
移動体検出装置
【課題】安定性に優れ精度の高い移動体検出が可能となる移動体検出装置を提供する。
【解決手段】移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段とを具備している。
【解決手段】移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段とを具備している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、たとえば、高速道路等の有料道路を利用する車両に対し通行料金の収受処理を自動的に行なうETC(ETC:登録商標)システムにおいて、料金収受車線を走行する車両の車種判別を行なうために車両の車軸数(あるいは、車輪数)等を検出するのに好適な移動体検出装置に関する。
【背景技術】
【0002】
従来の移動体検出装置として、車両の車軸数を検出する車軸検知装置のように、走行する車両の側面に対しパルス状のレーザ光をスキャンすることにより求めた距離情報から、車両移動体(移動体)の検出を行なうという技術がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−339586号公報
【特許文献2】特開2008−128792号公報
【特許文献3】特公平4−68680号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の移動体検出装置では、移動体の速度変化に対する安定性や路面の鏡面反射など環境に対する安定性に課題があった。
【0005】
そこで、実施形態は、安定性に優れ精度の高い移動体検出が可能となる移動体検出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
実施形態に係る移動体検出装置は、移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段とを具備している。
【0007】
また、実施形態に係る移動体検出装置は、車両が走行する道路の側部に設けられ、当該道路を走行する車両の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から、前記車両の側面に対する特徴量として、少なくとも車輪の直径および車軸間距離を求める特徴計算手段と、この特徴計算手段により求められた特徴量としての車輪の直径および車軸間距離を、あらかじめ標準的な車両から取得された基準の特徴量としての車輪の直径および車軸間距離と比較することにより、当該車両の少なくとも車軸数を求める移動体検出手段とを具備している。
【図面の簡単な説明】
【0008】
【図1】第1の実施形態に係る移動体検出装置の構成を概略的に示すブロック図。
【図2】第1の実施形態に係る距離画像入力部の配設例を説明する道路の正面から見た模式図。
【図3】第1の実施形態に係る動作を説明するフローチャート。
【図4】第1の実施形態において取得した距離画像の一例を模式的に示す図。
【図5】第1の実施形態における2値化処理を説明する模式図。
【図6】第1の実施形態における微分画像の一例を模式的に示す図。
【図7】第1の実施形態における特徴量抽出処理を説明する模式図。
【図8】第1の実施形態における特徴量抽出処理を説明するフローチャート。
【図9】第1の実施形態において追跡線を求める処理を説明する図。
【図10】第1の実施形態において追跡線を求める処理を説明する図。
【図11】第1の実施形態において求めた追跡線を示す図。
【図12】第1の実施形態において求めた追跡線から特徴量を計算する処理を説明するフローチャート。
【図13】第1の実施形態において求めた追跡線から特徴量を計算する処理を説明する図。
【図14】第1の実施形態において求めた追跡線の座標値、求めた追跡線の傾き、道路境界線の座標値の具体例を示す図。
【図15】第1の実施形態における特徴点を説明する図。
【図16】第1の実施形態における特徴量データベースの具体例を示す図。
【図17】第1の実施形態に係る距離画像入力部の配設の変形例を説明する道路の上方から見た模式図。
【図18】第2の実施形態に係る移動体検出装置の構成を概略的に示すブロック図。
【図19】第2の実施形態に係る距離画像入力部の配設例を説明する道路の正面から見た模式図。
【図20】第2の実施形態に係る車両検出の原理を説明する道路の正面から見た模式図。
【図21】第2の実施形態に係る動作を説明するフローチャート。
【図22】第2の実施形態における追跡線の距離画像の具体例を示す図。
【図23】第2の実施形態における車輪幅計算の原理を説明する道路の上方から見た模式図。
【図24】第3の実施形態に係る移動体検出装置の構成を概略的に示すブロック図。
【図25】第3の実施形態に係る距離画像入力部の配設例を説明するもので、(a)図は道路の正面から見た模式図、(b)図は道路の上方から見た模式図。
【図26】第3の実施形態において取得した距離画像の一例を模式的に示す図。
【図27】第4の実施形態に係るステレオカメラの構成例を概略的に示す模式図。
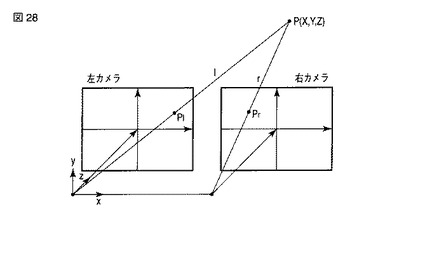
【図28】第4の実施形態におけるステレオカメラの原理を説明する図。
【図29】第4の実施形態における距離画像作成処理を説明するフローチャート。
【図30】第4の実施形態におけるステレオカメラの対応点の探索を説明する模式図。
【発明を実施するための形態】
【0009】
以下、実施形態について図面を参照して説明する。
なお、以下の説明では、移動体が走行する車両(自動車)の場合について述べるが、これに限定されるものではなく、たとえば、人物や人物以外の動物、さらには自動車以外の車両(電車や船舶等)などであっても同様に適用可能である。
【0010】
まず、第1の実施形態について説明する。
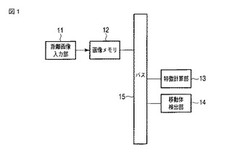
図1は、第1の実施形態に係る移動体検出装置の構成を概略的に示すものである。第1の実施形態に係る移動体検出装置は、車両(移動体)が走行する道路(移動路)の側部に設けられ、当該道路を走行する車両の側面までの距離を示す距離画像を取得する距離画像取得手段としての距離画像入力部11、距離画像入力部11により入力された距離画像を格納(記憶)する画像記憶手段としての画像メモリ12、画像メモリ12に格納された距離画像から車両の側面に対する特徴量を求める特徴計算手段としての特徴計算部13、特徴計算部13により求められた特徴量に基づき、あらかじめ標準的な車両から取得された基準の特徴量を参照することにより車両を判別する移動体検出手段としての移動体検出部14、および、これらを通信可能に接続するデータバスおよびアドレスバス15により構成されている。
【0011】
以下、各部について詳細に説明する。
距離画像入力部11は、たとえば、図2に示すように、有料道路の料金所における道路(料金収受車線)21の一方の側部に設けられたアイランド22上に、道路21を走行する車両(たとえば、自動車)23の側面と相対向するように設置されている。なお、図2において、24は道路21の他方の側部に設けられたアイランド、25はアイランド24に植えられた樹木である。
【0012】
距離画像入力部11は、たとえば、TOF(タイム・オブ・フライト)式の距離画像センサによって構成されている。TOF式の距離画像センサとは、受光部の各画素に光の飛行時間に対応した信号電荷検出機能を集積化することで、距離情報を画像として同時に取得することができるものであり、光源から出力されるパルス光を対象物(車両23)に向けて照射し、その対象物からの反射光を受光部で受光するまでの時間と光の速度から、対象物までの距離を計算することで距離画像を取得するという原理に基づいている。
