
移動体搭載装置及び移動体管理装置
【課題】移動体を利用した移動を行っているユーザの状況を、離れた場所から把握できるようにし、さらに把握された状況に応じた適切な処理が行われるようにする。
【解決手段】福祉用電動車両100の車載装置200は、利用者が福祉用電動車両に乗車中か否か、及び福祉用電動車両が移動中か否かを検知することが可能である。車載装置200は、監視者通信端末210からの着呼を受けた場合、利用者が乗車中か否か及び福祉用電動車両が移動中か否かの検知結果に基づいて、利用者が車載装置を用いて通話を行うことが可能な状況かどうかを判定する。そして、利用者が車載装置を用いて通話を行うことが可能であれば利用者に車載装置を用いた通話を行わせる一方、不可能であれば、別の登録されている通信装置(利用者宅家電話機260や携帯電話機280)から、利用者の現在の状況に最適な通信装置を選択し、通話要求を転送する。
【解決手段】福祉用電動車両100の車載装置200は、利用者が福祉用電動車両に乗車中か否か、及び福祉用電動車両が移動中か否かを検知することが可能である。車載装置200は、監視者通信端末210からの着呼を受けた場合、利用者が乗車中か否か及び福祉用電動車両が移動中か否かの検知結果に基づいて、利用者が車載装置を用いて通話を行うことが可能な状況かどうかを判定する。そして、利用者が車載装置を用いて通話を行うことが可能であれば利用者に車載装置を用いた通話を行わせる一方、不可能であれば、別の登録されている通信装置(利用者宅家電話機260や携帯電話機280)から、利用者の現在の状況に最適な通信装置を選択し、通話要求を転送する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体の利用者の移動支援や、移動体の利用者の監視・保護を行う移動体に搭載される移動体搭載装置、及びこの移動体の管理を行う移動体管理装置に関する。
【背景技術】
【0002】
従来、様々な通信技術が存在し、ユーザが利用する通信端末も様々な形態のものが存在する。ユーザ同士で通話を行うことが可能な電話機としては、例えばテレビ電話機、携帯電話機、家庭用電話機(家電話機)、車用ハンドフリーヘッドセット(マイクロホン付きヘッドホン)など、様々な通信技術及び通信端末の形態が存在している。
【0003】
こうした通信端末はそれぞれメリットとデメリットが存在する。例えば、携帯電話機の場合は、持ち運び可能なことからユーザとの連絡が取れやすいというメリットはあるものの、無線通信の電波が届かない場合(通信不可能な場合)があるというデメリットや、車両の運転中は通話不可能(安全上の理由で携帯電話機による通話は禁止されている)というデメリットなどが存在している。このように、各種の通信手段は利用者の存在している場所や利用者の状況などによって、利用可能な場合や利用に適している場合などが大きく異なっている。
【0004】
一方、車両などの移動体の状況を、離れた場所から把握することを可能にする技術として、例えば、下記の特許文献1〜3に開示されている技術が存在する。
【0005】
下記の特許文献1には、駆動手段を有する移動体のバッテリ残量を移動体から離れた介護者用端末器(保護者)に通知したり、設定された移動目的地までの距離に応じて通知したりすることを可能とする技術が開示されている。
【0006】
また、下記の特許文献2には、巡回車両における乗員の着座を判断することによって、巡回車両の巡回先への到着を判断することを可能とする技術が開示されている。
【0007】
また、下記の特許文献3には、車椅子にナビゲーション装置を設置し、車椅子の現在位置情報を通信手段を介して第3者に送信できるようにする技術が開示されている。
【特許文献1】特開2002−267463号公報
【特許文献2】特開2005−165818号公報
【特許文献3】特開2001−304908号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に開示されている技術では、車両のバッテリ残量が、離れた場所に存在する第3者に通知されるだけで、この通知だけでは、車両やドライバがどのような状況に置かれているかを詳細に把握することは不可能である。特に、実際にバッテリが切れてしまい、移動体が動かなくなった後のドライバの行動は把握できない。
【0009】
また、特許文献2に開示されている技術では、着座(運転)中のドライバの行動は把握できるものの、ドライバが下車している場合の行動や状況を把握することは困難である。
【0010】
また、特許文献3に開示されている技術では、車椅子の現在位置を把握することが可能であるが、やはり同様にこの車椅子を使用しているユーザの詳細な状況を把握することは困難である。
【0011】
これらの技術ではいずれも、移動体を利用して移動を行っているユーザ(ドライバ)の状況を詳細に把握することは不可能である。したがって、例えばこのユーザの置かれている状況が正確に分からないため、このユーザに対して連絡を取ろうとしている人は、そのような通信手段がより連絡が取れやすいかを適切に判断することはできない。
【0012】
上記の問題に鑑み、本発明は、移動体を利用した移動を行っているユーザの状況に応じた適切な処理が行われるようにすることを目的とする。
【課題を解決するための手段】
【0013】
上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者又は前記移動体の状況を検知する状況検知手段と、
前記利用者と連絡が可能な複数の通信装置のそれぞれのあて先を含む利用者登録データが格納されている利用者登録データ格納手段と、
無線通信を介して通話を行うための通話手段と
前記通話手段において任意の端末から通話要求を受信した場合、前記状況検知手段によって前記利用者又は前記移動体の状況を判断して、前記利用者が前記通話手段による通話を行うことが可能か否かを判定する通話可能判定手段と、
前記通話手段での通話が不可能と判定された場合に、前記利用者登録データに含まれる前記複数の通信装置の中から、前記状況検知手段の検知結果に基づいて最適と判断される通信装置を選択する通信選択手段と、
前記通信選択手段で選択された前記通信装置に対する前記通話要求の転送を指示する通話要求転送指示手段とを、
有する。
【0014】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記状況検知手段が、前記移動体が移動中か停止中か、及び/又は、前記利用者が乗車中か下車中かを検知するように構成されている。
【0015】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記状況検知手段によって前記利用者が乗車中であることが検知された場合に、前記利用者に前記通話手段による通話を行わせるための着呼処理を行う着呼処理手段を有する。
【0016】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体の移動時における通話の危険性を示す警報を報知する警報報知手段を有する。
【0017】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体が停止するまで前記利用者に前記通話手段による通話を行わせないように構成されている。
【0018】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者による前記着呼への応答と同時に前記移動体を減速又は停止させる移動体制動手段を有する。
【0019】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が前記移動体を移動させるための操作を行う操作器と、前記利用者が通話を行うために把持する受話器とを前記利用者が同時に操作できないように前記操作器及び前記受話器が配置されている。
【0020】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の停止後、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する。
【0021】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が停止中であることが検知された場合に、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する。
【0022】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答しなかった場合、前記利用者に対して前記利用者又は前記移動体に関する情報の送信が行われていることを報知せずに、所定の連絡先に対して前記利用者又は前記移動体に関する情報を送信する情報送信手段を有する。
【0023】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者に関する情報として前記利用者の現在の状態を示す情報を使用するように構成されている。
【0024】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者の顔を撮像する利用者撮像手段、及び/又は、前記利用者の生体情報を検知する生体情報検知手段を有し、前記利用者に関する情報として、前記利用者撮像手段によって撮像された前記利用者の顔画像、及び/又は、前記生体情報検知手段によって検知された前記利用者の生体情報を使用するように構成されている。
【0025】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体に関する情報として前記移動体の現在の状態を示す情報を使用するように構成されている。
【0026】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の現在地情報を取得する現在地情報取得手段、前記移動体の周囲を撮像する周囲撮像手段、前記移動体の移動履歴情報を格納する移動履歴情報格納手段の少なくとも1つを有し、前記移動体に関する情報として、前記現在地情報取得手段で取得された前記移動体の現在地情報、前記周囲撮像手段によって撮像された前記移動体の周囲画像、前記移動履歴情報格納手段に格納されている前記移動体の移動履歴の少なくとも1つを使用するように構成されている。
【0027】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答しなかった場合、通話の発呼側から受信する前記移動体の減速又は停止の指示に基づいて前記移動体を減速又は停止させる移動体制動手段を有する。
【0028】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答しなかった場合であっても、前記通話の着呼に応じる処理を行って前記利用者に強制的に通話させる強制着呼手段を有する。
【0029】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記着呼処理時に、通話の着呼を示す情報と共に、前記通話の発呼側から受信する画像情報を表示する画像表示手段を有する。
【0030】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の現在地情報を取得する現在地情報取得手段と、
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段とを、
有し、前記状況検知手段によって前記移動体が停止中、かつ前記利用者が下車中であることが検知された場合に、前記現在地情報取得手段で取得された前記移動体の現在地情報が前記自宅位置の周辺である場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の自宅電話機として登録されている前記通信装置を選択するように構成されている。
【0031】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の現在地情報を取得する現在地情報取得手段と、
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段とを、
有し、前記状況検知手段によって前記移動体が停止中、かつ前記利用者が下車中であることが検知された場合に、前記現在地情報取得手段で取得された前記移動体の現在地情報が前記自宅位置の周辺ではない場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の携帯電話機として登録されている前記通信装置を選択するように構成されている。
【0032】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の現在地情報を取得する現在地情報取得手段と、
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段と、
無線通信によって、前記移動体の周囲に存在する子機に前記通話を転送する基地局として機能する無線通信手段とを、
有し、前記状況検知手段によって前記移動体が停止中、かつ前記利用者が下車中であることが検知された場合に、前記現在地情報取得手段で取得された前記移動体の現在地情報が前記自宅位置の周辺ではない場合には、前記通信選択手段は、前記通話の転送先として、無線通信手段を介して通話が可能な前記子機を選択するように構成されている。
【0033】
また、上記の目的を達成するため、本発明の移動体管理装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置から、前記利用者又は前記移動体の状況に係る情報を受信し格納する状況情報格納手段と、
前記利用者と連絡が可能な複数の通信装置のそれぞれのあて先を含む利用者登録データが格納されている利用者登録データ格納手段と、
任意の端末から前記移動体搭載装置への通話要求を受信した場合、前記状況情報格納手段に格納されている前記利用者の状況に係る情報から前記利用者又は前記移動体の状況を判断して、前記利用者が前記移動体搭載装置に搭載されている通話手段によって通話を行うことが可能か否かを判定する通話可能判定手段と、
前記移動体搭載装置に搭載されている前記通話手段による前記利用者の通話が不可能と判定された場合に、前記利用者登録データに含まれる前記複数の通信装置の中から、前記利用者又は前記移動体の状況に基づいて最適と判断される通信装置を選択する通信選択手段と、
前記通信選択手段で選択された前記通信装置に対する前記通話要求の転送を行う通話要求転送手段とを、
有する。
【0034】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記利用者又は前記移動体の状況に係る情報に、前記移動体が移動中か停止中かを示す情報、及び/又は、前記利用者が乗車中か下車中かを示す情報が含まれている。
【0035】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記利用者又は前記移動体の状況に係る情報に基づいて、前記利用者が乗車中であることが把握された場合には、前記移動体搭載装置に搭載されている通話手段に前記通話要求の転送を行うように構成されている。
【0036】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段を有し、
前記利用者又は前記移動体の状況に係る情報に基づいて、前記移動体が停止中、かつ前記利用者が下車中であることが把握された場合に、前記利用者又は前記移動体の状況に係る情報に含まれる前記移動体の現在地情報が前記自宅位置の周辺である場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の自宅電話機として登録されている前記通信装置を選択するように構成されている。
【0037】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段を有し、
前記利用者又は前記移動体の状況に係る情報に基づいて、前記移動体が停止中、かつ前記利用者が下車中であることが把握された場合に、前記利用者又は前記移動体の状況に係る情報に含まれる前記移動体の現在地情報が前記自宅位置の周辺ではない場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の携帯電話機として登録されている前記通信装置を選択するように構成されている。
【0038】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者又は前記移動体の状況を検知する状況検知手段と、
無線通信を介して通話を行うための通話手段と、
前記通話手段において任意の端末から通話要求を受信した場合、前記利用者に前記通話手段による通話を行わせるための着呼処理を行う着呼処理手段と、
前記着呼に対する前記利用者の応答の有無、及び、前記状況検知手段によって検知された前記利用者又は前記移動体の状況に応じた処理を行う着呼時処理手段とを、
有する。
【0039】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記状況検知手段が、前記移動体が移動中か停止中か、及び/又は、前記利用者が乗車中か下車中かを検知するように構成されている。
【0040】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体の移動時における通話の危険性を示す警報を報知する警報報知手段を有する。
【0041】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体が停止するまで前記利用者に前記通話手段による通話を行わせないように構成されている。
【0042】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者による前記着呼への応答と同時に前記移動体を減速又は停止させる移動体制動手段を有する。
【0043】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が前記移動体を移動させるための操作を行う操作器と、前記利用者が通話を行うために把持する受話器とを前記利用者が同時に操作できないように前記操作器及び前記受話器が配置されている。
【0044】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の停止後、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する。
【0045】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が停止中であることが検知された場合に、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する。
【0046】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答しなかった場合、前記利用者に対して前記利用者又は前記移動体に関する情報の送信が行われていることを報知せずに、所定の連絡先に対して前記利用者又は前記移動体に関する情報を送信する情報送信手段を有する。
【0047】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者に関する情報として前記利用者の現在の状態を示す情報を使用するように構成されている。
【0048】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者の顔を撮像する利用者撮像手段、及び/又は、前記利用者の生体情報を検知する生体情報検知手段を有し、前記利用者に関する情報として、前記利用者撮像手段によって撮像された前記利用者の顔画像、及び/又は、前記生体情報検知手段によって検知された前記利用者の生体情報を使用するように構成されている。
【0049】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体に関する情報として前記移動体の現在の状態を示す情報を使用するように構成されている。
【0050】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の現在地情報を取得する現在地情報取得手段、前記移動体の周囲を撮像する周囲撮像手段、前記移動体の移動履歴情報を格納する移動履歴情報格納手段の少なくとも1つを有し、前記移動体に関する情報として、前記現在地情報取得手段で取得された前記移動体の現在地情報、前記周囲撮像手段によって撮像された前記移動体の周囲画像、前記移動履歴情報格納手段に格納されている前記移動体の移動履歴の少なくとも1つを使用するように構成されている。
【0051】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答しなかった場合、通話の発呼側から受信する前記移動体の減速又は停止の指示に基づいて前記移動体を減速又は停止させる移動体制動手段を有する。
【0052】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答しなかった場合であっても、前記通話の着呼に応じる処理を行って前記利用者に強制的に通話させる強制着呼手段を有する。
【0053】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記着呼処理時に、通話の着呼を示す情報と共に、前記通話の発呼側から受信する画像情報を表示する画像表示手段を有する。
【0054】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者が前記移動体から下車しており、かつ前記移動体が停止中であることを検知する下車検知手段と、
前記下車検知手段で、前記利用者が前記移動体を下車しており、かつ前記移動体が停止中であることが検知されている状態において、前記利用者が前記移動体にすぐに乗車することのできない前記移動体が乗り捨てられた状態であることを推定する乗り捨て状態推定手段とを、
有する。
【0055】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記乗り捨て状態推定手段が、前記利用者の下車を検知した場合、前記利用者の下車から一定時間経過した場合、前記利用者が前記移動体のキーを抜いてから一定時間経過した場合、前記利用者が前記移動体のアクセサリ電源をオフにしてから一定時間経過した場合、前記移動体のギアがパーキングにセットされてから一定時間経過した場合、前記利用者と前記移動体との距離が一定距離以上離れてから一定時間経過した場合、前記移動体が駐車エリアに停止している場合のいずれか1つの条件に基づいて、前記移動体が乗り捨てられた状態であることを推定するように構成されている。
【0056】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記乗り捨て状態推定手段によって前記移動体が乗り捨てられた状態であると判断された場合には、所定の連絡先に情報の送信を行う情報送信手段を有する。
【0057】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記情報送信手段が、前記移動体に設けられている現在地取得手段によって取得された前記移動体の現在地情報、前記移動体に設けられている前記利用者の画像又は前記移動体の周囲の画像を撮像する撮像手段によって撮像された撮像画像、前記移動体によって記録された前記移動体の移動履歴情報の少なくとも1つを送信するように構成されている。
【0058】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記所定の連絡先が前記利用者の携帯電話機であって、前記情報送信手段が、前記移動体に設けられている現在地取得手段によって取得された前記移動体の現在地情報、前記移動体の現在地までの誘導するためのナビゲーション情報、前記乗り捨て状態にある旨を通知する警告情報の少なくとも1つを送信するように構成されている。
【0059】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体に設けられている前記利用者の画像又は前記移動体の周囲の画像を撮像する撮像手段と、
前記撮像手段によって撮像された撮像画像を記憶する撮像画像記憶手とを、
有し、前記撮像手段が前記利用者の下車時以降に画像を撮像して前記撮像画像に記憶し、前記情報送信手段が、前記撮像画像記憶手段に記憶された前記撮像画像を送信するように構成されている。
【0060】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記撮像手段が前記利用者の下車から一定時間だけ撮像を行うように構成されている。
【0061】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が下車してからの経過時間に応じて、前記撮像手段が撮像方法を変更するように構成されている。
【0062】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の周囲の動体を検出する動体検出手段を有し、前記撮像手段が前記動体の検出に応じて撮像を行うように構成されている。
【0063】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記動体の検出結果に応じて、前記撮像手段が撮像方法を変更するように構成されている。
【0064】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者との距離を測定することが可能な距離情報取得手段を有し、前記撮像手段が、前記距離情報取得手段に応じて撮像方法を変更するように構成されている。
【0065】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記撮像手段が、前記撮像方法を変更する際に、撮像周期の変更又は前記撮像画像の情報量の変更を行うように構成されている。
【0066】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記情報送信手段が、前記所定の連絡先から要求を受けずに自発的に前記情報を送信するように構成されている。
【0067】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記情報送信手段が、前記所定の連絡先から要求を受けた場合に前記情報を送信するように構成されている。
【0068】
また、上記の目的を達成するため、本発明の移動体管理装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置から前記移動体の現在地情報を受信する現在地情報受信手段と、
所定のエリアを特定するエリア情報を格納するエリア情報格納手段と、
前記移動体の前記現在地を参照して、前記移動体が新たに前記所定のエリアに進入したか否かを検出する現在地状況判断手段と、
前記現在地状況判断手段によって前記所定のエリアへの前記移動体の進入が検出された場合、前記移動体の進入が検出された旨を所定の連絡先に通知する通知手段とを、
有する。
【0069】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記所定のエリアとして、前記利用者の過去の行動履歴から得られる前記利用者がよく訪れる行動エリア、前記利用者の行動を制限する制限エリア、前記利用者の進入が推奨される推奨エリアの少なくとも1つを使用するように構成されている。
【0070】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記移動体の進入が検出された前記所定のエリアの特性又は設定レベルに応じて、前記移動体搭載装置に対して前記移動体の移動性能の変更指示を行う性能変更指示手段を有する。
【0071】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記所定のエリアへの進入を前記利用者に報知するように前記移動体搭載装置に指示する報知指示手段と、
前記移動体の進入が検出された前記所定のエリアの特性又は設定レベルに応じて、前記報知指示手段で指示する報知の態様の変更指示を行う報知態様変更指示手段とを、
有する。
【0072】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記移動体の進入が検出された前記所定のエリアの特性又は設定レベルに応じて、前記移動体搭載装置に対して前記移動体からの情報送信の態様の変更指示を行う情報送信態様変更指示手段を有する。
【0073】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記移動体の駆動を行うための電力を蓄電するバッテリと、
前記バッテリの残量を測定するバッテリ残量測定手段と、
前記移動体が過去によく停止していた地点の情報を格納する停止地点格納手段と、
前記移動体の現在地情報を取得する現在地取得手段と、
前記バッテリ残量測定手段で測定された前記バッテリの残量が所定値より低くなった場合に、前記移動体が過去によく停止していた地点の情報及び前記現在地情報を所定の連絡先に通知する通知手段とを、
有する。
【0074】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記移動体の駆動を行うための電力を蓄電するバッテリと、
前記バッテリの残量を測定するバッテリ残量測定手段と、
前記移動体が過去によく停止していた地点の情報を格納する停止地点格納手段と、
前記移動体の現在地情報を取得する現在地取得手段と、
前記バッテリ残量測定手段で測定された前記バッテリの残量が所定値より低くなった場合に、前記現在地情報と、前記移動体が過去によく停止していた地点の情報とに基づいて、前記移動体のこの後の停止地点を予測する停止地点予測手段と、
前記停止地点予測手段によって予測された前記停止地点を所定の連絡先に通知する通知手段とを、
有する。
【0075】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記移動体の駆動を行うための電力を蓄電する第1バッテリと、
前記移動体の通信を行うための電力を蓄電する第2バッテリと、
前記第1及び第2バッテリの残量を測定するバッテリ残量測定手段と、
前記バッテリ残量測定手段で測定された前記第1バッテリの残量が第1の所定値より低くなった場合に、又は、前記バッテリ残量測定手段で測定された前記第2バッテリの残量が第2の所定値より低くなった場合に、所定の連絡先に第1及び第2バッテリのそれぞれに応じた通知を行う通知手段とを、
有する。
【0076】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者が前記移動体に乗車しており、かつ前記移動体が停止中であることを検知する状況検知手段と、
前記状況検知手段で、前記利用者が前記移動体に乗車しており、かつ前記移動体が停止中である状態が所定時間続いた場合には、所定の連絡先に対して前記利用者又は前記移動体に関する情報を送信する情報送信手段とを、
有する。
【0077】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者に関する情報として前記利用者の現在の状態を示す情報を使用するように構成されている。
【0078】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者の顔を撮像する利用者撮像手段、及び/又は、前記利用者の生体情報を検知する生体情報検知手段を有し、前記利用者に関する情報として、前記利用者撮像手段によって撮像された前記利用者の顔画像、及び/又は、前記生体情報検知手段によって検知された前記利用者の生体情報を使用するように構成されている。
【0079】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体に関する情報として前記移動体の現在の状態を示す情報を使用するように構成されている。
【0080】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の現在地情報を取得する現在地情報取得手段、前記移動体の周囲を撮像する周囲撮像手段、前記移動体の移動履歴情報を格納する移動履歴情報格納手段の少なくとも1つを有し、前記移動体に関する情報として、前記現在地情報取得手段で取得された前記移動体の現在地情報、前記周囲撮像手段によって撮像された前記移動体の周囲画像、前記移動履歴情報格納手段に格納されている前記移動体の移動履歴の少なくとも1つを使用するように構成されている。
【0081】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者が前記移動体から下車しており、かつ前記移動体が移動中であることを検知する状況検知手段と、
前記状況検知手段で、前記利用者が前記移動体から下車しており、かつ前記移動体が移動中である状態が検知された場合には、所定の連絡先に対して前記状況検知手段による検知結果を通知する通知手段とを、
有する。
【発明の効果】
【0082】
本発明は、移動体を利用した移動を行っているユーザの状況に応じた適切な処理が行われるようにするという効果を有している。
【発明を実施するための最良の形態】
【0083】
以下、図面を参照しながら、本発明の第1〜第3の実施の形態について説明する。
【0084】
本発明によれば、車両を運転して移動しているドライバ(利用者と呼ぶこともある)の状況を把握できるようにし、車両から離れた場所に存在している監視者(保護者と呼ぶこともある)がドライバに対して連絡を取る場合に、そのドライバの状況に応じて適切な連絡先につながるようになり、また、ドライバと連絡が取れない場合でも、そのドライバの近況が把握できるようになる。
【0085】
また、本発明によれば、ドライバが車両を降りて車両から離れた場合でも、車両から離れた場所に存在している監視者がドライバの下車時の状況を把握できるようになり、さらにドライバの下車後の行動を予測できるようになる。また、本発明によれば、ドライバの下車後の車両の状態を把握できるようになる。
【0086】
また、本発明によれば、ドライバの行動履歴に基づいてドライバの状況の通知が行われるようにすることにより、車両から離れた場所に存在している監視者が、そのドライバの状況を把握できるようになる。
【0087】
