
移動体の障害物回避方法及び該移動体

【課題】 移動体が円滑にかつ安全に自律走行でき、特に一般家庭等の不規則で乱雑な環境下においても障害物を安定的に回避することができ、さらに狭隘部においても走行不能状態に陥らない移動体の障害物回避方法及び該移動体を提供する。
【解決手段】 移動体10は、少なくとも側方センサと前方センサを複数組み合わせたセンサ群を有し、この検出データに基づき最適な移動経路を探索するようにし、該移動経路の探索にて、移動体進行向きを基準として複数段階の経路選択範囲を有する経路選択フィルタを設け、前記移動体の走行過程にて、予め設定された経路選択フィルタの移動経路範囲内で移動経路を選択するようにし、該移動経路範囲内に走行可能な移動経路が存在しない場合には段階的に該移動経路範囲を拡大するようにした。
【解決手段】 移動体10は、少なくとも側方センサと前方センサを複数組み合わせたセンサ群を有し、この検出データに基づき最適な移動経路を探索するようにし、該移動経路の探索にて、移動体進行向きを基準として複数段階の経路選択範囲を有する経路選択フィルタを設け、前記移動体の走行過程にて、予め設定された経路選択フィルタの移動経路範囲内で移動経路を選択するようにし、該移動経路範囲内に走行可能な移動経路が存在しない場合には段階的に該移動経路範囲を拡大するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数のセンサにて取得した検出データに基づき、地図上で移動経路を探索して障害物を回避しながら自律走行する移動体に関し、特に相対的に移動する対象に対して安定的に回避行動をとり、また狭隘部を円滑に通過することができる移動体の障害物回避方法及び該移動体に関する。
【背景技術】
【0002】
従来より、自律的に行動する移動体に関する技術は種々提案されており、またこのような移動体は各種工業に広く利用されている。工業分野にて利用されている移動体は、整備された環境下で動作するものであったが、近年、不規則で乱雑な環境下、即ち一般家庭や各種施設等においても移動体の導入が要望されており、このような無秩序な環境下でもフレキシブルに動作する移動体が必要とされている。
移動体の主要な技術の一つとして、到達目標地へ向けて自律走行する際に、進行方向に位置する障害物を検知し、回避する技術が挙げられる。
これは、未知の領域において移動体が円滑に移動するために、移動体に配設されたセンサにより走行領域に存在する障害物を検知し、該障害物を回避する経路を選択するものである。
【0003】
特許文献1(特許第2608509号公報)、特許文献2(特許第2627472号公報)には、移動体の幅方向に複数配置した距離検出手段によって前方障害物から移動体までの距離を測定し、障害物を検知した距離検出手段の各幅方向の位置と検出距離に基づいて、移動体が障害物を回避するための旋回方向と旋回半径を計算して障害物を回避する方法が記載されている。特許文献1及び2では、移動体は計算した旋回方向と旋回半径に基づき障害物の回避軌道を移動するが、前記距離検出手段が障害物を検知しなくなっても移動体が障害物の横に到達するまで旋回動作を続行させる。
【0004】
しかしながら、特許文献1及び2に記載の方法では、以下に示す問題点がある。
(1)これらの方法では移動体の幅方向に距離検出手段を列設するため、移動ロボットの左右方向の障害物に対してはこれを検知して回避動作を行うことができるが、例えば一般家庭における床上の小物、テーブル、椅子などのように、上下方向に空間的に分布した障害物が存在する場合、左右方向だけの障害物検知及び回避では上下方向に分布した障害物を検知することができず、完全な回避動作を行わせることができない。
(2)移動体が障害物を検出した際に、移動体と障害物との距離に関わらず一様な回避行動を行なうため、障害物からの距離が離れている時にも過剰な回避行動を採ることがあり、円滑な自律走行が妨げられる惧れがある。
前記特許文献1及び2では、上記した問題点について全く考慮されておらず、障害物回避の機能としては非常に限定されたものであった。
【0005】
そこで、特許文献3(特開平7−306042号公報)では、セルラ構造の周辺地図の作成方法及び装置として、センサで検出した移動ユニット周辺の障害物を格子状地図に書き込む方法について開示している。かかる特許文献3では、測定サイクル、距離依存、移動速度による障害物の重み付けを行なっており、さらには移動ユニットの下面からみて高さ方向に異なった地図を2種類以上準備する方法について開示している。
【0006】
このように、特許文献3によれば上記した問題点(1)、(2)は解決するものと思われる。
しかし、移動体を円滑に自律走行させるためには、高度な技術が必要とされ、依然として以下に示す問題が残る。
即ち、(3)移動体の回避時は、通常の移動経路から逸脱した異常状態であるにも関わらず通常と同様の走行を行なっているため、移動体の走行危険性が増加する。
(4)障害物には、固定的に配置されているものとテンポラリに置かれたものとが存在するが、これらの区別を行なわずに単一に処理を行うと、移動体の走行が円滑に行なわれず、最悪の場合走行停止に陥ることも考えられる。例えば、一般家庭において、壁、ドア、テーブルなどは一旦固定されると一般的には殆どその場所から動かされることは無い半永久的な障害物と考えてよいが、床上に散らばったペットボトルや玩具などは時間の経過に伴ってその位置が変化する可能性が高い。このような時間に対する障害物の位置変化を認識せずに走行すると、周囲を障害物で取り囲まれた地図が作成され、走行が阻害されてしまうことがある。
【0007】
(5)障害物を回避する場合と、廊下などの間口幅の狭い狭隘部を通過する場合とでは移動体の動作には差異がある。即ち、狭隘部通過の場合に通常の障害物と同様な回避運動をさせた場合、廊下の側壁に開口したドアを回避可能な通路と判断し、ドア間口に向かって進入していくため廊下を離れて別の部屋に入り込み、その結果、廊下に復帰しようとする場合に部屋の壁に邪魔されてデッドロック(回避移動不能)の状態に陥ることが考えられる。このように、狭隘部を通過する場合については上記した何れの特許文献も想定しておらず問題が残る。
また、移動体の動作環境も自律走行に大きく影響するため、非特許文献1に開示されるようなオープンスペースに適した技術を一般家庭に持ち込んだ場合、経路から逸脱し続け、目標地点になかなか到達できない。また、永久的な障害物とテンポラリな障害物との区別が付かないため回避行動の融通性が無い。狭隘部と広いスペースでのモードの切り替えが無いため、廊下を通過する場合に側壁の間口に進入していき、デッドロック状態になる可能性が高い、といった問題が発生する。
【0008】
さらにまた、特許文献1及び2に開示されるように、移動体の進行方向側に備えた障害物検出器が移動経路近傍に存在する障害物を検知し、所定の距離になると移動体を停止させるという方法がある。しかしながらこの方法では、障害物が多数存在する環境では移動体が知能的と言えるような自律走行を行えない。また、移動体の進行方向側にカメラなどの視覚センサを備え、これによって移動体の進行方向を撮像し、撮像した画像情報を画像処理して障害物を検出して障害物を回避する経路を生成するという方法も提案されているが、画像処理速度の問題によりリアルタイムな制御が行えないという問題があり、実用化は困難であった。
【0009】
【特許文献1】特許第2608509号公報
【特許文献2】特許第2627472号公報
【特許文献3】特開平7−306042号公報
【非特許文献1】「D. Langeret. Al. : “A reactive System ForOff-Roand Navigation”, Proc. Of IEEERobotics and Automationm May, 1994」
【発明の開示】
【発明が解決しようとする課題】
【0010】
従って、本発明は上記従来技術の問題点に鑑み、移動体が円滑にかつ安全に自律走行でき、特に一般家庭等の不規則で乱雑な環境下においても障害物を安定的に回避することができ、さらには狭隘部においてもデッドロック状態に陥らず、目的地点まで円滑に到達可能な移動体の障害物回避方法及び該移動体を提供することを目的とする。
【課題を解決するための手段】
【0011】
そこで、本発明はかかる課題を解決するために、移動体に設けられた複数のセンサにより取得した検出データに基づき、移動体走行領域の周辺地図を作成し、該周辺地図に基づき障害物を回避する移動経路を選択して自律走行する障害物回避方法において、
前記移動体は、少なくとも該移動体の前方域を検知する前方センサと、側方域を検知する側方センサとを含むセンサ群を有し、該センサ群にて取得した検出データに基づき、三次元的に異なる複数の周辺地図を作成する周辺地図作成ステップと、
絶対座標系を基準とし、前記複数の周辺地図を融合して一の二次元的な融合地図を作成する融合地図作成ステップと、
該融合地図から障害物を回避する最適な移動経路を探索する経路探索ステップと、を備え、
前記融合地図作成ステップでは、前記前方センサに基づき作成された前方周辺地図を前記側方センサに基づき作成された側方周辺地図より優先させて融合地図を作成するようにしたことを特徴とする。
【0012】
本発明によれば、まず三次元的に異なる複数の周辺地図を作成し、さらにこれを融合して二次元的な融合地図を作成し、これに基づき最適な移動経路を探索することにより、平面上だけでなく、上下方向に分布した障害物をも確実に検知することができ、円滑な自律走行を可能とする。特に、一般家庭のような不規則な走行環境においても、種々の大きさの障害物に対応可能であるため、円滑な走行が可能である。
また、前記三次元的に複数存在する周辺地図を、二次元的な融合地図に統合しているため、移動経路の探索にて演算処理の負荷が大幅に軽減し、処理速度が早くなり、移動体の応答性能が向上する。
【0013】
また、前記融合地図作成ステップにて、前記前方センサによる検出データを優先的に用いて融合地図を作成するようにし、移動体の進行方向の検出データを重視することにより、誤認識を最小限に抑えて円滑な移動を可能とする。これは、例えば左右の壁の桟などを移動体の側方センサが検知したときに、前方が空いているにも関わらず正面の経路が塞がれたものと誤認識して移動不能の状態となるなどの不具合を避けることができる。
【0014】
また、前記周辺地図作成ステップでは、予め障害物領域、未知領域、移動可能領域の順に増加する重み付けを夫々設定し、前記検出データに基づき格子状地図上の各格子毎に前記重み付けを投票した周辺地図を作成し、
前記融合地図作成ステップにて、絶対座標系を基準として前記側方周辺地図上で前記前方周辺地図に対応する領域を該前方周辺地図により上書き処理した後、
夫々の周辺地図の同位置に存在する格子に投票された重み付けを比較し、前記未知領域の重み付けより小さい値が存在する場合には、前記投票された重み付けから最も小さい値を採用し、
前記未知領域の重み付けより小さい値が存在しない場合には、前記投票された重み付けの平均値を採用して融合地図を作成することを特徴とする。
【0015】
これによれば、移動空間の判定を細かく設定でき、移動体の障害物を回避する際の柔軟性が向上する。
また、前記格子上に投票された重み付けのうち、障害物の存在可能性がある場合には、最も小さい値を採用することにより、確実に障害物を認知することができ安全な自律走行が可能となる。
さらに、前記融合地図作成ステップにて、前記側方周辺地図を前記前方周辺地図にて上書き処理することにより、検出データによる誤認識を防止することが可能である。
