
移動体用非接触給電装置
【課題】送電コイル上に存在する金物異物を高精度に検出し、且つ、除去することができる移動体用非接触給電装置を提供する。
【解決手段】送電コイル31と、この送電コイルにギャップを介して対向する受電コイル32とを備え、送電コイルが地上側に設置され、受電コイルが移動体側に設置され、送電コイルから受電コイルに電磁誘導により給電が行われる移動体用非接触給電装置であって、送電コイルに異物検出用電力を供給して求めた給電損失の測定値と標準値との差分に基づいて送電コイル31上の金物異物100の有無を検出し、金物異物100を検出したとき、異物検出信号を出力する異物検出手段50と、金物異物100が検出されたことを受けて、送電コイル31の上から金物異物100を除去する異物除去手段70とを備える。異物検出手段が送電コイル上の金物異物を検出し、異物除去手段がその金物異物を除去する。
【解決手段】送電コイル31と、この送電コイルにギャップを介して対向する受電コイル32とを備え、送電コイルが地上側に設置され、受電コイルが移動体側に設置され、送電コイルから受電コイルに電磁誘導により給電が行われる移動体用非接触給電装置であって、送電コイルに異物検出用電力を供給して求めた給電損失の測定値と標準値との差分に基づいて送電コイル31上の金物異物100の有無を検出し、金物異物100を検出したとき、異物検出信号を出力する異物検出手段50と、金物異物100が検出されたことを受けて、送電コイル31の上から金物異物100を除去する異物除去手段70とを備える。異物検出手段が送電コイル上の金物異物を検出し、異物除去手段がその金物異物を除去する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地上側の送電コイルから、受電コイルを備える電気自動車などの移動体に非接触給電を行う移動体用非接触給電装置に関し、送電コイル上に存在する金物異物を検出し、除去できるようにしたものである。
【背景技術】
【0002】
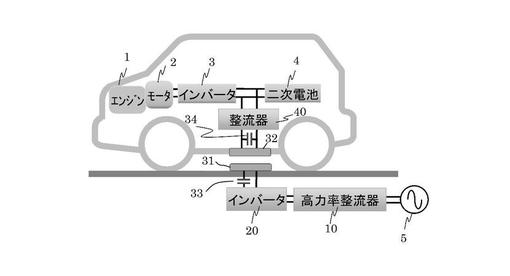
非接触給電装置は、非接触給電トランスを構成する送電コイル(一次コイル)と受電コイル(二次コイル)との間の電磁誘導を利用して送電コイルから受電コイルに電力を供給する。この非接触給電装置を利用して電気自動車やプラグインハイブリッド車に搭載された二次電池の充電を行う移動体用非接触給電装置は、図12に示すように、地上側に、商用電源5の交流を直流に変換する高力率整流器10と、直流から高周波交流を生成するインバータ20と、非接触給電トランスの一方である送電コイル31と、送電コイルに直列接続された一次側直列コンデンサ33とを備えている。
【0003】
一方、車両側がプラグインハイブリッド車の場合は、エンジン1とともにモータ2を駆動源として搭載し、モータ用の電源である二次電池4と、二次電池4の直流を交流に変換してモータ2に供給するインバータ3と、二次電池4への給電機構とを具備し、その給電機構として、非接触給電トランスの他方である受電コイル32と、二次電池4のために交流を直流に変換する整流器40と、受電コイル33と整流器40との間に並列接続された二次側並列共振コンデンサ34とを備えている。
【0004】
ここで、(送電コイル31+受電コイル33)を非接触給電トランスと呼び、(非接触給電トランス+一次側直列コンデンサ33+二次側並列共振コンデンサ34)を非接触給電装置と呼び、(高周波電源+非接触給電装置+二次側整流器40)を非接触給電システムと呼ぶことにする。
【0005】
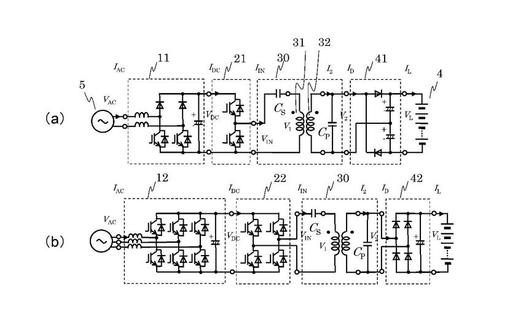
図13は、非接触給電システムの回路図を示している。
図13(a)は、単相100V〜220Vの商用電源5に適した主回路であり、一次側整流器にブリッジレス高力率昇圧型整流器11を使用し、インバータにハーフブリッジインバータ21を使用し、非接触給電装置30の出力を整流する二次側整流器に倍電圧整流器41を使用している。
また、図13(b)は、三相200V〜440Vの電源に適した主回路であり、一次側整流器に三相高力率PWM整流器12を使用し、インバータにフルブリッジインバータ22を使用し、非接触給電装置30の出力を整流する二次側整流器に全波整流器42を使用している。
【0006】
送電コイル31は、上面が円形あるいは長方形の扁平な形状を有している。自動車への給電時には、受電コイル32が送電コイル31のほぼ真上に位置するように自動車を駐車し、送電コイル31と受電コイル32との間に50mm〜200mmの空隙を隔てて非接触給電が行われる。
この給電時に、送電コイル31と受電コイル32との空隙に缶、釘、硬貨などの金物異物が存在すると、空隙の交流磁界で金物異物が熱せられて高温になる。
【0007】
図14は、移動体用非接触給電装置の送電コイル及び受電コイルを模した図15の実験装置を用いて、送電コイルと受電コイルとの間にスチール缶が介在したとき(図14(a))及び各種の硬貨が介在したとき(図14(b))の温度変化を測定した結果について示している。この実験では、50kHzで1.5kW給電を行っている。スチール缶は、約18秒で100℃に昇温し、最終的に120℃にまで達した。硬貨は、その種類により昇温傾向に違いがあり、最も昇温が速い100円玉では、約10分で65℃に達した。
非接触給電装置は電磁調理器と同じ原理(電磁誘導)でエネルギーを伝送するため、スチール缶などの金属類は極めて短時間で高温になり、近くに可燃物があると発火や発煙の危険性がある。
金物異物が発熱することは、非接触給電では給電損失(=送電電力−受電電力)が増大することを意味する。
【0008】
非接触給電は、携帯電話や電動髭剃りなどの充電にも利用されており、この場合も、送電コイルと受電コイルとの間に硬貨やピンなどの金物異物が介在すると、それが発熱し、製品の安全性が脅かされる。
こうした事故を防ぐため、下記特許文献1には、二次電池を有する受電側が、充電時の電池電圧と充電電流とを積算した電力値の情報を送電側に送り、送電側が、その値を送信した電力値と比較して、電力値の差が規定値内であれば電力の送信を続け、規定値外であれば電力の送信を停止する非接触充電器が提案されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2011−83094号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、移動体用非接触給電装置の給電電力量は、携帯機器などの非接触給電装置に比べて桁違いに多く、そのため、金物異物に起因する給電損失の割合は相対的に小さい。それ故、移動体用非接触給電装置では、金物異物に起因する給電損失を高精度に検出することが難しい。
また、移動体用非接触給電装置の場合は、送電コイル上に金物異物が存在することを検知できたとしても、送電コイルの上に車両が駐車しているため、金物異物を取り除くことが容易でない。
【0011】
本発明は、こうした事情を考慮して創案したものであり、送電コイル上に存在する金物異物を高精度に検出し、且つ、除去することができる移動体用非接触給電装置を提供することを目的としている。
【課題を解決するための手段】
【0012】
本発明は、送電コイルと、この送電コイルにギャップを介して対向する受電コイルとを備え、送電コイルが地上側に設置され、受電コイルが移動体側に設置され、送電コイルから受電コイルに電磁誘導により給電が行われる移動体用非接触給電装置であって、送電コイル上に金物異物が存在しない状態で送電コイルに異物検出用電力を供給して給電損失の標準値を求め、送電コイルに異物検出用電力を供給して求めた給電損失の測定値と標準値との差分に基づいて送電コイル上の金物異物の有無を検出し、金物異物を検出したとき、異物検出信号を出力する異物検出手段を備えることを特徴とする。
この装置では、異物検出手段が送電コイル上の金物異物を検出して異物検出信号を出力する。
【0013】
また、本発明の移動体用非接触給電装置では、異物検出用電力が受電コイルに対向する送電コイルに供給され、異物検出手段が、送電コイルの入力電力PIN0と、受電コイルの出力電力PL0と、送電コイルの銅損Pc1と、受電コイルの銅損Pc2とを求め、(PIN0−PL0−Pc1−Pc2)の値の測定値と標準値との差分に基づいて金物異物の有無を検出する。
このように、送電コイルの入力電力PIN0と受電コイルの出力電力PL0との差分から銅損による損失分を引き去ることで、金物異物に起因する給電損失の検出感度を高めることができる。
【0014】
また、本発明の移動体用非接触給電装置では、異物検出手段が、さらに、送電コイルの鉄損Pf1と、受電コイルの鉄損Pf2とを求め、(PIN0−PL0−Pc1−Pc2−Pf1−Pf2)の値の測定値と標準値との差分に基づいて金物異物の有無を検出するようにしても良い。
このように、送電コイルの入力電力PIN0と受電コイルの出力電力PL0との差分から銅損及び鉄損による損失分を引き去ることで、金物異物に起因する給電損失の検出感度をさらに高めることができる。
【0015】
また、本発明の移動体用非接触給電装置では、異物検出用電力を、定格給電電力の20%以下に設定することが望ましい。
このように、異物検出用電力を下げることで、異物検出時の発火や発煙の危険性を減らすことができる。
【0016】
また、本発明の移動体用非接触給電装置では、送電コイルに異物検出用電力を供給するとき、受電コイルと、後続する整流器との接続を遮断することが望ましい。
このように、受電コイルを、整流器及び二次電池から切り離すことで、整流器及び二次電池が関与する損失分を除くことができるから、金物異物に起因する給電損失の検出感度を高めることができる。
【0017】
また、本発明の移動体用非接触給電装置では、異物検出用電力を受電コイルに対向していない送電コイルに供給し、異物検出手段が、送電コイルの入力電力PIN0と、送電コイルの銅損Pc1とを求め、(PIN0−Pc1)の値の測定値と標準値との差分に基づいて金物異物の有無を検出するようにしても良い。
この場合、車両を送電コイル上に駐車する前に、送電コイルの上に金物異物が有るか無いかを調べることができる。このように、送電コイルのみを用いて異物検出を行う場合は、送電コイルと受電コイルとの位置ずれに起因する測定誤差が排除できる、と言う利点がある。
【0018】
また、本発明の移動体用非接触給電装置では、異物検出手段が、さらに、送電コイルの鉄損Pf1を求め、(PIN0−Pc1−Pf1)の値の測定値と標準値との差分に基づいて金物異物の有無を検出するようにしても良い。
このように、送電コイルの入力電力PIN0から銅損及び鉄損による損失分を引き去ることで、金物異物に起因する給電損失の検出感度をさらに高めることができる。
【0019】