また、本発明によれば、車両の駆動源(電動式の場合はバッテリ)の残りエネルギー量が少なくなった場合に車両から通知が行われることによって、車両から離れた場所に存在している監視者が、そのドライバの状況を把握し、かつ車両のバッテリがなくなった後のドライバの行動を予測できるようになる。
【0088】
なお、本明細書における車両は、エンジンやモータなどの自律的な駆動手段を有する移動体であり、一般的な車両に加えて、日本国の道路交通法では歩行者としての扱いを受ける電動車椅子や福祉用電動車両(バッテリカー)なども含むものである。
【0089】
以下では、ドライバ(主に老齢者)が運転する福祉用電動車両の移動位置やドライバの状況を、その家族である保護者(監視者)が監視するシステムに本発明を適用した場合について説明する。なお、本発明は、例えば運送会社のオペレータが荷物の配送を行うドライバ(配送員)の行動を管理するシステムや、タクシー管理会社がタクシー(タクシードライバ)の走行位置を管理するシステムなどを始めとして、移動体の移動位置や移動体のドライバの状況などを、遠隔のオペレータが把握、管理するための任意のシステムに適用可能である。
【0090】
<第1の実施の形態>
以下、本発明の第1の実施の形態について説明する。
【0091】
まず、本発明の第1の実施の形態における構成について説明する。図1には、本発明の第1の実施の形態における移動体(福祉用電動車両)の外観及び機能が模式的に図示されている。図1には、ドライバ150が乗車している福祉用電動車両100に、タッチパネル画面105、ドライバ撮像用カメラ110、車外撮像用カメラ115、乗車センサ120、GPS(Global Positioning System)装置125、TV電話システム130、データ通信部135の各機能が設けられている状態が模式的に図示されている。
【0092】
図1において、タッチパネル画面105は、ドライバ150が運転中でも容易に視認可能な位置に配置される表示画面及び操作入力部である。また、ドライバ撮像用カメラ110は、運転席を撮像範囲とし、ドライバが乗車している状態を撮像するためのカメラである。また、車外撮像用カメラ115は、福祉用電動車両100の周辺の風景を撮像するためのカメラである。また、乗車センサ120は、ドライバが福祉用電動車両100に乗車しているか否かを検知する機能を有している。
【0093】
また、GPS装置125は、GPS信号の受信及び処理によって、福祉用電動車両100の現在地情報を取得する機能を有している。また、TV電話システム130は、タッチパネル画面105への画面表示と共に通話を行うテレビ電話機能を有している。また、データ通信部135は、パケット交換型データ通信ネットワークなどを通じてパケットデータ通信を行う機能を有している。
【0094】
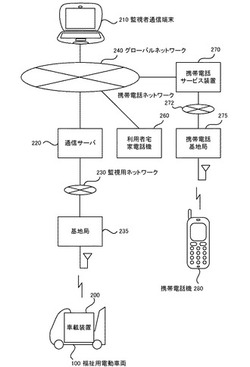
また、図2には、本発明の第1の実施の形態におけるドライバ監視システムの構成の一例が図示されている。図2には、福祉用電動車両100に搭載されている車載装置200、監視者通信端末210、通信サーバ(移動体管理装置)220、監視用ネットワーク230、基地局235、グローバルネットワーク240、利用者宅家電話機260、携帯電話サービス装置270、携帯電話ネットワーク272、携帯電話基地局275、携帯電話機280が図示されている。
【0095】
図2において、車載装置200は、図1に図示されている福祉用電動車両100に搭載されている装置である。また、監視者通信端末210は、福祉用電動車両100のドライバ150の監視を行う監視者(発呼者)が操作する端末である。
【0096】
また、通信サーバ220は、監視者通信端末210がドライバ150に対して行った発呼に関する通話要求を、そのドライバ150の対応する車載装置200、利用者宅家電話機260、携帯電話機280のいずれかに中継する装置である。なお、通信サーバ220は、複数のドライバ150の管理を行い、それぞれのドライバ150に応じた端末に通話要求を行うことも可能である。
【0097】
また、監視用ネットワーク230は、通信サーバ220と車載装置200とを接続するネットワークであり、基地局235は、車載装置200が無線通信によって監視用ネットワーク230に接続する接続ポイントである。なお、図2では、基地局235は1つしか図示されていないが、通常は、車載装置200が移動先において通信可能となるように、多数の基地局235が存在している。
【0098】
また、グローバルネットワーク240は、例えばインターネットなどである。図2では、グローバルネットワーク240には、監視者通信端末210、通信サーバ220、利用者宅家電話機260、携帯電話サービス装置270が接続されている。
【0099】
また、利用者宅家電話機260は、例えば、ドライバ150の自宅に設置されている固定電話機であり、IP(Internet Protocol:インターネットプロトコル)通信を利用したIP電話機であってもよく、電話通信を使用する電話機であってもよい。また、携帯電話サービス装置270は、グローバルネットワーク240と携帯電話ネットワーク272との接続を仲介する装置であり、携帯電話の通信事業者により管理されている。
【0100】
また、携帯電話ネットワーク272は、携帯電話機280における通話を中継するネットワークであり、また、携帯電話基地局275は、携帯電話機280が無線通信によって接続する基地局である。なお、図2では、携帯電話基地局275は1つしか図示されていないが、通常は、携帯電話機280が移動先において通話可能となるように、多数の携帯電話基地局275が存在している。
【0101】
また、携帯電話機280は、ドライバ150が常時携帯しているものであり、ドライバ150が福祉用電動車両100から離れている場合であっても、この携帯電話機280を通じて、ドライバ150と連絡を取ることが可能である。
【0102】
なお、図2に図示されている監視用ネットワーク230、グローバルネットワーク240、携帯電話ネットワーク272の各ネットワークが、他のネットワークの一部又は全部と同一の物理ネットワークを使用してもよい。例えば、監視用ネットワーク230は、通信サーバ220の配下にグローバルネットワーク240から独立して存在していように図示されているが、グローバルネットワーク240内に監視用ネットワーク230の論理ネットワークが構築されるようにしてもよい。なお、こうしたネットワークトポロジは、例えば、車載装置200の無線通信に用いられている通信技術によって異なるものとなるが、本発明では、こうしたネットワークトポロジ及び通信技術に制限されるものではない。
【0103】
また、図2では、車載装置200、利用者宅家電話機260、携帯電話機280がそれぞれ1つずつ図示されているが、それぞれ複数存在してもよい。この場合、複数のドライバ150のそれぞれに対応する車載装置200、利用者宅家電話機260、携帯電話機280が存在してもよい。さらには、例えば、車載装置200を基地局とする子機を使用して、車載装置200から離れた場所から、車載装置200に搭載されている通信手段を通じて通話を行えるようにしてもよい。
【0104】
また、図3には、本発明の第1の実施の形態における車載装置の構成の一例が図示されている。なお、図3には、車載装置200の機能が内部バスで接続された各ブロックによって図示されているが、これらの各機能は、ハードウェア及び/又はソフトウェア(プログラム)によって実現可能である。
【0105】
図3に図示されている車載装置200は、表示入力部305、ドライバ撮像部310、車外撮像部315、乗車検知部320、自車位置検知部325、通話部330、通信部335、利用者登録データ格納部340、画像データ格納部345、移動履歴データ格納部350、地図データ格納部355、車両制御部360、情報処理部365を有している。
【0106】
表示入力部305は、ドライバ150に情報を提供するための表示画面と、ドライバ150が情報を入力するための操作入力部である。表示入力部305は、ドライバが運転席に着座した位置から視認できるとともに、入力操作を行うことができる位置に配置されることが望ましい。なお、この表示入力部305は、図1に図示されているタッチパネル画面105に対応するものである。
【0107】
また、ドライバ撮像部310は、例えば運転席を撮像範囲とし、ドライバ150が運転席に着座している状態を撮像することが可能な位置に配置されているカメラである。なお、このドライバ撮像部310は、図1に図示されているドライバ撮像用カメラ110に対応するものである。
【0108】
また、車外撮像部315は、福祉用電動車両100の周囲を撮像するためのカメラである。なお、この車外撮像用カメラ115は、ドライバの運転を支援するために福祉用電動車両100の前方や後方を撮像するカメラを兼用してもよく、福祉用電動車両100の周囲を全方位にわたって撮像できるものであってもよい。また、この車外撮像部315は、図1に図示されている車外撮像用カメラ115に対応するものである。
【0109】
また、乗車検知部320は、ドライバ150が乗車しているか否か(運転席に着座しているか否か)を検知するための機能である。なお、ドライバ150が乗車していることを検知するための方法には任意の技術を用いることが可能である。例えば、乗車検知部320は、ドライバ150が運転席に着座した際の重量の変化やシートベルトの状態の変化などから、ドライバ150が乗車しているか否かを検知してもよく、さらには、ドライバ150の顔認識を行うことによって、乗車している人物がこの福祉用電動車両100を通常運転している利用者か、あるいは、それ以外の人物(他人)なのかを認識してもよい。なお、この乗車検知部320は、図1に図示されている乗車センサ120に対応するものである。
【0110】
また、自車位置検知部325は、福祉用電動車両100の現在地情報を取得する機能を有している。なお、福祉用電動車両100の現在地を検知するための方法には任意の技術を用いることが可能である。例えば、自車位置検知部325は、GPS信号を受信、解析して、現在地の緯度及び経度を取得してもよく、複数の基地局からの識別情報及び受信電界強度を解析して、現在地を推定してもよい。なお、この自車位置検知部325は、図1に図示されているGPS装置125に対応するものである。また、福祉用電動車両100が移動中(走行中)であるか否かを検出するためには、自車位置検知部325による現在地の時間的な変化が発生しているか否かを確認してもよいが、車載装置200が速度センや加速度センサ(いずれも不図示)を有しており、これらのセンサによって移動の検知が行われてもよい。また、単純に速度が発生している場合(速度>0km/hの場合)に福祉用電動車両100が移動中であると定義してもよく、あるいは、例えば一定時間以上速度が発生した場合や、一定時間における平均速度>0km/hとなった場合に福祉用電動車両100が移動中であると定義してもよい。
【0111】
また、通話部330は、ドライバ150が任意の通話端末(例えば、図2に図示されている監視者通信端末210)を操作している人物と通話を行うための機能を有している。この通話部330は、音声のみの通話機能を有していてもよく、表示画面の映像(双方のカメラによって撮像された映像)と連動して通話を行うテレビ電話機能を有していてもよい。なお、この通話部330は、図1に図示されているTV電話システム130に対応するものである。
【0112】
また、通信部335は、パケット交換型データ通信ネットワークなどを通じてパケットデータ通信を行う機能を有している。なお、図3では、通話部330と通信部335が異なるブロックによって表されているが、実際には、一部の通信機能を共用することが可能である。なお、この通信部335は、図1に図示されているデータ通信部135に対応するものである。
【0113】
また、利用者登録データ格納部340は、ドライバ150に関する様々な登録データを格納する情報格納部である。なお、このドライバ150の登録データは、例えば、後述の通信サーバ220の利用者登録データ格納部420に登録されるデータ(利用者ID、利用者アドレスデータ、緊急時連絡先アドレス、自宅位置)である。
【0114】
また、画像データ格納部345は、ドライバ撮像部310や車外撮像部315によって撮像された撮像画像の画像データを格納する情報格納部である。なお、画像データ格納部345に格納される画像データは、画像データ格納部345のデータ格納可能容量に基づいて、所定のデータ容量を超えないように、新しい画像データが格納されるとともに、古い画像データが消去されることが望ましい。
【0115】
また、移動履歴データ格納部350は、福祉用電動車両100の移動位置の履歴を格納する情報格納部である。例えば、移動履歴データ格納部350には、時刻とその時刻に自車位置検知部325で取得された現在地情報とが、所定時間間隔で格納される。
【0116】
また、地図データ格納部355は、表示入力部305に表示させる地図データを格納している情報格納部である。この地図データは、ドライバ150が現在地や目的地までの道程を視覚的に把握できるようにするために使用される。
【0117】
また、車両制御部360は、福祉用電動車両100を移動させる駆動手段(図3には不図示)の制御を行うことによって、福祉用電動車両100の走行制御を行う機能を有している。
【0118】
また、情報処理部365は、車載装置200における様々な判断処理や制御処理を行う機能を有している。また、例えば、情報処理部365によって、表示入力部305における地図データ(現在地周辺の地図及び福祉用電動車両100の現在地)の表示や目的地への誘導などの運転支援処理が行われてもよい。
【0119】
また、図8Aには、本発明の第1の実施の形態における車載装置200の表示画面周辺の一例が図示されている。図8Aに図示されているように、福祉用電動車両100のドライバ150が視認可能なタッチパネル画面105の周辺には、ドライバ撮像用カメラ110、スピーカ801、マイクロホン803が配置されている。また、図8Aでは、表示画面には、現在地付近の地図上に自車位置アイコン及び走行軌跡が表示されていることに加えて、通話アイコン811が表示されている。なお、通話アイコン811は、着呼時に表示画面に表示され、ドライバ150がこの通話アイコン811にタッチすることによって通話が開始される。
【0120】
また、図8Bには、本発明の第1の実施の形態における車載装置200の表示画面周辺の別の一例が図示されている。図8Bには、図8Aと同様にタッチパネル画面105の周辺が図示されているが、通話中の表示画面が図示されている。図8に図示されているように、通話中は、通話相手(監視者)の画像に加えて、通話終了アイコン813が表示されている。この通話終了アイコン813は、通話時に表示画面に表示され、ドライバ150がこの通話終了アイコン813にタッチすることによって通話が終了となる。
【0121】
一方、ドライバ150の通話相手となる監視者の監視者通信端末210の表示画面周辺は、図9に図示されているようなものとなる。図9には、本発明の第1の実施の形態における監視者通信端末210の表示画面周辺の一例が図示されている。図9に図示されているように、監視者通信端末210を操作する監視者が視認可能なタッチパネル画面907の周辺には、スピーカ901、マイクロホン903、監視者を撮像するためのカメラ905が配置されている。
【0122】
また、図9では、表示画面の下半分の左側にアドレスリスト917が表示されており、監視者は、複数のドライバ150の名前のリストの中から所望の名前をタッチすることで、そのドライバ150の情報を選択的に確認することが可能である。アドレスリストの名前が選択されると、可能であれば、例えば、そのドライバ150が所有している福祉用電動車両100の現在地が地図上に表示されることが望ましい。
【0123】
なお、図9では、アドレスリスト917の中から『Aさん』が選択されており、表示画面には『Aさん』に関する様々な情報が表示されている。さらに、表示画面の下半分には、『Aさん』の運転している福祉用電動車両100の現在地が地図上に表示されており、『Aさん』の状態が現在乗車中である旨も表示されている。
【0124】
また、『Aさん』とは現在通話中であり、図9では、表示画面の左上にドライバ150の画像、表示画面の右上に福祉用電動車両100の周辺を撮像した撮像画像が表示されているとともに、『Aさん』との通話を終了するための通話終了アイコン915も表示されている。さらに、表示画面には停車アイコン913も表示されている。この停車アイコン913は、監視者がタッチすることによって、福祉用電動車両100を強制的に減速及び停止させるための指示を車載装置200に送信することが可能である。
【0125】
また、図4には、本発明の第1の実施の形態における通信サーバの構成の一例が図示されている。なお、図4には、通信サーバ220の機能が内部バスで接続された各ブロックによって図示されているが、これらの各機能は、ハードウェア及び/又はソフトウェア(プログラム)によって実現可能である。
【0126】
図4に図示されている通信サーバ220は、情報処理部405、ネットワーク通信部410、車載装置側通信部415、利用者登録データ格納部420を有している。
【0127】
情報処理部405は、通信サーバ220における様々な判断処理や制御処理を行う機能を有している。また、ネットワーク通信部410は、通信サーバ220がグローバルネットワーク240に接続するための通信インタフェースであり、車載装置側通信部415は、通信サーバ220が監視用ネットワーク230に接続するための通信インタフェースである。なお、図4では、ネットワーク通信部410及び車載装置側通信部415は、それぞれ異なるブロックによって表されているが、これらの通信部は同一であってもよい。
【0128】
また、利用者登録データ格納部420は、ドライバ150に関する様々な登録データを格納する情報格納部である。なお、ドライバ150の登録データは、頻繁に変更されることのない静的な情報である。また、通信サーバ220において複数のドライバ150に関する処理が行われる場合には、利用者登録データ格納部420には、複数のドライバ150のそれぞれに関する様々な登録データが格納される。
【0129】
例えば、利用者登録データ格納部420に格納されるドライバ150の登録データは、図10に図示されているような構造を有している。すなわち、利用者登録データ格納部420に格納されるドライバ150の登録データは、複数のドライバ150のそれぞれに関して、利用者IDによって識別するとともに、各ドライバ150の利用者アドレスデータ(このドライバ150の車載装置200を特定する車載装置アドレス、このドライバ150の利用者宅家電話機260を特定する家電話アドレス、このドライバ150の携帯電話機280を特定する携帯電話アドレス)、このドライバ150の監視者に連絡を取る際の緊急時連絡先アドレス、自宅位置(例えば、緯度及び経度によって特定)を保持する構造を有している。
【0130】
次に、本発明の第1の実施の形態における動作について説明する。図5には、本発明の第1の実施の形態における通信サーバが発呼者から通信要求を受け付けた際の処理の一例が図示されている。
【0131】
ドライバ150の監視者が監視者通信端末210を操作し、車載装置200との通信を要求する操作を行ったとする。この場合、通信サーバ220は、車載装置200との通信要求を発呼者通信端末210から受け付けると、まず当該車載装置200が通信可能な状態か否かを調べる(ステップS501)。そして、車載装置200が通信可能な状態の場合には、発呼者情報(監視者通信端末210又はその操作を行っている監視者を特定する情報を含む)と共に通話要求を車載装置200に送信する(ステップS503)。
【0132】
なお、ステップS501では、福祉用電動車両100が通信圏内(無線通信の電波の届く範囲内)に存在していない場合や、福祉用電動車両100のバッテリが切れていたり、故障が発生していたりする場合などに、車載装置200が通信不可能な状態であると判断される。したがって、通信サーバ220は、まずステップS503における通話要求の送信処理を行い、車載装置200からの応答の有無に応じて、車載装置が通信可能な状態か否かを把握してもよい。
【0133】
通信サーバ220は、ステップS503で通信可能な状態の車載装置200に対して通話要求を行った後、車載装置200からの応答を待機する。このとき、通信サーバ220は、家電話機260で通話するように指示する車載装置200からの返信(ステップS505)、あるいは、携帯電話機280で通話するように指示する車載装置200からの返信(ステップS507)を待機する。なお、このとき車載装置200で行われる処理に関しては、図6を参照しながら後述する。
【0134】
そして、通信サーバ220は、家電話機260や携帯電話機280で通話するように指示する返信を車載装置200から受けなかった場合には、ステップS503で行われた通話要求が車載装置200に受け入れられて、監視者通信端末210と車載装置200との間で通話が行われている状態となり、そのまま車載装置200での通話を継続させる(ステップS508)。
【0135】
一方、車載装置200における処理の結果、家電話機260で通話するように指示する返信を車載装置200から受けた場合には、通信サーバ220は家電話機260へ通話要求を行って(ステップS509)、家電話機からの応答を待機する(ステップS511)。そして、この通話要求に対して家電話機260の応答があった場合(すなわち、家電話機260に出た場合)には、家電話機260での通話を継続させる(ステップS513)。
【0136】
また、車載装置200における処理の結果、携帯電話機280で通話するように指示する返信を車載装置200から受けた場合や、家電話機260への通話要求に対する応答がなかった場合には、通信サーバ220は携帯電話機280へ通話要求を行って(ステップS515)、家電話機からの応答を待機する(ステップS517)。そして、この通話要求に対して携帯電話機280の応答があった場合(すなわち、携帯電話機280に出た場合)には、携帯電話機280での通話を継続させる(ステップS519)。一方、携帯電話機280への通話要求に対する応答を受けなかった場合には、ドライバ150との通話は不可能と判断され、通信サーバ220は、発呼者に対してドライバ150との通話は不可能である旨を通知する(ステップS521)。
【0137】
なお、上述の説明では、ドライバ150が通話を行う際に利用可能な端末(電話機)として、車載装置200、家電話機260、携帯電話機280の3つを一例に挙げているが、通信サーバ220は、ドライバ150が利用可能な任意の端末(電話機)に対して、任意の優先度(通話要求を行う順列の設定)で通話要求を行うことが可能である。
【0138】
また、図6には、本発明の第1の実施の形態における車載装置が通信サーバから通信要求を受け付けた際の処理の一例が図示されている。
【0139】
通信サーバ220からの通話要求(図5のステップS503の処理に対応)を受信した車載装置200は、乗車検知部320の検知結果に基づいて、ドライバ150が乗車中か否かを判断する(ステップS601)。
【0140】
ステップS601でドライバ150が乗車中と判断された場合には、車載装置200は、表示入力部305の表示画面に通話アイコン811を表示する(ステップS603)。なお、この通話アイコン811の表示によって、ドライバ150に着呼を視覚的に通知することが可能となる。また、ドライバ150が、この通話アイコン811をタッチすることによって通話を受ける(電話に出る)ことが可能となる。さらには、ステップS603において、通話アイコン811と共に、発呼者通信端末210から受信する画像(例えば、発呼者通信端末210に付随するカメラで撮像された発呼者の顔画像)を表示画面に表示することによって、ドライバ150に対して通話相手を視覚的に通知することが可能となる。
【0141】
そして、所定の時間(例えばT秒)だけ、ドライバ150による通話アイコン811のタッチ操作を待機し(ステップS605)、ドライバ150によってT秒以内に通話アイコン811のタッチ(ドライバ150による着呼への応答操作)が行われた場合には、車載装置200は、福祉用電動車両100が現在移動中(走行中)か否かを判断する(ステップS607)。福祉用電動車両100が移動中の場合には、車両制御部360によって、福祉用電動車両100が停止するまで減速制御が行われる(ステップS609、S611)。
【0142】
そして、福祉用電動車両100が最初から停止している場合や減速制御によって停止した場合には、車両制御部360によって、通話中は移動できないように福祉用電動車両100の駆動をロックし(ステップS613)、発呼者の画像を表示入力部305の表示画面に表示して通話を開始する(ステップS615)。
【0143】
一方、ステップS605でドライバ150によってT秒以内に通話アイコン811のタッチが行われなかった場合には、車載装置200は、例えば自動的に通話を受ける(電話に出る)ことが可能である(ステップS617)。このときの通話は、TV電話を使用せずにあくまでも音声通話のみとし、表示入力部305の表示画面は変更しない(すなわち、発呼者の画像を表示しない)ことが望ましい。
【0144】
また、ここで、ドライバ150が福祉用電動車両100を減速及び停止した場合には、ステップS613、S615の処理に進み、音声通話からTV電話への切り替えが行われるようにしてもよい。また、発呼者が監視者通信端末210を操作して、車載装置に対して福祉用電動車両100の停止指示を送信した場合(ステップS619)には上述のステップS607以降の処理に進み、福祉用電動車両100の減速及び停止後に、音声通話からTV電話への切り替えが行われるようにしてもよい。
【0145】
なお、ステップS605でドライバ150によってT秒以内に通話アイコン811のタッチが行われなかった場合には、車載装置200は、監視モードに自動的に移行してもよい。この監視モードは、例えば、ドライバ150が着呼に気付かずに電話に出なかった場合でも、例えば、ドライバ撮像部110によって撮像されたドライバ150の撮像画像が監視者通信端末210に送信されることによって、発呼者である監視者が、ドライバ150の現在の状態を把握できるようにするものである。なお、この監視モードでは、ドライバ150の撮像画像と共に、福祉用電動車両100で取得される音声も監視者通信端末210に送信されてもよい。また、監視モードにおいて、福祉用電動車両100の現在地情報や福祉用電動車両100の周辺を撮像した車外画像、現在地に至るまでの移動履歴などが監視者通信端末210に送信されてもよい。さらには、監視モードにおいて、例えば、所定のセンサによって検出されたドライバ150のバイタル情報(脈拍、体温などの生体情報)が監視者通信端末210に送信されてもよい。
【0146】
また、この監視モードでは、監視者通信端末210からドライバ150に話しかけることができるようにしてもよく、また、ドライバ150が監視者通信端末210からの会話(話しかけ)に応答すると、福祉用電動車両100が減速及び停止するように構成されていてもよい。さらには、ドライバ150が監視者通信端末210からの通話要求に応じなかった場合であっても、監視者通信端末210からの指示によって福祉用電動車両100の減速及び停止制御を強制的に行わせるとともに、ドライバ150との通話が開始されるようにしてもよい。
【0147】
また、上述の動作では、ドライバ150による通話アイコン811のタッチ操作が行われた場合には、車両制御部360によって減速制御が行われる。しかしながら、ドライバ150が通話の際に受話器を使用するようにし、さらに、その受話器の配置位置を例えば図12に図示されているようにすることによって、ドライバ150自身が福祉用電動車両100を減速及び停止しないと通話を行うことができないようにすることが可能である。
【0148】
また、上述の動作において、福祉用電動車両100が移動中の状態でドライバ150が着呼に応答した場合には、ドライバ150に対して警報を報知することが望ましい。この警報は、例えば福祉用電動車両100の停止を促す警報(「停止してください」などのメッセージを報知)であり、この場合、福祉用電動車両100が停止するまでは、通話が行われないように制御することも可能である。また、福祉用電動車両100が移動中の状態でドライバ150が着呼に応答した場合に、福祉用電動車両100の減速制御を自動的に行うと同時に、福祉用電動車両100が減速、停止する旨を通知する警報(「車両は自動的に停止します。停止した後、通話を行うことができます。」などのメッセージ)を報知することも可能である。
【0149】
図12には、本発明の第1の実施の形態における福祉用電動車両100の運転席周辺の外観の一例が図示されている。図12に図示されているように、ドライバ150は福祉用電動車両100を運転する際に両手でグリップ1203を握るとともに、さらに右手で速度調整レバー1201を握ることによって福祉用電動車両100の加速が開始され、速度調整レバー1201を握るのを止めた場合には、福祉用電動車両100は速やかに減速する。
【0150】
一方、通話時にドライバ150によって使用される受話器1205は、右手(速度調整レバー1201を握る手)側に設けられている。そして、車載装置200に対して着呼があった場合、ドライバ150は、受話器1205を右手で把持する必要があり、その結果、速度調整レバー1201から右手が離れて、福祉用電動車両100は減速及び停止する。これによって、通話を受けると同時に、福祉用電動車両100の減速及び停止が行われるようになり、ドライバ150による安全な運転が実現されるとともに、ドライバ150が自分の意図(及び自分のタイミング)で福祉用電動車両100を減速及び停止させるので、違和感のない福祉用電動車両100の減速及び停止が行われるようになる。
【0151】
また、図6のステップS601でドライバ150が乗車中ではない(すなわち下車中)と判断された場合には、図7に図示されている処理が行われる。図7には、本発明の第1の実施の形態における車載装置が通信サーバから通信要求を受け付けた際に、ドライバ150が下車中と判断された場合の処理の一例が図示されている。
【0152】
ステップS601でドライバ150が下車中と判断された場合には、図7において、車載装置200は、福祉用電動車両100が現在移動中(走行中)か否かを判断する(ステップS701)。福祉用電動車両100が停止している場合には、自車位置検知部325で取得された福祉用電動車両100の現在地が、利用者登録データ格納部340の登録データに登録されている自宅付近か否かを判断する(ステップS703)。
【0153】
福祉用電動車両100が自宅近くに停車中の場合には、ドライバ150は自宅に居ると判断され、ドライバ150の家電話機260へ通話するように指示する通信サーバ220への返信を行う(ステップS705)。この家電話機260へ通話するように指示する返信は、図5のステップS505で通信サーバ220が車載装置200から受信する返信に対応している。
【0154】
一方、福祉用電動車両100が移動中の場合や、福祉用電動車両100が自宅から離れた場所に停車中の場合には、ドライバ150の携帯電話機280へ通話するように指示する通信サーバ220への返信を行う(ステップS707)。この携帯電話機280へ通話するように指示する返信は、図5のステップS507で通信サーバ220が車載装置200から受信する返信に対応している。
【0155】
なお、上述の動作では、福祉用電動車両100が自宅近くに停車中の場合には、自宅の家電話機260へ通話が行われるようにしているが、同様に、ドライバ150が頻繁に訪れる施設(例えば病院や福祉施設など)の位置及び電話番号(施設アドレス)を登録データに登録しておき、ドライバ150が下車中で、かつ福祉用電動車両100が特定の施設周辺に停車中の場合には、その施設に関連して登録されている電話番号あてに通話が行われるようにしてもよい。
【0156】
また、上述の動作では、ドライバ150が下車中で、かつ福祉用電動車両100が移動中の場合には、携帯電話機280へ通話が行われるようにしているが、ドライバ150が下車中で、かつ福祉用電動車両100が移動中の状況が異常な状態(例えば、レッカー移動されている状態や盗難にあっている状態)であることを考慮して、この場合には、警察や所定の管理会社、緊急時連絡先に通報が行われるようにしてもよい。また、発呼者に対しても、ドライバ150が乗車していないにもかかわらず、福祉用電動車両100が移動している旨を通知することが望ましい。
【0157】
なお、本発明では、ドライバ150の状況を2つの状況(乗車中又は下車中)に分類するとともに、福祉用電動車両100の状況を2つの状況(移動中又は停止中)に分類し、これらの組み合わせから、図11に図示されているように、4つの状態(乗車中及び移動中、乗車中及び停止中、下車中及び移動中、下車中及び停止中)を考慮する。そして、監視者がドライバ150に対して通信要求を行った際の状態が、上記の4つの状態のいずれに属するかを判断して、監視者がドライバ150と通話を行うのに適した通信端末に監視者からの通信要求を転送する。
【0158】
また、図11に図示されているように、乗車中及び移動中の場合は、ドライバ150が運転している状態であることが推定される。また、乗車中及び停止中の場合は、ドライバ150が乗車して止まっている(信号待ちなどで停車中、若しくは乗車した状態で休憩中)状態であることが推定される。また、下車中及び移動中の場合は、レッカー移動や盗難などの何らかの異常な状態が発生していることが推定される。また、下車中及び停止中の場合は、ドライバ150が福祉用電動車両100を駐車して離れていることが推定される。この場合は、ドライバ150が自宅に戻っている状態と、外出先で福祉用電動車両100を乗り捨てている状態とに大別できる。
【0159】
なお、ここでは、福祉用電動車両100が盗難にあっている場合を下車中及び移動中に分類しているが、ドライバ150が乗車中か否かを検知する乗車検知部320の乗車検知方法によっては、異なる状態に分類される。例えば、乗車検知部320が顔認識などによってドライバ150の乗車を検知する場合には、通常のドライバ150以外の第3者が福祉用電動車両100を運転していることが把握可能であり、この場合には、盗難は下車中及び移動中の状態に分類される。一方、乗車検知部320が座席の重量などによってドライバ150の乗車を検知する場合には、座席に座って運転しているのが、通常のドライバ150なのか第3者なのかを識別することはできないため、この場合には、盗難は下車中及び移動中の状態に分類することは不可能である。ただし、レッカー移動に関しては、乗車検知部320の乗車検知方法によらず、常に下車中及び移動中に分類可能である。
