
移動体監視装置及びコンピュータプログラム及び移動体監視方法

【課題】多数の移動体を監視する監視者を支援する移動体監視装置において、監視者の注意を喚起すべき場合とそうでない場合とを適切に峻別することにより、監視者の注意義務を軽減し、監視者が適切な判断をできるようにする。
【解決手段】ブロック生成部150は、複数の移動体(航空機)それぞれについて、占有ブロックを生成する。重複判定部170は、複数の移動体についてブロック生成部150が生成した複数の占有ブロックが重複しているか否かを判定する。占有ブロックが重複していると重複判定部170が判定した場合、注意喚起部180は、監視者(管制官)の注意を喚起する。
【解決手段】ブロック生成部150は、複数の移動体(航空機)それぞれについて、占有ブロックを生成する。重複判定部170は、複数の移動体についてブロック生成部150が生成した複数の占有ブロックが重複しているか否かを判定する。占有ブロックが重複していると重複判定部170が判定した場合、注意喚起部180は、監視者(管制官)の注意を喚起する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、航空機などの移動体が多数存在する空港の滑走路などトラフィックが多い場所において、移動体を監視し、移動体に対する指示などを行う監視者を支援する移動体監視装置に関する。
【背景技術】
【0002】
空港の滑走路には、出発機、到着機、横断機など様々な目的を持つ航空機が、進入・離脱を繰り返す。このようなトラフィックが多い場所において、管制官などの監視者は、状況を正しく判断し、移動体に対して適切な指示をする必要がある。監視者の指示が適切でなければ、事故や移動体の滞留を招く可能性がある。
このような状況において、移動体の位置関係などを表示して、監視者を支援する移動体監視装置がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−197600号公報
【特許文献2】特開2003−85700号公報
【特許文献3】特開2005−250691号公報
【特許文献4】特開2005−339392号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の移動体監視装置は、安全性を重視する余り、移動体の間隔を広めに取る傾向があり、移動体の数が多い場合に滞留を招くため、あまり多くの移動体を捌くことができなかった。また、監視者の判断で移動体の間隔を狭めると、移動体監視装置が多数の警告を発することになり、監視者の注意が分散してしまうため、かえって安全性を損ねる可能性があった。
この発明は、例えば上記のような課題を解決するためになされたものであり、監視者の注意を喚起すべき場合とそうでない場合とを適切に峻別することにより、監視者の注意義務を軽減し、監視者が適切な判断をできるようにすることを目的とする。
【課題を解決するための手段】
【0005】
この発明にかかる移動体監視装置は、データを処理する処理装置と、ブロック生成部と、重複判定部と、注意喚起部とを有し、
上記ブロック生成部は、上記処理装置を用いて、複数の移動体それぞれについて、上記移動体が占有する区域を表わす占有ブロックを生成し、
上記重複判定部は、上記処理装置を用いて、上記複数の移動体について上記ブロック生成部が生成した複数の占有ブロックが重複しているか否かを判定し、
上記注意喚起部は、上記処理装置を用いて、上記複数の占有ブロックが重複していると上記重複判定部が判定した場合に、監視者の注意を喚起することを特徴とする。
【発明の効果】
【0006】
この発明にかかる移動体監視装置によれば、複数の移動体についてブロック生成部が生成した占有ブロックが重複しているか否かを判定することにより、監視者の注意を喚起すべき場合とそうでない場合とを適切に峻別することができる。これにより、複数の移動体が所定の位置関係となったことを監視者が見落とす可能性が低くなるとともに、監視者の注意義務を軽減することにより、監視者が適切な状況判断をすることができる。
【図面の簡単な説明】
【0007】
【図1】実施の形態1における移動体監視装置100が航空機621(移動体の一例)を監視する空港610の構成の一例を示す図。
【図2】実施の形態1における移動体監視装置100の外観の一例を示す斜視図。
【図3】実施の形態1における移動体監視装置100のハードウェア資源の一例を示す図。
【図4】実施の形態1における移動体監視装置100の機能ブロックの構成の一例を示すブロック構成図。
【図5】実施の形態1におけるブロック生成処理S400の流れの一例を示すフローチャート図。
【図6】実施の形態1における到着機ブロック生成処理S420の流れの一例を示すフローチャート図。
【図7】実施の形態1における到着機ブロック生成処理S420でブロック生成部150が生成する占有予定ブロック511の一例を示す図。
【図8】実施の形態1における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図。
【図9】実施の形態1における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図。
【図10】実施の形態1における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図。
【図11】実施の形態1における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図。
【図12】実施の形態1における到着機ブロック生成処理S420でブロック生成部150が占有ブロックを生成しない場合の一例を示す図。
【図13】実施の形態1における出発機ブロック生成処理S430の流れの一例を示すフローチャート図。
【図14】実施の形態1における出発機ブロック生成処理S430でブロック生成部150が生成する占有予定ブロック512の一例を示す図。
【図15】実施の形態1における出発機ブロック生成処理S430でブロック生成部150が生成する占有予定ブロック513及び占有済ブロック522の一例を示す図。
【図16】実施の形態1における出発機ブロック生成処理S430でブロック生成部150が生成する占有予定ブロック513及び占有済ブロック522の一例を示す図。
【図17】実施の形態1における出発機ブロック生成処理S430でブロック生成部150が生成する占有済ブロック523の一例を示す図。
【図18】実施の形態1における出発機ブロック生成処理S430でブロック生成部150が生成する占有済ブロック523の一例を示す図。
【図19】実施の形態1における出発機ブロック生成処理S430でブロック生成部150が占有ブロックを生成しない場合の一例を示す図。
【図20】実施の形態1における横断機ブロック生成処理S440の流れの一例を示すフローチャート図。
【図21】実施の形態1における横断機ブロック生成処理S440でブロック生成部150が生成する占有予定ブロック514の一例を示す図。
【図22】実施の形態1における横断機ブロック生成処理S440でブロック生成部150が生成する占有済ブロック524の一例を示す図。
【図23】実施の形態1における横断機ブロック生成処理S440でブロック生成部150が占有ブロックを生成しない場合の一例を示す図。
【図24】実施の形態1における重複判定処理S450の流れの一例を示すフローチャート図。
【図25】実施の形態1における表示装置901が表示する画面の一例を示す図。
【図26】実施の形態1における注意喚起部180が管制官の注意を喚起する航空機621の組み合わせの一例を示す図。
【図27】実施の形態2における到着機ブロック生成処理S420の流れの一例を示すフローチャート図。
【図28】実施の形態2における到着機ブロック生成処理S420でブロック生成部150が生成する一部対象占有済ブロック531の一例を示す図。
【図29】実施の形態2における横断機ブロック生成処理S440の流れの一例を示すフローチャート図。
【図30】実施の形態2における到着機ブロック生成処理S420でブロック生成部150が生成する一部対象占有済ブロック534の一例を示す図。
【図31】実施の形態2における注意喚起部180が管制官の注意を喚起する航空機621の組み合わせの一例を示す図。
【発明を実施するための形態】
【0008】
実施の形態1.
実施の形態1について、図1〜図26を用いて説明する。
【0009】
図1は、この実施の形態における移動体監視装置100が航空機621(移動体の一例)を監視する空港610の構成の一例を示す図である。
空港610は、滑走路611を有する。滑走路611の両端を始端612及び終端613と呼ぶ。航空機621は、始端612側から終端613側へ向けて移動するものとする。すなわち、離陸する航空機621は、始端612付近から終端613側へ向けて加速して離陸し、着陸する航空機621は、始端612付近に着地して終端613へ向かって減速して着陸する。したがって、風向きなどにより滑走路611を逆向きに使用する場合には、始端612と終端613との呼び方が逆になる。また、滑走路611の長手方向の中心となる線分を中心線614と呼ぶ。
【0010】
滑走路611付近には、多数の航空機621が存在する。滑走路611付近に存在する航空機621は、大きく分けて、出発機、到着機、横断機の三つに分けられる。出発機は、空港610から離陸する航空機621であり、滑走路611付近の誘導路で待機している航空機621、滑走路611に移動した航空機621、離陸のため加速している航空機621、離陸して滑走路611の上に浮いている航空機621、滑走路611の延長線上を飛んでいる航空機621などである。到着機は、空港610に着陸する航空機621であり、着陸準備のため滑走路611の延長線を滑走路611に向けて降下している航空機621、滑走路611の上に浮いていてもうすぐ着陸する航空機621、滑走路611に着地した航空機621、停止するため減速している航空機621、滑走路611から誘導路に向かって地上を移動している航空機621などである。横断機は、離陸や着陸のために滑走路611に入るのではなく、滑走路611の向こう側へ移動するため滑走路611を横切る航空機621であり、滑走路611付近の誘導路で待機している航空機621、滑走路611を横断中の航空機621、横断を終えて反対側の誘導路へ移動した航空機621などである。
このように、滑走路611付近には、様々な目的で移動している多数の航空機621が存在している。これらの航空機621を適切に誘導することにより、滑走路611の利用効率を向上し、航空機621の発着回数を増やすことができる。
【0011】
空港610は、図示していない空港面探知レーダやマルチラテレーションシステムなどにより、航空機621の位置を検出する移動体検出装置を備える。移動体監視装置100は、移動体検出装置が検出した航空機621の位置に基づいて、航空機621を監視し、管制官による管制業務を補助する。
【0012】
図2は、この実施の形態における移動体監視装置100の外観の一例を示す斜視図である。
移動体監視装置100は、システムユニット910、CRT(Cathode・Ray・Tube)やLCD(液晶)の表示画面を有する表示装置901、キーボード902(Key・Board:K/B)、マウス903、FDD904(Flexible・Disk・Drive)、コンパクトディスク装置905(CDD)、プリンタ装置906、スキャナ装置907などのハードウェア資源を備え、これらはケーブルや信号線で接続されている。
システムユニット910は、コンピュータであり、ファクシミリ機932、電話器931とケーブルで接続され、また、ローカルエリアネットワーク942(LAN)、ゲートウェイ941を介してインターネット940に接続されている。
【0013】
図3は、この実施の形態における移動体監視装置100のハードウェア資源の一例を示す図である。
移動体監視装置100は、プログラムを実行するCPU911(Central・Processing・Unit、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、プロセッサともいう)を備えている。CPU911は、バス912を介してROM913、RAM914、通信装置915、表示装置901、キーボード902、マウス903、FDD904、CDD905、プリンタ装置906、スキャナ装置907、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。磁気ディスク装置920の代わりに、光ディスク装置、メモリカード読み書き装置などの記憶装置でもよい。
RAM914は、揮発性メモリの一例である。ROM913、FDD904、CDD905、磁気ディスク装置920の記憶媒体は、不揮発性メモリの一例である。これらは、記憶装置あるいは記憶部の一例である。通信装置915、キーボード902、スキャナ装置907、FDD904などは、入力部、入力装置の一例である。
また、通信装置915、表示装置901、プリンタ装置906などは、出力部、出力装置の一例である。
【0014】
通信装置915は、ファクシミリ機932、電話器931、LAN942等に接続されている。通信装置915は、LAN942に限らず、インターネット940、ISDN等のWAN(ワイドエリアネットワーク)などに接続されていても構わない。インターネット940或いはISDN等のWANに接続されている場合、ゲートウェイ941は不用となる。
磁気ディスク装置920には、オペレーティングシステム921(OS)、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。プログラム群923のプログラムは、CPU911、オペレーティングシステム921、ウィンドウシステム922により実行される。
【0015】
上記プログラム群923には、以下に述べる実施の形態の説明において「〜部」として説明する機能を実行するプログラムが記憶されている。プログラムは、CPU911により読み出され実行される。
ファイル群924には、以下に述べる実施の形態の説明において、「〜の判定結果」、「〜の計算結果」、「〜の処理結果」として説明する情報やデータや信号値や変数値やパラメータが、「〜ファイル」や「〜データベース」の各項目として記憶されている。「〜ファイル」や「〜データベース」は、ディスクやメモリなどの記録媒体に記憶される。ディスクやメモリなどの記憶媒体に記憶された情報やデータや信号値や変数値やパラメータは、読み書き回路を介してCPU911によりメインメモリやキャッシュメモリに読み出され、抽出・検索・参照・比較・演算・計算・処理・出力・印刷・表示などのCPUの動作に用いられる。抽出・検索・参照・比較・演算・計算・処理・出力・印刷・表示のCPUの動作の間、情報やデータや信号値や変数値やパラメータは、メインメモリやキャッシュメモリやバッファメモリに一時的に記憶される。
また、以下に述べる実施の形態の説明において説明するフローチャートの矢印の部分は主としてデータや信号の入出力を示し、データや信号値は、RAM914のメモリ、FDD904のフレキシブルディスク、CDD905のコンパクトディスク、磁気ディスク装置920の磁気ディスク、その他光ディスク、ミニディスク、DVD(Digital・Versatile・Disk)等の記録媒体に記録される。また、データや信号は、バス912や信号線やケーブルその他の伝送媒体によりオンライン伝送される。
【0016】
また、以下に述べる実施の形態の説明において「〜部」として説明するものは、「〜回路」、「〜装置」、「〜機器」であってもよく、また、「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ROM913に記憶されたファームウェアで実現されていても構わない。或いは、ソフトウェアのみ、或いは、素子・デバイス・基板・配線などのハードウェアのみ、或いは、ソフトウェアとハードウェアとの組み合わせ、さらには、ファームウェアとの組み合わせで実施されても構わない。ファームウェアとソフトウェアは、プログラムとして、磁気ディスク、フレキシブルディスク、光ディスク、コンパクトディスク、ミニディスク、DVD等の記録媒体に記憶される。プログラムはCPU911により読み出され、CPU911により実行される。すなわち、プログラムは、以下に述べる「〜部」としてコンピュータを機能させるものである。あるいは、以下に述べる「〜部」の手順や方法をコンピュータに実行させるものである。
【0017】
図4は、この実施の形態における移動体監視装置100の機能ブロックの構成の一例を示すブロック構成図である。
移動体監視装置100は、移動体入力部110、移動体記憶部120、移動体表示部130、ブロック生成規則記憶部140、ブロック生成部150、ブロック記憶部160、重複判定部170、注意喚起部180を有する。
【0018】
移動体入力部110は、CPU911を用いて、移動体検出装置が検出した航空機621の位置や便名など、航空機621に関する情報を表わすデータ(以下「移動体データ」と呼ぶ。)を入力する。
移動体記憶部120は、磁気ディスク装置920を用いて、移動体入力部110が入力した移動体データを記憶する。なお、移動体記憶部120が記憶する移動体データは、航空機621の位置や便名だけでなく、移動速度や状態(出発機であるか到着機であるかなど)などの情報を含む。これらの情報は、移動体検出装置が検出して出力する構成であってもよいし、移動体入力部110が、航空機621の位置から移動速度を算出したり、フライトプランを参照して航空機621の状態を取得したりして、移動体データに付け加える構成であってもよい。
移動体表示部130は、表示装置901を用いて、移動体記憶部120が記憶した移動体データに基づいて、航空機621の位置を空港610の地図上にプロットするなど、管制官にわかりやすい形式で表示する。
【0019】
ブロック生成規則記憶部140は、磁気ディスク装置920を用いて、あらかじめ、ブロック生成規則データを記憶している。ブロック生成規則データとは、ブロック生成規則を表わすデータである。ブロック生成規則とは、航空機621の位置などの情報に基づいて、その航空機621の占有ブロックを生成するためのルールである。占有ブロックとは、その航空機621が占有する区域を表わすデータである。移動体監視装置100は、占有ブロックの重なりを判定することにより、航空機621を適切に誘導するための情報を生成する。
【0020】
ブロック生成部150は、CPU911を用いて、移動体記憶部120が記憶した移動体データと、ブロック生成規則記憶部140が記憶したブロック生成規則データとを入力する。ブロック生成部150は、CPU911を用いて、入力した移動体データとブロック生成規則データとに基づいて、各航空機621について、その航空機621の占有ブロックを生成する。ブロック生成部150は、CPU911を用いて、生成した占有ブロックを出力する。
ブロック記憶部160は、CPU911を用いて、ブロック生成部150が出力した占有ブロックを入力する。ブロック記憶部160は、磁気ディスク装置920を用いて、入力した占有ブロックを記憶する。
【0021】
重複判定部170は、CPU911を用いて、ブロック記憶部160が記憶した占有ブロックを入力する。重複判定部170は、CPU911を用いて、二つの航空機621の占有ブロックの間に重複部分があるか否かを判定する。重複判定部170は、CPU911を用いて、占有ブロックに重複部分があると判定した二つの航空機621について、その航空機621を表わすデータを出力する。
注意喚起部180は、CPU911を用いて、重複判定部170が出力したデータを入力する。注意喚起部180は、CPU911を用いて、入力したデータに基づいて、管制官の注意を喚起する。具体的には、注意喚起部180は、例えば、移動体表示部130が表示装置901を用いて表示した地図上に、占有ブロックが重複していることを表わすメッセージを表示したり、スピーカを用いて、注意喚起音やメッセージを発したりする。
【0022】
図5は、この実施の形態におけるブロック生成処理S400の流れの一例を示すフローチャート図である。
ブロック生成処理S400において、ブロック生成部150は、滑走路611について航空機621の占有ブロックを生成する。空港610に滑走路611が複数ある場合、ブロック生成部150は、滑走路611ごとに占有ブロックを生成する。ブロック生成処理S400は、状態判定工程S410、到着機ブロック生成処理S420、出発機ブロック生成処理S430、横断機ブロック生成処理S440を有する。
【0023】
状態判定工程S410において、ブロック生成部150は、CPU911を用いて、移動体記憶部120が記憶した移動体データのなかから、一つの航空機621についての移動体データを取得する。ブロック生成部150は、CPU911を用いて、取得した移動体データに基づいて、航空機621が、その滑走路611に到着する到着機であるか、その滑走路611から出発する出発機であるか、その滑走路611を横断する横断機であるか、その滑走路611と無関係(その滑走路611を横断せず他の滑走路に離着陸する航空機など)であるかを判定する。到着機と判定した場合、到着機ブロック生成処理S420へ進む。出発機と判定した場合、出発機ブロック生成処理S430へ進む。横断機と判定した場合、横断機ブロック生成処理S440へ進む。無関係と判定した場合、ブロック生成処理S400を終了する。
【0024】
