
移動体位置測定装置
【課題】車載カメラを利用した実時間測位の技術に係わり、安価かつ高精度な測位を実現できる技術を提供する。
【解決手段】本自動車及び車載情報システム100の実時間測位部1は、車載のカメラ4から参照地点付近で撮影された複数の実画像を入力し、その中から特徴部を抽出して第1の特徴情報(c1)とする第1の特徴抽出部11と、地図DB5から対応する第2の特徴情報(c2)を読み出して取得する第2の特徴抽出部12と、第1、第2の特徴情報を入力して特徴部を比較してマッチングすることにより、各特徴部の位置を推定し、当該位置をもとに、SFM手法を用いて、移動に伴う各時点の自車の位置と上記各特徴部の位置との相対的な位置関係を演算することにより、自車現在位置を推定して第2の位置情報(L2)として出力する特徴マッチング部13と、を有する。
【解決手段】本自動車及び車載情報システム100の実時間測位部1は、車載のカメラ4から参照地点付近で撮影された複数の実画像を入力し、その中から特徴部を抽出して第1の特徴情報(c1)とする第1の特徴抽出部11と、地図DB5から対応する第2の特徴情報(c2)を読み出して取得する第2の特徴抽出部12と、第1、第2の特徴情報を入力して特徴部を比較してマッチングすることにより、各特徴部の位置を推定し、当該位置をもとに、SFM手法を用いて、移動に伴う各時点の自車の位置と上記各特徴部の位置との相対的な位置関係を演算することにより、自車現在位置を推定して第2の位置情報(L2)として出力する特徴マッチング部13と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車(移動体)の測位技術に関する。特に、車載情報システム、マイコン、カーナビゲーションシステム等において、車載カメラ(その画像・映像)を用いて自動車(移動体)の現在位置を実時間で測位を行う技術に関する。更に、GPS等の手段による位置情報、車載カメラの実画像(実時間での走行時の撮影画像)、及び地図DB(データベース)などを用いて、現在位置の推定・補正などの処理を行う技術に関する。
【背景技術】
【0002】
本発明に係わる自動車の測位技術に関し、背景技術及びその問題点などは以下である。
【0003】
(従来手法1) 主流の手法としてGPS+自律航法がある。GPS衛星等から自車現在位置情報(誤差有り)を取得し、そのデータに対し、車載のセンサ(ヨーレイトセンサ、ジャイロセンサ、加速度センサ等)や車速計(車速信号)による自律航法によって補正をかけ、カーナビ等のデジタル地図上でマップマッチング(道路などから外れないように自車位置を補正して表示する等)を行う。しかしながらこの手法では、単独の測位精度は15メートル、出力頻度は1Hzであり、そして周囲道路ネットワーク状況によって1〜2秒の出力遅延などの問題点が存在する。
【0004】
(従来手法2) 特開2005−265494号公報(特許文献1)の路面マーク比較方式がある。この方式では、路面マーク及び道路標識などをランドマークとし、各ランドマークの絶対位置(3次元空間位置座標)をデータベース(地図DB)に逐一登録しておく。実時間測位の際には、車載カメラの撮影画像から、車線境界線(白線など)とランドマークを抽出し、地図DBの情報と比較(整合性判定)して、車線位置を確定する(車線領域での自車の位置を推定する)。
【0005】
(従来手法3) 特開平10−300493号(特許文献2)のレーザースキャン方式がある。この方式では、レーダ装置によって検出された静止物のデータと道路周囲環境記憶装置に記憶された静止物のデータに基づいて、ナビゲーション装置で求めた自車現在位置を修正することにより、自車現在位置の誤差を数10m程度から10cm程度〜数10cm程度の誤差にすることができ、精度を向上することができる。
【0006】
(従来手法4) また、高精度RTK(Real Time Kinematic)−GPS方式などがある。この方式では、誤差2〜3cm程度の測位精度が得られるようになった。しかし、従来手法3,4等の方式による測位装置は非常に高価であり、また、例えば高速移動体に関する測位を実時間で実施するには不得意である。
【0007】
(従来手法5) また、本発明者の提案によるハイブリッド法(特開2008−175786号公報(特許文献3))もある。この手法では、既存のカーナビションシステムに加え、3次元慣性ジャイロスコープセンサ、車速センサ、及び白線検出結果を統合して正確な車両位置を実時間に推定する。この手法では、実時間の測位速度を達成しているが、平均測位精度は3〜5メートルにとどまっている。
【0008】
(従来手法6) また、車載カメラを利用した測位の手法として、本発明者の提案による、特開2010−151658号公報(特許文献4)(「移動体位置測定装置」等)がある。この手法では、移動体(自車)に搭載したカメラ(撮像部)の実画像(走行方向の路面や景観)から抽出した特徴部(特徴情報)と、地図DB(地図情報)に含まれる特徴部(特徴情報)とをマッチング処理することにより、移動体の位置を測定(推定)する。なお、本発明と特許文献4では、大きな枠組みは共通するが、技術的特徴は異なる。
【0009】
特許文献4では、具体的には、自車の走行方向の路面の白線(車線境界線)などを撮像・認識し、移動体の白線からのオフセット距離を検出して移動体の位置を補正する(例えば複数の車線から適切な車線を選択する)等の処理により、自車位置の精度を高める。また、所定間隔で設けられた交差点などの参照地点において、複数の位置から走路方向を臨んで撮像した画像を、当該地点に関連付けて記憶しておくことができる(3次元画像の不要による処理短縮化)。また、事前に、3次元画像(実画像データ)ではなくその特徴部データ(特徴情報)のみを記憶しておくことで、抽出処理の省略による高速化、及び必要な記憶容量の削減ができる。また、地図情報をもとに複数の車線がある場合など、自車が存在可能な複数の位置を想定し、各々の存在可能位置(車線)から例えば前方の画像の特徴部の情報と、対応する実時間処理で抽出した実画像の特徴部の情報とを比較して差分を演算する(マッチング処理)。
【0010】
一方、カメラ画像を利用した測位技術に係わり、SFM(Structure from Motion)と呼ばれる手法がある。例えば非特許文献1,2に記載されている。SFM手法では、カメラを搭載したロボット(移動体)において、カメラで撮像した画像情報のみから、3次元環境の復元と同時にロボットの移動の前後の相対的な位置・姿勢などを推定する。
【0011】
また、画像から特徴量(特徴部、特徴情報)を抽出する画像解析処理については、例えば非特許文献3などに記載されている。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特開2005−265494号公報 (路面マーク比較)
【特許文献2】特開平10−300493号公報 (レーザースキャン)
【特許文献3】特開2008−175786号公報 (ハイブリッド)
【特許文献4】特開2010−151658号公報 (カメラ利用)
【非特許文献】
【0013】
【非特許文献1】C. Tomasi and T. Kanade, “Shape and motion from image streams under orthography-A factorization method,” Int. J. Comput. Vision, 9-2, pp. 137-154, Nov. 1992.
【非特許文献2】金出武雄, コンラッド・ポールマン, 森田俊彦, “因子分解法による物体形状とカメラ運動の復元,” 電子情報通信学会論文誌D-II, J74-D-II-8, pp. 1497-1505, Aug. 1993.
【非特許文献3】David G. Lowe, "Distinctive image features from scale-invariant keypoints", International Journal of Computer Vision,60, 2 (2004), pp. 91-110.
【発明の概要】
【発明が解決しようとする課題】
【0014】
従来手法6(特許文献4)のように、車載カメラを利用した実時間の測位の技術において、安価(高価な装置を使用しないこと)、かつ高精度(少なくとも一般的なGPS等の手段よりも高精度)な測位を実現したい。
【0015】
上記実時間の測位の際、カメラによる実画像(路面や景観などを含む)から特徴部を抽出する処理を行うが、周囲状況などの要因によって実画像の内容が変化するため、適切な抽出及び判定などが難しくなる問題点がある。上記要因は、例えば、走行時の時期・天候や、道路混雑状況(走行車両や路側帯の駐停車両、歩行人物など)、建築環境(道路や建物、樹木など)の変動などが挙げられる。上記問題点に対しても有効な測位を実現したい。
【0016】
以上のように、本発明の主な目的は、車載カメラを利用した実時間測位の技術に係わり、安価かつ高精度な測位を実現できる技術を提供することである。
【課題を解決するための手段】
【0017】
上記目的を達成するため、本発明の代表的な形態は、自動車などの移動体及びそれに搭載される情報システム等に係わる移動体位置測定装置などであって、以下に示す構成を有することを特徴とする。
【0018】
本装置は、移動体の位置を測定ないし推定する移動体位置測定装置であって、(a)移動体の走行時に実時間でGPS等の手段を用いて移動体の現在の概略の位置と方位を第1の位置情報として検出する位置検出部と、(b)前記移動体に搭載され移動体の走行時に実時間で移動体の周囲の少なくとも1つの第1の方向(例えば前方)を撮影して第1の画像(実画像群)を得る1つ以上の撮像部(カメラ)と、(c)前記第1の画像として、地図上の参照地点(RP)の付近で撮影された複数の実画像の中から、直線や角点(特徴点)を含む特徴部を抽出して第1の特徴情報とする第1の特徴抽出部と、(d)地図上の所定の参照地点の付近の第2の画像(実画像群)の中から、直線や角点を含む特徴部を抽出して第2の特徴情報とし、当該第2の特徴情報を含むデータが事前に登録された地図データベースと、(e)前記移動体の走行時に、前記第1の位置情報をもとに、前記地図データベースから、前記参照地点の付近の該当する第2の特徴情報を読み出して取得する第2の特徴抽出部と、(f)前記第1の特徴情報と前記第2の特徴情報とを入力してそれぞれの特徴部を比較してマッチングすることにより、前記参照地点の付近の複数の特徴部の位置を推定し、当該複数の特徴部の位置をもとに、SFM手法を用いて、移動に伴う各時点の前記移動体の位置と上記複数の各特徴部の位置との相対的な位置関係を演算することにより、前記移動体の現在の位置を推定して第2の位置情報として出力する、特徴マッチング部と、(g)前記第1の位置情報に対して前記第2の位置情報を用いて補正することにより、前記移動体の現在の位置を第3の位置情報として出力する位置補正部と、を有する。
【発明の効果】
【0019】
本発明の代表的な形態によれば、車載カメラを利用した実時間測位の技術に係わり、安価かつ高精度な測位を実現できる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施の形態のシステム(移動体位置測定装置)である自動車及び車載情報システムの構成例を示す図である。
【図2】ある時・位置における地図上のRP付近の特徴部などの例を模式的に示す図である。
【図3】ある時・位置で撮像した実画像における特徴点などの例を示す図である。
【図4】移動前後の時・位置の実画像の間における自車位置と特徴点位置との相対関係の例を示す図である。
【図5】事前登録処理の詳しい処理例を示す図である。
【図6】実時間測位処理の詳しい処理例を示す図である。
【図7】SFM手法を用いた位置推定等について概略的に示す図である。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態を図面に基づいて詳細に説明する。なお、実施の形態を説明するための全図において、同一部には原則として同一符号を付し、その繰り返しの説明は省略する。略称として、RP:参照地点(Reference Point)、等とする。説明上の記号として、T:時点、K:自車位置(≒カメラ撮像位置)、G:画像・実画像、P:特徴点(及び特徴点位置)、等とする。
【0022】
本実施の形態の主な特徴は、移動体(自動車)の実時間測位の際、SFM手法を利用した特徴マッチング処理などを行うことである。図1の構成に基づき、図5,図6の各処理により、図2〜図4のような特徴点(P)の抽出・推定・マッチング、及び自車位置(K)の推定などを行う。これにより自車現在位置(K)を安価かつ高精度で推定する。
【0023】
[システム]
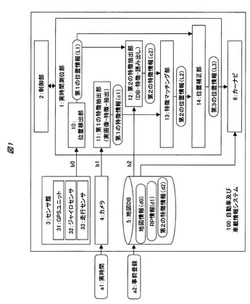