【0013】
画像メモリ12は、たとえば、RAM(ランダム・アクセス・メモリ)などによって構成されていて、距離画像入力部11から所定の時間間隔で出力される距離画像を保管(記憶)する。
【0014】
特徴計算部13は、画像メモリ12に格納された距離画像から、車両23の側面に対する特徴量として、車輪(タイヤ)の直径および車軸間距離(ホイールベース)等を求めるものであり、たとえば、CPU(セントラル・プロセッシング・ユニット)やDSP(デジタル・シグナル・プロセッサ)などによって構成されている。
【0015】
移動体検出部14は、特徴計算部13により求められた特徴量としての車輪の直径および車軸間距離を、あらかじめ標準的な車両から取得して特徴量データベースに格納された基準の特徴量としての車輪の直径および車軸間距離と比較することにより、確からしさを検証し、車両23を判別するとともに車両23の車軸数などを求めるものであり、たとえば、CPU(セントラル・プロセッシング・ユニット)やDSP(デジタル・シグナル・プロセッサ)などによって構成されている。
【0016】
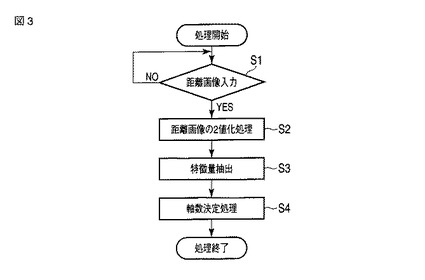
次に、上記のような構成において、図3に示すフローチャートを参照して動作を説明する。
なお、以下の説明においては、車両23の側面に対する特徴量として特に車輪の直径および車軸間距離を算出することにより、最終的に車軸数を決定する事例について述べる。
【0017】
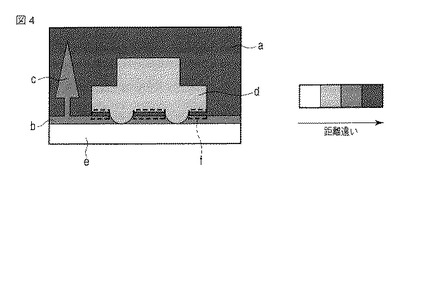
距離画像入力部11は、ある一定の時間間隔で距離画像を入力し、この入力された距離画像は画像メモリ12に格納される(ステップS1)。距離画像入力部11から得られる距離画像のイメージを図4に示す。この例は図2に対応していて、奥に行くほど画像の濃淡値が小さく(暗くなる)形式の距離画像を示しており、a部は一番奥の背景、b部はアイランド24、c部はアイランド24上の樹木、d部は車両23、e部は道路21に対応している。この距離画像には、図4からも明らかなように、車輪がない部分には必ず隙間fが存在するという特徴がある。
【0018】
次に、特徴計算部13は、特徴計算部13は、画像メモリ12に格納された距離画像から車両23の側面に対する特徴量を計算する。
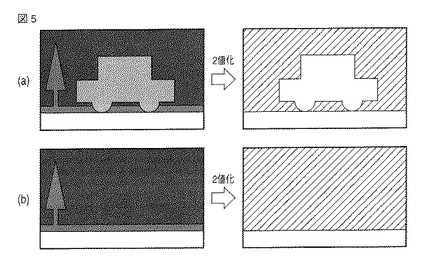
すなわち、まず、画像メモリ12に格納された距離画像(図4)に対して2値化処理を行なうことにより、図5に示すような2値化画像(白色部が「1」、車線部が「0」とする)を取得する(ステップS2)。図5(a)は車両23が存在する場合の2値化例、図5(b)は車両23が存在しない場合の2値化例である。
【0019】
ここに、2値化を行なう際の閾値は、道路21を走行する車両23の奥の構造物(図2ではアイランド24や樹木25等)が誤検出されにくい値、たとえば、距離画像入力部11から道路21を走行する車両23の幅方向に対する中央部までの距離L(図2参照)に相当する値に設定するものとする。
【0020】
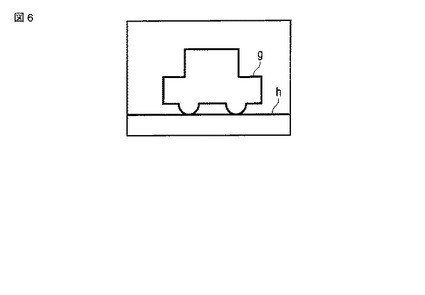
次に、特徴計算部13は、上記のようにして得られた2値化画像に対して微分処理を行なうことにより、図6に示すような車両の輪郭線gおよび道路との境界線hを有する微分画像を取得し、この取得した微分画像に対して特徴量抽出処理を行なう(ステップS3)。
すなわち、まず、上記のようにして得られた微分画像に対して、図8に示すフローチャートに基づく処理を行なうことで車輪の検出に必要な追跡線を求める。まず、図7に示すように、得られた微分画像に対して、車輪および道路の位置と考えられる一定の検索範囲(点線枠)26を設定し、この設定した検索範囲26に対して、ラスタスキャンを行なうことにより1画素ずつ「1」の画素を探索する(ステップS21)。
【0021】
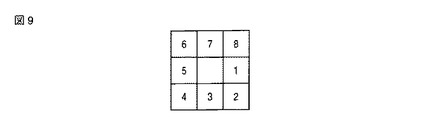
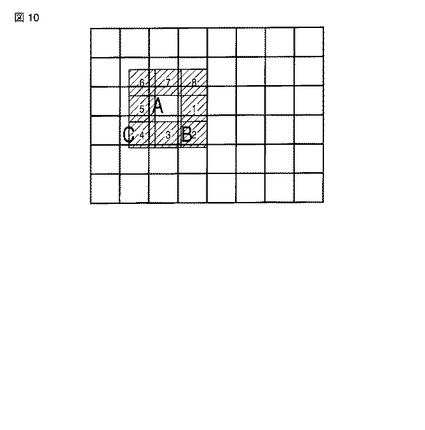
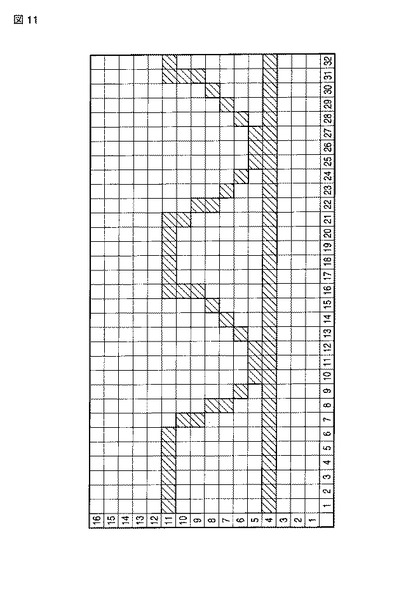
「1」の画素が見つかったら(ステップS22)、図9に示すような3×3のマスク(窓)により、「1」の画素を追跡する。具体的な方法を述べると、マスクには、「1」画素の探索の優先順位が付けられており、番号が若いほど探索結果の優先順位が高いものとする。たとえば、図10に示すように、A点の次の候補の追跡において、マスクに「2」と「4」の番号の付けられた位置にB点、C点が見つかったとすると、B点を追跡の候補点とし、次はB点にマスクの中心をおいて次の追跡を開始する(ステップS23)。このようにして、追跡を画像の右端に達するまで行なうことにより(ステップS24)、図11に示すような追跡線を描くことができる。
【0022】
なお、もう1つの線(道路面)については、上記同様の手法にて求めてもよいし、あらかじめ辞書データとして特徴計算部13内のメモリに格納しておいてもよい。
【0023】
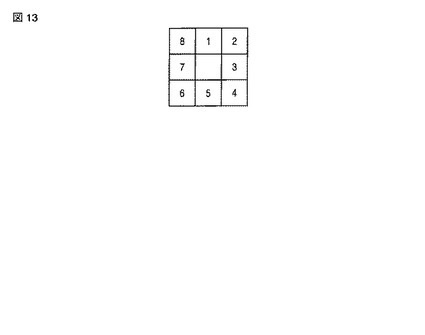
次に、図12に示すフローチャートに基づく処理を行なうことで、求めた追跡線(図11)から特徴量を計算する。まず、求めた追跡線の傾きを求める(ステップS31)。傾きは、本実施形態においては、上下左右に各斜め方向を加えた8種類のみのため、図13に示すような3×3のマスク内に付した方向を示す数字で表す。たとえば、「2」は右上、「4」は右下、「8」は左上、「6」は左下である。
【0024】
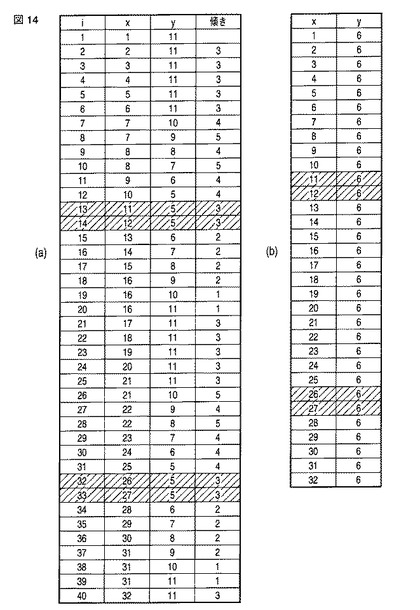
点の追跡順番をiとして、追跡結果の座標、求めた傾きの値を示す表を図14(a)に、道路境界線の座標を図14(b)に示す。また、ここで追跡線と道路面とが車輪底面で接地している条件として、車輪底面のx座標(図14では「26,27」など)において、車輪底面のy座標(図14では「5」)と道路面のy座標(図14では「6」)の距離(この場合「1」)が少ない(たとえば「3」以下)という条件を加えることにより、高精度な検出を実現することが可能である。
【0025】
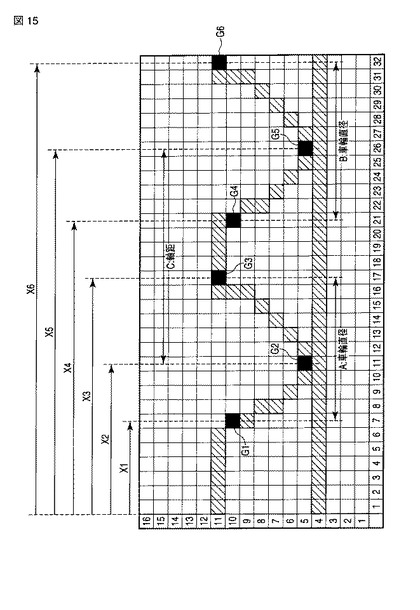
次に、特徴点を以下のような規則で求める(ステップS32)。すなわち、たとえば、傾きが「3」(水平)の状態からそうでない状態が3回以上続くと、その開始点を車輪の側面候補とする。また、傾きが「3」(水平)以外から「3」(水平)に戻る場合も同様な定義により、車輪の側面候補とする。また、車輪の側面と側面との間で傾き「3」(水平)が2回以上続くと、その開始点を車輪底面候補とする。このようにして、図15に示すように、車輪の側面候補(特徴点)G1,G3,G4,G6、および、底面候補(特徴点)G2,G5を求めることができる。
【0026】
次に、上記のようにして求めた特徴点G1〜G6のx座標値x1〜x6(図15参照)を用いて下記計算を行なうことにより、特徴量としての前輪の直径A、後輪の直径Bおよび車軸間距離Cを求める(ステップS33)。
A=x3−x1
B=x6−x4
C=x5−x2
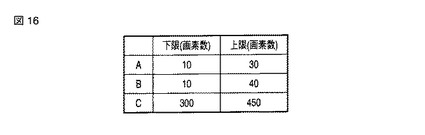
次に、特徴計算部13は、上記のようにして求めた特徴量A,B,Cについて、たとえば、図16に示すような特徴量データベースに格納された、あらかじめ標準的な車両から取得した基準の特徴量としての車輪の直径A,Bおよび車軸間距離Cの上限値、下限値とそれぞれ比較することにより、確からしさを検証し、上限値、下限値の範囲内に入っていれば正しい検出結果として、求めた特徴量A,B,Cに基づき当該車両の車軸数を決定し、決定した車軸数を上位装置に送信する(ステップS4)。
