
移動体装置および目標物情報検索方法
【課題】視認できる目標物の位置や情報を容易に確認することができる移動体装置を提供する。
【解決手段】移動体装置は、目標物について検索する際、現在位置を検出するとともに、距離測定器141で現在位置から目視可能な目標物21までの距離を測定する。さらに、方位センサ121で目標物の方位を検出する。そこで、測定された距離および検出された方位に基づいて地図データベースを参照し、目標物およびその位置を特定する。この特定された目標物の情報を好ましくは地図上に現在位置とともに表示する。比較的大きな仰角をもって目標物を指定した場合には、測定距離aを実際の距離xに換算して用いる。
【解決手段】移動体装置は、目標物について検索する際、現在位置を検出するとともに、距離測定器141で現在位置から目視可能な目標物21までの距離を測定する。さらに、方位センサ121で目標物の方位を検出する。そこで、測定された距離および検出された方位に基づいて地図データベースを参照し、目標物およびその位置を特定する。この特定された目標物の情報を好ましくは地図上に現在位置とともに表示する。比較的大きな仰角をもって目標物を指定した場合には、測定距離aを実際の距離xに換算して用いる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目標物の情報を取得することができる移動体装置および目標物情報検索方法に関する。
【背景技術】
【0002】
従来、全地球測位システム(GPS)と加速度センサ等の方位検出センサを用いて、ユーザ装置の現在地と方位を検出し、その値に基づいて設定された目標地点までの位置関係を示し、ナビゲーションを行う方法があった。
【0003】
このようなナビゲーション方法では、目標地点を設定するためには、目標地点の名前・住所・電話番号といった目標地点を特定するための情報を入力するか、ディスプレイに表示される地図上で該当箇所を指定する必要があった。
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、戸外を歩いていて背の高いビルなど特定の建造物等が目についたときに、それは何なのか、そこまでの距離はどの程度なのか、という興味が湧く場合がある。
【0005】
このような際にユーザが所持する移動体装置を用いてその目標物を指示することにより即座にかつ容易にその位置や情報を得ることができれば好ましい。
【0006】
本発明はこのような背景においてなされたものであり、視認できる目標物の位置や情報を容易に確認することができる移動体装置およびこれを用いた目標物情報検索方法を提供することを企図する。
【課題を解決するための手段】
【0007】
本発明による移動体装置は、現在位置を検出する位置検出手段と、現在位置から目視可能な目標物までの距離を測定する距離測定手段と、前記目標物の方位を検出する方位検出手段と、前記測定された距離および検出された方位に基づいて地図データベースを参照し、前記目標物およびその位置を特定する検索手段と、前記特定された目標物の情報を表示する表示手段とを備えたことを特徴とする。地図データベースは移動体装置の内部に保持していてもよいし、通信インタフェースを介して外部から取得してもよい。
【0008】
この構成により、目標物までの距離と方位が分かれば、地図データベースを参照することにより、目標物の位置が特定される。また、地図データベースにその目標物の情報が格納されていれば、その情報も取得される。
【発明の効果】
【0009】
本発明によれば、目標物が見えている場合に、ユーザがその目標物についての知識や情報を持っていなくても、本発明の移動体装置によって目標物およびその位置を特定することができる。すなわち、目標物が見えてさえいれば、ユーザと目標物の地図上の位置関係を確認し、目標物についての情報を取得することができる。
【0010】
また、ユーザとその目標物との地図上の位置関係を取得したり、目標物の地図上の座標から目標物についての情報を取得したり、その目標物へのナビゲーションを行ったりすることができるようになる。