また、本発明の移動体用非接触給電装置では、異物検出用電力を受電コイルに対向していない送電コイルに供給し、異物検出手段が、送電コイルの入力電力PIN0を求め、PIN0の値の測定値と標準値との差分に基づいて金物異物の有無を検出するようにしても良い。
この場合、金物異物の検出が簡単に実施できる。
【0020】
また、本発明の移動体用非接触給電装置では、さらに、異物検出手段が金物異物を検出したことを受けて、送電コイルの上から金物異物を除去する異物除去手段を備える。
この装置では、異物検出手段が送電コイル上の金物異物を検出し、異物除去手段が、その金物異物を除去する。
【0021】
また、本発明の移動体用非接触給電装置では、異物除去手段が、送電コイルの上面を覆う非磁性且つ非導電性のカバー部材と、このカバー部材を、送電コイルの側縁位置で送電コイルの上面に平行な軸線を中心に所定角度回転できるように枢支する枢支手段と、金物異物が検出されたことを受けて、カバー部材を、前記軸線を中心に所定角度回転する回転駆動手段と、を備える。
この異物除去手段は、送電コイルのカバー部材を斜めに傾斜させて、カバー部材上の金物異物を排除する。
【0022】
また、本発明の移動体用非接触給電装置では、カバー部材を、送電コイルの上面を分割して覆う複数の分割カバー部材で構成し、枢支手段を分割カバー部材のそれぞれに設け、金物異物が検出されたことを受けて、回転駆動手段が、分割カバー部材の全てを回転するようにしても良い。
この場合、カバー部材を分割することで、傾斜したときのカバー部材の最高位置の高さを、分割しないときよりも低くすることができる。
【0023】
また、本発明の移動体用非接触給電装置では、異物除去手段が、金物異物が検出されたことを受けて、送電コイルと受電コイルとの空隙に高速の空気を吹き付けるエアコンプレッサーを備えるようにしても良い。
この異物除去手段は、金物異物に高速の空気を吹き付けて送電コイル上から除去する。
【0024】
また、本発明の移動体用非接触給電装置では、異物除去手段が、樹脂製のベルトコンベアーと、ベルトコンベアーを巡回可能に支持する駆動ローラ及び従動ローラのローラ対と、を備え、ローラ対は、巡回するベルトコンベアーの一面が送電コイルの上面を覆うようにベルトコンベアーを支持し、金物異物が検出されたことを受けて、駆動ローラが、ベルトコンベアーを巡回させて、送電コイルの上面を覆うベルトコンベアーの面を更新する。
この異物除去手段では、送電コイルの上面を覆うベルトコンベアーが移動して、ベルトコンベアー上の金物異物を除去する。
【0025】
また、本発明の移動体用非接触給電装置では、異物除去手段が、送電コイルの上面を拭うワイパー部材と、ワイパー部材を駆動するワイパー駆動手段とを備え、金物異物が検出されたことを受けて、ワイパー駆動手段がワイパー部材を駆動し、送電コイルの上面がワイパー部材によって拭われる。
この異物除去手段では、送電コイル上をワイパー部材が動いて、送電コイル上の金物異物を除去する。
また、本発明の移動体用非接触給電装置では、
【0026】
また、本発明の移動体用非接触給電装置では、異物検出手段が出力した異物検出信号に基づいて、送信コイルへの異物検出用電力の供給を停止し、異物検出警報を表示するようにしても良い。
こうすることで、異物除去手段を持たない移動体用非接触給電装置でも、金物異物の介在による事故を回避できる。
【0027】
また、本発明の移動体用非接触給電装置では、異物検出用電力の供給を停止した送信コイルに、予め設定された時間が経過するごとに異物検出用電力を供給して、異物検出手段が送電コイル上の金物異物の検出を繰り返し、異物検出手段により金物異物が検出されなかったとき、送信コイルに給電用電力を供給するようにしても良い。
こうすることで、異物除去手段を持たない移動体用非接触給電装置でも、安全を確認して非接触給電を開始することができる。
【0028】
また、本発明の移動体用非接触給電装置では、送電コイルの上面から金物異物を除去した異物除去手段が、異物検出手段にその旨を通知し、通知を受けた異物検出手段が、送電コイル上の金物異物を検出し、金物異物が検出されなかったとき、送信コイルに給電用電力を供給することが望ましい。
異物検出手段が異物を除去した場合でも、安全を確認して非接触給電を開始することができる。
【発明の効果】
【0029】
本発明の移動体用非接触給電装置は、送電コイル上に存在する金物異物を高精度に検出することができ、また、検出した金物異物を除去することができる。
そのため、送電コイル上に金物異物が存在する場合でも、その異物を迅速に除去して、移動体への非接触給電を安全に、且つ、滞り無く続けることができる。
【図面の簡単な説明】
【0030】
【図1】本発明の第1の実施形態に係る移動体用非接触給電装置を示す模式図
【図2】図1の異物検出器の構成を示すブロック図
【図3】図2の異物検出器の動作を示すフロー図
【図4】図1の移動体用非接触給電装置の変形例を示す図
【図5】本発明の第2の実施形態に係る移動体用非接触給電装置を示す模式図
【図6】図5の異物検出器の動作を示すフロー図
【図7】カバー部材の傾斜構造を有する異物除去装置を示す図
【図8】分割カバー部材の傾斜構造を有する異物除去装置を示す図
【図9】エアコンプレッサーを備える異物除去装置を示す図
【図10】ベルトコンベアーを備える異物除去装置を示す図
【図11】ワイパー機構を備える異物除去装置を示す図
【図12】従来の移動体用非接触給電装置を示す模式図
【図13】移動体用非接触給電システムの回路図
【図14】金物異物による発熱実験の測定結果を示す図
【図15】図14の実験に用いた装置を示す図
【発明を実施するための形態】
【0031】
(第1の実施形態)
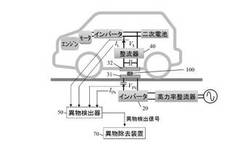
図1は、本発明の第1の実施形態に係る移動体用非接触給電装置を模式的に示している。
この装置は、非接触給電装置の送電コイル31と受電コイル32との間に存在する金物異物100を検出する異物検出器50(特許請求の範囲で言う“異物検出手段”)と、異物検出器50が金物異物を検出したとき、その金物異物100を送電コイル31上から除去する異物除去装置70(特許請求の範囲で言う“異物除去手段”)とを備えている。
異物検出器50は、金物異物を検出するために、地上側から、非接触給電装置の入力電圧及び入力電流に相当するインバータ20の出力電圧VIN及び出力電流IINの情報を取得し、車両側から、非接触給電装置の出力電圧及び出力電流に対応する整流器40の出力直流電圧VL及び出力直流電流ILの情報を取得する。
【0032】
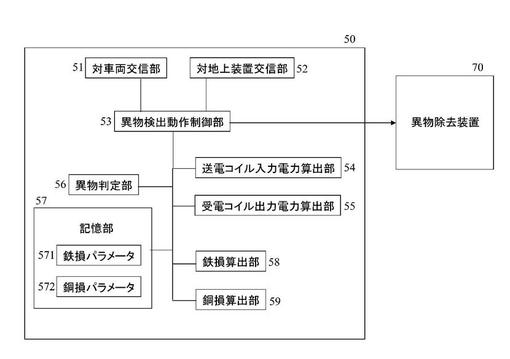
この異物検出器50は、図2に示すように、車両側と無線通信で情報を交換する際のインタフェースである対車両交信部51と、地上側装置と情報を交換する際のインタフェースである対地上装置交信部52と、異物検出動作を制御する異物検出動作制御部53と、送電コイル31に入力する電力を算出する送電コイル入力電力算出部54と、受電コイル32から出力する電力を算出する受電コイル出力電力算出部55と、送電コイル31及び受電コイル32の鉄損を算出する鉄損算出部58と、送電コイル31及び受電コイル32の銅損を算出する銅損算出部59と、送電コイル31上に金物異物が存在するか否かを判定する異物判定部56と、各種演算作業に必要な情報を記憶する記憶部57とを備えている。
【0033】
この異物検出動作制御部53、送電コイル入力電力算出部54、受電コイル出力電力算出部55、鉄損算出部58、銅損算出部59及び異物判定部56は、コンピュータがプログラムで規定された動作を実行することにより実現される。
【0034】
送電コイル入力電力算出部54は、インバータ20から送られた出力電圧VINと出力電流IINとの情報からインバータ20の出力電力PIN(=VIN×IIN)を算出し、その電力PINの一定時間の平均を計算して、送電コイル31の一定時間の平均入力電力PIN0を得る。
受電コイル出力電力算出部55は、車両側から送られた整流器40の出力直流電圧VLと出力直流電流ILとの情報から整流器40の出力電力PL(=VL×IL)を算出し、その電力PLの一定時間の平均を計算して、受電コイル32の一定時間の平均出力電力PL0を得る。
【0035】
銅損算出部59は、送電コイル31の巻線抵抗(r1)と電流(IIN)とから送電コイル31の銅損Pc1(=r1×IIN2)を算出し、受電コイル32の巻線抵抗(r2)と電流(IL)とから受電コイル32の銅損Pc2(=r2×IL2)を算出する。なお、送電コイル31の巻線抵抗(r1)や受電コイル32の巻線抵抗(r2)の情報は、対地上装置交信部52及び対車両交信部51を通じて地上側装置及び車両側から事前に取得し、記憶部57の銅損パラメータ領域572で保持する。
【0036】
鉄損算出部58は、送電コイル31及び受電コイル32の鉄損の推定値を算出する。鉄損は、送電コイル31及び受電コイル32の鉄心(フェライトコア)が交流で磁化されるときに失われる電気エネルギーであり、ヒステリシス損と渦電流損との和で表される。鉄損は電圧の関数であり、地上側装置から、VINを代入すれば送電コイル31の鉄損が算出できる鉄損パラメータを予め取得し、また、車両側から、VLを代入すれば受電コイル32の鉄損が算出できる鉄損パラメータを予め取得して、記憶部57の鉄損パラメータ領域571で保持することにより、鉄損算出部58は、VINから送電コイル31の鉄損の推定値(Pf1)を算出することができ、また、VLから受電コイル32の鉄損の推定値(Pf2)を算出することができる。
【0037】
異物判定部56は、送電コイル入力電力算出部54、受電コイル出力電力算出部55、銅損算出部59、及び、鉄損算出部58が算出した値を用いて、送電コイル31上に金物異物が存在するか否かを判定する。
この判定に先立ち、送電コイル31上に金物異物が存在しない状態で送電コイル入力電力算出部54、受電コイル出力電力算出部55、銅損算出部59、及び、鉄損算出部58が算出した値PIN0、PL0、Pc1、Pc2、Pf1、Pf2から給電損失Ps(=PIN0−PL0−Pc1−Pc2−Pf1−Pf2)を算出し、この値Psを標準値として記憶部57に記録する。なお、車両側の非接触給電装置の構成が幾つかの種別に分かれる場合は、各種別の非接触給電装置を搭載した車両を金物異物が存在しない送電コイル31上に駐車させて、各種別に応じた標準値を測定し、記憶部57に記録する。
【0038】
さて、送電コイル31上に金物異物が存在するかしないか分からない状態で非接触給電を行う車両が送電コイル31上に停車すると、異物判定部56は、送電コイル入力電力算出部54、受電コイル出力電力算出部55、銅損算出部59、及び、鉄損算出部58の各々が算出した値P’IN0、P’L0、P’c1、P’c2、P’f1、P’f2から給電損失P’s(=P’IN0−P’L0−P’c1−P’c2−P’f1−P’f2)を算出する。
