
移動体端末の位置の推定を可能にする方法及び装置
第1のネットワークノード(180)と第2の無線ネットワークノード(120)と移動体端末(170)とにおける、移動体端末の位置の推定を可能にする方法および装置構成を提供する。あるステップで、第1のネットワークノード(180)が、移動体端末(170)の位置を推定する要求を受信する。別のステップで、第1のネットワークノード(180)が、第2の無線ネットワークノード(120)と2つの別の無線ネットワークノード(130,140)とを含む、無線ネットワークノードの第1の集合を決定する。次のステップで、第1のネットワークノード(180)が、第1の集合の無線ネットワークノード(120,130,140)から移動体端末(170)に送信する、位置決め信号を決定する。さらに次のステップでは、第1のネットワークノード(180)が、第1の集合の複数の無線ネットワークノード(120,130,140)それぞれに、それらに関連付けられた位置決め信号を移動体端末(170)に送信するよう指示する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、セルラ無線通信システムにおける移動体端末の位置の推定を可能にする方法および装置構成に関する。特に、本発明は、移動体端末の位置の推定を可能にする第1のネットワークノードにおける方法および装置構成と、移動体端末の位置の推定を可能にする第2の無線ネットワークノードにおける方法および装置構成と、移動体端末の位置の推定を可能にする移動体端末における方法および装置構成とに関する。
【背景技術】
【0002】
例えば、LTE通信システムのような現代の無線通信システムでは、移動体デバイスすなわち移動体端末の位置を決定する方法が、そのシステムに存在する。これらの方法の精度はさまざまである。とは言っても、これらの方法は、アプリケーション開発者や無線ネットワーク運用各社が位置に基づくサービスを提供することを可能にしてきた。例えば、道案内システム、ショッピング支援、友人発見、プレゼンスサービス、コミュニティおよび通信サービス、およびその他のサービスが開発されてきた。このようにして、移動体デバイスのユーザは、ユーザがどこに位置するか、すなわち、どこにいるのかに基づいて、ローカル情報を受信する。
【0003】
また、商用サービスに加えて、数か国の政府が、緊急呼を発する移動体端末の位置を決定できるようにするため、ネットワーク運用各社に要件を課している。これらの要件は、屋内環境と屋外環境とを区別していない。
【0004】
屋外環境では、移動体端末の位置の推定は、測位システム、例えば、アシステッドGPS(A−GPS)のようなGPS(全球測位システム)に基づく方法を用いて行われてもよい。また、位置の推定は、無線通信システム自体を用いて行われてもよい。無線通信システムを用いた移動体端末の位置の推定のための既知の方法は、2つの主要なグループに区別される。
【0005】
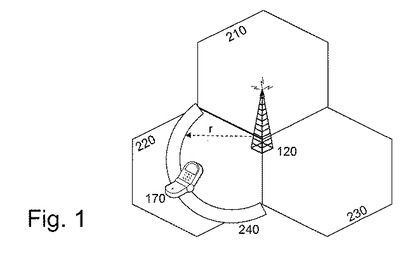
第1のグループは、緊急呼を発する移動体端末が滞在している無線基地局に基づく方法を含む。従って、第1のグループでは、位置の推定は、セルIDまたは、セルIDとTA(タイミングアドバンス)との組み合わせに基づいている。TAの測定の原理を、図1に示す。簡単に言うと、無線基地局120から移動体端末170まで、および、その逆方向の電波の伝播時間を測定する。この伝播時間を、以下、RTT(往復時間)と言う。無線基地局から移動体端末までの距離r(点線の矢印rで示す)は、r=c(TA/2)で得られる。
【0006】
ここで、TAは往復時間であり、cは光の速度である。往復時間の測定だけだと、円(この一部分を図1に240で示す)を定義するか、あるいは、不正確であることを考慮に入れるならば、無線基地局の周りの円形の帯を定義するのみである。この情報を、無線基地局120の多角形210、220、240と組み合わせることによって、円形の帯の左右の角度を計算することができ、それによって、判定された移動体端末の位置の目安の精度を向上させることができる。従って、移動体端末の位置は、在圏セル、すなわち、移動体端末が滞在している無線基地局によってカバーされるエリアと、円形の帯との交点を算出することによって決定される。いくつかのシステム、特に、LTEシステムでは、TAを用いて、移動体端末が位置するアンテナからの距離を識別することができる。これは距離を与えるけれども、(無線基地局からの距離によって定義される)球面あるいは円形の帯の部分のどこに移動体端末がいるかを決定することはできない。移動体端末は基地局から500mの距離にいるとRTT測定値が判定した場合、これは扇形の弧または円の円周に沿っている。
【0007】
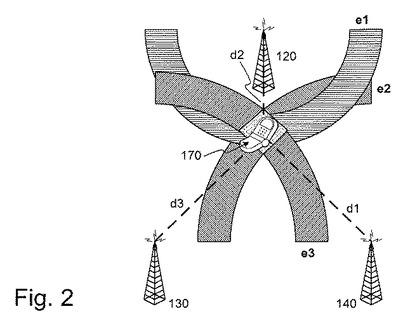
第2のグループは、図2に示すように、複数の基地局からの到来時刻測定値すなわちTOA(到来時刻)に基づく方法を含む。数式で表すと、到来時刻の原理は、次式のようになる。即ち、
t1R=t1T+√{(x−x1)2+(y−y1)2}/c+b+ν1 (1a)
t2R=t2T+√{(x−x2)2+(y−y2)2}/c+b+ν2 (1b)
tNR=tNT+√{(x−xN)2+(y−yN)2}/c+b+νN (1N)
である。
【0008】
ここで、
tRi:i番目の基地局についての受信時刻(測定値)
tTi:i番目の基地局についての送信時刻
xi,yi:i番目の基地局の座標(既知)
c:光の速度
x,y:(MSまたはネットワークノード内で)方程式を解くことによって
計算されたMSの座標
b:受信器の時計バイアス
νi:i番目のタイミング測定の測定誤差
である。
【0009】
N≧3の場合に未知数(x,y,b)について式(1a)〜(1N)を解き、かつ、基地局の地理的位置が適切であれば、移動体端末の位置の推定は、座標xとyとの形式で得られる。1つの解決策は、式(1a)〜式(1N)のテイラー級数展開に基づく数式最適化の解決策を用いることである。これらの方法は、この技術分野では周知であるので、ここではこれ以上詳述しない。
【0010】
TOAに基づく方法を用いた移動体端末の位置の推定は、少なくとも3つの地理的に分散した基地局のタイミングが測定されることを必要とする。従って、前記少なくとも3つの基地局に対するSNR(信号対雑音比)が、各基地局が移動体端末によって検出されるように、十分強いことを保証することが必要である。同じ周波数帯を再利用するセルラシステムは、セル間に強固な分離を形成するように設計されており、それはすなわち、在圏基地局からの信号は強く、他方、隣接基地局からの干渉は最小化されるべきであることを意味する。要するに、測位についての要件と通信についての要件とは、矛盾している。LTEは本質的には通信システムであるため、測位のための時間測定は、隣接基地局に対するC/I(搬送波対干渉波比)が非常に低い状態で行われる必要があり、それが、移動体端末の受信器に高い要件を課し、通常、測位の精度を低下させる。
【0011】
分散した基地局のタイミングは、LTE基地局から常に送信されている既知の信号の一部を用いて測定されてもよい。例えば、タイミングは、同期信号または基準信号に基づいてもよい。LTEシステムでは、各無線フレームは10個のサブフレームを含む。
【0012】
同期信号は、一般にサブフレーム0および5で送信される。プライマリ同期信号は、1つのサブフレームのうちの最後のOFDMシンボルで送信され、セカンダリ同期信号は、最後から2番目のOFDMシンボルで送信される。3つの異なるPSS(プライマリ同期信号)シーケンスと、168の異なるSSS(セカンダリ同期信号)シーケンスとが存在する。シーケンス識別子を用いて、異なる基地局(またはセル)を区別する。次いで、基地局の識別子を用いて、基準信号シーケンスと、時間−周波数グリッドにおけるその割り当てとを決定することができる。同期信号は、例えば、割り当てられた帯域幅の中心において、62のリソース要素を占める。
【0013】
基準シンボルは、サブフレーム毎に、かつ、全帯域幅にわたって、送信される。異なる基地局が、6つの異なる周波数シフトを用いてもよく、504の異なる信号が存在する。実際には、基準シンボルには、再利用される3つのパターンがある(2つのTXアンテナを想定する)。低負荷の場合、干渉は、基準シンボルに関する時間測定には有利であるだろう。しかし、高負荷では、状況は同期信号についてのPSS/SSSと同様になる。
【0014】
特許文献1には、TDMA/FDMA(GSM(登録商標))システムにおいて動作中の移動体端末の地理的位置を決定する方法が開示されている。位置の決定が必要な時、端末は、所定の周波数における所定のタイムスロットで所定のシーケンスを送信するよう命令され、そして基地局は、TOAまたはTDOA(到来時間差)の測定を実行する。次いで、移動体端末は、周波数間HOを行うように強制され、その手順は、その周波数上で繰り返される。十分な数のTOA/TDOA推定値が得られた後、移動体端末の位置を推定することができる。この方法では、基地局が測定を行うことと、移動体端末が所定の位置決め信号を送信することとが必要になる。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】米国特許第6064888号明細書
【発明の概要】
【発明が解決しようとする課題】
【0016】
本発明の目的は、セルラ無線通信システム、例えば、LTE通信システムにおける移動体端末の位置の推定を可能にするための方法を提供することである。
【課題を解決するための手段】
【0017】
本発明を1つの側面からみれば、その目的は、移動体端末の位置の推定を可能にするための第1のネットワークノードにおける方法によって達成される。セルラ無線通信システムが、前記第1のネットワークノードと第2の無線ネットワークノードと複数の無線ネットワークノードと前記移動体端末とを含んでいる。前記第2の無線ネットワークノードは、前記第1のネットワークノードによって管理されている。ある工程では、第1のネットワークノードが、第2の無線ネットワークノードを介して、移動体端末の位置を推定する要求を受信する。別のステップでは、第1のネットワークノードが、第2の無線ネットワークノードと2つの別の無線ネットワークノードとを含む無線ネットワークノードの第1の集合を決定する。2つの別の無線ネットワークノードは、前記複数の無線ネットワークノードの間から選択される。
【0018】
本発明を別の側面からみれば、その目的は、移動体端末の位置の推定を可能にするための第1のネットワークノードにおける装置構成によって達成される。セルラ無線通信システムが、前記第1のネットワークノードと第2の無線ネットワークノードと複数の無線ネットワークノードと前記移動体端末とを含んでいる。前記第2の無線ネットワークノードは、前記第1のネットワークノードによって管理されている。この構成は、第2の無線ネットワークノードを介して、移動体端末の位置を推定する要求を受信するように構成された受信ユニットと、第2の無線ネットワークノードと2つの別の無線ネットワークノードとを含む無線ネットワークノードの第1の集合を決定するように構成された処理ユニットとを備えていてもよい。2つの別の無線ネットワークノードは、前記複数の無線ネットワークノードの間から選択されてもよい。さらに、処理ユニットは、第1の集合の無線ネットワークノードから移動体端末へ送信するための位置決め信号を決定するように構成されてもよい。それぞれの位置決め信号は、第1の集合の個々の無線ネットワークノードに関連付けられてもよく、そして、第1の集合の個々の無線ネットワークノードに、それらに関連付けられた位置決め信号を移動体端末に送信するよう指示するように構成されてもよい。
【0019】
本発明をさらに別の側面から見れば、その目的は、移動体端末の位置の推定を可能にするための第2の無線ネットワークノードにおける方法によって達成される。セルラ無線通信システムが、前記第2の無線ネットワークノードと前記移動体端末とを含んでいる。移動体端末は、位置決め信号が第2の無線ネットワークノードと移動体端末との間で転送可能なように、第2の無線ネットワークノードの近くに位置してもよい。あるステップでは、第2の無線ネットワークノードが、第2の無線ネットワークノードから移動体端末へ送信するため、第2の無線ネットワークノードに関連付けられた位置決め信号を決定する。別のステップでは、第2の無線ネットワークノードが位置決め信号を移動体端末に送信する。
【0020】
本発明をさらに別の側面から見れば、その目的は、移動体端末の位置の推定を可能にするための第2の無線ネットワークノードにおける装置構成によって達成される。セルラ無線通信システムが、前記第2の無線ネットワークノードと前記移動体端末とを含んでいる。移動体端末は、位置決め信号が第2の無線ネットワークノードと移動体端末との間で転送可能なように第2の無線ネットワークノードの近くに位置してもよい。その構成は、第2の無線ネットワークノードから移動体端末へ送信するため、第2の無線ネットワークノードに関連付けられた位置決め信号を決定するように構成された処理ユニットと、その位置決め信号を移動体端末へ送信するように構成された送信ユニットとを備えるとよい。
【0021】
本発明をさらに別の側面から見れば、その目的は、移動体端末の位置の推定を可能にするための移動体端末における方法によって達成される。セルラ無線通信システムは、第2の無線ネットワークノードと少なくとも2つの別の無線ネットワークノードと前記移動体端末とを含んでいる。その移動体端末は、第2の無線ネットワークノードによってサービスを受ける。複数の無線ネットワークノードの第1の集合は、第2のネットワークノードと前記少なくとも2つの別の無線ネットワークノードとを含んでいてもよい。あるステップでは、前記移動体端末が、第1の集合の複数の無線ネットワークノードの各無線ネットワークノードから送信される各位置決め信号についての情報を、第2の無線ネットワークノードから受信する。別のステップでは、前記移動体端末が、前記第1の集合の複数の無線ネットワークノードそれぞれから、各位置決め信号を受信する。さらに次のステップでは、前記移動体端末が、受信された位置決め信号それぞれに基づいて、位置決め信号それぞれについての各タイミング推定値を決定する。各タイミング推定値は、第1の集合の複数の無線ネットワークノードそれぞれと移動体端末との間の距離を示す。
【0022】
本発明をさらに別の側面から見れば、その目的は、移動体端末の位置の推定を可能にするための移動体端末によって達成される。セルラ無線通信システムが、第2の無線ネットワークノードと少なくとも2つの別の無線ネットワークノードと前記移動体端末とを含んでいる。前記移動体端末は、第2の無線ネットワークノードによってサービスを受けるとよい。無線ネットワークノードの第1の集合は、第2のネットワークノードと前記少なくとも2つの別の無線ネットワークノードとを含んでいてもよい。その移動体端末の構成は、第1の集合の複数の無線ネットワークノードの各無線ネットワークノードから送信される各位置決め信号についての情報を第2の無線ネットワークノードから受信し、第1の集合の複数の無線ネットワークノードそれぞれから各位置決め信号を受信するように構成された受信ユニットを備えていてもよい。さらに、その構成は、受信された位置決め信号それぞれに基づいて、位置決め信号それぞれについての各タイミング推定値を決定するように構成された処理ユニットを備えていてもよい。各タイミング推定値は、第1の集合の各無線ネットワークノードと移動体端末との間の距離を示す。
【0023】
位置決め信号は、移動体端末からの要求に応じて無線ネットワークノードから送信されるので、この移動体端末(またはセルラ無線通信システム内に含まれている他の移動体端末)が、移動体端末の位置の推定のための情報を決定することができる。そのような情報は、タイミング推定値と移動体端末の地理的座標との内の少なくともいずれかをを含んでもよい。このようにして、移動体端末の位置が推定または決定されることになる場合に限って位置決め信号が無線ネットワークノードから移動体端末へ送達または送信されるということが保証されてもよい。結果として、セルラ無線通信システムにおける移動体端末の位置の推定を可能にするための方法が提供される。
【0024】
添付の請求の範囲および以下の説明を検討すれば、本発明のさらなる特徴および利点が明らかになるであろう。当業者であれば、本発明のさまざまな特徴が組み合わされて、添付の請求の範囲によって定義される本発明の範囲を逸脱することなく、以下に説明したもの以外の実施例を生成できることを理解するであろう。
【0025】
本発明の種々の側面が、その個々の特徴と利点とを含めて、以下の詳細な説明と添付図面とから容易に理解されるであろう。
【図面の簡単な説明】
【0026】
【図1】無線基地局およびその関連セルの概略を示す図である。
【図2】3つの無線基地局の近くに位置している移動体端末を模式的に示す図である。
【図3】例示するセルラ無線通信システムの概略を示す図である。
【図4】移動体端末の位置の推定を可能にするための図3によるセルラ無線通信システムにおける方法の実施例のシグナリングとフローチャートとを組み合わせた略図である。
【図5】移動体端末の位置の推定を可能にする第1のネットワークノードにおける方法の実施例の概略フローチャートである。
【図6】移動体端末の位置の推定を可能にする第1のネットワークノードにおける装置構成の実施例の概略ブロック図である。
【図7】移動体端末の位置の推定を可能にする第2の無線ネットワークノードにおける方法の実施例の概略フローチャートである。
【図8】移動体端末の位置の推定を可能にする第2の無線ネットワークノードにおける装置構成の実施例の概略ブロック図である。
【図9】移動体端末の位置の推定を可能にする移動体端末における方法の実施例の概略フローチャートである。
【図10】移動体端末の位置の推定を可能にする移動体端末における装置構成の実施例の概略ブロック図である。
【図11】検出された閾値SNRの関数としての誤り警告率の一組のグラフを示す図である。
【図12】ラグの関数としてのSSS信号の相互相関特性を示す図である。
【発明を実施するための形態】
【0027】
以下の説明全体を通じて、適用可能な場合には、同様の参照番号が、同様の要素、部分、項目または特徴を示すのに用いられている。
【0028】
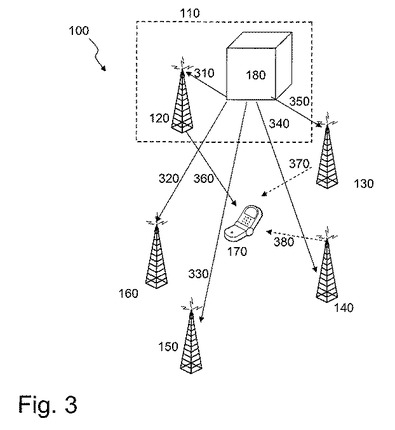
図3に、本発明による解決策が実施される代表的なセルラ無線通信システム、例えば、LTE通信システムの概要を示す。LTE通信システムには、第1のネットワークノード180と、例えば、無線基地局すなわちeNBのような複数の無線ネットワークノード120、130、140、150、160と、移動体端末170とが含まれている。移動体端末170は、第2の無線ネットワークノード120によってサービスを受けるように構成されており、すなわち、移動体端末170は、第2の無線ネットワークノード120に滞在している。LTE通信システム100の実施例では、主要ネットワークノード110は、第1のネットワークノード180、例えば、MME、HSS等のコアネットワークノードを含んでいる。LTE通信システム100の別の実施例では、主要ネットワークノード110は、第2の無線ネットワークノード120を含んでいる。
【0029】
また、矢印360は、移動体端末170と移動体端末170にサービスを行っている第2の無線ネットワークノード120との間の接続を示す。矢印370と矢印380は無線ネットワークノード130、140を示しており、それらの無線ネットワークノードは、それらの無線ネットワークノード130、140と移動体端末170との間で信号が転送可能なように位置している。なおまた、矢印310、320、330、340、350は、第1のネットワークノード180が、直接または間接的に、無線ネットワークノード120〜160と接続されていることを示す。なお、しかしながら、無線ネットワークノード120〜160の一部は、第1のネットワークノード180によって管理されてもよいが、他方、無線ネットワークノード120〜160の一部は、第1のネットワークノード180によって管理されなくてもよい。
【0030】
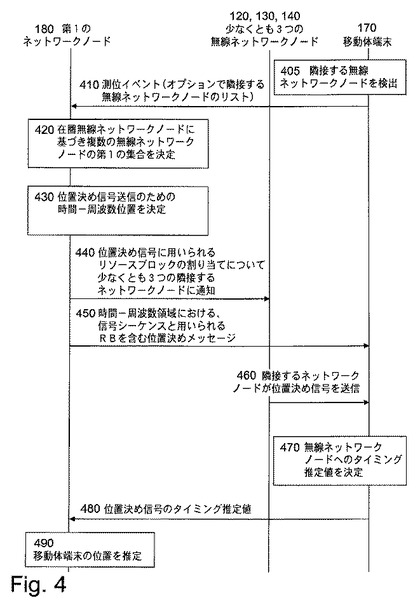