【0016】
また、前記経路探索ステップにて、移動体進行向きを基準として複数段階の移動経路範囲を有する経路選択フィルタを設け、前記移動体の走行過程にて、予め設定された経路選択フィルタの移動経路範囲内で移動経路を選択するようにし、該移動経路範囲内に走行可能な移動経路が存在しない場合には段階的に該移動経路範囲を拡大するようにしたことを特徴とし、このとき、前記経路選択フィルタの最大移動経路範囲内に走行可能な移動経路が存在しない場合には、前記移動体が所定角度だけ回転動作を行うようにすることが好ましい。
本発明によれば、経路選択フィルタを設けることにより、移動体の急激な旋回動作が避けられ、移動体のより細かく滑らかな旋回動作が可能となり、転倒等の危険性を防ぐことができる。また、移動体が目標地点に対して異常に離れた回避経路を選択することを防止できる。さらにまた、前記移動経路範囲を段階的に拡げるようにしたため、移動体が移動経路を探索できずにデッドロック状態となることを防止できる。同様に、移動経路が存在しない場合に前記移動体が所定角度だけ回転動作を行うようにすることにより、移動経路が探索できない場合でも新たな向きに対応した移動経路を探し出すことができ、デッドロック状態を防止でき、移動能力の向上が期待できる。
【0017】
さらに、前記経路探索ステップにて、前記移動体の走行可能な移動経路が存在しない場合には、現位置以前の移動経路上に戻り、前記移動体の目標地点とする側に一旦回避し、再度移動経路の探索を行うようにしたことを特徴とする。
これによれば、移動体が障害物に囲まれる等の状態に陥り、移動不能となった場合にリカバリが可能となり、高価な視覚センサを使用せずに自律的に目標地点に到達する移動経路を形成することができるようになる。
さらにまた、前記移動体の走行中に該移動体が障害物に接触して移動不能となった場合には、該移動体の進行向きと反対の向きに後退するようにしたことを特徴とする。
これは、移動体の障害物が接触して移動不能となった場合に、該移動体が前方に走行する、向きを変えるなどの無理な動作を行わず、一旦後退して移動体の動作スペースを確保することにより、移動体の損傷、故障の惧れがなく、障害物との接触状態を円滑に回避することが可能である。
【0018】
また、上記した発明を好適に実施する装置の発明として、周囲の障害物を検知するセンサを複数有し、該検出データに基づき作成した周辺地図により障害物を回避する移動経路を選択して自律走行する移動体において、
前記複数のセンサが、少なくとも前記移動体の前方域を検知する前方センサと、側方域を検知する側方センサとを含むセンサ群であり、
該センサ群にて取得した検出データに基づき、三次元的に異なる複数の周辺地図を作成する周辺地図作成手段と、
絶対座標系を基準とし、前記複数の周辺地図を融合して一の二次元的な融合地図を作成する融合地図作成手段と、
該融合地図から障害物を回避する最適な移動経路を探索する経路探索手段と、を有し、
前記融合地図作成手段では、前記前方センサに基づき作成された前方周辺地図を前記側方センサに基づき作成された側方周辺地図より優先させて融合地図を作成するようにしたことを特徴とする。
【0019】
また、前記周辺地図作成手段が、予め障害物領域、未知領域、移動可能領域の順に増加する重み付けを夫々設定し、前記検出データに基づき格子状地図上の各格子毎に前記重み付けを投票した周辺地図を作成する構成であるとともに、
前記融合地図作成手段が、絶対座標系を基準として前記側方周辺地図上で前記前方周辺地図に対応する領域を該前方周辺地図により上書き処理し、夫々の周辺地図の同位置に存在する格子に投票された重み付けを比較し、前記未知領域の重み付けより小さい値が存在する場合には、前記投票された重み付けから最も小さい値を採用し、前記未知領域の重み付けより小さい値が存在しない場合には、前記投票された重み付けの平均値を採用して融合地図を作成する構成であることを特徴とする。
【0020】
また、前記経路探索手段が、移動体進行向きを基準として複数段階の移動経路範囲を有する経路選択フィルタを備え、予め設定された経路選択フィルタの移動経路範囲内から前記移動体の移動経路を選択し、該移動経路範囲内に走行可能な移動経路が存在しない場合には段階的に該移動経路範囲を拡大するようにしたことを特徴とし、このとき、前記経路探索手段は、前記経路選択フィルタの最大移動経路範囲内に走行可能な移動経路が存在しない場合には、前記移動体が所定角度だけ回転動作を行うように指示するように構成することが好ましい。
さらに、前記経路探索手段は、前記移動体の走行可能な移動経路が存在しない場合には、現位置以前の移動経路上に戻り、前記移動体の目標地点とする側に一旦回避し、再度移動経路の探索を行うようにしたことを特徴とする。
さらにまた、前記移動体が障害物に接触したことを検知する接触センサを備え、前記移動体の走行中に前記接触センサにより障害物との接触が検知された場合には、該移動体の進行向きと反対の向きに後退するようにしたことを特徴とする。
【発明の効果】
【0021】
以上記載のごとく本発明によれば、一般家庭のように不規則で乱雑な環境下であっても、障害物を回避し、また狭隘部を通過する際にもデッドロック状態に陥る可能性が低く、円滑にかつ安定的に自律走行可能である移動体の障害物回避方法及び該移動体を提供することが可能である。
即ち、三次元的な複数の周辺地図から二次元的な融合地図を作成しているため、上下方向に分布した障害物をも確実に検知することができ、円滑な自律走行を可能とする。特に、一般家庭のような不規則な走行環境においても、種々の大きさの障害物に対応可能であるため、円滑な走行が可能である。
また、移動経路の探索処理では二次元的な融合地図を利用しているため、演算処理の負荷が大幅に軽減し、処理速度が早くなり、移動体の応答性能が向上する。
また、融合地図の作成において、前記前方センサによる検出データを優先的に用いて融合地図を作成するようにし、移動体の進行方向の検出データを重視することにより、誤認識を最小限に抑えて移動体の円滑な移動を可能とする。
【0022】
さらに、周辺地図作成において、予め複数階層の重み付けを設定することにより移動空間の判定を細かく設定でき、移動体の障害物を回避する際の柔軟性が向上する。
さらにまた、複数段階の移動経路範囲を有する経路選択フィルタを設け、必要に応じて移動経路範囲を拡げるようにしたため、移動体のより細かく滑らかな動作が可能となり、急激な旋回動作を避けることができる。
また、移動経路の探索処理において、前記移動体の走行可能な移動経路が存在しない場合には、現位置以前の移動経路上に戻り、前記移動体の目標地点とする側に一旦回避させることにより、移動体が障害物に囲まれる等の状態に陥り、移動不能となった場合にリカバリが可能となり、自律的に目標地点に到達する移動経路を形成することができるようになる。
また、移動体が障害物に接触して移動不能となった場合に後退するようにしたため、移動体の損傷、故障を防止でき、障害物との接触状態を円滑に回避することが可能となる。
【発明を実施するための最良の形態】
【0023】
以下、図面を参照して本発明の好適な実施例を例示的に詳しく説明する。但しこの実施例に記載されている構成部品の寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
本実施例に示す移動体の走行空間としては、一般家庭、各種施設、工場内等が挙げられるが、特に前記移動体は一般家庭内にてユーザの生活を補助、支援、介護するロボットであることが好適である。
【実施例1】
【0024】
図1は本実施例に係るセンサ群を具備した移動体の概略構成を示す正面図(a)、及び(a)に示す移動体のX−X線断面図(b)である。
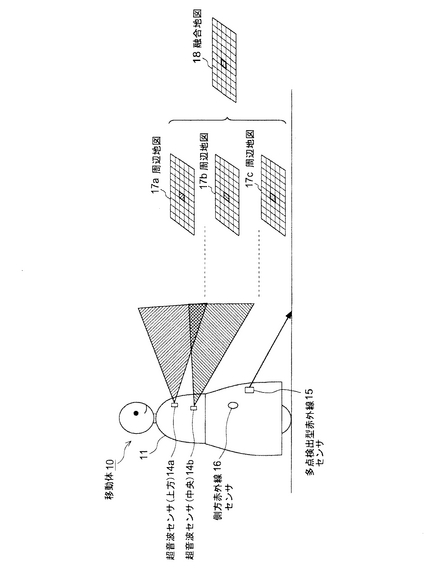
図1(a)に示すように本実施例に係る移動体10は、頭部と胴部を備えた本体11と、該本体11からの各種指令に基づき図示しない駆動装置により走行を補助する左右一対の駆動輪12と、移動体10の周囲に設置された超音波センサ14a、14b、多点検出型赤外線センサ15、側方赤外線センサ16からなるセンサ群13と、前記本体11に内蔵されたCPU(制御部)20と、を主要構成とする。
前記CPU20には、前記センサ群13の検出データに基づき周辺地図を作成する周辺地図作成手段21と、該周辺地図を融合して融合地図を作成する融合地図作成手段22と、該融合地図に基づき最適経路を探索する経路探索手段23と、前記移動体10の走行速度を制御する速度制御手段24と、前記周辺地図、前記融合地図、グローバル座標系、及び後述するタイムチャート、記憶忘れフィルタ、急旋回防止フィルタ等が格納されている記憶部25が備えられている。
【0025】
前記センサ群13は、少なくとも移動体の前方域の障害物を検知する前方センサと、側方域の障害物を検知する側方センサとを有し、本実施例では、該前方センサとして、前記超音波センサ14a、14b及び前記多点検出型センサ15を用い、前記側方センサとして、前記側方赤外線センサ16を用いる。また、好適にはセンシング手段が異なる少なくとも2種類のセンサが複数設けると良く、赤外線センサ等の指向性センサ、超音波センサ等の広域性センサの組み合わせとすることがより好ましい。このセンサ群13の具体的な例として、前記超音波センサ14a、14bは、前記本体11の前面に一又は複数配設され、照射方向は略水平方向であり、水平方向から垂直方向まで広域に亘って前方上方域の障害物までの距離を検出可能である。前記側方赤外線センサ16は、前記本体11の側面に左右一対若しくは左右に複数配設され、照射方向は略水平方向で、前記移動体11の側方域の障害物までの距離を検出可能である。
【0026】
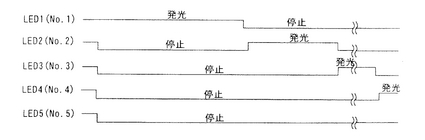
前記多点検出型赤外線センサ15は、前記本体11の前面に一又は複数列設され、照射方向は斜め下向き方向で、前方下方域の障害物までの距離を検出可能である。該多点検出型赤外線センサ15は、図1(b)に示されるように複数の多点検出型赤外線センサ15a、15b、15cが異なる方向に向けて水平に列置されている。該多点検出型赤外線センサは、夫々複数の赤外線発光LEDを有しており、これらのLEDが放射状に赤外線を発光して床面に存在する障害物を検知する構成である。本実施例ではNo.1〜No.5まで5個のLEDを有する多点検出型赤外線センサを3個設置し、床面を15点掃引しながら床上の小さな障害物を検知する。このとき、前記LEDの発光タイミングは、図2に示されるようなタイムチャートに基づき設定すると良い。
【0027】
図2には一の多点検出型赤外線センサを例に挙げ、該センサのタイムチャートを示す。前記タイムチャートは、前記多点検出型赤外線センサが有するNo.1〜No.5までのLEDを順に発光させ、受光素子に複数の反射波が同時に入射して誤差が生じないように設定している。同様に、複数の多点検出型赤外線センサ間においても、発光した赤外線が受光素子に同時入射しないように予めタイムチャートを作成し、これに基づき検知動作を行なうようにする。これにより、誤差を最小限に抑え、信頼性の高い検出データを取得することができる。
また、センシング手段が異なる少なくとも2種類のセンサを複数組み合わせた構成としているため、移動体周囲の夫々の検知領域に応じて適正な検出データを取得することができ、信頼性の高い検出データを収集することができる。
【0028】