【0011】
ナビゲーションにおいて、ユーザが地図を見るのが得意な人間である場合には、地図上で目標物を見つけて目的地に設定することは可能かもしれない。しかし、このような動作を万人に期待することはできない。本発明の移動体装置によれば、ナビゲーションシステムに組み込む、またはナビゲーションシステムと組み合わせることにより、目標物を実空間中で指差すようにして、直感的に目的地指定を行うことができるため、地図上で指定するよりも容易かつ迅速に目的地を設定できる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の好適な実施の形態を図面により詳細に説明する。
【0013】
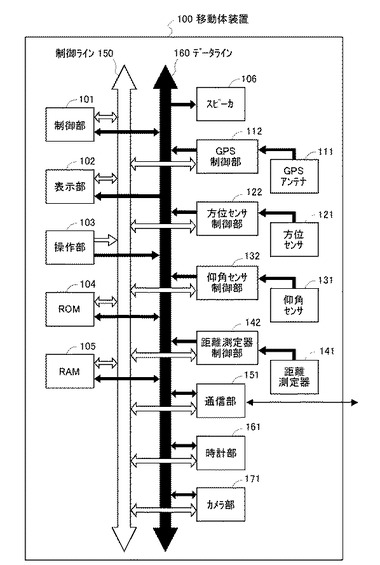
図1は、本発明の実施の形態に係る移動体装置100を示すブロック図である。
【0014】
この移動体装置100は、CPU等を含む制御部101と、テキスト、静止画、動画等の情報を表示する表示画面を有する表示部102と、複数のキー等を合む操作部103と、ナビゲーションアプリケーション・プログラム等の各種アプリケーション・プログラムが記憶されたROM104と、CPUの作業領域や一時データ記憶領域を提供するRAM105、音声を出力するスピーカ部106と、位置データを取得するためのGPSアンテナ111とそれを制御するためのGPS制御部112、移動体装置100の向いている方位を測定するための方位センサ121とそれを制御するための方位センサ制御部122、仰角を測定するための仰角センサ131とそれを制御するための仰角センサ制御部132、目的物までの距離を測定するための距離測定器141とそれを制御するための距離測定器制御部142、外部のネットワークと接続され電話やデータ通信を行うための通信部151、日時やタイマー管理等を行う時計部161、CCD等の撮像素子を用いて撮像を行うカメラ部171、および制御部101と各部を接続する制御ライン150及びデータライン160を有している。ROM104には地図データベースが記憶されてもよい。また、ROM104の少なくとも一部の領域は、フラッシュメモリ等の再書き込み可能な不揮発性メモリを含んでもよい。距離測定器141は、レーザや超音波などを用いたもので、その測定器を目標物に向けて、目標物までの距離を測定するための機器である。距離測定器141は、目標物を指示する目標物指示手段としての例えばレーザポインタ等の可視光線を発生する手段をさらに備えてもよい。あるいは、目標物指示手段として、目標物を表示画面のプレビューにて視認できるカメラ部171を利用する構成としてもよい。
【0015】
以下、この移動体装置100の動作を図2〜図9を用いて説明する。
【0016】
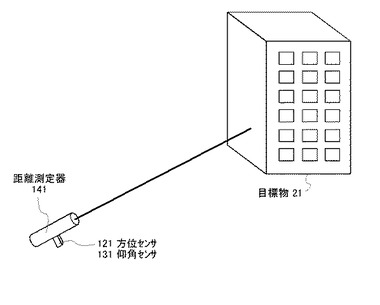
この移動体装置100では図2のように、目標物21に対して距離測定器141を向けて、目標物21までの距離を測定する。仰角センサで仰角(θ)も測定する距離測定器141は移動体装置100に内蔵されていてもよいし、外付けされるものであってもよい。
【0017】
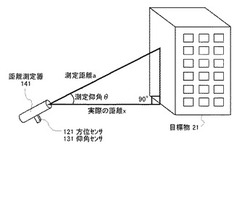
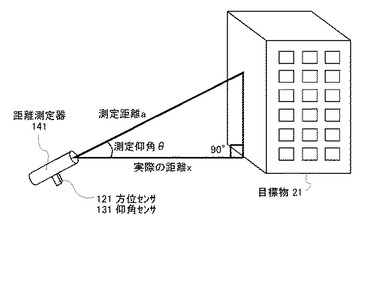
距離測定器141によって得られた距離は移動体装置100から目標物上の特定の点までの距離であるため、図3に示すように、目標物までの測定距離aおよび仰角θが求まったとき、測定距離を実際の距離に換算する。すなわち、目標物までの実際の距離xは次式(1)で求めることができる。
【0018】
x=a×cosθ …(1)
但し、仰角θが十分小さいときにはx=aと見なせるので、仰角センサは必ずしも必要ではない。
【0019】
図4は、移動体装置100により距離測定時の表示部102の表示内容の変化の例を示している。
【0020】
