
移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラム
【課題】移動体がすれ違うなどの観測値と対象物の対応関係が曖昧になるシーンでも、位置推定精度の低下を招かず、対象物の移動経路の推定誤りを引き起こさない、移動体位置推定装置及び方法、並びに、移動体位置推定プログラムを提供する。
【解決手段】識別情報割り当て手段103は、移動体の識別情報と位置情報を低頻度で出力する第1の観測手段101から観測値が得られる時点Aと、時点Aの次に観測手段101から観測値が得られる時点B、及び、時間区間ABにおいて、移動体の位置情報を高頻度で出力する第2の観測手段102から得られる観測値の系列に対して、時点A、Bにおける第1の観測手段101の観測値と第2の観測手段102の観測値の位置の近さが最小になるように、及び、時間区間ABにおける観測手段102の観測値の移動量の合計が最小になるように、第2の観測手段102の観測値に対して第1の観測手段の観測値に含まれる識別情報を割り当てる。
【解決手段】識別情報割り当て手段103は、移動体の識別情報と位置情報を低頻度で出力する第1の観測手段101から観測値が得られる時点Aと、時点Aの次に観測手段101から観測値が得られる時点B、及び、時間区間ABにおいて、移動体の位置情報を高頻度で出力する第2の観測手段102から得られる観測値の系列に対して、時点A、Bにおける第1の観測手段101の観測値と第2の観測手段102の観測値の位置の近さが最小になるように、及び、時間区間ABにおける観測手段102の観測値の移動量の合計が最小になるように、第2の観測手段102の観測値に対して第1の観測手段の観測値に含まれる識別情報を割り当てる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、センサからの対象物体に関する観測値に基づいて、観測対象の空間内に存在する複数の移動物体(人などの移動体)の位置を推定する移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラムに関するものである。
【背景技術】
【0002】
センサの観測値に基づいて人などの移動体の位置を推定する方式として、センシング性能の異なる異種のセンサの観測値を統合することにより、単体のセンサのみによるセンシングの弱点を補完する方式が存在する。
【0003】
例えば、カメラと画像認識処理による画像センサにより人の識別と位置との推定をしようとした場合、画像認識処理だけでは、複数の人をお互いに高精度に識別する事が困難なケースが多い。そこで、カメラとは別に、人の識別性能の高いセンサ(無線タグ)の観測値と、カメラの観測値とを組み合わせることで、単体のセンサの弱点を解消しつつ、移動体の識別と位置の推定を行う従来技術(非特許文献1)がある。
【0004】
非特許文献1では、対象物の位置情報は出力できるが、識別能力がないカメラと画像認識によるセンサの観測値と、対象物の識別能力が高く、位置情報も出力できる無線タグによるセンサの観測値とを統合することにより、移動する対象物を互いに識別しながら、逐次変化する位置を推定し対象物の移動軌跡を出力する方式が開示されている。
【0005】
具体的には、非特許文献1で開示される方式は、オンラインベイズ推定の枠組みに、複数の観測値と、推定処理内部の複数の位置推定分布の対応付けを確率的に表現するアソシエーション変数とを導入することで、複数の人などの移動体の逐次位置推定を同時に行うものである。
【0006】
さらに具体的には、対象物の識別情報(ID)の離散分布であるID尤度、及び、対象物の観測位置と、推定処理内部の各対象物の推定位置分布との距離的な近さから算出される距離尤度(距離が近い方が観測値と位置推定分布との対応の可能性が大きいとして距離尤度が大きい値を取る)の2つの値の積を規格化した値を、アソシエーション値として算出する。
【0007】
このアソシエーション値は、観測値と推定位置分布の対応関係に1つ割り当てられる値であり、各観測値に含まれる位置情報を、各対象物の推定位置の更新にどれだけ寄与させればよいかの重みに相当する。
【0008】
各観測値の観測値位置に前記アソシエーション値を重みづけした値で、推定分布を更新することにより、観測値と対象物の対応関係の曖昧性を考慮した位置推定を行っている。
【0009】
特に、非特許文献1は、識別情報(ID)を出力できないセンサ(例えば認識機能をもつカメラセンサ)を用いた場合にも、前記のアソシエーション値に基づく、複数物体の移動軌跡を推定するための構成と方式を開示している。カメラの撮像データの画像認識処理では、対象物の識別を高精度に行うことは難しいが、1観測周期において時間的に前後する2つの観測値が同じ対象物を観測したかどうかについては、その時点で撮像した対象物の画像特徴の類似性を評価するなどにより容易に判別できる。
【0010】
そこで、観測周期前後で同じ対象物を観測していると判別できた場合は、前回の観測時点での観測値と対象物の対応関係が維持されているとして、カメラセンサが出力できないID尤度を、前の観測値に基づいて得られたアソシエーション値で近似する。一方、観測周期前後で同じ対象物ではないと判別された場合は、前回の観測時点での観測値と対象物の対応関係が維持されていないため、カメラセンサが出力できないID尤度を、一様分布で近似する(ID尤度が一様分布であるということは観測値と対象物の対応関係が不明であるということに対応する)。前記対象物が同一であるかどうかの判別状態が曖昧な場合は、判別状態を確率値(追跡尤度)で表現し、前記2つの場合を、この追跡尤度により結合し、ID尤度を近似する。
【0011】
(数1)
そのときのカメラセンサ観測値のID尤度=追跡尤度×前回のアソシエーション値+(1−追跡尤度)×一様分布
....(式1)
【0012】
このように、式1で示されるID尤度の近似により、対象物の識別情報が出力できないセンサに対して、識別情報の近似値を与えることで、複数物体の位置推定を行えるようにしている。
【先行技術文献】
【非特許文献】
【0013】
【非特許文献1】谷川徹、山上勝義、“カメラと無線タグのセンサ情報統合による移動体トラッキング技術の開発”、第28回日本ロボット学会学術講演会、2010年9月22〜24日
【発明の概要】
【発明が解決しようとする課題】
【0014】
しかしながら、非特許文献1で開示されている方式は、観測対象である移動体同士の距離が接近するような状況においては、観測値と対象物との対応関係が曖昧になるために、位置推定誤差が蓄積し、移動体の移動経路を誤って推定してしまうという課題を有する。
【0015】
この課題について、2人の人が交差するように移動した例を用いて説明する。
【0016】
図17は、空間1701内を北から南へ移動する人(図17中でIDが「A」の人)、西から東へ移動する人(図17中でIDが「B」の人)が真ん中付近ですれ違うように移動した場合の、人の移動経路1702,1703を示す図である。
【0017】
図17の1701Aは、破線状の矩形で表した、空間1701の中心付近の領域である。この中心付近の領域1701Aで起こる現象を、図18を用いて説明する。
【0018】
図18の(A)、(B)、(C)は、図17の中心付近の領域1701Aに対応する領域でのAの人及びBの人の位置推定分布(図中丸で示す)と、カメラの観測値(図中三角で示す)を示したものである。(A)、(B)、(C)の順に観測が進んだものとする。
【0019】
非特許文献1で開示されている方式では、移動体同士が接近する状況では、観測値と位置推定分布との近さに基づく距離尤度の観点では、観測値が真に対応する位置推定分布との距離尤度の値と、観測値が真に対応しない位置推定分布との距離尤度の値が均等に近づいていく。例えば、図18の(B)に示される状況においては、Aの人のカメラ観測値とAの人の位置推定分布との距離と、Aの人のカメラ観測値とBの人の位置推定分布との距離は、相対的に近くなるため、Aの人のカメラ観測値のAの人の位置推定分布との距離尤度の値と、Aの人のカメラ観測値とBの人の位置推定分布との距離尤度の値は相対的に近くなる。
【0020】
また、非特許文献1で開示されている方式では、移動体同士が接近する状況では、画像識別処理において2つの移動体の分別が難しくなることで、同じ対象を観測出来ているかどうかが曖昧になる。よって、式1の追跡尤度の確率値が小さい値になり、結果的に一様分布がID尤度に反映される割合が大きくなり、近似されたID尤度の観点でも観測値が真に観測値した対象物とのID尤度の値と、観測値が真に観測した対象物以外とのID尤度の値が、相対的に値が近くなる。
【0021】
距離尤度の値、及び、ID尤度の値が均等に近づくと、その結果、距離尤度とID尤度の積から算出されるアソシエーション値についても、位置推定分布と対応するはずの観測値との間のアソシエーション値と、位置推定分布と対応しないはずの観測値との間のアソシエーション値が、相対的に近くなる。
【0022】
このため、位置推定分布の更新時に、真に対象物を観測した観測値以外の観測値の位置情報が更新に寄与する割合が相対的に高まることにより、真に対象物を観測した観測値の方向とはずれた方向に位置推定分布の更新が行われ、位置推定誤差が増大する。
【0023】
図18の実線矢印は、観測値により位置推定分布が更新される方向を例示したものである。図18の(B)の状況では、Aの人の位置推定分布、Bの人の位置推定分布、それぞれ更新される方向が、Aの人のカメラ観測値の位置、Bの人のカメラ観測値の位置の方向からずれている。このため、次の観測時刻((C)の状況)では、Aの人の位置推定分布は東側にずれ、Bの人の位置推定分布は南側にずれる。
【0024】
図18の(C)の状況では、観測値と、その観測値と対応するはずの位置推定分布の距離ははなれ、むしろ、その観測値と対応しないはずの位置推定分布との距離が近くなり、結果的に、観測値による位置推定分布の方向はさらに、誤った方向になり、さらに位置推定誤差が増大する。
【0025】
このように、非特許文献1の方式では、特に対象物が接近した状況では位置推定の誤りが起こりやすく、その誤りに起因して、真に人が移動した経路とはまったく異なる経路を推定してしまうという課題を有す。
【0026】
図19は、図17で示した2人の人A,Bの移動に対して非特許文献1の方式に基づいて位置推定した結果、2人の人A,Bの移動経路1702,1703とは全く異なる移動経路を誤って推定した結果を示す図である。
【0027】
図18に示したように、2人の人A,Bが接近し交差する付近での位置推定誤差の増大により、A,Bのそれぞれの人の位置推定分布の移動履歴は交差せずに、中心付近で誤った方向に移動してしまった結果である。
【0028】
図18の(C)の状況からさらに先に進むと、対象物の識別情報を出力する無線タグ観測値に関しても、観測値が出力する位置情報と、その観測値の識別情報に対応する対象物の位置推定分布との距離も大きく離れ、反対に、当該観測値の識別情報に対応しない対象物の位置推定分布に近くなるという状況が起こる。
【0029】
非特許文献1で開示される方式では、観測値の位置情報で対象物の位置情報の推定値を更新する際の重み(アソシエーション値)の計算を、距離尤度(観測値の位置情報と対象物の位置推定分布との近さ)とID尤度の積に基づいて計算するため、ID尤度における重みが、距離尤度によって、割り引かれてしまう。そのため、対象物の識別性能が高く位置推定誤差の訂正に寄与するはずの無線タグ観測値の識別情報が、位置推定分布の推定誤差の訂正に有効に寄与しない。よって、一度、位置推定分布が真の人の位置から大きくずれると、そのずれが増大し結果的にまったく異なる推定結果を導くという課題を有す。
【0030】
さらに、無線タグの観測頻度が、カメラの観測頻度より低い場合は、時間の観点で見たときの無線タグの観測値の対象物の推定位置へ更新の寄与はさらに弱まるため、推定誤差の訂正が起こりにくいという課題を有す。
【0031】
ならびに、非特許文献1では、カメラ観測値が常に人の数だけ得られている場合の方式のみ開示されており、カメラ観測値が人数分得られないケース、つまり、カメラ観測値の消失又はカメラ観測値が実際の人数よりも多く得られるケース場合の対応について記載はない。カメラによる人認識処理では、遮蔽物により観測対象の人が遮られる、接近した2人を1人と検知するなどの理由により、カメラの観測値が人数分得られないことが起こりうる。また、人ではない物体を人であると誤認識することで、カメラの観測値が人数分よりも多く得られる場合も起こりうる。しかしながら、非特許文献1ではこのようなケースにおける対応方法が開示されておらず、仮にカメラ観測値が消失し、観測値の個数が人数に満たない場合は、1つのカメラ観測値をその観測値に対応しない人も含めて複数の人の位置推定分布の更新に同時に反映させることになり、誤った推定結果を招くという課題を有す。
【0032】
従って、本発明の目的は、上記問題を解決することにあって、移動体がすれ違うなどの観測値と対象物の対応関係が曖昧になるシーンでも、位置推定精度の低下を招くこと無く、かつ、対象物の移動経路の推定誤りを引き起こさない、移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラムを提供することにある。
【課題を解決するための手段】
【0033】
前記課題を解決するために、本発明は以下のように構成される。
【0034】
本発明の1つの態様によれば、観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定装置であって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に出力する第1の観測手段と、
前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で出力する第2の観測手段と、
前記第1の観測手段と前記第2の観測手段のそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる識別情報割り当て手段と、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を推定する位置推定手段を、
有する移動体位置推定装置を提供する。
【0035】
本発明の別の態様によれば、観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定方法であって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に第1の観測手段により出力し、
前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で第2の観測手段により出力し、
前記第1の観測手段と前記第2の観測手段のそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を識別情報割り当て手段により割り当て、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を位置推定手段により推定する、
移動体位置推定方法を提供する。
【0036】
本発明のさらに別の態様によれば、観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定プログラムであって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に出力する第1の観測手段と、前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で出力する第2の観測手段とのそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる識別情報割り当て手段と、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を推定する位置推定手段と
の機能をコンピュータに実現させるための移動体位置推定プログラムを提供する。
【発明の効果】
【0037】
本発明の移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラムは、観測対象物の識別能力が高いセンサの識別情報に基づいて、観測対象物の識別能力を持たない(あるいは識別能力が低い)センサの観測値への妥当な識別情報の割り当てを行うことができるので、観測値と観測対象物との対応関係を常に確定できる。従って、移動体がすれ違うなどの観測値と対象物の対応関係が曖昧になるシーンでも、位置推定精度の低下を招くこと無く、かつ、対象物の移動経路の推定誤りを引き起こさないという格別の効果を有す。
【0038】
また、本発明の移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラムは、観測エラーによる観測値の消失又は過観測が発生する状況においても、観測対象物の識別能力を持たない(あるいは識別能力が低い)センサの観測値への妥当な識別情報の割り当てを行うことができる。従って、実環境において常に観測対象が正しくセンシングされるとは限らない状況においても、位置推定精度の低下を招くことなく、かつ、対象物の移動経路の推定誤りを引き起こさないという格別の効果を有す。
【図面の簡単な説明】
【0039】
【図1】本発明の第1実施形態の移動体位置推定装置の構成を示すブロック図。
【図2】本発明の第1実施形態の移動体位置推定装置に係る、人位置トラッキング装置の構成を示すブロック図。
【図3】本発明の第1実施形態に係る、人位置トラッキング装置で人の位置を検出する状況の例を示す図。
【図4A】本発明の第1実施形態に係る、観測値バッファに記録された観測値の一例を示す図。
【図4B】本発明の第1実施形態に係る、観測値バッファに記録された観測値の一例を示す図。
【図5】本発明の第1実施形態に係る、人位置推定値記録部バッファに記録された人位置情報の例を示す図。
【図6】本発明の第1実施形態に係る、人位置表示部に表示された人の位置、及び、移動軌跡の例を示す図。
【図7】本発明の第1実施形態に係る、人位置トラッキング処理のメイン処理のフローチャート。
【図8】本発明の第1実施形態に係る、ステップS105の処理方法を説明するための人の移動軌跡例を示す図。
【図9】本発明の第1実施形態に係る、ステップS105の処理方法を説明するためのID割り当て処理の対象となる観測値の例を示す図。
【図10】本発明の第1実施形態に係る、ステップS105の処理方法を説明するためのある時刻tにおける観測値へのID割り当ての定式化を示す図。
【図11】本発明の第1実施形態に係る、ステップS105の処理方法を説明するためのある時刻tにおける観測値へのID割り当ての組み合わせを示す図。
【図12】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理が最小コスト経路探索問題となることの説明図。
【図13】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理の最小コスト経路探索問題をA*アルゴリズムで解く場合の予測コスト設定を説明する図。
【図14】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理の最小コスト経路探索問題をA*アルゴリズムで解く場合の各ノードに格納される情報の例を示す図。
【図15A】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理の最小コスト経路探索問題をA*アルゴリズムで解く場合の開始ノードの作成と、目標ノードの作成に関わる動作のフローチャート。
【図15B】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理の最小コスト経路探索問題をA*アルゴリズムで解く場合の、最小コスト経路を導出する手順のフローチャート。
【図16A】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理の最小コスト経路探索問題でID割り当ての仮説ノードを枝刈りする方法を説明する図。
【図16B】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理の最小コスト経路探索問題でID割り当ての仮説ノードを枝刈りする方法を説明する図。
【図17】従来技術における人位置推定の課題を説明するための2つの移動体の移動軌跡の例を示す図。
【図18】従来技術での課題を説明するための2つの移動体と観測値の位置関係において人位置推定間違いの原因を示す図。
【図19】従来技術における人位置移動経路の推定間違いの例を示す図。
【図20】本発明の第2実施形態に係る、人位置トラッキング装置の構成を示すブロック図。
【図21】本発明の第2実施形態に係る、人位置トラッキング処理のメイン処理のフローチャート。
【図22】本発明の第2実施形態に係る、ステップS105A内のID割り当て仮説を生成する処理の流れを示すフローチャート。
【図23】本発明の第2実施形態に係る、観測値移動可能性判定部の処理内容に関わる人認識カメラ観測値の例を示す図。
【図24】本発明の第2実施形態に係る、観測値移動可能性判定部の判定結果の例を示す図。
【図25】本発明の第2実施形態に係る、仮想観測値生成部の処理内容の例を示す図。
【図26】本発明の第2実施形態に係る、IDの割り当て制御部が観測値に対してIDを割り当てた例を示す図。
【図27】本発明の第2実施形態に係る、IDの割り当て仮説のノード表現を表す図。
【図28】本発明の第1実施形態における人位置移動経路の推定結果の例を示す図。
【発明を実施するための形態】
【0040】
以下に、本発明にかかる実施の形態を図面に基づいて詳細に説明する。
【0041】
以下、図面を参照して本発明における実施形態を詳細に説明する前に、本発明の種々の態様について説明する。
【0042】
本発明の第1態様によれば、観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定装置であって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に出力する第1の観測手段と、
前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で出力する第2の観測手段と、
前記第1の観測手段と前記第2の観測手段のそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる識別情報割り当て手段と、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を推定する位置推定手段を、
有する移動体位置推定装置を提供する。
【0043】
