
移動体検知システム及び移動体検知表示装置

【課題】車両等の移動体を検知する移動体検知システムにおいて、移動体に適切な移動方向を指示する。
【解決手段】車両等の移動体を検知する移動体検知システムにおいて、移動体検知手段(例えば、ミリ波レーダ装置)が検知範囲に存在する移動体を検知し、進行方向決定手段が前記移動体検知手段により検知された移動体に対して表示する進行方向を決定し、表示手段が前記移動体検知手段により検知された移動体に対して前記進行方向決定手段により決定された進行方向の情報(例えば、移動体を誘導するための矢印の情報)を表示する。
【解決手段】車両等の移動体を検知する移動体検知システムにおいて、移動体検知手段(例えば、ミリ波レーダ装置)が検知範囲に存在する移動体を検知し、進行方向決定手段が前記移動体検知手段により検知された移動体に対して表示する進行方向を決定し、表示手段が前記移動体検知手段により検知された移動体に対して前記進行方向決定手段により決定された進行方向の情報(例えば、移動体を誘導するための矢印の情報)を表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両等の移動体の有無を検知する移動体検知システムや移動体検知表示装置に関し、特に、移動体に適切な移動方向を指示することを行う移動体検知システムや移動体検知表示装置に関する。
【背景技術】
【0002】
(背景の第1の例)
例えば、信号機が無い交差点では、出会いがしらの衝突事故が発生し易い。このような場所での通行車両の有無の確認は、主に、交差点に設置されたミラーによる目視確認によって行われる。
しかしながら、この方法では、ミラーに映された範囲のみしか確認することができない。また、運転手は様々な方向の状況確認をするため、ミラーに映された状況を適切に確認しきれない場合もあり得る。更に、ミラーは、雨天時や夜間の状態や、ほこり等により汚れた状態などでは、認識精度を悪くする。
こうしたことから、信号機が無い交差点では、従来のミラーでの確認に代えて或いはそれと共に、運転手に通行車両の有無を事前に知らせて、衝突事故を未然に防ぐためのシステムを設けた方が好ましいと考えられる。
【0003】
(背景の第2の例)
例えば、混雑時の駐車場では、空き駐車スペースを探すために駐車場内を巡回する車両がよく見られる。このとき、運転手は駐車場内のどのあたりに空き駐車スペースがあるのかを知ることができず、運良く空き駐車スペースを見つけるまで、探し続けなければならない。
だが、この際、駐車場内には巡回する車両や歩行者が数多く存在することになり、接触事故の危険性があり得る。
【0004】
現在、空き駐車スペースを誘導する方法としては、人間による方法と、駐車スペースに設置されたセンサによる方法がある。
しかしながら、人間による方法では、駐車場管理の人間が車両に対して進行方向を適宜指示するため、労力や人件費が必要となる。一方、センサによる方法では、空き駐車スペースの場所を駐車場内の表示板やランプ等によって運転手に知らせることは可能であるが、それと同時に駐車場内の危険を知らせることはできない。
こうしたことから、駐車場内における接触事故を未然に防ぐために、運転手に車両や歩行者の有無を事前に知らせ、且つ、空き駐車スペースの場所を適切に知らせるシステムを設けた方が好ましいと考えられる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平8−305998号公報
【特許文献2】特開平10−122886号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述のように、従来では、駐車場などで、移動体の利便性(例えば、車両の運転手の利便性)を高めることができるシステムの開発が望まれていた。
本発明は、このような従来の事情に鑑み為されたもので、車両等の移動体に適切な移動方向を指示することを行うことができる移動体検知システムや移動体検知表示装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
(移動体検知システムの説明)
上記目的を達成するため、本発明では、移動体検知システムにおいて、次のような構成とした。
すなわち、移動体検知手段が、検知範囲に存在する移動体を検知する。進行方向決定手段が、前記移動体検知手段により検知された移動体に対して表示する進行方向を決定する。表示手段が、前記移動体検知手段により検知された移動体に対して、前記進行方向決定手段により決定された進行方向の情報を表示する。
従って、車両等の移動体に適切な移動方向を指示することを行うことができ、利便性を高めることができる。
【0008】
更に、一構成例として、本発明では、移動体検知システムにおいて、次のような構成とした。
すなわち、所定の領域における空きスペースへの進行方向を移動体に対して表示するシステムとした。
そして、前記所定の領域について異なる検知範囲を有する複数の移動体検知手段を備えた。前記進行方向決定手段は、前記所定の領域における空きスペースの位置を検出する位置検出手段を有し、前記移動体検知手段により検知された移動体に対して表示する進行方向として、当該移動体を前記位置検出手段により検出された空きスペースの位置へ誘導するための進行方向を決定する。
従って、所定の領域における空きスペースへの進行方向を移動体に対して表示することができ、利便性を高めることができる。
【0009】
ここで、移動体としては、種々なものが用いられてもよく、例えば、車両や人(歩行者等)などを用いることができる。
また、移動体を検知する態様としては、例えば、移動体の存在の有無、移動体の速度、移動体の距離(例えば、相対的な距離)などの1以上を検知する態様を用いることができる。
また、移動体検知手段としては、種々なものが用いられてもよく、例えば、ミリ波の電波を無線により放射してその反射波に基づいて移動体を検知するレーダ装置を用いることができる。
【0010】
また、表示手段としては、種々なものが用いられてもよく、例えば、表示板のようなものを用いることができ、また、例えば、所定の色の光を点灯或いは点滅等させるランプを用いることや、所定の色で文字や図形等を表示する画面を用いることができる。
また、進行方向の情報としては、種々な情報が用いられてもよく、例えば、進行方向を示す矢印の情報を用いることができる。
【0011】
また、移動体に対して空きスペースへの進行方向を表示するシステムにおける所定の領域としては、種々な領域が用いられてもよく、例えば、駐車場などの領域を用いることができる。一般に、駐車場では、車両を駐車するための複数の位置(区画)が線などで示されており、各位置毎にそのスペースが車両で駐車されているか又はいないか(つまり、空いているか)が決まる。
【0012】
また、空きスペースの位置を検出する位置検出手段としては、種々なものが用いられてもよく、一例として、駐車場などにおける各位置(各区画)が空いているか否かを検出するセンサを用いて構成することができる。
また、移動体を空きスペースの位置へ誘導するための進行方向を決定する態様としては、例えば、移動体が存在する位置に最も近い(或いは、予め設定された条件等に基づいて近いと判定される)空きスペースの位置へ誘導するための進行方向を決定する態様を用いることができ、この場合、例えば、移動体に近い(例えば、最も近い)空きスペースの位置を決定するための処理手順が予め設定される。
【0013】
また、複数の移動体検知手段を備える場合には、それぞれの移動体検知手段の検知範囲としては、種々な態様で設定されてもよく、例えば、それぞれの移動体検知手段の検知範囲をそれぞれ異なる通路或いは道路等とするような態様を用いることができる。
また、複数の移動体検知手段を備える場合には、例えば、各移動体検知手段の間で検知結果の情報を有線や無線で通信して把握や利用してもよく、或いは、これら複数の移動体検知手段を管理する装置などが、各移動体検知手段による検知結果の情報を有線や無線で受信して管理(記憶等)し、その管理情報を用いて、予め設定された条件等に従って、各移動体検知手段に各種の指示を送信して制御することや、表示対象とする情報を表示手段に送信して表示させることなどを行うような構成とすることも可能である。
【0014】
また、表示手段により移動体等に対して種々な情報が表示されてもよく、例えば、危険を知らせるための情報や、移動体の速度や距離の情報や、指示内容等を示す文字の情報や、所定の領域における全体的な位置(区画)の地図や空きスペース等を示す情報、などを表示する態様が用いられてもよい。
【0015】
一構成例として、通路(或いは、道路)Aと通路Bが交差しており、通路Aを通行してその交差点へ向かっている移動体Aが移動体検知手段Aにより検知されるとともに、通路Bを通行してその交差点へ向かっている移動体B(又は、その交差点へ向かってはいないが通路Bに存在する移動体B)が移動体検知手段Bにより検知された場合に、移動体Aの方向に情報を表示するように設けられた表示手段Aにより移動体Aに対して、通路Bに危険(ここでは、他の移動体B)が存在することを、所定のランプの点灯等や、所定の文字などにより、その危険が存在する方向が判別されるように或いはその判別の情報は省略して、表示するような構成を用いることができる。
