
移動体検出装置
【課題】
本発明は、画像から移動体を検出する装置に関する。従来の背景差分法では移動体が存在しない背景画像が必要であり、従来のフレーム間差分法ではフレーム間における移動体の移動量が大きくなければ移動体を検出できなかった。本発明の装置によれば、背景画像を利用できない状況においても移動量の少ない移動体を検出することができる。
【解決手段】
少なくとも2枚の画像100から色変化を表す差分画像110を算出し、前記差分画像110に基づき変化領域200を抽出し、それぞれの前記変化領域200に対し対称的な色変化を持つ他の前記変化領域200を探索し、前記探索の結果に基づき移動体300を含む移動体領域210を検出する演算部を備えた移動体検出装置を提供する。
本発明は、画像から移動体を検出する装置に関する。従来の背景差分法では移動体が存在しない背景画像が必要であり、従来のフレーム間差分法ではフレーム間における移動体の移動量が大きくなければ移動体を検出できなかった。本発明の装置によれば、背景画像を利用できない状況においても移動量の少ない移動体を検出することができる。
【解決手段】
少なくとも2枚の画像100から色変化を表す差分画像110を算出し、前記差分画像110に基づき変化領域200を抽出し、それぞれの前記変化領域200に対し対称的な色変化を持つ他の前記変化領域200を探索し、前記探索の結果に基づき移動体300を含む移動体領域210を検出する演算部を備えた移動体検出装置を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像から移動体を検出する装置に関する。
【背景技術】
【0002】
カメラで取得した画像から移動体のみを抽出する技術の用途は幅広く、監視システムでは不審物の発見、車載システムでは障害物の回避などに用いることができる。
その移動体抽出手法として、非特許文献1には背景差分法が紹介されている。この手法は、移動体が存在しない状況で撮影した画像を背景画像としてあらかじめ準備し、運用時には、撮影した画像と背景画像との差分を取り、変化の大きい領域を移動体が存在する領域として検出する、という手法である。また、非特許文献2にはフレーム間差分法が紹介されている。この手法は、時系列で撮影された画像間で差分を取り、変化のある領域を移動体が存在する領域として検出する、というものである。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】顔チャットTMシステム(著:井田孝他、東芝レビュー、Vol.57、No.6、pp.26〜29)
【非特許文献2】2視点からの映像を利用したサッカーボール追跡手法(著:石井規弘他、MIRU2007講演論文集、pp.1035〜1040)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、背景差分法では背景画像の準備や更新が必要となる。この手法はカメラが空間に固定されるような場合には有効であるが、カメラが移動し、撮影した画像上で背景が移り変わっていくような場合には適用することができない。例えば、コンビニエンスストアに設置される監視カメラなどには適用可能であるが、カメラを搭載した航空機により上空から陸上や海上を監視するシステムや、自動車に搭載する障害物検知システムなどでは背景画像の事前作成ができずに適用が困難となる。また、固定カメラの場合でも、周囲の照明が時々刻々変化するような空間では明暗の変化を移動体と誤認識する場合があり、問題となっている。
これに対し、フレーム間差分法は背景が変化する場合にも適用が可能である。ただし、連続する2フレームが撮影される間に移動体が自身の大きさ1つ分よりも大きく移動していなければ、その移動体を検出することができない。このことは、検出可能な移動体の速度が限定されてしまうことを示している。高速に移動する物体を検出するためには、取りこぼしが発生しないように撮影間隔を短くする必要があるが、そうすると低速の移動体の移動量が2フレーム間で小さくなり、検出不可能となる。逆に、低速に移動する物体を検出するためには、2フレーム間の移動量を大きくするため撮影間隔を長くする必要があるが、高速の移動体は撮影のインターバル中に過ぎ去ってしまい撮影できなくなる。つまり、たとえば、時速10kmで走行する自動車と時速100kmで走行する自動車を同時に検出することができない、という問題が発生する。