本発明の第2態様によれば、前記第1観測手段は、前記移動体の識別情報を含みかつ前記移動体が有する無線タグから発信される電波を受信して前記移動体の識別情報と位置情報を観測値として出力する無線タグ観測部、又は、前記移動体に超音波を発信して反射した超音波を受信して前記移動体の識別情報と位置情報を観測値として出力する超音波センサであり、
前記第2観測手段は、画像を撮像して前記移動体の位置情報を観測値として出力するカメラ、又は、前記移動体にミリ波を発信して反射したミリ波を受信して前記移動体の位置情報を観測値として出力するミリ波送受信器、又は、前記観測空間の床面に複数配置して前記移動体の位置情報を観測値として出力する圧力センサである、第1の態様に記載の移動体位置推定装置を提供する。
【0044】
本発明の第3態様によれば、前記識別情報割り当て手段において、前記観測間隔の時間内に前記移動体が移動可能な移動可能範囲外にある前記第2観測手段の観測値を削除して、前記観測間隔の時間内に前記移動体が移動可能な移動可能範囲内にある前記第2観測手段の観測値を基に、識別情報割り当て処理を行うときに対する前回の前記第2観測手段の観測値の位置から移動不可能な、前記識別情報割り当てを行うときの観測値を特定し、又は、前記識別情報割り当てを行うときの前記第2観測手段の観測値の位置へ移動可能なものが1つもない、前記識別情報割り当てを行うときに対する前回の観測値を特定し、特定された前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる、第1又は2の態様に記載の移動体位置推定装置を提供する。
【0045】
本構成によって、第2観測手段において想定される観測エラー、たとえば、観測対象の隠蔽又は、観測対象同士の接近等に起因する観測値の消失、あるいは、観測対象以外の物体を観測対象だと誤検知することに起因する誤観測値の発生の状況を把握することができ、第2の観測手段の観測値のうち、第1の観測手段から得られた識別情報を割り当てるべきものとそうではないものとを区別可能である。従って、観測エラーに起因する誤った識別情報の割り当てを回避でき、観測エラーによる最終的な移動体の位置推定結果の精度低下を防ぐことができる。
【0046】
本発明の第4態様によれば、前記識別情報割り当て手段は、前記識別情報割り当てを行うときの前記第2観測手段の観測値の位置へ移動可能なものが1つもないと特定された、前記識別情報割り当てを行うときに対する前回の観測値に対して、前記当該観測値の移動履歴に基づいて、前記識別情報割り当てを行うときの移動先位置を予測し、前記予測位置に仮想的な観測値を生成する仮想観測値生成部を備える、第3の態様に記載の移動体位置推定装置を提供する。
【0047】
本構成によって、当該観測対象の移動履歴から妥当であると思われる位置に観測対象が移動したと仮定して、仮想的に観測値を生成し、第1観測手段から得られた識別情報を割り当てることにより、観測対象が隠蔽されるなどの原因で、ある観測時刻において当該観測対象の第2の観測手段の観測値が得られなかった場合にも、当該観測対象の移動経路を推定することが可能である。
【0048】
本発明の第5態様によれば、前記識別情報割り当て手段において、前記観測対象の前記移動体の前記移動可能範囲を、当該移動体の移動能力の計測結果に基づく最大の移動速度と、前記観測間隔の積を半径とする円の範囲と設定する第3又は4の態様に記載の移動体位置推定装置を提供する。
【0049】
本発明の第6態様によれば、前記識別情報割り当て手段において、前記観測対象の前記移動体の前記移動可能範囲を、前記第2の観測手段の観測値の移動履歴の、前記識別情報割り当てを行うときに対する前回の観測値の位置と、前記識別情報割り当てを行うときに対する前々回の観測値の位置から算出される移動速度と移動方向とが維持されると仮定して得られる移動先位置を中心とした所定の半径を持つ円と定める、第3又は4の態様に記載の移動体位置推定装置を提供する。
【0050】
本発明の第7態様によれば、観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定方法であって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に第1の観測手段により出力し、
前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で第2の観測手段により出力し、
前記第1の観測手段と前記第2の観測手段のそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を識別情報割り当て手段により割り当て、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を位置推定手段により推定する、
移動体位置推定方法を提供する。
【0051】
本発明の第8態様によれば、前記移動体の識別情報と位置情報を含みかつ前記第1の観測手段から出力された第1の観測値と、前記移動体の位置情報を含みかつ前記第2の観測手段から出力された第2の観測値とが同時に得られた第1の時刻から、次に、前記第1の観測値と前記第2の観測値が同時に得られた第2の時刻の間に得られた第2の観測値に対して、
前記第1の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求め、
前記第1の時刻における組み合わせに基づいて、前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当て、
さらに、前記第2の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求め、
前記第2の時刻における組み合わせにおいて前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当て、
前記識別情報割り当て手段において、前記第1の時刻における前記第2の観測値への識別情報の割り当て状態を開始ノードとし、また、前記第2の時刻における前記第2の観測値への識別情報の割り当て状態を目標ノードとし、前記第1の時刻と前記第2の時刻の間の前記第2の観測値への識別情報の割り当ての組み合わせを、前記開始ノードと前記目標ノードの間に位置するノードとすることにより得られる探索グラフにおいて、前記ノード間の遷移コストを前記第2の観測値の移動量の合計と置くことで、前記探索グラフの前記開始ノードから前記目標ノードに至る最小コスト経路を求めることにより、前記第1の時刻から前記第2の時刻までの前記第2の観測値に前記第1の観測値の識別情報を前記識別情報割り当て手段で割り当てる、
第7の態様に記載の移動体位置推定方法を提供する。
【0052】
本発明の第9態様によれば、前記探索グラフ上の探索処理において、前記識別情報割り当て手段により、ある観測時刻における識別情報の割り当て状態に相当するノードから、次の観測時刻への割り当て状態の仮説に相当するノードを生成する場合に、前記観測対象の前記移動体の移動可能範囲を考慮し、前記観測間隔の時間内に移動可能な前記第2観測手段の観測値の対応関係を判定し、探索処理を行うときに対する前回の前記第2観測手段の観測値の位置から移動不可能な、前記探索処理を行うときの観測値を特定することで、前記探索処理を行うときに対する前回の観測値の位置から移動不可能な観測値を含んだ割り当ての仮説ノードを生成しない、第8の態様に記載の移動体位置推定方法を提供する。
【0053】
本発明の第10態様によれば、前記探索グラフ上の探索処理において、前記識別情報割り当て手段により、ある観測時刻における識別情報の割り当て状態に相当するノードから、次の観測時刻への割り当て状態の仮説に相当するノードを生成する場合に、前記観測対象の前記移動体の移動可能範囲を考慮し、探索処理を行うときの観測値の位置へ移動可能なものが1つもないと特定された、前記探索処理を行うときに対する前回の観測値に対して、前記当該観測値の移動履歴に基づいて前記探索処理を行うときの移動先位置を予測し、前記予測位置に仮想的な観測値を生成し、前記仮想的な観測値に前記当該の観測値が移動したとする仮説ノードを生成する、第8又は9の態様に記載の移動体位置推定方法を提供する。
【0054】
本発明の第11態様によれば、観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定プログラムであって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に出力する第1の観測手段と、前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で出力する第2の観測手段とのそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる識別情報割り当て手段と、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を推定する位置推定手段と
の機能をコンピュータに実現させるための移動体位置推定プログラムを提供する。
【0055】
本発明の第12態様によれば、前記移動体の識別情報と位置情報を含みかつ前記第1の観測手段から出力された第1の観測値と、前記移動体の位置情報を含みかつ前記第2の観測手段から出力された第2の観測値とが同時に得られた第1の時刻から、次に、前記第1の観測値と前記第2の観測値とが同時に得られた第2の時刻の間に得られた第2の観測値に対して、
前記第1の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求める機能と、
前記第1の時刻における組み合わせに基づいて、前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当てる機能と、
さらに、前記第2の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求める機能と、
前記第2の時刻における組み合わせにおいて前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当てる機能と、
前記第1の時刻における前記第2の観測値への識別情報の割り当て状態を開始ノードとし、また、前記第2の時刻における前記第2の観測値への識別情報の割り当て状態を目標ノードとし、前記第1の時刻と前記第2の時刻の間の前記第2の観測値への識別情報の割り当ての組み合わせを、前記開始ノードと前記目標ノードの間に位置するノードとすることにより得られる探索グラフにおいて、前記ノード間の遷移コストを前記第2の観測値の移動量の合計と置くことで、前記探索グラフの前記開始ノードから前記目標ノードに至る最小コスト経路を求めることにより、前記第1の時刻から前記第2の時刻までの前記第2の観測値に前記第1の観測値の識別情報を前記識別情報割り当て手段で割り当てる機能と、
をコンピュータに実現させるための、第11の態様に記載の移動体位置推定プログラムを提供する。
【0056】
以下に、本発明にかかる実施形態を図面に基づいて詳細に説明する。
【0057】
(第1実施形態)
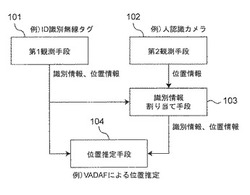
図1は、本発明の第1実施形態にかかる移動体位置推定装置の構成を示すブロック図である。移動体位置推定装置は、第1観測手段101と、第2観測手段102と、識別情報割り当て手段103と、位置推定手段104とを備えて構成している。
【0058】
第1観測手段101は、複数の観測対象を区別する識別情報と、観測対象の位置情報を識別情報割り当て手段103と位置推定手段104とに出力する。
【0059】
第2観測手段102は、第1観測手段101と同じ観測対象に対して、位置情報のみを識別情報割り当て手段103に出力する。
【0060】
識別情報割り当て手段103は、対象物の識別精度が高い第1観測手段101の各観測値と、対象物の識別ができない第2観測手段102の各観測値の対応関係を、対応させる観測値の距離の合計が最も小さくなるように対応付ける。この識別情報割り当て手段103での対応関係に基づき、第1観測手段101の観測値が得られた時刻において、第2観測手段102の観測値への識別情報の割り当てを識別情報割り当て手段103で行う。さらに、識別情報割り当て手段103は、第1観測手段101の観測値が得られた時刻での、第2観測手段102の観測値への識別情報の割り当てに基づいて、第1観測手段101の観測値が得られない時刻における、第2観測手段102の観測値に対する識別情報の割り当ての考えうる組み合わせの中で、観測時刻毎の第2観測手段102の識別情報を割り当てられた観測値の移動量の合計が最小になるような、識別情報の割り当ての組み合わせを決定し、第1観測手段101の観測値が得られない時刻における、第2観測手段102の観測値へも識別情報の割り当てを行う。識別情報割り当て手段103で得られた情報は、位置推定手段104に出力される。
【0061】
位置推定手段104は、第1観測手段101の観測値に含まれる識別情報及び位置情報、そして、識別情報割り当て手段103により識別情報が割り当てられた第2観測手段102の観測値に含まれる識別情報及び位置情報に基づいて、観測値が得られた時刻毎に、観測対象物の推定位置を更新することで、移動する対象物の位置を捕捉する。
【0062】
このような構成によって、識別情報割り当て手段103において、第1観測手段101の観測値の識別情報に基づいて、第2観測手段102の観測値には含まれない識別情報を割り当てる。このように構成することにより、従来技術における識別情報を近似する方式では、観測値同士が接近する状況になると、識別情報を持たないセンサの識別情報が曖昧になるという問題を回避することができる。従って、識別情報が曖昧になることに起因する対象物の位置推定誤差の増大、さらには、位置推定誤差の増大による、観測対象物の移動経路の推定間違いという問題を、この第1実施形態では回避することができる。
【0063】
また、識別情報割り当て手段103においては、第1の観測手段101の観測値の観測頻度が、第2の観測手段102の観測頻度よりも低い場合においても、第2の観測手段102の観測値への識別情報の割り当てを行うことが可能なので、従来技術では、観測頻度が低いセンサの情報が位置推定の誤りを補正する方向に働きにくいという問題も、同時に回避することができる。
【0064】
図2は、本発明の第1実施形態における移動体位置推定装置の具体的な一例としての人位置トラッキング装置90の構成を示すブロック図である。人位置トラッキング装置90は、第1の観測手段の一例としての無線タグ観測部201と、第2の観測手段の一例としての人認識カメラ202と、識別情報割り当て手段の一例としてのID割り当て処理部205と、位置推定手段の一例としての人位置推定部206とを備えるように構成している。人位置トラッキング装置90は、さらに、観測値取得部203と、観測値バッファ204と、人位置推定値記録部207と、人位置表示部208とを備えている。
【0065】
無線タグ観測部201は、観測対象である人が所持する無線タグから発信される電波を複数のアンテナで受信し、アンテナ毎の到達時間の差からタグの位置を測位する。同時に、無線タグ観測部201は、個々の無線タグに割り当てられた固有のID情報を、タグの位置の情報と組み合わせ、観測値として観測値取得部203に出力する。
【0066】
人認識カメラ202は、観測対象である人と人以外のものとを識別することにより、撮像範囲内に存在する人の位置を観測値として観測値取得部203に出力する。
【0067】
図3に、第1実施形態における人位置トラッキング装置90の無線タグ観測部201と人認識カメラ202とを、観測空間91に配置した例を示す。観測対象となる人89は、無線タグ(無線発信器)301,302,303を所持することで、無線タグ301,302,303から発信される電波を、無線タグ観測部201が受信することにより、無線タグ301,302,303の位置と識別情報とが無線タグ観測部201で観測される。また、人認識カメラ202の撮像範囲が観測対象となる観測空間91の床面91fの全体を含むように、天井から床面方向に向けて人認識カメラ202を配置することで、人認識カメラ202により、床面91f上を移動する人89の位置を観測する。
【0068】
観測値取得部203は、内部に無線タグ観測部201及び人認識カメラ202の観測値をそれぞれ取得するタイミングを管理するタイマ203Aを持っている。観測値取得部203は、無線タグ観測部201の観測周期としてタイマ203Aで設定された時間間隔、及び、人認識カメラ202の観測周期としてタイマ203Aで設定された時間間隔で、それぞれの観測値を取得し、観測値バッファ204に追加記録する。
【0069】
観測値バッファ204は、観測値取得部203が取得した観測値を観測時刻毎に記録する。図4A及び図4Bに、観測値バッファ204に記録される観測値の例を示す。
【0070】
図4A及び図4Bでは、観測対象の人が3人存在する場合の例で、各観測時刻において、無線タグ観測値及び人認識カメラ観測値は、それぞれ3個ずつ記録される。1つの観測値は、位置情報とID情報とで構成される。位置情報は、観測空間91内に人89の存在する座標である。第1実施形態では、人89の存在する空間91の床面91fの平面における2次元座標を位置座標とした場合の例を示す。ID情報は、観測された人89を互いに区別するための情報である。第1実施形態では、3人の人89をそれぞれA,B,CというID情報の値で区別するものとする。
【0071】
観測値バッファ204に記録される観測値は、無線タグ観測値が得られた時刻から次の無線タグ観測値が得られた時刻までの観測値とする。第1実施形態においては、人認識カメラ202の観測周期をΔtとし、無線タグ観測部201の観測周期を4Δtとする。すなわち、無線タグ観測部201と人認識カメラ202との観測頻度の比は、1:4であるとする。従って、図4A及び図4Bでは観測時刻が0から4Δtまでの5つの時刻の観測値が記録される。
【0072】
図4Aは、観測値取得部203が、無線タグ観測部201及び人認識カメラ202から観測値を取得した直後の状態を示す。無線タグ観測値には、位置情報とID情報とが含まれるが、人認識カメラ観測値には識別情報は含まれない。このため、図4Aでは、人認識カメラ202の観測値のID情報は不定(Unknown)を意味する「UK」という値である。
【0073】
図4Bは、後述するID割り当て処理部205が、人認識カメラ観測値に対しID情報を割り当てた直後の状態を示す。図4Bでは、人認識カメラ202の観測値のID情報は、それぞれ割り当てられたID情報が格納されている。
【0074】
ID割り当て処理部205は、観測値バッファ204に記録された観測値の内容を読み出し、無線タグ観測値の位置情報と人認識カメラ観測値の位置情報との対応関係、及び、人認識カメラ観測値の観測時刻毎の観測値の移動量の評価に基づいて、人認識カメラ観測値へのID識別情報の割り当てを決定し、割り当てられたID識別情報を観測値バッファ204の人認識カメラ観測値のID情報に書き込む。
【0075】
人位置推定部206は、ID情報が書き込まれた状態の観測値バッファ204の観測値に基づいて、各観測時刻における人89の位置を推定する。人位置推定部206は、その内部に、識別される人毎に推定位置を保持している。観測値と推定位置との対応関係は、観測値バッファ204の観測値の識別情報から直ちに分かるので、対応する観測値により人89の推定位置を観測時刻毎に更新することで、移動する人89の位置を推定し、人位置の推定値を人位置推定値記録部207に記録する。
【0076】
人位置推定値記録部207には、人位置推定部206で推定された人89の推定位置の情報が観測時刻毎に人89の人数分だけ記録される。
【0077】
図5に、人位置推定値記録部207に記録される人89の位置の推定位置の例を示す。各観測値時刻におけるIDで区別された3人A,B,Cの人89の推定位置(2次元座標)が記録される。
【0078】
人位置表示部208は、人位置推定値記録部207に記録された人位置の推定値の任意の時間範囲の人位置推定値、さらに、任意の人89の人位置推定値を、指定して読み出し、各人の位置の軌跡を表示する。人位置表示部208は、例えばCRT又は液晶ディスプレイのようなディスプレイを含んだ装置として構成される。
【0079】
図6に人位置表示部208の表示例を示す。ここでは、第1実施形態において3人の人(ID=A,B,C)604,605,606が移動しており、601、602、603で示される丸印と丸印間を結ぶ矢印線が3人それぞれの人604,605,606の移動軌跡を表す。最新の観測値時刻(t=4Δt)から7回前の観測時刻までの3人604,605,606それぞれの推定位置が丸印で表示されており、各観測時刻間の移動は、丸印を結ぶ矢印線で表される。
【0080】
なお、人認識カメラ202で天井から床面方向に撮像した映像を人位置表示部208へ送り、人位置表示部208において、人認識カメラ202からの映像に、図6に示す人の移動軌跡601、602、603を重ねて表示する構成を取ることもできる。
【0081】
図6の604、605、606は、人認識カメラ202で撮影した映像中に映る人A,B,Cを示す。天井方向から床面方向の撮影なので、頭頂部分と肩が主に映る。
【0082】
次に、図7に示すフロー図に基づいて、第1実施形態における人位置トラッキング装置90の動作の流れについて説明する。
【0083】
図7に示すステップS101からステップS107は、無線タグ観測部101及び人認識カメラ102から観測値をそれぞれ取得し、ID割り当て処理部103で人認識カメラ観測値へのID情報の割り当て処理を行い、ID情報割り当て済みの観測値に対して、人位置推定部206で人の位置推定を行うまでの動作フローに相当する。
【0084】
まず、ステップS101では、観測値取得部203が、無線タグ観測部201及び人認識カメラ202のそれぞれにタイマー203Aで設定した観測周期に同期した時刻において、無線タグ観測部201及び人認識カメラ202から観測値を取得する。観測周期に同期した時刻以外では、観測値の取得を行わない。第1実施形態においては、無線タグ201の観測周期は、人認識カメラ202の観測周期の4倍に設定しているので、無線タグ観測値と人認識カメラ観測値とが同時に取得できるときと、人認識カメラ観測値のみ取得できるときとがある。
【0085】
次いで、ステップS102では、観測値取得部203が、ステップS101で取得した観測値を観測値バッファ204に記録する。
【0086】
次いで、ステップS103では、ステップS101で無線タグ観測値が取得できたかどうかをID割り当て処理部205で判断する。ステップS101で無線タグ観測値が取得できなかったと観測値取得部203で判断した場合は、フローはステップS104へ進む。ステップS104では、人認識カメラの観測周期であるΔt時間ウェイトし、ステップS101へ戻る。
【0087】