到着機ブロック生成処理S420において、ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データのなかから、到着機についてのブロック生成規則データを取得する。ブロック生成部150は、CPU911を用いて、取得したブロック生成規則データが表わすブロック生成規則と、状態判定工程S410で取得した移動体データとに基づいて、航空機621の占有ブロックを生成する。その後、ブロック生成処理S400を終了する。
【0025】
出発機ブロック生成処理S430において、ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データのなかから、出発機についてのブロック生成規則データを取得する。ブロック生成部150は、CPU911を用いて、取得したブロック生成規則データが表わすブロック生成規則と、状態判定工程S410で取得した移動体データとに基づいて、航空機621の占有ブロックを生成する。その後、ブロック生成処理S400を終了する。
【0026】
横断機ブロック生成処理S440において、ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データのなかから、横断機についてのブロック生成規則データを取得する。ブロック生成部150は、CPU911を用いて、取得したブロック生成規則データが表わすブロック生成規則と、状態判定工程S410で取得した移動体データとに基づいて、航空機621の占有ブロックを生成する。その後、ブロック生成処理S400を終了する。
【0027】
図6は、この実施の形態における到着機ブロック生成処理S420の流れの一例を示すフローチャート図である。
到着機ブロック生成処理S420は、始端距離判定工程S421、占有予定ブロック生成工程S422、全部占有済ブロック生成工程S424、離脱距離判定工程S426、前方占有済ブロック生成工程S427を有する。
【0028】
始端距離判定工程S421において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621と滑走路611の始端612との間の平面距離dを算出する。ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データから、二つの閾値D1,D2(ただし、0<D1<D2。)を取得する。ブロック生成部150は、CPU911を用いて、算出した平面距離dと、二つの閾値D1,D2とを比較する。
平面距離dが閾値D2以上である場合は、到着機ブロック生成処理S420を終了する。すなわち、航空機621の占有ブロックを生成しない。これは、航空機621が滑走路611からまだ十分に離れているので、滑走路611を占有する必要がないからである。
平面距離dが閾値D1以上かつ閾値D2未満である場合は、占有予定ブロック生成工程S422へ進む。
平面距離dが0以上かつ閾値D1未満である場合は、全部占有済ブロック生成工程S424へ進む。
平面距離dが0未満である場合、離脱距離判定工程S426へ進む。平面距離dは、始端612から滑走路611の外側へ向かう方向を正とする。すなわち、平面距離dが0未満である場合とは、航空機621が滑走路611上もしくは滑走路611の上空にいる場合を意味する。なお、ここでは、滑走路611に着陸しようとしている航空機621のみを対象としているので、滑走路611の上空といっても着陸態勢である高さの範囲内のことであり、滑走路611のはるか上空を飛んでいる航空機621や、着陸を取り止めて離脱しようとしている航空機621は対象外である。
【0029】
占有予定ブロック生成工程S422において、ブロック生成部150は、CPU911を用いて、滑走路611の始端612から終端613までの全部を範囲とする占有予定ブロックを生成する。占有予定ブロックとは、占有ブロックのうち、他の航空機621を排除する効力を持たず、主に、他の航空機621を監視する目的で生成される占有ブロックのことである。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有予定ブロックを記憶する。その後、到着機ブロック生成処理S420を終了する。
【0030】
全部占有済ブロック生成工程S424において、ブロック生成部150は、CPU911を用いて、滑走路611の始端612から終端613までの全部を範囲とする占有済ブロックを生成する。占有済ブロックとは、占有ブロックのうち、他の航空機621を排除する効力を持つ占有ブロックのことである。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有済ブロックを記憶する。その後、到着機ブロック生成処理S420を終了する。
【0031】
離脱距離判定工程S426において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621と、空港610の中心線614との間の距離wを算出する。ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成記憶データから、閾値W1を取得する。ブロック生成部150は、CPU911を用いて、算出した距離wと、取得した閾値W1とを比較する。
距離wが閾値W1以上である場合は、到着機ブロック生成処理S420を終了する。すなわち、航空機621の占有ブロックを生成しない。これは、航空機621が滑走路611に着陸して滑走路611から十分に離れた場合に、滑走路611を解放するためである。
距離wが閾値W1未満である場合は、前方占有済ブロック生成工程S427へ進む。
【0032】
前方占有済ブロック生成工程S427において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621の現在位置を取得する。ブロック生成部150は、CPU911を用いて、取得した航空機621の現在位置から滑走路611の終端613までを範囲とする占有済ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有済ブロックを記憶する。その後、到着機ブロック生成処理S420を終了する。
【0033】
図7は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する占有予定ブロック511の一例を示す図である。
航空機621と滑走路611の始端612との間の平面距離dが閾値D1以上かつ閾値D2未満の場合、ブロック生成部150は、占有予定ブロック生成工程S422で、滑走路611の始端612から終端613までの全部を範囲とする占有予定ブロック511を生成する。これにより、航空機621がこれから着陸しようとしている滑走路611の全範囲に他の航空機621がいないかを監視する状態となる。
滑走路611に他の航空機621の占有ブロックがある場合、注意喚起部180が管制官に注意を喚起し、管制官は、航空機621の着陸を取り止めるか否かを判断する。例えば、滑走路611に占有ブロックを持つ他の航空機621が、滑走路611に着陸済の到着機であり、もうすぐ滑走路611から離脱するのであれば、管制官は、航空機621の着陸を決行すると判断する。
【0034】
このように、航空機621の着陸を取り止めるか否かを移動体監視装置100が機械的に判断するのではなく、管制官の判断に委ねることにより、柔軟な運用が可能となり、滑走路611の利用効率を高めることができる。また、管制官の判断が必要な状況では、注意喚起部180が管制官の注意を喚起するので、管制官の見落としによる事故の発生を防ぐことができる。更に、管制官は、注意喚起部180が注意を喚起した状況の判断に集中することができるので、より適切な判断をすることができ、滑走路611の利用効率を高めることができる。
【0035】
図8は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図である。
航空機621が滑走路611に近づき、航空機621と滑走路611の始端612との間の平面距離が閾値D1未満になった場合、ブロック生成部150は、全部占有済ブロック生成工程S424で、滑走路611の始端612から終端613までの全部を範囲とする占有済ブロック521を生成する。これにより、航空機621がこれから着陸しようとしている滑走路611の全範囲から他の航空機621を排除する状態となる。
滑走路611に他の航空機621の占有ブロックがある場合、注意喚起部180が管制官に注意を喚起し、管制官は、航空機621の着陸を取り止めるか否かを判断する。また、注意喚起部180は、他の航空機621の側にも注意を喚起する。管制官は、航空機621の着陸を決行すると判断した場合、他の航空機621を滑走路611から速やかに排除する。
【0036】
図9は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図である。
航空機621が滑走路611の始端612を越えて滑走路611上に進入し、航空機621と滑走路611の始端612との間の平面距離dが負になった場合、ブロック生成部150は、前方占有済ブロック生成工程S427で、航空機621の現在位置から滑走路611の終端613までを範囲とする占有済ブロック521を生成する。これにより、航空機621の前方から他の航空機621を排除するが、航空機621の後方には他の航空機621の進入を許す状態となる。
【0037】
図10は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図である。
航空機621が滑走路611に着陸し、減速中の場合も同様に、ブロック生成部150は、前方占有済ブロック生成工程S427で、航空機621の現在位置から滑走路611の終端613までを範囲とする占有済ブロック521を生成する。
【0038】
図11は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図である。
航空機621が着陸後十分に減速し、滑走路611から離脱しようとしている場合であっても、航空機621と滑走路611の中心線614との間の距離wが閾値W1未満であれば、まだ、ブロック生成部150は、前方占有済ブロック生成工程S427で、航空機621の現在位置から滑走路611の終端613までを範囲とする占有済ブロック521を生成する。
【0039】
図12は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が占有ブロックを生成しない場合の一例を示す図である。
航空機621が滑走路611から完全に離脱し、航空機621と滑走路611の中心線614との間の距離wが閾値W1以上になった場合、ブロック生成部150は、航空機621の占有ブロックを生成しない。
【0040】
図13は、この実施の形態における出発機ブロック生成処理S430の流れの一例を示すフローチャート図である。
出発機ブロック生成処理S430は、進入距離判定工程S431、占有予定ブロック生成工程S432、速度判定工程S433、前方占有予定ブロック生成工程S434、後方占有済ブロック生成工程S435、前方占有済ブロック生成工程S436を有する。
【0041】
進入距離判定工程S431において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621と滑走路611の中心線614との間の距離wを算出する。ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データから、二つの閾値W2,W3(ただし、W2<W3。)を取得する。ブロック生成部150は、CPU911を用いて、算出した距離wと、二つの閾値W2,W3とを比較する。
距離wが閾値W3以上である場合は、出発機ブロック生成処理S430を終了する。すなわち、航空機621の占有ブロックを生成しない。これは、航空機621が滑走路611からまだ十分に離れているので、滑走路611を占有する必要がないからである。
距離wが閾値W2以上かつ閾値W3未満である場合は、占有予定ブロック生成工程S432へ進む。
距離wが閾値W2未満である場合は、速度判定工程S433へ進む。
【0042】
占有予定ブロック生成工程S432において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621が進入しようとしている滑走路611上の位置を算出する。ブロック生成部150は、CPU911を用いて、算出した位置の前後所定の区域を範囲とする占有予定ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有予定ブロックを記憶する。その後、出発機ブロック生成処理S430を終了する。
【0043】
速度判定工程S433において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621の速度vを取得する。ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データから、閾値V1を取得する。ブロック生成部150は、CPU911を用いて、取得した速度vと、取得した閾値V1とを比較する。
速度vが閾値V1未満である場合は、前方占有予定ブロック生成工程S434へ進む。
速度vが閾値V1以上である場合は、前方占有済ブロック生成工程S436へ進む。
【0044】
前方占有予定ブロック生成工程S434において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621の現在位置を取得する。ブロック生成部150は、CPU911を用いて、取得した航空機621の現在位置から滑走路611の終端613までを範囲とする占有予定ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有予定ブロックを記憶する。
後方占有済ブロック生成工程S435において、ブロック生成部150は、CPU911を用いて、滑走路611の始端612から、前方占有予定ブロック生成工程S434で取得した航空機621の現在位置までを範囲とする占有済ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有済ブロックを記憶する。その後、出発機ブロック生成処理S430を終了する。
【0045】
前方占有済ブロック生成工程S436において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621の現在位置を取得する。ブロック生成部150は、CPU911を用いて、取得した航空機621の現在位置から滑走路611の終端613までを範囲とする占有済ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有済ブロックを記憶する。その後、出発機ブロック生成処理S430を終了する。
【0046】
図14は、この実施の形態における出発機ブロック生成処理S430でブロック生成部150が生成する占有予定ブロック512の一例を示す図である。
航空機621が離陸のため滑走路611に近づき、航空機621と滑走路611の中心線614との間の距離wが閾値W2以上かつ閾値W3未満になった場合、ブロック生成部150は、占有予定ブロック生成工程S432で、航空機621が進入しようとしている滑走路611上の位置の前後を範囲とする占有予定ブロック512を生成する。これにより、航空機621が進入しようとしている位置に、他の航空機621の占有ブロックがないかを監視する状態となる。
例えば、滑走路611に着陸中の他の航空機621がある場合、航空機621が進入しようとしている位置よりも、他の航空機621が始端612側にいれば、他の航空機621の占有ブロックと、航空機621の占有予定ブロック512とが重なるので、注意喚起部180が管制官に注意を喚起する。管制官は、例えば、航空機621に対して、他の航空機621が通過するのを待つよう指示する。
これに対し、航空機621が進入しようとしている位置よりも、他の航空機621が終端613側にいれば、他の航空機621の占有ブロックと、航空機621の占有予定ブロック512とが重ならないので、注意喚起部180は、管制官に注意を喚起しない。管制官は、航空機621が滑走路611に進入するのを許す。これにより、到着機が滑走路611から離脱するのを待たずに、航空機621が滑走路611に進入し、離陸準備をすることができるので、滑走路611の使用効率が高くなる。
【0047】
図15は、この実施の形態における出発機ブロック生成処理S430でブロック生成部150が生成する占有予定ブロック513及び占有済ブロック522の一例を示す図である。
航空機621が滑走路611に更に近づいて、航空機621と滑走路611の中心線614との間の距離が閾値W2未満になった場合、ブロック生成部150は、前方占有予定ブロック生成工程S434で、航空機621の現在位置から滑走路611の終端613までを範囲とする占有予定ブロック513を生成し、後方占有済ブロック生成工程S435で、滑走路611の始端612から航空機621の現在位置までを範囲とする占有済ブロック522を生成する。これにより、航空機621の前方に他の航空機621がいないかを監視するとともに、航空機621の後方から他の航空機621を排除する状態となる。
例えば、滑走路611に着陸中の他の航空機621がある場合、他の航空機621が終端613側にいれば、他の航空機621の占有ブロックと、航空機621の占有予定ブロック512とが重なるので、注意喚起部180が管制官に注意を喚起する。管制官は、例えば、離陸準備が整った航空機621に対して、他の航空機621が滑走路611から離脱するまで待つよう指示する。
【0048】
図16は、この実施の形態における出発機ブロック生成処理S430でブロック生成部150が生成する占有予定ブロック513及び占有済ブロック522の一例を示す図である。
航空機621が離陸するため加速しているが、まだ、すぐに停止できる程度の速度であって、航空機621の速度vが閾値V1未満である場合、ブロック生成部150は、航空機621の前方に占有予定ブロック513、後方に占有済ブロック522を生成する。
例えば、航空機621に続けて滑走路611から離陸しようとして誘導路にいる他の航空機621がある場合、他の航空機621の占有予定ブロック512と、航空機621の占有済ブロック522とが重なるので、注意喚起部180が管制官に注意を喚起する。管制官は、例えば、他の航空機621に対して、滑走路611に進入するのを待つよう指示する。
【0049】
図17は、この実施の形態における出発機ブロック生成処理S430でブロック生成部150が生成する占有済ブロック523の一例を示す図である。
航空機621が更に加速して、航空機621の速度vが閾値V1以上である場合、ブロック生成部150は、航空機621の現在位置から滑走路611の終端613までを範囲とする占有済ブロック523を生成する。これにより、航空機621の前方から他の航空機621を排除するが、航空機621の後方には他の航空機621の進入を許す状態となる。
例えば、航空機621に続けて滑走路611から離陸しようとして誘導路にいる他の航空機621がある場合、他の航空機621の占有予定ブロック512と、航空機621の占有済ブロック523とは重ならないので、注意喚起部180は、管制官に注意を喚起しない。管制官は、他の航空機621が滑走路611に進入するのを許す。これにより、出発機が離陸するのを待たずに、他の航空機621が滑走路611に進入し、離陸準備をすることができるので、滑走路611の使用効率が高くなる。
【0050】
図18は、この実施の形態における出発機ブロック生成処理S430でブロック生成部150が生成する占有済ブロック523の一例を示す図である。
航空機621が更に加速して離陸しても、航空機621がまだ滑走路611の上にいる場合、ブロック生成部150は、航空機621の現在位置から滑走路611の終端613までの範囲とする占有済ブロック523を生成する。これにより、滑走路611の大部分には他の航空機621の進入を許すが、航空機621がこれから通過する真下からは他の航空機621を排除する状態となる。
【0051】
図19は、この実施の形態における出発機ブロック生成処理S430でブロック生成部150が占有ブロックを生成しない場合の一例を示す図である。
航空機621が離陸して、滑走路611の終端613を越えた場合、ブロック生成部150は、占有ブロックを生成しない。これにより、滑走路611が完全に解放され、他の航空機621の進入を許す状態となる。
【0052】
図20は、この実施の形態における横断機ブロック生成処理S440の流れの一例を示すフローチャート図である。
横断機ブロック生成処理S440は、進入距離判定工程S441、占有予定ブロック生成工程S442、後方占有済ブロック生成工程S443を有する。
【0053】