図1において、本発明の一実施の形態のシステム(移動体位置測定装置)である自動車及び車載情報システム100の構成例を示している。自動車及び車載情報システム100は、実時間測位部1、制御部2、センサ類3、カメラ(撮像部)4、地図DB(データベース)5、等を備える。制御部2は、例えばCPU,ROM,RAM等を含んで成り、回路やプログラムの処理により、システム全体の制御、及び実時間測位部1を含む処理機能を実現する。
【0024】
なお本自動車(100)はユーザが利用するが、後述する計測車両の場合は、実時間測位部1に対応した事前登録処理部などを備え、地図DB5への事前登録(a2)の処理(d2登録処理を含む)を行う。またユーザの自動車(100)に事前登録処理部を搭載する形態(地図DB5内容(d2)を随時更新する形態)も可能である。
【0025】
センサ類3は、GPSユニット31、ジャイロセンサ32、走行センサ33、等の公知の要素である(他の手段を有してもよい)。GPSユニット31により、複数のGPS衛星からの搬送波(例えば1回/1秒)を受信し、到達時間差などから緯度・経度による位置を検出する。ジャイロセンサ32は、自車の角速度変化から、自車の方位角(向き)を検出する。走行センサ33(車速計など)は、自車の走行の距離や速度を検出する。
【0026】
カメラ4は、1台の自動車(100)に対して1つ以上が搭載される。カメラ4の搭載の位置や向き、及び詳細な機能などは各種の形態が可能である。例えば図3のように、自動車(100)の前方の路面や景観を含むフレームを撮像する位置・向きで搭載される。実時間測位の際、カメラ4は、自車の移動に伴い、走行方向(カメラ4の向きに対応)の道路や景観等を撮像し、それによる複数の実画像のフレームを得る。その実画像データは適宜記憶手段に一時記憶してもよい。カメラ4は、例えばリアビューカメラやドライブ・レコーダー用カメラなど、安価な単眼カメラが適用可能である。
【0027】
1台の自動車に対して2つ以上(複数)のカメラ4を搭載する場合は、それら複数のカメラ4で同時に撮像した複数の実画像を特徴抽出処理(画像解析処理)などで用いる。これにより、コストが増える代わりに測位精度を高めることができる。上記複数の実画像については、例えば、同じ撮像位置(カメラ位置)から複数の方向の景観を撮像する形、あるいは、複数の撮像位置(カメラ位置)から同じ対象を撮像する形、などが可能である。
【0028】
地図DB5は、地図情報(d0)、RP情報(d1)、第2の特徴情報(d2)、等のデータを格納する。地図DB5は、図示しない記憶手段(例えばHDD,DVD等)や通信ネットワーク上のサービス(地図DB5内容を自動更新する)等により実現される。地図DB5への事前登録(a2)の処理では、所定のRP付近での実画像から特徴部を抽出し、RP情報(d1)、第2の特徴情報(d2)、等として関連付けて登録する。所定のRPとして少なくとも道路の交差点を含む。
【0029】
地図情報(d0)は、公知の道路情報・景観情報、等を含み、本例ではカーナビ6のデジタル地図で使用されるデータを想定している。また、本発明に係わる要素として、地図情報(d0)には、特に、所定のRPに関する情報(d1)を含み、RP情報(d1)は、当該RPに関連付けられる第2の特徴情報(d2)を含む。
【0030】
RP情報(d1)は、地図上における、実時間測位の際の参照対象とする交差点などのRPやランドマーク等に関する情報であり、当該RP等に関する識別情報や属性情報、3次元空間(地図)内の位置座標(3次元座標{X,Y,Z}または対応する緯度・経度などの所定の形式の情報)などの情報を有する。
【0031】
第2の特徴情報(d2)は、RP情報(d1)で識別されるRPの付近の景観(実画像)内に含まれる標識や建物などのランドマーク等に関して、事前登録(a2)の際の処理で抽出された特徴部(特徴点(P)など)に関する特徴量や位置座標(画像内の2次元座標{x,y}及び対応する3次元座標{X,Y,Z})などの情報を含む。
【0032】
カーナビ6は、実時間測位部1による自車現在位置の情報を利用・出力するカーナビゲーションシステムやディスプレイ等である。カーナビ6は、地図DB5のデータ、及び第3の位置情報(L3)等を用いて、ナビゲーション用の地図等のデータを随時に生成し、画面表示処理などを行う。また前述のように、車両制御のためのマイコンやECUへ車両現在位置と方位角の情報などを転送する形態としてもよい。
【0033】
[実時間測位部、処理概要]
図1を用いて、本実施の形態(自動車及び車載情報システム100)における実時間測位部1の構成、及びその実時間測位などの際の処理概要を以下(0)〜(5)等で説明する。実時間測位部1は、制御部2により、センサ類3、カメラ4、地図DB5、カーナビ6等と連携して、実時間測位に係わる処理を行う。実時間測位部1は、位置検出部10、第1の特徴抽出部11、第2の特徴抽出部12、特徴マッチング部13、位置補正部14、等を備える。その他必要に応じて、画像データ記憶部、マップマッチング部、等の公知の要素を備えてもよい。なおユーザが一般車両で本システムを利用する際の各部の処理については基本的に実時間(リアルタイム)での処理であり、地図DB5のデータ{d0,d1,d2}については、事前登録(a2)による処理(例えば本システム提供者、計測車両による処理)である。
【0034】
(0) 位置検出部10は、随時、実時間でのGPSユニット31等を含むセンサ類3からの検出情報(b0)を入力し、そのデータを用いて自車の概略の現在位置と方位角など(一般的なGPSによる測位誤差を持つ概略の第1の位置)を検出し、この検出情報を第1の位置情報(L1)とする。例えば図2に状況を示す。
【0035】
(1) 第1の特徴抽出部11は、実時間(a1)での入力によるカメラ4で撮像した実画像(カメラ4毎の時間軸上の複数の各々の画像フレーム)のデータ(b1)を入力し、その実画像(例えば図3)の中から、自車周囲環境の道路を含む景観に関する特徴部を抽出する処理を行い、第1の特徴情報(c1)として出力する。特徴部及び第1の特徴情報(c1)は、上記実画像(2次元景観画像)に含まれる角点(特徴点(P))の座標({x,y})、及び、その角点の形状・色・明度変化などの特徴を表す特徴量(例えばSIFT特徴量;例えば非特許文献3を参照)など、所定の画像解析処理などにより抽出できる各種の情報を含む(後述、図3等)。実時間測位は、少なくとも、交差点などのRPの近く(手前など)の位置から開始される。第1の特徴抽出部11は、第1の位置情報(L1)に従って、視野範囲内にあるRPの近くの位置から、上記特徴抽出処理(時間軸上の複数の実画像フレームの処理)を行う。
【0036】
(2) 第2の特徴抽出部12は、上記第1の特徴抽出部11の動作に並行して、自車の移動に伴う第1の位置情報(L1)をもとに、事前登録(a2)による各データ(d1,d2,d3)が登録済みの地図DB5から、自車の第1の位置の付近の地図情報(d0)、RP情報(d1)、及び第2の特徴情報(d2)を逐次に取得する。第2の特徴抽出部12は、地図DB5からデータ(b2)を読み出して入力する形で、該当RP付近の景観(実画像)の中から特徴部を抽出し、第1の特徴情報(c1)に対するマッチングの対象(参照元)とするための第2の特徴情報(c2)として出力する。上記データ(b2)は、該当RP付近の特徴部の情報にあたる第2の特徴情報(d2)を含む。地図DB5内に、対応する第2の特徴情報(d2)が事前登録(a2)済みの場合は、単にそのデータを読み出して取得すればよい。第2の特徴情報(c2)は、第1の特徴情報(c1)と同様の形式であり、特徴点などについての特徴量や位置座標などの情報を含む。
【0037】
上記(1),(2)における実時間(a1)及び事前登録(a2)の際のそれぞれの特徴抽出処理では、地図上のRP(例えば図2の交差点など)付近の道路や景観を対象とした画像の中から、ランドマーク等(路面の白線、標識、建物など)に関する特徴部(特徴点など)を抽出する画像解析処理を行う(後述、図5,図6)。
【0038】
(3) 特徴マッチング部13は、第1の特徴情報(c1)と第2の特徴情報(c2)とを入力し、SFM手法を用いた特徴マッチング処理を行うことにより、逐次で自車現在位置を推定し、この結果(推定の自車現在位置)を、第2の位置情報(L2)として出力する。自車の移動に伴う複数の時点(T)・位置(K)の複数の実画像(G)のフレーム中における複数の各々の特徴部(特徴点(P)など)との相対的な位置関係(相対的な自車の位置・方位)を、SFM手法を用いて演算することにより、自車現在位置(K)を推定する(後述、図4等)。
【0039】
(4) 位置補正部14は、第1の位置情報(L1)と第2の位置情報(L2)とを入力し、L1に対してL2を用いて自車現在位置を補正し、その結果を第3の位置情報(L3)として出力する。L3は、車両現在位置と方位角の情報を含む。
【0040】
なお、位置補正部14を設けずに、第2の位置情報(L2)を最終結果の位置情報として出力する形態としてもよい。少なくともL2はL1よりも高精度な値が得られる。RP付近以外の場所では、位置補正部14による補正を行うことが好適である。
【0041】
またマップマッチング処理などを行う場合は、例えば、第1の位置情報(L1)等をもとに、地図内の道路から自車が外れないように補正する。例えばL1とその付近の地図情報(d0)から、自車の存在可能位置を選択する。また、L1をもとに、道路の車線数や車線幅、路面上のマークや標識・信号といった地図情報(d0)を取得して、自車の存在可能位置などを把握してもよい。
【0042】
(5) 自動車及び車載情報システム100では、上記第3の位置情報(L3)を用いて処理を行う。例えばカーナビ6で、L3等を用いて自車現在位置を表示する。また、車両制御のためのマイコンやECUへ上記L3による車両現在位置と方位角の情報を転送して利用する形態などとしてもよい。
【0043】
[事前登録処理]
地図DB5への事前登録(a2)の際の処理は、例えば、計測車両(カメラ及び事前登録処理部などを備える)で行われる。事前登録処理部は、第1の特徴抽出部11等と同様の処理部を含む構成である。計測車両により実際に対象の道路を走行して、対象のRP付近の景観を撮像する。その実画像データを一旦記憶し、その実画像データから、第1の特徴抽出部11での処理と同様に、特徴部を抽出する処理を行い、この結果を第2の特徴情報(d2)とし、地図DB5内にRP情報(d1)に関連付けて登録する。この処理は、実時間測位の際の第1の特徴抽出部11での処理内容と概略的には共通である。なおこの処理では、実時間測位の際とは異なり、すべてを実時間で処理する必要は無い。例えば予め収集・蓄積した実画像データを対象としてまとめて特徴抽出処理を実行する形態などとしてもよい。
【0044】
[RP、ランドマーク]
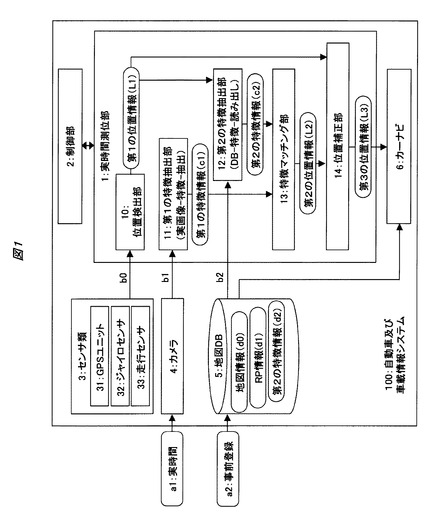
図2において、地図、道路、RP、ランドマーク、特徴点(P)、等の例を、2次元平面によって模式的に示す(なお説明用であってカーナビ6で表示する地図とは異なる)。自車200、交差点201、道路202、道路/車線203、白線(車線境界線)204、建物205、路側206、等の例を示す。Kは、自車200の現在位置を示し、3次元座標{X,Y,Z}及び方位角(矢印)などによって表現される。
【0045】
RPは、測位に役立つ景観特徴を持つ測位参考点であり、201のような道路交差点や、分岐・合流部、そしてランドマーク地点などを指している。RPとしては、現実(地図)に存在するうちの主なもの(測位に役立つもの)がRP情報(d1)として事前登録(a2)される。RPは、交差点201に限らず、例えば所定間隔での複数の地点や、ランドマークとなる建物205などを対象としてもよい。またRPの3次元位置情報は、地図DB5を構築する際(a2)に計測車両によって計算されてRP情報(d1)に登録される。なおこのRPの3次元位置情報の計算過程については別に記述される(図5の事前登録処理にて記述されている)。また本実施の形態では登録しないが、事前に撮像されるRP付近の実画像データを関連付けて登録してもよい。
【0046】
図2では、交差点201(RP)付近の道路202・車線203において、自車200が当該RPに進入しようとしている時の自車200の現在位置(K)を示している。ある時点(T)の位置(K)の情報として、事前に地図に登録されたRPの3次元位置座標({X,Y,Z})と方位角、そして当該位置データの誤差範囲(後述の推定精度)、等の情報を有する。なお座標だけでなく方位角も含めて位置情報と略称している。丸印は、実画像よりランドマーク等に関して抽出される特徴部の例として特徴点(P)を示し、例えば、自車200の進行方向の路面の白線204の角点や、進行方向の両側の建物205の角などを示している。破線は、自車200の現在位置(K)(≒カメラ4の撮像位置)と、複数の各々の特徴点(P)との間の距離(相対的な位置関係)を示している。なお特徴点(P)の位置は、図2では地図上の座標({X,Y,Z})で示しているが、対応する実画像内の画素の座標({x,y})の情報などを有する。
【0047】
[実画像、特徴抽出処理]
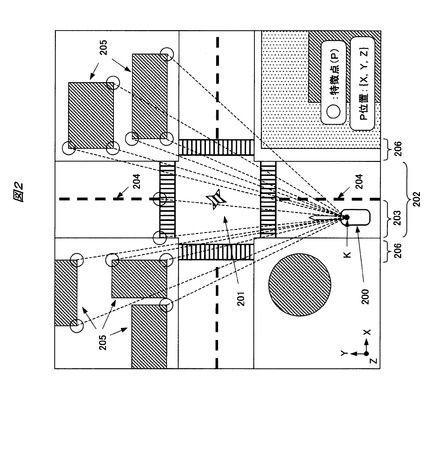
