
移動体検知装置及び移動体検知方法

【課題】精度良く移動体を検知できる簡易な構成の移動体検知装置及び移動体検知方法を提供する。
【解決手段】
車両に送信する送信波を発振する発振部と、発振部が発振した送信波を送信すると共に送信した送信波の反射波を受信する送受信部と、送受信部が受信した反射波が変動させる発振部のバイアス電圧を検出する検出部と、検出部が検出したバイアス電圧の変化に基づいて車両において移動する移動体を検知する検知処理を実行する移動体検知部とを備える移動体検知装置であって、移動体検知部は、検出部で検出するバイアス電圧に基づいて発振部に異常が生じたか否かを判定する判定処理を更に実行する。これによれば、移動体の検知に用いる発振部のバイアス電圧に基づいて発振部に異常が生じたか否かを判定するため、簡易な構成で精度良く移動体を検知できる。
【解決手段】
車両に送信する送信波を発振する発振部と、発振部が発振した送信波を送信すると共に送信した送信波の反射波を受信する送受信部と、送受信部が受信した反射波が変動させる発振部のバイアス電圧を検出する検出部と、検出部が検出したバイアス電圧の変化に基づいて車両において移動する移動体を検知する検知処理を実行する移動体検知部とを備える移動体検知装置であって、移動体検知部は、検出部で検出するバイアス電圧に基づいて発振部に異常が生じたか否かを判定する判定処理を更に実行する。これによれば、移動体の検知に用いる発振部のバイアス電圧に基づいて発振部に異常が生じたか否かを判定するため、簡易な構成で精度良く移動体を検知できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両において移動する移動体を検知する移動体検知装置及び移動体検知方法に関する。
【背景技術】
【0002】
近年、例えば、車両の盗難又は破壊を防止するため、車両において移動する移動体を検知する移動体検知装置が車両に搭載されている。この車両に搭載される移動体検知装置は、例えば、車内に向けて送信した電磁波の反射波を測定することで、車内及び車両周辺における移動体の移動を検知するドップラセンサで構成される。
【0003】
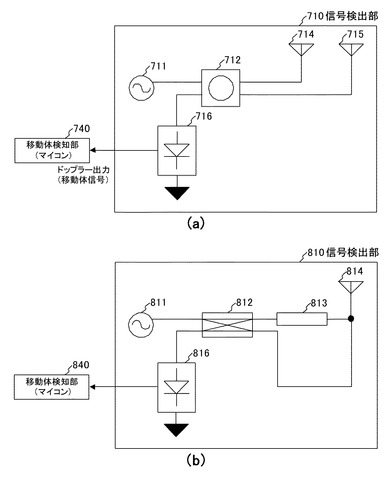
この一般的なドップラセンサは、図10(a)に示すように、車両に電磁波を送信する送信用アンテナ714と、送信用アンテナ714へ送信する送信波を発する発振部711と、発振部711が発した送信波を送信用アンテナ714へ中継するサーキュレータ712とを備える。また、このドップラセンサは、車両における移動体等で反射した反射波を受信する受信用アンテナ715と、受信用アンテナ715が受信した反射波と発振部711が発した送信波とを検波すると共に、検波した送信波と受信波とを混合してドップラ信号を出力する検波素子716とを更に備え、サーキュレータ712は反射波と送信波とを検波素子716へ中継することを特徴としている。
【0004】
また、送信用アンテナと受信用アンテナとを備えるのではなく、1つのアンテナを送信用と受信用とで共用した簡易な構成で車両において移動する移動体を検知できるドップラセンサが知られている。
このドップラセンサは、図10(b)に示すように、送信波を発振する発振部811と、送信波を送信すると共に送信波の反射波を受信する送受信用アンテナ814と、送受信用アンテナ814が受信した反射波から発振部811を隔離するアイソレータ813とを備える。また、このドップラセンサは、発振部811が発した送信信号を結合する送受信アンテナ814の方向へ中継すると共に、送受信用アンテナ814が受信した反射波を検波素子816の方向へ中継する方向性結合器812と、反射波及び送信波を検波してドップラ信号を出力する検波素子816とを備えることを特徴としている。
【0005】
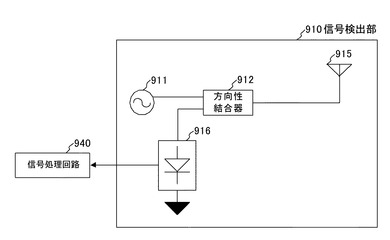
更に、送信波と送信波の反射波とを混合してドップラ信号を生成するドップラセンサよりも簡易な構成で車両へ移動体の侵入を検知できる侵入検知装置が知られるに至った(例えば、特許文献1参照)。
この侵入検知装置は、図11に示すように、送受信アンテナ915へ送信する送信信号を発する発振部911と、発振部911が発する送信信号を検波する検波素子916と、検波素子916が検波して出力する出力信号を処理する信号処理回路940とを備える。また、この侵入検知装置は、結合する送受信アンテナ915の方向と検波素子916の方向とに発振部911が発した送信信号を分岐して中継する方向性結合器を更に備え、信号処理回路940は、車両への侵入者で反射した反射波を送受信アンテナ915が受信することで発振部911の発する送信信号が変動することによりに生じる出力信号の変動を検出することを特徴としている。
【0006】
つまり、送受信アンテナ915が侵入者等の移動体からの反射波を受信すると、受信した反射波の影響を受けて発振部911からみた負荷が変動する。よって、この侵入検知装置は、発振部911からみた負荷の変動を利用して移動体を検知することを特徴としている。
【特許文献1】特開2007−333560号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところで、ドップラセンサでは、送信波と受信した反射波とを混合させてドップラ信号を検出する検波素子716及び816が必要になる。また、ドップラセンサでは、送信波と反射波とを所定の方向へ中継するサーキュレータ712又は方向性結合器812といったマッチング回路が必要である。更に、送信用アンテナと受信用アンテナとを一体化したドップラセンサでは、反射波を発振部811から隔離するアイソレータ813が必要になる。このため、ドップラセンサは、搭載する部品数が多く簡易な構成ではないという問題があった。つまり、搭載する部品数が多いドップラセンサは、部品の実装スペースを広く必要とし、部品の消費電力を多く必要とし、製造コストが高いという問題を生じていた。
【0008】
また、特許文献1に記載の侵入検知装置は、移動体を検知するために用いる発振部911からみた負荷を監視しないため、発振部911が正常であるか否かを判定できない。具体例としては、この侵入検知装置は、発振が停止する又は発振レベルが侵入を検知するには小さ過ぎるといった異常を検出できない。つまり、特許文献1に記載の侵入検知装置は、発振部911が正常であるいか否かを判定できないため、精度良く車両への侵入を検知できないという問題があった。
【0009】
本発明は、上記問題に鑑みて成されたものであり、その目的とするところは、精度良く移動体を検知できる簡易な構成の移動体検知装置及び移動体検知方法を提供することにある。
【課題を解決するための手段】
【0010】
本発明に係る移動体検知装置は、車両に送信する送信波を発振する発振部と、発振部が発振した送信波を送信すると共に送信した送信波の反射波を受信する送受信部と、送受信部が受信した反射波が変動させる発振部のバイアス電圧を検出する検出部と、検出部で検出するバイアス電圧に基づいて発振部が正常であるか否かを判定する判定処理と、判定処理で発振部が正常であると判定する場合に、検出部で検出する発振部のバイアス電圧の変化に基づいて車両において移動する移動体を検知する検知処理とを実行する移動体検知部とを備えることを特徴としている。
【0011】
上記構成において、発振部は、移動体検知装置から電力の供給を受けて発振し、移動体検知部は、発振部へ電力を供給する供給処理と、判定処理により発振部が正常でないと判定した場合に電源の供給を停止する停止処理とを更に実行し、判定処理は、供給処理により発振部へ電力を供給する前に検出部が検出したバイアス電圧と、後に検出したバイアス電圧とに基づいて発振部が正常であるか否かを判定する処理である構成を採用できる。
【0012】
上記構成において、発振部の発振と共振する誘電体共振部に対して電磁界により結合した線路を備え、検出部は、線路から発振部のバイアス電圧を検出する構成を採用できる。
【0013】
本発明に係る移動体検知方法は、車両に送信する送信波を発振部が発振する発振ステップと、発振ステップで発振した送信波を送信すると共に送信した送信波の反射波を受信する送受信ステップと、送受信ステップで受信した反射波が変動させる発振部のバイアス電圧を検出する検出ステップと、検出ステップで検出するバイアス電圧に基づいて発振部が正常であるか否かを判定する判定処理と、判定処理で発振部が正常であると判定する場合に、検出ステップで検出する発振部のバイアス電圧の変化に基づいて車両において移動する移動体を検知する検知処理とを実行する移動体検知ステップとを備えることを特徴としている。
【発明の効果】
【0014】
これらの構成によれば、移動体の検知に用いる発振部のバイアス電圧に基づいて発振部が正常であるか否かを判定するため、簡易な構成で精度良く移動体を検知できる。
【発明を実施するための最良の形態】
【0015】
以下、本発明の最良の実施形態について、添付図面を参照しつつ説明する。
【実施例1】
【0016】
先ず、図1を参照して、本発明の移動体検知装置100を備える移動体検知システム1について説明する。
【0017】
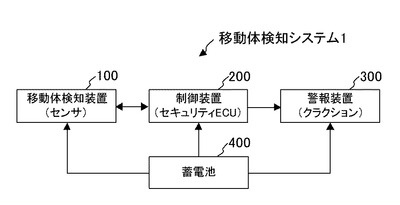
図1に示す移動体検知システム1は、車両に搭載される。車両は、例えば、乗用車、バス、及びトラック等の自動車で構成される。尚、本実施例では、車両が自動車で構成されるとして説明を行うが、これに限定される訳ではなく、原動機付自転車、軽車両、及びトロリーバス、戦車及び装甲車等の軍用車両、並びに鉄道車両で構成される実施例を採用できる。
本実施例において、移動体検知システム1が車両に搭載される場合について説明するが、これに限定される訳ではない。例えば、移動体検知システム1は、船舶、航空機、並びに人工衛星、宇宙探査機、及び宇宙ステーション等の宇宙機に搭載される構成を採用できる。また更に、移動体検知システム1は、車両又は船舶等に搭載されずに使用される構成を採用できる。
【0018】
移動体検知システム1は、移動体検知装置100、制御装置200、警報装置300、及び蓄電池400で構成される。ここで、移動体検知装置100について説明する前に、制御装置200、警報装置300、及び蓄電池400について説明する。
制御装置200は、例えば、ECU(Electronic Control Unit)で構成される。制御装置200は、特に例えば、セキュリティECUで構成され、車両の安全を確保するために車両に搭載された各種の装置を制御する。制御装置200は、移動体検知装置100、警報装置300、及び蓄電池400に接続する。制御装置200は、移動体検知装置100から車両において移動する移動体を検知したことを表す検知信号を受信した場合に、蓄電池400が提供する電力を用いて、車両への侵入を警報するよう警報装置400を制御する。尚、車両において移動する移動体とは、車両内部及び車両付近を移動する移動体をいう。ここで、車両付近とは、少なくとも車両に対して侵入行為を行うことができる範囲をいう。尚、制御装置200は、例えば、CAN(Controller Area Network)バス、又はLIN(Local Interconnect Network)バス等の通信路を介して他の制御装置と車両の安全を確保するために用いる情報を通信するが、本実施例においては説明を省略する。
