
移動体の速度測定装置及び速度測定方法
【課題】本発明の目的は、ノイズ波の干渉を防止するとともに、車両の上下動や走行路面の凹凸により速度の計測に誤差が生じるのを防止することが可能な移動体の速度測定装置を提供することである。
【解決手段】移動体2の底面2aに設けられ、移動体2の走行方向Xに対して傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信器8と、送信波3と反射波5との間の周波数偏移量△fから移動体2の速度Vを計算する速度計算手段7とを備えている移動体2の速度測定装置1において、送受信器8は、円偏波を送受信するように構成され、送受信器8は、所定の旋回方向の円偏波を放射し、旋回方向と反対方向の円偏波のみを受信するように構成されている。
【解決手段】移動体2の底面2aに設けられ、移動体2の走行方向Xに対して傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信器8と、送信波3と反射波5との間の周波数偏移量△fから移動体2の速度Vを計算する速度計算手段7とを備えている移動体2の速度測定装置1において、送受信器8は、円偏波を送受信するように構成され、送受信器8は、所定の旋回方向の円偏波を放射し、旋回方向と反対方向の円偏波のみを受信するように構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体の速度測定装置及び速度測定方法に関し、特に、超音波あるいは電磁波等のドップラー効果を利用した移動体の速度測定装置及び速度測定方法に関する。
【背景技術】
【0002】
従来より、鉄道車両や自動車等の移動体の速度を測定するために、様々な速度測定装置が提案されている。
【0003】
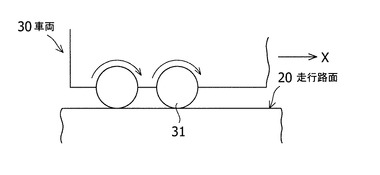
図8は、車両の速度測定装置の第1の従来例を示している。
図8に示すように、車両30は複数のタイヤ31で支持されており、このタイヤ31の近傍には回転センサ(図示せず)が配置されている。第1の従来例では、この回転センサから出力されるパルス信号の周期等に基づいてタイヤ31の回転角を検出することにより車両30の速度を測定している。
【0004】
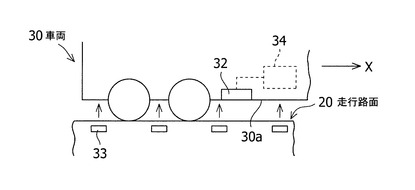
図9は、車両の速度測定装置の第2の従来例を示している。
図9に示すように、車両30の底面30aにはコイル32が配置されており、一方、走行路面20には所定の間隔を置いて複数の磁石マーカ33が埋設されている。この状態において、車両30が、磁石マーカ33が埋設された走行路面20上を通過すると、コイル32には誘起電圧が生じる。第2の従来例では、速度計算手段34が、コイル32の誘起電圧の発生情報を計測するとともに、誘起電圧の大きさが車両30の速度に比例する関係を利用することにより、車両30の速度を計算している。
【0005】
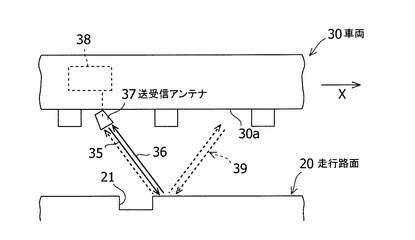
図10は、車両の速度測定装置の第3の従来例を示している。
図10に示すように、車両30の底面30aには、車両30の走行方向Xに対して傾斜した送信波35を走行路面20に向けて放射するとともに走行路面20から反射した反射波36を受信するように構成された送受信アンテナ37が設けられている。第3の従来例では、速度計算手段38が、受信アンテナ37から送信波35及び反射波36の情報を受け取り、送信波35と反射波36との間の周波数偏移量を利用することにより、車両30の速度を計算している。
【0006】
一方、特許文献1には、車両の底部に設けられたアンテナから軌道面に垂直に電波を放射し、軌道面上の枕木から反射してきた反射波を受信することにより車両の速度を計測する速度検出装置が開示されている。
また、特許文献2には、クレーン及び無人搬送台車用の基地局間の電波干渉を防止するとともに、コンテナターミナル全体に亘って無人搬送台車等を無線遠隔操作することが可能な無線通信システムが開示されている。
【特許文献1】特開昭58−205876号公報
【特許文献2】特開2006−180141号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
上述の第1の従来例の場合、車両30にブレーキをかけると、タイヤ31が走行路面20上を滑る場合があり、実際の車両30の速度よりも計測された速度が遅くなるという問題があった。加えて、タイヤ31は走行中に空気圧が変化して直径が変化するので、タイヤ31の回転角の計測に誤差が生じ、結果として、車両30の速度の計測にも誤差が生じるという問題があった。
【0008】
また、上述の第2の従来例では、走行路面20に磁石マーカ33を埋設しなければならず、コストがかかり、施工や保守にかかる時間も大きくなるという問題があった。
【0009】
また、上述の第3の従来例では、送受信アンテナ37から放射された送信波35が、走行路面20及び車両30で複数回反射してノイズ波39となって送受信アンテナ37で受信される可能性がある。ノイズ波39が送受信アンテナ37で受信されると、送受信アンテナ37で受信する反射波36がノイズ波39の影響を受けることになり、結果として、正確な周波数偏移量が得られず、車両30の速度が正確に計測できないという問題があった。
加えて、第3の従来例では、車両30の上下動や走行路面20の側溝21によって送受信アンテナ37から送信波35の反射位置までの距離が変動した場合、送受信アンテナ37で受信する反射波36に位相のずれが生じ、その結果、車両30の速度の計測にばらつきが生じる可能性があった。そのため、第3の従来例では、データのばらつきを解消するために、直近の複数の速度のデータについて移動平均をとる等のデータ処理手段を設けなければならなかった。しかも、このような直近の複数のデータの移動平均を取るようなデータ処理では、現実の速度に対して誤差が生じるという問題もあった。
【0010】
一方、特許文献1は、電波を軌道に垂直に放射して車両の速度を測定するものであるが、車両の上下動における誤差や軌道等から反射してくるノイズ波を考慮した構成が全く設けられていない。加えて、軌道上に配置された枕木毎に発生するパルスの数を数えるような構成となっており、軌道上に枕木や犬釘等がなければならず、速度が測定できる車両が限定されてしまう。
また、特許文献2は、クレーン及び無人搬送台車用の基地局間の電波干渉を防止するものであるが、クレーンや無人搬送台車を無線で遠隔制御するものであり、移動体の速度を測定するものではない。
【0011】
本発明はこのような実状に鑑みてなされたものであって、その目的は、ノイズ波の干渉を防止するとともに、車両の上下動や走行路面の凹凸等により速度の計測に誤差が生じるのを防止することが可能な移動体の速度測定装置を提供することである。
【課題を解決するための手段】
【0012】
上記従来技術の有する課題を解決するために、請求項1の本発明では、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記送受信器は、円偏波を送受信するように構成され、前記送受信器は、所定の旋回方向の円偏波を放射し、前記旋回方向と反対方向の円偏波のみを受信するように構成されている。
【0013】
請求項2の本発明では、前記送受信器は、送信器と受信器とが別個に構成されており、前記送信器及び前記受信器が、前記移動体の前記底面に並列して配置されている。
【0014】
請求項3の本発明では、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記移動体の前記底面には、前記走行路面における前記送信波の反射位置を挟んで前記送受信器の位置と対称となる位置において反射板が設けられており、該反射板は、前記走行路面で反射してきた入射波を前記移動体の外側に反射させる面を有している。
【0015】
請求項4の本発明では、移動体の走行路面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を前記移動体に向けて放射するとともに前記移動体から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記送受信器は、円偏波を送受信するように構成され、前記送受信器は、所定の旋回方向の円偏波を放射し、前記旋回方向と反対方向の円偏波のみを受信するように構成されている。
【0016】
請求項5の本発明では、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記移動体の前記底面には、前記送受信器から前記走行路面における前記送信波の反射位置までの距離を計測する距離計が設けられており、前記速度計算手段は、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納したデータベースを備えており、前記速度計算手段は、計測された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を前記データベースから取得するように構成されている。
【0017】
請求項6の本発明では、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記移動体の前記底面には、前記走行路面における前記送信波の反射位置を挟んで前記送受信器の位置と対称となる位置において、前記走行路面で反射してきた入射波を受信する受信器が設けられており、前記速度計算手段は、前記送受信器から放射した前記送信波と前記受信器で受信した前記入射波との間の位相偏移量と、前記送受信器から前記走行路面における前記送信波の反射位置までの距離との関係を格納した第1のデータベースと、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納した第2のデータベースとを備えており、前記速度計算手段は、計測された前記位相偏移量に対応する前記距離を前記第1のデータベースから取得し、取得された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を前記第2のデータベースから取得するように構成されている。
【0018】
請求項7の本発明では、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記送信波を走行路面に向けて放射するステップは、所定の旋回方向の円偏波を放射するステップであり、前記走行路面から反射した反射波を受信するステップは、前記旋回方向と反対方向の円偏波のみを受信するステップである。
【0019】
請求項8の本発明では、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記移動体の前記底面であって前記走行路面における前記送信波の反射位置を挟んで前記送信波の放射位置と対称となる位置において、前記走行路面で反射してきた入射波を前記移動体の外側に反射させる。
【0020】
請求項9の本発明では、移動体の走行路面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を前記移動体に向けて放射するステップと、前記送信波の放射位置の近傍において前記移動体から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記送信波を移動体に向けて放射するステップは、所定の旋回方向の円偏波を放射するステップであり、前記移動体から反射した反射波を受信するステップは、前記旋回方向と反対方向の円偏波のみを受信するステップである。
【0021】
請求項10の本発明では、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記送信波の放射位置から前記走行路面における前記送信波の反射位置までの距離を計測するステップを更に備え、前記移動体の速度を計算するステップは、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納したデータベースから、計測された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を取得するステップを備えている。
【0022】
請求項11の本発明では、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記移動体の前記底面であって前記走行路面における前記送信波の反射位置を挟んで前記送信波の放射位置と対称となる位置において、前記走行路面で反射してきた入射波を受信するステップを更に備え、前記移動体の速度を計算するステップは、前記送信波と受信した前記入射波との間の位相偏移量と、前記送信波の放射位置から前記走行路面における前記送信波の反射位置までの距離との関係を格納した第1のデータベースから、計測された前記位相偏移量に対応する前記距離を取得するステップと、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納した第2のデータベースから、取得された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を取得するステップとを備えている。
【発明の効果】
【0023】
上述の如く、本発明に係る移動体の速度測定装置によれば、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記送受信器は、円偏波を送受信するように構成され、前記送受信器は、所定の旋回方向の円偏波を放射し、前記旋回方向と反対方向の円偏波のみを受信するように構成されているので、送受信器が、偶数回反射して入射してくるノイズ波を受信することがなくなり、走行路面で1回反射した反射波のみを受信することになる。これにより、送受信器が反射波を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて送信波と反射波との間の周波数偏移量が正確に計測されることになり、その結果、より精度の高い移動体の速度を測定することができる。
【0024】
さらに、本発明に係る移動体の速度測定装置によれば、前記送受信器は、送信器と受信器とが別個に構成されており、前記送信器及び前記受信器が、前記移動体の前記底面に並列して配置されているので、送信器と受信機とを個別に管理及びメンテナンスをすることができる。
【0025】
また、本発明に係る移動体の速度測定装置によれば、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記移動体の前記底面には、前記走行路面における前記送信波の反射位置を挟んで前記送受信器の位置と対称となる位置において反射板が設けられており、該反射板は、前記走行路面で反射してきた入射波を前記移動体の外側に反射させる面を有しているので、走行路面で反射して移動体の底面に入射してきた入射波が、送受信器に向かって戻るように反射せず、移動体の外側(移動体の進行方向に対し側方にそれる方向)に向かって反射することになる。これにより、送受信器が反射波を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて送信波と反射波との間の周波数偏移量が正確に検出されることになり、その結果、より精度の高い移動体の速度を測定することができる。