進入距離判定工程S441において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621と滑走路611の中心線614との間の距離wを算出する。なお、滑走路611を航空機621がこれから横断しようとして滑走路611に近づいている場合と、滑走路611を航空機621が横断したのち滑走路611から遠ざかっている場合とを、距離wの符号による区別するものとする。すなわち、距離wが正の場合は、滑走路611を航空機621がこれから横断しようとして滑走路611に近づいていることを表わし、距離wが負の場合は、滑走路611を航空機621が横断したのち滑走路611から遠ざかっていることを表わすものとする。ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データから、横断機についての三つの閾値W1,W2,W3(ただし、0<W1、0<W2<W3。)を取得する。なお、これらの閾値は、到着機や出発機の場合と同じであってもよいし、異なっていてもよい。ブロック生成部150は、CPU911を用いて、算出した距離wと、閾値W1の符号を反転した閾値−W1及び閾値W2,W3とを比較する。
距離wが閾値W2以上かつW3未満である場合は、占有予定ブロック生成工程S442へ進む。
距離wが閾値−W1以上かつ閾値W2未満である場合は、後方占有済ブロック生成工程S443へ進む。
それ以外の場合は、横断機ブロック生成処理S440を終了する。すなわち、ブロック生成部150は、航空機621の占有ブロックを生成しない。これは、これから滑走路611を横断しようとしている航空機621がまだ滑走路611から十分に離れているか、あるいは、滑走路611を横断した航空機621が滑走路611から十分に離れたので、滑走路611を占有する必要がないからである。
【0054】
占有予定ブロック生成工程S442において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621が横断しようとしている滑走路611上の位置を算出する。ブロック生成部150は、CPU911を用いて、算出した位置の前後所定の区域を範囲とする占有予定ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有予定ブロックを記憶する。その後、横断機ブロック生成処理S440を終了する。
【0055】
後方占有済ブロック生成工程S443において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621の現在位置を取得する。ブロック生成部150は、CPU911を用いて、滑走路611の始端612から、取得した航空機621の現在位置までを範囲とする占有済ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有済ブロックを記憶する。その後、横断機ブロック生成処理S440を終了する。
【0056】
図21は、この実施の形態における横断機ブロック生成処理S440でブロック生成部150が生成する占有予定ブロック514の一例を示す図である。
航空機621が滑走路611を横断するために滑走路611に近づき、航空機621と滑走路611の中心線614との間の距離wが閾値W2以上かつ閾値W3未満になった場合、ブロック生成部150は、占有予定ブロック生成工程S442で、航空機621が横断しようとしている滑走路611上の位置の前後を範囲とする占有予定ブロック514を生成する。これにより、航空機621が横断しようとしている位置に、他の航空機621の占有ブロックがないかを監視する状態となる。
【0057】
図22は、この実施の形態における横断機ブロック生成処理S440でブロック生成部150が生成する占有済ブロック524の一例を示す図である。
航空機621が更に滑走路611に近づき、航空機621と滑走路611の中心線614との間の距離wが閾値−W1以上かつ閾値W2未満となった場合、ブロック生成部150は、滑走路611の始端612から航空機621の現在位置までを範囲とする占有済ブロック524を生成する。これにより、航空機621の始端612側から他の航空機621を排除する状態となる。
【0058】
図23は、この実施の形態における横断機ブロック生成処理S440でブロック生成部150が占有ブロックを生成しない場合の一例を示す図である。
航空機621が滑走路611を横断して滑走路611から離れ、航空機621と滑走路611の中心線614との間の距離wが閾値−W1未満となった場合、ブロック生成部150は、占有ブロックを生成しない。
【0059】
このように、ブロック生成部150は、航空機621の状態・位置・速度などに基づいて、占有予定ブロックや占有済ブロックなどの占有ブロックを生成する。なお、ブロック生成部150が生成する航空機621の占有ブロックの種類や範囲は、以上説明したものに限らず、ブロック生成部150は、他の種類や範囲の占有ブロックを生成する構成であってもよい。また、ブロック生成規則記憶部140が記憶したブロック生成規則データに基づいて、ブロック生成部150が生成する占有ブロックの種類や範囲を定める構成であってもよい。そうすれば、ブロック生成規則記憶部140が記憶したブロック生成規則データを更新することにより、ブロック生成部150が生成する占有ブロックの種類や範囲を変えることができ、移動体監視装置100を柔軟に運用できる。
【0060】
図24は、この実施の形態における重複判定処理S450の流れの一例を示すフローチャート図である。
重複判定処理S450において、移動体監視装置100は、占有ブロックの重複を判定し、管制官の注意を喚起する。重複判定処理S450は、移動体選択工程S451、占有済ブロック選択工程S452、重複判定工程S453、占有済ブロック繰り返し工程S454、注意喚起工程S455、移動体繰り返し工程S456を有する。
【0061】
移動体選択工程S451において、重複判定部170は、CPU911を用いて、ブロック記憶部160が占有ブロックを記憶した航空機621のなかから、航空機621を一つずつ選択する。重複判定部170は、CPU911を用いて、選択した航空機621についてブロック記憶部160が記憶した占有ブロックを取得する。選択した航空機621についてブロック記憶部160が記憶した占有ブロックが一つの場合、重複判定部170は、CPU911を用いて、取得した占有ブロックの範囲を重複判定範囲とする。選択した航空機621についてブロック記憶部160が記憶した占有ブロックが複数ある場合、重複判定部170は、CPU911を用いて、複数の占有ブロックの少なくともいずれかに属する範囲を重複判定範囲とする。
【0062】
占有済ブロック選択工程S452において、重複判定部170は、CPU911を用いて、ブロック記憶部160が記憶した占有ブロックのなかから、移動体選択工程S451で選択した航空機621以外の航空機621の占有済ブロックを一つずつ選択する。
【0063】
重複判定工程S453において、重複判定部170は、CPU911を用いて、移動体選択工程S451で取得した重複判定範囲と、占有済ブロック選択工程S452で選択した占有済ブロックとの間に重複があるか否かを判定する。
重複なしと判定した場合は、占有済ブロック繰り返し工程S454へ進む。
重複ありと判定した場合は、注意喚起工程S455へ進む。
【0064】
占有済ブロック繰り返し工程S454において、重複判定部170は、CPU911を用いて、占有済ブロック選択工程S452で選択すべき占有済ブロックをすべて選択したか否かを判定する。
まだ選択していない占有済ブロックがあると判定した場合は、占有済ブロック選択工程S452に戻り、次の占有済ブロックを選択する。
すべての占有済ブロックを選択したと判定した場合は、移動体繰り返し工程S456へ進む。
【0065】
注意喚起工程S455において、注意喚起部180は、表示装置901を用いて、移動体選択工程S451で選択した航空機621について、注意喚起メッセージを表示するなどして、管制官の注意を喚起する。
【0066】
移動体繰り返し工程S456において、重複判定部170は、CPU911を用いて、移動体選択工程S451で選択すべき航空機621をすべて選択したか否かを判定する。
まだ選択していない航空機621があると判定した場合は、移動体選択工程S451に戻り、次の航空機621を選択する。
すべての航空機621を選択したと判定した場合は、重複判定処理S450を終了する。
【0067】
図25は、この実施の形態における表示装置901が表示する画面の一例を示す図である。
表示装置901には、移動体表示部130が、例えば、空港610の地図や航空機621の位置などを表示する。また、表示装置901には、注意喚起部180が、例えば、注意喚起メッセージを表示する。注意喚起部180は、例えば、吹出しなどを用いて、管制官の注意を喚起すべき航空機621と関係がわかるように、注意喚起メッセージを表示する。また、注意喚起部180は、例えば、文字の大きさを大きくしたり、表示色を変えたりして、管制官の注意を喚起しやすいように、注意喚起メッセージを表示する。
なお、注意喚起部180は、他の航空機621の占有済ブロックが、占有ブロックと重複している航空機621について注意喚起メッセージを表示するだけでなく、他の航空機621の占有予定ブロックが、占有済ブロックと重複する航空機621についても注意喚起メッセージを表示する構成であってもよい。その場合、注意喚起レベルの違いを表現するため、注意喚起メッセージを表示する文字の大きさや表示色を変える構成であってもよい。
【0068】
図26は、この実施の形態における注意喚起部180が管制官の注意を喚起する航空機621の組み合わせの一例を示す図である。
この図において、「×」は、航空機Bの存在により、航空機Aについて注意喚起部180が管制官の注意を喚起する場合を示す。「○」は、航空機Bの存在により、航空機Aについて注意喚起部180が管制官の注意を喚起しない場合を示す。
到着機について「最終進入中」とは、航空機621と滑走路611の始端612との間の平面距離dが閾値D1以上かつ閾値D2未満である場合を示す。「着陸中」とは、平面距離dが閾値D1未満であり、かつ、航空機621と滑走路611の中心線614との間の距離wが閾値W1未満である場合を示す。
出発機及び横断機について「進入待ち」とは、航空機621と滑走路611の中心線614との間の距離wが閾値W2以上かつ閾値W3未満である場合を示す。出発機について「準備中」とは、距離wが閾値W2未満であり、かつ、航空機621の速度vが閾値V1未満である場合を示す。「離陸中」とは、航空機621の速度vが閾値V1以上dである場合を示す。横断機について「横断中」とは、距離wが閾値−W1以上かつ閾値W2未満である場合を示す。
また、「A→B」は、航空機Aが航空機Bよりも始端612の側にあることを示す。逆に、「B→A」は、航空機Aが航空機Bよりも終端613の側にあることを示す。
【0069】
航空機Bが、到着機であって最終進入中である場合、および、出発機または横断機であって進入待ちである場合、ブロック生成部150は、航空機Bについて占有予定ブロックを生成するが占有済ブロックを生成しないので、注意喚起部180は、航空機Aについて管制官の注意を喚起しない。
【0070】
航空機Aが航空機Bよりも終端613側にある場合であって、航空機Bが、到着機で着陸中の場合および出発機で離陸中の場合、ブロック生成部150が航空機Bの終端613側に生成する占有済ブロックと、航空機Aの占有ブロックとが重複するので、注意喚起部180は、航空機Aについて管制官の注意を喚起する。
また、航空機Aが航空機Bよりも始端612側にある場合であって、航空機Bが、出発機で準備中の場合および横断機で横断中の場合、ブロック生成部150が航空機Bの始端612側に生成する占有済ブロックと、航空機Aの占有ブロックとが重複するので、注意喚起部180は、航空機Aについて管制官の注意を喚起する。
【0071】
航空機Aが航空機Bよりも始端612側にある場合であって、航空機Bが、到着機で着陸中の場合および出発機で離陸中の場合、ブロック生成部150は、航空機Bの終端613側に占有済ブロックを生成する。航空機Aが、到着機で最終進入中あるいは着陸中の場合および出発機で準備中あるいは離陸中の場合は、ブロック生成部150が航空機Aの終端613側に占有ブロックを生成するので、占有ブロックが重複し、注意喚起部180は、航空機Aについて管制官の注意を喚起する。航空機Aが、出発機または横断機で進入待ちの場合および横断機で横断中の場合は、ブロック生成部150が航空機Aの終端613側に占有ブロックを生成しないので、占有ブロックは重複せず、注意喚起部180は、航空機Aについて管制官の注意を喚起しない。
【0072】
航空機Aが航空機Bよりも終端613側にある場合であって、航空機Bが、出発機で準備中の場合および横断機で横断中の場合、ブロック生成部150は、航空機Bの始端612側に占有済ブロックを生成する。航空機Aが、出発機で準備中の場合および横断機で横断中の場合は、注意喚起部180が航空機Aの始端612側に占有ブロックを生成するので、占有ブロックが重複し、注意喚起部180は、航空機Aについて管制官の注意を喚起する。航空機Aが到着機で着陸中の場合および出発機または横断機で進入待ちの場合および出発機で離陸中の場合は、注意喚起部180が航空機Aの始端612側に占有ブロックを生成しないので、占有ブロックが重複せず、注意喚起部180は、航空機Aについて管制官の注意を喚起しない。
【0073】
このように、占有ブロックの重複に基づいて、注意喚起部180が管制官の注意を喚起することにより、二つの航空機621の状態の組み合わせによって管制官の注意を喚起するか否かを細かく設定することができる。
【0074】
この実施の形態における移動体監視装置100は、データを処理する処理装置(CPU911)と、ブロック生成部150と、重複判定部170と、注意喚起部180とを有する。
上記ブロック生成部150は、上記処理装置を用いて、複数の移動体(航空機621)それぞれについて、上記移動体が占有する区域を表わす占有ブロックを生成する。
上記重複判定部170は、上記処理装置を用いて、上記複数の移動体について上記ブロック生成部150が生成した複数の占有ブロックが重複しているか否かを判定する。
上記注意喚起部180は、上記処理装置を用いて、上記複数の占有ブロックが重複していると上記重複判定部170が判定した場合に、監視者(管制官)の注意を喚起する。
【0075】
この実施の形態における移動体監視装置100によれば、複数の移動体についてブロック生成部150が生成した占有ブロックが重複しているか否かを判定することにより、監視者の注意を喚起すべき場合とそうでない場合とを適切に峻別することができる。これにより、複数の移動体が所定の位置関係となったことを監視者が見落とす可能性が低くなるとともに、監視者の注意義務を軽減することにより、監視者が適切な状況判断をすることができる。
【0076】
この実施の形態における移動体監視装置100において、上記ブロック生成部150は、上記移動体が滑走路611を滑走している航空機621である場合に、上記処理装置を用いて、上記移動体の現在位置から上記滑走路611の終端613までの区域を上記移動体が占有するものとして、占有ブロックを生成する。
【0077】
この実施の形態における移動体監視装置100によれば、移動体が離陸あるいは着陸のため滑走路611を滑走している場合に、滑走路611のうち、移動体の移動方向にあたる部分をその移動体の占有ブロックとするので、その区域に他の移動体が進入した場合や進入しようとした場合に、監視者の注意を喚起することができる。また、滑走路611のうち、移動体の移動方向と反対の方向にあたる部分は、その移動体の占有ブロックとしないので、その区域に他の移動体が進入しても監視者の注意を喚起せず、他の移動体の進入を許すことができる。これにより、滑走路611の使用効率を高めることができる。
【0078】
この実施の形態における移動体監視装置100において、上記ブロック生成部150は、上記移動体が滑走路611に進入しようとしている航空機621である場合に、上記処理装置を用いて、上記移動体が進入しようとしている上記滑走路611上の区域を上記移動体が占有するものとして、占有ブロックを生成する。
【0079】
この実施の形態における移動体監視装置100によれば、移動体が滑走路611に進入しようとしている場合に、滑走路611のうち、移動体が進入しようとしている部分をその移動体の占有ブロックとするので、移動体が滑走路611に進入する前に、監視者の注意を喚起することができる。
【0080】
この実施の形態における移動体監視装置100において、上記ブロック生成部150は、上記移動体が滑走路611に進入した航空機621である場合に、上記処理装置を用いて、上記滑走路611の始端612から、上記移動体の現在位置までの区域を上記移動体が占有するものとして、占有ブロックを生成する。
【0081】
この実施の形態における移動体監視装置100によれば、移動体が滑走路611に進入した場合に、滑走路611のうち、他の移動体が移動体のほうへ向かって滑走してくる方向の部分をその移動体の占有ブロックとするので、移動体のほうへ向かってくる他の移動体がある場合に、監視者の注意を喚起することができる。
【0082】
この実施の形態における移動体監視装置100において、上記ブロック生成部150は、上記処理装置を用いて、上記占有ブロックとして、上記移動体が現に占有している区域を表わす占有済ブロックと、上記移動体が占有しようとしている区域を表わす占有予定ブロックとを生成する。
上記注意喚起部180は、上記処理装置を用いて、一の移動体についての占有済ブロックと他の移動体についての占有予定ブロックとが重複していると上記重複判定部170が判定した場合に、上記他の移動体について、上記監視者の注意を喚起する。
【0083】
この実施の形態における移動体監視装置100によれば、二つの移動体の占有ブロックが重複した場合に、二つの移動体について対称に注意を喚起するのではなく、その区域を先に占有している移動体を優先し、後から占有しようとする移動体について監視者の注意を喚起することができる。これにより、監視者は、より適切な状況判断をすることができる。
【0084】
この実施の形態における移動体監視装置100は、データを処理する処理装置(CPU911)を有するコンピュータが、上記コンピュータを移動体監視装置100として動作させるコンピュータプログラムを実行することにより実現できる。
この実施の形態における移動体監視装置100を実現するコンピュータプログラムによれば、複数の移動体についてブロック生成部150が生成した占有ブロックが重複しているか否かを判定することにより、監視者の注意を喚起すべき場合とそうでない場合とを適切に峻別することができる。これにより、複数の移動体が所定の位置関係となったことを監視者が見落とす可能性が低くなるとともに、監視者の注意義務を軽減することにより、監視者が適切な状況判断をすることができる移動体監視装置100を実現できる。
【0085】
この実施の形態における移動体監視装置100が、複数の移動体(航空機621)を監視する移動体監視方法は、以下の工程を有する。
上記処理装置(CPU911)が、上記複数の移動体それぞれについて、上記移動体が占有する区域を表わす占有ブロックを生成する。
上記処理装置が、上記複数の移動体について生成した複数の占有ブロックが重複しているか否かを判定する。
上記処理装置が、上記複数の占有ブロックが重複していると判定した場合に、監視者の注意を喚起する。
【0086】
この実施の形態における移動体監視方法によれば、複数の移動体について生成した占有ブロックが重複しているか否かを判定することにより、監視者の注意を喚起すべき場合とそうでない場合とを適切に峻別することができる。これにより、複数の移動体が所定の位置関係となったことを監視者が見落とす可能性が低くなるとともに、監視者の注意義務を軽減することにより、監視者が適切な状況判断をすることができる。
【0087】
以上説明した移動体監視装置100は、出発機、到着機、滑走路横断機など目的が異なる航空機621が同時に滑走路611への進入要求をした場合などであっても、管制官が、状況に応じて短時間に的確な判断をすることができるよう、管制官の判断を支援する。
移動体監視装置100は、空港地上面における移動中の航空機621の位置に応じて、滑走路611上で進入不可となる部分を占有ブロックとして生成し、生成した占有ブロックを用いて滑走路611の占有を監視する。占有ブロックには、他の航空機621が進入できない。占有ブロックに他の航空機621が進入した場合、移動体監視装置100は、注意喚起状態であると判定して、管制官に対して注意喚起提供をする。
移動体監視装置100は、航空機621の移動に合わせて、占有ブロックの大きさを伸縮する。例えば、航空機621が到着機である場合、移動体監視装置100は、着陸の一定時間前から着陸予定の滑走路611全面に占有ブロックを生成し、他の出発予定機や滑走路横断機が進入できない状況とする。到着機が着陸したのち、移動体監視装置100は、航空機621の動きに合わせて、占有ブロックを縮小していく。他の航空機621が進入しようとしている位置の占有ブロックがなくなることにより、他の航空機621が滑走路611に進入可能となる。
【0088】
航空機621の動きに合わせて占有ブロックを生成するので、その占有ブロックに対する進入可不可の判定をシステマティックに行うことができる。
航空機621の動きに合わせて占有ブロックを縮小するので、むやみに進入不可状態を作り出すことなく、滑走路611を効率的に利用することができる。
これにより、管制官は、必要最小限の注意喚起状態に対して、状況判断などの業務を行えばよい。また、管制官は、滑走路611への着陸、滑走路611からの離陸、滑走路611の横断を、最大限許可することができるので、滑走路611利用の効率化、離着陸機数の増大が可能となる。
【0089】
実施の形態2.
