
移動体玩具
【課題】 同じ読取情報であっても読み取る方向によって異なる制御をすることができる移動体玩具を提供する。
【解決手段】 データ列から構成される移動途上に設けられた光学読取情報によって動作が制御される移動体玩具の走行環境決定プログラムであって、コンピュータを、移動体玩具の走行中に走査される前記光学読取情報を入力させる手段と、入力された光学読取情報におけるデータ列の読み取り順を検知する手段と、検知した読み取りデータ列順に基づいて前記光学読取情報に関連付けて記憶された当該データ列順に対応する走行環境情報を抽出する手段と、抽出した走行環境情報により移動体玩具の動作を制御する手段として機能させる。
【解決手段】 データ列から構成される移動途上に設けられた光学読取情報によって動作が制御される移動体玩具の走行環境決定プログラムであって、コンピュータを、移動体玩具の走行中に走査される前記光学読取情報を入力させる手段と、入力された光学読取情報におけるデータ列の読み取り順を検知する手段と、検知した読み取りデータ列順に基づいて前記光学読取情報に関連付けて記憶された当該データ列順に対応する走行環境情報を抽出する手段と、抽出した走行環境情報により移動体玩具の動作を制御する手段として機能させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、面上やレール上を走行する途上において光学読取情報を取得して該光学読取情報に基づいて走行制御する移動体玩具に関するものである。
【背景技術】
【0002】
周知の通り、車両と該車両が走行するレールと該レール周りに配置される風景等を模した簡単な成型品とからなる安価なレール式車両玩具が汎用されている。また、近年、カメラ搭載型や高機能ジオラマなどの付加価値を付けた高価格な高級志向の車両玩具も市場に出回っている。
【0003】
また、走行面上に配置された誘導線を検出し、当該誘導線の車両に対する位置関係を読み取ることによって、直線及びカーブの道路を判別して車両を制御するようにした、操縦性能を上げる工夫がなされた車両玩具走行装置が提案されている(例えば、特許文献1参照)。
【0004】
また、レール上に設けられたバーコードを車両が読み取って検出したコード信号に応じた音声を発生させる発音玩具(例えば、特許文献2参照)が提案され、自動車玩具の車体にバーコードリーダを設けて制御パターンをバーコード化して印刷したカードを複数枚用意し、当該複数のカードをバーコードリーダに通して読み取らせたカードの順番にしたがって自動車玩具を制御する車両玩具(例えば、特許文献3参照)が提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】 特開平6−269574号公報
【特許文献2】 特開2001−113055号公報
【特許文献3】 特開2006−68232号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、バーコードの読取情報に基づいて車両を制御する前記車両玩具走行装置や前記発音玩具は、車両の走行方向によって異なる制御が必要な場合があっても同じ制御を行い、臨場感あるジオラマを形成することができないという問題点があった。また、前記車両玩具においては、車両の走行方向によって異なる制御が必要な場合には、一方向における制御のために複数のカードをカードリーダに通した後、他方向における制御を行うために、新たにカードを選別したり順番を逆にする等して複数枚のカードを再度カードリーダに通さなければならないという問題点があった。
【0007】
そこで、本発明は、同じ読取情報であっても読み取る方向によって異なる制御をすることができる移動体玩具を得ることを技術的課題として、その具現化をはかるべく研究・実験を重ねた結果、読取情報を読み取った方向によって移動体玩具の進行方向を判別してこの進行方向に対応した制御をすれば、ジオラマ効果を高めることができるという刮目すべき知見を得、前記技術的課題を達成したものである。
【課題を解決するための手段】
【0008】
前記技術的課題は、次の通りの本発明によって解決できる。
【0009】
即ち、本発明に係る移動体玩具は、データ列から構成される移動途上に設けられた光学読取情報によって動作が制御される移動体玩具において、前記光学読取情報を走査する走査手段と、前記走査手段によって読み取られた光学読取情報におけるデータ列の読み取り順を検知する検知手段と、前記検知手段によって検知された読み取りデータ列順に基づいて前記移動体玩具の移動途上における走行環境を決定する決定手段とを備えているものである。
【0010】
また、本発明は、前記移動体玩具において、光学読取情報を所定の軌道上に設けられたバーコードとしたものである。
【0011】
また、本発明は、前記いずれかの移動体玩具において、走行環境を位置情報としたものである。
【0012】
また、本発明は、前記いずれかの移動体玩具において、走行環境を動作の開始又は終了を指示する動作情報としたものである。
【0013】
さらに、本発明に係る移動体玩具の走行環境決定プログラムは、データ列から構成される移動途上に設けられた光学読取情報によって動作が制御される移動体玩具の走行環境決定プログラムであって、コンピュータを、移動体玩具の走行中に走査される前記光学読取情報を入力させる手段と、入力された光学読取情報におけるデータ列の読み取り順を検知する手段と、検知した読み取りデータ列順に基づいて前記光学読取情報に関連付けて記憶された当該データ列順に対応する走行環境情報を抽出する手段と、抽出した走行環境情報により移動体玩具の動作を制御する手段として機能させるものである。