ステップS101において、無線タグ観測値が取得できたと観測値取得部203で判断した場合は、ステップS105へ進む。この場合は、図4Aに示した例と同様に、観測値バッファ204には、そのときの観測時刻と前回の観測値時刻との間に観測された無線タグ観測値及び人認識カメラ観測値が記録されている。
【0088】
ステップS105では、ID割り当て処理部205が、観測値バッファ204に記録された無線タグ観測値と人認識カメラ観測値とに含まれる、位置情報及びID情報に基づいて、人認識カメラ観測値へのID情報の割り当て処理を行う。ステップS105の処理の詳細については、後ほど述べる。
【0089】
次いで、ステップS106では、人位置推定部206が、観測値バッファ204に記録されている無線タグ観測値、及び、ステップS105でID情報が割り当てられた人認識カメラ観測値の位置情報、及び、ID情報に基づいて、人89の位置の推定処理を行う。人位置推定部206の人位置推定の方法としては、既に提案されている逐次推定手法を用いることができる。例えば、オンラインベイズフィルタの一種であるVariational Data Association Filter(VADAF)を用いることができる。
【0090】
ここで、オンラインベイズフィルターに基づく位置推定処理を行うことで、無線タグ観測部201及び人認識カメラ202の観測値にそれぞれ含まれる位置情報の誤差特性、つまり、位置センサとしての観測値のバラツキを考慮した位置推定を行うことができ、観測値の位置情報をそのまま人の位置として取り扱うのに較べて、真の人の位置との誤差を低減できる。観測値の位置情報をそのまま人の位置としても、誤差が問題にならない場合には、位置推定処理を行わなくてもよく、本発明の効果を損なうものではない。
【0091】
次いで、ステップS107では、人位置推定部206が推定した人位置の情報を、人位置推定値記録部207に書き込む。
【0092】
以上が、人位置トラッキング装置90の動作のフローである。
【0093】
次に、ステップS105のID割り当て処理部205によるID割り当て処理の詳細について説明する。
【0094】
まず、ステップS105のID割り当て処理が、組み合わせ探索問題の一種である最小コスト経路探索問題として定式化できることを説明する。
【0095】
その後で、最小コスト経路探索問題を解く手順として、A*アルゴリズムが適用できることを述べ、A*アルゴリズムにより最小コスト経路を導出する手順を説明する。
【0096】
最小コスト経路問題としてID割り当て処理を定式化する説明を行う。
【0097】
図8は、以下の定式化の説明において、A,B,CのID情報で区別される3人の人89が実際に移動した軌跡801,802,803の例を示す図である。
【0098】
図9は、図8の灰色の矩形領域804を3人の人が移動した際に得られた観測値の例を示す図である。A、B,Cの人の無線タグの観測値は、それぞれ、黒く塗りつぶされた正方形と、内部が斜線模様の正方形と、正方形とで示す。黒く塗りつぶされた丸は、人認識カメラ202の観測値である。
【0099】
図9において、点線の矩形で囲んだ領域910に含まれる観測値は、それぞれ、同じ観測時刻に得られた観測値である。5つの点線矩形領域910は、無線タグ観測値が得られた時刻t=0から、次の無線タグ観測値が得られた時刻t=4Δtまでの各観測時刻に同時に得られた観測値である。ここで、人認識カメラ観測値へID情報をID割り当て処理部205で割り当てるということは、各観測時刻ごとに3つある人認識カメラ202の観測値の各々にA,B,CのどのID情報をID割り当て処理部205で割り当てるかということである。このことを定式化するために、各観測時刻の3つの観測値を区別するために観測値のインデックスとして変数iを用いる。i=1は1番目、i=2は2番目、i=3は3番目の観測値を指す。次に、i番目の観測値に対するID情報の割り当ての定式化のために変数IDi(t)を用いる。例えば、IDi(t)=Aは時刻tのi番目の観測値にID情報Aが割り当てられていることを表す。
【0100】
次に、後に最小コスト経路問題として定式化するために観測値の位置情報(座標)を用いるので、xi(t)を時刻tのi番目の観測値の座標とする。
【0101】
ここで述べた、観測値とi, IDi(t), xi(t)の定式化に関しては、観測値との対応関係を図10に示す。
【0102】
図11は、3人の人がいるときに得られる3つの人認識カメラ観測値へのID情報の割り当ての組み合わせを示す図である。3つの観測値へのA,B,CのID情報の割り当ての組み合わせは3!=6通りあることがわかる。n人の場合は、n!通りである。
【0103】
まず、無線タグ観測値が得られる時刻t=0、及び、時刻t=4Δtにおいては、これら6通りの人認識カメラの観測値へのID割り当ての組み合わせの中で最適な組み合わせを決定することができる。無線タグ観測値の位置と、その無線タグ観測値のID情報と同じID情報が割り当てられた人認識カメラ観測値の位置の距離の合計(ここでは観測値間の3つの距離の合計)が最も小さくなるような、ID割り当ての組み合わせをID割り当て処理部205で選ぶ。例えば、t=0においては、図9の観測値901にはID情報Aを割り当て、観測値902にはID情報Bを割り当て、観測値903にはID情報Cを割り当てるという組み合わせをID割り当て処理部205で選べばよい。t=4Δtにおいては、観測値904にはID情報Bを割り当て、観測値905にはID情報Cを割り当て、観測値906にはID情報Aを割り当てる組み合わせをID割り当て処理部205で選べばよい。
【0104】
ここまでで、時刻t=0と時刻t=4Δtでは、1つのID割り当ての組み合わせ、それ以外の時刻では6つのID割り当ての組み合わせが考えられることが分かる。
【0105】
ここで、i=1〜3の観測値へのID情報の割り当て状態を、3つの横に並んだ矩形にA,B,Cを並べる順番で表現する。
【0106】
図12は、t=0からt=4Δtに到るまでの、人認識カメラ観測値へのID割り当ての組み合わせの探索空間を探索グラフで表した図である。各観測時刻における人認識カメラ観測値へのIDの割り当て状態が探索グラフのノードとなる。
【0107】
ノード間を結ぶエッジは、観測時刻が1つ進む度に、エッジが始まるノードが表す観測値へのIDの割り当て状態から、エッジが終わるノードが表す観測値へのIDの割り当て状態に変化した時の遷移を表す。また各エッジにはCostというコスト値を割り当てる。Costを定義する式を以下に(式2)として掲げる。
【0108】
(数2)

【0109】
前記(式2)の左辺のCost(t,t+Δt)は、時刻tのn個の観測値、及び、次の観測時刻t+Δtのn個の観測値にそれぞれあるIDが割り当てられているとし、そのID割当状態において、同じIDを持つ観測値間の距離を合計したものである。
【0110】
図12に示す探索グラフのt=0のノードからエッジとノードを辿って、t=4Δtのノードへ辿る経路のうち、Costの合計が最小となる経路(最小コスト経路)をID割り当て処理部205で考える。その経路上に存在するノードが表す観測値へのID割り当ては、観測時刻間での同じIDをもつ観測値の移動距離の合計が最も小さいID割り当てになる。すなわち、時刻t=0、t=4Δtでは、無線タグ観測値のID情報との位置関係から最適な人認識カメラへのID割り当てがなされた上で、その制約を満たす中で、時刻t=0、t=4Δt以外の人認識カメラの観測値へは移動距離の観点から最適なID割り当てがID割り当て処理部205で求まる。従って、人認識カメラ観測値へのID割り当て問題が、ID割り当て処理部205で、最小コスト経路探索問題として定式化できる。
【0111】
次に、ここまでで定式化した最小コスト経路探索問題を解く手順として、ID割り当て処理部205において、A*アルゴリズムが適用できることを説明する。A*アルゴリズムはコスト最小に基づいて探索問題を解くアルゴリズムの一種として知られており、探索の手順の中に予測コストを導入することにより、ダイクストラ法などの予測コストによらない方法よりも、効率的に最小コスト経路をID割り当て処理部205で導出できる。
【0112】
以下、A*アルゴリズムの説明を行う。図12に示すように、探索グラフの各エッジにコストが設定されているとし、探索グラフの中の任意のノードnを経由しかつ最小コストとなる経路のコストをf(n)とおくと、f(n)は、
f(n)=g(n)+h(n)
と表すことができる。g(n)は開始ノードからnまでの最小コスト、h(n)はnから目標ノードまでの最小コストである。ノードnを通る経路でコストが最小の経路は未知であり、g(n),h(n),f(n)も未知である。よって、f(n)の推定値f*(n)を考える。
【0113】
f*(n)=g*(n)+h*(n)
ここで、g*(n)は開始ノードからnまでの最小コストの推定値であり、h*(n)はnから目標ノードまでの最小コストの推定値である。g*(n)については、開始ノードから探索を順次進めることにより、エッジに割り当てられたコストの積算から推定できるが、h*(n)については、探索の途中で求めることはできない。従って、h*(n)に対して適当な推定値を与え、ノードnを経由する経路の推定コストf*(n)を評価し、より小さいf*(n)を与える経路を辿ることにより、最小コスト経路を探索するのがA*アルゴリズムである。
【0114】
h*(n)はA*アルゴリズムのヒューリスティクス関数と呼ばれ、すべてのnについて、h*(n)が、
h*(n)≦h(n)
を満たすとき、A*アルゴリズムにより求められた開始ノードから目標ノードに至る経路が、最小コスト経路であることが保証される。逆に言うと、この式を満たすh*(n)が設定できれば、その問題はA*アルゴリズムで解くことができる。
【0115】
第1実施形態において、h*(n)の設定方法を示す。時刻ΔtにおけるID割り当て状態のノードのいずれかをnとする。h*(n)として、図13の破線で示すように、時刻Δtの観測値から時刻4Δtの観測値への同じIDを持つ観測値間の距離の合計をh*(n)と考える。あるIDの観測値ついて、時刻tの観測値の位置から時刻4Δtの観測値の位置へ移動する距離の中で、破線の距離は最短であることは、ID割り当て処理部205で、すぐわかるので、nから時刻4Δtの目標ノードまでの真の最小コストh(n)に対して、
h*(n)≦h(n)
が成り立つ。従って、ID割り当て処理部205により、第1実施形態のID割り当て問題をA*アルゴリズムで解くことができる。
【0116】
次に、ID割り当て処理部205において、ID割り当て問題をA*アルゴリズムで解く手順について説明する。図14は、ID割り当て処理部205において、A*アルゴリズムで解く場合の、ノードの表現形式を示す図である。1つのノードは、時刻t、各観測値へのIDの割り当て状態、そのノードの推定コストf*の値、1つ前のノードへのポインタからなる。ノードへのポインタを辿ることにより、開始ノードから経由してきたノードを知ることができる。図14では、時刻Δtのノードのポインタが時刻0のノード(開始ノード)へのポインタを持つ例を示している。
【0117】
図15A及び図15Bは、ID割り当て処理部205において、A*アルゴリズムで解く場合の手順のフロー図である。図15A及び図15Bのフローの手順は、ID割り当て処理部205で実行される。
【0118】
図15Aのフロー中のts、teは、それぞれ無線タグ観測値が得られた時刻であり、ts<teである。
【0119】
ステップS201〜S203までは、ID割り当て処理部205により、ID割り当ての探索問題の開始ノードを設定する処理である。
【0120】
まず、ステップS201では、無線タグ観測値が得られた時刻tsにおいて、無線タグ観測値と人認識カメラ観測値との距離が最小になる対応関係をID割り当て処理部205で求める。
【0121】
次いで、ステップS202では、その対応に基づいて、人認識カメラ観測値に対応する無線タグ観測値のID情報をID割り当て処理部205で割り当てる。
【0122】
次いで、ステップS203で、その割当状態から開始ノードをID割り当て処理部205で作成する。
【0123】
ステップS204〜S206までは、ID割り当て処理部205において、ID割り当ての探索問題の目標ノードを設定する処理である。
【0124】
ステップS204では、無線タグ観測値が得られた時刻teにおいて、無線タグ観測値と人認識カメラ観測値の距離が最小になる対応関係をID割り当て処理部205で求める。
【0125】
次いで、ステップS205では、その対応に基づいて、人認識カメラ観測値に対応する無線タグ観測値のID情報をID割り当て処理部205で割り当てる。
【0126】
次いで、ステップS206では、その割当状態から目標ノードをID割り当て処理部205で作成する。
【0127】
次に、図15Bのフロー図で、ステップS206に続く手順について説明する。
【0128】
図15B中のsは開始ノードであり、OPENリスト及びCLOSEリストは、それぞれノードを格納するリストである。CLOSEリストは、自ノードから先のノードの探索が進んでいるノードを格納するリストであり、OPENリストは、自ノードから先のノードへの探索が進んでいないノードを格納するリストである。
【0129】
ステップS207がA*アルゴリズムの開始になり、ID割り当て処理部205において、OPENリストに開始ノードを入れる。このときの開始ノードの推定コストf*(s)は、f*(s)=h*(s)にID割り当て処理部205で設定する。なお、第1実施形態では、開始ノードの観測値と目標ノードの観測値との同じID同士の観測値間の距離の合計である。
【0130】
次いで、ステップS208では、ID割り当て処理部205において、OPENリストが空かどうかを調べ、OPENリストが空であるとID割り当て処理部205で判断すれば終了する。OPENリストが空である場合は、目標ノードに達する経路が見つからなかったケースに相当するが、第1実施形態の探索問題の場合は、必ず開始ノードから目標ノードへの経路がID割り当て処理部205で見つかる。OPENリストが空でないとID割り当て処理部205で判断する場合は、ステップS209に進む。
【0131】
次いで、ステップS209で、ID割り当て処理部205において、OPENリストから最小のf*の値を持つノードnを取り出し、CLOSEリストに移す。
【0132】
次いで、ステップS210で、ID割り当て処理部205において、nが目標ノードかどうかを判別し、nが目標ノードであるとID割り当て処理部205で判断すれば探索は終了である。このとき、nのポインタを開始ノードに達するまで辿って得られるノードの経路が、最小コスト経路である。nが目標ノードではないとID割り当て処理部205で判断する場合は、ステップS211に進む。
【0133】
次いで、ステップS211では、ID割り当て処理部205において、nのノードの観測時刻の次の観測値時刻のID割り当て状態の仮説を生成し、それらをノードnの継続ノードとしてノードの集合Mとする。Mの各ノードmについて、f’(m)=g*(n)+h*(m)+Cost(n,m)の値をID割り当て処理部205で計算する。Cost(n,m)はノードnからノードmへのエッジに割り当てられたコストであり、(式2)に基づいてID割り当て処理部205で計算する。
【0134】
次いで、ステップS212では、ID割り当て処理部205において、Mから1つノードを取り出しmとする。
【0135】
次いで、ステップS213では、ID割り当て処理部205において、ノードmがOPENリストに含まれるノードに一致するか、あるいは、CLOSEリストに含まれるノードに一致するか、あるいは、そのどちらのリストのノードにも一致しないかを判断する。
【0136】
ノードmがどちらのリストにも含まれないとID割り当て処理部205で判断する場合は、ステップS214に進む。ステップS214では、ID割り当て処理部205において、ステップS211で計算したf’(m)をノードmの予測コストf*として設定し、ノードmのポインタをノードn設定してOPENリストに追加する。
【0137】
ノードmがOPENリストに含まれるとID割り当て処理部205で判断する場合は、ステップS215に進む。ステップS215では、ID割り当て処理部205において、含まれているノードの予測コストf*(m)とステップS211で計算したf’(m)を比較し、f’(m)<f*(m)ならば、f*(m)=f’(m)でf*の値を置き換えて、ノードmのポインタをノードnに設定する。
【0138】
ノードmがCLOSEリストに含まれるとID割り当て処理部205で判断する場合は、ステップS216に進む。ステップS216では、ID割り当て処理部205において、含まれているノードの予測コストf*(m)とステップS211で計算したf’(m)を比較し、f’(m)<f*(m)ならば、f*(m)=f’(m)でf*の値を置き換えて、ノードmのポインタをノードnに設定した上で、mをCLOSEリストからOPENリストへ移す。
【0139】
ステップS214、ステップS215、ステップS216の次は、ステップS217で、ID割り当て処理部205において、ノードの集合Mからすべてのmを取り出したかを判断する。すべてのmを取り出していないとID割り当て処理部205で判断する場合は、ステップS212に戻る。すべてのmを取り出したとID割り当て処理部205で判断する場合は、ステップS208に戻る。
【0140】
ステップS210で、nが目標ノードまで達して終了したときに得られる、目標ノードのポインタを辿り、開始ノードに至るまでの間のノードに表現されているID割り当て状態が、ID割り当て処理部205で求めるべき各観測値における人認識カメラ観測値へのID割り当て状態である。
【0141】
さて、A*アルゴリズムでの解法の手順のステップS211において、ノードnの次の観測時刻のID割り当て状態仮説をID割り当て処理部205で生成する際、ここまでの説明では、考えうるすべてのID割り当て状態をID割り当て処理部205で考えるとしている。例えば、観測値が3つある場合は、6通りの割り当て状態すべてを仮説としてID割り当て処理部205で生成するわけである。
【0142】
しかし、第1実施形態の観測対象が人であるとすると、実際に観測周期Δtの間に人が動ける距離には限界がある。よって、ステップS211で、ID割り当て状態の仮説をID割り当て処理部205で生成する際に、ノードnのID割り当て状態から、次の観測時刻の観測値へのID割り当て状態として考えられる仮説の中には、実際に人の移動により実現不可能な仮説も含まれる場合がある。そのような仮説は人の移動では実現不可能であるため、生成して探索の対象としても無駄である。図16Aは、時刻0の観測値のID割り当てから、時刻ΔtのID割り当てで、同じIDの観測値が移動する距離が、いずれも人の移動可能な範囲(図中の点線の円の範囲)になっている例を示している。
【0143】
一方、図16Bは、時刻0の観測値のID割り当てから、時刻ΔtのID割り当てで、同じIDの観測値が移動する距離のうち、Bについては人の移動可能な範囲(図中の点線の円の範囲)になっているが、A,Cについては、人の移動可能な範囲(図中の点線の円の範囲)を超えている例である。
【0144】
第1実施形態においては、ある位置からの人の移動可能な範囲(図中の点線の円の範囲)の設定については、当該位置を中心とし、観測周期Δtと観測対象空間において予め計測した最大の人の移動速度の積により算出される距離を半径とする円の内部とする。
【0145】
もちろん、他の方法による人の移動可能範囲の設定も可能である。例えば、観測値の移動履歴から予想される移動速度と移動方向に基づいて、そのときの観測時刻における観測値の予想位置を設定することもできる。
【0146】
よって、図16Aの時刻ΔtのID割り当ての仮説は生成可能だが、図16Bの時刻ΔtのID割り当ての仮説は生成不可能である。
【0147】
従って、ステップS211では、図16Bの例のように人の移動可能距離の限界を超える同じIDの観測値の移動距離が生じてしまう仮説をID割り当て処理部205で捨てることにより、探索空間を減らし、探索を効率的に行うことができる。
【0148】
かかる構成によって、ID割り当て処理部203により、無線タグ観測部201のID情報を手がかりにID情報を持たない人認識カメラ202の観測値に対して、ID情報を割り当てることで、観測対象が互いに接近するような状況を含む、任意の状況において、観測値のID情報を確定することができ、その結果として、人同士のすれ違いを含む人位置推定の誤りが発生しやすい状況での、推定誤りの問題を解決することができる。一例として、図17の場合のように人が移動経路1702,1703に沿って移動した場合に、第1実施形態を使用して人位置移動経路の推定結果の例を図28に示す。図28より、従来技術の図19とは大きく異なり、図17の人の移動経路1702,1703とほぼ同じように、人位置移動経路を推定できることがわかる。
【0149】
なお、本第1実施形態においては、人位置の推定位置をディスプレイなどの人位置表示部208に表示するとしている。しかしながら、人位置の推定値の利用形態は、人の位置を要求する他の装置への入力とすることも、もちろん可能であり、本発明の範囲を限定するものではない。
【0150】
(第2実施形態)
図20は、本発明の第2実施形態における人位置トラッキング装置90Aの構成を示すブロック図である。本発明の第2実施形態は、人認識カメラ観測値の個数が、隠蔽又は誤認識などにより無線タグ観測値の個数と一致しない場合にも人認識カメラ観測値へのID割り当て処理を行うよう構成したものである。本発明の第2実施形態は、本発明の第1実施形態のID割り当て処理部205を、内部構成が異なるID割り当て処理部210に置き換えたものであり、その他の構成部については、本発明の第1実施形態と同じである。第1実施形態の記述において説明済みの構成部分の説明は省略する。
【0151】
ID割り当て処理部210は、内部の構成として、ID割り当て制御部210Aと、観測値移動可能性判定部210Bと、仮想観測値生成部210Cとを備えるように構成される。
【0152】
ID割り当て処理部210の全体の処理の制御を行うのが、ID割り当て制御部210Aである。ID割り当て制御部210Aは、本発明の第1実施形態のID割り当て処理部205と同様に、各観測時刻における人認識カメラ202の複数の観測値に対して、ID割り当ての仮説の探索グラフを生成したのち、その探索グラフ上で最もコストが小さい経路を導出することで、各観測時刻における人認識カメラ観測値へのID情報の最適な割り当てを決定する。
【0153】