図4では、図3のLTE通信システム100を運用している時に移動体端末の位置を推定するための方法の実施例のシグナリング図とフローチャートとを組み合わせた概略が示されている。次のステップの一部または全部が実行される。
【0031】
オプションのステップ405では、移動体端末170が、近隣の、または隣接する無線ネットワークノードを検出する。例えば、無線ネットワークノード140〜160が、位置決め信号がこれらの無線ネットワークノードのいずれか1つと移動体端末170との間で転送されるように位置しているならば、移動体端末がそれらを検出してもよい。移動体端末170は、例えば、通常のセル探索手順、すなわち、PSS/SSSの検出と、オプションでその後にPBCHチャネルからの同報情報の復号化とを用いて、隣接する無線ネットワークノードを検出してもよい。検出された無線ネットワークノードは、位置決め信号を送信するための無線ネットワークノードの集合の選択の仕方に関するいくらかの情報を提供してもよい。そのような無線ネットワークノードの集合は、従って、検出されたネットワークノードの一部または全部、および場合によっては、例えば、第1のネットワークノード180によって決定された、いくつかの別の無線ネットワークノードを含んでもよい。
【0032】
ステップ410で、移動体端末170が、その位置の推定を求める要求を第1のネットワークノード180に送信する。別の表現をすると、移動体端末170は、「測位イベント」を生成し、それが第1のネットワークノード180に送られる(送信される)。「測位イベント」は、ユーザによってトリガされてもよく、ユーザは、例えば、112、911、またはその場の状況に適した番号をダイヤルすることによって緊急呼を発呼するか、または、移動体端末170の中の測位アプリケーションまたはサービスを起動する。
【0033】
ステップ420で、位置推定要求が、第1のネットワークノード180によって処理される。オプション的には、第1のネットワークノード180が、移動体端末に、検出された無線ネットワークノード130、140のリストを発信する(送信する)ように要求してもよい(ステップ405を参照)。そのリストは、正しい隣接無線ネットワークノード(セルと呼ばれることもある)が測位手順について通知されるように、第1のネットワークノード180を支援する(次のステップを参照)。このようにして、例えば、どの無線ネットワークノード120によって移動体端末170がサービスを受けているかに基づいて、第1のネットワークノード180が、少なくとも3つの無線ネットワークノード120、130、140のリストを決定してもよい。例えば、第1のネットワークノードと第2のネットワークノードとの内の少なくともいずれかに基づいた、少なくとも3つの無線ネットワークノード120、130、140の決定されたリストは、その決定が、第1のネットワークノードと第2の無線ネットワークノードとの内の少なくともいずれかについての位置と識別子コードとの内の少なくともいずれかに基づいていることを意味しているかもしれない。ここではこれ以降、複数の無線ネットワークノードのリストは、無線ネットワークノードの第1の集合とも呼ぶ。例えば、第1のネットワークノード180は、在圏無線ネットワークノード120すなわち第2の無線ネットワークノード(即ち、移動体端末170は、在圏無線ネットワークノードによってサービスを受けている)に隣接しているか、または、その近隣にある複数の無線ネットワークノードのリストを決定することができる。ときには、そのような隣接するかまたは近隣にある無線基地局も、位置決め信号を移動体端末170に送信することもあるため、これは有益である。対照的に、第1のネットワークノードによって管理される他の無線基地局が、例えば、無線送信を妨害する建物等に起因して移動体端末に位置決め信号をうまく送信できないことがあるというリスクがある。複数の無線ネットワークノードのリストには第1のネットワークノードも含まれることが好適であるかもしれない。
【0034】
ステップ430で、第1のネットワークノード180が、第1の集合の無線ネットワークノードに送信される位置決め信号についての時間−周波数位置を決定する。位置決め信号についての時間−周波数位置は、どのリソースブロックにおいて位置決め信号が送信されることになるかを示す。
【0035】
ステップ440で、第1のネットワークノード180が、第1のメッセージを前記少なくとも3つの無線ネットワークノードに送り、すなわち送信する。ここで、第1のメッセージは、位置決め信号をどのように送信するかに関する前記少なくとも3つの隣接する無線ネットワークノードに対する命令を含む。従って、第1のメッセージは、時間−周波数空間におけるどのリソースブロックに位置決め信号がその後送信されることになるのか、さらに、どの時刻すなわちどのサブフレームにおいてなのかについての情報も含む。加えて、用いられる位置決め信号は、前記少なくとも3つの無線ネットワークノードにも送信されることが望ましい。一部の実施例では、位置決め信号は、物理セルID(PCI)に結合されており、すなわち、いったん無線ネットワークノード120、130、140が、位置決め信号を発信するかまたは送信するようにという命令を受信した後は、上述したように位置決め信号は物理セルID(PCI)に基づいているので、無線ネットワークノードは、どの位置決め信号を用いるべきかを知る。
【0036】
ステップ450で、第1のネットワークノード180は、第2のメッセージを移動体端末170へ送信する。第2のメッセージは、位置決め信号についての情報、すなわち、時間−周波数領域において用いられる信号シーケンスとリソースブロックとの内、少なくともいずれかを含む。第2のメッセージは、RRCメッセージとして送信され、それが、隣接する無線ネットワークノードのリストを(そして通常は、移動体端末にサービスを行う第1のネットワークノードも)含むことが望ましい。また、加えて、隣接する無線ネットワークノードのリストは、移動体端末によって検出された無線ネットワークノードだけでなく、検出された無線ネットワークノード130、140の近隣のノードも含んでもよい。RRCメッセージは、さらに、位置決め信号の時間および周波数割り当て(用いられるリソースブロックおよびサブフレーム)を含む。位置決め信号を送信する無線ネットワークノードについて(リソースブロックおよびサブフレーム番号の点で)同じ割り当てを用いることが好適であるが、これは要求されていない。結果として、移動体端末170は、これらの無線ネットワークノード120、130、140からの位置決め信号を受信して復号してもよい。
【0037】
ステップ460で、前記少なくとも3つの無線ネットワークノード120、130、140が、位置決め信号を移動体端末170に送信する。
【0038】
ステップ470では、移動体端末170は、位置決め信号のタイミング推定値を決定する。例えば、無線ネットワークノード130、140にとって、タイミングが無線ネットワークノード120からの位置決め信号のTOAに比較して表されるように、タイミング推定値が無線ネットワークノード120の時刻ベースで表されてもよい。タイミング推定値の決定は通常、以下でさらに説明するように、マッチングされたフィルタリングとピーク検出とを含む。
【0039】
ステップ480で、移動体端末170がタイミング推定値を送信し、そして、できれば、移動体端末170が前記少なくとも3つのネットワークノードについてのタイミング推定値を判定した場合には、検出された位置決め信号についてのPCI(またはシーケンス番号)を第1のネットワークノード180に送信することが望ましい。
【0040】
ステップ490で、第1のネットワークノード180が、移動体端末170から受信したタイミング推定値に基づいて移動体端末170の位置を推定する。
【0041】
さらに、第1のネットワークノード180が、第3のメッセージを前記少なくとも3つの無線ネットワークノードに送信してもよく、ここで、第3のメッセージは、前記少なくとも3つの無線ネットワークノードに、位置決め信号を発信すること、すなわち送信することを中止するよう命令する。あるいは、前記少なくとも2つのネットワークノードが、例えば、100〜10000ミリ秒または他の適切な値のような、限定された時間の間、位置決め信号を送信するよう命令されてもよい。
【0042】
ステップ490に加えるか、または、できればステップ490の代わりに、移動体端末が、(図4には不図示のステップで)、ステップ440で第2のメッセージと共に受信した無線ネットワークノード座標に基づいて自分自身の位置を推定する。次いで、次のステップで、移動体端末が、推定された位置を、例えば、地理的な位置座標の形で、第1のネットワークノード180に送信する。
【0043】
セルラ無線通信システム100における方法の実施例において、位置決め信号は、OFDM搬送波上のQAM変調として、または(OFDM搬送波上に)重畳されたCDMA信号として生成されてもよい。CDMA信号は、GPSシステムによって用いられるいわゆるゴールドコード(Gold code)に基づく信号のように、到来推定について良好な特性、すなわち良好な時間分解能、自己相関および相互相関特性を有することがよく知られている。
【0044】
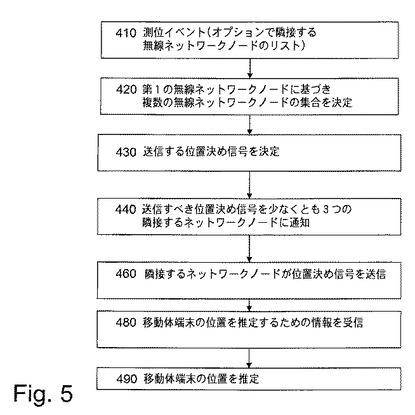
図5に、移動体端末170の位置の推定を可能にする第1のネットワークノード180における方法の実施例の概略フローチャートを示す。セルラ無線通信システム100が、第1のネットワークノード180と、第2の無線ネットワークノード120と、複数の無線ネットワークノード130、140、150、160と、移動体端末170とを含んでいる。第2の無線ネットワークノード120は、第1のネットワークノード180によって管理されている。以下のステップの一部または全部が実行される。
【0045】
ステップ410で、第1のネットワークノード180が、第2の無線ネットワークノード120を介して、移動体端末170の位置を推定する要求を受信する。
【0046】
ステップ420で、第1のネットワークノード180が、オプションで第1のネットワークノード180と第2の無線ネットワークノード120との内、少なくとも1つに基づいて、第2の無線ネットワークノード120と2つの別の無線ネットワークノード130、140とを含む無線ネットワークノードの第1の集合を決定する。2つの別の無線ネットワークノード130、140は、前記複数の無線ネットワークノード130、140、150、160から選択される。
【0047】
第1のネットワークノード180における方法の一部の実施例では、ネットワークノードの第1の集合を決定するステップ420はさらに、オプションで移動体端末170の位置を推定する要求に関連して、移動体端末170によって検出された無線ネットワークノードのリストを、移動体端末170から受信するステップを含む。無線ネットワークノードの第1の集合の決定は、さらに、検出された無線ネットワークノードの受信されたリストに基づいている。
【0048】
ステップ430で、第1のネットワークノード180が、第1の集合の無線ネットワークノード120、130、140から移動体端末170へ送信するための位置決め信号を決定する。各位置決め信号は、第1の集合の各無線ネットワークノードに関連付けられている。オプションで、第1のネットワークノード180が、各位置決め信号の時間−周波数位置を決定する。各位置決め信号についての時間−周波数位置は、その具体的な信号についてどのリソースブロックを用いるかを示す。
【0049】
ステップ440で、第1のネットワークノード180が、第1の集合の無線ネットワークノード120、130、140に、それらに関連付けられた位置決め信号を移動体端末170に送信するよう命令する。
【0050】
第1のネットワークノード180における方法の一部の実施例では、無線ネットワークノードの第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号のうちの2つが、所定の閾値未満の相互相関を有する。このようにして、位置決め信号間の干渉が低減される。位置決め信号(それらのシーケンス)が、例えば、少なくとも疑似的な雑音の挙動を呈するように構成されること、すなわち、Nがシーケンスの長さである場合に、サイド相互相関が1/√(平方根)(N)であることが好適である。この例では、閾値は、α*1/√(N)であってもよい。ここでαは1〜10の範囲、好ましくは2〜4の範囲内にあるとよい。オプションで、ステップ430で判定される位置決め信号が、所定の閾値未満の相互相関を有するか、直交或いはほぼ直交であるかの内の少なくともいずれかであるように決定される。
【0051】
第1のネットワークノード180における方法の実施例では、無線ネットワークノード120、130、140の第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号の2つが、直交或いはほぼ直交する。
【0052】
第1のネットワークノード180における方法の一部の実施例では、移動体端末170が、第2の無線ネットワークノード120によってサービスを受ける。
【0053】
第1のネットワークノード180における方法の一部の実施例では、移動体端末170の位置を推定する要求が、移動体端末170から送信される。従って、推定または決定されることになるのは、要求を送信している移動体端末の位置である。要求を送信している移動体端末とは、緊急呼を発し、測位サービス等を起動する移動体端末であり、すなわち、測位イベントを生成する移動体端末である。
【0054】
加えて、または、代わりに、もし、それが要求を送信している移動体端末以外の別の移動体端末の位置である場合には、その別の移動体端末(第2の移動体端末)は、位置決め信号について通知される必要がある。第2の移動体端末は、そのような情報を、情報を移動体端末に同報する第1のネットワークノードまたは第2の無線ネットワークノードから受信してもよい。接続状態或いはアイドル状態のいずれかにある少なくとも1つの移動体端末が、呼び出しメッセージを受信して、「位置決めの測定が、次のパラメータ等を使って行われてもよい」ことを移動体端末に通知する同報メッセージを読み取る。
【0055】
オプションのステップで、第1のネットワークノード180が、第1の集合の各無線ネットワークノードを経由して、決定された位置決め信号それぞれを移動体端末170に送信する。
【0056】
オプションのステップ480で、第1のネットワークノード180が、第2の無線ネットワークノード120を介して、移動体端末170の位置を推定するための情報を移動体端末170から受信する。
【0057】
オプションのステップ490で、第1のネットワークノード180が、受信情報に基づいて移動体端末170の位置を推定する。第1のネットワークノード180における方法の一部の実施例では、その情報は、無線ネットワークノードの第1の集合の複数の無線ネットワークノードの各無線ネットワークノード120、130、140についてのタイミング推定値についての情報を含む。それぞれの個別のタイミング推定値は、各無線ネットワークノード120、130、140と移動体端末170との間の距離を示す。従って、第1のネットワークノードは、移動体端末170の位置座標を算出(または推定)するのに用いられる情報を受信する。オプションで、受信情報は、第1のネットワークノードにはすでに利用可能な他の情報と組み合わせる必要がある。そのような情報とは、位置、すなわち、第1の集合の複数の無線ネットワークノードの地理的座標であってもよい。第1のネットワークノード180における方法の一部の実施例では。その情報は、移動体端末170の地理的位置についての情報を含んでおり、その地理的位置は、移動体端末170によって決定される。従って、第1のネットワークノードは、移動体端末170の地理的位置座標を受信する。
【0058】
第1のネットワークノード180における方法の一部の実施例では、各位置決め信号の時間−周波数位置は、第1の集合の各無線ネットワークノード120、130、140における負荷のうちの少なくとも1つと、第1の集合のネットワークノード120、130、140の間の相対的タイミングとに基づいている。このようにして、位置決め信号は、できるだけ直交するようにされ、かつ、干渉を最小化するように選択される。
【0059】
第1のネットワークノード180における方法の一部の実施例では、時間−周波数位置の決定は、さらに、第1の集合の各ネットワークノード120、130、140についての物理セル識別子に基づいている。結果として、無線ネットワークノード間および移動体端末へのシグナリングの必要性が減少する。
【0060】
第1のネットワークノード180における方法の一部の実施例では、位置決め信号の決定はさらに、第1の集合の各無線ネットワークノード120、130、140の物理セル識別子に基づいている。
【0061】
第1のネットワークノード180における方法の一部の実施例では、個別の位置決め信号の少なくとも1つが、個別の位置決め信号の前記少なくとも1つが送信されるサブフレームに基づいており、それによって、1つのサブフレームにおいて送信された個別の位置決め信号は、別のサブフレームにおいて送信された少なくとも1つの個別の位置決め信号とは異なる。このようにして、異なるシーケンス間、すなわち、位置決め信号間の平均相互相関が減少する。
【0062】
第1のネットワークノード180における方法の一部の実施例では、第1のネットワークノード110、180は、例えば(従来のシステムアーキテクチャでのRNC(無線ネットワーク制御装置)に対応する)E−SMLC(発展型在圏移動体ロケーションセンタ:Evoloved-Serving Mobile Location Center)のようなコアネットワークノード180を含む。
【0063】
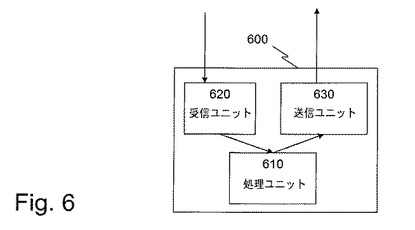
図6には、移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の実施例の概略ブロック図が示されている。セルラ無線通信システム100は、第1のネットワークノード180と、第2の無線ネットワークノード120と、複数の無線ネットワークノード130、140、150、160と、移動体端末170とを含んでいる。第2の無線ネットワークノード120は、第1のネットワークノード180によって管理されている。装置構成600は、第2の無線ネットワークノード120を介して、移動体端末170の位置を推定する要求を受信するように構成された受信ユニット620と、オプションで第1のネットワークノード180と第2の無線ネットワークノード120との内の少なくともいずれかに基づいて、第2の無線ネットワークノード120と2つの別の無線ネットワークノード130、140とを含む無線ネットワークノードの第1の集合を決定するように構成された処理ユニット610とを備えていてもよい。2つの別の無線ネットワークノード130、140は、前記複数の無線ネットワークノード130、140、150、160から選択されてもよい。さらに、処理ユニット610は、第1の集合の無線ネットワークノード120、130、140から移動体端末170へ送信するための位置決め信号を決定するように構成されてもよい。各位置決め信号は、第1の集合の各無線ネットワークノードに関連付けられて、そして、第1の集合の各無線ネットワークノード120、130、140に、それらに関連付けられた位置決め信号を移動体端末170に送信するよう命令するように構成されてもよい。オプション的には、装置構成600はさらに、送信ユニット、すなわち発信ユニット630を備えていてもよい。
【0064】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、受信ユニット620はさらに、オプションで移動体端末170の位置を推定する要求に関連して、移動体端末170によって検出された無線ネットワークノードのリストを、移動体端末170から受信するように構成される。無線ネットワークノードの第1の集合の決定はさらに、検出された無線ネットワークノードの受信されたリストに基づいている。