【発明の効果】
【0013】
本発明によれば、移動体玩具の走行中に走査される光学読取情報の走査方向を判別してこの走査方向に対応した移動体玩具の走行環境を決定してこの走行環境に対応した制御をするようにしたので、同じ光学読取情報であっても移動体玩具の進行方向によって異なる制御をすることができるから、ジオラマ効果を高めることができる。
【図面の簡単な説明】
【0014】
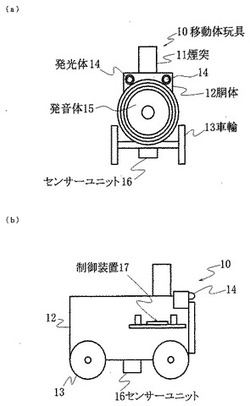
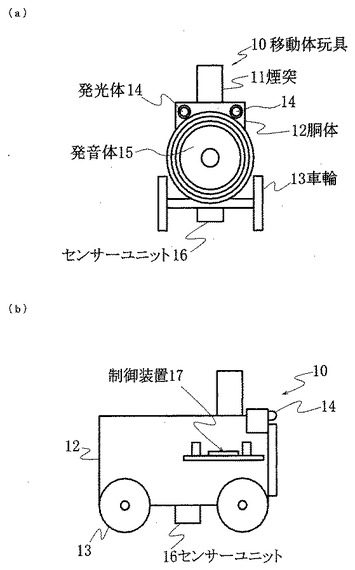
【図1】 本発明の一実施の形態を説明する移動体玩具の説明図であり、図1の(a)は移動体玩具の正面図、図1の(b)は移動体玩具の側面図である。
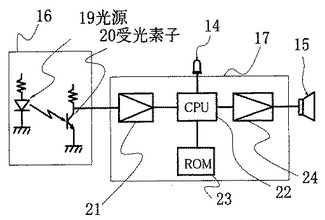
【図2】 図1に図示する制御装置のブロック図である。
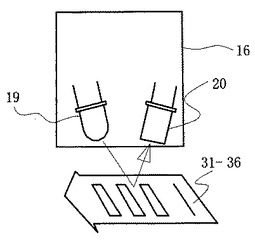
【図3】 図2に図示するセンサーユニットの説明図である。
【図4】 図2に図示する記憶部のブロック図である。
【図5】 移動体玩具の動作説明図である。
【図6】 図5に図示する鉄橋の説明図である。
【図7】 バーコードの説明図である。
【図8】 走行環境決定プログラムを説明するフローチャート図である。
【図9】 走行環境決定プログラムを説明するフローチャート図である。
【図10】 本発明の他の実施例を説明する図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図面に基づき説明する。
【実施例1】
【0016】
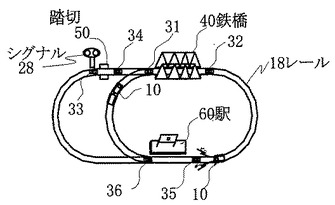
10は、煙突11と胴体12と車輪13とから構成されている汽車様移動体玩具であり(図1参照)、胴体12の前面には前方を照らす発光体(ライト)14と汽笛を鳴らす発音体(スピーカ)15とが設けられ、胴体12の下面には、移動体玩具10が所定の軌道上を走行中にシート状バーコード(光学読取情報)31〜36(図7参照)を走査するセンサーユニット(走査手段)16が設けられ、胴体12の内部には、センサーユニット16によって読み取ったバーコード31〜36におけるデータ列の読み取り順を検知し、検知した読み取りデータ列順に基づいて移動体玩具10の走査時の移動途上における走行環境を決定し、当該走行環境に従って移動体玩具10の動作を制御する信号を出力する電子回路からなる制御装置(検知手段、決定手段)17が設けられている。そして、移動体玩具10は、図5に示すように、レール18上を自力走行し、当該レール18内に前記バーコード31〜36が貼着されている。
【0017】
前記センサーユニット16は、図2及び図3に示すように、バーコード31〜36のデータ列を読み取るための光を照射する光源19と該光源19から発せられた反射光を受光する受光素子20とを備えており、当該受光素子20によって得られたアナログ信号を前記制御装置17に出力している。
【0018】
前記制御装置17は、前記センサーユニット16で読み取ったバーコード31〜36の読み取りデータ列順に基づいて前記移動体玩具10の移動途上における走行環境を決定して該走行環境に従って移動体玩具10の動作を制御しており、前記センサーユニット16から出力されたアナログ信号をデジタル信号に変換するAD変換回路21と、図8及び図9に示す走行環境決定プログラム(後述)を実行して当該AD変換回路21によって変換された2値化デジタル信号のデータ列の読み取り順を検知し、検知した読み取りデータ列順に基づいて走査時の移動体玩具10の移動途上における走行環境を決定して当該移動体玩具10を制御をする制御部(CPU)22と、前記走行環境決定プログラムとバーコード31〜36に関連付けられたデータ列順に対応する走行環境情報とを記憶させた記憶部(ROM)23と、前記制御部22から出力される移動体玩具10の動作を制御するデジタル信号をアナログ信号に変換するDA変換回路24とを備えて構成されている。
【0019】
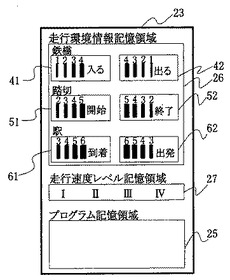
前記記憶部23には、図4に示すように、プログラム記憶領域25と走行環境情報記憶領域26と走行速度レベル記憶領域27が設けられており、走行環境情報記憶領域26には、レール18の軌跡上に配置される鉄橋40に差し掛かったか或いは渡り終えたかの走行環境情報を決定する鉄橋入口用のデータ列順データ41と該データ41と同じデータであってデータ列順が逆順となっている鉄橋出口用のデータ列順データ42とが対で記憶され、レール18の軌跡上に配置される踏切50にてシグナル28(図5参照)の点滅を開始するか或いは終了させるかの走行環境情報を決定するシグナル開始用のデータ列順データ51と該データ51と同じデータであってデータ列順が逆順となっているシグナル終了用のデータ列順データ52とが対で記憶され、レール18の軌跡上に配置される駅60に到着するか或いは出発するかの走行環境情報を決定する駅到着用のデータ列順データ61と該データ61と同じデータであってデータ列順が逆順となっている駅出発用のデータ列順データ62とが対で記憶されている。また走行速度レベル記憶領域27には、バーコード31〜36の読み取り開始から読み取り終了までの読み取り時間によって移動体玩具10の走行速度を決定するための速度レベルデーター(I、II、III、IV)が記憶されている。