【0160】
以上、説明したように、本発明の第1の実施の形態によれば、車両を運転して移動しているドライバの状況を把握できるようにし、車両から離れた場所に存在している監視者がドライバに対して連絡を取る場合に、そのドライバの状況に応じて適切な連絡先につながるようになり、また、ドライバと連絡が取れない場合でも、そのドライバの近況が把握できるようになる。
【0161】
<第2の実施の形態>
次に、本発明の第2の実施の形態について説明する。
【0162】
上述の本発明の第1の実施の形態では、通信サーバ220が、監視者通信端末210から通信要求を受けた際に、ドライバ150の状況や福祉用電動車両100の状況を車載装置200に問い合わせる必要があるが、本発明の第2の実施の形態では、通信サーバ220が、あらかじめ車載装置200から、ドライバ150の状況や福祉用電動車両100の状況などを把握できる情報を取得しておくようにする。
【0163】
本発明の第2の実施の形態では、本発明の第1の実施の形態に比べて、通信サーバ220から車載装置200への問い合わせに要する時間が短縮され、ドライバ150の状況や福祉用電動車両100の状況が迅速に把握されて、適切な通信端末への転送及び通話開始までの時間が短縮される。また、車載装置200との連絡がまったく取れない場合でも、通信サーバ220で把握されているドライバ150の状況や福祉用電動車両100の状況から、現在の状況を推定することが可能である。
【0164】
このように、通信サーバ220は、ドライバ150の状況や福祉用電動車両100の状況を車載装置200から受信して、格納しておく必要がある。図13には、本発明の第2の実施の形態における通信サーバの構成の一例が図示されている。なお、図13には、通信サーバ220の機能が内部バスによって接続されたブロックによって図示されているが、これらの各機能は、ハードウェア及び/又はソフトウェア(プログラム)によって実現可能である。
【0165】
図13に図示されている通信サーバ220は、情報処理部405、ネットワーク通信部410、車載装置側通信部415、利用者登録データ格納部420、利用者状況データ格納部425を有している。なお、上述の本発明の第1の実施の形態における通信サーバ220(図4を参照)と比較した場合、本発明の第2の実施の形態における通信サーバ220は、利用者状況データ格納部425を更に有している。
【0166】
利用者状況データ格納部425は、車載装置200によって把握され、車載装置200から受信するドライバ150の状況や福祉用電動車両100の状況などを把握できる情報を格納する機能を有している。なお、ドライバ150の状況や福祉用電動車両100の状況を表す情報は、福祉用電動車両100の移動や時間の経過と共に変更される動的な情報である。また、通信サーバ220において複数のドライバ150に関する処理が行われる場合には、利用者状況データ格納部425には、複数のドライバ150のそれぞれに関する最新の更新情報が格納される。
【0167】
例えば、利用者状況データ格納部425に格納される情報(利用者状況データ)は、図14に図示されているような構造を有している。すなわち、利用者状況データ格納部425に格納される情報は、複数のドライバ150のそれぞれに関して、利用者IDによって識別するとともに、各ドライバ150の現在地(例えば、緯度及び経度によって特定)、自宅近傍フラグ(現在地が自宅の近傍か否かを示すフラグ)、乗車中フラグ(ドライバ150が福祉用電動車両100に乗車しているか否かを示すフラグ)、移動中フラグ(福祉用電動車両100が移動しているか否かを示すフラグ)、ドライバ150が下車してからの経過時間(あるいは、ドライバ150の下車時刻)、福祉用電動車両100のバッテリ残量、当該エントリが更新された際の最新更新時刻を保持する構造を有している。
【0168】
また、不図示であるが、車載装置200においても、こうした情報を通信サーバ220に対して通知する機能が追加される必要がある。なお、車載装置200がこうした情報を通信サーバ220に通知するタイミングは、例えば周期的であってもよく、あるいは、情報が更新された場合であってもよい。
【0169】
なお、本発明の第2の実施の形態における動作は、上述の本発明の第1の実施の形態で通信サーバ220から車載装置200に対して行われていた問い合わせ(ドライバ150の状況や福祉用電動車両100の状況などの情報に関する問い合わせ)や、これらの情報に基づいた車載装置200における判断処理(ドライバ150への通話に適した通信端末の選択処理など)などが、利用者状況データ格納部425に格納されている情報に基づいて通信サーバ220で行われるようになるだけで、基本的には同一である。
【0170】
また、本発明の第2の実施の形態における通信サーバ220の機能を監視者通信端末210に組み込み、車載装置200から受信する最新の更新情報に基づいて、監視者通信端末210が、ドライバ150への通話に適した通信端末の選択処理を行うサーバレス構成とすることも可能である。
【0171】
さらには、監視者通信端末210は、利用者状況データ格納部425に格納される更新情報を表示画面に表示することによって監視者に報知するのみであり、監視者自身が、こうした情報に基づいてドライバ150への通話に適した通信端末を考え、選択することも可能である。
【0172】
以上、説明したように、本発明の第2の実施の形態によれば、上述の本発明の第1の実施の形態と同様に、車両を運転して移動しているドライバの状況を把握できるようにし、車両から離れた場所に存在している監視者がドライバに対して連絡を取る場合に、そのドライバの状況に応じて適切な連絡先につながるようになり、また、ドライバと連絡が取れない場合でも、そのドライバの近況が把握できるようになる。また、通信サーバ220から車載装置200へ問い合わせを行う必要がなくなり、車載装置200が任意のタイミングで更新された情報を通信サーバ210に通知できるようになるので、例えば、車載装置200が通信状況(電波状況)の悪い環境に存在している場合でも、そのときのドライバの状況に極めて近い条件を把握できるようになる。
【0173】
<第3の実施の形態>
次に、本発明の第3の実施の形態について説明する。
【0174】
本発明の第3の実施の形態では、ドライバ150が福祉用電動車両100を下車時及び下車中の車載装置200における処理について説明する。なお、以下に説明する車載装置200の処理(図15及び図16に図示されている動作)は、ドライバ150が下車して福祉用電動車両100を離れている際に自発的に行われるように設定されることが望ましい。
【0175】
図15には、本発明の第3の実施の形態における車載装置200がドライバ150の下車を検知した場合の処理の一例が図示されている。
【0176】
図15において、ドライバ150が福祉用電動車両100を下車したことが乗車検知部320によって検知されると、車載装置200は、ドライバ150が再び戻ってきて乗車するのを待機する(ステップS1501)と同時に、ドライバ画像(ドライバ撮像部319によって撮像)及び車外画像(車外撮像部315によって撮像)を画像データ格納部345に保存する(ステップS1503)。
【0177】
そして、ドライバ150が下車してからの経過時間を計測し、下車より30分経過しているか否かを判断する(ステップS1505)。ここで、下車よりまだ30分が経過していない場合には、下車より1分が経過しているか否かを判断する(ステップS1507)。
【0178】
そして、ステップS1507でドライバ150の下車から1分に満たない以内の場合には1秒間待機し(ステップS1509)、一方、ステップS1507で下車から1分以上経過している場合には10秒間待機して(ステップS1511)、再びステップS1501の処理に戻る。すなわち、この待機処理によって、ドライバ150が下車してから1分間は、1秒間隔でドライバ画像及び車外画像の保存が行われ、ドライバ150が下車してから1分を過ぎた場合には、10秒間隔でドライバ画像及び車外画像の保存が行われる。
【0179】
この待機時間の設定は、ドライバ150の下車直後の画像を詳細に記録する一方、下車してからある程度の時間(ここでは、1分間)が経過した場合には、ドライバ150は福祉用電動車両100から離れ、詳細な記録を行う必要がないことに基づいている。これによって、撮像画像の画像データを記憶するスペースを節約して使用することができるようになる。なお、撮像時間の間隔を変更する方法以外にも、例えば、撮像画像の画素数(解像度)を落として、1枚の撮像画像の画像データ容量を減らすようにしてもよい。
【0180】
また、ドライバ150が福祉用電動車両100を下車してから30分以上経過している場合には、あらかじめ設定されている登録データの緊急時連絡先へ、福祉用電動車両100の現在地(緯度及び経度)とドライバ150の下車後に保存された画像データ(すなわち、ステップS1503における画像の保存処理によって蓄積された画像データ)を送信する(ステップS1513)。ただし、現在地がドライバ150の自宅近辺(あるいは、所定の登録された施設周辺)の場合には、ドライバ150は自宅に戻るために下車したことが予想されるので、緊急時連絡先へ画像データを送信する必要はない。
【0181】
なお、ステップS1513において、例えば、ドライバ150の携帯電話機280に各種情報を送信することも可能である。例えば、ドライバ150の携帯電話機280に対して、福祉用電動車両100から離れすぎている旨を通知するメッセージを送信してもよくい、福祉用電動車両100が停止している場所周辺の地図を送信してもよい。また、車載装置200がドライバ150の携帯電話機280の現在地(すなわち、ドライバ150の現在地)を把握できた場合には、ドライバ150の現在地から福祉用電動車両100の現在地までの誘導情報(ナビゲーション情報)を送信してもよく、福祉用電動車両100がドライバ150の現在地まで自動走行で移動してもよい。さらには、把握されたドライバ150の現在地を緊急連絡先へ通知することも可能である。
【0182】
また、上述の動作の説明において設定されている下車からの経過時間の閾値(1分又は30分)や、下車後の画像保存のタイミング(1秒間隔又は10秒間隔)は、任意の値に設定されてもよい。また、ここではドライバ150が下車してからの経過時間を計測しているが、アクセサリ電源をオフ(ACC_OFF)にしてからの経過時間、キーを抜いてからの経過時間、ギアをパーキングに入れてからの経過時間、ドライバ150が福祉用電動車両100から一定距離離れてからの経過時間などを計測してもよく、また、停車している場所が駐車スペースの場合に、ドライバ150が下車して福祉用電動車両から離れると判断し、下車してからの経過時間の計測を開始してもよい。
【0183】
また、ここでは、ドライバ150の下車後の経過時間に応じて、画像を撮像する周期を変更しているが、例えば、福祉用電動車両100の周囲で移動する物体(例えば人影)が検知された場合に、画像の撮像を行うようにしてもよく、車載装置200がドライバ150との距離を測定する機能を有し、この測定結果が一定の距離以上離れるまで短い撮像周期(細かい解像度)を維持してもよい。
【0184】
また、ここでは、下車してから所定の時間以上(30分以上)経過した場合に、福祉用電動車両100の現在地及び下車後に撮像された画像データが緊急時連絡先に送信されるが、特定の端末(例えば、監視者通信端末210)から要求された場合に、これらの情報を送るようにしてもよい。また、ドライバ150が下車した場合にはすぐに緊急時連絡先に、福祉用電動車両100の現在地及び下車後に撮像された画像データが送信されてもよい。また、下車してから所定の時間以上(30分以上)経過した場合であって、さらに、時間帯が夜(例えば、午後9時から午前6時までの時間帯)の場合に、ステップS1513において緊急時連絡先に通知が行われるようにしてもよい。また、下車してから通知が行われるまでの基準となる所定の時間(上記の例では30分)に関しても時間帯を考慮し、例えば、時間帯が夜(例えば、午後9時から午前6時までの時間帯)の場合には、所定の時間が30分から15分に変わるなど、時間帯に応じて変化してもよい。
【0185】
以上の処理によって、車載装置200は、ドライバ150が福祉用電動車両100を乗り捨てた際の状態を撮像して画像データとして保存し、福祉用電動車両100が所定の時間以上乗り捨てられた場合に、緊急時連絡先に対して、保存された画像データを送信できるようになる。緊急時連絡先では、この画像データを閲覧することで、例えば、ドライバ150の下車時の様子や、ドライバ150が下車後に歩いて行った方向などを把握することができるようになる。
【0186】
図29には、本発明の第3の実施の形態における車載装置200がドライバ150の下車を検知した場合の処理の一例が図示されている。
【0187】
図29において、車載装置200は、例えば、ドライバ150が乗車中であり、かつ、福祉用電動車両100が停止中であることを検知した場合には、この状態が所定の時間(例えば、15分以上)続いているか否かを監視する(ステップS2901)。そして、この状態が所定の時間以上続いた場合には、あらかじめ設定されている登録データの緊急時連絡先へ、ドライバ150が乗車中にもかかわらず長時間停止している状態にある旨を通知する(ステップS2903)。なお、ステップS2903において、各種情報を同時に送信することも可能である。通知すべき各種情報としては、例えば、ドライバ150の状態を撮像したドライバ画像や、福祉用電動車両100の周辺を撮像した車外画像、ドライバ150のバイタル情報、福祉用電動車両100の現在地や現在地に至るまでの移動履歴などが挙げられる。
【0188】
また、図16には、本発明の第3の実施の形態における車載装置200が自車の移動を検知した場合の処理の一例が図示されている。
【0189】
図16において、車載装置200は、例えば、現在地の変化などから福祉用電動車両100の移動が始まったことを検知した場合には、ドライバ150が乗車中か否かを判断する(ステップS1601)。
【0190】
ドライバ150が乗車していることが検知された場合には、ドライバ150の運転によって福祉用電動車両100の移動が開始されたと判断されて特別な処理は行われないが、ドライバ150が乗車していないことが検知された場合には、あらかじめ設定されている登録データの緊急時連絡先と、ドライバ150の携帯電話機280に対して、福祉用電動車両100が移動中の旨を通知する(ステップS1603)。
【0191】
以上の処理によって、ドライバ150が乗車していない状態で福祉用電動車両100が移動を開始した場合に、緊急時連絡先及びドライバ150の携帯電話機280にその旨の通知が送られるようになる。
【0192】
以上、説明したように、本発明の第3の実施の形態によれば、ドライバ150が福祉用電動車両100を降りて福祉用電動車両100から離れた場合でも、福祉用電動車両100から離れた場所に存在している監視者がドライバ150の下車時の状況を把握できるようになり、さらにドライバ150の下車後の行動を予測できるようになる。また、ドライバの下車後の車両の状態も把握できるようになる。
【0193】
<第4の実施の形態>
次に、本発明の第4の実施の形態について説明する。
【0194】
まず、本発明の第4の実施の形態における構成について説明する。図17には、本発明の実施の形態における車載装置の構成の一例が図示されている。なお、図17には、車載装置200の機能がブロックによって図示されているが、これらの各機能は、ハードウェア及び/又はソフトウェア(プログラム)によって実現可能である。
【0195】
図17に図示されている車載装置200は、図3に図示されている車載装置200の構成に加えて、さらに、バッテリ残量測定部1701、エリア設定データ格納部1703が設けられている。なお、図3に図示されている構成要素と同一の構成要素に関しては、ここでは説明を省略する。
【0196】
バッテリ残量測定部1701は、福祉用電動車両100の電気系統に電気を供給するバッテリ(不図示)に蓄電されている電気の残量を測定する機能を有している。なお、バッテリ残量測定部1701による測定結果に基づいて、情報処理部365が、残り使用可能時間を算出することも可能である。
【0197】
なお、福祉用電動車両100の電気系統は、福祉用電動車両100の駆動系と、その他の電気系統(表示・通信系など)とに大別することが可能である。情報処理部365は、駆動系における残り使用可能時間(残り走行可能距離)と、その他の電気系統における残り使用可能時間とをそれぞれ算出することも可能である。また、駆動系のバッテリとその他の電気系統のバッテリとをそれぞれ別々のバッテリによって実現し、バッテリ残量測定部1701は、駆動系のバッテリ及びその他の電気系統のバッテリに関して、それぞれの電気の残量を測定してもよい。
【0198】
また、エリア設定データ格納部1703は、地図上の特定のエリアを識別するためのエリア設定データを格納する機能を有している。エリア設定データは、例えば、図20に図示されているような緯度及び経度のマトリックスで区切られたエリア設定を示すデータである。
【0199】
また、図18には、本発明の第4の実施の形態における通信サーバの構成の一例が図示されている。なお、図18には、通信サーバ220の機能がブロックによって図示されているが、これらの各機能は、ハードウェア及び/又はソフトウェア(プログラム)によって実現可能である。
【0200】
図18に図示されている通信サーバ220は、図4に図示されている通信サーバ220の構成に加えて、さらに、エリア管理データ・エリア設定データ格納部1801が設けられている。なお、図4に図示されている構成要素と同一の構成要素に関しては、ここでは説明を省略する。
【0201】
エリア管理データ・エリア設定データ格納部1801は、例えば、図21に図示されているような各エリアにおける行動頻度及び制限レベルを定めるエリア管理データや、図20に図示されているような地図上の特定のエリアを識別するためのエリア設定データを格納する機能を有している。
【0202】
また、図19には、本発明の第4の実施の形態における車載装置200の表示画面に表示されるエリア表示の一例が図示されている。図19に図示されている車載装置200のタッチパネル画面105には、地図上に福祉用電動車両100の現在地に対応した自車位置アイコン1901が表示されているとともに、行動が制限されているエリア(行動制限エリアA1903や行動制限エリアB1905)やドライバ150の行動経験が多いエリア1907が表示されている。
【0203】
なお、行動経験が多いエリアとは、ドライバ150が過去にこのエリアに進入した回数やこのエリアに留まった回数(時間)などが所定の閾レベルを超えているエリアである。また、行動が制限されているエリアとは、例えばドライバ150が近づくことを禁止されている場所を含むエリアや、安全走行のために走行速度などを制限すべきエリアなどである。
【0204】
行動経験に関しては、例えば行動経験が多いエリアと少ないエリアの2つの特性に分類することが可能である。また、行動の制限に関しては、各エリアにおいて、例えば行動を厳しく制限するエリア(制限エリアA)、行動を緩く制限するエリア(制限エリアB)、行動を制限しないエリアの3つの特性に分類することが可能である。なお、上記の分類方法(例えば、上記では行動制限を3段階のレベルで分類している)は一例であり、適宜、任意の分類方法を用いることが可能である。
【0205】
また、どのエリアに対してどのような行動の制限を設けるかに関しては、例えば、監視者が任意の端末(例えば、監視者通信端末210)を用いて設定することも可能であり、あるいは、グローバルネットワーク240に接続されている特定の情報提供サービス会社の通信装置から設定されてもよい。
【0206】
なお、本明細書では、ドライバ150に行かせたくない場所近辺を行動制限エリアとして設定する場合について説明するが、逆に、ドライバ150に行かせたい場所(例えば病院など)を基準として、それ以外のエリアを行動制限エリアとして設定してもよい。また、ドライバ150に行かせたい場所(例えば病院など)を含むエリアに福祉用電動車両100が進入した場合に、緊急時連絡先に通知が送られるようにしてもよい。すなわち、各エリアにおいて、例えば進入が推奨されるエリア(推奨エリア)、進入が推奨されないエリアの2つの特性に分類することも可能であり、さらに、推奨される程度を複数のレベルに分類することも可能である。
【0207】
また、図20には、本発明の第4の実施の形態における車載装置200及び通信サーバで保持されるエリア設定データの一例が模式的に図示されており、図21には、本発明の第4の実施の形態における通信サーバ220で保持されるエリア管理データの一例が模式的に図示されている。
【0208】
エリア設定データは、例えば、地表面を矩形エリアで区切る構造を有しておる。例えば図20に図示されているように、東経及び北緯をそれぞれ1秒ずつに区切って囲まれるエリアが設定される。なお、各エリアはエリア番号(「A1」や「B2」など)によって識別されることが望ましい。
【0209】
また、エリア管理データは、図21に図示されているように、各利用者のエントリが各エリアの情報を持つ構造を有している。各エリアの情報としては、行動経験のレベルを表す値が設定される行動頻度情報と、行動の制限レベルを表す制限レベル情報とが含まれており、これによって、各エリアの行動経験及び行動の制限が特定されるようになる。
【0210】
また、図21に図示されている例では、福祉用電動車両100が各エリアに進入した回数や各エリアにおける滞在時間などが蓄積される所在履歴情報が、各利用者の各エリアに存在している。例えば、所在履歴には、福祉用電動車両の現在地情報と時刻とが関連付けられた情報が格納される。この所在履歴情報は福祉用電動車両100の移動に応じて情報が追加され、この情報の変化に応じて行動頻度情報も変更されるようになっている。
【0211】
また、図22には、本発明の第4の実施の形態において、エリア設定データとエリア管理データとに基づいて作成される各エリアの行動経験の多いエリア及び行動制限エリアの概念が図示されている。このように、エリア設定データ及びエリア管理データに基づいて作成された各エリアの特性を表す情報が表示画面に表示されている地図上にスーパインポーズされることによって、上述の図19に図示されているような表示画面が実現される。
【0212】
なお、図22の行動経験が多いエリア2201は図19の行動経験が多いエリア1907、図22の行動制限エリアA2203は図19の表示画面上の行動制限エリアA1903、図22の行動制限エリアB2205は図19の表示画面上の行動制限エリアB1905にそれぞれ対応している。
【0213】
次に、本発明の第4の実施の形態における動作について説明する。図23には、本発明の第4の実施の形態における車載装置200が行うエリア表示の更新処理の一例が図示されている。
【0214】
図23において、車載装置200は、自車位置検知部325で福祉用電動車両100の現在地(自車位置)を取得すると(ステップS2301)、表示画面にその現在地周辺の地図を表示するとともに、現在地が対応する地図上の位置に自車位置アイコンを表示する(ステップS2303)。
【0215】
続いて、車載装置200は、福祉用電動車両100の自車位置及び自利用者IDを通信サーバ220へ送信する(ステップS2305)。さらに、車載装置200は、通信サーバ220に対して、自利用者IDのエリア管理データが更新されているか否かの問い合わせを行う(ステップS2307)。
【0216】
ここで、エリア管理データが更新されている場合には、その更新を反映するために、通信サーバ220からエリア管理データを取得し、そのエリア管理データに基づいて表示画面内のエリア表示の更新を行う(ステップS2309)。
【0217】
なお、ステップS2309において、車載装置200は、通信サーバ220から、エリア管理データが更新された差分情報のみ、あるいは表示画面に表示されているエリアに係るエリア管理データの更新情報のみを取得して、表示画面内のエリア表示の更新を行ってもよい。エリア管理データは、上述のように行動頻度及び制限レベルの2種類の情報を含んでおり、これら2種類の情報の更新によって、表示画面上のエリア表示も更新される。例えば、所在履歴の変化によって行動頻度が変更された場合や、何らかの外部操作によって行動制限エリアの設定が変更された場合に、表示画面上のエリア表示が更新されることになる。
【0218】
また、上述の処理が完了すると、所定の時間(エリア表示が更新される時間間隔よりも十分に短い時間:例えば1分間)だけ待機した後(ステップS2311)、再びステップS2301の処理から行われる。
【0219】
また、図24には、本発明の第4の実施の形態において、通信サーバが車載装置から現在地情報を受信した際の処理の一例が図示されている。
【0220】
図24において、通信サーバ220は車載装置200から、その現在地の位置情報を受信した場合(図23のステップS2305の処理に対応)、エリア設定データを参照して、その現在地に対応するエリア番号を取得する(ステップS2401)。
【0221】
続いて、通信サーバ220は、受信した利用者のそのエリアでの所在履歴に、時刻と現在地の位置情報とを格納することによって、エリア管理データの更新を行う(ステップS2403)。また、通信サーバ220は、更新後の所在履歴情報を参照して、そのエリアでの所在回数が所定値T(例えば100回)を超えたか否かを判定する(ステップS2405)。なお、例えば、過去1ヶ月間におけるそのエリアでの所在回数を用いるなど、そのエリアでの所在回数の対象期間を定めることが望ましい。
【0222】
そして、ステップS2405で所在回数が所定値Tを超えた場合には、エリア管理データの行動頻度の値を1(行動経験が多いことを示す値)にセットし(ステップS2407)、ステップS2407で所在回数が所定値T以下の場合には、エリア管理データの行動頻度の値を0(行動経験が少ないことを示す値)にセットする(ステップS2409)。
【0223】
そして、通信サーバ220は、行動頻度や制限レベルの変化を検知して、その変化に従った処理を行う状況判定処理を実行する(ステップS2411)。なお、このステップS2411の状況判定処理は、後で図25を参照しながら説明する。また、通信サーバ220は、この福祉用電動車両100が置かれている現在の状況に対応する行動頻度及び制限レベルの値を記憶する(ステップS2413)。
【0224】
また、図25には、図24に図示されているステップS2411の状況判断処理の詳細な処理例が図示されている。
【0225】
この状況判定処理では、まず、エリア管理データが参照されて、福祉用電動車両100の現在地に対応する制限レベルが変化したか否かの確認が行われる(ステップS2501)。
【0226】
なお、福祉用電動車両100の現在地に対応する制限レベルは、例えば、監視者の端末や行動制限エリアの設定サービスを提供する情報提供サービス端末から、福祉用電動車両100の現在地を含むエリアの制限レベルが変化した場合や、福祉用電動車両100が移動して異なる制限レベルのエリアに進入した場合などに変化する。
【0227】
ここで、制限レベルに変化があった場合には、制限レベル変化時の処理が行われる(ステップS2511)。なお、このステップS2511の制限レベル変化時の処理は、後で図26を参照しながら説明する。
【0228】
また、ここで、制限レベルに変化がなかった場合には、福祉用電動車両100の現在の状況に対応する行動頻度の値が変化したか否かの確認が行われる(ステップS2503)。なお、行動頻度の値に変化がなかった場合には、当該状況判定処理は終了となる。
【0229】
一方、行動頻度の値に変化があった場合には、過去に行動経験の少ないエリアに進入したか否かが確認される(ステップS2505)。そして、ステップS2405で過去に行動経験の少ないエリアに進入したことが確認された場合には、過去に行動経験の少ないエリアに進入した旨を利用者登録データの緊急連絡先に通知する(ステップS2507)。一方、ステップS2405で過去に行動経験の多いエリアに進入したことが確認された場合には、過去に行動経験の多いエリアに進入した旨を利用者登録データの緊急連絡先に通知する(ステップS2509)。
【0230】
また、図26には、図25に図示されているステップS2511の制限レベル変化時の処理の詳細な処理例が図示されている。
【0231】
この制限レベル変化時の処理では、通信サーバ220は、まず制限レベルの変化に対応して、現在の制限レベルを利用者登録データの緊急連絡先に通知する(ステップS2601)。また、通信サーバ220は、制限レベルがどのレベルに変化されたのかを確認する(ステップS2603、S2605)。例えば、ステップS2603及びS2605において、変化後の制限レベルが、行動を厳しく制限するエリア(制限エリアA)、行動を緩く制限するエリア(制限エリアB)、行動を制限しないエリアのどれに当てはまるのかが確認される。
【0232】
そして、制限レベルが制限エリアAの値に変化している場合には、福祉用電動車両100の最高速度を時速2kmに設定するよう車載装置200に通知する(ステップS2607)。また、制限レベルが制限エリアBの値に変化している場合には、福祉用電動車両100の最高速度を時速4kmに設定するよう車載装置200に通知する(ステップS2609)。また、制限レベルが制限エリアA及び制限エリアBの値以外の値に変化していない場合には、福祉用電動車両100の最高速度を時速6kmに設定するよう車載装置200に通知する(ステップS2611)。これによって、ドライバ150の行動を厳しく制限するエリアほど福祉用電動車両100の速度を抑え、単位時間当たりの行動範囲を狭くすることが可能となる。なお、上記の時速設定は一例であり、制限する時速は任意に設定可能である。また、時速を0kmに設定することで、そのエリアに入れないようにすることも可能である。
【0233】
なお、上述の動作では、福祉用電動車両100の最高速度を制御する指示が行われているが、その他の移動性能に関する制御が行われてもよい。さらに、各エリアに進入した旨が車載装置200から利用者に報知されるよう指示が行われてもよい。車載装置200におけるエリア進入の報知は、各エリアの特性(行動制限エリア、推奨エリア、行動経験の多い/少ないエリアなどの特性)やそのエリアに設定されているレベルなどに応じて、様々な報知の態様が利用可能であり、危険性や緊急性の高いエリアの進入ほど利用者150が確実に把握できるようにすることが望ましい。また、時間帯や曜日などに応じて、行動制限エリアや推奨エリアの特性や閾レベルが変化してもよい。例えば、ある特定のエリアのレベルを変動可能とし、昼間は行動を緩く制限するエリア(制限エリアB)に設定され、夜間は行動を厳しく制限するエリア(制限エリアA)に設定されるようにしてもよい。また、ある特定のエリアの特性を変動可能とし、昼間は推奨エリアに設定され、夜間は制限エリアされるようにしてもよい。
【0234】
さらには、行動が制限される制限エリアAや制限エリアBに福祉用電動車両100が進入した場合には、車外撮像画像やドライバ画像などが所定の緊急時連絡先に送信されるようにしてもよい。さらに、行動の制限が厳しいエリアほど、これらの撮像画像の送信周期を短くしたり解像度を高くしたりすることも可能である。
【0235】
以上、説明したように、本発明の第4の実施の形態によれば、ドライバの行動履歴やあらかじめ設定されたエリアへの進入などに応じてドライバの状況の通知が行われるようにすることにで、車両から離れた場所に存在している監視者が、そのドライバの状況を把握できるようになる。
【0236】
<第5の実施の形態>
次に、本発明の第5の実施の形態について説明する。
【0237】
図27には、本発明の第5の実施の形態における車載装置のバッテリ残量に関連した処理の一例が図示されている。
【0238】
バッテリ系の処理では、まず、通信サーバへの通知が行われた旨を示す通知フラグが初期状態のFALSEにセットされる(ステップS2701)。なお、この通知フラグは、バッテリ残量が少なくなってきたときに緊急連絡先への通知が行われたこと(具体的には、下記のステップS2709の処理が行われたこと)を示すために使用されるフラグである。
【0239】
バッテリ残量測定部1701は、福祉用電動車両100に搭載されているバッテリの残量を測定する(ステップS2703)。このバッテリ残量の測定結果は情報処理部365に渡され、情報処理部365において、バッテリ残量が所定量未満(例えば、バッテリの最大蓄電量の5%未満)となったか否かがチェックされる(ステップS2705)。
【0240】
ここで、バッテリ残量が所定量以上である場合には、通知フラグはFALSEにセットされる(ステップS2713)。なお、通知フラグがFALSEにセットされている場合には、ステップS2713において、通知フラグはそのままFALSEに維持される。
【0241】
一方、バッテリ残量が所定量未満である場合には、通知フラグがTRUEにセットされているか否かがチェックされる(ステップS2707)。ここで、通知フラグがFALSEにセットされている場合には、バッテリ残量が残り少なくなってきたことを緊急連絡先に通知する処理が行われる。このとき、車載装置200は、例えば、現在地、移動履歴、過去に停止していた地点情報を通信サーバ220を介して緊急時連絡先に送信する(ステップS2709)。また、ステップS2709において、その他の情報(車外の撮像画像やドライバの撮像画像など)が送信されてもよい。なお、車載装置200において、例えば、現在地、移動履歴、過去に停止していた地点情報やその他の様々な情報に基づいて、この後、どの地点に向かい、どの地点で福祉用電動車両100が停止することになるのかを予測し、ステップS2709において、この予測地点を緊急時連絡先に送信してもよい。なお、このとき予測地点の候補を複数提示してもよく、さらには、複数の予測地点のそれぞれの確度(最終的に予測地点に停止する確率)を計算して提示してもよい。
【0242】
なお、福祉用電源車両100が、駆動系に給電するバッテリと通信系に給電するバッテリと備えており、ステップS2709において、それぞれのバッテリに関して独立して通知が行われるようにしてもよい。また、1つのバッテリによって駆動系及び通信系の両方に給電されている場合であっても、「もうすぐ動けなくなります」という通知と、さらにバッテリ残量が少なくなった場合に「もうすぐ通信できなくなります」という通知の2段階の通知が行われるようにしてもよい。