図3は、ある時点(T)及び位置(K)におけるカメラ4で撮像した実画像(G)の例を模式的に示している。交差点(RP)の手前から前方を撮像した場合である。丸印は特徴点(P)の例である。わかりやすくするため他車の存在などは省略している。301は道路領域(走行車線領域)、302は白線(白線領域)を示す。各特徴点(P)は、実画像内の画素の位置座標情報({x,y})などを有する。
【0048】
地図DB5に第2の特徴情報(d2)を事前登録するための実画像(特徴部を抽出する対象)は、例えば図3のように、RPの手前などから走行方向・RPを臨んで撮像した画像とする。図2の交差点201の場合であれば、当該RPに進入する4方向からの各画像を用いる。
【0049】
特徴点(P)などを抽出するための特徴抽出処理では、基本的には公知の各種の技術(画像解析処理)を適用可能である。画像解析処理では、例えば、実画像を構成する画素の明度・輝度などの差分値を演算することで、路面の白線(204,302)や建物(205)の輪郭などに対応する線分や角点などの形状・色・明度変化などを表す特徴量を抽出することができる。なお、抽出する特徴部としては、適用する処理手法などに応じて、線分や角点などに限らず、所定の図形(円弧など)とすることも可能である。
【0050】
[自車と特徴点との関係、特徴マッチング処理]
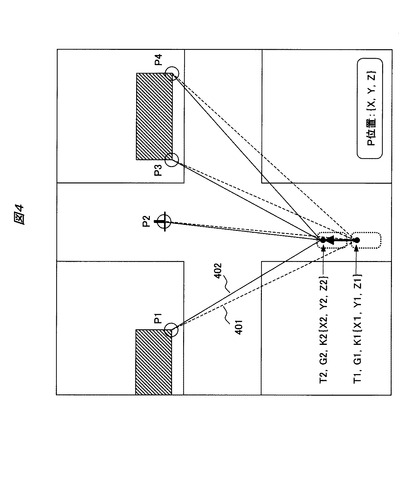
図4は、自車の移動による自車位置(K)と特徴点(P)との相対的な位置関係の例を示す。自車の移動に伴う複数の時点(T)・位置(K)の各実画像(G)における複数の特徴点(P)などがあるとき、SFM手法によって、自車現在位置(K)を推定する。例えば、自車の移動の前後の2つの時点(T1,T2)を考える。対応する各位置(K1,K2)及び実画像(G1,G2)を有する。それぞれに対応して、複数の特徴点P(例えばP1〜P4)の位置と自車の位置(K)との相対的な距離がある。401(破線)はT1等に対応した距離、402(実線)はT2等に対応した距離である。
【0051】
特徴部は、実画像(G)の撮像時の位置(K)によって変化する。言い換えると、特徴部の情報は、上記撮像時の位置(K)の情報が含まれている。よって、SFM手法を利用した演算により、自車現在位置(K)を推定することができる。
【0052】
特徴マッチング処理では、例えば、実時間測位の際に抽出された複数の特徴点P(第1の特徴情報(c1))と、対応して地図DB5から読み出された複数の特徴点P(第2の特徴情報(c2))とにおいて、複数の特徴点Pの位置が比較され、一致・類似の度合いが判定される。例えばよく使う手法としては、ユークリッド距離を計算し、距離が一番小さいものを、一致する特徴点とする。
【0053】
[SFM手法を用いた位置推定]
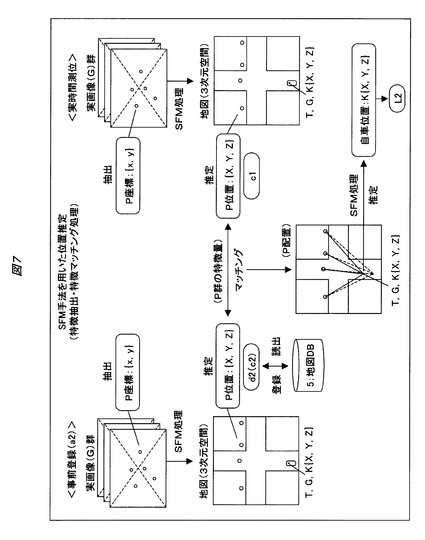
図7は、SFM手法を用いた位置推定(特徴抽出・特徴マッチング処理)等について概略的に示す。本内容は、実時間測位部1及び事前登録処理部における特徴抽出処理や特徴マッチング処理の内容に対応する。
【0054】
特徴点(P)は、2次元画像(例えば図3)より抽出され、その2次元座標({x,y})に基づいて、SFM手法によって特徴点(P)の3次元空間位置({X,Y,Z})(例えば図2)が推定される。事前登録(a2)のプロセスでは、特徴点(P)における形状・色・明度変化などの特徴を表す特徴量(例えばSIFT特徴量)と、推定されたP位置、及びその推定精度(誤差の共分散行列)などの情報が、地図DB5(d2)へ登録される(後述、図5)。一方、実時間測位のプロセスでは、実時間(a1)の処理で抽出した各特徴点(P)の特徴量(c1)と、地図DB5(d2)に登録されている各特徴点(P)の特徴量(c2)とのマッチングが行われる。この対応付けができた場合は、この結果(各P配置)を用いて、SFM手法によって自車現在位置(K)を推定し(例えば図4)、その推定精度(誤差の共分散行列)も同時に計算できる。
【0055】
[詳細]
以上に基づき、以下、本実施の形態における詳細な処理例などについて説明する。本システム(実時間測位部1)では、SFM手法を活かして、車載カメラ4から撮像した複数枚の実画像(G)の特徴部(c1,c2)のマッチングにより、高精度な3次元相対位置(K)を推定の計算により決定する。
【0056】
本手法の一環である特徴量(第2の特徴情報(c2))の事前登録(a2)の処理として、交差点(201)等のRPの付近で事前に撮像された複数枚の実画像(G)から、特徴点Pなどの特徴部(特徴量及び3次元位置座標など)を抽出し、自車位置(K)を推定する。RP付近の特徴量を最適化処理し、自車位置(K)の測定誤差(推定精度)を所定範囲内に抑えられるまでは逐次に最適な特徴量(特徴部)を選択する。自車位置(K)の測定誤差(推定精度)を最小とするように最適な特徴量(特徴部)を選択すると同時に、特徴量の3次元空間位置と推定精度を求めることができる。最終的に選択された特徴部の情報を、第2の特徴情報(c2)として地図DB5に登録する。
【0057】
一方、実時間測位部1では、カメラ4の実画像(b1)から抽出した特徴部の特徴量などの情報(第1の特徴情報(c1))と、対応する地図DB5から読み出した情報(第2の特徴情報(c2))とで特徴マッチング処理を行い、SFM手法によって自車現在位置(K)とRP付近の特徴部(複数の特徴点P)との相対的な位置と方位を計測することにより、自車現在位置(K)の高精度な測位が実現される。実時間測位部1では、自車の移動に伴い、少なくとも交差点などのRPの近くの位置から上記特徴マッチング処理などを実行し、各時点(T)の実画像(G)の処理を経ながら、逐次に自車現在位置(K)の測位誤差を最小化し、所定の許容精度(範囲)内に達した時点で当該測位結果を出力する。
【0058】
本システムでは、SFM手法を用いた処理の際、公知の拡張カルマンフィルタの原理に基づいて、特徴量の最適化(連続で撮影された複数の実画像の中から最適な特徴部を選択するプロセス)と同時に3次元の測位(3次元位置座標の計算)を行う。本処理に関して、事前登録処理(図5)と実時間測位処理(図6)とで分けられる。違いとしては例えば図5では各特徴点位置を推定するが図6では登録済みゆえ推定しない。
【0059】
[事前登録処理(詳細)]
事前登録(a2)の際の処理では、所定のRP付近の実画像内の特徴部の情報(d2)を含む地図DB5を作成するために、計測車両(事前登録処理部)では、例えば所定のRPの手前の位置から計測を開始する。計測車両の例えば前方に搭載された1台以上のカメラからRP・走行方向を撮像し、それら時間軸上の複数の実画像に対する特徴抽出処理(画像解析処理)を行う。
【0060】
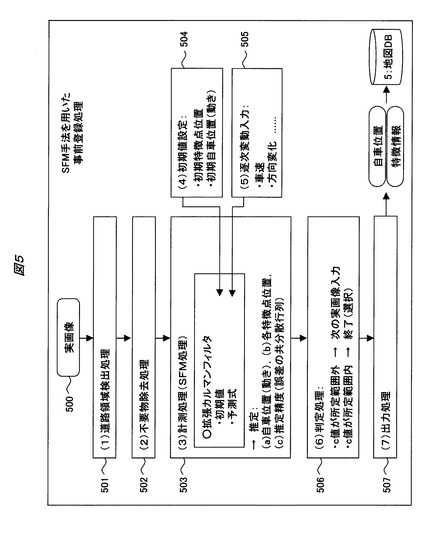
図5を用いて、事前登録処理部での詳しい構成・処理例として、SFM手法を用いた処理などについて説明する。500は、入力である実画像などのデータ情報である。
【0061】
(1)まず、道路領域検出処理501では、入力画像(500)の中から、道路領域(及び非道路領域)などを検出する。道路領域(走行車線領域など)は、例えば図2の203、図3の301のような領域であり、図2の204、図3の302のような白線などで区画される領域などである。
【0062】
道路領域検出処理501では、実画像(道路や景観を含む)の中から、角点及び直線分などの特徴部を抽出することにより、上記道路領域を検出する。上記抽出する特徴部は、路面の白線などや景観内の建物などにおける特徴点(P)などである(図3)。
【0063】
また、自車の走行道路に係わり複数の車線がある場合(例えば図3の301)は、白線の検出などにより、各車線領域を検出してもよい。その場合、実画像データにおける画素の差分値の演算で、Hough変換などを用いて、白線領域(302)などのエッジ(線分や角点)を検出する。
【0064】
また、上記道路領域に対して、路側(路側帯領域)(例えば図2の206)、及び路側における特徴点(P)なども検出される。なおここでいう路側は道路外領域にあたる。
【0065】
また、上記で検出される特徴部は、図2,図3のような測位に有効な特徴点(P)ばかりではなく、状況に応じて、測位に不要(悪影響)な特徴点なども含まれる。例えば、道路領域や路側における、走行車両(他車)、駐停車両、歩行人物、樹木、看板など(「不要物」とする)に対応した特徴点などである。
【0066】
(2)不要物除去処理502では、上記(1)の結果に対して、以下の処理(503〜)で不要(悪影響)なものとして、上記不要物の特徴点などを除去する所定の処理を行う。例えば、上記路側などの領域内のエッジ分布密度の計算をもとに、不要物の特徴点を取り除く。
【0067】
上記(1),(2)を経て、各時点(T)・位置(K)の実画像(G)に関係付けられた複数の各々の特徴点(P)などの特徴部(図2〜図4)に関する特徴量及び位置座標情報などを特徴情報として得る。
【0068】
(3)計測処理503(SFM処理)では、上記(2)の結果を対象(入力)として、拡張カルマンフィルタ(予測式、及び初期値)を用いて、それぞれの特徴点(P)の3次元空間位置({X,Y,Z})、及び自車現在位置(K)を推定しながら、それぞれの推定精度(誤差の共分散行列)を計算する。図5のように、(a)自車現在位置(K)、及び(b)各々の特徴点(P)の位置、及び(c)それら各々の推定精度(誤差の共分散行列)、等を推定する計算処理を行う。aの自車位置については動き(変動量)を用いる。詳しい計算式については後述する。
【0069】
(4)初期値設定504: 上記(3)の初期値については、本システムで予め設定された値が入力される。初期値は、初期特徴点位置、初期自車位置(動き)、等である。初期値の設定の仕方としては、例えば、経験値によるか、あるいは、地図DB5の地図情報(d0)から大まかな位置を設定する、等である。また、例えば2台のカメラ4を使用する場合では、ステレオ計算による奥行き情報から求めて設定することができる。
【0070】
(5)逐次変動入力505: 上記(3)の予測式に対しては、次の時点(T)の実画像(G)のフレームを取り込むまでに、センサ類3による自車速度・方向変化などの逐次変動情報が入力される。
【0071】
(6)判定処理506では、上記(3)の推定の結果(a〜c)をもとに、当該時点(T)・位置(K)・実画像(G)における上記cの推定精度(誤差の共分散行列)の値が、例えば所定の範囲内(閾値以下)になったかどうかを判定する。c値が範囲外である場合は、最初に戻り、続けて次の時点(T)の実画像(G)のフレームを入力して、上記同様の計算処理等(501〜503)を繰り返す。c値が範囲内になった場合は、その時点で、当該推定値(a〜c)を最適なものとして選択して計測処理を終了する。
【0072】
上記(6)の処理では、自車位置(K)の推定精度(c)が所定範囲内に抑えられるまでは、次の実画像(G)のフレームを入力して新しい特徴量を導入しながら、前後のフレーム間で追跡できなかった特徴量を削除する。自車位置(K)の推定精度(c)から新しい特徴量を選択して取り入れることができる。例えば、自車進行方向(例えば図2のY方向)の位置(K)の精度(c)が低い場合では、遠い所にある新しい特徴点を選択することとができ、自車進行方向に対する横方向(例えば図2のX方向)の位置(K)の精度(c)が低い場合では、近い所にある新しい特徴点を選択することができる。
【0073】
(7)出力処理507では、上記(6)の選択の結果(a〜c)の情報(最適な特徴部のリストを含む)を、当該RP位置に関する、自車位置(K)の推定値(対応する地図上の位置)及び特徴情報(c2)として出力する。そして、事前登録(a2)の際は、上記出力情報を地図DB5に登録する。
【0074】
[実時間測位処理(詳細)]
実時間測位の際の処理では、一般車両(100)のカメラ4からRP・走行方向を撮像し、第1の位置情報(L1)に基づいて地図DB5(RP情報(d1))からカメラ4の視野範囲内のRPを検索し、当該RPの手前の位置から実時間測位処理を開始する。
【0075】
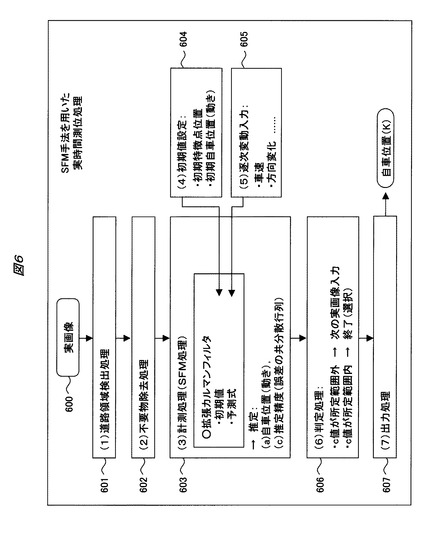
図6を用いて、実時間測位部1での詳しい構成・処理例として、SFM手法を用いた処理などについて説明する。なお図6の処理は、図1では主に第1の特徴抽出部11と特徴マッチング部13の処理に対応する。600は、入力である実画像のデータ(b1)などである。以下、図5と重複する処理内容については簡略に説明する。
【0076】
(1)まず、道路領域検出処理601では、入力画像(600)の中から、角点及び直線分などの特徴部を抽出することにより、道路領域(及び非道路領域)などを検出する(601と同様)。上記検出する特徴部は、前述同様に、路面の白線や景観内の建物等における特徴点(P)などである。また前述同様に、走行道路に複数の車線がある場合は、白線の検出などにより、各車線領域を検出してもよい。また前述同様に、上記道路領域に対して、路側、及び路側における特徴点(P)なども検出される。上記で検出される特徴部は、測位に不要な特徴点(P)なども含まれる。