【0020】
次に、前記制御部22の制御により、移動体玩具10の走行中に走査されるバーコード31〜36を入力する手段と入力したバーコード31〜36におけるデータ列の読み取り順を検知する手段と検知した読み取りデータ列順に基づいてバーコード31〜36に関連付けて記憶部23に記憶された当該データ列順に対応する走行環境情報を抽出する手段と抽出した走行環境情報により移動体玩具10の動作を制御する手段とを備えている走行環境決定プログラムに基づいて移動体玩具10の動作を説明する。
【0021】
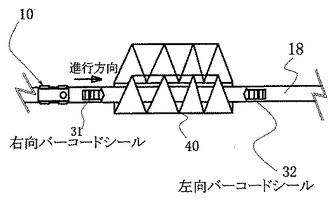
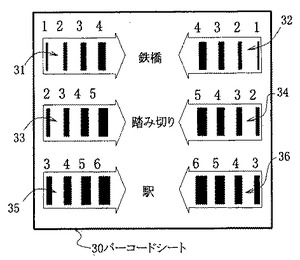
図5に示すように、レール18の軌跡上には鉄橋40と踏切50と駅60とが配置されており、図6に示すように、移動体玩具10の進行方向に対して鉄橋40に差し掛かるレール位置内には、図7に示すバーコードシート30に形成された、鉄橋入口用のデータ列順データ41と同じデータ列順の鉄橋入口用右向バーコード31のシールを剥がして当該右向バーコード31が鉄橋40を指すように貼着され、鉄橋40を出るレール位置内には、鉄橋出口用のデータ列順データ42と同じデータ列順になるように逆向きにして形成された、前記右向バーコード31と同じ鉄橋出口用左向バーコード32のシールを剥がして当該左向バーコード32が鉄橋40を指すように貼着されている。また、同様に、移動体玩具10の進行方向に対して踏切50に差し掛かるレール位置内には、シグナル開始用のデータ列順データ51と同じデータ列順のシグナル開始用右向バーコード33のシールを剥がして当該右向バーコード33が踏切50を指すように貼着され、踏切50を出るレール位置内には、シグナル終了用のデータ列順データ52と同じデータ列順になるように逆向きにして形成された、前記右向バーコード33と同じシグナル終了用左向バーコード34のシールを剥がして当該左向バーコード34が踏切50を指すように貼着されている。また、同様に、移動体玩具10の進行方向に対して駅60に差し掛かるレール位置内には、駅到着用のデータ列順データ61と同じデータ列順の駅到着用右向バーコード35のシールを剥がして当該右向バーコード35が駅60を指すように貼着され、駅60を出るレール位置内には、駅出発用のデータ列順データ62と同じデータ列順になるように逆向きにして形成された、前記右向バーコード35と同じ駅出発用左向バーコード36のシールを剥がして当該左向バーコード36が駅60を指すように貼着されている。
【0022】
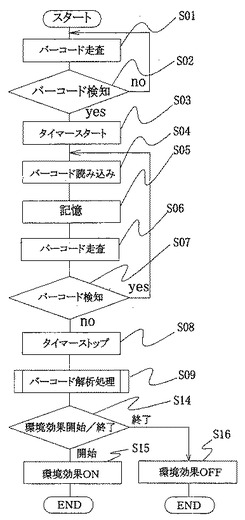
レール18を走行している移動体玩具10は、常時、センサーユニット16によってレール18内をスキャニングし、反射光を受光素子20へ入力して移動途上のバーコード31〜36を走査している(ステップS01)。図6に示すように、移動体玩具10が鉄橋40の手前に差し掛かってレール18内に配置された鉄橋入口用右向バーコード31をセンサーユニット16が走査すれば(ステップS02)、右向バーコード31の最初にスキャンされるコードを始点として制御部22内のタイマー(図示せず。)を始動させ(ステップS03)、図3に示すように、コードのデータを読み取り(ステップS04)、読み取ったコードデータを制御部22へ入力して制御部22内のメモリ(図示せず。)へ格納し(ステップS05)、右向バーコード31の次のコードをスキャンし(ステップS06)、この動作を繰り返し(ステップS07)、最後に検出したコードを終点としてタイマーをストップさせ(ステップS08)、続いて、制御部22に記憶された右向バーコード31の解析処理を実行する(ステップS09)。
【0023】
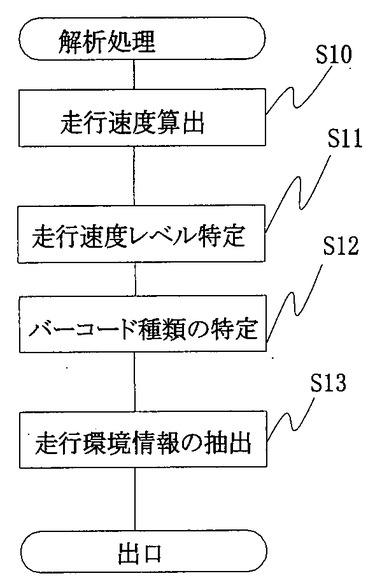
前記バーコード解析処理では、先ず、制御部22の制御により、バーコード31(32)の読み取り時間によって移動体玩具10の走行速度を算出し(ステップS10)走行速度レベル記憶領域にアクセスすることにより、走行速度レベル27を特定する(ステップs11)、次いで、入力されたバーコード31,32の種類をバーコードのデータ列によって特定し、例えば、バーコード31(32)のデータ列が「1−2−3−4」であれば、走行環境情報記憶領域26にアクセスすることによって「鉄橋」に関する走行環境情報であるとしてバーコードの種類が特定され(ステップs12)、次いで、読み取ったバーコード31(32)のデータ列の読み取り順を検知してデータ列順を特定し、例えば、データ列順が「1」→「2」→「3」→「4」と列数が増加していく順番であれば、走行環境情報記憶領域26にアクセスすることによって鉄橋入口用のデータ列順データ41であると特定されて鉄橋40に差し掛かったという走行環境情報を抽出して鉄橋を渡ることを表す鉄橋音を走行レベルに応じた音として鳴らす信号(走行環境情報)を得る(ステップS13)。
【0024】
前記バーコード解析処理で得られた走行環境情報の信号が環境効果を開始する信号であれば(ステップS14)、制御部22の制御によって、発音体15から警笛を発し(ステップs15)、走行環境情報の信号が鉄橋40を渡り終えて環境効果を終了する信号であれば(ステップS14)、警笛を停止する(ステップS16)。
【0025】