そして、この車両から得た非接触給電装置の種別に応じた標準値Psを記憶部57から読み出し、給電損失の測定値P’sと標準値Psとの差分(P’s−Ps)を算出する。
この差分(P’s−Ps)の絶対値が大きい場合は、送電コイル31と受電コイル32との間に金物異物が存在し、この金物異物が発熱しているために給電損失が増大していると考えられる。
【0039】
異物判定部56は、この差分(P’s−Ps)を予め定めた閾値と比較し、差分(P’s−Ps)が閾値を超えていれば、送電コイル31上に金物異物が存在すると判定し、差分(P’s−Ps)が閾値以下であれば、送電コイル31上に金物異物が存在しないと判定する。なお、この閾値は、金物異物検出試験を繰り返して適切な値に設定する。
また、閾値との比較は、差分(P’s−Ps)を標準値Psで除した値(=(P’s−Ps)/Ps)について行うようにしても良い。
異物判定部56が送電コイル31上に金物異物が在ると判定したときは、異物検出動作制御部53が、異物除去装置70に異物検出信号を送出する。
異物除去装置70の動作については後述する。
【0040】
図3は、異物検出器50の動作フローを示している。
前以て、各種非接触給電装置を搭載した車両ごとの標準値Psを測定し、記憶部57に記録する(ステップ1)。
送電コイル31上に駐車した車両を検知すると(ステップ2)、車両から鉄損パラメータ、銅損パラメータ及び非接触給電装置の種別情報を取得し(ステップ3)、地上側装置に対して異物検出用電力の供給開始を指示する(ステップ4)。
異物検出用電力は、送電コイル31上に金物異物が存在しても、この検出中に発火や発煙が生じないように、定格給電電力の20%以下に設定することが望ましい。
【0041】
インバータ20の出力電圧と出力電流とを取得して、送電コイル31の入力電力を算出し(ステップ5)、整流器40の出力直流電圧と出力直流電流とを取得して、受電コイル32の出力電力を算出する(ステップ6)。これを一定時間続けて送電コイル31の平均入力電力PIN0と受電コイル32の平均出力電力PL0とを算出する(ステップ8)。
また、送電コイル31の銅損Pc1及び受電コイル32の銅損Pc1を算出し(ステップ9)、送電コイル31の鉄損Pf1及び受電コイル32の鉄損Pf1を算出する(ステップ10)。
【0042】
次に、給電損失(PIN0−PL0−Pc1−Pc2−Pf1−Pf2)を求め、その値と標準値Psとの差分を算出する(ステップ11)。差分の絶対値が閾値を超えていれば(ステップ12でYes)、異物除去装置70に異物検出信号を送出する(ステップ13)。異物除去装置70から異物除去完了の情報を受けると(ステップ14)、地上側装置に対して給電用電力の供給開始を指示する(ステップ15)。また、ステップ12で差分の絶対値が閾値以下であれば(ステップ12でNo)、ステップ15に移行し、地上側装置に対して給電用電力の供給開始を指示する。
なお、ステップ12では、差分を閾値と比較する代わりに、(差分/Ps)を閾値と比較しても良い。
【0043】
このように、この移動体用非接触給電装置では、給電損失の算出に当たり、銅損や鉄損による損失分を除いているので、給電損失に占める“金物異物に起因する給電損失分”が相対的に大きくなる。そのため、金物異物に起因する給電損失の検出感度が向上し、金物異物の有無を的確に判別することができる。
なお、ここでは、給電損失から銅損及び鉄損を除いているが、算出が容易な銅損だけを除くようにしても良い。
【0044】
また、送電コイル31及び受電コイル32に異物検出用電力を供給して送電コイル31上の金物異物を検出する際に、図4に示すように、受電コイル32と整流器40との電気接続を遮断する(受電コイル32の出力端子を開放、または、受電コイル32に並列コンデンサ34だけを接続し、整流器40や負荷を接続しない)ようにしても良い。
こうすることで、受電コイル32が整流器40及び二次電池4から切り離され、整流器40及び二次電池4が関与する損失分が給電損失から除かれるため、給電損失に占める“金物異物に起因する給電損失分”が相対的に大きくなり、金物異物に起因する給電損失の検出感度が向上する。
この場合、異物検出器50の異物検出動作制御部53は、地上側装置への異物検出用電力の供給開始指示(図3のステップ4)に先立ち、車両側に対して受電コイル32の出力端の開放を指示する。異物検出用電力の供給が開始された後は、車両側から受電コイル32の出力電圧V2及び出力電流I2を取得して、受電コイル出力電力算出部55に、受電コイル32の出力電力を計算させる(図3のステップ6)。
【0045】
(第2の実施形態)
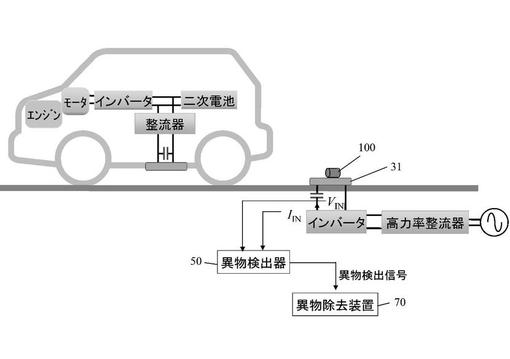
図5は、本発明の第2の実施形態に係る移動体用非接触給電装置を模式的に示している。この装置では、送信コイル31の上に車両が駐車する前に、異物検出器50により送信コイル31上の金物異物100が検出され、異物除去装置70により除去される。
異物検出器50の構成は、第1の実施形態(図2)と同様であるが、受電コイル出力電力算出部55の作業が行われない点だけが違っている。
【0046】
図6は、この異物検出器50の動作フローを示している。
前以て、送電コイル31の上に金物異物が存在しない状態での標準値Psが測定され、記憶部57に記録される(ステップ21)。
非接触給電を行う車両が接近すると、地上側装置に対して異物検出用電力の供給開始を指示する(ステップ22)。
インバータ20の出力電圧VINと出力電流IINとを取得して、送電コイル31の入力電力PIN(=VIN×IIN)を算出し(ステップ23)、これを一定時間続けて(ステップ24)、送電コイル31の平均入力電力PIN0を算出する(ステップ25)。
また、予め取得した送電コイル31の巻線抵抗(r1)とIINとから送電コイル31の銅損Pc1(=r1×IIN2)を算出し(ステップ26)、予め取得した送電コイル31の鉄損パラメータとVINとから送電コイル31の鉄損の推定値(Pf1)を算出する(ステップ27)。
【0047】
次に、給電損失(PIN0−Pc1−Pf1)を求め、その値と標準値Psとの差分を算出する(ステップ28)。差分の絶対値が閾値を超えていれば(ステップ29でYes)、異物除去装置70に異物検出信号を送出する(ステップ30)。異物除去装置70から異物除去完了の情報を受けた後(ステップ31)、車両が送電コイル31の上に駐車したことを確認すると(ステップ32)、地上側装置に対して給電用電力の供給開始を指示する(ステップ33)。また、ステップ29で差分の絶対値が閾値以下であれば(ステップ29でNo)、ステップ32に移行し、車両の送電コイル31上への駐車を確認して、地上側装置に給電用電力の供給開始を指示する。
なお、ステップ29では、差分を閾値と比較する代わりに、(差分/Ps)を閾値と比較しても良い。
【0048】
このように、この移動体用非接触給電装置では、給電損失の算出に当たり、銅損や鉄損による損失分を除いているため、給電損失に占める“金物異物に起因する給電損失分”が相対的に大きくなり、金物異物に起因する給電損失の検出感度が向上する。
また、この移動体用非接触給電装置では、車両が送電コイル31上に乗り入れる前に金物異物が検出され、除去されるため、異物検出時に発火や発煙が発生したとしても、車両に及ぶ影響は殆ど無い。
また、第1の実施形態に比べて、異物検出に到る処理手順が少ないため、その実施が容易である。
また、この移動体用非接触給電装置では、送電コイルのみを用いて異物検出を行うため、
第1の実施形態の装置に比べて、送電コイルと受電コイルとの位置ずれに起因する測定誤差が排除できる、と言う利点がある。
なお、ここでは、給電損失から銅損及び鉄損を除いているが、算出が容易な銅損だけを除くようにしても良い。
また、給電損失から銅損及び鉄損を除かずに、送信コイル31の平均入力電力PIN0と、その標準値との差分から金物異物を検出することもできる。
【0049】
(第3の実施形態)
本発明の第3の実施形態では、異物除去装置70の構成について説明する。
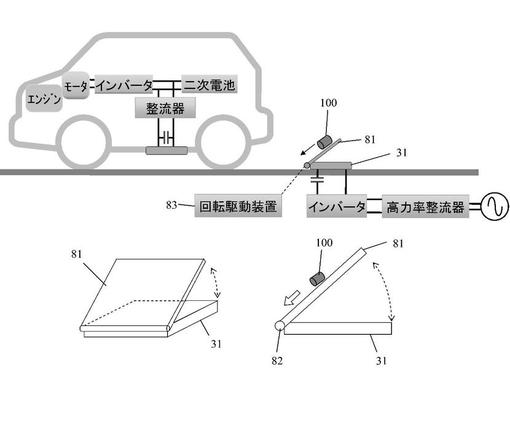
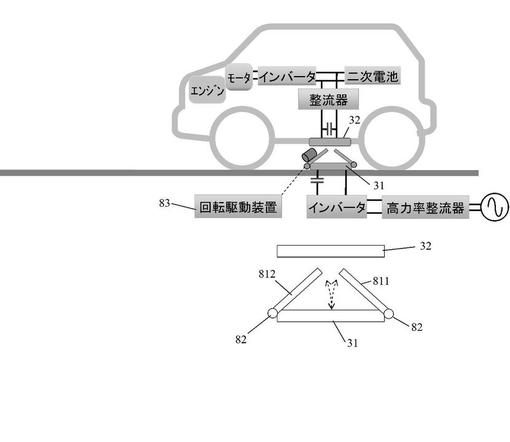
図7に示す異物除去装置は、送電コイル31の上面を覆う一枚のカバー部材81と、送電コイル31の側縁位置でカバー部材81を枢支する枢支機構82と、異物検出器50から異物検出信号が入力すると、枢支されたカバー部材81を所定角度回転する回転駆動装置83とを備えている。
枢支機構82は、送電コイル31上面に平行な軸線を中心にカバー部材81が回転できるように、カバー部材81を枢支している。
カバー部材81は、非磁性且つ非導電性で機械的強度が強い強化樹脂などの材料で形成されている。通常状態のカバー部材81は、送電コイル31の上面と平行する状態で送電コイル31の上面を覆っている。
カバー部材81の上の金物異物100を検出した異物検出器50から異物検出信号が入力すると、回転駆動装置83は、カバー部材81を、送電コイル31上面に平行な軸線を中心に回転する。カバー部材81の最大回転角度は約30°に設定されている。
この回転でカバー部材81が傾斜すると、金物異物100は、重力の作用でカバー部材81から滑り落ちる。
回転駆動装置83は、金物異物100が無くなったカバー部材81を、送電コイル31を覆う通常の状態に戻し、異物検出器50に異物除去完了を伝える。
【0050】
この異物除去装置は、傾斜したカバー部材81の最高位置が比較的高くなる。それ故、送電コイル31の上に車両が駐車していると、傾斜したカバー部材81の先端が車両の底面に当接する虞がある。そのため、この異物除去装置は、車両が非接触給電位置に進入する前に異物検出が行われる第2の実施形態の移動体用非接触給電装置(図5)で使用する方が適している。
【0051】
図8は、カバー部材を2枚の分割カバー部材811、812で構成し、枢支機構82を分割カバー部材811、812のそれぞれに設けた異物除去装置を示している。
異物検出器50から異物検出信号が入力すると、回転駆動装置83は、2枚の分割カバー部材811、812の各々を送電コイル31上面に平行な軸線を中心に回転する。
この装置では、カバー部材811、812が分割されているので、傾斜した分割カバー部材811、812の最高位置が高くならない。そのため、車両が非接触給電位置に進入して異物検出が行われる第1の実施形態の移動体用非接触給電装置(図1)でも使用することができる。
なお、ここでは、2枚の分割カバーを用いているが、カバー部材の分割数は、3以上でも良い。
【0052】
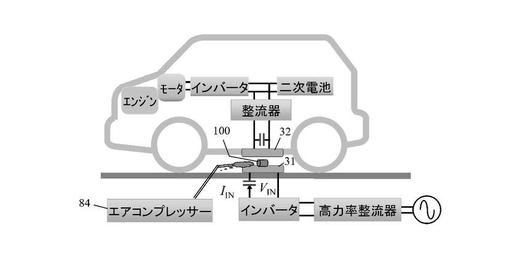