次に、図3乃至図9を参照して、前記移動体10の自律走行の指標となる融合地図の作成処理について説明する。融合地図の作成処理は、図1に示したセンサ群13とCPU20により実現される。尚、本実施例にて用いられる座標系は、移動体10を中心とした相対座標系と、移動体の位置に関わらず一定の座標軸を有するグローバル座標系(絶対座標系)との2つの座標系を使用する。
図3は周辺地図作成アルゴリズムを示し、該周辺地図17の作成では、まず最初に前記センサ群13の各センサにより夫々の検知領域に存在する障害物までの相対的な距離を取得する(S1)。このとき、誤差を最小限に抑えるために、各センサの測定可能レンジ外の検出データは除去すると良い(S2)。
【0029】
また、前記移動体10が具備する自己位置、方位認識手段及び姿勢角検出手段(不図示)により、移動体位置、姿勢データ26を取得し、前記CPU20の記憶部26に格納しておく。
前記センサ群13により取得した前記検出距離と、前記移動体位置、姿勢データ26に基づき、センサ取り付け位置と障害物の検出位置とを導き、さらに相対座標系からグローバル座標系への座標変換を行い、前記移動体10を中心とした格子状地図上におけるセンサ取り付け位置と検出位置を導出する(S3)。
ここで、好適にはデータバラつき防止のための不感帯処理(S4)を施すと良い。これはセンサの検出限界近傍の信頼性の低い範囲を不感帯に設定し、該不感帯に存在する検出データを除去することにより、データの信頼性を高めるものである。
【0030】
次に、前記移動体10の周囲に存在する障害物の有無を判定する。該判定の方法は、前記センサ取り付け位置−前記検出位置間の検出距離と、センサ前方が遮られない場合の照射距離とを比較し(S5)、該検出距離の方が前記照射距離より短い場合には障害物有りの判定がなされ、前記検出距離が前記照射距離より短くない場合には障害物無しの判定がなされる。
そして、判定結果に基づき複数階層の重み付けを行い、前記格子地図上に該重み付けを投票する。本実施例の評価基準は一例として3段階に分類し、障害物が検知された部分には+1、障害物が検知されない部分には−1、センサによる検知範囲外には0を投票するようにした。即ち、障害物有りの判定がなされた場合には、センサ取り付け位置から照射位置間に+1、照射位置から所定距離(本実施例では50mm)先に−1を登録し(S6)、障害物無しの判定がなされた場合には、センサ取り付け位置から照射位置間に+1を登録し(S7)、それ以外のグリッドには全て0を配置し(S8)、重み付けの投票値が登録された周辺地図を作成した。
【0031】
このように、前記複数のセンサにより取得した検出データに基づき、三次元的に異なる複数の周辺地図を作成していく。
また本実施例では、各々のセンサが所定時間間隔で連続的に検出データを取得し、前記得られた検出データのうち新規なデータにて、前記周辺地図を上書き更新していく構成とする。このとき、各センサで生成された周辺地図のうち、同一のセンシング手段を有するセンサ種類で与えられた検出データでのみ前記周辺地図が上書きされるものとする。これにより、センサ種類が異なることに起因する精度の差、性能の差を解消し、誤差を最小限に抑え、信頼性の高い地図を作成することができる。
【0032】
前記周辺地図を作成した後に、これらを融合して二次元的な一の融合地図を作成する。
図4は周辺地図から融合地図を作成する処理を説明する図、図5は融合地図作成アルゴリズムを示すフロー、図6は図4に示す処理により作成した融合地図の模式図である。
図4及び図5に示されるように、融合地図作成処理では、まず図3に示した周辺地図作成アルゴリズムに従い、超音波センサ14a、14b、多点検出型赤外線センサ15により取得した検出データに基づき、夫々上方域の周辺地図17a、中央域の周辺地図17b、下方域の周辺地図17cを作成する。(場合によっては、側方赤外線センサ16の検知領域を加えても良い。)
そして、これらの周辺地図に記憶忘れフィルタによる演算処理を施す(S10a、S10b、S10c)。これは、前記周辺地図に時定数を設け、時間の経過とともに前記登録された重み付けが消失するような時定数とする。
これにより、周辺地図17上に投票された障害物は時間の経過とともに消失していくため、テンポラリな障害物を認識することができ、移動体が障害物を回避する動作において知能的に振舞うことができる。即ち、前記移動体の周囲にむやみに障害物が登録されることがなく、移動体の円滑な自律走行が可能となる。
尚、前記記憶忘れフィルタによる処理は特に設けない構成としても良い。
【0033】
各センサによる周辺地図が作成されたら、上方超音波センサ14aに基づき作成された上方周辺地図17aと、中央超音波センサ14bに基づき作成された中央領域周辺地図17bとを比較し、グローバル座標系を基準として重複する領域がある場合には、前記中央領域周辺地図17bに対して前記上方領域周辺地図17aを上書き処理する。この具体的な処理については後述する。
【0034】
さらに、夫々の周辺地図17において、移動体位置を+1で上書き掃引する(S11)。これは、前記移動体位置には障害物が存在し得ないため、移動可能領域として投票するものである。
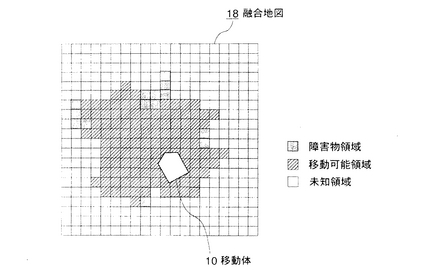
次に、夫々の周辺地図17a、17b、17cのうち同グリッド上に位置する重み付けの投票値を比較し、3つの値のうち、負のものがあるか否かを判定する(S12)。負の値がある場合には、これら3つの値のうち負の値の最低値を選択し、前記グリッドの重み付けとして登録し(S13A)、負の値がない場合(0を含む)には3つの値の平均値を算出し、前記グリッドの重み付けとして登録する(S13B)。そして、各グリッドにつきこれらの処理を行なって重み付けを決定し、二次元的な融合地図18を作成する(S14)。
このようにして、図6に示すように、格子状地図上の各グリッドに障害物領域と移動可能領域と未知領域とが登録された融合地図が作成される。
【0035】
ここで、本実施例の特徴的な構成である上書き処理について説明する。図7〜図9に上書き処理に関する図を示した。図7は周辺地図の上書き処理を説明する図であり、(a)は上書き処理を行わない比較例を示す図、(b)は上書き処理を行った場合の本実施例を示す図、図8は移動体の障害物検知領域を示す図、図9は上書き処理アルゴリズムを示すフロー図である。
移動体10が壁に挟まれた廊下を通過する場合、図7(a)に示されるように上書き処理を行わない比較例の場合には、中央超音波センサにより例えば廊下の桟を検出すると、該中央超音波センサの検出領域26のうち、桟の検出距離に位置する検出領域全体を障害物領域27と認識する。このとき、上方超音波センサの検出領域25では障害物を検出していなくても、前記障害物領域27が前方領域25にかかっていると、移動体10の前方が障害物により塞がれているとみなされ、移動不能状態に陥ってしまう。
そこで本実施例では図7(b)に示されるように、中央超音波センサの検出領域26に対して、上方超音波センサの検出領域25が重複する場合には、該上方超音波センサにて検出された検出データを上書き処理した融合地図を作成することにより、移動体10の前方に障害物が存在せず、空いている融合地図を作成することができ、該移動体10は移動可能となる。
【0036】
次に、上記した上書き処理により正確に障害物位置が検出される否かを検討する。
図8、図9に示すように、移動体10の左側に位置する障害物Aを検出する場合は、中央超音波センサである超音波センサの検出領域(ロ)の左側で障害物Aを検出し、移動体前方の左半分に障害物があると処理するが、上方超音波センサである超音波センサの検出領域(イ)が未検出であるため、正面は障害物なしと上書き処理され、最終的に左側に障害物Aがあることが認識される。
移動体10の前方に位置する障害物Bを検出する場合は、中央超音波センサの検出領域(ロ)では障害物は未検出であるが、上方超音波センサの検出領域(イ)が障害物を検出し、これが上書き処理されるため、移動体10の正面に障害物Bが存在することが認識される。
移動体10の両側に位置する障害物Cを検出する場合は、中央超音波センサの検出領域(ロ)にて両側に障害物Cが検出されるが、上方超音波センサの検出領域(イ)にて未検出であるためこれが上書き処理されて前方真ん中が空いていることが認識される。
【0037】
移動体10の左前方に位置する障害物Dを検出する場合は、中央超音波センサの検出領域(ロ)が左側で障害物を検出し、移動体左前方に障害物があると処理されるが、前方センサの検出領域(イ)では未検出で上書き処理され、結果的に左端に障害物があると認識される。しかし、他の前方センサである赤外線センサの検知領域(ハ)で障害物を検出し、超音波センサより広い範囲で左前方に障害物Dがあることが認識される。
移動体10の前方真ん中に位置する障害物Eを検出する場合は、上方超音波センサの検知領域(イ)及び中央超音波超音波センサの検知領域(ロ)では障害物を検出しないが、前方センサである赤外線センサの検知領域(ハ)で障害物を検出し、移動体10の真ん中に障害物Eがあることが認識される。
このように本実施例の上書き処理によれば、センサによる誤認識を防止でき、移動体が移動不能状態になる不具合を避けることが可能である。
【0038】
図10に、融合地図18における移動体の経路選択範囲を模式的に示す。前記移動体の選択可能経路は、移動体10を中心にその進行方向を軸線40とし、該軸線から放射状に左右に広がる経路選択範囲から、目標地点に向かう複数の移動経路が規定される。
前記複数の選択可能経路から最適な移動経路(回避経路)を探索する処理は、幅が規定された移動体10により前記選択可能経路を掃引した時の各グリッドの重み付けの和を、各経路毎に足し合わせ、該足し合わせた重み付けの和を比較し、重み付けの和が最大となる経路を探索し、この移動経路を最適な移動経路として選択する。
本実施例では、図10に示すように前記軸線40から左右に±120°を移動可能な移動経路範囲としており、該移動経路範囲から左右に7経路を規定し、該規定した全15通り(軸線上を含む)の経路において、各経路毎に前記移動体10が掃引した際の前記融合地図18の重み付けの和を算出し、該重み付けの和を比較して最も大きな値となる選択可能経路を最適移動経路とする。
【0039】
このとき、前記移動体の最適移動経路の開始地点は、前記移動体10の障害物検知から走行開始までに要する時間と、該移動体10の走行速度とに基づき設定することが好ましい。即ち、実際の移動体位置は、図10の移動体10’で示される位置に存在するが、前記移動体10の前記センサ群20により検知が行なわれ、各種演算処理を行い、駆動系まで指令が達する時間を考慮し、これに要する時間に移動体が移動する距離を見越して仮想の開始位置(移動体10)を設定することにより、実際の移動体の動きに即した移動指令を与えることができ、信頼性が向上する。
【0040】
次に、本実施例における移動体10が狭隘部を通過する場合について説明する。例えば、一般家庭の室内を走行する場合において、図11は一般家庭の室内31を示し、移動体10がリビングから廊下を通過して寝室1の目標地点30まで移動する場合、廊下にてドア32が開いた状態にあると、前記移動体10は狭隘部33を通過しなければならない。しかし、本実施例における経路探索処理では、狭隘部33を避けてキッチンへ侵入し、移動不能な状態に陥ることがある。
従って、本実施例では図12に示すように、規定された経路選択可能な移動経路範囲D1、D2よりも狭められた移動経路範囲D1’、D2’を設定し、狭隘部通過時には該移動経路範囲D1’、D2’にて経路探索処理を行うようにした。狭隘部通過時の経路選択移動経路範囲D1’、D2’は、例えば軸線40を中心として左右に±45°とし、この範囲内で15個の移動経路を設定する。尚、前記経路選択移動経路範囲D1、D2は、移動体の初期位置10が目標地点に向かう方向を基準として予め設定されているものとする。