図4(a)は目標物検索のための表示部102の表示画面300の一例を示している。本実施の形態における目標物検索は、メニュー選択または特定のキー押下等により、起動され、表示画面300のような表示を行う。この表示画面300では、ユーザに目標物をポインタで指示して決定ボタンを押すように促している。これに応じてユーザが目標物を指示して決定ボタンを押すと、移動体装置は距離測定器141により目標物までの距離aを測定するとともに、仰角センサ131によりその時点の仰角θを検出する。また、方位センサ121により、距離測定器141が向いている方位も検出する。この測定および検出の結果に応じて、距離xを求める。現在位置を基準にこの距離xおよび方位に基づいて、地図データベースを参照することにより、地図上での当該目標物の位置を特定する。また、可能であればその目標物も特定し、その目標物に関連した情報情報(例えば、名称、高さ、建造年月日、備考等)を取得する。さらに、ナビゲーションシステムと連携している場合には、移動手段(例えば歩行)、現在時刻、その目標物の位置を目的地として移動した場合の到着時刻、想定移動距離等を図4(b)の表示画面400に示すように表示する。ここに、想定移動距離は好ましくは推定経路に沿った距離である。このような距離は地図データベースから求めることができる。この後、ナビゲーションを行う場合には、ユーザの操作に従って、地図表示を行い、この求めた目標物の位置を目的地として設定したナビゲーションを行う。
【0021】
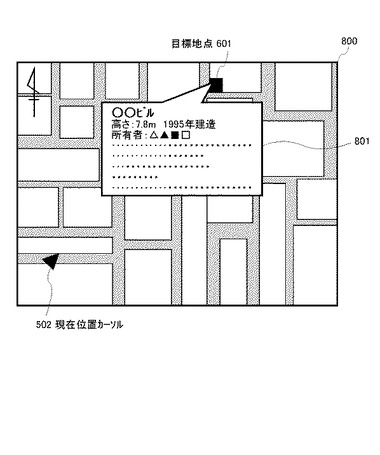
図5は、ナビゲーションシステムを起動後に本実施の形態の目標物検索を行う場合の表示画面例を示している。表示画面500は、現在位置を含む地図が表示された状態で、ユーザに目標物の指示を促すウィンドウ501を表示している。地図上には現在位置および方位を表す現在位置カーソル502が表示されている。これに応じてユーザが目標物を指示して決定ボタンを押すと、図4で説明したと同様の処理が実行される。但し、図5の場合、既にナビゲーションシステムが起動されているので、即座に図6に示すような表示画面600を表示する。この表示画面600では、目標物のある目標地点601が地図上で表示されている。さらに、目標物に関連した情報が取得されたら、その情報を併せて表示する。図では、目標物のビルの名称を目標地点601に表示している。さらに、図4(b)で説明したような追加的な情報が得られたら、図7の表示画面700に示すように、その情報が追加表示される。また、現在位置から目標地点までの推奨される経路が表示される。
【0022】
図8は、目標地点601について、ビルの名称以外の情報も得られた場合の情報の表示形態の一例を示している。このような情報はナビゲーションシステムから得られる場合の他、通信部151を介してインターネットにアクセスして所定のサーバから得られる場合がありうる。ナビゲーションシステムは移動体装置内に設けられている場合を想定しているが、インターネット等を介して外部のナビゲーションシステムを利用する形態であってもよい。
【0023】
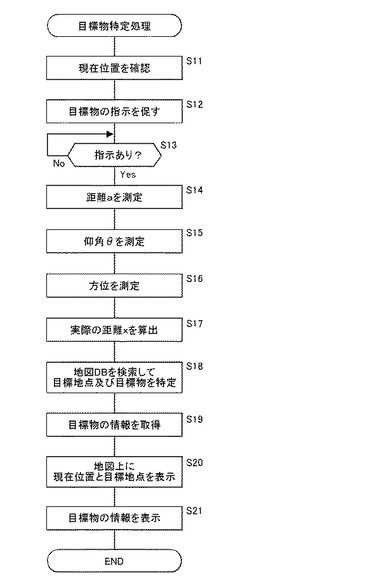
図9に、本実施の形態における目標物特定処理の一例を表したフローチャートを示す。この処理は、制御部101がROM105に保存されたプログラムを読み出して実行することにより実現される。
【0024】
まず、GPSにより現在位置を確認する(S11)。ついで、ユーザに対して上述のように目標物の指示を促す(S12)。ユーザの指示を待って(S13)、距離aを測定する(S14)。ついで、仰角θを測定する(S15)。さらに、距離測定器141が向いている方位を測定する(S16)。そこで、上記式(1)により実際の距離xを算出する(S17)。次に、地図データベースを検索して、目標地点および目標物を特定する(S18)。さらに、この目標物の情報を取得する(S19)。そこで、表示画面上で地図とともに現在位置および方位を示すカーソルおよび目標地点を表示する(S20)。さらに、目標物の情報を表示する(S21)。
【0025】
この例では、目標物特定処理に、現在位置の確認や地図表示も含めたが、図4で説明したように地図表示は必須のステップではない。