【0027】
ここに、上記特徴量データベースに格納された車輪の直径A,Bおよび車軸間距離Cの上限値、下限値は、この例では画素数で表わされているものとする。
【0028】
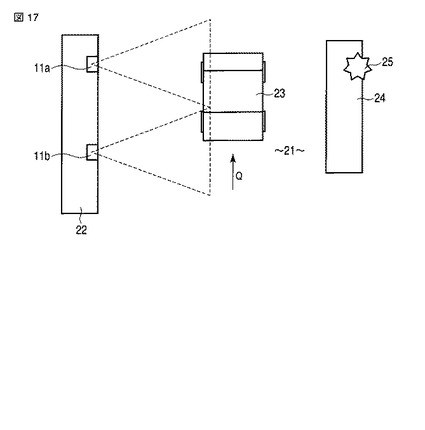
なお、上記第1の実施形態では、距離画像入力部11が1個の場合について説明したが、これに限らず、たとえば、図17に示すように、複数個(この例では2個)の距離画像入力部11a,11bを車両23の進行方向Qに沿って並設し、これら複数個の距離画像入力部11a,11bを時間的に同期させて動作させることにより、車両23の検出範囲が広くなる。また、車両23の進行方向ではなく、車両23の進行方向と直交する方向(車両23の高さ方向)に並設すれば、大型車も視野全面に入れることが可能となり、より正確な検出が可能となる。
【0029】
次に、第2の実施形態について説明する。
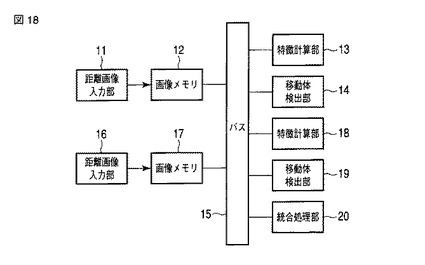
図18は、第2の実施形態に係る移動体検出装置の構成を概略的に示すものである。第2の実施形態の第1の実施形態と異なる点は、第1の実施形態の距離画像入力部11、画像メモリ12、特徴計算部13と同様な距離画像入力部16、画像メモリ17、特徴計算部18、および、双方からの処理結果を統合処理する統合処理部20が追加された点にあり、その外は同じであるので、第1の実施形態と異なる点についてだけ説明する。
【0030】
なお、特徴計算部13,18や移動体検出部14,19は別々に構成されているが、画像メモリ12,17へのアクセスを時間的に並列処理にするなどすることにより、特徴計算部や移動体検出部の構成を1つにすることも可能である。
【0031】
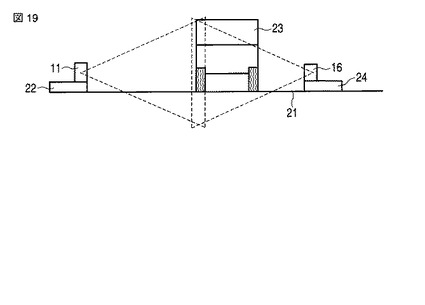
一方の距離画像入力部11は、たとえば、図19に示すように、有料道路の料金所における道路21の一方の側部に設けられたアイランド22上に、道路21を走行する車両23の側面と相対向するように設置され、他方の距離画像入力部16は、たとえば、図19に示すように、道路21の他方の側部に設けられたアイランド24上に、一方の距離画像入力部11と相対向するように設置されている。この場合、2つの距離画像入力部11,16は、車両23の進行方向Qと直交する方向に相対向して配設される。
【0032】
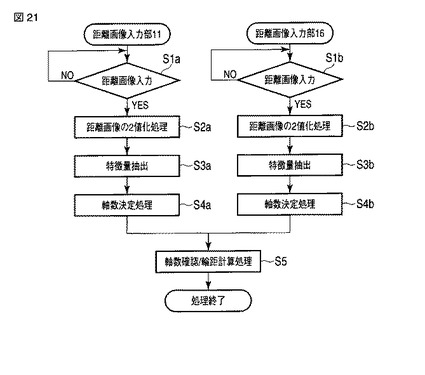
次に、上記のような構成において、図21に示すフローチャートを参照して動作を説明する。
なお、図21のステップS1a〜S4aは距離画像入力部11側の処理で、ステップS1b〜S4bは距離画像入力部16側の処理であり、それぞれ図3のステップS1〜S4と同様であるので、詳細な説明は省略し、異なる部分についてだけ説明する。
【0033】
距離画像入力部11側のステップS3aの特徴点抽出処理におけるステップS31(図12参照)の処理では、図22に示すように、追跡線中の各点の距離が得られている。そこで、各画素の距離の平均値を求めることにより、距離画像入力部11から車両23の左側面までの距離Dとする(図20参照)。図22の例では20cmとなり、これは図20における距離画像入力部11から車両23の側面までの距離Dが20cmということになる。
【0034】
また、距離画像入力部16側のステップS3bでも、上記同様に距離画像入力部16から車両23の右側面までの距離Eが求められる。また、ステップS4a,S4bからは、それぞれの距離画像入力部11,16から得られた距離画像から見た車軸数がそれぞれ出力される。
【0035】
そこで、統合処理部20では、ステップS4a,S4bで得られた各車軸数が合致しているか否かを確認する。車軸数が合致している場合、距離画像入力部11,16間の距離F(図20参照)は既知であるため、下記計算を行なうことにより、車輪間距離(輪距、トレッド)Z(図20参照)を求める(ステップS5)。
【0036】
Z≒F−(D+E)
また、統合処理部20では、上記のようにして求めた車輪間距離Zについて、前述した第1の実施形態と同様、特徴量データベース(図示省略)に格納された、あらかじめ標準的な車両から取得した基準の特徴量としての車輪間距離Zの上限値、下限値とそれぞれ比較することにより、確からしさを検証し、上限値、下限値の範囲内に入っていれば正しい検出結果として、求めた車輪間距離ZおよびステップS4a,S4bで得られた車軸数を上位装置に送信する(ステップS5)。
【0037】
このように、車両23の両側から車輪(側面)までの距離を求めることができるため、車輪間の車幅方向の距離(車輪間距離Z)も検出可能となる。また、車両23の両側の画像を同時に取得する目的で、2つの距離画像入力部11,16を同期して動作させることにより、より精度の高い測定が可能となる。
【0038】
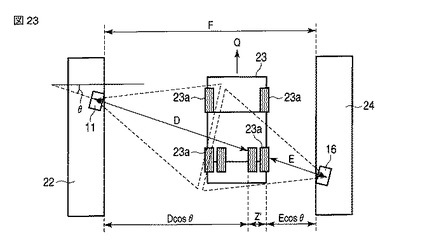
なお、上記第2の実施形態では、2つの距離画像入力部11,16を車両23の進行方向Qと直交する方向に相対向して配設した場合について説明したが、これに限らず、たとえば、図23に示すように、2つの距離画像取得部11,16をその相対向する光軸を車両23の進行方向Qに対して所定の角度θ傾斜させて配設してもよい。
【0039】
このように、距離画像取得部11,16をその光軸を所定の角度θ傾斜させて配置することにより、図23に示すように車輪23aの幅(タイヤ幅)を検出することも可能となるもので、以下それについて図23を参照して説明する。
【0040】
距離画像取得部11,16の光軸の傾きをθとすると、上記第2の実施形態における距離DをDcosθ、距離EをEcosθに置き換えるとともに車輪間距離Zを車輪幅Z′とし、下記計算を行なうことにより、車輪幅Z′を求めることができる。
【0041】
Z′≒F−(Dcosθ+Ecosθ)
また、ステップS5では、上記のようにして求めた車輪幅Z′について、上記第2の実施形態と同様、特徴量データベース(図示省略)に格納された、あらかじめ標準的な車両から取得した基準の特徴量としての車輪幅Z′の上限値、下限値とそれぞれ比較することにより、妥当性を検証したり、ダブル車輪(ダブルタイヤ)か否かを判定したりし、その判定結果やステップS4a,S4bで得られた車軸数を上位装置に送信する。
【0042】
次に、第3の実施形態について説明する。
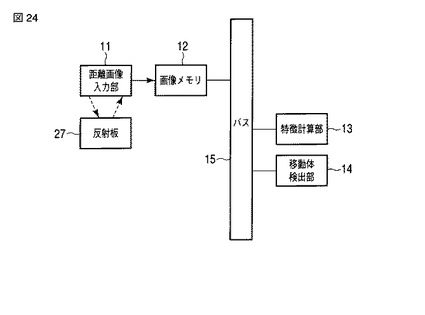
図24は、第3の実施形態に係る移動体検出装置の構成を概略的に示すものである。第3の実施形態の第1の実施形態と異なる点は、距離画像取得部11から照射されるパルス光を距離画像取得部11に向けて反射させる反射板(拡散反射板あるいは再帰反射板)27が追加された点にあり、その外は同じであるので、第1の実施形態と異なる点についてだけ説明する。
【0043】
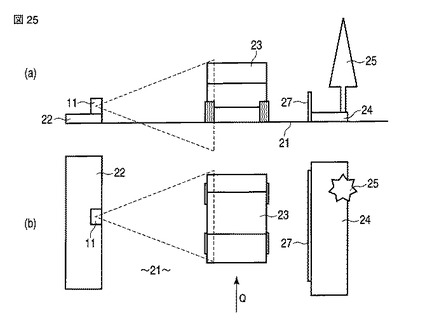
反射板27は、たとえば、図25に示すように、道路21の他方の側部に設けられたアイランド24の内側に、車両23を間にして距離画像入力部11と相対向するように設置されている。なお、この例では、反射板27の高さは車両23の車輪の直径以上とし、反射板27の車両23の進行方向Qに対する幅は車両23の長さ以上としている。
【0044】
反射板27は、車両検出の安定性を向上させるために設置されるものであって、拡散反射板や再帰反射板によって実現される。このような反射板27を用いることによって、距離画像入力部11から得られる距離画像は図26に示すようになり、車両検出の重要な部分(車両23が存在する部分)の距離と反射率が一定に保たれるという効果がある。なお、図26の距離画像において、i部が反射板27に対応している。