これにより、本実施例を障害物回避だけでなく狭隘部通過時にも適用でき、移動体10が正確に目的とする地点まで走行することが可能となる。
【0041】
また、本実施例の他の特徴的な構成として、図13〜図16に移動体走行中の障害物回避処理に関する図を示す。図13は経路選択フィルタを用いた処理を説明する図、図14は移動体の障害物一時回避動作を説明する図、図15は移動体の後退動作を説明する図、図16は移動体の回避動作及び後退動作を含む処理のアルゴリズムを示すフロー図である。
図16のフロー図を参照しながら、夫々の動作を具体的に説明する。
本実施例では、図13に示されるように、前記移動体10の現在の進行向きを基準として段階的に複数の経路選択範囲を有する経路選択フィルタ37を設けている。前記移動体10は、該経路選択フィルタ37の経路選択範囲内から移動経路を探索する。
【0042】
まず、予め経路選択フィルタ27の経路選択範囲(例えば移動体向きを中心として左右に±50°の角度範囲)を設定しておき(S31)、該経路選択範囲内で移動経路があるか否かを探索し(S32)、移動経路がある場合には移動可能方向に進行する(S33)。移動体前方を障害物28で塞がれるなどにより経路選択範囲内に走行可能な移動経路が存在しない場合には、移動体10の走行速度を落としながら移動経路が見つかるまで所定角度ずつ(例えば±30°ずつ)経路選択範囲を段階的に拡大する(S35)。これを経路選択フィルタの限界値である最大移動経路範囲(例えば±80°)まで順次行う(S34)。この最大移動経路範囲は、移動体10が安全に旋回動作を行うことができる限界の移動経路範囲とする。
このように、経路選択フィルタ37を設けることにより、より細かい旋回動作が可能となり、移動体10が目標地点に対して異常に離れた回路選択を行うことを防止し、急激な旋回動作を避けることが可能となる。
【0043】
また、前記経路選択フィルタ37を最大移動経路範囲としても移動経路が探索できない場合には、図13に示されるように、移動体10が所定角度だけ回転動作を行うようにする(S36)。そして、回転した移動体10’の向きを基準とした移動経路範囲内に移動可能経路があるか否かを再度探索し(S37)、移動可能経路がある場合には移動可能方向に進行する(S33)。このように、移動体10がデッドロック状態に陥った場合に回転動作を行うことによって、この状態を回避することが可能となる。
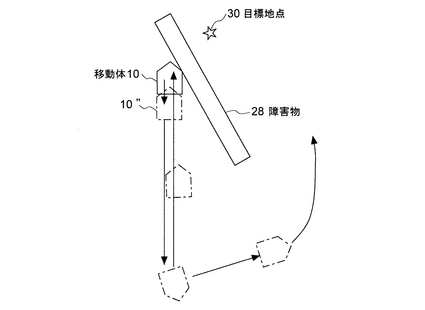
前記移動体10’が取り得る移動経路がない場合には、図14に示されるように、移動体10の現位置以前の移動経路上に戻る(S38)。このとき、直前に経路探索処理を行った位置、即ち1つ前のノードに戻ることが好ましい。そして戻った位置の移動体10”から目標地点30側の方向に例えば50cm移動するなどにより一旦回動作を行い(S39)、この位置にて目標地点への移動経路を再度探索する(S40)。このように、デッドロック状態に陥った場合に直前の移動経路上に戻ることにより、障害物28に囲まれたとき等の移動不能な場合のリカバリが可能となり、高価な視覚センサを使用せずに前方に進むことができないと判断し、自律的に目標地点30に到達する移動経路を形成することができる。
【0044】
一方、移動体10が移動経路を進行している時(S33)に、障害物28に接触した場合には、移動体10に設けた接触センサにより障害物28が検出され(S41)、該移動体10は非常停止し、障害物28に進入した向きと反対の向きに後退する(S42)。
これにより、移動体10に障害物28が接触して移動不能となった場合に、該移動体10が前方に走行する、向きを変えるなどの無理な動作を行わず、一旦後退して移動体10の動作スペースを確保することにより、移動体10の損傷、故障等の不具合を防止でき、障害物との接触状態を円滑に回避することが可能となる。
【図面の簡単な説明】
【0045】
【図1】本実施例に係るセンサ群を具備した移動体の概略構成を示す正面図(a)、及び(a)に示す移動体のX−X線断面図(b)である。
【図2】多点検出型赤外線センサの発光タイムチャートを示す。
【図3】本実施例に係る周辺地図作成アルゴリズムを示すフロー図である。
【図4】周辺地図から融合地図を作成する処理を説明する図である。
【図5】本実施例に係る融合地図作成アルゴリズムを示すフロー図である。
【図6】図4に示す処理により作成した融合地図の模式図である。
【図7】周辺地図の上書き処理を説明する図であり、(a)は上書き処理を行わない比較例を示す図で、(b)は上書き処理を行った場合の本実施例を示す図である。
【図8】移動体の障害物検知領域を示す図である。
【図9】上書き処理アルゴリズムを示すフロー図である。
【図10】融合地図における移動体の経路選択範囲を模式的に表す図である。
【図11】一般家庭における狭隘部の一例を示す図である。
【図12】狭隘部通過時における経路選択範囲を示す図である。
【図13】経路選択フィルタを用いた処理を説明する図である。
【図14】移動体の障害物一時回避動作を説明する図である。
【図15】移動体の後退動作を説明する図である。
【図16】移動体の回避動作及び後退動作を含む処理のアルゴリズムを示すフロー図である。
【符号の説明】
【0046】
10 移動体
12 駆動輪
13 センサ群
14a、14b 超音波センサ(前方センサ)
15、15a、15b、15c 多点検出型赤外線センサ(前方センサ)
16 側方赤外線センサ(側方センサ)
17、17a、17b、17c 周辺地図
18 融合地図
19 グローバル座標系
20 CPU(制御部)
28 障害物
35 設定経路
36 回避経路
37 急旋回防止フィルタ
【技術分野】
【0001】
本発明は、複数のセンサにて取得した検出データに基づき、地図上で移動経路を探索して障害物を回避しながら自律走行する移動体に関し、特に相対的に移動する対象に対して安定的に回避行動をとり、また狭隘部を円滑に通過することができる移動体の障害物回避方法及び該移動体に関する。
【背景技術】
【0002】
従来より、自律的に行動する移動体に関する技術は種々提案されており、またこのような移動体は各種工業に広く利用されている。工業分野にて利用されている移動体は、整備された環境下で動作するものであったが、近年、不規則で乱雑な環境下、即ち一般家庭や各種施設等においても移動体の導入が要望されており、このような無秩序な環境下でもフレキシブルに動作する移動体が必要とされている。
移動体の主要な技術の一つとして、到達目標地へ向けて自律走行する際に、進行方向に位置する障害物を検知し、回避する技術が挙げられる。
これは、未知の領域において移動体が円滑に移動するために、移動体に配設されたセンサにより走行領域に存在する障害物を検知し、該障害物を回避する経路を選択するものである。
【0003】
特許文献1(特許第2608509号公報)、特許文献2(特許第2627472号公報)には、移動体の幅方向に複数配置した距離検出手段によって前方障害物から移動体までの距離を測定し、障害物を検知した距離検出手段の各幅方向の位置と検出距離に基づいて、移動体が障害物を回避するための旋回方向と旋回半径を計算して障害物を回避する方法が記載されている。特許文献1及び2では、移動体は計算した旋回方向と旋回半径に基づき障害物の回避軌道を移動するが、前記距離検出手段が障害物を検知しなくなっても移動体が障害物の横に到達するまで旋回動作を続行させる。
【0004】
しかしながら、特許文献1及び2に記載の方法では、以下に示す問題点がある。
(1)これらの方法では移動体の幅方向に距離検出手段を列設するため、移動ロボットの左右方向の障害物に対してはこれを検知して回避動作を行うことができるが、例えば一般家庭における床上の小物、テーブル、椅子などのように、上下方向に空間的に分布した障害物が存在する場合、左右方向だけの障害物検知及び回避では上下方向に分布した障害物を検知することができず、完全な回避動作を行わせることができない。
(2)移動体が障害物を検出した際に、移動体と障害物との距離に関わらず一様な回避行動を行なうため、障害物からの距離が離れている時にも過剰な回避行動を採ることがあり、円滑な自律走行が妨げられる惧れがある。
前記特許文献1及び2では、上記した問題点について全く考慮されておらず、障害物回避の機能としては非常に限定されたものであった。
【0005】
そこで、特許文献3(特開平7−306042号公報)では、セルラ構造の周辺地図の作成方法及び装置として、センサで検出した移動ユニット周辺の障害物を格子状地図に書き込む方法について開示している。かかる特許文献3では、測定サイクル、距離依存、移動速度による障害物の重み付けを行なっており、さらには移動ユニットの下面からみて高さ方向に異なった地図を2種類以上準備する方法について開示している。
【0006】
このように、特許文献3によれば上記した問題点(1)、(2)は解決するものと思われる。
しかし、移動体を円滑に自律走行させるためには、高度な技術が必要とされ、依然として以下に示す問題が残る。
即ち、(3)移動体の回避時は、通常の移動経路から逸脱した異常状態であるにも関わらず通常と同様の走行を行なっているため、移動体の走行危険性が増加する。
(4)障害物には、固定的に配置されているものとテンポラリに置かれたものとが存在するが、これらの区別を行なわずに単一に処理を行うと、移動体の走行が円滑に行なわれず、最悪の場合走行停止に陥ることも考えられる。例えば、一般家庭において、壁、ドア、テーブルなどは一旦固定されると一般的には殆どその場所から動かされることは無い半永久的な障害物と考えてよいが、床上に散らばったペットボトルや玩具などは時間の経過に伴ってその位置が変化する可能性が高い。このような時間に対する障害物の位置変化を認識せずに走行すると、周囲を障害物で取り囲まれた地図が作成され、走行が阻害されてしまうことがある。
【0007】
(5)障害物を回避する場合と、廊下などの間口幅の狭い狭隘部を通過する場合とでは移動体の動作には差異がある。即ち、狭隘部通過の場合に通常の障害物と同様な回避運動をさせた場合、廊下の側壁に開口したドアを回避可能な通路と判断し、ドア間口に向かって進入していくため廊下を離れて別の部屋に入り込み、その結果、廊下に復帰しようとする場合に部屋の壁に邪魔されてデッドロック(回避移動不能)の状態に陥ることが考えられる。このように、狭隘部を通過する場合については上記した何れの特許文献も想定しておらず問題が残る。
また、移動体の動作環境も自律走行に大きく影響するため、非特許文献1に開示されるようなオープンスペースに適した技術を一般家庭に持ち込んだ場合、経路から逸脱し続け、目標地点になかなか到達できない。また、永久的な障害物とテンポラリな障害物との区別が付かないため回避行動の融通性が無い。狭隘部と広いスペースでのモードの切り替えが無いため、廊下を通過する場合に側壁の間口に進入していき、デッドロック状態になる可能性が高い、といった問題が発生する。
【0008】
さらにまた、特許文献1及び2に開示されるように、移動体の進行方向側に備えた障害物検出器が移動経路近傍に存在する障害物を検知し、所定の距離になると移動体を停止させるという方法がある。しかしながらこの方法では、障害物が多数存在する環境では移動体が知能的と言えるような自律走行を行えない。また、移動体の進行方向側にカメラなどの視覚センサを備え、これによって移動体の進行方向を撮像し、撮像した画像情報を画像処理して障害物を検出して障害物を回避する経路を生成するという方法も提案されているが、画像処理速度の問題によりリアルタイムな制御が行えないという問題があり、実用化は困難であった。