【0026】
本実施の形態によれば、旅先などで、何であるかは分からないが面白そうな建物等の目標物を見つけたとき、その目標物の情報を取得したり、その目標物までのナビゲーションを容易に行うことができる。
【0027】
地図を読むのが苦手な人や、方向感覚が狂いがちな人であっても、初めて訪れる土地で「あの建物は何だろう?」「あそこも楽しそう!」と、自由気ままに旅を楽しむことができるようになる。
【0028】
また、カーナビゲーションシステムや、携帯電話のようなGPSと位置測定センサを用いたナビゲーション装置において、距離測定装置と、仰角測定センサを追加し、距離測定装置で距離測定を行うことで、ナビゲーション装置の目的地設定を行うことができる。
【0029】
以上、本発明の好適な実施の形態について説明したが、上記で言及した以外にも種々の変形、変更を行うことが可能である。例えば、現在位置検出手段としてGPSを利用する例を示したが、GPSに限るものではない。移動体装置は携帯端末を想定したが、カーナビゲーション装置に対して方位センサ、仰角センサ、距離測定器等を外付けした構成であってもよい。
【図面の簡単な説明】
【0030】
【図1】本発明の実施の形態に係る移動体装置を示すブロック図である。
【図2】本発明の実施の形態において距離測定器による目標物までの距離の測定の様子を表した図である。
【図3】本発明の実施の形態において、目標物までの測定距離を実際の距離に換算する原理を示した図である。
【図4】本発明の実施の形態において、目標物検索のための表示画面の一例(a)および検索結果の一例(b)を示す図である。
【図5】ナビゲーションシステムを起動後に本発明の実施の形態の目標物検索を行う場合の表示画面例を示す図である。
【図6】図5の表示画面に続く表示画面を示す図である。
【図7】図5の表示画面に続く他の表示画面を示す図である。
【図8】本発明の実施の形態において、目標地点について、ビルの名称以外の情報も得られた場合の情報の表示形態の一例を示す図である。
【図9】本発明の実施の形態における目標物特定処理の一例を表したフローチャートである。
【符号の説明】
【0031】
100…移動体装置、101…制御部、102…表示部、103…操作部、106…スピーカ部、111…GPSアンテナ、112…GPS制御部、121…方位センサ、122…方位センサ制御部、131…仰角センサ、132…仰角センサ制御部、141…距離測定器、142…距離測定器制御部、150…制御ライン、151…通信部、160…データライン、161…時計部、171…カメラ部、300…表示画面、400…表示画面、500…表示画面、501…ウィンドウ、502…現在位置カーソル、600…表示画面、601…目標地点、700…表示画面
【技術分野】
【0001】
本発明は、目標物の情報を取得することができる移動体装置および目標物情報検索方法に関する。
【背景技術】
【0002】
従来、全地球測位システム(GPS)と加速度センサ等の方位検出センサを用いて、ユーザ装置の現在地と方位を検出し、その値に基づいて設定された目標地点までの位置関係を示し、ナビゲーションを行う方法があった。
【0003】
このようなナビゲーション方法では、目標地点を設定するためには、目標地点の名前・住所・電話番号といった目標地点を特定するための情報を入力するか、ディスプレイに表示される地図上で該当箇所を指定する必要があった。
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、戸外を歩いていて背の高いビルなど特定の建造物等が目についたときに、それは何なのか、そこまでの距離はどの程度なのか、という興味が湧く場合がある。
【0005】
このような際にユーザが所持する移動体装置を用いてその目標物を指示することにより即座にかつ容易にその位置や情報を得ることができれば好ましい。
【0006】
本発明はこのような背景においてなされたものであり、視認できる目標物の位置や情報を容易に確認することができる移動体装置およびこれを用いた目標物情報検索方法を提供することを企図する。