【0243】
なお、ステップS2709における緊急連絡先への通知方法や通知する際に同時に送信する情報の種類などに関しては、例えばシステム運用などに合わせて任意に設定可能である。
【0244】
そして、ステップS2709における通知が行われた後、通知フラグがTRUEにセットされ(ステップS2711)、ステップS2711又はS2713における通知フラグの設定後、再びステップS2703に戻って、上記の処理が繰り返し行われる。
【0245】
また、図28には、ステップS2709において、車載装置200からバッテリ残量が残り少なくなってきたことが通知された場合の緊急連絡先として指定されている端末の表示画面の一例が図示されている。
【0246】
図28において、緊急連絡先として指定されている端末(例えば、図2に図示されている監視者通信端末210であってもよい)の表示画面2800には、例えば、福祉用電動車両100の現在地周辺の地図が表示されるとともに、車載装置200から送信されてきた現在地情報に対応する地図上の位置を示す自車位置アイコン2801、車載装置200から送信されてきた移動履歴情報に基づいて表示される移動経路2803、福祉用電動車両100が過去によく停止していた地点2805(すなわち、ドライバ150がよく訪れている場所)が表示される。
【0247】
緊急連絡先として指定されている端末のオペレータは、この表示画面を参照することで、福祉用電動車両100のバッテリ残量が少なくなっていることを把握するとともに、福祉用電動車両100の自車位置アイコン2801や移動経路2803、過去によく停止していた地点2705から、この後、ドライバ150がどこに向かおうとしていたのか、あるいは、どこで福祉用電動車両100を乗り捨て、その後どこへ向かうかなどを推測することができるようになる。例えば、バッテリ残量が少なくなっている福祉用電動車両100が、ドライバ150のよく行く施設(過去によく停止していた地点2805の1つ)付近に存在している場合には、バッテリが切れて福祉用電動車両100が動かなくなった後、ドライバ150はその施設に徒歩で向かうことが予測される。
【0248】
また、ステップS2709で、福祉用電動車両100のバッテリ残量や、その値から予測される走行可能距離又は走行可能時間が通知され、緊急連絡先として指定されている端末の表示画面に表示されてもよい。こうした情報も、緊急連絡先として指定されている端末のオペレータがドライバ150のこの後の行動を予測するための情報として使用可能である。
【0249】
以上、説明したように、本発明の第5の実施の形態によれば、車両の駆動源(電動式の場合はバッテリ)の残りエネルギー量が少なくなった場合に車両から通知が行われることによって、車両から離れた場所に存在している監視者が、そのドライバの状況を把握し、かつ車両のバッテリがなくなった後のドライバの行動を予測できるようになる。
【産業上の利用可能性】
【0250】
本発明は、移動体を利用した移動を行っているユーザの状況に応じた適切な処理が行われるようにするという効果を有しており、移動体の利用者の移動支援や、移動体の利用者の監視・保護を行う技術に適用可能である。
【図面の簡単な説明】
【0251】
【図1】本発明の第1の実施の形態における移動体(福祉用電動車両)の外観及び機能を模式的に示す図である。
【図2】本発明の第1の実施の形態におけるドライバ監視システムの構成の一例を示す図である。
【図3】本発明の第1の実施の形態における車載装置の構成の一例を示す図である。
【図4】本発明の実施の形態における通信サーバの構成の一例を示す図である。
【図5】本発明の第1の実施の形態における通信サーバが発呼者から通信要求を受け付けた際の処理の一例を示すフローチャートである。
【図6】本発明の第1の実施の形態における車載装置が通信サーバから通信要求を受け付けた際の処理の一例を示すフローチャートである。
【図7】本発明の第1の実施の形態における車載装置が通信サーバから通信要求を受け付けた際に、ドライバが下車中と判断された場合の処理の一例を示すフローチャートである。
【図8A】本発明の第1の実施の形態における車載装置の表示画面周辺の一例を示す図である。
【図8B】本発明の第1の実施の形態における車載装置の表示画面周辺の別の一例を示す図である。
【図9】本発明の第1の実施の形態における監視者通信端末の表示画面周辺の一例を示す図である。
【図10】本発明の実施の形態における通信サーバの利用者登録データ格納部に格納されるドライバの登録データの構造の一例を示す図である。
【図11】本発明の第1の実施の形態における車両及びドライバの状態を区別するための4つの分類を示す図である。
【図12】本発明の第1の実施の形態における車両の運転席周辺の外観の一例を示す図である。
【図13】本発明の第2の実施の形態における通信サーバの構成の一例を示す図である。
【図14】本発明の第2の実施の形態における通信サーバの利用者状況データ格納部に格納される情報の構造の一例を示す図である。
【図15】本発明の第3の実施の形態における車載装置がドライバの下車を検知した場合の処理の一例を示す図である。
【図16】本発明の第3の実施の形態における車載装置が自車の移動を検知した場合の処理の一例を示すフローチャートである。
【図17】本発明の第4の実施の形態における車載装置の構成の一例を示す図である。
【図18】本発明の第4の実施の形態における通信サーバの構成の一例を示す図である。
【図19】本発明の第4の実施の形態における車載装置の表示画面に表示されるエリア表示の一例を示す図である。
【図20】本発明の第4の実施の形態における車載装置及び通信サーバで保持されるエリア設定データの一例を模式的に示す図である。
【図21】本発明の第4の実施の形態における通信サーバで保持されるエリア管理データの一例を模式的に示す図である。
【図22】本発明の第4の実施の形態において、エリア設定データとエリア管理データとに基づいて作成される各エリアの行動経験の多いエリア及び行動制限エリアを示す概念図である。
【図23】本発明の第4の実施の形態における車載装置が行うエリア表示の更新処理の一例を示すフローチャートである。
【図24】本発明の第4の実施の形態において、通信サーバが車載装置から現在地情報を受信した際の処理の一例を示すフローチャートである。
【図25】本発明の第4の実施の形態に係る状況判断処理の詳細な処理例を示すフローチャートである。
【図26】本発明の第4の実施の形態に係る制限レベル変化時の処理の詳細な処理例を示すフローチャートである。
【図27】本発明の第5の実施の形態における車載装置のバッテリ残量に関連した処理の一例を示すフローチャートである。
【図28】本発明の第5の実施の形態において、車載装置からバッテリの残量が残り少ないことを通知された緊急連絡先の端末の表示画面の一例を示す図である。
【図29】本発明の第3の実施の形態における車載装置がドライバの下車を検知した場合の処理の一例を示すフローチャートである。
【符号の説明】
【0252】
105、907 タッチパネル画面
110 ドライバ撮像用カメラ
115 車外撮像用カメラ
120 乗車センサ
125 GPS装置
130 TV電話システム
135 データ通信部
200 車載装置
210 監視者通信端末
220 通信サーバ
230 監視用ネットワーク
235 基地局
240 グローバルネットワーク
260 利用者宅家電話機
270 携帯電話サービス装置
275 携帯電話基地局
280 携帯電話機
305 表示入力部
310 ドライバ撮像部
315 車外撮像部
320 乗車検知部
325 自車位置検知部
330 通話部
335 通信部
340 利用者登録データ格納部
345 画像データ格納部
350 移動履歴データ格納部
355 地図データ格納部
360 車両制御部
365 情報処理部
405 情報処理部
410 ネットワーク通信部
415 車載装置側通信部
420 利用者登録データ格納部
425 利用者状況データ格納部
801、901 スピーカ
803、903 マイクロホン
811 通話アイコン
813、915 通話終了アイコン
905 カメラ
913 停車アイコン
917 アドレスリスト
1201 速度調整レバー
1203 グリップ
1205 受話器
1701 バッテリ残量測定部
1703 エリア設定データ格納部
1801 エリア管理データ・エリア設定データ格納部
1903 行動制限エリアA
1905 行動制限エリアB
1907 行動経験が多いエリア
2800 表示画面
2801 自車位置アイコン
2803 移動経路
2805 過去によく停止していた地点
【技術分野】
【0001】
本発明は、移動体の利用者の移動支援や、移動体の利用者の監視・保護を行う移動体に搭載される移動体搭載装置、及びこの移動体の管理を行う移動体管理装置に関する。
【背景技術】
【0002】
従来、様々な通信技術が存在し、ユーザが利用する通信端末も様々な形態のものが存在する。ユーザ同士で通話を行うことが可能な電話機としては、例えばテレビ電話機、携帯電話機、家庭用電話機(家電話機)、車用ハンドフリーヘッドセット(マイクロホン付きヘッドホン)など、様々な通信技術及び通信端末の形態が存在している。
【0003】
こうした通信端末はそれぞれメリットとデメリットが存在する。例えば、携帯電話機の場合は、持ち運び可能なことからユーザとの連絡が取れやすいというメリットはあるものの、無線通信の電波が届かない場合(通信不可能な場合)があるというデメリットや、車両の運転中は通話不可能(安全上の理由で携帯電話機による通話は禁止されている)というデメリットなどが存在している。このように、各種の通信手段は利用者の存在している場所や利用者の状況などによって、利用可能な場合や利用に適している場合などが大きく異なっている。
【0004】
一方、車両などの移動体の状況を、離れた場所から把握することを可能にする技術として、例えば、下記の特許文献1〜3に開示されている技術が存在する。
【0005】
下記の特許文献1には、駆動手段を有する移動体のバッテリ残量を移動体から離れた介護者用端末器(保護者)に通知したり、設定された移動目的地までの距離に応じて通知したりすることを可能とする技術が開示されている。
【0006】
また、下記の特許文献2には、巡回車両における乗員の着座を判断することによって、巡回車両の巡回先への到着を判断することを可能とする技術が開示されている。
【0007】
また、下記の特許文献3には、車椅子にナビゲーション装置を設置し、車椅子の現在位置情報を通信手段を介して第3者に送信できるようにする技術が開示されている。
【特許文献1】特開2002−267463号公報
【特許文献2】特開2005−165818号公報
【特許文献3】特開2001−304908号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に開示されている技術では、車両のバッテリ残量が、離れた場所に存在する第3者に通知されるだけで、この通知だけでは、車両やドライバがどのような状況に置かれているかを詳細に把握することは不可能である。特に、実際にバッテリが切れてしまい、移動体が動かなくなった後のドライバの行動は把握できない。
【0009】
また、特許文献2に開示されている技術では、着座(運転)中のドライバの行動は把握できるものの、ドライバが下車している場合の行動や状況を把握することは困難である。
【0010】
また、特許文献3に開示されている技術では、車椅子の現在位置を把握することが可能であるが、やはり同様にこの車椅子を使用しているユーザの詳細な状況を把握することは困難である。
【0011】
これらの技術ではいずれも、移動体を利用して移動を行っているユーザ(ドライバ)の状況を詳細に把握することは不可能である。したがって、例えばこのユーザの置かれている状況が正確に分からないため、このユーザに対して連絡を取ろうとしている人は、そのような通信手段がより連絡が取れやすいかを適切に判断することはできない。
【0012】
上記の問題に鑑み、本発明は、移動体を利用した移動を行っているユーザの状況に応じた適切な処理が行われるようにすることを目的とする。
【課題を解決するための手段】
【0013】
上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者又は前記移動体の状況を検知する状況検知手段と、
前記利用者と連絡が可能な複数の通信装置のそれぞれのあて先を含む利用者登録データが格納されている利用者登録データ格納手段と、
無線通信を介して通話を行うための通話手段と
前記通話手段において任意の端末から通話要求を受信した場合、前記状況検知手段によって前記利用者又は前記移動体の状況を判断して、前記利用者が前記通話手段による通話を行うことが可能か否かを判定する通話可能判定手段と、
前記通話手段での通話が不可能と判定された場合に、前記利用者登録データに含まれる前記複数の通信装置の中から、前記状況検知手段の検知結果に基づいて最適と判断される通信装置を選択する通信選択手段と、
前記通信選択手段で選択された前記通信装置に対する前記通話要求の転送を指示する通話要求転送指示手段とを、
有する。
【0014】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記状況検知手段が、前記移動体が移動中か停止中か、及び/又は、前記利用者が乗車中か下車中かを検知するように構成されている。
【0015】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記状況検知手段によって前記利用者が乗車中であることが検知された場合に、前記利用者に前記通話手段による通話を行わせるための着呼処理を行う着呼処理手段を有する。
【0016】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体の移動時における通話の危険性を示す警報を報知する警報報知手段を有する。
【0017】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体が停止するまで前記利用者に前記通話手段による通話を行わせないように構成されている。
【0018】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者による前記着呼への応答と同時に前記移動体を減速又は停止させる移動体制動手段を有する。
【0019】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が前記移動体を移動させるための操作を行う操作器と、前記利用者が通話を行うために把持する受話器とを前記利用者が同時に操作できないように前記操作器及び前記受話器が配置されている。
【0020】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の停止後、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する。
【0021】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が停止中であることが検知された場合に、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する。
【0022】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答しなかった場合、前記利用者に対して前記利用者又は前記移動体に関する情報の送信が行われていることを報知せずに、所定の連絡先に対して前記利用者又は前記移動体に関する情報を送信する情報送信手段を有する。
【0023】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者に関する情報として前記利用者の現在の状態を示す情報を使用するように構成されている。
【0024】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者の顔を撮像する利用者撮像手段、及び/又は、前記利用者の生体情報を検知する生体情報検知手段を有し、前記利用者に関する情報として、前記利用者撮像手段によって撮像された前記利用者の顔画像、及び/又は、前記生体情報検知手段によって検知された前記利用者の生体情報を使用するように構成されている。
【0025】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体に関する情報として前記移動体の現在の状態を示す情報を使用するように構成されている。
【0026】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の現在地情報を取得する現在地情報取得手段、前記移動体の周囲を撮像する周囲撮像手段、前記移動体の移動履歴情報を格納する移動履歴情報格納手段の少なくとも1つを有し、前記移動体に関する情報として、前記現在地情報取得手段で取得された前記移動体の現在地情報、前記周囲撮像手段によって撮像された前記移動体の周囲画像、前記移動履歴情報格納手段に格納されている前記移動体の移動履歴の少なくとも1つを使用するように構成されている。
【0027】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答しなかった場合、通話の発呼側から受信する前記移動体の減速又は停止の指示に基づいて前記移動体を減速又は停止させる移動体制動手段を有する。
【0028】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答しなかった場合であっても、前記通話の着呼に応じる処理を行って前記利用者に強制的に通話させる強制着呼手段を有する。
【0029】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記着呼処理時に、通話の着呼を示す情報と共に、前記通話の発呼側から受信する画像情報を表示する画像表示手段を有する。
【0030】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の現在地情報を取得する現在地情報取得手段と、
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段とを、
有し、前記状況検知手段によって前記移動体が停止中、かつ前記利用者が下車中であることが検知された場合に、前記現在地情報取得手段で取得された前記移動体の現在地情報が前記自宅位置の周辺である場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の自宅電話機として登録されている前記通信装置を選択するように構成されている。
【0031】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の現在地情報を取得する現在地情報取得手段と、
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段とを、
有し、前記状況検知手段によって前記移動体が停止中、かつ前記利用者が下車中であることが検知された場合に、前記現在地情報取得手段で取得された前記移動体の現在地情報が前記自宅位置の周辺ではない場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の携帯電話機として登録されている前記通信装置を選択するように構成されている。
【0032】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の現在地情報を取得する現在地情報取得手段と、
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段と、
無線通信によって、前記移動体の周囲に存在する子機に前記通話を転送する基地局として機能する無線通信手段とを、
有し、前記状況検知手段によって前記移動体が停止中、かつ前記利用者が下車中であることが検知された場合に、前記現在地情報取得手段で取得された前記移動体の現在地情報が前記自宅位置の周辺ではない場合には、前記通信選択手段は、前記通話の転送先として、無線通信手段を介して通話が可能な前記子機を選択するように構成されている。
【0033】
また、上記の目的を達成するため、本発明の移動体管理装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置から、前記利用者又は前記移動体の状況に係る情報を受信し格納する状況情報格納手段と、
前記利用者と連絡が可能な複数の通信装置のそれぞれのあて先を含む利用者登録データが格納されている利用者登録データ格納手段と、
任意の端末から前記移動体搭載装置への通話要求を受信した場合、前記状況情報格納手段に格納されている前記利用者の状況に係る情報から前記利用者又は前記移動体の状況を判断して、前記利用者が前記移動体搭載装置に搭載されている通話手段によって通話を行うことが可能か否かを判定する通話可能判定手段と、
前記移動体搭載装置に搭載されている前記通話手段による前記利用者の通話が不可能と判定された場合に、前記利用者登録データに含まれる前記複数の通信装置の中から、前記利用者又は前記移動体の状況に基づいて最適と判断される通信装置を選択する通信選択手段と、
前記通信選択手段で選択された前記通信装置に対する前記通話要求の転送を行う通話要求転送手段とを、
有する。
【0034】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記利用者又は前記移動体の状況に係る情報に、前記移動体が移動中か停止中かを示す情報、及び/又は、前記利用者が乗車中か下車中かを示す情報が含まれている。
【0035】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記利用者又は前記移動体の状況に係る情報に基づいて、前記利用者が乗車中であることが把握された場合には、前記移動体搭載装置に搭載されている通話手段に前記通話要求の転送を行うように構成されている。
【0036】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段を有し、
前記利用者又は前記移動体の状況に係る情報に基づいて、前記移動体が停止中、かつ前記利用者が下車中であることが把握された場合に、前記利用者又は前記移動体の状況に係る情報に含まれる前記移動体の現在地情報が前記自宅位置の周辺である場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の自宅電話機として登録されている前記通信装置を選択するように構成されている。
【0037】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段を有し、
前記利用者又は前記移動体の状況に係る情報に基づいて、前記移動体が停止中、かつ前記利用者が下車中であることが把握された場合に、前記利用者又は前記移動体の状況に係る情報に含まれる前記移動体の現在地情報が前記自宅位置の周辺ではない場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の携帯電話機として登録されている前記通信装置を選択するように構成されている。
【0038】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者又は前記移動体の状況を検知する状況検知手段と、
無線通信を介して通話を行うための通話手段と、
前記通話手段において任意の端末から通話要求を受信した場合、前記利用者に前記通話手段による通話を行わせるための着呼処理を行う着呼処理手段と、
前記着呼に対する前記利用者の応答の有無、及び、前記状況検知手段によって検知された前記利用者又は前記移動体の状況に応じた処理を行う着呼時処理手段とを、
有する。
【0039】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記状況検知手段が、前記移動体が移動中か停止中か、及び/又は、前記利用者が乗車中か下車中かを検知するように構成されている。
【0040】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体の移動時における通話の危険性を示す警報を報知する警報報知手段を有する。
【0041】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体が停止するまで前記利用者に前記通話手段による通話を行わせないように構成されている。
【0042】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者による前記着呼への応答と同時に前記移動体を減速又は停止させる移動体制動手段を有する。
【0043】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が前記移動体を移動させるための操作を行う操作器と、前記利用者が通話を行うために把持する受話器とを前記利用者が同時に操作できないように前記操作器及び前記受話器が配置されている。
【0044】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の停止後、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する。
【0045】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が停止中であることが検知された場合に、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する。
【0046】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答しなかった場合、前記利用者に対して前記利用者又は前記移動体に関する情報の送信が行われていることを報知せずに、所定の連絡先に対して前記利用者又は前記移動体に関する情報を送信する情報送信手段を有する。
【0047】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者に関する情報として前記利用者の現在の状態を示す情報を使用するように構成されている。
【0048】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者の顔を撮像する利用者撮像手段、及び/又は、前記利用者の生体情報を検知する生体情報検知手段を有し、前記利用者に関する情報として、前記利用者撮像手段によって撮像された前記利用者の顔画像、及び/又は、前記生体情報検知手段によって検知された前記利用者の生体情報を使用するように構成されている。
【0049】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体に関する情報として前記移動体の現在の状態を示す情報を使用するように構成されている。
【0050】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の現在地情報を取得する現在地情報取得手段、前記移動体の周囲を撮像する周囲撮像手段、前記移動体の移動履歴情報を格納する移動履歴情報格納手段の少なくとも1つを有し、前記移動体に関する情報として、前記現在地情報取得手段で取得された前記移動体の現在地情報、前記周囲撮像手段によって撮像された前記移動体の周囲画像、前記移動履歴情報格納手段に格納されている前記移動体の移動履歴の少なくとも1つを使用するように構成されている。
【0051】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答しなかった場合、通話の発呼側から受信する前記移動体の減速又は停止の指示に基づいて前記移動体を減速又は停止させる移動体制動手段を有する。
【0052】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が通話の着呼に応答しなかった場合であっても、前記通話の着呼に応じる処理を行って前記利用者に強制的に通話させる強制着呼手段を有する。
【0053】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記着呼処理時に、通話の着呼を示す情報と共に、前記通話の発呼側から受信する画像情報を表示する画像表示手段を有する。
【0054】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者が前記移動体から下車しており、かつ前記移動体が停止中であることを検知する下車検知手段と、
前記下車検知手段で、前記利用者が前記移動体を下車しており、かつ前記移動体が停止中であることが検知されている状態において、前記利用者が前記移動体にすぐに乗車することのできない前記移動体が乗り捨てられた状態であることを推定する乗り捨て状態推定手段とを、
有する。
【0055】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記乗り捨て状態推定手段が、前記利用者の下車を検知した場合、前記利用者の下車から一定時間経過した場合、前記利用者が前記移動体のキーを抜いてから一定時間経過した場合、前記利用者が前記移動体のアクセサリ電源をオフにしてから一定時間経過した場合、前記移動体のギアがパーキングにセットされてから一定時間経過した場合、前記利用者と前記移動体との距離が一定距離以上離れてから一定時間経過した場合、前記移動体が駐車エリアに停止している場合のいずれか1つの条件に基づいて、前記移動体が乗り捨てられた状態であることを推定するように構成されている。
【0056】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記乗り捨て状態推定手段によって前記移動体が乗り捨てられた状態であると判断された場合には、所定の連絡先に情報の送信を行う情報送信手段を有する。
【0057】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記情報送信手段が、前記移動体に設けられている現在地取得手段によって取得された前記移動体の現在地情報、前記移動体に設けられている前記利用者の画像又は前記移動体の周囲の画像を撮像する撮像手段によって撮像された撮像画像、前記移動体によって記録された前記移動体の移動履歴情報の少なくとも1つを送信するように構成されている。
【0058】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記所定の連絡先が前記利用者の携帯電話機であって、前記情報送信手段が、前記移動体に設けられている現在地取得手段によって取得された前記移動体の現在地情報、前記移動体の現在地までの誘導するためのナビゲーション情報、前記乗り捨て状態にある旨を通知する警告情報の少なくとも1つを送信するように構成されている。
【0059】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体に設けられている前記利用者の画像又は前記移動体の周囲の画像を撮像する撮像手段と、
前記撮像手段によって撮像された撮像画像を記憶する撮像画像記憶手とを、
有し、前記撮像手段が前記利用者の下車時以降に画像を撮像して前記撮像画像に記憶し、前記情報送信手段が、前記撮像画像記憶手段に記憶された前記撮像画像を送信するように構成されている。
【0060】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記撮像手段が前記利用者の下車から一定時間だけ撮像を行うように構成されている。
【0061】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者が下車してからの経過時間に応じて、前記撮像手段が撮像方法を変更するように構成されている。
【0062】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の周囲の動体を検出する動体検出手段を有し、前記撮像手段が前記動体の検出に応じて撮像を行うように構成されている。
【0063】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記動体の検出結果に応じて、前記撮像手段が撮像方法を変更するように構成されている。
【0064】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者との距離を測定することが可能な距離情報取得手段を有し、前記撮像手段が、前記距離情報取得手段に応じて撮像方法を変更するように構成されている。
【0065】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記撮像手段が、前記撮像方法を変更する際に、撮像周期の変更又は前記撮像画像の情報量の変更を行うように構成されている。
【0066】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記情報送信手段が、前記所定の連絡先から要求を受けずに自発的に前記情報を送信するように構成されている。
【0067】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記情報送信手段が、前記所定の連絡先から要求を受けた場合に前記情報を送信するように構成されている。
【0068】
また、上記の目的を達成するため、本発明の移動体管理装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置から前記移動体の現在地情報を受信する現在地情報受信手段と、
所定のエリアを特定するエリア情報を格納するエリア情報格納手段と、
前記移動体の前記現在地を参照して、前記移動体が新たに前記所定のエリアに進入したか否かを検出する現在地状況判断手段と、
前記現在地状況判断手段によって前記所定のエリアへの前記移動体の進入が検出された場合、前記移動体の進入が検出された旨を所定の連絡先に通知する通知手段とを、
有する。
【0069】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記所定のエリアとして、前記利用者の過去の行動履歴から得られる前記利用者がよく訪れる行動エリア、前記利用者の行動を制限する制限エリア、前記利用者の進入が推奨される推奨エリアの少なくとも1つを使用するように構成されている。
