
移動体位置検出システム
【課題】平面上に描いたパターンを利用して移動体の位置の検出を行う。
【解決手段】本発明の移動体位置検出システムは、表面に同一のドットパターンが配置された複数のパネルを並設することにより構成される平面と、複数のパネルのドットパターンを構成する個々のドットの基準特徴量を算出し、この基準特徴量を個々のドットの平面上における座標値と対応付けてデータベースに格納する基準特徴量格納手段と、移動体が位置する平面上の領域を予め決められた時間間隔で撮像する撮像手段と、撮像手段が取得した画像中の複数のドットから所定のドットを選択し、選択したドットの検出特徴量を算出する検出特徴量算出手段と、検出特徴量をデータベース中の所定の大きさの照合範囲の基準特徴量と照合することにより、最も一致度の高い基準特徴量を選択し、選択した基準特徴量の座標値を、平面上における移動体の現在位置として検出する特徴量照合手段とを備える。
【解決手段】本発明の移動体位置検出システムは、表面に同一のドットパターンが配置された複数のパネルを並設することにより構成される平面と、複数のパネルのドットパターンを構成する個々のドットの基準特徴量を算出し、この基準特徴量を個々のドットの平面上における座標値と対応付けてデータベースに格納する基準特徴量格納手段と、移動体が位置する平面上の領域を予め決められた時間間隔で撮像する撮像手段と、撮像手段が取得した画像中の複数のドットから所定のドットを選択し、選択したドットの検出特徴量を算出する検出特徴量算出手段と、検出特徴量をデータベース中の所定の大きさの照合範囲の基準特徴量と照合することにより、最も一致度の高い基準特徴量を選択し、選択した基準特徴量の座標値を、平面上における移動体の現在位置として検出する特徴量照合手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、平面上を移動する物体の位置を検出するシステムに関する。
【背景技術】
【0002】
従来、建物内において搬送機械、ロボット、人間等の移動体の位置を検出する方法としては、天井カメラ方式、天井ID設置方式、超音波利用方式、RFID利用方式等の方法が知られている。
【0003】
天井カメラ方式は、天井や壁に設置したカメラを用いて、対象物に設置したマークを撮像し、このマークを検出することで位置を割り出す方法である。また、天井ID設置方式は、赤外線を反射するIDマーカを天井に設置し、下方から赤外線を照射してその反射をカメラでとらえることによって、カメラの位置・方向を検出する。しかし、これらの方法は、天井や壁などの構造物が上方にないと成立しない。また、カメラとマークとの間を遮断する物体が存在する場合には検出不能になる。
【0004】
超音波利用方式は、天井や壁に超音波マイクを複数配置するとともに、対象物に超音波スピーカを設置し、超音波スピーカに発音指令を送ってから超音波マイクでその音が聞こえるまでの時間を計測し、この時間から超音波スピーカと複数の超音波マイク間の距離を割り出し、三角測量によりスピーカの3次元位置を算出する方法である。しかしながら、この方法では、スピーカとマイクとの間に物体が入ると音が遮断されるため、計測不能になる。また、壁や柱で超音波が反射されることで、大きな計測誤差が生じる。
【0005】
RFID方式は、床にRFIDタグを多数配置し、これらのRFIDタグをRFIDレシーバにより受信し、受信したRFIDタグのIDにより検出位置を特定する方法である。しかしながら、一般には、RFIDタグは不連続に検出されるため、RFIDが検出できない位置では、位置を検出することができない。RFIDタグを高密度に敷き詰めることにより、連続に近いタグの検出は可能であるが、コストが増大する上、検出値は数センチ単位に離散的であり、最小でも数センチの分解能でしか位置を特定することができない。
【0006】
さらに、上記の各種方式のような建物内の移動体の位置検出に限らず、平面上に配置したパターン(模様)を利用して、平面上を移動する移動体の位置の検出を行う方法が知られている(例えば特許文献1を参照)。
【0007】
特許文献1の位置検出システムでは、平面のXY座標値を符号化した符号化パターンが平面上に配置されている。この符号化パターンは、複数の格子状の基準線を備えており、複数のドットが基準線の各交点の位置に関連づけられて配置されている。移動体に備えられた位置検出装置は、移動体が位置する平面上の領域を撮像し、取得した画像を処理して符号化パターンを識別し、この符号化パターンを復元することによって移動体の平面上のXY座標値を得る。
【0008】
【特許文献1】特開2006−141061号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
特許文献1に示すように、平面上に配置したパターンを利用して、平面上を移動する移動体の位置の検出を行う位置検出システムでは、平面上の各座標値に1つの符号化パターンを対応させているため、パターンの設計の自由度が低いという問題がある。特に、特許文献1の位置検出システムでは、格子状の基準線の交点周辺にドットが配置されるため、格子模様に近いパターンのみしか適用することができない。
【0010】
本発明は、上記の点に鑑み、従来のように平面の座標値に対応させてコード化したパターンを用いずに、平面上に描いたパターンを利用して移動体の位置の検出を行うことができる移動体位置検出システムを提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明の移動体位置検出システムは、表面に同一のドットパターンが配置された複数のパネルを並設することにより構成される平面と、前記ドットパターンを構成する個々のドットと前記個々のドットの周辺に位置する複数のドットとの位置関係を、前記個々のドットの基準特徴量として算出し、前記基準特徴量を、前記個々のドットの前記平面における座標値と対応付けて基準特徴量データベースに格納する基準特徴量格納手段と、前記平面上を移動する移動体に備えられ、前記移動体が位置する前記平面上の領域を予め決められた時間間隔で撮像する撮像手段と、前記撮像手段が取得した画像中の複数のドットから所定のドットを選択し、選択したドットと、このドットの周辺に位置する複数のドットとの位置関係を、選択したドットの検出特徴量として算出する検出特徴量算出手段と、前記検出特徴量を、前記基準特徴量データベース中の所定の大きさの照合範囲の基準特徴量と照合することにより、前記検出特徴量と最も一致度の高い基準特徴量を選択し、選択した基準特徴量の前記平面における座標値を、前記平面における移動体の現在位置として検出する特徴量照合手段と、を備えたことを特徴とする。
【0012】
また、本発明の請求項2の移動体位置検出システムは、上記請求項1において、ドットパターンが、前記パネルを複数のブロックに分割し、各ブロック内のランダムな位置にドットを配置することによって作成されたものであることを特徴とする。
【0013】
また、本発明の請求項3の移動体位置検出システムは、上記請求項1又は2において、前記基準特徴量及び検出特徴量が、ドットと該ドットを中心とする所定半径の円の領域内に位置する複数の周辺ドットとを結ぶ各線分の方向からなる配列と、各線分の長さからなる配列を含むことを特徴とする。
【0014】
また、本発明の請求項4の移動体位置検出システムは、上記請求項1から3のいずれか一つにおいて、前記照合範囲が、同じ基準特徴量をもつドットが含まれない範囲に設定されることを特徴とする。
【0015】
また、本発明の請求項5の移動体位置検出システムは、上記請求項1から3のいずれか一つにおいて、前記照合範囲が、前記移動体の最高移動速度と前記撮像手段の画像取得時間間隔から決まる前記移動体の移動可能範囲を包含する周辺領域に設定されることを特徴とする。
【発明の効果】
【0016】
本発明の移動体位置検出システムによれば、従来のように平面座標値に対応させて符号化したドットパターンを用いて検出を行う場合と比べて、平面上に配置するドットパターンの設計の自由度を向上させることができる。
【0017】
さらに、従来の位置検出システムでは床面全体に異なるドットパターンを配置していたため、複数のパネルやタイル等の材料で床面を施工する際に、パネルを並べる順番と向きを間違えないように敷き詰める必要があり、施工性が悪いという問題があったが、本発明の移動体位置検出システムによれば、同一のドットパターンを有する複数のパネルを並設することによって床面を構成するようにしたことで、パネルを設置する際の施工性を向上させることができる。
【発明を実施するための最良の形態】
【0018】
以下に、添付図面を参照して、本発明の移動体位置検出システムの好適な実施の形態について詳細に説明する。以下では、建物内の床面上を移動する移動体が自己の位置を検出する例について説明する。
【0019】
(実施の形態1)
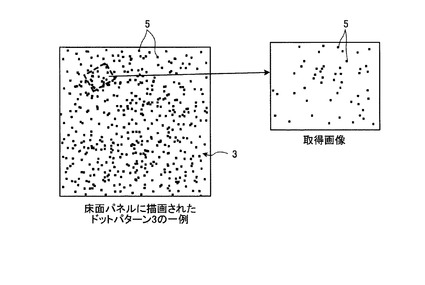
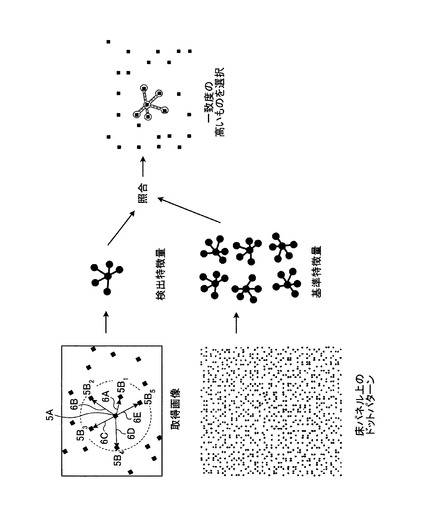
図1は、本実施の形態である移動体位置検出システム1の概念図であり、図2の左図は、移動体の移動領域である床F(床パネルf)上に配置されたドットパターン3の一例を示す図、右図はドットパターン3の一部の領域を撮像した画像の一例を示す図である。また、図3は床Fの平面図であり、図4は移動体位置検出システム1における照合処理の概念図である。
【0020】
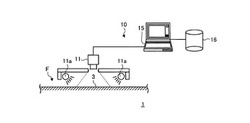
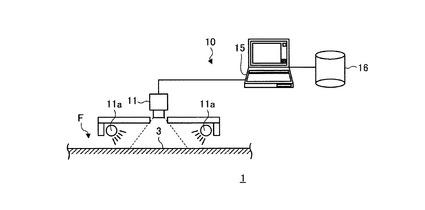
図1に例示される移動体位置検出システム1は、複数のパネルを並設することにより構成される床Fと、移動体(図示を省略)に備えられ、移動体とともに床F上を移動する移動体位置検出装置10とから構成されている。ここで、移動体とは、例えば搬送台車、ロボット、人間等である。
【0021】
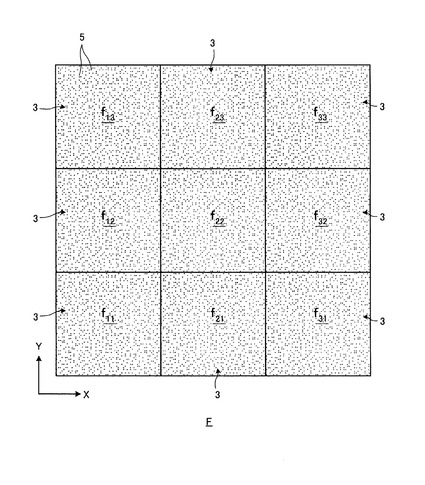
床Fは、図3に示すように、同一の大きさの正方形状に形成された複数の床パネルf11〜f33から構成されている。これらの複数の床パネルf11〜f33は、隣接する辺同士を接触させた状態で、X方向及びY方向に並設されている。ここで、各床パネルf11〜f33の2桁の添え字は、床パネルfのX方向及びY方向の並び番号を示している。
【0022】
各床パネルf11〜f33は、図3に示すように、それぞれの表面に同一のドットパターン3が配置されている。すなわち、床Fの全体は、同一のドットパターン3の繰り返しとなっている。
【0023】
移動体位置検出装置10は、予め決められた時間間隔で移動体の位置する床F上の領域を撮像する撮像部11と、撮像部11によって撮像された画像を処理することにより移動体の位置検出を行う制御部15とを有している。
【0024】
図4に示すように、移動体位置検出装置10は、移動体の位置検出を行う前に、基準となる床パネルf11のドットパターン3を構成するすべてのドット5の特徴量を予め算出し、これを基準特徴量データベース16に蓄積する。この特徴量は、後述するように、ドットパターン3における個々のドット5と、個々のドット5の周辺に位置する複数のドット5との位置関係を算出したものである。以下では、これを「基準特徴量」とよぶことにする。算出された個々のドット5の基準特徴量は、個々のドット5の床F上の絶対座標値と対応付けられ、基準特徴量データベース16に格納される。