【0005】
上記のように、移動するカメラから撮影した画像から移動体を検出する際、従来の手法では検出可能な移動体の速度が限定されていた。
【0006】
本発明によると、連続する2フレームが撮影される間に移動体が自身の大きさ1つ分よりも小さい移動をしている場合でもその移動体を検出することができ、検出可能な移動体の速度の範囲を広げることができる。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の移動体検出装置では、複数の撮影画像から作成された差分画像において、1つの移動体が対称的な2つ1組の領域を持つことに着目する。例えば、上空から道路を走行する自動車を連続して撮影する場合、それらの画像から作成される差分画像において、注目する自動車は、前方には道路の色から自動車の色への色変化を持つ領域を、後方には自動車の色から道路の色への色変化を持つ領域を形成する。そのため、差分画像において2つの領域の色変化は符号を反転させたような対称的な関係を持つ。このことに着目し、差分画像に基づき色変化の大きい複数の変化領域を抽出し、抽出した変化領域から対称的な色変化を持つ領域の組を選出し、それら選出された2つの領域を包括する領域を移動体が撮影されている領域として検出する。
【0008】
そのため、本発明では、少なくとも2枚の画像から色変化を表す差分画像を算出し、差分画像に基づき変化領域を抽出し、それぞれの変化領域に対し対称的な色変化を持つ他の変化領域を探索し、探索の結果に基づき移動体を含む移動体領域を検出することを特徴とする演算部を備えた移動体検出装置を提供する。
【発明の効果】
【0009】
本発明の移動体検出装置によれば、カメラによって撮影される画像の背景が時間と共に変化するような場合において、連続する2フレームが撮影される間に移動体が自身の大きさ1つ分よりも小さい移動をしている場合でもその移動体を検出することができる。その結果、検出可能な移動体の速度の範囲を広げることができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第一の実施形態の動作を表す概念図である。
【図2】本発明の第一の実施形態の動作を表すフローチャートである。
【図3】本発明の第二の実施形態の動作を表す概念図である。
【図4】本発明の第二の実施形態の動作を表すフローチャートである。
【図5】画像間位置合わせの様子を表す概念図である。
【発明を実施するための形態】
【0011】
本発明の第一の実施形態について説明する。
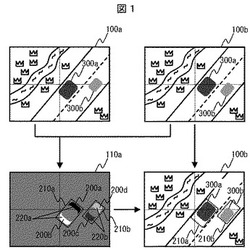
図1は、本発明の第一の実施形態の動作を表す概念図であり、図2は、本発明の第一の実施形態の動作を表すフローチャートである。図1では、2枚の画像100a、100bに移動体300a、300bが写っている。
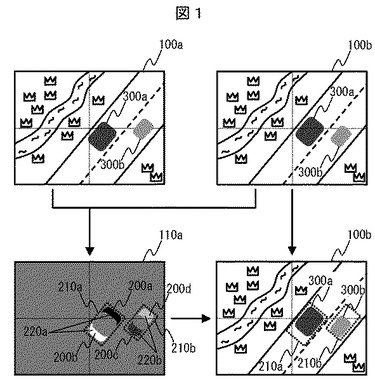
演算部に2枚の画像100が入力されると、演算部はそれらの色変化を示す差分画像110を作成する(S10)。演算部は、差分画像110の各画素に対し、一方の画像100において対応する画素の色と他方の画像100において対応する画素の色とを比較して色変化を算出し、その色変化を表す値を与える。図1では、2枚の画像100a、100bから差分画像110aが作成されている。
続いて、演算部は、差分画像110の各画素が示す色変化に基づき、2枚の画像100の間で変化した領域を示す変化領域200を抽出する(S20)。演算部は、差分画像110の各画素に対し、その画素の色変化と閾値に基づきその画素が色変化の大きい変化画素か否かを判定する。そして、隣接する変化画素を1つの領域に纏め、変化領域200を抽出する。図1では、差分画像110aに基づいて、変化領域200a、200b、200c、200dが抽出されている。
また、演算部は、各変化領域200に対し差分画像110に基づいて色変化を調査し、対称的な色変化を持つ他の変化領域200を探索する(S30)。演算部は、各変化領域200に対し差分画像110に示される色変化の代表値あるいは色変化と画素数の関係を表すヒストグラムを求める。さらに、演算部は、各変化領域200に対し、色変化の大きさがほぼ等しく変化の方向がほぼ逆転している他の変化領域200を探索する。そして、その探索の結果から、対称的な色変化を持つ変化領域ペア220を選出する(S40)。図1では、変化領域200aと変化領域200bの組が変化領域ペア220aとして、変化領域200cと変化領域200dの組が変化領域ペア220bとして、選出されている。