図9は、エアコンプレッサー84を備える異物除去装置を示している。エアコンプレッサー84は、異物検出器50から異物検出信号が入力すると、送電コイル31と受電コイル32との空隙に高速の空気を吹き付けて、送電コイル31上の金物異物100を吹き飛ばす。
【0053】
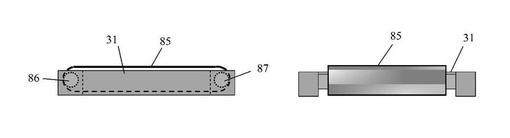
図10は、樹脂製のベルトコンベアー85を利用した異物除去装置を示している。このベルトコンベアー85は、その一面が送電コイル31の上面を覆って巡回するように、駆動ローラ86及び従動ローラ87のローラ対で支持されている。ベルトコンベアー85の上に載る金物異物を検出した異物検出器50から異物検出信号が入力すると、駆動ローラ86は、送電コイル31の上面を覆うベルトコンベアー85の面が一新されるまで回転してベルトコンベアー85を巡回させる。この巡回で、ベルトコンベアー85上の金物異物は、除去される。
【0054】
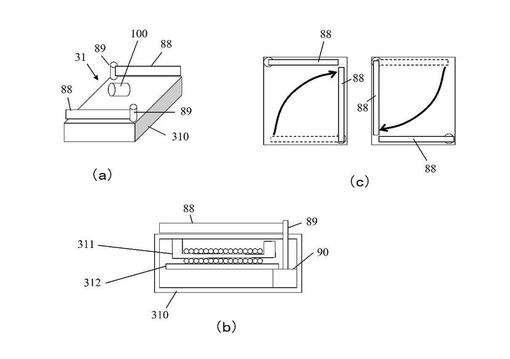
図11は、送電コイル31の上面を拭う二本のワイパー部材88を備えた異物除去装置を示している。各ワイパー部材88の一端は、送電コイル31が収容されたケース310の対角位置に配置された駆動軸89に固定されており、図11(b)の断面図に示すように、この駆動軸89を回転するモータ90が、ケース310内の遮蔽板312(フェライトコア311に電線を巻回して構成した送電コイル31の漏洩磁束が下方に回り込むのを防いでいる。)より下方の空間に配置されている。
送電コイル31のケース310上の金物異物100(図11(a))を検出した異物検出器50から異物検出信号が入力すると、モータ90は、図11(c)に示すように、二本のワイパー部材88を、それぞれ、90°回転させる。二本のワイパー部材88の回転で送電コイル31上のケース310面は、余す所無く拭われ、送電コイル31の上の金物異物100は、除去される。
【0055】
このように、異物除去装置70は、異物検出器50から異物検出信号が入力すると、種々の方式で金物異物100を除去した後、異物除去が完了したことを異物検出器50に伝える。
なお、ここでは、異物検出器50の異物検出信号が異物除去装置70に直接入力して異物除去装置70が動作する場合について説明したが、異物検出器50の異物検出信号に基づいて、表示器などに注意を促す情報が表示され、その情報に接した地上装置の管理者、あるいは、車両の運転者が異物除去装置70を操作するような形態でも良い。
また、異物を検出した異物検出器50の異物検出信号に基づいて、地上側装置に送電コイルへの電力供給を停止させ、異物検出警報(ランプ表示や警報音)を継続して表示するようにしても良い。
【0056】
また、異物検出器50が異物を検出して送電コイルへの電力供給を停止した場合に、一定時間が経過するごとに、送電コイルに異物検出用電力を供給して、異物検出器50による異物検出動作を繰り返し、異物が検出されなかった時点で、送電コイルへの電力供給を給電用電力に切り換えるようにしても良い。こうすることで、異物が無くなったことを確認した上で移動体への非接触給電を行うことができる。
また、異物除去装置70が異物を除去して異物除去の完了を異物検出器50に伝えた場合に、異物検出器50が異物検出動作を行い、異物が検出されないことを確認した上で送電コイルへの給電用電力の供給を行うようにしても良い。
【0057】
以上のように、本発明の移動体用非接触給電装置は、送電コイル上に存在する金物異物を高精度に検出し、それを除去することができる。そのため、移動体に非接触給電を行う際の、金物異物による事故や給電動作の停滞を回避することができ、安全で安定した非接触給電を行うことができる。
【産業上の利用可能性】
【0058】
本発明の移動体用非接触給電装置は、金物異物による事故を回避して、安全で安定した非接触給電を可能にするものであり、電気自動車やプラグインハイブリッド車、搬送車、移動ロボットなど、多くの移動体の非接触給電に広く利用することができる。
【符号の説明】
【0059】
1 エンジン
2 モータ
3 インバータ
4 二次電池
5 商用電源
10 高力率整流器
20 インバータ
31 送電コイル
32 受電コイル
33 一次側直列コンデンサ
34 二次側並列共振コンデンサ
40 整流器
50 異物検出器
51 対車両交信部
52 対地上装置交信部
53 異物検出動作制御部
54 送電コイル入力電力算出部
55 受電コイル出力電力算出部
56 異物判定部
57 記憶部
58 鉄損算出部
59 銅損算出部
70 異物除去装置
81 カバー部材
82 枢支機構
83 回転駆動装置
84 エアコンプレッサー
85 ベルトコンベアー
86 駆動ローラ
87 従動ローラ
88 ワイパー部材
89 駆動軸
90 モータ
100 金物異物
310 ケース
311 フェライトコア
312 遮蔽板
571 鉄損パラメータ記憶領域
572 銅損パラメータ記憶領域
811 分割カバー部材
812 分割カバー部材
【技術分野】
【0001】
本発明は、地上側の送電コイルから、受電コイルを備える電気自動車などの移動体に非接触給電を行う移動体用非接触給電装置に関し、送電コイル上に存在する金物異物を検出し、除去できるようにしたものである。
【背景技術】
【0002】
非接触給電装置は、非接触給電トランスを構成する送電コイル(一次コイル)と受電コイル(二次コイル)との間の電磁誘導を利用して送電コイルから受電コイルに電力を供給する。この非接触給電装置を利用して電気自動車やプラグインハイブリッド車に搭載された二次電池の充電を行う移動体用非接触給電装置は、図12に示すように、地上側に、商用電源5の交流を直流に変換する高力率整流器10と、直流から高周波交流を生成するインバータ20と、非接触給電トランスの一方である送電コイル31と、送電コイルに直列接続された一次側直列コンデンサ33とを備えている。
【0003】
一方、車両側がプラグインハイブリッド車の場合は、エンジン1とともにモータ2を駆動源として搭載し、モータ用の電源である二次電池4と、二次電池4の直流を交流に変換してモータ2に供給するインバータ3と、二次電池4への給電機構とを具備し、その給電機構として、非接触給電トランスの他方である受電コイル32と、二次電池4のために交流を直流に変換する整流器40と、受電コイル33と整流器40との間に並列接続された二次側並列共振コンデンサ34とを備えている。
【0004】
ここで、(送電コイル31+受電コイル33)を非接触給電トランスと呼び、(非接触給電トランス+一次側直列コンデンサ33+二次側並列共振コンデンサ34)を非接触給電装置と呼び、(高周波電源+非接触給電装置+二次側整流器40)を非接触給電システムと呼ぶことにする。
【0005】
図13は、非接触給電システムの回路図を示している。
図13(a)は、単相100V〜220Vの商用電源5に適した主回路であり、一次側整流器にブリッジレス高力率昇圧型整流器11を使用し、インバータにハーフブリッジインバータ21を使用し、非接触給電装置30の出力を整流する二次側整流器に倍電圧整流器41を使用している。
また、図13(b)は、三相200V〜440Vの電源に適した主回路であり、一次側整流器に三相高力率PWM整流器12を使用し、インバータにフルブリッジインバータ22を使用し、非接触給電装置30の出力を整流する二次側整流器に全波整流器42を使用している。
【0006】
送電コイル31は、上面が円形あるいは長方形の扁平な形状を有している。自動車への給電時には、受電コイル32が送電コイル31のほぼ真上に位置するように自動車を駐車し、送電コイル31と受電コイル32との間に50mm〜200mmの空隙を隔てて非接触給電が行われる。
この給電時に、送電コイル31と受電コイル32との空隙に缶、釘、硬貨などの金物異物が存在すると、空隙の交流磁界で金物異物が熱せられて高温になる。
【0007】
図14は、移動体用非接触給電装置の送電コイル及び受電コイルを模した図15の実験装置を用いて、送電コイルと受電コイルとの間にスチール缶が介在したとき(図14(a))及び各種の硬貨が介在したとき(図14(b))の温度変化を測定した結果について示している。この実験では、50kHzで1.5kW給電を行っている。スチール缶は、約18秒で100℃に昇温し、最終的に120℃にまで達した。硬貨は、その種類により昇温傾向に違いがあり、最も昇温が速い100円玉では、約10分で65℃に達した。
非接触給電装置は電磁調理器と同じ原理(電磁誘導)でエネルギーを伝送するため、スチール缶などの金属類は極めて短時間で高温になり、近くに可燃物があると発火や発煙の危険性がある。
金物異物が発熱することは、非接触給電では給電損失(=送電電力−受電電力)が増大することを意味する。
【0008】
非接触給電は、携帯電話や電動髭剃りなどの充電にも利用されており、この場合も、送電コイルと受電コイルとの間に硬貨やピンなどの金物異物が介在すると、それが発熱し、製品の安全性が脅かされる。
こうした事故を防ぐため、下記特許文献1には、二次電池を有する受電側が、充電時の電池電圧と充電電流とを積算した電力値の情報を送電側に送り、送電側が、その値を送信した電力値と比較して、電力値の差が規定値内であれば電力の送信を続け、規定値外であれば電力の送信を停止する非接触充電器が提案されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2011−83094号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、移動体用非接触給電装置の給電電力量は、携帯機器などの非接触給電装置に比べて桁違いに多く、そのため、金物異物に起因する給電損失の割合は相対的に小さい。それ故、移動体用非接触給電装置では、金物異物に起因する給電損失を高精度に検出することが難しい。
また、移動体用非接触給電装置の場合は、送電コイル上に金物異物が存在することを検知できたとしても、送電コイルの上に車両が駐車しているため、金物異物を取り除くことが容易でない。
【0011】
本発明は、こうした事情を考慮して創案したものであり、送電コイル上に存在する金物異物を高精度に検出し、且つ、除去することができる移動体用非接触給電装置を提供することを目的としている。
【課題を解決するための手段】
【0012】
本発明は、送電コイルと、この送電コイルにギャップを介して対向する受電コイルとを備え、送電コイルが地上側に設置され、受電コイルが移動体側に設置され、送電コイルから受電コイルに電磁誘導により給電が行われる移動体用非接触給電装置であって、送電コイル上に金物異物が存在しない状態で送電コイルに異物検出用電力を供給して給電損失の標準値を求め、送電コイルに異物検出用電力を供給して求めた給電損失の測定値と標準値との差分に基づいて送電コイル上の金物異物の有無を検出し、金物異物を検出したとき、異物検出信号を出力する異物検出手段を備えることを特徴とする。