【0016】
(移動体検知表示装置の説明)
上記目的を達成するため、本発明では、移動体検知表示装置において、次のような構成とした。
すなわち、移動体検知手段が、検知範囲に存在する移動体を検知する。進行方向取得手段が、前記移動体検知手段により検知された移動体に対して表示する進行方向の情報を取得する。表示手段が、前記移動体検知手段により検知された移動体に対して、前記進行方向取得手段により取得された進行方向の情報を表示する。
従って、車両等の移動体に適切な移動方向を指示することを行うことができ、利便性を高めることができる。
【0017】
ここで、上述した移動体検知システムについて述べたことは、移動体検知表示装置に適用することも可能である。
また、進行方向取得手段としては、例えば、移動体検知手段により検知された移動体に対して表示する進行方向を決定する進行方向決定手段として構成されて、自ら進行方向を決定する機能を有してもよく、或いは、自ら進行方向を決定する機能は有さずに、移動体検知表示装置の外部の所定の装置(手段)により決定された進行方向の情報を受信して取得するものとして構成されてもよい。
【発明の効果】
【0018】
以上説明したように、本発明によると、車両等の移動体に適切な移動方向を指示することを行うことができ、利便性を高めることができる。
【図面の簡単な説明】
【0019】
【図1】四差路の交差点を上方から見た様子の一例を示す図である。
【図2】ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示す図である。
【図3】三差路の交差点を上方から見た様子の一例を示す図である。
【図4】ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示す図である。
【図5】交差点に設置する表示部の表示の一例を示す図である。
【図6】駐車場を上方から見た様子の一例を示す図である。
【図7】ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示す図である。
【図8】ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示す図である。
【図9】駐車場に設置する表示部の表示の一例を示す図である。
【図10】FM−CW方式のミリ波レーダ装置の構成例を示す図である。
【図11】円偏波を用いるFM−CW方式のミリ波レーダ装置の構成例を示す図である。
【発明を実施するための形態】
【0020】
本発明に係る実施例を図面を参照して説明する。
(第1の例)交差点における移動体検知の例を説明する。
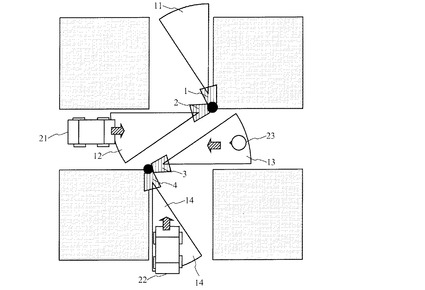
図1には、四差路の交差点を上方から見た様子の一例を示してある。
本例では、4個のミリ波レーダ装置1〜4が、それぞれ、ポール(他のものでもよい)に取り付けられて、交差点の角に配置されている。ここで、ミリ波レーダ装置1とミリ波レーダ装置2は同一のポールに取り付けられており、ミリ波レーダ装置3とミリ波レーダ装置4は別の同一のポールに取り付けられている。
【0021】
また、4個のミリ波レーダ装置1〜4の各々の検知可能範囲は、検知範囲11〜14の各々で示されており、これらは四差路の各方向の所定範囲を検知している。
また、離れて設置されたミリ波レーダ装置1、2とミリ波レーダ装置3、4は、無線又は有線で通信し、各々の検知結果の情報を共有している。
また、四差路を通過する車両21、22や歩行者23といった移動体を示してある。
【0022】
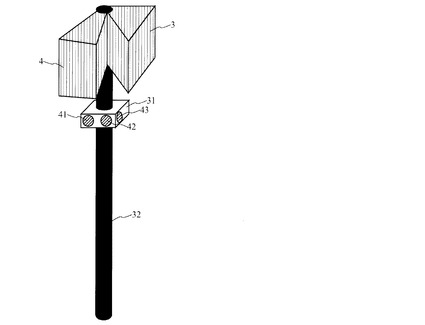
図2には、ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示してある。なお、ここでは、ミリ波レーダ装置3、4を例として示すが、ミリ波レーダ装置1、2についても同様である。
本例では、ポール32の上端に2個のミリ波レーダ装置3、4がそれぞれ異なる道路を向く方向で取り付けられており、それより下の方に表示部31が取り付けられている。また、表示部31には、例えば赤色などに点灯等するランプ41、42、43が設けられている。
【0023】
本例のミリ波レーダ装置1〜4は、FM−CW方式で動作し、対向する移動体(車両21〜22や歩行者23等)の速度や距離を測ることができる。
また、本例のミリ波レーダ装置3、4(ミリ波レーダ装置1、2も同様)は、表示部31を有しており、ミリ波レーダ装置3、4の検知結果から判断した交差点に関する情報を表示部31に表示し、車両21〜22や歩行者23に知らせる機能を有している。
【0024】
図1に示される場面を用いて、表示部31の動作の一例を示す。
本例では、検知範囲12に交差点に向かう車両21が存在し、検知範囲13に交差点に向かう歩行者23が存在し、検知範囲14に交差点に向かう車両22が存在する。
このとき、ミリ波レーダ装置3、4の表示部31では、例えば、ミリ波レーダ装置4により車両22が交差点に向かっていることを検知したことにより、ミリ波レーダ装置3の検知範囲13(歩行者23)の方に向いているランプ43を点灯若しくは点滅などさせて、歩行者23に対して、左方に危険が存在することを知らせる。
【0025】
また、ミリ波レーダ装置2により車両21が検知され、ミリ波レーダ装置3により歩行者23が交差点に向かっていることが検知されたことにより、表示部31では、ミリ波レーダ装置4の検知範囲14(車両22)の方に向いている2個の左右のランプ41、42を点灯若しくは点滅などさせて、車両22に対して、右方及び左方共に危険が存在することを知らせる。
【0026】
このように、ミリ波レーダ装置1〜4と表示部31によって、交差点の各方向に存在する移動体21〜23に、交差点の各方向に危険があるかどうかを事前に知らせることができる。
これにより、車両21〜22及び歩行者23は、例えば従来のように交差点近くでミラーを凝視して自ら危険を確認するような必要がなく、本例では、表示部31に示された情報により比較的遠方から危険を知ることが可能となる。
【0027】
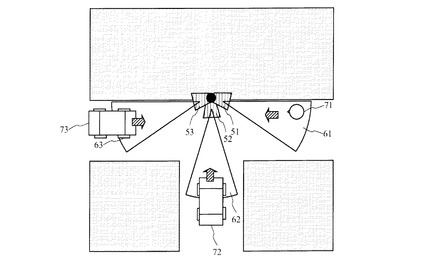
図3には、三差路の交差点を上方から見た様子の一例を示してある。
本例では、3個のミリ波レーダ装置51〜53、各ミリ波レーダ装置51〜53の検知範囲61〜63、歩行者71や車両72〜73を示してある。
ここで、基本的な構成や動作は図1や図2に示される四差路の場合と同じであるが、本例の三差路の場合には、1つのポールに3個のミリ波レーダ装置51〜53がそれぞれ3つの道路の各々を向く方向で取り付けられた構造(形状)を有している。
【0028】
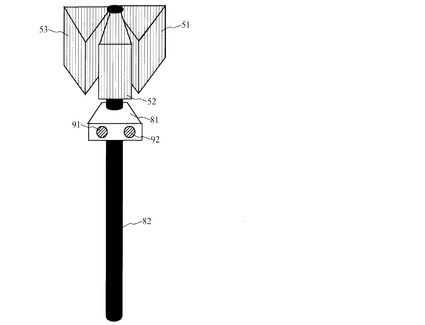
図4には、ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示してある。
本例では、ポール82の上端に3個のミリ波レーダ装置51、52、53がそれぞれ異なる道路を向く方向で取り付けられており、それより下の方に表示部81が取り付けられている。また、表示部81には、ランプ91、92が設けられている。
このように、本例の構成では、図2に示されるものと同様に、ミリ波レーダ装置51〜53と表示部81を有しており、各方向に対して、交差点に関する状況を知らせることができる。
【0029】
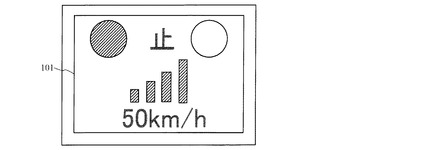
図5には、交差点に設置する表示部の表示の一例を示してある。
本例の表示部101は、表示板から構成されており、ランプの点灯等を行うばかりでなく、文字等も表示する。
具体的には、本例の表示部101は、接近する移動体の有無を知らせるための表示を行い、図示の例では、左側からの移動体の接近があることを検知したことに応じて、左右のランプの内の左側のランプを点灯(例えば、赤色に点灯)させて、その中央に「止まれ」という文字(例えば、赤色の文字)の指示を表示している。また、FM−CWレーダにより接近物の速度を検知することが可能であり、本例では、表示部101は、検知された速度のインジケータ表示や数値表示(例えば、赤色での表示)をしている。これにより、例えば、人間の目視による速度認識誤差に起因した接触事故を減らすことができると考えられる。
【0030】
(第2の例)駐車場内における移動体検知の例を説明する。
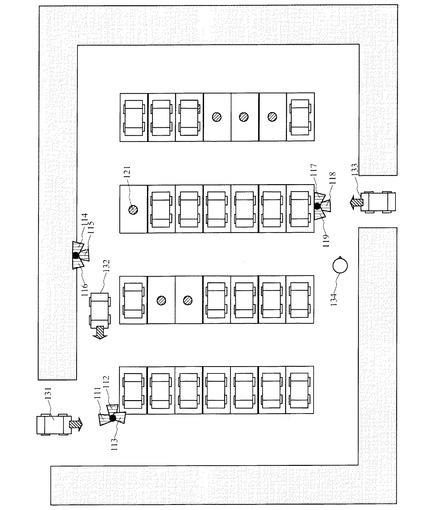
図6には、駐車場を上方から見た様子の一例を示してある。
本例では、駐車場内の3箇所にミリ波レーダ装置が設置されており、1箇所目には1つのポールに3個のミリ波レーダ装置111〜113が取り付けられたものが設置されており、2箇所目には1つのポールに3個のミリ波レーダ装置114〜116が取り付けられたものが設置されており、3箇所目には1つのポールに3個のミリ波レーダ装置117〜119が取り付けられたものが設置されている。