【0019】
また、制御装置200は、移動体検知装置100の異常を表す異常信号を移動体検知装置100から取得した場合に、蓄電池400が提供する電力を用いて、移動体検知装置100の異常を警報するよう警報装置400を制御する。また、制御装置200は、移動体検知装置100から異常信号を受信した場合に、移動体の検知を停止するよう移動体検知装置100を制御する。具体例としては、制御装置200は、移動体検知装置100に対して検知を停止するよう命じる停止信号を出力する。また、これに限定される訳ではなく、制御装置200は、移動体検知装置100へ供給する電源を遮断して検知を停止するよう移動体検知装置100を制御する構成を採用できる。この構成によれば、効率的に誤検知を防止できる。
【0020】
警報装置300は、例えば、クラクション等の警笛、メータパネル等の表示装置、又はスピーカ等の音声出力装置で構成される。警報装置300は、制御装置200及び蓄電池400に接続する。警報装置300は、制御装置200に制御されて、蓄電池400が提供する電力を用いて、車両における移動体の移動を警報する音声の出力又は表示を行う。具体例としては、警報装置300は、クラクションを鳴らす、警報ランプを点灯させる、又は所定の警報音を出力する等して移動体の移動を警報する。また、警報装置300は、警報ランプを点滅させて点灯させる構成を採用できる。
【0021】
蓄電池400は、例えば、鉛蓄電池等の一般型のバッテリで構成される。蓄電池400は、移動体検知装置100、制御装置200、及び警報装置300に接続する。蓄電池400は、電力を蓄積し、蓄積した電力を移動体検知装置100、制御装置200、及び警報装置300に対して供給する。
【0022】
移動体検知装置100は、制御装置200に接続する。移動体検知装置100は、波動を用いて移動体を検知する。ここで、一例として、移動体の検知は、車両への侵入を検知するために行われるが、これに限定される訳ではない。尚、波動は、光、電磁波、電波、又は超音波を含む。移動体検知装置100は、車両における移動体の移動を検知すると検知信号を制御装置200へ出力する。また、移動体検知装置100は、移動体検知装置100が正常でない(以下、移動体検知装置100に異常が生じたともいう)と判定した場合には、異常信号を制御装置200へ出力すると共に、移動体の検知を停止する。
【0023】
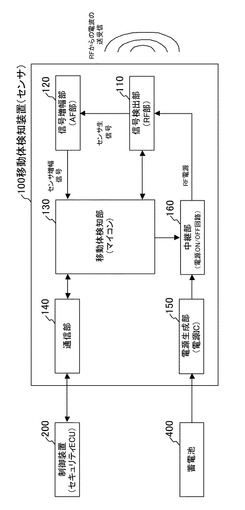
ここで、図2を参照して、移動体検知装置100の構成について機能に着目して説明する。図2は、移動体検知装置100の一構成例を表す機能ブロック図である。
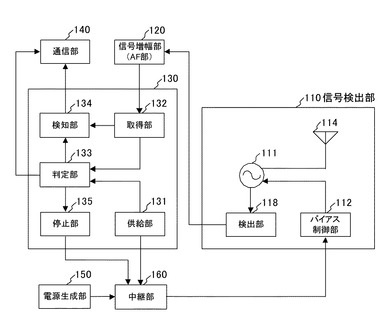
移動体検知装置100は、信号検出部110、信号増幅部120、移動体検知部130、通信部140、電源生成部150、及び中継部160で構成される。
【0024】
信号検出部110は、ハードウェア回路で構成される。信号検出部110は、信号増幅部120、移動体検知部130、及び中継部160に接続する。信号検出部110は、高周波(RF:Radio Frequency)を車両に送信すると共に、送信した送信波の反射波を受信する。よって、以下、信号検出部110をRF部110とも図示し、RF部110が中継部160から中継される電源をRF電源と図示する。次に、信号検出部110は、受信した反射波が及ぼす影響に基づいて、送信波を反射する移動体の位置及び移動速度等を表す移動体信号(以下、センサ生信号ともいう)を信号増幅部120及へ出力する。
【0025】
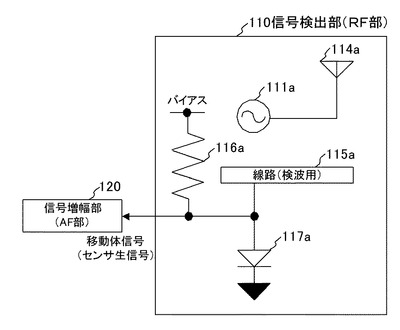
次に、図3を参照して、信号検出部110の構成についてハードウェアに着目して概説する。図3は、信号検出部110の一構成例を概表する回路図である。
図3において、信号検出部110は、発振素子111a、アンテナ114a、線路115a、バイアス抵抗器116a、及び検波器117aで構成されるとして概表する。
【0026】
発振素子111aは、例えば、電界効果トランジスタ(以下、FET:Field effect transistor)又は、高電子移動度トランジスタ(以下、HEMT:High Electron Mobility Transistor)で構成される。発振素子111aは、アンテナ114a及び不図示の誘電体共振器DRに対して電磁界により結合する。発振素子111aは、バイアス電圧を受けて誘電体共振器DRに制御された周波数を有する送信波を発振すると共に、発振した送信波をアンテナ114aへ出力する。また、発振素子111aのバイアス電圧は、アンテナ114aが受信する反射波の影響を受けて変動する。
【0027】
アンテナ114aは、例えば、平面アンテナ、線状アンテナ、及び立体アンテナで構成される。アンテナ114aは、発振素子111aに接続する。アンテナ114aは、発振素子111aが発する送信波を車両へ送信する。また、アンテナ114aは、送信した送信波の反射波を受信する。尚、上記の様に、アンテナ114aが受信した反射波は、発振素子111aのバイアス電圧を変動させる。
【0028】
線路115aは、例えば、マイクロストリップラインで構成される。線路115aは、電磁界により結合する不図示の誘電体共振器DRに結合する。また、線路115aは、バイアス抵抗器116a、検波器117a、及び信号増幅部120に接続する。線路115aは、誘電体共振器DRを介して結合する発振素子111aのバイアス電圧の変動をバイアス抵抗器116a、検波器117a、及び信号増幅部120へ伝える。
【0029】
バイアス抵抗器116aは、例えば、サーミスタ等の感温抵抗器で構成される。バイアス抵抗器116aは、片端でバイアス電圧の電圧源と接続し、他端で線路115a、検波器117a、及び信号増幅部120に接続する。バイアス抵抗器116aは、検波器117aに印加するバイアス電圧を制御する。
特に、バイアス抵抗器116aは、温度の上昇により検波器117aを流れる電流及び電圧の上昇を相殺するために、温度の上昇によって抵抗値が上昇する正特性を有する。また、バイアス抵抗器116aは、温度の低下により検波器117aを流れる電流及び電圧の下降を相殺するために、温度の下降によって抵抗値が下降する特性を有する。この構成によれば、検波電圧を安定化できるため、移動体の検知精度を向上できる。
【0030】
検波器117aは、例えば、整流器で構成される。特に、検波器117aは、高周波の整流に適した整流器で構成される。具体例としては、検波器117aは、例えば、ショットキーバリアダイオード(Schottky Barrier Diode)で構成される。検波器117aは、線路115a、バイアス抵抗器116a、及び信号増幅部120に接続する。検波器117aは、バイアス抵抗器116aを介してバイアス電圧を印加される。検波器117aのバイアス電圧は、線路115aを介して伝達される発振素子111aのバイアス電圧が変動することで変動する。検波器117aは、変動するバイアス電圧を受けて所定方向へ整流を流すことで、発振素子111aが発振する送信波を検波する。尚、変動するバイアス電圧は、センサ生信号(移動体信号)として、信号増幅部120へ出力される。
【0031】
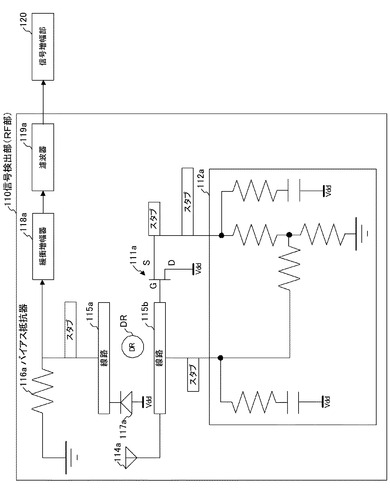
次に、図4及び5を参照して、信号検出部110の構成についてハードウェアに着目して詳説する。図4は、信号検出部110の一構成例を詳表する回路図であり、図5は、信号検出部110の一構成例を詳表する配置図である。
図4及び5において、信号検出部110は、図3で説明した誘電体共振器DR、発振素子111a、(発振用)バイアス回路112a、アンテナ114a、線路115a、(検波用)バイアス抵抗器116a、及び検波器117aの他に、線路115b、緩衝増幅器118a、及び濾波器119aで構成される。図3で説明した誘電体共振器DRから検波器117aについては、繰り返しの説明を省略する。
【0032】
誘電体共振器DRは、例えば、DRO(Dielectric Resonant Oscillator)で構成される。誘電体共振器DRは、線路115a及び115bに結合している。誘電体共振器DRは、線路115bを介して結合する発振素子111aの発振と共振すると共に、共振する発振素子111aのバイアス電圧の変動を線路115aへ伝達する。
【0033】
発振素子111aは、ゲート(Gate)側で、アンテナ114aと接続する線路115bに接続する。この構成によれば、発振素子111aは、ゲート側でアンテナ114aと接続するため、アンテナ114aが受信する反射波の影響を受け易く、反射波を反射する移動体を精度良く検知できる。
【0034】
また、発振素子111aは、バイアス回路112aに接続する。発振素子111aは、ソース側(Source)にバイアス回路112aによって値「Vdd」の電圧が印加され、誘電体共振器DRに制御された周波数を有する送信波を発生させてアンテナ114aへ出力する。また、発振素子111aのゲート(Gate)とドレイン(Drain)間のバイアス電圧は、アンテナ114aが受信する反射波の影響を受けて変動する。
【0035】
バイアス回路112aは、抵抗器及び不図示のバイアス制御素子で構成される。バイアス回路112aは、発振素子111aに接続する。バイアス回路112aは、発振素子111aのソース側(Source)に対して、間欠的に電圧を印加する構成を採用できる。具体的には、バイアス回路112aは、例えば、トランジスタスイッチ回路で構成される開閉器を更に備え、開閉器は移動体検知部130により間欠的に開閉を制御されることで、発振素子111aに対して間欠的に電圧を印加する構成を採用できる。この構成によれば、発振素子111aの消費電力を軽減できる。
【0036】
アンテナ114aは、発振素子111aに接続する線路115bと接続する。
線路115bは、検波用の線路115aと同様に、例えば、マイクロストリップラインで構成される。線路115bは、誘電体共振器DRと結合し、発振素子111a及びアンテナ114aと接続する。ここで、線路115bは、発信用の線路115bである。つまり、線路115bは、アンテナ114aが受信した反射波の影響を受けて変動する発振素子111aのバイアス電圧を誘電体共振器DRへ伝達する。
【0037】
尚、図5に示すように、線路115a及び115bと誘電体共振器DRとは、互いの結合により線路115bと接続する発振素子111aが発振を停止するなどの異常動作を生じない位置に配置されている。この位置は、線路115a及び115bと誘電体共振器DRとの最短距離及び線路115a及び115bの端部と誘電体共振器DRの中心との距離で定まる。