【0045】
次に、第4の実施形態について説明する。
第4の実施形態に係る移動体検出装置の全体的な構成は前述した第1の実施形態(図1)と同様であるので図示を省略し、第1の実施形態と異なる点は距離画像入力部11としてステレオカメラを用いる点にある。
【0046】
したがって、距離画像入力部11で距離画像を取得した後は第1の実施形態と全く同じ処理となるため説明を省略し、ステレオカメラを用いて距離画像を取得する部分についてだけ以下に説明する。
【0047】
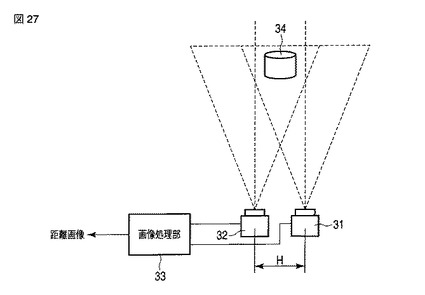
ステレオカメラは、図27に示すように、左右2つのカメラ(たとえば、ビデオカメラ)31,32、および、これら2つのカメラ31,32で撮像された画象から距離画像を作成する画像処理部33により構成されている。カメラ31,32は、図27に示すように対象物33に対し所定の距離Hを離して平行に配設されている。
【0048】
次に、図28を参照してステレオカメラの原理的な部分を説明する。左カメラ32の画像を基準画像とし、この画面上の点Plに対応する右カメラ31の画像(参照画像)の点Prを求める。直線lと直線rは点Pで交わるため、点Pの3次元座標(X,Y,Z)は、Pl(xl,yl)とPr(xr,yr)から求まる。点Pが手前にあるほど点Plと点Prの位置の差(視差)は大きく、奥にあるほど視差は小さいことを原理としている。
【0049】
次に、画像処理部33において距離画像を作成する手順を図29に示すフローチャートにしたがって説明する。
左右のカメラ31,32からの画像が入力されると(ステップS41)、まず、左右カメラ31,32の画像間の対応点を求める(ステップS42)。たとえば、図30に示すように、左カメラ32の画像(図30(a))のある点の対応点(i,j)を右カメラ31の画像(図30(b))にて探す場合を、一般的に2乗残差法(SSD法)と呼ばれる手法を用いて説明する。
【0050】
まず、左カメラ32の画像の探索したい点と右カメラ31の画像の探索範囲x内の各点間で、それらの点を中心とした3×3画素のエリア内における明るさの差の2乗和を計算する(2乗残差)。具体的には、下記数1で計算される。下記数1において、Mrは右側カメラ31の画像の輝度値、Mlは左側カメラ32の画像の輝度値とし、()内はその座標である。(i,j)は探索したい点の座標を表し、xは右カメラ31の探索範囲を示す。2乗残差Rが最も小さい座標(i+x,j)を対応点とする。
【数1】

【0051】
次に、左右のカメラ31,32の視差がXと求められた場合、一般にそこまでの距離(L)はカメラ31,32間の距離Hと、カメラ31,32の焦点距離fを用いて以下のように表される。
【0052】
L=fH/X
このように、左カメラ32の各点に対して、右カメラ31の対応点を探索し、距離を求めることにより、距離画像を得ることができる(ステップS43)。
【0053】
以上説明したように上記実施形態によれば、TOF式の距離画像センサあるいはステレオカメラを用いた距離画像入力部を走行する車両の側面側に配設して、車両の側面に対する距離画像を非接触で取得し、取得した距離画像から車両の側面に対する特徴点を求めることにより、車輪の直径や車軸間距離等を求め、この求めた車輪の直径や車軸間距離に基づき、あらかじめ標準的な車両から取得された基準の特徴量を参照することにより妥当性を検証し、当該車輪の車軸数等を求めることにより、常に安定性に優れ精度の高い車軸数の検出が可能となる。
【0054】
なお、前記実施形態では、移動体が車両(自動車)の場合で、最終的には車輪の車軸数、車輪間距離、車輪幅を検出する場合について説明したが、これらと同時あるいは単独に車両のパターンを検出することも可能である。
【0055】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行なうことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0056】
11…距離画像入力部(距離画像取得手段)、12…画像メモリ(画像記憶手段)、13…特徴計算部(特徴計算手段)、14…移動体検出部(移動体検出手段)、15…データバスおよびアドレスバス、21…道路(移動路)、22…アイランド、23…車両(移動体)、23a…車輪、24…アイランド、25…樹木、27…反射板。
【技術分野】
【0001】
本発明の実施形態は、たとえば、高速道路等の有料道路を利用する車両に対し通行料金の収受処理を自動的に行なうETC(ETC:登録商標)システムにおいて、料金収受車線を走行する車両の車種判別を行なうために車両の車軸数(あるいは、車輪数)等を検出するのに好適な移動体検出装置に関する。
【背景技術】
【0002】
従来の移動体検出装置として、車両の車軸数を検出する車軸検知装置のように、走行する車両の側面に対しパルス状のレーザ光をスキャンすることにより求めた距離情報から、車両移動体(移動体)の検出を行なうという技術がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−339586号公報
【特許文献2】特開2008−128792号公報
【特許文献3】特公平4−68680号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の移動体検出装置では、移動体の速度変化に対する安定性や路面の鏡面反射など環境に対する安定性に課題があった。
【0005】
そこで、実施形態は、安定性に優れ精度の高い移動体検出が可能となる移動体検出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
実施形態に係る移動体検出装置は、移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段とを具備している。
【0007】
また、実施形態に係る移動体検出装置は、車両が走行する道路の側部に設けられ、当該道路を走行する車両の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から、前記車両の側面に対する特徴量として、少なくとも車輪の直径および車軸間距離を求める特徴計算手段と、この特徴計算手段により求められた特徴量としての車輪の直径および車軸間距離を、あらかじめ標準的な車両から取得された基準の特徴量としての車輪の直径および車軸間距離と比較することにより、当該車両の少なくとも車軸数を求める移動体検出手段とを具備している。
【図面の簡単な説明】
【0008】
【図1】第1の実施形態に係る移動体検出装置の構成を概略的に示すブロック図。
【図2】第1の実施形態に係る距離画像入力部の配設例を説明する道路の正面から見た模式図。
【図3】第1の実施形態に係る動作を説明するフローチャート。
【図4】第1の実施形態において取得した距離画像の一例を模式的に示す図。
【図5】第1の実施形態における2値化処理を説明する模式図。
【図6】第1の実施形態における微分画像の一例を模式的に示す図。
【図7】第1の実施形態における特徴量抽出処理を説明する模式図。
【図8】第1の実施形態における特徴量抽出処理を説明するフローチャート。
【図9】第1の実施形態において追跡線を求める処理を説明する図。
【図10】第1の実施形態において追跡線を求める処理を説明する図。
【図11】第1の実施形態において求めた追跡線を示す図。
【図12】第1の実施形態において求めた追跡線から特徴量を計算する処理を説明するフローチャート。
【図13】第1の実施形態において求めた追跡線から特徴量を計算する処理を説明する図。
【図14】第1の実施形態において求めた追跡線の座標値、求めた追跡線の傾き、道路境界線の座標値の具体例を示す図。