【0025】
また、移動体位置検出装置10は、移動体とともに移動する際に、自身が位置する床F上の領域を撮像し、取得した画像中の複数のドット5から所定のドット5A(図4を参照)を選択し、このドット5Aの特徴量を算出する。この特徴量は、後述するように、画像中のドット5Aと、ドット5Aの周辺に位置する複数のドット5Bとの位置関係を算出したものである。以下では、これを「検出特徴量」とよぶことにする。
【0026】
そして、移動体検出装置10は、取得画像中のドット5Aの検出特徴量を、基準特徴量データベース16中の所定の大きさの照合範囲の基準特徴量と照合することにより、最も一致度の高い基準特徴量を選択し、選択した基準特徴量の座標値を、床F上における移動体の現在位置として検出する。
【0027】
[ドットパターンの作成]
図5−1及び図5−2は、床パネルf11〜f33の表面にドットパターン3を作成する方法の一例を説明するための図である。図5−1では、基準となる床パネルf11の一部を拡大して示している。なお、上述したように、床Fを構成する床パネルf11〜f33は同一のドットパターン3をもつものであるから、以下に説明する計算は、基準となるひとつの床パネルf11のみ行えばよい。
【0028】
ドットパターン3を構成する複数のドット5は、原則的にはランダムに打たれたものであるが、まったくランダムにドット5を打つと、撮像部11の撮像領域に最小限度必要な数のドット5が存在しないという事態が生じることもあり得る。このような場合には移動体の位置検出を行うことができなくなるため、床面2上のどの領域を撮像しても画像中に最小限度必要な数のドット5が存在する程度に、床面2上に均一にドット5を打つ必要がある。
【0029】
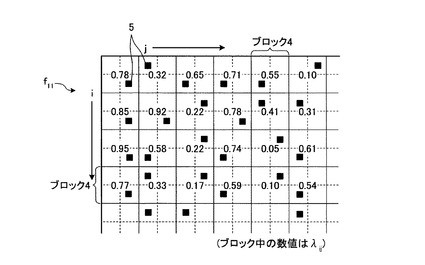
上記の点を考慮して、本実施の形態では、図5−1に示すように、床パネルf11の表面を正方形の複数のブロック(領域)4に分割し、各ブロック4内のランダムな位置に一つのドット5を打つことによって、ドットパターン3を作成する。各ブロック4内にランダムにドット5を打つ方法としては様々な方法が考えられるが、本実施の形態では、各ブロック4を、4のN乗個の正方形の小ブロックに細分化し、各ブロック4に対応してランダムに数値を発生させ、この数値に基づいて一つの小ブロックを選択し、選択した小ブロックの中心にドット5を割り当てる方法を採用している。
【0030】
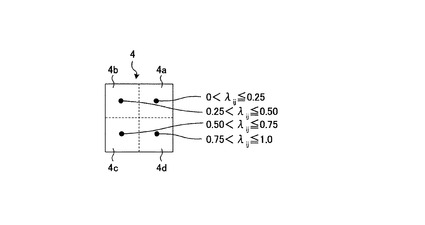
例えば、最も簡単な例として、図5−2に示すように、ブロック4を4つ(4の1乗個)の正方形の小ブロック4a〜4dに分け、ランダムに発生させた数値λijに応じて、小ブロック4a〜4dのいずれか一つにドット5を打つ。ここで、λijにおけるi及びjはブロック4の位置を示す番号であり、iはブロック縦方向の番号、jはブロック横方向の番号である。図5−2に示すように、0<λij≦0.25の範囲であれば、小ブロック4aにドット5を打つ。また、0.25<λij≦0.50の範囲であれば、小ブロック4bにドット5を打つ。また、0.50<λij≦0.75の範囲であれば、小ブロック4cにドット5を打つ。また、0.75<λij≦1.0の範囲であれば、小ブロック4dにドット5を打つ。例えば、図5−1に示すように、λ11は0.78であるから小ブロック4dにドット5が打たれ、λ12は0.32であるから小ブロック4aにドット5が打たれている。これを床パネルf11上の全てのブロック4について行うことにより、床パネルf11上にドットパターン3を作成することができる。なお、上記のドットパターン3の作成方法は一例であり、他にも様々な作成方法が考えられる。
【0031】
[基準特徴量データベースの作成]
次に、ドットパターン3における個々のドット5の基準特徴量の算出方法について説明する。上記のように、各床パネルf11〜f33は同一のドットパターン3を有している。従って、以下に説明する基準特徴量の計算は、基準となるひとつの床パネルf11についてのみ行う。
【0032】
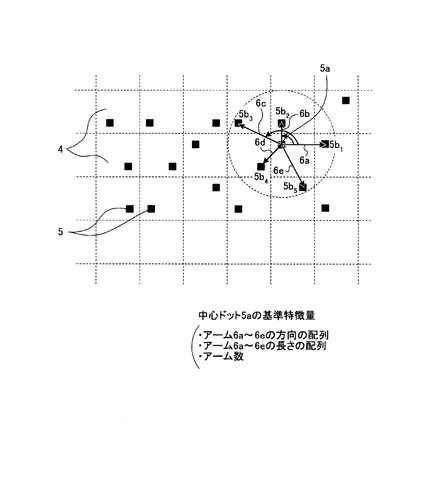
図6に示すように、算出対象となるドット5aを中心とした所定半径の大きさの円を想定する。以下では、ドット5aを「中心ドット5a」とよぶ。この円の半径は特に限定されないが、本実施の形態では、円の半径をブロック4の1辺の長さの1.25倍としてある。図6に示す例では、中心ドット5aを中心とした円の領域内に、5つの周辺ドット5b1〜5b5がある。
【0033】
次に、中心ドット5aと各周辺ドット5b1〜5b5とを結ぶ5本のアーム(線分)を描き、アーム6a〜6eのいずれか一つのアームを基準として選び、このアームと他の4本のアームとのなす角度から各アーム6a〜6eの方向を求める。さらに、5本のアーム6a〜6eの長さを求める。
【0034】
中心ドット5aと各周辺ドット5b1〜5b5との位置関係は、アーム6a〜6eの数と、各アーム6a〜6eの方向の配列と、各アーム6a〜6eの長さの配列とからなる。図6に示す中心ドット5aを例に示すと、アーム数は5、各アーム6a〜6eの方向の配列は、アーム6aを基準として、(0,90,150,240,300)、各アーム6a〜6eの長さの配列は、ブロック4の一辺の長さを1として、(1,0.5,1.2,0.5,1.2)と表わされる。以下では、アームの方向の配列を、省略して「アーム方向配列」とよび、アームの長さの配列を、省略して「アーム長配列」とよぶ。
【0035】
ドットパターン3のすべてのドット5について、上述したアームの数、アーム方向配列、アーム長配列を算出する。これをドットパターン3の各ドット5の基準特徴量とする。床パネルf11の各ドット5の基準特徴量は、各ドット5の床Fの絶対座標値と対応付けて基準特徴量データベース16に格納される。
【0036】
他の床パネルf12〜f33については、基準となる床パネルf11に対する相対座標(基準となる床パネルf11に対して床パネルf12〜f33が相対的にどこに配置されているかを示す座標)を基準特徴量データベース16に格納しておく。後述するように、移動体の位置検出を行う際には、基準となる床パネルf11に対する他の床パネルf12〜f33の相対的な位置が分かっていれば、他の床パネルf12〜f33における各ドットの絶対座標値を求めることができる。
【0037】
[移動体位置検出処理]
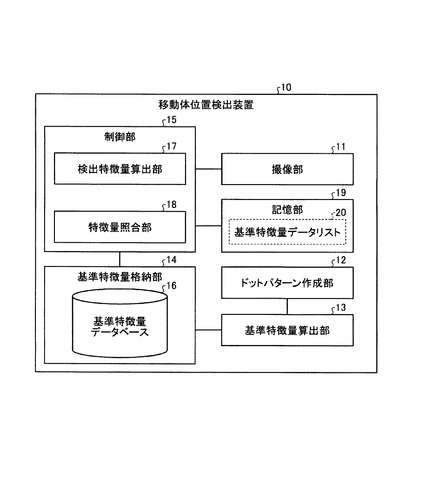
次に、移動体位置検出装置10が床面2上の移動体の位置を検出する処理について説明する。図7は移動体位置検出装置10のブロック図である。図7に示すように、移動体位置検出装置10は、撮像部11、ドットパターン作成部12、基準特徴量算出部13、基準特徴量格納部14、制御部15及び記憶部19とから構成されている。
【0038】
撮像部11は、CCDカメラ等の画像取得装置である。撮像部11は移動体に固定されており、移動体とともに移動しながら、移動体の位置する床面2上の領域を所定の時間間隔で撮像し、図2に示したような画像を取得する。本実施の形態では、高速度カメラを用いて、例えば10ms程度の時間間隔で画像を取得している。また、図1に示すように、撮像部11と床面2との間の距離は数センチメートルであり、照明11aを用いることで、外乱光の影響の少ない画像を取得することができる。
【0039】
ドットパターン作成部12は、床パネルf上に配置される個々のドット5の位置を算出し、床パネルfにドットパターン3を作成する。ドットパターン3の作成手順は上述したとおりである。
【0040】
基準特徴量算出部13は、ドットパターン作成部12によって作成された床パネルfのドットパターン3におけるすべてのドット5の基準特徴量を算出する。基準特徴量の算出手順は上述したとおりである。
【0041】
基準特徴量格納部14は、基準特徴量算出部13で算出された基準となる床パネルf11の個々のドット5の基準特徴量を床Fの絶対座標値と対応付けて格納するとともに、基準となる床パネルf11に対する他の床パネルf12〜f33の相対座標値を格納する部位であり、上述した基準特徴量データベース16を有している。
【0042】
制御部15は、撮像部11によって撮像された画像を処理することにより移動体の床面2上における位置検出を行うものであり、検出特徴量算出部17と特徴量照合部18とを備えている。
【0043】
検出特徴量算出部17は、図4に示すように、撮像部11が取得した画像中の複数のドット5から、画像の中心に近い位置にあるドット5A(以下、これを「中心ドット5A」という)を選択し、選択したドット5Aと、このドット5Aの周辺に位置する複数のドット5Bとの位置関係を、ドット5Aの検出特徴量として算出する。
【0044】
検出特徴量は、上述した基準特徴量の算出方法と同様にして算出する。図4に示す取得画像において、中心ドット5Aを中心とした所定半径の大きさの円を想定する。この円の半径は、基準特徴量を算出した際の円の半径と同じとする。図4に示す例では、中心ドット5Aを中心とした円の領域内に、5つの周辺ドット5B1〜5B5がある。中心ドット5Aと各周辺ドット5B1〜5B5とを結ぶ5本のアーム6A〜6Eを描き、5本のアーム6A〜6Eのいずれか一つのアームを基準として選び、基準となるアームと他の4本のアームとのなす角度θ1〜θ5(θ1は0°)から、各アームの方向を求める。さらに、5本のアーム6A〜6Eの長さL1〜L5を求める。すなわち、中心ドット5Aの検出特徴量は、アーム6A〜6Eの本数と、アーム方向配列(θ1,θ2,θ3,θ4,θ5)と、アーム長配列(L1,L2,L3,L4,L5)とで表される。
【0045】
特徴量照合部18は、検出特徴量算出部17で算出した取得画像中における中心ドット5Aの検出特徴量を基準特徴量データベース16中の所定の大きさの照合範囲の基準特徴量と照合することにより、中心ドット5Aの検出特徴量と最も一致度の高い基準特徴量を選択する。そして、選択したドットの絶対座標値を、床F上における移動体の現在位置として検出する。以下では、基準特徴量データベース16中の所定の大きさの照合範囲にある基準特徴量を、「基準特徴量データリスト20」とよぶ。
【0046】
上述したように、床Fの全体は同一のドットパターン3の繰り返しとなっている。そのため、画像中の中心ドット5Aの検出特徴量を、基準特徴量データリスト20と照合する際に、基準特徴量データリスト20の大きさ(照合範囲)を大きくしすぎると、照合範囲の中に、同じ基準特徴量をもつ2つ以上のドット5があらわれるといった事態が生じる。すなわち、異なる床パネルにおいて同じ位置にあるドット5が照合範囲に含まれる。このような場合には移動体の位置検出が不能となる。同じ基準特徴量をもつドットが照合範囲に含まれてしまう照合範囲の大きさの目安は、床パネル1枚の大きさ程度である。このため、上記の照合範囲はそれよりも小さくしなければならない。照合範囲をどの程度の大きさにするかは、以下のようにして決めることができる。
【0047】
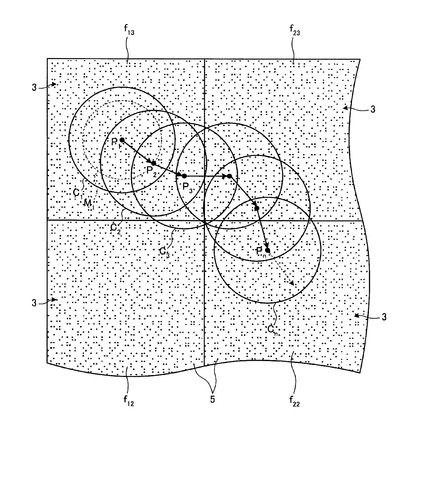