実施の形態2について、図27〜図31を用いて説明する。
なお、実施の形態1と共通する部分については、同一の符号を付し、説明を省略する。
【0090】
この実施の形態では、航空機621の占有済ブロックに複数の種類を設ける。他の航空機621の種別に応じて、他の航空機621の占有ブロックとの重複を判定する占有済ブロックを使い分ける。例えば、ブロック生成部150は、ある航空機621について、到着機に対する占有済ブロックと、出発機に対する占有済ブロックとを生成する。他の航空機621が到着機である場合、重複判定部170は、他の航空機621の占有ブロックと、その航空機621の到着機に対する占有済ブロックとの重複を判定し、他の航空機621が出発機である場合、重複判定部170は、他の航空機621の占有ブロックと、その航空機621の出発機に対する占有済ブロックとの重複を判定する。
これにより、移動体監視装置100は、管制官の注意を喚起する場合と喚起しない場合との仕分けを、より細かく設定することができるので、本当に管制官の注意を喚起する必要があるときのみ管制官の注意を喚起し、かつ、管制官の注意を喚起する必要がある場合に確実に管制官の注意を喚起することができる。
【0091】
図27は、この実施の形態における到着機ブロック生成処理S420の流れの一例を示すフローチャート図である。
到着機ブロック生成処理S420は、実施の形態1で説明した工程に加えて、一部対象ブロック生成工程S423を有する。
【0092】
始端距離判定工程S421において、ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データに基づいて、三つの閾値D1,D2,D3(ただし、0<D1<D3<D2。)を取得する。ブロック生成部150は、CPU911を用いて、算出した平面距離dと、三つの閾値D1,D2,D3とを比較する。
平面距離dが閾値D2以上である場合は、到着機ブロック生成処理S420を終了する。
平面距離dが閾値D3以上かつ閾値D2未満である場合は、占有予定ブロック生成工程S422へ進む。
平面距離dが閾値D1以上かつ閾値D3未満である場合は、一部対象ブロック生成工程S423へ進む。
平面距離dが0以上かつ閾値D1未満である場合は、全部占有済ブロック生成工程S424へ進む。
平面距離dが0未満である場合は、離脱距離判定工程S426へ進む。
【0093】
一部対象ブロック生成工程S423において、ブロック生成部150は、CPU911を用いて、滑走路611の始端612から終端613までを範囲とし、出発機および横断機のみを対象とする占有済ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有済ブロックを記憶する。その後、到着機ブロック生成処理S420を終了する。
【0094】
図28は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する一部対象占有済ブロック531の一例を示す図である。
一部対象占有済ブロック531は、出発機および横断機に対する重複判定の基礎となるが、到着機に対しては重複判定の基礎とならない占有済ブロックである。
滑走路611に着陸しようとしている航空機621と滑走路611の始端612との間の平面距離dが閾値D1以上かつ閾値D3未満になった場合、ブロック生成部150は、滑走路611の全部を範囲とする一部対象占有済ブロック531を生成する。
【0095】
このように、航空機621が到着機である場合に、最終進入中の状態と着陸中の状態との間に中間段階を設ける。中間段階では、滑走路611から出発機と横断機とを排除するが、到着機は排除しない。この時点で、滑走路611上にいる到着機は、航空機621の前に滑走路611に着陸した他の航空機621であるから、すぐに滑走路611から離脱することが期待できるからである。これにより、滑走路611に他の航空機621が新たに進入してくるのを防ぎつつ、航空機621の着陸間隔を短くすることができるので、滑走路611の利用効率を高くすることができる。
【0096】
図29は、この実施の形態における横断機ブロック生成処理S440の流れの一例を示すフローチャート図である。
横断機ブロック生成処理S440は、実施の形態1で説明した後方占有済ブロック生成工程S443に代えて、一部対象ブロック生成工程S444を有する。
【0097】
進入距離判定工程S441において、航空機621と滑走路611の中心線614との距離wが閾値−W1以上かつ閾値W2未満である場合、一部対象ブロック生成工程S444へ進む。
【0098】
一部対象ブロック生成工程S444において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621の現在位置を取得する。ブロック生成部150は、CPU911を用いて、滑走路611の始端612から、取得した航空機621の現在位置までを範囲とし、到着機および出発機のみを対象とする占有済ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、生成した占有済ブロックを記憶する。その後、横断機ブロック生成処理S440を終了する。
【0099】
図30は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する一部対象占有済ブロック534の一例を示す図である。
一部対象占有済ブロック534は、到着機および出発機に対する重複判定の基礎となるが、横断機に対する重複判定の基礎とならない占有済ブロックである。
滑走路611を横断しようとしている航空機621と、滑走路611の中心線614との間の距離dが閾値−W1以上かつ閾値W2未満になった場合、ブロック生成部150は、滑走路611の始端612から航空機621の現在位置までを範囲とする一部対象占有済ブロック534を生成する。これにより、航空機621の始端612側から到着機と出発機とを排除するが、横断機は排除しない状態となる。したがって、同じ滑走路611を複数の航空機621が同時に横断することができる。
【0100】
次に、重複判定処理S450について、図24を用いて、実施の形態1と異なる部分を説明する。
【0101】
占有済ブロック選択工程S452において、重複判定部170は、CPU911を用いて、ブロック記憶部160が記憶した占有ブロックのなかから、移動体選択工程S451で選択した航空機621以外の航空機621の占有済ブロックであって、移動体選択工程S451で選択した航空機621の種別を対象に含む占有済ブロックを一つずつ選択する。
例えば、移動体選択工程S451で選択した航空機621が到着機である場合であれば、重複判定部170は、ブロック記憶部160が記憶した占有済ブロックのなかから、対象を限定しない占有済ブロックや、到着機を対象に含む一部対象占有済ブロックを選択するが、到着機を対象に含まない一部対象占有済ブロックは選択しない。
【0102】
これにより、航空機621の占有ブロックと、対象を限定しない他の航空機621の占有済ブロックや、航空機621の種別を対象に含む他の航空機621の一部対象占有済ブロックとが重複する場合に、注意喚起部180は、航空機621について管制官の注意を喚起する。
【0103】
図31は、この実施の形態における注意喚起部180が管制官の注意を喚起する航空機621の組み合わせの一例を示す図である。
到着機について「最終進入中」とは、航空機621と滑走路611の始端612との平面距離dが閾値D3以上かつ閾値D2未満の場合を示す。「中間段階」とは、平面距離dが閾値D1以上かつ閾値D2未満の場合を示す。
【0104】
航空機Bが到着機であって中間段階である場合、ブロック生成部150は、航空機Bについて出発機および横断機を対象とする占有済ブロックを生成するので、航空機Aが出発機または横断機であれば、注意喚起部180は、航空機Aについて管制官の注意を喚起する。航空機Aが到着機であれば、注意喚起部180は、航空機Aについて管制官の注意を喚起しない。
【0105】
航空機Bが横断機であって横断中である場合、ブロック生成部150は、航空機Bについて到着機および出発機を対象とする占有済ブロックを生成するので、航空機Aも横断機であれば、注意喚起部180は、航空機Aについて管制官の注意を喚起しない。
【0106】
このように、航空機621の種別により、重複を判定する占有ブロックを変えることにより、管制官の注意を喚起するか否かを、更に適切に設定することができる。
【0107】
この実施の形態における移動体監視装置100において、上記ブロック生成部150は、上記処理装置(CPU911)を用いて、他の移動体(航空機621)の種別ごとに異なる区域を表わす占有ブロックを生成する。
上記注意喚起部180は、上記処理装置を用いて、他の移動体についての占有ブロックと、一の移動体について上記他の移動体の種別に対する占有ブロックとが重複していると上記重複判定部170が判定した場合に、上記他の移動体について、上記監視者の注意を喚起する。
【0108】
この実施の形態における移動体監視装置100によれば、注意を喚起すべき相手である他の移動体の種別により異なる占有ブロックを生成するので、移動体の種別に応じた細かな設定をすることができ、更に適切に、監視者の注意を喚起することができる。
【0109】
以上説明した移動体監視装置100によれば、占有ブロックの監視対象の設定など、占有ブロックに付加価値を設けることにより、きめ細かい監視が可能となる。
【0110】
移動体監視装置100は、航空機データ(移動体データ)を入力する。航空機データは、航空機621の便名、位置、高度、速度などを保持する。移動体監視装置100は、航空機データに基づいて、航空機621が出発機、到着機もしくは滑走路横断機のいずれであるかを判定する。移動体監視装置100は、航空機621の位置に応じて、ブロック情報(占有ブロック)を生成し、生成したブロック情報に、監視対象となるブロック対象を付加する。移動体監視装置100は、生成したブロック情報に基づいて、ブロック情報の重なりを監視することにより、滑走路611における航空機621の監視を実現する。ブロック情報は、例えば、滑走路611を一次元の線分とみなし、始端612からの距離により、占有ブロックの始点を表わす数値と、終点を表わす数値との組である。
【0111】
到着機については、着陸予定の滑走路611の始端612からの距離dに応じて、以下のようにステータスを定義する。移動体監視装置100は、ステータスに応じて、滑走路611上でのブロック範囲と、ブロック対象となる航空機621とを定める。
・最終進入中:進入中の滑走路611の始端612からの距離dが一定値(閾値D3)以上である場合。ブロック範囲は、滑走路611全域。ブロック対象は、なし。
・滑走路占有状態(中間段階):進入中の滑走路611の始端612からの距離dが一定値(閾値D1)以上離れている場合。ブロック範囲は、滑走路611全域。ブロック対象は、出発機および滑走路横断機。
・ランディング状態(着陸中):進入中の滑走路611の始端612からの距離dが一定値(閾値D1)未満である場合。ブロック範囲は、滑走路611全域。ブロック対象は、全種類。
・着陸状態(着陸中):到着機が滑走路611上に存在する場合。ブロック範囲は、到着機の位置から滑走路611の終端613まで。ブロック対象は、全種類。
移動体監視装置100は、到着機と滑走路611の中心線614との距離wが一定値(閾値W1)以上となった場合に、滑走路611から離脱したと判定し、占有ブロックを消去する。
なお、閾値D1,D3,W1は、パラメータとして任意に設定することができる。同様に、ブロック対象も、パラメータとして任意に設定することができる。
【0112】
出発機については、離陸予定の滑走路611からの距離w、滑走路611への進入状態などに応じて、以下のようにステータスを定義する。移動体監視装置100は、ステータスに応じて、滑走路611上でのブロック範囲と、ブロック対象となる航空機621とを定める。
・滑走路予占有状態(進入待ち):離陸予定の滑走路611に隣接する誘導路との交点からの距離wが一定値(閾値W2)以上である場合。ブロック範囲は、交点周辺。ブロック対象は、なし。
・滑走路占有状態(準備中):出発機が滑走路611上に存在する場合。ブロック範囲は、滑走路611の始端612から出発機の位置まで。ブロック対象は、全種類。
・離陸滑走状態(離陸中):出発機が滑走路611上に存在し、速度vが一定値(閾値V1)以上かつ加速度aが一定値以上の場合。ブロック範囲は、出発機の位置から滑走路611の終端613まで。ブロック対象は、全種類。
移動体監視装置100は、出発機と滑走路611の中心線614との距離wが一定値(閾値W1)以上となった場合に、出発機が離陸を中断して滑走路611から離脱したと判定し、占有ブロックを消去する。
なお、閾値W1,W2は、パラメータとして任意に設定することができる。同様に、ブロック対象も、パラメータとして任意に設定することができる。
【0113】
滑走路横断機については、横断する滑走路611の滑走路横断箇所からの距離w、滑走路611への進入状態などに応じて、以下のようにステータスを定義する。移動体監視装置100は、ステータスに応じて、滑走路611上でのブロック範囲と、ブロック対象となる航空機621とを定める。
・滑走路横断前状態(進入待ち):滑走路611を横断する候補の航空機621の位置と滑走路611との最小距離wが、一定値(閾値W3)以内である場合。ブロック範囲は、横断予定部分(誘導路幅)。ブロック対象は、出発機および滑走路横断機。
・滑走路横断中状態(横断中):滑走路611を横断する候補の航空機621の位置と滑走路611との最小距離wが一定値(閾値W2)以内である場合。ブロック範囲は、滑走路611の始端612から、航空機621が進入した位置まで。ブロック対象は、出発機および到着機。
移動体監視装置100は、横断機の位置と滑走路611との最小距離wが一定値(閾値W1)以上となった場合に、横断が終了したと判定し、占有ブロックを消去する。
なお、閾値W1,W2,W3は、パラメータとして任意に設定することができる。同様に、ブロック対象も、パラメータとして任意に設定することができる。
【0114】
以上のようにして生成した占有ブロック(ブロック範囲およびブロック対象)と、各航空機621のステータス(到着機、出発機または滑走路横断機)とに基づいて、移動体監視装置100は、滑走路占有の監視を行う。移動体監視装置100は、航空機621の占有ブロックと、他の航空機621の占有ブロックとが重なり、かつ、他の航空機621の占有ブロックのブロック対象がその航空機621と合致した場合、その航空機621に対する注意喚起状態であると判定し、管制官に対して注意喚起情報を提供する。
【0115】
例えば、最終進入中の到着機と、滑走路占有状態の出発機とがある場合、到着機の占有ブロックのブロック範囲(全範囲)と、出発機の占有ブロックのブロック範囲(始端612側)とが重なっている。到着機の占有ブロックのブロック対象(なし)には出発機が含まれないので、移動体監視装置100は、出発機に対する注意喚起状態ではないと判定する。また、出発機の占有ブロックのブロック対象(全種類)には到着機が含まれるので、移動体監視装置100は、到着機に対する注意喚起状態であると判定する。
その後、到着機が滑走路611に近づいて滑走路占有状態になると、ブロック範囲は変わらず、到着機の占有ブロックのブロック対象が出発機または滑走路横断機に変わるので、移動体監視装置100は、出発機に対しても注意喚起状態になったと判定する。
【0116】
また、例えば、滑走路占有状態(離陸待ち状態)の出発機と、それよりも終端613側を横断しようとしている滑走路横断前状態の滑走路横断機とがある場合、出発機の占有ブロックのブロック範囲(始端612側)と、滑走路横断機の占有ブロックのブロック範囲(横断予定部分)とが重ならないので、移動体監視装置100は、注意喚起状態でないと判定する。
その後、滑走路横断機が滑走路611に進入して、滑走路横断中状態になると、滑走路横断機の占有ブロックのブロック範囲が始端612側に変わり、ブロック範囲が重なる。出発機の占有ブロックのブロック対象(全種類)には滑走路横断機が含まれるので、移動体監視装置100は、滑走路横断機に対する注意喚起状態であると判定する。また、滑走路横断機の占有ブロックのブロック対象(到着機または出発機)には出発機が含まれるので、移動体監視装置100は、出発機に対しても注意喚起状態であると判定する。
【0117】
また、例えば、滑走路占有状態の到着機Aと、ランディング状態の到着機Bとがある場合、到着機Aの占有ブロックのブロック範囲(全範囲)と、到着機Bの占有ブロックのブロック範囲(終端613側)とが重なっている。到着機Aの占有ブロックのブロック対象(出発機または滑走路横断機)には到着機が含まれないので、移動体監視装置100は、到着機Bに対する注意喚起状態でないと判定する。また、到着機Bの占有ブロックのブロック対象(全種類)には到着機が含まれるので、移動体監視装置100は、到着機Aに対する注意喚起状態であると判定する。
【0118】
このように、ブロック対象をパラメータで設定可能とすることにより、注意喚起を必要最小限に抑えることができる。例えば、先行着陸機がランディング状態(着陸状態)で滑走路611上に存在し、後続機が滑走路611に近づいてきた場合、移動体監視装置100は注意喚起をしないので、管制官に業務が発生せず、管制官の負荷を減らすことができる。
また、到着機・出発機・滑走路横断機の位置や状態に応じて占有ブロックを柔軟に生成することにより、注意喚起を必要最小限に抑えることができる。更に、そのブロック範囲をパラメータで設定可能とすることにより、管制官の業務方式に応じた設定が可能となる。これにより、注意喚起を必要最小限に抑えることができるとともに、管制官を支援することにより、滑走路611からの離陸回数、滑走路611への着陸回数、滑走路611の横断回数を、最大限に増やすことができ、滑走路611の利用効率を高めることができる。
【符号の説明】
【0119】
100 移動体監視装置、110 移動体入力部、120 移動体記憶部、130 移動体表示部、140 ブロック生成規則記憶部、150 ブロック生成部、160 ブロック記憶部、170 重複判定部、180 注意喚起部、511〜514 占有予定ブロック、521〜524 占有済ブロック、531,534 一部対象占有済ブロック、610 空港、611 滑走路、612 始端、613 終端、614 中心線、621 航空機、901 表示装置、902 キーボード、903 マウス、904 FDD、905 CDD、906 プリンタ装置、907 スキャナ装置、910 システムユニット、911 CPU、912 バス、913 ROM、914 RAM、915 通信装置、920 磁気ディスク装置、921 OS、922 ウィンドウシステム、923 プログラム群、924 ファイル群、931 電話器、932 ファクシミリ機、940 インターネット、941 ゲートウェイ、942 LAN。
【技術分野】
【0001】
この発明は、航空機などの移動体が多数存在する空港の滑走路などトラフィックが多い場所において、移動体を監視し、移動体に対する指示などを行う監視者を支援する移動体監視装置に関する。
【背景技術】
【0002】
空港の滑走路には、出発機、到着機、横断機など様々な目的を持つ航空機が、進入・離脱を繰り返す。このようなトラフィックが多い場所において、管制官などの監視者は、状況を正しく判断し、移動体に対して適切な指示をする必要がある。監視者の指示が適切でなければ、事故や移動体の滞留を招く可能性がある。
このような状況において、移動体の位置関係などを表示して、監視者を支援する移動体監視装置がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−197600号公報
【特許文献2】特開2003−85700号公報
【特許文献3】特開2005−250691号公報
【特許文献4】特開2005−339392号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の移動体監視装置は、安全性を重視する余り、移動体の間隔を広めに取る傾向があり、移動体の数が多い場合に滞留を招くため、あまり多くの移動体を捌くことができなかった。また、監視者の判断で移動体の間隔を狭めると、移動体監視装置が多数の警告を発することになり、監視者の注意が分散してしまうため、かえって安全性を損ねる可能性があった。
この発明は、例えば上記のような課題を解決するためになされたものであり、監視者の注意を喚起すべき場合とそうでない場合とを適切に峻別することにより、監視者の注意義務を軽減し、監視者が適切な判断をできるようにすることを目的とする。
【課題を解決するための手段】
【0005】
この発明にかかる移動体監視装置は、データを処理する処理装置と、ブロック生成部と、重複判定部と、注意喚起部とを有し、
上記ブロック生成部は、上記処理装置を用いて、複数の移動体それぞれについて、上記移動体が占有する区域を表わす占有ブロックを生成し、
上記重複判定部は、上記処理装置を用いて、上記複数の移動体について上記ブロック生成部が生成した複数の占有ブロックが重複しているか否かを判定し、
上記注意喚起部は、上記処理装置を用いて、上記複数の占有ブロックが重複していると上記重複判定部が判定した場合に、監視者の注意を喚起することを特徴とする。
【発明の効果】
【0006】
この発明にかかる移動体監視装置によれば、複数の移動体についてブロック生成部が生成した占有ブロックが重複しているか否かを判定することにより、監視者の注意を喚起すべき場合とそうでない場合とを適切に峻別することができる。これにより、複数の移動体が所定の位置関係となったことを監視者が見落とす可能性が低くなるとともに、監視者の注意義務を軽減することにより、監視者が適切な状況判断をすることができる。
【図面の簡単な説明】
【0007】
【図1】実施の形態1における移動体監視装置100が航空機621(移動体の一例)を監視する空港610の構成の一例を示す図。
【図2】実施の形態1における移動体監視装置100の外観の一例を示す斜視図。
【図3】実施の形態1における移動体監視装置100のハードウェア資源の一例を示す図。
【図4】実施の形態1における移動体監視装置100の機能ブロックの構成の一例を示すブロック構成図。
【図5】実施の形態1におけるブロック生成処理S400の流れの一例を示すフローチャート図。
【図6】実施の形態1における到着機ブロック生成処理S420の流れの一例を示すフローチャート図。
【図7】実施の形態1における到着機ブロック生成処理S420でブロック生成部150が生成する占有予定ブロック511の一例を示す図。
【図8】実施の形態1における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図。
【図9】実施の形態1における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図。
【図10】実施の形態1における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図。
【図11】実施の形態1における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図。
【図12】実施の形態1における到着機ブロック生成処理S420でブロック生成部150が占有ブロックを生成しない場合の一例を示す図。
【図13】実施の形態1における出発機ブロック生成処理S430の流れの一例を示すフローチャート図。
【図14】実施の形態1における出発機ブロック生成処理S430でブロック生成部150が生成する占有予定ブロック512の一例を示す図。
【図15】実施の形態1における出発機ブロック生成処理S430でブロック生成部150が生成する占有予定ブロック513及び占有済ブロック522の一例を示す図。
【図16】実施の形態1における出発機ブロック生成処理S430でブロック生成部150が生成する占有予定ブロック513及び占有済ブロック522の一例を示す図。
【図17】実施の形態1における出発機ブロック生成処理S430でブロック生成部150が生成する占有済ブロック523の一例を示す図。
【図18】実施の形態1における出発機ブロック生成処理S430でブロック生成部150が生成する占有済ブロック523の一例を示す図。
【図19】実施の形態1における出発機ブロック生成処理S430でブロック生成部150が占有ブロックを生成しない場合の一例を示す図。
【図20】実施の形態1における横断機ブロック生成処理S440の流れの一例を示すフローチャート図。
【図21】実施の形態1における横断機ブロック生成処理S440でブロック生成部150が生成する占有予定ブロック514の一例を示す図。
【図22】実施の形態1における横断機ブロック生成処理S440でブロック生成部150が生成する占有済ブロック524の一例を示す図。
【図23】実施の形態1における横断機ブロック生成処理S440でブロック生成部150が占有ブロックを生成しない場合の一例を示す図。
【図24】実施の形態1における重複判定処理S450の流れの一例を示すフローチャート図。
【図25】実施の形態1における表示装置901が表示する画面の一例を示す図。
【図26】実施の形態1における注意喚起部180が管制官の注意を喚起する航空機621の組み合わせの一例を示す図。
【図27】実施の形態2における到着機ブロック生成処理S420の流れの一例を示すフローチャート図。
【図28】実施の形態2における到着機ブロック生成処理S420でブロック生成部150が生成する一部対象占有済ブロック531の一例を示す図。
【図29】実施の形態2における横断機ブロック生成処理S440の流れの一例を示すフローチャート図。
【図30】実施の形態2における到着機ブロック生成処理S420でブロック生成部150が生成する一部対象占有済ブロック534の一例を示す図。
【図31】実施の形態2における注意喚起部180が管制官の注意を喚起する航空機621の組み合わせの一例を示す図。
【発明を実施するための形態】
【0008】
実施の形態1.