また、線路115a及び115bは、同様に、発振素子111aが異常動作を生じない長さを有する。この長さは、発振素子111aが発振する送信波の波長により定まる。線路115a及び115bと誘電体共振器DRとの好適な位置、及び線路115a及び115bの好適な長さは、いわゆる当業者が実験又は理論により容易に定めることができる。
【0038】
バイアス抵抗器116a及び検波器117aは、図3で説明を行ったため繰り返しの説明については省略する。
検波器117aは、図5に示す様に、最大検波電圧となる位置に実装される。検波器117aの好適な位置は、いわゆる当業者が実験又は理論により容易に定めることができる。また、図5に示す検波器117aは、当業者が定めた位置に移動させることができる。
【0039】
緩衝増幅器118aは、例えば、バッファアンプで構成される。緩衝増幅器118aは、線路115a、バイアス抵抗器116a、及び濾波器119aに接続する。緩衝増幅器118aは、濾波器119a及び濾波器119aに接続する信号増幅部120が及ぼす影響を吸収する。また、緩衝増幅器118aは、バイアス抵抗器116aを介して検波用のバイアス電圧を印加される。この検波用のバイアス電圧は、線路115aを介して伝達される発振素子111aのバイアス電圧の変動によって変動する。よって、緩衝増幅器118aは、発振素子111aのバイアス電圧の変動を増幅した信号を濾波器119aへ出力する。
濾波器119aは、例えば、フィルタ回路で構成される。濾波器119aは、緩衝増幅器118aが入力する信号からバイアス電圧の変動を表す信号を周波数に基づいて取り出す。次に、濾波器119aは、取り出した信号をセンサ生信号(移動体信号)として信号増幅器120へ出力する。
【0040】
この構成によれば、発振素子111aの発振と共振する誘電体共振器DRと結合した線路115aから発振素子のバイアス電圧を検出するため、検波による干渉が少なく発振が安定して精度良く移動体を検知できる。
またこの構成によれば、例えば、誘電体共振器DRと結合した線路115aから発振素子111aのバイアス電圧を検出するため、誘電体共振器DRと結合せずにバイアス電圧を検出する場合と比べて、発振素子111aの発振が「20GHz」を超える高周波数であっても、線路115a及び115bの寸法精度が低くとも精度良く移動体を検知できる。
【0041】
次に、図6を参照して、信号検出部110の構成について、機能に着目して説明する。図6は、信号検出部110の一構成例を表する機能ブロック図である。
図6に示すように、信号検出部110は、発振部111、バイアス制御部112、送受信部114、及び検出部118で構成される。
発振部111は、例えば、発振素子111aで構成される。発振部111は、バイアス制御部112、送受信部114、及び検出部118に接続する。発振部111は、バイアス制御部112が制御するバイアス電圧を受けて車両に送信する送信波を発する。次に、発振部111は、発した送信波を送受信部114へ出力する。また、発振部111のバイアス電圧は、送受信部114の受信する反射波の影響を受けて変動する。この変動するバイアス電圧は、検出部116によって参照される。
【0042】
送受信部114は、例えば、アンテナ114aで構成される。送受信部114は、発振部111に接続する。送受信部114は、発振部111が発した送信波を車両に送信すると共に、送信した送信波の移動体による反射波を受信する。
【0043】
バイアス制御部112は、例えば、バイアス回路112aで構成される。バイアス制御部112は、発振部111及び中継部160に接続する。バイアス制御部112は、移動体検知部130が提供するよう中継部160に指示する電力を用いて発振部111に印加するバイアス電圧を制御する。
検出部118は、例えば、バイアス抵抗器116a、検波器117a、緩衝増幅器118a、及び濾波器119aで構成される。検出部118は、発振部111及び信号増幅部120に接続する。検出部118は、送受信部114が受信した反射波が変動させる発振部111のバイアス電圧を検出すると共に、検出したバイアス電圧を信号増幅器120へ出力する。
【0044】
ここで、図2に戻り、移動体検知装置100の構成について引き続き説明を行う。
信号増幅部120は、例えば、AF(Audio Frequency)回路で構成される。よって、信号増幅部120をAF部とも表す。AF回路は、例えば、低周波増幅回路で構成される。信号増幅部120は、信号検出部110及び移動体検知部130に接続する。信号増幅部120は、信号検出部110が出力する低周波信号(つまり、移動体信号及びセンサ生信号)を増幅させたセンサ増幅信号を移動体検知部130へ入力する。
移動体検知部130は、例えば、マイクロコンピュータ(以下単に、マイコンという)で構成される。移動体検知部130は、信号検出部110、信号増幅部120、通信部140、及び中継部160に接続する。移動体検知部130は、ソフトウェア処理である移動体検知処理を実行することで、信号検出部110を構成する検出部118が検出したバイアス電圧の変化に基づいて車両における移動体の移動を検知すると共に、バイアス電圧の変化に基づいて信号検出部110が異常であると判定すると移動体の検知を停止する。
【0045】
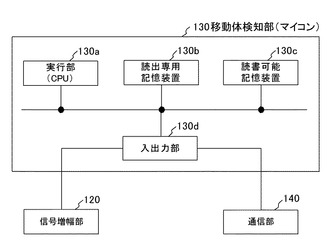
ここで、図7を参照して、移動体検知部130がソフトウェア処理を実行するために用いるハードウェアの一構成例について説明する。図7は、移動体検知部130の一構成例を表すハードウェア構成図である。
移動体検知部130は、例えば、CPU(Central Processing Unit)で構成される実行部130a、EPROM(Erasable Programmable Read-Only Memory)又はEEPROM(Electrically Erasable Programmable Read-Only Memory)等で構成される読出専用記憶装置130b、DRAM(Dynamic RAM)又はSRAM(Static RAM)等の揮発性メモリ及びNVRAM(Non Volatile RAM)等の不揮発性メモリで構成される読書可能記憶装置130c、及び入出力回路で構成される入出力部130dで構成され、実行部130a、読出専用記憶装置130b、読書可能記憶装置130c、及び入出力部130dは互いにバスによって接続している。
【0046】
ソフトウェア処理は、実行部130aが、読出専用記憶装置130bに格納したプログラムを読み込み、読み込んだプログラムに従って演算を実行することにより実現される。なお、読書可能記憶装置130cには、演算結果のデータが書き込まれ、特にNVRAMには、電源オフする場合にバックアップが必要なデータが保存される。また、演算結果は、入出力部130dを介して接続する信号増幅部120及び通信部140との間で入出力される。尚、入出力部130dは、信号検出部110が出力するアナログ信号をデジタル信号にAD変換して入力する。
【0047】
次に、図6を再度参照して、移動体検知部130の構成について機能に着目して説明する。
移動体検知部130は、供給部131、取得部132、判定部133、検知部134、及び停止部135で構成される。
供給部131は、移動体検知部130を構成する実行部130aが供給処理を実行することで実現される。供給部131は、判定部133及び中継部160に接続する。供給部131は、信号検出部110へ電力を供給する。具体的には、供給部131は、電力を信号検出部110へ中継するよう命じる信号を中継部160及び判定部133へ出力する。
【0048】
取得部132は、実行部130aが取得処理を実行することで実現される。取得部132は、センサ増幅信号を信号増幅部120から取得する。次に、取得部132は、取得したセンサ増幅信号を判定部133及び検知部134へ出力する。
判定部133は、実行部130aが判定処理を実行することで実現される。判定部133は、供給部131、取得部132、検知部134、停止部135、及び通信部140に接続する。判定部133は、取得部132が取得したセンサ増幅信号に基づいて発振部111が正常であるか否か(つまり、発振部111に異常が生じたか否か)を判定する。具体的には、判定部133は、供給部131が信号増幅部120へ電力を供給する前に取得部132から取得したセンサ増幅信号が表すバイアス電圧と、後に検出したバイアス電圧とに基づいて信号増幅部120に異常が生じたか否かを判定する。判定部133は、信号増幅部120が異常であると判断する場合には、異常信号を通信部140及び停止部135へ出力する。
この構成によれば、移動体の検知に用いる発振部111のバイアス電圧に基づいて発振部111に異常が生じたか否かを判定するため、簡易な構成で精度良く移動体を検知できる。
【0049】
より具体的な例を説明すると、判定部133は、電力を供給する前のバイアス電圧と供給した後のバイアス電圧との差異が所定の範囲に属する場合に、信号増幅部120を構成する発振部111が正常であると判定し、そうでない場合に異常であると判定する。尚、発振部111が正常であるか否かを判断するための所定の範囲は、いわゆる当業者が実験又は理論に基づいて容易に決定し得る。
この構成によれば、電力を供給する前のバイアス電圧と供給した後のバイアス電圧との差異が所定の範囲に属する場合に、信号増幅部120を構成する発振部111が正常であると判定し、そうでない場合に異常であると判定するため、発振レベルが移動体を検知するには小さ過ぎる値となる異常を検出できる。
【0050】
また他の具体例を説明すると、判定部133は、電力を供給する前のバイアス電圧が供給した後のバイアス電圧よりも小さい場合に、信号増幅部120を構成する発振部111が正常であると判定し、そうでない場合に異常であると判定する構成を採用できる。
この構成によれば、電力を供給する前のバイアス電圧が供給した後のバイアス電圧よりも小さい場合に、信号増幅部120を構成する発振部111が正常であると判定し、そうでない場合に異常であると判定するため、発振が停止する異常を検出できる。
【0051】
検知部134は、実行部130aが検知処理を実行することで実現される。検知部134は、取得部132、判定部133、及び通信部140に接続する。検知部134は、取得部132が取得した電圧の変化に基づいて車両における移動体の移動を検知する。具体的には、検知部134は、取得部132が取得した電圧の変化量が所定の閾値を上回った場合に、車両における移動体の移動を検知すると共に、検知信号を通信部140へ出力する。また、検知部134は、判定部133から異常信号を取得した場合には、移動体の検知を中止する。尚、車両における移動体の移動を検知するための所定の閾値は、いわゆる当業者が実験又は理論に基づいて容易に決定し得る。
この構成によれば、発振部111のバイアス電圧の変化に基づいて移動体を検知するため、従来のドップラセンサに比べて、搭載する部品数が少なく、部品の実装スペースが狭く、部品の消費電力が少なく、かつ製造コストを安価にできる。
