
移動体用スペクトル測定装置
【課題】車両等の移動体に搭載されたスペクトルセンサによる撮像データ(スペクトルデータ)に生じる移動体の移動に起因するスペクトル波形の変化を軽減して、測定対象のより精度の高い識別を可能にする移動体用スペクトル測定装置を提供する。
【解決手段】スペクトルセンサ14にて検出される観測光のスペクトル波形に基づいて車両10周辺の測定対象を識別する移動体用スペクトル測定装置は、複数の測定対象のスペクトル波形が辞書データとして格納されている辞書データ記憶部16と、観測光のスペクトル波形と辞書データ記憶部16に格納されているスペクトル波形との比較演算に基づいて測定対象を識別する演算装置17と、当該車両10の速度を取得する車両状態取得装置19とを備える。演算装置17は、当該車両10の速度に基づき観測光のスペクトル波形を補正して辞書データ記憶部16に格納されているスペクトル波形との比較演算を行う。
【解決手段】スペクトルセンサ14にて検出される観測光のスペクトル波形に基づいて車両10周辺の測定対象を識別する移動体用スペクトル測定装置は、複数の測定対象のスペクトル波形が辞書データとして格納されている辞書データ記憶部16と、観測光のスペクトル波形と辞書データ記憶部16に格納されているスペクトル波形との比較演算に基づいて測定対象を識別する演算装置17と、当該車両10の速度を取得する車両状態取得装置19とを備える。演算装置17は、当該車両10の速度に基づき観測光のスペクトル波形を補正して辞書データ記憶部16に格納されているスペクトル波形との比較演算を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両、特に自動車などの移動体に搭載されたスペクトルセンサにより測定された測定対象のスペクトルデータから測定対象を識別する移動体用スペクトル測定装置に関する。
【背景技術】
【0002】
近年、自動車等の車両には、その運転支援装置として、車両周囲において動的に変化する歩行者や信号などの状態を認識してドライバーの運転や意思決定を支援する装置が搭載されることが少なくない。そして、そのような装置の多くは、信号や歩行者等の状態をCCDカメラ等にて撮像するとともに、その撮像画像を実時間で画像処理して状態認識し、その認識した結果を上述した運転支援等に用いるようにしている。しかし通常、歩行者は、その形状が大きさや向き、あるいは持ち物の有無などにより多様に変化することから、上記画像処理に基づいて得られる形状からその存在を正確に認識することは難しい。また、信号機は一般に、その大きさや色についての規格性が高いものの、見る角度によってはその形状が変化するなどの不都合も避けがたく、上記画像処理を通じた形状認識ではやはり限界がある。
【0003】
一方、特許文献1には、測定対象を認識する技術として、スペクトルセンサにより採取されたスペクトルデータを用いるリモートセンシング技術が記載されている。すなわちここでは、航空機や人工衛星に搭載されたスペクトルセンサにより撮像された不可視光領域をも含むマルチスペクトル画像データから、例えば森林、田畑、市街地等のような、可視光領域のみでは認識の困難な測定対象の分類、特徴付けが行なわれ、こうして分類され、特徴付けされたデータに基づいて測定対象が識別される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−251052号公報
【特許文献2】特開2006−145362号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このように、スペクトルセンサでは、不可視光領域をも含む各波長帯の輝度値(光強度)が観測されることから、波長毎の輝度値を比較することによって測定対象特有の特性を知ることができ、ひいてはその識別が可能となる。また近年は、このようなスペクトルセンサとして、撮像可能な帯域幅が広く、またその分解能も数nm〜数十nmと高いハイパースペクトルセンサなども実用化されている(特許文献2参照)。
【0006】
そこで最近は、このようなスペクトルセンサを自動車等の車両に搭載し、このスペクトルセンサにより撮像されたスペクトルデータを用いて車両周囲の各種測定対象を識別することが検討されている。ただし、車両等の移動体は一般に、測定対象との距離が近いため、その移動とともに測定対象との相対的な距離が大きく変化し、異なる時点で取得されるそれぞれのスペクトルデータ相互の間でも、このように距離が変化することに起因して、スペクトル波形(スペクトル強度及びスペクトル形状)に変化をきたすようになる。そして、このようなスペクトル波形の変化によって、測定対象の識別精度も自ずと低下するようになる。
【0007】
本発明は、このような実情に鑑みてなされたものであり、その目的は、車両等の移動体
に搭載されたスペクトルセンサによる撮像データ(スペクトルデータ)に生じる移動体の移動に起因するスペクトル波形の変化を軽減して、測定対象のより精度の高い識別を可能にする移動体用スペクトル測定装置を提供することにある。
【課題を解決するための手段】
【0008】
以下、上記課題を解決するための手段、及びその作用効果について説明する。
請求項1に記載の発明は、波長情報と光強度情報とを測定可能なスペクトルセンサを移動体に搭載し、このスペクトルセンサにて検出される観測光のスペクトル波形に基づいて移動体周辺の測定対象を識別する移動体用スペクトル測定装置であって、予め定められた複数の測定対象についての波長情報と光強度情報とを含むスペクトル波形が辞書データとして格納されている辞書データ記憶部と、前記観測光のスペクトル波形と前記辞書データ記憶部に格納されているスペクトル波形との比較演算に基づいて前記測定対象を識別する演算装置と、当該移動体の移動状態に関する情報を取得する移動状態取得装置と、を備え、前記演算装置は、前記移動状態取得装置によって取得される当該移動体の移動状態に関する情報に基づき前記観測光のスペクトル波形を補正して前記辞書データ記憶部に格納されているスペクトル波形との比較演算を行うことをその要旨とする。
【0009】
移動体、例えば自動車等の車両に搭載されたスペクトルセンサによって移動体周辺の測定対象、例えば人や信号機等の撮像データ(スペクトルデータ)を取得する場合、移動体自身の移動とともに、すなわち移動体自身の移動状態によって測定対象との相対的な距離が大きく変化すること。そしてこのため、異なる時点で取得されるそれぞれのスペクトルデータ相互の間でも、このように測定対象との相対的な距離が変化することに起因して、スペクトル波形(スペクトル強度及びスペクトル形状)に変化をきたすようになることは前述した通りである。この点、移動状態取得装置によって当該移動体の移動状態に関する情報を取得し、この取得される移動状態に関する情報に基づいてスペクトルセンサによる観測光のスペクトル波形を補正する移動体用スペクトル測定装置としての上記構成によれば、移動体の移動状態、すなわち測定対象との相対的な距離が都度変化するような場合であれ、測定対象の属性毎に、すなわち人とか信号機とかに特有のスペクトル特性毎に各々同一のスペクトル波形に補正することが可能となる。そしてこのため、演算装置を通じて上記辞書データとの比較のもとに該スペクトル波形から測定対象の識別(トラッキング)を行う場合であれ、その識別精度も自ずと高められるようになる。
【0010】
請求項2に記載の発明は、請求項1に記載の移動体用スペクトル測定装置において、前記観測光のスペクトル波形の補正が、前記測定対象との距離に相関する前記観測光のスペクトル強度の大気による減衰を補うべくなされる補正であることをその要旨とする。
【0011】
スペクトルセンサによって取得されるスペクトルデータのスペクトル波形(スペクトル強度)が測定対象との距離に応じて変化することは上述の通りであるが、その主な要因は大気による減衰であり、環境光が太陽光であるようないわばパッシブな条件下では距離の2乗に反比例してスペクトル強度が減衰し、また環境光が移動体自身から灯火されたライトであるようないわばアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰する。そこで上記構成によるように、上述したスペクトル波形の補正を、当該移動体と測定対象との距離に相関するスペクトル強度の大気による減衰を補うべく行うこととすれば、上記補正にかかる精度も高く維持されるようになる。
【0012】
請求項3に記載の発明は、請求項2に記載の移動体用スペクトル測定装置において、前記測定対象との距離が一定時間内に当該移動体が移動する距離として近似され、前記補正は、この近似される距離が短いほど前記観測光のスペクトル強度に対する補正量を小さく、同近似される距離が長いほど前記観測光のスペクトル強度に対する補正量を大きくする態様で行われることをその要旨とする。
【0013】
正確さにはやや欠けるものの、スペクトルセンサによる観測光の大気によるスペクトル強度の減衰を補う補正という観点からすれば、上記測定対象との距離についてはこれを、一定時間内に当該移動体が移動する距離として近似することができる。すなわち、移動体が一定時間内に移動する距離が短い場合には、測定対象からの反射スペクトルが光路長の変化に及ぼす影響が少ない(光路長に大きな差はない)ため、その補正量は小さくて済む。また逆に、移動体が一定時間内に移動する距離が長い場合には、測定対象からの反射スペクトルが光路長の変化に及ぼす影響が多い(光路長に大きな差が生じる)ため、その補正量は大きくする必要がある。そこでこの場合、上記構成によるように、こうして近似される距離が短いほど観測光のスペクトル強度に対する補正量を小さく、同近似される距離が長いほど観測光のスペクトル強度に対する補正量を大きくする態様で上記補正を行うこととすれば、実用上、有益な補正を行うことができるようになる。
【0014】
請求項4に記載の発明は、請求項3に記載の移動体用スペクトル測定装置において、前記移動状態取得装置の取得する当該移動体の移動状態に関する情報が同移動体の速度情報であって、前記近似される距離はこの取得される当該移動体のその都度の速度情報に換算され、前記補正量は、この換算されたその都度の速度情報に応じて定まる補正係数として補正データ記憶部にマップ化されてなることをその要旨とする。
【0015】
上記一定時間内に当該移動体が移動する距離は、移動体自体に通常備わっている速度計(速度センサ)による速度情報に換算することができる。すなわち、移動体の速度が低ければ移動体が一定時間内に移動する距離は短く、移動体の速度が高ければ移動体が一定時間内に移動する距離は長い。そこで上記構成によるように、上記補正量を、こうして換算されたその都度の速度情報に応じて定まる補正係数として補正データ記憶部にマップ化することとすれば、スペクトルセンサ以外のセンサを別途設けることなく、しかも簡単なマップ演算を通じて、観測光のスペクトル強度に対する上述した補正を行うことができるようになる。
【0016】
請求項5に記載の発明は、請求項4に記載の移動体用スペクトル測定装置において、前記補正係数は、前記スペクトル波形の異なる波長帯域の別に、各速度情報毎に複数の値を持ってマップ化されてなることをその要旨とする。
【0017】
スペクトル強度の上記大気を要因とする減衰は、測定対象との距離に応じた大気の吸収帯(吸収されやすい波長帯)の影響も無視できない。そこで上記構成によるように、補正係数のマップ化に際し、スペクトル波形の異なる波長帯域の別に、各速度情報毎に複数の値を持って同補正係数をマップ化することとすれば、このような大気の吸収帯の影響をも緩和もしくは回避することができるようになる。
【0018】
請求項6に記載の発明は、請求項2に記載の移動体用スペクトル測定装置において、前記測定対象との距離が当該移動体との相対距離であり、前記補正は、前記測定対象もしくは当該移動体を基準にして、この相対距離の変化に対し常に一定のスペクトル強度が得られる態様で行われることをその要旨とする。
【0019】
上記測定対象との距離についてこれを当該移動体との相対距離として求めることができれば、スペクトル強度の上記大気を要因とする減衰についてもより正確な補正が可能となる。そしてこの場合、上記構成によるように、測定対象もしくは当該移動体を基準にして、この相対距離の変化に対し常に一定のスペクトル強度が得られる態様で同スペクトル強度の補正を行うこととすれば、測定対象との距離の変化に依存しないスペクトル波形を得ることができるようになる。すなわちここでは、当該移動体側を基準にした場合には、測定対象と移動体との相対距離が短くなるほど大きな補正(縮小する補正)が行われ、逆に
測定対象側を基準にした場合には、測定対象と移動体との相対距離が長くなるほど大きな補正(拡大する補正)が行われることとなる。なお、辞書データとの比較のもとにスペクトル波形から測定対象の識別(トラッキング)を行うといった前提からすれば、当該移動体側を基準にすることがより望ましい。
【0020】
請求項7に記載の発明は、請求項6に記載の移動体用スペクトル測定装置において、前記移動状態取得装置の取得する当該移動体の移動状態に関する情報が同移動体の前記測定対象に対する距離情報であり、前記補正すべき量は、この取得されるその都度の距離情報に応じて定まる補正係数として補正データ記憶部にマップ化されてなることをその要旨とする。
【0021】
移動状態取得装置が、当該移動体から測定対象までの距離情報を取得可能な装置である場合には、上記構成によるように、この取得されるその都度の距離情報に応じて定まる補正係数として上記補正すべき量を補正データ記憶部にマップ化しておくことが望ましい。これにより、簡単なマップ演算を通じてその都度の距離情報に応じた補正係数を得ることができるようになる。なお、上記距離情報を取得可能な移動状態取得装置としては、例えばステレオカメラやレーダ装置等がある。
【0022】
請求項8に記載の発明は、請求項7に記載の移動体用スペクトル測定装置において、前記補正係数は、前記スペクトル波形の異なる波長帯域の別に、各距離情報毎に複数の値を持ってマップ化されてなることをその要旨とする。
【0023】
上述のように、スペクトル強度の上記大気を要因とする減衰は、測定対象との距離に応じた大気の吸収帯(吸収されやすい波長帯)の影響も無視できない。そこで上記構成によるように、上記補正係数のマップ化に際しても、スペクトル波形の異なる波長帯域の別に、各速度情報毎に複数の値を持って同補正係数をマップ化することとすれば、このような大気の吸収帯の影響をも緩和もしくは回避することができるようになる。
【0024】
請求項9に記載の発明は、請求項4、5、7、8のいずれか一項に記載の移動体用スペクトル測定装置において、前記移動状態取得装置の取得する当該移動体の移動状態に関する情報として当該移動体のライト灯火の有無に関する情報が併せて取得され、前記補正係数は、このライト灯火の有無に応じた各別の補正係数として前記補正データ記憶部にマップ化されてなることをその要旨とする。
【0025】
これも上述のように、環境光が太陽光であるようないわばパッシブな条件下では距離の2乗に反比例してスペクトル強度が減衰するものの、環境光が移動体自身から灯火されたライトであるようないわばアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰する。そこで上記構成によるように、上述したスペクトル波形の補正係数をこれらパッシブな条件下とアクティブな条件下とで、もしくはアクティブな状態を含まない条件下とアクティブな状態含む条件下とで各別に用意しておくこととすれば、それら環境光による影響をも併せて補正することができるようになる。
【0026】
請求項10に記載の発明は、請求項9に記載の移動体用スペクトル測定装置において、前記補正係数は、ライト灯火有りに対する補正がライト灯火無しに対する補正よりも大きな補正量となる態様でマップ化されてなることをその要旨とする。
【0027】
少なくともアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰することから、その具体的な補正係数としても、上記構成によるように、ライト灯火有りに対する補正がライト灯火無しに対する補正よりも大きな補正量となる態様で補正係数をマップ化することで、その補正精度も的確に維持されるようになる。