最後に、演算部は、選択された各変化領域ペア220に対し、2つの変化領域200を包括するような領域を作成し、移動体300を含む領域である移動体領域210として検出する(S50)。図1では、変化領域200aと変化領域200bを包括する移動体領域210aが移動体300aを含む領域として検出され、変化領域200cと変化領域200dを包括する移動体領域210bが移動体300bを含む領域として検出されている。
第一の実施形態において、移動体300に伴う2つの変化領域200の面積は等しくなる。図1では、変化領域200aと変化領域200bの面積が等しく、変化領域200cと変化領域200dの面積が等しい。このように、演算部は、面積も対称性を有する性質を利用して、S30で表す手順を行う際に各変化領域200の面積を調査し、S40で表す手順を行う際に、対称的な色変化と対称的な面積を持つ変化領域200の組を変化領域ペア220として選択しても良い。
ここで、本発明の第一の実施形態には、連続する2フレームが撮影される間に移動体が自身の大きさ1つ分よりも大きく移動をしている場合、その移動体に対応する移動体領域が過大になる、という問題がある。次に、この問題を解決するための、本発明の第二の実施形態について説明する。
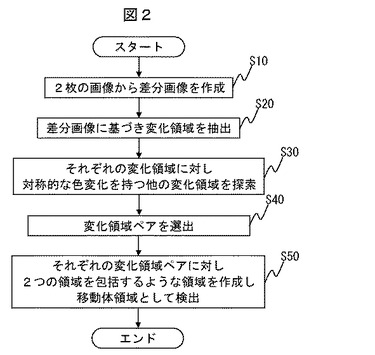
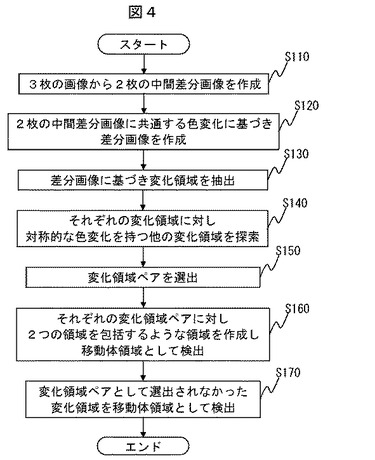
図3は、本発明の第二の実施形態の動作を表す概念図であり、図4は、本発明の第二の実施形態の動作を表すフローチャートである。図3では、3枚の画像100c、100d、100eに移動体300c、300dが写っている。
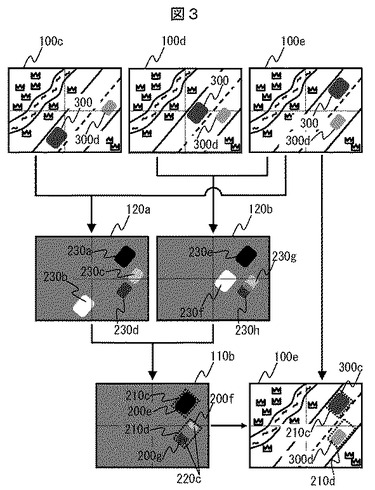
演算部に3枚の画像100が入力されると、演算部は基準となる画像100とその他の画像100との色変化を示す2枚の中間差分画像120を作成する(S110)。図3では、画像100eを基準とし、画像100cと画像100eから中間差分画像120aが、画像100dと画像100eから中間差分画像120bが、それぞれ作成されている。中間差分画像120の作成方法は、第一の実施形態において2枚の画像100から差分画像110を作成した方法と同様である。
続いて、演算部は、2枚の中間差分画像120に共通する色変化を示す差分画像110を作成する(S120)。演算部は、差分画像110の各画素に対し、2つの色変化が共通しているか否かを判定するためにあらかじめ与えられた閾値に基づき、一方の中間差分画像120において対応する画素の色変化と他方の中間差分画像120において対応する画素の色変化とが共通しているかどうかを判定し、共通している場合は2つの色変化を表す値の代表値を与え、共通していない場合は色変化がないことを表す値を与える。図3では、2枚の中間差分画像120a、120bから、それらに共通する色変化を示す差分画像110bが作成されている。中間変化領域230aと中間変化領域230eとは色変化が共通していると判断され、差分画像110bに反映されているが、中間変化領域230bや中間変化領域230fは2枚の中間差分画像120a、120bにおいて色変化が共通しておらず、差分画像110bに反映されていない。また、中間変化領域230c、230g、または中間変化領域230d、230hに関しては、それらの共通部分が差分画像110bに反映されている。
また、演算部は、差分画像110の各画素が示す色変化に基づき、3枚の画像100において変化した領域を示す変化領域200を抽出する(S130)。変化領域200の抽出方法は、第一の実施形態における変化領域200の抽出方法と同様である。図3では、変化領域200e、200f、200gが抽出される。
さらに、演算部は、各変化領域200に対し差分画像110に基づき色変化を調査し、対称的な色変化を持つ他の変化領域200を探索する(S140)。探索方法は第一の実施形態における探索方法と同様であるが、第二の実施形態においては面積の対称性は保障されないため、色変化の対称性のみを用いて探索を行なう。そして、その探索の結果から、対称的な色変化を持つ変化領域ペア220を選出する(S150)。図3では、変化領域200fと変化領域200gの組が変化領域ペア220cとして選出される。