図8は、床F上を移動する移動体の軌跡を概念的に示したものである。図8における点P1〜Pnは、撮像部11の画像取得時における移動体の位置、すなわち、移動体の検出位置をそれぞれ表している。撮像部11は、一定の時間間隔で画像を取得する。点P1は移動体の初期位置(移動開始位置)である。また、初期位置P1を中心とした所定半径の円内領域C1は、上述した照合範囲である。この照合範囲C1は、具体的には、次の画像取得時における移動体の位置P2を検索する範囲を意味する。
【0048】
図8に示すように、照合範囲C1は、移動体の初期位置P1からの移動可能範囲M1を包含する周辺領域である。ここで、移動体の移動可能範囲M1とは、移動体の移動最高速度と撮像部11の画像取得時間間隔から決まる移動体の移動範囲である。具体的な例を挙げて説明すると、撮像部11の画像取得間隔を10ms(100分の1秒)、移動体の移動最高速度を1.0m/sとすると、1回の画像取得間隔10msの間で移動体は10mm進む。この場合、移動体の移動可能範囲M1は、移動体を中心とした半径10mmの円の領域内である。すなわち、移動可能範囲とは、撮像部11が画像を取得してから次の画像を取得するまでの間に移動体が進むことのできる範囲である。従って、照合範囲C1は、移動可能範囲M1よりも大きく設定する必要があるが、図8に示すように、移動可能範囲M1よりも一回り程度大きい周辺領域に設定すれば、次の画像取得時における移動体の位置P2を確実に検出することができる。
【0049】
但し、上述したように、照合範囲C1は、同じ基準特徴量をもつドット5が含まれない範囲としなければならない。従って、図8に示す移動可能範囲M1が床パネル一枚の広さを超えるような場合には位置検出不能となる。このような場合には、撮像部11の画像取得時間間隔を短く設定し、移動可能範囲M1を床パネル一枚の大きさよりも小さくする必要がある。
【0050】
記憶部19は、基準特徴量データベース16中から抽出された基準特徴量データリスト20を一時的に格納する部位である。
【0051】
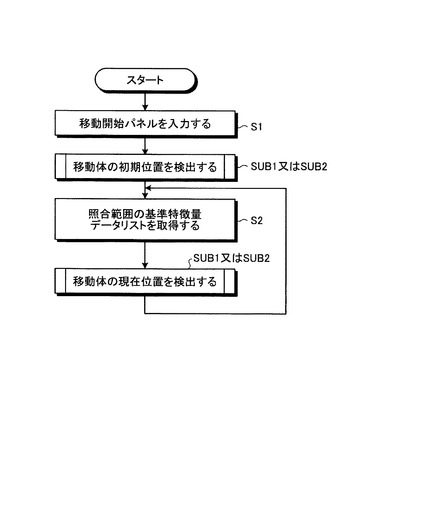
図9〜図12は、上記のように構成した移動体位置検出装置10の制御部15が実行する処理の流れを示すフローチャートである。図9はメインフローチャートであり、図10及び図11は図9のサブフローチャートである。また、図12は図10及び図11のサブフローチャートである。以下、図8及び図9〜図12を参照しながら、制御部15が実行する処理手順について説明する。
【0052】
検出処理を行う前に、予め移動体が移動を開始する床パネルの並び番号を入力しておく。例えば図8に示す例では、移動体の初期位置P1は床パネルf13上にあるので、「f13」と入力する。移動体位置検出装置10の制御部50は、移動開始パネルf13が入力されると(ステップS1)、移動体の初期位置P1の検出処理を行う。移動体の初期位置P1を検出する手順は、図10に示す手順SUB1と、図11に示す手順SUB2の2通りがある。まず、図10に示す手順について説明する。
【0053】
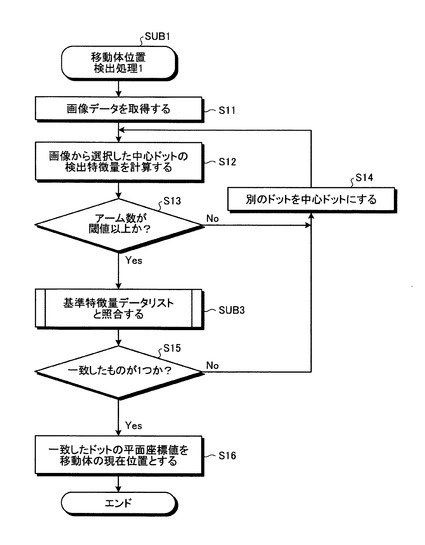
図10に示すように、制御部15は、撮像部11から移動体の初期位置P1の画像データを取得すると(SUB1:ステップS11)、画像中の複数のドットから一つのドット5A(中心ドット5A)を選択し、検出特徴量算出部17を通じて、中心ドット5Aの検出特徴量を計算する(SUB1:ステップS12)。ここで、検出特徴量とは、図4に示すように、中心ドット5Aと複数の周辺ドット5Bとを結ぶアーム本数、アーム方向配列、アーム長配列である。制御部15は、中心ドット5Aのアーム本数が閾値以上である場合に(SUB1:ステップS13:Yes)、基準特徴量データベース16から移動開始パネルf13に対応する基準特徴量データリスト20を抽出し、これを記憶部19に格納する。そして、制御部50は、特徴量照合部18を通じて、中心ドット5Aの検出特徴量を記憶部19の基準特徴量データリスト20と照合する(SUB3)。一方、中心ドット5Aにおけるアーム本数が閾値未満の場合には(SUB1:ステップS13:No)、基準特徴量データリスト20と照合せず、画像中の別のドットを新たに中心ドット5Aとして選択し(SUB1:ステップS14)、ステップS12に戻って新たに選択した中心ドット5Aの検出特徴量を計算する。ここで、ステップ13におけるアーム本数の閾値は、ドットパターン3のドット5の密度等により適宜設定されるものである。本実施の形態では、アーム本数の閾値を4本としている。
【0054】
ステップS13で、検出特徴量のアーム本数に閾値を設ける理由は、アーム本数が少ないと照合結果が1つに決まる割合が低くなるためであり、計算を高速化することを目的としている。しかしながら、ステップS13は必ずしも設ける必要はなく、ステップS13を省略してもよい。
【0055】
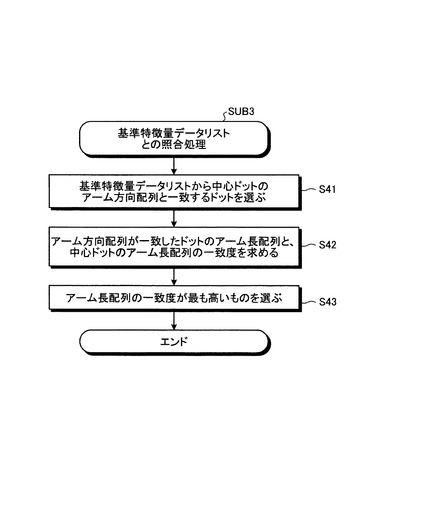
画像中の中心ドット5Aの検出特徴量を基準特徴量データリスト20と照合する処理(SUB3)は、図12に示す手順で行う。まず、基準特徴量データリスト20から、画像中の中心ドット5Aのアーム方向配列と一致するドットを選ぶ(SUB3:ステップS41)。
【0056】
上述したように、基準特徴量データリスト20(基準特徴量データベース16)には、各ドットのアーム方向配列として、特定の基準となるアームと他のアームとのなす角度からなる配列が一種類ずつ格納されている。従って、画像中の中心ドット5Aのアーム方向配列において基準となるアームと、基準特徴量データリスト20のドットのアーム方向配列において基準となるアームは必ずしも一致しない可能性がある。そのため、画像中の中心ドット5Aのアーム方向配列として、各アームを基準アームとした配列を作成する。すなわち、図4に示す画像中の中心ドット5Aのようにアーム数が5本の場合には、5本の各アームを基準アームとした5種類のアーム方向配列を作り、この5種類のアーム方向配列を、基準特徴量データリスト20のアーム方向配列と照合する。
【0057】
アーム方向配列が一致した場合、一致した基準特徴量データリスト20のドットのアーム長配列と、画像中の中心ドット5Aのアーム長配列との一致度を求める(SUB3:ステップS42)。上述したように、基準特徴量データリスト20における各ドットのアーム長配列は、特定の基準となるアームから順番にアーム長を並べた配列が一種類ずつ格納されている。このため、アーム長配列の一致度を求める際には、画像中の中心ドット5Aのアーム長の順を並べ替えた配列も作成する。すなわち、図4に示す画像中の中心ドット5Aのようにアーム数が5本の場合には、(L1,L2,L3,L4,L5),(L2,L3,L4,L5,L1,),(L3,L4,L5,L1,L2),(L4,L5,L1,L2,L3),(L5,L1,L2,L3,L4)の5種類のアーム長配列を求め、この5種類のアーム長配列と、基準特徴量データリスト20のアーム長配列との一致度を求める。そして、この中から一致度が最も高いものを選ぶ(SUB3:ステップS43)。
【0058】
アーム長配列の一致度を求める方法の一例としては、以下に説明する方法がある。上記の5種類の各アーム長配列をそれぞれの配列の大きさで割って単位ベクトルにする。また、基準特徴量のアーム長配列も配列の大きさで割って単位ベクトルにする。そして、5種類の各アーム長配列(単位ベクトル)と、基準特徴量のアーム長配列(単位ベクトル)との内積を計算し、この内積の値を一致度とする。すなわち、内積の値が最も1に近いものを、最も一致度が高いものとする。なお、アーム長配列の一致度として内積の値を用いることは、あくまでも一例であり、他の方法を用いることもできる。
【0059】
なお、アーム方向配列の照合、及び、アーム長配列の一致度の基準は、画像解像度などに起因する誤差に対する許容範囲を持たせておく。
【0060】
基準特徴量データベースの照合処理SUB3が完了した後、制御部15は、図10に示すように、画像中の中心ドット5Aと一致したものが1つであるか否かを判定する(SUB1:ステップS15)。一致したものが一つであった場合には(SUB1:ステップS15:Yes)、基準特徴量データリスト20における一致したドットの床F上の絶対座標値を現在位置として検出する。
【0061】
この一致したドット5の絶対座標値は以下のようにして求めることができる。上述したように、基準特徴量データリスト20には、基準となる床パネルf11に対する他の床パネルf12〜f33の相対座標が格納されている。基準となるパネルf11において、基準特徴量データリスト20の一致したドットと同じ特徴量をもつドットをPn(図示せず)として、このPnの絶対座標値に、床パネルf13の相対座標を加算すれば、一致したドットの絶対座標値が求められる。この絶対座標値を、初期位置P1の現在位置とする(SUB1:ステップS16)。
【0062】
一方、一致したものが複数あった場合には(SUB1:ステップS15:No)、照合結果を採用せず、画像中の別のドット5を新たに中心ドット5Aとして選択し(SUB1:ステップS14)、新たに選択した中心ドット5Aの検出特徴量を計算する(SUB1:ステップS12)。以降、最終的に照合結果が一つに決まるまでステップS12からステップS15までの処理を繰り返す。
【0063】
制御部15は、移動体の初期位置P1を検出すると、基準特徴量データベース16から、初期位置P1を中心とした照合範囲C1にあるドットの基準特徴量データリスト20抽出し、これを記憶部19に格納する(ステップS2)。そして、移動体の現在位置の検出処理を開始する(SUB1)。
【0064】
制御部15は、撮像部11から画像データを取得すると(SUB1:ステップS11)、画像中の複数のドットから一つのドット(中心ドット5A)を選択し、検出特徴量算出部17を通じて、中心ドット5Aの検出特徴量を計算する(SUB1:ステップS12)。制御部15は、中心ドット5Aにおけるアーム本数が閾値以上である場合に(SUB1:ステップS13:Yes)、特徴量照合部18を通じて、中心ドット5Aの検出特徴量を記憶部19の基準特徴量データリスト20と照合する(SUB3)。一方、中心ドット5Aにおけるアーム本数が閾値未満の場合には(SUB1:ステップS13:No)、基準特徴量データリスト20と照合せず、画像中の別のドット5を新たに中心ドット5Aとして選択し(SUB1:ステップS14)、ステップS12に戻って新たに選択した中心ドット5Aの検出特徴量を計算する。
【0065】
制御部15は、SUB3のステップS41〜ステップS43において照合範囲C1の基準特徴量データリスト20の照合を行い、画像中の中心ドット5Aと一致したものが1つであるか否かを判定する(SUB1:ステップS15)。一致したものが一つであった場合には(SUB1:ステップS15:Yes)、基準特徴量データリスト20の一致したドットの床F上での絶対座標値を、移動体の現在位置P2として検出する(SUB1:ステップS16)。この一致したドット5の絶対座標値を求める方法は、上記の初期位置P1の場合と同じである。
【0066】