【0028】
請求項11に記載の発明は、請求項4、5、7、8のいずれか一項に記載の移動体用スペクトル測定装置において、前記補正係数は、ライトが照射する灯火のスペクトル波形に応じた各別の補正係数として前記補正データ記憶部にマップ化されてなることをその要旨とする。
【0029】
これも上述のように、環境光が移動体自身から灯火されたライトであるようないわばアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰する。そこで上記構成によるように、上述したスペクトル波形の補正係数をアクティブな条件下で各別に用意しておくこととすれば、このようなライト灯火からなる環境光による影響を補正することができるようになる。
【図面の簡単な説明】
【0030】
【図1】本発明に係る移動体用スペクトル測定装置を備える移動体の第1の実施形態のとしてその装置の構成の概略を示すブロック図。
【図2】観測光のスペクトル波形の光強度について大気による減衰と波長との関係を示すグラフ。
【図3】同実施形態における補正マップの例であって観測光のスペクトル波形を補正するための補正値と、測定対象との間の相対的な距離との関係を示すマップ。
【図4】同実施形態における測定対象のスペクトル波形と、測定対象に対する車両の距離との関係を説明するための説明図。
【図5】同実施形態における測定対象との距離の変化に応じた観測光のスペクトル波形の変化を示すグラフであり、(a)は距離の変化が大きい場合を示し、(b)は距離の変化が小さい場合を示す。
【図6】同実施形態におけるスペクトル測定装置にて行なわれるスペクトル解析の工程について示すフローチャート。
【図7】本発明に係る移動体用スペクトル測定装置を備える移動体の第2の実施形態について用いられる補正マップを示すマップ。
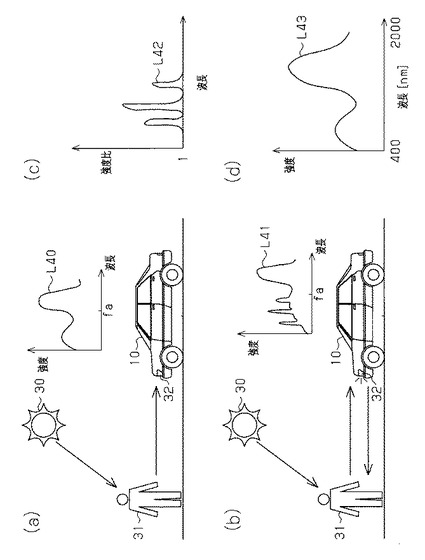
【図8】同実施形態におけるスペクトル波形の補正例を説明する説明図であって、(a)は環境光がパッシブである状態を示す図、(b)は環境光がアクティブである状態を示す図、(c)ライトのスペクトル波形の例を示す図、(d)補正されたスペクトル波形の例を示す図。
【図9】本発明に係る移動体用スペクトル測定装置を備える移動体の第3の実施形態について測定対象との距離との関係の一例を説明するための状態図であって、(a)は距離が離れているときを示す図、(b)は距離が近いときを示す図。
【図10】同実施形態における測定対象との距離の変化に応じた観測光のスペクトル波形の変化を示すグラフであり、(a)は距離の変化が大きい場合を示し、(b)は距離の変化が小さい場合を示す。
【図11】本発明に係る移動体用スペクトル測定装置を備える移動体について行われるスペクトル解析の工程についてその他の態様を示すフローチャート。
【発明を実施するための形態】
【0031】
(第1の実施形態)
以下、本発明に係る移動体用スペクトル測定装置を備える移動体を具体化した第1の実施形態について図に従って説明する。
【0032】
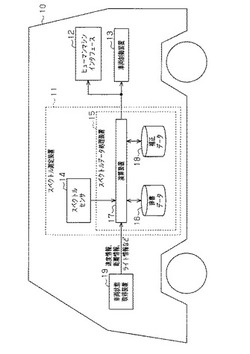
図1は、移動体用スペクトル測定装置を備える移動体としての車両に備えられた同装置の概略構成を示す図である。図1に示すように、車両10には、車両外部の可視光及び不可視光を含む光情報を取得するスペクトル測定装置11と、同スペクトル測定装置から出力された情報を移動体の搭乗者に伝達するヒューマンマシンインタフェース12と、同ス
ペクトル測定装置11からの出力された情報を車両制御に反映させる車両制御装置13とが設けられている。また、車両10には、当該車両10の移動状態に関する情報を取得することのできる車両状態取得装置19が設けられている。
【0033】
ヒューマンマシンインタフェース12は、光や色、音などを通じて搭乗者、特に操縦者に車両状態等を伝えるとともに、搭乗者の意思がボタン等を通じて入力されるように、押しボタンやタッチパネルなどの操作装置が設けられている公知のインタフェース装置である。
【0034】
車両制御装置13は、車両に搭載された制御装置の一つであり、例えばエンジン制御装置など同じく車両に搭載されている他の各種制御装置と直接的にもしくは車載ネットワークなどにより接続され、必要な情報を相互に伝達可能になっている装置である。なお本実施形態では、車両制御装置13は、その装置に入力されたスペクトル測定装置11により識別された対象物などの情報を他の各種制御装置に伝達して、同識別された測定対象に応じて要求される運転支援が同車両10にて実行されるようにする。
【0035】
スペクトル測定装置11には、観測光のスペクトルデータを検出するスペクトルセンサ14と、スペクトルセンサ14の検出した観測光のスペクトルデータを受けて同データを処理するスペクトルデータ処理装置15とが設けられている。スペクトルセンサ14は、可視光及び不可視光からなる光としての観測光を所定の波長帯域に分光する。そして、観測光を前記分光された波長帯域を構成する各波長を示す情報としての波長情報と、それら各波長毎にその波長における分光された同観測光の光強度を示す情報としての光強度情報とにより構成されるスペクトルデータとして出力する。すなわち、スペクトルデータには、観測光の各波長における光強度であるスペクトル強度と、同スペクトル強度の波長帯域における分布から形成されるスペクトル形状とが含まれており、このことによりスペクトルデータからは、スペクトル強度とスペクトル形状とに基づいて所定のスペクトル波形が得られる。なお、スペクトルセンサ14は、波長情報と光強度情報とを同時に測定してもよいし、それぞれ必要なときに測定するようにしてもよい。
【0036】
スペクトルデータ処理装置15は、例えば演算装置や記憶装置などを有するマイクロコンピュータを中心に構成されている。スペクトルデータ処理装置15は、スペクトルセンサ14の検出した観測光のスペクトルデータが入力される。スペクトルデータ処理装置15は、入力された観測光のスペクトルデータに基づいて観測された測定対象を識別してその結果を出力することで、同結果をヒューマンマシンインタフェース12や車両制御装置13に出力する。
【0037】
スペクトルデータ処理装置15には、複数の測定対象のそれぞれのスペクトル波形(スペクトルデータ)が辞書データとして格納されている辞書データ記憶部16と、辞書データとしての測定対象のスペクトル波形を観測光のスペクトル波形と比較する比較演算に基づいて測定対象を識別する演算装置17とが備えられている。またスペクトルデータ処理装置15には、演算装置17に入力された観測光のスペクトル波形の補正などに用いられる補正データが保持される補正データ記憶部18が設けられている。
【0038】
辞書データ記憶部16は、公知の記憶装置に設けられている記憶領域の全部もしくは一部からなり、該記憶領域に辞書データとしてのスペクトルデータが格納される。辞書データとしてのスペクトルデータも、先の観測光のスペクトルデータと同様に、波長情報と光強度情報とを有しており、同スペクトルデータからは、スペクトル強度とスペクトル形状とに基づいて所定のスペクトル波形が得られる。
【0039】
辞書データは、識別したい対象としての測定対象のスペクトルデータ(スペクトル波形
)からなり、識別したい測定対象の数だけ予め準備される。測定対象としては、例えば、移動体として歩行者(人)、自転車、自動二輪車、自動車などがあり、非移動体として、信号、標識、路面のペイント、ガードレール、店舗、看板などがある。また、測定対象としては、例えば、歩行者(人)をさらに詳細な属性により、子供、老人、男性、女性などに分類し、自動車をさらに詳細な属性により、トラック、バス、セダン、SUV、軽自動車などに分類してもよい。すなわち辞書データ記憶部16としての記憶領域は、予め準備される複数の辞書データを格納可能な記憶容量が満足されるように、一または複数の記憶装置の記憶領域から構成されてもよい。
【0040】
辞書データとして一つの測定対象のデータは、スペクトルセンサが測定可能な波長帯域を同スペクトルセンサの波長分解能で除して求まる数の光強度情報が対応する波長情報と一対として設けられており、そのデータ量は多いものとなっている。例えば、比較演算に用いる波長帯域を400〜2500(nm)とし、その波長分解能を5(nm)とした場合、一つの測定対象のスペクトルデータには、420組からなる波長情報と光強度情報とが含まれている。
【0041】
演算装置17は、測定対象の識別をするために、辞書データ記憶部16から取得した測定対象の辞書データと観測光のスペクトル波形とを比較演算して、その同一性などに基づいた識別結果を出力する。また、観測光のスペクトル波形を、過去に取得された観測光のスペクトル波形と比較演算して、その同一性などに基づいた識別結果も出力することができるようになっている。さらに、観測光のスペクトル波形などに対して四則演算を含む各種の補正計算を施し、その結果を得ることができるようにもなっている。
【0042】
車両状態取得装置19は、車両10の状態、特に走行状態を取得する各種の検出装置であり、接続されている演算装置17に、その検出された車両状態を伝達する。車両状態取得装置19としては、必要に応じて、車両10の移動速度である車速を速度計から取得したり、車両10の加速度を加速度計から取得したり、車両10の操舵角を取得したり、車両10のライトの灯火状態などの各種装備品の各状態を取得したり、車両10に設けられた距離センサの測定した測定対象までの距離を取得したりしてもよい。
【0043】
ところで、観測光のスペクトル波形は、大気による減衰の影響を受ける。このことから、観測光のスペクトル波形を辞書データのスペクトル波形などと比較演算するときには、そのスペクトル波形の補正を行なうことにより測定対象の識別精度が向上されるようになる。そこで、補正データ記憶部18には、観測光のスペクトル波形を辞書データのスペクトル波形と比較するときなどに用いられる補正値がマップ状の補正データ(補正マップ)として保持されている。すなわち、本実施形態では、演算装置17では、補正マップから得られる補正値に基づいて補正された観測光のスペクトル波形が辞書データのスペクトル波形などと比較されるようになっている。
【0044】
次に、観測光のスペクトル波形の補正について、図2及び図3を参照して説明する。
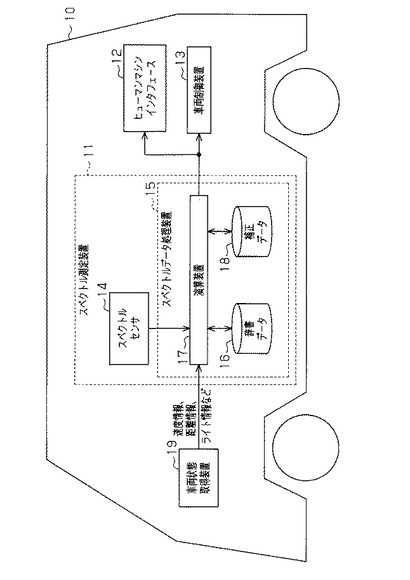
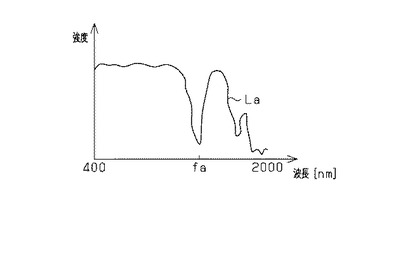
図2は、観測光のスペクトル波形の光強度について大気による減衰と波長との関係をグラフにして示す図である。図3は、補正マップの例であって、観測光のスペクトル波形を補正するための補正量と、測定対象との間の相対的な距離との関係をマップとして示す図である。
【0045】
観測光のスペクトル強度は、たとえ測定対象からの放射光が全波長帯域に一様な強度を有する場合であれ、大気による減衰を受けると、波長帯によりそのスペクトル強度が変化する。すなわち、大気は光の吸収帯(吸収されやすい波長帯)を有しており、観測光のスペクトル波形はその大気の吸収帯の影響を受ける。大気の吸収帯は、図2のグラフLaに示すように、波長fa近傍の波長帯や、波長2000(nm)に近い波長帯に存在し、そ
の他の波長帯よりも同波長帯の光強度の減衰が大きい。例えば、大気の吸収帯としての波長faとその近傍からなる波長帯は、水による吸収率の高い波長帯であり、観測光は大気中に含まれる水分によりその光強度の減衰率が高くなる。
【0046】
また、観測光のスペクトル強度は、大気による減衰の影響を受けて、そのスペクトル強度は低下する。このとき、大気による光の減衰率は、観測光を放射している測定対象とその観測光を検出するスペクトルセンサ14との間の距離である測定距離の2乗に反比例する態様で大きくなる。すなわち、測定対象と離れた位置にて取得された観測光のスペクトル波形を、辞書データのスペクトル波形と比較する際の補正量は、例えば、図3のグラフCa,Cbに示すように、測定距離の2乗に比例して大きくなる。
【0047】
またこの補正量は、2つの異なる位置にて検出された観測光のスペクトル形状を比較する際に用いることもできる。異なる位置にて検出された観測光のスペクトル形状の場合、それらの検出位置の距離の差は、測定対象との光路長の差ともなることから、いずれか一方の観測光のスペクトル形状を距離として同距離差に応じた補正量にて補正することで、少なくとも他方の観測光のスペクトル形状の光強度と同様の強度への補正が可能となる。例えば、測定対象に近くて減衰の少ない一方のスペクトル形状と、測定対象から離れて減衰の大きい他方のスペクトル形状がある場合に、他方のスペクトル形状を一方との距離差により生じる減衰を補う補正を施すことで、一方の測定対象のスペクトル形状との比較に適した光強度とすることもできる。なお、グラフCbは大気の吸収帯に対応する例えば波長faを含む波長帯を補正する場合の補正率を例示し、グラフCaはそれ以外の波長帯を補正する場合の補正率を例示している。
【0048】
これらのことから、観測光のスペクトル波形を補正するための補正量は、波長帯による光強度の減衰率と、測定対象との距離に基づく減衰率とに基づいて求められるようになる。そして、このようにして求められる補正量が補正マップに設定される。これにより観測光のスペクトル波形を補正マップに設定された補正値により補正することで、例えば辞書データのスペクトル波形との比較演算に適したスペクトル波形にすることができるようになる。
【0049】
測定対象の観測光のスペクトル波形を辞書データのスペクトル波形と比較演算する態様としては、辞書データのスペクトル波形が得られる距離を基準(例えば「0」)として、同距離との差に応じた補正値にて観測光のスペクトル波形を補正する態様がある。逆に、同距離との差に応じた補正値にて辞書データのスペクトル波形を補正する態様がある。どちらのスペクトル波形を補正するかは、その目的などに応じて適宜選択することもできるが、精度の高い識別のためには、観測光のスペクトル波形を補正することが好ましい。ところで、測定対象を識別する場合、その比較演算には補正が必須とされているものではなく、スペクトル波形の特徴的な部分の対比などによってその同一性が判断されれば、このような補正がなされなくても、観測光のスペクトル波形から測定対象を識別することができる。
【0050】
また上述のように、複数、例えば2つの観測光のスペクトルの比較演算も可能となる。すなわち、測定対象との距離が異なる状態にて取得された同測定対象の2つの観測光のスペクトル波形を比較演算する場合、測定対象に離れた観測光のスペクトル波形を補正して測定対象に近い観測光のスペクトルと比較することができる。また、測定対象に近い観測光のスペクトル波形を補正して、距離が離れた観測光のスペクトルと比較することや、それぞれの観測光のスペクトル波形をそれぞれ補正して、例えば辞書データのスペクトル波形と比較するようにするようなことなどもできる。測定対象の識別を高精度で行なう場合には、2つの観測光のスペクトル波形をともに補正して辞書データのスペクトル波形と比較することが好適である。しかし、特定の測定対象を時間的に連続的して認識する処理で
あるトラッキングなどのために、2つの観測光のスペクトル波形の同一性のみを判断する場合、一方の観測光のスペクトル波形を補正して他方の観測光のスペクトル波形と比較するようにしてもよい。この場合であれ、2つの観測光のスペクトル波形の少なくとも一方が、辞書データのスペクトル波形との比較演算などにより、その測定対象が識別されていれば、他方の観測光のスペクトル波形も、間接的ながら、辞書データのスペクトル波形との比較演算により測定対象が識別されていることとなる。
【0051】
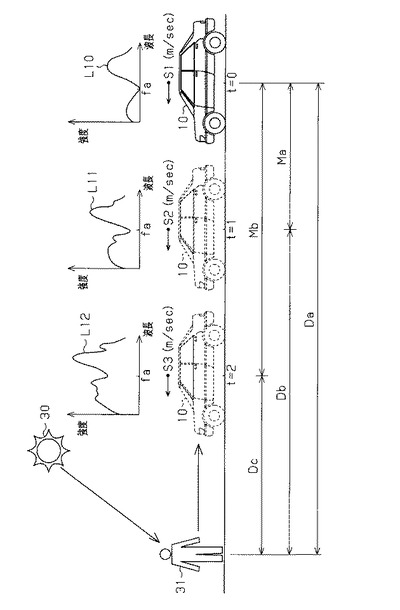
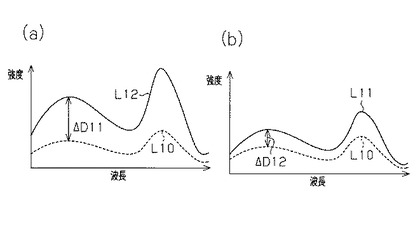