その後、演算部は、選択された各変化領域ペア220に対し、2つの変化領域200を包括するような領域を作成し、移動体300を含む領域である移動体領域210として検出する(S160)。図3では、変化領域200fと変化領域200gを包括する移動体領域210dが移動体300dを含む領域として検出されている。
最後に、演算部は、変化領域ペア220として選択されなかった変化領域200を包括する領域を作成し、移動体300を含む領域である移動体領域210として検出する(S170)。図3では、変化領域200eを囲むような移動体領域210cが移動体300cを含む領域として検出されている。
第一の実施形態および第二の実施形態において、入力画像100に含まれているノイズが影響し、極めて小さい変化領域200が無数に抽出され、移動体検出結果に影響を与える場合がある。この問題を回避するため、まず、差分画像110に基づき色変化の大きい領域を単純変化領域として抽出し、あらかじめ与えられた面積の閾値に基づき、面積の大きい単純変化領域のみを選別し、選別された単純変化領域を変化領域200として抽出しても良い。
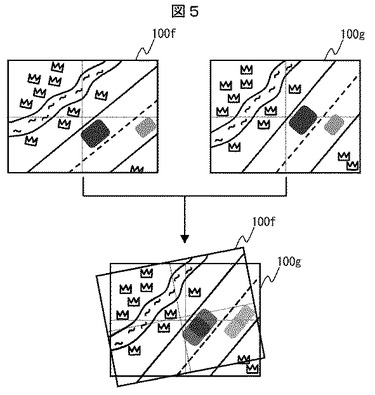
また、撮影するカメラが移動する場合は、それぞれの画像100において、背景の相対移動が顕著になり、移動体検出に失敗することがある。図5は、このような状況を回避するために行う画像間位置合わせの様子を表す概念図である。画像100に写っている大部分が実際には動いていない背景である場合は、異なる位置に背景が写っている2つの画像100について、片方または両方の画像100を透視変換することにより背景の位置を一致させることができる。図5では、画像100fを透視変換することにより、画像100f、100gの背景の位置を一致させている。これを利用し、本発明の第一の実施形態におけるS10で示す手順、あるいは第二の実施形態におけるS110で示す手順について、それぞれの画像100に対し背景の位置が一致するように画像100に透視変換を施して、差分画像110や中間差分画像120を作成しても良い。
【符号の説明】
【0012】
100・・・画像、110・・・差分画像、120・・・中間差分画像、200・・・変化領域、210・・・変化領域ペア、220・・・移動体領域、230・・・中間変化領域、300・・・移動体
【技術分野】
【0001】
本発明は、画像から移動体を検出する装置に関する。
【背景技術】
【0002】
カメラで取得した画像から移動体のみを抽出する技術の用途は幅広く、監視システムでは不審物の発見、車載システムでは障害物の回避などに用いることができる。
その移動体抽出手法として、非特許文献1には背景差分法が紹介されている。この手法は、移動体が存在しない状況で撮影した画像を背景画像としてあらかじめ準備し、運用時には、撮影した画像と背景画像との差分を取り、変化の大きい領域を移動体が存在する領域として検出する、という手法である。また、非特許文献2にはフレーム間差分法が紹介されている。この手法は、時系列で撮影された画像間で差分を取り、変化のある領域を移動体が存在する領域として検出する、というものである。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】顔チャットTMシステム(著:井田孝他、東芝レビュー、Vol.57、No.6、pp.26〜29)
【非特許文献2】2視点からの映像を利用したサッカーボール追跡手法(著:石井規弘他、MIRU2007講演論文集、pp.1035〜1040)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、背景差分法では背景画像の準備や更新が必要となる。この手法はカメラが空間に固定されるような場合には有効であるが、カメラが移動し、撮影した画像上で背景が移り変わっていくような場合には適用することができない。例えば、コンビニエンスストアに設置される監視カメラなどには適用可能であるが、カメラを搭載した航空機により上空から陸上や海上を監視するシステムや、自動車に搭載する障害物検知システムなどでは背景画像の事前作成ができずに適用が困難となる。また、固定カメラの場合でも、周囲の照明が時々刻々変化するような空間では明暗の変化を移動体と誤認識する場合があり、問題となっている。
