
移動体位置推定システム
【課題】簡易な構成で移動体の自車両への接近状況を推定可能な移動体位置推定システムを提供する。
【解決手段】移動体に備えられた携帯機と、自車両に備えられた車載装置とを有し、携帯機は、移動体の位置を検出する移動体位置検出部と、移動体の位置を含む移動体情報を車載装置に送信する携帯機側送信部と、を備え、車載装置は、携帯機から送信された移動体情報を受信する車載装置側受信部と、自車両の位置を取得する自車両位置取得部と、自車両の位置および移動体情報に含まれる携帯機の位置に基づいて、移動体の移動状況を推定する移動状況推定部と、移動状況推定部が推定した移動体の移動状況を含む移動体状況情報を出力する移動体状況情報出力部と、を備えることを特徴とする。
【解決手段】移動体に備えられた携帯機と、自車両に備えられた車載装置とを有し、携帯機は、移動体の位置を検出する移動体位置検出部と、移動体の位置を含む移動体情報を車載装置に送信する携帯機側送信部と、を備え、車載装置は、携帯機から送信された移動体情報を受信する車載装置側受信部と、自車両の位置を取得する自車両位置取得部と、自車両の位置および移動体情報に含まれる携帯機の位置に基づいて、移動体の移動状況を推定する移動状況推定部と、移動状況推定部が推定した移動体の移動状況を含む移動体状況情報を出力する移動体状況情報出力部と、を備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体の位置を推定して車両の運転者に報知する移動体位置推定システムに関する。
【背景技術】
【0002】
近年、車両の運転者から死角となる位置の状況を、運転者に報知するための装置が考案されている。
【0003】
例えば、駐停車状態(停止状態)からの発進時に、周囲複数方向についての状況を運転者に提示できる周囲状況提示システムが考案されている(特許文献1参照)。
【0004】
また、高速移動体に乗車中の者に関する情報は運転者に報知されない一方、歩行状態に相当する状態にある者に関する情報は運転者に好適に報知する車両用歩行者検知システムが考案されている(特許文献2参照)。
【0005】
また、FM電波の送受信機を用いて簡易に構成することができる接触回避装置が考案されている(特許文献3参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特表2007−519549号公報
【特許文献2】特開2005−352577号公報
【特許文献3】特開2007−216739号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の構成では、車両の発進時以外は、周囲複数方向についての状況を運転者に提示することができないという問題がある。
【0008】
特許文献2の構成では、携帯電話を使用しており、携帯電話の位置の特定には無線基地局を使用するため、システム構成が大型化・複雑化するという問題がある。
【0009】
特許文献3の構成では、FM送信機およびダイバシティアンテナが必要となるという問題がある。また、電波の状態によっては、他車両の接近方向を精確に検知できないこともあり得る。
【0010】
また、とりわけ四輪車(自動車)からの二輪車の位置推定は困難であり、二輪車の発見は運転者の注意力に依存している。しかし、運転席からの視界には多数の死角が存在し、運転者の負荷の増加を招いている。特に、夜間になると、二輪車の発見はさらに困難となる。また、二輪車発見の手法として、聴覚による発見が考えられるが、運転中には様々な騒音が発生しているため、このような手法は実現が困難といえる。
【0011】
上記問題点を背景として、簡易な構成で移動体の自車両への接近状況を推定可能な移動体位置推定システムを提供することにある。
【課題を解決するための手段および発明の効果】
【0012】
上記課題を解決するための移動体位置推定システムは、
移動体に備えられた携帯機と、自車両に備えられた車載装置とを有し、
携帯機は、移動体の位置を検出する移動体位置検出部と、移動体の位置を含む移動体情報を車載装置に送信する携帯機側送信部と、を備え、
車載装置は、携帯機から送信された移動体情報を受信する車載装置側受信部と、自車両の位置を取得する自車両位置取得部と、自車両の位置および移動体情報に含まれる携帯機の位置に基づいて、移動体の移動状況を推定する移動状況推定部と、移動状況推定部が推定した移動体の移動状況を含む移動体状況情報を出力する移動体状況情報出力部と、を備えることを特徴とする。
【0013】
上記構成によって、携帯電話や無線基地局を使用しない簡易な構成で、車両の発進時以外にも移動体の自車両への接近状況を推定可能となる。また、移動体位置検出部は、例えばGPS(Global Positioning System:全地球測位システム)受信機を用いることで、小型化・低コスト化・システムの簡素化を図ることができる。
【0014】
また、本発明の移動体位置推定システムにおける車載装置は、移動体の移動状況に基づいて、移動体が自車両に接近しているか否かを判定する接近判定部を備え、移動体状況情報出力部は、接近判定部が、移動体が自車両に接近していると判定したとき、その移動体の移動状況を移動体状況情報として出力する。
【0015】
上記構成によって、例えば見通しの悪い交差点で、物陰から飛び出してくる自転車の存在を移動体状況情報として出力することができ、危険を回避することができる。
【0016】
また、本発明の移動体位置推定システムにおける携帯機は、移動体の移動速度を検出する移動速度検出部を備え、移動体情報は、移動体の移動速度を含む。
【0017】
上記構成によって、自車両のユーザは、移動体がどのくらいの速度で自車両に接近しているかを把握することができる。また、移動体の移動速度は、単位時間あたりの移動体の位置の変化から算出することができるため、速度センサを必要としないという利点もある。
【0018】
また、本発明の移動体位置推定システムにおける携帯機は、携帯機を一意に識別する識別コードを記憶する識別コード記憶部を備え、移動体情報は、識別コードを含む。
【0019】
上記構成によって、例えば、複数台の自転車が集団を形成して走行している場合でも、事前に台数(および位置、速度)を把握できるので、「1台と思っていたら3台だった」というような思わぬ事態を招くことを防止できる。
【0020】
また、本発明の移動体位置推定システムにおける移動体情報は、移動体の種別に応じて定められる種別コードを含む。
【0021】
上記構成によって、どのような移動体が存在、接近しているかを判別でき、移動体に応じて適切な対応をとることができる。
【0022】
また、本発明の移動体位置推定システムにおける移動体の種別は、歩行者、軽自車両、二輪車、および自動車のうちの少なくとも一つを含む。
【0023】
上記構成によって、接近してくる移動体の種別を事前に把握できることで、その移動体に対応するための態勢を整えておくことができる。
【0024】
また、本発明の移動体位置推定システムにおける携帯機は、ユーザの操作により移動体の種別を設定するための操作入力部を備える。
【0025】
上記構成によって、確実かつ正確に移動体の種別を設定することができる。
【0026】
また、本発明の移動体位置推定システムにおける車載装置は、自車両の位置を含む電子地図データを取得する電子地図データ取得部と、取得した電子地図データと、移動体状況情報に基づく移動体の位置および自車両の位置とを、表示器に表示する表示制御部と、を備える。
【0027】
上記構成によって、どの種別の移動体がどこから接近してくるかを視覚的に把握することができる。
【0028】
また、本発明の移動体位置推定システムにおける表示制御部は、移動体の移動状況に応じて、移動体の表示意匠を異なるものとする。
【0029】
上記構成によって、単に移動体を表示するだけではないため、自車両のユーザは、どの移動体に注意を払えばよいか視覚的に判断し、移動体に対する対応の優先順位付けを行うことができる。
【0030】
また、本発明の移動体位置推定システムにおける車載装置は、移動体の自車両に対する接近速度を算出する接近速度算出部を備え、表示制御部は、接近速度に応じて移動体の表示意匠を異なるものとする。
【0031】
一般に、接近速度が大きい移動体ほど、自車両に対する脅威は高くなる。上記構成によって、自車両のユーザは、どの移動体に注意を払えばよいかを速やかに判断することができる。
【0032】
また、本発明の移動体位置推定システムにおける車載装置は、移動体と自車両との距離を算出する距離算出部を備え、表示制御部は、距離に応じて移動体の表示意匠を異なるものとする。
【0033】
一般に、自車両との距離が小さい移動体ほど、自車両に対する脅威は高くなる。上記構成によっても、自車両のユーザは、どの移動体に注意を払えばよいかを速やかに判断することができる。
【0034】
また、本発明の移動体位置推定システムにおける車載装置は、自車両に接近している移動体の携帯機に対して、自車両に接近している旨の接近情報を送信する車載装置側送信部を備え、携帯機は、接近情報を受信する携帯機側受信部と、携帯機側受信部が受信した接近情報に基づいて、自車両に接近している旨を報知する接近情報報知部と、を備える。
【0035】
上記構成によって、自車両に接近している移動体の位置を推定することに加え、自車両に接近している移動体に対してその旨の情報(接近情報)を送信することで、移動体にも注意喚起を行うことができる。
【0036】
また、本発明の移動体位置推定システムにおける車載装置と携帯機との通信は、RF通信により行う。
【0037】
RF(Radio Frequency:高周波)通信で主として用いられるUHF帯(例えば、国内なら300MHz帯)では、送信出力が微弱でも数十m、もう少し出力を上げれば数百〜千m程度の通信距離を確保でき、出力の割に比較的遠距離まで送信することができる。上記構成によって、移動体の接近を推定するためには、概ね20m程度の通信距離があればよいので、本発明にはRF通信が適している。また、送信出力が微弱で済むため、電池を電源とする携帯機の電力消費を抑制することもできる。
【0038】
また、本発明の移動体位置推定システムにおける自車両には、携帯型のスマートキーをポーリングするためのポーリング信号を無線出力するポーリング信号出力部と、該ポーリング信号の受信に基づいてスマートキーから送信されるIDコードを受信するIDコード受信部と、受信した該IDコードと自身に記憶されたマスターコードとを照合する照合部と、その照合結果に基づいて予め定められた動作を許可する動作許可部とを備えるスマートエントリーシステムが設けられ、車載装置側受信部は、IDコード受信部に兼用され、携帯機は、スマートキーに兼用され、識別コードはIDコードに兼用される。
【0039】
