
移動体管理装置
【課題】タグを有しない移動体を的確に判定することのできる移動体管理装置を得る。
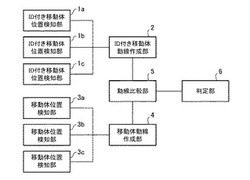
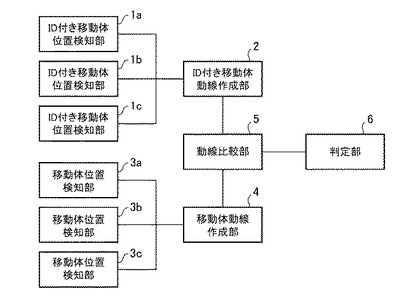
【解決手段】ID付き移動体動線作成部2は、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線をID付き移動体動線として作成する。移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線を移動体動線として作成する。動線比較部5は、ID付き移動体動線と移動体動線とを比較し、動線が近いものを対応付ける。判定部6は、動線比較部5において、対応付けがなされない動線の移動体をタグを有しない移動体として判定する。
【解決手段】ID付き移動体動線作成部2は、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線をID付き移動体動線として作成する。移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線を移動体動線として作成する。動線比較部5は、ID付き移動体動線と移動体動線とを比較し、動線が近いものを対応付ける。判定部6は、動線比較部5において、対応付けがなされない動線の移動体をタグを有しない移動体として判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ID識別可能な装置(以下タグと呼ぶ)を持った人物等の移動体の位置とID識別可能な装置を持たない人物等の移動体の位置とを検知・管理・区別する移動体管理装置に関するものである。
【背景技術】
【0002】
従来、タグを持つ人物とタグを持たない人物とを検知・区別する監視システムでは、例えば、局所的な領域において、タグの数と人の数を比較することにより、タグを持たない人物を発見するよう構成されていた(例えば、特許文献1参照)。また、種類の異なる個人毎の行動履歴を比較し、それらの行動の矛盾点を見つけることにより、タグの入れ替わり等の異常を検知するようにした管理装置があった(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−16042号公報
【特許文献2】特開2008−293137号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されたような監視システムでは、局所領域で人の数とタグの数を比較しているため、局所領域で検知ミスを生じてしまった場合に、タグの不保持者を発見することが困難であるという問題があった。また、タグの不保持者を検知できたとしても、退路を断つ手段がなければタグの不保持者を見失ってしまうという問題があった。また、特許文献2に記載された管理装置では、タグを用いて得られた行動履歴のみを比較しているため、タグを保有していない人物の行動は検知できないという問題があった。
【0005】
この発明は上記のような課題を解決するためになされたもので、タグを有しない移動体を的確に判定することのできる移動体管理装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る移動体管理装置は、タグを有する移動体と、タグを有しない移動体とを識別する移動体管理装置であって、タグの位置を検知するID付き移動体位置検知部と、ID付き移動体位置検知部の検知結果からタグの時空間の動線をID付き移動体動線として作成するID付き移動体動線作成部と、移動体を検知する移動体位置検知部と、移動体位置検知部の検知結果から移動体の時空間の動線を移動体動線として作成する移動体動線作成部と、ID付き移動体動線と移動体動線とを比較し、動線が近いものを対応付ける動線比較部と、動線比較部において、対応付けがなされない動線の移動体をタグを有しない移動体として判定する判定部とを備えたものである。
【発明の効果】
【0007】
この発明の移動体管理装置は、タグを有する移動体の動線と、タグの有無とは無関係に検知した移動体の動線とを比較してタグを有しない移動体を判定するようにしたので、タグを有しない移動体を的確に判定することができる。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1による移動体管理装置を示す構成図である。
【図2】この発明の実施の形態1による移動体管理装置のID付き移動体動線作成部の動作を示すフローチャートである。
【図3】この発明の実施の形態1による移動体管理装置のステップST202のデータ統合の説明図である。
【図4】この発明の実施の形態1による移動体管理装置のステップST203の動線作成の説明図である。
【図5】この発明の実施の形態1による移動体管理装置の移動体動線作成部の動作を示すフローチャートである。
【図6】この発明の実施の形態1による移動体管理装置の移動体位置検知部での検知例を示す説明図である。
【図7】この発明の実施の形態1による移動体管理装置の移動体動線作成部で作成した動作を示す説明図である。
【図8】この発明の実施の形態1による移動体管理装置でID付き人動線と人動線を時間区間毎に比較する説明図である。
【図9】この発明の実施の形態1による移動体管理装置でID付き人動線と人動線をエリア区間毎に比較する説明図である。
【図10】この発明の実施の形態2による移動体管理装置のID付き人動線から人存在率を求める場合の説明図である。
【図11】この発明の実施の形態2による移動体管理装置の移動体動線作成部で求めた人存在率の説明図である。
【図12】この発明の実施の形態5による移動体管理装置の検知部の配置例を示す説明図である。
【図13】この発明の実施の形態7による移動体管理装置の並列処理を行う場合の構成図である。
【図14】この発明の実施の形態7による移動体管理装置の比較履歴を用いる場合の構成図である。
【図15】この発明の実施の形態8による移動体管理装置の検知パラメータを変更する場合の構成図である。
【発明を実施するための形態】
【0009】
実施の形態1.
図1は、この発明の実施の形態1による移動体管理装置を示す構成図である。
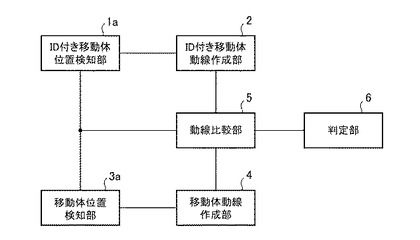
図1に示す移動体管理装置は、ID付き移動体位置検知部1a,1b,1c、ID付き移動体動線作成部2、移動体位置検知部3a,3b,3c、移動体動線作成部4、動線比較部5、判定部6を備えている。
【0010】
ID付き移動体位置検知部1a,1b,1cは、それぞれ移動体である人物が保持するタグの位置を検知する機能部である。このID付き移動体位置検知部1a,1b,1cとしては、例えば、RF−IDタグを読み取る受信機からなり、受信機の近くに存在するタグのID情報を読み取る。そして、読み取ったタグIDと受信機のID、読み取り時刻、受信機の設置位置情報を結びつけることにより、誰がいつどこにいるかを検知する。尚、RF−ID以外にも、人体通信、可視光通信、赤外線通信、GPS、無線LAN、UWB等を利用してタグのIDを読み取り、人物の位置を特定してもよい。また、ID付き移動体動線作成部2は、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線をID付き人動線(ID付き移動体動線)として作成する機能部であり、ID毎の滞在時間や移動履歴といった動線や行動履歴を作成する。
【0011】
移動体位置検知部3a,3b,3cは、それぞれタグの保持の有無とは無関係に移動体である人物を検知する機能部である。即ち、これら移動体位置検知部3a,3b,3cは、人の存在や動きを検知する装置であり、焦電センサ、温度センサ、超音波センサ、圧力センサ、距離センサ、カメラ等、個人を確実に特定することはできないが、タグの保有状況にかかわらずに人物の検知を行う装置である。例えば、焦電センサを利用した人感センサの場合、人の発する赤外線の変化を検知するため、センサ検知範囲内を横切る等の人の動きを検知できる。他にも、天井に取り付けた超音波センサで床までの距離を随時測定し、人が存在しない時刻の距離を基準距離として記憶しておくことで、基準距離と差分の大きい時刻は人が存在していると検知してもよい。また、マット状の圧力センサを床に敷き詰め、圧力のかかった部分に人が存在するとしてもよい。また、移動体動線作成部4では、移動体位置検知部3a,3b,3cの検知結果を用いて、人の存在確率や人流度、人数分布等を作成する機能部である。即ち、移動体動線作成部4は、周囲のセンサとの位置関連情報・検知履歴を用いることによって、移動方向や移動速度、おおよその人数等を算出し、これを人動線情報(移動体動線情報)として出力する。
【0012】
動線比較部5は、ID付き移動体動線作成部2で作成したID付き人動線情報と、移動体動線作成部4で作成した人動線情報とを比較し、動線が近いものを対応付ける機能部である。例えば、あるエリアの人動線情報とID付き人動線情報を比較する場合、人動線情報では人が存在しているが、ID付き人動線情報ではどのIDを持った人もそのエリアに存在しないという結果になれば、そのエリアにはタグを持っていない人が存在していたということがわかる。判定部6は、動線比較部5において対応付けがなされなかった人動線の長さを求め、その長さが時間閾値や距離閾値以上のものをタグ不保持者として判定する機能部である。
【0013】
以下、ID付き移動体位置検知部1a,1b,1cとしてRFIDタグを読み取る受信機を、移動体位置検知部3a,3b,3cとして焦電センサ利用の人感センサを用いた場合の、タグ不保持者を検知する例について説明する。
【0014】
RFID受信機は受信機の検知範囲内にあるタグのIDを読み取り、受信機番号と読み取ったタグのID番号と読み取り時刻を出力する。人感センサは検知範囲内の赤外光の変化量を検知し、変化量がある一定値以上であれば動く人がいると判断し、人感センサ番号と動き検知結果と検知時刻を出力する。受信機のタグ検知タイミングと人感センサの人検知タイミングが等しく、受信機と人感センサの検知範囲が同じである場合、受信機1台の出力と人感センサ1個の出力を比較するだけで、タグの不保持者を検知することができる。例えば、受信機はタグを検知していない時刻に人感センサが人を検知している場合、タグ不保持者が検知範囲内に存在すると判定する。
【0015】
このように、受信機1台と人感センサ1台の出力結果を比較することで、おおよその人の有無とタグ保有状況を判別することができるが、RFID受信機と人感センサでは検知情報の種類が異なるため、タグ不保持者が静止している場合、タグ保持者と不保持者が同時に検知範囲に侵入する場合等、検知できないパターンが存在する。また、RFID受信機と人感センサの検知範囲が等しくなるよう調節するのは難しく現実的ではない。更に、RFID受信機と人感センサでは検知のタイミングが異なるため、検知時刻がずれることがある。例えば、RFIDタグがIDを受信するよりも早く人感センサが動きを検知した場合、タグ不保持者を検知したと誤判定する場合がある。
【0016】
特にビル等の建物全域でタグ保持者と不保持者の位置を検知・管理する場合には、非常に多くの装置を配置しなければならず、ID付き移動体位置検知部1a,1b,1cと移動体位置検知部3a,3b,3cの検知範囲や検知タイミングを全て調整するのは困難である。そこで、本発明では検知結果を直接比較するのではなく、ID付き移動体動線作成部2でID付き人動線を、また、移動体動線作成部4で人位置動線を作成し、これらを比較することでタグ不保持者の検知を行う。
【0017】
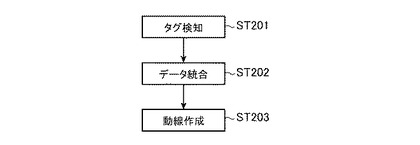
次に、図2を用いて、ID付き移動体動線作成部2でのID付き人動線の作成について説明する。ステップST201では、ID付き移動体位置検知部1a,1b,1cからのタグ検知結果を得る。ステップST202では、時空間的に距離の近い同じIDのタグ検知結果を統合する。ステップST203では、ステップST202で統合されたタグ検知データを時系列につなぐことで、ID毎の動線を作成する。
【0018】
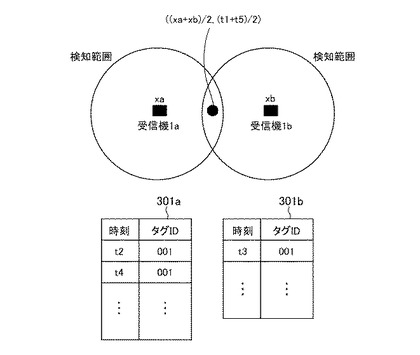
次に、図3を用いてステップST202でのデータ統合について説明する。同時に複数の受信機が同じIDのタグを検知した場合や、検知時刻の近いデータが存在する場合には、検知データの統合を行う。ここで、ID付き移動体位置検知部1a,1bとしてRFIDタグ受信機1aと1bがそれぞれ位置座標xa,xbに設置されているとする。図中、検知履歴301a,301bは、受信機1aと1bのタグの検知結果であり、t2<t3<t4である。データ統合を行う統合時刻範囲の開始時刻をt1、終了時刻をt5とし、時刻t1〜t5に含まれる検知データのうち、同じIDの検知データを統合する。統合データの中に複数の受信機が存在し、その位置が閾値以下の場合、統合後の検知結果は、タグの位置=Σ受信機の位置座標/受信機の数、検知時刻=(統合開始時刻+統合終了時刻)/2となる。