また、各駐車スペースの床若しくは天井には、車両の有無を判定するセンサ121(図6では、1個のみを符号で示した)が設けられている。
また、駐車場内には、空き駐車スペースを探す車両131〜133や、歩行者134が存在している。
【0031】
本例では、ミリ波レーダ装置111〜119は、空き駐車スペースを探す車両に対して、近隣の空き駐車スペースの場所を表示部により知らせる機能を有しており、例えばこれと同時に、接触するおそれのある車両や歩行者が近傍に存在する場合には、その存在を表示部に示して運転手に知らせる機能を有している。
【0032】
具体例を示す。
車両133が駐車場に進入しようとしている場合、その存在はミリ波レーダ装置118によって検知される。これと同時に、同じポールに設けられたミリ波レーダ装置119は、その車両133の左方から歩行者134が向かっていることを検知している。
また、空き駐車スペースの有無は各駐車スペースの床若しくは天井に配置されたセンサ121によって判断される。このセンサ121によって全駐車場内の空きスペースの情報が一括管理され、その情報は各ミリ波レーダ装置111〜119と共有されている。これにより、ミリ波レーダ装置111〜119は、進入してきた車両133に対して、最も近い場所の空き駐車スペースを知らせることができる。
【0033】
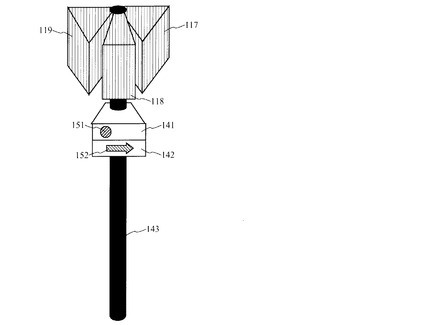
図7には、ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示してある。
本例では、ポール143の上端に3個のミリ波レーダ装置117、118、119がそれぞれ異なる通路を向く方向で取り付けられており、それより下の方に表示部141、142が取り付けられている。また、表示部141にはランプ151が設けられており、表示部142にはランプからなる矢印152が設けられている。
【0034】
本具体例では、車両133の左方から歩行者134が向かってくるため、ミリ波レーダ装置118の検知範囲(車両133)の方に向いている表示部141のランプ151を赤色などに点灯又は点滅等させて、左方からの危険を知らせる。
また、車両133に対して近くの空き駐車スペースは右方にあるため、ミリ波レーダ装置118の検知範囲(車両133)の方に向いている表示部142に、右方向へ進むことを示す青色などの矢印152が点灯等されて示される。
【0035】
具体例の続きを示す。
車両131が駐車場に進入しようとしている場合、その存在はミリ波レーダ装置111によって検知される。これと同時に、同じポールに設けられたミリ波レーダ装置112は、車両131の左方から車両132が向かっていることを検知している。
【0036】
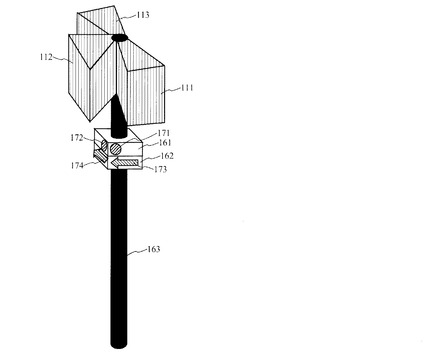
図8には、ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示してある。
本例では、ポール163の上端に3個のミリ波レーダ装置111、112、113がそれぞれ異なる通路を向く方向で取り付けられており、それより下の方に表示部161、162が取り付けられている。また、表示部161にはランプ171、172が設けられており、表示部162にはランプからなる矢印173、174が設けられている。
【0037】
本具体例では、車両131の左方から車両132が向かってくるため、ミリ波レーダ装置111の検知範囲(車両131)の方に向いている表示部161のランプ171を赤色などで点灯又は点滅等させて、左方からの危険を知らせる。
また、車両131に対して近くの空き駐車スペースは左方にあるため、ミリ波レーダ装置111の検知範囲(車両131)の方に向いている表示部162に、左方向へ進むことを示す青色などの矢印173が点灯等されて示される。
【0038】
また、車両132に対しては、右方から車両131が向かってくるため、ミリ波レーダ装置112の検知範囲(車両132)の方に向いている表示部161のランプ172を赤色などで点灯又は点滅等させて、右方からの危険を知らせる。
また、車両132に対して近くの空き駐車スペースは左方にあるため、ミリ波レーダ装置112の検知範囲(車両132)の方に向いている表示部162に、左方向へ進むことを示す青色などの矢印174が点灯等されて示される。
【0039】
ここで、図6では、例えば、ミリ波レーダ装置111〜113とミリ波レーダ装置114〜116は一部のアンテナ(本例では、ミリ波レーダ装置112のアンテナとミリ波レーダ装置116のアンテナ)を対向させて設置している。このため、両装置が同一周波数f0の電波を発射した場合には、電波干渉が生じて、FM−CWレーダの検知誤差を招くことが考えられる。そこで、本例では、このように対向する2つのレーダ装置には互いに異なる発射周波数f0、f1を割り当てており、これにより、両者の検知誤差を低減することが可能である。
【0040】
図9には、駐車場に設置する表示部の表示の一例を示してある。
本例の表示部181〜183(表示部の全体)は、表示板から構成されており、ランプの点灯等を行うばかりでなく、文字等も表示する。
具体的には、上段の表示部181は、接近する移動体の有無を知らせる表示部分であり、本例では、左側からの移動体の接近があることが検知されたことに応じて、左右の2個のランプの内の左側のランプが赤色などで点灯等され、且つ、その中央に、「止まれ」の指示(本例では、赤色などの「止」という文字)を表示している。
【0041】
中段の表示部182は、移動体との接触の危険性が無い場合に表示される進行方向を指示する矢印の表示部分であり、本例では、右方向に移動することで空き駐車スペースが存在することを、青色などの右向きの矢印を表示して示している。
下段の表示部183は、駐車場内の駐車状況のマップ表示を行う表示部分であり、各駐車スペースに配置されたセンサ121によって検出された駐車状況(駐車されているか或いは空いているか)を表示している。本例では、全ての駐車スペースを示すマップ上において、駐車されている箇所は赤色などで表示され、空いている箇所は黄色などで表示されている。これにより、駐車場全体の駐車状況を運転手に知らせることができる。
【0042】
(FM−CW方式のミリ波レーダ装置の例)
図10には、FM−CW方式のミリ波レーダ装置の構成例(内部ブロックの例)を示してある。
本例のミリ波レーダ装置は、FM(Frequency Modulation)変調器201、ミリ波発振器202、送信増幅器203、送信アンテナ204、受信アンテナ211、受信増幅器212、ミキサ213、IF(中間周波数)増幅器214、信号処理部215、表示部216を備えている。
【0043】
本例のミリ波レーダ装置における動作の一例を示す。
FM変調器201によって変調されたミリ波発振器202の出力信号が、送信増幅器203で増幅された後に、送信アンテナ204から放射される。
この放射波が対象物により反射された反射波が、受信アンテナ211で受信され、受信増幅器212で増幅された後に、ミキサ213によって、ミリ波発振器202の出力信号とミキシングされ、そして、その結果の信号が、IF増幅器214により増幅される。その後、その結果の信号が、信号処理部215により処理されて、その処理結果の情報(例えば、距離や速度の情報や、危険や進行方向を知らせる情報、など)が表示部216に表示される。このように、送信周波数と受信周波数との差であるビート周波数を検出することにより、ミリ波レーダ装置と対象物との間の距離及び速度(例えば、相対速度)を知ることができる。
【0044】
図11には、円偏波を用いるFM−CW方式のミリ波レーダ装置の構成例(内部ブロックの例)を示してある。
本例のミリ波レーダ装置は、FM変調器221、ミリ波発振器222、送信増幅器223、円偏波送信アンテナ(右旋又は左旋)224、円偏波受信アンテナ(右旋又は左旋)A1、受信増幅器B1、ミキサC1、IF(中間周波数)増幅器D1、円偏波受信アンテナ(左旋又は右旋)A2、受信増幅器B2、ミキサC2、IF(中間周波数)増幅器D2、信号処理部231、表示部232を備えている。
【0045】
本例のミリ波レーダ装置における動作の一例を示す。
FM変調器221によって変調されたミリ波発振器222の出力信号が、送信増幅器223で増幅された後に、円偏波送信アンテナ224から放射される。
この放射波が対象物により反射された反射波が、2つの受信系のそれぞれにおいて、円偏波受信アンテナA1、A2で受信され、受信増幅器B1、B2で増幅された後に、ミキサC1、C2によって、ミリ波発振器222の出力信号とミキシングされ、そして、その結果の信号が、IF増幅器D1、D2により増幅される。その後、その結果の信号が、信号処理部231により処理されて、その処理結果の情報(例えば、距離や速度の情報や、危険や進行方向を知らせる情報、など)が表示部232に表示される。このように、送信周波数と受信周波数との差であるビート周波数を検出することにより、ミリ波レーダ装置と対象物との間の距離及び速度(例えば、相対速度)を知ることができる。