【課題を解決するための手段】
【0007】
本発明による移動体装置は、現在位置を検出する位置検出手段と、現在位置から目視可能な目標物までの距離を測定する距離測定手段と、前記目標物の方位を検出する方位検出手段と、前記測定された距離および検出された方位に基づいて地図データベースを参照し、前記目標物およびその位置を特定する検索手段と、前記特定された目標物の情報を表示する表示手段とを備えたことを特徴とする。地図データベースは移動体装置の内部に保持していてもよいし、通信インタフェースを介して外部から取得してもよい。
【0008】
この構成により、目標物までの距離と方位が分かれば、地図データベースを参照することにより、目標物の位置が特定される。また、地図データベースにその目標物の情報が格納されていれば、その情報も取得される。
【発明の効果】
【0009】
本発明によれば、目標物が見えている場合に、ユーザがその目標物についての知識や情報を持っていなくても、本発明の移動体装置によって目標物およびその位置を特定することができる。すなわち、目標物が見えてさえいれば、ユーザと目標物の地図上の位置関係を確認し、目標物についての情報を取得することができる。
【0010】
また、ユーザとその目標物との地図上の位置関係を取得したり、目標物の地図上の座標から目標物についての情報を取得したり、その目標物へのナビゲーションを行ったりすることができるようになる。
【0011】
ナビゲーションにおいて、ユーザが地図を見るのが得意な人間である場合には、地図上で目標物を見つけて目的地に設定することは可能かもしれない。しかし、このような動作を万人に期待することはできない。本発明の移動体装置によれば、ナビゲーションシステムに組み込む、またはナビゲーションシステムと組み合わせることにより、目標物を実空間中で指差すようにして、直感的に目的地指定を行うことができるため、地図上で指定するよりも容易かつ迅速に目的地を設定できる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の好適な実施の形態を図面により詳細に説明する。
【0013】
図1は、本発明の実施の形態に係る移動体装置100を示すブロック図である。
【0014】
この移動体装置100は、CPU等を含む制御部101と、テキスト、静止画、動画等の情報を表示する表示画面を有する表示部102と、複数のキー等を合む操作部103と、ナビゲーションアプリケーション・プログラム等の各種アプリケーション・プログラムが記憶されたROM104と、CPUの作業領域や一時データ記憶領域を提供するRAM105、音声を出力するスピーカ部106と、位置データを取得するためのGPSアンテナ111とそれを制御するためのGPS制御部112、移動体装置100の向いている方位を測定するための方位センサ121とそれを制御するための方位センサ制御部122、仰角を測定するための仰角センサ131とそれを制御するための仰角センサ制御部132、目的物までの距離を測定するための距離測定器141とそれを制御するための距離測定器制御部142、外部のネットワークと接続され電話やデータ通信を行うための通信部151、日時やタイマー管理等を行う時計部161、CCD等の撮像素子を用いて撮像を行うカメラ部171、および制御部101と各部を接続する制御ライン150及びデータライン160を有している。ROM104には地図データベースが記憶されてもよい。また、ROM104の少なくとも一部の領域は、フラッシュメモリ等の再書き込み可能な不揮発性メモリを含んでもよい。距離測定器141は、レーザや超音波などを用いたもので、その測定器を目標物に向けて、目標物までの距離を測定するための機器である。距離測定器141は、目標物を指示する目標物指示手段としての例えばレーザポインタ等の可視光線を発生する手段をさらに備えてもよい。あるいは、目標物指示手段として、目標物を表示画面のプレビューにて視認できるカメラ部171を利用する構成としてもよい。
【0015】
以下、この移動体装置100の動作を図2〜図9を用いて説明する。