制御部15は、移動体の現在位置P2を検出した後、ステップS2に戻り、基準特徴量データベース16から、次の照合範囲C2の基準特徴量データリスト20を抽出し、これを記憶部19に格納する。以上のようにして、制御部15は、これ以降、移動体の現在位置(P3,P4,・・・,Pn,・・・)の検出処理を繰り返す。
【0067】
なお、図8に示す照合範囲C3のように、照合範囲が床パネルf13、床パネルf12、床パネルf22、床パネルf23の複数枚の床パネルに跨っている場合であっても、基準となる床パネルf11に対する各床パネルの相対座標から、床パネルf13、床パネルf12、床パネルf22、床パネルf23の各照合範囲のドット5の基準特徴量を抽出することができる。制御部15は、照合範囲C3における床パネルf13、床パネルf12、床パネルf22、床パネルf23の各領域のドット5の基準特徴量と照合し、現在位置P4の位置を検出する。
【0068】
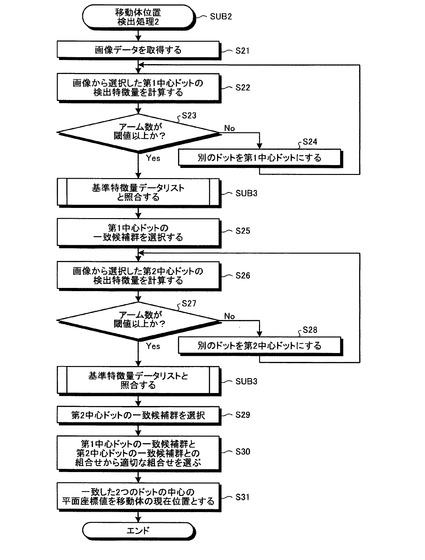
次に、移動体の現在位置を検出する手順として、図11に示す手順(SUB2)を採用した場合について説明する。なお、以下では移動体の初期位置P1を検出する際の手順について説明する。
【0069】
図11に示すように、制御部15は、撮像部11から移動体の初期位置P1の画像データを取得すると(SUB2:ステップS21)、画像中の複数のドットから一つ目のドット5(第1中心ドット5A1)を選択し、検出特徴量算出部17を通じて、第1中心ドット5A1の検出特徴量を計算する(SUB2:ステップS22)。制御部15は、第1中心ドット5A1におけるアーム本数が閾値以上である場合に(SUB2:ステップS23:Yes)、基準特徴量データベース16から移動開始パネルf13に対応する基準特徴量データリスト20を抽出し、これを記憶部19に格納する。そして、特徴量照合部18を通じて、第1中心ドット5A1の検出特徴量を記憶部19の基準特徴量データリスト20と照合する(SUB3)。一方、第1中心ドット5A1におけるアーム本数が閾値未満の場合には(SUB2:ステップS23:No)、基準特徴量データリスト20と照合せず、画像中の別のドットを新たに第1中心ドット5A1として選択し(SUB2:ステップS24)、ステップS22に戻って新たに選択した第1中心ドット5A1の検出特徴量を計算する。
【0070】
図12に示すSUB3のステップS41〜S43の照合処理を行い、基準特徴量データリスト20から、画像中の第1中心ドット5A1と最も一致度の高いドットを選択する。複数のドットが選択された場合には、これらを「一致候補群」とする(SUB2:ステップS25)。
【0071】
次いで、制御部15は、画像中の複数のドットから二つ目のドット(第2中心ドット5A2)を選択し、検出特徴量算出部17を通じて、第2中心ドット5A2の検出特徴量を計算する(SUB2:ステップS26)。制御部15は、第2中心ドット5A2におけるアーム本数が閾値以上である場合に(SUB2:ステップS27:Yes)、特徴量照合部18を通じて、第2中心ドット5A2の検出特徴量を記憶部19の基準特徴量データリスト20と照合する(SUB3)。一方、第2中心ドット5A2におけるアーム本数が閾値未満の場合には(SUB2:ステップS27:No)、基準特徴量データリスト20と照合せず、画像中の別のドット5を新たに第2中心ドット5A2として選択し(ステップS28)、ステップS26に戻って新たに選択した第2中心ドット5A2の検出特徴量を計算する。
【0072】
図12に示すSUB3のステップS41〜S43の照合処理を行い、基準特徴量データリスト20から、画像中の第2中心ドット5A2と最も一致度の高いドットを選択する。複数のドットが選択された場合には、これらを「一致候補群」とする(SUB2:ステップS29)。
【0073】
次いで、制御部15は、ステップS25の第1中心ドット5A1の一致候補群と、ステップS29の第2中心ドット5A2の一致候補群との組み合わせから、適切な組み合わせを選択する(SUB2:ステップS30)。具体的には、2つのドット間の距離が、取得画像中の第1中心ドット5A1と第2中心ドット5A2との間の距離と等しいものを、最適な組み合わせとして選択する。
【0074】
次いで、制御部15は、最適な組み合わせとして各一致候補群から選択した2つのドットの中点の床F上の絶対座標値を、移動体の初期位置P1として検出する(SUB2:ステップS31)。
【0075】
先に説明したSUB1の処理では、基準特徴量データリスト20の照合結果が最終的に一つに決まるまで、画像中の中心ドット5Aを替えて検出特徴量の計算及び照合処理を繰り返し行ったが、後に説明したSUB2の処理では、これらの処理を何回も行う必要がなく、一度の処理で現在位置を特定することが可能である。従って、SUB2の処理は、SUB1の処理と比べて検出時間が速くなるというメリットがある。なお、次の検出位置P2以降の位置検出処理についても、同様にしてSUB2の処理を行う。
【0076】
以上説明したように、本実施の形態の移動体位置検出システム1は、表面に同一のドットパターン3が配置された複数の床パネルfを並設することにより構成される床Fと、のドットパターン3を構成する個々のドット5とこの個々のドット5の周辺に位置する複数のドット5との位置関係を、個々のドット5の基準特徴量として算出し、基準特徴量を個々のドット5の床Fにおける座標値と対応付けて基準特徴量データベース16に格納する基準特徴量データベース16と、移動体が位置する床F上の領域を予め決められた時間間隔で撮像する撮像部11と、撮像部11が取得した画像中の複数のドット5から所定のドット(中心ドット5A)を選択し、選択したドット5Aと、このドット5Aの周辺に位置する複数のドット5Bとの位置関係を、選択したドット5Aの検出特徴量として算出する検出特徴量算出部17と、検出特徴量を、基準特徴量データベース16中の所定の大きさの照合範囲の基準特徴量データリスト20と照合することにより、検出特徴量と最も一致度の高い基準特徴量を選択し、選択した基準特徴量の絶対座標値を床F上における移動体の現在位置として検出する特徴量照合部18を備えた構成としている。すなわち、本実施の形態では、ドットパターン3を床上の座標値に対応させて符号化する手法を採用しないため、従来のように床上の座標値に対応させて符号化したパターンを用いて検出を行う場合と比べて、床面上のパターンの設計の自由度を向上させることができる。
【0077】
具体的には、床上の座標値に対応させて符号化したパターンを用いて検出を行う場合と比べて、ランダムなドットパターンを床F上に配置することが可能となる。
【0078】
また、従来の位置検出システムでは床面全体に異なるドットパターンを配置していたため、複数の床パネル等の材料で床を施工する際に、床パネルを並べる順番、向きを間違えないように敷き詰める必要があり、施工性が悪いという問題があったが、本実施の形態の移動体位置検出システム1では、同一のドットパターン3を有する複数の床パネルfを並設することによって床Fを構成している。上記のように構成したことで、床Fを施工する際には、床パネルfの向きに留意するだけでよいため、床パネルfを設置する際の施工性を向上させることができる。また、同一のドットパターン3の床パネルfを使用することで、異なるドットパターンを床パネル一枚一枚に施すよりも安価に施工することができる。さらに、予め床F全体のドット5の基準特徴量を、基準特徴量データベース16に格納するため、床パネルfの境界等を勘案する必要はない。
【0079】
さらに、本実施の形態の移動体位置検出システム1では、検出特徴量と照合する基準特徴量データリスト20の大きさ(照合範囲)を、同じ基準特徴量をもつドット5が含まれない範囲に設定している。このため、同じドットパターン3が繰り返された床F上で位置検出を行う場合に、誤検出や検出不能になるといった事態を招来することなく、確実に移動体の位置を検出することができる。
【0080】
加えて、本実施の形態の移動体位置検出システム1では、検出特徴量と照合する基準特徴量データリスト20の大きさ(照合範囲)を、移動体の最高移動速度と撮像部11の画像取得時間間隔から決まる移動体の移動可能範囲を包含する周辺領域に設定しており、照合範囲を必要最小限度の範囲としている。その結果、移動体の位置検出の計算速度を高速化させることができる。
【0081】
なお、上述した実施の形態では、本発明の移動体位置検出システムを建物内での搬送台車等の位置検出に適用した例について説明したが、これに限定されるものではなく、一般的な平面上の移動体の位置検出に広く適用することが可能である。
【図面の簡単な説明】
【0082】
【図1】本実施の形態の移動体位置検出システムの概念図である。
【図2】左図は、床面上に配置されたドットパターンの一例を示す図、右図はドットパターンの一部の領域を撮像した画像の一例を示す図である。
【図3】複数の床パネルを並設して構成した床の平面図である
【図4】移動体位置検出処理の手順を示す概念図である。
【図5−1】床面上にドットパターンを作成する方法の一例を説明する図である。
【図5−2】床面上にドットパターンを作成する方法の一例を説明する図である。
【図6】ドットパターンにおけるドットの基準特徴量を説明する図である。
【図7】本実施の形態の移動体位置検出システムのブロック図である。
【図8】床面上を移動する移動体の軌跡を概念的に示した図である。
【図9】移動体位置検出装置の制御部が実行する処理の流れを示すフローチャートである。
【図10】移動体位置検出装置の制御部が実行する処理の流れを示すフローチャートである。
【図11】移動体位置検出装置の制御部が実行する処理の流れを示すフローチャートである。
【図12】移動体位置検出装置の制御部が実行する処理の流れを示すフローチャートである。
【符号の説明】
【0083】
1 移動体位置検出システム
2 床面
3 ドットパターン
4 ブロック
5 ドット
10 移動体位置検出装置
11 撮像部
11a 照明
12 ドットパターン作成部
13 基準特徴量算出部
14 基準特徴量格納部
15 制御部
16 基準特徴量データベース
17 検出特徴量算出部
18 特徴量照合部
19 記憶部
20 基準特徴量データリスト
f 床パネル
F 床
【技術分野】
【0001】
本発明は、平面上を移動する物体の位置を検出するシステムに関する。
【背景技術】
【0002】
従来、建物内において搬送機械、ロボット、人間等の移動体の位置を検出する方法としては、天井カメラ方式、天井ID設置方式、超音波利用方式、RFID利用方式等の方法が知られている。
【0003】
天井カメラ方式は、天井や壁に設置したカメラを用いて、対象物に設置したマークを撮像し、このマークを検出することで位置を割り出す方法である。また、天井ID設置方式は、赤外線を反射するIDマーカを天井に設置し、下方から赤外線を照射してその反射をカメラでとらえることによって、カメラの位置・方向を検出する。しかし、これらの方法は、天井や壁などの構造物が上方にないと成立しない。また、カメラとマークとの間を遮断する物体が存在する場合には検出不能になる。
【0004】
超音波利用方式は、天井や壁に超音波マイクを複数配置するとともに、対象物に超音波スピーカを設置し、超音波スピーカに発音指令を送ってから超音波マイクでその音が聞こえるまでの時間を計測し、この時間から超音波スピーカと複数の超音波マイク間の距離を割り出し、三角測量によりスピーカの3次元位置を算出する方法である。しかしながら、この方法では、スピーカとマイクとの間に物体が入ると音が遮断されるため、計測不能になる。また、壁や柱で超音波が反射されることで、大きな計測誤差が生じる。