これに対し、フレーム間差分法は背景が変化する場合にも適用が可能である。ただし、連続する2フレームが撮影される間に移動体が自身の大きさ1つ分よりも大きく移動していなければ、その移動体を検出することができない。このことは、検出可能な移動体の速度が限定されてしまうことを示している。高速に移動する物体を検出するためには、取りこぼしが発生しないように撮影間隔を短くする必要があるが、そうすると低速の移動体の移動量が2フレーム間で小さくなり、検出不可能となる。逆に、低速に移動する物体を検出するためには、2フレーム間の移動量を大きくするため撮影間隔を長くする必要があるが、高速の移動体は撮影のインターバル中に過ぎ去ってしまい撮影できなくなる。つまり、たとえば、時速10kmで走行する自動車と時速100kmで走行する自動車を同時に検出することができない、という問題が発生する。
【0005】
上記のように、移動するカメラから撮影した画像から移動体を検出する際、従来の手法では検出可能な移動体の速度が限定されていた。
【0006】
本発明によると、連続する2フレームが撮影される間に移動体が自身の大きさ1つ分よりも小さい移動をしている場合でもその移動体を検出することができ、検出可能な移動体の速度の範囲を広げることができる。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の移動体検出装置では、複数の撮影画像から作成された差分画像において、1つの移動体が対称的な2つ1組の領域を持つことに着目する。例えば、上空から道路を走行する自動車を連続して撮影する場合、それらの画像から作成される差分画像において、注目する自動車は、前方には道路の色から自動車の色への色変化を持つ領域を、後方には自動車の色から道路の色への色変化を持つ領域を形成する。そのため、差分画像において2つの領域の色変化は符号を反転させたような対称的な関係を持つ。このことに着目し、差分画像に基づき色変化の大きい複数の変化領域を抽出し、抽出した変化領域から対称的な色変化を持つ領域の組を選出し、それら選出された2つの領域を包括する領域を移動体が撮影されている領域として検出する。
【0008】
そのため、本発明では、少なくとも2枚の画像から色変化を表す差分画像を算出し、差分画像に基づき変化領域を抽出し、それぞれの変化領域に対し対称的な色変化を持つ他の変化領域を探索し、探索の結果に基づき移動体を含む移動体領域を検出することを特徴とする演算部を備えた移動体検出装置を提供する。
【発明の効果】
【0009】
本発明の移動体検出装置によれば、カメラによって撮影される画像の背景が時間と共に変化するような場合において、連続する2フレームが撮影される間に移動体が自身の大きさ1つ分よりも小さい移動をしている場合でもその移動体を検出することができる。その結果、検出可能な移動体の速度の範囲を広げることができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第一の実施形態の動作を表す概念図である。
【図2】本発明の第一の実施形態の動作を表すフローチャートである。
【図3】本発明の第二の実施形態の動作を表す概念図である。
【図4】本発明の第二の実施形態の動作を表すフローチャートである。
【図5】画像間位置合わせの様子を表す概念図である。
【発明を実施するための形態】
【0011】
本発明の第一の実施形態について説明する。
図1は、本発明の第一の実施形態の動作を表す概念図であり、図2は、本発明の第一の実施形態の動作を表すフローチャートである。図1では、2枚の画像100a、100bに移動体300a、300bが写っている。
演算部に2枚の画像100が入力されると、演算部はそれらの色変化を示す差分画像110を作成する(S10)。演算部は、差分画像110の各画素に対し、一方の画像100において対応する画素の色と他方の画像100において対応する画素の色とを比較して色変化を算出し、その色変化を表す値を与える。図1では、2枚の画像100a、100bから差分画像110aが作成されている。
