4アンテナ12A〜12Dのそれぞれに送信信号を供給するものである。また、第1乃至第4アンテナ12A〜12Dのそれぞれから供給される受信信号に基づいてドップラー周波数Fdを有する第1乃至第4ドップラー信号SdA、SdB、SdC、SdDを時系列データとして生成するものである。
ドップラー信号Sdとは、前記送信信号の周波数F1と前記受信信号の周波数F2との差分の周波数F1−F2で定義されるドップラー周波数Fdを有する信号である。
ドップラーセンサ14A〜14Dは、市販されている種々のものが使用可能である。
なお、前記の送信信号としては、例えば、24GHzのマイクロ波が使用可能であり、ドップラー信号Sdを得られるものであれば送信信号の周波数は限定されない。
【0016】
マイク16は、ゴルフボール2がゴルフクラブヘッド4によって打撃された際に発生する打撃音を収音し音声信号を検出するものである。
トリガ信号発生部18は、マイク16によって検出された音声信号の振幅が予め定められたしきい値を上回ったときに、トリガ信号trgを生成して計測処理部20に供給するものである。
トリガ信号trgは、計測処理部20に対して後述するデータ処理の開始を指示するものである。
なお、上述したようにトリガ信号発生部18が単に打撃音に応じてトリガ信号trgを生成するものである場合、計測装置10の設置環境によっては以下の不都合が生じることが懸念される。
すなわち、計測装置10の設置環境が例えば複数の打席を備えるゴルフ練習場である場合、計測装置10の測定対象となる打席以外の周囲の打席の打撃音によってもトリガ信号trgが生成され、計測装置10の誤動作が発生することが懸念される。
したがって、本実施の形態では、以下のように構成することで上記誤動作の防止を図っている。
トリガ信号発生部18を、マイク16からの音声信号に加えて、各ドップラーセンサ14A〜14Dからのドップラー信号SdA〜SdDを入力する。
そして、トリガ信号発生部18は、ドップラー信号SdA〜SdDの少なくとも1つ以上の信号を受信し、かつ、打撃音の音声信号が予め定められたしきい値を上回ったときに、トリガ信号trgを生成して計測処理部20に供給する。この場合、当初発生するドップラー信号SdA〜SdDはゴルフクラブヘッド4の動きを検出したものとなる。
したがって、トリガ信号発生部18は、ゴルフクラブ4の動きと打撃音の両方でトリガ信号trgを生成するため、計測装置10の誤動作を的確に防止する上で有利となる。
トリガ信号発生部18はトリガ信号trgを生成できれば、マイク16以外のセンサを用いても良い。例えば、予め定められた特定の位置(例えば基準位置O)を通過するゴルフクラブヘッド4を検出する光センサを設け、該光センサの検出信号に基づいてトリガ信号発生部18がトリガ信号trgを生成するなど任意である。しかしながら、光センサは設置する位置や方向を厳密に調整する必要があることから、本実施の形態のようにマイク16を用いる方が設置作業の簡素化を図る上で有利となる。
【0017】
計測処理部20は、第1乃至第4のドップラーセンサ14A〜14Dから供給される第1乃至第4のドップラー信号SdA〜SdDを入力して演算処理を行うことにより、ゴルフボール2の移動方向および移動速度を算出するものである。
本実施の形態では、計測処理部20は、マイクロコンピュータ21によって構成されている。
マイクロコンピュータ21は、CPU21Aと、不図示のインターフェース回路およびバスラインを介して接続されたROM21B、RAM21C、インターフェース21D、表示用ドライバ21Eなどを含んで構成されている。
ROM21BはCPU21Aが実行する移動体の移動方向および移動速度を算出するための制御プログラムなどを格納し、RAM21Cはワーキングエリアを提供するものである。
インターフェース21Dは、第1乃至第4のドップラー信号SdA〜SdDを入力してCPU21Aに供給し、また、操作部24からの操作信号を受け付けてCPU21Aに供給するものである。
表示用ドライバ21EはCPU21Aの制御に基づいて表示部22を駆動するものである。
【0018】
図2はマイクロコンピュータ21の構成を機能ブロックで示した計測装置10のブロック図である。
マイクロコンピュータ21は、機能的には、蓄積部30と、信号強度分布データ生成部32と、速度演算部34と、移動方向演算部36と、移動速度演算部38とを含んで構成されている。
また、蓄積部30と、信号強度分布データ生成部32と、速度演算部34と、移動方向演算部36と、移動速度演算部38は、CPU22Aが前記制御プログラムを実行することで実現されるものであるが、これらの部分は、回路等のハードウェアで構成されたものであってもよい。
【0019】
蓄積部30は、第1乃至第4のドップラー信号SdA〜SdDと、トリガ信号trgを予め定められたサンプリング周期で時間経過に従って順番に蓄積するものである。本実施の形態では、CPU21Aが第1乃至第4のドップラー信号SdA〜SdDとトリガ信号trgを前記サンプリング周期でサンプリングしてRAM21Cに第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータおよびトリガ信号trgのサンプリングデータとして格納する。
蓄積部30は、例えば、計測装置10の電源が投入されると同時にサンプリング動作を開始する。
図8はゴルフクラブヘッド4によってゴルフボール2を打撃した際の第1乃至第4のドップラー信号SdA〜SdDの一例を示す線図であり、横軸に時間t(sec)、縦軸に振幅(任意単位)をとっている。
図8において、初めの大きな振幅を呈する波形部分がゴルフクラブヘッド4によって生じるドップラー信号の部分を示し、その後に続く波形部分が打撃されたゴルフボール2によって生じるドップラー信号の部分を示している。
【0020】
信号強度分布データ生成部32は、蓄積部30に蓄積された第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータを周波数解析(連続FFT解析、あるいは、ウェーブレット解析)することによって信号強度分布データを生成するものである。
言い換えると、信号強度分布データ生成部32は、第1乃至第4のドップラーセンサ14A〜14Dのそれぞれから得られた第1乃至第4のドップラー信号SdA〜SdDを周波数解析することにより周波数ごとの信号強度の分布を示す第1乃至第4の信号強度分布データを生成する。
本実施の形態では、信号強度分布データ生成部32は、蓄積部30に蓄積されたトリガ信号trgに基づいて、蓄積部30に蓄積された時系列データである第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータを予め定められた区間に特定して第1乃至第4の信号強度分布データの生成を実施する。ここで、第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータの区間は単一のトリガ信号trgに基づいて同期して特定される。
言い換えると、信号強度分布データ生成部32は、垂れ流し方式で蓄積されている各ドップラー信号SdA〜SdDのサンプリングデータのうち、ゴルフボール2が打撃された後の区間におけるサンプリングデータを特定して第1乃至第4の信号強度分布データの生成を実施する。
【0021】
サンプリングデータを予め定められた区間に特定する方法としては以下の方法が例示される。