【0005】
RFID方式は、床にRFIDタグを多数配置し、これらのRFIDタグをRFIDレシーバにより受信し、受信したRFIDタグのIDにより検出位置を特定する方法である。しかしながら、一般には、RFIDタグは不連続に検出されるため、RFIDが検出できない位置では、位置を検出することができない。RFIDタグを高密度に敷き詰めることにより、連続に近いタグの検出は可能であるが、コストが増大する上、検出値は数センチ単位に離散的であり、最小でも数センチの分解能でしか位置を特定することができない。
【0006】
さらに、上記の各種方式のような建物内の移動体の位置検出に限らず、平面上に配置したパターン(模様)を利用して、平面上を移動する移動体の位置の検出を行う方法が知られている(例えば特許文献1を参照)。
【0007】
特許文献1の位置検出システムでは、平面のXY座標値を符号化した符号化パターンが平面上に配置されている。この符号化パターンは、複数の格子状の基準線を備えており、複数のドットが基準線の各交点の位置に関連づけられて配置されている。移動体に備えられた位置検出装置は、移動体が位置する平面上の領域を撮像し、取得した画像を処理して符号化パターンを識別し、この符号化パターンを復元することによって移動体の平面上のXY座標値を得る。
【0008】
【特許文献1】特開2006−141061号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
特許文献1に示すように、平面上に配置したパターンを利用して、平面上を移動する移動体の位置の検出を行う位置検出システムでは、平面上の各座標値に1つの符号化パターンを対応させているため、パターンの設計の自由度が低いという問題がある。特に、特許文献1の位置検出システムでは、格子状の基準線の交点周辺にドットが配置されるため、格子模様に近いパターンのみしか適用することができない。
【0010】
本発明は、上記の点に鑑み、従来のように平面の座標値に対応させてコード化したパターンを用いずに、平面上に描いたパターンを利用して移動体の位置の検出を行うことができる移動体位置検出システムを提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明の移動体位置検出システムは、表面に同一のドットパターンが配置された複数のパネルを並設することにより構成される平面と、前記ドットパターンを構成する個々のドットと前記個々のドットの周辺に位置する複数のドットとの位置関係を、前記個々のドットの基準特徴量として算出し、前記基準特徴量を、前記個々のドットの前記平面における座標値と対応付けて基準特徴量データベースに格納する基準特徴量格納手段と、前記平面上を移動する移動体に備えられ、前記移動体が位置する前記平面上の領域を予め決められた時間間隔で撮像する撮像手段と、前記撮像手段が取得した画像中の複数のドットから所定のドットを選択し、選択したドットと、このドットの周辺に位置する複数のドットとの位置関係を、選択したドットの検出特徴量として算出する検出特徴量算出手段と、前記検出特徴量を、前記基準特徴量データベース中の所定の大きさの照合範囲の基準特徴量と照合することにより、前記検出特徴量と最も一致度の高い基準特徴量を選択し、選択した基準特徴量の前記平面における座標値を、前記平面における移動体の現在位置として検出する特徴量照合手段と、を備えたことを特徴とする。
【0012】
また、本発明の請求項2の移動体位置検出システムは、上記請求項1において、ドットパターンが、前記パネルを複数のブロックに分割し、各ブロック内のランダムな位置にドットを配置することによって作成されたものであることを特徴とする。
【0013】
また、本発明の請求項3の移動体位置検出システムは、上記請求項1又は2において、前記基準特徴量及び検出特徴量が、ドットと該ドットを中心とする所定半径の円の領域内に位置する複数の周辺ドットとを結ぶ各線分の方向からなる配列と、各線分の長さからなる配列を含むことを特徴とする。
【0014】
また、本発明の請求項4の移動体位置検出システムは、上記請求項1から3のいずれか一つにおいて、前記照合範囲が、同じ基準特徴量をもつドットが含まれない範囲に設定されることを特徴とする。
【0015】
また、本発明の請求項5の移動体位置検出システムは、上記請求項1から3のいずれか一つにおいて、前記照合範囲が、前記移動体の最高移動速度と前記撮像手段の画像取得時間間隔から決まる前記移動体の移動可能範囲を包含する周辺領域に設定されることを特徴とする。
【発明の効果】
【0016】
本発明の移動体位置検出システムによれば、従来のように平面座標値に対応させて符号化したドットパターンを用いて検出を行う場合と比べて、平面上に配置するドットパターンの設計の自由度を向上させることができる。
【0017】
さらに、従来の位置検出システムでは床面全体に異なるドットパターンを配置していたため、複数のパネルやタイル等の材料で床面を施工する際に、パネルを並べる順番と向きを間違えないように敷き詰める必要があり、施工性が悪いという問題があったが、本発明の移動体位置検出システムによれば、同一のドットパターンを有する複数のパネルを並設することによって床面を構成するようにしたことで、パネルを設置する際の施工性を向上させることができる。
【発明を実施するための最良の形態】
【0018】
以下に、添付図面を参照して、本発明の移動体位置検出システムの好適な実施の形態について詳細に説明する。以下では、建物内の床面上を移動する移動体が自己の位置を検出する例について説明する。
【0019】
(実施の形態1)
図1は、本実施の形態である移動体位置検出システム1の概念図であり、図2の左図は、移動体の移動領域である床F(床パネルf)上に配置されたドットパターン3の一例を示す図、右図はドットパターン3の一部の領域を撮像した画像の一例を示す図である。また、図3は床Fの平面図であり、図4は移動体位置検出システム1における照合処理の概念図である。
【0020】
図1に例示される移動体位置検出システム1は、複数のパネルを並設することにより構成される床Fと、移動体(図示を省略)に備えられ、移動体とともに床F上を移動する移動体位置検出装置10とから構成されている。ここで、移動体とは、例えば搬送台車、ロボット、人間等である。
【0021】
床Fは、図3に示すように、同一の大きさの正方形状に形成された複数の床パネルf11〜f33から構成されている。これらの複数の床パネルf11〜f33は、隣接する辺同士を接触させた状態で、X方向及びY方向に並設されている。ここで、各床パネルf11〜f33の2桁の添え字は、床パネルfのX方向及びY方向の並び番号を示している。
【0022】
各床パネルf11〜f33は、図3に示すように、それぞれの表面に同一のドットパターン3が配置されている。すなわち、床Fの全体は、同一のドットパターン3の繰り返しとなっている。
【0023】
移動体位置検出装置10は、予め決められた時間間隔で移動体の位置する床F上の領域を撮像する撮像部11と、撮像部11によって撮像された画像を処理することにより移動体の位置検出を行う制御部15とを有している。
【0024】
図4に示すように、移動体位置検出装置10は、移動体の位置検出を行う前に、基準となる床パネルf11のドットパターン3を構成するすべてのドット5の特徴量を予め算出し、これを基準特徴量データベース16に蓄積する。この特徴量は、後述するように、ドットパターン3における個々のドット5と、個々のドット5の周辺に位置する複数のドット5との位置関係を算出したものである。以下では、これを「基準特徴量」とよぶことにする。算出された個々のドット5の基準特徴量は、個々のドット5の床F上の絶対座標値と対応付けられ、基準特徴量データベース16に格納される。
【0025】
また、移動体位置検出装置10は、移動体とともに移動する際に、自身が位置する床F上の領域を撮像し、取得した画像中の複数のドット5から所定のドット5A(図4を参照)を選択し、このドット5Aの特徴量を算出する。この特徴量は、後述するように、画像中のドット5Aと、ドット5Aの周辺に位置する複数のドット5Bとの位置関係を算出したものである。以下では、これを「検出特徴量」とよぶことにする。
【0026】
そして、移動体検出装置10は、取得画像中のドット5Aの検出特徴量を、基準特徴量データベース16中の所定の大きさの照合範囲の基準特徴量と照合することにより、最も一致度の高い基準特徴量を選択し、選択した基準特徴量の座標値を、床F上における移動体の現在位置として検出する。
【0027】
[ドットパターンの作成]
図5−1及び図5−2は、床パネルf11〜f33の表面にドットパターン3を作成する方法の一例を説明するための図である。図5−1では、基準となる床パネルf11の一部を拡大して示している。なお、上述したように、床Fを構成する床パネルf11〜f33は同一のドットパターン3をもつものであるから、以下に説明する計算は、基準となるひとつの床パネルf11のみ行えばよい。
【0028】
ドットパターン3を構成する複数のドット5は、原則的にはランダムに打たれたものであるが、まったくランダムにドット5を打つと、撮像部11の撮像領域に最小限度必要な数のドット5が存在しないという事態が生じることもあり得る。このような場合には移動体の位置検出を行うことができなくなるため、床面2上のどの領域を撮像しても画像中に最小限度必要な数のドット5が存在する程度に、床面2上に均一にドット5を打つ必要がある。
【0029】
上記の点を考慮して、本実施の形態では、図5−1に示すように、床パネルf11の表面を正方形の複数のブロック(領域)4に分割し、各ブロック4内のランダムな位置に一つのドット5を打つことによって、ドットパターン3を作成する。各ブロック4内にランダムにドット5を打つ方法としては様々な方法が考えられるが、本実施の形態では、各ブロック4を、4のN乗個の正方形の小ブロックに細分化し、各ブロック4に対応してランダムに数値を発生させ、この数値に基づいて一つの小ブロックを選択し、選択した小ブロックの中心にドット5を割り当てる方法を採用している。
【0030】
例えば、最も簡単な例として、図5−2に示すように、ブロック4を4つ(4の1乗個)の正方形の小ブロック4a〜4dに分け、ランダムに発生させた数値λijに応じて、小ブロック4a〜4dのいずれか一つにドット5を打つ。ここで、λijにおけるi及びjはブロック4の位置を示す番号であり、iはブロック縦方向の番号、jはブロック横方向の番号である。図5−2に示すように、0<λij≦0.25の範囲であれば、小ブロック4aにドット5を打つ。また、0.25<λij≦0.50の範囲であれば、小ブロック4bにドット5を打つ。また、0.50<λij≦0.75の範囲であれば、小ブロック4cにドット5を打つ。また、0.75<λij≦1.0の範囲であれば、小ブロック4dにドット5を打つ。例えば、図5−1に示すように、λ11は0.78であるから小ブロック4dにドット5が打たれ、λ12は0.32であるから小ブロック4aにドット5が打たれている。これを床パネルf11上の全てのブロック4について行うことにより、床パネルf11上にドットパターン3を作成することができる。なお、上記のドットパターン3の作成方法は一例であり、他にも様々な作成方法が考えられる。
