
移動体回転半径測定装置及び方法
【課題】移動体の回転半径を、精度が高く、かつ、労力や時間がかからずに測定する移動体回転半径測定装置及び方法を提供すること。
【解決手段】移動体回転半径計測装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した南北方向の速度を積算して南北方向の移動距離を算出し、算出した東西方向の速度を積算して東西方向の移動距離を算出し、算出した移動距離に基づいて算出される移動軌跡から、回転半径を算出する。
【解決手段】移動体回転半径計測装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した南北方向の速度を積算して南北方向の移動距離を算出し、算出した東西方向の速度を積算して東西方向の移動距離を算出し、算出した移動距離に基づいて算出される移動軌跡から、回転半径を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体回転半径測定装置及び方法に関する。
【背景技術】
【0002】
従来より、自動車の性能の改良や評価目的で自動車の性能評価試験が多々実施されている。このような自動車の性能評価試験を効率よく行う技術を開示する特許文献1が知られている。この技術は、車両の車速計及びブレーキの検査のついでに、後輪のトー角及びキャンバー角測定と、自動車差動ギヤ周辺部の異常検出までも短時間で容易かつ安価に実行するように構成されている。
【0003】
自動車の性能評価試験には、上述の試験以外に、自動車の最小回転半径を測定する試験がある。この測定は、自動車を最大かじ取りで徐行させ、最も外側となるタイヤの中心点が通る軌跡の直径を、右回り及び左回りで測定するように規定されている。従来では、この測定は、タイヤにチョーク等で印をつける方法や、タイヤの脇に水の入ったボトルを取り付け、徐行しながら水をまく方式で行われていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−340743号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の方式では、自動車が実際に描いた軌跡を測定するので測定の精度が低く、また、チョーク等で印をつけた後に運転者と測定者との2人以上がメジャーで測定するので労力や時間がかかるという問題があった。
【0006】
そこで、移動体(例えば、自動車)の回転半径を、精度が高く、かつ、労力や時間がかからずに測定する装置及び方法が求められている。
【0007】
本発明は、移動体の回転半径を、精度が高く、かつ、労力や時間がかからずに測定する移動体回転半径測定装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明では、以下のような解決手段を提供する。
(1) 移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機と、前記移動体に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMUとを備え、前記移動体が移動したときの回転半径を計測する移動体回転半径計測装置であって、前記GPS受信機が受信したGPS搬送波と、前記IMUが出力したデータとをカルマンフィルタにより処理することで速度を算出する移動体高精度速度算出手段と、前記移動体高精度速度算出手段により算出された南北方向の速度を積算し、南北方向の移動距離を算出する南北方向距離算出手段と、前記移動体高精度速度算出手段により算出された東西方向の速度を積算し、東西方向の移動距離を算出する東西方向距離算出手段と、前記南北方向距離算出手段及び前記東西方向距離算出手段によって算出された移動距離に基づいて算出される移動軌跡から、回転半径を算出する回転半径算出手段と、を備える移動体回転半径計測装置。
【0009】
(1)の構成のよれば、本発明に係る移動体回転半径計測装置は、GPS受信機が受信したGPS搬送波と、IMUが出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した南北方向の速度を積算して南北方向の移動距離を算出し、算出された東西方向の速度を積算して東西方向の移動距離を算出し、算出した移動距離に基づいて算出される移動軌跡から、回転半径を算出する。
【0010】
したがって、本発明に係る移動体回転半径計測装置は、移動体(例えば、自動車)の回転半径を、精度が高く、かつ、労力や時間がかからずに測定することができる。
【0011】
(2) 前記GPS受信機及び前記IMUは、前記移動体である自動車のタイヤの中心点の鉛直上方に設置される、(1)に記載の移動体回転半径計測装置。
【0012】
したがって、(2)に係る移動体回転半径計測装置は、移動体(例えば、自動車)の回転半径を、精度が高く、測定することができる。
【0013】
(3) 前記移動体高精度速度算出手段は、前記IMUからデータを受信して、前記移動体の加速度及び角速度を計測する加速度計測手段と、前記加速度計測手段によって計測された前記移動体の加速度及び角速度からストラップダウン演算により速度を算出し、算出した速度に基づいてリアルタイム補間速度を算出するストラップダウンナビゲータ手段と、前記GPS受信機が受信したGPS搬送波のドップラーシフト量から前記移動体のドップラー速度を測定する速度測定手段と、前記速度測定手段によって測定された前記ドップラー速度から算出した加速度と、前記加速度計測手段によって計測された加速度との差分を算出し、算出した差分に基づいて係数を算出する良否係数算出手段と、前記良否係数算出手段によって前記係数が算出されるための時間だけ、前記速度測定手段によって測定された前記ドップラー速度を演算に用いる時間を遅延させる遅延処理手段と、前記遅延処理手段によって遅延させた前記ドップラー速度と、前記ストラップダウンナビゲータ手段からフィードバックさせた前記リアルタイム補間速度との同期化を行い、同期化された前記ドップラー速度と前記リアルタイム補間速度との誤差量を算出する同期化処理手段と、前記同期化処理手段によって算出された前記誤差量に、前記良否係数算出手段によって算出された前記係数を乗算する良否係数乗算手段と、前記良否係数乗算手段によって前記係数が乗算された誤差量から前記リアルタイム補間速度に対する調整量を、カルマンフィルタによって推定演算するカルマンフィルタ手段と、を備え、前記ストラップダウンナビゲータ手段は、前記ストラップダウン演算により算出された速度に、前記カルマンフィルタ手段によって推定演算された前記調整量を融合して前記リアルタイム補間速度を算出する、(1)又は(2)に記載の移動体回転半径計測装置。
【0014】
したがって、(3)に係る移動体回転半径計測装置は、移動体(例えば、自動車)の回転半径を、さらに精度が高く、測定することができる。
【0015】
(4) 移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機と、前記移動体に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMUとを備え、前記移動体が移動したときの回転半径を計測する移動体回転半径計測装置が実行する方法であって、前記GPS受信機が受信したGPS搬送波と、前記IMUが出力したデータとをカルマンフィルタにより処理することで速度を算出する移動体高精度速度算出ステップと、前記移動体高精度速度算出ステップにより算出された南北方向の速度を積算し、南北方向の移動距離を算出する南北方向距離算出ステップと、前記移動体高精度速度算出ステップにより算出された東西方向の速度を積算し、東西方向の移動距離を算出する東西方向距離算出ステップと、前記南北方向距離算出ステップ及び前記東西方向距離算出ステップによって算出された移動距離に基づいて算出される移動軌跡から、回転半径を算出する回転半径算出ステップと、を備える方法。
【0016】
したがって、(4)に係る方法は、(1)と同様に、移動体(例えば、自動車)の回転半径を、精度が高く、かつ、労力や時間がかからずに測定することができる。