すなわち、信号強度分布データ生成部32は、トリガ信号trgの検出時点を基準時点として、基準時点から数えてa個目までのサンプリングデータを除外し、a+1個目からb個目(a<b)までのサンプリングデータを特定して第1乃至第4の信号強度分布データの生成を実施する。
この場合、a+1個目からb個目(a<b)までのサンプリングデータに、ゴルフクラブヘッド4による影響を受けたデータが含まれないように、上記の数値a、bを設定する。
数値a,bは、実際にゴルフクラブ6がスウィングされた場合のゴルフクラブヘッド4のスピードのばらつきを考慮して設定すればよい。
あるいは、トリガ信号trgの検出時点を基準時点として、経過時間に基づいてゴルフクラブヘッドによる影響を受けたデータが含まれないように、サンプリングデータを予め定められた区間に特定してもよい。
また、上記の数値a、bの設定は、基準位置Oに対してゴルフボール2が約1m移動した時点前後におけるサンプリングデータが得られるにように設定される。この理由は、ゴルフクラブヘッド4で打撃されたゴルフボール2が1m前後移動した時点における移動速度の変化がほぼ無視できるからである。
図9は信号強度分布データ生成部32によって生成された第1乃至第4の信号強度分布データPA〜PDの一例を示す線図であり、横軸に周波数f(Hz)、縦軸に信号強度P(任意単位)を取っている。
図9において、周波数fが低い領域で信号強度Pが高くなっている部分は、ゴルフクラブヘッド4による反射波W2に対応しており、その後に続く信号強度の山の部分が打撃されたゴルフゴール2による反射波W2に対応している。
【0022】
速度演算部34は、第1乃至第4の信号強度分布データPA〜PDのそれぞれに基づいて、ゴルフボール2の移動速度に対応するドップラー周波数成分を検出し、それら検出したドップラー周波数成分に基づいて第1乃至第4の速度V1〜V4を算出するものである。
各信号強度分布データPA〜PDからドップラー周波数成分を検出する方法としては以下の手順が例示される。
(1)第1乃至第4の信号強度分布データPA〜PDのそれぞれについて移動平均を取ることによってノイズの影響を抑制した信号強度分布データを得る。
(2)移動平均を取った信号強度分布データにおいて信号強度のピーク値、あるいは、信号強度の山の中央値に対応する周波数をドップラー周波数成分(ドップラー周波数)として検出する。
なお、ドップラー周波数成分の検出方法は、各信号強度分布データPA〜PDに含まれるノイズの影響を抑制し、ドップラー周波数成分を正確かつ安定して検出できればよいのであり、上記の手順に限定されるものではない。
【0023】
ここで、ゴルフボール2の速度の計測原理について説明する。
従来から知られているように、ドップラー周波数Fdは式(1)で表される。
Fd=F1−F2=2・V・F1/c (1)
ただし、V:ゴルフボール2の速度、c:光速(3・108m/s)
したがって、式(1)をVについて解くと、(2)式となる。
V=c・Fd/(2・F1) (2)
すなわち、ゴルフボール22の速度Vは、ドップラー周波数Fdに比例することになる。
したがって、ドップラー信号Sdからドップラー周波数Fdの周波数成分を検出し、検出したドップラー周波数成分から式(2)に基づいてゴルフボール2の速度Vを求めることができる。
ところで、式(2)によって得られるゴルフボール2の移動速度は、アンテナの指向性を示す仮想軸と一致する方向の速度成分である。
したがって、ゴルフボール2の移動軌跡がアンテナの指向性を示す仮想軸に対して外れるほど式(2)によって得られるゴルフボール2の移動速度の誤差が増大する傾向となる。
そこで、本発明では、第1乃至第4のアンテナ12A〜12Dを用いて得られた第1乃至第4の速度VA〜VDと、実測されたゴルフボール2の移動方向との間に相関関係があり、また、それら第1乃至第4の速度VA〜VDと、実測されたゴルフボール2の移動速度との間に相関関係があることに着目した。
すなわち、予め上述した2つの相関関係を取得しておけば、それら2つの相関関係に基づいて第1乃至第4の速度VA〜VDからゴルフボール2の移動方向および移動速度を求めることが可能となる。
【0024】
移動方向演算部36は、予め得られている第1乃至第4の速度VA〜VDと実測されたゴルフボール2の移動方向との相関関係に基づいて、第1乃至第4の速度VA〜VDから移動方向を算出するものである。
本実施の形態では、ゴルフボール2の移動方向を次のように定義する。
図10、図11に示すように、基準位置Oを通る仮想線CLを含む基準鉛直面Pvと、基準位置Oを通り基準鉛直面Pvと直交する基準水平面Phとを設定する。
言い換えると、予め定められた基準位置Oを通り水平方向に延在する仮想線CLを含み鉛直方向に延在する平面を基準鉛直面Pvとする。基準位置Oを通り基準鉛直面Pvと直交する平面を基準水平面Phとする。
ゴルフボール2の移動軌跡を基準鉛直面Pvに投影した場合に投影した移動軌跡と基準水平面Ph(仮想線CL)とがなす角度を上下角度θyとする。
ゴルフボール2の移動軌跡を基準水平面Phに投影した場合に投影した移動軌跡と基準鉛直面Pvとがなす角度を左右角度θxとする。
ゴルフボール2の移動方向を上下角度θyと左右角度θxとで定義する。
【0025】
本実施の形態では、鉛直方向において間隔dVをおいて配置された2つのアンテナを用いて実測して得た2つの速度の差分と、実測して得たゴルフボール2の上下角度θyとの相関関係に基づいて上下角度θyを算出する。
より詳細には、第1、第2のアンテナ12A、12Bを用いて実測して得た第1、第2の速度VA、VBの差分ΔVAB=VA−VBと第3、第4のアンテナ12C、12Dとを用いて得た第3、第4の速度VC、VDの差分ΔVCD=VC−VDとの平均値(ΔVAB+ΔVCD)/2を、第1乃至第4の速度VA〜VDの平均値ΔVAVEで除算した第1の値D1=((ΔVAB+ΔVCD)/2)/ΔVAVEを算出する。
また、予め実測して得た第1の値D1と、実測して得たゴルフボール2の上下角度θyとの相関関係に基づいて、第1の値D1から上下角度θyを算出する。
このように2組のアンテナを用いて得た2つの速度の差分の平均値から上下角度θyを算出することにより上下角度θyの値をより精度よく安定して求める上で有利となる。
【0026】
また、本実施の形態では、水平方向において間隔dHをおいて配置された2つのアンテナを用いて実測して得た2つの速度の差分と、実測して得たゴルフボール2の左右角度θxとの相関関係に基づいて左右角度θxを算出する。
より詳細には、第1、第3のアンテナ12A、12Cを用いて得た第1、第3の速度VA、VCの差分ΔVAC=VA−VCと第2、第4のアンテナ12B、12Dとを用いて得た第2、第4の速度VB、VDの差分ΔVBD=VB−VDとの平均値(ΔVAC+ΔVBD)/2を、第1乃至第4の速度VA〜VDの平均値ΔVAVEで除算した第2の値D2=((ΔVAC+ΔVBD)/2)/ΔVAVEを算出する。
また、実測して得た第2の値D2と、実測して得たゴルフボール2の左右角度θxとの相関関係に基づいて、第2の値D2から左右角度θxを算出する。
このように2組のアンテナを用いて得た2つの速度の差分の平均値から左右角度θxを算出することにより左右角度θxの値をより精度よく安定して求める上で有利となる。
【0027】
移動速度演算部38は、予め得られている第1乃至第4の速度VA〜VDと実測されたゴルフボール2の移動速度Vαとの相関関係に基づいて、第1乃至第4の速度VA〜VDから移動速度Vαを算出するものである。