【0031】
[基準特徴量データベースの作成]
次に、ドットパターン3における個々のドット5の基準特徴量の算出方法について説明する。上記のように、各床パネルf11〜f33は同一のドットパターン3を有している。従って、以下に説明する基準特徴量の計算は、基準となるひとつの床パネルf11についてのみ行う。
【0032】
図6に示すように、算出対象となるドット5aを中心とした所定半径の大きさの円を想定する。以下では、ドット5aを「中心ドット5a」とよぶ。この円の半径は特に限定されないが、本実施の形態では、円の半径をブロック4の1辺の長さの1.25倍としてある。図6に示す例では、中心ドット5aを中心とした円の領域内に、5つの周辺ドット5b1〜5b5がある。
【0033】
次に、中心ドット5aと各周辺ドット5b1〜5b5とを結ぶ5本のアーム(線分)を描き、アーム6a〜6eのいずれか一つのアームを基準として選び、このアームと他の4本のアームとのなす角度から各アーム6a〜6eの方向を求める。さらに、5本のアーム6a〜6eの長さを求める。
【0034】
中心ドット5aと各周辺ドット5b1〜5b5との位置関係は、アーム6a〜6eの数と、各アーム6a〜6eの方向の配列と、各アーム6a〜6eの長さの配列とからなる。図6に示す中心ドット5aを例に示すと、アーム数は5、各アーム6a〜6eの方向の配列は、アーム6aを基準として、(0,90,150,240,300)、各アーム6a〜6eの長さの配列は、ブロック4の一辺の長さを1として、(1,0.5,1.2,0.5,1.2)と表わされる。以下では、アームの方向の配列を、省略して「アーム方向配列」とよび、アームの長さの配列を、省略して「アーム長配列」とよぶ。
【0035】
ドットパターン3のすべてのドット5について、上述したアームの数、アーム方向配列、アーム長配列を算出する。これをドットパターン3の各ドット5の基準特徴量とする。床パネルf11の各ドット5の基準特徴量は、各ドット5の床Fの絶対座標値と対応付けて基準特徴量データベース16に格納される。
【0036】
他の床パネルf12〜f33については、基準となる床パネルf11に対する相対座標(基準となる床パネルf11に対して床パネルf12〜f33が相対的にどこに配置されているかを示す座標)を基準特徴量データベース16に格納しておく。後述するように、移動体の位置検出を行う際には、基準となる床パネルf11に対する他の床パネルf12〜f33の相対的な位置が分かっていれば、他の床パネルf12〜f33における各ドットの絶対座標値を求めることができる。
【0037】
[移動体位置検出処理]
次に、移動体位置検出装置10が床面2上の移動体の位置を検出する処理について説明する。図7は移動体位置検出装置10のブロック図である。図7に示すように、移動体位置検出装置10は、撮像部11、ドットパターン作成部12、基準特徴量算出部13、基準特徴量格納部14、制御部15及び記憶部19とから構成されている。
【0038】
撮像部11は、CCDカメラ等の画像取得装置である。撮像部11は移動体に固定されており、移動体とともに移動しながら、移動体の位置する床面2上の領域を所定の時間間隔で撮像し、図2に示したような画像を取得する。本実施の形態では、高速度カメラを用いて、例えば10ms程度の時間間隔で画像を取得している。また、図1に示すように、撮像部11と床面2との間の距離は数センチメートルであり、照明11aを用いることで、外乱光の影響の少ない画像を取得することができる。
【0039】
ドットパターン作成部12は、床パネルf上に配置される個々のドット5の位置を算出し、床パネルfにドットパターン3を作成する。ドットパターン3の作成手順は上述したとおりである。
【0040】
基準特徴量算出部13は、ドットパターン作成部12によって作成された床パネルfのドットパターン3におけるすべてのドット5の基準特徴量を算出する。基準特徴量の算出手順は上述したとおりである。
【0041】
基準特徴量格納部14は、基準特徴量算出部13で算出された基準となる床パネルf11の個々のドット5の基準特徴量を床Fの絶対座標値と対応付けて格納するとともに、基準となる床パネルf11に対する他の床パネルf12〜f33の相対座標値を格納する部位であり、上述した基準特徴量データベース16を有している。
【0042】
制御部15は、撮像部11によって撮像された画像を処理することにより移動体の床面2上における位置検出を行うものであり、検出特徴量算出部17と特徴量照合部18とを備えている。
【0043】
検出特徴量算出部17は、図4に示すように、撮像部11が取得した画像中の複数のドット5から、画像の中心に近い位置にあるドット5A(以下、これを「中心ドット5A」という)を選択し、選択したドット5Aと、このドット5Aの周辺に位置する複数のドット5Bとの位置関係を、ドット5Aの検出特徴量として算出する。
【0044】
検出特徴量は、上述した基準特徴量の算出方法と同様にして算出する。図4に示す取得画像において、中心ドット5Aを中心とした所定半径の大きさの円を想定する。この円の半径は、基準特徴量を算出した際の円の半径と同じとする。図4に示す例では、中心ドット5Aを中心とした円の領域内に、5つの周辺ドット5B1〜5B5がある。中心ドット5Aと各周辺ドット5B1〜5B5とを結ぶ5本のアーム6A〜6Eを描き、5本のアーム6A〜6Eのいずれか一つのアームを基準として選び、基準となるアームと他の4本のアームとのなす角度θ1〜θ5(θ1は0°)から、各アームの方向を求める。さらに、5本のアーム6A〜6Eの長さL1〜L5を求める。すなわち、中心ドット5Aの検出特徴量は、アーム6A〜6Eの本数と、アーム方向配列(θ1,θ2,θ3,θ4,θ5)と、アーム長配列(L1,L2,L3,L4,L5)とで表される。
【0045】
特徴量照合部18は、検出特徴量算出部17で算出した取得画像中における中心ドット5Aの検出特徴量を基準特徴量データベース16中の所定の大きさの照合範囲の基準特徴量と照合することにより、中心ドット5Aの検出特徴量と最も一致度の高い基準特徴量を選択する。そして、選択したドットの絶対座標値を、床F上における移動体の現在位置として検出する。以下では、基準特徴量データベース16中の所定の大きさの照合範囲にある基準特徴量を、「基準特徴量データリスト20」とよぶ。
【0046】
上述したように、床Fの全体は同一のドットパターン3の繰り返しとなっている。そのため、画像中の中心ドット5Aの検出特徴量を、基準特徴量データリスト20と照合する際に、基準特徴量データリスト20の大きさ(照合範囲)を大きくしすぎると、照合範囲の中に、同じ基準特徴量をもつ2つ以上のドット5があらわれるといった事態が生じる。すなわち、異なる床パネルにおいて同じ位置にあるドット5が照合範囲に含まれる。このような場合には移動体の位置検出が不能となる。同じ基準特徴量をもつドットが照合範囲に含まれてしまう照合範囲の大きさの目安は、床パネル1枚の大きさ程度である。このため、上記の照合範囲はそれよりも小さくしなければならない。照合範囲をどの程度の大きさにするかは、以下のようにして決めることができる。
【0047】
図8は、床F上を移動する移動体の軌跡を概念的に示したものである。図8における点P1〜Pnは、撮像部11の画像取得時における移動体の位置、すなわち、移動体の検出位置をそれぞれ表している。撮像部11は、一定の時間間隔で画像を取得する。点P1は移動体の初期位置(移動開始位置)である。また、初期位置P1を中心とした所定半径の円内領域C1は、上述した照合範囲である。この照合範囲C1は、具体的には、次の画像取得時における移動体の位置P2を検索する範囲を意味する。
【0048】
図8に示すように、照合範囲C1は、移動体の初期位置P1からの移動可能範囲M1を包含する周辺領域である。ここで、移動体の移動可能範囲M1とは、移動体の移動最高速度と撮像部11の画像取得時間間隔から決まる移動体の移動範囲である。具体的な例を挙げて説明すると、撮像部11の画像取得間隔を10ms(100分の1秒)、移動体の移動最高速度を1.0m/sとすると、1回の画像取得間隔10msの間で移動体は10mm進む。この場合、移動体の移動可能範囲M1は、移動体を中心とした半径10mmの円の領域内である。すなわち、移動可能範囲とは、撮像部11が画像を取得してから次の画像を取得するまでの間に移動体が進むことのできる範囲である。従って、照合範囲C1は、移動可能範囲M1よりも大きく設定する必要があるが、図8に示すように、移動可能範囲M1よりも一回り程度大きい周辺領域に設定すれば、次の画像取得時における移動体の位置P2を確実に検出することができる。
【0049】
但し、上述したように、照合範囲C1は、同じ基準特徴量をもつドット5が含まれない範囲としなければならない。従って、図8に示す移動可能範囲M1が床パネル一枚の広さを超えるような場合には位置検出不能となる。このような場合には、撮像部11の画像取得時間間隔を短く設定し、移動可能範囲M1を床パネル一枚の大きさよりも小さくする必要がある。
【0050】
記憶部19は、基準特徴量データベース16中から抽出された基準特徴量データリスト20を一時的に格納する部位である。
【0051】
図9〜図12は、上記のように構成した移動体位置検出装置10の制御部15が実行する処理の流れを示すフローチャートである。図9はメインフローチャートであり、図10及び図11は図9のサブフローチャートである。また、図12は図10及び図11のサブフローチャートである。以下、図8及び図9〜図12を参照しながら、制御部15が実行する処理手順について説明する。
【0052】
検出処理を行う前に、予め移動体が移動を開始する床パネルの並び番号を入力しておく。例えば図8に示す例では、移動体の初期位置P1は床パネルf13上にあるので、「f13」と入力する。移動体位置検出装置10の制御部50は、移動開始パネルf13が入力されると(ステップS1)、移動体の初期位置P1の検出処理を行う。移動体の初期位置P1を検出する手順は、図10に示す手順SUB1と、図11に示す手順SUB2の2通りがある。まず、図10に示す手順について説明する。
【0053】
図10に示すように、制御部15は、撮像部11から移動体の初期位置P1の画像データを取得すると(SUB1:ステップS11)、画像中の複数のドットから一つのドット5A(中心ドット5A)を選択し、検出特徴量算出部17を通じて、中心ドット5Aの検出特徴量を計算する(SUB1:ステップS12)。ここで、検出特徴量とは、図4に示すように、中心ドット5Aと複数の周辺ドット5Bとを結ぶアーム本数、アーム方向配列、アーム長配列である。制御部15は、中心ドット5Aのアーム本数が閾値以上である場合に(SUB1:ステップS13:Yes)、基準特徴量データベース16から移動開始パネルf13に対応する基準特徴量データリスト20を抽出し、これを記憶部19に格納する。そして、制御部50は、特徴量照合部18を通じて、中心ドット5Aの検出特徴量を記憶部19の基準特徴量データリスト20と照合する(SUB3)。一方、中心ドット5Aにおけるアーム本数が閾値未満の場合には(SUB1:ステップS13:No)、基準特徴量データリスト20と照合せず、画像中の別のドットを新たに中心ドット5Aとして選択し(SUB1:ステップS14)、ステップS12に戻って新たに選択した中心ドット5Aの検出特徴量を計算する。ここで、ステップ13におけるアーム本数の閾値は、ドットパターン3のドット5の密度等により適宜設定されるものである。本実施の形態では、アーム本数の閾値を4本としている。