【0065】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、処理ユニット610はさらに、無線ネットワークノード120、130、140の第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号の2つを、その2つの信号が所定の閾値未満の相互相関を有するように決定するように構成される。
【0066】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、処理ユニット610はさらに、第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号の2つを、その2つの信号が直交或いはほぼ直交するように決定するように構成される。
【0067】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、移動体端末170は、第2の無線ネットワークノード120によってサービスを受ける。
【0068】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、送信ユニット630はさらに、第1の集合の各無線ネットワークノードを介して、決定された各位置決め信号を移動体端末170に送信するように構成される。
【0069】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、受信ユニット620はさらに、第2の無線ネットワークノード120を介して、移動体端末170の位置を推定するための情報を移動体端末170から受信するように構成される。
【0070】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、処理ユニット610はさらに、受信された情報に基づいて移動体端末170の位置を推定するように構成される。第1のネットワークノード180における装置構成600の一部の実施例では、その情報は、第1の集合の複数のネットワークノードの各無線ネットワークノード120、130、140についてのタイミング推定値についての情報を含んでいる。各タイミング推定値は、各無線ネットワークノード120、130、140と移動体端末170との間の距離を示す。従って、第1のネットワークノードは、移動体端末170の位置座標を算出(または推定)するのに用いられる情報を受信する。オプションでは、その受信された情報は、第1のネットワークノードにすでに利用可能な他の情報と組み合わせる必要がある。そのような情報とは、位置、すなわち、第1の集合の無線ネットワークノードの地理的座標であるとよい。第1のネットワークノード180における装置構成600の一部の実施例では、その情報は、移動体端末170の地理的位置についての情報を含んでいる。ここで、その地理的位置は移動体端末170によって決定される。従って、第1のネットワークノードは、移動体端末170の位置座標を受信する。
【0071】
第1のネットワークノード180における装置構成600の一部の実施例では、処理ユニット610はさらに、第1の集合の各無線ネットワークノード120、130、140についての物理セル識別子に基づいて時間−周波数位置を決定するように構成される。
【0072】
第1のネットワークノード180における装置構成600の一部の実施例では、処理ユニット610はさらに、第1の集合の各無線ネットワークノード120、130、140についての物理セル識別子に基づいて位置決め信号を決定するように構成される。
【0073】
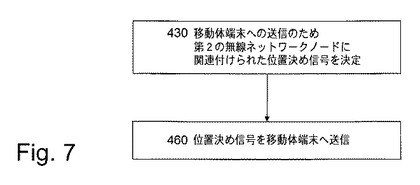
図7には、移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における方法の実施例の概略フローチャートが示されている。セルラ無線通信システム100が、第2の無線ネットワークノード120、130、140と、移動体端末170とを含んでいる。移動体端末170は、位置決め信号が第2の無線ネットワークノード120、130、140と移動体端末170との間で転送されるように、第2の無線ネットワークノード120、130、140の近くに位置していてもよい。次のステップの一部または全部が実行される。
【0074】
ステップ430では、第2の無線ネットワークノード120、130、140が、第2の無線ネットワークノード120、130、140から移動体端末170に送信するための、第2の無線ネットワークノード120、130、140に関連付けられた位置決め信号を決定する。
【0075】
ステップ460で、第2の無線ネットワークノード120、130、140が、位置決め信号を移動体端末170に送信する。
【0076】
オプションの次のステップでは、第2の無線ネットワークノード120、130、140が、位置決め信号を送信するようにという命令を第1のネットワークノード180から受信する。セルラ無線通信システム100はさらに、第1のネットワークノード180を含んでいる。
【0077】
第2の無線ネットワークノード120、130、140における方法の一部の実施例では、位置決め信号を決定するステップ430はさらに、位置決め信号の送信のための時間−周波数位置を、第1のネットワークノード180から受信するステップを含む。
【0078】
第2の無線ネットワークノード120における方法の一部の実施例では、セルラ無線通信システム100がさらに、2つの別の無線ネットワークノード130、140を含んでいる。ここで、位置決め信号を決定するステップ430はさらに、オプションで第2の無線ネットワークノード120に基づいて、第2の無線ネットワークノード120と前記2つの別の無線ネットワークノード130、140とを含めて無線ネットワークノードの第1の集合を決定するステップを含む。
【0079】
別のオプションのステップでは、第2の無線ネットワークノード120は、第1の集合の無線ネットワークノード120、130、140から移動体端末170に送信するための位置決め信号を決定する。各位置決め信号は、第1の集合の各無線ネットワークノードに関連付けられているとよい。
【0080】
第2の無線ネットワークノード120における方法の一部の実施例では、移動体端末170は、第2の無線ネットワークノードによってサービスを受ける。
【0081】
第2の無線ネットワークノード120における方法の一部の実施例では、位置決め信号を決定するステップ430はさらに、各位置決め信号について時間−周波数位置を決定するステップを含む。
【0082】
第2の無線ネットワークノード120における方法の一部の実施例では、無線ネットワークノード120、130、140の第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号の2つが、所定の閾値未満となる相互相関を有する。
【0083】
第2の無線ネットワークノード120における方法の一部の実施例では、第2の無線ネットワークノードは、eNodeBを含む。
【0084】
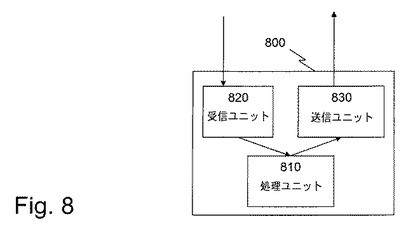
図8は、移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の実施例の概略ブロック図を示す。セルラ無線通信システム100が、第2の無線ネットワークノード120、130、140と移動体端末170とを含んでいる。移動体端末170は、位置決め信号が第2の無線ネットワークノード120、130、140と移動体端末170との間で転送されるように第2の無線ネットワークノード120、130、140の近くに位置しているとよい。装置構成800は、第2の無線ネットワークノード120、130、140に関連付けられ、第2の無線ネットワークノード120、130、140から移動体端末170へ送信するための位置決め信号を決定するように構成された処理ユニット810と、位置決め信号を移動体端末170へ送信するように構成された送信ユニット830とを備えているとよい。オプションで、装置構成800はさらに、受信ユニット820を備えていてもよい。
【0085】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、受信ユニット820はさらに、位置決め信号を送信するようにという命令を第1のネットワークノード180から受信するように構成される。セルラ無線通信システム100はさらに、第1のネットワークノード180を含んでいる。
【0086】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、受信ユニット820はさらに、第1のネットワークノード180から位置決め信号を送信するための時間−周波数位置を受信するように構成される。
【0087】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、セルラ無線通信システム100はさらに、2つの別の無線ネットワークノード130、140を含んでいる。処理ユニット810はさらに、オプションで第2の無線ネットワークノード120に基づいて、第2の無線ネットワークノード120と前記2つの別の無線ネットワークノード130、140とを含めて無線ネットワークノードの第1の集合を決定するように構成される。
【0088】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、処理ユニット810はさらに、第1の集合の無線ネットワークノード120、130、140から移動体端末170に送信するための位置決め信号を決定するように構成される。各位置決め信号は、第1の集合の各無線ネットワークノードに関連付けられるとよい。
【0089】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、移動体端末170は、第2の無線ネットワークノード120によってサービスを受ける。
【0090】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、処理ユニット810はさらに、各位置決め信号について時間−周波数位置を決定するように構成される。
【0091】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、処理ユニットはさらに、無線ネットワークノード120、130、140の第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号の2つを、それらの信号が所定の閾値未満の相互相関を有するように決定するように構成される。
【0092】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、処理ユニットはさらに、第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号の2つを、その2つの位置決め信号が直交或いはほぼ直交するように決定するように構成される。
【0093】
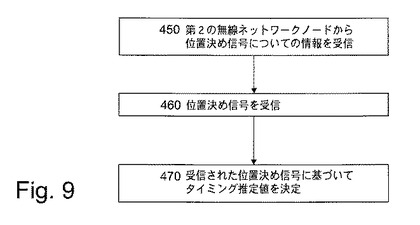
図9には、移動体端末170の位置の推定を可能にする移動体端末170における方法の実施例の概略フローチャートが示されている。セルラ無線通信システム100が、第2の無線ネットワークノード120と、少なくとも2つの別の無線ネットワークノード130、140と、移動体端末170とを含んでいる。移動体端末170は、第2の無線ネットワークノード120によってサービスを受けるとよい。無線ネットワークノードの第1の集合が、第2のネットワークノード120と、前記少なくとも2つの別の無線ネットワークノード130、140とを含んでいてもよい。次のステップの一部または全部が実行される。
【0094】
ステップ450で、移動体端末170が、無線ネットワークノード120、130、140の第1の集合の各無線ネットワークノードから受信される各位置決め信号についての情報を、第2の無線ネットワークノード120から受信する。
【0095】
ステップ460では、移動体端末170は、第1の集合の各無線ネットワークノード120、130、140から各位置決め信号を受信する。
【0096】
ステップ470で、移動体端末170は、受信された各位置決め信号に基づいて、各位置決め信号についての各タイミング推定値を決定する。各タイミング推定値は、第1の集合の各無線ネットワークノード120、130、140と移動体端末170との間の距離を示す。
【0097】
(図4に示す)オプションのステップ405で、移動体端末170は、複数の無線ネットワークノード130、140を検出する。前記複数の無線ネットワークノード130、140は、各位置決め信号が無線ネットワークノードの第1の集合の各無線ネットワークノードと移動体端末170との間で転送可能なように移動体端末170の近くに位置しているとよい。
【0098】
別のオプションのステップで、移動体端末170は、前記検出された複数の無線ネットワークノード130、140についての情報を含むリストを第2の無線ネットワークノード120に送信する。
【0099】
また別のオプションのステップでは、移動体端末170は、第1の集合の各無線ネットワークノードに対応する、決定されたタイミング推定値と物理セル識別子とを第2の無線ネットワークノード120に送信する。
【0100】
さらに別のオプションのステップでは、移動体端末170は、決定されたタイミング推定値に基づいて移動体端末170の位置を推定する。オプションで、移動体端末170は、決定されたタイミング推定値に基づいて自分自身の地理的位置座標を決定する。
【0101】
オプションのステップでは、移動体端末170は、推定された位置を第2の無線ネットワークノード120に送信する。
【0102】
移動体端末170における方法の一部の実施例では、前記タイミング推定値の決定はさらに、受信された位置決め信号のマッチングされたフィルタバンクに基づき、そのマッチングされたフィルタバンクは各位置決め信号の時間−周波数位置に基づいている。このようにして、前記タイミング推定値の決定が効率よく高速で行われる。オプションでは、前記タイミング推定値の決定がさらに、マッチングされたフィルタバンクからの第1の顕著なピーク出力に基づいている。そのピーク出力は、推定された雑音分散と比較され、そのピーク、すなわち、第1の顕著なピークが雑音分散より十分大きい場合、その信号は検出される。この閾値は、例えば、雑音だけで構成される入力信号が閾値を上回るピークを生成する確率が低くなるように選択することができる。第2に、2つ以上のピークが閾値を上回る場合には通常、最初に達したピークが選択される。しかしながら、最初のピークは、所望の信号の自己相関のサイドローブピークではないことをチェックすることも必要である。自己相関関数のサイドローブピークのサイズは、事前に容易に判定することができる。
【0103】
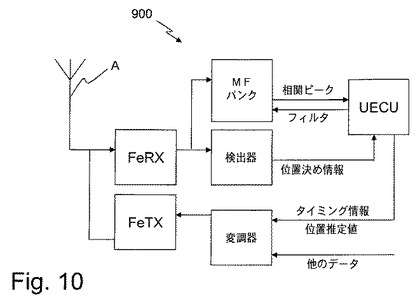
さて、図10には、移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の実施例の概略ブロック図が示されている。セルラ無線通信システム100は、第2の無線ネットワークノード120と、少なくとも2つの別の無線ネットワークノード130、140と、移動体端末170とを含んでいる。移動体端末170は、第2の無線ネットワークノード120によってサービスを受けてもよい。複数の無線ネットワークノードの第1の集合は、第2のネットワークノード120と、前記少なくとも2つの別の無線ネットワークノード130、140とを含んでいてもよい。装置構成900は、無線ネットワークノード120、130、140の第1の集合の各無線ネットワークノードから送信される各位置決め信号についての情報を第2の無線ネットワークノード120から受信し、第1の集合の各無線ネットワークノード120、130、140から各位置決め信号を受信するように構成された受信ユニットFeRXを備えているとよい。さらに、装置構成900は、受信した各位置決め信号に基づいて、各位置決め信号について個別のタイミング推定値を決定するように構成された処理ユニットUECUを備えているとよい。各タイミング推定値は、第1の集合の各無線ネットワークノード120、130、140と移動体端末170との間の距離を示す。オプションで、装置構成900はさらに、送信ユニットFeTXを備える。
【0104】
移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の一部の実施例では、処理ユニットUECUはさらに、複数の無線ネットワークノード130、140を検出するように構成される。前記複数の無線ネットワークノード130、140は、各位置決め信号が無線ネットワークノードの第1の集合の各無線ネットワークノードと移動体端末170との間で転送可能なように、移動体端末170の近くに位置しているとよい。
【0105】
移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の一部の実施例では、送信ユニットFeTXはさらに、前記検出された複数の無線ネットワークノード130、140についての情報を含むリストを第2の無線ネットワークノード120に送信するように構成される。
【0106】
移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の一部の実施例では、送信ユニットFeTXはさらに、第1の集合の各無線ネットワークノードに対応する、決定されたタイミング推定値と物理セル識別子とを第2の無線ネットワークノード120に送信するように構成される。
【0107】
移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の一部の実施例では、処理ユニットUECUはさらに、決定されたタイミング推定値に基づいて移動体端末170の位置を推定するように構成される。
【0108】
移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の一部の実施例では、送信ユニットFeTXはさらに、推定された位置を第2の無線ネットワークノード120に送信するように構成される。
【0109】
移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の一部の実施例では、その装置構成はさらに、前記タイミング推定値の決定のために処理ユニットUEUCが用いるように構成された、受信された位置決め信号のマッチングされたフィルタバンクMF Bankを備える。マッチングされたフィルタバンクは、各位置決め信号の時間−周波数位置に基づいていてもよい。オプションで、前記タイミング推定値の決定はさらに、マッチングされたフィルタバンクからの第1の顕著なピーク出力に基づいていてもよい。
【0110】
装置構成900を動作させる場合、信号がアンテナAを通じて受信され、フロントエンド受信器FeRXすなわち受信ユニットでベースバンド信号に変換される。次いで、その信号は、例えば、位置決め信号情報を検出する検出器にフィードされる。次いで、この情報は、マッチングされたフィルタバンクMF Bankによって用いられるフィルタ係数を決定する移動体端末の制御ユニットUECUに転送される。次いで、MF Bankは、受信された信号の相関をとり、検出された相関ピークをレポートする。次いで、制御ユニットUECUは、異なる位置決め信号と、オプションでは位置推定値とについてのタイミング推定値を決定し、この情報が他のデータと多重化され、変調され、フロントエンド送信器FeTXで無線信号にアップコンバートされ、アンテナAを介して、例えば、図3の第2の無線ネットワークノードのような在圏基地局(図10では不図示)に送信される。
【0111】
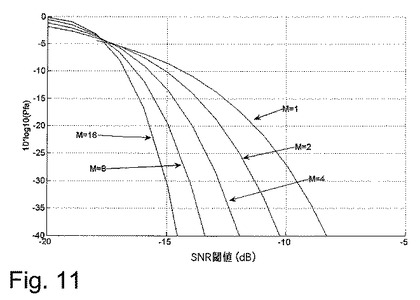
図11には、同期信号について検出された閾値SNRの関数としての誤り警告率の一組のグラフが示されている。誤り警告率は、(信号が存在しない場合に)雑音だけが、信号検出用の閾値を上回る検出結果を生成する確率の尺度である。この技術分野では、誤り警告率の一般的な値は、0.0001〜0.001である。この図では、誤り警告率は、設計パラメータとして蓄積された同期フレーム数Mを使ってプロットされる。この図から、誤り警告率は、蓄積の数が増えても、−15dBを超えることはほとんどないことが分かる。実際、Mが無限大に近づくと、−18dBの限度に達する。この値は、処理利得に等しい。