【0026】
また、本発明に係る移動体の速度測定装置によれば、移動体の走行路面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を前記移動体に向けて(例えば、走行路面上から移動体の底面に、走行路面の上方から移動体の屋根面に、あるいは移動体の側面に向けて)放射するとともに前記移動体から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記送受信器は、円偏波を送受信するように構成され、前記送受信器は、所定の旋回方向の円偏波を放射し、前記旋回方向と反対方向の円偏波のみを受信するように構成されているので、送受信器が、偶数回反射して入射してくるノイズ波を受信することがなくなり、移動体(移動体の底面、移動体の屋根面、あるいは移動体の側面)で1回反射した反射波のみを受信することになる。これにより、送受信器が反射波を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて送信波と反射波との間の周波数偏移量が正確に計測されることになり、その結果、より精度の高い移動体の速度を測定することができる。
また、送受信器が走行路面に設けられているので、ある特定の移動体の速度を測定するのではなく、特定のポイントを通過する複数の移動体の速度をそれぞれ測定するような場合に有益である。
【0027】
また、本発明に係る移動体の速度測定装置によれば、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記移動体の前記底面には、前記送受信器から前記走行路面における前記送信波の反射位置までの距離を計測する距離計が設けられており、前記速度計算手段は、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納したデータベースを備えており、前記速度計算手段は、計測された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を前記データベースから取得するように構成されているので、従来では、移動体の上下動や走行路面の凹凸によって送受信器から送信波の反射位置までの距離が変動した場合を想定して、計測された移動体の速度に対して移動平均をとる等のデータ処理を行う必要があったが、本発明では、あらかじめ実験的に構築したデータベースを利用することにより、計測された距離と計測された周波数偏移量とから移動体の速度が得られることになり、従来のようなデータ処理を行う必要がない。加えて、送受信器から送信波の反射位置までの距離が変動した場合でも、反射波の位相のずれ等の影響を受けることなく、正確な移動体の速度をデータベースを利用して取得することができる。
【0028】
また、本発明に係る移動体の速度測定装置によれば、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記移動体の前記底面には、前記走行路面における前記送信波の反射位置を挟んで前記送受信器の位置と対称となる位置において、前記走行路面で反射してきた入射波を受信する受信器が設けられており、前記速度計算手段は、前記送受信器から放射した前記送信波と前記受信器で受信した前記入射波との間の位相偏移量と、前記送受信器から前記走行路面における前記送信波の反射位置までの距離との関係を格納した第1のデータベースと、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納した第2のデータベースとを備えており、前記速度計算手段は、計測された前記位相偏移量に対応する前記距離を前記第1のデータベースから取得し、取得された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を前記第2のデータベースから取得するように構成されているので、従来では、移動体の上下動や走行路面の凹凸によって送受信器から送信波の反射位置までの距離が変動した場合を想定して、計測された移動体の速度に対して移動平均をとる等のデータ処理を行う必要があったが、本発明では、あらかじめ実験的に構築したデータベースを利用することにより、計測された距離と計測された周波数偏移量とから即時に移動体の速度が得られることになり、従来のようなデータ処理を行う必要がない。加えて、送受信器から送信波の反射位置までの距離が変動した場合でも、反射波の位相のずれ等の影響を受けることなく、正確な移動体の速度を第1及び第2のデータベースを利用して取得することができる。また、第1のデータベースを利用することにより、送受信器から放射した送信波と受信器で受信した入射波との間の位相偏移量から、送受信器から送信波の反射位置までの距離が取得できるので、移動体の底面に距離計を設ける必要がなく、コストも低減される。
【0029】
また、本発明に係る移動体の速度測定方法によれば、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記送信波を走行路面に向けて放射するステップは、所定の旋回方向の円偏波を放射するステップであり、前記走行路面から反射した反射波を受信するステップは、前記旋回方向と反対方向の円偏波のみを受信するステップであるので、走行路面から反射した反射波を受信するステップにおいて、偶数回反射して入射してくるノイズ波を受信することがなくなり、走行路面で1回反射した反射波のみを受信することになる。これにより、反射波を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて送信波と反射波との間の周波数偏移量が正確に計測されることになり、その結果、より精度の高い移動体の速度を測定することができる。
【0030】
また、本発明に係る移動体の速度測定方法によれば、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記移動体の前記底面であって前記走行路面における前記送信波の反射位置を挟んで前記送信波の放射位置と対称となる位置において、前記走行路面で反射してきた入射波を前記移動体の外側に反射させるので、走行路面で反射して移動体の底面に入射してきた入射波が、反射波の受信位置に向かって戻ることはない。これにより、反射波を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて送信波と反射波との間の周波数偏移量が正確に検出されることになり、その結果、より精度の高い移動体の速度を測定することができる。
【0031】
また、本発明に係る移動体の速度測定方法によれば、移動体の走行路面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を前記移動体に向けて放射するステップと、前記送信波の放射位置の近傍において前記移動体から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記送信波を移動体に向けて放射するステップは、所定の旋回方向の円偏波を放射するステップであり、前記移動体から反射した反射波を受信するステップは、前記旋回方向と反対方向の円偏波のみを受信するステップであるので、移動体から反射した反射波を受信するステップにおいて、偶数回反射して入射してくるノイズ波を受信することがなくなり、移動体で1回反射した反射波のみを受信することになる。これにより、反射波を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて送信波と反射波との間の周波数偏移量が正確に計測されることになり、その結果、より精度の高い移動体の速度を測定することができる。
【0032】
また、本発明に係る移動体の速度測定方法によれば、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記送信波の放射位置から前記走行路面における前記送信波の反射位置までの距離を計測するステップを更に備え、前記移動体の速度を計算するステップは、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納したデータベースから、計測された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を取得するステップを備えているので、従来では、移動体の上下動や走行路面の凹凸によって送信波の放射位置から送信波の反射位置までの距離が変動した場合を想定して、計測された移動体の速度に対して移動平均をとる等のデータ処理を行う必要があったが、本発明では、あらかじめ実験的に構築したデータベースを利用することにより、計測された距離と計測された周波数偏移量とから移動体の速度が得られることになり、従来のようなデータ処理を行う必要がない。加えて、送信波の放射位置から送信波の反射位置までの距離が変動した場合でも、反射波の位相のずれ等の影響を受けることなく、正確な移動体の速度をデータベースを利用して取得することができる。
【0033】
また、本発明に係る移動体の速度測定方法によれば、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記移動体の前記底面であって前記走行路面における前記送信波の反射位置を挟んで前記送信波の放射位置と対称となる位置において、前記走行路面で反射してきた入射波を受信するステップを更に備え、前記移動体の速度を計算するステップは、前記送信波と受信した前記入射波との間の位相偏移量と、前記送信波の放射位置から前記走行路面における前記送信波の反射位置までの距離との関係を格納した第1のデータベースから、計測された前記位相偏移量に対応する前記距離を取得するステップと、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納した第2のデータベースから、取得された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を取得するステップとを備えているので、従来では、移動体の上下動や走行路面の凹凸によって送信波の放射位置から送信波の反射位置までの距離が変動した場合を想定して、計測された移動体の速度に対して移動平均をとる等のデータ処理を行う必要があったが、本発明では、あらかじめ実験的に構築したデータベースを利用することにより、計測された距離と計測された周波数偏移量とから即時に移動体の速度が得られることになり、従来のようなデータ処理を行う必要がない。加えて、送信波の放射位置からから送信波の反射位置までの距離が変動した場合でも、反射波の位相のずれ等の影響を受けることなく、正確な移動体の速度を第1及び第2のデータベースを利用して取得することができる。
【発明を実施するための最良の形態】
【0034】
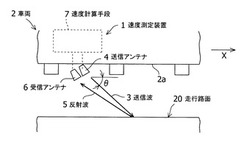
以下、本発明に係る移動体の速度測定装置を、図面を参照しながら説明する。図1は、本発明の第1実施形態に係る移動体の速度測定装置が設けられた車両の側面図である。
【0035】
図1に示すように、本発明の第1実施形態に係る速度測定装置1は、専用の走行路面20を走行する軌道系交通システムの車両2に適用されるものである。
本発明の第1実施形態に係る移動体の速度測定装置1は、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するように構成された送信アンテナ4と、車両2の底面2aに進行方向Xに対して送信アンテナ4と並列に設けられ、走行路面20から反射した反射波5を受信するように構成された受信アンテナ6と、送信波3と反射波5との間の周波数偏移量から車両2の速度を計算する速度計算手段7とを備えている。
送信アンテナ4及び受信アンテナ6は、速度計算手段7にそれぞれ接続されており、送信波3あるいは反射波5の情報を速度計算手段7に送信するように構成されている。
【0036】
本発明の第1実施形態に係る移動体の速度測定装置1では、送信アンテナ4は、所定の旋回方向の円偏波を走行路面20に放射するように構成され、受信アンテナ6は、送信アンテナ4が放射する円偏波と旋回方向が反対方向の円偏波のみを受信するように構成されている。
ここで、円偏波とは、電界の偏波面が時間と共に回転する電波であり、旋回方向の違いにより右旋偏波と左旋偏波とがある。また、円偏波は、反射した際に旋回方向が電波の進行方向に対し反対(逆旋回)になる性質を有している。
【0037】
次に、本発明の第1実施形態に係る移動体の速度測定装置1を用いて車両2の速度Vを測定する手順について説明する。以下では、例として、送信アンテナ4は右旋偏波を放射し、受信アンテナ6は左旋偏波のみを受信するように設定されている。
図1に示すように、送信アンテナ4は、ある角度θをもって送信波3を走行路面20に対して放射する。
この送信波3は、走行路面20で反射した際に、ドップラー効果によって周波数偏差を受けるとともに、旋回方向が反対となって左旋偏波となる。受信アンテナ6は、走行路面20で1回反射した左旋偏波のみを反射波5として受信する。ここで、受信アンテナ6は左旋偏波のみを受信するように設定されているので、例えば、車両2及び走行路面20で偶数回反射した右旋偏波の波を受信することはない。
そして、送信アンテナ4は送信波3の情報を速度計算手段7に送信し、受信アンテナ6は受信した反射波5の情報を速度計算手段7に送信する。速度計算手段7は、受信アンテナ6で得られた反射波5にFFT(Fast Fourier Transform:高速フーリエ変換)等の信号処理を施すことにより、反射波5の周波数成分から送信波3と反射波5との周波数偏差(ドップラー周波数)△(デルタ)fを算出する。
そして、速度計算手段7は、例えば、以下の[数1]の式の関係を用いて車両2の速度Vを計算することができる。
なお、ここで、[数1]は、移動体(車両2)の進行方向Xに向かって送信波3を放射していること、及び送信アンテナ4と受信アンテナ6の設置位置が同一(例えば、送受信一体型のアンテナ)であることが前提となる。[数1]の式中のf0は送信アンテナ4から放射された送信波3の周波数であり、Vは速度(走行路面20に対する速度)であり、cは光速である。また、速度については進行方向Xを正の向きとする。
【数1】

以上により、車両2の速度Vを求めることができる。
【0038】
このように、第1実施形態に係る移動体の速度測定装置1によれば、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するように構成された送信アンテナ4と、車両2の底面2aに進行方向Xに対して送信アンテナ4と並列に設けられ、走行路面20から反射した反射波5を受信するように構成された受信アンテナ6と、送信波3と反射波5との間の周波数偏移量△fから車両2の速度Vを計算する速度計算手段7とを備えている移動体の速度測定装置1において、送信アンテナ4は、所定の旋回方向の円偏波を走行路面20に放射するように構成され、受信アンテナ6は、送信アンテナ4が放射する円偏波と旋回方向が反対方向の円偏波のみを受信するように構成されているので、受信アンテナ6が、偶数回反射して入射してくるノイズ波を受信することがなくなり、走行路面20で1回反射した反射波5のみを受信することになる。これにより、受信アンテナ6が反射波5を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて正確な送信波3と反射波5との間の周波数偏移量△fが計測されることになり、その結果、より精度の高い車両2の速度Vを測定することができる。