【0052】
停止部135は、実行部130aが停止処理を実行することで実現される。停止部135は、判定部133及び中継部160に接続する。停止部135は、判定部133が信号検出部110に異常が生じたと判定した場合に、信号検出部110への電源の供給を停止するよう中継部160を制御する。
この構成によれば、電力の供給を受けて発振部111が発振する前のバイアス電圧と発振した後のバイアス電圧とに基づいて発振部の異常を判定すると共に、異常と判定した場合に発振部111への電源供給を停止するため、精度良く異常を判定できるだけでなく、精度良く誤検知を防止できる。
【0053】
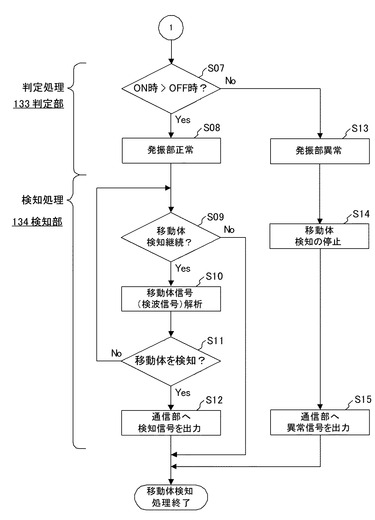
ここで、図8及び9を参照して、移動体検知部130が実行する移動体検知処理について説明する。図8は、移動体検知部130が実行する移動体検知処理の一例を表すフローチャートの一部であり、図9は、移動体検知部130が実行する移動体検知処理の一例を表すフローチャートの他部である。
先ず、移動体検知部130は、発振部111の電源をOFFにする(ステップS01)。具体的には、移動体検知部130は、電源生成部150が生成する電源の信号検出部110に対する供給を停止するよう中継部160を制御する。次に、移動体検知部130は、検波電圧を測定する(ステップS02)。具体的には、移動体検知部130は、信号増幅部120からセンサ増幅信号を取得する。
【0054】
その後、移動体検知部130は、例えば、図7の読書可能記憶装置130cへ、ステップS02で測定した検波電圧を記録する(ステップS03)。次に、移動体検知部130は、発振部111の電源をONにする(ステップS04)。具体的には、移動体検知部130は、電源生成部150が生成する電源を信号検出部110へ中継するよう中継部160を制御する。次に、移動体検知部130は、ステップS02と同様に、検波電圧を測定する(ステップS05)。
【0055】
その後、移動体検知部130は、発振部111の電源がONの場合に測定した検波電圧と、OFFの場合に測定した検波電圧とを比較する(ステップS06)。次に、移動体検知部130は、検波電圧の比較により発振部111が正常であるか否かを判定する(ステップS07)。入検知部130は、正常であると判定する場合にはステップS08の処理を、そうでない場合にはステップS13の処理を実行する。本実施例において、移動体検知部130は、発振部111の電源がONの場合に測定した検波電圧が、OFFの場合に測定した検波電圧よりも大きい場合に発振部111が正常であると判定するとして説明するが、これに限定される訳ではない。例えば、上記の様に、移動体検知部130は、ONの場合に測定した検波電圧とOFFの場合に測定した検波電圧との差異が所定の範囲に属する場合に正常であると判定する構成を採用できる。
【0056】
ステップS07において、電源ONの場合に測定した検波電圧がOFFの場合に測定した検波電圧よりも大きいと判断した場合には、移動体検知部130は、発振部111が正常であると判定する(ステップS08)。次に、移動体検知部130は、移動体の検知を継続するか否かを判断する(ステップS09)。移動体検知部130は、検知を継続すると判断する場合にはステップS10の処理を実行し、そうでない場合には移動体検知処理の実行を終了する。
具体例としては、移動体検知部130は、制御装置200から移動体の検知を停止するよう命じる信号を取得した場合に検知を継続しないと判断し、そうでない場合に検知を継続すると判断する。また、他の具体例としては、検波電圧の変動が所定時間に渡って生じない場合に、移動体検知部130は、移動体の検知を継続しないと判断してスリープ処理を実行する。
【0057】
ステップS09において、検知を継続すると判断した場合には、移動体検知部130は、検波信号(つまり、移動体信号及びセンサ増幅信号)を解析する(ステップS10)。次に、移動体検知部130は、解析の結果として移動体を検知したか否かを判断する(ステップS11)。移動体検知部130は、移動体を検知したと判断する場合にはステップS12の処理を、そうでない場合にはステップS09に戻り上記処理を繰り返す。具体例としては、移動体検知部130は、上記の様に、検波信号のレベルが所定の閾値を超えた場合に移動体を検知する。
ステップS11において、移動体を検知したと判断した場合には、通信部140へ検知信号を出力する(ステップS12)。その後、移動体検知部130は、移動体検知処理の実行を終了する。
【0058】
ステップS07において、電源ONの場合に測定した検波電圧がOFFの場合に測定した検波電圧よりも大きくないと判断した場合には、移動体検知部130は、発振部111が異常であると判定する(ステップS13)。次に、移動体検知部130は、移動体の検知を停止する(ステップS14)。その後、通信部140へ異常信号を出力する(ステップS15)。その後、移動体検知部130は、移動体検知処理の実行を終了する。
【0059】
尚、ステップS01の処理が停止部135を実現する停止処理に相当し、ステップS02及びS05の処理が取得部132を実現する取得処理に相当し、ステップS04の処理が供給部131を実現する供給処理に相当し、ステップS06からS08、S13、及びS15の処理が判定部133を実現する判定処理に相当し、ステップS09からS12及びS14の処理が検知部131を実現する検知処理に相当する。
【0060】
ここで、図2に戻り、移動体検知装置100の構成について引き続き説明する。
通信部140は、例えば、通信回路で構成される。通信部140は、移動体検知部130及び制御装置200に接続する。通信部140は、移動体検知部130が移動体を検知した場合に、検知信号を制御装置200へ送信する。また、通信部140は、移動体検知部130が判定処理の実行により発振部111が異常であると判定した場合に、異常信号を制御装置200へ送信する。
【0061】
電源生成部150は、例えば、電源回路で構成される。電源回路は、例えば、電源IC(Integrated Circuit)で構成される。電源生成部150は、蓄電池400及び中継部160に接続する。電源生成部150は、蓄電池400が供給する電力を用いて、信号検出部110(RF部)が用いる電源(以下、RF電源と図示する)を生成する。
中継部160は、例えば、電源ON/OFF回路で構成される。電源ON/OFF回路は、例えば、電磁リレー等で構成される。中継部160は、信号検出部110、移動体検知部130、及び電源生成部150に接続する。中継部160は、移動体検知部130が出力する信号に従って、電源生成部150が生成する電源を信号検出部110(RF部)へ中継又は中断する。
【0062】
本実施例において、ソフトウェア処理である移動体検知処理を移動体検知部130が実行する場合について説明したが、これに限定される訳ではない。例えば、移動体検知処理の実行により実現される機能の一部又は全部をハードウェア回路が実現する構成を採用できる。
【0063】
本発明の移動体検知方法は、移動体検知装置100を用いて実施できる。
移動体検知部130が実行するプログラムは、磁気ディスクや光ディスク、半導体メモリ、その他の記録媒体に格納して配布したり、ネットワークを介して配信したりすることにより提供できる。
【0064】
以上本発明の好ましい実施例について詳述したが、本発明は係る特定の実施例に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形、変更が可能である。
【図面の簡単な説明】
【0065】
【図1】本発明の移動体検知装置を備える移動体検知システムの一例を表すシステム構成図である。
【図2】移動体検知装置の一構成例を表す機能ブロック図である。
【図3】信号検出部の一構成例を概表する回路図である。
【図4】信号検出部の一構成例を詳表する回路図である。
【図5】信号検出部の一構成例を詳表する配置図である。
【図6】信号検出部の一構成例を表する機能ブロック図である。
【図7】移動体検知部の一構成例を表すハードウェア構成図である。
【図8】移動体検知部が実行する移動体検知処理の一例を表すフローチャートの一部である。
【図9】移動体検知部が実行する移動体検知処理の一例を表すフローチャートの他部である。
【図10】従来の信号検出部の一構成例を表すハードウェア構成図である。
【図11】従来の信号検出部の他構成例を表すハードウェア構成図である。
【符号の説明】
【0066】
100…移動体検知装置(センサ)
110…信号検出部(RF部) 111…発振部
111a…発振素子 112…バイアス制御部
112a…バイアス回路 114…送受信部
114a…アンテナ 115a…線路
115b…線路 116a…バイアス抵抗器
117a…検波器 118…検出部
118a…緩衝増幅器 119a…濾波器
120…信号増幅部(AF部) 130…移動体検知部(マイコン)
130a…実行部(PCU) 130b…読出専用記憶装置
130c…読書可能記憶装置 130d…入出力部
131…供給部 132…取得部
133…判定部 134…検知部
135…停止部 140…通信部
150…電源生成部
160…中継部(電源ON/OFF回路)
200…制御装置(セキュリティECU)
300…警報装置 400…蓄電池
710…信号検出部 711…発振部
712…サーキュレータ 714…送信アンテナ
715…受信アンテナ 716…検波素子
740…移動体検知部 810…信号検出部
811…発振部 812…方向性結合器
813…アイソレータ 814…送受信アンテナ
816…検波素子 840…移動体検知部
910…信号検出部 911…発振部
912…方向性結合器 915…送受信アンテナ
916…検波素子 940…信号処理回路
DR…誘電共振体
【技術分野】
【0001】
本発明は、車両において移動する移動体を検知する移動体検知装置及び移動体検知方法に関する。
【背景技術】
【0002】
近年、例えば、車両の盗難又は破壊を防止するため、車両において移動する移動体を検知する移動体検知装置が車両に搭載されている。この車両に搭載される移動体検知装置は、例えば、車内に向けて送信した電磁波の反射波を測定することで、車内及び車両周辺における移動体の移動を検知するドップラセンサで構成される。
【0003】
この一般的なドップラセンサは、図10(a)に示すように、車両に電磁波を送信する送信用アンテナ714と、送信用アンテナ714へ送信する送信波を発する発振部711と、発振部711が発した送信波を送信用アンテナ714へ中継するサーキュレータ712とを備える。また、このドップラセンサは、車両における移動体等で反射した反射波を受信する受信用アンテナ715と、受信用アンテナ715が受信した反射波と発振部711が発した送信波とを検波すると共に、検波した送信波と受信波とを混合してドップラ信号を出力する検波素子716とを更に備え、サーキュレータ712は反射波と送信波とを検波素子716へ中継することを特徴としている。
【0004】