次に、観測光のスペクトル波形と車両の距離との関係について図4及び図5を参照して説明する。図4は、太陽30から受けた太陽光に基づく光を放射する測定対象としての人31に、スペクトル測定装置11を搭載した車両10が接近する場合に検出される「人」の観測光のスペクトル波形を示す説明図である。図5は、測定対象との距離に伴い変化する観測光のスペクトル波形を比較可能に例示するグラフであり、(a)は距離の変化が大きい場合を示し、(b)は距離の変化が小さい場合を示す。
【0052】
図4に示すように、時間t=0において車両10では、離間距離Daだけ離れている測定対象「人」のスペクトル波形L10が検出される。同車両10が速度S1にて人31に近づいていくと、時間t=1において移動距離Maだけ進み、離間距離Dbとなる測定対象「人」のスペクトル波形L11が検出される。さらに同車両10が速度S2にて人31に近づいていくと、時間t=2において移動距離Mbから移動距離Maを減じた距離だけ進み、離間距離Dcとなる測定対象「人」のスペクトル波形L12が検出される。なお、説明の便宜上、速度S1〜S3は同速であるものとする。
【0053】
このとき、例えば、速度S1が上記説明の2倍の速度であれば、時間当たりに進む距離が2倍になることから、車両10は、時間t=1において移動距離Mbだけ進み、離間距離Dcとなる測定対象「人」のスペクトル波形L12が検出される。すなわち、検出されるスペクトル形状は、「人」の放射しているスペクトル形状が同一であるとしても、観測光のスペクトル波形を取得したときの、車両10の位置、より正確には「人」と車両との間の距離に応じて変化する。なお、車両の位置は、車両の移動速度(車速)や経過時間により変化するものであることは言うまでもない。なお、このとき、人が移動していたとしてもその移動速度が相対的に小さければ、移動距離Maや移動距離Mbは人に近づいた距離として近似することができる。また、2つの観測光のスペクトル波形を比較するような場合、それらの検出位置の距離の差、すなわち光路長の差に基づく補正をすればよく、測定対象との距離について、これを一定時間内に移動体が移動する距離と近似して、補正マップの補正量を適用することもできる。このような、2つの観測光のスペクトル波形を比較であれば、必ずしも測定対象との距離が得られない場合でも、取得が容易な当該車両10の移動距離に基づいた補正値が取得できる特徴を有する。
【0054】
すなわち、図5(a)に示すように、時間t=0のとき検出したスペクトル波形L10と、そこから移動距離Mb進んだとき検出したスペクトル波形L12を比較すると、スペクトル波形L12は、時間t=0のときよりも移動距離Mbだけ人31に近づいたことにより、その光強度が強い。逆にいうと、スペクトル波形L10は、移動距離Mbだけ人31から離れていることにより、その光強度が弱い。光強度は、距離が離れるときには距離の2乗に反比例するかたちに弱くなることから、スペクトル波形L10を移動距離に基づき補正マップから取得した補正値により補正することで、例えば差ΔD11がほぼ解消されて、その形状をスペクトル波形L12に近似させることができるようになる。
【0055】
図5(b)に示すように、時間t=0のとき検出したスペクトル波形L10と、そこから移動距離Ma進んだとき検出したスペクトル波形L11を比較すると、スペクトル波形L11は、時間t=0のときよりも移動距離Maだけ人31に近づいたことにより、その光強度が強い。逆にいうと、スペクトル波形L10は、移動距離Maだけ人31から離れ
ていることにより、その光強度が弱い。光強度は、距離が離れるときには距離の2乗に反比例するかたちに弱くなることから、スペクトル波形L10を移動距離に基づき補正マップから取得した補正値により補正することで、例えば差ΔD12がほぼ解消されて、その形状をスペクトル波形L11に近似させることができるようにもなる。
【0056】
このように、スペクトル波形L10を、スペクトル波形L11やスペクトル波形L12に近似させて、比較演算を行ないその同一性が判断されると、スペクトル波形L10のトラッキング処理が行えるようになる。また、スペクトル波形L10を辞書データのスペクトル波形と比較して、測定対象の識別を行なっておけば、スペクトル波形L10との同一性を有するスペクトル波形L11やスペクトル波形L12の測定対象も識別されることとなり、測定対象が識別されたトラッキング処理が行えるようになる。
【0057】
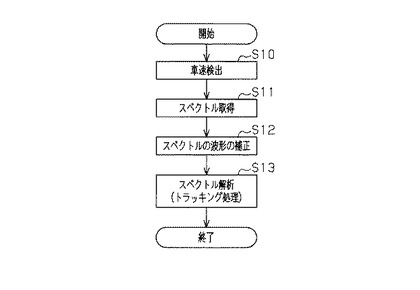
次に、本実施形態のスペクトル測定装置におけるスペクトル解析工程について、図6を参照して説明する。図6は、スペクトル測定装置によって行なわれるトラッキング処理を含むスペクトル解析工程についてその工程を示すフローチャートである。
【0058】
なお、このスペクトル解析工程はスペクトル測定装置11の起動中に繰り返し実行される工程である。なおここでは、説明の便宜上、既に上記説明における時間t=0に相当する時点のスペクトル形状についてのスペクトル解析工程は終了しており、その次に行なわれるスペクトル解析工程であるものとする。また、その終了したスペクトル解析工程によって測定対象は識別されたものとする。
【0059】
スペクトル解析工程が開始されると、スペクトル測定装置11のスペクトルデータ処理装置15は、車両10の速度を検出して、同速度と前回の工程からの経過時間とから、その経過時間において車両10の移動した移動距離を算出する(図6のステップS10)。また、スペクトルデータ処理装置15は、その演算装置17に随時入力される観測光のスペクトル波形を取得する(図6のステップS11)。スペクトル波形が取得されると、先に算出された移動距離に対応している補正値を、補正値マップから選択して、選択された補正値により前回のスペクトル波形を補正する(図6のステップS12)。そして、同補正したスペクトル形状と、取得されたスペクトル形状との同一性について判定する(図6のステップS13)。本実施形態では、同一性は、両スペクトル形状を比較する比較演算に基づき行なうが、その同一性の判断に用いる演算手法は、公知の画像認識技術やデータ処理技術に用いられている各種の演算手法であってもよい。ここで前回の測定対象と今回の測定対象の同一性が判定された場合、測定対象のトラッキングがされることとなる。また、前回のスペクトル形状はその測定対象が識別されているので、今回のスペクトル形状も辞書データとの対比による識別が行なわれたこととになる。これにより、測定対象の識別がされるととともに、当該測定対象のトラッキング処理が行なわれるようになる。
【0060】
これにより、スペクトルセンサ14から得られた観測光のスペクトル波形に測定対象との距離、すなわち車両の移動距離に伴う変化が生じても、そのような変化による影響を抑制させて識別精度を高く維持させることができるようになる。
【0061】
以上説明したように、本実施形態の移動体用スペクトル測定装置によれば、以下に列記するような効果が得られるようになる。
(1)スペクトル測定装置11としての構成を、車両状態取得装置19によって当該車両10の移動状態として速度に関する情報を取得し、この取得される移動状態に関する情報に基づいてスペクトルセンサ14による観測光のスペクトル波形を補正するようにした。これによりにより、車両10の移動状態、すなわち測定対象との相対的な距離が都度変化するような場合であれ、測定対象の属性毎に、すなわち人とか信号機とかに特有のスペクトル特性毎に各々同一のスペクトル波形に補正することが可能となる。
【0062】
(2)そしてこのため、演算装置17を通じて上記辞書データとの比較のもとに該スペクトル波形から測定対象の識別(トラッキング)を行う場合であれ、その識別精度も自ずと高められるようになる。
【0063】
(3)スペクトルセンサ14によって取得されるスペクトルデータのスペクトル波形(スペクトル強度)が測定対象との距離に応じて変化することは上述の通りであるが、その主な要因は大気による減衰であり、環境光が太陽光であるようないわばパッシブな条件下では距離の2乗に反比例してスペクトル強度が減衰する。そこで上記構成によるように、上述したスペクトル波形の補正を、当該車両10と測定対象との距離に相関するスペクトル強度の大気による減衰を補うべく行うこととすれば、上記補正にかかる精度も高く維持されるようになる。
【0064】
(4)正確さにはやや欠けるものの、スペクトルセンサによる観測光の大気によるスペクトル強度の減衰を補う補正という観点からすれば、測定対象との距離についてはこれを、一定時間内に当該移動体が移動する距離として近似することもできる。すなわち、車両10が一定時間内に移動する距離が短い場合には、測定対象からの反射スペクトルが光路長の変化に及ぼす影響が少ない(光路長に大きな差はない)ため、その補正量は小さくて済む。また逆に、車両10が一定時間内に移動する距離が長い場合には、測定対象からの反射スペクトルが光路長の変化に及ぼす影響が多い(光路長に大きな差が生じる)ため、その補正量は大きくする必要がある。そこでこの場合、上記構成によるように、こうして近似される距離が短いほど観測光のスペクトル強度に対する補正量を小さく、同近似される距離が長いほど観測光のスペクトル強度に対する補正量を大きくする態様で上記補正を行うこととすれば、実用上、有益な補正を行うことができるようになる。
【0065】
(5)車両10が移動する距離は、移動体自体に通常備わっている速度計(速度センサ)による速度情報に換算できる。すなわち、車両10の速度が低ければ車両10が一定時間内に移動する距離は短く、車両10の速度が高ければ移動体が一定時間内に移動する距離は長い。そこで上記構成によるように、上記補正量を、こうして換算されたその都度の速度情報に応じて定まる補正係数として補正データ記憶部18にマップ化することとすれば、スペクトルセンサ14以外のセンサを別途設けることなく、しかも簡単なマップ演算を通じて、観測光のスペクトル強度に対する上述した補正を行うことができるようになる。
【0066】
(6)スペクトル強度の上記大気を要因とする減衰は、測定対象との距離に応じた大気の吸収帯(吸収されやすい波長帯)の影響も無視できない。そこで上記構成によるように、補正係数のマップ化に際し、スペクトル波形の異なる波長帯域の別に、各速度情報毎に複数の値を持って同補正係数をマップ化することとすれば、このような大気の吸収帯の影響をも緩和もしくは回避することができるようになる。
【0067】
(7)スペクトル強度の上記大気を要因とする減衰は、測定対象との距離に応じた大気の吸収帯(吸収されやすい波長帯)の影響も無視できない。そこで上記構成によるように、上記補正係数のマップ化に際しても、スペクトル波形の異なる波長帯域の別に、各速度情報毎に複数の値を持って同補正係数をマップ化することとすれば、このような大気の吸収帯の影響をも緩和もしくは回避することができるようになる。
【0068】
(第2の実施形態)
次に、本発明にかかる移動体用スペクトル測定装置の第2の実施形態について図7及び図8を参照して説明する。なお、本実施形態は、先の第1の実施形態とは、その構成は同一であり、補正データ記憶部18に保持された補正データとしての補正マップが相違する
。以下では主に、先の第1の実施形態との相違点を中心に、同スペクトル測定装置11としての具体構成について説明する。また、図8において、先に示した第1の実施形態と同一の部材には同一の符号を付し、重複する説明を省略する。
【0069】
なお、本実施形態では、車両状態取得装置19により、スペクトルセンサ14と測定対象としての「人」との距離が計測されており、その計測された距離は演算装置17に入力されているものとする。また、車両状態取得装置19は、車両10のライト32が点灯状態であるか消灯状態であるかも取得し、演算装置17に入力させている。なお、車両10のライトとしては、前照灯のようなものに限らず、LoビームやHiビーム、ウィンカー、ハザードランプなどでもよい。
【0070】
先の図4を参照すると、時間t=0で離間距離Daだけ離れた対象を検出したとすると、時間t=0での速度S1で等速移動した場合、時間t=1での測定対象との距離は離間距離Db(=Da−S1・t)となる。このとき、距離毎に予め準備した補正マップにより測定対象のスペクトル波形が距離に関わらず一定となるようにすると、初期値としての測定対象との距離は必要となるものの、以降は、測定対象との距離に依存しないスペクトル認識も可能となる。
【0071】
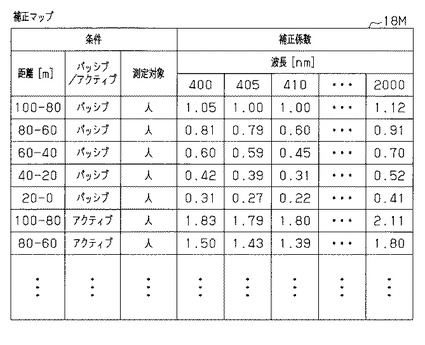
そこで、補正データ記憶部18には、図7に示すような、スペクトルセンサ14と測定対象との間の離間距離等に基づいて分類される補正マップ18Mが保持されている。この補正マップ18Mは、スペクトルセンサ14と測定対象との間の離間距離と、環境光が太陽光であるようないわゆるパッシブな状態であるのか環境光がライト32の光であるようないわゆるアクティブな状態であるのかと、測定対象とを条件としている。そして、それら条件に対応する観測光のスペクトル波形を補正すべき補正係数が、所定の波長帯域において、所定の波長間隔毎に設定されている。すなわち、補正係数は、400〜2000(nm)の間において5(nm)毎に設定されている。なお、説明の便宜上、図7に示す補正マップ18Mには、それら補正係数の一部のみを記載し、その他の補正係数についてはその記載を省略している。
【0072】
詳述すると、補正マップ18Mには、条件として測定対象が「人」で、環境光がパッシブ状態であって、離間距離が100〜80(m)のときの補正係数が、波長400(nm)で1.05、波長405(nm)で1.00、波長410(nm)で1.00、・・・、波長2000(nm)で1.12と設定されている。同様に、同離間距離が80〜60(m)のときの補正係数が、波長400(nm)で0.81、波長405(nm)で0.79、波長410(nm)で0.60、・・・、波長2000(nm)で0.91と設定されている。また、同離間距離が60〜40(m)のときの補正係数が、波長400(nm)で0.60、波長405(nm)で0.59、波長410(nm)で0.45、・・・、波長2000(nm)で0.70と設定されている。さらに、同離間距離が40〜20(m)のときの補正係数が、波長400(nm)で0.42、波長405(nm)で0.39、波長410(nm)で0.31、・・・、波長2000(nm)で0.52と設定されている。また、同離間距離が20〜0(m)のときの補正係数が、波長400(nm)で0.31、波長405(nm)で0.27、波長410(nm)で0.22、・・・、波長2000(nm)で0.41と設定されている。
【0073】
そして、測定対象が「人」で、観測光がアクティブ状態であって、スペクトルセンサ14と測定対象との間の離間距離が100〜80(m)のときの補正係数が、波長400(nm)で1.83、波長405(nm)で1.79、波長410(nm)で1.80、・・・、波長2000(nm)で2.11と設定されている。同様に、同離間距離が80〜60(m)のときの補正係数が、波長400(nm)で1.50、波長405(nm)で1.43、波長410(nm)で1.39、・・・、波長2000(nm)で1.80と
設定されている。
【0074】
次に、図8を参照して、補正マップ18Mを使用したスペクトル形状の補正について説明する。図8は、スペクトル波形の補正の例を説明する説明図であって、(a)は環境光がパッシブである状態を示す図、(b)は環境光がアクティブである状態を示す図、(c)ライト32のスペクトル波形の例を示す図、(d)補正されたスペクトル波形の例を示す図である。
【0075】
図8(a)において、車両10は環境光が太陽光であるようないわゆるパッシブな条件下で人31の観測光のスペクトル波形L40を検出する。このとき、スペクトルセンサ14の検出した観測光のスペクトル波形L40を補正する補正係数を測定対象との距離、パッシブ状態、測定対象「人」との条件に基づいて補正マップ18Mから取得して、同取得した補正値により各光強度を補正して、図8(d)に示される、補正された観測光のスペクトル波形L43を算出する。また、スペクトル波形L43を辞書データのスペクトル形状と比較演算することにより、測定対象が「人」であることを識別するようにしてもよい。