【0077】
(2)不要物除去処理602では、上記(1)の結果に対して、以下の処理(603〜)で不要なものとして、上記不要物の特徴点(P)などを除去する所定の処理(502と同様)を行う。
【0078】
上記(1),(2)を経て、各時点(T)・位置(K)における実画像(G)に関係付けられた複数の各々の特徴点(P)などの特徴部(図2〜図4)に関する特徴量及び位置座標情報などを特徴情報として得る。
【0079】
(3)計測処理603(SFM処理)では、上記(2)の結果を対象(入力)として、拡張カルマンフィルタ(予測式、及び初期値)を用いて、それぞれの特徴点(P)の3次元空間位置、及び自車現在位置(K)を推定しながら、それぞれの推定精度(誤差の共分散行列)を計算する。図6のように、(a)自車現在位置(K)、及び(c)現在位置の推定精度(誤差の共分散行列)、等を推定する計算処理を行う。詳しい計算式については後述する。
【0080】
(4)初期値設定604: 上記(3)の初期値については、第1の位置情報(L1)と地図DB5の地図情報(d0)に関連付けて登録された第2の特徴情報(c2)から各特徴点(P)の目標位置を推定し、上記(3)の初期値を設定する。
【0081】
(5)逐次変動入力605: 上記(3)の予測式に対しては、次の時点(T)の実画像(G)のフレームを取り込むまでに、センサ類3による自車速度・方向変化などの逐次変動情報が入力される。
【0082】
(6)判定処理606では、上記(3)の結果(a,c)をもとに、当該時点(T)・位置(K)・実画像(G)における上記cの推定精度(誤差の共分散行列)の値が、所定の範囲内(閾値以下)になったかどうかを判定する。上記c値が範囲外である場合は、最初に戻り、続けて次の実画像(G)のフレームを入力して、上記同様の計算処理等(601〜603)を繰り返す。上記c値が範囲内になった場合は、その時点で、当該推定値(a,c)を選択して終了する。
【0083】
(7)出力処理607では、上記(6)の選択の結果(a,c)の情報を、自車現在位置(K)の推定値(L2に対応)として出力する。
【0084】
[計算式]
前記(3)の計測処理(SFM処理)における計算式などは以下である。
【0085】
拡張カルマンフィルタの予測式は、下記の式(1)である。
【0086】
【数1】

【0087】
ここでは、上記状態ベクトルX,計測誤差の共分散行列(予測誤差)Qは下記の式(2)で定義される。
【0088】
【数2】
【0089】
Xは、計測対象である車両(カメラ)の相対位置・姿勢を表す車両状態ベクトルVと景観画像の特徴点の2次元座標ベクトルPとの接合ベクトルであり、VとPはそれぞれ6個(回転分量Rと並進分量T)と2N個(N:特徴点数)の要素で構成される。
【0090】
カルマンフィルタの逐次ループでは、下記の式(3)である。
【0091】
【数3】
【0092】
ここでは、上記Gvは車両状態(位置と向き)のジャコビアン行列、Gpは特徴点のジャコビアン行列であり、上記Gv,Gpは下記の式(4),(5)である。
【0093】
【数4】
【0094】
【数5】
【0095】
カルマンフィルタの更新処理では、下記の式(6)である。
【0096】
【数6】
【0097】
ここでは、上記のu,vは、下記の式(7)である。
【0098】
【数7】
【0099】
prediction point:予測した特徴点の画像投影位置、matched point:マッチングした特徴点の2次元画像検出位置、Mc:カメラ内部行列、Rα,β,γ:カメラ回転行列、P:特徴点の3次元絶対位置、V:車両の現在位置を示す。
【0100】
[効果等]
以上説明したように、本実施の形態によれば、自動車及び車載情報システム100において、車載カメラ4を利用した仕組みにより自車現在位置(K)の測位を安価に実現でき、かつ、GPS等の手段よりも高精度な推定(計算)を実現できる。従来の一般的な測位精度(10〜15メートル)に比べて、安価なカメラ4(リアビューカメラ等)及び既存の安価なナビゲーション用のハードウェア・ソフトウェア等でも、実時間(出力更新:10〜60Hz)でのサブメートル測位精度(平均測位誤差:1メートル以下)を達成でき、先進的なナビ連動システムを実現して一般車両への普及が可能となる。
【0101】
特に、実時間測位部1の高精度な測位の結果(L3)を利用して、例えばカーナビ6で、運転で必要とされている要素として、どの交差点で曲がるべきか、どの車線に進むべきか、等を効果的にナビゲートすることができる。また、車両へのシフト制御やエンジン噴射制御、さらにACCにおける車間距離制御などの車両協調システムなどに応用できる。
【0102】
本発明では、従来手法2(路面マーク比較)等と同様に、2次元の実画像(G)を利用するが、個々のマーク等(特徴点(P)等)の高精度な絶対位置の情報を地図DB5等へ事前登録する必要は無い(SFM手法による推定の位置情報を登録する)。また本発明では、路側に存在する物(建物、看板、標識など)も、RP景観特徴を多く取り入れるため、前述の不要物除去処理により、先行車両などの遮蔽物による影響(測位精度への悪影響)を最小に抑制できる。
【0103】
本発明では、従来手法3(レーザースキャン)のように高価な手段・装置を必要とせずに高精度を実現できる。また実画像内の特徴は2次元情報であり、レーザーによる1次元情報よりも精度が高い、及び曖昧さが低い。また、カメラ4の視野が大きいため、先行車両や他の障害物による影響を受け難い。
【0104】
[変形例]
上記実施の形態では、データ量の削減、そして後の特徴マッチング処理のプロセスを高速化するために、地図DB5内には、特徴情報(各特徴部の特徴量など)のみを登録するが、対応する実画像データについては登録していない。変形例として、地図DB5には、記憶容量が十分ある場合などには、事前登録(a2)の際、あるいは実時間測位の際、カメラ4での撮影による実画像データを、RP情報(d1)などと関連付けて登録してもよい。この場合、画像データの記憶の分、地図DB5の容量が必要になるが、記憶した画像データを後の処理で有効活用できる。例えば、事前登録(a2)の際に第2の特徴情報(d2)を抽出して地図DB5へ登録済みではない場合は、実時間(a1)の処理の際、地図DB5内に事前に記憶された実画像データから随時に第2の特徴情報(c2)を抽出する処理を行う形態としてもよい。
【0105】
以上、本発明者によってなされた発明を実施の形態に基づき具体的に説明したが、本発明は前記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることは言うまでもない。
【産業上の利用可能性】
【0106】
本発明は、自動車及び車載情報システム、カーナビ、ナビ連動システム、車両先進安全システム、等に利用可能である。
【符号の説明】
【0107】
1…実時間測位部、2…制御部、3…センサ類、4…カメラ、5…地図DB、6…カーナビ、10…位置検出部、11…第1の特徴抽出部、12…第2の特徴走査部、13…特徴マッチング部、14…位置補正部、100…自動車及び車載情報システム。
【技術分野】
【0001】
本発明は、自動車(移動体)の測位技術に関する。特に、車載情報システム、マイコン、カーナビゲーションシステム等において、車載カメラ(その画像・映像)を用いて自動車(移動体)の現在位置を実時間で測位を行う技術に関する。更に、GPS等の手段による位置情報、車載カメラの実画像(実時間での走行時の撮影画像)、及び地図DB(データベース)などを用いて、現在位置の推定・補正などの処理を行う技術に関する。
【背景技術】
【0002】
本発明に係わる自動車の測位技術に関し、背景技術及びその問題点などは以下である。
【0003】
(従来手法1) 主流の手法としてGPS+自律航法がある。GPS衛星等から自車現在位置情報(誤差有り)を取得し、そのデータに対し、車載のセンサ(ヨーレイトセンサ、ジャイロセンサ、加速度センサ等)や車速計(車速信号)による自律航法によって補正をかけ、カーナビ等のデジタル地図上でマップマッチング(道路などから外れないように自車位置を補正して表示する等)を行う。しかしながらこの手法では、単独の測位精度は15メートル、出力頻度は1Hzであり、そして周囲道路ネットワーク状況によって1〜2秒の出力遅延などの問題点が存在する。
【0004】
(従来手法2) 特開2005−265494号公報(特許文献1)の路面マーク比較方式がある。この方式では、路面マーク及び道路標識などをランドマークとし、各ランドマークの絶対位置(3次元空間位置座標)をデータベース(地図DB)に逐一登録しておく。実時間測位の際には、車載カメラの撮影画像から、車線境界線(白線など)とランドマークを抽出し、地図DBの情報と比較(整合性判定)して、車線位置を確定する(車線領域での自車の位置を推定する)。
【0005】
(従来手法3) 特開平10−300493号(特許文献2)のレーザースキャン方式がある。この方式では、レーダ装置によって検出された静止物のデータと道路周囲環境記憶装置に記憶された静止物のデータに基づいて、ナビゲーション装置で求めた自車現在位置を修正することにより、自車現在位置の誤差を数10m程度から10cm程度〜数10cm程度の誤差にすることができ、精度を向上することができる。
【0006】
(従来手法4) また、高精度RTK(Real Time Kinematic)−GPS方式などがある。この方式では、誤差2〜3cm程度の測位精度が得られるようになった。しかし、従来手法3,4等の方式による測位装置は非常に高価であり、また、例えば高速移動体に関する測位を実時間で実施するには不得意である。
【0007】
(従来手法5) また、本発明者の提案によるハイブリッド法(特開2008−175786号公報(特許文献3))もある。この手法では、既存のカーナビションシステムに加え、3次元慣性ジャイロスコープセンサ、車速センサ、及び白線検出結果を統合して正確な車両位置を実時間に推定する。この手法では、実時間の測位速度を達成しているが、平均測位精度は3〜5メートルにとどまっている。
【0008】
(従来手法6) また、車載カメラを利用した測位の手法として、本発明者の提案による、特開2010−151658号公報(特許文献4)(「移動体位置測定装置」等)がある。この手法では、移動体(自車)に搭載したカメラ(撮像部)の実画像(走行方向の路面や景観)から抽出した特徴部(特徴情報)と、地図DB(地図情報)に含まれる特徴部(特徴情報)とをマッチング処理することにより、移動体の位置を測定(推定)する。なお、本発明と特許文献4では、大きな枠組みは共通するが、技術的特徴は異なる。
【0009】
特許文献4では、具体的には、自車の走行方向の路面の白線(車線境界線)などを撮像・認識し、移動体の白線からのオフセット距離を検出して移動体の位置を補正する(例えば複数の車線から適切な車線を選択する)等の処理により、自車位置の精度を高める。また、所定間隔で設けられた交差点などの参照地点において、複数の位置から走路方向を臨んで撮像した画像を、当該地点に関連付けて記憶しておくことができる(3次元画像の不要による処理短縮化)。また、事前に、3次元画像(実画像データ)ではなくその特徴部データ(特徴情報)のみを記憶しておくことで、抽出処理の省略による高速化、及び必要な記憶容量の削減ができる。また、地図情報をもとに複数の車線がある場合など、自車が存在可能な複数の位置を想定し、各々の存在可能位置(車線)から例えば前方の画像の特徴部の情報と、対応する実時間処理で抽出した実画像の特徴部の情報とを比較して差分を演算する(マッチング処理)。
【0010】
一方、カメラ画像を利用した測位技術に係わり、SFM(Structure from Motion)と呼ばれる手法がある。例えば非特許文献1,2に記載されている。SFM手法では、カメラを搭載したロボット(移動体)において、カメラで撮像した画像情報のみから、3次元環境の復元と同時にロボットの移動の前後の相対的な位置・姿勢などを推定する。
【0011】
また、画像から特徴量(特徴部、特徴情報)を抽出する画像解析処理については、例えば非特許文献3などに記載されている。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特開2005−265494号公報 (路面マーク比較)
【特許文献2】特開平10−300493号公報 (レーザースキャン)
【特許文献3】特開2008−175786号公報 (ハイブリッド)
【特許文献4】特開2010−151658号公報 (カメラ利用)
【非特許文献】
【0013】
【非特許文献1】C. Tomasi and T. Kanade, “Shape and motion from image streams under orthography-A factorization method,” Int. J. Comput. Vision, 9-2, pp. 137-154, Nov. 1992.