スマートエントリーシステムでは、一般的に、スマートキーから自車両(車載装置)へのデータ送信には、UHF帯の電波を用いている。上記構成によって、スマートエントリーシステムに本発明の機能を組み込むことができるので、低コストで本発明の構成を実現することができる。また、近年、自車両のスマートキーを用いてドアの施錠/開錠を行う住居が建築・販売されている。この場合、ユーザ(入居者)は、常時スマートキーを携帯する必要があるので、歩行者として行動するときも、自転車、二輪車、自動車のいずれで移動するときも他の車両から移動体として認識されるので、他の車両に移動体として認識されるだけではなく、自身も他の車両からの接近情報を受信できるので、双方の移動時の安全性が高くなるという効果もある。
【0040】
また、本発明の移動体位置推定システムにおける自車両には、ユーザの操作により携帯型のワイヤレスキーから送信される制御信号を受信する制御信号受信部を備え、受信した制御信号に基づいて、自車両のドアロック機構の施錠および解錠を行うキーレスエントリーシステムが設けられ、車載装置側受信部は、制御信号受信部に兼用され、携帯機は、ワイヤレスキーに兼用される。
【0041】
キーレスエントリーシステムでは、一般的に、ワイヤレスキーから自車両(車載装置)へのデータ送信には、UHF帯の電波を用いている。上記構成によって、キーレスエントリーシステムに本発明の機能を組み込むことができるので、低コストで本発明の構成を実現することができる。また、キーレスエントリーシステムは、広く普及しているので、本発明の機能を組み込むことで、自車両および移動体の走行時あるいは接近時の安全性が高まる。
【図面の簡単な説明】
【0042】
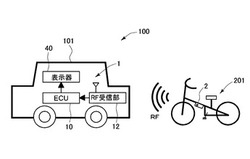
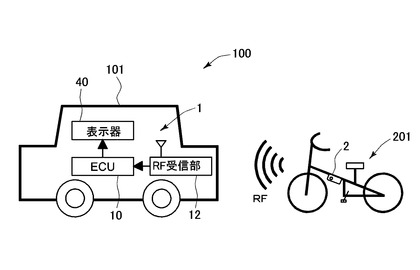
【図1】移動体位置推定システムの構成を示すブロック図。
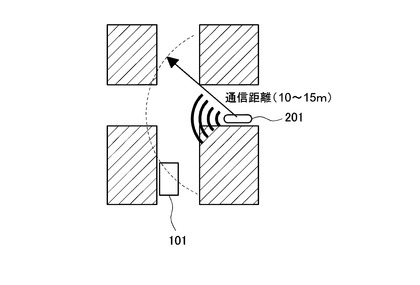
【図2】車載装置と携帯機との通信範囲の一例を示す図。
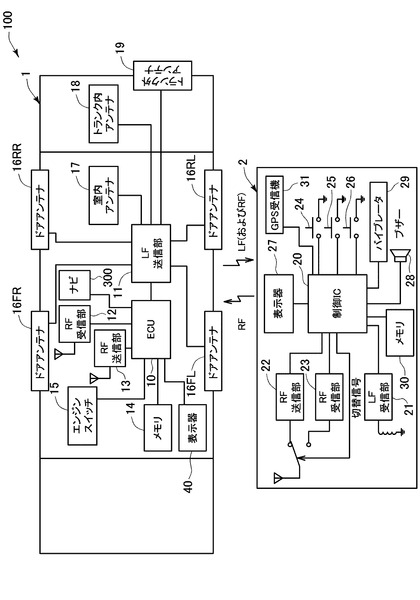
【図3】車載装置および携帯機の構成を示すブロック図。
【図4】ナビゲーション装置の構成を示すブロック図。
【図5】移動体位置推定処理を説明するフロー図。
【図6】移動体状況情報の記憶例を示す図。
【図7】車載装置の表示器における表示画面例を示す図。
【図8】車載装置の表示器における表示画面例の別例を示す図。
【図9】車載装置の表示器における表示画面例のさらなる別例を示す図。
【図10】移動体位置推定システムの構成の別例を示すブロック図。
【発明を実施するための形態】
【0043】
以下、本発明の移動体位置推定システムを、図面を用いて説明する。図1に、移動体位置推定システム100の全体構成を示す。移動体位置推定システム100は、自車両101に搭載された車載装置1、および自車両101以外の移動体201に搭載された携帯機2を含んで構成される。
【0044】
図1の例では、移動体201として自転車を例示しているが、携帯機2を自動車に搭載してもよいし、人(すなわち歩行者)が携帯してもよい。また、携帯機2を人が携帯すれば、自動車に乗車する場合、自転車に乗る場合、徒歩で行動する場合、のいずれにおいても移動体と見なされる。なお、携帯機2は、図示しない電池(一次電池および二次電池のいずれでも可)により動作するようになっているが、携帯機2を自動車や自転車に搭載する場合、自動車のバッテリ、あるいは自転車の発電機やバッテリから電源を供給可能な構成としておけば、携帯機2の電池の消耗を抑制することができる。
【0045】
図2に、車載装置1(自車両101)と携帯機2(移動体201)との通信状態の一例を示す。図1にもあるように、車載装置1と携帯機2とはRFによる通信を行う。RFのうち、送信出力が微弱でも数十m程度の通信距離を確保できるUHF帯が適している。本実施例では、車載装置1と携帯機2との通信距離が、概ね10〜15mとなるように、車載装置および携帯機2において通信出力が設定されている。
【0046】
図3に、車載装置1および携帯機2の構成の一例を示す。本実施例は、本発明を、スマートエントリーシステムの一部として構成したものである。車載装置1は、ECU10,LF送信部11,RF受信部12,RF送信部13,フラッシュメモリ等の不揮発性記憶媒体で構成されるメモリ14,エンジンスイッチ15,ドアアンテナ16(16FR,16RR,16FL,16RLの総称),室内アンテナ17,トランク内アンテナ18,トランク外アンテナ19,LCD等の表示器40などを備えている。
【0047】
ECU10は、周知のCPU,各種プログラム(「車載装置制御プログラム」と総称する)が格納されたROMやRAM,および信号入出力回路(いずれも図示せず)等を含むコンピュータとして構成される。そして、CPUが車載装置制御プログラムを実行することで、車載装置1としての各種機能を実現する。また、ECU10は、ナビゲーション装置(図1では、「ナビ」と略記)300と、例えば車内LAN50(図4参照)を介してデータ通信可能に接続されている。なお、ECU10が本発明の自車両位置取得部,移動状況推定部,移動体状況情報出力部,接近判定部,表示制御部,接近速度算出部,距離算出部,電子地図データ取得部に相当する。
【0048】
LF送信部11は、携帯機2に対し、LF帯(例えば、100kHz帯)の電波にて無線信号を送信する。また、LF送信部11から送信される無線信号は、4箇所にあるドアアンテナ16,室内アンテナ17,トランク内アンテナ18,およびトランク外アンテナ19を介して、ドア近傍(車室外),車室内,トランク内,トランク外近傍の、限られた通信エリア内に対してのみ到達するようになっている。
【0049】
RF受信部12は、携帯機2から例えばUHF帯の電波にて送信されてくる無線信号を受信する。これにより、携帯機2の出力レベルが比較的微弱でも相応に通信距離が得られ、携帯機2からの応答信号をより確実に受信できる。また、RF送信部13は、携帯機2に対し、UHF帯の電波にて無線信号を送信する。なお、RF受信部12が本発明の車載装置側受信部に相当する。また、RF送信部13が本発明の車載装置側送信部に相当する。RF送信部13を備えない構成としてもよい。
【0050】
エンジンスイッチ15は、エンジンを始動する際に利用者が操作するスイッチで、利用者がエンジンスイッチ15を操作したことが、エンジンスイッチ15からの信号によって検知された場合、ECU10はエンジン始動が許可される状態にあるか否かを判断し、エンジン始動が許可される状態にあれば、ECU10からエンジン制御系へエンジン始動信号が伝達されるようになっている。
【0051】
携帯機2は、制御IC20,LF受信部21,RF送信部22,RF受信部23,プッシュスイッチ24〜26,表示器27,ブザー28,バイブレータ29,フラッシュメモリ等の不揮発性記憶媒体で構成されるメモリ30,GPS用の人工衛星からの送信電波(GPS信号)を受信するGPS受信機31などを備えている。なお、メモリ30が本発明の識別コード記憶部に相当する。また、GPS受信機31が本発明の移動体位置検出部に相当する。
【0052】
制御IC20は、例えば、周知のCPU,各種プログラム(「携帯機制御プログラム」と総称する)が格納されたROMやRAM,および信号入出力回路(いずれも図示せず)等を含むコンピュータとして構成される。そして、CPUが携帯機制御プログラムを実行することで、携帯機2としての各種機能を実現する。なお、制御IC20が本発明の移動速度検出部に相当する。
【0053】
LF受信部21は、車載装置1からLF帯の電波にて送信されてくる無線信号を受信する。RF送信部22は、車載装置1に対し、UHF帯の電波にて無線信号を送信する。また、RF受信部23は、車載装置1からUHF帯の電波にて送信されてくる無線信号を受信する。RF送信部22とRF受信部23とは、制御IC20からの切替信号によって送受信の動作が切り替えられる。なお、RF送信部22が本発明の携帯機側送信部に相当する。また、RF受信部23が本発明の携帯機側受信部に相当する。RF受信部23を含まない構成としてもよい。
【0054】
プッシュスイッチ24,25は、主にキーレスエントリー機能を利用するためのトリガーとなるキーとして用意されたもので、ワンプッシュ操作をした場合、例えばプッシュスイッチ24ではドアのロックが行われ、プッシュスイッチ25ではドアのアンロックが行われる。
【0055】
プッシュスイッチ26は、移動体種別コード(詳細は後述)を設定するために用いる。なお、プッシュスイッチ26が本発明の操作入力部に相当する。
【0056】
表示器27は、例えば、表示中に消費電力が不要か、または極小で済む電子ペーパーによって構成され、携帯機2の動作状態をメッセージ等により表示する。ブザー28は、携帯機2の動作状態を音で報知するものである。バイブレータ29は、携帯機2の動作状態を振動で報知するものである。なお、表示器27が本発明の接近情報報知部に相当する。
【0057】
上述のような構成によって、移動体位置推定システム100における車載装置1は、LF送信部11(ポーリング信号出力部と兼用)を介して、携帯機2(スマートキーと兼用)のスリープ状態を解除して通常の動作を行うようにするためのWAKE要求信号を携帯機2へ送信する。車載装置1側では、携帯機2からのWAKE応答信号をRF受信部12が正しく受信できたとき、IDコードの送信要求を行うための照合要求信号(すなわち、ポーリング信号)を携帯機2へ送信する。そして、車載装置1側では、携帯機2からの照合要求応答信号(IDコード)をRF受信部12(IDコード受信部と兼用)が受信し、ECU10(照合部,動作許可部と兼用)においてIDコードの照合を行う。そして、照合結果に応じてドアのアンロックやエンジン始動の許可(エンジンスイッチ15のオン指示等)、照合処理のリトライなどが行われる。これらは本願に直接関係しないため、詳細は割愛する。
【0058】
上述の構成では、本発明の構成を、新たなハードウェアを追加することなく、スマートエントリーシステムの車載装置制御プログラムおよび携帯機制御プログラムの改良のみにより実現することができる。
【0059】
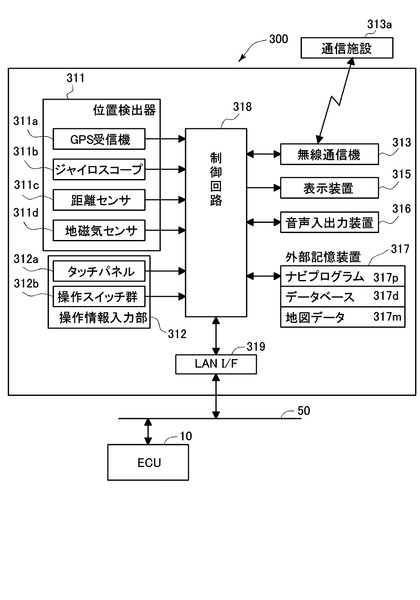
図4に、ナビゲーション装置300の全体構成を示す。ナビゲーション装置300は、車両の現在位置を検出する位置検出器311,運転者等の操作者からの各種指示を入力するための操作情報入力部312,無線通信機313,地図表示画面やTV(Television)画面等の各種表示を行うための表示装置315,各種のガイド音声等を出力したり運転者等の操作者の音声を入力したりするための音声入出力装置316,各種データを記憶するための、例えばハードディスクドライブ(HDD),ソリッドステート・ドライブ(SSD),あるいはシリコンディスク・ドライブ(SDD)で構成される外部記憶装置317,車両情報の授受を行うためのLAN I/F319,およびこれらが接続された制御回路318とを備えている。