なお、奇数回(例えば、3回)反射して受信アンテナ6に入射してくるノイズ波は、受信アンテナ6が受信する円偏波と同じ旋回方向となるが、反射のたびに電波は減衰されているので、ノイズ波としての影響を与える可能性が小さくなる。したがって、送信波3と反射波5との間の周波数偏移量△fの計測に影響を与えることはない。
【0039】
次に、本発明の第2実施形態に係る移動体の速度測定装置1を、図面を参照しながら説明する。
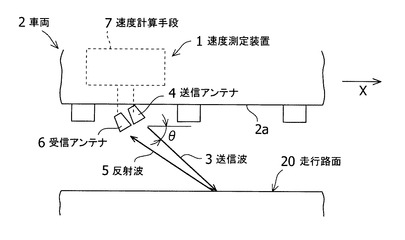
図2は、本発明の第2実施形態に係る移動体の速度測定装置1が設けられた走行路面20上を車両2が通過した際の側面図である。
【0040】
本発明の第2実施形態に係る移動体の速度測定装置1は、走行路面20に設けられ、車両2の進行方向Xに向かって傾斜した送信波3を車両2の底面2aに向けて放射するように構成された送信アンテナ4と、走行路面20に進行方向Xに対して送信アンテナ4と並列に設けられ、車両2の底面2aから反射した反射波5を受信するように構成された受信アンテナ6と、送信波3と反射波5との間の周波数偏移量から車両2の速度を計算する速度計算手段7とを備えている。
送信アンテナ4及び受信アンテナ6は、速度計算手段7にそれぞれ接続されており、送信波3あるいは受信波5の情報を速度計算手段7に送信するように構成されている。
【0041】
本発明の第2実施形態に係る移動体の速度測定装置1では、送信アンテナ4は、所定の旋回方向の円偏波を走行路面20に放射するように構成され、受信アンテナ6は、送信アンテナ4が放射する円偏波と旋回方向が反対方向の円偏波のみを受信するように構成されている。
なお、本発明の第2実施形態に係る移動体の速度測定装置1を用いて、車両2の速度Vを測定する手順については、第1実施形態と同様である。
【0042】
また、本実施形態では、送信アンテナ4及び受信アンテナ6を走行路面20に設け、車両2の底面2aに向けて上向きに送信波3を放射しているが、本実施形態は一例にすぎず、これに限定されない。例えば、送信アンテナ4及び受信アンテナ6を車両2よりも上方に位置するように配置して、車両2の屋根面に送信波3を放射するように構成してもよい。また、送信アンテナ4及び受信アンテナ6を車両2の車幅方向外側に位置するように配置して、車両2の側面に送信波3を放射するように構成してもよい。
【0043】
このように、第2実施形態に係る移動体の速度測定装置1によれば、走行路面20に設けられ、車両2の進行方向Xに向かって傾斜した送信波3を車両2の底面2aに向けて放射するように構成された送信アンテナ4と、走行路面20に進行方向Xに対して送信アンテナ4と並列に設けられ、車両2の底面2aから反射した反射波5を受信するように構成された受信アンテナ6と、送信波3と反射波5との間の周波数偏移量△fから車両2の速度Vを計算する速度計算手段7とを備えている移動体の速度測定装置1において、送信アンテナ4は、所定の旋回方向の円偏波を走行路面20に放射するように構成され、受信アンテナ6は、送信アンテナ4が放射する円偏波と旋回方向が反対方向の円偏波のみを受信するように構成されているので、受信アンテナ6が、偶数回反射して入射してくるノイズ波を受信することがなくなり、車両2の底面2aで1回反射した反射波5のみを受信することになる。これにより、受信アンテナ6が反射波5を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて正確な送信波3と反射波5との間の周波数偏移量△fが計測されることになり、その結果、より精度の高い車両2の速度Vを測定することができる。
また、送信アンテナ4及び受信アンテナ6が走行路面20に設けられているので、ある特定の車両2の速度を測定するのではなく、特定のポイントを通過する複数の車両2の速度をそれぞれ測定するような場合に有益である。
【0044】
次に、本発明の第3実施形態に係る移動体の速度測定装置1を、図面を参照しながら説明する。
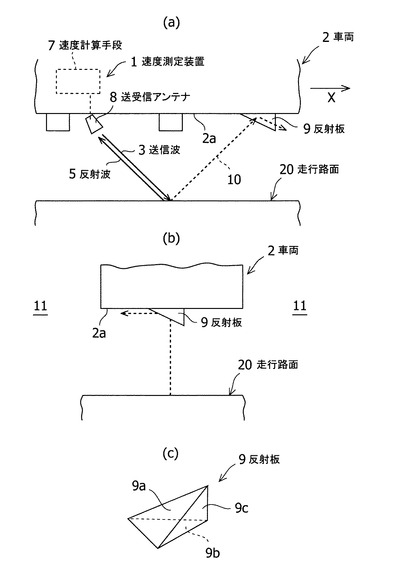
図3は、本発明の第3実施形態に係る移動体の速度測定装置1を示しており、(a)は速度測定装置1が設けられた車両2の側面図であり、(b)は速度測定装置1が設けられた車両2の正面図であり、(c)は反射板の斜視図である。
【0045】
本発明の第3実施形態に係る移動体の速度測定装置1は、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信アンテナ8と、送信波3と反射波5との間の周波数偏移量から車両2の速度を計算する速度計算手段7とを備えている。
送受信アンテナ8は、速度計算手段7に接続されており、送信波3及び反射波5の情報を速度計算手段7に送信するように構成されている。
【0046】
本発明の第3実施形態に係る移動体の速度測定装置1では、車両2の底面2aには、走行路面20における送信波3の反射位置を挟んで送受信アンテナ8の位置と対称となる位置において反射板9が設けられている。図3(c)に示すように、反射板9は、三角錐で形成されており、走行路面20で反射してきた入射波10を車両2の外側11に反射させる反射面9aを有している。反射板9は、三角錐の底面9bを車両2の底面2aに合わせるとともに反射板9の面9cが進行方向Xと略平行になるように配置されている。これにより、反射板9の反射面9aが車両2の外側11を向くように配置される。
以上の構成から、図3(a)及び(b)に示すように、走行路面20で反射して車両2の底面2aに入射してきた入射波10が、送受信アンテナ8に向かって戻るように反射せず、反射板9の反射面9aにより車両2の外側11(車両2の進行方向Xに対し側方にそれる方向)に向かって反射することになる。
なお、本発明の第3実施形態に係る移動体の速度測定装置1を用いて車両2の速度Vを測定する手順については、第1実施形態と同様である。
【0047】
また、本実施形態において、反射板9は、反射面9aが二等辺三角形であるとともに面9cが直角三角形をなす三角錐で形成され、面9cが車両2の進行方向Xと略平行になるように配置されているが、本実施形態は一例にすぎず、これに限定されない。すなわち、走行路面20で反射してきた入射波10を車両2の外側11に反射させる反射面を有していればよく、反射面の形状及び反射板の全体の形状は別の形状で形成してもよい。
【0048】
このように、第3実施形態に係る移動体の速度測定装置1によれば、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信アンテナ8と、送信波3と反射波5との間の周波数偏移量△fから車両2の速度Vを計算する速度計算手段7とを備えている移動体の速度測定装置1において、車両2の底面2aには、走行路面20における送信波3の反射位置を挟んで送受信アンテナ8の位置と対称となる位置において反射板9が設けられており、反射板9は、走行路面20で反射してきた入射波10を車両2の外側11に反射させる面9aを有しているので、走行路面20で反射して車両2の底面2aに入射してきた入射波10が、送受信アンテナ8に向かって戻るように反射せず、車両2の外側11に向かって反射することになる。これにより、送受信アンテナ8が反射波5を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて正確な送信波3と反射波5との間の周波数偏移量△fが検出されることになり、その結果、より精度の高い車両2の速度Vを測定することができる。
【0049】
次に、本発明の第4実施形態に係る移動体の速度測定装置1を、図面を参照しながら説明する。
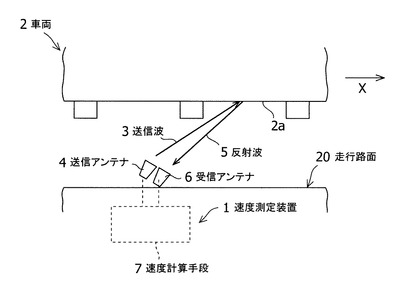
図4は、本発明の第4実施形態に係る移動体の速度測定装置1が設けられた車両2の側面図である。
【0050】
本発明の第4実施形態に係る移動体の速度測定装置1は、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信アンテナ8と、送信波3と反射波5との間の周波数偏移量から車両2の速度を計算する速度計算手段7とを備えている。
送受信アンテナ8は、速度計算手段7に接続されており、送信波3及び受信波5の情報を速度計算手段7に送信するように構成されている。
【0051】
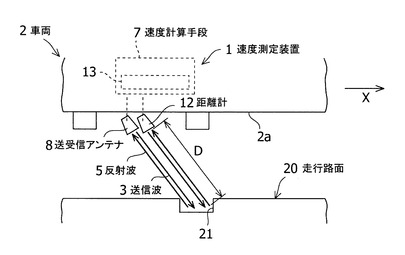
本発明の第4実施形態に係る移動体の速度測定装置1では、車両2の底面2aには、送受信アンテナ8から走行路面20における送信波3の反射位置までの距離Dを計測する距離計12が設けられている。距離計12は、例えば、レーザ等の光線を使用した光学式距離計である。そして、距離計12は、進行方向Xに対して送受信アンテナ8と並列で、かつ、放射する光線(レーザ)の方向が送受信アンテナ8の送信波3の放射方向と同一になるように配置されている。また、距離計12は、速度計算手段7に接続されており、測定した距離Dの情報を速度計算手段7に送信するように構成されている。
【0052】
本発明の第4実施形態に係る移動体の速度測定装置1では、速度計算手段7は、周波数偏移量毎における距離Dと車両2の速度との関係を格納したデータベース13を備えている。また、速度計算手段7は、計測された距離Dと計測された周波数偏移量とに対応する車両2の速度をデータベース13から取得するように構成されている。
【0053】
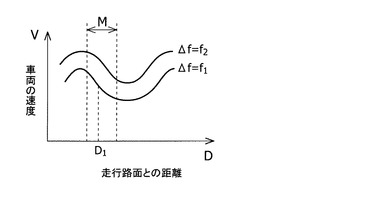
図5は、データベース13に格納されているデータの一例を示したグラフであり、周波数偏移量毎(△f=f1,f2,・・・)における距離Dと車両2の速度Vとの関係を示したグラフである。
データベース13は、移動体の速度測定装置1が設置される車両2において、本実施形態の送受信アンテナ8や距離計12等を用いてあらかじめ実験を行い、その結果得られた実験値を蓄積したものである。また、実験により得られた距離Dと車両2の速度Vとの関係は、図5に示すような曲線となるが、この曲線の全範囲をデータとして使用せず、適切な範囲を選択して使用する。このデータとして使用する範囲Mも、あらかじめ行った実験により決定されている。
【0054】
次に、本発明の第4実施形態に係る移動体の速度測定装置1を用いて車両2の速度Vを測定する手順について説明する。
図4に示すように、送受信アンテナ8は、送信波3を走行路面20に対して放射し、距離計12は同時に光線を走行路面20に対して放射する。
送受信アンテナ8から放射された送信波3は、走行路面20で反射した際にドップラー効果によって周波数偏差△fを受け、反射波5として送受信アンテナ8で受信される。一方、距離計12は走行路面20から反射してきた光線の情報から、送受信アンテナ8から走行路面20における送信波3の反射位置までの距離Dを算出する。
そして、送受信アンテナ8は送信波3及び反射波5の情報を速度計算手段7に送信し、距離計12は算出した距離Dを速度計算手段7に送信する。速度計算手段7は、送受信アンテナ8で得られた反射波5にFFT等の信号処理を施すことにより、反射波5の周波数成分から送信波3と反射波5との周波数偏差(ドップラー周波数)△f=f1を算出する。
そして、図5に示すように、速度計算手段7は、まず、算出された周波数偏移量△f=f1に対応する距離Dと移動体の速度Vとの関係を表したデータ集合をデータベース13から検索し、その後、算出した距離D1に対応する移動体の速度Vを上記データ集合から取得する。
以上により、車両2の速度Vを求めることができる。
【0055】
このように、第4実施形態に係る移動体の速度測定装置1によれば、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信アンテナ8と、送信波3と反射波5との間の周波数偏移量△fから車両2の速度Vを計算する速度計算手段7とを備えている移動体の速度測定装置1において、車両2の底面2aには、送受信アンテナ8から走行路面20における送信波3の反射位置までの距離を計測する距離計12が設けられており、速度計算手段7は、周波数偏移量毎における距離Dと移動体の速度Vとの関係を格納したデータベース13を備えており、速度計算手段7は、計測された距離D1と計測された周波数偏移量f1とに対応する移動体の速度Vをデータベース13から取得するように構成されているので、従来では、車両2の上下動や走行路面20の凹凸によって送受信アンテナ8から送信波3の反射位置までの距離Dが変動した場合を想定して、計測された車両2の速度Vに対して移動平均をとる等のデータ処理を行う必要があったが、本実施形態では、あらかじめ実験的に構築したデータベース13を利用することにより、計測された距離D1と計測された周波数偏移量f1とから即時に車両2の速度Vが得られることになり、従来のようなデータ処理を行う必要がない。加えて、送受信アンテナ8から送信波3の反射位置までの距離Dが変動した場合でも、反射波5の位相のずれ等の影響を受けることなく、正確な車両2の速度Vをデータベース13を利用して取得することができる。
【0056】
次に、本発明の第5実施形態に係る移動体の速度測定装置1を、図面を参照しながら説明する。
図6は、本発明の第5実施形態に係る移動体の速度測定装置1が設けられた車両2の側面図である。
【0057】
本発明の第5実施形態に係る移動体の速度測定装置1は、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信アンテナ8と、送信波3と反射波5との間の周波数偏移量から車両2の速度を計算する速度計算手段7とを備えている。
送受信アンテナ8は、速度計算手段7に接続されており、送信波3及び受信波5の情報を速度計算手段7に送信するように構成されている。
【0058】
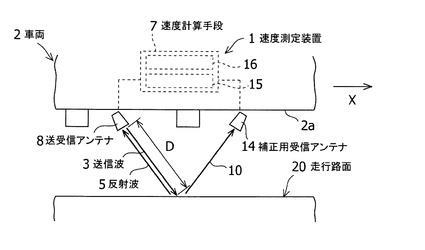
本発明の第5実施形態に係る移動体の速度測定装置1では、車両2の底面2aには、走行路面20における送信波3の反射位置を挟んで送受信アンテナ8の位置と対称となる位置において、走行路面20で反射してきた入射波10を受信する補正用受信アンテナ14が設けられている。補正用受信アンテナ14は、速度計算手段7に接続されており、走行路面20で反射してきた入射波10の情報を速度計算手段7に送信するように構成されている。
【0059】
また、本発明の第5実施形態に係る移動体の速度測定装置1では、速度計算手段7は、送受信アンテナ8から放射した送信波3と補正用受信アンテナ14で受信した入射波10との間の位相偏移量と、送受信アンテナ8から走行路面20における送信波3の反射位置までの距離Dとの関係を格納した第1のデータベース15を備えている。
【0060】