【0070】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記移動体の進入が検出された前記所定のエリアの特性又は設定レベルに応じて、前記移動体搭載装置に対して前記移動体の移動性能の変更指示を行う性能変更指示手段を有する。
【0071】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記所定のエリアへの進入を前記利用者に報知するように前記移動体搭載装置に指示する報知指示手段と、
前記移動体の進入が検出された前記所定のエリアの特性又は設定レベルに応じて、前記報知指示手段で指示する報知の態様の変更指示を行う報知態様変更指示手段とを、
有する。
【0072】
さらに、本発明の移動体管理装置は、上記の構成に加えて、前記移動体の進入が検出された前記所定のエリアの特性又は設定レベルに応じて、前記移動体搭載装置に対して前記移動体からの情報送信の態様の変更指示を行う情報送信態様変更指示手段を有する。
【0073】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記移動体の駆動を行うための電力を蓄電するバッテリと、
前記バッテリの残量を測定するバッテリ残量測定手段と、
前記移動体が過去によく停止していた地点の情報を格納する停止地点格納手段と、
前記移動体の現在地情報を取得する現在地取得手段と、
前記バッテリ残量測定手段で測定された前記バッテリの残量が所定値より低くなった場合に、前記移動体が過去によく停止していた地点の情報及び前記現在地情報を所定の連絡先に通知する通知手段とを、
有する。
【0074】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記移動体の駆動を行うための電力を蓄電するバッテリと、
前記バッテリの残量を測定するバッテリ残量測定手段と、
前記移動体が過去によく停止していた地点の情報を格納する停止地点格納手段と、
前記移動体の現在地情報を取得する現在地取得手段と、
前記バッテリ残量測定手段で測定された前記バッテリの残量が所定値より低くなった場合に、前記現在地情報と、前記移動体が過去によく停止していた地点の情報とに基づいて、前記移動体のこの後の停止地点を予測する停止地点予測手段と、
前記停止地点予測手段によって予測された前記停止地点を所定の連絡先に通知する通知手段とを、
有する。
【0075】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記移動体の駆動を行うための電力を蓄電する第1バッテリと、
前記移動体の通信を行うための電力を蓄電する第2バッテリと、
前記第1及び第2バッテリの残量を測定するバッテリ残量測定手段と、
前記バッテリ残量測定手段で測定された前記第1バッテリの残量が第1の所定値より低くなった場合に、又は、前記バッテリ残量測定手段で測定された前記第2バッテリの残量が第2の所定値より低くなった場合に、所定の連絡先に第1及び第2バッテリのそれぞれに応じた通知を行う通知手段とを、
有する。
【0076】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者が前記移動体に乗車しており、かつ前記移動体が停止中であることを検知する状況検知手段と、
前記状況検知手段で、前記利用者が前記移動体に乗車しており、かつ前記移動体が停止中である状態が所定時間続いた場合には、所定の連絡先に対して前記利用者又は前記移動体に関する情報を送信する情報送信手段とを、
有する。
【0077】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者に関する情報として前記利用者の現在の状態を示す情報を使用するように構成されている。
【0078】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記利用者の顔を撮像する利用者撮像手段、及び/又は、前記利用者の生体情報を検知する生体情報検知手段を有し、前記利用者に関する情報として、前記利用者撮像手段によって撮像された前記利用者の顔画像、及び/又は、前記生体情報検知手段によって検知された前記利用者の生体情報を使用するように構成されている。
【0079】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体に関する情報として前記移動体の現在の状態を示す情報を使用するように構成されている。
【0080】
さらに、本発明の移動体搭載装置は、上記の構成に加えて、前記移動体の現在地情報を取得する現在地情報取得手段、前記移動体の周囲を撮像する周囲撮像手段、前記移動体の移動履歴情報を格納する移動履歴情報格納手段の少なくとも1つを有し、前記移動体に関する情報として、前記現在地情報取得手段で取得された前記移動体の現在地情報、前記周囲撮像手段によって撮像された前記移動体の周囲画像、前記移動履歴情報格納手段に格納されている前記移動体の移動履歴の少なくとも1つを使用するように構成されている。
【0081】
また、上記の目的を達成するため、本発明の移動体搭載装置は、利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者が前記移動体から下車しており、かつ前記移動体が移動中であることを検知する状況検知手段と、
前記状況検知手段で、前記利用者が前記移動体から下車しており、かつ前記移動体が移動中である状態が検知された場合には、所定の連絡先に対して前記状況検知手段による検知結果を通知する通知手段とを、
有する。
【発明の効果】
【0082】
本発明は、移動体を利用した移動を行っているユーザの状況に応じた適切な処理が行われるようにするという効果を有している。
【発明を実施するための最良の形態】
【0083】
以下、図面を参照しながら、本発明の第1〜第3の実施の形態について説明する。
【0084】
本発明によれば、車両を運転して移動しているドライバ(利用者と呼ぶこともある)の状況を把握できるようにし、車両から離れた場所に存在している監視者(保護者と呼ぶこともある)がドライバに対して連絡を取る場合に、そのドライバの状況に応じて適切な連絡先につながるようになり、また、ドライバと連絡が取れない場合でも、そのドライバの近況が把握できるようになる。
【0085】
また、本発明によれば、ドライバが車両を降りて車両から離れた場合でも、車両から離れた場所に存在している監視者がドライバの下車時の状況を把握できるようになり、さらにドライバの下車後の行動を予測できるようになる。また、本発明によれば、ドライバの下車後の車両の状態を把握できるようになる。
【0086】
また、本発明によれば、ドライバの行動履歴に基づいてドライバの状況の通知が行われるようにすることにより、車両から離れた場所に存在している監視者が、そのドライバの状況を把握できるようになる。
【0087】
また、本発明によれば、車両の駆動源(電動式の場合はバッテリ)の残りエネルギー量が少なくなった場合に車両から通知が行われることによって、車両から離れた場所に存在している監視者が、そのドライバの状況を把握し、かつ車両のバッテリがなくなった後のドライバの行動を予測できるようになる。
【0088】
なお、本明細書における車両は、エンジンやモータなどの自律的な駆動手段を有する移動体であり、一般的な車両に加えて、日本国の道路交通法では歩行者としての扱いを受ける電動車椅子や福祉用電動車両(バッテリカー)なども含むものである。
【0089】
以下では、ドライバ(主に老齢者)が運転する福祉用電動車両の移動位置やドライバの状況を、その家族である保護者(監視者)が監視するシステムに本発明を適用した場合について説明する。なお、本発明は、例えば運送会社のオペレータが荷物の配送を行うドライバ(配送員)の行動を管理するシステムや、タクシー管理会社がタクシー(タクシードライバ)の走行位置を管理するシステムなどを始めとして、移動体の移動位置や移動体のドライバの状況などを、遠隔のオペレータが把握、管理するための任意のシステムに適用可能である。
【0090】
<第1の実施の形態>
以下、本発明の第1の実施の形態について説明する。
【0091】
まず、本発明の第1の実施の形態における構成について説明する。図1には、本発明の第1の実施の形態における移動体(福祉用電動車両)の外観及び機能が模式的に図示されている。図1には、ドライバ150が乗車している福祉用電動車両100に、タッチパネル画面105、ドライバ撮像用カメラ110、車外撮像用カメラ115、乗車センサ120、GPS(Global Positioning System)装置125、TV電話システム130、データ通信部135の各機能が設けられている状態が模式的に図示されている。
【0092】
図1において、タッチパネル画面105は、ドライバ150が運転中でも容易に視認可能な位置に配置される表示画面及び操作入力部である。また、ドライバ撮像用カメラ110は、運転席を撮像範囲とし、ドライバが乗車している状態を撮像するためのカメラである。また、車外撮像用カメラ115は、福祉用電動車両100の周辺の風景を撮像するためのカメラである。また、乗車センサ120は、ドライバが福祉用電動車両100に乗車しているか否かを検知する機能を有している。
【0093】
また、GPS装置125は、GPS信号の受信及び処理によって、福祉用電動車両100の現在地情報を取得する機能を有している。また、TV電話システム130は、タッチパネル画面105への画面表示と共に通話を行うテレビ電話機能を有している。また、データ通信部135は、パケット交換型データ通信ネットワークなどを通じてパケットデータ通信を行う機能を有している。
【0094】
また、図2には、本発明の第1の実施の形態におけるドライバ監視システムの構成の一例が図示されている。図2には、福祉用電動車両100に搭載されている車載装置200、監視者通信端末210、通信サーバ(移動体管理装置)220、監視用ネットワーク230、基地局235、グローバルネットワーク240、利用者宅家電話機260、携帯電話サービス装置270、携帯電話ネットワーク272、携帯電話基地局275、携帯電話機280が図示されている。
【0095】
図2において、車載装置200は、図1に図示されている福祉用電動車両100に搭載されている装置である。また、監視者通信端末210は、福祉用電動車両100のドライバ150の監視を行う監視者(発呼者)が操作する端末である。
【0096】
また、通信サーバ220は、監視者通信端末210がドライバ150に対して行った発呼に関する通話要求を、そのドライバ150の対応する車載装置200、利用者宅家電話機260、携帯電話機280のいずれかに中継する装置である。なお、通信サーバ220は、複数のドライバ150の管理を行い、それぞれのドライバ150に応じた端末に通話要求を行うことも可能である。
【0097】
また、監視用ネットワーク230は、通信サーバ220と車載装置200とを接続するネットワークであり、基地局235は、車載装置200が無線通信によって監視用ネットワーク230に接続する接続ポイントである。なお、図2では、基地局235は1つしか図示されていないが、通常は、車載装置200が移動先において通信可能となるように、多数の基地局235が存在している。
【0098】
また、グローバルネットワーク240は、例えばインターネットなどである。図2では、グローバルネットワーク240には、監視者通信端末210、通信サーバ220、利用者宅家電話機260、携帯電話サービス装置270が接続されている。
【0099】
また、利用者宅家電話機260は、例えば、ドライバ150の自宅に設置されている固定電話機であり、IP(Internet Protocol:インターネットプロトコル)通信を利用したIP電話機であってもよく、電話通信を使用する電話機であってもよい。また、携帯電話サービス装置270は、グローバルネットワーク240と携帯電話ネットワーク272との接続を仲介する装置であり、携帯電話の通信事業者により管理されている。
【0100】
また、携帯電話ネットワーク272は、携帯電話機280における通話を中継するネットワークであり、また、携帯電話基地局275は、携帯電話機280が無線通信によって接続する基地局である。なお、図2では、携帯電話基地局275は1つしか図示されていないが、通常は、携帯電話機280が移動先において通話可能となるように、多数の携帯電話基地局275が存在している。
【0101】
また、携帯電話機280は、ドライバ150が常時携帯しているものであり、ドライバ150が福祉用電動車両100から離れている場合であっても、この携帯電話機280を通じて、ドライバ150と連絡を取ることが可能である。
【0102】
なお、図2に図示されている監視用ネットワーク230、グローバルネットワーク240、携帯電話ネットワーク272の各ネットワークが、他のネットワークの一部又は全部と同一の物理ネットワークを使用してもよい。例えば、監視用ネットワーク230は、通信サーバ220の配下にグローバルネットワーク240から独立して存在していように図示されているが、グローバルネットワーク240内に監視用ネットワーク230の論理ネットワークが構築されるようにしてもよい。なお、こうしたネットワークトポロジは、例えば、車載装置200の無線通信に用いられている通信技術によって異なるものとなるが、本発明では、こうしたネットワークトポロジ及び通信技術に制限されるものではない。
【0103】
また、図2では、車載装置200、利用者宅家電話機260、携帯電話機280がそれぞれ1つずつ図示されているが、それぞれ複数存在してもよい。この場合、複数のドライバ150のそれぞれに対応する車載装置200、利用者宅家電話機260、携帯電話機280が存在してもよい。さらには、例えば、車載装置200を基地局とする子機を使用して、車載装置200から離れた場所から、車載装置200に搭載されている通信手段を通じて通話を行えるようにしてもよい。
【0104】
また、図3には、本発明の第1の実施の形態における車載装置の構成の一例が図示されている。なお、図3には、車載装置200の機能が内部バスで接続された各ブロックによって図示されているが、これらの各機能は、ハードウェア及び/又はソフトウェア(プログラム)によって実現可能である。
【0105】
図3に図示されている車載装置200は、表示入力部305、ドライバ撮像部310、車外撮像部315、乗車検知部320、自車位置検知部325、通話部330、通信部335、利用者登録データ格納部340、画像データ格納部345、移動履歴データ格納部350、地図データ格納部355、車両制御部360、情報処理部365を有している。
【0106】
表示入力部305は、ドライバ150に情報を提供するための表示画面と、ドライバ150が情報を入力するための操作入力部である。表示入力部305は、ドライバが運転席に着座した位置から視認できるとともに、入力操作を行うことができる位置に配置されることが望ましい。なお、この表示入力部305は、図1に図示されているタッチパネル画面105に対応するものである。
【0107】
また、ドライバ撮像部310は、例えば運転席を撮像範囲とし、ドライバ150が運転席に着座している状態を撮像することが可能な位置に配置されているカメラである。なお、このドライバ撮像部310は、図1に図示されているドライバ撮像用カメラ110に対応するものである。
【0108】
また、車外撮像部315は、福祉用電動車両100の周囲を撮像するためのカメラである。なお、この車外撮像用カメラ115は、ドライバの運転を支援するために福祉用電動車両100の前方や後方を撮像するカメラを兼用してもよく、福祉用電動車両100の周囲を全方位にわたって撮像できるものであってもよい。また、この車外撮像部315は、図1に図示されている車外撮像用カメラ115に対応するものである。
【0109】
また、乗車検知部320は、ドライバ150が乗車しているか否か(運転席に着座しているか否か)を検知するための機能である。なお、ドライバ150が乗車していることを検知するための方法には任意の技術を用いることが可能である。例えば、乗車検知部320は、ドライバ150が運転席に着座した際の重量の変化やシートベルトの状態の変化などから、ドライバ150が乗車しているか否かを検知してもよく、さらには、ドライバ150の顔認識を行うことによって、乗車している人物がこの福祉用電動車両100を通常運転している利用者か、あるいは、それ以外の人物(他人)なのかを認識してもよい。なお、この乗車検知部320は、図1に図示されている乗車センサ120に対応するものである。
【0110】
また、自車位置検知部325は、福祉用電動車両100の現在地情報を取得する機能を有している。なお、福祉用電動車両100の現在地を検知するための方法には任意の技術を用いることが可能である。例えば、自車位置検知部325は、GPS信号を受信、解析して、現在地の緯度及び経度を取得してもよく、複数の基地局からの識別情報及び受信電界強度を解析して、現在地を推定してもよい。なお、この自車位置検知部325は、図1に図示されているGPS装置125に対応するものである。また、福祉用電動車両100が移動中(走行中)であるか否かを検出するためには、自車位置検知部325による現在地の時間的な変化が発生しているか否かを確認してもよいが、車載装置200が速度センや加速度センサ(いずれも不図示)を有しており、これらのセンサによって移動の検知が行われてもよい。また、単純に速度が発生している場合(速度>0km/hの場合)に福祉用電動車両100が移動中であると定義してもよく、あるいは、例えば一定時間以上速度が発生した場合や、一定時間における平均速度>0km/hとなった場合に福祉用電動車両100が移動中であると定義してもよい。
【0111】
また、通話部330は、ドライバ150が任意の通話端末(例えば、図2に図示されている監視者通信端末210)を操作している人物と通話を行うための機能を有している。この通話部330は、音声のみの通話機能を有していてもよく、表示画面の映像(双方のカメラによって撮像された映像)と連動して通話を行うテレビ電話機能を有していてもよい。なお、この通話部330は、図1に図示されているTV電話システム130に対応するものである。
【0112】
また、通信部335は、パケット交換型データ通信ネットワークなどを通じてパケットデータ通信を行う機能を有している。なお、図3では、通話部330と通信部335が異なるブロックによって表されているが、実際には、一部の通信機能を共用することが可能である。なお、この通信部335は、図1に図示されているデータ通信部135に対応するものである。
【0113】
また、利用者登録データ格納部340は、ドライバ150に関する様々な登録データを格納する情報格納部である。なお、このドライバ150の登録データは、例えば、後述の通信サーバ220の利用者登録データ格納部420に登録されるデータ(利用者ID、利用者アドレスデータ、緊急時連絡先アドレス、自宅位置)である。
【0114】
また、画像データ格納部345は、ドライバ撮像部310や車外撮像部315によって撮像された撮像画像の画像データを格納する情報格納部である。なお、画像データ格納部345に格納される画像データは、画像データ格納部345のデータ格納可能容量に基づいて、所定のデータ容量を超えないように、新しい画像データが格納されるとともに、古い画像データが消去されることが望ましい。
【0115】
また、移動履歴データ格納部350は、福祉用電動車両100の移動位置の履歴を格納する情報格納部である。例えば、移動履歴データ格納部350には、時刻とその時刻に自車位置検知部325で取得された現在地情報とが、所定時間間隔で格納される。
【0116】
また、地図データ格納部355は、表示入力部305に表示させる地図データを格納している情報格納部である。この地図データは、ドライバ150が現在地や目的地までの道程を視覚的に把握できるようにするために使用される。
【0117】
また、車両制御部360は、福祉用電動車両100を移動させる駆動手段(図3には不図示)の制御を行うことによって、福祉用電動車両100の走行制御を行う機能を有している。
【0118】
また、情報処理部365は、車載装置200における様々な判断処理や制御処理を行う機能を有している。また、例えば、情報処理部365によって、表示入力部305における地図データ(現在地周辺の地図及び福祉用電動車両100の現在地)の表示や目的地への誘導などの運転支援処理が行われてもよい。
【0119】
また、図8Aには、本発明の第1の実施の形態における車載装置200の表示画面周辺の一例が図示されている。図8Aに図示されているように、福祉用電動車両100のドライバ150が視認可能なタッチパネル画面105の周辺には、ドライバ撮像用カメラ110、スピーカ801、マイクロホン803が配置されている。また、図8Aでは、表示画面には、現在地付近の地図上に自車位置アイコン及び走行軌跡が表示されていることに加えて、通話アイコン811が表示されている。なお、通話アイコン811は、着呼時に表示画面に表示され、ドライバ150がこの通話アイコン811にタッチすることによって通話が開始される。
【0120】
また、図8Bには、本発明の第1の実施の形態における車載装置200の表示画面周辺の別の一例が図示されている。図8Bには、図8Aと同様にタッチパネル画面105の周辺が図示されているが、通話中の表示画面が図示されている。図8に図示されているように、通話中は、通話相手(監視者)の画像に加えて、通話終了アイコン813が表示されている。この通話終了アイコン813は、通話時に表示画面に表示され、ドライバ150がこの通話終了アイコン813にタッチすることによって通話が終了となる。
【0121】
一方、ドライバ150の通話相手となる監視者の監視者通信端末210の表示画面周辺は、図9に図示されているようなものとなる。図9には、本発明の第1の実施の形態における監視者通信端末210の表示画面周辺の一例が図示されている。図9に図示されているように、監視者通信端末210を操作する監視者が視認可能なタッチパネル画面907の周辺には、スピーカ901、マイクロホン903、監視者を撮像するためのカメラ905が配置されている。
【0122】
また、図9では、表示画面の下半分の左側にアドレスリスト917が表示されており、監視者は、複数のドライバ150の名前のリストの中から所望の名前をタッチすることで、そのドライバ150の情報を選択的に確認することが可能である。アドレスリストの名前が選択されると、可能であれば、例えば、そのドライバ150が所有している福祉用電動車両100の現在地が地図上に表示されることが望ましい。
【0123】
なお、図9では、アドレスリスト917の中から『Aさん』が選択されており、表示画面には『Aさん』に関する様々な情報が表示されている。さらに、表示画面の下半分には、『Aさん』の運転している福祉用電動車両100の現在地が地図上に表示されており、『Aさん』の状態が現在乗車中である旨も表示されている。
【0124】
また、『Aさん』とは現在通話中であり、図9では、表示画面の左上にドライバ150の画像、表示画面の右上に福祉用電動車両100の周辺を撮像した撮像画像が表示されているとともに、『Aさん』との通話を終了するための通話終了アイコン915も表示されている。さらに、表示画面には停車アイコン913も表示されている。この停車アイコン913は、監視者がタッチすることによって、福祉用電動車両100を強制的に減速及び停止させるための指示を車載装置200に送信することが可能である。
【0125】
また、図4には、本発明の第1の実施の形態における通信サーバの構成の一例が図示されている。なお、図4には、通信サーバ220の機能が内部バスで接続された各ブロックによって図示されているが、これらの各機能は、ハードウェア及び/又はソフトウェア(プログラム)によって実現可能である。
【0126】
図4に図示されている通信サーバ220は、情報処理部405、ネットワーク通信部410、車載装置側通信部415、利用者登録データ格納部420を有している。
【0127】
情報処理部405は、通信サーバ220における様々な判断処理や制御処理を行う機能を有している。また、ネットワーク通信部410は、通信サーバ220がグローバルネットワーク240に接続するための通信インタフェースであり、車載装置側通信部415は、通信サーバ220が監視用ネットワーク230に接続するための通信インタフェースである。なお、図4では、ネットワーク通信部410及び車載装置側通信部415は、それぞれ異なるブロックによって表されているが、これらの通信部は同一であってもよい。
【0128】
また、利用者登録データ格納部420は、ドライバ150に関する様々な登録データを格納する情報格納部である。なお、ドライバ150の登録データは、頻繁に変更されることのない静的な情報である。また、通信サーバ220において複数のドライバ150に関する処理が行われる場合には、利用者登録データ格納部420には、複数のドライバ150のそれぞれに関する様々な登録データが格納される。
【0129】
例えば、利用者登録データ格納部420に格納されるドライバ150の登録データは、図10に図示されているような構造を有している。すなわち、利用者登録データ格納部420に格納されるドライバ150の登録データは、複数のドライバ150のそれぞれに関して、利用者IDによって識別するとともに、各ドライバ150の利用者アドレスデータ(このドライバ150の車載装置200を特定する車載装置アドレス、このドライバ150の利用者宅家電話機260を特定する家電話アドレス、このドライバ150の携帯電話機280を特定する携帯電話アドレス)、このドライバ150の監視者に連絡を取る際の緊急時連絡先アドレス、自宅位置(例えば、緯度及び経度によって特定)を保持する構造を有している。
【0130】
次に、本発明の第1の実施の形態における動作について説明する。図5には、本発明の第1の実施の形態における通信サーバが発呼者から通信要求を受け付けた際の処理の一例が図示されている。
【0131】
ドライバ150の監視者が監視者通信端末210を操作し、車載装置200との通信を要求する操作を行ったとする。この場合、通信サーバ220は、車載装置200との通信要求を発呼者通信端末210から受け付けると、まず当該車載装置200が通信可能な状態か否かを調べる(ステップS501)。そして、車載装置200が通信可能な状態の場合には、発呼者情報(監視者通信端末210又はその操作を行っている監視者を特定する情報を含む)と共に通話要求を車載装置200に送信する(ステップS503)。
【0132】
なお、ステップS501では、福祉用電動車両100が通信圏内(無線通信の電波の届く範囲内)に存在していない場合や、福祉用電動車両100のバッテリが切れていたり、故障が発生していたりする場合などに、車載装置200が通信不可能な状態であると判断される。したがって、通信サーバ220は、まずステップS503における通話要求の送信処理を行い、車載装置200からの応答の有無に応じて、車載装置が通信可能な状態か否かを把握してもよい。
【0133】
通信サーバ220は、ステップS503で通信可能な状態の車載装置200に対して通話要求を行った後、車載装置200からの応答を待機する。このとき、通信サーバ220は、家電話機260で通話するように指示する車載装置200からの返信(ステップS505)、あるいは、携帯電話機280で通話するように指示する車載装置200からの返信(ステップS507)を待機する。なお、このとき車載装置200で行われる処理に関しては、図6を参照しながら後述する。
【0134】
そして、通信サーバ220は、家電話機260や携帯電話機280で通話するように指示する返信を車載装置200から受けなかった場合には、ステップS503で行われた通話要求が車載装置200に受け入れられて、監視者通信端末210と車載装置200との間で通話が行われている状態となり、そのまま車載装置200での通話を継続させる(ステップS508)。
【0135】
一方、車載装置200における処理の結果、家電話機260で通話するように指示する返信を車載装置200から受けた場合には、通信サーバ220は家電話機260へ通話要求を行って(ステップS509)、家電話機からの応答を待機する(ステップS511)。そして、この通話要求に対して家電話機260の応答があった場合(すなわち、家電話機260に出た場合)には、家電話機260での通話を継続させる(ステップS513)。
【0136】
また、車載装置200における処理の結果、携帯電話機280で通話するように指示する返信を車載装置200から受けた場合や、家電話機260への通話要求に対する応答がなかった場合には、通信サーバ220は携帯電話機280へ通話要求を行って(ステップS515)、家電話機からの応答を待機する(ステップS517)。そして、この通話要求に対して携帯電話機280の応答があった場合(すなわち、携帯電話機280に出た場合)には、携帯電話機280での通話を継続させる(ステップS519)。一方、携帯電話機280への通話要求に対する応答を受けなかった場合には、ドライバ150との通話は不可能と判断され、通信サーバ220は、発呼者に対してドライバ150との通話は不可能である旨を通知する(ステップS521)。
【0137】
なお、上述の説明では、ドライバ150が通話を行う際に利用可能な端末(電話機)として、車載装置200、家電話機260、携帯電話機280の3つを一例に挙げているが、通信サーバ220は、ドライバ150が利用可能な任意の端末(電話機)に対して、任意の優先度(通話要求を行う順列の設定)で通話要求を行うことが可能である。
【0138】
また、図6には、本発明の第1の実施の形態における車載装置が通信サーバから通信要求を受け付けた際の処理の一例が図示されている。
【0139】
通信サーバ220からの通話要求(図5のステップS503の処理に対応)を受信した車載装置200は、乗車検知部320の検知結果に基づいて、ドライバ150が乗車中か否かを判断する(ステップS601)。
【0140】
ステップS601でドライバ150が乗車中と判断された場合には、車載装置200は、表示入力部305の表示画面に通話アイコン811を表示する(ステップS603)。なお、この通話アイコン811の表示によって、ドライバ150に着呼を視覚的に通知することが可能となる。また、ドライバ150が、この通話アイコン811をタッチすることによって通話を受ける(電話に出る)ことが可能となる。さらには、ステップS603において、通話アイコン811と共に、発呼者通信端末210から受信する画像(例えば、発呼者通信端末210に付随するカメラで撮像された発呼者の顔画像)を表示画面に表示することによって、ドライバ150に対して通話相手を視覚的に通知することが可能となる。
【0141】
そして、所定の時間(例えばT秒)だけ、ドライバ150による通話アイコン811のタッチ操作を待機し(ステップS605)、ドライバ150によってT秒以内に通話アイコン811のタッチ(ドライバ150による着呼への応答操作)が行われた場合には、車載装置200は、福祉用電動車両100が現在移動中(走行中)か否かを判断する(ステップS607)。福祉用電動車両100が移動中の場合には、車両制御部360によって、福祉用電動車両100が停止するまで減速制御が行われる(ステップS609、S611)。
【0142】
そして、福祉用電動車両100が最初から停止している場合や減速制御によって停止した場合には、車両制御部360によって、通話中は移動できないように福祉用電動車両100の駆動をロックし(ステップS613)、発呼者の画像を表示入力部305の表示画面に表示して通話を開始する(ステップS615)。
【0143】
一方、ステップS605でドライバ150によってT秒以内に通話アイコン811のタッチが行われなかった場合には、車載装置200は、例えば自動的に通話を受ける(電話に出る)ことが可能である(ステップS617)。このときの通話は、TV電話を使用せずにあくまでも音声通話のみとし、表示入力部305の表示画面は変更しない(すなわち、発呼者の画像を表示しない)ことが望ましい。
【0144】
また、ここで、ドライバ150が福祉用電動車両100を減速及び停止した場合には、ステップS613、S615の処理に進み、音声通話からTV電話への切り替えが行われるようにしてもよい。また、発呼者が監視者通信端末210を操作して、車載装置に対して福祉用電動車両100の停止指示を送信した場合(ステップS619)には上述のステップS607以降の処理に進み、福祉用電動車両100の減速及び停止後に、音声通話からTV電話への切り替えが行われるようにしてもよい。
【0145】
なお、ステップS605でドライバ150によってT秒以内に通話アイコン811のタッチが行われなかった場合には、車載装置200は、監視モードに自動的に移行してもよい。この監視モードは、例えば、ドライバ150が着呼に気付かずに電話に出なかった場合でも、例えば、ドライバ撮像部110によって撮像されたドライバ150の撮像画像が監視者通信端末210に送信されることによって、発呼者である監視者が、ドライバ150の現在の状態を把握できるようにするものである。なお、この監視モードでは、ドライバ150の撮像画像と共に、福祉用電動車両100で取得される音声も監視者通信端末210に送信されてもよい。また、監視モードにおいて、福祉用電動車両100の現在地情報や福祉用電動車両100の周辺を撮像した車外画像、現在地に至るまでの移動履歴などが監視者通信端末210に送信されてもよい。さらには、監視モードにおいて、例えば、所定のセンサによって検出されたドライバ150のバイタル情報(脈拍、体温などの生体情報)が監視者通信端末210に送信されてもよい。
【0146】
また、この監視モードでは、監視者通信端末210からドライバ150に話しかけることができるようにしてもよく、また、ドライバ150が監視者通信端末210からの会話(話しかけ)に応答すると、福祉用電動車両100が減速及び停止するように構成されていてもよい。さらには、ドライバ150が監視者通信端末210からの通話要求に応じなかった場合であっても、監視者通信端末210からの指示によって福祉用電動車両100の減速及び停止制御を強制的に行わせるとともに、ドライバ150との通話が開始されるようにしてもよい。
【0147】
また、上述の動作では、ドライバ150による通話アイコン811のタッチ操作が行われた場合には、車両制御部360によって減速制御が行われる。しかしながら、ドライバ150が通話の際に受話器を使用するようにし、さらに、その受話器の配置位置を例えば図12に図示されているようにすることによって、ドライバ150自身が福祉用電動車両100を減速及び停止しないと通話を行うことができないようにすることが可能である。