【0046】
ここで、円偏波を用いることについて説明する。
例えば、狭い交差点や駐車場内などでは、対象物以外の反射物が周囲に存在する。この場合、対象物からの直接反射波以外に、周囲の物体による不要な多重反射波を受信アンテナが受信する可能性がある。
そこで、本例では、送受信アンテナに円偏波アンテナ224、A1、A2を使用している。
円偏波は、反射波の旋回方向が反射前と逆になる特性がある。従って、右旋の円偏波アンテナから放射された反射波は、左旋の円偏波アンテナでは受信できるが、右旋の円偏波アンテナでの受信ではその受信レベルは激減する。同様に、左旋の円偏波アンテナから放射された反射波は、右旋の円偏波アンテナでは受信できるが、左旋の円偏波アンテナでの受信ではその受信レベルは激減する。
【0047】
本例では、この特性を用いることとし、1つの円偏波送信アンテナ224と、互いに逆旋回方向の2つの円偏波受信アンテナA1、A2を使用している。
例えば、送信アンテナとして右旋の円偏波アンテナを用いた場合に、2つの受信アンテナのうちで左旋の円偏波アンテナの受信レベルの方が高いときには、対象物からの直接反射波が受信されたと判断し、有意な検知結果とする。
【0048】
一方、送信アンテナとして右旋の円偏波アンテナを用いた場合に、2つの受信アンテナのうちで右旋の円偏波アンテナの方の受信レベルが高いときには、偶数回の多重反射波が受信されたと判断し、不要な検知結果とする。
また、送信アンテナとして左旋の円偏波アンテナを用いた場合には、受信アンテナの右旋、左旋の関係が上記の場合と逆になる。
このように、1つの円偏波送信アンテナ224と、逆旋回方向の2つの円偏波受信アンテナA1、A2を用いることで、多重反射による検知誤差を減らすことができる。
【0049】
ここで、上記した各判断は、例えば、各アンテナの旋回方向の情報をメモリに記憶等する信号処理部231により行われる。また、信号処理部231は、例えば、受信した信号のレベルについて、円偏波送信アンテナ224とは逆の旋回方向の受信アンテナの方が高い受信レベルであったときにのみ、受信信号を復調する。
【0050】
(まとめ)
以上のように、本例の移動体検知システムでは、車両や歩行者等の移動体の有無を検知するセンサとして、交差点や駐車場の分岐路などにミリ波帯のFM−CW方式のレーダ装置を設置し、このミリ波レーダ装置により対人や対物の検知を行い、交差点や駐車場などを監視する。また、ミリ波レーダ装置は、その内部又は外部の表示部(表示装置)と接続され、危険な移動体の有無や適切な移動方向等の情報を表示させて運転手や歩行者に知らせる。
【0051】
また、ミリ波レーダ装置(無線装置)は、例えば、固定して設置され、無線により信号を送受信する送受信部や、内部又は外部の表示部を有しており、送受信部によって送信した電波の反射波を利用して移動体(移動物体)の接近を検知し、移動体の検知結果に基づいて、移動体に対して、危険を知らせる若しくは適切な移動方向(進行方向)を指示するためなどの所定の表示内容を表示部に表示する。
【0052】
従って、本例の移動体検知システムでは、例えば、信号機が無い交差点等において、従来のミラーでの確認に代えて或いはそれと共に、運転手に通行車両の有無を事前に知らせて、衝突事故を未然に防ぐことができる。
また、本例の移動体検知システムでは、例えば、混雑時の駐車場等において、運転手に車両や歩行者の有無を事前に知らせることができ、また、空き駐車スペースの場所を適切に知らせることができる。これにより、駐車場内の接触事故を未然に防ぐことができ、また、従来のような人間による誘導作業を減らすことができる。
【0053】
具体例として、レーダの送信元とは別の方向に対して、車両等が接近している旨を通知することができる。また、車両等の進行方向を誘導することができる。
また、本例では、ミリ波のレーダを用いており、これにより、例えば、車両の高さ(又は、長さ)を正確に把握することが可能となり、トラックと乗用車の違いに応じた車両誘導或いは情報提示や、車高制限のある立体駐車場での車高に応じた車両誘導或いは情報提示、などが可能となる。
また、例えば、高速道路のSA/PA等では、進行方向が決められているため、空いている駐車スペースを探すことが困難であると考えられるが、本例の移動体検知システムを用いることで、進行方向を決めることなく、事故を防ぐことができる。
【0054】
また、例えば、ミリ波レーダ装置において、1つの円偏波送信アンテナと、互いに逆旋回方向の2つの円偏波受信アンテナを用いることで、多重反射による不要な受信波を判断することができ、検知誤差を減らすことができる。
以上のように、本例の移動体検知システムでは、車両や歩行者等の移動体の検知結果に応じて、移動体に事前に危険を知らせることや、移動体に適切な移動方向を指示することを行うことができ、これにより、種々な場面で、車両の運転手や歩行者などの利便性を高めることができる。
【0055】
なお、本例の移動体検知システムや本例の移動体検知表示装置(本例では、表示部を有するミリ波レーダ装置)では、車両や歩行者により移動体が構成されており、複数のミリ波レーダ装置の機能により複数の移動体検知手段が構成されており、信号処理部の機能により進行方向決定手段(或いは、進行方向取得手段)が構成されており、例えば駐車場のセンサにより位置検出手段が構成されており、表示部の機能により表示手段が構成されている。
また、本例では、各レーダ装置間の情報を統括し、制御するための制御装置については記載がされていないが、各レーダ装置の情報を一括収集するサーバのような制御装置を有し、同制御装置によって収集されたデータを元に統計をとり、データ管理することも可能である。
【0056】
ここで、本発明に係るシステムや装置などの構成としては、必ずしも以上に示したものに限られず、種々な構成が用いられてもよい。また、本発明は、例えば、本発明に係る処理を実行する方法或いは方式や、このような方法や方式を実現するためのプログラムや当該プログラムを記録する記録媒体などとして提供することも可能であり、また、種々なシステムや装置として提供することも可能である。
また、本発明の適用分野としては、必ずしも以上に示したものに限られず、本発明は、種々な分野に適用することが可能なものである。
また、本発明に係るシステムや装置などにおいて行われる各種の処理としては、例えばプロセッサやメモリ等を備えたハードウエア資源においてプロセッサがROM(Read Only Memory)に格納された制御プログラムを実行することにより制御される構成が用いられてもよく、また、例えば当該処理を実行するための各機能手段が独立したハードウエア回路として構成されてもよい。
また、本発明は上記の制御プログラムを格納したフロッピー(登録商標)ディスクやCD(Compact Disc)−ROM等のコンピュータにより読み取り可能な記録媒体や当該プログラム(自体)として把握することもでき、当該制御プログラムを当該記録媒体からコンピュータに入力してプロセッサに実行させることにより、本発明に係る処理を遂行させることができる。
【符号の説明】
【0057】
1〜4、51〜53、111〜119・・ミリ波レーダ装置、 11〜14、61〜63・・検知範囲、 21、22、72、73、131〜133・・車両、 23、71、134・・歩行者、 31、81、101、141、142、161、162、181〜183・・表示部、 32、82、143、163・・ポール、 41〜43、91、92、151、171、172・・ランプ、 121・・センサ、 152、173、174・・矢印、
201、221・・FM変調器、 202、222・・ミリ波発振器、 203、223・・送信増幅器、 204・・送信アンテナ、 211・・受信アンテナ、 212、B1、B2・・受信増幅器、 213、C1、C2・・ミキサ、 214、D1、D2・・IF増幅器、 215、231・・信号処理部、 216、232・・表示部、 224・・円偏波送信アンテナ、 A1、A2・・円偏波受信アンテナ、
【技術分野】
【0001】
本発明は、車両等の移動体の有無を検知する移動体検知システムや移動体検知表示装置に関し、特に、移動体に適切な移動方向を指示することを行う移動体検知システムや移動体検知表示装置に関する。
【背景技術】
【0002】
(背景の第1の例)
例えば、信号機が無い交差点では、出会いがしらの衝突事故が発生し易い。このような場所での通行車両の有無の確認は、主に、交差点に設置されたミラーによる目視確認によって行われる。
しかしながら、この方法では、ミラーに映された範囲のみしか確認することができない。また、運転手は様々な方向の状況確認をするため、ミラーに映された状況を適切に確認しきれない場合もあり得る。更に、ミラーは、雨天時や夜間の状態や、ほこり等により汚れた状態などでは、認識精度を悪くする。
こうしたことから、信号機が無い交差点では、従来のミラーでの確認に代えて或いはそれと共に、運転手に通行車両の有無を事前に知らせて、衝突事故を未然に防ぐためのシステムを設けた方が好ましいと考えられる。