【非特許文献2】金出武雄, コンラッド・ポールマン, 森田俊彦, “因子分解法による物体形状とカメラ運動の復元,” 電子情報通信学会論文誌D-II, J74-D-II-8, pp. 1497-1505, Aug. 1993.
【非特許文献3】David G. Lowe, "Distinctive image features from scale-invariant keypoints", International Journal of Computer Vision,60, 2 (2004), pp. 91-110.
【発明の概要】
【発明が解決しようとする課題】
【0014】
従来手法6(特許文献4)のように、車載カメラを利用した実時間の測位の技術において、安価(高価な装置を使用しないこと)、かつ高精度(少なくとも一般的なGPS等の手段よりも高精度)な測位を実現したい。
【0015】
上記実時間の測位の際、カメラによる実画像(路面や景観などを含む)から特徴部を抽出する処理を行うが、周囲状況などの要因によって実画像の内容が変化するため、適切な抽出及び判定などが難しくなる問題点がある。上記要因は、例えば、走行時の時期・天候や、道路混雑状況(走行車両や路側帯の駐停車両、歩行人物など)、建築環境(道路や建物、樹木など)の変動などが挙げられる。上記問題点に対しても有効な測位を実現したい。
【0016】
以上のように、本発明の主な目的は、車載カメラを利用した実時間測位の技術に係わり、安価かつ高精度な測位を実現できる技術を提供することである。
【課題を解決するための手段】
【0017】
上記目的を達成するため、本発明の代表的な形態は、自動車などの移動体及びそれに搭載される情報システム等に係わる移動体位置測定装置などであって、以下に示す構成を有することを特徴とする。
【0018】
本装置は、移動体の位置を測定ないし推定する移動体位置測定装置であって、(a)移動体の走行時に実時間でGPS等の手段を用いて移動体の現在の概略の位置と方位を第1の位置情報として検出する位置検出部と、(b)前記移動体に搭載され移動体の走行時に実時間で移動体の周囲の少なくとも1つの第1の方向(例えば前方)を撮影して第1の画像(実画像群)を得る1つ以上の撮像部(カメラ)と、(c)前記第1の画像として、地図上の参照地点(RP)の付近で撮影された複数の実画像の中から、直線や角点(特徴点)を含む特徴部を抽出して第1の特徴情報とする第1の特徴抽出部と、(d)地図上の所定の参照地点の付近の第2の画像(実画像群)の中から、直線や角点を含む特徴部を抽出して第2の特徴情報とし、当該第2の特徴情報を含むデータが事前に登録された地図データベースと、(e)前記移動体の走行時に、前記第1の位置情報をもとに、前記地図データベースから、前記参照地点の付近の該当する第2の特徴情報を読み出して取得する第2の特徴抽出部と、(f)前記第1の特徴情報と前記第2の特徴情報とを入力してそれぞれの特徴部を比較してマッチングすることにより、前記参照地点の付近の複数の特徴部の位置を推定し、当該複数の特徴部の位置をもとに、SFM手法を用いて、移動に伴う各時点の前記移動体の位置と上記複数の各特徴部の位置との相対的な位置関係を演算することにより、前記移動体の現在の位置を推定して第2の位置情報として出力する、特徴マッチング部と、(g)前記第1の位置情報に対して前記第2の位置情報を用いて補正することにより、前記移動体の現在の位置を第3の位置情報として出力する位置補正部と、を有する。
【発明の効果】
【0019】
本発明の代表的な形態によれば、車載カメラを利用した実時間測位の技術に係わり、安価かつ高精度な測位を実現できる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施の形態のシステム(移動体位置測定装置)である自動車及び車載情報システムの構成例を示す図である。
【図2】ある時・位置における地図上のRP付近の特徴部などの例を模式的に示す図である。
【図3】ある時・位置で撮像した実画像における特徴点などの例を示す図である。
【図4】移動前後の時・位置の実画像の間における自車位置と特徴点位置との相対関係の例を示す図である。
【図5】事前登録処理の詳しい処理例を示す図である。
【図6】実時間測位処理の詳しい処理例を示す図である。
【図7】SFM手法を用いた位置推定等について概略的に示す図である。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態を図面に基づいて詳細に説明する。なお、実施の形態を説明するための全図において、同一部には原則として同一符号を付し、その繰り返しの説明は省略する。略称として、RP:参照地点(Reference Point)、等とする。説明上の記号として、T:時点、K:自車位置(≒カメラ撮像位置)、G:画像・実画像、P:特徴点(及び特徴点位置)、等とする。
【0022】
本実施の形態の主な特徴は、移動体(自動車)の実時間測位の際、SFM手法を利用した特徴マッチング処理などを行うことである。図1の構成に基づき、図5,図6の各処理により、図2〜図4のような特徴点(P)の抽出・推定・マッチング、及び自車位置(K)の推定などを行う。これにより自車現在位置(K)を安価かつ高精度で推定する。
【0023】
[システム]
図1において、本発明の一実施の形態のシステム(移動体位置測定装置)である自動車及び車載情報システム100の構成例を示している。自動車及び車載情報システム100は、実時間測位部1、制御部2、センサ類3、カメラ(撮像部)4、地図DB(データベース)5、等を備える。制御部2は、例えばCPU,ROM,RAM等を含んで成り、回路やプログラムの処理により、システム全体の制御、及び実時間測位部1を含む処理機能を実現する。
【0024】
なお本自動車(100)はユーザが利用するが、後述する計測車両の場合は、実時間測位部1に対応した事前登録処理部などを備え、地図DB5への事前登録(a2)の処理(d2登録処理を含む)を行う。またユーザの自動車(100)に事前登録処理部を搭載する形態(地図DB5内容(d2)を随時更新する形態)も可能である。
【0025】
センサ類3は、GPSユニット31、ジャイロセンサ32、走行センサ33、等の公知の要素である(他の手段を有してもよい)。GPSユニット31により、複数のGPS衛星からの搬送波(例えば1回/1秒)を受信し、到達時間差などから緯度・経度による位置を検出する。ジャイロセンサ32は、自車の角速度変化から、自車の方位角(向き)を検出する。走行センサ33(車速計など)は、自車の走行の距離や速度を検出する。
【0026】
カメラ4は、1台の自動車(100)に対して1つ以上が搭載される。カメラ4の搭載の位置や向き、及び詳細な機能などは各種の形態が可能である。例えば図3のように、自動車(100)の前方の路面や景観を含むフレームを撮像する位置・向きで搭載される。実時間測位の際、カメラ4は、自車の移動に伴い、走行方向(カメラ4の向きに対応)の道路や景観等を撮像し、それによる複数の実画像のフレームを得る。その実画像データは適宜記憶手段に一時記憶してもよい。カメラ4は、例えばリアビューカメラやドライブ・レコーダー用カメラなど、安価な単眼カメラが適用可能である。
【0027】
1台の自動車に対して2つ以上(複数)のカメラ4を搭載する場合は、それら複数のカメラ4で同時に撮像した複数の実画像を特徴抽出処理(画像解析処理)などで用いる。これにより、コストが増える代わりに測位精度を高めることができる。上記複数の実画像については、例えば、同じ撮像位置(カメラ位置)から複数の方向の景観を撮像する形、あるいは、複数の撮像位置(カメラ位置)から同じ対象を撮像する形、などが可能である。
【0028】
地図DB5は、地図情報(d0)、RP情報(d1)、第2の特徴情報(d2)、等のデータを格納する。地図DB5は、図示しない記憶手段(例えばHDD,DVD等)や通信ネットワーク上のサービス(地図DB5内容を自動更新する)等により実現される。地図DB5への事前登録(a2)の処理では、所定のRP付近での実画像から特徴部を抽出し、RP情報(d1)、第2の特徴情報(d2)、等として関連付けて登録する。所定のRPとして少なくとも道路の交差点を含む。
【0029】
地図情報(d0)は、公知の道路情報・景観情報、等を含み、本例ではカーナビ6のデジタル地図で使用されるデータを想定している。また、本発明に係わる要素として、地図情報(d0)には、特に、所定のRPに関する情報(d1)を含み、RP情報(d1)は、当該RPに関連付けられる第2の特徴情報(d2)を含む。
【0030】
RP情報(d1)は、地図上における、実時間測位の際の参照対象とする交差点などのRPやランドマーク等に関する情報であり、当該RP等に関する識別情報や属性情報、3次元空間(地図)内の位置座標(3次元座標{X,Y,Z}または対応する緯度・経度などの所定の形式の情報)などの情報を有する。
【0031】
第2の特徴情報(d2)は、RP情報(d1)で識別されるRPの付近の景観(実画像)内に含まれる標識や建物などのランドマーク等に関して、事前登録(a2)の際の処理で抽出された特徴部(特徴点(P)など)に関する特徴量や位置座標(画像内の2次元座標{x,y}及び対応する3次元座標{X,Y,Z})などの情報を含む。
【0032】
カーナビ6は、実時間測位部1による自車現在位置の情報を利用・出力するカーナビゲーションシステムやディスプレイ等である。カーナビ6は、地図DB5のデータ、及び第3の位置情報(L3)等を用いて、ナビゲーション用の地図等のデータを随時に生成し、画面表示処理などを行う。また前述のように、車両制御のためのマイコンやECUへ車両現在位置と方位角の情報などを転送する形態としてもよい。
【0033】
[実時間測位部、処理概要]
図1を用いて、本実施の形態(自動車及び車載情報システム100)における実時間測位部1の構成、及びその実時間測位などの際の処理概要を以下(0)〜(5)等で説明する。実時間測位部1は、制御部2により、センサ類3、カメラ4、地図DB5、カーナビ6等と連携して、実時間測位に係わる処理を行う。実時間測位部1は、位置検出部10、第1の特徴抽出部11、第2の特徴抽出部12、特徴マッチング部13、位置補正部14、等を備える。その他必要に応じて、画像データ記憶部、マップマッチング部、等の公知の要素を備えてもよい。なおユーザが一般車両で本システムを利用する際の各部の処理については基本的に実時間(リアルタイム)での処理であり、地図DB5のデータ{d0,d1,d2}については、事前登録(a2)による処理(例えば本システム提供者、計測車両による処理)である。
【0034】
(0) 位置検出部10は、随時、実時間でのGPSユニット31等を含むセンサ類3からの検出情報(b0)を入力し、そのデータを用いて自車の概略の現在位置と方位角など(一般的なGPSによる測位誤差を持つ概略の第1の位置)を検出し、この検出情報を第1の位置情報(L1)とする。例えば図2に状況を示す。
【0035】
(1) 第1の特徴抽出部11は、実時間(a1)での入力によるカメラ4で撮像した実画像(カメラ4毎の時間軸上の複数の各々の画像フレーム)のデータ(b1)を入力し、その実画像(例えば図3)の中から、自車周囲環境の道路を含む景観に関する特徴部を抽出する処理を行い、第1の特徴情報(c1)として出力する。特徴部及び第1の特徴情報(c1)は、上記実画像(2次元景観画像)に含まれる角点(特徴点(P))の座標({x,y})、及び、その角点の形状・色・明度変化などの特徴を表す特徴量(例えばSIFT特徴量;例えば非特許文献3を参照)など、所定の画像解析処理などにより抽出できる各種の情報を含む(後述、図3等)。実時間測位は、少なくとも、交差点などのRPの近く(手前など)の位置から開始される。第1の特徴抽出部11は、第1の位置情報(L1)に従って、視野範囲内にあるRPの近くの位置から、上記特徴抽出処理(時間軸上の複数の実画像フレームの処理)を行う。
【0036】