【0148】
また、上述の動作において、福祉用電動車両100が移動中の状態でドライバ150が着呼に応答した場合には、ドライバ150に対して警報を報知することが望ましい。この警報は、例えば福祉用電動車両100の停止を促す警報(「停止してください」などのメッセージを報知)であり、この場合、福祉用電動車両100が停止するまでは、通話が行われないように制御することも可能である。また、福祉用電動車両100が移動中の状態でドライバ150が着呼に応答した場合に、福祉用電動車両100の減速制御を自動的に行うと同時に、福祉用電動車両100が減速、停止する旨を通知する警報(「車両は自動的に停止します。停止した後、通話を行うことができます。」などのメッセージ)を報知することも可能である。
【0149】
図12には、本発明の第1の実施の形態における福祉用電動車両100の運転席周辺の外観の一例が図示されている。図12に図示されているように、ドライバ150は福祉用電動車両100を運転する際に両手でグリップ1203を握るとともに、さらに右手で速度調整レバー1201を握ることによって福祉用電動車両100の加速が開始され、速度調整レバー1201を握るのを止めた場合には、福祉用電動車両100は速やかに減速する。
【0150】
一方、通話時にドライバ150によって使用される受話器1205は、右手(速度調整レバー1201を握る手)側に設けられている。そして、車載装置200に対して着呼があった場合、ドライバ150は、受話器1205を右手で把持する必要があり、その結果、速度調整レバー1201から右手が離れて、福祉用電動車両100は減速及び停止する。これによって、通話を受けると同時に、福祉用電動車両100の減速及び停止が行われるようになり、ドライバ150による安全な運転が実現されるとともに、ドライバ150が自分の意図(及び自分のタイミング)で福祉用電動車両100を減速及び停止させるので、違和感のない福祉用電動車両100の減速及び停止が行われるようになる。
【0151】
また、図6のステップS601でドライバ150が乗車中ではない(すなわち下車中)と判断された場合には、図7に図示されている処理が行われる。図7には、本発明の第1の実施の形態における車載装置が通信サーバから通信要求を受け付けた際に、ドライバ150が下車中と判断された場合の処理の一例が図示されている。
【0152】
ステップS601でドライバ150が下車中と判断された場合には、図7において、車載装置200は、福祉用電動車両100が現在移動中(走行中)か否かを判断する(ステップS701)。福祉用電動車両100が停止している場合には、自車位置検知部325で取得された福祉用電動車両100の現在地が、利用者登録データ格納部340の登録データに登録されている自宅付近か否かを判断する(ステップS703)。
【0153】
福祉用電動車両100が自宅近くに停車中の場合には、ドライバ150は自宅に居ると判断され、ドライバ150の家電話機260へ通話するように指示する通信サーバ220への返信を行う(ステップS705)。この家電話機260へ通話するように指示する返信は、図5のステップS505で通信サーバ220が車載装置200から受信する返信に対応している。
【0154】
一方、福祉用電動車両100が移動中の場合や、福祉用電動車両100が自宅から離れた場所に停車中の場合には、ドライバ150の携帯電話機280へ通話するように指示する通信サーバ220への返信を行う(ステップS707)。この携帯電話機280へ通話するように指示する返信は、図5のステップS507で通信サーバ220が車載装置200から受信する返信に対応している。
【0155】
なお、上述の動作では、福祉用電動車両100が自宅近くに停車中の場合には、自宅の家電話機260へ通話が行われるようにしているが、同様に、ドライバ150が頻繁に訪れる施設(例えば病院や福祉施設など)の位置及び電話番号(施設アドレス)を登録データに登録しておき、ドライバ150が下車中で、かつ福祉用電動車両100が特定の施設周辺に停車中の場合には、その施設に関連して登録されている電話番号あてに通話が行われるようにしてもよい。
【0156】
また、上述の動作では、ドライバ150が下車中で、かつ福祉用電動車両100が移動中の場合には、携帯電話機280へ通話が行われるようにしているが、ドライバ150が下車中で、かつ福祉用電動車両100が移動中の状況が異常な状態(例えば、レッカー移動されている状態や盗難にあっている状態)であることを考慮して、この場合には、警察や所定の管理会社、緊急時連絡先に通報が行われるようにしてもよい。また、発呼者に対しても、ドライバ150が乗車していないにもかかわらず、福祉用電動車両100が移動している旨を通知することが望ましい。
【0157】
なお、本発明では、ドライバ150の状況を2つの状況(乗車中又は下車中)に分類するとともに、福祉用電動車両100の状況を2つの状況(移動中又は停止中)に分類し、これらの組み合わせから、図11に図示されているように、4つの状態(乗車中及び移動中、乗車中及び停止中、下車中及び移動中、下車中及び停止中)を考慮する。そして、監視者がドライバ150に対して通信要求を行った際の状態が、上記の4つの状態のいずれに属するかを判断して、監視者がドライバ150と通話を行うのに適した通信端末に監視者からの通信要求を転送する。
【0158】
また、図11に図示されているように、乗車中及び移動中の場合は、ドライバ150が運転している状態であることが推定される。また、乗車中及び停止中の場合は、ドライバ150が乗車して止まっている(信号待ちなどで停車中、若しくは乗車した状態で休憩中)状態であることが推定される。また、下車中及び移動中の場合は、レッカー移動や盗難などの何らかの異常な状態が発生していることが推定される。また、下車中及び停止中の場合は、ドライバ150が福祉用電動車両100を駐車して離れていることが推定される。この場合は、ドライバ150が自宅に戻っている状態と、外出先で福祉用電動車両100を乗り捨てている状態とに大別できる。
【0159】
なお、ここでは、福祉用電動車両100が盗難にあっている場合を下車中及び移動中に分類しているが、ドライバ150が乗車中か否かを検知する乗車検知部320の乗車検知方法によっては、異なる状態に分類される。例えば、乗車検知部320が顔認識などによってドライバ150の乗車を検知する場合には、通常のドライバ150以外の第3者が福祉用電動車両100を運転していることが把握可能であり、この場合には、盗難は下車中及び移動中の状態に分類される。一方、乗車検知部320が座席の重量などによってドライバ150の乗車を検知する場合には、座席に座って運転しているのが、通常のドライバ150なのか第3者なのかを識別することはできないため、この場合には、盗難は下車中及び移動中の状態に分類することは不可能である。ただし、レッカー移動に関しては、乗車検知部320の乗車検知方法によらず、常に下車中及び移動中に分類可能である。
【0160】
以上、説明したように、本発明の第1の実施の形態によれば、車両を運転して移動しているドライバの状況を把握できるようにし、車両から離れた場所に存在している監視者がドライバに対して連絡を取る場合に、そのドライバの状況に応じて適切な連絡先につながるようになり、また、ドライバと連絡が取れない場合でも、そのドライバの近況が把握できるようになる。
【0161】
<第2の実施の形態>
次に、本発明の第2の実施の形態について説明する。
【0162】
上述の本発明の第1の実施の形態では、通信サーバ220が、監視者通信端末210から通信要求を受けた際に、ドライバ150の状況や福祉用電動車両100の状況を車載装置200に問い合わせる必要があるが、本発明の第2の実施の形態では、通信サーバ220が、あらかじめ車載装置200から、ドライバ150の状況や福祉用電動車両100の状況などを把握できる情報を取得しておくようにする。
【0163】
本発明の第2の実施の形態では、本発明の第1の実施の形態に比べて、通信サーバ220から車載装置200への問い合わせに要する時間が短縮され、ドライバ150の状況や福祉用電動車両100の状況が迅速に把握されて、適切な通信端末への転送及び通話開始までの時間が短縮される。また、車載装置200との連絡がまったく取れない場合でも、通信サーバ220で把握されているドライバ150の状況や福祉用電動車両100の状況から、現在の状況を推定することが可能である。
【0164】
このように、通信サーバ220は、ドライバ150の状況や福祉用電動車両100の状況を車載装置200から受信して、格納しておく必要がある。図13には、本発明の第2の実施の形態における通信サーバの構成の一例が図示されている。なお、図13には、通信サーバ220の機能が内部バスによって接続されたブロックによって図示されているが、これらの各機能は、ハードウェア及び/又はソフトウェア(プログラム)によって実現可能である。
【0165】
図13に図示されている通信サーバ220は、情報処理部405、ネットワーク通信部410、車載装置側通信部415、利用者登録データ格納部420、利用者状況データ格納部425を有している。なお、上述の本発明の第1の実施の形態における通信サーバ220(図4を参照)と比較した場合、本発明の第2の実施の形態における通信サーバ220は、利用者状況データ格納部425を更に有している。
【0166】
利用者状況データ格納部425は、車載装置200によって把握され、車載装置200から受信するドライバ150の状況や福祉用電動車両100の状況などを把握できる情報を格納する機能を有している。なお、ドライバ150の状況や福祉用電動車両100の状況を表す情報は、福祉用電動車両100の移動や時間の経過と共に変更される動的な情報である。また、通信サーバ220において複数のドライバ150に関する処理が行われる場合には、利用者状況データ格納部425には、複数のドライバ150のそれぞれに関する最新の更新情報が格納される。
【0167】
例えば、利用者状況データ格納部425に格納される情報(利用者状況データ)は、図14に図示されているような構造を有している。すなわち、利用者状況データ格納部425に格納される情報は、複数のドライバ150のそれぞれに関して、利用者IDによって識別するとともに、各ドライバ150の現在地(例えば、緯度及び経度によって特定)、自宅近傍フラグ(現在地が自宅の近傍か否かを示すフラグ)、乗車中フラグ(ドライバ150が福祉用電動車両100に乗車しているか否かを示すフラグ)、移動中フラグ(福祉用電動車両100が移動しているか否かを示すフラグ)、ドライバ150が下車してからの経過時間(あるいは、ドライバ150の下車時刻)、福祉用電動車両100のバッテリ残量、当該エントリが更新された際の最新更新時刻を保持する構造を有している。
【0168】
また、不図示であるが、車載装置200においても、こうした情報を通信サーバ220に対して通知する機能が追加される必要がある。なお、車載装置200がこうした情報を通信サーバ220に通知するタイミングは、例えば周期的であってもよく、あるいは、情報が更新された場合であってもよい。
【0169】
なお、本発明の第2の実施の形態における動作は、上述の本発明の第1の実施の形態で通信サーバ220から車載装置200に対して行われていた問い合わせ(ドライバ150の状況や福祉用電動車両100の状況などの情報に関する問い合わせ)や、これらの情報に基づいた車載装置200における判断処理(ドライバ150への通話に適した通信端末の選択処理など)などが、利用者状況データ格納部425に格納されている情報に基づいて通信サーバ220で行われるようになるだけで、基本的には同一である。
【0170】
また、本発明の第2の実施の形態における通信サーバ220の機能を監視者通信端末210に組み込み、車載装置200から受信する最新の更新情報に基づいて、監視者通信端末210が、ドライバ150への通話に適した通信端末の選択処理を行うサーバレス構成とすることも可能である。
【0171】
さらには、監視者通信端末210は、利用者状況データ格納部425に格納される更新情報を表示画面に表示することによって監視者に報知するのみであり、監視者自身が、こうした情報に基づいてドライバ150への通話に適した通信端末を考え、選択することも可能である。
【0172】
以上、説明したように、本発明の第2の実施の形態によれば、上述の本発明の第1の実施の形態と同様に、車両を運転して移動しているドライバの状況を把握できるようにし、車両から離れた場所に存在している監視者がドライバに対して連絡を取る場合に、そのドライバの状況に応じて適切な連絡先につながるようになり、また、ドライバと連絡が取れない場合でも、そのドライバの近況が把握できるようになる。また、通信サーバ220から車載装置200へ問い合わせを行う必要がなくなり、車載装置200が任意のタイミングで更新された情報を通信サーバ210に通知できるようになるので、例えば、車載装置200が通信状況(電波状況)の悪い環境に存在している場合でも、そのときのドライバの状況に極めて近い条件を把握できるようになる。
【0173】
<第3の実施の形態>
次に、本発明の第3の実施の形態について説明する。
【0174】
本発明の第3の実施の形態では、ドライバ150が福祉用電動車両100を下車時及び下車中の車載装置200における処理について説明する。なお、以下に説明する車載装置200の処理(図15及び図16に図示されている動作)は、ドライバ150が下車して福祉用電動車両100を離れている際に自発的に行われるように設定されることが望ましい。
【0175】
図15には、本発明の第3の実施の形態における車載装置200がドライバ150の下車を検知した場合の処理の一例が図示されている。
【0176】
図15において、ドライバ150が福祉用電動車両100を下車したことが乗車検知部320によって検知されると、車載装置200は、ドライバ150が再び戻ってきて乗車するのを待機する(ステップS1501)と同時に、ドライバ画像(ドライバ撮像部319によって撮像)及び車外画像(車外撮像部315によって撮像)を画像データ格納部345に保存する(ステップS1503)。
【0177】
そして、ドライバ150が下車してからの経過時間を計測し、下車より30分経過しているか否かを判断する(ステップS1505)。ここで、下車よりまだ30分が経過していない場合には、下車より1分が経過しているか否かを判断する(ステップS1507)。
【0178】
そして、ステップS1507でドライバ150の下車から1分に満たない以内の場合には1秒間待機し(ステップS1509)、一方、ステップS1507で下車から1分以上経過している場合には10秒間待機して(ステップS1511)、再びステップS1501の処理に戻る。すなわち、この待機処理によって、ドライバ150が下車してから1分間は、1秒間隔でドライバ画像及び車外画像の保存が行われ、ドライバ150が下車してから1分を過ぎた場合には、10秒間隔でドライバ画像及び車外画像の保存が行われる。
【0179】
この待機時間の設定は、ドライバ150の下車直後の画像を詳細に記録する一方、下車してからある程度の時間(ここでは、1分間)が経過した場合には、ドライバ150は福祉用電動車両100から離れ、詳細な記録を行う必要がないことに基づいている。これによって、撮像画像の画像データを記憶するスペースを節約して使用することができるようになる。なお、撮像時間の間隔を変更する方法以外にも、例えば、撮像画像の画素数(解像度)を落として、1枚の撮像画像の画像データ容量を減らすようにしてもよい。
【0180】
また、ドライバ150が福祉用電動車両100を下車してから30分以上経過している場合には、あらかじめ設定されている登録データの緊急時連絡先へ、福祉用電動車両100の現在地(緯度及び経度)とドライバ150の下車後に保存された画像データ(すなわち、ステップS1503における画像の保存処理によって蓄積された画像データ)を送信する(ステップS1513)。ただし、現在地がドライバ150の自宅近辺(あるいは、所定の登録された施設周辺)の場合には、ドライバ150は自宅に戻るために下車したことが予想されるので、緊急時連絡先へ画像データを送信する必要はない。
【0181】
なお、ステップS1513において、例えば、ドライバ150の携帯電話機280に各種情報を送信することも可能である。例えば、ドライバ150の携帯電話機280に対して、福祉用電動車両100から離れすぎている旨を通知するメッセージを送信してもよくい、福祉用電動車両100が停止している場所周辺の地図を送信してもよい。また、車載装置200がドライバ150の携帯電話機280の現在地(すなわち、ドライバ150の現在地)を把握できた場合には、ドライバ150の現在地から福祉用電動車両100の現在地までの誘導情報(ナビゲーション情報)を送信してもよく、福祉用電動車両100がドライバ150の現在地まで自動走行で移動してもよい。さらには、把握されたドライバ150の現在地を緊急連絡先へ通知することも可能である。
【0182】
また、上述の動作の説明において設定されている下車からの経過時間の閾値(1分又は30分)や、下車後の画像保存のタイミング(1秒間隔又は10秒間隔)は、任意の値に設定されてもよい。また、ここではドライバ150が下車してからの経過時間を計測しているが、アクセサリ電源をオフ(ACC_OFF)にしてからの経過時間、キーを抜いてからの経過時間、ギアをパーキングに入れてからの経過時間、ドライバ150が福祉用電動車両100から一定距離離れてからの経過時間などを計測してもよく、また、停車している場所が駐車スペースの場合に、ドライバ150が下車して福祉用電動車両から離れると判断し、下車してからの経過時間の計測を開始してもよい。
【0183】
また、ここでは、ドライバ150の下車後の経過時間に応じて、画像を撮像する周期を変更しているが、例えば、福祉用電動車両100の周囲で移動する物体(例えば人影)が検知された場合に、画像の撮像を行うようにしてもよく、車載装置200がドライバ150との距離を測定する機能を有し、この測定結果が一定の距離以上離れるまで短い撮像周期(細かい解像度)を維持してもよい。
【0184】
また、ここでは、下車してから所定の時間以上(30分以上)経過した場合に、福祉用電動車両100の現在地及び下車後に撮像された画像データが緊急時連絡先に送信されるが、特定の端末(例えば、監視者通信端末210)から要求された場合に、これらの情報を送るようにしてもよい。また、ドライバ150が下車した場合にはすぐに緊急時連絡先に、福祉用電動車両100の現在地及び下車後に撮像された画像データが送信されてもよい。また、下車してから所定の時間以上(30分以上)経過した場合であって、さらに、時間帯が夜(例えば、午後9時から午前6時までの時間帯)の場合に、ステップS1513において緊急時連絡先に通知が行われるようにしてもよい。また、下車してから通知が行われるまでの基準となる所定の時間(上記の例では30分)に関しても時間帯を考慮し、例えば、時間帯が夜(例えば、午後9時から午前6時までの時間帯)の場合には、所定の時間が30分から15分に変わるなど、時間帯に応じて変化してもよい。
【0185】
以上の処理によって、車載装置200は、ドライバ150が福祉用電動車両100を乗り捨てた際の状態を撮像して画像データとして保存し、福祉用電動車両100が所定の時間以上乗り捨てられた場合に、緊急時連絡先に対して、保存された画像データを送信できるようになる。緊急時連絡先では、この画像データを閲覧することで、例えば、ドライバ150の下車時の様子や、ドライバ150が下車後に歩いて行った方向などを把握することができるようになる。
【0186】
図29には、本発明の第3の実施の形態における車載装置200がドライバ150の下車を検知した場合の処理の一例が図示されている。
【0187】
図29において、車載装置200は、例えば、ドライバ150が乗車中であり、かつ、福祉用電動車両100が停止中であることを検知した場合には、この状態が所定の時間(例えば、15分以上)続いているか否かを監視する(ステップS2901)。そして、この状態が所定の時間以上続いた場合には、あらかじめ設定されている登録データの緊急時連絡先へ、ドライバ150が乗車中にもかかわらず長時間停止している状態にある旨を通知する(ステップS2903)。なお、ステップS2903において、各種情報を同時に送信することも可能である。通知すべき各種情報としては、例えば、ドライバ150の状態を撮像したドライバ画像や、福祉用電動車両100の周辺を撮像した車外画像、ドライバ150のバイタル情報、福祉用電動車両100の現在地や現在地に至るまでの移動履歴などが挙げられる。
【0188】
また、図16には、本発明の第3の実施の形態における車載装置200が自車の移動を検知した場合の処理の一例が図示されている。
【0189】
図16において、車載装置200は、例えば、現在地の変化などから福祉用電動車両100の移動が始まったことを検知した場合には、ドライバ150が乗車中か否かを判断する(ステップS1601)。
【0190】
ドライバ150が乗車していることが検知された場合には、ドライバ150の運転によって福祉用電動車両100の移動が開始されたと判断されて特別な処理は行われないが、ドライバ150が乗車していないことが検知された場合には、あらかじめ設定されている登録データの緊急時連絡先と、ドライバ150の携帯電話機280に対して、福祉用電動車両100が移動中の旨を通知する(ステップS1603)。
【0191】
以上の処理によって、ドライバ150が乗車していない状態で福祉用電動車両100が移動を開始した場合に、緊急時連絡先及びドライバ150の携帯電話機280にその旨の通知が送られるようになる。
【0192】
以上、説明したように、本発明の第3の実施の形態によれば、ドライバ150が福祉用電動車両100を降りて福祉用電動車両100から離れた場合でも、福祉用電動車両100から離れた場所に存在している監視者がドライバ150の下車時の状況を把握できるようになり、さらにドライバ150の下車後の行動を予測できるようになる。また、ドライバの下車後の車両の状態も把握できるようになる。
【0193】
<第4の実施の形態>
次に、本発明の第4の実施の形態について説明する。
【0194】
まず、本発明の第4の実施の形態における構成について説明する。図17には、本発明の実施の形態における車載装置の構成の一例が図示されている。なお、図17には、車載装置200の機能がブロックによって図示されているが、これらの各機能は、ハードウェア及び/又はソフトウェア(プログラム)によって実現可能である。
【0195】
図17に図示されている車載装置200は、図3に図示されている車載装置200の構成に加えて、さらに、バッテリ残量測定部1701、エリア設定データ格納部1703が設けられている。なお、図3に図示されている構成要素と同一の構成要素に関しては、ここでは説明を省略する。
【0196】
バッテリ残量測定部1701は、福祉用電動車両100の電気系統に電気を供給するバッテリ(不図示)に蓄電されている電気の残量を測定する機能を有している。なお、バッテリ残量測定部1701による測定結果に基づいて、情報処理部365が、残り使用可能時間を算出することも可能である。
【0197】
なお、福祉用電動車両100の電気系統は、福祉用電動車両100の駆動系と、その他の電気系統(表示・通信系など)とに大別することが可能である。情報処理部365は、駆動系における残り使用可能時間(残り走行可能距離)と、その他の電気系統における残り使用可能時間とをそれぞれ算出することも可能である。また、駆動系のバッテリとその他の電気系統のバッテリとをそれぞれ別々のバッテリによって実現し、バッテリ残量測定部1701は、駆動系のバッテリ及びその他の電気系統のバッテリに関して、それぞれの電気の残量を測定してもよい。
【0198】
また、エリア設定データ格納部1703は、地図上の特定のエリアを識別するためのエリア設定データを格納する機能を有している。エリア設定データは、例えば、図20に図示されているような緯度及び経度のマトリックスで区切られたエリア設定を示すデータである。
【0199】
また、図18には、本発明の第4の実施の形態における通信サーバの構成の一例が図示されている。なお、図18には、通信サーバ220の機能がブロックによって図示されているが、これらの各機能は、ハードウェア及び/又はソフトウェア(プログラム)によって実現可能である。
【0200】
図18に図示されている通信サーバ220は、図4に図示されている通信サーバ220の構成に加えて、さらに、エリア管理データ・エリア設定データ格納部1801が設けられている。なお、図4に図示されている構成要素と同一の構成要素に関しては、ここでは説明を省略する。
【0201】
エリア管理データ・エリア設定データ格納部1801は、例えば、図21に図示されているような各エリアにおける行動頻度及び制限レベルを定めるエリア管理データや、図20に図示されているような地図上の特定のエリアを識別するためのエリア設定データを格納する機能を有している。
【0202】
また、図19には、本発明の第4の実施の形態における車載装置200の表示画面に表示されるエリア表示の一例が図示されている。図19に図示されている車載装置200のタッチパネル画面105には、地図上に福祉用電動車両100の現在地に対応した自車位置アイコン1901が表示されているとともに、行動が制限されているエリア(行動制限エリアA1903や行動制限エリアB1905)やドライバ150の行動経験が多いエリア1907が表示されている。
【0203】
なお、行動経験が多いエリアとは、ドライバ150が過去にこのエリアに進入した回数やこのエリアに留まった回数(時間)などが所定の閾レベルを超えているエリアである。また、行動が制限されているエリアとは、例えばドライバ150が近づくことを禁止されている場所を含むエリアや、安全走行のために走行速度などを制限すべきエリアなどである。
【0204】
行動経験に関しては、例えば行動経験が多いエリアと少ないエリアの2つの特性に分類することが可能である。また、行動の制限に関しては、各エリアにおいて、例えば行動を厳しく制限するエリア(制限エリアA)、行動を緩く制限するエリア(制限エリアB)、行動を制限しないエリアの3つの特性に分類することが可能である。なお、上記の分類方法(例えば、上記では行動制限を3段階のレベルで分類している)は一例であり、適宜、任意の分類方法を用いることが可能である。
【0205】
また、どのエリアに対してどのような行動の制限を設けるかに関しては、例えば、監視者が任意の端末(例えば、監視者通信端末210)を用いて設定することも可能であり、あるいは、グローバルネットワーク240に接続されている特定の情報提供サービス会社の通信装置から設定されてもよい。
【0206】
なお、本明細書では、ドライバ150に行かせたくない場所近辺を行動制限エリアとして設定する場合について説明するが、逆に、ドライバ150に行かせたい場所(例えば病院など)を基準として、それ以外のエリアを行動制限エリアとして設定してもよい。また、ドライバ150に行かせたい場所(例えば病院など)を含むエリアに福祉用電動車両100が進入した場合に、緊急時連絡先に通知が送られるようにしてもよい。すなわち、各エリアにおいて、例えば進入が推奨されるエリア(推奨エリア)、進入が推奨されないエリアの2つの特性に分類することも可能であり、さらに、推奨される程度を複数のレベルに分類することも可能である。
【0207】
また、図20には、本発明の第4の実施の形態における車載装置200及び通信サーバで保持されるエリア設定データの一例が模式的に図示されており、図21には、本発明の第4の実施の形態における通信サーバ220で保持されるエリア管理データの一例が模式的に図示されている。
【0208】
エリア設定データは、例えば、地表面を矩形エリアで区切る構造を有しておる。例えば図20に図示されているように、東経及び北緯をそれぞれ1秒ずつに区切って囲まれるエリアが設定される。なお、各エリアはエリア番号(「A1」や「B2」など)によって識別されることが望ましい。
【0209】
また、エリア管理データは、図21に図示されているように、各利用者のエントリが各エリアの情報を持つ構造を有している。各エリアの情報としては、行動経験のレベルを表す値が設定される行動頻度情報と、行動の制限レベルを表す制限レベル情報とが含まれており、これによって、各エリアの行動経験及び行動の制限が特定されるようになる。
【0210】
また、図21に図示されている例では、福祉用電動車両100が各エリアに進入した回数や各エリアにおける滞在時間などが蓄積される所在履歴情報が、各利用者の各エリアに存在している。例えば、所在履歴には、福祉用電動車両の現在地情報と時刻とが関連付けられた情報が格納される。この所在履歴情報は福祉用電動車両100の移動に応じて情報が追加され、この情報の変化に応じて行動頻度情報も変更されるようになっている。
【0211】
また、図22には、本発明の第4の実施の形態において、エリア設定データとエリア管理データとに基づいて作成される各エリアの行動経験の多いエリア及び行動制限エリアの概念が図示されている。このように、エリア設定データ及びエリア管理データに基づいて作成された各エリアの特性を表す情報が表示画面に表示されている地図上にスーパインポーズされることによって、上述の図19に図示されているような表示画面が実現される。
【0212】
なお、図22の行動経験が多いエリア2201は図19の行動経験が多いエリア1907、図22の行動制限エリアA2203は図19の表示画面上の行動制限エリアA1903、図22の行動制限エリアB2205は図19の表示画面上の行動制限エリアB1905にそれぞれ対応している。
【0213】
次に、本発明の第4の実施の形態における動作について説明する。図23には、本発明の第4の実施の形態における車載装置200が行うエリア表示の更新処理の一例が図示されている。
【0214】
図23において、車載装置200は、自車位置検知部325で福祉用電動車両100の現在地(自車位置)を取得すると(ステップS2301)、表示画面にその現在地周辺の地図を表示するとともに、現在地が対応する地図上の位置に自車位置アイコンを表示する(ステップS2303)。
【0215】
続いて、車載装置200は、福祉用電動車両100の自車位置及び自利用者IDを通信サーバ220へ送信する(ステップS2305)。さらに、車載装置200は、通信サーバ220に対して、自利用者IDのエリア管理データが更新されているか否かの問い合わせを行う(ステップS2307)。
【0216】
ここで、エリア管理データが更新されている場合には、その更新を反映するために、通信サーバ220からエリア管理データを取得し、そのエリア管理データに基づいて表示画面内のエリア表示の更新を行う(ステップS2309)。
【0217】
なお、ステップS2309において、車載装置200は、通信サーバ220から、エリア管理データが更新された差分情報のみ、あるいは表示画面に表示されているエリアに係るエリア管理データの更新情報のみを取得して、表示画面内のエリア表示の更新を行ってもよい。エリア管理データは、上述のように行動頻度及び制限レベルの2種類の情報を含んでおり、これら2種類の情報の更新によって、表示画面上のエリア表示も更新される。例えば、所在履歴の変化によって行動頻度が変更された場合や、何らかの外部操作によって行動制限エリアの設定が変更された場合に、表示画面上のエリア表示が更新されることになる。
【0218】
また、上述の処理が完了すると、所定の時間(エリア表示が更新される時間間隔よりも十分に短い時間:例えば1分間)だけ待機した後(ステップS2311)、再びステップS2301の処理から行われる。
【0219】
また、図24には、本発明の第4の実施の形態において、通信サーバが車載装置から現在地情報を受信した際の処理の一例が図示されている。
【0220】
図24において、通信サーバ220は車載装置200から、その現在地の位置情報を受信した場合(図23のステップS2305の処理に対応)、エリア設定データを参照して、その現在地に対応するエリア番号を取得する(ステップS2401)。
【0221】
続いて、通信サーバ220は、受信した利用者のそのエリアでの所在履歴に、時刻と現在地の位置情報とを格納することによって、エリア管理データの更新を行う(ステップS2403)。また、通信サーバ220は、更新後の所在履歴情報を参照して、そのエリアでの所在回数が所定値T(例えば100回)を超えたか否かを判定する(ステップS2405)。なお、例えば、過去1ヶ月間におけるそのエリアでの所在回数を用いるなど、そのエリアでの所在回数の対象期間を定めることが望ましい。
【0222】
そして、ステップS2405で所在回数が所定値Tを超えた場合には、エリア管理データの行動頻度の値を1(行動経験が多いことを示す値)にセットし(ステップS2407)、ステップS2407で所在回数が所定値T以下の場合には、エリア管理データの行動頻度の値を0(行動経験が少ないことを示す値)にセットする(ステップS2409)。
【0223】
そして、通信サーバ220は、行動頻度や制限レベルの変化を検知して、その変化に従った処理を行う状況判定処理を実行する(ステップS2411)。なお、このステップS2411の状況判定処理は、後で図25を参照しながら説明する。また、通信サーバ220は、この福祉用電動車両100が置かれている現在の状況に対応する行動頻度及び制限レベルの値を記憶する(ステップS2413)。
【0224】
また、図25には、図24に図示されているステップS2411の状況判断処理の詳細な処理例が図示されている。
【0225】
この状況判定処理では、まず、エリア管理データが参照されて、福祉用電動車両100の現在地に対応する制限レベルが変化したか否かの確認が行われる(ステップS2501)。
【0226】
なお、福祉用電動車両100の現在地に対応する制限レベルは、例えば、監視者の端末や行動制限エリアの設定サービスを提供する情報提供サービス端末から、福祉用電動車両100の現在地を含むエリアの制限レベルが変化した場合や、福祉用電動車両100が移動して異なる制限レベルのエリアに進入した場合などに変化する。
【0227】
ここで、制限レベルに変化があった場合には、制限レベル変化時の処理が行われる(ステップS2511)。なお、このステップS2511の制限レベル変化時の処理は、後で図26を参照しながら説明する。
【0228】
また、ここで、制限レベルに変化がなかった場合には、福祉用電動車両100の現在の状況に対応する行動頻度の値が変化したか否かの確認が行われる(ステップS2503)。なお、行動頻度の値に変化がなかった場合には、当該状況判定処理は終了となる。