この装置では、異物検出手段が送電コイル上の金物異物を検出して異物検出信号を出力する。
【0013】
また、本発明の移動体用非接触給電装置では、異物検出用電力が受電コイルに対向する送電コイルに供給され、異物検出手段が、送電コイルの入力電力PIN0と、受電コイルの出力電力PL0と、送電コイルの銅損Pc1と、受電コイルの銅損Pc2とを求め、(PIN0−PL0−Pc1−Pc2)の値の測定値と標準値との差分に基づいて金物異物の有無を検出する。
このように、送電コイルの入力電力PIN0と受電コイルの出力電力PL0との差分から銅損による損失分を引き去ることで、金物異物に起因する給電損失の検出感度を高めることができる。
【0014】
また、本発明の移動体用非接触給電装置では、異物検出手段が、さらに、送電コイルの鉄損Pf1と、受電コイルの鉄損Pf2とを求め、(PIN0−PL0−Pc1−Pc2−Pf1−Pf2)の値の測定値と標準値との差分に基づいて金物異物の有無を検出するようにしても良い。
このように、送電コイルの入力電力PIN0と受電コイルの出力電力PL0との差分から銅損及び鉄損による損失分を引き去ることで、金物異物に起因する給電損失の検出感度をさらに高めることができる。
【0015】
また、本発明の移動体用非接触給電装置では、異物検出用電力を、定格給電電力の20%以下に設定することが望ましい。
このように、異物検出用電力を下げることで、異物検出時の発火や発煙の危険性を減らすことができる。
【0016】
また、本発明の移動体用非接触給電装置では、送電コイルに異物検出用電力を供給するとき、受電コイルと、後続する整流器との接続を遮断することが望ましい。
このように、受電コイルを、整流器及び二次電池から切り離すことで、整流器及び二次電池が関与する損失分を除くことができるから、金物異物に起因する給電損失の検出感度を高めることができる。
【0017】
また、本発明の移動体用非接触給電装置では、異物検出用電力を受電コイルに対向していない送電コイルに供給し、異物検出手段が、送電コイルの入力電力PIN0と、送電コイルの銅損Pc1とを求め、(PIN0−Pc1)の値の測定値と標準値との差分に基づいて金物異物の有無を検出するようにしても良い。
この場合、車両を送電コイル上に駐車する前に、送電コイルの上に金物異物が有るか無いかを調べることができる。このように、送電コイルのみを用いて異物検出を行う場合は、送電コイルと受電コイルとの位置ずれに起因する測定誤差が排除できる、と言う利点がある。
【0018】
また、本発明の移動体用非接触給電装置では、異物検出手段が、さらに、送電コイルの鉄損Pf1を求め、(PIN0−Pc1−Pf1)の値の測定値と標準値との差分に基づいて金物異物の有無を検出するようにしても良い。
このように、送電コイルの入力電力PIN0から銅損及び鉄損による損失分を引き去ることで、金物異物に起因する給電損失の検出感度をさらに高めることができる。
【0019】
また、本発明の移動体用非接触給電装置では、異物検出用電力を受電コイルに対向していない送電コイルに供給し、異物検出手段が、送電コイルの入力電力PIN0を求め、PIN0の値の測定値と標準値との差分に基づいて金物異物の有無を検出するようにしても良い。
この場合、金物異物の検出が簡単に実施できる。
【0020】
また、本発明の移動体用非接触給電装置では、さらに、異物検出手段が金物異物を検出したことを受けて、送電コイルの上から金物異物を除去する異物除去手段を備える。
この装置では、異物検出手段が送電コイル上の金物異物を検出し、異物除去手段が、その金物異物を除去する。
【0021】
また、本発明の移動体用非接触給電装置では、異物除去手段が、送電コイルの上面を覆う非磁性且つ非導電性のカバー部材と、このカバー部材を、送電コイルの側縁位置で送電コイルの上面に平行な軸線を中心に所定角度回転できるように枢支する枢支手段と、金物異物が検出されたことを受けて、カバー部材を、前記軸線を中心に所定角度回転する回転駆動手段と、を備える。
この異物除去手段は、送電コイルのカバー部材を斜めに傾斜させて、カバー部材上の金物異物を排除する。
【0022】
また、本発明の移動体用非接触給電装置では、カバー部材を、送電コイルの上面を分割して覆う複数の分割カバー部材で構成し、枢支手段を分割カバー部材のそれぞれに設け、金物異物が検出されたことを受けて、回転駆動手段が、分割カバー部材の全てを回転するようにしても良い。
この場合、カバー部材を分割することで、傾斜したときのカバー部材の最高位置の高さを、分割しないときよりも低くすることができる。
【0023】
また、本発明の移動体用非接触給電装置では、異物除去手段が、金物異物が検出されたことを受けて、送電コイルと受電コイルとの空隙に高速の空気を吹き付けるエアコンプレッサーを備えるようにしても良い。
この異物除去手段は、金物異物に高速の空気を吹き付けて送電コイル上から除去する。
【0024】
また、本発明の移動体用非接触給電装置では、異物除去手段が、樹脂製のベルトコンベアーと、ベルトコンベアーを巡回可能に支持する駆動ローラ及び従動ローラのローラ対と、を備え、ローラ対は、巡回するベルトコンベアーの一面が送電コイルの上面を覆うようにベルトコンベアーを支持し、金物異物が検出されたことを受けて、駆動ローラが、ベルトコンベアーを巡回させて、送電コイルの上面を覆うベルトコンベアーの面を更新する。
この異物除去手段では、送電コイルの上面を覆うベルトコンベアーが移動して、ベルトコンベアー上の金物異物を除去する。
【0025】
また、本発明の移動体用非接触給電装置では、異物除去手段が、送電コイルの上面を拭うワイパー部材と、ワイパー部材を駆動するワイパー駆動手段とを備え、金物異物が検出されたことを受けて、ワイパー駆動手段がワイパー部材を駆動し、送電コイルの上面がワイパー部材によって拭われる。
この異物除去手段では、送電コイル上をワイパー部材が動いて、送電コイル上の金物異物を除去する。
また、本発明の移動体用非接触給電装置では、
【0026】
また、本発明の移動体用非接触給電装置では、異物検出手段が出力した異物検出信号に基づいて、送信コイルへの異物検出用電力の供給を停止し、異物検出警報を表示するようにしても良い。
こうすることで、異物除去手段を持たない移動体用非接触給電装置でも、金物異物の介在による事故を回避できる。
【0027】
また、本発明の移動体用非接触給電装置では、異物検出用電力の供給を停止した送信コイルに、予め設定された時間が経過するごとに異物検出用電力を供給して、異物検出手段が送電コイル上の金物異物の検出を繰り返し、異物検出手段により金物異物が検出されなかったとき、送信コイルに給電用電力を供給するようにしても良い。
こうすることで、異物除去手段を持たない移動体用非接触給電装置でも、安全を確認して非接触給電を開始することができる。
【0028】
また、本発明の移動体用非接触給電装置では、送電コイルの上面から金物異物を除去した異物除去手段が、異物検出手段にその旨を通知し、通知を受けた異物検出手段が、送電コイル上の金物異物を検出し、金物異物が検出されなかったとき、送信コイルに給電用電力を供給することが望ましい。
異物検出手段が異物を除去した場合でも、安全を確認して非接触給電を開始することができる。
【発明の効果】
【0029】
本発明の移動体用非接触給電装置は、送電コイル上に存在する金物異物を高精度に検出することができ、また、検出した金物異物を除去することができる。
そのため、送電コイル上に金物異物が存在する場合でも、その異物を迅速に除去して、移動体への非接触給電を安全に、且つ、滞り無く続けることができる。
【図面の簡単な説明】
【0030】
【図1】本発明の第1の実施形態に係る移動体用非接触給電装置を示す模式図
【図2】図1の異物検出器の構成を示すブロック図
【図3】図2の異物検出器の動作を示すフロー図
【図4】図1の移動体用非接触給電装置の変形例を示す図
【図5】本発明の第2の実施形態に係る移動体用非接触給電装置を示す模式図
【図6】図5の異物検出器の動作を示すフロー図
【図7】カバー部材の傾斜構造を有する異物除去装置を示す図
【図8】分割カバー部材の傾斜構造を有する異物除去装置を示す図
【図9】エアコンプレッサーを備える異物除去装置を示す図
【図10】ベルトコンベアーを備える異物除去装置を示す図
【図11】ワイパー機構を備える異物除去装置を示す図
【図12】従来の移動体用非接触給電装置を示す模式図
【図13】移動体用非接触給電システムの回路図
【図14】金物異物による発熱実験の測定結果を示す図
【図15】図14の実験に用いた装置を示す図
【発明を実施するための形態】
【0031】
(第1の実施形態)
図1は、本発明の第1の実施形態に係る移動体用非接触給電装置を模式的に示している。
この装置は、非接触給電装置の送電コイル31と受電コイル32との間に存在する金物異物100を検出する異物検出器50(特許請求の範囲で言う“異物検出手段”)と、異物検出器50が金物異物を検出したとき、その金物異物100を送電コイル31上から除去する異物除去装置70(特許請求の範囲で言う“異物除去手段”)とを備えている。
異物検出器50は、金物異物を検出するために、地上側から、非接触給電装置の入力電圧及び入力電流に相当するインバータ20の出力電圧VIN及び出力電流IINの情報を取得し、車両側から、非接触給電装置の出力電圧及び出力電流に対応する整流器40の出力直流電圧VL及び出力直流電流ILの情報を取得する。
【0032】
この異物検出器50は、図2に示すように、車両側と無線通信で情報を交換する際のインタフェースである対車両交信部51と、地上側装置と情報を交換する際のインタフェースである対地上装置交信部52と、異物検出動作を制御する異物検出動作制御部53と、送電コイル31に入力する電力を算出する送電コイル入力電力算出部54と、受電コイル32から出力する電力を算出する受電コイル出力電力算出部55と、送電コイル31及び受電コイル32の鉄損を算出する鉄損算出部58と、送電コイル31及び受電コイル32の銅損を算出する銅損算出部59と、送電コイル31上に金物異物が存在するか否かを判定する異物判定部56と、各種演算作業に必要な情報を記憶する記憶部57とを備えている。
【0033】
この異物検出動作制御部53、送電コイル入力電力算出部54、受電コイル出力電力算出部55、鉄損算出部58、銅損算出部59及び異物判定部56は、コンピュータがプログラムで規定された動作を実行することにより実現される。
【0034】
送電コイル入力電力算出部54は、インバータ20から送られた出力電圧VINと出力電流IINとの情報からインバータ20の出力電力PIN(=VIN×IIN)を算出し、その電力PINの一定時間の平均を計算して、送電コイル31の一定時間の平均入力電力PIN0を得る。