【0060】
位置検出器311は、GPS用の人工衛星からの送信電波(GPS信号)を、GPSアンテナを介して受信し、車両の位置,方位,速度等を検出するGPS受信機311a,車両に加えられる回転運動の大きさを検出するジャイロスコープ311b,車両の前後方向の加速度等から走行した距離を検出する距離センサ311c,地磁気から進行方位を検出する地磁気センサ311dを備えている。そして、これらセンサ等311a〜311dは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。なお、精度によっては、上述したうちの一部のセンサで構成してもよく、またステアリングの回転センサ等(図示せず)を用いてもよい。
【0061】
操作情報入力部312は、例えば、表示装置315の表示画面上に構成されたタッチパネル312aと、メカニカルスイッチで構成される操作スイッチ群312bとのうちの少なくとも一方を備えている。また、タッチパネル312a上にはタッチセンサが備えられ、タッチパネル312aへのタッチ操作により該タッチセンサが押下されると、その押下された位置の座標が制御回路318に入力されるようになっている。
【0062】
無線通信機313は、車外の通信施設313aと通信を行うためのものである。通信施設313aは、インターネット上のWEBサーバ,交通情報センター,携帯電話基地局などが含まれ、無線通信機313は、これらの通信施設の一つあるいは複数と通信可能な回路を備えている。
【0063】
表示装置315は、例えば運転席の前方に設置されたカラー表示装置であり、液晶ディスプレイ,プラズマディスプレイ,有機ELディスプレイ等のいずれを用いてもよい。
【0064】
音声入出力装置316は、外部記憶装置317より読み出した施設のガイドや各種案内の音声や、LAN I/F319を介して取得した情報の読み上げ音声を出力することができる。音声入出力装置316は、音声データが周知のMP3形式のような音声ファイルである場合は、そのファイルに対応するCODECを含み、音声データがテキストファイルであれば、テキストファイルのデータを音声データに変換する音声合成回路を含む。
【0065】
また、音声入出力装置316は、図示しないマイクおよび周知の音声認識ユニットを含み、運転者等の操作者の音声を操作コマンド等として制御回路318に入力することができる構成としてもよい。
【0066】
外部記憶装置317には、ナビプログラム317pの他に位置検出の精度向上のためのいわゆるマップマッチング用データ、道路の接続を表した道路地図データを含む地図データベースである地図データ(すなわち、電子地図データ)317mが記憶される。地図データ317mは、表示用となる所定の地図画像情報を記憶するとともに、リンク情報やノード情報等を含む道路網情報を記憶する。リンク情報は、各道路を構成する所定の区間情報であって、位置座標,距離,所要時間,道幅,車線数,制限速度,該区間の傾斜角,道路形状等から構成される。また、ノード情報は、交差点(分岐路)等を規定する情報であって、位置座標,右左折車線数,接続先道路リンク,高度情報等から構成される。また、リンク間接続情報には、通行の可不可を示すデータなどが設定されている。
【0067】
また、外部記憶装置317には、データベース317dが構成され、その中には、上述の音声案内を行うためのデータ(音声ファイル,テキストデータ)も記憶されている。
【0068】
LAN I/F319は、車内LAN50を介して他の車載機器(車載装置1等)やセンサとのデータの遣り取りを行うためのインターフェース回路である。
【0069】
制御回路318は、図示しない周知のCPU,ROM,RAM,入出力回路であるI/O(Input/Output)およびこれらの構成を接続するバスラインなどからなる周知のマイクロコンピュータを中心に構成されている。CPUは、外部記憶装置317に記憶されたナビプログラム317pを実行し、外部記憶装置317に記憶されたデータを用いて制御を行う。
【0070】
上述のような構成によって、ナビゲーション装置300は、CPUがナビプログラム317pを実行することで、位置検出器311からの各検出信号に基づき座標および進行方向の組として車両の現在位置を算出し、外部記憶装置317を介して読み込んだ現在位置付近の地図や、操作情報入力部312の操作によって指示された範囲の地図等を表示装置315に表示する地図表示処理や、外部記憶装置317に格納された地点データに基づき、操作情報入力部312の操作にしたがって目的地となる施設を選択し、現在位置から目的地までの最適な経路を自動的に求める経路計算を行って経路案内を行う経路案内処理等を行う。このように自動的に最適な経路を設定する手法は、ダイクストラ法等の手法が知られている。
【0071】
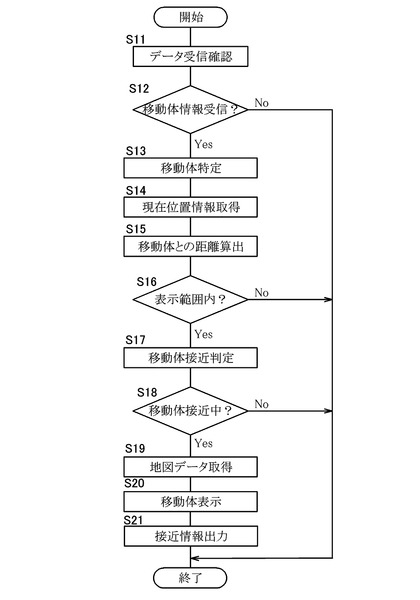
図5を用いて、車載装置1のECU10にて行われる移動体位置推定処理について説明する。なお、本処理は、上述の車載装置制御プログラムに含まれ、該プログラムに含まれる他の処理とともに予め定められたタイミングで実行される。
【0072】
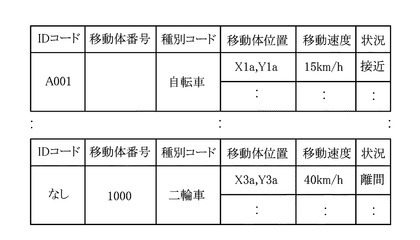
携帯機2からは、予め定められたタイミング(所定時間間隔、あるいは移動体201が所定距離移動したとき)で、移動体情報を送信している。移動体情報には、携帯機2を一意に識別する識別コード((IDコードと兼用))、GPS受信機31で受信したGPS信号により特定される移動体の位置(移動体位置情報)、種別コード、移動体の移動速度を含む。
【0073】
種別コードは、移動体201の種別を識別するためのもので、例えば、人(歩行者)、自転車、自動二輪車(原付自転車を含む)、自動車のように分類される。ユーザが携帯機2のプッシュスイッチ26を押下することで、上述の種別が表示器27の画面上にサイクリックに表示されるので、設定したい種別が表示されたときにプッシュスイッチ26の操作を停止する、あるいは他のプッシュスイッチ(24,25)を操作すると、その種別に設定されるようになっている。
【0074】
移動体201の移動速度は、単位時間あたりの移動体201(携帯機2)の位置の変化(すなわち、移動距離距離)から算出することができる。
【0075】
種別コードを、ユーザの設定操作を行うことなく自動設定するようにしてもよい。例えば、以下のように、移動体201(携帯機2)の移動速度に対して閾値を設定し、その閾値を超えるか否かによって、移動体201の種別を、少なくとも、歩行者、自転車、自動車に分類する。
・移動速度<6km/hのときは、種別を歩行者とする。
・6km/h≦移動速度<40km/hのときは、種別を自転車とする。
・40km/h≦移動速度のときは、種別を自動車とする。
【0076】
また、車載装置1で種別コードを設定するようにしてもよい。図5の移動体位置推定処理(詳細は後述)で、移動体情報を受信したときに、ナビゲーション装置300から自車両101周辺の地図データを取得し、移動体201が道路の車線の略中央を移動しているときには自動車に設定し、移動体201が道路の歩道寄りを移動しているときには、移動速度に応じて自転車あるいは自動二輪車に設定し、移動体201が道路の歩道を移動しているときには、移動速度に応じて歩行者あるいは自転車に設定する。
【0077】
図5に戻り、まず、RF受信部12が、移動体201の携帯機2からのデータを受信したか否かを確認し(S11)、そのデータが移動体情報であるか否かを判定する。移動体情報を受信したと判定したとき(S12:Yes)、以下のうちの少なくとも一つの方法を用いて、移動体201を特定する(S13)。
・移動体情報にIDコードが含まれているときには、IDコードにより移動体201を特定する。つまり、同じ位置に、同じ種別コードかつ同じ移動速度の複数の移動体が存在する場合でも、IDコードは異なるので、移動体を個々に特定できる。
・移動体情報にIDコードが含まれていないときには、種別コード、移動体位置情報および移動速度に基づいて、移動体201を特定する。つまり、同じ位置に複数の移動体が存在する場合でも、種別コードあるいは移動速度が異なれば、移動体を個々に特定できる。
【0078】
車載装置1では、受信した移動体情報等を、特定した移動体毎に、移動体状況情報としてメモリ14に記憶する。図6に移動体状況情報の記憶例を示す。移動体状況情報は、移動体情報の他に、移動体201が自車両101に接近しているか否かの状況(以下、「接近状況」ともいう)も含まれている。
【0079】
移動体201が車両101の電波受信範囲に進入し、車両101が該移動体からの電波(すなわち、移動体情報)を最初に受信したとき、その移動体に関する移動体状況情報を、移動体情報にIDコードが含まれているときには、IDコードに関連付けて記憶し、以降同じIDコードの移動体情報を受信したときには、そのIDコードに関連付けて、履歴情報として順次記憶する。
【0080】
また、移動体情報にIDコードが含まれていないときには、特定した順に移動体番号を付与し、その移動体番号に関連付けて移動体状況情報として記憶する。そして、これ以降、IDコードが含まれていない移動体情報を受信したときには、既に記憶されているIDコードが含まれていない移動体についての移動体状況情報を参照し、種別コードが同じかどうか、位置の変化が所定範囲内か、移動速度の変化が所定範囲内か、あるいは接近状況が同じか、によって、既に記憶されている移動体のものであるか否かを判定し、既に記憶されている移動体のものであるときには、その移動体番号に関連付けて記憶し、記憶されていない移動体のものであるときには、新たな移動体番号を付与して記憶する。
【0081】
なお、移動体状況情報は、その移動体からの電波を受信しなくなったとき、あるいは、その移動体が自車両101から所定距離を超えて遠ざかったときに消去する。
【0082】
図5に戻り、自車両101の現在位置情報を取得する(S14)。これは、ナビゲーション装置300に現在位置要求信号を送信し、ナビゲーション装置300は位置検出部311で検出した自車両101の現在位置情報を車載装置1に送る。
【0083】
次に、移動体情報に含まれる移動体201の移動体位置情報と自車両101の現在位置情報とに基づいて、自車両101と移動体201との距離を算出する(S15)。そして、算出した距離に基づいて、表示器40の表示範囲内にあるか否かを判定する。なお、表示範囲は、以下のうちの少なくとも一方を用いる。
・自車両101から予め定められた距離の範囲(例えば、10m四方)を表示範囲とする。
・表示器40に表示されている自車両101周辺の地図を表示範囲とする。
【0084】