【0003】
(背景の第2の例)
例えば、混雑時の駐車場では、空き駐車スペースを探すために駐車場内を巡回する車両がよく見られる。このとき、運転手は駐車場内のどのあたりに空き駐車スペースがあるのかを知ることができず、運良く空き駐車スペースを見つけるまで、探し続けなければならない。
だが、この際、駐車場内には巡回する車両や歩行者が数多く存在することになり、接触事故の危険性があり得る。
【0004】
現在、空き駐車スペースを誘導する方法としては、人間による方法と、駐車スペースに設置されたセンサによる方法がある。
しかしながら、人間による方法では、駐車場管理の人間が車両に対して進行方向を適宜指示するため、労力や人件費が必要となる。一方、センサによる方法では、空き駐車スペースの場所を駐車場内の表示板やランプ等によって運転手に知らせることは可能であるが、それと同時に駐車場内の危険を知らせることはできない。
こうしたことから、駐車場内における接触事故を未然に防ぐために、運転手に車両や歩行者の有無を事前に知らせ、且つ、空き駐車スペースの場所を適切に知らせるシステムを設けた方が好ましいと考えられる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平8−305998号公報
【特許文献2】特開平10−122886号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述のように、従来では、駐車場などで、移動体の利便性(例えば、車両の運転手の利便性)を高めることができるシステムの開発が望まれていた。
本発明は、このような従来の事情に鑑み為されたもので、車両等の移動体に適切な移動方向を指示することを行うことができる移動体検知システムや移動体検知表示装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
(移動体検知システムの説明)
上記目的を達成するため、本発明では、移動体検知システムにおいて、次のような構成とした。
すなわち、移動体検知手段が、検知範囲に存在する移動体を検知する。進行方向決定手段が、前記移動体検知手段により検知された移動体に対して表示する進行方向を決定する。表示手段が、前記移動体検知手段により検知された移動体に対して、前記進行方向決定手段により決定された進行方向の情報を表示する。
従って、車両等の移動体に適切な移動方向を指示することを行うことができ、利便性を高めることができる。
【0008】
更に、一構成例として、本発明では、移動体検知システムにおいて、次のような構成とした。
すなわち、所定の領域における空きスペースへの進行方向を移動体に対して表示するシステムとした。
そして、前記所定の領域について異なる検知範囲を有する複数の移動体検知手段を備えた。前記進行方向決定手段は、前記所定の領域における空きスペースの位置を検出する位置検出手段を有し、前記移動体検知手段により検知された移動体に対して表示する進行方向として、当該移動体を前記位置検出手段により検出された空きスペースの位置へ誘導するための進行方向を決定する。
従って、所定の領域における空きスペースへの進行方向を移動体に対して表示することができ、利便性を高めることができる。
【0009】
ここで、移動体としては、種々なものが用いられてもよく、例えば、車両や人(歩行者等)などを用いることができる。
また、移動体を検知する態様としては、例えば、移動体の存在の有無、移動体の速度、移動体の距離(例えば、相対的な距離)などの1以上を検知する態様を用いることができる。
また、移動体検知手段としては、種々なものが用いられてもよく、例えば、ミリ波の電波を無線により放射してその反射波に基づいて移動体を検知するレーダ装置を用いることができる。
【0010】
また、表示手段としては、種々なものが用いられてもよく、例えば、表示板のようなものを用いることができ、また、例えば、所定の色の光を点灯或いは点滅等させるランプを用いることや、所定の色で文字や図形等を表示する画面を用いることができる。
また、進行方向の情報としては、種々な情報が用いられてもよく、例えば、進行方向を示す矢印の情報を用いることができる。
【0011】
また、移動体に対して空きスペースへの進行方向を表示するシステムにおける所定の領域としては、種々な領域が用いられてもよく、例えば、駐車場などの領域を用いることができる。一般に、駐車場では、車両を駐車するための複数の位置(区画)が線などで示されており、各位置毎にそのスペースが車両で駐車されているか又はいないか(つまり、空いているか)が決まる。
【0012】
また、空きスペースの位置を検出する位置検出手段としては、種々なものが用いられてもよく、一例として、駐車場などにおける各位置(各区画)が空いているか否かを検出するセンサを用いて構成することができる。
また、移動体を空きスペースの位置へ誘導するための進行方向を決定する態様としては、例えば、移動体が存在する位置に最も近い(或いは、予め設定された条件等に基づいて近いと判定される)空きスペースの位置へ誘導するための進行方向を決定する態様を用いることができ、この場合、例えば、移動体に近い(例えば、最も近い)空きスペースの位置を決定するための処理手順が予め設定される。
【0013】
また、複数の移動体検知手段を備える場合には、それぞれの移動体検知手段の検知範囲としては、種々な態様で設定されてもよく、例えば、それぞれの移動体検知手段の検知範囲をそれぞれ異なる通路或いは道路等とするような態様を用いることができる。
また、複数の移動体検知手段を備える場合には、例えば、各移動体検知手段の間で検知結果の情報を有線や無線で通信して把握や利用してもよく、或いは、これら複数の移動体検知手段を管理する装置などが、各移動体検知手段による検知結果の情報を有線や無線で受信して管理(記憶等)し、その管理情報を用いて、予め設定された条件等に従って、各移動体検知手段に各種の指示を送信して制御することや、表示対象とする情報を表示手段に送信して表示させることなどを行うような構成とすることも可能である。
【0014】
また、表示手段により移動体等に対して種々な情報が表示されてもよく、例えば、危険を知らせるための情報や、移動体の速度や距離の情報や、指示内容等を示す文字の情報や、所定の領域における全体的な位置(区画)の地図や空きスペース等を示す情報、などを表示する態様が用いられてもよい。
【0015】
一構成例として、通路(或いは、道路)Aと通路Bが交差しており、通路Aを通行してその交差点へ向かっている移動体Aが移動体検知手段Aにより検知されるとともに、通路Bを通行してその交差点へ向かっている移動体B(又は、その交差点へ向かってはいないが通路Bに存在する移動体B)が移動体検知手段Bにより検知された場合に、移動体Aの方向に情報を表示するように設けられた表示手段Aにより移動体Aに対して、通路Bに危険(ここでは、他の移動体B)が存在することを、所定のランプの点灯等や、所定の文字などにより、その危険が存在する方向が判別されるように或いはその判別の情報は省略して、表示するような構成を用いることができる。
【0016】
(移動体検知表示装置の説明)
上記目的を達成するため、本発明では、移動体検知表示装置において、次のような構成とした。
すなわち、移動体検知手段が、検知範囲に存在する移動体を検知する。進行方向取得手段が、前記移動体検知手段により検知された移動体に対して表示する進行方向の情報を取得する。表示手段が、前記移動体検知手段により検知された移動体に対して、前記進行方向取得手段により取得された進行方向の情報を表示する。
従って、車両等の移動体に適切な移動方向を指示することを行うことができ、利便性を高めることができる。
【0017】
ここで、上述した移動体検知システムについて述べたことは、移動体検知表示装置に適用することも可能である。
また、進行方向取得手段としては、例えば、移動体検知手段により検知された移動体に対して表示する進行方向を決定する進行方向決定手段として構成されて、自ら進行方向を決定する機能を有してもよく、或いは、自ら進行方向を決定する機能は有さずに、移動体検知表示装置の外部の所定の装置(手段)により決定された進行方向の情報を受信して取得するものとして構成されてもよい。
【発明の効果】
【0018】
以上説明したように、本発明によると、車両等の移動体に適切な移動方向を指示することを行うことができ、利便性を高めることができる。
【図面の簡単な説明】
【0019】
【図1】四差路の交差点を上方から見た様子の一例を示す図である。
【図2】ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示す図である。
【図3】三差路の交差点を上方から見た様子の一例を示す図である。
【図4】ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示す図である。
【図5】交差点に設置する表示部の表示の一例を示す図である。
【図6】駐車場を上方から見た様子の一例を示す図である。