【発明の効果】
【0017】
本発明によれば、移動体(例えば、自動車)の回転半径を、精度が高く、かつ、労力や時間がかからずに測定することができる。すなわち、本発明によれば、運転者1人で車両を1周させるだけで、回転半径の高精度な測定が可能である。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態に係る移動体回転半径計測装置の設置状態を示す図である。
【図2】本発明の一実施形態である移動体回転半径計測装置の構成を示すブロック図である。
【図3】本発明の一実施形態である移動体回転半径計測装置の移動体高精度速度算出部の構成を示すブロック図である。
【図4】本発明の一実施形態に係る移動体回転半径計測装置のハードウェア構成の一例を示す図である。
【図5】本発明の一実施形態に係る移動体回転半径計測装置の処理内容を示すフローチャートである。
【図6】本発明の一実施形態に係る移動体回転半径計測装置の移動体高精度速度算出処理の処理内容を示すフローチャートである。
【図7】本発明の一実施形態に係る移動体回転半径計測装置が回転半径を算出していることを示す図である。
【発明を実施するための形態】
【0019】
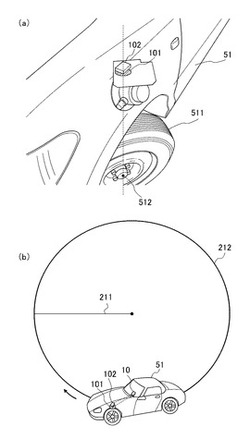
以下、本発明の実施形態について図を参照しながら説明する。図1は、本発明の一実施形態に係る移動体回転半径計測装置10の設置状態を示す図である。図1(a)は、移動体51(例えば、自動車等)が円を描くように走行する場合に外側となるタイヤ511の中心点512の鉛直上に、GPS受信機101とIMU102とが設置されていることを示す図である。図1(b)の図は、移動体回転半径計測装置10が、移動体51に設置されたGPS受信機101とIMU102とに接続されていることを示す図である。GPS受信機101は、GPS衛星からGPS搬送波を受信する。IMU102は、3次元の角速度と加速度とを求めるためのデータを出力する。移動体51は、図1(b)が示す様に、回転半径211の移動軌跡212を描いて一周し、最大かじ取りの場合に、最小回転半径で一周する。
【0020】
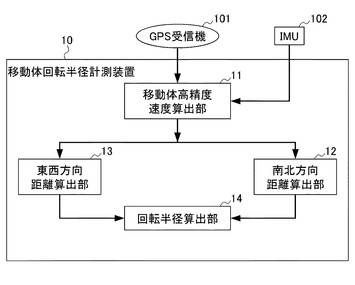
図2は、本発明の一実施形態である移動体回転半径計測装置10の構成を示すブロック図である。移動体回転半径計測装置10は、移動体高精度速度算出手段としての移動体高精度速度算出部11と、南北方向距離算出手段としての南北方向距離算出部12と、東西方向距離算出手段としての東西方向距離算出部13と、回転半径算出手段としての回転半径算出部14とを備えている。
【0021】
移動体高精度速度算出部11は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出する。移動体高精度速度算出部11は、GPS受信機101及びIMU102のデータを処理して得られるドップラー速度、3軸加速度、3軸角速度を用いて、NED(North−East−Down)座標系における高精度な移動体速度を算出する。
【0022】
南北方向距離算出部12は、移動体高精度速度算出部11により算出された南北方向の速度を積算し、南北方向の移動距離を算出する。具体的には、南北方向距離算出部12は、移動体高精度速度算出部11より得られるNED(北、東、下方向)座標系の南北方向の速度情報を積算することで、南北方向の移動距離を算出し、測定開始点を原点とする南北方向の座標値として、算出ごとに記憶部(例えば、メモリ1050)に記憶させる。
【0023】
東西方向距離算出部13は、移動体高精度速度算出部11により算出された東西方向の速度を積算し、東西方向の移動距離を算出する。具体的には、東西方向距離算出部13は、移動体高精度速度算出部11より得られるNED(北、東、下方向)座標系の東西方向の速度情報を積算することで、東西方向の移動距離を算出し、測定開始点を原点とする東西方向の座標値として、算出ごとに記憶部(例えば、メモリ1050)に記憶させる。
【0024】
回転半径算出部14は、南北方向距離算出部12及び東西方向距離算出部13によって算出された移動距離に基づいて算出される移動軌跡から、回転半径を算出する。具体的には、回転半径算出部14は、南北方向距離算出部12及び東西方向距離算出部13によって算出され、記憶された座標値によって算出される移動軌跡を円の軌跡として解析し、移動軌跡の回転半径を算出する。
【0025】
図3は、本発明の一実施形態である移動体回転半径計測装置10の移動体高精度速度算出部11の構成を示すブロック図である。移動体高精度速度算出部11は、加速度計測部111と、ストラップダウンナビゲータ部112と、速度測定部113と、良否係数算出部114と、遅延処理部115と、同期化処理部116と、良否係数乗算部117と、カルマンフィルタ部118とを備える。
【0026】
加速度計測部111は、IMU102を使用して移動体の加速度及び角速度を計測する。IMU102は、3軸のジャイロと3方向の加速度計から構成され、3次元の角速度と加速度とを求める。なお、IMU102は、計測の信頼性向上のために、さらに複数のセンサを搭載してもよい。
【0027】
ストラップダウンナビゲータ部112(自律航法アルゴリズム)は、加速度計測部111によって計測された移動体の加速度及び角速度からストラップダウン演算により速度を算出し、算出した速度に、後述するカルマンフィルタ部118によって推定演算された調整量を融合してリアルタイム補間速度を算出し、算出したリアルタイム補間速度を出力すると共に、カルマンフィルタ部118へフィードバックさせる。
【0028】
速度測定部113は、GPS受信機101を使用してGPS搬送波のドップラーシフト量から移動体のドップラー速度を測定する。例えば、GPS受信機101とGPS衛星との距離が、遠ざかる又は近づくと、GPS受信機101が受信する搬送波の位相は、連続的に変化し、周波数が低くなったり高くなったりする。速度測定部113は、この周波数の変化量からGPS受信機101が出力するドップラー速度を取得する。
【0029】
良否係数算出部114は、速度測定部113によって測定されたドップラー速度から算出した加速度と、加速度計測部111によって計測された加速度との差分を算出し、算出した差分に基づいて係数(図3におけるβ)を算出する。例えば、良否係数算出部114は、座標変換処理部(図示せず)によって、IMU102によって計測された加速度を、ストラップダウンナビゲータ部112により演算された現在の姿勢角に基づき座標変換し、GPS受信機101が出力したドップラー速度と同座標系の加速度に変換する。そして、良否係数算出部114は、ドップラー速度を微分した加速度と、座標変換した加速度との差分を算出し、算出した差分を二乗し、二乗した差分についてエンベロープ処理を行う。次に、良否係数算出部114は、エンベロープ処理を行った後の差分を示す関数の逆関数を求め、求めた逆関数に基づいて、係数を算出する。すなわち、良否係数算出部114は、求めた逆関数に基づいて、ドップラー速度がノイズを含んでいないと判断した場合に良判定を行い、ノイズを含んでいると判断した場合に否判定を行い、判定を数値化した良否係数を算出する。例えば、良否係数=1−速度変動判定−α×ドップラー精度指標、により良否係数を算出してもよい。ここで、速度変動判定はドップラー速度がノイズを含むと判定された割合、αは所定の値、ドップラー速度精度指標はGPS衛星の配置に関する指標や、観測衛星数等のGPS受信機から得られる情報に基づいて統計的に算出した指標である。このように算出された良否係数は、カルマンフィルタ部118に入力する誤差量を調整する係数である。
【0030】
遅延処理部115は、良否係数算出部114によって係数が算出されるための時間だけ、速度測定部113によって測定されたドップラー速度を演算に用いる時間を遅延させる。すなわち、遅延処理部115は、後述する、ドップラー速度による誤差量を算出するための演算を、良否係数算出部114によって係数が算出される時間だけ遅延させる。
【0031】