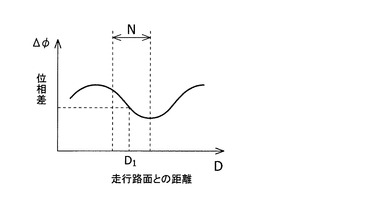
図6は、第1のデータベース15に格納されているデータの一例を示したグラフであり、送受信アンテナ8から放射した送信波3と補正用受信アンテナ14で受信した入射波10との間の位相偏移量△φと、送受信アンテナ8から走行路面20における送信波3の反射位置までの距離Dとの関係を示したグラフである。
第1のデータベース15は、移動体の速度測定装置1が設置される車両2において、本実施形態の送受信アンテナ8、補正用受信アンテナ14、及び距離計等を用いてあらかじめ実験を行い、その結果得られた実験値を蓄積したものである。また、実験により得られた位相偏移量△φと距離Dとの関係は、図7に示すような曲線となるが、この曲線の全範囲をデータとして使用せず、適切な範囲Nを選択して使用する。このデータとして使用する範囲Nも、あらかじめ行った実験により決定されている。
【0061】
また、速度計算手段7は、周波数偏移量毎(△f=f1,f2・・・)における距離Dと車両2の速度Vとの関係を格納した第2のデータベース16を備えている。この第2のデータベース16は、第4実施形態におけるデータベース13と同様のものである。
そして、速度計算手段7は、計測された位相偏移量△φに対応する距離Dを第1のデータベース15から取得し、取得された距離D1と計測された周波数偏移量f1とに対応する車両2の速度Vを第2のデータベース16から取得するように構成されている。
【0062】
次に、本発明の第5実施形態に係る移動体の速度測定装置1を用いて車両2の速度Vを測定する手順について説明する。
図6に示すように、まず、送受信アンテナ8は、送信波3を走行路面20に対して放射する。
送受信アンテナ8から放射された送信波3は、走行路面20で反射した際にドップラー効果によって周波数偏差△fを受け、反射波5として送受信アンテナ8で受信される。一方、補正用受信アンテナ14は、走行路面20で反射してきた入射波10を受信する。その後、送受信アンテナ8は送信波3及び反射波5の情報を速度計算手段7に送信し、補正用受信アンテナ14は入射波10の情報を速度計算手段7に送信する。
速度計算手段7は、送受信アンテナ8で得られた反射波5にFFT等の信号処理を施すことにより、反射波5の周波数成分から送信波3と反射波5との周波数偏差(ドップラー周波数)△f=f1を算出する。
次に、速度計算手段7は、送信波3の位相成分と補正用受信アンテナ14で受信した入射波10の位相成分とから位相偏移量△φを算出する。ここで、送信波3の波動方程式を
【数2】
とし、入射波10の波動方程式を、
【数3】
とすると、位相偏移量△φは、
【数4】
により算出される。ここで、A,Bは振幅であり、ωは角周波数であり、tは時刻であり、φ1,φ2は位相である。
そして、速度計算手段7は、まず、算出された位相偏移量△φに対応する距離D1を第1のデータベース15から取得し、その後、算出した周波数偏移量△f=f1に対応する距離Dと車両2の速度Vとの関係を表したデータ集合を第2のデータベース16から検索する。最後に、第1のデータベース15から取得した距離D1に対応する車両2の速度Vを上記データ集合から取得する。
以上により、車両2の速度Vを求めることができる。
【0063】
このように、第5実施形態に係る移動体の速度測定装置1によれば、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信アンテナ8と、送信波3と反射波5との間の周波数偏移量△φから車両2の速度Vを計算する速度計算手段7とを備えている移動体の速度測定装置1において、車両2の底面2aには、走行路面20における送信波3の反射位置を挟んで送受信アンテナ8の位置と対称となる位置において、走行路面20で反射してきた入射波10を受信する補正用受信アンテナ14が設けられており、速度計算手段7は、送受信アンテナ8から放射した送信波3と補正用受信アンテナ14で受信した入射波10との間の位相偏移量△φと、送受信アンテナ8から走行路面20における送信波3の反射位置までの距離Dとの関係を格納した第1のデータベース15と、周波数偏移量△φ毎における距離Dと移動体の速度Vとの関係を格納した第2のデータベース16とを備えており、速度計算手段7は、計測された位相偏移量△φに対応する距離D1を第1のデータベース15から取得し、取得された距離D1と計測された周波数偏移量△fとに対応する車両2の速度Vを第2のデータベース16から取得するように構成されているので、従来では、車両2の上下動や走行路面20の凹凸によって送受信アンテナ8から送信波3の反射位置までの距離Dが変動した場合を想定して、計測された車両2の速度Vに対して移動平均をとる等のデータ処理を行う必要があったが、本実施形態では、あらかじめ実験的に構築したデータベース15,16を利用することにより、計測された距離D1と計測された周波数偏移量△f=f1とから車両2の速度Vが得られることになり、従来のようなデータ処理を行う必要がない。加えて、送受信アンテナ8から送信波3の反射位置までの距離Dが変動した場合でも、反射波5の位相のずれ等の影響を受けることなく、正確な車両2の速度Vを第1及び第2のデータベース15,16を利用して取得することができる。また、第1のデータベース15を利用することにより、送受信アンテナ8から放射した送信波3と補正用受信アンテナ14で受信した入射波10との間の位相偏移量△φから、送受信アンテナ8から送信波3の反射位置までの距離Dが取得できるため、車両2の底面2aに距離計を設ける必要がなく、コストも低減される。
【0064】
以上、本発明の実施の形態につき述べたが、本発明は既述の実施形態に限定されるものでなく、本発明の技術的思想に基づいて各種の変形及び変更が可能である。
【0065】
上記第1ないし第5の実施形態では、本発明に係る移動体の速度測定装置1を軌道系交通システムの車両2に設けているが、自動車等の車両や物流用の運搬機等にも適用可能である。また、本発明に係る移動体の速度測定装置1は、速度の測定のみならず、ドップラー周波数等を利用して障害物等の接近を検知するように構成することで、障害物検知、車両の衝突防止等の分野にも適用可能である。
【0066】
上記第1実施形態では、送信アンテナ4は右旋偏波を放射し、受信アンテナ6は左旋偏波のみを受信するように設定されているが、送信アンテナ4を及び受信アンテナ6の円偏波の旋回方向はこれに限定されず、送信アンテナ4と受信アンテナ6とで旋回方向が逆になっていればよい。
【0067】
上記第1及び第2実施形態では、送信アンテナ4及び受信アンテナ6が進行方向Xに対して並列に配置されているが、これらの配置に限定されず、進行方向Xの鉛直方向に対して並列に配置する等、送信アンテナ4及び受信アンテナ6が近接して配置されていればよい。また、送受信一体型のアンテナのように同軸上に送受信一体のアンテナを置き、回路上で送信信号と受信信号の方向性分離を行ってもよい。
【0068】
上記第3実施形態では、反射板9により走行路面20で反射してきた入射波10を車両2の外側11に反射させているが、反射板9の代わりにラバー状の電波吸収体を設けて、入射波10を吸収するように構成してもよい。
【0069】
上記第4実施形態では、送受信アンテナ8及び距離計12が進行方向Xに対して並列に配置されているが、これらの配置に限定されず、進行方向Xの鉛直方向に対して並列に配置する等、送受信アンテナ8及び距離計12が近接して配置されていればよい。
【図面の簡単な説明】
【0070】
【図1】本発明の第1実施形態に係る移動体の速度測定装置が設けられた車両の側面図である。
【図2】本発明の第2実施形態に係る移動体の速度測定装置が設けられた走行路面上を車両が通過した際の側面図である。
【図3】本発明の第3実施形態に係る移動体の速度測定装置1を示しており、(a)は速度測定装置が設けられた車両の側面図であり、(b)は速度測定装置が設けられた車両の正面図であり、(c)は反射板の斜視図である。
【図4】本発明の第4実施形態に係る移動体の速度測定装置が設けられた車両の側面図である。
【図5】、データベースに格納されているデータの一例を示した図であり、周波数偏移量毎における距離と車両の速度との関係を示したグラフである。
【図6】本発明の第5実施形態に係る移動体の速度測定装置が設けられた車両の側面図である。
【図7】送受信アンテナから放射した送信波と補正用受信アンテナで受信した入射波との間の位相偏移量と、送受信アンテナから走行路面における送信波の反射位置までの距離との関係を示したグラフである。
【図8】車両の速度測定装置の第1の従来例を示している図である。
【図9】車両の速度測定装置の第2の従来例を示している図である。
【図10】車両の速度測定装置の第3の従来例を示している図である。
【符号の説明】
【0071】
1 速度測定装置
2 車両
2a 車両の底面
3 送信波
4 送信アンテナ
5 反射波
6 受信アンテナ
7 速度計算手段
8 送受信アンテナ
9 反射板
9a,9b 反射板の面
10 入射波
11 車両の外側
12 距離計
13 データベース
14 補正用受信アンテナ
15 第1のデータベース
16 第2のデータベース
20 走行路面
【技術分野】
【0001】
本発明は、移動体の速度測定装置及び速度測定方法に関し、特に、超音波あるいは電磁波等のドップラー効果を利用した移動体の速度測定装置及び速度測定方法に関する。
【背景技術】
【0002】
従来より、鉄道車両や自動車等の移動体の速度を測定するために、様々な速度測定装置が提案されている。
【0003】
図8は、車両の速度測定装置の第1の従来例を示している。
図8に示すように、車両30は複数のタイヤ31で支持されており、このタイヤ31の近傍には回転センサ(図示せず)が配置されている。第1の従来例では、この回転センサから出力されるパルス信号の周期等に基づいてタイヤ31の回転角を検出することにより車両30の速度を測定している。
【0004】
図9は、車両の速度測定装置の第2の従来例を示している。
図9に示すように、車両30の底面30aにはコイル32が配置されており、一方、走行路面20には所定の間隔を置いて複数の磁石マーカ33が埋設されている。この状態において、車両30が、磁石マーカ33が埋設された走行路面20上を通過すると、コイル32には誘起電圧が生じる。第2の従来例では、速度計算手段34が、コイル32の誘起電圧の発生情報を計測するとともに、誘起電圧の大きさが車両30の速度に比例する関係を利用することにより、車両30の速度を計算している。
【0005】
図10は、車両の速度測定装置の第3の従来例を示している。
図10に示すように、車両30の底面30aには、車両30の走行方向Xに対して傾斜した送信波35を走行路面20に向けて放射するとともに走行路面20から反射した反射波36を受信するように構成された送受信アンテナ37が設けられている。第3の従来例では、速度計算手段38が、受信アンテナ37から送信波35及び反射波36の情報を受け取り、送信波35と反射波36との間の周波数偏移量を利用することにより、車両30の速度を計算している。
【0006】
一方、特許文献1には、車両の底部に設けられたアンテナから軌道面に垂直に電波を放射し、軌道面上の枕木から反射してきた反射波を受信することにより車両の速度を計測する速度検出装置が開示されている。
また、特許文献2には、クレーン及び無人搬送台車用の基地局間の電波干渉を防止するとともに、コンテナターミナル全体に亘って無人搬送台車等を無線遠隔操作することが可能な無線通信システムが開示されている。
【特許文献1】特開昭58−205876号公報
【特許文献2】特開2006−180141号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
上述の第1の従来例の場合、車両30にブレーキをかけると、タイヤ31が走行路面20上を滑る場合があり、実際の車両30の速度よりも計測された速度が遅くなるという問題があった。加えて、タイヤ31は走行中に空気圧が変化して直径が変化するので、タイヤ31の回転角の計測に誤差が生じ、結果として、車両30の速度の計測にも誤差が生じるという問題があった。
【0008】
また、上述の第2の従来例では、走行路面20に磁石マーカ33を埋設しなければならず、コストがかかり、施工や保守にかかる時間も大きくなるという問題があった。
【0009】
また、上述の第3の従来例では、送受信アンテナ37から放射された送信波35が、走行路面20及び車両30で複数回反射してノイズ波39となって送受信アンテナ37で受信される可能性がある。ノイズ波39が送受信アンテナ37で受信されると、送受信アンテナ37で受信する反射波36がノイズ波39の影響を受けることになり、結果として、正確な周波数偏移量が得られず、車両30の速度が正確に計測できないという問題があった。
加えて、第3の従来例では、車両30の上下動や走行路面20の側溝21によって送受信アンテナ37から送信波35の反射位置までの距離が変動した場合、送受信アンテナ37で受信する反射波36に位相のずれが生じ、その結果、車両30の速度の計測にばらつきが生じる可能性があった。そのため、第3の従来例では、データのばらつきを解消するために、直近の複数の速度のデータについて移動平均をとる等のデータ処理手段を設けなければならなかった。しかも、このような直近の複数のデータの移動平均を取るようなデータ処理では、現実の速度に対して誤差が生じるという問題もあった。
【0010】
一方、特許文献1は、電波を軌道に垂直に放射して車両の速度を測定するものであるが、車両の上下動における誤差や軌道等から反射してくるノイズ波を考慮した構成が全く設けられていない。加えて、軌道上に配置された枕木毎に発生するパルスの数を数えるような構成となっており、軌道上に枕木や犬釘等がなければならず、速度が測定できる車両が限定されてしまう。
また、特許文献2は、クレーン及び無人搬送台車用の基地局間の電波干渉を防止するものであるが、クレーンや無人搬送台車を無線で遠隔制御するものであり、移動体の速度を測定するものではない。
【0011】
本発明はこのような実状に鑑みてなされたものであって、その目的は、ノイズ波の干渉を防止するとともに、車両の上下動や走行路面の凹凸等により速度の計測に誤差が生じるのを防止することが可能な移動体の速度測定装置を提供することである。
【課題を解決するための手段】
【0012】
上記従来技術の有する課題を解決するために、請求項1の本発明では、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記送受信器は、円偏波を送受信するように構成され、前記送受信器は、所定の旋回方向の円偏波を放射し、前記旋回方向と反対方向の円偏波のみを受信するように構成されている。
【0013】
請求項2の本発明では、前記送受信器は、送信器と受信器とが別個に構成されており、前記送信器及び前記受信器が、前記移動体の前記底面に並列して配置されている。
【0014】
請求項3の本発明では、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記移動体の前記底面には、前記走行路面における前記送信波の反射位置を挟んで前記送受信器の位置と対称となる位置において反射板が設けられており、該反射板は、前記走行路面で反射してきた入射波を前記移動体の外側に反射させる面を有している。