受電コイル出力電力算出部55は、車両側から送られた整流器40の出力直流電圧VLと出力直流電流ILとの情報から整流器40の出力電力PL(=VL×IL)を算出し、その電力PLの一定時間の平均を計算して、受電コイル32の一定時間の平均出力電力PL0を得る。
【0035】
銅損算出部59は、送電コイル31の巻線抵抗(r1)と電流(IIN)とから送電コイル31の銅損Pc1(=r1×IIN2)を算出し、受電コイル32の巻線抵抗(r2)と電流(IL)とから受電コイル32の銅損Pc2(=r2×IL2)を算出する。なお、送電コイル31の巻線抵抗(r1)や受電コイル32の巻線抵抗(r2)の情報は、対地上装置交信部52及び対車両交信部51を通じて地上側装置及び車両側から事前に取得し、記憶部57の銅損パラメータ領域572で保持する。
【0036】
鉄損算出部58は、送電コイル31及び受電コイル32の鉄損の推定値を算出する。鉄損は、送電コイル31及び受電コイル32の鉄心(フェライトコア)が交流で磁化されるときに失われる電気エネルギーであり、ヒステリシス損と渦電流損との和で表される。鉄損は電圧の関数であり、地上側装置から、VINを代入すれば送電コイル31の鉄損が算出できる鉄損パラメータを予め取得し、また、車両側から、VLを代入すれば受電コイル32の鉄損が算出できる鉄損パラメータを予め取得して、記憶部57の鉄損パラメータ領域571で保持することにより、鉄損算出部58は、VINから送電コイル31の鉄損の推定値(Pf1)を算出することができ、また、VLから受電コイル32の鉄損の推定値(Pf2)を算出することができる。
【0037】
異物判定部56は、送電コイル入力電力算出部54、受電コイル出力電力算出部55、銅損算出部59、及び、鉄損算出部58が算出した値を用いて、送電コイル31上に金物異物が存在するか否かを判定する。
この判定に先立ち、送電コイル31上に金物異物が存在しない状態で送電コイル入力電力算出部54、受電コイル出力電力算出部55、銅損算出部59、及び、鉄損算出部58が算出した値PIN0、PL0、Pc1、Pc2、Pf1、Pf2から給電損失Ps(=PIN0−PL0−Pc1−Pc2−Pf1−Pf2)を算出し、この値Psを標準値として記憶部57に記録する。なお、車両側の非接触給電装置の構成が幾つかの種別に分かれる場合は、各種別の非接触給電装置を搭載した車両を金物異物が存在しない送電コイル31上に駐車させて、各種別に応じた標準値を測定し、記憶部57に記録する。
【0038】
さて、送電コイル31上に金物異物が存在するかしないか分からない状態で非接触給電を行う車両が送電コイル31上に停車すると、異物判定部56は、送電コイル入力電力算出部54、受電コイル出力電力算出部55、銅損算出部59、及び、鉄損算出部58の各々が算出した値P’IN0、P’L0、P’c1、P’c2、P’f1、P’f2から給電損失P’s(=P’IN0−P’L0−P’c1−P’c2−P’f1−P’f2)を算出する。
そして、この車両から得た非接触給電装置の種別に応じた標準値Psを記憶部57から読み出し、給電損失の測定値P’sと標準値Psとの差分(P’s−Ps)を算出する。
この差分(P’s−Ps)の絶対値が大きい場合は、送電コイル31と受電コイル32との間に金物異物が存在し、この金物異物が発熱しているために給電損失が増大していると考えられる。
【0039】
異物判定部56は、この差分(P’s−Ps)を予め定めた閾値と比較し、差分(P’s−Ps)が閾値を超えていれば、送電コイル31上に金物異物が存在すると判定し、差分(P’s−Ps)が閾値以下であれば、送電コイル31上に金物異物が存在しないと判定する。なお、この閾値は、金物異物検出試験を繰り返して適切な値に設定する。
また、閾値との比較は、差分(P’s−Ps)を標準値Psで除した値(=(P’s−Ps)/Ps)について行うようにしても良い。
異物判定部56が送電コイル31上に金物異物が在ると判定したときは、異物検出動作制御部53が、異物除去装置70に異物検出信号を送出する。
異物除去装置70の動作については後述する。
【0040】
図3は、異物検出器50の動作フローを示している。
前以て、各種非接触給電装置を搭載した車両ごとの標準値Psを測定し、記憶部57に記録する(ステップ1)。
送電コイル31上に駐車した車両を検知すると(ステップ2)、車両から鉄損パラメータ、銅損パラメータ及び非接触給電装置の種別情報を取得し(ステップ3)、地上側装置に対して異物検出用電力の供給開始を指示する(ステップ4)。
異物検出用電力は、送電コイル31上に金物異物が存在しても、この検出中に発火や発煙が生じないように、定格給電電力の20%以下に設定することが望ましい。
【0041】
インバータ20の出力電圧と出力電流とを取得して、送電コイル31の入力電力を算出し(ステップ5)、整流器40の出力直流電圧と出力直流電流とを取得して、受電コイル32の出力電力を算出する(ステップ6)。これを一定時間続けて送電コイル31の平均入力電力PIN0と受電コイル32の平均出力電力PL0とを算出する(ステップ8)。
また、送電コイル31の銅損Pc1及び受電コイル32の銅損Pc1を算出し(ステップ9)、送電コイル31の鉄損Pf1及び受電コイル32の鉄損Pf1を算出する(ステップ10)。
【0042】
次に、給電損失(PIN0−PL0−Pc1−Pc2−Pf1−Pf2)を求め、その値と標準値Psとの差分を算出する(ステップ11)。差分の絶対値が閾値を超えていれば(ステップ12でYes)、異物除去装置70に異物検出信号を送出する(ステップ13)。異物除去装置70から異物除去完了の情報を受けると(ステップ14)、地上側装置に対して給電用電力の供給開始を指示する(ステップ15)。また、ステップ12で差分の絶対値が閾値以下であれば(ステップ12でNo)、ステップ15に移行し、地上側装置に対して給電用電力の供給開始を指示する。
なお、ステップ12では、差分を閾値と比較する代わりに、(差分/Ps)を閾値と比較しても良い。
【0043】
このように、この移動体用非接触給電装置では、給電損失の算出に当たり、銅損や鉄損による損失分を除いているので、給電損失に占める“金物異物に起因する給電損失分”が相対的に大きくなる。そのため、金物異物に起因する給電損失の検出感度が向上し、金物異物の有無を的確に判別することができる。
なお、ここでは、給電損失から銅損及び鉄損を除いているが、算出が容易な銅損だけを除くようにしても良い。
【0044】
また、送電コイル31及び受電コイル32に異物検出用電力を供給して送電コイル31上の金物異物を検出する際に、図4に示すように、受電コイル32と整流器40との電気接続を遮断する(受電コイル32の出力端子を開放、または、受電コイル32に並列コンデンサ34だけを接続し、整流器40や負荷を接続しない)ようにしても良い。
こうすることで、受電コイル32が整流器40及び二次電池4から切り離され、整流器40及び二次電池4が関与する損失分が給電損失から除かれるため、給電損失に占める“金物異物に起因する給電損失分”が相対的に大きくなり、金物異物に起因する給電損失の検出感度が向上する。
この場合、異物検出器50の異物検出動作制御部53は、地上側装置への異物検出用電力の供給開始指示(図3のステップ4)に先立ち、車両側に対して受電コイル32の出力端の開放を指示する。異物検出用電力の供給が開始された後は、車両側から受電コイル32の出力電圧V2及び出力電流I2を取得して、受電コイル出力電力算出部55に、受電コイル32の出力電力を計算させる(図3のステップ6)。
【0045】
(第2の実施形態)
図5は、本発明の第2の実施形態に係る移動体用非接触給電装置を模式的に示している。この装置では、送信コイル31の上に車両が駐車する前に、異物検出器50により送信コイル31上の金物異物100が検出され、異物除去装置70により除去される。
異物検出器50の構成は、第1の実施形態(図2)と同様であるが、受電コイル出力電力算出部55の作業が行われない点だけが違っている。
【0046】
図6は、この異物検出器50の動作フローを示している。
前以て、送電コイル31の上に金物異物が存在しない状態での標準値Psが測定され、記憶部57に記録される(ステップ21)。
非接触給電を行う車両が接近すると、地上側装置に対して異物検出用電力の供給開始を指示する(ステップ22)。
インバータ20の出力電圧VINと出力電流IINとを取得して、送電コイル31の入力電力PIN(=VIN×IIN)を算出し(ステップ23)、これを一定時間続けて(ステップ24)、送電コイル31の平均入力電力PIN0を算出する(ステップ25)。
また、予め取得した送電コイル31の巻線抵抗(r1)とIINとから送電コイル31の銅損Pc1(=r1×IIN2)を算出し(ステップ26)、予め取得した送電コイル31の鉄損パラメータとVINとから送電コイル31の鉄損の推定値(Pf1)を算出する(ステップ27)。
【0047】
次に、給電損失(PIN0−Pc1−Pf1)を求め、その値と標準値Psとの差分を算出する(ステップ28)。差分の絶対値が閾値を超えていれば(ステップ29でYes)、異物除去装置70に異物検出信号を送出する(ステップ30)。異物除去装置70から異物除去完了の情報を受けた後(ステップ31)、車両が送電コイル31の上に駐車したことを確認すると(ステップ32)、地上側装置に対して給電用電力の供給開始を指示する(ステップ33)。また、ステップ29で差分の絶対値が閾値以下であれば(ステップ29でNo)、ステップ32に移行し、車両の送電コイル31上への駐車を確認して、地上側装置に給電用電力の供給開始を指示する。
なお、ステップ29では、差分を閾値と比較する代わりに、(差分/Ps)を閾値と比較しても良い。
【0048】
このように、この移動体用非接触給電装置では、給電損失の算出に当たり、銅損や鉄損による損失分を除いているため、給電損失に占める“金物異物に起因する給電損失分”が相対的に大きくなり、金物異物に起因する給電損失の検出感度が向上する。
また、この移動体用非接触給電装置では、車両が送電コイル31上に乗り入れる前に金物異物が検出され、除去されるため、異物検出時に発火や発煙が発生したとしても、車両に及ぶ影響は殆ど無い。
また、第1の実施形態に比べて、異物検出に到る処理手順が少ないため、その実施が容易である。
また、この移動体用非接触給電装置では、送電コイルのみを用いて異物検出を行うため、
第1の実施形態の装置に比べて、送電コイルと受電コイルとの位置ずれに起因する測定誤差が排除できる、と言う利点がある。
なお、ここでは、給電損失から銅損及び鉄損を除いているが、算出が容易な銅損だけを除くようにしても良い。
また、給電損失から銅損及び鉄損を除かずに、送信コイル31の平均入力電力PIN0と、その標準値との差分から金物異物を検出することもできる。
【0049】
(第3の実施形態)
本発明の第3の実施形態では、異物除去装置70の構成について説明する。