同期化処理部116は、遅延処理部115によって遅延させたドップラー速度と、ストラップダウンナビゲータ部112からフィードバックさせたリアルタイム補間速度との同期化を行い、同期化されたドップラー速度とリアルタイム補間速度との誤差量(図3におけるδx)を算出する。
【0032】
良否係数乗算部117は、同期化処理部116によって算出された誤差量に、良否係数算出部114によって算出された係数を乗算する。
【0033】
カルマンフィルタ部118は、良否係数乗算部117によって係数が乗算された誤差量からリアルタイム補間速度に対する調整量を、カルマンフィルタによって推定演算する。例えば、カルマンフィルタ部118は、入力された誤差量と、1ステップ前の推定演算し記憶した調整量とから、今回の調整量(ろ波推定値)を算出する反復推定器(反復推定型フィルタ)である。
【0034】
このように、移動体高精度速度算出部11は、速度測定部113によって測定されたドップラー速度とフィードバックされたリアルタイム補間速度とを同期させて算出した誤差量にドップラー速度の良否係数を乗算し、乗算して調整した誤差量からカルマンフィルタ部118によって推定演算された調整量と、加速度計測部111によって計測された加速度及び角速度からストラップダウン演算により算出された速度と、を融合してリアルタイム補間速度を算出し、算出したリアルタイム補間速度を出力すると共にフィードバックさせる。
【0035】
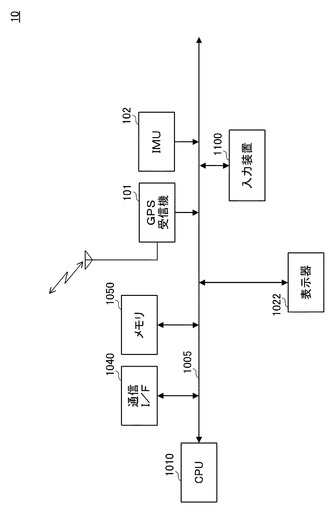
図4は、本発明の一実施形態に係る移動体回転半径計測装置10のハードウェア構成の一例を示す図である。移動体回転半径計測装置10は、CPU(Central Processing Unit)1010、バスライン1005、通信I/F1040、メモリ1050、表示器1022、入力装置1100、GPS受信機101及びIMU102を備える。
【0036】
CPU1010は、移動体回転半径計測装置10を統括的に制御する部分であり、メモリ1050に記憶された各種プログラムを適宜読み出して実行することにより、上述したハードウェアと協働し、本発明に係る各種機能を実現している。
【0037】
メモリ1050は、適宜読み出して実行されるプログラムを記憶し、プログラムの実行によって作成される種々の情報を記憶する。例えば、メモリ1050は、移動体(例えば、自動車)の移動軌跡を構成する座標値や、ストラップダウンナビゲータ部112によってフィードバックされるリアルタイム補間速度や、カルマンフィルタ部118によって推定演算される調整量等を記憶する。
【0038】
ここで、表示器1022は、移動体回転半径計測装置10による演算処理結果、例えば、移動軌跡及び回転半径や、算出したリアルタイム補間速度や、算出過程のドップラー速度等を表示したりするものであり、液晶表示装置(LCD)等のディスプレイ装置を含む。
【0039】
また、通信I/F1040は、移動体回転半径計測装置10を専用ネットワークを介してホストコンピュータ等と接続できるようにするためのネットワーク・アダプタである。通信I/F1040は、ホストコンピュータ等に、算出された移動軌跡の座標値や回転半径等を出力するための接続インターフェースである。
【0040】
入力装置1100は、移動体回転半径計測装置10の利用者による入力の受け付けを行うものであり、キーボード及びマウス等で構成される。
【0041】
GPS受信機101は、無線通信に必要なアンテナ及びアンテナ信号処理回路等を含んで構成される。GPS受信機101は、複数のGPS衛星から電波を受信し、受信したGPS搬送波のドップラーシフト量からドップラー速度を算出し、出力する。
【0042】
IMU102は、移動体の加速度及び角速度を計測するためのデータを出力する。IMU102は、慣性計測装置(IMU:Inertial Measurement Unit)であって、3軸のジャイロと3方向の加速度計によって、運動を司る3軸の角度(又は角速度)と加速度とを検出する。
【0043】
図5は、本発明の一実施形態に係る移動体回転半径計測装置10の処理内容を示すフローチャートである。なお、本処理は、例えば、プログラム開始指令を受け付けて開始し、プログラム終了指令により終了する。
【0044】
ステップS101において、CPU1010は、ストラップダウンナビゲータ部112の初期設定(初期速度、初期位置、初期姿勢角)、カルマンフィルタ部118の初期設定(誤差共分散行列の初期化)を行う。その後、CPU1010は、処理をステップS102に移す。
【0045】
ステップS102において、CPU1010(移動体高精度速度算出部11)は、移動体高精度速度算出処理を行う。その後、CPU1010は、処理をステップS103に移す。
【0046】
ステップS103において、CPU1010は、計測開始か否かを判断する。より具体的には、CPU1010は、回転半径測定を開始する開始指令を受け付けた直後か否かを判断する。この判断がYESの場合、CPU1010は、処理をステップS104に移し、この判断がNOの場合、CPU1010は、処理をステップS105に移す。
【0047】
ステップS104において、CPU1010は、計測開始点を記憶する。その後、CPU1010は、処理をステップS105に移す。
【0048】
ステップS105において、CPU1010(南北方向距離算出部12)は、南北方向の速度を積算する。より具体的には、CPU1010は、ステップS102において算出された速度のうちN値を積算し、南北方向の相対距離を算出し、算出ごとに移動軌跡の座標値としてメモリ1050に記憶する。その後、CPU1010は、処理をステップS106に移す。
【0049】
ステップS106において、CPU1010(東西方向距離算出部13)は、東西方向の速度を積算する。より具体的には、CPU1010は、ステップS102において算出された速度のうちE値を積算し、東西方向の相対距離を算出し、算出ごとに移動軌跡の座標値としてメモリ1050に記憶する。その後、CPU1010は、処理をステップS107に移す。
【0050】
ステップS107において、CPU1010は、計測終了か否かを判断する。より具体的には、CPU1010は、回転半径測定を終了する終了指令を受け付けたか否かを判断する。また、CPU1010は、ステップS104で記憶した計測開始点の座標値と、ステップS105及びステップS106で算出した最新の座標値とを比較し、差が閾値以内である場合に計測終了と判断してもよい。この判断がYESの場合、CPU1010は、処理をステップS108に移し、この判断がNOの場合、CPU1010は、処理をステップS102に移す。
【0051】
ステップS108において、CPU1010(回転半径算出部14)は、回転半径を算出する。より具体的には、CPU1010は、ステップS105及びステップS106において記憶した移動軌跡の座標値に基づいて、移動軌跡の回転半径を算出する。その後、CPU1010は、処理を終了する。
【0052】
図6は、本発明の一実施形態に係る移動体回転半径計測装置10の移動体高精度速度算出処理の処理内容を示すフローチャートである。
【0053】
ステップS201において、CPU1010(加速度計測部111)は、IMU102によって加速度及び角速度を計測する。その後、CPU1010は、処理をステップS202に移す。
【0054】
ステップS202において、CPU1010(ストラップダウンナビゲータ部112)は、ステップS201において計測された加速度及び角速度からストラップダウン演算により速度を算出し、カルマンフィルタ部118からの調整量を融合させて、リアルタイム補間速度を算出し、出力すると共にフィードバックさせる。その後、CPU1010は、処理をステップS203に移す。
【0055】
ステップS203において、CPU1010(速度測定部113)は、GPS受信機101によって移動体のドップラー速度を取得する。より具体的には、CPU1010は、GPS受信機101が受信したGPS搬送波のドップラーシフト量から算出したドップラー速度を取得する。その後、CPU1010は、処理をステップS204に移す。