次に、移動体201の移動体位置情報の変化に基づいて、移動体201が自車両101に接近しているか否かを判定する(S17)。判定の結果は、該当する移動体201の移動体状況情報に記憶する。移動体201が自車両101に接近していると判定したときには、ナビゲーション装置300から、自車両101の現在位置周辺の地図データを取得し(S19)、表示器40の表示画面で、その地図データ上に、自車両101に接近している移動体201を重ねて表示する(S20)。なお、ステップS21は、本実施の形態では実行しないので、ここでは説明しない。
【0085】
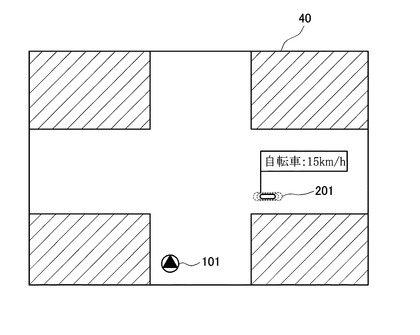
図7に、表示器40の表示画面例を示す。図7の例では、自車両101の右方向から接近する移動体201がシンボルで表示されている。移動体201の種別、移動速度を表示してもよい。また、自車両101と移動体201との距離、あるいは移動体201の自車両101への接近速度に応じて、例えば以下のように、表示意匠を異なるものとしてもよい。
・自車両101と移動体201との距離を基準とするときには、距離が短くなるにつれて、「緑→黄→赤」のように表示色を、警告の意味合いが強くなる色調に変化させる。あるいは、表示色を同一とし、距離が短くなるにつれて、「点灯→遅い点滅→早い点滅」のように表示形態を変化させる。
・移動体201の接近速度を基準とするときには、接近速度が速くなるにつれて、距離を基準とするときと同様に、警告の意味合いが強くなるように表示色あるいは表示形態を変化させる。
【0086】
図8に、表示器40の表示画面例の別例を示す。図8の例では、自車両101に接近していないものを含めて、自車両101の周辺の全ての移動体(201a〜201g)を表示している。また、各移動体は丸印で示され、その丸印は、自車両101と移動体との距離、あるいは移動体の自車両101への接近速度により表示意匠が変化する。また、丸印の周縁部から突出する棒状の部分は、移動方向および移動速度を示すベクトル部である。ベクトル部は、移動速度が速くなるにつれて長くなるようになっている。
【0087】
自車両101から離れて行く移動体201b,201eは、ユーザの注意をあまり引かない表示意匠で表示され、自車両101に接近している移動体201a,201c,201d,201f,201gは、上述の距離あるいは接近速度に応じて、移動体201a,201c,201fは、移動体201d,201gよりもユーザの注意を引く表示意匠で表示される。
【0088】
また、ナビゲーション装置300で目的地までの経路案内を行っているときには、例えば、図5のステップS14において、ナビゲーション装置300から案内経路に関する情報を取得し、その案内経路情報も含めて接近判定をしてもよい。図9に、このときの表示器40の表示画面例を示す。自車両101は交差点を左折しようとしているので、移動体201bに接近することになり、移動体201bの表示意匠は移動体201fと同じものとなる。そして、左折を完了すると、移動体201a,201fの表示意匠は移動体201eと同じものとなる。
【0089】
車載装置1がRF送信部13を備え、携帯機2がRF受信部23を備えるとき、例えば、図5のステップS21のように、車載装置1から自車両101に接近している移動体201の携帯機2に、RF送信部13を介して自車両101に接近している旨の接近情報を送信し、携帯機2はRF受信部23を介して接近情報を受信したときに、表示器27に「車両が接近しています。注意して下さい」のようなメッセージを表示してもよい。また、接近情報の報知を行う際に、ブザー28を予め定められた吹鳴パターンで吹鳴させたり、バイブレータ29を予め定められた振動パターンで振動させてもよい。これら報知内容(表示用データ),吹鳴パターン,振動パターンは、メモリ30に記憶されている。また、車載装置1で、移動体201から見た自車両101の接近方向を特定して、その接近方向を接近情報に含めて送信してもよい。これにより、移動体201側では、車両がどの方向から接近してくるかを認識できる。
【0090】
上述の実施例は、本発明を、スマートエントリーシステムの一部として構成したものであるが、キーレスエントリーシステムの一部として構成しもよい。図10に、このときの車載装置1および携帯機2の構成の一例を示す。図10と異なる点は、スマートエントリーシステム特有の構成である、LF送信部11,ドアアンテナ16,室内アンテナ17,トランク内アンテナ18,トランク外アンテナ19(以上は車載装置1)、およびLF受信部21(携帯機2)を備えていないことである。また、上述の実施例と同様に、車載装置1のRF送信部13および携帯機2のRF受信部23を含まない構成としてもよい。
【0091】
キーレスエントリーシステムは、ユーザのプッシュスイッチ(24,25)の操作により携帯機2(ワイヤレスキーと兼用)のRF送信部22から送信される制御信号を、RF受信部12(制御信号受信部と兼用)にて受信し、受信した制御信号に基づいて、自車両101のドアロック機構(図示せず)の施錠および解錠を行う。このキーレスエントリーシステムにおいても、本発明の構成を実現できる。
【0092】
また、上述の実施形態は、本発明を、スマートエントリーシステムあるいはキーレスエントリーシステムの一部として構成したものであるが、ナビゲーション装置の一部として構成してもよい。すなわち、車内LAN50を介して移動体情報をECU10から取得して、制御回路318において図5のステップS13〜S20までの処理を行い、表示装置315に移動体状況情報を表示する。そして、携帯機に接近情報を出力するときには(S21)、接近情報および接近情報送信指令をECU10に送る。
【0093】
以上、本発明の実施の形態を説明したが、これらはあくまで例示にすぎず、本発明はこれらに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて、当業者の知識に基づく種々の変更が可能である。
【符号の説明】
【0094】
1 車載装置
2 携帯機
10 ECU(自車両位置取得部,移動状況推定部,移動体状況情報出力部,接近判定部,表示制御部,接近速度算出部,距離算出部,電子地図データ取得部)
12 RF受信部(車載装置側受信部)
13 RF送信部(車載装置側送信部)
20 制御IC(移動速度検出部)
22 RF送信部(携帯機側送信部)
23 RF受信部(携帯機側受信部)
26 プッシュスイッチ(操作入力部)
27 表示器(接近情報報知部)
28 ブザー
29 バイブレータ
30 メモリ(識別コード記憶部)
31 GPS受信機(移動体位置検出部)
100 車載機器制御システム
101 自車両
201 移動体
300 ナビゲーション装置
311 位置検出器
317m 地図データ(電子地図データ)
【技術分野】
【0001】
本発明は、移動体の位置を推定して車両の運転者に報知する移動体位置推定システムに関する。
【背景技術】
【0002】
近年、車両の運転者から死角となる位置の状況を、運転者に報知するための装置が考案されている。
【0003】
例えば、駐停車状態(停止状態)からの発進時に、周囲複数方向についての状況を運転者に提示できる周囲状況提示システムが考案されている(特許文献1参照)。
【0004】
また、高速移動体に乗車中の者に関する情報は運転者に報知されない一方、歩行状態に相当する状態にある者に関する情報は運転者に好適に報知する車両用歩行者検知システムが考案されている(特許文献2参照)。
【0005】
また、FM電波の送受信機を用いて簡易に構成することができる接触回避装置が考案されている(特許文献3参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特表2007−519549号公報
【特許文献2】特開2005−352577号公報
【特許文献3】特開2007−216739号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の構成では、車両の発進時以外は、周囲複数方向についての状況を運転者に提示することができないという問題がある。
【0008】
特許文献2の構成では、携帯電話を使用しており、携帯電話の位置の特定には無線基地局を使用するため、システム構成が大型化・複雑化するという問題がある。
【0009】
特許文献3の構成では、FM送信機およびダイバシティアンテナが必要となるという問題がある。また、電波の状態によっては、他車両の接近方向を精確に検知できないこともあり得る。
【0010】
また、とりわけ四輪車(自動車)からの二輪車の位置推定は困難であり、二輪車の発見は運転者の注意力に依存している。しかし、運転席からの視界には多数の死角が存在し、運転者の負荷の増加を招いている。特に、夜間になると、二輪車の発見はさらに困難となる。また、二輪車発見の手法として、聴覚による発見が考えられるが、運転中には様々な騒音が発生しているため、このような手法は実現が困難といえる。
【0011】
上記問題点を背景として、簡易な構成で移動体の自車両への接近状況を推定可能な移動体位置推定システムを提供することにある。
【課題を解決するための手段および発明の効果】
【0012】
上記課題を解決するための移動体位置推定システムは、
移動体に備えられた携帯機と、自車両に備えられた車載装置とを有し、
携帯機は、移動体の位置を検出する移動体位置検出部と、移動体の位置を含む移動体情報を車載装置に送信する携帯機側送信部と、を備え、
車載装置は、携帯機から送信された移動体情報を受信する車載装置側受信部と、自車両の位置を取得する自車両位置取得部と、自車両の位置および移動体情報に含まれる携帯機の位置に基づいて、移動体の移動状況を推定する移動状況推定部と、移動状況推定部が推定した移動体の移動状況を含む移動体状況情報を出力する移動体状況情報出力部と、を備えることを特徴とする。
【0013】
上記構成によって、携帯電話や無線基地局を使用しない簡易な構成で、車両の発進時以外にも移動体の自車両への接近状況を推定可能となる。また、移動体位置検出部は、例えばGPS(Global Positioning System:全地球測位システム)受信機を用いることで、小型化・低コスト化・システムの簡素化を図ることができる。
【0014】
また、本発明の移動体位置推定システムにおける車載装置は、移動体の移動状況に基づいて、移動体が自車両に接近しているか否かを判定する接近判定部を備え、移動体状況情報出力部は、接近判定部が、移動体が自車両に接近していると判定したとき、その移動体の移動状況を移動体状況情報として出力する。
【0015】
上記構成によって、例えば見通しの悪い交差点で、物陰から飛び出してくる自転車の存在を移動体状況情報として出力することができ、危険を回避することができる。
【0016】
また、本発明の移動体位置推定システムにおける携帯機は、移動体の移動速度を検出する移動速度検出部を備え、移動体情報は、移動体の移動速度を含む。
【0017】