また、送信用アンテナと受信用アンテナとを備えるのではなく、1つのアンテナを送信用と受信用とで共用した簡易な構成で車両において移動する移動体を検知できるドップラセンサが知られている。
このドップラセンサは、図10(b)に示すように、送信波を発振する発振部811と、送信波を送信すると共に送信波の反射波を受信する送受信用アンテナ814と、送受信用アンテナ814が受信した反射波から発振部811を隔離するアイソレータ813とを備える。また、このドップラセンサは、発振部811が発した送信信号を結合する送受信アンテナ814の方向へ中継すると共に、送受信用アンテナ814が受信した反射波を検波素子816の方向へ中継する方向性結合器812と、反射波及び送信波を検波してドップラ信号を出力する検波素子816とを備えることを特徴としている。
【0005】
更に、送信波と送信波の反射波とを混合してドップラ信号を生成するドップラセンサよりも簡易な構成で車両へ移動体の侵入を検知できる侵入検知装置が知られるに至った(例えば、特許文献1参照)。
この侵入検知装置は、図11に示すように、送受信アンテナ915へ送信する送信信号を発する発振部911と、発振部911が発する送信信号を検波する検波素子916と、検波素子916が検波して出力する出力信号を処理する信号処理回路940とを備える。また、この侵入検知装置は、結合する送受信アンテナ915の方向と検波素子916の方向とに発振部911が発した送信信号を分岐して中継する方向性結合器を更に備え、信号処理回路940は、車両への侵入者で反射した反射波を送受信アンテナ915が受信することで発振部911の発する送信信号が変動することによりに生じる出力信号の変動を検出することを特徴としている。
【0006】
つまり、送受信アンテナ915が侵入者等の移動体からの反射波を受信すると、受信した反射波の影響を受けて発振部911からみた負荷が変動する。よって、この侵入検知装置は、発振部911からみた負荷の変動を利用して移動体を検知することを特徴としている。
【特許文献1】特開2007−333560号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところで、ドップラセンサでは、送信波と受信した反射波とを混合させてドップラ信号を検出する検波素子716及び816が必要になる。また、ドップラセンサでは、送信波と反射波とを所定の方向へ中継するサーキュレータ712又は方向性結合器812といったマッチング回路が必要である。更に、送信用アンテナと受信用アンテナとを一体化したドップラセンサでは、反射波を発振部811から隔離するアイソレータ813が必要になる。このため、ドップラセンサは、搭載する部品数が多く簡易な構成ではないという問題があった。つまり、搭載する部品数が多いドップラセンサは、部品の実装スペースを広く必要とし、部品の消費電力を多く必要とし、製造コストが高いという問題を生じていた。
【0008】
また、特許文献1に記載の侵入検知装置は、移動体を検知するために用いる発振部911からみた負荷を監視しないため、発振部911が正常であるか否かを判定できない。具体例としては、この侵入検知装置は、発振が停止する又は発振レベルが侵入を検知するには小さ過ぎるといった異常を検出できない。つまり、特許文献1に記載の侵入検知装置は、発振部911が正常であるいか否かを判定できないため、精度良く車両への侵入を検知できないという問題があった。
【0009】
本発明は、上記問題に鑑みて成されたものであり、その目的とするところは、精度良く移動体を検知できる簡易な構成の移動体検知装置及び移動体検知方法を提供することにある。
【課題を解決するための手段】
【0010】
本発明に係る移動体検知装置は、車両に送信する送信波を発振する発振部と、発振部が発振した送信波を送信すると共に送信した送信波の反射波を受信する送受信部と、送受信部が受信した反射波が変動させる発振部のバイアス電圧を検出する検出部と、検出部で検出するバイアス電圧に基づいて発振部が正常であるか否かを判定する判定処理と、判定処理で発振部が正常であると判定する場合に、検出部で検出する発振部のバイアス電圧の変化に基づいて車両において移動する移動体を検知する検知処理とを実行する移動体検知部とを備えることを特徴としている。
【0011】
上記構成において、発振部は、移動体検知装置から電力の供給を受けて発振し、移動体検知部は、発振部へ電力を供給する供給処理と、判定処理により発振部が正常でないと判定した場合に電源の供給を停止する停止処理とを更に実行し、判定処理は、供給処理により発振部へ電力を供給する前に検出部が検出したバイアス電圧と、後に検出したバイアス電圧とに基づいて発振部が正常であるか否かを判定する処理である構成を採用できる。
【0012】
上記構成において、発振部の発振と共振する誘電体共振部に対して電磁界により結合した線路を備え、検出部は、線路から発振部のバイアス電圧を検出する構成を採用できる。
【0013】
本発明に係る移動体検知方法は、車両に送信する送信波を発振部が発振する発振ステップと、発振ステップで発振した送信波を送信すると共に送信した送信波の反射波を受信する送受信ステップと、送受信ステップで受信した反射波が変動させる発振部のバイアス電圧を検出する検出ステップと、検出ステップで検出するバイアス電圧に基づいて発振部が正常であるか否かを判定する判定処理と、判定処理で発振部が正常であると判定する場合に、検出ステップで検出する発振部のバイアス電圧の変化に基づいて車両において移動する移動体を検知する検知処理とを実行する移動体検知ステップとを備えることを特徴としている。
【発明の効果】
【0014】
これらの構成によれば、移動体の検知に用いる発振部のバイアス電圧に基づいて発振部が正常であるか否かを判定するため、簡易な構成で精度良く移動体を検知できる。
【発明を実施するための最良の形態】
【0015】
以下、本発明の最良の実施形態について、添付図面を参照しつつ説明する。
【実施例1】
【0016】
先ず、図1を参照して、本発明の移動体検知装置100を備える移動体検知システム1について説明する。
【0017】
図1に示す移動体検知システム1は、車両に搭載される。車両は、例えば、乗用車、バス、及びトラック等の自動車で構成される。尚、本実施例では、車両が自動車で構成されるとして説明を行うが、これに限定される訳ではなく、原動機付自転車、軽車両、及びトロリーバス、戦車及び装甲車等の軍用車両、並びに鉄道車両で構成される実施例を採用できる。
本実施例において、移動体検知システム1が車両に搭載される場合について説明するが、これに限定される訳ではない。例えば、移動体検知システム1は、船舶、航空機、並びに人工衛星、宇宙探査機、及び宇宙ステーション等の宇宙機に搭載される構成を採用できる。また更に、移動体検知システム1は、車両又は船舶等に搭載されずに使用される構成を採用できる。
【0018】
移動体検知システム1は、移動体検知装置100、制御装置200、警報装置300、及び蓄電池400で構成される。ここで、移動体検知装置100について説明する前に、制御装置200、警報装置300、及び蓄電池400について説明する。
制御装置200は、例えば、ECU(Electronic Control Unit)で構成される。制御装置200は、特に例えば、セキュリティECUで構成され、車両の安全を確保するために車両に搭載された各種の装置を制御する。制御装置200は、移動体検知装置100、警報装置300、及び蓄電池400に接続する。制御装置200は、移動体検知装置100から車両において移動する移動体を検知したことを表す検知信号を受信した場合に、蓄電池400が提供する電力を用いて、車両への侵入を警報するよう警報装置400を制御する。尚、車両において移動する移動体とは、車両内部及び車両付近を移動する移動体をいう。ここで、車両付近とは、少なくとも車両に対して侵入行為を行うことができる範囲をいう。尚、制御装置200は、例えば、CAN(Controller Area Network)バス、又はLIN(Local Interconnect Network)バス等の通信路を介して他の制御装置と車両の安全を確保するために用いる情報を通信するが、本実施例においては説明を省略する。
【0019】
また、制御装置200は、移動体検知装置100の異常を表す異常信号を移動体検知装置100から取得した場合に、蓄電池400が提供する電力を用いて、移動体検知装置100の異常を警報するよう警報装置400を制御する。また、制御装置200は、移動体検知装置100から異常信号を受信した場合に、移動体の検知を停止するよう移動体検知装置100を制御する。具体例としては、制御装置200は、移動体検知装置100に対して検知を停止するよう命じる停止信号を出力する。また、これに限定される訳ではなく、制御装置200は、移動体検知装置100へ供給する電源を遮断して検知を停止するよう移動体検知装置100を制御する構成を採用できる。この構成によれば、効率的に誤検知を防止できる。
【0020】
警報装置300は、例えば、クラクション等の警笛、メータパネル等の表示装置、又はスピーカ等の音声出力装置で構成される。警報装置300は、制御装置200及び蓄電池400に接続する。警報装置300は、制御装置200に制御されて、蓄電池400が提供する電力を用いて、車両における移動体の移動を警報する音声の出力又は表示を行う。具体例としては、警報装置300は、クラクションを鳴らす、警報ランプを点灯させる、又は所定の警報音を出力する等して移動体の移動を警報する。また、警報装置300は、警報ランプを点滅させて点灯させる構成を採用できる。
【0021】
蓄電池400は、例えば、鉛蓄電池等の一般型のバッテリで構成される。蓄電池400は、移動体検知装置100、制御装置200、及び警報装置300に接続する。蓄電池400は、電力を蓄積し、蓄積した電力を移動体検知装置100、制御装置200、及び警報装置300に対して供給する。
【0022】
移動体検知装置100は、制御装置200に接続する。移動体検知装置100は、波動を用いて移動体を検知する。ここで、一例として、移動体の検知は、車両への侵入を検知するために行われるが、これに限定される訳ではない。尚、波動は、光、電磁波、電波、又は超音波を含む。移動体検知装置100は、車両における移動体の移動を検知すると検知信号を制御装置200へ出力する。また、移動体検知装置100は、移動体検知装置100が正常でない(以下、移動体検知装置100に異常が生じたともいう)と判定した場合には、異常信号を制御装置200へ出力すると共に、移動体の検知を停止する。
【0023】
ここで、図2を参照して、移動体検知装置100の構成について機能に着目して説明する。図2は、移動体検知装置100の一構成例を表す機能ブロック図である。
移動体検知装置100は、信号検出部110、信号増幅部120、移動体検知部130、通信部140、電源生成部150、及び中継部160で構成される。
【0024】