本実施の形態では、後述するように、予め得られている第1乃至第4の速度VA〜VDの平均値と、実測されたゴルフボール2の移動速度Vαとの相関関係に基づいて移動速度Vαを算出する。
このように4つのアンテナを用いて得た第1乃至第4の速度VA〜VDの平均値からゴルフボールの移動速度Vαを算出することにより移動速度Vαの値をより精度よく安定して求める上で有利となる。
なお、本明細書において、ゴルフボール2の移動速度Vαは、ゴルフボール2の移動方向に沿ったゴルフボール2の速度、すなわちゴルフボール2の3次元速度をいう。
【0028】
次に、(1)実測して得た第1乃至第4の速度VA〜VDと実測して得たゴルフボール2の移動方向との相関関係と、(2)実測して得た第1乃至第4の速度VA〜VDと実測して得たゴルフボール2の移動速度との相関関係の取得について説明する。
【0029】
まず、専用のゴルフボール打ち出し装置(スイングロボット)によって基準位置Oに位置するゴルフボール2を、さまざまな速度、方向にて打ち出す。言い換えると、左右角度θx、上下角度θy、移動速度Vαを異ならせて打撃する。
そして、移動体の移動方向および移動速度を高精度に計測可能な基準計測器によってゴルフボール2の左右角度θx、上下角度θy、移動速度Vαを計測し、左右角度θx、上下角度θy、移動速度Vαの実測データを取得する。
このような基準計測器として、例えば、特許第4104384号に開示されているような従来公知のさまざまな測定装置が使用可能である。
また、左右角度θx、上下角度θy、移動速度Vαの計測と同時に、本実施の形態の計測装置10Aを用いることにより、速度演算部34によって第1乃至第4の速度VA、VB、VC、VDを取得する。すなわち、左右角度θx、上下角度θy、移動速度Vαの実測データに対応する第1乃至第4の速度VA、VB、VC、VDを取得する。
【0030】
(1)実測して得た第1乃至第4の速度VA〜VDと実測して得たゴルフボール2の移動方向との相関関係については以下のように求める。
そして、上下角度θyの実測データと、第1乃至第4の速度VA、VB、VC、VDから算出された第1の値D1との相関関係に基づいて上下角度θy算出用の相関式(回帰式)を求める。なお、計測装置10は、相関式の算出を行う機能を備える必要はなく、相関式の算出は、計測装置10とは別に設けられたコンピュータを用いて行うなど任意である。
【0031】
言い換えると、上下角度θyと、第1の値D1との関係を離散的に測定したデータを取得する。そして、取得したデータを従来公知の最小二乗法などを用いて回帰分析することによって上下角度θyを第1の値D1の関数(多項式)によって表わした相関式を求める。すなわち、このようにして求められた相関式によって上下角度θyと第1の値D1との関係を示す特性線を得ることができる。
同様に、左右角度θxの実測データと、第1乃至第4の速度VA、VB、VC、VDから算出された第2の値D2との相関関係に基づいて左右角度θx算出用の相関式(回帰式)を求める。
言い換えると、左右角度θxと、第2の値D2との関係を離散的に測定したデータを取得する。そして、取得したデータを従来公知の最小二乗法などを用いて回帰分析することによって左右角度θxを第2の値D2の関数(多項式)によって表わした相関式を求める。すなわち、このようにして求められた相関式によって左右角度θxと第2の値D2との関係を示す特性線を得ることができる。
したがって、これら2つの相関式を用いることにより、第1乃至第4の速度VA、VB、VC、VDから左右角度θxおよび上下角度θyを求めることが可能となる。
本実施の形態では、移動方向演算部36は上下角度θy算出用の相関式および左右角度θx算出用の相関式を用いることで第1乃至第4の速度VA、VB、VC、VDから左右角度θxおよび上下角度θyをゴルフボール2の移動方向として算出する。
したがって、本実施の形態では、移動方向演算部36による移動方向の算出は、予め実測され得られている第1乃至第4の速度VA〜VDと予め実測され得られているゴルフボール2の移動方向との相関関係を示す移動方向算出用の相関式に基づいてなされる。
なお、上記のような相関式に代えて、相関式によって示される特性線のデータを左右角度θx算出用のマップとしてあるいは上下角度θy算出用のマップとして記憶しておき、各マップを用いて左右角度θxおよび上下角度θyを算出してもよい。その場合にはそれらマップをマイクロコンピュータのメモリ、例えば、ROMに設けるなど任意である。
【0032】
図12は、左右角度θxと第1の値D1との相関関係を表す特性線kを示す図である。
横軸は第1の値D1を示し、縦軸は左右角度θxを示している。記号●は離散的に計測された左右角度θxと第1の値D1とのデータを示している。
特性線kが左右角度と第1のデータD1との相関関係を示しており、特性線kを示す相関式(回帰式)は、例えば、3次の多項式で示されている。
なお、上下角度θyについても図12と同様の特性線が算出される。
【0033】
また、本実施の形態では、第1の値D1、第2の値D2を算出するために、2つの速度の差分である以下の4つのデータを用いた。
(1)第1、第2の速度VA、VBの差分ΔVAB=VA−VB
(2)第3、第4の速度VC、VDの差分ΔVCD=VC−VD
(3)第1、第3の速度VA、VCの差分ΔVAC=VA−VC
(4)第2、第4の速度VB、VDの差分ΔVBD=VB−VD
しかしながら、上記4つのデータに代えて以下に示す2つの速度の比である以下の4つのデータを用いても、第1の値D1と上下角度θy、上下速度Vyとの相関関係、第2の値D2と左右角度θx、左右速度Vxとの相関関係を得ることができ、したがって、上記(1)〜(4)の値に代えて以下の(5)〜(8)の値を用いてもよい。
(5)第1、第2の速度VA、VBの比RVAB=VA/VB
(6)第3、第4の速度VC、VDの比RVCD=VC/VD
(7)第1、第3の速度VA、VCの比RVAC=VA/VC
(8)第2、第4の速度VB、VDの比RVBD=VB/VD
【0034】
(2)実測して得た第1乃至第4の速度VA〜VDと実測して得たゴルフボール2の移動速度との相関関係については以下のように求める。
第1乃至第4の速度VA、VB、VC、VDの平均値Vave=(VA+VB+VC+VD)/4を算出する。
基準測定器で計測した移動速度Vαの実測データと、平均値Vaveとの相関関係に基づいて移動速度Vα算出用の相関式(回帰式)を求める。
言い換えると、移動速度Vαと、平均値Vaveとの関係を離散的に測定したデータを取得する。そして、取得したデータを従来公知の最小二乗法などを用いて回帰分析することによって移動速度Vαを平均値Vaveの関数(多項式)によって表わした相関式を求める。すなわち、このようにして求められた相関式によって移動速度Vαと平均値Vaveとの関係を示す特性線を得ることができる。
したがって、このようにして求めた相関式を用いることにより、第1乃至第4の速度VA、VB、VC、VDから移動速度Vαを求めることが可能となる。
本実施の形態では、移動速度演算部38は上記の相関式を用いることで第1乃至第4の速度VA、VB、VC、VDからゴルフボール2の移動速度Vαを算出する。
したがって、本実施の形態では、移動速度演算部38による移動速度の算出は、予め実測され得られている第1乃至第4の速度VA〜VDと予め実測され得られているゴルフボール2の移動速度との相関関係を示す移動速度算出用の相関式に基づいてなされる。