【0112】
同期されたネットワークでは、すべての基地局は、送信用に共通の時間基準を用いる。それは、例えば、2つの基地局から等距離に位置する移動体端末は大まかに言えば、時間的には重なり合うこれら2つの基地局からのPSS/SSSを観測することを意味する。従って、干渉が常に存在し、他のPSS/SSS信号で構成されるであろう。このことの1つの結果は、感度を向上させるため複数のフレームからの相関を蓄積することは、それほどの効果がないかもしれないということである。これは相互相関特性が、特に研究に値することを意味する。
【0113】
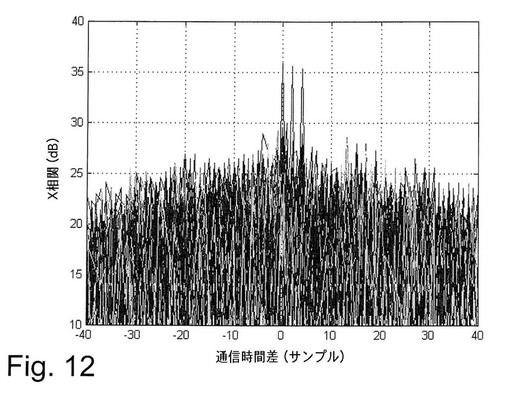
図12には、SSSシーケンスの相互相関(X相関)特性が通信時間差(ラグ)の関数として示されている。1つのSSSシーケンスが自分自身と503個すべての他のSSSシーケンスに対して相関が取られる。ラグ0にピークを持つ線は、所望の信号である。図12から、このSSSシーケンスと2つの他のSSSシーケンスとの間の分離は非常に良好であるとはいえないことが分かるであろう。これは、位置決め信号を計画する際に考慮されなければならない。加えて、他の信号に対する保護も非常に強力とはいえず、わずか8dBであるということは、例えば、第2の無線ネットワークノードのような在圏セルすなわち在圏無線ネットワークノードの近くに優勢な干渉物が存在する場合、目標の−15dBに到達しないことを意味する。
【0114】
結論として、これは同期されたLTEネットワークにおいて経験されるSINRは、同期信号を用いた直接的な相関方法を可能にするには、低すぎるということを示す。さらに、同期信号の相関属性は、干渉が限定的なシナリオにおいても性能を制限する。基準信号(Reference Signal)を用いた測定は、処理利得および相互相関の問題に関してはより良い選択肢でありうる。リソースブロック毎に8つの基準シンボル(Reference Symbol)が存在していて、10MHzのシステム(50のリソースブロック)については50×8=400=26dBの処理利得が得られることを意味しているが、それは理論的には、無数の蓄積を使えば、SNR=−26dBの信号を検出できることを意味する。しかしながら、同じ基準信号シーケンスがサブフレーム毎に繰り返されるのだから、干渉している基準信号から来る相互相関のピークは、蓄積された信号の利点を制限するであろう。
【0115】
従って、本願発明の発明者らは、ここで説明したように特定の位置決め信号を用いることを提案するものである。
【0116】
雑音の中に深く埋もれた信号を検出するための良好な処理利得を得るためには、位置決め信号のシーケンス、すなわち位置決め信号は、十分な長さを持つ必要がある。約24dB以上の処理利得が望ましい。周波数および1つの伝送時間間隔(TTI)という、少なくとも2つのリソースブロック(RB)(すなわち「RBペア」)においてすべてのエネルギーを占めている信号を想定することによって、合計で、11*12*2>24dBの処理利得が達成される。さらに、本発明の別の実施例では、RBは隣接しており、移動体端末においてマッチングされたフィルタの実装をより簡単に行えることを意味する。信号シーケンスは、周波数領域に生成されたOFDM信号、例えば、QPSK信号であってもよいが、QPSK信号は、時間−周波数グリッドにおいて、所望の時間相関属性に達するように(例えば、白色雑音疑似雑音に類似した性能)選択されなければならない。別の実施例では、位置決め信号シーケンスはより多くのRB上に、ただし、より弱く、通常のOFDMシンボルを重畳し、すなわち、位置決め信号は重畳されたCDMA信号である。
【0117】
さらに、位置決め信号シーケンスは、一定の特性やセル負荷等に依存してネットワークノードによって事前に定義されるかまたは定義された蓄積を可能にするため、例えば、特定のサブフレームにおいて5或いは10ミリ秒毎に繰り返されることが望ましい。その信号の望ましいもう1つの特性は、相互相関のピークに伴う問題を回避するために、それぞれの送信について、多様な位置決め信号のシーケンスが送信されるということである。
【0118】
この場合もやはり、各サブフレームで送信される位置決め信号のシーケンスを決定するために、シーケンシャルなフレーム番号と組み合わせて、PCIが用いられるとよい。
【0119】
本発明について、その具体的で代表的な実施例に関して説明してが、当業者にとっては、多くの異なる変形例、変更などが明らかになるであろう。それ故に、説明した実施例は、本発明の範囲を限定することを意図してはおらず、本発明の範囲は添付の請求の範囲によって定義される。
【技術分野】
【0001】
本発明は、セルラ無線通信システムにおける移動体端末の位置の推定を可能にする方法および装置構成に関する。特に、本発明は、移動体端末の位置の推定を可能にする第1のネットワークノードにおける方法および装置構成と、移動体端末の位置の推定を可能にする第2の無線ネットワークノードにおける方法および装置構成と、移動体端末の位置の推定を可能にする移動体端末における方法および装置構成とに関する。
【背景技術】
【0002】
例えば、LTE通信システムのような現代の無線通信システムでは、移動体デバイスすなわち移動体端末の位置を決定する方法が、そのシステムに存在する。これらの方法の精度はさまざまである。とは言っても、これらの方法は、アプリケーション開発者や無線ネットワーク運用各社が位置に基づくサービスを提供することを可能にしてきた。例えば、道案内システム、ショッピング支援、友人発見、プレゼンスサービス、コミュニティおよび通信サービス、およびその他のサービスが開発されてきた。このようにして、移動体デバイスのユーザは、ユーザがどこに位置するか、すなわち、どこにいるのかに基づいて、ローカル情報を受信する。
【0003】
また、商用サービスに加えて、数か国の政府が、緊急呼を発する移動体端末の位置を決定できるようにするため、ネットワーク運用各社に要件を課している。これらの要件は、屋内環境と屋外環境とを区別していない。
【0004】
屋外環境では、移動体端末の位置の推定は、測位システム、例えば、アシステッドGPS(A−GPS)のようなGPS(全球測位システム)に基づく方法を用いて行われてもよい。また、位置の推定は、無線通信システム自体を用いて行われてもよい。無線通信システムを用いた移動体端末の位置の推定のための既知の方法は、2つの主要なグループに区別される。
【0005】
第1のグループは、緊急呼を発する移動体端末が滞在している無線基地局に基づく方法を含む。従って、第1のグループでは、位置の推定は、セルIDまたは、セルIDとTA(タイミングアドバンス)との組み合わせに基づいている。TAの測定の原理を、図1に示す。簡単に言うと、無線基地局120から移動体端末170まで、および、その逆方向の電波の伝播時間を測定する。この伝播時間を、以下、RTT(往復時間)と言う。無線基地局から移動体端末までの距離r(点線の矢印rで示す)は、r=c(TA/2)で得られる。
【0006】
ここで、TAは往復時間であり、cは光の速度である。往復時間の測定だけだと、円(この一部分を図1に240で示す)を定義するか、あるいは、不正確であることを考慮に入れるならば、無線基地局の周りの円形の帯を定義するのみである。この情報を、無線基地局120の多角形210、220、240と組み合わせることによって、円形の帯の左右の角度を計算することができ、それによって、判定された移動体端末の位置の目安の精度を向上させることができる。従って、移動体端末の位置は、在圏セル、すなわち、移動体端末が滞在している無線基地局によってカバーされるエリアと、円形の帯との交点を算出することによって決定される。いくつかのシステム、特に、LTEシステムでは、TAを用いて、移動体端末が位置するアンテナからの距離を識別することができる。これは距離を与えるけれども、(無線基地局からの距離によって定義される)球面あるいは円形の帯の部分のどこに移動体端末がいるかを決定することはできない。移動体端末は基地局から500mの距離にいるとRTT測定値が判定した場合、これは扇形の弧または円の円周に沿っている。
【0007】
第2のグループは、図2に示すように、複数の基地局からの到来時刻測定値すなわちTOA(到来時刻)に基づく方法を含む。数式で表すと、到来時刻の原理は、次式のようになる。即ち、
t1R=t1T+√{(x−x1)2+(y−y1)2}/c+b+ν1 (1a)
t2R=t2T+√{(x−x2)2+(y−y2)2}/c+b+ν2 (1b)
tNR=tNT+√{(x−xN)2+(y−yN)2}/c+b+νN (1N)
である。
【0008】
ここで、
tRi:i番目の基地局についての受信時刻(測定値)
tTi:i番目の基地局についての送信時刻
xi,yi:i番目の基地局の座標(既知)
c:光の速度
x,y:(MSまたはネットワークノード内で)方程式を解くことによって
計算されたMSの座標
b:受信器の時計バイアス
νi:i番目のタイミング測定の測定誤差
である。
【0009】
N≧3の場合に未知数(x,y,b)について式(1a)〜(1N)を解き、かつ、基地局の地理的位置が適切であれば、移動体端末の位置の推定は、座標xとyとの形式で得られる。1つの解決策は、式(1a)〜式(1N)のテイラー級数展開に基づく数式最適化の解決策を用いることである。これらの方法は、この技術分野では周知であるので、ここではこれ以上詳述しない。
【0010】
TOAに基づく方法を用いた移動体端末の位置の推定は、少なくとも3つの地理的に分散した基地局のタイミングが測定されることを必要とする。従って、前記少なくとも3つの基地局に対するSNR(信号対雑音比)が、各基地局が移動体端末によって検出されるように、十分強いことを保証することが必要である。同じ周波数帯を再利用するセルラシステムは、セル間に強固な分離を形成するように設計されており、それはすなわち、在圏基地局からの信号は強く、他方、隣接基地局からの干渉は最小化されるべきであることを意味する。要するに、測位についての要件と通信についての要件とは、矛盾している。LTEは本質的には通信システムであるため、測位のための時間測定は、隣接基地局に対するC/I(搬送波対干渉波比)が非常に低い状態で行われる必要があり、それが、移動体端末の受信器に高い要件を課し、通常、測位の精度を低下させる。
【0011】
分散した基地局のタイミングは、LTE基地局から常に送信されている既知の信号の一部を用いて測定されてもよい。例えば、タイミングは、同期信号または基準信号に基づいてもよい。LTEシステムでは、各無線フレームは10個のサブフレームを含む。
【0012】
同期信号は、一般にサブフレーム0および5で送信される。プライマリ同期信号は、1つのサブフレームのうちの最後のOFDMシンボルで送信され、セカンダリ同期信号は、最後から2番目のOFDMシンボルで送信される。3つの異なるPSS(プライマリ同期信号)シーケンスと、168の異なるSSS(セカンダリ同期信号)シーケンスとが存在する。シーケンス識別子を用いて、異なる基地局(またはセル)を区別する。次いで、基地局の識別子を用いて、基準信号シーケンスと、時間−周波数グリッドにおけるその割り当てとを決定することができる。同期信号は、例えば、割り当てられた帯域幅の中心において、62のリソース要素を占める。
【0013】
基準シンボルは、サブフレーム毎に、かつ、全帯域幅にわたって、送信される。異なる基地局が、6つの異なる周波数シフトを用いてもよく、504の異なる信号が存在する。実際には、基準シンボルには、再利用される3つのパターンがある(2つのTXアンテナを想定する)。低負荷の場合、干渉は、基準シンボルに関する時間測定には有利であるだろう。しかし、高負荷では、状況は同期信号についてのPSS/SSSと同様になる。
【0014】
特許文献1には、TDMA/FDMA(GSM(登録商標))システムにおいて動作中の移動体端末の地理的位置を決定する方法が開示されている。位置の決定が必要な時、端末は、所定の周波数における所定のタイムスロットで所定のシーケンスを送信するよう命令され、そして基地局は、TOAまたはTDOA(到来時間差)の測定を実行する。次いで、移動体端末は、周波数間HOを行うように強制され、その手順は、その周波数上で繰り返される。十分な数のTOA/TDOA推定値が得られた後、移動体端末の位置を推定することができる。この方法では、基地局が測定を行うことと、移動体端末が所定の位置決め信号を送信することとが必要になる。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】米国特許第6064888号明細書
【発明の概要】
【発明が解決しようとする課題】
【0016】
本発明の目的は、セルラ無線通信システム、例えば、LTE通信システムにおける移動体端末の位置の推定を可能にするための方法を提供することである。
【課題を解決するための手段】
【0017】
本発明を1つの側面からみれば、その目的は、移動体端末の位置の推定を可能にするための第1のネットワークノードにおける方法によって達成される。セルラ無線通信システムが、前記第1のネットワークノードと第2の無線ネットワークノードと複数の無線ネットワークノードと前記移動体端末とを含んでいる。前記第2の無線ネットワークノードは、前記第1のネットワークノードによって管理されている。ある工程では、第1のネットワークノードが、第2の無線ネットワークノードを介して、移動体端末の位置を推定する要求を受信する。別のステップでは、第1のネットワークノードが、第2の無線ネットワークノードと2つの別の無線ネットワークノードとを含む無線ネットワークノードの第1の集合を決定する。2つの別の無線ネットワークノードは、前記複数の無線ネットワークノードの間から選択される。
【0018】
本発明を別の側面からみれば、その目的は、移動体端末の位置の推定を可能にするための第1のネットワークノードにおける装置構成によって達成される。セルラ無線通信システムが、前記第1のネットワークノードと第2の無線ネットワークノードと複数の無線ネットワークノードと前記移動体端末とを含んでいる。前記第2の無線ネットワークノードは、前記第1のネットワークノードによって管理されている。この構成は、第2の無線ネットワークノードを介して、移動体端末の位置を推定する要求を受信するように構成された受信ユニットと、第2の無線ネットワークノードと2つの別の無線ネットワークノードとを含む無線ネットワークノードの第1の集合を決定するように構成された処理ユニットとを備えていてもよい。2つの別の無線ネットワークノードは、前記複数の無線ネットワークノードの間から選択されてもよい。さらに、処理ユニットは、第1の集合の無線ネットワークノードから移動体端末へ送信するための位置決め信号を決定するように構成されてもよい。それぞれの位置決め信号は、第1の集合の個々の無線ネットワークノードに関連付けられてもよく、そして、第1の集合の個々の無線ネットワークノードに、それらに関連付けられた位置決め信号を移動体端末に送信するよう指示するように構成されてもよい。
【0019】
本発明をさらに別の側面から見れば、その目的は、移動体端末の位置の推定を可能にするための第2の無線ネットワークノードにおける方法によって達成される。セルラ無線通信システムが、前記第2の無線ネットワークノードと前記移動体端末とを含んでいる。移動体端末は、位置決め信号が第2の無線ネットワークノードと移動体端末との間で転送可能なように、第2の無線ネットワークノードの近くに位置してもよい。あるステップでは、第2の無線ネットワークノードが、第2の無線ネットワークノードから移動体端末へ送信するため、第2の無線ネットワークノードに関連付けられた位置決め信号を決定する。別のステップでは、第2の無線ネットワークノードが位置決め信号を移動体端末に送信する。
【0020】
本発明をさらに別の側面から見れば、その目的は、移動体端末の位置の推定を可能にするための第2の無線ネットワークノードにおける装置構成によって達成される。セルラ無線通信システムが、前記第2の無線ネットワークノードと前記移動体端末とを含んでいる。移動体端末は、位置決め信号が第2の無線ネットワークノードと移動体端末との間で転送可能なように第2の無線ネットワークノードの近くに位置してもよい。その構成は、第2の無線ネットワークノードから移動体端末へ送信するため、第2の無線ネットワークノードに関連付けられた位置決め信号を決定するように構成された処理ユニットと、その位置決め信号を移動体端末へ送信するように構成された送信ユニットとを備えるとよい。
【0021】
本発明をさらに別の側面から見れば、その目的は、移動体端末の位置の推定を可能にするための移動体端末における方法によって達成される。セルラ無線通信システムは、第2の無線ネットワークノードと少なくとも2つの別の無線ネットワークノードと前記移動体端末とを含んでいる。その移動体端末は、第2の無線ネットワークノードによってサービスを受ける。複数の無線ネットワークノードの第1の集合は、第2のネットワークノードと前記少なくとも2つの別の無線ネットワークノードとを含んでいてもよい。あるステップでは、前記移動体端末が、第1の集合の複数の無線ネットワークノードの各無線ネットワークノードから送信される各位置決め信号についての情報を、第2の無線ネットワークノードから受信する。別のステップでは、前記移動体端末が、前記第1の集合の複数の無線ネットワークノードそれぞれから、各位置決め信号を受信する。さらに次のステップでは、前記移動体端末が、受信された位置決め信号それぞれに基づいて、位置決め信号それぞれについての各タイミング推定値を決定する。各タイミング推定値は、第1の集合の複数の無線ネットワークノードそれぞれと移動体端末との間の距離を示す。
【0022】
本発明をさらに別の側面から見れば、その目的は、移動体端末の位置の推定を可能にするための移動体端末によって達成される。セルラ無線通信システムが、第2の無線ネットワークノードと少なくとも2つの別の無線ネットワークノードと前記移動体端末とを含んでいる。前記移動体端末は、第2の無線ネットワークノードによってサービスを受けるとよい。無線ネットワークノードの第1の集合は、第2のネットワークノードと前記少なくとも2つの別の無線ネットワークノードとを含んでいてもよい。その移動体端末の構成は、第1の集合の複数の無線ネットワークノードの各無線ネットワークノードから送信される各位置決め信号についての情報を第2の無線ネットワークノードから受信し、第1の集合の複数の無線ネットワークノードそれぞれから各位置決め信号を受信するように構成された受信ユニットを備えていてもよい。さらに、その構成は、受信された位置決め信号それぞれに基づいて、位置決め信号それぞれについての各タイミング推定値を決定するように構成された処理ユニットを備えていてもよい。各タイミング推定値は、第1の集合の各無線ネットワークノードと移動体端末との間の距離を示す。
【0023】
位置決め信号は、移動体端末からの要求に応じて無線ネットワークノードから送信されるので、この移動体端末(またはセルラ無線通信システム内に含まれている他の移動体端末)が、移動体端末の位置の推定のための情報を決定することができる。そのような情報は、タイミング推定値と移動体端末の地理的座標との内の少なくともいずれかをを含んでもよい。このようにして、移動体端末の位置が推定または決定されることになる場合に限って位置決め信号が無線ネットワークノードから移動体端末へ送達または送信されるということが保証されてもよい。結果として、セルラ無線通信システムにおける移動体端末の位置の推定を可能にするための方法が提供される。
【0024】
添付の請求の範囲および以下の説明を検討すれば、本発明のさらなる特徴および利点が明らかになるであろう。当業者であれば、本発明のさまざまな特徴が組み合わされて、添付の請求の範囲によって定義される本発明の範囲を逸脱することなく、以下に説明したもの以外の実施例を生成できることを理解するであろう。
【0025】
本発明の種々の側面が、その個々の特徴と利点とを含めて、以下の詳細な説明と添付図面とから容易に理解されるであろう。
【図面の簡単な説明】