実施の形態1について、図1〜図26を用いて説明する。
【0009】
図1は、この実施の形態における移動体監視装置100が航空機621(移動体の一例)を監視する空港610の構成の一例を示す図である。
空港610は、滑走路611を有する。滑走路611の両端を始端612及び終端613と呼ぶ。航空機621は、始端612側から終端613側へ向けて移動するものとする。すなわち、離陸する航空機621は、始端612付近から終端613側へ向けて加速して離陸し、着陸する航空機621は、始端612付近に着地して終端613へ向かって減速して着陸する。したがって、風向きなどにより滑走路611を逆向きに使用する場合には、始端612と終端613との呼び方が逆になる。また、滑走路611の長手方向の中心となる線分を中心線614と呼ぶ。
【0010】
滑走路611付近には、多数の航空機621が存在する。滑走路611付近に存在する航空機621は、大きく分けて、出発機、到着機、横断機の三つに分けられる。出発機は、空港610から離陸する航空機621であり、滑走路611付近の誘導路で待機している航空機621、滑走路611に移動した航空機621、離陸のため加速している航空機621、離陸して滑走路611の上に浮いている航空機621、滑走路611の延長線上を飛んでいる航空機621などである。到着機は、空港610に着陸する航空機621であり、着陸準備のため滑走路611の延長線を滑走路611に向けて降下している航空機621、滑走路611の上に浮いていてもうすぐ着陸する航空機621、滑走路611に着地した航空機621、停止するため減速している航空機621、滑走路611から誘導路に向かって地上を移動している航空機621などである。横断機は、離陸や着陸のために滑走路611に入るのではなく、滑走路611の向こう側へ移動するため滑走路611を横切る航空機621であり、滑走路611付近の誘導路で待機している航空機621、滑走路611を横断中の航空機621、横断を終えて反対側の誘導路へ移動した航空機621などである。
このように、滑走路611付近には、様々な目的で移動している多数の航空機621が存在している。これらの航空機621を適切に誘導することにより、滑走路611の利用効率を向上し、航空機621の発着回数を増やすことができる。
【0011】
空港610は、図示していない空港面探知レーダやマルチラテレーションシステムなどにより、航空機621の位置を検出する移動体検出装置を備える。移動体監視装置100は、移動体検出装置が検出した航空機621の位置に基づいて、航空機621を監視し、管制官による管制業務を補助する。
【0012】
図2は、この実施の形態における移動体監視装置100の外観の一例を示す斜視図である。
移動体監視装置100は、システムユニット910、CRT(Cathode・Ray・Tube)やLCD(液晶)の表示画面を有する表示装置901、キーボード902(Key・Board:K/B)、マウス903、FDD904(Flexible・Disk・Drive)、コンパクトディスク装置905(CDD)、プリンタ装置906、スキャナ装置907などのハードウェア資源を備え、これらはケーブルや信号線で接続されている。
システムユニット910は、コンピュータであり、ファクシミリ機932、電話器931とケーブルで接続され、また、ローカルエリアネットワーク942(LAN)、ゲートウェイ941を介してインターネット940に接続されている。
【0013】
図3は、この実施の形態における移動体監視装置100のハードウェア資源の一例を示す図である。
移動体監視装置100は、プログラムを実行するCPU911(Central・Processing・Unit、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、プロセッサともいう)を備えている。CPU911は、バス912を介してROM913、RAM914、通信装置915、表示装置901、キーボード902、マウス903、FDD904、CDD905、プリンタ装置906、スキャナ装置907、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。磁気ディスク装置920の代わりに、光ディスク装置、メモリカード読み書き装置などの記憶装置でもよい。
RAM914は、揮発性メモリの一例である。ROM913、FDD904、CDD905、磁気ディスク装置920の記憶媒体は、不揮発性メモリの一例である。これらは、記憶装置あるいは記憶部の一例である。通信装置915、キーボード902、スキャナ装置907、FDD904などは、入力部、入力装置の一例である。
また、通信装置915、表示装置901、プリンタ装置906などは、出力部、出力装置の一例である。
【0014】
通信装置915は、ファクシミリ機932、電話器931、LAN942等に接続されている。通信装置915は、LAN942に限らず、インターネット940、ISDN等のWAN(ワイドエリアネットワーク)などに接続されていても構わない。インターネット940或いはISDN等のWANに接続されている場合、ゲートウェイ941は不用となる。
磁気ディスク装置920には、オペレーティングシステム921(OS)、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。プログラム群923のプログラムは、CPU911、オペレーティングシステム921、ウィンドウシステム922により実行される。
【0015】
上記プログラム群923には、以下に述べる実施の形態の説明において「〜部」として説明する機能を実行するプログラムが記憶されている。プログラムは、CPU911により読み出され実行される。
ファイル群924には、以下に述べる実施の形態の説明において、「〜の判定結果」、「〜の計算結果」、「〜の処理結果」として説明する情報やデータや信号値や変数値やパラメータが、「〜ファイル」や「〜データベース」の各項目として記憶されている。「〜ファイル」や「〜データベース」は、ディスクやメモリなどの記録媒体に記憶される。ディスクやメモリなどの記憶媒体に記憶された情報やデータや信号値や変数値やパラメータは、読み書き回路を介してCPU911によりメインメモリやキャッシュメモリに読み出され、抽出・検索・参照・比較・演算・計算・処理・出力・印刷・表示などのCPUの動作に用いられる。抽出・検索・参照・比較・演算・計算・処理・出力・印刷・表示のCPUの動作の間、情報やデータや信号値や変数値やパラメータは、メインメモリやキャッシュメモリやバッファメモリに一時的に記憶される。
また、以下に述べる実施の形態の説明において説明するフローチャートの矢印の部分は主としてデータや信号の入出力を示し、データや信号値は、RAM914のメモリ、FDD904のフレキシブルディスク、CDD905のコンパクトディスク、磁気ディスク装置920の磁気ディスク、その他光ディスク、ミニディスク、DVD(Digital・Versatile・Disk)等の記録媒体に記録される。また、データや信号は、バス912や信号線やケーブルその他の伝送媒体によりオンライン伝送される。
【0016】
また、以下に述べる実施の形態の説明において「〜部」として説明するものは、「〜回路」、「〜装置」、「〜機器」であってもよく、また、「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ROM913に記憶されたファームウェアで実現されていても構わない。或いは、ソフトウェアのみ、或いは、素子・デバイス・基板・配線などのハードウェアのみ、或いは、ソフトウェアとハードウェアとの組み合わせ、さらには、ファームウェアとの組み合わせで実施されても構わない。ファームウェアとソフトウェアは、プログラムとして、磁気ディスク、フレキシブルディスク、光ディスク、コンパクトディスク、ミニディスク、DVD等の記録媒体に記憶される。プログラムはCPU911により読み出され、CPU911により実行される。すなわち、プログラムは、以下に述べる「〜部」としてコンピュータを機能させるものである。あるいは、以下に述べる「〜部」の手順や方法をコンピュータに実行させるものである。
【0017】
図4は、この実施の形態における移動体監視装置100の機能ブロックの構成の一例を示すブロック構成図である。
移動体監視装置100は、移動体入力部110、移動体記憶部120、移動体表示部130、ブロック生成規則記憶部140、ブロック生成部150、ブロック記憶部160、重複判定部170、注意喚起部180を有する。
【0018】
移動体入力部110は、CPU911を用いて、移動体検出装置が検出した航空機621の位置や便名など、航空機621に関する情報を表わすデータ(以下「移動体データ」と呼ぶ。)を入力する。
移動体記憶部120は、磁気ディスク装置920を用いて、移動体入力部110が入力した移動体データを記憶する。なお、移動体記憶部120が記憶する移動体データは、航空機621の位置や便名だけでなく、移動速度や状態(出発機であるか到着機であるかなど)などの情報を含む。これらの情報は、移動体検出装置が検出して出力する構成であってもよいし、移動体入力部110が、航空機621の位置から移動速度を算出したり、フライトプランを参照して航空機621の状態を取得したりして、移動体データに付け加える構成であってもよい。
移動体表示部130は、表示装置901を用いて、移動体記憶部120が記憶した移動体データに基づいて、航空機621の位置を空港610の地図上にプロットするなど、管制官にわかりやすい形式で表示する。
【0019】
ブロック生成規則記憶部140は、磁気ディスク装置920を用いて、あらかじめ、ブロック生成規則データを記憶している。ブロック生成規則データとは、ブロック生成規則を表わすデータである。ブロック生成規則とは、航空機621の位置などの情報に基づいて、その航空機621の占有ブロックを生成するためのルールである。占有ブロックとは、その航空機621が占有する区域を表わすデータである。移動体監視装置100は、占有ブロックの重なりを判定することにより、航空機621を適切に誘導するための情報を生成する。
【0020】
ブロック生成部150は、CPU911を用いて、移動体記憶部120が記憶した移動体データと、ブロック生成規則記憶部140が記憶したブロック生成規則データとを入力する。ブロック生成部150は、CPU911を用いて、入力した移動体データとブロック生成規則データとに基づいて、各航空機621について、その航空機621の占有ブロックを生成する。ブロック生成部150は、CPU911を用いて、生成した占有ブロックを出力する。
ブロック記憶部160は、CPU911を用いて、ブロック生成部150が出力した占有ブロックを入力する。ブロック記憶部160は、磁気ディスク装置920を用いて、入力した占有ブロックを記憶する。
【0021】
重複判定部170は、CPU911を用いて、ブロック記憶部160が記憶した占有ブロックを入力する。重複判定部170は、CPU911を用いて、二つの航空機621の占有ブロックの間に重複部分があるか否かを判定する。重複判定部170は、CPU911を用いて、占有ブロックに重複部分があると判定した二つの航空機621について、その航空機621を表わすデータを出力する。
注意喚起部180は、CPU911を用いて、重複判定部170が出力したデータを入力する。注意喚起部180は、CPU911を用いて、入力したデータに基づいて、管制官の注意を喚起する。具体的には、注意喚起部180は、例えば、移動体表示部130が表示装置901を用いて表示した地図上に、占有ブロックが重複していることを表わすメッセージを表示したり、スピーカを用いて、注意喚起音やメッセージを発したりする。
【0022】
図5は、この実施の形態におけるブロック生成処理S400の流れの一例を示すフローチャート図である。
ブロック生成処理S400において、ブロック生成部150は、滑走路611について航空機621の占有ブロックを生成する。空港610に滑走路611が複数ある場合、ブロック生成部150は、滑走路611ごとに占有ブロックを生成する。ブロック生成処理S400は、状態判定工程S410、到着機ブロック生成処理S420、出発機ブロック生成処理S430、横断機ブロック生成処理S440を有する。
【0023】
状態判定工程S410において、ブロック生成部150は、CPU911を用いて、移動体記憶部120が記憶した移動体データのなかから、一つの航空機621についての移動体データを取得する。ブロック生成部150は、CPU911を用いて、取得した移動体データに基づいて、航空機621が、その滑走路611に到着する到着機であるか、その滑走路611から出発する出発機であるか、その滑走路611を横断する横断機であるか、その滑走路611と無関係(その滑走路611を横断せず他の滑走路に離着陸する航空機など)であるかを判定する。到着機と判定した場合、到着機ブロック生成処理S420へ進む。出発機と判定した場合、出発機ブロック生成処理S430へ進む。横断機と判定した場合、横断機ブロック生成処理S440へ進む。無関係と判定した場合、ブロック生成処理S400を終了する。
【0024】
到着機ブロック生成処理S420において、ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データのなかから、到着機についてのブロック生成規則データを取得する。ブロック生成部150は、CPU911を用いて、取得したブロック生成規則データが表わすブロック生成規則と、状態判定工程S410で取得した移動体データとに基づいて、航空機621の占有ブロックを生成する。その後、ブロック生成処理S400を終了する。
【0025】
出発機ブロック生成処理S430において、ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データのなかから、出発機についてのブロック生成規則データを取得する。ブロック生成部150は、CPU911を用いて、取得したブロック生成規則データが表わすブロック生成規則と、状態判定工程S410で取得した移動体データとに基づいて、航空機621の占有ブロックを生成する。その後、ブロック生成処理S400を終了する。
【0026】
横断機ブロック生成処理S440において、ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データのなかから、横断機についてのブロック生成規則データを取得する。ブロック生成部150は、CPU911を用いて、取得したブロック生成規則データが表わすブロック生成規則と、状態判定工程S410で取得した移動体データとに基づいて、航空機621の占有ブロックを生成する。その後、ブロック生成処理S400を終了する。
【0027】
図6は、この実施の形態における到着機ブロック生成処理S420の流れの一例を示すフローチャート図である。
到着機ブロック生成処理S420は、始端距離判定工程S421、占有予定ブロック生成工程S422、全部占有済ブロック生成工程S424、離脱距離判定工程S426、前方占有済ブロック生成工程S427を有する。
【0028】
始端距離判定工程S421において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621と滑走路611の始端612との間の平面距離dを算出する。ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データから、二つの閾値D1,D2(ただし、0<D1<D2。)を取得する。ブロック生成部150は、CPU911を用いて、算出した平面距離dと、二つの閾値D1,D2とを比較する。
平面距離dが閾値D2以上である場合は、到着機ブロック生成処理S420を終了する。すなわち、航空機621の占有ブロックを生成しない。これは、航空機621が滑走路611からまだ十分に離れているので、滑走路611を占有する必要がないからである。
平面距離dが閾値D1以上かつ閾値D2未満である場合は、占有予定ブロック生成工程S422へ進む。
平面距離dが0以上かつ閾値D1未満である場合は、全部占有済ブロック生成工程S424へ進む。
平面距離dが0未満である場合、離脱距離判定工程S426へ進む。平面距離dは、始端612から滑走路611の外側へ向かう方向を正とする。すなわち、平面距離dが0未満である場合とは、航空機621が滑走路611上もしくは滑走路611の上空にいる場合を意味する。なお、ここでは、滑走路611に着陸しようとしている航空機621のみを対象としているので、滑走路611の上空といっても着陸態勢である高さの範囲内のことであり、滑走路611のはるか上空を飛んでいる航空機621や、着陸を取り止めて離脱しようとしている航空機621は対象外である。
【0029】
占有予定ブロック生成工程S422において、ブロック生成部150は、CPU911を用いて、滑走路611の始端612から終端613までの全部を範囲とする占有予定ブロックを生成する。占有予定ブロックとは、占有ブロックのうち、他の航空機621を排除する効力を持たず、主に、他の航空機621を監視する目的で生成される占有ブロックのことである。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有予定ブロックを記憶する。その後、到着機ブロック生成処理S420を終了する。
【0030】
全部占有済ブロック生成工程S424において、ブロック生成部150は、CPU911を用いて、滑走路611の始端612から終端613までの全部を範囲とする占有済ブロックを生成する。占有済ブロックとは、占有ブロックのうち、他の航空機621を排除する効力を持つ占有ブロックのことである。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有済ブロックを記憶する。その後、到着機ブロック生成処理S420を終了する。
【0031】
離脱距離判定工程S426において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621と、空港610の中心線614との間の距離wを算出する。ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成記憶データから、閾値W1を取得する。ブロック生成部150は、CPU911を用いて、算出した距離wと、取得した閾値W1とを比較する。
距離wが閾値W1以上である場合は、到着機ブロック生成処理S420を終了する。すなわち、航空機621の占有ブロックを生成しない。これは、航空機621が滑走路611に着陸して滑走路611から十分に離れた場合に、滑走路611を解放するためである。
距離wが閾値W1未満である場合は、前方占有済ブロック生成工程S427へ進む。
【0032】
前方占有済ブロック生成工程S427において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621の現在位置を取得する。ブロック生成部150は、CPU911を用いて、取得した航空機621の現在位置から滑走路611の終端613までを範囲とする占有済ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有済ブロックを記憶する。その後、到着機ブロック生成処理S420を終了する。
【0033】
図7は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する占有予定ブロック511の一例を示す図である。
航空機621と滑走路611の始端612との間の平面距離dが閾値D1以上かつ閾値D2未満の場合、ブロック生成部150は、占有予定ブロック生成工程S422で、滑走路611の始端612から終端613までの全部を範囲とする占有予定ブロック511を生成する。これにより、航空機621がこれから着陸しようとしている滑走路611の全範囲に他の航空機621がいないかを監視する状態となる。
滑走路611に他の航空機621の占有ブロックがある場合、注意喚起部180が管制官に注意を喚起し、管制官は、航空機621の着陸を取り止めるか否かを判断する。例えば、滑走路611に占有ブロックを持つ他の航空機621が、滑走路611に着陸済の到着機であり、もうすぐ滑走路611から離脱するのであれば、管制官は、航空機621の着陸を決行すると判断する。
【0034】
このように、航空機621の着陸を取り止めるか否かを移動体監視装置100が機械的に判断するのではなく、管制官の判断に委ねることにより、柔軟な運用が可能となり、滑走路611の利用効率を高めることができる。また、管制官の判断が必要な状況では、注意喚起部180が管制官の注意を喚起するので、管制官の見落としによる事故の発生を防ぐことができる。更に、管制官は、注意喚起部180が注意を喚起した状況の判断に集中することができるので、より適切な判断をすることができ、滑走路611の利用効率を高めることができる。
【0035】
図8は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図である。
航空機621が滑走路611に近づき、航空機621と滑走路611の始端612との間の平面距離が閾値D1未満になった場合、ブロック生成部150は、全部占有済ブロック生成工程S424で、滑走路611の始端612から終端613までの全部を範囲とする占有済ブロック521を生成する。これにより、航空機621がこれから着陸しようとしている滑走路611の全範囲から他の航空機621を排除する状態となる。