【図15】第1の実施形態における特徴点を説明する図。
【図16】第1の実施形態における特徴量データベースの具体例を示す図。
【図17】第1の実施形態に係る距離画像入力部の配設の変形例を説明する道路の上方から見た模式図。
【図18】第2の実施形態に係る移動体検出装置の構成を概略的に示すブロック図。
【図19】第2の実施形態に係る距離画像入力部の配設例を説明する道路の正面から見た模式図。
【図20】第2の実施形態に係る車両検出の原理を説明する道路の正面から見た模式図。
【図21】第2の実施形態に係る動作を説明するフローチャート。
【図22】第2の実施形態における追跡線の距離画像の具体例を示す図。
【図23】第2の実施形態における車輪幅計算の原理を説明する道路の上方から見た模式図。
【図24】第3の実施形態に係る移動体検出装置の構成を概略的に示すブロック図。
【図25】第3の実施形態に係る距離画像入力部の配設例を説明するもので、(a)図は道路の正面から見た模式図、(b)図は道路の上方から見た模式図。
【図26】第3の実施形態において取得した距離画像の一例を模式的に示す図。
【図27】第4の実施形態に係るステレオカメラの構成例を概略的に示す模式図。
【図28】第4の実施形態におけるステレオカメラの原理を説明する図。
【図29】第4の実施形態における距離画像作成処理を説明するフローチャート。
【図30】第4の実施形態におけるステレオカメラの対応点の探索を説明する模式図。
【発明を実施するための形態】
【0009】
以下、実施形態について図面を参照して説明する。
なお、以下の説明では、移動体が走行する車両(自動車)の場合について述べるが、これに限定されるものではなく、たとえば、人物や人物以外の動物、さらには自動車以外の車両(電車や船舶等)などであっても同様に適用可能である。
【0010】
まず、第1の実施形態について説明する。
図1は、第1の実施形態に係る移動体検出装置の構成を概略的に示すものである。第1の実施形態に係る移動体検出装置は、車両(移動体)が走行する道路(移動路)の側部に設けられ、当該道路を走行する車両の側面までの距離を示す距離画像を取得する距離画像取得手段としての距離画像入力部11、距離画像入力部11により入力された距離画像を格納(記憶)する画像記憶手段としての画像メモリ12、画像メモリ12に格納された距離画像から車両の側面に対する特徴量を求める特徴計算手段としての特徴計算部13、特徴計算部13により求められた特徴量に基づき、あらかじめ標準的な車両から取得された基準の特徴量を参照することにより車両を判別する移動体検出手段としての移動体検出部14、および、これらを通信可能に接続するデータバスおよびアドレスバス15により構成されている。
【0011】
以下、各部について詳細に説明する。
距離画像入力部11は、たとえば、図2に示すように、有料道路の料金所における道路(料金収受車線)21の一方の側部に設けられたアイランド22上に、道路21を走行する車両(たとえば、自動車)23の側面と相対向するように設置されている。なお、図2において、24は道路21の他方の側部に設けられたアイランド、25はアイランド24に植えられた樹木である。
【0012】
距離画像入力部11は、たとえば、TOF(タイム・オブ・フライト)式の距離画像センサによって構成されている。TOF式の距離画像センサとは、受光部の各画素に光の飛行時間に対応した信号電荷検出機能を集積化することで、距離情報を画像として同時に取得することができるものであり、光源から出力されるパルス光を対象物(車両23)に向けて照射し、その対象物からの反射光を受光部で受光するまでの時間と光の速度から、対象物までの距離を計算することで距離画像を取得するという原理に基づいている。
【0013】
画像メモリ12は、たとえば、RAM(ランダム・アクセス・メモリ)などによって構成されていて、距離画像入力部11から所定の時間間隔で出力される距離画像を保管(記憶)する。
【0014】
特徴計算部13は、画像メモリ12に格納された距離画像から、車両23の側面に対する特徴量として、車輪(タイヤ)の直径および車軸間距離(ホイールベース)等を求めるものであり、たとえば、CPU(セントラル・プロセッシング・ユニット)やDSP(デジタル・シグナル・プロセッサ)などによって構成されている。
【0015】
移動体検出部14は、特徴計算部13により求められた特徴量としての車輪の直径および車軸間距離を、あらかじめ標準的な車両から取得して特徴量データベースに格納された基準の特徴量としての車輪の直径および車軸間距離と比較することにより、確からしさを検証し、車両23を判別するとともに車両23の車軸数などを求めるものであり、たとえば、CPU(セントラル・プロセッシング・ユニット)やDSP(デジタル・シグナル・プロセッサ)などによって構成されている。
【0016】
次に、上記のような構成において、図3に示すフローチャートを参照して動作を説明する。
なお、以下の説明においては、車両23の側面に対する特徴量として特に車輪の直径および車軸間距離を算出することにより、最終的に車軸数を決定する事例について述べる。
【0017】
距離画像入力部11は、ある一定の時間間隔で距離画像を入力し、この入力された距離画像は画像メモリ12に格納される(ステップS1)。距離画像入力部11から得られる距離画像のイメージを図4に示す。この例は図2に対応していて、奥に行くほど画像の濃淡値が小さく(暗くなる)形式の距離画像を示しており、a部は一番奥の背景、b部はアイランド24、c部はアイランド24上の樹木、d部は車両23、e部は道路21に対応している。この距離画像には、図4からも明らかなように、車輪がない部分には必ず隙間fが存在するという特徴がある。
【0018】
次に、特徴計算部13は、特徴計算部13は、画像メモリ12に格納された距離画像から車両23の側面に対する特徴量を計算する。
すなわち、まず、画像メモリ12に格納された距離画像(図4)に対して2値化処理を行なうことにより、図5に示すような2値化画像(白色部が「1」、車線部が「0」とする)を取得する(ステップS2)。図5(a)は車両23が存在する場合の2値化例、図5(b)は車両23が存在しない場合の2値化例である。
【0019】
ここに、2値化を行なう際の閾値は、道路21を走行する車両23の奥の構造物(図2ではアイランド24や樹木25等)が誤検出されにくい値、たとえば、距離画像入力部11から道路21を走行する車両23の幅方向に対する中央部までの距離L(図2参照)に相当する値に設定するものとする。
【0020】
次に、特徴計算部13は、上記のようにして得られた2値化画像に対して微分処理を行なうことにより、図6に示すような車両の輪郭線gおよび道路との境界線hを有する微分画像を取得し、この取得した微分画像に対して特徴量抽出処理を行なう(ステップS3)。
すなわち、まず、上記のようにして得られた微分画像に対して、図8に示すフローチャートに基づく処理を行なうことで車輪の検出に必要な追跡線を求める。まず、図7に示すように、得られた微分画像に対して、車輪および道路の位置と考えられる一定の検索範囲(点線枠)26を設定し、この設定した検索範囲26に対して、ラスタスキャンを行なうことにより1画素ずつ「1」の画素を探索する(ステップS21)。
【0021】
「1」の画素が見つかったら(ステップS22)、図9に示すような3×3のマスク(窓)により、「1」の画素を追跡する。具体的な方法を述べると、マスクには、「1」画素の探索の優先順位が付けられており、番号が若いほど探索結果の優先順位が高いものとする。たとえば、図10に示すように、A点の次の候補の追跡において、マスクに「2」と「4」の番号の付けられた位置にB点、C点が見つかったとすると、B点を追跡の候補点とし、次はB点にマスクの中心をおいて次の追跡を開始する(ステップS23)。このようにして、追跡を画像の右端に達するまで行なうことにより(ステップS24)、図11に示すような追跡線を描くことができる。