【0076】
図8(b)において、車両10はそのライト32を点灯させており、その光が測定対象の人31に照射されている。これにより、車両10は環境光が太陽光と、ライト32の光からなるようないわゆるアクティブな条件との下で人31の観測光のスペクトル波形L41を検出する。このとき、観測光のスペクトル波形L41は、測定対象との距離、測定対象「人」そしてパッシブ状態との条件に基づく補正値と、測定対象との距離、測定対象「人」そしてアクティブ状態との条件に基づく補正値とをそれぞれ補正マップ18Mから取得してそれら補正値により各光強度を補正し、補正された観測光のスペクトル形状を得る。なお、このとき得られた観測光のスペクトル形状には、ライト32のスペクトル形状の影響が残る。そこで、この補正された観測光のスペクトル形状を、ライト32のスペクトル形状として予め設定されているスペクトル波形L42により、補正、例えば除算するなどにより、ライト32の光のスペクトル形状の影響を除去して、図8(d)に示される、観測光のスペクトル波形L43を算出する。また、スペクトル波形L43を辞書データのスペクトル形状と比較演算することにより、測定対象が「人」であることを識別するようにしてもよい。さらに、アクティブ状態の補正値をライト32が照射する灯火のスペクトル波形に応じた補正係数として設定しておくようにすれば、観測光のスペクトル形状に生じるライト32の灯火の影響を当該補正値により補正することができるようにもなる。
【0077】
なお、環境光が自らの車両10のライト32の光によるパッシブな条件下においては、同環境光は距離の4乗に反比例してスペクトル強度が減衰することから、パッシブな条件下における補正値は、アクティブな条件下の補正値に比べて、光強度の減衰を大きく補うかたちとなる。
【0078】
これにより、スペクトルセンサ14から得られた観測光のスペクトル波形に測定対象との距離、すなわち車両の移動距離に伴う変化が生じても、そのような変化による影響を抑制させて識別精度を高く維持させることができるようになる。
【0079】
以上説明したように、本実施形態の移動体用スペクトル測定装置によっても先の第1の実施形態の前記(1)〜(7)の効果と同等もしくはそれに準じた効果が得られるとともに、次のような効果が得られるようになる。
【0080】
(8)スペクトル波形が測定対象との距離に応じて変化する主な要因は大気による減衰であり、環境光が太陽光であるようないわばパッシブな条件下では距離の2乗に反比例してスペクトル強度が減衰し、また環境光が移動体自身から灯火されたライトであるような
いわばアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰する。そこで上記構成によるように、上述したスペクトル波形の補正を、当該移動体と測定対象との距離に相関するスペクトル強度の大気による減衰を補うべく行うこととすれば、上記補正にかかる精度も高く維持されるようになる。
【0081】
(9)測定対象との距離についてこれを当該車両10との相対距離として求めることができれば、スペクトル強度の上記大気を要因とする減衰についてもより正確な補正が可能となる。そしてこの場合、上記構成によるように、測定対象もしくは当該車両10を基準にして、この相対距離の変化に対し常に一定のスペクトル強度が得られる態様で同スペクトル強度の補正を行うこととすれば、測定対象との距離の変化に依存しないスペクトル波形を得ることができるようになる。すなわちここでは、当該車両10を基準にした場合には、測定対象と移動体との相対距離が短くなるほど大きな補正(縮小する補正)が行われ、逆に測定対象側を基準にした場合には、測定対象と移動体との相対距離が長くなるほど大きな補正(拡大する補正)が行われることとなる。なお、辞書データとの比較のもとにスペクトル波形から測定対象の識別(トラッキング)を行うといった前提からすれば、当該移動体側を基準にすることがより望ましい。
【0082】
(10)車両状態取得装置19が、当該移動体から測定対象までの距離情報を取得可能な装置である場合には、上記構成によるように、この取得されるその都度の距離情報に応じて定まる補正係数として上記補正すべき量を補正データ記憶部にマップ化しておくことが望ましい。これにより、簡単なマップ演算を通じてその都度の距離情報に応じた補正係数を得ることができるようになる。なお、上記距離情報を取得可能な車両状態取得装置19としては、例えばステレオカメラやレーダ装置等がある。
【0083】
(11)環境光が太陽光であるようないわばパッシブな条件下では距離の2乗に反比例してスペクトル強度が減衰するものの、環境光が車両10自身から灯火されたライト32であるようないわばアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰する。そこで上記構成によるように、上述したスペクトル波形の補正係数をこれらパッシブな条件下とアクティブな条件下とで、もしくはアクティブな状態を含まない条件下とアクティブな状態含む条件下とで各別に用意しておくこととすれば、それら環境光による影響をも併せて補正することができるようになる。
【0084】
(12)少なくともアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰することから、その具体的な補正係数としても、上記構成によるように、ライト灯火有りに対する補正がライト灯火無しに対する補正よりも大きな補正量となる態様で補正係数をマップ化することで、その補正精度も的確に維持されるようになる。
【0085】
(第3の実施形態)
次に、本発明にかかる移動体用スペクトル測定装置の第3の実施形態について図9及び図10を参照して説明する。なお、本実施形態は、先の第1の実施形態とは、その構成は同一であり、補正データ記憶部18に保持された補正データとしての補正マップが相違する。以下では主に、先の第1の実施形態との相違点を中心に、補正マップの相違点について説明する。
【0086】
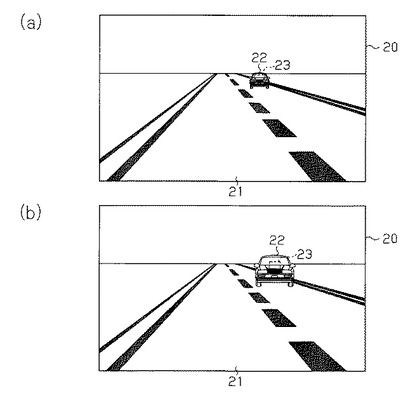
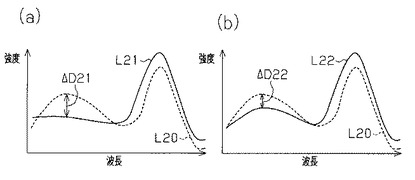
図9は、測定対象の距離の変化の状態を示す図であり、(a)は距離が離れている状態図であり、(b)は距離が近いときの状態図である。図10は、測定対象の距離の変化に応じて変化する観測光のスペクトル波形を示すグラフであり、(a)は距離の変化が大きい場合、(b)は距離の変化が小さい場合をそれぞれ示す。
【0087】
図9に示すように、スペクトルセンサ14の検出する撮像データ(スペクトルデータ)
の範囲は画像20に示される範囲とする。このとき、画像20には、路面21と対向車線を走る対向車22が含まれている。スペクトルセンサ14は、同画像20の領域を、例えば、上下に複数分割して規定される各ラインを下から上へスキャンするようになっており、画像20全体のスキャン毎に同画像20がマトリクス状に分割された各区画に対するスペクトルデータが取得される。画像20には、マトリクス状に分割された区画のうちの一つの区画23を示している。区画23は、測定対象の距離にかかわらず、所定の大きさを有していることから、測定対象との距離により、区画23に含まれる測定対象の領域に変化が生じ、測定対象において観測光を放射する放射面の構成比率が変化するなどして観測光のスペクトル形状も変化する。
【0088】
すなわち、測定対象としての対向車22が遠い場合には、区画23には対向車22の大部分が含まれるが、逆に測定対象としての対向車22が近い場合には、区画23には対向車22の一部のみが含まれるようになる。図10(a)に示す、区画23には対向車22の大部分が含まれる場合には、観測光としてスペクトル波形L20が検出される。このとき、相対速度が速く、観測光の光路長の差が大きくなるような場合には、次に取得される観測光として例えば、スペクトル波形L21が検出される。なおこのとき、スペクトル波形L21は測定対象としての「車」の辞書データのスペクトル形状により近似していることが普通である。すなわち、スペクトル波形L21と交差するようなスペクトル波形L20は、大気による減衰などの影響のみならず、例えば、距離が遠いことによるノイズの混入や、区画23における各放射面の分布の影響などにより、その形状が不規則に変化されている。すなわち、スペクトル形状に、図10(a)において、差ΔD21に示すような測定対象との距離に基づかない不規則な変化が生じるようなこともあるが、そのような場合でも、補正マップ18Mなどにおいて、適切な補正係数を設定することで、観測光としてのスペクトル波形L20を適切に補正することができるようになる。
【0089】
このとき、相対速度が遅く、観測光の光路長の差が小さいような場合には、図10(b)に示すような観測光のスペクトル波形L22が、スペクトル波形L20の次に検出される。先と同様にスペクトル波形L20,L22にはそれぞれ距離によらない不規則な変化が生じることもあるが、この場合にも、差ΔD22を補正するような補正係数を設定すれば、両スペクトル波形L20,L22との間ではトラッキング処理が可能なる。
【0090】
また、いずれの場合であれ、補正係数が辞書データのスペクトル形状に近似するように設定されていれば、辞書データのスペクトル形状との比較による測定対象の識別及びトラッキング処理が行えるようにもなる。
【0091】
以上説明したように、本実施形態の移動体用スペクトル測定装置によっても先の第1の実施形態の前記(1)〜(12)の効果と同等もしくはそれに準じた効果が得られるとともに、次のような効果が得られるようになる。
【0092】
(13)大気による減衰の以外の要因によりスペクトル波形に生じる変化であれ、それを事前のシミュレーションや経験値、もしくは実験値などに基づいて補うように補正マップの補正値を定めるようにすることで、このような補正マップによるスペクトル波形の補正が行えるようになる。
【0093】
なお、上記各実施形態は、例えば以下のような態様にて実施することもできる。
・上記各実施形態では、スペクトルセンサ14にスペクトルデータを検出する波長分解能や波長領域を設定しない場合について例示した。しかしこれに限らず、スペクトルセンサに波長分解能や波長領域を設定してもよい。すなわち、スペクトルセンサとして、光強度情報を検出する波長を変更することが可能なものを採用して、そこに例えば、波長分解能と波長帯域を設定することで、同波長分解能と同波長帯域から規定される波長の光強度
情報のみを検出するようにしてもよい。このような場合には、図11に示されるように、スペクトル解析工程に、スペクトルセンサに波長を設定する工程(図11のステップS21)を設けるようにすることで、観測光のスペクトル形状の有するデータ量を減少させることができるようにもなる。データ量の減少は、その後のスペクトル取得(図11のステップS22)、スペクトル波形の補正(図11のステップS23)、スペクトル解析(トラッキング処理)(図11のステップS24)、の各工程における演算量を減少させてスペクトル解析工程に要する処理時間を減少させることができるようにもなる。これにより、このようなスペクトル測定装置が移動体としての車両に搭載された場合であれ、実時間での処理能力を向上させるようになり、移動速度の速い車両等への採用可能性も高められる。
【0094】
・上記各実施形態では、スペクトル測定装置11の補正データはマップのかたちにて保持されている場合について例示した。しかしこれに限らず、補正データは、数式などのかたちで保持されてもよい。この場合には、補正値は都度の演算により求められるようにすればよい。補正値を示す数式としては、例えばパッシブの条件下ならば2次関数の式の採用が考えられ、アクティブの条件下ならば4次関数の式の採用が考えられる。
【0095】
・上記各実施形態では、補正データ記憶部18に補正データが保持される場合について例示した。しかしこれに限らず、補正データはその他の記憶領域、例えば、辞書データ記憶部や演算装置の内部メモリーなどに保持されるなどしていてもよい。補正データ記憶部18を有さない構成とすることによれば、スペクトル測定装置11の構成を容易にすることができるようにもなる。
【0096】
・上記各実施形態の車両は、自動車でもよい。このようなスペクトル測定装置であれば、自動車に搭載された場合であれ、路上走行にともない順次接近してくる測定対象の認識及びトラッキング処理を、実時間行で行ない適切な運転支援が行えるようになる。これによって、自動車へのスペクトル測定装置の採用可能性が高められる。
【0097】
・なお上記各実施形態は、車両としての自動車に限られず、自動二輪車やロボットなど路上を移動する移動体であれば、このような移動体用スペクトル測定装置の採用が可能である。
【符号の説明】
【0098】
10…車両、11…スペクトル測定装置、12…ヒューマンマシンインタフェース、13…車両制御装置、14…スペクトルセンサ、15…スペクトルデータ処理装置、16…辞書データ記憶部、17…演算装置、18…補正データ記憶部、18M…補正マップ、19…移動状態取得装置としての車両状態取得装置、20…画像、21…路面、22…対向車、23…区画、30…太陽、31…人、32…ライト。
【技術分野】
【0001】
本発明は、車両、特に自動車などの移動体に搭載されたスペクトルセンサにより測定された測定対象のスペクトルデータから測定対象を識別する移動体用スペクトル測定装置に関する。
【背景技術】
【0002】
近年、自動車等の車両には、その運転支援装置として、車両周囲において動的に変化する歩行者や信号などの状態を認識してドライバーの運転や意思決定を支援する装置が搭載されることが少なくない。そして、そのような装置の多くは、信号や歩行者等の状態をCCDカメラ等にて撮像するとともに、その撮像画像を実時間で画像処理して状態認識し、その認識した結果を上述した運転支援等に用いるようにしている。しかし通常、歩行者は、その形状が大きさや向き、あるいは持ち物の有無などにより多様に変化することから、上記画像処理に基づいて得られる形状からその存在を正確に認識することは難しい。また、信号機は一般に、その大きさや色についての規格性が高いものの、見る角度によってはその形状が変化するなどの不都合も避けがたく、上記画像処理を通じた形状認識ではやはり限界がある。
【0003】
一方、特許文献1には、測定対象を認識する技術として、スペクトルセンサにより採取されたスペクトルデータを用いるリモートセンシング技術が記載されている。すなわちここでは、航空機や人工衛星に搭載されたスペクトルセンサにより撮像された不可視光領域をも含むマルチスペクトル画像データから、例えば森林、田畑、市街地等のような、可視光領域のみでは認識の困難な測定対象の分類、特徴付けが行なわれ、こうして分類され、特徴付けされたデータに基づいて測定対象が識別される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−251052号公報
【特許文献2】特開2006−145362号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このように、スペクトルセンサでは、不可視光領域をも含む各波長帯の輝度値(光強度)が観測されることから、波長毎の輝度値を比較することによって測定対象特有の特性を知ることができ、ひいてはその識別が可能となる。また近年は、このようなスペクトルセンサとして、撮像可能な帯域幅が広く、またその分解能も数nm〜数十nmと高いハイパースペクトルセンサなども実用化されている(特許文献2参照)。
【0006】
そこで最近は、このようなスペクトルセンサを自動車等の車両に搭載し、このスペクトルセンサにより撮像されたスペクトルデータを用いて車両周囲の各種測定対象を識別することが検討されている。ただし、車両等の移動体は一般に、測定対象との距離が近いため、その移動とともに測定対象との相対的な距離が大きく変化し、異なる時点で取得されるそれぞれのスペクトルデータ相互の間でも、このように距離が変化することに起因して、スペクトル波形(スペクトル強度及びスペクトル形状)に変化をきたすようになる。そして、このようなスペクトル波形の変化によって、測定対象の識別精度も自ずと低下するようになる。