ただし、各観測時刻において人認識カメラ観測値の個数が無線タグ観測値の個数と一致しない場合、あるいは、観測対象の移動体(例えば、人)の移動能力又は移動履歴から予想される位置に観測値が無い場合、あるいは、予想される位置から外れた位置に観測値が存在する場合であっても、ID割り当ての仮説ノードを生成するために、観測値移動可能性判定部210Bにおいて、1単位の観測時刻間で移動可能な観測値の組み合わせを判定したのち、IDを割り当てるべき観測値がない場合には、仮想観測値生成部210Cで、観測値の移動履歴から予想される位置に仮想の観測値を生成し、すべてのIDを割り当て可能にする。
【0154】
次に、第2実施形態における人位置トラッキング装置90Aの動作の流れについて説明する。図21は、第2実施形態の人位置トラッキング装置90Aの動作の流れを示すフロー図である。
【0155】
第2実施形態の動作は、第1実施形態における人位置トラッキング装置90の動作の流れと基本的には同じであり、ステップS105Aでの処理の内容を除いて、各ステップの処理内容、及び、動作フローの構成は、図7のフロー図に示される動作フローと同一である。
【0156】
ステップS105AがステップS105と異なるのは、上述の通り、無線タグ観測値の個数と人認識カメラ観測値の個数が一致しない場合への対応を含む処理内容になっている点である。具体的には、人認識カメラ観測値へのID割り当て処理のうち、人認識カメラ観測値へのID割り当ての仮説ノードを生成する部分の処理が異なる部分なので、この部分に絞って動作フローを説明する。
【0157】
観測値バッファ204には、図4に示すように、人認識カメラ観測値が観測間隔Δtで得られている。ここで、観測時刻t=t0における人認識カメラ観測値へのID割り当て状態から、観測時刻t=t0+Δtにおける人認識カメラ観測値へのID割り当て状態の仮説をID割り当て処理部210で生成する状況を考える。
【0158】
図22は、この状況での人認識カメラ観測値へのID割り当て仮説ノードをID割り当て処理部210で生成する動作のフロー図である。
【0159】
まず、ステップS2201では、観測値移動可能性判定部210Bが、時刻t=t0における人認識カメラ202の各観測値から時刻t=t0+Δtにおける人認識カメラ202の各観測値への移動可能性を判定する。図23は、観測時刻t=t0から観測時刻t=t0+Δtへの観測値間の移動を表す例である。観測値の側の数字は、各観測時刻における観測値を区別するための数字である。
【0160】
図23の観測時刻t=t0における参照符号1〜5までの観測値を中心に点線で示される円2301は、各観測値が観測時間間隔Δtの間に、人(移動体)が移動可能な範囲の境界を表す。第2実施形態では、観測対象の人89が移動可能な範囲の指定については、本発明の第1実施形態と同様に、観測時間間隔Δtと観測対象の人89の移動速度の限界から定めた半径を持つ円2301内とする。
【0161】
この移動可能性の判定基準により、観測値移動可能性判定部210Bは、観測時刻t=t0おける各観測値が、観測時刻t=t0+Δtのどの観測値の位置まで移動可能かを判定する。
【0162】
図24に、観測値移動可能性判定部210Bの移動可能性判定結果を表にしたものを示す。図24の左側の表2401は、ステップS2201での移動可能性判定の結果を表の形式で示したものである。表2401において、縦軸が観測時刻t=t0における観測値の識別番号、横軸が観測時刻t=t0+Δtにおける観測値の識別番号である。観測時刻t=t0におけるある観測値の位置から、観測時刻t=t0+Δtにおける観測値の位置に移動可能である場合は「○」で示し、移動可能ではない場合は「×」で示す。
【0163】
次に、ステップS2202では、ID割り当て制御部210Aが、ステップS2201の処理で求めた観測値の移動可能性判定結果に基づいて、観測時刻t=t0のどの観測値からも移動不可能な観測時刻t=t0+Δtの観測値を、ID割り当ての対象から除外する。
【0164】
図24に示す観測値の移動可能性判定結果では、観測時刻t=t0+Δtの識別番号3の観測値は、観測時刻t=t0のどの観測値からも移動不可能となっているため、この観測値をID割り当ての対象からID割り当て制御部210Aで除外する。
【0165】
次に、ステップS2203では、仮想観測値生成部210Cが、観測時刻t=t0+Δtのどの観測値にも移動可能なものがない観測時刻t=t0の観測値に対して、当該の観測値の移動履歴から予想される移動位置に仮想の観測値を生成する。
【0166】
図24に示す観測値の移動可能性判定結果では、観測時刻t=t0の識別番号5の観測値は、観測時刻t=t0+Δtのどの観測値にも移動可能ではない。よって、仮想観測値生成部210Cにおいて、当該観測値が観測時刻t=t0+Δtにおける移動予測位置を当該観測値の移動履歴から求め、その位置に仮想観測値を生成し、観測値バッファ204に生成した仮想観測値の情報を追加する。
【0167】
図25は、図23に示す観測時刻での観測値に加え、観測時刻での観測値と、生成した仮想観測値(図25中の識別番号5*を付与した○)を示す図である。観測時刻の識別番号5の観測値は、観測時刻の識別番号5の観測値が移動したという仮説(すなわち両者に同じIDを割り当てるという仮説)が仮想観測値生成部210Cで生成されているので、仮想観測値生成部210Cにおいて、その仮説に基づき、観測時刻から観測時刻への移動速度と移動方向が維持されると仮定して、観測時刻における移動予測位置を図25の「○」で表す位置と定め、そこに仮想観測値(図中「○」で示す)を生成する。
【0168】
次に、ステップS2204において、観測値移動可能性判定部210Bは、ID割り当て仮想観測値生成部210Cが生成した観測時刻における仮想観測値に対して、移動可能性を再評価する。観測値移動可能性判定部210Bで再評価した結果を図24の右側の表2402に示す。仮想的に生成した観測値を真に得られた観測値の個数の次の数字(仮想観測値が複数あれば順次数字を加算する)に*を付けた形の識別番号で区別する。
【0169】
次に、ステップS2205において、ID割り当て制御部210Aは、ステップS2204までの処理で、評価された観測値の移動可能性判定結果として得られる観測時刻の観測値と観測時刻の観測値の移動に関する対応関係に基づき、対応関係にある観測時刻の観測値に観測時刻の観測時刻の観測値に割り当てられたIDを割り当てた仮説を複数生成する。
【0170】
図26は、図24の観測値の移動可能性判定結果から得られる観測値へのID割り当ての仮説の組み合わせを示す表である。ID割り当て制御部210Aにおいて、観測時刻の観測値のうち識別番号1,2の観測値には、IDの多重の割り当てを許容したID割り当てを行うことになる。観測時刻の識別番号4,識別番号5*へは、それぞれID=D、ID=EがID割り当て制御部210Aで割り当てられる。
【0171】
図27は、図26に示した3つのID割り当て仮説に対応する仮説ノードの表現を示す図である。仮説ノードの内部構造は、第1実施形態の図14で説明した仮説ノードの構造同じである。1つの観測値に対して2つ以上のIDを割り当てた場合は、観測値の識別番号に「’」(ダッシュ)を追加して、同じ識別番号にIDが複数割り当てられていることを示す。ID割り当て仮説1の場合は、識別番号2の観測値にID=B,ID=Cの2つのIDが多重割り当てされるので、ID=Cの割り当てに関しては、識別番号を2’としてノードに記録する。2つ以上のIDが割り当てられる場合は、「’」を順次増やして区別する。
【0172】
かかる構成により、ID割り当て処理部210の内部において、観測値移動可能性判定部210Bが、1単位の観測間隔において人の移動可能性に基づいて、観測エラーによる観測値の消失の状態と、誤検出による誤観測値の状態を特定しつつ、移動可能な観測値間の対応関係を判定し、観測値の消失に関しても、仮想観測値生成手段210Cが観測値の移動履歴に基づいて予想される移動先位置に仮想的に観測値生成することにより、人認識カメラ202における観測エラーに対応可能な人位置トラッキング装置90Aを実現できる。
【0173】
なお、第2実施形態においては、人位置の推定位置をディスプレイなどの人位置表示部208に表示するとしている。しかしながら、人位置の推定の利用形態は、人の位置を要求する他の装置のへの入力とすることも、もちろん可能であり、本発明の範囲を限定するものではない。
【0174】
第1実施形態及び第2実施形態において、第1観測手段101は、移動体(例えば、人)の識別情報を含みかつ移動体が有する無線タグ301〜303から発信される電波を受信して移動体の識別情報と位置情報を観測値として出力する無線タグ観測部201で構成しているが、これに限るものではなく、移動体に超音波を発信して反射した超音波を受信して移動体の識別情報と位置情報を観測値として出力する超音波センサで構成することもできる。
【0175】
第1実施形態及び第2実施形態において、第2観測手段102は、画像を撮像して移動体(例えば、人)の位置情報を観測値として出力するカメラ202で構成しているが、これに限るものではなく、移動体にミリ波を発信して反射したミリ波を受信して移動体の位置情報を観測値として出力するミリ波送受信器、又は、観測空間の床面に複数配置して移動体の位置情報を観測値として出力する圧力センサで構成することもできる。
【0176】
なお、上記様々な実施形態又は変型例のうちの任意の実施形態又は変型例を適宜組み合わせることにより、それぞれの有する効果を奏するようにすることができる。
【産業上の利用可能性】
【0177】
本発明に係る移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラムは、観測対象の人の行動を記録・監視するシステム又は、作業者の移動履歴を分析し作業手順の効率性を評価するシステム、物流現場における荷物の位置をトレースするシステムなどに応用が可能である。
【符号の説明】
【0178】
89 人
90,90A 人位置トラッキング装置
91 観測空間
91f 床面
101 第1観測手段
102 第2観測手段
103 識別情報割り当て手段
104 位置推定手段
201 無線タグ観測部
202 人認識カメラ
203 観測値取得部
204 観測値バッファ
205 ID割り当て処理部
206 人位置推定部
207 人位置推定部記録部
208 人位置表示部
210 ID割り当て処理部
210A ID割り当て制御部
210B 観測値移動可能性判定部
210C 仮想観測値生成部
300 部屋
301 無線タグ
302 無線タグ
303 無線タグ
401 観測値バッファに記録される観測値の例
402 観測値バッファに記録された観測値にID割り当て処理が行われた例
601 人位置表示部の人の移動軌跡の表示例
602 人位置表示部の人の移動軌跡の表示例
603 人位置表示部の人の移動軌跡の表示例
604 人位置表示部に表示される人の頭頂方向からの被写映像
605 人位置表示部に表示される人の頭頂方向からの被写映像
606 人位置表示部に表示される人の頭頂方向からの被写映像
901 人認識カメラ観測値の例
902 人認識カメラ観測値の例
903 人認識カメラ観測値の例
904 人認識カメラ観測値の例
905 人認識カメラ観測値の例
906 人認識カメラ観測値の例
1701 従来技術での課題を説明するための対象物の移動経路の例
1701A 従来技術での課題を説明するための対象物が接近する領域
1702,1703 移動経路
2301 各観測値が観測時間間隔Δtの間に、人(移動体)が移動可能な範囲の境界
2401 観測値の移動可能性の判定結果
2402 仮想観測値に対する移動可能性の判定結果
【技術分野】
【0001】
本発明は、センサからの対象物体に関する観測値に基づいて、観測対象の空間内に存在する複数の移動物体(人などの移動体)の位置を推定する移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラムに関するものである。
【背景技術】
【0002】
センサの観測値に基づいて人などの移動体の位置を推定する方式として、センシング性能の異なる異種のセンサの観測値を統合することにより、単体のセンサのみによるセンシングの弱点を補完する方式が存在する。
【0003】
例えば、カメラと画像認識処理による画像センサにより人の識別と位置との推定をしようとした場合、画像認識処理だけでは、複数の人をお互いに高精度に識別する事が困難なケースが多い。そこで、カメラとは別に、人の識別性能の高いセンサ(無線タグ)の観測値と、カメラの観測値とを組み合わせることで、単体のセンサの弱点を解消しつつ、移動体の識別と位置の推定を行う従来技術(非特許文献1)がある。
【0004】
非特許文献1では、対象物の位置情報は出力できるが、識別能力がないカメラと画像認識によるセンサの観測値と、対象物の識別能力が高く、位置情報も出力できる無線タグによるセンサの観測値とを統合することにより、移動する対象物を互いに識別しながら、逐次変化する位置を推定し対象物の移動軌跡を出力する方式が開示されている。
【0005】
具体的には、非特許文献1で開示される方式は、オンラインベイズ推定の枠組みに、複数の観測値と、推定処理内部の複数の位置推定分布の対応付けを確率的に表現するアソシエーション変数とを導入することで、複数の人などの移動体の逐次位置推定を同時に行うものである。
【0006】
さらに具体的には、対象物の識別情報(ID)の離散分布であるID尤度、及び、対象物の観測位置と、推定処理内部の各対象物の推定位置分布との距離的な近さから算出される距離尤度(距離が近い方が観測値と位置推定分布との対応の可能性が大きいとして距離尤度が大きい値を取る)の2つの値の積を規格化した値を、アソシエーション値として算出する。
【0007】
このアソシエーション値は、観測値と推定位置分布の対応関係に1つ割り当てられる値であり、各観測値に含まれる位置情報を、各対象物の推定位置の更新にどれだけ寄与させればよいかの重みに相当する。
【0008】
各観測値の観測値位置に前記アソシエーション値を重みづけした値で、推定分布を更新することにより、観測値と対象物の対応関係の曖昧性を考慮した位置推定を行っている。
【0009】
特に、非特許文献1は、識別情報(ID)を出力できないセンサ(例えば認識機能をもつカメラセンサ)を用いた場合にも、前記のアソシエーション値に基づく、複数物体の移動軌跡を推定するための構成と方式を開示している。カメラの撮像データの画像認識処理では、対象物の識別を高精度に行うことは難しいが、1観測周期において時間的に前後する2つの観測値が同じ対象物を観測したかどうかについては、その時点で撮像した対象物の画像特徴の類似性を評価するなどにより容易に判別できる。
【0010】
そこで、観測周期前後で同じ対象物を観測していると判別できた場合は、前回の観測時点での観測値と対象物の対応関係が維持されているとして、カメラセンサが出力できないID尤度を、前の観測値に基づいて得られたアソシエーション値で近似する。一方、観測周期前後で同じ対象物ではないと判別された場合は、前回の観測時点での観測値と対象物の対応関係が維持されていないため、カメラセンサが出力できないID尤度を、一様分布で近似する(ID尤度が一様分布であるということは観測値と対象物の対応関係が不明であるということに対応する)。前記対象物が同一であるかどうかの判別状態が曖昧な場合は、判別状態を確率値(追跡尤度)で表現し、前記2つの場合を、この追跡尤度により結合し、ID尤度を近似する。
【0011】
(数1)
そのときのカメラセンサ観測値のID尤度=追跡尤度×前回のアソシエーション値+(1−追跡尤度)×一様分布
....(式1)
【0012】
このように、式1で示されるID尤度の近似により、対象物の識別情報が出力できないセンサに対して、識別情報の近似値を与えることで、複数物体の位置推定を行えるようにしている。
【先行技術文献】
【非特許文献】
【0013】
【非特許文献1】谷川徹、山上勝義、“カメラと無線タグのセンサ情報統合による移動体トラッキング技術の開発”、第28回日本ロボット学会学術講演会、2010年9月22〜24日
【発明の概要】
【発明が解決しようとする課題】
【0014】
しかしながら、非特許文献1で開示されている方式は、観測対象である移動体同士の距離が接近するような状況においては、観測値と対象物との対応関係が曖昧になるために、位置推定誤差が蓄積し、移動体の移動経路を誤って推定してしまうという課題を有する。
【0015】
この課題について、2人の人が交差するように移動した例を用いて説明する。
【0016】
図17は、空間1701内を北から南へ移動する人(図17中でIDが「A」の人)、西から東へ移動する人(図17中でIDが「B」の人)が真ん中付近ですれ違うように移動した場合の、人の移動経路1702,1703を示す図である。
【0017】
図17の1701Aは、破線状の矩形で表した、空間1701の中心付近の領域である。この中心付近の領域1701Aで起こる現象を、図18を用いて説明する。
【0018】
図18の(A)、(B)、(C)は、図17の中心付近の領域1701Aに対応する領域でのAの人及びBの人の位置推定分布(図中丸で示す)と、カメラの観測値(図中三角で示す)を示したものである。(A)、(B)、(C)の順に観測が進んだものとする。
【0019】
非特許文献1で開示されている方式では、移動体同士が接近する状況では、観測値と位置推定分布との近さに基づく距離尤度の観点では、観測値が真に対応する位置推定分布との距離尤度の値と、観測値が真に対応しない位置推定分布との距離尤度の値が均等に近づいていく。例えば、図18の(B)に示される状況においては、Aの人のカメラ観測値とAの人の位置推定分布との距離と、Aの人のカメラ観測値とBの人の位置推定分布との距離は、相対的に近くなるため、Aの人のカメラ観測値のAの人の位置推定分布との距離尤度の値と、Aの人のカメラ観測値とBの人の位置推定分布との距離尤度の値は相対的に近くなる。
【0020】
また、非特許文献1で開示されている方式では、移動体同士が接近する状況では、画像識別処理において2つの移動体の分別が難しくなることで、同じ対象を観測出来ているかどうかが曖昧になる。よって、式1の追跡尤度の確率値が小さい値になり、結果的に一様分布がID尤度に反映される割合が大きくなり、近似されたID尤度の観点でも観測値が真に観測値した対象物とのID尤度の値と、観測値が真に観測した対象物以外とのID尤度の値が、相対的に値が近くなる。
【0021】
距離尤度の値、及び、ID尤度の値が均等に近づくと、その結果、距離尤度とID尤度の積から算出されるアソシエーション値についても、位置推定分布と対応するはずの観測値との間のアソシエーション値と、位置推定分布と対応しないはずの観測値との間のアソシエーション値が、相対的に近くなる。
【0022】
このため、位置推定分布の更新時に、真に対象物を観測した観測値以外の観測値の位置情報が更新に寄与する割合が相対的に高まることにより、真に対象物を観測した観測値の方向とはずれた方向に位置推定分布の更新が行われ、位置推定誤差が増大する。
【0023】
図18の実線矢印は、観測値により位置推定分布が更新される方向を例示したものである。図18の(B)の状況では、Aの人の位置推定分布、Bの人の位置推定分布、それぞれ更新される方向が、Aの人のカメラ観測値の位置、Bの人のカメラ観測値の位置の方向からずれている。このため、次の観測時刻((C)の状況)では、Aの人の位置推定分布は東側にずれ、Bの人の位置推定分布は南側にずれる。
【0024】
図18の(C)の状況では、観測値と、その観測値と対応するはずの位置推定分布の距離ははなれ、むしろ、その観測値と対応しないはずの位置推定分布との距離が近くなり、結果的に、観測値による位置推定分布の方向はさらに、誤った方向になり、さらに位置推定誤差が増大する。
【0025】
このように、非特許文献1の方式では、特に対象物が接近した状況では位置推定の誤りが起こりやすく、その誤りに起因して、真に人が移動した経路とはまったく異なる経路を推定してしまうという課題を有す。
【0026】
図19は、図17で示した2人の人A,Bの移動に対して非特許文献1の方式に基づいて位置推定した結果、2人の人A,Bの移動経路1702,1703とは全く異なる移動経路を誤って推定した結果を示す図である。
【0027】
図18に示したように、2人の人A,Bが接近し交差する付近での位置推定誤差の増大により、A,Bのそれぞれの人の位置推定分布の移動履歴は交差せずに、中心付近で誤った方向に移動してしまった結果である。
【0028】
図18の(C)の状況からさらに先に進むと、対象物の識別情報を出力する無線タグ観測値に関しても、観測値が出力する位置情報と、その観測値の識別情報に対応する対象物の位置推定分布との距離も大きく離れ、反対に、当該観測値の識別情報に対応しない対象物の位置推定分布に近くなるという状況が起こる。
【0029】
非特許文献1で開示される方式では、観測値の位置情報で対象物の位置情報の推定値を更新する際の重み(アソシエーション値)の計算を、距離尤度(観測値の位置情報と対象物の位置推定分布との近さ)とID尤度の積に基づいて計算するため、ID尤度における重みが、距離尤度によって、割り引かれてしまう。そのため、対象物の識別性能が高く位置推定誤差の訂正に寄与するはずの無線タグ観測値の識別情報が、位置推定分布の推定誤差の訂正に有効に寄与しない。よって、一度、位置推定分布が真の人の位置から大きくずれると、そのずれが増大し結果的にまったく異なる推定結果を導くという課題を有す。
【0030】
さらに、無線タグの観測頻度が、カメラの観測頻度より低い場合は、時間の観点で見たときの無線タグの観測値の対象物の推定位置へ更新の寄与はさらに弱まるため、推定誤差の訂正が起こりにくいという課題を有す。
【0031】
ならびに、非特許文献1では、カメラ観測値が常に人の数だけ得られている場合の方式のみ開示されており、カメラ観測値が人数分得られないケース、つまり、カメラ観測値の消失又はカメラ観測値が実際の人数よりも多く得られるケース場合の対応について記載はない。カメラによる人認識処理では、遮蔽物により観測対象の人が遮られる、接近した2人を1人と検知するなどの理由により、カメラの観測値が人数分得られないことが起こりうる。また、人ではない物体を人であると誤認識することで、カメラの観測値が人数分よりも多く得られる場合も起こりうる。しかしながら、非特許文献1ではこのようなケースにおける対応方法が開示されておらず、仮にカメラ観測値が消失し、観測値の個数が人数に満たない場合は、1つのカメラ観測値をその観測値に対応しない人も含めて複数の人の位置推定分布の更新に同時に反映させることになり、誤った推定結果を招くという課題を有す。
【0032】
従って、本発明の目的は、上記問題を解決することにあって、移動体がすれ違うなどの観測値と対象物の対応関係が曖昧になるシーンでも、位置推定精度の低下を招くこと無く、かつ、対象物の移動経路の推定誤りを引き起こさない、移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラムを提供することにある。
【課題を解決するための手段】
【0033】