【0019】
受信機の位置xaとxb間の距離が閾値以下で、t1<t2<t3<t4<t5のとき、時刻t2〜t4の3つのタグID001の検知結果が統合され、統合後は(検知位置,検知時刻)=(xa+xb)/2,(t1+t5)/2となる。受信機の位置xaとxb間の距離が閾値以下で、t1<t2<t3<t5<t4のとき、時刻t2とt3の2つのタグID001の検知結果が統合され、統合後は(検知位置,検知時刻)=(xa+xb)/2,(t1+t5)/2となり、その後、(xa,t4)でタグ001が検知されたことになる。受信機の位置xaとxb間の距離が閾値以上で、t1<t2<t3<t4<t5のとき、t2とt4のデータが統合され、(検知位置,検知時刻)=xa,(t1+t5)/2となる。統合距離の閾値は受信機の検知範囲等から定め、統合時間範囲は受信機の読み取り周期等から定める。統合距離の閾値や統合時間範囲は位置毎に変えてもよい。タグの位置を、Σ重み*受信機の位置座標/受信機の数とし、受信時の電波強度等から重みを求めてもよい。
【0020】
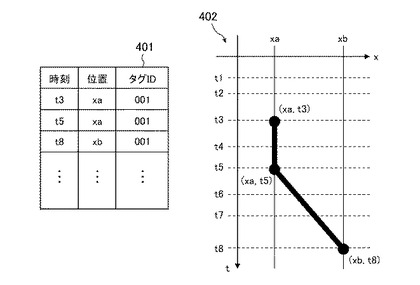
次に、図4を用いてステップST203での動線作成について説明する。ステップST202でのデータ統合後のID001の検知履歴が401であり、t1<t2<t3<t4<t5<t6<t7<t8であるとする。タグID001の検知位置と検知時刻の組を時系列に並べると、(xa,t3)、(xa,t5)、(xb,t8)となり、このデータを座標上にプロットし時系列に直線でつなぐと、ID001の動線はグラフ402の線のようになる。ここで、位置座標は一次元ではなく、二次元や三次元でもよい。他のIDについても同様に動線を作成する。ここで、空間情報として、壁や障害物等の移動不可能領域の情報を用いてより正確な動線情報を作成する方法もある。タグ検知結果を動線で結ぶ際に動線と移動不可能領域が衝突する場合には、移動不可能領域に衝突しない最短経路をとる。移動不可能領域と動線の衝突、および最短経路の導出は幾何学を用いて計算する。
【0021】
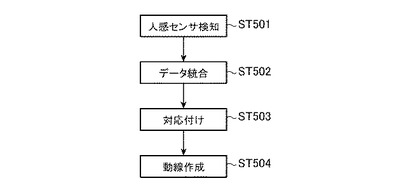
次に、図5を用いて、移動体動線作成部4での人動線の作成方法について説明する。
ステップST501では、移動体位置検知部3a,3b,3cからのタグ検知結果を得る。ステップST502では、時空間的に距離の近い検知結果を統合する。ステップST503では、ステップST502で統合された検知データを追跡し、対応付けを行う。ステップST504では、ステップST503で対応付けられた検知データをつないで動線を作成する。
ステップST502でのデータ統合の方法はステップST202のデータ統合の方法と同じである。但し、ステップST501ではID情報が得られないため、ステップST502でのデータ統合の対象はID毎ではなく、全検知データが対象となる。
ステップST503では、ステップST502でのデータ統合後の検知データをステップST504でつないで動線を作成するため、対応付けを行う。
【0022】
ステップST503での対応付け方法を、図6及び図7を用いて説明する。
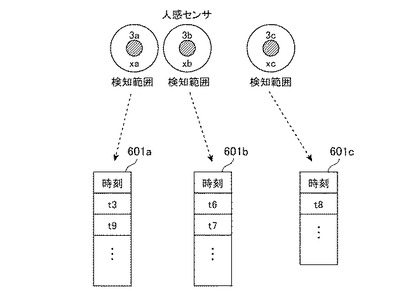
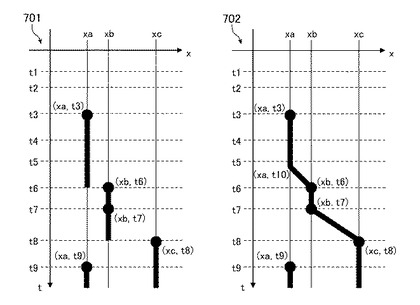
図6に示すように、移動体位置検知部3a,3b,3cとして、人感センサ3a,3b,3cがそれぞれ位置座標xa,xb,xcに設置されており、それぞれ検知範囲と影響範囲を有しているとする。検知履歴601a,601b,601cは、人感センサ3a,3b,3cの動き検知結果であり、ステップST502で統合済みである。ここで、t1<t2<t3<t4<t5<t6<t7<t8<t9である。移動体位置検知部3a,3b,3cとして人感センサを用いると静止人物の検知はできないため、動きを検知した人感センサの検知範囲内には人が存在し、検知後もその位置に滞在し続けているとする。また、人感センサが動きを検知した際の近傍領域に人が存在している場合、その人物が動きを検知したセンサの位置に移動してきたとして対応付ける。近傍領域に人が2人以上存在する場合、近い方を対応付ける。xaとxb間、xbとxc間の距離は近傍領域閾値以下であり、xaとxc間の距離は近傍領域閾値以上であるとすると、検知履歴601a,601b,601cに基づいて、対応付けを行った結果は図7に示すような人動線701となる。
【0023】
動きを検知した人感センサの位置と時刻を時系列順に並べると、(xa,t3)、(xb,t6)、(xb,t7)、(xc,t8)となる。時刻t3で人感センサ3aが動きを検知した後、位置xaには人が滞在する。時刻t6で人感センサ3bが動きを検知したとき、xaとxb間の距離は近傍領域閾値以下であるから、位置xaから位置xbに人が移動したと判定される。よって、位置xaへの滞在は打ち切られ、位置xbに人が滞在する。同様に、時刻t8で人感センサ3cが動きを検知した場合にも、位置xbに滞在していた人が位置xcに移動してきたこととなる。時刻t9に人感センサ3aが動きを検知しても、xaとxc間の距離は近傍領域閾値以上であるため、位置xcに滞在中の人位置は位置xaに移動せず、位置xaには新たな人物が滞在し始めたと判定する。近傍領域の閾値には、人感センサの検知範囲や設置間隔等から定める。この閾値は位置によって変えてもよい。対応付けの方法として、カルマンフィルタやパーティクルフィルタのような時系列フィルタを用いて追跡を行ってもよい。
【0024】
ステップST504での動線作成は、図7における人動線701のように離散的であってもよいが、人の平均的な歩行速度を用いて、センサ間の位置移動を滑らかに補間してもよい。補間した動線を人動線702に示す。時刻t6で位置xaからxbへの移動があったと判定された場合、人の平均的な歩行速度とxa、xb間の距離から移動開始時刻t10を算出し、(xa,t10)と(xb,t6)を直線で結ぶことで動線を補間する。但し、移動開始時刻t10が位置xaでの最終検知時刻t3を超える場合は最終検知時刻を移動開始時刻とする。(xc,t8)での検知から生じるxbからxcへの移動では、xbでの移動開始時刻t11を算出すると、t11<t7となるため移動開始時刻はt7となり、(xb,t7)と(xc,t8)をつなぐ。センサ間の位置移動を滑らかに補間すると、より正確な動線を作成することができる。
【0025】
次に、動線比較部5の動線比較と判定部6の判定処理について説明する。
動線比較部5では、ID付き移動体動線作成部2で作成されたID付き人動線と移動体動線作成部4で作成された人動線の動線比較を行う。即ち、動線比較部5では、全てのID付き人動線について、ID付き動線に対応する人動線を求め、対応する人動線にはラベルIDを貼る。また、判定部6では、対応ラベルの貼られなかった人動線の長さを求め、その長さが時間閾値や距離閾値以上のものをタグ不保持者と判定する。
【0026】
次に、動線比較部5における対応付けの方法について説明する。対応付けには動線の移動ベクトル間の距離を用い、移動ベクトル間の距離が閾値以下の場合に対応付けが成功したとして人動線の一部にラベルIDを貼る。ここで移動ベクトルとは、始点(始点位置,始点位置存在時刻)→終点(終点位置,終点位置存在時刻)の組で表され、動線を切り取ることで求められる。
【0027】
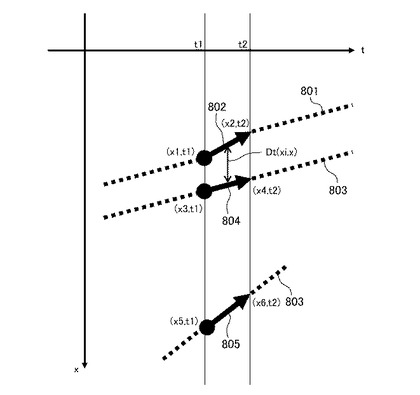
図8を用いて移動ベクトルの距離算出方法を説明する。タグIDiの動線801を時間間隔t1〜t2で切り取り、IDiの時刻[t1,t2]間の移動ベクトル802を得る。人動線803を時間間隔t1〜t2で切り取ると、人移動ベクトル804と人移動ベクトル805の2つが得られる。次に、IDiの移動ベクトル802と全ての人移動ベクトルとの距離を求め、距離が閾値以下でかつ最も近いものを対応付ける。全ての人移動ベクトルとの距離を計算すると計算コストがかかるため、近傍エリアを探索し、近傍エリア内のラベル付けのされていない人移動ベクトル804との距離を計算してもよい。距離の計算は、例えば時刻毎の位置の和ΣD(xit,xt)(xitはIDi移動ベクトルの時刻tでの位置、xtは人移動ベクトルの時刻tでの位置、D(a,b)は2点a,bのユークリッド距離)を用いる。ベクトル間の距離はピアソンの相関係数を用いる等、他の方法で求めてもよい。
【0028】
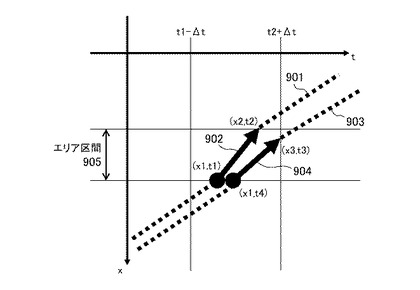
図9を用いて別の移動ベクトル間の距離算出方法を説明する。IDiの動線901をエリア区間905で切り取ると、IDiの移動ベクトル902が得られる。エリア区間905とIDiの移動ベクトル902の周囲の時間区間[t1−Δt,t2+Δt]で人動線903を切り取ると、人移動ベクトル904が得られる。次に、IDiの移動ベクトル902と人移動ベクトル904の距離を計算する。ID付き動線と人動線は検知タイミングや設置位置に差があるため、速度と移動方向(角度)を用いて移動ベクトルの距離を計算する。例えば、距離=w1*角度差+w2*速度差(w1,w2は重み)とし、閾値以下であるものを対応付いたとする。
【0029】
図8および図9の例では、局所的な動線の比較方法について説明したが、局所的な比較だけでは誤りを生じやすいため、時間やエリアの区間を長くしてベクトルの類似度を求めてもよい。ID付き動線に沿って人動線の類似度を求めていき、時間的または空間的に閾値以上の長さで類似度が高い場合に、ラベルIDを貼り付けてもよい。
【0030】
以上の説明では、監視用途を目的としてタグ不保持者を検知する例を説明したが、タグ保有者とタグ不保持者の両者の動線や人分布を把握し、区別を行うことは他のサービスにも適用できる。例えば、警備員にタグを持たせて動線を把握し、一般の人はタグ不保持者として位置の検知を行い、両者の位置関係を元に警備員の巡回経路を動的に設定するサービスに適用できる。また、商業施設等で、店員にタグを持たせてタグの位置により店員の位置を管理し、一般の人はタグ不保持者として動線を把握することにより、目的の売り場がわからずうろうろしている一般人の動きを検知し、最寄りの店員を派遣するといったサービスに適用できる。
【0031】
このように、実施の形態1では、ID付き移動体位置検知部1a,1b,1cと移動体位置検知部3a,3b,3cの検知範囲や検知タイミングが異なる場合でも、ID付き移動体動線作成部2と移動体動線作成部4でそれぞれの動線を求めることにより、動線比較部5で比較しタグ不保持者を検知できる。特に、ビル等の建物全域で検知を行うためにセンサを配置する場合には、非常に多くの装置を配置しなければならず、ID付き移動体位置検知部1a,1b,1cと移動体位置検知部3a,3b,3cの検知範囲や検知タイミングを全て調整するのは困難であるため、この方法が有効である。
【0032】
また、動線を作成しているため、タグ不保持者を検知した後タグ不保持者の追跡を行い、タグ不保持者の現在位置を通知することができる。更に、動線を過去方向にさかのぼってタグ不保持者の位置履歴を調べ、タグ不保持者が映像監視領域に立ち入った時刻を調べることができるため、監視映像と照らし合わせてタグ不保持者の映像を入手するといったことができる。また、タグ不保持者が出会った、もしくは、共に移動したタグのID番号を調べることができるため、タグ不保持者に不審人物の有無を尋ねる、共連れをうながした可能性の高いID番号を特定する等ができる。
【0033】
以上のように、実施の形態1の移動体管理装置によれば、タグを有する移動体と、タグを有しない移動体とを識別する移動体管理装置であって、タグの位置を検知するID付き移動体位置検知部1a,1b,1cと、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線をID付き移動体動線として作成するID付き移動体動線作成部2と、移動体を検知する移動体位置検知部3a,3b,3cと、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線を移動体動線として作成する移動体動線作成部4と、ID付き移動体動線と移動体動線とを比較し、動線が近いものを対応付ける動線比較部5と、動線比較部5において、対応付けがなされない動線の移動体をタグを有しない移動体として判定する判定部6とを備えたので、タグを有しない移動体を的確に判定することができる。
【0034】
実施の形態2.