移動体玩具10が鉄橋40を渡ってレール18内に配置された鉄橋入口用の左向バーコード32をセンサーユニット16が走査すれば、ステップS02〜S13を経て、データ列順が「4」→「3」→「2」→「1」と列数が減少していく順番となって、前述したとおり、前記バーコード解析処理で得られた走行環境情報の信号は環境効果を終了する信号であると判断して、制御部22の制御によって、警笛が止まるようになっている(ステップS16)。また、シグナル開始用の右向バーコード33を走査した場合には、シグナル28を点滅させる走行環境情報の信号が得られ、シグナル終了用左向バーコード34を走査した場合には、シグナル28の点滅をOFFにする走行環境情報の信号が得られる。また、駅到着用右向バーコード35を走査した場合には、駅60に到着したことを表す警笛を鳴らすと共に、点灯させる走行環境情報の信号が得られ、駅出発用左向バーコード36を走査した場合には、駅60を出発することを表す警笛の停止と消灯との走行環境情報の信号が得られようになっている。
【0026】
このように、例えば、鉄橋40を表すバーコード列が「1−2−3−4」であり、鉄橋40の左右に逆向きにバーコード31、32を配置すれば、左から移動体玩具10が進入して「1」→「2」→「3」→「4」→「鉄橋」→「4」→「3」→「2」→「1」とバーコードを検知することとなる。検知されたバーコード列データの読み取り順序を制御部22が解析して数列順序が増加していると特定した場合は環境効果の開始であると判断し、数列順序が減少していると特定した場合は環境効果出力の終了であると判断することによって、バーコードのデータ列「1」,「2」,「3」,「4」の読み取り、鉄橋音開始、バーコードのデータ列「4」,「3」,「2」,「1」の読み取り、鉄橋音終了、を演出することができる。即ち、鉄橋40等のジオラマ環境の左右位置に同じバーコードのシートを逆向きに設置することにより、移動体玩具10の進行方向が逆であっても、同じ演出のジオラマを実現することができる。さらに、ジオラマ環境毎にバーコードのデータ列を決めておけば、その環境条件に応じた、音や光を演出することができる。
【0027】
なお、移動体玩具10を手でもって所定の平面軌道上を走行させてバーコードを読み取り、バーコード解析処理して走行環境情報を得るようにしてもよい。
【実施例2】
【0028】
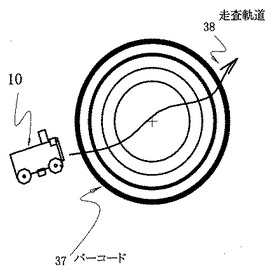
本実施例は、前記実施例1の変形例であり、37は、バーコードのバーが同心円を描くように円形に形成されているバーコードである(図10参照)。本実施例では、符号38にて示す走査軌道のように、移動体玩具10がバーコード37に対してあらゆる方向から進入してもバーコード37の円の中心付近(バーが形成されていない位置)を通過することによって、前記実施例1と同様の作用・効果を奏することができる。
【0029】
光学読取情報は、バーコードの外に、ドットコードであってもよい。また、制御装置17は、移動体玩具10の車体と切り離してコントローラとして別途に設けてもよい。
【0030】
また、移動体玩具は、面上を移動する走行手段(車体)と、前記面上に設けた光学読取情報を前記走行手段の移動によって走査する前記走行手段に設けられた走査手段(スキャナー)と、前記走行手段の移動に起因して前記走査手段によって読み取られる前記光学読取情報におけるデータ列の読み取り順を検知する(CPU)手段と、前記検知する手段によって検知されたデータ列の読み取り順に基づいて前記走査手段によって走査された前記光学読取情報の走査方向を認識する認識手段(CPU)と、前記認識手段によって認識された走査方向によって前記走行手段の前記面上での風景や観賞物や障害物や干渉物等の走行環境を決定する決定手段(CPU)を備えているものであってもよい。
【産業上の利用可能性】
【0031】
本発明によれば、光学読取情報の配置位置及び配置向きによって、走行中の車両状況を演出することができ、同じ光学読取情報であっても走行環境に合った音楽や案内を違った形で出力できるから、ジオラマを自由にレイアウトすることができる創造性のある移動体玩具を提供することができる。
【0032】
従って、本発明の産業上利用性は非常に高いといえる。
【符号の説明】
【0033】
10 汽車様移動体玩具
14 発光体(ライト)
15 発音体(スピーカ)
16 センサーユニット
17 制御装置
18 レール
22 制御部(CPU)
23 記憶部(ROM)
25 プログラム記憶領域
26 走行環境情報記憶領域
27 走行速度レベル記憶領域
28 シグナル
30 バーコードシート
31〜36 バーコード
40 鉄橋
41 鉄橋入口用データ列順データ
42 鉄橋出口用データ列順データ
50 踏切
51 シグナル開始用データ列順データ
52 シグナル終了用データ列順データ
60 駅
61 駅到着用データ列順データ
62 駅出発用データ列順データ
【技術分野】
【0001】
本発明は、面上やレール上を走行する途上において光学読取情報を取得して該光学読取情報に基づいて走行制御する移動体玩具に関するものである。
【背景技術】
【0002】
周知の通り、車両と該車両が走行するレールと該レール周りに配置される風景等を模した簡単な成型品とからなる安価なレール式車両玩具が汎用されている。また、近年、カメラ搭載型や高機能ジオラマなどの付加価値を付けた高価格な高級志向の車両玩具も市場に出回っている。
【0003】