【0022】
なお、もう1つの線(道路面)については、上記同様の手法にて求めてもよいし、あらかじめ辞書データとして特徴計算部13内のメモリに格納しておいてもよい。
【0023】
次に、図12に示すフローチャートに基づく処理を行なうことで、求めた追跡線(図11)から特徴量を計算する。まず、求めた追跡線の傾きを求める(ステップS31)。傾きは、本実施形態においては、上下左右に各斜め方向を加えた8種類のみのため、図13に示すような3×3のマスク内に付した方向を示す数字で表す。たとえば、「2」は右上、「4」は右下、「8」は左上、「6」は左下である。
【0024】
点の追跡順番をiとして、追跡結果の座標、求めた傾きの値を示す表を図14(a)に、道路境界線の座標を図14(b)に示す。また、ここで追跡線と道路面とが車輪底面で接地している条件として、車輪底面のx座標(図14では「26,27」など)において、車輪底面のy座標(図14では「5」)と道路面のy座標(図14では「6」)の距離(この場合「1」)が少ない(たとえば「3」以下)という条件を加えることにより、高精度な検出を実現することが可能である。
【0025】
次に、特徴点を以下のような規則で求める(ステップS32)。すなわち、たとえば、傾きが「3」(水平)の状態からそうでない状態が3回以上続くと、その開始点を車輪の側面候補とする。また、傾きが「3」(水平)以外から「3」(水平)に戻る場合も同様な定義により、車輪の側面候補とする。また、車輪の側面と側面との間で傾き「3」(水平)が2回以上続くと、その開始点を車輪底面候補とする。このようにして、図15に示すように、車輪の側面候補(特徴点)G1,G3,G4,G6、および、底面候補(特徴点)G2,G5を求めることができる。
【0026】
次に、上記のようにして求めた特徴点G1〜G6のx座標値x1〜x6(図15参照)を用いて下記計算を行なうことにより、特徴量としての前輪の直径A、後輪の直径Bおよび車軸間距離Cを求める(ステップS33)。
A=x3−x1
B=x6−x4
C=x5−x2
次に、特徴計算部13は、上記のようにして求めた特徴量A,B,Cについて、たとえば、図16に示すような特徴量データベースに格納された、あらかじめ標準的な車両から取得した基準の特徴量としての車輪の直径A,Bおよび車軸間距離Cの上限値、下限値とそれぞれ比較することにより、確からしさを検証し、上限値、下限値の範囲内に入っていれば正しい検出結果として、求めた特徴量A,B,Cに基づき当該車両の車軸数を決定し、決定した車軸数を上位装置に送信する(ステップS4)。
【0027】
ここに、上記特徴量データベースに格納された車輪の直径A,Bおよび車軸間距離Cの上限値、下限値は、この例では画素数で表わされているものとする。
【0028】
なお、上記第1の実施形態では、距離画像入力部11が1個の場合について説明したが、これに限らず、たとえば、図17に示すように、複数個(この例では2個)の距離画像入力部11a,11bを車両23の進行方向Qに沿って並設し、これら複数個の距離画像入力部11a,11bを時間的に同期させて動作させることにより、車両23の検出範囲が広くなる。また、車両23の進行方向ではなく、車両23の進行方向と直交する方向(車両23の高さ方向)に並設すれば、大型車も視野全面に入れることが可能となり、より正確な検出が可能となる。
【0029】
次に、第2の実施形態について説明する。
図18は、第2の実施形態に係る移動体検出装置の構成を概略的に示すものである。第2の実施形態の第1の実施形態と異なる点は、第1の実施形態の距離画像入力部11、画像メモリ12、特徴計算部13と同様な距離画像入力部16、画像メモリ17、特徴計算部18、および、双方からの処理結果を統合処理する統合処理部20が追加された点にあり、その外は同じであるので、第1の実施形態と異なる点についてだけ説明する。
【0030】
なお、特徴計算部13,18や移動体検出部14,19は別々に構成されているが、画像メモリ12,17へのアクセスを時間的に並列処理にするなどすることにより、特徴計算部や移動体検出部の構成を1つにすることも可能である。
【0031】
一方の距離画像入力部11は、たとえば、図19に示すように、有料道路の料金所における道路21の一方の側部に設けられたアイランド22上に、道路21を走行する車両23の側面と相対向するように設置され、他方の距離画像入力部16は、たとえば、図19に示すように、道路21の他方の側部に設けられたアイランド24上に、一方の距離画像入力部11と相対向するように設置されている。この場合、2つの距離画像入力部11,16は、車両23の進行方向Qと直交する方向に相対向して配設される。
【0032】
次に、上記のような構成において、図21に示すフローチャートを参照して動作を説明する。
なお、図21のステップS1a〜S4aは距離画像入力部11側の処理で、ステップS1b〜S4bは距離画像入力部16側の処理であり、それぞれ図3のステップS1〜S4と同様であるので、詳細な説明は省略し、異なる部分についてだけ説明する。
【0033】
距離画像入力部11側のステップS3aの特徴点抽出処理におけるステップS31(図12参照)の処理では、図22に示すように、追跡線中の各点の距離が得られている。そこで、各画素の距離の平均値を求めることにより、距離画像入力部11から車両23の左側面までの距離Dとする(図20参照)。図22の例では20cmとなり、これは図20における距離画像入力部11から車両23の側面までの距離Dが20cmということになる。
【0034】
また、距離画像入力部16側のステップS3bでも、上記同様に距離画像入力部16から車両23の右側面までの距離Eが求められる。また、ステップS4a,S4bからは、それぞれの距離画像入力部11,16から得られた距離画像から見た車軸数がそれぞれ出力される。
【0035】
そこで、統合処理部20では、ステップS4a,S4bで得られた各車軸数が合致しているか否かを確認する。車軸数が合致している場合、距離画像入力部11,16間の距離F(図20参照)は既知であるため、下記計算を行なうことにより、車輪間距離(輪距、トレッド)Z(図20参照)を求める(ステップS5)。
【0036】
Z≒F−(D+E)
また、統合処理部20では、上記のようにして求めた車輪間距離Zについて、前述した第1の実施形態と同様、特徴量データベース(図示省略)に格納された、あらかじめ標準的な車両から取得した基準の特徴量としての車輪間距離Zの上限値、下限値とそれぞれ比較することにより、確からしさを検証し、上限値、下限値の範囲内に入っていれば正しい検出結果として、求めた車輪間距離ZおよびステップS4a,S4bで得られた車軸数を上位装置に送信する(ステップS5)。
【0037】
このように、車両23の両側から車輪(側面)までの距離を求めることができるため、車輪間の車幅方向の距離(車輪間距離Z)も検出可能となる。また、車両23の両側の画像を同時に取得する目的で、2つの距離画像入力部11,16を同期して動作させることにより、より精度の高い測定が可能となる。
【0038】
なお、上記第2の実施形態では、2つの距離画像入力部11,16を車両23の進行方向Qと直交する方向に相対向して配設した場合について説明したが、これに限らず、たとえば、図23に示すように、2つの距離画像取得部11,16をその相対向する光軸を車両23の進行方向Qに対して所定の角度θ傾斜させて配設してもよい。
【0039】
このように、距離画像取得部11,16をその光軸を所定の角度θ傾斜させて配置することにより、図23に示すように車輪23aの幅(タイヤ幅)を検出することも可能となるもので、以下それについて図23を参照して説明する。