【0016】
この移動体装置100では図2のように、目標物21に対して距離測定器141を向けて、目標物21までの距離を測定する。仰角センサで仰角(θ)も測定する距離測定器141は移動体装置100に内蔵されていてもよいし、外付けされるものであってもよい。
【0017】
距離測定器141によって得られた距離は移動体装置100から目標物上の特定の点までの距離であるため、図3に示すように、目標物までの測定距離aおよび仰角θが求まったとき、測定距離を実際の距離に換算する。すなわち、目標物までの実際の距離xは次式(1)で求めることができる。
【0018】
x=a×cosθ …(1)
但し、仰角θが十分小さいときにはx=aと見なせるので、仰角センサは必ずしも必要ではない。
【0019】
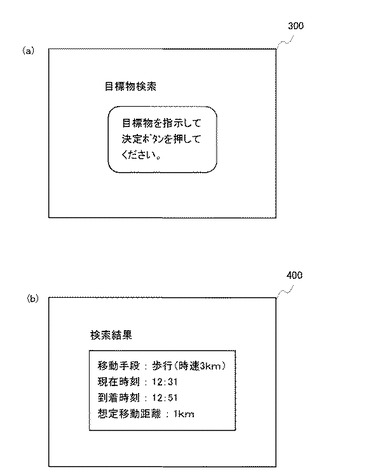
図4は、移動体装置100により距離測定時の表示部102の表示内容の変化の例を示している。
【0020】
図4(a)は目標物検索のための表示部102の表示画面300の一例を示している。本実施の形態における目標物検索は、メニュー選択または特定のキー押下等により、起動され、表示画面300のような表示を行う。この表示画面300では、ユーザに目標物をポインタで指示して決定ボタンを押すように促している。これに応じてユーザが目標物を指示して決定ボタンを押すと、移動体装置は距離測定器141により目標物までの距離aを測定するとともに、仰角センサ131によりその時点の仰角θを検出する。また、方位センサ121により、距離測定器141が向いている方位も検出する。この測定および検出の結果に応じて、距離xを求める。現在位置を基準にこの距離xおよび方位に基づいて、地図データベースを参照することにより、地図上での当該目標物の位置を特定する。また、可能であればその目標物も特定し、その目標物に関連した情報情報(例えば、名称、高さ、建造年月日、備考等)を取得する。さらに、ナビゲーションシステムと連携している場合には、移動手段(例えば歩行)、現在時刻、その目標物の位置を目的地として移動した場合の到着時刻、想定移動距離等を図4(b)の表示画面400に示すように表示する。ここに、想定移動距離は好ましくは推定経路に沿った距離である。このような距離は地図データベースから求めることができる。この後、ナビゲーションを行う場合には、ユーザの操作に従って、地図表示を行い、この求めた目標物の位置を目的地として設定したナビゲーションを行う。
【0021】
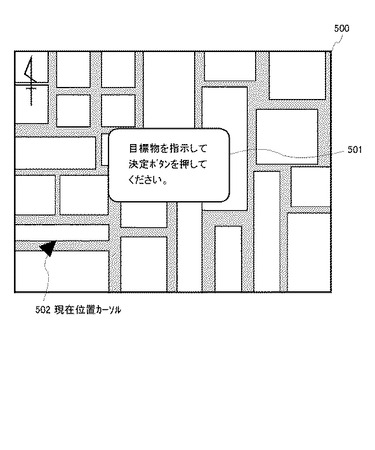
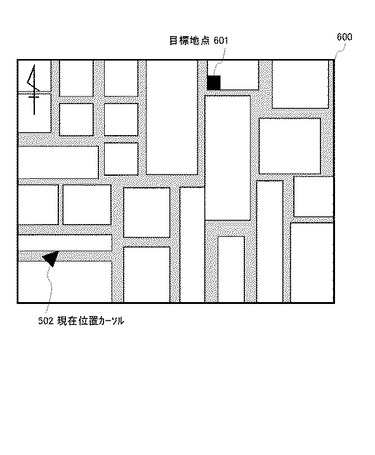
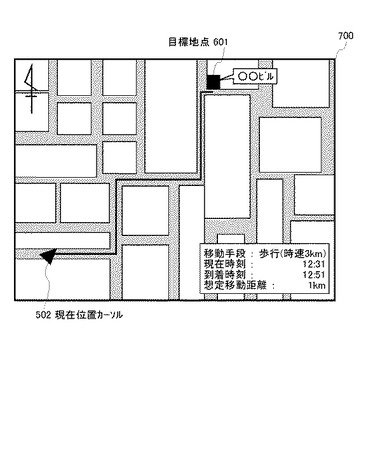
図5は、ナビゲーションシステムを起動後に本実施の形態の目標物検索を行う場合の表示画面例を示している。表示画面500は、現在位置を含む地図が表示された状態で、ユーザに目標物の指示を促すウィンドウ501を表示している。地図上には現在位置および方位を表す現在位置カーソル502が表示されている。これに応じてユーザが目標物を指示して決定ボタンを押すと、図4で説明したと同様の処理が実行される。但し、図5の場合、既にナビゲーションシステムが起動されているので、即座に図6に示すような表示画面600を表示する。この表示画面600では、目標物のある目標地点601が地図上で表示されている。さらに、目標物に関連した情報が取得されたら、その情報を併せて表示する。図では、目標物のビルの名称を目標地点601に表示している。さらに、図4(b)で説明したような追加的な情報が得られたら、図7の表示画面700に示すように、その情報が追加表示される。また、現在位置から目標地点までの推奨される経路が表示される。
【0022】
図8は、目標地点601について、ビルの名称以外の情報も得られた場合の情報の表示形態の一例を示している。このような情報はナビゲーションシステムから得られる場合の他、通信部151を介してインターネットにアクセスして所定のサーバから得られる場合がありうる。ナビゲーションシステムは移動体装置内に設けられている場合を想定しているが、インターネット等を介して外部のナビゲーションシステムを利用する形態であってもよい。