また、走行面上に配置された誘導線を検出し、当該誘導線の車両に対する位置関係を読み取ることによって、直線及びカーブの道路を判別して車両を制御するようにした、操縦性能を上げる工夫がなされた車両玩具走行装置が提案されている(例えば、特許文献1参照)。
【0004】
また、レール上に設けられたバーコードを車両が読み取って検出したコード信号に応じた音声を発生させる発音玩具(例えば、特許文献2参照)が提案され、自動車玩具の車体にバーコードリーダを設けて制御パターンをバーコード化して印刷したカードを複数枚用意し、当該複数のカードをバーコードリーダに通して読み取らせたカードの順番にしたがって自動車玩具を制御する車両玩具(例えば、特許文献3参照)が提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】 特開平6−269574号公報
【特許文献2】 特開2001−113055号公報
【特許文献3】 特開2006−68232号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、バーコードの読取情報に基づいて車両を制御する前記車両玩具走行装置や前記発音玩具は、車両の走行方向によって異なる制御が必要な場合があっても同じ制御を行い、臨場感あるジオラマを形成することができないという問題点があった。また、前記車両玩具においては、車両の走行方向によって異なる制御が必要な場合には、一方向における制御のために複数のカードをカードリーダに通した後、他方向における制御を行うために、新たにカードを選別したり順番を逆にする等して複数枚のカードを再度カードリーダに通さなければならないという問題点があった。
【0007】
そこで、本発明は、同じ読取情報であっても読み取る方向によって異なる制御をすることができる移動体玩具を得ることを技術的課題として、その具現化をはかるべく研究・実験を重ねた結果、読取情報を読み取った方向によって移動体玩具の進行方向を判別してこの進行方向に対応した制御をすれば、ジオラマ効果を高めることができるという刮目すべき知見を得、前記技術的課題を達成したものである。
【課題を解決するための手段】
【0008】
前記技術的課題は、次の通りの本発明によって解決できる。
【0009】
即ち、本発明に係る移動体玩具は、データ列から構成される移動途上に設けられた光学読取情報によって動作が制御される移動体玩具において、前記光学読取情報を走査する走査手段と、前記走査手段によって読み取られた光学読取情報におけるデータ列の読み取り順を検知する検知手段と、前記検知手段によって検知された読み取りデータ列順に基づいて前記移動体玩具の移動途上における走行環境を決定する決定手段とを備えているものである。
【0010】
また、本発明は、前記移動体玩具において、光学読取情報を所定の軌道上に設けられたバーコードとしたものである。
【0011】
また、本発明は、前記いずれかの移動体玩具において、走行環境を位置情報としたものである。
【0012】
また、本発明は、前記いずれかの移動体玩具において、走行環境を動作の開始又は終了を指示する動作情報としたものである。
【0013】
さらに、本発明に係る移動体玩具の走行環境決定プログラムは、データ列から構成される移動途上に設けられた光学読取情報によって動作が制御される移動体玩具の走行環境決定プログラムであって、コンピュータを、移動体玩具の走行中に走査される前記光学読取情報を入力させる手段と、入力された光学読取情報におけるデータ列の読み取り順を検知する手段と、検知した読み取りデータ列順に基づいて前記光学読取情報に関連付けて記憶された当該データ列順に対応する走行環境情報を抽出する手段と、抽出した走行環境情報により移動体玩具の動作を制御する手段として機能させるものである。
【発明の効果】
【0013】
本発明によれば、移動体玩具の走行中に走査される光学読取情報の走査方向を判別してこの走査方向に対応した移動体玩具の走行環境を決定してこの走行環境に対応した制御をするようにしたので、同じ光学読取情報であっても移動体玩具の進行方向によって異なる制御をすることができるから、ジオラマ効果を高めることができる。
【図面の簡単な説明】
【0014】
【図1】 本発明の一実施の形態を説明する移動体玩具の説明図であり、図1の(a)は移動体玩具の正面図、図1の(b)は移動体玩具の側面図である。
【図2】 図1に図示する制御装置のブロック図である。
【図3】 図2に図示するセンサーユニットの説明図である。
【図4】 図2に図示する記憶部のブロック図である。
【図5】 移動体玩具の動作説明図である。
【図6】 図5に図示する鉄橋の説明図である。
【図7】 バーコードの説明図である。
【図8】 走行環境決定プログラムを説明するフローチャート図である。
【図9】 走行環境決定プログラムを説明するフローチャート図である。
【図10】 本発明の他の実施例を説明する図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図面に基づき説明する。
【実施例1】
【0016】
10は、煙突11と胴体12と車輪13とから構成されている汽車様移動体玩具であり(図1参照)、胴体12の前面には前方を照らす発光体(ライト)14と汽笛を鳴らす発音体(スピーカ)15とが設けられ、胴体12の下面には、移動体玩具10が所定の軌道上を走行中にシート状バーコード(光学読取情報)31〜36(図7参照)を走査するセンサーユニット(走査手段)16が設けられ、胴体12の内部には、センサーユニット16によって読み取ったバーコード31〜36におけるデータ列の読み取り順を検知し、検知した読み取りデータ列順に基づいて移動体玩具10の走査時の移動途上における走行環境を決定し、当該走行環境に従って移動体玩具10の動作を制御する信号を出力する電子回路からなる制御装置(検知手段、決定手段)17が設けられている。そして、移動体玩具10は、図5に示すように、レール18上を自力走行し、当該レール18内に前記バーコード31〜36が貼着されている。