【0015】
請求項4の本発明では、移動体の走行路面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を前記移動体に向けて放射するとともに前記移動体から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記送受信器は、円偏波を送受信するように構成され、前記送受信器は、所定の旋回方向の円偏波を放射し、前記旋回方向と反対方向の円偏波のみを受信するように構成されている。
【0016】
請求項5の本発明では、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記移動体の前記底面には、前記送受信器から前記走行路面における前記送信波の反射位置までの距離を計測する距離計が設けられており、前記速度計算手段は、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納したデータベースを備えており、前記速度計算手段は、計測された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を前記データベースから取得するように構成されている。
【0017】
請求項6の本発明では、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記移動体の前記底面には、前記走行路面における前記送信波の反射位置を挟んで前記送受信器の位置と対称となる位置において、前記走行路面で反射してきた入射波を受信する受信器が設けられており、前記速度計算手段は、前記送受信器から放射した前記送信波と前記受信器で受信した前記入射波との間の位相偏移量と、前記送受信器から前記走行路面における前記送信波の反射位置までの距離との関係を格納した第1のデータベースと、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納した第2のデータベースとを備えており、前記速度計算手段は、計測された前記位相偏移量に対応する前記距離を前記第1のデータベースから取得し、取得された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を前記第2のデータベースから取得するように構成されている。
【0018】
請求項7の本発明では、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記送信波を走行路面に向けて放射するステップは、所定の旋回方向の円偏波を放射するステップであり、前記走行路面から反射した反射波を受信するステップは、前記旋回方向と反対方向の円偏波のみを受信するステップである。
【0019】
請求項8の本発明では、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記移動体の前記底面であって前記走行路面における前記送信波の反射位置を挟んで前記送信波の放射位置と対称となる位置において、前記走行路面で反射してきた入射波を前記移動体の外側に反射させる。
【0020】
請求項9の本発明では、移動体の走行路面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を前記移動体に向けて放射するステップと、前記送信波の放射位置の近傍において前記移動体から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記送信波を移動体に向けて放射するステップは、所定の旋回方向の円偏波を放射するステップであり、前記移動体から反射した反射波を受信するステップは、前記旋回方向と反対方向の円偏波のみを受信するステップである。
【0021】
請求項10の本発明では、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記送信波の放射位置から前記走行路面における前記送信波の反射位置までの距離を計測するステップを更に備え、前記移動体の速度を計算するステップは、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納したデータベースから、計測された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を取得するステップを備えている。
【0022】
請求項11の本発明では、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記移動体の前記底面であって前記走行路面における前記送信波の反射位置を挟んで前記送信波の放射位置と対称となる位置において、前記走行路面で反射してきた入射波を受信するステップを更に備え、前記移動体の速度を計算するステップは、前記送信波と受信した前記入射波との間の位相偏移量と、前記送信波の放射位置から前記走行路面における前記送信波の反射位置までの距離との関係を格納した第1のデータベースから、計測された前記位相偏移量に対応する前記距離を取得するステップと、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納した第2のデータベースから、取得された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を取得するステップとを備えている。
【発明の効果】
【0023】
上述の如く、本発明に係る移動体の速度測定装置によれば、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記送受信器は、円偏波を送受信するように構成され、前記送受信器は、所定の旋回方向の円偏波を放射し、前記旋回方向と反対方向の円偏波のみを受信するように構成されているので、送受信器が、偶数回反射して入射してくるノイズ波を受信することがなくなり、走行路面で1回反射した反射波のみを受信することになる。これにより、送受信器が反射波を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて送信波と反射波との間の周波数偏移量が正確に計測されることになり、その結果、より精度の高い移動体の速度を測定することができる。
【0024】
さらに、本発明に係る移動体の速度測定装置によれば、前記送受信器は、送信器と受信器とが別個に構成されており、前記送信器及び前記受信器が、前記移動体の前記底面に並列して配置されているので、送信器と受信機とを個別に管理及びメンテナンスをすることができる。
【0025】
また、本発明に係る移動体の速度測定装置によれば、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記移動体の前記底面には、前記走行路面における前記送信波の反射位置を挟んで前記送受信器の位置と対称となる位置において反射板が設けられており、該反射板は、前記走行路面で反射してきた入射波を前記移動体の外側に反射させる面を有しているので、走行路面で反射して移動体の底面に入射してきた入射波が、送受信器に向かって戻るように反射せず、移動体の外側(移動体の進行方向に対し側方にそれる方向)に向かって反射することになる。これにより、送受信器が反射波を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて送信波と反射波との間の周波数偏移量が正確に検出されることになり、その結果、より精度の高い移動体の速度を測定することができる。
【0026】
また、本発明に係る移動体の速度測定装置によれば、移動体の走行路面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を前記移動体に向けて(例えば、走行路面上から移動体の底面に、走行路面の上方から移動体の屋根面に、あるいは移動体の側面に向けて)放射するとともに前記移動体から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記送受信器は、円偏波を送受信するように構成され、前記送受信器は、所定の旋回方向の円偏波を放射し、前記旋回方向と反対方向の円偏波のみを受信するように構成されているので、送受信器が、偶数回反射して入射してくるノイズ波を受信することがなくなり、移動体(移動体の底面、移動体の屋根面、あるいは移動体の側面)で1回反射した反射波のみを受信することになる。これにより、送受信器が反射波を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて送信波と反射波との間の周波数偏移量が正確に計測されることになり、その結果、より精度の高い移動体の速度を測定することができる。
また、送受信器が走行路面に設けられているので、ある特定の移動体の速度を測定するのではなく、特定のポイントを通過する複数の移動体の速度をそれぞれ測定するような場合に有益である。
【0027】
また、本発明に係る移動体の速度測定装置によれば、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記移動体の前記底面には、前記送受信器から前記走行路面における前記送信波の反射位置までの距離を計測する距離計が設けられており、前記速度計算手段は、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納したデータベースを備えており、前記速度計算手段は、計測された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を前記データベースから取得するように構成されているので、従来では、移動体の上下動や走行路面の凹凸によって送受信器から送信波の反射位置までの距離が変動した場合を想定して、計測された移動体の速度に対して移動平均をとる等のデータ処理を行う必要があったが、本発明では、あらかじめ実験的に構築したデータベースを利用することにより、計測された距離と計測された周波数偏移量とから移動体の速度が得られることになり、従来のようなデータ処理を行う必要がない。加えて、送受信器から送信波の反射位置までの距離が変動した場合でも、反射波の位相のずれ等の影響を受けることなく、正確な移動体の速度をデータベースを利用して取得することができる。
【0028】
また、本発明に係る移動体の速度測定装置によれば、移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、前記移動体の前記底面には、前記走行路面における前記送信波の反射位置を挟んで前記送受信器の位置と対称となる位置において、前記走行路面で反射してきた入射波を受信する受信器が設けられており、前記速度計算手段は、前記送受信器から放射した前記送信波と前記受信器で受信した前記入射波との間の位相偏移量と、前記送受信器から前記走行路面における前記送信波の反射位置までの距離との関係を格納した第1のデータベースと、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納した第2のデータベースとを備えており、前記速度計算手段は、計測された前記位相偏移量に対応する前記距離を前記第1のデータベースから取得し、取得された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を前記第2のデータベースから取得するように構成されているので、従来では、移動体の上下動や走行路面の凹凸によって送受信器から送信波の反射位置までの距離が変動した場合を想定して、計測された移動体の速度に対して移動平均をとる等のデータ処理を行う必要があったが、本発明では、あらかじめ実験的に構築したデータベースを利用することにより、計測された距離と計測された周波数偏移量とから即時に移動体の速度が得られることになり、従来のようなデータ処理を行う必要がない。加えて、送受信器から送信波の反射位置までの距離が変動した場合でも、反射波の位相のずれ等の影響を受けることなく、正確な移動体の速度を第1及び第2のデータベースを利用して取得することができる。また、第1のデータベースを利用することにより、送受信器から放射した送信波と受信器で受信した入射波との間の位相偏移量から、送受信器から送信波の反射位置までの距離が取得できるので、移動体の底面に距離計を設ける必要がなく、コストも低減される。
【0029】
また、本発明に係る移動体の速度測定方法によれば、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記送信波を走行路面に向けて放射するステップは、所定の旋回方向の円偏波を放射するステップであり、前記走行路面から反射した反射波を受信するステップは、前記旋回方向と反対方向の円偏波のみを受信するステップであるので、走行路面から反射した反射波を受信するステップにおいて、偶数回反射して入射してくるノイズ波を受信することがなくなり、走行路面で1回反射した反射波のみを受信することになる。これにより、反射波を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて送信波と反射波との間の周波数偏移量が正確に計測されることになり、その結果、より精度の高い移動体の速度を測定することができる。
【0030】
また、本発明に係る移動体の速度測定方法によれば、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記移動体の前記底面であって前記走行路面における前記送信波の反射位置を挟んで前記送信波の放射位置と対称となる位置において、前記走行路面で反射してきた入射波を前記移動体の外側に反射させるので、走行路面で反射して移動体の底面に入射してきた入射波が、反射波の受信位置に向かって戻ることはない。これにより、反射波を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて送信波と反射波との間の周波数偏移量が正確に検出されることになり、その結果、より精度の高い移動体の速度を測定することができる。
【0031】
また、本発明に係る移動体の速度測定方法によれば、移動体の走行路面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を前記移動体に向けて放射するステップと、前記送信波の放射位置の近傍において前記移動体から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記送信波を移動体に向けて放射するステップは、所定の旋回方向の円偏波を放射するステップであり、前記移動体から反射した反射波を受信するステップは、前記旋回方向と反対方向の円偏波のみを受信するステップであるので、移動体から反射した反射波を受信するステップにおいて、偶数回反射して入射してくるノイズ波を受信することがなくなり、移動体で1回反射した反射波のみを受信することになる。これにより、反射波を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて送信波と反射波との間の周波数偏移量が正確に計測されることになり、その結果、より精度の高い移動体の速度を測定することができる。