図7に示す異物除去装置は、送電コイル31の上面を覆う一枚のカバー部材81と、送電コイル31の側縁位置でカバー部材81を枢支する枢支機構82と、異物検出器50から異物検出信号が入力すると、枢支されたカバー部材81を所定角度回転する回転駆動装置83とを備えている。
枢支機構82は、送電コイル31上面に平行な軸線を中心にカバー部材81が回転できるように、カバー部材81を枢支している。
カバー部材81は、非磁性且つ非導電性で機械的強度が強い強化樹脂などの材料で形成されている。通常状態のカバー部材81は、送電コイル31の上面と平行する状態で送電コイル31の上面を覆っている。
カバー部材81の上の金物異物100を検出した異物検出器50から異物検出信号が入力すると、回転駆動装置83は、カバー部材81を、送電コイル31上面に平行な軸線を中心に回転する。カバー部材81の最大回転角度は約30°に設定されている。
この回転でカバー部材81が傾斜すると、金物異物100は、重力の作用でカバー部材81から滑り落ちる。
回転駆動装置83は、金物異物100が無くなったカバー部材81を、送電コイル31を覆う通常の状態に戻し、異物検出器50に異物除去完了を伝える。
【0050】
この異物除去装置は、傾斜したカバー部材81の最高位置が比較的高くなる。それ故、送電コイル31の上に車両が駐車していると、傾斜したカバー部材81の先端が車両の底面に当接する虞がある。そのため、この異物除去装置は、車両が非接触給電位置に進入する前に異物検出が行われる第2の実施形態の移動体用非接触給電装置(図5)で使用する方が適している。
【0051】
図8は、カバー部材を2枚の分割カバー部材811、812で構成し、枢支機構82を分割カバー部材811、812のそれぞれに設けた異物除去装置を示している。
異物検出器50から異物検出信号が入力すると、回転駆動装置83は、2枚の分割カバー部材811、812の各々を送電コイル31上面に平行な軸線を中心に回転する。
この装置では、カバー部材811、812が分割されているので、傾斜した分割カバー部材811、812の最高位置が高くならない。そのため、車両が非接触給電位置に進入して異物検出が行われる第1の実施形態の移動体用非接触給電装置(図1)でも使用することができる。
なお、ここでは、2枚の分割カバーを用いているが、カバー部材の分割数は、3以上でも良い。
【0052】
図9は、エアコンプレッサー84を備える異物除去装置を示している。エアコンプレッサー84は、異物検出器50から異物検出信号が入力すると、送電コイル31と受電コイル32との空隙に高速の空気を吹き付けて、送電コイル31上の金物異物100を吹き飛ばす。
【0053】
図10は、樹脂製のベルトコンベアー85を利用した異物除去装置を示している。このベルトコンベアー85は、その一面が送電コイル31の上面を覆って巡回するように、駆動ローラ86及び従動ローラ87のローラ対で支持されている。ベルトコンベアー85の上に載る金物異物を検出した異物検出器50から異物検出信号が入力すると、駆動ローラ86は、送電コイル31の上面を覆うベルトコンベアー85の面が一新されるまで回転してベルトコンベアー85を巡回させる。この巡回で、ベルトコンベアー85上の金物異物は、除去される。
【0054】
図11は、送電コイル31の上面を拭う二本のワイパー部材88を備えた異物除去装置を示している。各ワイパー部材88の一端は、送電コイル31が収容されたケース310の対角位置に配置された駆動軸89に固定されており、図11(b)の断面図に示すように、この駆動軸89を回転するモータ90が、ケース310内の遮蔽板312(フェライトコア311に電線を巻回して構成した送電コイル31の漏洩磁束が下方に回り込むのを防いでいる。)より下方の空間に配置されている。
送電コイル31のケース310上の金物異物100(図11(a))を検出した異物検出器50から異物検出信号が入力すると、モータ90は、図11(c)に示すように、二本のワイパー部材88を、それぞれ、90°回転させる。二本のワイパー部材88の回転で送電コイル31上のケース310面は、余す所無く拭われ、送電コイル31の上の金物異物100は、除去される。
【0055】
このように、異物除去装置70は、異物検出器50から異物検出信号が入力すると、種々の方式で金物異物100を除去した後、異物除去が完了したことを異物検出器50に伝える。
なお、ここでは、異物検出器50の異物検出信号が異物除去装置70に直接入力して異物除去装置70が動作する場合について説明したが、異物検出器50の異物検出信号に基づいて、表示器などに注意を促す情報が表示され、その情報に接した地上装置の管理者、あるいは、車両の運転者が異物除去装置70を操作するような形態でも良い。
また、異物を検出した異物検出器50の異物検出信号に基づいて、地上側装置に送電コイルへの電力供給を停止させ、異物検出警報(ランプ表示や警報音)を継続して表示するようにしても良い。
【0056】
また、異物検出器50が異物を検出して送電コイルへの電力供給を停止した場合に、一定時間が経過するごとに、送電コイルに異物検出用電力を供給して、異物検出器50による異物検出動作を繰り返し、異物が検出されなかった時点で、送電コイルへの電力供給を給電用電力に切り換えるようにしても良い。こうすることで、異物が無くなったことを確認した上で移動体への非接触給電を行うことができる。
また、異物除去装置70が異物を除去して異物除去の完了を異物検出器50に伝えた場合に、異物検出器50が異物検出動作を行い、異物が検出されないことを確認した上で送電コイルへの給電用電力の供給を行うようにしても良い。
【0057】
以上のように、本発明の移動体用非接触給電装置は、送電コイル上に存在する金物異物を高精度に検出し、それを除去することができる。そのため、移動体に非接触給電を行う際の、金物異物による事故や給電動作の停滞を回避することができ、安全で安定した非接触給電を行うことができる。
【産業上の利用可能性】
【0058】
本発明の移動体用非接触給電装置は、金物異物による事故を回避して、安全で安定した非接触給電を可能にするものであり、電気自動車やプラグインハイブリッド車、搬送車、移動ロボットなど、多くの移動体の非接触給電に広く利用することができる。
【符号の説明】
【0059】
1 エンジン
2 モータ
3 インバータ
4 二次電池
5 商用電源
10 高力率整流器
20 インバータ
31 送電コイル
32 受電コイル
33 一次側直列コンデンサ
34 二次側並列共振コンデンサ
40 整流器
50 異物検出器
51 対車両交信部
52 対地上装置交信部
53 異物検出動作制御部
54 送電コイル入力電力算出部
55 受電コイル出力電力算出部
56 異物判定部
57 記憶部
58 鉄損算出部
59 銅損算出部
70 異物除去装置
81 カバー部材
82 枢支機構
83 回転駆動装置
84 エアコンプレッサー
85 ベルトコンベアー
86 駆動ローラ
87 従動ローラ
88 ワイパー部材
89 駆動軸
90 モータ
100 金物異物
310 ケース
311 フェライトコア
312 遮蔽板
571 鉄損パラメータ記憶領域
572 銅損パラメータ記憶領域
811 分割カバー部材
812 分割カバー部材
【特許請求の範囲】
【請求項1】
送電コイルと、該送電コイルにギャップを介して対向する受電コイルとを備え、前記送電コイルが地上側に設置され、前記受電コイルが移動体側に設置され、前記送電コイルから前記受電コイルに電磁誘導により給電が行われる移動体用非接触給電装置であって、
前記送電コイル上に金物異物が存在しない状態で前記送電コイルに異物検出用電力を供給して給電損失の標準値を求め、前記送電コイルに前記異物検出用電力を供給して求めた給電損失の測定値と前記標準値との差分に基づいて前記送電コイル上の金物異物の有無を検出し、前記金物異物を検出したとき、異物検出信号を出力する異物検出手段を備えることを特徴とする移動体用非接触給電装置。
【請求項2】
請求項1に記載の移動体用非接触給電装置であって、前記異物検出用電力が前記受電コイルに対向する前記送電コイルに供給され、前記異物検出手段が、前記送電コイルの入力電力PIN0と、前記受電コイルの出力電力PL0と、前記送電コイルの銅損Pc1と、前記受電コイルの銅損Pc2とを求め、(PIN0−PL0−Pc1−Pc2)の値の前記測定値と前記標準値との差分に基づいて前記金物異物の有無を検出することを特徴とする移動体用非接触給電装置。
【請求項3】
請求項2に記載の移動体用非接触給電装置であって、前記異物検出手段が、さらに、前記送電コイルの鉄損Pf1と、前記受電コイルの鉄損Pf2とを求め、(PIN0−PL0−Pc1−Pc2−Pf1−Pf2)の値の前記測定値と前記標準値との差分に基づいて前記金物異物の有無を検出することを特徴とする移動体用非接触給電装置。
【請求項4】
請求項1に記載の移動体用非接触給電装置であって、前記異物検出用電力が、定格給電電力の20%以下であることを特徴とする移動体用非接触給電装置。
【請求項5】
請求項2または3に記載の移動体用非接触給電装置であって、前記送電コイルに前記異物検出用電力を供給するとき、前記受電コイルと、後続する整流器との接続が遮断されることを特徴とする移動体用非接触給電装置。
【請求項6】
請求項1に記載の移動体用非接触給電装置であって、前記異物検出用電力が前記受電コイルに対向していない前記送電コイルに供給され、前記異物検出手段は、前記送電コイルの入力電力PIN0と、前記送電コイルの銅損Pc1とを求め、(PIN0−Pc1)の値の前記測定値と前記標準値との差分に基づいて前記金物異物の有無を検出することを特徴とする移動体用非接触給電装置。
【請求項7】
請求項6に記載の移動体用非接触給電装置であって、前記異物検出手段が、さらに、前記送電コイルの鉄損Pf1を求め、(PIN0−Pc1−Pf1)の値の前記測定値と前記標準値との差分に基づいて前記金物異物の有無を検出することを特徴とする移動体用非接触給電装置。
【請求項8】
請求項1に記載の移動体用非接触給電装置であって、前記異物検出用電力が前記受電コイルに対向していない前記送電コイルに供給され、前記異物検出手段は、前記送電コイルの入力電力PIN0を求め、PIN0の値の前記測定値と前記標準値との差分に基づいて前記金物異物の有無を検出することを特徴とする移動体用非接触給電装置。
【請求項9】
請求項1から請求項8のいずれかに記載の移動体用非接触給電装置であって、さらに、前記異物検出手段が金物異物を検出したことを受けて、前記送電コイルの上から前記金物異物を除去する異物除去手段を備えることを特徴とする移動体用非接触給電装置。
【請求項10】