(2) 第2の特徴抽出部12は、上記第1の特徴抽出部11の動作に並行して、自車の移動に伴う第1の位置情報(L1)をもとに、事前登録(a2)による各データ(d1,d2,d3)が登録済みの地図DB5から、自車の第1の位置の付近の地図情報(d0)、RP情報(d1)、及び第2の特徴情報(d2)を逐次に取得する。第2の特徴抽出部12は、地図DB5からデータ(b2)を読み出して入力する形で、該当RP付近の景観(実画像)の中から特徴部を抽出し、第1の特徴情報(c1)に対するマッチングの対象(参照元)とするための第2の特徴情報(c2)として出力する。上記データ(b2)は、該当RP付近の特徴部の情報にあたる第2の特徴情報(d2)を含む。地図DB5内に、対応する第2の特徴情報(d2)が事前登録(a2)済みの場合は、単にそのデータを読み出して取得すればよい。第2の特徴情報(c2)は、第1の特徴情報(c1)と同様の形式であり、特徴点などについての特徴量や位置座標などの情報を含む。
【0037】
上記(1),(2)における実時間(a1)及び事前登録(a2)の際のそれぞれの特徴抽出処理では、地図上のRP(例えば図2の交差点など)付近の道路や景観を対象とした画像の中から、ランドマーク等(路面の白線、標識、建物など)に関する特徴部(特徴点など)を抽出する画像解析処理を行う(後述、図5,図6)。
【0038】
(3) 特徴マッチング部13は、第1の特徴情報(c1)と第2の特徴情報(c2)とを入力し、SFM手法を用いた特徴マッチング処理を行うことにより、逐次で自車現在位置を推定し、この結果(推定の自車現在位置)を、第2の位置情報(L2)として出力する。自車の移動に伴う複数の時点(T)・位置(K)の複数の実画像(G)のフレーム中における複数の各々の特徴部(特徴点(P)など)との相対的な位置関係(相対的な自車の位置・方位)を、SFM手法を用いて演算することにより、自車現在位置(K)を推定する(後述、図4等)。
【0039】
(4) 位置補正部14は、第1の位置情報(L1)と第2の位置情報(L2)とを入力し、L1に対してL2を用いて自車現在位置を補正し、その結果を第3の位置情報(L3)として出力する。L3は、車両現在位置と方位角の情報を含む。
【0040】
なお、位置補正部14を設けずに、第2の位置情報(L2)を最終結果の位置情報として出力する形態としてもよい。少なくともL2はL1よりも高精度な値が得られる。RP付近以外の場所では、位置補正部14による補正を行うことが好適である。
【0041】
またマップマッチング処理などを行う場合は、例えば、第1の位置情報(L1)等をもとに、地図内の道路から自車が外れないように補正する。例えばL1とその付近の地図情報(d0)から、自車の存在可能位置を選択する。また、L1をもとに、道路の車線数や車線幅、路面上のマークや標識・信号といった地図情報(d0)を取得して、自車の存在可能位置などを把握してもよい。
【0042】
(5) 自動車及び車載情報システム100では、上記第3の位置情報(L3)を用いて処理を行う。例えばカーナビ6で、L3等を用いて自車現在位置を表示する。また、車両制御のためのマイコンやECUへ上記L3による車両現在位置と方位角の情報を転送して利用する形態などとしてもよい。
【0043】
[事前登録処理]
地図DB5への事前登録(a2)の際の処理は、例えば、計測車両(カメラ及び事前登録処理部などを備える)で行われる。事前登録処理部は、第1の特徴抽出部11等と同様の処理部を含む構成である。計測車両により実際に対象の道路を走行して、対象のRP付近の景観を撮像する。その実画像データを一旦記憶し、その実画像データから、第1の特徴抽出部11での処理と同様に、特徴部を抽出する処理を行い、この結果を第2の特徴情報(d2)とし、地図DB5内にRP情報(d1)に関連付けて登録する。この処理は、実時間測位の際の第1の特徴抽出部11での処理内容と概略的には共通である。なおこの処理では、実時間測位の際とは異なり、すべてを実時間で処理する必要は無い。例えば予め収集・蓄積した実画像データを対象としてまとめて特徴抽出処理を実行する形態などとしてもよい。
【0044】
[RP、ランドマーク]
図2において、地図、道路、RP、ランドマーク、特徴点(P)、等の例を、2次元平面によって模式的に示す(なお説明用であってカーナビ6で表示する地図とは異なる)。自車200、交差点201、道路202、道路/車線203、白線(車線境界線)204、建物205、路側206、等の例を示す。Kは、自車200の現在位置を示し、3次元座標{X,Y,Z}及び方位角(矢印)などによって表現される。
【0045】
RPは、測位に役立つ景観特徴を持つ測位参考点であり、201のような道路交差点や、分岐・合流部、そしてランドマーク地点などを指している。RPとしては、現実(地図)に存在するうちの主なもの(測位に役立つもの)がRP情報(d1)として事前登録(a2)される。RPは、交差点201に限らず、例えば所定間隔での複数の地点や、ランドマークとなる建物205などを対象としてもよい。またRPの3次元位置情報は、地図DB5を構築する際(a2)に計測車両によって計算されてRP情報(d1)に登録される。なおこのRPの3次元位置情報の計算過程については別に記述される(図5の事前登録処理にて記述されている)。また本実施の形態では登録しないが、事前に撮像されるRP付近の実画像データを関連付けて登録してもよい。
【0046】
図2では、交差点201(RP)付近の道路202・車線203において、自車200が当該RPに進入しようとしている時の自車200の現在位置(K)を示している。ある時点(T)の位置(K)の情報として、事前に地図に登録されたRPの3次元位置座標({X,Y,Z})と方位角、そして当該位置データの誤差範囲(後述の推定精度)、等の情報を有する。なお座標だけでなく方位角も含めて位置情報と略称している。丸印は、実画像よりランドマーク等に関して抽出される特徴部の例として特徴点(P)を示し、例えば、自車200の進行方向の路面の白線204の角点や、進行方向の両側の建物205の角などを示している。破線は、自車200の現在位置(K)(≒カメラ4の撮像位置)と、複数の各々の特徴点(P)との間の距離(相対的な位置関係)を示している。なお特徴点(P)の位置は、図2では地図上の座標({X,Y,Z})で示しているが、対応する実画像内の画素の座標({x,y})の情報などを有する。
【0047】
[実画像、特徴抽出処理]
図3は、ある時点(T)及び位置(K)におけるカメラ4で撮像した実画像(G)の例を模式的に示している。交差点(RP)の手前から前方を撮像した場合である。丸印は特徴点(P)の例である。わかりやすくするため他車の存在などは省略している。301は道路領域(走行車線領域)、302は白線(白線領域)を示す。各特徴点(P)は、実画像内の画素の位置座標情報({x,y})などを有する。
【0048】
地図DB5に第2の特徴情報(d2)を事前登録するための実画像(特徴部を抽出する対象)は、例えば図3のように、RPの手前などから走行方向・RPを臨んで撮像した画像とする。図2の交差点201の場合であれば、当該RPに進入する4方向からの各画像を用いる。
【0049】
特徴点(P)などを抽出するための特徴抽出処理では、基本的には公知の各種の技術(画像解析処理)を適用可能である。画像解析処理では、例えば、実画像を構成する画素の明度・輝度などの差分値を演算することで、路面の白線(204,302)や建物(205)の輪郭などに対応する線分や角点などの形状・色・明度変化などを表す特徴量を抽出することができる。なお、抽出する特徴部としては、適用する処理手法などに応じて、線分や角点などに限らず、所定の図形(円弧など)とすることも可能である。
【0050】
[自車と特徴点との関係、特徴マッチング処理]
図4は、自車の移動による自車位置(K)と特徴点(P)との相対的な位置関係の例を示す。自車の移動に伴う複数の時点(T)・位置(K)の各実画像(G)における複数の特徴点(P)などがあるとき、SFM手法によって、自車現在位置(K)を推定する。例えば、自車の移動の前後の2つの時点(T1,T2)を考える。対応する各位置(K1,K2)及び実画像(G1,G2)を有する。それぞれに対応して、複数の特徴点P(例えばP1〜P4)の位置と自車の位置(K)との相対的な距離がある。401(破線)はT1等に対応した距離、402(実線)はT2等に対応した距離である。
【0051】
特徴部は、実画像(G)の撮像時の位置(K)によって変化する。言い換えると、特徴部の情報は、上記撮像時の位置(K)の情報が含まれている。よって、SFM手法を利用した演算により、自車現在位置(K)を推定することができる。
【0052】
特徴マッチング処理では、例えば、実時間測位の際に抽出された複数の特徴点P(第1の特徴情報(c1))と、対応して地図DB5から読み出された複数の特徴点P(第2の特徴情報(c2))とにおいて、複数の特徴点Pの位置が比較され、一致・類似の度合いが判定される。例えばよく使う手法としては、ユークリッド距離を計算し、距離が一番小さいものを、一致する特徴点とする。
【0053】
[SFM手法を用いた位置推定]
図7は、SFM手法を用いた位置推定(特徴抽出・特徴マッチング処理)等について概略的に示す。本内容は、実時間測位部1及び事前登録処理部における特徴抽出処理や特徴マッチング処理の内容に対応する。
【0054】
特徴点(P)は、2次元画像(例えば図3)より抽出され、その2次元座標({x,y})に基づいて、SFM手法によって特徴点(P)の3次元空間位置({X,Y,Z})(例えば図2)が推定される。事前登録(a2)のプロセスでは、特徴点(P)における形状・色・明度変化などの特徴を表す特徴量(例えばSIFT特徴量)と、推定されたP位置、及びその推定精度(誤差の共分散行列)などの情報が、地図DB5(d2)へ登録される(後述、図5)。一方、実時間測位のプロセスでは、実時間(a1)の処理で抽出した各特徴点(P)の特徴量(c1)と、地図DB5(d2)に登録されている各特徴点(P)の特徴量(c2)とのマッチングが行われる。この対応付けができた場合は、この結果(各P配置)を用いて、SFM手法によって自車現在位置(K)を推定し(例えば図4)、その推定精度(誤差の共分散行列)も同時に計算できる。
【0055】
[詳細]
以上に基づき、以下、本実施の形態における詳細な処理例などについて説明する。本システム(実時間測位部1)では、SFM手法を活かして、車載カメラ4から撮像した複数枚の実画像(G)の特徴部(c1,c2)のマッチングにより、高精度な3次元相対位置(K)を推定の計算により決定する。
【0056】
本手法の一環である特徴量(第2の特徴情報(c2))の事前登録(a2)の処理として、交差点(201)等のRPの付近で事前に撮像された複数枚の実画像(G)から、特徴点Pなどの特徴部(特徴量及び3次元位置座標など)を抽出し、自車位置(K)を推定する。RP付近の特徴量を最適化処理し、自車位置(K)の測定誤差(推定精度)を所定範囲内に抑えられるまでは逐次に最適な特徴量(特徴部)を選択する。自車位置(K)の測定誤差(推定精度)を最小とするように最適な特徴量(特徴部)を選択すると同時に、特徴量の3次元空間位置と推定精度を求めることができる。最終的に選択された特徴部の情報を、第2の特徴情報(c2)として地図DB5に登録する。
【0057】
一方、実時間測位部1では、カメラ4の実画像(b1)から抽出した特徴部の特徴量などの情報(第1の特徴情報(c1))と、対応する地図DB5から読み出した情報(第2の特徴情報(c2))とで特徴マッチング処理を行い、SFM手法によって自車現在位置(K)とRP付近の特徴部(複数の特徴点P)との相対的な位置と方位を計測することにより、自車現在位置(K)の高精度な測位が実現される。実時間測位部1では、自車の移動に伴い、少なくとも交差点などのRPの近くの位置から上記特徴マッチング処理などを実行し、各時点(T)の実画像(G)の処理を経ながら、逐次に自車現在位置(K)の測位誤差を最小化し、所定の許容精度(範囲)内に達した時点で当該測位結果を出力する。
【0058】
本システムでは、SFM手法を用いた処理の際、公知の拡張カルマンフィルタの原理に基づいて、特徴量の最適化(連続で撮影された複数の実画像の中から最適な特徴部を選択するプロセス)と同時に3次元の測位(3次元位置座標の計算)を行う。本処理に関して、事前登録処理(図5)と実時間測位処理(図6)とで分けられる。違いとしては例えば図5では各特徴点位置を推定するが図6では登録済みゆえ推定しない。