実施の形態2では、ID付き移動体動線作成部2と移動体動線作成部4で場所・時間毎の人存在率を求め、動線比較部5で各々の人存在率を比較することでタグ不保持者を検知するようにしたものである。図面上の構成は図1に示した実施の形態1と同様であるため、図1を用いて説明する。実施の形態2におけるID付き移動体位置検知部1a,1b,1cおよび移動体位置検知部3a,3b,3cについては実施の形態1と同様である。ID付き移動体動線作成部2では、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の存在率をID付き移動体存在率として作成する。また、移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から、移動体の時空間の存在率を移動体存在率として作成する。更に、動線比較部5は、ID付き移動体存在率と移動体存在率とを比較し、タグを有しない移動体の存在率を求める。そして、判定部6は、タグを有しない移動体の存在率が所定値以上に大きい場合に、タグを有しない移動体が存在していると判定するよう構成されている。
【0035】
次に、実施の形態2の移動体管理装置の動作について説明する。
先ず動線を作成し、次に人存在率を求める。
ID付き人存在率を求めるには、ID付き移動体動線作成部2でタグID毎の動線を求める。動線の作成方法は実施の形態1と同様であるため、ここでの説明は省略する。但し、図2のステップST202でのデータ統合時に、検知点を1点に絞るのではなく、候補点を数点選んでもよい。それぞれの点について、電波強度等から信頼度を算出する。候補点が数点ある場合、図2のステップST203で、複数の動線が結ばれる。各動線は候補点の信頼度から求めた信頼度を持つ。信頼度は同時刻の動線の信頼度を加算すると1になるように正規化する。動線の作成方法は実施の形態1以外の方法を用いてもよい。
【0036】
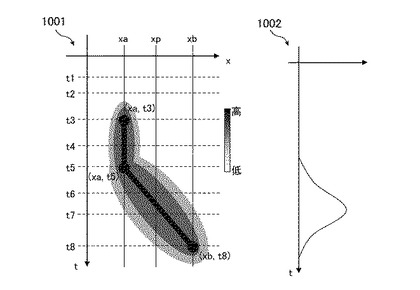
次に、ID付き人動線から人存在率を計算する方法について説明する。図10は、実施の形態2のおけるID付き人動線から人存在率を求める例を示す説明図であり、図4のID001の動線402から作成された人存在率を示している。
実際には、タグの読み取り位置は点ではなく、受信機の検知範囲エリアのどこかである。また、タグの電池寿命を延ばすためにタグの読み取り間隔を空けていることもあるため、読み取りタイミングが検知エリアに入ってきた瞬間であるとは限らない。そこで、それぞれの受信機のタグ検知範囲特性に基づいて、時空間に存在確率を求めると、例えば、グラフ1001のように、動線を中心として動線から遠ざかるにつれて確率が低くなるような分布となる。時刻tでのタグID001の存在率は全空間で加算すると1になるような分布となる。例えば、受信機のタグ受信強度が標準偏差σのガウス分布で近似されるとき、人存在率は動線を中心として標準偏差σのガウス分布を動線に沿って動かした分布とする。位置座標xpである点Pの時刻tでの人存在率P(xp,t)は、グラフ1001中の直線x=xp上の値の集合になるため、グラフ1002のようになる。
【0037】
人存在率の分布は受信機の検知特性から求めたが、空間属性や個人の歩行特性、タグID読み取り時の通信強度等を利用してもよい。例えば、受信機(ID付き移動体位置検知部)1aと受信機(ID付き移動体位置検知部)1bが通路に設置されており、通路の歩行方向がxa→xbの方向である場合、壁部分に人が存在する可能性は低いため、xa→xb方向に直交する方向の人存在率分布の範囲を通路の幅に限定できる。ID毎の歩行特性として、例えば通常時の歩行速度が分かっている場合には、タグ検知時刻から算出された実際の移動速度と通常時の歩行速度を比較することにより、存在率の分布を変更する。例えば、通常時の歩行速度より実際の移動速度が速い場合には、直線的に移動する確率が高いため、人存在率分布の広がりを小さくする。逆に、通常時の歩行速度より実際の移動速度が遅い場合には、蛇行した可能性が高いため、人存在率の分布の広がりを大きくする。タグID読み取り時の通信強度を利用する場合には、通信強度が強い程受信機とタグの間の距離が近いという特性を利用して、通信強度から推定される受信機とタグの距離を人存在率の分布特性に導入する。距離が遠い程広がった分布になり、距離が近い程狭い分布になる。このように、空間属性や個人の歩行特性、タグID読み取り時の通信強度等を利用して人存在率の分布を計算すると、より正確に人存在率を求めることができる。
【0038】
同時刻に複数の動線が存在する場合には、それぞれの動線について人存在率を求め、その人存在率に動線の信頼度を積算する。同時刻同時点の人存在率は、全ての動線から求められる存在率を加算する。例えば、ある時刻tにおいて、タグIDiの動線がn本存在し、動線nから求めた点p(位置座標xp)の存在率をPin(xp,t)とすると、タグIDiの点pでの存在率Pi(xp,t)は、Pi(xp,t)=Σ動線nの信頼度*Pin(xp,t)となる。
【0039】
次に、移動体動線作成部4で人存在率を求める方法を説明する。
移動体動線作成部4における人動線の作成方法は実施の形態1と同様であるためここでの説明は省略する。但し、図5のステップST502でのデータ統合時に、検知点を1点に絞るのではなく、候補点を数点選んでもよい。また、図5のステップST503で、複数の点と対応付けを行ってもよく、図5のステップST504で複数対応付いた検知点と複数の動線を結んでもよい。各動線は検知点同士の近さや移動速度などから求めた信頼度を持つ。動線の作成方法は実施の形態1以外の方法を用いてもよい。また、人動線から人存在率を求める方法は上述したID付き動線からID毎の人存在率を求める方法と同様であるためその説明は省略する。
【0040】
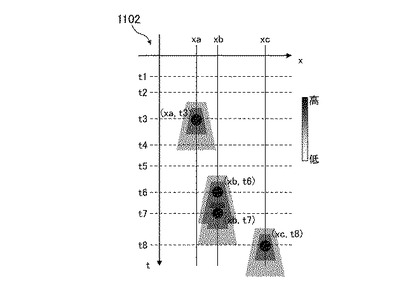
移動する人物の間隔がセンサの設置間隔や設置範囲に対して十分に空いている場合には、検知パターンから動線を作成することが可能であり、人存在率の分布を求めることができる。しかし、人が密集するような場所では個人を識別できないセンサの検知結果を人毎に分けて線でつなぐことは困難であるため、人の動きを検知した時刻の周囲に人が存在する確率が高いとして人存在率を求めてもよい。このとき、人存在率のグラフは図11の1102のようになる。人感センサが動きを検知した時刻と位置を中心として人存在率を設定する。動きを検知した時刻と位置が最も存在率が高く、徐々に時空間に分布が広がっていくような確率分布関数を用いる。例えば、検知位置を中心とした標準偏差σΔt(Δtは検知時刻からの差分時刻)のガウス分布を用い、σΔtはΔtに応じて大きくなる関数であるとする。複数の検知結果から求められる人存在分布が重なる地点では、確率を加算することにより人の動きが時空間的に密集している場所は人が存在する確率がより高くなる。例えば、検知(xb,t6)と検知(xb,t7)は検知時刻が近いため、その間の空間は人存在率が加算される。
【0041】
次に、動線比較部5での人存在率の比較方法について説明する。
地点xのある時刻tでの人存在率をP(x,t)、IDiのタグ存在率をPi(x,t)とすると、タグ不保持者の存在率はP(x,t)−Pi(x,t)である。全エリア、全IDについてタグ不保持者の存在率を求め、時空間的に連続して存在率の高い時刻・エリアが存在するとき、判定部6で、タグ不保持者が存在しているとする。タグ不保持者の検知は例えば、タグ不保持者の存在確率に基づいて2値化してクラスタリングを行い、存在確率の高いクラスタが一定以上に大きいときに判定部6でタグ不保持者が存在しているとする。
【0042】
このように、実施の形態2の移動体管理装置では、動線を一意に特定せず人やタグの存在率でタグ不保持者を検知するため、検知パターンから人の動線を抽出するのが困難である場合や、動線に曖昧性が残るような場合でも本実施の形態は適用できる。
また、ID付き移動体位置検知部1a,1b,1cと移動体位置検知部3a,3b,3cのセンサ配置管理において、それぞれのセンサがフロアのどこに配置されたかという座標情報だけを持っていれば人存在率が計算できるため、センサ位置を変更する場合に、位置を変更したセンサの設定だけを変更するだけでよく、位置を変更しなかったセンサの設定を変更する必要はない。センサ同士の関連テーブルを持っている場合では、1つのセンサ位置を変更すると、他の移動しなかったセンサの設定も変更する必要があり、作業コストが増大する場合や変更ミスを生じる場合がある。
更に、空間属性や個人の歩行特性、タグID読み取り時の通信強度等を利用して人存在率の分布を計算すると、より正確に人存在率を求めることができる。
【0043】
以上のように、実施の形態2の移動体管理装置によれば、タグを有する移動体と、タグを有しない移動体とを識別する移動体管理装置であって、タグの位置を検知するID付き移動体位置検知部1a,1b,1cと、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の存在率をID付き移動体存在率として作成するID付き移動体動線作成部2と、移動体を検知する移動体位置検知部3a,3b,3cと、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の存在率を移動体存在率として作成する移動体動線作成部4と、ID付き移動体存在率と移動体存在率とを比較し、タグを有しない移動体の存在率を求める動線比較部5と、タグを有しない移動体の存在率が所定値以上に大きい場合に、タグを有しない移動体が存在していると判定する判定部6とを備えたので、人の動線を抽出するのが困難である場合や、動線に曖昧性が残るような場合でもタグを有しない移動体を的確に判定することができる。
【0044】
実施の形態3.
実施の形態3では、ID付き移動体動線作成部2と移動体動線作成部4で場所・時間毎の人数分布を求め、動線比較部5で各々の人数分布を比較することでタグ不保持者を検知するようにしたものである。図面上の構成は図1に示した実施の形態1と同様であるため、図1を用いて説明する。実施の形態3におけるID付き移動体位置検知部1a,1b,1cおよび移動体位置検知部3a,3b,3cについては実施の形態1と同様である。ID付き移動体動線作成部2では、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の人数分布をID付き人数分布として作成する。また、移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から、移動体の時空間の人数分布を作成する。更に、動線比較部5は、ID付き人数分布と人数分布とを比較し、タグを有しない人物の人数分布を求める。そして、判定部6は、タグを有しない人物の人数分布が所定値以上であった場合に、タグを有しない人物が存在していると判定するよう構成されている。
【0045】
以下、実施の形態3の移動体管理装置の動作について説明する。
ID付き移動体位置検知部1a,1b,1cの動作は実施の形態1、2と同様である。ID付き移動体動線作成部2では、全IDの人存在率を加算して人数分布を求める。移動体動線作成部4では、例えば、カメラ画像に映っている特徴点の数やエリア内の人感センサの検知頻度から人数分布を推定する。入退室管理装置からフロアや建物の総人数の真値を得て、検知頻度を元に人分布を計算し、総人数を人分布に基づいて割り振ってもよい。例えば、フロア内に2つのエリアAとBが存在し、エリア毎の検知頻度がA:B=8:2でありフロア総人数が10人の場合、エリアAには8人、エリアBには2人の人がいるとする。動線比較部5では、移動体動線作成部4で得た人数分布とID付き移動体動線作成部2で得たID付き人数分布との差を全エリア、全IDについて求め、これをタグ不保持者の人数分布とする。判定部6は、タグ不保持者の人数分布が所定値以上であった場合、タグ不保持者が存在していると判定する。
【0046】
このように、実施の形態3では、単なる人の存在率ではなく、人数分布を用いてタグ不保持者を検知するため、タグ保持者とタグ不保持者が行動を共にしている場合でもタグ不保持者を検知できる。局所的な人数比較ではタグ不保持者の誤検知等が起こり得るが、長期的に追跡を行ってタグ不保持者を検知するため、精度が向上する。
【0047】
以上のように、実施の形態3の移動体管理装置によれば、タグを有する移動体と、タグを有しない移動体とを識別する移動体管理装置であって、タグの位置を検知するID付き移動体位置検知部1a,1b,1cと、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の移動体数分布をID付き移動体数分布として求めるID付き移動体動線作成部2と、移動体を検知する移動体位置検知部3a,3b,3cと、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の移動体数分布を求める移動体動線作成部4と、ID付き移動体数分布と移動体数分布とを比較し、タグを有しない移動体の移動体数分布を求める動線比較部5と、タグを有しない移動体の移動体数分布が所定値以上であった場合に、タグを有しない移動体が存在していると判定する判定部6とを備えたので、例えば、タグ保持者とタグ不保持者が行動を共にしているといった場合でもタグ不保持者を的確に検知することができる。
【0048】
実施の形態4.
実施の形態4では、実際に運用を行う前に真値と計測データの学習期間を設け、システムが自動で閾値等の調整を行うようにしたものである。ID付き移動体位置検知部1a,1b,1c〜判定部6の基本的な構成は、上述した実施の形態1〜3のいずれかであるので、ここでの詳細な説明は省略する。
【0049】
実施の形態4では、ID付き移動体動線作成部2や移動体動線作成部4で動線・人存在率・人数分布を算出する際に、機械学習を用いてもよい。例えば、動線や人有無・人数の真値と、ID付き移動体位置検知部1a,1b,1cや移動体位置検知部3a,3b,3cの検知パターンとを組にして数パターン学習しておき、ID付き移動体位置検知部1a,1b,1cや移動体位置検知部3a,3b,3cの学習したパターンのどのパターンに近いかで、動線・人有無・人数等を推定する。また、タグIDを読み取った受信機の位置と検知時刻から、タグ保有者の歩行速度を自動学習し、ID付き移動体動線作成部2や移動体動線作成部4における動線作成時に反映させてもよい。動線比較部5で動線を比較する際に、ID付き移動体動線作成部2と移動体動線作成部4で予めタグ保有者の動線を比較しておくことにより、同一人物を検知したときの動線の差異を動線比較部5の閾値に利用してもよい。
【0050】
以上のように、実施の形態4の移動体管理装置によれば、ID付き移動体動線作成部2と移動体動線作成部4と動線比較部5のうち少なくともいずれか一つの処理部は、予め用意した真値と計測データとに基づき、処理結果の学習を行うようにしたので、動線作成、比較時の精度を向上させることができる。また、設置環境による誤差を学習により吸収でき、精度が向上する。更に、設置時のパラメータ調整を自動化し、設置員の手間を省くことができる。
【0051】
実施の形態5.
実施の形態5は、ID付き移動体位置検知部1a,1b,1cと、移動体位置検知部3a,3b,3cとにおける各検知部の設置位置の位置関係に基づいて、ID付き移動体動線作成部2および移動体動線作成部4がそれぞれ動線等の作成を行うようにしたものである。図面上の構成は実施の形態1と同様であるため、図1を用いて説明する。
【0052】
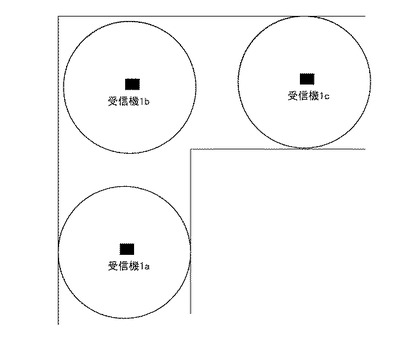
タグ受信機や人感センサの設置位置を座標で管理するだけでなく、機器同士の隣接関係を利用することで、ID付き移動体動線作成部2や移動体動線作成部4での動線作成精度が向上する。例えば、図12のように通路にタグ受信機(ID付き移動体位置検知部)1a、1b、1cが設置してある場合、受信機1bでタグの検知ミスがあると、ID付き移動体動線作成部2では、受信機1aと受信機1cの動線をつないでしまう可能性がある。そこで、実施の形態5では、機器同士の隣接関係、即ち、受信機1aと受信機1bとが隣接し、受信機1bと受信機1cとが隣接しているという関係を利用する。これにより、受信機1aと受信機1cの検知の間には必ず受信機1bの場所を通っていることが推定でき、動線を正しくつなぐことができる。尚、壁や通路といった空間情報を受信機の設置位置と同じ座標系上の情報として持っているとき、受信機1aと受信機1cの間の動線と壁が衝突することは、幾何学的に計算できるが、計算コストがかかる。
【0053】
また、機器の配置位置、人不可侵領域、機器の隣接関係の設定はテーブルとして管理してもよいし、GUI上で設定し管理テーブルを自動で生成してもよい。例えば、フロア図面上に機器アイコンを設置することで機器の設置位置座標を設定する。同様に図面上で不可侵領域の設定を行う。ここで、人不可侵領域と機器設置の位置座標から、機器隣接情報を自動で生成してもよい。
【0054】
以上のように、実施の形態5の移動体管理装置によれば、ID付き移動体動線作成部2及び移動体動線作成部4は、それぞれ複数のID付き移動体位置検知部1a,1b,1c及び複数の移動体位置検知部3a,3b,3cにおける各検知部の設置位置の位置関係に基づいて処理を行うようにしたので、衝突判定や近傍検索等の計算コストの高い計算をすることなく、近傍の機器の位置や空間のつながり等を求めることができるため、計算コストを抑えることができる。
【0055】
実施の形態6.