上記構成によって、自車両のユーザは、移動体がどのくらいの速度で自車両に接近しているかを把握することができる。また、移動体の移動速度は、単位時間あたりの移動体の位置の変化から算出することができるため、速度センサを必要としないという利点もある。
【0018】
また、本発明の移動体位置推定システムにおける携帯機は、携帯機を一意に識別する識別コードを記憶する識別コード記憶部を備え、移動体情報は、識別コードを含む。
【0019】
上記構成によって、例えば、複数台の自転車が集団を形成して走行している場合でも、事前に台数(および位置、速度)を把握できるので、「1台と思っていたら3台だった」というような思わぬ事態を招くことを防止できる。
【0020】
また、本発明の移動体位置推定システムにおける移動体情報は、移動体の種別に応じて定められる種別コードを含む。
【0021】
上記構成によって、どのような移動体が存在、接近しているかを判別でき、移動体に応じて適切な対応をとることができる。
【0022】
また、本発明の移動体位置推定システムにおける移動体の種別は、歩行者、軽自車両、二輪車、および自動車のうちの少なくとも一つを含む。
【0023】
上記構成によって、接近してくる移動体の種別を事前に把握できることで、その移動体に対応するための態勢を整えておくことができる。
【0024】
また、本発明の移動体位置推定システムにおける携帯機は、ユーザの操作により移動体の種別を設定するための操作入力部を備える。
【0025】
上記構成によって、確実かつ正確に移動体の種別を設定することができる。
【0026】
また、本発明の移動体位置推定システムにおける車載装置は、自車両の位置を含む電子地図データを取得する電子地図データ取得部と、取得した電子地図データと、移動体状況情報に基づく移動体の位置および自車両の位置とを、表示器に表示する表示制御部と、を備える。
【0027】
上記構成によって、どの種別の移動体がどこから接近してくるかを視覚的に把握することができる。
【0028】
また、本発明の移動体位置推定システムにおける表示制御部は、移動体の移動状況に応じて、移動体の表示意匠を異なるものとする。
【0029】
上記構成によって、単に移動体を表示するだけではないため、自車両のユーザは、どの移動体に注意を払えばよいか視覚的に判断し、移動体に対する対応の優先順位付けを行うことができる。
【0030】
また、本発明の移動体位置推定システムにおける車載装置は、移動体の自車両に対する接近速度を算出する接近速度算出部を備え、表示制御部は、接近速度に応じて移動体の表示意匠を異なるものとする。
【0031】
一般に、接近速度が大きい移動体ほど、自車両に対する脅威は高くなる。上記構成によって、自車両のユーザは、どの移動体に注意を払えばよいかを速やかに判断することができる。
【0032】
また、本発明の移動体位置推定システムにおける車載装置は、移動体と自車両との距離を算出する距離算出部を備え、表示制御部は、距離に応じて移動体の表示意匠を異なるものとする。
【0033】
一般に、自車両との距離が小さい移動体ほど、自車両に対する脅威は高くなる。上記構成によっても、自車両のユーザは、どの移動体に注意を払えばよいかを速やかに判断することができる。
【0034】
また、本発明の移動体位置推定システムにおける車載装置は、自車両に接近している移動体の携帯機に対して、自車両に接近している旨の接近情報を送信する車載装置側送信部を備え、携帯機は、接近情報を受信する携帯機側受信部と、携帯機側受信部が受信した接近情報に基づいて、自車両に接近している旨を報知する接近情報報知部と、を備える。
【0035】
上記構成によって、自車両に接近している移動体の位置を推定することに加え、自車両に接近している移動体に対してその旨の情報(接近情報)を送信することで、移動体にも注意喚起を行うことができる。
【0036】
また、本発明の移動体位置推定システムにおける車載装置と携帯機との通信は、RF通信により行う。
【0037】
RF(Radio Frequency:高周波)通信で主として用いられるUHF帯(例えば、国内なら300MHz帯)では、送信出力が微弱でも数十m、もう少し出力を上げれば数百〜千m程度の通信距離を確保でき、出力の割に比較的遠距離まで送信することができる。上記構成によって、移動体の接近を推定するためには、概ね20m程度の通信距離があればよいので、本発明にはRF通信が適している。また、送信出力が微弱で済むため、電池を電源とする携帯機の電力消費を抑制することもできる。
【0038】
また、本発明の移動体位置推定システムにおける自車両には、携帯型のスマートキーをポーリングするためのポーリング信号を無線出力するポーリング信号出力部と、該ポーリング信号の受信に基づいてスマートキーから送信されるIDコードを受信するIDコード受信部と、受信した該IDコードと自身に記憶されたマスターコードとを照合する照合部と、その照合結果に基づいて予め定められた動作を許可する動作許可部とを備えるスマートエントリーシステムが設けられ、車載装置側受信部は、IDコード受信部に兼用され、携帯機は、スマートキーに兼用され、識別コードはIDコードに兼用される。
【0039】
スマートエントリーシステムでは、一般的に、スマートキーから自車両(車載装置)へのデータ送信には、UHF帯の電波を用いている。上記構成によって、スマートエントリーシステムに本発明の機能を組み込むことができるので、低コストで本発明の構成を実現することができる。また、近年、自車両のスマートキーを用いてドアの施錠/開錠を行う住居が建築・販売されている。この場合、ユーザ(入居者)は、常時スマートキーを携帯する必要があるので、歩行者として行動するときも、自転車、二輪車、自動車のいずれで移動するときも他の車両から移動体として認識されるので、他の車両に移動体として認識されるだけではなく、自身も他の車両からの接近情報を受信できるので、双方の移動時の安全性が高くなるという効果もある。
【0040】
また、本発明の移動体位置推定システムにおける自車両には、ユーザの操作により携帯型のワイヤレスキーから送信される制御信号を受信する制御信号受信部を備え、受信した制御信号に基づいて、自車両のドアロック機構の施錠および解錠を行うキーレスエントリーシステムが設けられ、車載装置側受信部は、制御信号受信部に兼用され、携帯機は、ワイヤレスキーに兼用される。
【0041】
キーレスエントリーシステムでは、一般的に、ワイヤレスキーから自車両(車載装置)へのデータ送信には、UHF帯の電波を用いている。上記構成によって、キーレスエントリーシステムに本発明の機能を組み込むことができるので、低コストで本発明の構成を実現することができる。また、キーレスエントリーシステムは、広く普及しているので、本発明の機能を組み込むことで、自車両および移動体の走行時あるいは接近時の安全性が高まる。
【図面の簡単な説明】
【0042】
【図1】移動体位置推定システムの構成を示すブロック図。
【図2】車載装置と携帯機との通信範囲の一例を示す図。
【図3】車載装置および携帯機の構成を示すブロック図。
【図4】ナビゲーション装置の構成を示すブロック図。
【図5】移動体位置推定処理を説明するフロー図。
【図6】移動体状況情報の記憶例を示す図。
【図7】車載装置の表示器における表示画面例を示す図。
【図8】車載装置の表示器における表示画面例の別例を示す図。
【図9】車載装置の表示器における表示画面例のさらなる別例を示す図。
【図10】移動体位置推定システムの構成の別例を示すブロック図。
【発明を実施するための形態】
【0043】
以下、本発明の移動体位置推定システムを、図面を用いて説明する。図1に、移動体位置推定システム100の全体構成を示す。移動体位置推定システム100は、自車両101に搭載された車載装置1、および自車両101以外の移動体201に搭載された携帯機2を含んで構成される。
【0044】
図1の例では、移動体201として自転車を例示しているが、携帯機2を自動車に搭載してもよいし、人(すなわち歩行者)が携帯してもよい。また、携帯機2を人が携帯すれば、自動車に乗車する場合、自転車に乗る場合、徒歩で行動する場合、のいずれにおいても移動体と見なされる。なお、携帯機2は、図示しない電池(一次電池および二次電池のいずれでも可)により動作するようになっているが、携帯機2を自動車や自転車に搭載する場合、自動車のバッテリ、あるいは自転車の発電機やバッテリから電源を供給可能な構成としておけば、携帯機2の電池の消耗を抑制することができる。
【0045】
図2に、車載装置1(自車両101)と携帯機2(移動体201)との通信状態の一例を示す。図1にもあるように、車載装置1と携帯機2とはRFによる通信を行う。RFのうち、送信出力が微弱でも数十m程度の通信距離を確保できるUHF帯が適している。本実施例では、車載装置1と携帯機2との通信距離が、概ね10〜15mとなるように、車載装置および携帯機2において通信出力が設定されている。
【0046】
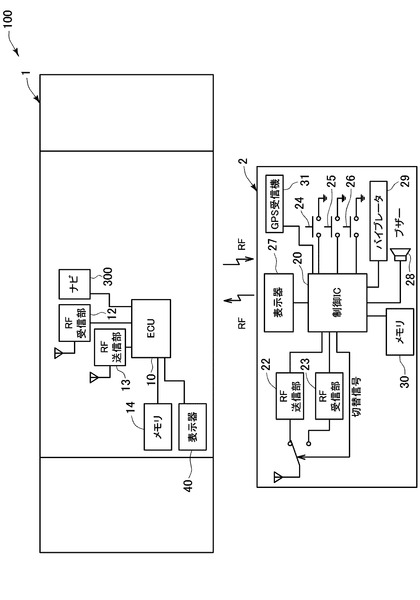
図3に、車載装置1および携帯機2の構成の一例を示す。本実施例は、本発明を、スマートエントリーシステムの一部として構成したものである。車載装置1は、ECU10,LF送信部11,RF受信部12,RF送信部13,フラッシュメモリ等の不揮発性記憶媒体で構成されるメモリ14,エンジンスイッチ15,ドアアンテナ16(16FR,16RR,16FL,16RLの総称),室内アンテナ17,トランク内アンテナ18,トランク外アンテナ19,LCD等の表示器40などを備えている。
【0047】
ECU10は、周知のCPU,各種プログラム(「車載装置制御プログラム」と総称する)が格納されたROMやRAM,および信号入出力回路(いずれも図示せず)等を含むコンピュータとして構成される。そして、CPUが車載装置制御プログラムを実行することで、車載装置1としての各種機能を実現する。また、ECU10は、ナビゲーション装置(図1では、「ナビ」と略記)300と、例えば車内LAN50(図4参照)を介してデータ通信可能に接続されている。なお、ECU10が本発明の自車両位置取得部,移動状況推定部,移動体状況情報出力部,接近判定部,表示制御部,接近速度算出部,距離算出部,電子地図データ取得部に相当する。
【0048】
LF送信部11は、携帯機2に対し、LF帯(例えば、100kHz帯)の電波にて無線信号を送信する。また、LF送信部11から送信される無線信号は、4箇所にあるドアアンテナ16,室内アンテナ17,トランク内アンテナ18,およびトランク外アンテナ19を介して、ドア近傍(車室外),車室内,トランク内,トランク外近傍の、限られた通信エリア内に対してのみ到達するようになっている。
【0049】