【0017】
前記センサーユニット16は、図2及び図3に示すように、バーコード31〜36のデータ列を読み取るための光を照射する光源19と該光源19から発せられた反射光を受光する受光素子20とを備えており、当該受光素子20によって得られたアナログ信号を前記制御装置17に出力している。
【0018】
前記制御装置17は、前記センサーユニット16で読み取ったバーコード31〜36の読み取りデータ列順に基づいて前記移動体玩具10の移動途上における走行環境を決定して該走行環境に従って移動体玩具10の動作を制御しており、前記センサーユニット16から出力されたアナログ信号をデジタル信号に変換するAD変換回路21と、図8及び図9に示す走行環境決定プログラム(後述)を実行して当該AD変換回路21によって変換された2値化デジタル信号のデータ列の読み取り順を検知し、検知した読み取りデータ列順に基づいて走査時の移動体玩具10の移動途上における走行環境を決定して当該移動体玩具10を制御をする制御部(CPU)22と、前記走行環境決定プログラムとバーコード31〜36に関連付けられたデータ列順に対応する走行環境情報とを記憶させた記憶部(ROM)23と、前記制御部22から出力される移動体玩具10の動作を制御するデジタル信号をアナログ信号に変換するDA変換回路24とを備えて構成されている。
【0019】
前記記憶部23には、図4に示すように、プログラム記憶領域25と走行環境情報記憶領域26と走行速度レベル記憶領域27が設けられており、走行環境情報記憶領域26には、レール18の軌跡上に配置される鉄橋40に差し掛かったか或いは渡り終えたかの走行環境情報を決定する鉄橋入口用のデータ列順データ41と該データ41と同じデータであってデータ列順が逆順となっている鉄橋出口用のデータ列順データ42とが対で記憶され、レール18の軌跡上に配置される踏切50にてシグナル28(図5参照)の点滅を開始するか或いは終了させるかの走行環境情報を決定するシグナル開始用のデータ列順データ51と該データ51と同じデータであってデータ列順が逆順となっているシグナル終了用のデータ列順データ52とが対で記憶され、レール18の軌跡上に配置される駅60に到着するか或いは出発するかの走行環境情報を決定する駅到着用のデータ列順データ61と該データ61と同じデータであってデータ列順が逆順となっている駅出発用のデータ列順データ62とが対で記憶されている。また走行速度レベル記憶領域27には、バーコード31〜36の読み取り開始から読み取り終了までの読み取り時間によって移動体玩具10の走行速度を決定するための速度レベルデーター(I、II、III、IV)が記憶されている。
【0020】
次に、前記制御部22の制御により、移動体玩具10の走行中に走査されるバーコード31〜36を入力する手段と入力したバーコード31〜36におけるデータ列の読み取り順を検知する手段と検知した読み取りデータ列順に基づいてバーコード31〜36に関連付けて記憶部23に記憶された当該データ列順に対応する走行環境情報を抽出する手段と抽出した走行環境情報により移動体玩具10の動作を制御する手段とを備えている走行環境決定プログラムに基づいて移動体玩具10の動作を説明する。
【0021】
図5に示すように、レール18の軌跡上には鉄橋40と踏切50と駅60とが配置されており、図6に示すように、移動体玩具10の進行方向に対して鉄橋40に差し掛かるレール位置内には、図7に示すバーコードシート30に形成された、鉄橋入口用のデータ列順データ41と同じデータ列順の鉄橋入口用右向バーコード31のシールを剥がして当該右向バーコード31が鉄橋40を指すように貼着され、鉄橋40を出るレール位置内には、鉄橋出口用のデータ列順データ42と同じデータ列順になるように逆向きにして形成された、前記右向バーコード31と同じ鉄橋出口用左向バーコード32のシールを剥がして当該左向バーコード32が鉄橋40を指すように貼着されている。また、同様に、移動体玩具10の進行方向に対して踏切50に差し掛かるレール位置内には、シグナル開始用のデータ列順データ51と同じデータ列順のシグナル開始用右向バーコード33のシールを剥がして当該右向バーコード33が踏切50を指すように貼着され、踏切50を出るレール位置内には、シグナル終了用のデータ列順データ52と同じデータ列順になるように逆向きにして形成された、前記右向バーコード33と同じシグナル終了用左向バーコード34のシールを剥がして当該左向バーコード34が踏切50を指すように貼着されている。また、同様に、移動体玩具10の進行方向に対して駅60に差し掛かるレール位置内には、駅到着用のデータ列順データ61と同じデータ列順の駅到着用右向バーコード35のシールを剥がして当該右向バーコード35が駅60を指すように貼着され、駅60を出るレール位置内には、駅出発用のデータ列順データ62と同じデータ列順になるように逆向きにして形成された、前記右向バーコード35と同じ駅出発用左向バーコード36のシールを剥がして当該左向バーコード36が駅60を指すように貼着されている。