実施の形態6は、動線比較部5において多段階比較を行うようにしたものである。
ID付き移動体動線作成部2、移動体動線作成部4で1点毎の動線や存在率を求め動線比較部5で比較すると計算コストが膨大になるため、動線・存在率の計算、位置比較を空間区間、時間区間毎に行ってもよく、また粒度(空間区間、時間区間の間隔)を動的に変更してもよい。動線比較部5で比較する時間区間や空間区間を広くとって比較し、タグ不保持者のいる可能性の高い時間区間、空間区間は再度区間を細かく分割して比較を行う。即ち、実施の形態6では、動線比較部5において、最初に第1の処理として、所定の空間区間または時間区間毎に比較処理を行い、次に、第1の処理の空間区間または時間区間の間隔を狭くし、かつ、対象となる空間領域または時間領域を限定した第2の処理を行う。尚、第2の処理としては1回だけでなく複数回の処理であってもよい。また、タグ不保持者のいる可能性に応じて、比較に用いる時間区間を変えてもよい。空間区間毎に、タグ不保持者のいる可能性が高くなると比較に用いる時間間隔を狭くし、タグ不保持者のいる可能性が低くなると比較に用いる時間間隔を長くしてもよい。
【0056】
以上のように、実施の形態6の移動体管理装置によれば、動線比較部5における比較処理は、所定の空間区間または時間区間毎に行う第1の処理と、第1の処理の空間区間または時間区間の間隔を狭くし、かつ、対象となる空間領域または時間領域を限定した第2の処理からなるようにしたので、比較を行う時間的空間的な間隔を多段階や動的に変えることにより、精度を落とすことなく計算コストを削減することができる。
【0057】
実施の形態7.
監視用途でタグ不保持者を検知する場合にはできるだけ早くタグ不保持者を検知することが望まれるが、オフィスビル等の人数の多い場所で全ての人の動線を作成、比較するのには膨大な計算コストがかかる。そのため、実施の形態7の移動体管理装置では、例えば、担当エリア区間を分割して並列に計算を行う。
【0058】
図13は、実施の形態7の移動体管理装置を示す構成図である。
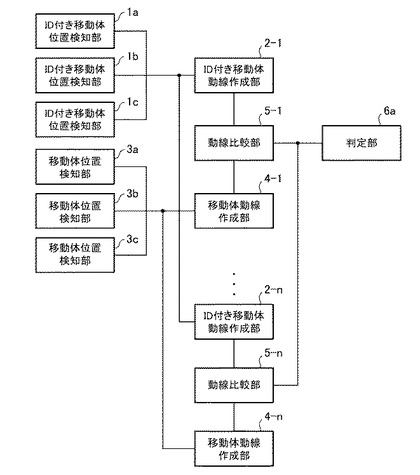
図において、ID付き移動体位置検知部1a,1b,1cおよび移動体位置検知部3a,3b,3cは、実施の形態1の構成と同様である。ID付き移動体動線作成部2−1〜2−n、移動体動線作成部4−1〜4−nおよび動線比較部5−1〜5−nは、それぞれ複数(n個)設けられており、それぞれが並列に処理を行う演算処理部である。尚、処理内容は、いずれかの実施の形態のID付き移動体動線作成部2、移動体動線作成部4および動線比較部5と同様である。また、判定部6aは、複数の動線比較部5−1〜5−nの結果を用いて判定処理を行うよう構成されている。
【0059】
実施の形態7の移動体管理装置では、例えば、担当エリア区間を分割して並列に計算を行う。尚、この分割方法についてはID付き移動体位置検知部1a,1b,1cや移動体位置検知部3a,3b,3c毎でも良いし、他の分割方法であってもよい。判定部6aは、複数の動線比較部5−1〜5−nの結果を用いてタグ不保持者を検知する。
【0060】
尚、上記説明では、ID付き移動体動線作成部2−1〜2−n、移動体動線作成部4−1〜4−nおよび動線比較部5−1〜5−nを全て複数設ける場合を説明したが、例えば動線比較部5−1〜5−nのみを複数とする、といったように、いずれかの演算処理部のみを並列処理するようにしてもよい。
【0061】
また、動線比較部5における比較履歴を別途記憶し、この比較履歴を用いて判定するようにしてもよく、これを次に説明する。
図14は、実施の形態7の移動体管理装置の他の例を示す構成図である。
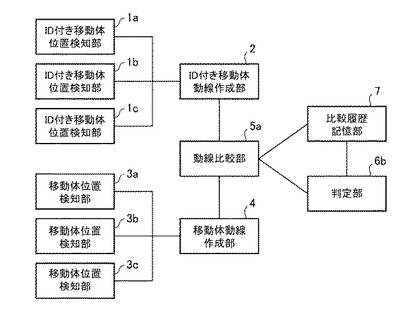
図14に示す移動体管理装置は、ID付き移動体位置検知部1a,1b,1c、ID付き移動体動線作成部2、移動体位置検知部3a,3b,3c、移動体動線作成部4、動線比較部5a、判定部6b、比較履歴記憶部7を備えている。ここで、ID付き移動体位置検知部1a,1b,1c〜移動体動線作成部4は、実施の形態1〜6のいずれかの構成と同様である。動線比較部5aはID付き移動体動線作成部2と移動体動線作成部4で新しく乗じた動線の比較を行い、比較履歴は比較履歴記憶部7に記憶するよう構成されている。また、判定部6bは、比較履歴記憶部7における比較履歴と動線比較部5aの結果に基づいてタグ不保持者の検知を判定するよう構成されている。
【0062】
このように構成された移動体管理装置において、動線比較部5aはID付き移動体動線作成部2と移動体動線作成部4で新しく生じた動線の比較のみを行い、比較履歴は比較履歴記憶部7で記憶する。そして、判定部6bは、比較履歴記憶部7に記憶されている比較履歴と動線比較部5aの結果からタグ不保持者の検知を判定する。
【0063】
以上のように、実施の形態7の移動体管理装置によれば、ID付き移動体動線作成部2と移動体動線作成部4と動線比較部5のうち少なくともいずれかの処理部を複数設け、複数設けた処理部は並列に処理を行うようにしたので、タグを有しない移動体の検知を速やかに行うことができる。
【0064】
また、実施の形態7の移動体管理装置によれば、動線比較部における比較結果の履歴を記憶する比較履歴記憶部7を備え、判定部6bは、動線比較部5aの比較結果と、比較履歴記憶部7に記憶された比較結果の履歴に基づいて判定を行うようにしたので、ID付き移動体動線作成部2や移動体動線作成部4や動線比較部5を複数設けることなく、タグを有しない移動体の検知をリアルタイムで行うことができる。
【0065】
実施の形態8.
実施の形態8は、空間や時間帯毎に、ID付き移動体動線作成部2および移動体動線作成部4で作成する動線の種類や動線比較部5での比較方法を変更するようにしたものである。図面上の構成は実施の形態1と同様であるため、図1を用いて説明する。
実施の形態8におけるID付き移動体動線作成部2は、ID付き移動体位置検知部1a,1b,1cの検知結果に基づいて、タグの時空間の動線か存在率か人数分布を作成する。また、移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線か存在率か人数分布を作成する。即ち、これらID付き移動体動線作成部2及び移動体動線作成部4は、上述した実施の形態1,2,3のID付き移動体動線作成部2及び移動体動線作成部4のうちいずれかの機能を有している。動線比較部5は、ID付き移動体動線作成部2と移動体動線作成部4の結果を、空間的要因または時間的要因に基づいて選択し比較する。あるいは、動線比較の空間区間または時間区間を空間的要因または時間的要因に基づいて変更し、処理を行う。判定部6は動線比較部5の比較結果に基づいて、タグを保持しない移動体を判定する。
【0066】
例えば、タグ保有者の多い場所や監視員のタグの近傍では、人の目による監視が行われるため、動線比較の空間間隔・時間間隔を疎にする。他にも、会議室エリア等、人が密集しているエリアでは移動体動線作成部4で作成する動線の信頼度が低くなるため、動線ではなく人存在率を用いてタグ不保持者を検知するが、通路等の人が疎である空間では、動線を用いてタグ不保持者を検知する。予め空間毎に動線比較に用いるデータの種類を定めておいてもよいし、ID付き移動体動線作成部2と移動体動線作成部4で作成した動線や人分布情報に基づいて動線比較部5での比較方法を変更してもよい。
【0067】
また、実施の形態8では、図15に示すように、ID付き移動体動線作成部2及び移動体動線作成部4で作成した動線や人分布情報と、動線比較部5での比較結果のいずれかを用いて、ID付き移動体位置検知部1a,1b,1c及び移動体位置検知部3a,3b,3cにおけるセンサ感度といった検知パラメータを動的に変更してもよい。尚、図15中では、複数のID付き移動体位置検知部1a,1b,1c及び移動体位置検知部3a,3b,3cのうち、ID付き移動体位置検知部1aと移動体位置検知部3aのみ示している。また、ID付き移動体位置検知部1a,1b,1c及び移動体位置検知部3a,3b,3cの検知パラメータを変更する以外のID付き移動体位置検知部1a,1b,1c〜判定部6の基本的な構成は実施の形態1〜6のいずれかと同様である。
検知パラメータの変更としては、例えば、会議中等、人の動きの小さいエリアでは人感センサの検知感度を上げるといったものである。動線の方向の履歴から、その空間の動線方向傾向を求め、動線作成時や動線から人存在率を求める際に利用する。
【0068】
以上のように、実施の形態8の移動体管理装置によれば、タグを有する移動体と、タグを有しない移動体とを識別する移動体管理装置であって、タグの位置を検知するID付き移動体位置検知部1a,1b,1cと、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線、存在率及び移動体数分布のうちのいずれかを空間的要因または時間的要因に基づいて選択し作成するID付き移動体動線作成部2と、移動体を検知する移動体位置検知部3a,3b,3cと、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線、存在率及び移動体数分布のうちのいずれかを空間的要因または時間的要因に基づいて選択し作成する移動体動線作成部4と、ID付き移動体動線作成部2と移動体動線作成部4の結果を比較する動線比較部5と、動線比較部5の比較結果に基づいて、タグを保持しない移動体を判定する判定部6とを備えたので、空間属性や移動体の動きに合わせて最適な比較方法を選択することができ、タグを有しない移動体を的確に判定することができる。
【0069】
また、実施の形態8の移動体管理装置によれば、ID付き移動体動線作成部2と移動体動線作成部4の結果に基づく動線比較の空間区間または時間区間を、空間的要因または時間的要因に基づいて変更するようにしたので、空間属性や移動体の動きに合わせて最適な比較を行うことができ、タグを有しない移動体を的確に判定することができる。
【0070】
また、実施の形態8の移動体管理装置によれば、ID付き移動体動線作成部2、移動体動線作成部4及び動線比較部5のうち、少なくともいずれかの処理部の演算結果に基づいて、ID付き移動体位置検知部1a,1b,1cと移動体位置検知部3a,3b,3cのうち少なくともいずれかの検知部の検知パラメータを変更するようにしたので、空間属性や移動体の動きに合わせて最適な位置検知を行うことができ、タグを有しない移動体を的確に判定することができる。
【符号の説明】
【0071】
1a,1b,1c ID付き移動体位置検知部、2,2−1〜2−n ID付き移動体動線作成部、3a,3b,3c 移動体位置検知部、4,4−1〜4−n 移動体動線作成部、5,5a,5−1〜5−n 動線比較部、6,6a,6b 判定部、7 比較履歴記憶部。
【技術分野】
【0001】
本発明は、ID識別可能な装置(以下タグと呼ぶ)を持った人物等の移動体の位置とID識別可能な装置を持たない人物等の移動体の位置とを検知・管理・区別する移動体管理装置に関するものである。
【背景技術】
【0002】
従来、タグを持つ人物とタグを持たない人物とを検知・区別する監視システムでは、例えば、局所的な領域において、タグの数と人の数を比較することにより、タグを持たない人物を発見するよう構成されていた(例えば、特許文献1参照)。また、種類の異なる個人毎の行動履歴を比較し、それらの行動の矛盾点を見つけることにより、タグの入れ替わり等の異常を検知するようにした管理装置があった(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−16042号公報
【特許文献2】特開2008−293137号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されたような監視システムでは、局所領域で人の数とタグの数を比較しているため、局所領域で検知ミスを生じてしまった場合に、タグの不保持者を発見することが困難であるという問題があった。また、タグの不保持者を検知できたとしても、退路を断つ手段がなければタグの不保持者を見失ってしまうという問題があった。また、特許文献2に記載された管理装置では、タグを用いて得られた行動履歴のみを比較しているため、タグを保有していない人物の行動は検知できないという問題があった。
【0005】
この発明は上記のような課題を解決するためになされたもので、タグを有しない移動体を的確に判定することのできる移動体管理装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る移動体管理装置は、タグを有する移動体と、タグを有しない移動体とを識別する移動体管理装置であって、タグの位置を検知するID付き移動体位置検知部と、ID付き移動体位置検知部の検知結果からタグの時空間の動線をID付き移動体動線として作成するID付き移動体動線作成部と、移動体を検知する移動体位置検知部と、移動体位置検知部の検知結果から移動体の時空間の動線を移動体動線として作成する移動体動線作成部と、ID付き移動体動線と移動体動線とを比較し、動線が近いものを対応付ける動線比較部と、動線比較部において、対応付けがなされない動線の移動体をタグを有しない移動体として判定する判定部とを備えたものである。
【発明の効果】
【0007】
この発明の移動体管理装置は、タグを有する移動体の動線と、タグの有無とは無関係に検知した移動体の動線とを比較してタグを有しない移動体を判定するようにしたので、タグを有しない移動体を的確に判定することができる。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1による移動体管理装置を示す構成図である。
【図2】この発明の実施の形態1による移動体管理装置のID付き移動体動線作成部の動作を示すフローチャートである。
【図3】この発明の実施の形態1による移動体管理装置のステップST202のデータ統合の説明図である。
【図4】この発明の実施の形態1による移動体管理装置のステップST203の動線作成の説明図である。
【図5】この発明の実施の形態1による移動体管理装置の移動体動線作成部の動作を示すフローチャートである。
【図6】この発明の実施の形態1による移動体管理装置の移動体位置検知部での検知例を示す説明図である。
【図7】この発明の実施の形態1による移動体管理装置の移動体動線作成部で作成した動作を示す説明図である。
【図8】この発明の実施の形態1による移動体管理装置でID付き人動線と人動線を時間区間毎に比較する説明図である。
【図9】この発明の実施の形態1による移動体管理装置でID付き人動線と人動線をエリア区間毎に比較する説明図である。
【図10】この発明の実施の形態2による移動体管理装置のID付き人動線から人存在率を求める場合の説明図である。
【図11】この発明の実施の形態2による移動体管理装置の移動体動線作成部で求めた人存在率の説明図である。
【図12】この発明の実施の形態5による移動体管理装置の検知部の配置例を示す説明図である。
【図13】この発明の実施の形態7による移動体管理装置の並列処理を行う場合の構成図である。
【図14】この発明の実施の形態7による移動体管理装置の比較履歴を用いる場合の構成図である。
【図15】この発明の実施の形態8による移動体管理装置の検知パラメータを変更する場合の構成図である。
【発明を実施するための形態】
【0009】
実施の形態1.