【0032】
また、本発明に係る移動体の速度測定方法によれば、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記送信波の放射位置から前記走行路面における前記送信波の反射位置までの距離を計測するステップを更に備え、前記移動体の速度を計算するステップは、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納したデータベースから、計測された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を取得するステップを備えているので、従来では、移動体の上下動や走行路面の凹凸によって送信波の放射位置から送信波の反射位置までの距離が変動した場合を想定して、計測された移動体の速度に対して移動平均をとる等のデータ処理を行う必要があったが、本発明では、あらかじめ実験的に構築したデータベースを利用することにより、計測された距離と計測された周波数偏移量とから移動体の速度が得られることになり、従来のようなデータ処理を行う必要がない。加えて、送信波の放射位置から送信波の反射位置までの距離が変動した場合でも、反射波の位相のずれ等の影響を受けることなく、正確な移動体の速度をデータベースを利用して取得することができる。
【0033】
また、本発明に係る移動体の速度測定方法によれば、移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、前記移動体の前記底面であって前記走行路面における前記送信波の反射位置を挟んで前記送信波の放射位置と対称となる位置において、前記走行路面で反射してきた入射波を受信するステップを更に備え、前記移動体の速度を計算するステップは、前記送信波と受信した前記入射波との間の位相偏移量と、前記送信波の放射位置から前記走行路面における前記送信波の反射位置までの距離との関係を格納した第1のデータベースから、計測された前記位相偏移量に対応する前記距離を取得するステップと、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納した第2のデータベースから、取得された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を取得するステップとを備えているので、従来では、移動体の上下動や走行路面の凹凸によって送信波の放射位置から送信波の反射位置までの距離が変動した場合を想定して、計測された移動体の速度に対して移動平均をとる等のデータ処理を行う必要があったが、本発明では、あらかじめ実験的に構築したデータベースを利用することにより、計測された距離と計測された周波数偏移量とから即時に移動体の速度が得られることになり、従来のようなデータ処理を行う必要がない。加えて、送信波の放射位置からから送信波の反射位置までの距離が変動した場合でも、反射波の位相のずれ等の影響を受けることなく、正確な移動体の速度を第1及び第2のデータベースを利用して取得することができる。
【発明を実施するための最良の形態】
【0034】
以下、本発明に係る移動体の速度測定装置を、図面を参照しながら説明する。図1は、本発明の第1実施形態に係る移動体の速度測定装置が設けられた車両の側面図である。
【0035】
図1に示すように、本発明の第1実施形態に係る速度測定装置1は、専用の走行路面20を走行する軌道系交通システムの車両2に適用されるものである。
本発明の第1実施形態に係る移動体の速度測定装置1は、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するように構成された送信アンテナ4と、車両2の底面2aに進行方向Xに対して送信アンテナ4と並列に設けられ、走行路面20から反射した反射波5を受信するように構成された受信アンテナ6と、送信波3と反射波5との間の周波数偏移量から車両2の速度を計算する速度計算手段7とを備えている。
送信アンテナ4及び受信アンテナ6は、速度計算手段7にそれぞれ接続されており、送信波3あるいは反射波5の情報を速度計算手段7に送信するように構成されている。
【0036】
本発明の第1実施形態に係る移動体の速度測定装置1では、送信アンテナ4は、所定の旋回方向の円偏波を走行路面20に放射するように構成され、受信アンテナ6は、送信アンテナ4が放射する円偏波と旋回方向が反対方向の円偏波のみを受信するように構成されている。
ここで、円偏波とは、電界の偏波面が時間と共に回転する電波であり、旋回方向の違いにより右旋偏波と左旋偏波とがある。また、円偏波は、反射した際に旋回方向が電波の進行方向に対し反対(逆旋回)になる性質を有している。
【0037】
次に、本発明の第1実施形態に係る移動体の速度測定装置1を用いて車両2の速度Vを測定する手順について説明する。以下では、例として、送信アンテナ4は右旋偏波を放射し、受信アンテナ6は左旋偏波のみを受信するように設定されている。
図1に示すように、送信アンテナ4は、ある角度θをもって送信波3を走行路面20に対して放射する。
この送信波3は、走行路面20で反射した際に、ドップラー効果によって周波数偏差を受けるとともに、旋回方向が反対となって左旋偏波となる。受信アンテナ6は、走行路面20で1回反射した左旋偏波のみを反射波5として受信する。ここで、受信アンテナ6は左旋偏波のみを受信するように設定されているので、例えば、車両2及び走行路面20で偶数回反射した右旋偏波の波を受信することはない。
そして、送信アンテナ4は送信波3の情報を速度計算手段7に送信し、受信アンテナ6は受信した反射波5の情報を速度計算手段7に送信する。速度計算手段7は、受信アンテナ6で得られた反射波5にFFT(Fast Fourier Transform:高速フーリエ変換)等の信号処理を施すことにより、反射波5の周波数成分から送信波3と反射波5との周波数偏差(ドップラー周波数)△(デルタ)fを算出する。
そして、速度計算手段7は、例えば、以下の[数1]の式の関係を用いて車両2の速度Vを計算することができる。
なお、ここで、[数1]は、移動体(車両2)の進行方向Xに向かって送信波3を放射していること、及び送信アンテナ4と受信アンテナ6の設置位置が同一(例えば、送受信一体型のアンテナ)であることが前提となる。[数1]の式中のf0は送信アンテナ4から放射された送信波3の周波数であり、Vは速度(走行路面20に対する速度)であり、cは光速である。また、速度については進行方向Xを正の向きとする。
【数1】
以上により、車両2の速度Vを求めることができる。
【0038】
このように、第1実施形態に係る移動体の速度測定装置1によれば、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するように構成された送信アンテナ4と、車両2の底面2aに進行方向Xに対して送信アンテナ4と並列に設けられ、走行路面20から反射した反射波5を受信するように構成された受信アンテナ6と、送信波3と反射波5との間の周波数偏移量△fから車両2の速度Vを計算する速度計算手段7とを備えている移動体の速度測定装置1において、送信アンテナ4は、所定の旋回方向の円偏波を走行路面20に放射するように構成され、受信アンテナ6は、送信アンテナ4が放射する円偏波と旋回方向が反対方向の円偏波のみを受信するように構成されているので、受信アンテナ6が、偶数回反射して入射してくるノイズ波を受信することがなくなり、走行路面20で1回反射した反射波5のみを受信することになる。これにより、受信アンテナ6が反射波5を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて正確な送信波3と反射波5との間の周波数偏移量△fが計測されることになり、その結果、より精度の高い車両2の速度Vを測定することができる。
なお、奇数回(例えば、3回)反射して受信アンテナ6に入射してくるノイズ波は、受信アンテナ6が受信する円偏波と同じ旋回方向となるが、反射のたびに電波は減衰されているので、ノイズ波としての影響を与える可能性が小さくなる。したがって、送信波3と反射波5との間の周波数偏移量△fの計測に影響を与えることはない。
【0039】
次に、本発明の第2実施形態に係る移動体の速度測定装置1を、図面を参照しながら説明する。
図2は、本発明の第2実施形態に係る移動体の速度測定装置1が設けられた走行路面20上を車両2が通過した際の側面図である。
【0040】
本発明の第2実施形態に係る移動体の速度測定装置1は、走行路面20に設けられ、車両2の進行方向Xに向かって傾斜した送信波3を車両2の底面2aに向けて放射するように構成された送信アンテナ4と、走行路面20に進行方向Xに対して送信アンテナ4と並列に設けられ、車両2の底面2aから反射した反射波5を受信するように構成された受信アンテナ6と、送信波3と反射波5との間の周波数偏移量から車両2の速度を計算する速度計算手段7とを備えている。
送信アンテナ4及び受信アンテナ6は、速度計算手段7にそれぞれ接続されており、送信波3あるいは受信波5の情報を速度計算手段7に送信するように構成されている。
【0041】
本発明の第2実施形態に係る移動体の速度測定装置1では、送信アンテナ4は、所定の旋回方向の円偏波を走行路面20に放射するように構成され、受信アンテナ6は、送信アンテナ4が放射する円偏波と旋回方向が反対方向の円偏波のみを受信するように構成されている。
なお、本発明の第2実施形態に係る移動体の速度測定装置1を用いて、車両2の速度Vを測定する手順については、第1実施形態と同様である。
【0042】
また、本実施形態では、送信アンテナ4及び受信アンテナ6を走行路面20に設け、車両2の底面2aに向けて上向きに送信波3を放射しているが、本実施形態は一例にすぎず、これに限定されない。例えば、送信アンテナ4及び受信アンテナ6を車両2よりも上方に位置するように配置して、車両2の屋根面に送信波3を放射するように構成してもよい。また、送信アンテナ4及び受信アンテナ6を車両2の車幅方向外側に位置するように配置して、車両2の側面に送信波3を放射するように構成してもよい。
【0043】
このように、第2実施形態に係る移動体の速度測定装置1によれば、走行路面20に設けられ、車両2の進行方向Xに向かって傾斜した送信波3を車両2の底面2aに向けて放射するように構成された送信アンテナ4と、走行路面20に進行方向Xに対して送信アンテナ4と並列に設けられ、車両2の底面2aから反射した反射波5を受信するように構成された受信アンテナ6と、送信波3と反射波5との間の周波数偏移量△fから車両2の速度Vを計算する速度計算手段7とを備えている移動体の速度測定装置1において、送信アンテナ4は、所定の旋回方向の円偏波を走行路面20に放射するように構成され、受信アンテナ6は、送信アンテナ4が放射する円偏波と旋回方向が反対方向の円偏波のみを受信するように構成されているので、受信アンテナ6が、偶数回反射して入射してくるノイズ波を受信することがなくなり、車両2の底面2aで1回反射した反射波5のみを受信することになる。これにより、受信アンテナ6が反射波5を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて正確な送信波3と反射波5との間の周波数偏移量△fが計測されることになり、その結果、より精度の高い車両2の速度Vを測定することができる。
また、送信アンテナ4及び受信アンテナ6が走行路面20に設けられているので、ある特定の車両2の速度を測定するのではなく、特定のポイントを通過する複数の車両2の速度をそれぞれ測定するような場合に有益である。
【0044】
次に、本発明の第3実施形態に係る移動体の速度測定装置1を、図面を参照しながら説明する。
図3は、本発明の第3実施形態に係る移動体の速度測定装置1を示しており、(a)は速度測定装置1が設けられた車両2の側面図であり、(b)は速度測定装置1が設けられた車両2の正面図であり、(c)は反射板の斜視図である。
【0045】
本発明の第3実施形態に係る移動体の速度測定装置1は、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信アンテナ8と、送信波3と反射波5との間の周波数偏移量から車両2の速度を計算する速度計算手段7とを備えている。
送受信アンテナ8は、速度計算手段7に接続されており、送信波3及び反射波5の情報を速度計算手段7に送信するように構成されている。
【0046】
本発明の第3実施形態に係る移動体の速度測定装置1では、車両2の底面2aには、走行路面20における送信波3の反射位置を挟んで送受信アンテナ8の位置と対称となる位置において反射板9が設けられている。図3(c)に示すように、反射板9は、三角錐で形成されており、走行路面20で反射してきた入射波10を車両2の外側11に反射させる反射面9aを有している。反射板9は、三角錐の底面9bを車両2の底面2aに合わせるとともに反射板9の面9cが進行方向Xと略平行になるように配置されている。これにより、反射板9の反射面9aが車両2の外側11を向くように配置される。
以上の構成から、図3(a)及び(b)に示すように、走行路面20で反射して車両2の底面2aに入射してきた入射波10が、送受信アンテナ8に向かって戻るように反射せず、反射板9の反射面9aにより車両2の外側11(車両2の進行方向Xに対し側方にそれる方向)に向かって反射することになる。
なお、本発明の第3実施形態に係る移動体の速度測定装置1を用いて車両2の速度Vを測定する手順については、第1実施形態と同様である。
【0047】
また、本実施形態において、反射板9は、反射面9aが二等辺三角形であるとともに面9cが直角三角形をなす三角錐で形成され、面9cが車両2の進行方向Xと略平行になるように配置されているが、本実施形態は一例にすぎず、これに限定されない。すなわち、走行路面20で反射してきた入射波10を車両2の外側11に反射させる反射面を有していればよく、反射面の形状及び反射板の全体の形状は別の形状で形成してもよい。
【0048】
このように、第3実施形態に係る移動体の速度測定装置1によれば、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信アンテナ8と、送信波3と反射波5との間の周波数偏移量△fから車両2の速度Vを計算する速度計算手段7とを備えている移動体の速度測定装置1において、車両2の底面2aには、走行路面20における送信波3の反射位置を挟んで送受信アンテナ8の位置と対称となる位置において反射板9が設けられており、反射板9は、走行路面20で反射してきた入射波10を車両2の外側11に反射させる面9aを有しているので、走行路面20で反射して車両2の底面2aに入射してきた入射波10が、送受信アンテナ8に向かって戻るように反射せず、車両2の外側11に向かって反射することになる。これにより、送受信アンテナ8が反射波5を受信する際にノイズ波の干渉を受けなくなるので、従来に比べて正確な送信波3と反射波5との間の周波数偏移量△fが検出されることになり、その結果、より精度の高い車両2の速度Vを測定することができる。
【0049】