【0023】
図9に、本実施の形態における目標物特定処理の一例を表したフローチャートを示す。この処理は、制御部101がROM105に保存されたプログラムを読み出して実行することにより実現される。
【0024】
まず、GPSにより現在位置を確認する(S11)。ついで、ユーザに対して上述のように目標物の指示を促す(S12)。ユーザの指示を待って(S13)、距離aを測定する(S14)。ついで、仰角θを測定する(S15)。さらに、距離測定器141が向いている方位を測定する(S16)。そこで、上記式(1)により実際の距離xを算出する(S17)。次に、地図データベースを検索して、目標地点および目標物を特定する(S18)。さらに、この目標物の情報を取得する(S19)。そこで、表示画面上で地図とともに現在位置および方位を示すカーソルおよび目標地点を表示する(S20)。さらに、目標物の情報を表示する(S21)。
【0025】
この例では、目標物特定処理に、現在位置の確認や地図表示も含めたが、図4で説明したように地図表示は必須のステップではない。
【0026】
本実施の形態によれば、旅先などで、何であるかは分からないが面白そうな建物等の目標物を見つけたとき、その目標物の情報を取得したり、その目標物までのナビゲーションを容易に行うことができる。
【0027】
地図を読むのが苦手な人や、方向感覚が狂いがちな人であっても、初めて訪れる土地で「あの建物は何だろう?」「あそこも楽しそう!」と、自由気ままに旅を楽しむことができるようになる。
【0028】
また、カーナビゲーションシステムや、携帯電話のようなGPSと位置測定センサを用いたナビゲーション装置において、距離測定装置と、仰角測定センサを追加し、距離測定装置で距離測定を行うことで、ナビゲーション装置の目的地設定を行うことができる。
【0029】
以上、本発明の好適な実施の形態について説明したが、上記で言及した以外にも種々の変形、変更を行うことが可能である。例えば、現在位置検出手段としてGPSを利用する例を示したが、GPSに限るものではない。移動体装置は携帯端末を想定したが、カーナビゲーション装置に対して方位センサ、仰角センサ、距離測定器等を外付けした構成であってもよい。
【図面の簡単な説明】
【0030】
【図1】本発明の実施の形態に係る移動体装置を示すブロック図である。
【図2】本発明の実施の形態において距離測定器による目標物までの距離の測定の様子を表した図である。
【図3】本発明の実施の形態において、目標物までの測定距離を実際の距離に換算する原理を示した図である。
【図4】本発明の実施の形態において、目標物検索のための表示画面の一例(a)および検索結果の一例(b)を示す図である。
【図5】ナビゲーションシステムを起動後に本発明の実施の形態の目標物検索を行う場合の表示画面例を示す図である。
【図6】図5の表示画面に続く表示画面を示す図である。
【図7】図5の表示画面に続く他の表示画面を示す図である。
【図8】本発明の実施の形態において、目標地点について、ビルの名称以外の情報も得られた場合の情報の表示形態の一例を示す図である。
【図9】本発明の実施の形態における目標物特定処理の一例を表したフローチャートである。
【符号の説明】
【0031】
100…移動体装置、101…制御部、102…表示部、103…操作部、106…スピーカ部、111…GPSアンテナ、112…GPS制御部、121…方位センサ、122…方位センサ制御部、131…仰角センサ、132…仰角センサ制御部、141…距離測定器、142…距離測定器制御部、150…制御ライン、151…通信部、160…データライン、161…時計部、171…カメラ部、300…表示画面、400…表示画面、500…表示画面、501…ウィンドウ、502…現在位置カーソル、600…表示画面、601…目標地点、700…表示画面
【特許請求の範囲】
【請求項1】