図1は、この発明の実施の形態1による移動体管理装置を示す構成図である。
図1に示す移動体管理装置は、ID付き移動体位置検知部1a,1b,1c、ID付き移動体動線作成部2、移動体位置検知部3a,3b,3c、移動体動線作成部4、動線比較部5、判定部6を備えている。
【0010】
ID付き移動体位置検知部1a,1b,1cは、それぞれ移動体である人物が保持するタグの位置を検知する機能部である。このID付き移動体位置検知部1a,1b,1cとしては、例えば、RF−IDタグを読み取る受信機からなり、受信機の近くに存在するタグのID情報を読み取る。そして、読み取ったタグIDと受信機のID、読み取り時刻、受信機の設置位置情報を結びつけることにより、誰がいつどこにいるかを検知する。尚、RF−ID以外にも、人体通信、可視光通信、赤外線通信、GPS、無線LAN、UWB等を利用してタグのIDを読み取り、人物の位置を特定してもよい。また、ID付き移動体動線作成部2は、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線をID付き人動線(ID付き移動体動線)として作成する機能部であり、ID毎の滞在時間や移動履歴といった動線や行動履歴を作成する。
【0011】
移動体位置検知部3a,3b,3cは、それぞれタグの保持の有無とは無関係に移動体である人物を検知する機能部である。即ち、これら移動体位置検知部3a,3b,3cは、人の存在や動きを検知する装置であり、焦電センサ、温度センサ、超音波センサ、圧力センサ、距離センサ、カメラ等、個人を確実に特定することはできないが、タグの保有状況にかかわらずに人物の検知を行う装置である。例えば、焦電センサを利用した人感センサの場合、人の発する赤外線の変化を検知するため、センサ検知範囲内を横切る等の人の動きを検知できる。他にも、天井に取り付けた超音波センサで床までの距離を随時測定し、人が存在しない時刻の距離を基準距離として記憶しておくことで、基準距離と差分の大きい時刻は人が存在していると検知してもよい。また、マット状の圧力センサを床に敷き詰め、圧力のかかった部分に人が存在するとしてもよい。また、移動体動線作成部4では、移動体位置検知部3a,3b,3cの検知結果を用いて、人の存在確率や人流度、人数分布等を作成する機能部である。即ち、移動体動線作成部4は、周囲のセンサとの位置関連情報・検知履歴を用いることによって、移動方向や移動速度、おおよその人数等を算出し、これを人動線情報(移動体動線情報)として出力する。
【0012】
動線比較部5は、ID付き移動体動線作成部2で作成したID付き人動線情報と、移動体動線作成部4で作成した人動線情報とを比較し、動線が近いものを対応付ける機能部である。例えば、あるエリアの人動線情報とID付き人動線情報を比較する場合、人動線情報では人が存在しているが、ID付き人動線情報ではどのIDを持った人もそのエリアに存在しないという結果になれば、そのエリアにはタグを持っていない人が存在していたということがわかる。判定部6は、動線比較部5において対応付けがなされなかった人動線の長さを求め、その長さが時間閾値や距離閾値以上のものをタグ不保持者として判定する機能部である。
【0013】
以下、ID付き移動体位置検知部1a,1b,1cとしてRFIDタグを読み取る受信機を、移動体位置検知部3a,3b,3cとして焦電センサ利用の人感センサを用いた場合の、タグ不保持者を検知する例について説明する。
【0014】
RFID受信機は受信機の検知範囲内にあるタグのIDを読み取り、受信機番号と読み取ったタグのID番号と読み取り時刻を出力する。人感センサは検知範囲内の赤外光の変化量を検知し、変化量がある一定値以上であれば動く人がいると判断し、人感センサ番号と動き検知結果と検知時刻を出力する。受信機のタグ検知タイミングと人感センサの人検知タイミングが等しく、受信機と人感センサの検知範囲が同じである場合、受信機1台の出力と人感センサ1個の出力を比較するだけで、タグの不保持者を検知することができる。例えば、受信機はタグを検知していない時刻に人感センサが人を検知している場合、タグ不保持者が検知範囲内に存在すると判定する。
【0015】
このように、受信機1台と人感センサ1台の出力結果を比較することで、おおよその人の有無とタグ保有状況を判別することができるが、RFID受信機と人感センサでは検知情報の種類が異なるため、タグ不保持者が静止している場合、タグ保持者と不保持者が同時に検知範囲に侵入する場合等、検知できないパターンが存在する。また、RFID受信機と人感センサの検知範囲が等しくなるよう調節するのは難しく現実的ではない。更に、RFID受信機と人感センサでは検知のタイミングが異なるため、検知時刻がずれることがある。例えば、RFIDタグがIDを受信するよりも早く人感センサが動きを検知した場合、タグ不保持者を検知したと誤判定する場合がある。
【0016】
特にビル等の建物全域でタグ保持者と不保持者の位置を検知・管理する場合には、非常に多くの装置を配置しなければならず、ID付き移動体位置検知部1a,1b,1cと移動体位置検知部3a,3b,3cの検知範囲や検知タイミングを全て調整するのは困難である。そこで、本発明では検知結果を直接比較するのではなく、ID付き移動体動線作成部2でID付き人動線を、また、移動体動線作成部4で人位置動線を作成し、これらを比較することでタグ不保持者の検知を行う。
【0017】
次に、図2を用いて、ID付き移動体動線作成部2でのID付き人動線の作成について説明する。ステップST201では、ID付き移動体位置検知部1a,1b,1cからのタグ検知結果を得る。ステップST202では、時空間的に距離の近い同じIDのタグ検知結果を統合する。ステップST203では、ステップST202で統合されたタグ検知データを時系列につなぐことで、ID毎の動線を作成する。
【0018】
次に、図3を用いてステップST202でのデータ統合について説明する。同時に複数の受信機が同じIDのタグを検知した場合や、検知時刻の近いデータが存在する場合には、検知データの統合を行う。ここで、ID付き移動体位置検知部1a,1bとしてRFIDタグ受信機1aと1bがそれぞれ位置座標xa,xbに設置されているとする。図中、検知履歴301a,301bは、受信機1aと1bのタグの検知結果であり、t2<t3<t4である。データ統合を行う統合時刻範囲の開始時刻をt1、終了時刻をt5とし、時刻t1〜t5に含まれる検知データのうち、同じIDの検知データを統合する。統合データの中に複数の受信機が存在し、その位置が閾値以下の場合、統合後の検知結果は、タグの位置=Σ受信機の位置座標/受信機の数、検知時刻=(統合開始時刻+統合終了時刻)/2となる。
【0019】
受信機の位置xaとxb間の距離が閾値以下で、t1<t2<t3<t4<t5のとき、時刻t2〜t4の3つのタグID001の検知結果が統合され、統合後は(検知位置,検知時刻)=(xa+xb)/2,(t1+t5)/2となる。受信機の位置xaとxb間の距離が閾値以下で、t1<t2<t3<t5<t4のとき、時刻t2とt3の2つのタグID001の検知結果が統合され、統合後は(検知位置,検知時刻)=(xa+xb)/2,(t1+t5)/2となり、その後、(xa,t4)でタグ001が検知されたことになる。受信機の位置xaとxb間の距離が閾値以上で、t1<t2<t3<t4<t5のとき、t2とt4のデータが統合され、(検知位置,検知時刻)=xa,(t1+t5)/2となる。統合距離の閾値は受信機の検知範囲等から定め、統合時間範囲は受信機の読み取り周期等から定める。統合距離の閾値や統合時間範囲は位置毎に変えてもよい。タグの位置を、Σ重み*受信機の位置座標/受信機の数とし、受信時の電波強度等から重みを求めてもよい。
【0020】
次に、図4を用いてステップST203での動線作成について説明する。ステップST202でのデータ統合後のID001の検知履歴が401であり、t1<t2<t3<t4<t5<t6<t7<t8であるとする。タグID001の検知位置と検知時刻の組を時系列に並べると、(xa,t3)、(xa,t5)、(xb,t8)となり、このデータを座標上にプロットし時系列に直線でつなぐと、ID001の動線はグラフ402の線のようになる。ここで、位置座標は一次元ではなく、二次元や三次元でもよい。他のIDについても同様に動線を作成する。ここで、空間情報として、壁や障害物等の移動不可能領域の情報を用いてより正確な動線情報を作成する方法もある。タグ検知結果を動線で結ぶ際に動線と移動不可能領域が衝突する場合には、移動不可能領域に衝突しない最短経路をとる。移動不可能領域と動線の衝突、および最短経路の導出は幾何学を用いて計算する。
【0021】
次に、図5を用いて、移動体動線作成部4での人動線の作成方法について説明する。
ステップST501では、移動体位置検知部3a,3b,3cからのタグ検知結果を得る。ステップST502では、時空間的に距離の近い検知結果を統合する。ステップST503では、ステップST502で統合された検知データを追跡し、対応付けを行う。ステップST504では、ステップST503で対応付けられた検知データをつないで動線を作成する。
ステップST502でのデータ統合の方法はステップST202のデータ統合の方法と同じである。但し、ステップST501ではID情報が得られないため、ステップST502でのデータ統合の対象はID毎ではなく、全検知データが対象となる。
ステップST503では、ステップST502でのデータ統合後の検知データをステップST504でつないで動線を作成するため、対応付けを行う。
【0022】
ステップST503での対応付け方法を、図6及び図7を用いて説明する。
図6に示すように、移動体位置検知部3a,3b,3cとして、人感センサ3a,3b,3cがそれぞれ位置座標xa,xb,xcに設置されており、それぞれ検知範囲と影響範囲を有しているとする。検知履歴601a,601b,601cは、人感センサ3a,3b,3cの動き検知結果であり、ステップST502で統合済みである。ここで、t1<t2<t3<t4<t5<t6<t7<t8<t9である。移動体位置検知部3a,3b,3cとして人感センサを用いると静止人物の検知はできないため、動きを検知した人感センサの検知範囲内には人が存在し、検知後もその位置に滞在し続けているとする。また、人感センサが動きを検知した際の近傍領域に人が存在している場合、その人物が動きを検知したセンサの位置に移動してきたとして対応付ける。近傍領域に人が2人以上存在する場合、近い方を対応付ける。xaとxb間、xbとxc間の距離は近傍領域閾値以下であり、xaとxc間の距離は近傍領域閾値以上であるとすると、検知履歴601a,601b,601cに基づいて、対応付けを行った結果は図7に示すような人動線701となる。
【0023】
動きを検知した人感センサの位置と時刻を時系列順に並べると、(xa,t3)、(xb,t6)、(xb,t7)、(xc,t8)となる。時刻t3で人感センサ3aが動きを検知した後、位置xaには人が滞在する。時刻t6で人感センサ3bが動きを検知したとき、xaとxb間の距離は近傍領域閾値以下であるから、位置xaから位置xbに人が移動したと判定される。よって、位置xaへの滞在は打ち切られ、位置xbに人が滞在する。同様に、時刻t8で人感センサ3cが動きを検知した場合にも、位置xbに滞在していた人が位置xcに移動してきたこととなる。時刻t9に人感センサ3aが動きを検知しても、xaとxc間の距離は近傍領域閾値以上であるため、位置xcに滞在中の人位置は位置xaに移動せず、位置xaには新たな人物が滞在し始めたと判定する。近傍領域の閾値には、人感センサの検知範囲や設置間隔等から定める。この閾値は位置によって変えてもよい。対応付けの方法として、カルマンフィルタやパーティクルフィルタのような時系列フィルタを用いて追跡を行ってもよい。
【0024】
ステップST504での動線作成は、図7における人動線701のように離散的であってもよいが、人の平均的な歩行速度を用いて、センサ間の位置移動を滑らかに補間してもよい。補間した動線を人動線702に示す。時刻t6で位置xaからxbへの移動があったと判定された場合、人の平均的な歩行速度とxa、xb間の距離から移動開始時刻t10を算出し、(xa,t10)と(xb,t6)を直線で結ぶことで動線を補間する。但し、移動開始時刻t10が位置xaでの最終検知時刻t3を超える場合は最終検知時刻を移動開始時刻とする。(xc,t8)での検知から生じるxbからxcへの移動では、xbでの移動開始時刻t11を算出すると、t11<t7となるため移動開始時刻はt7となり、(xb,t7)と(xc,t8)をつなぐ。センサ間の位置移動を滑らかに補間すると、より正確な動線を作成することができる。
【0025】
次に、動線比較部5の動線比較と判定部6の判定処理について説明する。
動線比較部5では、ID付き移動体動線作成部2で作成されたID付き人動線と移動体動線作成部4で作成された人動線の動線比較を行う。即ち、動線比較部5では、全てのID付き人動線について、ID付き動線に対応する人動線を求め、対応する人動線にはラベルIDを貼る。また、判定部6では、対応ラベルの貼られなかった人動線の長さを求め、その長さが時間閾値や距離閾値以上のものをタグ不保持者と判定する。
【0026】
次に、動線比較部5における対応付けの方法について説明する。対応付けには動線の移動ベクトル間の距離を用い、移動ベクトル間の距離が閾値以下の場合に対応付けが成功したとして人動線の一部にラベルIDを貼る。ここで移動ベクトルとは、始点(始点位置,始点位置存在時刻)→終点(終点位置,終点位置存在時刻)の組で表され、動線を切り取ることで求められる。
【0027】