【0022】
レール18を走行している移動体玩具10は、常時、センサーユニット16によってレール18内をスキャニングし、反射光を受光素子20へ入力して移動途上のバーコード31〜36を走査している(ステップS01)。図6に示すように、移動体玩具10が鉄橋40の手前に差し掛かってレール18内に配置された鉄橋入口用右向バーコード31をセンサーユニット16が走査すれば(ステップS02)、右向バーコード31の最初にスキャンされるコードを始点として制御部22内のタイマー(図示せず。)を始動させ(ステップS03)、図3に示すように、コードのデータを読み取り(ステップS04)、読み取ったコードデータを制御部22へ入力して制御部22内のメモリ(図示せず。)へ格納し(ステップS05)、右向バーコード31の次のコードをスキャンし(ステップS06)、この動作を繰り返し(ステップS07)、最後に検出したコードを終点としてタイマーをストップさせ(ステップS08)、続いて、制御部22に記憶された右向バーコード31の解析処理を実行する(ステップS09)。
【0023】
前記バーコード解析処理では、先ず、制御部22の制御により、バーコード31(32)の読み取り時間によって移動体玩具10の走行速度を算出し(ステップS10)走行速度レベル記憶領域にアクセスすることにより、走行速度レベル27を特定する(ステップs11)、次いで、入力されたバーコード31,32の種類をバーコードのデータ列によって特定し、例えば、バーコード31(32)のデータ列が「1−2−3−4」であれば、走行環境情報記憶領域26にアクセスすることによって「鉄橋」に関する走行環境情報であるとしてバーコードの種類が特定され(ステップs12)、次いで、読み取ったバーコード31(32)のデータ列の読み取り順を検知してデータ列順を特定し、例えば、データ列順が「1」→「2」→「3」→「4」と列数が増加していく順番であれば、走行環境情報記憶領域26にアクセスすることによって鉄橋入口用のデータ列順データ41であると特定されて鉄橋40に差し掛かったという走行環境情報を抽出して鉄橋を渡ることを表す鉄橋音を走行レベルに応じた音として鳴らす信号(走行環境情報)を得る(ステップS13)。
【0024】
前記バーコード解析処理で得られた走行環境情報の信号が環境効果を開始する信号であれば(ステップS14)、制御部22の制御によって、発音体15から警笛を発し(ステップs15)、走行環境情報の信号が鉄橋40を渡り終えて環境効果を終了する信号であれば(ステップS14)、警笛を停止する(ステップS16)。
【0025】
移動体玩具10が鉄橋40を渡ってレール18内に配置された鉄橋入口用の左向バーコード32をセンサーユニット16が走査すれば、ステップS02〜S13を経て、データ列順が「4」→「3」→「2」→「1」と列数が減少していく順番となって、前述したとおり、前記バーコード解析処理で得られた走行環境情報の信号は環境効果を終了する信号であると判断して、制御部22の制御によって、警笛が止まるようになっている(ステップS16)。また、シグナル開始用の右向バーコード33を走査した場合には、シグナル28を点滅させる走行環境情報の信号が得られ、シグナル終了用左向バーコード34を走査した場合には、シグナル28の点滅をOFFにする走行環境情報の信号が得られる。また、駅到着用右向バーコード35を走査した場合には、駅60に到着したことを表す警笛を鳴らすと共に、点灯させる走行環境情報の信号が得られ、駅出発用左向バーコード36を走査した場合には、駅60を出発することを表す警笛の停止と消灯との走行環境情報の信号が得られようになっている。
【0026】
このように、例えば、鉄橋40を表すバーコード列が「1−2−3−4」であり、鉄橋40の左右に逆向きにバーコード31、32を配置すれば、左から移動体玩具10が進入して「1」→「2」→「3」→「4」→「鉄橋」→「4」→「3」→「2」→「1」とバーコードを検知することとなる。検知されたバーコード列データの読み取り順序を制御部22が解析して数列順序が増加していると特定した場合は環境効果の開始であると判断し、数列順序が減少していると特定した場合は環境効果出力の終了であると判断することによって、バーコードのデータ列「1」,「2」,「3」,「4」の読み取り、鉄橋音開始、バーコードのデータ列「4」,「3」,「2」,「1」の読み取り、鉄橋音終了、を演出することができる。即ち、鉄橋40等のジオラマ環境の左右位置に同じバーコードのシートを逆向きに設置することにより、移動体玩具10の進行方向が逆であっても、同じ演出のジオラマを実現することができる。さらに、ジオラマ環境毎にバーコードのデータ列を決めておけば、その環境条件に応じた、音や光を演出することができる。
【0027】
なお、移動体玩具10を手でもって所定の平面軌道上を走行させてバーコードを読み取り、バーコード解析処理して走行環境情報を得るようにしてもよい。
【実施例2】
【0028】
本実施例は、前記実施例1の変形例であり、37は、バーコードのバーが同心円を描くように円形に形成されているバーコードである(図10参照)。本実施例では、符号38にて示す走査軌道のように、移動体玩具10がバーコード37に対してあらゆる方向から進入してもバーコード37の円の中心付近(バーが形成されていない位置)を通過することによって、前記実施例1と同様の作用・効果を奏することができる。
【0029】
光学読取情報は、バーコードの外に、ドットコードであってもよい。また、制御装置17は、移動体玩具10の車体と切り離してコントローラとして別途に設けてもよい。