なお、移動速度Vαの場合も、上記のような相関式に代えて、相関式によって示される特性線のデータを移動速度Vα算出用のマップとして記憶しておき、マップを用いて移動速度Vαを算出してもよく、それらマップをマイクロコンピュータのメモリ、例えば、ROMに設けるなど任意である。
なお、移動速度Vαについても図12と同様の特性線が算出される。
【0035】
図1に戻って説明する。
表示部22は文字や画像を表示する表示画面を有している。このような表示部22として液晶表示装置など従来公知のさまざまな表示装置が使用可能である。
表示部22は、計測処理部20によって算出されたゴルフボール2の移動方向および移動速度を表示画面に表示する。
【0036】
操作部24は、表示部22に表示されるゴルフボール2の移動方向および移動速度の表示形態などを切り替えるための種々の操作入力を受け付けてCPU22Aに供給するものである。
【0037】
次に、計測装置10の動作について図13、図14のフローチャートを参照して説明する。
まず、図13を参照して、第1乃至第4の速度VA〜VDと、ゴルフボール2の移動方向および移動速度との相関関係を示す相関式の設定について説明する。
まず、専用のゴルフボール打ち出し装置(スイングロボット)を用いてゴルフボール2を、左右角度θx、上下角度θy、移動速度Vαを異ならせて打撃し、左右角度θx、上下角度θy、移動速度Vαを実測する(ステップS10)。
同時に、計測装置10を用いて第1乃至第4の速度VA〜VDを計測する(ステップS12)。
次いで、計測装置10とは別のコンピュータにより、第1乃至第4の速度VA〜VDに基づいて第1の値D1、第2の値D2を算出する(ステップS14)。
次いで、第1の値D1と上下角度θyとの相関関係を示す相関式を算出し(ステップS16)、第2の値D2と左右角度θxとの相関関係を示す相関式を算出する(ステップS18)。
次いで、第1乃至第4の速度VA〜VDに基づいて平均値Vaveを算出する(ステップS20)。
次いで、平均値Vaveと移動速度Vαとの相関関係を示す相関式を算出する(ステップS22)。
そして、ステップS16、S18、S22によって得られた3つの相関式を計測装置10に設定する(ステップS24)。
【0038】
次に、図14を参照してゴルフボール2を打撃した場合における計測装置10の移動方向および移動速度の計測動作について説明する。
予め図13の処理が実施され、計測装置10に前記の相関式が設定されているものとする。
まず、使用者は、ゴルフボール2の打ち出し方向においてゴルフボール2から例えば1.7m程度後方の箇所に、第1乃至第4のアンテナ12A〜12Dをゴルフボール2に向けてケース26を設置する。
ケース26は、例えば地面Gの上に載置すればよい。
これにより、第1乃至第4のアンテナ12A〜12Dから送出された送信波W1がゴルフボール2に当たり、反射波W2が第1乃至第4のアンテナ12A〜12Dに受信可能な状態となる。
使用者が操作部24を操作することにより、計測装置10はゴルフボール2の移動方向および移動速度を計測するための計測モードに設定される(ステップS40)。
【0039】
計測モードに設定されると、第1乃至第4のドップラー信号SdA〜SdDとトリガ信号trgの蓄積部30へのサンプリングが開始される(ステップS42)。
ここで、使用者がゴルフクラブ6を把持してスウィングしてゴルフクラブヘッド4でゴルフボール2を打ち出すと、打撃音がマイク16によって収音される。トリガ信号発生部18は、ドップラー信号SdA〜SdDの少なくとも1つ以上の信号を受信し、かつ、打撃音の音声信号が予め定められたしきい値を上回ったときに、トリガ信号trgを生成して計測処理部20に供給し、これによりトリガ信号trgが蓄積部30に供給される。
【0040】
信号強度分布データ生成部32は、蓄積部30にサンプリングされたトリガ信号trgの検出の有無を判定しており(ステップS44)、トリガ信号trgを検出しなければ、ステップS44を繰り返す。
信号強度分布データ生成部32は、トリガ信号trgを検出すると、トリガ信号trgの検出時点から予め定められた区間にわたる第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータを特定する(ステップS46)。
そして、信号強度分布データ生成部32は、第1乃至第4の信号強度分布データPA〜PDを生成する(ステップS48)。
次いで、速度演算部34は、第1乃至第4の信号強度分布データPA〜PDから第1乃至第4の速度VA〜VDを算出する(ステップS50)。
次いで、移動方向検出部36は、第1の値D1、第2の値D2を算出し(ステップS52)、予め設定されている相関式から第1の値D1、第2の値D2に基づいて上下角度θy、左右角度θxを算出する(ステップS54)。
また、移動速度検出部38は、第1乃至第4の速度VA〜VDから平均値Vaveを算出し(ステップS56)、予め設定されている相関式から平均値Vaveに基づいて移動速度Vαを算出する(ステップS58)。
このようにして得られた上下角度θyおよび左右角度θxが移動方向として表示部22に供給されて表示され、移動速度Vαが移動速度として表示部22に供給されて表示される(ステップS60)。以上で一連の計測動作が終了する。
【0041】
次に、本実施の形態の計測装置10の作用効果について説明する。
本実施の形態によれば、移動体(ゴルフボール2)に向けて送信波W1を送信すると共に、移動体から反射された反射波W2を受信するアンテナを複数個設け、予め得られている各アンテナを用いて計測された速度と移動方向および移動速度との実測値との相関関係に基づき、測定された各速度から移動方向および移動速度を算出するようにした。
したがって、移動体の速度ベクトルを算出する従来技術と比較してアンテナの指向性を狭いものとし、かつ、各アンテナの配置を厳密に設定するといった制約が少ないことから、移動体に送信波を送信しかつ移動体で反射された反射波を受信する空間を広く確保する上で有利となり、しかも、予め得られた相関関係に基づいて移動方向および移動速度を算出するため移動方向および移動速度の精度を確保する上で有利となる。
そのため、移動体がゴルフボール2のように移動方向のばらつきの大きなものであっても移動方向および移動速度を的確に計測する上で有利となる。
また、測定装置10を製造する際、個々の測定装置10毎に、図13で説明した工程を実施して、移動方向および移動速度に関する相関関係(相関式)を得て設定することで、測定装置10によって計測される移動方向および移動速度の製造上のばらつきを抑制する上で有利となる。
また、相関関係に基づいて移動方向および移動速度を計測することから、移動方向および移動速度の精度を確保しつつ、測定装置10の製造上の位置精度の許容差、具体的には、第1乃至第4のアンテナ12A、12B、12C、12Dの位置精度の許容差を緩和できるため、製造コストの低減を図る上で有利となる。
【0042】
また、本実施の形態の計測装置10をゴルフシミュレータ装置に適用すれば、計測装置10で算出されたゴルフボール2の移動方向、移動速度に基づいてゴルフボール2の弾道を的確にシミュレーションすることができる。
特に、従来のゴルフシミュレータ装置では、高速度カメラで撮影したゴルフボール2の画像データに基づいてゴルフボール2の挙動の計測を行い、その計測結果に基づいてゴルフボール2の弾道のシミュレーションを行うものが多い。このような画像データを用いるゴルフシミュレータ装置では、照明光や外光の変化が高速度カメラで撮影した画像データに影響を及ぼすことから、高速度カメラの動作設定を簡単に行うことが難しく不利である。