信号検出部110は、ハードウェア回路で構成される。信号検出部110は、信号増幅部120、移動体検知部130、及び中継部160に接続する。信号検出部110は、高周波(RF:Radio Frequency)を車両に送信すると共に、送信した送信波の反射波を受信する。よって、以下、信号検出部110をRF部110とも図示し、RF部110が中継部160から中継される電源をRF電源と図示する。次に、信号検出部110は、受信した反射波が及ぼす影響に基づいて、送信波を反射する移動体の位置及び移動速度等を表す移動体信号(以下、センサ生信号ともいう)を信号増幅部120及へ出力する。
【0025】
次に、図3を参照して、信号検出部110の構成についてハードウェアに着目して概説する。図3は、信号検出部110の一構成例を概表する回路図である。
図3において、信号検出部110は、発振素子111a、アンテナ114a、線路115a、バイアス抵抗器116a、及び検波器117aで構成されるとして概表する。
【0026】
発振素子111aは、例えば、電界効果トランジスタ(以下、FET:Field effect transistor)又は、高電子移動度トランジスタ(以下、HEMT:High Electron Mobility Transistor)で構成される。発振素子111aは、アンテナ114a及び不図示の誘電体共振器DRに対して電磁界により結合する。発振素子111aは、バイアス電圧を受けて誘電体共振器DRに制御された周波数を有する送信波を発振すると共に、発振した送信波をアンテナ114aへ出力する。また、発振素子111aのバイアス電圧は、アンテナ114aが受信する反射波の影響を受けて変動する。
【0027】
アンテナ114aは、例えば、平面アンテナ、線状アンテナ、及び立体アンテナで構成される。アンテナ114aは、発振素子111aに接続する。アンテナ114aは、発振素子111aが発する送信波を車両へ送信する。また、アンテナ114aは、送信した送信波の反射波を受信する。尚、上記の様に、アンテナ114aが受信した反射波は、発振素子111aのバイアス電圧を変動させる。
【0028】
線路115aは、例えば、マイクロストリップラインで構成される。線路115aは、電磁界により結合する不図示の誘電体共振器DRに結合する。また、線路115aは、バイアス抵抗器116a、検波器117a、及び信号増幅部120に接続する。線路115aは、誘電体共振器DRを介して結合する発振素子111aのバイアス電圧の変動をバイアス抵抗器116a、検波器117a、及び信号増幅部120へ伝える。
【0029】
バイアス抵抗器116aは、例えば、サーミスタ等の感温抵抗器で構成される。バイアス抵抗器116aは、片端でバイアス電圧の電圧源と接続し、他端で線路115a、検波器117a、及び信号増幅部120に接続する。バイアス抵抗器116aは、検波器117aに印加するバイアス電圧を制御する。
特に、バイアス抵抗器116aは、温度の上昇により検波器117aを流れる電流及び電圧の上昇を相殺するために、温度の上昇によって抵抗値が上昇する正特性を有する。また、バイアス抵抗器116aは、温度の低下により検波器117aを流れる電流及び電圧の下降を相殺するために、温度の下降によって抵抗値が下降する特性を有する。この構成によれば、検波電圧を安定化できるため、移動体の検知精度を向上できる。
【0030】
検波器117aは、例えば、整流器で構成される。特に、検波器117aは、高周波の整流に適した整流器で構成される。具体例としては、検波器117aは、例えば、ショットキーバリアダイオード(Schottky Barrier Diode)で構成される。検波器117aは、線路115a、バイアス抵抗器116a、及び信号増幅部120に接続する。検波器117aは、バイアス抵抗器116aを介してバイアス電圧を印加される。検波器117aのバイアス電圧は、線路115aを介して伝達される発振素子111aのバイアス電圧が変動することで変動する。検波器117aは、変動するバイアス電圧を受けて所定方向へ整流を流すことで、発振素子111aが発振する送信波を検波する。尚、変動するバイアス電圧は、センサ生信号(移動体信号)として、信号増幅部120へ出力される。
【0031】
次に、図4及び5を参照して、信号検出部110の構成についてハードウェアに着目して詳説する。図4は、信号検出部110の一構成例を詳表する回路図であり、図5は、信号検出部110の一構成例を詳表する配置図である。
図4及び5において、信号検出部110は、図3で説明した誘電体共振器DR、発振素子111a、(発振用)バイアス回路112a、アンテナ114a、線路115a、(検波用)バイアス抵抗器116a、及び検波器117aの他に、線路115b、緩衝増幅器118a、及び濾波器119aで構成される。図3で説明した誘電体共振器DRから検波器117aについては、繰り返しの説明を省略する。
【0032】
誘電体共振器DRは、例えば、DRO(Dielectric Resonant Oscillator)で構成される。誘電体共振器DRは、線路115a及び115bに結合している。誘電体共振器DRは、線路115bを介して結合する発振素子111aの発振と共振すると共に、共振する発振素子111aのバイアス電圧の変動を線路115aへ伝達する。
【0033】
発振素子111aは、ゲート(Gate)側で、アンテナ114aと接続する線路115bに接続する。この構成によれば、発振素子111aは、ゲート側でアンテナ114aと接続するため、アンテナ114aが受信する反射波の影響を受け易く、反射波を反射する移動体を精度良く検知できる。
【0034】
また、発振素子111aは、バイアス回路112aに接続する。発振素子111aは、ソース側(Source)にバイアス回路112aによって値「Vdd」の電圧が印加され、誘電体共振器DRに制御された周波数を有する送信波を発生させてアンテナ114aへ出力する。また、発振素子111aのゲート(Gate)とドレイン(Drain)間のバイアス電圧は、アンテナ114aが受信する反射波の影響を受けて変動する。
【0035】
バイアス回路112aは、抵抗器及び不図示のバイアス制御素子で構成される。バイアス回路112aは、発振素子111aに接続する。バイアス回路112aは、発振素子111aのソース側(Source)に対して、間欠的に電圧を印加する構成を採用できる。具体的には、バイアス回路112aは、例えば、トランジスタスイッチ回路で構成される開閉器を更に備え、開閉器は移動体検知部130により間欠的に開閉を制御されることで、発振素子111aに対して間欠的に電圧を印加する構成を採用できる。この構成によれば、発振素子111aの消費電力を軽減できる。
【0036】
アンテナ114aは、発振素子111aに接続する線路115bと接続する。
線路115bは、検波用の線路115aと同様に、例えば、マイクロストリップラインで構成される。線路115bは、誘電体共振器DRと結合し、発振素子111a及びアンテナ114aと接続する。ここで、線路115bは、発信用の線路115bである。つまり、線路115bは、アンテナ114aが受信した反射波の影響を受けて変動する発振素子111aのバイアス電圧を誘電体共振器DRへ伝達する。
【0037】
尚、図5に示すように、線路115a及び115bと誘電体共振器DRとは、互いの結合により線路115bと接続する発振素子111aが発振を停止するなどの異常動作を生じない位置に配置されている。この位置は、線路115a及び115bと誘電体共振器DRとの最短距離及び線路115a及び115bの端部と誘電体共振器DRの中心との距離で定まる。
また、線路115a及び115bは、同様に、発振素子111aが異常動作を生じない長さを有する。この長さは、発振素子111aが発振する送信波の波長により定まる。線路115a及び115bと誘電体共振器DRとの好適な位置、及び線路115a及び115bの好適な長さは、いわゆる当業者が実験又は理論により容易に定めることができる。
【0038】
バイアス抵抗器116a及び検波器117aは、図3で説明を行ったため繰り返しの説明については省略する。
検波器117aは、図5に示す様に、最大検波電圧となる位置に実装される。検波器117aの好適な位置は、いわゆる当業者が実験又は理論により容易に定めることができる。また、図5に示す検波器117aは、当業者が定めた位置に移動させることができる。
【0039】
緩衝増幅器118aは、例えば、バッファアンプで構成される。緩衝増幅器118aは、線路115a、バイアス抵抗器116a、及び濾波器119aに接続する。緩衝増幅器118aは、濾波器119a及び濾波器119aに接続する信号増幅部120が及ぼす影響を吸収する。また、緩衝増幅器118aは、バイアス抵抗器116aを介して検波用のバイアス電圧を印加される。この検波用のバイアス電圧は、線路115aを介して伝達される発振素子111aのバイアス電圧の変動によって変動する。よって、緩衝増幅器118aは、発振素子111aのバイアス電圧の変動を増幅した信号を濾波器119aへ出力する。
濾波器119aは、例えば、フィルタ回路で構成される。濾波器119aは、緩衝増幅器118aが入力する信号からバイアス電圧の変動を表す信号を周波数に基づいて取り出す。次に、濾波器119aは、取り出した信号をセンサ生信号(移動体信号)として信号増幅器120へ出力する。
【0040】
この構成によれば、発振素子111aの発振と共振する誘電体共振器DRと結合した線路115aから発振素子のバイアス電圧を検出するため、検波による干渉が少なく発振が安定して精度良く移動体を検知できる。
またこの構成によれば、例えば、誘電体共振器DRと結合した線路115aから発振素子111aのバイアス電圧を検出するため、誘電体共振器DRと結合せずにバイアス電圧を検出する場合と比べて、発振素子111aの発振が「20GHz」を超える高周波数であっても、線路115a及び115bの寸法精度が低くとも精度良く移動体を検知できる。
【0041】
次に、図6を参照して、信号検出部110の構成について、機能に着目して説明する。図6は、信号検出部110の一構成例を表する機能ブロック図である。
図6に示すように、信号検出部110は、発振部111、バイアス制御部112、送受信部114、及び検出部118で構成される。
発振部111は、例えば、発振素子111aで構成される。発振部111は、バイアス制御部112、送受信部114、及び検出部118に接続する。発振部111は、バイアス制御部112が制御するバイアス電圧を受けて車両に送信する送信波を発する。次に、発振部111は、発した送信波を送受信部114へ出力する。また、発振部111のバイアス電圧は、送受信部114の受信する反射波の影響を受けて変動する。この変動するバイアス電圧は、検出部116によって参照される。
【0042】
送受信部114は、例えば、アンテナ114aで構成される。送受信部114は、発振部111に接続する。送受信部114は、発振部111が発した送信波を車両に送信すると共に、送信した送信波の移動体による反射波を受信する。
【0043】