【0009】
【特許文献1】特許第2608509号公報
【特許文献2】特許第2627472号公報
【特許文献3】特開平7−306042号公報
【非特許文献1】「D. Langeret. Al. : “A reactive System ForOff-Roand Navigation”, Proc. Of IEEERobotics and Automationm May, 1994」
【発明の開示】
【発明が解決しようとする課題】
【0010】
従って、本発明は上記従来技術の問題点に鑑み、移動体が円滑にかつ安全に自律走行でき、特に一般家庭等の不規則で乱雑な環境下においても障害物を安定的に回避することができ、さらには狭隘部においてもデッドロック状態に陥らず、目的地点まで円滑に到達可能な移動体の障害物回避方法及び該移動体を提供することを目的とする。
【課題を解決するための手段】
【0011】
そこで、本発明はかかる課題を解決するために、移動体に設けられた複数のセンサにより取得した検出データに基づき、移動体走行領域の周辺地図を作成し、該周辺地図に基づき障害物を回避する移動経路を選択して自律走行する障害物回避方法において、
前記移動体は、少なくとも該移動体の前方域を検知する前方センサと、側方域を検知する側方センサとを含むセンサ群を有し、該センサ群にて取得した検出データに基づき、三次元的に異なる複数の周辺地図を作成する周辺地図作成ステップと、
絶対座標系を基準とし、前記複数の周辺地図を融合して一の二次元的な融合地図を作成する融合地図作成ステップと、
該融合地図から障害物を回避する最適な移動経路を探索する経路探索ステップと、を備え、
前記融合地図作成ステップでは、前記前方センサに基づき作成された前方周辺地図を前記側方センサに基づき作成された側方周辺地図より優先させて融合地図を作成するようにしたことを特徴とする。
【0012】
本発明によれば、まず三次元的に異なる複数の周辺地図を作成し、さらにこれを融合して二次元的な融合地図を作成し、これに基づき最適な移動経路を探索することにより、平面上だけでなく、上下方向に分布した障害物をも確実に検知することができ、円滑な自律走行を可能とする。特に、一般家庭のような不規則な走行環境においても、種々の大きさの障害物に対応可能であるため、円滑な走行が可能である。
また、前記三次元的に複数存在する周辺地図を、二次元的な融合地図に統合しているため、移動経路の探索にて演算処理の負荷が大幅に軽減し、処理速度が早くなり、移動体の応答性能が向上する。
【0013】
また、前記融合地図作成ステップにて、前記前方センサによる検出データを優先的に用いて融合地図を作成するようにし、移動体の進行方向の検出データを重視することにより、誤認識を最小限に抑えて円滑な移動を可能とする。これは、例えば左右の壁の桟などを移動体の側方センサが検知したときに、前方が空いているにも関わらず正面の経路が塞がれたものと誤認識して移動不能の状態となるなどの不具合を避けることができる。
【0014】
また、前記周辺地図作成ステップでは、予め障害物領域、未知領域、移動可能領域の順に増加する重み付けを夫々設定し、前記検出データに基づき格子状地図上の各格子毎に前記重み付けを投票した周辺地図を作成し、
前記融合地図作成ステップにて、絶対座標系を基準として前記側方周辺地図上で前記前方周辺地図に対応する領域を該前方周辺地図により上書き処理した後、
夫々の周辺地図の同位置に存在する格子に投票された重み付けを比較し、前記未知領域の重み付けより小さい値が存在する場合には、前記投票された重み付けから最も小さい値を採用し、
前記未知領域の重み付けより小さい値が存在しない場合には、前記投票された重み付けの平均値を採用して融合地図を作成することを特徴とする。
【0015】
これによれば、移動空間の判定を細かく設定でき、移動体の障害物を回避する際の柔軟性が向上する。
また、前記格子上に投票された重み付けのうち、障害物の存在可能性がある場合には、最も小さい値を採用することにより、確実に障害物を認知することができ安全な自律走行が可能となる。
さらに、前記融合地図作成ステップにて、前記側方周辺地図を前記前方周辺地図にて上書き処理することにより、検出データによる誤認識を防止することが可能である。
【0016】
また、前記経路探索ステップにて、移動体進行向きを基準として複数段階の移動経路範囲を有する経路選択フィルタを設け、前記移動体の走行過程にて、予め設定された経路選択フィルタの移動経路範囲内で移動経路を選択するようにし、該移動経路範囲内に走行可能な移動経路が存在しない場合には段階的に該移動経路範囲を拡大するようにしたことを特徴とし、このとき、前記経路選択フィルタの最大移動経路範囲内に走行可能な移動経路が存在しない場合には、前記移動体が所定角度だけ回転動作を行うようにすることが好ましい。
本発明によれば、経路選択フィルタを設けることにより、移動体の急激な旋回動作が避けられ、移動体のより細かく滑らかな旋回動作が可能となり、転倒等の危険性を防ぐことができる。また、移動体が目標地点に対して異常に離れた回避経路を選択することを防止できる。さらにまた、前記移動経路範囲を段階的に拡げるようにしたため、移動体が移動経路を探索できずにデッドロック状態となることを防止できる。同様に、移動経路が存在しない場合に前記移動体が所定角度だけ回転動作を行うようにすることにより、移動経路が探索できない場合でも新たな向きに対応した移動経路を探し出すことができ、デッドロック状態を防止でき、移動能力の向上が期待できる。
【0017】
さらに、前記経路探索ステップにて、前記移動体の走行可能な移動経路が存在しない場合には、現位置以前の移動経路上に戻り、前記移動体の目標地点とする側に一旦回避し、再度移動経路の探索を行うようにしたことを特徴とする。
これによれば、移動体が障害物に囲まれる等の状態に陥り、移動不能となった場合にリカバリが可能となり、高価な視覚センサを使用せずに自律的に目標地点に到達する移動経路を形成することができるようになる。
さらにまた、前記移動体の走行中に該移動体が障害物に接触して移動不能となった場合には、該移動体の進行向きと反対の向きに後退するようにしたことを特徴とする。
これは、移動体の障害物が接触して移動不能となった場合に、該移動体が前方に走行する、向きを変えるなどの無理な動作を行わず、一旦後退して移動体の動作スペースを確保することにより、移動体の損傷、故障の惧れがなく、障害物との接触状態を円滑に回避することが可能である。
【0018】
また、上記した発明を好適に実施する装置の発明として、周囲の障害物を検知するセンサを複数有し、該検出データに基づき作成した周辺地図により障害物を回避する移動経路を選択して自律走行する移動体において、
前記複数のセンサが、少なくとも前記移動体の前方域を検知する前方センサと、側方域を検知する側方センサとを含むセンサ群であり、
該センサ群にて取得した検出データに基づき、三次元的に異なる複数の周辺地図を作成する周辺地図作成手段と、
絶対座標系を基準とし、前記複数の周辺地図を融合して一の二次元的な融合地図を作成する融合地図作成手段と、
該融合地図から障害物を回避する最適な移動経路を探索する経路探索手段と、を有し、
前記融合地図作成手段では、前記前方センサに基づき作成された前方周辺地図を前記側方センサに基づき作成された側方周辺地図より優先させて融合地図を作成するようにしたことを特徴とする。
【0019】
また、前記周辺地図作成手段が、予め障害物領域、未知領域、移動可能領域の順に増加する重み付けを夫々設定し、前記検出データに基づき格子状地図上の各格子毎に前記重み付けを投票した周辺地図を作成する構成であるとともに、
前記融合地図作成手段が、絶対座標系を基準として前記側方周辺地図上で前記前方周辺地図に対応する領域を該前方周辺地図により上書き処理し、夫々の周辺地図の同位置に存在する格子に投票された重み付けを比較し、前記未知領域の重み付けより小さい値が存在する場合には、前記投票された重み付けから最も小さい値を採用し、前記未知領域の重み付けより小さい値が存在しない場合には、前記投票された重み付けの平均値を採用して融合地図を作成する構成であることを特徴とする。
【0020】
また、前記経路探索手段が、移動体進行向きを基準として複数段階の移動経路範囲を有する経路選択フィルタを備え、予め設定された経路選択フィルタの移動経路範囲内から前記移動体の移動経路を選択し、該移動経路範囲内に走行可能な移動経路が存在しない場合には段階的に該移動経路範囲を拡大するようにしたことを特徴とし、このとき、前記経路探索手段は、前記経路選択フィルタの最大移動経路範囲内に走行可能な移動経路が存在しない場合には、前記移動体が所定角度だけ回転動作を行うように指示するように構成することが好ましい。
さらに、前記経路探索手段は、前記移動体の走行可能な移動経路が存在しない場合には、現位置以前の移動経路上に戻り、前記移動体の目標地点とする側に一旦回避し、再度移動経路の探索を行うようにしたことを特徴とする。
さらにまた、前記移動体が障害物に接触したことを検知する接触センサを備え、前記移動体の走行中に前記接触センサにより障害物との接触が検知された場合には、該移動体の進行向きと反対の向きに後退するようにしたことを特徴とする。
【発明の効果】
【0021】
以上記載のごとく本発明によれば、一般家庭のように不規則で乱雑な環境下であっても、障害物を回避し、また狭隘部を通過する際にもデッドロック状態に陥る可能性が低く、円滑にかつ安定的に自律走行可能である移動体の障害物回避方法及び該移動体を提供することが可能である。
即ち、三次元的な複数の周辺地図から二次元的な融合地図を作成しているため、上下方向に分布した障害物をも確実に検知することができ、円滑な自律走行を可能とする。特に、一般家庭のような不規則な走行環境においても、種々の大きさの障害物に対応可能であるため、円滑な走行が可能である。
また、移動経路の探索処理では二次元的な融合地図を利用しているため、演算処理の負荷が大幅に軽減し、処理速度が早くなり、移動体の応答性能が向上する。
また、融合地図の作成において、前記前方センサによる検出データを優先的に用いて融合地図を作成するようにし、移動体の進行方向の検出データを重視することにより、誤認識を最小限に抑えて移動体の円滑な移動を可能とする。
【0022】
さらに、周辺地図作成において、予め複数階層の重み付けを設定することにより移動空間の判定を細かく設定でき、移動体の障害物を回避する際の柔軟性が向上する。
さらにまた、複数段階の移動経路範囲を有する経路選択フィルタを設け、必要に応じて移動経路範囲を拡げるようにしたため、移動体のより細かく滑らかな動作が可能となり、急激な旋回動作を避けることができる。
また、移動経路の探索処理において、前記移動体の走行可能な移動経路が存在しない場合には、現位置以前の移動経路上に戻り、前記移動体の目標地点とする側に一旦回避させることにより、移動体が障害物に囲まれる等の状態に陥り、移動不能となった場合にリカバリが可能となり、自律的に目標地点に到達する移動経路を形成することができるようになる。
また、移動体が障害物に接触して移動不能となった場合に後退するようにしたため、移動体の損傷、故障を防止でき、障害物との接触状態を円滑に回避することが可能となる。
【発明を実施するための最良の形態】
【0023】