これに対して本実施の形態では、照明光や光の影響を受けることがないため、計測装置10、ゴルフシミュレータ装置の設定作業の簡素化を図る上で有利となる。
また、高速度カメラを用いる場合は、ゴルフボール2をその移動方向と直交する方向から撮影しなくてはならないため、高速度カメラをゴルファーの正面に配置する必要があり、ゴルファーの視界に高速度カメラが入ることから、ゴルファーに圧迫感を与える不都合がある。
これに対して本実施の形態では、アンテナをゴルフボール2の後方に離れた箇所に配置すればよいため、ゴルファーの視界にアンテナが入りにくく、ゴルファーに与える圧迫感を抑制する上で有利となる。
【0043】
また、本実施の形態では、第1乃至第4のアンテナ12A〜12Dのうち、第1、第2のアンテナ12A、12Bは互いに鉛直方向に間隔dVをおいて配置され、かつ、第3、第4のアンテナ12C、12Dは互いに鉛直方向に間隔dVをおいて配置され、第1、第3のアンテナ12A、12Cは互いに水平方向に間隔dHをおいて配置され、かつ、第2、第4のアンテナ12B、12Dは互いに水平方向に間隔dHをおいて配置されている。
そして、鉛直方向に間隔dVをおいて配置された2組のアンテナ12A、12Bと12C、12Dとを用いて得た2つの速度の差分の平均値から上下角度θy、上下速度Vyをそれぞれ算出し、水平方向に間隔dHをおいて配置された2組のアンテナ12A、12Cと、12B、12Dとを用いて得た2つの速度の差分の平均値から左右角度θx、左右速度Vxをそれぞれ算出するようにした。
言い換えると、上下角度θy、上下速度Vyを算出するための速度の差分をそれぞれ2つ得られ、また、左右角度θx、左右速度Vxを算出するための速度の差分をそれぞれ2つ得られる。そのため、それら2つの速度の差分の平均値を用いて移動体の角度および速度を算出できることから、移動体の角度および速度を正確かつ安定して算出する上で有利となる。
また、2組のアンテナ12A、12Cと、12B、12Dとを設けたため、各アンテナとゴルフボール2との間に試打者やクラブなどの障害物が入るなどにより、一方の組のアンテナを用いた計測動作が正常になされなくなったとしても、他方の組みのアンテナを用いた計測動作が正常であれば、正常な組みのアンテナを用いた計測結果に基づいて、移動方向および移動速度を算出することができる。
したがって、2組のアンテナの一方が実質的に使用できない状態となっても残りの組みのアンテナを使用して計測を行うことができるため、障害物の影響を排除して移動方向および移動速度を計測でき有利となる。
【0044】
なお、図15に示すように、第1乃至第3のアンテナ12A、12B、12Cの3つのアンテナを設け、第1、第2のアンテナ12A、12Bを互いに水平方向に間隔dHをおいて配置し、第1、第3のアンテナ12A、12Cを鉛直方向に間隔dVをおいて配置する構成としてもよい。
この場合は、上下角度θy、上下速度Vyを算出するための速度の差分が1つ得られ、また、左右角度θx、左右速度Vxを算出するための速度の差分が1つ得られるので、実施の形態と同様に、移動体の角度および速度を算出することができる。
しかしながら、本実施の形態のようにすると、2つの速度の差分の平均値を用いて移動体の角度および速度を算出できるので、移動体の角度および速度を正確かつ安定して算出する上でより有利となる。
【0045】
(第2の実施の形態)
次に第2の実施の形態について説明する。
第1の実施の形態では、図12に示すような特性線kを示す相関式(回帰式)を予め求めておき、相関式を用いて第1の値D1、第2の値D2、平均値Vaveから移動方向あるいは移動速度を算出した。
言い換えると、特性線kを示す相関式は、上下角度θy、左右角度θx、移動速度Vαのそれぞれについて1つずつ設定されている。
しかしながら、実際の相関関係においては、特性線kを示す相関式は複雑なものとなり、単一の相関式で特性線kを表すには限度がある。
そこで、特性線kを複数の領域に区分すると共に、各領域毎に異なる相関式を求めることが考えられる。このようにすると、特性線kを単一の相関式で示す場合と比較して、相関関係をより正確に示すことができ、したがって、上下角度θy、左右角度θx、移動速度Vαをより正確に算出する上で有利となる。
そこで、第2の実施の形態では、特性線kを複数の領域に区分すると共に、各領域毎に異なる相関式を求め、各相関式を用いて第1の値D1、第2の値D2、平均値Vaveから移動方向あるいは移動速度を算出するようにしたものである。
【0046】
以下では、図16、図17を参照して、第2の値D2と上下角度θyとの相関関係、相関式を例にとって説明する。
まず、図16に示すように、特性線kを示す単一の相関式(以下第1の相関式)を作成する。ここで、第1の相関式は、例えば、直線式のような単純な式でよい。第1の相関式を作成する場合も、第1の実施の形態と同様に、上下角度θyと、第2の値D2との関係を離散的に測定したデータを取得し、取得したデータを従来公知の最小二乗法などを用いて回帰分析することによって上下角度θyを第2の値D2の関数(多項式)によって表わした相関式を求めることでなされる。
そして、特性線kを上下角度θyの値に応じて複数の領域、例えば第1、第2の領域Ga、Gbに区分する。
次いで、第1、第2の領域Ga、Gbのそれぞれについて該当するデータを回帰分析することによって上下角度θyを第2の値D2の関数(多項式)によって表わした相関式(以下第2、第3の相関式という)を求める。
ここで、第2、第3の相関式は、例えば、3次式以上の高次の多項式である。
図17(a)、(b)は各領域Ga、Gbに区分された特性線ka、kbを示し、それぞれ第2、第3の相関式によって示される。
このようにして得られた第1乃至第3の相関式を移動方向演算部36に設定しておく。
【0047】
移動方向演算部36による移動方向の演算動作は次のようになされる。
まず、移動方向演算部36は、第1の値D1が算出されたならば、図16に示す第1の相関式を用いて上下角度θyを算出し、その上下角度θyが該当する領域が第1、第2の領域Ga、Gbのうちの何れであるかを特定する。
次いで、移動方向演算部36は、特定された領域に対応する相関式を図17(a)、(b)に示される第2、第3の相関式のうちから特定し、特定した相関式を用いて第2の値D2から上下角度θyを算出する。
【0048】
なお、移動方向演算部36による左右角度θx、移動速度演算部38による移動速度Vαの演算についても上述と同様に第1、第2、第3の相関式が設定されており、同様に算出される。
上述の例では、特性線kを第1、第2の領域Ga、Gbに区分した場合について説明したが、3つ以上の領域に区分してもよく、その場合にも、各領域に応じて相関式を設定することは同様である。
言い換えると、移動方向算出用の相関式は、移動方向の全域について作成された1つの1次処理用の相関式と、移動方向の全域が2つ以上の範囲に区分けされ、該区分けされた各範囲毎に作成された2つ以上の2次処理用の相関式とを含んで構成されている。
そして、移動方向演算部36による移動方向の算出は、1次処理用の相関式を用いて1回目の移動方向を算出し、2つ以上の範囲のうち、算出された1回目の移動方向が該当する範囲に対応する2次処理用の相関式を用いて2回目の移動方向を算出することによってなされる。