図8を用いて移動ベクトルの距離算出方法を説明する。タグIDiの動線801を時間間隔t1〜t2で切り取り、IDiの時刻[t1,t2]間の移動ベクトル802を得る。人動線803を時間間隔t1〜t2で切り取ると、人移動ベクトル804と人移動ベクトル805の2つが得られる。次に、IDiの移動ベクトル802と全ての人移動ベクトルとの距離を求め、距離が閾値以下でかつ最も近いものを対応付ける。全ての人移動ベクトルとの距離を計算すると計算コストがかかるため、近傍エリアを探索し、近傍エリア内のラベル付けのされていない人移動ベクトル804との距離を計算してもよい。距離の計算は、例えば時刻毎の位置の和ΣD(xit,xt)(xitはIDi移動ベクトルの時刻tでの位置、xtは人移動ベクトルの時刻tでの位置、D(a,b)は2点a,bのユークリッド距離)を用いる。ベクトル間の距離はピアソンの相関係数を用いる等、他の方法で求めてもよい。
【0028】
図9を用いて別の移動ベクトル間の距離算出方法を説明する。IDiの動線901をエリア区間905で切り取ると、IDiの移動ベクトル902が得られる。エリア区間905とIDiの移動ベクトル902の周囲の時間区間[t1−Δt,t2+Δt]で人動線903を切り取ると、人移動ベクトル904が得られる。次に、IDiの移動ベクトル902と人移動ベクトル904の距離を計算する。ID付き動線と人動線は検知タイミングや設置位置に差があるため、速度と移動方向(角度)を用いて移動ベクトルの距離を計算する。例えば、距離=w1*角度差+w2*速度差(w1,w2は重み)とし、閾値以下であるものを対応付いたとする。
【0029】
図8および図9の例では、局所的な動線の比較方法について説明したが、局所的な比較だけでは誤りを生じやすいため、時間やエリアの区間を長くしてベクトルの類似度を求めてもよい。ID付き動線に沿って人動線の類似度を求めていき、時間的または空間的に閾値以上の長さで類似度が高い場合に、ラベルIDを貼り付けてもよい。
【0030】
以上の説明では、監視用途を目的としてタグ不保持者を検知する例を説明したが、タグ保有者とタグ不保持者の両者の動線や人分布を把握し、区別を行うことは他のサービスにも適用できる。例えば、警備員にタグを持たせて動線を把握し、一般の人はタグ不保持者として位置の検知を行い、両者の位置関係を元に警備員の巡回経路を動的に設定するサービスに適用できる。また、商業施設等で、店員にタグを持たせてタグの位置により店員の位置を管理し、一般の人はタグ不保持者として動線を把握することにより、目的の売り場がわからずうろうろしている一般人の動きを検知し、最寄りの店員を派遣するといったサービスに適用できる。
【0031】
このように、実施の形態1では、ID付き移動体位置検知部1a,1b,1cと移動体位置検知部3a,3b,3cの検知範囲や検知タイミングが異なる場合でも、ID付き移動体動線作成部2と移動体動線作成部4でそれぞれの動線を求めることにより、動線比較部5で比較しタグ不保持者を検知できる。特に、ビル等の建物全域で検知を行うためにセンサを配置する場合には、非常に多くの装置を配置しなければならず、ID付き移動体位置検知部1a,1b,1cと移動体位置検知部3a,3b,3cの検知範囲や検知タイミングを全て調整するのは困難であるため、この方法が有効である。
【0032】
また、動線を作成しているため、タグ不保持者を検知した後タグ不保持者の追跡を行い、タグ不保持者の現在位置を通知することができる。更に、動線を過去方向にさかのぼってタグ不保持者の位置履歴を調べ、タグ不保持者が映像監視領域に立ち入った時刻を調べることができるため、監視映像と照らし合わせてタグ不保持者の映像を入手するといったことができる。また、タグ不保持者が出会った、もしくは、共に移動したタグのID番号を調べることができるため、タグ不保持者に不審人物の有無を尋ねる、共連れをうながした可能性の高いID番号を特定する等ができる。
【0033】
以上のように、実施の形態1の移動体管理装置によれば、タグを有する移動体と、タグを有しない移動体とを識別する移動体管理装置であって、タグの位置を検知するID付き移動体位置検知部1a,1b,1cと、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線をID付き移動体動線として作成するID付き移動体動線作成部2と、移動体を検知する移動体位置検知部3a,3b,3cと、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線を移動体動線として作成する移動体動線作成部4と、ID付き移動体動線と移動体動線とを比較し、動線が近いものを対応付ける動線比較部5と、動線比較部5において、対応付けがなされない動線の移動体をタグを有しない移動体として判定する判定部6とを備えたので、タグを有しない移動体を的確に判定することができる。
【0034】
実施の形態2.
実施の形態2では、ID付き移動体動線作成部2と移動体動線作成部4で場所・時間毎の人存在率を求め、動線比較部5で各々の人存在率を比較することでタグ不保持者を検知するようにしたものである。図面上の構成は図1に示した実施の形態1と同様であるため、図1を用いて説明する。実施の形態2におけるID付き移動体位置検知部1a,1b,1cおよび移動体位置検知部3a,3b,3cについては実施の形態1と同様である。ID付き移動体動線作成部2では、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の存在率をID付き移動体存在率として作成する。また、移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から、移動体の時空間の存在率を移動体存在率として作成する。更に、動線比較部5は、ID付き移動体存在率と移動体存在率とを比較し、タグを有しない移動体の存在率を求める。そして、判定部6は、タグを有しない移動体の存在率が所定値以上に大きい場合に、タグを有しない移動体が存在していると判定するよう構成されている。
【0035】
次に、実施の形態2の移動体管理装置の動作について説明する。
先ず動線を作成し、次に人存在率を求める。
ID付き人存在率を求めるには、ID付き移動体動線作成部2でタグID毎の動線を求める。動線の作成方法は実施の形態1と同様であるため、ここでの説明は省略する。但し、図2のステップST202でのデータ統合時に、検知点を1点に絞るのではなく、候補点を数点選んでもよい。それぞれの点について、電波強度等から信頼度を算出する。候補点が数点ある場合、図2のステップST203で、複数の動線が結ばれる。各動線は候補点の信頼度から求めた信頼度を持つ。信頼度は同時刻の動線の信頼度を加算すると1になるように正規化する。動線の作成方法は実施の形態1以外の方法を用いてもよい。
【0036】
次に、ID付き人動線から人存在率を計算する方法について説明する。図10は、実施の形態2のおけるID付き人動線から人存在率を求める例を示す説明図であり、図4のID001の動線402から作成された人存在率を示している。
実際には、タグの読み取り位置は点ではなく、受信機の検知範囲エリアのどこかである。また、タグの電池寿命を延ばすためにタグの読み取り間隔を空けていることもあるため、読み取りタイミングが検知エリアに入ってきた瞬間であるとは限らない。そこで、それぞれの受信機のタグ検知範囲特性に基づいて、時空間に存在確率を求めると、例えば、グラフ1001のように、動線を中心として動線から遠ざかるにつれて確率が低くなるような分布となる。時刻tでのタグID001の存在率は全空間で加算すると1になるような分布となる。例えば、受信機のタグ受信強度が標準偏差σのガウス分布で近似されるとき、人存在率は動線を中心として標準偏差σのガウス分布を動線に沿って動かした分布とする。位置座標xpである点Pの時刻tでの人存在率P(xp,t)は、グラフ1001中の直線x=xp上の値の集合になるため、グラフ1002のようになる。
【0037】
人存在率の分布は受信機の検知特性から求めたが、空間属性や個人の歩行特性、タグID読み取り時の通信強度等を利用してもよい。例えば、受信機(ID付き移動体位置検知部)1aと受信機(ID付き移動体位置検知部)1bが通路に設置されており、通路の歩行方向がxa→xbの方向である場合、壁部分に人が存在する可能性は低いため、xa→xb方向に直交する方向の人存在率分布の範囲を通路の幅に限定できる。ID毎の歩行特性として、例えば通常時の歩行速度が分かっている場合には、タグ検知時刻から算出された実際の移動速度と通常時の歩行速度を比較することにより、存在率の分布を変更する。例えば、通常時の歩行速度より実際の移動速度が速い場合には、直線的に移動する確率が高いため、人存在率分布の広がりを小さくする。逆に、通常時の歩行速度より実際の移動速度が遅い場合には、蛇行した可能性が高いため、人存在率の分布の広がりを大きくする。タグID読み取り時の通信強度を利用する場合には、通信強度が強い程受信機とタグの間の距離が近いという特性を利用して、通信強度から推定される受信機とタグの距離を人存在率の分布特性に導入する。距離が遠い程広がった分布になり、距離が近い程狭い分布になる。このように、空間属性や個人の歩行特性、タグID読み取り時の通信強度等を利用して人存在率の分布を計算すると、より正確に人存在率を求めることができる。
【0038】
同時刻に複数の動線が存在する場合には、それぞれの動線について人存在率を求め、その人存在率に動線の信頼度を積算する。同時刻同時点の人存在率は、全ての動線から求められる存在率を加算する。例えば、ある時刻tにおいて、タグIDiの動線がn本存在し、動線nから求めた点p(位置座標xp)の存在率をPin(xp,t)とすると、タグIDiの点pでの存在率Pi(xp,t)は、Pi(xp,t)=Σ動線nの信頼度*Pin(xp,t)となる。
【0039】
次に、移動体動線作成部4で人存在率を求める方法を説明する。
移動体動線作成部4における人動線の作成方法は実施の形態1と同様であるためここでの説明は省略する。但し、図5のステップST502でのデータ統合時に、検知点を1点に絞るのではなく、候補点を数点選んでもよい。また、図5のステップST503で、複数の点と対応付けを行ってもよく、図5のステップST504で複数対応付いた検知点と複数の動線を結んでもよい。各動線は検知点同士の近さや移動速度などから求めた信頼度を持つ。動線の作成方法は実施の形態1以外の方法を用いてもよい。また、人動線から人存在率を求める方法は上述したID付き動線からID毎の人存在率を求める方法と同様であるためその説明は省略する。
【0040】
移動する人物の間隔がセンサの設置間隔や設置範囲に対して十分に空いている場合には、検知パターンから動線を作成することが可能であり、人存在率の分布を求めることができる。しかし、人が密集するような場所では個人を識別できないセンサの検知結果を人毎に分けて線でつなぐことは困難であるため、人の動きを検知した時刻の周囲に人が存在する確率が高いとして人存在率を求めてもよい。このとき、人存在率のグラフは図11の1102のようになる。人感センサが動きを検知した時刻と位置を中心として人存在率を設定する。動きを検知した時刻と位置が最も存在率が高く、徐々に時空間に分布が広がっていくような確率分布関数を用いる。例えば、検知位置を中心とした標準偏差σΔt(Δtは検知時刻からの差分時刻)のガウス分布を用い、σΔtはΔtに応じて大きくなる関数であるとする。複数の検知結果から求められる人存在分布が重なる地点では、確率を加算することにより人の動きが時空間的に密集している場所は人が存在する確率がより高くなる。例えば、検知(xb,t6)と検知(xb,t7)は検知時刻が近いため、その間の空間は人存在率が加算される。
【0041】
次に、動線比較部5での人存在率の比較方法について説明する。
地点xのある時刻tでの人存在率をP(x,t)、IDiのタグ存在率をPi(x,t)とすると、タグ不保持者の存在率はP(x,t)−Pi(x,t)である。全エリア、全IDについてタグ不保持者の存在率を求め、時空間的に連続して存在率の高い時刻・エリアが存在するとき、判定部6で、タグ不保持者が存在しているとする。タグ不保持者の検知は例えば、タグ不保持者の存在確率に基づいて2値化してクラスタリングを行い、存在確率の高いクラスタが一定以上に大きいときに判定部6でタグ不保持者が存在しているとする。
【0042】
このように、実施の形態2の移動体管理装置では、動線を一意に特定せず人やタグの存在率でタグ不保持者を検知するため、検知パターンから人の動線を抽出するのが困難である場合や、動線に曖昧性が残るような場合でも本実施の形態は適用できる。
また、ID付き移動体位置検知部1a,1b,1cと移動体位置検知部3a,3b,3cのセンサ配置管理において、それぞれのセンサがフロアのどこに配置されたかという座標情報だけを持っていれば人存在率が計算できるため、センサ位置を変更する場合に、位置を変更したセンサの設定だけを変更するだけでよく、位置を変更しなかったセンサの設定を変更する必要はない。センサ同士の関連テーブルを持っている場合では、1つのセンサ位置を変更すると、他の移動しなかったセンサの設定も変更する必要があり、作業コストが増大する場合や変更ミスを生じる場合がある。
更に、空間属性や個人の歩行特性、タグID読み取り時の通信強度等を利用して人存在率の分布を計算すると、より正確に人存在率を求めることができる。
【0043】
以上のように、実施の形態2の移動体管理装置によれば、タグを有する移動体と、タグを有しない移動体とを識別する移動体管理装置であって、タグの位置を検知するID付き移動体位置検知部1a,1b,1cと、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の存在率をID付き移動体存在率として作成するID付き移動体動線作成部2と、移動体を検知する移動体位置検知部3a,3b,3cと、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の存在率を移動体存在率として作成する移動体動線作成部4と、ID付き移動体存在率と移動体存在率とを比較し、タグを有しない移動体の存在率を求める動線比較部5と、タグを有しない移動体の存在率が所定値以上に大きい場合に、タグを有しない移動体が存在していると判定する判定部6とを備えたので、人の動線を抽出するのが困難である場合や、動線に曖昧性が残るような場合でもタグを有しない移動体を的確に判定することができる。
【0044】
実施の形態3.