滑走路611に他の航空機621の占有ブロックがある場合、注意喚起部180が管制官に注意を喚起し、管制官は、航空機621の着陸を取り止めるか否かを判断する。また、注意喚起部180は、他の航空機621の側にも注意を喚起する。管制官は、航空機621の着陸を決行すると判断した場合、他の航空機621を滑走路611から速やかに排除する。
【0036】
図9は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図である。
航空機621が滑走路611の始端612を越えて滑走路611上に進入し、航空機621と滑走路611の始端612との間の平面距離dが負になった場合、ブロック生成部150は、前方占有済ブロック生成工程S427で、航空機621の現在位置から滑走路611の終端613までを範囲とする占有済ブロック521を生成する。これにより、航空機621の前方から他の航空機621を排除するが、航空機621の後方には他の航空機621の進入を許す状態となる。
【0037】
図10は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図である。
航空機621が滑走路611に着陸し、減速中の場合も同様に、ブロック生成部150は、前方占有済ブロック生成工程S427で、航空機621の現在位置から滑走路611の終端613までを範囲とする占有済ブロック521を生成する。
【0038】
図11は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する占有済ブロック521の一例を示す図である。
航空機621が着陸後十分に減速し、滑走路611から離脱しようとしている場合であっても、航空機621と滑走路611の中心線614との間の距離wが閾値W1未満であれば、まだ、ブロック生成部150は、前方占有済ブロック生成工程S427で、航空機621の現在位置から滑走路611の終端613までを範囲とする占有済ブロック521を生成する。
【0039】
図12は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が占有ブロックを生成しない場合の一例を示す図である。
航空機621が滑走路611から完全に離脱し、航空機621と滑走路611の中心線614との間の距離wが閾値W1以上になった場合、ブロック生成部150は、航空機621の占有ブロックを生成しない。
【0040】
図13は、この実施の形態における出発機ブロック生成処理S430の流れの一例を示すフローチャート図である。
出発機ブロック生成処理S430は、進入距離判定工程S431、占有予定ブロック生成工程S432、速度判定工程S433、前方占有予定ブロック生成工程S434、後方占有済ブロック生成工程S435、前方占有済ブロック生成工程S436を有する。
【0041】
進入距離判定工程S431において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621と滑走路611の中心線614との間の距離wを算出する。ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データから、二つの閾値W2,W3(ただし、W2<W3。)を取得する。ブロック生成部150は、CPU911を用いて、算出した距離wと、二つの閾値W2,W3とを比較する。
距離wが閾値W3以上である場合は、出発機ブロック生成処理S430を終了する。すなわち、航空機621の占有ブロックを生成しない。これは、航空機621が滑走路611からまだ十分に離れているので、滑走路611を占有する必要がないからである。
距離wが閾値W2以上かつ閾値W3未満である場合は、占有予定ブロック生成工程S432へ進む。
距離wが閾値W2未満である場合は、速度判定工程S433へ進む。
【0042】
占有予定ブロック生成工程S432において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621が進入しようとしている滑走路611上の位置を算出する。ブロック生成部150は、CPU911を用いて、算出した位置の前後所定の区域を範囲とする占有予定ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有予定ブロックを記憶する。その後、出発機ブロック生成処理S430を終了する。
【0043】
速度判定工程S433において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621の速度vを取得する。ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データから、閾値V1を取得する。ブロック生成部150は、CPU911を用いて、取得した速度vと、取得した閾値V1とを比較する。
速度vが閾値V1未満である場合は、前方占有予定ブロック生成工程S434へ進む。
速度vが閾値V1以上である場合は、前方占有済ブロック生成工程S436へ進む。
【0044】
前方占有予定ブロック生成工程S434において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621の現在位置を取得する。ブロック生成部150は、CPU911を用いて、取得した航空機621の現在位置から滑走路611の終端613までを範囲とする占有予定ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有予定ブロックを記憶する。
後方占有済ブロック生成工程S435において、ブロック生成部150は、CPU911を用いて、滑走路611の始端612から、前方占有予定ブロック生成工程S434で取得した航空機621の現在位置までを範囲とする占有済ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有済ブロックを記憶する。その後、出発機ブロック生成処理S430を終了する。
【0045】
前方占有済ブロック生成工程S436において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621の現在位置を取得する。ブロック生成部150は、CPU911を用いて、取得した航空機621の現在位置から滑走路611の終端613までを範囲とする占有済ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有済ブロックを記憶する。その後、出発機ブロック生成処理S430を終了する。
【0046】
図14は、この実施の形態における出発機ブロック生成処理S430でブロック生成部150が生成する占有予定ブロック512の一例を示す図である。
航空機621が離陸のため滑走路611に近づき、航空機621と滑走路611の中心線614との間の距離wが閾値W2以上かつ閾値W3未満になった場合、ブロック生成部150は、占有予定ブロック生成工程S432で、航空機621が進入しようとしている滑走路611上の位置の前後を範囲とする占有予定ブロック512を生成する。これにより、航空機621が進入しようとしている位置に、他の航空機621の占有ブロックがないかを監視する状態となる。
例えば、滑走路611に着陸中の他の航空機621がある場合、航空機621が進入しようとしている位置よりも、他の航空機621が始端612側にいれば、他の航空機621の占有ブロックと、航空機621の占有予定ブロック512とが重なるので、注意喚起部180が管制官に注意を喚起する。管制官は、例えば、航空機621に対して、他の航空機621が通過するのを待つよう指示する。
これに対し、航空機621が進入しようとしている位置よりも、他の航空機621が終端613側にいれば、他の航空機621の占有ブロックと、航空機621の占有予定ブロック512とが重ならないので、注意喚起部180は、管制官に注意を喚起しない。管制官は、航空機621が滑走路611に進入するのを許す。これにより、到着機が滑走路611から離脱するのを待たずに、航空機621が滑走路611に進入し、離陸準備をすることができるので、滑走路611の使用効率が高くなる。
【0047】
図15は、この実施の形態における出発機ブロック生成処理S430でブロック生成部150が生成する占有予定ブロック513及び占有済ブロック522の一例を示す図である。
航空機621が滑走路611に更に近づいて、航空機621と滑走路611の中心線614との間の距離が閾値W2未満になった場合、ブロック生成部150は、前方占有予定ブロック生成工程S434で、航空機621の現在位置から滑走路611の終端613までを範囲とする占有予定ブロック513を生成し、後方占有済ブロック生成工程S435で、滑走路611の始端612から航空機621の現在位置までを範囲とする占有済ブロック522を生成する。これにより、航空機621の前方に他の航空機621がいないかを監視するとともに、航空機621の後方から他の航空機621を排除する状態となる。
例えば、滑走路611に着陸中の他の航空機621がある場合、他の航空機621が終端613側にいれば、他の航空機621の占有ブロックと、航空機621の占有予定ブロック512とが重なるので、注意喚起部180が管制官に注意を喚起する。管制官は、例えば、離陸準備が整った航空機621に対して、他の航空機621が滑走路611から離脱するまで待つよう指示する。
【0048】
図16は、この実施の形態における出発機ブロック生成処理S430でブロック生成部150が生成する占有予定ブロック513及び占有済ブロック522の一例を示す図である。
航空機621が離陸するため加速しているが、まだ、すぐに停止できる程度の速度であって、航空機621の速度vが閾値V1未満である場合、ブロック生成部150は、航空機621の前方に占有予定ブロック513、後方に占有済ブロック522を生成する。
例えば、航空機621に続けて滑走路611から離陸しようとして誘導路にいる他の航空機621がある場合、他の航空機621の占有予定ブロック512と、航空機621の占有済ブロック522とが重なるので、注意喚起部180が管制官に注意を喚起する。管制官は、例えば、他の航空機621に対して、滑走路611に進入するのを待つよう指示する。
【0049】
図17は、この実施の形態における出発機ブロック生成処理S430でブロック生成部150が生成する占有済ブロック523の一例を示す図である。
航空機621が更に加速して、航空機621の速度vが閾値V1以上である場合、ブロック生成部150は、航空機621の現在位置から滑走路611の終端613までを範囲とする占有済ブロック523を生成する。これにより、航空機621の前方から他の航空機621を排除するが、航空機621の後方には他の航空機621の進入を許す状態となる。
例えば、航空機621に続けて滑走路611から離陸しようとして誘導路にいる他の航空機621がある場合、他の航空機621の占有予定ブロック512と、航空機621の占有済ブロック523とは重ならないので、注意喚起部180は、管制官に注意を喚起しない。管制官は、他の航空機621が滑走路611に進入するのを許す。これにより、出発機が離陸するのを待たずに、他の航空機621が滑走路611に進入し、離陸準備をすることができるので、滑走路611の使用効率が高くなる。
【0050】
図18は、この実施の形態における出発機ブロック生成処理S430でブロック生成部150が生成する占有済ブロック523の一例を示す図である。
航空機621が更に加速して離陸しても、航空機621がまだ滑走路611の上にいる場合、ブロック生成部150は、航空機621の現在位置から滑走路611の終端613までの範囲とする占有済ブロック523を生成する。これにより、滑走路611の大部分には他の航空機621の進入を許すが、航空機621がこれから通過する真下からは他の航空機621を排除する状態となる。
【0051】
図19は、この実施の形態における出発機ブロック生成処理S430でブロック生成部150が占有ブロックを生成しない場合の一例を示す図である。
航空機621が離陸して、滑走路611の終端613を越えた場合、ブロック生成部150は、占有ブロックを生成しない。これにより、滑走路611が完全に解放され、他の航空機621の進入を許す状態となる。
【0052】
図20は、この実施の形態における横断機ブロック生成処理S440の流れの一例を示すフローチャート図である。
横断機ブロック生成処理S440は、進入距離判定工程S441、占有予定ブロック生成工程S442、後方占有済ブロック生成工程S443を有する。
【0053】
進入距離判定工程S441において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621と滑走路611の中心線614との間の距離wを算出する。なお、滑走路611を航空機621がこれから横断しようとして滑走路611に近づいている場合と、滑走路611を航空機621が横断したのち滑走路611から遠ざかっている場合とを、距離wの符号による区別するものとする。すなわち、距離wが正の場合は、滑走路611を航空機621がこれから横断しようとして滑走路611に近づいていることを表わし、距離wが負の場合は、滑走路611を航空機621が横断したのち滑走路611から遠ざかっていることを表わすものとする。ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データから、横断機についての三つの閾値W1,W2,W3(ただし、0<W1、0<W2<W3。)を取得する。なお、これらの閾値は、到着機や出発機の場合と同じであってもよいし、異なっていてもよい。ブロック生成部150は、CPU911を用いて、算出した距離wと、閾値W1の符号を反転した閾値−W1及び閾値W2,W3とを比較する。
距離wが閾値W2以上かつW3未満である場合は、占有予定ブロック生成工程S442へ進む。
距離wが閾値−W1以上かつ閾値W2未満である場合は、後方占有済ブロック生成工程S443へ進む。
それ以外の場合は、横断機ブロック生成処理S440を終了する。すなわち、ブロック生成部150は、航空機621の占有ブロックを生成しない。これは、これから滑走路611を横断しようとしている航空機621がまだ滑走路611から十分に離れているか、あるいは、滑走路611を横断した航空機621が滑走路611から十分に離れたので、滑走路611を占有する必要がないからである。
【0054】
占有予定ブロック生成工程S442において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621が横断しようとしている滑走路611上の位置を算出する。ブロック生成部150は、CPU911を用いて、算出した位置の前後所定の区域を範囲とする占有予定ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有予定ブロックを記憶する。その後、横断機ブロック生成処理S440を終了する。
【0055】
後方占有済ブロック生成工程S443において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621の現在位置を取得する。ブロック生成部150は、CPU911を用いて、滑走路611の始端612から、取得した航空機621の現在位置までを範囲とする占有済ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有済ブロックを記憶する。その後、横断機ブロック生成処理S440を終了する。
【0056】
図21は、この実施の形態における横断機ブロック生成処理S440でブロック生成部150が生成する占有予定ブロック514の一例を示す図である。
航空機621が滑走路611を横断するために滑走路611に近づき、航空機621と滑走路611の中心線614との間の距離wが閾値W2以上かつ閾値W3未満になった場合、ブロック生成部150は、占有予定ブロック生成工程S442で、航空機621が横断しようとしている滑走路611上の位置の前後を範囲とする占有予定ブロック514を生成する。これにより、航空機621が横断しようとしている位置に、他の航空機621の占有ブロックがないかを監視する状態となる。
【0057】
図22は、この実施の形態における横断機ブロック生成処理S440でブロック生成部150が生成する占有済ブロック524の一例を示す図である。
航空機621が更に滑走路611に近づき、航空機621と滑走路611の中心線614との間の距離wが閾値−W1以上かつ閾値W2未満となった場合、ブロック生成部150は、滑走路611の始端612から航空機621の現在位置までを範囲とする占有済ブロック524を生成する。これにより、航空機621の始端612側から他の航空機621を排除する状態となる。
【0058】
図23は、この実施の形態における横断機ブロック生成処理S440でブロック生成部150が占有ブロックを生成しない場合の一例を示す図である。
航空機621が滑走路611を横断して滑走路611から離れ、航空機621と滑走路611の中心線614との間の距離wが閾値−W1未満となった場合、ブロック生成部150は、占有ブロックを生成しない。
【0059】
このように、ブロック生成部150は、航空機621の状態・位置・速度などに基づいて、占有予定ブロックや占有済ブロックなどの占有ブロックを生成する。なお、ブロック生成部150が生成する航空機621の占有ブロックの種類や範囲は、以上説明したものに限らず、ブロック生成部150は、他の種類や範囲の占有ブロックを生成する構成であってもよい。また、ブロック生成規則記憶部140が記憶したブロック生成規則データに基づいて、ブロック生成部150が生成する占有ブロックの種類や範囲を定める構成であってもよい。そうすれば、ブロック生成規則記憶部140が記憶したブロック生成規則データを更新することにより、ブロック生成部150が生成する占有ブロックの種類や範囲を変えることができ、移動体監視装置100を柔軟に運用できる。
【0060】
図24は、この実施の形態における重複判定処理S450の流れの一例を示すフローチャート図である。
重複判定処理S450において、移動体監視装置100は、占有ブロックの重複を判定し、管制官の注意を喚起する。重複判定処理S450は、移動体選択工程S451、占有済ブロック選択工程S452、重複判定工程S453、占有済ブロック繰り返し工程S454、注意喚起工程S455、移動体繰り返し工程S456を有する。
【0061】
移動体選択工程S451において、重複判定部170は、CPU911を用いて、ブロック記憶部160が占有ブロックを記憶した航空機621のなかから、航空機621を一つずつ選択する。重複判定部170は、CPU911を用いて、選択した航空機621についてブロック記憶部160が記憶した占有ブロックを取得する。選択した航空機621についてブロック記憶部160が記憶した占有ブロックが一つの場合、重複判定部170は、CPU911を用いて、取得した占有ブロックの範囲を重複判定範囲とする。選択した航空機621についてブロック記憶部160が記憶した占有ブロックが複数ある場合、重複判定部170は、CPU911を用いて、複数の占有ブロックの少なくともいずれかに属する範囲を重複判定範囲とする。
【0062】
占有済ブロック選択工程S452において、重複判定部170は、CPU911を用いて、ブロック記憶部160が記憶した占有ブロックのなかから、移動体選択工程S451で選択した航空機621以外の航空機621の占有済ブロックを一つずつ選択する。
【0063】
重複判定工程S453において、重複判定部170は、CPU911を用いて、移動体選択工程S451で取得した重複判定範囲と、占有済ブロック選択工程S452で選択した占有済ブロックとの間に重複があるか否かを判定する。
重複なしと判定した場合は、占有済ブロック繰り返し工程S454へ進む。
重複ありと判定した場合は、注意喚起工程S455へ進む。
【0064】
占有済ブロック繰り返し工程S454において、重複判定部170は、CPU911を用いて、占有済ブロック選択工程S452で選択すべき占有済ブロックをすべて選択したか否かを判定する。
まだ選択していない占有済ブロックがあると判定した場合は、占有済ブロック選択工程S452に戻り、次の占有済ブロックを選択する。
すべての占有済ブロックを選択したと判定した場合は、移動体繰り返し工程S456へ進む。
【0065】
注意喚起工程S455において、注意喚起部180は、表示装置901を用いて、移動体選択工程S451で選択した航空機621について、注意喚起メッセージを表示するなどして、管制官の注意を喚起する。
【0066】
移動体繰り返し工程S456において、重複判定部170は、CPU911を用いて、移動体選択工程S451で選択すべき航空機621をすべて選択したか否かを判定する。
まだ選択していない航空機621があると判定した場合は、移動体選択工程S451に戻り、次の航空機621を選択する。
すべての航空機621を選択したと判定した場合は、重複判定処理S450を終了する。
【0067】
図25は、この実施の形態における表示装置901が表示する画面の一例を示す図である。