【0026】
【図1】無線基地局およびその関連セルの概略を示す図である。
【図2】3つの無線基地局の近くに位置している移動体端末を模式的に示す図である。
【図3】例示するセルラ無線通信システムの概略を示す図である。
【図4】移動体端末の位置の推定を可能にするための図3によるセルラ無線通信システムにおける方法の実施例のシグナリングとフローチャートとを組み合わせた略図である。
【図5】移動体端末の位置の推定を可能にする第1のネットワークノードにおける方法の実施例の概略フローチャートである。
【図6】移動体端末の位置の推定を可能にする第1のネットワークノードにおける装置構成の実施例の概略ブロック図である。
【図7】移動体端末の位置の推定を可能にする第2の無線ネットワークノードにおける方法の実施例の概略フローチャートである。
【図8】移動体端末の位置の推定を可能にする第2の無線ネットワークノードにおける装置構成の実施例の概略ブロック図である。
【図9】移動体端末の位置の推定を可能にする移動体端末における方法の実施例の概略フローチャートである。
【図10】移動体端末の位置の推定を可能にする移動体端末における装置構成の実施例の概略ブロック図である。
【図11】検出された閾値SNRの関数としての誤り警告率の一組のグラフを示す図である。
【図12】ラグの関数としてのSSS信号の相互相関特性を示す図である。
【発明を実施するための形態】
【0027】
以下の説明全体を通じて、適用可能な場合には、同様の参照番号が、同様の要素、部分、項目または特徴を示すのに用いられている。
【0028】
図3に、本発明による解決策が実施される代表的なセルラ無線通信システム、例えば、LTE通信システムの概要を示す。LTE通信システムには、第1のネットワークノード180と、例えば、無線基地局すなわちeNBのような複数の無線ネットワークノード120、130、140、150、160と、移動体端末170とが含まれている。移動体端末170は、第2の無線ネットワークノード120によってサービスを受けるように構成されており、すなわち、移動体端末170は、第2の無線ネットワークノード120に滞在している。LTE通信システム100の実施例では、主要ネットワークノード110は、第1のネットワークノード180、例えば、MME、HSS等のコアネットワークノードを含んでいる。LTE通信システム100の別の実施例では、主要ネットワークノード110は、第2の無線ネットワークノード120を含んでいる。
【0029】
また、矢印360は、移動体端末170と移動体端末170にサービスを行っている第2の無線ネットワークノード120との間の接続を示す。矢印370と矢印380は無線ネットワークノード130、140を示しており、それらの無線ネットワークノードは、それらの無線ネットワークノード130、140と移動体端末170との間で信号が転送可能なように位置している。なおまた、矢印310、320、330、340、350は、第1のネットワークノード180が、直接または間接的に、無線ネットワークノード120〜160と接続されていることを示す。なお、しかしながら、無線ネットワークノード120〜160の一部は、第1のネットワークノード180によって管理されてもよいが、他方、無線ネットワークノード120〜160の一部は、第1のネットワークノード180によって管理されなくてもよい。
【0030】
図4では、図3のLTE通信システム100を運用している時に移動体端末の位置を推定するための方法の実施例のシグナリング図とフローチャートとを組み合わせた概略が示されている。次のステップの一部または全部が実行される。
【0031】
オプションのステップ405では、移動体端末170が、近隣の、または隣接する無線ネットワークノードを検出する。例えば、無線ネットワークノード140〜160が、位置決め信号がこれらの無線ネットワークノードのいずれか1つと移動体端末170との間で転送されるように位置しているならば、移動体端末がそれらを検出してもよい。移動体端末170は、例えば、通常のセル探索手順、すなわち、PSS/SSSの検出と、オプションでその後にPBCHチャネルからの同報情報の復号化とを用いて、隣接する無線ネットワークノードを検出してもよい。検出された無線ネットワークノードは、位置決め信号を送信するための無線ネットワークノードの集合の選択の仕方に関するいくらかの情報を提供してもよい。そのような無線ネットワークノードの集合は、従って、検出されたネットワークノードの一部または全部、および場合によっては、例えば、第1のネットワークノード180によって決定された、いくつかの別の無線ネットワークノードを含んでもよい。
【0032】
ステップ410で、移動体端末170が、その位置の推定を求める要求を第1のネットワークノード180に送信する。別の表現をすると、移動体端末170は、「測位イベント」を生成し、それが第1のネットワークノード180に送られる(送信される)。「測位イベント」は、ユーザによってトリガされてもよく、ユーザは、例えば、112、911、またはその場の状況に適した番号をダイヤルすることによって緊急呼を発呼するか、または、移動体端末170の中の測位アプリケーションまたはサービスを起動する。
【0033】
ステップ420で、位置推定要求が、第1のネットワークノード180によって処理される。オプション的には、第1のネットワークノード180が、移動体端末に、検出された無線ネットワークノード130、140のリストを発信する(送信する)ように要求してもよい(ステップ405を参照)。そのリストは、正しい隣接無線ネットワークノード(セルと呼ばれることもある)が測位手順について通知されるように、第1のネットワークノード180を支援する(次のステップを参照)。このようにして、例えば、どの無線ネットワークノード120によって移動体端末170がサービスを受けているかに基づいて、第1のネットワークノード180が、少なくとも3つの無線ネットワークノード120、130、140のリストを決定してもよい。例えば、第1のネットワークノードと第2のネットワークノードとの内の少なくともいずれかに基づいた、少なくとも3つの無線ネットワークノード120、130、140の決定されたリストは、その決定が、第1のネットワークノードと第2の無線ネットワークノードとの内の少なくともいずれかについての位置と識別子コードとの内の少なくともいずれかに基づいていることを意味しているかもしれない。ここではこれ以降、複数の無線ネットワークノードのリストは、無線ネットワークノードの第1の集合とも呼ぶ。例えば、第1のネットワークノード180は、在圏無線ネットワークノード120すなわち第2の無線ネットワークノード(即ち、移動体端末170は、在圏無線ネットワークノードによってサービスを受けている)に隣接しているか、または、その近隣にある複数の無線ネットワークノードのリストを決定することができる。ときには、そのような隣接するかまたは近隣にある無線基地局も、位置決め信号を移動体端末170に送信することもあるため、これは有益である。対照的に、第1のネットワークノードによって管理される他の無線基地局が、例えば、無線送信を妨害する建物等に起因して移動体端末に位置決め信号をうまく送信できないことがあるというリスクがある。複数の無線ネットワークノードのリストには第1のネットワークノードも含まれることが好適であるかもしれない。
【0034】
ステップ430で、第1のネットワークノード180が、第1の集合の無線ネットワークノードに送信される位置決め信号についての時間−周波数位置を決定する。位置決め信号についての時間−周波数位置は、どのリソースブロックにおいて位置決め信号が送信されることになるかを示す。
【0035】
ステップ440で、第1のネットワークノード180が、第1のメッセージを前記少なくとも3つの無線ネットワークノードに送り、すなわち送信する。ここで、第1のメッセージは、位置決め信号をどのように送信するかに関する前記少なくとも3つの隣接する無線ネットワークノードに対する命令を含む。従って、第1のメッセージは、時間−周波数空間におけるどのリソースブロックに位置決め信号がその後送信されることになるのか、さらに、どの時刻すなわちどのサブフレームにおいてなのかについての情報も含む。加えて、用いられる位置決め信号は、前記少なくとも3つの無線ネットワークノードにも送信されることが望ましい。一部の実施例では、位置決め信号は、物理セルID(PCI)に結合されており、すなわち、いったん無線ネットワークノード120、130、140が、位置決め信号を発信するかまたは送信するようにという命令を受信した後は、上述したように位置決め信号は物理セルID(PCI)に基づいているので、無線ネットワークノードは、どの位置決め信号を用いるべきかを知る。
【0036】
ステップ450で、第1のネットワークノード180は、第2のメッセージを移動体端末170へ送信する。第2のメッセージは、位置決め信号についての情報、すなわち、時間−周波数領域において用いられる信号シーケンスとリソースブロックとの内、少なくともいずれかを含む。第2のメッセージは、RRCメッセージとして送信され、それが、隣接する無線ネットワークノードのリストを(そして通常は、移動体端末にサービスを行う第1のネットワークノードも)含むことが望ましい。また、加えて、隣接する無線ネットワークノードのリストは、移動体端末によって検出された無線ネットワークノードだけでなく、検出された無線ネットワークノード130、140の近隣のノードも含んでもよい。RRCメッセージは、さらに、位置決め信号の時間および周波数割り当て(用いられるリソースブロックおよびサブフレーム)を含む。位置決め信号を送信する無線ネットワークノードについて(リソースブロックおよびサブフレーム番号の点で)同じ割り当てを用いることが好適であるが、これは要求されていない。結果として、移動体端末170は、これらの無線ネットワークノード120、130、140からの位置決め信号を受信して復号してもよい。
【0037】
ステップ460で、前記少なくとも3つの無線ネットワークノード120、130、140が、位置決め信号を移動体端末170に送信する。
【0038】
ステップ470では、移動体端末170は、位置決め信号のタイミング推定値を決定する。例えば、無線ネットワークノード130、140にとって、タイミングが無線ネットワークノード120からの位置決め信号のTOAに比較して表されるように、タイミング推定値が無線ネットワークノード120の時刻ベースで表されてもよい。タイミング推定値の決定は通常、以下でさらに説明するように、マッチングされたフィルタリングとピーク検出とを含む。
【0039】
ステップ480で、移動体端末170がタイミング推定値を送信し、そして、できれば、移動体端末170が前記少なくとも3つのネットワークノードについてのタイミング推定値を判定した場合には、検出された位置決め信号についてのPCI(またはシーケンス番号)を第1のネットワークノード180に送信することが望ましい。
【0040】
ステップ490で、第1のネットワークノード180が、移動体端末170から受信したタイミング推定値に基づいて移動体端末170の位置を推定する。
【0041】
さらに、第1のネットワークノード180が、第3のメッセージを前記少なくとも3つの無線ネットワークノードに送信してもよく、ここで、第3のメッセージは、前記少なくとも3つの無線ネットワークノードに、位置決め信号を発信すること、すなわち送信することを中止するよう命令する。あるいは、前記少なくとも2つのネットワークノードが、例えば、100〜10000ミリ秒または他の適切な値のような、限定された時間の間、位置決め信号を送信するよう命令されてもよい。
【0042】
ステップ490に加えるか、または、できればステップ490の代わりに、移動体端末が、(図4には不図示のステップで)、ステップ440で第2のメッセージと共に受信した無線ネットワークノード座標に基づいて自分自身の位置を推定する。次いで、次のステップで、移動体端末が、推定された位置を、例えば、地理的な位置座標の形で、第1のネットワークノード180に送信する。
【0043】
セルラ無線通信システム100における方法の実施例において、位置決め信号は、OFDM搬送波上のQAM変調として、または(OFDM搬送波上に)重畳されたCDMA信号として生成されてもよい。CDMA信号は、GPSシステムによって用いられるいわゆるゴールドコード(Gold code)に基づく信号のように、到来推定について良好な特性、すなわち良好な時間分解能、自己相関および相互相関特性を有することがよく知られている。
【0044】
図5に、移動体端末170の位置の推定を可能にする第1のネットワークノード180における方法の実施例の概略フローチャートを示す。セルラ無線通信システム100が、第1のネットワークノード180と、第2の無線ネットワークノード120と、複数の無線ネットワークノード130、140、150、160と、移動体端末170とを含んでいる。第2の無線ネットワークノード120は、第1のネットワークノード180によって管理されている。以下のステップの一部または全部が実行される。
【0045】
ステップ410で、第1のネットワークノード180が、第2の無線ネットワークノード120を介して、移動体端末170の位置を推定する要求を受信する。
【0046】
ステップ420で、第1のネットワークノード180が、オプションで第1のネットワークノード180と第2の無線ネットワークノード120との内、少なくとも1つに基づいて、第2の無線ネットワークノード120と2つの別の無線ネットワークノード130、140とを含む無線ネットワークノードの第1の集合を決定する。2つの別の無線ネットワークノード130、140は、前記複数の無線ネットワークノード130、140、150、160から選択される。
【0047】
第1のネットワークノード180における方法の一部の実施例では、ネットワークノードの第1の集合を決定するステップ420はさらに、オプションで移動体端末170の位置を推定する要求に関連して、移動体端末170によって検出された無線ネットワークノードのリストを、移動体端末170から受信するステップを含む。無線ネットワークノードの第1の集合の決定は、さらに、検出された無線ネットワークノードの受信されたリストに基づいている。
【0048】
ステップ430で、第1のネットワークノード180が、第1の集合の無線ネットワークノード120、130、140から移動体端末170へ送信するための位置決め信号を決定する。各位置決め信号は、第1の集合の各無線ネットワークノードに関連付けられている。オプションで、第1のネットワークノード180が、各位置決め信号の時間−周波数位置を決定する。各位置決め信号についての時間−周波数位置は、その具体的な信号についてどのリソースブロックを用いるかを示す。
【0049】
ステップ440で、第1のネットワークノード180が、第1の集合の無線ネットワークノード120、130、140に、それらに関連付けられた位置決め信号を移動体端末170に送信するよう命令する。
【0050】
第1のネットワークノード180における方法の一部の実施例では、無線ネットワークノードの第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号のうちの2つが、所定の閾値未満の相互相関を有する。このようにして、位置決め信号間の干渉が低減される。位置決め信号(それらのシーケンス)が、例えば、少なくとも疑似的な雑音の挙動を呈するように構成されること、すなわち、Nがシーケンスの長さである場合に、サイド相互相関が1/√(平方根)(N)であることが好適である。この例では、閾値は、α*1/√(N)であってもよい。ここでαは1〜10の範囲、好ましくは2〜4の範囲内にあるとよい。オプションで、ステップ430で判定される位置決め信号が、所定の閾値未満の相互相関を有するか、直交或いはほぼ直交であるかの内の少なくともいずれかであるように決定される。
【0051】
第1のネットワークノード180における方法の実施例では、無線ネットワークノード120、130、140の第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号の2つが、直交或いはほぼ直交する。
【0052】
第1のネットワークノード180における方法の一部の実施例では、移動体端末170が、第2の無線ネットワークノード120によってサービスを受ける。
【0053】
第1のネットワークノード180における方法の一部の実施例では、移動体端末170の位置を推定する要求が、移動体端末170から送信される。従って、推定または決定されることになるのは、要求を送信している移動体端末の位置である。要求を送信している移動体端末とは、緊急呼を発し、測位サービス等を起動する移動体端末であり、すなわち、測位イベントを生成する移動体端末である。
【0054】
加えて、または、代わりに、もし、それが要求を送信している移動体端末以外の別の移動体端末の位置である場合には、その別の移動体端末(第2の移動体端末)は、位置決め信号について通知される必要がある。第2の移動体端末は、そのような情報を、情報を移動体端末に同報する第1のネットワークノードまたは第2の無線ネットワークノードから受信してもよい。接続状態或いはアイドル状態のいずれかにある少なくとも1つの移動体端末が、呼び出しメッセージを受信して、「位置決めの測定が、次のパラメータ等を使って行われてもよい」ことを移動体端末に通知する同報メッセージを読み取る。
【0055】
オプションのステップで、第1のネットワークノード180が、第1の集合の各無線ネットワークノードを経由して、決定された位置決め信号それぞれを移動体端末170に送信する。
【0056】
オプションのステップ480で、第1のネットワークノード180が、第2の無線ネットワークノード120を介して、移動体端末170の位置を推定するための情報を移動体端末170から受信する。
【0057】
オプションのステップ490で、第1のネットワークノード180が、受信情報に基づいて移動体端末170の位置を推定する。第1のネットワークノード180における方法の一部の実施例では、その情報は、無線ネットワークノードの第1の集合の複数の無線ネットワークノードの各無線ネットワークノード120、130、140についてのタイミング推定値についての情報を含む。それぞれの個別のタイミング推定値は、各無線ネットワークノード120、130、140と移動体端末170との間の距離を示す。従って、第1のネットワークノードは、移動体端末170の位置座標を算出(または推定)するのに用いられる情報を受信する。オプションで、受信情報は、第1のネットワークノードにはすでに利用可能な他の情報と組み合わせる必要がある。そのような情報とは、位置、すなわち、第1の集合の複数の無線ネットワークノードの地理的座標であってもよい。第1のネットワークノード180における方法の一部の実施例では。その情報は、移動体端末170の地理的位置についての情報を含んでおり、その地理的位置は、移動体端末170によって決定される。従って、第1のネットワークノードは、移動体端末170の地理的位置座標を受信する。
【0058】
第1のネットワークノード180における方法の一部の実施例では、各位置決め信号の時間−周波数位置は、第1の集合の各無線ネットワークノード120、130、140における負荷のうちの少なくとも1つと、第1の集合のネットワークノード120、130、140の間の相対的タイミングとに基づいている。このようにして、位置決め信号は、できるだけ直交するようにされ、かつ、干渉を最小化するように選択される。
【0059】
第1のネットワークノード180における方法の一部の実施例では、時間−周波数位置の決定は、さらに、第1の集合の各ネットワークノード120、130、140についての物理セル識別子に基づいている。結果として、無線ネットワークノード間および移動体端末へのシグナリングの必要性が減少する。
【0060】
第1のネットワークノード180における方法の一部の実施例では、位置決め信号の決定はさらに、第1の集合の各無線ネットワークノード120、130、140の物理セル識別子に基づいている。
【0061】