【0040】
距離画像取得部11,16の光軸の傾きをθとすると、上記第2の実施形態における距離DをDcosθ、距離EをEcosθに置き換えるとともに車輪間距離Zを車輪幅Z′とし、下記計算を行なうことにより、車輪幅Z′を求めることができる。
【0041】
Z′≒F−(Dcosθ+Ecosθ)
また、ステップS5では、上記のようにして求めた車輪幅Z′について、上記第2の実施形態と同様、特徴量データベース(図示省略)に格納された、あらかじめ標準的な車両から取得した基準の特徴量としての車輪幅Z′の上限値、下限値とそれぞれ比較することにより、妥当性を検証したり、ダブル車輪(ダブルタイヤ)か否かを判定したりし、その判定結果やステップS4a,S4bで得られた車軸数を上位装置に送信する。
【0042】
次に、第3の実施形態について説明する。
図24は、第3の実施形態に係る移動体検出装置の構成を概略的に示すものである。第3の実施形態の第1の実施形態と異なる点は、距離画像取得部11から照射されるパルス光を距離画像取得部11に向けて反射させる反射板(拡散反射板あるいは再帰反射板)27が追加された点にあり、その外は同じであるので、第1の実施形態と異なる点についてだけ説明する。
【0043】
反射板27は、たとえば、図25に示すように、道路21の他方の側部に設けられたアイランド24の内側に、車両23を間にして距離画像入力部11と相対向するように設置されている。なお、この例では、反射板27の高さは車両23の車輪の直径以上とし、反射板27の車両23の進行方向Qに対する幅は車両23の長さ以上としている。
【0044】
反射板27は、車両検出の安定性を向上させるために設置されるものであって、拡散反射板や再帰反射板によって実現される。このような反射板27を用いることによって、距離画像入力部11から得られる距離画像は図26に示すようになり、車両検出の重要な部分(車両23が存在する部分)の距離と反射率が一定に保たれるという効果がある。なお、図26の距離画像において、i部が反射板27に対応している。
【0045】
次に、第4の実施形態について説明する。
第4の実施形態に係る移動体検出装置の全体的な構成は前述した第1の実施形態(図1)と同様であるので図示を省略し、第1の実施形態と異なる点は距離画像入力部11としてステレオカメラを用いる点にある。
【0046】
したがって、距離画像入力部11で距離画像を取得した後は第1の実施形態と全く同じ処理となるため説明を省略し、ステレオカメラを用いて距離画像を取得する部分についてだけ以下に説明する。
【0047】
ステレオカメラは、図27に示すように、左右2つのカメラ(たとえば、ビデオカメラ)31,32、および、これら2つのカメラ31,32で撮像された画象から距離画像を作成する画像処理部33により構成されている。カメラ31,32は、図27に示すように対象物33に対し所定の距離Hを離して平行に配設されている。
【0048】
次に、図28を参照してステレオカメラの原理的な部分を説明する。左カメラ32の画像を基準画像とし、この画面上の点Plに対応する右カメラ31の画像(参照画像)の点Prを求める。直線lと直線rは点Pで交わるため、点Pの3次元座標(X,Y,Z)は、Pl(xl,yl)とPr(xr,yr)から求まる。点Pが手前にあるほど点Plと点Prの位置の差(視差)は大きく、奥にあるほど視差は小さいことを原理としている。
【0049】
次に、画像処理部33において距離画像を作成する手順を図29に示すフローチャートにしたがって説明する。
左右のカメラ31,32からの画像が入力されると(ステップS41)、まず、左右カメラ31,32の画像間の対応点を求める(ステップS42)。たとえば、図30に示すように、左カメラ32の画像(図30(a))のある点の対応点(i,j)を右カメラ31の画像(図30(b))にて探す場合を、一般的に2乗残差法(SSD法)と呼ばれる手法を用いて説明する。
【0050】
まず、左カメラ32の画像の探索したい点と右カメラ31の画像の探索範囲x内の各点間で、それらの点を中心とした3×3画素のエリア内における明るさの差の2乗和を計算する(2乗残差)。具体的には、下記数1で計算される。下記数1において、Mrは右側カメラ31の画像の輝度値、Mlは左側カメラ32の画像の輝度値とし、()内はその座標である。(i,j)は探索したい点の座標を表し、xは右カメラ31の探索範囲を示す。2乗残差Rが最も小さい座標(i+x,j)を対応点とする。
【数1】
【0051】
次に、左右のカメラ31,32の視差がXと求められた場合、一般にそこまでの距離(L)はカメラ31,32間の距離Hと、カメラ31,32の焦点距離fを用いて以下のように表される。
【0052】
L=fH/X
このように、左カメラ32の各点に対して、右カメラ31の対応点を探索し、距離を求めることにより、距離画像を得ることができる(ステップS43)。
【0053】
以上説明したように上記実施形態によれば、TOF式の距離画像センサあるいはステレオカメラを用いた距離画像入力部を走行する車両の側面側に配設して、車両の側面に対する距離画像を非接触で取得し、取得した距離画像から車両の側面に対する特徴点を求めることにより、車輪の直径や車軸間距離等を求め、この求めた車輪の直径や車軸間距離に基づき、あらかじめ標準的な車両から取得された基準の特徴量を参照することにより妥当性を検証し、当該車輪の車軸数等を求めることにより、常に安定性に優れ精度の高い車軸数の検出が可能となる。
【0054】
なお、前記実施形態では、移動体が車両(自動車)の場合で、最終的には車輪の車軸数、車輪間距離、車輪幅を検出する場合について説明したが、これらと同時あるいは単独に車両のパターンを検出することも可能である。
【0055】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行なうことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0056】
11…距離画像入力部(距離画像取得手段)、12…画像メモリ(画像記憶手段)、13…特徴計算部(特徴計算手段)、14…移動体検出部(移動体検出手段)、15…データバスおよびアドレスバス、21…道路(移動路)、22…アイランド、23…車両(移動体)、23a…車輪、24…アイランド、25…樹木、27…反射板。
【特許請求の範囲】
【請求項1】
移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、
この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、
この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段と、
を具備したことを特徴とする移動体検出装置。
【請求項2】
車両が走行する道路の側部に設けられ、当該道路を走行する車両の側面までの距離を示す距離画像を取得する距離画像取得手段と、
この距離画像取得手段により取得された距離画像から、前記車両の側面に対する特徴量として、少なくとも車輪の直径および車軸間距離を求める特徴計算手段と、
この特徴計算手段により求められた特徴量としての車輪の直径および車軸間距離を、あらかじめ標準的な車両から取得された基準の特徴量としての車輪の直径および車軸間距離と比較することにより、当該車両の少なくとも車軸数を求める移動体検出手段と、
を具備したことを特徴とする移動体検出装置。
【請求項3】
車両が走行する道路の両側部に相対向してそれぞれ設けられ、当該道路を走行する車両の側面までの距離を示す距離画像を取得する2つの距離画像取得手段と、