【0056】
ステップS204において、CPU1010(良否係数算出部114)は、ドップラー速度から良否係数を算出する。より具体的には、CPU1010は、ステップS202において算出したドップラー速度を微分した加速度と、IMU102が計測した加速度との差分を算出し、算出した差分を二乗し、二乗した差分についてエンベロープ処理を行う。そして、CPU1010は、エンベロープ処理を行った後の差分を示す関数の逆関数を求め、求めた逆関数に基づいて、ドップラー速度の信頼性(ドップラー速度がノイズを含んでいないと判定した場合に良、ノイズを含んでいると判定した場合に否)に対する判定の結果を示す良否係数(β)を算出する。その後、CPU1010は、処理をステップS205に移す。
【0057】
ステップS205において、CPU1010(遅延処理部115、同期化処理部116)は、フィードバックされたリアルタイム補間速度と、ドップラー速度とを同期させ、誤差量を算出する。より具体的には、CPU1010は、ステップS203において算出されたドップラー速度による誤差量を算出するための演算を、ステップS204において良否係数が算出される時間だけ遅延させ、遅延させたドップラー速度とフィードバックされたリアルタイム補間速度とを同期させて誤差量(δx)を算出する。その後、CPU1010は、処理をステップS206に移す。
【0058】
ステップS206において、CPU1010(良否係数乗算部117)は、誤差量に良否係数を乗算する。より具体的には、CPU1010は、ステップS205において算出した誤差量(δx)に、ステップS204において算出した良否係数(β)を乗算して、調整された誤差量(βδx)を算出する。その後、CPU1010は、処理をステップS207に移す。
【0059】
ステップS207において、CPU1010(カルマンフィルタ部118)は、調整された誤差量(βδx)からリアルタイム補間速度に対する調整量を、カルマンフィルタによって推定演算する。その後、CPU1010は、移動体高精度速度算出処理に移行したステップの次のステップに、処理を戻す。
【0060】
図7は、本発明の一実施形態に係る移動体回転半径計測装置10が回転半径を算出していることを示す図である。移動体51が一周すると、移動体回転半径計測装置10は、GPS受信機101とIMU102とに基づいて算出した高精度の速度を積算して、移動体51の位置204を開始位置203からの相対的な座標値として記憶し、記憶した座標値に基づいて、移動軌跡212の回転半径211を算出する。図7の例は、移動体回転半径計測装置10が、算出した回転半径211と共に、移動軌跡212を、表示器1022に表示している例である。
【0061】
本実施形態によれば、移動体回転半径計測装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した南北方向の速度を積算して南北方向の移動距離を算出し、算出された東西方向の速度を積算して東西方向の移動距離を算出し、算出した移動距離に基づいて算出される移動軌跡から、回転半径を算出する。GPS受信機101及びIMU102は、移動体51である自動車のタイヤの中心点の鉛直上方に設置される。
したがって、移動体回転半径計測装置10は、移動体51(例えば、自動車)の回転半径を、精度が高く、かつ、労力や時間がかからずに測定することができる。
【0062】
以上、本発明の実施形態について説明したが、本発明は上述した実施形態に限るものではない。また、本発明の実施形態に記載された効果は、本発明から生じる最も好適な効果を列挙したに過ぎず、本発明による効果は、本発明の実施形態に記載されたものに限定されるものではない。
【符号の説明】
【0063】
10 移動体回転半径計測装置
11 移動体高精度速度算出部
111 加速度計測部
112 ストラップダウンナビゲータ部
113 速度測定部
114 良否係数算出部
115 遅延処理部
116 同期化処理部
117 良否係数乗算部
118 カルマンフィルタ部
12 南北方向距離算出部
13 東西方向距離算出部
14 回転半径算出部
51 移動体
101 GPS受信機
102 IMU
【技術分野】
【0001】
本発明は、移動体回転半径測定装置及び方法に関する。
【背景技術】
【0002】
従来より、自動車の性能の改良や評価目的で自動車の性能評価試験が多々実施されている。このような自動車の性能評価試験を効率よく行う技術を開示する特許文献1が知られている。この技術は、車両の車速計及びブレーキの検査のついでに、後輪のトー角及びキャンバー角測定と、自動車差動ギヤ周辺部の異常検出までも短時間で容易かつ安価に実行するように構成されている。
【0003】
自動車の性能評価試験には、上述の試験以外に、自動車の最小回転半径を測定する試験がある。この測定は、自動車を最大かじ取りで徐行させ、最も外側となるタイヤの中心点が通る軌跡の直径を、右回り及び左回りで測定するように規定されている。従来では、この測定は、タイヤにチョーク等で印をつける方法や、タイヤの脇に水の入ったボトルを取り付け、徐行しながら水をまく方式で行われていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−340743号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の方式では、自動車が実際に描いた軌跡を測定するので測定の精度が低く、また、チョーク等で印をつけた後に運転者と測定者との2人以上がメジャーで測定するので労力や時間がかかるという問題があった。
【0006】
そこで、移動体(例えば、自動車)の回転半径を、精度が高く、かつ、労力や時間がかからずに測定する装置及び方法が求められている。
【0007】
本発明は、移動体の回転半径を、精度が高く、かつ、労力や時間がかからずに測定する移動体回転半径測定装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明では、以下のような解決手段を提供する。
(1) 移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機と、前記移動体に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMUとを備え、前記移動体が移動したときの回転半径を計測する移動体回転半径計測装置であって、前記GPS受信機が受信したGPS搬送波と、前記IMUが出力したデータとをカルマンフィルタにより処理することで速度を算出する移動体高精度速度算出手段と、前記移動体高精度速度算出手段により算出された南北方向の速度を積算し、南北方向の移動距離を算出する南北方向距離算出手段と、前記移動体高精度速度算出手段により算出された東西方向の速度を積算し、東西方向の移動距離を算出する東西方向距離算出手段と、前記南北方向距離算出手段及び前記東西方向距離算出手段によって算出された移動距離に基づいて算出される移動軌跡から、回転半径を算出する回転半径算出手段と、を備える移動体回転半径計測装置。
【0009】
(1)の構成のよれば、本発明に係る移動体回転半径計測装置は、GPS受信機が受信したGPS搬送波と、IMUが出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した南北方向の速度を積算して南北方向の移動距離を算出し、算出された東西方向の速度を積算して東西方向の移動距離を算出し、算出した移動距離に基づいて算出される移動軌跡から、回転半径を算出する。
【0010】
したがって、本発明に係る移動体回転半径計測装置は、移動体(例えば、自動車)の回転半径を、精度が高く、かつ、労力や時間がかからずに測定することができる。
【0011】
(2) 前記GPS受信機及び前記IMUは、前記移動体である自動車のタイヤの中心点の鉛直上方に設置される、(1)に記載の移動体回転半径計測装置。
【0012】
したがって、(2)に係る移動体回転半径計測装置は、移動体(例えば、自動車)の回転半径を、精度が高く、測定することができる。
【0013】