【0059】
[事前登録処理(詳細)]
事前登録(a2)の際の処理では、所定のRP付近の実画像内の特徴部の情報(d2)を含む地図DB5を作成するために、計測車両(事前登録処理部)では、例えば所定のRPの手前の位置から計測を開始する。計測車両の例えば前方に搭載された1台以上のカメラからRP・走行方向を撮像し、それら時間軸上の複数の実画像に対する特徴抽出処理(画像解析処理)を行う。
【0060】
図5を用いて、事前登録処理部での詳しい構成・処理例として、SFM手法を用いた処理などについて説明する。500は、入力である実画像などのデータ情報である。
【0061】
(1)まず、道路領域検出処理501では、入力画像(500)の中から、道路領域(及び非道路領域)などを検出する。道路領域(走行車線領域など)は、例えば図2の203、図3の301のような領域であり、図2の204、図3の302のような白線などで区画される領域などである。
【0062】
道路領域検出処理501では、実画像(道路や景観を含む)の中から、角点及び直線分などの特徴部を抽出することにより、上記道路領域を検出する。上記抽出する特徴部は、路面の白線などや景観内の建物などにおける特徴点(P)などである(図3)。
【0063】
また、自車の走行道路に係わり複数の車線がある場合(例えば図3の301)は、白線の検出などにより、各車線領域を検出してもよい。その場合、実画像データにおける画素の差分値の演算で、Hough変換などを用いて、白線領域(302)などのエッジ(線分や角点)を検出する。
【0064】
また、上記道路領域に対して、路側(路側帯領域)(例えば図2の206)、及び路側における特徴点(P)なども検出される。なおここでいう路側は道路外領域にあたる。
【0065】
また、上記で検出される特徴部は、図2,図3のような測位に有効な特徴点(P)ばかりではなく、状況に応じて、測位に不要(悪影響)な特徴点なども含まれる。例えば、道路領域や路側における、走行車両(他車)、駐停車両、歩行人物、樹木、看板など(「不要物」とする)に対応した特徴点などである。
【0066】
(2)不要物除去処理502では、上記(1)の結果に対して、以下の処理(503〜)で不要(悪影響)なものとして、上記不要物の特徴点などを除去する所定の処理を行う。例えば、上記路側などの領域内のエッジ分布密度の計算をもとに、不要物の特徴点を取り除く。
【0067】
上記(1),(2)を経て、各時点(T)・位置(K)の実画像(G)に関係付けられた複数の各々の特徴点(P)などの特徴部(図2〜図4)に関する特徴量及び位置座標情報などを特徴情報として得る。
【0068】
(3)計測処理503(SFM処理)では、上記(2)の結果を対象(入力)として、拡張カルマンフィルタ(予測式、及び初期値)を用いて、それぞれの特徴点(P)の3次元空間位置({X,Y,Z})、及び自車現在位置(K)を推定しながら、それぞれの推定精度(誤差の共分散行列)を計算する。図5のように、(a)自車現在位置(K)、及び(b)各々の特徴点(P)の位置、及び(c)それら各々の推定精度(誤差の共分散行列)、等を推定する計算処理を行う。aの自車位置については動き(変動量)を用いる。詳しい計算式については後述する。
【0069】
(4)初期値設定504: 上記(3)の初期値については、本システムで予め設定された値が入力される。初期値は、初期特徴点位置、初期自車位置(動き)、等である。初期値の設定の仕方としては、例えば、経験値によるか、あるいは、地図DB5の地図情報(d0)から大まかな位置を設定する、等である。また、例えば2台のカメラ4を使用する場合では、ステレオ計算による奥行き情報から求めて設定することができる。
【0070】
(5)逐次変動入力505: 上記(3)の予測式に対しては、次の時点(T)の実画像(G)のフレームを取り込むまでに、センサ類3による自車速度・方向変化などの逐次変動情報が入力される。
【0071】
(6)判定処理506では、上記(3)の推定の結果(a〜c)をもとに、当該時点(T)・位置(K)・実画像(G)における上記cの推定精度(誤差の共分散行列)の値が、例えば所定の範囲内(閾値以下)になったかどうかを判定する。c値が範囲外である場合は、最初に戻り、続けて次の時点(T)の実画像(G)のフレームを入力して、上記同様の計算処理等(501〜503)を繰り返す。c値が範囲内になった場合は、その時点で、当該推定値(a〜c)を最適なものとして選択して計測処理を終了する。
【0072】
上記(6)の処理では、自車位置(K)の推定精度(c)が所定範囲内に抑えられるまでは、次の実画像(G)のフレームを入力して新しい特徴量を導入しながら、前後のフレーム間で追跡できなかった特徴量を削除する。自車位置(K)の推定精度(c)から新しい特徴量を選択して取り入れることができる。例えば、自車進行方向(例えば図2のY方向)の位置(K)の精度(c)が低い場合では、遠い所にある新しい特徴点を選択することとができ、自車進行方向に対する横方向(例えば図2のX方向)の位置(K)の精度(c)が低い場合では、近い所にある新しい特徴点を選択することができる。
【0073】
(7)出力処理507では、上記(6)の選択の結果(a〜c)の情報(最適な特徴部のリストを含む)を、当該RP位置に関する、自車位置(K)の推定値(対応する地図上の位置)及び特徴情報(c2)として出力する。そして、事前登録(a2)の際は、上記出力情報を地図DB5に登録する。
【0074】
[実時間測位処理(詳細)]
実時間測位の際の処理では、一般車両(100)のカメラ4からRP・走行方向を撮像し、第1の位置情報(L1)に基づいて地図DB5(RP情報(d1))からカメラ4の視野範囲内のRPを検索し、当該RPの手前の位置から実時間測位処理を開始する。
【0075】
図6を用いて、実時間測位部1での詳しい構成・処理例として、SFM手法を用いた処理などについて説明する。なお図6の処理は、図1では主に第1の特徴抽出部11と特徴マッチング部13の処理に対応する。600は、入力である実画像のデータ(b1)などである。以下、図5と重複する処理内容については簡略に説明する。
【0076】
(1)まず、道路領域検出処理601では、入力画像(600)の中から、角点及び直線分などの特徴部を抽出することにより、道路領域(及び非道路領域)などを検出する(601と同様)。上記検出する特徴部は、前述同様に、路面の白線や景観内の建物等における特徴点(P)などである。また前述同様に、走行道路に複数の車線がある場合は、白線の検出などにより、各車線領域を検出してもよい。また前述同様に、上記道路領域に対して、路側、及び路側における特徴点(P)なども検出される。上記で検出される特徴部は、測位に不要な特徴点(P)なども含まれる。
【0077】
(2)不要物除去処理602では、上記(1)の結果に対して、以下の処理(603〜)で不要なものとして、上記不要物の特徴点(P)などを除去する所定の処理(502と同様)を行う。
【0078】
上記(1),(2)を経て、各時点(T)・位置(K)における実画像(G)に関係付けられた複数の各々の特徴点(P)などの特徴部(図2〜図4)に関する特徴量及び位置座標情報などを特徴情報として得る。
【0079】
(3)計測処理603(SFM処理)では、上記(2)の結果を対象(入力)として、拡張カルマンフィルタ(予測式、及び初期値)を用いて、それぞれの特徴点(P)の3次元空間位置、及び自車現在位置(K)を推定しながら、それぞれの推定精度(誤差の共分散行列)を計算する。図6のように、(a)自車現在位置(K)、及び(c)現在位置の推定精度(誤差の共分散行列)、等を推定する計算処理を行う。詳しい計算式については後述する。
【0080】
(4)初期値設定604: 上記(3)の初期値については、第1の位置情報(L1)と地図DB5の地図情報(d0)に関連付けて登録された第2の特徴情報(c2)から各特徴点(P)の目標位置を推定し、上記(3)の初期値を設定する。
【0081】
(5)逐次変動入力605: 上記(3)の予測式に対しては、次の時点(T)の実画像(G)のフレームを取り込むまでに、センサ類3による自車速度・方向変化などの逐次変動情報が入力される。
【0082】
(6)判定処理606では、上記(3)の結果(a,c)をもとに、当該時点(T)・位置(K)・実画像(G)における上記cの推定精度(誤差の共分散行列)の値が、所定の範囲内(閾値以下)になったかどうかを判定する。上記c値が範囲外である場合は、最初に戻り、続けて次の実画像(G)のフレームを入力して、上記同様の計算処理等(601〜603)を繰り返す。上記c値が範囲内になった場合は、その時点で、当該推定値(a,c)を選択して終了する。
【0083】
(7)出力処理607では、上記(6)の選択の結果(a,c)の情報を、自車現在位置(K)の推定値(L2に対応)として出力する。
【0084】
[計算式]
前記(3)の計測処理(SFM処理)における計算式などは以下である。
【0085】
拡張カルマンフィルタの予測式は、下記の式(1)である。
【0086】
【数1】
【0087】
ここでは、上記状態ベクトルX,計測誤差の共分散行列(予測誤差)Qは下記の式(2)で定義される。
【0088】
【数2】
【0089】
Xは、計測対象である車両(カメラ)の相対位置・姿勢を表す車両状態ベクトルVと景観画像の特徴点の2次元座標ベクトルPとの接合ベクトルであり、VとPはそれぞれ6個(回転分量Rと並進分量T)と2N個(N:特徴点数)の要素で構成される。
【0090】
カルマンフィルタの逐次ループでは、下記の式(3)である。
【0091】
【数3】
【0092】
ここでは、上記Gvは車両状態(位置と向き)のジャコビアン行列、Gpは特徴点のジャコビアン行列であり、上記Gv,Gpは下記の式(4),(5)である。
【0093】
【数4】
【0094】
【数5】
【0095】
カルマンフィルタの更新処理では、下記の式(6)である。
【0096】
【数6】
【0097】
ここでは、上記のu,vは、下記の式(7)である。
【0098】
【数7】
【0099】
prediction point:予測した特徴点の画像投影位置、matched point:マッチングした特徴点の2次元画像検出位置、Mc:カメラ内部行列、Rα,β,γ:カメラ回転行列、P:特徴点の3次元絶対位置、V:車両の現在位置を示す。
【0100】
[効果等]
以上説明したように、本実施の形態によれば、自動車及び車載情報システム100において、車載カメラ4を利用した仕組みにより自車現在位置(K)の測位を安価に実現でき、かつ、GPS等の手段よりも高精度な推定(計算)を実現できる。従来の一般的な測位精度(10〜15メートル)に比べて、安価なカメラ4(リアビューカメラ等)及び既存の安価なナビゲーション用のハードウェア・ソフトウェア等でも、実時間(出力更新:10〜60Hz)でのサブメートル測位精度(平均測位誤差:1メートル以下)を達成でき、先進的なナビ連動システムを実現して一般車両への普及が可能となる。
【0101】
特に、実時間測位部1の高精度な測位の結果(L3)を利用して、例えばカーナビ6で、運転で必要とされている要素として、どの交差点で曲がるべきか、どの車線に進むべきか、等を効果的にナビゲートすることができる。また、車両へのシフト制御やエンジン噴射制御、さらにACCにおける車間距離制御などの車両協調システムなどに応用できる。
【0102】
本発明では、従来手法2(路面マーク比較)等と同様に、2次元の実画像(G)を利用するが、個々のマーク等(特徴点(P)等)の高精度な絶対位置の情報を地図DB5等へ事前登録する必要は無い(SFM手法による推定の位置情報を登録する)。また本発明では、路側に存在する物(建物、看板、標識など)も、RP景観特徴を多く取り入れるため、前述の不要物除去処理により、先行車両などの遮蔽物による影響(測位精度への悪影響)を最小に抑制できる。
【0103】