RF受信部12は、携帯機2から例えばUHF帯の電波にて送信されてくる無線信号を受信する。これにより、携帯機2の出力レベルが比較的微弱でも相応に通信距離が得られ、携帯機2からの応答信号をより確実に受信できる。また、RF送信部13は、携帯機2に対し、UHF帯の電波にて無線信号を送信する。なお、RF受信部12が本発明の車載装置側受信部に相当する。また、RF送信部13が本発明の車載装置側送信部に相当する。RF送信部13を備えない構成としてもよい。
【0050】
エンジンスイッチ15は、エンジンを始動する際に利用者が操作するスイッチで、利用者がエンジンスイッチ15を操作したことが、エンジンスイッチ15からの信号によって検知された場合、ECU10はエンジン始動が許可される状態にあるか否かを判断し、エンジン始動が許可される状態にあれば、ECU10からエンジン制御系へエンジン始動信号が伝達されるようになっている。
【0051】
携帯機2は、制御IC20,LF受信部21,RF送信部22,RF受信部23,プッシュスイッチ24〜26,表示器27,ブザー28,バイブレータ29,フラッシュメモリ等の不揮発性記憶媒体で構成されるメモリ30,GPS用の人工衛星からの送信電波(GPS信号)を受信するGPS受信機31などを備えている。なお、メモリ30が本発明の識別コード記憶部に相当する。また、GPS受信機31が本発明の移動体位置検出部に相当する。
【0052】
制御IC20は、例えば、周知のCPU,各種プログラム(「携帯機制御プログラム」と総称する)が格納されたROMやRAM,および信号入出力回路(いずれも図示せず)等を含むコンピュータとして構成される。そして、CPUが携帯機制御プログラムを実行することで、携帯機2としての各種機能を実現する。なお、制御IC20が本発明の移動速度検出部に相当する。
【0053】
LF受信部21は、車載装置1からLF帯の電波にて送信されてくる無線信号を受信する。RF送信部22は、車載装置1に対し、UHF帯の電波にて無線信号を送信する。また、RF受信部23は、車載装置1からUHF帯の電波にて送信されてくる無線信号を受信する。RF送信部22とRF受信部23とは、制御IC20からの切替信号によって送受信の動作が切り替えられる。なお、RF送信部22が本発明の携帯機側送信部に相当する。また、RF受信部23が本発明の携帯機側受信部に相当する。RF受信部23を含まない構成としてもよい。
【0054】
プッシュスイッチ24,25は、主にキーレスエントリー機能を利用するためのトリガーとなるキーとして用意されたもので、ワンプッシュ操作をした場合、例えばプッシュスイッチ24ではドアのロックが行われ、プッシュスイッチ25ではドアのアンロックが行われる。
【0055】
プッシュスイッチ26は、移動体種別コード(詳細は後述)を設定するために用いる。なお、プッシュスイッチ26が本発明の操作入力部に相当する。
【0056】
表示器27は、例えば、表示中に消費電力が不要か、または極小で済む電子ペーパーによって構成され、携帯機2の動作状態をメッセージ等により表示する。ブザー28は、携帯機2の動作状態を音で報知するものである。バイブレータ29は、携帯機2の動作状態を振動で報知するものである。なお、表示器27が本発明の接近情報報知部に相当する。
【0057】
上述のような構成によって、移動体位置推定システム100における車載装置1は、LF送信部11(ポーリング信号出力部と兼用)を介して、携帯機2(スマートキーと兼用)のスリープ状態を解除して通常の動作を行うようにするためのWAKE要求信号を携帯機2へ送信する。車載装置1側では、携帯機2からのWAKE応答信号をRF受信部12が正しく受信できたとき、IDコードの送信要求を行うための照合要求信号(すなわち、ポーリング信号)を携帯機2へ送信する。そして、車載装置1側では、携帯機2からの照合要求応答信号(IDコード)をRF受信部12(IDコード受信部と兼用)が受信し、ECU10(照合部,動作許可部と兼用)においてIDコードの照合を行う。そして、照合結果に応じてドアのアンロックやエンジン始動の許可(エンジンスイッチ15のオン指示等)、照合処理のリトライなどが行われる。これらは本願に直接関係しないため、詳細は割愛する。
【0058】
上述の構成では、本発明の構成を、新たなハードウェアを追加することなく、スマートエントリーシステムの車載装置制御プログラムおよび携帯機制御プログラムの改良のみにより実現することができる。
【0059】
図4に、ナビゲーション装置300の全体構成を示す。ナビゲーション装置300は、車両の現在位置を検出する位置検出器311,運転者等の操作者からの各種指示を入力するための操作情報入力部312,無線通信機313,地図表示画面やTV(Television)画面等の各種表示を行うための表示装置315,各種のガイド音声等を出力したり運転者等の操作者の音声を入力したりするための音声入出力装置316,各種データを記憶するための、例えばハードディスクドライブ(HDD),ソリッドステート・ドライブ(SSD),あるいはシリコンディスク・ドライブ(SDD)で構成される外部記憶装置317,車両情報の授受を行うためのLAN I/F319,およびこれらが接続された制御回路318とを備えている。
【0060】
位置検出器311は、GPS用の人工衛星からの送信電波(GPS信号)を、GPSアンテナを介して受信し、車両の位置,方位,速度等を検出するGPS受信機311a,車両に加えられる回転運動の大きさを検出するジャイロスコープ311b,車両の前後方向の加速度等から走行した距離を検出する距離センサ311c,地磁気から進行方位を検出する地磁気センサ311dを備えている。そして、これらセンサ等311a〜311dは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。なお、精度によっては、上述したうちの一部のセンサで構成してもよく、またステアリングの回転センサ等(図示せず)を用いてもよい。
【0061】
操作情報入力部312は、例えば、表示装置315の表示画面上に構成されたタッチパネル312aと、メカニカルスイッチで構成される操作スイッチ群312bとのうちの少なくとも一方を備えている。また、タッチパネル312a上にはタッチセンサが備えられ、タッチパネル312aへのタッチ操作により該タッチセンサが押下されると、その押下された位置の座標が制御回路318に入力されるようになっている。
【0062】
無線通信機313は、車外の通信施設313aと通信を行うためのものである。通信施設313aは、インターネット上のWEBサーバ,交通情報センター,携帯電話基地局などが含まれ、無線通信機313は、これらの通信施設の一つあるいは複数と通信可能な回路を備えている。
【0063】
表示装置315は、例えば運転席の前方に設置されたカラー表示装置であり、液晶ディスプレイ,プラズマディスプレイ,有機ELディスプレイ等のいずれを用いてもよい。
【0064】
音声入出力装置316は、外部記憶装置317より読み出した施設のガイドや各種案内の音声や、LAN I/F319を介して取得した情報の読み上げ音声を出力することができる。音声入出力装置316は、音声データが周知のMP3形式のような音声ファイルである場合は、そのファイルに対応するCODECを含み、音声データがテキストファイルであれば、テキストファイルのデータを音声データに変換する音声合成回路を含む。
【0065】
また、音声入出力装置316は、図示しないマイクおよび周知の音声認識ユニットを含み、運転者等の操作者の音声を操作コマンド等として制御回路318に入力することができる構成としてもよい。
【0066】
外部記憶装置317には、ナビプログラム317pの他に位置検出の精度向上のためのいわゆるマップマッチング用データ、道路の接続を表した道路地図データを含む地図データベースである地図データ(すなわち、電子地図データ)317mが記憶される。地図データ317mは、表示用となる所定の地図画像情報を記憶するとともに、リンク情報やノード情報等を含む道路網情報を記憶する。リンク情報は、各道路を構成する所定の区間情報であって、位置座標,距離,所要時間,道幅,車線数,制限速度,該区間の傾斜角,道路形状等から構成される。また、ノード情報は、交差点(分岐路)等を規定する情報であって、位置座標,右左折車線数,接続先道路リンク,高度情報等から構成される。また、リンク間接続情報には、通行の可不可を示すデータなどが設定されている。
【0067】
また、外部記憶装置317には、データベース317dが構成され、その中には、上述の音声案内を行うためのデータ(音声ファイル,テキストデータ)も記憶されている。
【0068】
LAN I/F319は、車内LAN50を介して他の車載機器(車載装置1等)やセンサとのデータの遣り取りを行うためのインターフェース回路である。
【0069】
制御回路318は、図示しない周知のCPU,ROM,RAM,入出力回路であるI/O(Input/Output)およびこれらの構成を接続するバスラインなどからなる周知のマイクロコンピュータを中心に構成されている。CPUは、外部記憶装置317に記憶されたナビプログラム317pを実行し、外部記憶装置317に記憶されたデータを用いて制御を行う。
【0070】
上述のような構成によって、ナビゲーション装置300は、CPUがナビプログラム317pを実行することで、位置検出器311からの各検出信号に基づき座標および進行方向の組として車両の現在位置を算出し、外部記憶装置317を介して読み込んだ現在位置付近の地図や、操作情報入力部312の操作によって指示された範囲の地図等を表示装置315に表示する地図表示処理や、外部記憶装置317に格納された地点データに基づき、操作情報入力部312の操作にしたがって目的地となる施設を選択し、現在位置から目的地までの最適な経路を自動的に求める経路計算を行って経路案内を行う経路案内処理等を行う。このように自動的に最適な経路を設定する手法は、ダイクストラ法等の手法が知られている。
【0071】
図5を用いて、車載装置1のECU10にて行われる移動体位置推定処理について説明する。なお、本処理は、上述の車載装置制御プログラムに含まれ、該プログラムに含まれる他の処理とともに予め定められたタイミングで実行される。
【0072】
携帯機2からは、予め定められたタイミング(所定時間間隔、あるいは移動体201が所定距離移動したとき)で、移動体情報を送信している。移動体情報には、携帯機2を一意に識別する識別コード((IDコードと兼用))、GPS受信機31で受信したGPS信号により特定される移動体の位置(移動体位置情報)、種別コード、移動体の移動速度を含む。
【0073】
種別コードは、移動体201の種別を識別するためのもので、例えば、人(歩行者)、自転車、自動二輪車(原付自転車を含む)、自動車のように分類される。ユーザが携帯機2のプッシュスイッチ26を押下することで、上述の種別が表示器27の画面上にサイクリックに表示されるので、設定したい種別が表示されたときにプッシュスイッチ26の操作を停止する、あるいは他のプッシュスイッチ(24,25)を操作すると、その種別に設定されるようになっている。
【0074】