第1のネットワークノード180における方法の一部の実施例では、個別の位置決め信号の少なくとも1つが、個別の位置決め信号の前記少なくとも1つが送信されるサブフレームに基づいており、それによって、1つのサブフレームにおいて送信された個別の位置決め信号は、別のサブフレームにおいて送信された少なくとも1つの個別の位置決め信号とは異なる。このようにして、異なるシーケンス間、すなわち、位置決め信号間の平均相互相関が減少する。
【0062】
第1のネットワークノード180における方法の一部の実施例では、第1のネットワークノード110、180は、例えば(従来のシステムアーキテクチャでのRNC(無線ネットワーク制御装置)に対応する)E−SMLC(発展型在圏移動体ロケーションセンタ:Evoloved-Serving Mobile Location Center)のようなコアネットワークノード180を含む。
【0063】
図6には、移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の実施例の概略ブロック図が示されている。セルラ無線通信システム100は、第1のネットワークノード180と、第2の無線ネットワークノード120と、複数の無線ネットワークノード130、140、150、160と、移動体端末170とを含んでいる。第2の無線ネットワークノード120は、第1のネットワークノード180によって管理されている。装置構成600は、第2の無線ネットワークノード120を介して、移動体端末170の位置を推定する要求を受信するように構成された受信ユニット620と、オプションで第1のネットワークノード180と第2の無線ネットワークノード120との内の少なくともいずれかに基づいて、第2の無線ネットワークノード120と2つの別の無線ネットワークノード130、140とを含む無線ネットワークノードの第1の集合を決定するように構成された処理ユニット610とを備えていてもよい。2つの別の無線ネットワークノード130、140は、前記複数の無線ネットワークノード130、140、150、160から選択されてもよい。さらに、処理ユニット610は、第1の集合の無線ネットワークノード120、130、140から移動体端末170へ送信するための位置決め信号を決定するように構成されてもよい。各位置決め信号は、第1の集合の各無線ネットワークノードに関連付けられて、そして、第1の集合の各無線ネットワークノード120、130、140に、それらに関連付けられた位置決め信号を移動体端末170に送信するよう命令するように構成されてもよい。オプション的には、装置構成600はさらに、送信ユニット、すなわち発信ユニット630を備えていてもよい。
【0064】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、受信ユニット620はさらに、オプションで移動体端末170の位置を推定する要求に関連して、移動体端末170によって検出された無線ネットワークノードのリストを、移動体端末170から受信するように構成される。無線ネットワークノードの第1の集合の決定はさらに、検出された無線ネットワークノードの受信されたリストに基づいている。
【0065】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、処理ユニット610はさらに、無線ネットワークノード120、130、140の第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号の2つを、その2つの信号が所定の閾値未満の相互相関を有するように決定するように構成される。
【0066】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、処理ユニット610はさらに、第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号の2つを、その2つの信号が直交或いはほぼ直交するように決定するように構成される。
【0067】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、移動体端末170は、第2の無線ネットワークノード120によってサービスを受ける。
【0068】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、送信ユニット630はさらに、第1の集合の各無線ネットワークノードを介して、決定された各位置決め信号を移動体端末170に送信するように構成される。
【0069】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、受信ユニット620はさらに、第2の無線ネットワークノード120を介して、移動体端末170の位置を推定するための情報を移動体端末170から受信するように構成される。
【0070】
移動体端末170の位置の推定を可能にする第1のネットワークノード180における装置構成600の一部の実施例では、処理ユニット610はさらに、受信された情報に基づいて移動体端末170の位置を推定するように構成される。第1のネットワークノード180における装置構成600の一部の実施例では、その情報は、第1の集合の複数のネットワークノードの各無線ネットワークノード120、130、140についてのタイミング推定値についての情報を含んでいる。各タイミング推定値は、各無線ネットワークノード120、130、140と移動体端末170との間の距離を示す。従って、第1のネットワークノードは、移動体端末170の位置座標を算出(または推定)するのに用いられる情報を受信する。オプションでは、その受信された情報は、第1のネットワークノードにすでに利用可能な他の情報と組み合わせる必要がある。そのような情報とは、位置、すなわち、第1の集合の無線ネットワークノードの地理的座標であるとよい。第1のネットワークノード180における装置構成600の一部の実施例では、その情報は、移動体端末170の地理的位置についての情報を含んでいる。ここで、その地理的位置は移動体端末170によって決定される。従って、第1のネットワークノードは、移動体端末170の位置座標を受信する。
【0071】
第1のネットワークノード180における装置構成600の一部の実施例では、処理ユニット610はさらに、第1の集合の各無線ネットワークノード120、130、140についての物理セル識別子に基づいて時間−周波数位置を決定するように構成される。
【0072】
第1のネットワークノード180における装置構成600の一部の実施例では、処理ユニット610はさらに、第1の集合の各無線ネットワークノード120、130、140についての物理セル識別子に基づいて位置決め信号を決定するように構成される。
【0073】
図7には、移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における方法の実施例の概略フローチャートが示されている。セルラ無線通信システム100が、第2の無線ネットワークノード120、130、140と、移動体端末170とを含んでいる。移動体端末170は、位置決め信号が第2の無線ネットワークノード120、130、140と移動体端末170との間で転送されるように、第2の無線ネットワークノード120、130、140の近くに位置していてもよい。次のステップの一部または全部が実行される。
【0074】
ステップ430では、第2の無線ネットワークノード120、130、140が、第2の無線ネットワークノード120、130、140から移動体端末170に送信するための、第2の無線ネットワークノード120、130、140に関連付けられた位置決め信号を決定する。
【0075】
ステップ460で、第2の無線ネットワークノード120、130、140が、位置決め信号を移動体端末170に送信する。
【0076】
オプションの次のステップでは、第2の無線ネットワークノード120、130、140が、位置決め信号を送信するようにという命令を第1のネットワークノード180から受信する。セルラ無線通信システム100はさらに、第1のネットワークノード180を含んでいる。
【0077】
第2の無線ネットワークノード120、130、140における方法の一部の実施例では、位置決め信号を決定するステップ430はさらに、位置決め信号の送信のための時間−周波数位置を、第1のネットワークノード180から受信するステップを含む。
【0078】
第2の無線ネットワークノード120における方法の一部の実施例では、セルラ無線通信システム100がさらに、2つの別の無線ネットワークノード130、140を含んでいる。ここで、位置決め信号を決定するステップ430はさらに、オプションで第2の無線ネットワークノード120に基づいて、第2の無線ネットワークノード120と前記2つの別の無線ネットワークノード130、140とを含めて無線ネットワークノードの第1の集合を決定するステップを含む。
【0079】
別のオプションのステップでは、第2の無線ネットワークノード120は、第1の集合の無線ネットワークノード120、130、140から移動体端末170に送信するための位置決め信号を決定する。各位置決め信号は、第1の集合の各無線ネットワークノードに関連付けられているとよい。
【0080】
第2の無線ネットワークノード120における方法の一部の実施例では、移動体端末170は、第2の無線ネットワークノードによってサービスを受ける。
【0081】
第2の無線ネットワークノード120における方法の一部の実施例では、位置決め信号を決定するステップ430はさらに、各位置決め信号について時間−周波数位置を決定するステップを含む。
【0082】
第2の無線ネットワークノード120における方法の一部の実施例では、無線ネットワークノード120、130、140の第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号の2つが、所定の閾値未満となる相互相関を有する。
【0083】
第2の無線ネットワークノード120における方法の一部の実施例では、第2の無線ネットワークノードは、eNodeBを含む。
【0084】
図8は、移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の実施例の概略ブロック図を示す。セルラ無線通信システム100が、第2の無線ネットワークノード120、130、140と移動体端末170とを含んでいる。移動体端末170は、位置決め信号が第2の無線ネットワークノード120、130、140と移動体端末170との間で転送されるように第2の無線ネットワークノード120、130、140の近くに位置しているとよい。装置構成800は、第2の無線ネットワークノード120、130、140に関連付けられ、第2の無線ネットワークノード120、130、140から移動体端末170へ送信するための位置決め信号を決定するように構成された処理ユニット810と、位置決め信号を移動体端末170へ送信するように構成された送信ユニット830とを備えているとよい。オプションで、装置構成800はさらに、受信ユニット820を備えていてもよい。
【0085】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、受信ユニット820はさらに、位置決め信号を送信するようにという命令を第1のネットワークノード180から受信するように構成される。セルラ無線通信システム100はさらに、第1のネットワークノード180を含んでいる。
【0086】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、受信ユニット820はさらに、第1のネットワークノード180から位置決め信号を送信するための時間−周波数位置を受信するように構成される。
【0087】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、セルラ無線通信システム100はさらに、2つの別の無線ネットワークノード130、140を含んでいる。処理ユニット810はさらに、オプションで第2の無線ネットワークノード120に基づいて、第2の無線ネットワークノード120と前記2つの別の無線ネットワークノード130、140とを含めて無線ネットワークノードの第1の集合を決定するように構成される。
【0088】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、処理ユニット810はさらに、第1の集合の無線ネットワークノード120、130、140から移動体端末170に送信するための位置決め信号を決定するように構成される。各位置決め信号は、第1の集合の各無線ネットワークノードに関連付けられるとよい。
【0089】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、移動体端末170は、第2の無線ネットワークノード120によってサービスを受ける。
【0090】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、処理ユニット810はさらに、各位置決め信号について時間−周波数位置を決定するように構成される。
【0091】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、処理ユニットはさらに、無線ネットワークノード120、130、140の第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号の2つを、それらの信号が所定の閾値未満の相互相関を有するように決定するように構成される。
【0092】
移動体端末170の位置の推定を可能にする第2の無線ネットワークノード120、130、140における装置構成800の一部の実施例では、処理ユニットはさらに、第1の集合のうちの2つの個別の無線ネットワークノード120、130、140に関連付けられた位置決め信号の2つを、その2つの位置決め信号が直交或いはほぼ直交するように決定するように構成される。
【0093】
図9には、移動体端末170の位置の推定を可能にする移動体端末170における方法の実施例の概略フローチャートが示されている。セルラ無線通信システム100が、第2の無線ネットワークノード120と、少なくとも2つの別の無線ネットワークノード130、140と、移動体端末170とを含んでいる。移動体端末170は、第2の無線ネットワークノード120によってサービスを受けるとよい。無線ネットワークノードの第1の集合が、第2のネットワークノード120と、前記少なくとも2つの別の無線ネットワークノード130、140とを含んでいてもよい。次のステップの一部または全部が実行される。
【0094】
ステップ450で、移動体端末170が、無線ネットワークノード120、130、140の第1の集合の各無線ネットワークノードから受信される各位置決め信号についての情報を、第2の無線ネットワークノード120から受信する。
【0095】
ステップ460では、移動体端末170は、第1の集合の各無線ネットワークノード120、130、140から各位置決め信号を受信する。
【0096】
ステップ470で、移動体端末170は、受信された各位置決め信号に基づいて、各位置決め信号についての各タイミング推定値を決定する。各タイミング推定値は、第1の集合の各無線ネットワークノード120、130、140と移動体端末170との間の距離を示す。
【0097】
(図4に示す)オプションのステップ405で、移動体端末170は、複数の無線ネットワークノード130、140を検出する。前記複数の無線ネットワークノード130、140は、各位置決め信号が無線ネットワークノードの第1の集合の各無線ネットワークノードと移動体端末170との間で転送可能なように移動体端末170の近くに位置しているとよい。
【0098】
別のオプションのステップで、移動体端末170は、前記検出された複数の無線ネットワークノード130、140についての情報を含むリストを第2の無線ネットワークノード120に送信する。
【0099】
また別のオプションのステップでは、移動体端末170は、第1の集合の各無線ネットワークノードに対応する、決定されたタイミング推定値と物理セル識別子とを第2の無線ネットワークノード120に送信する。
【0100】
さらに別のオプションのステップでは、移動体端末170は、決定されたタイミング推定値に基づいて移動体端末170の位置を推定する。オプションで、移動体端末170は、決定されたタイミング推定値に基づいて自分自身の地理的位置座標を決定する。
【0101】
オプションのステップでは、移動体端末170は、推定された位置を第2の無線ネットワークノード120に送信する。
【0102】
移動体端末170における方法の一部の実施例では、前記タイミング推定値の決定はさらに、受信された位置決め信号のマッチングされたフィルタバンクに基づき、そのマッチングされたフィルタバンクは各位置決め信号の時間−周波数位置に基づいている。このようにして、前記タイミング推定値の決定が効率よく高速で行われる。オプションでは、前記タイミング推定値の決定がさらに、マッチングされたフィルタバンクからの第1の顕著なピーク出力に基づいている。そのピーク出力は、推定された雑音分散と比較され、そのピーク、すなわち、第1の顕著なピークが雑音分散より十分大きい場合、その信号は検出される。この閾値は、例えば、雑音だけで構成される入力信号が閾値を上回るピークを生成する確率が低くなるように選択することができる。第2に、2つ以上のピークが閾値を上回る場合には通常、最初に達したピークが選択される。しかしながら、最初のピークは、所望の信号の自己相関のサイドローブピークではないことをチェックすることも必要である。自己相関関数のサイドローブピークのサイズは、事前に容易に判定することができる。
【0103】
さて、図10には、移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の実施例の概略ブロック図が示されている。セルラ無線通信システム100は、第2の無線ネットワークノード120と、少なくとも2つの別の無線ネットワークノード130、140と、移動体端末170とを含んでいる。移動体端末170は、第2の無線ネットワークノード120によってサービスを受けてもよい。複数の無線ネットワークノードの第1の集合は、第2のネットワークノード120と、前記少なくとも2つの別の無線ネットワークノード130、140とを含んでいてもよい。装置構成900は、無線ネットワークノード120、130、140の第1の集合の各無線ネットワークノードから送信される各位置決め信号についての情報を第2の無線ネットワークノード120から受信し、第1の集合の各無線ネットワークノード120、130、140から各位置決め信号を受信するように構成された受信ユニットFeRXを備えているとよい。さらに、装置構成900は、受信した各位置決め信号に基づいて、各位置決め信号について個別のタイミング推定値を決定するように構成された処理ユニットUECUを備えているとよい。各タイミング推定値は、第1の集合の各無線ネットワークノード120、130、140と移動体端末170との間の距離を示す。オプションで、装置構成900はさらに、送信ユニットFeTXを備える。
【0104】
移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の一部の実施例では、処理ユニットUECUはさらに、複数の無線ネットワークノード130、140を検出するように構成される。前記複数の無線ネットワークノード130、140は、各位置決め信号が無線ネットワークノードの第1の集合の各無線ネットワークノードと移動体端末170との間で転送可能なように、移動体端末170の近くに位置しているとよい。
【0105】
移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の一部の実施例では、送信ユニットFeTXはさらに、前記検出された複数の無線ネットワークノード130、140についての情報を含むリストを第2の無線ネットワークノード120に送信するように構成される。
【0106】
移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の一部の実施例では、送信ユニットFeTXはさらに、第1の集合の各無線ネットワークノードに対応する、決定されたタイミング推定値と物理セル識別子とを第2の無線ネットワークノード120に送信するように構成される。