本発明では、従来手法3(レーザースキャン)のように高価な手段・装置を必要とせずに高精度を実現できる。また実画像内の特徴は2次元情報であり、レーザーによる1次元情報よりも精度が高い、及び曖昧さが低い。また、カメラ4の視野が大きいため、先行車両や他の障害物による影響を受け難い。
【0104】
[変形例]
上記実施の形態では、データ量の削減、そして後の特徴マッチング処理のプロセスを高速化するために、地図DB5内には、特徴情報(各特徴部の特徴量など)のみを登録するが、対応する実画像データについては登録していない。変形例として、地図DB5には、記憶容量が十分ある場合などには、事前登録(a2)の際、あるいは実時間測位の際、カメラ4での撮影による実画像データを、RP情報(d1)などと関連付けて登録してもよい。この場合、画像データの記憶の分、地図DB5の容量が必要になるが、記憶した画像データを後の処理で有効活用できる。例えば、事前登録(a2)の際に第2の特徴情報(d2)を抽出して地図DB5へ登録済みではない場合は、実時間(a1)の処理の際、地図DB5内に事前に記憶された実画像データから随時に第2の特徴情報(c2)を抽出する処理を行う形態としてもよい。
【0105】
以上、本発明者によってなされた発明を実施の形態に基づき具体的に説明したが、本発明は前記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることは言うまでもない。
【産業上の利用可能性】
【0106】
本発明は、自動車及び車載情報システム、カーナビ、ナビ連動システム、車両先進安全システム、等に利用可能である。
【符号の説明】
【0107】
1…実時間測位部、2…制御部、3…センサ類、4…カメラ、5…地図DB、6…カーナビ、10…位置検出部、11…第1の特徴抽出部、12…第2の特徴走査部、13…特徴マッチング部、14…位置補正部、100…自動車及び車載情報システム。
【特許請求の範囲】
【請求項1】
移動体の位置を測定ないし推定する移動体位置測定装置であって、
実時間で移動体の位置を測定ないし推定する実時間測位部を有し、
前記実時間測位部は、
前記移動体に搭載され移動体の走行時に実時間で移動体の周囲の少なくとも1つの第1の方向を撮影して第1の画像を得る1つ以上の撮像部から前記第1の画像を入力し、
前記第1の画像として、地図上の参照地点の付近で撮影された複数の実画像の中から、直線や角点を含む特徴部を抽出して第1の特徴情報とする第1の特徴抽出部と、
地図上の所定の参照地点の付近の第2の画像の中から、直線や角点を含む特徴部を抽出して第2の特徴情報とし、当該第2の特徴情報を含むデータが事前に登録された地図データベースから、前記移動体の走行時に、前記参照地点の付近の該当する第2の特徴情報を読み出して取得する第2の特徴抽出部と、
前記第1の特徴情報と前記第2の特徴情報とを入力してそれぞれの特徴部を比較してマッチングすることにより、前記参照地点の付近の複数の特徴部の位置を推定し、当該複数の特徴部の位置をもとに、SFM手法を用いて、移動に伴う各時点の前記移動体の位置と上記複数の各特徴部の位置との相対的な位置関係を演算することにより、前記移動体の現在の位置を推定して第2の位置情報として出力する、特徴マッチング部と、を有すること、を特徴とする移動体位置測定装置。
【請求項2】
移動体の位置を測定ないし推定する移動体位置測定装置であって、
移動体の走行時に実時間で移動体の現在の概略の位置と方位を第1の位置情報として検出する位置検出部と、
前記移動体に搭載され移動体の走行時に実時間で移動体の周囲の少なくとも1つの第1の方向を撮影して第1の画像を得る1つ以上の撮像部と、
前記第1の画像として、地図上の参照地点の付近で撮影された複数の実画像の中から、直線や角点を含む特徴部を抽出して第1の特徴情報とする第1の特徴抽出部と、
地図上の所定の参照地点の付近の第2の画像の中から、直線や角点を含む特徴部を抽出して第2の特徴情報とし、当該第2の特徴情報を含むデータが事前に登録された地図データベースと、
前記移動体の走行時に、前記第1の位置情報をもとに、前記地図データベースから、前記参照地点の付近の該当する第2の特徴情報を読み出して取得する第2の特徴抽出部と、
前記第1の特徴情報と前記第2の特徴情報とを入力してそれぞれの特徴部を比較してマッチングすることにより、前記参照地点の付近の複数の特徴部の位置を推定し、当該複数の特徴部の位置をもとに、SFM手法を用いて、移動に伴う各時点の前記移動体の位置と上記複数の各特徴部の位置との相対的な位置関係を演算することにより、前記移動体の現在の位置を推定して第2の位置情報として出力する、特徴マッチング部と、
前記第1の位置情報に対して前記第2の位置情報を用いて補正することにより、前記移動体の現在の位置を第3の位置情報として出力する位置補正部と、を有すること、を特徴とする移動体位置測定装置。
【請求項3】
請求項1または2に記載の移動体位置測定装置において、
前記第1の特徴抽出部、第2の特徴抽出部、及び前記特徴マッチング部において、
画像解析処理により、実画像のフレームの中から道路領域及び非道路領域を検出する処理と、
路側帯領域を含む領域における不要物の影響を除去する処理と、
SFM手法による拡張カルマンフィルタを用いた計測処理により前記移動体の位置及び前記特徴部の位置を推定する処理と、
前記計測処理の結果をもとに、最適な位置を選択するための所定の閾値を用いた判定処理と、
前記判定の結果を出力する処理と、を含むこと、を特徴とする移動体位置測定装置。
【請求項4】
請求項3記載の移動体位置測定装置において、
前記SFM手法による計測処理では、前記移動体の位置、前記複数の特徴部の位置、及びその推定精度を計算し、
前記判定処理では、上記推定精度が所定の範囲内に達するまでは、次の時点の実画像を入力して、前記計測処理を繰り返し、所定の範囲内に達した時点で、当該推定結果を最適なものとして選択して終了すること、を特徴とする移動体位置測定装置。
【請求項5】
請求項2記載の移動体位置測定装置において、
前記第1の位置検出部は、GPSユニットを用いて、前記移動体の現在の概略の位置と方位を第1の位置情報として検出すること、を特徴とする移動体位置測定装置。
【請求項1】
移動体の位置を測定ないし推定する移動体位置測定装置であって、
実時間で移動体の位置を測定ないし推定する実時間測位部を有し、
前記実時間測位部は、
前記移動体に搭載され移動体の走行時に実時間で移動体の周囲の少なくとも1つの第1の方向を撮影して第1の画像を得る1つ以上の撮像部から前記第1の画像を入力し、
前記第1の画像として、地図上の参照地点の付近で撮影された複数の実画像の中から、直線や角点を含む特徴部を抽出して第1の特徴情報とする第1の特徴抽出部と、
地図上の所定の参照地点の付近の第2の画像の中から、直線や角点を含む特徴部を抽出して第2の特徴情報とし、当該第2の特徴情報を含むデータが事前に登録された地図データベースから、前記移動体の走行時に、前記参照地点の付近の該当する第2の特徴情報を読み出して取得する第2の特徴抽出部と、
前記第1の特徴情報と前記第2の特徴情報とを入力してそれぞれの特徴部を比較してマッチングすることにより、前記参照地点の付近の複数の特徴部の位置を推定し、当該複数の特徴部の位置をもとに、SFM手法を用いて、移動に伴う各時点の前記移動体の位置と上記複数の各特徴部の位置との相対的な位置関係を演算することにより、前記移動体の現在の位置を推定して第2の位置情報として出力する、特徴マッチング部と、を有すること、を特徴とする移動体位置測定装置。
【請求項2】
移動体の位置を測定ないし推定する移動体位置測定装置であって、
移動体の走行時に実時間で移動体の現在の概略の位置と方位を第1の位置情報として検出する位置検出部と、
前記移動体に搭載され移動体の走行時に実時間で移動体の周囲の少なくとも1つの第1の方向を撮影して第1の画像を得る1つ以上の撮像部と、
前記第1の画像として、地図上の参照地点の付近で撮影された複数の実画像の中から、直線や角点を含む特徴部を抽出して第1の特徴情報とする第1の特徴抽出部と、
地図上の所定の参照地点の付近の第2の画像の中から、直線や角点を含む特徴部を抽出して第2の特徴情報とし、当該第2の特徴情報を含むデータが事前に登録された地図データベースと、
前記移動体の走行時に、前記第1の位置情報をもとに、前記地図データベースから、前記参照地点の付近の該当する第2の特徴情報を読み出して取得する第2の特徴抽出部と、
前記第1の特徴情報と前記第2の特徴情報とを入力してそれぞれの特徴部を比較してマッチングすることにより、前記参照地点の付近の複数の特徴部の位置を推定し、当該複数の特徴部の位置をもとに、SFM手法を用いて、移動に伴う各時点の前記移動体の位置と上記複数の各特徴部の位置との相対的な位置関係を演算することにより、前記移動体の現在の位置を推定して第2の位置情報として出力する、特徴マッチング部と、
前記第1の位置情報に対して前記第2の位置情報を用いて補正することにより、前記移動体の現在の位置を第3の位置情報として出力する位置補正部と、を有すること、を特徴とする移動体位置測定装置。
【請求項3】
請求項1または2に記載の移動体位置測定装置において、
前記第1の特徴抽出部、第2の特徴抽出部、及び前記特徴マッチング部において、
画像解析処理により、実画像のフレームの中から道路領域及び非道路領域を検出する処理と、
路側帯領域を含む領域における不要物の影響を除去する処理と、
SFM手法による拡張カルマンフィルタを用いた計測処理により前記移動体の位置及び前記特徴部の位置を推定する処理と、
前記計測処理の結果をもとに、最適な位置を選択するための所定の閾値を用いた判定処理と、
前記判定の結果を出力する処理と、を含むこと、を特徴とする移動体位置測定装置。
【請求項4】
請求項3記載の移動体位置測定装置において、
前記SFM手法による計測処理では、前記移動体の位置、前記複数の特徴部の位置、及びその推定精度を計算し、
前記判定処理では、上記推定精度が所定の範囲内に達するまでは、次の時点の実画像を入力して、前記計測処理を繰り返し、所定の範囲内に達した時点で、当該推定結果を最適なものとして選択して終了すること、を特徴とする移動体位置測定装置。
【請求項5】
請求項2記載の移動体位置測定装置において、
前記第1の位置検出部は、GPSユニットを用いて、前記移動体の現在の概略の位置と方位を第1の位置情報として検出すること、を特徴とする移動体位置測定装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−127896(P2012−127896A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−281381(P2010−281381)
【出願日】平成22年12月17日(2010.12.17)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度 独立行政法人科学技術振興機構 研究成果最適支援事業「フィージビリティスタディ 可能性発掘タイプ(シーズ顕在化)」における研究開発課題「次世代カーナビ用サブメートル実時間高精度測位技術開発」、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(504159235)国立大学法人 熊本大学 (314)
【出願人】(302062931)ルネサスエレクトロニクス株式会社 (8,021)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月17日(2010.12.17)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度 独立行政法人科学技術振興機構 研究成果最適支援事業「フィージビリティスタディ 可能性発掘タイプ(シーズ顕在化)」における研究開発課題「次世代カーナビ用サブメートル実時間高精度測位技術開発」、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(504159235)国立大学法人 熊本大学 (314)
【出願人】(302062931)ルネサスエレクトロニクス株式会社 (8,021)
【Fターム(参考)】
[ Back to top ]