【0054】
ステップS13で、検出特徴量のアーム本数に閾値を設ける理由は、アーム本数が少ないと照合結果が1つに決まる割合が低くなるためであり、計算を高速化することを目的としている。しかしながら、ステップS13は必ずしも設ける必要はなく、ステップS13を省略してもよい。
【0055】
画像中の中心ドット5Aの検出特徴量を基準特徴量データリスト20と照合する処理(SUB3)は、図12に示す手順で行う。まず、基準特徴量データリスト20から、画像中の中心ドット5Aのアーム方向配列と一致するドットを選ぶ(SUB3:ステップS41)。
【0056】
上述したように、基準特徴量データリスト20(基準特徴量データベース16)には、各ドットのアーム方向配列として、特定の基準となるアームと他のアームとのなす角度からなる配列が一種類ずつ格納されている。従って、画像中の中心ドット5Aのアーム方向配列において基準となるアームと、基準特徴量データリスト20のドットのアーム方向配列において基準となるアームは必ずしも一致しない可能性がある。そのため、画像中の中心ドット5Aのアーム方向配列として、各アームを基準アームとした配列を作成する。すなわち、図4に示す画像中の中心ドット5Aのようにアーム数が5本の場合には、5本の各アームを基準アームとした5種類のアーム方向配列を作り、この5種類のアーム方向配列を、基準特徴量データリスト20のアーム方向配列と照合する。
【0057】
アーム方向配列が一致した場合、一致した基準特徴量データリスト20のドットのアーム長配列と、画像中の中心ドット5Aのアーム長配列との一致度を求める(SUB3:ステップS42)。上述したように、基準特徴量データリスト20における各ドットのアーム長配列は、特定の基準となるアームから順番にアーム長を並べた配列が一種類ずつ格納されている。このため、アーム長配列の一致度を求める際には、画像中の中心ドット5Aのアーム長の順を並べ替えた配列も作成する。すなわち、図4に示す画像中の中心ドット5Aのようにアーム数が5本の場合には、(L1,L2,L3,L4,L5),(L2,L3,L4,L5,L1,),(L3,L4,L5,L1,L2),(L4,L5,L1,L2,L3),(L5,L1,L2,L3,L4)の5種類のアーム長配列を求め、この5種類のアーム長配列と、基準特徴量データリスト20のアーム長配列との一致度を求める。そして、この中から一致度が最も高いものを選ぶ(SUB3:ステップS43)。
【0058】
アーム長配列の一致度を求める方法の一例としては、以下に説明する方法がある。上記の5種類の各アーム長配列をそれぞれの配列の大きさで割って単位ベクトルにする。また、基準特徴量のアーム長配列も配列の大きさで割って単位ベクトルにする。そして、5種類の各アーム長配列(単位ベクトル)と、基準特徴量のアーム長配列(単位ベクトル)との内積を計算し、この内積の値を一致度とする。すなわち、内積の値が最も1に近いものを、最も一致度が高いものとする。なお、アーム長配列の一致度として内積の値を用いることは、あくまでも一例であり、他の方法を用いることもできる。
【0059】
なお、アーム方向配列の照合、及び、アーム長配列の一致度の基準は、画像解像度などに起因する誤差に対する許容範囲を持たせておく。
【0060】
基準特徴量データベースの照合処理SUB3が完了した後、制御部15は、図10に示すように、画像中の中心ドット5Aと一致したものが1つであるか否かを判定する(SUB1:ステップS15)。一致したものが一つであった場合には(SUB1:ステップS15:Yes)、基準特徴量データリスト20における一致したドットの床F上の絶対座標値を現在位置として検出する。
【0061】
この一致したドット5の絶対座標値は以下のようにして求めることができる。上述したように、基準特徴量データリスト20には、基準となる床パネルf11に対する他の床パネルf12〜f33の相対座標が格納されている。基準となるパネルf11において、基準特徴量データリスト20の一致したドットと同じ特徴量をもつドットをPn(図示せず)として、このPnの絶対座標値に、床パネルf13の相対座標を加算すれば、一致したドットの絶対座標値が求められる。この絶対座標値を、初期位置P1の現在位置とする(SUB1:ステップS16)。
【0062】
一方、一致したものが複数あった場合には(SUB1:ステップS15:No)、照合結果を採用せず、画像中の別のドット5を新たに中心ドット5Aとして選択し(SUB1:ステップS14)、新たに選択した中心ドット5Aの検出特徴量を計算する(SUB1:ステップS12)。以降、最終的に照合結果が一つに決まるまでステップS12からステップS15までの処理を繰り返す。
【0063】
制御部15は、移動体の初期位置P1を検出すると、基準特徴量データベース16から、初期位置P1を中心とした照合範囲C1にあるドットの基準特徴量データリスト20抽出し、これを記憶部19に格納する(ステップS2)。そして、移動体の現在位置の検出処理を開始する(SUB1)。
【0064】
制御部15は、撮像部11から画像データを取得すると(SUB1:ステップS11)、画像中の複数のドットから一つのドット(中心ドット5A)を選択し、検出特徴量算出部17を通じて、中心ドット5Aの検出特徴量を計算する(SUB1:ステップS12)。制御部15は、中心ドット5Aにおけるアーム本数が閾値以上である場合に(SUB1:ステップS13:Yes)、特徴量照合部18を通じて、中心ドット5Aの検出特徴量を記憶部19の基準特徴量データリスト20と照合する(SUB3)。一方、中心ドット5Aにおけるアーム本数が閾値未満の場合には(SUB1:ステップS13:No)、基準特徴量データリスト20と照合せず、画像中の別のドット5を新たに中心ドット5Aとして選択し(SUB1:ステップS14)、ステップS12に戻って新たに選択した中心ドット5Aの検出特徴量を計算する。
【0065】
制御部15は、SUB3のステップS41〜ステップS43において照合範囲C1の基準特徴量データリスト20の照合を行い、画像中の中心ドット5Aと一致したものが1つであるか否かを判定する(SUB1:ステップS15)。一致したものが一つであった場合には(SUB1:ステップS15:Yes)、基準特徴量データリスト20の一致したドットの床F上での絶対座標値を、移動体の現在位置P2として検出する(SUB1:ステップS16)。この一致したドット5の絶対座標値を求める方法は、上記の初期位置P1の場合と同じである。
【0066】
制御部15は、移動体の現在位置P2を検出した後、ステップS2に戻り、基準特徴量データベース16から、次の照合範囲C2の基準特徴量データリスト20を抽出し、これを記憶部19に格納する。以上のようにして、制御部15は、これ以降、移動体の現在位置(P3,P4,・・・,Pn,・・・)の検出処理を繰り返す。
【0067】
なお、図8に示す照合範囲C3のように、照合範囲が床パネルf13、床パネルf12、床パネルf22、床パネルf23の複数枚の床パネルに跨っている場合であっても、基準となる床パネルf11に対する各床パネルの相対座標から、床パネルf13、床パネルf12、床パネルf22、床パネルf23の各照合範囲のドット5の基準特徴量を抽出することができる。制御部15は、照合範囲C3における床パネルf13、床パネルf12、床パネルf22、床パネルf23の各領域のドット5の基準特徴量と照合し、現在位置P4の位置を検出する。
【0068】
次に、移動体の現在位置を検出する手順として、図11に示す手順(SUB2)を採用した場合について説明する。なお、以下では移動体の初期位置P1を検出する際の手順について説明する。
【0069】
図11に示すように、制御部15は、撮像部11から移動体の初期位置P1の画像データを取得すると(SUB2:ステップS21)、画像中の複数のドットから一つ目のドット5(第1中心ドット5A1)を選択し、検出特徴量算出部17を通じて、第1中心ドット5A1の検出特徴量を計算する(SUB2:ステップS22)。制御部15は、第1中心ドット5A1におけるアーム本数が閾値以上である場合に(SUB2:ステップS23:Yes)、基準特徴量データベース16から移動開始パネルf13に対応する基準特徴量データリスト20を抽出し、これを記憶部19に格納する。そして、特徴量照合部18を通じて、第1中心ドット5A1の検出特徴量を記憶部19の基準特徴量データリスト20と照合する(SUB3)。一方、第1中心ドット5A1におけるアーム本数が閾値未満の場合には(SUB2:ステップS23:No)、基準特徴量データリスト20と照合せず、画像中の別のドットを新たに第1中心ドット5A1として選択し(SUB2:ステップS24)、ステップS22に戻って新たに選択した第1中心ドット5A1の検出特徴量を計算する。
【0070】
図12に示すSUB3のステップS41〜S43の照合処理を行い、基準特徴量データリスト20から、画像中の第1中心ドット5A1と最も一致度の高いドットを選択する。複数のドットが選択された場合には、これらを「一致候補群」とする(SUB2:ステップS25)。
【0071】
次いで、制御部15は、画像中の複数のドットから二つ目のドット(第2中心ドット5A2)を選択し、検出特徴量算出部17を通じて、第2中心ドット5A2の検出特徴量を計算する(SUB2:ステップS26)。制御部15は、第2中心ドット5A2におけるアーム本数が閾値以上である場合に(SUB2:ステップS27:Yes)、特徴量照合部18を通じて、第2中心ドット5A2の検出特徴量を記憶部19の基準特徴量データリスト20と照合する(SUB3)。一方、第2中心ドット5A2におけるアーム本数が閾値未満の場合には(SUB2:ステップS27:No)、基準特徴量データリスト20と照合せず、画像中の別のドット5を新たに第2中心ドット5A2として選択し(ステップS28)、ステップS26に戻って新たに選択した第2中心ドット5A2の検出特徴量を計算する。
【0072】
図12に示すSUB3のステップS41〜S43の照合処理を行い、基準特徴量データリスト20から、画像中の第2中心ドット5A2と最も一致度の高いドットを選択する。複数のドットが選択された場合には、これらを「一致候補群」とする(SUB2:ステップS29)。
【0073】
次いで、制御部15は、ステップS25の第1中心ドット5A1の一致候補群と、ステップS29の第2中心ドット5A2の一致候補群との組み合わせから、適切な組み合わせを選択する(SUB2:ステップS30)。具体的には、2つのドット間の距離が、取得画像中の第1中心ドット5A1と第2中心ドット5A2との間の距離と等しいものを、最適な組み合わせとして選択する。
【0074】
次いで、制御部15は、最適な組み合わせとして各一致候補群から選択した2つのドットの中点の床F上の絶対座標値を、移動体の初期位置P1として検出する(SUB2:ステップS31)。
【0075】