【0007】
本発明は、このような実情に鑑みてなされたものであり、その目的は、車両等の移動体
に搭載されたスペクトルセンサによる撮像データ(スペクトルデータ)に生じる移動体の移動に起因するスペクトル波形の変化を軽減して、測定対象のより精度の高い識別を可能にする移動体用スペクトル測定装置を提供することにある。
【課題を解決するための手段】
【0008】
以下、上記課題を解決するための手段、及びその作用効果について説明する。
請求項1に記載の発明は、波長情報と光強度情報とを測定可能なスペクトルセンサを移動体に搭載し、このスペクトルセンサにて検出される観測光のスペクトル波形に基づいて移動体周辺の測定対象を識別する移動体用スペクトル測定装置であって、予め定められた複数の測定対象についての波長情報と光強度情報とを含むスペクトル波形が辞書データとして格納されている辞書データ記憶部と、前記観測光のスペクトル波形と前記辞書データ記憶部に格納されているスペクトル波形との比較演算に基づいて前記測定対象を識別する演算装置と、当該移動体の移動状態に関する情報を取得する移動状態取得装置と、を備え、前記演算装置は、前記移動状態取得装置によって取得される当該移動体の移動状態に関する情報に基づき前記観測光のスペクトル波形を補正して前記辞書データ記憶部に格納されているスペクトル波形との比較演算を行うことをその要旨とする。
【0009】
移動体、例えば自動車等の車両に搭載されたスペクトルセンサによって移動体周辺の測定対象、例えば人や信号機等の撮像データ(スペクトルデータ)を取得する場合、移動体自身の移動とともに、すなわち移動体自身の移動状態によって測定対象との相対的な距離が大きく変化すること。そしてこのため、異なる時点で取得されるそれぞれのスペクトルデータ相互の間でも、このように測定対象との相対的な距離が変化することに起因して、スペクトル波形(スペクトル強度及びスペクトル形状)に変化をきたすようになることは前述した通りである。この点、移動状態取得装置によって当該移動体の移動状態に関する情報を取得し、この取得される移動状態に関する情報に基づいてスペクトルセンサによる観測光のスペクトル波形を補正する移動体用スペクトル測定装置としての上記構成によれば、移動体の移動状態、すなわち測定対象との相対的な距離が都度変化するような場合であれ、測定対象の属性毎に、すなわち人とか信号機とかに特有のスペクトル特性毎に各々同一のスペクトル波形に補正することが可能となる。そしてこのため、演算装置を通じて上記辞書データとの比較のもとに該スペクトル波形から測定対象の識別(トラッキング)を行う場合であれ、その識別精度も自ずと高められるようになる。
【0010】
請求項2に記載の発明は、請求項1に記載の移動体用スペクトル測定装置において、前記観測光のスペクトル波形の補正が、前記測定対象との距離に相関する前記観測光のスペクトル強度の大気による減衰を補うべくなされる補正であることをその要旨とする。
【0011】
スペクトルセンサによって取得されるスペクトルデータのスペクトル波形(スペクトル強度)が測定対象との距離に応じて変化することは上述の通りであるが、その主な要因は大気による減衰であり、環境光が太陽光であるようないわばパッシブな条件下では距離の2乗に反比例してスペクトル強度が減衰し、また環境光が移動体自身から灯火されたライトであるようないわばアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰する。そこで上記構成によるように、上述したスペクトル波形の補正を、当該移動体と測定対象との距離に相関するスペクトル強度の大気による減衰を補うべく行うこととすれば、上記補正にかかる精度も高く維持されるようになる。
【0012】
請求項3に記載の発明は、請求項2に記載の移動体用スペクトル測定装置において、前記測定対象との距離が一定時間内に当該移動体が移動する距離として近似され、前記補正は、この近似される距離が短いほど前記観測光のスペクトル強度に対する補正量を小さく、同近似される距離が長いほど前記観測光のスペクトル強度に対する補正量を大きくする態様で行われることをその要旨とする。
【0013】
正確さにはやや欠けるものの、スペクトルセンサによる観測光の大気によるスペクトル強度の減衰を補う補正という観点からすれば、上記測定対象との距離についてはこれを、一定時間内に当該移動体が移動する距離として近似することができる。すなわち、移動体が一定時間内に移動する距離が短い場合には、測定対象からの反射スペクトルが光路長の変化に及ぼす影響が少ない(光路長に大きな差はない)ため、その補正量は小さくて済む。また逆に、移動体が一定時間内に移動する距離が長い場合には、測定対象からの反射スペクトルが光路長の変化に及ぼす影響が多い(光路長に大きな差が生じる)ため、その補正量は大きくする必要がある。そこでこの場合、上記構成によるように、こうして近似される距離が短いほど観測光のスペクトル強度に対する補正量を小さく、同近似される距離が長いほど観測光のスペクトル強度に対する補正量を大きくする態様で上記補正を行うこととすれば、実用上、有益な補正を行うことができるようになる。
【0014】
請求項4に記載の発明は、請求項3に記載の移動体用スペクトル測定装置において、前記移動状態取得装置の取得する当該移動体の移動状態に関する情報が同移動体の速度情報であって、前記近似される距離はこの取得される当該移動体のその都度の速度情報に換算され、前記補正量は、この換算されたその都度の速度情報に応じて定まる補正係数として補正データ記憶部にマップ化されてなることをその要旨とする。
【0015】
上記一定時間内に当該移動体が移動する距離は、移動体自体に通常備わっている速度計(速度センサ)による速度情報に換算することができる。すなわち、移動体の速度が低ければ移動体が一定時間内に移動する距離は短く、移動体の速度が高ければ移動体が一定時間内に移動する距離は長い。そこで上記構成によるように、上記補正量を、こうして換算されたその都度の速度情報に応じて定まる補正係数として補正データ記憶部にマップ化することとすれば、スペクトルセンサ以外のセンサを別途設けることなく、しかも簡単なマップ演算を通じて、観測光のスペクトル強度に対する上述した補正を行うことができるようになる。
【0016】
請求項5に記載の発明は、請求項4に記載の移動体用スペクトル測定装置において、前記補正係数は、前記スペクトル波形の異なる波長帯域の別に、各速度情報毎に複数の値を持ってマップ化されてなることをその要旨とする。
【0017】
スペクトル強度の上記大気を要因とする減衰は、測定対象との距離に応じた大気の吸収帯(吸収されやすい波長帯)の影響も無視できない。そこで上記構成によるように、補正係数のマップ化に際し、スペクトル波形の異なる波長帯域の別に、各速度情報毎に複数の値を持って同補正係数をマップ化することとすれば、このような大気の吸収帯の影響をも緩和もしくは回避することができるようになる。
【0018】
請求項6に記載の発明は、請求項2に記載の移動体用スペクトル測定装置において、前記測定対象との距離が当該移動体との相対距離であり、前記補正は、前記測定対象もしくは当該移動体を基準にして、この相対距離の変化に対し常に一定のスペクトル強度が得られる態様で行われることをその要旨とする。
【0019】
上記測定対象との距離についてこれを当該移動体との相対距離として求めることができれば、スペクトル強度の上記大気を要因とする減衰についてもより正確な補正が可能となる。そしてこの場合、上記構成によるように、測定対象もしくは当該移動体を基準にして、この相対距離の変化に対し常に一定のスペクトル強度が得られる態様で同スペクトル強度の補正を行うこととすれば、測定対象との距離の変化に依存しないスペクトル波形を得ることができるようになる。すなわちここでは、当該移動体側を基準にした場合には、測定対象と移動体との相対距離が短くなるほど大きな補正(縮小する補正)が行われ、逆に
測定対象側を基準にした場合には、測定対象と移動体との相対距離が長くなるほど大きな補正(拡大する補正)が行われることとなる。なお、辞書データとの比較のもとにスペクトル波形から測定対象の識別(トラッキング)を行うといった前提からすれば、当該移動体側を基準にすることがより望ましい。
【0020】
請求項7に記載の発明は、請求項6に記載の移動体用スペクトル測定装置において、前記移動状態取得装置の取得する当該移動体の移動状態に関する情報が同移動体の前記測定対象に対する距離情報であり、前記補正すべき量は、この取得されるその都度の距離情報に応じて定まる補正係数として補正データ記憶部にマップ化されてなることをその要旨とする。
【0021】
移動状態取得装置が、当該移動体から測定対象までの距離情報を取得可能な装置である場合には、上記構成によるように、この取得されるその都度の距離情報に応じて定まる補正係数として上記補正すべき量を補正データ記憶部にマップ化しておくことが望ましい。これにより、簡単なマップ演算を通じてその都度の距離情報に応じた補正係数を得ることができるようになる。なお、上記距離情報を取得可能な移動状態取得装置としては、例えばステレオカメラやレーダ装置等がある。
【0022】
請求項8に記載の発明は、請求項7に記載の移動体用スペクトル測定装置において、前記補正係数は、前記スペクトル波形の異なる波長帯域の別に、各距離情報毎に複数の値を持ってマップ化されてなることをその要旨とする。
【0023】
上述のように、スペクトル強度の上記大気を要因とする減衰は、測定対象との距離に応じた大気の吸収帯(吸収されやすい波長帯)の影響も無視できない。そこで上記構成によるように、上記補正係数のマップ化に際しても、スペクトル波形の異なる波長帯域の別に、各速度情報毎に複数の値を持って同補正係数をマップ化することとすれば、このような大気の吸収帯の影響をも緩和もしくは回避することができるようになる。
【0024】
請求項9に記載の発明は、請求項4、5、7、8のいずれか一項に記載の移動体用スペクトル測定装置において、前記移動状態取得装置の取得する当該移動体の移動状態に関する情報として当該移動体のライト灯火の有無に関する情報が併せて取得され、前記補正係数は、このライト灯火の有無に応じた各別の補正係数として前記補正データ記憶部にマップ化されてなることをその要旨とする。
【0025】
これも上述のように、環境光が太陽光であるようないわばパッシブな条件下では距離の2乗に反比例してスペクトル強度が減衰するものの、環境光が移動体自身から灯火されたライトであるようないわばアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰する。そこで上記構成によるように、上述したスペクトル波形の補正係数をこれらパッシブな条件下とアクティブな条件下とで、もしくはアクティブな状態を含まない条件下とアクティブな状態含む条件下とで各別に用意しておくこととすれば、それら環境光による影響をも併せて補正することができるようになる。
【0026】
請求項10に記載の発明は、請求項9に記載の移動体用スペクトル測定装置において、前記補正係数は、ライト灯火有りに対する補正がライト灯火無しに対する補正よりも大きな補正量となる態様でマップ化されてなることをその要旨とする。
【0027】
少なくともアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰することから、その具体的な補正係数としても、上記構成によるように、ライト灯火有りに対する補正がライト灯火無しに対する補正よりも大きな補正量となる態様で補正係数をマップ化することで、その補正精度も的確に維持されるようになる。
【0028】
請求項11に記載の発明は、請求項4、5、7、8のいずれか一項に記載の移動体用スペクトル測定装置において、前記補正係数は、ライトが照射する灯火のスペクトル波形に応じた各別の補正係数として前記補正データ記憶部にマップ化されてなることをその要旨とする。
【0029】
これも上述のように、環境光が移動体自身から灯火されたライトであるようないわばアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰する。そこで上記構成によるように、上述したスペクトル波形の補正係数をアクティブな条件下で各別に用意しておくこととすれば、このようなライト灯火からなる環境光による影響を補正することができるようになる。
【図面の簡単な説明】
【0030】
【図1】本発明に係る移動体用スペクトル測定装置を備える移動体の第1の実施形態のとしてその装置の構成の概略を示すブロック図。
【図2】観測光のスペクトル波形の光強度について大気による減衰と波長との関係を示すグラフ。
【図3】同実施形態における補正マップの例であって観測光のスペクトル波形を補正するための補正値と、測定対象との間の相対的な距離との関係を示すマップ。
【図4】同実施形態における測定対象のスペクトル波形と、測定対象に対する車両の距離との関係を説明するための説明図。
【図5】同実施形態における測定対象との距離の変化に応じた観測光のスペクトル波形の変化を示すグラフであり、(a)は距離の変化が大きい場合を示し、(b)は距離の変化が小さい場合を示す。
【図6】同実施形態におけるスペクトル測定装置にて行なわれるスペクトル解析の工程について示すフローチャート。
【図7】本発明に係る移動体用スペクトル測定装置を備える移動体の第2の実施形態について用いられる補正マップを示すマップ。
【図8】同実施形態におけるスペクトル波形の補正例を説明する説明図であって、(a)は環境光がパッシブである状態を示す図、(b)は環境光がアクティブである状態を示す図、(c)ライトのスペクトル波形の例を示す図、(d)補正されたスペクトル波形の例を示す図。
【図9】本発明に係る移動体用スペクトル測定装置を備える移動体の第3の実施形態について測定対象との距離との関係の一例を説明するための状態図であって、(a)は距離が離れているときを示す図、(b)は距離が近いときを示す図。
【図10】同実施形態における測定対象との距離の変化に応じた観測光のスペクトル波形の変化を示すグラフであり、(a)は距離の変化が大きい場合を示し、(b)は距離の変化が小さい場合を示す。
【図11】本発明に係る移動体用スペクトル測定装置を備える移動体について行われるスペクトル解析の工程についてその他の態様を示すフローチャート。
【発明を実施するための形態】
【0031】
(第1の実施形態)
以下、本発明に係る移動体用スペクトル測定装置を備える移動体を具体化した第1の実施形態について図に従って説明する。
【0032】
図1は、移動体用スペクトル測定装置を備える移動体としての車両に備えられた同装置の概略構成を示す図である。図1に示すように、車両10には、車両外部の可視光及び不可視光を含む光情報を取得するスペクトル測定装置11と、同スペクトル測定装置から出力された情報を移動体の搭乗者に伝達するヒューマンマシンインタフェース12と、同ス
ペクトル測定装置11からの出力された情報を車両制御に反映させる車両制御装置13とが設けられている。また、車両10には、当該車両10の移動状態に関する情報を取得することのできる車両状態取得装置19が設けられている。
【0033】
ヒューマンマシンインタフェース12は、光や色、音などを通じて搭乗者、特に操縦者に車両状態等を伝えるとともに、搭乗者の意思がボタン等を通じて入力されるように、押しボタンやタッチパネルなどの操作装置が設けられている公知のインタフェース装置である。
【0034】
車両制御装置13は、車両に搭載された制御装置の一つであり、例えばエンジン制御装置など同じく車両に搭載されている他の各種制御装置と直接的にもしくは車載ネットワークなどにより接続され、必要な情報を相互に伝達可能になっている装置である。なお本実施形態では、車両制御装置13は、その装置に入力されたスペクトル測定装置11により識別された対象物などの情報を他の各種制御装置に伝達して、同識別された測定対象に応じて要求される運転支援が同車両10にて実行されるようにする。