請求項9に記載の移動体用非接触給電装置であって、前記異物除去手段が、前記送電コイルの上面を覆う非磁性且つ非導電性のカバー部材と、前記カバー部材を、前記送電コイルの側縁位置で前記送電コイルの上面に平行な軸線を中心に所定角度回転できるように枢支する枢支手段と、金物異物が検出されたことを受けて、前記カバー部材を、前記軸線を中心に所定角度回転する回転駆動手段と、を備えることを特徴とする移動体用非接触給電装置。
【請求項11】
請求項9に記載の移動体用非接触給電装置であって、前記カバー部材が、前記送電コイルの上面を分割して覆う複数の分割カバー部材から成り、前記枢支手段が前記分割カバー部材のそれぞれに設けられ、金物異物が検出されたことを受けて、前記回転駆動手段が、前記分割カバー部材の全てを回転することを特徴とする移動体用非接触給電装置。
【請求項12】
請求項9に記載の移動体用非接触給電装置であって、前記異物除去手段が、金物異物が検出されたことを受けて、前記送電コイルと前記受電コイルとの空隙に高速の空気を吹き付けるエアコンプレッサーを備えることを特徴とする移動体用非接触給電装置。
【請求項13】
請求項9に記載の移動体用非接触給電装置であって、前記異物除去手段が、樹脂製のベルトコンベアーと、該ベルトコンベアーを巡回可能に支持する駆動ローラ及び従動ローラのローラ対と、を備え、前記ローラ対は、巡回する前記ベルトコンベアーの一面が前記送電コイルの上面を覆うように該ベルトコンベアーを支持し、金物異物が検出されたことを受けて、前記駆動ローラが、前記ベルトコンベアーを巡回させて、前記送電コイルの上面を覆う前記ベルトコンベアーの面を更新することを特徴とする移動体用非接触給電装置。
【請求項14】
請求項9に記載の移動体用非接触給電装置であって、前記異物除去手段が、前記送電コイルの上面を拭うワイパー部材と、前記ワイパー部材を駆動するワイパー駆動手段とを備え、前記ワイパー駆動手段が、金物異物が検出されたことを受けて、前記ワイパー部材を駆動し、前記送電コイルの上面が前記ワイパー部材によって拭われることを特徴とする移動体用非接触給電装置。
【請求項15】
請求項1から請求項8のいずれかに記載の移動体用非接触給電装置であって、前記異物検出手段が出力した前記異物検出信号に基づいて、前記送信コイルへの前記異物検出用電力の供給が停止され、異物検出警報が表示されることを特徴とする移動体用非接触給電装置。
【請求項16】
請求項15に記載の移動体用非接触給電装置であって、前記異物検出用電力の供給が停止された前記送信コイルに、予め設定された時間が経過するごとに前記異物検出用電力が供給されて、前記異物検出手段が前記送電コイル上の金物異物の検出を繰り返し、前記異物検出手段が金物異物を検出しなかったとき、前記送信コイルに給電用電力が供給されることを特徴とする移動体用非接触給電装置。
【請求項17】
請求項9から請求項14のいずれかに記載の移動体用非接触給電装置であって、前記送電コイルの上面から金物異物を除去した前記異物除去手段が、前記異物検出手段にその旨を通知し、通知を受けた前記異物検出手段が、前記送電コイル上の金物異物を検出し、金物異物が検出されなかったとき、前記送信コイルに給電用電力が供給されることを特徴とする移動体用非接触給電装置。
【請求項1】
送電コイルと、該送電コイルにギャップを介して対向する受電コイルとを備え、前記送電コイルが地上側に設置され、前記受電コイルが移動体側に設置され、前記送電コイルから前記受電コイルに電磁誘導により給電が行われる移動体用非接触給電装置であって、
前記送電コイル上に金物異物が存在しない状態で前記送電コイルに異物検出用電力を供給して給電損失の標準値を求め、前記送電コイルに前記異物検出用電力を供給して求めた給電損失の測定値と前記標準値との差分に基づいて前記送電コイル上の金物異物の有無を検出し、前記金物異物を検出したとき、異物検出信号を出力する異物検出手段を備えることを特徴とする移動体用非接触給電装置。
【請求項2】
請求項1に記載の移動体用非接触給電装置であって、前記異物検出用電力が前記受電コイルに対向する前記送電コイルに供給され、前記異物検出手段が、前記送電コイルの入力電力PIN0と、前記受電コイルの出力電力PL0と、前記送電コイルの銅損Pc1と、前記受電コイルの銅損Pc2とを求め、(PIN0−PL0−Pc1−Pc2)の値の前記測定値と前記標準値との差分に基づいて前記金物異物の有無を検出することを特徴とする移動体用非接触給電装置。
【請求項3】
請求項2に記載の移動体用非接触給電装置であって、前記異物検出手段が、さらに、前記送電コイルの鉄損Pf1と、前記受電コイルの鉄損Pf2とを求め、(PIN0−PL0−Pc1−Pc2−Pf1−Pf2)の値の前記測定値と前記標準値との差分に基づいて前記金物異物の有無を検出することを特徴とする移動体用非接触給電装置。
【請求項4】
請求項1に記載の移動体用非接触給電装置であって、前記異物検出用電力が、定格給電電力の20%以下であることを特徴とする移動体用非接触給電装置。
【請求項5】
請求項2または3に記載の移動体用非接触給電装置であって、前記送電コイルに前記異物検出用電力を供給するとき、前記受電コイルと、後続する整流器との接続が遮断されることを特徴とする移動体用非接触給電装置。
【請求項6】
請求項1に記載の移動体用非接触給電装置であって、前記異物検出用電力が前記受電コイルに対向していない前記送電コイルに供給され、前記異物検出手段は、前記送電コイルの入力電力PIN0と、前記送電コイルの銅損Pc1とを求め、(PIN0−Pc1)の値の前記測定値と前記標準値との差分に基づいて前記金物異物の有無を検出することを特徴とする移動体用非接触給電装置。
【請求項7】
請求項6に記載の移動体用非接触給電装置であって、前記異物検出手段が、さらに、前記送電コイルの鉄損Pf1を求め、(PIN0−Pc1−Pf1)の値の前記測定値と前記標準値との差分に基づいて前記金物異物の有無を検出することを特徴とする移動体用非接触給電装置。
【請求項8】
請求項1に記載の移動体用非接触給電装置であって、前記異物検出用電力が前記受電コイルに対向していない前記送電コイルに供給され、前記異物検出手段は、前記送電コイルの入力電力PIN0を求め、PIN0の値の前記測定値と前記標準値との差分に基づいて前記金物異物の有無を検出することを特徴とする移動体用非接触給電装置。
【請求項9】
請求項1から請求項8のいずれかに記載の移動体用非接触給電装置であって、さらに、前記異物検出手段が金物異物を検出したことを受けて、前記送電コイルの上から前記金物異物を除去する異物除去手段を備えることを特徴とする移動体用非接触給電装置。
【請求項10】
請求項9に記載の移動体用非接触給電装置であって、前記異物除去手段が、前記送電コイルの上面を覆う非磁性且つ非導電性のカバー部材と、前記カバー部材を、前記送電コイルの側縁位置で前記送電コイルの上面に平行な軸線を中心に所定角度回転できるように枢支する枢支手段と、金物異物が検出されたことを受けて、前記カバー部材を、前記軸線を中心に所定角度回転する回転駆動手段と、を備えることを特徴とする移動体用非接触給電装置。
【請求項11】
請求項9に記載の移動体用非接触給電装置であって、前記カバー部材が、前記送電コイルの上面を分割して覆う複数の分割カバー部材から成り、前記枢支手段が前記分割カバー部材のそれぞれに設けられ、金物異物が検出されたことを受けて、前記回転駆動手段が、前記分割カバー部材の全てを回転することを特徴とする移動体用非接触給電装置。
【請求項12】
請求項9に記載の移動体用非接触給電装置であって、前記異物除去手段が、金物異物が検出されたことを受けて、前記送電コイルと前記受電コイルとの空隙に高速の空気を吹き付けるエアコンプレッサーを備えることを特徴とする移動体用非接触給電装置。
【請求項13】
請求項9に記載の移動体用非接触給電装置であって、前記異物除去手段が、樹脂製のベルトコンベアーと、該ベルトコンベアーを巡回可能に支持する駆動ローラ及び従動ローラのローラ対と、を備え、前記ローラ対は、巡回する前記ベルトコンベアーの一面が前記送電コイルの上面を覆うように該ベルトコンベアーを支持し、金物異物が検出されたことを受けて、前記駆動ローラが、前記ベルトコンベアーを巡回させて、前記送電コイルの上面を覆う前記ベルトコンベアーの面を更新することを特徴とする移動体用非接触給電装置。
【請求項14】
請求項9に記載の移動体用非接触給電装置であって、前記異物除去手段が、前記送電コイルの上面を拭うワイパー部材と、前記ワイパー部材を駆動するワイパー駆動手段とを備え、前記ワイパー駆動手段が、金物異物が検出されたことを受けて、前記ワイパー部材を駆動し、前記送電コイルの上面が前記ワイパー部材によって拭われることを特徴とする移動体用非接触給電装置。
【請求項15】
請求項1から請求項8のいずれかに記載の移動体用非接触給電装置であって、前記異物検出手段が出力した前記異物検出信号に基づいて、前記送信コイルへの前記異物検出用電力の供給が停止され、異物検出警報が表示されることを特徴とする移動体用非接触給電装置。
【請求項16】
請求項15に記載の移動体用非接触給電装置であって、前記異物検出用電力の供給が停止された前記送信コイルに、予め設定された時間が経過するごとに前記異物検出用電力が供給されて、前記異物検出手段が前記送電コイル上の金物異物の検出を繰り返し、前記異物検出手段が金物異物を検出しなかったとき、前記送信コイルに給電用電力が供給されることを特徴とする移動体用非接触給電装置。
【請求項17】
請求項9から請求項14のいずれかに記載の移動体用非接触給電装置であって、前記送電コイルの上面から金物異物を除去した前記異物除去手段が、前記異物検出手段にその旨を通知し、通知を受けた前記異物検出手段が、前記送電コイル上の金物異物を検出し、金物異物が検出されなかったとき、前記送信コイルに給電用電力が供給されることを特徴とする移動体用非接触給電装置。
【図1】



【図2】
【図3】

【図4】

【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図15】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−59239(P2013−59239A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−197461(P2011−197461)
【出願日】平成23年9月9日(2011.9.9)
【出願人】(504190548)国立大学法人埼玉大学 (292)
【出願人】(591206887)株式会社テクノバ (20)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月9日(2011.9.9)
【出願人】(504190548)国立大学法人埼玉大学 (292)
【出願人】(591206887)株式会社テクノバ (20)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]