表示装置901には、移動体表示部130が、例えば、空港610の地図や航空機621の位置などを表示する。また、表示装置901には、注意喚起部180が、例えば、注意喚起メッセージを表示する。注意喚起部180は、例えば、吹出しなどを用いて、管制官の注意を喚起すべき航空機621と関係がわかるように、注意喚起メッセージを表示する。また、注意喚起部180は、例えば、文字の大きさを大きくしたり、表示色を変えたりして、管制官の注意を喚起しやすいように、注意喚起メッセージを表示する。
なお、注意喚起部180は、他の航空機621の占有済ブロックが、占有ブロックと重複している航空機621について注意喚起メッセージを表示するだけでなく、他の航空機621の占有予定ブロックが、占有済ブロックと重複する航空機621についても注意喚起メッセージを表示する構成であってもよい。その場合、注意喚起レベルの違いを表現するため、注意喚起メッセージを表示する文字の大きさや表示色を変える構成であってもよい。
【0068】
図26は、この実施の形態における注意喚起部180が管制官の注意を喚起する航空機621の組み合わせの一例を示す図である。
この図において、「×」は、航空機Bの存在により、航空機Aについて注意喚起部180が管制官の注意を喚起する場合を示す。「○」は、航空機Bの存在により、航空機Aについて注意喚起部180が管制官の注意を喚起しない場合を示す。
到着機について「最終進入中」とは、航空機621と滑走路611の始端612との間の平面距離dが閾値D1以上かつ閾値D2未満である場合を示す。「着陸中」とは、平面距離dが閾値D1未満であり、かつ、航空機621と滑走路611の中心線614との間の距離wが閾値W1未満である場合を示す。
出発機及び横断機について「進入待ち」とは、航空機621と滑走路611の中心線614との間の距離wが閾値W2以上かつ閾値W3未満である場合を示す。出発機について「準備中」とは、距離wが閾値W2未満であり、かつ、航空機621の速度vが閾値V1未満である場合を示す。「離陸中」とは、航空機621の速度vが閾値V1以上dである場合を示す。横断機について「横断中」とは、距離wが閾値−W1以上かつ閾値W2未満である場合を示す。
また、「A→B」は、航空機Aが航空機Bよりも始端612の側にあることを示す。逆に、「B→A」は、航空機Aが航空機Bよりも終端613の側にあることを示す。
【0069】
航空機Bが、到着機であって最終進入中である場合、および、出発機または横断機であって進入待ちである場合、ブロック生成部150は、航空機Bについて占有予定ブロックを生成するが占有済ブロックを生成しないので、注意喚起部180は、航空機Aについて管制官の注意を喚起しない。
【0070】
航空機Aが航空機Bよりも終端613側にある場合であって、航空機Bが、到着機で着陸中の場合および出発機で離陸中の場合、ブロック生成部150が航空機Bの終端613側に生成する占有済ブロックと、航空機Aの占有ブロックとが重複するので、注意喚起部180は、航空機Aについて管制官の注意を喚起する。
また、航空機Aが航空機Bよりも始端612側にある場合であって、航空機Bが、出発機で準備中の場合および横断機で横断中の場合、ブロック生成部150が航空機Bの始端612側に生成する占有済ブロックと、航空機Aの占有ブロックとが重複するので、注意喚起部180は、航空機Aについて管制官の注意を喚起する。
【0071】
航空機Aが航空機Bよりも始端612側にある場合であって、航空機Bが、到着機で着陸中の場合および出発機で離陸中の場合、ブロック生成部150は、航空機Bの終端613側に占有済ブロックを生成する。航空機Aが、到着機で最終進入中あるいは着陸中の場合および出発機で準備中あるいは離陸中の場合は、ブロック生成部150が航空機Aの終端613側に占有ブロックを生成するので、占有ブロックが重複し、注意喚起部180は、航空機Aについて管制官の注意を喚起する。航空機Aが、出発機または横断機で進入待ちの場合および横断機で横断中の場合は、ブロック生成部150が航空機Aの終端613側に占有ブロックを生成しないので、占有ブロックは重複せず、注意喚起部180は、航空機Aについて管制官の注意を喚起しない。
【0072】
航空機Aが航空機Bよりも終端613側にある場合であって、航空機Bが、出発機で準備中の場合および横断機で横断中の場合、ブロック生成部150は、航空機Bの始端612側に占有済ブロックを生成する。航空機Aが、出発機で準備中の場合および横断機で横断中の場合は、注意喚起部180が航空機Aの始端612側に占有ブロックを生成するので、占有ブロックが重複し、注意喚起部180は、航空機Aについて管制官の注意を喚起する。航空機Aが到着機で着陸中の場合および出発機または横断機で進入待ちの場合および出発機で離陸中の場合は、注意喚起部180が航空機Aの始端612側に占有ブロックを生成しないので、占有ブロックが重複せず、注意喚起部180は、航空機Aについて管制官の注意を喚起しない。
【0073】
このように、占有ブロックの重複に基づいて、注意喚起部180が管制官の注意を喚起することにより、二つの航空機621の状態の組み合わせによって管制官の注意を喚起するか否かを細かく設定することができる。
【0074】
この実施の形態における移動体監視装置100は、データを処理する処理装置(CPU911)と、ブロック生成部150と、重複判定部170と、注意喚起部180とを有する。
上記ブロック生成部150は、上記処理装置を用いて、複数の移動体(航空機621)それぞれについて、上記移動体が占有する区域を表わす占有ブロックを生成する。
上記重複判定部170は、上記処理装置を用いて、上記複数の移動体について上記ブロック生成部150が生成した複数の占有ブロックが重複しているか否かを判定する。
上記注意喚起部180は、上記処理装置を用いて、上記複数の占有ブロックが重複していると上記重複判定部170が判定した場合に、監視者(管制官)の注意を喚起する。
【0075】
この実施の形態における移動体監視装置100によれば、複数の移動体についてブロック生成部150が生成した占有ブロックが重複しているか否かを判定することにより、監視者の注意を喚起すべき場合とそうでない場合とを適切に峻別することができる。これにより、複数の移動体が所定の位置関係となったことを監視者が見落とす可能性が低くなるとともに、監視者の注意義務を軽減することにより、監視者が適切な状況判断をすることができる。
【0076】
この実施の形態における移動体監視装置100において、上記ブロック生成部150は、上記移動体が滑走路611を滑走している航空機621である場合に、上記処理装置を用いて、上記移動体の現在位置から上記滑走路611の終端613までの区域を上記移動体が占有するものとして、占有ブロックを生成する。
【0077】
この実施の形態における移動体監視装置100によれば、移動体が離陸あるいは着陸のため滑走路611を滑走している場合に、滑走路611のうち、移動体の移動方向にあたる部分をその移動体の占有ブロックとするので、その区域に他の移動体が進入した場合や進入しようとした場合に、監視者の注意を喚起することができる。また、滑走路611のうち、移動体の移動方向と反対の方向にあたる部分は、その移動体の占有ブロックとしないので、その区域に他の移動体が進入しても監視者の注意を喚起せず、他の移動体の進入を許すことができる。これにより、滑走路611の使用効率を高めることができる。
【0078】
この実施の形態における移動体監視装置100において、上記ブロック生成部150は、上記移動体が滑走路611に進入しようとしている航空機621である場合に、上記処理装置を用いて、上記移動体が進入しようとしている上記滑走路611上の区域を上記移動体が占有するものとして、占有ブロックを生成する。
【0079】
この実施の形態における移動体監視装置100によれば、移動体が滑走路611に進入しようとしている場合に、滑走路611のうち、移動体が進入しようとしている部分をその移動体の占有ブロックとするので、移動体が滑走路611に進入する前に、監視者の注意を喚起することができる。
【0080】
この実施の形態における移動体監視装置100において、上記ブロック生成部150は、上記移動体が滑走路611に進入した航空機621である場合に、上記処理装置を用いて、上記滑走路611の始端612から、上記移動体の現在位置までの区域を上記移動体が占有するものとして、占有ブロックを生成する。
【0081】
この実施の形態における移動体監視装置100によれば、移動体が滑走路611に進入した場合に、滑走路611のうち、他の移動体が移動体のほうへ向かって滑走してくる方向の部分をその移動体の占有ブロックとするので、移動体のほうへ向かってくる他の移動体がある場合に、監視者の注意を喚起することができる。
【0082】
この実施の形態における移動体監視装置100において、上記ブロック生成部150は、上記処理装置を用いて、上記占有ブロックとして、上記移動体が現に占有している区域を表わす占有済ブロックと、上記移動体が占有しようとしている区域を表わす占有予定ブロックとを生成する。
上記注意喚起部180は、上記処理装置を用いて、一の移動体についての占有済ブロックと他の移動体についての占有予定ブロックとが重複していると上記重複判定部170が判定した場合に、上記他の移動体について、上記監視者の注意を喚起する。
【0083】
この実施の形態における移動体監視装置100によれば、二つの移動体の占有ブロックが重複した場合に、二つの移動体について対称に注意を喚起するのではなく、その区域を先に占有している移動体を優先し、後から占有しようとする移動体について監視者の注意を喚起することができる。これにより、監視者は、より適切な状況判断をすることができる。
【0084】
この実施の形態における移動体監視装置100は、データを処理する処理装置(CPU911)を有するコンピュータが、上記コンピュータを移動体監視装置100として動作させるコンピュータプログラムを実行することにより実現できる。
この実施の形態における移動体監視装置100を実現するコンピュータプログラムによれば、複数の移動体についてブロック生成部150が生成した占有ブロックが重複しているか否かを判定することにより、監視者の注意を喚起すべき場合とそうでない場合とを適切に峻別することができる。これにより、複数の移動体が所定の位置関係となったことを監視者が見落とす可能性が低くなるとともに、監視者の注意義務を軽減することにより、監視者が適切な状況判断をすることができる移動体監視装置100を実現できる。
【0085】
この実施の形態における移動体監視装置100が、複数の移動体(航空機621)を監視する移動体監視方法は、以下の工程を有する。
上記処理装置(CPU911)が、上記複数の移動体それぞれについて、上記移動体が占有する区域を表わす占有ブロックを生成する。
上記処理装置が、上記複数の移動体について生成した複数の占有ブロックが重複しているか否かを判定する。
上記処理装置が、上記複数の占有ブロックが重複していると判定した場合に、監視者の注意を喚起する。
【0086】
この実施の形態における移動体監視方法によれば、複数の移動体について生成した占有ブロックが重複しているか否かを判定することにより、監視者の注意を喚起すべき場合とそうでない場合とを適切に峻別することができる。これにより、複数の移動体が所定の位置関係となったことを監視者が見落とす可能性が低くなるとともに、監視者の注意義務を軽減することにより、監視者が適切な状況判断をすることができる。
【0087】
以上説明した移動体監視装置100は、出発機、到着機、滑走路横断機など目的が異なる航空機621が同時に滑走路611への進入要求をした場合などであっても、管制官が、状況に応じて短時間に的確な判断をすることができるよう、管制官の判断を支援する。
移動体監視装置100は、空港地上面における移動中の航空機621の位置に応じて、滑走路611上で進入不可となる部分を占有ブロックとして生成し、生成した占有ブロックを用いて滑走路611の占有を監視する。占有ブロックには、他の航空機621が進入できない。占有ブロックに他の航空機621が進入した場合、移動体監視装置100は、注意喚起状態であると判定して、管制官に対して注意喚起提供をする。
移動体監視装置100は、航空機621の移動に合わせて、占有ブロックの大きさを伸縮する。例えば、航空機621が到着機である場合、移動体監視装置100は、着陸の一定時間前から着陸予定の滑走路611全面に占有ブロックを生成し、他の出発予定機や滑走路横断機が進入できない状況とする。到着機が着陸したのち、移動体監視装置100は、航空機621の動きに合わせて、占有ブロックを縮小していく。他の航空機621が進入しようとしている位置の占有ブロックがなくなることにより、他の航空機621が滑走路611に進入可能となる。
【0088】
航空機621の動きに合わせて占有ブロックを生成するので、その占有ブロックに対する進入可不可の判定をシステマティックに行うことができる。
航空機621の動きに合わせて占有ブロックを縮小するので、むやみに進入不可状態を作り出すことなく、滑走路611を効率的に利用することができる。
これにより、管制官は、必要最小限の注意喚起状態に対して、状況判断などの業務を行えばよい。また、管制官は、滑走路611への着陸、滑走路611からの離陸、滑走路611の横断を、最大限許可することができるので、滑走路611利用の効率化、離着陸機数の増大が可能となる。
【0089】
実施の形態2.
実施の形態2について、図27〜図31を用いて説明する。
なお、実施の形態1と共通する部分については、同一の符号を付し、説明を省略する。
【0090】
この実施の形態では、航空機621の占有済ブロックに複数の種類を設ける。他の航空機621の種別に応じて、他の航空機621の占有ブロックとの重複を判定する占有済ブロックを使い分ける。例えば、ブロック生成部150は、ある航空機621について、到着機に対する占有済ブロックと、出発機に対する占有済ブロックとを生成する。他の航空機621が到着機である場合、重複判定部170は、他の航空機621の占有ブロックと、その航空機621の到着機に対する占有済ブロックとの重複を判定し、他の航空機621が出発機である場合、重複判定部170は、他の航空機621の占有ブロックと、その航空機621の出発機に対する占有済ブロックとの重複を判定する。
これにより、移動体監視装置100は、管制官の注意を喚起する場合と喚起しない場合との仕分けを、より細かく設定することができるので、本当に管制官の注意を喚起する必要があるときのみ管制官の注意を喚起し、かつ、管制官の注意を喚起する必要がある場合に確実に管制官の注意を喚起することができる。
【0091】
図27は、この実施の形態における到着機ブロック生成処理S420の流れの一例を示すフローチャート図である。
到着機ブロック生成処理S420は、実施の形態1で説明した工程に加えて、一部対象ブロック生成工程S423を有する。
【0092】
始端距離判定工程S421において、ブロック生成部150は、CPU911を用いて、ブロック生成規則記憶部140が記憶したブロック生成規則データに基づいて、三つの閾値D1,D2,D3(ただし、0<D1<D3<D2。)を取得する。ブロック生成部150は、CPU911を用いて、算出した平面距離dと、三つの閾値D1,D2,D3とを比較する。
平面距離dが閾値D2以上である場合は、到着機ブロック生成処理S420を終了する。
平面距離dが閾値D3以上かつ閾値D2未満である場合は、占有予定ブロック生成工程S422へ進む。
平面距離dが閾値D1以上かつ閾値D3未満である場合は、一部対象ブロック生成工程S423へ進む。
平面距離dが0以上かつ閾値D1未満である場合は、全部占有済ブロック生成工程S424へ進む。
平面距離dが0未満である場合は、離脱距離判定工程S426へ進む。
【0093】
一部対象ブロック生成工程S423において、ブロック生成部150は、CPU911を用いて、滑走路611の始端612から終端613までを範囲とし、出発機および横断機のみを対象とする占有済ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、ブロック生成部150が生成した占有済ブロックを記憶する。その後、到着機ブロック生成処理S420を終了する。
【0094】
図28は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する一部対象占有済ブロック531の一例を示す図である。
一部対象占有済ブロック531は、出発機および横断機に対する重複判定の基礎となるが、到着機に対しては重複判定の基礎とならない占有済ブロックである。
滑走路611に着陸しようとしている航空機621と滑走路611の始端612との間の平面距離dが閾値D1以上かつ閾値D3未満になった場合、ブロック生成部150は、滑走路611の全部を範囲とする一部対象占有済ブロック531を生成する。
【0095】
このように、航空機621が到着機である場合に、最終進入中の状態と着陸中の状態との間に中間段階を設ける。中間段階では、滑走路611から出発機と横断機とを排除するが、到着機は排除しない。この時点で、滑走路611上にいる到着機は、航空機621の前に滑走路611に着陸した他の航空機621であるから、すぐに滑走路611から離脱することが期待できるからである。これにより、滑走路611に他の航空機621が新たに進入してくるのを防ぎつつ、航空機621の着陸間隔を短くすることができるので、滑走路611の利用効率を高くすることができる。
【0096】
図29は、この実施の形態における横断機ブロック生成処理S440の流れの一例を示すフローチャート図である。
横断機ブロック生成処理S440は、実施の形態1で説明した後方占有済ブロック生成工程S443に代えて、一部対象ブロック生成工程S444を有する。
【0097】
進入距離判定工程S441において、航空機621と滑走路611の中心線614との距離wが閾値−W1以上かつ閾値W2未満である場合、一部対象ブロック生成工程S444へ進む。
【0098】
一部対象ブロック生成工程S444において、ブロック生成部150は、CPU911を用いて、状態判定工程S410で取得した移動体データに基づいて、航空機621の現在位置を取得する。ブロック生成部150は、CPU911を用いて、滑走路611の始端612から、取得した航空機621の現在位置までを範囲とし、到着機および出発機のみを対象とする占有済ブロックを生成する。ブロック記憶部160は、磁気ディスク装置920を用いて、生成した占有済ブロックを記憶する。その後、横断機ブロック生成処理S440を終了する。
【0099】
図30は、この実施の形態における到着機ブロック生成処理S420でブロック生成部150が生成する一部対象占有済ブロック534の一例を示す図である。
一部対象占有済ブロック534は、到着機および出発機に対する重複判定の基礎となるが、横断機に対する重複判定の基礎とならない占有済ブロックである。
滑走路611を横断しようとしている航空機621と、滑走路611の中心線614との間の距離dが閾値−W1以上かつ閾値W2未満になった場合、ブロック生成部150は、滑走路611の始端612から航空機621の現在位置までを範囲とする一部対象占有済ブロック534を生成する。これにより、航空機621の始端612側から到着機と出発機とを排除するが、横断機は排除しない状態となる。したがって、同じ滑走路611を複数の航空機621が同時に横断することができる。
【0100】
次に、重複判定処理S450について、図24を用いて、実施の形態1と異なる部分を説明する。
【0101】
占有済ブロック選択工程S452において、重複判定部170は、CPU911を用いて、ブロック記憶部160が記憶した占有ブロックのなかから、移動体選択工程S451で選択した航空機621以外の航空機621の占有済ブロックであって、移動体選択工程S451で選択した航空機621の種別を対象に含む占有済ブロックを一つずつ選択する。
例えば、移動体選択工程S451で選択した航空機621が到着機である場合であれば、重複判定部170は、ブロック記憶部160が記憶した占有済ブロックのなかから、対象を限定しない占有済ブロックや、到着機を対象に含む一部対象占有済ブロックを選択するが、到着機を対象に含まない一部対象占有済ブロックは選択しない。
【0102】
これにより、航空機621の占有ブロックと、対象を限定しない他の航空機621の占有済ブロックや、航空機621の種別を対象に含む他の航空機621の一部対象占有済ブロックとが重複する場合に、注意喚起部180は、航空機621について管制官の注意を喚起する。
【0103】
図31は、この実施の形態における注意喚起部180が管制官の注意を喚起する航空機621の組み合わせの一例を示す図である。
到着機について「最終進入中」とは、航空機621と滑走路611の始端612との平面距離dが閾値D3以上かつ閾値D2未満の場合を示す。「中間段階」とは、平面距離dが閾値D1以上かつ閾値D2未満の場合を示す。
【0104】
航空機Bが到着機であって中間段階である場合、ブロック生成部150は、航空機Bについて出発機および横断機を対象とする占有済ブロックを生成するので、航空機Aが出発機または横断機であれば、注意喚起部180は、航空機Aについて管制官の注意を喚起する。航空機Aが到着機であれば、注意喚起部180は、航空機Aについて管制官の注意を喚起しない。
【0105】
航空機Bが横断機であって横断中である場合、ブロック生成部150は、航空機Bについて到着機および出発機を対象とする占有済ブロックを生成するので、航空機Aも横断機であれば、注意喚起部180は、航空機Aについて管制官の注意を喚起しない。
【0106】