この2つの距離画像取得手段にそれぞれ対応して設けられ、当該2つの距離画像取得手段により取得された距離画像から、前記車両の側面に対する特徴量として、少なくとも車輪の直径および車軸間距離を求める2つの特徴計算手段と、
この2つの特徴計算手段にそれぞれ対応して設けられ、当該2つの特徴計算手段により求められた特徴量としての車輪の直径および車軸間距離を、あらかじめ標準的な車両から取得された基準の特徴量としての車輪の直径および車軸間距離と比較することにより、当該車両の少なくとも車軸数を求める2つの移動体検出手段と、
この2つの移動体検出手段から得られる各車軸数が合致しているか否かの確認を行なうとともに、当該各車軸数に基づき当該車両の輪間距離を求める統合処理手段と、
を具備したことを特徴とする移動体検出装置。
【請求項4】
前記距離画像取得手段は、前記道路の側部に前記車両の進行方向に沿って複数個並設されていて、これら複数個の距離画像取得手段を時間的に同期させて動作させることを特徴とする請求項2または請求項3記載の移動体検出装置。
【請求項5】
前記距離画像取得手段は、光源から出力されるパルス光を対象物に向けて照射し、その対象物からの反射光を受光部で受光するまでの時間と光の速度から、対象物までの距離を計算することで距離画像を取得するTOF(タイム・オブ・フライト)式の距離画像取得手段であることを特徴とする請求項1〜3のいずれかに記載の移動体検出装置。
【請求項6】
前記2つの距離画像取得手段の相対向する光軸を前記車両の進行方向に対して所定の角度傾斜させることにより、前記統合処理手段はさらに当該車両の車輪の幅をも求めることを特徴とする請求項5記載の移動体検出装置。
【請求項7】
前記距離画像取得手段と対象物を間にして相対向する部位に設けられ、前記光源から照射されるパルス光を前記受光部に向けて反射させる拡散反射板あるいは再帰反射板をさらに具備したことを特徴とする請求項5記載の移動体検出装置。
【請求項8】
前記距離画像取得手段は、ステレオカメラを用いて対象物までの距離を示す距離画像を取得することを特徴とする請求項1〜3のいずれかに記載の移動体検出装置。
【請求項9】
前記特徴計算手段は、距離画像取得手段により取得された距離画像に対して2値化処理を行ない、この2値化処理により得られた2値化画像に対して微分処理を行なうことで車両の輪郭線および道路との境界線を求め、この求めた車両の輪郭線に対し追跡処理を行なうことで特徴点として車輪の側面候補および車輪の道路面と接する底面候補を求め、この求めた車輪の側面候補および車輪の道路面と接する底面候補に基づき車輪の直径および車軸間距離を求めることを特徴とする請求項2または請求項3記載の移動体検出装置。
【請求項1】
移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、
この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、
この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段と、
を具備したことを特徴とする移動体検出装置。
【請求項2】
車両が走行する道路の側部に設けられ、当該道路を走行する車両の側面までの距離を示す距離画像を取得する距離画像取得手段と、
この距離画像取得手段により取得された距離画像から、前記車両の側面に対する特徴量として、少なくとも車輪の直径および車軸間距離を求める特徴計算手段と、
この特徴計算手段により求められた特徴量としての車輪の直径および車軸間距離を、あらかじめ標準的な車両から取得された基準の特徴量としての車輪の直径および車軸間距離と比較することにより、当該車両の少なくとも車軸数を求める移動体検出手段と、
を具備したことを特徴とする移動体検出装置。
【請求項3】
車両が走行する道路の両側部に相対向してそれぞれ設けられ、当該道路を走行する車両の側面までの距離を示す距離画像を取得する2つの距離画像取得手段と、
この2つの距離画像取得手段にそれぞれ対応して設けられ、当該2つの距離画像取得手段により取得された距離画像から、前記車両の側面に対する特徴量として、少なくとも車輪の直径および車軸間距離を求める2つの特徴計算手段と、
この2つの特徴計算手段にそれぞれ対応して設けられ、当該2つの特徴計算手段により求められた特徴量としての車輪の直径および車軸間距離を、あらかじめ標準的な車両から取得された基準の特徴量としての車輪の直径および車軸間距離と比較することにより、当該車両の少なくとも車軸数を求める2つの移動体検出手段と、
この2つの移動体検出手段から得られる各車軸数が合致しているか否かの確認を行なうとともに、当該各車軸数に基づき当該車両の輪間距離を求める統合処理手段と、
を具備したことを特徴とする移動体検出装置。
【請求項4】
前記距離画像取得手段は、前記道路の側部に前記車両の進行方向に沿って複数個並設されていて、これら複数個の距離画像取得手段を時間的に同期させて動作させることを特徴とする請求項2または請求項3記載の移動体検出装置。
【請求項5】
前記距離画像取得手段は、光源から出力されるパルス光を対象物に向けて照射し、その対象物からの反射光を受光部で受光するまでの時間と光の速度から、対象物までの距離を計算することで距離画像を取得するTOF(タイム・オブ・フライト)式の距離画像取得手段であることを特徴とする請求項1〜3のいずれかに記載の移動体検出装置。
【請求項6】
前記2つの距離画像取得手段の相対向する光軸を前記車両の進行方向に対して所定の角度傾斜させることにより、前記統合処理手段はさらに当該車両の車輪の幅をも求めることを特徴とする請求項5記載の移動体検出装置。
【請求項7】
前記距離画像取得手段と対象物を間にして相対向する部位に設けられ、前記光源から照射されるパルス光を前記受光部に向けて反射させる拡散反射板あるいは再帰反射板をさらに具備したことを特徴とする請求項5記載の移動体検出装置。
【請求項8】
前記距離画像取得手段は、ステレオカメラを用いて対象物までの距離を示す距離画像を取得することを特徴とする請求項1〜3のいずれかに記載の移動体検出装置。
【請求項9】
前記特徴計算手段は、距離画像取得手段により取得された距離画像に対して2値化処理を行ない、この2値化処理により得られた2値化画像に対して微分処理を行なうことで車両の輪郭線および道路との境界線を求め、この求めた車両の輪郭線に対し追跡処理を行なうことで特徴点として車輪の側面候補および車輪の道路面と接する底面候補を求め、この求めた車輪の側面候補および車輪の道路面と接する底面候補に基づき車輪の直径および車軸間距離を求めることを特徴とする請求項2または請求項3記載の移動体検出装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】

【図8】

【図9】
【図10】
【図11】
【図12】

【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】

【図21】
【図22】

【図23】
【図24】
【図25】
【図26】

【図27】
【図28】
【図29】

【図30】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【公開番号】特開2012−22573(P2012−22573A)
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2010−160977(P2010−160977)
【出願日】平成22年7月15日(2010.7.15)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成22年7月15日(2010.7.15)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]