【0107】
移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の一部の実施例では、処理ユニットUECUはさらに、決定されたタイミング推定値に基づいて移動体端末170の位置を推定するように構成される。
【0108】
移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の一部の実施例では、送信ユニットFeTXはさらに、推定された位置を第2の無線ネットワークノード120に送信するように構成される。
【0109】
移動体端末170の位置の推定を可能にする移動体端末170における装置構成900の一部の実施例では、その装置構成はさらに、前記タイミング推定値の決定のために処理ユニットUEUCが用いるように構成された、受信された位置決め信号のマッチングされたフィルタバンクMF Bankを備える。マッチングされたフィルタバンクは、各位置決め信号の時間−周波数位置に基づいていてもよい。オプションで、前記タイミング推定値の決定はさらに、マッチングされたフィルタバンクからの第1の顕著なピーク出力に基づいていてもよい。
【0110】
装置構成900を動作させる場合、信号がアンテナAを通じて受信され、フロントエンド受信器FeRXすなわち受信ユニットでベースバンド信号に変換される。次いで、その信号は、例えば、位置決め信号情報を検出する検出器にフィードされる。次いで、この情報は、マッチングされたフィルタバンクMF Bankによって用いられるフィルタ係数を決定する移動体端末の制御ユニットUECUに転送される。次いで、MF Bankは、受信された信号の相関をとり、検出された相関ピークをレポートする。次いで、制御ユニットUECUは、異なる位置決め信号と、オプションでは位置推定値とについてのタイミング推定値を決定し、この情報が他のデータと多重化され、変調され、フロントエンド送信器FeTXで無線信号にアップコンバートされ、アンテナAを介して、例えば、図3の第2の無線ネットワークノードのような在圏基地局(図10では不図示)に送信される。
【0111】
図11には、同期信号について検出された閾値SNRの関数としての誤り警告率の一組のグラフが示されている。誤り警告率は、(信号が存在しない場合に)雑音だけが、信号検出用の閾値を上回る検出結果を生成する確率の尺度である。この技術分野では、誤り警告率の一般的な値は、0.0001〜0.001である。この図では、誤り警告率は、設計パラメータとして蓄積された同期フレーム数Mを使ってプロットされる。この図から、誤り警告率は、蓄積の数が増えても、−15dBを超えることはほとんどないことが分かる。実際、Mが無限大に近づくと、−18dBの限度に達する。この値は、処理利得に等しい。
【0112】
同期されたネットワークでは、すべての基地局は、送信用に共通の時間基準を用いる。それは、例えば、2つの基地局から等距離に位置する移動体端末は大まかに言えば、時間的には重なり合うこれら2つの基地局からのPSS/SSSを観測することを意味する。従って、干渉が常に存在し、他のPSS/SSS信号で構成されるであろう。このことの1つの結果は、感度を向上させるため複数のフレームからの相関を蓄積することは、それほどの効果がないかもしれないということである。これは相互相関特性が、特に研究に値することを意味する。
【0113】
図12には、SSSシーケンスの相互相関(X相関)特性が通信時間差(ラグ)の関数として示されている。1つのSSSシーケンスが自分自身と503個すべての他のSSSシーケンスに対して相関が取られる。ラグ0にピークを持つ線は、所望の信号である。図12から、このSSSシーケンスと2つの他のSSSシーケンスとの間の分離は非常に良好であるとはいえないことが分かるであろう。これは、位置決め信号を計画する際に考慮されなければならない。加えて、他の信号に対する保護も非常に強力とはいえず、わずか8dBであるということは、例えば、第2の無線ネットワークノードのような在圏セルすなわち在圏無線ネットワークノードの近くに優勢な干渉物が存在する場合、目標の−15dBに到達しないことを意味する。
【0114】
結論として、これは同期されたLTEネットワークにおいて経験されるSINRは、同期信号を用いた直接的な相関方法を可能にするには、低すぎるということを示す。さらに、同期信号の相関属性は、干渉が限定的なシナリオにおいても性能を制限する。基準信号(Reference Signal)を用いた測定は、処理利得および相互相関の問題に関してはより良い選択肢でありうる。リソースブロック毎に8つの基準シンボル(Reference Symbol)が存在していて、10MHzのシステム(50のリソースブロック)については50×8=400=26dBの処理利得が得られることを意味しているが、それは理論的には、無数の蓄積を使えば、SNR=−26dBの信号を検出できることを意味する。しかしながら、同じ基準信号シーケンスがサブフレーム毎に繰り返されるのだから、干渉している基準信号から来る相互相関のピークは、蓄積された信号の利点を制限するであろう。
【0115】
従って、本願発明の発明者らは、ここで説明したように特定の位置決め信号を用いることを提案するものである。
【0116】
雑音の中に深く埋もれた信号を検出するための良好な処理利得を得るためには、位置決め信号のシーケンス、すなわち位置決め信号は、十分な長さを持つ必要がある。約24dB以上の処理利得が望ましい。周波数および1つの伝送時間間隔(TTI)という、少なくとも2つのリソースブロック(RB)(すなわち「RBペア」)においてすべてのエネルギーを占めている信号を想定することによって、合計で、11*12*2>24dBの処理利得が達成される。さらに、本発明の別の実施例では、RBは隣接しており、移動体端末においてマッチングされたフィルタの実装をより簡単に行えることを意味する。信号シーケンスは、周波数領域に生成されたOFDM信号、例えば、QPSK信号であってもよいが、QPSK信号は、時間−周波数グリッドにおいて、所望の時間相関属性に達するように(例えば、白色雑音疑似雑音に類似した性能)選択されなければならない。別の実施例では、位置決め信号シーケンスはより多くのRB上に、ただし、より弱く、通常のOFDMシンボルを重畳し、すなわち、位置決め信号は重畳されたCDMA信号である。
【0117】
さらに、位置決め信号シーケンスは、一定の特性やセル負荷等に依存してネットワークノードによって事前に定義されるかまたは定義された蓄積を可能にするため、例えば、特定のサブフレームにおいて5或いは10ミリ秒毎に繰り返されることが望ましい。その信号の望ましいもう1つの特性は、相互相関のピークに伴う問題を回避するために、それぞれの送信について、多様な位置決め信号のシーケンスが送信されるということである。
【0118】
この場合もやはり、各サブフレームで送信される位置決め信号のシーケンスを決定するために、シーケンシャルなフレーム番号と組み合わせて、PCIが用いられるとよい。
【0119】
本発明について、その具体的で代表的な実施例に関して説明してが、当業者にとっては、多くの異なる変形例、変更などが明らかになるであろう。それ故に、説明した実施例は、本発明の範囲を限定することを意図してはおらず、本発明の範囲は添付の請求の範囲によって定義される。
【特許請求の範囲】
【請求項1】
第1のネットワークノード(180)と前記第1のネットワークノード(180)によって管理されている第2の無線ネットワークノード(120)と複数の無線ネットワークノード(130,140,150,160)と移動体端末とを含むセルラ無線通信システム(100)における、前記移動体端末の位置の推定を可能にするための前記第1のネットワークノード(180)における方法であって、
前記第2の無線ネットワークノード(120)を介して、前記移動体端末(170)の位置を推定する要求を受信する工程(410)と、
前記第2の無線ネットワークノード(120)と、前記複数の無線ネットワークノード(130,140,150,160)の間から選択される2つの別の無線ネットワークノード(130,140)とを含む複数の無線ネットワークノードの第1の集合を決定する工程(420)と、
前記第1の集合の複数の無線ネットワークノード(120,130,140)から前記移動体端末(170)へ送信する、前記第1の集合の各無線ネットワークノードに関係する位置決め信号を決定する工程(430)と、
前記各無線ネットワークノードに関係する前記位置決め信号を前記移動体端末(170)に送信するよう前記第1の集合(120,130,140)の前記複数の無線ネットワークノード夫々に指示する工程(440)とを有することを特徴とする方法。
【請求項2】
前記位置決め信号を決定する工程はさらに、前記位置決め信号夫々に対する時間−周波数の位置を決定する工程(430)を含むことを特徴とする請求項1に記載の方法。
【請求項3】
前記第1の集合の無線ネットワークノード(120,130,140)の内の2つの無線ネットワークノード(120,130,140)夫々に関係した2つの前記位置決め信号は、所定の閾値未満の相互相関をもつことを特徴とする請求項1又は2に記載の方法。
【請求項4】
前記複数の無線ネットワークノードの第1の集合を決定する工程は、前記第1のネットワークノード(180)と前記第2の無線ネットワークノード(120)との内の少なくとも1つに基づくことを特徴とする請求項1乃至3のいずれか1項に記載の方法。
【請求項5】
前記移動体端末(170)は前記第2の無線ネットワークノード(120)によりサービスを受けることを特徴とする請求項1乃至4のいずれか1項に記載の方法。
【請求項6】
前記移動体端末(170)の位置を推定する要求は、前記移動体端末(170)から送信されることを特徴とする請求項1乃至5のいずれか1項に記載の方法。
【請求項7】
前記第1の集合の前記複数の無線ネットワークノード各々を介して、前記決定された位置決め信号それぞれを前記移動体端末(170)に送信する工程をさらに有することを特徴とする請求項1乃至6のいずれか1項に記載の方法。
【請求項8】
前記移動体端末(170)の位置を推定するための情報を、前記第2の無線ネットワークノード(120)を介して前記移動体端末(170)から受信する工程(480)と、
前記受信した情報に基づいて、前記移動体端末(170)の位置を推定する工程(490)とをさらに有することを特徴とする請求項1乃至7のいずれか1項に記載の方法。
【請求項9】
前記受信した情報は、前記第1の集合の複数の無線ネットワークノードの各無線ネットワークノード(120,130,140)に対するタイミング推定についての情報を含み、
各タイミング推定は、前記各無線ネットワークノード(120,130,140)と前記移動体端末(170)との間の距離を示すことを特徴とする請求項8に記載の方法。
【請求項10】
前記受信した情報は、前記移動体端末(170)の地理的位置についての情報を含み、
前記地理的位置は前記移動体端末(170)によって決定されることを特徴とする請求項8に記載の方法。
【請求項11】
前記複数の無線ネットワークノードの第1の集合を決定する工程(420)はさらに、
前記移動体端末(170)により検出された複数の無線ネットワークノードのリストを前記移動体端末(170)から受信する工程を含み、
前記複数の無線ネットワークノードの第1の集合の決定はさらに、前記検出された複数の無線ネットワークノードの前記受信されたリストに基づくことを特徴とする請求項1乃至10のいずれか1項に記載の方法。
【請求項12】
前記複数の無線ネットワークノードのリストは、前記移動体端末(170)の位置を推定する要求に合わせて受信されることを特徴とする請求項11に記載の方法。
【請求項13】
各位置決め信号の前記時間−周波数の位置は、前記第1の集合の各無線ネットワークノード(120,130,140)における負荷の内の少なくとも1つと、前記第1の集合の複数の無線ネットワークノード(120,130,140)の間の相対的なタイミングとに基づいていることを特徴とする請求項2乃至12のいずれか1項に記載の方法。
【請求項14】
請求項2に従属するときに、前記時間−周波数の位置の決定はさらに、前記第1の集合の各無線ネットワークノード(120,130,140)の物理的セルの識別子に基づくことを特徴とする請求項2又は請求項3乃至13のいずれか1項に記載の方法。
【請求項15】
請求項3に従属するときに、前記位置決め信号の決定はさらに、前記第1の集合の各無線ネットワークノード(120,130,140)の物理的セルの識別子に基づくことを特徴とする請求項3又は請求項4乃至14のいずれか1項に記載の方法。
【請求項16】
前記各位置決め信号の少なくとも1つは、前記各位置決め信号の前記少なくとも1つが送信されるサブフレームに基づいており、これにより、1つのサブフレームにおいて送信される各位置決め信号は、別のサブフレームにおいて送信される少なくとも1つの位置決め信号とは異なることを特徴とする請求項1乃至15のいずれか1項に記載の方法。
【請求項17】
前記第1のネットワークノード(110,180)は、発展型在圏移動体ロケーションセンタ(E−SMLC)のようなコアネットワークノード(180)を含むことを特徴とする請求項1乃至16のいずれか1項に記載の方法。
【請求項18】
第1のネットワークノード(180)と前記第1のネットワークノード(180)によって管理されている第2の無線ネットワークノード(120)と複数の無線ネットワークノード(130,140,150,160)と移動体端末とを含むセルラ無線通信システム(100)における、前記移動体端末(170)の位置の推定を可能にするための第1のネットワークノード(180)であって、前記第1のネットワークノードの構成(600)は、
前記第2の無線ネットワークノード(120)を介して、前記移動体端末(170)の位置を推定する要求を受信するように構成された受信ユニット(620)と、
前記第2の無線ネットワークノード(120)と、前記複数の無線ネットワークノード(130,140,150,160)の間から選択される2つの別の無線ネットワークノード(130,140)とを含む複数の無線ネットワークノードの第1の集合を決定し、前記第1の集合の複数の無線ネットワークノード(120,130,140)から前記移動体端末(170)へ送信する、前記第1の集合の各無線ネットワークノードに関係する位置決め信号を決定し、前記各無線ネットワークノードに関係する前記位置決め信号を前記移動体端末(170)に送信するよう前記第1の集合(120,130,140)の前記無線ネットワークノード夫々に指示するよう構成された処理ユニット(610)とを有することを特徴とする第1のネットワークノード。
【請求項19】
第2の無線ネットワークノード(120,130,140)と移動体端末(170)とを含むセルラ無線通信システム(100)において、位置決め信号が前記第2の無線ネットワークノード(120,130,140)と前記移動体端末(170)との間で転送可能であるように前記移動体端末(170)が前記第2の無線ネットワークノード(120,130,140)の近傍に位置し、前記移動体端末の位置の推定を可能にするための第2の無線ネットワークノードにおける方法であって、
前記第2の無線ネットワークノード(120,130,140)から前記移動体端末(170)へ送信する、前記第2の無線ネットワークノード(120,130,140)に関連付けられた位置決め信号を決定する工程(430)と、
前記位置決め信号を前記移動体端末(170)に送信する工程(460)とを有することを特徴とする方法。
【請求項20】
前記セルラ無線通信システム(100)はさらに、第1のネットワークノード(180)を含み、
前記方法は、前記位置決め信号を送信するために、前記第1のネットワークノード(180)から指示を受信する工程をさらに有することを特徴とする請求項19に記載の方法。
【請求項21】
前記位置決め信号を決定する工程(430)は、
前記位置決め信号の送信のために時間−周波数の位置を前記第1のネットワークノード(180)から受信する工程を含むことを特徴とする請求項20に記載の方法。
【請求項22】
前記セルラ無線通信システム(100)はさらに、2つの別の無線ネットワークノード(130,140)を含み、
前記位置決め信号を決定する工程(430)は、
前記第2の無線ネットワークノード(120)と、前記2つの別の無線ネットワークノード(130,140)とを含む複数の無線ネットワークノードの第1の集合を決定する工程と、
前記第1の集合の複数の無線ネットワークノード(120,130,140)から前記移動体端末(170)へ送信する、前記第1の集合の各無線ネットワークノードに関係する位置決め信号を決定する工程とを含むことを特徴とする請求項19に記載の方法。
【請求項23】
前記複数の無線ネットワークノードの第1の集合を決定する工程は、前記第2の無線ネットワークノード(120,140)に基づくことを特徴とする請求項22に記載の方法。
【請求項24】
前記移動体端末(170)は前記第2の無線ネットワークノード(120)によりサービスを受けることを特徴とする請求項22又は23に記載の方法。
【請求項25】
前記位置決め信号を決定する工程はさらに、前記位置決め信号夫々に対する時間−周波数の位置を決定する工程を含むことを特徴とする請求項22乃至24のいずれか1項に記載の方法。
【請求項26】
前記第1の集合の複数の無線ネットワークノード(120,130,140)の内の2つの無線ネットワークノード(120,130,140)夫々に関係した2つの前記位置決め信号は、所定の閾値未満の相互相関をもつことを特徴とする請求項22乃至25のいずれか1項に記載の方法。
【請求項27】
前記第2の無線ネットワークノードはeノードBを含むことを特徴とする請求項22乃至26のいずれか1項に記載の方法。
【請求項28】
第2の無線ネットワークノード(120,130,140)と移動体端末(170)とを含むセルラ無線通信システム(100)において、位置決め信号が前記第2の無線ネットワークノード(120,130,140)と前記移動体端末(170)との間で転送可能であるように前記移動体端末(170)が前記第2の無線ネットワークノード(120,130,140)の近傍に位置し、前記移動体端末(170)の位置の推定を可能にする前記第2の無線ネットワークノード(120,130,140)であって、
前記第2の無線ネットワークノードの構成(800)は、
前記第2の無線ネットワークノード(120,130,140)から前記移動体端末(170)へ送信するための、前記第2の無線ネットワークノード(120,130,140)に関連付けられた位置決め信号を判定するように構成された処理ユニット(810)と、
前記位置決め信号を前記移動体端末(170)へ送信するように構成された送信ユニット(830)とを有することを特徴とする第2の無線ネットワークノード。
【請求項29】
第2の無線ネットワークノード(120)と2つの別の無線ネットワークノード(130,140)と前記第2の無線ネットワークノード(120)によりサービスを受ける移動体端末(170)とを含むセルラ無線通信システム(100)において、前記第2の無線ネットワークノード(120)と前記2つの別の無線ネットワークノード(130,140)とが第1の集合の複数の無線ネットワークノードを形成し、前記移動体端末(170)の位置の推定を可能にする前記移動体端末(170)における方法であって、
前記第1の集合の複数の無線ネットワークノード(120,130,140)の各無線ネットワークノードから送信される各位置決め信号についての情報を前記第2の無線ネットワークノード(120)から受信する工程(450)と、
前記第1の集合の前記複数の無線ネットワークノード(120,130,140)それぞれから、各位置決め信号を受信する工程(460)と、
前記受信した位置決め信号それぞれに基づいて、前記位置決め信号それぞれについて、前記第1の集合の前記各無線ネットワークノード(120,130,140)と前記移動体端末(170)との間の距離を示す各タイミング推定を決定する工程(470)とを有することを特徴とする方法。
【請求項30】