続いて、演算部は、差分画像110の各画素が示す色変化に基づき、2枚の画像100の間で変化した領域を示す変化領域200を抽出する(S20)。演算部は、差分画像110の各画素に対し、その画素の色変化と閾値に基づきその画素が色変化の大きい変化画素か否かを判定する。そして、隣接する変化画素を1つの領域に纏め、変化領域200を抽出する。図1では、差分画像110aに基づいて、変化領域200a、200b、200c、200dが抽出されている。
また、演算部は、各変化領域200に対し差分画像110に基づいて色変化を調査し、対称的な色変化を持つ他の変化領域200を探索する(S30)。演算部は、各変化領域200に対し差分画像110に示される色変化の代表値あるいは色変化と画素数の関係を表すヒストグラムを求める。さらに、演算部は、各変化領域200に対し、色変化の大きさがほぼ等しく変化の方向がほぼ逆転している他の変化領域200を探索する。そして、その探索の結果から、対称的な色変化を持つ変化領域ペア220を選出する(S40)。図1では、変化領域200aと変化領域200bの組が変化領域ペア220aとして、変化領域200cと変化領域200dの組が変化領域ペア220bとして、選出されている。
最後に、演算部は、選択された各変化領域ペア220に対し、2つの変化領域200を包括するような領域を作成し、移動体300を含む領域である移動体領域210として検出する(S50)。図1では、変化領域200aと変化領域200bを包括する移動体領域210aが移動体300aを含む領域として検出され、変化領域200cと変化領域200dを包括する移動体領域210bが移動体300bを含む領域として検出されている。
第一の実施形態において、移動体300に伴う2つの変化領域200の面積は等しくなる。図1では、変化領域200aと変化領域200bの面積が等しく、変化領域200cと変化領域200dの面積が等しい。このように、演算部は、面積も対称性を有する性質を利用して、S30で表す手順を行う際に各変化領域200の面積を調査し、S40で表す手順を行う際に、対称的な色変化と対称的な面積を持つ変化領域200の組を変化領域ペア220として選択しても良い。
ここで、本発明の第一の実施形態には、連続する2フレームが撮影される間に移動体が自身の大きさ1つ分よりも大きく移動をしている場合、その移動体に対応する移動体領域が過大になる、という問題がある。次に、この問題を解決するための、本発明の第二の実施形態について説明する。
図3は、本発明の第二の実施形態の動作を表す概念図であり、図4は、本発明の第二の実施形態の動作を表すフローチャートである。図3では、3枚の画像100c、100d、100eに移動体300c、300dが写っている。
演算部に3枚の画像100が入力されると、演算部は基準となる画像100とその他の画像100との色変化を示す2枚の中間差分画像120を作成する(S110)。図3では、画像100eを基準とし、画像100cと画像100eから中間差分画像120aが、画像100dと画像100eから中間差分画像120bが、それぞれ作成されている。中間差分画像120の作成方法は、第一の実施形態において2枚の画像100から差分画像110を作成した方法と同様である。
続いて、演算部は、2枚の中間差分画像120に共通する色変化を示す差分画像110を作成する(S120)。演算部は、差分画像110の各画素に対し、2つの色変化が共通しているか否かを判定するためにあらかじめ与えられた閾値に基づき、一方の中間差分画像120において対応する画素の色変化と他方の中間差分画像120において対応する画素の色変化とが共通しているかどうかを判定し、共通している場合は2つの色変化を表す値の代表値を与え、共通していない場合は色変化がないことを表す値を与える。図3では、2枚の中間差分画像120a、120bから、それらに共通する色変化を示す差分画像110bが作成されている。中間変化領域230aと中間変化領域230eとは色変化が共通していると判断され、差分画像110bに反映されているが、中間変化領域230bや中間変化領域230fは2枚の中間差分画像120a、120bにおいて色変化が共通しておらず、差分画像110bに反映されていない。また、中間変化領域230c、230g、または中間変化領域230d、230hに関しては、それらの共通部分が差分画像110bに反映されている。
また、演算部は、差分画像110の各画素が示す色変化に基づき、3枚の画像100において変化した領域を示す変化領域200を抽出する(S130)。変化領域200の抽出方法は、第一の実施形態における変化領域200の抽出方法と同様である。図3では、変化領域200e、200f、200gが抽出される。