【図7】ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示す図である。
【図8】ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示す図である。
【図9】駐車場に設置する表示部の表示の一例を示す図である。
【図10】FM−CW方式のミリ波レーダ装置の構成例を示す図である。
【図11】円偏波を用いるFM−CW方式のミリ波レーダ装置の構成例を示す図である。
【発明を実施するための形態】
【0020】
本発明に係る実施例を図面を参照して説明する。
(第1の例)交差点における移動体検知の例を説明する。
図1には、四差路の交差点を上方から見た様子の一例を示してある。
本例では、4個のミリ波レーダ装置1〜4が、それぞれ、ポール(他のものでもよい)に取り付けられて、交差点の角に配置されている。ここで、ミリ波レーダ装置1とミリ波レーダ装置2は同一のポールに取り付けられており、ミリ波レーダ装置3とミリ波レーダ装置4は別の同一のポールに取り付けられている。
【0021】
また、4個のミリ波レーダ装置1〜4の各々の検知可能範囲は、検知範囲11〜14の各々で示されており、これらは四差路の各方向の所定範囲を検知している。
また、離れて設置されたミリ波レーダ装置1、2とミリ波レーダ装置3、4は、無線又は有線で通信し、各々の検知結果の情報を共有している。
また、四差路を通過する車両21、22や歩行者23といった移動体を示してある。
【0022】
図2には、ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示してある。なお、ここでは、ミリ波レーダ装置3、4を例として示すが、ミリ波レーダ装置1、2についても同様である。
本例では、ポール32の上端に2個のミリ波レーダ装置3、4がそれぞれ異なる道路を向く方向で取り付けられており、それより下の方に表示部31が取り付けられている。また、表示部31には、例えば赤色などに点灯等するランプ41、42、43が設けられている。
【0023】
本例のミリ波レーダ装置1〜4は、FM−CW方式で動作し、対向する移動体(車両21〜22や歩行者23等)の速度や距離を測ることができる。
また、本例のミリ波レーダ装置3、4(ミリ波レーダ装置1、2も同様)は、表示部31を有しており、ミリ波レーダ装置3、4の検知結果から判断した交差点に関する情報を表示部31に表示し、車両21〜22や歩行者23に知らせる機能を有している。
【0024】
図1に示される場面を用いて、表示部31の動作の一例を示す。
本例では、検知範囲12に交差点に向かう車両21が存在し、検知範囲13に交差点に向かう歩行者23が存在し、検知範囲14に交差点に向かう車両22が存在する。
このとき、ミリ波レーダ装置3、4の表示部31では、例えば、ミリ波レーダ装置4により車両22が交差点に向かっていることを検知したことにより、ミリ波レーダ装置3の検知範囲13(歩行者23)の方に向いているランプ43を点灯若しくは点滅などさせて、歩行者23に対して、左方に危険が存在することを知らせる。
【0025】
また、ミリ波レーダ装置2により車両21が検知され、ミリ波レーダ装置3により歩行者23が交差点に向かっていることが検知されたことにより、表示部31では、ミリ波レーダ装置4の検知範囲14(車両22)の方に向いている2個の左右のランプ41、42を点灯若しくは点滅などさせて、車両22に対して、右方及び左方共に危険が存在することを知らせる。
【0026】
このように、ミリ波レーダ装置1〜4と表示部31によって、交差点の各方向に存在する移動体21〜23に、交差点の各方向に危険があるかどうかを事前に知らせることができる。
これにより、車両21〜22及び歩行者23は、例えば従来のように交差点近くでミラーを凝視して自ら危険を確認するような必要がなく、本例では、表示部31に示された情報により比較的遠方から危険を知ることが可能となる。
【0027】
図3には、三差路の交差点を上方から見た様子の一例を示してある。
本例では、3個のミリ波レーダ装置51〜53、各ミリ波レーダ装置51〜53の検知範囲61〜63、歩行者71や車両72〜73を示してある。
ここで、基本的な構成や動作は図1や図2に示される四差路の場合と同じであるが、本例の三差路の場合には、1つのポールに3個のミリ波レーダ装置51〜53がそれぞれ3つの道路の各々を向く方向で取り付けられた構造(形状)を有している。
【0028】
図4には、ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示してある。
本例では、ポール82の上端に3個のミリ波レーダ装置51、52、53がそれぞれ異なる道路を向く方向で取り付けられており、それより下の方に表示部81が取り付けられている。また、表示部81には、ランプ91、92が設けられている。
このように、本例の構成では、図2に示されるものと同様に、ミリ波レーダ装置51〜53と表示部81を有しており、各方向に対して、交差点に関する状況を知らせることができる。
【0029】
図5には、交差点に設置する表示部の表示の一例を示してある。
本例の表示部101は、表示板から構成されており、ランプの点灯等を行うばかりでなく、文字等も表示する。
具体的には、本例の表示部101は、接近する移動体の有無を知らせるための表示を行い、図示の例では、左側からの移動体の接近があることを検知したことに応じて、左右のランプの内の左側のランプを点灯(例えば、赤色に点灯)させて、その中央に「止まれ」という文字(例えば、赤色の文字)の指示を表示している。また、FM−CWレーダにより接近物の速度を検知することが可能であり、本例では、表示部101は、検知された速度のインジケータ表示や数値表示(例えば、赤色での表示)をしている。これにより、例えば、人間の目視による速度認識誤差に起因した接触事故を減らすことができると考えられる。
【0030】
(第2の例)駐車場内における移動体検知の例を説明する。
図6には、駐車場を上方から見た様子の一例を示してある。
本例では、駐車場内の3箇所にミリ波レーダ装置が設置されており、1箇所目には1つのポールに3個のミリ波レーダ装置111〜113が取り付けられたものが設置されており、2箇所目には1つのポールに3個のミリ波レーダ装置114〜116が取り付けられたものが設置されており、3箇所目には1つのポールに3個のミリ波レーダ装置117〜119が取り付けられたものが設置されている。
また、各駐車スペースの床若しくは天井には、車両の有無を判定するセンサ121(図6では、1個のみを符号で示した)が設けられている。
また、駐車場内には、空き駐車スペースを探す車両131〜133や、歩行者134が存在している。
【0031】
本例では、ミリ波レーダ装置111〜119は、空き駐車スペースを探す車両に対して、近隣の空き駐車スペースの場所を表示部により知らせる機能を有しており、例えばこれと同時に、接触するおそれのある車両や歩行者が近傍に存在する場合には、その存在を表示部に示して運転手に知らせる機能を有している。
【0032】
具体例を示す。
車両133が駐車場に進入しようとしている場合、その存在はミリ波レーダ装置118によって検知される。これと同時に、同じポールに設けられたミリ波レーダ装置119は、その車両133の左方から歩行者134が向かっていることを検知している。
また、空き駐車スペースの有無は各駐車スペースの床若しくは天井に配置されたセンサ121によって判断される。このセンサ121によって全駐車場内の空きスペースの情報が一括管理され、その情報は各ミリ波レーダ装置111〜119と共有されている。これにより、ミリ波レーダ装置111〜119は、進入してきた車両133に対して、最も近い場所の空き駐車スペースを知らせることができる。
【0033】
図7には、ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示してある。
本例では、ポール143の上端に3個のミリ波レーダ装置117、118、119がそれぞれ異なる通路を向く方向で取り付けられており、それより下の方に表示部141、142が取り付けられている。また、表示部141にはランプ151が設けられており、表示部142にはランプからなる矢印152が設けられている。
【0034】
本具体例では、車両133の左方から歩行者134が向かってくるため、ミリ波レーダ装置118の検知範囲(車両133)の方に向いている表示部141のランプ151を赤色などに点灯又は点滅等させて、左方からの危険を知らせる。
また、車両133に対して近くの空き駐車スペースは右方にあるため、ミリ波レーダ装置118の検知範囲(車両133)の方に向いている表示部142に、右方向へ進むことを示す青色などの矢印152が点灯等されて示される。
【0035】
具体例の続きを示す。
車両131が駐車場に進入しようとしている場合、その存在はミリ波レーダ装置111によって検知される。これと同時に、同じポールに設けられたミリ波レーダ装置112は、車両131の左方から車両132が向かっていることを検知している。