移動体201の移動速度は、単位時間あたりの移動体201(携帯機2)の位置の変化(すなわち、移動距離距離)から算出することができる。
【0075】
種別コードを、ユーザの設定操作を行うことなく自動設定するようにしてもよい。例えば、以下のように、移動体201(携帯機2)の移動速度に対して閾値を設定し、その閾値を超えるか否かによって、移動体201の種別を、少なくとも、歩行者、自転車、自動車に分類する。
・移動速度<6km/hのときは、種別を歩行者とする。
・6km/h≦移動速度<40km/hのときは、種別を自転車とする。
・40km/h≦移動速度のときは、種別を自動車とする。
【0076】
また、車載装置1で種別コードを設定するようにしてもよい。図5の移動体位置推定処理(詳細は後述)で、移動体情報を受信したときに、ナビゲーション装置300から自車両101周辺の地図データを取得し、移動体201が道路の車線の略中央を移動しているときには自動車に設定し、移動体201が道路の歩道寄りを移動しているときには、移動速度に応じて自転車あるいは自動二輪車に設定し、移動体201が道路の歩道を移動しているときには、移動速度に応じて歩行者あるいは自転車に設定する。
【0077】
図5に戻り、まず、RF受信部12が、移動体201の携帯機2からのデータを受信したか否かを確認し(S11)、そのデータが移動体情報であるか否かを判定する。移動体情報を受信したと判定したとき(S12:Yes)、以下のうちの少なくとも一つの方法を用いて、移動体201を特定する(S13)。
・移動体情報にIDコードが含まれているときには、IDコードにより移動体201を特定する。つまり、同じ位置に、同じ種別コードかつ同じ移動速度の複数の移動体が存在する場合でも、IDコードは異なるので、移動体を個々に特定できる。
・移動体情報にIDコードが含まれていないときには、種別コード、移動体位置情報および移動速度に基づいて、移動体201を特定する。つまり、同じ位置に複数の移動体が存在する場合でも、種別コードあるいは移動速度が異なれば、移動体を個々に特定できる。
【0078】
車載装置1では、受信した移動体情報等を、特定した移動体毎に、移動体状況情報としてメモリ14に記憶する。図6に移動体状況情報の記憶例を示す。移動体状況情報は、移動体情報の他に、移動体201が自車両101に接近しているか否かの状況(以下、「接近状況」ともいう)も含まれている。
【0079】
移動体201が車両101の電波受信範囲に進入し、車両101が該移動体からの電波(すなわち、移動体情報)を最初に受信したとき、その移動体に関する移動体状況情報を、移動体情報にIDコードが含まれているときには、IDコードに関連付けて記憶し、以降同じIDコードの移動体情報を受信したときには、そのIDコードに関連付けて、履歴情報として順次記憶する。
【0080】
また、移動体情報にIDコードが含まれていないときには、特定した順に移動体番号を付与し、その移動体番号に関連付けて移動体状況情報として記憶する。そして、これ以降、IDコードが含まれていない移動体情報を受信したときには、既に記憶されているIDコードが含まれていない移動体についての移動体状況情報を参照し、種別コードが同じかどうか、位置の変化が所定範囲内か、移動速度の変化が所定範囲内か、あるいは接近状況が同じか、によって、既に記憶されている移動体のものであるか否かを判定し、既に記憶されている移動体のものであるときには、その移動体番号に関連付けて記憶し、記憶されていない移動体のものであるときには、新たな移動体番号を付与して記憶する。
【0081】
なお、移動体状況情報は、その移動体からの電波を受信しなくなったとき、あるいは、その移動体が自車両101から所定距離を超えて遠ざかったときに消去する。
【0082】
図5に戻り、自車両101の現在位置情報を取得する(S14)。これは、ナビゲーション装置300に現在位置要求信号を送信し、ナビゲーション装置300は位置検出部311で検出した自車両101の現在位置情報を車載装置1に送る。
【0083】
次に、移動体情報に含まれる移動体201の移動体位置情報と自車両101の現在位置情報とに基づいて、自車両101と移動体201との距離を算出する(S15)。そして、算出した距離に基づいて、表示器40の表示範囲内にあるか否かを判定する。なお、表示範囲は、以下のうちの少なくとも一方を用いる。
・自車両101から予め定められた距離の範囲(例えば、10m四方)を表示範囲とする。
・表示器40に表示されている自車両101周辺の地図を表示範囲とする。
【0084】
次に、移動体201の移動体位置情報の変化に基づいて、移動体201が自車両101に接近しているか否かを判定する(S17)。判定の結果は、該当する移動体201の移動体状況情報に記憶する。移動体201が自車両101に接近していると判定したときには、ナビゲーション装置300から、自車両101の現在位置周辺の地図データを取得し(S19)、表示器40の表示画面で、その地図データ上に、自車両101に接近している移動体201を重ねて表示する(S20)。なお、ステップS21は、本実施の形態では実行しないので、ここでは説明しない。
【0085】
図7に、表示器40の表示画面例を示す。図7の例では、自車両101の右方向から接近する移動体201がシンボルで表示されている。移動体201の種別、移動速度を表示してもよい。また、自車両101と移動体201との距離、あるいは移動体201の自車両101への接近速度に応じて、例えば以下のように、表示意匠を異なるものとしてもよい。
・自車両101と移動体201との距離を基準とするときには、距離が短くなるにつれて、「緑→黄→赤」のように表示色を、警告の意味合いが強くなる色調に変化させる。あるいは、表示色を同一とし、距離が短くなるにつれて、「点灯→遅い点滅→早い点滅」のように表示形態を変化させる。
・移動体201の接近速度を基準とするときには、接近速度が速くなるにつれて、距離を基準とするときと同様に、警告の意味合いが強くなるように表示色あるいは表示形態を変化させる。
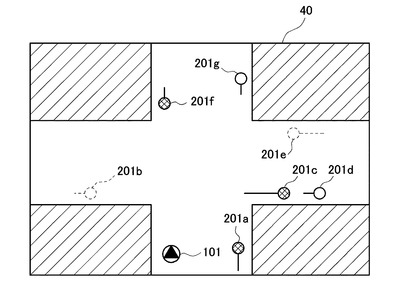
【0086】
図8に、表示器40の表示画面例の別例を示す。図8の例では、自車両101に接近していないものを含めて、自車両101の周辺の全ての移動体(201a〜201g)を表示している。また、各移動体は丸印で示され、その丸印は、自車両101と移動体との距離、あるいは移動体の自車両101への接近速度により表示意匠が変化する。また、丸印の周縁部から突出する棒状の部分は、移動方向および移動速度を示すベクトル部である。ベクトル部は、移動速度が速くなるにつれて長くなるようになっている。
【0087】
自車両101から離れて行く移動体201b,201eは、ユーザの注意をあまり引かない表示意匠で表示され、自車両101に接近している移動体201a,201c,201d,201f,201gは、上述の距離あるいは接近速度に応じて、移動体201a,201c,201fは、移動体201d,201gよりもユーザの注意を引く表示意匠で表示される。
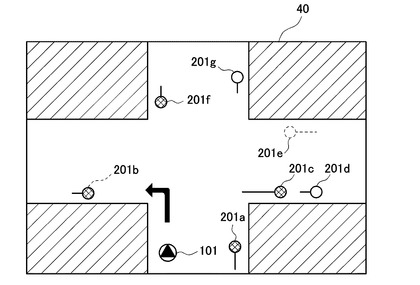
【0088】
また、ナビゲーション装置300で目的地までの経路案内を行っているときには、例えば、図5のステップS14において、ナビゲーション装置300から案内経路に関する情報を取得し、その案内経路情報も含めて接近判定をしてもよい。図9に、このときの表示器40の表示画面例を示す。自車両101は交差点を左折しようとしているので、移動体201bに接近することになり、移動体201bの表示意匠は移動体201fと同じものとなる。そして、左折を完了すると、移動体201a,201fの表示意匠は移動体201eと同じものとなる。
【0089】
車載装置1がRF送信部13を備え、携帯機2がRF受信部23を備えるとき、例えば、図5のステップS21のように、車載装置1から自車両101に接近している移動体201の携帯機2に、RF送信部13を介して自車両101に接近している旨の接近情報を送信し、携帯機2はRF受信部23を介して接近情報を受信したときに、表示器27に「車両が接近しています。注意して下さい」のようなメッセージを表示してもよい。また、接近情報の報知を行う際に、ブザー28を予め定められた吹鳴パターンで吹鳴させたり、バイブレータ29を予め定められた振動パターンで振動させてもよい。これら報知内容(表示用データ),吹鳴パターン,振動パターンは、メモリ30に記憶されている。また、車載装置1で、移動体201から見た自車両101の接近方向を特定して、その接近方向を接近情報に含めて送信してもよい。これにより、移動体201側では、車両がどの方向から接近してくるかを認識できる。
【0090】
上述の実施例は、本発明を、スマートエントリーシステムの一部として構成したものであるが、キーレスエントリーシステムの一部として構成しもよい。図10に、このときの車載装置1および携帯機2の構成の一例を示す。図10と異なる点は、スマートエントリーシステム特有の構成である、LF送信部11,ドアアンテナ16,室内アンテナ17,トランク内アンテナ18,トランク外アンテナ19(以上は車載装置1)、およびLF受信部21(携帯機2)を備えていないことである。また、上述の実施例と同様に、車載装置1のRF送信部13および携帯機2のRF受信部23を含まない構成としてもよい。
【0091】
キーレスエントリーシステムは、ユーザのプッシュスイッチ(24,25)の操作により携帯機2(ワイヤレスキーと兼用)のRF送信部22から送信される制御信号を、RF受信部12(制御信号受信部と兼用)にて受信し、受信した制御信号に基づいて、自車両101のドアロック機構(図示せず)の施錠および解錠を行う。このキーレスエントリーシステムにおいても、本発明の構成を実現できる。
【0092】
また、上述の実施形態は、本発明を、スマートエントリーシステムあるいはキーレスエントリーシステムの一部として構成したものであるが、ナビゲーション装置の一部として構成してもよい。すなわち、車内LAN50を介して移動体情報をECU10から取得して、制御回路318において図5のステップS13〜S20までの処理を行い、表示装置315に移動体状況情報を表示する。そして、携帯機に接近情報を出力するときには(S21)、接近情報および接近情報送信指令をECU10に送る。
【0093】
以上、本発明の実施の形態を説明したが、これらはあくまで例示にすぎず、本発明はこれらに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて、当業者の知識に基づく種々の変更が可能である。
【符号の説明】
【0094】
1 車載装置
2 携帯機
10 ECU(自車両位置取得部,移動状況推定部,移動体状況情報出力部,接近判定部,表示制御部,接近速度算出部,距離算出部,電子地図データ取得部)
12 RF受信部(車載装置側受信部)