【0035】
スペクトル測定装置11には、観測光のスペクトルデータを検出するスペクトルセンサ14と、スペクトルセンサ14の検出した観測光のスペクトルデータを受けて同データを処理するスペクトルデータ処理装置15とが設けられている。スペクトルセンサ14は、可視光及び不可視光からなる光としての観測光を所定の波長帯域に分光する。そして、観測光を前記分光された波長帯域を構成する各波長を示す情報としての波長情報と、それら各波長毎にその波長における分光された同観測光の光強度を示す情報としての光強度情報とにより構成されるスペクトルデータとして出力する。すなわち、スペクトルデータには、観測光の各波長における光強度であるスペクトル強度と、同スペクトル強度の波長帯域における分布から形成されるスペクトル形状とが含まれており、このことによりスペクトルデータからは、スペクトル強度とスペクトル形状とに基づいて所定のスペクトル波形が得られる。なお、スペクトルセンサ14は、波長情報と光強度情報とを同時に測定してもよいし、それぞれ必要なときに測定するようにしてもよい。
【0036】
スペクトルデータ処理装置15は、例えば演算装置や記憶装置などを有するマイクロコンピュータを中心に構成されている。スペクトルデータ処理装置15は、スペクトルセンサ14の検出した観測光のスペクトルデータが入力される。スペクトルデータ処理装置15は、入力された観測光のスペクトルデータに基づいて観測された測定対象を識別してその結果を出力することで、同結果をヒューマンマシンインタフェース12や車両制御装置13に出力する。
【0037】
スペクトルデータ処理装置15には、複数の測定対象のそれぞれのスペクトル波形(スペクトルデータ)が辞書データとして格納されている辞書データ記憶部16と、辞書データとしての測定対象のスペクトル波形を観測光のスペクトル波形と比較する比較演算に基づいて測定対象を識別する演算装置17とが備えられている。またスペクトルデータ処理装置15には、演算装置17に入力された観測光のスペクトル波形の補正などに用いられる補正データが保持される補正データ記憶部18が設けられている。
【0038】
辞書データ記憶部16は、公知の記憶装置に設けられている記憶領域の全部もしくは一部からなり、該記憶領域に辞書データとしてのスペクトルデータが格納される。辞書データとしてのスペクトルデータも、先の観測光のスペクトルデータと同様に、波長情報と光強度情報とを有しており、同スペクトルデータからは、スペクトル強度とスペクトル形状とに基づいて所定のスペクトル波形が得られる。
【0039】
辞書データは、識別したい対象としての測定対象のスペクトルデータ(スペクトル波形
)からなり、識別したい測定対象の数だけ予め準備される。測定対象としては、例えば、移動体として歩行者(人)、自転車、自動二輪車、自動車などがあり、非移動体として、信号、標識、路面のペイント、ガードレール、店舗、看板などがある。また、測定対象としては、例えば、歩行者(人)をさらに詳細な属性により、子供、老人、男性、女性などに分類し、自動車をさらに詳細な属性により、トラック、バス、セダン、SUV、軽自動車などに分類してもよい。すなわち辞書データ記憶部16としての記憶領域は、予め準備される複数の辞書データを格納可能な記憶容量が満足されるように、一または複数の記憶装置の記憶領域から構成されてもよい。
【0040】
辞書データとして一つの測定対象のデータは、スペクトルセンサが測定可能な波長帯域を同スペクトルセンサの波長分解能で除して求まる数の光強度情報が対応する波長情報と一対として設けられており、そのデータ量は多いものとなっている。例えば、比較演算に用いる波長帯域を400〜2500(nm)とし、その波長分解能を5(nm)とした場合、一つの測定対象のスペクトルデータには、420組からなる波長情報と光強度情報とが含まれている。
【0041】
演算装置17は、測定対象の識別をするために、辞書データ記憶部16から取得した測定対象の辞書データと観測光のスペクトル波形とを比較演算して、その同一性などに基づいた識別結果を出力する。また、観測光のスペクトル波形を、過去に取得された観測光のスペクトル波形と比較演算して、その同一性などに基づいた識別結果も出力することができるようになっている。さらに、観測光のスペクトル波形などに対して四則演算を含む各種の補正計算を施し、その結果を得ることができるようにもなっている。
【0042】
車両状態取得装置19は、車両10の状態、特に走行状態を取得する各種の検出装置であり、接続されている演算装置17に、その検出された車両状態を伝達する。車両状態取得装置19としては、必要に応じて、車両10の移動速度である車速を速度計から取得したり、車両10の加速度を加速度計から取得したり、車両10の操舵角を取得したり、車両10のライトの灯火状態などの各種装備品の各状態を取得したり、車両10に設けられた距離センサの測定した測定対象までの距離を取得したりしてもよい。
【0043】
ところで、観測光のスペクトル波形は、大気による減衰の影響を受ける。このことから、観測光のスペクトル波形を辞書データのスペクトル波形などと比較演算するときには、そのスペクトル波形の補正を行なうことにより測定対象の識別精度が向上されるようになる。そこで、補正データ記憶部18には、観測光のスペクトル波形を辞書データのスペクトル波形と比較するときなどに用いられる補正値がマップ状の補正データ(補正マップ)として保持されている。すなわち、本実施形態では、演算装置17では、補正マップから得られる補正値に基づいて補正された観測光のスペクトル波形が辞書データのスペクトル波形などと比較されるようになっている。
【0044】
次に、観測光のスペクトル波形の補正について、図2及び図3を参照して説明する。
図2は、観測光のスペクトル波形の光強度について大気による減衰と波長との関係をグラフにして示す図である。図3は、補正マップの例であって、観測光のスペクトル波形を補正するための補正量と、測定対象との間の相対的な距離との関係をマップとして示す図である。
【0045】
観測光のスペクトル強度は、たとえ測定対象からの放射光が全波長帯域に一様な強度を有する場合であれ、大気による減衰を受けると、波長帯によりそのスペクトル強度が変化する。すなわち、大気は光の吸収帯(吸収されやすい波長帯)を有しており、観測光のスペクトル波形はその大気の吸収帯の影響を受ける。大気の吸収帯は、図2のグラフLaに示すように、波長fa近傍の波長帯や、波長2000(nm)に近い波長帯に存在し、そ
の他の波長帯よりも同波長帯の光強度の減衰が大きい。例えば、大気の吸収帯としての波長faとその近傍からなる波長帯は、水による吸収率の高い波長帯であり、観測光は大気中に含まれる水分によりその光強度の減衰率が高くなる。
【0046】
また、観測光のスペクトル強度は、大気による減衰の影響を受けて、そのスペクトル強度は低下する。このとき、大気による光の減衰率は、観測光を放射している測定対象とその観測光を検出するスペクトルセンサ14との間の距離である測定距離の2乗に反比例する態様で大きくなる。すなわち、測定対象と離れた位置にて取得された観測光のスペクトル波形を、辞書データのスペクトル波形と比較する際の補正量は、例えば、図3のグラフCa,Cbに示すように、測定距離の2乗に比例して大きくなる。
【0047】
またこの補正量は、2つの異なる位置にて検出された観測光のスペクトル形状を比較する際に用いることもできる。異なる位置にて検出された観測光のスペクトル形状の場合、それらの検出位置の距離の差は、測定対象との光路長の差ともなることから、いずれか一方の観測光のスペクトル形状を距離として同距離差に応じた補正量にて補正することで、少なくとも他方の観測光のスペクトル形状の光強度と同様の強度への補正が可能となる。例えば、測定対象に近くて減衰の少ない一方のスペクトル形状と、測定対象から離れて減衰の大きい他方のスペクトル形状がある場合に、他方のスペクトル形状を一方との距離差により生じる減衰を補う補正を施すことで、一方の測定対象のスペクトル形状との比較に適した光強度とすることもできる。なお、グラフCbは大気の吸収帯に対応する例えば波長faを含む波長帯を補正する場合の補正率を例示し、グラフCaはそれ以外の波長帯を補正する場合の補正率を例示している。
【0048】
これらのことから、観測光のスペクトル波形を補正するための補正量は、波長帯による光強度の減衰率と、測定対象との距離に基づく減衰率とに基づいて求められるようになる。そして、このようにして求められる補正量が補正マップに設定される。これにより観測光のスペクトル波形を補正マップに設定された補正値により補正することで、例えば辞書データのスペクトル波形との比較演算に適したスペクトル波形にすることができるようになる。
【0049】
測定対象の観測光のスペクトル波形を辞書データのスペクトル波形と比較演算する態様としては、辞書データのスペクトル波形が得られる距離を基準(例えば「0」)として、同距離との差に応じた補正値にて観測光のスペクトル波形を補正する態様がある。逆に、同距離との差に応じた補正値にて辞書データのスペクトル波形を補正する態様がある。どちらのスペクトル波形を補正するかは、その目的などに応じて適宜選択することもできるが、精度の高い識別のためには、観測光のスペクトル波形を補正することが好ましい。ところで、測定対象を識別する場合、その比較演算には補正が必須とされているものではなく、スペクトル波形の特徴的な部分の対比などによってその同一性が判断されれば、このような補正がなされなくても、観測光のスペクトル波形から測定対象を識別することができる。
【0050】
また上述のように、複数、例えば2つの観測光のスペクトルの比較演算も可能となる。すなわち、測定対象との距離が異なる状態にて取得された同測定対象の2つの観測光のスペクトル波形を比較演算する場合、測定対象に離れた観測光のスペクトル波形を補正して測定対象に近い観測光のスペクトルと比較することができる。また、測定対象に近い観測光のスペクトル波形を補正して、距離が離れた観測光のスペクトルと比較することや、それぞれの観測光のスペクトル波形をそれぞれ補正して、例えば辞書データのスペクトル波形と比較するようにするようなことなどもできる。測定対象の識別を高精度で行なう場合には、2つの観測光のスペクトル波形をともに補正して辞書データのスペクトル波形と比較することが好適である。しかし、特定の測定対象を時間的に連続的して認識する処理で
あるトラッキングなどのために、2つの観測光のスペクトル波形の同一性のみを判断する場合、一方の観測光のスペクトル波形を補正して他方の観測光のスペクトル波形と比較するようにしてもよい。この場合であれ、2つの観測光のスペクトル波形の少なくとも一方が、辞書データのスペクトル波形との比較演算などにより、その測定対象が識別されていれば、他方の観測光のスペクトル波形も、間接的ながら、辞書データのスペクトル波形との比較演算により測定対象が識別されていることとなる。
【0051】
次に、観測光のスペクトル波形と車両の距離との関係について図4及び図5を参照して説明する。図4は、太陽30から受けた太陽光に基づく光を放射する測定対象としての人31に、スペクトル測定装置11を搭載した車両10が接近する場合に検出される「人」の観測光のスペクトル波形を示す説明図である。図5は、測定対象との距離に伴い変化する観測光のスペクトル波形を比較可能に例示するグラフであり、(a)は距離の変化が大きい場合を示し、(b)は距離の変化が小さい場合を示す。
【0052】
図4に示すように、時間t=0において車両10では、離間距離Daだけ離れている測定対象「人」のスペクトル波形L10が検出される。同車両10が速度S1にて人31に近づいていくと、時間t=1において移動距離Maだけ進み、離間距離Dbとなる測定対象「人」のスペクトル波形L11が検出される。さらに同車両10が速度S2にて人31に近づいていくと、時間t=2において移動距離Mbから移動距離Maを減じた距離だけ進み、離間距離Dcとなる測定対象「人」のスペクトル波形L12が検出される。なお、説明の便宜上、速度S1〜S3は同速であるものとする。
【0053】
このとき、例えば、速度S1が上記説明の2倍の速度であれば、時間当たりに進む距離が2倍になることから、車両10は、時間t=1において移動距離Mbだけ進み、離間距離Dcとなる測定対象「人」のスペクトル波形L12が検出される。すなわち、検出されるスペクトル形状は、「人」の放射しているスペクトル形状が同一であるとしても、観測光のスペクトル波形を取得したときの、車両10の位置、より正確には「人」と車両との間の距離に応じて変化する。なお、車両の位置は、車両の移動速度(車速)や経過時間により変化するものであることは言うまでもない。なお、このとき、人が移動していたとしてもその移動速度が相対的に小さければ、移動距離Maや移動距離Mbは人に近づいた距離として近似することができる。また、2つの観測光のスペクトル波形を比較するような場合、それらの検出位置の距離の差、すなわち光路長の差に基づく補正をすればよく、測定対象との距離について、これを一定時間内に移動体が移動する距離と近似して、補正マップの補正量を適用することもできる。このような、2つの観測光のスペクトル波形を比較であれば、必ずしも測定対象との距離が得られない場合でも、取得が容易な当該車両10の移動距離に基づいた補正値が取得できる特徴を有する。
【0054】
すなわち、図5(a)に示すように、時間t=0のとき検出したスペクトル波形L10と、そこから移動距離Mb進んだとき検出したスペクトル波形L12を比較すると、スペクトル波形L12は、時間t=0のときよりも移動距離Mbだけ人31に近づいたことにより、その光強度が強い。逆にいうと、スペクトル波形L10は、移動距離Mbだけ人31から離れていることにより、その光強度が弱い。光強度は、距離が離れるときには距離の2乗に反比例するかたちに弱くなることから、スペクトル波形L10を移動距離に基づき補正マップから取得した補正値により補正することで、例えば差ΔD11がほぼ解消されて、その形状をスペクトル波形L12に近似させることができるようになる。
【0055】
図5(b)に示すように、時間t=0のとき検出したスペクトル波形L10と、そこから移動距離Ma進んだとき検出したスペクトル波形L11を比較すると、スペクトル波形L11は、時間t=0のときよりも移動距離Maだけ人31に近づいたことにより、その光強度が強い。逆にいうと、スペクトル波形L10は、移動距離Maだけ人31から離れ
ていることにより、その光強度が弱い。光強度は、距離が離れるときには距離の2乗に反比例するかたちに弱くなることから、スペクトル波形L10を移動距離に基づき補正マップから取得した補正値により補正することで、例えば差ΔD12がほぼ解消されて、その形状をスペクトル波形L11に近似させることができるようにもなる。
【0056】
このように、スペクトル波形L10を、スペクトル波形L11やスペクトル波形L12に近似させて、比較演算を行ないその同一性が判断されると、スペクトル波形L10のトラッキング処理が行えるようになる。また、スペクトル波形L10を辞書データのスペクトル波形と比較して、測定対象の識別を行なっておけば、スペクトル波形L10との同一性を有するスペクトル波形L11やスペクトル波形L12の測定対象も識別されることとなり、測定対象が識別されたトラッキング処理が行えるようになる。
【0057】
次に、本実施形態のスペクトル測定装置におけるスペクトル解析工程について、図6を参照して説明する。図6は、スペクトル測定装置によって行なわれるトラッキング処理を含むスペクトル解析工程についてその工程を示すフローチャートである。
【0058】
なお、このスペクトル解析工程はスペクトル測定装置11の起動中に繰り返し実行される工程である。なおここでは、説明の便宜上、既に上記説明における時間t=0に相当する時点のスペクトル形状についてのスペクトル解析工程は終了しており、その次に行なわれるスペクトル解析工程であるものとする。また、その終了したスペクトル解析工程によって測定対象は識別されたものとする。