【0036】
図8には、ポールに取り付けられたミリ波レーダ装置及び表示部の概観の一例を示してある。
本例では、ポール163の上端に3個のミリ波レーダ装置111、112、113がそれぞれ異なる通路を向く方向で取り付けられており、それより下の方に表示部161、162が取り付けられている。また、表示部161にはランプ171、172が設けられており、表示部162にはランプからなる矢印173、174が設けられている。
【0037】
本具体例では、車両131の左方から車両132が向かってくるため、ミリ波レーダ装置111の検知範囲(車両131)の方に向いている表示部161のランプ171を赤色などで点灯又は点滅等させて、左方からの危険を知らせる。
また、車両131に対して近くの空き駐車スペースは左方にあるため、ミリ波レーダ装置111の検知範囲(車両131)の方に向いている表示部162に、左方向へ進むことを示す青色などの矢印173が点灯等されて示される。
【0038】
また、車両132に対しては、右方から車両131が向かってくるため、ミリ波レーダ装置112の検知範囲(車両132)の方に向いている表示部161のランプ172を赤色などで点灯又は点滅等させて、右方からの危険を知らせる。
また、車両132に対して近くの空き駐車スペースは左方にあるため、ミリ波レーダ装置112の検知範囲(車両132)の方に向いている表示部162に、左方向へ進むことを示す青色などの矢印174が点灯等されて示される。
【0039】
ここで、図6では、例えば、ミリ波レーダ装置111〜113とミリ波レーダ装置114〜116は一部のアンテナ(本例では、ミリ波レーダ装置112のアンテナとミリ波レーダ装置116のアンテナ)を対向させて設置している。このため、両装置が同一周波数f0の電波を発射した場合には、電波干渉が生じて、FM−CWレーダの検知誤差を招くことが考えられる。そこで、本例では、このように対向する2つのレーダ装置には互いに異なる発射周波数f0、f1を割り当てており、これにより、両者の検知誤差を低減することが可能である。
【0040】
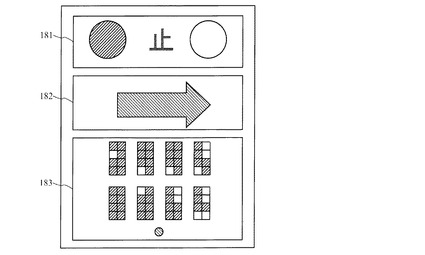
図9には、駐車場に設置する表示部の表示の一例を示してある。
本例の表示部181〜183(表示部の全体)は、表示板から構成されており、ランプの点灯等を行うばかりでなく、文字等も表示する。
具体的には、上段の表示部181は、接近する移動体の有無を知らせる表示部分であり、本例では、左側からの移動体の接近があることが検知されたことに応じて、左右の2個のランプの内の左側のランプが赤色などで点灯等され、且つ、その中央に、「止まれ」の指示(本例では、赤色などの「止」という文字)を表示している。
【0041】
中段の表示部182は、移動体との接触の危険性が無い場合に表示される進行方向を指示する矢印の表示部分であり、本例では、右方向に移動することで空き駐車スペースが存在することを、青色などの右向きの矢印を表示して示している。
下段の表示部183は、駐車場内の駐車状況のマップ表示を行う表示部分であり、各駐車スペースに配置されたセンサ121によって検出された駐車状況(駐車されているか或いは空いているか)を表示している。本例では、全ての駐車スペースを示すマップ上において、駐車されている箇所は赤色などで表示され、空いている箇所は黄色などで表示されている。これにより、駐車場全体の駐車状況を運転手に知らせることができる。
【0042】
(FM−CW方式のミリ波レーダ装置の例)
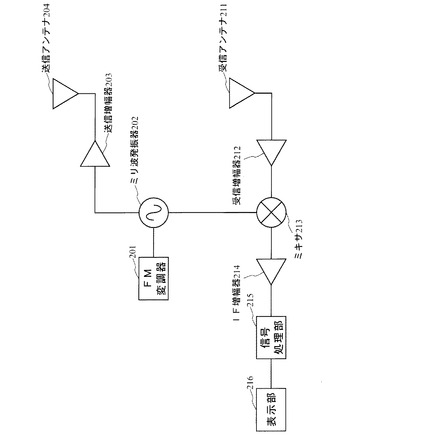
図10には、FM−CW方式のミリ波レーダ装置の構成例(内部ブロックの例)を示してある。
本例のミリ波レーダ装置は、FM(Frequency Modulation)変調器201、ミリ波発振器202、送信増幅器203、送信アンテナ204、受信アンテナ211、受信増幅器212、ミキサ213、IF(中間周波数)増幅器214、信号処理部215、表示部216を備えている。
【0043】
本例のミリ波レーダ装置における動作の一例を示す。
FM変調器201によって変調されたミリ波発振器202の出力信号が、送信増幅器203で増幅された後に、送信アンテナ204から放射される。
この放射波が対象物により反射された反射波が、受信アンテナ211で受信され、受信増幅器212で増幅された後に、ミキサ213によって、ミリ波発振器202の出力信号とミキシングされ、そして、その結果の信号が、IF増幅器214により増幅される。その後、その結果の信号が、信号処理部215により処理されて、その処理結果の情報(例えば、距離や速度の情報や、危険や進行方向を知らせる情報、など)が表示部216に表示される。このように、送信周波数と受信周波数との差であるビート周波数を検出することにより、ミリ波レーダ装置と対象物との間の距離及び速度(例えば、相対速度)を知ることができる。
【0044】
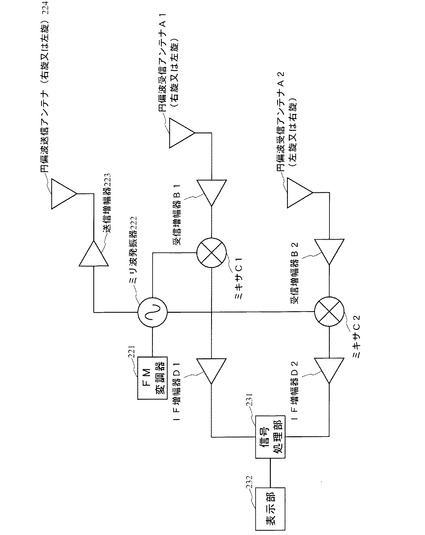
図11には、円偏波を用いるFM−CW方式のミリ波レーダ装置の構成例(内部ブロックの例)を示してある。
本例のミリ波レーダ装置は、FM変調器221、ミリ波発振器222、送信増幅器223、円偏波送信アンテナ(右旋又は左旋)224、円偏波受信アンテナ(右旋又は左旋)A1、受信増幅器B1、ミキサC1、IF(中間周波数)増幅器D1、円偏波受信アンテナ(左旋又は右旋)A2、受信増幅器B2、ミキサC2、IF(中間周波数)増幅器D2、信号処理部231、表示部232を備えている。
【0045】
本例のミリ波レーダ装置における動作の一例を示す。
FM変調器221によって変調されたミリ波発振器222の出力信号が、送信増幅器223で増幅された後に、円偏波送信アンテナ224から放射される。
この放射波が対象物により反射された反射波が、2つの受信系のそれぞれにおいて、円偏波受信アンテナA1、A2で受信され、受信増幅器B1、B2で増幅された後に、ミキサC1、C2によって、ミリ波発振器222の出力信号とミキシングされ、そして、その結果の信号が、IF増幅器D1、D2により増幅される。その後、その結果の信号が、信号処理部231により処理されて、その処理結果の情報(例えば、距離や速度の情報や、危険や進行方向を知らせる情報、など)が表示部232に表示される。このように、送信周波数と受信周波数との差であるビート周波数を検出することにより、ミリ波レーダ装置と対象物との間の距離及び速度(例えば、相対速度)を知ることができる。
【0046】
ここで、円偏波を用いることについて説明する。
例えば、狭い交差点や駐車場内などでは、対象物以外の反射物が周囲に存在する。この場合、対象物からの直接反射波以外に、周囲の物体による不要な多重反射波を受信アンテナが受信する可能性がある。
そこで、本例では、送受信アンテナに円偏波アンテナ224、A1、A2を使用している。
円偏波は、反射波の旋回方向が反射前と逆になる特性がある。従って、右旋の円偏波アンテナから放射された反射波は、左旋の円偏波アンテナでは受信できるが、右旋の円偏波アンテナでの受信ではその受信レベルは激減する。同様に、左旋の円偏波アンテナから放射された反射波は、右旋の円偏波アンテナでは受信できるが、左旋の円偏波アンテナでの受信ではその受信レベルは激減する。
【0047】
本例では、この特性を用いることとし、1つの円偏波送信アンテナ224と、互いに逆旋回方向の2つの円偏波受信アンテナA1、A2を使用している。
例えば、送信アンテナとして右旋の円偏波アンテナを用いた場合に、2つの受信アンテナのうちで左旋の円偏波アンテナの受信レベルの方が高いときには、対象物からの直接反射波が受信されたと判断し、有意な検知結果とする。
【0048】
一方、送信アンテナとして右旋の円偏波アンテナを用いた場合に、2つの受信アンテナのうちで右旋の円偏波アンテナの方の受信レベルが高いときには、偶数回の多重反射波が受信されたと判断し、不要な検知結果とする。
また、送信アンテナとして左旋の円偏波アンテナを用いた場合には、受信アンテナの右旋、左旋の関係が上記の場合と逆になる。
このように、1つの円偏波送信アンテナ224と、逆旋回方向の2つの円偏波受信アンテナA1、A2を用いることで、多重反射による検知誤差を減らすことができる。
【0049】
ここで、上記した各判断は、例えば、各アンテナの旋回方向の情報をメモリに記憶等する信号処理部231により行われる。また、信号処理部231は、例えば、受信した信号のレベルについて、円偏波送信アンテナ224とは逆の旋回方向の受信アンテナの方が高い受信レベルであったときにのみ、受信信号を復調する。
【0050】
(まとめ)
以上のように、本例の移動体検知システムでは、車両や歩行者等の移動体の有無を検知するセンサとして、交差点や駐車場の分岐路などにミリ波帯のFM−CW方式のレーダ装置を設置し、このミリ波レーダ装置により対人や対物の検知を行い、交差点や駐車場などを監視する。また、ミリ波レーダ装置は、その内部又は外部の表示部(表示装置)と接続され、危険な移動体の有無や適切な移動方向等の情報を表示させて運転手や歩行者に知らせる。