このように、航空機621の種別により、重複を判定する占有ブロックを変えることにより、管制官の注意を喚起するか否かを、更に適切に設定することができる。
【0107】
この実施の形態における移動体監視装置100において、上記ブロック生成部150は、上記処理装置(CPU911)を用いて、他の移動体(航空機621)の種別ごとに異なる区域を表わす占有ブロックを生成する。
上記注意喚起部180は、上記処理装置を用いて、他の移動体についての占有ブロックと、一の移動体について上記他の移動体の種別に対する占有ブロックとが重複していると上記重複判定部170が判定した場合に、上記他の移動体について、上記監視者の注意を喚起する。
【0108】
この実施の形態における移動体監視装置100によれば、注意を喚起すべき相手である他の移動体の種別により異なる占有ブロックを生成するので、移動体の種別に応じた細かな設定をすることができ、更に適切に、監視者の注意を喚起することができる。
【0109】
以上説明した移動体監視装置100によれば、占有ブロックの監視対象の設定など、占有ブロックに付加価値を設けることにより、きめ細かい監視が可能となる。
【0110】
移動体監視装置100は、航空機データ(移動体データ)を入力する。航空機データは、航空機621の便名、位置、高度、速度などを保持する。移動体監視装置100は、航空機データに基づいて、航空機621が出発機、到着機もしくは滑走路横断機のいずれであるかを判定する。移動体監視装置100は、航空機621の位置に応じて、ブロック情報(占有ブロック)を生成し、生成したブロック情報に、監視対象となるブロック対象を付加する。移動体監視装置100は、生成したブロック情報に基づいて、ブロック情報の重なりを監視することにより、滑走路611における航空機621の監視を実現する。ブロック情報は、例えば、滑走路611を一次元の線分とみなし、始端612からの距離により、占有ブロックの始点を表わす数値と、終点を表わす数値との組である。
【0111】
到着機については、着陸予定の滑走路611の始端612からの距離dに応じて、以下のようにステータスを定義する。移動体監視装置100は、ステータスに応じて、滑走路611上でのブロック範囲と、ブロック対象となる航空機621とを定める。
・最終進入中:進入中の滑走路611の始端612からの距離dが一定値(閾値D3)以上である場合。ブロック範囲は、滑走路611全域。ブロック対象は、なし。
・滑走路占有状態(中間段階):進入中の滑走路611の始端612からの距離dが一定値(閾値D1)以上離れている場合。ブロック範囲は、滑走路611全域。ブロック対象は、出発機および滑走路横断機。
・ランディング状態(着陸中):進入中の滑走路611の始端612からの距離dが一定値(閾値D1)未満である場合。ブロック範囲は、滑走路611全域。ブロック対象は、全種類。
・着陸状態(着陸中):到着機が滑走路611上に存在する場合。ブロック範囲は、到着機の位置から滑走路611の終端613まで。ブロック対象は、全種類。
移動体監視装置100は、到着機と滑走路611の中心線614との距離wが一定値(閾値W1)以上となった場合に、滑走路611から離脱したと判定し、占有ブロックを消去する。
なお、閾値D1,D3,W1は、パラメータとして任意に設定することができる。同様に、ブロック対象も、パラメータとして任意に設定することができる。
【0112】
出発機については、離陸予定の滑走路611からの距離w、滑走路611への進入状態などに応じて、以下のようにステータスを定義する。移動体監視装置100は、ステータスに応じて、滑走路611上でのブロック範囲と、ブロック対象となる航空機621とを定める。
・滑走路予占有状態(進入待ち):離陸予定の滑走路611に隣接する誘導路との交点からの距離wが一定値(閾値W2)以上である場合。ブロック範囲は、交点周辺。ブロック対象は、なし。
・滑走路占有状態(準備中):出発機が滑走路611上に存在する場合。ブロック範囲は、滑走路611の始端612から出発機の位置まで。ブロック対象は、全種類。
・離陸滑走状態(離陸中):出発機が滑走路611上に存在し、速度vが一定値(閾値V1)以上かつ加速度aが一定値以上の場合。ブロック範囲は、出発機の位置から滑走路611の終端613まで。ブロック対象は、全種類。
移動体監視装置100は、出発機と滑走路611の中心線614との距離wが一定値(閾値W1)以上となった場合に、出発機が離陸を中断して滑走路611から離脱したと判定し、占有ブロックを消去する。
なお、閾値W1,W2は、パラメータとして任意に設定することができる。同様に、ブロック対象も、パラメータとして任意に設定することができる。
【0113】
滑走路横断機については、横断する滑走路611の滑走路横断箇所からの距離w、滑走路611への進入状態などに応じて、以下のようにステータスを定義する。移動体監視装置100は、ステータスに応じて、滑走路611上でのブロック範囲と、ブロック対象となる航空機621とを定める。
・滑走路横断前状態(進入待ち):滑走路611を横断する候補の航空機621の位置と滑走路611との最小距離wが、一定値(閾値W3)以内である場合。ブロック範囲は、横断予定部分(誘導路幅)。ブロック対象は、出発機および滑走路横断機。
・滑走路横断中状態(横断中):滑走路611を横断する候補の航空機621の位置と滑走路611との最小距離wが一定値(閾値W2)以内である場合。ブロック範囲は、滑走路611の始端612から、航空機621が進入した位置まで。ブロック対象は、出発機および到着機。
移動体監視装置100は、横断機の位置と滑走路611との最小距離wが一定値(閾値W1)以上となった場合に、横断が終了したと判定し、占有ブロックを消去する。
なお、閾値W1,W2,W3は、パラメータとして任意に設定することができる。同様に、ブロック対象も、パラメータとして任意に設定することができる。
【0114】
以上のようにして生成した占有ブロック(ブロック範囲およびブロック対象)と、各航空機621のステータス(到着機、出発機または滑走路横断機)とに基づいて、移動体監視装置100は、滑走路占有の監視を行う。移動体監視装置100は、航空機621の占有ブロックと、他の航空機621の占有ブロックとが重なり、かつ、他の航空機621の占有ブロックのブロック対象がその航空機621と合致した場合、その航空機621に対する注意喚起状態であると判定し、管制官に対して注意喚起情報を提供する。
【0115】
例えば、最終進入中の到着機と、滑走路占有状態の出発機とがある場合、到着機の占有ブロックのブロック範囲(全範囲)と、出発機の占有ブロックのブロック範囲(始端612側)とが重なっている。到着機の占有ブロックのブロック対象(なし)には出発機が含まれないので、移動体監視装置100は、出発機に対する注意喚起状態ではないと判定する。また、出発機の占有ブロックのブロック対象(全種類)には到着機が含まれるので、移動体監視装置100は、到着機に対する注意喚起状態であると判定する。
その後、到着機が滑走路611に近づいて滑走路占有状態になると、ブロック範囲は変わらず、到着機の占有ブロックのブロック対象が出発機または滑走路横断機に変わるので、移動体監視装置100は、出発機に対しても注意喚起状態になったと判定する。
【0116】
また、例えば、滑走路占有状態(離陸待ち状態)の出発機と、それよりも終端613側を横断しようとしている滑走路横断前状態の滑走路横断機とがある場合、出発機の占有ブロックのブロック範囲(始端612側)と、滑走路横断機の占有ブロックのブロック範囲(横断予定部分)とが重ならないので、移動体監視装置100は、注意喚起状態でないと判定する。
その後、滑走路横断機が滑走路611に進入して、滑走路横断中状態になると、滑走路横断機の占有ブロックのブロック範囲が始端612側に変わり、ブロック範囲が重なる。出発機の占有ブロックのブロック対象(全種類)には滑走路横断機が含まれるので、移動体監視装置100は、滑走路横断機に対する注意喚起状態であると判定する。また、滑走路横断機の占有ブロックのブロック対象(到着機または出発機)には出発機が含まれるので、移動体監視装置100は、出発機に対しても注意喚起状態であると判定する。
【0117】
また、例えば、滑走路占有状態の到着機Aと、ランディング状態の到着機Bとがある場合、到着機Aの占有ブロックのブロック範囲(全範囲)と、到着機Bの占有ブロックのブロック範囲(終端613側)とが重なっている。到着機Aの占有ブロックのブロック対象(出発機または滑走路横断機)には到着機が含まれないので、移動体監視装置100は、到着機Bに対する注意喚起状態でないと判定する。また、到着機Bの占有ブロックのブロック対象(全種類)には到着機が含まれるので、移動体監視装置100は、到着機Aに対する注意喚起状態であると判定する。
【0118】
このように、ブロック対象をパラメータで設定可能とすることにより、注意喚起を必要最小限に抑えることができる。例えば、先行着陸機がランディング状態(着陸状態)で滑走路611上に存在し、後続機が滑走路611に近づいてきた場合、移動体監視装置100は注意喚起をしないので、管制官に業務が発生せず、管制官の負荷を減らすことができる。
また、到着機・出発機・滑走路横断機の位置や状態に応じて占有ブロックを柔軟に生成することにより、注意喚起を必要最小限に抑えることができる。更に、そのブロック範囲をパラメータで設定可能とすることにより、管制官の業務方式に応じた設定が可能となる。これにより、注意喚起を必要最小限に抑えることができるとともに、管制官を支援することにより、滑走路611からの離陸回数、滑走路611への着陸回数、滑走路611の横断回数を、最大限に増やすことができ、滑走路611の利用効率を高めることができる。
【符号の説明】
【0119】
100 移動体監視装置、110 移動体入力部、120 移動体記憶部、130 移動体表示部、140 ブロック生成規則記憶部、150 ブロック生成部、160 ブロック記憶部、170 重複判定部、180 注意喚起部、511〜514 占有予定ブロック、521〜524 占有済ブロック、531,534 一部対象占有済ブロック、610 空港、611 滑走路、612 始端、613 終端、614 中心線、621 航空機、901 表示装置、902 キーボード、903 マウス、904 FDD、905 CDD、906 プリンタ装置、907 スキャナ装置、910 システムユニット、911 CPU、912 バス、913 ROM、914 RAM、915 通信装置、920 磁気ディスク装置、921 OS、922 ウィンドウシステム、923 プログラム群、924 ファイル群、931 電話器、932 ファクシミリ機、940 インターネット、941 ゲートウェイ、942 LAN。
【特許請求の範囲】
【請求項1】
データを処理する処理装置と、ブロック生成部と、重複判定部と、注意喚起部とを有し、
上記ブロック生成部は、上記処理装置を用いて、複数の移動体それぞれについて、上記移動体が占有する区域を表わす占有ブロックを生成し、
上記重複判定部は、上記処理装置を用いて、上記複数の移動体について上記ブロック生成部が生成した複数の占有ブロックが重複しているか否かを判定し、
上記注意喚起部は、上記処理装置を用いて、上記複数の占有ブロックが重複していると上記重複判定部が判定した場合に、監視者の注意を喚起することを特徴とする移動体監視装置。
【請求項2】
上記ブロック生成部は、上記移動体が滑走路を滑走している航空機である場合に、上記処理装置を用いて、上記移動体の現在位置から上記滑走路の終端までの区域を上記移動体が占有するものとして、占有ブロックを生成することを特徴とする請求項1に記載の移動体監視装置。
【請求項3】
上記ブロック生成部は、上記移動体が滑走路に進入しようとしている航空機である場合に、上記処理装置を用いて、上記移動体が進入しようとしている上記滑走路上の区域を上記移動体が占有するものとして、占有ブロックを生成することを特徴とする請求項1または請求項2に記載の移動体監視装置。
【請求項4】
上記ブロック生成部は、上記移動体が滑走路に進入した航空機である場合に、上記処理装置を用いて、上記滑走路の始端から、上記移動体の現在位置までの区域を上記移動体が占有するものとして、占有ブロックを生成することを特徴とする請求項1乃至請求項3のいずれかに記載の移動体監視装置。
【請求項5】
上記ブロック生成部は、上記処理装置を用いて、上記占有ブロックとして、上記移動体が現に占有している区域を表わす占有済ブロックと、上記移動体が占有しようとしている区域を表わす占有予定ブロックとを生成し、
上記注意喚起部は、上記処理装置を用いて、一の移動体についての占有済ブロックと他の移動体についての占有予定ブロックとが重複していると上記重複判定部が判定した場合に、上記他の移動体について、上記監視者の注意を喚起することを特徴とする請求項1乃至請求項4のいずれかに記載の移動体監視装置。
【請求項6】
上記ブロック生成部は、上記処理装置を用いて、他の移動体の種別ごとに異なる区域を表わす占有ブロックを生成し、
上記注意喚起部は、上記処理装置を用いて、他の移動体についての占有ブロックと、一の移動体について上記他の移動体の種別に対する占有ブロックとが重複していると上記重複判定部が判定した場合に、上記他の移動体について、上記監視者の注意を喚起することを特徴とする請求項1乃至請求項5のいずれかに記載の移動体監視装置。
【請求項7】
データを処理する処理装置を有するコンピュータが実行することにより、上記コンピュータを請求項1乃至請求項6のいずれかに記載の移動体監視装置として動作させることを特徴とするコンピュータプログラム。
【請求項8】
データを処理する処理装置を有する移動体監視装置が、複数の移動体を監視する移動体監視方法において、
上記処理装置が、上記複数の移動体それぞれについて、上記移動体が占有する区域を表わす占有ブロックを生成し、
上記処理装置が、上記複数の移動体について生成した複数の占有ブロックが重複しているか否かを判定し、
上記処理装置が、上記複数の占有ブロックが重複していると判定した場合に、監視者の注意を喚起することを特徴とする移動体監視方法。
【請求項1】
データを処理する処理装置と、ブロック生成部と、重複判定部と、注意喚起部とを有し、
上記ブロック生成部は、上記処理装置を用いて、複数の移動体それぞれについて、上記移動体が占有する区域を表わす占有ブロックを生成し、
上記重複判定部は、上記処理装置を用いて、上記複数の移動体について上記ブロック生成部が生成した複数の占有ブロックが重複しているか否かを判定し、
上記注意喚起部は、上記処理装置を用いて、上記複数の占有ブロックが重複していると上記重複判定部が判定した場合に、監視者の注意を喚起することを特徴とする移動体監視装置。
【請求項2】
上記ブロック生成部は、上記移動体が滑走路を滑走している航空機である場合に、上記処理装置を用いて、上記移動体の現在位置から上記滑走路の終端までの区域を上記移動体が占有するものとして、占有ブロックを生成することを特徴とする請求項1に記載の移動体監視装置。
【請求項3】
上記ブロック生成部は、上記移動体が滑走路に進入しようとしている航空機である場合に、上記処理装置を用いて、上記移動体が進入しようとしている上記滑走路上の区域を上記移動体が占有するものとして、占有ブロックを生成することを特徴とする請求項1または請求項2に記載の移動体監視装置。
【請求項4】
上記ブロック生成部は、上記移動体が滑走路に進入した航空機である場合に、上記処理装置を用いて、上記滑走路の始端から、上記移動体の現在位置までの区域を上記移動体が占有するものとして、占有ブロックを生成することを特徴とする請求項1乃至請求項3のいずれかに記載の移動体監視装置。
【請求項5】
上記ブロック生成部は、上記処理装置を用いて、上記占有ブロックとして、上記移動体が現に占有している区域を表わす占有済ブロックと、上記移動体が占有しようとしている区域を表わす占有予定ブロックとを生成し、
上記注意喚起部は、上記処理装置を用いて、一の移動体についての占有済ブロックと他の移動体についての占有予定ブロックとが重複していると上記重複判定部が判定した場合に、上記他の移動体について、上記監視者の注意を喚起することを特徴とする請求項1乃至請求項4のいずれかに記載の移動体監視装置。
【請求項6】
上記ブロック生成部は、上記処理装置を用いて、他の移動体の種別ごとに異なる区域を表わす占有ブロックを生成し、
上記注意喚起部は、上記処理装置を用いて、他の移動体についての占有ブロックと、一の移動体について上記他の移動体の種別に対する占有ブロックとが重複していると上記重複判定部が判定した場合に、上記他の移動体について、上記監視者の注意を喚起することを特徴とする請求項1乃至請求項5のいずれかに記載の移動体監視装置。
【請求項7】
データを処理する処理装置を有するコンピュータが実行することにより、上記コンピュータを請求項1乃至請求項6のいずれかに記載の移動体監視装置として動作させることを特徴とするコンピュータプログラム。
【請求項8】
データを処理する処理装置を有する移動体監視装置が、複数の移動体を監視する移動体監視方法において、
上記処理装置が、上記複数の移動体それぞれについて、上記移動体が占有する区域を表わす占有ブロックを生成し、
上記処理装置が、上記複数の移動体について生成した複数の占有ブロックが重複しているか否かを判定し、
上記処理装置が、上記複数の占有ブロックが重複していると判定した場合に、監視者の注意を喚起することを特徴とする移動体監視方法。
【図1】


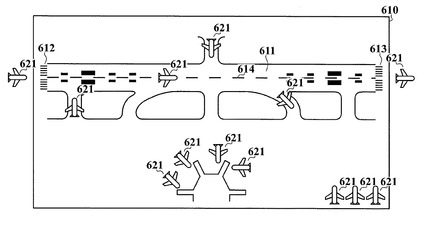
【図2】
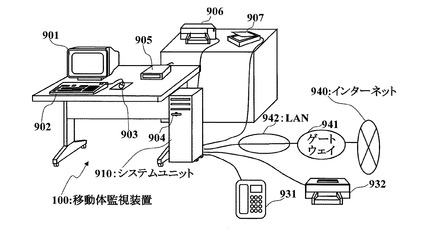
【図3】
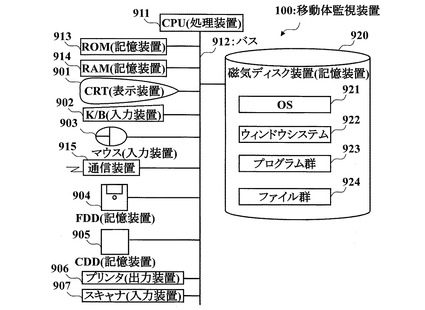
【図4】
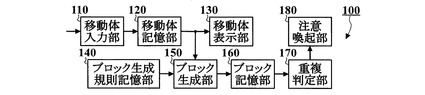
【図5】
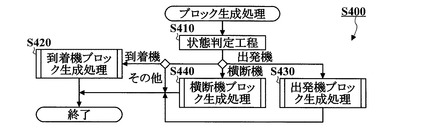
【図6】
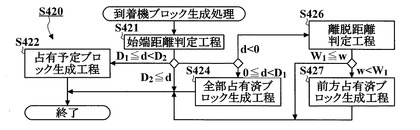
【図7】
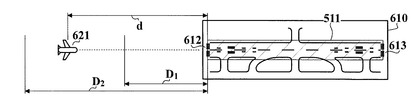
【図8】
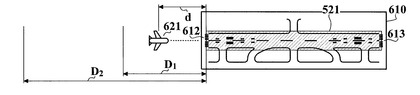
【図9】
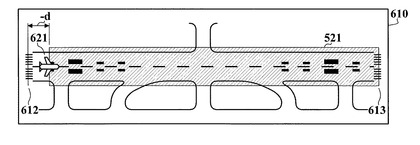
【図10】
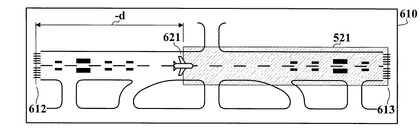
【図11】
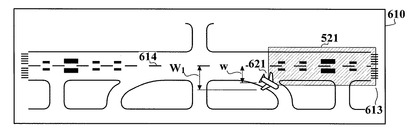
【図12】
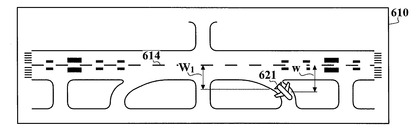
【図13】
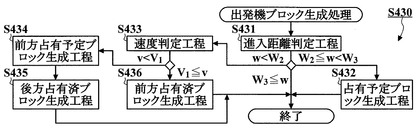
【図14】
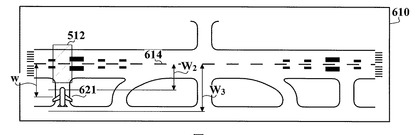
【図15】
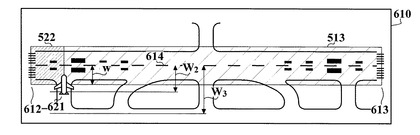
【図16】
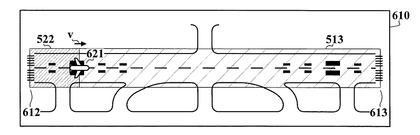
【図17】
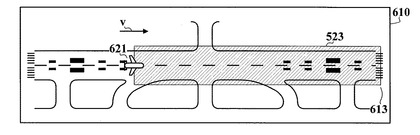
【図18】
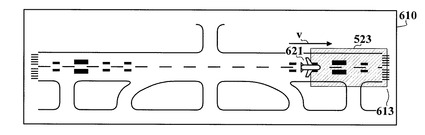
【図19】
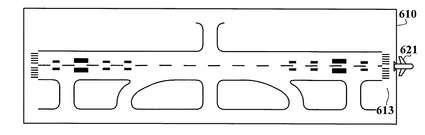
【図20】
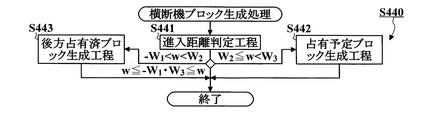
【図21】
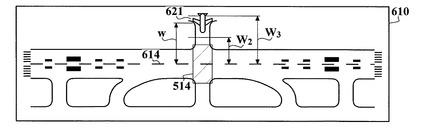
【図22】
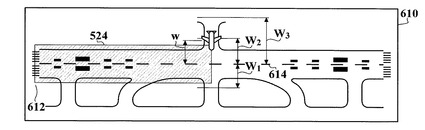
【図23】
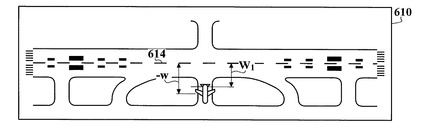
【図24】
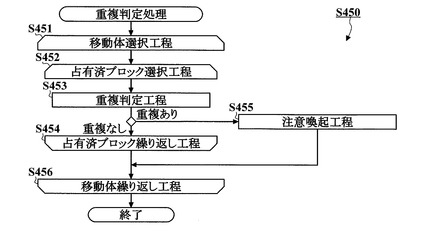
【図25】
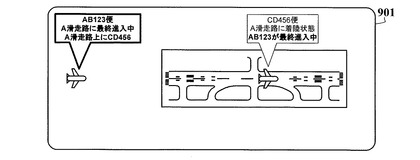
【図26】
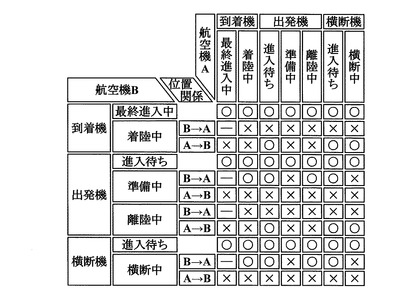
【図27】
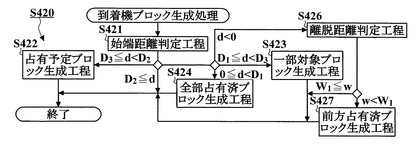
【図28】
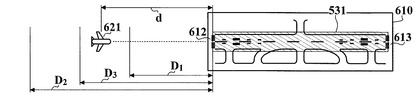
【図29】
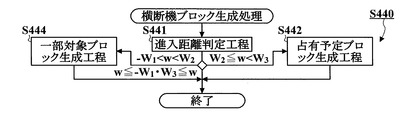
【図30】
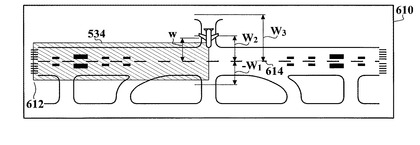
【図31】
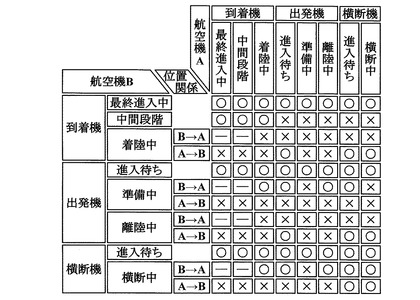
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【公開番号】特開2010−266916(P2010−266916A)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2009−115316(P2009−115316)
【出願日】平成21年5月12日(2009.5.12)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願日】平成21年5月12日(2009.5.12)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]