言い換えると、移動速度算出用の相関式は、移動速度の全域について作成された1つの1次処理用の相関式と、移動速度の全域が2つ以上の範囲に区分けされ、該区分けされた各範囲毎に作成された2つ以上の2次処理用の相関式とを含んで構成されている。
そして、移動速度演算部38による移動速度の算出は、1次処理用の相関式を用いて1回目の移動速度を算出し、2つ以上の範囲のうち、算出された1回目の移動速度が該当する範囲に対応する2次処理用の相関式を用いて2回目の移動速度を算出することによってなされる。
また、第2の実施の形態において、移動方向演算部36および移動速度演算部38以外の構成は第1の実施の形態と同様であるため、説明を省略する。
【0049】
第2の実施の形態によれば、移動体の移動方向および移動速度を算出するために用いる相関式として、特性線の範囲を区分するための第1の相関式と、第1の相関式を用いて特定された特性線の範囲ごとに設定された第2、第3の相関式とを予め用意しておき、これら第1の相関式と、第2、第3の相関式とを用いて段階的に移動体の移動方向および移動速度を算出するようにした。
したがって、実測して得た第1乃至第4の速度V1〜V4と実測して得た移動体の移動方向との相関関係、あるいは、実測して得た第1乃至第4の速度V1〜V4と実測して得た移動体の移動速度との相関関係をより正確に反映させて移動体の移動方向および移動速度を算出できるため、移動体の移動方向および移動速度をより正確に算出する上で有利となる。
また、アンテナ特性などの原因によって、第1乃至第4のアンテナ12A〜12Dから見て仮想軸LA〜LDに近い範囲で移動体を計測した場合(計測範囲の中心部で計測した場合)と、その範囲の周囲で移動体を計測した場合(計測範囲の端部で計測した場合)とで、算出される第1乃至第4の速度V1〜V4の値に傾向の違いが生じることが考えられる。
この場合、同一の移動方向および同一の移動速度を有する移動体を計測したとしても、計測範囲の中心部で計測した場合と、計測範囲の端部で計測した場合とで得られる移動方向および移動速度に違いが生じ、精度が低下することが懸念される。
しかしながら、上述のように複数の相関式を用いると、算出される第1乃至第4の速度V1〜V4の値に傾向の違いを解消でき、したがって、計測範囲の中心部で計測した場合と、計測範囲の端部で計測した場合とで得られる移動方向および移動速度の精度を高める上で有利となる。
【0050】
(第3の実施の形態)
次に第3の実施の形態について説明する。
第1の実施の形態では、蓄積部30に蓄積された時系列データである第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータを予め定められた区間に特定して第1乃至第4の信号強度分布データの生成を実施した。
そして、サンプリングデータを予め定められた区間に特定する方法として、トリガ信号trgの検出時点を基準時点として、基準時点から数えてa個目までのサンプリングデータを除外し、a+1個目からb個目(a<b)までのサンプリングデータを特定して第1乃至第4の信号強度分布データの生成を実施するものとして説明した。
ところで、ゴルフクラブヘッド4のヘッドスピードは、ゴルファによって異なり、また、スウィングごとにばらつく。ヘッドスピードが異なれば、打撃されたゴルフボール2の移動速度も異なり、その結果、上記特定する区間が同一であっても、サンプリングデータを取得するゴルフボール2の基準位置Oに対する位置がばらつくことになる。
サンプリングデータを取得するゴルフボール2の位置(範囲)が異なると、第1乃至第4の速度V1〜V4とゴルフボールの移動方向との相関関係、および、第1乃至第4の速度V1〜V4とゴルフボールの移動速度との相関関係も影響を受け、最終的に算出される移動方向、移動速度の値が影響を受けることなる。
したがって、ゴルフボール2の移動速度に拘わらずゴルフボール2が同一の位置(範囲)にあるときのサンプリングデータを特定できるように、ゴルフボール2の移動速度に応じてサンプリングデータを特定する区間を補正することが、最終的に算出される移動方向、移動速度の精度を確保する上で好ましい。
【0051】
そこで第3の実施の形態では、図18に示すように、計測処理部20は、図2に示す構成に加えて、サンプリングデータを特定する区間を補正するサンプリングデータ特定手段40を設けたものである。
サンプリングデータ特定手段40による補正は、基準位置Oに対して前方に離間した位置を予め設定しておき、ゴルフクラブヘッド4がゴルフボール2を打撃してから前記位置に到達するまでの間のサンプリングデータを除外するものである。
すなわち、基準位置Oから前方に予め定められた距離X離間した位置をサンプリング区間開始位置Osとして設定しておく。
サンプリングデータ特定手段40は、蓄積部30から得た第1乃至第4のドップラー信号SdA〜SdDのサンプリングデータ、トリガ信号trgに基づいて第1乃至第4の信号強度分布データPA〜PDを生成する機能を有している。ただし、サンプリングデータの区間を特定することなく、トリガ信号trg以後のサンプリングデータに基づいて第1乃至第4の信号強度分布データPA〜PDを生成する点が信号強度分布データ生成部32と異なる。
【0052】
また、サンプリングデータ特定手段40は、生成した第1乃至第4の信号強度分布データPA〜PDに基づいて仮の移動速度Vβを求める機能を有している。
より詳細には、図9に示すように周波数fが低い領域で信号強度Pが高くなっている部分に相当する第1乃至第4の信号強度分布データPA〜PDからドップラー周波数成分を検出し、それらドップラー周波数成分に基づいて仮の移動速度Vβを求める。
仮の移動速度Vβは、厳密に言うとゴルフクラブヘッド4の移動速度であるが、仮の移動速度Vβをゴルフボール2の仮の移動速度とみなしても誤差は無視できる。
仮の移動速度Vβは、第1乃至第4の信号強度分布データPA〜PDのそれぞれから得られた速度の平均を求めることで算出してもよいし、第1乃至第4の信号強度分布データPA〜PDのそれぞれから得られた速度の1つを選択してもよい。
サンプリングデータ特定手段40は、以下に示す式(3)に基づいてトリガ信号trgの検出時点(基準時点)から予め定められた距離Xまでのサンプリングデータ数aを求める。
a=(X/Vβ)/(1/Ts) (3)
ただし、Ts:蓄積部30のサンプリング周期
したがって、サンプリングデータのうちa個のサンプリングデータは、ゴルフクラブヘッド4がゴルフボール2を打撃してから距離Xの位置に到達するまでのサンプリングデータである。
サンプリングデータ特定手段40は、サンプリングデータ数aを信号強度分布データ生成部32に供給する。
これにより、信号強度分布データ生成部32は、第1の実施の形態と同様に、基準時点から数えてa個目までのサンプリングデータを除外し、a+1個目からb個目(a<b)までのサンプリングデータを特定して第1乃至第4の信号強度分布データの生成を実施する。
これ以降の処理は第1の実施の形態と同様であるため説明を省略する。
【0053】
以上説明したように、第3の実施の形態によれば、ゴルフボール2の移動速度に拘わらずゴルフボール2が同一の位置(範囲)にあるときのサンプリングデータを特定できるようにしたので、計測されるゴルフボール2の移動方向、移動速度の精度を確保する上でより有利となる。