【0051】
また、ミリ波レーダ装置(無線装置)は、例えば、固定して設置され、無線により信号を送受信する送受信部や、内部又は外部の表示部を有しており、送受信部によって送信した電波の反射波を利用して移動体(移動物体)の接近を検知し、移動体の検知結果に基づいて、移動体に対して、危険を知らせる若しくは適切な移動方向(進行方向)を指示するためなどの所定の表示内容を表示部に表示する。
【0052】
従って、本例の移動体検知システムでは、例えば、信号機が無い交差点等において、従来のミラーでの確認に代えて或いはそれと共に、運転手に通行車両の有無を事前に知らせて、衝突事故を未然に防ぐことができる。
また、本例の移動体検知システムでは、例えば、混雑時の駐車場等において、運転手に車両や歩行者の有無を事前に知らせることができ、また、空き駐車スペースの場所を適切に知らせることができる。これにより、駐車場内の接触事故を未然に防ぐことができ、また、従来のような人間による誘導作業を減らすことができる。
【0053】
具体例として、レーダの送信元とは別の方向に対して、車両等が接近している旨を通知することができる。また、車両等の進行方向を誘導することができる。
また、本例では、ミリ波のレーダを用いており、これにより、例えば、車両の高さ(又は、長さ)を正確に把握することが可能となり、トラックと乗用車の違いに応じた車両誘導或いは情報提示や、車高制限のある立体駐車場での車高に応じた車両誘導或いは情報提示、などが可能となる。
また、例えば、高速道路のSA/PA等では、進行方向が決められているため、空いている駐車スペースを探すことが困難であると考えられるが、本例の移動体検知システムを用いることで、進行方向を決めることなく、事故を防ぐことができる。
【0054】
また、例えば、ミリ波レーダ装置において、1つの円偏波送信アンテナと、互いに逆旋回方向の2つの円偏波受信アンテナを用いることで、多重反射による不要な受信波を判断することができ、検知誤差を減らすことができる。
以上のように、本例の移動体検知システムでは、車両や歩行者等の移動体の検知結果に応じて、移動体に事前に危険を知らせることや、移動体に適切な移動方向を指示することを行うことができ、これにより、種々な場面で、車両の運転手や歩行者などの利便性を高めることができる。
【0055】
なお、本例の移動体検知システムや本例の移動体検知表示装置(本例では、表示部を有するミリ波レーダ装置)では、車両や歩行者により移動体が構成されており、複数のミリ波レーダ装置の機能により複数の移動体検知手段が構成されており、信号処理部の機能により進行方向決定手段(或いは、進行方向取得手段)が構成されており、例えば駐車場のセンサにより位置検出手段が構成されており、表示部の機能により表示手段が構成されている。
また、本例では、各レーダ装置間の情報を統括し、制御するための制御装置については記載がされていないが、各レーダ装置の情報を一括収集するサーバのような制御装置を有し、同制御装置によって収集されたデータを元に統計をとり、データ管理することも可能である。
【0056】
ここで、本発明に係るシステムや装置などの構成としては、必ずしも以上に示したものに限られず、種々な構成が用いられてもよい。また、本発明は、例えば、本発明に係る処理を実行する方法或いは方式や、このような方法や方式を実現するためのプログラムや当該プログラムを記録する記録媒体などとして提供することも可能であり、また、種々なシステムや装置として提供することも可能である。
また、本発明の適用分野としては、必ずしも以上に示したものに限られず、本発明は、種々な分野に適用することが可能なものである。
また、本発明に係るシステムや装置などにおいて行われる各種の処理としては、例えばプロセッサやメモリ等を備えたハードウエア資源においてプロセッサがROM(Read Only Memory)に格納された制御プログラムを実行することにより制御される構成が用いられてもよく、また、例えば当該処理を実行するための各機能手段が独立したハードウエア回路として構成されてもよい。
また、本発明は上記の制御プログラムを格納したフロッピー(登録商標)ディスクやCD(Compact Disc)−ROM等のコンピュータにより読み取り可能な記録媒体や当該プログラム(自体)として把握することもでき、当該制御プログラムを当該記録媒体からコンピュータに入力してプロセッサに実行させることにより、本発明に係る処理を遂行させることができる。
【符号の説明】
【0057】
1〜4、51〜53、111〜119・・ミリ波レーダ装置、 11〜14、61〜63・・検知範囲、 21、22、72、73、131〜133・・車両、 23、71、134・・歩行者、 31、81、101、141、142、161、162、181〜183・・表示部、 32、82、143、163・・ポール、 41〜43、91、92、151、171、172・・ランプ、 121・・センサ、 152、173、174・・矢印、
201、221・・FM変調器、 202、222・・ミリ波発振器、 203、223・・送信増幅器、 204・・送信アンテナ、 211・・受信アンテナ、 212、B1、B2・・受信増幅器、 213、C1、C2・・ミキサ、 214、D1、D2・・IF増幅器、 215、231・・信号処理部、 216、232・・表示部、 224・・円偏波送信アンテナ、 A1、A2・・円偏波受信アンテナ、
【特許請求の範囲】
【請求項1】
移動体検知システムにおいて、
検知範囲に存在する移動体を検知する移動体検知手段と、
前記移動体検知手段により検知された移動体に対して表示する進行方向を決定する進行方向決定手段と、
前記移動体検知手段により検知された移動体に対して、前記進行方向決定手段により決定された進行方向の情報を表示する表示手段と、
を備えたことを特徴とする移動体検知システム。
【請求項2】
請求項1に記載の移動体検知システムにおいて、
所定の領域における空きスペースへの進行方向を移動体に対して表示するシステムであり、
前記所定の領域について異なる検知範囲を有する複数の移動体検知手段を備え、
前記進行方向決定手段は、前記所定の領域における空きスペースの位置を検出する位置検出手段を有し、前記移動体検知手段により検知された移動体に対して表示する進行方向として、当該移動体を前記位置検出手段により検出された空きスペースの位置へ誘導するための進行方向を決定する、
ことを特徴とする移動体検知システム。
【請求項3】
移動体検知表示装置において、
検知範囲に存在する移動体を検知する移動体検知手段と、
前記移動体検知手段により検知された移動体に対して表示する進行方向の情報を取得する進行方向取得手段と、
前記移動体検知手段により検知された移動体に対して、前記進行方向取得手段により取得された進行方向の情報を表示する表示手段と、
を備えたことを特徴とする移動体検知表示装置。
【請求項1】
移動体検知システムにおいて、
検知範囲に存在する移動体を検知する移動体検知手段と、
前記移動体検知手段により検知された移動体に対して表示する進行方向を決定する進行方向決定手段と、
前記移動体検知手段により検知された移動体に対して、前記進行方向決定手段により決定された進行方向の情報を表示する表示手段と、
を備えたことを特徴とする移動体検知システム。
【請求項2】
請求項1に記載の移動体検知システムにおいて、
所定の領域における空きスペースへの進行方向を移動体に対して表示するシステムであり、
前記所定の領域について異なる検知範囲を有する複数の移動体検知手段を備え、
前記進行方向決定手段は、前記所定の領域における空きスペースの位置を検出する位置検出手段を有し、前記移動体検知手段により検知された移動体に対して表示する進行方向として、当該移動体を前記位置検出手段により検出された空きスペースの位置へ誘導するための進行方向を決定する、
ことを特徴とする移動体検知システム。
【請求項3】
移動体検知表示装置において、
検知範囲に存在する移動体を検知する移動体検知手段と、
前記移動体検知手段により検知された移動体に対して表示する進行方向の情報を取得する進行方向取得手段と、
前記移動体検知手段により検知された移動体に対して、前記進行方向取得手段により取得された進行方向の情報を表示する表示手段と、
を備えたことを特徴とする移動体検知表示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−154610(P2011−154610A)
【公開日】平成23年8月11日(2011.8.11)
【国際特許分類】
【出願番号】特願2010−16594(P2010−16594)
【出願日】平成22年1月28日(2010.1.28)
【出願人】(000001122)株式会社日立国際電気 (5,007)
【Fターム(参考)】
【公開日】平成23年8月11日(2011.8.11)
【国際特許分類】
【出願日】平成22年1月28日(2010.1.28)
【出願人】(000001122)株式会社日立国際電気 (5,007)
【Fターム(参考)】
[ Back to top ]