前記課題を解決するために、本発明は以下のように構成される。
【0034】
本発明の1つの態様によれば、観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定装置であって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に出力する第1の観測手段と、
前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で出力する第2の観測手段と、
前記第1の観測手段と前記第2の観測手段のそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる識別情報割り当て手段と、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を推定する位置推定手段を、
有する移動体位置推定装置を提供する。
【0035】
本発明の別の態様によれば、観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定方法であって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に第1の観測手段により出力し、
前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で第2の観測手段により出力し、
前記第1の観測手段と前記第2の観測手段のそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を識別情報割り当て手段により割り当て、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を位置推定手段により推定する、
移動体位置推定方法を提供する。
【0036】
本発明のさらに別の態様によれば、観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定プログラムであって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に出力する第1の観測手段と、前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で出力する第2の観測手段とのそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる識別情報割り当て手段と、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を推定する位置推定手段と
の機能をコンピュータに実現させるための移動体位置推定プログラムを提供する。
【発明の効果】
【0037】
本発明の移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラムは、観測対象物の識別能力が高いセンサの識別情報に基づいて、観測対象物の識別能力を持たない(あるいは識別能力が低い)センサの観測値への妥当な識別情報の割り当てを行うことができるので、観測値と観測対象物との対応関係を常に確定できる。従って、移動体がすれ違うなどの観測値と対象物の対応関係が曖昧になるシーンでも、位置推定精度の低下を招くこと無く、かつ、対象物の移動経路の推定誤りを引き起こさないという格別の効果を有す。
【0038】
また、本発明の移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラムは、観測エラーによる観測値の消失又は過観測が発生する状況においても、観測対象物の識別能力を持たない(あるいは識別能力が低い)センサの観測値への妥当な識別情報の割り当てを行うことができる。従って、実環境において常に観測対象が正しくセンシングされるとは限らない状況においても、位置推定精度の低下を招くことなく、かつ、対象物の移動経路の推定誤りを引き起こさないという格別の効果を有す。
【図面の簡単な説明】
【0039】
【図1】本発明の第1実施形態の移動体位置推定装置の構成を示すブロック図。
【図2】本発明の第1実施形態の移動体位置推定装置に係る、人位置トラッキング装置の構成を示すブロック図。
【図3】本発明の第1実施形態に係る、人位置トラッキング装置で人の位置を検出する状況の例を示す図。
【図4A】本発明の第1実施形態に係る、観測値バッファに記録された観測値の一例を示す図。
【図4B】本発明の第1実施形態に係る、観測値バッファに記録された観測値の一例を示す図。
【図5】本発明の第1実施形態に係る、人位置推定値記録部バッファに記録された人位置情報の例を示す図。
【図6】本発明の第1実施形態に係る、人位置表示部に表示された人の位置、及び、移動軌跡の例を示す図。
【図7】本発明の第1実施形態に係る、人位置トラッキング処理のメイン処理のフローチャート。
【図8】本発明の第1実施形態に係る、ステップS105の処理方法を説明するための人の移動軌跡例を示す図。
【図9】本発明の第1実施形態に係る、ステップS105の処理方法を説明するためのID割り当て処理の対象となる観測値の例を示す図。
【図10】本発明の第1実施形態に係る、ステップS105の処理方法を説明するためのある時刻tにおける観測値へのID割り当ての定式化を示す図。
【図11】本発明の第1実施形態に係る、ステップS105の処理方法を説明するためのある時刻tにおける観測値へのID割り当ての組み合わせを示す図。
【図12】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理が最小コスト経路探索問題となることの説明図。
【図13】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理の最小コスト経路探索問題をA*アルゴリズムで解く場合の予測コスト設定を説明する図。
【図14】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理の最小コスト経路探索問題をA*アルゴリズムで解く場合の各ノードに格納される情報の例を示す図。
【図15A】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理の最小コスト経路探索問題をA*アルゴリズムで解く場合の開始ノードの作成と、目標ノードの作成に関わる動作のフローチャート。
【図15B】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理の最小コスト経路探索問題をA*アルゴリズムで解く場合の、最小コスト経路を導出する手順のフローチャート。
【図16A】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理の最小コスト経路探索問題でID割り当ての仮説ノードを枝刈りする方法を説明する図。
【図16B】本発明の第1実施形態に係る、ステップS105の処理のID割り当て処理の最小コスト経路探索問題でID割り当ての仮説ノードを枝刈りする方法を説明する図。
【図17】従来技術における人位置推定の課題を説明するための2つの移動体の移動軌跡の例を示す図。
【図18】従来技術での課題を説明するための2つの移動体と観測値の位置関係において人位置推定間違いの原因を示す図。
【図19】従来技術における人位置移動経路の推定間違いの例を示す図。
【図20】本発明の第2実施形態に係る、人位置トラッキング装置の構成を示すブロック図。
【図21】本発明の第2実施形態に係る、人位置トラッキング処理のメイン処理のフローチャート。
【図22】本発明の第2実施形態に係る、ステップS105A内のID割り当て仮説を生成する処理の流れを示すフローチャート。
【図23】本発明の第2実施形態に係る、観測値移動可能性判定部の処理内容に関わる人認識カメラ観測値の例を示す図。
【図24】本発明の第2実施形態に係る、観測値移動可能性判定部の判定結果の例を示す図。
【図25】本発明の第2実施形態に係る、仮想観測値生成部の処理内容の例を示す図。
【図26】本発明の第2実施形態に係る、IDの割り当て制御部が観測値に対してIDを割り当てた例を示す図。
【図27】本発明の第2実施形態に係る、IDの割り当て仮説のノード表現を表す図。
【図28】本発明の第1実施形態における人位置移動経路の推定結果の例を示す図。
【発明を実施するための形態】
【0040】
以下に、本発明にかかる実施の形態を図面に基づいて詳細に説明する。
【0041】
以下、図面を参照して本発明における実施形態を詳細に説明する前に、本発明の種々の態様について説明する。
【0042】
本発明の第1態様によれば、観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定装置であって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に出力する第1の観測手段と、
前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で出力する第2の観測手段と、
前記第1の観測手段と前記第2の観測手段のそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる識別情報割り当て手段と、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を推定する位置推定手段を、
有する移動体位置推定装置を提供する。
【0043】
本発明の第2態様によれば、前記第1観測手段は、前記移動体の識別情報を含みかつ前記移動体が有する無線タグから発信される電波を受信して前記移動体の識別情報と位置情報を観測値として出力する無線タグ観測部、又は、前記移動体に超音波を発信して反射した超音波を受信して前記移動体の識別情報と位置情報を観測値として出力する超音波センサであり、
前記第2観測手段は、画像を撮像して前記移動体の位置情報を観測値として出力するカメラ、又は、前記移動体にミリ波を発信して反射したミリ波を受信して前記移動体の位置情報を観測値として出力するミリ波送受信器、又は、前記観測空間の床面に複数配置して前記移動体の位置情報を観測値として出力する圧力センサである、第1の態様に記載の移動体位置推定装置を提供する。
【0044】
本発明の第3態様によれば、前記識別情報割り当て手段において、前記観測間隔の時間内に前記移動体が移動可能な移動可能範囲外にある前記第2観測手段の観測値を削除して、前記観測間隔の時間内に前記移動体が移動可能な移動可能範囲内にある前記第2観測手段の観測値を基に、識別情報割り当て処理を行うときに対する前回の前記第2観測手段の観測値の位置から移動不可能な、前記識別情報割り当てを行うときの観測値を特定し、又は、前記識別情報割り当てを行うときの前記第2観測手段の観測値の位置へ移動可能なものが1つもない、前記識別情報割り当てを行うときに対する前回の観測値を特定し、特定された前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる、第1又は2の態様に記載の移動体位置推定装置を提供する。
【0045】
本構成によって、第2観測手段において想定される観測エラー、たとえば、観測対象の隠蔽又は、観測対象同士の接近等に起因する観測値の消失、あるいは、観測対象以外の物体を観測対象だと誤検知することに起因する誤観測値の発生の状況を把握することができ、第2の観測手段の観測値のうち、第1の観測手段から得られた識別情報を割り当てるべきものとそうではないものとを区別可能である。従って、観測エラーに起因する誤った識別情報の割り当てを回避でき、観測エラーによる最終的な移動体の位置推定結果の精度低下を防ぐことができる。
【0046】
本発明の第4態様によれば、前記識別情報割り当て手段は、前記識別情報割り当てを行うときの前記第2観測手段の観測値の位置へ移動可能なものが1つもないと特定された、前記識別情報割り当てを行うときに対する前回の観測値に対して、前記当該観測値の移動履歴に基づいて、前記識別情報割り当てを行うときの移動先位置を予測し、前記予測位置に仮想的な観測値を生成する仮想観測値生成部を備える、第3の態様に記載の移動体位置推定装置を提供する。
【0047】
本構成によって、当該観測対象の移動履歴から妥当であると思われる位置に観測対象が移動したと仮定して、仮想的に観測値を生成し、第1観測手段から得られた識別情報を割り当てることにより、観測対象が隠蔽されるなどの原因で、ある観測時刻において当該観測対象の第2の観測手段の観測値が得られなかった場合にも、当該観測対象の移動経路を推定することが可能である。
【0048】
本発明の第5態様によれば、前記識別情報割り当て手段において、前記観測対象の前記移動体の前記移動可能範囲を、当該移動体の移動能力の計測結果に基づく最大の移動速度と、前記観測間隔の積を半径とする円の範囲と設定する第3又は4の態様に記載の移動体位置推定装置を提供する。
【0049】
本発明の第6態様によれば、前記識別情報割り当て手段において、前記観測対象の前記移動体の前記移動可能範囲を、前記第2の観測手段の観測値の移動履歴の、前記識別情報割り当てを行うときに対する前回の観測値の位置と、前記識別情報割り当てを行うときに対する前々回の観測値の位置から算出される移動速度と移動方向とが維持されると仮定して得られる移動先位置を中心とした所定の半径を持つ円と定める、第3又は4の態様に記載の移動体位置推定装置を提供する。
【0050】
本発明の第7態様によれば、観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定方法であって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に第1の観測手段により出力し、
前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で第2の観測手段により出力し、
前記第1の観測手段と前記第2の観測手段のそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を識別情報割り当て手段により割り当て、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を位置推定手段により推定する、
移動体位置推定方法を提供する。
【0051】
本発明の第8態様によれば、前記移動体の識別情報と位置情報を含みかつ前記第1の観測手段から出力された第1の観測値と、前記移動体の位置情報を含みかつ前記第2の観測手段から出力された第2の観測値とが同時に得られた第1の時刻から、次に、前記第1の観測値と前記第2の観測値が同時に得られた第2の時刻の間に得られた第2の観測値に対して、
前記第1の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求め、
前記第1の時刻における組み合わせに基づいて、前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当て、
さらに、前記第2の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求め、
前記第2の時刻における組み合わせにおいて前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当て、
前記識別情報割り当て手段において、前記第1の時刻における前記第2の観測値への識別情報の割り当て状態を開始ノードとし、また、前記第2の時刻における前記第2の観測値への識別情報の割り当て状態を目標ノードとし、前記第1の時刻と前記第2の時刻の間の前記第2の観測値への識別情報の割り当ての組み合わせを、前記開始ノードと前記目標ノードの間に位置するノードとすることにより得られる探索グラフにおいて、前記ノード間の遷移コストを前記第2の観測値の移動量の合計と置くことで、前記探索グラフの前記開始ノードから前記目標ノードに至る最小コスト経路を求めることにより、前記第1の時刻から前記第2の時刻までの前記第2の観測値に前記第1の観測値の識別情報を前記識別情報割り当て手段で割り当てる、
第7の態様に記載の移動体位置推定方法を提供する。
【0052】
本発明の第9態様によれば、前記探索グラフ上の探索処理において、前記識別情報割り当て手段により、ある観測時刻における識別情報の割り当て状態に相当するノードから、次の観測時刻への割り当て状態の仮説に相当するノードを生成する場合に、前記観測対象の前記移動体の移動可能範囲を考慮し、前記観測間隔の時間内に移動可能な前記第2観測手段の観測値の対応関係を判定し、探索処理を行うときに対する前回の前記第2観測手段の観測値の位置から移動不可能な、前記探索処理を行うときの観測値を特定することで、前記探索処理を行うときに対する前回の観測値の位置から移動不可能な観測値を含んだ割り当ての仮説ノードを生成しない、第8の態様に記載の移動体位置推定方法を提供する。
【0053】
本発明の第10態様によれば、前記探索グラフ上の探索処理において、前記識別情報割り当て手段により、ある観測時刻における識別情報の割り当て状態に相当するノードから、次の観測時刻への割り当て状態の仮説に相当するノードを生成する場合に、前記観測対象の前記移動体の移動可能範囲を考慮し、探索処理を行うときの観測値の位置へ移動可能なものが1つもないと特定された、前記探索処理を行うときに対する前回の観測値に対して、前記当該観測値の移動履歴に基づいて前記探索処理を行うときの移動先位置を予測し、前記予測位置に仮想的な観測値を生成し、前記仮想的な観測値に前記当該の観測値が移動したとする仮説ノードを生成する、第8又は9の態様に記載の移動体位置推定方法を提供する。
【0054】
本発明の第11態様によれば、観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定プログラムであって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に出力する第1の観測手段と、前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で出力する第2の観測手段とのそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる識別情報割り当て手段と、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を推定する位置推定手段と
の機能をコンピュータに実現させるための移動体位置推定プログラムを提供する。
【0055】
本発明の第12態様によれば、前記移動体の識別情報と位置情報を含みかつ前記第1の観測手段から出力された第1の観測値と、前記移動体の位置情報を含みかつ前記第2の観測手段から出力された第2の観測値とが同時に得られた第1の時刻から、次に、前記第1の観測値と前記第2の観測値とが同時に得られた第2の時刻の間に得られた第2の観測値に対して、
前記第1の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求める機能と、
前記第1の時刻における組み合わせに基づいて、前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当てる機能と、
さらに、前記第2の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求める機能と、
前記第2の時刻における組み合わせにおいて前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当てる機能と、
前記第1の時刻における前記第2の観測値への識別情報の割り当て状態を開始ノードとし、また、前記第2の時刻における前記第2の観測値への識別情報の割り当て状態を目標ノードとし、前記第1の時刻と前記第2の時刻の間の前記第2の観測値への識別情報の割り当ての組み合わせを、前記開始ノードと前記目標ノードの間に位置するノードとすることにより得られる探索グラフにおいて、前記ノード間の遷移コストを前記第2の観測値の移動量の合計と置くことで、前記探索グラフの前記開始ノードから前記目標ノードに至る最小コスト経路を求めることにより、前記第1の時刻から前記第2の時刻までの前記第2の観測値に前記第1の観測値の識別情報を前記識別情報割り当て手段で割り当てる機能と、
をコンピュータに実現させるための、第11の態様に記載の移動体位置推定プログラムを提供する。
【0056】
以下に、本発明にかかる実施形態を図面に基づいて詳細に説明する。
【0057】
(第1実施形態)
図1は、本発明の第1実施形態にかかる移動体位置推定装置の構成を示すブロック図である。移動体位置推定装置は、第1観測手段101と、第2観測手段102と、識別情報割り当て手段103と、位置推定手段104とを備えて構成している。
【0058】
第1観測手段101は、複数の観測対象を区別する識別情報と、観測対象の位置情報を識別情報割り当て手段103と位置推定手段104とに出力する。
【0059】
第2観測手段102は、第1観測手段101と同じ観測対象に対して、位置情報のみを識別情報割り当て手段103に出力する。
【0060】
識別情報割り当て手段103は、対象物の識別精度が高い第1観測手段101の各観測値と、対象物の識別ができない第2観測手段102の各観測値の対応関係を、対応させる観測値の距離の合計が最も小さくなるように対応付ける。この識別情報割り当て手段103での対応関係に基づき、第1観測手段101の観測値が得られた時刻において、第2観測手段102の観測値への識別情報の割り当てを識別情報割り当て手段103で行う。さらに、識別情報割り当て手段103は、第1観測手段101の観測値が得られた時刻での、第2観測手段102の観測値への識別情報の割り当てに基づいて、第1観測手段101の観測値が得られない時刻における、第2観測手段102の観測値に対する識別情報の割り当ての考えうる組み合わせの中で、観測時刻毎の第2観測手段102の識別情報を割り当てられた観測値の移動量の合計が最小になるような、識別情報の割り当ての組み合わせを決定し、第1観測手段101の観測値が得られない時刻における、第2観測手段102の観測値へも識別情報の割り当てを行う。識別情報割り当て手段103で得られた情報は、位置推定手段104に出力される。
【0061】
位置推定手段104は、第1観測手段101の観測値に含まれる識別情報及び位置情報、そして、識別情報割り当て手段103により識別情報が割り当てられた第2観測手段102の観測値に含まれる識別情報及び位置情報に基づいて、観測値が得られた時刻毎に、観測対象物の推定位置を更新することで、移動する対象物の位置を捕捉する。
【0062】