(3) 前記移動体高精度速度算出手段は、前記IMUからデータを受信して、前記移動体の加速度及び角速度を計測する加速度計測手段と、前記加速度計測手段によって計測された前記移動体の加速度及び角速度からストラップダウン演算により速度を算出し、算出した速度に基づいてリアルタイム補間速度を算出するストラップダウンナビゲータ手段と、前記GPS受信機が受信したGPS搬送波のドップラーシフト量から前記移動体のドップラー速度を測定する速度測定手段と、前記速度測定手段によって測定された前記ドップラー速度から算出した加速度と、前記加速度計測手段によって計測された加速度との差分を算出し、算出した差分に基づいて係数を算出する良否係数算出手段と、前記良否係数算出手段によって前記係数が算出されるための時間だけ、前記速度測定手段によって測定された前記ドップラー速度を演算に用いる時間を遅延させる遅延処理手段と、前記遅延処理手段によって遅延させた前記ドップラー速度と、前記ストラップダウンナビゲータ手段からフィードバックさせた前記リアルタイム補間速度との同期化を行い、同期化された前記ドップラー速度と前記リアルタイム補間速度との誤差量を算出する同期化処理手段と、前記同期化処理手段によって算出された前記誤差量に、前記良否係数算出手段によって算出された前記係数を乗算する良否係数乗算手段と、前記良否係数乗算手段によって前記係数が乗算された誤差量から前記リアルタイム補間速度に対する調整量を、カルマンフィルタによって推定演算するカルマンフィルタ手段と、を備え、前記ストラップダウンナビゲータ手段は、前記ストラップダウン演算により算出された速度に、前記カルマンフィルタ手段によって推定演算された前記調整量を融合して前記リアルタイム補間速度を算出する、(1)又は(2)に記載の移動体回転半径計測装置。
【0014】
したがって、(3)に係る移動体回転半径計測装置は、移動体(例えば、自動車)の回転半径を、さらに精度が高く、測定することができる。
【0015】
(4) 移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機と、前記移動体に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMUとを備え、前記移動体が移動したときの回転半径を計測する移動体回転半径計測装置が実行する方法であって、前記GPS受信機が受信したGPS搬送波と、前記IMUが出力したデータとをカルマンフィルタにより処理することで速度を算出する移動体高精度速度算出ステップと、前記移動体高精度速度算出ステップにより算出された南北方向の速度を積算し、南北方向の移動距離を算出する南北方向距離算出ステップと、前記移動体高精度速度算出ステップにより算出された東西方向の速度を積算し、東西方向の移動距離を算出する東西方向距離算出ステップと、前記南北方向距離算出ステップ及び前記東西方向距離算出ステップによって算出された移動距離に基づいて算出される移動軌跡から、回転半径を算出する回転半径算出ステップと、を備える方法。
【0016】
したがって、(4)に係る方法は、(1)と同様に、移動体(例えば、自動車)の回転半径を、精度が高く、かつ、労力や時間がかからずに測定することができる。
【発明の効果】
【0017】
本発明によれば、移動体(例えば、自動車)の回転半径を、精度が高く、かつ、労力や時間がかからずに測定することができる。すなわち、本発明によれば、運転者1人で車両を1周させるだけで、回転半径の高精度な測定が可能である。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態に係る移動体回転半径計測装置の設置状態を示す図である。
【図2】本発明の一実施形態である移動体回転半径計測装置の構成を示すブロック図である。
【図3】本発明の一実施形態である移動体回転半径計測装置の移動体高精度速度算出部の構成を示すブロック図である。
【図4】本発明の一実施形態に係る移動体回転半径計測装置のハードウェア構成の一例を示す図である。
【図5】本発明の一実施形態に係る移動体回転半径計測装置の処理内容を示すフローチャートである。
【図6】本発明の一実施形態に係る移動体回転半径計測装置の移動体高精度速度算出処理の処理内容を示すフローチャートである。
【図7】本発明の一実施形態に係る移動体回転半径計測装置が回転半径を算出していることを示す図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態について図を参照しながら説明する。図1は、本発明の一実施形態に係る移動体回転半径計測装置10の設置状態を示す図である。図1(a)は、移動体51(例えば、自動車等)が円を描くように走行する場合に外側となるタイヤ511の中心点512の鉛直上に、GPS受信機101とIMU102とが設置されていることを示す図である。図1(b)の図は、移動体回転半径計測装置10が、移動体51に設置されたGPS受信機101とIMU102とに接続されていることを示す図である。GPS受信機101は、GPS衛星からGPS搬送波を受信する。IMU102は、3次元の角速度と加速度とを求めるためのデータを出力する。移動体51は、図1(b)が示す様に、回転半径211の移動軌跡212を描いて一周し、最大かじ取りの場合に、最小回転半径で一周する。
【0020】
図2は、本発明の一実施形態である移動体回転半径計測装置10の構成を示すブロック図である。移動体回転半径計測装置10は、移動体高精度速度算出手段としての移動体高精度速度算出部11と、南北方向距離算出手段としての南北方向距離算出部12と、東西方向距離算出手段としての東西方向距離算出部13と、回転半径算出手段としての回転半径算出部14とを備えている。
【0021】
移動体高精度速度算出部11は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出する。移動体高精度速度算出部11は、GPS受信機101及びIMU102のデータを処理して得られるドップラー速度、3軸加速度、3軸角速度を用いて、NED(North−East−Down)座標系における高精度な移動体速度を算出する。
【0022】
南北方向距離算出部12は、移動体高精度速度算出部11により算出された南北方向の速度を積算し、南北方向の移動距離を算出する。具体的には、南北方向距離算出部12は、移動体高精度速度算出部11より得られるNED(北、東、下方向)座標系の南北方向の速度情報を積算することで、南北方向の移動距離を算出し、測定開始点を原点とする南北方向の座標値として、算出ごとに記憶部(例えば、メモリ1050)に記憶させる。
【0023】
東西方向距離算出部13は、移動体高精度速度算出部11により算出された東西方向の速度を積算し、東西方向の移動距離を算出する。具体的には、東西方向距離算出部13は、移動体高精度速度算出部11より得られるNED(北、東、下方向)座標系の東西方向の速度情報を積算することで、東西方向の移動距離を算出し、測定開始点を原点とする東西方向の座標値として、算出ごとに記憶部(例えば、メモリ1050)に記憶させる。
【0024】
回転半径算出部14は、南北方向距離算出部12及び東西方向距離算出部13によって算出された移動距離に基づいて算出される移動軌跡から、回転半径を算出する。具体的には、回転半径算出部14は、南北方向距離算出部12及び東西方向距離算出部13によって算出され、記憶された座標値によって算出される移動軌跡を円の軌跡として解析し、移動軌跡の回転半径を算出する。
【0025】
図3は、本発明の一実施形態である移動体回転半径計測装置10の移動体高精度速度算出部11の構成を示すブロック図である。移動体高精度速度算出部11は、加速度計測部111と、ストラップダウンナビゲータ部112と、速度測定部113と、良否係数算出部114と、遅延処理部115と、同期化処理部116と、良否係数乗算部117と、カルマンフィルタ部118とを備える。
【0026】
加速度計測部111は、IMU102を使用して移動体の加速度及び角速度を計測する。IMU102は、3軸のジャイロと3方向の加速度計から構成され、3次元の角速度と加速度とを求める。なお、IMU102は、計測の信頼性向上のために、さらに複数のセンサを搭載してもよい。