以下、図面を参照して本発明の好適な実施例を例示的に詳しく説明する。但しこの実施例に記載されている構成部品の寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
本実施例に示す移動体の走行空間としては、一般家庭、各種施設、工場内等が挙げられるが、特に前記移動体は一般家庭内にてユーザの生活を補助、支援、介護するロボットであることが好適である。
【実施例1】
【0024】
図1は本実施例に係るセンサ群を具備した移動体の概略構成を示す正面図(a)、及び(a)に示す移動体のX−X線断面図(b)である。
図1(a)に示すように本実施例に係る移動体10は、頭部と胴部を備えた本体11と、該本体11からの各種指令に基づき図示しない駆動装置により走行を補助する左右一対の駆動輪12と、移動体10の周囲に設置された超音波センサ14a、14b、多点検出型赤外線センサ15、側方赤外線センサ16からなるセンサ群13と、前記本体11に内蔵されたCPU(制御部)20と、を主要構成とする。
前記CPU20には、前記センサ群13の検出データに基づき周辺地図を作成する周辺地図作成手段21と、該周辺地図を融合して融合地図を作成する融合地図作成手段22と、該融合地図に基づき最適経路を探索する経路探索手段23と、前記移動体10の走行速度を制御する速度制御手段24と、前記周辺地図、前記融合地図、グローバル座標系、及び後述するタイムチャート、記憶忘れフィルタ、急旋回防止フィルタ等が格納されている記憶部25が備えられている。
【0025】
前記センサ群13は、少なくとも移動体の前方域の障害物を検知する前方センサと、側方域の障害物を検知する側方センサとを有し、本実施例では、該前方センサとして、前記超音波センサ14a、14b及び前記多点検出型センサ15を用い、前記側方センサとして、前記側方赤外線センサ16を用いる。また、好適にはセンシング手段が異なる少なくとも2種類のセンサが複数設けると良く、赤外線センサ等の指向性センサ、超音波センサ等の広域性センサの組み合わせとすることがより好ましい。このセンサ群13の具体的な例として、前記超音波センサ14a、14bは、前記本体11の前面に一又は複数配設され、照射方向は略水平方向であり、水平方向から垂直方向まで広域に亘って前方上方域の障害物までの距離を検出可能である。前記側方赤外線センサ16は、前記本体11の側面に左右一対若しくは左右に複数配設され、照射方向は略水平方向で、前記移動体11の側方域の障害物までの距離を検出可能である。
【0026】
前記多点検出型赤外線センサ15は、前記本体11の前面に一又は複数列設され、照射方向は斜め下向き方向で、前方下方域の障害物までの距離を検出可能である。該多点検出型赤外線センサ15は、図1(b)に示されるように複数の多点検出型赤外線センサ15a、15b、15cが異なる方向に向けて水平に列置されている。該多点検出型赤外線センサは、夫々複数の赤外線発光LEDを有しており、これらのLEDが放射状に赤外線を発光して床面に存在する障害物を検知する構成である。本実施例ではNo.1〜No.5まで5個のLEDを有する多点検出型赤外線センサを3個設置し、床面を15点掃引しながら床上の小さな障害物を検知する。このとき、前記LEDの発光タイミングは、図2に示されるようなタイムチャートに基づき設定すると良い。
【0027】
図2には一の多点検出型赤外線センサを例に挙げ、該センサのタイムチャートを示す。前記タイムチャートは、前記多点検出型赤外線センサが有するNo.1〜No.5までのLEDを順に発光させ、受光素子に複数の反射波が同時に入射して誤差が生じないように設定している。同様に、複数の多点検出型赤外線センサ間においても、発光した赤外線が受光素子に同時入射しないように予めタイムチャートを作成し、これに基づき検知動作を行なうようにする。これにより、誤差を最小限に抑え、信頼性の高い検出データを取得することができる。
また、センシング手段が異なる少なくとも2種類のセンサを複数組み合わせた構成としているため、移動体周囲の夫々の検知領域に応じて適正な検出データを取得することができ、信頼性の高い検出データを収集することができる。
【0028】
次に、図3乃至図9を参照して、前記移動体10の自律走行の指標となる融合地図の作成処理について説明する。融合地図の作成処理は、図1に示したセンサ群13とCPU20により実現される。尚、本実施例にて用いられる座標系は、移動体10を中心とした相対座標系と、移動体の位置に関わらず一定の座標軸を有するグローバル座標系(絶対座標系)との2つの座標系を使用する。
図3は周辺地図作成アルゴリズムを示し、該周辺地図17の作成では、まず最初に前記センサ群13の各センサにより夫々の検知領域に存在する障害物までの相対的な距離を取得する(S1)。このとき、誤差を最小限に抑えるために、各センサの測定可能レンジ外の検出データは除去すると良い(S2)。
【0029】
また、前記移動体10が具備する自己位置、方位認識手段及び姿勢角検出手段(不図示)により、移動体位置、姿勢データ26を取得し、前記CPU20の記憶部26に格納しておく。
前記センサ群13により取得した前記検出距離と、前記移動体位置、姿勢データ26に基づき、センサ取り付け位置と障害物の検出位置とを導き、さらに相対座標系からグローバル座標系への座標変換を行い、前記移動体10を中心とした格子状地図上におけるセンサ取り付け位置と検出位置を導出する(S3)。
ここで、好適にはデータバラつき防止のための不感帯処理(S4)を施すと良い。これはセンサの検出限界近傍の信頼性の低い範囲を不感帯に設定し、該不感帯に存在する検出データを除去することにより、データの信頼性を高めるものである。
【0030】
次に、前記移動体10の周囲に存在する障害物の有無を判定する。該判定の方法は、前記センサ取り付け位置−前記検出位置間の検出距離と、センサ前方が遮られない場合の照射距離とを比較し(S5)、該検出距離の方が前記照射距離より短い場合には障害物有りの判定がなされ、前記検出距離が前記照射距離より短くない場合には障害物無しの判定がなされる。
そして、判定結果に基づき複数階層の重み付けを行い、前記格子地図上に該重み付けを投票する。本実施例の評価基準は一例として3段階に分類し、障害物が検知された部分には+1、障害物が検知されない部分には−1、センサによる検知範囲外には0を投票するようにした。即ち、障害物有りの判定がなされた場合には、センサ取り付け位置から照射位置間に+1、照射位置から所定距離(本実施例では50mm)先に−1を登録し(S6)、障害物無しの判定がなされた場合には、センサ取り付け位置から照射位置間に+1を登録し(S7)、それ以外のグリッドには全て0を配置し(S8)、重み付けの投票値が登録された周辺地図を作成した。
【0031】
このように、前記複数のセンサにより取得した検出データに基づき、三次元的に異なる複数の周辺地図を作成していく。
また本実施例では、各々のセンサが所定時間間隔で連続的に検出データを取得し、前記得られた検出データのうち新規なデータにて、前記周辺地図を上書き更新していく構成とする。このとき、各センサで生成された周辺地図のうち、同一のセンシング手段を有するセンサ種類で与えられた検出データでのみ前記周辺地図が上書きされるものとする。これにより、センサ種類が異なることに起因する精度の差、性能の差を解消し、誤差を最小限に抑え、信頼性の高い地図を作成することができる。
【0032】
前記周辺地図を作成した後に、これらを融合して二次元的な一の融合地図を作成する。
図4は周辺地図から融合地図を作成する処理を説明する図、図5は融合地図作成アルゴリズムを示すフロー、図6は図4に示す処理により作成した融合地図の模式図である。
図4及び図5に示されるように、融合地図作成処理では、まず図3に示した周辺地図作成アルゴリズムに従い、超音波センサ14a、14b、多点検出型赤外線センサ15により取得した検出データに基づき、夫々上方域の周辺地図17a、中央域の周辺地図17b、下方域の周辺地図17cを作成する。(場合によっては、側方赤外線センサ16の検知領域を加えても良い。)
そして、これらの周辺地図に記憶忘れフィルタによる演算処理を施す(S10a、S10b、S10c)。これは、前記周辺地図に時定数を設け、時間の経過とともに前記登録された重み付けが消失するような時定数とする。
これにより、周辺地図17上に投票された障害物は時間の経過とともに消失していくため、テンポラリな障害物を認識することができ、移動体が障害物を回避する動作において知能的に振舞うことができる。即ち、前記移動体の周囲にむやみに障害物が登録されることがなく、移動体の円滑な自律走行が可能となる。
尚、前記記憶忘れフィルタによる処理は特に設けない構成としても良い。
【0033】
各センサによる周辺地図が作成されたら、上方超音波センサ14aに基づき作成された上方周辺地図17aと、中央超音波センサ14bに基づき作成された中央領域周辺地図17bとを比較し、グローバル座標系を基準として重複する領域がある場合には、前記中央領域周辺地図17bに対して前記上方領域周辺地図17aを上書き処理する。この具体的な処理については後述する。
【0034】
さらに、夫々の周辺地図17において、移動体位置を+1で上書き掃引する(S11)。これは、前記移動体位置には障害物が存在し得ないため、移動可能領域として投票するものである。
次に、夫々の周辺地図17a、17b、17cのうち同グリッド上に位置する重み付けの投票値を比較し、3つの値のうち、負のものがあるか否かを判定する(S12)。負の値がある場合には、これら3つの値のうち負の値の最低値を選択し、前記グリッドの重み付けとして登録し(S13A)、負の値がない場合(0を含む)には3つの値の平均値を算出し、前記グリッドの重み付けとして登録する(S13B)。そして、各グリッドにつきこれらの処理を行なって重み付けを決定し、二次元的な融合地図18を作成する(S14)。
このようにして、図6に示すように、格子状地図上の各グリッドに障害物領域と移動可能領域と未知領域とが登録された融合地図が作成される。
【0035】
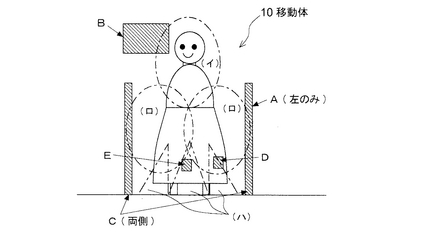
ここで、本実施例の特徴的な構成である上書き処理について説明する。図7〜図9に上書き処理に関する図を示した。図7は周辺地図の上書き処理を説明する図であり、(a)は上書き処理を行わない比較例を示す図、(b)は上書き処理を行った場合の本実施例を示す図、図8は移動体の障害物検知領域を示す図、図9は上書き処理アルゴリズムを示すフロー図である。
移動体10が壁に挟まれた廊下を通過する場合、図7(a)に示されるように上書き処理を行わない比較例の場合には、中央超音波センサにより例えば廊下の桟を検出すると、該中央超音波センサの検出領域26のうち、桟の検出距離に位置する検出領域全体を障害物領域27と認識する。このとき、上方超音波センサの検出領域25では障害物を検出していなくても、前記障害物領域27が前方領域25にかかっていると、移動体10の前方が障害物により塞がれているとみなされ、移動不能状態に陥ってしまう。
そこで本実施例では図7(b)に示されるように、中央超音波センサの検出領域26に対して、上方超音波センサの検出領域25が重複する場合には、該上方超音波センサにて検出された検出データを上書き処理した融合地図を作成することにより、移動体10の前方に障害物が存在せず、空いている融合地図を作成することができ、該移動体10は移動可能となる。
【0036】
次に、上記した上書き処理により正確に障害物位置が検出される否かを検討する。