【0030】
また、移動体玩具は、面上を移動する走行手段(車体)と、前記面上に設けた光学読取情報を前記走行手段の移動によって走査する前記走行手段に設けられた走査手段(スキャナー)と、前記走行手段の移動に起因して前記走査手段によって読み取られる前記光学読取情報におけるデータ列の読み取り順を検知する(CPU)手段と、前記検知する手段によって検知されたデータ列の読み取り順に基づいて前記走査手段によって走査された前記光学読取情報の走査方向を認識する認識手段(CPU)と、前記認識手段によって認識された走査方向によって前記走行手段の前記面上での風景や観賞物や障害物や干渉物等の走行環境を決定する決定手段(CPU)を備えているものであってもよい。
【産業上の利用可能性】
【0031】
本発明によれば、光学読取情報の配置位置及び配置向きによって、走行中の車両状況を演出することができ、同じ光学読取情報であっても走行環境に合った音楽や案内を違った形で出力できるから、ジオラマを自由にレイアウトすることができる創造性のある移動体玩具を提供することができる。
【0032】
従って、本発明の産業上利用性は非常に高いといえる。
【符号の説明】
【0033】
10 汽車様移動体玩具
14 発光体(ライト)
15 発音体(スピーカ)
16 センサーユニット
17 制御装置
18 レール
22 制御部(CPU)
23 記憶部(ROM)
25 プログラム記憶領域
26 走行環境情報記憶領域
27 走行速度レベル記憶領域
28 シグナル
30 バーコードシート
31〜36 バーコード
40 鉄橋
41 鉄橋入口用データ列順データ
42 鉄橋出口用データ列順データ
50 踏切
51 シグナル開始用データ列順データ
52 シグナル終了用データ列順データ
60 駅
61 駅到着用データ列順データ
62 駅出発用データ列順データ
【特許請求の範囲】
【請求項1】
データ列から構成される移動途上に設けられた光学読取情報によって動作が制御される移動体玩具において、前記光学読取情報を走査する走査手段と、前記走査手段によって読み取られた光学読取情報におけるデータ列の読み取り順を検知する検知手段と、前記検知手段によって検知された読み取りデータ列順に基づいて前記移動体玩具の移動途上における走行環境を決定する決定手段とを備えていることを特徴とする移動体玩具。
【請求項2】
光学読取情報が所定の軌道上に設けられたバーコードである請求項1記載の移動体玩具。
【請求項3】
走行環境が位置情報である請求項1又は2記載の移動体玩具。
【請求項4】
走行環境が動作の開始又は終了を指示する動作情報である請求項1又は2記載の移動玩具。
【請求項5】
データ列から構成される移動途上に設けられた光学読取情報によって動作が制御される移動体玩具の走行環境決定プログラムであって、コンピュータを、移動体玩具の走行中に走査される前記光学読取情報を入力させる手段と、入力された光学読取情報におけるデータ列の読み取り順を検知する手段と、検知した読み取りデータ列順に基づいて前記光学読取情報に関連付けて記憶された当該データ列順に対応する走行環境情報を抽出する手段と、抽出した走行環境情報により移動体玩具の動作を制御する手段として機能させるための移動体玩具の走行環境決定プログラム。
【請求項1】
データ列から構成される移動途上に設けられた光学読取情報によって動作が制御される移動体玩具において、前記光学読取情報を走査する走査手段と、前記走査手段によって読み取られた光学読取情報におけるデータ列の読み取り順を検知する検知手段と、前記検知手段によって検知された読み取りデータ列順に基づいて前記移動体玩具の移動途上における走行環境を決定する決定手段とを備えていることを特徴とする移動体玩具。
【請求項2】
光学読取情報が所定の軌道上に設けられたバーコードである請求項1記載の移動体玩具。
【請求項3】
走行環境が位置情報である請求項1又は2記載の移動体玩具。
【請求項4】
走行環境が動作の開始又は終了を指示する動作情報である請求項1又は2記載の移動玩具。
【請求項5】
データ列から構成される移動途上に設けられた光学読取情報によって動作が制御される移動体玩具の走行環境決定プログラムであって、コンピュータを、移動体玩具の走行中に走査される前記光学読取情報を入力させる手段と、入力された光学読取情報におけるデータ列の読み取り順を検知する手段と、検知した読み取りデータ列順に基づいて前記光学読取情報に関連付けて記憶された当該データ列順に対応する走行環境情報を抽出する手段と、抽出した走行環境情報により移動体玩具の動作を制御する手段として機能させるための移動体玩具の走行環境決定プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−240345(P2010−240345A)
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願番号】特願2009−104507(P2009−104507)
【出願日】平成21年4月2日(2009.4.2)
【出願人】(597010226)株式会社コト (13)
【Fターム(参考)】
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願日】平成21年4月2日(2009.4.2)
【出願人】(597010226)株式会社コト (13)
【Fターム(参考)】
[ Back to top ]