バイアス制御部112は、例えば、バイアス回路112aで構成される。バイアス制御部112は、発振部111及び中継部160に接続する。バイアス制御部112は、移動体検知部130が提供するよう中継部160に指示する電力を用いて発振部111に印加するバイアス電圧を制御する。
検出部118は、例えば、バイアス抵抗器116a、検波器117a、緩衝増幅器118a、及び濾波器119aで構成される。検出部118は、発振部111及び信号増幅部120に接続する。検出部118は、送受信部114が受信した反射波が変動させる発振部111のバイアス電圧を検出すると共に、検出したバイアス電圧を信号増幅器120へ出力する。
【0044】
ここで、図2に戻り、移動体検知装置100の構成について引き続き説明を行う。
信号増幅部120は、例えば、AF(Audio Frequency)回路で構成される。よって、信号増幅部120をAF部とも表す。AF回路は、例えば、低周波増幅回路で構成される。信号増幅部120は、信号検出部110及び移動体検知部130に接続する。信号増幅部120は、信号検出部110が出力する低周波信号(つまり、移動体信号及びセンサ生信号)を増幅させたセンサ増幅信号を移動体検知部130へ入力する。
移動体検知部130は、例えば、マイクロコンピュータ(以下単に、マイコンという)で構成される。移動体検知部130は、信号検出部110、信号増幅部120、通信部140、及び中継部160に接続する。移動体検知部130は、ソフトウェア処理である移動体検知処理を実行することで、信号検出部110を構成する検出部118が検出したバイアス電圧の変化に基づいて車両における移動体の移動を検知すると共に、バイアス電圧の変化に基づいて信号検出部110が異常であると判定すると移動体の検知を停止する。
【0045】
ここで、図7を参照して、移動体検知部130がソフトウェア処理を実行するために用いるハードウェアの一構成例について説明する。図7は、移動体検知部130の一構成例を表すハードウェア構成図である。
移動体検知部130は、例えば、CPU(Central Processing Unit)で構成される実行部130a、EPROM(Erasable Programmable Read-Only Memory)又はEEPROM(Electrically Erasable Programmable Read-Only Memory)等で構成される読出専用記憶装置130b、DRAM(Dynamic RAM)又はSRAM(Static RAM)等の揮発性メモリ及びNVRAM(Non Volatile RAM)等の不揮発性メモリで構成される読書可能記憶装置130c、及び入出力回路で構成される入出力部130dで構成され、実行部130a、読出専用記憶装置130b、読書可能記憶装置130c、及び入出力部130dは互いにバスによって接続している。
【0046】
ソフトウェア処理は、実行部130aが、読出専用記憶装置130bに格納したプログラムを読み込み、読み込んだプログラムに従って演算を実行することにより実現される。なお、読書可能記憶装置130cには、演算結果のデータが書き込まれ、特にNVRAMには、電源オフする場合にバックアップが必要なデータが保存される。また、演算結果は、入出力部130dを介して接続する信号増幅部120及び通信部140との間で入出力される。尚、入出力部130dは、信号検出部110が出力するアナログ信号をデジタル信号にAD変換して入力する。
【0047】
次に、図6を再度参照して、移動体検知部130の構成について機能に着目して説明する。
移動体検知部130は、供給部131、取得部132、判定部133、検知部134、及び停止部135で構成される。
供給部131は、移動体検知部130を構成する実行部130aが供給処理を実行することで実現される。供給部131は、判定部133及び中継部160に接続する。供給部131は、信号検出部110へ電力を供給する。具体的には、供給部131は、電力を信号検出部110へ中継するよう命じる信号を中継部160及び判定部133へ出力する。
【0048】
取得部132は、実行部130aが取得処理を実行することで実現される。取得部132は、センサ増幅信号を信号増幅部120から取得する。次に、取得部132は、取得したセンサ増幅信号を判定部133及び検知部134へ出力する。
判定部133は、実行部130aが判定処理を実行することで実現される。判定部133は、供給部131、取得部132、検知部134、停止部135、及び通信部140に接続する。判定部133は、取得部132が取得したセンサ増幅信号に基づいて発振部111が正常であるか否か(つまり、発振部111に異常が生じたか否か)を判定する。具体的には、判定部133は、供給部131が信号増幅部120へ電力を供給する前に取得部132から取得したセンサ増幅信号が表すバイアス電圧と、後に検出したバイアス電圧とに基づいて信号増幅部120に異常が生じたか否かを判定する。判定部133は、信号増幅部120が異常であると判断する場合には、異常信号を通信部140及び停止部135へ出力する。
この構成によれば、移動体の検知に用いる発振部111のバイアス電圧に基づいて発振部111に異常が生じたか否かを判定するため、簡易な構成で精度良く移動体を検知できる。
【0049】
より具体的な例を説明すると、判定部133は、電力を供給する前のバイアス電圧と供給した後のバイアス電圧との差異が所定の範囲に属する場合に、信号増幅部120を構成する発振部111が正常であると判定し、そうでない場合に異常であると判定する。尚、発振部111が正常であるか否かを判断するための所定の範囲は、いわゆる当業者が実験又は理論に基づいて容易に決定し得る。
この構成によれば、電力を供給する前のバイアス電圧と供給した後のバイアス電圧との差異が所定の範囲に属する場合に、信号増幅部120を構成する発振部111が正常であると判定し、そうでない場合に異常であると判定するため、発振レベルが移動体を検知するには小さ過ぎる値となる異常を検出できる。
【0050】
また他の具体例を説明すると、判定部133は、電力を供給する前のバイアス電圧が供給した後のバイアス電圧よりも小さい場合に、信号増幅部120を構成する発振部111が正常であると判定し、そうでない場合に異常であると判定する構成を採用できる。
この構成によれば、電力を供給する前のバイアス電圧が供給した後のバイアス電圧よりも小さい場合に、信号増幅部120を構成する発振部111が正常であると判定し、そうでない場合に異常であると判定するため、発振が停止する異常を検出できる。
【0051】
検知部134は、実行部130aが検知処理を実行することで実現される。検知部134は、取得部132、判定部133、及び通信部140に接続する。検知部134は、取得部132が取得した電圧の変化に基づいて車両における移動体の移動を検知する。具体的には、検知部134は、取得部132が取得した電圧の変化量が所定の閾値を上回った場合に、車両における移動体の移動を検知すると共に、検知信号を通信部140へ出力する。また、検知部134は、判定部133から異常信号を取得した場合には、移動体の検知を中止する。尚、車両における移動体の移動を検知するための所定の閾値は、いわゆる当業者が実験又は理論に基づいて容易に決定し得る。
この構成によれば、発振部111のバイアス電圧の変化に基づいて移動体を検知するため、従来のドップラセンサに比べて、搭載する部品数が少なく、部品の実装スペースが狭く、部品の消費電力が少なく、かつ製造コストを安価にできる。
【0052】
停止部135は、実行部130aが停止処理を実行することで実現される。停止部135は、判定部133及び中継部160に接続する。停止部135は、判定部133が信号検出部110に異常が生じたと判定した場合に、信号検出部110への電源の供給を停止するよう中継部160を制御する。
この構成によれば、電力の供給を受けて発振部111が発振する前のバイアス電圧と発振した後のバイアス電圧とに基づいて発振部の異常を判定すると共に、異常と判定した場合に発振部111への電源供給を停止するため、精度良く異常を判定できるだけでなく、精度良く誤検知を防止できる。
【0053】
ここで、図8及び9を参照して、移動体検知部130が実行する移動体検知処理について説明する。図8は、移動体検知部130が実行する移動体検知処理の一例を表すフローチャートの一部であり、図9は、移動体検知部130が実行する移動体検知処理の一例を表すフローチャートの他部である。
先ず、移動体検知部130は、発振部111の電源をOFFにする(ステップS01)。具体的には、移動体検知部130は、電源生成部150が生成する電源の信号検出部110に対する供給を停止するよう中継部160を制御する。次に、移動体検知部130は、検波電圧を測定する(ステップS02)。具体的には、移動体検知部130は、信号増幅部120からセンサ増幅信号を取得する。
【0054】
その後、移動体検知部130は、例えば、図7の読書可能記憶装置130cへ、ステップS02で測定した検波電圧を記録する(ステップS03)。次に、移動体検知部130は、発振部111の電源をONにする(ステップS04)。具体的には、移動体検知部130は、電源生成部150が生成する電源を信号検出部110へ中継するよう中継部160を制御する。次に、移動体検知部130は、ステップS02と同様に、検波電圧を測定する(ステップS05)。
【0055】
その後、移動体検知部130は、発振部111の電源がONの場合に測定した検波電圧と、OFFの場合に測定した検波電圧とを比較する(ステップS06)。次に、移動体検知部130は、検波電圧の比較により発振部111が正常であるか否かを判定する(ステップS07)。入検知部130は、正常であると判定する場合にはステップS08の処理を、そうでない場合にはステップS13の処理を実行する。本実施例において、移動体検知部130は、発振部111の電源がONの場合に測定した検波電圧が、OFFの場合に測定した検波電圧よりも大きい場合に発振部111が正常であると判定するとして説明するが、これに限定される訳ではない。例えば、上記の様に、移動体検知部130は、ONの場合に測定した検波電圧とOFFの場合に測定した検波電圧との差異が所定の範囲に属する場合に正常であると判定する構成を採用できる。
【0056】
ステップS07において、電源ONの場合に測定した検波電圧がOFFの場合に測定した検波電圧よりも大きいと判断した場合には、移動体検知部130は、発振部111が正常であると判定する(ステップS08)。次に、移動体検知部130は、移動体の検知を継続するか否かを判断する(ステップS09)。移動体検知部130は、検知を継続すると判断する場合にはステップS10の処理を実行し、そうでない場合には移動体検知処理の実行を終了する。
具体例としては、移動体検知部130は、制御装置200から移動体の検知を停止するよう命じる信号を取得した場合に検知を継続しないと判断し、そうでない場合に検知を継続すると判断する。また、他の具体例としては、検波電圧の変動が所定時間に渡って生じない場合に、移動体検知部130は、移動体の検知を継続しないと判断してスリープ処理を実行する。