前記位置決め信号それぞれが前記第1の集合の複数の無線ネットワークノードの無線ネットワークノードそれぞれと前記移動体端末(170)との間で転送可能であるように移動体端末(170)の近傍に位置した前記複数の無線ネットワークノード(130,140)を検出する工程(405)と、
前記複数の無線ネットワークノード(130,140)についての情報を含むリストを前記第2の無線ネットワークノード(120)に送信する工程とをさらに有することを特徴とする請求項29に記載の方法。
【請求項31】
前記第1の集合の各無線ネットワークノードに対応する、前記決定されたタイミング推定と物理セルの識別子とを前記第2の無線ネットワークノード(120)に送信する工程をさらに有することを特徴とする請求項29又は請求項30に記載の方法。
【請求項32】
前記決定されたタイミング推定に基づいて、前記移動体端末(170)の位置を推定する工程をさらに有することを特徴とする請求項29乃至31のいずれか1項に記載の方法。
【請求項33】
前記第2の無線ネットワークノード(120)に前記決定された位置を送信する工程をさらに有することを特徴とする請求項29乃至32のいずれか1項に記載の方法。
【請求項34】
前記タイミング推定の決定はさらに、受信した位置決め信号のマッチングされたフィルタバンクに基づいており、
前記マッチングされたフィルタバンクは、前記各位置決め信号の時間−周波数の位置に基づいていることを特徴とする請求項29乃至33のいずれか1項に記載の方法。
【請求項35】
前記タイミング推定の決定はさらに、前記マッチングされたフィルタバンクから出力される第1の顕著なピークに基づいていることを特徴とする請求項29乃至34のいずれか1項に記載の方法。
【請求項36】
第2の無線ネットワークノード(120)と2つの別の無線ネットワークノード(130,140)と前記第2の無線ネットワークノード(120)によりサービスを受ける移動体端末(170)とを含むセルラ無線通信システム(100)において、前記第2の無線ネットワークノード(120)と前記2つの別の無線ネットワークノード(130,140)とが第1の集合の複数の無線ネットワークノードを形成し、前記移動体端末(170)の位置の推定を可能にする前記移動体端末(170)であって、前記移動体端末(170)の構成(900)は、
前記第1の集合の複数の無線ネットワークノード(120,130,140)の各無線ネットワークノードから送信される各位置決め信号についての情報を前記第2の無線ネットワークノード(120)から受信し、前記第1の集合の前記複数の無線ネットワークノード(120,130,140)それぞれから、各位置決め信号を受信するように構成された受信ユニット(FeRX)と、
前記受信した位置決め信号それぞれに基づいて、前記位置決め信号それぞれについて、前記第1の集合の前記各無線ネットワークノード(120,130,140)と前記移動体端末(170)との間の距離を示す各タイミング推定を決定するように構成された処理ユニット(UECU)とを有することを特徴とする移動体端末。
【請求項1】
第1のネットワークノード(180)と前記第1のネットワークノード(180)によって管理されている第2の無線ネットワークノード(120)と複数の無線ネットワークノード(130,140,150,160)と移動体端末とを含むセルラ無線通信システム(100)における、前記移動体端末の位置の推定を可能にするための前記第1のネットワークノード(180)における方法であって、
前記第2の無線ネットワークノード(120)を介して、前記移動体端末(170)の位置を推定する要求を受信する工程(410)と、
前記第2の無線ネットワークノード(120)と、前記複数の無線ネットワークノード(130,140,150,160)の間から選択される2つの別の無線ネットワークノード(130,140)とを含む複数の無線ネットワークノードの第1の集合を決定する工程(420)と、
前記第1の集合の複数の無線ネットワークノード(120,130,140)から前記移動体端末(170)へ送信する、前記第1の集合の各無線ネットワークノードに関係する位置決め信号を決定する工程(430)と、
前記各無線ネットワークノードに関係する前記位置決め信号を前記移動体端末(170)に送信するよう前記第1の集合(120,130,140)の前記複数の無線ネットワークノード夫々に指示する工程(440)とを有することを特徴とする方法。
【請求項2】
前記位置決め信号を決定する工程はさらに、前記位置決め信号夫々に対する時間−周波数の位置を決定する工程(430)を含むことを特徴とする請求項1に記載の方法。
【請求項3】
前記第1の集合の無線ネットワークノード(120,130,140)の内の2つの無線ネットワークノード(120,130,140)夫々に関係した2つの前記位置決め信号は、所定の閾値未満の相互相関をもつことを特徴とする請求項1又は2に記載の方法。
【請求項4】
前記複数の無線ネットワークノードの第1の集合を決定する工程は、前記第1のネットワークノード(180)と前記第2の無線ネットワークノード(120)との内の少なくとも1つに基づくことを特徴とする請求項1乃至3のいずれか1項に記載の方法。
【請求項5】
前記移動体端末(170)は前記第2の無線ネットワークノード(120)によりサービスを受けることを特徴とする請求項1乃至4のいずれか1項に記載の方法。
【請求項6】
前記移動体端末(170)の位置を推定する要求は、前記移動体端末(170)から送信されることを特徴とする請求項1乃至5のいずれか1項に記載の方法。
【請求項7】
前記第1の集合の前記複数の無線ネットワークノード各々を介して、前記決定された位置決め信号それぞれを前記移動体端末(170)に送信する工程をさらに有することを特徴とする請求項1乃至6のいずれか1項に記載の方法。
【請求項8】
前記移動体端末(170)の位置を推定するための情報を、前記第2の無線ネットワークノード(120)を介して前記移動体端末(170)から受信する工程(480)と、
前記受信した情報に基づいて、前記移動体端末(170)の位置を推定する工程(490)とをさらに有することを特徴とする請求項1乃至7のいずれか1項に記載の方法。
【請求項9】
前記受信した情報は、前記第1の集合の複数の無線ネットワークノードの各無線ネットワークノード(120,130,140)に対するタイミング推定についての情報を含み、
各タイミング推定は、前記各無線ネットワークノード(120,130,140)と前記移動体端末(170)との間の距離を示すことを特徴とする請求項8に記載の方法。
【請求項10】
前記受信した情報は、前記移動体端末(170)の地理的位置についての情報を含み、
前記地理的位置は前記移動体端末(170)によって決定されることを特徴とする請求項8に記載の方法。
【請求項11】
前記複数の無線ネットワークノードの第1の集合を決定する工程(420)はさらに、
前記移動体端末(170)により検出された複数の無線ネットワークノードのリストを前記移動体端末(170)から受信する工程を含み、
前記複数の無線ネットワークノードの第1の集合の決定はさらに、前記検出された複数の無線ネットワークノードの前記受信されたリストに基づくことを特徴とする請求項1乃至10のいずれか1項に記載の方法。
【請求項12】
前記複数の無線ネットワークノードのリストは、前記移動体端末(170)の位置を推定する要求に合わせて受信されることを特徴とする請求項11に記載の方法。
【請求項13】
各位置決め信号の前記時間−周波数の位置は、前記第1の集合の各無線ネットワークノード(120,130,140)における負荷の内の少なくとも1つと、前記第1の集合の複数の無線ネットワークノード(120,130,140)の間の相対的なタイミングとに基づいていることを特徴とする請求項2乃至12のいずれか1項に記載の方法。
【請求項14】
請求項2に従属するときに、前記時間−周波数の位置の決定はさらに、前記第1の集合の各無線ネットワークノード(120,130,140)の物理的セルの識別子に基づくことを特徴とする請求項2又は請求項3乃至13のいずれか1項に記載の方法。
【請求項15】
請求項3に従属するときに、前記位置決め信号の決定はさらに、前記第1の集合の各無線ネットワークノード(120,130,140)の物理的セルの識別子に基づくことを特徴とする請求項3又は請求項4乃至14のいずれか1項に記載の方法。
【請求項16】
前記各位置決め信号の少なくとも1つは、前記各位置決め信号の前記少なくとも1つが送信されるサブフレームに基づいており、これにより、1つのサブフレームにおいて送信される各位置決め信号は、別のサブフレームにおいて送信される少なくとも1つの位置決め信号とは異なることを特徴とする請求項1乃至15のいずれか1項に記載の方法。
【請求項17】
前記第1のネットワークノード(110,180)は、発展型在圏移動体ロケーションセンタ(E−SMLC)のようなコアネットワークノード(180)を含むことを特徴とする請求項1乃至16のいずれか1項に記載の方法。
【請求項18】
第1のネットワークノード(180)と前記第1のネットワークノード(180)によって管理されている第2の無線ネットワークノード(120)と複数の無線ネットワークノード(130,140,150,160)と移動体端末とを含むセルラ無線通信システム(100)における、前記移動体端末(170)の位置の推定を可能にするための第1のネットワークノード(180)であって、前記第1のネットワークノードの構成(600)は、
前記第2の無線ネットワークノード(120)を介して、前記移動体端末(170)の位置を推定する要求を受信するように構成された受信ユニット(620)と、
前記第2の無線ネットワークノード(120)と、前記複数の無線ネットワークノード(130,140,150,160)の間から選択される2つの別の無線ネットワークノード(130,140)とを含む複数の無線ネットワークノードの第1の集合を決定し、前記第1の集合の複数の無線ネットワークノード(120,130,140)から前記移動体端末(170)へ送信する、前記第1の集合の各無線ネットワークノードに関係する位置決め信号を決定し、前記各無線ネットワークノードに関係する前記位置決め信号を前記移動体端末(170)に送信するよう前記第1の集合(120,130,140)の前記無線ネットワークノード夫々に指示するよう構成された処理ユニット(610)とを有することを特徴とする第1のネットワークノード。
【請求項19】
第2の無線ネットワークノード(120,130,140)と移動体端末(170)とを含むセルラ無線通信システム(100)において、位置決め信号が前記第2の無線ネットワークノード(120,130,140)と前記移動体端末(170)との間で転送可能であるように前記移動体端末(170)が前記第2の無線ネットワークノード(120,130,140)の近傍に位置し、前記移動体端末の位置の推定を可能にするための第2の無線ネットワークノードにおける方法であって、
前記第2の無線ネットワークノード(120,130,140)から前記移動体端末(170)へ送信する、前記第2の無線ネットワークノード(120,130,140)に関連付けられた位置決め信号を決定する工程(430)と、
前記位置決め信号を前記移動体端末(170)に送信する工程(460)とを有することを特徴とする方法。
【請求項20】
前記セルラ無線通信システム(100)はさらに、第1のネットワークノード(180)を含み、
前記方法は、前記位置決め信号を送信するために、前記第1のネットワークノード(180)から指示を受信する工程をさらに有することを特徴とする請求項19に記載の方法。
【請求項21】
前記位置決め信号を決定する工程(430)は、
前記位置決め信号の送信のために時間−周波数の位置を前記第1のネットワークノード(180)から受信する工程を含むことを特徴とする請求項20に記載の方法。
【請求項22】
前記セルラ無線通信システム(100)はさらに、2つの別の無線ネットワークノード(130,140)を含み、
前記位置決め信号を決定する工程(430)は、
前記第2の無線ネットワークノード(120)と、前記2つの別の無線ネットワークノード(130,140)とを含む複数の無線ネットワークノードの第1の集合を決定する工程と、
前記第1の集合の複数の無線ネットワークノード(120,130,140)から前記移動体端末(170)へ送信する、前記第1の集合の各無線ネットワークノードに関係する位置決め信号を決定する工程とを含むことを特徴とする請求項19に記載の方法。
【請求項23】
前記複数の無線ネットワークノードの第1の集合を決定する工程は、前記第2の無線ネットワークノード(120,140)に基づくことを特徴とする請求項22に記載の方法。
【請求項24】
前記移動体端末(170)は前記第2の無線ネットワークノード(120)によりサービスを受けることを特徴とする請求項22又は23に記載の方法。
【請求項25】
前記位置決め信号を決定する工程はさらに、前記位置決め信号夫々に対する時間−周波数の位置を決定する工程を含むことを特徴とする請求項22乃至24のいずれか1項に記載の方法。
【請求項26】
前記第1の集合の複数の無線ネットワークノード(120,130,140)の内の2つの無線ネットワークノード(120,130,140)夫々に関係した2つの前記位置決め信号は、所定の閾値未満の相互相関をもつことを特徴とする請求項22乃至25のいずれか1項に記載の方法。
【請求項27】
前記第2の無線ネットワークノードはeノードBを含むことを特徴とする請求項22乃至26のいずれか1項に記載の方法。
【請求項28】
第2の無線ネットワークノード(120,130,140)と移動体端末(170)とを含むセルラ無線通信システム(100)において、位置決め信号が前記第2の無線ネットワークノード(120,130,140)と前記移動体端末(170)との間で転送可能であるように前記移動体端末(170)が前記第2の無線ネットワークノード(120,130,140)の近傍に位置し、前記移動体端末(170)の位置の推定を可能にする前記第2の無線ネットワークノード(120,130,140)であって、
前記第2の無線ネットワークノードの構成(800)は、
前記第2の無線ネットワークノード(120,130,140)から前記移動体端末(170)へ送信するための、前記第2の無線ネットワークノード(120,130,140)に関連付けられた位置決め信号を判定するように構成された処理ユニット(810)と、
前記位置決め信号を前記移動体端末(170)へ送信するように構成された送信ユニット(830)とを有することを特徴とする第2の無線ネットワークノード。
【請求項29】
第2の無線ネットワークノード(120)と2つの別の無線ネットワークノード(130,140)と前記第2の無線ネットワークノード(120)によりサービスを受ける移動体端末(170)とを含むセルラ無線通信システム(100)において、前記第2の無線ネットワークノード(120)と前記2つの別の無線ネットワークノード(130,140)とが第1の集合の複数の無線ネットワークノードを形成し、前記移動体端末(170)の位置の推定を可能にする前記移動体端末(170)における方法であって、
前記第1の集合の複数の無線ネットワークノード(120,130,140)の各無線ネットワークノードから送信される各位置決め信号についての情報を前記第2の無線ネットワークノード(120)から受信する工程(450)と、
前記第1の集合の前記複数の無線ネットワークノード(120,130,140)それぞれから、各位置決め信号を受信する工程(460)と、
前記受信した位置決め信号それぞれに基づいて、前記位置決め信号それぞれについて、前記第1の集合の前記各無線ネットワークノード(120,130,140)と前記移動体端末(170)との間の距離を示す各タイミング推定を決定する工程(470)とを有することを特徴とする方法。
【請求項30】
前記位置決め信号それぞれが前記第1の集合の複数の無線ネットワークノードの無線ネットワークノードそれぞれと前記移動体端末(170)との間で転送可能であるように移動体端末(170)の近傍に位置した前記複数の無線ネットワークノード(130,140)を検出する工程(405)と、
前記複数の無線ネットワークノード(130,140)についての情報を含むリストを前記第2の無線ネットワークノード(120)に送信する工程とをさらに有することを特徴とする請求項29に記載の方法。
【請求項31】
前記第1の集合の各無線ネットワークノードに対応する、前記決定されたタイミング推定と物理セルの識別子とを前記第2の無線ネットワークノード(120)に送信する工程をさらに有することを特徴とする請求項29又は請求項30に記載の方法。
【請求項32】
前記決定されたタイミング推定に基づいて、前記移動体端末(170)の位置を推定する工程をさらに有することを特徴とする請求項29乃至31のいずれか1項に記載の方法。
【請求項33】
前記第2の無線ネットワークノード(120)に前記決定された位置を送信する工程をさらに有することを特徴とする請求項29乃至32のいずれか1項に記載の方法。
【請求項34】
前記タイミング推定の決定はさらに、受信した位置決め信号のマッチングされたフィルタバンクに基づいており、
前記マッチングされたフィルタバンクは、前記各位置決め信号の時間−周波数の位置に基づいていることを特徴とする請求項29乃至33のいずれか1項に記載の方法。
【請求項35】
前記タイミング推定の決定はさらに、前記マッチングされたフィルタバンクから出力される第1の顕著なピークに基づいていることを特徴とする請求項29乃至34のいずれか1項に記載の方法。
【請求項36】
第2の無線ネットワークノード(120)と2つの別の無線ネットワークノード(130,140)と前記第2の無線ネットワークノード(120)によりサービスを受ける移動体端末(170)とを含むセルラ無線通信システム(100)において、前記第2の無線ネットワークノード(120)と前記2つの別の無線ネットワークノード(130,140)とが第1の集合の複数の無線ネットワークノードを形成し、前記移動体端末(170)の位置の推定を可能にする前記移動体端末(170)であって、前記移動体端末(170)の構成(900)は、
前記第1の集合の複数の無線ネットワークノード(120,130,140)の各無線ネットワークノードから送信される各位置決め信号についての情報を前記第2の無線ネットワークノード(120)から受信し、前記第1の集合の前記複数の無線ネットワークノード(120,130,140)それぞれから、各位置決め信号を受信するように構成された受信ユニット(FeRX)と、
前記受信した位置決め信号それぞれに基づいて、前記位置決め信号それぞれについて、前記第1の集合の前記各無線ネットワークノード(120,130,140)と前記移動体端末(170)との間の距離を示す各タイミング推定を決定するように構成された処理ユニット(UECU)とを有することを特徴とする移動体端末。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公表番号】特表2012−522418(P2012−522418A)
【公表日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2012−501956(P2012−501956)
【出願日】平成21年3月27日(2009.3.27)
【国際出願番号】PCT/SE2009/050323
【国際公開番号】WO2010/110709
【国際公開日】平成22年9月30日(2010.9.30)
【出願人】(598036300)テレフオンアクチーボラゲット エル エム エリクソン(パブル) (2,266)
【Fターム(参考)】
【公表日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願日】平成21年3月27日(2009.3.27)
【国際出願番号】PCT/SE2009/050323
【国際公開番号】WO2010/110709
【国際公開日】平成22年9月30日(2010.9.30)
【出願人】(598036300)テレフオンアクチーボラゲット エル エム エリクソン(パブル) (2,266)
【Fターム(参考)】
[ Back to top ]