13 RF送信部(車載装置側送信部)
20 制御IC(移動速度検出部)
22 RF送信部(携帯機側送信部)
23 RF受信部(携帯機側受信部)
26 プッシュスイッチ(操作入力部)
27 表示器(接近情報報知部)
28 ブザー
29 バイブレータ
30 メモリ(識別コード記憶部)
31 GPS受信機(移動体位置検出部)
100 車載機器制御システム
101 自車両
201 移動体
300 ナビゲーション装置
311 位置検出器
317m 地図データ(電子地図データ)
【特許請求の範囲】
【請求項1】
移動体に備えられた携帯機と、自車両に備えられた車載装置とを有し、
前記携帯機は、
前記移動体の位置を検出する移動体位置検出部と、
前記移動体の位置を含む移動体情報を前記車載装置に送信する携帯機側送信部と、
を備え、
前記車載装置は、
前記携帯機から送信された前記移動体情報を受信する車載装置側受信部と、
前記自車両の位置を取得する自車両位置取得部と、
前記自車両の位置および前記移動体情報に含まれる前記携帯機の位置に基づいて、前記移動体の移動状況を推定する移動状況推定部と、
前記移動状況推定部が推定した前記移動体の移動状況を含む移動体状況情報を出力する移動体状況情報出力部と、
を備えることを特徴とする移動体位置推定システム。
【請求項2】
前記車載装置は、
前記移動体の移動状況に基づいて、前記移動体が前記自車両に接近しているか否かを判定する接近判定部を備え、
前記移動体状況情報出力部は、前記接近判定部が、前記移動体が前記自車両に接近していると判定したとき、その移動体の移動状況を前記移動体状況情報として出力する請求項1に記載の移動体位置推定システム。
【請求項3】
前記携帯機は、
前記移動体の移動速度を検出する移動速度検出部を備え、
前記移動体情報は、前記移動体の移動速度を含む請求項1または請求項2に記載の移動体位置推定システム。
【請求項4】
前記携帯機は、
前記携帯機を一意に識別する識別コードを記憶する識別コード記憶部を備え、
前記移動体情報は、前記識別コードを含む請求項1ないし請求項3のいずれか1項に記載の移動体位置推定システム。
【請求項5】
前記移動体情報は、前記移動体の種別に応じて定められる種別コードを含む請求項1ないし請求項4のいずれか1項に記載の移動体位置推定システム。
【請求項6】
前記移動体の種別は、歩行者、軽自車両、二輪車、および自動車のうちの少なくとも一つを含む請求項5に記載の移動体位置推定システム。
【請求項7】
前記携帯機は、
ユーザの操作により前記移動体の種別を設定するための操作入力部を備える請求項5または請求項6に記載の移動体位置推定システム。
【請求項8】
前記車載装置は、
前記自車両の位置を含む電子地図データを取得する電子地図データ取得部と、
取得した前記電子地図データと、前記移動体状況情報に基づく前記移動体の位置および前記自車両の位置とを、表示器に表示する表示制御部と、
を備える請求項1ないし請求項7のいずれか1項に記載の移動体位置推定システム。
【請求項9】
前記表示制御部は、前記移動体の移動状況に応じて、前記移動体の表示意匠を異なるものとする請求項8に記載の移動体位置推定システム。
【請求項10】
前記車載装置は、
前記移動体の前記自車両に対する接近速度を算出する接近速度算出部を備え、
前記表示制御部は、前記接近速度に応じて前記移動体の表示意匠を異なるものとする請求項9に記載の移動体位置推定システム。
【請求項11】
前記車載装置は、
前記移動体と前記自車両との距離を算出する距離算出部を備え、
前記表示制御部は、前記距離に応じて前記移動体の表示意匠を異なるものとする請求項9または請求項10に記載の移動体位置推定システム。
【請求項12】
前記車載装置は、
前記自車両に接近している移動体の携帯機に対して、前記自車両に接近している旨の接近情報を送信する車載装置側送信部を備え、
前記携帯機は、
前記接近情報を受信する携帯機側受信部と、
前記携帯機側受信部が受信した前記接近情報に基づいて、前記自車両に接近している旨を報知する接近情報報知部と、
を備える請求項2に記載の移動体位置推定システム。
【請求項13】
前記車載装置と前記携帯機との通信は、RF通信により行う請求項1ないし請求項12のいずれか1項に記載の移動体位置推定システム。
【請求項14】
前記自車両には、携帯型のスマートキーをポーリングするためのポーリング信号を無線出力するポーリング信号出力部と、該ポーリング信号の受信に基づいて前記スマートキーから送信されるIDコードを受信するIDコード受信部と、受信した該IDコードと自身に記憶されたマスターコードとを照合する照合部と、その照合結果に基づいて予め定められた動作を許可する動作許可部とを備えるスマートエントリーシステムが設けられ、
前記車載装置側受信部は、前記IDコード受信部に兼用され、前記携帯機は、前記スマートキーに兼用され、前記識別コードは前記IDコードに兼用される請求項4に記載の移動体位置推定システム。
【請求項15】
前記自車両には、ユーザの操作により携帯型のワイヤレスキーから送信される制御信号を受信する制御信号受信部を備え、受信した制御信号に基づいて、前記自車両のドアロック機構の施錠および解錠を行うキーレスエントリーシステムが設けられ、
前記車載装置側受信部は、前記制御信号受信部に兼用され、前記携帯機は、前記ワイヤレスキーに兼用される請求項1ないし請求項13のいずれか1項に記載の移動体位置推定システム。
【請求項1】
移動体に備えられた携帯機と、自車両に備えられた車載装置とを有し、
前記携帯機は、
前記移動体の位置を検出する移動体位置検出部と、
前記移動体の位置を含む移動体情報を前記車載装置に送信する携帯機側送信部と、
を備え、
前記車載装置は、
前記携帯機から送信された前記移動体情報を受信する車載装置側受信部と、
前記自車両の位置を取得する自車両位置取得部と、
前記自車両の位置および前記移動体情報に含まれる前記携帯機の位置に基づいて、前記移動体の移動状況を推定する移動状況推定部と、
前記移動状況推定部が推定した前記移動体の移動状況を含む移動体状況情報を出力する移動体状況情報出力部と、
を備えることを特徴とする移動体位置推定システム。
【請求項2】
前記車載装置は、
前記移動体の移動状況に基づいて、前記移動体が前記自車両に接近しているか否かを判定する接近判定部を備え、
前記移動体状況情報出力部は、前記接近判定部が、前記移動体が前記自車両に接近していると判定したとき、その移動体の移動状況を前記移動体状況情報として出力する請求項1に記載の移動体位置推定システム。
【請求項3】
前記携帯機は、
前記移動体の移動速度を検出する移動速度検出部を備え、
前記移動体情報は、前記移動体の移動速度を含む請求項1または請求項2に記載の移動体位置推定システム。
【請求項4】
前記携帯機は、
前記携帯機を一意に識別する識別コードを記憶する識別コード記憶部を備え、
前記移動体情報は、前記識別コードを含む請求項1ないし請求項3のいずれか1項に記載の移動体位置推定システム。
【請求項5】
前記移動体情報は、前記移動体の種別に応じて定められる種別コードを含む請求項1ないし請求項4のいずれか1項に記載の移動体位置推定システム。
【請求項6】
前記移動体の種別は、歩行者、軽自車両、二輪車、および自動車のうちの少なくとも一つを含む請求項5に記載の移動体位置推定システム。
【請求項7】
前記携帯機は、
ユーザの操作により前記移動体の種別を設定するための操作入力部を備える請求項5または請求項6に記載の移動体位置推定システム。
【請求項8】
前記車載装置は、
前記自車両の位置を含む電子地図データを取得する電子地図データ取得部と、
取得した前記電子地図データと、前記移動体状況情報に基づく前記移動体の位置および前記自車両の位置とを、表示器に表示する表示制御部と、
を備える請求項1ないし請求項7のいずれか1項に記載の移動体位置推定システム。
【請求項9】
前記表示制御部は、前記移動体の移動状況に応じて、前記移動体の表示意匠を異なるものとする請求項8に記載の移動体位置推定システム。
【請求項10】
前記車載装置は、
前記移動体の前記自車両に対する接近速度を算出する接近速度算出部を備え、
前記表示制御部は、前記接近速度に応じて前記移動体の表示意匠を異なるものとする請求項9に記載の移動体位置推定システム。
【請求項11】
前記車載装置は、
前記移動体と前記自車両との距離を算出する距離算出部を備え、
前記表示制御部は、前記距離に応じて前記移動体の表示意匠を異なるものとする請求項9または請求項10に記載の移動体位置推定システム。
【請求項12】
前記車載装置は、
前記自車両に接近している移動体の携帯機に対して、前記自車両に接近している旨の接近情報を送信する車載装置側送信部を備え、
前記携帯機は、
前記接近情報を受信する携帯機側受信部と、
前記携帯機側受信部が受信した前記接近情報に基づいて、前記自車両に接近している旨を報知する接近情報報知部と、
を備える請求項2に記載の移動体位置推定システム。
【請求項13】
前記車載装置と前記携帯機との通信は、RF通信により行う請求項1ないし請求項12のいずれか1項に記載の移動体位置推定システム。
【請求項14】
前記自車両には、携帯型のスマートキーをポーリングするためのポーリング信号を無線出力するポーリング信号出力部と、該ポーリング信号の受信に基づいて前記スマートキーから送信されるIDコードを受信するIDコード受信部と、受信した該IDコードと自身に記憶されたマスターコードとを照合する照合部と、その照合結果に基づいて予め定められた動作を許可する動作許可部とを備えるスマートエントリーシステムが設けられ、
前記車載装置側受信部は、前記IDコード受信部に兼用され、前記携帯機は、前記スマートキーに兼用され、前記識別コードは前記IDコードに兼用される請求項4に記載の移動体位置推定システム。
【請求項15】
前記自車両には、ユーザの操作により携帯型のワイヤレスキーから送信される制御信号を受信する制御信号受信部を備え、受信した制御信号に基づいて、前記自車両のドアロック機構の施錠および解錠を行うキーレスエントリーシステムが設けられ、
前記車載装置側受信部は、前記制御信号受信部に兼用され、前記携帯機は、前記ワイヤレスキーに兼用される請求項1ないし請求項13のいずれか1項に記載の移動体位置推定システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−48532(P2012−48532A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−190515(P2010−190515)
【出願日】平成22年8月27日(2010.8.27)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月27日(2010.8.27)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]