【0059】
スペクトル解析工程が開始されると、スペクトル測定装置11のスペクトルデータ処理装置15は、車両10の速度を検出して、同速度と前回の工程からの経過時間とから、その経過時間において車両10の移動した移動距離を算出する(図6のステップS10)。また、スペクトルデータ処理装置15は、その演算装置17に随時入力される観測光のスペクトル波形を取得する(図6のステップS11)。スペクトル波形が取得されると、先に算出された移動距離に対応している補正値を、補正値マップから選択して、選択された補正値により前回のスペクトル波形を補正する(図6のステップS12)。そして、同補正したスペクトル形状と、取得されたスペクトル形状との同一性について判定する(図6のステップS13)。本実施形態では、同一性は、両スペクトル形状を比較する比較演算に基づき行なうが、その同一性の判断に用いる演算手法は、公知の画像認識技術やデータ処理技術に用いられている各種の演算手法であってもよい。ここで前回の測定対象と今回の測定対象の同一性が判定された場合、測定対象のトラッキングがされることとなる。また、前回のスペクトル形状はその測定対象が識別されているので、今回のスペクトル形状も辞書データとの対比による識別が行なわれたこととになる。これにより、測定対象の識別がされるととともに、当該測定対象のトラッキング処理が行なわれるようになる。
【0060】
これにより、スペクトルセンサ14から得られた観測光のスペクトル波形に測定対象との距離、すなわち車両の移動距離に伴う変化が生じても、そのような変化による影響を抑制させて識別精度を高く維持させることができるようになる。
【0061】
以上説明したように、本実施形態の移動体用スペクトル測定装置によれば、以下に列記するような効果が得られるようになる。
(1)スペクトル測定装置11としての構成を、車両状態取得装置19によって当該車両10の移動状態として速度に関する情報を取得し、この取得される移動状態に関する情報に基づいてスペクトルセンサ14による観測光のスペクトル波形を補正するようにした。これによりにより、車両10の移動状態、すなわち測定対象との相対的な距離が都度変化するような場合であれ、測定対象の属性毎に、すなわち人とか信号機とかに特有のスペクトル特性毎に各々同一のスペクトル波形に補正することが可能となる。
【0062】
(2)そしてこのため、演算装置17を通じて上記辞書データとの比較のもとに該スペクトル波形から測定対象の識別(トラッキング)を行う場合であれ、その識別精度も自ずと高められるようになる。
【0063】
(3)スペクトルセンサ14によって取得されるスペクトルデータのスペクトル波形(スペクトル強度)が測定対象との距離に応じて変化することは上述の通りであるが、その主な要因は大気による減衰であり、環境光が太陽光であるようないわばパッシブな条件下では距離の2乗に反比例してスペクトル強度が減衰する。そこで上記構成によるように、上述したスペクトル波形の補正を、当該車両10と測定対象との距離に相関するスペクトル強度の大気による減衰を補うべく行うこととすれば、上記補正にかかる精度も高く維持されるようになる。
【0064】
(4)正確さにはやや欠けるものの、スペクトルセンサによる観測光の大気によるスペクトル強度の減衰を補う補正という観点からすれば、測定対象との距離についてはこれを、一定時間内に当該移動体が移動する距離として近似することもできる。すなわち、車両10が一定時間内に移動する距離が短い場合には、測定対象からの反射スペクトルが光路長の変化に及ぼす影響が少ない(光路長に大きな差はない)ため、その補正量は小さくて済む。また逆に、車両10が一定時間内に移動する距離が長い場合には、測定対象からの反射スペクトルが光路長の変化に及ぼす影響が多い(光路長に大きな差が生じる)ため、その補正量は大きくする必要がある。そこでこの場合、上記構成によるように、こうして近似される距離が短いほど観測光のスペクトル強度に対する補正量を小さく、同近似される距離が長いほど観測光のスペクトル強度に対する補正量を大きくする態様で上記補正を行うこととすれば、実用上、有益な補正を行うことができるようになる。
【0065】
(5)車両10が移動する距離は、移動体自体に通常備わっている速度計(速度センサ)による速度情報に換算できる。すなわち、車両10の速度が低ければ車両10が一定時間内に移動する距離は短く、車両10の速度が高ければ移動体が一定時間内に移動する距離は長い。そこで上記構成によるように、上記補正量を、こうして換算されたその都度の速度情報に応じて定まる補正係数として補正データ記憶部18にマップ化することとすれば、スペクトルセンサ14以外のセンサを別途設けることなく、しかも簡単なマップ演算を通じて、観測光のスペクトル強度に対する上述した補正を行うことができるようになる。
【0066】
(6)スペクトル強度の上記大気を要因とする減衰は、測定対象との距離に応じた大気の吸収帯(吸収されやすい波長帯)の影響も無視できない。そこで上記構成によるように、補正係数のマップ化に際し、スペクトル波形の異なる波長帯域の別に、各速度情報毎に複数の値を持って同補正係数をマップ化することとすれば、このような大気の吸収帯の影響をも緩和もしくは回避することができるようになる。
【0067】
(7)スペクトル強度の上記大気を要因とする減衰は、測定対象との距離に応じた大気の吸収帯(吸収されやすい波長帯)の影響も無視できない。そこで上記構成によるように、上記補正係数のマップ化に際しても、スペクトル波形の異なる波長帯域の別に、各速度情報毎に複数の値を持って同補正係数をマップ化することとすれば、このような大気の吸収帯の影響をも緩和もしくは回避することができるようになる。
【0068】
(第2の実施形態)
次に、本発明にかかる移動体用スペクトル測定装置の第2の実施形態について図7及び図8を参照して説明する。なお、本実施形態は、先の第1の実施形態とは、その構成は同一であり、補正データ記憶部18に保持された補正データとしての補正マップが相違する
。以下では主に、先の第1の実施形態との相違点を中心に、同スペクトル測定装置11としての具体構成について説明する。また、図8において、先に示した第1の実施形態と同一の部材には同一の符号を付し、重複する説明を省略する。
【0069】
なお、本実施形態では、車両状態取得装置19により、スペクトルセンサ14と測定対象としての「人」との距離が計測されており、その計測された距離は演算装置17に入力されているものとする。また、車両状態取得装置19は、車両10のライト32が点灯状態であるか消灯状態であるかも取得し、演算装置17に入力させている。なお、車両10のライトとしては、前照灯のようなものに限らず、LoビームやHiビーム、ウィンカー、ハザードランプなどでもよい。
【0070】
先の図4を参照すると、時間t=0で離間距離Daだけ離れた対象を検出したとすると、時間t=0での速度S1で等速移動した場合、時間t=1での測定対象との距離は離間距離Db(=Da−S1・t)となる。このとき、距離毎に予め準備した補正マップにより測定対象のスペクトル波形が距離に関わらず一定となるようにすると、初期値としての測定対象との距離は必要となるものの、以降は、測定対象との距離に依存しないスペクトル認識も可能となる。
【0071】
そこで、補正データ記憶部18には、図7に示すような、スペクトルセンサ14と測定対象との間の離間距離等に基づいて分類される補正マップ18Mが保持されている。この補正マップ18Mは、スペクトルセンサ14と測定対象との間の離間距離と、環境光が太陽光であるようないわゆるパッシブな状態であるのか環境光がライト32の光であるようないわゆるアクティブな状態であるのかと、測定対象とを条件としている。そして、それら条件に対応する観測光のスペクトル波形を補正すべき補正係数が、所定の波長帯域において、所定の波長間隔毎に設定されている。すなわち、補正係数は、400〜2000(nm)の間において5(nm)毎に設定されている。なお、説明の便宜上、図7に示す補正マップ18Mには、それら補正係数の一部のみを記載し、その他の補正係数についてはその記載を省略している。
【0072】
詳述すると、補正マップ18Mには、条件として測定対象が「人」で、環境光がパッシブ状態であって、離間距離が100〜80(m)のときの補正係数が、波長400(nm)で1.05、波長405(nm)で1.00、波長410(nm)で1.00、・・・、波長2000(nm)で1.12と設定されている。同様に、同離間距離が80〜60(m)のときの補正係数が、波長400(nm)で0.81、波長405(nm)で0.79、波長410(nm)で0.60、・・・、波長2000(nm)で0.91と設定されている。また、同離間距離が60〜40(m)のときの補正係数が、波長400(nm)で0.60、波長405(nm)で0.59、波長410(nm)で0.45、・・・、波長2000(nm)で0.70と設定されている。さらに、同離間距離が40〜20(m)のときの補正係数が、波長400(nm)で0.42、波長405(nm)で0.39、波長410(nm)で0.31、・・・、波長2000(nm)で0.52と設定されている。また、同離間距離が20〜0(m)のときの補正係数が、波長400(nm)で0.31、波長405(nm)で0.27、波長410(nm)で0.22、・・・、波長2000(nm)で0.41と設定されている。
【0073】
そして、測定対象が「人」で、観測光がアクティブ状態であって、スペクトルセンサ14と測定対象との間の離間距離が100〜80(m)のときの補正係数が、波長400(nm)で1.83、波長405(nm)で1.79、波長410(nm)で1.80、・・・、波長2000(nm)で2.11と設定されている。同様に、同離間距離が80〜60(m)のときの補正係数が、波長400(nm)で1.50、波長405(nm)で1.43、波長410(nm)で1.39、・・・、波長2000(nm)で1.80と
設定されている。
【0074】
次に、図8を参照して、補正マップ18Mを使用したスペクトル形状の補正について説明する。図8は、スペクトル波形の補正の例を説明する説明図であって、(a)は環境光がパッシブである状態を示す図、(b)は環境光がアクティブである状態を示す図、(c)ライト32のスペクトル波形の例を示す図、(d)補正されたスペクトル波形の例を示す図である。
【0075】
図8(a)において、車両10は環境光が太陽光であるようないわゆるパッシブな条件下で人31の観測光のスペクトル波形L40を検出する。このとき、スペクトルセンサ14の検出した観測光のスペクトル波形L40を補正する補正係数を測定対象との距離、パッシブ状態、測定対象「人」との条件に基づいて補正マップ18Mから取得して、同取得した補正値により各光強度を補正して、図8(d)に示される、補正された観測光のスペクトル波形L43を算出する。また、スペクトル波形L43を辞書データのスペクトル形状と比較演算することにより、測定対象が「人」であることを識別するようにしてもよい。
【0076】
図8(b)において、車両10はそのライト32を点灯させており、その光が測定対象の人31に照射されている。これにより、車両10は環境光が太陽光と、ライト32の光からなるようないわゆるアクティブな条件との下で人31の観測光のスペクトル波形L41を検出する。このとき、観測光のスペクトル波形L41は、測定対象との距離、測定対象「人」そしてパッシブ状態との条件に基づく補正値と、測定対象との距離、測定対象「人」そしてアクティブ状態との条件に基づく補正値とをそれぞれ補正マップ18Mから取得してそれら補正値により各光強度を補正し、補正された観測光のスペクトル形状を得る。なお、このとき得られた観測光のスペクトル形状には、ライト32のスペクトル形状の影響が残る。そこで、この補正された観測光のスペクトル形状を、ライト32のスペクトル形状として予め設定されているスペクトル波形L42により、補正、例えば除算するなどにより、ライト32の光のスペクトル形状の影響を除去して、図8(d)に示される、観測光のスペクトル波形L43を算出する。また、スペクトル波形L43を辞書データのスペクトル形状と比較演算することにより、測定対象が「人」であることを識別するようにしてもよい。さらに、アクティブ状態の補正値をライト32が照射する灯火のスペクトル波形に応じた補正係数として設定しておくようにすれば、観測光のスペクトル形状に生じるライト32の灯火の影響を当該補正値により補正することができるようにもなる。
【0077】
なお、環境光が自らの車両10のライト32の光によるパッシブな条件下においては、同環境光は距離の4乗に反比例してスペクトル強度が減衰することから、パッシブな条件下における補正値は、アクティブな条件下の補正値に比べて、光強度の減衰を大きく補うかたちとなる。
【0078】
これにより、スペクトルセンサ14から得られた観測光のスペクトル波形に測定対象との距離、すなわち車両の移動距離に伴う変化が生じても、そのような変化による影響を抑制させて識別精度を高く維持させることができるようになる。
【0079】
以上説明したように、本実施形態の移動体用スペクトル測定装置によっても先の第1の実施形態の前記(1)〜(7)の効果と同等もしくはそれに準じた効果が得られるとともに、次のような効果が得られるようになる。
【0080】
(8)スペクトル波形が測定対象との距離に応じて変化する主な要因は大気による減衰であり、環境光が太陽光であるようないわばパッシブな条件下では距離の2乗に反比例してスペクトル強度が減衰し、また環境光が移動体自身から灯火されたライトであるような
いわばアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰する。そこで上記構成によるように、上述したスペクトル波形の補正を、当該移動体と測定対象との距離に相関するスペクトル強度の大気による減衰を補うべく行うこととすれば、上記補正にかかる精度も高く維持されるようになる。
【0081】
(9)測定対象との距離についてこれを当該車両10との相対距離として求めることができれば、スペクトル強度の上記大気を要因とする減衰についてもより正確な補正が可能となる。そしてこの場合、上記構成によるように、測定対象もしくは当該車両10を基準にして、この相対距離の変化に対し常に一定のスペクトル強度が得られる態様で同スペクトル強度の補正を行うこととすれば、測定対象との距離の変化に依存しないスペクトル波形を得ることができるようになる。すなわちここでは、当該車両10を基準にした場合には、測定対象と移動体との相対距離が短くなるほど大きな補正(縮小する補正)が行われ、逆に測定対象側を基準にした場合には、測定対象と移動体との相対距離が長くなるほど大きな補正(拡大する補正)が行われることとなる。なお、辞書データとの比較のもとにスペクトル波形から測定対象の識別(トラッキング)を行うといった前提からすれば、当該移動体側を基準にすることがより望ましい。
【0082】
(10)車両状態取得装置19が、当該移動体から測定対象までの距離情報を取得可能な装置である場合には、上記構成によるように、この取得されるその都度の距離情報に応じて定まる補正係数として上記補正すべき量を補正データ記憶部にマップ化しておくことが望ましい。これにより、簡単なマップ演算を通じてその都度の距離情報に応じた補正係数を得ることができるようになる。なお、上記距離情報を取得可能な車両状態取得装置19としては、例えばステレオカメラやレーダ装置等がある。
【0083】
(11)環境光が太陽光であるようないわばパッシブな条件下では距離の2乗に反比例してスペクトル強度が減衰するものの、環境光が車両10自身から灯火されたライト32であるようないわばアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰する。そこで上記構成によるように、上述したスペクトル波形の補正係数をこれらパッシブな条件下とアクティブな条件下とで、もしくはアクティブな状態を含まない条件下とアクティブな状態含む条件下とで各別に用意しておくこととすれば、それら環境光による影響をも併せて補正することができるようになる。