図8、図9に示すように、移動体10の左側に位置する障害物Aを検出する場合は、中央超音波センサである超音波センサの検出領域(ロ)の左側で障害物Aを検出し、移動体前方の左半分に障害物があると処理するが、上方超音波センサである超音波センサの検出領域(イ)が未検出であるため、正面は障害物なしと上書き処理され、最終的に左側に障害物Aがあることが認識される。
移動体10の前方に位置する障害物Bを検出する場合は、中央超音波センサの検出領域(ロ)では障害物は未検出であるが、上方超音波センサの検出領域(イ)が障害物を検出し、これが上書き処理されるため、移動体10の正面に障害物Bが存在することが認識される。
移動体10の両側に位置する障害物Cを検出する場合は、中央超音波センサの検出領域(ロ)にて両側に障害物Cが検出されるが、上方超音波センサの検出領域(イ)にて未検出であるためこれが上書き処理されて前方真ん中が空いていることが認識される。
【0037】
移動体10の左前方に位置する障害物Dを検出する場合は、中央超音波センサの検出領域(ロ)が左側で障害物を検出し、移動体左前方に障害物があると処理されるが、前方センサの検出領域(イ)では未検出で上書き処理され、結果的に左端に障害物があると認識される。しかし、他の前方センサである赤外線センサの検知領域(ハ)で障害物を検出し、超音波センサより広い範囲で左前方に障害物Dがあることが認識される。
移動体10の前方真ん中に位置する障害物Eを検出する場合は、上方超音波センサの検知領域(イ)及び中央超音波超音波センサの検知領域(ロ)では障害物を検出しないが、前方センサである赤外線センサの検知領域(ハ)で障害物を検出し、移動体10の真ん中に障害物Eがあることが認識される。
このように本実施例の上書き処理によれば、センサによる誤認識を防止でき、移動体が移動不能状態になる不具合を避けることが可能である。
【0038】
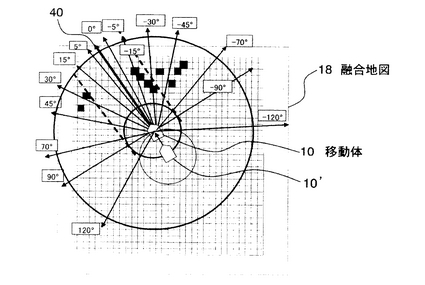
図10に、融合地図18における移動体の経路選択範囲を模式的に示す。前記移動体の選択可能経路は、移動体10を中心にその進行方向を軸線40とし、該軸線から放射状に左右に広がる経路選択範囲から、目標地点に向かう複数の移動経路が規定される。
前記複数の選択可能経路から最適な移動経路(回避経路)を探索する処理は、幅が規定された移動体10により前記選択可能経路を掃引した時の各グリッドの重み付けの和を、各経路毎に足し合わせ、該足し合わせた重み付けの和を比較し、重み付けの和が最大となる経路を探索し、この移動経路を最適な移動経路として選択する。
本実施例では、図10に示すように前記軸線40から左右に±120°を移動可能な移動経路範囲としており、該移動経路範囲から左右に7経路を規定し、該規定した全15通り(軸線上を含む)の経路において、各経路毎に前記移動体10が掃引した際の前記融合地図18の重み付けの和を算出し、該重み付けの和を比較して最も大きな値となる選択可能経路を最適移動経路とする。
【0039】
このとき、前記移動体の最適移動経路の開始地点は、前記移動体10の障害物検知から走行開始までに要する時間と、該移動体10の走行速度とに基づき設定することが好ましい。即ち、実際の移動体位置は、図10の移動体10’で示される位置に存在するが、前記移動体10の前記センサ群20により検知が行なわれ、各種演算処理を行い、駆動系まで指令が達する時間を考慮し、これに要する時間に移動体が移動する距離を見越して仮想の開始位置(移動体10)を設定することにより、実際の移動体の動きに即した移動指令を与えることができ、信頼性が向上する。
【0040】
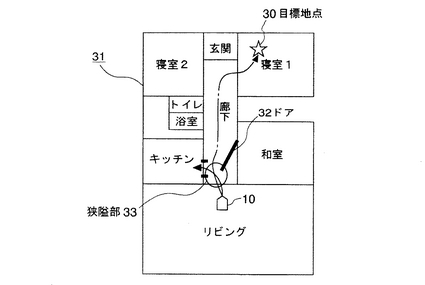
次に、本実施例における移動体10が狭隘部を通過する場合について説明する。例えば、一般家庭の室内を走行する場合において、図11は一般家庭の室内31を示し、移動体10がリビングから廊下を通過して寝室1の目標地点30まで移動する場合、廊下にてドア32が開いた状態にあると、前記移動体10は狭隘部33を通過しなければならない。しかし、本実施例における経路探索処理では、狭隘部33を避けてキッチンへ侵入し、移動不能な状態に陥ることがある。
従って、本実施例では図12に示すように、規定された経路選択可能な移動経路範囲D1、D2よりも狭められた移動経路範囲D1’、D2’を設定し、狭隘部通過時には該移動経路範囲D1’、D2’にて経路探索処理を行うようにした。狭隘部通過時の経路選択移動経路範囲D1’、D2’は、例えば軸線40を中心として左右に±45°とし、この範囲内で15個の移動経路を設定する。尚、前記経路選択移動経路範囲D1、D2は、移動体の初期位置10が目標地点に向かう方向を基準として予め設定されているものとする。
これにより、本実施例を障害物回避だけでなく狭隘部通過時にも適用でき、移動体10が正確に目的とする地点まで走行することが可能となる。
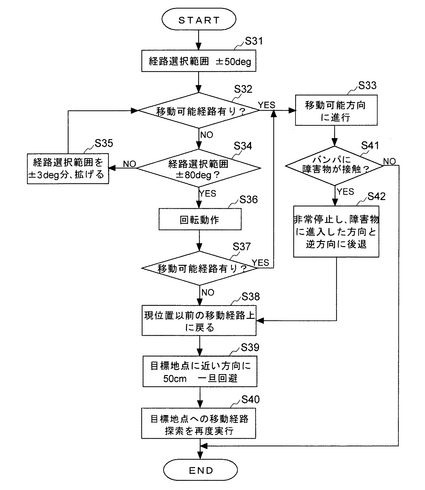
【0041】
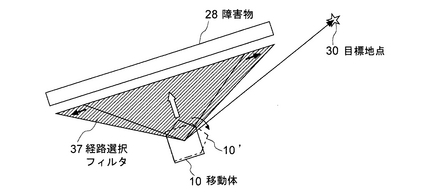
また、本実施例の他の特徴的な構成として、図13〜図16に移動体走行中の障害物回避処理に関する図を示す。図13は経路選択フィルタを用いた処理を説明する図、図14は移動体の障害物一時回避動作を説明する図、図15は移動体の後退動作を説明する図、図16は移動体の回避動作及び後退動作を含む処理のアルゴリズムを示すフロー図である。
図16のフロー図を参照しながら、夫々の動作を具体的に説明する。
本実施例では、図13に示されるように、前記移動体10の現在の進行向きを基準として段階的に複数の経路選択範囲を有する経路選択フィルタ37を設けている。前記移動体10は、該経路選択フィルタ37の経路選択範囲内から移動経路を探索する。
【0042】
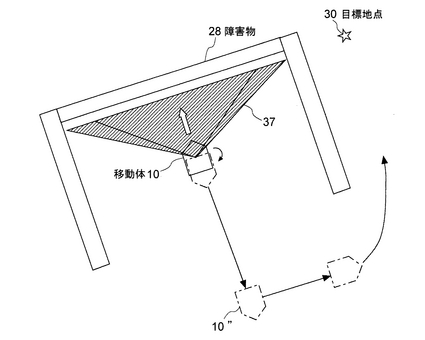
まず、予め経路選択フィルタ27の経路選択範囲(例えば移動体向きを中心として左右に±50°の角度範囲)を設定しておき(S31)、該経路選択範囲内で移動経路があるか否かを探索し(S32)、移動経路がある場合には移動可能方向に進行する(S33)。移動体前方を障害物28で塞がれるなどにより経路選択範囲内に走行可能な移動経路が存在しない場合には、移動体10の走行速度を落としながら移動経路が見つかるまで所定角度ずつ(例えば±30°ずつ)経路選択範囲を段階的に拡大する(S35)。これを経路選択フィルタの限界値である最大移動経路範囲(例えば±80°)まで順次行う(S34)。この最大移動経路範囲は、移動体10が安全に旋回動作を行うことができる限界の移動経路範囲とする。
このように、経路選択フィルタ37を設けることにより、より細かい旋回動作が可能となり、移動体10が目標地点に対して異常に離れた回路選択を行うことを防止し、急激な旋回動作を避けることが可能となる。
【0043】
また、前記経路選択フィルタ37を最大移動経路範囲としても移動経路が探索できない場合には、図13に示されるように、移動体10が所定角度だけ回転動作を行うようにする(S36)。そして、回転した移動体10’の向きを基準とした移動経路範囲内に移動可能経路があるか否かを再度探索し(S37)、移動可能経路がある場合には移動可能方向に進行する(S33)。このように、移動体10がデッドロック状態に陥った場合に回転動作を行うことによって、この状態を回避することが可能となる。
前記移動体10’が取り得る移動経路がない場合には、図14に示されるように、移動体10の現位置以前の移動経路上に戻る(S38)。このとき、直前に経路探索処理を行った位置、即ち1つ前のノードに戻ることが好ましい。そして戻った位置の移動体10”から目標地点30側の方向に例えば50cm移動するなどにより一旦回動作を行い(S39)、この位置にて目標地点への移動経路を再度探索する(S40)。このように、デッドロック状態に陥った場合に直前の移動経路上に戻ることにより、障害物28に囲まれたとき等の移動不能な場合のリカバリが可能となり、高価な視覚センサを使用せずに前方に進むことができないと判断し、自律的に目標地点30に到達する移動経路を形成することができる。
【0044】
一方、移動体10が移動経路を進行している時(S33)に、障害物28に接触した場合には、移動体10に設けた接触センサにより障害物28が検出され(S41)、該移動体10は非常停止し、障害物28に進入した向きと反対の向きに後退する(S42)。
これにより、移動体10に障害物28が接触して移動不能となった場合に、該移動体10が前方に走行する、向きを変えるなどの無理な動作を行わず、一旦後退して移動体10の動作スペースを確保することにより、移動体10の損傷、故障等の不具合を防止でき、障害物との接触状態を円滑に回避することが可能となる。
【図面の簡単な説明】
【0045】
【図1】本実施例に係るセンサ群を具備した移動体の概略構成を示す正面図(a)、及び(a)に示す移動体のX−X線断面図(b)である。
【図2】多点検出型赤外線センサの発光タイムチャートを示す。
【図3】本実施例に係る周辺地図作成アルゴリズムを示すフロー図である。
【図4】周辺地図から融合地図を作成する処理を説明する図である。
【図5】本実施例に係る融合地図作成アルゴリズムを示すフロー図である。
【図6】図4に示す処理により作成した融合地図の模式図である。
【図7】周辺地図の上書き処理を説明する図であり、(a)は上書き処理を行わない比較例を示す図で、(b)は上書き処理を行った場合の本実施例を示す図である。
【図8】移動体の障害物検知領域を示す図である。
【図9】上書き処理アルゴリズムを示すフロー図である。
【図10】融合地図における移動体の経路選択範囲を模式的に表す図である。
【図11】一般家庭における狭隘部の一例を示す図である。
【図12】狭隘部通過時における経路選択範囲を示す図である。
【図13】経路選択フィルタを用いた処理を説明する図である。
【図14】移動体の障害物一時回避動作を説明する図である。
【図15】移動体の後退動作を説明する図である。
【図16】移動体の回避動作及び後退動作を含む処理のアルゴリズムを示すフロー図である。
【符号の説明】
【0046】
10 移動体
12 駆動輪
13 センサ群
14a、14b 超音波センサ(前方センサ)
15、15a、15b、15c 多点検出型赤外線センサ(前方センサ)
16 側方赤外線センサ(側方センサ)
17、17a、17b、17c 周辺地図
18 融合地図
19 グローバル座標系
20 CPU(制御部)
28 障害物
35 設定経路
36 回避経路
37 急旋回防止フィルタ
【特許請求の範囲】
【請求項1】
移動体に設けられた複数のセンサにより取得した検出データに基づき、移動体走行領域の周辺地図を作成し、該周辺地図に基づき障害物を回避する移動経路を選択して自律走行する障害物回避方法において、
前記移動体は、少なくとも該移動体の前方域を検知する前方センサと、側方域を検知する側方センサとを含むセンサ群を有し、該センサ群にて取得した検出データに基づき、三次元的に異なる複数の周辺地図を作成する周辺地図作成ステップと、
絶対座標系を基準とし、前記複数の周辺地図を融合して一の二次元的な融合地図を作成する融合地図作成ステップと、
該融合地図から障害物を回避する最適な移動経路を探索する経路探索ステップと、を備え、
前記融合地図作成ステップでは、前記前方センサに基づき作成された前方周辺地図を前記側方センサに基づき作成された側方周辺地図より優先させて融合地図を作成するようにしたことを特徴とする移動体の障害物回避方法。
【請求項2】