【0229】
一方、行動頻度の値に変化があった場合には、過去に行動経験の少ないエリアに進入したか否かが確認される(ステップS2505)。そして、ステップS2405で過去に行動経験の少ないエリアに進入したことが確認された場合には、過去に行動経験の少ないエリアに進入した旨を利用者登録データの緊急連絡先に通知する(ステップS2507)。一方、ステップS2405で過去に行動経験の多いエリアに進入したことが確認された場合には、過去に行動経験の多いエリアに進入した旨を利用者登録データの緊急連絡先に通知する(ステップS2509)。
【0230】
また、図26には、図25に図示されているステップS2511の制限レベル変化時の処理の詳細な処理例が図示されている。
【0231】
この制限レベル変化時の処理では、通信サーバ220は、まず制限レベルの変化に対応して、現在の制限レベルを利用者登録データの緊急連絡先に通知する(ステップS2601)。また、通信サーバ220は、制限レベルがどのレベルに変化されたのかを確認する(ステップS2603、S2605)。例えば、ステップS2603及びS2605において、変化後の制限レベルが、行動を厳しく制限するエリア(制限エリアA)、行動を緩く制限するエリア(制限エリアB)、行動を制限しないエリアのどれに当てはまるのかが確認される。
【0232】
そして、制限レベルが制限エリアAの値に変化している場合には、福祉用電動車両100の最高速度を時速2kmに設定するよう車載装置200に通知する(ステップS2607)。また、制限レベルが制限エリアBの値に変化している場合には、福祉用電動車両100の最高速度を時速4kmに設定するよう車載装置200に通知する(ステップS2609)。また、制限レベルが制限エリアA及び制限エリアBの値以外の値に変化していない場合には、福祉用電動車両100の最高速度を時速6kmに設定するよう車載装置200に通知する(ステップS2611)。これによって、ドライバ150の行動を厳しく制限するエリアほど福祉用電動車両100の速度を抑え、単位時間当たりの行動範囲を狭くすることが可能となる。なお、上記の時速設定は一例であり、制限する時速は任意に設定可能である。また、時速を0kmに設定することで、そのエリアに入れないようにすることも可能である。
【0233】
なお、上述の動作では、福祉用電動車両100の最高速度を制御する指示が行われているが、その他の移動性能に関する制御が行われてもよい。さらに、各エリアに進入した旨が車載装置200から利用者に報知されるよう指示が行われてもよい。車載装置200におけるエリア進入の報知は、各エリアの特性(行動制限エリア、推奨エリア、行動経験の多い/少ないエリアなどの特性)やそのエリアに設定されているレベルなどに応じて、様々な報知の態様が利用可能であり、危険性や緊急性の高いエリアの進入ほど利用者150が確実に把握できるようにすることが望ましい。また、時間帯や曜日などに応じて、行動制限エリアや推奨エリアの特性や閾レベルが変化してもよい。例えば、ある特定のエリアのレベルを変動可能とし、昼間は行動を緩く制限するエリア(制限エリアB)に設定され、夜間は行動を厳しく制限するエリア(制限エリアA)に設定されるようにしてもよい。また、ある特定のエリアの特性を変動可能とし、昼間は推奨エリアに設定され、夜間は制限エリアされるようにしてもよい。
【0234】
さらには、行動が制限される制限エリアAや制限エリアBに福祉用電動車両100が進入した場合には、車外撮像画像やドライバ画像などが所定の緊急時連絡先に送信されるようにしてもよい。さらに、行動の制限が厳しいエリアほど、これらの撮像画像の送信周期を短くしたり解像度を高くしたりすることも可能である。
【0235】
以上、説明したように、本発明の第4の実施の形態によれば、ドライバの行動履歴やあらかじめ設定されたエリアへの進入などに応じてドライバの状況の通知が行われるようにすることにで、車両から離れた場所に存在している監視者が、そのドライバの状況を把握できるようになる。
【0236】
<第5の実施の形態>
次に、本発明の第5の実施の形態について説明する。
【0237】
図27には、本発明の第5の実施の形態における車載装置のバッテリ残量に関連した処理の一例が図示されている。
【0238】
バッテリ系の処理では、まず、通信サーバへの通知が行われた旨を示す通知フラグが初期状態のFALSEにセットされる(ステップS2701)。なお、この通知フラグは、バッテリ残量が少なくなってきたときに緊急連絡先への通知が行われたこと(具体的には、下記のステップS2709の処理が行われたこと)を示すために使用されるフラグである。
【0239】
バッテリ残量測定部1701は、福祉用電動車両100に搭載されているバッテリの残量を測定する(ステップS2703)。このバッテリ残量の測定結果は情報処理部365に渡され、情報処理部365において、バッテリ残量が所定量未満(例えば、バッテリの最大蓄電量の5%未満)となったか否かがチェックされる(ステップS2705)。
【0240】
ここで、バッテリ残量が所定量以上である場合には、通知フラグはFALSEにセットされる(ステップS2713)。なお、通知フラグがFALSEにセットされている場合には、ステップS2713において、通知フラグはそのままFALSEに維持される。
【0241】
一方、バッテリ残量が所定量未満である場合には、通知フラグがTRUEにセットされているか否かがチェックされる(ステップS2707)。ここで、通知フラグがFALSEにセットされている場合には、バッテリ残量が残り少なくなってきたことを緊急連絡先に通知する処理が行われる。このとき、車載装置200は、例えば、現在地、移動履歴、過去に停止していた地点情報を通信サーバ220を介して緊急時連絡先に送信する(ステップS2709)。また、ステップS2709において、その他の情報(車外の撮像画像やドライバの撮像画像など)が送信されてもよい。なお、車載装置200において、例えば、現在地、移動履歴、過去に停止していた地点情報やその他の様々な情報に基づいて、この後、どの地点に向かい、どの地点で福祉用電動車両100が停止することになるのかを予測し、ステップS2709において、この予測地点を緊急時連絡先に送信してもよい。なお、このとき予測地点の候補を複数提示してもよく、さらには、複数の予測地点のそれぞれの確度(最終的に予測地点に停止する確率)を計算して提示してもよい。
【0242】
なお、福祉用電源車両100が、駆動系に給電するバッテリと通信系に給電するバッテリと備えており、ステップS2709において、それぞれのバッテリに関して独立して通知が行われるようにしてもよい。また、1つのバッテリによって駆動系及び通信系の両方に給電されている場合であっても、「もうすぐ動けなくなります」という通知と、さらにバッテリ残量が少なくなった場合に「もうすぐ通信できなくなります」という通知の2段階の通知が行われるようにしてもよい。
【0243】
なお、ステップS2709における緊急連絡先への通知方法や通知する際に同時に送信する情報の種類などに関しては、例えばシステム運用などに合わせて任意に設定可能である。
【0244】
そして、ステップS2709における通知が行われた後、通知フラグがTRUEにセットされ(ステップS2711)、ステップS2711又はS2713における通知フラグの設定後、再びステップS2703に戻って、上記の処理が繰り返し行われる。
【0245】
また、図28には、ステップS2709において、車載装置200からバッテリ残量が残り少なくなってきたことが通知された場合の緊急連絡先として指定されている端末の表示画面の一例が図示されている。
【0246】
図28において、緊急連絡先として指定されている端末(例えば、図2に図示されている監視者通信端末210であってもよい)の表示画面2800には、例えば、福祉用電動車両100の現在地周辺の地図が表示されるとともに、車載装置200から送信されてきた現在地情報に対応する地図上の位置を示す自車位置アイコン2801、車載装置200から送信されてきた移動履歴情報に基づいて表示される移動経路2803、福祉用電動車両100が過去によく停止していた地点2805(すなわち、ドライバ150がよく訪れている場所)が表示される。
【0247】
緊急連絡先として指定されている端末のオペレータは、この表示画面を参照することで、福祉用電動車両100のバッテリ残量が少なくなっていることを把握するとともに、福祉用電動車両100の自車位置アイコン2801や移動経路2803、過去によく停止していた地点2705から、この後、ドライバ150がどこに向かおうとしていたのか、あるいは、どこで福祉用電動車両100を乗り捨て、その後どこへ向かうかなどを推測することができるようになる。例えば、バッテリ残量が少なくなっている福祉用電動車両100が、ドライバ150のよく行く施設(過去によく停止していた地点2805の1つ)付近に存在している場合には、バッテリが切れて福祉用電動車両100が動かなくなった後、ドライバ150はその施設に徒歩で向かうことが予測される。
【0248】
また、ステップS2709で、福祉用電動車両100のバッテリ残量や、その値から予測される走行可能距離又は走行可能時間が通知され、緊急連絡先として指定されている端末の表示画面に表示されてもよい。こうした情報も、緊急連絡先として指定されている端末のオペレータがドライバ150のこの後の行動を予測するための情報として使用可能である。
【0249】
以上、説明したように、本発明の第5の実施の形態によれば、車両の駆動源(電動式の場合はバッテリ)の残りエネルギー量が少なくなった場合に車両から通知が行われることによって、車両から離れた場所に存在している監視者が、そのドライバの状況を把握し、かつ車両のバッテリがなくなった後のドライバの行動を予測できるようになる。
【産業上の利用可能性】
【0250】
本発明は、移動体を利用した移動を行っているユーザの状況に応じた適切な処理が行われるようにするという効果を有しており、移動体の利用者の移動支援や、移動体の利用者の監視・保護を行う技術に適用可能である。
【図面の簡単な説明】
【0251】
【図1】本発明の第1の実施の形態における移動体(福祉用電動車両)の外観及び機能を模式的に示す図である。
【図2】本発明の第1の実施の形態におけるドライバ監視システムの構成の一例を示す図である。
【図3】本発明の第1の実施の形態における車載装置の構成の一例を示す図である。
【図4】本発明の実施の形態における通信サーバの構成の一例を示す図である。
【図5】本発明の第1の実施の形態における通信サーバが発呼者から通信要求を受け付けた際の処理の一例を示すフローチャートである。
【図6】本発明の第1の実施の形態における車載装置が通信サーバから通信要求を受け付けた際の処理の一例を示すフローチャートである。
【図7】本発明の第1の実施の形態における車載装置が通信サーバから通信要求を受け付けた際に、ドライバが下車中と判断された場合の処理の一例を示すフローチャートである。
【図8A】本発明の第1の実施の形態における車載装置の表示画面周辺の一例を示す図である。
【図8B】本発明の第1の実施の形態における車載装置の表示画面周辺の別の一例を示す図である。
【図9】本発明の第1の実施の形態における監視者通信端末の表示画面周辺の一例を示す図である。
【図10】本発明の実施の形態における通信サーバの利用者登録データ格納部に格納されるドライバの登録データの構造の一例を示す図である。
【図11】本発明の第1の実施の形態における車両及びドライバの状態を区別するための4つの分類を示す図である。
【図12】本発明の第1の実施の形態における車両の運転席周辺の外観の一例を示す図である。
【図13】本発明の第2の実施の形態における通信サーバの構成の一例を示す図である。
【図14】本発明の第2の実施の形態における通信サーバの利用者状況データ格納部に格納される情報の構造の一例を示す図である。
【図15】本発明の第3の実施の形態における車載装置がドライバの下車を検知した場合の処理の一例を示す図である。
【図16】本発明の第3の実施の形態における車載装置が自車の移動を検知した場合の処理の一例を示すフローチャートである。
【図17】本発明の第4の実施の形態における車載装置の構成の一例を示す図である。
【図18】本発明の第4の実施の形態における通信サーバの構成の一例を示す図である。
【図19】本発明の第4の実施の形態における車載装置の表示画面に表示されるエリア表示の一例を示す図である。
【図20】本発明の第4の実施の形態における車載装置及び通信サーバで保持されるエリア設定データの一例を模式的に示す図である。
【図21】本発明の第4の実施の形態における通信サーバで保持されるエリア管理データの一例を模式的に示す図である。
【図22】本発明の第4の実施の形態において、エリア設定データとエリア管理データとに基づいて作成される各エリアの行動経験の多いエリア及び行動制限エリアを示す概念図である。
【図23】本発明の第4の実施の形態における車載装置が行うエリア表示の更新処理の一例を示すフローチャートである。
【図24】本発明の第4の実施の形態において、通信サーバが車載装置から現在地情報を受信した際の処理の一例を示すフローチャートである。
【図25】本発明の第4の実施の形態に係る状況判断処理の詳細な処理例を示すフローチャートである。
【図26】本発明の第4の実施の形態に係る制限レベル変化時の処理の詳細な処理例を示すフローチャートである。
【図27】本発明の第5の実施の形態における車載装置のバッテリ残量に関連した処理の一例を示すフローチャートである。
【図28】本発明の第5の実施の形態において、車載装置からバッテリの残量が残り少ないことを通知された緊急連絡先の端末の表示画面の一例を示す図である。
【図29】本発明の第3の実施の形態における車載装置がドライバの下車を検知した場合の処理の一例を示すフローチャートである。
【符号の説明】
【0252】
105、907 タッチパネル画面
110 ドライバ撮像用カメラ
115 車外撮像用カメラ
120 乗車センサ
125 GPS装置
130 TV電話システム
135 データ通信部
200 車載装置
210 監視者通信端末
220 通信サーバ
230 監視用ネットワーク
235 基地局
240 グローバルネットワーク
260 利用者宅家電話機
270 携帯電話サービス装置
275 携帯電話基地局
280 携帯電話機
305 表示入力部
310 ドライバ撮像部
315 車外撮像部
320 乗車検知部
325 自車位置検知部
330 通話部
335 通信部
340 利用者登録データ格納部
345 画像データ格納部
350 移動履歴データ格納部
355 地図データ格納部
360 車両制御部
365 情報処理部
405 情報処理部
410 ネットワーク通信部
415 車載装置側通信部
420 利用者登録データ格納部
425 利用者状況データ格納部
801、901 スピーカ
803、903 マイクロホン
811 通話アイコン
813、915 通話終了アイコン
905 カメラ
913 停車アイコン
917 アドレスリスト
1201 速度調整レバー
1203 グリップ
1205 受話器
1701 バッテリ残量測定部
1703 エリア設定データ格納部
1801 エリア管理データ・エリア設定データ格納部
1903 行動制限エリアA
1905 行動制限エリアB
1907 行動経験が多いエリア
2800 表示画面
2801 自車位置アイコン
2803 移動経路
2805 過去によく停止していた地点
【特許請求の範囲】
【請求項1】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者又は前記移動体の状況を検知する状況検知手段と、
前記利用者と連絡が可能な複数の通信装置のそれぞれのあて先を含む利用者登録データが格納されている利用者登録データ格納手段と、
無線通信を介して通話を行うための通話手段と、
前記通話手段において任意の端末から通話要求を受信した場合、前記状況検知手段によって前記利用者又は前記移動体の状況を判断して、前記利用者が前記通話手段による通話を行うことが可能か否かを判定する通話可能判定手段と、
前記通話手段での通話が不可能と判定された場合に、前記利用者登録データに含まれる前記複数の通信装置の中から、前記状況検知手段の検知結果に基づいて最適と判断される通信装置を選択する通信選択手段と、
前記通信選択手段で選択された前記通信装置に対する前記通話要求の転送を指示する通話要求転送指示手段とを、
有する移動体搭載装置。
【請求項2】
前記状況検知手段が、前記移動体が移動中か停止中か、及び/又は、前記利用者が乗車中か下車中かを検知するように構成されている請求項1に記載の移動体搭載装置。
【請求項3】
前記状況検知手段によって前記利用者が乗車中であることが検知された場合に、前記利用者に前記通話手段による通話を行わせるための着呼処理を行う着呼処理手段を有する請求項2に記載の移動体搭載装置。
【請求項4】
前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体の移動時における通話の危険性を示す警報を報知する警報報知手段を有する請求項3に記載の移動体搭載装置。
【請求項5】
前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体が停止するまで前記利用者に前記通話手段による通話を行わせないように構成されている請求項3に記載の移動体搭載装置。
【請求項6】
前記利用者による前記着呼への応答と同時に前記移動体を減速又は停止させる移動体制動手段を有する請求項5に記載の移動体搭載装置。
【請求項7】
前記利用者が前記移動体を移動させるための操作を行う操作器と、前記利用者が通話を行うために把持する受話器とを前記利用者が同時に操作できないように前記操作器及び前記受話器が配置されている請求項5に記載の移動体搭載装置。
【請求項8】
前記移動体の停止後、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する請求項6又は7に記載の移動体搭載装置。
【請求項9】
前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が停止中であることが検知された場合に、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する請求項3に記載の移動体搭載装置。
【請求項10】
前記利用者が通話の着呼に応答しなかった場合、前記利用者に対して前記利用者又は前記移動体に関する情報の送信が行われていることを報知せずに、所定の連絡先に対して前記利用者又は前記移動体に関する情報を送信する情報送信手段を有する請求項3に記載の移動体搭載装置。
【請求項11】
前記利用者に関する情報として前記利用者の現在の状態を示す情報を使用するように構成されている請求項10に記載の移動体搭載装置。
【請求項12】
前記利用者の顔を撮像する利用者撮像手段、及び/又は、前記利用者の生体情報を検知する生体情報検知手段を有し、前記利用者に関する情報として、前記利用者撮像手段によって撮像された前記利用者の顔画像、及び/又は、前記生体情報検知手段によって検知された前記利用者の生体情報を使用するように構成されている請求項11に記載の移動体搭載装置。
【請求項13】
前記移動体に関する情報として前記移動体の現在の状態を示す情報を使用するように構成されている請求項10に記載の移動体搭載装置。
【請求項14】
前記移動体の現在地情報を取得する現在地情報取得手段、前記移動体の周囲を撮像する周囲撮像手段、前記移動体の移動履歴情報を格納する移動履歴情報格納手段の少なくとも1つを有し、前記移動体に関する情報として、前記現在地情報取得手段で取得された前記移動体の現在地情報、前記周囲撮像手段によって撮像された前記移動体の周囲画像、前記移動履歴情報格納手段に格納されている前記移動体の移動履歴の少なくとも1つを使用するように構成されている請求項13に記載の移動体搭載装置。
【請求項15】
前記利用者が通話の着呼に応答しなかった場合、通話の発呼側から受信する前記移動体の減速又は停止の指示に基づいて前記移動体を減速又は停止させる移動体制動手段を有する請求項3に記載の移動体搭載装置。
【請求項16】
前記利用者が通話の着呼に応答しなかった場合であっても、前記通話の着呼に応じる処理を行って前記利用者に強制的に通話させる強制着呼手段を有する請求項3に記載の移動体搭載装置。
【請求項17】
前記着呼処理時に、通話の着呼を示す情報と共に、前記通話の発呼側から受信する画像情報を表示する画像表示手段を有する請求項3に記載の移動体搭載装置。
【請求項18】
前記移動体の現在地情報を取得する現在地情報取得手段と、
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段とを、
有し、前記状況検知手段によって前記移動体が停止中、かつ前記利用者が下車中であることが検知された場合に、前記現在地情報取得手段で取得された前記移動体の現在地情報が前記自宅位置の周辺である場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の自宅電話機として登録されている前記通信装置を選択するように構成されている請求項2に記載の移動体搭載装置。
【請求項19】
前記移動体の現在地情報を取得する現在地情報取得手段と、
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段とを、
有し、前記状況検知手段によって前記移動体が停止中、かつ前記利用者が下車中であることが検知された場合に、前記現在地情報取得手段で取得された前記移動体の現在地情報が前記自宅位置の周辺ではない場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の携帯電話機として登録されている前記通信装置を選択するように構成されている請求項2に記載の移動体搭載装置。
【請求項20】
前記移動体の現在地情報を取得する現在地情報取得手段と、
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段と、
無線通信によって、前記移動体の周囲に存在する子機に前記通話を転送する基地局として機能する無線通信手段とを、
有し、前記状況検知手段によって前記移動体が停止中、かつ前記利用者が下車中であることが検知された場合に、前記現在地情報取得手段で取得された前記移動体の現在地情報が前記自宅位置の周辺ではない場合には、前記通信選択手段は、前記通話の転送先として、無線通信手段を介して通話が可能な前記子機を選択するように構成されている請求項2に記載の移動体搭載装置。
【請求項21】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置から、前記利用者又は前記移動体の状況に係る情報を受信し格納する状況情報格納手段と、
前記利用者と連絡が可能な複数の通信装置のそれぞれのあて先を含む利用者登録データが格納されている利用者登録データ格納手段と、
任意の端末から前記移動体搭載装置への通話要求を受信した場合、前記状況情報格納手段に格納されている前記利用者の状況に係る情報から前記利用者又は前記移動体の状況を判断して、前記利用者が前記移動体搭載装置に搭載されている通話手段によって通話を行うことが可能か否かを判定する通話可能判定手段と、
前記移動体搭載装置に搭載されている前記通話手段による前記利用者の通話が不可能と判定された場合に、前記利用者登録データに含まれる前記複数の通信装置の中から、前記利用者又は前記移動体の状況に基づいて最適と判断される通信装置を選択する通信選択手段と、
前記通信選択手段で選択された前記通信装置に対する前記通話要求の転送を行う通話要求転送手段とを、
有する移動体管理装置。
【請求項22】
前記利用者又は前記移動体の状況に係る情報に、前記移動体が移動中か停止中かを示す情報、及び/又は、前記利用者が乗車中か下車中かを示す情報が含まれている請求項21に記載の移動体搭載装置。
【請求項23】
前記利用者又は前記移動体の状況に係る情報に基づいて、前記利用者が乗車中であることが把握された場合には、前記移動体搭載装置に搭載されている通話手段に前記通話要求の転送を行うように構成されている請求項22に記載の移動体搭載装置。
【請求項24】
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段を有し、
前記利用者又は前記移動体の状況に係る情報に基づいて、前記移動体が停止中、かつ前記利用者が下車中であることが把握された場合に、前記利用者又は前記移動体の状況に係る情報に含まれる前記移動体の現在地情報が前記自宅位置の周辺である場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の自宅電話機として登録されている前記通信装置を選択するように構成されている請求項22に記載の移動体搭載装置。
【請求項25】
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段を有し、
前記利用者又は前記移動体の状況に係る情報に基づいて、前記移動体が停止中、かつ前記利用者が下車中であることが把握された場合に、前記利用者又は前記移動体の状況に係る情報に含まれる前記移動体の現在地情報が前記自宅位置の周辺ではない場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の携帯電話機として登録されている前記通信装置を選択するように構成されている請求項22に記載の移動体搭載装置。
【請求項26】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者又は前記移動体の状況を検知する状況検知手段と、
無線通信を介して通話を行うための通話手段と、
前記通話手段において任意の端末から通話要求を受信した場合、前記利用者に前記通話手段による通話を行わせるための着呼処理を行う着呼処理手段と、
前記着呼に対する前記利用者の応答の有無、及び、前記状況検知手段によって検知された前記利用者又は前記移動体の状況に応じた処理を行う着呼時処理手段とを、
有する移動体搭載装置。
【請求項27】
前記状況検知手段が、前記移動体が移動中か停止中か、及び/又は、前記利用者が乗車中か下車中かを検知するように構成されている請求項26に記載の移動体搭載装置。
【請求項28】
前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体の移動時における通話の危険性を示す警報を報知する警報報知手段を有する請求項27に記載の移動体搭載装置。
【請求項29】
前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体が停止するまで前記利用者に前記通話手段による通話を行わせないように構成されている請求項27に記載の移動体搭載装置。
【請求項30】
前記利用者による前記着呼への応答と同時に前記移動体を減速又は停止させる移動体制動手段を有する請求項29に記載の移動体搭載装置。
【請求項31】
前記利用者が前記移動体を移動させるための操作を行う操作器と、前記利用者が通話を行うために把持する受話器とを前記利用者が同時に操作できないように前記操作器及び前記受話器が配置されている請求項29に記載の移動体搭載装置。
【請求項32】
前記移動体の停止後、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する請求項30又は31に記載の移動体搭載装置。
【請求項33】
前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が停止中であることが検知された場合に、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する請求項27に記載の移動体搭載装置。
【請求項34】
前記利用者が通話の着呼に応答しなかった場合、前記利用者に対して前記利用者又は前記移動体に関する情報の送信が行われていることを報知せずに、所定の連絡先に対して前記利用者又は前記移動体に関する情報を送信する情報送信手段を有する請求項27に記載の移動体搭載装置。
【請求項35】
前記利用者に関する情報として前記利用者の現在の状態を示す情報を使用するように構成されている請求項34に記載の移動体搭載装置。
【請求項36】
前記利用者の顔を撮像する利用者撮像手段、及び/又は、前記利用者の生体情報を検知する生体情報検知手段を有し、前記利用者に関する情報として、前記利用者撮像手段によって撮像された前記利用者の顔画像、及び/又は、前記生体情報検知手段によって検知された前記利用者の生体情報を使用するように構成されている請求項35に記載の移動体搭載装置。
【請求項37】
前記移動体に関する情報として前記移動体の現在の状態を示す情報を使用するように構成されている請求項34に記載の移動体搭載装置。
【請求項38】
前記移動体の現在地情報を取得する現在地情報取得手段、前記移動体の周囲を撮像する周囲撮像手段、前記移動体の移動履歴情報を格納する移動履歴情報格納手段の少なくとも1つを有し、前記移動体に関する情報として、前記現在地情報取得手段で取得された前記移動体の現在地情報、前記周囲撮像手段によって撮像された前記移動体の周囲画像、前記移動履歴情報格納手段に格納されている前記移動体の移動履歴の少なくとも1つを使用するように構成されている請求項37に記載の移動体搭載装置。
【請求項39】
前記利用者が通話の着呼に応答しなかった場合、通話の発呼側から受信する前記移動体の減速又は停止の指示に基づいて前記移動体を減速又は停止させる移動体制動手段を有する請求項27に記載の移動体搭載装置。
【請求項40】
前記利用者が通話の着呼に応答しなかった場合であっても、前記通話の着呼に応じる処理を行って前記利用者に強制的に通話させる強制着呼手段を有する請求項27に記載の移動体搭載装置。
【請求項41】
前記着呼処理時に、通話の着呼を示す情報と共に、前記通話の発呼側から受信する画像情報を表示する画像表示手段を有する請求項27に記載の移動体搭載装置。
【請求項42】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者が前記移動体から下車しており、かつ前記移動体が停止中であることを検知する下車検知手段と、
前記下車検知手段で、前記利用者が前記移動体を下車しており、かつ前記移動体が停止中であることが検知されている状態において、前記利用者が前記移動体にすぐに乗車することのできない前記移動体が乗り捨てられた状態であることを推定する乗り捨て状態推定手段とを、
有する移動体搭載装置。
【請求項43】
前記乗り捨て状態推定手段が、前記利用者の下車を検知した場合、前記利用者の下車から一定時間経過した場合、前記利用者が前記移動体のキーを抜いてから一定時間経過した場合、前記利用者が前記移動体のアクセサリ電源をオフにしてから一定時間経過した場合、前記移動体のギアがパーキングにセットされてから一定時間経過した場合、前記利用者と前記移動体との距離が一定距離以上離れてから一定時間経過した場合、前記移動体が駐車エリアに停止している場合のいずれか1つの条件に基づいて、前記移動体が乗り捨てられた状態であることを推定するように構成されている請求項42に記載の移動体搭載装置。
【請求項44】
前記乗り捨て状態推定手段によって前記移動体が乗り捨てられた状態であると判断された場合には、所定の連絡先に情報の送信を行う情報送信手段を有する請求項42に記載の移動体搭載装置。
【請求項45】
前記情報送信手段が、前記移動体に設けられている現在地取得手段によって取得された前記移動体の現在地情報、前記移動体に設けられている前記利用者の画像又は前記移動体の周囲の画像を撮像する撮像手段によって撮像された撮像画像、前記移動体によって記録された前記移動体の移動履歴情報の少なくとも1つを送信するように構成されている請求項44に記載の移動体搭載装置。
【請求項46】
前記所定の連絡先が前記利用者の携帯電話機であって、前記情報送信手段が、前記移動体に設けられている現在地取得手段によって取得された前記移動体の現在地情報、前記移動体の現在地までの誘導するためのナビゲーション情報、前記乗り捨て状態にある旨を通知する警告情報の少なくとも1つを送信するように構成されている請求項44に記載の移動体搭載装置。
【請求項47】
前記移動体に設けられている前記利用者の画像又は前記移動体の周囲の画像を撮像する撮像手段と、
前記撮像手段によって撮像された撮像画像を記憶する撮像画像記憶手とを、
有し、前記撮像手段が前記利用者の下車時以降に画像を撮像して前記撮像画像に記憶し、前記情報送信手段が、前記撮像画像記憶手段に記憶された前記撮像画像を送信するように構成されている請求項44に記載の移動体搭載装置。
【請求項48】
前記撮像手段が前記利用者の下車から一定時間だけ撮像を行うように構成されている請求項47に記載の移動体搭載装置。
【請求項49】
前記利用者が下車してからの経過時間に応じて、前記撮像手段が撮像方法を変更するように構成されている請求項48に記載の移動体搭載装置。
【請求項50】
前記移動体の周囲の動体を検出する動体検出手段を有し、前記撮像手段が前記動体の検出に応じて撮像を行うように構成されている請求項47に記載の移動体搭載装置。
【請求項51】
前記動体の検出結果に応じて、前記撮像手段が撮像方法を変更するように構成されている請求項48に記載の移動体搭載装置。
【請求項52】
前記利用者との距離を測定することが可能な距離情報取得手段を有し、前記撮像手段が、前記距離情報取得手段に応じて撮像方法を変更するように構成されている請求項47に記載の移動体搭載装置。
【請求項53】
前記撮像手段が、前記撮像方法を変更する際に、撮像周期の変更又は前記撮像画像の情報量の変更を行うように構成されている請求項49、51、52のいずれか1つに記載の移動体搭載装置。
【請求項54】
前記情報送信手段が、前記所定の連絡先から要求を受けずに自発的に前記情報を送信するように構成されている請求項44に記載の移動体搭載装置。
【請求項55】
前記情報送信手段が、前記所定の連絡先から要求を受けた場合に前記情報を送信するように構成されている請求項44に記載の移動体搭載装置。
【請求項56】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置から前記移動体の現在地情報を受信する現在地情報受信手段と、
所定のエリアを特定するエリア情報を格納するエリア情報格納手段と、
前記移動体の前記現在地を参照して、前記移動体が新たに前記所定のエリアに進入したか否かを検出する現在地状況判断手段と、