次に、本発明の第4実施形態に係る移動体の速度測定装置1を、図面を参照しながら説明する。
図4は、本発明の第4実施形態に係る移動体の速度測定装置1が設けられた車両2の側面図である。
【0050】
本発明の第4実施形態に係る移動体の速度測定装置1は、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信アンテナ8と、送信波3と反射波5との間の周波数偏移量から車両2の速度を計算する速度計算手段7とを備えている。
送受信アンテナ8は、速度計算手段7に接続されており、送信波3及び受信波5の情報を速度計算手段7に送信するように構成されている。
【0051】
本発明の第4実施形態に係る移動体の速度測定装置1では、車両2の底面2aには、送受信アンテナ8から走行路面20における送信波3の反射位置までの距離Dを計測する距離計12が設けられている。距離計12は、例えば、レーザ等の光線を使用した光学式距離計である。そして、距離計12は、進行方向Xに対して送受信アンテナ8と並列で、かつ、放射する光線(レーザ)の方向が送受信アンテナ8の送信波3の放射方向と同一になるように配置されている。また、距離計12は、速度計算手段7に接続されており、測定した距離Dの情報を速度計算手段7に送信するように構成されている。
【0052】
本発明の第4実施形態に係る移動体の速度測定装置1では、速度計算手段7は、周波数偏移量毎における距離Dと車両2の速度との関係を格納したデータベース13を備えている。また、速度計算手段7は、計測された距離Dと計測された周波数偏移量とに対応する車両2の速度をデータベース13から取得するように構成されている。
【0053】
図5は、データベース13に格納されているデータの一例を示したグラフであり、周波数偏移量毎(△f=f1,f2,・・・)における距離Dと車両2の速度Vとの関係を示したグラフである。
データベース13は、移動体の速度測定装置1が設置される車両2において、本実施形態の送受信アンテナ8や距離計12等を用いてあらかじめ実験を行い、その結果得られた実験値を蓄積したものである。また、実験により得られた距離Dと車両2の速度Vとの関係は、図5に示すような曲線となるが、この曲線の全範囲をデータとして使用せず、適切な範囲を選択して使用する。このデータとして使用する範囲Mも、あらかじめ行った実験により決定されている。
【0054】
次に、本発明の第4実施形態に係る移動体の速度測定装置1を用いて車両2の速度Vを測定する手順について説明する。
図4に示すように、送受信アンテナ8は、送信波3を走行路面20に対して放射し、距離計12は同時に光線を走行路面20に対して放射する。
送受信アンテナ8から放射された送信波3は、走行路面20で反射した際にドップラー効果によって周波数偏差△fを受け、反射波5として送受信アンテナ8で受信される。一方、距離計12は走行路面20から反射してきた光線の情報から、送受信アンテナ8から走行路面20における送信波3の反射位置までの距離Dを算出する。
そして、送受信アンテナ8は送信波3及び反射波5の情報を速度計算手段7に送信し、距離計12は算出した距離Dを速度計算手段7に送信する。速度計算手段7は、送受信アンテナ8で得られた反射波5にFFT等の信号処理を施すことにより、反射波5の周波数成分から送信波3と反射波5との周波数偏差(ドップラー周波数)△f=f1を算出する。
そして、図5に示すように、速度計算手段7は、まず、算出された周波数偏移量△f=f1に対応する距離Dと移動体の速度Vとの関係を表したデータ集合をデータベース13から検索し、その後、算出した距離D1に対応する移動体の速度Vを上記データ集合から取得する。
以上により、車両2の速度Vを求めることができる。
【0055】
このように、第4実施形態に係る移動体の速度測定装置1によれば、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信アンテナ8と、送信波3と反射波5との間の周波数偏移量△fから車両2の速度Vを計算する速度計算手段7とを備えている移動体の速度測定装置1において、車両2の底面2aには、送受信アンテナ8から走行路面20における送信波3の反射位置までの距離を計測する距離計12が設けられており、速度計算手段7は、周波数偏移量毎における距離Dと移動体の速度Vとの関係を格納したデータベース13を備えており、速度計算手段7は、計測された距離D1と計測された周波数偏移量f1とに対応する移動体の速度Vをデータベース13から取得するように構成されているので、従来では、車両2の上下動や走行路面20の凹凸によって送受信アンテナ8から送信波3の反射位置までの距離Dが変動した場合を想定して、計測された車両2の速度Vに対して移動平均をとる等のデータ処理を行う必要があったが、本実施形態では、あらかじめ実験的に構築したデータベース13を利用することにより、計測された距離D1と計測された周波数偏移量f1とから即時に車両2の速度Vが得られることになり、従来のようなデータ処理を行う必要がない。加えて、送受信アンテナ8から送信波3の反射位置までの距離Dが変動した場合でも、反射波5の位相のずれ等の影響を受けることなく、正確な車両2の速度Vをデータベース13を利用して取得することができる。
【0056】
次に、本発明の第5実施形態に係る移動体の速度測定装置1を、図面を参照しながら説明する。
図6は、本発明の第5実施形態に係る移動体の速度測定装置1が設けられた車両2の側面図である。
【0057】
本発明の第5実施形態に係る移動体の速度測定装置1は、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信アンテナ8と、送信波3と反射波5との間の周波数偏移量から車両2の速度を計算する速度計算手段7とを備えている。
送受信アンテナ8は、速度計算手段7に接続されており、送信波3及び受信波5の情報を速度計算手段7に送信するように構成されている。
【0058】
本発明の第5実施形態に係る移動体の速度測定装置1では、車両2の底面2aには、走行路面20における送信波3の反射位置を挟んで送受信アンテナ8の位置と対称となる位置において、走行路面20で反射してきた入射波10を受信する補正用受信アンテナ14が設けられている。補正用受信アンテナ14は、速度計算手段7に接続されており、走行路面20で反射してきた入射波10の情報を速度計算手段7に送信するように構成されている。
【0059】
また、本発明の第5実施形態に係る移動体の速度測定装置1では、速度計算手段7は、送受信アンテナ8から放射した送信波3と補正用受信アンテナ14で受信した入射波10との間の位相偏移量と、送受信アンテナ8から走行路面20における送信波3の反射位置までの距離Dとの関係を格納した第1のデータベース15を備えている。
【0060】
図6は、第1のデータベース15に格納されているデータの一例を示したグラフであり、送受信アンテナ8から放射した送信波3と補正用受信アンテナ14で受信した入射波10との間の位相偏移量△φと、送受信アンテナ8から走行路面20における送信波3の反射位置までの距離Dとの関係を示したグラフである。
第1のデータベース15は、移動体の速度測定装置1が設置される車両2において、本実施形態の送受信アンテナ8、補正用受信アンテナ14、及び距離計等を用いてあらかじめ実験を行い、その結果得られた実験値を蓄積したものである。また、実験により得られた位相偏移量△φと距離Dとの関係は、図7に示すような曲線となるが、この曲線の全範囲をデータとして使用せず、適切な範囲Nを選択して使用する。このデータとして使用する範囲Nも、あらかじめ行った実験により決定されている。
【0061】
また、速度計算手段7は、周波数偏移量毎(△f=f1,f2・・・)における距離Dと車両2の速度Vとの関係を格納した第2のデータベース16を備えている。この第2のデータベース16は、第4実施形態におけるデータベース13と同様のものである。
そして、速度計算手段7は、計測された位相偏移量△φに対応する距離Dを第1のデータベース15から取得し、取得された距離D1と計測された周波数偏移量f1とに対応する車両2の速度Vを第2のデータベース16から取得するように構成されている。
【0062】
次に、本発明の第5実施形態に係る移動体の速度測定装置1を用いて車両2の速度Vを測定する手順について説明する。
図6に示すように、まず、送受信アンテナ8は、送信波3を走行路面20に対して放射する。
送受信アンテナ8から放射された送信波3は、走行路面20で反射した際にドップラー効果によって周波数偏差△fを受け、反射波5として送受信アンテナ8で受信される。一方、補正用受信アンテナ14は、走行路面20で反射してきた入射波10を受信する。その後、送受信アンテナ8は送信波3及び反射波5の情報を速度計算手段7に送信し、補正用受信アンテナ14は入射波10の情報を速度計算手段7に送信する。
速度計算手段7は、送受信アンテナ8で得られた反射波5にFFT等の信号処理を施すことにより、反射波5の周波数成分から送信波3と反射波5との周波数偏差(ドップラー周波数)△f=f1を算出する。
次に、速度計算手段7は、送信波3の位相成分と補正用受信アンテナ14で受信した入射波10の位相成分とから位相偏移量△φを算出する。ここで、送信波3の波動方程式を
【数2】
とし、入射波10の波動方程式を、
【数3】
とすると、位相偏移量△φは、
【数4】
により算出される。ここで、A,Bは振幅であり、ωは角周波数であり、tは時刻であり、φ1,φ2は位相である。
そして、速度計算手段7は、まず、算出された位相偏移量△φに対応する距離D1を第1のデータベース15から取得し、その後、算出した周波数偏移量△f=f1に対応する距離Dと車両2の速度Vとの関係を表したデータ集合を第2のデータベース16から検索する。最後に、第1のデータベース15から取得した距離D1に対応する車両2の速度Vを上記データ集合から取得する。
以上により、車両2の速度Vを求めることができる。
【0063】
このように、第5実施形態に係る移動体の速度測定装置1によれば、車両2の底面2aに設けられ、車両2の進行方向Xに向かって傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信アンテナ8と、送信波3と反射波5との間の周波数偏移量△φから車両2の速度Vを計算する速度計算手段7とを備えている移動体の速度測定装置1において、車両2の底面2aには、走行路面20における送信波3の反射位置を挟んで送受信アンテナ8の位置と対称となる位置において、走行路面20で反射してきた入射波10を受信する補正用受信アンテナ14が設けられており、速度計算手段7は、送受信アンテナ8から放射した送信波3と補正用受信アンテナ14で受信した入射波10との間の位相偏移量△φと、送受信アンテナ8から走行路面20における送信波3の反射位置までの距離Dとの関係を格納した第1のデータベース15と、周波数偏移量△φ毎における距離Dと移動体の速度Vとの関係を格納した第2のデータベース16とを備えており、速度計算手段7は、計測された位相偏移量△φに対応する距離D1を第1のデータベース15から取得し、取得された距離D1と計測された周波数偏移量△fとに対応する車両2の速度Vを第2のデータベース16から取得するように構成されているので、従来では、車両2の上下動や走行路面20の凹凸によって送受信アンテナ8から送信波3の反射位置までの距離Dが変動した場合を想定して、計測された車両2の速度Vに対して移動平均をとる等のデータ処理を行う必要があったが、本実施形態では、あらかじめ実験的に構築したデータベース15,16を利用することにより、計測された距離D1と計測された周波数偏移量△f=f1とから車両2の速度Vが得られることになり、従来のようなデータ処理を行う必要がない。加えて、送受信アンテナ8から送信波3の反射位置までの距離Dが変動した場合でも、反射波5の位相のずれ等の影響を受けることなく、正確な車両2の速度Vを第1及び第2のデータベース15,16を利用して取得することができる。また、第1のデータベース15を利用することにより、送受信アンテナ8から放射した送信波3と補正用受信アンテナ14で受信した入射波10との間の位相偏移量△φから、送受信アンテナ8から送信波3の反射位置までの距離Dが取得できるため、車両2の底面2aに距離計を設ける必要がなく、コストも低減される。
【0064】
以上、本発明の実施の形態につき述べたが、本発明は既述の実施形態に限定されるものでなく、本発明の技術的思想に基づいて各種の変形及び変更が可能である。
【0065】
上記第1ないし第5の実施形態では、本発明に係る移動体の速度測定装置1を軌道系交通システムの車両2に設けているが、自動車等の車両や物流用の運搬機等にも適用可能である。また、本発明に係る移動体の速度測定装置1は、速度の測定のみならず、ドップラー周波数等を利用して障害物等の接近を検知するように構成することで、障害物検知、車両の衝突防止等の分野にも適用可能である。
【0066】
上記第1実施形態では、送信アンテナ4は右旋偏波を放射し、受信アンテナ6は左旋偏波のみを受信するように設定されているが、送信アンテナ4を及び受信アンテナ6の円偏波の旋回方向はこれに限定されず、送信アンテナ4と受信アンテナ6とで旋回方向が逆になっていればよい。
【0067】
上記第1及び第2実施形態では、送信アンテナ4及び受信アンテナ6が進行方向Xに対して並列に配置されているが、これらの配置に限定されず、進行方向Xの鉛直方向に対して並列に配置する等、送信アンテナ4及び受信アンテナ6が近接して配置されていればよい。また、送受信一体型のアンテナのように同軸上に送受信一体のアンテナを置き、回路上で送信信号と受信信号の方向性分離を行ってもよい。
【0068】
上記第3実施形態では、反射板9により走行路面20で反射してきた入射波10を車両2の外側11に反射させているが、反射板9の代わりにラバー状の電波吸収体を設けて、入射波10を吸収するように構成してもよい。
【0069】
上記第4実施形態では、送受信アンテナ8及び距離計12が進行方向Xに対して並列に配置されているが、これらの配置に限定されず、進行方向Xの鉛直方向に対して並列に配置する等、送受信アンテナ8及び距離計12が近接して配置されていればよい。
【図面の簡単な説明】
【0070】
【図1】本発明の第1実施形態に係る移動体の速度測定装置が設けられた車両の側面図である。
【図2】本発明の第2実施形態に係る移動体の速度測定装置が設けられた走行路面上を車両が通過した際の側面図である。
【図3】本発明の第3実施形態に係る移動体の速度測定装置1を示しており、(a)は速度測定装置が設けられた車両の側面図であり、(b)は速度測定装置が設けられた車両の正面図であり、(c)は反射板の斜視図である。
【図4】本発明の第4実施形態に係る移動体の速度測定装置が設けられた車両の側面図である。
【図5】、データベースに格納されているデータの一例を示した図であり、周波数偏移量毎における距離と車両の速度との関係を示したグラフである。
【図6】本発明の第5実施形態に係る移動体の速度測定装置が設けられた車両の側面図である。
【図7】送受信アンテナから放射した送信波と補正用受信アンテナで受信した入射波との間の位相偏移量と、送受信アンテナから走行路面における送信波の反射位置までの距離との関係を示したグラフである。