【0057】
ステップS09において、検知を継続すると判断した場合には、移動体検知部130は、検波信号(つまり、移動体信号及びセンサ増幅信号)を解析する(ステップS10)。次に、移動体検知部130は、解析の結果として移動体を検知したか否かを判断する(ステップS11)。移動体検知部130は、移動体を検知したと判断する場合にはステップS12の処理を、そうでない場合にはステップS09に戻り上記処理を繰り返す。具体例としては、移動体検知部130は、上記の様に、検波信号のレベルが所定の閾値を超えた場合に移動体を検知する。
ステップS11において、移動体を検知したと判断した場合には、通信部140へ検知信号を出力する(ステップS12)。その後、移動体検知部130は、移動体検知処理の実行を終了する。
【0058】
ステップS07において、電源ONの場合に測定した検波電圧がOFFの場合に測定した検波電圧よりも大きくないと判断した場合には、移動体検知部130は、発振部111が異常であると判定する(ステップS13)。次に、移動体検知部130は、移動体の検知を停止する(ステップS14)。その後、通信部140へ異常信号を出力する(ステップS15)。その後、移動体検知部130は、移動体検知処理の実行を終了する。
【0059】
尚、ステップS01の処理が停止部135を実現する停止処理に相当し、ステップS02及びS05の処理が取得部132を実現する取得処理に相当し、ステップS04の処理が供給部131を実現する供給処理に相当し、ステップS06からS08、S13、及びS15の処理が判定部133を実現する判定処理に相当し、ステップS09からS12及びS14の処理が検知部131を実現する検知処理に相当する。
【0060】
ここで、図2に戻り、移動体検知装置100の構成について引き続き説明する。
通信部140は、例えば、通信回路で構成される。通信部140は、移動体検知部130及び制御装置200に接続する。通信部140は、移動体検知部130が移動体を検知した場合に、検知信号を制御装置200へ送信する。また、通信部140は、移動体検知部130が判定処理の実行により発振部111が異常であると判定した場合に、異常信号を制御装置200へ送信する。
【0061】
電源生成部150は、例えば、電源回路で構成される。電源回路は、例えば、電源IC(Integrated Circuit)で構成される。電源生成部150は、蓄電池400及び中継部160に接続する。電源生成部150は、蓄電池400が供給する電力を用いて、信号検出部110(RF部)が用いる電源(以下、RF電源と図示する)を生成する。
中継部160は、例えば、電源ON/OFF回路で構成される。電源ON/OFF回路は、例えば、電磁リレー等で構成される。中継部160は、信号検出部110、移動体検知部130、及び電源生成部150に接続する。中継部160は、移動体検知部130が出力する信号に従って、電源生成部150が生成する電源を信号検出部110(RF部)へ中継又は中断する。
【0062】
本実施例において、ソフトウェア処理である移動体検知処理を移動体検知部130が実行する場合について説明したが、これに限定される訳ではない。例えば、移動体検知処理の実行により実現される機能の一部又は全部をハードウェア回路が実現する構成を採用できる。
【0063】
本発明の移動体検知方法は、移動体検知装置100を用いて実施できる。
移動体検知部130が実行するプログラムは、磁気ディスクや光ディスク、半導体メモリ、その他の記録媒体に格納して配布したり、ネットワークを介して配信したりすることにより提供できる。
【0064】
以上本発明の好ましい実施例について詳述したが、本発明は係る特定の実施例に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形、変更が可能である。
【図面の簡単な説明】
【0065】
【図1】本発明の移動体検知装置を備える移動体検知システムの一例を表すシステム構成図である。
【図2】移動体検知装置の一構成例を表す機能ブロック図である。
【図3】信号検出部の一構成例を概表する回路図である。
【図4】信号検出部の一構成例を詳表する回路図である。
【図5】信号検出部の一構成例を詳表する配置図である。
【図6】信号検出部の一構成例を表する機能ブロック図である。
【図7】移動体検知部の一構成例を表すハードウェア構成図である。
【図8】移動体検知部が実行する移動体検知処理の一例を表すフローチャートの一部である。
【図9】移動体検知部が実行する移動体検知処理の一例を表すフローチャートの他部である。
【図10】従来の信号検出部の一構成例を表すハードウェア構成図である。
【図11】従来の信号検出部の他構成例を表すハードウェア構成図である。
【符号の説明】
【0066】
100…移動体検知装置(センサ)
110…信号検出部(RF部) 111…発振部
111a…発振素子 112…バイアス制御部
112a…バイアス回路 114…送受信部
114a…アンテナ 115a…線路
115b…線路 116a…バイアス抵抗器
117a…検波器 118…検出部
118a…緩衝増幅器 119a…濾波器
120…信号増幅部(AF部) 130…移動体検知部(マイコン)
130a…実行部(PCU) 130b…読出専用記憶装置
130c…読書可能記憶装置 130d…入出力部
131…供給部 132…取得部
133…判定部 134…検知部
135…停止部 140…通信部
150…電源生成部
160…中継部(電源ON/OFF回路)
200…制御装置(セキュリティECU)
300…警報装置 400…蓄電池
710…信号検出部 711…発振部
712…サーキュレータ 714…送信アンテナ
715…受信アンテナ 716…検波素子
740…移動体検知部 810…信号検出部
811…発振部 812…方向性結合器
813…アイソレータ 814…送受信アンテナ
816…検波素子 840…移動体検知部
910…信号検出部 911…発振部
912…方向性結合器 915…送受信アンテナ
916…検波素子 940…信号処理回路
DR…誘電共振体
【特許請求の範囲】
【請求項1】
車両に送信する送信波を発振する発振部と、
前記発振部が発振した送信波を送信すると共に送信した送信波の反射波を受信する送受信部と、
前記送受信部が受信した反射波が変動させる前記発振部のバイアス電圧を検出する検出部と、
前記検出部で検出するバイアス電圧に基づいて前記発振部が正常であるか否かを判定する判定処理と、前記判定処理で前記発振部が正常であると判定する場合に、前記検出部で検出する前記発振部のバイアス電圧の変化に基づいて、前記車両において移動する移動体を検知する検知処理とを実行する移動体検知部とを備えることを特徴とする移動体検知装置。
【請求項2】
前記発振部は、前記移動体検知装置から電力の供給を受けて発振し、
前記移動体検知部は、前記発振部へ電力を供給する供給処理と、前記判定処理により前記発振部が正常でないと判定した場合に前記電源の供給を停止する停止処理とを更に実行し、
前記判定処理は、前記供給処理により前記発振部へ電力を供給する前に前記検出部が検出したバイアス電圧と、後に検出したバイアス電圧とに基づいて前記発振部が正常であるか否かを判定する処理であることを特徴とする請求項1に記載の移動体検知装置。
【請求項3】
前記発振部の発振と共振する誘電体共振部に対して電磁界により結合した線路を備え、
前記検出部は、前記線路から前記発振部のバイアス電圧を検出することを特徴とする請求項1又は2のいずれかに記載の移動体検知装置。
【請求項4】
車両に送信する送信波を発振部が発振する発振ステップと、
前記発振ステップで発振した送信波を送信すると共に送信した送信波の反射波を受信する送受信ステップと、
前記送受信ステップで受信した反射波が変動させる前記発振部のバイアス電圧を検出する検出ステップと、
前記検出ステップで検出するバイアス電圧に基づいて前記発振部が正常であるか否かを判定する判定処理と、前記判定処理で前記発振部が正常であると判定する場合に、前記検出ステップで検出する前記発振部のバイアス電圧の変化に基づいて、前記車両において移動する移動体を検知する検知処理とを実行する移動体検知ステップとを備えることを特徴とする移動体検知方法。
【請求項1】
車両に送信する送信波を発振する発振部と、
前記発振部が発振した送信波を送信すると共に送信した送信波の反射波を受信する送受信部と、
前記送受信部が受信した反射波が変動させる前記発振部のバイアス電圧を検出する検出部と、
前記検出部で検出するバイアス電圧に基づいて前記発振部が正常であるか否かを判定する判定処理と、前記判定処理で前記発振部が正常であると判定する場合に、前記検出部で検出する前記発振部のバイアス電圧の変化に基づいて、前記車両において移動する移動体を検知する検知処理とを実行する移動体検知部とを備えることを特徴とする移動体検知装置。
【請求項2】
前記発振部は、前記移動体検知装置から電力の供給を受けて発振し、
前記移動体検知部は、前記発振部へ電力を供給する供給処理と、前記判定処理により前記発振部が正常でないと判定した場合に前記電源の供給を停止する停止処理とを更に実行し、
前記判定処理は、前記供給処理により前記発振部へ電力を供給する前に前記検出部が検出したバイアス電圧と、後に検出したバイアス電圧とに基づいて前記発振部が正常であるか否かを判定する処理であることを特徴とする請求項1に記載の移動体検知装置。
【請求項3】
前記発振部の発振と共振する誘電体共振部に対して電磁界により結合した線路を備え、
前記検出部は、前記線路から前記発振部のバイアス電圧を検出することを特徴とする請求項1又は2のいずれかに記載の移動体検知装置。
【請求項4】
車両に送信する送信波を発振部が発振する発振ステップと、
前記発振ステップで発振した送信波を送信すると共に送信した送信波の反射波を受信する送受信ステップと、
前記送受信ステップで受信した反射波が変動させる前記発振部のバイアス電圧を検出する検出ステップと、
前記検出ステップで検出するバイアス電圧に基づいて前記発振部が正常であるか否かを判定する判定処理と、前記判定処理で前記発振部が正常であると判定する場合に、前記検出ステップで検出する前記発振部のバイアス電圧の変化に基づいて、前記車両において移動する移動体を検知する検知処理とを実行する移動体検知ステップとを備えることを特徴とする移動体検知方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−60427(P2010−60427A)
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願番号】特願2008−226297(P2008−226297)
【出願日】平成20年9月3日(2008.9.3)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願日】平成20年9月3日(2008.9.3)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]