【0084】
(12)少なくともアクティブな条件下では距離の4乗に反比例してスペクトル強度が減衰することから、その具体的な補正係数としても、上記構成によるように、ライト灯火有りに対する補正がライト灯火無しに対する補正よりも大きな補正量となる態様で補正係数をマップ化することで、その補正精度も的確に維持されるようになる。
【0085】
(第3の実施形態)
次に、本発明にかかる移動体用スペクトル測定装置の第3の実施形態について図9及び図10を参照して説明する。なお、本実施形態は、先の第1の実施形態とは、その構成は同一であり、補正データ記憶部18に保持された補正データとしての補正マップが相違する。以下では主に、先の第1の実施形態との相違点を中心に、補正マップの相違点について説明する。
【0086】
図9は、測定対象の距離の変化の状態を示す図であり、(a)は距離が離れている状態図であり、(b)は距離が近いときの状態図である。図10は、測定対象の距離の変化に応じて変化する観測光のスペクトル波形を示すグラフであり、(a)は距離の変化が大きい場合、(b)は距離の変化が小さい場合をそれぞれ示す。
【0087】
図9に示すように、スペクトルセンサ14の検出する撮像データ(スペクトルデータ)
の範囲は画像20に示される範囲とする。このとき、画像20には、路面21と対向車線を走る対向車22が含まれている。スペクトルセンサ14は、同画像20の領域を、例えば、上下に複数分割して規定される各ラインを下から上へスキャンするようになっており、画像20全体のスキャン毎に同画像20がマトリクス状に分割された各区画に対するスペクトルデータが取得される。画像20には、マトリクス状に分割された区画のうちの一つの区画23を示している。区画23は、測定対象の距離にかかわらず、所定の大きさを有していることから、測定対象との距離により、区画23に含まれる測定対象の領域に変化が生じ、測定対象において観測光を放射する放射面の構成比率が変化するなどして観測光のスペクトル形状も変化する。
【0088】
すなわち、測定対象としての対向車22が遠い場合には、区画23には対向車22の大部分が含まれるが、逆に測定対象としての対向車22が近い場合には、区画23には対向車22の一部のみが含まれるようになる。図10(a)に示す、区画23には対向車22の大部分が含まれる場合には、観測光としてスペクトル波形L20が検出される。このとき、相対速度が速く、観測光の光路長の差が大きくなるような場合には、次に取得される観測光として例えば、スペクトル波形L21が検出される。なおこのとき、スペクトル波形L21は測定対象としての「車」の辞書データのスペクトル形状により近似していることが普通である。すなわち、スペクトル波形L21と交差するようなスペクトル波形L20は、大気による減衰などの影響のみならず、例えば、距離が遠いことによるノイズの混入や、区画23における各放射面の分布の影響などにより、その形状が不規則に変化されている。すなわち、スペクトル形状に、図10(a)において、差ΔD21に示すような測定対象との距離に基づかない不規則な変化が生じるようなこともあるが、そのような場合でも、補正マップ18Mなどにおいて、適切な補正係数を設定することで、観測光としてのスペクトル波形L20を適切に補正することができるようになる。
【0089】
このとき、相対速度が遅く、観測光の光路長の差が小さいような場合には、図10(b)に示すような観測光のスペクトル波形L22が、スペクトル波形L20の次に検出される。先と同様にスペクトル波形L20,L22にはそれぞれ距離によらない不規則な変化が生じることもあるが、この場合にも、差ΔD22を補正するような補正係数を設定すれば、両スペクトル波形L20,L22との間ではトラッキング処理が可能なる。
【0090】
また、いずれの場合であれ、補正係数が辞書データのスペクトル形状に近似するように設定されていれば、辞書データのスペクトル形状との比較による測定対象の識別及びトラッキング処理が行えるようにもなる。
【0091】
以上説明したように、本実施形態の移動体用スペクトル測定装置によっても先の第1の実施形態の前記(1)〜(12)の効果と同等もしくはそれに準じた効果が得られるとともに、次のような効果が得られるようになる。
【0092】
(13)大気による減衰の以外の要因によりスペクトル波形に生じる変化であれ、それを事前のシミュレーションや経験値、もしくは実験値などに基づいて補うように補正マップの補正値を定めるようにすることで、このような補正マップによるスペクトル波形の補正が行えるようになる。
【0093】
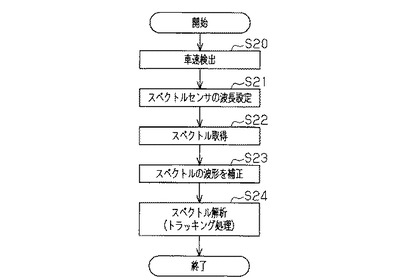
なお、上記各実施形態は、例えば以下のような態様にて実施することもできる。
・上記各実施形態では、スペクトルセンサ14にスペクトルデータを検出する波長分解能や波長領域を設定しない場合について例示した。しかしこれに限らず、スペクトルセンサに波長分解能や波長領域を設定してもよい。すなわち、スペクトルセンサとして、光強度情報を検出する波長を変更することが可能なものを採用して、そこに例えば、波長分解能と波長帯域を設定することで、同波長分解能と同波長帯域から規定される波長の光強度
情報のみを検出するようにしてもよい。このような場合には、図11に示されるように、スペクトル解析工程に、スペクトルセンサに波長を設定する工程(図11のステップS21)を設けるようにすることで、観測光のスペクトル形状の有するデータ量を減少させることができるようにもなる。データ量の減少は、その後のスペクトル取得(図11のステップS22)、スペクトル波形の補正(図11のステップS23)、スペクトル解析(トラッキング処理)(図11のステップS24)、の各工程における演算量を減少させてスペクトル解析工程に要する処理時間を減少させることができるようにもなる。これにより、このようなスペクトル測定装置が移動体としての車両に搭載された場合であれ、実時間での処理能力を向上させるようになり、移動速度の速い車両等への採用可能性も高められる。
【0094】
・上記各実施形態では、スペクトル測定装置11の補正データはマップのかたちにて保持されている場合について例示した。しかしこれに限らず、補正データは、数式などのかたちで保持されてもよい。この場合には、補正値は都度の演算により求められるようにすればよい。補正値を示す数式としては、例えばパッシブの条件下ならば2次関数の式の採用が考えられ、アクティブの条件下ならば4次関数の式の採用が考えられる。
【0095】
・上記各実施形態では、補正データ記憶部18に補正データが保持される場合について例示した。しかしこれに限らず、補正データはその他の記憶領域、例えば、辞書データ記憶部や演算装置の内部メモリーなどに保持されるなどしていてもよい。補正データ記憶部18を有さない構成とすることによれば、スペクトル測定装置11の構成を容易にすることができるようにもなる。
【0096】
・上記各実施形態の車両は、自動車でもよい。このようなスペクトル測定装置であれば、自動車に搭載された場合であれ、路上走行にともない順次接近してくる測定対象の認識及びトラッキング処理を、実時間行で行ない適切な運転支援が行えるようになる。これによって、自動車へのスペクトル測定装置の採用可能性が高められる。
【0097】
・なお上記各実施形態は、車両としての自動車に限られず、自動二輪車やロボットなど路上を移動する移動体であれば、このような移動体用スペクトル測定装置の採用が可能である。
【符号の説明】
【0098】
10…車両、11…スペクトル測定装置、12…ヒューマンマシンインタフェース、13…車両制御装置、14…スペクトルセンサ、15…スペクトルデータ処理装置、16…辞書データ記憶部、17…演算装置、18…補正データ記憶部、18M…補正マップ、19…移動状態取得装置としての車両状態取得装置、20…画像、21…路面、22…対向車、23…区画、30…太陽、31…人、32…ライト。
【特許請求の範囲】
【請求項1】
波長情報と光強度情報とを測定可能なスペクトルセンサを移動体に搭載し、このスペクトルセンサにて検出される観測光のスペクトル波形に基づいて移動体周辺の測定対象を識別する移動体用スペクトル測定装置であって、
予め定められた複数の測定対象についての波長情報と光強度情報とを含むスペクトル波形が辞書データとして格納されている辞書データ記憶部と、
前記観測光のスペクトル波形と前記辞書データ記憶部に格納されているスペクトル波形との比較演算に基づいて前記測定対象を識別する演算装置と、
当該移動体の移動状態に関する情報を取得する移動状態取得装置と、を備え、
前記演算装置は、前記移動状態取得装置によって取得される当該移動体の移動状態に関する情報に基づき前記観測光のスペクトル波形を補正して前記辞書データ記憶部に格納されているスペクトル波形との比較演算を行う
ことを特徴とする移動体用スペクトル測定装置。
【請求項2】
前記観測光のスペクトル波形の補正が、前記測定対象との距離に相関する前記観測光のスペクトル強度の大気による減衰を補うべくなされる補正である
請求項1に記載の移動体用スペクトル測定装置。
【請求項3】
前記測定対象との距離が一定時間内に当該移動体が移動する距離として近似され、前記補正は、この近似される距離が短いほど前記観測光のスペクトル強度に対する補正量を小さく、同近似される距離が長いほど前記観測光のスペクトル強度に対する補正量を大きくする態様で行われる
請求項2に記載の移動体用スペクトル測定装置。
【請求項4】
前記移動状態取得装置の取得する当該移動体の移動状態に関する情報が同移動体の速度情報であって、前記近似される距離はこの取得される当該移動体のその都度の速度情報に換算され、前記補正量は、この換算されたその都度の速度情報に応じて定まる補正係数として補正データ記憶部にマップ化されてなる
請求項3に記載の移動体用スペクトル測定装置。
【請求項5】
前記補正係数は、前記スペクトル波形の異なる波長帯域の別に、各速度情報毎に複数の値を持ってマップ化されてなる
請求項4に記載の移動体用スペクトル測定装置。
【請求項6】
前記測定対象との距離が当該移動体との相対距離であり、前記補正は、前記測定対象もしくは当該移動体を基準にして、この相対距離の変化に対し常に一定のスペクトル強度が得られる態様で行われる
請求項2に記載の移動体用スペクトル測定装置。
【請求項7】
前記移動状態取得装置の取得する当該移動体の移動状態に関する情報が同移動体の前記測定対象に対する距離情報であり、前記補正すべき量は、この取得されるその都度の距離情報に応じて定まる補正係数として補正データ記憶部にマップ化されてなる
請求項6に記載の移動体用スペクトル測定装置。
【請求項8】
前記補正係数は、前記スペクトル波形の異なる波長帯域の別に、各距離情報毎に複数の値を持ってマップ化されてなる
請求項7に記載の移動体用スペクトル測定装置。
【請求項9】
前記移動状態取得装置の取得する当該移動体の移動状態に関する情報として当該移動体
のライト灯火の有無に関する情報が併せて取得され、前記補正係数は、このライト灯火の有無に応じた各別の補正係数として前記補正データ記憶部にマップ化されてなる
請求項4、5、7、8のいずれか一項に記載の移動体用スペクトル測定装置。
【請求項10】
前記補正係数は、ライト灯火有りに対する補正がライト灯火無しに対する補正よりも大きな補正量となる態様でマップ化されてなる
請求項9に記載の移動体用スペクトル測定装置。
【請求項11】
前記補正係数は、ライトが照射する灯火のスペクトル波形に応じた各別の補正係数として前記補正データ記憶部にマップ化されてなる
請求項4、5、7、8のいずれか一項に記載の移動体用スペクトル測定装置。
【請求項1】
波長情報と光強度情報とを測定可能なスペクトルセンサを移動体に搭載し、このスペクトルセンサにて検出される観測光のスペクトル波形に基づいて移動体周辺の測定対象を識別する移動体用スペクトル測定装置であって、
予め定められた複数の測定対象についての波長情報と光強度情報とを含むスペクトル波形が辞書データとして格納されている辞書データ記憶部と、
前記観測光のスペクトル波形と前記辞書データ記憶部に格納されているスペクトル波形との比較演算に基づいて前記測定対象を識別する演算装置と、
当該移動体の移動状態に関する情報を取得する移動状態取得装置と、を備え、
前記演算装置は、前記移動状態取得装置によって取得される当該移動体の移動状態に関する情報に基づき前記観測光のスペクトル波形を補正して前記辞書データ記憶部に格納されているスペクトル波形との比較演算を行う
ことを特徴とする移動体用スペクトル測定装置。
【請求項2】
前記観測光のスペクトル波形の補正が、前記測定対象との距離に相関する前記観測光のスペクトル強度の大気による減衰を補うべくなされる補正である
請求項1に記載の移動体用スペクトル測定装置。
【請求項3】
前記測定対象との距離が一定時間内に当該移動体が移動する距離として近似され、前記補正は、この近似される距離が短いほど前記観測光のスペクトル強度に対する補正量を小さく、同近似される距離が長いほど前記観測光のスペクトル強度に対する補正量を大きくする態様で行われる
請求項2に記載の移動体用スペクトル測定装置。
【請求項4】
前記移動状態取得装置の取得する当該移動体の移動状態に関する情報が同移動体の速度情報であって、前記近似される距離はこの取得される当該移動体のその都度の速度情報に換算され、前記補正量は、この換算されたその都度の速度情報に応じて定まる補正係数として補正データ記憶部にマップ化されてなる
請求項3に記載の移動体用スペクトル測定装置。
【請求項5】
前記補正係数は、前記スペクトル波形の異なる波長帯域の別に、各速度情報毎に複数の値を持ってマップ化されてなる
請求項4に記載の移動体用スペクトル測定装置。
【請求項6】
前記測定対象との距離が当該移動体との相対距離であり、前記補正は、前記測定対象もしくは当該移動体を基準にして、この相対距離の変化に対し常に一定のスペクトル強度が得られる態様で行われる
請求項2に記載の移動体用スペクトル測定装置。
【請求項7】
前記移動状態取得装置の取得する当該移動体の移動状態に関する情報が同移動体の前記測定対象に対する距離情報であり、前記補正すべき量は、この取得されるその都度の距離情報に応じて定まる補正係数として補正データ記憶部にマップ化されてなる
請求項6に記載の移動体用スペクトル測定装置。
【請求項8】
前記補正係数は、前記スペクトル波形の異なる波長帯域の別に、各距離情報毎に複数の値を持ってマップ化されてなる
請求項7に記載の移動体用スペクトル測定装置。
【請求項9】
前記移動状態取得装置の取得する当該移動体の移動状態に関する情報として当該移動体
のライト灯火の有無に関する情報が併せて取得され、前記補正係数は、このライト灯火の有無に応じた各別の補正係数として前記補正データ記憶部にマップ化されてなる
請求項4、5、7、8のいずれか一項に記載の移動体用スペクトル測定装置。
【請求項10】
前記補正係数は、ライト灯火有りに対する補正がライト灯火無しに対する補正よりも大きな補正量となる態様でマップ化されてなる
請求項9に記載の移動体用スペクトル測定装置。
【請求項11】
前記補正係数は、ライトが照射する灯火のスペクトル波形に応じた各別の補正係数として前記補正データ記憶部にマップ化されてなる
請求項4、5、7、8のいずれか一項に記載の移動体用スペクトル測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−276556(P2010−276556A)
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願番号】特願2009−131583(P2009−131583)
【出願日】平成21年5月29日(2009.5.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願日】平成21年5月29日(2009.5.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]