【図8】車両の速度測定装置の第1の従来例を示している図である。
【図9】車両の速度測定装置の第2の従来例を示している図である。
【図10】車両の速度測定装置の第3の従来例を示している図である。
【符号の説明】
【0071】
1 速度測定装置
2 車両
2a 車両の底面
3 送信波
4 送信アンテナ
5 反射波
6 受信アンテナ
7 速度計算手段
8 送受信アンテナ
9 反射板
9a,9b 反射板の面
10 入射波
11 車両の外側
12 距離計
13 データベース
14 補正用受信アンテナ
15 第1のデータベース
16 第2のデータベース
20 走行路面
【特許請求の範囲】
【請求項1】
移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、
前記送受信器は、円偏波を送受信するように構成され、前記送受信器は、所定の旋回方向の円偏波を放射し、前記旋回方向と反対方向の円偏波のみを受信するように構成されていることを特徴とする移動体の速度測定装置。
【請求項2】
前記送受信器は、送信器と受信器とが別個に構成されており、前記送信器及び前記受信器が、前記移動体の前記底面に並列して配置されていることを特徴とする請求項1に記載の移動体の速度測定装置。
【請求項3】
移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、
前記移動体の前記底面には、前記走行路面における前記送信波の反射位置を挟んで前記送受信器の位置と対称となる位置において反射板が設けられており、該反射板は、前記走行路面で反射してきた入射波を前記移動体の外側に反射させる面を有していることを特徴とする移動体の速度測定装置。
【請求項4】
移動体の走行路面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を前記移動体に向けて放射するとともに前記移動体から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、
前記送受信器は、円偏波を送受信するように構成され、前記送受信器は、所定の旋回方向の円偏波を放射し、前記旋回方向と反対方向の円偏波のみを受信するように構成されていることを特徴とする移動体の速度測定装置。
【請求項5】
移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、
前記移動体の前記底面には、前記送受信器から前記走行路面における前記送信波の反射位置までの距離を計測する距離計が設けられており、前記速度計算手段は、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納したデータベースを備えており、前記速度計算手段は、計測された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を前記データベースから取得するように構成されていることを特徴とする移動体の速度測定装置。
【請求項6】
移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、
前記移動体の前記底面には、前記走行路面における前記送信波の反射位置を挟んで前記送受信器の位置と対称となる位置において、前記走行路面で反射してきた入射波を受信する受信器が設けられており、前記速度計算手段は、前記送受信器から放射した前記送信波と前記受信器で受信した前記入射波との間の位相偏移量と、前記送受信器から前記走行路面における前記送信波の反射位置までの距離との関係を格納した第1のデータベースと、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納した第2のデータベースとを備えており、前記速度計算手段は、計測された前記位相偏移量に対応する前記距離を前記第1のデータベースから取得し、取得された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を前記第2のデータベースから取得するように構成されていることを特徴とする移動体の速度測定装置。
【請求項7】
移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、
前記送信波を走行路面に向けて放射するステップは、所定の旋回方向の円偏波を放射するステップであり、前記走行路面から反射した反射波を受信するステップは、前記旋回方向と反対方向の円偏波のみを受信するステップであることを特徴とする移動体の速度測定方法。
【請求項8】
移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、
前記移動体の前記底面であって前記走行路面における前記送信波の反射位置を挟んで前記送信波の放射位置と対称となる位置において、前記走行路面で反射してきた入射波を前記移動体の外側に反射させることを特徴としている移動体の速度測定方法。
【請求項9】
移動体の走行路面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を前記移動体に向けて放射するステップと、前記送信波の放射位置の近傍において前記移動体から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、
前記送信波を移動体に向けて放射するステップは、所定の旋回方向の円偏波を放射するステップであり、前記移動体から反射した反射波を受信するステップは、前記旋回方向と反対方向の円偏波のみを受信するステップであることを特徴とする移動体の速度測定方法。
【請求項10】
移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、
前記送信波の放射位置から前記走行路面における前記送信波の反射位置までの距離を計測するステップを更に備え、
前記移動体の速度を計算するステップは、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納したデータベースから、計測された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を取得するステップを備えていることを特徴とする移動体の速度測定方法。
【請求項11】
移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、
前記移動体の前記底面であって前記走行路面における前記送信波の反射位置を挟んで前記送信波の放射位置と対称となる位置において、前記走行路面で反射してきた入射波を受信するステップを更に備え、
前記移動体の速度を計算するステップは、
前記送信波と受信した前記入射波との間の位相偏移量と、前記送信波の放射位置から前記走行路面における前記送信波の反射位置までの距離との関係を格納した第1のデータベースから、計測された前記位相偏移量に対応する前記距離を取得するステップと、
前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納した第2のデータベースから、取得された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を取得するステップと
を備えていることを特徴とする移動体の速度測定方法。
【請求項1】
移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、
前記送受信器は、円偏波を送受信するように構成され、前記送受信器は、所定の旋回方向の円偏波を放射し、前記旋回方向と反対方向の円偏波のみを受信するように構成されていることを特徴とする移動体の速度測定装置。
【請求項2】
前記送受信器は、送信器と受信器とが別個に構成されており、前記送信器及び前記受信器が、前記移動体の前記底面に並列して配置されていることを特徴とする請求項1に記載の移動体の速度測定装置。
【請求項3】
移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、
前記移動体の前記底面には、前記走行路面における前記送信波の反射位置を挟んで前記送受信器の位置と対称となる位置において反射板が設けられており、該反射板は、前記走行路面で反射してきた入射波を前記移動体の外側に反射させる面を有していることを特徴とする移動体の速度測定装置。
【請求項4】
移動体の走行路面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を前記移動体に向けて放射するとともに前記移動体から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、
前記送受信器は、円偏波を送受信するように構成され、前記送受信器は、所定の旋回方向の円偏波を放射し、前記旋回方向と反対方向の円偏波のみを受信するように構成されていることを特徴とする移動体の速度測定装置。
【請求項5】
移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、
前記移動体の前記底面には、前記送受信器から前記走行路面における前記送信波の反射位置までの距離を計測する距離計が設けられており、前記速度計算手段は、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納したデータベースを備えており、前記速度計算手段は、計測された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を前記データベースから取得するように構成されていることを特徴とする移動体の速度測定装置。
【請求項6】
移動体の底面に設けられ、前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するとともに前記走行路面から反射した反射波を受信するように構成された送受信器と、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算する速度計算手段とを備えている移動体の速度測定装置において、
前記移動体の前記底面には、前記走行路面における前記送信波の反射位置を挟んで前記送受信器の位置と対称となる位置において、前記走行路面で反射してきた入射波を受信する受信器が設けられており、前記速度計算手段は、前記送受信器から放射した前記送信波と前記受信器で受信した前記入射波との間の位相偏移量と、前記送受信器から前記走行路面における前記送信波の反射位置までの距離との関係を格納した第1のデータベースと、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納した第2のデータベースとを備えており、前記速度計算手段は、計測された前記位相偏移量に対応する前記距離を前記第1のデータベースから取得し、取得された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を前記第2のデータベースから取得するように構成されていることを特徴とする移動体の速度測定装置。
【請求項7】
移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、
前記送信波を走行路面に向けて放射するステップは、所定の旋回方向の円偏波を放射するステップであり、前記走行路面から反射した反射波を受信するステップは、前記旋回方向と反対方向の円偏波のみを受信するステップであることを特徴とする移動体の速度測定方法。
【請求項8】
移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、
前記移動体の前記底面であって前記走行路面における前記送信波の反射位置を挟んで前記送信波の放射位置と対称となる位置において、前記走行路面で反射してきた入射波を前記移動体の外側に反射させることを特徴としている移動体の速度測定方法。
【請求項9】
移動体の走行路面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を前記移動体に向けて放射するステップと、前記送信波の放射位置の近傍において前記移動体から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、
前記送信波を移動体に向けて放射するステップは、所定の旋回方向の円偏波を放射するステップであり、前記移動体から反射した反射波を受信するステップは、前記旋回方向と反対方向の円偏波のみを受信するステップであることを特徴とする移動体の速度測定方法。
【請求項10】
移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、
前記送信波の放射位置から前記走行路面における前記送信波の反射位置までの距離を計測するステップを更に備え、
前記移動体の速度を計算するステップは、前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納したデータベースから、計測された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を取得するステップを備えていることを特徴とする移動体の速度測定方法。
【請求項11】
移動体の底面から前記移動体の走行方向または前記走行方向と逆方向に対して傾斜した送信波を走行路面に向けて放射するステップと、前記送信波の放射位置の近傍において前記走行路面から反射した反射波を受信するステップと、前記送信波と前記反射波との間の周波数偏移量から前記移動体の速度を計算するステップとを備えている移動体の速度測定方法において、
前記移動体の前記底面であって前記走行路面における前記送信波の反射位置を挟んで前記送信波の放射位置と対称となる位置において、前記走行路面で反射してきた入射波を受信するステップを更に備え、
前記移動体の速度を計算するステップは、
前記送信波と受信した前記入射波との間の位相偏移量と、前記送信波の放射位置から前記走行路面における前記送信波の反射位置までの距離との関係を格納した第1のデータベースから、計測された前記位相偏移量に対応する前記距離を取得するステップと、
前記周波数偏移量毎における前記距離と前記移動体の速度との関係を格納した第2のデータベースから、取得された前記距離と計測された前記周波数偏移量とに対応する前記移動体の速度を取得するステップと
を備えていることを特徴とする移動体の速度測定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2009−198362(P2009−198362A)
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願番号】特願2008−41224(P2008−41224)
【出願日】平成20年2月22日(2008.2.22)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願日】平成20年2月22日(2008.2.22)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]