実施の形態3では、ID付き移動体動線作成部2と移動体動線作成部4で場所・時間毎の人数分布を求め、動線比較部5で各々の人数分布を比較することでタグ不保持者を検知するようにしたものである。図面上の構成は図1に示した実施の形態1と同様であるため、図1を用いて説明する。実施の形態3におけるID付き移動体位置検知部1a,1b,1cおよび移動体位置検知部3a,3b,3cについては実施の形態1と同様である。ID付き移動体動線作成部2では、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の人数分布をID付き人数分布として作成する。また、移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から、移動体の時空間の人数分布を作成する。更に、動線比較部5は、ID付き人数分布と人数分布とを比較し、タグを有しない人物の人数分布を求める。そして、判定部6は、タグを有しない人物の人数分布が所定値以上であった場合に、タグを有しない人物が存在していると判定するよう構成されている。
【0045】
以下、実施の形態3の移動体管理装置の動作について説明する。
ID付き移動体位置検知部1a,1b,1cの動作は実施の形態1、2と同様である。ID付き移動体動線作成部2では、全IDの人存在率を加算して人数分布を求める。移動体動線作成部4では、例えば、カメラ画像に映っている特徴点の数やエリア内の人感センサの検知頻度から人数分布を推定する。入退室管理装置からフロアや建物の総人数の真値を得て、検知頻度を元に人分布を計算し、総人数を人分布に基づいて割り振ってもよい。例えば、フロア内に2つのエリアAとBが存在し、エリア毎の検知頻度がA:B=8:2でありフロア総人数が10人の場合、エリアAには8人、エリアBには2人の人がいるとする。動線比較部5では、移動体動線作成部4で得た人数分布とID付き移動体動線作成部2で得たID付き人数分布との差を全エリア、全IDについて求め、これをタグ不保持者の人数分布とする。判定部6は、タグ不保持者の人数分布が所定値以上であった場合、タグ不保持者が存在していると判定する。
【0046】
このように、実施の形態3では、単なる人の存在率ではなく、人数分布を用いてタグ不保持者を検知するため、タグ保持者とタグ不保持者が行動を共にしている場合でもタグ不保持者を検知できる。局所的な人数比較ではタグ不保持者の誤検知等が起こり得るが、長期的に追跡を行ってタグ不保持者を検知するため、精度が向上する。
【0047】
以上のように、実施の形態3の移動体管理装置によれば、タグを有する移動体と、タグを有しない移動体とを識別する移動体管理装置であって、タグの位置を検知するID付き移動体位置検知部1a,1b,1cと、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の移動体数分布をID付き移動体数分布として求めるID付き移動体動線作成部2と、移動体を検知する移動体位置検知部3a,3b,3cと、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の移動体数分布を求める移動体動線作成部4と、ID付き移動体数分布と移動体数分布とを比較し、タグを有しない移動体の移動体数分布を求める動線比較部5と、タグを有しない移動体の移動体数分布が所定値以上であった場合に、タグを有しない移動体が存在していると判定する判定部6とを備えたので、例えば、タグ保持者とタグ不保持者が行動を共にしているといった場合でもタグ不保持者を的確に検知することができる。
【0048】
実施の形態4.
実施の形態4では、実際に運用を行う前に真値と計測データの学習期間を設け、システムが自動で閾値等の調整を行うようにしたものである。ID付き移動体位置検知部1a,1b,1c〜判定部6の基本的な構成は、上述した実施の形態1〜3のいずれかであるので、ここでの詳細な説明は省略する。
【0049】
実施の形態4では、ID付き移動体動線作成部2や移動体動線作成部4で動線・人存在率・人数分布を算出する際に、機械学習を用いてもよい。例えば、動線や人有無・人数の真値と、ID付き移動体位置検知部1a,1b,1cや移動体位置検知部3a,3b,3cの検知パターンとを組にして数パターン学習しておき、ID付き移動体位置検知部1a,1b,1cや移動体位置検知部3a,3b,3cの学習したパターンのどのパターンに近いかで、動線・人有無・人数等を推定する。また、タグIDを読み取った受信機の位置と検知時刻から、タグ保有者の歩行速度を自動学習し、ID付き移動体動線作成部2や移動体動線作成部4における動線作成時に反映させてもよい。動線比較部5で動線を比較する際に、ID付き移動体動線作成部2と移動体動線作成部4で予めタグ保有者の動線を比較しておくことにより、同一人物を検知したときの動線の差異を動線比較部5の閾値に利用してもよい。
【0050】
以上のように、実施の形態4の移動体管理装置によれば、ID付き移動体動線作成部2と移動体動線作成部4と動線比較部5のうち少なくともいずれか一つの処理部は、予め用意した真値と計測データとに基づき、処理結果の学習を行うようにしたので、動線作成、比較時の精度を向上させることができる。また、設置環境による誤差を学習により吸収でき、精度が向上する。更に、設置時のパラメータ調整を自動化し、設置員の手間を省くことができる。
【0051】
実施の形態5.
実施の形態5は、ID付き移動体位置検知部1a,1b,1cと、移動体位置検知部3a,3b,3cとにおける各検知部の設置位置の位置関係に基づいて、ID付き移動体動線作成部2および移動体動線作成部4がそれぞれ動線等の作成を行うようにしたものである。図面上の構成は実施の形態1と同様であるため、図1を用いて説明する。
【0052】
タグ受信機や人感センサの設置位置を座標で管理するだけでなく、機器同士の隣接関係を利用することで、ID付き移動体動線作成部2や移動体動線作成部4での動線作成精度が向上する。例えば、図12のように通路にタグ受信機(ID付き移動体位置検知部)1a、1b、1cが設置してある場合、受信機1bでタグの検知ミスがあると、ID付き移動体動線作成部2では、受信機1aと受信機1cの動線をつないでしまう可能性がある。そこで、実施の形態5では、機器同士の隣接関係、即ち、受信機1aと受信機1bとが隣接し、受信機1bと受信機1cとが隣接しているという関係を利用する。これにより、受信機1aと受信機1cの検知の間には必ず受信機1bの場所を通っていることが推定でき、動線を正しくつなぐことができる。尚、壁や通路といった空間情報を受信機の設置位置と同じ座標系上の情報として持っているとき、受信機1aと受信機1cの間の動線と壁が衝突することは、幾何学的に計算できるが、計算コストがかかる。
【0053】
また、機器の配置位置、人不可侵領域、機器の隣接関係の設定はテーブルとして管理してもよいし、GUI上で設定し管理テーブルを自動で生成してもよい。例えば、フロア図面上に機器アイコンを設置することで機器の設置位置座標を設定する。同様に図面上で不可侵領域の設定を行う。ここで、人不可侵領域と機器設置の位置座標から、機器隣接情報を自動で生成してもよい。
【0054】
以上のように、実施の形態5の移動体管理装置によれば、ID付き移動体動線作成部2及び移動体動線作成部4は、それぞれ複数のID付き移動体位置検知部1a,1b,1c及び複数の移動体位置検知部3a,3b,3cにおける各検知部の設置位置の位置関係に基づいて処理を行うようにしたので、衝突判定や近傍検索等の計算コストの高い計算をすることなく、近傍の機器の位置や空間のつながり等を求めることができるため、計算コストを抑えることができる。
【0055】
実施の形態6.
実施の形態6は、動線比較部5において多段階比較を行うようにしたものである。
ID付き移動体動線作成部2、移動体動線作成部4で1点毎の動線や存在率を求め動線比較部5で比較すると計算コストが膨大になるため、動線・存在率の計算、位置比較を空間区間、時間区間毎に行ってもよく、また粒度(空間区間、時間区間の間隔)を動的に変更してもよい。動線比較部5で比較する時間区間や空間区間を広くとって比較し、タグ不保持者のいる可能性の高い時間区間、空間区間は再度区間を細かく分割して比較を行う。即ち、実施の形態6では、動線比較部5において、最初に第1の処理として、所定の空間区間または時間区間毎に比較処理を行い、次に、第1の処理の空間区間または時間区間の間隔を狭くし、かつ、対象となる空間領域または時間領域を限定した第2の処理を行う。尚、第2の処理としては1回だけでなく複数回の処理であってもよい。また、タグ不保持者のいる可能性に応じて、比較に用いる時間区間を変えてもよい。空間区間毎に、タグ不保持者のいる可能性が高くなると比較に用いる時間間隔を狭くし、タグ不保持者のいる可能性が低くなると比較に用いる時間間隔を長くしてもよい。
【0056】
以上のように、実施の形態6の移動体管理装置によれば、動線比較部5における比較処理は、所定の空間区間または時間区間毎に行う第1の処理と、第1の処理の空間区間または時間区間の間隔を狭くし、かつ、対象となる空間領域または時間領域を限定した第2の処理からなるようにしたので、比較を行う時間的空間的な間隔を多段階や動的に変えることにより、精度を落とすことなく計算コストを削減することができる。
【0057】
実施の形態7.
監視用途でタグ不保持者を検知する場合にはできるだけ早くタグ不保持者を検知することが望まれるが、オフィスビル等の人数の多い場所で全ての人の動線を作成、比較するのには膨大な計算コストがかかる。そのため、実施の形態7の移動体管理装置では、例えば、担当エリア区間を分割して並列に計算を行う。
【0058】
図13は、実施の形態7の移動体管理装置を示す構成図である。
図において、ID付き移動体位置検知部1a,1b,1cおよび移動体位置検知部3a,3b,3cは、実施の形態1の構成と同様である。ID付き移動体動線作成部2−1〜2−n、移動体動線作成部4−1〜4−nおよび動線比較部5−1〜5−nは、それぞれ複数(n個)設けられており、それぞれが並列に処理を行う演算処理部である。尚、処理内容は、いずれかの実施の形態のID付き移動体動線作成部2、移動体動線作成部4および動線比較部5と同様である。また、判定部6aは、複数の動線比較部5−1〜5−nの結果を用いて判定処理を行うよう構成されている。
【0059】
実施の形態7の移動体管理装置では、例えば、担当エリア区間を分割して並列に計算を行う。尚、この分割方法についてはID付き移動体位置検知部1a,1b,1cや移動体位置検知部3a,3b,3c毎でも良いし、他の分割方法であってもよい。判定部6aは、複数の動線比較部5−1〜5−nの結果を用いてタグ不保持者を検知する。
【0060】
尚、上記説明では、ID付き移動体動線作成部2−1〜2−n、移動体動線作成部4−1〜4−nおよび動線比較部5−1〜5−nを全て複数設ける場合を説明したが、例えば動線比較部5−1〜5−nのみを複数とする、といったように、いずれかの演算処理部のみを並列処理するようにしてもよい。
【0061】
また、動線比較部5における比較履歴を別途記憶し、この比較履歴を用いて判定するようにしてもよく、これを次に説明する。
図14は、実施の形態7の移動体管理装置の他の例を示す構成図である。
図14に示す移動体管理装置は、ID付き移動体位置検知部1a,1b,1c、ID付き移動体動線作成部2、移動体位置検知部3a,3b,3c、移動体動線作成部4、動線比較部5a、判定部6b、比較履歴記憶部7を備えている。ここで、ID付き移動体位置検知部1a,1b,1c〜移動体動線作成部4は、実施の形態1〜6のいずれかの構成と同様である。動線比較部5aはID付き移動体動線作成部2と移動体動線作成部4で新しく乗じた動線の比較を行い、比較履歴は比較履歴記憶部7に記憶するよう構成されている。また、判定部6bは、比較履歴記憶部7における比較履歴と動線比較部5aの結果に基づいてタグ不保持者の検知を判定するよう構成されている。
【0062】
このように構成された移動体管理装置において、動線比較部5aはID付き移動体動線作成部2と移動体動線作成部4で新しく生じた動線の比較のみを行い、比較履歴は比較履歴記憶部7で記憶する。そして、判定部6bは、比較履歴記憶部7に記憶されている比較履歴と動線比較部5aの結果からタグ不保持者の検知を判定する。
【0063】
以上のように、実施の形態7の移動体管理装置によれば、ID付き移動体動線作成部2と移動体動線作成部4と動線比較部5のうち少なくともいずれかの処理部を複数設け、複数設けた処理部は並列に処理を行うようにしたので、タグを有しない移動体の検知を速やかに行うことができる。
【0064】
また、実施の形態7の移動体管理装置によれば、動線比較部における比較結果の履歴を記憶する比較履歴記憶部7を備え、判定部6bは、動線比較部5aの比較結果と、比較履歴記憶部7に記憶された比較結果の履歴に基づいて判定を行うようにしたので、ID付き移動体動線作成部2や移動体動線作成部4や動線比較部5を複数設けることなく、タグを有しない移動体の検知をリアルタイムで行うことができる。
【0065】
実施の形態8.