さらに、演算部は、各変化領域200に対し差分画像110に基づき色変化を調査し、対称的な色変化を持つ他の変化領域200を探索する(S140)。探索方法は第一の実施形態における探索方法と同様であるが、第二の実施形態においては面積の対称性は保障されないため、色変化の対称性のみを用いて探索を行なう。そして、その探索の結果から、対称的な色変化を持つ変化領域ペア220を選出する(S150)。図3では、変化領域200fと変化領域200gの組が変化領域ペア220cとして選出される。
その後、演算部は、選択された各変化領域ペア220に対し、2つの変化領域200を包括するような領域を作成し、移動体300を含む領域である移動体領域210として検出する(S160)。図3では、変化領域200fと変化領域200gを包括する移動体領域210dが移動体300dを含む領域として検出されている。
最後に、演算部は、変化領域ペア220として選択されなかった変化領域200を包括する領域を作成し、移動体300を含む領域である移動体領域210として検出する(S170)。図3では、変化領域200eを囲むような移動体領域210cが移動体300cを含む領域として検出されている。
第一の実施形態および第二の実施形態において、入力画像100に含まれているノイズが影響し、極めて小さい変化領域200が無数に抽出され、移動体検出結果に影響を与える場合がある。この問題を回避するため、まず、差分画像110に基づき色変化の大きい領域を単純変化領域として抽出し、あらかじめ与えられた面積の閾値に基づき、面積の大きい単純変化領域のみを選別し、選別された単純変化領域を変化領域200として抽出しても良い。
また、撮影するカメラが移動する場合は、それぞれの画像100において、背景の相対移動が顕著になり、移動体検出に失敗することがある。図5は、このような状況を回避するために行う画像間位置合わせの様子を表す概念図である。画像100に写っている大部分が実際には動いていない背景である場合は、異なる位置に背景が写っている2つの画像100について、片方または両方の画像100を透視変換することにより背景の位置を一致させることができる。図5では、画像100fを透視変換することにより、画像100f、100gの背景の位置を一致させている。これを利用し、本発明の第一の実施形態におけるS10で示す手順、あるいは第二の実施形態におけるS110で示す手順について、それぞれの画像100に対し背景の位置が一致するように画像100に透視変換を施して、差分画像110や中間差分画像120を作成しても良い。
【符号の説明】
【0012】
100・・・画像、110・・・差分画像、120・・・中間差分画像、200・・・変化領域、210・・・変化領域ペア、220・・・移動体領域、230・・・中間変化領域、300・・・移動体
【特許請求の範囲】
【請求項1】
少なくとも2枚の画像から色変化を表す差分画像を算出し、
前記差分画像に基づいて変化領域を抽出し、
それぞれの前記変化領域に対して、対称的な色変化を持つ他の前記変化領域を探索し、
前記探索の結果に基づいて移動体を含む移動体領域を検出する
演算部を備えた移動体検出装置。
【請求項2】
請求項1に記載の移動体検出装置において、
前記演算部は、
前記探索の結果に基づいて、対称的な色変化を持つ2つの前記変化領域を変化領域ペアとして選出し、
1組の前記変化領域ペアに対し1つの前記移動体領域を検出する
ことを特徴とする移動体検出装置。
【請求項3】
請求項1に記載の移動体検出装置において、
前記演算部は、
前記探索の結果に基づいて、対称的な色変化と対称的な面積を持つ2つの前記変化領域を変化領域ペアとして選出し、
1組の前記変化領域ペアに対し1つの前記移動体領域を検出する
ことを特徴とする移動体検出装置。
【請求項4】
請求項2に記載の移動体検出装置において、
前記演算部は、
少なくとも3枚の画像から少なくとも2枚の中間差分画像を算出し、
前記中間差分画像に基づいて前記差分画像を算出し、
前記探索の結果に基づいて、どの前記変化領域ペアにも含まれない1つの前記変化領域に対し1つの前記移動体領域を検出する
ことを特徴とする移動体検出装置。
【請求項5】
請求項1から4に記載の移動体検出装置において、