現在位置を検出する位置検出手段と、
現在位置から目視可能な目標物までの距離を測定する距離測定手段と、
前記目標物の方位を検出する方位検出手段と、
前記測定された距離および検出された方位に基づいて地図データベースを参照し、前記目標物およびその位置を特定する検索手段と、
前記特定された目標物の情報を表示する表示手段と
を備えたことを特徴とする移動体装置。
【請求項2】
前記距離測定手段の仰角を検出する仰角検出手段をさらに備え、前記距離測定手段により測定された距離を前記仰角で補正する距離補正手段を備えた請求項1記載の移動体装置。
【請求項3】
前記表示手段は、前記地図データベースを参照して現在位置から前記目標物までの経路を示した地図を表示する請求項1記載の移動体装置。
【請求項4】
前記距離測定手段は、目標物を指示する目標物指示手段をさらに備えた請求項1記載の移動体装置。
【請求項5】
前記目標物指示手段は可視光線を発生する手段を含む請求項4記載の移動体装置。
【請求項6】
前記目標物指示手段は前記目標物を表示画面にて視認できるカメラ部を含む請求項4記載の移動体装置。
【請求項7】
移動体装置を用いた目標物情報検索方法であって、
現在位置を検出するステップと、
現在位置から目視可能な目標物までの距離を測定するステップと、
前記目標物の方位を検出するステップと、
前記測定された距離および検出された方位に基づいて地図データベースを参照し、前記目標物およびその位置を特定するステップと、
前記特定された目標物の情報を表示するステップと
を備えたことを特徴とする目標物情報検索方法。
【請求項1】
現在位置を検出する位置検出手段と、
現在位置から目視可能な目標物までの距離を測定する距離測定手段と、
前記目標物の方位を検出する方位検出手段と、
前記測定された距離および検出された方位に基づいて地図データベースを参照し、前記目標物およびその位置を特定する検索手段と、
前記特定された目標物の情報を表示する表示手段と
を備えたことを特徴とする移動体装置。
【請求項2】
前記距離測定手段の仰角を検出する仰角検出手段をさらに備え、前記距離測定手段により測定された距離を前記仰角で補正する距離補正手段を備えた請求項1記載の移動体装置。
【請求項3】
前記表示手段は、前記地図データベースを参照して現在位置から前記目標物までの経路を示した地図を表示する請求項1記載の移動体装置。
【請求項4】
前記距離測定手段は、目標物を指示する目標物指示手段をさらに備えた請求項1記載の移動体装置。
【請求項5】
前記目標物指示手段は可視光線を発生する手段を含む請求項4記載の移動体装置。
【請求項6】
前記目標物指示手段は前記目標物を表示画面にて視認できるカメラ部を含む請求項4記載の移動体装置。
【請求項7】
移動体装置を用いた目標物情報検索方法であって、
現在位置を検出するステップと、
現在位置から目視可能な目標物までの距離を測定するステップと、
前記目標物の方位を検出するステップと、
前記測定された距離および検出された方位に基づいて地図データベースを参照し、前記目標物およびその位置を特定するステップと、
前記特定された目標物の情報を表示するステップと
を備えたことを特徴とする目標物情報検索方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2008−111693(P2008−111693A)
【公開日】平成20年5月15日(2008.5.15)
【国際特許分類】
【出願番号】特願2006−293572(P2006−293572)
【出願日】平成18年10月30日(2006.10.30)
【出願人】(501431073)ソニー・エリクソン・モバイルコミュニケーションズ株式会社 (810)
【Fターム(参考)】
【公開日】平成20年5月15日(2008.5.15)
【国際特許分類】
【出願日】平成18年10月30日(2006.10.30)
【出願人】(501431073)ソニー・エリクソン・モバイルコミュニケーションズ株式会社 (810)
【Fターム(参考)】
[ Back to top ]