前記周辺地図作成ステップでは、予め障害物領域、未知領域、移動可能領域の順に増加する重み付けを夫々設定し、前記検出データに基づき格子状地図上の各格子毎に前記重み付けを投票した周辺地図を作成し、
前記融合地図作成ステップにて、絶対座標系を基準として前記側方周辺地図上で前記前方周辺地図に対応する領域を該前方周辺地図により上書き処理した後、
夫々の周辺地図の同位置に存在する格子に投票された重み付けを比較し、前記未知領域の重み付けより小さい値が存在する場合には、前記投票された重み付けから最も小さい値を採用し、
前記未知領域の重み付けより小さい値が存在しない場合には、前記投票された重み付けの平均値を採用して融合地図を作成することを特徴とする請求項1記載の移動体の障害物回避方法。
【請求項3】
前記経路探索ステップにて、移動体進行向きを基準として複数段階の移動経路範囲を有する経路選択フィルタを設け、予め設定された経路選択フィルタの移動経路範囲内で移動経路を選択するようにし、該移動経路範囲内に走行可能な移動経路が存在しない場合には段階的に該移動経路範囲を拡大するようにしたことを特徴とする請求項1記載の移動体の障害物回避方法。
【請求項4】
前記経路選択フィルタの最大移動経路範囲内に走行可能な移動経路が存在しない場合には、前記移動体が所定角度だけ回転動作を行うようにしたことを特徴とする請求項3記載の移動体の障害物回避方法。
【請求項5】
前記経路探索ステップにて、前記移動体の走行可能な移動経路が存在しない場合には、現位置以前の移動経路上に戻り、前記移動体の目標地点とする側に一旦回避し、再度移動経路の探索を行うようにしたことを特徴とする請求項1、3若しくは4の何れかに記載の移動体の障害物回避方法。
【請求項6】
前記移動体の走行中に該移動体が障害物に接触して移動不能となった場合には、該移動体の進行向きと反対の向きに後退するようにしたことを特徴とする請求項1、3、4若しくは5の何れかに記載の移動体の障害物回避方法。
【請求項7】
周囲の障害物を検知するセンサを複数有し、該検出データに基づき作成した周辺地図により障害物を回避する移動経路を選択して自律走行する移動体において、
前記複数のセンサが、少なくとも前記移動体の前方域を検知する前方センサと、側方域を検知する側方センサとを含むセンサ群であり、
該センサ群にて取得した検出データに基づき、三次元的に異なる複数の周辺地図を作成する周辺地図作成手段と、
絶対座標系を基準とし、前記複数の周辺地図を融合して一の二次元的な融合地図を作成する融合地図作成手段と、
該融合地図から障害物を回避する最適な移動経路を探索する経路探索手段と、を有し、
前記融合地図作成手段では、前記前方センサに基づき作成された前方周辺地図を前記側方センサに基づき作成された側方周辺地図より優先させて融合地図を作成するようにしたことを特徴とする移動体。
【請求項8】
前記周辺地図作成手段が、予め障害物領域、未知領域、移動可能領域の順に増加する重み付けを夫々設定し、前記検出データに基づき格子状地図上の各格子毎に前記重み付けを投票した周辺地図を作成する構成であるとともに、
前記融合地図作成手段が、絶対座標系を基準として前記側方周辺地図上で前記前方周辺地図に対応する領域を該前方周辺地図により上書き処理し、夫々の周辺地図の同位置に存在する格子に投票された重み付けを比較し、前記未知領域の重み付けより小さい値が存在する場合には、前記投票された重み付けから最も小さい値を採用し、前記未知領域の重み付けより小さい値が存在しない場合には、前記投票された重み付けの平均値を採用して融合地図を作成する構成であることを特徴とする請求項7記載の移動体。
【請求項9】
前記経路探索手段が、移動体進行向きを基準として複数段階の移動経路範囲を有する経路選択フィルタを備え、予め設定された経路選択フィルタの移動経路範囲内から前記移動体の移動経路を選択し、該移動経路範囲内に走行可能な移動経路が存在しない場合には段階的に該移動経路範囲を拡大するようにしたことを特徴とする請求項7記載の移動体。
【請求項10】
前記経路探索手段は、前記経路選択フィルタの最大移動経路範囲内に走行可能な移動経路が存在しない場合には、前記移動体が所定角度だけ回転動作を行うように指示することを特徴とする請求項9記載の移動体。
【請求項11】
前記経路探索手段は、前記移動体の走行可能な移動経路が存在しない場合には、現位置以前の移動経路上に戻り、前記移動体の目標地点とする側に一旦回避し、再度移動経路の探索を行うようにしたことを特徴とする請求項7、9若しくは10の何れかに記載の移動体。
【請求項12】
前記移動体が障害物に接触したことを検知する接触センサを備え、前記移動体の走行中に前記接触センサにより障害物との接触が検知された場合には、該移動体の進行向きと反対の向きに後退するようにしたことを特徴とする請求項7、9、10若しくは11の何れかに記載の移動体。
【請求項1】
移動体に設けられた複数のセンサにより取得した検出データに基づき、移動体走行領域の周辺地図を作成し、該周辺地図に基づき障害物を回避する移動経路を選択して自律走行する障害物回避方法において、
前記移動体は、少なくとも該移動体の前方域を検知する前方センサと、側方域を検知する側方センサとを含むセンサ群を有し、該センサ群にて取得した検出データに基づき、三次元的に異なる複数の周辺地図を作成する周辺地図作成ステップと、
絶対座標系を基準とし、前記複数の周辺地図を融合して一の二次元的な融合地図を作成する融合地図作成ステップと、
該融合地図から障害物を回避する最適な移動経路を探索する経路探索ステップと、を備え、
前記融合地図作成ステップでは、前記前方センサに基づき作成された前方周辺地図を前記側方センサに基づき作成された側方周辺地図より優先させて融合地図を作成するようにしたことを特徴とする移動体の障害物回避方法。
【請求項2】
前記周辺地図作成ステップでは、予め障害物領域、未知領域、移動可能領域の順に増加する重み付けを夫々設定し、前記検出データに基づき格子状地図上の各格子毎に前記重み付けを投票した周辺地図を作成し、
前記融合地図作成ステップにて、絶対座標系を基準として前記側方周辺地図上で前記前方周辺地図に対応する領域を該前方周辺地図により上書き処理した後、
夫々の周辺地図の同位置に存在する格子に投票された重み付けを比較し、前記未知領域の重み付けより小さい値が存在する場合には、前記投票された重み付けから最も小さい値を採用し、
前記未知領域の重み付けより小さい値が存在しない場合には、前記投票された重み付けの平均値を採用して融合地図を作成することを特徴とする請求項1記載の移動体の障害物回避方法。
【請求項3】
前記経路探索ステップにて、移動体進行向きを基準として複数段階の移動経路範囲を有する経路選択フィルタを設け、予め設定された経路選択フィルタの移動経路範囲内で移動経路を選択するようにし、該移動経路範囲内に走行可能な移動経路が存在しない場合には段階的に該移動経路範囲を拡大するようにしたことを特徴とする請求項1記載の移動体の障害物回避方法。
【請求項4】
前記経路選択フィルタの最大移動経路範囲内に走行可能な移動経路が存在しない場合には、前記移動体が所定角度だけ回転動作を行うようにしたことを特徴とする請求項3記載の移動体の障害物回避方法。
【請求項5】
前記経路探索ステップにて、前記移動体の走行可能な移動経路が存在しない場合には、現位置以前の移動経路上に戻り、前記移動体の目標地点とする側に一旦回避し、再度移動経路の探索を行うようにしたことを特徴とする請求項1、3若しくは4の何れかに記載の移動体の障害物回避方法。
【請求項6】
前記移動体の走行中に該移動体が障害物に接触して移動不能となった場合には、該移動体の進行向きと反対の向きに後退するようにしたことを特徴とする請求項1、3、4若しくは5の何れかに記載の移動体の障害物回避方法。
【請求項7】
周囲の障害物を検知するセンサを複数有し、該検出データに基づき作成した周辺地図により障害物を回避する移動経路を選択して自律走行する移動体において、
前記複数のセンサが、少なくとも前記移動体の前方域を検知する前方センサと、側方域を検知する側方センサとを含むセンサ群であり、
該センサ群にて取得した検出データに基づき、三次元的に異なる複数の周辺地図を作成する周辺地図作成手段と、
絶対座標系を基準とし、前記複数の周辺地図を融合して一の二次元的な融合地図を作成する融合地図作成手段と、
該融合地図から障害物を回避する最適な移動経路を探索する経路探索手段と、を有し、
前記融合地図作成手段では、前記前方センサに基づき作成された前方周辺地図を前記側方センサに基づき作成された側方周辺地図より優先させて融合地図を作成するようにしたことを特徴とする移動体。
【請求項8】
前記周辺地図作成手段が、予め障害物領域、未知領域、移動可能領域の順に増加する重み付けを夫々設定し、前記検出データに基づき格子状地図上の各格子毎に前記重み付けを投票した周辺地図を作成する構成であるとともに、
前記融合地図作成手段が、絶対座標系を基準として前記側方周辺地図上で前記前方周辺地図に対応する領域を該前方周辺地図により上書き処理し、夫々の周辺地図の同位置に存在する格子に投票された重み付けを比較し、前記未知領域の重み付けより小さい値が存在する場合には、前記投票された重み付けから最も小さい値を採用し、前記未知領域の重み付けより小さい値が存在しない場合には、前記投票された重み付けの平均値を採用して融合地図を作成する構成であることを特徴とする請求項7記載の移動体。
【請求項9】
前記経路探索手段が、移動体進行向きを基準として複数段階の移動経路範囲を有する経路選択フィルタを備え、予め設定された経路選択フィルタの移動経路範囲内から前記移動体の移動経路を選択し、該移動経路範囲内に走行可能な移動経路が存在しない場合には段階的に該移動経路範囲を拡大するようにしたことを特徴とする請求項7記載の移動体。
【請求項10】
前記経路探索手段は、前記経路選択フィルタの最大移動経路範囲内に走行可能な移動経路が存在しない場合には、前記移動体が所定角度だけ回転動作を行うように指示することを特徴とする請求項9記載の移動体。
【請求項11】
前記経路探索手段は、前記移動体の走行可能な移動経路が存在しない場合には、現位置以前の移動経路上に戻り、前記移動体の目標地点とする側に一旦回避し、再度移動経路の探索を行うようにしたことを特徴とする請求項7、9若しくは10の何れかに記載の移動体。
【請求項12】
前記移動体が障害物に接触したことを検知する接触センサを備え、前記移動体の走行中に前記接触センサにより障害物との接触が検知された場合には、該移動体の進行向きと反対の向きに後退するようにしたことを特徴とする請求項7、9、10若しくは11の何れかに記載の移動体。
【図1】



【図2】
【図3】

【図4】
【図5】

【図6】
【図7】

【図8】
【図9】

【図10】
【図11】
【図12】

【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2006−236098(P2006−236098A)
【公開日】平成18年9月7日(2006.9.7)
【国際特許分類】
【出願番号】特願2005−51300(P2005−51300)
【出願日】平成17年2月25日(2005.2.25)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成18年9月7日(2006.9.7)
【国際特許分類】
【出願日】平成17年2月25日(2005.2.25)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]