このような構成によって、識別情報割り当て手段103において、第1観測手段101の観測値の識別情報に基づいて、第2観測手段102の観測値には含まれない識別情報を割り当てる。このように構成することにより、従来技術における識別情報を近似する方式では、観測値同士が接近する状況になると、識別情報を持たないセンサの識別情報が曖昧になるという問題を回避することができる。従って、識別情報が曖昧になることに起因する対象物の位置推定誤差の増大、さらには、位置推定誤差の増大による、観測対象物の移動経路の推定間違いという問題を、この第1実施形態では回避することができる。
【0063】
また、識別情報割り当て手段103においては、第1の観測手段101の観測値の観測頻度が、第2の観測手段102の観測頻度よりも低い場合においても、第2の観測手段102の観測値への識別情報の割り当てを行うことが可能なので、従来技術では、観測頻度が低いセンサの情報が位置推定の誤りを補正する方向に働きにくいという問題も、同時に回避することができる。
【0064】
図2は、本発明の第1実施形態における移動体位置推定装置の具体的な一例としての人位置トラッキング装置90の構成を示すブロック図である。人位置トラッキング装置90は、第1の観測手段の一例としての無線タグ観測部201と、第2の観測手段の一例としての人認識カメラ202と、識別情報割り当て手段の一例としてのID割り当て処理部205と、位置推定手段の一例としての人位置推定部206とを備えるように構成している。人位置トラッキング装置90は、さらに、観測値取得部203と、観測値バッファ204と、人位置推定値記録部207と、人位置表示部208とを備えている。
【0065】
無線タグ観測部201は、観測対象である人が所持する無線タグから発信される電波を複数のアンテナで受信し、アンテナ毎の到達時間の差からタグの位置を測位する。同時に、無線タグ観測部201は、個々の無線タグに割り当てられた固有のID情報を、タグの位置の情報と組み合わせ、観測値として観測値取得部203に出力する。
【0066】
人認識カメラ202は、観測対象である人と人以外のものとを識別することにより、撮像範囲内に存在する人の位置を観測値として観測値取得部203に出力する。
【0067】
図3に、第1実施形態における人位置トラッキング装置90の無線タグ観測部201と人認識カメラ202とを、観測空間91に配置した例を示す。観測対象となる人89は、無線タグ(無線発信器)301,302,303を所持することで、無線タグ301,302,303から発信される電波を、無線タグ観測部201が受信することにより、無線タグ301,302,303の位置と識別情報とが無線タグ観測部201で観測される。また、人認識カメラ202の撮像範囲が観測対象となる観測空間91の床面91fの全体を含むように、天井から床面方向に向けて人認識カメラ202を配置することで、人認識カメラ202により、床面91f上を移動する人89の位置を観測する。
【0068】
観測値取得部203は、内部に無線タグ観測部201及び人認識カメラ202の観測値をそれぞれ取得するタイミングを管理するタイマ203Aを持っている。観測値取得部203は、無線タグ観測部201の観測周期としてタイマ203Aで設定された時間間隔、及び、人認識カメラ202の観測周期としてタイマ203Aで設定された時間間隔で、それぞれの観測値を取得し、観測値バッファ204に追加記録する。
【0069】
観測値バッファ204は、観測値取得部203が取得した観測値を観測時刻毎に記録する。図4A及び図4Bに、観測値バッファ204に記録される観測値の例を示す。
【0070】
図4A及び図4Bでは、観測対象の人が3人存在する場合の例で、各観測時刻において、無線タグ観測値及び人認識カメラ観測値は、それぞれ3個ずつ記録される。1つの観測値は、位置情報とID情報とで構成される。位置情報は、観測空間91内に人89の存在する座標である。第1実施形態では、人89の存在する空間91の床面91fの平面における2次元座標を位置座標とした場合の例を示す。ID情報は、観測された人89を互いに区別するための情報である。第1実施形態では、3人の人89をそれぞれA,B,CというID情報の値で区別するものとする。
【0071】
観測値バッファ204に記録される観測値は、無線タグ観測値が得られた時刻から次の無線タグ観測値が得られた時刻までの観測値とする。第1実施形態においては、人認識カメラ202の観測周期をΔtとし、無線タグ観測部201の観測周期を4Δtとする。すなわち、無線タグ観測部201と人認識カメラ202との観測頻度の比は、1:4であるとする。従って、図4A及び図4Bでは観測時刻が0から4Δtまでの5つの時刻の観測値が記録される。
【0072】
図4Aは、観測値取得部203が、無線タグ観測部201及び人認識カメラ202から観測値を取得した直後の状態を示す。無線タグ観測値には、位置情報とID情報とが含まれるが、人認識カメラ観測値には識別情報は含まれない。このため、図4Aでは、人認識カメラ202の観測値のID情報は不定(Unknown)を意味する「UK」という値である。
【0073】
図4Bは、後述するID割り当て処理部205が、人認識カメラ観測値に対しID情報を割り当てた直後の状態を示す。図4Bでは、人認識カメラ202の観測値のID情報は、それぞれ割り当てられたID情報が格納されている。
【0074】
ID割り当て処理部205は、観測値バッファ204に記録された観測値の内容を読み出し、無線タグ観測値の位置情報と人認識カメラ観測値の位置情報との対応関係、及び、人認識カメラ観測値の観測時刻毎の観測値の移動量の評価に基づいて、人認識カメラ観測値へのID識別情報の割り当てを決定し、割り当てられたID識別情報を観測値バッファ204の人認識カメラ観測値のID情報に書き込む。
【0075】
人位置推定部206は、ID情報が書き込まれた状態の観測値バッファ204の観測値に基づいて、各観測時刻における人89の位置を推定する。人位置推定部206は、その内部に、識別される人毎に推定位置を保持している。観測値と推定位置との対応関係は、観測値バッファ204の観測値の識別情報から直ちに分かるので、対応する観測値により人89の推定位置を観測時刻毎に更新することで、移動する人89の位置を推定し、人位置の推定値を人位置推定値記録部207に記録する。
【0076】
人位置推定値記録部207には、人位置推定部206で推定された人89の推定位置の情報が観測時刻毎に人89の人数分だけ記録される。
【0077】
図5に、人位置推定値記録部207に記録される人89の位置の推定位置の例を示す。各観測値時刻におけるIDで区別された3人A,B,Cの人89の推定位置(2次元座標)が記録される。
【0078】
人位置表示部208は、人位置推定値記録部207に記録された人位置の推定値の任意の時間範囲の人位置推定値、さらに、任意の人89の人位置推定値を、指定して読み出し、各人の位置の軌跡を表示する。人位置表示部208は、例えばCRT又は液晶ディスプレイのようなディスプレイを含んだ装置として構成される。
【0079】
図6に人位置表示部208の表示例を示す。ここでは、第1実施形態において3人の人(ID=A,B,C)604,605,606が移動しており、601、602、603で示される丸印と丸印間を結ぶ矢印線が3人それぞれの人604,605,606の移動軌跡を表す。最新の観測値時刻(t=4Δt)から7回前の観測時刻までの3人604,605,606それぞれの推定位置が丸印で表示されており、各観測時刻間の移動は、丸印を結ぶ矢印線で表される。
【0080】
なお、人認識カメラ202で天井から床面方向に撮像した映像を人位置表示部208へ送り、人位置表示部208において、人認識カメラ202からの映像に、図6に示す人の移動軌跡601、602、603を重ねて表示する構成を取ることもできる。
【0081】
図6の604、605、606は、人認識カメラ202で撮影した映像中に映る人A,B,Cを示す。天井方向から床面方向の撮影なので、頭頂部分と肩が主に映る。
【0082】
次に、図7に示すフロー図に基づいて、第1実施形態における人位置トラッキング装置90の動作の流れについて説明する。
【0083】
図7に示すステップS101からステップS107は、無線タグ観測部101及び人認識カメラ102から観測値をそれぞれ取得し、ID割り当て処理部103で人認識カメラ観測値へのID情報の割り当て処理を行い、ID情報割り当て済みの観測値に対して、人位置推定部206で人の位置推定を行うまでの動作フローに相当する。
【0084】
まず、ステップS101では、観測値取得部203が、無線タグ観測部201及び人認識カメラ202のそれぞれにタイマー203Aで設定した観測周期に同期した時刻において、無線タグ観測部201及び人認識カメラ202から観測値を取得する。観測周期に同期した時刻以外では、観測値の取得を行わない。第1実施形態においては、無線タグ201の観測周期は、人認識カメラ202の観測周期の4倍に設定しているので、無線タグ観測値と人認識カメラ観測値とが同時に取得できるときと、人認識カメラ観測値のみ取得できるときとがある。
【0085】
次いで、ステップS102では、観測値取得部203が、ステップS101で取得した観測値を観測値バッファ204に記録する。
【0086】
次いで、ステップS103では、ステップS101で無線タグ観測値が取得できたかどうかをID割り当て処理部205で判断する。ステップS101で無線タグ観測値が取得できなかったと観測値取得部203で判断した場合は、フローはステップS104へ進む。ステップS104では、人認識カメラの観測周期であるΔt時間ウェイトし、ステップS101へ戻る。
【0087】
ステップS101において、無線タグ観測値が取得できたと観測値取得部203で判断した場合は、ステップS105へ進む。この場合は、図4Aに示した例と同様に、観測値バッファ204には、そのときの観測時刻と前回の観測値時刻との間に観測された無線タグ観測値及び人認識カメラ観測値が記録されている。
【0088】
ステップS105では、ID割り当て処理部205が、観測値バッファ204に記録された無線タグ観測値と人認識カメラ観測値とに含まれる、位置情報及びID情報に基づいて、人認識カメラ観測値へのID情報の割り当て処理を行う。ステップS105の処理の詳細については、後ほど述べる。
【0089】
次いで、ステップS106では、人位置推定部206が、観測値バッファ204に記録されている無線タグ観測値、及び、ステップS105でID情報が割り当てられた人認識カメラ観測値の位置情報、及び、ID情報に基づいて、人89の位置の推定処理を行う。人位置推定部206の人位置推定の方法としては、既に提案されている逐次推定手法を用いることができる。例えば、オンラインベイズフィルタの一種であるVariational Data Association Filter(VADAF)を用いることができる。
【0090】
ここで、オンラインベイズフィルターに基づく位置推定処理を行うことで、無線タグ観測部201及び人認識カメラ202の観測値にそれぞれ含まれる位置情報の誤差特性、つまり、位置センサとしての観測値のバラツキを考慮した位置推定を行うことができ、観測値の位置情報をそのまま人の位置として取り扱うのに較べて、真の人の位置との誤差を低減できる。観測値の位置情報をそのまま人の位置としても、誤差が問題にならない場合には、位置推定処理を行わなくてもよく、本発明の効果を損なうものではない。
【0091】
次いで、ステップS107では、人位置推定部206が推定した人位置の情報を、人位置推定値記録部207に書き込む。
【0092】
以上が、人位置トラッキング装置90の動作のフローである。
【0093】
次に、ステップS105のID割り当て処理部205によるID割り当て処理の詳細について説明する。
【0094】
まず、ステップS105のID割り当て処理が、組み合わせ探索問題の一種である最小コスト経路探索問題として定式化できることを説明する。
【0095】
その後で、最小コスト経路探索問題を解く手順として、A*アルゴリズムが適用できることを述べ、A*アルゴリズムにより最小コスト経路を導出する手順を説明する。
【0096】
最小コスト経路問題としてID割り当て処理を定式化する説明を行う。
【0097】
図8は、以下の定式化の説明において、A,B,CのID情報で区別される3人の人89が実際に移動した軌跡801,802,803の例を示す図である。
【0098】
図9は、図8の灰色の矩形領域804を3人の人が移動した際に得られた観測値の例を示す図である。A、B,Cの人の無線タグの観測値は、それぞれ、黒く塗りつぶされた正方形と、内部が斜線模様の正方形と、正方形とで示す。黒く塗りつぶされた丸は、人認識カメラ202の観測値である。
【0099】
図9において、点線の矩形で囲んだ領域910に含まれる観測値は、それぞれ、同じ観測時刻に得られた観測値である。5つの点線矩形領域910は、無線タグ観測値が得られた時刻t=0から、次の無線タグ観測値が得られた時刻t=4Δtまでの各観測時刻に同時に得られた観測値である。ここで、人認識カメラ観測値へID情報をID割り当て処理部205で割り当てるということは、各観測時刻ごとに3つある人認識カメラ202の観測値の各々にA,B,CのどのID情報をID割り当て処理部205で割り当てるかということである。このことを定式化するために、各観測時刻の3つの観測値を区別するために観測値のインデックスとして変数iを用いる。i=1は1番目、i=2は2番目、i=3は3番目の観測値を指す。次に、i番目の観測値に対するID情報の割り当ての定式化のために変数IDi(t)を用いる。例えば、IDi(t)=Aは時刻tのi番目の観測値にID情報Aが割り当てられていることを表す。
【0100】
次に、後に最小コスト経路問題として定式化するために観測値の位置情報(座標)を用いるので、xi(t)を時刻tのi番目の観測値の座標とする。
【0101】
ここで述べた、観測値とi, IDi(t), xi(t)の定式化に関しては、観測値との対応関係を図10に示す。
【0102】
図11は、3人の人がいるときに得られる3つの人認識カメラ観測値へのID情報の割り当ての組み合わせを示す図である。3つの観測値へのA,B,CのID情報の割り当ての組み合わせは3!=6通りあることがわかる。n人の場合は、n!通りである。
【0103】
まず、無線タグ観測値が得られる時刻t=0、及び、時刻t=4Δtにおいては、これら6通りの人認識カメラの観測値へのID割り当ての組み合わせの中で最適な組み合わせを決定することができる。無線タグ観測値の位置と、その無線タグ観測値のID情報と同じID情報が割り当てられた人認識カメラ観測値の位置の距離の合計(ここでは観測値間の3つの距離の合計)が最も小さくなるような、ID割り当ての組み合わせをID割り当て処理部205で選ぶ。例えば、t=0においては、図9の観測値901にはID情報Aを割り当て、観測値902にはID情報Bを割り当て、観測値903にはID情報Cを割り当てるという組み合わせをID割り当て処理部205で選べばよい。t=4Δtにおいては、観測値904にはID情報Bを割り当て、観測値905にはID情報Cを割り当て、観測値906にはID情報Aを割り当てる組み合わせをID割り当て処理部205で選べばよい。
【0104】
ここまでで、時刻t=0と時刻t=4Δtでは、1つのID割り当ての組み合わせ、それ以外の時刻では6つのID割り当ての組み合わせが考えられることが分かる。
【0105】
ここで、i=1〜3の観測値へのID情報の割り当て状態を、3つの横に並んだ矩形にA,B,Cを並べる順番で表現する。
【0106】
図12は、t=0からt=4Δtに到るまでの、人認識カメラ観測値へのID割り当ての組み合わせの探索空間を探索グラフで表した図である。各観測時刻における人認識カメラ観測値へのIDの割り当て状態が探索グラフのノードとなる。
【0107】
ノード間を結ぶエッジは、観測時刻が1つ進む度に、エッジが始まるノードが表す観測値へのIDの割り当て状態から、エッジが終わるノードが表す観測値へのIDの割り当て状態に変化した時の遷移を表す。また各エッジにはCostというコスト値を割り当てる。Costを定義する式を以下に(式2)として掲げる。
【0108】
(数2)
【0109】
前記(式2)の左辺のCost(t,t+Δt)は、時刻tのn個の観測値、及び、次の観測時刻t+Δtのn個の観測値にそれぞれあるIDが割り当てられているとし、そのID割当状態において、同じIDを持つ観測値間の距離を合計したものである。
【0110】
図12に示す探索グラフのt=0のノードからエッジとノードを辿って、t=4Δtのノードへ辿る経路のうち、Costの合計が最小となる経路(最小コスト経路)をID割り当て処理部205で考える。その経路上に存在するノードが表す観測値へのID割り当ては、観測時刻間での同じIDをもつ観測値の移動距離の合計が最も小さいID割り当てになる。すなわち、時刻t=0、t=4Δtでは、無線タグ観測値のID情報との位置関係から最適な人認識カメラへのID割り当てがなされた上で、その制約を満たす中で、時刻t=0、t=4Δt以外の人認識カメラの観測値へは移動距離の観点から最適なID割り当てがID割り当て処理部205で求まる。従って、人認識カメラ観測値へのID割り当て問題が、ID割り当て処理部205で、最小コスト経路探索問題として定式化できる。
【0111】
次に、ここまでで定式化した最小コスト経路探索問題を解く手順として、ID割り当て処理部205において、A*アルゴリズムが適用できることを説明する。A*アルゴリズムはコスト最小に基づいて探索問題を解くアルゴリズムの一種として知られており、探索の手順の中に予測コストを導入することにより、ダイクストラ法などの予測コストによらない方法よりも、効率的に最小コスト経路をID割り当て処理部205で導出できる。
【0112】
以下、A*アルゴリズムの説明を行う。図12に示すように、探索グラフの各エッジにコストが設定されているとし、探索グラフの中の任意のノードnを経由しかつ最小コストとなる経路のコストをf(n)とおくと、f(n)は、
f(n)=g(n)+h(n)
と表すことができる。g(n)は開始ノードからnまでの最小コスト、h(n)はnから目標ノードまでの最小コストである。ノードnを通る経路でコストが最小の経路は未知であり、g(n),h(n),f(n)も未知である。よって、f(n)の推定値f*(n)を考える。
【0113】
f*(n)=g*(n)+h*(n)
ここで、g*(n)は開始ノードからnまでの最小コストの推定値であり、h*(n)はnから目標ノードまでの最小コストの推定値である。g*(n)については、開始ノードから探索を順次進めることにより、エッジに割り当てられたコストの積算から推定できるが、h*(n)については、探索の途中で求めることはできない。従って、h*(n)に対して適当な推定値を与え、ノードnを経由する経路の推定コストf*(n)を評価し、より小さいf*(n)を与える経路を辿ることにより、最小コスト経路を探索するのがA*アルゴリズムである。
【0114】
h*(n)はA*アルゴリズムのヒューリスティクス関数と呼ばれ、すべてのnについて、h*(n)が、
h*(n)≦h(n)
を満たすとき、A*アルゴリズムにより求められた開始ノードから目標ノードに至る経路が、最小コスト経路であることが保証される。逆に言うと、この式を満たすh*(n)が設定できれば、その問題はA*アルゴリズムで解くことができる。
【0115】
第1実施形態において、h*(n)の設定方法を示す。時刻ΔtにおけるID割り当て状態のノードのいずれかをnとする。h*(n)として、図13の破線で示すように、時刻Δtの観測値から時刻4Δtの観測値への同じIDを持つ観測値間の距離の合計をh*(n)と考える。あるIDの観測値ついて、時刻tの観測値の位置から時刻4Δtの観測値の位置へ移動する距離の中で、破線の距離は最短であることは、ID割り当て処理部205で、すぐわかるので、nから時刻4Δtの目標ノードまでの真の最小コストh(n)に対して、
h*(n)≦h(n)
が成り立つ。従って、ID割り当て処理部205により、第1実施形態のID割り当て問題をA*アルゴリズムで解くことができる。
【0116】
次に、ID割り当て処理部205において、ID割り当て問題をA*アルゴリズムで解く手順について説明する。図14は、ID割り当て処理部205において、A*アルゴリズムで解く場合の、ノードの表現形式を示す図である。1つのノードは、時刻t、各観測値へのIDの割り当て状態、そのノードの推定コストf*の値、1つ前のノードへのポインタからなる。ノードへのポインタを辿ることにより、開始ノードから経由してきたノードを知ることができる。図14では、時刻Δtのノードのポインタが時刻0のノード(開始ノード)へのポインタを持つ例を示している。
【0117】
図15A及び図15Bは、ID割り当て処理部205において、A*アルゴリズムで解く場合の手順のフロー図である。図15A及び図15Bのフローの手順は、ID割り当て処理部205で実行される。
【0118】
図15Aのフロー中のts、teは、それぞれ無線タグ観測値が得られた時刻であり、ts<teである。
【0119】
ステップS201〜S203までは、ID割り当て処理部205により、ID割り当ての探索問題の開始ノードを設定する処理である。
【0120】
まず、ステップS201では、無線タグ観測値が得られた時刻tsにおいて、無線タグ観測値と人認識カメラ観測値との距離が最小になる対応関係をID割り当て処理部205で求める。
【0121】
次いで、ステップS202では、その対応に基づいて、人認識カメラ観測値に対応する無線タグ観測値のID情報をID割り当て処理部205で割り当てる。
【0122】
次いで、ステップS203で、その割当状態から開始ノードをID割り当て処理部205で作成する。
【0123】
ステップS204〜S206までは、ID割り当て処理部205において、ID割り当ての探索問題の目標ノードを設定する処理である。
【0124】
ステップS204では、無線タグ観測値が得られた時刻teにおいて、無線タグ観測値と人認識カメラ観測値の距離が最小になる対応関係をID割り当て処理部205で求める。
【0125】
次いで、ステップS205では、その対応に基づいて、人認識カメラ観測値に対応する無線タグ観測値のID情報をID割り当て処理部205で割り当てる。
【0126】
次いで、ステップS206では、その割当状態から目標ノードをID割り当て処理部205で作成する。
【0127】
次に、図15Bのフロー図で、ステップS206に続く手順について説明する。
【0128】
図15B中のsは開始ノードであり、OPENリスト及びCLOSEリストは、それぞれノードを格納するリストである。CLOSEリストは、自ノードから先のノードの探索が進んでいるノードを格納するリストであり、OPENリストは、自ノードから先のノードへの探索が進んでいないノードを格納するリストである。
【0129】
ステップS207がA*アルゴリズムの開始になり、ID割り当て処理部205において、OPENリストに開始ノードを入れる。このときの開始ノードの推定コストf*(s)は、f*(s)=h*(s)にID割り当て処理部205で設定する。なお、第1実施形態では、開始ノードの観測値と目標ノードの観測値との同じID同士の観測値間の距離の合計である。