前記演算部は、
前記差分画像に基づいて単純変化領域を抽出し、
前記単純変化領域の面積に基づいて前記単純変化領域を選別し、
前記選別により選ばれた前記単純変化領域を前記変化領域として抽出する
ことを特徴とする移動体検出装置。
【請求項6】
請求項1から5に記載の移動体検出装置において、
前記演算部は、
前記差分画像に基づいて、前記変化領域内の各画素における色変化の代表値を算出し、
前記代表値に基づいて対称的な色変化を持つ他の前記変化領域を探索する
ことを特徴とする移動体検出装置。
【請求項7】
請求項1から5に記載の移動体検出装置において、
前記演算部は、
前記差分画像に基づいて、前記変化領域の色変化と画素数の関係を表すヒストグラムを算出し、
前記ヒストグラムに基づいて、対称的な色変化を持つ他の前記変化領域を探索する
ことを特徴とする移動体検出装置。
【請求項8】
請求項1から7に記載の移動体検出装置において、
前記演算部は、
それぞれの前記画像における背景の位置が一致するように前記画像に対し透視変換を行い、
前記透視変換の結果に基づいて前記差分画像を算出する
ことを特徴とする移動体検出装置。
【請求項1】
少なくとも2枚の画像から色変化を表す差分画像を算出し、
前記差分画像に基づいて変化領域を抽出し、
それぞれの前記変化領域に対して、対称的な色変化を持つ他の前記変化領域を探索し、
前記探索の結果に基づいて移動体を含む移動体領域を検出する
演算部を備えた移動体検出装置。
【請求項2】
請求項1に記載の移動体検出装置において、
前記演算部は、
前記探索の結果に基づいて、対称的な色変化を持つ2つの前記変化領域を変化領域ペアとして選出し、
1組の前記変化領域ペアに対し1つの前記移動体領域を検出する
ことを特徴とする移動体検出装置。
【請求項3】
請求項1に記載の移動体検出装置において、
前記演算部は、
前記探索の結果に基づいて、対称的な色変化と対称的な面積を持つ2つの前記変化領域を変化領域ペアとして選出し、
1組の前記変化領域ペアに対し1つの前記移動体領域を検出する
ことを特徴とする移動体検出装置。
【請求項4】
請求項2に記載の移動体検出装置において、
前記演算部は、
少なくとも3枚の画像から少なくとも2枚の中間差分画像を算出し、
前記中間差分画像に基づいて前記差分画像を算出し、
前記探索の結果に基づいて、どの前記変化領域ペアにも含まれない1つの前記変化領域に対し1つの前記移動体領域を検出する
ことを特徴とする移動体検出装置。
【請求項5】
請求項1から4に記載の移動体検出装置において、
前記演算部は、
前記差分画像に基づいて単純変化領域を抽出し、
前記単純変化領域の面積に基づいて前記単純変化領域を選別し、
前記選別により選ばれた前記単純変化領域を前記変化領域として抽出する
ことを特徴とする移動体検出装置。
【請求項6】
請求項1から5に記載の移動体検出装置において、
前記演算部は、
前記差分画像に基づいて、前記変化領域内の各画素における色変化の代表値を算出し、
前記代表値に基づいて対称的な色変化を持つ他の前記変化領域を探索する
ことを特徴とする移動体検出装置。
【請求項7】
請求項1から5に記載の移動体検出装置において、
前記演算部は、
前記差分画像に基づいて、前記変化領域の色変化と画素数の関係を表すヒストグラムを算出し、
前記ヒストグラムに基づいて、対称的な色変化を持つ他の前記変化領域を探索する
ことを特徴とする移動体検出装置。
【請求項8】
請求項1から7に記載の移動体検出装置において、
前記演算部は、
それぞれの前記画像における背景の位置が一致するように前記画像に対し透視変換を行い、
前記透視変換の結果に基づいて前記差分画像を算出する
ことを特徴とする移動体検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−227634(P2011−227634A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−95607(P2010−95607)
【出願日】平成22年4月19日(2010.4.19)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年4月19日(2010.4.19)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]