【0027】
ストラップダウンナビゲータ部112(自律航法アルゴリズム)は、加速度計測部111によって計測された移動体の加速度及び角速度からストラップダウン演算により速度を算出し、算出した速度に、後述するカルマンフィルタ部118によって推定演算された調整量を融合してリアルタイム補間速度を算出し、算出したリアルタイム補間速度を出力すると共に、カルマンフィルタ部118へフィードバックさせる。
【0028】
速度測定部113は、GPS受信機101を使用してGPS搬送波のドップラーシフト量から移動体のドップラー速度を測定する。例えば、GPS受信機101とGPS衛星との距離が、遠ざかる又は近づくと、GPS受信機101が受信する搬送波の位相は、連続的に変化し、周波数が低くなったり高くなったりする。速度測定部113は、この周波数の変化量からGPS受信機101が出力するドップラー速度を取得する。
【0029】
良否係数算出部114は、速度測定部113によって測定されたドップラー速度から算出した加速度と、加速度計測部111によって計測された加速度との差分を算出し、算出した差分に基づいて係数(図3におけるβ)を算出する。例えば、良否係数算出部114は、座標変換処理部(図示せず)によって、IMU102によって計測された加速度を、ストラップダウンナビゲータ部112により演算された現在の姿勢角に基づき座標変換し、GPS受信機101が出力したドップラー速度と同座標系の加速度に変換する。そして、良否係数算出部114は、ドップラー速度を微分した加速度と、座標変換した加速度との差分を算出し、算出した差分を二乗し、二乗した差分についてエンベロープ処理を行う。次に、良否係数算出部114は、エンベロープ処理を行った後の差分を示す関数の逆関数を求め、求めた逆関数に基づいて、係数を算出する。すなわち、良否係数算出部114は、求めた逆関数に基づいて、ドップラー速度がノイズを含んでいないと判断した場合に良判定を行い、ノイズを含んでいると判断した場合に否判定を行い、判定を数値化した良否係数を算出する。例えば、良否係数=1−速度変動判定−α×ドップラー精度指標、により良否係数を算出してもよい。ここで、速度変動判定はドップラー速度がノイズを含むと判定された割合、αは所定の値、ドップラー速度精度指標はGPS衛星の配置に関する指標や、観測衛星数等のGPS受信機から得られる情報に基づいて統計的に算出した指標である。このように算出された良否係数は、カルマンフィルタ部118に入力する誤差量を調整する係数である。
【0030】
遅延処理部115は、良否係数算出部114によって係数が算出されるための時間だけ、速度測定部113によって測定されたドップラー速度を演算に用いる時間を遅延させる。すなわち、遅延処理部115は、後述する、ドップラー速度による誤差量を算出するための演算を、良否係数算出部114によって係数が算出される時間だけ遅延させる。
【0031】
同期化処理部116は、遅延処理部115によって遅延させたドップラー速度と、ストラップダウンナビゲータ部112からフィードバックさせたリアルタイム補間速度との同期化を行い、同期化されたドップラー速度とリアルタイム補間速度との誤差量(図3におけるδx)を算出する。
【0032】
良否係数乗算部117は、同期化処理部116によって算出された誤差量に、良否係数算出部114によって算出された係数を乗算する。
【0033】
カルマンフィルタ部118は、良否係数乗算部117によって係数が乗算された誤差量からリアルタイム補間速度に対する調整量を、カルマンフィルタによって推定演算する。例えば、カルマンフィルタ部118は、入力された誤差量と、1ステップ前の推定演算し記憶した調整量とから、今回の調整量(ろ波推定値)を算出する反復推定器(反復推定型フィルタ)である。
【0034】
このように、移動体高精度速度算出部11は、速度測定部113によって測定されたドップラー速度とフィードバックされたリアルタイム補間速度とを同期させて算出した誤差量にドップラー速度の良否係数を乗算し、乗算して調整した誤差量からカルマンフィルタ部118によって推定演算された調整量と、加速度計測部111によって計測された加速度及び角速度からストラップダウン演算により算出された速度と、を融合してリアルタイム補間速度を算出し、算出したリアルタイム補間速度を出力すると共にフィードバックさせる。
【0035】
図4は、本発明の一実施形態に係る移動体回転半径計測装置10のハードウェア構成の一例を示す図である。移動体回転半径計測装置10は、CPU(Central Processing Unit)1010、バスライン1005、通信I/F1040、メモリ1050、表示器1022、入力装置1100、GPS受信機101及びIMU102を備える。
【0036】
CPU1010は、移動体回転半径計測装置10を統括的に制御する部分であり、メモリ1050に記憶された各種プログラムを適宜読み出して実行することにより、上述したハードウェアと協働し、本発明に係る各種機能を実現している。
【0037】
メモリ1050は、適宜読み出して実行されるプログラムを記憶し、プログラムの実行によって作成される種々の情報を記憶する。例えば、メモリ1050は、移動体(例えば、自動車)の移動軌跡を構成する座標値や、ストラップダウンナビゲータ部112によってフィードバックされるリアルタイム補間速度や、カルマンフィルタ部118によって推定演算される調整量等を記憶する。
【0038】
ここで、表示器1022は、移動体回転半径計測装置10による演算処理結果、例えば、移動軌跡及び回転半径や、算出したリアルタイム補間速度や、算出過程のドップラー速度等を表示したりするものであり、液晶表示装置(LCD)等のディスプレイ装置を含む。
【0039】
また、通信I/F1040は、移動体回転半径計測装置10を専用ネットワークを介してホストコンピュータ等と接続できるようにするためのネットワーク・アダプタである。通信I/F1040は、ホストコンピュータ等に、算出された移動軌跡の座標値や回転半径等を出力するための接続インターフェースである。
【0040】
入力装置1100は、移動体回転半径計測装置10の利用者による入力の受け付けを行うものであり、キーボード及びマウス等で構成される。
【0041】
GPS受信機101は、無線通信に必要なアンテナ及びアンテナ信号処理回路等を含んで構成される。GPS受信機101は、複数のGPS衛星から電波を受信し、受信したGPS搬送波のドップラーシフト量からドップラー速度を算出し、出力する。
【0042】
IMU102は、移動体の加速度及び角速度を計測するためのデータを出力する。IMU102は、慣性計測装置(IMU:Inertial Measurement Unit)であって、3軸のジャイロと3方向の加速度計によって、運動を司る3軸の角度(又は角速度)と加速度とを検出する。
【0043】
図5は、本発明の一実施形態に係る移動体回転半径計測装置10の処理内容を示すフローチャートである。なお、本処理は、例えば、プログラム開始指令を受け付けて開始し、プログラム終了指令により終了する。
【0044】
ステップS101において、CPU1010は、ストラップダウンナビゲータ部112の初期設定(初期速度、初期位置、初期姿勢角)、カルマンフィルタ部118の初期設定(誤差共分散行列の初期化)を行う。その後、CPU1010は、処理をステップS102に移す。
【0045】
ステップS102において、CPU1010(移動体高精度速度算出部11)は、移動体高精度速度算出処理を行う。その後、CPU1010は、処理をステップS103に移す。
【0046】
ステップS103において、CPU1010は、計測開始か否かを判断する。より具体的には、CPU1010は、回転半径測定を開始する開始指令を受け付けた直後か否かを判断する。この判断がYESの場合、CPU1010は、処理をステップS104に移し、この判断がNOの場合、CPU1010は、処理をステップS105に移す。
【0047】