【0130】
次いで、ステップS208では、ID割り当て処理部205において、OPENリストが空かどうかを調べ、OPENリストが空であるとID割り当て処理部205で判断すれば終了する。OPENリストが空である場合は、目標ノードに達する経路が見つからなかったケースに相当するが、第1実施形態の探索問題の場合は、必ず開始ノードから目標ノードへの経路がID割り当て処理部205で見つかる。OPENリストが空でないとID割り当て処理部205で判断する場合は、ステップS209に進む。
【0131】
次いで、ステップS209で、ID割り当て処理部205において、OPENリストから最小のf*の値を持つノードnを取り出し、CLOSEリストに移す。
【0132】
次いで、ステップS210で、ID割り当て処理部205において、nが目標ノードかどうかを判別し、nが目標ノードであるとID割り当て処理部205で判断すれば探索は終了である。このとき、nのポインタを開始ノードに達するまで辿って得られるノードの経路が、最小コスト経路である。nが目標ノードではないとID割り当て処理部205で判断する場合は、ステップS211に進む。
【0133】
次いで、ステップS211では、ID割り当て処理部205において、nのノードの観測時刻の次の観測値時刻のID割り当て状態の仮説を生成し、それらをノードnの継続ノードとしてノードの集合Mとする。Mの各ノードmについて、f’(m)=g*(n)+h*(m)+Cost(n,m)の値をID割り当て処理部205で計算する。Cost(n,m)はノードnからノードmへのエッジに割り当てられたコストであり、(式2)に基づいてID割り当て処理部205で計算する。
【0134】
次いで、ステップS212では、ID割り当て処理部205において、Mから1つノードを取り出しmとする。
【0135】
次いで、ステップS213では、ID割り当て処理部205において、ノードmがOPENリストに含まれるノードに一致するか、あるいは、CLOSEリストに含まれるノードに一致するか、あるいは、そのどちらのリストのノードにも一致しないかを判断する。
【0136】
ノードmがどちらのリストにも含まれないとID割り当て処理部205で判断する場合は、ステップS214に進む。ステップS214では、ID割り当て処理部205において、ステップS211で計算したf’(m)をノードmの予測コストf*として設定し、ノードmのポインタをノードn設定してOPENリストに追加する。
【0137】
ノードmがOPENリストに含まれるとID割り当て処理部205で判断する場合は、ステップS215に進む。ステップS215では、ID割り当て処理部205において、含まれているノードの予測コストf*(m)とステップS211で計算したf’(m)を比較し、f’(m)<f*(m)ならば、f*(m)=f’(m)でf*の値を置き換えて、ノードmのポインタをノードnに設定する。
【0138】
ノードmがCLOSEリストに含まれるとID割り当て処理部205で判断する場合は、ステップS216に進む。ステップS216では、ID割り当て処理部205において、含まれているノードの予測コストf*(m)とステップS211で計算したf’(m)を比較し、f’(m)<f*(m)ならば、f*(m)=f’(m)でf*の値を置き換えて、ノードmのポインタをノードnに設定した上で、mをCLOSEリストからOPENリストへ移す。
【0139】
ステップS214、ステップS215、ステップS216の次は、ステップS217で、ID割り当て処理部205において、ノードの集合Mからすべてのmを取り出したかを判断する。すべてのmを取り出していないとID割り当て処理部205で判断する場合は、ステップS212に戻る。すべてのmを取り出したとID割り当て処理部205で判断する場合は、ステップS208に戻る。
【0140】
ステップS210で、nが目標ノードまで達して終了したときに得られる、目標ノードのポインタを辿り、開始ノードに至るまでの間のノードに表現されているID割り当て状態が、ID割り当て処理部205で求めるべき各観測値における人認識カメラ観測値へのID割り当て状態である。
【0141】
さて、A*アルゴリズムでの解法の手順のステップS211において、ノードnの次の観測時刻のID割り当て状態仮説をID割り当て処理部205で生成する際、ここまでの説明では、考えうるすべてのID割り当て状態をID割り当て処理部205で考えるとしている。例えば、観測値が3つある場合は、6通りの割り当て状態すべてを仮説としてID割り当て処理部205で生成するわけである。
【0142】
しかし、第1実施形態の観測対象が人であるとすると、実際に観測周期Δtの間に人が動ける距離には限界がある。よって、ステップS211で、ID割り当て状態の仮説をID割り当て処理部205で生成する際に、ノードnのID割り当て状態から、次の観測時刻の観測値へのID割り当て状態として考えられる仮説の中には、実際に人の移動により実現不可能な仮説も含まれる場合がある。そのような仮説は人の移動では実現不可能であるため、生成して探索の対象としても無駄である。図16Aは、時刻0の観測値のID割り当てから、時刻ΔtのID割り当てで、同じIDの観測値が移動する距離が、いずれも人の移動可能な範囲(図中の点線の円の範囲)になっている例を示している。
【0143】
一方、図16Bは、時刻0の観測値のID割り当てから、時刻ΔtのID割り当てで、同じIDの観測値が移動する距離のうち、Bについては人の移動可能な範囲(図中の点線の円の範囲)になっているが、A,Cについては、人の移動可能な範囲(図中の点線の円の範囲)を超えている例である。
【0144】
第1実施形態においては、ある位置からの人の移動可能な範囲(図中の点線の円の範囲)の設定については、当該位置を中心とし、観測周期Δtと観測対象空間において予め計測した最大の人の移動速度の積により算出される距離を半径とする円の内部とする。
【0145】
もちろん、他の方法による人の移動可能範囲の設定も可能である。例えば、観測値の移動履歴から予想される移動速度と移動方向に基づいて、そのときの観測時刻における観測値の予想位置を設定することもできる。
【0146】
よって、図16Aの時刻ΔtのID割り当ての仮説は生成可能だが、図16Bの時刻ΔtのID割り当ての仮説は生成不可能である。
【0147】
従って、ステップS211では、図16Bの例のように人の移動可能距離の限界を超える同じIDの観測値の移動距離が生じてしまう仮説をID割り当て処理部205で捨てることにより、探索空間を減らし、探索を効率的に行うことができる。
【0148】
かかる構成によって、ID割り当て処理部203により、無線タグ観測部201のID情報を手がかりにID情報を持たない人認識カメラ202の観測値に対して、ID情報を割り当てることで、観測対象が互いに接近するような状況を含む、任意の状況において、観測値のID情報を確定することができ、その結果として、人同士のすれ違いを含む人位置推定の誤りが発生しやすい状況での、推定誤りの問題を解決することができる。一例として、図17の場合のように人が移動経路1702,1703に沿って移動した場合に、第1実施形態を使用して人位置移動経路の推定結果の例を図28に示す。図28より、従来技術の図19とは大きく異なり、図17の人の移動経路1702,1703とほぼ同じように、人位置移動経路を推定できることがわかる。
【0149】
なお、本第1実施形態においては、人位置の推定位置をディスプレイなどの人位置表示部208に表示するとしている。しかしながら、人位置の推定値の利用形態は、人の位置を要求する他の装置への入力とすることも、もちろん可能であり、本発明の範囲を限定するものではない。
【0150】
(第2実施形態)
図20は、本発明の第2実施形態における人位置トラッキング装置90Aの構成を示すブロック図である。本発明の第2実施形態は、人認識カメラ観測値の個数が、隠蔽又は誤認識などにより無線タグ観測値の個数と一致しない場合にも人認識カメラ観測値へのID割り当て処理を行うよう構成したものである。本発明の第2実施形態は、本発明の第1実施形態のID割り当て処理部205を、内部構成が異なるID割り当て処理部210に置き換えたものであり、その他の構成部については、本発明の第1実施形態と同じである。第1実施形態の記述において説明済みの構成部分の説明は省略する。
【0151】
ID割り当て処理部210は、内部の構成として、ID割り当て制御部210Aと、観測値移動可能性判定部210Bと、仮想観測値生成部210Cとを備えるように構成される。
【0152】
ID割り当て処理部210の全体の処理の制御を行うのが、ID割り当て制御部210Aである。ID割り当て制御部210Aは、本発明の第1実施形態のID割り当て処理部205と同様に、各観測時刻における人認識カメラ202の複数の観測値に対して、ID割り当ての仮説の探索グラフを生成したのち、その探索グラフ上で最もコストが小さい経路を導出することで、各観測時刻における人認識カメラ観測値へのID情報の最適な割り当てを決定する。
【0153】
ただし、各観測時刻において人認識カメラ観測値の個数が無線タグ観測値の個数と一致しない場合、あるいは、観測対象の移動体(例えば、人)の移動能力又は移動履歴から予想される位置に観測値が無い場合、あるいは、予想される位置から外れた位置に観測値が存在する場合であっても、ID割り当ての仮説ノードを生成するために、観測値移動可能性判定部210Bにおいて、1単位の観測時刻間で移動可能な観測値の組み合わせを判定したのち、IDを割り当てるべき観測値がない場合には、仮想観測値生成部210Cで、観測値の移動履歴から予想される位置に仮想の観測値を生成し、すべてのIDを割り当て可能にする。
【0154】
次に、第2実施形態における人位置トラッキング装置90Aの動作の流れについて説明する。図21は、第2実施形態の人位置トラッキング装置90Aの動作の流れを示すフロー図である。
【0155】
第2実施形態の動作は、第1実施形態における人位置トラッキング装置90の動作の流れと基本的には同じであり、ステップS105Aでの処理の内容を除いて、各ステップの処理内容、及び、動作フローの構成は、図7のフロー図に示される動作フローと同一である。
【0156】
ステップS105AがステップS105と異なるのは、上述の通り、無線タグ観測値の個数と人認識カメラ観測値の個数が一致しない場合への対応を含む処理内容になっている点である。具体的には、人認識カメラ観測値へのID割り当て処理のうち、人認識カメラ観測値へのID割り当ての仮説ノードを生成する部分の処理が異なる部分なので、この部分に絞って動作フローを説明する。
【0157】
観測値バッファ204には、図4に示すように、人認識カメラ観測値が観測間隔Δtで得られている。ここで、観測時刻t=t0における人認識カメラ観測値へのID割り当て状態から、観測時刻t=t0+Δtにおける人認識カメラ観測値へのID割り当て状態の仮説をID割り当て処理部210で生成する状況を考える。
【0158】
図22は、この状況での人認識カメラ観測値へのID割り当て仮説ノードをID割り当て処理部210で生成する動作のフロー図である。
【0159】
まず、ステップS2201では、観測値移動可能性判定部210Bが、時刻t=t0における人認識カメラ202の各観測値から時刻t=t0+Δtにおける人認識カメラ202の各観測値への移動可能性を判定する。図23は、観測時刻t=t0から観測時刻t=t0+Δtへの観測値間の移動を表す例である。観測値の側の数字は、各観測時刻における観測値を区別するための数字である。
【0160】
図23の観測時刻t=t0における参照符号1〜5までの観測値を中心に点線で示される円2301は、各観測値が観測時間間隔Δtの間に、人(移動体)が移動可能な範囲の境界を表す。第2実施形態では、観測対象の人89が移動可能な範囲の指定については、本発明の第1実施形態と同様に、観測時間間隔Δtと観測対象の人89の移動速度の限界から定めた半径を持つ円2301内とする。
【0161】
この移動可能性の判定基準により、観測値移動可能性判定部210Bは、観測時刻t=t0おける各観測値が、観測時刻t=t0+Δtのどの観測値の位置まで移動可能かを判定する。
【0162】
図24に、観測値移動可能性判定部210Bの移動可能性判定結果を表にしたものを示す。図24の左側の表2401は、ステップS2201での移動可能性判定の結果を表の形式で示したものである。表2401において、縦軸が観測時刻t=t0における観測値の識別番号、横軸が観測時刻t=t0+Δtにおける観測値の識別番号である。観測時刻t=t0におけるある観測値の位置から、観測時刻t=t0+Δtにおける観測値の位置に移動可能である場合は「○」で示し、移動可能ではない場合は「×」で示す。
【0163】
次に、ステップS2202では、ID割り当て制御部210Aが、ステップS2201の処理で求めた観測値の移動可能性判定結果に基づいて、観測時刻t=t0のどの観測値からも移動不可能な観測時刻t=t0+Δtの観測値を、ID割り当ての対象から除外する。
【0164】
図24に示す観測値の移動可能性判定結果では、観測時刻t=t0+Δtの識別番号3の観測値は、観測時刻t=t0のどの観測値からも移動不可能となっているため、この観測値をID割り当ての対象からID割り当て制御部210Aで除外する。
【0165】
次に、ステップS2203では、仮想観測値生成部210Cが、観測時刻t=t0+Δtのどの観測値にも移動可能なものがない観測時刻t=t0の観測値に対して、当該の観測値の移動履歴から予想される移動位置に仮想の観測値を生成する。
【0166】
図24に示す観測値の移動可能性判定結果では、観測時刻t=t0の識別番号5の観測値は、観測時刻t=t0+Δtのどの観測値にも移動可能ではない。よって、仮想観測値生成部210Cにおいて、当該観測値が観測時刻t=t0+Δtにおける移動予測位置を当該観測値の移動履歴から求め、その位置に仮想観測値を生成し、観測値バッファ204に生成した仮想観測値の情報を追加する。
【0167】
図25は、図23に示す観測時刻での観測値に加え、観測時刻での観測値と、生成した仮想観測値(図25中の識別番号5*を付与した○)を示す図である。観測時刻の識別番号5の観測値は、観測時刻の識別番号5の観測値が移動したという仮説(すなわち両者に同じIDを割り当てるという仮説)が仮想観測値生成部210Cで生成されているので、仮想観測値生成部210Cにおいて、その仮説に基づき、観測時刻から観測時刻への移動速度と移動方向が維持されると仮定して、観測時刻における移動予測位置を図25の「○」で表す位置と定め、そこに仮想観測値(図中「○」で示す)を生成する。
【0168】
次に、ステップS2204において、観測値移動可能性判定部210Bは、ID割り当て仮想観測値生成部210Cが生成した観測時刻における仮想観測値に対して、移動可能性を再評価する。観測値移動可能性判定部210Bで再評価した結果を図24の右側の表2402に示す。仮想的に生成した観測値を真に得られた観測値の個数の次の数字(仮想観測値が複数あれば順次数字を加算する)に*を付けた形の識別番号で区別する。
【0169】
次に、ステップS2205において、ID割り当て制御部210Aは、ステップS2204までの処理で、評価された観測値の移動可能性判定結果として得られる観測時刻の観測値と観測時刻の観測値の移動に関する対応関係に基づき、対応関係にある観測時刻の観測値に観測時刻の観測時刻の観測値に割り当てられたIDを割り当てた仮説を複数生成する。
【0170】
図26は、図24の観測値の移動可能性判定結果から得られる観測値へのID割り当ての仮説の組み合わせを示す表である。ID割り当て制御部210Aにおいて、観測時刻の観測値のうち識別番号1,2の観測値には、IDの多重の割り当てを許容したID割り当てを行うことになる。観測時刻の識別番号4,識別番号5*へは、それぞれID=D、ID=EがID割り当て制御部210Aで割り当てられる。
【0171】
図27は、図26に示した3つのID割り当て仮説に対応する仮説ノードの表現を示す図である。仮説ノードの内部構造は、第1実施形態の図14で説明した仮説ノードの構造同じである。1つの観測値に対して2つ以上のIDを割り当てた場合は、観測値の識別番号に「’」(ダッシュ)を追加して、同じ識別番号にIDが複数割り当てられていることを示す。ID割り当て仮説1の場合は、識別番号2の観測値にID=B,ID=Cの2つのIDが多重割り当てされるので、ID=Cの割り当てに関しては、識別番号を2’としてノードに記録する。2つ以上のIDが割り当てられる場合は、「’」を順次増やして区別する。
【0172】
かかる構成により、ID割り当て処理部210の内部において、観測値移動可能性判定部210Bが、1単位の観測間隔において人の移動可能性に基づいて、観測エラーによる観測値の消失の状態と、誤検出による誤観測値の状態を特定しつつ、移動可能な観測値間の対応関係を判定し、観測値の消失に関しても、仮想観測値生成手段210Cが観測値の移動履歴に基づいて予想される移動先位置に仮想的に観測値生成することにより、人認識カメラ202における観測エラーに対応可能な人位置トラッキング装置90Aを実現できる。
【0173】
なお、第2実施形態においては、人位置の推定位置をディスプレイなどの人位置表示部208に表示するとしている。しかしながら、人位置の推定の利用形態は、人の位置を要求する他の装置のへの入力とすることも、もちろん可能であり、本発明の範囲を限定するものではない。
【0174】
第1実施形態及び第2実施形態において、第1観測手段101は、移動体(例えば、人)の識別情報を含みかつ移動体が有する無線タグ301〜303から発信される電波を受信して移動体の識別情報と位置情報を観測値として出力する無線タグ観測部201で構成しているが、これに限るものではなく、移動体に超音波を発信して反射した超音波を受信して移動体の識別情報と位置情報を観測値として出力する超音波センサで構成することもできる。
【0175】
第1実施形態及び第2実施形態において、第2観測手段102は、画像を撮像して移動体(例えば、人)の位置情報を観測値として出力するカメラ202で構成しているが、これに限るものではなく、移動体にミリ波を発信して反射したミリ波を受信して移動体の位置情報を観測値として出力するミリ波送受信器、又は、観測空間の床面に複数配置して移動体の位置情報を観測値として出力する圧力センサで構成することもできる。
【0176】
なお、上記様々な実施形態又は変型例のうちの任意の実施形態又は変型例を適宜組み合わせることにより、それぞれの有する効果を奏するようにすることができる。
【産業上の利用可能性】
【0177】
本発明に係る移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラムは、観測対象の人の行動を記録・監視するシステム又は、作業者の移動履歴を分析し作業手順の効率性を評価するシステム、物流現場における荷物の位置をトレースするシステムなどに応用が可能である。
【符号の説明】
【0178】
89 人
90,90A 人位置トラッキング装置
91 観測空間
91f 床面
101 第1観測手段
102 第2観測手段
103 識別情報割り当て手段
104 位置推定手段
201 無線タグ観測部
202 人認識カメラ
203 観測値取得部
204 観測値バッファ
205 ID割り当て処理部
206 人位置推定部
207 人位置推定部記録部
208 人位置表示部
210 ID割り当て処理部
210A ID割り当て制御部
210B 観測値移動可能性判定部
210C 仮想観測値生成部
300 部屋
301 無線タグ
302 無線タグ
303 無線タグ
401 観測値バッファに記録される観測値の例
402 観測値バッファに記録された観測値にID割り当て処理が行われた例
601 人位置表示部の人の移動軌跡の表示例
602 人位置表示部の人の移動軌跡の表示例
603 人位置表示部の人の移動軌跡の表示例
604 人位置表示部に表示される人の頭頂方向からの被写映像
605 人位置表示部に表示される人の頭頂方向からの被写映像
606 人位置表示部に表示される人の頭頂方向からの被写映像
901 人認識カメラ観測値の例
902 人認識カメラ観測値の例
903 人認識カメラ観測値の例
904 人認識カメラ観測値の例
905 人認識カメラ観測値の例
906 人認識カメラ観測値の例
1701 従来技術での課題を説明するための対象物の移動経路の例
1701A 従来技術での課題を説明するための対象物が接近する領域
1702,1703 移動経路
2301 各観測値が観測時間間隔Δtの間に、人(移動体)が移動可能な範囲の境界
2401 観測値の移動可能性の判定結果
2402 仮想観測値に対する移動可能性の判定結果
【特許請求の範囲】
【請求項1】
観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定装置であって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に出力する第1の観測手段と、
前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で出力する第2の観測手段と、
前記第1の観測手段と前記第2の観測手段のそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる識別情報割り当て手段と、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を推定する位置推定手段を、
有する移動体位置推定装置。
【請求項2】
前記第1観測手段は、前記移動体の識別情報を含みかつ前記移動体が有する無線タグから発信される電波を受信して前記移動体の識別情報と位置情報を観測値として出力する無線タグ観測部、又は、前記移動体に超音波を発信して反射した超音波を受信して前記移動体の識別情報と位置情報を観測値として出力する超音波センサであり、
前記第2観測手段は、画像を撮像して前記移動体の位置情報を観測値として出力するカメラ、又は、前記移動体にミリ波を発信して反射したミリ波を受信して前記移動体の位置情報を観測値として出力するミリ波送受信器、又は、前記観測空間の床面に複数配置して前記移動体の位置情報を観測値として出力する圧力センサである、請求項1に記載の移動体位置推定装置。
【請求項3】
前記識別情報割り当て手段において、前記観測間隔の時間内に前記移動体が移動可能な移動可能範囲外にある前記第2観測手段の観測値を削除して、前記観測間隔の時間内に前記移動体が移動可能な移動可能範囲内にある前記第2観測手段の観測値を基に、識別情報割り当て処理を行うときに対する前回の前記第2観測手段の観測値の位置から移動不可能な、前記識別情報割り当てを行うときの観測値を特定し、又は、前記識別情報割り当てを行うときの前記第2観測手段の観測値の位置へ移動可能なものが1つもない、前記識別情報割り当てを行うときに対する前回の観測値を特定し、特定された前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる、請求項1又は2に記載の移動体位置推定装置。