前記現在地状況判断手段によって前記所定のエリアへの前記移動体の進入が検出された場合、前記移動体の進入が検出された旨を所定の連絡先に通知する通知手段とを、
有する移動体管理装置。
【請求項57】
前記所定のエリアとして、前記利用者の過去の行動履歴から得られる前記利用者がよく訪れる行動エリア、前記利用者の行動を制限する制限エリア、前記利用者の進入が推奨される推奨エリアの少なくとも1つを使用するように構成されている請求項56に記載の移動体管理装置。
【請求項58】
前記移動体の進入が検出された前記所定のエリアの特性又は設定レベルに応じて、前記移動体搭載装置に対して前記移動体の移動性能の変更指示を行う性能変更指示手段を有する請求項56に記載の移動体管理装置。
【請求項59】
前記所定のエリアへの進入を前記利用者に報知するように前記移動体搭載装置に指示する報知指示手段と、
前記移動体の進入が検出された前記所定のエリアの特性又は設定レベルに応じて、前記報知指示手段で指示する報知の態様の変更指示を行う報知態様変更指示手段とを、
有する請求項56に記載の移動体管理装置。
【請求項60】
前記移動体の進入が検出された前記所定のエリアの特性又は設定レベルに応じて、前記移動体搭載装置に対して前記移動体からの情報送信の態様の変更指示を行う情報送信態様変更指示手段を有する請求項56に記載の移動体管理装置。
【請求項61】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記移動体の駆動を行うための電力を蓄電するバッテリと、
前記バッテリの残量を測定するバッテリ残量測定手段と、
前記移動体が過去によく停止していた地点の情報を格納する停止地点格納手段と、
前記移動体の現在地情報を取得する現在地取得手段と、
前記バッテリ残量測定手段で測定された前記バッテリの残量が所定値より低くなった場合に、前記移動体が過去によく停止していた地点の情報及び前記現在地情報を所定の連絡先に通知する通知手段とを、
有する移動体搭載装置。
【請求項62】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記移動体の駆動を行うための電力を蓄電するバッテリと、
前記バッテリの残量を測定するバッテリ残量測定手段と、
前記移動体が過去によく停止していた地点の情報を格納する停止地点格納手段と、
前記移動体の現在地情報を取得する現在地取得手段と、
前記バッテリ残量測定手段で測定された前記バッテリの残量が所定値より低くなった場合に、前記現在地情報と、前記移動体が過去によく停止していた地点の情報とに基づいて、前記移動体のこの後の停止地点を予測する停止地点予測手段と、
前記停止地点予測手段によって予測された前記停止地点を所定の連絡先に通知する通知手段とを、
有する移動体搭載装置。
【請求項63】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記移動体の駆動を行うための電力を蓄電する第1バッテリと、
前記移動体の通信を行うための電力を蓄電する第2バッテリと、
前記第1及び第2バッテリの残量を測定するバッテリ残量測定手段と、
前記バッテリ残量測定手段で測定された前記第1バッテリの残量が第1の所定値より低くなった場合に、又は、前記バッテリ残量測定手段で測定された前記第2バッテリの残量が第2の所定値より低くなった場合に、所定の連絡先に第1及び第2バッテリのそれぞれに応じた通知を行う通知手段とを、
有する移動体搭載装置。
【請求項64】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者が前記移動体に乗車しており、かつ前記移動体が停止中であることを検知する状況検知手段と、
前記状況検知手段で、前記利用者が前記移動体に乗車しており、かつ前記移動体が停止中である状態が所定時間続いた場合には、所定の連絡先に対して前記利用者又は前記移動体に関する情報を送信する情報送信手段とを、
有する移動体搭載装置。
【請求項65】
前記利用者に関する情報として前記利用者の現在の状態を示す情報を使用するように構成されている請求項64に記載の移動体搭載装置。
【請求項66】
前記利用者の顔を撮像する利用者撮像手段、及び/又は、前記利用者の生体情報を検知する生体情報検知手段を有し、前記利用者に関する情報として、前記利用者撮像手段によって撮像された前記利用者の顔画像、及び/又は、前記生体情報検知手段によって検知された前記利用者の生体情報を使用するように構成されている請求項65に記載の移動体搭載装置。
【請求項67】
前記移動体に関する情報として前記移動体の現在の状態を示す情報を使用するように構成されている請求項65に記載の移動体搭載装置。
【請求項68】
前記移動体の現在地情報を取得する現在地情報取得手段、前記移動体の周囲を撮像する周囲撮像手段、前記移動体の移動履歴情報を格納する移動履歴情報格納手段の少なくとも1つを有し、前記移動体に関する情報として、前記現在地情報取得手段で取得された前記移動体の現在地情報、前記周囲撮像手段によって撮像された前記移動体の周囲画像、前記移動履歴情報格納手段に格納されている前記移動体の移動履歴の少なくとも1つを使用するように構成されている請求項67に記載の移動体搭載装置。
【請求項69】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者が前記移動体から下車しており、かつ前記移動体が移動中であることを検知する状況検知手段と、
前記状況検知手段で、前記利用者が前記移動体から下車しており、かつ前記移動体が移動中である状態が検知された場合には、所定の連絡先に対して前記状況検知手段による検知結果を通知する通知手段とを、
有する移動体搭載装置。
【請求項1】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者又は前記移動体の状況を検知する状況検知手段と、
前記利用者と連絡が可能な複数の通信装置のそれぞれのあて先を含む利用者登録データが格納されている利用者登録データ格納手段と、
無線通信を介して通話を行うための通話手段と、
前記通話手段において任意の端末から通話要求を受信した場合、前記状況検知手段によって前記利用者又は前記移動体の状況を判断して、前記利用者が前記通話手段による通話を行うことが可能か否かを判定する通話可能判定手段と、
前記通話手段での通話が不可能と判定された場合に、前記利用者登録データに含まれる前記複数の通信装置の中から、前記状況検知手段の検知結果に基づいて最適と判断される通信装置を選択する通信選択手段と、
前記通信選択手段で選択された前記通信装置に対する前記通話要求の転送を指示する通話要求転送指示手段とを、
有する移動体搭載装置。
【請求項2】
前記状況検知手段が、前記移動体が移動中か停止中か、及び/又は、前記利用者が乗車中か下車中かを検知するように構成されている請求項1に記載の移動体搭載装置。
【請求項3】
前記状況検知手段によって前記利用者が乗車中であることが検知された場合に、前記利用者に前記通話手段による通話を行わせるための着呼処理を行う着呼処理手段を有する請求項2に記載の移動体搭載装置。
【請求項4】
前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体の移動時における通話の危険性を示す警報を報知する警報報知手段を有する請求項3に記載の移動体搭載装置。
【請求項5】
前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体が停止するまで前記利用者に前記通話手段による通話を行わせないように構成されている請求項3に記載の移動体搭載装置。
【請求項6】
前記利用者による前記着呼への応答と同時に前記移動体を減速又は停止させる移動体制動手段を有する請求項5に記載の移動体搭載装置。
【請求項7】
前記利用者が前記移動体を移動させるための操作を行う操作器と、前記利用者が通話を行うために把持する受話器とを前記利用者が同時に操作できないように前記操作器及び前記受話器が配置されている請求項5に記載の移動体搭載装置。
【請求項8】
前記移動体の停止後、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する請求項6又は7に記載の移動体搭載装置。
【請求項9】
前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が停止中であることが検知された場合に、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する請求項3に記載の移動体搭載装置。
【請求項10】
前記利用者が通話の着呼に応答しなかった場合、前記利用者に対して前記利用者又は前記移動体に関する情報の送信が行われていることを報知せずに、所定の連絡先に対して前記利用者又は前記移動体に関する情報を送信する情報送信手段を有する請求項3に記載の移動体搭載装置。
【請求項11】
前記利用者に関する情報として前記利用者の現在の状態を示す情報を使用するように構成されている請求項10に記載の移動体搭載装置。
【請求項12】
前記利用者の顔を撮像する利用者撮像手段、及び/又は、前記利用者の生体情報を検知する生体情報検知手段を有し、前記利用者に関する情報として、前記利用者撮像手段によって撮像された前記利用者の顔画像、及び/又は、前記生体情報検知手段によって検知された前記利用者の生体情報を使用するように構成されている請求項11に記載の移動体搭載装置。
【請求項13】
前記移動体に関する情報として前記移動体の現在の状態を示す情報を使用するように構成されている請求項10に記載の移動体搭載装置。
【請求項14】
前記移動体の現在地情報を取得する現在地情報取得手段、前記移動体の周囲を撮像する周囲撮像手段、前記移動体の移動履歴情報を格納する移動履歴情報格納手段の少なくとも1つを有し、前記移動体に関する情報として、前記現在地情報取得手段で取得された前記移動体の現在地情報、前記周囲撮像手段によって撮像された前記移動体の周囲画像、前記移動履歴情報格納手段に格納されている前記移動体の移動履歴の少なくとも1つを使用するように構成されている請求項13に記載の移動体搭載装置。
【請求項15】
前記利用者が通話の着呼に応答しなかった場合、通話の発呼側から受信する前記移動体の減速又は停止の指示に基づいて前記移動体を減速又は停止させる移動体制動手段を有する請求項3に記載の移動体搭載装置。
【請求項16】
前記利用者が通話の着呼に応答しなかった場合であっても、前記通話の着呼に応じる処理を行って前記利用者に強制的に通話させる強制着呼手段を有する請求項3に記載の移動体搭載装置。
【請求項17】
前記着呼処理時に、通話の着呼を示す情報と共に、前記通話の発呼側から受信する画像情報を表示する画像表示手段を有する請求項3に記載の移動体搭載装置。
【請求項18】
前記移動体の現在地情報を取得する現在地情報取得手段と、
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段とを、
有し、前記状況検知手段によって前記移動体が停止中、かつ前記利用者が下車中であることが検知された場合に、前記現在地情報取得手段で取得された前記移動体の現在地情報が前記自宅位置の周辺である場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の自宅電話機として登録されている前記通信装置を選択するように構成されている請求項2に記載の移動体搭載装置。
【請求項19】
前記移動体の現在地情報を取得する現在地情報取得手段と、
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段とを、
有し、前記状況検知手段によって前記移動体が停止中、かつ前記利用者が下車中であることが検知された場合に、前記現在地情報取得手段で取得された前記移動体の現在地情報が前記自宅位置の周辺ではない場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の携帯電話機として登録されている前記通信装置を選択するように構成されている請求項2に記載の移動体搭載装置。
【請求項20】
前記移動体の現在地情報を取得する現在地情報取得手段と、
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段と、
無線通信によって、前記移動体の周囲に存在する子機に前記通話を転送する基地局として機能する無線通信手段とを、
有し、前記状況検知手段によって前記移動体が停止中、かつ前記利用者が下車中であることが検知された場合に、前記現在地情報取得手段で取得された前記移動体の現在地情報が前記自宅位置の周辺ではない場合には、前記通信選択手段は、前記通話の転送先として、無線通信手段を介して通話が可能な前記子機を選択するように構成されている請求項2に記載の移動体搭載装置。
【請求項21】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置から、前記利用者又は前記移動体の状況に係る情報を受信し格納する状況情報格納手段と、
前記利用者と連絡が可能な複数の通信装置のそれぞれのあて先を含む利用者登録データが格納されている利用者登録データ格納手段と、
任意の端末から前記移動体搭載装置への通話要求を受信した場合、前記状況情報格納手段に格納されている前記利用者の状況に係る情報から前記利用者又は前記移動体の状況を判断して、前記利用者が前記移動体搭載装置に搭載されている通話手段によって通話を行うことが可能か否かを判定する通話可能判定手段と、
前記移動体搭載装置に搭載されている前記通話手段による前記利用者の通話が不可能と判定された場合に、前記利用者登録データに含まれる前記複数の通信装置の中から、前記利用者又は前記移動体の状況に基づいて最適と判断される通信装置を選択する通信選択手段と、
前記通信選択手段で選択された前記通信装置に対する前記通話要求の転送を行う通話要求転送手段とを、
有する移動体管理装置。
【請求項22】
前記利用者又は前記移動体の状況に係る情報に、前記移動体が移動中か停止中かを示す情報、及び/又は、前記利用者が乗車中か下車中かを示す情報が含まれている請求項21に記載の移動体搭載装置。
【請求項23】
前記利用者又は前記移動体の状況に係る情報に基づいて、前記利用者が乗車中であることが把握された場合には、前記移動体搭載装置に搭載されている通話手段に前記通話要求の転送を行うように構成されている請求項22に記載の移動体搭載装置。
【請求項24】
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段を有し、
前記利用者又は前記移動体の状況に係る情報に基づいて、前記移動体が停止中、かつ前記利用者が下車中であることが把握された場合に、前記利用者又は前記移動体の状況に係る情報に含まれる前記移動体の現在地情報が前記自宅位置の周辺である場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の自宅電話機として登録されている前記通信装置を選択するように構成されている請求項22に記載の移動体搭載装置。
【請求項25】
前記利用者の自宅位置を示す自宅位置情報を格納する自宅位置情報格納手段を有し、
前記利用者又は前記移動体の状況に係る情報に基づいて、前記移動体が停止中、かつ前記利用者が下車中であることが把握された場合に、前記利用者又は前記移動体の状況に係る情報に含まれる前記移動体の現在地情報が前記自宅位置の周辺ではない場合には、前記通信選択手段は、前記通話の転送先として、前記利用者の携帯電話機として登録されている前記通信装置を選択するように構成されている請求項22に記載の移動体搭載装置。
【請求項26】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者又は前記移動体の状況を検知する状況検知手段と、
無線通信を介して通話を行うための通話手段と、
前記通話手段において任意の端末から通話要求を受信した場合、前記利用者に前記通話手段による通話を行わせるための着呼処理を行う着呼処理手段と、
前記着呼に対する前記利用者の応答の有無、及び、前記状況検知手段によって検知された前記利用者又は前記移動体の状況に応じた処理を行う着呼時処理手段とを、
有する移動体搭載装置。
【請求項27】
前記状況検知手段が、前記移動体が移動中か停止中か、及び/又は、前記利用者が乗車中か下車中かを検知するように構成されている請求項26に記載の移動体搭載装置。
【請求項28】
前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体の移動時における通話の危険性を示す警報を報知する警報報知手段を有する請求項27に記載の移動体搭載装置。
【請求項29】
前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が移動中であることが検知された場合に、前記移動体が停止するまで前記利用者に前記通話手段による通話を行わせないように構成されている請求項27に記載の移動体搭載装置。
【請求項30】
前記利用者による前記着呼への応答と同時に前記移動体を減速又は停止させる移動体制動手段を有する請求項29に記載の移動体搭載装置。
【請求項31】
前記利用者が前記移動体を移動させるための操作を行う操作器と、前記利用者が通話を行うために把持する受話器とを前記利用者が同時に操作できないように前記操作器及び前記受話器が配置されている請求項29に記載の移動体搭載装置。
【請求項32】
前記移動体の停止後、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する請求項30又は31に記載の移動体搭載装置。
【請求項33】
前記利用者が通話の着呼に応答した場合、前記状況検知手段によって前記移動体が停止中であることが検知された場合に、前記利用者が通話している間は前記移動体を移動させるための駆動部の動作をロックする駆動ロック手段を有する請求項27に記載の移動体搭載装置。
【請求項34】
前記利用者が通話の着呼に応答しなかった場合、前記利用者に対して前記利用者又は前記移動体に関する情報の送信が行われていることを報知せずに、所定の連絡先に対して前記利用者又は前記移動体に関する情報を送信する情報送信手段を有する請求項27に記載の移動体搭載装置。
【請求項35】
前記利用者に関する情報として前記利用者の現在の状態を示す情報を使用するように構成されている請求項34に記載の移動体搭載装置。
【請求項36】
前記利用者の顔を撮像する利用者撮像手段、及び/又は、前記利用者の生体情報を検知する生体情報検知手段を有し、前記利用者に関する情報として、前記利用者撮像手段によって撮像された前記利用者の顔画像、及び/又は、前記生体情報検知手段によって検知された前記利用者の生体情報を使用するように構成されている請求項35に記載の移動体搭載装置。
【請求項37】
前記移動体に関する情報として前記移動体の現在の状態を示す情報を使用するように構成されている請求項34に記載の移動体搭載装置。
【請求項38】
前記移動体の現在地情報を取得する現在地情報取得手段、前記移動体の周囲を撮像する周囲撮像手段、前記移動体の移動履歴情報を格納する移動履歴情報格納手段の少なくとも1つを有し、前記移動体に関する情報として、前記現在地情報取得手段で取得された前記移動体の現在地情報、前記周囲撮像手段によって撮像された前記移動体の周囲画像、前記移動履歴情報格納手段に格納されている前記移動体の移動履歴の少なくとも1つを使用するように構成されている請求項37に記載の移動体搭載装置。
【請求項39】
前記利用者が通話の着呼に応答しなかった場合、通話の発呼側から受信する前記移動体の減速又は停止の指示に基づいて前記移動体を減速又は停止させる移動体制動手段を有する請求項27に記載の移動体搭載装置。
【請求項40】
前記利用者が通話の着呼に応答しなかった場合であっても、前記通話の着呼に応じる処理を行って前記利用者に強制的に通話させる強制着呼手段を有する請求項27に記載の移動体搭載装置。
【請求項41】
前記着呼処理時に、通話の着呼を示す情報と共に、前記通話の発呼側から受信する画像情報を表示する画像表示手段を有する請求項27に記載の移動体搭載装置。
【請求項42】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者が前記移動体から下車しており、かつ前記移動体が停止中であることを検知する下車検知手段と、
前記下車検知手段で、前記利用者が前記移動体を下車しており、かつ前記移動体が停止中であることが検知されている状態において、前記利用者が前記移動体にすぐに乗車することのできない前記移動体が乗り捨てられた状態であることを推定する乗り捨て状態推定手段とを、
有する移動体搭載装置。
【請求項43】
前記乗り捨て状態推定手段が、前記利用者の下車を検知した場合、前記利用者の下車から一定時間経過した場合、前記利用者が前記移動体のキーを抜いてから一定時間経過した場合、前記利用者が前記移動体のアクセサリ電源をオフにしてから一定時間経過した場合、前記移動体のギアがパーキングにセットされてから一定時間経過した場合、前記利用者と前記移動体との距離が一定距離以上離れてから一定時間経過した場合、前記移動体が駐車エリアに停止している場合のいずれか1つの条件に基づいて、前記移動体が乗り捨てられた状態であることを推定するように構成されている請求項42に記載の移動体搭載装置。
【請求項44】
前記乗り捨て状態推定手段によって前記移動体が乗り捨てられた状態であると判断された場合には、所定の連絡先に情報の送信を行う情報送信手段を有する請求項42に記載の移動体搭載装置。
【請求項45】
前記情報送信手段が、前記移動体に設けられている現在地取得手段によって取得された前記移動体の現在地情報、前記移動体に設けられている前記利用者の画像又は前記移動体の周囲の画像を撮像する撮像手段によって撮像された撮像画像、前記移動体によって記録された前記移動体の移動履歴情報の少なくとも1つを送信するように構成されている請求項44に記載の移動体搭載装置。
【請求項46】
前記所定の連絡先が前記利用者の携帯電話機であって、前記情報送信手段が、前記移動体に設けられている現在地取得手段によって取得された前記移動体の現在地情報、前記移動体の現在地までの誘導するためのナビゲーション情報、前記乗り捨て状態にある旨を通知する警告情報の少なくとも1つを送信するように構成されている請求項44に記載の移動体搭載装置。
【請求項47】
前記移動体に設けられている前記利用者の画像又は前記移動体の周囲の画像を撮像する撮像手段と、
前記撮像手段によって撮像された撮像画像を記憶する撮像画像記憶手とを、
有し、前記撮像手段が前記利用者の下車時以降に画像を撮像して前記撮像画像に記憶し、前記情報送信手段が、前記撮像画像記憶手段に記憶された前記撮像画像を送信するように構成されている請求項44に記載の移動体搭載装置。
【請求項48】
前記撮像手段が前記利用者の下車から一定時間だけ撮像を行うように構成されている請求項47に記載の移動体搭載装置。
【請求項49】
前記利用者が下車してからの経過時間に応じて、前記撮像手段が撮像方法を変更するように構成されている請求項48に記載の移動体搭載装置。
【請求項50】
前記移動体の周囲の動体を検出する動体検出手段を有し、前記撮像手段が前記動体の検出に応じて撮像を行うように構成されている請求項47に記載の移動体搭載装置。
【請求項51】
前記動体の検出結果に応じて、前記撮像手段が撮像方法を変更するように構成されている請求項48に記載の移動体搭載装置。
【請求項52】
前記利用者との距離を測定することが可能な距離情報取得手段を有し、前記撮像手段が、前記距離情報取得手段に応じて撮像方法を変更するように構成されている請求項47に記載の移動体搭載装置。
【請求項53】
前記撮像手段が、前記撮像方法を変更する際に、撮像周期の変更又は前記撮像画像の情報量の変更を行うように構成されている請求項49、51、52のいずれか1つに記載の移動体搭載装置。
【請求項54】
前記情報送信手段が、前記所定の連絡先から要求を受けずに自発的に前記情報を送信するように構成されている請求項44に記載の移動体搭載装置。
【請求項55】
前記情報送信手段が、前記所定の連絡先から要求を受けた場合に前記情報を送信するように構成されている請求項44に記載の移動体搭載装置。
【請求項56】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置から前記移動体の現在地情報を受信する現在地情報受信手段と、
所定のエリアを特定するエリア情報を格納するエリア情報格納手段と、
前記移動体の前記現在地を参照して、前記移動体が新たに前記所定のエリアに進入したか否かを検出する現在地状況判断手段と、
前記現在地状況判断手段によって前記所定のエリアへの前記移動体の進入が検出された場合、前記移動体の進入が検出された旨を所定の連絡先に通知する通知手段とを、
有する移動体管理装置。
【請求項57】
前記所定のエリアとして、前記利用者の過去の行動履歴から得られる前記利用者がよく訪れる行動エリア、前記利用者の行動を制限する制限エリア、前記利用者の進入が推奨される推奨エリアの少なくとも1つを使用するように構成されている請求項56に記載の移動体管理装置。
【請求項58】
前記移動体の進入が検出された前記所定のエリアの特性又は設定レベルに応じて、前記移動体搭載装置に対して前記移動体の移動性能の変更指示を行う性能変更指示手段を有する請求項56に記載の移動体管理装置。
【請求項59】
前記所定のエリアへの進入を前記利用者に報知するように前記移動体搭載装置に指示する報知指示手段と、
前記移動体の進入が検出された前記所定のエリアの特性又は設定レベルに応じて、前記報知指示手段で指示する報知の態様の変更指示を行う報知態様変更指示手段とを、
有する請求項56に記載の移動体管理装置。
【請求項60】
前記移動体の進入が検出された前記所定のエリアの特性又は設定レベルに応じて、前記移動体搭載装置に対して前記移動体からの情報送信の態様の変更指示を行う情報送信態様変更指示手段を有する請求項56に記載の移動体管理装置。
【請求項61】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記移動体の駆動を行うための電力を蓄電するバッテリと、
前記バッテリの残量を測定するバッテリ残量測定手段と、
前記移動体が過去によく停止していた地点の情報を格納する停止地点格納手段と、
前記移動体の現在地情報を取得する現在地取得手段と、
前記バッテリ残量測定手段で測定された前記バッテリの残量が所定値より低くなった場合に、前記移動体が過去によく停止していた地点の情報及び前記現在地情報を所定の連絡先に通知する通知手段とを、
有する移動体搭載装置。
【請求項62】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記移動体の駆動を行うための電力を蓄電するバッテリと、
前記バッテリの残量を測定するバッテリ残量測定手段と、
前記移動体が過去によく停止していた地点の情報を格納する停止地点格納手段と、
前記移動体の現在地情報を取得する現在地取得手段と、
前記バッテリ残量測定手段で測定された前記バッテリの残量が所定値より低くなった場合に、前記現在地情報と、前記移動体が過去によく停止していた地点の情報とに基づいて、前記移動体のこの後の停止地点を予測する停止地点予測手段と、
前記停止地点予測手段によって予測された前記停止地点を所定の連絡先に通知する通知手段とを、
有する移動体搭載装置。
【請求項63】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記移動体の駆動を行うための電力を蓄電する第1バッテリと、
前記移動体の通信を行うための電力を蓄電する第2バッテリと、
前記第1及び第2バッテリの残量を測定するバッテリ残量測定手段と、
前記バッテリ残量測定手段で測定された前記第1バッテリの残量が第1の所定値より低くなった場合に、又は、前記バッテリ残量測定手段で測定された前記第2バッテリの残量が第2の所定値より低くなった場合に、所定の連絡先に第1及び第2バッテリのそれぞれに応じた通知を行う通知手段とを、
有する移動体搭載装置。
【請求項64】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者が前記移動体に乗車しており、かつ前記移動体が停止中であることを検知する状況検知手段と、
前記状況検知手段で、前記利用者が前記移動体に乗車しており、かつ前記移動体が停止中である状態が所定時間続いた場合には、所定の連絡先に対して前記利用者又は前記移動体に関する情報を送信する情報送信手段とを、
有する移動体搭載装置。
【請求項65】
前記利用者に関する情報として前記利用者の現在の状態を示す情報を使用するように構成されている請求項64に記載の移動体搭載装置。
【請求項66】
前記利用者の顔を撮像する利用者撮像手段、及び/又は、前記利用者の生体情報を検知する生体情報検知手段を有し、前記利用者に関する情報として、前記利用者撮像手段によって撮像された前記利用者の顔画像、及び/又は、前記生体情報検知手段によって検知された前記利用者の生体情報を使用するように構成されている請求項65に記載の移動体搭載装置。
【請求項67】
前記移動体に関する情報として前記移動体の現在の状態を示す情報を使用するように構成されている請求項65に記載の移動体搭載装置。
【請求項68】
前記移動体の現在地情報を取得する現在地情報取得手段、前記移動体の周囲を撮像する周囲撮像手段、前記移動体の移動履歴情報を格納する移動履歴情報格納手段の少なくとも1つを有し、前記移動体に関する情報として、前記現在地情報取得手段で取得された前記移動体の現在地情報、前記周囲撮像手段によって撮像された前記移動体の周囲画像、前記移動履歴情報格納手段に格納されている前記移動体の移動履歴の少なくとも1つを使用するように構成されている請求項67に記載の移動体搭載装置。
【請求項69】
利用者の運転によって前記利用者を乗せて移動する移動体に搭載された移動体搭載装置であって、
前記利用者が前記移動体から下車しており、かつ前記移動体が移動中であることを検知する状況検知手段と、
前記状況検知手段で、前記利用者が前記移動体から下車しており、かつ前記移動体が移動中である状態が検知された場合には、所定の連絡先に対して前記状況検知手段による検知結果を通知する通知手段とを、
有する移動体搭載装置。
【図1】


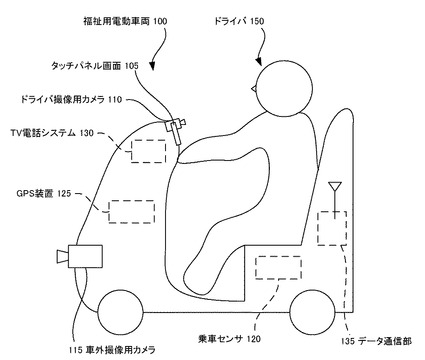
【図2】
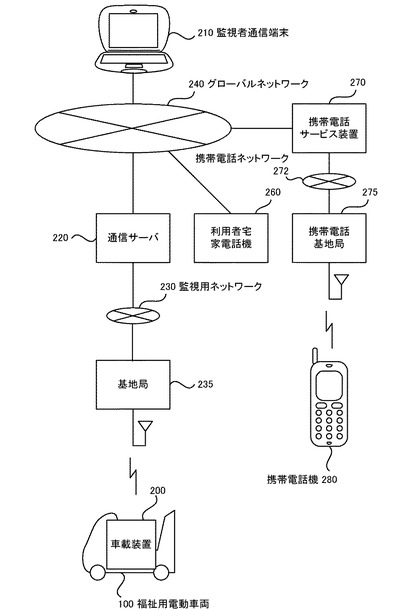
【図3】
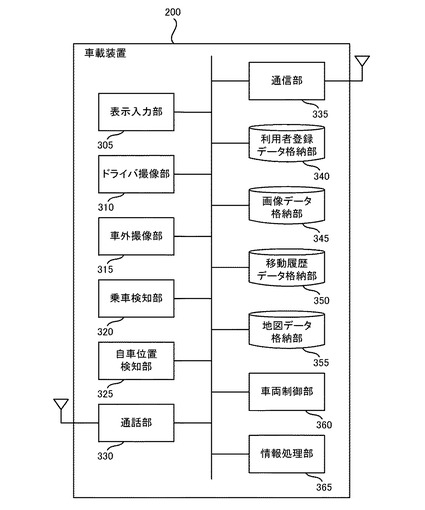
【図4】
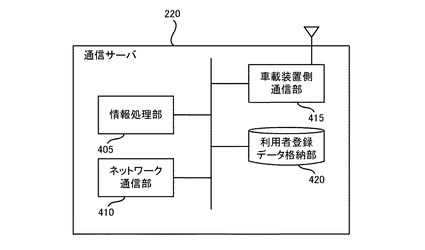
【図5】
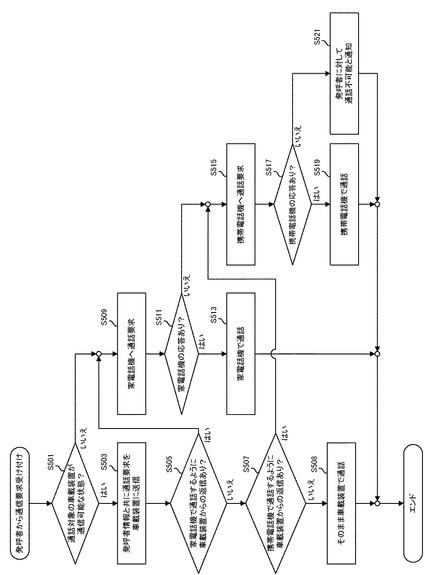
【図6】
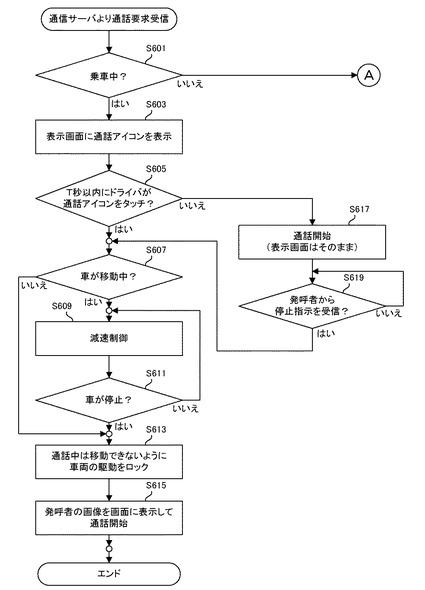
【図7】
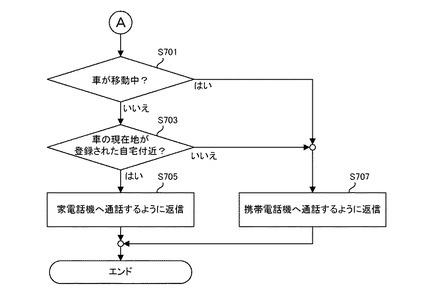
【図8A】
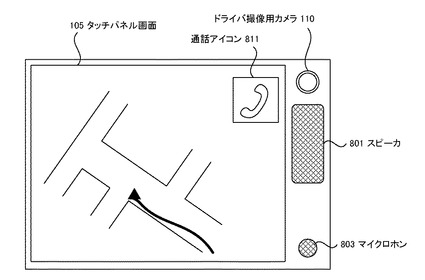
【図8B】
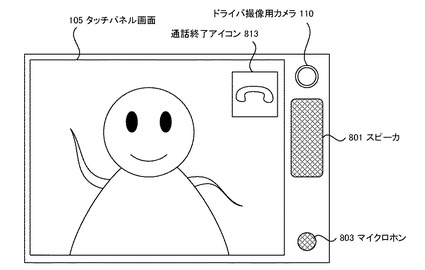
【図9】
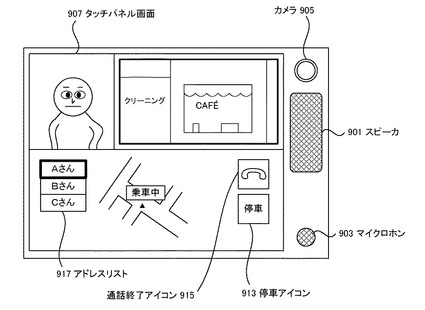
【図10】
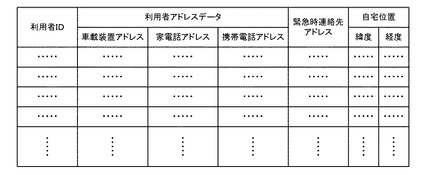
【図11】
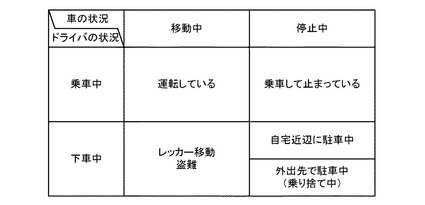
【図12】
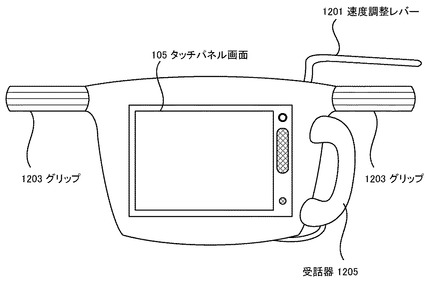
【図13】
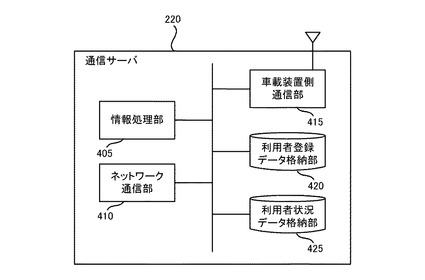
【図14】
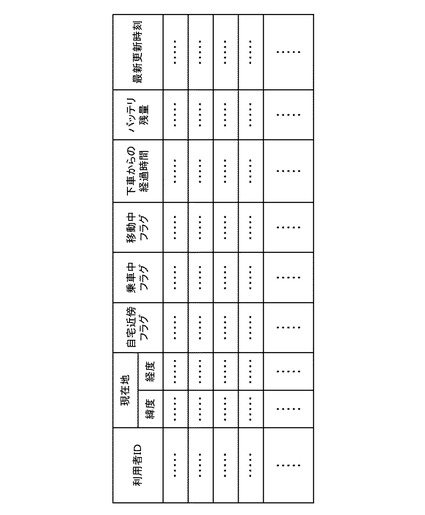
【図15】
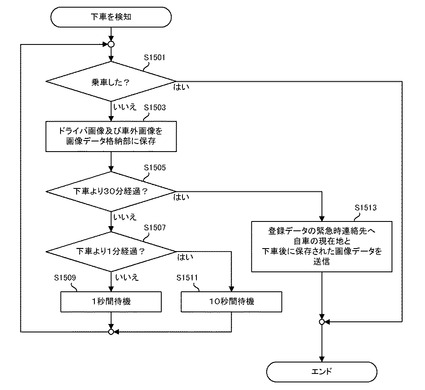
【図16】
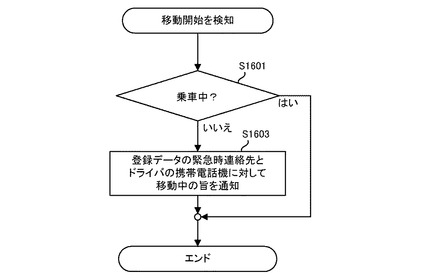
【図17】
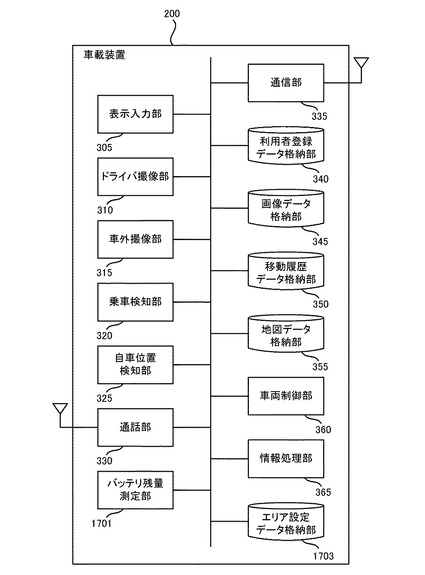
【図18】
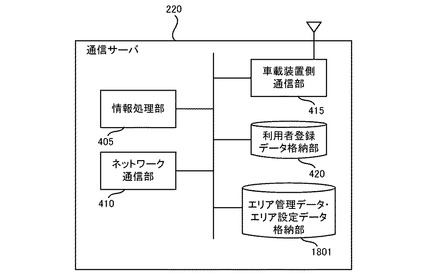
【図19】
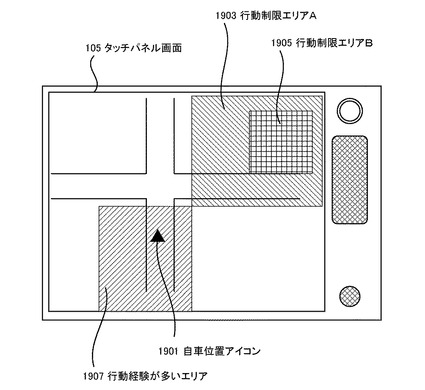
【図20】
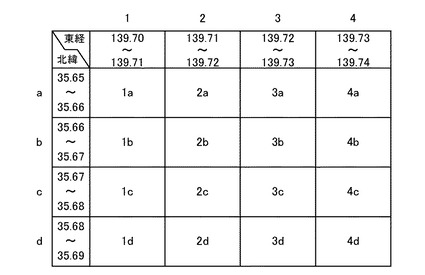
【図21】
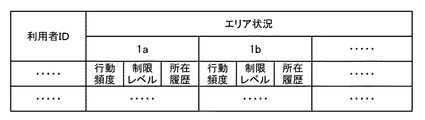
【図22】
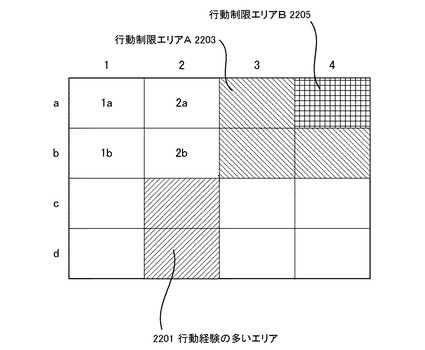
【図23】
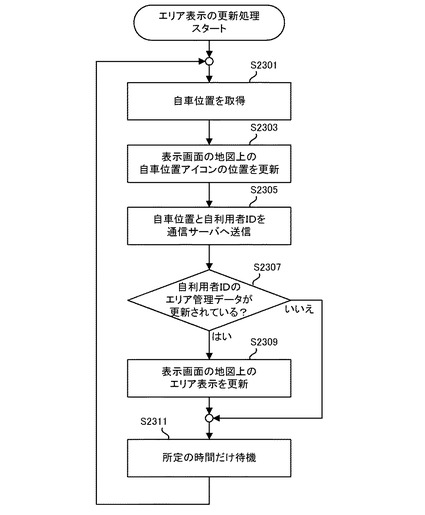
【図24】
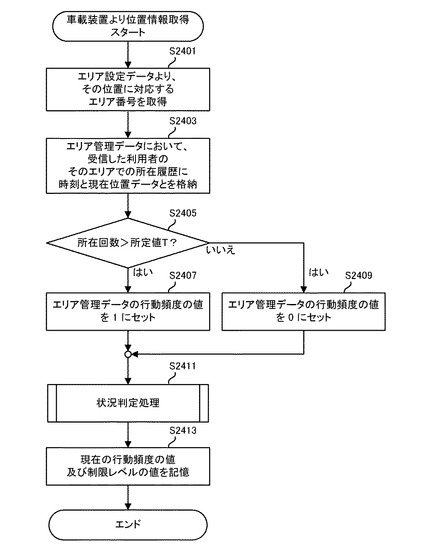
【図25】
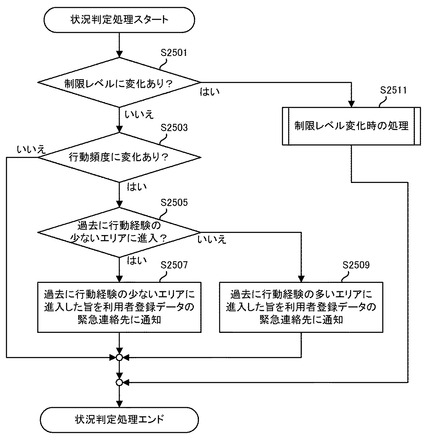
【図26】
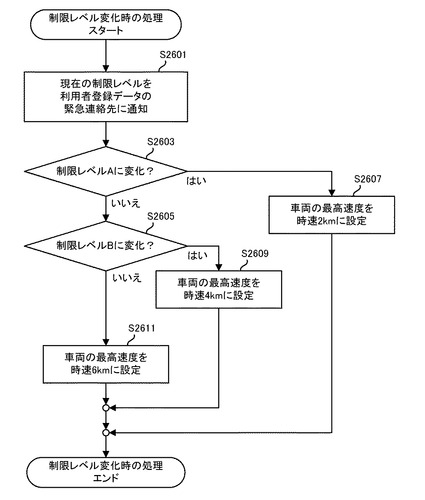
【図27】
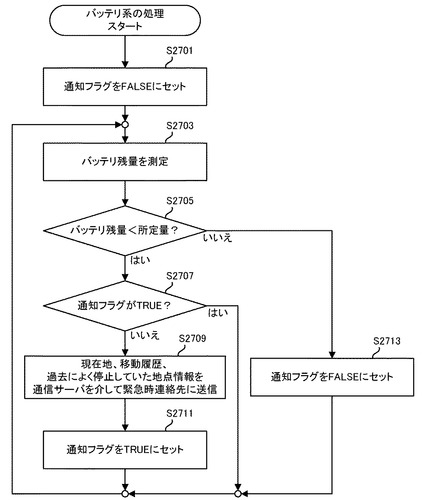
【図28】
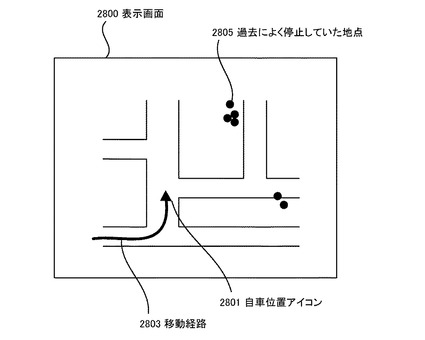
【図29】
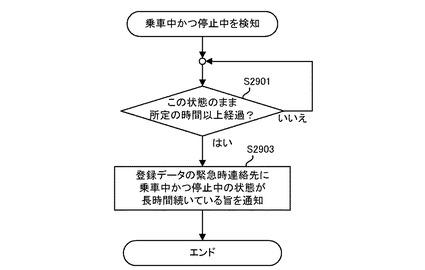
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【公開番号】特開2008−252166(P2008−252166A)
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願番号】特願2007−87104(P2007−87104)
【出願日】平成19年3月29日(2007.3.29)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【Fターム(参考)】
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願日】平成19年3月29日(2007.3.29)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【Fターム(参考)】
[ Back to top ]