ステップS104において、CPU1010は、計測開始点を記憶する。その後、CPU1010は、処理をステップS105に移す。
【0048】
ステップS105において、CPU1010(南北方向距離算出部12)は、南北方向の速度を積算する。より具体的には、CPU1010は、ステップS102において算出された速度のうちN値を積算し、南北方向の相対距離を算出し、算出ごとに移動軌跡の座標値としてメモリ1050に記憶する。その後、CPU1010は、処理をステップS106に移す。
【0049】
ステップS106において、CPU1010(東西方向距離算出部13)は、東西方向の速度を積算する。より具体的には、CPU1010は、ステップS102において算出された速度のうちE値を積算し、東西方向の相対距離を算出し、算出ごとに移動軌跡の座標値としてメモリ1050に記憶する。その後、CPU1010は、処理をステップS107に移す。
【0050】
ステップS107において、CPU1010は、計測終了か否かを判断する。より具体的には、CPU1010は、回転半径測定を終了する終了指令を受け付けたか否かを判断する。また、CPU1010は、ステップS104で記憶した計測開始点の座標値と、ステップS105及びステップS106で算出した最新の座標値とを比較し、差が閾値以内である場合に計測終了と判断してもよい。この判断がYESの場合、CPU1010は、処理をステップS108に移し、この判断がNOの場合、CPU1010は、処理をステップS102に移す。
【0051】
ステップS108において、CPU1010(回転半径算出部14)は、回転半径を算出する。より具体的には、CPU1010は、ステップS105及びステップS106において記憶した移動軌跡の座標値に基づいて、移動軌跡の回転半径を算出する。その後、CPU1010は、処理を終了する。
【0052】
図6は、本発明の一実施形態に係る移動体回転半径計測装置10の移動体高精度速度算出処理の処理内容を示すフローチャートである。
【0053】
ステップS201において、CPU1010(加速度計測部111)は、IMU102によって加速度及び角速度を計測する。その後、CPU1010は、処理をステップS202に移す。
【0054】
ステップS202において、CPU1010(ストラップダウンナビゲータ部112)は、ステップS201において計測された加速度及び角速度からストラップダウン演算により速度を算出し、カルマンフィルタ部118からの調整量を融合させて、リアルタイム補間速度を算出し、出力すると共にフィードバックさせる。その後、CPU1010は、処理をステップS203に移す。
【0055】
ステップS203において、CPU1010(速度測定部113)は、GPS受信機101によって移動体のドップラー速度を取得する。より具体的には、CPU1010は、GPS受信機101が受信したGPS搬送波のドップラーシフト量から算出したドップラー速度を取得する。その後、CPU1010は、処理をステップS204に移す。
【0056】
ステップS204において、CPU1010(良否係数算出部114)は、ドップラー速度から良否係数を算出する。より具体的には、CPU1010は、ステップS202において算出したドップラー速度を微分した加速度と、IMU102が計測した加速度との差分を算出し、算出した差分を二乗し、二乗した差分についてエンベロープ処理を行う。そして、CPU1010は、エンベロープ処理を行った後の差分を示す関数の逆関数を求め、求めた逆関数に基づいて、ドップラー速度の信頼性(ドップラー速度がノイズを含んでいないと判定した場合に良、ノイズを含んでいると判定した場合に否)に対する判定の結果を示す良否係数(β)を算出する。その後、CPU1010は、処理をステップS205に移す。
【0057】
ステップS205において、CPU1010(遅延処理部115、同期化処理部116)は、フィードバックされたリアルタイム補間速度と、ドップラー速度とを同期させ、誤差量を算出する。より具体的には、CPU1010は、ステップS203において算出されたドップラー速度による誤差量を算出するための演算を、ステップS204において良否係数が算出される時間だけ遅延させ、遅延させたドップラー速度とフィードバックされたリアルタイム補間速度とを同期させて誤差量(δx)を算出する。その後、CPU1010は、処理をステップS206に移す。
【0058】
ステップS206において、CPU1010(良否係数乗算部117)は、誤差量に良否係数を乗算する。より具体的には、CPU1010は、ステップS205において算出した誤差量(δx)に、ステップS204において算出した良否係数(β)を乗算して、調整された誤差量(βδx)を算出する。その後、CPU1010は、処理をステップS207に移す。
【0059】
ステップS207において、CPU1010(カルマンフィルタ部118)は、調整された誤差量(βδx)からリアルタイム補間速度に対する調整量を、カルマンフィルタによって推定演算する。その後、CPU1010は、移動体高精度速度算出処理に移行したステップの次のステップに、処理を戻す。
【0060】
図7は、本発明の一実施形態に係る移動体回転半径計測装置10が回転半径を算出していることを示す図である。移動体51が一周すると、移動体回転半径計測装置10は、GPS受信機101とIMU102とに基づいて算出した高精度の速度を積算して、移動体51の位置204を開始位置203からの相対的な座標値として記憶し、記憶した座標値に基づいて、移動軌跡212の回転半径211を算出する。図7の例は、移動体回転半径計測装置10が、算出した回転半径211と共に、移動軌跡212を、表示器1022に表示している例である。
【0061】
本実施形態によれば、移動体回転半径計測装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した南北方向の速度を積算して南北方向の移動距離を算出し、算出された東西方向の速度を積算して東西方向の移動距離を算出し、算出した移動距離に基づいて算出される移動軌跡から、回転半径を算出する。GPS受信機101及びIMU102は、移動体51である自動車のタイヤの中心点の鉛直上方に設置される。
したがって、移動体回転半径計測装置10は、移動体51(例えば、自動車)の回転半径を、精度が高く、かつ、労力や時間がかからずに測定することができる。
【0062】
以上、本発明の実施形態について説明したが、本発明は上述した実施形態に限るものではない。また、本発明の実施形態に記載された効果は、本発明から生じる最も好適な効果を列挙したに過ぎず、本発明による効果は、本発明の実施形態に記載されたものに限定されるものではない。
【符号の説明】
【0063】
10 移動体回転半径計測装置
11 移動体高精度速度算出部
111 加速度計測部
112 ストラップダウンナビゲータ部
113 速度測定部
114 良否係数算出部
115 遅延処理部
116 同期化処理部
117 良否係数乗算部
118 カルマンフィルタ部
12 南北方向距離算出部
13 東西方向距離算出部
14 回転半径算出部
51 移動体
101 GPS受信機
102 IMU
【特許請求の範囲】
【請求項1】
移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機と、前記移動体に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMUとを備え、前記移動体が移動したときの回転半径を計測する移動体回転半径計測装置であって、
前記GPS受信機が受信したGPS搬送波と、前記IMUが出力したデータとをカルマンフィルタにより処理することで速度を算出する移動体高精度速度算出手段と、
前記移動体高精度速度算出手段により算出された南北方向の速度を積算し、南北方向の移動距離を算出する南北方向距離算出手段と、
前記移動体高精度速度算出手段により算出された東西方向の速度を積算し、東西方向の移動距離を算出する東西方向距離算出手段と、
前記南北方向距離算出手段及び前記東西方向距離算出手段によって算出された移動距離に基づいて算出される移動軌跡から、回転半径を算出する回転半径算出手段と、