【請求項4】
前記識別情報割り当て手段は、前記識別情報割り当てを行うときの前記第2観測手段の観測値の位置へ移動可能なものが1つもないと特定された、前記識別情報割り当てを行うときに対する前回の観測値に対して、前記当該観測値の移動履歴に基づいて、前記識別情報割り当てを行うときの移動先位置を予測し、前記予測位置に仮想的な観測値を生成する仮想観測値生成部を備える、請求項3に記載の移動体位置推定装置。
【請求項5】
前記識別情報割り当て手段において、前記観測対象の前記移動体の前記移動可能範囲を、当該移動体の移動能力の計測結果に基づく最大の移動速度と、前記観測間隔の積を半径とする円の範囲と設定する請求項3又は4に記載の移動体位置推定装置。
【請求項6】
前記識別情報割り当て手段において、前記観測対象の前記移動体の前記移動可能範囲を、前記第2の観測手段の観測値の移動履歴の、前記識別情報割り当てを行うときに対する前回の観測値の位置と、前記識別情報割り当てを行うときに対する前々回の観測値の位置から算出される移動速度と移動方向とが維持されると仮定して得られる移動先位置を中心とした所定の半径を持つ円と定める、請求項3又は4に記載の移動体位置推定装置。
【請求項7】
観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定方法であって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に第1の観測手段により出力し、
前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で第2の観測手段により出力し、
前記第1の観測手段と前記第2の観測手段のそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を識別情報割り当て手段により割り当て、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を位置推定手段により推定する、
移動体位置推定方法。
【請求項8】
前記移動体の識別情報と位置情報を含みかつ前記第1の観測手段から出力された第1の観測値と、前記移動体の位置情報を含みかつ前記第2の観測手段から出力された第2の観測値とが同時に得られた第1の時刻から、次に、前記第1の観測値と前記第2の観測値が同時に得られた第2の時刻の間に得られた第2の観測値に対して、
前記第1の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求め、
前記第1の時刻における組み合わせに基づいて、前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当て、
さらに、前記第2の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求め、
前記第2の時刻における組み合わせにおいて前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当て、
前記識別情報割り当て手段において、前記第1の時刻における前記第2の観測値への識別情報の割り当て状態を開始ノードとし、また、前記第2の時刻における前記第2の観測値への識別情報の割り当て状態を目標ノードとし、前記第1の時刻と前記第2の時刻の間の前記第2の観測値への識別情報の割り当ての組み合わせを、前記開始ノードと前記目標ノードの間に位置するノードとすることにより得られる探索グラフにおいて、前記ノード間の遷移コストを前記第2の観測値の移動量の合計と置くことで、前記探索グラフの前記開始ノードから前記目標ノードに至る最小コスト経路を求めることにより、前記第1の時刻から前記第2の時刻までの前記第2の観測値に前記第1の観測値の識別情報を前記識別情報割り当て手段で割り当てる、
請求項7に記載の移動体位置推定方法。
【請求項9】
前記探索グラフ上の探索処理において、前記識別情報割り当て手段により、ある観測時刻における識別情報の割り当て状態に相当するノードから、次の観測時刻への割り当て状態の仮説に相当するノードを生成する場合に、前記観測対象の前記移動体の移動可能範囲を考慮し、前記観測間隔の時間内に移動可能な前記第2観測手段の観測値の対応関係を判定し、探索処理を行うときに対する前回の前記第2観測手段の観測値の位置から移動不可能な、前記探索処理を行うときの観測値を特定することで、前記探索処理を行うときに対する前回の観測値の位置から移動不可能な観測値を含んだ割り当ての仮説ノードを生成しない、請求項8に記載の移動体位置推定方法。
【請求項10】
前記探索グラフ上の探索処理において、前記識別情報割り当て手段により、ある観測時刻における識別情報の割り当て状態に相当するノードから、次の観測時刻への割り当て状態の仮説に相当するノードを生成する場合に、前記観測対象の前記移動体の移動可能範囲を考慮し、探索処理を行うときの観測値の位置へ移動可能なものが1つもないと特定された、前記探索処理を行うときに対する前回の観測値に対して、前記当該観測値の移動履歴に基づいて前記探索処理を行うときの移動先位置を予測し、前記予測位置に仮想的な観測値を生成し、前記仮想的な観測値に前記当該の観測値が移動したとする仮説ノードを生成する、請求項8又は9に記載の移動体位置推定方法。
【請求項11】
観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定プログラムであって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に出力する第1の観測手段と、前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で出力する第2の観測手段とのそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる識別情報割り当て手段と、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を推定する位置推定手段と
の機能をコンピュータに実現させるための移動体位置推定プログラム。
【請求項12】
前記移動体の識別情報と位置情報を含みかつ前記第1の観測手段から出力された第1の観測値と、前記移動体の位置情報を含みかつ前記第2の観測手段から出力された第2の観測値とが同時に得られた第1の時刻から、次に、前記第1の観測値と前記第2の観測値とが同時に得られた第2の時刻の間に得られた第2の観測値に対して、
前記第1の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求める機能と、
前記第1の時刻における組み合わせに基づいて、前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当てる機能と、
さらに、前記第2の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求める機能と、
前記第2の時刻における組み合わせにおいて前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当てる機能と、
前記第1の時刻における前記第2の観測値への識別情報の割り当て状態を開始ノードとし、また、前記第2の時刻における前記第2の観測値への識別情報の割り当て状態を目標ノードとし、前記第1の時刻と前記第2の時刻の間の前記第2の観測値への識別情報の割り当ての組み合わせを、前記開始ノードと前記目標ノードの間に位置するノードとすることにより得られる探索グラフにおいて、前記ノード間の遷移コストを前記第2の観測値の移動量の合計と置くことで、前記探索グラフの前記開始ノードから前記目標ノードに至る最小コスト経路を求めることにより、前記第1の時刻から前記第2の時刻までの前記第2の観測値に前記第1の観測値の識別情報を前記識別情報割り当て手段で割り当てる機能と、
をコンピュータに実現させるための、請求項11に記載の移動体位置推定プログラム。
【請求項1】
観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定装置であって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に出力する第1の観測手段と、
前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で出力する第2の観測手段と、
前記第1の観測手段と前記第2の観測手段のそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる識別情報割り当て手段と、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を推定する位置推定手段を、
有する移動体位置推定装置。
【請求項2】
前記第1観測手段は、前記移動体の識別情報を含みかつ前記移動体が有する無線タグから発信される電波を受信して前記移動体の識別情報と位置情報を観測値として出力する無線タグ観測部、又は、前記移動体に超音波を発信して反射した超音波を受信して前記移動体の識別情報と位置情報を観測値として出力する超音波センサであり、
前記第2観測手段は、画像を撮像して前記移動体の位置情報を観測値として出力するカメラ、又は、前記移動体にミリ波を発信して反射したミリ波を受信して前記移動体の位置情報を観測値として出力するミリ波送受信器、又は、前記観測空間の床面に複数配置して前記移動体の位置情報を観測値として出力する圧力センサである、請求項1に記載の移動体位置推定装置。
【請求項3】
前記識別情報割り当て手段において、前記観測間隔の時間内に前記移動体が移動可能な移動可能範囲外にある前記第2観測手段の観測値を削除して、前記観測間隔の時間内に前記移動体が移動可能な移動可能範囲内にある前記第2観測手段の観測値を基に、識別情報割り当て処理を行うときに対する前回の前記第2観測手段の観測値の位置から移動不可能な、前記識別情報割り当てを行うときの観測値を特定し、又は、前記識別情報割り当てを行うときの前記第2観測手段の観測値の位置へ移動可能なものが1つもない、前記識別情報割り当てを行うときに対する前回の観測値を特定し、特定された前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる、請求項1又は2に記載の移動体位置推定装置。
【請求項4】
前記識別情報割り当て手段は、前記識別情報割り当てを行うときの前記第2観測手段の観測値の位置へ移動可能なものが1つもないと特定された、前記識別情報割り当てを行うときに対する前回の観測値に対して、前記当該観測値の移動履歴に基づいて、前記識別情報割り当てを行うときの移動先位置を予測し、前記予測位置に仮想的な観測値を生成する仮想観測値生成部を備える、請求項3に記載の移動体位置推定装置。
【請求項5】
前記識別情報割り当て手段において、前記観測対象の前記移動体の前記移動可能範囲を、当該移動体の移動能力の計測結果に基づく最大の移動速度と、前記観測間隔の積を半径とする円の範囲と設定する請求項3又は4に記載の移動体位置推定装置。
【請求項6】
前記識別情報割り当て手段において、前記観測対象の前記移動体の前記移動可能範囲を、前記第2の観測手段の観測値の移動履歴の、前記識別情報割り当てを行うときに対する前回の観測値の位置と、前記識別情報割り当てを行うときに対する前々回の観測値の位置から算出される移動速度と移動方向とが維持されると仮定して得られる移動先位置を中心とした所定の半径を持つ円と定める、請求項3又は4に記載の移動体位置推定装置。
【請求項7】
観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定方法であって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に第1の観測手段により出力し、
前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で第2の観測手段により出力し、
前記第1の観測手段と前記第2の観測手段のそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を識別情報割り当て手段により割り当て、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を位置推定手段により推定する、
移動体位置推定方法。
【請求項8】
前記移動体の識別情報と位置情報を含みかつ前記第1の観測手段から出力された第1の観測値と、前記移動体の位置情報を含みかつ前記第2の観測手段から出力された第2の観測値とが同時に得られた第1の時刻から、次に、前記第1の観測値と前記第2の観測値が同時に得られた第2の時刻の間に得られた第2の観測値に対して、
前記第1の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求め、
前記第1の時刻における組み合わせに基づいて、前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当て、
さらに、前記第2の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求め、
前記第2の時刻における組み合わせにおいて前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当て、
前記識別情報割り当て手段において、前記第1の時刻における前記第2の観測値への識別情報の割り当て状態を開始ノードとし、また、前記第2の時刻における前記第2の観測値への識別情報の割り当て状態を目標ノードとし、前記第1の時刻と前記第2の時刻の間の前記第2の観測値への識別情報の割り当ての組み合わせを、前記開始ノードと前記目標ノードの間に位置するノードとすることにより得られる探索グラフにおいて、前記ノード間の遷移コストを前記第2の観測値の移動量の合計と置くことで、前記探索グラフの前記開始ノードから前記目標ノードに至る最小コスト経路を求めることにより、前記第1の時刻から前記第2の時刻までの前記第2の観測値に前記第1の観測値の識別情報を前記識別情報割り当て手段で割り当てる、
請求項7に記載の移動体位置推定方法。
【請求項9】
前記探索グラフ上の探索処理において、前記識別情報割り当て手段により、ある観測時刻における識別情報の割り当て状態に相当するノードから、次の観測時刻への割り当て状態の仮説に相当するノードを生成する場合に、前記観測対象の前記移動体の移動可能範囲を考慮し、前記観測間隔の時間内に移動可能な前記第2観測手段の観測値の対応関係を判定し、探索処理を行うときに対する前回の前記第2観測手段の観測値の位置から移動不可能な、前記探索処理を行うときの観測値を特定することで、前記探索処理を行うときに対する前回の観測値の位置から移動不可能な観測値を含んだ割り当ての仮説ノードを生成しない、請求項8に記載の移動体位置推定方法。
【請求項10】
前記探索グラフ上の探索処理において、前記識別情報割り当て手段により、ある観測時刻における識別情報の割り当て状態に相当するノードから、次の観測時刻への割り当て状態の仮説に相当するノードを生成する場合に、前記観測対象の前記移動体の移動可能範囲を考慮し、探索処理を行うときの観測値の位置へ移動可能なものが1つもないと特定された、前記探索処理を行うときに対する前回の観測値に対して、前記当該観測値の移動履歴に基づいて前記探索処理を行うときの移動先位置を予測し、前記予測位置に仮想的な観測値を生成し、前記仮想的な観測値に前記当該の観測値が移動したとする仮説ノードを生成する、請求項8又は9に記載の移動体位置推定方法。
【請求項11】
観測空間に存在する複数の移動体を観測して、移動体毎に逐次得られる前記移動体の識別情報及び前記移動体の位置情報を含む観測値を入力として、観測対象である前記複数の移動体の識別情報、及び、位置情報を推定する移動体位置推定プログラムであって、
前記移動体の識別情報と位置情報を観測値として所定時間間隔毎に出力する第1の観測手段と、前記移動体の位置情報を観測値として、前記第1の観測手段の間隔とは異なる時間間隔で出力する第2の観測手段とのそれぞれの前記時間間隔のうちのある観測区間における、前記第1の観測手段の前記観測値の位置情報と前記第2の観測手段の前記観測値の位置情報の相対距離の合計、及び、前記第2の観測手段の観測値の当該観測区間における移動量の合計が最小になるように、前記第2の観測手段の観測値に対して前記第1の観測手段から得られた識別情報を割り当てる識別情報割り当て手段と、
前記第1の観測手段の観測値、及び、前記識別情報割り当て手段によって割り当てられた前記識別情報を含む前記第2の観測手段の観測値に基づいて、前記移動体の位置を推定する位置推定手段と
の機能をコンピュータに実現させるための移動体位置推定プログラム。
【請求項12】
前記移動体の識別情報と位置情報を含みかつ前記第1の観測手段から出力された第1の観測値と、前記移動体の位置情報を含みかつ前記第2の観測手段から出力された第2の観測値とが同時に得られた第1の時刻から、次に、前記第1の観測値と前記第2の観測値とが同時に得られた第2の時刻の間に得られた第2の観測値に対して、
前記第1の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求める機能と、
前記第1の時刻における組み合わせに基づいて、前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当てる機能と、
さらに、前記第2の時刻において、前記第1の観測値の位置と、前記第2の観測値の位置の距離の合計が最も短い組み合わせを前記識別情報割り当て手段で求める機能と、
前記第2の時刻における組み合わせにおいて前記第1の観測値の識別情報を前記第2の観測値の識別情報として前記識別情報割り当て手段で割り当てる機能と、
前記第1の時刻における前記第2の観測値への識別情報の割り当て状態を開始ノードとし、また、前記第2の時刻における前記第2の観測値への識別情報の割り当て状態を目標ノードとし、前記第1の時刻と前記第2の時刻の間の前記第2の観測値への識別情報の割り当ての組み合わせを、前記開始ノードと前記目標ノードの間に位置するノードとすることにより得られる探索グラフにおいて、前記ノード間の遷移コストを前記第2の観測値の移動量の合計と置くことで、前記探索グラフの前記開始ノードから前記目標ノードに至る最小コスト経路を求めることにより、前記第1の時刻から前記第2の時刻までの前記第2の観測値に前記第1の観測値の識別情報を前記識別情報割り当て手段で割り当てる機能と、
をコンピュータに実現させるための、請求項11に記載の移動体位置推定プログラム。
【図1】

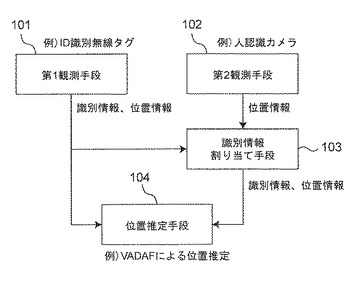
【図2】
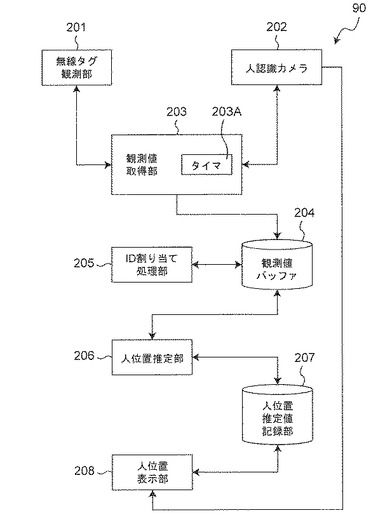
【図3】
【図4A】
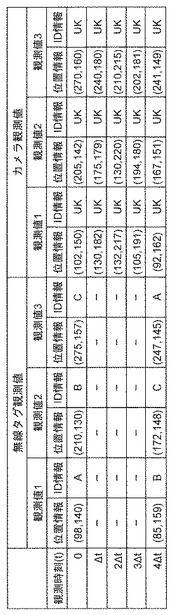
【図4B】
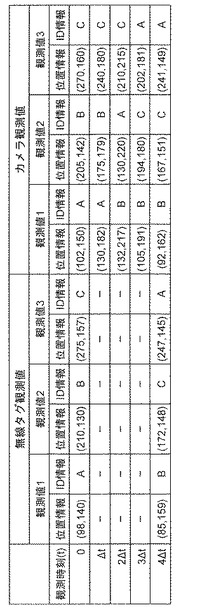
【図5】
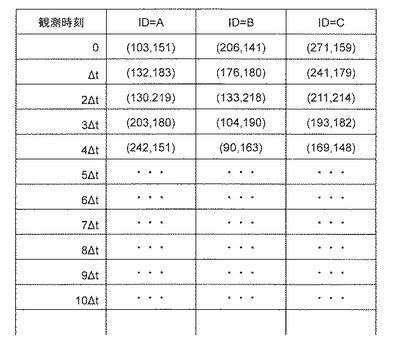
【図6】
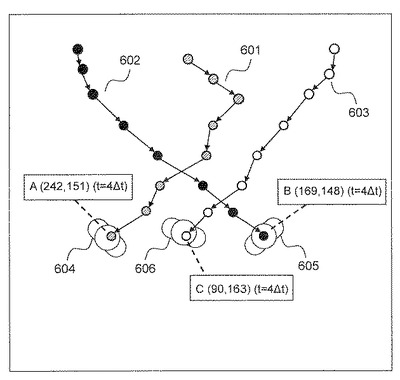
【図7】
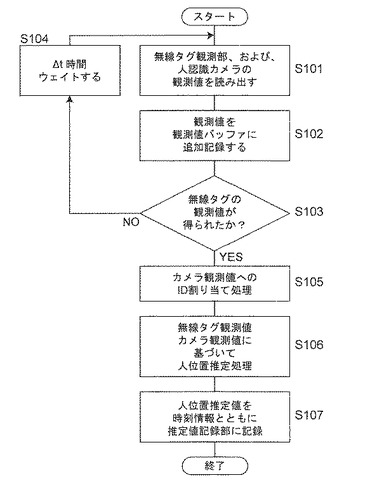
【図8】
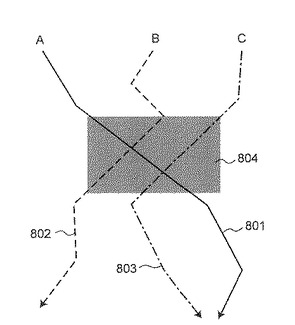
【図9】
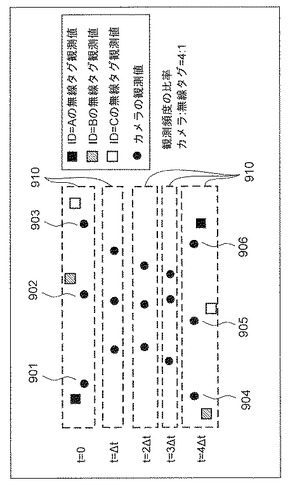
【図10】
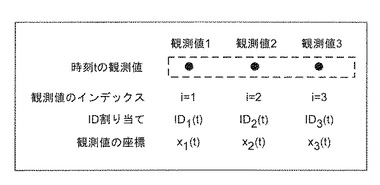
【図11】
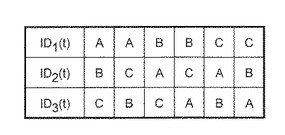
【図12】
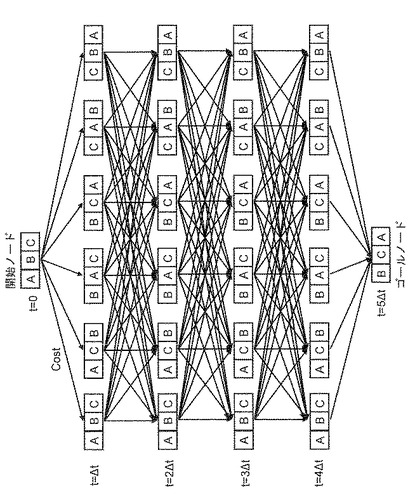
【図13】
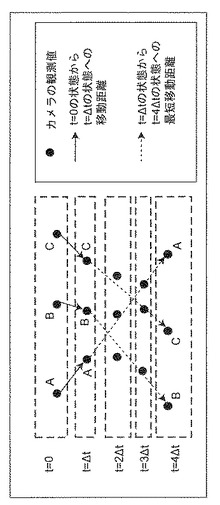
【図14】
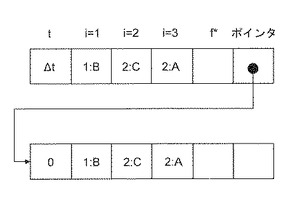
【図15A】
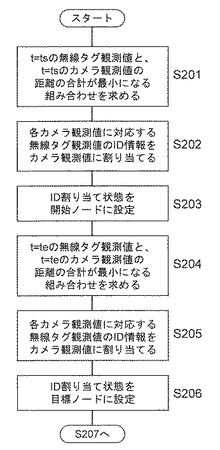
【図15B】
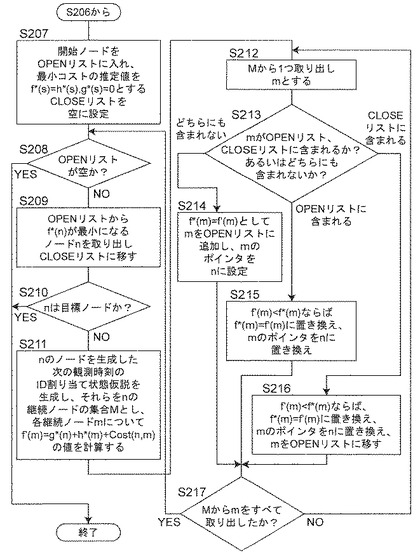
【図16A】
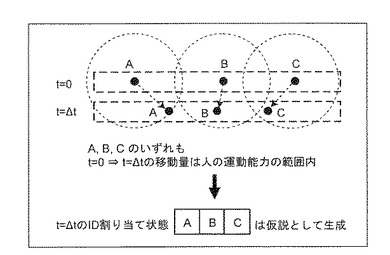
【図16B】
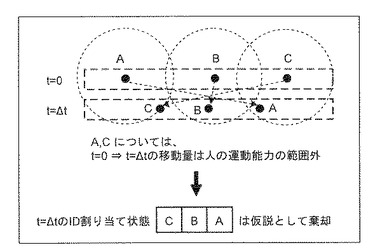
【図17】
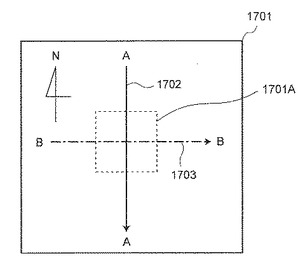
【図18】
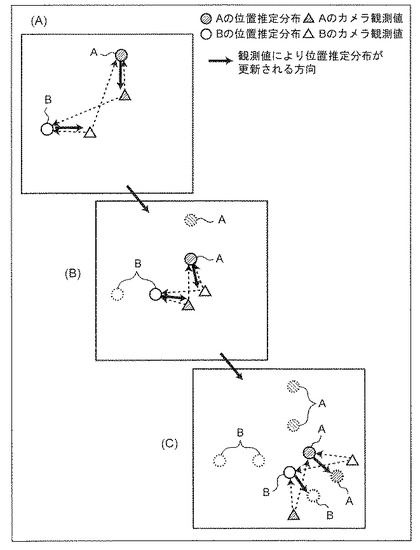
【図19】
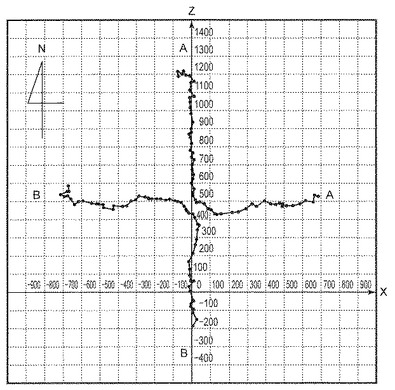
【図20】
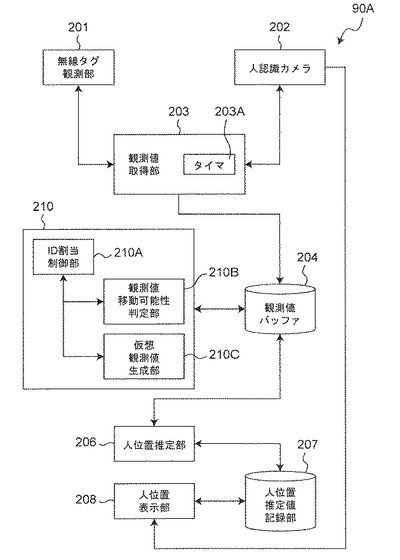
【図21】
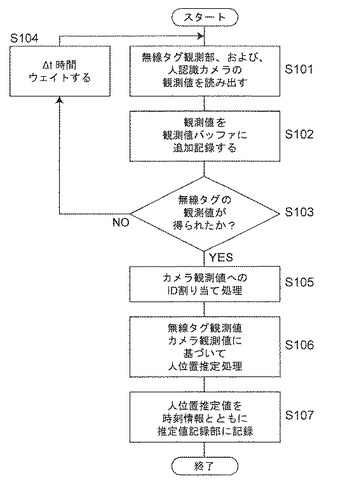
【図22】
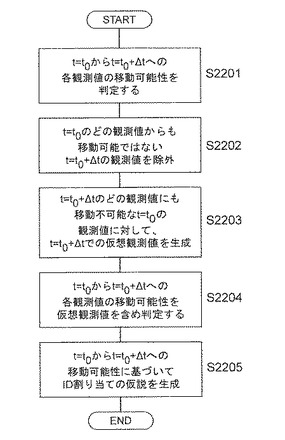
【図23】
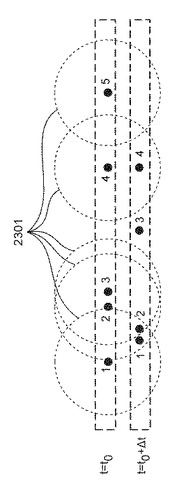
【図24】
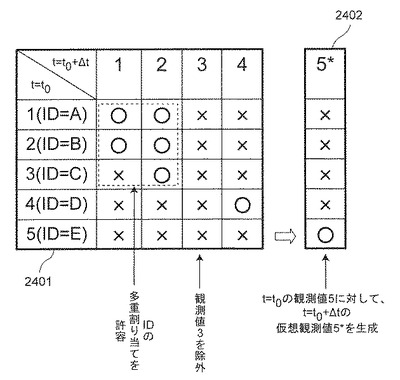
【図25】
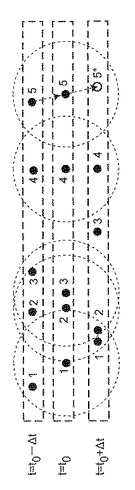
【図26】
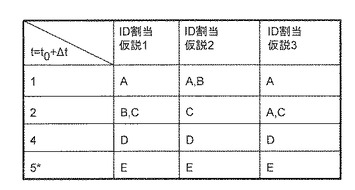
【図27】
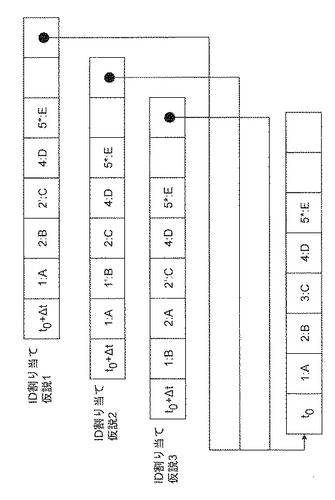
【図28】
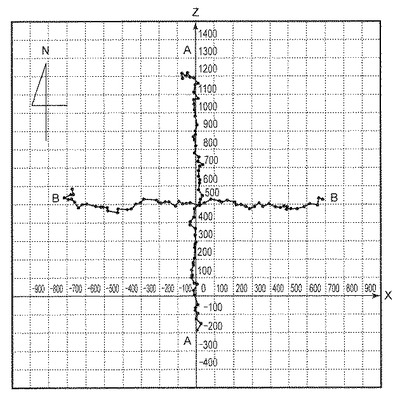
【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15A】
【図15B】
【図16A】
【図16B】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2013−72858(P2013−72858A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−214552(P2011−214552)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]