実施の形態8は、空間や時間帯毎に、ID付き移動体動線作成部2および移動体動線作成部4で作成する動線の種類や動線比較部5での比較方法を変更するようにしたものである。図面上の構成は実施の形態1と同様であるため、図1を用いて説明する。
実施の形態8におけるID付き移動体動線作成部2は、ID付き移動体位置検知部1a,1b,1cの検知結果に基づいて、タグの時空間の動線か存在率か人数分布を作成する。また、移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線か存在率か人数分布を作成する。即ち、これらID付き移動体動線作成部2及び移動体動線作成部4は、上述した実施の形態1,2,3のID付き移動体動線作成部2及び移動体動線作成部4のうちいずれかの機能を有している。動線比較部5は、ID付き移動体動線作成部2と移動体動線作成部4の結果を、空間的要因または時間的要因に基づいて選択し比較する。あるいは、動線比較の空間区間または時間区間を空間的要因または時間的要因に基づいて変更し、処理を行う。判定部6は動線比較部5の比較結果に基づいて、タグを保持しない移動体を判定する。
【0066】
例えば、タグ保有者の多い場所や監視員のタグの近傍では、人の目による監視が行われるため、動線比較の空間間隔・時間間隔を疎にする。他にも、会議室エリア等、人が密集しているエリアでは移動体動線作成部4で作成する動線の信頼度が低くなるため、動線ではなく人存在率を用いてタグ不保持者を検知するが、通路等の人が疎である空間では、動線を用いてタグ不保持者を検知する。予め空間毎に動線比較に用いるデータの種類を定めておいてもよいし、ID付き移動体動線作成部2と移動体動線作成部4で作成した動線や人分布情報に基づいて動線比較部5での比較方法を変更してもよい。
【0067】
また、実施の形態8では、図15に示すように、ID付き移動体動線作成部2及び移動体動線作成部4で作成した動線や人分布情報と、動線比較部5での比較結果のいずれかを用いて、ID付き移動体位置検知部1a,1b,1c及び移動体位置検知部3a,3b,3cにおけるセンサ感度といった検知パラメータを動的に変更してもよい。尚、図15中では、複数のID付き移動体位置検知部1a,1b,1c及び移動体位置検知部3a,3b,3cのうち、ID付き移動体位置検知部1aと移動体位置検知部3aのみ示している。また、ID付き移動体位置検知部1a,1b,1c及び移動体位置検知部3a,3b,3cの検知パラメータを変更する以外のID付き移動体位置検知部1a,1b,1c〜判定部6の基本的な構成は実施の形態1〜6のいずれかと同様である。
検知パラメータの変更としては、例えば、会議中等、人の動きの小さいエリアでは人感センサの検知感度を上げるといったものである。動線の方向の履歴から、その空間の動線方向傾向を求め、動線作成時や動線から人存在率を求める際に利用する。
【0068】
以上のように、実施の形態8の移動体管理装置によれば、タグを有する移動体と、タグを有しない移動体とを識別する移動体管理装置であって、タグの位置を検知するID付き移動体位置検知部1a,1b,1cと、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線、存在率及び移動体数分布のうちのいずれかを空間的要因または時間的要因に基づいて選択し作成するID付き移動体動線作成部2と、移動体を検知する移動体位置検知部3a,3b,3cと、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線、存在率及び移動体数分布のうちのいずれかを空間的要因または時間的要因に基づいて選択し作成する移動体動線作成部4と、ID付き移動体動線作成部2と移動体動線作成部4の結果を比較する動線比較部5と、動線比較部5の比較結果に基づいて、タグを保持しない移動体を判定する判定部6とを備えたので、空間属性や移動体の動きに合わせて最適な比較方法を選択することができ、タグを有しない移動体を的確に判定することができる。
【0069】
また、実施の形態8の移動体管理装置によれば、ID付き移動体動線作成部2と移動体動線作成部4の結果に基づく動線比較の空間区間または時間区間を、空間的要因または時間的要因に基づいて変更するようにしたので、空間属性や移動体の動きに合わせて最適な比較を行うことができ、タグを有しない移動体を的確に判定することができる。
【0070】
また、実施の形態8の移動体管理装置によれば、ID付き移動体動線作成部2、移動体動線作成部4及び動線比較部5のうち、少なくともいずれかの処理部の演算結果に基づいて、ID付き移動体位置検知部1a,1b,1cと移動体位置検知部3a,3b,3cのうち少なくともいずれかの検知部の検知パラメータを変更するようにしたので、空間属性や移動体の動きに合わせて最適な位置検知を行うことができ、タグを有しない移動体を的確に判定することができる。
【符号の説明】
【0071】
1a,1b,1c ID付き移動体位置検知部、2,2−1〜2−n ID付き移動体動線作成部、3a,3b,3c 移動体位置検知部、4,4−1〜4−n 移動体動線作成部、5,5a,5−1〜5−n 動線比較部、6,6a,6b 判定部、7 比較履歴記憶部。
【特許請求の範囲】
【請求項1】
タグを有する移動体と、当該タグを有しない移動体とを識別する移動体管理装置であって、
前記タグの位置を検知するID付き移動体位置検知部と、
前記ID付き移動体位置検知部の検知結果から前記タグの時空間の動線をID付き移動体動線として作成するID付き移動体動線作成部と、
前記移動体を検知する移動体位置検知部と、
前記移動体位置検知部の検知結果から前記移動体の時空間の動線を移動体動線として作成する移動体動線作成部と、
前記ID付き移動体動線と前記移動体動線とを比較し、動線が近いものを対応付ける動線比較部と、
前記動線比較部において、対応付けがなされない動線の移動体を前記タグを有しない移動体として判定する判定部とを備えた移動体管理装置。
【請求項2】
タグを有する移動体と、当該タグを有しない移動体とを識別する移動体管理装置であって、
前記タグの位置を検知するID付き移動体位置検知部と、
前記ID付き移動体位置検知部の検知結果から前記タグの時空間の存在率をID付き移動体存在率として作成するID付き移動体動線作成部と、
前記移動体を検知する移動体位置検知部と、
前記移動体位置検知部の検知結果から前記移動体の時空間の存在率を移動体存在率として作成する移動体動線作成部と、
前記ID付き移動体存在率と前記移動体存在率とを比較し、前記タグを有しない移動体の存在率を求める動線比較部と、
前記タグを有しない移動体の存在率が所定値以上に大きい場合に、当該タグを有しない移動体が存在していると判定する判定部とを備えた移動体管理装置。
【請求項3】
タグを有する移動体と、当該タグを有しない移動体とを識別する移動体管理装置であって、
前記タグの位置を検知するID付き移動体位置検知部と、
前記ID付き移動体位置検知部の検知結果から前記タグの時空間の移動体数分布をID付き移動体数分布として求めるID付き移動体動線作成部と、
前記移動体を検知する移動体位置検知部と、
前記移動体位置検知部の検知結果から前記移動体の時空間の移動体数分布を求める移動体動線作成部と、
前記ID付き移動体数分布と前記移動体数分布とを比較し、前記タグを有しない移動体の移動体数分布を求める動線比較部と、
前記タグを有しない移動体の移動体数分布が所定値以上であった場合に、当該タグを有しない移動体が存在していると判定する判定部とを備えた移動体管理装置。
【請求項4】
ID付き移動体動線作成部と移動体動線作成部と動線比較部のうち少なくともいずれか一つの処理部は、予め用意した真値と計測データとに基づき、処理結果の学習を行うことを特徴とする請求項1から請求項3のうちのいずれか1項記載の移動体管理装置。
【請求項5】
ID付き移動体動線作成部および移動体動線作成部は、それぞれ複数のID付き移動体位置検知部および複数の移動体位置検知部における各検知部の設置位置の位置関係に基づいて処理を行うことを特徴とする請求項1から請求項4のうちのいずれか1項記載の移動体管理装置。
【請求項6】
動線比較部における比較処理は、所定の空間区間または時間区間毎に行う第1の処理と、当該第1の処理の空間区間または時間区間の間隔を狭くし、かつ、対象となる空間領域または時間領域を限定した第2の処理からなることを特徴とする請求項1から請求項5のうちのいずれか1項記載の移動体管理装置。
【請求項7】
ID付き移動体動線作成部と移動体動線作成部と動線比較部のうち少なくともいずれかの処理部を複数設け、当該複数設けた処理部は並列に処理を行うことを特徴とする請求項1から請求項6のうちのいずれか1項記載の移動体管理装置。
【請求項8】
動線比較部における比較結果の履歴を記憶する比較履歴記憶部を備え、
判定部は、前記動線比較部の比較結果と、前記比較履歴記憶部に記憶された比較結果の履歴に基づいて判定を行うことを特徴とする請求項1から請求項6のうちのいずれか1項記載の移動体管理装置。
【請求項9】
タグを有する移動体と、当該タグを有しない移動体とを識別する移動体管理装置であって、
前記タグの位置を検知するID付き移動体位置検知部と、
前記ID付き移動体位置検知部の検知結果から前記タグの時空間の動線、存在率及び移動体数分布のうちのいずれかを空間的要因または時間的要因に基づいて選択し作成するID付き移動体動線作成部と、
前記移動体を検知する移動体位置検知部と、
前記移動体位置検知部の検知結果から前記移動体の時空間の動線、存在率及び移動体数分布のうちのいずれかを空間的要因または時間的要因に基づいて選択し作成する移動体動線作成部と、
前記ID付き移動体動線作成部と前記移動体動線作成部の結果を比較する動線比較部と、
前記動線比較部の比較結果に基づいて、前記タグを保持しない移動体を判定する判定部とを備えた移動体管理装置。
【請求項10】
ID付き移動体動線作成部と移動体動線作成部の結果に基づく動線比較の空間区間または時間区間を、空間的要因または時間的要因に基づいて変更することを特徴とする請求項1から請求項9のうちのいずれか1項記載の移動体管理装置。
【請求項11】
ID付き移動体動線作成部、移動体動線作成部及び動線比較部のうち、少なくともいずれかの処理部の演算結果に基づいて、ID付き移動体位置検知部と移動体位置検知部のうち少なくともいずれかの検知部の検知パラメータを変更することを特徴とする請求項1から請求項10のうちのいずれか1項記載の移動体管理装置。
【請求項1】
タグを有する移動体と、当該タグを有しない移動体とを識別する移動体管理装置であって、
前記タグの位置を検知するID付き移動体位置検知部と、
前記ID付き移動体位置検知部の検知結果から前記タグの時空間の動線をID付き移動体動線として作成するID付き移動体動線作成部と、
前記移動体を検知する移動体位置検知部と、
前記移動体位置検知部の検知結果から前記移動体の時空間の動線を移動体動線として作成する移動体動線作成部と、
前記ID付き移動体動線と前記移動体動線とを比較し、動線が近いものを対応付ける動線比較部と、
前記動線比較部において、対応付けがなされない動線の移動体を前記タグを有しない移動体として判定する判定部とを備えた移動体管理装置。
【請求項2】
タグを有する移動体と、当該タグを有しない移動体とを識別する移動体管理装置であって、
前記タグの位置を検知するID付き移動体位置検知部と、
前記ID付き移動体位置検知部の検知結果から前記タグの時空間の存在率をID付き移動体存在率として作成するID付き移動体動線作成部と、
前記移動体を検知する移動体位置検知部と、
前記移動体位置検知部の検知結果から前記移動体の時空間の存在率を移動体存在率として作成する移動体動線作成部と、
前記ID付き移動体存在率と前記移動体存在率とを比較し、前記タグを有しない移動体の存在率を求める動線比較部と、
前記タグを有しない移動体の存在率が所定値以上に大きい場合に、当該タグを有しない移動体が存在していると判定する判定部とを備えた移動体管理装置。
【請求項3】
タグを有する移動体と、当該タグを有しない移動体とを識別する移動体管理装置であって、
前記タグの位置を検知するID付き移動体位置検知部と、
前記ID付き移動体位置検知部の検知結果から前記タグの時空間の移動体数分布をID付き移動体数分布として求めるID付き移動体動線作成部と、
前記移動体を検知する移動体位置検知部と、
前記移動体位置検知部の検知結果から前記移動体の時空間の移動体数分布を求める移動体動線作成部と、
前記ID付き移動体数分布と前記移動体数分布とを比較し、前記タグを有しない移動体の移動体数分布を求める動線比較部と、
前記タグを有しない移動体の移動体数分布が所定値以上であった場合に、当該タグを有しない移動体が存在していると判定する判定部とを備えた移動体管理装置。
【請求項4】
ID付き移動体動線作成部と移動体動線作成部と動線比較部のうち少なくともいずれか一つの処理部は、予め用意した真値と計測データとに基づき、処理結果の学習を行うことを特徴とする請求項1から請求項3のうちのいずれか1項記載の移動体管理装置。
【請求項5】
ID付き移動体動線作成部および移動体動線作成部は、それぞれ複数のID付き移動体位置検知部および複数の移動体位置検知部における各検知部の設置位置の位置関係に基づいて処理を行うことを特徴とする請求項1から請求項4のうちのいずれか1項記載の移動体管理装置。
【請求項6】
動線比較部における比較処理は、所定の空間区間または時間区間毎に行う第1の処理と、当該第1の処理の空間区間または時間区間の間隔を狭くし、かつ、対象となる空間領域または時間領域を限定した第2の処理からなることを特徴とする請求項1から請求項5のうちのいずれか1項記載の移動体管理装置。
【請求項7】
ID付き移動体動線作成部と移動体動線作成部と動線比較部のうち少なくともいずれかの処理部を複数設け、当該複数設けた処理部は並列に処理を行うことを特徴とする請求項1から請求項6のうちのいずれか1項記載の移動体管理装置。
【請求項8】
動線比較部における比較結果の履歴を記憶する比較履歴記憶部を備え、
判定部は、前記動線比較部の比較結果と、前記比較履歴記憶部に記憶された比較結果の履歴に基づいて判定を行うことを特徴とする請求項1から請求項6のうちのいずれか1項記載の移動体管理装置。
【請求項9】
タグを有する移動体と、当該タグを有しない移動体とを識別する移動体管理装置であって、
前記タグの位置を検知するID付き移動体位置検知部と、
前記ID付き移動体位置検知部の検知結果から前記タグの時空間の動線、存在率及び移動体数分布のうちのいずれかを空間的要因または時間的要因に基づいて選択し作成するID付き移動体動線作成部と、
前記移動体を検知する移動体位置検知部と、
前記移動体位置検知部の検知結果から前記移動体の時空間の動線、存在率及び移動体数分布のうちのいずれかを空間的要因または時間的要因に基づいて選択し作成する移動体動線作成部と、
前記ID付き移動体動線作成部と前記移動体動線作成部の結果を比較する動線比較部と、
前記動線比較部の比較結果に基づいて、前記タグを保持しない移動体を判定する判定部とを備えた移動体管理装置。
【請求項10】
ID付き移動体動線作成部と移動体動線作成部の結果に基づく動線比較の空間区間または時間区間を、空間的要因または時間的要因に基づいて変更することを特徴とする請求項1から請求項9のうちのいずれか1項記載の移動体管理装置。
【請求項11】
ID付き移動体動線作成部、移動体動線作成部及び動線比較部のうち、少なくともいずれかの処理部の演算結果に基づいて、ID付き移動体位置検知部と移動体位置検知部のうち少なくともいずれかの検知部の検知パラメータを変更することを特徴とする請求項1から請求項10のうちのいずれか1項記載の移動体管理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−128107(P2011−128107A)
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願番号】特願2009−289186(P2009−289186)
【出願日】平成21年12月21日(2009.12.21)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願日】平成21年12月21日(2009.12.21)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]