を備える移動体回転半径計測装置。
【請求項2】
前記GPS受信機及び前記IMUは、前記移動体である自動車のタイヤの中心点の鉛直上方に設置される、請求項1に記載の移動体回転半径計測装置。
【請求項3】
前記移動体高精度速度算出手段は、
前記IMUからデータを受信して、前記移動体の加速度及び角速度を計測する加速度計測手段と、
前記加速度計測手段によって計測された前記移動体の加速度及び角速度からストラップダウン演算により速度を算出し、算出した速度に基づいてリアルタイム補間速度を算出するストラップダウンナビゲータ手段と、
前記GPS受信機が受信したGPS搬送波のドップラーシフト量から前記移動体のドップラー速度を測定する速度測定手段と、
前記速度測定手段によって測定された前記ドップラー速度から算出した加速度と、前記加速度計測手段によって計測された加速度との差分を算出し、算出した差分に基づいて係数を算出する良否係数算出手段と、
前記良否係数算出手段によって前記係数が算出されるための時間だけ、前記速度測定手段によって測定された前記ドップラー速度を演算に用いる時間を遅延させる遅延処理手段と、
前記遅延処理手段によって遅延させた前記ドップラー速度と、前記ストラップダウンナビゲータ手段からフィードバックさせた前記リアルタイム補間速度との同期化を行い、同期化された前記ドップラー速度と前記リアルタイム補間速度との誤差量を算出する同期化処理手段と、
前記同期化処理手段によって算出された前記誤差量に、前記良否係数算出手段によって算出された前記係数を乗算する良否係数乗算手段と、
前記良否係数乗算手段によって前記係数が乗算された誤差量から前記リアルタイム補間速度に対する調整量を、カルマンフィルタによって推定演算するカルマンフィルタ手段と、
を備え、
前記ストラップダウンナビゲータ手段は、前記ストラップダウン演算により算出された速度に、前記カルマンフィルタ手段によって推定演算された前記調整量を融合して前記リアルタイム補間速度を算出する、
請求項1又は2に記載の移動体回転半径計測装置。
【請求項4】
移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機と、前記移動体に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMUとを備え、前記移動体が移動したときの回転半径を計測する移動体回転半径計測装置が実行する方法であって、
前記GPS受信機が受信したGPS搬送波と、前記IMUが出力したデータとをカルマンフィルタにより処理することで速度を算出する移動体高精度速度算出ステップと、
前記移動体高精度速度算出ステップにより算出された南北方向の速度を積算し、南北方向の移動距離を算出する南北方向距離算出ステップと、
前記移動体高精度速度算出ステップにより算出された東西方向の速度を積算し、東西方向の移動距離を算出する東西方向距離算出ステップと、
前記南北方向距離算出ステップ及び前記東西方向距離算出ステップによって算出された移動距離に基づいて算出される移動軌跡から、回転半径を算出する回転半径算出ステップと、
を備える方法。
【請求項1】
移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機と、前記移動体に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMUとを備え、前記移動体が移動したときの回転半径を計測する移動体回転半径計測装置であって、
前記GPS受信機が受信したGPS搬送波と、前記IMUが出力したデータとをカルマンフィルタにより処理することで速度を算出する移動体高精度速度算出手段と、
前記移動体高精度速度算出手段により算出された南北方向の速度を積算し、南北方向の移動距離を算出する南北方向距離算出手段と、
前記移動体高精度速度算出手段により算出された東西方向の速度を積算し、東西方向の移動距離を算出する東西方向距離算出手段と、
前記南北方向距離算出手段及び前記東西方向距離算出手段によって算出された移動距離に基づいて算出される移動軌跡から、回転半径を算出する回転半径算出手段と、
を備える移動体回転半径計測装置。
【請求項2】
前記GPS受信機及び前記IMUは、前記移動体である自動車のタイヤの中心点の鉛直上方に設置される、請求項1に記載の移動体回転半径計測装置。
【請求項3】
前記移動体高精度速度算出手段は、
前記IMUからデータを受信して、前記移動体の加速度及び角速度を計測する加速度計測手段と、
前記加速度計測手段によって計測された前記移動体の加速度及び角速度からストラップダウン演算により速度を算出し、算出した速度に基づいてリアルタイム補間速度を算出するストラップダウンナビゲータ手段と、
前記GPS受信機が受信したGPS搬送波のドップラーシフト量から前記移動体のドップラー速度を測定する速度測定手段と、
前記速度測定手段によって測定された前記ドップラー速度から算出した加速度と、前記加速度計測手段によって計測された加速度との差分を算出し、算出した差分に基づいて係数を算出する良否係数算出手段と、
前記良否係数算出手段によって前記係数が算出されるための時間だけ、前記速度測定手段によって測定された前記ドップラー速度を演算に用いる時間を遅延させる遅延処理手段と、
前記遅延処理手段によって遅延させた前記ドップラー速度と、前記ストラップダウンナビゲータ手段からフィードバックさせた前記リアルタイム補間速度との同期化を行い、同期化された前記ドップラー速度と前記リアルタイム補間速度との誤差量を算出する同期化処理手段と、
前記同期化処理手段によって算出された前記誤差量に、前記良否係数算出手段によって算出された前記係数を乗算する良否係数乗算手段と、
前記良否係数乗算手段によって前記係数が乗算された誤差量から前記リアルタイム補間速度に対する調整量を、カルマンフィルタによって推定演算するカルマンフィルタ手段と、
を備え、
前記ストラップダウンナビゲータ手段は、前記ストラップダウン演算により算出された速度に、前記カルマンフィルタ手段によって推定演算された前記調整量を融合して前記リアルタイム補間速度を算出する、
請求項1又は2に記載の移動体回転半径計測装置。
【請求項4】
移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機と、前記移動体に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMUとを備え、前記移動体が移動したときの回転半径を計測する移動体回転半径計測装置が実行する方法であって、
前記GPS受信機が受信したGPS搬送波と、前記IMUが出力したデータとをカルマンフィルタにより処理することで速度を算出する移動体高精度速度算出ステップと、
前記移動体高精度速度算出ステップにより算出された南北方向の速度を積算し、南北方向の移動距離を算出する南北方向距離算出ステップと、
前記移動体高精度速度算出ステップにより算出された東西方向の速度を積算し、東西方向の移動距離を算出する東西方向距離算出ステップと、
前記南北方向距離算出ステップ及び前記東西方向距離算出ステップによって算出された移動距離に基づいて算出される移動軌跡から、回転半径を算出する回転半径算出ステップと、
を備える方法。
【図1】



【図2】
【図3】

【図4】
【図5】

【図6】

【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−50392(P2013−50392A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−188664(P2011−188664)
【出願日】平成23年8月31日(2011.8.31)
【出願人】(000145806)株式会社小野測器 (230)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月31日(2011.8.31)
【出願人】(000145806)株式会社小野測器 (230)
【Fターム(参考)】
[ Back to top ]