なお、第3の実施の形態では、サンプリングデータ特定手段40を、信号強度分布データ生成部32および速度演算部34と独立して設けた場合について説明したが、サンプリングデータ特定手段40と同様の機能を、信号強度分布データ生成部32および速度演算部34によって実現するようにしてもよいことは無論である。
【符号の説明】
【0054】
2……ゴルフボール(移動体)、12A〜12D……第1乃至第4のアンテナ、14A〜14D……第1乃至第4のドップラーセンサ、32……信号強度分布データ生成部、
34……速度演算部、36……移動方向演算部、38……移動速度演算部、PA〜PD……第1乃至第4の信号強度分布データ、VA〜VD……第1乃至第4の速度。
【特許請求の範囲】
【請求項1】
指向性を有し、供給される送信信号に基づいて移動体に向けて送信波を送信すると共に、前記移動体で反射された反射波を受信して受信信号を生成する第1乃至第n(nは2以上の整数)のアンテナを互いに離間して配置し、
前記第1乃至第nのアンテナのそれぞれに対応して、前記アンテナに前記送信信号を供給すると共に、前記アンテナから供給される前記受信信号に基づいてドップラー周波数を有するドップラー信号を生成する第1乃至第nのドップラーセンサを設け、
前記第1乃至第nのドップラーセンサのそれぞれから得られたドップラー信号を周波数解析することにより周波数ごとの信号強度の分布を示す第1乃至第nの信号強度分布データを生成する信号強度分布データ生成部を設け、
前記第1乃至第nの信号強度分布データのそれぞれに基づいて、前記移動体の移動速度に対応するドップラー周波数成分を検出し、それら検出したドップラー周波数成分に基づいて第1乃至第nの速度を算出する速度演算部を設け、
前記第1乃至第nの速度と前記移動体の移動方向との相関関係と、前記第1乃至第nの速度と前記移動体の移動速度との相関関係とをそれぞれ予め求めておき、
前記第1乃至第nの速度と前記移動体の移動方向との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動方向を算出し、
前記第1乃至第nの速度と前記移動体の移動速度との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動速度を算出する、
ことを特徴とする移動体の計測方法。
【請求項2】
指向性を有し、供給される送信信号に基づいて移動体に向けて送信波を送信すると共に、前記移動体で反射された反射波を受信して受信信号を生成する互いに離間して配置された第1乃至第n(nは2以上の整数)のアンテナと、
前記第1乃至第nのアンテナのそれぞれに対応して設けられ、前記アンテナに前記送信信号を供給すると共に、前記アンテナから供給される前記受信信号に基づいてドップラー周波数を有するドップラー信号を生成する第1乃至第nのドップラーセンサと、
前記第1乃至第nのドップラーセンサのそれぞれから得られたドップラー信号を周波数解析することにより周波数ごとの信号強度の分布を示す第1乃至第nの信号強度分布データを生成する信号強度分布データ生成部と、
前記第1乃至第nの信号強度分布データのそれぞれに基づいて、前記移動体の移動速度に対応するドップラー周波数成分を検出し、それら検出したドップラー周波数成分に基づいて第1乃至第nの速度を算出する速度演算部と、
予め実測され得られている前記第1乃至第nの速度と予め実測され得られている前記移動体の移動方向との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動方向を算出する移動方向演算部と、
予め実測され得られている前記第1乃至第nの速度と予め実測され得られている前記移動体の移動速度との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動速度を算出する移動速度演算部と、
を備えることを特徴とする移動体の計測装置。
【請求項3】
予め定められた基準位置を通り水平方向に延在する仮想線を含み鉛直方向に延在する平面を基準鉛直面とし、
前記基準位置を通り前記基準鉛直面と直交する平面を基準水平面とし、
前記移動体が前記基準位置から移動したときの移動軌跡を前記基準鉛直面に投影して得られた移動軌跡と前記基準水平面とがなす角度を上下角度とし、
前記移動体が前記基準位置から移動したときの移動軌跡を前記基準水平面に投影して得られれた移動軌跡と前記基準鉛直面とがなす角度を左右角度とした場合、
前記移動方向演算部によって算出される前記移動方向は前記上下角度と前記左右角度とで示される、
ことを特徴とする請求項2記載の移動体の計測装置。
【請求項4】
前記移動速度演算部によって算出される前記移動速度は、前記移動体の移動方向に沿った前記移動体の速度である、
ことを特徴とする請求項2または3記載の移動体の計測装置。
【請求項5】
前記移動方向演算部による前記移動方向の算出は、
予め実測され得られている前記第1乃至第nの速度と予め実測され得られている前記移動体の移動方向との相関関係を示す移動方向算出用の相関式に基づいてなされる、
ことを特徴とする請求項2乃至4に何れか1項記載の移動体の計測装置。
【請求項6】
前記移動方向算出用の相関式は、
前記移動方向の全域について作成された1つの1次処理用の相関式と、
前記移動方向の全域が2つ以上の範囲に区分けされ、該区分けされた各範囲毎に作成された2つ以上の2次処理用の相関式とを含んで構成され、
前記移動方向演算部による前記移動方向の算出は、
前記1次処理用の相関式を用いて1回目の移動方向を算出し、前記2つ以上の範囲のうち、前記算出された1回目の移動方向が該当する前記範囲に対応する前記2次処理用の相関式を用いて2回目の移動方向を算出することによってなされる、
ことを特徴とする請求項5記載の移動体の計測装置。
【請求項7】
前記移動速度演算部による前記移動速度の算出は、
予め実測され得られている前記第1乃至第nの速度と予め実測され得られている前記移動体の移動速度との相関関係を示す移動速度算出用の相関式に基づいてなされる、
ことを特徴とする請求項2乃至6に何れか1項記載の移動体の計測装置。
【請求項8】
前記移動速度算出用の相関式は、
前記移動速度の全域について作成された1つの1次処理用の相関式と、
前記移動速度の全域が2つ以上の範囲に区分けされ、該区分けされた各範囲毎に作成された2つ以上の2次処理用の相関式とを含んで構成され、
前記移動速度演算部による前記移動速度の算出は、
前記1次処理用の相関式を用いて1回目の移動速度を算出し、前記2つ以上の範囲のうち、前記算出された1回目の移動速度が該当する前記範囲に対応する前記2次処理用の相関式を用いて2回目の移動速度を算出することによってなされる、
ことを特徴とする請求項7記載の移動体の計測装置。
【請求項9】
nは4であり、
第1乃至第4のアンテナのうち、第1、第2のアンテナは互いに鉛直方向に第1の間隔をおいて配置され、かつ、第3、第4のアンテナは互いに鉛直方向に前記第1の間隔をおいて配置され、
第1、第3のアンテナは互いに水平方向に第2の間隔をおいて配置され、かつ、第2、第4のアンテナは互いに水平方向に前記第2の間隔をおいて配置されている、
ことを特徴とする請求項2乃至8に何れか1項記載の移動体の計測装置。
【請求項10】
nは3であり、
第1乃至第3のアンテナのうち、第1、第2のアンテナは互いに水平方向に第1の間隔をおいて配置され、
第1、第3のアンテナは互いに鉛直方向に第2の間隔をおいて配置されている、
ことを特徴とする請求項2乃至8に何れか1項記載の移動体の計測装置。
【請求項1】