先に説明したSUB1の処理では、基準特徴量データリスト20の照合結果が最終的に一つに決まるまで、画像中の中心ドット5Aを替えて検出特徴量の計算及び照合処理を繰り返し行ったが、後に説明したSUB2の処理では、これらの処理を何回も行う必要がなく、一度の処理で現在位置を特定することが可能である。従って、SUB2の処理は、SUB1の処理と比べて検出時間が速くなるというメリットがある。なお、次の検出位置P2以降の位置検出処理についても、同様にしてSUB2の処理を行う。
【0076】
以上説明したように、本実施の形態の移動体位置検出システム1は、表面に同一のドットパターン3が配置された複数の床パネルfを並設することにより構成される床Fと、のドットパターン3を構成する個々のドット5とこの個々のドット5の周辺に位置する複数のドット5との位置関係を、個々のドット5の基準特徴量として算出し、基準特徴量を個々のドット5の床Fにおける座標値と対応付けて基準特徴量データベース16に格納する基準特徴量データベース16と、移動体が位置する床F上の領域を予め決められた時間間隔で撮像する撮像部11と、撮像部11が取得した画像中の複数のドット5から所定のドット(中心ドット5A)を選択し、選択したドット5Aと、このドット5Aの周辺に位置する複数のドット5Bとの位置関係を、選択したドット5Aの検出特徴量として算出する検出特徴量算出部17と、検出特徴量を、基準特徴量データベース16中の所定の大きさの照合範囲の基準特徴量データリスト20と照合することにより、検出特徴量と最も一致度の高い基準特徴量を選択し、選択した基準特徴量の絶対座標値を床F上における移動体の現在位置として検出する特徴量照合部18を備えた構成としている。すなわち、本実施の形態では、ドットパターン3を床上の座標値に対応させて符号化する手法を採用しないため、従来のように床上の座標値に対応させて符号化したパターンを用いて検出を行う場合と比べて、床面上のパターンの設計の自由度を向上させることができる。
【0077】
具体的には、床上の座標値に対応させて符号化したパターンを用いて検出を行う場合と比べて、ランダムなドットパターンを床F上に配置することが可能となる。
【0078】
また、従来の位置検出システムでは床面全体に異なるドットパターンを配置していたため、複数の床パネル等の材料で床を施工する際に、床パネルを並べる順番、向きを間違えないように敷き詰める必要があり、施工性が悪いという問題があったが、本実施の形態の移動体位置検出システム1では、同一のドットパターン3を有する複数の床パネルfを並設することによって床Fを構成している。上記のように構成したことで、床Fを施工する際には、床パネルfの向きに留意するだけでよいため、床パネルfを設置する際の施工性を向上させることができる。また、同一のドットパターン3の床パネルfを使用することで、異なるドットパターンを床パネル一枚一枚に施すよりも安価に施工することができる。さらに、予め床F全体のドット5の基準特徴量を、基準特徴量データベース16に格納するため、床パネルfの境界等を勘案する必要はない。
【0079】
さらに、本実施の形態の移動体位置検出システム1では、検出特徴量と照合する基準特徴量データリスト20の大きさ(照合範囲)を、同じ基準特徴量をもつドット5が含まれない範囲に設定している。このため、同じドットパターン3が繰り返された床F上で位置検出を行う場合に、誤検出や検出不能になるといった事態を招来することなく、確実に移動体の位置を検出することができる。
【0080】
加えて、本実施の形態の移動体位置検出システム1では、検出特徴量と照合する基準特徴量データリスト20の大きさ(照合範囲)を、移動体の最高移動速度と撮像部11の画像取得時間間隔から決まる移動体の移動可能範囲を包含する周辺領域に設定しており、照合範囲を必要最小限度の範囲としている。その結果、移動体の位置検出の計算速度を高速化させることができる。
【0081】
なお、上述した実施の形態では、本発明の移動体位置検出システムを建物内での搬送台車等の位置検出に適用した例について説明したが、これに限定されるものではなく、一般的な平面上の移動体の位置検出に広く適用することが可能である。
【図面の簡単な説明】
【0082】
【図1】本実施の形態の移動体位置検出システムの概念図である。
【図2】左図は、床面上に配置されたドットパターンの一例を示す図、右図はドットパターンの一部の領域を撮像した画像の一例を示す図である。
【図3】複数の床パネルを並設して構成した床の平面図である
【図4】移動体位置検出処理の手順を示す概念図である。
【図5−1】床面上にドットパターンを作成する方法の一例を説明する図である。
【図5−2】床面上にドットパターンを作成する方法の一例を説明する図である。
【図6】ドットパターンにおけるドットの基準特徴量を説明する図である。
【図7】本実施の形態の移動体位置検出システムのブロック図である。
【図8】床面上を移動する移動体の軌跡を概念的に示した図である。
【図9】移動体位置検出装置の制御部が実行する処理の流れを示すフローチャートである。
【図10】移動体位置検出装置の制御部が実行する処理の流れを示すフローチャートである。
【図11】移動体位置検出装置の制御部が実行する処理の流れを示すフローチャートである。
【図12】移動体位置検出装置の制御部が実行する処理の流れを示すフローチャートである。
【符号の説明】
【0083】
1 移動体位置検出システム
2 床面
3 ドットパターン
4 ブロック
5 ドット
10 移動体位置検出装置
11 撮像部
11a 照明
12 ドットパターン作成部
13 基準特徴量算出部
14 基準特徴量格納部
15 制御部
16 基準特徴量データベース
17 検出特徴量算出部
18 特徴量照合部
19 記憶部
20 基準特徴量データリスト
f 床パネル
F 床
【特許請求の範囲】
【請求項1】
表面に同一のドットパターンが配置された複数のパネルを並設することにより構成される平面と、
前記ドットパターンを構成する個々のドットと前記個々のドットの周辺に位置する複数のドットとの位置関係を、前記個々のドットの基準特徴量として算出し、前記基準特徴量を、前記個々のドットの前記平面における座標値と対応付けて基準特徴量データベースに格納する基準特徴量格納手段と、
前記平面上を移動する移動体に備えられ、前記移動体が位置する前記平面上の領域を予め決められた時間間隔で撮像する撮像手段と、
前記撮像手段が取得した画像中の複数のドットから所定のドットを選択し、選択したドットと、このドットの周辺に位置する複数のドットとの位置関係を、選択したドットの検出特徴量として算出する検出特徴量算出手段と、
前記検出特徴量を、前記基準特徴量データベース中の所定の大きさの照合範囲の基準特徴量と照合することにより、前記検出特徴量と最も一致度の高い基準特徴量を選択し、選択した基準特徴量の前記平面における座標値を、前記平面における移動体の現在位置として検出する特徴量照合手段と、
を備えたことを特徴とする移動体位置検出システム。
【請求項2】
前記ドットパターンは、
前記パネルを複数のブロックに分割し、各ブロック内のランダムな位置にドットを配置することによって作成されたものであることを特徴とする請求項1に記載の移動体位置検出システム。
【請求項3】
前記基準特徴量及び検出特徴量は、
ドットと該ドットを中心とする所定半径の円の領域内に位置する複数の周辺ドットとを結ぶ各線分の方向からなる配列と、各線分の長さからなる配列を含むことを特徴とする請求項1又は2に記載の移動体位置検出システム。
【請求項4】
前記照合範囲は、
同じ基準特徴量をもつドットが含まれない範囲に設定されることを特徴とする請求項1から3のいずれか1つに記載の移動体位置検出システム。
【請求項5】
前記照合範囲は、
前記移動体の最高移動速度と前記撮像手段の画像取得時間間隔から決まる前記移動体の移動可能範囲を包含する周辺領域に設定されることを特徴とする請求項1から3のいずれか1つに記載の移動体位置検出システム。
【請求項1】
表面に同一のドットパターンが配置された複数のパネルを並設することにより構成される平面と、
前記ドットパターンを構成する個々のドットと前記個々のドットの周辺に位置する複数のドットとの位置関係を、前記個々のドットの基準特徴量として算出し、前記基準特徴量を、前記個々のドットの前記平面における座標値と対応付けて基準特徴量データベースに格納する基準特徴量格納手段と、
前記平面上を移動する移動体に備えられ、前記移動体が位置する前記平面上の領域を予め決められた時間間隔で撮像する撮像手段と、
前記撮像手段が取得した画像中の複数のドットから所定のドットを選択し、選択したドットと、このドットの周辺に位置する複数のドットとの位置関係を、選択したドットの検出特徴量として算出する検出特徴量算出手段と、
前記検出特徴量を、前記基準特徴量データベース中の所定の大きさの照合範囲の基準特徴量と照合することにより、前記検出特徴量と最も一致度の高い基準特徴量を選択し、選択した基準特徴量の前記平面における座標値を、前記平面における移動体の現在位置として検出する特徴量照合手段と、
を備えたことを特徴とする移動体位置検出システム。
【請求項2】
前記ドットパターンは、
前記パネルを複数のブロックに分割し、各ブロック内のランダムな位置にドットを配置することによって作成されたものであることを特徴とする請求項1に記載の移動体位置検出システム。
【請求項3】
前記基準特徴量及び検出特徴量は、
ドットと該ドットを中心とする所定半径の円の領域内に位置する複数の周辺ドットとを結ぶ各線分の方向からなる配列と、各線分の長さからなる配列を含むことを特徴とする請求項1又は2に記載の移動体位置検出システム。
【請求項4】
前記照合範囲は、
同じ基準特徴量をもつドットが含まれない範囲に設定されることを特徴とする請求項1から3のいずれか1つに記載の移動体位置検出システム。
【請求項5】
前記照合範囲は、
前記移動体の最高移動速度と前記撮像手段の画像取得時間間隔から決まる前記移動体の移動可能範囲を包含する周辺領域に設定されることを特徴とする請求項1から3のいずれか1つに記載の移動体位置検出システム。
【図1】


【図2】
【図3】
【図4】
【図5−1】
【図5−2】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5−1】
【図5−2】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−102585(P2010−102585A)
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願番号】特願2008−274681(P2008−274681)
【出願日】平成20年10月24日(2008.10.24)
【出願人】(000002299)清水建設株式会社 (2,433)
【出願人】(803000115)学校法人東京理科大学 (545)
【Fターム(参考)】
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願日】平成20年10月24日(2008.10.24)
【出願人】(000002299)清水建設株式会社 (2,433)
【出願人】(803000115)学校法人東京理科大学 (545)
【Fターム(参考)】
[ Back to top ]