指向性を有し、供給される送信信号に基づいて移動体に向けて送信波を送信すると共に、前記移動体で反射された反射波を受信して受信信号を生成する第1乃至第n(nは2以上の整数)のアンテナを互いに離間して配置し、
前記第1乃至第nのアンテナのそれぞれに対応して、前記アンテナに前記送信信号を供給すると共に、前記アンテナから供給される前記受信信号に基づいてドップラー周波数を有するドップラー信号を生成する第1乃至第nのドップラーセンサを設け、
前記第1乃至第nのドップラーセンサのそれぞれから得られたドップラー信号を周波数解析することにより周波数ごとの信号強度の分布を示す第1乃至第nの信号強度分布データを生成する信号強度分布データ生成部を設け、
前記第1乃至第nの信号強度分布データのそれぞれに基づいて、前記移動体の移動速度に対応するドップラー周波数成分を検出し、それら検出したドップラー周波数成分に基づいて第1乃至第nの速度を算出する速度演算部を設け、
前記第1乃至第nの速度と前記移動体の移動方向との相関関係と、前記第1乃至第nの速度と前記移動体の移動速度との相関関係とをそれぞれ予め求めておき、
前記第1乃至第nの速度と前記移動体の移動方向との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動方向を算出し、
前記第1乃至第nの速度と前記移動体の移動速度との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動速度を算出する、
ことを特徴とする移動体の計測方法。
【請求項2】
指向性を有し、供給される送信信号に基づいて移動体に向けて送信波を送信すると共に、前記移動体で反射された反射波を受信して受信信号を生成する互いに離間して配置された第1乃至第n(nは2以上の整数)のアンテナと、
前記第1乃至第nのアンテナのそれぞれに対応して設けられ、前記アンテナに前記送信信号を供給すると共に、前記アンテナから供給される前記受信信号に基づいてドップラー周波数を有するドップラー信号を生成する第1乃至第nのドップラーセンサと、
前記第1乃至第nのドップラーセンサのそれぞれから得られたドップラー信号を周波数解析することにより周波数ごとの信号強度の分布を示す第1乃至第nの信号強度分布データを生成する信号強度分布データ生成部と、
前記第1乃至第nの信号強度分布データのそれぞれに基づいて、前記移動体の移動速度に対応するドップラー周波数成分を検出し、それら検出したドップラー周波数成分に基づいて第1乃至第nの速度を算出する速度演算部と、
予め実測され得られている前記第1乃至第nの速度と予め実測され得られている前記移動体の移動方向との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動方向を算出する移動方向演算部と、
予め実測され得られている前記第1乃至第nの速度と予め実測され得られている前記移動体の移動速度との相関関係に基づいて、前記速度演算部で算出された第1乃至第nの速度から前記移動速度を算出する移動速度演算部と、
を備えることを特徴とする移動体の計測装置。
【請求項3】
予め定められた基準位置を通り水平方向に延在する仮想線を含み鉛直方向に延在する平面を基準鉛直面とし、
前記基準位置を通り前記基準鉛直面と直交する平面を基準水平面とし、
前記移動体が前記基準位置から移動したときの移動軌跡を前記基準鉛直面に投影して得られた移動軌跡と前記基準水平面とがなす角度を上下角度とし、
前記移動体が前記基準位置から移動したときの移動軌跡を前記基準水平面に投影して得られれた移動軌跡と前記基準鉛直面とがなす角度を左右角度とした場合、
前記移動方向演算部によって算出される前記移動方向は前記上下角度と前記左右角度とで示される、
ことを特徴とする請求項2記載の移動体の計測装置。
【請求項4】
前記移動速度演算部によって算出される前記移動速度は、前記移動体の移動方向に沿った前記移動体の速度である、
ことを特徴とする請求項2または3記載の移動体の計測装置。
【請求項5】
前記移動方向演算部による前記移動方向の算出は、
予め実測され得られている前記第1乃至第nの速度と予め実測され得られている前記移動体の移動方向との相関関係を示す移動方向算出用の相関式に基づいてなされる、
ことを特徴とする請求項2乃至4に何れか1項記載の移動体の計測装置。
【請求項6】
前記移動方向算出用の相関式は、
前記移動方向の全域について作成された1つの1次処理用の相関式と、
前記移動方向の全域が2つ以上の範囲に区分けされ、該区分けされた各範囲毎に作成された2つ以上の2次処理用の相関式とを含んで構成され、
前記移動方向演算部による前記移動方向の算出は、
前記1次処理用の相関式を用いて1回目の移動方向を算出し、前記2つ以上の範囲のうち、前記算出された1回目の移動方向が該当する前記範囲に対応する前記2次処理用の相関式を用いて2回目の移動方向を算出することによってなされる、
ことを特徴とする請求項5記載の移動体の計測装置。
【請求項7】
前記移動速度演算部による前記移動速度の算出は、
予め実測され得られている前記第1乃至第nの速度と予め実測され得られている前記移動体の移動速度との相関関係を示す移動速度算出用の相関式に基づいてなされる、
ことを特徴とする請求項2乃至6に何れか1項記載の移動体の計測装置。
【請求項8】
前記移動速度算出用の相関式は、
前記移動速度の全域について作成された1つの1次処理用の相関式と、
前記移動速度の全域が2つ以上の範囲に区分けされ、該区分けされた各範囲毎に作成された2つ以上の2次処理用の相関式とを含んで構成され、
前記移動速度演算部による前記移動速度の算出は、
前記1次処理用の相関式を用いて1回目の移動速度を算出し、前記2つ以上の範囲のうち、前記算出された1回目の移動速度が該当する前記範囲に対応する前記2次処理用の相関式を用いて2回目の移動速度を算出することによってなされる、
ことを特徴とする請求項7記載の移動体の計測装置。
【請求項9】
nは4であり、
第1乃至第4のアンテナのうち、第1、第2のアンテナは互いに鉛直方向に第1の間隔をおいて配置され、かつ、第3、第4のアンテナは互いに鉛直方向に前記第1の間隔をおいて配置され、
第1、第3のアンテナは互いに水平方向に第2の間隔をおいて配置され、かつ、第2、第4のアンテナは互いに水平方向に前記第2の間隔をおいて配置されている、
ことを特徴とする請求項2乃至8に何れか1項記載の移動体の計測装置。
【請求項10】
nは3であり、
第1乃至第3のアンテナのうち、第1、第2のアンテナは互いに水平方向に第1の間隔をおいて配置され、
第1、第3のアンテナは互いに鉛直方向に第2の間隔をおいて配置されている、
ことを特徴とする請求項2乃至8に何れか1項記載の移動体の計測装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−63151(P2012−63151A)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願番号】特願2010−205435(P2010−205435)
【出願日】平成22年9月14日(2010.9.14)
【出願人】(000006714)横浜ゴム株式会社 (4,905)
【Fターム(参考)】
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願日】平成22年9月14日(2010.9.14)
【出願人】(000006714)横浜ゴム株式会社 (4,905)
【Fターム(参考)】
[ Back to top ]